MATEMATICI APLICATE ECONOMIE - NOTE DE CURS - PENTRU - ÎNVǍŢǍMÂNTUL LA DISTANŢǍ-
|
|
|
- Ευτρόπιος Ζερβός
- 7 χρόνια πριν
- Προβολές:
Transcript
1 UNIVERSITATEA "LUCIAN BLAGA" DIN SIBIU Dumitru Acu Petrică Dicu Mugur Acu Ana Maria Acu MATEMATICI APLICATE ÎN ECONOMIE - NOTE DE CURS - PENTRU - ÎNVǍŢǍMÂNTUL LA DISTANŢǍ-
2 Cuprins Introducere 6. Necesitatea utilizării matematicii în ştiinţele economice Modelarea matematico-economică Câteva exemple de modele matematico economice Optimizarea producţiei unei întreprinderi Modele de gospodărire Problema dietei (nutriţiei)... 0 Spaţii vectoriale. Definiţia spaţiului vectorial.... Subspaţii vectoriale Independenţa şi dependenţa liniară a vectorilor. Bază şi dimensiune Produs scalar. Spaţii normate. Spaţii metrice....5 Mulţimiconvexe Testul Nr. de verificare a cunoştinţelor Matrice. Determinanţi. Sisteme de ecuaţii liniare 8 3. Matrice Determinanţi Sisteme de ecuaţiiliniare Testul Nr. de verificare a cunoştinţelor Operatori liniari. Forme biliniare şi forme pătratice Operatori liniari Forme biliniare Forme pătratice Testul Nr. 3 de verificare a cunoştinţelor Elemente de programare liniară 7 5. Obiectul programării matematice Noţiuni generale relative la o problemă de programare liniară Algoritmul simplex Cazuri speciale într-o problemă dep.l Soluţii multiple Soluţie infinită Degenerare în problemele de programare liniară Rezolvarea problemei generale de programare liniară Dualitatea în problemele de programare liniară Testul Nr. 4 de verificare a cunoştinţelor
3 6 Elemente de teoria grafurilor Noţiuni fundamentale Algoritmi pentru rezolvarea unor probleme relative la grafuri Algoritmul lui Yu Chen pentru aflarea matricei drumurilor Algoritmi pentru precizarea existenţei circuitelor într-ungraf Algoritmi pentru aflarea componentelor tare conexe ale unui graf Algoritmi pentru aflarea drumurilor hamiltoniene ale unui graf Algoritmi pentru determinarea drumurilor de lungime optimă Metoda drumului critic Problema fluxului optim în reţeledetransport Reţeledetransport Algoritmul lui Ford Fulkerson pentru determinarea fluxului maxim într-un graf de reţea Testul Nr. 5 de verificare a cunoştinţelor Probleme de transport Modelul matematic pentru o problemă detransport Determinarea unei soluţii iniţiale Metoda colţuluinord Vest Metoda elementului minim Metoda diferenţelormaxime Ameliorarea (îmbunătăţirea) unei soluţii Aflarea unei soluţii optime Degenerarea înproblemeledetransport Probleme de transport cu capacităţi limitate Testul Nr. 6 de verificare a cunoştinţelor Şiruri Şiruridenumerereale Şiruri în spaţiimetrice Test de verificare a cunoştinţelornr Serii numerice Noţiuni preliminare Criterii de convergenţă pentruseriinumericecutermenioarecare Seriiabsolutconvergente.Seriisemiconvergente Serii cu termeni pozitivi Problemă economică.fluxuldevenit Test de verificare a cunoştinţelornr Funcţii între spaţii metrice Vecinătatea unui punct Funcţii între spaţiimetrice Limita unei funcţii într-un punct Continuitatea funcţiilor între spaţiimetrice Test de verificare a cunoştinţelornr Derivarea funcţiilor reale 0. Definiţia derivatei şi proprietăţile ei de bază Proprietăţi de bază ale funcţiilor derivabile pe un interval Diferenţiala unei funcţiireale Aplicaţiile derivatei în economie Test de verificare a cunoştinţelornr
4 Derivarea funcţiilor de mai multe variabile 38. Derivate parţiale Interpretări geometrice şi economice ale derivatelor parţiale Derivarea funcţiilor compuse Diferenţiala funcţiilor de mai multe variabile Extremele funcţiilor de mai multe variabile Extreme condiţionate Ajustarea unor date Interpolarea funcţiilor Test de verificare a cunoştinţelornr Generalizări ale noţiunii de integrală Integrale improprii Integrale cu parametri Integrale euleriene. Funcţia Gamma. FuncţiaBeta Integrale duble Test de verificare a cunoştinţelornr
5 Capitolul Introducere Obiective: În acest capitol introductiv se pune în evidenţă importanţa cunoaşterii matematicii pentru un viitor economist. Rezumat: În acest capitol sunt prezentate principiile modelării matematico-economice cu prezentarea câtorva modele precise, cum ar fi optimizarea producţiei unei întreprinderi, modele de gospodărie şi problema dietei (nutriţiei). Conţinutul capitolului:. Necesitatea utilizării matematicii în ştiinţele economice. Modelarea matematico-economică 3. Câteva exemple de modele matematico-economice 4. Bibliografia aferentă capitolului Cuvinte cheie: metode matematice, model matematic, optim economic, optimizarea producţiei, modele de gospodărie, problema dietei.. Necesitatea utilizării matematicii în ştiinţele economice În prezent şi în viitor este clar pentru oricine că osimplă observaţie a unui fenomen economic, fără un studiu matematic şi statistic aprofundat, nu mai este satisfăcătoare şi nu poate fi acceptată fără urmări dintre cele mai grave. Folosirea metodelor matematicii în practica economică, de orice nivel, constituie o preocupare cu efecte benefice în rezolvarea problemelor economice actuale. Cel care este interesat de studiul fenomenelor economice trebuie să aibă opregătire interdisciplinară. Studierea globală a aspectelor calitative şi cantitative a unui fenomen economic necesită unanu- mit volum de noţiuni; concepte şi metode matematice care considerate ca un ansamblu dau un aşa numit model matematic ataşat fenomenului studiat. Modelarea este un atribut al activităţii umane, întâlnit în procesul de cunoaştere a lumii, prin care omul reuşeşte să surprindă esenţialul şi să descopere legile după care se guvernează fenomenele naturale, sociale şi psihice. Utilizarea matematicii în problemele economice, prin utilizarea modelelor matematice, nu este o chestiune simplă. Istoric, ele cochetează de mult timp, dar rezolvarea problemelor ridicate de studiul unui fenomen economic, numărul mare de date cu care lucrează şi volumul mare de calcule necesare, pretindea o tehnică de calcul puternică. Apariţia informaticii şi calculatoarelor rapide au făcut să apară capitole noi în matematică, care să se preocupe de modelarea proceselor economice, ca de exemplu cercetările operaţionale. Aşa cum sublinia profesorul André Brunet cercetarea operaţională este pregătirea ştiinţifică a deciziilor ([3]). În condiţiile actuale este necesar ca la orice nivel de decizie să prelucrăm un număr mare de informaţii şi date care să permită unraţionament logic în alegerea variantei celei mai potrivite. Un alt motiv care pledează pentru utilizarea matematicii în studiul proceselor economice este şi dorinţa omului de a atinge un anumit optim. Problema alegerii dintr-o mulţime de rezultate posibile pe cel optim, în concordanţă cuunanu- mit scop, este de o importanţă majoră pentru orice economist, teoretician sau practician. Noţiunea de 6
6 optim, destul de veche în gândirea economică legată direct de practică, apare într-o nouă lumină prin posibilităţile oferite de matematica contemporană. Dacă în trecut conţinutul optimului economic funcţiona, cel mai adesea, după principiul cu cât mai mult, cu atât mai bine,în prezent optimul economic lucrează după principiul profit maxim în condiţii date. Utilizarea calculului diferenţial şi integral în economia politică, începând cu sfârşitul secolului al XIX-lea şi începutul secolului al XX-lea, era o necesitate. Aşa s-a născut economia matematică, care, treptat s-a impus în cercetările economice. În conformitate cu aceste preocupări, în economia matematică s-a creat conceptul de optim paretian, introdus de Vilfredo Pareto. S-au creat noi metode precise de optimizare a activităţii economice, apelându-se la ramurile existente în matematică, dar şi cerând imperios găsirea de noi concepte matematice, care să permită găsirea soluţiilor optime cât mai rapid şi cât mai exact. Aşa au apărut metodele de programare matematică în rezolvarea unor probleme de optimizare a activităţii unor întreprinderi, a unor societăţi de comerţ, turism sau cu preocupări agricole. Problemele puse de practica economică stimulează continuu descoperirea de noi metode matematice. Fără să greşim putem afirma că există o conlucrare benefică, atât pentru economişti, cât şi pentru matematicieni. Legătura concretă dintre matematică şi economie se stabileşte printr-o traducere în limbaj matematic a noţiunilor şi a relaţiilor ce intervin în fenomenele economice, fapt ce se realizează prin procesul de modelare matematică. Folosirea limbajului matematic în ştiinţele economice oferă posibilitatea formulării necontradictorii a fenomenelor economice şi introducerii rigorii în studiul lor.. Modelarea matematico-economică Aplicarea matematicii în economie are două direcţii principale. Prima, care foloseşte metodele matematicii ca instrument menit să sprijine studiul calitativ al fenomenelor economice şi a doua, în care matematica este utilizată la analiza aspectelor cantitative din practica economică (planificare, prognoză, etc.). Utilitatea matematicii ca instrument ajutător economistului se evidenţiază în plan: logic, empiric şi euristic. Traducând o situaţie economică într-o problemă matematică, îi putem verifica consistenţa, planul empiric şi, în fine, dezvăluirea de relaţii noi. Însă,oastfeldemetodă de lucru impune precizarea conceptului de model. Esenţa metodei modelării constă în înlocuirea obiectului sau fenomenului real care ne interesează cu un alt obiect sau fenomen, mai convenabil pentru cercetare. După o astfel de substituire nu se mai studiază obiectul primar ci modelul, iar apoi rezultatul cercetărilor se extinde asupra obiectului sau fenomenului iniţial, cu anumite precauţii. Termenul de model vine de la diminutivul lui modus (măsurăîn limba latină), care este modulus. În limba germană a devenit model, iar în secolul al XVI-lea în Franţa se folosea deja termenul modèle, provenit din italienescul modello. Acelaşi cuvânt a dat în limba engleză termenul model. Încă dela început sensul cuvântului model oscila între concret şi abstract. Se pare că primul care a folosit conceptul de model în sensul actual a fost matematicianul italian Beltrami, în anul 868, când a construit un model euclidian pentru o geometrie neeuclidiană. În ştiinţă seîntâlnesc diferite modele: modelul atomic, modelul cosmologic, modele de creştere economică etc. Astăzi, metoda modelării este o metodă generală de cercetare şi studiere a unor procese reale cu ajutorul cercetării şi studierii altor procese, care pot fi mai apropiate sau mai depărtate de cele iniţiale. Modelul trebuie să reflecte într-o cât mai mare măsură proprietăţile originalului care sunt legate de scopul cercetării. Atragem însă atenţia că modelul nu este la fel cu originalul. Modelele ne servesc în viaţa de toate zilele, în ştiinţă, în învăţământ, industrie, proiectare, artă, etc. Multe din modele, cum ar fi hărţile mulajele, machetele, desenele etc., constituie o reproducere materială a unor aspecte ale originalului cercetat. Asemenea modele materiale au posibilităţi limitate, multe din ele servind mai mult înţelegerii şi mai puţin cunoaşterii originalelor. Pentru cunoaşterea ştiinţifică s-a trecut la modele simbolice, care sunt modele matematice. Utilizarea limbajului matematic în descrierea unor modele, permit acestora să aibă unînalt grad de abstractizare şi de generalizare, unul şi acelaşi model (ecuaţie, funcţie, sistem, etc.) poate descrie cu mult succes obiecte sau situaţii total diferite. Într-un model matematic se folosesc pentru descriere numai mijloace matematice şi logice, ceea 7
7 ce conduce la înlăturarea tratărilor subiective. În plus reprezentările matematice nu sunt îngrădite de limite materiale şi nici de traducerea dintr-o disciplină în alta. În elaborarea unui model matematic ataşat unui proces trebuiesc respectate etapele:. Obţinerea modelului descriptiv al procesului, care are subetapele:.. formularea problemei propuse;.. analiza structurii informaţionale a fenomenului abordat;.3. discutarea criteriilor posibile care reflectă obiectivele urmărite;.4. stabilirea factorilor esenţiali şi factorilor secundari;. Formularea matematică a modelului descriptiv, etapă în care se elaborează modelul matematic; 3. Studierea (cercetarea) modelului, adică rezolvarea practică a problemei pe model. Astăzi, în această etapă de mare folos este calculatorul. Modelul realizat şi testat trebuie să reflecteze originalul cu destulă precizie. S-ar putea ca modelul să fie bine construit dar să nu dea rezultate sa- tisfăcătoare. El trebuie îmbunătăţit sau abandonat. Fidelitatea unui model se poate realiza nu numai având grijă să nu pierdem din vedere anumite aspecte ale fenomenului studiat, ci şi prin aparatul matematic folosit. Fidelitatea faţă de original creşte odată cu perfecţionarea aparatului matematic utilizat. În funcţie de aparatul matematic folosit au apărut modele foarte variate, uneori chiar pentru aceeaşi problemă. După modelul matematic utilizat se poate da următoarea clasificare a modelelor: ) modele aritmetice (utilizate până în secolul al XVIII-lea) folosesc numai concepte aritmetice; ) modele bazate pe analiza matematică (utilizate începând cu secolul al XVIII-lea) folosesc concepte de analiză matematică; 3) modele liniare utilizează concepte de algebră liniară (de exemplu, programarea liniară); 4) modele de joc care iau în considerare şi variabile necontrolabile; 5) modele de optimizare urmăresc optimizarea unei funcţii (numită funcţia obiectiv) supusă unor restricţii; 6) modele neliniare utilizează restricţii de optim sau funcţii obiectiv neliniare; 7) modele diferenţiale care descriu prin ecuaţii diferenţiale fenomenul (de exemplu, modelul care descrie variaţia producţiei); 8) modele de tip catrastofic utilizate de studiul fenomenelor cu variaţii bruşte; 9) modele deterministe mărimile care intervin sunt perfect determinate; 0) modele stohastice mărimile care intervin sunt aleatorii; ) modele de tip statistico-matematice mărimile care intervin sunt date statistic; ) modele vagi mărimile care intervin nu sunt date cu precizie, ci doar vag; 3) modele discrete mărimile care intervin variază discret; 4) modele continue mărimile care intervin variază continuu. Cu toată diversitatea conceptelor şi rezultatelor matematice, există numeroase fenomene economice pentru care nu s-au elaborat modele pe deplin satisfăcătoare..3 Câteva exemple de modele matematico economice În acest paragraf prezentăm câteva din cele mai cunoscute modele matematico economice. 8
8 .3. Optimizarea producţiei unei întreprinderi Să considerăm o întreprindere care îşi desfăşoară activitatea de producţie în următoarele condiţii: i) în întreprindere se desfăşoară n activităţi A i, i =,n; ii) există m factori disponibili F j, j =,m; iii) se cunosc coeficienţii tehnici de utilizare a celor m factori în cele n activităţi. Vom încerca să obţinem descrierea matematică a activităţii de producţie. Pentru realizarea modelării acestui program de producţie să notăm cu x i nivelul activităţii A i, i =,n,şi cu b i volumul (cantitatea) disponibil de factorul F j, j =,mşi a ij factorul de proporţionalitate al consumului F i pentru activitatea A j. Acum putem scrie restricţiile: (.) a x + a x a n x n b a x + a x a n x n b. a m x + a m x a mn x n b m Restricţiile (.) reprezintă condiţiile în care întreprinderea poate să-şi desfăşoare activitatea. Ele se pot scrie şi sub forma matricială. În acest scop facem notaţiile: A =(a ij ) matricea coeficienţilor tehnici; x = t (x,x,...,x n )(t transpus) vectorul coloană al nivelului producţiei; C,C,...,C n vectorii coloană din matricea A; C 0 vectorul coloană al volumelor disponibile. Acum condiţiile (.) se pot scrie sub forma C x + C x C n x n C 0 sau Ax C 0. Până aici am urmărit descrierea tehnologiei producţiei. Dar orice proces de producţie mai urmăreşte şi o motivaţie economică, de exemplu să se realizeze o eficienţă maximă. Un astfel de criteriu de eficienţă este dat de maximizarea profitului. Practic, finalul acestui proces este optimizarea unei anumite funcţii, care de fapt realizează optimizarea funcţionării unui proces economic..3. Modele de gospodărire Orice firmă doreştefiesă-şi maximizeze veniturile, fie să-şi minimizeze cheltuielile, iar consumatorii să-şi distribuie salariile aşa încât să-şi satisfacă la maximum nevoile vieţii. De fapt, orice situaţie de gospodărire impune o repartizare optimă a unor resurse disponibile limitate între diferite activităţi care se desfăşoară pentru realizarea unui anumit scop. Acest tip de procese economice poartă numele de probleme de gospodărire. Un model pentru o problemă de gospodărire se compune din două părţi: prima referitoare la restricţii şi o a doua care descrie criteriul sau obiectivul activităţii de derulat. Într-un astfel de model se cere găsirea valorilor unor variabile x,x,...,x n pentru care o funcţie f(x,x,...,x n ) este optimă şi care sunt supuse unor restricţii de forma: F (x,x,...,x n ) 0, F (x,x,...,x n ) 0,... F m (x,x,...,x n ) 0, unde semnul poate fi şi. Cum orice model de gospodărire are menirea de a stabili un program de acţiune, el a căpătat denumirea de model de programare. Domeniile de aplicare a modelelor de programare se referă la un număr mare de probleme de planificare din industrie, transporturi, agricultură, ş.a. Unele din ele au o foarte mare circulaţie şi numeroase aplicaţii fapt ce le-au făcut celebre. Dăm un astfel de exemplu în subparagraful următor. 9
9 .3.3 Problema dietei (nutriţiei) Una dintre problemele celebre de gospodărire este problema alimentării cât mai ieftine şi realizarea unor cerinţe de alimentaţie conform unui scop propus. O alimentaţie seconsideră bună dacăseoferă anumite substanţe în cantităţi minimale precizate. Evident că aceste substanţe se găsesc în diferite alimente cu preţuri cunoscute. Se cere să se stabilească o dietă (raţie) care să fie corespunzătoare şi totodată cât mai ieftină. Substanţele care intră într-o dietă se numesc substanţe nutritive sau principii nutritive. Vom obţine, în continuare, modelul matematico-economic pentru problema dietei. Fie S,S,...,S m substanţele nutritive care trebuie să intre în compunerea dietei în cantităţile minimale b,b,...,b m şi A,A,...,A n alimentele de care dispunem cu preţul corespunzător pe unitate c,c,...,c n. Notăm cu a ij numărul de unităţi din substanţa S i, i =,m,segăsesc într-o unitate din alimentul A j, j =,n. Se cere să seaflex,x,...,x n numărul de unităţi din alimentele A,A,...,A n aşa încât să seobţină oraţie acceptabilă launpreţcât de mic. De obicei datele problemei se prezintă într-un tabel de forma: Minim Alimente A Substanţa A... A j... A n necesar din S i S a a... a j... a n b S i a i a i... a ij... a in b i S m a m a m... a mj... a mn b m Preţ alimente c c... c j... c n Unităţi de consum x x... x j... x n Cantitatea din substanţa S i care se realizează estea i x + a i x a in x n, care din cerinţa problemei trebuie să fie b i, i =,m. Ajungem astfel la condiţiile (restricţiile): (.) a x + a x a n x n b a x + a x a n x n b... a m x + a m x a mn x n b m Natura datelor cu care lucrăm impun şi condiţiile de nenegativitate: (.3) x 0,x 0,...,x n 0. Funcţia obiectiv care exprimă costul unei raţii este dată de: (.4) f = c x + c x c n x n. Problema dietei cere să determinăm x,x,...,x n aşa încât f să fie minimă. O astfel de dietă se numeşte optimă. Orice dietă care satisface restricţiile (.) şi (.3) se numeşte admisibilă. Modelul dietei poate fi folosit şi în alte situaţii, ca de exemplu: problema furajării raţionale (în zootehnie), chestiunea amestecului optim (în amestecuri de benzină sau uleiuri auto, în realizarea unor sortimente de băuturi sau îngheţată), ş.a. Pentru alte modele matematico-economice se pot consulta lucrările [], [3], [4], [5]. 0
10 Bibliografia aferentă capitolului: [] Acu, A.M., Acu D., Acu M., Dicu P., Matematici aplicate în economie - Volumul I, Editura ULB, Sibiu, 00. [] Izvercian, P.N.,Creţu, V., Izvercian, M., Resiga, R., Introducere în teoria grafurilor. Metoda drumului critic, Editura de Vest, Timişoara, 994. [3] Popescu, O., Raischi, C., Matematici aplicate în economie, vol.i, II, Editura Didactică şi Pedagogică, Bucureşti, 993. [4] Raţiu-Raicu, C., Modelare şi simularea proceselor economice, Editura Didactică şi Pedagogică, R.A., Bucureşti, 995. [5] Stavre, P., Matematici speciale cu aplicaţii în economie, Editura Scrisul Românesc, Craiova, 98.
11 Capitolul Spaţii vectoriale Obiective: În acest capitol studentul va lua contact cu noţiunile teoretice fundamentale (cum ar fi spaţiile vectoriale, prehilbertiene, normate şi metrice) necesare înţelegerii metodelor / aplicaţiilor prezentate în capitolele următoare. Rezumat: În acest capitol sunt prezentate noţiunile de spaţiu vectorial, subspaţiu vectorial, sistem de vectori, combinaţie liniară, liniar independenţă şi liniar dependenţă, bază, dimensiune, produs scalar şi spaţii prehilbertiene, normă şi spaţii normate, metrică şi spaţii metrice, mulţimi convexe, etc. Conţinutul capitolului:. Definiţia spaţiului vectorial. Subspaţiu vectorial 3. Independenţa şi dependenţa liniară a vectorilor. Bază şi dimensiune 4. Produs scalar. Spaţii normate. Spaţii metrice 5. Mulţimi convexe 6. Test de verificare a cunoştinţelor 7. Bibliografia aferentă capitolului Cuvinte cheie: spaţiu vectorial, bază, dimensiune, produs scalar, normă, metrică, mulţimi convexe.. Definiţia spaţiului vectorial În acest paragraf vom trata noţiunea de spaţiu vectorial şi principalele ei proprietăţi. Definiţia.. Se numeşte lege de compoziţie (operaţie) externă pe mulţimea M faţă de mulţimea K, ofuncţie f : K M M. Mulţimea K se numeşte domeniul operatorilor sau scalarilor Exemplul... Aplicaţia f : R C C definită prin formula f(a, z) =az, a R, z C, esteo operaţie externă pe C având pe R ca domeniu de operatori. Acum, fie V o mulţime nevidă de elemente oarecare şi K un câmp de elemente α,β,γ,...,cu0 elementul neutru (nul) şi elementul unitate. Suma respectiv produsul elementelor α şi β din K va fi notată cuα + β, respectiv α β sau simplu αβ. Definiţia.. Se spune că pe mulţimea V s-a definit o structură de spaţiu vectorial (liniar) peste câmplul K, dacă pev s-a definit o lege de compoziţie internă (x, y) x + y, x, y V,numită adunare, şi o lege de compoziţie externă faţădecâmpul K, (α, x) αx, α K, x V,numită înmulţire cu scalari, astfelcă pentru orice x, y, z V şi orice a, b K să avem. x + y = y + x (comutativitatea adunării);. (x + y)+z = x +(y + z) (asociativitatea adunării); 3. Există elementul θ V,astfelcax + θ = θ + x = x;
12 4. Oricărui x V îi corespunde x V astfel cu x +( x) =( x)+x = θ ( x se numeşte opusul lui x); (Prin urmare (V,+) este un grup comutativ); 5. x = x; 6. (a + b)x = ax + bx; 7. (ab)x = a(bx); 8. a(x + y) =ax + ay. Mulţimea V împreună cu structura de spaţiu vectorial peste câmpul K se numeşte spaţiu vectorial (liniar) peste K, iar elementele sale le vom numi vectori. Se observă că operaţia de adunare a vectorilor din V a fost notată tot cu semnul + caşi adunarea din K, iar operaţia de înmulţire cu scalari a fost notată cu ca şi înmulţirea din K, acest lucru nu produce confuzie deoarece în context orice ambiguitate este înlăturată. Dacă K este corpul R al numerelor reale, atunci V se numeşte spaţiu vectorial real, iar dacă K este corpul C al numerelor complexe, atunci V se numeşte spaţiu vectorial complex. Elementul θ V se numeşte vectorul nul al spaţiului vectorial V. Propoziţia.. Dacă V este un spaţiu vectorial peste K, atunci. 0 x = θ, pentru orice x V ;. a θ = θ, pentru orice a K; 3. ( )x = x, pentru orice x V. Demonstraţie.. Utilizând condiţiile 5) şi 6) din Definiţia.., avem x = x =(0+)x =0 x + x =0 x + x, de unde, folosind condiţia 3) din aceeaşi definiţie, rezultă 0 x = θ.. Din condiţia 6) a Definiţiei.. avem ax + aθ = a(x + θ) =ax şi ţinând seama de condiţia 3) din aceeaşi definiţie, rezultă a θ = θ. 3. Din condiţia 6) avem x +( )x = ( + ( ))x = 0x = θ, de unde folosind 4), obţinem ( )x = x. Exemple.... Mulţimea R a numerelor reale cu operaţia de adunare şi cu operaţia de înmulţire cu numere raţionale este un spaţiu vectorial peste câmpul Q al numerelor raţionale...3. Mulţimea C a numerelor complexe cu operaţia de adunareşi cu operaţia externă de înmulţire cu numere reale este un spaţiu vectorial peste câmpul Q al numerelor raţionale...4. Mulţimea C a numerelor complexe cu operaţia de adunareşi cu operaţia externă de înmulţire cu numere reale este un spaţiu vectorial peste câmpul R al numerelor reale...5. Fie Hom(R, R) ={f f : R R, funcţie} în care definim operaţiile de adunare a două funcţii şi de înmulţire a unei funcţii cu un număr real astfel: f + g : R R, (f + g)(x) =f(x)+g(x), ( )f,y Hom(f,g) şi ( )x R şi αf : R R, (αf)(x) =αf(x), ( )f Hom(f,g) şi ( )r R. Aceste operaţii determină pehom(r, R) o structură de spaţiu vectorial...6. Fie K un câmp oarecare şi n un număr natural nenul. Considerăm produsul cartezian K n = K K... K, adică mulţimea sistemelor ordonate x =(x }{{},x,...,x n )decâte n elemente din nori K. Definim pe K n operaţiile: x + y =(x + y,x + y,...,x n + y n ), ax =(ax,ax,...,ax n ), pentru orice x =(x,x,...,x n ) K n, y =(y,y,...,y n ) K n şi a K. Înzestrată cu cele două operaţii definite mai sus, mulţimea K n devine un spaţiu vectorial, numit 3
13 spaţiul vectorial aritmetic cu n dimensiuni peste K. Pentru K = R se obţin spaţiile euclidiene, iar pentru K = C se obţin spaţiile unitare sau hermitice. În cazul unui vector x =(x,x,...,x n ) din K n, x,x,...,x n se numesc componentele sau coordonatele vectorului x. De aceea, când vom nota vectorii cu indici vom folosi scrierea cu exponenţi în paranteză, pentru a se deosebi de componentele sale. Comentariul... Spaţiile vectoriale R n şi C n sunt instrumente matematice de bază în studiul modelelor matematico-economice. Spaţiile R şi R 3 conduc la vectorii utilizaţi în fizică.. Subspaţii vectoriale O submulţime W a unui spaţiu vectorial V peste un câmp K se numeşte subspaţiu vectorial al lui V,dacă cele două operaţii date pe V induc pe W o structură de spaţiu vectorial peste K. Vom nota faptul că W este un subspaţiu al lui V prin W V. Teorema.. Submulţimea W a unui spaţiu vectorial V peste câmpul K este subspaţiu vectorial peste câmpul K, dacă şi numai dacă sunt îndeplinite condiţiile:. pentru orice x, y W avem x + y W ;. pentru orice x W şi orice a K avem ax W. Demonstraţie. Dacă W V, atunci condiţiile ) şi ) rezultă din faptul că operaţiile din V trebuie să fie interne şi pe W. Reciproc, dacă presupunem că )şi ) au loc şi luând x W, din ) rezultă căşi x =( )(x) W, iar de aici, folosind ), rezultă că θ = x +( x) segăseşte în W. Celelalte condiţii din definiţia unui spaţiu vectorial având loc pe V au loc şi pe W. Teorema precedentă este echivalentă cu: Teorema.. Submulţimea W a spaţiului vectorial V peste K este subspaţiu vectorial pentru V peste K, dacă şi numai dacă, pentru orice a, b K şi orice x, y W avem ax + by W. Observaţia.. Orice subspaţiu vectorial W al unui spaţiu vectorial V conţine vectorul nul. Exemple.... Dacă V este un spaţiu vectorial, atunci submulţimea {θ}, formată numai din vectorul nul, este un subspaţiu vectorial numit subspaţiul nul.... Pentru spaţiul vectorial R şi numărul real a fixat, submulţimea W = {x R x =(x,y ) cu y = ax } formează un subspaţiu vectorial. Într-adevăr, dacă x, y W, x =(x,y ), y = ax, y =(x,y ), y = ax, atunci: x + y = (x + y,x + y )cuy + y = ax + ax = a(x + x )şi deci x + y W. Pentru a R avem αx =(αx,αy ), cu αy = α(ax )=a(αx n )şi deci αx W. Cele demonstrate ne aratăcă, în spaţiul vectorial R (în plan) dreptele ce trec prin origine formează subspaţii vectoriale pentru R...3. Dacă K este un câmp, atunci mulţimea vectorilor x =(x,x,...,x n )dink n cu x n = 0 formează un subspaţiu vectorial al spaţiului vectorial K n. Uşor se verifică faptul că intersecţia a două subspaţii vectoriale ale unui spaţiu vectorial V este tot un subspaţiu vectorial al lui V. Prin urmare, dacă A este o submulţime a spaţiului vectorial V, atunci există un cel mai mic subspaţiu al lui V care conţine pe A, anume intersecţia tuturor subspaţiilor lui V ce conţin pe A, numit subspaţiu generat de A sau acoperirea (înfăşurătoarea) liniară a lui A. Două subspaţii W şi W ale unui spaţiu vectorial se zic independente dacă W W = {0}. Fie S = {x (),x (),...,x (n) } un sistem de n vectori, n N, din spaţiul vectorial V peste câmpul K. Definiţia.. Se spune că vectorul x V este o combinaţie liniară de vectorii sistemului S dacă există n scalari a,a,...,a n K astfel ca să avem x = n a k x (k). k= 4
14 Teorema..3 Mulţimea vectorilor din spaţiu vectorial V care se pot scrie ca şi combinaţii liniare de vectorii sistemului S formează unsubspaţiu vectorial al lui V. Acest subspaţiu se notează prin [S] şi se numeşte subspaţiul lui V generat de sistemul de vectori S. Demonstraţie. n Într-adevăr, dacă x = a k x (k) şi y = k= k= n b k x (k), atunci, pentru orice α, β K, avem αx + βy = n αa k x (k) + k= n βb k x (k) = k= n (αa k + βb k )x (k), k= adică αx + βy este o combinaţie liniară de vectori a sistemului S. Teorema..4 Subspaţiul [S] generat de sistemul de vectori S coincide cu acoperirea liniară a lui S. Demonstraţie. Fie S acoperirea liniară aluis. AvemS [S] şi din definiţia lui S rezultă S [S]. n Reciproc, dacă x [S], atunci rezultă că x = a k x (k), a,a,...,a n K. Prin urmare, x S, adică [S] S. Rezultă că S =[S]. k= Definiţia.. Un sistem de vectori S V se numeşte sistem de generatori pentru subspaţiul W V dacă W =[S]. Exemplul..4. În spaţiul R n un sistem de generatori pentru R n este format din vectorii: e () = (, 0, 0,...,0), e () =(0,, 0,...,0),..., e (n) =(0, 0,...,0, ). În adevăr, orice x =(x,x,...,x n ) R n se scrie sub forma x = x e () + x e () x n e (n). Definiţia..3 Dacă W şi W sunt subspaţii ale spaţiului vectorial V, atunci subspaţiul generat de S = W W se numeşte suma celor două subspaţii. Notăm [S] =W + W. Teorema..5 Suma W + W a două subspaţii vectoriale ale lui V coincide cu mulţimea vectorilor x V care se scrie sub forma x = x () + x (),cux () W, x () W. Demonstraţie. Fie W = {x V x = x () + x (),x () W,x () W }. Evident că W W + W. Dacă x W + W, atunci x = a y () a r y (r) + a r+ y (r+) a p y (p), unde y (),...,y (r) W, iar y (r+),...,y (p) W. Punând x () = a y () a r y (r) şi x () = a r+ y (r+) a p y (p),găsim x = x () + x (), deci W + W W. Rezultă W = W + W. Exemplul..5. În R considerăm W = {(x, 0) x R} şi W = {(0,y) y R}. Atunci avem R = W + W. Definiţia..4 Suma S a două subspaţii vectoriale W şi W ale spaţiului vectorial V se numeşte directă, dacă W W = {θ}. În acest caz scriem S = W W, iar despre W şi W se zic că suntsubspaţii vectoriale independente. Teorema..6 Suma a două subspaţii vectoriale W şi W ale spaţiului vectorial V este directă, dacă şi numai dacă orice vector x din S = W + W se scrie în mod unic sub forma x = x () + x (), x () W, x () W. Demonstraţie. Să admitem că S = W W şi să presupunem că există x S aşa încât x = x () + x (), x () W, x () W şi x = y () + y (), y () W, y () W. Atunci x () + x () = y () + y (), de unde x () y () = x () y () W W = {θ} şi deci x () = y () şi x () = y (). Rezultă că scrierea lui x ca sumă de elemente din W şi W este unică. Reciproc, să admitem că oricex S = W + W, are o scriere unică de forma x = x () + x (), x () W, x () W.Dacăarexistat W W, t θ, atunci x =(x () t)+(x () t), cu x () t W şi x () t W, ceea ce ar fi o contradicţie. Prin urmare W W = {θ}, adică S = W W. Definiţia..5 Două subspaţii W şi W ale spaţiului vectorial V se numesc suplimentare dacă W W = {θ} şi V = W W. 5
15 Exemplul..6. Spaţiul vectorial Hom(R, R) al funcţiilor f : R R este suma directă a subspaţiilor W şi W ale funcţiilor pare şi respectiv impare deoarece W W = {θ}. Cum, pentru orice f Hom(R, R), avem f(x) = f(x)+f( x) f(x) f( x) +, ( )x R, adică suma dintre o funcţie pară şi una impară, deducem că W şi W sunt subspaţii vectoriale suplimentare pentru Hom(R, R)..3 Independenţa şi dependenţa liniară a vectorilor. Bază şi dimensiune Definiţia.3. Sistemul de vectori S = {x (),x (),...,x (n) } din spaţiul vectorial V peste câmpul K se zice că esteliniar independent dacă o combinaţie liniară a lor a x () + a x () a n x (n), a,a,...,a n K, dă vectorul nul numai dacă a = a =...= a n =0. În caz contrar, adică dacă existăcelpuţin o mulţime de scalari a,a,...,a n K, nu toţi nuli, n astfel ca a i x (i) = θ, atunci se zice că sistemul S de vectori este liniar dependent. i= Dacă sistemul S de vectori este liniar independent (liniar dependent), se mai zice că vectorii x (),...,x (n) sunt liniar independenţi (liniar dependenţi). Exemple..3.. Vectorii e (),e (),...,e (n) (v.exemplul..4) sunt liniar independenţi în R n. În adevăr, n dacă a,a,...,a n R astfel ca a i e (i) = θ, atunci rezultă (a,a,...,a n )=θ, de unde obţinem că i= a = a =...= a n = Vectorii x () =(,, ), x () =(,, ) şi x (3) =(4,, 5) sunt liniar dependenţi în R 3 deoarece avem x () 3x () + x (3) = θ. Teorema.3. Sistemul S = {x (),x (),...,x (n) } de vectori este liniar dependent, dacă şi numai dacă cel puţin unul din vectorii lui S se poate exprima ca o combinaţie liniară de ceilalţi vectori ai sistemului. Demonstraţie. Dacă sistemul S este liniar dependent, atunci există scalarii a,a,...,a n K, nu toţi nuli, astfel ca a x () a n x (n) = θ. Presupunem că a 0, atunci x () = a a x() a 3 a x(3)... a n a x(n), ceea ce ne arată că vectorul x () se exprimă ca o combinaţie liniară de vectorii x (),...,x (n). Reciproc, dacă cel puţin un vector, de exemplu x (), se exprimă ca o combinaţie liniară de ceilalţi, atunci putem scrie x () = a x ()... a n x (n), de unde x () + a x () a n x (n) = θ, cu coeficientul lui x () nenul, ceea ce ne arată că vectorii x (),...,x (n) sunt liniar dependenţi. Propoziţia.3. Într-un spaţiu vectorial V peste câmpul K sunt valabile afirmaţiile: i) vectorul nul θ formează un sistem liniar dependent; ii) orice vector x θ formează un sistem liniar independent; iii) orice sistem de vectori din care se poate extrage un sistem liniar dependent este de asemenea liniar dependent. Demonstraţie. i) Valabilitatea acestei afirmaţii rezultă din θ = θ. ii) Pentru x θ din ax = θ, a K, rezultă a =0. iii) Dacă pentru sistemul de vectori S = {x (),x (),...,x (n) }, n >, există subsistemul {x (),...,x (m) }, m<n, liniar dependent, atunci există scalarii a,...,a n K astfel cu a x () + a x () a m x (m) = θ. De aici, avem a x () + a x () a m x (m) +0 x (m+) +0 x (n) = θ şi deci sistemul S este liniar dependent. Corolarul.3. Sunt valabile afirmaţiile: 6
16 i) Orice sistem de vectori care conţine vectorul nul este liniar dependent; ii) Orice subsistem al unui sistem liniar independent de vectori este, de asemenea, liniar independent. Definiţia.3. Un sistem infinit de vectori din spaţiul vectorial V se numeşte liniar independent dacă orice subsistem finit al său este liniar independent. În caz contrar se zice că sistemul este liniar dependent. Exemplul.3.3. În spaţiul vectorial Hom(R, R) sistemul {,x,x,...,x n,... este liniar independent. Într-adevăr, orice relaţie de forma a i x i + a i x i a ik x i k = θ, ( )x R, unde i <i < < i k, are loc numai dacă a i = a i =...= a ik = 0, adică orice subsistem finit este liniar independent. Definiţia.3.3 Un sistem B, finit sau infinit, de vectori din spaţiul vectorial V se numeşte bază pentru spaţiul vectorial V, dacă B este liniar independent şi B este un sistem de generatori pentru V. Exemple În spaţiul R n sistemul B = {e (),e (),...,e (n) }, e () = (, 0,...,0),...,e (n) = (0, 0,...,) formează o bază. S-a arătat că B este liniar independent (v.exemplul.3.) şi constituie un sistem de generatori pentru R n (v.exemplul..4). Această bazăaluir n se numeşte baza canonică sau naturală În spaţiul vectorial P n al polinoamelor de grad cel mult n, n, peste câmpul R, o bază este dată de sistemul B = {,x,x,...,x n }. Teorema.3. Sistemul de vectori B = {e (),e (),...,e (n) } constituie o bază pentru spaţiul vectorial V peste câmpul K, dacă şi numai dacă orice vector din V se exprimă în mod unic ca o combinaţie liniară de vectorii lui B. Demonstraţie. Dacă B este bază aspaţiului vectorial V, atunci orice x V se scrie sub forma n n x =, a k e (k), a,a,...,a n K. Dacă mai avem şi x = b k e (k), b,...,b n K, atunci obţinem k= n (a k b k )e (k) = θ, de unde, folosind faptul că B este liniar independent, rezultă a k = b k, k =,,...,n, k= adică scrierea lui x în baza B este unică. Reciproc, dacă orice vector din spaţiul V se exprimă în mod unic ca o combinaţie liniară de vectorii n lui B, atunci şi vectorul nul are această proprietate, adică dinθ = a k e (k) rezultă a k =0,k =,n (se foloseşte unicitatea scrierii), ceea ce ne arată că B este liniar independent. Definiţia.3.4 Dacă B = {e (),e (),...,e (n) } este o bază aspaţiului vectorial V peste câmpul K, atunci n scalarii a,a,...,a n K din scrierea x = a k e k se numesc componentele sau coordonatele vectorului x în baza B. k= Teorema.3.3 (teorema înlocuirii a lui Steinitz.) Dacă B = {e (),e (),...,e (n) } este o bază în n spaţiul vectorial V peste câmpul K şi x = a k e (k) este un vector din V ce satisface condiţia a t 0, k= atunci sistemul B = {e (),e (),...,e (t ),x,e (t+),...,e (n) } este, de asemenea, o bază pentru V. Demonstraţie. Să arătăm mai întâi că B este liniar independent. Dacă b e () b t e (t ) + b t x + b t+ e (t+) b n e (n) = θ, atunci înlocuind pe x cu expresia lui, găsim: k= k= (b + b t a )e () +...+(b t + b t a t )e (t ) + b t a t e (t) + +(b t+ + b t a t+ )e (t+) +...+(b n + b t a n )e (n) = θ. 7
17 Cum B este bază în spaţiul vectorial V, din egalitatea precedentă rezultă: b + b t a =0,...,b t + b t a t =0,b t a t =0,b t+ + b t a t+ = =0,...,b n + b t a n =0. Deoarece a t 0, deducem b t =0şi deci b = b =...= b n = 0, ceea ce ne arată că B este liniar independent. Să arătăm acum că B este un sistem de generatori pentru V.Fieyun vector din V,careîn baza n B are scrierea y = c k e (k).cuma t 0, din scrierea lui x avem k= înlocuind pe e (t) în y, obţinem e (t) = a t (x a e ()... a t e (t ) a t+ e (t+)... a n e (n) ), (.) y =(c a t a c t )e () +...+(c t a t a t c t )e (t ) + a t c t x+ +(c t+ a t a t+ c t )e (t+) +...+(c n a t a n c t )e (n), ceea ce ne arată că B este un sistem de generatori pentru V. Observaţia.3. Prin inducţie matematică se poate demonstra următorul rezultat (teorema generală aînlocuirii): dacă B = {e (),e (),...,e (n) } este o bază în spaţiul vectorial V peste câmpul K şi S = {x (),x (),...,x (p) } este un sistem de vectori liniar independent din V, atunci p n şi putem înlocui p vectori din B prin vectorii lui S, astfel ca, renumerotând vectorii, B = {x (),...,x (p),e (p+),...,e (n) } să fie, de asemenea, bază pentru V. Comentariul.3. Demonstraţia Teoremei ne dăşi procedeul practic de înlocuire a unui vector dintr-o bază cu un alt vector, cât şi formulele de calcul al coordonatelor unui vector în noua bază. Intradevăr, pentru coordonatele vectorului y = c k e (k) în noua bază B din formula (.) rezultă n formulele k= (.) şi (.3) y k = c k a t a k c t = c ka t a k c t, pentru k t a t y t = a t c t = c t, pentru k = t. a t Formulele (.) şi (.3) ne dau regulile de aflare a componentelor lui y în baza B,în care în locul vectorului e (t) s-a introdus vectorul x. Formula (.3) arată că noua componentă a vectorului y corespunzătoare vectorului x ce intrăîn locul lui e (t),seobţine prin împărţirea componentei sale c t (de pe linia t ) la componenta a t aluix de pe coloana t, iar formula (.) indică regula: componenta nouă y k aluiy, de pe o linie arbitrară k, seobţine din vechea componentă a k după regula a t c t echivalentă cu a tc k a k c t = y a k c k, k a t numită şi regula dreptunghiului. Elementul a t 0senumeşte şi pivot, ceea ce face ca regula dreptunghiului să se mai numească şi regula pivotului. De obicei calculele se fac în tabele succesive de 8
18 forma Baza e () e ()... e (t)... e (n)... x y e () a c e () a c x e (t) a t c t e (k) ak c k e (n) a n c n Exemplul.3.6. Fie vectorii x = (, 3, ) şi y = (3, 4, 5) scrişi în baza canonică dinr 3. Scriem componentele lui y în baza (e (),x,e (3) ). Avem Baza e () e () e (3) x y e () x e () e (3) e () x e () unde elementele de pe linia lui e () s-au împărţit cu elementul pivot 3, iar celelalte s-au calculat cu regula dreptunghiului. Pe coloana elementului pivot se pune în locul elementului pivot şi în rest 0. De reţinut că, utilizând această cale de lucru, se poate înlocui o bază a unui spaţiu vectorial cu o alta. Exemplul.3.7. În R săseînlocuiască baza canonică cu baza dată de vectorii x () =(, 3) şi x () = (4, ) şi în noua bază să se scrie componentele vectorului v =(3, 4). Avem Baza e () e () x () x () v x () e () e () x () 3 0 x () e () x () x () Observaţia.3. Metoda elementului pivot este utilizată în rezolvarea multor probleme de matematică cu aplicarea în modelele matematico-economice. Corolarul.3. Dacă o bază a unui spaţiu vectorial este formată din n vectori, atunci orice bază a sa are tot n vectori. Definiţia.3.5 Dacă o bază a unui spaţiu vectorial V este formată din n vectori, atunci spunem că spaţiul V are dimensiune finită egală cu n. Scriem dim V = n. Spunem că un spaţiu vectorial are o dimensiune infinită dacă există în el o bază infinită. De exemplu, avem dim R n = n şi dim Hom(R, R) =. Definiţia.3.6 Un spaţiu vectorial V cu dim V =se numeşte dreaptă vectorială ;un spaţiu V cu dim V =se numeşte plan vectorial. 9
19 Un subspaţiu W,cudim W = n. a unui spaţiu vectorial V,cudim V = n, senumeşte hiperplan vectorial. Altfel spus, un subspaţiu vectorial W este un hiperplan vectorial dacă eleste suplimentar unei drepte vectoriale. Definiţia.3.7 Se numeşte rangul unui sistem S de vectori din spaţiu vectorial V, dimensiunea spaţiului vectorial generat de S. Notăm rangul lui S prin rang S. Propoziţia.3. Rangul unui sistem de vectori din spaţiul vectorial V nu se modifică dacă: i) se schimbă ordinea vectorilor; ii) se înmulţeşte un vector al sistemului cu un scalar nenul; iii) se adună la un vector al sistemului un alt vector din sistem, înmulţit cu un scalar. Pentru demonstraţie se observăcă sistemele de vectori obţinute prin transformările i) iii) din propoziţie generează acelaşi subspaţiu vectorial şi deci are acelaşi rang. Transformările i), ii), iii) se numesc transformări elementare. Teorema.3.4 Rangul unui sistem finit de vectori este egal cu numărul maxim de vectori liniar independenţi ai sistemului. Demonstraţie. Fie S = {x (),x (),...,x (m) } un sistem de vectori în spaţiul vectorial V şi k m numărul maxim de vectori liniar independenţi ai lui. Pentru comoditatea scrierii considerăm că vectorii x (),x (),...,x (k) sunt liniar independenţi, ceea ce implică că ceilalţi vectori ai sistemului se vor exprima ca şi combinaţii liniare de aceştia, adică x (k+i) = a i x () + a i x () a ik x (k),i=,,...,m k Acum, adunăm în sistemul S la fiecare din vectorii x (k+i), i =,,...,m k, respectiv vectorul a i x () + a i x () a ik x (k) şi obţinem sistemul S = {x (),x (),...,x (k),θ,θ,...,θ}. După Propoziţia.3. sistemul S are acelaşi rang cu sistemul S. Dar în sistemul S sistemul de vectori {x (),...,x (k) } este o bază, ceea ce ne arată că dimensiunea lui este k. Prin urmare, rangul lui S şi deci şi al lui S este k. Definiţia.3.8 Două spaţii vectoriale V şi W peste acelaşi câmp K se numesc izomorfe dacă există o aplicaţie f : V W care să fie izomorfism faţă de operaţiilecedefinescpev şi W structura de spaţiu vectorial. Teorema.3.5 Printr-un izomorfism de două spaţii vectoriale se păstrează rangul unui sistem finit de vectori Demonstraţie. Fie f : V W un izomorfism între spaţiile vectoriale V şi W şi S = {x (),x (),...,x (m) } un sistem de vectori de rang k, k m, din spaţiul vectorial V. Prin f se obţine sistemul de vectori S = {y (),y (),...,y (m) }, unde y (i) = f(x (i) ), i =,m,dinw. Pentru comoditatea scrierii considerăm că vectorii x (),x (),...,x (k) sunt liniar independenţi. Atunci din relaţia a y () +a y () +...+a k y (k) = θ, a,a,...,a k K, rezultă a f(x () )+a f(x () )+...+a k f(x (k) )=θ, iar de aici f(a x () +a x () +...+a k x (k) )=θ. Cumf este injectivă deducem că a x () +a x () +...+a k x (k) = θ şi de aici a = a =...= a k = 0, ceea ce ne arată că vectorii y (),y (),...,y (k) sunt liniar independenţi. Acum considerând relaţiile şi aplicând funcţia f, obţinem x (k+i) = a i x () + a i x () a ik x (k),i=,,...,m r y (k+i) = a i y () + a i y () a ik y (k),i=,,...,m r. Prin urmare, sistemul de vectori y (),...,y (k) este un sistem de generatori pentru S şi deci rang S = rang S. 0
20 Teorema.3.6 Condiţia necesară şi suficientă ca două spaţii vectoriale V şi W peste câmpul K, de dimensiune finită, să fie izomorfe este ca ele să aibă aceeaşi dimensiune. Demonstraţie. Necesitatea rezultă imediat aplicând Teorema.3.5. Pentru suficienţă să considerăm spaţiile vectoriale V şi W cu dim V = dim W = n. Fie B = {e (),e (),...,e (n) } şi B = {f (),f (),...,f (n) } câte o bază în V şi respectiv W. Definim, aplicaţia n n h : V W după regula: pentru orice x B, x = a i x (i), h(x) = a i f (i). Se verifică imediat că h i= este un izomorfism şi deci spaţiile V şi W sunt izomorfe. Corolarul.3.3 Printr-un izomorfism între două spaţii vectoriale V şi W de dimensiune finită o bază din V este dusă într-o bază dinw. Corolarul.3.4 Există un izomorfism şi numai unul între două spaţii vectoriale V şi W de dimeniune finită caresăducăobază B din V într-o bază dată B din W. Corolarul.3.5 Orice spaţiu vectorial V peste câmpul K de dimensiune n este izomorf cu spaţiul K n. Corolarul.3.6 Pentru orice subspaţiu W al unui spaţiu vectorial V avem dim W dim V..4 Produs scalar. Spaţii normate. Spaţii metrice Fie V un spaţiu vectorial peste corpul K, unde K = R sau K = C. Definiţia.4. Se numeşte produs scalar pe V, orice aplicaţie <, >: V V K, cu proprietăţile: P. <x,x> 0, oricare ar fi x, y V şi <x,x>=0, dacă şi numai dacă x = θ; P. <x,y>= <y,x>,(z este conjugatul lui z în C), oricare ar fi x, y V ; P3. < λx, y >= λ<x,y>, oricare ar fi λ K şi x, y V ; P4. <x+ y, z >=< x,z>+ <y,z>, oricare ar fi x, y, z V. Dacă K = R, cum un număr real este egal cu conjugatul său rezultă că P devine <x,y>=< y, x >, adică produsul scalar este comutativ. Definiţia.4. Un spaţiu vectorial peste câmpul K = R C înzestrat cu un produs scalar se numeşte spaţiu prehilbertian. Dacă K = R, atunci spaţiul se numeşte euclidian, iar dacă K = C atunci spaţiul vectorial înzestrat cu un produs scalar se numeşte unitar. Exemple. <x,y>=.4.. Dacă în R n considerăm vectorii x =(x,...,x n )şi y =(y,y,...,y n )şi definim n x i y i, atunci R n devine un spaţiu euclidian. Prin simple calcule se verifică proprietăţile i= P P În Cn produsul scalar al vectorilor x =(x,...,x n ), y =(y,...,y n ) se defineşte prin devenind astfel un spaţiu unitar. <x,y>= n x i y i,.4.3. Pe spaţiul vectorial C[a, b] al funcţiilor reale continue, expresia <f, g>= este un produs scalar. i= i= b a f(x)g(x)dx Definiţia.4.3 Se numeşte normă peste spaţiul vectorial V peste K = R C orice aplicaţie : V R cu următoarele proprietăţi:
21 N. x =0, dacă şi numai dacă x = θ; N. λx = λ x, oricare ar fi λ K şi x V ; N3. x + y x + y (inegalitatea triunghiurilor), oricare ar fi x, y V. Dacă în N3 punem y = x, atunci rezultă x 0, pentru orice x V. Definiţia.4.4 Un spaţiu vectorial V peste K este normat dacă pe el s-a definit o normă. Scriem (V, ). Teorema.4. Dacă (V,<, >) este un spaţiu euclidian, atunci pentru orice x, y V are loc inegalitatea <x,y> <x,x> <y,y>. numită inegalitatea lui Cauchy Schwarz Buniakowscki. Demonstraţie. Pentru orice x, y V şi orice λ R, avem < x + λy, x + λy > 0. De aici, folosind P P 4obţinem (.4) <y,y>λ +λ<x,y>+ <x,x> 0 pentru orice λ R. Dacă y = θ inegalitatea (0.8) devine (.5) λ <x,θ>+ <x,x> 0. Dar <x,θ>=< x,x x>=< x,x>+ <x, x >=< x,x>+ < x, x >=< x,x> <x,x>= 0. Cum <x,x> 0, rezultă că (0.8) are loc pentru y = θ şi oricare ar fi x V. Deci, putem presupune y θ, adică <y,y>>0. Atunci trinomul de gradul doi în λ din (0.8) va fi 0, oricare ar fi λ R, dacăşi numai dacă Δ λ =<x,y> <y,y> <x,x> 0, de unde rezultă <x,y> <x,x> <y,y>ceea ce trebuia demonstrat. Egalitate în inegalitatea lui Cauchy Schwarz Buniakowski se obţine numai dacă x = λy, adică vectorii x şi y sunt coliniari. Observaţia.4. Pentru x =(x,...,x n ), y =(y,y,...,y n ) vectori din R n inegalitatea Cauchy Schwarz Buniakowski ia forma ( n ) ( n )( n ) x i y i, cu egalitate numai dacă x /y = x /y =...= x n /y n = λ R. i= i= Teorema.4. Dacă (V,<, >) este un spaţiu euclidian, aplicaţia : V R, definită prin x = <x,x>este o normă pev,numită norma generată de produsul scalar. Altfel spus, un spaţiu prehilbertian este un spaţiu normat. Demonstraţie. Trebuiesc verificate proprietăţile normei. Din x = 0 avem <x,x>= 0, de unde, pe baza lui P, deducem x = θ, ceea ce ne demonstrază N. Pentru N avem λx = < λx, λx > = λ <x,x> = λ x, pentru orice λ R şi orice x V. Pentru a demonstra N3 putem scrie x + y =<x+ y, x + y>= <x,x>+ <x,y>+ <y,y> x + x y + y =( x + y ) (s-a folosit inegalitatea lui Cauchy Schwarz Buniakowski), de unde rezultă x + y x + y, oricare ar fi x, y V. Observaţia.4. Teoremele 0.4. şi 0.4. rămân adevărate şi pentru spaţiile vectoriale unitare. x i i= y i
22 Definiţia.4.5 Fie (V,<, >) un spaţiu vectorial euclidian. Oricare ar fi vectorii x, y V, diferiţi de vectorul nul, numărul real ϕ [0,π] definit prin cos ϕ = <x,y> x y, se numeşte unghiul dintre x şi y. Unghiulϕ se notează şi prin ( x, y). Dacă <x,y>=0, atunci ϕ = π/, iar vectorii x şi y se numesc ortogonali. Un vector v se numeşte versor dacă v =. Definiţia.4.6 Fie A o mulţime nevidă. Se numeşte metrică (distanţă) pe A, orice aplicaţie d : A A R cu următoarele proprietăţi: M. d(x, y) =0, dacă şi numai dacă x = y (separare); M. d(x, y) =d(y, x), pentru orice x, y A (simetrie); M 3. d(x, z) d(x, y)+d(y, z), pentru orice x, y, z A (inegalitatea triunghiului). Definiţia.4.7 Se numeşte spaţiu metric orice mulţime nevidă A înzestrată cu o metrică. Notăm cu (A, d) mulţimea A înzestrată cu metrica d. Observaţia.4.3 Pentru orice x, y (A, d) avem d(x, y) 0. Într-adevăr, din M 3, punând z = x, rezultă 0 d(x, y)+d(y, x) =d(x, y), de unde d(x, y) 0. Exemple Aplicaţia d : A A R prin d(x, y) = {, x y 0, x = y metrica grosieră Aplicaţia d : R R R, d(x, y) = x y este o metrică per. este o metrică pe A, numită Teorema.4.3 Dacă (V, ) este un spaţiu vectorial normat, atunci aplicaţia d : V V R definită prin d(x, y) = x y este o metrică pev,numită metrica generată denormă. Demonstraţie. Trebuie să arătăm că d verifică proprietăţile M M 3. Pentru M din d(x, y) =0,avem x y = 0, de unde, pe baza lui N,obţinem x = y. Proprietatea de simetrie M rezultă astfel: d(x, y) = x y = ( )(y x) = ( ) y x = d(y, x), pentru orice x, y V. Inegalitatea triunghiului pentru d rezultă astfel: pentru orice x, y, z V. d(x, y) = x z = x y +(y z) x y + y z = d(x, y)+d(y, z), Observaţia.4.4 Pentru spaţiile euclidiene R n metrica generată de norma dată de produsul scalar conduce la d(x, y) = n (x i y i ) oricare ar fi x =(x,...,x n ) R şi y =(y,...,y n ) R. numităşi metrica euclidiană. i= 3
23 .5 Mulţimi convexe În acest paragraf vom introduce noţiunea de mulţime convexă şi proprietăţile ei. Ea are o importanţă deosebită în rezolvarea modelelor matematico economice de programare liniară. Definiţia.5. Fie x =(x,...,x n ) şi y =(y,...,y n ) doi vectori din R n. Vectorul z = ax +( a)y, cu a [0, ] se numeşte combinaţia liniară convexă a vectorilor x şi y. Definiţia.5. Dacă x, y R n mulţimea {z R n z = ax +( a)y, a [0, ]} se numeşte segmentul de dreaptă deextremităţi x şi y. El se notează cu[x, y]. Dacă a (0, ), atunci segmentul deschis dat de x şi y se notează cu(x, y). Pe R segmentul [x, y] şi segmentul deschis (x, y) coincid cu intervalul închis [x, y] respectiv intervalul deschis (x, y) Definiţia.5.3 Omulţime A R n se numeşte mulţime convexă, dacă oricare ar fi x, y A avem [x, y] A. Altfel spus, oricare ar fi două punctedina, segmentul [x, y] este o mulţime din A. Exemple..5.. Fie a =(a,a,...,a n ) R n un vector fixat din R n şi b un număr real dat. Mulţimea H = {x R n <a,x>= b} este convexă. Fie λ [0, ]. Pentru orice x, y H avem <a,λx+( λ)y >= λ<a,x>+( λ) <a,y>= λb +( λ)b = b ceea ce ne arată că[x, y] H. Mulţimea H este un hiperplan în R n de ecuaţie a x +a x +...+a n x n = b, dacă x =(x,...,x n ) R n..5.. În ipotezele de la.5., mulţimile S = {x R n <a,x> b} şi S = {x R n <a,x> b}, numite şi semispaţiile determinate de hiperplanul H, sunt mulţimi convexe Mulţimile M a,b = {z R n z = ax + by,x,y R n,a,b 0} sunt convexe. Ele sunt numite şi conuri convexe Mulţimea S 0 = {x R n ax 0,a R n,fixat} este un con convex, în timp ce S şi S,cu b 0, din exemplul.5. nu sunt conuri convexe. Propoziţia.5. Intersecţia a două mulţimi convexe este o mulţime convexă. Demonstraţie. Fie A şi B două mulţimi convexe din R n. Pentru orice λ [0, ] şi x, y A B avem λx +( λ)y A B. Propoziţia.5. rămâne valabilă pentru orice familie numărabilă de mulţimi convexe. Definiţia.5.4 Mulţimea A R n se numeşte con poliedral convex, dacă oricare ar fi x A se poate scriecaocombinaţie liniară nenegativă deunnumăr finit de elemente x (i) A, adică x = k a i x (i),a i 0,i=,k i= Orice subspaţiu a lui R n este un con poliedral convex. Definiţia.5.5 Fie A R n omulţime. Mulţimea tuturor combinaţiilor liniare convexe de elemente din A se numeşte acoperirea convexă a lui A. Ea se notează prin Co(A). Propoziţia.5. Co(A) este convexă şi A Co(A). Dacă A este convexă, atunci Co(A) =A. Demonstraţia propoziţiei este imediată. Definiţia.5.6 Dacă A R n este o mulţime convexă, atunci elementul x (0) A se numeşte punct extremal pentru A dacă nuexistă x, y A, a (0, ) aşa încât să avem x (0) = ax+( a)y, adică x (0) nu poate fi interior segmentului [x, y], oricare ar fi x, y A. Exemplu Vârfurile unui triunghi sunt punctele sale extremale. 4
24 .6 Testul Nr. de verificare a cunoştinţelor. Definiţi următoarele noţiuni: a) Spaţiu vectorial; b) Acoperirea liniară; c) Bază a a unui spaţiu vectorial; d) Produs scalar; e) Normă; f) Metrică; g) Combinaţie liniară convexă; h) Mulţime convexă.. Arătaţi cădacă(k, +, ) este corp comutativ şi n N, iar K n = {x =(x,..., x n ) x i K, i =,n}, pentru n, atunci mulţimea K n înzestrată cuoperaţiile este un spaţiu vectorial peste K. x + y def (x + y,..., x n + y n ) α x def (αx,..., αx n ), α K 3. Arătaţi că B = {v, u, w}, v =(,, ), u =(,, ) şi w =(,, ) este o bază în R 3 şi să se afle coordonatele vectorului t =(3, 6, ) în această bază. 4. Fie în R 4 baza B = {x,x,x 3,x 4 } cu x =(,,, ), x =(,, 0, ), x 3 =(0, 0,, ), şi x 4 =(,,, 0). Vectorul v are coordonatele (,,, ) în această bază. Găsiţi coordonatele lui v în baza B = {y,y,y 3,y 4 } cu y = x, y = x, y 3 =x +x +x 3 +x 4 şi y 4 = x Fie în R 3 baza B = {x,x,x 3 } cu x =(, 0, 0), x =(,, 0), x 3 =( 3,, ) şi vectorul v = 8x +4x x 3.Găsiţi coordonatele vectorului v în baza B = {y,y,y 3 },cuy = x + x + x 3, y = x + x x 3 şi y 3 = x x + x Arătţi că (R n,d) unde d : R n R n R, d(x, y) = este spaţiu metric. n x k y k, x =(x,..., x n )şi y =(y,..., y n ) 7. Arătaţi că aplicaţia <, > : R R R definită prin<x,y>=3x y x y x y +x y, x =(x,x )şi y =(y,y ), este un produs scalar. 8. Să se arate că într-un spaţiu prehilbertian real oarecare are loc pentru orice vectori x şi y egalitatea: x + y + x y =( x + y ). 9. Demonstraţi că orice spaţiu prehilbertian real X este şi spaţiu normat. 0. Fie a, b R cu a<b.arătaţi că [a, b] ={x R a x b} este o mulţime convexă. k= 5
25 Indicaţii şi răspunsuri Testul. Se verifică condiţiile prezentate în definiţia noţiunii de spaţiu vectorial. 3. Se verifică condiţiile de liniar independenţă şi sistem de generatori ale sistemului de vectori B. Folosind relaţiile găsite la verificarea condiţiei de sistem de generatori ale sistemului de vectori B se găseşte t B =( 4, 4, 7). 4. Se obţine tabelul v (xi) y 3(xi) v (yi) Deci v (yi) =(, 0,, ). ( 3 5. Se foloseşte matricea de trecere şi se obţine v (yi) =, 9 ),. 6. Se verifică condiţiile impuse asupra aplicaţiei d în definiţiea noţiunii de metrică. 7. Se verifică condiţiile din definiţia noţiunii de produs scalar. 8. Se foloseşte definiţia normei induse de produsul scalar şi proprietăţile produsului scalar ( x = <x,x>). 9. Se foloseşte definiţia normei induse de produsul scalar ( x = <x,x>)şi se verifică condiţiile din definiţia noţiunii de normă. Remarcăm că folosim şi inegalitatea Cauchy- Baniakowski-Schwarz: <x,y> <x,x> < y,y>. 0. Se arată că oricare ar fi x, y din [a, b] segmentul cu extremitatea iniţială în x şi cea finală în y aparţine tot lui [a, b]. 6
26 Bibliografia aferentă capitolului: [] Acu, A.M., Acu D., Acu M., Dicu P., Matematici aplicate în economie - Volumul I, Editura ULB, Sibiu, 00. 7
27 Capitolul 3 Matrice. Determinanţi. Sisteme de ecuaţii liniare Obiective: Scopul acestui capitol este de a oferi studenţilor metode rapide de soluţionare a problemelor legate de matrici, determinanţi şi sisteme de ecuaţii liniare. Rezumat: În prezentul capitol sunt prezentate atât metodele cunoscute din liceu, precum şi metode avansate, de aflare a inversei unei matrici, de calcul a valorii unui determinant şi de rezolvare a unui sistem de ecuaţii liniare, metode care se vor aplica în capitolele ulterioare. Conţinutul capitolului:. Matrice. Determinanţi 3. Sisteme de ecuaţii liniare 4. Test de verificare a cunoştinţelor 5. Bibliografia aferentă capitolului Cuvinte cheie: matrice, determinant, sistem de ecuaţii libiare, Gauss, Gauss- Jordan, metoda lui Chio. 3. Matrice Definiţia 3.. Se numeşte matrice de tipul m n peste un câmp K un tablou dreptunghiular A format din m n elemente din K situate pe m linii şi n coloane. Scriem a a... a n a a... a n A =.... a m a m a m3 a mn sau condensat A =(a ij ) i=,m, j=,n unde a ij reprezintă elementul matricei situat pe linia i şi coloana j. Elementele a,a,... formează diagonala principală a matricei, iar elementele a n,a,n,... diagonala secundară. Notăm cu M m n (K) mulţimea matricelor de tipul m n peste câmpul K, iar cu M(K) mulţimea tuturor matricelor peste câmpul K. Dacă m = n, matricele se numesc pătratice de ordin n. Dacă m =, matricea se numeşte matrice sau vector linie. Dacă n =, matricea se numeşte matrice sau matrice coloană. 8
28 Unei matrice A de tip m n isepoateataă sistemul ordonat de m vectori linie din K n dat de L i =(a i,a i,...,a in ),i=,m şi sistemul ordonat de n vectori coloană C j = t (a j,a j,...,a mj ),j =,n. Definiţia 3.. Două matrice de acelaşi tip sunt egale dacă elementele corespunzătoare sunt egale. Definiţia 3..3 Se numeşte suma matricelor A =(a ij ) şi B =(b ij ), ambele de tipul m n peste K, matricea notată cua + B dată deregulaa + B =(a ij + b ij ). Operaţia care realizează această regulăsenumeşte adunarea matricelor. Matricea O M m n (K) cu toate elementele nule se numeşte matricea nulă. Fiind dată matricea A =(a ij ) M m n (K), matricea A =( a ij ) M m n (K) se numeşte opusa lui A. Se verifică imediat că (M m n (K), +) este un grup comutativ. Definiţia 3..4 Se numeşte produsul matricei A =(a ij ) M m n (K) cu scalarul α K, matricea notată αa, obţinută prin regula αa =(αa ij ) M m n (K). Operaţia dată de această regulă senumeşte înmulţirea cu un scalar a matricelor. Înmulţirea cu un scalar a matricelor verifică proprietăţile evidente A = A, α(a + B) =αa + αb, (α + β)a = αa + βa,α(βa) =(αβ)a, oricare ar fi α, β K şi A, B M m n (K). Rezultă că are loc propoziţia: Propoziţia 3.. Mulţimea matricelor M m n (K) în raport cu operaţiile de adunare şi de înmulţire cu un scalar are o structură de spaţiu vectorial peste K. Dimensiunea spaţiului vectorial M m n (K) este mn. Într-adevăr se observă căorice A =(a ij ) M m n (K) se scrie în mod unic sub forma A = m i= n a ij E (ij), j= unde E (ij) sunt matricele de tipul m n, care au toate elementele egale cu 0, în afară decel de pe linia i şi coloana j care este egal cu. Definiţia 3..5 Se numeşte transpunere în mulţimea M(K) a matricelor peste K, aplicaţia t : M(K) M(K), definită prin t(a) = t A, unde A =(a ij ) M m n (K), iar t A =(a ji ) M n m (K). Matricea t A se numeşte transpusa lui A. Se observă uşor că transpusa este o funcţie bijectivă, care verifică proprietăţile: ) t ( t A)=A; ) t (A + B) = t A + t B şi 3) t (αa) =α t A, oricare ar fi A, B M m n (K) şi α K. De aici rezultă că transpunerea este un izomorfism între spaţiile vectoriale M m n (K) şi M n m (K). Definiţia 3..6 O matrice pătratică A =(a ij ) M n n (K) se numeşte simetrică dacă A = t A, adică elementele simetrice faţă de diagonala principală sunt egale a ij = a ji, i, j =,n. Definiţia 3..7 O matrice pătratică A =(a ij ) M m n (K) enumeşte antisimetrică dacă A = t A, adică elementele simetrice faţă de diagonala principală sunt opuse a ij = a ji i, j =,n. Definiţia 3..8 O matrice pătratică se numeşte triunghiulară superioară respectiv inferioară dacă toate elementele situate dedesuptul, respectiv deasupra diagonalei principale sunt nule. 9
