Περισσότερα+για+τις+στροφές+
|
|
|
- ÊΦάνης Καλογιάννης
- 7 χρόνια πριν
- Προβολές:
Transcript

1 ΤεχνολογικόEκπαιδευτικόΊδρυμαKρήτης Ρομποτική «Τοπικήπαραμετροποίησηπινάκωνστροφής,γωνίεςEuler, πίνακαςστροφήςγύρωαπόισοδύναμοάξονα» Δρ.ΦασουλάςΓιάννης 1 Περισσότεραγιατιςστροφές ΗστροφήενόςΣΣμπορείνααντιστοιχηθείσεένα πίνακαστροφής Οπίνακαςστροφήςέχει9στοιχεία Οπίνακαςστροφήςμπορείναπαραμετροποιηθεί μεδιάφορουςτρόπους: ΓωνίεςRoll,Pitch,Yaw ΓωνίεςEuler Στροφήγύρωαπόισοδύναμοάξονα Μεάλλουςτρόπους Δρ.ΦασουλάςΓιάννης
2 Προσανατολισμόςμετοπικήπαραμετροποίηση Προσανατολισμόςμετοπικήπαραμετροποίηση 3Ανεξάρτητοιπαράμετροι R 3Γωνίεςστροφήςγύρωαπότουςβασικούςάξονεςτου αδρανειακούπλαισίου ΒΑΣΙΚΕΣΓΩΝΙΕΣΧaΥaΖ γωνίεςroll,pitch,yaw 3Γωνίεςστροφήςγύρωαπότουςβασικούςάξονεςτου κινουμένουπλαισίου ΓΩΝΙΕΣEULERΖaΥaΧ Γωνίαστροφήςγύρωαπόισοδύναμοάξονα Δρ.ΦασουλάςΓιάννης 3 ΒΑΣΙΚΕΣΓΩΝΙΕΣΣτροφές)ΧaΥaΖ Προσανατολισμόςμετοπικήπαραμετροποίηση {A} rotx A, γ ) eax e Az {A} eay roty A, β ) R γβα,, ) = rotz, α ) roty, β ) rotx, γ) ab XYZ rotz A, α ) { B} Αντίναπεριγράφουμετονπροσανατολισμόμετονπίνακαστροφής Χρησιμοποιούμεμόνοτιςγωνίεςγ,β,απουλέγονταιβασικέςγωνίεςΧeΥe Ζγύρωαπόσταθερούςάξονες. Γωνίεςγ,β,αήαλλιώςγωνίεςRoll,Pitch,Yaw Δρ.ΦασουλάςΓιάννης 4
 rotx B, γ ) { B} ZYXΓωνίεςEuler=α,β,γ) Αντίναπεριγράφουμετονπροσανατολισμόμετονπίνακαστροφής Χρησιμοποιούμεμόνοτιςγωνίεςα,β,γ,πουλέγονταιΖΥΧγωνίεςEuler γύρωαπότουςκινούμενουςάξονες). Δρ.")
3 ΓωνίεςEulerZaYaX R γβα,, ) = rotz, α ) roty, β ) rotx, γ) ab XYZ Προσανατολισμόςμετοπικήπαραμετροποίηση {A}"{B} e Az Διαφορετικήερμηνείατου παραπάνωπίνακαστροφής eax {A} eay {A} rotz B, α) roty B, β ) rotx B, γ ) { B} ZYXΓωνίεςEuler=α,β,γ) Αντίναπεριγράφουμετονπροσανατολισμόμετονπίνακαστροφής Χρησιμοποιούμεμόνοτιςγωνίεςα,β,γ,πουλέγονταιΖΥΧγωνίεςEuler γύρωαπότουςκινούμενουςάξονες). Δρ.ΦασουλάςΓιάννης 5 Προσανατολισμόςμετοπική ΓωνίεςEulerRoll,Pitch,Yaw) ab ZYXΓωνίεςEuler rotz B, α) ZYX παραμετροποίηση { A} { B 0)} roty B, β ) R αβγ,, ) = rotz, α ) roty, β ) rotx, γ ) = % cα sα 0 % cβ 0 sβ % = sα cα cγ sγ sβ 0 cβ 0 sγ cγ $ cc α β css α β γ sc α γ csc α β γ ss α γ% = sc α β sss α β γ cc α γ ssc α β γ cs α γ =R ab γβα,, ) sβ cβsγ cβc ) γ rotx B, γ ) { B} XYZ Roll {A} = {B0)} Yaw Pitch 6
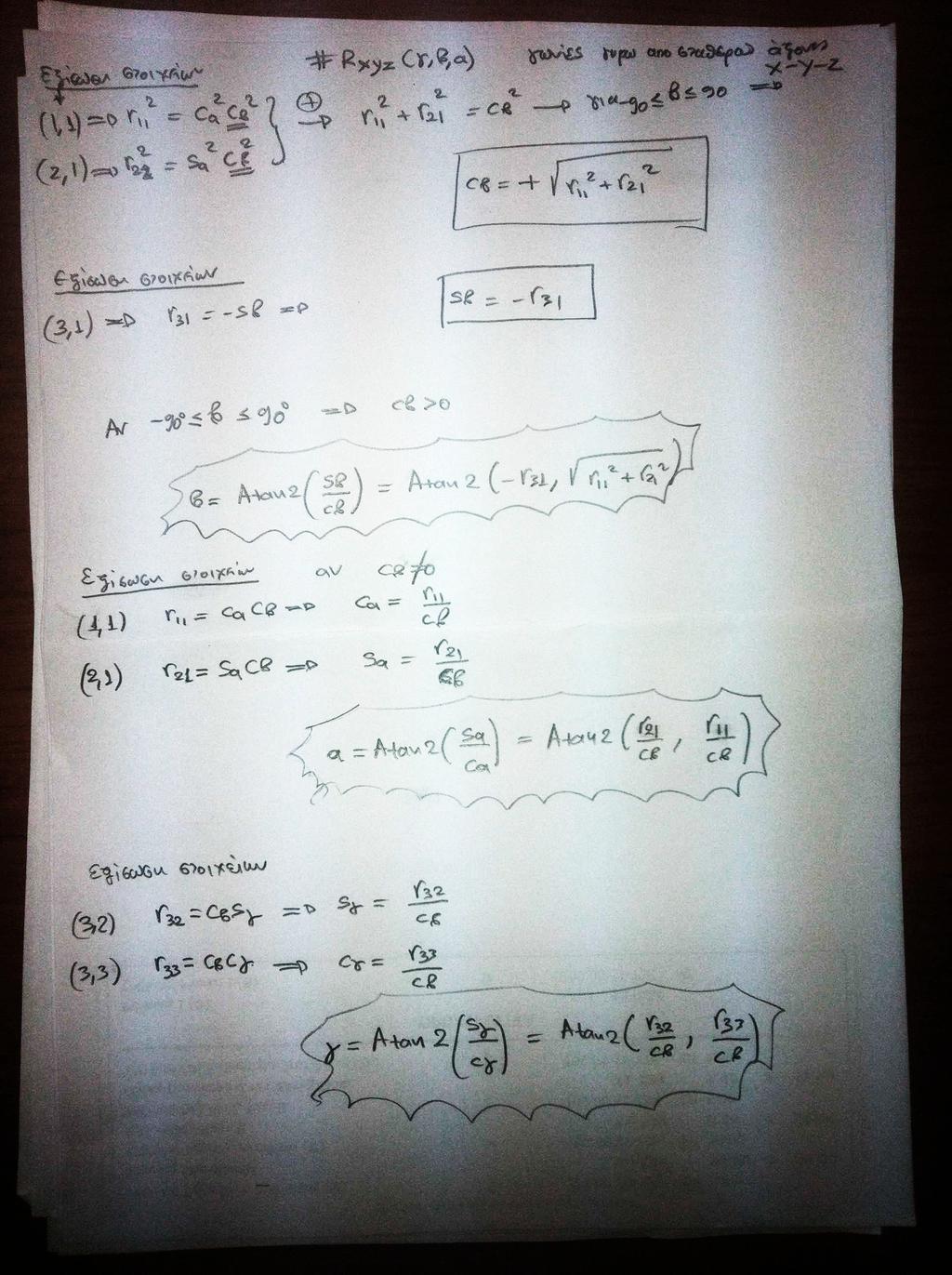
 c α sβ s α s α sβ c α cβ Υπολογισμόςτωνγωνιώνα,β,γανξέρουμετονπίνακαστροφής c α sβ s α % s α sβ c α")
4 Προσανατολισμόςμετοπική παραμετροποίηση Σύνοψη {A}"{B} R ab Ζα)eΥβ)eΧγ)γωνίεςEuler βασικέςγωνίεςχγ)eυβ)eζα) R ab γ,β,α) XYZ BASE = rotz,α) roty,β) rotx,γ ) = Rotα,β,γ ) ZYX EULER "cα = $$ sα $ 0 sα cα 0 0 " cβ 0%% $$ 0 1 % $ sβ 0 sβ " %% $$0 cγ 0 cβ % $0 sγ 0 sγ %% = cγ % $cα cβ sα cβ sβ ) c α sβ s α s α sβ c α cβ Υπολογισμόςτωνγωνιώνα,β,γανξέρουμετονπίνακαστροφής c α sβ s α % s α sβ c α cβ Δρ.ΦασουλάςΓιάννης 7. Representing Pose in 3-Dimensions Leonhard Euler ) was a Swiss mathematician and physicist who dominated eighteenth century mathematics. He was a student of Johann Bernoulli and applied new mathematical techniques such as calculus to many problems in mechanics and optics. He also developed the functional notation, y = Fx), that we use today. In robotics we use his rotation theorem and his equations of motion in rotational dynamics. He was prolific and his collected wors fill 75 volumes. Almost half of this was produced during the last seventeen years of his life when he was completely blind. It is common practice to refer to all 3-angle representations as Euler angles but this is underspecified since there are twelve different types to choose from. The particular angle sequence is often a convention within a particular technological field. The ZYZ sequence.13) is commonly used in aeronautics and mechanical dynamics, and is used in the Toolbox. The Euler angles are the 3-vector = φ, θ, ψ). For example, to compute the equivalent rotation matrix for = 0.1, 0., 0.3) we write >> R = rotz0.1) roty0.) rotz0.3); or more conveniently >> R = eulr0.1, 0., 0.3) R = The inverse problem is finding the Euler angles that correspond to a given rotation matrix >> gamma = treulr) 9
 = 180 θ 90 για x y ) 90 θ 0 για x y")

 = r 11 r 1, 90 β 90 90 o < β < 90 o Ανβ=±)90 ο")
5 ΗσυνάρτησηArctany,x)ήAtany,x) 0 θ 90 για x y 90 θ 180 για x y θ = arc tan y,x) = 180 θ 90 για x y ) 90 θ 0 για x y Επιστρέφει την γωνία στο σωστό τεταρτηµόριο y x Υπολογισμόςτωνγωνιώνα,β,γανξέρουμετον πίνακαστροφής A B R = R AB ΙσοδύναμοςσυμβολισμόςπουχρησιμοποιείταιστοβιβλίοτουCraig cosβ) = r 11 r 1, 90 β o < β < 90 o Ανβ=±)90 ο έχουμειδιάζονσημείοcosβ)=0 10
6 11 1
