ΣΧΕΔΙΑΣΗ ΚΑΙ ΥΛΟΠΟΙΗΣΗ ΨΗΦΙΑΚΟΥ ΕΛΕΓΚΤΗ ΣΕ ΚΑΡΤΑ DSPACE ΓΙΑ ΒΑΘΜΩΤΟ ΚΑΙ ΑΝΥΣΜΑΤΙΚΟ ΕΛΕΓΧΟ ΕΠΑΓΩΓΙΚΟΥ ΚΙΝΗΤΗΡΑ
|
|
|
- Αρμονία Γιάγκος
- 6 χρόνια πριν
- Προβολές:
Transcript
1 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΣΧΕΔΙΑΣΗ ΚΑΙ ΥΛΟΠΟΙΗΣΗ ΨΗΦΙΑΚΟΥ ΕΛΕΓΚΤΗ ΣΕ ΚΑΡΤΑ DSPACE ΓΙΑ ΒΑΘΜΩΤΟ ΚΑΙ ΑΝΥΣΜΑΤΙΚΟ ΕΛΕΓΧΟ ΕΠΑΓΩΓΙΚΟΥ ΚΙΝΗΤΗΡΑ ΕΥΑΓΓΕΛΟΣ ΚΡΑΒΑΡΙΤΗΣ ΑΕΜ:5079 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΧΡΗΣΤΟΣ ΜΑΔΕΜΛΗΣ Θεσσαλονίκη Απρίλιος 2008
2 Περιεχόμενα 1 ΣΧΕΔΙΑΣΗ ΚΑΙ ΥΛΟΠΟΙΗΣΗ ΨΗΦΙΑΚΟΥ ΕΛΕΓΚΤΗ ΜΕ ΚΑΡΤΑ ΕΛΕΓΧΟΥ DSPACE ΓΙΑ ΒΑΘΜΩΤΟ ΚΑΙ ΑΝΥΣΜΑΤΙΚΟ ΕΛΕΓΧΟ ΕΠΑΓΩΓΙΚΟΥ ΚΙΝΗΤΗΡΑ ΠΕΡΙΕΧΟΜΕΝΑ Εισαγωγή 4 Κεφάλαιο 1 Βασική θεωρία επαγωγικών κινητήρων και βαθμωτού ελέγχου. 1.1 Επαγωγικοί κινητήρες Μεταβολή της συχνότητας αναλογικά µε τη τάση (περιοχή σταθερής ροπής, για έλεγχο ταχύτητας (0<ω<ω ον ) (U S / f e ) Μεταβολή της συχνότητας µε σταθερή τάση στάτη (περιοχή σταθερής ισχύος, για έλεγχο ταχύτητας ( ω m > ω 1m ον ) Μεταβολή της συχνότητας µε σταθερή τάση στάτη (λειτουργία στη ροπή ανατροπής, για έλεγχο στην περιοχή υψηλών ταχυτήτων (ω m >> ω 1m ον ) 12 Κεφάλαιο 2 Έλεγχος κινητήρα με ημιτονοειδή διαμόρφωση PWM. 2.1 Θεωρία ελέγχου κινητήρα με ημιτονοειδή PWM διαμόρφωση Διάταξη ελέγχου επαγωγικού κινητήρα Τµήµα ισχύος Τµήµα ελέγχου Προσομοίωση στο πρόγραμμα Simulink βαθμωτού ελέγχου με ημιτονοειδή PWM διαμόρφωση Περιγραφή μοντέλου προσομοίωσης Μετρητικές διατάξεις Τμήμα ελέγχου Πέδηση-Braking Αποτελέσματα προσομοίωσης Πειραματική υλοποίηση βαθμωτού ελέγχου με ημιτονοειδή διαμόρφωση PWM Εισαγωγικά για την πειραματική υλοποίηση Περιγραφή του ψηφιακού ελεγκτή Προβλήματα που παρατηρήθηκαν κατά την πειραματική υλοποίηση Προσομοίωση βαθμωτού ελέγχου με ημιτονοειδή PWM διαμόρφωση στο πρόγραμμα Simulink με βελτιωμένο τμήμα ελέγχου (Σταθερό m f ) 48
3 Περιεχόμενα Περιγραφή μοντέλου προσομοίωσης Αποτελέσματα προσομοίωσης Περιγραφή ψηφιακού ελεγκτή βαθμωτού ελέγχου με ημιτονοειδή PWM διαμόρφωση, όπου m f σταθερό Προσομοίωση βαθμωτού ελέγχου με ημιτονοειδή διαμόρφωση PWM στο πρόγραμμα Simulink με βελτιωμένο τμήμα ελέγχου (Μεταβλητό m f ) Περιγραφή μοντέλου προσομοίωσης Αποτελέσματα προσομοίωσης Πειραματική υλοποίηση βαθμωτού ελέγχου με ημιτονοειδή PWM διαμόρφωση, όπου m f μεταβλητό (m f περιττό πολλαπλάσιο του 3) Περιγραφή ψηφιακού ελεγκτή Πειραματικά αποτελέσματα 56 Κεφάλαιο 3 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 3.1 Θεωρία αντιστροφέα ισχύος διαμόρφωσης διανύσματος χώρου Space Vector Προσομοίωση στο πρόγραμμα Simulink βαθμωτού ελέγχου με διαμόρφωση διανύσματος χώρου Space Vector Περιγραφή μοντέλου προσομοίωσης Αποτελέσματα προσομοίωσης Πειραματική υλοποίηση βαθμωτού ελέγχου με διαμόρφωση διανύσματος χώρου -Space Vector Περιγραφή ψηφιακού ελεγκτή που υλοποιεί διαμόρφωση διανύσματος χώρου - Space Vector Πειραματικά αποτελέσματα διαμόρφωσης διανύσματος χώρου 92 Κεφάλαιο 4 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 4.1 Θεωρία έμμεσου ανυσματικού ελέγχου ταχύτητας επαγωγικού κινητήρα Εισαγωγή στον ανυσματικό έλεγχο επαγωγικού κινητήρα Αρχή λειτουργίας ανυσματικού ελέγχου επαγωγικού κινητήρα 104
4 Περιεχόμενα Έμμεσος ανυσματικός έλεγχος επαγωγικών κινητήρων Αντιστροφέας ισχύος PWM ελέγχου ρεύματος Μαθηματικό μοντέλο προσομοίωσης ανυσματικού ελέγχου ταχύτητας επαγωγικού κινητήρα Περιγραφή μαθηματικού μοντέλου προσομοίωσης Αποτελέσματα προσομοίωσης μαθηματικού μοντέλου Πλήρες μοντέλο προσομοίωσης έμμεσου ανυσματικού ελέγχου επαγωγικού κινητήρα Περιγραφή πλήρους μοντέλου Αποτελέσματα προσομοίωσης πλήρους μοντέλου Πειραματική υλοποίηση έμμεσου ανυσματικού ελέγχου ταχύτητας επαγωγικού κινητήρα Περιγραφή ψηφιακού ελεγκτή, που υλοποιεί έμμεσο ανυσματικό έλεγχο ταχύτητας Πειραματικά αποτελέσματα έμμεσου ανυσματικού ελέγχου 140 Συμπεράσματα 148 Παράρτημα Α: Πειραματική διάταξη 149 Παράρτημα Β: Εισαγωγή στο Control desk 166 Παράρτημα Γ: Μέτρηση κατασκευαστικών χαρακτηριστικών επαγωγικού κινητήρα 173 Βιβλιογραφία 177

5 Περιεχόμενα 4 ΕΙΣΑΓΩΓΗ Η διπλωματική εργασία αναφέρεται στη σχεδίαση και υλοποίηση ψηφιακού ελεγκτή, προγραμματισμένο στο λογισμικό του Simulink (MATLAB). Σκοπός της εργασίας ήταν η δημιουργία ψηφιακών ελεγκτών με τους οποίους θα υλοποιείται βαθμωτός και ανυσματικός έλεγχος σε επαγωγικό κινητήρα. Συγκεκριμένα για βαθμωτό έλεγχο δημιουργήθηκαν δύο ελεγκτές, ο πρώτος υλοποιεί ημιτονοειδή PWM διαμόρφωση, ενώ ο δεύτερος διαμόρφωση διανύσματος χώρου της τάσης (Space Vector). Ο τρίτος ελεγκτής υλοποιεί έμμεσο ανυσματικό έλεγχο ταχύτητας και θέσης. Η σχεδίαση των ψηφιακών ελεγκτών και η προσομοίωση της λειτουργίας του σερβοκινητηρίου συστήματος έγινε στο πρόγραμμα Simulink. Στο στάδιο αυτό προσομοιωθήκαν με ικανοποιητική ακρίβεια οι πειραματικές συνθήκες του προβλήματος, και επιβεβαιώσαμε τα θεωρητικά συμπεράσματα. Η ανάλυση της δομής των ελεγκτών καθώς και των αποτελεσμάτων στο στάδιο της προσομοίωσης συντέλεσε, ώστε να είναι ευκολότερη η πειραματική υλοποίηση, που θα ακολουθήσει στη συνέχεια. Η υλοποίηση του ψηφιακού ελεγκτή έγινε στην κάρτα dspace DS1104, συχνότητας 250 ΜΗz. Η πειραματική διάταξη αποτελείται από τον υπολογιστή με την κάρτα dspace, τον αντιστροφέα ισχύος της εταιρίας Semikron, τις μετρητικές διατάξεις, τον επαγωγικό κινητήρα και την ηλεκτρική μηχανή πέδησης (dc γεννήτρια ανεξάρτητης διέγερσης). Το πρόγραμμα του ελεγκτή φορτώνεται στην κάρτα dspace, η οποία υπολογίζει τους παλμούς ελέγχου μέσω ενός συστήματος ανοικτού ή κλειστού βρόχου (ανάλογα με τη διάταξη που εφαρμόζεται) και στη συνέχεια οι παλμοί ελέγχου οδηγούνται στον αντιστροφέα ισχύος. Στην εργασία επιβεβαιώθηκε η αδυναμία του ψηφιακού ελεγκτή να λειτουργήσει στο απλό σύστημα με PWM διαμόρφωση και χρήση τριγωνικού φέρον σήμα. Επίσης, αναδείχθηκαν τα σημαντικά πλεονεκτήματα της ψηφιακής τεχνικής στην διαμόρφωση διανύσματος χώρου και στον ανυσματικό έλεγχο ταχύτητας του κινητήρα σε σύστημα κλειστού βρόχου. Τέλος μέσω του προγράμματος Control desk, το οποίο συνδέει την κάρτα dspace DS1104 με τον ελεγκτή (Simulink), επιβλέπεται το σύστημα ελέγχου, ρυθμίζονται οι παράμετροι των ελεγκτών, καταγράφονται τα πειραματικά αποτελέσματα και γενικά εποπτεύεται η λειτουργία όλου του κινητήριου συστήματος. Στο παρακάτω σχήμα βλέπουμε το σχηματικό διάγραμμα της πειραματικής διάταξης.
6 Βασική θεωρία επαγωγικών κινητήρων και βαθμωτού ελέγχου Βασική θεωρία επαγωγικών κινητήρων και βαθμωτού ελέγχου. 1.1 Επαγωγικοί κινητήρες Ο τριφασικός επαγωγικός ηλεκτροκινητήρας βραχυκυκλωµένου δροµέα χρησιμοποιείται στο 80% περίπου των εφαρμογών ηλεκτρικής κίνησης. Στο στάτη φέρει τριφασική περιέλιξη, ενώ ο δροµέας είναι βραχυκυκλωµένος κλωβός και αποτελείται από ράβδους (μπάρες) αλουμινίου ή χαλκού. Οι πυρήνες του στάτη και του δροµέα, στα αυλάκια των οποίων είναι τοποθετημένη η περιέλιξη και ο κλωβός αντίστοιχα, κατασκευάζονται από δυναµοελάσµατα. Η τριφασική περιέλιξη του στάτη τροφοδοτείται από εναλλασσόμενη τριφασική τάση και δημιουργεί στο διάκενο της μηχανής ένα στρεφόμενο μαγνητικό πεδίο µε
7 Βασική θεωρία επαγωγικών κινητήρων και βαθμωτού ελέγχου μαγνητική επαγωγή B S. Η ταχύτητα περιστροφής του μαγνητικού πεδίου ονομάζεται σύγχρονη ταχύτητα και ορίζεται από τη σχέση ω m ωe = p 2π f = p e 1 [rad/sec] (1.1) 60 f e n1 m = [rpm] (1.2) p όπου ω e η κυκλική συχνότητα της τάσης τροφοδοσίας του στάτη [rad/s] f e η συχνότητα της τάσης τροφοδοσίας του στάτη [Ηz] και p ο αριθµός των ζευγών των πόλων. Όταν ο δροµέας είναι ακίνητος, το στρεφόμενο μαγνητικό πεδίο του στάτη επάγει στους αγωγούς του δροµέα τάσεις και ρεύματα, συχνότητας ίση µε τη συχνότητα της τάσης τροφοδοσίας του στάτη. Τα επαγόμενα ρεύματα του δροµέα δημιουργούν ένα στρεφόμενο μαγνητικό πεδίο μαγνητικής επαγωγής Β R. Η αλληλεπίδραση των δύο πεδίων (B S και B R ) δημιουργεί ροπή στρέψης. Έτσι ο κινητήρας αρχίζει να περιστρέφεται και να επιταχύνεται μέχρι την ταχύτητα ω m. H ταχύτητα αυτή είναι μικρότερη της σύγχρονης ταχύτητας (ω m <ω 1m ). Ο κινητήρας δεν μπορεί ποτέ να φτάσει τη σύγχρονη ταχύτητα περιστροφής, γιατί τότε δεν θα επάγεται τάση στο δροµέα και δεν θα παράγεται ροπή. Η per unit τιμή της διαφοράς της σύγχρονης μηχανικής ταχύτητας ω 1m και της πραγματικής μηχανικής ταχύτητας του κινητήρα ονομάζεται ολίσθηση και η μηχανική ταχύτητα περιστροφής είναι s ω 1m m m = = (1.3) ω ω 1m Δω ω 1m ω m 2π f e = ( 1 s) ω1 m = (1 s) (1.4) p Στην κανονική λειτουργία του κινητήρα, η συχνότητα των ηλεκτρικών μεγεθών του δροµέα είναι f R s ω1m = s f e = p (1.5) 2π To απλοποιημένο ισοδύναμο κύκλωμα του επαγωγικού κινητήρα δίνεται στο Σχήμα 1.1. Η χαρακτηριστική ροπής ταχύτητας στη λειτουργία κινητήρα, γεννήτριας και πέδησης φαίνεται στο Σχήμα 1.2 Στη λειτουργία γεννήτριας η ταχύτητα περιστροφής της επαγωγικής μηχανής είναι μεγαλύτερη της σύγχρονης ( ω m > ω m1 και s <0 ), ενώ στη λειτουργία πέδησης η επαγωγική μηχανή στρέφεται αντίθετα προς τη φορά περιστροφής του μαγνητικού πεδίου διακένου (αρνητική ταχύτητα περιστροφής, ω<0 και s>1).