29 Definiţia 3..9 O matrice pătratică se numeşte diagonală dacă toate elementele ei sunt nule cu excepţia celor de pe diagonala principală. Teorema 3.. Teorema rangului. Pentru o matrice rangul sistemului de vectori linie este egal cu rangul sistemului de vectori coloană. Demonstraţie. Fie A = (a ij ) M m n (K) şi r şi p rangurile sistemelor de vectori linie L i = (a i,a i,...,a in ), i =,m şi coloană C j = (a j,a j,...,a mj ), j =,n. Nu restrângem generalitatea, dacă presupunem că primele r linii sunt liniare independente, deoarece o schimbare a ordinii liniilor păstrează rangul sistemului vectorilor linie. O astfel de schimbare modifică vectorii coloană. Fiecare vector coloană sescrie m C j = a ij e (i), unde B = {e (),e (),...,e (m) } este baza canonică dink m, este dus în vectorul C j = i= m a ij f (i), i= unde B = {f (),f (),...,f (m) } este noua bază dink m,obţinută dinb prin schimbarea ordinii vectorilor ei, corespunzătoare schimbării liniilor matricei A. Considerăm, acum, automorfismul spaţiului K m, care duce baza B în baza B, acesta ducând vectorii C j în vectorii C j şi deci păstrează rangul sistemului format de ei. Celelalte linii ale matricei A se vor exprima ca şi combinaţii liniare de primele r, adică putem scrie L r+s = α r+s, L + α r+s, L α r+s,r L r,s=,,...,m r, de unde, folosind egalitatea vectorilor în K n,rezultă a r+s,j = α r+s, a j + α r+s, a j α r+n,r a rj,j =,...,n. Înlocuind în expresiile coloanelor C j,obţinem = r i= C j = r i= m r a ij e (i) + a r+s,j e (r+s) = s= m r a ij e (i) + (α r+s, a j + α r+s, a j α r+s,r a rj )e (r+s),j =,n. s= Cum coeficienţii α r+s,j, j =,n sunt independenţi de ordinea liniilor, grupând termenii care conţin pe a ij,obţinem ) r m r C j = a ij (e (i) + α r+s,i e (r+s),j =,n. i= s= Punând g (i) = e (i) + m r s= α r+s,ie (r+s), i =,r,rezultă r C j = a ij g (i),j =,n. i= Am dedus că cein vectori coloană se exprimă caşi combinaţii liniare de r vectori g (i) din K m, iar rangul p al sistemului format de ei este cel mult egal cu numărul generatorilor g (i),decip r. Dacă acum schimbăm rolul coloanelor şi liniilor şi facem acelaşi raţionament, obţinem r p. Din p r şi r p rezultă r = p, ceea ce trebuia demonstrat. 30
30 Definiţia 3..0 Rangul comun al sistemelor de vectori linii sau coloane a unei matrice se numeşte rangul ei. Altfel spus, rangul unei matrice este egal cu numărul maxim de linii sau coloane liniar independent, între ele. Propoziţia 3.. Rangul unei matrici este egal cu rangul transpusei sale. Demonstraţie. Deoarece prin transpunere sistemul de vectori linie al unei matrici devine sistemul de vectori coloană al transpusei matricei, din teorema rangului rezultă că matricea şi transpusa ei au acelaşi rang. Observaţia 3.. Prin transformări elementare aplicate sistemului de vectori linie sau coloane, rangul unei matrice nu se modifică. Valabilitatea acestei observaţii rezultă din teorema rangului şi din faptul că prin efectuarea unor transformări elementare rangul unui sistem de vectori nu se modifică (v.3.3). Propoziţia 3..3 Prin transformări elementare asupra liniilor şi coloanelor, orice matrice A poate fi transformată într-o matrice B, având toate elementele nule cu excepţia primelor r elemente de pe diagonala principală, care să fie egale cu. Matricea A are atunci rangul r. Demonstraţie. Considerăm matricea a a... a j... a n A = a i a i... a ij... a in a m a m... a mj... a mn Dacă A este matricea nulă, atunci afirmaţia propoziţiei este dovedită. Dacă nu, atunci putem presupune că a 0 (în caz că a = 0 se fac schimbări ale ordinii liniilor sau coloanelor). Pentru a obţine pe poziţia lui a înmulţim prima linie cu a. Pentru a avea 0 pe poziţia a i, i =,m, înmulţim acum linia întâi cu a i. Elementul a ij se înlocuieşte cu a ij a a ja i = a a ij a j a i,i=,m,j =,n, a n în care se recunoaşte regula de calcul a dreptunghiului sau elementului pivot. Aplicând repetat acest procedeu, după un număr finit de paşi, ajungem că A este echivalentă ( ) din punctul de vedere al rangului cu matricea B = linia r şi deci rangul lui A este r, datdenumărul de cifre din B. Demonstraţia acestei propoziţii ne dăşi procedeul practic de aflare a rangului unei matrice, calculele făcându-se cu cunoscuta regulă a dreptunghiului. Exemplul 3... Să se afle rangul matricei A =
31 Schimbând coloana cu coloana şi înmulţind coloana 5 cu /3 obţinem 0 A Înmulţim prima linie cu /, apoi pe linia întâi şi coloana întâi completăm cu 0, iar restul elementelor le calculăm cu regula dreptunghiului, obţinând A Aplicând succesiv acelaşi procedeu avem: A şi deci rang A = , Definiţia 3.. O matrice pătratică deordinn se numeşte nesingulară sau regulată dacă rangul ei este egal cu n. În caz contrar, adică dacă rangul ei este mai mic ca n, atunci matricea se numeşte singulară. Definiţia 3.. Se numeşte matrice extrasă dintr-o matrice A orice matrice B obţinută din A înlăturând anumite linii şi coloane, păstrând ordinea liniilor şi coloanelor rămase. Teorema 3.. Rangul unei matrice este egal cu ordinul maxim al matricelor pătratice nesingulare extrase din ea. Demonstraţie. Fie A o matrice, r rangul ei şi B o matrice pătratică nesingurală extrasădin A şi de rang maxim p. Celep linii ale matricei A care intervin în B sunt liniar independente, deoarece dependenţa liniară a acestor linii în A ar atrage dependenţa lor liniară şi în B, ceea ce ar face ca B să fie singulară. Prin urmare p r. Acumsăarătăm că oricare p+ linii din A sunt liniar independente. Să admitem că există în A (p +) linii liniar independente, atunci, extrăgând din A matricea formată din ele, am obţine o matrice C de rang (p +). Pe baza teoremei rangului, matricea C are şi p + coloane liniar independente. Acum extrăgând din C (deci şi din A) matricea D formată din cele p + coloane liniar independente, obţinem o matrice nesingulară de ordin p +, ceea ce ar contrazice alegerea lui p. Rezultăcă r<p+ şicumamarătat că p r, deducem că r = p. Să introducem acum pe mulţimea M(K) a matricelor operaţia de înmulţire. Definiţia 3..3 Se numeşte produsul matricei A =(a ij ) M m n (K) cu matricea B =(b ij ) M n p (K), matricea C =(c ij ) M m p (K), unde c ij = a i b j + a i b j a in b nj,i=,m,j =,p. Operaţia care realizează acest proces se numeşte înmulţirea ma- Scriem C = A B. tricelor. 3
32 Propoziţia 3..4 Înmulţirea matricelor, când are sens, este asociativă. Demonstraţie. Fie A =(a ij ) M m n (K), B =(b ij ) M n p (K), C =(c ij ) M p q (K). Avem ( n ]) ( n ) p A(BC) = b kl c lj = a ik b kl c lj = [ p a ik k= l= k= l= ( p [ n ] ) = a ik b kl c lj =(AB)C. l= k= Propoziţia 3..5 Înmulţirea matricelor este distributivă faţă de adunarea lor. Demonstraţie. Fie A =(a ij ) M m n (K), B =(b ij ) M n p (K) şi C =(c ij ) M n p (K). Avem ( n ) ( n ) n A[B + C] = a ik [b kj + c kj ] = a ik b kj + a ik c kj = k= k= k= ( n ) ( n ) = a ik b kj + a ik c kj = AB + AC, k= k= adică înmulţirea este distributivă la stânga faţă de adunare. În mod analog, se demonstrează şi distributivitatea la dreapta. Definiţia 3..4 Matricea pătratică I n =(δ ij ), i, j =,n,unde {,i= j δ ij = 0,i j i,j =,n este simbolul lui Kronecker, se numeşte matricea unitate de ordinul n. Altfel spus, matricea I n este o matrice diagonală cu toate elementele de pe diagonala principală egale cu. Când nu dorim să precizăm ordinul matricei unitate o vom nota prin I. Observaţia 3.. Pentru orice matrice A M m n (K) avem I m A = A şi AI n = A. Observaţia 3..3 Înmulţirea matricelor, în general. nu este comutativă. Din proprietăţile adunării şi înmulţirii rezultă: Propoziţia 3..6 Mulţimea M n (K) a matricelor pătratice de acelaşi ordin n înzestrată cu operaţiile de adunare şi înmulţire are o structură de inel cu divizori ai lui zero. Propoziţia 3..7 Transpusa unui produs de două matrice este egală cu produsul transpuselor în ordine inversă. Demonstraţie. Fie A =(a ij ) M m n (K) şi B =(b ij ) M n p (K). Avem ( n ) ( n ) ( n ) t (AB) = t a ik b kj = a jk b ki = b ki a jk = t B t A. k= k= Rezultatul obţinut se poate extinde prin inducţie matematică la un produs cu un număr finit de factori. Definiţia 3..5 Se numeşte inversa matricei pătratice A, matricea notată cua, care satisface condiţiile A A = A A = I. k= 33
33 Teorema 3..3 Condiţia necesară şi suficientă ca o matrice pătratică să aibă inversă este ca ea să fie nesingulară. Demonstraţie. Necesitatea. Presupunem că matricea A =(a ij ) M n (K) areoinversăpe A =(b ij ) M n (K). Din A A = I rezultă n b ik a kj = δ ij,i,j =,n. k= de unde, pentru vectorii e (i), i =,n ai bazei canonice obţinem exprimarea n (3.) e (i) = b ik L k, L k, k =,n, fiind vectorii linie ai matricei A. Cum pentru orice x K n avem x = k= n x i e (i), înlocuind e (i) din relaţiile (3.) deducem că orice vector x K n se exprimă ca o combinaţie liniară de vectori linie L k, k =,n.rezultăcă sistemul de vectori linie L k, k =,n, generează spaţiul K n, ceea ce înseamnă că are rangul n şi deci matricea A este nesingulară. Suficienţa. Din faptul că A este nesingulară, rezultă că vectorii linie L k, k =,n,sunt liniar independenţi şi deci formează obazăîn K n. Exprimăm vectorii e (i), i =,n, ai bazei canonice în baza dată de vectorii linie şi avem n e (i) = b ik L k,i=,n, k= de unde, punând B =(b ik ),obţinem BA = I. Matricea A fiind nesingulară are şi vectorii coloană liniar independenţi, formând şi ei obază în K n,şi deci putem scrie AC = I. Acum obţinem C = IC =(BA)C = B(AC) =BI = B, de unde C = B = A şi prin urmare matricea A are inversă. Uşor se arată că inversa unei matrice este unică şi că eaestenesingulară. Propoziţia 3..8 Produsul a două matrice nesingulare este o matrice nesingulară şi inversa ei este egală cu produsul inverselor luate în ordine schimbată Demonstraţie. Avem (AB) = B A (AB)(B A )=A(BB )A = AA = I şi (B A )(AB) =B (A A)B = B B = I, relaţii ce demonstrează afirmaţiile din enunţ. Rezultatul se extinde prin inducţie matematică la un produs de matrice nesingulare cu un număr finit de factori. Pentru aflarea inversei unei matrice se foloseşte transformarea ei în matrice unitate, aplicând regula dreptunghiului, după schema (A I) = (A A A I)= (I A ). Exemplul 3... Pentru a afla inversa matricei 3 A = 3 3 i= 34
34 procedăm astfel (A I 3 )= = Prin urmare, avem A = = = = Se poate lucra utilizând regula dreptunghiului fără aîmpărţi la pivot şi transformând matricea (A I) extinsă aşa încât să ajungem la situaţia (D C), unde D este matricea diagonală a a... 0 D =.... iar C =(c ij),i,j =,n a nn Pentru a afla inversa A împărţim liniile L,L,...,L n a a...a nn, a...a nn,...,a nn. Exemplul Pentru a afla inversa matricei 3 A = 3 3 ale matricei C respectiv la: procedăm astfel de unde (A I 3 )= = A = = = = Definiţia 3..6 O matrice pătratică A se numeşte ortogonală dacă t A A = I.. = Propoziţia 3..9 Condiţia necesară si suficientă ca o matrice pătratică să fie ortogonală este ca ea să fie nesingulară, iar transpusa şi inversa ei să fie egale. Demonstraţie. Necesitatea. Din t A A = I rezultă că A este nesingulară şi, înmulţind această egalitate la dreapta cu A,obţinem t A = A. Suficienţa. Dacă A este nesingulară şi verifică t A = A, atunci, prin înmulţire la dreapta cu A, găsim t A A = I, ceea ce ne arată că A este ortogonală. Teorema 3..4 Rangul unui produs de matrice nu depăşeşte rangul fiecăruia din factorii săi. 35
35 Demonstraţie. Fie A =(a ij ) M m n (K), B =(b ij ) M n p şi C = A B =(c ij ) M m p, unde n c ij = a ik b kj,i=,m,j =,p. k= Ultimele relaţii ne arată că liniile matricei C se exprimă ca şi combinaţii liniare de liniile matricei B şi deci subspaţiul generat de liniile matricei C sunt incluse în subspaţiul generat de liniile matricei B. Aşadar, avem rang C rang B În mod analog, raţionând cu vectorii coloană, obţinem rang C rang A. Dacă unul din factorii produsului este o matrice nesingulară, atunci avem un rezultat mai precis. Teorema 3..5 Rangul produsului dintre o matrice A şi o matrice nesingulară B este egal cu rangul lui A. Demonstraţie. Fie C = AB. Din Teorema 3..4 avem rang C rang A. Ţinând seama că B este nesingulară, există B şi înmulţind la dreapta cu B în C = AB, obţinem A = CB. Aplicând din nou Teorema 3..4, rezultă rang A rang C. Din rang C rang A şi rang A rang C obţinem rang C = rang A. Observaţia 3..4 Pentru simplificarea calculelor cu matrice se lucrează, deseori, cu matrice împărţită (partiţionată) în submatrice sau blocuri, obţinute ducând paralele la liniile şi coloanele ei. De exemplu, matricea A M n (K) se poate scrie ( ) B C A = D E unde B M p (K), E M (n p) (K), C M p,(n p),iard M n p,p. Cu matricele formate din blocuri se pot face operaţii ca şi cu matrice obişnuite, reducând calculele la matrice de ordine mai mici. O importantă aplicaţie a partiţionării în blocuri o constituie inversarea unei matrice. Să presupunem că B este inversa matricei A. Atunci AB = I sau prin partiţionare ( A A A A )( B B B B ) ( I O = O I ) Efectuând înmulţirile şi identificând matricele din cei doi membrii, vom obţine () A B + A B = I, () A B + A B =0, (3) A B + A B =0, (4) A B + A B = I. Din () avem B = A A B, care înlocuită în (4) ne conduce la Deoarece BA = I, vom avea B =(A A A A ) B A + B A =0, 36
36 de unde B = B A A iar din () B = A A A B. Ordinea de calculare a blocurilor matricei B este: B, B, B şi B. Exemplul Să se afle inversa matricei Partiţionăm luând A = A =, A =(34), A = ( ) ( 4 şi A = 3 ) Calculăm B = P, unde P = A A A A = ( ) Pentru a afla P partiţionarea Avem calculele procedăm prin acelaşi algoritm, considerând A = P şi făcând A = 4, A = 7, A = 5, A = 7. B = ( 7+ 5 ( ) ) ( 7) = 8 4 B = ( 4 ( 7) 8 ) = 3 B = 8 ( 5 )( 4 ) = 5 ) B = ( 7) ( 5 = 3 şi ( P = Acum revenim la calculul inversei matricei A iniţială. Avem ). rezultând B = P, B = A A B = ( (3 4) B = B A A = ( 3 ) = ), B = A A A B = (3 4) ( 3 ( ) A B B = B B ) = ( 5 ), ( 4 ), 37
37 În încheierea acestui paragraf să prezentăm o aplicaţie a matricelor la schimbarea bazei unui spaţiu vectorial. Fie V un spaţiu vectorial peste câmpul K cu dim V = n şi B = {e (),e (),...,e (n) } obază alui. Faţă de această bază un vector x V se scrie în mod unic sub forma x = n x i e (i), i= ceea ce înseamnă că vectorului x îi corespunde vectorul linie x =(x,...,x n ) din K n.deaici rezultă dacă avem în V sistemul de vectori x (i) =(x i,x i,...x in ), i =,,...,p, atunci rangul sistemului de vectori {x (),x (),...,x (p) } este egal cu rangul matricei coordonatelor x x... x n A = x x... x n x p x p... x pn Rezultă cădacăconsiderăm în V sistemul de vectori B = {f (),f (),...,f (n) }, dat faţă de B prin formulele n f j = a ij e (i), j =,n, i= atunci B formează o bază în V dacă şi numai dacă matricea A = (a ij ) M n (K) este nesingulară. În acest caz, A se numeşte matricea schimbării de bază sau matricea de trecere de la baza B la baza B. Punând faţă deb n x = y j f (j) şi înlocuind pe f j,avem x = de unde, identificând cu x = j= ( n n ) y j a ij e (i) = j= i= n x i e (i),rezultă i= n n a ij y i e (i) i= j= n x i = a ij y j, j= i =,n, care constituie formulele de schimbare a sistemului de coordonate, cores- punzătoare schimbării de bază B în B. Sub formă matricială formulele de schimbare se scriu astfel t x = A t y. 3. Determinanţi Considerăm matricea pătratică A = (a ij ) M n (K) cu elemente din câmpul K. Formăm produse de forma a i,a i...a nin,obţinute luând câte un element şi numai unul 38
38 din fiecare linie şi coloană a matricei A. Unui astfel de produs îi asociem permutarea (substituţia) ( )... n G = i i... i n numită permutarea indicilor săi. Notăm cu S n mulţimea tuturor celor n! permutări ale mulţimii {,,..., n}. În permutarea σ S n avem o inversiune dacă i<j şi σ(i) >σ(j). De exemplu, în permutarea ( ) 3 4 σ = 4 elementele 4 şi prezintă o inversiune. Prin Inv(G) notăm numărul inversiunilor permutării G, iar prin ε(σ) =( ) Inv(σ) signatura permutărilor σ. Dacă ε(σ) =, avem o permutare pară, iar dacă ε(σ) = avem o permutare impară. Definiţia 3.. Numim determinantul matricei pătratice A = (a ij ) M n (K), elementul det A K dat de formula det A = ε(σ)a i a i...a nin, σ S n unde suma se extinde la toate cele n! permutări din S n. Altfel spus, determinantul matricei A este elementul det A din K egal cu suma a n! produse, unde în fiecare produs intră cafactorcâte un element de pe fiecare linie şi coloană a matricei A, produsul având semnul + sau după cum permutarea indicilor săi este pară sau impară. Determinantul det A se zice de ordinul n dacă matricea A are ordinul n. Pentru det A folosim notaţia a a... a n det A = a a... a n a n a n... a nn sau det A = A = a ij. Vom prezenta acum proprietăţile determinanţilor. Propoziţia 3.. Determinantul unei matrice este egal cu determinantul transpusei sale. Demonstraţie. Valabilitatea Propoziţiei rezultă din faptul că o permutare σ şi inversa ei σ au aceeaşi paritate. Din această propoziţie rezultă că dacă pentru liniile unui determinant avem o propoziţie adevărată, atunci aceasta este adevărată şi pentru coloanele determinantului. De aceea, în continuare, vom formula şi justifica proprietăţile numai pentru liniile unui determinant. Propoziţia 3.. Dacă linia L i a matricei pătratice A =(a ij ) M n (K) este suma a p vectori, atunci determinantul ei este egal cu suma a p determinanţi corespunzători matricelor care au aceleaşi linii cu A, cuexcepţia liniei L i unde are câte unul din cei p vectori. Demonstraţie. Dacă linia L i este suma a p vectori atunci p a ij = b (k) ij, i =,n şi putem scrie det A = k= σ S n ε(σ)a j...a iji = 39 σ S n ε(σ)a j p k= b (k) ij i...a njn =
39 ceea ce trebuia demonstrat. = p ε(σ)a j b (k) ij i...a njn, σ S n k= Propoziţia 3..3 Dacă într-un determinant înmulţim o linie cu un factor k K, atunci valoarea determinantului se înmulţeşte cu k. Demonstraţie. Fie A =(a ij ) M n (K) şi B matricea obţinută dina, în care elementele liniei i sunt înmulţite cu k. Atunci det (B) = σ S n ε(σ)a j...(ka iji )...a njn = = k ε(σ)a i...a ji a njn = kdeta. σ S n Propoziţia 3..4 Dacă într-un determinant se schimbă două linii între ele, atunci valoarea lui îşi schimbă semnul. Demonstraţie. Se observă că prin schimbarea celor două linii permutarea indicilor îşi schimbă paritatea. Propoziţia 3..5 Dacă într-un determinant două linii sunt identice, atunci valoarea lui este zero. Demonstraţie. Dacăîn det A schimbăm între ele cele două linii identice, atunci, folosind propoziţia 3..4 putem scrie det A = det A, de unde det A =0. Propoziţia 3..6 Dacă într-un determinant avem două linii proporţionale, atunci valoarea lui este zero. Demonstraţie. Valabilitatea propoziţiei rezultă din Propoziţiile 3..3 şi Propoziţia 3..7 Dacă într-un determinant la o linie adăugăm o combinaţie liniară de celelalte linii, atunci valoarea lui rămâne neschimbată. Demosntratîe. Se aplică Propoziţiile 3.. şi Propoziţia 3..8 Dacă liniile matricei care defineşte determinantul sunt liniar dependente (matricea este singulară), atunci valoarea determinantului este zero. Demonstraţie. Se aplică Propoziţiile 3.. şi În particular, dacă pe o linie a unui determinant avem numai zero, atunci valoarea determinantului este zero. Definiţia 3.. Numim minorul complementar al elementului a ij din matricea pătratică A = (a ij ) M n (K), determinantul asociat matricei extrase din A prin eliminarea liniei i şi coloanei j. Notăm M ij minorul complementar al elementului a ij. Definiţia 3..3 Numim complementul algebric al elementului a ij din matricea pătratică A = (a j ) M n (K) elementul A ij K dat de relaţia A ij =( ) i+j M ij. Propoziţia 3..9 Determinantul matricei A =(a ij ) M n (K) este egal cu suma produselor elementelor liniei L i (i =,n) prin complemenţii lor algebrici, adică det (A) =a i A i a ij A ij a in A in. 40
40 Demosntraţie. Se arată căefectuând produsele a ij A ij, j =,n obţinem toate produsele din definiţia lui det A luate cu acelaşi semn. Corolarul 3.. Dacă în dezvoltarea determinantului det (A) după elementele liniei L i înlocuim aceste elemente prin elementele α,...,α n din K, atuncisumaobţinută reprezintă determinantul matricei obţinută dina prin înlocuirea liniei L i cu vectorul (α,α,...,α n ). Corolarul 3.. Suma produselor elementelor unei linii L i ai matricei A =(a ij ) M n (K) prin complemenţii algebrici ai elementelor altei linii L j este egală cuzero. De fapt, din Propoziţia 3..9 şi Corolarul 3.. putem scrie n a ij A kj = δ ik det A, j= i, k =,n. Observaţia 3.. Propoziţia 3..9 se poate generaliza prin aşa numita regulă a lui Laplace. În acest scop se introduce noţiunea de minor de ordinul k al matricei A =(a ij ) M n (K), notat prin M j,j,...,j k i,i,...,i k şi fiind determinatul asociat matricei de ordin k formată cu elementele ce se găsesc la intersecţia liniilor i,...,i k cu coloanele j,...,j k (i <... < i k,j <... < j k ). Minorul complementar al minorului M j,j,...,j k i,i,...,i k, notat prin M j,j,...,j k i,i,...,i k este determinatul asociat matricei extrase din A prin înlăturarea liniilor i,...,i n şi coloanelor j,...,j k. Se numeşte complementul algebric al minorului M j,j,...,j k i,i,...,i k elementul A j,j,...,j k i,i,...,i k K dat de relaţia A j,...,j k i,...,i k =( ) i+...+i k+j +...+j k M j,...,j k i,...,i k. Regula lui Laplace ne spune că determinantul unei matrice pătratice este egal cu suma produselor minorilor de pe k linii fixate ale matricei prin complemenţii lor algebrici. Observaţia 3.. Calculul unui determinant de ordin n se poate face calculând numai determinanţi de ordinul doi (de fapt, aplicând regula dreptunghiului fără împărţirea la elemntul pivot). Fie de calculat det A = a a... a j... a n a i a i... a ij... a in a n a n... a nj... a nn Presupunem că a 0. Împărţim linia întâi cu a (în faţa determinantului se va înmulţi cu a ). Apoi facem 0 pe prima coloană, ceea ce va face ca elementul a ij să fie înlocuit prin a ij a j a i = a ija a j a i a a = b ij, a j i,j =,n. Dezvoltând acum determinantul după prima coloană şi scoţând în noul determinant factorul /a de pe fiecare linie, obţinem formula lui Chio: det A = a n b b 3... b n b 3 b b 3n b n b n3... b nn. 4
41 Practic se aplică repetat această formulă, în care elementele b ij, i, j =,n,seobţin prin regula dreptunghiului fără împărţirea la elementul pivot. Exemplu. Avem 3 det A = = = = =4 8 5 =4 ( 3) = 5. Utilizând regula lui Laplace se demonstrează: Propoziţia 3..0 Determinantul produsului a două matrice A şi B de ordin n este egal cu produsul determinanţilor acestor matrice. Propoziţia 3.. Condiţia necesară şi suficientă ca o matrice să fie nesingulară este ca determinantul ei să fie diferit de zero. Demonstraţie. Necesitatea. Dacă A este o matrice pătratică nesingulară, atunci admite inversă şi din relaţia A A = I avem det (A ) det (A) =şi deci det (A) 0. Suficienţa. Dacă det (A) 0, matricea A nu poate fi singulară deoarece după consecinţa 3..8 ar rezulta det (A) =0. Corolarul 3..3 Rangul unei matrice este egal cu ordinul maxim al minorilor diferiţi de zero. Acest corolar ne dă un alt procedeu pentru aflarea rangului unei matrice. Definiţia 3..4 Se numeşte matrice adjunctă a matricei A =(a ij ) M n (K) matricea notată prin A şi dată prin A =(A ji ),undea ij este complementul algebric al elementului a ij din A. este transpusa matricei formată cu complemenţii algebrici ai ele- Altfel spus, A mentelor matricei A. Propoziţia 3.. Inversa unei matrice nesingulare A de ordin n este dată de formula A = det (A) A. Demonstraţie. Folosind corolarul 3.., avem n A det A A = A kj a ij = det (A) j= ( ) det (A) δ ij =(δ ij )=I n, det (A) ceea ce trebuia demonstrat. Formula din Propoziţia 3.. dă un alt procedeu pentru calcularea inversei unei matrice. 3.3 Sisteme de ecuaţii liniare În acest paragraf vom aplica matricele şi determinanţii la rezolvarea sistemelor de ecuaţii liniare, întâlnite în mod curent în aplicaţiile economice. 4
42 Definiţia 3.3. Se numeşte sistem de m ecuaţii liniare cu n necunoscute peste câmpul K, un ansamblu de relaţii de forma (3.) a x + a x a n x n = b, a x + a x a n x n = b,... a m x + a m x a mn x n = b m, unde a ij K, i =,m, j =,n sunt coeficienţii sistemului, b,...,b n K termenii liberi ai sistemului, iar x,...,x n K sunt necunoscutele sistemului. Dacă cel puţin un termen liber este diferit de zero atunci vom spune că sistemul este neomogen, iar dacă toţi termenii liberi sunt nuli, atunci vom zice că sistemul este neomogen. Definiţia 3.3. Numim soluţie a sistemului (.8) orice ansamblu format din n elemente α,α,...,α n din K cu proprietatea că înlocuind în membrii stângi ai ecuaţiilor sistemului x i = α i, i =,n,şi făcând calculele, se obţin elementele corespunzătoare din membrii drepţi. Definiţia Un sistem de ecuaţii liniare se zice că este compatibil dacă arecelpuţin o soluţie şi incompatibil în caz contrar. Matricea a a... a n A = a a... a n a n a n... a mn se numeşte matricea sistemului, iar matricea A = a a... a n b a a... a n b a n a n... a mn b m se numeşte matricea extinsă (completă) a sistemului (.8) Notând cu X = t (x,x,...,x n ) vectorul coloană al necunoscutelor şi cu B = t (b,b,...,b m ) vectorul termenilor liberi, sistemul (.8) se poate scrie sub forma matriceală AX = B. Definiţia Numim sistem Cramer un sistem de n ecuaţii liniare cu n necunoscute pentru care matricea A a sistemului este nesingulară, adică det A 0. Pentru astfel de sisteme are loc: Teorema 3.3. (Cramer). Orice sistem Cramer este compatibil determinat (are soluţie unică) şi x i = Δ i det A, i =,n, unde Δ i este determinantul matricei obţinută din matricea A a sistemului prin înlocuirea coloanei C i cu coloana B a termenilor liberi. Demonstraţie. Ţinând seama că A este nesingulară, din forma matriceală a sistemului obţinem X = A B, care ne arată că sistemul este compatibil. Cum A =(det A) A, unde A este matricea adjunctă a matricei A (v. Propoziţia 3..), înlocuind în X = A B, 43
43 obţinem X = det (A) A B = det (A) n A k b k n A k b k k= k=. n A ki b k k=. n A km b k k= = det A de unde x i = Δ i det (A), i =,n. Prezentăm acum metoda eliminării totale (Gauss Jordan) pentru aflarea soluţiilor pentru sistemele Cramer. În acest scop, scriem matricea extinsă a sistemului şi avem succesiv Δ Δ... Δ i. Δ n, (3.3) (A B) = (A A A B) = (I n X). unde I este matricea unitate de ordinul n. Practic se lucrează cu metoda dreptunghiului, prin care pe poziţia lui A facem să apară I n, iar pe poziţia lui B va apărea soluţia sistemului. Exemplul Să se rezolve sistemul Avem succesiv de unde x i =,x =,x 3 =. x +3x + x 3 =6 3x x x 3 =7 x x +3x 3 = , Observaţia 3.3. Dacă în transformările (.9) facem ca în locul lui I n să apară omatrice triunghiulară superioară având elementele de pe diagonala principală egale cu, atunci se zice că se rezolvă sistemul prin metoda eliminării parţiale. De exemplu, pentru sistemul din exemplul 3.3., lucrând prin metoda eliminării parţiale, avem: ,
44 iar de aici x 3 = :x + 7 x 3 = 4, de unde x = =: x + 3 x + x 3 =3, de unde x =3 3 + =. Să revenim acum la cazul general al sistemelor de m ecuaţii liniare cu n necunoscute. Mai întâi să prezentăm două criterii de compatibilitate date de teorema lui Kronecker Capelli şi Rouché Frobenius. Teorema 3.3. Kronecker Capelli. Condiţia necesară şi suficientă ca un sistem de ecuaţii liniare să fie compatibil este ca rangul matricei sistemului să fie egal cu rangul matricei extinse. Demonstraţie. Fie A = {C,C,...,C n } sistemul de vectori coloane ai matricei A a sistemului (.8); sistemul (.8) poate fi scris sub forma x C + x C x n C n = B, de unde rezultă că el este compatibil dacă şi numai dacă rangul sistemului de vectori coloane {C,C,...,C n } ai matricei A este egal cu rangul sistemului de vectori coloane {C,C,...,C n,b} ai matricei extinse A, ceea ce este echivalent cu faptul că matricele A şi A au acelaşi rang. Definiţia Numim determinantul principal pentru sistemul de ecuaţii liniare (.8) orice minor de ordin maxim diferit de zero al matricei sistemului. Este evident că ordinul unui determinant principal este egal cu rangul matricei sistemului. Definiţia Numim determinant caracteristic asociat unui determinant principal fixat, orice minor principal al matricei extinse obţinut prin completarea (bordarea) determinantului principal cu o linie formată din elementele corespunzătoare de pe una din liniile rămase şi cu coloana termenilor liberi corespunzători. Dacă rangul matricei sistemului este egal cu numărul m al ecuaţiilor, atunci nu avem determinanţi caracteristici, sistemuul fiind totdeauna compatibil deoarece rangul matricei extinseestetotm. Teorema (Rouché Frobenius). Condiţia necesară si suficientă ca un sistem de ecuaţii liniare să fie compatibil este ca toţi determinanţii caracteristici asociaţi unui determinant principal al sistemului să fie nuli. Demonstraţie. Necesitatea. Fie r rangul matricei A a sistemului (.8). Dacă sistemul este compatibil, atunci după teorema lui Kronecker Capelli, rangul matricei extinse A este egal cu r şi deci toţi determinanţii caracteristici sunt nuli deoarece sunt minori de ordinul r + pentru A. Suficienţa. Fără arestrânge generalizarea să presupunem că (3.4) Δ p = a a... a r a a... a r a r a r... a rr este un determinant principal pentru care toţi determinanţii caracteristici sunt nuli. Considerând matricele a... a n b a... a n b (3.5) a r... a rn b r, s =,,...,m r a r+s,... a r+s,n b r+s 45
45 extrase din matricea extinsă A, constatăm că ele au toate rangul r. Într-adevăr, primele C,C,...,C r coloane sunt liniar independente deoarece Δ p 0,coloaneleC r+,c r+,...,c n sunt combinaţii liniare de C,C,...,C r pentru că matricea A are rangul r, iar coloana C n+ este combinaţie liniară dec,...,c r deoarece determinanţii caracteristici sunt nuli. Atunci rang A = rang A şi, pe baza teoremei lui Kronecker Capelli, rezultă că sistemul este compatibil. Definiţia Subsistemul sitemului (.8) de ecuaţii liniare format din ecuaţiile corespunzătoare liniilor unui determinant principal se numeşte subsistem principal, şi ecuaţiile lui se numesc ecuaţii principale. Celelalte ecuaţii ale sistemului (.8) se numesc ecuaţii secundare. Necunoscutele corespunzătoare coloanelor unui determinant principal se numesc necunoscute principale, iar celelalte se numesc necunoscute secundare (libere). Definiţia Două sisteme de ecuaţii liniare se numesc echivalente dacă orice soluţie a unuia este soluţie şi pentru celelalt. Uşor se verifică că această relaţie este într-adevăr o relaţie de echivalenţă. Teorema Un sistem liniar compatibil este echivalent cu orice subsistem principal al său. Demonstraţie. Este evident că oricesoluţie a sistemului (.8) este soluţie pentru orice subsistem al său deoarece ea verifică fiecare ecuaţie a sistemului. Reciproc, să considerăm subsistemul principal cu determinantul principal (.9). Cum matricele (.0) au toate rangul r, ultima linie este o combinaţie liniară de celelalte şi deci avem: de unde (3.6) şi (3.7) L r+s = λ L + λ L λ r L r, s =,,...,m r, a r+s,j = λ a j + λ a j λ r a jr, j =,n b r+s = λ b + λ b λ r b r. Dacă punem E i = a x a n x n b i, i =,n, atunci înmulţind egalităţile (.) corespunzător cu x j, j =,n, egalitatea (3.7) cu şi adunându-le obţinem (3.8) E r+s = λ E + λ E λ r E r, s =,,...,m r Acum, dacă considerăm o soluţie a subsistemului principal atunci E =0,...,E r =0, iar din (3.9) rezultă căşi E r+s =0, s =,,...,m r. Deci, sistemul (.8) este echivalent cu subsistemul principal considerat. Practic, rezolvarea unui sistem compatibil de ecuaţii liniare se reduce la rezolvarea unui subsistem principal al său, în care termenii cu necunoscutele secundare au fost trecute în membrul doi, acestea devenind parametrii. Subsistemul principal este un sistem Cramer şi se poate rezolva cu oricare din metodele date mai sus. Observaţia 3.3. Metodele eliminării totale sau parţiale se pot aplica şi la studierea compatibilităţii unui sistem de ecuaţii liniare. Şi anume, dacă nu se mai pot face cifre de pe diagonala ce pleacă dina şi pe liniile care nu avem cifre de găsim numai zerouri, atât în matricea sistemului cât şi la termenii liberi, atunci sistemul este compatibil. În caz contrar, sistemul este incompatibil. 46
46 Exemplul Să considerăm sistemul x x +x 3 + x 4 + x 5 = x + x + x 3 x 4 +3x 5 =5 x 4x +5x 3 +4x 4 =. Utilizând metoda eliminării totale, avem succesiv: Rezultă că rangul matricei sistemului este şi cum pe linia a treia avem numai zero, deducem că avem un sistem compatibil nedeterminat. Soluţiile sistemului sunt x = a 4 3 c; x =+a + b c 3 ; x 3 = a; x 4 = b; x 5 = c, a, b, c R. Exemplul Să se rezolve sistemul x 3x + x 3 + x 4 = x 3x + x 3 x 4 = x 3x + x 3 +5x 4 =6 Folosim metoda eliminării totale şi avem: Cum pe linia a treia avem o situaţie imposibilă, rezultă că sistemul este incompatibil. În încheierea acestui paragraf să facem câteva observaţii cu privire la sistemele omogene de ecuaţii liniare. Cum la orice sistem omogen rang A = rang A, rezultăcă el este compatibil, având evident soluţia x = x =...= x n =0,numităsoluţie nulă sau banală. Un sistem omogen va avea soluţii diferite de soluţia banală numai dacă rangul său va fi mai mic decât numărul necunoscutelor. Teorema Mulţimea soluţiilor unui sistem omogen de ecuaţii liniare peste câmpul K, cu n necunoscute şi rang r, r<n, formează unsubspaţiu vectorial V,cudim V = n r, al spaţiului K n. Demonstraţie. Considerăm că subsistemul principal asociat are determinantul principal Δ p dat de (.9) şi notăm necunoscutele secundare x r+,...,x n r respectiv prin λ,λ,...,λ n r. Soluţia generală a sistemului omogen este: x i = α i λ + α i λ α i,n r λ r, i =,r x r+k = λ k, k =,n r, care sub formă vectorială (matriceală) se scrie (3.9) X = λ Y + λ Y λ r Y n r, 47
47 unde Y = α α... α r... 0,Y = α α.. α r ,...,Y n r = α,n r α,n r... α r,n r 0..., sunt soluţii particulare ale sistemului omogen. Se observă că Y,Y,...,Y n r sunt vectori liniari independenţi în K n, deoarece considerând matricea formată cu componentele lor, submatricea ei compusă din ultimele n r linii este matricea unitate de ordinul n r. Cu aceasta teorema este demonstrată. Din teorema şi (3.9) rezultă Corolarul 3.3. Suma a două soluţii a unui sistem omogen este, de asemenea, o soluţie a lui. Corolarul 3.3. Produsul dintre o soluţie a unui sistem omogen peste un câmp K cu un element din K este tot o soluţie a sistemului. 48
48 3.4 Testul Nr. de verificare a cunoştinţelor. Definiţi următoarele noţiuni: a) Matrice pătratică simetrică; b) Matrice pătratică singulară; c) Inversa unei matrice pătratice; d) Determinant al unei matrice pătratice; e) Sistem Cramer. Enunţaţi următoarele teoreme: a) Teorema rangului; b) Teorema lui Kronecker - Capelli; c) Teorema lui Rouché - Frobenius.. Aflaţi cu ajutorul transformărilor elementare rangul matricei: 3 A = Calculaţi determinantul de ordinul n, n>: x y x y... x y n D = x y x y... x y n x n y x n y... x n y n 4. Să se discute după parametrul real m sistemul: { mx +4y = 3m x + my = m 5. Folosind metoda eliminării parţiale să se rezolve sistemul: Ax = B,cu A = 0 ; B = 0 6. Folosind metoda eliminării totale să se rezolve sistemul 0 Ax = B,cu A = ; B = 0 7. Folosind metoda eliminării totale să se rezolve sistemul: Ax = B,cu A = 0 ; B = 0 49
49 8. Folosind metoda lui Laplace să se calculeze determinantul D = x x x 0 5 x x x Folosind metoda lui Laplace să se calculeze determinantul D = Folosind formula lui Chio să se calculeze determinantul D =
50 Indicaţii şi răspunsuri Testul. ranga =3 3. Δ=0 4. Dacă m = atunci sistemul este incompatibil. Dacă m =atunci sistemul este compatibil nedeterminat cu soluţia x = a, y = a R. Dacă m ± atunci sistemul este compatibil determinat cu soluţia x = m +4 m +, y = m +m. m + 5. Se obţine soluţia x =4, x = 3, x 3 =. 6. Se obţine soluţia x =4, x =, x 3 =. 7. Se obţine soluţia x =4, x = 3, x 3 =. 8. Δ=x 9x Δ=9. 0. Δ=9. 5
51 Bibliografia aferentă capitolului: [] Acu, A.M., Acu D., Acu M., Dicu P., Matematici aplicate în economie - Volumul I, Editura ULB, Sibiu, 00. 5
52 Capitolul 4 Operatori liniari. Forme biliniare şi forme pătratice Obiective: În modelarea matematică a fenomenelor din realitatea înconjurătoare, în particular cea economică, unul dintre cele mai des folosite concepte este cel de liniaritate. Acesta se datorează, atât simplităţii conceptului de liniaritate, cât şi faptului că aproximarea unor situaţii neliniare prin situaţii liniare, aşa numitul principiu al liniarităţii, constituie una din metodele de bază în studiul realităţii. Rezumat: În prezentul capitol se vor prezenta noţiunile de aplicaţie/transformare/operator liniar(ă), formă biliniară, formă pătratică, formă canonică a unei forme pătratice, precum şi metode de determinare a formei canonice a unei forme pătratice. Conţinutul capitolului:. Operatori liniari. Forme biliniare 3. Forme pătratice 4. Test de verificare a cunoştinţelor 5. Bibliografia aferentă capitolului Cuvinte cheie: operator liniar, transformare liniară, formă biliniară, formă pătratică, forma canonică, metoda lui Gauss, Metoda lui Jacobi. 4. Operatori liniari Fie X şi Y două spaţii vectoriale peste acelaşi câmp K. Definiţia 4.. Numim operator liniar sau transformare liniară sau omomorfism de spaţii vectoriale, o aplicaţie T : X Y care satisface condiţiile: o. T (x () + x () )=T (x () )+T (x () ), ( )x () X, ( )x () X (aditivitate), o. T (λx () )=λt (x () ), ( )λ K, ( )x () X (omogenitate). Teorema 4.. Operatorul T : X Y este liniar dacă şi numai dacă pentru orice x (),x () X şi orice λ,λ K, avem (4.) T (λ x () + λ x () )=λ T (x () )+λ T (x () ). Demonstraţie. Să admitemcă T este operator liniar, atunci, folosind condiţiile o şi o din Definiţia 4.., avem: T (λ x () + λ x () )=T (λ x () )+T (λ x () )=λ T (x () )+λ T (x () ), 53
53 ceea ce trebuia demonstrat. Reciproc, dacă în (4.) punem λ = λ =,obţinem condiţia o din Definiţia 4.., iar dacă punem λ =0. obţinem condiţia o din aceeaşi definiţie. Dacă X = Y un operator liniar se numeşte endomorfism. Dacă transformarea liniară T este bijectivă, atunci ea se numeşte izomorfism de spaţii vectoriale. Un endomorfism bijectiv se numeşte automorfism al lui X. Cum orice câmp K este un spaţiu vectorial peste el însuşi, atunci putem considera un operator liniar T : X K, numitşi formă liniară sau funcţională liniară. În continuare vom nota cu L(X, Y ) mulţimea operatorilor liniari definiţi pe X cu valori în Y. Exemple Fie P n spaţiu vectorial al polinoamelor de grad cel mult n peste câmpul K. Aplicaţia T : P n P n, T (f) =f,adicăderivataluif, oricare ar fi f P n, este un operator liniar.într-adevăr, oricare ar fi f,f P n şi oricare ar fi λ,λ K avem T (λ f + λ f )=(λ f + λ f ) = λ f + λ f = λ T (f )+λ T (f ) Fie X un spaţiu vectorial n dimensional peste câmpul K şi B = {e (),e (),...,e (n) } n obazăîn el şi a,a,...,a n K scalari fixaţi. Aplicaţia f : X K, f(x) = a i x i, unde x = n x i e (i),esteofuncţională liniară. i= Fie X un spaţiu vectorial peste câmpul K şi a un element fixat din K. Aplicaţia T a : X X definită prin T a (x) =ax, pentruoricex X, este un operator liniar. Aplicaţia T a se numeşte omotetia spaţiului X de raport a K. Propoziţia 4.. Dacă T L(X, Y ), atunci avem o. T (θx) =θy, undeθx şi θy sunt vectorii nuli ai spaţiilor X şi Y ; o. T ( x) = T (x), oricare ar fi x X. Demonstraţia propoziţiei rezultă din faptul că T este un omomorfism între grupurile comutative (X, +) şi (Y,+). i= Propoziţia 4.. Dacă T L(X, Y ) şi X subspaţiu în Y. este un subspaţiu al lui X, atuncit (X ) este un Demonstraţie. Pentru orice vectori y,y T (x ) există x (),x () X, astfel ca y = T (x () ), y = T (x () ). Considerând λ,λ K şi folosind Teorema 4.., avem λ y + λ y = λ T (x () )+λ T (x () )=T (λ x () + λ x () ). Cum λ x () + λ x () X,rezultăcă λ y + λ y T (X ), ceea ce ne arată că T (x ) este un subspaţiu vectorial al lui Y. În particular, T (X) este un subspaţiu al lui Y şi se notează cuimt. Dimensiunea lui ImT se numeşte rangul transformării T. Observaţia 4.. Orice transformare liniară păstrează liniar dependenţa unui sistem de vectori, iar dacă este injectivă, atunci păstrează şi liniar independenţa. În particular, dacă B = {e (),...,e (n) } este o bază în X şi transformarea T L(X, Y ) este injectivă, atunci B = {T (e (),...,T(e (n) ))} este o bază în Y. Propoziţia 4..3 Dacă T L(X, Y ) şi Y este un subspaţiu al lui Y, atunci contraimaginea T (Y ) este un subspaţiu al lui X. 54
54 Demonstraţie. Fie x (),x () T (Y ); atunci T (x () ),T(x () ) Y şi deci pentru orice λ,λ K avem λ T (x () )+λ T (x () )=T(λ x () + λ x () ) Y. Prin urmare, λ x () + λ x () T (Y ) şi decit (Y ) este subspaţiu al lui X. În particular, T ({θy}), unde θy este vectorul nul din Y, este un subspaţiu al lui X, care se numeşte nucleul operatorului liniar T şi se notează cuker T. Se verifică imediat că operatorul T L(X, Y ) este injectiv dacă şi numai dacă ker T = {θx}, θx fiind vectorul nul din X. Dimesiunea nucleului ker T se numeşte defectul transformării liniare T. Se demonstrează că dim(ker T )+dim(im T) = dim X (v. []) Deoarece operatorii liniari sunt funcţii, operaţiile cu funcţii vor conduce la operaţii cu transformări liniare. Astfel, dacă T,T L(X, Y ), atunci T + T : X Y, (T + T )(x) = T (x)+t (x), ( )x K, defineşte adunarea lor; kt : X Y, (kt )(x) =kt (x), k K, ( )x X defineşte mulţimea operatorului liniar T cu un scalar k K. De asemenea, dacă T L(X, Y ) şi T L(Y,Z), atunci T T : X Z, (T T )(x) = T (T (x)), ( )x X, defineşte compunerea a două transformări liniare. T T se notează, uneori, şi cu T T şi se numeşte produsul transformărilor T şi T. Se verifică imediat că sumaadouă transformări liniare este tot o transformare liniară şi, de asemenea, produsul unei transformări liniare cu un scalar este tot o transformare liniară, adică L(X, Y ) este un subspaţiu vectorial al spaţiului vectorial Hom(X, Y ) peste K al tuturor funcţiilor definite pe X cu valori în Y. În particular mulţimea L(X, K) a funcţionalelor liniare definite pe spaţiul vectorial X cu valori în câmpul K este un spaţiu vectorial numit dualul algebric al spaţiului vectorial X şi este notat prin X. Se arată că produsul a două transformări liniare este tot o transformare liniară, iar dacă T L(X, Y ) este bijectivă, atunci T L(Y,X), adică este tot o transformare liniară. Rezultă că L(X, X) în raport cu operaţiile de adunare şi compunere este un inel cu element unitate. În continuare vom arăta că un operator liniar între două spaţii vectorial finit dimensionale peste câmpul K este complet determinat de o matrice cu elemente din K. Fie X şi Y două spaţii vectoriale peste acelaşi câmp K de dimensiuni finite, respectiv n şi m; T L(X, Y ) un operator liniar, B = {e (),e (),...,e (n) } o bază în X şi n B = {f (),f (),...,f (m) } o bază în Y. Deoarece oricare ar fi x X, x = x j e (j), avem T (x) = j= n x j T (e (j) ), iar vectorii T (e (j) ) Y, j =,n, se exprimă, unic în funcţie de coordonatele lor în baza B : (4.) avem (4.3) T (x) = T (e (j) )= n m x j j= i= m a ij f (i), i= i= j =,n, m n a ij f (i) = a ij x j f (i). Dacă y = T (x) =t(y,y,...,y n ) în baza B, atunci comparând cu (4.3) găsim j= j= (4.4) n y i = a ij x j, j= i =,m, relaţii ce pot fi scrise matriceal sub forma (4.5) y = Ax, 55
55 unde t x = (x,...,x n ) x i, i =,n fiind coordonatele lui x în baza B, iar matricea A =(a ij ) M m n (K) are pe coloane coordonatele imaginilor vectorilor din baza B în baza B. Matricea A se numeşte matricea asociată (asociată) transformării T faţă de cele două baze B şi B alese în spaţiile X şi Y. Ea este unic determinată derelaţiile (4.). Relaţiile (4.4) sau (4.5) se numesc ecuaţiile operatorului liniar în bazele B şi B. Se arată că rangul transformării liniare este egal cu rangul matricei asociate ei faţă de două baze. În adevăr, rangul transformării T fiind, conform definiţiei, dimensiunea spaţiului imagine, este egal cu rangul sistemului de vectori {T (e (j) )} j=,n, care îl generează pe aceasta. Cum vectorii T (e j ) j=,n, sunt vectori coloană ai matricei A, rezultăcă rang A = rang T. Exemplul Dacă T L(R 3, R ), (x) = (x 3x, 4x +x + x 3 ), x = (x,x,x 3 ) şi B = {e (),e (),e (3) }, e () = (, 0, 0), e () = (0,, 0), e (3) = (0, 0, ), respectiv B = {f (),f () }, f () =(, 0), f () =(0, ) sunt bazele canonice, atunci matricea ataşată luit este A = ( deoarece T (e () )=(, 4), T (e () )=( 3, ), T (e (3) )=(0, ). Fie acum T,T L(X, Y ) şi T = T + T suma lor. Avem ), T (e (j) )=T (e (j) )+T (e (j) ), j =,n de unde notând cu A matricea ataşată luit, A matricea ataşată luit şi cu C matricea ataşată luit, deducem că C = A + A,adică matricea transformării sumei este suma matricelor transformărilor termeni. Analog, se arată că matricea produs dintre un scalar şi o transformare liniară este produsul scalarului cu matricea acelei transformări, iar matricea transformării liniare produs este egală cu produsul matricelor transformărilor liniare factori. De aici, rezultă Propoziţia 4..4 i) Funcţia care asociază fiecărui operator liniar T L(X, Y ), dim X = n, dim Y = m, matricea corespunzătoare ei faţă de două baze fixate, este un izomorfism între spaţiul vectorial L(X, Y ) şi spaţiul vectorial M m n (K) al matricelor de tipul m n peste K. ii) Funcţia care asociază fiecărui operator T L(X, X), dim X = n, matricea corespunzătoare ei într-o bază fixată în X, este un izomorfism între inelul L(X, X) şi inelul matricelor pătratice de ordin n peste K. Acum să cercetăm cum se schimbă matricea ataşată unei transformări liniare la schimbarea bazelor. Teorema 4.. Fie B şi B baze în spaţiul vectorial n dimensional X peste K, iarb şi B baze în spaţiul vectorial m dimensional Y peste acelaşi câmp K. Dacă T L(X, Y ), A este matricea transformării T faţă debazeleb şi B,iarA este matricea transformării T faţă de bazele B şi B,atunciA = D AC, undec şi D sunt matricele de trecere de la baza B la B respectivdelab la B. Demonstraţie. Conform celor demnstrate în Capitolul IV, dacă (x,...,x n )= t x sunt coordonatele unui vector x X în baza B şi (x,...,x n)= t x sunt coordonatele aceluiaşi vector x în baza B, atunci x = Cx, unde C este matricea trecerii de la baza B la baza B,având pe coloane coordonatele vectorilor bazei B în raport cu B. Analog, dacă avem(y,...,y m )= t y coordonatele imaginii y = T (x) în B şi (y,...,y m)= t y coordonatele lui y în baza B, atunci y = Dy. Ţinând seama că T este un operator liniar, cu notaţiile din enunţ, avem y = Ax respectiv y = A x, de unde înlocuind x = C x, y = D y şi y = Ax în y = A x, găsim D Ax = A C x, de unde D A = A C, care este echivalentă cud AC = A. 56
56 Observaţia 4.. Dacă T L(X, X), dim X = n, A matricea ataşată luit în raport cu baza B, iara este matricea ataşată luit în raport cu baza B,atunciA = C AC, undec este matricea de trecere de la B la B. Definiţia 4.. Matricele A, B M n (K) se numesc asemenea, notăm aceasta prin A B, dacă există matricea nesingulară C M n (K) aşa încât B = C AC. Se verifică imediat că asemănarea matricelor este o relaţiedeechivalenţăpem n (K). Exemplul Fie T L(R 3, R 4 ), x =(x,x,x 3 ) R 3, T (x) =(x x + x 3,x x 3,x + x + x 3,x x ). Aflaţi matricea asociată luit în raport cu perechea de baze B = {e (),e() (0,, ), e () =(, 0, ), e (3) =(,, 0) în R 3 şi B = {e (),e(),e(3),e(4),e(3) }, e() = }, e() =(,,, ), e () = (0,,, ), e (3) =(0, 0,, ), e (4) =(0, 0, 0, ), în R 4. Se cere matricea A a transformării T faţă de bazele B şi B. Deoarece T (x) = 0 0 x x x 3 deducem că matricea transformării liniare T în raport cu bazele canonice B şi B din R 3 respectiv R 4 este A = 0 0 Matricea C de trecere de la baza B la B este C = iar matricea D de trecere de la baza B la baza B este D = Se găseşte şi deci avem D = A = D AC = Am văzut în Observaţia 4.. că matricea unei transformări liniare T L(X, X), dim X = n, depinde de alegerea bazei în X. În continuare ne punem problema de a găsi obazăfaţă de care această matrice să aibă o formă diagonală (4.6) A = λ λ λ n 57
57 Ţinând seama de expresiile (4.5) care definesc matricea A a transformării liniare T în baza B = {f (),...,f (n) } obţinem: Teorema 4..3 Condiţia necesară şi suficientă ca matricea transformării liniare T L(X, X), dim X = n, să poată fi adusă la forma diagonală (4.6) este să existe o bază B = {f (),f (),...,f (n) } în X şi n elemente λ,λ,...,λ n K astfel încât să avem (4.7) T (f (i) )=λ i f (i), i =,n. Definiţia 4..3 Se spune că vectorul x θ, x X, este un vector caracteristic sau propriu pentru operatorul liniar T L(X, X) dacă există un element λ K astfel încât să avem (4.8) T (x) =λx. Elementul λ corespunzător vectorului propriu x se numeşte atunci valoare caracteristică sau proprie pentru transformarea liniară T. În conformitate cu această definiţie, matricea unei transformări liniare poate fi adusă la o formă diagonală dacă şi numai dacă transformarea are n vectori proprii liniar independenţi. În acest caz, elementele de pe diagonala principală din matricea diagonală sunt atunci valorile proprii corespunzătoare. În cele ce urmează ne vom ocupa cu determinarea valorilor proprii şi vectorilor proprii pentru un operator liniar T din L(X, X), cudim X = n. Fie B = {e (),e (),...,e (n) } obază în X, A =(a ij ) M n (K) matricea asociată luit, I matricea unitate de ordin n şi t x =(x,...,x n ) coordonatele unui vector x V în baza B; atunci ecuaţia (4.8) se poate scrie sub forma matriceală (4.9) (A λi)x =0. Această ecuaţie este echivalentă cu sistemul (4.0) (a λ)x + a x a n x n =0 a x +(a λ)x a n x n =0... a n x + a n x +...+(a nn λ)x n =0 Sistemul (4.0) fiind liniar şi omogen, admite soluţii diferite de soluţia banală dacăşi numai dacă determinantul matricei sistemului este egal cu zero. Acest determinant se notează cup A (λ) şi are forma P A (λ) = det(a λi) = a λ a... a n a a λ... a n a n a n... a nn λ numit polinomul caracteristic ataşat transformării liniare T sau matricei A. Prin urmare valorile caracteristice ale matricei A sau transformări liniare T se găsesc printre rădăcinile ecuaţiei (4.) P A (λ) =0, numită ecuaţia caracteristică corespunzătoare matricei A sau transformării liniare T. Şirul λ,λ,...,λ n al tuturor rădăcinilor ecuaţiei caracteristice, unde fiecare este socotită deatâtea ori cât indică ordinul său de multiplicitate, constituie spectrul matricei A sau a operatorului liniar T. Polinomul caracteristic are gradul n şi se poate scrie dezvoltat sub forma: P A (λ) =( ) n λ n +( ) n δ λ n +( ) n δ λ n +...+( )δ n λ + δ n, 58
58 unde δ i, i =,n, este suma minorilor diagonali de ordin i ai matricei asociate operatorului liniar T într-o anumită bază, adică: a... a i δ i = a i... a ii + a... a,i a i+,... a i+,i a n i+,n i+... a n i+,n a n,n i+... a nn, suma având Cn i termeni, i =,n. Prin minor diagonal al matricei A înţelegem un minor care are pe diagonala principală numai elemente de pe diagonala principală a matricei A. Se observă că δ = a + a a nn = tr(a) este urma matricei A, iarδ n = det A. Propoziţia 4..5 Două matrice asemenea au acelaşi polinom caracteristic. Demonstraţie. Într-adevăr, dacă matricea A este asemenea cu B, adică are loc Definiţia 4.., atunci P B (λ) = det(b λi) = det(c AC λi) = det(c (A λi)c) = = det C det(a λi) det C = det(a λi) =P A (λ). Corolarul 4.. Polinomul caracteristic al unui operator liniar T L(X, X) este invariant la schimbarea bazei. Valabilitatea acestui corolar rezultă din Observaţia 4.. şi Propoziţia Prin urmare, ca să găsim valorile caracteristice (spectrul) şi vectorii caracteristici pentru operatorul liniar T L(X, X), dim X = n, alegem o bază B = {e (),...,e (n) } în X, rezolvăm ecuaţia caracteristică P A (λ) =0şi, introducând pe rând fiecare rădăcină λ i, i =,n, a acesteia în sistemul (4.0), găsim vectori caracteristici corespunzători. Propoziţia 4..6 Vectorii caracteristici corespunzători unei valori caracteristice λ i, i =,n formează împreună cu vectorul nul al spaţiului vectorial X un subspaţiu V i al lui X, numit subspaţiu caracteristic sau propriu, de dimensiune cel mult egală cu ordinul de multiplicitate al lui λ i, i =,n. Demonstraţie. Se observă că V i este mulţimea soluţiilor ecuaţiei (T λ i I)(x) =θ, adică nucleul transformării liniare T λ i I L(X, X) şi după Propoziţia 4..3 acesta este un subspaţiu al lui X. Fie acum k i =dimv i şi m i ordinul de multiplicitate pentru λ i. Presupunem că amalesbazab = {e (),...,e (n) } în X aşa ca e (),...,e (ki) săsegăsească în V i. Atunci avem T (e (s) )=λ i e (s), s =,,...,k i şi deci matricea A are, faţă de această bază, forma λ i a,ki+...a n 0 λ i...0 a,ki+...a n A = 00...λ i a ki,k i+...a ki,n a ki+,k i+...a ki+,n a n,ki+...a nn de unde rezultă P A (λ) =(λ λ i ) ki Q(λ) şi cum ordinul de multiplicitate al lui λ i este m i,rezultă k i m i. Corolarul 4.. Unei valori caracteristice simple îi corespunde un subspaţiu propriu de dimensiune egală cuunu. 59
59 Teorema 4..4 Dacă vectorii caracteristici x (),x (),...,x (m) corespund la valori caracteristice distincte λ,λ,...,λ m, atunci ei sunt liniar independenţi. Demonstraţie. Procedăm prin inducţie matematică. Pentru m =, teorema este evident adevărată. Presupunem că esteadevărată pentru k şi să o demonstrăm pentru k +. Presupunem că x (),x (),...,x (k+) ar fi liniar dependenţi, adică arexistă scalari α,α,...,α k+ K, nu toţi nuli, aşa încât (4.) α x () + α x () α k+ x (k+) = θ. Aplicând în (4.) operatorul liniar T şi folosind ipoteza teoremei, obţinem (4.3) α λ x () + α λ x () + +α k+ λ k+ x (k+) = θ. Eliminând pe x (k+) între relaţiile (4.) şi (4.3) găsim (4.4) α (λ λ k+ )x () + α (λ λ k+ )x () α k (λ k λ k+ )x (k) = θ Fără să restrângem generalitatea, să admitem cu α 0, atunci, ţinând seama că x (),...,x (k) sunt liniar independenţi, deducem λ = λ k+ ceea ce constituie o contradicţie. Rezultă că vectorii x (),x (),...x (m) sunt liniar independenţi. Corolarul 4..3 Dacă operatorul liniar T are n valori caracteristice distincte atunci el poate fi adus la forma diagonală. Într-adevăm, în această situaţie alegând câte un vector propriu corespunzător fiecărei valori caracteristice obţinem n vectori caracteristici liniar independenţi şi deci o bază în X. Faţă de această bază, după Teorema 4..3, operatorul liniar T are forma diagonală. Pentru cazul general se demonstrează (v. []): Teorema 4..5 Condiţia necesară şi suficientă ca matricea operatorului liniar T L(X, X), dim X = n, săaibă formă diagonală este ca toate valorile caracteristice să fiedincâmpul K şi subspaţiile proprii corespunzătoare să aibă dimensiunile egale cu ordinele de multiplicitate corespunzătoare. Exemplul Să considerăm transformarea liniară T L(R 3, R 3 ) definită prin T (x) =(x + x 3,x + x 3,x + x ),x=(x,x,x 4 ) R 3. Să arătăm că T poate fi adusă la o formă diagonalăşi să se precizeze o bază faţăde care matricea ei are forma diagonală. Matricea transformării în baza canonică aluir 3 este A = 0 0 0, iar ecuaţia caracteristică are forma λ λ λ =0 de unde λ 3 3λ =0. De aici găsim valorile caracteristice λ =, λ = λ 3 =. Vectorii caracteristici sunt soluţiile sistemului liniar omogen (4.5) λx + x + x 3 =0 x λx + x 3 =0 x + x λx 3 =0 60
60 unde λ se înlocuieşte pe rând cu una din valorile caracteristice, Pentru λ =sistemul (4.5) are soluţia x () =(,, ), iar dimensiunea subspaţiului propriu V este unu şi o bază în V este dată dex (). Pentru λ = λ 3 =, sistemul (4.5) se reduce la ecuaţia x + x + x 3 =0 şi subspaţiul propriu V careestemulţimea soluţiilor acestei ecuaţii, are dimensiunea, ca bază putând fi luaţi vectorii caracteristici x () =(,, 0),x (3) =(, 0, ). Cum dim V =, adică egală cu ordinul de multiplicitate al va- lorii caracteristice λ =, deducem că matricea tranformării poate fi adusă la forma diagonală A = iar B = {x (),x (),x (3) }, unde x (), x (), x (3) sunt vectorii caracteristici determinaţi, este o bază în R 3 faţă de care matricea transformării are forma diagonală A. În încheierea acestui paragraf, dă fără demonstraţie următorul rezultat (v. []): Teorema 4..6 Cayley-Hamilton. Pentru orice operator liniar T L(X, X), dim X = n, matricea transformării A verifică ecuaţia caracteristică P A (λ) =0. 4. Forme biliniare Definiţia 4.. Fie X un spaţiu vectorial peste câmpul K. Numim formă biliniară peste câmpul K o aplicaţie f : X X K, care este liniară în raport cu fiecare variabilă, adică satisface condiţiile: o. f(αx + βy,z) =αf ( x, z)+βf(y, z). o. f(x, αy + βz) =αf(x, y)+βf(x, z), oricare ar fi x, y, z X şi α, β K. Definiţia 4.. O formă biliniară f se numeşte simetrică dacă f(x, y) =f(y, x), ( )x, y X şi antisimetrică dacă f(x, y) = f(y, x), ( )x, y X. Exemple Produsul scalar definit într-un spaţiu vectorial real este o formă biliniară. Să notă, cu B(X) mulţimea formelor biliniare definite pe X. Dacă f,g B(X) şi k K atunci aplicaţiile kf, f + g : X X K definite natural prin (kf)(x, y) =kf(x, y) şi (f + g)(x, y) = f(x, y)+g(x, y), oricare ar fi x, y X, sunt forme biliniare, numite înmulţirea cu un scalar a unei forme biliniare şi respectiv adunarea a două forme biliniare. Se constată imediat că operaţiile de adunare a două forme biliniare şi de înmulţire a unei forme biliniare cu un scalar din K definesc pe mulţimea B(X) o structură despaţiu vectorial peste K. Mulţimea formelor biliniare simetrice formează un subspaţiu vectorial al lui B(X). Să considerăm acum spaţiul vectorial X de dimensiune finită n. Fie B = {e (),...,e (n) } obazăîn X; punând x, y X x = n x i e (i) şi y = i= n y j e (j), j= 6
61 pentru forma biliniară f avem n n f(x, y) =f x i e (i), y j e (j) = = n i= i= j= j= n x i y j f(e (i),e (j) ). Rezultă că forma biliniară este determinată de valorile ei pe vectorii bazei. Elementele a ij = f(e (i),e (j) ), i,j =,n se numesc coeficienţii formei biliniare, iar expresia f(x, y) = n i= j= se numeşte expresia analitică a formei biliniare. Dacă punem n a ij x i y i x = t (x,x,...,x n ),y = t (y,...,y n ),A=(a ij ) i,j=,n M n (K), atunci putem scrie f(x, y) = t xay, care reprezintă forma matriceală a formei biliniare, iar A se numeşte matricea ataşată formei biliniare în baza B. Rangul matricei ataşate într-o bază dată unei forme biliniare se numeşte rangul formei biliniare. Dacă rangul formei coincide cu dimensiunea spaţiului vectorial, atunci forma biliniară senumeşte nedependentă. Se numeşte discriminantul unei forme biliniare într-o bază dată, determinantul matricei asociate formei în baza dată. 4.3 Forme pătratice În studiul unor probleme de analiză economică un rol deosebit îl au formele pătratice. Definiţia 4.3. Fie X un spaţiu vectorial peste câmpul K şi f o formă biliniară simetrică pe X. Numim formă pătratică asociată luif aplicaţia g : X K, g(x) =f(x, x), oricare ar fi x din X. Forma biliniară f care generează forma pătratică g se numeşte forma polară a lui g. Dacă în câmpul K avem a + a 0,pentruoricea K, a 0, atunci avem g(x + y) =f(x + y, x + y) =f(x, x)+f(x, y)+f(y, x)+f(y, y) = de unde = g(x)+f(x, y)+g(y), f(x, y) = [g(x + y) g(x) g(y)]. Acest rezultat ne arată că forma polară este determinată în mod unic de forma sa pătratică. Altfel spus, între mulţimea formelor biliniare simetrice şi mulţimea celor pătratice definite pe X există un izomorfism. Dacă presupunem că dim X = n şi considerăm obază B = {e (),...,e (n) } în el, atunci din expresia analitică a formei biliniare f ( 5.) găsim următoarea expresie analitică pentru forma pătratică g (4.6) g(x) = n i= j= n a ij x i x j. 6
62 Dacă punem A =(a ij ) M n (K), care pentru formele pătratice este o matrice simetrică, obţinem expresia matriceală pentru forma pătratică: unde x = t (x,...,x n ) X. g(x) = t xax, Definiţia 4.3. Dacăîn expresia analitică (4.6) a formei pătratice g, toţi coeficienţii a ij cu i j sunt nuli, atunci se spune că reprezentarea formei pătratice este sub formă canonică. Teorema 4.3. (Gauss). Expresia analitică a oricărei forme pătratice pe un spaţiu vectorial X peste K, dim X = n, poate fi adusă printr-o schimbare de bază, la forma canonică. Demonstraţie. Vom demonstra această teoremă prin inducţie matematică după numărul k al variabilelor ce apar în expresia analitică aformeipătratice. Evident că pentru k = avem g(x) = a x, care este scrisă sub forma canonică. Presupunem teorema valabilă pentru k variabile şi o demonstrăm pentru k. Fără a restrânge generalitatea presupunem că a 0(în caz contrar renumerotăm variabilele, iar dacă toţi a =0, i =,n, atunci într-un produs x i x j facem schimbarea de variabile x i = y i y j, x j = y i + y j ). Acum, scriem expresia analitică (4.6) a formei pătratice astfel g(x) = n n a a x + a a j x x j + a ij x i x j = j= ( = n ) a j x j + a i= i,j= n b ij x i x j, noii coeficienţi b ij rezultă din reducerea termenilor asemenea după formarea pătratului perfect. Făcând schimbarea de variabile n y = a j x j, y k = x k, k =,n obţinem unde j= i,j= g(x) = a y + h(y), h(y) = n i= j= n b ij y i y j nu depinde de x,deciîn expresia ei analitică avemdoark variabile. Folosind ipoteza inducţiei, există o bază (o schimbare de coordonate) a spaţiului X în care h(y) =λ y λ m y m. Atunci g(x) =λ y λ m ym, λ =/a. Teorema este demonstrată. Demonstraţia teoremei ne oferă şi un procedeu practic de a scrie o formă pătratică sub forma canonică numitămetodaluigauss. Astfel,maiîntâi se formează unpătrat perfect cu termeni care conţin pe x,apoicutermeniiceconţinpe x ş.a.m.d. Exemplul Să reducem la forma canonică formapătratică g : R 3 R, g(x) =x +x x + 63
63 x +4x x 3 +4x 3. Utilizând metoda lui Gauss avem g(x) = (4x +x x +8x x 3 )+x +4x 3 = x +3x 3 x x 3 = [ (5 6 ) x 8 5 x x 3 ] +3x 3 = ( x + x +x 3 ( x + x ) +x 3 + ) + ( x + x +x ( x ) 4 x x 3. Punând y =x + x +x 3, y = 5 6 x x 3 (4.7) 4, y 3 = x 3 obţinem forma canonică pentru g: (4.8) g(x) = y y y 3. Din (4.7) avem: x = y 4 5 y 6 5 y 3 x = 6 5 y y 3 x 3 = y 3 sau matriceal x = Cy, unde x = t (x,x,x 3 ), y = t (y,y,y 3 ), x, y R 3 şi C = Cum C este nesingulară şi are ( rangul ) 3 deducem ( că formapătratică este nedegenerată, iar vectorii coloană dinc, f () =, 0, 0, f () = 4 5, 0 ) ( 5, 0, f (3) = 6 5, 4 ) 5, constituie noua bază faţă de care g are forma canonică (4.8). Exemplul Să aducem la forma canonică formapătratică g : R 4 R, g(x) =x x + x x 3 x x 3 + x 3 x 4. Deoarece nu avem termeni în x, i =,, 3, 4, facem schimbare de variabile ) + (4.9) x = y y, x = y + y, x 3 = y 3, x 4 = y 4 şi obţinem (4.0) g(x) =y y y y 3 3y y 3 + y 3 y 4. Acum aplicând metoda lui Gauss avem succesiv, ( g(x) = y y ) 3 y 4 y 3 3y y 3 + y 3 y 4 = ( ) ( = y + 3 ) y 3 +y3 + y 3 y 4 = ( = y y 3 y y 3 ) ( y + 3 y 3 ) + 64 ( y 3 + ) y 4 8 y 4.
