'Διερεύνηση αποτελεσματικότητας ασαφούς ελεγκτή για διαφορετικές θέσεις αισθητήρα-διεγέρτη'
|
|
|
- Οφέλια Μπουκουβαλαίοι
- 7 χρόνια πριν
- Προβολές:
Transcript
1 'Διερεύνηση αποτελεσματικότητας ασαφούς ελεγκτή για διαφορετικές θέσεις αισθητήρα-διεγέρτη' ΟΝΟΜΑ ΦΟΙΤΗΤΗ: ΣΕΛΛΗΣ ΗΛΙΑΣ ΑΡΙΘΜΟΣ ΜΗΤΡΩΟΥ: ΤΜΗΜΑ: ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ : ΣΤΑΥΡΟΥΛΑΚΗΣ ΓΕΩΡΓΙΟΣ
2 ΠΕΡΙΕΧΟΜΕΝΑ 1. ΕΙΣΑΓΩΓΗ 2. ΘΕΩΡΙΑ 3. ΠΕΡΙΓΡΑΦΗ ΠΡΟΒΛΗΜΑΤΟΣ ΚΑΙ ΚΩΔΙΚΑ 4. 1 ο ΜΕΡΟΣ 5. 2 ο ΜΕΡΟΣ 6. ΣΥΜΠΕΡΑΣΜΑΤΑ 7. ΒΙΒΛΙΟΓΡΑΦΙΑ
3 1. ΕΙΣΑΓΩΓΗ Η διπλωματική έγινε με την επίβλεψη και την βοήθεια του κύριου Γεώργιου Σταυρουλάκη καθηγητή του τμήματος Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείου Κρήτης. Αφόρα την μελέτη ασαφούς ελεγκτή για διάφορες θέσης αισθητήρα. Το σύστημα πάνω στο οποίο δοκιμάζουμε τον ελεγκτή έχει σχεδιαστεί και έχει χρησιμοποιηθεί από τον κύριο Γεώργιο Ταιρίδη στα πλαίσια της μεταπτυχιακής του διατριβής με τίτλο προσομοίωση σύνθετων ευφυών μηχανικών συστημάτων με αισθητήρες και διεγέρτες από πιεζοηλεκτρικά υλικά Χανιά Μάιος Το σύστημα που εξετάζουμε αποτελείται από μια πακτωμένη ράβδο (πρόβολο δοκού) η οποία εκτίθεται σε αρμονικά ταλάντωση.προσομοιώνουμε την μηχανική συμπεριφορά σε MATLAB. Στόχος μας είναι να ελέγξουμε όσο το δυνατό γίνεται την ταλάντωση ως προς το εύρος της και την ευστάθεια στο χρόνο, να βρούμε την βέλτιστη θέση του αισθητήρα και να ελέγξουμε πως αντιδρά σε ένα τυχαίο εύρος τιμών.
4 2. ΘΕΩΡΙΑ I) Ασαφής λογική Η ασαφής λογική αφορά τα εντος-γραμμής έμπειρα συστήματα που έχουν εφαρμοστεί για τον έλεγχο βιομηχανικών διαδικασιών σε πραγματικό χρόνο. Ακόμα κατέχει παράλληλη θέση με τη θεωρία πιθανοτήτων, την οποία όμως δεν την αντικαθιστά, και στοχεύει να αναπαράγει τον ασαφή συμπερασμό για αβέβαιες και σύνθετες διαδικασίες. Η θεωρία της ασαφής λογική βασίζεται στην προϋπόθεση ότι ο περιβάλλων χώρος απαρτίζεται από στοιχεία που ανήκουν σε σύνολα με διαφορετικούς βαθμούς συμμετοχής. Η ασάφεια δημιουργεί μια πλειότιμη έννοια στο χώρο της αβεβαιότητας, παραδείγματα της οποίας είναι η αλήθεια το ψεύδος και οι ενδιάμεσες έννοιες ασάφεια μπορεί να εισαχθεί στη θεωρία των συνόλων, αν γενικευτεί η χαρακτηριστική συνάρτηση για να λαμβάνει άπειρο αριθμό τιμών στο διάστημα [0,1]. Όταν ένα στοιχείο ανήκει στο υπό εξέταση σύνολο τότε λαμβάνει την τιμή 1 αλλιώς την τιμή 0 και δεν ανήκει στο σύνολο,αυτό το στοιχείο ανήκει στο κλασικό σύνολο.σε αντίθεση στα ασαφή σύνολα δεν ισχύει αυτό,δηλαδή κάθε στοιχείο μπορεί να λάβει τιμή από ένα εύρος τιμών και να ανήκει στο υπό εξέταση σύνολο με αυτήν την τιμή.όσο μεγαλύτερη είναι αυτή η τιμή τόσο μεγαλύτερη είναι και η συμμετοχή του στοιχείου στο σύνολο. Αυτή η συνάρτηση συνάρτηση συμμετοχής. Συνεπώς στα ασαφή σύνολα το δίπολο τιμών 0 ή 1 αντικαθιστάται από ένα διάστημα τιμών [0, 1].Η ασαφοποίηση είναι πλέον σημαντική διαδικασία για την ασαφή θεωρία. Συγκεκριμένα πρόκειται για την διαδικασία μετατροπής μιας ακριβούς αριθμητικής ποσότητας σε ασαφή η αναπαριστάται με τις συναρτήσεις συμμετοχής.
5 Στις συναρτήσεις συμμετοχής οι τιμές ορίζονται είτε διαισθητικά είτε με χρήση αλγόριθμων και λογικών διαδικασιών όπως: διαίσθηση, συνεπαγωγή, κατάξη, γωνιακά ασαφή σύνολα, νευρωνικά δίκτυα, γενετικοί αλγόριθμοι και επαγωγική προσαρμογή. Γι αυτή την εργασία και συγκεκριμένα για το πρόβλημα της δοκού βασιστήκαμε στη <<διαίσθηση του μηχανικού>> για να δώσουμε τις τιμές στις συναρτήσεις συμμετοχής τις οποίες πήρα με έτοιμες από τον κύριο Ταϊριδη. Η αποασαφοποίηση ορίζεται η διαδικασια μετατροπής ασαφών εξόδων σε ακριβείς, η διαδικασία αυτή είναι απαραίτητη γιατί οι τιμές των εξόδων πρέπει να είναι ακριβείς,ειδικά όταν το σύστημα χρησιμοποιείται σαν ελεγκτής.οι μέθοδοι που χρησιμοποιούνται αποασαφοποίηση είναι: Αρχή μέγιστου, κεντροειδής μέθοδος μέθοδος σταθμισμένου μέσου, μέθοδος μέσου- μέγιστου, κέντρο βάρους αθροισμάτων, κέντρο βάρους μέγιστης επιφάνειας και πρώτη ή τελευταία τιμή μέγιστου. Στην δικιά μας περίπτωση χρησιμοποιήσαμε την μέθοδο μέσου-μέγιστου για την αποασαφοποίηση της εξόδου του ασαφούς ελεγκτή. 3. ΠΕΡΙΓΡΑΦΗ ΠΡΟΒΛΗΜΑΤΟΣ ΚΑΙ ΚΩΔΙΚΑ Έχουμε μια δοκό την οποία την έχουμε χωρίσει σε 7 μέρη. Στο καθένα υπάρχει και ένας αισθητήρας που μα δίνει πληροφορίες για την ταχύτητα την επιτάχυνση και την μετατόπιση.
6 Το πρόγραμμα Beam_lqr_ges υπολογίζει την ταλάντωση και τον κλασικό έλεγχο δοκού.
7 Αρχικά τρέχουμε τον αλγόριθμο beam_lqr_ges το οποίο είναι έτοιμο από τον κύριο Ταϊρίδη Γεώργιο. Αυτός ο αλγόριθμος αρχίκα υπολογίζει την ταλάντωση και τον κλασσικό έλεγχο της δοκού. Δημιουργεί τα δεδομένα της δοκού τα οποία αποθηκεύονται στο databeam για μελλοντική χρήση σε άλλους αλγόριθμους. Τα διαγράμματα που παίρνουμε από την εκτέλεση αυτού του αλγόριθμου είναι:
8
9

 τον έλεγχο με την")
10 Το πρόγραμμα Integration_matrix ενσωματώνει μέσα στην ολοκλήρωση στο χρόνο (μεθ. Χούμβολτ) τον έλεγχο με την χρήση ασαφούς λογικής.
11 Τώρα θα πούμε λίγα λόγια για το πρόβλημα της προβόλου δοκού,καθώς και τον τρόπο που μοντελοποιούνται.υπάρχουν πολλές γνωστές μέθοδοι ολοκλήρωσης αλλά εμείς χρησιμοποιούμε μέθοδο Χούμβολτ,η οποία είναι μια από τις πιο παραδοσιακές μεθόδους αριθμητικής ολοκλήρωσης και η πιο σταθερή σε τέτοιου είδους προβλήματα.αυτή χρησιμοποιεί και ο κύριος Ταϊριδης στην μοντελοποίηση του προβλήματος την οποία ακολουθούμε και εμείς. Mu Cu Ku P Z όπου: τέλος u u, u M C, K, είναι τα μητρώα μάζας, απόσβεσης και δυσκαμψίας, είναι τα πεδία μετακινήσεων, ταχυτήτων και επιταχύνσεων και αντίστοιχα. P, Z είναι οι εξωτερικές δυνάμεις και οι δυνάμεις ελέγχου Η μέθοδος αυτή χρησιμοποιεί δυο σταθερές β και γ (σταθερές Houbolt).Για το πρόβλημα μας αυτές οι δυο σταθερές λαμβάνουν αντίστοιχα τις τιμές 0,25 και 0,50. Ο συνολικός χρόνος της διαδικασίας είναι 3 δευτερόλεπτα βήμα που επιλέχθηκε,μετά από δοκιμές (Ταϊρίδης εργασία) είναι 0,001 δευτερόλεπτα,δημιουργώντας έτσι 3000 επαναλήψεις. Ο σταθερές ολοκλήρωσης ( c i ) δίνονται από τις ακόλουθες εξισώσεις: 1 c 1, 2 ( t) c 1 t 2, 1 c 3, 2 c 4, 5 t c, c 6 t 1 2
12 Ο αλγόριθμος Houbolt, όπως υλοποιήθηκε με τον ασαφή έλεγχο, συνοψίζεται στα ακόλουθα βήματα. Βήμα 1: Αρχικοποίηση μεταβλητών X, X, X, Fm, M,, K,,, c 1, c2, c3, c4, c5, c6 * Βήμα 2: Υπολογισμός ενδιάμεσης ποσότητας F * K K c1m c 4 * Αντιστροφή του K : F * K * T Έναρξη βρόχου for από t 0 έως t f * Βήμα 3: Υπολογισμός ενδιάμεσης ποσότητας P Υπολογισμός μεταβολής φορτίσεων: dfm Fm ( t 1) Fm ( t ) Υπολογισμός μεταβολής δύναμης ελέγχου u Προσθήκη στην ποσότητα df m: dfm dfm u
13 * Υπολογισμός της ποσότητας P με χρήση των μητρώων μάζας (M) και απόσβεσης (Λ) του συστήματος: * P dfm M c2 X t c3 X t c5 X t c6x t ( ( ) ( )) ( ( ) ( ) Βήμα 4: Υπολογισμός του βήματος απόκρισης dx dx F P * * Βήμα 5: Επίλυση του επόμενου χρονικού βήματος ( t t ) Calculate acceleration: X( t 1) X ( t) c1dx c2x ( t) c3x ( t ) Calculate velocity: X ( t 1) X ( t) c4dx c5 X ( t) c6x ( t ) Calculate displacement: X ( t 1) X ( t) dx Τερματισμός του βρόχου for Τέλος Στον κώδικα integration_matrix αφού ορίσαμε τις μεταβλητές μας και δημιουργήσαμε αυτό που αναφέραμε προηγουμένως δηλαδή την διαδικασία Houbolt δημιουργήσαμε και μια συνάρτηση την fuzzy_initial η
14 οποία παίρνει ορίσματα τα δυο εύρη που βρίσκουμε απο την παραπάνω διαδικασία και έτσι δημιουργεί τους κανόνες για να γίνει ο fuzzy έλεγχος. Οι κανόνες (τους οποίους πήραμε έτοιμους από τον κύριο Ταίριδη είναι οι εξής: 1. If (Displacement is Far_L) and (Velocity is Left) then (Control_Force is Max) (1) 2. If (Displacement is Far_L) and (Velocity is Null) then (Control_Force is Med+) (1) 3. If (Displacement is Far_L) and (Velocity is Right) then (Control_Force is Low+) (1) 4. If (Displacement is Close_L) and (Velocity is Left) then (Control_Force is Med+) (1) 5. If (Displacement is Close_L) and (Velocity is Null) then (Control_Force is Low+) (1) 6. If (Displacement is Close_L) and (Velocity is Right) then (Control_Force is Null) (1) 7. If (Displacement is Equilibrium) and (Velocity is Left) then (Control_Force is Low+) (1) 8. If (Displacement is Equilibrium) and (Velocity is Null) then (Control_Force is Null) (1) 9. If (Displacement is Equilibrium) and (Velocity is Right) then (Control_Force is Low-) (1) 10. If (Displacement is Close_R) and (Velocity is Left) then (Control_Force is Null) (1)