8 Βασική θεωρία επαγωγικών κινητήρων και βαθμωτού ελέγχου Σχήμα 1.1 Απλοποιημένο ισοδύναμο κύκλωμα επαγωγικής μηχανής. Τα ρεύματα του στάτη και του δροµέα δίνονται από τις εξισώσεις όπου S U το διάνυσµα της τάσης του στάτη και s I, m I και R I' τα διανύσµατα των ρευμάτων στάτη, μαγνήτισης και δρομέα, αντίστοιχα. H ηλεκτρομαγνητική ροπή στρέψης, η μέγιστη ροπή (ροπή ανατροπής) και η ολίσθηση ανατροπής, αντίστοιχα, υπολογίζονται από τις εξισώσεις: jω L σ s R R U I I e R S S m s = ) / ' ( (1.6) 2 2 ) ( ) / ' ( ' ω L σ s R R U I e R S S R + + = (1.7) ) ( ) / ' ( ' 3 σ ω ω L s R R R s U T e R S R m S m + + = (1.8) ) ( 2( 1 3 σ αν ω ω L R R U T e S S m S + + = (1.9) 2 2 ) ( ' σ αν ω L R R s e S R + = (1.10)
9 Βασική θεωρία επαγωγικών κινητήρων και βαθμωτού ελέγχου Σχήμα 1.2 Χαρακτηριστική ροπής ταχύτητας του επαγωγικού κινητήρα για διάφορες καταστάσεις λειτουργίας. 1.2 Μεταβολή της συχνότητας αναλογικά µε τη τάση (περιοχή σταθερής ροπής, για έλεγχο ταχύτητας (0<ω<ω ον ) (U S / f e ) Αν η συχνότητα της τροφοδοσίας που εφαρμόζεται στο στάτη του επαγωγικού κινητήρα μεταβληθεί, μεταβάλλεται ανάλογα η ταχύτητα περιστροφής του στρεφόμενου μαγνητικού πεδίου και συνεπώς και η μηχανική ταχύτητα του άξονα (εξίσωση 1.4). Όταν τροφοδοτήσουμε τον κινητήρα με τα ονομαστικά μεγέθη, που ορίζει ο κατασκευαστής, τότε έχουμε την ονομαστική ταχύτητα. Η ταχύτητα του επαγωγικού κινητήρα μπορεί να ρυθμίζεται σε ένα μεγάλο εύρος, από το 5% της ονομαστικής ταχύτητας έως και σε διπλάσιες τιμές με τη μέθοδο αυτή. Όταν ο κινητήρας λειτουργεί σε μικρότερες ταχύτητες από την ονομαστική, επιβάλλεται να μειώνεται η εφαρμοζόμενη τάση γραμμικά με τη συχνότητα της τροφοδοσίας, για να είναι ασφαλής η λειτουργία του. Ειδικότερα η μαγνητική ροή που αναπτύσσεται δίνεται από το νόμο του Faraday U S (t)= N dφ 1 ή Φ(t)= U ( t) dt dt N S (1.11) οπότε αν η τάση που εφαρμόζεται στον στάτη είναι U S (t)= U S *sin(ω e t) συνεπάγεται 1 Φ(t)= U *sin( ω t dt άρα N S e )
 ω N e Aν μειωθεί η συχνότητα ω e =2π f e χωρίς αναλογική μείωση της τάσης U S,η μαγνητική ροή Φ αρχίζει να αυξάνει, άρα και το ρεύμα μαγνήτισης και πολύ γρήγορα ο κινητήρας έρχεται σε κατάσταση")

10 Βασική θεωρία επαγωγικών κινητήρων και βαθμωτού ελέγχου Φ(t)= U S cos(ω e t) (1.12) ω N e Aν μειωθεί η συχνότητα ω e =2π f e χωρίς αναλογική μείωση της τάσης U S,η μαγνητική ροή Φ αρχίζει να αυξάνει, άρα και το ρεύμα μαγνήτισης και πολύ γρήγορα ο κινητήρας έρχεται σε κατάσταση μαγνητικού κορεσμού, αφού συνήθως είναι σχεδιασμένος να λειτουργεί κοντά στο σημείο κορεσμού της καμπύλης μαγνήτισης. Αυτό έχει ως αποτέλεσμα την αύξηση του ρεύματος του στάτη και συνεπώς μείωση του βαθμού απόδοσης του κινητήρα με κίνδυνο υπερθέρμανσης του. Αντίθετα, αν αυξηθεί η συχνότητα χωρίς αναλογική αύξηση της τάσης, η μαγνητική ροή Φ μειώνεται και συνεπώς μειώνεται η ροπή στρέψης και η ροπή ανατροπής. Στη περίπτωση αυτή, μειώνεται το επίπεδο κορεσμού του επαγωγικού κινητήρα και αντίστοιχα οι απώλειες σιδήρου, ωστόσο μειώνεται ο λόγος ροπής προς όγκο μηχανής (Nm/Kg ) και συνεπώς δεν γίνεται βέλτιστη εκμετάλλευση του σιδηροµαγνητικού υλικού του πυρήνα. Αυτή είναι µια επιθυμητή λειτουργική κατάσταση και εφαρμόζεται στον έλεγχο της ταχύτητας περιστροφής του επαγωγικού κινητήρα για ταχύτητες μεγαλύτερες της σύγχρονης ονομαστικής, δηλαδή διατηρείται σταθερή η τάση τροφοδοσίας και αυξάνεται η συχνότητα. Όταν υλοποιούμε τον βαθμωτό έλεγχο U S /f e και η τάση μεταβάλλεται αναλογικά με την συχνότητα, για ταχύτητες μικρότερες της ονομαστικής, οι χαρακτηριστικές ροπής ταχύτητας παίρνουν την μορφή που φαίνεται στο Σχήμα 1.3. Σχήμα 1.3 Χαρακτηριστικές ροπής-ταχύτητας για σταθερό λόγο τάσης στάτη προς συχνότητα ( U S / f e ). Όπως φαίνεται στο παραπάνω σχήμα η ροπή ανατροπής είναι σταθερή, ενώ όλες οι χαρακτηριστικές ροπής-ταχύτητας έχουν την ίδια μορφή και είναι μετατοπισμένες μεταξύ τους κατά τη διαφορά των σύγχρονων γωνιακών ταχυτήτων. Στις χαμηλές συχνότητες (μικρότερες του 10% της συχνότητας του δικτύου) οι τιμές των επαγωγικών αντιστάσεων μειώνονται και επομένως αυξάνει η επιρροή της ωμικής
11 Βασική θεωρία επαγωγικών κινητήρων και βαθμωτού ελέγχου αντίστασης του στάτη R S και αντίστοιχα η πτώση τάσης που προκαλεί. Αυτό έχει ως αποτέλεσμα τη μείωση της ηλεκτρεγερτικής δύναμης E m, αντίστοιχα της μαγνητικής ροής και συνεπώς της ροπής στρέψης. Υπενθυμίζεται ότι για το απλοποιημένο ισοδύναμο κύκλωμα (Σχήμα1.1) γίνεται προσέγγιση ότι η αντίσταση του στάτη R S είναι αμελητέα. Για να διατηρηθεί σταθερή η μαγνητική ροή πρέπει να αυξηθεί η τάση του στάτη στις χαμηλές συχνότητες, ώστε να αντισταθμίσει την πτώση τάσης στην αντίσταση R S, όπως φαίνεται στο Σχήμα 1.4 Σχήμα 1.4 Καμπύλη τάσης στάτη - ταχύτητας για τη διάταξη οδήγησης ενός επαγωγικού κινητήρα µε στατικό μετατροπέα ισχύος μεταβλητής συχνότητας. Πρέπει να επισημανθεί ότι τα προβλήματα αυτά δεν θα υπήρχαν αν ελέγχονταν απ ευθείας η μαγνητική ροή (διατήρηση σταθερού λόγου Ε m /f e ). Ωστόσο είναι πολύ δύσκολο να κατασκευαστεί διάταξη που να μετρά και να ελέγχει απευθείας τη μαγνητική ροή. Γι αυτό στον βαθμωτό έλεγχο ο έλεγχος της ροής γίνεται έµµεσα µέσω του λόγου U S /f e, λαμβάνοντας υπόψη ότι υπάρχει απόκλιση στις χαμηλές συχνότητες και απαιτείται διόρθωσή του. Οι τεχνικές ελέγχου που υλοποιούν τον έλεγχο Ε m /f e δεν στηρίζονται στη θεωρία του βαθμωτού ελέγχου. 1.3 Μεταβολή της συχνότητας µε σταθερή τάση στάτη (περιοχή σταθερής ισχύος, για έλεγχο ταχύτητας ( ω m > ω 1m ον ) Αν η συχνότητα f e γίνει μεγαλύτερη της συχνότητας του δικτύου (f e > f eον ), τότε δεν µπορεί να διατηρηθεί σταθερός ο λόγος τάσης προς συχνότητα U S /f e, γιατί θα απαιτούσε η τάση U S να γίνει μεγαλύτερη της ονομαστικής. Επειδή η ονομαστική τιμή της τάσης του στάτη είναι συνήθως η τάση του δικτύου, η τιμή της U S δεν μπορεί να αυξηθεί περισσότερο. Για ταχύτητες περιστροφής ω m >ω 1mον, η τάση τροφοδοσίας του στάτη διατηρείται σταθερή στην ονομαστική τιμή U S =U ον. Όπως αναφέρθηκε προηγουμένως, αυτό έχει ως αποτέλεσμα να μειώνονται η μαγνητική ροή καθώς και οι ροπές στρέψης και ανατροπής. Αποδεικνύεται ότι, για σταθερή τάση στάτη, η ροπή ανατροπής είναι αντιστρόφως ανάλογη Τ αν ~ 1 ω 2 1m (1.13)
12 Βασική θεωρία επαγωγικών κινητήρων και βαθμωτού ελέγχου του τετραγώνου της σύγχρονης ταχύτητας και συνεπώς όλα τα σημεία των ροπών ανατροπής βρίσκονται στη καμπύλη υπερβολής (διακεκοµµένη καμπύλη), όπως φαίνεται στο Σχήμα 1.5, ώστε 2 T ω 1m σταθ. (1.14) αν = Σχήμα 1.5 Χαρακτηριστικές ροπής - ταχύτητας για ταχύτητες µεγαλύτερες της σύγχρονης ταχύτητας που αντιστοιχεί στη συχνότητα του δικτύου. Σε συνθήκες μέγιστης φόρτισης το ρεύμα του δροµέα είναι ίσο µε το ονομαστικό Ι R =I Rον. Επίσης, η ολίσθηση είναι επίσης σταθερή. s I U Για έλεγχο ταχύτητας στη περιοχή ω m > ω 1m ον, η ροπή στρέψης μειώνεται, ενώ η μηχανική ισχύς που αναπτύσσει ο επαγωγικός κινητήρας παραμένει σταθερή. Γι αυτό το λόγο, η περιοχή ταχυτήτων ω m > ω 1m ον ονομάζεται περιοχή σταθερής ισχύος (Σχήμα 1.5, λειτουργία στη καμπύλη μεταξύ των σημείων B-C-D). Στην περιοχή σταθερής ισχύος ισχύει: Συνεπώς, η μέγιστη μηχανική ισχύς που αναπτύσσει ο επαγωγικός κινητήρας στη περιοχή ελέγχου ταχύτητας ω m > ω 1m ον είναι ίση µε την ονομαστική του ισχύ και η ολίσθηση είναι η ονομαστική ολίσθηση. Για µικρότερες φορτίσεις, ο κινητήρας μπορεί να διατηρεί σταθερή τη ροπή στρέψης μέχρι κάποια ταχύτητα και στη συνέχεια να αρχίζει να μειώνεται ακολουθώντας τη χαρακτηριστική σταθερής ισχύος, όπως περιγράφεται από την εξίσωση (1.16). Στο Σχήμα 1.5, η καµπύλη 1 (µεταξύ των σηµείων A-B) αντιστοιχεί σε ονομαστική ροπή φορτίου T L =T ον και η καμπύλη 2 (μεταξύ των σηµείων A - C) σε ροπή φορτίου T L <T ον. Παρατηρείστε ότι, αν ο κινητήρας έχει ονομαστική ροπή φορτίου και η ταχύτητα, µέσω του ελέγχου, γίνει μεγαλύτερη της σύγχρονης ω m > ω 1m ον, τότε η μαγνητική ροή δεν επαρκεί για R ' = Rον R (1.15) Sον T ω = T ω 1 σταθ. (1.16) m m ον mον =
13 Βασική θεωρία επαγωγικών κινητήρων και βαθμωτού ελέγχου να διατηρήσει σταθερή τη ροπή του κινητήρα, µε αποτέλεσμα η ροπή να μειώνεται ακολουθώντας τη καμπύλη σταθερής ισχύος των σημείων B-C-D (βλέπε εξίσωση 1.16). Αντίθετα, αν η ροπή φορτίου είναι μικρότερη της ονομαστικής, τότε ο κινητήρας μπορεί να λειτουργήσει µε σταθερή ροπή για ταχύτητες ω m > ω 1m ον μέχρι το σημείο C και στη συνέχεια ακολουθεί τη καμπύλη σταθερής ισχύος των σημείων C-D. 1.4 Μεταβολή της συχνότητας µε σταθερή τάση στάτη (λειτουργία στη ροπή ανατροπής, για έλεγχο στην περιοχή υψηλών ταχυτήτων ( ω m >> ω 1m ον ) Αν η συχνότητα της τάσης τροφοδοσίας του στάτη αυξηθεί περισσότερο από κάποια τιμή, τότε η ροπή στρέψης που μπορεί να αναπτύξει ο επαγωγικός κινητήρας μειώνεται τόσο πολύ και γίνεται ίση µε τη ροπή ανατροπής (Σχήμα 1.5 λειτουργία µετά το σημείο D). Σ αυτή τη περιοχή λειτουργίας, η ταχύτητα του κινητήρα είναι πολύ μεγάλη και η τάση δεν επαρκεί για να διατηρήσει σταθερή την ισχύ που παράγει η μηχανή. Έτσι, η μέγιστη ισχύς του κινητήρα είναι μικρότερη της ονομαστικής Tm ωm < Tον ω1mον (1.17) και η μέγιστη ροπή στρέψης περιορίζεται στη ροπή ανατροπής Σχήμα 1.6 Περιοχές ελέγχου ταχύτητας και χαρακτηριστικές ροπής ταχύτητας επαγωγικού κινητήρα. T max T αν U S 3p ω = e 2 1 2L = (1.18) σ