7 Ιδιάζονσημείοότανβ=±)90 ο Rγ,β,α) XYZ BASE = rotz,α) roty,β) rotx,γ ) = Rotα,β,γ ) ZYX EULER c α c α s α c α s α s γ s α s α c α s α c α = c γ Ανβ=±)90 ο έχουμειδιάζονσημείοcosβ)=0 " 0 sin ψ cosψ% β = π Έστωτώρα R = $ 0 cosψ sin ψ $ r 11 r 1 r 13 r 1 r r 3 r 31 r 3 r 33 α γ = ψ Rα, π 0 sinα γ) cosα γ), γ) = 0 cosα γ) sinα γ) ZYX EULER Μίασύμβασηείναιναεπιλέξουμετοα=0 x y x y x y x y x y x y cos cos cos sin sin sin sin cos cos sin Atan x)= Atanx) Οπότεγ=eAtanr 1,r )γιαβ=eπ/ 13 14
 ZYZ EULER = I Στηνπερίπτωσηπούτοάκροτουβραχίονακινείταιμέσαστονχώροτότεη")

8 ΖΥZΓωνίεςEulerεφαρμογήστονσφαιρικόκαρπό) R ab α,β,γ ) ZYZ EULER = rotz,α) roty,β) rotz,γ ) = c α s α c α s α c α s β s α c α s α c α s α c β Υπάρχειιδιάζονσημείοστηνπερίπτωσηπουβ=0,καιοπίνακαςγίνεται R = I 3 Δηλαδή,οάξοναςτηςθ 6 γίνεταιπαράλληλοςμεαυτόντηςθ 4 υπάρχουνάπειρεςεπιλογέςγιατηντιμήτηςγωνίαςα R ab α,0, α) ZYZ EULER = I Στηνπερίπτωσηπούτοάκροτουβραχίονακινείταιμέσαστονχώροτότεη αρπάγητουρομπότθαέχειτονπροσανατολισμόrt)οοποίοςείναι συνάρτησητουχρόνου.μπορούμε,προκειμένουναπεριγράψουμετον προσανατολισμό,αντίγιατονπίνακαστροφήςναχρησιμοποιήσουμετις γωνίεςeuleraζυζ.όμωςηαπεικόνισητουπίνακαστροφήςστιςγωνίεςzyz γιατηνπερίπτωσηπουαναφέρουμεπαραπάνωδενείναιμονοσήμαντη. 15 Υπολογισμόςτωνγωνιώνα,β,γαπότονπίνακα στροφής R ab α,β,γ) ZYZ EULER = c α s α c α s α c α s α c α s α c α s α = r 11 r 1 r 13 r 1 r r 3 r 31 r 3 r 33 if sinβ) = r 31 r 3, 0 Ο < β <180 Ο sinβ) 0 Oτανsinβ)=0έχουμειδιάζονσημείοκαικατάσύμβαση μπορούμεναεπιλέξουμετοα=0 16
9 Oτανsinβ)=0κατάσύμβασημπορούμεναεπιλέξουμετοα=0 17 Γωνίαστροφήςκαιισοδύναμοςάξονας Γωνίαστροφήςγύρωαπόισοδύναμοάξονα θεώρηματουeuler) x x {A} z z α xvθ cθ x yvθ zsθ x zvθ ysθ % R,θ = % x yvθ zsθ yvθ cθ y zvθ xsθ % x zvθ ysθ y zvθ xsθ zvθ cθ β $ θ p ab y y x y sinβ = cosβ = z v θ = 1 c θ sinα = cosα = x " = $ :μοναδιαίοάνυσμα y y x y $ % $ z x x y Δρ.ΦασουλάςΓιάννης 19
10 Γωνίαστροφήςκαιισοδύναμοςάξονας Γωνίαστροφήςκαιισοδύναμοςάξοναςπεριστροφής απόπίνακαστροφής ΈστωέναςπίνακαςστροφήςRμεστοιχείαr ij,αποδεικνύεται ότισεαυτόντονπίνακα στροφήςαντιστοιχείοάξοναςπεριστροφήςκαιηγωνία περιστροφήςθ: " r3 r3 $ r11 r r33 1% 1 θ = arccos, r13 r ) 31 =, sin θ r r Ηαντιστοιχία«ΠίνακαςΣτροφής»σεέκφραση«ΆξοναaΓωνίας»δενείναιμοναδική π.χ.ανεπιλεχθείσανγωνίαηπaθτότεοάξοναςπουβρίσκουμεείναιοa 0 Δρ.ΦασουλάςΓιάννης ΠΑΡΑΔΕΙΓΜΑΙ Γωνίαστροφήςκαιισοδύναμοςάξονας Παράδειγμα1/) " r r r 1 ) r3 r3 1 = r r, sin θ, θ = arccos% 13 31, - r1 r1. Δρ.ΦασουλάςΓιάννης 1
11 ΠΑΡΑΔΕΙΓΜΑΙ Γωνίαστροφήςκαιισοδύναμοςάξονας Παράδειγμα/) r11 r r 33 = 0 Η γωνία υπολογίζεται ως 1 0 θ = arc cos ) = 10 " r r r 1 ) r3 r3 1 = r r, sin θ, θ = arccos% 13 31, - r1 r1. και ο αντίστοιχος άξονας περιστροφής είναι T =,, ) Δρ.ΦασουλάςΓιάννης ΠΑΡΑΔΕΙΓΜΑΙΙ Γωνίαστροφήςκαιισοδύναμοςάξονας R ab = Rot, θ)rotz, ϕ) {A}"{B} Rot,θ) Rotz,φ) άξονας=στροφήκατάrotz,ψ)τουάξοναyτου{α} 0$ y = 1 " 0% R ab ψ, θ, φ) cosψ sin ψ 0$ 0$ sψ $ x $ = % sin ψ cosψ 0 % 1 = % c = % % % % ψ % y % 0 0 1% 0 % 0 % z % s v c s c v c s = ψ θ c s sψsθ cθ ψ θ θ ψ ψ θ ψ θ sψcψ vθ cψ vθ cθ sψsθ R,θ % cφ sφ 0 sφ cφ 0 ) 0 0 1) Rotz,φ) Δρ.ΦασουλάςΓιάννης 3
Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής"
 Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής" Βιομηχανική Ρομποτική «Τοπική παραμετροποίηση πινάκων στροφής, γωνίες
Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής" Βιομηχανική Ρομποτική «Τοπική παραμετροποίηση πινάκων στροφής, γωνίες
PARTIAL NOTES for 6.1 Trigonometric Identities
 PARTIAL NOTES for 6.1 Trigonometric Identities tanθ = sinθ cosθ cotθ = cosθ sinθ BASIC IDENTITIES cscθ = 1 sinθ secθ = 1 cosθ cotθ = 1 tanθ PYTHAGOREAN IDENTITIES sin θ + cos θ =1 tan θ +1= sec θ 1 + cot
PARTIAL NOTES for 6.1 Trigonometric Identities tanθ = sinθ cosθ cotθ = cosθ sinθ BASIC IDENTITIES cscθ = 1 sinθ secθ = 1 cosθ cotθ = 1 tanθ PYTHAGOREAN IDENTITIES sin θ + cos θ =1 tan θ +1= sec θ 1 + cot
6.1. Dirac Equation. Hamiltonian. Dirac Eq.
 6.1. Dirac Equation Ref: M.Kaku, Quantum Field Theory, Oxford Univ Press (1993) η μν = η μν = diag(1, -1, -1, -1) p 0 = p 0 p = p i = -p i p μ p μ = p 0 p 0 + p i p i = E c 2 - p 2 = (m c) 2 H = c p 2
6.1. Dirac Equation Ref: M.Kaku, Quantum Field Theory, Oxford Univ Press (1993) η μν = η μν = diag(1, -1, -1, -1) p 0 = p 0 p = p i = -p i p μ p μ = p 0 p 0 + p i p i = E c 2 - p 2 = (m c) 2 H = c p 2
Section 8.3 Trigonometric Equations
 99 Section 8. Trigonometric Equations Objective 1: Solve Equations Involving One Trigonometric Function. In this section and the next, we will exple how to solving equations involving trigonometric functions.