15 11. If (Displacement is Close_R) and (Velocity is Null) then (Control_Force is Low-) (1) 12. If (Displacement is Close_R) and (Velocity is Right) then (Control_Force is Med-) (1) 13. If (Displacement is Far_R) and (Velocity is Left) then (Control_Force is Low-) (1) 14. If (Displacement is Far_R) and (Velocity is Null) then (Control_Force is Med-) (1) 15. If (Displacement is Far_R) and (Velocity is Right) then (Control_Force is Min) (1) Θα διερευνήσουμε αρχικά την βέλτιστη θέση του αισθητήρα ελέγχοντας και τις 7 πιθανές θέσεις που μπορεί να πάρει. Η θέση του διεγέρτη δηλαδή της δύναμης που ασκείται δεν μας ενδιαφέρει γιατί το εύρος που χρειαζόμαστε έτσι ώστε να φτάσουμε στο αποτέλεσμα που θέλουμε, εξαρτάται από την θέση του αισθητήρα(dofcontrol) και όχι από το που ασκείται η δύναμη (dofload).βλέπουμε και στον κώδικα αυτό που αναφέραμε πιο πάνω: ΕΥΡΟΣ ΜΕΤΑΤΟΠΙΣΗΣ ΤΑΧΥΤΗΤΑΣ & ΕΠΙΤΑΧΥΝΣΗΣ ΧΩΡΙΣ FUZZY ΕΛΕΓΧΟ umax(dofcontrol,1) = max(u(dofcontrol,:))- min(u(dofcontrol,:)); udmax(dofcontrol,1) = max(ud(dofcontrol,:)) - min(ud(dofcontrol,:)); uddmax(dofcontrol,1) = max(udd(dofcontrol,:)) - min(udd(dofcontrol,:));
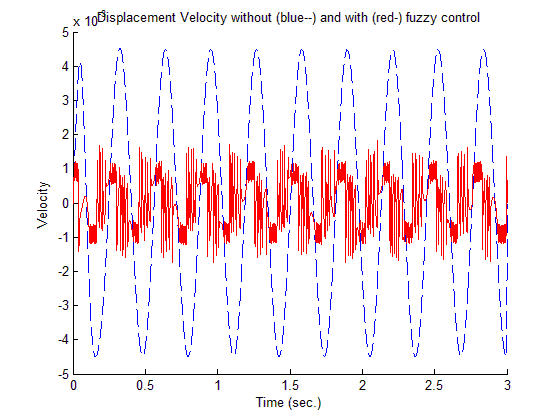
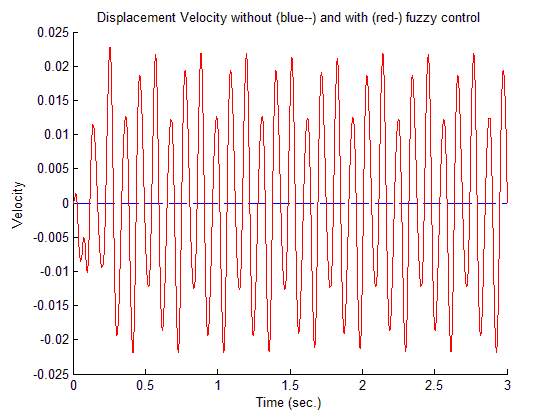
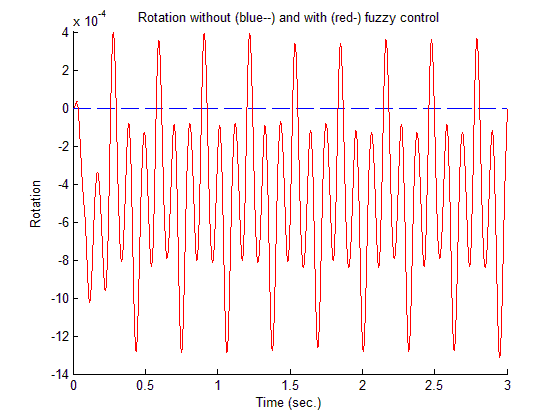
16 ΕΥΡΟΣ ΜΕΤΑΤΟΠΙΣΗΣ ΤΑΧΥΤΗΤΑΣ & ΕΠΙΤΑΧΥΝΣΗΣ FUZZY ΕΛΕΓΧΟ u_f_euros(dofcontrol,1)=max(u_f(dofcontrol,:))- min(u_f(dofcontrol,:)); ud_f_euros(dofcontrol,1)=max(ud_f(dofcontrol,:)- min(ud_f(dofcontrol,:); udd_f_euros(dofcontrol,1)=max(udd_f(dofcontrol,:)mi n(udd_f(dofcontrol,:)); Γι αυτό τον λόγο όταν τρέχω τον κώδικα το dofcontrol παίρνει τιμές από το 1 έως το 7 ενώ για dofload βάζω τυχαίες αφού δεν επηρεάζει τα αποτελέσματά μου. Για κάθε θέση του αισθητήρα θα ελέγχω τα 3 μεγέθη ταχύτητα(velocity) μετατόπιση(displacement) και επιτάχυνση (rotation). Σκοπός μας είναι να βρούμε που βελτιστοποιούνται αυτά τα μεγέθη. Τα κριτήρια είναι τα εξής: 1. Η ταλάντωση να έχει ελεγχόμενη ευστάθεια στο χρόνο 2. Το εύρος της ταλάντωσης να είναι μικρό
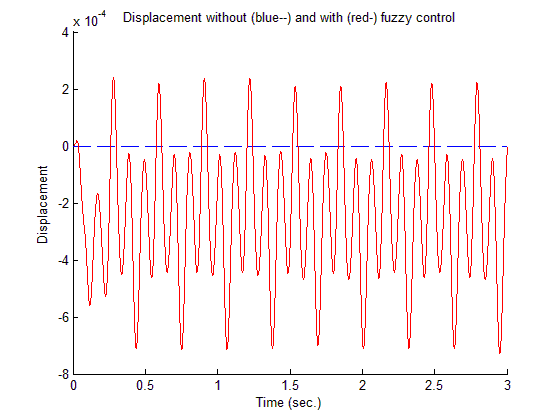
17 4. 1 ο ΜΕΡΟΣ Ξεκινάμε με την μετατόπιση για θέση αισθητήρα 1εως 7(dofcontrol=1:7) 1. 2.
18 3. 4.
19
 1. 2.")
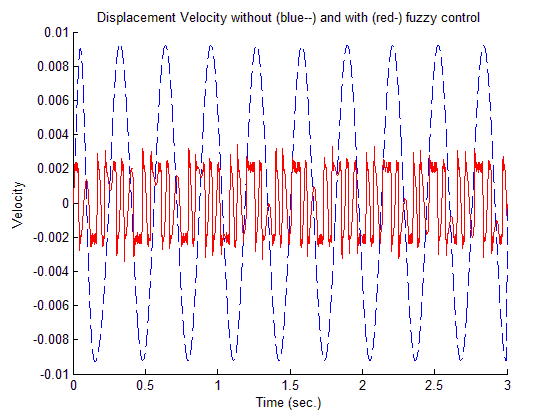
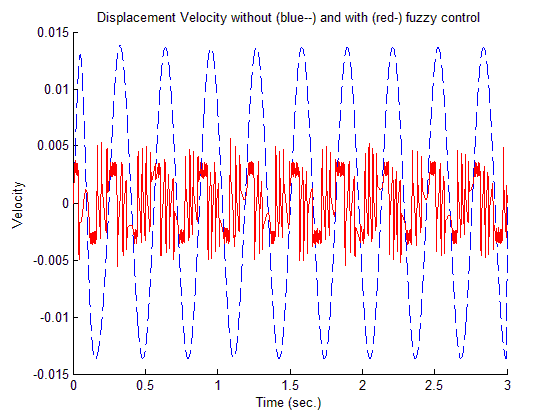
20 Συνεχίζουμε με την ταxύτητα για θέση αισθητήρα 1εως 7(dofcontrol=1:7) 1. 2.
21 3. 4.
22
 1. 2.")
23 Τώρα ελέχγουμε την επιτάχυνση για θέση αισθητήρα 1εως 7(dofcontrol=1:7) 1. 2.
24
25 7. Τα αποτελέσματα που παίρνουμε από τα παραπάνω στα διαγράμματα είναι τα εξής:\ Τα ακόλουθα αποτελέσματα αφορούν μετρήσεις χωρίς fuzzy έλεγχο. Για την θέση του αισθητήρα στη θέση 1 έχουμε εύρος για : μετατόπιση (χ)= *10 ταχύτητα (u)= *10 επιτάχυνση(α)=
26 Για την θέση του αισθητήρα στη θέση 2 έχουμε εύρος για : 4 μετατόπιση (χ)= 4.62*10 ταχύτητα (u)= επιτάχυνση (α)= Για την θέση του αισθητήρα στη θέση 3 έχουμε εύρος για : 5 μετατόπιση (χ)= 5.12*10 4 ταχύτητα (u)= 9.95*10 επιτάχυνση (α)= Για την θέση του αισθητήρα στη θέση 4 έχουμε εύρος για : 4 μετατόπιση (χ)= 9.57*10 ταχύτητα (u)= επιτάχυνση (α)= Για την θέση του αισθητήρα στη θέση 5 έχουμε εύρος για : 4 μετατόπιση (χ)= *10 ταχύτητα (u)= επιτάχυνση (α)= Για την θέση του αισθητήρα στη θέση 6 έχουμε εύρος για : μετατόπιση (χ)= ταχύτητα (u)= επιτάχυνση (α)= Για την θέση του αισθητήρα στη θέση 7 έχουμε εύρος για : μετατόπιση (χ)= *10 ταχύτητα (u)= επιτάχυνση (α)=
27 Τώρα έχουμε τα αποτελέσμτα με fuzzy έλεχγο Για την θέση του αισθητήρα στη θέση 1 έχουμε εύρος για : 6 μετατόπιση (χ)= *10 ταχύτητα (u)= επιτάχυνση(α)= *10 5 Για την θέση του αισθητήρα στη θέση 2 έχουμε εύρος για : 4 μετατόπιση (χ)= 0.622*10 ταχύτητα (u)= επιτάχυνση(α)= Για την θέση του αισθητήρα στη θέση 3 έχουμε εύρος για : 5 μετατόπιση (χ)= 0.726*10 4 ταχύτητα (u)= 4.65*10 επιτάχυνση(α)= Για την θέση του αισθητήρα στη θέση 4 έχουμε εύρος για : 4 μετατόπιση (χ)= 1.32*10 ταχύτητα (u)= επιτάχυνση(α)= Για την θέση του αισθητήρα στη θέση 5 έχουμε εύρος για : 4 μετατόπιση (χ)= 3.056*10 ταχύτητα (u)= επιτάχυνση(α)= Για την θέση του αισθητήρα στη θέση 6 έχουμε εύρος για :
28 4 μετατόπιση (χ)= 1.932*10 ταχύτητα (u)= επιτάχυνση(α)= Για την θέση του αισθητήρα στη θέση 7 έχουμε εύρος για : 4 μετατόπιση (χ)= 0.604*10 ταχύτητα (u)= επιτάχυνση(α)= Παρατηρούμε σύμφωνα και από τα αποτέλεσμα που παίρνουμε από τον κώδικα ότι η πιό βέλτιστη επιλογή είναι η θέση 1 του αισθητήρα. Αυτό συμβαίνει καθώς η ταλάντωση έχει ελεγχόμενη ευστάθεια στο χρόνο, πράγμα που συμβαίνει σε σχεδόν όλα τα διαγράμματα της μετατόπισης εκτός της περίπτωσης του αισθητήρα που βρίσκεται στην θέση 5 που παρατηρούμε μεγάλη αστάθεια στην περίπτωση που έχουμε fuzzy έλεγχο. Ακόμα από τα αποτελέσματα που παίρνουμε τον κώδικα το μικρότερο εύρος το έχουμε στην θέση 1. Τα παραπάνω αποτελέσματα τα τρέξαμε ένα προς ένα για να γίνει πιο εύκολη η διερεύνηση δηλαδή για συντομία θα μπορούσαμε να δημιουργήσουμε ένα for dofcontrol 1:7 αλλά ήταν πολύ δύσκολο να ελεχθούν όλα τα γραφήματα μαζί ο ΜΕΡΟΣ Στο προηγούμενο βήμα υπολογίζαμε την θέση του αισθητήρα βρίσκοντας το εύρος της μετατόπισης, ταχύτητας και επιτάχυνσης με τον τρόπο που είχε βρει ο κύριος ΤαΪρίδης, ενώ τώρα θα προσπαθήσουμε να δούμε τι αποτέλεσμα θα έχουμε αν τα εύρη που αναφέραμε πριν τα επιλέγουμε
29 τώρα μέσα από ένα τυχαίο εύρος τιμών. Όλα αυτά τα ελέγχουμε για τον έλεγχο με fuzzy καθώς ς τα εύρη αυτά μπαίνουν ορίσματα στην fuzyy_initial συνάρτηση. Δημιουργήσαμε στον κώδικα 2 for που δίνουν τιμές στα umax & udmax. for umax=0.001:0.005:0.016 auks1=auks1+1; auks2=0; for udmax=0.0001:0.005: auks2=auks2+1; και για να βρίσκουμε το εύρος του fuzzy που είναι και το ζητούμενο χρησιμοποιούμε αυτές τις τρεις γραμμές κώδικα και για να τα αποθηκεύω δημιούργησα τρείς πίνακες 4*4. u_f_euros (dofcontrol,1)=max(u_f(dofcontrol,:))- min(u_f(dofcontrol,: )); ud_f_euros(dofcontrol,1)=max(ud_f(dofcontrol,:))- min(ud_f(dofcontrol,: )); udd_f_euros(dofcontrol,1)=max(udd_f(dofcontrol,:))- min(udd_f(dofcontrol,: )); matrix_u_f_euros(auks1,auks2)=u_f_euros(dofcontrol, 1); matrix_ud_f_euros(auks1,auks2)=ud_f_euros(dofcontro l,1);
30 matrix_udd_f_euros(auks1,auks2)=udd_f_euros(dofcont rol,1); Τα ζευγάρια που μας δίνουν οι δύο for είναι 16, από τα οποία το καθένα μας δίνει από τρείς γραφικές για τα τρία μεγέθη που ελέγχαμε και πριν. Τα ζευγάρια που παίρνουμε για την μετατόπιση είναι τα εξής: επαναλήψεις Umax udmax ευρος 1η αστάθεια 0,41587*10-3 2η αστάθεια 0,955*10-3 3η ευστάθεια 0,082 4η αστάθεια 0,0058 5η αστάθεια 0,0027 6η αστάθεια 0,0032 7η ευστάθεια 0,095 8η αστάθεια 0,0149 9η αστάθεια 0, η αστάθεια 0,411* η αστάθεια 0,97* η αστάθεια 0,0018
31 13η αστάθεια 0,056 14η αστάθεια 0,445* η αστάθεια 0, η ευστάθεια 0,0055 Παρατηρούμε ότι η 3 η,7 η και 16 η γραφική παράσταση έχουν την μεγαλύτερη ευστάθεια από τις άλλες
32
33
34
35
36 \
37 Τα ζευγάρια που παίρνουμε για την ταχύτητα είναι τα εξής: επαναλήψεις umax udmax ευρος 1η αστάθεια 0,0081 2η ευστάθεια 0,0256 3η ευστάθεια 0,5099 4η αστάθεια 0,2039 5η αστάθεια 0,0873 6η ευστάθεια 0,0231 7η ευστάθεια 0,4488 8η αστάθεια 0,2054 9η αστάθεια 0, η αστάθεια 0, η αστάθεια 0, η αστάθεια 0, η αστάθεια 0, η αστάθεια 0, η αστάθεια 0,052 16η ευστάθεια 0,0247


38 Παρατηρούμε ότι για την ταχύτητα παίρνουμε καλύτερα αποτελέσματα από πριν δηλαδή περισσότερες γραφικές παραστάσεις έχουν ευστάθεια (2 η, 3 η,6 η,7 η, 16 η )
39
40
41
42 Παρατηρούμε ότι ευστάθεια έχουν η 3 η 7 η και 16 η προσπαθεια. εξής : Τα αποτελέσματα που παίρνουμε για την επιτάχυνση ειναι τα
43 επαναλήψεις umax udmax ευρος 1η αστάθεια 0,2572 2η αστάθεια 3,05 3η ευστάθεια 21,8 4η αστάθεια 13,5 5η αστάθεια 6,2756 6η αστάθεια 2,13 7η ευστάθεια 22,6 8η αστάθεια 14,2 9η αστάθεια 22,8 10η αστάθεια 0,236 11η αστάθεια 2,96 12η αστάθεια 1,05 13η αστάθεια 5,12 14η αστάθεια 0, η αστάθεια 2,96 16η ευστάθεια 1,67
44
45
46
47
48 Συμπεραίνουμε ότι το πρώτο κριτήριο της ευστάθειας μονό 3 η,7 η και 16 η προσπάθεια το επαληθεύουν απο τις τρείς όμως προσπάθειες η πιο βέλτιστη είναι η 16 Η η οποία έχει και στα τρία μεγέθη πάντα το μικρότερο εύρος.