14 Βασική θεωρία επαγωγικών κινητήρων και βαθμωτού ελέγχου T 2 m ω 1m = T ν ω 1m = σταθ. a (1.19) η οποία μειώνεται µε το τετράγωνο της ταχύτητας και ισχύει Σ αυτή τη περιοχή ταχυτήτων, για μέγιστη ροπή στρέψης έχουµε ολίσθηση ανατροπής, η ' R R 1 s = sαν = L (1.20) σ ωe οποία μειώνεται µε την αύξηση της σύγχρονης ταχύτητας και δίνεται από τον τύπο Στο διάγραµµα του Σχήματος1.6 παρουσιάζονται συγκεντρωτικά οι τρεις περιοχές ελέγχου ταχύτητας που εξετάστηκαν προηγουμένως και στο διάγραµµα του Σχήματος 1.7, φαίνεται η μεταβολή των διαφόρων μεγεθών του επαγωγικού κινητήρα ως προς τη ταχύτητα περιστροφής. Σχήμα 1.7. Μεταβολή των διαφόρων μεγεθών του επαγωγικού κινητήρα ως προς την ταχύτητα περιστροφής στις τρεις περιοχές ελέγχου της ταχύτητας (οι καμπύλες αναφέρονται στις µέγιστες συνθήκες φόρτισης.
15 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση Στο κεφάλαιο 2 αρχικά γίνεται εισαγωγή στη θεωρία της ημιτονοειδούς PWM διαμόρφωσης. Κατόπιν περιγράφεται το πλήρες μοντέλο προσομοίωσης του σερβοκινητηρίου συστήματος και αναλύονται τα αποτελέσματα που προκύπτουν. Τέλος γίνεται περιγραφή της πειραματικής διάταξης, του ψηφιακού ελεγκτή που υλοποιεί την ημιτονοειδή PWM διαμόρφωση και παρουσιάζονται τα αποτελέσματα της πειραματικής υλοποίησης.
16 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση Θεωρία ελέγχου κινητήρα με ημιτονοειδή PWM διαμόρφωση Διάταξη ελέγχου επαγωγικού κινητήρα Ο έλεγχος του τριφασικού επαγωγικού κινητήρα και η υλοποίηση του βαθμωτού ελέγχου γίνεται µε ειδικούς στατικούς μετατροπείς συχνότητας (inverters). Στο Σχήμα 2.1 δίνεται το λειτουργικό διάγραµµα ενός στατικού μετατροπέα συχνότητας. Αρχικά µια ανορθωτική γέφυρα μετατρέπει την εναλλασσόμενη τάση του δικτύου σε συνεχή και κατόπιν ένας αντιστροφέας ισχύος μετατρέπει την συνεχή τάση σε εναλλασσόμενη επιθυμητής τάσης και συχνότητας. Η ανορθωτική γέφυρα αποτελείται από έξι διόδους ισχύoς και ο αντιστροφέας από έξι ελεγχόμενα ηλεκτρονικά ισχύος (τρανζίστορ ισχύος, IGBT). Ο τύπος αυτού του μετατροπέα ονομάζεται πηγής τάσης (Voltage Source Inverter, VSI), γιατί ο αντιστροφέας ισχύος τροφοδοτείται µε σταθερή συνεχή τάση και μεταβλητή ελέγχου είναι η τάση εξόδου του µετατροπέα. Μεταξύ της ανορθωτικής γέφυρας και του αντιστροφέα, παρεμβάλλεται ένα χαµηλοπερατόφίλτρο L-C. Σχήμα 2.1 Σχηματικό διάγραµµα στατικού μετατροπέα συχνότητας πηγής τάσης (voltage source inverter, VSI). Στο Σχήμα 2.2 φαίνεται το λειτουργικό διάγραµµα ενός στατικού μετατροπέα συχνότητας ανοιχτού βρόχου πηγής τάσης. Ο μετατροπέας αυτός ονομάζεται ανοικτού βρόχου, γιατί δεν υπάρχει ανάδραση του σήματος της ταχύτητας, ώστε η ταχύτητα του κινητήρα να είναι πάντοτε σταθερή και ανεξάρτητη του φορτίου (η ταχύτητα επιβάλλεται από το σήμα εντολής-αναφοράς ω * m ). Έτσι η ταχύτητα του κινητήρα μειώνεται µε την αύξηση του φορτίου και δεν μπορούμε να έχουμε ακριβή έλεγχο της ταχύτητας (η ταχύτητα του κινητήρα είναι πάντοτε μικρότερη της ταχύτητας αναφοράς). Αντίθετα, ο μετατροπέας κλειστού βρόχου συγκρίνει την πραγματική ταχύτητα του κινητήρα µε την ταχύτητα αναφοράς και αυξοµειώνει την σύγχρονη ταχύτητα (συχνότητα της τάσης του στάτη), ώστε πάντοτε η ταχύτητα του κινητήρα να είναι ίση µε τη ταχύτητα αναφοράς ανεξάρτητα του φορτίου. Για την λειτουργία του μετατροπέα κλειστού βρόχου απαιτείται η μέτρηση της ταχύτητας του κινητήρα, η οποία γίνεται µε ταχογεννήτρια που είναι τοποθετημένη στον άξονα του κινητήρα.
17 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 16. Σχήμα 2.2 Λειτουργικό διάγραμμα στατικού μετατροπέα συχνότητας πηγής τάσης ανοικτού βρόχου. Ο μετατροπέας ανοικτού βρόχου είναι πιο απλός στη κατασκευή, οικονομικότερος και μπορεί να χρησιμοποιηθεί για τον έλεγχο περισσότερων από ένα επαγωγικών κινητήρων. Αντίθετα, ο μετατροπέας κλειστού βρόχου είναι ακριβότερος, έχει πολυπλοκότερο σύστημα ελέγχου, μπορεί να ελέγχει το πολύ ένα κινητήρα και η διάταξη ελέγχου είναι κατάλληλα προσαρµοσµένη στα χαρακτηριστικά του κινητήρα, ωστόσο επιτυγχάνεται ακριβής έλεγχος της ταχύτητας περιστροφής του κινητήρα. Η επιλογή του είδους του μετατροπέα συχνότητας εξαρτάται πάντοτε από τις απαιτήσεις σε ακρίβεια ελέγχου ταχύτητας που έχει η εκάστοτε εφαρμογή καθώς και αν οι απαιτήσεις αυτές δικαιολογούν τη διαφορά κόστος του μετατροπέα. Για παράδειγμα, σε µια απλή διάταξη ανύψωσης βαρών, όταν χρειάζεται έλεγχος της ταχύτητας κίνησης ενδεχομένως να µην χρειάζεται ακριβής έλεγχος της ταχύτητας µέσω συστήματος κλειστού βρόχου. Αντίθετα, σε µια μηχανή κοπής, ρομπότ κλπ. Ο έλεγχος της ταχύτητας που απαιτείται είναι τόσο υψηλής ακρίβειας (πρόσθετη απαίτηση για έλεγχο θέσης), ώστε ακόμη και ο απλός μετατροπέας συχνότητας κλειστού βρόχου να µην επαρκεί και να χρειάζεται ειδική σερβοµηχανική διάταξη (σερβοκινητήρας µε έλεγχο ταχύτητας και θέσης). Ο μετατροπέας συχνότητας αποτελείται κυρίως από δύο τµήµατα. Το τμήμα ισχύος και το τµήµα ελέγχου Τµήµα ισχύος Αποτελείται από µια ανορθωτική γέφυρα µε διόδους ισχύος και έναν αντιστροφέα ισχύος που μετατρέπει την συνεχή τάση σε εναλλασσόμενη. Ο αντιστροφέας ισχύος αποτελείται από
18 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 17. έξι τρανζίστορ ισχύος µε αντιπαράλληλες διόδους για την αµφίδροµη ροή της ισχύος. Στις βάσεις των τρανζίστορ ισχύος οδηγούνται παλμοί κατάλληλης συχνότητας, οι οποίοι προέρχονται από το τμήμα ελέγχου, έτσι ώστε η θεμελιώδης αρμονική της τάσης εξόδου να έχει την επιθυμητή τιμή πλάτους και συχνότητας. Στο Σχήμα 2.3 φαίνεται το κύκλωμα ισχύος του στατικού μετατροπέα συχνότητας πηγής τάσης. Στους ακροδέκτες του κινητήρα οδηγείται µια παλμική τάση, η οποία έχει πολλές αρμονικές συνιστώσες, µε αποτέλεσμα την αύξηση των απωλειών ισχύος και των παρασιτικών ροπών του κινητήρα. Γι αυτό το λόγο εφαρμόζονται ειδικές τεχνικές που στοχεύουν στη μείωση του πλάτους των αρμονικών και την αύξηση της συχνότητας των συνιστωσών τους, ώστε να φιλτραριστούν από την αυτεπαγωγή του κινητήρα και έτσι να μειωθεί η επίδρασή τους στη λειτουργία του επαγωγικού κινητήρα. Ειδικότερα το πηνίο χρησιμεύει, ώστε να περιορίζονται οι διακυμάνσεις του ρεύματος και να μειώνονται οι βυθίσεις της συνεχούς τάσης. Ο πυκνωτής, ηλεκτρολυτικός μεγάλης χωρητικότητας (1mF έως 20mF), χρησιμεύει για να διατηρείται σταθερή η συνεχής τάση εισόδου του αντιστροφέα. Σχήμα 2.3 Τµήµα ισχύος στατικού μετατροπέα συχνότητας πηγής τάσης, για οδήγηση ριφασικού επαγωγικού κινητήρα. Η αντίσταση δυναμικής πέδησης, που φαίνεται στο Σχήμα 2.3, χρησιμοποιείται για να απορροφά την ηλεκτρική ισχύ που παράγεται, όταν μειώνεται απότομα η ταχύτητα περιστροφής του κινητήρα. Σε εκείνο το διάστημα η ηλεκτρική μηχανή λειτουργεί ως γεννήτρια και η κινητική της ενέργεια μετατρέπεται σε ηλεκτρική. Η απορρόφηση της ηλεκτρικής ισχύος που παράγεται κατά την πέδηση του κινητήρα είναι απαραίτητη, γιατί η ανορθωτική γέφυρα δεν επιτρέπει ροή του ανάστροφου ρεύματος προς τη πηγή, με αποτέλεσμα να φορτίζει τον πυκνωτή του φίλτρου και να παρατηρούνται έντονες και επικίνδυνες διακυμάνσεις στην dc τάση του αντιστροφέα. Η ενέργεια αυτή μπορεί διοχετευτεί σε μια αντίσταση, τοποθετημένη
19 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 18. παράλληλα μεταξύ ανορθωτικής γέφυρας και αντιστροφέα. Ένα ηλεκτρονικό κύκλωμα ελέγχει την τάση του πυκνωτή και, όταν γίνει μεγαλύτερη από ένα όριο, άγει το τρανζίστορ T R, ώστε το ρεύμα που επιστρέφει να περνά από την αντίσταση. Η διάταξη ονομάζεται δυναμική πέδηση. Υπάρχει η δυνατότητα να γίνει πέδηση με ανάκτηση της ισχύος (λειτουργία στα τέσσερα τεταρτημόρια), που φυσικά αυξάνει το κόστος, γιατί απαιτείται δεύτερο κύκλωμα αντιστροφέα. Η επιλογή αυτή συνιστάται, όταν ο αντιστροφέας τροφοδοτείται από μπαταρία, γιατί επιτυγχάνεται σοβαρή εξοικονόμηση ισχύος. Στις βάσεις των τρανζίστορ ισχύος οδηγούνται παλμοί κατάλληλης συχνότητας, οι οποίοι προέρχονται από το τµήµα ελέγχου, έτσι ώστε η θεμελιώδης αρμονική της τάσης εξόδου να έχει την επιθυμητή τιμή πλάτους και συχνότητας. Η τεχνική που εφαρμόζεται για να παραχθούν οι παλμοί ονομάζεται διαμόρφωση εύρους παλμών (pulse-width modulation, PWM) και θα εξεταστεί στη συνέχεια Τµήµα ελέγχου Το τμήμα ελέγχου αποτελείται από µια συστοιχία ηλεκτρονικών καρτών που υλοποιούν τον PWM διαμορφωτή και ελέγχουν το ρεύμα του στάτη µέσω του περιοριστή ρεύματος, ώστε να µην ξεπεράσεί την ονομαστική του τιμή. Η έξοδος του τμήματος ελέγχου είναι οι παλμοί ελέγχου που οδηγούνται στις βάσεις των ηλεκτρονικών ισχύος της μονάδας αντιστροφής. Στο Σχήμα 2.4 φαίνεται η αρχή λειτουργίας της ημιτονοειδούς PWM διαμόρφωσης, όπου ένα τριγωνικό φέρον σήμα (carrier signal) υψηλής συχνότητας V c (συνήθως 5 έως 10 khz) συγκρίνεται µε ένα ημιτονοειδές σήμα αναφοράς V r (reference signal) συχνότητας ίση µε τη συχνότητα της τάσης µε την οποία θέλουμε να οδηγήσουμε τον επαγωγικό κινητήρα. Όταν η στιγμιαία τιμή του V r είναι μεγαλύτερη της V c, η έξοδος του συγκριτή είναι θετικός παλμός, ενώ στην αντίθετη περίπτωση είναι αρνητικός παλμός ή μπορεί να είναι και μηδέν, αναλόγως την επεξεργασία. Μέσω του ημιτονοειδούς σήματος αναφοράς μπορούμε να ελέγξουμε το πλάτος και τη συχνότητα του σήματος εξόδου του διαμορφωτή. Αυξομειώνοντας το πλάτος του ημιτονοειδούς σήματος αναφοράς V r, αυξομειώνεται η διάρκεια των παλμών και έτσι αυξομειώνεται αντίστοιχα το πλάτος της θεμελιώδους αρμονικής του σήματος εξόδου του διαμορφωτή. Ακόμη, μεταβαλλόντας τη συχνότητα του ημιτονοειδούς σήματος αναφοράς μεταβάλλεται αντίστοιχα η συχνότητα του σήματος εξόδου του διαμορφωτή. Ειδικότερα ορίζεται ο συντελεστής διαμόρφωσης πλάτους m a ^ όπου V το πλάτος του ημιτόνου αναφοράς και V το πλάτος του τριγωνικού παλμού. r ^ V m a = ^ V r c ^ c (2.1)