64 Dacă punem (4.) obţinem (4.) z = y y 3, z = y + 3 y 3, z 3 =y 3 + y 4,z 4 = y 4, g(x) =z z + z 3 8 z 4. Din (4.) găsim x = z z z z 4 x = z + 3 z 9 8 z z 4 x 3 = z 3 8 z 4 x 4 z 4 care constituie schimbarea de variabile prin care g(x) se scrie sub forma canonică (4.). Oaltămetodă de aducere la forma canonică a unei forme pătratice a fost dată de Jacobi. Teorema 4.3. Jacobi. Fie g : X K o formă pătratică pespaţiul vectorial n dimensional X peste K şi A =(a ij ) M n (K) matricea formei în baza B = {e (),...,e (n) } aspaţiului X. Dacă determinanţii Δ = a, Δ = a a,..., (4.3) Δ i = a... a i a i... a ii a a,...,δ n = det A sunt toţi nenuli, atunci există obază B = {h (),...,h (n) } aspaţiului X aşa încât g are forma canonică n Δ i (4.4) g(x) = yi, Δ 0 =, Δ i= i unde (y,y,...,y n ) sunt coordonatele vectorului x în baza B. Demonstraţie. Pentru găsirea bazei B, vom considera vectori h (i), i =,n de forma (4.5) şi vom impune condiţiile h () = b e () h () = b e () + b e (). h (n) = b n e () + b n e () b nn e (n) f(h (i),e (j) )=0, pentru j<i n, (4.6) f(h (i),e (i) )=, pentru i n, unde f este forma polară aformeipătratice g. Condiţiile (4.6) determină în mod unic vectorii h (i), i =,n. Astfel, ca să determinăm vectorul h (i) = h i e () + h i e () b ii e (i), i =,n, în condiţiile (4.6) obţinem sistemul liniar a α i + a α i a i α ii =0 a α i + a α i a i α ii =0... a i, α i + a i, α i a i,i α ii =0 a i α i + a i α i a ii α ii = 65
65 care are o soluţie unică deoarece determinantul său este Δ i 0. Se arată uşor că vectorii h (),...,h (n) astfel construiţi sunt liniar independenţi. Acum să arătăm că B = {h (),...,h (n) } esste baza în care matricea formei pătratice g este C = (c ij )=M n (K), cua ij =0, i j şi c ij =Δ i /Δ i, i =,n. Avem c ij = f(h (i),h (j) )=f(h (i),b j e () + b j e () b jj e (j) )= = b j f(h (i),e () )+b j (h (i),e () )+...+ b jj f(h (i),e (j) ), de unde folosind condiţiile (4.5), găsim c ij =0, dacă i j şi c ii = b ii =Δ i /Δ i,i=,n. Teorema este astfel demonstrată. Exemplul Utilizând metoda lui Jacobi să aflăm formele canonice pentru formele pătratice din Exemplele 4.3. şi Matricea formei pătratice din Exemplul 4.3. este A = cu Δ 0 =, Δ =, Δ = = 7 şi Δ 3 = det A =3, 4 iar din (4.3) obţinem g(x) = y y + 7 y 3. cu Pentru forma pătratică din exemplul 4.3. utilizăm forma (4.0) şi avem A = Δ 0 =, Δ =, Δ =, Δ 3 = şi Δ 4 = det A = 4 de unde, folosind (4.3), găsim g(x) =z z +z3 z4. Observaţia 4.3. Pentru determinarea formei canonice a unei forme pătratice g se pot utiliza şi valorile caracteristice (proprii) ale matricei A ataşatei ei într-o bază. Dacă λ,λ,...,λ n sunt valorile caracteristice corespunzătoare lui A, atunci forma canonică este g(x) =λ y + λ y λ n yn (v. []). În studiul punctelor de extrem avem nevoie de semnul unei forme pătratice. 66
66 Vom considera acum o formă pătratică pesteunspaţiu vectorial peste R. Definiţia Fie g : X R o formă pătratică reală adusă laoformă canonicăîntr-o bază. Dacă în această formă canonică p coeficienţii sunt strict pozitivi, q sunt strict negativi iar r = n (p + q) sunt nuli, atunci tripletul (p, q, r) se numeşte signatura formei pătratice. Se demonstrează (v. []) următorul rezultat: Teorema (inerţiei). Signatura unei forme pătratice este invariantă la schimbarea bazei. Definiţia O formă pătratică reală g : X R se numeşte pozitiv definită respectiv negativ definită dacă g(x) > 0 respectiv g(x) < 0, pentru orice x X, x θ. Forma g se numeşte semidefinită pozitiv sau semidefinită negativ după cumg(x) 0 sau g(x) 0, pentru orice x X. Forma g se numeşte nedefinită dacă există vectorii x () X şi x () X astfel încât g(x () ) > 0 şi g(x () ) < 0. Teorema (Sylvester). În condiţiile Teoremei lui Jacobi, forma pătratică g : X R este pozitiv definită dacă şi numai dacă Δ i 0, i =,n şi negativ definită dacă şi numai dacă ( ) i Δ i > 0, i =,n. Demonstraţie. Să considerăm că g este pozitiv definită. Arătăm mai întâi că Δ i 0, i =,n. Să presupunem prin obsurd că există k {,,...,n} pentru care Δ k =0. Atunci în determinantul Δ k una din linii este o combinaţie liniară a celorlalte, adică există scalarii α,α,...,α k astfel încât (4.7) α a j + α a j α k a kj =0, j =,k. Dacă f este polara formei pătratice g, ţinând seama că a ij = f(e (i),e (j) ), i, j =,n,din (4.7) avem 0=α f(e (),e (j) )+α f(e (),e (j) )+...+ α k f(e (k),e (j) )= = f(α e () + α e () α k e (k),e (j) ), j =,k Înmulţind corespunzător cu α j, i =,k, egalităţile precedente şi însumându-le, obţinem f(α e () + α e () α k e (k),α e () + α e () α k e (k) )=0, adică (4.8) g(α e () + α e () +...α k e (k) )=0. Cum g este pozitiv definită deducem că (4.8) este posibilă numai dacă α e () + α e () α k e (k) = θ, ceea ce contrazice liniar independenţa vectorială a bazei B = {e (),e (),...,e (n) }. Prin urmare, presupunerea că ar exista un Δ k = 0 este falsă şi deci Δ i 0, i =,n. Acum, folosind Teorema lui Jacobi, există obază B = {h (),h (),...,h (n) } faţă de care g(x) = n i= Δ i Δ i y i. Cum g(x) > 0, pentru orice x nenul. în particular pentru (y,...,y i,...,y n ) = (0,...,,...,0), obţinem Δ i /Δ i > 0, i =,n. Deoarece Δ 0 =şi Δ 0 /Δ > 0, avemδ > 0 şi din aproape în aproape obţinem Δ i > 0, i =,n. Reciproc, dacă Δ i > 0, i =,n, atunci Δ i /Δ i > 0, i =,n,şi n Δ i g(x) = y 0 Δ i= i cu egalitate numai dacă y = y =...= y n =0,adicăx = θ, ceea ce ne arată că g este pozitiv definită. Dacă g este negativ definită atunci forma pătratică g : X R este pozitiv definită, matricea ei fiind A =( a ij ) cu minorii diagonali Δ i =( )i Δ i. Deoarece g este pozitiv definită numai dacă Δ i > 0 rezultă că g este negativ definită numai dacă ( )i Δ i > 0, i =,n. 67
67 Corolarul 4.3. O formă pătratică reală pe un spaţiu n dimensional este pozitiv respectiv negativ definită dacă şi numai dacă una din condiţiile de mai jos este îndeplinită: o. signatura ei este (n, 0, 0) respectiv (0,n,0); o. toate valorile caracteristice ale matricei A ataşate formei într-o bază sunt strict pozitive (strict negative). Forma pătratică din Exemplul 4.3. este pozitiv definită deoarece signatura ei este (3, 0, 0). 68
68 4.4 Testul Nr. 3 de verificare a cunoştinţelor. Definiţi următoarele noţiuni: a) Transformare liniară; b) Formă liniară; c) Nucleul unui operator liniar; d) Vector caracteristic; e) Formă biliniară; f) Formăpătratică; g) Forma canonică a unei forme pătratice; h) Signatura formei pătratice.. Arătaţi că următoarea aplicaţie este o transformare liniară: f : R 3 R, f(x,x,x 3 )= (x + x, 4x 3 ). 3. Fie aplicaţiile f : R R, f(x,x )=(x x, 3x ) şi g : R R, g(x,x )=(x x, 4x ). Arătaţi că f şi g sunt operatori liniari, apoi determinaţi f g şi g f şi verificaţi că sunt operatori liniari. 4. Fie transformarea liniară f : R 3 R 3 care în baza canonică estedată de matricea 5 3 A = Găsiţi valorile şi vectorii caracteristici ataşaţi transformării. 5. Fie transformarea liniară T : R 3 R 3 cu exprimarea în baza B dată de matricea 7 6 A = Arătaţi că există o bază B în R 3 faţă de care matricea transformării T are forma diagonală. 6. Diagonalizaţi matricea A = Să se aducă la forma canonică, cu ajutorul metodei lui Gauss, forma pătratică:. f(x) =x + x + x 3 x 4 x x +x x 3 x x 4 +x x 3 4x x Să se aducă la forma canonică, cu ajutorul metodei lui Gauss, forma pătratică: f(x) =x x +3x x 3 +5x x Să se aducă la forma canonică, cu ajutorul metodei lui Jacobi, forma pătratică: f(x) =x +x +3x 3 +3x 4 x x 3 x x 3 +x x 4 +6x x Să se aducă la forma canonică, cu ajutorul metodei lui Jacobi, forma pătratică: f(x) =x +4x x +x x 4 +3x x x 3 +x x 4 +x 3 4x 3 x 4 x 4. 69
69 Indicaţii şi răspunsuri Testul 3. Se verifică condiţia f(αx + βy) =α f(x)+β f(y) ( ) α, β R şi ( ) x, y R Se soluţionează analog cu problema precedentă. 4. Se obţin valorile caracteristici λ =, λ =, λ 3 =3şi vectorii caracteristice v = (a, a, a), a R cu reprezentatul v =(,, ); v =(a, a, 0), a R cu reprezentantul v =(,, 0); v 3 =(a, a, 3a), a R cu reprezentantul v 3 =(,, ). 5. Se obţin valorile caracteristice λ =, λ = λ 3 =şi vectorii caracteristici v =(3, 5, 6), v =(,, 0) şi v 3 =(, 0, ). Apoisearatăcă v,v,v 3 sunt liniar independenţi. Deoarece din R 3 =3se obţine {v,v,v 3 } baza căutată iar matricea ataşată este Se determină valorile caracteristice λ =3, λ = λ 3 =, vectorii caracteristici v = (, 5, 6), v = (0,, ), v 3 = (,, 0) care se arată că sunt liniar indepedenţi. Deci {v,v,v 3 } bază în R 3 şi matricea transformării are forma diagonală Forma canonică estef(y) =y 3y +3y Folosim transformarea: y = x + x, y = x x, y 3 = x 3 şi obţinem f(y) =y y + 8y y 3 y y 3. Apoi aplicând metoda lui Gauss obţinem forma canonică: f(z) =z z 5z Avem Δ 0 =, Δ =, Δ =, Δ 3 =3, Δ 4 = 0, deci forma canonică: f(y) =y + y + 3 y y Analog cu soluţia problemei precedente se obţine forma canonică: f(y) =y y + 3 y 3 4 y 4. 70
70 Bibliografia aferentă capitolului: [] Acu, A.M., Acu D., Acu M., Dicu P., Matematici aplicate în economie - Volumul I, Editura ULB, Sibiu, 00. [] Cruceanu, V., Elemente de algebră liniară şi geometrie, Editura Didactică şi pedagogică, Bucureşti,
71 Capitolul 5 Elemente de programare liniară Obiective: Scopul acestui capitol este de a pune la dispoziţia studenţilor (viitorii economişti) a unuia dintre cele mai utile modelări matematice cu aplicaţii economice, împreună cu algoritmul de rezolvare al acestui model. Rezumat: În acest capitol se vor prezenta noţiunile fundamentale legate de programarea matematică cu accent pe programarea liniară şi în special a algoritmului simplex pentru rezolvarea problemelor de programare liniară. Conţinutul capitolului:. Obiectul programării matematice. Noţiuni generale relative la o problemă de programare liniară 3. Algoritmul simplex 4. Cazuri speciale într-o problemă de programare liniară 5. Rezolvarea problemei generale de programare liniară 6. Dualitatea în problemele de programare liniară 7. Test de verificare a cunoştinţelor 8. Bibliografia aferentă capitolului Cuvinte cheie: programare matematică, programare liniară, soluţie posibilă, soluţie debază, soluţie optimă, algoritmul simplex, problema duală. 5. Obiectul programării matematice Am văzut în Capitolul I că aplicarea conceptelor matematice în studiul proceselor economice a căpătat o dezvoltare deosebită, prin rezolvarea unui număr tot mai mare de probleme. Astăzi, problemele de producţie, de planificare sau de proiectare se cer rezolvate nu la întâmplare, ci aşa fel încât soluţiile obţinute să fie corespunzătoare unui anumit scop. De exemplu, realizarea unui proces de producţie să se facă cu cheltuieli cât mai mici şi cu venit cât mai mare. Organizarea ştiinţifică a proceselor economice, în scopul luării unei decizii conştiente, în raport cu ţelurile urmărite şi în urma unei analize a corelaţiilor dintre diferiţiifactorice intervin, constituie obiectul a ceea ce se numeşte programare matematică. În general, problema programării desfăşurării unor fenomene economice este o problemă complexă şi vastă, pentru rezolvarea cărora matematica oferă diverse metode din multitudinea de ramuri, ca: aritmetica, algebra, geometria, analiza matematică, calculul probabilităţilor, analiza funcţională, ecuaţii diferenţiale, ecuaţii integrale, etc. Forma generală a unei probleme de programare matematică (v. cap.i,. şi.3) cere să se determine valorile variabilelor x j, j =,n, astfel încât ele să satisfacă restricţiile (5.) g k (x,...,x n ) 0, k =,m, iar funcţia z = f(x,x,...,x n ),numită funcţia obiectiv (scop, eficienţă), să iavaloareaoptimă (maximă, respectiv minimă). 7
72 Deseori, pe lângă restricţiile (5.), se mai adaugă şi condiţiile de nenegativitate x j 0, j =,n. Astfel că modelul matematic al unei probleme de programare arată astfel: (5.) (optim)z = f(x,...,x n ) g k (x,x,...,x n ) 0, k =,m x j 0, j =,n. Clasificarea problemelor de programare matematică se face după forma funcţiilor f şi g k, natura necunoscutelor x j, j =,n şi respectiv, natura coeficienţilor necunoscutelor în f şi g k, k =,m. Dacă funcţiile f şi g k, k =,m, sunt forme liniare, atunci problema de programare are denumirea consacrată de problemă de programare liniară, prescurtat (P.L). Când funcţia z, sau unele restricţii, sunt funcţii neliniare, problema poartă denumirea de problemă de programare neliniară. De exemplu, dacă f este o formă pătratică, atunci spunem că avem o problemă de programare pătratică. Dacă necunoscutele x,...,x m se caută în numere întregi, spunem că avem programare întreagă (în numere întregi). Dacă toţi coeficienţii necunoscutelor x j, j =,n, în f şi g k, k =,m,suntconstanţi, atunci se zice că avem o problemă de programare deterministă. În caz că cel puţin unul din aceşti coeficienţi este variabil (depinzând de parametrii), avem programare parametrică. Dacă cel puţin unul din aceşti coeficienţi esteovariabilă aleatoare, atunci spunem că avem programare aleatoare sau stochastică. În acest capitol ne vom ocupa de problema programării liniare (P.L.). Programarea liniară esteoramură unitară a matematicilor aplicate în economie, având metode proprii şi generale de rezolvare a problemelor respective. Constituirea obiectului de programare liniară s-a datorat faptului căîn viaţa social economică există multe aplicaţii care conduc la probleme liniare de programare (v..3). Rezolvarea problemelor de programare liniară poate fi făcută folosind diferite metode, unele particulare (metoda repartizării, metoda grafică), altele generale (metoda simplex). Primele probleme de programare liniară au fost formulate de L.V.Kantorovici (939) şi de F.L.Hitchcock (94). Programarea liniară se naşte însă în anii de după cel de-al doilea război mondial, o dată cu formularea ei generală în 947, de către G.B.Dantzig, care a propus, totodată şi un procedeu eficient de rezolvare metoda simplex. Astăzi, se poate vorbi despre un mod unitar de abordare al tuturor problemelor de programare liniară. Diversele metode de rezolvare existente au ca ţel sporirea rapidităţii în calcule, având în vedere în special utilizarea calculatoarelor. 5. Noţiuni generale relative la o problemă de programare liniară Problema de P.L., sub forma cea mai simplă pe care o vom numi forma standard sau forma algebrică, este dată prin modelul matematic (5.3) (5.4) (optim)f(x) =c x + c x c n x n a x + a x a n x n = b a x + a x a n x n = b... a m x + a m x a mn x n = b m (5.5) x j 0, j =,n, unde (5.3) este funcţia de scop, (5.4) sunt restricţiile, iar (5.5) condiţiile de nenegativitate. Sistemul de restricţii (5.4) reprezintă concordanţa internă a unui proces economic. Coeficienţii a ij, i =,m, j =,n, sunt coeficienţi tehnici constanţi, planificaţi sau determinaţi 73
73 în mod statistic. Necunoscutele x j, j =,n,suntmărimi care trebuie găsite, iar termenii liberi b i, i =,m,suntmărimi constante date, determinate de condiţiile locale ale procesului economic. numiţi coeficienţi de restricţie ai programului dat. Dacă sistemul liniar (5.4) de ecuaţii de condiţii (restricţii) este compatibil determinat, atunci din punct de vedere economic avem un proces economic cu concordanţă internă rigidă. În acest caz nu mai are rost să se pună problema determinării valorii optime pentru funcţia scop deoarece ea are o valoare unică bine determinată, corespunzătoare soluţiei sistemului (5.4). Când sistemul liniar (5.4) de ecuaţii de restricţii este compatibil nedeterminat, atunci concordanţa internă a procesului economic este elastică, deoarece oferă posibilitatea alegerii dintr-o infinitate de soluţii ale sitemului numai pe acelea care fac funcţia de scop optimă. Utilizând puternicul aparat al matematicii, problema de programare liniară (5.3) (5.5) poate fi prezentată şi în alte moduri. Fie matricele A = a a... a n a a... a n a m a m... a mn,b = c =(c,...,c n ),θ = b b... b m 0. 0,x= Cu aceste notaţii, problema de programare liniară (5.3) (5.5) ia forma matriceală: (optim)f(x) =cx Ax = b x θ Dacă notăm cu P j, j =,n, vectorii ale căror componente sunt elemente corespunzătoare coloanelor matricei A, atunci problema de programare liniară (5.3) (5.5) ia forma (optim)f(x) =cx x P + x P x n P n = b x θ numită forma vectorială a problemei de programare liniară. Definiţia 5.. Se numeşte soluţie posibilă a problemei de programare liniară standard orice vector coloană x (0) θ, care verifică sistemul de restricţii, adică Ax (0) = b. Pe baza celor demonstrate în 3.5, rezultă că mulţimea tuturor soluţiilor posibile pentru o problemă de programare liniară este convexă. Definiţia 5.. Se numeşte soluţie de bază pentru o problemă de programare liniară orice soluţie posibilă, care are cel mult m componente strict pozitive. Ea se obţine dintr-o soluţie posibilă, când necunoscutelor secundare se atribuie valoarea zero. Definiţia 5..3 O soluţie de bază este numită nedegenerată, dacă are exact m componente strict pozitive. În caz contrar ea este numită soluţia de bază degenerată. Definiţia 5..4 Soluţia posibilă x () este numită mai bună decât soluţia posibilă x (), dacă f(x () ) f(x () ) când pentru f se cere minimul, respectiv f(x () ) f(x () ),când pentru f se cere maximul. Definiţia 5..5 Osoluţie de bază x (0) este soluţie optimă dacă f(x (0) ) este valoarea optimă pentru f. x x.. x n, 74
74 Definiţia 5..6 Dacă avem k soluţii optime x (),...,x (k), atunci soluţia generală este combinaţia liniară convexă a soluţiilor optime, adică x = k α i x (i), i= cu k α i =, α i [0, ), i =,k. i= Observaţia 5.. Într-o problemă de programare liniară putem lucra considerând optimul drept minim deoarece dacă se cere maximul, atunci din relaţia max f = min( f) se deduce că este suficient să se determine min( f), iar apoi, cu semn schimbat, vom avea maximul lui f. Observaţia 5.. Într-o problemă economică concretă, de obicei, restricţiile problemei de programare liniară sunt inecuaţii, caz în care spunem că avem o problemă generală de programare liniară. Modelul matematic al acesteia, sub forma matricială, arată astfel: 5.3 Algoritmul simplex (optim)f(x) =cx A x = b () A x b () A 3 x b (3) x θ. Metoda generală de rezolvare a problemelor de programare liniară este cunoscută în literatura de specialitate sub numele de metoda simplex sau algoritmul simplex. Ea este datorată lui G.B.Dantzig, care a publicat primele lucrări în 947. Ulterior s-au dat diverse variante îmbunătăţite ale metodei. Ea are la bază metoda eliminării complete de rezolvare a unui sistem de ecuaţii liniare, desigur adaptată scopului urmărit: aflarea soluţiilor cu componente nenegative, respectiv a soluţiei (sau soluţiilor) pentru care funcţia liniară de scop f are valoarea optimă. Pe baza Observaţiei 5.. este suficient să considerăm problema de P.L. standard. minf = n c j x j j= a x + a x a n x n = b a x + a x a n x n = b... a m x + a m x a mn x n = b m x j 0, j =,n. Ideea metodei simplex constă în a găsirea mai întâi a unei soluţii de bază, apoi de un procedeu prin care din aceasta se obţin soluţii de bază mai bune, până la aflarea soluţiilor optime. Pentru determinarea unei soluţii de bază vom utiliza metoda eliminării complete (Gauss Jordan). Utilizând metoda elementului pivot şi presupunând că am lucrat pe primele m coloane 75
75 cu m n, obţinem (A b) α,m+... α n β α,m+... α n β α i,m+... α in β i α m,m+... α mn β m În ipoteza că β i 0, i =,m (în caz contrar se aleg alte necunoscute principale), vom putea considera soluţia de bază x = β,...,x m = β m,x m+ =0,...,x n =0 adică t x () =(β,β,...,β m, 0,...,0). Pentru această soluţie x () avem f(x () )= m c j β j. Acum vrem să trecemdelasoluţia de bază x () la o nouă soluţie de bază x () care să fie mai bună. Să admitemcă α i,m+ 0,adică poate fi considerat ca element pivot. Atunci putem înlocui necunoscuta principală x i prin x m+. Aplicând metoda elementului pivot, obţinem (A b) j= 0... α,m+ α i,m γ,m+... γ,n β βiα,m+ α i,m α,m+ α i,m γ,m+... γ,n β - βiα,m+ α i,m α i,m αi,m+ α α i,m+... i,n α i,m β i α i,m αm,m+ α i,m γ m,m+... γ m,n β m βiαm,m+ α i,m+ Noua soluţie x () are componentele x = β β iα,m+,...,x i = β i β iα i,m+,x i =0, α i,m+ α i,m+ x i+ = β i+ β iα i+,m+,...,x m = β m β iα m,m+, α i,m+ α i,m+ x m+ = β i,x m+ =0,...,x n =0. α i,m+ Pentru ca x () săfiesoluţiedebază trebuie ca (5.6) β i α i,m+ 0 şi respectiv: (5.7) β j β iα j,m+ 0, α i,m+ j =,m,j i, Cum β i 0, din (5.6) găsim (5.8) α i,m+ > 0. 76
76 Inegalităţile (5.7) pentru care α j,m+ 0 sunt evidente. Pentru α j,m+ > 0, din (5.7) găsim β j β i, α j,m+ α i,m+ care ne arată că λ = β i (5.9) β j α i,m+ este minimul rapoartelor, cu α j,m+ > 0. Aşadar, vom obţine prin trecerea de la α i,m+ x () la x () onouăsoluţiede bază dacă elementul pivot este pozitiv, iar pivotul va fi acela care furnizează cel mai mic raport λ, când termenii liberi se împart la elementele pozitive corespunzătoare de pe coloana pe care lucrăm. În limbaj vectorial, se mai spune că am găsit condiţia prin care precizăm vectorul care iese din bază. Acum să vedem în ce condiţii x () este o soluţie de bază mai bună cax (). Avem ( f(x () )=c β β ) ( iα,m c i β i β ) iα i,m+ + α i,m+ α i,m+ ( +c i+ β i+ β ) ( iα i c m β m β ) iα m,m+ β i + c m+ = α i,m+ α i,m+ α i,m+ Dacă notăm = f(x () )+ β i α i,m+ [c m+ (c α,m+ + c α,m c i α i,m c m α m,m+ )]. z m+ = c α,m+ + c α,m c i α i,m c m α m,m+ atunci putem scrie f(x () ) f(x () )=λ(c m+ z m+ ) Cum λ>0, rezultăcă f(x () ) <f(x () ) dacă Δ m+ = c m+ z m+ < 0. Prin urmare, vom trece de la o soluţie de bază x () la una x () mai bună, dacă diferenţa Δ m+ = c m+ z m+, corespunzătoare vectorului P m+, corespunzător necunoscutei x m+ care va deveni principală, este mai mică decât 0. Practic, trebuie să calculăm mărimile z j = c α j + c α j c m α mj = C B,P j, j =,n, adică produsul scalar dintre vectorii C B =(c,c,...,c m ) al coeficienţilor necunoscutelor de bază şi t P j =(α j,α j,...,α mj ) al componentelor coloanei j; apoi diferenţele Δ j = c j z j, j =,n. Cum f(x () ) f(x () )=λδ j,rezultăcă x () va fi o soluţie mai bună dacă Δ j < 0. Aceasta înseamnă cădacă toate diferenţele Δ j 0, j =,n, atunci nu se poate obţine o îmbunătăţire a soluţiei, şi în consecinţă, soluţia x () de bază esteoptimă. Din cele de mai sus, rezultă pentru algoritmul simplex următorii paşi: Pasul. Se determină osoluţie de bază a problemei de P.L., prin aplicarea metodei elementului pivot care respectă condiţiile (5.8) şi (5.9); Pasul. Se calculează toate valorile z j, j =,n,obţinute prin produsul scalar al vectorilor C B şi P j ; Pasul 3. Dacă există diferenţe Δ j = c j z j < 0 se trece la găsirea unei alte soluţii de bază prin introducerea în bază a vectorului pentru care Δ j < 0 este cea mai mare în valoare absolută. Dacă toate diferenţele Δ j 0, atuncisetrecelapasul5; Pasul 4. Se repetă paşii şi 3 până când nu mai există diferenţe Δ j < 0. Acum s-a ajuns la soluţia optimă. 77
77 Pasul 5. Se scrie soluţia optimă: variabilele principale (ale căror vectori coloană conţin numai o cifră de restul fiind zero) au valorile corespunzătoare din coloana termenilor liberi, variabilele secundare au toate valoarea zero, iar min f = C B,S B, unde S B este soluţia de bază. De obicei, pentru lucrul manual, paşii algoritmului simplex se efectuează într-un tabel. Acest tabel reprezintă, de fapt, transformările de la metoda eliminării complete aplicată la rezolvarea sistemului de restricţii, dar completate cu o primă linie formată din coeficienţii funcţiei scop f şi cu încă două coloane: C B a coeficienţilor bazei, respectiv cu baza B. În momentul în care s-a ajuns la o soluţie de bază tabelul se completează cudouă linii pentru calcularea valorilor lui z j,respectivδ j. Un astfel de tabel are forma c c c c 3... c n C B B b P P P 3... P n e b a a a 3... a n e b a a a 3... a n P j..... aij. e i e m b m a m a m a m3... a mn z j f Δ j - P j e i semnifică faptul că vectorul e i pleacă din bază, în locul lui intrând vectorul P j. Să ilustrăm acestea printr-un exemplu. Exemplul Să se rezolve problema de P.L. (min)f(x) =x +x + x 3 +3x 4 cu restricţiile Avem x + x x 3 +x 4 =6 x + x +x 3 =5 x +x + x 3 + x 4 =8 x j 0,j =, 4. c 3 C B B b P P P 3 P 4 P e 6 - e e 5 0 e P 3 P 5 e 0 - e 5 e 3 0 P 0-3 P P 4 e 3 e P P P 30 P Prima 3 P soluţie 68 z j de bază 3 Δ j
78 Cum Δ j 0, j =, 4, rezultăcăsoluţia de bază găsită esteşi optimă: t x min = ( 5 7, 30 7, 0, ) 7 şi min f = Observaţia 5.3. Dacă printre vectorii P j aceştia pot fi luaţi direct în baza B. avem vectori unitari din baza canonică, atunci Exemplul Să se rezolve problema de P.L. (max)f(x) = 3x +7x x 3 5x 4 3x 5 x + x + x 3 x 4 + x 6 = x +x x 3 x 4 + x 7 =3 3x x + x 3 + x 5 =9 x j 0, j =, 7 Cerinţa de maxim poate fi înlocuită prin cea de minim (vezi Observaţia 5..), considerând (min)( f(x)) = 3x 7x + x 3 +5x 4 +3x 5 Se mai observă că vectorii P 5, P 6 şi P 7 sunt din baza canonică, deci, pot fi consideraţi direct în baza B. Avem c C B B b P P P 3 P 4 P 5 P 6 P 7 P P 6 0 P P P z j Δ j P 0 0 P P 7 0 P P z j Δ j P P P 8-7 P P z j Δ j P P P z j Δ j Prima soluţie de bază Adoua soluţie de bază Atreia soluţie de bază Apatra soluţie de bază 79
79 ( Cum toţi Δ j 0. j =, 7, rezultă că am găsit soluţia optimă, dată de t x = 0, 7 4, 4, 0,, 0, 0), iat min( f(x)) = 55/8. Rezultă că problema de P.L. dată are aceeaşi soluţiedeoptim,iar(max)f(x) = min( f(x)) = 55/8. Observaţia 5.3. O problemă de P.L. de maxim se poate rezolva şi direct, fără a o mai reduce la una de minim, numai că atunci vom avea soluţia optimă când Δ j 0, j =,n. Dacă avem şi Δ j > 0, atunci vom alege pe cea mai mare Δ j > 0, aceasta determinând vectorul care intră în bază. Vectorul care iese din bază sestabileşte ca şi la problema de P.L. de minim. Observaţia Dacă în unele ecuaţii de restricţii avem termeni liberi negativi, respectivele ecuaţii pot fi înmulţite cu. 5.4 Cazuri speciale într-o problemă de P.L. În acest paragraf vom analiza câteva situaţii speciale care pot apărea într-o problemă de P.L Soluţii multiple În orice tabel simplex toate diferenţele Δ j corespunzătoare vectorilor bazei (necunoscutelor principale) sunt nuli. Dacă în tabelul simplex, care conţine soluţia optimă, numărul zerourilor din linia diferenţelor Δ j este mai mare ca m (numărul vectorilor unitari), atunci problema de P.L. poate avea mai multe soluţii optime. Pentru a găsi celelalte soluţii optime se introduc în bază, dacă este posibil, vectorii P j pentru care Δ j =0. Numărul maxim de soluţii optime este C m k, unde k este numărul de zerouri din linia diferenţelor Δ j. După obţinerea tuturor soluţiilor optime se scrie soluţia optimă generală ca şi o combinaţie liniară convexă (vezi Definiţia 5..6). Exemplul Să se rezolve problema de P.L. (min)f(x) =3x +x +x 3 + x 4 x +x +x 3 +x 4 = 00 x x +x 3 +x 4 =0 x +x 4 =0 x j 0, i =, 4. Rezolvarea problemei de P.L. cu algoritmul simplex este dată în tabelul următor c 3 C B B b P P P 3 P 4 e 00 e P e e 3 e P 3 e e 0-0 P P e e P P P P Prima soluţiedebază P z j 40 3 Δ j
80 Cum toate diferenţele Δ j 0 rezultă căavemsoluţia optimă x () = (40, 0, 50, 0), cu (min)f(x) = 40. Cum avem patru zerouri pe linia lui Δ j este posibil să obţinem şi o altă soluţie optimă, introducând pe P 4 în bază. Cum λ minim se obţine pentru P, vectorul P 4 va intra în locul lui P. Tabelul simplex pentru problema P.L. se continuă astfel: adică Se obţine a doua soluţie optimă c 3 C B B b P P P 3 P 4 3 P P P z j 40 3 Δ j x () = (50, 0, 40, 0), cu (min)f(x) = 40. Se observă că alte soluţii optime nu mai există. Soluţia generală a problemei va fi: x = αx () + βx (), unde α, β 0,α+ β =, x = (40α +50β,0α, 50α +40β,0β), (min)f(x) = 40. Observaţia 5.4. În general, soluţia optimă generală nu este şi soluţie de bază, numărul componentelor sale nenule fiind mai mare decât m Soluţie infinită Fie o problemă de P.L. de minim. Există situaţii în care avem o diferenţă Δ j < 0, dar componentele vectorului P j sunt toate negative sau 0, ceea ce face imposibilă alegerea elementului pivot. Vom arăta că în această situaţie funcţia de eficienţă are un minim infinit, adică valoarea ei poate fi făcută oricât de mică. Considerăm tabelul simplex c c c... c m... c j... c n C B B b P P... P m... P j... P n c P β α j... α n c P β α j... α n c m P m β m α mj... α mn z j z b c c... c m... z j... z n Δ j Δ j... Δ n cu soluţia de bază x () =(β,...,β m, 0,...,0), Δ j < 0 şi α ij < 0, i =,m. Atribuim necunoscutei x j valoare M>0 (oricât de mare ), adică x j = M, iar celorlalte necunoscute secundare le atribuim valoare 0, adică x m+ =0,...,x j =0, x j+ =0,...,x n =0. Obţinem astfel soluţia posibilă x () =(β α j M,β x α j M,...,β m α mj M,0,...,M,0,...,0) Valoarea funcţiei de scop f pentru x () este: f(x () )=c (β α j M)+c (β α j M)+...+ c m (β m α mj M)+c j M = 8
81 = f(x () )+M[c j (c α j + c α j c m α mj )] = f(x () )+MΔ j. Cum Δ j < 0 şi M,rezultăcă f(x () ), ceea ce trebuia demonstrat. Pentru o astfel de problemă de P.L. sse spune că eaaresoluţie (optimă) infinită. Exemplul Să se rezolve problema de P.L.: (min)f(x) = x + x x 3 3x 4 4x +x 3x 4 =0 x x +x 3 =6 x x +3x 4 =6 x j 0, j =, 4. Utilizând algoritmul simplex obţinem tabelul: P 4 P c C B B b P P P 3 P 4 e P e e 3 e e P P P P P z j Δ j Deoarece Δ = < 0, iarα =0, α = < 0, α 3 = 3 < 0, rezultăcă (min)f =. Într-adevăr, luând x = M>0, x = 8 3, x 3 = 3 + M, x 4 = 3 + M, avem f(x) = 86 3 M şi astfel când M,obţinem f Degenerare în problemele de programare liniară Considerăm problema de P.L. standard (min)f(x) =cx Ax = b x θ. Aceasta, conform Definiţiei 5..3, va avea o soluţie degenerată dacănumărul componentelor sale strict pozitive este mai mic decât m, adică cel puţin o necunoscută principală are valoarea zero (în vectorul coloană b există zerouri). Situaţia de degenerare într-o problemă de P.L., apare, fie la început, fie pe parcurs, când la introducerea în bază a unui vector există mai multe elemente pozitive care furnizează acelaşi raport minim. În această ultimă situaţie apare aşa numitul fenomen de ciclare. Pentru a evita acest fapt, elementul pivot, se demonstrează, va fi ales acela care furnizează cea mai mică linie în ordonarea lexicografică. Definiţia 5.4. Linia (b ; x,x,...,x n ) este mai mică în ordine lexicografică decât linia (b ; y,y,...,y n ) dacă b <b, sau b = b şi x <y, sau b = b, x = y şi x <y, sau şi aşa mai departe b = b, x = y,...,x n = y n şi x n <y n. 8
82 Exemplul Să se rezolve problema de P.L. standard: (max)f(x) =x +4x +5x 3 +x 4 Înlocuim cerinţa de maxim prin 3x +x +x 3 +x 4 =6 x +x +x 3 +x 4 =6 x +x +3x 3 =7 x j 0, j =, 4. (min)( f(x)) = x 4x 5x 3 x 4. Acum, utilizând algoritmul simplex, avem: c C B B b P P P 3 P 4 e 6 3 P e 6 e e P 5 e 3 0 e -4 P e P P P 3 e e P P P z j Δ j P P P z j Δ j Prima soluţie de bază La tabelul care a dat prima soluţie de bază avemδ 4 = 5 < 0,iar raportul minim λ = 3 este obţinut şi pe linia lui P şi pe linia lui P. Cum b =<b =,rezultăcăîn ordinea lexicografică linia lui P este mai mică decât linia lui P.Aşa că la acest pas s-a ales elementul pivot 3 din linia lui P. Soluţia optimă obţinută este degenerată ( x () = 0, 0, 7 3, ), pentru care (min)( f) = 9. 3 Soluţia x () este soluţie optimă şi pentru problema de P.L. de maxim, când (max)f = min(( f) = Rezolvarea problemei generale de programare liniară Într-o problemă generală, de programare liniară unele restricţii apar şi sub formă de inecuaţii (vezi Observaţia 5..). Rezolvarea unei astfel de probleme se face prin transformarea ei într-una standard, prin introducerea necunoscutelor de compensare. 83
83 Astfel, pentru o restricţie de forma a i x + a i x a in x n b i considerăm necunoscuta de compensare x n+ 0 şi transformăm inecuaţia în ecuaţie astfel Pentru o restricţie de forma a i x + a i x a in x n + x n+ = b i a k x + a k x a kn x n b k considerăm necunoscuta de compensare x n+ 0 şi transformăm inecuaţia în ecuaţie, astfel a k x + a k x a kn x n x n+ = b k Câte restricţii de tip inecuaţie avem, atâtea necunoscute de compensare vom introduce. În funcţia de eficienţă necunoscutele de compensare se introduc cu coeficienţii egali cu zero. În soluţia optimă din tabelul simplex s-ar putea să apară şi unele necunoscute de compensare, dar în soluţia obţinută a problemei de P.L. generală acestea nu se consideră. Exemplul Să se rezolve problema generală de P.L.: (min)f(x) =3x x +4x 3 x 4 x +3x x 3 +x 4 =7 5x +x +x 3 x 4 5 x +x +x 3 +x 4 0 x +x +x 3 +x 4 9 x j 0, j =, 4. Transformăm problema generală în una standard, introducând variabile de compensare x 5, x 6, x 7 : (min)f(x) =3x x +4x 3 x 4 x +3x x 3 +x 4 =7 5x +x +x 3 x 4 x 5 =5 x +x +x 3 +x 4 +x 6 =0 x +x +x 3 +x 4 +x 7 =9 x j 0, j =, 7. Acum, aplicăm algoritmul simplex şi avem: c C B B b P P P 3 P 4 P 5 P 6 P 7 e P e e P P P e 5 0 e 3 P P P P 3 P 0 P P 7 47 z j Δ j
84 Cum toţi Δ j 0, j =, 7. rezultăcăsoluţia problemei de P.L. standard este ( x () =, 5 84, 0, 0, 0,, 47 ), (min)f(x) = 47, iar a problemei generale x () = (, 5 ), 0, 0, (min)f(x) = 47, caz în care nu am mai luat în seamă valorile necunoscutelor de compensare. 5.6 Dualitatea în problemele de programare liniară Plecând de la o problemă de P.L., totdeauna se poate formula o nouă problemă de P.L., folosind aceleaşi date numerice ale problemei date, care însă să ceară determinarea valorii optime contrare. Între soluţiile celor două probleme de P.L. există strânse legături. Perechea de probleme de P.L. astfel construite respectă un principiu general din ştiinţă, în particular din matematică, numit principiul dualităţii, iar problemele respective sunt numite probleme duale (se mai întâlneşte şi termenul de probleme conjugate) una alteia. De obicei problema de P.L. iniţială senumeşte primală, iar cea obţinută prin dualitate se numeşte duală. Noţiunea de dualitate în problemele de P.L. are, pe lângă însemnătatea teoretică, şi o mare importanţă practică, deoarece, fiind date două probleme duale, există posiblitatea alegerii pentru rezolvare a problemei mai convenabile din punct de vedere calculatoriu. Mai exact, tabelul simplex, ce conţine soluţia optimă a unei probleme, cuprinde soluţia optimă a problemei duale, componentele acestei soluţii se află pe linia diferenţelor Δ j ale acestui tabel, în dreptul vectorilor (necunoscutelor) de compensare corespunzător problemei duale. În caz că avem mai puţin de m vectori (necunoscute de compensare) se adaugă vectori unitari e j în completare (numiţi vectori ajutători sau artificiali), cu coeficienţi zero pe linia lui c. Definiţia 5.6. Spunem că într-o problemă de P.L. avem o restricţie concordantă dacă ea conţine semnul într-o problemă de minim şi, respectiv, semnul într-o problemă de maxim. Definiţia 5.6. Spunem că într-o problemă P.L. avem o restricţie neconcordantă dacă ea conţine semnul într-o problemă de minim şi, respectiv, semnul într-o problemă de maxim. Prin urmare, într-o problemă de P.L. avem următoarele categorii de restricţii: concordante, neconcordante şi egalităţi. Pentru a cuprinde toate situaţiile posibile vom considera că şi pentru necunoscute (variabile) putem avea următoarele categorii: nenegative, (x j 0), nepozitive (x j 0) şi libere (x j R). 85
85 Acum, putem da regulile de corespondenţă în formarea problemelor de P.L. P.L. primal minim maxim necunoscută nenegativă necunoscută nepozitivă variabilă liberă restricţie concordantă restricţie neconcordantă restricţie egalitate număr de necunoscute (variabile) număr de restricţii P.L. dual maxim minim restricţie concordantă restricţie neconcordantă restricţie egalitate variabilă nenegativă variabilă nepozitivă variabilă liberă număr de restricţii număr de necunoscute (variabile) termenii liberi ai restricţiilor coeficienţii funcţiei obiectiv coloanele matricei restricţiilor necunoscute principale necunoscute de compensare coloana b din tabelul simplex linie Δ j din tabelul simplex Exemplul Se dă problema primală de P.L. (min)f(x) =x + x 4x +3x 4 5x +9x 45 3x 4x 44 x 8 coeficienţii funcţiei obiectiv termenii liberi ai restricţiilor liniile matricei restricţiilor necunoscute de compensare necunoscute principale linia Δ j din tabelul simplex (eventual cu semn schimbat) coloana b din tabelul simplex (eventual cu semn schimbat) x 0, x > 0. Să se scrie duala acestei probleme. Având patru restricţii şi, respectiv, două necunoscute din programul primal, vom avea patru necunoscute şi, respectiv, două restricţii. Aşadar, programul dual va avea forma: (max)g(y) =4y +45y 44y 3 8y 4 (termenii liberi ai restricţiilor au devenit coeficienţii funcţiei obiectiv), { 4y +5y +3y 3 y 4 3y +9y 4y 3 y j 0, j =, 4. Exemplul Fie dată problema principală de P.L.: (max)f(x) =x +x +3x 3 +3x 4, x +x +x 3 +x 4 5 7x +5x +3x 3 +x 4 3x +5x +0x 3 +5x 4 x j 0, j =, 4, 86
86 duala ei are forma: (min)g(y) =5y + y + y 3 y +7y +3y 3 y +5y +5y 3 y +3y +0y 3 3 y +y +5y 3 3 y j 0, j =, 3. Exemplul Pentru problema primală dep.l. (min)f(x) =x + x 3x 3 x +x +x 3 6 x x +3x 3 8 x x 3 =5 x j 0, j =, 3, duala are forma (max)g(y) =6y +8y +5y 3 y +y +y 3 6 y y 8 y +3y y 3 5 y 0, y 0, y 3 liberă (oarecare). Am văzut până acum o primă legătură între problemele duale de programare, în sensul că una se obţine din cealaltă prin mijloacele menţionate mai sus. În continuare vom prezenta o altă legatură, sub aspectul unor relaţii dintre soluţii şi funcţiile de eficienţă. Să considerăm problemele duale, scrise matricial: () P.L. primală (min)f(x) =cx Ax = b x θ () P.L. duală (max)g(y) = t by t Ay t c y arbitrar unde t y =(y,...,y m ). Teorema 5.6. Dacă x (0) şi y (0) sunt soluţii posibile oarecare ale problemelor () şi (), atunci g(y (0) )= t by (0) cx (0) = f(x (0) ). Demonstraţie. Din faptul că x (0) şi y (0) sunt soluţii posibile ale problemelor () şi () respectiv, avem: t Ay (0) t c, cu y (0) arbitrar, respectiv Astfel putem scrie Ax (0) = b, cu x (0) 0. g(y (0) )= t by (0) = t (Ax (0) )y (0) =( t x (0)t A)y (0) = t x (0) ( t Ay (0) ) t x (0)t c = ceea ce trebuia demonstrat. = t (cx (0) )= t f(x (0) )=f(x (0) ), Teorema 5.6. Pentru problemele duale () şi () de programare liniară au loc una şi numai una din următoarele situaţii: 87
87 a) ambele probleme au soluţii optime finite şi atunci (min)f = (max)g; b) una din probleme are soluţie infinită, iar cealaltă este incompatibilă (nu are soluţie); c) una dintre probleme are soluţie degenerată, iar cealaltă problemă poate avea soluţii multiple. Demonstraţie. a) Fie x () osoluţie optimă a problemei () şi y () osoluţie optimă a problemei (). Din Teorema 5.6. avem min f(x) =f(x () ) g(y () ) = max g(y). Acum, din obţinerea tabelului simplex rezultă cădacănotăm cu Γ matricea de tipul m m din A, dată de vectorii principali P j care dau soluţia optimă x (), atunci x () =Γ b. Analog avem t y () = c B Γ. Atunci rezultă f(x () )=c B x () = c B Γ b = t y () b = g(y (0) ), adică min f(x) = max g(y). În mod analog se stabilesc acum, fără mare greutate şi punctele b) şi c) ale teoremei. Observaţia 5.6. Teoremele 5.6. şi 5.6. poartă numeledeteoreme ale dualităţii. Ele ne justifică cele afirmate la începutul paragrafului: prin rezolvarea uneia dintre problemele duale avem şi soluţia celeilalte. De aceea, practic putem alege pe cea în care calculele sunt mai simple. Exemplul Să considerăm problema de P.L. din exemplul Aici se observă că este mai convenabil să rezolvăm problema duală deoarece ea conţine numai două restricţii. O aducem la forma standard, introducând variabilele de compensare y 5 şi y 6 (max)g(y) =4y +45y 44y 3 8y 4 { 4y +5y +3y 3 y 4 +y 5 = 3y +9y 4y 3 +y 6 = y i 0, i =, 6 Aplicând algoritmul simplex, obţinem: c C B B b P P P 3 P 4 P 5 P 6 0 P P 0 P P 6 z j Δ j P P P 5 45 P z j Δ j P P z j Δ j Cum toate Δ j 0, rezultăcă y () = ( 4,, 0, 0) este soluţie optimă pentru problema duală, cu min g(y) = De pe linia lui Δ j, în dreptul vectorilor de compensare P 5 şi P 6,găsim soluţia problemei primale: ( 7 x () = 7, 0 ) 7, 0, 0, cu max f(x) =
88 Observaţia 5.6. Există situaţii în care rezolvarea unei probleme de P.L. se lungeşte prin calculele care conduc la determinarea unei baze formată din vectorii P j ai problemei. Este preferabil ca într-o astfel de situaţie să lucrăm cu b în care avem şi componente b i < 0, folosind un algoritm simplex modificat, aplicat asupra problemei duale, numit algoritmul (metodă) simplex modificat (dual). Paşii de lucru sunt aceeaşi, deosebindu-se de metoda simplex primală numai prin următoarele: ) Criteriul de ieşire din bază. Pe coloana lui b se alege b i0 = min b i<0 {b i}. ) Criteriul de intrare în bază. Dacă pe linia lui b i0 toate elementele α i0j sunt nenegative, atunci problema este imposibilă. Dacă există α i0j < 0, atuncideterminăm α i0j 0 = min Δ j, α i0 j<0 α i0j urmând ca vectorul corespunzător lui α i0j 0 săintreîn noua bază. Se aplică repetat aceşti paşi până când b θ şi Δ j verifică condiţiile din simplex primal, situaţie în care b dă soluţia optimă. Exemplul Să se rezolve problema de P.L.: (min)f(x) =4x +5x +3x 3 3x +x +x 3 7 x x +x 3 6 x +x x 3 8 x j 0, j =, 3. Se observă cădacă am lucra cu problema primală necunoscutele de compensare ar fi introduse cu coeficienţii deci vectorii de compensare nu ar putea fi folosiţi în baza iniţială. Înmulţind cu restricţiile, obţinem problema de P.L.: (min)f(x) =4x +5x +3x 3 3x x x 3 7 x +x x 3 6 x x +x 3 8 x j 0, j =, 3. Acum introducem variabilele de compensare x 4, x 5 şi x 6 şi problema ia forma: (min)f(x) =4x +5x +3x 3 3x x x 3 +x 4 = 7 x +x x 3 +x 5 = 6 x x +x 3 +x 6 = 8 x j 0, j =, 6. 89
89 Cum b θ este mai convenabil să aplicăm algoritmul simplex dual. Avem: c C B B b P P P 3 P 4 P 5 P 6 0 P P P 0 P P 6 z j Δ j P 3 P P 5 0 P P z j Δ j P P P z j Δ j Cum b θ şi Δ j 0, j =, 6, rezultăcăavemsoluţia optimă: ( x () = 5, 0, 4 ), min f(x) =0 5 Observaţia Dualitatea în problemele de P.L. se poate interpreta şi economic. Astfel, problema primală (max)f(x) =cx Ax b x θ reprezintă modelul unui proces economic în care se realizează n produse, folosind m resurse, a ij reprezentând unitatea din resursa i utilizată laprodusulj, i =,m, j =,n, b i cantitatea disponibilă din resursa i, i =,m; c j venitul pentru o unitate din produsul j şi x j numărul de unităţi realizate din produsul j, j =,n (vezi.3). Funcţia obiectiv reprezintă venitul total realizat. În problema primală seceresăse determine numărul de unităţi din fiecare produs aşa încât venitul să fiemaxim. Acum, să urmărim procesul economic după criteriul cheltuieli venit. Fie y i preţul fixat pentru unitatea din resurse i, i =,m. Costul resursei i în cantitate de b i unităţi, consumată pentru fabricarea produselor, este b i y i. Cheltuielile necesare pentru toate resursele folosite sunt g(y) =b y + b y b m y m. Cum consumul din resursa i pentru realizarea unităţii de produs j este a ij, costul acestei cote care realizează unitatea de produs j este a ij y i. Costul total al cotelor din m resursele i, i =,m, care participă la crearea unităţii de produs j, este a ij y i, care trebuie să satisfacă condiţiile m a ij y i c j, i= j =,n. Cum dorim ca să avem cheltuieli minime, obţinem problema de P.L.: (min)g(y) =b y + b y b m y m i= 90
90 m a ij y i c j, j =,n y j 0, j =,n, care constituie duala problemei primale de maxim. i= 9
91 5.7 Testul Nr. 4 de verificare a cunoştinţelor. Definiţi următoarele noţiuni: a) Soluţie posibilă a problemei de programare liniară standard; b) Soluţie de bază a problemei de programare liniară; c) Soluţie nedegenerată a problemei de programare liniară; d) Soluţie degenerată a problemei de programare liniară; e) Restricţie concordantă într-o problemă P.L.; f) Restricţie neconcordantă într-o problemă P.L.. Rezolvaţi problema de programare liniară (min)f(x) =x + x +3x 3 +5x 4 x 5 x + x + x 3 =4 x +x 3 + x 5 =7 3x +x + x 4 =0 x i 0, i =, Rezolvaţi problema de programare liniară (max)f(x) =4x +3x +4x 3 x +3x x 3 +x 5 =7 x +4x 3 + x 4 = 4x +3x 3 +8x 5 + x 6 =0 x i 0, i =, Rezolvaţi problema deşeurilor minime: Se dispune de baze de fier de 4 m lungime din care trebuie tăiate 500 bucăţi de 8 m, 800 bucăţi de 5,5 m şi 450 bucăţi de,5 m. Se cere să se stabilească modul de tăiere care asigură cantitatea minimă de deşeuri. 5. Rezolvaţi problema de programare liniară (max)f(x) =4x x +x 3 +4x 4 6x + x 3x 4 = 4x x +x 3 =8 4x x +3x 4 =8 x i 0, i =, Rezolvaţi problema de programare liniară (max)f(x) =4x +5x +8x 3 +x 4 +3x 5 x +3x +3x 3 + x 4 +x 5 =0 x x +x 3 6x 4 +3x 5 =5 x + x + x 3 x 4 +x 5 =4 x i 0, i =, Rezolvaţi problema generală de programare liniară (min)f(x) =4x +8x x 3 + x 4 x + x + x 4 = x +x + x 3 5 x + x 3 3 x i 0, i =, 4. 9
92 8. Aduceţi următoarea problemă generală de programare liniară la forma canonică: (max)f(y) =3y 4y { y + y 8 y R, y 0. y y 9. Găsiţi valoarea optimului următoarei probleme de programare liniară folosind duala ei: (max)f(x) = x + x x + x 4 x + x 3 3x x 5 x 0, x Găsiţi valoarea optimului următoarei probleme de programare liniară folosind duala ei: (max)g(y) =6y +8y y + y 4 y +y y y y,y R. 93
93 Indicaţii şi răspunsuri Testul 4. Se palică algoritmul Simplex şi se obţine optimul finit t x =(0, 4, 0,, 7) şi min(f) =7. ( Se aplică algoritmul simplex şi se obţine soluţia optimă finită t x =, 9 3, 8 ), 0, 0, 0 şi 3 min g = (de unde g = f) şi astfel max f = Se observă căexistă cinci soluţii de tăiere pentru o bară: ) se taie o bucată de8m şi alta de 5,5 m obţinându-se deşeu 0, 75 = 3 m; ) se taie o bucată de8mşi două 4 bucăţi de,5 m obţinându-se deşeu m; 3) se taie două bucăţi de 5,5 m şi una de,5 mobţinându-se deşeu m; 4) se taie o bucată de5,5şi trei de,5 m obţinându-se deşeu, 5 = 5 4 m; 5) se taie cinci bucăţi de,5 m obţinându-se deşeu de, 5=6 4 m. Notând cu x i, i =, 5 numărul de bare planificate a se tăia în modul i obţinem problema de programare liniară (min)f = 4 (3x +4x +4x 3 +5x 4 +6x 5 ) x + x = 500 x +x 3 + x 4 = 800 x + x 3 +3x 4 +5x 5 = 450 x i 0, i =, 5. Pentru a uşura calculele se va folosi funcţia obiectiv f =3x +4x +4x 3 +5x 4 +6x 5. Se aplică algoritmul Simplex şi se obţin soluţiile optime t x = (500, 0, 50, 0, 60), t x = (500, 0, 90, 0, 0), t x 3 = (380, 0, 0, 0, 0), deci în final min(f ) = 460(m) min(f) = 65(m) cu t (x) =α t x + β t x + γ t x 3 cu α, β, γ [0, ], α + β + γ =. 5. Se aplică algoritmul Simplex pentru funcţia obiectiv g = f şi se obţine optim infinit: x = M>0 (foarte mare), x = 9 0, x 3 = 5 + M, x 4 = 5 + M, min(g) = M, de unde max(f) = M. 6. Se plică algoritmul Simplex şi se obţin soluţii multiple şi anume: t x = (, 3, 53 ) (, 0, 0, t x = 0, 5 6, 3 6, 0, ) t x = α t x + β t x cu α, β [0, ], α + β =şi min(g) = 3, deci max(f) =3. 7 Se introduc variabilele ecart x 5 şi x 6 obţinem forma canonică (min)f(x) =4x +8x x 3 + x 4 x + x + x 4 = x +x + x 3 + x 5 =5 x + x 3 x 6 =3 x i 0, i =, 6. Se aplică algoritmul Simplex şi se obţine optimul finit t x =(0, 0, 5,, 0, 0), adică x =0, x =0, x 3 =5, x 4 =şi min(f) = 8. 94
94 8. Se obţine forma canonică: (min)g(x) = 3x +3x 4x 3 x x x 3 + x 4 =8 x x + x 3 x 5 = x i 0, i =, Avem duala: (min)g(y) =4y +3y +5y 3 y y +3y 3 y + y y 3 y i 0, i =, 3. Forma canonică a acestei probleme de programare liniară este: (min)g(y) =4y +3y +5y 3 y y +3y 3 y 4 = y + y y 3 y 5 = y i 0, i =, 5. ( Se aplică algoritmul Simplex şi se obţine soluţia optimă finită t y = 3, ) 3, 0 min(g) = 0 3 maxf = 0 ( 3. Se poate obţine şi soluţia problemei iniţiale: t x = 3, 3 0. Duala problemei considerate este: (min)f(x) =4x +x + x 3 x + x + x 3 =6 x +x x 3 =8 x i 0, i =, 3. Se aplică algoritmul simplex şi se obţine soluţia optimă finită t x =(0, 5, ) şi min(f) = max(g) =. şi ). 95
95 Bibliografia aferentă capitolului: [] Acu, A.M., Acu D., Acu M., Dicu P., Matematici aplicate în economie - Volumul I, Editura ULB, Sibiu,
96 Capitolul 6 Elemente de teoria grafurilor Obiective: Scopul acestui capitol este de familiariza studenţii cu noţiunea de graf şi aplicaţiile acesteia în economie. Termenul de graf are cu totul altă semnificaţie decât cel de grafic. Prima lucrare de teoria grafurilor a fost scrisă de renumitul matematician elveţian Euler, în 736, în scopul rezolvării unor jocuri şi amuzamente matematice. Dezvoltarea ulterioară a matematicii şi în special a aplicaţiilor ei în diferite domenii ştiinţifice a dat un impuls puternic dezvoltării teoriei grafurilor. Utilizarea ei în domenii variate, teoretice sau practice, de la probleme economice la fundamentarea deciziilor politice, de la studiul reţelelor electrice la critica textelor, etc., îi conferă în zilele noastre o importanţă aparte. Folosirea grafurilor în elaborarea programelor de producţie, investiţii, transport, desfacere etc. ale unităţilor economice a devenit o necesitate de prim ordin. Rezumat: În acest capitol se vor aborda câteva din conceptele fundamentale ale teoriei grafurilor, precum şi câţiva algoritmi utili în rezolvarea unor probleme economice. Conţinutul capitolului:. Noţiuni fundamentale. Algoritmi pentru rezolvarea unor probleme relative la grafuri 3. Problema fluxului optim în reţele de transport 4. Test de verificare a cunoştinţelor 5. Bibliografia aferentă capitolului Cuvinte cheie: graf, matricea drumurilor, componente tare conexe ale unui graf, drumuri hamiltoniene, drum de lungime optimă, metoda drumului critic, rele de trasport. 6. Noţiuni fundamentale Fie X o mulţime nevidă şi cel puţin numărabilă de elemente numite noduri sau vârfuri. Definiţia 6.. Numim graf perechea (X, Γ), unde Γ X X, adică o mulţime de perechi ordonate sau nu de elemente din X. Dacă X este o mulţime finită, atunci graful (X, Γ) se numeşte graf finit, În caz contrar se zice că avem un graf infinit. Putem da pentru graf şi următoarea definiţie echivalentă: Definiţia 6.. Numim graf perechea (X, f), undef este o funcţie definită pex cu valori în mulţimea P(X) a părţilor (submulţimilor) lui X. Definiţia 6..3 Dacă toate perechile distincte din Γ sunt ordonate, graful se numeşte orientat. În cazul contrar, graful se numeşte neorientat. Pentru un graf orientat (X, Γ) perechea ordonată (x, y) Γ, x, y X, senumeşte arc, x fiind extremitatea iniţială, iar y extremitatea finală a arcului. În cazul unui graf neorientat 97
97 o pereche neordonată (x, y) Γ, x, y X se numeşte muchie. În continuare noi o să lucrăm numai cu grafuri orientate şi finite, fără a mai specifica acest lucru, menţionând totuşi în câteva locuri şi denumirea noţiunilor corepsunzătoare de la grafurile neorientate. Un graf orientat şi finit va fi notat prin (X, Γ), unde X = {x,x,...,x n } va reprezenta mulţimea vârfurilor, iar Γ mulţimea arcelor. Un graf (X, Γ) se reprezintă geometric în modul următor: a) fiecare vârf este reprezentat printr-un punct din plan; b) fiecare arc (x i,x j ) Γ se reprezintă printr-o linie (dreaptă sau curbă) care uneşte cele două extremităţi şi pe care se află osăgeată cusensul de la x i la x j (vezi fig.). Dacă x i coincide cu x j,zicemcă avem o buclă. Fig. Într-un graf neorientat muchia se reprezintă printr-un arc fără săgeată. Într-un arc (x i,x j ) vârful x i se numeşte predecesorul lui x j,iarx j succesorul lui x i. Exemplul 6... Graful (X, Γ) dat prin X = {x,x,x 3,x 4,x 5 }, Γ = {(x,x ), (x,x 3 ), (x,x 4 ), (x,x 3 ), (x 3,x ), (x,x 4 ), (x 3,x 4 ), (x 3,x 5 ), (x 4,x 5 )} este reprezentat în figura. În aceeaşi figură este reprezentat şi graful neorientat corespunzător lui. Fig. Definiţia 6..4 Două arce ale grafului (X, Γ) se numesc adiacente dacă au cel puţin o extremitate comună. Definiţia 6..5 Într-un graf (X, Γ) mulţimea arcelor cu extremitatea iniţială x i se numeşte mulţimea arcelor incidente spre exterior şi se notează cuγ + x i. Mulţimea arcelor incidente spre interior vârfului x i se va nota cu Γ x i. Atunci Γ xi =Γ + x i Γ x i este mulţimea arcelor incidente vârfului x i. Definiţia 6..6 Un graf (X, Γ) se numeşte simetric dacă oricare ar fi arcul (x i,x j ) Γ avem şi (x j,x i ) Γ. Graful (X, Γ) se numeşte antisimetric, dacă există unarc(x i,x j ) Γ astfel încât arcul (x j,x i ) Γ. Definiţia 6..7 Un graf (X, Γ) se numeşte complet dacă pentru orice x i,x j X din (x i,x j ) Γ rezultă (x j,x i ) Γ. Exemplul 6... Graful din figura 3 este simetric, cel din figura 4 este antisimetric, iar cel din figura 5 este complet. 98
98 Fig.3 Fig.4 Fig.5 Definiţia 6..8 Fie (X, Γ) un graf. Numim graf parţial al grafului dat, un graf (X, Γ ),unde Γ Γ, adică elseobţine din graful (X, Γ) prin suprimarea unor arce. Definiţia 6..9 Fie (X, Γ) un graf dat. Numim subgraf al grafului dat, un graf (X, Γ ),unde X X şi Γ Γ. Subgraful (X, Γ ) se obţine din graful (X, Γ) prin suprimare a unuia sau a mai multor vârfuri şi a arcelor aferente lor. Exemplul Graful din figura 7 este un graf parţial al celui din figura 6, iar graful din figura 7 un subgraf. Fig.6 Fig.7 Fig.7 Definiţia 6..0 Numim drum într-un graf o succesiune de arce, adiacente două câte două, la fel orientate, la care extremitatea finală a unui arc coincide cu extremitatea iniţială a arcului precedent. Un drum în care extremitatea finală a ultimului arc coincide cu extremitatea iniţială a primului arc se numeşte circuit. Un drum se dă prin scrierea între acolade (sau alte tipuri de paranteze) a succesiunii vârfurilor prin care trec arcele care constituie drumul sau menţionând arcele din care se compune. Exemplul În graful din figura 6 putem considera drumurile: d = {x,x,x 4,x 3 }, d = {x,x,x 4,x,x 4,x 5 } d 3 = {x,x 4,x }, care este un circuit. Definiţia 6.. Numărul de arce dintr-un drum se numeşte lungimea lui. 99
99 Definiţia 6.. Un drum al unui graf se numeşte elementar dacă fiecare vârf al său este utilizat o singură dată. În caz contrar, drumul este numit neelementar. Un drum elementar care trece prin toate vârfurile grafului se numeşte hamiltonian, iar unul neelementar care are aceeaşi proprietate se numeşte drum nehamiltonian (prehamiltonian). Definiţia 6..3 Un drum al unui graf se numeşte simplu dacă utilizează fiecare arc al său o singură dată. În caz contrar, drumul se numeşte compus. Un drum simplu care foloseşte arcele grafului se numeşte eulerian, iar unul compus care are aceeaşi proprietate se numşte drum neeulerian (preeulerian). Exemplul În graful din figura 6 drumul d = {x,x,x 4,x 3,x 5 } este hamiltonian, dar nu este eulerian. Drumul d = {x,x,x 4,x,x 4,x 3,x 5 } este nehamiltonian. Drumul d 3 = {x,x,x 4,x 5 } este simplu, iar d 4 = {x,x,x 4,x,x 4,x 5 } este compus. Observaţia 6.. Într-un graf neorientat noţiunea de drum este înlocuită cu cea de lanţ, iar cea de circuit cu cea de ciclu. Definiţia 6..4 Un graf (X, Γ) se numeşte conex dacă între oricare două vârfuri ale sale există un lanţ. Dacă între oricare două vârfuri ale grafului există un drum, atunci el se numeşte tare conex. Definiţia 6..5 Un subgraf conex al unui graf conex se numeşte componentă conexă a grafului, iar un subgraf tare conex al unui graf tare conex se numeşte componentă tare conexă. Se observă că un graf este conex, respectiv tare conex, dacă şi numai dacă el are o singură componentă conexă, respectiv tare conexă. Exemplul În figurile 8 şi respectiv 9 avem reprezentate un graf conex şi respectiv unul tare conex. În figurile 0 şi avem reprezentate un graf neconex şi respectiv unul care nu este tare conex. Fig.8 Fig.9 Fig.0 Fig. Graful din figura 0 are două componente conexe, iar cel din figura are două componente tare conexe. 00
 un vârf şi numai unul (numit rădăcină) nu este precedat de nici un altul; b) orice alt vârf este precedat de un singur cârf.")
100 Definiţia 6..6 Numim arbore un graf conex şi fără cicluri. neconex şi fără cicluri. Numim pădure un graf Exemplul În figura avem un arbore, iar în figura 3 o pădure cu 3 arbori: Fig. Fig.3 Definiţia 6..7 Numim arborescenţă un graf fără circuite, în care: a) un vârf şi numai unul (numit rădăcină) nu este precedat de nici un altul; b) orice alt vârf este precedat de un singur cârf. Vârfurile care nu au succesori se numesc frunze sau vârfuri suspendate (terminale). Cel mai cunoscut exemplu de arborescenţă este arborele genealogic. Exemplul În figura 4 avem o arborescenţă curădăcina x şi cu 6 frunze. Fig.4 Dacă numărul de vârfuri ale unui graf este mare, atunci reprezentarea geometrică devine greoaie. De aceea, s-au căutat alte modalităţi de reprezentare. Cea mai convenabilă s-a dovedit a fi cea cu ajutorul matricelor. Fie (X, Γ) un graf orientat cu X = {x,x,...,x n }. Definiţia 6..8 Matricea pătratică B =(b ij ), i, j =,n, definită astfel {, dacă (xi,x b ij = j ) Γ 0, dacă (x i,x j ) Γ se numeşte booleană (asociată) ataşată grafului(x, Γ) Exemplul Fie (X, Γ) graful din figura 5. 0
, i, j =,n, definită astfel {, există drum de la xi la x d ij = j 0, nu există drum de la x i la x j, se numeşte matricea drumurilor ataşată grafului(x, Γ). Exemplul 6.")