49 Τελικό συμπέρασμα από αυτό τον έλεγχο που κάναμε είναι ότι επιλέγουμε βέλτιστο ζευγάρι το (0,016, 0,0151). 6. ΓΕΝΙΚΑ ΣΥΜΠΕΡΑΣΜΑΤΑ 1)Παρατηρήσαμε ότι στο σύστημα που έχουμε να διερευνήσουμε αισθητήρα διεγέρτη βασικό ρόλλο παίρνει η θέση του αισθητήρα. Η οποία μας βοηθάει να βρούμε το umax & udmax τα οποία μπαίνουν σαν ορίσματα στη fuzzy initial. Μέσα στη ρουτίνα a= fuzzy_initial (umax, udmax, pm).εκεί γίνεται ο ορισμός του συστήματος ασαφής λογικής. 2)Είδαμε ότι καθώς τρέξαμε τον αλγόριθμο για τις 7 διαφορετικές θέσεις του αισθητήρα πήραμε αποτελέσματα τα οποία μας οδήγησαν μέσα από κάποια κριτήρια σε μια βέλτιστη θέση του αισθητήρα και συγκεκριμένα στην θέση 1. 3)Στην 2 η διερεύνηση που κάναμε, σταματήσαμε να βρίσκουμε το εύρος της μετατόπισης και της ταχύτητας χωρίς ασαφή έλεγχο μέσα από την διαδικασία που έκανε ο κύριος Ταϊρίδης αλλά δημιουργήσαμε ένα εύρος τιμών που θα ορίζονται αυτά τα δυο μεγέθη,έτσι ώστε να ορίζονται τυχαία ζευγάρια. Από την διερεύνηση αυτή οδηγηθήκαμε σε κάποια αποτελέσματα τα οποία ήταν 1)umax= )udmax =0,0151 3)u_f_euros=0,0055 4)ud_f_euros=0,0247
50 5)udd_f_euros=1,67 Τα αποτελέσματα που βρήκαμε στην αρχική διερεύνηση που ψάχναμε την βέλτιστη θέση του αισθητήρα ήταν: 1)umax=0,0605*10-6 2)udmax =1,18*10-4 3)u_f_euros=0,8045*10-6 4)ud_f_euros=0,52260*10-5 5)udd_f_euros=0,0645 Παρατηρούμε ότι τα αποτελέσματα που είχαμε βρει αρχικά ήταν καλυτέρα από αυτά που βρήκαμε τώρα με τις τυχαίες τιμές που ορίσαμε το εύρος τιμών χωρίς ασαφή έλεγχο. Πράγμα που δεν σημαίνει ότι αυτός ο τρόπος των τυχαίων τιμών είναι λάθος γιατί θα υπάρχει κάποιο εύρος τιμών που θα δίνει καλύτερα αποτελέσματα. Τέλος ελέγχουμε τα αποτελέσματα με αυτά τα κύριου Ταίρίδη που είχε επιλέξει θέση 7 αισθητήρα. 1)umax=0,415*10-4 2)udmax =0,0081 3)u_f_euros=0,22315*10-3 4)ud_f_euros=0,0168
51 5)udd_f_euros=2,430 Παρατηρούμε ότι και εδώ έχουμε επιτύχει μικρότερο εύρος. 6. ΒΙΒΛΙΟΓΡΑΦΙΑ 1. ΡΟΒΕΡΤΟΣ- Ε ΚΙΝΓΚ ΕΥΦΥΗΣ ΕΛΕΓΧΟΣ ΕΚΔΟΣΕΙΣ :ΤΖΙΟΛΑ, 2004
52 2. Γ. ΤΑΙΡΙΔΗΣ- Προσομοίωση σύνθετων ευφυών μηχανικών συστημάτων με αισθητήρες και διεγέρτες από πιεζοηλεκτρικά υλικά Διατριβή για απόκτηση μεταπτυχιακού διπλώματος ειδίκευσης 3. Χ. Κιλιμπέρης Παραμετρική διερεύνηση συστήματος ασαφούς ελέγχου με εφαρμογή σε πιεζοηλεκτρική ευφυή δοκό διπλωματική εργαασία. 4. M. Marinaki-Y. Marinakis- G. Stauroulakis- Fuzzy control optimized by a multi objective particle swarm optimization algorithm for vibration suppression of smart structure research paper 12 August 2010
Τμήμα Μηχανικών Παραγωγής και Διοίκησης. Διπλωματική εργασία: Νευροασαφής έλεγχος σε ευφυή ράβδο
 Πολυτεχνείο Κρήτης Τμήμα Μηχανικών Παραγωγής και Διοίκησης Καταγάς Μιχαήλ Α.Μ.:2006010074 Επιβλέπων καθηγητής: Σταυρουλάκης Γεώργιος Διπλωματική εργασία: Νευροασαφής έλεγχος σε ευφυή ράβδο Χανιά, Οκτώβριος
Πολυτεχνείο Κρήτης Τμήμα Μηχανικών Παραγωγής και Διοίκησης Καταγάς Μιχαήλ Α.Μ.:2006010074 Επιβλέπων καθηγητής: Σταυρουλάκης Γεώργιος Διπλωματική εργασία: Νευροασαφής έλεγχος σε ευφυή ράβδο Χανιά, Οκτώβριος
Κιλιμπέρης Χαράλαμπος
 ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ Διπλωματική Εργασία Παραμετρική Διερεύνηση Συστήματος Ασαφούς Ελέγχου με Εφαρμογή σε Πιεζοηλεκτρική Ευφυή Δοκό Κιλιμπέρης Χαράλαμπος Χανιά 2008
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ Διπλωματική Εργασία Παραμετρική Διερεύνηση Συστήματος Ασαφούς Ελέγχου με Εφαρμογή σε Πιεζοηλεκτρική Ευφυή Δοκό Κιλιμπέρης Χαράλαμπος Χανιά 2008
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΔΙΟΙΚΗΣΗΣ. Ρύθμιση παραμέτρων ασαφούς ελέγχου σε ευφυείς κατασκευές
 ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΔΙΟΙΚΗΣΗΣ Εργαστήριο Υπολογιστικής Μηχανικής & Βελτιστοποίησης ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ Ρύθμιση παραμέτρων ασαφούς ελέγχου σε ευφυείς κατασκευές Επιμέλεια: Βαλσαμόπουλος
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΔΙΟΙΚΗΣΗΣ Εργαστήριο Υπολογιστικής Μηχανικής & Βελτιστοποίησης ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ Ρύθμιση παραμέτρων ασαφούς ελέγχου σε ευφυείς κατασκευές Επιμέλεια: Βαλσαμόπουλος
«Έλεγχος σύνθετων πιεζοηλεκτρικών πλακών με χρήση ασαφούς λογικής»
 ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΔΙΟΙΚΗΣΗΣ Εργαστήριο Υπολογιστικής Μηχανικής & Βελτιστοποίησης ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ «Έλεγχος σύνθετων πιεζοηλεκτρικών πλακών με χρήση ασαφούς λογικής» Αντώνιος
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΔΙΟΙΚΗΣΗΣ Εργαστήριο Υπολογιστικής Μηχανικής & Βελτιστοποίησης ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ «Έλεγχος σύνθετων πιεζοηλεκτρικών πλακών με χρήση ασαφούς λογικής» Αντώνιος
Αριθμητική Ολοκλήρωση της Εξίσωσης Κίνησης
 Αριθμητική Ολοκλήρωση της Εξίσωσης Κίνησης Εισαγωγή Αριθμητική Ολοκλήρωση της Εξίσωσης Κίνησης: Δ18- Η δυναμική μετατόπιση u(t) είναι δυνατό να προσδιοριστεί με απ ευθείας αριθμητική ολοκλήρωση της εξίσωσης
Αριθμητική Ολοκλήρωση της Εξίσωσης Κίνησης Εισαγωγή Αριθμητική Ολοκλήρωση της Εξίσωσης Κίνησης: Δ18- Η δυναμική μετατόπιση u(t) είναι δυνατό να προσδιοριστεί με απ ευθείας αριθμητική ολοκλήρωση της εξίσωσης
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΔΙΟΙΚΗΣΗΣ
 ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΔΙΟΙΚΗΣΗΣ Εργαστήριο Υπολογιστικής Μηχανικής & Βελτιστοποίησης Διπλωματική εργασία: «Ιδιομορφική ανάλυση και έλεγχος κατασκευών με χρήση ασαφούς λογικής και
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΔΙΟΙΚΗΣΗΣ Εργαστήριο Υπολογιστικής Μηχανικής & Βελτιστοποίησης Διπλωματική εργασία: «Ιδιομορφική ανάλυση και έλεγχος κατασκευών με χρήση ασαφούς λογικής και
Βιομηχανικοί Ελεγκτές
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #7: Ευφυής Ελεγκτής Μέρος Α Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #7: Ευφυής Ελεγκτής Μέρος Α Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν
Τεχνητή Νοημοσύνη (ΥΠ23) 6 ο εξάμηνο Τμήμα Πληροφορικής και Τηλεματικής Χαροκόπειο Πανεπιστήμιο Ουρανία Χατζή
 6 ο εξάμηνο Τμήμα Πληροφορικής και Τηλεματικής Χαροκόπειο Πανεπιστήμιο Ουρανία Χατζή") Τεχνητή Νοημοσύνη (ΥΠ23) 6 ο εξάμηνο Τμήμα Πληροφορικής και Τηλεματικής Χαροκόπειο Πανεπιστήμιο Ουρανία Χατζή raniah@hua.gr 1 Ασάφεια (Fuzziness) Ποσοτικοποίηση της ποιοτικής πληροφορίας Οφείλεται κυρίως
Τεχνητή Νοημοσύνη (ΥΠ23) 6 ο εξάμηνο Τμήμα Πληροφορικής και Τηλεματικής Χαροκόπειο Πανεπιστήμιο Ουρανία Χατζή raniah@hua.gr 1 Ασάφεια (Fuzziness) Ποσοτικοποίηση της ποιοτικής πληροφορίας Οφείλεται κυρίως
Πιο συγκεκριμένα, η χρήση του MATLAB προσφέρει τα ακόλουθα πλεονεκτήματα.