20 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 19. Η σχέση μεταξύ της συχνότητας διαμόρφωσης και της συχνότητας του ημιτόνου αναφοράς εκφράζεται μέσω του συντελεστή διαμόρφωσης συχνότητας m f (frequency modulation ratio) και ορίζεται: f c : συχνότητα τριγωνικού φέροντος f : συχνότητα του ημιτόνου αναφοράς r m f = f f c r όπου (2.2) Σχήμα 2.4 Αρχή λειτουργίας της ημιτονοειδούς PWM διαμόρφωσης. Η παλµοσειρά του Σχήματος 2.4 οδηγείται στις βάσεις των τρανζίστορ ισχύος. Στην έξοδο του μετατροπέα παίρνουμε μια αντίστοιχη παλµοσειρά τάσης, όπου η θεμελιώδης αρμονική έχει το επιθυμητό πλάτος και συχνότητα. Οι επιθυμητές τιμές της θεμελιώδους συχνότητας και το πλάτος της τάσης καθορίζονται από τη γεννήτρια σήματος ανάλογα µε την περιοχή της ταχύτητας λειτουργίας του κινητήρα, όπως φαίνεται Σχήμα 2.2. Στο Σχήμα 2.5 φαίνονται οι κυµατοµορφές των τάσεων εξόδου του τριφασικού PWM μετατροπέα συχνότητας, που οδηγούνται στον τριφασικό επαγωγικό κινητήρα.
21 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 20. Σχήμα 2.5 Κυµατοµορφές τάσεων εξόδου τριφασικού PWM στατικού µετατροπέα συχνότητας. Σύμφωνα με την τεχνική που περιγράφηκε παραπάνω, πρέπει να σημειωθεί ότι η μέση φασική τάση εξόδου (ή ακριβέστερα η μέση τάση εξόδου στο διάστημα μιας περιόδου μετάβασης Τ c =1/f c ) εξαρτάται από τον λόγο ^ Vr προς ^c V για δεδομένη V dc. Συνεπώς με την μεταβολή του πλάτους του ημιτόνου αναφοράς, ρυθμίζεται το πλάτος της θεμελιώδους αρμονικής της τάσης εξόδου του αντιστροφέα (φασική τάση εξόδου). Ειδικότερα το πλάτος της θεμελιώδους αρμονικής είναι V U out =m dc a 2 για m a 1 (γραμμική περιοχή) (2.3) Συνεπώς για τιμές του συντελεστή διαμόρφωσης πλάτους m a μικρότερες της μονάδας (0 m a 1) βρισκόμαστε στην γραμμική περιοχή και η τάση εξόδου είναι ανάλογη του πλάτους του ημιτόνου αναφοράς. Ένα μειονέκτημα όμως της ημιτονοειδούς διαμόρφωσης PWM στην γραμμική περιοχή είναι ότι το μέγιστο δυνατό πλάτος της θεμελιώδους συνιστώσας της τάσης (δηλαδή για m a =1) έχει μια ανώτατη τιμή, που εξαρτάται από την V dc. Για μεγαλύτερη αύξηση του πλάτους της θεμελιώδους συνιστώσας, ο συντελεστής m a γίνεται μεγαλύτερος της τιμής 1 και εισερχόμαστε στην περιοχή της υπερδιαμόρφωσης. Στην περιοχή της υπεδιαμόρφωσης χάνεται η γραμμικότητα που προέκυπτε από την σύγκριση του ημιτόνου αναφοράς και του τριγωνικού φέροντος σήματος. Αυτό έχει ως αποτέλεσμα το πλάτος της θεμελιώδους
22 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 21. συνιστώσας της τάσης να μην μεταβάλλεται γραμμικά με τον συντελεστή διαμόρφωσης πλάτους m a. Η τάση εξόδου συναρτήσει του m a μεταβάλλεται όπως φαίνεται στο Σχήμα 2.6. Σχήμα 2.6 Τάση εξόδου αντιστροφέα συναρτήσει του συντελεστή διαμόρφωσης πλάτους m a. Στη μη γραμμική περιοχή, όπου m a >1, η τάση δεν αυξάνεται γραμμικά με το συντελεστή m a. Όπως φαίνεται και στο Σχήμα 2.6, για αύξηση της τάσης εξόδου χρειάζεται μεγαλύτερη αύξηση του m a από ότι στην γραμμική περιοχή (φαινόμενο κορεσμού). Στην περιοχή της υπερδιαμόρφωσης η μέγιστη τιμή της φασικής τάσης είναι U out max = π 4 V dc 2 (2.4) Την φασική rms τάση εξόδου του αντιστροφέα θα την συμβολίζουμε ως U S και την θεμελιώδη συχνότητα της τάσης θα την συμβολίζουμε ως f e. Η συνεχής τάση εξόδου του ανορθωτή ισούται με V dc = ( 3 2 ) U πολ ( rms) π ή 3 2 V dc = 3U φασ ( rms) π (2.5)
23 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 22. όπου U φασ(rms) η ονομαστική rms τάση τροφοδοσίας για ονομαστική συχνότητα. Το πλάτος της θεμελιώδους αρμονικής της τάσης στη γραμμική περιοχή είναι U out =m a ( dc 2) αντιστροφέα θα είναι U out =m a ( V 2) είναι V (εξίσωση 2.3), και συνεπώς η θεμελιώδη αρμονική της τάσης εξόδου του dc sinωt. Άρα η φασική rms τάση εξόδου του αντιστροφέα θα V U S =m dc a 2 2 και αν αντικατασταθεί η εξίσωση (2.5) στην (2.6) προκύπτει (2.6) 3 6 U S =m a 2π 2 U φασ(rms) = m a U (2.7) φασ(rms) H γραμμική περιοχή ισχύει έως εκεί όπου m a =1. Συνεπώς αν αντικαταστήσουμε στην εξίσωση (2.7) U φασ(rms) =220V προκύπτει ότι η γραμμική περιοχή ισχύει έως την τάση U S =181.94V (rms). Άρα εφαρμόζοντας την αναλογία U S /f e =220/50=4.4, συμπεραίνεται ότι η συχνότητα μέχρι την οποία ισχύει η γραμμική περιοχή είναι 41.35Hz, δηλαδή για βαθμωτό έλεγχο σε τετραπολικό κινητήρα η γραμμική περιοχή ισχύει περίπου μέχρι σύγχρονη ταχύτητα αναφοράς (41.35/50)*1500= rpm. Συγχρονισμένη διαμόρφωση: Για μικρές τιμές του m f το ημίτονο αναφοράς και η τριγωνική κυματομορφή πρέπει να είναι συγχρονισμένα μεταξύ τους, δηλαδή, όταν το ημίτονο αναφοράς είναι μηδέν, πρέπει και το τριγωνικό σήμα να είναι μηδέν ταυτόχρονα. Η συγχρονισμένη διαμόρφωση απαιτεί ακέραιη τιμή του m f. Αν δεν είναι ακέραιος, εμφανίζονται υποαρμονικές οι οποίες είναι εντελώς ανεπιθύμητες, γιατί παραμορφώνεται η τάση εξόδου του αντιστροφέα. Οι αρμονικές της τάσης εξόδου του αντιστροφέα εμφανίζονται ως πλευρικές ζώνες, με κέντρο τη συχνότητα μετάβασης (f c ) και τις πολλαπλάσιές της, δηλαδή γύρω από τις αρμονικές m f, 2m f, 3m f κ.ο.κ. Για ένα συντελεστή διαμόρφωσης συχνότητας m f 9, τα πλάτη των αρμονικών είναι σχεδόν ανεξάρτητα από το m f ωστόσο ο m f καθορίζει τις συχνότητες στις οποίες εμφανίζονται οι αρμονικές. Θεωρητικά οι συχνότητες στις οποίες εμφανίζονται οι αρμονικές μπορούν να εκφραστούν ως f h = ( j m f ± k) f e (2.8) όπου f e η θεμελιώδης συχνότητα της τάσης, j θετικός ακέραιος αριθμός και ο αριθμός k αντιστοιχεί στην k-τάξης πλευρική ζώνη της αρμονικής. Για περιττές τιμές του j, αρμονικές υπάρχουν μόνο για άρτιες τιμές του k. Για άρτιες τιμές του j, αρμονικές υπάρχουν μόνο για περιττές τιμές του k. Στόχος είναι το αρμονικό περιεχόμενο της τάσης εξόδου να είναι το μικρότερο δυνατό. Με βάση τα παραπάνω λοιπόν η συχνότητα διαμόρφωσης (η συχνότητα του τριγωνικού φέροντος κύματος) επιλέγεται όσο το δυνατόν μεγαλύτερη, γιατί όσο μεγαλύτερης τάξης είναι οι
24 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 23. αρμονικές, τόσο ευκολότερα αποκόπτονται. Το όριο της συχνότητας του φέροντος καθορίζεται από την διακοπτική συχνότητα των διακοπτών του αντιστροφέα. Η συχνότητα διαμόρφωσης είναι συνήθως μέχρι 10kHz, γιατί σε μεγαλύτερες συχνότητες παρουσιάζονται προβλήματα στην ομαλή διαδοχική έναυση και σβέση των διακοπτών και αυξάνονται σημαντικά οι διακοπτικές απώλειες. Επειδή η περίοδος διαμόρφωσης Τ c =1/f c (η περίοδος του τριγωνικού φέροντος σήματος) είναι πολύ μικρότερη της σταθεράς χρόνου του κινητήρα, οι αρμονικές της κυματομορφής του ρεύματος είναι σημαντικά μειωμένες. Με άλλα λόγια η αυτεπαγωγή του κινητήρα εξομαλύνει την κυματομορφή του ρεύματος. Όσο μεγαλύτερη είναι η συχνότητα του φέροντος σήματος, τόσο λιγότερες αρμονικές ρεύματος, και οι αρμονικές της τάσης γίνονται μεγαλύτερης τάξης. Αυτό φαίνεται χαρακτηριστικά στα Σχήματα 2.7 και 2.8. Ο συντελεστής διαμόρφωσης συχνότητας m f πρέπει να είναι περιττός ακέραιος, γιατί με αυτόν τον τρόπο εξαφανίζονται οι άρτιες αρμονικές από την πολική τάση εξόδου του αντιστροφέα. Συγκεκριμένα στους τριφασικούς μετατροπείς μας ενδιαφέρουν οι αρμονικές των πολικών τάσεων. Η τάση εξόδου κάθε σκέλους του τριφασικού αντιστροφέα έχει αρμονικές που εμφανίζονται σε κάθε πολλαπλάσιο του m f (εξίσωση 2.8). Θεωρώντας μόνο την αρμονική στο m f, η διαφορά φάσης μεταξύ της αρμονικής στο m f των δυο φάσεων του αντιστροφέα είναι (120m f ) ο. Αυτή η διαφορά φάσης θα ισοδυναμεί με μηδέν (ή με ένα πολλαπλάσιο των 360 μοιρών), αν η τιμή του m f είναι περιττό και πολλαπλάσιο του 3. Κατά συνέπεια, η αρμονική στο m f δεν εμφανίζεται στην πολική τάση. Το ίδιο ισχύει για τις αρμονικές στα περιττά πολλαπλάσια του m f, αν ο m f επιλέγεται περιττό πολλαπλάσιο του 3 Αναφέρθηκε παραπάνω ότι οι αρμονικές της τάσης εξόδου του αντιστροφέα εμφανίζονται ως πλευρικές ζώνες, με κέντρο τη συχνότητα μετάβασης (f c ) και τις πολλαπλάσιές της, δηλαδή γύρω από τις αρμονικές m f, 2m f, 3m f κ.ο.κ. (υπενθυμίζεται η εξίσωση (2.8) f h = ( j m f ± k) f e. Στο Σχήμα 2.9 φαίνονται οι αρμονικές στην πολική και στην φασική τάση αντίστοιχα, όπου η τιμή του m f είναι περιττό πολλαπλάσιο του 3. Παρατηρούμε ότι η αρμονική της φασικής τάσης στο m f, 3 m f κ.ο.κ αποκόπηκε στην πολική τάση. Όταν ισχύει m a >1, βρισκόμαστε στην κατάσταση της υπερδιαμόρφωσης και το πλάτος του ημιτόνου αναφοράς είναι μεγαλύτερο από αυτό του τριγωνικού παλμού. Σε αυτήν την κατάσταση η τάση εξόδου περιέχει περισσότερες αρμονικές στις πλευρικές ζώνες σε σύγκριση με την γραμμική περιοχή (αρμονικές γύρω από τα πολλαπλάσια του m f ). Ωστόσο οι κύριες αρμονικές (Σχήμα 2.9) μπορεί να μην έχουν τόσο μεγάλο πλάτος, όσο για m a 1. Στην υπερδιαμόρφωση το πλάτος δεν μεταβάλλεται γραμμικά με τον συντελεστή m a και οι αρμονικές στην τάση εξόδου εξαρτώνται έντονα από το m f, κάτι που δεν ισχύει στη γραμμική περιοχή