101 Matricea booleană ataşată grafului este Fig.5 B = x x x 3 x 4 x 5 x x x x x Definiţia 6..9 Matricea pătratică D =(d ij ), i, j =,n, definită astfel {, există drum de la xi la x d ij = j 0, nu există drum de la x i la x j, se numeşte matricea drumurilor ataşată grafului(x, Γ). Exemplul Pentru graful din figura 5 matricea drumurilor este D = x x x 3 x 4 x 5 x 0 x 0 0 x x x Definiţia 6..0 Matricea pătratică L =(l ij ), i, j =,n, definită astfel { xi x l ij = j, dacă (x i,x j ) Γ 0, dacă (x i,x j ) Γ se numeşte matricea latină ataşată grafului(x, Γ). Exemplul 6... Pentru graful din figura 5 matricea latină este L = x x x 3 x 4 x 5 x 0 x x x x x x x 4 0 x 3 0 x 3 x 0 0 x 3 x 5 x 4 0 x 4 x 0 0 x 4 x 5 x În rezolvarea unor probleme teoretice sau practice se introduc şi alte tipuri de matrice ataşate unui graf, care se difineşte în cadrul respectiv. 6. Algoritmi pentru rezolvarea unor probleme relative la grafuri În acest paragraf vom prezenta câţiva algoritmi pentru rezolvarea unor probleme relative la grafuri. 0
102 6.. Algoritmul lui Yu Chen pentru aflarea matricei drumurilor În asigurarea unor algoritmi relativi la probleme de teoria grafurilor avem nevoie de operaţiile de adunare booleană ( +) şi înmulţire booleană ( ), definite după cum urmează Algoritmul lui Yu Chen are următorii paşi: Pasul. Se scrie matricea booleană B a grafului (X, Γ); Pasul. Se adună boolean la prima linie toate liniile corespunzătoare la vârfurile care au cifra pe prima linie. Noile cifre de care apar se marchează cuo. Pasul 3. Se adună boolean la linia întâi toate liniile corespunzătoare vârfurilor care au cifra pe prima linie. Noile cifre de care apar se marchează cu. Acest pas se continuă până când nu mai apar cifre noi de pe linia întâi. Pasul 4. Se aplică paşii şi 3 la fiecare din liniile matricei booleene. În final, obţine matricea D a drumurilor. Justificarea algoritmilor este imediată. Exemplul 6... Pentru graful din figura 5 să aflăm matricea drumurilor, folosind algoritmul lui Yu Chen. Scriem matricea booleană ataşată grafului B = x x x 3 x 4 x 5 x x x x x Aplicând paşii algoritmului obţinem D = x x x 3 x 4 x 5 x 0 x 0 0 x x x care este tocmai matricea găsită la Exemplul Algoritmi pentru precizarea existenţei circuitelor într-un graf Vom prezenta doi algoritmi. Algoritmul marcării cu. Paşii acestui algoritm sunt: Pasul. Se marchează cu toatevârfurile fără succesori; Pasul. Marcăm cu toatevârfurile ale căror succesori au fost marcaţi; Pasul 3. Se continuă procesul de la Pasul până când nu mai putem face marcări. Dacă toate vârfurile au fost marcate, atunci graful este fără circuite. În caz că a rămas cel puţin un vârf nemarcat, graful este un circuit. Exemplul 6... Să cercetăm dacă graful din figura 6 are circuite. 03
103 Fig.6 La pasul întâi putem marca doar vârful x 7, fiind singurul fără succesori. La pasul putem marca vârful x 6 deoarece succesorul său x 7 a fost marcat. Nu mai putem face marcare de vârfuri deoarece vârfurile rămase au succesori nemarcaţi. Aşadar, graful dat are circuite. Algoritmul matricei drumurilor. Cum un circuit este un drum ce începe şi se termină în acelaşi vârf, rezultă căungrafvaaveacircuitedacăîn matricea drumurilor apare cifra pe diagonala principală. Rezultă că, pentru a cerceta dacă un graf are sau nu circuite, este suficient să găsim matricea drumurilor. Exemplul Să aplicăm acest algoritm la graful din figura 6. Scriem matricea booleană B: x x x 3 x 4 x 5 x 6 x 7 x x B = x x x x x Aplicând algoritmul Yu Chen pentru aflarea matricei drumurilor, obţinem: D = x x x 3 x 4 x 5 x 6 x 7 x 0 x 0 0 x x x x x Având în D o cifra de pe diagonala principală, conchidem că graful are circuite Algoritmi pentru aflarea componentelor tare conexe ale unui graf Aflarea componentelor tare conexe ale unui graf este importantă pentru practică deoarece se obţine o partiţie a grafului în subgrafele tare conexe. Algoritmul marcării cu ±. Pasul. Se marchează cu ± unvârf în care intrăşi iese cel puţin câte un arc. Pasul. Se marchează cu ± vârfurile care sunt extremităţi finale pentru arce care pleacă dintr-un vârf marcat cu ± şi se marchează cu vârfurile iniţiale pentruarcealecăror vârfuri finale sunt marcate cu. Pasul 3. Se aplică repetat pasul, până nu se mai pot face marcări. Dacă toatevârfurile au fost marcate cu ±, atunci graful este tare conex, având o sigură componentă tare conexă. Dacă existăvârfuri care nu au fost marcate cu ±, atunci se consideră mulţimea C formată din toate vârfurile marcate cu ±. C formează o primă componentătareconexă. Pasul 4. În graful dat se elimină vârfurile din componenta C şi toate arcele aferente acestora. Noului graf (de fapt, subgraf al grafului iniţial) i se aplică Paşii 3 până se găsesc toate componentele tare conexe ale grafului. Pentru a evidenţia geometric (intuitiv) descompunerea grafului dat în componente tare conexe se aranjează vârfurile pe componente şi se trasează arcele din graful iniţial. Exemplul Să considerăm graful din figura 7. 04


104 Fig.7 Deoarece în vârful x iese şi intră cel puţin câte un arc îl marcăm cu ±. Apoi marcăm cu + vârfurile x şi x 5 şi cu vârful x 3. Acum marcăm cu vârful x şi cu + vârfurile x 4 şi x 6. Procesul de marcare nu mai poate continua, rămânând vârfuri care nu sunt marcate cu ±. Prima componentă tare conexă a grafului este C = {x,x,x 3 }. Suprimăm vârfurile x,x,x 3 şi arcele adiacente lor şi obţinem graful din figura 8. Fig.8 Imediat se marchează cu ± numai vârfurile x 4 şi x 5, obţinând cea de-a doua componentă tare conexă C = {x 4,x 5 }. Vârful x 6 formează cea de-a treia componentă tare conexă C 3. În figura 9 prezentăm graful cu vârfurile sale împărţite în componente tare conexe. 05
. Pasul.")
105 Fig.9 Algoritmul lui Yu Chen. Acest algoritm pentru aflarea componentelor tare conexe foloseşte ideea de lucru de la algoritmul lui Chen pentru determinarea matricei drumurilor. Pasul. Se scrie matricea booleană B a grafului (X, Γ). Pasul. Se determină toate drumurile care pleacă dinx spre alte vârfuri, procedând ca la paşii şi 3 de la algoritmul Yu Chen pentru determinarea matricei drumurilor, adică se introduc prin adunare booleană toate cifrele de pe linia întâi. Notăm cu V mulţimea vârfurilor care au cifra pe linia întâi astfel obţinută. Pasul 3. Ca la pasul procedăm pe coloana întâi, determinând toate vârfurile care sunt legate prin drumuri cu x. Notăm cu V mulţimea vârfurilor care au cifra pe coloana întâi astfel obţinută. Pasul 4. Determinăm prima componentă tare conexă, luând C =(V V ) {x }. Pasul 5. În matricea B se elimină liniile şi coloanele care au vârfurile în C. La matricea obţinută se aplică, din nou paşii 5. Se aplică algoritmul până se epuizează vârfurile grafului. Exemplul Să considerăm graful din figura 0. Să-i aflăm componentele tare conexe. Fig.0 Scriem matricea booleană ataşată grafului: x x x 3 x 4 x 5 x 6 x 7 x 8 x x x B = x x x x x Determinăm toate legăturile prin drumuri ce pleacă dinx spre alte vˆrfuri: x x x 3 x 4 x 5 x 6 x 7 x 8 x de unde V = {x,x,x 3,x 4,x 5,x 6,x 7,x 8 }. Procedăm la fel pe coloana întâi, scriind tabelul, pentru economie de spaţiu, tot pe orizontală x x x x 3 x 4 x 5 x 6 x 7 x 8 06

106 De aici V = {x,x 3,x 7,x 8 }. Acum găsim prima componentă tareconexă C =(V V ) {x } = {x,x 3,x 7,x 8 }. Eliminăm în matricea B liniile şi coloanele corespunzătoare vârfurilor din C şi obţinem matricea x x 4 x 5 x 6 x B = x x x Cum pe linia lui x în B avem numai cifra 0, deducem că următoarea componentă tare conexă estec = {x }. Eliminând linia şi coloana corespunzătoare vârfului x din B,obţinem B = x 4 x 5 x 6 x x x Imediat rezultă şi componenta tare conexă C 3 = {x 4 },rămânând matricea B 3 = x 5 x 6 x 5 0 x 6 0 pentru care avem: x 5 x 6 x 5, V = {x 5,x 6 } x 5 x 5 x 6, V = {x 5,x 6 } deci mai avem componenta tare conexă C 4 = {x 5,x 6 }. Observaţia 6.. Deoarece oricare două vârfuri dintr-o componentă tare conexă sunt legate între ele prin drumuri, rezultă că un graf poate fi reprezentat prin unul care are ca vârfuri componentele tare conexe, arcele de legătură, între ele stabilindu-se după arcele din graful dat. În cazul exemplului nostru obţinem graful din figura. Graful astfel obţinut se numeşte graful condensat ataşat grafului dat. Fig. Graful condensat este important în rezolvarea multor probleme practice deoarece reduce dimensiunea sistemelor complexe. 07

107 6..4 Algoritmi pentru aflarea drumurilor hamiltoniene ale unui graf În multe aplicaţii practice avem de stabilit succesiunea unui număr de operaţii, cu respectarea unei anumite oridini. Din punctul de vedere a teoriei grafurilor aceasta revine la găsirea unui drum hamiltonian în graful asociat aplicaţiei respective. Algoritmul Yu Chen pentru grafe fără circuite. Pasul. Se determină matricea D a drumurilor ataşată grafului. Pasul. La matricea D se mai adaugă o coloană a, pe care se trec numărul de cifre de pe fiecare linie din D. Aceste numere se numesc puterile de atingere corespunzătoare vârfurilor grafului (ele reprezintă numărul de vârfuri, care sunt legate prin drumuri plecând din vârful respectiv). Pasul 3. Dacă pe coloana a avem puteri de atingere diferite două câte două, atunci graful are drum hamiltonian. Succesiuna vârfurilor în drumul hamiltonian se obţine în ordinea descrescătoare a puterilor de atingere (n,n,...,,, 0). Dacă cel puţin două puteri de atingere sunt egale, atunci graful nu are drumuri hamiltoniene. Observaţia 6.. Dacă un graf fără cricuite are drum hamiltonian, atunci el este unic. Exem,plul Fie graful din figura. Să cercetăm dacă are drum hamiltonian. Matricea booleană ataşată grafului este Fig. B = x x x 3 x 4 x 5 x 6 x x x x x x iar matricea drumurilor D = x x x 3 x 4 x 5 x 6 a x x x x x x Cum pe coloana a avem puteri de atingere diferite două câte două, rezultă că graful admite un drum hamiltonian. Acesta este d H = {x 4,x 5,x 3,x,x 6,x }. 08
108 Algoritmul Yu Chen pentru grafuri cu circuite. Acest algoritm are următorii paşi: Pasul. Se determină componentele tare conexe ale grafului (X, Γ), notatecuc,c,... Pasul. Se determină graful condensat asociat grafului (X, Γ), care este un graf fără circuite. Pasul 3. Se determină drumul hamiltonian în graful condensat, când există. Pasul 4. Se aranjează componentele tare conexe în ordinea dată de drumul hamiltonian determinat la Pasul 3. Pasul 5. Se scriu toate drumurile hamiltoniene din fiecare componentă tareconexă. Pasul 7. Stabilim legăturile de la o componentă laaltaîn funcţie dearceledeincidenţă (legătură) din graful dat, citind apoi toate drumurile hamiltoniene. Observaţia 6..3 Dacă în graful condensat nu există drum hamiltonian sau între două componente nu există legătură, atunci graful nu are drumuri hamiltoniene. Exemplul Să aflăm drumurile hamiltoniene ale grafului din figura 0. La exemplul 6..5 am găsit componentele tare conexe C = {x,x 3,x 7,x 8 },C = {x },C 3 = {x 4 },C 4 = {x 5,x 6 } şi graful condensat din figura. Se observă că în graful condensat avem drumul hamiltonian d CH = {C,C 3,C 4,C }. Acum, scriem componentele tare conexe în ordinea din drumul d CH şi sub ele scriem toate drumurile hamiltoniene din fiecare componentă: C C 3 C 4 C x x 3 x 8 x 7 x 7 x 8 x x 3 x 4 x 5x 6 x x 6 x 7 Apoi stabilim legăturile între ultimele elemente din drumurile dintr-o componentă şi primele vârfuri din componenta următoare (le indicăm prin săgeţi). Obţinem drumurile hamiltoniene: d H = {x,x 3,x 8,x 7,x 4,x 5,x 6,x } d H = {x 7,x 8,x,x 3,x 4,x 5,x 6,x } Algoritmul matricilor latine. Vom prezenta un procedeu prin care se pot găsi toate drumurile elementare, deci şi cele hamiltoniene, precum şi circuitele hamiltoniene. Fie (X, Γ) un graf. Vom utiliza matricea latină (Definiţia 6..0) L =(l ij ), unde { xi x l ij = j, dacă (x i,x j ) Γ 0, dacă (x i,x j ) Γ,i,j =,n. Construim matricea L, obţinută din L prin înlăturarea lui x i din succesiunea x i x j, când acasta există. Acum, definim o înmulţire specială de matrice, numită înmulţirea latină şi notată prin, după cum urmează: a) înmulţirea se face linii prin coloane; b) în locul înmulţirii obişnuite se face o alăturare de elemente, dacă acestea nu se repetă, sau se scrie 0 în caz contrar; c) în locul adunării obişnuite se iau grupele obţinute la b, când avem astfel de grupe. Prescurtat, vom scrie L L = L. Analog, calculăm L L = L 3,...,L k L = L k. Se observă că L k conţine toate drumurile elementare de lungime k. Prin urmare, în matricea L n figurează toate drumurile hamiltoniene. Dacă dorim să obţinem circuitele hamiltoniene se va calcula L n, dar admitem, ca excepţie, situaţia de repetare a primului şi a ultimului vârf (cel care închide circuitul). Exemplul Pentru graful din figura 3 să se determine drumurile hamiltoniene. 09

109 Fig.3 Scriem matricea latină L, iar apoi din ea găsim L prin suprimarea primei litere: L = a b c d e a 0 ab ac 0 0 b 0 0 bc 0 be c cd 0 d da db e 0 0 ec 0 0, L = a b c d e a 0 b c 0 0 b 0 0 c 0 e c d 0 d a b e 0 0 c 0 0 Acum calculăm L = L L = a b c d e a 0 0 abc acd abe b 0 0 bec bcd 0 c cda cdb dac d 0 dab dbc 0 dbe e ecd 0 Apoi avem: L 3 = L L = a b c d e a 0 acdb abec abcd 0 b bcda 0 0 becd 0 c 0 cdab 0 0 cdbe dabc d 0 0 dbec 0 dabe e ecda ecdb şi L 4 = L 3 L = a b c d e a abecd acdbe b becda c cdabe d 0 0 dabec 0 0 e 0 ecdab În concluzie, graful dat are 6 drumuri hamiltoniene: d H = {a, b, e, c, d}, d H = {a, x, d, b, e}, d 3H = {b, e, c, d, a}, d 4H = {c, d, a, b, e}, d 5H = {d, a, b, e, c} şi d 6H = {e, c, d, a, b}. Pentru a obţine circuitele hamiltoniene se va calcula L 5 = L 4 L, dar acum se admite ca primul şi ultimul vârf să se repete Algoritmi pentru determinarea drumurilor de lungime optimă În multe probleme practice suntem puşi în situaţia de a ataşa fiecărui arc din graful asociat problemelor respective un număr (timp de deplasare de-a lungul arcului, cost de 0
.")
110 transport de-a lungul arcului, beneficiu etc.) care, într-o astfel de situaţie, se interpretează ca lungimea sau capacitatea arcului. De obicei, într-o astfel de problemă practică se cere drumul de lungime optimă (maximă sau minimă). Vom mai considera că graful asociat problemei nu are circuite, dar are un vârf de intrare x şi un vârf de ieşire x n. Algoritmul elementar (Bellman). El are la bază principiul de optimalitate al lui Bellman: orice politică optimală este formată din subpolitici optimale. Prin acest algoritm fiecui vârf x i i se ataşează unnumăr d i, reprezentând lungimea minimă a drumurilor de la x la x i. Considerăm d =0. Acum, să presupunem că dorimsăgăsim pe d l, unde vârful x l este succesorul vârfurilor x i, x j şi x k, la care au fost deja calculate numerele d i, d j şi d k. Atunci lungimea minimă d l de la x la x l se determină prin formula d l = min(d i + c il,d j + c jl,d k + c kl ) unde c il, c jl şi c kl sunt capacităţile corespunzătoare arcelor (x i,x l ), (x j,x l ) şi (x k,x l ). În formula lui d l subliniem în paranteze valoarea pentru care minimul este atins. După determinarea tuturor numerelor d,d,...,d n, valoarea lui d n este lungimea minimă a drumului de la x la x n, iar pornind de la x n spre x şi citind vârfurile subliniate, obţinem drumul de lungime minimă. Pentru un drum de lungime maximă se lucrează în mod analog, înlocuind minimul cu maximul. Exemplul Pentru graful din figura 4 să se afle drumul de lungime minimă. Avem succesiv: Fig.4 d =0, d 3 = min{d +7} =7, d = min{d +,d 3 +4} = min{, 0} =, d 4 = min{d +3,d 3 +9} = min{5, 6} =5, d 5 = min{d +4,d 4 +8} = min{6, 3} =6, d 6 = min{d 5 +3,d 4 +} = min{9, 7} =7, d 7 = min{d 5 +9,d 6 +7} = min{5, 4} =4. Prin urmare, lungimea minimă este 4, iar drumul care are această lungime este: d min = {x,x,x 4,x 6,x 7 }. În figura 4 arcele drumului minim sunt dublate cu linie întreruptă. Algoritmul Bellman Kalaba. Ideea de lucru este aceeaşi cu cea de la algoritmul elementar: succesiv,pentru fiecare vârf, se calculează câte o cotă(un număr). Căutăm tot drumuri de lungime minimă. Introducem matricea pătratică C =(c ij ) i,j=,n, definită astfel c ij = l(x i,x j ), dacă există arcul (x i,x j ) 0, dacă i = j, dacă nuexistă arcul (x i,x j )
111 unde l(x i,x j ) este lungimea arcului (x i,x j ). Notăm cu l ik, i =,n, cota ataşată vârfului x i la pasul k, unde de obicei, luăm l i, = c in, când se caută drumul de lungime minimă între x şi x n. Determinăm valorile l ik, pas cu pas, prin rezolvarea sistemului l i,k = min (c ij + l j,k ), k =, 3,...,i=,n. j=,n Algoritmul se încheie când l i,k = l i,k+ situaţie în care l,k reprezintă lungimea minimă a drumului de la x la x n. Stabilirea drumului de lungime minimă se face astfel: pornind de la x n, pentru fiecare arc (x i,x j ) se decide apartenenţa sa la drumul minim dacă l j,k l i,k = c ij = l(x i,x j ). Practic, algoritmul lucrează după următorii paşi: Pasul. Se scrie matricea C. Pasul. Se calculează cotele l i,, i =,n. Pentru aceasta matricei C i se adaugă ultima coloană, pe care o notăm cu l i,. Apoi, se înmulţeşte C cu această coloană l i, după regula: inmulţirea se înlocuieşte cu adunare, iar adunarea cu operaţia de luare a minimului. Rezultă astfel valorile de pe coloana l i,. Pasul 3. Procesul de la pasul se repetă cu coloana l i, ş.a.m.d. până seobţin două coloane identice l i,k şi l i,k+. Exemplul Să găsim drumul de lungime minimă din graful dat în figura 4 utilizând algoritmul Bellman Kalaba. Avem sucesiv x x x 3 x 4 x 5 x 6 x 7 l i, l i, l i,3 l i,4 l i,5 x x x x x x x Cum l i,4 coincide cu l i,5,algoritmuls-aîncheiat. Avem l min (x,x 7 )=l,4 =4, iar drumul de lungime minimă seaflă prin selectarea arcelor (x i,x j ) pentru care l j,k l i,k = c ij. Aceste arce sunt: (x,x 3 ), (x,x 4 ), (x 4,x 6 ), (x 6,x 7 ), de unde rezultă că drumul de lungime minimă ested min = {x,x,x 4,x 6,x 7 }. Observaţia 6..4 Pentru drumul de lungime maximă matricea C este analoagă numai că în loc de + se ia. Teoria grafurilor, ca instrument matematic utilizat în rezolvarea problemelor din diferite domenii, este foarte bogată în algoritmi. Pentru cei care doresc să aprofundeze această minunată colecţie, poate apela la lucrările [], [3], [4], [5], [6], [7], [8] Metoda drumului critic Metoda drumului critic (Critical Path Method C.P.M.) este un instrument matematic util specialiştilor în rezolvarea programelor complexe de planificare, investiţii, producţie etc. Principiul metodei constă în descompunerea unui program complex în părţi componente, numite activităţi sau operaţii, la un nivel care să permită corelarea funcţională a acestora, adică să facă posibilă stabilirea intercondiţionărilor între părţile componente. La

112 stabilirea listei (reţelei) de activităţi x i, specialiştii care participă la această operaţie trebuie să precizeze activităţile care condiţionează sau preced în mod necesar activitatea x i. Astfel, se formează o listă de ateriorităţi obligatorii. Cu ajutorul acestor date se construieşte un graf G graful asociat sau graful program în felul următor: a) fiecărei activităţi i se asociază unarc(x i,x j ), unde vârful (evenimentul) x i reprezintă începutul operaţiei, iar x j sfârşitul ei; b) vârful x este numai vârful de început (intrare) în graf, vârful x n este numai vârf de sfârşit (ieşire), iar celelalte vârfuri sunt şi de intrare şi de ieşire în graf; c) condiţionarea (anterioritatea) a două activităţi se reprezintă prin succesiunea arcelor corespunzţoare; d) fiecărui arc (x i,x j ) i se asociază unnumăr nenegativ t ij, semnificând durata activităţii respective; e) nici o activitate nu poate începe înaintea terminării tuturor activităţilor precedente şi nu se poate finaliza după începerea activităţilor următoare. Graful astfel ataşat unei reţele de activităţi este un graf conex orientat, fără circuite, cu un singur vârf x de intrare în graf şi un singur vârf x n de ieşire din graf. Acest graf program evidenţiază legăturile funcţionale (tehnologie, economie ş.a.) dintre activităţi. Menţionăm că un astfel de graf, asociat unui program complex, poartă numeledereţea de planificare. Este evident căîntr-o reţea deplanificareexistă cel puţin o succesiune de activităţi de la intrare la ieşire. O astfel de succesiune reprezintă un drum de la intrare la ieşire, având o anumită lungime. În C.P.M. esenţial este de remarcat faptul că cea mai lungă succesiune de activităţi de la intrare la ieşire determină durata minimă posibilă deexecuţie integrală a programului. Această succesiune de activităţi poartă numele de drum critic (drumul de lungime maximă). Arcele lui reprezintă operaţiile critice, adică acele activităţi pentru care efectuarea lor nu poate întârzia, fără casă fie afectat termenul de finalizare a întregii lucrări. Într-o reţea de activităţi pot apare operaţii caresedesfăşoară în serie (una după alta), care în graf se reprezintă ca o succesiune de arce, şi operaţii caresedesfăşoară în paralel (simultan), care în graf se reprezintă astfel Această reprezentare poate crea confuzia că un arc (x i,x j ) reprezintă două acţiuni diferite. Pentru a înlătura acest neajuns, uneori, se introduc aşa numitele operaţii fictive de durată zero, aşa cum se arată în figura Activităţile fictive se desenează punctat şi au durata zero pentru că nuconsumănici timp şi nici resurse. Având graful unei reţele de activităţi, se trece la determinarea parametrilor programului. Aceştia sunt: 3
113 a) durata drumului critic între două vârfuri x i şi x j, notat prin t c (x i,x j ) şi obţinut prin valoarea maximă a duratei drumurilor dintre vârfurile x i şi x j ; b) durata drumului critic al programului este dată det c (x,x n ). În realizarea unui program reţea de activităţi ne interesează dacă o operaţie necritică poate fi amântă cu un anumit interval de timp astfel încât nici una din operaţiile care o succed să nu fie stânjenită în privinţa duratei ce i-a fost programată. Asta înseamnă că durata întregului program trebuie să rămână t c (x,x n ); c) t i timpul cel mai devreme (scurt) de realizare a evenimentului x i.avemt i = t c (x,x i ); d) t i timpul cel mai târziu (lung) de realizare a evenimentului x i. Avem t i = t c (,n) t c (i, n) Se observă că t i se calculează ca durata drumurilor de lungime maximă parcurgând reţeaua în sens direct, iar t i ca durata drumurilor de lungime maximă obţinute prin parcurgerea reţelei în sens invers. e) R(x i ) rezerva de timp a evenimentului x i dată prin formula R(x i )=t i t i. Intervalul [t i,t i ] se numeşte intervalul de fluctuaţie al evenimentului x i adică intervalul în care se va putea realiza evenimentul x i fără a produce modificări la timpul total de realizae a programului. Pentru evenimentul critic avem R(x i )=0, iar pentru cele necritice avem R(x i ) > 0; f) R(x i,x j ) rezerva (marja) totală de timp pentru operaţia (activitatea)(x i,x j ) reprezintă timpul maxim cu care se poate mări durata activităţii fără să se afecteze durata totală a programului. Avem formula de calcul R(x i,x j )=t i t i t(x i,x j ) unde t(x i,x j ) reprezintă timpul necesar realizării operaţiei (x i,x j ); g) r(x i,x j ) rezerva de timp liberă (marja liberă) a operaţiei (x i,x j ) reprezintă parteadin rezerva totală cu care se poate dilata durata de realizare a activităţii (x i,x j ) fără săfie afectat termenul cel mai devreme de realizare a evenimentului x i. Avem r(x i,x j )=t j t i t(x i,x j ). h) r s (x i,x j ) rezerva de timp sigură (marja sigură)a activităţii (x i,x j ) se defineşte prin formula r s (x i,x j )=t j t i t ij Dacă r s (x i,x j ) < 0, atunci se spune că activitatea (x i,x j ) nu are marjă sigură. Intervalele de fluctuaţie şi marjele libere măsoară elasticitatea unui program. Cu cât acestea sunt mai mici, cu atât programul este mai rigid. Determinarea tuturor acestor parametrii ataşaţi unei reţele de planificare se poate realiza prin întocmirea unui tabel de forma: i j t ij t i t j t i t j R(x i ) R(x i,x j ) r(x i,x j ) r s (x i,x j ) În prealabil se vor calcula duratele t c (x,x i ),respectivt c (x i,x n ) ale drumurilor critice, folosind algoritmii pentru determinarea drumurilor de lungime maximă. Valorile aflate se pot scrie lângă vârfurile grafului astfel [t c (x i,x j ),t c (x i,x n )] 4
, lista de anteriorităţi obligatorii şi durata de execuţie în luni: Nr.")
114 Exemplul Să analizăm programul unei investiţii pentru care dorim să studiem durata şi modul de execuţie. În urma analizei programului, specialiştii au stabilit următorul tabel de operaţii (activităţi), lista de anteriorităţi obligatorii şi durata de execuţie în luni: Nr. Denumire activităţii Anteriorităţi Durata crt. (Notaţia prescurtată) obligatorii (luni). Proiectarea (P ) 8. Eliberarea terenului (E) P 3 3. Comenzi utilaje (C, U) P 4 4. Organizare şantier etapa (OS ) P 5. Formare cadre calificate (F ) D 6. Execuţie drumuri interioare etapa (D ) E; OS 3 7. Execuţii reţele tehnice etapa (R ) E; OS 6 8. Livrări, recepţie utilaje (L, U) C, U 7 9. Lucrări construcţii montaj etapa (C ) E; OS 5 0. Organizare şantier etapa (OS ) OS 3. Execuţii drumuri interioare etapa (D ) D ; OS ; R 4. Execuţii reţele tehnice etapa (R ) R 6 3. Lucrări construcţii montaj etapa (C ) L, U, C,R j Ţinând seama de informaţiile din tabelul precedent, obţinem următorul graf pentru reţeaua de planificare. Acum, folosind algoritmul lui Bellman, determinăm numerele t i şi t i,trecându-le pe graf între paranteze drepte. 5
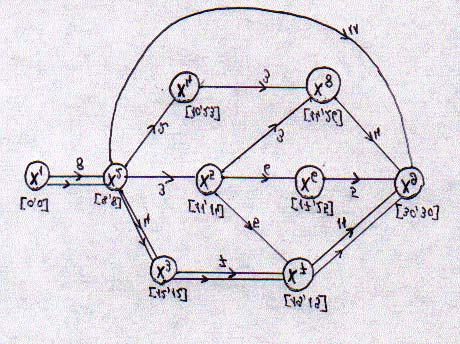
115 6
116 Cu ajutorul parametrilor t i şi t i întocmim tabelul de mai jos pentru a calcula rezervele (marjele) R(x i ), R(x i,x j ), r(x i,x j ) şi r s (x i,x j ). i j t ij t i t j t i t j R(x i ) R(x i,x j ) r(x i,x j ) r s (x i,x j ) Drumul critic este d cr = {x x,x 3,x 7,x 9 }, fiind marcat în ultimul graf prin săgeţile duble. Operaţiile critice se recunosc în tabelul de mai sus după R(x i,x j )=0. Timpul cel mai devreme de încheiere a întregului program este 30 (de luni), adică durata (lungimea maximă) drumului critic. Examinarea rezervelor de timp permite cunoaşterea posibilităţilor pe care le are la dispoziţie cel care coordonează programul în vederea unei intervenţii optime pentru executarea în termen a proiectului. De exemplu, pentru activitatea D ([x 8,x 9 ]), cu durata de execuţie 4 luni, deducem că nu poate începe mai devreme de trecerea a 4 luni de la începutul execuţiei programului (t 8 = 4). Aşadar, activitatea D poate începe a fi executată în intervalul de fluctuaţie [4, 6], fără a modifica într-un fel timpul minim necesar execuţiei programului de investiţie. Observaţia 6..5 Atunci când numărul operaţiilor dintr-un program nu este prea mare, pentru analiza grafului, cât şi pentru urmărirea realizării lui, se paote folosi diagrama Gantt. Pentru descrierea ei se procedeză astfel: a) se ordonează activităţile (x i,x j ) după j crescător, cele cu acelaşi j succedându-se în ordinea crescătoare dată de i, b) se reprezintă prin bare orizontale duratele activităţilor, marcându-le extremităţile lor cu numerele de ordine ale evenimentelor; c) se reprezintă punctat drumul critic. Pentru graful programului studiat în exemplul 6..0, diagrama Gantt este dată în figura de mai jos. 7
 şi începe activitatea (6, 9); rezultă căoperaţia (5, 6) s-ar putea amâna cu cel mult 7 unităţi de timp deoarece, în caz contrar, operaţia")
117 Diagrama Gantt ne descrie în mod intuitiv fluctuaţiile evenimentelor şi rezervele (marjele) activităţilor din programul studiat. De exemplu, cu evenimentul 6 se termină activitatea (5, 6) şi începe activitatea (6, 9); rezultă căoperaţia (5, 6) s-ar putea amâna cu cel mult 7 unităţi de timp deoarece, în caz contrar, operaţia (6, 9) s-ar deplasa spre dreapta, peste durata întregului program. Rezultă că fluctuaţia evenimentului 6 este de 7 unităţi. 6.3 Problema fluxului optim în reţele de transport Noţiunea de flux joacă un rol important în domenii de importanţă pentru economie, cum sunt: teoria informaţiei, cibernetică, transport, planificare etc. În acest paragraf vom studia problema determinării fluxului optim într-o reţea de transport Reţele de transport Fie (X, Γ) un graf orientat. Definiţia 6.3. Graful orientat (X, Γ) se numeşte reţea de transport dacă este fără circuite, are un singur vârf de intrare x (Γ x = ), un singur vârf de ieşire x n (Γ + x n = ) şi oricare arc a Γ are o capacitate pozitivă c(a). Definiţia 6.3. Se numeşte flux într-o reţeadetransportofuncţie ϕ :Γ R +, care satisface condiţile: i) ϕ(a) c(a), pentru orice arc a Γ; ii) în orice vârf x i X avem satisfăcută egalitatea ϕ(a) = ϕ(a), a Γ + x i a Γ x i numită proprietate de conservare. Numărul ϕ(a) se mai numeşte şi fluxul asociat arcului a şi reprezintă, din punct de vedere practic, cantitatea de materie ce trece prin arcul a, ca de exemplu: cantitate de informaţie, număr de produse etc. Condiţia ii) din Definiţia 6.3. exprimă faptul că suma fluxurilor ce intră într-un vârf 8
118 este egală cu suma fluxurilor ce ies din acel vârf ( legea lui Kirchoff ). Din aceeaşi condiţie ii) rezultă că ϕ(a) = ϕ(a). a Γ + x a Γ xn Definiţia Numărul real pozitiv Φ, definit prin egalitatea Φ= a Γ + x ϕ(a) se numeşte valoarea fluxului ϕ în reţea. Exemplul În graful din fig să se definească un flux şi să se calculeze valoarea fluxului în reţea. În paranteze drepte sunt trecute capacităţile arcelor. Fig Pentru a defini un flux în reţeaua dată de graful folosim Definiţia Funcţia ϕ definită prin tabelul Γ (x,x ) (x,x 3 ) (x,x 4 ) (x,x 3 ) (x,x 5 ) (x 3,x 5 ) (x 4,x 3 ) ϕ(a) (x 4,x 5 ) (x 4,x 6 ) (x 5,x 7 ) (x 6,x 5 ) (x 6,x 7 ) este un flux în reţea. Valoarea fluxului în reţea este Φ=5++7=0+3=3. Şi aplicaţia ϕ :Γ R + dată prin tabelul Γ (x,x ) (x,x 3 ) (x,x 4 ) (x,x 3 ) (x,x 5 ) (x 3,x 5 ) (x 4,x 3 ) ϕ (a) (x 4,x 5 ) (x 4,x 6 ) (x 5,x 7 ) (x 6,x 5 ) (x 6,x 7 ) este un flux în reţeaua din fig.6.3., iar valoarea fluxului în reţea este Φ =5++6=0+3=3 Definiţia Într-o reţea de transport înzestrată cu fluxul ϕ arcul a se numeşte saturat dacă ϕ(a) =c(a). Un drum în reţea se zice că este saturat dacă conţine cel puţin un arc saturat. Definiţia Un flux ϕ pentru care toate drumurile de la x la x n sunt saturate se numeşte flux complet. 9
119 Exemplul Pentru fluxul ϕ asociat grafului din fig drumul d =(x,x,x 5,x 7 ) este saturat deoarece arcele (x,x 5 ) şi (x 5,x 7 ) sunt saturate. Se verifică imediat că fluxul ϕ este complet. Într-adevăr, se observă că singurul drum de la x la x 7 care nu trece prin arcul (x 5,x 7 ) este d =(x,x 4,x 6,x 7 ), care are însă arcul saturat (x,x 4 ). Fluxul ϕ nu este complet deoarece drumul d =(x,x 4,x 6,x 7 ) nu este saturat. Observaţia 6.3. Orice flux se paote transforma într-unul complet. În acest scop pe fiecare drum nesaturat d de la x la x n se măresc fluxurile arcelor cu cantitatea k = min (c(a) ϕ(a)). a d Exemplul Să considerăm graful din fig cu fluxul incomplet ϕ. Se observă că singurul drum nesaturat este d =(x,x 4,x 6,x 7 ). Mărim fluxul pe arcele sale cu k = min(7 6, 6 3, 4 3) = şi obţinem arcul saturat (x,x 4 ). Astfel fluxul ϕ s-a transformat în fluxul complet ϕ dat prin tabelul: Γ (x,x ) (x,x 3 ) (x,x 4 ) (x,x 3 ) (x,x 5 ) (x 3,x 5 ) (x 4,x 3 ) ϕ (a) (x 4,x 5 ) (x 4,x 6 ) (x 5,x 7 ) (x 6,x 5 ) (x 6,x 7 ) Fluxul în reţea este Φ = Algoritmul lui Ford Fulkerson pentru determinarea fluxului maxim într-un graf de reţea În acest paragraf vom descrie un algoritm de marcare iterativă cu + şi a vârfurilor grafului reţelei de transport. Dacă prin acest proces se va ajunge la marcarea vârfului x n, atunci fluxul nu este maxim, în caz contrar fluxul complet va fi maxim. Algoritmul de marcare cu + şi (Ford Fulkerson) are următorii paşi: ) se marchează x cu +; ) dacă x i este un vârf marcat şi există arcul nesaturat (x i,x j ) Γ, atunci x j se marchează cu +; 3) dacă vârful x i este marcat şi există arcul (x j,x i ) Γ cu flux pozitiv, atunci x j se marchează cu ; 4) se repetă paşii ) şi 3) atât timp cât este posibil; 5) dacă prin procedeul de marcare nu s-a ajuns la vârful x n, atunci fluxul este maxim; dacă prin procesul de marcare s-a ajuns la x n, atunci fluxul complet nu este maxim şi se trece la pasul următor; 6) se majoreză fluxul cu cantitatea m = min a,a L {c(a) ϕ(a),ϕ(a )}. Aici, am notat cu L lanţul care trece prin toate vârfurile marcate de la x la x n, a tipul de arc din L precizat la pasul ), iar a tipul de arc din L precizat la pasul 3). Majorarea fluxului se face astfel: cantitatea m se adună la fluxul de pe arcele a şi se scade la fluxul de pe arcele a ; 7) se reia procesul de marcare a vârfurilor. Pentru justificarea mai comodă a algoritmuui Ford Fulkerson introducem noţiuneaa de tăietură într-un graf. 0
 este, prin definiţie, suma capacităţilor arcelor cu vârful iniţial în Y şi vârful final în C(Y ), adică v(y/x)= c(a), unde Γ + Y = Γ + x i. a Γ + Y Propoziţia 6.")
120 Definiţia Numim tăietură în graful F =(X, Γ) o partiţionare a vârfurilor X în două submulţimi Y şi C(Y ), astfel încât x Y şi x n C(Y ). Notăm prin Y/X tăietura determinată dey în graful G. Valoarea tăieturii, notată prin v(y/x) este, prin definiţie, suma capacităţilor arcelor cu vârful iniţial în Y şi vârful final în C(Y ), adică v(y/x)= c(a), unde Γ + Y = Γ + x i. a Γ + Y Propoziţia 6.3. Fie în graful reţea G =(X, Γ) otăietură Y/X. Pentru orice flux ϕ are loc inegalitatea Φ v(y/x). Demonstraţie. Având în vedere că suma fluxurilor ce intră în Y este egală cusuma fluxurilor ce ies din Y, putem scrie Φ+ ϕ(a ij )= ϕ(a ij ), i x i Y a ij Γ Y a ij Γ + Y de unde Φ= ϕ(a ij ) i ϕ(a ij ) c(a ij )=v(y/x). a ij Γ + Y a ij Γ Y a ij Γ + Y Propoziţia 6.3. Dacă utilizând algoritmul lui Ford Fulkerson nu se poate marca vârful x n, atunci valoarea fluxului Φ corespunzător este maximă. Demonstraţie. Fie Y mulţimea vârfurilor marcate prin algoritmul lui Ford Fulkerson. Avem x Y şi x n Y. Cum nu se mai poate marca nici un vârf, un arc a ij =(x i,x j ) cu x i Y şi x j Y verifică ϕ(a ij )=c(a ij ), iar un arc a ji =(x j,x i ) cu x i X şi x j Y verifică ϕ(a ji )=0. Deci: Φ= ϕ(a ij ) = c(a ij )=v(y/x). i a ij Γ + Y a ij Γ Y a ij Γ + Y Folosind propoziţia 6.3., rezultă că Φ are valoarea maximă. Teorema 6.3. (Ford Fulkerson). este Într-un graf G =(X, Γ) valoarea maximă a unui flux Φ max Φ = min v(y/x). ϕ Y/X Demonstraţie. Veridicitatea teoremei rezultă din propoziţiile 6.3. şi Exemplul Să se determine fluxul maxim în graful reţea de transport dat în fig Plecăm de la fluxul complet obţinut în Exemplul şi începem procesul de marcare a vârfurilor cum este ilustrat în fig.6.3..
121 Fig Marcăm mai întâi vârful x cu +. Apoi marcăm cu + vârfurile x şi x 3 deoarece arcele (x,x ) şi (x,x 3 ) sunt nesaturate. Vârful x 4 se marchează cu pentru că arcul (x 4,x 3 ) are fluxul pozitiv. Se marchează cu + vârful x 5 şi x 6 deoarece arcele (x 4,x 5 ) şi (x 4,x 6 ) sunt nesaturate. În fine, se marchează cu + vârful x 7 deoarece arcul (x 6,x 7 ) este nesaturat. Întrucât s-a marcat x 7 deducem că fluxul nu este maxim. El poate fi majorat cu cantitatea m = min{3,, 6 4, 3 4} =, minimul fiind luat pe lanţul L = {x,x 3,x 4,x 6,x 7 }. Rezultă fluxul complet Γ (x,x ) (x,x 3 ) (x,x 4 ) (x,x 3 ) (x,x 5 ) (x 3,x 5 ) (x 4,x 3 ) ϕ 3 (a) (x 4,x 5 ) (x 4,x 6 ) (x 5,x 7 ) (x 6,x 5 ) (x 6,x 7 ) cu valoare Φ 3 =5. Încercăm o nouă marcare (al doilea semn + sau ). Se poate marca din nou vârfurile lanţului L =(x,x,x 3,x 4,x 6,x 7 ). Rezultăcă fluxul ϕ 3 nu este maxim. El poate fi majorat cu cantitatea m = min{6 5,,, 6 5, 3 5} =. Rezută fluxul complet Γ (x,x ) (x,x 3 ) (x,x 4 ) (x,x 3 ) (x,x 5 ) (x 3,x 5 ) (x 4,x 3 ) ϕ 4 (a) (x 4,x 5 ) (x 4,x 6 ) (x 5,x 7 ) (x 6,x 5 ) (x 6,x 7 ) cu valoarea Φ 4 =6+3+7=0+6=6. Deoarece s-a marcat x 7 deducem că trebuie continuat algoritmul Ford Fulkerson. Marcăm cu + vârful x (al treilea +) şi se observă că nu se mai pot marca alte vârfuri deoarece arcele (x,x ), (x,x 3 ) şi (x,x 4 ) sunt saturate. Rezultă că fluxul Φ 4 =6este maxim. Tăietura cu valoare minimă estedatădemulţimea Y = {x } cu v(y/x)=6+3+7=6. Exemplul Trei depozite D, D, D 3 dispun de, 0, 3 tone dintr-un produs din care patru consumatori C, C, C 3, C 4 au nevoie de 9, 8, 9 şi tone. Posibilităţile de transport limitate de capacităţile mijloacelor de transport sunt date în tabelul: D i \ C j C C C 3 C 4 D D D Existenţa numărului 0 ne indică că de la depozitele D respective nu se face nici un transport la consumatorii corespunzători. Să se determine un plan optim de transport astfel încât să poată fi asigurată integral cererea consumatorilor C şi C 3, iar cererea consumatorilor C şi C 4 în cea mai mare măsură. Transformăm problema într-un graf de reţea de transport, considerând vârful de intrare x,vârfurile x, x 3, x 4 corespunzătoare depozitelor D, D, D 3,vârfurile x 5, x 6, x 7, x 8 corespunzătoare celor patru consumatori şi x 9 vârful de ieşire. Problemei noastre îi corespunde graful din figura

122 5 0 4 Fig Rezolvarea problemei revine la determinarea unui flux maxim în reţeaua de transport din fig Vom utiliza algoritmul lui Ford Fulkerson. Mai întâi trebuie să determinăm un flux ϕ pentru reţea. Prin încercări, respectând condiţiile din Definiţia 6.3., construim fluxul Γ (x,x ) (x,x 3 ) (x,x 4 ) (x,x 5 ) (x,x 6 ) (x,x 8 ) (x 3,x 5 ) ϕ (x 3,x 7 ) (x 4,x 6 ) (x 4,x 7 ) (x 4,x 8 ) (x 5,x 9 ) (x 6,x 9 ) (x 7,x 9 ) (x 8,x 9 ) cu valoarea Φ=. Se observă că fluxul ϕ este incomplet deoarece drumurile d = (x,x,x 5,x 9 ), d = (x,x,x 6,x 9 ), d 3 =(x,x,x 8,x 9 ), d 4 =(x,x 3,x 5,x 9 ), d 5 =(x,x 4,x 6,x 9 ), d 6 =(x,x 4,x 8,x 9 ) sunt nesaturate. Pe fiecare din aceste drumuri fluxul poate fi majorat corespunzător cu k = min( 7, 5 4, 9 4) =, k = min( 7, 3, 8 7) =, k 3 = min( 7, 6, ) = 4, k 4 = min(0 8, 3 0, 9 4) =, k 5 = min(3 6, 6 5, 8 7) =, k 6 = min(3 6, 5 0, ) = 5. Obţinem noul flux ϕ : Γ (x,x ) (x,x 3 ) (x,x 4 ) (x,x 5 ) (x,x 6 ) (x,x 8 ) (x 3,x 5 ) ϕ (x 3,x 7 ) (x 4,x 6 ) (x 4,x 7 ) (x 4,x 8 ) (x 5,x 9 ) (x 6,x 9 ) (x 7,x 9 ) (x 8,x 9 ) cu Φ =+0+= =33. Deoarece prin majorare cu k 3 arcul (x,x ) s-a saturat, drumurile d şi d au devenit saturate prin urmare nu s-au mai putut majora fluxurile pe d şi d. Este evident că fluxul ϕ este complet deoarece pe fiecare din drumurile de la x la x 9 se află cel puţin un arc saturat. Acum trecem la îmbunătăţirea fluxului prin folosirea algoritmului Ford Fulkerson. Marcăm x cu +. Cum arcul (x,x 4 ) este nesaturat, marcăm x 4 cu +. Deoarece arcele (x 4,x 6 ), (x 4,x 7 ), (x 4,x 8 ) sunt saturate, rezultă că marcarea nu mai poate fi continuată. Prin urmare, vârful x 9 nu poate fi marcat. Deducem că valoarea fluxului maxim este 33. Tăietura de capacitate minimă estey = {x,x 4 } cu v(y/x)= =33. Programul optimal dat de fluxul ϕ se poate reprezenta şi prin tabelul C j x 5 x 6 x 7 x 8 Cantităţi din produse Cantităţi D j C C C 3 C 4 disponibile în depozite consumate x D x 3 D x 4 D Cererile consumatorilor Cereri satisfăcute
123 Valorile (x i,x j ) din tabel au fost citite din fluxul optimal ϕ şi reprezintă cantitatea de produs luată din depozitul x i şi transportată la consumatorul x j. Observaţia 6.3. Algoritmul Ford Fulkerson se poate utiliza şi la rezolvarea problemei determinării numărului maxim de cuplaje (legături independente) într-un graf bipartit. Un graf G =(X, Γ) se numeşte bipartit dacă există o partiţie a mulţimii X = X X, X X = astfel încât fiecare arc a lui G are o extremitate în X şi cealaltă în X. 4
124 6.4 Testul Nr. 5 de verificare a cunoştinţelor. Definiţi noţiunile următoare: a) Graf; b) Graf simetric; c) Drum într-un graf; d) Drum hamiltonian; e) Graf tare conex.. Definiţi noţiunile următoare a) Arbore; b) Matricea booleană ataşată unuigraf; c) Reţea de transport; d) Flux complet într-o reţea de transport. 3. Să se găsească cu ajutorul algoritmului lui Bellman drumul minim x x 5 din următorul graf: X 5 X 3 X4 5 3 X5 X3 4. Găsiţi drumurile, fără circuite, de lungime, şi 3 din graful următor X X5 X X4 X3 5. Determinaţi cu ajutorul algoritmului lui Bellman drumul de lungime maximă x x 4 din graful următor, precizând şi lungimea acesteia: X X4 7 5 X X X5 4 5 X8 9 X X X X3 3 X4 X6 8 X7 9 X9 5
125 6. Găsiţi cu ajutorul algoritmului Bellman - Kalaba drumul minim x x 7 şi lungimea acestuia din următorul graf: X 4 X5 X X4 8 X X6 X7 7. Găsiţi cu ajutorul algoritmului Bellman - Kalaba drumul maxim x x 7 şi lungimea acestuia din graful de la problema precedentă. 8. Folosind metoda drumului critic să se determine elementele caracteritice ale următoarei reţele de activităţi: X X4 7 5 X X X5 4 5 X8 9 X X X X3 3 X4 X6 8 X7 9 X9 9. Stabiliţi folosind algoritmul marcării dacă următorul graf are circuite: X X X3 X5 X4 0. Scrieţi matricea booleană asociată grafului X X5 X X6 X3 X4 6
126 Indicaţii şi răspunsuri Testul 5 3. Drumul minim este [x,x,x 4,x 5 ] şi are lungimea Se obţin matricile: L x x x 3 x 4 x 5 x 0 x x 0 x x 4 x x 5 x 0 0 x x 3 0 x x 5 x 3 x 3 x x x 4 x 3 0 x 4 x 5 x L x x x 3 x 4 x 5 x 0 x 0 x x x 0 0 x 0 x x 3 x x x 4 0 x 4 x L = L L x x x 3 x 4 x 5 x 0 0 x x x 3 0 x x x 5 x x 4 x 3 x x 4 x 5 x x x 3 x x 3 0 x 3 x x 0 x 3 x x 4 x 3 x x 5 x 4 x 4 x 3 x x L 3 = L L x x x 3 x 4 x 5 x x x x 3 x x 4 x x 3 x x 5 x x 3 x x x 5 x 3 x x 4 x 5 x 4 0 x 4 x 3 x x 0 0 x 4 x 3 x x 5 x Drumul de lungime maximă este[x,x,x 4,x 5,x 3,x 7,x 8,x,x 3,x 4 ] şi lmax = Se obţine l min (x x 7 )=7şi drumul minim [x,x 3,x 6,x 7 ]. 7. Se obţine lmax(x x 7 )=8şi dmax(x x 7 )=[x,x 4,x 3,x 5,x 6,x 7 ]. 7
127 8. Se obţine tabelul final: i j l ij t i t j s j m ij M ij Se vor marca în ordine x 3,x 4,x 5,x,x şiastfelsededucecăavemungraffără circuite. 0. matricea booleană asociată este:
128 Bibliografia aferentă capitolului: [] Acu, A.M., Acu D., Acu M., Dicu P., Matematici aplicate în economie - Volumul I, Editura ULB, Sibiu, 00. [] Blaga, P., Mureşan, A., Matematici aplicate în economie, vol.i, II, Transilvania Press, Cluj Napoca, 996. [3] Ionescu, T., Grafuri. Aplicaţii, vol.i, vol.ii, Editura Didactică şi Pedagogică, Bucureşti, 973, 974. [4] Izvercian, P.N.,Creţu, V., Izvercian, M., Resiga, R., Introducere în teoria grafurilor. Metoda drumului critic, Editura de Vest, Timişoara, 994. [5] Popescu, O., Raischi, C., Matematici aplicate în economie, vol.i, II, Editura Didactică şi Pedagogică, Bucureşti, 993. [6] Roşu, A., Teoria grafurilor, algoritmi, aplicaţii, Editura Militară, Bucureşti, 974. [7] Tamaş, V. (coord.), Brănzei, D., Smadici, C., Moicovici, T., Modele matematice în economie, Editura Graphix, Iaşi, 995. [8] Văduva, I., Dinescu, C., Săvulescu, B., Metode matematice de organizare şi conducerea producţiei, Editura Didactică şi Pedagogică, Bucureşti,
129 Capitolul 7 Probleme de transport Obiective: În acest capitol se doreşte familiarizarea studenţilor cu problemele de transport, probleme cu o imporatnţa deosebită în optimizarea a numeroase procese economice. O problemă de transport constă în aflarea unui plan de transport a unui produs, de la anumite centre producătoare (depozite), în scopul satisfacerii cerinţelor unor consumatori şi minimizării cheltuielilor de transport. Problemele de tip transport se întâlnesc în multe procese economice, ca de exemplu: transporturi de bunuri; proiectarea de canale de energie (informaţii, electricitate), de canale în agricultură; proiectarea de depozite în acelaşi spaţiu productiv; repartiţia optimă a sarcinilor de producţie pe maşini, secţii, întreprinderi, optimizarea unor probleme de producţie şi stocaj etc. Rezumat: Modelul matematic al problemelor de transport se încadrează în modelul problemelor de programare liniară. Având în vedere numărul mare de variabile, rezolvarea unei probleme de transport prin algoritmul simplex este în general puţin eficientă. De aceea, pentru rezolvarea problemelor de tip transport se folosesc tehnici speciale. Acest capitol este dedicat prezentării, sub o formă simplă, a acestor tehnici. Conţinutul capitolului:. Modelul matematic pentru o problemă de transport. Determinarea unei soluţii iniţiale 3. Ameliorarea (îmbunătăţirea) unei soluţii 4. Aflarea unei soluţii optime 5. Degenerarea în problemele de transport 6. Probleme de transport cu capacităţi limitate 7. Test de verificare a cunoştinţelor 8. Bibliografia aferentă capitolului Cuvinte cheie: probleme de transport, soluţie iniţială a unei probleme de trasport, soluţie optimă a unei probleme de transport, probleme de trasport cu capacităţi limitate. 7. Modelul matematic pentru o problemă de transport O problemă de transport a fost formulată la Capitolul, problema. Să o formulăm din nou. Un produs (marfă) se află în depozitele D, D,..., D m cu capacităţile a, a,..., a m şi trebuie transportat(ă) la centrele de consum C, C,..., C n în cantităţile b, b,..., b n. Cunoscând costul transportului pe unitate de produs de la depozitul D i, i =,m la centrul de consum C j, j =,n, notat cu c ij,seceresăseîntocmească un astfel de plan de repartiţie a produsului încât costul total al transportului să fie minim. Dacă notăm cu x ij cantitatea de produs ce se va transporta de la depozitul D i, i =,m, la centrul de consum C j, j =,n, atunci modelul matematic pentru probleme de transport 30
130 se scrie astfel: (7.) n x ij = a i, i =,m j= m x ij = b i, i =,n i= x ij 0, i =,m,j =,n m n (min)f = c ij x ij. i= j= Intuitiv, modelul matematic (7.) al problemei de transport se poate reprezenta prin Tabelul 7.. D i \ C j C C... C n Disponibil c D c c... n a x x x n D c x c x... c n x n a.. D m c m x m c m x m c mn x mn a m Necesar b b... b n T c Cuplul ij poartă numeledecăsuţă. x ij Algoritmul de rezolvare a unui model de transport cere ca acest model să fie echilibrat, adică săfieîndeplinită condiţia de echilibru m n a i = b j, i= adică totalul disponibilului să fie egal cu totalul necesarului. Valoarea comună T a acestui total se trece în căsuţa (m +,n+). În caz contrar, modelul se echilibrează prin considerarea, fie a unui depozit fictiv D m+, fie a unui centru de consum fictiv C n+, care oferă, sau cere, diferenţa dintre cele două sume. Deoarece cantităţile transportate de la un depozit arbitrar, respectiv la acest centru fictiv, nu există în realitate, costurile de transport corespunzătoare le considerăm nule. Se observă căîntr-o problemă de transport cu m depozite şi n centre de consum modelul matematic conţine m n variabile necunoscute şi cel mult m+n restricţii independente (nu s-au inclus condiţiile de nenegativitate). Numărul variabilelor necunoscute fiind evident mai mare ca cel al restricţiilor, rezultă că valorile variabilelor ce verifică sistemul de restricţii nu sunt unic determinate. Osoluţie realizabilă a problemei, care conţine cel mult (m + n ) componente strict pozitive, se numeşte soluţiedebază. Soluţia de bază cu exact (m + n ) componente pozitive se numeşte soluţie de bază nedegenerată, iar în caz contrar, degenerată. Se constată că modelul matematic reprezintă o problemă de programare liniară deo formă specială. Cu toate că în restricţii coeficienţii necunoscutelor sunt 0 sau, rezolvarea prin metoda simplex cere un volum de calcule foarte mare. De aceea, se preferă pentru rezolvarea unei probleme de transport o cale cu tehnică specifică. În general, pentru rezolvarea unei probleme de transport se parcurg etapele: a) Determinarea (aflarea) unei soluţii iniţiale (de bază, nedegerată); b) Ameliorarea (îmbunătăţirea) unei soluţii; c) Aflarea (determinarea) soluţiei optime. j= 3
131 7. Determinarea unei soluţii iniţiale Pentru aflarea unei soluţii iniţiale într-o problemă de transport se cunosc mai multe metode. În cele ce urmează vom prezenta trei metode. 7.. Metoda colţului Nord Vest Această metodă constă în a atribui, pe rând, valori variabilelor necunoscute începând cu cea din colţul Nord Vest al tabelului. Astfel, mai întâi luăm x = min(a,b ). Dacă min(a,b )=a, atunci x =... = x n =0,iardacă min(a,b )=b, atunci x = x 3 =... = x m = 0. Metoda continuă apoi cu x = min(a,b a ) în prima situaţie, respectiv cu x = min(a b,b ) în cealaltă situaţie. Procesul se repetă până când este repartizată şi ultima cantitate disponibilă. Exemplul 7... Se consideră trei furnizori D, D şi D 3 care au disponibile corespunzător cantităţile de un anumit produs a =50, a =30şi a 3 =40. Acestea sunt solicitate de patru consumatori C, C, C 3 şi C 4 în cantităţile b =45, b =5, b 3 =5şi b 4 =35. Cunoscând costurile unitare de transport 3,,, ;, 3,, şi 4,, 3, unităţi monetare de la D, D şi D 3, să se scrie modelul matematic al problemei de transport, când se urmăreşte minimizarea costului total. Utilizând metoda colţului Nord Vest să se găsească o soluţie iniţială. Dacă notăm cu x ij cantitatea de produs ce se va transporta de la furnizorul D i, i =,, 3 la beneficiarul C j, j =,, 3, 4, atunci obţinem următorul model matematic: x +x +x 3 +x 4 =50 x +x +x 3 +x 4 =30 x 3 +x 3 +x 33 +x 34 =40 x +x +x 3 =45 x +x +x 3 =5 x 3 +x 3 +x 33 =5 x 4 +x 4 +x 34 =35 x ij 0, i =,, 3, j =,, 3, 4. (min)f =3x +x + x 3 + x 4 +x +3x + +x 3 + x 4 +4x 3 +x 3 +3x 33 +x 34 Sub formă tabelară modelul matematic este D i \ C j C C C 3 C 4 Disponibil 3 D x x x 3 x D x x x 3 x D 3 x 3 x 3 x 33 x Necesar Pentru aflarea soluţiei iniţiale cu metoda colţului Nord Vest procedăm astfel: alegem x = min(45, 50) = 45; atunci x = x 3 =0; apoi x = min(5, 5) = 5 şi x 3 = x 4 =0; în continuare x = min(0, 30) = 0 şi x 3 =0; mai departe x 3 = min(0, 5) = 0 şi x 4 =0şi în final x 33 =5şi x 34 =35. De obicei, se determină soluţia iniţială în tabel, micşorându-se de fiecare dată disponi- 3
132 bilul şi necesarul respectiv şi scriind alăturat cel rămas. Astfel avem D i \ C j C C C 3 C 4 Disponibil 3 D ; 5; 0 3 D ; 0; D ; 35; 0 Necesar Tabelul 7... Valoarea funcţiei cost total pentru soluţia iniţială găsită este f = = 300 Această metodă este foarte simplă dar puţin eficientă deoarece nu ţine cont de valorile costurilor c ij. 7.. Metoda elementului minim Metoda constă în a atribui, pe rând, valori variabilelor necunoscute, începând cu aceea la care costul unitar c ij este minim. Apoi din cele rămase se lucrează tot cu aceea care corespunde costului minim. Dacă sunt mai multe costuri minime egale, atunci se va considera mai întâi acea variabilă care poate lua valoarea mai mare. Valoarea variabilei se va afla ca şi la metoda Nord Vest, considerând minimul dintre disponibil şi necesar. Exemplul 7... Utilizând metoda elementului minim să aflăm o soluţie iniţială pentru problema de transport de la Exemplul 7... Deoarece c 3 = c 4 = c 4 = este costul minim, mai întâi vor determina valoarea variabilei x 4 întrucât vom obţine valoarea maximă (x 3 =5; x 4 =35; x 4 = 30). Aşadar, luăm x 4 =35, ceea ce implică c 4 =0, x 34 =0. Apoi alegem x 3 =5deoarece c 3 =este costul minim din cele rămase. Avem x = x =0. Considerând costurile egale cu alegem x =30şi x = x 3 =0. Acum luăm x 3 =5, x 33 =0şi x 3 =5. Ilustrarea intuitivă prin tabel este dată în Tabelul 7... Valoarea lui f pentru această soluţie este f = = = = 30. D i \ C j C C C 3 C 4 Disponibil 3 D ; 5; 0 3 D ; D ; 0 Necesar Tabelul
133 7..3 Metoda diferenţelor maxime Valorile variabilelor se atribuie ca şi în cazul metodelor precedente, dar ordinea de atribuire se face după o altă regulă. Pentru stabilirea ordinii de urmat se calculează, pentru fiecare linie, respectiv pentru fiecare coloană, diferenţa dintre cele mai mici două elemente (costuri). Apoi pe linia sau coloana cu diferenţa maximă se determină variabilele din căsuţa cu cost minim. Apoi procedeul se repetă. La diferenţe maxime egale se consideră mai întâi costul minim. La lucrul cu tabel diferenţele pe linii se trec în stânga tabelului, iar cele pe coloane deasupra tabelului. Exemplul Să se afle o soluţie iniţială cu metoda diferenţelor maxime pentru problema de transport din Exemplul 7... Calculăm diferenţele pe linii şi coloane. Avem următorul tabel cu diferenţe calculate astfel: =pentru linia întâi, =pe linia a doua, 3 =pentru linia a treia, 3 =pentru coloana întâi, 3 =pentru coloana a doua, =pentru coloana atreiaşi =pentru coloana a patra. Se observă că avem toate diferenţele egale cu. Alegem x 4 =35deoarece dă cea mai mare repartizare pentru preţurile minime. Atunci x 4 = x 35 =0. Recalculăm diferenţele pe liniile şi coloanele rămase, obţinem tabelul Toate diferenţele sunt egale. Ţinând seama de costul minim alegem x 3 =5şi x = x =0. Pentru liniile şi coloanele necompletate recalculăm diferenţele şi obţinem tabelul Diferenţa maximă este şi corespunde coloanei întâi. Alegem x =30şi x = x 3 =0. Acum, pe linia a treia luăm x 3 =5, x 3 =5şi x 33 =0. Sub formă de tabel calculele arată astfel: D i \ C j C C C 3 C 4 Disponibil 3 D ; 5; 0 3 D ; D Necesar Valoarea lui f pe această soluţie iniţială este f = = 30 Se observă că s-a obţinut aceeaşi soluţie iniţială ca şi la utilizarea metodei elementului minim. 34
134 Observaţia 7.. Toate cele trei soluţii iniţiale găsite pentru problema de transport din Exemplul 7... sunt soluţii de bază nedegenerate, având 4+3 =6 componente pozitive. 7.3 Ameliorarea (îmbunătăţirea) unei soluţii Pentru a elabora un mod de ameliorare a unei soluţii corespunzătoare unei probleme de transport, adică de a trece de la o soluţie de bază la una mai bună, vom recurge la problema duală. Problema de transport are modelul matematic dat de (7.), 7.. Pentru a scrie duala trebuie să introducem variabilele duale u,u,...,u m, corespunzătoare primelor m restricţii, şi v,v,...,v n corespunzătoare următoarelor n restricţii. Obţinem u + v c, u + v c,..., u + v n c n, u + v c, u + v c..., u + v n c n, (7.) u m + v c m, u m + v c m..., u m + v n c mn, u i,i=,m, v j,j =,n, arbitrare (max)g = a u + a u a m u m + b v + b v b n v n. Teoremele de dualitate (v. Teoremele 5.6. şi 5.6.) ne asigură căosoluţie X (0) = (x (0) ij ) este optimă dacă variabilele duale verifică restricţiile i=,m j=,n (7.3) u i + v j = c ij, dacă x (0) ij 0(x (0) ij este necunoscuta principală) (7.4) u i + v j c ij, dacă x (0) ij =0(x (0) ij este necunoscuta secundară) numite condiţii de optimalitate pentru soluţia unei probleme de transport. Fie X =(x ij ) i=,m osoluţie iniţială a problemei de transport. j=,n Căsuţele din tabelul soluţiei cu x ij 0le numim căsuţe ocupate, iar cele cu x ij =0le numim căsuţe libere. Relaţiile (7.3) formează un sistem liniar de m+n ecuaţii (corespunzătoare căsuţelor ocupate) cu m + n necunoscute. Se observă că acest sistem este compatibil nedeterminat. Pentru aflarea unei soluţii putem lua o necunoscută secundară egalăcu0, deobiceivom alege u =0. Valorile găsite pentru u,u,...,u m şi v,v,...,v n se trec pe marginea tabelului soluţie în mod corespunzător (de aceea se mai numesc şi valori marginale), iar sumele u i + v j se scriu în colţuldindreaptasusalcăsuţelor ocupate, alături de coeficienţii c ij,adicăstructura unei astfel de căsuţe ocupate arată astfel c ij u i + v j x ij Acum verificăm condiţiile de optimalitate (7.4) pentru căsuţele libere. Dacă toate condiţiile (7.4) sunt îndeplinite, atunci soluţia iniţială este optimă. Dacă cel puţin o condiţie (7.4) nu este verificată, atunci se trece la procesul de ameliorare (îmbunătăţire) a soluţiei. Definiţia 7.3. Numim ciclu corespunzător unei căsuţe libere o succesiune de căsuţe ocupate, două câte două alăturate pe aceeaşi linie, sau respectiv pe aceeaşi coloană, cu treceri alternative pe linii şi coloane, succesiunea începând imediat după căsuţa liberă şi terminându-se în vecinătatea aceleiaşi căsuţe libere. Într-un ciclu marcăm alternativ cu + şi căsuţele, începând cu căsuţa liberă. Semnele se trec în colţul din stânga jos al căsuţei. 35
135 Pentru îmbunătăţirea soluţiei se determină valoarea minimă θ avaloriix ij din căsuţele marcate cu. Apoi, valoarea minimă θ se adună la valorile x ij din căsuţele marcate cu + şi se scade din valorile x ij din căsuţele marcate cu. Ciclul se alege pentru căsuţa liberă corespunzătoare diferenţei Δ ij = c ij (u i + v j ) cea mai mare în valoare absolută dintre diferenţele Δ ij < 0. Prin acest proces se obţine o nouă soluţie a problemei de transport, mai bună decât cea de la care am plecat. Exemplul Să considerăm problema de transport din Exemplul 7.. cu soluţia iniţială din Tabelul 7.., obţinută prin metoda colţului Nord Vest. Considerăm variabilele marginale u,u,u 3 şi v,v,v 3,v 4. Sistemul (7.3) corespunzător căsuţelor ocupate din Tabelul 7.. este: (7.5) u + v =3, u + v =, u + v =3, u + v 3 = u 3 + v 3 =3, u 3 + v 4 =. Alegând u =0,găsim v =3, v =, u =, v 3 =, u 3 =, v 4 =0. Acum verificăm condiţiile de optimalitate (7.4) pentru căsuţele libere. Avem: u + v 3 ==c 3 ; u + v 4 =0 c 4 =; u + v =4>, u + v 4 = c 4 ; u 3 + v =5> 4, u 3 + v =4>, de unde observăm că pentru căsuţele libere (, ), (3, ) şi (3, ) nu sunt verificate condiţiile de optimalitate. Prin urmare, soluţia iniţială din Tabelul 7.. nu este optimă. Calculele de mai sus se pot reprezenta ca în Tabelul v j v =3 v = v 3 = v 4 =0 u i D i \ C j C C C 3 C 4 Disponibil u =0 D u = D u 3 = D Necesar Tabelul Sistemul (7.5) se poate rezolva direct pe Tabelul 7.3., plecând de la u + v =3şi u =0. Acum stabilim căsuţa liberă pentru care considerăm ciclul. În acest scop calculăm diferenţele Δ ij pentru căsuţele libere în care nu au fost îndeplinite condiţiile de optimalitate: Δ =, Δ 3 = şi Δ =. Cum max(,, ) =este atins pentru două căsuţe libere (, ) şi (, ), vom alege unul din ciclurile determinate de ele. De exemplu, să nefixăm pe cel determinat de căsuţa (, ). Acesta este dat de căsuţele (, ), (, ), (, ) şi (, ). Marcăm alternativ căsuţele ciclului cu + şi, începând cu cea liberă. Numărul θ este dat de θ = min{45, 0} =0. 36