 i Π Ρ Ο Λ Ο Γ Ο Σ Το βιβλίο αυτό αποτελεί μια εισαγωγή στα βασικά προβλήματα των αριθμητικών μεθόδων της υπολογιστικής γραμμικής άλγεβρας (computational linear algebra) και της αριθμητικής ανάλυσης (numerical
i Π Ρ Ο Λ Ο Γ Ο Σ Το βιβλίο αυτό αποτελεί μια εισαγωγή στα βασικά προβλήματα των αριθμητικών μεθόδων της υπολογιστικής γραμμικής άλγεβρας (computational linear algebra) και της αριθμητικής ανάλυσης (numerical
Στη C++ υπάρχουν τρεις τύποι βρόχων: (a) while, (b) do while, και (c) for. Ακολουθεί η σύνταξη για κάθε μια:
 while, (b) do while, και (c) for. Ακολουθεί η σύνταξη για κάθε μια:") Εργαστήριο 6: 6.1 Δομές Επανάληψης Βρόγχοι (Loops) Όταν θέλουμε να επαναληφθεί μια ομάδα εντολών τη βάζουμε μέσα σε ένα βρόχο επανάληψης. Το αν θα (ξανα)επαναληφθεί η εκτέλεση της ομάδας εντολών καθορίζεται
Εργαστήριο 6: 6.1 Δομές Επανάληψης Βρόγχοι (Loops) Όταν θέλουμε να επαναληφθεί μια ομάδα εντολών τη βάζουμε μέσα σε ένα βρόχο επανάληψης. Το αν θα (ξανα)επαναληφθεί η εκτέλεση της ομάδας εντολών καθορίζεται
Δρ. Βασίλειος Γ. Καμπουρλάζος Δρ. Ανέστης Γ. Χατζημιχαηλίδης
 Μάθημα 2ο Δρ. Ανέστης Γ. Χατζημιχαηλίδης Τμήμα Μηχανικών Πληροφορικής Τ.Ε. ΤΕΙ Ανατολικής Μακεδονίας και Θράκης 2016-2017 Ασαφή Συστήματα 2 Η ασαφής λογική προτάθηκε το 1965 από τον Prof. Lotfi Zadeh
Μάθημα 2ο Δρ. Ανέστης Γ. Χατζημιχαηλίδης Τμήμα Μηχανικών Πληροφορικής Τ.Ε. ΤΕΙ Ανατολικής Μακεδονίας και Θράκης 2016-2017 Ασαφή Συστήματα 2 Η ασαφής λογική προτάθηκε το 1965 από τον Prof. Lotfi Zadeh
K15 Ψηφιακή Λογική Σχεδίαση 7-8: Ανάλυση και σύνθεση συνδυαστικών λογικών κυκλωμάτων
 K15 Ψηφιακή Λογική Σχεδίαση 7-8: Ανάλυση και σύνθεση συνδυαστικών λογικών κυκλωμάτων Γιάννης Λιαπέρδος TEI Πελοποννήσου Σχολή Τεχνολογικών Εφαρμογών Τμήμα Μηχανικών Πληροφορικής ΤΕ Η έννοια του συνδυαστικού
K15 Ψηφιακή Λογική Σχεδίαση 7-8: Ανάλυση και σύνθεση συνδυαστικών λογικών κυκλωμάτων Γιάννης Λιαπέρδος TEI Πελοποννήσου Σχολή Τεχνολογικών Εφαρμογών Τμήμα Μηχανικών Πληροφορικής ΤΕ Η έννοια του συνδυαστικού
Δυναμική Μηχανών I. Διάλεξη 10. Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
 Δυναμική Μηχανών I Διάλεξη 10 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1 Περιεχόμενα Προσομοίωση απόκρισης συστήματος στο MATLAB μέσω της συνάρτησης ode45 (Runge-Kutta) Προσομοίωση απόκρισης
Δυναμική Μηχανών I Διάλεξη 10 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1 Περιεχόμενα Προσομοίωση απόκρισης συστήματος στο MATLAB μέσω της συνάρτησης ode45 (Runge-Kutta) Προσομοίωση απόκρισης
ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ
 ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ Πρόλογος... 11 Μέρος Α: Στοιχεία Αλγοριθμικής... 15 1 Επίλυση προβλημάτων με Η/Υ... 19 1.1 Εισαγωγή... 19 1.2 Αλγόριθμοι-αλγοριθμικά προβλήματα... 20 1.3 Το μαθηματικό μοντέλο... 26
ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ Πρόλογος... 11 Μέρος Α: Στοιχεία Αλγοριθμικής... 15 1 Επίλυση προβλημάτων με Η/Υ... 19 1.1 Εισαγωγή... 19 1.2 Αλγόριθμοι-αλγοριθμικά προβλήματα... 20 1.3 Το μαθηματικό μοντέλο... 26
y 1 (x) f(x) W (y 1, y 2 )(x) dx,
 f(x) W (y 1, y 2 )(x) dx,") Συνήθεις Διαφορικές Εξισώσεις Ι Ασκήσεις - 07/1/017 Μέρος 1ο: Μη Ομογενείς Γραμμικές Διαφορικές Εξισώσεις Δεύτερης Τάξης Θεωρούμε τη γραμμική μή-ομογενή διαφορική εξίσωση y + p(x) y + q(x) y = f(x), x
Συνήθεις Διαφορικές Εξισώσεις Ι Ασκήσεις - 07/1/017 Μέρος 1ο: Μη Ομογενείς Γραμμικές Διαφορικές Εξισώσεις Δεύτερης Τάξης Θεωρούμε τη γραμμική μή-ομογενή διαφορική εξίσωση y + p(x) y + q(x) y = f(x), x
FORTRAN και Αντικειμενοστραφής Προγραμματισμός
 FORTRAN και Αντικειμενοστραφής Προγραμματισμός Παραδόσεις Μαθήματος 2016 Δρ Γ Παπαλάμπρου Επίκουρος Καθηγητής ΕΜΠ georgepapalambrou@lmentuagr Εργαστήριο Ναυτικής Μηχανολογίας (Κτίριο Λ) Σχολή Ναυπηγών
FORTRAN και Αντικειμενοστραφής Προγραμματισμός Παραδόσεις Μαθήματος 2016 Δρ Γ Παπαλάμπρου Επίκουρος Καθηγητής ΕΜΠ georgepapalambrou@lmentuagr Εργαστήριο Ναυτικής Μηχανολογίας (Κτίριο Λ) Σχολή Ναυπηγών
4 Αρμονικές Ταλαντώσεις 1 γενικά 17/9/2014
 4 Αρμονικές Ταλαντώσεις γενικά 7/9/4 Περιοδικά φαινόμενα Περιοδικά φαινόμενα Περίοδος Συχνότητα Γωνιακή συχνότητα Ταλαντώσεις Απλή αρμονική ταλάντωση Περιοδικό φαινόμενο Περιοδικά φαινόμενα ονομάζονται
4 Αρμονικές Ταλαντώσεις γενικά 7/9/4 Περιοδικά φαινόμενα Περιοδικά φαινόμενα Περίοδος Συχνότητα Γωνιακή συχνότητα Ταλαντώσεις Απλή αρμονική ταλάντωση Περιοδικό φαινόμενο Περιοδικά φαινόμενα ονομάζονται
0,4 2 t (όλα τα μεγέθη στο S.I.). Η σύνθετη ταλάντωση περιγράφεται (στο
. Η σύνθετη ταλάντωση περιγράφεται (στο") ΚΕΦΑΛΑΙΟ Ο : ΜΗΧΑΝΙΚΕΣ ΗΛΕΚΤΡΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ΕΝΟΤΗΤΑ 5: ΣΥΝΘΕΣΗ ΤΑΛΑΝΤΩΣΕΩΝ ΘΕΜΑΤΑ ΠΡΟΣ ΕΠΙΛΥΣΗ ΘΕΜΑ Β Ερώτηση. Ένα σώμα εκτελεί κίνηση που προέρχεται από τη σύνθεση δύο απλών αρμονικών ταλαντώσεων, ίδιας
ΚΕΦΑΛΑΙΟ Ο : ΜΗΧΑΝΙΚΕΣ ΗΛΕΚΤΡΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ΕΝΟΤΗΤΑ 5: ΣΥΝΘΕΣΗ ΤΑΛΑΝΤΩΣΕΩΝ ΘΕΜΑΤΑ ΠΡΟΣ ΕΠΙΛΥΣΗ ΘΕΜΑ Β Ερώτηση. Ένα σώμα εκτελεί κίνηση που προέρχεται από τη σύνθεση δύο απλών αρμονικών ταλαντώσεων, ίδιας
Προβλήματα, αλγόριθμοι, ψευδοκώδικας
 Προβλήματα, αλγόριθμοι, ψευδοκώδικας October 11, 2011 Στο μάθημα Αλγοριθμική και Δομές Δεδομένων θα ασχοληθούμε με ένα μέρος της διαδικασίας επίλυσης υπολογιστικών προβλημάτων. Συγκεκριμένα θα δούμε τι
Προβλήματα, αλγόριθμοι, ψευδοκώδικας October 11, 2011 Στο μάθημα Αλγοριθμική και Δομές Δεδομένων θα ασχοληθούμε με ένα μέρος της διαδικασίας επίλυσης υπολογιστικών προβλημάτων. Συγκεκριμένα θα δούμε τι
Ανάλυση Δεδομένων με χρήση του Στατιστικού Πακέτου R
 Ανάλυση Δεδομένων με χρήση του Στατιστικού Πακέτου R, Επίκουρος Καθηγητής, Τομέας Μαθηματικών, Σχολή Εφαρμοσμένων Μαθηματικών και Φυσικών Επιστημών, Εθνικό Μετσόβιο Πολυτεχνείο. Περιεχόμενα Εισαγωγή στο
Ανάλυση Δεδομένων με χρήση του Στατιστικού Πακέτου R, Επίκουρος Καθηγητής, Τομέας Μαθηματικών, Σχολή Εφαρμοσμένων Μαθηματικών και Φυσικών Επιστημών, Εθνικό Μετσόβιο Πολυτεχνείο. Περιεχόμενα Εισαγωγή στο
ΕΝΟΤΗΤΑ 1.1: ΠΕΡΙΟΔΙΚΟ ΦΑΙΝΟΜΕΝΟ ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ (ΚΙΝΗΜΑΤΙΚΗ ΚΑΙ ΔΥΝΑΜΙΚΗ ΠΡΟΣΕΓΓΙΣΗ) 1ο σετ - Μέρος Β ΘΕΜΑ Β
 1ο σετ - Μέρος Β ΘΕΜΑ Β") ΚΕΦΑΛΑΙΟ 1 Ο : ΜΗΧΑΝΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ΕΝΟΤΗΤΑ 1.1: ΠΕΡΙΟΔΙΚΟ ΦΑΙΝΟΜΕΝΟ ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ (ΚΙΝΗΜΑΤΙΚΗ ΚΑΙ ΔΥΝΑΜΙΚΗ ΠΡΟΣΕΓΓΙΣΗ) 1ο σετ - Μέρος Β Ερώτηση 1. ΘΕΜΑ Β Σώμα εκτελεί Α.Α.Τ. με εξίσωση απομάκρυνσης
ΚΕΦΑΛΑΙΟ 1 Ο : ΜΗΧΑΝΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ΕΝΟΤΗΤΑ 1.1: ΠΕΡΙΟΔΙΚΟ ΦΑΙΝΟΜΕΝΟ ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ (ΚΙΝΗΜΑΤΙΚΗ ΚΑΙ ΔΥΝΑΜΙΚΗ ΠΡΟΣΕΓΓΙΣΗ) 1ο σετ - Μέρος Β Ερώτηση 1. ΘΕΜΑ Β Σώμα εκτελεί Α.Α.Τ. με εξίσωση απομάκρυνσης
Ηλεκτρική και Μηχανική ταλάντωση στο ίδιο φαινόμενο
 Ηλεκτρική και Μηχανική ταλάντωση στο ίδιο φαινόμενο Στο σχήμα φαίνεται μια γνώριμη διάταξη δύο παράλληλων αγωγών σε απόσταση, που ορίζουν οριζόντιο επίπεδο, κάθετο σε ομογενές μαγνητικό πεδίο έντασης.
Ηλεκτρική και Μηχανική ταλάντωση στο ίδιο φαινόμενο Στο σχήμα φαίνεται μια γνώριμη διάταξη δύο παράλληλων αγωγών σε απόσταση, που ορίζουν οριζόντιο επίπεδο, κάθετο σε ομογενές μαγνητικό πεδίο έντασης.
Κατ οίκον Εργασία 1 Σκελετοί Λύσεων
 ΕΠΛ Δομές Δεδομένων και Αλγόριθμοι Σεπτέμβριος 008 Κατ οίκον Εργασία Σκελετοί Λύσεων Άσκηση Παρατηρούμε ότι ο χρόνος εκτέλεσης μέσης περίπτωσης της κάθε εντολής if ξεχωριστά: if (c mod 0) for (k ; k
ΕΠΛ Δομές Δεδομένων και Αλγόριθμοι Σεπτέμβριος 008 Κατ οίκον Εργασία Σκελετοί Λύσεων Άσκηση Παρατηρούμε ότι ο χρόνος εκτέλεσης μέσης περίπτωσης της κάθε εντολής if ξεχωριστά: if (c mod 0) for (k ; k
ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ
 3-0-0 ΘΕΡΙΝ ΣΕΙΡ ΘΕΜ ο ΔΙΓΩΝΙΣΜ ΣΤΗ ΦΥΣΙΚΗ ΚΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΛΥΣΕΙΣ Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις -4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή
3-0-0 ΘΕΡΙΝ ΣΕΙΡ ΘΕΜ ο ΔΙΓΩΝΙΣΜ ΣΤΗ ΦΥΣΙΚΗ ΚΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΛΥΣΕΙΣ Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις -4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή
Ασαφής Λογική (Fuzzy Logic)
") Ασαφής Λογική (Fuzzy Logic) Ασάφεια: έννοια που σχετίζεται με την ποσοτικοποίηση της πληροφορίας και οφείλεται κυρίως σε μη-ακριβή (imprecise) δεδομένα. Π.χ. "Ο Νίκος είναι ψηλός": δεν προσδιορίζεται με
Ασαφής Λογική (Fuzzy Logic) Ασάφεια: έννοια που σχετίζεται με την ποσοτικοποίηση της πληροφορίας και οφείλεται κυρίως σε μη-ακριβή (imprecise) δεδομένα. Π.χ. "Ο Νίκος είναι ψηλός": δεν προσδιορίζεται με
β. Το πλάτος της σύνθετης ταλάντωσης είναι : Α = (Α 1 ² + Α 2 ² + 2 Α 1 Α 2 συν φ) (φ = π rad) Α = (Α 1 ² + Α 2 ² + 2 Α 1 Α 2 συν π) Α = [Α 1 ² + Α 2
 (φ = π rad) Α = (Α 1 ² + Α 2 ² + 2 Α 1 Α 2 συν π) Α = [Α 1 ² + Α 2") 1) Ένα κινητό εκτελεί συγχρόνως δύο απλές αρμονικές ταλαντώσεις που γίνονται στην ίδια διεύθυνση και γύρω από την θέση ισορροπίας με εξισώσεις : x 1 = 3 ημ [(2 π) t] και x 2 = 4 ημ [(2 π) t + φ], (S.I.).
1) Ένα κινητό εκτελεί συγχρόνως δύο απλές αρμονικές ταλαντώσεις που γίνονται στην ίδια διεύθυνση και γύρω από την θέση ισορροπίας με εξισώσεις : x 1 = 3 ημ [(2 π) t] και x 2 = 4 ημ [(2 π) t + φ], (S.I.).
Ο αλγόριθμος πρέπει να τηρεί κάποια κριτήρια
 Αλγόριθμος είναι μια πεπερασμένη σειρά ενεργειών, αυστηρά καθορισμένων και εκτελέσιμων σε πεπερασμένο χρόνο, που στοχεύουν στην επίλυση ενός προβλήματος. Ο αλγόριθμος πρέπει να τηρεί κάποια κριτήρια Είσοδος:
Αλγόριθμος είναι μια πεπερασμένη σειρά ενεργειών, αυστηρά καθορισμένων και εκτελέσιμων σε πεπερασμένο χρόνο, που στοχεύουν στην επίλυση ενός προβλήματος. Ο αλγόριθμος πρέπει να τηρεί κάποια κριτήρια Είσοδος:
M m l B r mglsin mlcos x ml 2 1) Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br
 Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br") ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
Δυναμική Μηχανών I. Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink
 Δυναμική Μηχανών I 5 6 Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε
Δυναμική Μηχανών I 5 6 Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε
Αριθμητικές Μέθοδοι σε Προγραμματιστικό Περιβάλλον
 Τμήμα Μηχανικών Πληροφορικής Αριθμητικές Μέθοδοι σε Προγραμματιστικό Περιβάλλον Δρ. Δημήτρης Βαρσάμης Επίκουρος Καθηγητής Οκτώβριος 2015 Δρ. Δημήτρης Βαρσάμης Οκτώβριος 2015 1 / 47 Αριθμητικές Μέθοδοι
Τμήμα Μηχανικών Πληροφορικής Αριθμητικές Μέθοδοι σε Προγραμματιστικό Περιβάλλον Δρ. Δημήτρης Βαρσάμης Επίκουρος Καθηγητής Οκτώβριος 2015 Δρ. Δημήτρης Βαρσάμης Οκτώβριος 2015 1 / 47 Αριθμητικές Μέθοδοι
ΦΥΣΙΚΗ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ Α ΛΥΚΕΙΟΥ
 ΦΥΣΙΚΗ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ Α ΛΥΚΕΙΟΥ Ευθύγραμμη Ομαλή Κίνηση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός https://physicscorses.wordpress.com/ Βασικές Έννοιες Ένα σώμα καθώς κινείται περνάει από διάφορα σημεία.