25 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 24. (α) (β) (γ) (δ) Σχήμα 2.7 (α) Κυματομορφή τάσης, (β) φάσμα αρμονικών τάσης,(γ) κυματομορφή ρεύματος και (δ) φάσμα αρμονικών ρεύματος εξόδου τριφασικού PWM αντιστροφέα ισχύος πηγής τάσης με συχνότητα φέρον σήματος 5 khz.
26 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 25. (α) (β) (γ) (δ) Σχήμα 2.8 (α) Κυματομορφή τάσης, (β) φάσμα αρμονικών τάσης,(γ) κυματομορφή ρεύματος και (δ) φάσμα αρμονικών ρεύματος εξόδου τριφασικού PWM αντιστροφέα ισχύος πηγής τάσης με συχνότητα φέρον σήματος 10 khz.
27 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 26. Σχήμα 2.9 (α) πολική τάση εξόδου, (β) αρμονικές πολικής τάσης εξόδου για m f περιττό πολλαπλάσιο του 3, (γ) αρμονικές φασικής τάσης εξόδου. Στους στατικούς μετατροπείς συχνότητας ανοικτού βρόχου επιβάλλεται η προστασία της διάταξης µέσω ενός περιοριστή ρεύματος, ο οποίος ελέγχει το ρεύμα του στάτη, και προστατευτεί τον αντιστροφέα από τις απότομες μεταβολές του ρεύματος του στάτη, που παρατηρούνται σε επιταχύνσεις και επιβραδύνσεις του κινητήρα κατά τις μεταβολές της ταχύτητας αναφοράς. Θα εξηγηθεί καλύτερα στο παράδειγμα που ακολουθεί. Έστω ότι σε ένα τριφασικό επαγωγικό κινητήρα η ταχύτητα αναφοράς (εντολή) και η ροπή φορτίου είναι τέτοιες, ώστε το σημείο λειτουργίας στη χαρακτηριστική ροπής-ταχύτητας του Σχήματος 2.10 είναι το σημείο 1. Αν αυξηθεί η ταχύτητα αναφοράς για σταθερή ροπή φορτίου, το νέο σημείο λειτουργίας είναι το σημείο 4. Αν δεν υπήρχε ο περιοριστής ρεύματος, το τµήµα ελέγχου θα αύξανε απότομα τη συχνότητα του ημιτονοειδούς σήματος αναφοράς, ώστε η θεμελιώδης αρμονική της τάσης εξόδου του αντιστροφέα να έχει τη συχνότητα που αντιστοιχεί στη νέα ταχύτητα αναφοράς. Λόγω της αδράνειας του άξονα, η ταχύτητα του κινητήρα δεν θα αυξανόταν απότομα και θα μεσολαβούσε ένα μεταβατικό διάστημα, όπου ο
28 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 27. κινητήρας θα αύξανε την ηλεκτρομαγνητική του ροπή, ώστε να επιταχυνθεί και να αποκτήσει τη νέα του ταχύτητα. Τη στιγμή της αλλαγής της ταχύτητας εντολής, ο κινητήρας βρίσκεται σε χαρακτηριστική ροπής ταχύτητας, (πιο έντονη χαρακτηριστική στο Σχήμα 2.10) που για την τρέχουσα ταχύτητα η ροπή είναι μεγαλύτερη (σημείο 1 ). Ωστόσο το σημείο λειτουργίας 1 βρίσκεται στην ασταθή περιοχή της χαρακτηριστικής και το ρεύμα που αναπτύσσεται είναι μεγαλύτερο του ρεύματος που αντιστοιχεί στη ροπή ανατροπής. Ο περιοριστής ρεύματος ελέγχει και περιορίζει το ρεύμα σε μια ανώτερη τιμή, ώστε ο κινητήρας να λειτουργεί πάντα στην ευσταθή περιοχή και να έχει ικανοποιητική δυναμική συμπεριφορά. Από την αρχή της αλλαγής της ταχύτητας εντολής αυξάνει σταδιακά τη σύγχρονη ταχύτητα, ώστε να έρθει όμαλα από το σημείο 1 στο 4, ακολουθώντας τα σημεία των χαρακτηριστικών ροπήςταχύτητας. Αυτό έχει ως αποτέλεσμα οι μεταβολές στη ταχύτητα να είναι µεν πιο αργές, αλλά ωστόσο αυτό είναι αναγκαίο για τη προστασία του κινητήρα. Παρόμοια αντιμετώπιση ακολουθείται για μείωση της ταχύτητας εντολής, ώστε να επιβραδυνθεί ο κινητήρας. Στη περίπτωση αυτή η μεταβολή ακολουθεί τα σημεία των χαρακτηριστικών του Σχήματος Σχήμα 2.10 Χαρακτηριστικές ροπής ταχύτητας τριφασικού επαγωγικού κινητήρα όπου φαίνεται η λειτουργία του περιοριστή ρεύματος κατά την επιτάχυνση και επιβράδυνση της ταχύτητας του κινητήρα.
29 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση Προσομοίωση στο πρόγραμμα Simulink βαθμωτού ελέγχου με Ημιτονοειδή PWM διαμόρφωση Περιγραφή μοντέλου προσομοίωσης Στο πρόγραμμα Simulink προσομοιώνονται με ικανοποιητική ακρίβεια οι πειραματικές συνθήκες του προβλήματος, ώστε αφενός μεν να επιβεβαιωθούν τα θεωρητικά συμπεράσματα, αφετέρου δε να είναι ευκολότερη η πειραματική υλοποίηση, που θα ακολουθήσει αργότερα. Στο Σχήμα 2.11 βλέπουμε το μοντέλο που χρησιμοποιήθηκε για την προσομοίωση του βαθμωτού ελέγχου U S /f e με ημιτονοειδή διαμόρφωση PWM. Σχήμα 2.11 Περιβάλλον Simulink. Υλοποίηση βαθμωτού ελέγχου με ημιτονοειδή διαμόρφωση PWM. Τα τμήματα από τα οποία αποτελείται το μοντέλο προσομοίωσης Simulink είναι το τμήμα ισχύος, το τμήμα ελέγχου και οι μετρητικές διατάξεις. Το τμήμα ισχύος περιλαμβάνει το block της τροφοδοσίας, την ανορθωτική διάταξη, το block που υλοποιεί την πέδηση ( Braking ) και τέλος το block του αντιστροφέα.
30 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 29. Οι παλμοί ελέγχου, που είναι είσοδος στο block του αντιστροφέα, παράγονται από το τμήμα ελέγχου. Το τμήμα ελέγχου έχει είσοδο την ταχύτητα αναφοράς Ν * [rpm], και στο block Pulses Generator παράγονται οι παλμοί ελέγχου. Στις μετρητικές διατάξεις βλέπουμε τα αποτελέσματα της προσομοίωσης. Στο Σχήμα 2.11 διακρίνεται το block Το block αυτό δηλώνει ότι ο υπολογιστής εκτελεί τους υπολογισμούς που ορίζει το μοντέλο προσομοίωσης κάθε 1μsec, δηλαδή με ένα διακριτό βήμα 1μsec ή συχνότητα 1MHz. Επίσης στο πρόγραμμα Simulink υπάρχει η δυνατότητα κάποια block να εκτελούνται με διαφορετική συχνότητα από ότι στα υπόλοιπα block. Στις περιπτώσεις αυτές χρησιμοποιούνται διαφορετικές συχνότητες δειγματοληψίας. To block που φαίνεται παρακάτω ορίζει την εφαρμοζόμενη μηχανική ροπή στον άξονα του δρομέα. Υπάρχει η δυνατότητα να αλλάζει η τιμή της εφαρμοζόμενης ροπής κατά την διάρκεια της προσομοίωσης, δηλαδή να έχουμε διαταραχή ροπής Μετρητικές διατάξεις Τα παρακάτω blocks χρησιμοποιούνται στις μετρητικές διατάξεις για την γραφική αποτύπωση των μετρήσεων και τελικά έλεγχο των αποτελεσμάτων προσομοίωσης. Το block που φαίνεται παρακάτω χρησιμοποιείται για τη μέτρηση της τάσης (βολτόμετρο) και συνδέεται παράλληλα με τους αγωγούς που μεταφέρουν την ισχύ στον κινητήρα. Το block αντιστοιχεί σε παλμογράφο. Το παρακάτω block απεικονίζει την αριθμητική τιμή μιας μεταβλητής, π.χ της ταχύτητας κάθε χρονική στιγμή
31 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 30. Το block είναι φίλτρο το οποίο χρησιμοποιείται για την απεικόνιση στο παλμογράφο της θεμελιώδους αρμονικής της πολικής τάσης. Οι μετρητικές διατάξεις χρησιμοποιήθηκαν για την μέτρηση της ταχύτητας, της ροπής, του ρεύματος του στάτη και δρομέα, καθώς και της πολικής τάσης στους ακροδέκτες εξόδου του αντιστροφέα Τμήμα ελέγχου Στο τμήμα ελέγχου, που φαίνεται στο Σχήματος 2.12, αρχικά δίνεται η εντολή-command της ταχύτητας και στην συνέχεια δημιουργούνται οι αντίστοιχοι παλμοί ελέγχου, που οδηγούνται στις βάσεις των διακοπτών του αντιστροφέα, ώστε να παραχθεί η επιθυμητή τιμή της τάσης. Η είσοδος στο τμήμα ελέγχου είναι η ταχύτητα αναφοράς (block 1). Η ταχύτητα αναφοράς δίνεται σε rpm και στη συνέχεια μετατρέπεται σε per unit τιμή με ταχύτητα βάσης τις 1500rpm. Το σήμα εισέρχεται στο block 3, το οποίο υλοποιεί την ημιτονοειδή PWM διαμόρφωση και έχει έξοδο τους παλμούς ελέγχου που στέλνονται στις βάσεις των διακοπτών του αντιστροφέα. Σχήμα 2.12 Τμήμα ελέγχου. Εδώ παράγονται οι παλμοί ελέγχου που στέλνονται στις βάσεις των διακοπτών του αντιστροφέα. Στο Σχήμα 2.12 υπάρχει γεννήτρια παλμών ή διαφορετικά triggering παλμογεννήτρια (block 4) με περίοδο t=50μsec. Με τη βοήθεια της triggering παλμογεννήτριας πετυχαίνουμε το block Pulses Genarator να εκτελείται κάθε 50μsec. Με άλλα λόγια σε όλα τα υπόλοιπα blocks του μοντέλου προσομοίωσης οι υπολογισμοί γίνονται κάθε 1μsec, ενώ στο block Pulses Generator οι υπολογισμοί, που ορίζονται στο εσωτερικό του block, εκτελούνται κάθε 50μsec. Επιλέγουμε το block Pulses Generator να εκτελείται με χρόνο δειγματοληψίας 50μsec, για να προσομοιώσουμε όσο το δυνατόν τις συνθήκες της εργαστηριακής υλοποίησης. Συγκεκριμένα εκτιμούμε ότι θα απαιτείται υπολογιστικός χρόνος Δt= 50μsec ή διαφορετικά δειγματοληψία συχνότητας 20kHz, ώστε να παραχθούν από το ψηφιακό σύστημα οι πραγματικοί παλμοί ελέγχου.