99 Section 8. Trigonometric Equations Objective 1: Solve Equations Involving One Trigonometric Function. In this section and the next, we will exple how to solving equations involving trigonometric functions.
CORDIC Background (4A)
") CORDIC Background (4A Copyright (c 20-202 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version.2 or any later
CORDIC Background (4A Copyright (c 20-202 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version.2 or any later
Οµάδα Ασκήσεων #1-Λύσεις
 Οµάδα Ασκήσεων #-Λύσεις Πρόβληµα # (α) (β) Τουλάχιστον Β.Ε. (Βαθµοί Ελευθερίας) χρειάζονται για αυθαίρετη τοποθέτηση στο χώρο (x,y,z) και επιπλέον Β.Ε. απαιτούνται για αυθαίρετο προσανατολισµό (στη δεδοµένη
Οµάδα Ασκήσεων #-Λύσεις Πρόβληµα # (α) (β) Τουλάχιστον Β.Ε. (Βαθµοί Ελευθερίας) χρειάζονται για αυθαίρετη τοποθέτηση στο χώρο (x,y,z) και επιπλέον Β.Ε. απαιτούνται για αυθαίρετο προσανατολισµό (στη δεδοµένη
Χωρικές Περιγραφές και Μετασχηµατισµοί
 Χωρικές Περιγραφές και Μετασχηµατισµοί Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007 Ροµπότ SCR 1 Περιεχόµενα Στοιχεία γραµµικής άλγεβρας Χωρικές
Χωρικές Περιγραφές και Μετασχηµατισµοί Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007 Ροµπότ SCR 1 Περιεχόµενα Στοιχεία γραµµικής άλγεβρας Χωρικές
CORDIC Background (2A)
") CORDIC Background 2A Copyright c 20-202 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version.2 or any later
CORDIC Background 2A Copyright c 20-202 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version.2 or any later
CRASH COURSE IN PRECALCULUS
 CRASH COURSE IN PRECALCULUS Shiah-Sen Wang The graphs are prepared by Chien-Lun Lai Based on : Precalculus: Mathematics for Calculus by J. Stuwart, L. Redin & S. Watson, 6th edition, 01, Brooks/Cole Chapter
CRASH COURSE IN PRECALCULUS Shiah-Sen Wang The graphs are prepared by Chien-Lun Lai Based on : Precalculus: Mathematics for Calculus by J. Stuwart, L. Redin & S. Watson, 6th edition, 01, Brooks/Cole Chapter
Exercises 10. Find a fundamental matrix of the given system of equations. Also find the fundamental matrix Φ(t) satisfying Φ(0) = I. 1.
 satisfying Φ(0) = I. 1.") Exercises 0 More exercises are available in Elementary Differential Equations. If you have a problem to solve any of them, feel free to come to office hour. Problem Find a fundamental matrix of the given
Exercises 0 More exercises are available in Elementary Differential Equations. If you have a problem to solve any of them, feel free to come to office hour. Problem Find a fundamental matrix of the given
Inverse trigonometric functions & General Solution of Trigonometric Equations. ------------------ ----------------------------- -----------------
 Inverse trigonometric functions & General Solution of Trigonometric Equations. 1. Sin ( ) = a) b) c) d) Ans b. Solution : Method 1. Ans a: 17 > 1 a) is rejected. w.k.t Sin ( sin ) = d is rejected. If sin
Inverse trigonometric functions & General Solution of Trigonometric Equations. 1. Sin ( ) = a) b) c) d) Ans b. Solution : Method 1. Ans a: 17 > 1 a) is rejected. w.k.t Sin ( sin ) = d is rejected. If sin
3.4 SUM AND DIFFERENCE FORMULAS. NOTE: cos(α+β) cos α + cos β cos(α-β) cos α -cos β
 cos α + cos β cos(α-β) cos α -cos β") 3.4 SUM AND DIFFERENCE FORMULAS Page Theorem cos(αβ cos α cos β -sin α cos(α-β cos α cos β sin α NOTE: cos(αβ cos α cos β cos(α-β cos α -cos β Proof of cos(α-β cos α cos β sin α Let s use a unit circle
3.4 SUM AND DIFFERENCE FORMULAS Page Theorem cos(αβ cos α cos β -sin α cos(α-β cos α cos β sin α NOTE: cos(αβ cos α cos β cos(α-β cos α -cos β Proof of cos(α-β cos α cos β sin α Let s use a unit circle
Practice Exam 2. Conceptual Questions. 1. State a Basic identity and then verify it. (a) Identity: Solution: One identity is csc(θ) = 1
 Identity: Solution: One identity is csc(θ) = 1") Conceptual Questions. State a Basic identity and then verify it. a) Identity: Solution: One identity is cscθ) = sinθ) Practice Exam b) Verification: Solution: Given the point of intersection x, y) of the
Conceptual Questions. State a Basic identity and then verify it. a) Identity: Solution: One identity is cscθ) = sinθ) Practice Exam b) Verification: Solution: Given the point of intersection x, y) of the
Homework 8 Model Solution Section
 MATH 004 Homework Solution Homework 8 Model Solution Section 14.5 14.6. 14.5. Use the Chain Rule to find dz where z cosx + 4y), x 5t 4, y 1 t. dz dx + dy y sinx + 4y)0t + 4) sinx + 4y) 1t ) 0t + 4t ) sinx
MATH 004 Homework Solution Homework 8 Model Solution Section 14.5 14.6. 14.5. Use the Chain Rule to find dz where z cosx + 4y), x 5t 4, y 1 t. dz dx + dy y sinx + 4y)0t + 4) sinx + 4y) 1t ) 0t + 4t ) sinx
Section 8.2 Graphs of Polar Equations
 Section 8. Graphs of Polar Equations Graphing Polar Equations The graph of a polar equation r = f(θ), or more generally F(r,θ) = 0, consists of all points P that have at least one polar representation
Section 8. Graphs of Polar Equations Graphing Polar Equations The graph of a polar equation r = f(θ), or more generally F(r,θ) = 0, consists of all points P that have at least one polar representation
Spherical Coordinates
 Spherical Coordinates MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Spherical Coordinates Another means of locating points in three-dimensional space is known as the spherical
Spherical Coordinates MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Spherical Coordinates Another means of locating points in three-dimensional space is known as the spherical
Τα ρομπότ στην βιομηχανία
 Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής" Βιομηχανική Ρομποτική «Κινηματική στερεών σωμάτων» Δρ. Φασουλάς Γιάννης
Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής" Βιομηχανική Ρομποτική «Κινηματική στερεών σωμάτων» Δρ. Φασουλάς Γιάννης
Εισαγωγή στη θεωρία μετασχηματισμών. Τα ρομπότ στην βιομηχανία
 Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής" Βιομηχανική Ρομποτική «Κινηματική στερεών σωμάτων» Τα ρομπότ στην
Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής" Βιομηχανική Ρομποτική «Κινηματική στερεών σωμάτων» Τα ρομπότ στην
Reminders: linear functions
 Reminders: linear functions Let U and V be vector spaces over the same field F. Definition A function f : U V is linear if for every u 1, u 2 U, f (u 1 + u 2 ) = f (u 1 ) + f (u 2 ), and for every u U
Reminders: linear functions Let U and V be vector spaces over the same field F. Definition A function f : U V is linear if for every u 1, u 2 U, f (u 1 + u 2 ) = f (u 1 ) + f (u 2 ), and for every u U
If we restrict the domain of y = sin x to [ π, π ], the restrict function. y = sin x, π 2 x π 2