ΦΥΣΙΚΗ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ Α ΛΥΚΕΙΟΥ Ευθύγραμμη Ομαλή Κίνηση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός https://physicscorses.wordpress.com/ Βασικές Έννοιες Ένα σώμα καθώς κινείται περνάει από διάφορα σημεία.
ΣΧΕΔΙΟ ΔΙΔΑΣΚΑΛΙΑΣ ΕΞΙΣΩΣΗΣ 1 ΟΥ ΒΑΘΜΟΥ Α ΛΥΚΕΙΟΥ
 Page1 ΣΧΕΔΙΟ ΔΙΔΑΣΚΑΛΙΑΣ ΕΞΙΣΩΣΗΣ 1 ΟΥ ΒΑΘΜΟΥ Α ΛΥΚΕΙΟΥ ΔΙΔΑΚΤΙΚΗ ΕΝΟΤΗΤΑ: 3.1 - Η 1 ΟΥ ΒΑΘΜΟΥ ΕΞΙΣΩΣΗ i. ΔΙΔΑΚΤΙΚΟΙ ΣΤΟΧΟΙ: 1. Να κατανοήσουν τον ρόλο της αλγεβρικής αναγωγής σε απλούστερες αλγεβρικές
Page1 ΣΧΕΔΙΟ ΔΙΔΑΣΚΑΛΙΑΣ ΕΞΙΣΩΣΗΣ 1 ΟΥ ΒΑΘΜΟΥ Α ΛΥΚΕΙΟΥ ΔΙΔΑΚΤΙΚΗ ΕΝΟΤΗΤΑ: 3.1 - Η 1 ΟΥ ΒΑΘΜΟΥ ΕΞΙΣΩΣΗ i. ΔΙΔΑΚΤΙΚΟΙ ΣΤΟΧΟΙ: 1. Να κατανοήσουν τον ρόλο της αλγεβρικής αναγωγής σε απλούστερες αλγεβρικές
ΚΕΦΑΛΑΙΟ 3. Περιγραφή της Μεθόδου ΠΕΡΙΓΡΑΦΗ ΤΗΣ ΜΕΘΟΔΟΥ
 ΚΕΦΑΛΑΙΟ 3 Περιγραφή της Μεθόδου Το αντικείμενο αυτής της εργασίας είναι η χρήση μιας μεθόδου προσέγγισης συναρτήσεων που έχει προταθεί από τον hen-ha huang και ονομάζεται Ασαφώς Σταθμισμένη Παλινδρόμηση
ΚΕΦΑΛΑΙΟ 3 Περιγραφή της Μεθόδου Το αντικείμενο αυτής της εργασίας είναι η χρήση μιας μεθόδου προσέγγισης συναρτήσεων που έχει προταθεί από τον hen-ha huang και ονομάζεται Ασαφώς Σταθμισμένη Παλινδρόμηση
2). V (s) = R(s) + γ max T (s, a, s )V (s ) (3)
. V (s) = R(s) + γ max T (s, a, s )V (s ) (3)") ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Παράδοση: 5 Απριλίου 2012 Μιχελιουδάκης Ευάγγελος 2007030014 ΠΛΗ513: Αυτόνομοι Πράκτορες ΑΝΑΦΟΡΑ ΕΡΓΑΣΙΑΣ Εισαγωγή Η εργασία με
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Παράδοση: 5 Απριλίου 2012 Μιχελιουδάκης Ευάγγελος 2007030014 ΠΛΗ513: Αυτόνομοι Πράκτορες ΑΝΑΦΟΡΑ ΕΡΓΑΣΙΑΣ Εισαγωγή Η εργασία με
Χρησιμοποιείται για να αποφασίσει το πρόγραμμα αν θα κάνει κάτι σε ένα σημείο της εκτέλεσής του, εξετάζοντας αν ισχύει ή όχι μια συνθήκη.
 Εργαστήριο 4: 4.1 Η Δομή Ελέγχου if Χρησιμοποιείται για να αποφασίσει το πρόγραμμα αν θα κάνει κάτι σε ένα σημείο της εκτέλεσής του, εξετάζοντας αν ισχύει ή όχι μια συνθήκη. Γενική Μορφή: Παρατηρήσεις:
Εργαστήριο 4: 4.1 Η Δομή Ελέγχου if Χρησιμοποιείται για να αποφασίσει το πρόγραμμα αν θα κάνει κάτι σε ένα σημείο της εκτέλεσής του, εξετάζοντας αν ισχύει ή όχι μια συνθήκη. Γενική Μορφή: Παρατηρήσεις:
Αριθμητικές Μέθοδοι σε Προγραμματιστικό Περιβάλλον (Εργαστήριο 6)
") Τμήμα Μηχανικών Πληροφορικής Αριθμητικές Μέθοδοι σε Προγραμματιστικό Περιβάλλον (Εργαστήριο 6) Δρ. Δημήτρης Βαρσάμης Επίκουρος Καθηγητής Δρ. Δημήτρης Βαρσάμης Αριθμητικές Μέθοδοι (E 6) Σεπτέμβριος 2015
Τμήμα Μηχανικών Πληροφορικής Αριθμητικές Μέθοδοι σε Προγραμματιστικό Περιβάλλον (Εργαστήριο 6) Δρ. Δημήτρης Βαρσάμης Επίκουρος Καθηγητής Δρ. Δημήτρης Βαρσάμης Αριθμητικές Μέθοδοι (E 6) Σεπτέμβριος 2015
ΕΝΟΤΗΤΑ 1.2: ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ (ΕΝΕΡΓΕΙΑΚΗ ΠΡΟΣΕΓΓΙΣΗ, ΑΡΧΙΚΗ ΦΑΣΗ, ΣΥΣΤΗΜΑ ΕΛΑΤΗΡΙΟΥ ΣΩΜΑΤΟΣ, ΟΡΜΗ) 2ο set - μέρος Α - Απαντήσεις ΘΕΜΑ Β
 2ο set - μέρος Α - Απαντήσεις ΘΕΜΑ Β") ΚΕΦΑΛΑΙΟ Ο : ΜΗΧΑΝΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ΕΝΟΤΗΤΑ.: ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ (ΕΝΕΡΓΕΙΑΚΗ ΠΡΟΣΕΓΓΙΣΗ, ΑΡΧΙΚΗ ΦΑΣΗ, ΣΥΣΤΗΜΑ ΕΛΑΤΗΡΙΟΥ ΣΩΜΑΤΟΣ, ΟΡΜΗ) ο set - μέρος Α - Απαντήσεις ΘΕΜΑ Β Ερώτηση. Ένα σώμα εκτελεί
ΚΕΦΑΛΑΙΟ Ο : ΜΗΧΑΝΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ΕΝΟΤΗΤΑ.: ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ (ΕΝΕΡΓΕΙΑΚΗ ΠΡΟΣΕΓΓΙΣΗ, ΑΡΧΙΚΗ ΦΑΣΗ, ΣΥΣΤΗΜΑ ΕΛΑΤΗΡΙΟΥ ΣΩΜΑΤΟΣ, ΟΡΜΗ) ο set - μέρος Α - Απαντήσεις ΘΕΜΑ Β Ερώτηση. Ένα σώμα εκτελεί
ΚΕΦΑΛΑΙΟ 1. Ασαφή Συστήματα. 1.1 Ασαφή Σύνολα. x A. 1, x
 ΚΕΦΑΛΑΙΟ 1 Ασαφή Συστήματα Η τεχνολογική πρόοδος των τελευταίων ετών επέβαλλε τη δημιουργία συστημάτων ικανών να εκτελέσουν προσεγγιστικούς συλλογισμούς, παρόμοιους με αυτούς του ανθρώπινου εγκέφαλου.
ΚΕΦΑΛΑΙΟ 1 Ασαφή Συστήματα Η τεχνολογική πρόοδος των τελευταίων ετών επέβαλλε τη δημιουργία συστημάτων ικανών να εκτελέσουν προσεγγιστικούς συλλογισμούς, παρόμοιους με αυτούς του ανθρώπινου εγκέφαλου.
Αριθμητικές μέθοδοι σε ταλαντώσεις μηχανολογικών συστημάτων
 ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Καθηγητής κ. Σ. Νατσιάβας Αριθμητικές μέθοδοι σε ταλαντώσεις μηχανολογικών συστημάτων Στοιχεία Φοιτητή Ονοματεπώνυμο: Νατσάκης Αναστάσιος Αριθμός Ειδικού Μητρώου:
ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Καθηγητής κ. Σ. Νατσιάβας Αριθμητικές μέθοδοι σε ταλαντώσεις μηχανολογικών συστημάτων Στοιχεία Φοιτητή Ονοματεπώνυμο: Νατσάκης Αναστάσιος Αριθμός Ειδικού Μητρώου:
Εισαγωγή στην υδροπληροφορική και βελτιστοποίηση συστημάτων υδατικών πόρων
 Σημειώσεις στα πλαίσια του μαθήματος: Βελτιστοποίηση Συστημάτων Υδατικών Πόρων Υδροπληροφορική Εισαγωγή στην υδροπληροφορική και βελτιστοποίηση συστημάτων υδατικών πόρων Ανδρέας Ευστρατιάδης, Χρήστος Μακρόπουλος
Σημειώσεις στα πλαίσια του μαθήματος: Βελτιστοποίηση Συστημάτων Υδατικών Πόρων Υδροπληροφορική Εισαγωγή στην υδροπληροφορική και βελτιστοποίηση συστημάτων υδατικών πόρων Ανδρέας Ευστρατιάδης, Χρήστος Μακρόπουλος
ΠΕΙΡΑΜΑΤΙΚΕΣ ΠΡΟΣΟΜΟΙΩΣΕΙΣ ΚΕΦΑΛΑΙΟ 4. είναι η πραγματική απόκριση του j δεδομένου (εκπαίδευσης ή ελέγχου) και y ˆ j
 και y ˆ j") Πειραματικές Προσομοιώσεις ΚΕΦΑΛΑΙΟ 4 Όλες οι προσομοιώσεις έγιναν σε περιβάλλον Matlab. Για την υλοποίηση της μεθόδου ε-svm χρησιμοποιήθηκε το λογισμικό SVM-KM που αναπτύχθηκε στο Ecole d Ingenieur(e)s
Πειραματικές Προσομοιώσεις ΚΕΦΑΛΑΙΟ 4 Όλες οι προσομοιώσεις έγιναν σε περιβάλλον Matlab. Για την υλοποίηση της μεθόδου ε-svm χρησιμοποιήθηκε το λογισμικό SVM-KM που αναπτύχθηκε στο Ecole d Ingenieur(e)s
Νευροασαφής έλεγχoς σε μοντέλο πλάκας με αποκόλληση
 Πολυτεχνείο Κρήτης Σχολή Μηχανικών Παραγωγής & Διοίκησης Νευροασαφής έλεγχoς σε μοντέλο πλάκας με αποκόλληση Διπλωματική εργασία του Ορέστη Μπερτίδη Επιβλέπων: καθ. Γεώργιος Ε. Σταυρουλάκης Χανιά, Ιούνιος
Πολυτεχνείο Κρήτης Σχολή Μηχανικών Παραγωγής & Διοίκησης Νευροασαφής έλεγχoς σε μοντέλο πλάκας με αποκόλληση Διπλωματική εργασία του Ορέστη Μπερτίδη Επιβλέπων: καθ. Γεώργιος Ε. Σταυρουλάκης Χανιά, Ιούνιος
Ποσοτικές Μέθοδοι στη Διοίκηση Επιχειρήσεων ΙΙ Σύνολο- Περιεχόμενο Μαθήματος
 Ποσοτικές Μέθοδοι στη Διοίκηση Επιχειρήσεων ΙΙ Σύνολο- Περιεχόμενο Μαθήματος Χιωτίδης Γεώργιος Τμήμα Λογιστικής και Χρηματοοικονομικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης
Ποσοτικές Μέθοδοι στη Διοίκηση Επιχειρήσεων ΙΙ Σύνολο- Περιεχόμενο Μαθήματος Χιωτίδης Γεώργιος Τμήμα Λογιστικής και Χρηματοοικονομικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης
5 ΕΙΣΑΓΩΓΗ ΣΤΗ ΘΕΩΡΙΑ ΑΛΓΟΡΙΘΜΩΝ
 5 ΕΙΣΑΓΩΓΗ ΣΤΗ ΘΕΩΡΙΑ ΑΛΓΟΡΙΘΜΩΝ 5.1 Εισαγωγή στους αλγορίθμους 5.1.1 Εισαγωγή και ορισμοί Αλγόριθμος (algorithm) είναι ένα πεπερασμένο σύνολο εντολών οι οποίες εκτελούν κάποιο ιδιαίτερο έργο. Κάθε αλγόριθμος
5 ΕΙΣΑΓΩΓΗ ΣΤΗ ΘΕΩΡΙΑ ΑΛΓΟΡΙΘΜΩΝ 5.1 Εισαγωγή στους αλγορίθμους 5.1.1 Εισαγωγή και ορισμοί Αλγόριθμος (algorithm) είναι ένα πεπερασμένο σύνολο εντολών οι οποίες εκτελούν κάποιο ιδιαίτερο έργο. Κάθε αλγόριθμος
Συστήματα Αυτομάτου Ελέγχου ΙΙ Ασκήσεις Πράξης
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΔΥΤΙΚΗΣ ΑΤΤΙΚΗΣ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΚΗΣ ΣΧΕΔΙΑΣΗΣ & ΠΑΡΑΓΩΓΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ Αν Καθ: Δ ΔΗΜΟΓΙΑΝΝΟΠΟΥΛΟΣ Καθ Εφαρμ: Σ ΒΑΣΙΛΕΙΑΔΟΥ Συστήματα
ΠΑΝΕΠΙΣΤΗΜΙΟ ΔΥΤΙΚΗΣ ΑΤΤΙΚΗΣ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΚΗΣ ΣΧΕΔΙΑΣΗΣ & ΠΑΡΑΓΩΓΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ Αν Καθ: Δ ΔΗΜΟΓΙΑΝΝΟΠΟΥΛΟΣ Καθ Εφαρμ: Σ ΒΑΣΙΛΕΙΑΔΟΥ Συστήματα
Δομές Ακολουθίας- Επιλογής - Επανάληψης. Δομημένος Προγραμματισμός
 Δομές Ακολουθίας- Επιλογής - Επανάληψης Δομημένος Προγραμματισμός 1 Βασικές Έννοιες αλγορίθμων Σταθερές Μεταβλητές Εκφράσεις Πράξεις Εντολές 2 Βασικές Έννοιες Αλγορίθμων Σταθερά: Μια ποσότητα που έχει
Δομές Ακολουθίας- Επιλογής - Επανάληψης Δομημένος Προγραμματισμός 1 Βασικές Έννοιες αλγορίθμων Σταθερές Μεταβλητές Εκφράσεις Πράξεις Εντολές 2 Βασικές Έννοιες Αλγορίθμων Σταθερά: Μια ποσότητα που έχει
4 Αρμονικές Ταλαντώσεις 1 γενικά 17/9/2014
 4 Αρμονικές Ταλαντώσεις γενικά 7/9/4 Περιοδικά φαινόμενα Περιοδικά φαινόμενα Περίοδος Συχνότητα ωνιακή συχνότητα Ταλαντώσεις Απλή αρμονική ταλάντωση Περιοδικό φαινόμενο Περιοδικά φαινόμενα ονομάζονται
4 Αρμονικές Ταλαντώσεις γενικά 7/9/4 Περιοδικά φαινόμενα Περιοδικά φαινόμενα Περίοδος Συχνότητα ωνιακή συχνότητα Ταλαντώσεις Απλή αρμονική ταλάντωση Περιοδικό φαινόμενο Περιοδικά φαινόμενα ονομάζονται
ΙΑ ΟΧΙΚΕΣ ΒΕΛΤΙΩΣΕΙΣ