32 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 31. Το πρόγραμμα προσομοίωσης, για να «αντιληφθεί» ότι κάποια block «τρέχουν» κάθε 50μsec και όχι κάθε 1μsec, όπως τα υπόλοιπα block του αρχείου, από το Simulation Configuration parameters επιλέγουμε Variable step. Στο Σχήμα 2.13 παρουσιάζει το εσωτερικό του block Pulses Generator, το οποίο υλοποιεί και την ημιτονοειδή PWM διαμόρφωση. Στο block αυτό κατασκευάζονται τα ημίτονα αναφοράς, το τριγωνικό φέρον σήμα και κατόπιν συγκρίνονται μεταξύ τους και παράγονται οι παλμοί ελέγχου. Οι είσοδοι στο block είναι η ταχύτητα αναφοράς Νr εκφρασμένη σε p.u (ταχύτητα βάσης 1500rpm) και το Clock_time. Σχήμα 2.13 Τμήμα ελέγχου που υλοποιεί την ημιτονοειδή διαμόρφωση PWM. Κατασκευή ημιτόνων αναφοράς Για να υλοποιήσουμε βαθμωτό έλεγχο με την ημιτονοειδή PWM διαμόρφωση, πρέπει να υπολογίσουμε το πλάτος και τη συχνότητα του ημιτόνου αναφοράς, που θα συγκριθεί με το τριγωνικό φέρον σήμα. Το τριγωνικό σήμα έχει πλάτος ίσο με την μονάδα. Συνεπώς, για να εκφράσουμε το συντελεστή διαμόρφωσης πλάτους m a, αρκεί να μεταβάλουμε αναλόγικά το πλάτος και την συχνότητα των ημίτονων αναφοράς, ώστε να υλοποιείται ο έλεγχος U S /f e. To ημίτονο αναφοράς που θα δημιουργηθεί δίνεται από τον τύπο: m sinω a e t. Όπως φαίνεται στο Σχήμα 2.13, η per unit τιμή της ταχύτητας αναφοράς ενισχύεται κατά την τιμή 2π*50, ώστε να δημιουργηθεί η επιθυμητή κυκλική συχνότητα ω e του ημιτόνου αναφοράς (π.χ για ταχύτητα αναφοράς 750rpm η κυκλική συχνότητα ω e =2πf e θα είναι ω e =2π =2π 25 rad/sec). Για να δημιουργηθεί ο όρος ω e t του ημιτόνου αναφοράς πολλαπλασιάζεται η είσοδος clock_time με τον όρο ω e, όπως φαίνεται στο Σχήμα 2.13.
33 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 32. Με το block εισάγεται η διαφορά φάσης 120 ο μοιρών μεταξύ των τριών ημιτόνων αναφοράς. O inverter πρέπει να έχει έξοδο τριφασική τάση και γι αυτό κάθε σκέλος του ελέγχεται από ένα ημίτονο αναφοράς, που έχει διαφορά φάσης από τα υπόλοιπα 120 ο μοίρες. Η κυκλική συχνότητα του ημιτόνου αναφοράς διαμορφώνεται ανάλογα με την ταχύτητα αναφοράς, όπως εξηγήθηκε προηγουμένως. Πρέπει όμως να ρυθμιστεί και το πλάτος του ημιτόνου αναφοράς αναλόγως της ταχύτητας αναφοράς. Θα αναφέρουμε ένα παράδειγμα για το πώς καθορίζεται το πλάτος του ημιτόνου αναφοράς. Όταν η ταχύτητα αναφοράς είναι π.χ 750rpm, η είσοδος Νr στο block Pulses Generator (Σχήμα 2.13) είναι 0.5 p.u. Η τιμή αυτή ορίζεται να είναι και το πλάτος του ημιτόνου αναφοράς. Αντίστοιχα για ταχύτητα αναφοράς π.χ 600rpm το πλάτος του ημιτόνου αναφοράς θα είναι 0.4 p.u. Συνεπώς το πλάτος του ημιτόνου αναφοράς μεταβάλλεται γραμμικά με την p.u τιμή της ταχύτητας αναφοράς. Όμως από την έχει βρεθεί ότι η γραμμική περιοχή μεταξύ της θεμελιώδους τάσης εξόδου και συντελεστή διαμόρφωσης πλάτους ισχύει έως την τάση 182V rms (συχνότητα 41.35Hz), δηλαδή ισχύει η γραμμική περιοχή μέχρι την ταχύτητα αναφοράς (41.35/50)*1500=1240,5 rpm για τετραπολικό κινητήρα. Στη μη γραμμική περιοχή το πλάτος της θεμελιώδους τάση εξόδου του αντιστροφέα δεν αυξάνεται γραμμικά με το m a (φαινόμενο κορεσμού), δηλαδή δεν ισχύει ο τύπος U S =m a V dc 2. Συνεπώς στη μη γραμμική περιοχή δεν ισχύει η αναλογία U S /f e που θέλουμε να πετύχουμε. Για να πετύχουμε να ισχύει η γραμμική σχέση U S /f e και για ταχύτητες μεγαλύτερες των 1240rpm, θα πρέπει να ενισχύεται η είσοδος Νr, δηλαδή να αυξάνεται το πλάτος του ημιτόνου αναφοράς, έτσι ώστε να «αντισταθμιστεί» το φαινόμενο κορεσμού. Τα παραπάνω επιτυγχάνονται με το Look up table του Σχήματος Σχήμα 2.14 Με την χρήση του παραπάνω Look up table ρυθμίζεται το πλάτος του ημιτόνου αναφοράς, ώστε να ισχύει η σχέση U S /f e. Το Look up table έχει είσοδο την τιμή Νr [Ταχύτητα αναφοράς(rpm) /1500] και έξοδο το πλάτος του ημιτόνου αναφοράς. Όπως περιγράφηκε προηγουμένως, πάνω από τις 1240rpm χάνεται η γραμμικότητα. Συνεπώς το block Look up table πρέπει να ενισχύσει με τέτοιο τρόπο την είσοδο, ώστε το πλάτος του ημιτόνου αναφοράς να έχει την κατάλληλη τιμή, ώστε να ισχύει η γραμμική σχέση U S /f e. Από τις 1240rpm έως τις 200rpm ισχύει η γραμμικότητα και συνεπώς το Look up table έχει σταθερή κλίση. Από τις 200rpm και κάτω, όπως φαίνεται, έχουμε
34 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 33. ενίσχυση και παύει να ισχύει η σχέση U S /f e, για να μην μειώνεται η τάση σε πολύ χαμηλά επίπεδα. Ειδικότερα στις μικρές ταχύτητες π.χ 200rpm, σύμφωνα με την αναλογία U S /f e η εφαρμοζόμενη τάση θα έπρεπε να είναι: U S =29.3V. Όμως η πτώση τάσης στην αντίσταση του στάτη είναι συγκρίσιμη με την τιμή 29.3V και συνεπώς μειώνεται σημαντικά η ηλεκτρεγερτική δύναμη, άρα και η μαγνητική ροή και συνεπώς και η ροπή στρέψης. Για να έχουμε αυξημένη τάση στις χαμηλές ταχύτητες, φροντίζουμε μέσω του block Look up table το πλάτος του ημιτόνου αναφοράς να έχει μεγαλύτερη τιμή, από ότι θα είχε αν ίσχυε αυστηρά ο λόγος U S /f e. Με τη διαδικασία που περιγράφηκε δημιουργείται το ημίτονο αναφοράς, το οποίο θα συγκριθεί με τριγωνική κυματομορφή του φέροντος σήματος. Δημιουργία τριγωνικής κυματομορφής Στο Σχήμα 2.15 φαίνεται η διάταξη που παράγει το τριγωνικό φέρον σήμα, που θα συγκριθεί με τα ημίτονα αναφοράς. Σχήμα 2.15 Διάταξη παραγωγής τριγωνικού φέροντος κύματος. Ειδικότερα η συνάρτηση rem (Remainder after division) υπολογίζει το υπόλοιπο της διαίρεσης του χρόνου της προσομοίωσης (clock time) προς τη σταθερά 1/1000, που καθορίζει την επιθυμητή περίοδο της τριγωνικής κυματομορφής. Για την συνάρτηση rem πιο αναλυτικά ισχύει η εξίσωση: REM(x,y) = x n y όπου n =fix(x./y), (όπου η συνάρτηση fix υπολογίζει το ακέραιο τμήμα του πηλίκου). Στο τμήμα ελέγχου, ο όρος x αντιστοιχεί στο χρόνο t (Clock time) και ο όρος y στην τιμή 1/1000. Όπως είναι εύκολα αντιληπτό η έξοδος της συνάρτησης rem θα κυμαίνεται από μηδέν 0 έως και 10-3 και θα επαναλαμβάνεται περιοδικά. Με ένα Look up table, δημιουργείται ο τριγωνικός παλμός συχνότητας 1kHz. Υπενθυμίζουμε ότι το ημίτονο αναφοράς πρέπει να είναι συγχρονισμένο με το φέρον σήμα, για να αποφεύγονται οι υποαρμονικές. Δηλαδή, όταν είναι μηδέν το ημίτονο αναφοράς, να είναι ταυτόχρονα μηδέν και η τιμή του φέροντος. Η απαίτηση αυτή ικανοποιείται από το τμήμα ελέγχου. Αρκεί να παρατηρηθεί στο Σχήμα 2.13, ότι τόσο για την δημιουργία των ημιτόνων αναφοράς όσο και του τριγωνικού φέροντος σήματος, χρησιμοποιείται από κοινού η είσοδος clock time. Έτσι τα δύο σήματα είναι συγχρονισμένα.

35 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 34. Δημιουργία παλμών ελέγχου Αφού δημιουργήθηκαν τα ημίτονα αναφοράς και το τριγωνικό φέρον, κατόπιν συγκρίνονται, όπως φαίνεται στο Σχήμα Τα αποτελέσματα της σύγκρισης των ημιτόνων αναφοράς και του φέροντος σήματος οδηγούνται στη διάταξη του Σχήματος Η έξοδος της διάταξης αυτής είναι οι τρεις παλμοσειρές (πλάτους από μηδέν έως τη μονάδα), που προκύπτουν από την σύγκριση των τριών ημιτόνων αναφοράς και του φέροντος σήματος. Σχήμα 2.16 Διάταξη η οποία παράγει τις τρεις παλμοσειρές που προκύπτουν από την σύγκριση των ημιτόνων αναφοράς και του φέροντος σήματος. Κατόπιν στο Σχήμα 2.13 ακολουθεί το block: Όπου εσωτερικά έχει ως εξής: Σχήμα 2.17 Από τους παλμούς ελέγχου που θα οδηγηθούν στο άνω σκέλος του αντιστροφέα δημιουργούμε τους παλμούς ελέγχου ( συμπληρωματικοίδιαφορά φάσης 180 ο ) που θα οδηγηθούν στους διακόπτες του κάτω σκέλους του αντιστροφέα. Στο block του Σχήματος 2.17 εισάγονται οι παλμοσειρές που παρήχθησαν από το block του Σχήματος 2.16, οι οποίες θα οδηγηθούν στους διακόπτες του άνω σκέλους του αντιστροφέα. Για το κάτω σκέλος του αντιστροφέα δημιουργούνται οι συμπληρωματικοί παλμοί (διαφορά φάσης 180 ο ), για να οδηγηθούν στους αντίστοιχους διακόπτες.