![If we restrict the domain of y = sin x to [ π, π ], the restrict function. y = sin x, π 2 x π 2](/thumbs/53/31933086.jpg "If we restrict the domain of y = sin x to [ π, π ], the restrict function. y = sin x, π 2 x π 2") Chapter 3. Analytic Trigonometry 3.1 The inverse sine, cosine, and tangent functions 1. Review: Inverse function (1) f 1 (f(x)) = x for every x in the domain of f and f(f 1 (x)) = x for every x in the
Chapter 3. Analytic Trigonometry 3.1 The inverse sine, cosine, and tangent functions 1. Review: Inverse function (1) f 1 (f(x)) = x for every x in the domain of f and f(f 1 (x)) = x for every x in the
Lecture 2: Dirac notation and a review of linear algebra Read Sakurai chapter 1, Baym chatper 3
 Lecture 2: Dirac notation and a review of linear algebra Read Sakurai chapter 1, Baym chatper 3 1 State vector space and the dual space Space of wavefunctions The space of wavefunctions is the set of all
Lecture 2: Dirac notation and a review of linear algebra Read Sakurai chapter 1, Baym chatper 3 1 State vector space and the dual space Space of wavefunctions The space of wavefunctions is the set of all
If we restrict the domain of y = sin x to [ π 2, π 2
 Chapter 3. Analytic Trigonometry 3.1 The inverse sine, cosine, and tangent functions 1. Review: Inverse function (1) f 1 (f(x)) = x for every x in the domain of f and f(f 1 (x)) = x for every x in the
Chapter 3. Analytic Trigonometry 3.1 The inverse sine, cosine, and tangent functions 1. Review: Inverse function (1) f 1 (f(x)) = x for every x in the domain of f and f(f 1 (x)) = x for every x in the
Trigonometry 1.TRIGONOMETRIC RATIOS
 Trigonometry.TRIGONOMETRIC RATIOS. If a ray OP makes an angle with the positive direction of X-axis then y x i) Sin ii) cos r r iii) tan x y (x 0) iv) cot y x (y 0) y P v) sec x r (x 0) vi) cosec y r (y
Trigonometry.TRIGONOMETRIC RATIOS. If a ray OP makes an angle with the positive direction of X-axis then y x i) Sin ii) cos r r iii) tan x y (x 0) iv) cot y x (y 0) y P v) sec x r (x 0) vi) cosec y r (y
Areas and Lengths in Polar Coordinates
 Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Section 7.6 Double and Half Angle Formulas
 09 Section 7. Double and Half Angle Fmulas To derive the double-angles fmulas, we will use the sum of two angles fmulas that we developed in the last section. We will let α θ and β θ: cos(θ) cos(θ + θ)
09 Section 7. Double and Half Angle Fmulas To derive the double-angles fmulas, we will use the sum of two angles fmulas that we developed in the last section. We will let α θ and β θ: cos(θ) cos(θ + θ)
Areas and Lengths in Polar Coordinates
 Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
10/3/ revolution = 360 = 2 π radians = = x. 2π = x = 360 = : Measures of Angles and Rotations
 //.: Measures of Angles and Rotations I. Vocabulary A A. Angle the union of two rays with a common endpoint B. BA and BC C. B is the vertex. B C D. You can think of BA as the rotation of (clockwise) with
//.: Measures of Angles and Rotations I. Vocabulary A A. Angle the union of two rays with a common endpoint B. BA and BC C. B is the vertex. B C D. You can think of BA as the rotation of (clockwise) with
Mock Exam 7. 1 Hong Kong Educational Publishing Company. Section A 1. Reference: HKDSE Math M Q2 (a) (1 + kx) n 1M + 1A = (1) =
 (1 + kx) n 1M + 1A = (1) =") Mock Eam 7 Mock Eam 7 Section A. Reference: HKDSE Math M 0 Q (a) ( + k) n nn ( )( k) + nk ( ) + + nn ( ) k + nk + + + A nk... () nn ( ) k... () From (), k...() n Substituting () into (), nn ( ) n 76n 76n
Mock Eam 7 Mock Eam 7 Section A. Reference: HKDSE Math M 0 Q (a) ( + k) n nn ( )( k) + nk ( ) + + nn ( ) k + nk + + + A nk... () nn ( ) k... () From (), k...() n Substituting () into (), nn ( ) n 76n 76n
Partial Differential Equations in Biology The boundary element method. March 26, 2013
 The boundary element method March 26, 203 Introduction and notation The problem: u = f in D R d u = ϕ in Γ D u n = g on Γ N, where D = Γ D Γ N, Γ D Γ N = (possibly, Γ D = [Neumann problem] or Γ N = [Dirichlet
The boundary element method March 26, 203 Introduction and notation The problem: u = f in D R d u = ϕ in Γ D u n = g on Γ N, where D = Γ D Γ N, Γ D Γ N = (possibly, Γ D = [Neumann problem] or Γ N = [Dirichlet
Finite Field Problems: Solutions
 Finite Field Problems: Solutions 1. Let f = x 2 +1 Z 11 [x] and let F = Z 11 [x]/(f), a field. Let Solution: F =11 2 = 121, so F = 121 1 = 120. The possible orders are the divisors of 120. Solution: The
Finite Field Problems: Solutions 1. Let f = x 2 +1 Z 11 [x] and let F = Z 11 [x]/(f), a field. Let Solution: F =11 2 = 121, so F = 121 1 = 120. The possible orders are the divisors of 120. Solution: The
DiracDelta. Notations. Primary definition. Specific values. General characteristics. Traditional name. Traditional notation
 DiracDelta Notations Traditional name Dirac delta function Traditional notation x Mathematica StandardForm notation DiracDeltax Primary definition 4.03.02.000.0 x Π lim ε ; x ε0 x 2 2 ε Specific values
DiracDelta Notations Traditional name Dirac delta function Traditional notation x Mathematica StandardForm notation DiracDeltax Primary definition 4.03.02.000.0 x Π lim ε ; x ε0 x 2 2 ε Specific values
Trigonometric Formula Sheet
 Trigonometric Formula Sheet Definition of the Trig Functions Right Triangle Definition Assume that: 0 < θ < or 0 < θ < 90 Unit Circle Definition Assume θ can be any angle. y x, y hypotenuse opposite θ
Trigonometric Formula Sheet Definition of the Trig Functions Right Triangle Definition Assume that: 0 < θ < or 0 < θ < 90 Unit Circle Definition Assume θ can be any angle. y x, y hypotenuse opposite θ
ω ω ω ω ω ω+2 ω ω+2 + ω ω ω ω+2 + ω ω+1 ω ω+2 2 ω ω ω ω ω ω ω ω+1 ω ω2 ω ω2 + ω ω ω2 + ω ω ω ω2 + ω ω+1 ω ω2 + ω ω+1 + ω ω ω ω2 + ω
 0 1 2 3 4 5 6 ω ω + 1 ω + 2 ω + 3 ω + 4 ω2 ω2 + 1 ω2 + 2 ω2 + 3 ω3 ω3 + 1 ω3 + 2 ω4 ω4 + 1 ω5 ω 2 ω 2 + 1 ω 2 + 2 ω 2 + ω ω 2 + ω + 1 ω 2 + ω2 ω 2 2 ω 2 2 + 1 ω 2 2 + ω ω 2 3 ω 3 ω 3 + 1 ω 3 + ω ω 3 +
0 1 2 3 4 5 6 ω ω + 1 ω + 2 ω + 3 ω + 4 ω2 ω2 + 1 ω2 + 2 ω2 + 3 ω3 ω3 + 1 ω3 + 2 ω4 ω4 + 1 ω5 ω 2 ω 2 + 1 ω 2 + 2 ω 2 + ω ω 2 + ω + 1 ω 2 + ω2 ω 2 2 ω 2 2 + 1 ω 2 2 + ω ω 2 3 ω 3 ω 3 + 1 ω 3 + ω ω 3 +
C.S. 430 Assignment 6, Sample Solutions
 C.S. 430 Assignment 6, Sample Solutions Paul Liu November 15, 2007 Note that these are sample solutions only; in many cases there were many acceptable answers. 1 Reynolds Problem 10.1 1.1 Normal-order
C.S. 430 Assignment 6, Sample Solutions Paul Liu November 15, 2007 Note that these are sample solutions only; in many cases there were many acceptable answers. 1 Reynolds Problem 10.1 1.1 Normal-order
Problem 1.1 For y = a + bx, y = 4 when x = 0, hence a = 4. When x increases by 4, y increases by 4b, hence b = 5 and y = 4 + 5x.