136 Adunăm θ la x ij din căsuţele cu + şi scădem acelaşi număr la cele marcate cu. Obţinem noua soluţie dată de Tabelul D i \ C j C C C 3 C 4 Disponibil 3 D D D Necesar Tabelul 7.3. Valoarea funcţiei cost total pentru noua soluţie (din Tabelul 7.3.) este f = = Aflarea unei soluţii optime În paragrafele precedente am văzut cum se află o soluţie iniţială şi cum poate ea fi ameliorată (îmbunătăţită). Acum putem prezenta un algoritm pentru aflarea soluţiei optime pentru o problemă de transport. Acesta poartă numele de algoritmul distributiv sau algoritmul potenţialelor. Paşii algoritmului sunt: Pasul. Se determină osoluţieiniţială a problemei de transport; Pasul. Se găsesc valorile marginale u i, i =,m şi v j, j =,n,casoluţiiale sistemului de ecuaţii u i + v j = c ij, unde i şi j sunt indicii căsuţelor ocupate; Pasul 3. Se verifică condiţiile de optimalitate a soluţiei găsite, adică dacă au loc inegalităţile u i + v j c ij pentru toţi indicii (i, j) de căsuţe libere; Pasul 4. Dacă soluţia nu este optimă, adică cel puţin o condiţie de optimalitate nu este îndeplinită, atunci se calculează diferenţele Δ ij = c ij (u i + v j ) < 0 corespunzătoare căsuţelor libere pentru care condiţia de optimalitate nu este verificată. Cea mai mare diferenţă Δ ij în valoare absolută determină căsuţa liberă (i, j) pentru care alegem ciclul folosit în ameliorarea soluţiei. Pasul 5. Se marchează alternativ cu + şi căsuţele ciclului, începând cu căsuţa liberă. Pasul 6. Se determină valoarea minimă θ a valorilor x ij din căsuţele ciclului marcate cu. Pasul 7. Valoarea minimă θ se adună la valorile x ij din căsuţele marcate cu + şi se scade din valorile x ij din căsuţele marcate cu. Se obţine astfel o nouă soluţie pentru problema de transport. Pasul 8. Se reiau paşii 7 cu noua soluţie şi se continuă repetarea lor până când toate condiţiile de optimalitate sunt îndeplinite, adică s-aobţinut o soluţie optimă. Pasul 9. Se scrie soluţia optimăşi se calculează valoareaminimă a funcţiei obiectiv (scop). Exemplul Să rezolvăm problema de transport din Exemplul 7... Vom porni de la soluţia iniţială obţinută prin metoda elementului minim (vezi Tabelul 7..). Vom parcurge calculele algoritmului direct pe tabel. 37
137 Avem v j v = v =0 v 3 = v 4 = u i D i \ C j C C C 3 C 4 Disponibil 3 0 u =0 D u =0 D u 3 = D Necesar Tabelul şi întrucât u 3 + v 4 =3> =c 34, deducem că soluţia nu este optimă. Avem o singură căsuţă liberă cuδ ij < 0 şi anume căsuţa (3, 4). Formăm ciclul determinat de ea prin căsuţele (3, 4), (3, 3), (, 3) şi (, 4). Marcăm alternativ cu + şi căsuţele ciclului. Valoarea minimă θ este dată de θ = min{0, 35} = 0. Se obţine astfel o nouă soluţie reprezentată în Tabelul 7.4. v j v =3 v = v 3 = v 4 = u i D i \ C j C C C 3 C 4 Disponibil 3 3 u =0 D u = D u 3 = D Necesar Tabelul Reluăm calculul valorilor marginale şi verificarea condiţiilor de optimalitate pentru noua soluţie. Lucrăm pe Tabelul Se observă că soluţia obţinută în tabelul este optimă deoarece u i + v j c ij pentru toate căsuţele libere. Deci, o soluţie optimă a problemei de transport 7.. este X = iar min f = = 0. Observaţia 7.4. Este posibil ca soluţia optimă a uni probleme de transport să nu fie unică, adică să aibă soluţii multiple. Vom avea soluţii multiple atunci când există mai multe căsuţe la care u i + v j = c ij, adică condiţia de optimalitate este îndeplinită cu egalitate. Celelalte soluţii optime, când există, se obţin aplicând procedeul ameliorării soluţiilor pentru căsuţele la care u i + v j = c ij. Soluţia generală se va scrie ca o combinaţie liniară convexă a soluţiilor optime găsite. În cazul exemplului nostru, se observă că în tabelul 7.4. avem căsuţa (, ) pentru care u +v =3=c =3.Formăm ciclul (, ), (, 4), (3, 4) şi (3, 3). Marcăm cu + şi căsuţele ciclului. Valoarea minimă θ este dată de θ = min{5, 5} =5 38
138 Obţinem o nouă soluţie optimă dată prin X = Soluţia generală este X = αx + βx = unde α 0, β 0, α + β =. 5β 0 5α +5β 5α +0β 30α +30β α 5α +5β 0 0α +5β 7.5 Degenerarea în problemele de transport Am văzut ( 7.) că soluţia unei probleme de transport este degenerată dacă are mai puţin de m + n valori nenule (căsuţe ocupate). Degenerarea în problemele de transport apare în următoarele situaţii: a) când soluţia iniţială este degenerată, situaţie posibilă dacă valoarea disponibilului este egală cu valoarea necesarului, pentru o anumită linie şi coloană; b) la îmbunătăţirea unei soluţii, când valoarea minimă din căsuţele ciclului marcate cu este atinsă în cel puţin două cazuri. În ambele situaţii se obţin mai puţine căsuţe ocupate, având mai puţine ecuaţii decât m + n. Rezultăcă variabilele duale (marginale) nu pot fi determinate. Pentru înlăturarea acestui inconvenient se foloseşte metoda zerourilor esenţiale. Acesta constă în tranformarea unor căsuţe libere în căsuţe ocupate cu un 0, numit zero esenţial. Acest 0 se pune în căsuţele libere cu costuri minime, care nu formează cicluri cu căsuţele deja ocupate. În final, trebuie ca numărul total al căsuţelor ocupate să fiem+n. În situaţia b) zerourile esenţiale se înscriu în căsuţe care se eliberează şi în care costurile sunt mai mici. Exemplul Trei întreprinderi I, I şi I 3 produc patru tipuri de produse P, P, P 3 şi P 4 cu cheltuielile unitare de producţie diferite. Cheltuielile pentru producerea unei unităţi din fiecare tip de produs, de către fiecare întreprindere, sunt date în tabelul I i \ P i P P P 3 P 4 I I 4 5 I Tabelul Cele trei întreprinderi au capacităţi egale de producţie, fiecare putând produce cel mult 40 de unităţi din cele patru produse luate la un loc. Cantităţile necesare din cele patru produse sunt egale cu 40, 30, 50 şi 40 unităţi. i) Să se determine un plan de producţie comun pentru cele trei întreprinderi astfel încât să se asigurea într-o măsură cât mai mare cantităţile necesare din cele patru produse, cu cheltuieli totale de producţie minime. ii) Să se interpreteze din punct de vedere economic soluţia optimă obţinută. iii) Este unică soluţia optimă? i) Se observă că avem o problemă de transport deoarece putem considera cele patru tipuri de produse ca patru centre consumatoare, iar cele trei întreprinderi ca trei centre de 39
139 depozitare. Obţinem astfel problema de transport din Tabelul I i \ P j P P P 3 P 4 Disponibil I I 4 5 I Necesar Tabelul 7.5. Deoarece modelul este neechilibrat, totalul de necesar este mai mare decât totalul de disponibil, vom introduce un centru fictiv de producţie I 4, care să producă diferenţa de 40 unităţi. Pentru acest centru fictiv costurile unitare sunt nule. Modelul problemei de rezolvat ia forma din Tabelul I i \ P j P P P 3 P 4 Disponibil I I 4 5 I I Necesar Tabelul Aplicăm metoda elementului minim şi găsim soluţia iniţială din Tabelul v j v =0 v = v 3 = v 4 =0 u i I i \ P j P P P 3 P 4 Disponibil u =0 I ; u = I u 3 = I u 4 =0 I ; 0 Necesar Tabelul Soluţia determinată este degenerată. Introducem 0 (esenţial) la căsuţele (, ) şi (3, ). Determinăm valorile duale (marginale) trecute pe marginea Tabelului Formăm ciclul (4, ), (4, ), (3, ) şi (3, ) care se marchează cu+ şi ca în Tabelul
140 Cu θ = min{30, 40} =30,obţinem soluţia îmbunătăţită din Tabelul v j v =0 v = v 3 = v 4 =0 u i I i \ P j P P P 3 P 4 Disponibil u =0 I u = I u 3 = I u 4 =0 I Necesar Tabelul Pentru soluţia din Tabelul determinăm valorile marginale. Considerăm ciclul (4, 3), (4, ), (3, ) şi (3, 3), marcat cu + şi ca în Tabelul Cu θ = min{0, 0} =0,găsim soluţia din Tabelul v j v = v = v 3 = v 4 = u i I i \ P j P P P 3 P 4 Disponibil u =0 I u =0 I u 3 =0 I u 4 = I Necesar Tabelul Reluând procesul de ameliorare a unei soluţii pentru cea din Tabelul se constată că suntîndeplinite toate condiţiile de optimizare. Prin urmare, soluţia găsită X = este optimă, iar min f = = 40. ii) Soluţia optimă găsită ne arată că fiecare întreprindere trebuie să producă numai un tip de produs: întreprinderea I să producă P 3, întreprinderea I să producă P 4, iar întreprinderea I 3 să producă P.Celetreiîntreprinderi îşi folosesc la maxim capacităţile de producţie. Cu toate acestea, necesarul de produs P nu este satisfăcut complet (mai trebuie 30 de unităţi), precum şi 0 unităţi din produsul P 3. Cheltuielile minime de producţie totale sunt egale cu 40 unităţi monetare. iii) În Tabelul pentru căsuţele (4, ) şi (4, 4) avem u + v =0=c 4 şi respectiv u 4 + v 4 =0=c 44. Deoarece nu avem cicluri plecând de la aceste căsuţe libere, rezultă cănu mai obţinem o nouă soluţie optimă. Rezultă că problema are o singură soluţie optimă, cea găsită mai sus. 7.6 Probleme de transport cu capacităţi limitate Sunt situaţii în care într-o problemă de transport pe unele rute avem capacităţi limitate. Notăm cu d ij capacitatea maximă ce poate fi transportată pe ruta ce leagă depozitul 4
141 D i de centrul de consum C j. Dacă păstrăm notaţiile din 7.., atunci modelul matematic al acestei probleme, numită problemă de transport cu capacităţi limitate, este n x ij = a i, i =,m sau sub formă detabel j= m x ij = b j, j =,n i= 0 x ij d ij, i =,m,j =,n m n (min)f = c ij x ij i= j= D i \ C j C C... C n Disponibil c D c... d x d x d n x n a c D c c... n d x d x d n x n a D n c m c m c... mn d m x m d m x m d mn x mn a m m c n Necesar b b... b n Tabelul n b i i= Observaţia 7.6. Din condiţiile de limitare a capacităţilor rezultă că este necesar ca pe fiecare linie, respectiv coloană, să fie verificate inegalităţile: respectiv n d ij a i,i=,m j= m d ij b j,j =,n i= Metoda de rezolvare a unei probleme de transport cu capacităţi limitate este aproape identică cu cea a unei probleme de transport fără limite de capacitate. La determinarea unei soluţii iniţiale valoarea variabilei din căsuţa ce se ocupă se află acum ca minimul dintre disponibilul necesar şi capacitatea corespunzătoare varabilei respective. Când acest minim este egal cu capacitatea respectivă, valoarea se va sublinia, ceea ce înseamnă că pe linia, respectiv coloana căsuţei restul variabilelor nu se vor lua automat egale cu zero. Aceasta înseamnă că, în general, vor fi ocupate mai mult decât m + n căsuţe. Se vor considera un număr de m + n variabile nebarate. Trecând la problema duală, se găsesc următoarele condiţii, de optimalitate pentru probleme de transport cu capacităţi limitate: ) u i + v j c ij, pentru căsuţele libere (i, j); ) u i + v j c ij, pentru căsuţele (i, j) cu valori subliniate; i= a i 4
142 unde u i, i =,m şi v j, j =,n sunt variabilele duale u i şi v j,datedesistemul u i + v j = c ij unde (i, j) este indice de căsuţă ocupată (corespunzătoare la variabila de bază). La determinarea unei soluţii iniţiale, din cauza capacităţilor limitate, sunt situaţii în care nu se pot repartiza în căsuţe tot disponibilul şi tot necesarul. Pentru a nu ajunge la o astfel de situaţie, se recomandă următorul procedeu de ocupare a căsuţelor: a) pe linia (sau coloana) costului minim se ocupă căsuţele în ordine crescătoare a costurilor; b) se procedează analog pe coloana (linia) ultimei căsuţe ocupate din linia (coloana) de la a); c) se continuă în mod analog, alternativ, până la epuizarea disponibilului şi necesarului. Exemplul Să se rezolve problema de transport cu capacităţi limitate: x + x + x 3 + x 4 = 50 x + x + x 3 + x 4 = 50 x 3 + x 3 + x 33 + x 34 = 0 x + x + x 3 = 00 x + x + x 3 = 60 x + x 3 + x 33 = 90 x + x 4 + x 34 = 60 x ij 0,i=,, 3 şi j =,, 3, 4 x 80,x 3 70,x 3 80,x 3 0 (min)f =3x +x +5x 3 +9x 4 +x +3x + +5x 3 +6x 4 + x 3 +7x 3 +8x 33 +8x 34. Vom determina o soluţie iniţială folosind metoda elementului minim. Obţinem astfel Tabelul v = v =3 v 3 =5 v 4 =6 Disponibil u =0 50; u =0 50; 0; 00; 40; u 3 =3 0; 0; 0 Necesar Tabelul Se observă că pentru soluţia iniţială avem 3+4 = 6 variabile de bază (corespunzătoare la căsuţe ocupate cu valori nesubliniate). Aşadar, putem trece la verificarea optimalităţii. Calculăm valorile duale (marginale) şi observăm că soluţia nu este optimă deoarece pentru căsuţa liberă (, ) avem u + v = 3 >c =. Ciclul corespunzător acestei căsuţe este (, ), (, 3), (, 3) şi (, ). Marcăm cu + şi. Valoarea minimă θ = min{40, 50} =40ne permite să scriemsoluţia îmbunătăţită dată în Tabelul v = v = v 3 =5 v 4 =6 Disponibil u = u = u 3 = Necesar
143 Tabelul Se observă că noua soluţie găsită este optimală deoarece pentru toate căsuţele libere avem u i + v j c ij,iarpentrucăsuţele ocupate cu valori subliniate avem u i + v j c ij. Avem X = cu min f = = 3380 Observaţia 7.6. În procesul de îmbunătăţire a unei soluţii putem avea situaţia în care u i +v j c ij pentru toate căsuţele libere şi să existeocăsuţă ocupată (r, s) cu valoare subliniată pentru care u r + v s <c rs. În acest caz se continuă procesul de îmbunătăţire formând un ciclu cu vârf negativ în căsuţa (r, s) (ocupată cu valoarea subliniată). 44
144 7.7 Testul Nr. 6 de verificare a cunoştinţelor. Precizaţi noţiunea de problemă de transport.. Precizaţi etapele generale ale rezolvării unei probleme de transport. 3. a) Precizaţi metoda colţiului Nord-Vest pentru determinarea unei soluţii iniţiale a unei probleme de transport; b) Precizaţi metoda elementului maxim pentru determinarea unei soluţii iniţiale a unei probleme de transport; c) Prezentaţi metoda diferenţelor maxime pentru determinarea unei soluţii iniţiale a unei probleme de transport. 4. a) În ce constă îmbunătăţirea unei soluţii a unei probleme de transport? b) precizaţi algoritmul distributiv (algoritmul potenţialelor) pentru determinarea soluţiei optime a unei probleme de transport. 5. Se consideră doi furnizori F şi F, care au cantităţile disponibile a =40unităţi şi respectiv a =5unităţi. Acestea sunt solicitate de trei beneficiari B,B,B 3 în cantităţile b =0unităţi, b =35unităţi şi b 3 =0unităţi. Cunoscând costurile unitare de transport c =4, c =, c 3 =,respectivc =, c =, c 3 =3unităţi monetare, să se scrie modelul matematic şi să se determine o soluţie iniţială a problemei de transport considerate. 6. Considerând problema de transport prezentată în enunţul problemei precedente (inclusiv soluţia iniţială determinată) să se găsească valorile marginale şi să se verifice condiţiile de optimalitate. 7. Considerând probleme de transport prezentate în enunţul problemei 8, să se determine o soluţie iniţială folosind metoda colţului nord-vest, iar apoi să se utilizeze algoritmul distributiv pentru îmbunătăţirea acesteia şi rezolvarea completă a problemei respective. 8. Să se rezolve problema de transport: x + x + x 3 =0 x + x + x 3 =0 x 3 + x 3 + x 33 =30 x + x + x 3 =50 x + x + x 3 =5 x 3 + x 3 + x 33 =5 x ij 0, i =, 3, j =, 3 f =4x +3x + x 3 +x +4x +5x 3 + x 3 +x 3 +6x 33 minim 9. Presupunând că la un moment dat în timpul rezolvării unei probleme de transport s-a ajuns la tabelul (situaţie): Să se analizeze situaţia dată, apoi să se încerce formarea ciclului căsuţei (, 3). Să se rezolve situaţia de degenerare apărută. 45
145 0. Să se rezolve problema de transport: x + x + x 3 = x + x + x 3 + x 4 =7 x 3 + x 3 + x 33 + x 34 =4 x + x + x 3 =5 x + x + x 3 =5 x 3 + x 3 + x 33 =7 x 4 + x 4 + x 34 =5 x ij 0, i =, 3, j =, 4 f =4x +x +5x 3 + x 4 +6x +5x +4x 3 +4x 4 +6x 3 +8x 3 + x 33 +5x 34 minim 46
146 Indicaţii şi răspunsuri Testul 6 5. Notând cu x ij cantitatea ce se va transporta de la furnizorul F i (i =, ) la beneficiarul B j (j =, 3) seobţine modelul matematic: x + x + x 3 =40 x + x + x 3 =5 x + x =0 x + x =35 x 3 + x 3 =0 x ij 0, i =,, j =, 3 f =4x +x + x 3 +x + x +3x 3 min Apoi folosind metoda diferenţelor maxime obţinem soluţia iniţială: x =0, x =0, x 3 =0, x =0, x =5, x 3 =0şi f = Se obţine: u =0 u = v =3 v = v 3 = deci toate condiţiile de optimizare sunt verificate şi astfel soluţia X = cu f =95este optimă. 7. Se obţine soluţia iniţială: ( Folosind valorile marginale se deduce că soluţia nu este ( optimă. Aplicând ) mai departe algoritmul distributiv se obţine soluţia optimă X = cu f min = Folosind metoda diferenţelor maxime se obţine soluţia iniţială X = La aplicarea algoritmului distributiv se ajunge la degenerare şi se va introduce un zero esenţial. În final se deduce că soluţia iniţială vafioptimăşi se calculează l min = Se rezolvă situaţia de degenerare prin introducerea unui zero esenţial în căsuţa (, ) Folosind metoda diferenţelor maxime se obţine soluţia iniţială X 0 = cu f = 4. Aceasta va fi optimă, dar în căsuţa liberă (, ) avem condiţia de optimalitate verificată cu egalitate. Formând ciclul căsuţei respective şi verificând şi condiţia de optimalitate se deduce o nouă soluţie optimă: X = cu f min = Deci avem soluţia generală X = α X 0 + β X cu α, β [0, ] şi α + β =. ) 47
147 Bibliografia aferentă capitolului: [] Acu, A.M., Acu D., Acu M., Dicu P., Matematici aplicate în economie - Volumul I, Editura ULB, Sibiu,
148 Capitolul 8 Şiruri Obiective: Recapitularea şi completarea noţiunilor despre şiruri de numere reale, cunoscute din învăţământul preuniversitar, urmate de introducerea şi studiul şirurilor în spaţii metrice. Rezumat: Prezentul capitol începe cu reluarea cunoştinţelor esenţiale despre şiruri de numere reale. Se continuă cu studiul şirurilor pe spaţii metrice, cu particularizări în spaţiile R m, m şi principiul contracţiei. Conţinutul capitolului:. Şiruri de numere reale. Şiruri în spaţii metrice 3. Test de verificare a cunoştinţelor 4. Bibliografia aferentă capitolului Cuvinte cheie: şir de numere reale, şir monoton, şir mărginit, limită, şir fundamental, dobândă compusă, şir de puncte într-un spaţiu metric, spaţiu metric complet, contracţie, principiul contracţiei. 8. Şiruri de numere reale Acest paragraf este consacrat recapitulării noţiunilor principale despre şiruri de numere reale şi completării lor cu câteva noţiuni şi rezultate necesare în expunerile ulterioare. Definiţia 8.. Se numeşte şir de numere reale sau şirnumericofuncţie f : N p R, unde N p = {p, p +,p+,...}, p fiind un număr natural. Scriind f(n) =a n,şirul se notează prin (a n ) n p sau {a n } n p. În mod uzual se ia p = sau, uneori, p =0. Pentru comoditate, fără a restrânge generalitatea, vom considera şirurile (a n ) n, scriind simplu (a n ); a n se va numi termenul general al şirului. Un şir poate fi dat prin termenul general, enumerând termenii şirului sau printr-o formulă de recurenţă. Definiţia 8.. Un şir de numere reale (a n ) este mărginit superior (majorat) dacă mulţimea termenilor săi este majorată. Altfel spus, şirul numeric (a n ) este majorat dacă existănumărul real β aşa încât a n β, n =,, 3,... Definiţia 8..3 Un şir de numere reale (a n ) este mărginit inferior (minorat) dacă mulţimea termenilor săi este minorată. Cu alte cuvinte, şirul numeric (a n ) este minorat dacă existănumărul real aşa încât α a n, n =,, 3,... 49
 este mărginit dacă şi numai dacă existăun număr real M>0 aşa")
149 Definiţia 8..4 Spunem că şirul numeric (a n ) este mărginit dacă simultan este majorat şi minorat, adică dacă există numerele reale α şi β aşa încât α a n β, n =,, 3,... Deoarece orice interval [α, β] este inclus într-un interval simetric faţă de 0 de forma [ M,M], cum>0, putem afirma că şirul (a n ) este mărginit dacă şi numai dacă existăun număr real M>0 aşa încât să avem a n M, n =,, 3,... Definiţia 8..5 Şirul numerelor (a n ) este nemărginit dacă nu este mărginit, adică dacă în afara oricărui interval mărginit există cel puţin un termen al şirului. Exemple: 8.. Şirul a n =+( ) n este mărginit deoarece a n 3, ( )n N. 8.. Şirul a n =3 n nu este mărginit superior dar este mărginit inferior (a n, ( )n N) Şirul a n = 3 n nu este minorat, dar este majorat (a n < 0, ( )n N) Şirul a n =( ) n n nu este nici minorat şi nici majorat. Definiţia 8..6 Şirul (a n ) este crescător (strict crescător) dacă a n a n+, (respectiv a n < a n+ )pentruoricen N. Definiţia 8..7 Şirul (a n ) este descrescător (strict descrescător) dacă a n+ a n a n+ <a n ) pentru orice n N. (respectiv Un şir crescător sau descrescător se numeşte şir monoton, iar un şir strict crescător sau strict descrescător se numeşte şir strict monoton. Exemple: 8..5 Şirul a n = n este strict crescător. n n Şirul a n = este strict descrescător. n 8..7 Şirul a n =+( ) n nu este monoton. Definiţia 8..8 Fie (a n ) un şir de numere reale, iar (n k ) un şir strict crescător de numere naturale. Şirul y k = a nk, k N, senumeşte subşir al şirului (a n ). Definiţia 8..9 Şirul numeric (a n ) are limita l R dacă pentru orice număr real ε>0, există un număr natural n ε astfel încât să avem a n l <ε, pentru orice n natural, n>n ε. Dacă şirul (a n ) are limita l se scrie lim n a n = l sau a n l pentru n şi se mai spune că (a n ) este convergent la l. Geometric, faptul că (a n ) converge la l înseamnă că în afara intervalului V (l, ε) = (l ε, l + ε) (numit vecinătate de centru l şi rază ε) se află un număr finit de termeni, a,a,...,a nε, iar interiorul lui V (l, ε) se află o infinitate de termeni ai şirului (fig.8..). Fig
150 Rezultă că orice şir numeric convergent este mărginit. Definiţia 8..0 Şirul numeric (a n ) are limita + dacă pentru orice număr real pozitiv E, există n E N aşa încât a n >E, pentru orrice n natural, n>n E. Dacă şirul (a n ) are limita + înseamnă că în afara intervalului V ( ) =(E, ) (numit vecinătate alui+ ) seaflăunnumăr finit de termeni a,a,...,a ne (fig.8..). Fig.8... Definiţia 8.. Şirul numeric (a n ) are limita dacă pentru orice număr real negativ E, există n E N aşa încât a n <E, pentru orice n natural, n>n E. Dacă şirul a n are limită se scrie lim a n = sau a n pentru n. n Geometric, faptul că şirul (a n ) are limita înseamnă că în afara intervalului V ( ) =(,E) (numit vecinătate alui ) seaflăunnumăr finit de termeni ai şirului: a,a,...,a ne (fig.8..3). Fig Dacă unşir de numere reale are limita + sau se mai zice că arelimită infinită. Un şir de numere reale care are limită infinită sau nu are limită se spune că este divergent. Propoziţia 8.. Dacă un şir de numere reale are limită, finită sau infinită, atunci ea este unică. Veridicitatea acestei propoziţii rezultă prin reducere la absurd şi folosind definiţia limitei unui şir. Teorema 8.. Dacă (a n ) şi (b n ) sunt şiruri de numere reale astfel încât lim a n = l, n lim b n = l, l şi l finite sau infinite, iar a n b n pentru n natural, n n 0,atuncil l. n Demonstraţie. Vom demonstra numai în cazul l şi l finite. În celelalte situaţii demonstraţia este analoagă. Presupunem că l > l. Putem alege ε > 0 aşa încât l ε > l + ε > l. Atunci există n ε N aşa încât dacă n>n ε săavem a n l <εadică ε<a n l <ε, de unde a n >l ε>l + ε. Din lim b n = l rezultă că există n ε să avem b n l <ε, de unde n b n <l + ε. Acum, deducem că pentru n>max{n 0,n ε,n ε } are loc inegalitatea a n >b n, ceea ce contrazice ipoteza. Aşadar, l l. Utilizând această teoremă, se deduce valabilitatea următoarelor criterii de comparaţie, utile în aflarea limitelor de şiruri. Propoziţia 8.. (Criteriul majorării pentru limită finită). Dacă pentru şirul de numere reale (a n ) există unnumăr real l şi un şir numeric (b n ),cu lim b n =0,astfelîncât a n l b n, n atunci lim a n = l. n 5
151 Observaţia 8.. În practică, cea mai întâlnită situaţie este a n = x n y n,cu(x n ) şir mărginit şi (y n ) un şir convergent la zero. Exemplul Şirul a n = n sin n, n N are limita 0 deoarece lim n n =0şi sin n. Propoziţia 8..3 (Criteriul minorării pentru limita + ). Dacăpentruşiruldenumerereale (a n ) există şirul numeric (b n ), cu lim b n =+, şi numărul natural n 0 aşa încât a n b n, n pentru orice n n 0,atunci lim a n =+. n Exemplul Şirul a n = n n n, n N, are limita + deoarece a n n n n = n, pentruoricen N,şi lim a n =+. n Propoziţia 8..4 (Criteriul majorării pentru limita ). Dacăpentruşirul numeric (a n ) există şiruldenumerereale(b n ),cu lim b n =, şi numărul natural n 0,aşa încât a n b n, n pentru orice n n 0,atunci lim a n =. n Propoziţia 8..5 (Criteriul încadrării unui şir între două şiruri care au aceeaşi limită sau criteriul cleştelui). Dacă pentru şirul numeric (a n ) există şirurile (b n ) şi (c n ) de numere reale aşa încât b n a n c n pentru n n 0, n 0 N, cu lim b n = lim c n = l, atuncişirul (a n ) are limită şi n n lim a n = l. n Exemplul Pentru şirul n N,avem Cum a n = 3 8n3 + n n3 +n n3 + n + n, n 3 8n3 + n 3 + n <a n < lim n n 3 8n3 + n + n = lim n n 3 8n3 + n +, pentru orice n N. n 3 8n3 + n + =, deducem că lim a n = n. Propoziţia 8..6 Fie (a n ) şi (b n ) şiruri de numere reale cu lim a n = l şi lim b n = l, l şi l n n finite sau infinite. Dacă l + l are sens, atunci lim (a n + b n ) = lim a n + lim b n = l + l. n n n Demonstraţie. Să considerăm cazul l şi l finite. Pentru orice ε>0 există numerele naturale n ε şi n ε aşa încât a n l < ε, pentru orice n natural n>n ε şi b n l < ε, pentru orice n natural n>n ε Fie n ε = max{n ε,n ε }. Atunci, pentru orice n natural n>n ε,avem,în conformitate cu cele două inegalităţi: ceea ce ne arată că (a n + b n ) (l + l ) a n l + b n l < ε + ε = ε, lim n (a n + b n )=l + l. În mod analog se demonstrează că: dacă l =+ şi l finit, atunci l + l =+ ; dacă l =+ şi l =+, atunci l + l =+, iardacă l = şi l =, atunci l + l =. 5
152 Observaţia 8.. Pentru l =+ şi l = operaţia l + l este fără sens(numitşi caz de excepţie sau caz de nedeterminare) deoarece în acest caz nu se poate preciza de la început valoarea lui l + l, aceasta putând să fie orice număr real, +, sau să nu existe, în funcţie de (a n ) şi (b n ). Observaţia 8..3 Afirmaţiile din Propoziţia 8..6 rămân valabile şi pentru un număr finit de termeni independent de n. Astfel, putem scrie lim n ( n + n + + k ) =0(k independent de n) n dar nu putem scrie Corect, avem ( lim n n + n n ) n = =0 }{{} 0 ( lim n n + n n ) n = lim = n n n n(n +) n + = lim = lim =. n n n Propoziţia 8..7 Fie (a n ) şi (b n ) două şiruri de numere reale cu Dacă l l are sens, atunci lim (a nb n ) = lim a n lim b n = l l. n n n lim a n = l şi n lim b n = l. n Demonstraţie. Să considerăm l şi l finite. Dacă l =0, atunci ţinând seama că a n este mărginit, pe baza Observaţiei 8.., găsim lim n a nb n =0. Să presupunem că l 0.Cum(a n ) este convergent, pe de o parte este mărginit, adică există M>0 aşa încât a n <M,pentruoricen N, iar pe de altă parte, pentru orice ε>0 există n ε N aşa încât a n l < ε l, pentru orice n>n ε Din lim n b n = l rezultă căpentruoriceε>0 există n ε N aşa ca b n l < ε M, pentru orice n>n ε. Considerând n ε = max{n ε,n ε },avem a n b n l l = a n b n a n l + a n l l l = a n (b n l )+l (a n l ) ε a n b n l + l a n l <M M + l ε l = ε, pentru orice n>n ε,adică lim (a nb n )=l l. n Analog se arată că: dacă l finit şi l =+, atunci l l =+, dacă l > 0 şi l l =, dacă l < 0, dacă l finit şi l =, atunci l l =, dacă l > 0 şi l l =+, dacă l < 0; dacă l =+ şi l =, atunci l l =, dacă l =+ şi l =+, atunci l l =+ iar dacă l = şi l =, atunci l l =+. Observaţia 8..4 Pentru l =0 şi l = ±, operaţia l l este fără sens. Observaţia 8..5 Cele afirmate la Observaţia 8..3 rămân valabile şi la produsul de şiruri. Propoziţia 8..8 Fie (a n ) un şirdenumererealecu 53 lim a n = l. n
153 i) Dacă l R,atunci lim = n a n l ; ii) Dacă l =+ sau l =, atunci lim n a n =0; iii) Dacă l =0şi a n > 0 pentru toţi n n 0,atunci toţi n n 0,atunci lim n a n =. lim n a n =+, iar dacă a n < 0 pentru Demonstraţie. i) Cum l 0rezultă că /a n este definit cu excepţia eventual, a unui număr finit de termeni. Cum a n l a n l, Deducem că lim a n = l. Acum există n N aşa încât n a n l < l, de unde a n > l,pentruoricen n. Pentru orice ε>0 există n /ε N aşa că a n l < l ε, pentru orice n>n ε. Fie n ε = max{n,n ε }; atunci a n l = a n l a n l < l ε l l = ε, pentru orice n>n ε. Prin urmare, lim = n a n l. În mod analog se demonstrează punctele ii) şi iii) din enunţul Propoziţiei Observaţia 8..6 Folosind Propoziţiile 8..7 şi 8..8, acum, putem preciza limita câtului a două şiruri. Dacă lim a n = l, lim b n = l şi l /l are sens (cazuri de excepţie sunt 0/0 şi n n ± / ± ), atunci lim a n/b n = l /l. n Propoziţia 8..9 Fie (a n ) şi (b n ) două şiruri de numere reale, a n > 0, pentru orice n N, lim a n = a şi lim b n = b. n n i) Dacă a (0, ) şi b R, atunci lim n abn n = a b ; ii) Dacă a =0 şi b R {0}, atunci lim n abn n = iii) Dacă a (0, + ) şi b =+, atunci lim n abn n = iv) Dacă a (0, + ) şi b =, atunci lim n abn n = v) Dacă a =+ şi b (0, ), atunci lim n abn n = { 0, pentru b>0 +, pentru b<0; {, pentru a> 0, pentru a (0, ); { 0, pentru a>, pentru a (0, ); { +, pentru b>0 0, pentru b<0. 54
154 În cazul ridicării la putere avem cazurile de excepţii, situaţiile 0 0, 0 şi. Pentru demonstraţie acestei propoziţii se poate consulta cartea [4]. Propoziţia 8..0 Sunt adevărate afirmaţiile: i) Orice şir de numere reale monoton şi mărginit este convergent; ii) Orice şir numeric crescător şi nemărginit are limita + ; iii) Orice şir numeric descrescător şi nemărginit are limita. Demonstraţie. i) Fie (a n ) un şir crescător şi mărginit. Punem α =sup{a n n N }.Avema n α, pentru orice n N. Deoarece α este majorant, pentru orice ε>0, există n ε N aşa încât α ε<a nε α. Cum şirul (a n ) este crescător, pentru orice n N, n n ε va rezulta a n a nε. Deci, α ε<a nε a n α, de unde a n α <εpentru n>n ε, ceea ce ne arată că lim a n = α. n ii) Fie (a n ) un şir numeric monoton crescător şi nemărginit. Atunci mulţimea termenilor şirului este mărginită inferiordea, dar nu este majorată. Rezultă că, pentru orice E>0, existăunn E N aşa încât a ne >E. Acum, pentru n N, n>n ε, putem scrie a n a nε >E, ceea ce ne arată că lim a n =+. n iii) Se demonstrează la fel ca ii). Observaţia 8..7 Propoziţia 8..0 se poate enunţa scurt: reale are o limită în R = R {, + }. orice şir monoton de numere Exemplul 8... Fie şirul e n =(+/n) n, n N. Săarătăm că (e n ) este convergent. Să pornim de la identitatea (8.) b k a k =(b a)(b k + b k a + + ba k + a k ), care este valabilă pentruoricea, b R şi orice k natural. Din (8.), pentru 0 <a<b,obţinem inegalitatea (8.) b k <a k + k(b a)b k. Luând în (8.) a =+/(n +), b =+/n şi k = n +,găsim ( + ) e n = b n+ <a n+ + n + n n(n +) bn = e n+ + n e n, de unde rezultă e n <e n+, ceea ce ne arată căşirul (e n ) este strict crescător. Să arătăm că şirul (e n ) este mărginit superior. Luăm în (8.) a =, b =+/(n) şi k = n şi obţinem ( + ) n ( < +n + ) n < + ( + ) n, n n n n de unde găsim ( + ) n <, n care conduce la e n < 4. Deoarece (e n ) este un şir strict crescător, urmează că e n < 4 pentru orice n N. Din punctul i) al Propoziţiei 8..0 deducem că şirul (e n ) este convergent. Limita şirului (e n ) se notează cue, careesteunnumăr des întâlnit în matematică şi ştiinţă. valoarea lui este,
155 Propoziţia 8.. (Lema lui Cesaró). Orice şir mărginit de numere reale conţine cel puţin un subşir convergent. Demonstraţie. Fie (a n ) un şir mărginit de numere reale. Considerăm submulţimile A k = {a k,a k+,...}, k N şi notăm cu b k marginile lor superioare (acestea există deoarece mulţimea A = {a,a,...} este mărginită). Din A k A k+,rezultăb k b k+ k N,şi deci şirul (b n ) este descrescător. Cum A k A,pentruoricek N şi A mărginită rezultăcă şirul (b k ) este mărginit inferior. Rezultă căşirul (b k ) este convergent. Dacă pentruoricek N avem b k A k, atunci putem lua b k = a nk cu n k k. Dinn k k obţinem lim n k =, ceea ce ne arată că putem extrage un subşir (n k ) strict crescător de n numere naturale, iar subşirul (a nk ) vafiunsubşir al şirului (a n ), care are limită. Acum, să presupunem că există un indice i N aşa încât b i A i. Din faptul că b i este marginea superioară amulţimii A i, deducem că pentruoricen N există k n aşa încât b i n <a i+k n b i,adicăputem scrie a i+kn b i <. De aici, pe baza criteriului majorării n pentru limită finită, obţinem lim a i+k n n = b i. Săarătăm că şirul (k n ) de numere naturale este nemărginit. Într-adevăr, dacă arexistaunn 0 astfel ca k n = k n0, pentru toţi n n 0, atunci am avea a i+kn0 b i n pentru toţi n>n 0, ceea ce ar însemna că a i+kn0 = b i şi b i A i, ceea ce ar constitui o contradicţie. Prin urmare, subşirul (a i+kn ) este un subşir convergent pentru şirul (a n ). Definiţia 8.. Un şir (a n ) de numere reale se numeşte şir fundamental sau şir Cauchy dacă pentru orice ε>0, există unnumăr natural n ε, astfel încât pentru orice n, m N, n>n ε, m>n ε să avem a m a n <ε. Dacă n = m, atunci condiţia din definiţia precedentă este evident satisfăcută. De aceea, putem considera, fără arestrânge generalitatea, că m > n, adică m = n + p, unde p N. Atunci Definiţia 8.. se poate scrie sub forma echivalentă. Definiţia 8..3 Un şir (a n ) numeric se numeşte şir fundamental sau şir Cauchy dacă, pentru orice ε>0, există unnumăr natural n ε aşa încât pentru orice n N, n>n ε şi orice p N să avem a n+p a n <ε. Propoziţia 8.. Orice şir fundamental de numere reale este mărginit Demonstraţie. Aplicăm Definiţia 8.. pentru ε =. Atunci există n N aşa încât pentru orice n, m N, n>n, m>n,săavem a n a m <. Acum, putem scrie a n = a n a n+ + a n+ a n a n+ + a n+ < + a n+ pentru orice n>n. Dacă punem α = max{ a, a,..., a n, + a n+ }. atunci a n α, pentru orice n N,adicăşirul (a n ) este mărginit. Teorema 8.. (Criteriul lui Cauchy). numai dacă esteşir fundamental. Un şir de numere reale este convergent dacă şi Demonstraţie. Necesitatea. Fie (a n ) un şir de numere convergent la l. Săarătăm că este fundamental. Din lim a n = l, rezultăcăpentruoriceε>0 există n ε N aşa încât a n l <ε/ n pentru orice n N, n>n ε. Atunci, pentru orice n, m N, m>n ε, n>n ε avem a n a m = a n l + l a m a n l + a m l < ε + ε = ε ceea ce ne dovedeşte că (a n ) este un şir fundamental. Suficienţa. Să admitemcă (a n ) este un şir fundamental şi să arătăm că există l R aşa încât lim a n = l. Şirul (a n ) fiind fundamental, rezultă caestemărginit (Propoziţia 8..). n Atunci conform Lemei lui Cesaró (Propoziţia 8..), şirul (a n ) va conţine un subşir (a nk ) 56
156 convergent; fie l limita sa. Deoarece a nk l, pentru k,rezultăcăpentruoriceε>0 există k ε N aşa încât (8.3) a nk l < ε, pentru orice k N, k > k ε. Din faptul că (a n ) este şir fundamental avem că există n ε N aşa încât a n a m < ε, pentru orice n, m N, n > n ε, m>n ε. Fie acum n ε = max{k ε,n ε } şi luând k>n ε în (8.3), obţinem: a n l = a n a nk + a nk l a n a nk + a nk l < ε + ε = ε, pentru orice n N, n>n ε. Prin urmare, şirul (a n ) are limita l R, adică este convergent. Observaţia 8..8 Criteriul lui Cauchy permite studierea convergenţei unui şir fără să cunoaştem limita lui. Pentru aceasta este suficient să cercetăm dacă şirul este fundamental. Exemplul 8... Să arătăm căşirul a n = cos x + 3 este şir Cauchy, deci convergent. Avem a n+p = cos x 3 cu p N. Atunci + cos x cos nx n, n R, cos x cos nx cos(n +)x cos(n + p)x n + 3 n n+p, a n+p a n = cos(n +)x 3 n n+ 3 n+p = 3 n+ 3 p n cos(n + p)x 3 n+p ( 3 p ) < 3 n. Cum / 3 n 0, rezultăcăpentruoriceε>0 există n ε N aşa încât / 3 n <ε, pentru orice n N, n>n ε. Atunci, pentru orice n>n ε şi orice p N,avem a n+p a n <ε, ceea ce ne asigură că (a n ) este şir Cauchy. Exemplul Să arătăm căşirul a n = n nu este fundamental, deci nu este şir convergent. Se observă căavem a n a n = n + + n n > n } {{ } de n ori = n n n =, ceea ce ne arată că (a n ) nu poate fi şir Cauchy. Aplicaţie economică. Dobânda compusă. Se investeşte o sumă S, dată într-o anumită unitate monetară, care acumulează o dobândă compusă de r% anual. Dacă dobânda se adaugă anual, atunci la sfârşirul primului an vom avea suma S = S + rs = S( + r). 57
157 După doi ani, vom avea suma S = S( + r), iar după trecerea a k ani, suma acumulată vafi S k = S( + r) k. Dacă dobânda s-ar adăuga de n ori pe an, atunci la trecereea a k ani am avea suma ( S n,k = S + n) r kn. Se observă căşirul (S n,k ) este crescător în raport cu n. Apare întrebarea: dacă n ar creşte, adică adăugarea dobânzii s-ar face cât mai des, valoarea sumei acumulate în cei k ani, ar creşte foarte mult? Pentru a răspunde la întrebare să calculăm limita şirului (S n,k ) când n. Avem lim S n,k = lim (+ S r ) nk = S lim n n n n [ ( + r n ) n ] r n nk r = Se rk, ceea ce ne arată că, practic, valoarea sumei finale depinde de suma iniţială S, dobânda anuală r şi de numărul de ani k, influenţa desimii adăugării dobânzii fiind de mai mică importanţă. De exemplu, dacă am depune o sumă S =$cu dobândă compusă anualăde% pe o perioadă de an, oricât de des am adăuga dobânda, valoarea sumei acumulate la sfârşirul anului ar oscila în jurul lui e =, $. (v. [], [3], [5]). 8. Şiruri în spaţii metrice Definiţia 8.. Se numeşte şir de puncte în spaţiul metric (X, d) o aplicaţie a mulţimii N = {,,...,n,...} în X. Pentru un astfel de şir folosim notaţia (x n ) n sau simplu (x n ) ca şi în cazul şirurilor de numere reale. Definiţia 8.. Şirul de puncte (x n ) din spaţiul metric (X, d) este convergent la şiruldenumererealepozitive(d(x n,x)) are limita zero. x X dacă Ca şi la şirurile reale folosim notaţia lim n x n = x sau x n x (n ). Altfel spus, şirul x n x (n ) în spaţiul metric (X, d) dacă pentruoriceε>0, există n ε N, astfel încât d(x n,x) <εdacă n>n ε. Propoziţia 8.. Dacă şirul de puncte ((x n ) din (X, d) este convergent în spaţiul metric (X, d), atunci limita lui este unică. Demonstraţie. Fie lim x n = x şi lim x n = y. Din Definiţia 8.. avem lim d(x n,x)= n n n 0 şi lim d(x n,y) = 0. Atunci din d(x, y) d(x, x n )+d(x n,y) avem d(x, y) lim d(x n,x)+ n n lim d(x n,y)=0, de unde deducem că d(x, y) =0. Deci avem x = y. n Definiţia 8..3 Şirul de puncte (x n ) din spaţiul metric (X, d) este mărginit dacă există x 0 X şi M>0 aşa încât d(x n,x 0 ) M, pentru orice n N. Propoziţia 8.. Orice şir convergent de puncte din spaţiul metric (X, d) este mărginit. 58
158 Demonstraţie. Fie lim n x n = x; pentru ε =există n N aşa încât d(x n,x) <, oricare ar fi n>n. Punând M = max{d(x,x),d(x,x),...,d(x n,x), }, avemd(x n,x) M, pentruorice n N, ceea ce ne arată căşirul de puncte (x n ) este mărginit în (X, d). Definiţia 8..4 Şirul de puncte (y n ) din spaţiul (X, d) este subşir al şirului de puncte (x n ) din (X, d) dacă există unşir (k n ) n de numere naturale, strict crescător, aşa încât y n = x kn. Propoziţia 8..3 Dacă şirul de puncte (x n ) este convergent la x în (X, d), atunci orice subşir al său are de asemenea limita x. Demonstraţie. Valabilitatea propoziţiei rezultă din Propoziţia 8.., de la şiruri de numere reale deoarece dacă (y n ) este un subşir al şirului de puncte (x n ), atunci şirul real (d(y n,x)) este subşir al şirului numeric (d(x n,x)). Propoziţia 8..4 (Criteriul majorării). Dacă pentru şirul de puncte (x n ) din (X, d) există x X şi şirul (a n ) de numere reale aşa ca d(x n,x) a n şi lim a n =0, atunci (x n ) este n convergent şi lim x n = x. n Demonstraţia se obţine folosind criteriul majorării de la şiruri de numere reale şi Definiţia 8... Definiţia 8..5 Şirul de puncte (x n ) din (X, d) se numeşte şir fundamental sau şir Cauchy dacă pentru orice ε>0 există n ε N aşa încât pentru orice n, m N, n>n ε, m>n ε,să avem d(x m,x n ) <ε. Dacă în Definiţia 8..5 luăm m = n + p, p N, atunci obţinem formularea echivalentă: şirul (x n ) din (X, d) este fundamental dacă, pentru orice ε>0 şi orice p N există n ε N astfel încât, pentru orice n N, n>n ε,avemd(x n+p,x n ) <ε. Propoziţia 8..5 Orice şir fundamental în spaţiul metric (X, d) este mărginit. Demonstraţie. Fie (x n ) un şir Cauchy în (X, d). Pentru ε =există n N aşa încât, pentru orice n, m N, n>n, m>n,săavemd(x n,x m ) <. Dacă punem M = max{,d(x,x n+),d(x,x n+),...,d(x n,x n+)} atunci d(x n,x n+) M, pentruoricen N. Prin urmare, şirul (x n ) este mărginit în (X, d). Teorema 8.. Orice şir convergent de puncte din (X, d) este şir Cauchy în (X, d). Demonstraţie. Fie (x n ) un şir convergent de puncte din (X, d). Dacă lim x n = x, x X, n atunci pentru orice ε>0 există n ε aşa încât, oricare ar fi n N, n>n ε,săavemd(x n,x) <ε/. Cum pentru orice p N şi orice n N, n>n ε,avemşi d(x n+p,x) <ε/, putem scrie d(x n+p,x n ) d(x n+p,x)+d(x, x n ) <ε/+ε/ =ε, pentru orice n>n ε. De aici, rezultă căşirul (x n ) este şir fundamental. Reciproca Teoremei 8.. nu este adevărată în orice spaţiu metric. Exemplul ( 8... În spaţiul metric (R, ), ínzestrat cu metrica dată de modul, şirul e n = + n, n) n N este convergent (deci şi fundamental) şi are limita e. Spaţiul metric (Q, ) este un subspaţiu al lui (R, ). Proprietatea şirului (e n ) de a fi fundamental se păstrează şi în (Q, ), dar el nu mai este convergent în (Q, ) deoarece numărul e Q (e este număr iraţional). Definiţia 8..6 Spaţiul metric (X, d) se numeşte complet dacă orice şir fundamental din (X, d) este convergent în (X, d). Exemplul 8... Teorema 8..). Spaţiul metric (R, ) este complet pe baza criteriului lui Cauchy (v. 59
159 Definiţia 8..7 Un spaţiu vectorial normat şi complet se numeşte spaţiu Banach, iar un spaţiu prehilbertian şi complet se numeşte spaţiu Hilbert. Fie (X, d ), (Y,d ) două spaţii metrice şi Z = X Y produsul cartezian al celor două spaţii metrice. Dacă z =(x,y ), z =(x,y ) sunt două puncte din Z, atunci definim d(z,z )= d (x,x )+d (y,y ). Propoziţia 8..6 (Z, d) este un spaţiu metric. Demonstraţie. Trebuie să verificăm pentru d axiomele metricii.. Evident d(z,z ) 0, oricare ar fi (z,z ) Z. Dacă d(z,z )=0, atunci d (x,x )=0şi d (y,y )=0, de unde rezultă x = x, y = y,adică z = z.. d(z,z )= d (x,x )+d (y,y )= d (x,x )+d (y,y )=d(z,z ), oricare ar fi z,z Z. 3. Fie z 3 =(x 3,y 3 ) încă un punct arbitrar din Z. Avem d(z,z )= d (x,x )+d (y,y ) (d (x,x 3 )+d (x 3,x )) +(d (y,y 3 )+d (y 3,y )) d (x,x 3 )+d (y,y 3 )+ d (x 3,x )+d (y 3,y )= = d(z,z 3 )+d(z 3,z ), adică d verifică inegalitatea triunghiului. Prin urmare (Z, d) este spaţiu metric. Observaţia 8.. Valabilitatea Propoziţiei 8..6 se poate extinde la produsul cartezian al unui număr finit de spaţii metrice. Teorema 8.. Şirul z n = (x n,y n ), n N, din spaţiul metric (Z, d) este convergent către z =(x, y) Z dacă şi numai dacă, lim x n = x şi lim y n = y. n n Demonstraţie. Fie lim z n = z, atunci, pentru orice ε>0, există n ε N, aşa încât, pentru n orice n>n ε,săavemd(z n,z) <ε. Cum d (x n,x) d (x n,x)+d (y n,y)=d(z n,z) <ε şi d (y n,y) d (x n,x)+d (y n,y)=d(z n,z) <ε, pentru orice n N, n>n ε, deducem că lim x n = x şi lim y n = y, ceea ce trebuie demonstrat. n n Reciproc, dacă lim x n = x şi lim y n = y, atunci pentru orice ε>0 există n ε aşa încât, n n pentru orice n>n ε,săavemd (x n,x) <ε/ şi există n ε astfel încât, pentru orice n>n ε, să avemd (y n,y) <ε/. Cum, pentru orice n>n ε, n ε = max{n ε,n ε } avem ε d(z n,z)= d (x n,x)+d (y n,y) < + ε = ε, rezultă lim z n = z. n Din Teorema 8.. rezultă că putem scrie ( ) lim (x n,y n )= lim x n, lim y n. n n n 60
160 Observaţia 8.. Rezultatul Teoremei 8.. rămâne valabil şi la produsul cartezian al unui număr finit de spaţii metrice. Corolarul 8.. Un şir din spaţiul R m este convergent, dacă şi numai dacă, şirurile reale componente sunt convergente. Valabilitatea corolarului rezultă din Teorema 8.. şi faptul că R m cartezian al spaţiului metric R, repetat de m ori. Exemplul Să calculăm limita şirului din R 3 ( ( z n = n n, + n) n 3n ) n +, 4n,n. + n + Avem ( ( lim z n = lim n n, lim + n 3n, lim n n n n) ) n + n 4n = + n + = (,e, 3 4 ). este produsul Teorema 8..3 Şirul de puncte z n =(x n,y n ), n N,dinspaţiul metric (Z, d) este şir fundamental, dacă şi numai dacă, (x n ) şi respectiv (y n ) sunt şiruri fundamentale în (X, d ) şi respectiv (Y,d ). Demonstraţie. Să considerăm, mai întâi, că şirul (z n ) este fundamental în (Z, d), adică, pentru orice ε>0 şi orice p N, există n ε N aşa încât, pentru orice n>n ε, săavem d(z n+p,z n ) <ε. Deoarece d (x n+p,x n ) d (x n+p,x n )+d (y n+p,y n )=d(z n+p,z n ) <ε şi d (y n+p,y n ) d (x n+p,x n )+d (y n+p,y n )=d(z n+p,z n ) <ε pentru orice p N şi orice n N, n>n ε,rezultăcăşirul (x n ) şi respectiv (y n ) sunt fundamentale în (X, d ) şi respectiv (Y,d ). Reciproc, fie (x n ) şi respctive (y n ) şiruri fundamentale în (X, d ) şi respectiv (Y,d ).Să arătăm ca z n =(x n,y n ), n N este şir fundamental în (Z, d). Pentru orice ε>0 şi orice p N există n ε N aşa încât, pentru orice n>n ε săavem d (x n+p,x n ) < ε şi există n ε N aşa încât pentru orice n>n ε săavem d (y n+p,y n ) < Deoarece, pentru orice n N, n>n ε, n ε = max{n ε,n ε } avem ε d(z n+p,z n )= d (x n+p,x n )+d (y n+p,y n ) < + ε = ε, deducem că şirul (z n ) este fundamental în (Z, d). Din Teorema 8..3 rezultă căşirul z n =(x n,y n ), n N,din(Z, d) este fundamental, dacă şi numai dacă, componentele sale (x n ),respectiv(y n ) sunt şiruri fundamentale în (X, d ) şi respectiv (Y,d ). Prin urmare, spaţiul (Z, d) este complet, dacă şi numai dacă, (X, d ) şi (Y,d ) sunt complete. Observaţia 8..3 Rezultatul Teoremei 8..3 rămâne valabil şi la produsul cartezian al unui număr finit de spaţii metrice. ε. 6
161 Corolarul 8.. Spaţiile R m sunt complete. Valabilitatea corolarului rezultă din Observaţia 8..3 şi din faptul că spaţiul R este complet (Exemplul 8..). Definiţia 8..8 În spaţiul metric (X, d), o funcţie f : X X se numeşte contracţie, dacă există α [0, ) aşa încât, oricare ar fi x, y X avem (8.4) d(f(x),f(y)) αd(x, y). Exemplul Fie X = R m cu metrica euclidiană d(x, y) = m (x i y i ), i= unde x =(x,x,...,x m ) X, y =(y,y,...,y m ) X. Considerăm aplicaţia f : X X dfinită prin f(x) =(αx,αx,...,αx m ), α [0, ). Avem d(f(x),f(y)) = m (αx i αy i ) = α m (x i y i ) = αd(x, y), i= pentru orice x, y X, adică (8.4) este verificată pentru α [0, ), ceea ce ne arată că f este o contracţie. Exemplul Funcţia f : R R, definită prin f(x) = a x + b, a > 0, b > 0, a < b b este o contracţie a spaţiului metric (R, ). În adevăr, pentru orice x, y R, avem d(f(x),f(y)) = f(x) f(y) = a x + b a y + b = a x + y (x + b)(y d(x, y). + b) Cum t (t + b)/ b,pentruoricet R, putem scrie x + y x + y x + b b + y + b b = b (x + y +b) b b (x + b)(y + b) = b b (x + b)(y + b) Atunci d(f(x),f(y)) a b d(x, y), b cu α = a/b b [0, ), ceea ce ne arată că f este o contracţie a spaţiului metric R. Numeroase probleme practice conduc la rezolvarea unei relaţii de forma f(x) =x, unde f esteoaplicaţiea unui spaţiu metric X în el însăşi. Un astfel de punct x X pentru care f(x) =x se numeşte punct fix al funcţiei f. Astfel, dacă f este aplicaţia identică aunuispaţiu metric în el însuşi, adică f(x) =x, pentru orice x X, atunci toate punctele lui X sunt puncte fixe. În continuare vom prezenta un rezultat fundamental al Analizei Matematice, cu multe aplicaţii în matematică şi ştiinţele practice, numit principiul contracţiei sau teorema de punct fix a lui Banach care asigură, în anumite condiţii, existenţa şi unicitatea unui punct fix. i= 6
162 Teorema 8..4 (Principiul contracţiei). Orice contracţie a unui spaţiu metric complet în el însuşi admite un singur punct fix. Demonstraţie. Fie (X, d) un spaţiu metric şi f : X X o contracţie a sa. Unicitatea punctului fix. Să admitemcăarexistadouă puncte fixe x şi y din X, cu x y, aşa încât f(x) =x şi f(y) =y. Atunci d(x, y) =d(f(x),f(y)) αd((x, y),α [0, ), de unde ( α)d(x, y) 0. Cum d(x, y) > 0 şi ( α) > 0, avem o contradicţie. Prin urmare, presupunerea noastră este falsă, deci există un singur punct fix. Existenţa punctului fix. Să considerăm x 0 X un punct arbitrar şi să definim recurent şirul (x n ) prin x = f(x 0 ), x = f(x ),..., x n+ = f(x n ),... Vom arăta că şirul (x n ) este un şir fundamental. Avem d(x,x )=d(f(x ),f(x 0 )) αd(x,x 0 ), d(x 3,x )=d(f(x ),f(x )) αd(x,x ) α d(x,x 0 ). Prin inducţie matematică deducem că (8.5) d(x n+,x n ) α n d(x,x 0 ), pentru orice n N. Pentru n, p numere naturale, p 0, conform cu (8.5), putem scrie (8.6) d(x n+p,x n ) d(x n+p,x n+p )+d(x n+p,x n+p ) d(x n+,x n ) (α n+p + α n+p α n )d(x,x 0 )= = α n αp α d(x,x 0 ) αn α d(x,x 0 ). Să luăm d(x,x 0 ) > 0 (în caz contrar, punctul fix este x 0 şi demonstraţia existenţei este terminată). Deoarece α [0, ), rezultă lim n αn =0, de unde pentru orice ε>0, există n ε N aşa încât, pentru orice n>n ε,avem (8.7) α n ε( α) < d(x,x 0 ). Din (8.6) şi (8.7) rezultă că, pentru orice ε>0 şi pentru orice p N,existăn ε N, aşa încât d(x n+p,x n ) <ε,pentruoricen N, n>n ε,adicăşirul (x n ) este fundamental. Cum (X, d) este spaţiul metric complet, există x X aşa încât lim x n = x. Mai trebuie n arătat că x este punct fix. Într adevăr, putem scrie d(f(x),x) d(f(x),x n+ )+d(x n+,x)=d(f(x),f(x n ))+ +d(x n+,x) αd(x, x n )+d(x n+,x). De aici, folosind că lim d(x, x n)=0, lim d(x n+,x)=0şi ţinând cont de criteriul majorării pentru şiruri reale, deducem că d(f(x),x)=0, adică f(x) =x. n n Demonstraţia teoremei lui Banach de punct fix ne arată nu numai existenţa şi unicitatea punctului fix, ci şi o metodă de aflare a punctului fix x şi de asemenea, punerea în evidenţă a unei formule pentru evaloarea erorii ce se comite considerând respectiva aproximaţie. Într adevăr, deoarece d(x n,x) d(x n,x n+p )+d(x n+p,x) 63 αn α d(x,x 0 )+d(x n+p,x),
163 rezultă, pentru p că d(x n,x 0 ) αn α d(x,x 0 ), inegalitatea ce ne arată cu ce eroare aproximează x n punctul fix x. În acest fel, pornind de la x 0 X arbitrar, punctele x n = f(x n ), n =,,...,apar drept aproximaţii succesive ale punctului fix x, ceea ce face ca metoda de aproximare să poarte numele de metoda aproximaţiilor succesive. În aplicarea efectivă a metodei aproximaţiilor succesive partea dificilă constăîn determinarea convenabilă aspaţiului metric complet (X, d) şi a contracţiei f. Cutoată această dificultate, metoda aproximaţiilor succesive este una dintre cele mai puternice procedee de aproximare numerică a multor probleme puse de matematică şi ştiinţele practice (inclusiv cele economice). Exemplul Fie ecuaţia x 3 +4x =0şi să ne propunem să-i găsim aproximativ singura rădăcină realăpecareoare(demonstraţi acest fapt!). Scriem ecuaţia sub forma x = x +4 şi considerăm funcţia f : R R, f(x) =/(x +4). Din Exemplul 8..5, pentru a =şi b =4, găsim că f este o contracţie a spaţiului metric (R, ), cuα =/8. Pe baza principiilor contracţiei f are un singur punct fix x şi deci ecuaţia dată vaaveaosingurărădăcină reală. Folosind şirul aproximaţiilor succesive, considerând x 0 =0,găsim: x = f(x 0 )= =0, 5 4 x = f(x )=0, 46 x 3 = f(x )=0, 463,... iar x n va aproxima pe x cu o eroare d(x n,x) 7 8 n. 64
164 8.3 Test de verificare a cunoştinţelor nr. 7. Definiţi următoarele noţiuni: a) Şir de numere reale convergent; b) Şir de numere reale fundamental; c) Şir într-un spaţiu metric; d) Spaţiu metric complet.. Enunţaţi: a) Criteriul lui Cauchy pentru şiruri de numere reale; b) Principiul contracţiei. 3) Utilizând criteriul lui Cauchy să se arată că următoarele şiruri sunt convergente: n + a) a n = 5n + ; b) b n = n ; c) c n = a 0 + a q + a q a n q n cu a k <M ( )k N şi q < ; d) d n = cos x 3 + cos x cos nx 3 n ; e) e n = cos a + cos a cos a n n(n +) cu a i R ( ) i N. 4. Să se calculeze lim z n, unde z n = x n + iy n cu n x n = n a k (k+)!, a > şi y n = p + p n p n p+. k= 5. Să se calculeze lim u n, u n =(u n,u n,u n ), cu n u n = n + n + n, ( ) u n = n n, u n = 9 9n9 +5n n9 +5n n9 +5n + n. 6. Să se calculeze lim, u n =(u n,u n,u n ), cu n u n = n n n, ( n a + n u n = b u n = 3 3n ( 3+ n ) 3n. ) n cu a, b R +, 7. Să se calculeze lim u n, u n =(u n,u n,u n ) cu n n k! k u n = k= (n + )!, 65
165 ( u n =sin nπ 3 ) n 3 +3n +4n 5, n ( u n = n +! + 3! k ). k! k= 8. Într-o progresie aritmetică, în care al n-lea termen este a n şi suma primilor n termeni S n,avem S m = m S n n. Săsearatecă a m = m a n n. 9. Să se determine limita inferioară şi limita superioară pentru şirul (a n ) cu a n = a ( )n+ + n, a>0. 0. Folosind principiul contracţiei găsiţi cu o eroare de 0 soluţia ecuaţiei 0x =sinx. 66
166 Indicaţii şi răspunsuri Testul nr Se impune a n+p a n <εşi se găseşte n ε astfel încât (a n ) să fieşir Cauchy. 4. z n a + i 5. u n 6. u n 7. u n ( 0, ln, p ). (, ab, ). e ( ) 3,,e. 8. Se foloseşte faptul că suma primilor n termeni ai unei progresii aritmetice a,a n,..., a n,... cu raţia r este S n = n[a +(n )r]. 9. Pentru a< avem lim a n = a şi lim a n = a. Pentru a> avem lim a n = a şi lim a n = a. Pentru a =avem lim a n = lim a n = lim n a n =. 0. Se scrie ecuaţia sub forma x = sin x +. Notăm f(x) = 0 sin x +. Se arată că 0 f (x) < deci f este o contracţie. Apoi folosind principiul contracţiei se găseşte 0 sin soluţia aproximativă căutată x =
167 Bibliografia aferentă capitolului: [] Acu, A.M., Acu D., Acu M., Dicu P., Matematici aplicate în economie - Volumul II, Editura ULB, Sibiu, 00. [] Allen, R.G.D., Analiză matematică pentru economişti, Editura Ştiinţifică (traducere), Bucureşti, 97. [3] Lancaster, K., Analiză economică matematică, Editura Ştiinţifică, Bucureşti, 973. [4] Nicolescu, M., Dinculeanu, N., Marcus, S., Manual de analiză matematică, Vol.I, 96, Vol.II, 964, Editura Didactică şi Pedagogică, Bucureşti. [5] Vasiliu, D.P., Matematici economice, Editura Eficient, Bucureşti,
168 Capitolul 9 Serii numerice Obiective: Prezentarea noţiunilor generale legate de seriile numerice şi aplicaţiile economice ale acestora (de exemplu fluxul de venit). Rezumat: În acest capitol sunt introduse şi studiate noţiunile de serie numerică, convergenţa seriilor numerice, serii cu termeni pozitivi şi criteriile de convergenţă pentru acest tip de serii. Conţinutul capitolului:. Noţiuni preliminare. Criterii de convergenţă pentru serii numerice cu termeni oarecare 3. Serii absolut convergente. Serii semiconvergente 4. Serii cu termeni pozitivi 5. Problemă economică. Fluxul de venit 6. Test de verificare a cunoştinţelor 7. Bibliografia aferentă capitolului Cuvinte cheie: serie numerică, serie convergentă, criterii de convergenţă, serie absolut convergentă, serie semiconvergentă, serie cu termeni pozitivi, fluxul de venit. 9. Noţiuni preliminare Se cunoaşte că pentruoricenumăr finit de numere reale a,a,...,a n, putem efectua suma lor, utilizând proprietatea de asociativitate a adunării de numere reale. Astfel, mai întâi calculăm a + a, apoi se efectuează a + a + a 3 =(a + a )+a 3, a + a + a 3 + a 4 =(a + a + a 3 )+a 4 şi, în general a + a a n + a n =(a + a a n )+a n. Acum, este firesc să ne punem problema efectuării sumei termenilor unui şir (a n ) n de numere reale, adică a unei sume cu un număr infinit de termeni. Definiţia 9.. Fiind dat şiruldenumerereale(a n ),senumeşte seriedenumererealesau serie numerică problema adunării termenilor şirului (a n ), adică problema efectuării sumei (9.) a + a a n +... În locul sumei (9.) scriem prescurtat a n sau n= n numit termenul general al seriei numerice. Prin urmare, observăm că seriile numerice constituie problema adunării unei infinităţii numărabile de numere reale. a n sau simplu a n, a n fiind 69
169 Cum ştim efectua adunări de numere reale în care numărul termenilor este finit, dar oricât de mare, este natural ca pentru efectuarea sumei a n să utilizăm sume finite de tipul S n = a + a a n, în care să facempen să tindă la infinit. Definiţia 9.. Numin sumă parţială a seriei numerice a n,suma S n = n= n a i = a + a a n, iar şiruldenumerereale(s n ) se numeşte şirul sumelor parţiale. i= Observaţia 9.. În literatura matematică, deseori, se defineşte seria numerică a n prin cuplul de şiruri (a n ) şi (S n ) ([], [4]). Definiţia 9..3 Spunem că seria a n este convergentă dacă şirul sumelor parţiale (S n ) este convergent. În acest caz, dacă lim S n = S, atuncis se numeşte suma seriei a n şi scriem n S = a n = a + a a n +... Definiţia 9..4 Spunem că seria a n este divergentă, dacă şirul sumelor parţiale (S n ) este divergent. Exemplul 9. Seria numerică aq n, unde a, q R, senumeşte serie geometrică. Dacă n=0 a =0,avemS n =0pentru orice q R, de unde rezultă că seria este convergentă, având suma 0. Săconsiderăm a 0. Atunci, pentru q,avem S n = a + aq aq n = a qn+, q iar pentru q = S n = a(n +). Pentru q (, ), deoarece lim n qn+ =0,avem lim S n = a. Prin urmare, pentru n q q <, seria geometrică este convergentă, având suma S = a/( q). Dacă q, atunci şirul (S n ) are limita + sau după cum a > 0 sau, a < 0, iar pentru q limita şirului (S n ) nu există. Deci, pentru q seria geometrică este divergentă. În concluzie, seria geometrică aq n cenverge pentru a =0, oricare q R şi pentru a 0şi q (, ). Prin urmare, pentru q <, putem scrie Exemplul 9... Seria n= S n = n=0 n=0 aq n = a + aq aq n +...= a q. (n )(n +) n h= este convergentă. Într-adevăr, avem n (h )(h +) = ( h ) = h + h= 70
170 + = ( n 3 n + n = ( n + ). ) = n + /. Prin urmare, lim S n =, ceea ce arată căseriadată este convergentă, având suma n Observaţia 9.. O serie a n în care termenul general se poate pune sub forma a n = b n b n+ poartă numele de serie telescopică. Exemplul Seria ( ) n este divergentă deoarece S k =şi S k =0, pentru n= orice k N,şirul sumelor parţiale (S n ) fiind divergent. Exemplul Seria,numită seria armonică, este divergentă. n n= În adevăr, şirul sumelor parţiale S n = este divergent deoarece nu este n şir Cauchy (v. Exemplul 8..3). Observaţia 9..3 Seria n este numită serie armonică deoarece a n =/n este media armonică a numerelor a n, a n+, adică /a n =/a n +/a n+. Propoziţia 9.. Dacă seria a n converge, atunci Demonstraţie. Seria a n fiind convergentă,avem unde lim n a n = lim n S n lim n S n = S S =0. lim a n =0. n lim S n = S. Dar a n = S n S n,de n Corolarul 9.. Dacă pentru seria a n şirul (a n ) nu converge la 0, atunci seria este divergentă. Observaţia 9..4 Condiţia lim n a n =0este necesară dar nu şi suficientă pentru convergenţa seriei a n. De exemplu, seria armonică este divergentă, deşi lim /n =0. n n Exemplul Seria n n este divergentă deoarece lim n n = 0. n n Definiţia 9..5 Fiind dată seria a n, numim rest de ordinul k al ei, notat cu r k seria n= n=k+ a n = a k+ + a k Propoziţia 9.. Seria a n,seriarest n= a n au aceeaşi natură, adică suntambeleconvergente sau ambele divergente. n=k+ 7