 Tel.: +30 2310998051, Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης Σχολή Θετικών Επιστημών Τμήμα Φυσικής 541 24 Θεσσαλονίκη Καθηγητής Γεώργιος Θεοδώρου Ιστοσελίδα: http://users.auth.gr/theodoru ΙΑ ΟΧΙΚΕΣ ΒΕΛΤΙΩΣΕΙΣ
Tel.: +30 2310998051, Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης Σχολή Θετικών Επιστημών Τμήμα Φυσικής 541 24 Θεσσαλονίκη Καθηγητής Γεώργιος Θεοδώρου Ιστοσελίδα: http://users.auth.gr/theodoru ΙΑ ΟΧΙΚΕΣ ΒΕΛΤΙΩΣΕΙΣ
ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΣΧΟΛΗ ΕΠΙΣΤΗΜΩΝ ΤΗΣ ΔΙΟΙΚΗΣΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΟΙΚΟΝΟΜΙΑΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΝΟΤΗΤΑ 0: ΒΑΣΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΚΑΙ ΤΥΠΟΙ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Δρ Γιώργος
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΣΧΟΛΗ ΕΠΙΣΤΗΜΩΝ ΤΗΣ ΔΙΟΙΚΗΣΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΟΙΚΟΝΟΜΙΑΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΝΟΤΗΤΑ 0: ΒΑΣΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΚΑΙ ΤΥΠΟΙ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Δρ Γιώργος
Η Δομή Επανάληψης. Εισαγωγή στην δομή επανάληψης Χρονική διάρκεια: 3 διδακτικές ώρες
 Η Δομή Επανάληψης Εισαγωγή στην δομή επανάληψης Χρονική διάρκεια: 3 διδακτικές ώρες Οι 2 πρώτες διδακτικές ώρες στην τάξη Η τρίτη διδακτική ώρα στο εργαστήριο Γενικός Διδακτικός Σκοπός Ενότητας Να εξοικειωθούν
Η Δομή Επανάληψης Εισαγωγή στην δομή επανάληψης Χρονική διάρκεια: 3 διδακτικές ώρες Οι 2 πρώτες διδακτικές ώρες στην τάξη Η τρίτη διδακτική ώρα στο εργαστήριο Γενικός Διδακτικός Σκοπός Ενότητας Να εξοικειωθούν
Επαναληπτικές Διαδικασίες
 Επαναληπτικές Διαδικασίες Οι επαναληπτικές δομές ( εντολές επανάληψης επαναληπτικά σχήματα ) χρησιμοποιούνται, όταν μια ομάδα εντολών πρέπει να εκτελείται αρκετές- πολλές φορές ανάλογα με την τιμή μιας
Επαναληπτικές Διαδικασίες Οι επαναληπτικές δομές ( εντολές επανάληψης επαναληπτικά σχήματα ) χρησιμοποιούνται, όταν μια ομάδα εντολών πρέπει να εκτελείται αρκετές- πολλές φορές ανάλογα με την τιμή μιας
ΕΝΟΤΗΤΑ 1.2: ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ (ΕΝΕΡΓΕΙΑΚΗ ΠΡΟΣΕΓΓΙΣΗ, ΑΡΧΙΚΗ ΦΑΣΗ, ΣΥΣΤΗΜΑ ΕΛΑΤΗΡΙΟΥ ΣΩΜΑΤΟΣ, ΟΡΜΗ) ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΘΕΜΑ Β
 ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΘΕΜΑ Β") ΚΕΦΑΛΑΙΟ Ο : ΜΗΧΑΝΙΚΕΣ ΗΛΕΚΤΡΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ΕΝΟΤΗΤΑ : ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ (ΕΝΕΡΓΕΙΑΚΗ ΠΡΟΣΕΓΓΙΣΗ, ΑΡΧΙΚΗ ΦΑΣΗ, ΣΥΣΤΗΜΑ ΕΛΑΤΗΡΙΟΥ ΣΩΜΑΤΟΣ, ΟΡΜΗ) ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΘΕΜΑ Β Ερώτηση Ένα σώμα εκτελεί απλή
ΚΕΦΑΛΑΙΟ Ο : ΜΗΧΑΝΙΚΕΣ ΗΛΕΚΤΡΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ΕΝΟΤΗΤΑ : ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ (ΕΝΕΡΓΕΙΑΚΗ ΠΡΟΣΕΓΓΙΣΗ, ΑΡΧΙΚΗ ΦΑΣΗ, ΣΥΣΤΗΜΑ ΕΛΑΤΗΡΙΟΥ ΣΩΜΑΤΟΣ, ΟΡΜΗ) ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΘΕΜΑ Β Ερώτηση Ένα σώμα εκτελεί απλή
ΕΥΦΥΗΣ ΕΛΕΓΧΟΣ. Ενότητα #3: Αρχή της Επέκτασης - Ασαφείς Σχέσεις. Αναστάσιος Ντούνης Τμήμα Μηχανικών Αυτοματισμού Τ.Ε.
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΕΥΦΥΗΣ ΕΛΕΓΧΟΣ Ενότητα #3: Αρχή της Επέκτασης - Ασαφείς Σχέσεις Αναστάσιος Ντούνης Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΕΥΦΥΗΣ ΕΛΕΓΧΟΣ Ενότητα #3: Αρχή της Επέκτασης - Ασαφείς Σχέσεις Αναστάσιος Ντούνης Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης
Βέλτιστος Έλεγχος Συστημάτων
 Βέλτιστος Έλεγχος Συστημάτων Ενότητα 1: Εισαγωγή Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σημείωμα Αδειοδότησης Το παρόν υλικό διατίθεται
Βέλτιστος Έλεγχος Συστημάτων Ενότητα 1: Εισαγωγή Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σημείωμα Αδειοδότησης Το παρόν υλικό διατίθεται
Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ Η/Υ. Δομή Επανάληψης. Ιωάννης Λυχναρόπουλος Μαθηματικός, MSc, PhD
 Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ Η/Υ Δομή Επανάληψης Ιωάννης Λυχναρόπουλος Μαθηματικός, MSc, PhD Δομή Επανάληψης Επανάληψη με αρίθμηση DO = ,
Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ Η/Υ Δομή Επανάληψης Ιωάννης Λυχναρόπουλος Μαθηματικός, MSc, PhD Δομή Επανάληψης Επανάληψη με αρίθμηση DO = ,
Σκοπός. Εργαστήριο 6 Εντολές Επανάληψης
 Εργαστήριο 6 Εντολές Επανάληψης Η δομή Επιλογής στη PASCAL H δομή Επανάληψης στη PASCAL. Ρεύμα Εισόδου / Εξόδου.. Ρεύμα Εισόδου / Εξόδου. To πρόγραμμα γραφικών gnuplot. Γραφικά στη PASCAL. Σκοπός 6.1 ΕΠΙΔΙΩΞΗ
Εργαστήριο 6 Εντολές Επανάληψης Η δομή Επιλογής στη PASCAL H δομή Επανάληψης στη PASCAL. Ρεύμα Εισόδου / Εξόδου.. Ρεύμα Εισόδου / Εξόδου. To πρόγραμμα γραφικών gnuplot. Γραφικά στη PASCAL. Σκοπός 6.1 ΕΠΙΔΙΩΞΗ
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΔΙΟΙΚΗΣΗΣ
 ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΔΙΟΙΚΗΣΗΣ ΣΑΛΟΝΙΚΙΔΗΣ ΣΑΛΟΝΙΚΟΣ 2004010053 Επιβλέπων: Σταυρουλάκης Γεώργιος Συνεργάτες: Παπαχρήστου Ιωάννης Διπλωµατική εργασία Μελέτη για την απόδοση ενός
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΔΙΟΙΚΗΣΗΣ ΣΑΛΟΝΙΚΙΔΗΣ ΣΑΛΟΝΙΚΟΣ 2004010053 Επιβλέπων: Σταυρουλάκης Γεώργιος Συνεργάτες: Παπαχρήστου Ιωάννης Διπλωµατική εργασία Μελέτη για την απόδοση ενός
Λύσεις θεμάτων Α εξεταστικής περιόδου Χειμερινού εξαμήνου
 Λύσεις θεμάτων Α εξεταστικής περιόδου Χειμερινού εξαμήνου 203 4 ΘΕΜΑ Ο (4,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό (λειτουργικό) διάγραμμα ενός συστήματος ελέγχου κλειστού βρόχου. α. Να προσδιοριστεί
Λύσεις θεμάτων Α εξεταστικής περιόδου Χειμερινού εξαμήνου 203 4 ΘΕΜΑ Ο (4,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό (λειτουργικό) διάγραμμα ενός συστήματος ελέγχου κλειστού βρόχου. α. Να προσδιοριστεί
ΤΕΧΝΟΛΟΓΙΑ ΛΟΓΙΣΜΙΚΟΥ Ι
 ΤΕΧΝΟΛΟΓΙΑ ΛΟΓΙΣΜΙΚΟΥ Ι κ. ΠΕΤΑΛΙΔΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ 1 Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται
ΤΕΧΝΟΛΟΓΙΑ ΛΟΓΙΣΜΙΚΟΥ Ι κ. ΠΕΤΑΛΙΔΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ 1 Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται
4.3. Γραµµικοί ταξινοµητές
 Γραµµικοί ταξινοµητές Γραµµικός ταξινοµητής είναι ένα σύστηµα ταξινόµησης που χρησιµοποιεί γραµµικές διακριτικές συναρτήσεις Οι ταξινοµητές αυτοί αναπαρίστανται συχνά µε οµάδες κόµβων εντός των οποίων
Γραµµικοί ταξινοµητές Γραµµικός ταξινοµητής είναι ένα σύστηµα ταξινόµησης που χρησιµοποιεί γραµµικές διακριτικές συναρτήσεις Οι ταξινοµητές αυτοί αναπαρίστανται συχνά µε οµάδες κόµβων εντός των οποίων
Διάλεξη 04: Παραδείγματα Ανάλυσης
 Διάλεξη 04: Παραδείγματα Ανάλυσης Πολυπλοκότητας/Ανάλυση Αναδρομικών Αλγόριθμων Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: - Παραδείγματα Ανάλυσης Πολυπλοκότητας : Μέθοδοι, παραδείγματα
Διάλεξη 04: Παραδείγματα Ανάλυσης Πολυπλοκότητας/Ανάλυση Αναδρομικών Αλγόριθμων Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: - Παραδείγματα Ανάλυσης Πολυπλοκότητας : Μέθοδοι, παραδείγματα
ΚΕΦΑΛΑΙΟ 5 ο. ΓΕΩΜΕΤΡΙΚOΣ ΤΟΠΟΣ ΤΩΝ PIZΩN ή ΤΟΠΟΣ ΕVANS
 ΚΕΦΑΛΑΙΟ 5 ο ΓΕΩΜΕΤΡΙΚOΣ ΤΟΠΟΣ ΤΩΝ PIZΩN ή ΤΟΠΟΣ ΕVANS Εισαγωγή Η μελέτη ενός ΣΑΕ μπορεί να γίνει με την επίλυση της διαφορικής εξίσωσης που το περιγράφει και είναι τόσο πιο δύσκολο, όσο μεγαλυτέρου βαθμού
ΚΕΦΑΛΑΙΟ 5 ο ΓΕΩΜΕΤΡΙΚOΣ ΤΟΠΟΣ ΤΩΝ PIZΩN ή ΤΟΠΟΣ ΕVANS Εισαγωγή Η μελέτη ενός ΣΑΕ μπορεί να γίνει με την επίλυση της διαφορικής εξίσωσης που το περιγράφει και είναι τόσο πιο δύσκολο, όσο μεγαλυτέρου βαθμού
Εισαγωγή στην πληροφορική
 Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Αγρονόμων Τοπογράφων Μηχανικών Εισαγωγή στην πληροφορική Βασίλειος Βεσκούκης Δρ. Ηλεκτρολόγος Μηχανικός & Μηχανικός Υπολογιστών ΕΜΠ v.vescoukis@cs.ntua.gr Η γλώσσα προγραμματισμού
Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Αγρονόμων Τοπογράφων Μηχανικών Εισαγωγή στην πληροφορική Βασίλειος Βεσκούκης Δρ. Ηλεκτρολόγος Μηχανικός & Μηχανικός Υπολογιστών ΕΜΠ v.vescoukis@cs.ntua.gr Η γλώσσα προγραμματισμού
Φυσική για Μηχανικούς
 Φυσική για Μηχανικούς Εικόνα: Σταγόνες νερού που πέφτουν από ύψος επάνω σε μια επιφάνεια νερού προκαλούν την ταλάντωση της επιφάνειας. Αυτές οι ταλαντώσεις σχετίζονται με κυκλικά κύματα που απομακρύνονται
Φυσική για Μηχανικούς Εικόνα: Σταγόνες νερού που πέφτουν από ύψος επάνω σε μια επιφάνεια νερού προκαλούν την ταλάντωση της επιφάνειας. Αυτές οι ταλαντώσεις σχετίζονται με κυκλικά κύματα που απομακρύνονται
Προσοµοίωση σύνθετων ευφυών µηχανικών συστηµάτων µε αισθητήρες και διεγέρτες από πιεζοηλεκτρικά υλικά. Σύνδεση µε ευφυείς µεθόδους ελέγχου.