 Appendix B: Solutions to Problems Problem 1.1 For y a + bx, y 4 when x, hence a 4. When x increases by 4, y increases by 4b, hence b 5 and y 4 + 5x. Problem 1. The plus sign indicates that y increases
Appendix B: Solutions to Problems Problem 1.1 For y a + bx, y 4 when x, hence a 4. When x increases by 4, y increases by 4b, hence b 5 and y 4 + 5x. Problem 1. The plus sign indicates that y increases
Ασκήσεις Ρομποτικής με την χρήση του MATLAB
 Ασκήσεις Ρομποτικής με την χρήση του MATLAB Δρ. Φασουλάς Ιωάννης Επίκουρος Καθηγητής Τ.Ε.Ι. Κρήτης Τµήµα Μηχανολόγων Μηχανικών Τ.Ε. 2 ~Μέρος 1 ο ~ Βασικές Δραστηριότητες με το MATLAB Δραστηριότητα 1: Εξοικείωση
Ασκήσεις Ρομποτικής με την χρήση του MATLAB Δρ. Φασουλάς Ιωάννης Επίκουρος Καθηγητής Τ.Ε.Ι. Κρήτης Τµήµα Μηχανολόγων Μηχανικών Τ.Ε. 2 ~Μέρος 1 ο ~ Βασικές Δραστηριότητες με το MATLAB Δραστηριότητα 1: Εξοικείωση
9.09. # 1. Area inside the oval limaçon r = cos θ. To graph, start with θ = 0 so r = 6. Compute dr
 9.9 #. Area inside the oval limaçon r = + cos. To graph, start with = so r =. Compute d = sin. Interesting points are where d vanishes, or at =,,, etc. For these values of we compute r:,,, and the values
9.9 #. Area inside the oval limaçon r = + cos. To graph, start with = so r =. Compute d = sin. Interesting points are where d vanishes, or at =,,, etc. For these values of we compute r:,,, and the values
2 Composition. Invertible Mappings
 Arkansas Tech University MATH 4033: Elementary Modern Algebra Dr. Marcel B. Finan Composition. Invertible Mappings In this section we discuss two procedures for creating new mappings from old ones, namely,
Arkansas Tech University MATH 4033: Elementary Modern Algebra Dr. Marcel B. Finan Composition. Invertible Mappings In this section we discuss two procedures for creating new mappings from old ones, namely,
Other Test Constructions: Likelihood Ratio & Bayes Tests
 Other Test Constructions: Likelihood Ratio & Bayes Tests Side-Note: So far we have seen a few approaches for creating tests such as Neyman-Pearson Lemma ( most powerful tests of H 0 : θ = θ 0 vs H 1 :
Other Test Constructions: Likelihood Ratio & Bayes Tests Side-Note: So far we have seen a few approaches for creating tests such as Neyman-Pearson Lemma ( most powerful tests of H 0 : θ = θ 0 vs H 1 :
The challenges of non-stable predicates
 The challenges of non-stable predicates Consider a non-stable predicate Φ encoding, say, a safety property. We want to determine whether Φ holds for our program. The challenges of non-stable predicates
The challenges of non-stable predicates Consider a non-stable predicate Φ encoding, say, a safety property. We want to determine whether Φ holds for our program. The challenges of non-stable predicates
Section 9.2 Polar Equations and Graphs
 180 Section 9. Polar Equations and Graphs In this section, we will be graphing polar equations on a polar grid. In the first few examples, we will write the polar equation in rectangular form to help identify
180 Section 9. Polar Equations and Graphs In this section, we will be graphing polar equations on a polar grid. In the first few examples, we will write the polar equation in rectangular form to help identify
Fourier Series. MATH 211, Calculus II. J. Robert Buchanan. Spring Department of Mathematics
 Fourier Series MATH 211, Calculus II J. Robert Buchanan Department of Mathematics Spring 2018 Introduction Not all functions can be represented by Taylor series. f (k) (c) A Taylor series f (x) = (x c)
Fourier Series MATH 211, Calculus II J. Robert Buchanan Department of Mathematics Spring 2018 Introduction Not all functions can be represented by Taylor series. f (k) (c) A Taylor series f (x) = (x c)
Bounding Nonsplitting Enumeration Degrees
 Bounding Nonsplitting Enumeration Degrees Thomas F. Kent Andrea Sorbi Università degli Studi di Siena Italia July 18, 2007 Goal: Introduce a form of Σ 0 2-permitting for the enumeration degrees. Till now,
Bounding Nonsplitting Enumeration Degrees Thomas F. Kent Andrea Sorbi Università degli Studi di Siena Italia July 18, 2007 Goal: Introduce a form of Σ 0 2-permitting for the enumeration degrees. Till now,
Math221: HW# 1 solutions
 Math: HW# solutions Andy Royston October, 5 7.5.7, 3 rd Ed. We have a n = b n = a = fxdx = xdx =, x cos nxdx = x sin nx n sin nxdx n = cos nx n = n n, x sin nxdx = x cos nx n + cos nxdx n cos n = + sin
Math: HW# solutions Andy Royston October, 5 7.5.7, 3 rd Ed. We have a n = b n = a = fxdx = xdx =, x cos nxdx = x sin nx n sin nxdx n = cos nx n = n n, x sin nxdx = x cos nx n + cos nxdx n cos n = + sin
CHAPTER 25 SOLVING EQUATIONS BY ITERATIVE METHODS
 CHAPTER 5 SOLVING EQUATIONS BY ITERATIVE METHODS EXERCISE 104 Page 8 1. Find the positive root of the equation x + 3x 5 = 0, correct to 3 significant figures, using the method of bisection. Let f(x) =
CHAPTER 5 SOLVING EQUATIONS BY ITERATIVE METHODS EXERCISE 104 Page 8 1. Find the positive root of the equation x + 3x 5 = 0, correct to 3 significant figures, using the method of bisection. Let f(x) =
Rectangular Polar Parametric
 Harold s Precalculus Rectangular Polar Parametric Cheat Sheet 15 October 2017 Point Line Rectangular Polar Parametric f(x) = y (x, y) (a, b) Slope-Intercept Form: y = mx + b Point-Slope Form: y y 0 = m
Harold s Precalculus Rectangular Polar Parametric Cheat Sheet 15 October 2017 Point Line Rectangular Polar Parametric f(x) = y (x, y) (a, b) Slope-Intercept Form: y = mx + b Point-Slope Form: y y 0 = m
Strain gauge and rosettes
 Strain gauge and rosettes Introduction A strain gauge is a device which is used to measure strain (deformation) on an object subjected to forces. Strain can be measured using various types of devices classified
Strain gauge and rosettes Introduction A strain gauge is a device which is used to measure strain (deformation) on an object subjected to forces. Strain can be measured using various types of devices classified
CHAPTER 101 FOURIER SERIES FOR PERIODIC FUNCTIONS OF PERIOD
 CHAPTER FOURIER SERIES FOR PERIODIC FUNCTIONS OF PERIOD EXERCISE 36 Page 66. Determine the Fourier series for the periodic function: f(x), when x +, when x which is periodic outside this rge of period.
CHAPTER FOURIER SERIES FOR PERIODIC FUNCTIONS OF PERIOD EXERCISE 36 Page 66. Determine the Fourier series for the periodic function: f(x), when x +, when x which is periodic outside this rge of period.
ANSWERSHEET (TOPIC = DIFFERENTIAL CALCULUS) COLLECTION #2. h 0 h h 0 h h 0 ( ) g k = g 0 + g 1 + g g 2009 =?
 COLLECTION #2. h 0 h h 0 h h 0 ( ) g k = g 0 + g 1 + g g 2009 =?") Teko Classes IITJEE/AIEEE Maths by SUHAAG SIR, Bhopal, Ph (0755) 3 00 000 www.tekoclasses.com ANSWERSHEET (TOPIC DIFFERENTIAL CALCULUS) COLLECTION # Question Type A.Single Correct Type Q. (A) Sol least
Teko Classes IITJEE/AIEEE Maths by SUHAAG SIR, Bhopal, Ph (0755) 3 00 000 www.tekoclasses.com ANSWERSHEET (TOPIC DIFFERENTIAL CALCULUS) COLLECTION # Question Type A.Single Correct Type Q. (A) Sol least
ECE Spring Prof. David R. Jackson ECE Dept. Notes 2
 ECE 634 Spring 6 Prof. David R. Jackson ECE Dept. Notes Fields in a Source-Free Region Example: Radiation from an aperture y PEC E t x Aperture Assume the following choice of vector potentials: A F = =
ECE 634 Spring 6 Prof. David R. Jackson ECE Dept. Notes Fields in a Source-Free Region Example: Radiation from an aperture y PEC E t x Aperture Assume the following choice of vector potentials: A F = =
Lecture 2. Soundness and completeness of propositional logic
 Lecture 2 Soundness and completeness of propositional logic February 9, 2004 1 Overview Review of natural deduction. Soundness and completeness. Semantics of propositional formulas. Soundness proof. Completeness
Lecture 2 Soundness and completeness of propositional logic February 9, 2004 1 Overview Review of natural deduction. Soundness and completeness. Semantics of propositional formulas. Soundness proof. Completeness
Statistical Inference I Locally most powerful tests
 Statistical Inference I Locally most powerful tests Shirsendu Mukherjee Department of Statistics, Asutosh College, Kolkata, India. shirsendu st@yahoo.co.in So far we have treated the testing of one-sided
Statistical Inference I Locally most powerful tests Shirsendu Mukherjee Department of Statistics, Asutosh College, Kolkata, India. shirsendu st@yahoo.co.in So far we have treated the testing of one-sided
Every set of first-order formulas is equivalent to an independent set
 Every set of first-order formulas is equivalent to an independent set May 6, 2008 Abstract A set of first-order formulas, whatever the cardinality of the set of symbols, is equivalent to an independent
Every set of first-order formulas is equivalent to an independent set May 6, 2008 Abstract A set of first-order formulas, whatever the cardinality of the set of symbols, is equivalent to an independent
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ. Ενότητα 5 η : Παραδείγµατα 3 µηχανισµών. χώρο (3 )
") ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ Ενότητα 5 η Παραδείγµατα µηχανισµών στο χώρο (3 ) Παράδειγµα 1 ο : Ροµποτικός βραχίονας RPPRR R: revolute pair P: prismatic pair Βραχίονας Τηλεσκοπικός βραχίονας
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ Ενότητα 5 η Παραδείγµατα µηχανισµών στο χώρο (3 ) Παράδειγµα 1 ο : Ροµποτικός βραχίονας RPPRR R: revolute pair P: prismatic pair Βραχίονας Τηλεσκοπικός βραχίονας
derivation of the Laplacian from rectangular to spherical coordinates
 derivation of the Laplacian from rectangular to spherical coordinates swapnizzle 03-03- :5:43 We begin by recognizing the familiar conversion from rectangular to spherical coordinates (note that φ is used
derivation of the Laplacian from rectangular to spherical coordinates swapnizzle 03-03- :5:43 We begin by recognizing the familiar conversion from rectangular to spherical coordinates (note that φ is used
Ροµποτική. είτε µε το ανυσµατικό άθροισµα. όπου x = αποτελούν τα µοναδιαία ανύσµατα του
 Ροµποτική Ο χειρισµός αντικειµένων και εργαλείων από ένα ροµποτικό βραχίονα σηµαίνει ότι το ροµπότ πρέπει να είναι ικανό να τοποθετεί και να προσανατολίζει κατάλληλα το άκρο του στο χώρο εργασίας π.χ.