36 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 35. Ειδικότερα οι παλμοσειρές που παράγονται από την διάταξη στο Σχήμα 2.16 είναι φυσικά τεραγωνικοί με πλάτος ίσο με την μονάδα. Οι παλμοί αυτοί είναι δεδομένα τύπου double (πραγματικοί αριθμοί). Για να δημιουργήσουμε τους συμπληρωματικούς παλμούς, μετατρέπουμε την παλμοσειρά από τύπο double σε τύπο boolean και έπειτα με μια πύλη NOT εύκολα δημιουργούνται οι συμπληρωματικοί παλμοί ελέγχου (η πύλη NOT δέχεται μόνο δεδομένα τύπου boolean). Κατόπιν οι συμπληρωματικοί παλμοί μετατρέπονται από boοlean σε double. Έτσι παράγονται οι παλμοί ελέγχου που οδηγούν τον inverter και υλοποιούν τον βαθμωτό έλεγχο U S /f e Πέδηση-Braking Στο τμήμα ισχύος του Σχήματος 2.11 διακρίνουμε το block με την ονομασία Braking το οποίο υλοποιεί την λειτουργία της πέδησης και το εσωτερικό του φαίνεται στο Σχήμα 2.18 Η λειτουργία της πέδησης είναι απαραίτητη, ώστε η ηλεκτρική ισχύς που παράγεται από την απότομη μείωση της ταχύτητας του κινητήρα να καταναλώνεται στην αντίσταση δυναμικής πέδησης και να μην φορτίζει τον πυκνωτή. Ένα ηλεκτρονικό κύκλωμα ελέγχει την τάση του πυκνωτή και, όταν γίνει μεγαλύτερη από ένα όριο, άγει ο διακόπτης που είναι στην σειρά με την αντίσταση (Σχήμα 2.18) και έτσι το ρεύμα περνά από την αντίσταση. Σχήμα 2.18 Εσωτερικό του block της πέδησης.
37 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 36. Στο εσωτερικό του block Braking (Σχήμα 2.18) ο ελεγκτής Proportional controller έχει είσοδο την τάση στα άκρα του πυκνωτή. Όταν η τάση ξεπεράσει ένα όριο, ο ελεγκτής δίνει έξοδο μονάδα και άγει ο διακόπτης και έτσι το ρεύμα πού δημιουργήθηκε από την απότομη μείωση της ταχύτητας του κινητήρα περνά μέσω της αντίστασης. Όταν η τάση στον πυκνωτή μειωθεί ικανοποιητικά, ο ελεγκτής ανοίγει το διακόπτη και απενεργοποιείται η πέδηση. Το εσωτερικό του ελεγκτή Proportional controller φαίνεται στο Σχήμα Σχήμα 2.19 Ελεγκτής Proportional Controller που ρυθμίζει την λειτουργία της πέδησης. Ορισμένα block, όπως αυτό της πέδησης Braking, έχουν ένα παράθυρο διαλόγου με τον χρήστη μέσω του οποίου ορίζονται κάποιες παράμετροι του block. Για παράδειγμα, στο παράθυρο διαλόγου του block Braking, δίνονται οι επιθυμητές τιμές για να λειτουργήσει ο ελεγκτής Proportional controller. Συγκεκριμένα ορίζονται οι τάσεις ενεργοποίησης (chopa) και απενεργοποίησης (chopd) της πέδησης, η συχνότητα του chopper (trigerring παλμογεννήτρια στο Σχήμα 2.18.), η χωρητικότητα του πυκνωτή, και τέλος η αντίσταση πέδησης. Η τιμή της αντίστασης πέδησης δεν θα πρέπει να είναι πολύ μικρή, γιατί, όταν είναι ενεργοποιημένη η διάταξη της πέδησης, η τάση στα άκρα της (πάνω από 500V) θα έχει ως αποτέλεσμα το ρεύμα πέδησης να είναι πολύ μεγάλο. Αντίθετα δεν θα πρέπει να είναι ούτε πολύ μεγάλη, γιατί τότε το ρεύμα πέδησης θα είναι μικρό και δεν θα προστατεύεται ικανοποιητικά ο πυκνωτής. Γενικά η τιμή της αντίστασης πρέπει να επιλέγεται, ώστε η κατανάλωση της ενέργειας της πέδησης να γίνεται γρήγορα και με ασφαλή τρόπο. Επίσης η τιμή της εξαρτάται από την εφαρμογή και από τα ηλεκτρικά στοιχεία της διάταξης. Στο Σχήμα 2.19, όπου είναι το εσωτερικό του ελεγκτή, το block με την ονομασία relay, που φαίνεται στο παρακάτω σχήμα, υλοποιεί ουσιαστικά τον έλεγχο της πέδησης. Στο συγκεκριμένο block, αν η τάση ξεπεράσει ένα άνω όριο, έχει έξοδο 1 και ενεργοποιείται η πέδηση, μέχρι η τάση να μειωθεί σε ένα επιθυμητό επίπεδο τότε η έξοδός του block γίνεται μηδέν και απενεργοποιείται η πέδηση. Έπειτα η έξοδός του μετατρέπεται από πραγματικός αριθμός σε τύπου bollean και οδηγείται σε μια πύλη AND. Στο Σχήμα 2.19 το block με την ονομασία Ramp_generator έχει έξοδο τετραγωνικούς παλμούς συχνότητας 500Hz, οι οποίοι, αν η τάση ξεπεράσει το ανώτατο όριο, τότε οδηγούνται στην πύλη AND, όπως φαίνεται στο Σχήμα 2.19.
, ενώ η δεύτερη είναι μόνιμα ίση με την μονάδα.")
38 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 37. Συνεπώς, όταν είναι ενεργοποιημένη η πέδηση, στην πρώτη είσοδο της πύλης AND οδηγούνται τετραγωνικοί παλμοί (μοναδιαίου πλάτους), ενώ η δεύτερη είναι μόνιμα ίση με την μονάδα. Έτσι παράγονται τετραγωνικοί παλμοί συχνότητας 500Hz, οι οποίοι οδηγούνται στην βάση του ηλεκτρονικού-διακόπτη που ελέγχει την λειτουργία της πέδησης, όπως φαίνεται στο Σχήμα 2.18 (έτσι η πέδηση γίνεται με διακοπτική λειτουργία) Αποτελέσματα προσομοίωσης Όπως έχει αναφερθεί στην (σελ.30) το τμήμα ελέγχου εκτελείται με δειγματοληψία Δt=50μsec. Η κατάσταση αυτή επηρεάζει την διαδικασία παραγωγής του τριγωνικού φέροντος σήματος. Ειδικότερα για την κατασκευή του τριγωνικού σήματος χρησιμοποιούμε την συνάρτηση rem, η οποία εκτελεί ορισμένες μαθηματικές πράξεις, όπως έχει εξηγηθεί προηγουμένως (σελ33). Τα αποτελέσματα των μαθηματικών πράξεων χρησιμοποιούνται για την σύνθεση της επιθυμητής τριγωνικής κυματομορφής. Ειδικότερα η συνάρτηση rem εκτελεί έναν υπολογισμό κάθε Δt=50μsec. Επομένως σε χρονικό διάστημα 2msec (για τριγωνικό φέρον συχνότητας 500Hz) η συνάρτηση rem εκτελεί 40 υπολογισμούς, άρα και η κυματομορφή του φέροντος θα αποτελείται από 40 διακριτά «βήματα». Με την ίδια λογική ένα τριγωνικό φέρον συχνότητας 1kHz θα αποτελείται από 20 διακριτά βήματα. Όπως είναι εύκολα αντιληπτό, υπάρχει ένα άνω όριο στη συχνότητα του φέροντος που μπορεί να κατασκευαστεί, όταν έχουμε δειγματοληψία Δt=50μsec. Θα ήταν ιδανική κατάσταση, αν υπήρχε δυνατότητα το τμήμα ελέγχου να εκτελείται σε χρόνο Δt μικρότερο των 50μsec π.χ 5μsec. Στο Σχήμα 2.20 παρουσιάζονται οι τριγωνικές κυματομορφές που παράγονται από το μοντέλο προσομοίωσης για δειγματοληψία 50μsec.Ειδικότερα στο Σχήμα 2.20 βλέπουμε τριγωνικά φέροντα σήματα συχνοτήτων (α) 500 Ηz, (β)1 khz, (γ) 2.5 khz. (α) 500 Ηz
500ηz, (β)1khz, (γ)2.5 khz. Όπως βλέπουμε στο Σχήμα 2.")
39 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 38. (β) 1 khz (γ) 2.5 khz Σχήμα 2.20 Τριγωνικές κυματομορφές στο πρόγραμμα Simulink που χρησιμεύουν ως φέροντα σήματα για την ημιτονοειδή PWM διαμόρφωση με συχνότητες (α)500ηz, (β)1khz, (γ)2.5 khz. Όπως βλέπουμε στο Σχήμα 2.20, όσο μικρότερη είναι η συχνότητα του φέροντος, τόσο πιο ικανοποιητική είναι η κυματομορφή του φέροντος. Για συχνότητα 2.5kHz η παραγόμενη τριγωνική κυματομορφή δεν μπορεί να θεωρηθεί ως τριγωνική και είναι ακατάλληλη για την ημιτονοειδή PWM διαμόρφωση. Το τριγωνικό φέρον έχει ικανοποιητική τριγωνική κυματομορφή για συχνότητα έως 1kHz [Σχήμα 2.20(β)]. Τα παραπάνω οδηγούν στο συμπέρασμα εισάγεται περιορισμός στην συχνότητα του φέροντος και σχετική ανακρίβεια, λόγω της ψηφιακής δειγματοληψίας. Αν φυσικά ο χρόνος δειγματοληψίας ήταν μικρότερος, θα υπήρχε μεγαλύτερη ακρίβεια και θα πετυχαίναμε και μεγαλύτερες συχνότητες. Ωστόσο, για να επιτευχθούν μικρότεροι χρόνοι δειγματοληψίας η ψηφιακή διάταξη θα απαιτούσε πολύ μεγάλη συχνότητα στην κάρτα ελέγχου, με αποτέλεσμα το οικονομικό κόστος να είναι απαγορευτικό. Αυτό έχει ως αποτέλεσμα στα ψηφιακά συστήματα να μην μπορεί να δημιουργηθεί με ακρίβεια το τριγωνικό φέρον σήμα και τελικά η συχνότητα δειγματοληψίας του ελεγκτή να μην ξεπερνά την τιμή 1kHz. Συνέπεια είναι αυξημένες τιμές των αρμονικών, λόγω της χαμηλής τιμής της συχνότητας του φέροντος σήματος (Σχήμα 2.20). Στο Σχήμα 2.21 δίνονται ενδεικτικά οι διακοπτικές πολικές τάσεις εξόδου και οι αντίστοιχες θεμελιώδεις που παράγει ο αντιστροφέας, όταν δίνεται εντολή για ταχύτητες
 500 rpm για f c =1kHz, (β) 500rpm για f c =500Hz, (γ) 1500rpm για f c =1kHz (δ)1500 rpm για f c =500Hz.")
40 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση rpm και 1500rpm. Οι τάσεις εξόδου του Σχήματος 2.21 (α)-(δ) είναι για συχνότητες φέροντος 500Hz και 1kHz. Συγκεκριμένα: (α) 500 rpm για f c =1kHz, (β) 500rpm για f c =500Hz, (γ) 1500rpm για f c =1kHz (δ)1500 rpm για f c =500Hz. Στα παρακάτω διαγράμματα η κυμάτωση στην πολική διακοπτική τάση, οφείλεται στην κυματώση της dc τάσης εξόδου του ανορθωτή. (α) 500 rpm για f c =1kHz (γραμμική περιοχή). (β) 500rpm για f c =500Hz (γραμμική περιοχή). (γ) 1500rpm για f c =1kHz (υπερδιαμόρφωση).