 Πολυτεχνείο Κρήτης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Τοµέας Συστηµάτων Παραγωγής Επιβλέπων καθηγητής: Γεώργιος Σταυρουλάκης Προσοµοίωση σύνθετων ευφυών µηχανικών συστηµάτων µε αισθητήρες και διεγέρτες
Πολυτεχνείο Κρήτης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Τοµέας Συστηµάτων Παραγωγής Επιβλέπων καθηγητής: Γεώργιος Σταυρουλάκης Προσοµοίωση σύνθετων ευφυών µηχανικών συστηµάτων µε αισθητήρες και διεγέρτες
Επιλογή και επανάληψη. Λογική έκφραση ή συνθήκη
 Επιλογή και επανάληψη Η ύλη που αναπτύσσεται σε αυτό το κεφάλαιο είναι συναφής µε την ύλη που αναπτύσσεται στο 2 ο κεφάλαιο. Όπου υπάρχουν διαφορές αναφέρονται ρητά. Προσέξτε ιδιαίτερα, πάντως, ότι στο
Επιλογή και επανάληψη Η ύλη που αναπτύσσεται σε αυτό το κεφάλαιο είναι συναφής µε την ύλη που αναπτύσσεται στο 2 ο κεφάλαιο. Όπου υπάρχουν διαφορές αναφέρονται ρητά. Προσέξτε ιδιαίτερα, πάντως, ότι στο
Διάλεξη 04: Παραδείγματα Ανάλυσης Πολυπλοκότητας/Ανάλυση Αναδρομικών Αλγόριθμων
 Διάλεξη 04: Παραδείγματα Ανάλυσης Πολυπλοκότητας/Ανάλυση Αναδρομικών Αλγόριθμων Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: - Παραδείγματα Ανάλυσης Πολυπλοκότητας : Μέθοδοι, παραδείγματα
Διάλεξη 04: Παραδείγματα Ανάλυσης Πολυπλοκότητας/Ανάλυση Αναδρομικών Αλγόριθμων Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: - Παραδείγματα Ανάλυσης Πολυπλοκότητας : Μέθοδοι, παραδείγματα
ΘΕΜΑ 1ο. Να γράψετε στο τετράδιό σας τον αριθμό καθεμίας από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση.
 ΘΕΜΑ 1ο Να γράψετε στο τετράδιό σας τον αριθμό καθεμίας από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση 1 Ένα σώμα εκτελεί αρμονική ταλάντωση με ακραίες θέσεις που
ΘΕΜΑ 1ο Να γράψετε στο τετράδιό σας τον αριθμό καθεμίας από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση 1 Ένα σώμα εκτελεί αρμονική ταλάντωση με ακραίες θέσεις που
Αριθμητική Επίλυση Συνήθων Διαφορίκών Εξισώσεων 3ο Εργαστήριο 27/03/2015 1
 Αριθμητική Επίλυση Συνήθων Διαφορίκών Εξισώσεων 3ο Εργαστήριο 7/3/5 Σκοπός αυτού του εργαστηρίου είναι να δούμε πως μπορούμε να επιλύσουμε συστήματα διαφορικών εξισώσεων, με την χρήση του Matlab. Συστήματα
Αριθμητική Επίλυση Συνήθων Διαφορίκών Εξισώσεων 3ο Εργαστήριο 7/3/5 Σκοπός αυτού του εργαστηρίου είναι να δούμε πως μπορούμε να επιλύσουμε συστήματα διαφορικών εξισώσεων, με την χρήση του Matlab. Συστήματα
ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ
 ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ Πρόλογος... 11 Μέρος Α: Στοιχεία Αλγοριθμικής... 15 1 Επίλυση προβλημάτων με Η/Υ... 19 1.1 Εισαγωγή... 19 1.2 Αλγόριθμοι αλγοριθμικά προβλήματα... 20 1.3 Το μαθηματικό μοντέλο... 26
ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ Πρόλογος... 11 Μέρος Α: Στοιχεία Αλγοριθμικής... 15 1 Επίλυση προβλημάτων με Η/Υ... 19 1.1 Εισαγωγή... 19 1.2 Αλγόριθμοι αλγοριθμικά προβλήματα... 20 1.3 Το μαθηματικό μοντέλο... 26
ΕΠΛ231 Δομές Δεδομένων και Αλγόριθμοι 4. Παραδείγματα Ανάλυσης Πολυπλοκότητας Ανάλυση Αναδρομικών Αλγόριθμων
 ΕΠΛ31 Δομές Δεδομένων και Αλγόριθμοι 4. Παραδείγματα Ανάλυσης Πολυπλοκότητας Ανάλυση Αναδρομικών Αλγόριθμων Διάλεξη 04: Παραδείγματα Ανάλυσης Πολυπλοκότητας/Ανάλυση Αναδρομικών Αλγόριθμων Στην ενότητα
ΕΠΛ31 Δομές Δεδομένων και Αλγόριθμοι 4. Παραδείγματα Ανάλυσης Πολυπλοκότητας Ανάλυση Αναδρομικών Αλγόριθμων Διάλεξη 04: Παραδείγματα Ανάλυσης Πολυπλοκότητας/Ανάλυση Αναδρομικών Αλγόριθμων Στην ενότητα
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ ΥΔΡΑΥΛΙΚΗΣ ΚΑΙ ΤΕΧΝΙΚΗΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ ΥΔΡΑΥΛΙΚΗΣ ΚΑΙ ΤΕΧΝΙΚΗΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ ΕΥΑΓΓΕΛΙΑΣ Π. ΛΟΥΚΟΓΕΩΡΓΑΚΗ Διπλωματούχου Πολιτικού Μηχανικού ΟΛΟΚΛΗΡΩΜΕΝΟ
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ ΥΔΡΑΥΛΙΚΗΣ ΚΑΙ ΤΕΧΝΙΚΗΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ ΕΥΑΓΓΕΛΙΑΣ Π. ΛΟΥΚΟΓΕΩΡΓΑΚΗ Διπλωματούχου Πολιτικού Μηχανικού ΟΛΟΚΛΗΡΩΜΕΝΟ
Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα
 Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα ΔΙΑΛΕΞΗ 19 Ταλαντώσεις Απλή αρμονική κίνηση ΦΥΣ102 1 Ταλαντώσεις Ελατηρίου Όταν ένα αντικείμενο
Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα ΔΙΑΛΕΞΗ 19 Ταλαντώσεις Απλή αρμονική κίνηση ΦΥΣ102 1 Ταλαντώσεις Ελατηρίου Όταν ένα αντικείμενο
0,6 m. Οι πηγές ξεκινούν να ταλαντώνονται τη χρονική στιγμή t 0 με θετική
 ΚΕΦΑΛΑΙΟ Ο : ΚΥΜΑΤΑ ΕΝΟΤΗΤΑ : ΕΠΑΛΛΗΛΙΑ ΚΥΜΑΤΩΝ ΣΥΜΒΟΛΗ ΚΥΜΑΤΩΝ ΣΤΑΣΙΜΑ ΚΥΜΑΤΑ ΘΕΜΑΤΑ ΠΡΟΣ ΕΠΙΛΥΣΗ Άσκηση. ΘΕΜΑ Γ Δύο σύγχρονες κυματικές πηγές, ταλαντώνονται με το ίδιο πλάτος A 0, m, κάθετα στην ελαστική
ΚΕΦΑΛΑΙΟ Ο : ΚΥΜΑΤΑ ΕΝΟΤΗΤΑ : ΕΠΑΛΛΗΛΙΑ ΚΥΜΑΤΩΝ ΣΥΜΒΟΛΗ ΚΥΜΑΤΩΝ ΣΤΑΣΙΜΑ ΚΥΜΑΤΑ ΘΕΜΑΤΑ ΠΡΟΣ ΕΠΙΛΥΣΗ Άσκηση. ΘΕΜΑ Γ Δύο σύγχρονες κυματικές πηγές, ταλαντώνονται με το ίδιο πλάτος A 0, m, κάθετα στην ελαστική
ΤΕΧΝΟΛΟΓΙΑ ΛΟΓΙΣΜΙΚΟΥ Ι
 ΤΕΧΝΟΛΟΓΙΑ ΛΟΓΙΣΜΙΚΟΥ Ι κ. ΠΕΤΑΛΙΔΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ 1 Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται
ΤΕΧΝΟΛΟΓΙΑ ΛΟΓΙΣΜΙΚΟΥ Ι κ. ΠΕΤΑΛΙΔΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ 1 Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται
Τύποι δεδομένων, τελεστές, μεταβλητές
 Τύποι δεδομένων, τελεστές, μεταβλητές Βασικά στοιχεία της γλώσσας Η Java χαρακτηρίζεται από ένα αρκετά καλά οργανωμένο σύνολο εντολών κι ένα μέρος της επιτυχίας της οφείλεται στα διάφορα APIs (βιβλιοθήκες)
Τύποι δεδομένων, τελεστές, μεταβλητές Βασικά στοιχεία της γλώσσας Η Java χαρακτηρίζεται από ένα αρκετά καλά οργανωμένο σύνολο εντολών κι ένα μέρος της επιτυχίας της οφείλεται στα διάφορα APIs (βιβλιοθήκες)
Φυσική για Μηχανικούς
 Φυσική για Μηχανικούς Απλή Αρμονική Ταλάντωση Εικόνα: Σταγόνες νερού που πέφτουν από ύψος επάνω σε μια επιφάνεια νερού προκαλούν την ταλάντωση της επιφάνειας. Αυτές οι ταλαντώσεις σχετίζονται με κυκλικά
Φυσική για Μηχανικούς Απλή Αρμονική Ταλάντωση Εικόνα: Σταγόνες νερού που πέφτουν από ύψος επάνω σε μια επιφάνεια νερού προκαλούν την ταλάντωση της επιφάνειας. Αυτές οι ταλαντώσεις σχετίζονται με κυκλικά
Επανάληψη για τις Τελικές εξετάσεις. (Διάλεξη 24) ΕΠΛ 032: ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕΘΟΔΩΝ ΕΠΙΛΥΣΗΣ ΠΡΟΒΛΗΜΑΤΩΝ
 ΕΠΛ 032: ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕΘΟΔΩΝ ΕΠΙΛΥΣΗΣ ΠΡΟΒΛΗΜΑΤΩΝ") Επανάληψη για τις Τελικές εξετάσεις (Διάλεξη 24) Εισαγωγή Το μάθημα EPL032 έχει ως βασικό στόχο την επίλυση προβλημάτων πληροφορικής με την χρήση της γλώσσας προγραμματισμού C. Επομένως πρέπει: Nα κατανοήσετε
Επανάληψη για τις Τελικές εξετάσεις (Διάλεξη 24) Εισαγωγή Το μάθημα EPL032 έχει ως βασικό στόχο την επίλυση προβλημάτων πληροφορικής με την χρήση της γλώσσας προγραμματισμού C. Επομένως πρέπει: Nα κατανοήσετε
ΠΟΛΥΚΡΙΤΗΡΙΑ ΥΠΟΣΤΗΡΙΞΗ ΑΠΟΦΑΣΕΩΝ. Χάρης Δούκας, Πάνος Ξυδώνας, Ιωάννης Ψαρράς
 Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Ηλεκτρολόγων Μηχανικών Και Μηχανικών Υπολογιστών ΤΟΜΕΑΣ ΗΛΕΚΤΡΙΚΩΝ ΒΙΟΜΗΧΑΝΙΚΩΝ ΔΙΑΤΑΞΕΩΝ ΚΑΙ ΣΥΣΤΗΜΑΤΩΝ ΑΠΟΦΑΣΕΩΝ Εργαστήριο Συστημάτων Αποφάσεων και Διοίκησης ΠΟΛΥΚΡΙΤΗΡΙΑ
Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Ηλεκτρολόγων Μηχανικών Και Μηχανικών Υπολογιστών ΤΟΜΕΑΣ ΗΛΕΚΤΡΙΚΩΝ ΒΙΟΜΗΧΑΝΙΚΩΝ ΔΙΑΤΑΞΕΩΝ ΚΑΙ ΣΥΣΤΗΜΑΤΩΝ ΑΠΟΦΑΣΕΩΝ Εργαστήριο Συστημάτων Αποφάσεων και Διοίκησης ΠΟΛΥΚΡΙΤΗΡΙΑ
ΣΗΜΕΙΩΣΕΙΣ ΤΕΛΙΚΗΣ ΕΡΓΑΣΙΑΣ ΤΟΥ ΜΑΘΗΜΑΤΟΣ «ΓΛΩΣΣΕΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ»
 ΣΗΜΕΙΩΣΕΙΣ ΤΕΛΙΚΗΣ ΕΡΓΑΣΙΑΣ ΤΟΥ ΜΑΘΗΜΑΤΟΣ «ΓΛΩΣΣΕΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ» Κωνσταντίνος Π. Φερεντίνος Διδάσκων ΠΔ 407/80 Οι σημειώσεις αυτές αναπτύχθηκαν στα πλαίσια του προγράμματος «ΕΠΕΑΕΚ 2 Πρόγραμμα Αναβάθμισης
ΣΗΜΕΙΩΣΕΙΣ ΤΕΛΙΚΗΣ ΕΡΓΑΣΙΑΣ ΤΟΥ ΜΑΘΗΜΑΤΟΣ «ΓΛΩΣΣΕΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ» Κωνσταντίνος Π. Φερεντίνος Διδάσκων ΠΔ 407/80 Οι σημειώσεις αυτές αναπτύχθηκαν στα πλαίσια του προγράμματος «ΕΠΕΑΕΚ 2 Πρόγραμμα Αναβάθμισης
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔ ΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ Μεθοδολογία Κλεομένης Γ. Τσιγάνης Λέκτορας ΑΠΘ Πρόχειρες
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔ ΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ Μεθοδολογία Κλεομένης Γ. Τσιγάνης Λέκτορας ΑΠΘ Πρόχειρες
Εισαγωγή στην πληροφορική
 Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Αγρονόµων Τοπογράφων Μηχανικών Εισαγωγή στην πληροφορική Βασίλειος Βεσκούκης ρ. Ηλεκτρολόγος Μηχανικός & Μηχανικός Υπολογιστών ΕΜΠ v.vescoukis@cs.ntua.gr Η γλώσσα προγραµµατισµού
Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Αγρονόµων Τοπογράφων Μηχανικών Εισαγωγή στην πληροφορική Βασίλειος Βεσκούκης ρ. Ηλεκτρολόγος Μηχανικός & Μηχανικός Υπολογιστών ΕΜΠ v.vescoukis@cs.ntua.gr Η γλώσσα προγραµµατισµού
Ασκήσεις Φροντιστηρίου «Υπολογιστική Νοημοσύνη Ι» 5 o Φροντιστήριο