Ροµποτική Ο χειρισµός αντικειµένων και εργαλείων από ένα ροµποτικό βραχίονα σηµαίνει ότι το ροµπότ πρέπει να είναι ικανό να τοποθετεί και να προσανατολίζει κατάλληλα το άκρο του στο χώρο εργασίας π.χ.
Section 7.7 Product-to-Sum and Sum-to-Product Formulas
 Section 7.7 Product-to-Sum and Sum-to-Product Fmulas Objective 1: Express Products as Sums To derive the Product-to-Sum Fmulas will begin by writing down the difference and sum fmulas of the cosine function:
Section 7.7 Product-to-Sum and Sum-to-Product Fmulas Objective 1: Express Products as Sums To derive the Product-to-Sum Fmulas will begin by writing down the difference and sum fmulas of the cosine function:
DESIGN OF MACHINERY SOLUTION MANUAL h in h 4 0.
 DESIGN OF MACHINERY SOLUTION MANUAL -7-1! PROBLEM -7 Statement: Design a double-dwell cam to move a follower from to 25 6, dwell for 12, fall 25 and dwell for the remader The total cycle must take 4 sec
DESIGN OF MACHINERY SOLUTION MANUAL -7-1! PROBLEM -7 Statement: Design a double-dwell cam to move a follower from to 25 6, dwell for 12, fall 25 and dwell for the remader The total cycle must take 4 sec
Navigation Mathematics: Kinematics (Coordinate Frame Transformation) EE 565: Position, Navigation and Timing
 EE 565: Position, Navigation and Timing") Lecture Navigation Mathematics: Kinematics (Coordinate Frame Transformation) EE 565: Position, Navigation and Timing Lecture Notes Update on Feruary 20, 2018 Aly El-Osery and Kevin Wedeward, Electrical
Lecture Navigation Mathematics: Kinematics (Coordinate Frame Transformation) EE 565: Position, Navigation and Timing Lecture Notes Update on Feruary 20, 2018 Aly El-Osery and Kevin Wedeward, Electrical
The Simply Typed Lambda Calculus
 Type Inference Instead of writing type annotations, can we use an algorithm to infer what the type annotations should be? That depends on the type system. For simple type systems the answer is yes, and
Type Inference Instead of writing type annotations, can we use an algorithm to infer what the type annotations should be? That depends on the type system. For simple type systems the answer is yes, and
Phys460.nb Solution for the t-dependent Schrodinger s equation How did we find the solution? (not required)
") Phys460.nb 81 ψ n (t) is still the (same) eigenstate of H But for tdependent H. The answer is NO. 5.5.5. Solution for the tdependent Schrodinger s equation If we assume that at time t 0, the electron starts
Phys460.nb 81 ψ n (t) is still the (same) eigenstate of H But for tdependent H. The answer is NO. 5.5.5. Solution for the tdependent Schrodinger s equation If we assume that at time t 0, the electron starts
TRIGONOMETRIC FUNCTIONS
 Chapter TRIGONOMETRIC FUNCTIONS. Overview.. The word trigonometry is derived from the Greek words trigon and metron which means measuring the sides of a triangle. An angle is the amount of rotation of
Chapter TRIGONOMETRIC FUNCTIONS. Overview.. The word trigonometry is derived from the Greek words trigon and metron which means measuring the sides of a triangle. An angle is the amount of rotation of
b. Use the parametrization from (a) to compute the area of S a as S a ds. Be sure to substitute for ds!
 to compute the area of S a as S a ds. Be sure to substitute for ds!") MTH U341 urface Integrals, tokes theorem, the divergence theorem To be turned in Wed., Dec. 1. 1. Let be the sphere of radius a, x 2 + y 2 + z 2 a 2. a. Use spherical coordinates (with ρ a) to parametrize.
MTH U341 urface Integrals, tokes theorem, the divergence theorem To be turned in Wed., Dec. 1. 1. Let be the sphere of radius a, x 2 + y 2 + z 2 a 2. a. Use spherical coordinates (with ρ a) to parametrize.
EE512: Error Control Coding
 EE512: Error Control Coding Solution for Assignment on Finite Fields February 16, 2007 1. (a) Addition and Multiplication tables for GF (5) and GF (7) are shown in Tables 1 and 2. + 0 1 2 3 4 0 0 1 2 3
EE512: Error Control Coding Solution for Assignment on Finite Fields February 16, 2007 1. (a) Addition and Multiplication tables for GF (5) and GF (7) are shown in Tables 1 and 2. + 0 1 2 3 4 0 0 1 2 3
Trigonometry (4A) Trigonometric Identities. Young Won Lim 1/2/15
 Trigonometric Identities. Young Won Lim 1/2/15") Trigonometry (4 Trigonometric Identities 1//15 Copyright (c 011-014 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License,
Trigonometry (4 Trigonometric Identities 1//15 Copyright (c 011-014 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License,
6.3 Forecasting ARMA processes
 122 CHAPTER 6. ARMA MODELS 6.3 Forecasting ARMA processes The purpose of forecasting is to predict future values of a TS based on the data collected to the present. In this section we will discuss a linear
122 CHAPTER 6. ARMA MODELS 6.3 Forecasting ARMA processes The purpose of forecasting is to predict future values of a TS based on the data collected to the present. In this section we will discuss a linear
Review Test 3. MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question.
 Review Test MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. Find the exact value of the expression. 1) sin - 11π 1 1) + - + - - ) sin 11π 1 ) ( -
Review Test MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. Find the exact value of the expression. 1) sin - 11π 1 1) + - + - - ) sin 11π 1 ) ( -
F19MC2 Solutions 9 Complex Analysis
 F9MC Solutions 9 Complex Analysis. (i) Let f(z) = eaz +z. Then f is ifferentiable except at z = ±i an so by Cauchy s Resiue Theorem e az z = πi[res(f,i)+res(f, i)]. +z C(,) Since + has zeros of orer at
F9MC Solutions 9 Complex Analysis. (i) Let f(z) = eaz +z. Then f is ifferentiable except at z = ±i an so by Cauchy s Resiue Theorem e az z = πi[res(f,i)+res(f, i)]. +z C(,) Since + has zeros of orer at
Ordinal Arithmetic: Addition, Multiplication, Exponentiation and Limit
 Ordinal Arithmetic: Addition, Multiplication, Exponentiation and Limit Ting Zhang Stanford May 11, 2001 Stanford, 5/11/2001 1 Outline Ordinal Classification Ordinal Addition Ordinal Multiplication Ordinal
Ordinal Arithmetic: Addition, Multiplication, Exponentiation and Limit Ting Zhang Stanford May 11, 2001 Stanford, 5/11/2001 1 Outline Ordinal Classification Ordinal Addition Ordinal Multiplication Ordinal
Lifting Entry 2. Basic planar dynamics of motion, again Yet another equilibrium glide Hypersonic phugoid motion MARYLAND U N I V E R S I T Y O F
 ifting Entry Basic planar dynamics of motion, again Yet another equilibrium glide Hypersonic phugoid motion MARYAN 1 010 avid. Akin - All rights reserved http://spacecraft.ssl.umd.edu ifting Atmospheric
ifting Entry Basic planar dynamics of motion, again Yet another equilibrium glide Hypersonic phugoid motion MARYAN 1 010 avid. Akin - All rights reserved http://spacecraft.ssl.umd.edu ifting Atmospheric
Chapter 6: Systems of Linear Differential. be continuous functions on the interval
 Chapter 6: Systems of Linear Differential Equations Let a (t), a 2 (t),..., a nn (t), b (t), b 2 (t),..., b n (t) be continuous functions on the interval I. The system of n first-order differential equations
Chapter 6: Systems of Linear Differential Equations Let a (t), a 2 (t),..., a nn (t), b (t), b 2 (t),..., b n (t) be continuous functions on the interval I. The system of n first-order differential equations
( ) 2 and compare to M.