171 Demonstraţie. Fie n>k;notăm cu S n şi respectiv T n sumele parţiale corespunzătoare termenului a n din seria a n şi respectiv a n. Avem n=k+ T n = S n (a + a a k ). Dacă a n este convergentă, adică lim S n = S, atunci lim T n = S (a + a n n a k ), ceea ce ne arată căseria a n este tot convergentă. Reciproc, dacă este n=k+ n=k+ convergentă, adică lim T n = T, atunci lim S n = T +(a a k ), ceea ce arată căseria n n an este convergentă. Evident că, dacă unul din şirurile (S n ) şi (T n ) este divergent atunci şi celălalt este divergent. Prin urmare, dacă una din seriile şi este divergentă, atunci şi cealaltă este divergentă. n= a n n=k+ Corolarul 9.. Dacă unei serii numerice i se suprimă sau i se adaugă un numă finit de termeni, atunci natura ei nu se schimbă. Propoziţia 9..3 Dacă seria a n converge atunci şirul resturilor (r k ) k este convergent la zero. Demonstraţie. Dacă seria a n este convergentă, atunci lim n S n = S. Cum, pentru orice k N,avemr k = S S k, de unde lim k r k = S S =0. Definiţia 9..6 Dacă considerăm seriile se numeşte seria sumă seria numerică n= a n şi n= (a n + b n )=(a + b )+(a + b )+...+(a n + b n )+... n= şi serie produs cu scalarul λ R seria numerică b n (λa n )=λa + λa λa n +... n= a n a n Teorema 9.. Dacă seria a n converge, având suma A, iar seria b n converge, având suma B atunci seria (a n + b n ) converge şi are suma A + B. Demonstraţie. Fie A n = A n + B n = n a k şi B = k= n k= b k. Cum lim n A n = A, iar lim n B n = B, rezultăcă n (a k + b k ) converge la A + B, ceea ce ne permite să scriem (a n + b n )=A + B. k= Teorema 9.. Dacă λ R {0},atunci seriile a n şi λa n au aceeaşi natură. Demonstraţie. Fie S n = n a k. Dacă a n converge, atunci lim h= n a k n h= = S, ceea ce implică şi lim λs n = λs. Cum λa λa n = T n = λs n, rezultăcăşi seria λa n este n convergentă şi are suma λs. Dacă a n este divergentă, atunci şirul (S n ) diverge, ceea ce n= 7
172 atrage după sinecăşirul T n = λs n diverge, adică seria λa n este divergentă. Reciproc rezultă prin înlocuirea lui λ cu /λ. Teorema 9..3 Dacă într-o serie convergentă se asociază termenii seriei în grupe cu un număr finit de elemente, păstrând ordinea, atunci se obţine tot o serie covnergentă cu aceeaşi sumă. Demonstraţie. Fie seria a n convergentă, S n = a + a a n şi lim S n = S. n aranjăm termenii seriei a n în grupe cu un număr finit de termeni astfel (9.) (a + a a n )+(a n+a n a n ) (a nk + + a nk a nk )+... păstrând ordinea termenilor. Notând b i = a ni + + a nn a ni, i =,, 3,... şi T k = b + b b k, k =,,... scriem T k = S nk, k =,,... ceea ce ne arată că (T k ) este un subşir al şirului (S n ). Deoarece lim S n = S, deducem că lim T k = lim S n n k = S, ceea ce ne arată că k k seria (9.) este convergentă, iar suma ei este S. Observaţia 9..5 Reciproca teoremei nu are loc, adică dacă într-o serie a n convergentă în care termenii sunt grupe cu un număr finit de termeni, atunci prin desfăşurarea grupelor (înlăturarea parantezelor), păstrând ordinea termenilor, se poate obţine o serie divergentă. De exemplu, seria (9.3) ( ) + ( ) + ( ) +... este convergentă, în imp ce seria (9.4) = ( ) n este divergentă. Observaţia 9..6 Într-o serie divergentă se pot aranja termenii în grupe cu un număr finit de elemente, păstrând ordinea, aşa încât seria obţinută să fie convergentă. Astfel, seria (9.4) este divergentă iar seria (9.3) este convergentă. 9. Criterii de convergenţă pentru serii numerice cu termeni oarecare Dacă în seria a n nu facem nici o precizare asupra semnului termenilor, atunci se mai spune că avem o serie numerică cu termeni oarecare. În acest paragraf ne interesează să găsim criterii prin care să putem preciza convergenţa unei serii de numere reale. Este important să cunoaştem convergenţa unei serii deoarece, cunoscând acest fapt, chiar dacă nu-i cunoaştem suma, o putem evalua luând sume parţiale cuunnumăr cât mai mare de termeni. Teorema 9.. (Criteriul lui Cauchy). Seria a n este convergentă dacă şi numai dacă pentru orice ε>0 există unnumăr natural n ε astfel încât, pentru orice n natural, n>n ε şi orice p N să avem a n+ + a n a n+p <ε Demonstraţie. Fie (S n ) şirul sumelor parţiale, S n = a + a a n. Cum seria a n este convergentă dacăşi numai dacă şirul (S n ) este convergent, iar şirul (S n ) este covnergent dacă şi numai dacă esteşir fundamental, rezultă căserie a n este convergentă dacăsi numai dacă, pentru orice ε>0 şi orice p N,existăn ε N aşa încât, petru orice n N, n>n ε săavem S n+p S n <ε. De aici, prin înlocuirea corespunzătoare a sumelor S n+p şi S n,obţinem valabilitatea criteriului lui Cauchy pentru serii numerice. n= Să 73
173 Teorema 9.. (Criteriul Dirichlet). Seria a n b n este convergentă dacă şirul sumelor parţiale al seriei a n este mărginit, iar şirul (b n ) este descrescător şi convergent la 0. Demonstraţie. Fie (S n ) şirul sumelor parţiale al seriei a n,fiindmărginit, există un M>0 aşa încât S n M, pentruoricen natural. Utilizând faptul că şirul (b n ) este descrescător putem scrie succesiv: (9.5) a n+ b n+ + a n+ b n+ + a n+3 b n a n+p b n+p = = b n+ (S n+ S n )+b n+ (S n+ S n+ )+b n+3 (S n+3 + S n+ ) b n+p (S n+p + S n+p ) = = b n+ S n +(b n+ b n+ )S n+ +(b n+ b n+3 )S n (b n+p b n+p )S n+p + b n+p S n+p S n b n+ + b n+ b n+ S n+ + b n+ b n+ S n b n+p b n+p S n+p + b n+p S n+p M(b n+ + b n+ b n+ + b n+ b n b n+p b n+p + b n+p )= =Mb n+ Deoarece b n+ 0 pentru n,pentruoriceε>0 există n ε N aşa încât, pentru orice n N, n>n ε,săavemb n+ <ε/m. Acum, din (9.5) rezultă a n+ b n+ + a n+ b n a n+p b n+p <ε pentru orice n N, n>n ε. Prin urmare, sunt îndeplinite condiţiile din criteriul lui Cauchy (Teorema 9..), rezultând că seria a n b n este convergentă. sin nx Exemplul 9... Fie seria, unde x R. Se observă că seria sin nx are şirul n n= sumelor parţiale (S n (x)) mărginit. Într-adevăr dacă x kπ, k Z, înmulţind S n (x) cu sin x,găsim S n (x) = cos x cos ( ) n + x sin x, de unde cos x S n (x) = sin x +...+sinnx = cos ( ) n + x sin x sin x = sin x, pentru orice n N. Dacă x =kπ, k Z, atunci S n (x) =0. Deci, în ambele situaţii există M>0aşa încât S n (x) M, pentruoricen N. Pe de altă parte,şirul b n =/ n tinde descrescător la 0. Prin urmare, fiind îndeplinite sin nx condiţiile criteriului lui Dirichlet rezultă căseria este convergentă pentruorice n x R. Teorema 9..3 (Criteriul lui Abel). Dacă seria a n este convergentă şi (b n ) este un şir monoton şi mărginit, atunci seria a n b n este convergentă. n= n= 74
174 Demonstraţie. Cum şirul (b n ) este monoton şi mărginit rezultă că el este convergent; fie lim b n = b. Fără arestrânge generalitatea demonstraţiei putem considera că şirul (b n ) este n crescător. Atunci şirul (b b n ) va fi un şir descrescător şi cu limita 0. Din faptul că serie an este convergentă rezultăcăşirul sumelor parţiale este mărginit. Aplicând criteriul lui Dirichlet, deducem că serie a n (b b n ) este convergentă. Dar a n fiind convergentă rezultă că şi ba n este convergentă. Acum, utilizând teorema 9.., obţinem că seria an b n este convergentă deoarece a n b n = a n (b b n )+ba n,pentruoricen N. Cu această teorema este demonstrată. ( Exemplul 9... Fie seria n + ) n. Observăm că seria este convergentă, fiind n n n= serie geometrică curaţia (, ), iarşirul b n = ( n, + n) n N, este strict crescător şi mărginit (Exemplul 8..). Cum sunt îndeplinite condiţiile criteriului lui Abel, deducem că seria dată este convergentă. Definiţia 9.. Oserie a n se numeşte serie alternantă (sau alternată) dacă a n a n+ < 0, n= pentru orice n N, adică dacă termenii săi alternează casemn. sau Este evident că orice serie alternantă poate fi scrisă în una din formele: ( ) n a n,undea n 0, pentru orice n N. n= ( ) n a n Exemplul Seriile ( ) n n = şi ( ) n n = n= sunt serii alternate. Teorema 9..4 (Criteriul lui Leibniz). Dacă în serie alternantă ( ) n a n şirul (a n ) este descrescător şi convergent la zero, atunci seria este convergentă. Demonstraţie. Cum seria ( ) n are şirul sumelor parţiale mărginit ( S n, oricare n= ar fi n N ), iar şirul (a n ) este descrescător şi convergent la 0 rezultă, conform criteriului lui Dirichlet că seria alternantă este convergentă. Exemplul Seria ( ) n este convergentă deoarece sunt îndeplinite n n= ( ) condiţiile criteriului lui Leibniz, adică şirul n este descrescător şi convergent la n zero. Corolarul 9.. Dacă seria ( ) n a n îndeplineşte condiţiile din Criteriul lui Leibniz n= (Teorema 9..4) şi S este suma ei, atunci S S n a n+, pentru orice n N, n unde S n = ( ) k a k sumă parţială derangn. k= Demonstraţie. Într-adevăr, cum a k a k+ 0, k N, atunci n S S n = ( ) n a n ( ) k a k = n= 75 k= n= n=
175 ( ) n a n+ +( ) n+ a n+ +( ) n+ a n = = ( ) n [(a n+ a n+ )+(a n+3 a n+4 )+...] = =(a n+ a n+ )+(a n+3 a n+4 )+...= = a n+ (a n+ a n+3 ) (a n+4 a n+5 )... a n+. Exemplul Seria ( ) n (numită seria armonică alternantă) este convergentă n ( ) n= deoarece şirul este descrescător şi convergent la 0. Fie (S n ) şirul sumelor parţiale al n seriei. Cum şirul x n =+ n n ln n, n N, este convergent la γ constanta lui Euler, avem S n+ = ( ) k k = x n+ + ln(n +) (γ n +lnn) = n+ k= n + = x n+ x n +ln, n de unde lim S n+ = γ γ +ln=ln. n Deoarece şirul (S n ) este convergent şi subşirul (S n+ ) are limita ln, rezultăcăşi şirul (S n ) are limita S =ln. Atunci, pe baza Corolarului 9.., putem scrie S n ln n +,n N, adică eroarea absolută prin care şirul (S n ) aproximează peln nu depăşeşte pe /(n +). 9.3 Serii absolut convergente. Serii semiconvergente Am văzut în Exemplul că seria armonică alternantă ( ) n este conver- n gentă în timp ce seria ( )n n = n= n= n=,adicăseria armonică, este divergentă (Exemplul n 9..). Acest exemplu ne permite să considerăm definiţiile de mai jos, care ne permit o clasificare a seriilor convergente. Definiţia 9.3. Seria a n se numeşte absolut convergentă, dacă seria a n este convergentă. ( ) n Exemplul Seria n este absolut convergentă. n= Propoziţia 9.3. Dacă seria a n este absolut convergentă, atunci seria a n este convergentă. Demonstraţie. Deoarece a n este absolut convergentă rezultăcă a n este convergentă. Atunci, conform cu criteriul lui Cauchy, pentru orice ε>0, există n ε N aşa încât, pentru orice n N, n>n ε şi orice n N,săavem a n+ + a n a n+p <ε. 76
176 Cum a n+ + a n a n+p a n+ + a n a n+p, obţinem că, pentru orice ε>0, există n ε N, astfel încât, pentru orice n N, n>n ε şi orice p N,areloc a n+ + a n a n+p <ε, adică seria a n satisface criteriul lui Cauchy, ceea ce ne arată căeaesteoserieconvergentă. Observaţia 9.3. Reciproca Propoziţiei 9.3. nu are loc. Există serii convergente pentru care seria valorilor absolute este divergentă; de exemplu, seria armonică alternantă. Definiţia 9.3. Seria a n se numeşte serie semiconvergentă sau condiţionat convergentă dacă seria a n este convergentă dar seria a n este divergentă. Exemplul Seria ( ) n este semiconvergentă. n= Observaţia 9.3. (Riemann). Dacă a n este o serie semiconvergentă, atunci există o permutare a termenilor săi astfel încât să se obţină: i) o serie convergentă cu suma un număr real dat; ii) o serie divergentă cusuma+ sau ; iii) o serie divergentă cuşirul sumelor parţiale fără limită (divergent, oscilant) (v. [3]). Această observaţie ne avertizează că în seriile semiconvergente trebuie să fim atenţi la schimbarea ordinii termenilor, deoarece putem obţine serii cu naturi diferite. Definiţia Fiind date seriile al celor două serii, serie a n şi n= b n se numeşte produs Cauchy sau de convoluţie n= c n în care c n = n= Exemplul Pentru seria c n, unde n= c n = n k= n= ( ) n n n a k b n k+. k= ( ) k ( ) n k =( ) n n n k + produsul de convoluţie cu ea însăşi este seria n n= k(n k +), n =,,... ( ) n Se observă în exemplul precedent că seria este convergentă, conform criteriului lui Leibniz, însă seria c n a produsului de convoluţieestedivergentă n= n deoarece c n = n k= k(n k +) n k= n n =, pentru orice n N,adică lim c n 0. n Teorema 9.3. (Mertens). Dacă două serii sunt convergente şi cel puţin una este absolut convergentă, atunci seria produs Cauchy al celor două serii este convergentă, iarsumasa este egală cu produsul sumelor celor două serii. 77
177 Demonstraţie. Fie seria sumelor parţiale, iar presupunem că a n = A şi n= b n = B, cu(a n ) şi (B n ) şirurile corespunzătoare ale n= c n seria produs de convoluţie, cu (C n ) şirul sumelor parţiale. n= a n este absolut convergentă. Avem n= C n = c + c c n = a b +(a b + a b ) (a b n + a b n a n b )= = a (b + b b n )+a (b b n )+...+ a n (b + b )+a n b = = a B n + a B n a n B + a n B. Deoarece seria b n este convergentă şi are suma B, şirul d n = B n B, n =,,..., n= este convergent. Acum putem scrie de unde (9.6) Cum seria C n = a (d n + B)+a (d n + B)+...+ a n (d + B) = B(a + a a n )+a d n + a d n =...+ a n d = = BA n + a d n + a d n a n d, C n A n B = a d n + a d n a n d. a n este convergentă rezultăcăşirul sumelor ei parţiale este mărginit, n= adică existăunm>0aşa încât n (9.7) a k <M, pentru orice n N. k= Din faptul că şirul (d n ) este convergent la 0, deducem că, pentru orice ε>0, există n ε N aşa încât, pentru orice n>n săavem (9.8) d n < ε M. Pe de altă parte, deoarece seria a n este convergentă avem că a n 0. Atunci, pentru orice ε>0 există n N aşa încât, pentru orice n N, n>n,săavem ε a n < ( d + d d n ). Acum, din (9.6), (9.7) şi (9.8), pentru orice n natural, n>n + n, avem C n A n B ( a d n + a d n a n n d n+)+ +( a n n+ d n a n d ) < < ε M ( a + a +... a n n )+ ε + ( d d n ) ( d n d ) < < ε M M + ε = ε Ceea ce ne arată că lim (C n A n B)=0. De aici, obţinem n ceea ce trebuia demonstrat. Să lim C n = lim A nb = A B, n n 78
178 9.4 Serii cu termeni pozitivi În paragraful precedent am văzut că oserie a n absolut convergentă esteşi convergentă. Cum în seria a n avem a n 0, n =,,...,rezultăcă prezintă interes să obţinem criterii de convergenţă pentru serii a n,cua n > 0, n =,, 3,... Definiţia 9.4. Oserie a n cu a n > 0, n =,, 3,...,senumeşte serie cu termeni pozitivi. n Teorema 9.4. (Criteriul mărginirii şirului sumelor parţiale). Seria cu termeni pozitivi an este convergentă dacă şi numai dacă şirul sumelor parţiale este mărginit. Demonstraţie. Dacă seria a n este convergentă, atunci şirul sumelor parţiale (S n ) este convergent şi, prin urmare, mărginit. Reciproc dacă şirul sumelor parţiale (S n ) este mărginit, observând că el este strict crescător (S n+ S n = a n+ > 0, n =,,...), deducem că el este convergent, ceea ce ne demonstrează căseria a n este convergentă. Criteriul mărginirii şirului sumelor parţiale ne va permite să obţinem condiţii suficiente pentru convergenţa seriilor cu termeni pozitivi. Teorema 9.4. (Criteriul de comparaţie a termenilor generali). Fie seriile cu termenii pozitivi a n şi b n astfel ca a n b n, pentru orice n N. i) Dacă b n este convergentă, n= atunci şi este divergentă. n= n= a n este convergentă; ii) Dacă n= a n n= este divergentă, atunci şi n= b n Demonstraţie. Fie A n = a + a a n şi B n = b + b b n pentru n N.Dina n b n rezultă (9.9) A n B n, pentru orice n N i) Dacă b n este convergentă, atunci şirul (B n ) este mărginit şi din (9.9) deducem că n= şirul (A n ) este mărginit, deci, conform criteriului mărginirii şirului sumelor parţiale, seria a n este convergentă. n= ii) Dacă seria n= a n este divergentă, atunci şirul (A n ) este divergent şi crescător; deci, şirul (B n ) este divergent şi crescător. Prin urmare, seria b n este divergentă. Observaţia 9.4. Criteriul de comparaţie al termenilor generali se păstrează şi dacă a n b n pentru orice n>n 0, n 0 N. Exemplul Seria, α R se numeşte seria armonică generalizată. nα n= Pentru α =seria este divergentă (Exemplul 9..4.). Dacă α<, atunci /n α > /n, pentruoricen N. Cum seria este divergentă, n n= n= 79
179 conform criteriului de comparaţie a termenilor generali obţinem că seria este divergentă pentru α<. Fie α R, α>. Avem de unde α + 3 α α = α 4 α + 5 α + 6 α + 7 α < 4 4 α < ( α ( t ) α + ( t +) α ( ( t ) α < α ) t ( n ) α = α, S t = t k= k α < k= ) t ( α ) k = ( α ) t < α α, α n= n α adică subşirul (S t ) al şirului sumelor parţiale (S n ) este mărginit. Cum şirul (S n ) este crescător şi pentru orice n N există unt N aşa încât n< t, deducem că şirul (S n ) este mărginit. Prin urmare, conform criteriului mărginirii sumelor parţiale rezultă că seria n= n α este convergentă pentruoriceα R, α>. Este bine de reţinut că seria armonică generalizată α> şi divergentă pentru α. Exemplul Seria este convergentă deoarece n(n + )(n +) n= <, n(n + )(n +) n 3 n= n α este convergentă pentru iar seria este convergentă fiind o serie armonică generalizată cuα =3/ >. n3/ Teorema (Criteriul de comparaţie al limitei raportului termenilor generali). Fie seriile a n şi b n cu termenii pozitivi. a n i) Dacă există lim = λ şi λ (0, ), atunci cele două serii au aceeaşi natură. n b n a n ii) Dacă lim =0, atunci dacă b n este convergentă rezultăcăşi a n este convergentă, iar dacă a n este divergentă rezultăcăşi b n este divergentă. n b n a n iii) Dacă lim =, atunci dacă a n este convergentă rezultăcăşi b n este convergentă, iar dacă b n este divergentă rezultăcăşi a n este n b n divergentă. a n Demonstraţie. i) Din lim = λ rezultă că, pentru orice ε>0, există n ε N, aşa încât, n b n pentru orice n>n ε,săavem a n λ b n <ε, de unde λ ε< a n b n <λ+ ε. 80
180 De aici, luând ε = λ/, găsim λ (9.0) b n <a n < 3 λ b n, pentru orice n>n λ/. Din (9.0), aplicând teorema 9.4., rezultă afirmaţia delai). ii) Dacă λ =0, atunci pentru orice ε>0, există n ε N, astfel încât să avem ε < a n /b n <ε,pentruoricen>n 0, de unde obţinem (9.) a n <εb n, pentru orice n>n 0. Aplicând criteriul de comparaţie a termenilor generali, din (9.) rezultă afirmaţia de la ii). iii) Dacă lim teoremei, obţinem afirmaţiile de la iii). Exemplul Seria n= cum n a n/b n =, atunci rezultă că lim n lim b n/a n =0, de unde, conform cu ii) al n ( n ) este divergentă deoarece, considerând seria n, n n n = lim n =ln> 0, n rezultă conform teoremei 9.4.3i), că seriadată are aceeaşi natură caşi seria armonică n, adică divergentă. Teorema (Criteriul raportului D Alembert). Fie seria numerică a n cu termeni pozitivi. Dacă a n+ λ<, pentru orice n N, atunci seria este convergentă, iar dacă a n a n+, pentru orice n N, atunci seria este divergentă. a n Demonstraţie. Dacă a n+ q<. atunci putem scrie a n a n = a a a a n... a q q...q = a a a a n }{{} q n, (n ) ori de unde a n a q n. Cum q<, rezultăcă seria geometrică n= aq n este convergentă, iar de aici, folosind criteriul de comparaţie, a termenilor generali, deducem că seria a n este convergentă, în acest caz. Dacă a n+, rezultăcăşirul de numere pozitive (a n ) este crescător, deci lim a a n =0. n n Utilizând Corolarul 9.., rezultă căseria a n este divergentă. Corolarul 9.4. Fie seria a n cu termeni pozitivi. Dacă exită i) dacă l<, seria a n este covnergentă; n= a n+ lim = l, atunci: n a n ii) dacă l>, seria a n este divergentă. a n+ Demonstraţie. i) Dacă lim = l<, atunci pentru orice ε, cu0 <ε< l, există n ε N n a n astfel ca, pentru orice n>ε,săavem a n+ l a n <ε, 8
181 de unde a n+ <l+ ε<, pentru orice n>n ε. a n Acum, folosind prima parte a Teoremei 9.4.4, obţinem că seria a n este convergentă. ii) În situaţia l>, procedând în mod analog, găsim a n+ >l ε>, pentru n>n ε a n De aici, utilizând a doua parte a Teoremei 9.4.4, deducem că seria a n este divergentă. Observaţia 9.4. Corolarul 9.4. nu este aplicabil în situaţia l =. apelat la alte metode pentru a preciza natura seriei de studiat. Exemplul Seria de numere reale n= 3 n n! n n, 3 n+ (n+)! (n+) n+ 3 n n! n n În acest caz, trebuie este cu termeni pozitivi. Vom studia natura ei utilizând criteriul raportului cu limită. Avem succesiv: ( ) n a n+ n lim = lim = lim n a 3 = n n n n + = 3 lim n ( n+ n ) n = 3 e Cum 3/e >, rezultăcă seria este divergentă. Teorema (Criteriul rădăcinii Cauchy). Fie seria a n cu termeni pozitivi. Dacă n an λ<. pentru n, atunci seria este convergentă, iar dacă n a n, pentrun, atunci seria este divergentă. Demonstraţie. Dacă n a n λ<, atunci avem a n =( n a n ) n λ n, pentru orice n. Cum seria geometrică λ n este convergentă deoarece λ<, conform criteriului de comparaţie a termenilor generali, rezultă căşi seria a n este convergentă. Dacă n a n, atunci a n, deci 0şi deci, pe baza Corolarului 9.., rezultă că seria a n este divergentă. lim n Corolarul 9.4. (Criteriul rădăcinii cu limită). Fie seria a n cu termeni pozitivi. Dacă există lim n an = l, atunci seria este convergentă pentru l< şi este divergentă pentru n l>. Demonstraţie. Dacă lim număr natural n ε,aşa încât n n an = l<, atunci pentru orice ε, cu0 <ε< l, existăun n a n l <ε, pentru n>n ε, de unde adică n an <l+ ε<, pentru n>n ε, a n < (l + ε) n, pentru n>n ε. 8
182 Cum seria geometrică (l + ε) n este convergentă, conform criteriului de comparaţie a termenilor generali, rezultă căseria a n este convergentă. Dacă l>, procedând în mod analog, găsim a n > (l ε) n, cu l ε>, pentru n>n ε, de unde obţinem că seria a n este divergentă. Exemplul Seria numerică ( ) n a n +, cu a>0, n= n + este cu termeni pozitivi. Utilizând criteriul rădăcinii cu limită, avem (a n + n lim n n + ) n a n + = lim =a. n n + Dacă a <, adică a</, atunci seria numerică dată este convergentă, iar dacă a >, adică a>/, atunci seria dată este divergentă. Dacă a =/ atunci termenul general al seriei este, ceea ce implică că seria este divergentă. Teorema (Criteriul Raabe Duhamel cu limită). Fie seria a n cu termeni pozitivi. Dacă ( ) lim n an = l, n a n+ atunci seria este convergentă când l> şi este divergentă când l<. Demonstraţie. Dacă l>, atunci pentru orice ε (0,l ) există n ε N aşa încât ( ) an n >l ε, pentru n>n ε, a n+ de unde (9.) (l ε) an+ <na n na n+, pentru n>n ε. Fără arestrânge generalitatea, putem considera că (9.) are loc pentru orice n N. Dând succesiv valorile,,...,n în (9.) obţinem (l ε)a <a a (l ε)a 3 < a 3a 3. (l ε)a n < (n )a n (n )a n, care adunate membru cu membru conduc la (9.3) (l ε)(a + a a n ) < <a + a a n (n )a n. Punând S n = a + a a n, n N, din (9.3) obţinem (l ε)(s n a ) <S n na n <S n, pentru orice n N, 83
183 de unde găsim S n < a (l ε) l ε, pentru orice n N, ceea ce ne arată căşirul sumelor parţiale este mărginit. Prin urmare conform cu criteriul mărginirii şirului sumelor parţiale, deducem că seria a n este convergentă. Dacă l<, atunci pentru orice ε (0, l) există n ε N astfel încât ( ) an n <l+ ε<, pentru orice n>n ε, a n+ de unde na n na n+ <a n+, n > n ε adică (9.4) na n < (n +)a n+, n > n ε. Fără amicşora generalitatea, putem presupune că (9.4) are loc pentru orice n N. Luând succesiv în (9.4) pentru n valorile,,...,n, obţinem a < a, a < 3a 3,...,(n )a n <na n, care înmulţite membru cu membru conduc la a <na n, de unde a n > n a. Cum seria armonică este divergentă, conform criteriului de comparaţie a termenilor generali, deducem că şi seria a n este divergentă. n Exemplul Fie seria numerică n= n (n ) n +. Să cercetăm natura acestei serii de termeni pozitivi. Notând cu a n termenul general al seriei, avem / a n n(n +) 4...n = a n (n +) n (n ) n + = n + = n +3. a n+ Cum lim =,rezultăcă nu putem preciza natura seriei cu ajutorul criteriului n a n raportului. Aplicăm criteriul Raabe Duhamel: ( ) ( ) lim n an n +3 = lim n a n n+ n n + = n = lim n n + = <, de unde rezultă căseriadată este divergentă. 84
184 9.5 Problemă economică. Fluxul de venit În problemele de capitalizare se pune problema: ce sumă trebuie investită ca după x ani să se obţină o sumă egală cu a, dacă se cunoaşte dobânda r% şi frecvenţa capitalizării ei. Să notăm cu S suma investită (ce trebuie aflată). Ea se numeşte valoarea prezentă şi scontată asumeia, disponibilă pestex ani. Dacă dobânda r% se capitalizează o dată pe an, atunci din aplicaţia economică din., rezultă că suma disponibilă pestex ani este S( + r) x. Atunci, din S( + r) x = a, rezultă a S = ( + r) x. Dacă dobânda s-ar capitaliza de n ori pe an, cu r%, atunci a S = ( ) + r nx. n În fine, dacă, dobânda s-ar adăuga continuu, cu r%, atunci S = ae rx. Parametrii de care depinde S sunt r şi n, care reprezintă dobânda şi frecvenţa capitalizării. Se observă că suma prezentă S este cu atât mai mică cu cât dobânda este mai mare şi cu cât se capitalizează mai des. Problema pusă se poate extinde astfel: dacă dorim să variem veniturile de la an la an cu valorile a 0,a,...,a m,adăugându-se în fiecare an dobânda r%,a tunci valoarea variaţiei venitului, numită flux de venituri, ar fi (9.5) a 0 + a +r + a ( + r) a m ( + r) m. Suma (9.5) se numeşte valoarea de capital a fluxului de venit. Ea este suma S ce trebuie investită pentru a obţine veniturile a 0,a,...,a m în anii următori. Se observă că dacă numărul anilor de capitalizare ar creşte indefinit, atunci suma (9.5) reprezintă o serie de tip geometric. Să considerăm acum un flux de venit în valoare a care începe în anul următor şi continuă timpden ani cu dobânda anuală r%. Atunci valoarea prezentă a fluxului va fi S = a +r + a ( + r) a ( + r) n = a +r (+r) n = a [ ( ) n ]. r +r +r Dacă fluxul de venit continuă indefinit, atunci valoarea prezentă se obţine prin trecere la limită, făcând n, adică suma seriei geometrice convergente a/( + r) n. Prin urmare, valoarea prezentă S a sumei a, care va fi capitalizată la nesfârşit, cu rata dobânzii r% anual, este a/r. n= 85
185 9.6 Test de verificare a cunoştinţelor nr. 8. Definiţi următoarele noţiuni: a) Serie numerică; b) Serie numerică convergentă; c) Suma unei serii numerice; d) Serie numerică semiconvergentă.. Enunţaţi: a) Criteriul lui d Alembert (raportului) pentru serii cu termeni pozitivi; b) Criteriul lui Cauchy (radicalului) pentru serii cu termeni pozitivi; c) Criteriul lui Raabe - Duhamel pentru serii cu termeni pozitivi; d) Criteriul lui Leibniz pentru serii alternante; e) Primul criteriu de comparaţie pentru serii cu termeni pozitivi. 3. Aflaţi suma seriei n u n cu u n = 4. Aflaţi suma seriei n n(n +). u n cu u n = n + n 3. n! 5. cercetaţi natura seriilor n u n cu: a) u n = nn n!, b) u n = an n! n n cu a>0, a e, c) u n = n n. 6. Să se studieze natura seriilor u n cu: n ( ) n n + a) u n =, 3n + [ ] n b) u n = (n + )(n + a) n cu a>0, c) u n = ( + ) n, n ( n 3 d) u n = n 3 n ) n Să se studieze natura seriei n u n, unde u n = n! (λ + )(λ +)...(λ + n) cu λ R. 8. Să se studieze natura seriilor 86
186 a) n u n cu u n = [ ] a (n ) (n) n n cu a R3. b) u n, cu u n = 3, folosind primul criteriu de comparaţie pentru serii cu n4 + n termeni pozitivi. c) u n cu: n i) u n = n α, α, ii) u n = n α, α. folosind criteriul general al lui Cauchy. 9. Să se studieze absolut convergenţa şi semiconvergenţa seriei numerice n u n cu: a) u n = ( )n n(n +), sin na b) u n = n, a R. 0. Să se studieze natura seriei u n cu: n a) u n =( ) n 3 n, b) u n =( ) n n n. 87
187 Indicaţii şi răspunsuri Testul nr S =. 4. S =4. 5. a) Serie divergentă; b) Serie divergentă pentru a>e, respectiv convergentă pentru a<e; c) Serie convergentă. 6. a) Pentru a < seria converge. Pentru a seria diverge; b) Serie convergentă; c) Serie convergentă; d) Serie convergentă. 7. Pentru λ > seria converge. Pentru λ seria diverge. 8. a) Pentru a seria diverge. Pentru a > seria converge; b) Se compară cuseria care converge, deci şi seria dată converge. n 4 3 n c) La (i) seria diverge iar la (ii) seria converge. 9. a) Serie semiconvergentă; b) Serie absolut convergentă, deci şi convergentă. 0. a) Serie absolut convergentă, deci şi convergentă; b) Serie convergentă. 88
188 Bibliografia aferentă capitolului: [] Acu, A.M., Acu D., Acu M., Dicu P., Matematici aplicate în economie - Volumul II, Editura ULB, Sibiu, 00. [] Donciu, N., Flondor, D., Algebră şi analiză matematică. Culegere de probleme, Editura Didactică şi Pedagogică, Bucureşti, 979. [3] Nicolescu, M., Dinculeanu, N., Marcus, S., Manual de analiză matematică, Vol.I, 96, Vol.II, 964, Editura Didactică şi Pedagogică, Bucureşti. [4] Olaru, V., Halanay, A., Turbatu, S., Analiză matematică, Editura Didactică şi Pedagogică, Bucureşti,
189 Capitolul 0 Funcţii între spaţii metrice Obiective: Prezentarea noţiunilor generale legate de funcţiile între spaţii metrice (în special cazurilor R n şi R). Rezumat: În acest capitol sunt introduse şi studiate noţiunile de vecinatate a unui punct într-un spaţiu metric, funcţie între spaţii metrice, limită a unei funcţii într-un punct, continuitatea funcţiilor între spaţii metrice. Conţinutul capitolului:. Vecinătate a unui punct. Funcţii între spaţii metrice 3. Limita unei funcţii într-un punct 4. Continuitatea funcţiilor între spaţii metrice 5. Test de verificare a cunoştinţelor 6. Bibliografia aferentă capitolului Cuvinte cheie: funcţie între spaţii metrice, vecinătate, limită, continuitate. 0. Vecinătatea unui punct Noţiunea de vecinătate a unui punct într-un spaţiu metric este fundamentală în setarea noţiunilor de limită şi de continuitate. Definiţia 0.. Fie (X, d) un spaţiu metric şi a un punct arbitrar din X şi r un număr real pozitiv. Mulţimea S(a, r) ={x X d(a, x) <r} se numeşte sferă (bilă) deschisă sau de centru a şi rază r, iar mulţimea S(a, r) ={x X d(a, x) r} se numeşte sferă (bilă) închisă de centru a şi rază r. Exemplul 0... Pentru X = R şi d(x, y) = x y, pentruoricex, y R. sfera deschisă S(a, r) ={x R : x a <r} =(a r, a + r) este intervalul deschis, centrat în a, iar sfera închisă S(a, r) ={x R : x a r} este intervalul închis [a r, a + r]. Exemplul 0... Pentru X = R, sfera închisă, şi respectiv deschisă, de centru (a, b) şi de rază r în raport cu metrica euclidiană d(x, y) = (x y ) +(x y ), unde x =(x,x ) şi 90
190 y =(y,y R ),sunt date, repectiv, în figurile 0... şi 0... Fig.0... Fig.0... Exemplul Pentru X = R şi d(x, y) = max{ x y, x y }, dacă x =(x,x ), y =(y,y ), sfera deschisă derază r şi centru x 0 =(a, b) R este trasată în figura 0..4., iar sfera închisă de aceeaşi rază şi acelaşi centru este trasată în figura Fig Fig Exemplul Dacă X = R 3 şi d(x, y) = (x y ) +(x y ) +(x 3 y 3 ), unde x = (x,x,x 3 ), y =(y,y,y 3 ), atunci sfera deschisă S(x 0,r) coincide cu interiorul sferei cu centrul în x 0 =(a, b, c) şi de rază r, iarsferaînchisă S(x 0,r) coincide cu mulţimea punctelor din R 3 aflate în interiorul sferei sau pe sfera de rază r şi centru x 0. Definiţia 0.. Fie spaţiul metric (X, d) şi x 0 un punct arbitrar din X. Numim vecinătate a punctului x 0 omulţime V (x 0 ) aspaţiului X pentru care există o sferă deschisă centrată în x 0,conţinută în V. Altfel spus, V (x 0 ) este vecinătate a lui x 0 dacă există r>0 aşa încât S(x 0,r) V (x 0 ). Propoziţia 0.. Fie (X, d) un spaţiu metric şi x 0 un punct arbitrar din X. Sunt valabile următoarele proprietăţi: ) dacă V (x 0 ) este o vecinătate a punctului x 0, atunci orice supramulţime a sa, V,este, de asemenea vecinătate a punctului x 0 ; ) dacă V (x 0 ) şi V (x 0 ) sunt două vecinătăţi ale punctului x 0,atunciV (x 0 ) V (x 0 ) este vecinătate a punctului x 0 ; 3) dacă V (x ) este o vecinătate a punctului x 0 atunci x 0 V (x 0 ); 4) dacă V (x 0 ) este o vecinătate a punctului x 0, atunci există o vecinătate W (x 0 ) apunctului x 0 astfel ca pentru orice y W (x 0 ) mulţimea V (x 0 ) să fie vecinătate a punctului y. 9
191 Demonstraţie. ) Cum V (x 0 ) este vecinătate a lui x 0 rezultă că există r > 0 aşa încât S(x 0,r) V (x 0 ). Dar atunci S(x 0,r) U, adică U este o vecinătate a lui x 0. ) Din faptul că V (x 0 ) şi V (x 0 ) sunt vecinătăţi ale lui x 0 rezultă căexistă r > 0 şi r > 0, aşa încât S(x 0,r ) V (x 0 ) şi S(x 0,r ) V (x 0 ). Considerând r = min(r,r ) se observă că S(x 0,r) V i (x 0 ), i =, ; deci S(x 0,r) V (x 0 ) V (x 0 ). Prin urmare, V (x 0 ) V (x 0 ) este o vecinătate a lui x 0. 3) Această proprietate rezultă din definiţia vecinătăţii lui x 0. 4) Cum V (x 0 ) este vecinătate a lui x 0 rezultă că există r > 0 aşa ca S(x 0,r) V (x 0 ). Considerăm W (x 0 ) = S(x 0,r). Dacă y W (x 0 ), întrucât d(y, x 0 ) < r, luând r aşa încât 0 <r <r d(y, x 0 ), avem S(y, r ) S(x 0,r) V (x 0 ). Într-adevăr, dacă z S(y, r), atunci d(y, z) <r şi ţinând seama de alegerea lui r,avemd(z,x 0 ) d(z,y)+d(y, x 0 ) <r +d(x 0,y) <r, ceea ce ne arată că z S(x 0,r). Prin urmare, S(y, r ) V (x 0 ),adicăv(x 0 ) este vecinătate pentru y W (x 0 ). Din demonstraţia proprietăţii 4) a Propoziţiei 0.., rezultă: Corolarul 0.. Orice sferă deschisă dintr-un spaţiu metric este vecinătate pentru orice punct al său. Teorema 0.. (Proprietatea de separaţie Hausdorff ). Dacă a şi b sunt două punctedis- tincte ale spaţiului metric (X, d),a tunci există o vecinătate V (a) a punctului a şi o vecinătate U(b) a punctului b astfel ca V (a) U(b) =. ( Demonstraţie. Cum a b, rezultă d(a, b) =k>0. Considerăm V (a) =S a, k ) şi U(b) = ( 3 S b, k ).EvidentcăV(a) şi U(b) sunt vecinătăţi respectiv ale punctelor a şi b. Vomarăta că 3 V (a) U(b) =Φ. Presupunem contrariul, adică există z V (a) U(b). Atunci avem d(a, z) < k 3 şi d(b, y) < k 3. Dar putem scrie k = d(a, b) d(a, z)+d(z,b) < k 3 + k 3 = k 3, de unde < 3, ceea ce evident este absurd. În concluzie, V (a) U(b) =Φ. Definiţia 0..3 O submulţime D a spaţiului metric (X, d) se numeşte mulţime deschisă în X fie dacă D =Φ, fie dacă D este o vecinătate pentru orice punct al său, adică dacă pentru orice x D există r>0 astfel ca S(x, r) D. Exemplu Orice sferă deschisă S(x 0,r) dintr-un spaţiu metric este o mulţime deschisă. Valabilitatea acestei afirmaţii rezultă din Corolarul 0... În particular, dacă luăm X = R cu metrica euclidiană, atunci orice interval de forma (x 0 r, x 0 + r), cur>0, esteomulţime deschisă. Exemplu În X = R cu metrica euclidiană, orice interval de forma (a, b), a<b,sau (a, + ) sau (,b), cua, b R, esteomulţime deschisă. Exemplul Mulţimile D = {(x, y) R <x<4, 3 <y<} şi D = {(x, y) R x +y 4} sunt deschise. Exemplul Mulţimea {x R 3 < x 4} nu este deschisă într-ucât (3, 4] nu este vecinătate pentru 4 (nici o sferă cu centrul în 4 nu este conţinută în (3, 4]). Propoziţia 0.. Fie (X, d) un spaţiu metric. Sunt valabile următoarele afirmaţii: ) Orice reuniune (finită sau infinită) de mulţimi deschise este o mulţime deschisă; ) Intersecţia a doua mulţimi deschise este o mulţime deschisă; 3) X este o mulţime deschisă; 4) Orice mulţime deschisă nevidă se poate reprezenta ca o reuniune de sfere deschise. 9
192 Demonstraţie. ) Fie (D i ) i I o familie oarecare de mulţimi deschise ale lui X şi fie D = i I D i. Dacă D =Φ, atunci D este deschisă pe baza Definiţiei Dacă D Φ,săconsiderăm un x D arbitrar. Atunci rezultă căexistă D i0 aşa încât x D i0. Cum D i0 este mulţime deschisă rezultăcă D i0 este vecinătate pentru x. Dar D i0 D şi atunci în conformitate cu proprietatea ) din Propoziţia 0.., obţinem că D este vecinătate a punctului x. Deoarece x a fost ales arbitrar rezultă că D esteomulţime deschisă. ) Fie D şi D două mulţimi deschise şi D = D D. Dacă D =Φ, atunci proprietatea este evidentă. Dacă D Φ, atunci fie x D arbitrar. Atunci x D şi x D. Cum D şi D sunt deschise, rezultă că D şi D sunt vecinătăţi ale punctului x. Folosim proprietatea ) din Propoziţia 0.., rezultă căşi D este vecinătate pentru punctul x. Cumx afostales arbitrar rezultă că D este o mulţime deschisă. 3) Este evidentă. 4) Fie D Φomulţime deschisă; atunci pentru orice x D există r x > 0 aşa încât S(x,r x ) D. Dar D = {x} S(x, r x ) D, de unde rezultă D = S(x, r x ), ceea ce trebuie demonstrat. x D x D Corolarul 0.. Intersecţia unui număr finit de mulţimi deschise este o mulţime deschisă. Justificarea acestui corolar rezultă din afirmaţia )delapropoziţia 0... Ointersecţie infinită demulţimi deschise poate să nu mai fie o mulţime deschisă. Se poate vedea acest fapt din exemplul următor. ( Exemplul În spaţiu metric X = R cu metrica euclidiană mulţimea D k = k, ) este k deschisă, pentru orice k N. Se observăcă D k = {0} carenuesteomulţime deschisă k= deoarece pentru orice r>0, intervalul( r, r) {0}. Definiţia 0..4 O submulţime H a spaţiului metric (X, d) se numeşte închisă dacă complementara C(X) =X H este deschisă. Exemplul Mulţimile X şi Φ sunt închise deoarece C(x) = Φ şi C(Φ) = X sunt deschise. Exemplul 0... Orice sferă închisă dintr-un spaţiu metric (X, d) este o mulţime închisă. Într-adevăr, fie S(x 0,r)={x X d(x, x 0 ) r} şi fie y C(S(x 0,r)) ales arbitrar. Dacă luăm 0 <r <d(y, x 0 ) r, atunci se observă că S(y, r ) C(S(x 0,r)), adică C(S(x 0,r)) este vecinătate pentru punctul y. În particular, pentru X = R intervalul închis [a, b], a, b R, a b este o mulţime închisă. Utilizând Propoziţia 0.. şi formulale lui Morgan rezultă valabilitatea următoarei propoziţii: Propoziţia 0..3 Dacă (X, d) este un spaţiu metric, atunci: ) Orice intersecţie de mulţimi închise ale lui X este o mulţime închisă; ) Orice reuniune finită demulţimi închise ale lui X este o mulţime închisă. Observaţia 0.. Un spaţiu metric conţine şi submulţimi care nu sunt nici deschise nici închise. De exemplu, dacă X = R cu metrica euclidiană, atunci un interval de forma [a, b) cu a, b R, a < b, nu este nici mulţime deschisă nici închisă. Nu este deschisă deoarece mulţimea [a, b) nu este vecinătate pentru punctul a şi nu este închisă deoarece complementara C([a, b)) = R [a, b) =(, a) [b, ) nu este mulţime deschisă, nefiind vecinătate pentru punctul b. Definiţia 0..5 Dacă A este o submulţime nevidă a spaţiului metric (X, d), numim diametrul mulţimii A, notat δ(a), elementul din R + =(0, ) (+ ) definit prin δ(a) =sup{d(x, y) x A, y A}. x X 93
193 Exemplul Dacă X = R este înzestrat cu metrica euclidiană şi A = {(x, y) R x, y<3}, atunci δ(a) = ( ) +(3 ) = 5. Definiţia 0..6 Fie A o submulţime nevidă a spaţiului metric (X, d). Spunem că A este o mulţime mărginită dacă δ(a) < +. Dacă δ(a) =+, atunci spunem că mulţimea A este nemărginită. Practic, pentru a arăta că o mulţime A este mărginită este suficient să rătăm că mulţimea {d(x, y) x, y A} este majorată. Propoziţia 0..4 O mulţime nevidă A (X, d) este mărginită dacă şi numai dacă există o sferă deschisă S(x 0,r). aşa încât A S(x 0,r). Demonstraţie. Fie A Φşi mărginită. Dacă A conţine un singur punct, atunci proprietatea este evidentă. Să presupunem că A conţine cel puţin două puncte. Considerăm x 0 şi x două puncte arbitrare diferite din A. Fie r R, r>d(x 0,x )+δ(a); evidentr>0. Pentru sfera S(x 0,r) avem A S(x 0,r) deoarece, pentru orice y A, avemd(y, y 0 ) <δ(a) <r. Reciproc, dacă există o sferă deschisă S(x 0,r) aşa încât A S(x 0,r), atunci δ(a) δ(s(x 0,r)) r, adică A este o mulţime mărginită. Definiţia 0..7 Fie A o submulţime nevidă aspaţiului metric (X, d). Un punct x 0 A este numit punct interior al mulţimii A dacă A este o vecinătate pentru x 0, dacă există r>0 aşa încât S(x 0,r) A. Definiţia 0..8 Mulţimea tuturor punctelor interioare mulţimii A se numeşte interiorul lui A şi se notează cuåsauint A. Exemplul Fie X = R spaţiul metric înzestrat cu metrica euclidiană, iar A =[a, b], A =[a, b), A 3 =(a, b], A 4 =(a, b) submulţimi ale lui X. Se observăcă: Å = Å = Å 3 = Å 4 = (a, b). Punctul a nu este interior lui A deoarece A nu este vecinătate pentru a. Teorema 0.. Mulţimea A nevidă din spaţiul metric (X, d) este deschisă dacă şi numai dacă A = Å. Demonstraţie. Să presupunem că A este deschisă; atunci pentru orice x A avem că A este ovecinătate a lui x, adică x Å. Cum totdeauna Å A, obţinem A = Å. Reciproc, dacă A = Å, atunci orice x A este punct interior lui A şi deci A este o vecinătate a lui x, ceea ce ne arată că A este deschisă. Definiţia 0..9 Fie A o submulţime nevidă a spaţiului metric (X, d). Un punct interior complementarei lui A se numeşte punct exterior mulţimii A, iarint C(A) se numeşte exteriorul lui A, notat prin Ext A. Definiţia 0..0 Fie A o submulţime a spaţiului metric (X, d) un element x 0 X se numeşte punct aderent mulţimii A dacă pentru orice vecinătate V (x 0 ) aluix 0 avem V A Φ. Definiţia 0.. Dacă A (X, d), mulţimea tuturor punctelor aderente mulţimii se numeşte aderenţa sau închiderea mulţimii A, notată cu A. Exemplul Orice punct al mulţimii A din Definiţia 0..0 este punct aderent al mulţimii A. Evident căavema A. Exemplul Pentru mulţimea A =(a, b) R, a, b R, a<b, punctele a, b sunt puncte aderente deoarece orice vecinătate a lor are puncte comune cu A. Avem A =[a, b]. Teorema 0..3 Mulţimea A din spaţiul metric (X, d) este închisă dacă şi numai dacă A = A. Demonstraţie. Să admitem că A este o mulţime închisă. Atunci conform Definiţiei 0..4, deducem că mulţimea C(A) este deschisă. Cum A A trebuie să arătăm că A A. Dar A A este echivalent cu C(A) C(A). Fie x C(A) arbitrar, cu C(A) deschisă. Atunci conform Definiţiei 0..3 rezultă că C(A) este vecinătate a lui X. Însă C(A) A =Φ, ceea ce implică x A, decix C(A). 94
194 Reciproc, să presupunem că A = A. Fie x C(A) =C(A); atunci x A, deciexistăo vecinătate V (x) a punctului x, cu proprietatea V (x) A =Φ. Rezultăcă V (x) C(A); de unde, pe baza proprietăţii ) din Propoziţia 0.., obţinem că C(A) este o vecinătate a punctului x. Cumx a fost ales arbitrar din C(A), deducem că C(A) este o mulţime deschisă, adică A este închisă. Definiţia 0.. Fie A o submulţime a spaţiului metric (X, d). Numim frontiera mulţimii A, notată cu A sau Fr A, mulţimea A C(A). Punctele mulţimii Fr A se numesc punctele frontieră ale mulţimii A. Este evident că Fr A = A Å. Exemplul Dacă A =[a, b], atunci Fr A = {a, b}. Exemplul Dacă A = Q, atunci A = Q = R, C(Q) =R şi Fr A = R. Exemplul Dacă A = R, atunci Fr A =Φ. Definiţia 0..3 O submulţime A a unui spaţiu metric X, d) se numeşte densă în X dacă X = A. Exemplul Mulţimea Q este densă în R (înzestrat cu metrica euclidiană) deoarece Q = R. La fel mulţimea numerelor iraţionale R Q este densă în R. Exemplul 0... Mulţimea Q n = Q Q... Q (de n ori) este densă în R. Definiţia 0..4 Un spaţiu metric (X, d) se numeşte separabil dacă conţine o submulţime A numărabilă şi densă în X. Exemplul 0... Spaţiul metric R înzestrat cu metrica euclidiană este separabil deoarece Q este mulţime numărabilă şi densă în R. Exemplul Spaţiu metric R n, n, înzestrat cu metrica euclidiană este separabil deoarece mulţimea Q n este numărabilă şi densă în R n. Definiţia 0..5 Fie A o submulţime a spaţiului metric (X, d). Un punct x X se numeşte punct de acumulare pentru mulţimea A dacă pentru orice vecinătate V (x) aluix are loc (V (x) {x}) A Φ, adică în orice vecinătate V (x) a punctului x se găsesc puncte din A, diferite de x. Mulţiema punctelor de acumulare ale mulţimii A se numeşte mulţimea derivată şi se notează cua. Observaţia 0.. Orice punct de acumulare este un punct aderent. Observaţia 0..3 În orice vecinătate a unui punct de acumulare x 0 se găseşte o infinitate de puncte din A. Într-adevăr, dacă propunem că există o vecinătate V (x 0 ) a punctului x 0 care să conţină numai un număr finit de puncte x,x,...,x n, diferite de x 0 şi aparţinând lui A, atuncialegând r aşa încât 0 <r< min λd(x 0,x i )}, sferas(x 0,r) nu mai conţine nici i=,n un punct din A diferit de x 0, ceea ce contrazice definiţia punctului de acumulare. Din această observaţie rezultă că o mulţime finită nu are puncte de acumulare. Definiţia 0..6 Fie A o submulţime a spaţiului metric (X, d). Un punct x A care nu este punct e acumulare pentru A se numeşte punct izolat. Altfel spus, un punct x A este izolat dacă există ovecinătate V (x) asaastfelîncât V (x) A = {x}. Exemplul Pentru mulţimea A =(0, ) {, 3} din R avem A =[0, ], iar punctele şi 3 sunt izolate. Teorema 0..4 (de caracterizare a punctelor aderente şi a punctelor de acumulare). Fie A o submulţime a spaţiului metric X, d). 95
195 ) un punct x X este aderent mulţimii A dacă şi numai dacă există un şir (x n ) de puncte din A astfel ca lim x n = x (în X). n ) Un punct x X este punct de acumulare al mulţimii A dacă şi numai dacă există un şir (x n ) de puncte din A astfel încât x n x, pentru orice n N, şi lim x n = x (în X). n Demonstraţie. ) Să presupunem că ( x A, adică este punct aderent pentru A. Atunci, pentru orice n N, sfera deschisă S x, ) are puncte comune cu A. Alegem câte un punct ( n x r A S x, ), pentru orice n N. Obţinem, astfel, şirul de puncte (x n ) din A cu n d (x n,x) < n,pentruoricen N. Din d(x n,x) < rezultă lim n d(x n,x)=0, ceea ce ne arată n că lim x n = x (în X). n Reciproc, dacă (x n ) este un şir de puncte din A, astfel încât lim x n = x (în X), atunci, n pentru orice ε>0, existăunn ε N astfel încât x n S(x, ε) de îndată cen>n ε. Rezultăcă pentru orice ε>0 avem S(x, ε) A Φ, ceea ce ne asigură că x A. ) Demonstraţia se face în acelaşi mod ca la punctul ), utilizând definiţia punctului de acumulare. Definiţia 0..7 Spaţiul metric (X, d) se numeşte compact, dacă orice şir din X conţine un subşir convergent. Definiţia 0..8 Mulţimea A din spaţiul metric (X, d) este compactă, dacă orice şir (a n ) din A conţine un subşir convergent către un punct x 0 din A. Altfel spus, mulţimea A din (X, d) este compactă dacă şi numai dacă spaţiul metric (A, d) este compact. Exemplul Mulţimea A =[a, b] R, a < b, este compactă întrucât, conform Lemei lui Cesàro (vezi Propoziţia (8..), orice şir de puncte din [a, b] conţine un subşir convergent şi cum [a, b] este închis, limita acestui subşir aparţine lui A. Exemplul Mulţimea A =(a, b] R, a<b, nu este compactă deoarece şirul x n = a + n nu conţine nici un subşir convergent la un punct din (a, b) (toate subşirurile lui x n converg la a care nu aparţine mulţimii A). Definiţia 0..9 Fie (X, d) un spaţiu metric arbitrar şi A o submulţime a sa. D = {D i D i X, i I} de părţi ale lui X se numeşte acoperire amulţimii A dacă O familie Dacă D D şi A D i D A i I D i. D i,spunemcă D este o subacoperire aluid. O acoperire D amulţimii A se va numi deschisă dacă elementele lui D sunt mulţimi deschise. Exemplul Fie A =(, ) R. Familia D formată din intervalele D i = (+ i ),, i =, 3,... formează o acoperire deschisă pentru A deoarece pentru orice x A există un i 0 N aşa încât + <x,adicăoricex A se află în cel puţin un interval D i. i 0 Propoziţia 0..5 (Lebesgue). Dacă A este o mulţime compactă în spaţiul metric (X, d) iar D = {D i i I} este o acoperire deschisă aluia, atunci există unε>0 aşa încât pentru orice x din A să existe un i I aşa ca S(x, ε) D i. 96
196 Demonstraţie. Vom proceda prin reducere la absurd. Să presupunem că A este compactă darpentruoriceε>0 există unx ε A aşa încât pentru orice i I, S(x ε,ε) D i. În particular, pentru ε =/n există x n A astfel încât pentru orice i I are loc ( S x n, ) (0.) D i. n Deoarece A este compactă, şirul (x n ) conţine un sub şir (x nk ) convergent la un punct x A. Cum D constituie o acoperire pentru A, existăomulţime D i0 Daşa încât x D i0. Mulţimea D i0 fiind deschisă existăosferădeschisă S(x, r) aşa ca (0.) S(x, r) D io Din lim x n k = x A rezultă căexistăunnumăr natural k 0 depinzând de r/ aşa ca k ( pentru orice k k 0 săavemx nk S x, r ),adică (0.3) d (x nk,x) < r. (0.4) Cum lim =0,existăunk (r) N aşa încât pentru orice k>k sărezulte k n k < r n k. Fie k = max{k 0,k }. Pentru orice k>k 0, din relaţiile (0.), (0.3) şi (0.4) obţinem ( ) S x nk, S(x, r) D i0, incluziune ce contrazice (0.). Cu aceasta teorema este demonstrată. n k Propoziţia 0..6 Dacă A este o mulţime în spaţiul metric (X, d), atunci pentru orice ε > 0 există o familie finită de sfere deschise cu raza ε care constituie o acoperire deschisă a mulţimii A. Demonstraţie. Vom raţiona tot prin reducere la absurd. Presupunem că A este o mulţime compactă in(x, d) aşa încât există unε>0 pentru care nu există o acoperire finită cusfere deschise de rază ε. Fie x A; atunci sfera S(x,ε) A. Alegem x A aşa încât x S(x,ε). Acum considerăm sferele S(x,ε) şi S(x,ε), pentru care A S(x,ε) S(x,ε). Prin urmare, există x 3 A aşa ca x 3 A şi x 3 S(x,ε), x 3 S(x,ε). Din aproape în aproape, construim şirul (x n ) de puncte din A aşa încât x n A, x n S(x i,ε), i =,n. De aici rezultă căavemd(x n,x i ) ε, i =,n, pentruoricen N. Prin urmare, şirul (x n ) astfel construit cere proprietatea că x n A pentru orice n N,dar (0.5) d(x n,x m ) ε, pentru orice n, m N, cu n m. Acum, se observă căşirul (x n ) nu poate conţine nici un subşir convergent, întrucât, dacă ar exista un asemenea subşir acesta ar trebui să fie şir Cauchy, ceea ce ar contrazice (0.5). Aşadar, şirul (x n ) nu poate conţine nici un subşir convergent, ceea ce contrazice faptul că A este o mulţime compactă. În concluzie enunţul teoremei este adevărat. 97
197 Teorema 0..5 O mulţime A dintr-un spaţiu metric (X, d) este compactă dacă şi numai dacă din orice acoperire deschisă a sa se poate extrage o subacoperire finită. Demonstraţie. Să considerăm că A esteomulţime compactă. Fie D = {D i i I} o acoperire deschisă amulţimii compacte A. Conform Propoziţiei 0..5 există ε>0 aşa încât pentru orice x A să existei I aşa ca (0.6) S(x, ε) D i. Din Propoziţia 0..6, pentru acest ε>0 există unnumăr finit de sfere cu raza ε care să acopere mulţimea A, adică n A S(x k,ε). Din (0.6) rezultă că S(x k,ε) D i,k,pentruoricek =,,...,n. Atunci A k= n D i,k, k= adică din acoperirea D aluia am extras o subacoperire finită D = {D i,k k =,n} a sa, ceea ce trebuia demonstrat. Reciproc, să admitem că din orice acoperire deschisă a mulţimii A se poate extrage o subacoperire finită. Vom raţiona prin reducere la absurd. Să presupunem că A nu este o mulţime compactă. Atunci, există unşir (x n ) A care nu conţine nici un subşir convergent, ceea ce înseamnă că mulţimea termenilor săi nu are nici un punct de acumulare. De aici, rezultă căpentruoricex A există osferă S(x, ε x ) care conţine cel mult un număr finit de termeni ai şirului (x n ) deoarece, în caz contrar, ar exista un subşir al lui (x n ) care să conveargă lax. Familia D = {S(y, ε y ) y A} constituie o acoperire deschisă pentru A. Deci, din D se poate extrage o subacoperire finită D = {S(y i,ε yi ) i =,m}. Cum (x n ) A D iar fiecare din sferele S(y i,ε yi ) conţine cel mult un număr finit de termeni ai şirului (x n ) rezultă căşirul (x n ) are un număr finit de termeni, ceea ce constituie o contradicţie. Prin urmare, mulţimea A este compactă. Teorema 0..6 Orice submulţime compactă a unui spaţiu metric este mărginită şi închisă. Demonstraţie. Să considerăm A o submulţime compactă aspaţiului metric (X, d). Mai întâi, să arătăm că A este mărginită. Să observăm că familia sferelor deschise D = {S(x, ) x A} formează o acoperire deschisă pentru A. Conform cu Teorema 0..5, cum A este compactă, se poate extrage o subacoperire finită D = {S(x i, ) x i A, i =,n}. Fie B = {x i i =,n}, care este finită şi diametrul său δ(b) <. Să considerăm acum x şi y două puncte arbitrare din A. Atunci există osferădeschisă S(x i, ) D, care conţine pe x şi, de asemenea, există sfera deschisă S(x j, ) aşa ca y S(x j, ). Utilizând inegalitatea triunghiului, obţinem d(x, y) d(x, x i )+d(x i,x j )+d(x j,y) < +d(x i,x j ) < +δ(b), pentru orice x, y din A. Aşadar, δ(a) +δ(b) < +, ceea ce ne arată că A este mărginită. Acum, să arătăm că A este închisă, ceea ce este echivalent cu C(A) =x A este deschisă. Fie x un punct arbitrar din C(A) şi fie y A. Cumx y, utilizând proprietatea de separaţie Hausdorff (Teorema 0..) a spaţiului metric (X, d) rezultă căexistă sferele deschise S(y, r y ) şi S(x, r x,y ) aşa încât (0.7) S(y, r y ) S(x, r x,y )=Φ. Familia D = {S(y, r y ) y A} este o acoperire deschisă pentru A şi cum A este compactă există o subacoperire finită asad = {S(y i,r yi ) i =,n} (Teorema 0..5). 98
198 Fiecărei sfere S(y i,r yi ) îi corespunde, pe baza lui (0.7), o sferă deschisă S(x, r x,yi ). n Fie r = min {r x,y i }; atunci S(x, r) = S(x, r x,yi ) iar S(x, r) A = Φ deoarece A i=,n i= n S(y i,r yi ) şi, din (0.7), avem S(x, r) S(y i,r yi )=Φ. Aşadar, S(x, r) C(A), adică C(A) i= este vecinătate pentru x. Cum x a fost ales arbitrar în C(A) rezultă că mulţimea C(A) este deschisă deoarece ea este vecinătate pentru orice punct al ei. Condiţiile ca mulţimea A să fiemărgnită şi închisă sunt necesare pentru ca A să fie compactă. Aceste două condiţii nu sunt, în general, suficiente pentru compactitatea unei mulţimii într-un spaţiu metric. Vom arăta că în spaţiile R n, n, înzestrate cu metrica euclidiană, aceste condiţii sunt şi suficiente. Mai întâi vom demonstra următorul rezultat general. Teorema 0..7 Dacă (X, d ) şi (Y,d ) sunt două spaţii metrice compacte, atunci şi spaţiul Z = X Y,înzestrat cu metrica din Propoziţia 8..6, este compact Demonstraţie. Fie (z n ) un şir arbitrar din Z, cuz n =(x n,y n ), x n X, y n Y, n =,,...Cum (X, d ) este compact, şirul (x n ) conţine un subşir (x nk ) k N convergent la x X. Considerând subşirul (y nk ) k N al şirului (y n ) şi ţinând seama că şi (Y,d ) este compact, rezultă căexistă un subşir (y nkt ) t N al său, convergent la un punct y Y. Ţinând seama de Teorema 8.. rezultă că lim z n t kt = lim (x nkt,y nkt )=(x, y), t ceea ce ne arată căspaţiul Z este compact. Propoziţia 0..7 Intervalul [a, b] din R, a<b, este o mulţime compactă. Demonstraţie. Dacă (x n ) este un şir arbitrar din [a, b], rezultăcă (x n ) este mărginit. Atunci, conform lemei lui Cesàro (Propoziţia 8..) el conţine un subşir (x nk ) convergent la un punct din R. Cum [a, b] este mulţime închisă rezultăcă x [a, b]. Deci, [a, b] este o mulţime compactă în R. Definiţia 0..0 Fie [a i,b i ], i =,n, n, n intervale ale lui R. Mulţimea P R n,unde se numeşte paralelipiped închis în R n. P =[a,b ] [a,b ]... [a n,b n ], Propoziţia 0..8 Orice paralelipiped închis din R n, n, este o mulţime compactă. Demonstraţie. Valabilitatea propozoţiei rezultă imediat, utilizând Teorema 0..7 şi Propoziţia Acum putem demonstra: Teorema 0..8 O submulţime A aluir n mărginită şi închisă. (n ) este compactă dacă şi numai dacă este Demonstraţie. Dacă A este compactă, atunci pe baza Teoremei 0..6, deducem că ea este marginită şi închisă. Reciproc, să admitemcă submulţimea A aluir n este mărginită şi închisă şi să arătăm că este compactă. Cum A este mărginită, există un paralelipiped închis P aşa încât A P. Fie (x n ) un şir abritrar în A; atunci el este şi în P şi cum P este o mulţime compactă rezultă căexistăunsubşir (x nk ) convergent la un punct x P. Dar x este punct aderent mulţimii A şi cum A este închisă rezultăcă A = A (Teorema 0..3). Deducem că x A şi 99
199 deci A este compactă. În finalul acestui paragraf vom introduce noţiunea de conexitate, care, intuitiv, descrie faptul că o mulţime este formată dintr-o bucată, adică nu poate fi descompusă în două sau mai multe părţi separate. Definiţia 0.. Spaţiul metric (X, d) se numeşte conex dacă nu există două mulţimi D, D deschise, nevide şi disjuncte astfel ca X = D D. În caz contrar spaţiul (X, d) se numeşte neconex sau disconex. Deoarece D = C(D ) şi D = C(D ),rezultăcămulţimile D şi D sunt, în acelaşi timp, şi inchise, rezultând imediat următorul rezultat: Propoziţia 0..9 Într-un spaţiu metric (X, d) următoarele afirmaţii sunt echivalente: ) (X, d) exte conex; ) Nu există două mulţimi închise F şi F, nevide şi disjuncte, aşa încât X = F F ; 3) Singura mulţime nevidă din X simultan deschisă şi închisă este întreg spaţiul X. Definiţia 0.. O submulţime A aspaţiului metric (X.d) este conexă dacă (A, d) este un spaţiu metric conex. Altfel spus, A este conexă dacă nu există două mulţimi deschise în X, cu proprietăţile: ) D A Φ, D A Φ ) A D D 3) D D A =Φ. Exemplul Orice interval al lui R este o mulţime conexă. Să demonstrăm acest fapt. Presupunem contrariul; adică existăunintervala R care este o mulţime neconexă. Conform Definiţiei 0.., există douămulţimi deschise, nevide, D şi D în R aşa încât D D = A; D D =Φ. Există punctele a D şi b D, a b (putem presupune că a<b). Cum A este interval rezultă căşi [a, b] este interval şi [a, b] A. Notăm c = sup(d [a, b]). Cum D este, în acelaşi timp, închisă în A rezultă că c D. Însă b D şi deci c D [a, b), adică c b, deoarece, în caz contrar, c = b D, ceea ce ar conduce la c D D, lucru absurd. Aşadar, c D [a, b) şi D fiind deschisă în A există ε>0 astfel încât c + ε D [a, b), ceea ce contrazice faptul că sup(d [a, b)) = c. Prin urmare, presupunerea făcută estefalsă, rezultând că A este conexă. Observaţia 0..4 Are loc şi reciproca pentru afirmaţia din exemplul 0..8: orice submulţime nevidă şi conexă a lui R este un interval. Vom raţiona prin reducere la absurd. Să admitemcăexistăomulţime A R conexă, care nu este interval. Atunci există trei puncte x, x, x 3 din R aşa încât x,x 3 A, x < x <x 3,iarx A. Considerăm mulţimile D =(,x ) A şi D = A (x, + ). Evident că D şi D sunt închise în A, D D = A şi D D =Φ. Prin urmare, A este o mulţime neconexă, ceea ce constituie o contradicţie. Aşadar, A este un interval. Exemplul În spaţiul metric R mulţimea A = (, ) (3, 4) este neconexă. Întradevăr, mulţimile D =(, ) şi D =(3, 4) sunt deschise, A = D D,iarD D A =Φ, D A =(, ) Φ, D A =(3, 4) Φ. Definiţia 0..3 O mulţime deschisă şi conexă se numeşte domeniu. O mulţime închisă şi conexă se numeşte continuu. Exemplul O sferă deschisădinr m este un domeniu, iar una închisă este un continuu. 00
 A sau funcţie reală dem variabile reale şi se notează prin y = f(x) sau y = f(x,x,...,x m ). Este evident că valorile y ale funcţiei y = f(x,x,...,x m ) depind de cele m variabile.")