 Πρόβλημα ο Ασκήσεις Φροντιστηρίου 5 o Φροντιστήριο Δίνεται το παρακάτω σύνολο εκπαίδευσης: # Είσοδος Κατηγορία 0 0 0 Α 2 0 0 Α 0 Β 4 0 0 Α 5 0 Β 6 0 0 Α 7 0 Β 8 Β α) Στον παρακάτω κύβο τοποθετείστε τα
Πρόβλημα ο Ασκήσεις Φροντιστηρίου 5 o Φροντιστήριο Δίνεται το παρακάτω σύνολο εκπαίδευσης: # Είσοδος Κατηγορία 0 0 0 Α 2 0 0 Α 0 Β 4 0 0 Α 5 0 Β 6 0 0 Α 7 0 Β 8 Β α) Στον παρακάτω κύβο τοποθετείστε τα
3 Διακριτοποίηση Συστημάτων Συνεχούς Χρόνου... 65
 ΠΕΡΙΕΧΟΜΕΝΑ \ Πρόλογος 15 1 Εισαγωγικά Στοιχεία Βιομηχανικού Ελέγχου 19 1.1 Μοντέλα Περιγραφής Βιομηχανικών Συστημάτων... 19 1.2 Βιομηχανικοί Ελεγκτές 23 1.2.1 Σύστημα 23 1.2.2 Σύνδεση Συστημάτων 26 1.2.3
ΠΕΡΙΕΧΟΜΕΝΑ \ Πρόλογος 15 1 Εισαγωγικά Στοιχεία Βιομηχανικού Ελέγχου 19 1.1 Μοντέλα Περιγραφής Βιομηχανικών Συστημάτων... 19 1.2 Βιομηχανικοί Ελεγκτές 23 1.2.1 Σύστημα 23 1.2.2 Σύνδεση Συστημάτων 26 1.2.3
Κεφαλαιο 2.2 ΑΝΑΚΕΦΑΛΑΙΩΤΙΚΕΣ ΑΛΓΟΡΙΘΜΟΙ
 Κεφαλαιο 2.2 ΑΝΑΚΕΦΑΛΑΙΩΤΙΚΕΣ ΑΛΓΟΡΙΘΜΟΙ 1.Σ, 2.Σ, 3. Λ, 4.Σ, 5.Σ Στο α) ανήκουν: 1,2,5,6,7 Στο β) ανήκουν: 3,4,8,9,10 1.-Λ, 2.-Λ, 3.-Σ, 4.-Σ, 5.-Σ 1. -Πραγματικός, 2. -Αρφαριθμητικός, 3.-Αλφαριθμητικός,
Κεφαλαιο 2.2 ΑΝΑΚΕΦΑΛΑΙΩΤΙΚΕΣ ΑΛΓΟΡΙΘΜΟΙ 1.Σ, 2.Σ, 3. Λ, 4.Σ, 5.Σ Στο α) ανήκουν: 1,2,5,6,7 Στο β) ανήκουν: 3,4,8,9,10 1.-Λ, 2.-Λ, 3.-Σ, 4.-Σ, 5.-Σ 1. -Πραγματικός, 2. -Αρφαριθμητικός, 3.-Αλφαριθμητικός,
ΟΙΚΟΝΟΜΙΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ - ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ Θεωρία Παιγνίων και Αποφάσεων Διδάσκων: Ε. Μαρκάκης, Εαρινό εξάμηνο 2015
 ΟΙΚΟΝΟΜΙΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ - ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ Θεωρία Παιγνίων και Αποφάσεων Διδάσκων: Ε. Μαρκάκης, Εαρινό εξάμηνο 2015 Λύσεις 2η σειράς ασκήσεων Προθεσμία παράδοσης: 18 Μαίου 2015 Πρόβλημα 1. (14
ΟΙΚΟΝΟΜΙΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ - ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ Θεωρία Παιγνίων και Αποφάσεων Διδάσκων: Ε. Μαρκάκης, Εαρινό εξάμηνο 2015 Λύσεις 2η σειράς ασκήσεων Προθεσμία παράδοσης: 18 Μαίου 2015 Πρόβλημα 1. (14
Προσομoίωση Απόκρισης Συστήματος στο MATLAB
 Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Προσομoίωση Απόκρισης Συστήματος στο MATLAB Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Προσομoίωση Απόκρισης Συστήματος στο MATLAB του καθ. Ιωάννη
Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Προσομoίωση Απόκρισης Συστήματος στο MATLAB Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Προσομoίωση Απόκρισης Συστήματος στο MATLAB του καθ. Ιωάννη
1. Δύο σύγχρονες πηγές αρμονικών κυμάτων βρίσκονται σε δύο σημεία της επιφάνειας ενός υγρού δημιουργώντας
 ΣΥΜΒΟΛΗ ΚΥΜΑΤΩΝ. Δύο σύγχρονες πηγές αρμονικών κυμάτων βρίσκονται σε δύο σημεία της επιφάνειας ενός υγρού δημιουργώντας εγκάρσια κύματα τα οποία διαδίδονται στην επιφάνεια του υγρού με ταχύτητα 0,5 m/s.
ΣΥΜΒΟΛΗ ΚΥΜΑΤΩΝ. Δύο σύγχρονες πηγές αρμονικών κυμάτων βρίσκονται σε δύο σημεία της επιφάνειας ενός υγρού δημιουργώντας εγκάρσια κύματα τα οποία διαδίδονται στην επιφάνεια του υγρού με ταχύτητα 0,5 m/s.
Εξαναγκασμένη Ταλάντωση. Τυχαία Φόρτιση (Ολοκλήρωμα Duhamel)
") Εξαναγκασμένη Ταλάντωση Τυχαία Φόρτιση (Ολοκλήρωμα Duhamel) Εξαναγκασμένη Ταλάντωση: Τυχαία Φόρτιση: Απόκριση σε Τυχαία Φόρτιση: Βασική Ιδέα Δ10-2 Το πρόβλημα της κίνησης μονοβάθμιου συστήματος σε τυχαία
Εξαναγκασμένη Ταλάντωση Τυχαία Φόρτιση (Ολοκλήρωμα Duhamel) Εξαναγκασμένη Ταλάντωση: Τυχαία Φόρτιση: Απόκριση σε Τυχαία Φόρτιση: Βασική Ιδέα Δ10-2 Το πρόβλημα της κίνησης μονοβάθμιου συστήματος σε τυχαία
Αριθμητική εύρεση ριζών μη γραμμικών εξισώσεων
 Αριθμητική εύρεση ριζών μη γραμμικών εξισώσεων Με τον όρο μη γραμμικές εξισώσεις εννοούμε εξισώσεις της μορφής: f( ) 0 που προέρχονται από συναρτήσεις f () που είναι μη γραμμικές ως προς. Περιέχουν δηλαδή
Αριθμητική εύρεση ριζών μη γραμμικών εξισώσεων Με τον όρο μη γραμμικές εξισώσεις εννοούμε εξισώσεις της μορφής: f( ) 0 που προέρχονται από συναρτήσεις f () που είναι μη γραμμικές ως προς. Περιέχουν δηλαδή
ΣΥΜΜΕΤΟΧΗ Ι ΙΟΜΟΡΦΩΝ ΣΤΗ ΜΕΘΟ Ο ΕΠΑΛΛΗΛΙΑΣ
 Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Πολιτικών Μηχανικών ΣΥΜΜΕΤΟΧΗ Ι ΙΟΜΟΡΦΩΝ ΣΤΗ ΜΕΘΟ Ο ΕΠΑΛΛΗΛΙΑΣ Ε.Ι. Σαπουντζάκης Καθηγητής ΕΜΠ υναμική Ανάλυση Ραβδωτών Φορέων Μετακινήσεις στη μέθοδο επαλληλίας των ιδιομορφών,
Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Πολιτικών Μηχανικών ΣΥΜΜΕΤΟΧΗ Ι ΙΟΜΟΡΦΩΝ ΣΤΗ ΜΕΘΟ Ο ΕΠΑΛΛΗΛΙΑΣ Ε.Ι. Σαπουντζάκης Καθηγητής ΕΜΠ υναμική Ανάλυση Ραβδωτών Φορέων Μετακινήσεις στη μέθοδο επαλληλίας των ιδιομορφών,
4.4 Μετατροπή από μία μορφή δομής επανάληψης σε μία άλλη.
 4.4 Μετατροπή από μία μορφή δομής επανάληψης σε μία άλλη. Η μετατροπή μιας εντολής επανάληψης σε μία άλλη ή στις άλλες δύο εντολές επανάληψης, αποτελεί ένα θέμα που αρκετές φορές έχει εξεταστεί σε πανελλαδικό
4.4 Μετατροπή από μία μορφή δομής επανάληψης σε μία άλλη. Η μετατροπή μιας εντολής επανάληψης σε μία άλλη ή στις άλλες δύο εντολές επανάληψης, αποτελεί ένα θέμα που αρκετές φορές έχει εξεταστεί σε πανελλαδικό
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ ΜΗΧΑΝΩΝ
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ ΜΗΧΑΝΩΝ Εργαστηριακή Άσκηση 1 Προσδιορισμός Τεχνικών Παραμέτρων Ταλαντωτή Ενός Βαθμού Ελευθερίας Ονοματεπώνυμο: Παριανού Θεοδώρα Όνομα Πατρός: Απόστολος Αριθμός μητρώου: 1000107 Ημερομηνία
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ ΜΗΧΑΝΩΝ Εργαστηριακή Άσκηση 1 Προσδιορισμός Τεχνικών Παραμέτρων Ταλαντωτή Ενός Βαθμού Ελευθερίας Ονοματεπώνυμο: Παριανού Θεοδώρα Όνομα Πατρός: Απόστολος Αριθμός μητρώου: 1000107 Ημερομηνία
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΙΡΑΙΩΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΙ ΕΠΙΚΟΙΝΩΝΙΩΝ ΤΜΗΜΑ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ «ΔΟΜΕΣ ΔΕΔΟΜΕΝΩΝ»
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΙΡΑΙΩΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΙ ΕΠΙΚΟΙΝΩΝΙΩΝ ΤΜΗΜΑ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ «ΔΟΜΕΣ ΔΕΔΟΜΕΝΩΝ» ΗΜΕΡ.ΑΝΑΘΕΣΗΣ: Δευτέρα 21 Δεκεμβρίου 2015 ΗΜΕΡ.ΠΑΡΑΔΟΣΗΣ: Δευτέρα 25 Ιανουαρίου 2016 Διδάσκοντες:
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΙΡΑΙΩΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΙ ΕΠΙΚΟΙΝΩΝΙΩΝ ΤΜΗΜΑ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ «ΔΟΜΕΣ ΔΕΔΟΜΕΝΩΝ» ΗΜΕΡ.ΑΝΑΘΕΣΗΣ: Δευτέρα 21 Δεκεμβρίου 2015 ΗΜΕΡ.ΠΑΡΑΔΟΣΗΣ: Δευτέρα 25 Ιανουαρίου 2016 Διδάσκοντες:
f(x) = και στην συνέχεια
 = και στην συνέχεια") ΕΡΩΤΗΣΕΙΣ ΜΑΘΗΤΩΝ Ερώτηση. Στις συναρτήσεις μπορούμε να μετασχηματίσουμε πρώτα τον τύπο τους και μετά να βρίσκουμε το πεδίο ορισμού τους; Όχι. Το πεδίο ορισμού της συνάρτησης το βρίσκουμε πριν μετασχηματίσουμε
ΕΡΩΤΗΣΕΙΣ ΜΑΘΗΤΩΝ Ερώτηση. Στις συναρτήσεις μπορούμε να μετασχηματίσουμε πρώτα τον τύπο τους και μετά να βρίσκουμε το πεδίο ορισμού τους; Όχι. Το πεδίο ορισμού της συνάρτησης το βρίσκουμε πριν μετασχηματίσουμε
ΒΑΣΙΚΑ ΣΤΟΙΧΕΙΑ ΘΕΩΡΙΑΣ ΤΗΣ ΜΕΘΟΔΟΥ SIMPLEX
 ΒΑΣΙΚΑ ΣΤΟΙΧΕΙΑ ΘΕΩΡΙΑΣ ΤΗΣ ΜΕΘΟΔΟΥ SIMPLEX Θεμελιώδης αλγόριθμος επίλυσης προβλημάτων Γραμμικού Προγραμματισμού που κάνει χρήση της θεωρίας της Γραμμικής Άλγεβρας Προτάθηκε από το Dantzig (1947) και πλέον
ΒΑΣΙΚΑ ΣΤΟΙΧΕΙΑ ΘΕΩΡΙΑΣ ΤΗΣ ΜΕΘΟΔΟΥ SIMPLEX Θεμελιώδης αλγόριθμος επίλυσης προβλημάτων Γραμμικού Προγραμματισμού που κάνει χρήση της θεωρίας της Γραμμικής Άλγεβρας Προτάθηκε από το Dantzig (1947) και πλέον
MATLAB. Εισαγωγή στο SIMULINK. Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής
 MATLAB Εισαγωγή στο SIMULINK Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής Εισαγωγή στο Simulink - Βιβλιοθήκες - Παραδείγματα Εκκίνηση BLOCKS click ή Βιβλιοθήκες Νέο αρχείο click ή Προσθήκη block σε αρχείο
MATLAB Εισαγωγή στο SIMULINK Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής Εισαγωγή στο Simulink - Βιβλιοθήκες - Παραδείγματα Εκκίνηση BLOCKS click ή Βιβλιοθήκες Νέο αρχείο click ή Προσθήκη block σε αρχείο
ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ ΣΧΕΔΙΑΣΗ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΑΣΚΗΣΗ 2
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΗΜΑΤΩΝ ΕΛΕΓΧΟΥ ΚΑΙ ΡΟΜΠΟΤΙΚΗΣ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΗΜΑΤΩΝ ΕΛΕΓΧΟΥ ΚΑΙ ΡΟΜΠΟΤΙΚΗΣ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ ( Μεθοδολογία- Παραδείγματα ) Κλεομένης Γ. Τσιγάνης
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ ( Μεθοδολογία- Παραδείγματα ) Κλεομένης Γ. Τσιγάνης
Ο Αλγόριθµος της Simplex
 Βήµατα Αλγορίθµου Τα ϐήµατα του αλγορίθµου συνοψίζονται σε ϐήµατα. Βήµατα Αλγορίθµου Τα ϐήµατα του αλγορίθµου συνοψίζονται σε ϐήµατα. Αρχικοποίηση : Επέλεξε έναν αντιστρέψιµο πίνακα B (m m) έτσι ώστε x
Βήµατα Αλγορίθµου Τα ϐήµατα του αλγορίθµου συνοψίζονται σε ϐήµατα. Βήµατα Αλγορίθµου Τα ϐήµατα του αλγορίθµου συνοψίζονται σε ϐήµατα. Αρχικοποίηση : Επέλεξε έναν αντιστρέψιµο πίνακα B (m m) έτσι ώστε x