 2 and compare to M.") Problems and Solutions for Section 4.2 4.9 through 4.33) 4.9 Calculate the square root of the matrix 3!0 M!0 8 Hint: Let M / 2 a!b ; calculate M / 2!b c ) 2 and compare to M. Solution: Given: 3!0 M!0 8
Problems and Solutions for Section 4.2 4.9 through 4.33) 4.9 Calculate the square root of the matrix 3!0 M!0 8 Hint: Let M / 2 a!b ; calculate M / 2!b c ) 2 and compare to M. Solution: Given: 3!0 M!0 8
Geodesic Equations for the Wormhole Metric
 Geodesic Equations for the Wormhole Metric Dr R Herman Physics & Physical Oceanography, UNCW February 14, 2018 The Wormhole Metric Morris and Thorne wormhole metric: [M S Morris, K S Thorne, Wormholes
Geodesic Equations for the Wormhole Metric Dr R Herman Physics & Physical Oceanography, UNCW February 14, 2018 The Wormhole Metric Morris and Thorne wormhole metric: [M S Morris, K S Thorne, Wormholes
Space-Time Symmetries
 Chapter Space-Time Symmetries In classical fiel theory any continuous symmetry of the action generates a conserve current by Noether's proceure. If the Lagrangian is not invariant but only shifts by a
Chapter Space-Time Symmetries In classical fiel theory any continuous symmetry of the action generates a conserve current by Noether's proceure. If the Lagrangian is not invariant but only shifts by a
ΚΥΠΡΙΑΚΗ ΕΤΑΙΡΕΙΑ ΠΛΗΡΟΦΟΡΙΚΗΣ CYPRUS COMPUTER SOCIETY ΠΑΓΚΥΠΡΙΟΣ ΜΑΘΗΤΙΚΟΣ ΔΙΑΓΩΝΙΣΜΟΣ ΠΛΗΡΟΦΟΡΙΚΗΣ 19/5/2007
 Οδηγίες: Να απαντηθούν όλες οι ερωτήσεις. Αν κάπου κάνετε κάποιες υποθέσεις να αναφερθούν στη σχετική ερώτηση. Όλα τα αρχεία που αναφέρονται στα προβλήματα βρίσκονται στον ίδιο φάκελο με το εκτελέσιμο
Οδηγίες: Να απαντηθούν όλες οι ερωτήσεις. Αν κάπου κάνετε κάποιες υποθέσεις να αναφερθούν στη σχετική ερώτηση. Όλα τα αρχεία που αναφέρονται στα προβλήματα βρίσκονται στον ίδιο φάκελο με το εκτελέσιμο
SPECIAL FUNCTIONS and POLYNOMIALS
 SPECIAL FUNCTIONS and POLYNOMIALS Gerard t Hooft Stefan Nobbenhuis Institute for Theoretical Physics Utrecht University, Leuvenlaan 4 3584 CC Utrecht, the Netherlands and Spinoza Institute Postbox 8.195
SPECIAL FUNCTIONS and POLYNOMIALS Gerard t Hooft Stefan Nobbenhuis Institute for Theoretical Physics Utrecht University, Leuvenlaan 4 3584 CC Utrecht, the Netherlands and Spinoza Institute Postbox 8.195
CBC MATHEMATICS DIVISION MATH 2412-PreCalculus Exam Formula Sheets
 System of Equations and Matrices 3 Matrix Row Operations: MATH 41-PreCalculus Switch any two rows. Multiply any row by a nonzero constant. Add any constant-multiple row to another Even and Odd functions
System of Equations and Matrices 3 Matrix Row Operations: MATH 41-PreCalculus Switch any two rows. Multiply any row by a nonzero constant. Add any constant-multiple row to another Even and Odd functions
HOMEWORK 4 = G. In order to plot the stress versus the stretch we define a normalized stretch:
 HOMEWORK 4 Problem a For the fast loading case, we want to derive the relationship between P zz and λ z. We know that the nominal stress is expressed as: P zz = ψ λ z where λ z = λ λ z. Therefore, applying
HOMEWORK 4 Problem a For the fast loading case, we want to derive the relationship between P zz and λ z. We know that the nominal stress is expressed as: P zz = ψ λ z where λ z = λ λ z. Therefore, applying
Εγχειρίδια Μαθηµατικών και Χταποδάκι στα Κάρβουνα
 [ 1 ] Πανεπιστήµιο Κύπρου Εγχειρίδια Μαθηµατικών και Χταποδάκι στα Κάρβουνα Νίκος Στυλιανόπουλος, Πανεπιστήµιο Κύπρου Λευκωσία, εκέµβριος 2009 [ 2 ] Πανεπιστήµιο Κύπρου Πόσο σηµαντική είναι η απόδειξη
[ 1 ] Πανεπιστήµιο Κύπρου Εγχειρίδια Μαθηµατικών και Χταποδάκι στα Κάρβουνα Νίκος Στυλιανόπουλος, Πανεπιστήµιο Κύπρου Λευκωσία, εκέµβριος 2009 [ 2 ] Πανεπιστήµιο Κύπρου Πόσο σηµαντική είναι η απόδειξη
New bounds for spherical two-distance sets and equiangular lines
 New bounds for spherical two-distance sets and equiangular lines Michigan State University Oct 8-31, 016 Anhui University Definition If X = {x 1, x,, x N } S n 1 (unit sphere in R n ) and x i, x j = a
New bounds for spherical two-distance sets and equiangular lines Michigan State University Oct 8-31, 016 Anhui University Definition If X = {x 1, x,, x N } S n 1 (unit sphere in R n ) and x i, x j = a
Uniform Convergence of Fourier Series Michael Taylor
 Uniform Convergence of Fourier Series Michael Taylor Given f L 1 T 1 ), we consider the partial sums of the Fourier series of f: N 1) S N fθ) = ˆfk)e ikθ. k= N A calculation gives the Dirichlet formula
Uniform Convergence of Fourier Series Michael Taylor Given f L 1 T 1 ), we consider the partial sums of the Fourier series of f: N 1) S N fθ) = ˆfk)e ikθ. k= N A calculation gives the Dirichlet formula
F-TF Sum and Difference angle
 F-TF Sum and Difference angle formulas Alignments to Content Standards: F-TF.C.9 Task In this task, you will show how all of the sum and difference angle formulas can be derived from a single formula when
F-TF Sum and Difference angle formulas Alignments to Content Standards: F-TF.C.9 Task In this task, you will show how all of the sum and difference angle formulas can be derived from a single formula when
Θεωρία μετασχηματισμών
 Μήτρα Μετασχηματισμού Η γεωμετρία ενός αντικειμένου μπορεί να παρουσιαστεί από ένα σύνολο σημείων κατανεμημένων σε διάφορα επίπεδα. Έτσι λοιπόν ένα πλήθος δεδομένων για κάποιο αντικείμενο μπορεί να αναπαρασταθεί
Μήτρα Μετασχηματισμού Η γεωμετρία ενός αντικειμένου μπορεί να παρουσιαστεί από ένα σύνολο σημείων κατανεμημένων σε διάφορα επίπεδα. Έτσι λοιπόν ένα πλήθος δεδομένων για κάποιο αντικείμενο μπορεί να αναπαρασταθεί
Example Sheet 3 Solutions
 Example Sheet 3 Solutions. i Regular Sturm-Liouville. ii Singular Sturm-Liouville mixed boundary conditions. iii Not Sturm-Liouville ODE is not in Sturm-Liouville form. iv Regular Sturm-Liouville note
Example Sheet 3 Solutions. i Regular Sturm-Liouville. ii Singular Sturm-Liouville mixed boundary conditions. iii Not Sturm-Liouville ODE is not in Sturm-Liouville form. iv Regular Sturm-Liouville note
k A = [k, k]( )[a 1, a 2 ] = [ka 1,ka 2 ] 4For the division of two intervals of confidence in R +
[a 1, a 2 ] = [ka 1,ka 2 ] 4For the division of two intervals of confidence in R +](/thumbs/73/69566903.jpg "k A = [k, k]( )[a 1, a 2 ] = [ka 1,ka 2 ] 4For the division of two intervals of confidence in R +") Chapter 3. Fuzzy Arithmetic 3- Fuzzy arithmetic: ~Addition(+) and subtraction (-): Let A = [a and B = [b, b in R If x [a and y [b, b than x+y [a +b +b Symbolically,we write A(+)B = [a (+)[b, b = [a +b
Chapter 3. Fuzzy Arithmetic 3- Fuzzy arithmetic: ~Addition(+) and subtraction (-): Let A = [a and B = [b, b in R If x [a and y [b, b than x+y [a +b +b Symbolically,we write A(+)B = [a (+)[b, b = [a +b
Problem Set 9 Solutions. θ + 1. θ 2 + cotθ ( ) sinθ e iφ is an eigenfunction of the ˆ L 2 operator. / θ 2. φ 2. sin 2 θ φ 2. ( ) = e iφ. = e iφ cosθ.