200 0. Funcţii între spaţii metrice Definiţia 0.. Fie (X, d ) şi (Y,d ) două spaţii metrice. O apliacţie f : A B, A X şi B Y,se numeşte funcţie definită între două spaţii metrice. Definiţia 0.. Dacă X = R m, m N, m şi Y = R, atuncifuncţia f : A R, A R m,se numeşte funcţie reală deovariabilă vectorială x =(x,x,...,x m ) A sau funcţie reală dem variabile reale şi se notează prin y = f(x) sau y = f(x,x,...,x m ). Este evident că valorile y ale funcţiei y = f(x,x,...,x m ) depind de cele m variabile. Din punct de vedere sistemic variabilele independente x,x,...,x m reprezintă mărimi ce pot fi controlate sau precizate, numite date de intrare, iar variabila dependentă y precizează valoarea rezultată prin acţiunea lui f asupra datelor de intrare şi se numeşte datadeieşire (v.fig.0..). Fig.0.. Observaţia 0.. Funcţiile reale de mai multe variabile se mai numesc şi funcţii scalare sau câmpuri scalare. Graficul unei funcţii reale de m variabile reale, definită peomulţime A R m,este omulţime de puncte din R m+, ceea ce face să avem o imagine geometrică numai pentru m. Astfel, dacă m =atunci funcţia y = f(x), x A R are ca şi grafic o curbă plană, iar dacă m =funcţia reală f : A R R, y = f(x,x ) are ca şi grafic o suprafaţă (Σ) în spaţiul R 3 (v.fig.0..). Fig.0.. Definiţia 0..3 Dacă X = R m şi Y = R p,ofuncţie f : A B, A X, B Y,senumeşte funcţie vectorială de variabilă vectorială. 0
201 Dacă x =(x,...,x m ) A iar y =(y,...,y p ) B, atunci funcţia vectorială poate fi scrisă iar desfăşurat: y = f(x), (y,...,y p )=(f (x,...,x m ),f(x,...,x m ),...,f p (x,...,x m )) unde f i, i =,p, sunt funcţii de m variabile reale definite pe A cu valori în R. Funcţiile y i = f i (x,x,...,x m ), i =,p se numesc componentele funcţiei vectoriale f. Rezultă că studiul unei funcţii vectoriale se reduce la studiul unor funcţii reale de mai multe variabile reale. Cazuri particulare Dacă p =, atunci funcţia vectorială devariabilă vectorială se reduce la o funcţie reală de mai multe variabile reale Dacă p =şi m =, atunci funcţia vectorială are forma (y,y )=(x, y) = f(t) =(f (t),f (t)), t A R, de unde x = f (t), y = f (t), t A, care constituie reprezentarea parametrică a unei curbe plane Γ (v.fig.0..3). Fig Dacă p =3şi m =, atunci funcţia vectorială are forma (y,y,y 3 )=(x, y, z) = f(t) =(f (t),f (t),f 3 (t)),t A R, de unde x = f (t),y = f (t),z = f 3 (t),t A, care constituie reprezentarea parametrică a unei curbe în spaţiu Dacă p =3şi m =, atunci funcţia vectorială are forma (y,y,y 3 )=(x, y, z) = f (u, v) = =(f (u, v),f (u, v),f 3 (u, v)), (u, v) A R, de unde x = f (u, v),y = f (u, v),z = f 3 (u, v), (u, v) A, care constituie reprezentarea parametrică a unei suprafeţe în spaţiu (v.fig.0..4). 0
202 Fig Dacă p =3şi m =3, atunci o astfel de funcţie vectorială senumeşte câmp vectorial. De obicei, modelele matematice utilizate în descrierea fenomenelor economice se descriu prin funcţii reale de mai multe variabile reale. Exemplul 0... Funcţia de producţie. O problemă desîntâlnită în practica economică se referă la condiţiile de combinare a factorilor pentru producerea unui produs Y de către o întreprindere: Dacă condiţiile tehnice ale producţiei sunt date, cantitatea y din produsul Y realizată depinde numai de factorii variabili ai producţiei folosiţi X,X,...,X m. Dacă x,x,...,x m sunt cantităţile folosite din aceşti factori, atunci putem scrie funcţia de producţie y = f(x,x,...,x m ), care este o funcţie de m variabile reale. Exemplul 0... Funcţia cererii. Să presupunem că n mărfuri de consum Y,Y,...,Y n se vând la preţuri invariabile x,x,...,x n pe o piaţă cu concurenţă, care constă dintr-un număr de consumatori, cu gusturi şi venituri date. În această situaţie cantitatea y k de marfă Y k, k =,n, cerută pepiaţă depinde numai de preţurile tuturor mărfurilor de pe piaţă. Aceasta înseamnă că funcţia cererii pentru marfa Y k este y k = f k (x,x,...,x n ), care este o funcţie de n variabile. Funcţia cerere pentru toate cele n mărfuri va fi o funcţie vectorială (y,y,...,y n )=(f (x,...,x n ),...,f n (x,...,x n )). În practică, între funcţiile cerere y k = f k (x,...,x n ), k =,n, se studiază anumite corelaţii. Exemplul Funcţia costurilor de producţie. Să admitemcăoîntreprindere produce mărfurile X,X,...,X n în condiţii tehnice de producţie şi condiţii de aprovizionare date. Atunci funcţia costurilor de producţie este y = f(x,...,x n ), unde x,x,...,x n sunt cantităţile de mărfuri λ,λ,...,λ n produse, iar y este costul total. Pentru comoditate, în cazul a două mărfuri X şi Y funcţia costurilor se poate lua de forma particulară z = ax + by + cxy + dx + ey + f. 03
203 0.3 Limita unei funcţii într-un punct Fie (X, d ) şi (X, d ) două spaţii metrice, F : A Y, A X, o funcţie şi x 0 un punct de acumulare al mulţimii A (x 0 A ). Definiţia 0.3. (cu vecinătăţi.) Spunem că funcţia f are limită în punctul x 0, dacă există un punct l Y astfel încât, pentru orice vecinătate U(l) aluil, există o vecinătate V (x 0 ) aşa încât, pentru orice x V (x 0 ) A {x 0 },să avem f(x) U(l), adică Scriem lim x x 0 f(x) =l. f(v (x 0 ) A {x 0 }) U(l). Intuitiv noţiunea de limită a funcţiei f în punctul x 0 exprimă faptul că dacă ne apropiem de x 0 prin puncte din mulţimea A, atunci valorile funcţiei în aceste puncte se apropie oricât de mult de punctul l din Y. Teorema 0.3. (de caracterizare a noţiunii de limită.) Fie f : A (Y,d ),undea (X, d ) şi x 0 A. Atunci următoarele afirmaţii sunt echivalente: ) l este limita funcţiei f în punctul x 0 (definiţia cu vecinătăţi); ) pentru orice sferă deschisă S Y (l, ε) din spaţiul metric Y există o sferă deschisă S X (x 0,δ ε ) din spaţiul metric X astfel încât, pentru orice x S X (x 0,δ ε ) A {x 0 } să avem f(x) S Y (l, ε) (definiţia cu sfere); 3) pentru orice ε>0 există δ ε > 0 astfel încât pentru orice x A {x 0 } cu d (x, x 0 ) <δ ε să avem d (f(x),l) <ε (definiţia cu ε şi δ); 4) pentru orice şir convergent de puncte din A {x 0 } cu lim x X n = x 0 sărezulte lim f(x n) = Y n n l (definiţia cu şiruri sau definiţia lui Heine) Demonstraţie. Să arătăm mai întâi că din ) rezultă ). Luăm U(l) =S Y (l, ε), unde ε>0 este arbitrar. Conform cu ), există ovecinătate V (x 0 ) aşa încât, pentru orice x V (x 0 ) A {x 0 } să avemf(x) U(l). Cum V (x 0 ) este o vecinătate pentru x 0,existăosferădeschisă S X (x 0,δ ε ) V (x 0 ). Atunci pentru orice x S X (x 0,δ ε ) A {x 0 } avem f(x) U(l) =S Y (l, ε), adică )esteîndeplinită. Acum să arătăm că din ) rezultă 3). Pentru aceasta este suficient să exprimăm sferele şi condiţiile de la ) prin inegalităţi. Să demonstrăm acum că din 3) rezultă 4). Fie (x n ) un şir de puncte din A { x 0 } cu lim n x n X = x 0. Din 3) rezultă că, pentru orice ε>0, există δ ε > 0 aşa încât, pentru orice x A {x 0 } cu d (x, x 0 ) <δ ε săavemd (f(x),l) <ε. Cum lim x X n = x 0,existăunn δε N aşa n ca pentru orice n N, n>n δε sărezulted (x n,x 0 ) <δ ε. Atunci d (f(x),l) <εpentru orice n N, n>n δε = n ε. Aşadar, pentru orice ε>0 există n ε N aşa încât pentru orice n N, n>n ε săavemd (f(x n ),l) <ε,adică lim f(x n)=l, ceea ce trebuia demonstrat. n Demonstraţia teoremei este încheiată dacăarătăm că din 4) rezultă ). Vomraţiona prin reducere la absurd. Să presupunem că existăovecinătate U(l) aluir astfel ca, oricare ar fi V (x 0 ) ovecinătate a lui x 0,săexistex V(x 0 ) A {x 0 } pentru care f(x) U(l). ( Pentru orice n N luăm V (x) =S x 0, ). Atunci există x n V (x 0 ) A {x 0 } cu n ( x n x 0 aşa încât f(x n ) U(l). Cum x n S x 0, ), avem d X (x n,x 0 ) <, oricare ar fi n n n N. De aici rezultăcă lim x n = x 0. Conform cu 4), deducem că lim f(x n)=l; atunci n n există n N aşa încât pentru orice n N, n>n săavemf(x n ) U(l), ceea ce contrazice f(x n ) U(l). Prin urmare, presupunerea făcută estefalsăşi deci din 4) rezultă ). 04
204 Observaţia 0.3. Afirmaţiile ) 4) din teorema 0.3. fiind echivalente logic, rezultă că oricare din ele poate fi luată ca definiţie a limitei unei funcţii într-un punct. În continuare, noi vom folosi mai mult definiţia cu şiruri deoarece ne va permite ca să obţinem proprietăţile limitelor de funcţii din proprietăţile limitelor de şiruri. Observaţia 0.3. Definiţia limitei cu şiruri a limtiei unei funcţii într-un punct se utilizează la a dovedi că ofuncţie nu are limită într-un punct. Pentru aceasta este suficient să găsim un şir (x n ), (x n ) A {x 0 },cu lim x n = x 0 aşa încât lim f(x n) să nu existe sau să aflăm n n două şiruri (x () n ) şi (x () n ) din A {x 0 }, ambele convergente la x 0,pentrucareşirurile (f(x () n )) şi (f(x () n )) să aibă limite diferite în Y. Teorema 0.3. Fie spaţiile metrice (X, d ) şi (Y,d ), A X, x 0 A şi f : A Y ofuncţie. Dacă f are limită în x 0, atunci această limită este unică. Demonstraţie. Valabilitatea afirmaţiei rezultă aplicând definiţia cu şiruri a limitei unei funcţii într-un punct şi ţinând seama că limita unui şir de puncte dintr-un spaţiu metric este unică. Teorema Fie f : A R p, A R m, m, p, funcţia vectorială f =(f,f,...,f p ), unde f i : A R, i =,p şi x 0 A. Atunci f are limita l =(l,l,...,l p ) în punctul x 0 dacă şi numai dacă există lim f i (x) =l i, i =,p. x x 0 Demonstraţie. Afirmaţia rezultă imediat folosind definiţia limtiei unei funcţii cu şiruri şi faptul că în R n convergenta unui şir de elemente este echivalentă cu convergenţa pe coordonate (v.teorema 8..). Observaţia Din Teorema rezultă că studiul limitei funcţiilor vectoriale se reduce la studiul funcţiilor reale de mai multe variabile reale f : A R, A R m. prin Dacă x 0 =(a,a,...,a m ) A se obişnuieşte a nota lim x a x a. xm am f(x,x,...,x m ) lim f(x), x =(x,x,...,x m ) R m, x x 0 Utilizând cele demonstrate la şiruri pentru funcţiile care iau valori reale rezultă: Teorema Fie f,g : A R, unde A (X, d) şi x 0 A. Dacă există lim f(x) =l şi x x 0 lim f(x) =l,cul,l R, atunci există x x 0 ) lim (f + g)(x) şi valoarea ei este l + l ; x x 0 ) lim (f + g)(x) şi valoarea ei este l l ; x x 0 3) lim x x 0 f(x) şi valoarea ei este l l, dacă l 0 şi g(x) 0 pentru x A. Observaţia Dacă l,l R, atunci pot să apară aşa numitele operaţii fără sens, care se elimină prin diferite metode. Observaţia Fie f : A (Y,d), cua R, ofuncţie şi x 0 A. Dacă există x x0 lim f(x) = x<x 0 l s (respectiv x x0 lim f(x) =l d ), atunci spunem că f are limită lastânga (respectiv limită la x>x 0 dreapta) în punctul x 0. Limitele la stânga şi la dreapta într-un punct poartă numele de limită laterală. 05
205 Se arată că f are limită în punctul x 0 dacă şi numai dacă existăatât limita la stânga l s cât şi limita la dreapta l d în punctul x 0 pentru f şi lim f(x) =l s = l d. x x 0 Exemple Să calculăm ( x + x 3 ) a) l = lim, ( + x) x,x + x + x 0 x b) l = lim x 0 y 0 a) Avem de unde l =(0,e, ). b) Pentru l avem şi ( x y +, ( + xy) xy, x + x + y lim x 0 y 0 ) x + x 3 x + x lim = lim =0; x 0 x x 0 lim ( + x) x = lim [( + x) x ] = e ; x 0 x 0 lim (x + y + ) = ; lim x 0 y 0 x y x =0, deoarece + y de unde l =(,e,0) Să searatecă f(x, y) = xy ( x + y de puncte z n = n, α n adică limita şirului (0, 0). x 0 y 0 ( + xy) xy = e x y x + y x y x = y, nu are limită în punctul (0, 0) = θ. Considerăm şirul ), α R şi convergent la θ =(0, 0). Avem f ( n, α ) = n α n +α, n + α = α n ( ( f n, α )) depinde de α, de unde rezultă că funcţia f nu are limită în n 0.4 Continuitatea funcţiilor între spaţii metrice În acest paragraf vom adânci studiul ideii intuitive de apropiere a valorilor unei funcţii de valoarea ei într un punct dat x 0 de îndată ce valorile argumentului sunt suficient de aproape de x 0. Fie (X, d ) şi (Y,d ) două spaţii metrice şi f : A Y o funcţie, unde A X este o submulţime a lui X. Definiţia 0.4. (cu vecinătăţi.) Spunem că funcţia f este continuă în punctul x 0 A dacă pentru orice vecinătate U(f(x 0 )) aluif(x 0 ) există ovecinătate V (x 0 ) aluix 0 aşa încât pentru orice x V (x) A să avem f(x) U(f(x 0 )). Dacă funcţia f nu este continuă în punctul x 0 A, atunci spunem că funcţia f este discontinuă în punctul x 0 sau că x 0 este punct de discontinuitate afuncţiei f. Teorema 0.4. Funcţia f : A Y, A X, este continuă în punctul x 0 A dacă şi numai dacă are loc una din situaţiile: i) sau x 0 este punct izolat; 06
206 ii) sau x 0 estepunctdeacumularepentruaşi lim f(x) =f(x 0 ). x x 0 Demonstraţie. i) Într-adevăr, în orice punct izolat al domeniului de definiţie o funcţie este continuă. Fie x 0 un punct izolat pentru mulţimea A; atunciexistăovecinătate V (x 0 ) asa,aşa încât V (x 0 ) A = {x 0 }. Acum, rezultă că pentru orice vecinătate U(f(x 0 )) există ovecinătate V (x 0 ) astfel încât, pentru orice x V (x 0 ) A, săavemf(x) U(f(x 0 )). ii) Să admiteacă f este continuă în punctul x 0. Atunci pentru orice vecinătate U(f(x 0 )) există o vecinătate V (x 0 ) a lui x 0 aşa încât pentru orice x V (x 0 ) A să avem f(x) U(f(x 0 )). Evident că această afirmaţie are loc şi pentru x x 0, ceea ce implică lim f(x) =f(x 0 ). x x 0 Reciproc, dacă presupunem că lim f(x 0 )=f(x 0 ), atunci pentru orice U(x 0 ),existăo x x 0 vecinătate V (x 0 ) aşa încât, pentru orice x V (x 0 ) (A {x 0 }) să avemf(x) U(f(x 0 )). Cum pentru x = x 0 A avem evident f(x 0 ) U(f(x 0 ),rezultăcăpentruoricex V(x 0 ) A avem f(x) U(f(x 0 ))), ceea ce ne arată că f este continuă în x 0. Observaţia 0.4. Dacă x 0 este punct de acumulare din A şi funcţia f este continuă în x 0, atunci putem scrie ( ) lim f(x) =f lim x, x x 0 x x 0 ceea ce ne spune că operaţia de trecere la limită este permutabilă cufuncţiaf. Teorema 0.4. (de caracterizare a continuităţii în punct). Fie f : A (Y,d ) o funcţie, unde A (X, d ) şi x 0 A. Atunci următoarele afirmaţii sunt echivalente: ) f este continuă în punctul x 0 (definiţia cu vecinătăţi 0.4.) ) pentru orice sferă deschisă S Y (f(x 0 ),ε) din spaţiul metric Y, există o sferă deschisă S λ (x 0,δ ε ) din spaţiul metric X astfel încât, pentru orice x S X (x 0,δ ε ) A să avem f(x) S Y (f(x 0 ),ε) (definiţia cu sfere); 3) pentru orice ε>0 există δ ε > 0 astfel încât pentru orice x A cu d (x, x 0 ) <δ ε,să avem d (f(x),f(x 0 )) <ε(definiţia cu ε şi δ); 4) pentru orice şi convergent de puncte din A cu lim x X n = x 0 sărezulte lim f(x n) = Y f(x 0 ) n n (definiţie cu şiruri). Demonstraţie. Valabilitatea teoremei rezultă imediat din Teorema 0.3. de caracterizare anoţiunii de limită. Teorema Fie f : A R p, A R m, m, p, funcţia vectorială f =(f,f,...,f p ), unde f i : A R, i =,p şi x 0 A. Atunci f este continuă în punctul x 0 A, dacă şi numai dacă funcţiile f i sunt continue în x 0, i =,p. Demonstraţie. Utilizând Teoremele 0.4. şi 0.3.4, rezultă imediat valabilitatea celor afirmate în enunţul teoremei. Definiţia 0.4. Fie f : A (Y,d ), unde A (X, d ), o funcţie. continuă ped dacă f este continuă în orice punct din D. Zicem că funcţia f este 07
207 Exemple Fie (X, d) un spaţiu metric şi k un element fixat din X. Funcţia f : X X, X f(x) =k, oricare ar fi x X, este continuă pex deoarece dacă x 0 X şi x n x0, atunci f(x n ) X k = f(x 0 ),adicăestesatisfăcută definiţia cu şiruri a continuităţii în x Fie X :(X, d) (X, d) aplicaţia identică, adică X (x) =x, oricare ar fi x X. Atunci X este continuă pex. Într-adevăr, să considerăm un x 0 X arbitrar; atunci pentru orice şir (x n ) X cu lim x X n = x 0 avem lim x(x n ) = X lim x X n = x 0 = X (x 0 ), ceea ce ne arată că X n n n este continuă în x (Continuitatea funcţiilor compuse.) Fie (X, d ), (Y,d şi (Z, d 3 ) trei spaţii metrice şi fie funcţiile f : X Y, y : Y Z. Dacă f este continuă în x 0 X şi g este continuă în f(x 0 ) Y, atunci g f este continuă în x 0. Folosim definiţia cu şiruri a continuităţii. Fie (x n ) un şir arbitrar din X cu lim x X n = x 0. n Din continuitatea lui f în x 0 rezultă lim f(x n) = Y f(x 0 ). Acum, ţinând seama de continuitatea n lui g în f(x 0 ),obţinemcă lim g(f(x n)) = Z g(f(x 0 )), adică lim (g f)(x n) =(g Z f)(x 0 ), ceea ce n n ne arată că g f este continuă în x 0 X (Prelungirea prin continuitate). Fie (X, d ) şi (Y,d ) două spaţii metrice, A X şi x 0 un punct de acumulare din A. Dacă f : A {x 0 } Y este o funcţie definită pea {x 0 }, atunci am putea prelungi funcţia f la mulţimea A în diferite moduri atribuindu-i lui f o valoarea arbitrară în x 0. Dacăexistă lim f(x) = Y l Y, am putea considera funcţia x x 0 care este, evident, o prelungire a lui f pe A. Deoarece f : A Y, f(x) = { f(x), dacă x A {x0 }, l,dacă x = x 0, lim x x 0 f(x) =l = f(x0 ), rezultă că f este continuă în x 0. Funcţia f ataşată funcţiei f poartă numele de prelungirea funcţiei f prin continuitatea în punctul x (Funcţii continue cu valori reale). Fie f,g :(X, d) R funcţii continue şi λ R. Atunci: ) f + g, λf şi fg sunt continue pe X; ) f g : X {x X g(x) =0} R este continuă pex {x X g(x) =0}; 3) f este continuă pe X. Pentru a demonstra aceste afirmaţii să observăm mai întâi că dacă x 0 este punct izolat, atunci valabilitatea celor trei afirmaţii rezultă din teorema 0.4., punctul i). Dacă x 0 este punct de acumulare atunci afirmaţiile ) şi ) rezultă din teorema 0.3.4, utilizând definiţia cu şiruri a continuităţii. Pentru a demonstra 3) este suficient să arătăm că dacă lim x X n = x 0,atunci lim f(x n) = n n f(x 0 ). Cum f(x n ) f(x 0 ) f(x n ) f(x 0 ), pentru orice n N, şi din f continuă în x 0,obţinem că lim f(x n) = f(x 0 ), adică f este n continuă în x (Continuitate laterală). Fie f : A R, unde A R, şi fie x 0 A un punct acumulare pentru D. Dacăexistă limita la stânga în x 0, f(x 0 0) = f s (x 0 ) = x x0 lim f(x), iarf s (x 0 )=f(x 0 ), x<x 0 atunci spunem că f este continuă la stânga în x 0. Dacă există limită la dreapta în x 0, f(x 0 +0)=f d (x 0 ) = x x0 lim x>x 0 x 0. f(x), iarf d (x 0 )=f (x0)atunci spunem că f este continuă la dreapta în Ţinând seama de Observaţie 0.3.5, deducem că o funcţie f este continuă în x 0 dacă şi numai dacă f este continuă atât la stânga cât şi la dreapta în punctul x 0. 08
208 Punctul de acumulare x 0 A se numeşte punct de discontinuitate de speţa (specia) întâia dacă f nu este continuă în x 0, f s (x 0 ) şi f d (x 0 ) există, sunt finite şi diferite. Punctul x 0 A se numeşte de discontinuitate de speţa aii-adacă este punct de discontinuitate şi nu este de speţa întâia. Dacă x 0 A este un punct de discontinuitate de speţa întâia pentru funcţie f, atunci expresiile s f (x 0 )= f d (x 0 ) f s (x 0 ) şi osc (f; x 0 ) = max{ f d (x 0 ) f s (x 0 ), f(x 0 ) f s (x 0 ),, f(x 0 ) f d (x 0 ) } se numesc saltul lui f în x 0 şi respectiv oscilaţia lui f în x (Discontinuităţile funcţiilor monotone). O funcţie monotonă f, definită peintervalul (a, b), a<b +, poate avea puncte de discontinuitate numai de speţa întâia. Să presupunem că funcţia f este crescătoare şi să alegem un punct x 0 arbitrar din (a, b). Există punctele x,x (a, b) astfel încât x <x 0 <x. Pentru orice x (x,x 0 ) avem f(x ) f(x) f(x 0 ), de unde prin trecere la limită rezultă f(x ) lim f(x) f(x 0 ), x x 0 x<x 0 ceea ce ne arată că f(x 0 0) este finită. În mod analog, considerând x (x 0,x ),obţinemcă f(x 0 +0) este finită. Prin urmare, dacă x 0 este punct de discontinuitate, atunci el este de speţa întâia. Din demonstraţie rezultă căpentruoricex 0 (a, b) au loc inegalităţile f(x 0 0) f(x 0 ) f(x 0 +0). Definiţia Fie X şi Y două spaţii liniare normate. Spunem că operatorul liniar T : X Y este mărginit dacă există unnumăr M>0 aşa încât (0.8) T (x) M x, pentru orice x X. lor. Vom arăta că în cazul operatorilor liniari, mărginirea este echivalentă cu continuitatea Teorema Dacă T este un operator liniar între spaţiile liniare normate X şi Y,atunci următoarele afirmaţii sunt echivalente: ) T este continuu pe X; ) T este continuu în originea θx a spaţiului X; 3) T este mărginit. Demonstraţie. Din ) rezultă imediat deoarece T fiind continuu pe X este continuu în orice punct al lui X, decişi în θx. Acum, să arătăm că din ) rezultă 3). Din faptul că operatorul T este continuu în θx rezultă căpentruoriceε>0 există δ ε aşa încât, pentru orice x X cu x <δ ε,săavem T(x) T (θx) = T (x) <ε. În particular, luând ε =există δ > 0 aşa încât din x <δ sărezulte T (x) <. Se observă că (0.8) este verificată pentru x = θx. Fie acum x θx. Săconsiderăm y = δ x. Atunci y = x δ x x = δ <δ, ceea ce conduce la T (y). De aici obţinem ( ) T δ x = δ x x T (x), 09
209 de unde adică δ T (x), x T (x 0 ) δ x, pentru orice x X. Prin urmare, operatorul T este mărginit. Să arătăm că 3) implică ). Din faptul că T este mărginit rezultă căexistă M>0aşa încât (0.8) să aibăloc. Fie x o X arbitrar. Pentru orice ε>0 şi orice x X, aşa încât x x 0 < ε M,avem T (x) T (x 0 ) = T (x x 0 ) M x x 0 <M ceea ce exprimă continuitatea operatorului T. ε M = ε, Corolarul 0.4. Dacă T : R n R p este un operator liniar, atunci el este continuu. Demonstraţie. Fie T = (T,T,...,T p ), unde T i : R n R, i =,p. Dacă T este operator liniar, atunci rezultă că şi aplicaţiile T i sunt liniare. Conform Teoremei 0.4.3, a arăta că T este un oeprator liniar continuu revine la a arată că T i, i =,p, sunt funcţii continue. Prin urmare, este suficient să arătăm că un operator liniar T : R n R este continuu. Fie B = {e,e,...,e n } baza canonică aluir n. Dacă x R n atunci x =(x,x,...,x n ) şi n deci x = x i e i. Atunci i= ( n ) n T (x) =T x i e i = x i T (e i ), de unde, utilizând inegalitatea lui Cauchy Schwartz Buniakowski, avem i= ( n n T (x) = x i T (e i ) T (e i ) i= i= r= ) ( n i= x i ) = M x, pentru orice x R n, care ne arată că T este un operator liniar mărginit. Aşadar, conform Teoremei 0.4.4, rezultă că T este operator continuu. În continuare vom prezenta câteva proprietăţi cu privire la transformarea mulţimilor deschise, respectiv închise, compacte şi conexe printr-o aplicaţie continuă. Teorema Fie (X, d ) şi (Y,d ) două spaţii metrice şi f : X Y o funcţie. Atunci următoarele afirmaţii sunt echivalente: ) f este continuă pex; ) pentru orice mulţime deschisă D din Y, imaginea inversă f (D) este mulţime deschisă în X; 3) pentru orice mulţime închisă B din Y, imaginea inversă f (B) este mulţime închisă în X; 4) pentru orice submulţime A aluix, avem f(a) f(a). Demonstraţie. Să arătăm că dinrezultă 4). Fie x A aşa ca y = f(x). Cum x A rezultă că existăunşir de puncte (x n ) din mulţimea A aşa încât lim x X n = x. Din continuitatea n lui f rezultă lim f(x n) = Y f(x) =y,adică am arătat că în mulţimea f(a) există un şir de n 0
210 puncte (f(x n )) aşa ca lim n f(x n) Y = y. Prin urmare, y f(a), ceea ce ne arată căamdovedit incluziunea f(a) f(a). Acum, să arătăm că 4) implică 3). Fie B omulţime închisă în Y,adică B = B în Y. Notăm f (B) cu A. Conform ipotezei 4) avem f(a) f(a) =f(f (B)) B = B, de unde A f (f(a)) f (B) =A. Cum A A, rezultăcă A = A, ceea ce ne arată că A = f (B) este închisă în X. Să arătăm că 3) implică ). Fie D omulţime deschisă în Y. Atunci B = Y D este închisă în Y. Conform ipotezei 3) mulţimea f (B) =f (Y D) este închisă în X. De aici rezultă că X f (B) =X [f (Y ) f (D)] = f (D) este deschisă în X. Mai avem de demonstrat că din ) rezultă ). Fie x 0 un punct arbitrar din X şi D = S Y (f(x 0 ),ε) osferădeschisădiny. Conform ipotezei ), mulţimea f (D) este mulţime deschisă în X. Rezultăcă f (D) este o vecinătate pentru x 0 X. Atunci există osferă S X (x 0,δ ε ) f (D) aşa încât pentru orice x S X (x 0,δ ε ) să avem f(x) S Y (f(x 0 ),ε)=d, ceea ce ne arată că f este continuă în x 0 (vezi Teorema 0.4.). Observaţia 0.4. Mulţimea funcţiilor continue pe X cu valori în Y se notează prin C(X, Y ). Definiţia Fie (X, d ) şi (Y,d ) două spaţii metrice şi f : A X Y ofuncţie. Spunem că f este uniform continuă pea, dacă oricare ar fi ε>0 există δ ε > 0 (acelaşi pentru toate punctele x A) astfelîncât, oricare ar fi x,x A cu proprietatea d (x,x ) <δ ε are loc d (f(x ),f(x )) <ε. Propoziţia 0.4. Dacă f : A X Y este o funcţie uniform continuă pea, atuncif este continuă pea. Demonstraţie. Să considerăm x 0 un punct arbitrar din A. Din faptul că f este uniform continuă pea rezultă că, pentru orice ε>0, există δ ε > 0 astfel încât, pentru orice x,x A cu d (x,x ) <δ ε,arelocd (f(x ),f(x )) <ε. Atunci, oricare ar fi x A aşa încât d (x, x 0 ) <δ ε, are loc d(f(x),f(x 0 )) <ε,adică f este continuă în x 0.Cumx 0 a fost ales arbitrar din A, rezultă că f este continuă pe A. Observaţia Reciproca Propoziţiei 0.4. este falsă, adică există funcţii continue pe o mulţime, care nu sunt uniform continue. Exemplul Fie f :(0, ] R definită prin f(x) =/x, x (0, ]. Se observăcăf este continuă pe(0, ]. Să presupunem că f este uniform continuă pe(0, ], adicăpentruoriceε>0 există un δ ε > 0, acelaşi pentru toate punctele x (0, ], aşa încât pentru orice x,x (0, ] cu proprietatea x x <δ ε săaibăloc f(x ) f(x ) <ε. Săluăm, în particular, ε =/, când obţinem că există δ > 0 astfel încât pentru orice x,x (0, ] cu x x <δ,avem x x <. Fie x =/n şi x =/(n +) cu n N ales aşa încât n <δ /. Atunci, cum x x = n(n +) < n < δ, ar trebui ca x x = n (n +) = <, ceea ce constituie o contradicţie. Prin urmare, presupunerea făcută estefalsădecif nu este uniform continuă pe (0, ].
211 Observaţia Uniform continuitatea este o proprietate globală pentru o funcţie, referindu-se la întreg domeniul de definiţie, al funcţiei, în timp ce, continuitatea unei funcţii într-un punct este o proprietate locală. Definiţia Fie (X, d ) şi (Y,d ) două spaţii metrice. Spunem că aplicaţia f : A X Y este lipschitziană pe A, dacă există un număr α 0 astfel încât oricare ar fi x,x A, are loc d (f(x ),f(x )) αd (x,x ). Se mai zice că f este lipschitziană în raport cu α, sau α lipschitziană. Propoziţia 0.4. Orice contracţie a unui spaţiu metric (X, d) este o funcţie lipschitziană. Demonstraţie. Fie f o contracţie a lui X. Atunci, conform Definiţiei 8..8, există α [0, ) aşa că pentru orice x,x X, avem d(f(x ),f(x )) αd(x,x ), care ne arată că f este lipschitziană. Propoziţia Orice funcţie lipschitziană este uniform continuă. Demonstraţie. Fie f : A (X, d ) (Y,d ) o funcţie α lipschitziană pea, adicăpentruorice x,x A, arelocd (f(x ),f(x )) αd (x,x ). Fie ε>0. Dacă α =0,a tunci d (f(x ),f(x )) 0, pentru orice x,x A. Rezultă că f(x )=f(x ) oricare ar fi x,x A, deci f este constantă pea şi prin urmare este uniform continuă pea. Dacă α>0, luând δ ε = ε/α, atunci pentru orice x,x A cu d (x,x ) <δ ε,areloc d (f(x ),f(x )) αd (x,x ) <α ε = ε, ceea ce ne arată că f este uniform continuă pea. α Acum, să facem câteva precizări asupra funcţiilor continue pe mulţimi compacte. Teorema Fie (X, d ) şi (Y,d ) două spaţii metrice şi f : X Y ofuncţie continuă. Dacă A este o submulţime compactă a lui X, atunci f(a) este o submulţime compactă a lui Y. Demonstraţie. Fie (y n ) un şir din f(a). Atunci, pentru orice n N, există x n K, aşa încât f(x n )=y n. Mulţimea K fiind compactă, conform cu Definiţia 0..8, şirul (x n ) conţine un subşir (x nk ) convergent. Din continuitatea lui f rezultă căşirul (f(x nk )) este un subşir convergent al şirului (y n ) şi prin urmare, f(a) esteomulţime compactă diny. Definiţia Fie (X, d ) şi (Y,d ) două spaţii metrice. Spunem că ofuncţie f : A X Y este mărginită dacă mulţimea f(a) este mărginită în Y. Acum, din Teorema obţinem următorul rezultat. Corolarul 0.4. Orice funcţie continuă pe un compact dintr-un spaţiu metric este mărginită. Demonstraţie. Fie f : A (X, d ) (Y,d ) o funcţie continuă şi A o submulţime compactă aluix; conform Teoremei rezultă caf(a) este compactă în Y. Atunci f(a) este mărginită în Y şi deci funcţia f este mărginită pea. În caz particular, din Corolarul 0.4. obţinem următorul rezultat cunoscut din liceu: Corolarul Dacă funcţia f :[a, b] R este continuă, atunci f este mărginită. Observaţia Dacă mulţimea A, pe care funcţia f este continuă, nu este compactă, atunci rezultatul Corolarului 0.4. nu se mai păstrează. Într-adevăr, dacă considerăm funcţia f :(0, ) R definită prin f(x) =/x; pentruorice x (0, ), aceasta este continuă pe(0, ), darf(0, ) = (/, ) şi deci f nu este mărginită. Definiţia Fie (X, d) un spaţiu metric, f : X R ofuncţie, M =supf(x) marginea x X superioară aluif pe X şi, respectiv, m = inf f(x) marginea inferioară aluif pe X. x X Spunem, că f îşi atinge marginea superioară, respectiv marginea inferioară pe
212 mulţimea X dacă există un punct x X, respectiv un punct x X, aşa ca M = f(x ), respectiv f(x )=m. Spunem că f îşi atinge marginile pe X dacă f îşi atinge atât marginea superioară cât şi marginea inferioară pex. Teorema (Weierstrass). Dacă A este o submulţime compactă a spaţiului metric (X, d) şi f : X R este continuă, atunci f îşi atinge marginile pe mulţimea A. Demonstraţie. Pe baza Corolarului 0.4. rezultă că f(a) este mărginită în R. Fie M = supf(x) şi m = inf f(x). Deoarece M şi m sunt puncte aderente pentru mulţimea x A x A f(a) rezultă că M f(a) şi m f(a). Din f(a) este compactă rezultă că este mulţime închisă şi atunci M f(a) şi m f(a). Deci, rezultă căexistă x A aşa încât f(x )=M şi există x A aşa ca f(x )=m, ceea ce ne arată că f îşi atinge marginile pe A. În particular, din Teorema obţinem cunoscuta teoremă a lui Weierstrass studiată în liceu. Corolarul Funcţia f :[a, b] R continuă pe[a, b] este mărginită şi îşi atinge marginile pe [a, b]. Dăm acum o reciprocă pentru Propoziţia Teorema (Cantor.) Fie (X, d ) şi (Y,d ) două spaţii metrice. Dacă f : A X Y este o funcţie continuă pe A, iar A este o mulţime compactă în X, atunci f este uniform continuă pea. Demonstraţie. Presupunem că f nu este uniform continuă. Atunci, există unε 0 > 0 aşa încât pentru orice δ>0 există x,δ,x,δ A cu proprietatea că d (x,δ,x,δ ) <δşi d (f(x,δ ),f(x,δ )) ε 0. În particular, dacă δ =/n cu n N şi notăm x,δ = x n, x,δ = y n obţinem şirurile (x n ), (y n ) din A cu proprietatea că d (x n,y n ) <δ şi d (f(x n ),f(y n )) ε 0. Din faptul că mulţimea A este compactă rezultăcăşirul (x n ) conţine un subşir (x nk ) convergent la punctul x 0 A. Considerăm subşirul (y nk ) aşirului (y n ). Cum d (y nk,x 0 ) d (y nk,x nk )+d (x nk,x 0 ) n k + d (x nk,x 0 ) şi ( ) lim + d (x nk,x 0 )= =0, k n k rezultă că lim d (y nk,x 0 )=0,adică lim y Y n n n k = x0. Funcţia f fiind continuă, rezultă că lim k f(x n k ) Y = f(x 0 ) şi lim f(y n k ) = Y f(x 0 ), k de unde lim d (f(x nk ),f(y nk )) = 0, k care este în contradicţie cu d (f(x n ),f(y n )) ε 0. Aşadar, f este uniform continuă pea. În încheierea acestui paragraf să abordăm câteva proprietăţi ale funcţiilor continue pe mulţimi conexe. Teorema Fie (X, d ) şi (Y,d ) două spaţii metrice şi f : A X Y ofuncţie continuă pe A. Dacă A este conexă în X, atuncif(a) este conexă în Y. 3
213 Demonstraţie. Vom proceda prin reducere la absurd. Să presupunem contrariul. Atunci există douămulţimi nevide. D, D,deschiseîn Y,aşa ca (0.9) D D f(a) =, D f(a), D f(a) f(a) D D. Din faptul că f este continuă, pe baza Teoremei 0.4.5, rezultă cămulţimile Δ = f (D ) şi Δ = f (D ) sunt deschise în X. În plus, Δ, Δ, Δ Δ A = f (D ) f (D ) A = f (D D ) A =, Δ A, Δ A şi A Δ Δ. De aici, rezultă că A este neconexă, ceea ce este o contradicţie. Prin urmare, f(a) este conexă în Y. Corolarul (Proprietatea valorilor intermediare). Fie (X, d) un spaţiu metric şi A o submulţime conexă asa. Dacăfuncţia f : A R este continuă pea, a, b A şi f(a) <f(b), atunci pentru orice λ (f(a),f(b)) există c λ A aşa ca f(c λ )=λ. Demonstraţie. Din Teorema rezultă că f(a) este conexă. De aici, pe baza Observaţiei 0..4, deducem că f(a) este interval. Prin urmare, dacă f(a),f(b) f(a),atunci intervalul (f(a),f(b)) este înclus în f(a), de unde rezultă afirmaţia din Corolar. Din Corolarul obţinem rezultatul cunoscut: Corolarul Dacă I este un interval al lui R şi f : I R este o funcţie continuă pei, atunci mulţimea f(i) este un interval. Definiţia Fie (X, d ) şi (Y,d două spaţii metrice. Spunem că funcţia f : X Y are proprietatea lui Darboux dacă transformă orice submulţime conexă a lui X într-o submulţime conexă a lui Y. Observaţia Teorema ne spune că orice funcţie continuă are proprietatea lui Darboux. Observaţia În particular, o funcţie reală f : I R, I interval din R, are proprietatea Darboux dacă pentru orice a, b I cu a<bşi pentru orice λ (f(a),f(b)) sau λ (f(b),f(a)), există un element c λ (a, b) aşa ca f(c λ )=λ Propoziţia Fie f : I R o funcţie, unde I este un interval al lui R. Dacă f are proprietatea lui Darboux, atunci f poate avea numai discontinuităţi de speţa a doua. Demonstraţie. Vom folosi metoda reducerii la absurd. Presupunem că funcţia f are un punct x 0 I de discontinuitate de speţa întâia. Atunci, există limitele laterale f s (x 0 ) şi f d (x 0 ) finite şi ori f(x 0 ) f s (x 0 ),orif(x 0 ) f d (x 0 ). Să presupunem că f(x 0 ) <f d (x 0 ). Considerăm λ R aşa încât f(x 0 ) <λ<f d (x 0 ); de aici, avem f d (x 0 ) λ>0. Din definiţia limitei rezultă că pentru ε = f d (x 0 ) λ>0 există δ ε > 0 aşa ca, pentru orice x (x 0,x 0 + δ ε ),săavem f(x) f d (x 0 ) <ε= f d (x 0 ) λ, de unde f(x) >λ,pentruoricex (x 0,x 0 + δ ε ). Cum x 0 + δ ε / (x 0,x 0 + δ ε ), avem f(x + δ ε /) > λ > f(x 0 ), adică λ este valoare intermediară. Atunci, din faptul că f are proprietatea lui Darboux rezultă că există c λ (x 0,x 0 + δ ε ) aşa ca f(c λ )=λ, ceea ce contrazice f(x) >λ,pentruoricex (x 0,x 0 + δ ε ). Presupunerea făcută estefalsă, rezultând că f nu poate avea decât puncte de discontinuitate de speţaadoua. Corolarul Fie f : I R o funcţie, unde I este un interval al lui R. monotonă şi are proprietatea lui Darboux, atunci f este continuă pei. Dacă f este Demonstraţie. Conform Exemplului funcţia f fiind monotonă ar putea avea numai discontinuităţi de speţa întâia, iar, conform Propoziţiei 0.4.4, posedând proprietatea Darboux, poate avea numai discontinuităţi de speţa a doua. Prin urmare, f trebuie să fie continuă. 4
214 Teorema Fie I un interval al lui R, f : I R ofuncţie continuă şi J = f(i). Atunci f este o bijecţie de la I la J dacă şi numai dacă f este strict monotonă. În acest caz inversa f : J I este, de asemenea, strict monotonă (de acelaşi sens) şi continuă. Demonstraţie. Să considerăm că f nu este strict monotonă. Atunci există trei puncte x,x,x 3 în I aşa ca x <x <x 3 dar f(x ) >f(x ) şi f(x ) <f(x 3 ) (sau f(x ) <f(x ) şi f(x ) >f(x 3 )). Fie λ = min(f(x ),f(x )) şi μ =(λ + f(x ))/. Fără a influenţa rigurozitatea demonstraţiei, putem alege λ = f(x ). Atunci f(x ) <μ= λ + f(x ) = f(x )+f(x ) <f(x ) şi cum f, fiind continuă, are proprietatea lui Darboux, rezultă căexistă c (x,x ) aşa ca μ = f(c). Dar avem şi f(x ) <μ= λ + f(x ) <f(x 3 ), rezultă deaicicăexistă d (x,x 3 ) aşa ca f(d) =μ. Rezultăcă f(c) =f(d) şi fum f este bijectivă obţinem c = d, ceea ce este imposibil deoarece x <c<x <d<x 3. Aşadar, presupunerea făcută estefalsă. Rezultă că f este strict monotonă. Reciproc, să considerăm că f : I J este strict monotonă şi continuă. De aici, rezultă că f este injectivă (strict monotonă) şi surjectivă (J = f(i)), deci f este bijectivă. Fără arestrânge generalitatea, să presupunem că f este strict crescătoare şi să arătăm că şi f : J I are aceeaşi proprietate. Fie y, y din J cu y <y.notăm cu x = f (y ) şi cu x = f (y ). Atunci f(x )=y şi f(x )=y. Cum f este injectivă, avem f (y ) f (y ). Dacăamaveaf (y ) >f (y ), atunci, cum f este strict crescătoare, rezultă f(f (y )) >f(f (y )), de unde y >y, ceea ce este în contradicţie cu y <y. Rămâne că f (y ) <f (y ), ceea ce arată că f este strict crescătoare. Cum f este strict monotonă şi posedă proprietatea lui Darboux, de unde, pe baza Corolarului 0.4.7, rezultă că f este continuă. Observaţia Utilizând această teoremă, se arată cu uşurinţă că funcţiile inverse ale principalelor funcţii elementare sunt continue. 5
215 0.5 Test de verificare a cunoştinţelor nr. 9. Definiţi următoarele noţiuni: a) Funcţie între două spaţii metrice; b) Limita unei funcţii între două spaţii metrice (definiţia cu şiruri); c) Funcţie continuă într-un punct (f :(X, d ) (Y,d ) cu (X, d ) şi (Y,d ) spaţii metrice); d) Funcţie vectorială; e) Funcţie uniform continuă.. Să se demonstreze că o funcţie f : R R periodică şi care nu este constantă nuare limită la+ şi. 3. Calculaţi L = lim x (x + x) x. [ 4. a) Fie funcţia f : 0, π ] R, x sin x f(x) =,x 0 sin x,x=0. Să se studieze continuitatea funcţiei f. b) Se dă funcţia f :[a, b] [a, b] continuă pe[a, b]. Săsearatecă ( ) c [a, b] astfel încât f(c) =c. 5. a) Folosind definiţia să se arate că: lim (x,y) (,3) (x + xy) =4 b) Arătaţi cu ajutorul definiţiei cu şiruri că funcţia f(x, y) = xy x, (x, y) (0, 0) nu + y are limită în origine. 6. Arătaţi cu ajutorul definiţiei cu şiruri că funcţia f(x, y) = y +x y x, y x 0nu are limită în origine. 7. Cercetaţi limitele iterate şi limita globală (dacă este cazul) în origine pentru funcţia: a) f(x, y) = x y + x + y, x + y 0, x + y b) f(x, y) =x sin y, y Calculaţi: xy a) L = lim, (x,y) (0,0) xy + b) L = lim (x,y) (0,0) sin(xy). x 9. Studiaţi uniform continuitatea funcţiei: f(x) =arctg +x x, x (, ). 6
216 0. Studiaţi uniform continuitatea funcţiei: f :(, ) (, ) R, f(x, y) = x y. 7
217 Indicaţii şi răspunsuri Testul nr. 9. Se foloseşte definiţia cu şiruri. 3. L =. ( 4. a) f continuă pe 0, π ] ; b) Se foloseşte consecinţa lui Darboux: Dacă f :[a, b] [a, b] continuă pe[a, b] şi f(a) f(b) 0 atunci ( )c [a, b] astfel încât f(c) =c. ( 5. b) Se consideră şirurile n, 3 ) ( şi n n, ). n ( 6. Se consideră şirurile n, ) ( şi n n, ). n 7. a) lim lim f(x, y) =şi lim lim f(x, y) =, decinuexistă limita globală în (0, 0). x 0 y 0 y 0 x 0 b) Avem lim lim f(x, y) =0dar nu există lim lim f(x, y). Avem limita globală y 0 x 0 x 0 y 0 8. a) L =; b) L =. lim f(x, y) =0. (x,y) (0,0) 9. f este uniform continuă pe (, ). Se foloseşte identitatea: arctg α arctg β = arctg α β şi inegalitatea arctg x x. +αβ 0. f este uniform continuă pe(, ) (, ). 8
218 Bibliografia aferentă capitolului: [] Acu, A.M., Acu D., Acu M., Dicu P., Matematici aplicate în economie - Volumul II, Editura ULB, Sibiu, 00. 9
219 Capitolul Derivarea funcţiilor reale Obiective: Recapitularea noţiunilor legate de derivarea funcţiilor reale de o variabilă reală cunoscute din învăţământul preuniversitar şi completarea acestora cu acele noţiuni, legate de subiectul prezentului capitol, strict necesare pentru parcurgerea capitolelor următoare. Rezumat: În acest capitol sunt recapitulate şi completate noţiunile legate de derivata unei funcţii reale de o variabilă realăşi proprietăţile acesteia, proprietăţile de bază ale funcţiilor reale derivabile pe un interval real (teoremele lui Fermat, Rolle, Cauchy, Lagrange, Darboux, Taylor), diferenţiala unei funcţii reale de o variabilă realăşi proprietăţile acesteia. Capitolul se încheie cu prezentarea unor aplicaţii imediate ale noţiuni de derivată în economie. Conţinutul capitolului:. Definiţia derivatei şi proprietăţile ei de bază. Proprietăţi de bază ale funcţiilor derivabile pe un interval 3. Diferenţiala unei funcţii reale 4. Aplicaţiile derivatei în economie 5. Test de verificare a cunoştinţelor 6. Bibliografia aferentă capitolului Cuvinte cheie: derivată a unei funcţii reale de o variabilă reală, derivabilitate, teorema lui Fermat, teorema lui Rolle, teorema lui Lagrange, teorema lui Darboux, teorema lui Taylor, diferenţiala unei funcţii reale de o variabilă reală, producţie medie, ritm mediu, elasticitate medie.. Definiţia derivatei şi proprietăţile ei de bază Fie funcţia f : A R, unde A este o submulţime a lui R şi fie x 0 A un punct de acumulare pentru A. Definiţia.. Spunem că funcţia f are derivată în punctul x 0 dacă există în R limita f(x) f(x 0 ) lim, x x 0 x x 0 notată, de obicei, cu f (x 0 ). Dacă derivataf (x 0 ) există şi este finită zicem că funcţia f este derivabilă în punctul x 0. Dacă f (x 0 )=+ sau f (x) =, atunci vom spune că f are derivata infinită în punctul x 0. Propoziţia.. Dacă funcţia f : A R este derivabilă în x 0 continuă în x 0. A A, atunci f este 0
220 Demonstraţie. Din ipoteză avem că există şi este finită f(x) f(x 0 ) lim = f (x 0 ). x x 0 x x 0 Se observă căpentruoricex A {x 0 },avem f(x) =(x x 0 ) f(x) f(x 0) x x 0 + f(x 0 ), de unde prin trecere la limită obţinem lim x x 0 f(x) =f(x 0 ), ceea ce ne arată că f este continuă în x 0. Observaţia.. Reciproca Propoziţiei.. este falsă deoarece există funcţii continue într-un punct care nu sunt derivabile în acel punct. Pentru aceasta, este suficient să considerăm funcţia f(x) = x, x R, careestecontinuăper dar nu este derivabilă în 0. Definiţia.. Dacă funcţia f : A R, A R, este derivabilă în orice punct al unei submulţimi B a lui A, atunci spunem că f este derivabilă pe B. Dacă B este formată din toate punctele lui A în care funcţia f este derivabilă, atunci B se numeşte domeniul de derivabilitate a lui f. În acest caz, funcţia definită peb cu valori reale care asociază fiecărui punct x B derivata f (x) în punctul x se numeşte derivata lui f pe mulţimea B şi notăm prin f. Operaţia prin care din funcţia f obţinem funcţia f se numeşte operaţie de derivare. Definiţia..3 Fie f : A R R şi x 0 A un punct de acumulare pentru A (,x 0 ). Dacă există limita f s(x f(x) f(x 0 ) 0 ) = x x0 lim x<x 0 x x 0 atunci numim această limită derivata la stânga afuncţiei f în punctul x 0. Dacă x 0 A este punct de acumulare pentru A (x 0, + ) şi există limita f d(x f(x) f(x 0 ) 0 ) = x x0 lim, x>x 0 x x 0 atunci numim această limită derivata la dreapta afuncţiei f în punctul x 0. Dacă f s(x 0 ), respectiv f d (x 0), este finită, atunci spunem că f este derivabilă lastânga, respectiv la dreapta, în punctul x 0. Observaţia.. Dacă funcţia f este definită pe un interval [a, b] şi are derivată la dreapta în punctul a, respectiv la stânga în punctul b, atunci convenim să spunemcă f are derivată în a, respectiv în b. Din legătura între limita unei funcţii într-un punct şi limitele laterale în acel punct, obţinem: Propoziţia.. O funcţie f : A R R are derivată în punctul x A A dacă şi numai dacă f are derivată la dreapta şi la stânga în punctul x 0, iar f s(x 0 )=f d (x 0)=f (x 0 ). Teorema.. Fie f,g : A R două funcţii derivabile în x 0 A A şi λ R. Atunci sunt variabile afirmaţiile: ) Suma f + g este derivabilă în x 0 şi (f + g) (x 0 )=f (x 0 )+g (x 0 );
221 ) Produsul λf este derivabilă şi (λf) (x 0 )=λf (x 0 ); 3) Produsul fg este derivabilă în x 0 şi (fg) (x 0 )=f (x 0 )g (x 0 )+f(x 0 )g (x 0 ). 4) Dacă g(x 0 ) 0,atuncifuncţia cât f/g este derivabilă în x 0 şi ( ) f (x 0 )= f (x 0 )g(x 0 ) f(x 0 )g (x 0 ) g (g(x 0 )). Demonstraţia teoremei se face utilizând definiţia derivatei. De exemplu, să demonstrăm afirmaţiadela3). Avem (fg)(x) (fg)(x 0 ) f(x)g(x) f(x 0 )g(x 0 ) lim = lim = x x 0 x x 0 x x 0 x x 0 g(x)[f(x) f(x 0 )] + f(x 0 )[g(x) g(x 0 )] = lim = x x 0 x x 0 = lim g(x) f(x) f(x 0) f(x 0 )[g(x) g(x 0 )] + lim = x x 0 x x 0 x x 0 x x 0 = g(x 0 )f (x 0 )+f(x 0 )g (x 0 ), ceea ce trebuia demonstrat. Teorema.. (Derivarea funcţiilor compuse sau regula lanţului) Fie f : I R J R, g : J R, I şi J fiind intervale. Dacă f este derivabilă în punctul x 0 I şi g este derivabilă în punctul f(x 0 ),atuncifuncţiah: I R, h(x) =g(f(x 0 )) (h = g f) este derivabilăîn punctul x 0 şi h (x 0 )=g (f(x 0 ))f (x 0 ) adică (g f) =(g f)f. Demonstraţie. Considerăm funcţia ajutătoare u : J R, definită prin g(y) g(y 0 ), dacă y y (.) u(y) = 0 y y 0 g (y 0 ), dacă y = y 0 = f(x 0 ) Cum lim u(y) =g (y 0 ) rezultă că u este continuă în punctul y 0 = f(x 0 ). Din (.) y y 0 obţinem: g(y) g(y 0 )=u(y) (y y 0 ), pentru orice y J Deci avem g(f(x)) g(f(x 0 )) = u(f(x 0 ))(f(x) f(x 0 )), pentru orice x I. Rezultă că, pentru orice x I {x 0 } avem g(f(x)) g(f(x 0 )) = u(f(x)) f(x) f(x 0) (.) x x 0 x x 0 Cum f este derivabilă în x 0 rezultă că f este continuă în x 0, de unde, ţinând seama de continuitatea lui u în y 0 = f(x 0 ), deducem că funcţia compusă u f este continuă în x 0. Acum, utilizând derivabilitatea lui f în punctul x 0 obţinem din (.) că există limita g(f(x)) g(f(x 0 )) (.3) lim = u(f(x))f (x 0 ) x x 0 x x 0 Dar din (.), avem u(y 0 ) = u(f(x 0 )) = g (y 0 ) = = g (f(x 0 )) şi atunci din (.3) obţinem ceea ce trebuia demonstrat. (g f) (x 0 )=g (f(x 0 ))f (x 0 ),
222 Teorema..3 Fie f : I J, I, J intervale ale lui R, ofuncţie continuă şi bijectivă. Dacă f este dervabilă în punctul x 0 I şi f (x 0 ) 0,atuncifuncţia inversă f este derivabilă în punctul f(x 0 )=y 0 şi are loc formula (f ) (y 0 )= f (x 0 ), adică (f ) = f f Demonstraţie. Ţinând seama de Teorema rezultă că f este strict monotonă. În această situaţie deducem că funcţia inversă f este strict monotonă şi continuă. Fie y I {y 0 } şi x = f (y). Deoarece y y 0, ţinând seama de strict monotonia lui f, rezultă căşi x x 0. Acum, putem scrie f (y) f (y 0 ) = f (f(x)) f (f(x 0 )) = y y 0 f(x) f(x 0 ) x x 0 f(x) f(x 0 ) =, f(x) f(x 0) x x 0 de unde prin trecere la limită rezultă f (y) f (y 0 ) lim = y y 0 y y 0 f(x) f(x 0 ) lim x x 0 x x 0 = f (x 0 ). În finalul acestui paragraf să introducem noţiunea de derivată de ordin superior. Fie f : D R o funcţie derivabilă pemulţimea D. În acest caz, există funcţia derivată f : D R. Definiţia..4 Spunem că funcţia f : D R este de două ori derivabilă într-un punct x 0 D, dacă f este derivabilă într-o vecinătate a punctului x 0 şi f este derivabilă în punctul x 0. În acest caz derivata lui f în punctul x 0 se numeşte derivata a doua aluif în x 0 şi o notăm cu f (x 0 ). Dacă f este derivabilă ped, atunci derivata lui f se numeşte derivata a doua (sau de ordinul doi) aluif şi se notează cuf. În general, spunem că f este derivabilă den (n, n N) oriîn x 0 D dacă f este de (n ) ori derivabilă pe o vecinătate V aluix 0 şi dacă derivata de ordin (n ), notată prin f (n ), este derivabilă în punctul x 0. Spunem că f este derivabilă den ori pe D dacă f este derivabilă den ori în orice punct x D. Derivatele succesive ale lui f se notează prin f () = f, f () = f, f (3) = f,..., f (n) pentru orice n N. Convenim, de asemenea, să notăm prin f (0) = f. În general, aflarea derivatei de ordinul n a funcţiei f se face prin inducţie matematică. Exemplul... Se consideră funcţia f : E R, f(x) =(ax + b) α, α R, iare domeniul maxim de definiţie al lui f. Să se calculeze f (n). Avem f (x) =αa(ax + b) α f = α(α )a (ax + b) α... Presupunem că f (n) (x) =α(α )...(α n+)a n (ax+b) α n şi să demonstrăm că f (n+) (x) = α(α )...(α n + )(α n)(ax + b) α n. Avem f (n+) (x) =(f (n) (x)) =(α(α )...(α n +)a n (ax + b) α n ) = 3
223 (.4) Aşadar, avem = α(α )...(α n + )(α n)a n+ (a + b) α n ((ax + b) α ) (n) = α(α )...(α n +)a n (ax + b) α n Cazuri particulare.. Dacă α = n, atunci din (.4) găsim ((ax + b) n ) (n) = n!a n, de unde pentru a =şi b =0obţinem (x n ) (n) = n!.. Dacă α =, atunci din (.4) obţinem ( ) (n) = ( )n n!a n ax + b (ax + b) n+. 3. Dacă α =, atunci din (.4) obţinem ( ax + b) (n) n (n 3) ax + b =( ) n,n. (ax + b) n Exemplul... (Formula lui Leibniz.) Fie f,g : D R R două funcţii de n ori derivabile pe D. Atunci are loc egalitatea n (fg) (n) (x) = Cnf k (n k) (x)g (k) (x), k=0 pentru orice x D, numită formula lui Leibniz. Avem (f g) (x) =f (x)g (0) (x) +f (0) (x)g (x), pentru orice x D, deci egalitatea este adevărată pentru n =. Presupunem egalitatea adevărată pentru n = k şi să demonstrăm că esteadevărată şi pentru n = k +. Putem scrie ( k (fg) (k+) (x) =((fg) (k) ) (x) = Ckf i (k i) (x)g (x)) (i) = = k i=0 C i k i=0 [ ] f (k i+) (x)g (i) (x)+f (k i) (x)g (i+) (x) = = Ckf 0 (k+) (x)g (0) (x)+[ck 0 + Ck]f (k) (x)g () (x)+ +[Ck + Ck]f (k ) (x)g () (x)+...+[c k k + Ck k ]f () (x)g (k) (x)+ +Ck k f (0) (x)g (k+) (x). Deoarece Ck 0 = C0 k+ =, Ck k = Ck+ k+ =şi Ci k + Ck i = Ci k+, i k, egalitatea precedentă conduce la k+ (fg) k+ (x) = Ck+f i (k+ i) (x) g (i) (x), ceea ce trebuia demonstrat. Aşadar, formula lui Leibniz este adevărată. i=0. Proprietăţi de bază ale funcţiilor derivabile pe un interval Definiţia.. Fie f : A R R ofuncţie. Un punct x 0 A se numeşte punct de maxim local (sau relativ) al funcţiei f dacă există o vecinătate V (x 0 ) aluix 0 aşa încât f(x) f(x 0 ), pentru orice x V (x 0 ) A. Un punct x 0 A se numeşte punct de minim local (sau relativ) dacă există ovecinătate V (x 0 ) aluix 0 aşa încât f(x) f(x 0 ), pentru orice x V (x 0 ) A. Punctele de maxim sau minim local ale funcţiei f se numesc puncte de extrem relativ (sau local) ale funcţiei f, iar valorile funcţiei în punctele sale de extrem se numesc extreme ale funcţiei f. 4
224 Teorema.. (Teorema lui Fermat). Fie I un interval al lui R şi fie funcţia f : I R. Dacă x 0 este un punct de extrem local interior al intervalului I şi f este derivabilă în x 0, atunci f (x 0 )=0. Demonstraţie. Să presupunem că x 0 este un punct de maxim local pentru f, adicăexistă ovecinătate V (x 0 ) a punctului x 0 astfel ca f(x) f(x 0 ),pentruoricex V (x 0 ) I. Atunci, pentru x V (x 0 ) I cu x<x 0 putem scrie (.5) f(x) f(x 0 ) x x 0 0, iar pentru x V (x 0 ) I cu x>x 0 avem (.6) f(x) f(x 0 ) x x 0 0. Cum f este derivabilă în punctul interior x 0 I, deducem că există f s(x 0 ), f d (x 0) şi f (x 0 )=f s(x 0 )=f d (x 0) R. Ţinând seama de aceasta şi trecând la limită în (.5) şi (.6), obţinem, pe de o parte că f (x 0 )=f s(x 0 ) 0, iar,pedealtă parte, că f (x 0 )=f d (x 0) 0. De aici, rezultă că f (x 0 )=0, ceea ce trebuia demonstrat. Observaţia.. Teorema lui Fermat dă numai o condiţie necesară dar nu şi suficientă pentru existenţa punctelor de extrem. Se poate întâmpla ca într-un punct derivata să se anuleze fără ca punctul respectiv să fie punct de extrem local. Rădăcinile derivatei unei funcţii se numesc puncte critice sau puncte staţionare pentru funcţia respectivă. Observaţia.. Geometric, teorema lui Fermat afirmă că graficul unei funcţii derivabile are tangentă paralelă cu axa Ox în punctele de extrem interioare intervalului de definiţie a funcţiei. Teorema.. (Teorema lui Rolle). Fie funcţia f :[a, b] R, undea, b R şi a<b. Dacă sunt îndeplinite condiţiile: i) f este continuă pe[a, b], ii) f este derivabilă pe(a, b), iii) f(a) =f(b), atunci există unpunctc (a, b) aşa încât f (c) =0. Demonstraţie. Dacă f este constantă pe [a, b], atunci f =0pe (a, b) şi deci orice punct c (a, b) satisface cerinţa f (c) =0. Să admitem acum că f nu este constantă pe[a, b]. Cumf este continuă peintervalul compact [a, b], conform Corolarului rezultă că f este mărginită şi îşi atinge marginile. Dacă m = f(x) şi M = sup f(x), atunci există x [a, b] şi x [ a, b] aşa încât f(x )=m inf x [a,b] x [a,b] şi f(x )=M. Cum f nu este constantă pe[a, b] deducem că m<m. Se observăcă x şi x nu pot fi ambele situate în extremităţile intervalului [a, b]. Într-adevăr, dacă am presupune că x = a sau x = b, cumf(a) =f(b), dinf(x )=f(a) =m<m= f(x ) rezultă că x nu poate coincide nici cu a şi nici cu b, deci x (a, b). Atunci, conform Teoremei lui Fermat, avem f (x )=0şi deci există c = x (a, b) aşa ca f (c) =0. Observaţia..3 Geometric, teorema lui Rolle afirmă că în condiţiile din enunţul teoremei există celpuţin un punct al graficului funcţiei f, care nu coincide cu extremităţile, în care tangenta este paralelă cu axa Ox. Observaţia..4 Dacă în teorema lui Rolle f(a) =f(b) =0, atunci rezultă că între două rădăcini a, b ale funcţiei f există celpuţin o rădăcină c a derivatei. 5
225 Observaţia..5 Între două rădăcini reale consecutive ale derivatei unei funcţii pe un interval se află cel mult o rădăcină realăafuncţiei. Într-adevăr, fie c <c două rădăcini consecutive ale derivatei. Să presupunem că există douărăcini reale diferite x şi x ale funcţiei, f(x )=f(x )=0, c <x <x <c. După teorema lui Rolle între x! şi x trebuie să existeorădăcină a derivatei, ceea ce nu se poate, c şi c fiind rădăcini consecutive ale derivatei. Această observaţie permite să separăm rădăcinile reale ale ecuaţiei f(x) =0,dacă se cunosct rădăcinile ecuaţiei f (x) =0. Fie c <c <c 3 <... < c k rădăcinile ecuaţiei f (x) =0 aşezate în ordine crescătoare pe intervalul [a, b]. Formăm şirul lui Rolle f(a),f(c ),f(c ),...,f(c k ),f(b). Conform observaţiei..5, în fiecare interval (a, c ), (c,c ),...,(c k,b) există celmulto rădăcină a funcţiei. Există o rădăcină pe unul din aceste intervale numai dacă funcţia ia valori de semne contrare la capetele intervalului respectiv. Prin urmare, ecuaţia f(x) =0 are atâte rădăcini reale în [a, b] câte variaţii de semn are şirul lui Rolle. Teorema..3 (Teorema lui Cauchy; a doua teoremă de medie a calculului diferenţial). Fie f,g :[a, b] R două funcţii care verifică condiţiile: i) f,g sunt continue pe [a, b]. ii) f, g sunt derivabile pe (a, b). iii) g (x) 0 pentru orice x (a, b). Atunci există unpunctc (a, b) astfel ca f(b) f(a) g(b) g(a) = f (c) g (c). Demonstraţie. Observăm că g(b) g(a) deoarece în caz contrar, conform Teoremei lui Rolle, aplicată funcţiei g, arexistă ξ (a, b) cu g (ξ) =0, ceea ce este în contradicţie cu condiţia (iii) din enunţ. Acum, considerăm funcţia auxiliară h(x) =f(x) f(b) f(a) g(b) g(a) g(x), x [a, b], care este continuă pe[a, b], derivabilă pe(a, b), cu h (x) =f (x) f(b) f(a) g(b) g(a) g (x), x (a, b) şi h(a) =h(b). Deci, Teorema lui Rolle este aplicabilă funcţiei h, ceea ce implică existenţa unui punct c (a, b) aşa că h (c) =0,echivalentăcu f(b) f(a) g(b) g(a) = f (c) g (c). Observaţia..6 Teorema lui Cauchy ne permite sădeducemaşa numitele Reguli ale lui l Hospital de aflare a limitelor de funcţii în cazul nedeterminărilor 0 0 şi. Prima regulă aluil Hospital.Fie I un interval din R, x 0 I şi f,g : I R. Dacă sunt îndeplinite condiţiile: i) funcţiile f şi g sunt derivabile pe I {x 0 }; ii) există lim x x 0 f(x) = lim x x 0 g(x) =0; 6
226 iii) g (x) 0, oricare ar fi x I {x 0 }; f (x) iv) există lim x x 0 g (x) = l R, atunci are loc f(x) lim x x 0 g(x) = lim f (x) x x 0 g (x) = l. Pentru demonstraţie considerăm funcţiile { f(x), dacă x I {x0 } F (x) = 0, dacă x = x 0 şi { g(x), dacă x I {x0 } G(x) = 0, dacă x = x 0 Aceste funcţii sunt continue pe I derivabile pe I {x 0 } şi G (x) 0, oricare ar fi x I {x 0 }. Aplicăm teorema lui Cauchy funcţiilor F (x) şi G(x) pe intervalul compact [x 0,x] şi avem F (x) F (x 0 ) G(x) G(x 0 ) = F (c) G (c) = f (c) g (c), x 0 <c<x. De aici, utilizând condiţia iv), prin trecere la limităobţinem: f(x) lim x x 0 g(x) = lim f (x) x x 0 g (x) = l. A doua regulă a lui l Hospital.Fie a>0şi f,g :(a, + ) R două funcţii. îndeplinite condiţiile: Dacă sunt i) funcţiile f şi g sunt derivabile pe (a, + ); ii) lim f(x) = lim g(x) =0; x x iii) g (x) 0pentru orice x>a; f (x) iv) există lim x g = l R, atunci are loc egalitatea (x) f(x) lim x g(x) = lim f (x) x g (x). Pentru demonstraţie se face schimbarea de variabilă x =/t şi se aplică prima regulă aluil Hospital pe intervalul ( 0, a) pentru x 0. Observaţia..7 Dacă avem şi se aplică prima regulă aluil Hospital. lim x x 0 f(x) = lim x x 0 y(x) =+, atunciscriem f(x) lim x x 0 g(x) = lim x x 0 Observaţia..8 Cazurile de nedeterminare, 0 0,, 0 se reduc prin transformări (operaţii) algebrice la situaţiile 0 0 sau. Teorema..4 (Teorema lui Lagrange teorema creşterilor finite prima formulă de medie a calculului diferenţial). Fie f :[a, b] R o funcţie care satisface condiţiile: f(x) g(x) 7
227 i) f este continuă pe[a, b]; ii) f este derivabilă pe(a, b), atunci există unpunctc (a, b) aşa ca f(b) f(a) = f (c). b a Demonstraţie. Luăm în Teorema lui Cauchy funcţia g(x) =x, x [a, b]. Observaţia..9 Dacă funcţia f are derivată nulă pe un interval I, atunci f este constantă pe I. Demonstraţie. Fie x 0 un punct fixat din I şi x I un punct arbitrar. Aplicăm teorema lui Lagrange pe intervalul [x 0,x] (sau [x, x 0 ])şi rezultă căexistă c (x 0,x) (sau (x, x 0 ))aşa încât f(x) f(x 0 )=f (c)(x x 0 ). Cum f (x) =0, oricare ar fi x I, rezultăcă f(x) =f(x 0 ), oricare ar fi x I, şi deci f este cosntantă peintervaluli. Observaţia..0 Dacă două funcţii sunt derivabile pe un interval I şi derivatele sunt egale pe acest interval, atunci diferenţa lor este o constantă. Demonstraţie. Dacă f (x) =g (x) pentru orice x I, atunci rezultă că (f g) (x) =0, oricare ar fi x I. Atunci, pe baza Observaţiei..9, rezultă, (f g)(x) =k, oricare ar fi x I, adică f(x) g(x) =k, pentruoricex I. Observaţia.. Fie f o funcţie derivabilă pe intervalul I. i) Dacă f (x) 0, oricare ar fi x I, atuncif este crescătoare pe I; ii) Dacă f (x) 0, oricare ar fi x I, atuncif este descrescătoare pe I; iii) Dacă f (x) > 0, oricare ar fi x I, atuncif este strict crescătoare pe I; iv) Dacă f (x) < 0, oricare ar fi x I, atuncif este scrict descrescătoare pe I. Demonstraţie. Vom justifica numai punctul i), celelalte cazuri demonstrându-se în mod analog. Fie x,x două puncte arbitrare din I aşa încât x <x. Aplicăm teorema lui Lagrange pe intervalul [x,x ] şi rezultă căexistă c (x,x ) aşa încât f(x ) f(x )=f (c)(x x ). Cum f (x) 0, oricare ar fi x I, rezultăcă f(x ) f(x ) 0, adică f(x ) f(x ). Aşadar, f este crescătoare pe I. Afirmaţiile de la punctele i) şi ii) ale Observaţiei admit şi reciproce, în timp ce afirmaţiile de la punctele iii) şi iv) nu mai admit reciproce. Observaţia.. Fie f ofuncţie continuă pe un interval I şi x 0 I. Dacă f este dervabilă pe I {x 0 } iar derivata sa f are limită (finită sau infinită) în punctul x 0, atunci există derivata funcţiei f şi în punctul x 0 şi în plus f (x 0 ) = lim x x 0 f (x). Pentru demonstraţie se aplică teorema lui Lagrange pe intervalele [x, x 0 ] şi [x 0,x] şi se face x x 0. Observaţia..3 Dacă funcţia f are derivata mărginită pe I, atunci f este funcţia lipschitziană pei. 8