 sinθ e iφ is an eigenfunction of the ˆ L 2 operator. / θ 2. φ 2. sin 2 θ φ 2. ( ) = e iφ. = e iφ cosθ.") Chemistry 362 Dr Jean M Standard Problem Set 9 Solutions The ˆ L 2 operator is defined as Verify that the angular wavefunction Y θ,φ) Also verify that the eigenvalue is given by 2! 2 & L ˆ 2! 2 2 θ 2 +
Chemistry 362 Dr Jean M Standard Problem Set 9 Solutions The ˆ L 2 operator is defined as Verify that the angular wavefunction Y θ,φ) Also verify that the eigenvalue is given by 2! 2 & L ˆ 2! 2 2 θ 2 +
Πρόβλημα 1: Αναζήτηση Ελάχιστης/Μέγιστης Τιμής
 Πρόβλημα 1: Αναζήτηση Ελάχιστης/Μέγιστης Τιμής Να γραφεί πρόγραμμα το οποίο δέχεται ως είσοδο μια ακολουθία S από n (n 40) ακέραιους αριθμούς και επιστρέφει ως έξοδο δύο ακολουθίες από θετικούς ακέραιους
Πρόβλημα 1: Αναζήτηση Ελάχιστης/Μέγιστης Τιμής Να γραφεί πρόγραμμα το οποίο δέχεται ως είσοδο μια ακολουθία S από n (n 40) ακέραιους αριθμούς και επιστρέφει ως έξοδο δύο ακολουθίες από θετικούς ακέραιους
PP #6 Μηχανικές αρχές και η εφαρµογή τους στην Ενόργανη Γυµναστική
 PP #6 Μηχανικές αρχές και η εφαρµογή τους στην Ενόργανη Γυµναστική Υπολογισµός Γωνιών (1.2, 1.5) (2.0, 1.5) θ 3 θ 4 θ 2 θ 1 (1.3, 1.2) (1.7, 1.0) (0, 0) " 1 = tan #1 2.0 #1.7 1.5 #1.0 $ 310 " 2 = tan #1
PP #6 Μηχανικές αρχές και η εφαρµογή τους στην Ενόργανη Γυµναστική Υπολογισµός Γωνιών (1.2, 1.5) (2.0, 1.5) θ 3 θ 4 θ 2 θ 1 (1.3, 1.2) (1.7, 1.0) (0, 0) " 1 = tan #1 2.0 #1.7 1.5 #1.0 $ 310 " 2 = tan #1
Homework 3 Solutions
 Homework 3 Solutions Igor Yanovsky (Math 151A TA) Problem 1: Compute the absolute error and relative error in approximations of p by p. (Use calculator!) a) p π, p 22/7; b) p π, p 3.141. Solution: For
Homework 3 Solutions Igor Yanovsky (Math 151A TA) Problem 1: Compute the absolute error and relative error in approximations of p by p. (Use calculator!) a) p π, p 22/7; b) p π, p 3.141. Solution: For
Matrices and Determinants
 Matrices and Determinants SUBJECTIVE PROBLEMS: Q 1. For what value of k do the following system of equations possess a non-trivial (i.e., not all zero) solution over the set of rationals Q? x + ky + 3z
Matrices and Determinants SUBJECTIVE PROBLEMS: Q 1. For what value of k do the following system of equations possess a non-trivial (i.e., not all zero) solution over the set of rationals Q? x + ky + 3z
SCHOOL OF MATHEMATICAL SCIENCES G11LMA Linear Mathematics Examination Solutions
 SCHOOL OF MATHEMATICAL SCIENCES GLMA Linear Mathematics 00- Examination Solutions. (a) i. ( + 5i)( i) = (6 + 5) + (5 )i = + i. Real part is, imaginary part is. (b) ii. + 5i i ( + 5i)( + i) = ( i)( + i)
SCHOOL OF MATHEMATICAL SCIENCES GLMA Linear Mathematics 00- Examination Solutions. (a) i. ( + 5i)( i) = (6 + 5) + (5 )i = + i. Real part is, imaginary part is. (b) ii. + 5i i ( + 5i)( + i) = ( i)( + i)
2 2 2 The correct formula for the cosine of the sum of two angles is given by the following theorem.
 5 TRIGONOMETRIC FORMULAS FOR SUMS AND DIFFERENCES The fundamental trignmetric identities cnsidered earlier express relatinships amng trignmetric functins f a single variable In this sectin we develp trignmetric
5 TRIGONOMETRIC FORMULAS FOR SUMS AND DIFFERENCES The fundamental trignmetric identities cnsidered earlier express relatinships amng trignmetric functins f a single variable In this sectin we develp trignmetric
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΗΡΑΚΛΕΙΟ ΚΡΗΤΗΣ ΣΧΟΛΗ ΔΙΟΙΚΗΣΗΣ ΚΑΙ ΟΙΚΟΝΟΜΙΑΣ ΤΜΗΜΑ ΛΟΓΙΣΤΙΚΗΣ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΗΡΑΚΛΕΙΟ ΚΡΗΤΗΣ ΣΧΟΛΗ ΔΙΟΙΚΗΣΗΣ ΚΑΙ ΟΙΚΟΝΟΜΙΑΣ ΤΜΗΜΑ ΛΟΓΙΣΤΙΚΗΣ Π Τ Υ Χ Ι Α Κ Η Ε Ρ Γ Α Σ Ι Α: Ο ΡΟΛΟΣ ΤΗΣ ΣΥΝΑΙΣΘΗΜΑΤΙΚΗΣ ΝΟΗΜΟΣΥΝΗΣ ΣΤΗΝ ΑΠΟΤΕΛΕΣΜΑΤΙΚΗ ΗΓΕΣΙΑ ΕΠΙΜΕΛΕΙΑ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΗΡΑΚΛΕΙΟ ΚΡΗΤΗΣ ΣΧΟΛΗ ΔΙΟΙΚΗΣΗΣ ΚΑΙ ΟΙΚΟΝΟΜΙΑΣ ΤΜΗΜΑ ΛΟΓΙΣΤΙΚΗΣ Π Τ Υ Χ Ι Α Κ Η Ε Ρ Γ Α Σ Ι Α: Ο ΡΟΛΟΣ ΤΗΣ ΣΥΝΑΙΣΘΗΜΑΤΙΚΗΣ ΝΟΗΜΟΣΥΝΗΣ ΣΤΗΝ ΑΠΟΤΕΛΕΣΜΑΤΙΚΗ ΗΓΕΣΙΑ ΕΠΙΜΕΛΕΙΑ
Chapter 6 BLM Answers
 Chapter 6 BLM Answers BLM 6 Chapter 6 Prerequisite Skills. a) i) II ii) IV iii) III i) 5 ii) 7 iii) 7. a) 0, c) 88.,.6, 59.6 d). a) 5 + 60 n; 7 + n, c). rad + n rad; 7 9,. a) 5 6 c) 69. d) 0.88 5. a) negative
Chapter 6 BLM Answers BLM 6 Chapter 6 Prerequisite Skills. a) i) II ii) IV iii) III i) 5 ii) 7 iii) 7. a) 0, c) 88.,.6, 59.6 d). a) 5 + 60 n; 7 + n, c). rad + n rad; 7 9,. a) 5 6 c) 69. d) 0.88 5. a) negative
Approximation of distance between locations on earth given by latitude and longitude
 Approximation of distance between locations on earth given by latitude and longitude Jan Behrens 2012-12-31 In this paper we shall provide a method to approximate distances between two points on earth
Approximation of distance between locations on earth given by latitude and longitude Jan Behrens 2012-12-31 In this paper we shall provide a method to approximate distances between two points on earth
ω = radians per sec, t = 3 sec
 Secion. Linear and Angular Speed 7. From exercise, =. A= r A = ( 00 ) (. ) = 7,00 in 7. Since 7 is in quadran IV, he reference 7 8 7 angle is = =. In quadran IV, he cosine is posiive. Thus, 7 cos = cos
Secion. Linear and Angular Speed 7. From exercise, =. A= r A = ( 00 ) (. ) = 7,00 in 7. Since 7 is in quadran IV, he reference 7 8 7 angle is = =. In quadran IV, he cosine is posiive. Thus, 7 cos = cos
Congruence Classes of Invertible Matrices of Order 3 over F 2
 International Journal of Algebra, Vol. 8, 24, no. 5, 239-246 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/.2988/ija.24.422 Congruence Classes of Invertible Matrices of Order 3 over F 2 Ligong An and
International Journal of Algebra, Vol. 8, 24, no. 5, 239-246 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/.2988/ija.24.422 Congruence Classes of Invertible Matrices of Order 3 over F 2 Ligong An and
Solutions to the Schrodinger equation atomic orbitals. Ψ 1 s Ψ 2 s Ψ 2 px Ψ 2 py Ψ 2 pz
 Solutions to the Schrodinger equation atomic orbitals Ψ 1 s Ψ 2 s Ψ 2 px Ψ 2 py Ψ 2 pz ybridization Valence Bond Approach to bonding sp 3 (Ψ 2 s + Ψ 2 px + Ψ 2 py + Ψ 2 pz) sp 2 (Ψ 2 s + Ψ 2 px + Ψ 2 py)
Solutions to the Schrodinger equation atomic orbitals Ψ 1 s Ψ 2 s Ψ 2 px Ψ 2 py Ψ 2 pz ybridization Valence Bond Approach to bonding sp 3 (Ψ 2 s + Ψ 2 px + Ψ 2 py + Ψ 2 pz) sp 2 (Ψ 2 s + Ψ 2 px + Ψ 2 py)
Lecture 26: Circular domains
 Introductory lecture notes on Partial Differential Equations - c Anthony Peirce. Not to be copied, used, or revised without eplicit written permission from the copyright owner. 1 Lecture 6: Circular domains
Introductory lecture notes on Partial Differential Equations - c Anthony Peirce. Not to be copied, used, or revised without eplicit written permission from the copyright owner. 1 Lecture 6: Circular domains
2. THEORY OF EQUATIONS. PREVIOUS EAMCET Bits.
 EAMCET-. THEORY OF EQUATIONS PREVIOUS EAMCET Bits. Each of the roots of the equation x 6x + 6x 5= are increased by k so that the new transformed equation does not contain term. Then k =... - 4. - Sol.
EAMCET-. THEORY OF EQUATIONS PREVIOUS EAMCET Bits. Each of the roots of the equation x 6x + 6x 5= are increased by k so that the new transformed equation does not contain term. Then k =... - 4. - Sol.