228 Demonstraţie. Fie x,x două puncte arbitrare diferite din I. Aplicăm teorema lui Lagrange pe intervalul [x,x ] (sau [x,x ]) şi există c (x,x ) aşa încât f(x ) f(x )= f (c)(x x ). Cum f (x) M, M>0, oricare ar fi x I, avem f(x ) f(x ) = f (c)(x x ) = f (c) x x M x x, ceea ce ne arată că f este lipschitziană pei. Teorema..5 (Teorema lui Darboux). Dacă f : I R este o funcţie derivabilă pe I, atunci derivata sa f are proprietatea lui Darboux pe acel interval. Demonstraţie. Fie x,x I cu x < x. Să presupunem că f (x ) < f (x ) şi λ (f (x ),f (x )). Considerăm funcţia auxiliară g : I R, g(x) =f(x) λx, care verifică inegalităţile: g (x ) < 0 şi g (x ) > 0. Deoarece g este derivabilă pe[x,x ] I rezultă că g este continuă pe compactul [x,x ] deci îşi atinge marginile. Atunci există c [x,x ] aşa încât g(c) = g(x). Săarătăm min x [x,x ] că c x şi c x. Din g (x ) < 0 rezultă căexistă ε>0 aşa încât g(x) g(x) x x < 0, pentru orice x (x,x + ε), de unde obţinem că g(x) <g(x ),pentruoricex (x,x + ε). Această ultimă inegalitatenearatăcă g îşi atinge marginea inferioară într-un punct diferit de x ; deci c x. În mod analog, demonstrăm că c x. Acum, aplicând teorema lui Fermat funcţiei g pe intervalul [x,x ] rezultă că g (c) =0,adică f (c) =λ. Teorema..6 (Teorema lui Taylor). Fie I un interval deschis al lui R. Dacă funcţia f : I R este derivabilă den + ori pe I, atunci pentru orice două punctex, x 0 I, cu x x 0, există unpunctc (x, x 0 ) (sau (x 0,x)) aşa încât f(x) =f(x 0 )+ f (x 0 )! (x x 0 )+ f (x 0 ) (x x 0 ) +...+! + f (n) (x 0 ) (x x 0 ) n + f (n+) (c) n! (n + )! (x x 0) (n+), numită formula lui Taylor. (.7) Demonstraţie. Ne propunem să scriem pe f sub forma: f(x) =f(x 0 )+ f (x 0 )! (x x 0 )+ f (x 0 ) (x x 0 ) +...+! + f (n) (x 0 ) (x x 0 ) n + K(x x 0 ) (n+), ( )x I, n! unde K este un număr real. Considerăm funcţia auxiliară g(t) =f(t)+ f (t)! (x t)+ f (t) (x t) +...+! + f (n) (t) (x t) n + K(x t) (n+), ( )t I. n! Observăm că g este derivabilă pe I, g(x) = f(x), g(x 0 ) = f(x 0 ). Aşadar, funcţia g satisface condiţiile teoremei lui Rolle pe [x, x 0 ] (sau [x 0,x]). Atunci există un punct c (x, x 0 ) (sau (x 0,x)) aşa încât g (c) =0. Dar g (t) =f (t)+ f (t) (x t) f (t) + f (t) (x t) f (t) (x t)+!!!! f (n+) (t) (x t) n f (n) (t) n! (n )! (x t)n K(n + )(x t) n, 9
229 ( )t I, de unde g (t) = f (n+) (t) (x t) n K(n + )(x t) n, ( )t I. n! De aici obţinem g (c) =0,adică f (n+) (c) (x c) n = K(n + )(x c) n, n! de unde găsim K = f (n+) (c) (n + )!, care înlocuită în (.7) conduce la formula lui Taylor. Observaţia..4 Formula lui Taylor este o formulă de aproximare a funcţiei f prin polinomul (T n f)(x) =f(x 0 )+ f (x 0 )! (x x 0 )+ f (x 0 ) (x x 0 ) +...+! + f (n) (x 0 ) (x x 0 ) n, n! numit polinomul lui Taylor de grad n asociat funcţiei f. Expresia (v n t)(x) = f (n+) (c) (n + )! (x x 0) n+, se numeşte restul sub forma Lagrange al formulei lui Taylor. Proprietatea esenţială a polinomului lui Taylor este dată derelaţiile: (T n f)(x 0 )=f(x 0 ); (T n f) (x 0 )=f (x 0 ); (T n f) () (x 0 )=f () (x 0 );...;(T n f) (n) (x 0 )=f (n) (x 0 ). Observaţia..5 Dacă în formula lui Taylor considerăm x 0 =0,atunci obţinem Formula lui MacLaurin, adică f(x) =f(0) + f (0)! x + f (0) x f (n) (0) + f (n+) (c)! n! (n + )! xn+. Observaţia..6 Dacă în formula lui Taylor considerăm n =0,atunciobţinem formula creşterilor finite a lui Lagrange (v.teorema..4). Observaţia..7 Punctul c din intervalul deschis determinat de punctele x şi x 0 depinde de x, x 0 şi n. Punctul c se poate scrie şi sub forma c = x 0 + θ(x x 0 ),undeθ (0, ). Exemple.... Funcţia f(x) =e x, x R, estedeclasă C pe R iar f (k) (x) =e x, oricare ar fi k N şi oricare ar fi x R. Cum f (k) (0) =, k N, formula MacLaurin pentru e x are forma: e x =+ x! + x xn +...+! n! + xn+ (n + )! eθx, ( )x R.... Funcţia f(x) = ln( + x), x (, ), este indefinit derivabilă pe(, ). Cum f (k) k (k )! (x) =( ) ( + x) k, k N, ( )x (, ) (vezi Exemplul..), avem f(0) =, f (k) (0) = ( ) k (k )!, k N şi formula de tip MacLaurin ln( + x) = x x! + x3 3! x4 xn +...+( )n 4! n! + +( ) n xn+ n + ( + θx) n+ ( )x (, ), θ (0, ). 30
230 .3 Diferenţiala unei funcţii reale În acest paragraf introducem noţiunea de diferenţială relativă la o funcţie reală de o variabilă reală. Definiţia.3. Fie f : I R ofuncţie definită pe intervalul deschis I. Spunem că f este diferenţiabilă în punctul x 0 I dacă există numărul real A, care depinde de f şi x 0,şi o funcţie α : I R cu lim α(x) =α(x 0 )=0 astfel încât x x 0 (.8) f(x) f(x 0 )=A(x x 0 )+α(x)(x x 0 ), pentru orice x I. Teorema.3. Funcţia f : I R, interval deschis, este diferenţiabilă în punctul x 0 I dacă şi numai dacă f este derivabilă în x 0. Demonstraţie. Să admitecă f este diferenţiabilă în punctul x 0 I. Atunci există A R şi o funcţie α : I R cu lim x x 0 α(x) =α(x 0 )=0astfel încât să aibă loc (.8). Considerând x x 0 şi împarţind în (.8) ambii membrii prin x x 0 obţinem f(x) f(x 0 ) x x 0 A + α(x), ( )x I {x 0 }. Cum lim α(x) =0,rezultăcăexistă = A, adică f este derivabilă în x x 0 punctul x 0 şi A = f (x 0 ). Reciproc, să presupnem că f este derivabilă în punctul x 0. Din definiţia derivatei lui f în punctul x 0 avem f(x) f(x 0 ) lim x x 0 x x 0 f(x) f(x 0 ) lim = f (x 0 ). x x 0 x x 0 Considerăm funcţia α : I R, f(x) f(x 0 ) f α(x) = (x 0 ), pentru x I {x 0 } x x 0 0, pentru x = x 0. Se observă că pentru x x 0 avem lim α(x) =α(x 0 )=0,adicăαeste continuă în x 0. x x 0 f(x) f(x 0 )=f (x 0 )(x x 0 )+α(x)(x x 0 ), Din definiţia lui α egalitate evident verificată şi pentru x x 0. Rezultăcă f este diferenţiabilă în x 0 şi A = f (x 0 ). Observaţia.3. Teorema.3. exprimă faptul că pentru funcţiile reale de o variabilă reală noţiunile de diferenţiabilitate şi derivabilitate într-un punct sunt echivalente. Observaţia.3. Dacă f este diferenţiabilăîn punctul x 0, atunci pentru valori mici ale lui h = x x 0 diferenţa f(x) f(x 0 ) se poate aproxima cu f (x 0 )h, adică (.9) f(x 0 + h) f(x 0 ) f (x 0 )h Definiţia.3. Fie f : I R, I interval deschis din R, derivabilăîn punctul x 0 I. Funcţia liniară şi omogenă g : R R, g(h) =f (x 0 )h, h R, se numeşte diferenţiala funcţiei f în punctul x 0 şi se notează prin df (x 0 ), adică (.0) df (x 0 )(h) =f (x 0 )h. 3
231 Acum, relaţia (.9) se mai poate scrie f(x 0 + h) f(x 0 ) df (x 0 )(h). Diferenţiala lui f într-un punct oarecare x I onotăm prin df (x). Dacă în (.0) alegem, în particular, ca f aplicaţia identică, atunci diferenţiala lui f într-un punct x I este df (x)(h) =h, ( )h R, adică h = d(x)(h). Folosind notaţia simplă d(x) =dx, avem dx(h) =h. Revenind cu acest rezultat în (.0), obţinem df (x)(h) =f (x)dx(h), ( )h R, de unde găsim (.) Din (.) rezultă şi scrierea df (x) =f (x)dx. f df (x) (x) = dx, care constituie exprimarea derivatei lui f în limbajul diferenţialelor. Ţinând seama de (.), obţinem imediat din regulile de derivare următoarele reguli de diferenţiere: dacă f,g : I R sunt funcţii derivabile pe intervalul deschis I R, atunci d(f + g) =df + dg; d(λt) =λdf, d(fg)=gdf + fdg, iar dacă, în plus g 0, atunci ( ) f gdf fdg d = g g. Teorema.3. (diferenţiala unei funcţii compuse). Fie I şi J două intervale deschise ale lui R şi fie u : I J şi f : J R două funcţii derivabile respectiv pe I şi J. Atunci Demonstraţie. Avem oricare ar fi x I. df (u) =f (u)du. df (u(x)) = (f(u(x))) dx = f (u(x)) u (x)dx = f (u(x)) du(x), Definiţia.3.3 Numim diferenţiala de ordinul doi a funcţiei f în punctul x, notată prin d f(x), expresia d(df (x)), adică avem În general, d n f(x) =d(d n f(x)). Avem: d f(x) =d(df (x)). d f(x) =d(f (x)dx) =d(f (x)) dx + f (x)d(dx) = = f (x)dx dx = f (x)dx, deoarece d(dx) =0(derivata de ordinul doi a funcţiei identice este egală cu0). Prin inducţie matematică obţinem că d n f(x) =f (n) (x)dx n. Se mai zice că diferenţialele de ordin superior sunt invariante faţă deordinuldederivare. Această proprietate nu se mai păstrează pentru diferenţiala funcţiilor compuse. 3
232 .4 Aplicaţiile derivatei în economie Economia este considerată cea mai exactă dintre ştiinţele sociale, [?], deoarece, în general, procesele economicce sunt studiate prin modele matematice. În 3. am văzut că relaţiile dintre diferite mărimi economice se pot exprima prin funcţii. Pentru a studia variaţia unei astfel de funcţii şi a trasa graficul ei se folosesc derivatele funcţiei de ordinul întâi şi doi. În domeniul economic în descrierea variaţiei mărimii y în raport cu o altă mărime x, dată prin funcţia y = f(x), x I, I interval din R, se utilizează conceptul de medie şi conceptul de marginal. (vezi partea introductivă la capitolul 4). Definiţia.4. Numim valoarea medie a lui f pe intervalul [x, x + h] I,h > 0, notată cu f(x), raportul Δf Δx f(x + h) f(x) =. h Exemple:.4.. Fie P (t) numărul de unităţi produse într-un flux tehnologic după t ore de la începerea proccesului. Valoarea medie a lui P (t) într-un interval de h ore este P (t + h) P (t) h = P (t) şi se numeşte producţie medie..4.. Dacă funcţia de cost total pentru realizarea a x unităţi dintr-un produs este C(x) = x 9 + x + 00, x să stabilim câte unităţi trebuie realizate pentru a avea cel mai scăzut preţ mediu pe unitate de produs. Trebuie să studiem variaţia funcţiei preţ mediu C(x) = C(x) x = x ,x. x Cum C(x) = 9 00 x are rădăcina x =30, din tabelul de variaţie x 30 C (x) C(x) 9 3 rezultă că vom avea cel mai scăzut preţ mediudacă se produc 30 unităţi de produs. Definiţia.4. Numim valoare marginală afuncţiei f : I R, în punctul x I f(x + h) f(x) lim = f df (x) (x) = h 0 h dx Exemplul.4.3. În cazul Exemplului.4., valoarea marginală a producţiei P (t) este productivitatea P P (t + h) P (t) (t) = lim. h 0 h Definiţia.4.3 Numim variaţia relativă a funcţiei f : I R în punctul x I raportul Δf(x) f(x) = f(x + h) f(x), h > 0. f(x) Definiţia.4.4 / Numim ritmul mediu de variaţie a funcţiei f : I R în punctul x I raportul h şi se notează cur f,m. Δf(x) f(x) 33
233 Definiţia.4.5 Numim ritmul local (marginal) a funcţiei f : I R în punctul x limita lim R f,m, adică h 0 / Δf(x) Δf(x) h = lim f(x) h 0 h lim h 0 f(x) = f f = (ln f), care este derivata logaritmică aluif. Ritmul local a lui f în x se notează prin R f,x. Definiţia.4.6 Numim elasticitatea medie afuncţiei f : I R în punctul x, notată prin E m, raportul variaţiilor relative ale lui f(x) şi x, adică E f,m = Δf(x) / h f(x) x = Δf(x) x h f(x). Definiţia.4.7 Numim elasticitatea locală (marginală) afuncţiei f : I R, în punctul x limita elasticităţii medii când h 0. Ea se notează prin E f,m. Avem E f,m = lim h 0 x f(x) Δf(x) = x h f f = x(ln f) (ln f) = (ln x). Proprietatea importantă a elasticităţii unei funcţii este aceea că ea este ca mărime independentă de unităţile de măsură în care au fost măsurate variabilele f(x) şi x. Exemplul.4.4. Fie x = ap + b, a>0, b>0 o funcţie cerere pentru o marfă de preţ p. Elasticitatea marginală a cererii în p este E ap+b,p = p(ln(ap + b)) = ap ap + b. Cum E ap+b,p <, rezultăcă la o cerere de tip liniar la o creştere relativă a preţului corespunde o creştere relativă mai mică pentru cerere. Observaţia.4. Noţiunile introduse în acest paragraf se transpun uşor la noţiunile din domeniul economic. Astfel, avem cost mediu, cost marginal, elasticitatea costului, cerere medie, cerere marginală, elasticitatea cererii etc. 34
234 .5 Test de verificare a cunoştinţelor nr. 0. Definiţi următoarele noţiuni: a) Derivata unei funcţii reale de o variabilăreală; b) Diferenţiala unei funcţii reale de o variabilă reală.. Enunţaţi: a) Teorema lui Fermat; b) Teorema lui Rolle; c) Teorema lui Lagrange; d) Teorema (formula) lui Taylor; c) Teorema lui Cauchy. 3. Studiaţi derivabilitatea funcţiei: a) f : R R, f(x) = 3 x 3 3x +; x b) f : R R, f(x) =(x ) arcsin x + în punctul x =0. 4. Numerele a 0,a,..., a n verifică condiţia a 0 + a + a n a n 3 n + =0. Săsearatecă funcţia f :[,e ] R, f(x) =a 0 + a ln x + a ln x a n ln n x are cel puţinunzeroîn intervalul (,e ). 5. a) Se consideră fincţia f :(, ) R, f(t) = ln( + t). Aplicând teorema lui Lagrange funcţiei f pe intervalul [0,x], x > 0, săsearatecă oricare ar fi x > 0 are loc relaţia: x ( + x) ln( + x) < 0; b) Să searatecă funcţia g :(0, ) R, g(x) =(+x) x este monoton descrescătoare. 6. Utilizând teorema lui Cauchy să se demonstreze inegalitatea: ln( + x) > arctgx +x, x > a) Precizaţi punctele de extrem local ale funcţiei: f : R R, f(x) = x. b) Determinaţi derivata de ordinul n, n N, pentru funcţia f(x) =sinx. c) calculaţi derivata de ordinul 0 a funcţiei 8. Să se dezvolte după puterile lui x funcţia h(x) =x 3 sin x. f :(, ) R, f(x) = ln( + x). 9. Să sedezvoltef(x) =e x, x R, după puterile lui x Să se determine n N astfel încât polinomul lui Taylor T n (x) în punctul x 0 =0asociat funcţiei f(x) = +x, x [, ] să difere de funcţie cu mai puţin de în intervalul 6 [0, ]. 35
235 Indicaţii şi răspunsuri Test nr a) f este derivabilă per\{, }, iar(, 0) este punct de inflexiune şi (, 0) este punct de întoarcere. b) f este derivabilă în x =0, iar(0, 0) este punct unghiular. 4. Se consideră funcţia g :[,e ] R, şi se aplică teorema lui Rolle. g(x) = a 0 ln x + a ln x 5. b) Se calculează g (x) şi se foloseşte punctul (a) a n ln n+ x n + 6. Se aplică teorema lui Cauchy funcţiilor f,g :[0,x] R, cux>0, f(t) =(+t)ln(+t), g(t) =arctg (t). 7. a) (, 0) şi (, 0) sunt puncte de minim local, iar (0, ) este punct de maxim local; ( b) f (n) (x) =sin x + n π ), ( )n N. c) h (0) (x) = ( x ) ( 0 cos x + x 3 6x 0) sin x. 8. Se aplică formula lui Mac Laurin şi se obţine: ln( + x) =x x + x ( )n xn+ n + + +( ) n+ xn+ cu θ (0, ). n + ( + θx) n+ 9. Se aplică formula lui Taylor cu x 0 = şi se obţine: e x = [ e + x + ] (x +) (x +)n !! n! (x +)n+ + e +θ(x+). (n + )! 0. Se impune ca restul formulei lui Mac Laurin să aibă valoarea absolută mai mică sau egală cu şi se obţine n. 6 36
236 Bibliografia aferentă capitolului: [] Acu, A.M., Acu D., Acu M., Dicu P., Matematici aplicate în economie - Volumul II, Editura ULB, Sibiu,
237 Capitolul Derivarea funcţiilor de mai multe variabile Obiective: Introducerea noţiunilor de derivată parţială, diferenţiala funcţiilor de mai multe variabile, extremele funcţiilor de mai multe variabile, ajustarea datelor şi interpolarea funcţiilor. Rezumat: Capitolul începe cu definirea conceptului de derivată parţială şi aplicaţiile economice imediate ale acestuia. Se continuă cu generalizarea noţiunii de diferenţială pentru funcţiile reale de mai multe variabile reale, noţiuni necesare în studiul extremelor condiţionate ale funcţiilor de mai multe variabile. Capitolul continuă cu studiul metodelor de aflare a extremelor (simple şi condiţionate) ale funcţiilor de mai multe variabile, metoda celor mai mici pătrate pentru ajustarea datelor şi câteva noţiuni legate de interpolarea funcţiilor. Conţinutul capitolului:. Derivate parţiale. Interpretări geometrice şi economice ale derivatelor parţiale 3. Derivarea funcţiilor compuse 4. Diferenţiala funcţiilor de mai multe variabile 5. Extremele funcţiilor de mai multe variabile 6. Extreme condiţionate 7. Ajustarea unor date 8. Interpolarea funcţiilor 9. Test de verificare a cunoştinţelor 0. Bibliografia aferentă capitolului Cuvinte cheie: derivată parţială, diferenţială, extremele funcţiilor reale de mai multe variabile reale, ajustare, interpolare.. Derivate parţiale Să considerăm o funcţie de două variabile f : D R R, z = f(x, y) şi M(a,a ) un punct din D. Definiţia.. Dacă există limitele f(x, a ) f(a,a ) f(a,y) f(a,a ) lim şi lim x a x a x a y a şi sunt finite, atunci spunem că funcţia f este derivabilă parţial în punctul M, în cazul primei limite, în raport cu x şi în cazul al doilea, în raport cu y. 38
238 Aceste limite se numesc respectiv derivata parţială a funcţiei f în raport cu x şi derivata parţială afuncţiei f în raport cu y, în punctul M(a,a ). Ele se notează prin f x(a,a )= f(a,a ) x şi respectiv f y(a,a )= f(a,a ). y Este evident că dacă funcţia f este derivabilă în raport cu x şi respectiv cu y, atunci f este continuă în raport cu x şi respectiv în raport cu y. Dacă funcţia f este derivabilă parţial în orice punct din domeniul D, atunci derivatele parţiale resprezintă noi funcţii de două variabile, definite pe D şi asociate funcţiei f. Practic, pentru a calcula derivata parţială în raport cu x a funcţiei z = f(x, y) se consideră f ca funcţie de x, considerându-se y constantă, şi se aplică formulele de derivare cunoscute, pentru această funcţie de variabilă x. Pentru a calcula derivata parţială în raport cu y se consideră x constantă. Exemplul... Să calculăm derivatele parţiale pentru funcţia Avem f x(x, y) = f y(x, y) = f(x, y) = f(x, y) x f(x, y) y x + y x + y +, (x, y) R. = (x + y +) x(x + y) (x + y +) = = y x xy + (x + y +), = (x + y +) y(x + y) (x + y +) = = x y xy + (x + y +), oricare ar fi (x, y) R. Exemplul... Pentru funcţia f(x, y) = x y definită pe D = {(x, y) R x > 0,y R} derivatele parţiale sunt f x(x, f(x, y) y) = =y x y x şi f y(x, f(x, y) y) = = x y lnx. y Observaţia.. Derivatele parţiale ale unei funcţii de n variabile, n 3, se definesc în mod analog. Fie funcţia f : D R n R, z = f(x,x,...,x n ) şi punctul M(a,a,...,a n ) D. Spunem că funcţia f este derivabilă parţial în punctul M în raport cu variabila x k, dacă f(a,...,a k,x k,a k+,...,a n ) f(a,a,...,a n ) lim x k a k x a k există şi este finită. Această limită o numim derivata parţială a funcţiei f în raport cu variabila x k în punctul M şi o notăm prin f x k (M) =f x k (a,a,...,a n ) sau f(m) x k = f(a,a,...,a n ) x k O funcţie de n variabile derivabilă în fiecare punct al domeniului D este derivabilă parţial în acel domeniu şi derivatele parţiale sunt funcţii de n variabile definite în acel domeniu. Calculul lor se face pe aceleaşi principii ca la funcţiile de două variabile. 39
239 Exemplul..3. Pentru funcţia u =ln(x + y + z ) definită pe R {(0, 0, 0)} = D, avem derivatele parţiale: u x = u x = x x + y + z, u y = u y = y x + y + z, u z = u z = z x + y + z. Exemplul..4. Pentru funcţia u = x y3z definită ped = {(x, y, z) R 3 x>0,y > 0,z R}, derivatele parţiale sunt: u x = y3z x y 3z, u y = 3z xy 3z y 3z ln x, u z = 3z xy y 3z ln y ln x. Acum să introducem derivatele parţiale de ordin superior. Derivatele parţiale pentru funcţia f : D R R, z = f(x, y) sunt noi funcţii de două variabile. Dacă derivatele parţiale f x(x, y), f y(x, y) sunt la rândul lor derivabile parţial în raport cu x şi y, atunci derivatele lor parţiale se numesc derivate parţiale de ordinul doi ale funcţiei f. Ele se notează prin ( ) (f x) x = f x f f sau = f x x x ; (f x) y = f xy sau y (f y) x = f yx sau f y (f y) y = f y sau y ( ) f = f x y x ; ( ) f = f x y x ; ( ) f = f y x. Exemplul..5. Pentru funcţia f(x, y) =ln(x + y +3), (x, y) R,avem f f x = x x + y +3, y f y = x + y +3, ( ) x = x x + y = (x + y +3) x x +3 x (x + y +3) = (y x +3) (x + y +3), ( ) f xy x 4xy = x + y = +3 y (x + y +3), ( ) f yx y 4xy = x + y = +3 x (x + y +3), ( ) f y = y x + y = (x + y +3) 4y +3 (x + y +3) = (x y +3) (x + y +3). y Se observă că derivatele f xy şi yx, numite şi derivate parţiale mixte, sunt egale. În general ele nu sunt egale. Următoarea teoremă dă condiţii suficiente ca derivatele parţiale mixte să fie egale. Teorema.. (A.Schwarz). Dacă funcţia f : D R R, z = f(x, y) are derivate parţiale de ordinul doi într-o vecinătate V alui(x, y) D şi dacă f xy este continuă în punctul (x, y), atunci f xy(x, y) =f yx(yx). 40
240 Nu prezentăm demonstraţia acestei teoreme. Observaţia.. În mod analog se definesc derivatele parţiale de ordin n, n 3. Rezultatul Teoremei lui Schwarz se păstrează. Observaţia..3 Derivatele parţiale de ordin superior se definesc şi pentru funcţiile de n variabile, n 3. Pentru derivatele lor mixte se păstrează afirmaţia din Teorema... Exemplul..6. Să calculăm derivatele parţiale de ordinul doi pentru funcţia f(x, y, z) = x + y + z, (x, y, z) R 3. Avem: f x = x x + y + z, y f y = x + y + z, f x = Exemplul..7. Să calculăm Avem f z = z x + y + z x + y + z x x +y +z x + y + z = f xy = f yx yx = (x + y + z ), 3/ f xz = f zx xz = (x + y + z ), 3/ f yz = f zy yz = (x + y + z ), 3/ f y = x + z (x + y + z ) 3/, y + z (x + y + z ) 3/, f z = x + z (x + y + z ) 3/, (x, y, z) R3 {(0, 0, 0)}. 3 u x y z dacă u = exyz, (x, y, z) R 3. u z = xyexyz, u y z = xexyz + xy xze xyz =(x + x yz)e xyz, 3 u x y z =(+xyz)exyz +(x + x yz)yze xyz = =(+3xyz + x y z )e xyz, oricare ar fi (x, y, z) R 3.. Interpretări geometrice şi economice ale derivatelor parţiale Semnificaţia geometrică a derivatelor parţiale rezultă limpede dacă le interpretăm cu ajutorul reprezentărilor geometrice. În figura... fie M(a, b, f(a, b)) un punct de pe suprafaţa z = f(x, y), (x, y) D R. Prin M pot fi duse două secţiuni verticale, una perpendiculară peoy (y = b) şi cealaltă perpendiculară peox (x = a). 4
 = f(a,b) x.")
241 Fig... Prima este o curbă de pe suprafaţă, care trece prin M în direcţia lui Ox şi arată variaţia lui z când x variază. În această secţiune valoarea lui y este b. Panta tangentei MT x la secţiune în M este măsurată dederivataluiz ca funcţie de x, adicădederivataparţială z x (a, b) = f(a,b) x. La fel, valoarea z(a,b) y = f(a,b) y măsoară panta lui MT y,tangentaîn M(a, b) la secţiunea verticală a suprafeţei perpendiculară peox în x = a. În concluzie, derivatele parţiale f f x (a, b) şi y (a, b) măsoară pantele suprafeţei z = f(x, y) în două direcţii perpendiculare duse în punctul M(a, b), una perpendiculară pe Oy, iar cealaltă peox. Utilizând interpretarea geometrică a derivatelor parţiale ale funcţiei z = f(x, y) în punctul M(a, b, f(a, b)) putem scrie ecuaţia planului tangent la suprafaţa z = f(x, y) în punctul M(a, b, f(a, b)). Acesta are forma f(a, b) f(a, b) (x a) +(y b) = z f(a, b). x y Exemplul... Să scriem ecuaţia planului tangent la suprafaţa z = xy +x 3y + în punctul M(,, ). Avem z x = y +, z x(, ) = 3, z y = x 3, z x(, ) =, z(, ) =, iar ecuaţia planului tangent este: (x )3 + (y )( ) = z 4
Spatii liniare. Exemple Subspaţiu liniar Acoperire (înfăşurătoare) liniară. Mulţime infinită liniar independentă
 liniară. Mulţime infinită liniar independentă") Noţiunea de spaţiu liniar 1 Noţiunea de spaţiu liniar Exemple Subspaţiu liniar Acoperire (înfăşurătoare) liniară 2 Mulţime infinită liniar independentă 3 Schimbarea coordonatelor unui vector la o schimbare
Noţiunea de spaţiu liniar 1 Noţiunea de spaţiu liniar Exemple Subspaţiu liniar Acoperire (înfăşurătoare) liniară 2 Mulţime infinită liniar independentă 3 Schimbarea coordonatelor unui vector la o schimbare
Sisteme diferenţiale liniare de ordinul 1
 1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate.
 Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile
 Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
Metode iterative pentru probleme neliniare - contractii
 Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
1.3 Baza a unui spaţiu vectorial. Dimensiune
 .3 Baza a unui spaţiu vectorial. Dimensiune Definiţia.3. Se numeşte bază a spaţiului vectorial V o familie de vectori B care îndeplineşte condiţiile de mai jos: a) B este liniar independentă; b) B este
.3 Baza a unui spaţiu vectorial. Dimensiune Definiţia.3. Se numeşte bază a spaţiului vectorial V o familie de vectori B care îndeplineşte condiţiile de mai jos: a) B este liniar independentă; b) B este
Lectia VI Structura de spatiu an E 3. Dreapta si planul ca subspatii ane
 Subspatii ane Lectia VI Structura de spatiu an E 3. Dreapta si planul ca subspatii ane Oana Constantinescu Oana Constantinescu Lectia VI Subspatii ane Table of Contents 1 Structura de spatiu an E 3 2 Subspatii
Subspatii ane Lectia VI Structura de spatiu an E 3. Dreapta si planul ca subspatii ane Oana Constantinescu Oana Constantinescu Lectia VI Subspatii ane Table of Contents 1 Structura de spatiu an E 3 2 Subspatii
Spaţii vectoriale. Definiţia 1.1. Fie (K, +, ) un corp şi (V, +) un grup abelian.
 un corp şi (V, +) un grup abelian.") Spaţii vectoriale 1. Spaţii vectoriale. Definiţii şi proprietăţi de bază În continuare prin corp vom înţelege corp comutativ. Dacă nu se precizează altceva, se vor folosi notaţiile standard pentru elementele
Spaţii vectoriale 1. Spaţii vectoriale. Definiţii şi proprietăţi de bază În continuare prin corp vom înţelege corp comutativ. Dacă nu se precizează altceva, se vor folosi notaţiile standard pentru elementele
CURS 11: ALGEBRĂ Spaţii liniare euclidiene. Produs scalar real. Spaţiu euclidian. Produs scalar complex. Spaţiu unitar. Noţiunea de normă.
 Sala: 2103 Decembrie 2014 Conf. univ. dr.: Dragoş-Pătru Covei CURS 11: ALGEBRĂ Specializarea: C.E., I.E., S.P.E. Nota: Acest curs nu a fost supus unui proces riguros de recenzare pentru a fi oficial publicat.
Sala: 2103 Decembrie 2014 Conf. univ. dr.: Dragoş-Pătru Covei CURS 11: ALGEBRĂ Specializarea: C.E., I.E., S.P.E. Nota: Acest curs nu a fost supus unui proces riguros de recenzare pentru a fi oficial publicat.
Curs 14 Funcţii implicite. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi"
 Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
(a) se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.
 se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.") Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Curs 4 Serii de numere reale
 Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Planul determinat de normală şi un punct Ecuaţia generală Plane paralele Unghi diedru Planul determinat de 3 puncte necoliniare
 1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
5. FUNCŢII IMPLICITE. EXTREME CONDIŢIONATE.
 5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
Curs 1 Şiruri de numere reale
 Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
2 Transformări liniare între spaţii finit dimensionale
 Transformări 1 Noţiunea de transformare liniară Proprietăţi. Operaţii Nucleul şi imagine Rangul şi defectul unei transformări 2 Matricea unei transformări Relaţia dintre rang şi defect Schimbarea matricei
Transformări 1 Noţiunea de transformare liniară Proprietăţi. Operaţii Nucleul şi imagine Rangul şi defectul unei transformări 2 Matricea unei transformări Relaţia dintre rang şi defect Schimbarea matricei
CURS 5 Spaţii liniare. Spaţiul liniar R n
 CURS 5 Spaţii liniare. Spaţiul liniar R n A. Arusoaie arusoaie.andreea@gmail.com andreea.arusoaie@info.uaic.ro Facultatea de Informatică, Universitatea Alexandru Ioan Cuza din Iaşi 30 Octombrie 2017 Structura
CURS 5 Spaţii liniare. Spaţiul liniar R n A. Arusoaie arusoaie.andreea@gmail.com andreea.arusoaie@info.uaic.ro Facultatea de Informatică, Universitatea Alexandru Ioan Cuza din Iaşi 30 Octombrie 2017 Structura
Curs 2 Şiruri de numere reale
 Curs 2 Şiruri de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Convergenţă şi mărginire Teoremă Orice şir convergent este mărginit. Demonstraţie Fie (x n ) n 0 un
Curs 2 Şiruri de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Convergenţă şi mărginire Teoremă Orice şir convergent este mărginit. Demonstraţie Fie (x n ) n 0 un
III. Serii absolut convergente. Serii semiconvergente. ii) semiconvergentă dacă este convergentă iar seria modulelor divergentă.
 semiconvergentă dacă este convergentă iar seria modulelor divergentă.") III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
Asupra unei inegalităţi date la barajul OBMJ 2006
 Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
Vectori liberi Produs scalar Produs vectorial Produsul mixt. 1 Vectori liberi. 2 Produs scalar. 3 Produs vectorial. 4 Produsul mixt.
 liberi 1 liberi 2 3 4 Segment orientat liberi Fie S spaţiul geometric tridimensional cu axiomele lui Euclid. Orice pereche de puncte din S, notată (A, B) se numeşte segment orientat. Dacă A B, atunci direcţia
liberi 1 liberi 2 3 4 Segment orientat liberi Fie S spaţiul geometric tridimensional cu axiomele lui Euclid. Orice pereche de puncte din S, notată (A, B) se numeşte segment orientat. Dacă A B, atunci direcţia
Orice izometrie f : (X, d 1 ) (Y, d 2 ) este un homeomorfism. (Y = f(x)).
 (Y, d 2 ) este un homeomorfism. (Y = f(x)).") Teoremă. (Y = f(x)). Orice izometrie f : (X, d 1 ) (Y, d 2 ) este un homeomorfism Demonstraţie. f este continuă pe X: x 0 X, S Y (f(x 0 ), ε), S X (x 0, ε) aşa ca f(s X (x 0, ε)) = S Y (f(x 0 ), ε) : y
Teoremă. (Y = f(x)). Orice izometrie f : (X, d 1 ) (Y, d 2 ) este un homeomorfism Demonstraţie. f este continuă pe X: x 0 X, S Y (f(x 0 ), ε), S X (x 0, ε) aşa ca f(s X (x 0, ε)) = S Y (f(x 0 ), ε) : y
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE
 DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor X) functia f 1
 functia f 1") Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
Integrala nedefinită (primitive)
") nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
CURS XI XII SINTEZĂ. 1 Algebra vectorială a vectorilor liberi
 Lect. dr. Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr. Lucian MATICIUC http://math.etti.tuiasi.ro/maticiuc/ CURS XI XII SINTEZĂ 1 Algebra vectorială
Lect. dr. Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr. Lucian MATICIUC http://math.etti.tuiasi.ro/maticiuc/ CURS XI XII SINTEZĂ 1 Algebra vectorială
SERII NUMERICE. Definiţia 3.1. Fie (a n ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0
 n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0") SERII NUMERICE Definiţia 3.1. Fie ( ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0 şirul definit prin: s n0 = 0, s n0 +1 = 0 + 0 +1, s n0 +2 = 0 + 0 +1 + 0 +2,.......................................
SERII NUMERICE Definiţia 3.1. Fie ( ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0 şirul definit prin: s n0 = 0, s n0 +1 = 0 + 0 +1, s n0 +2 = 0 + 0 +1 + 0 +2,.......................................
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor
 Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Definiţia generală Cazul 1. Elipsa şi hiperbola Cercul Cazul 2. Parabola Reprezentari parametrice ale conicelor Tangente la conice
 1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
2.9 Forme biafine Forme pătratice afine. Aducerea la forma canonică Centre de simetrie Varietăţi pătratice...
 Geometrie Afină Contents 1 Spaţii vectoriale 3 1.1 Spaţii vectoriale peste un corp K........................ 3 1.2 Exemple de spaţii vectoriale........................... 4 1.3 Dependenţă liniară de vectori..........................
Geometrie Afină Contents 1 Spaţii vectoriale 3 1.1 Spaţii vectoriale peste un corp K........................ 3 1.2 Exemple de spaţii vectoriale........................... 4 1.3 Dependenţă liniară de vectori..........................
a n (ζ z 0 ) n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea
 n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea") Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Nicolae Cotfas ELEMENTE DE EDITURA UNIVERSITĂŢII DIN BUCUREŞTI
 Nicolae Cotfas ELEMENTE DE ALGEBRĂ LINIARĂ EDITURA UNIVERSITĂŢII DIN BUCUREŞTI Introducere Pe parcursul acestei cărţi ne propunem să prezentăm într-un mod cât mai accesibil noţiuni si rezultate de bază
Nicolae Cotfas ELEMENTE DE ALGEBRĂ LINIARĂ EDITURA UNIVERSITĂŢII DIN BUCUREŞTI Introducere Pe parcursul acestei cărţi ne propunem să prezentăm într-un mod cât mai accesibil noţiuni si rezultate de bază
Algebră liniară CAPITOLUL 1
 Algebră liniară CAPITOLUL SPAŢII VECTORIALE FINIT DIMENSIONALE. Definiţia spaţiilor vectoriale Pentru a introduce noţiunea de spaţiu vectorial avem nevoie de noţiunea de corp comutativ de caracteristică
Algebră liniară CAPITOLUL SPAŢII VECTORIALE FINIT DIMENSIONALE. Definiţia spaţiilor vectoriale Pentru a introduce noţiunea de spaţiu vectorial avem nevoie de noţiunea de corp comutativ de caracteristică
Matrice. Determinanti. Sisteme liniare
 Matrice 1 Matrice Adunarea matricelor Înmulţirea cu scalar. Produsul 2 Proprietăţi ale determinanţilor Rangul unei matrice 3 neomogene omogene Metoda lui Gauss (Metoda eliminării) Notiunea de matrice Matrice
Matrice 1 Matrice Adunarea matricelor Înmulţirea cu scalar. Produsul 2 Proprietăţi ale determinanţilor Rangul unei matrice 3 neomogene omogene Metoda lui Gauss (Metoda eliminării) Notiunea de matrice Matrice
Seminar 5 Analiza stabilității sistemelor liniare
 Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
f(x) = l 0. Atunci f are local semnul lui l, adică, U 0 V(x 0 ) astfel încât sgnf(x) = sgnl, x U 0 D\{x 0 }. < f(x) < l +
 = l 0. Atunci f are local semnul lui l, adică, U 0 V(x 0 ) astfel încât sgnf(x) = sgnl, x U 0 D\{x 0 }. < f(x) < l +") Semnul local al unei funcţii care are limită. Propoziţie. Fie f : D (, d) R, x 0 D. Presupunem că lim x x 0 f(x) = l 0. Atunci f are local semnul lui l, adică, U 0 V(x 0 ) astfel încât sgnf(x) = sgnl,
Semnul local al unei funcţii care are limită. Propoziţie. Fie f : D (, d) R, x 0 D. Presupunem că lim x x 0 f(x) = l 0. Atunci f are local semnul lui l, adică, U 0 V(x 0 ) astfel încât sgnf(x) = sgnl,
Lucrare. Varianta aprilie I 1 Definiţi noţiunile de număr prim şi număr ireductibil. Soluţie. Vezi Curs 6 Definiţiile 1 şi 2. sau p b.
 Lucrare Soluţii 28 aprilie 2015 Varianta 1 I 1 Definiţi noţiunile de număr prim şi număr ireductibil. Soluţie. Vezi Curs 6 Definiţiile 1 şi 2 Definiţie. Numărul întreg p se numeşte număr prim dacă p 0,
Lucrare Soluţii 28 aprilie 2015 Varianta 1 I 1 Definiţi noţiunile de număr prim şi număr ireductibil. Soluţie. Vezi Curs 6 Definiţiile 1 şi 2 Definiţie. Numărul întreg p se numeşte număr prim dacă p 0,
1. Sisteme de ecuaţii liniare Definiţia 1.1. Fie K un corp comutativ. 1) Prin sistem de m ecuaţii liniare cu n necunoscute X 1,...
 Prin sistem de m ecuaţii liniare cu n necunoscute X 1,...") 1. Sisteme de ecuaţii liniare Definiţia 1.1. Fie K un corp comutativ. 1) Prin sistem de m ecuaţii liniare cu n necunoscute X 1,..., X n şi coeficienţi în K se înţelege un ansamblu de egalităţi formale
1. Sisteme de ecuaţii liniare Definiţia 1.1. Fie K un corp comutativ. 1) Prin sistem de m ecuaţii liniare cu n necunoscute X 1,..., X n şi coeficienţi în K se înţelege un ansamblu de egalităţi formale
Esalonul Redus pe Linii (ERL). Subspatii.
. Subspatii.") Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
Metode de interpolare bazate pe diferenţe divizate
 Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
Capitolul 4. Integrale improprii Integrale cu limite de integrare infinite
 Capitolul 4 Integrale improprii 7-8 În cadrul studiului integrabilităţii iemann a unei funcţii s-au evidenţiat douăcondiţii esenţiale:. funcţia :[ ] este definită peintervalînchis şi mărginit (interval
Capitolul 4 Integrale improprii 7-8 În cadrul studiului integrabilităţii iemann a unei funcţii s-au evidenţiat douăcondiţii esenţiale:. funcţia :[ ] este definită peintervalînchis şi mărginit (interval
Contract POSDRU/86/1.2/S/ POSDRU ID * Bucureşti 2012
 Contract POSDRU/86/1.2/S/62485 Algebră Liniară POSDRU ID 62485 * Bucureşti 212 Prefaţă Algebra liniară şi geometria analitică stau la baza pregătirii matematice universitare, oferind modelări bazate pe
Contract POSDRU/86/1.2/S/62485 Algebră Liniară POSDRU ID 62485 * Bucureşti 212 Prefaţă Algebra liniară şi geometria analitică stau la baza pregătirii matematice universitare, oferind modelări bazate pe
riptografie şi Securitate
 riptografie şi Securitate - Prelegerea 12 - Scheme de criptare CCA sigure Adela Georgescu, Ruxandra F. Olimid Facultatea de Matematică şi Informatică Universitatea din Bucureşti Cuprins 1. Schemă de criptare
riptografie şi Securitate - Prelegerea 12 - Scheme de criptare CCA sigure Adela Georgescu, Ruxandra F. Olimid Facultatea de Matematică şi Informatică Universitatea din Bucureşti Cuprins 1. Schemă de criptare
Algebră liniară CAPITOLUL 3
 Algebră liniară CAPITOLUL 3 TRANSFORĂRI LINIARE 3.. Definiţia transformării liniare Definiţia 3... Fie V şi W două spaţii vectoriale peste un corp comutativ K. O funcţie u: V W se numeşte transformare
Algebră liniară CAPITOLUL 3 TRANSFORĂRI LINIARE 3.. Definiţia transformării liniare Definiţia 3... Fie V şi W două spaţii vectoriale peste un corp comutativ K. O funcţie u: V W se numeşte transformare
R R, f ( x) = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.
 = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.") 5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
Cursul Măsuri reale. D.Rusu, Teoria măsurii şi integrala Lebesgue 15
 MĂSURI RELE Cursul 13 15 Măsuri reale Fie (,, µ) un spaţiu cu măsură completă şi f : R o funcţie -măsurabilă. Cum am văzut în Teorema 11.29, dacă f are integrală pe, atunci funcţia de mulţime ν : R, ν()
MĂSURI RELE Cursul 13 15 Măsuri reale Fie (,, µ) un spaţiu cu măsură completă şi f : R o funcţie -măsurabilă. Cum am văzut în Teorema 11.29, dacă f are integrală pe, atunci funcţia de mulţime ν : R, ν()
2. Sisteme de forţe concurente...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
Capitolul 4 PROPRIETĂŢI TOPOLOGICE ŞI DE NUMĂRARE ALE LUI R. 4.1 Proprietăţi topologice ale lui R Puncte de acumulare
 Capitolul 4 PROPRIETĂŢI TOPOLOGICE ŞI DE NUMĂRARE ALE LUI R În cele ce urmează, vom studia unele proprietăţi ale mulţimilor din R. Astfel, vom caracteriza locul" unui punct în cadrul unei mulţimi (în limba
Capitolul 4 PROPRIETĂŢI TOPOLOGICE ŞI DE NUMĂRARE ALE LUI R În cele ce urmează, vom studia unele proprietăţi ale mulţimilor din R. Astfel, vom caracteriza locul" unui punct în cadrul unei mulţimi (în limba
EDITURA PARALELA 45 MATEMATICĂ DE EXCELENŢĂ. Clasa a X-a Ediţia a II-a, revizuită. pentru concursuri, olimpiade şi centre de excelenţă
 Coordonatori DANA HEUBERGER NICOLAE MUŞUROIA Nicolae Muşuroia Gheorghe Boroica Vasile Pop Dana Heuberger Florin Bojor MATEMATICĂ DE EXCELENŢĂ pentru concursuri, olimpiade şi centre de excelenţă Clasa a
Coordonatori DANA HEUBERGER NICOLAE MUŞUROIA Nicolae Muşuroia Gheorghe Boroica Vasile Pop Dana Heuberger Florin Bojor MATEMATICĂ DE EXCELENŢĂ pentru concursuri, olimpiade şi centre de excelenţă Clasa a
Seminar Algebra. det(a λi 3 ) = 0
 = 0") Rezolvari ale unor probleme propuse "Matematica const în a dovedi ceea ce este evident în cel mai puµin evident mod." George Polya P/Seminar Valori si vectori proprii : Solutie: ( ) a) A = Valorile proprii:
Rezolvari ale unor probleme propuse "Matematica const în a dovedi ceea ce este evident în cel mai puµin evident mod." George Polya P/Seminar Valori si vectori proprii : Solutie: ( ) a) A = Valorile proprii:
Functii Breviar teoretic 8 ianuarie ianuarie 2011
 Functii Breviar teoretic 8 ianuarie 011 15 ianuarie 011 I Fie I, interval si f : I 1) a) functia f este (strict) crescatoare pe I daca x, y I, x< y ( f( x) < f( y)), f( x) f( y) b) functia f este (strict)
Functii Breviar teoretic 8 ianuarie 011 15 ianuarie 011 I Fie I, interval si f : I 1) a) functia f este (strict) crescatoare pe I daca x, y I, x< y ( f( x) < f( y)), f( x) f( y) b) functia f este (strict)
1.4 Schimbarea bazei unui spaţiu vectorial
 Algebră liniară, geometrie analitică şi diferenţială. Schimbarea bazei unui spaţiu vectorial După cum s-a văzut deja, într-un spaţiu vectorial V avem mai multe baze, iar un vector x V va avea câte un sistem
Algebră liniară, geometrie analitică şi diferenţială. Schimbarea bazei unui spaţiu vectorial După cum s-a văzut deja, într-un spaţiu vectorial V avem mai multe baze, iar un vector x V va avea câte un sistem
Vladimir BALAN. Algebră Liniară, Geometrie Analitică, şi Elemente de Geometrie Diferenţială. Student Web Copy. = Bucureşti 2011 =
 Vladimir BALAN Algebră Liniară, Geometrie Analitică, şi Elemente de Geometrie Diferenţială = Bucureşti 2011 = Prefaţă Acest material include noţiunile, rezultatele teoretice de bază, precum şi probleme
Vladimir BALAN Algebră Liniară, Geometrie Analitică, şi Elemente de Geometrie Diferenţială = Bucureşti 2011 = Prefaţă Acest material include noţiunile, rezultatele teoretice de bază, precum şi probleme
Criterii de comutativitate a grupurilor
 Criterii de comutativitate a grupurilor Marius Tărnăuceanu 10.03.2017 Abstract În această lucrare vom prezenta mai multe condiţii suficiente de comutativitate a grupurilor. MSC (2010): 20A05, 20K99. Key
Criterii de comutativitate a grupurilor Marius Tărnăuceanu 10.03.2017 Abstract În această lucrare vom prezenta mai multe condiţii suficiente de comutativitate a grupurilor. MSC (2010): 20A05, 20K99. Key
2.1 Sfera. (EGS) ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2
 ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2") .1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
.1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
SEMINAR 14. Funcţii de mai multe variabile (continuare) ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0
 ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0") Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
GEOMETRIE ANALITICĂ. Mihai-Sorin Stupariu
 GEOMETRIE ANALITICĂ Mihai-Sorin Stupariu Sem. al II-lea, 007-008 Cuprins 1 Elemente de algebră liniară 3 1.1 Spaţii vectoriale. Definiţie. Exemple................ 3 1. Combinaţii liniare. Baze şi repere..................
GEOMETRIE ANALITICĂ Mihai-Sorin Stupariu Sem. al II-lea, 007-008 Cuprins 1 Elemente de algebră liniară 3 1.1 Spaţii vectoriale. Definiţie. Exemple................ 3 1. Combinaţii liniare. Baze şi repere..................
Conice - Câteva proprietǎţi elementare
 Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI GEOMETRIE. Teorie şi probleme
 ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI GEOMETRIE DIFERENŢIALĂ. Teorie şi probleme Florian MUNTEANU Departamentul de Matematici Aplicate, Universitatea din Craiova Al. Cuza 3, 585 Craiova, Dolj, România
ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI GEOMETRIE DIFERENŢIALĂ. Teorie şi probleme Florian MUNTEANU Departamentul de Matematici Aplicate, Universitatea din Craiova Al. Cuza 3, 585 Craiova, Dolj, România
Concurs MATE-INFO UBB, 1 aprilie 2017 Proba scrisă la MATEMATICĂ
 UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ Concurs MATE-INFO UBB, aprilie 7 Proba scrisă la MATEMATICĂ SUBIECTUL I (3 puncte) ) (5 puncte) Fie matricele A = 3 4 9 8
UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ Concurs MATE-INFO UBB, aprilie 7 Proba scrisă la MATEMATICĂ SUBIECTUL I (3 puncte) ) (5 puncte) Fie matricele A = 3 4 9 8
Toate subiectele sunt obligatorii. Timpul de lucru efectiv este de 3 ore. Se acordă din oficiu 10 puncte. SUBIECTUL I.
 Modelul 4 Se acordă din oficiu puncte.. Fie numărul complex z = i. Calculaţi (z ) 25. 2. Dacă x şi x 2 sunt rădăcinile ecuaţiei x 2 9x+8 =, atunci să se calculeze x2 +x2 2 x x 2. 3. Rezolvaţi în mulţimea
Modelul 4 Se acordă din oficiu puncte.. Fie numărul complex z = i. Calculaţi (z ) 25. 2. Dacă x şi x 2 sunt rădăcinile ecuaţiei x 2 9x+8 =, atunci să se calculeze x2 +x2 2 x x 2. 3. Rezolvaţi în mulţimea
COLEGIUL NATIONAL CONSTANTIN CARABELLA TARGOVISTE. CONCURSUL JUDETEAN DE MATEMATICA CEZAR IVANESCU Editia a VI-a 26 februarie 2005.
 SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
O generalizare a unei probleme de algebră dată la Olimpiada de Matematică, faza judeţeană, 2013
 O generalizare a unei probleme de algebră dată la Olimpiada de Matematică, faza judeţeană, 2013 Marius Tărnăuceanu 1 Aprilie 2013 Abstract În această lucrare vom prezenta un rezultat ce extinde Problema
O generalizare a unei probleme de algebră dată la Olimpiada de Matematică, faza judeţeană, 2013 Marius Tărnăuceanu 1 Aprilie 2013 Abstract În această lucrare vom prezenta un rezultat ce extinde Problema
Gheorghe PROCOPIUC PROBLEME DE ALGEBRĂ LINIARĂ GEOMETRIE
 Gheorghe PROCOPIUC PROBLEME DE ALGEBRĂ LINIARĂ ŞI GEOMETRIE IAŞI, 005 CUPRINS 1 MATRICE ŞI SISTEME ALGEBRICE LINIARE 5 1.1 Matrice şi determinanţi.......................... 5 1. Sisteme de ecuaţii algebrice
Gheorghe PROCOPIUC PROBLEME DE ALGEBRĂ LINIARĂ ŞI GEOMETRIE IAŞI, 005 CUPRINS 1 MATRICE ŞI SISTEME ALGEBRICE LINIARE 5 1.1 Matrice şi determinanţi.......................... 5 1. Sisteme de ecuaţii algebrice
Seminariile Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reziduurilor
 Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
3 FUNCTII CONTINUE Noţiuni teoretice şi rezultate fundamentale Spaţiul euclidian R p. Pentru p N *, p 2 fixat, se defineşte R
 3 FUNCTII CONTINUE 3.. Noţiuni teoretice şi rezultate fundamentale. 3... Saţiul euclidian R Pentru N *, fixat, se defineşte R = R R R = {(x, x,, x : x, x,, x R} de ori De exemlu, R = {(x, y: x, yr} R 3
3 FUNCTII CONTINUE 3.. Noţiuni teoretice şi rezultate fundamentale. 3... Saţiul euclidian R Pentru N *, fixat, se defineşte R = R R R = {(x, x,, x : x, x,, x R} de ori De exemlu, R = {(x, y: x, yr} R 3
Sala: Octombrie 2014 SEMINAR 1: ALGEBRĂ. este un Q-spaţiu vectorial, faţă de operaţiile uzuale de adunare şi înmulţire cu un număr raţional.
 Sala: Octombrie 24 SEMINAR : ALGEBRĂ Conf univ dr: Dragoş-Pătru Covei Programul de studii: CE, IE, SPE Nota: Acest curs nu a fost supus unui proces riguros de recenzare pentru a fi oficial publicat distribuit
Sala: Octombrie 24 SEMINAR : ALGEBRĂ Conf univ dr: Dragoş-Pătru Covei Programul de studii: CE, IE, SPE Nota: Acest curs nu a fost supus unui proces riguros de recenzare pentru a fi oficial publicat distribuit
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM 1 electronica.geniu.ro
 Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Sala: 2103 Octombrie 2014 CURS 1: ALGEBRĂ. Fie K corp comutativ cu elementul neutru la înmulţire notat prin 1 iar 0 la adunare.
 Sala: 2103 Octombrie 2014 Conf. univ. dr.: Dragoş-Pătru Covei CURS 1: ALGEBRĂ Specializarea: C.E., I.E., S.P.E. Nota: Acest curs nu a fost supus unui proces riguros de recenzare pentru a fi oficial publicat.
Sala: 2103 Octombrie 2014 Conf. univ. dr.: Dragoş-Pătru Covei CURS 1: ALGEBRĂ Specializarea: C.E., I.E., S.P.E. Nota: Acest curs nu a fost supus unui proces riguros de recenzare pentru a fi oficial publicat.
Ecuaţia generală Probleme de tangenţă Sfera prin 4 puncte necoplanare. Elipsoidul Hiperboloizi Paraboloizi Conul Cilindrul. 1 Sfera.
 pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
Aplicaţii ale principiului I al termodinamicii la gazul ideal
 Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Adriana-Ioana Lefter DIFERENŢIALE) Anul I, Facultatea de Chimie Note de curs
 Anul I, Facultatea de Chimie Note de curs") Adriana-Ioana Lefter MATEMATICĂ (ALGEBRĂ ŞI ECUAŢII DIFERENŢIALE) Anul I, Facultatea de Chimie Note de curs Cuprins Partea 1 ALGEBRĂ 1 Capitolul 1 Matrice şi determinanţi 3 11 Corpuri 3 12 Matrice 4 13
Adriana-Ioana Lefter MATEMATICĂ (ALGEBRĂ ŞI ECUAŢII DIFERENŢIALE) Anul I, Facultatea de Chimie Note de curs Cuprins Partea 1 ALGEBRĂ 1 Capitolul 1 Matrice şi determinanţi 3 11 Corpuri 3 12 Matrice 4 13
Criptosisteme cu cheie publică III
 Criptosisteme cu cheie publică III Anul II Aprilie 2017 Problema rucsacului ( knapsack problem ) Considerăm un număr natural V > 0 şi o mulţime finită de numere naturale pozitive {v 0, v 1,..., v k 1 }.
Criptosisteme cu cheie publică III Anul II Aprilie 2017 Problema rucsacului ( knapsack problem ) Considerăm un număr natural V > 0 şi o mulţime finită de numere naturale pozitive {v 0, v 1,..., v k 1 }.
Principiul Inductiei Matematice.
 Principiul Inductiei Matematice. Principiul inductiei matematice constituie un mijloc important de demonstratie in matematica a propozitiilor (afirmatiilor) ce depind de argument natural. Metoda inductiei
Principiul Inductiei Matematice. Principiul inductiei matematice constituie un mijloc important de demonstratie in matematica a propozitiilor (afirmatiilor) ce depind de argument natural. Metoda inductiei
CONCURS DE ADMITERE, 17 iulie 2017 Proba scrisă la MATEMATICĂ
 UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ CONCURS DE ADMITERE, 7 iulie 207 Proba scrisă la MATEMATICĂ SUBIECTUL I (30 puncte) ) (0 puncte) Să se arate că oricare ar
UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ CONCURS DE ADMITERE, 7 iulie 207 Proba scrisă la MATEMATICĂ SUBIECTUL I (30 puncte) ) (0 puncte) Să se arate că oricare ar
Geometrie computationala 2. Preliminarii geometrice
 Platformă de e-learning și curriculă e-content pentru învățământul superior tehnic Geometrie computationala 2. Preliminarii geometrice Preliminarii geometrice Spatiu Euclidean: E d Spatiu de d-tupluri,
Platformă de e-learning și curriculă e-content pentru învățământul superior tehnic Geometrie computationala 2. Preliminarii geometrice Preliminarii geometrice Spatiu Euclidean: E d Spatiu de d-tupluri,
Conice. Lect. dr. Constantin-Cosmin Todea. U.T. Cluj-Napoca
 Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
ELEMENTE DE GEOMETRIE. Dorel Fetcu
 ELEMENTE DE GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ Dorel Fetcu Acest curs este un fragment din manualul D. Fetcu, Elemente de algebră liniară, geometrie analitică şi geometrie diferenţială, Casa Editorială
ELEMENTE DE GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ Dorel Fetcu Acest curs este un fragment din manualul D. Fetcu, Elemente de algebră liniară, geometrie analitică şi geometrie diferenţială, Casa Editorială
Ecuatii exponentiale. Ecuatia ce contine variabila necunoscuta la exponentul puterii se numeste ecuatie exponentiala. a x = b, (1)
") Ecuatii exponentiale Ecuatia ce contine variabila necunoscuta la exponentul puterii se numeste ecuatie exponentiala. Cea mai simpla ecuatie exponentiala este de forma a x = b, () unde a >, a. Afirmatia.
Ecuatii exponentiale Ecuatia ce contine variabila necunoscuta la exponentul puterii se numeste ecuatie exponentiala. Cea mai simpla ecuatie exponentiala este de forma a x = b, () unde a >, a. Afirmatia.
Funcţii Ciudate. Beniamin Bogoşel
 Funcţii Ciudate Beniamin Bogoşel Scopul acestui articol este construcţia unor funcţii neobişnuite din punct de vedere intuitiv, care au anumite proprietăţi interesante. Construcţia acestor funcţii se face
Funcţii Ciudate Beniamin Bogoşel Scopul acestui articol este construcţia unor funcţii neobişnuite din punct de vedere intuitiv, care au anumite proprietăţi interesante. Construcţia acestor funcţii se face
Lectia VII Dreapta si planul
 Planul. Ecuatii, pozitii relative Dreapta. Ecuatii, pozitii relative Aplicatii Lectia VII Dreapta si planul Oana Constantinescu Oana Constantinescu Lectia VII Planul. Ecuatii, pozitii relative Dreapta.
Planul. Ecuatii, pozitii relative Dreapta. Ecuatii, pozitii relative Aplicatii Lectia VII Dreapta si planul Oana Constantinescu Oana Constantinescu Lectia VII Planul. Ecuatii, pozitii relative Dreapta.
Examen AG. Student:... Grupa:... ianuarie 2011
 Problema 1. Pentru ce valori ale lui n,m N (n,m 1) graful K n,m este eulerian? Problema 2. Să se construiască o funcţie care să recunoască un graf P 3 -free. La intrare aceasta va primi un graf G = ({1,...,n},E)
Problema 1. Pentru ce valori ale lui n,m N (n,m 1) graful K n,m este eulerian? Problema 2. Să se construiască o funcţie care să recunoască un graf P 3 -free. La intrare aceasta va primi un graf G = ({1,...,n},E)
Sisteme de ecuaţii diferenţiale
 Curs 5 Sisteme de ecuaţii diferenţiale 5. Sisteme normale Definiţie 5.. Se numeşte sistem normal sistemul de ecuaţii diferenţiale de ordinul întâi dx dt = f (t, x, x 2,..., x n ) dx 2 dt = f 2(t, x, x
Curs 5 Sisteme de ecuaţii diferenţiale 5. Sisteme normale Definiţie 5.. Se numeşte sistem normal sistemul de ecuaţii diferenţiale de ordinul întâi dx dt = f (t, x, x 2,..., x n ) dx 2 dt = f 2(t, x, x
Ecuatii trigonometrice
 Ecuatii trigonometrice Ecuatiile ce contin necunoscute sub semnul functiilor trigonometrice se numesc ecuatii trigonometrice. Cele mai simple ecuatii trigonometrice sunt ecuatiile de tipul sin x = a, cos
Ecuatii trigonometrice Ecuatiile ce contin necunoscute sub semnul functiilor trigonometrice se numesc ecuatii trigonometrice. Cele mai simple ecuatii trigonometrice sunt ecuatiile de tipul sin x = a, cos
Progresii aritmetice si geometrice. Progresia aritmetica.
 Progresii aritmetice si geometrice Progresia aritmetica. Definitia 1. Sirul numeric (a n ) n N se numeste progresie aritmetica, daca exista un numar real d, numit ratia progresia, astfel incat a n+1 a
Progresii aritmetice si geometrice Progresia aritmetica. Definitia 1. Sirul numeric (a n ) n N se numeste progresie aritmetica, daca exista un numar real d, numit ratia progresia, astfel incat a n+1 a
Activitatea A5. Introducerea unor module specifice de pregătire a studenţilor în vederea asigurării de şanse egale
 Investeşte în oameni! FONDUL SOCIAL EUROPEAN Programul Operaţional Sectorial pentru Dezvoltarea Resurselor Umane 2007 2013 Axa prioritară nr. 1 Educaţiaşiformareaprofesionalăînsprijinulcreşteriieconomiceşidezvoltăriisocietăţiibazatepecunoaştere
Investeşte în oameni! FONDUL SOCIAL EUROPEAN Programul Operaţional Sectorial pentru Dezvoltarea Resurselor Umane 2007 2013 Axa prioritară nr. 1 Educaţiaşiformareaprofesionalăînsprijinulcreşteriieconomiceşidezvoltăriisocietăţiibazatepecunoaştere
CURS VII-IX. Capitolul IV: Funcţii derivabile. Derivate şi diferenţiale. 1 Derivata unei funcţii. Interpretarea geometrică.
 Lect dr Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr Lucian MATICIUC CURS VII-IX Capitolul IV: Funcţii derivabile Derivate şi diferenţiale 1
Lect dr Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr Lucian MATICIUC CURS VII-IX Capitolul IV: Funcţii derivabile Derivate şi diferenţiale 1
z a + c 0 + c 1 (z a)
") 1 Serii Laurent (continuare) Teorema 1.1 Fie D C un domeniu, a D şi f : D \ {a} C o funcţie olomorfă. Punctul a este pol multiplu de ordin p al lui f dacă şi numai dacă dezvoltarea în serie Laurent a funcţiei
1 Serii Laurent (continuare) Teorema 1.1 Fie D C un domeniu, a D şi f : D \ {a} C o funcţie olomorfă. Punctul a este pol multiplu de ordin p al lui f dacă şi numai dacă dezvoltarea în serie Laurent a funcţiei
Profesor Blaga Mirela-Gabriela DREAPTA
 DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
Algebra si Geometrie Seminar 9
 Algebra si Geometrie Seminar 9 Decembrie 017 ii Equations are just the boring part of mathematics. I attempt to see things in terms of geometry. Stephen Hawking 9 Dreapta si planul in spatiu 1 Notiuni
Algebra si Geometrie Seminar 9 Decembrie 017 ii Equations are just the boring part of mathematics. I attempt to see things in terms of geometry. Stephen Hawking 9 Dreapta si planul in spatiu 1 Notiuni
1 Preliminarii. M 3, (a b) c = a (b c) (notăm a b c, obţinând astfel şi x 1 x 2... x n
 c = a (b c) (notăm a b c, obţinând astfel şi x 1 x 2... x n") 1 Preliminarii Fie M, A mulţimi nevide şi n N. Se muneşte operaţie n ară (sau lege de compoziţie n-ară) definită pe M orice aplicaţie τ : M n M (M n = } M {{... M } ). In cazul n = 2, obţinem operaţiile
1 Preliminarii Fie M, A mulţimi nevide şi n N. Se muneşte operaţie n ară (sau lege de compoziţie n-ară) definită pe M orice aplicaţie τ : M n M (M n = } M {{... M } ). In cazul n = 2, obţinem operaţiile
Subiecte Clasa a VII-a
 lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
Pseudoinversă şi inversă generalizată ale unei aplicaţii liniare
 Pseudoinversă şi inversă generalizată ale unei aplicaţii liniare Adrian REISNER 1 1. Pseudoinversă a unui endomorfism într-un spaţiu vectorial de dimensiune finită. Fie S un R-spaţiu vectorial de dimensiune
Pseudoinversă şi inversă generalizată ale unei aplicaţii liniare Adrian REISNER 1 1. Pseudoinversă a unui endomorfism într-un spaţiu vectorial de dimensiune finită. Fie S un R-spaţiu vectorial de dimensiune
Subiecte Clasa a VIII-a
 Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Ion CRĂCIUN CAPITOLE DE MATEMATICI SPECIALE EDITURA PIM
 Ion CRĂCIUN CAPITOLE DE MATEMATICI SPECIALE EDITURA PIM IAŞI 2007 2 Cuprins 1 Ecuaţii diferenţiale liniare de ordin superior 7 1.1 Ecuaţii diferenţiale liniare de ordinul n cu coeficienţi variabili 7 1.2
Ion CRĂCIUN CAPITOLE DE MATEMATICI SPECIALE EDITURA PIM IAŞI 2007 2 Cuprins 1 Ecuaţii diferenţiale liniare de ordin superior 7 1.1 Ecuaţii diferenţiale liniare de ordinul n cu coeficienţi variabili 7 1.2
INTERPOLARE. y i L i (x). L(x) = i=0
. L(x) = i=0") INTERPOLARE Se dau punctele P 0, P 1,..., P n in plan sau in spatiu, numite noduri si avand vectorii de pozitie r 0, r 1,..., r n. Problemă. Să se găsească o curbă (dintr-o anumită familie) care să treacă
INTERPOLARE Se dau punctele P 0, P 1,..., P n in plan sau in spatiu, numite noduri si avand vectorii de pozitie r 0, r 1,..., r n. Problemă. Să se găsească o curbă (dintr-o anumită familie) care să treacă
GEOMETRIE ANALITICĂ. Gheorghe MUNTEANU, Adelina MANEA
 GEOMETRIE ANALITICĂ Gheorghe MUNTEANU, Adelina MANEA 2 Cuprins Prefaţă 7 I Consideraţii teoretice 9 1 Spaţii vectoriale 11 1.1 Definiţie, exemple......................... 12 1.2 Subspaţii..............................
GEOMETRIE ANALITICĂ Gheorghe MUNTEANU, Adelina MANEA 2 Cuprins Prefaţă 7 I Consideraţii teoretice 9 1 Spaţii vectoriale 11 1.1 Definiţie, exemple......................... 12 1.2 Subspaţii..............................
CUPRINS 5. Reducerea sistemelor de forţe (continuare)... 1 Cuprins..1
... 1 Cuprins..1") CURS 5 REDUCEREA SISTEMELOR DE FORŢE (CONTINUARE) CUPRINS 5. Reducerea sistemelor de forţe (continuare)...... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 5.1. Teorema lui Varignon pentru sisteme
CURS 5 REDUCEREA SISTEMELOR DE FORŢE (CONTINUARE) CUPRINS 5. Reducerea sistemelor de forţe (continuare)...... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 5.1. Teorema lui Varignon pentru sisteme
ELEMENTE DE GEOMETRIA COMPUTAŢIONALĂ A CURBELOR Interpolare cu ajutorul funcţiilor polinomiale
 3 ELEMENTE DE GEOMETRIA COMPUTAŢIONALĂ A CURBELOR 31 Interpolare cu ajutorul funcţiilor polinomiale Prin interpolare se înţelege următoarea problemă: se dau n + 1 puncte P 0, P 1,, P n în plan sau în spaţiu
3 ELEMENTE DE GEOMETRIA COMPUTAŢIONALĂ A CURBELOR 31 Interpolare cu ajutorul funcţiilor polinomiale Prin interpolare se înţelege următoarea problemă: se dau n + 1 puncte P 0, P 1,, P n în plan sau în spaţiu
Laborator 6. Integrarea ecuaţiilor diferenţiale
 Laborator 6 Integrarea ecuaţiilor diferenţiale Responsabili: 1. Surdu Cristina(anacristinasurdu@gmail.com) 2. Ştirbăţ Bogdan(bogdanstirbat@yahoo.com) Obiective În urma parcurgerii acestui laborator elevul
Laborator 6 Integrarea ecuaţiilor diferenţiale Responsabili: 1. Surdu Cristina(anacristinasurdu@gmail.com) 2. Ştirbăţ Bogdan(bogdanstirbat@yahoo.com) Obiective În urma parcurgerii acestui laborator elevul