 500 rpm για f c =1kHz (β) 500rpm για f c =500Hz (γραμμική περιοχή) (γ)")
41 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 40. (δ)1500 rpm για f c =500Hz (υπερδιαμόρφωση). Σχήμα 2.21 Αποτελέσματα προσομοίωσης: Διακοπτικές πολικές τάσεις και οι αντίστοιχες θεμελιώδεις για επιβαλλόμενες ταχύτητες αναφοράς (α) 500 rpm για f c =1kHz (β) 500rpm για f c =500Hz (γραμμική περιοχή) (γ) 1500rpm για f c =1kHz (δ) 1500 rpm για f c =500Hz (υπερδιαμόρφωση) Στην ημιτονοειδή PWM διαμόρφωση είναι προφανές ότι όσο μεγαλύτερη είναι η συχνότητα του φέροντος σήματος, τόσο περισσότερες θα είναι οι συγκρίσεις του ημιτόνου αναφοράς με την τριγωνική κυματομορφή και συνεπώς περισσότερες αλλαγές στην λειτουργική κατάσταση των διακοπτών. Δηλαδή η τάση εξόδου του αντιστροφέα θα αποτελείται από περισσοτέρους παλμούς τάσης, όταν η συχνότητα του φέροντος είναι μεγαλύτερη. Αυτό φαίνεται στο Σχήματα 2.21 (α) έως (δ). Για ταχύτητα αναφοράς 1500rpm (220V φασική rms), βρισκόμαστε στην περιοχή της υπερδιαμόρφωσης, όπου το πλάτος του ημιτόνου αναφοράς είναι μεγαλύτερο από αυτό το πλάτος του τριγωνικού παλμού. Έτσι η διακοπτική πολική τάση τείνει να γίνει τετραγωνική, όπως φαίνεται στο Σχήματα 2.21 (γ) και (δ). Παρόλα αυτά, επειδή η συνάρτηση του ημίτονου αναφοράς «περνά» από το μηδέν, γίνεται σύγκριση με το φέρον και για αυτό υπάρχει διακοπτική τάση εκατέρωθεν της τετραγωνικής. Όταν το φέρον είναι 1kHz η διακοπτική τάση εκατέρωθεν της τετραγωνικής είναι πιο έντονη απ ότι, όταν το φέρον είναι 500Hz. Η μέθοδος της ημιτονοειδούς PWM διαμορφώνει την επιθυμητή τάση σε διακοπτική τάση με τη βοήθεια του φέροντος σήματος. Όσο πιο υψηλή είναι η συχνότητα του φέροντος σήματος που διαμορφώνει την τάση, τόσο οι αρμονικές τάσης, που αναγκαστικά παράγονται, είναι σε μεγαλύτερές συχνότητες. Ο αρμονικές ρεύματος εξαλείφονται από την αυτεπαγωγή του κινητήρα και όσο μεγαλύτερο το φέρον, τόσο μικρότερο το πλάτος των αρμονικών του ρεύματος. Τα παραπάνω έχουν αναλυθεί στην Για τους λόγους που αναφέρθηκαν η μέγιστη ικανοποιητική συχνότητα του φέροντος τριγωνικού σήματος που μπορεί να παραχθεί για δειγματοληψία 50μsec είναι 1kHz, ενώ οι inverter (όπως και αυτός του εργαστηρίου) έχουν μέγιστη διακοπτική συχνότητα 10kHz. Αυτό άλλωστε αποτελεί και ένα σοβαρό μειονέκτημα, όταν χρησιμοποιείται ψηφιακός ελεγκτής για υλοποίηση μιας αναλογικής μεθόδου διαμόρφωσης, όπως η ημιτονοειδής PWM.
42 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση Πειραματική υλοποίηση βαθμωτού ελέγχου με ημιτονοειδή διαμόρφωση PWM Εισαγωγικά για την πειραματική υλοποίηση Για την πειραματική υλοποίηση χρησιμοποιήθηκε το τμήμα ελέγχου του μοντέλου προσομοίωσης και αντικαταστάθηκαν τα block του κινητήρα και του τμήματος ελέγχου από τα block επικοινωνίας της κάρτας dspace DS1104 με το κύκλωμα του αντιστροφέα ισχύος. Στο Παράρτημα Α υπάρχουν τα τεχνικά φυλλάδια των συσκευών που απαρτίζουν την πειραματική διάταξη. Το πρόγραμμα του τμήματος ελέγχου (πρόγραμμα Simulink) φορτώνεται στην κάρτα dspace DS1104. Η κάρτα έχει ως έξοδο παλμούς ελέγχου τάσης 0-5V. Μέσω ειδικής ηλεκτρονικής διάταξης (βλέπε Παράρτημα Α) το πλάτος του σήματος μετατρέπεται από 5V σε 15 V, γιατί το κύκλωμα ελέγχου του Inverter που χρησιμοποιήθηκε λειτουργεί με παλμούς ελέγχου πλάτους 15V.Ο Inverter, δεχόμενος τους κατάλληλους παλμούς, τροφοδοτεί τον κινητήρα με την επιθυμητή τάση. Η εποπτεία και οι ρυθμίσεις του κινητηρίου συστήματος γίνεται μέσω του υπολογιστή με την βοήθεια του προγράμματος Control desk της DSPACE κάρτας. Στο Παράρτημα Β παρουσιάζεται συνοπτικά η λειτουργία του Control desk. Ο κινητήρας που χρησιμοποιήθηκε έχει τα παρακάτω ονομαστικά στοιχεία: Ισχύς: 1.5kW Τάση αστέρα: 400V Τάση τριγώνου: 230V Ρεύμα αστέρα: 3.20Α Ρέύμα τριγώνου : 5.60Α Ονομαστική συχνότητα: 50Hz Ονομαστική ταχύτητα: 1450rpm cosφ : 0,8 Βάρος: 17kg Μέγιστη θερμοκρασία λειτουργίας: 40 ο C Βαθμός προστασίας: IP55 Λειτουργία : S1 (Συνεχής λειτουργία) Στον κινητήρα είναι κομπλαρισμένη γεννήτρια συνεχούς ρεύματος η οποία χρησιμοποιείται ως φορτίο στον άξονα του κινητήρα. Το μέγεθος του φορτίου ρυθμίζεται από το ρεύμα διέγερσης της γεννήτριας σε συνδυασμό με την εξωτερική αντίσταση R φ, που συνδέεται στο κύκλωμα οπλισμού της DC γεννήτριας. Η γεννήτρια συνεχούς ρεύματος είναι ανεξάρτητης διέγερσης και τα ονομαστικά στοιχεία της είναι τα παρακάτω
43 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 42. Ηλεκτρική ισχύς εξόδου:pe=1.2kw Μηχανική ταχύτητα: ω m =1400rpm Τάση εξόδου: Voν=220 V Διέγερση : 0.55Α στα 220V Η πειραματική διάταξη φαίνεται στο Σχήμα 2.22 Σχήμα 2.22 Πειραματική διάταξη με την οποία γίνεται έλεγχος του κινητήρα μέσω της κάρτας dspace DS1104. Ο κινητήρας είναι συνδεδεμένος σε συνδεσμολογία αστέρα. Για την πειραματική υλοποίηση του βαθμωτού ελέγχου με ημιτονοειδή PWM διαμόρφωση θα φορτωθεί στην κάρτα ελέγχου το τμήμα ελέγχου, που περιγράφηκε στην ενότητα (Σχήμα 2.13), με μερικές προσθήκες και τροποποιήσεις. Οι τροποποιήσεις αυτές γίνονται για να υπάρχει σύνδεση του προγράμματος Simulink, όπου έχει υλοποιηθεί το τμήμα ελέγχου-ελεγκτής, με την κάρτα καθώς και με το πρόγραμμα της κάρτας Control desk. Το Control desk είναι ο συνδετικός κρίκος του Simulink και της κάρτας και επιτρέπει στον χειριστή να ρυθμίζει τις παραμέτρους του ελεγκτή, να παρατηρεί, να παίρνει μετρήσεις και γενικά να εποπτεύει την λειτουργία της πειραματικής διάταξης. Για παράδειγμα, μέσω του Control desk δίνονται οι εντολές για αλλαγή στην ταχύτητα, ρυθμίζεται ο ρυθμός μεταβολής της ταχύτητας. Επίσης η κάρτα διαθέτει A/D μετατροπείς και μπορούμε να μετρούμε σήματα από εξωτερικές μετρητικές διατάξεις (π.χ LEM). Οι μετρήσεις απεικονίζονται στην οθόνη του H/Y μέσω του Control desk. Όπως θα δούμε στα επόμενα κεφάλαια, τα εξωτερικά σήματα θα εισαχθούν και θα αξιοποιηθούν από τον ελεγκτή.

44 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 43. Το τμήμα ελέγχου-ελεγκτής που θα φορτωθεί στην κάρτα, φαίνεται στο Σχήμα Η αρχή λειτουργίας του τμήματος ελέγχου είναι φυσικά ίδια με αυτή που περιγράφηκε στην προσομοίωση. Όπως φαίνεται στο Σχήμα 2.23, θα πρέπει να επιλέξουμε ο χρόνος λειτουργίας του αρχείου να είναι άπειρος (inf), δηλαδή συνεχή λειτουργία της διάταξης και η εκτέλεση External, δηλαδή ο κώδικας του αρχείου Simulink θα στέλνεται στην κάρτα και η εκτέλεση θα γίνεται σε εξωτερικό μέσο (η κάρτα dspace). Σχήμα 2.23 Τμήμα ελέγχου-ελεγκτής που παράγει παλμούς ελέγχου με την μέθοδο της ημιτονοειδούς διαμόρφωσης PWM και το οποίο θα φορτωθεί στην κάρτα. Επίσης, θα πρέπει να επιλεγεί από το μενού Simulation Configuration parameters. [όπως φαίνεται στο παράθυρο διαλόγου του Σχήματος 2.24(α)]. Με την επιλογή Build ο ελεγκτής φορτώνεται στην κάρτα. Αν ο χρήστης κάνει κάποια τροποποίηση στον ελεγκτή, π.χ προσθέσει κάποιο block ή αλλάξει την τιμή κάποιας μεταβλητής, τότε θα πρέπει να ξανακάνει την ίδια διαδικασία και να φορτώσει εκ νέου το τροποποιημένο πρόγραμμα ελεγκτή στην κάρτα. Όπως αναφέρθηκε προηγουμένως, ο ελεγκτής του Σχήματος 2.23 φορτώνεται στην κάρτα ελέγχου dspace DS1104. Με τη φόρτωση του προγράμματος στη κάρτα, τα block του ελεγκτή μεταφράζονται σε γλώσσα μηχανής και αποθηκεύονται στην εσωτερική μνήμη της κάρτας. Επίσης, από την στήλη Select και την επιλογή Solver, ο χρήστης έχει την δυνατότητα να ορίσει το χρόνο δειγματοληψίας [Σχήματος 2.24(β)].Στην περίπτωση της ημιτονοειδούς PWM διαμόρφωσης επιλέγουμε χρόνο δειγματοληψίας 50 μsec. O χρόνος δειγματοληψίας


45 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 44. αυτός είναι Fixed-step size (fundamental sample time). Εδώ πρέπει να σημειωθεί ότι οι πολύ μικροί χρόνοι είναι απαγορευτικοί, καθώς η κάρτα δεν μπορεί να εκτελέσει τους υπολογισμούς που απαιτεί το αρχείο-τμήμα ελέγχου λόγω των περιορισμών της συχνότητας λειτουργίας της κάρτας. Ακόμη, όσα περισσότερα block έχει το τμήμα ελέγχου, τόσο αυξάνεται ο υπολογιστικός χρόνος, με αποτέλεσμα να απαιτείται μεγαλύτερη περίοδος δειγματοληψίας. Υπενθυμίζεται ότι στην προσομοίωση, τοποθετήθηκε ξεχωριστή δειγματοληψία στο τμήμα ελέγχου, για να προσομοιάσουμε την κατάσταση που περιγράφεται παραπάνω. Σχήμα 2.24(α) Διαδικασία φόρτωσης του αρχείου Simulink στην κάρτα. Σχήμα 2.24(β) Διαδικασία φόρτωσης του αρχείου Simulink στην κάρτα.
46 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση Περιγραφή του ψηφιακού ελεγκτή Στο Σχήμα 2.23 βλέπουμε τον ψηφιακό ελεγκτή που θα φορτωθεί στην κάρτα dspace DS1104. Tα blocks στο Σχήμα 2.23 είναι τα ίδια με αυτά του τμήματος ελέγχου στο μοντέλο προσομοίωσης. Παρακάτω αναλύονται οι προσθήκες και τροποποιήσεις που έγιναν στον ελεγκτή, ώστε να μπορεί να λειτουργήσει στη πειραματική διάταξη. Στο Σχήμα 2.23, πάνω αριστερά φαίνεται το πλαίσιο με την ένδειξη RTI Data (Real Time Interface), που δηλώνει ότι το παραπάνω αρχείο Simulink δημιουργεί σε πραγματικό χρόνο κώδικα, o οποίος φορτώνεται στην κάρτα. Το block V/f Gates έχει τη ίδια λειτουργία με αυτή που περιγράφηκε στη προσομοίωση, με κάποιες προσθήκες και τροποποιήσεις. Ειδικότερα, το εσωτερικό του block V/f Gates φαίνεται Σχήμα 2.25 Σχήμα 2.25 Εσωτερικό του block V/f gates. Από εδώ στέλνονται οι παλμοί ελέγχου στην κάρτα. Το block V/f Gates είναι σχεδόν ίδιο με αυτό που περιγράφηκε στην προσομοίωση (Σχήμα 2.17). Όπως και στο μοντέλο προσομοίωσης, δημιουργούνται οι συμπληρωματικοί παλμοί κάθε φάσης, ώστε να σταλθούν στους διακόπτες του κάτω σκέλους του αντιστροφέα. Στον ελεγκτή της πειραματικής διάταξης έχουν τοποθετηθεί έξι διακόπτες, ένας για κάθε IGBT του αντιστροφέα. Ο διακόπτης-επιλογέας του παρακάτω σχήματος
47 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 46. λειτουργεί ως εξής: επιλεγεί να περάσει η πρώτη είσοδος, αν η δεύτερη είσοδος είναι μεγαλύτερη από μια τιμή-κριτήριο, που έχουμε ορίσει από το block του διακόπτη (στην περίπτωσή μας είναι 0.5). Αν η δεύτερη είσοδος δεν είναι μεγαλύτερη από την ορισμένη τιμήκριτήριο, τότε ο διακόπτης επιλέγει να περάσει η τρίτη είσοδος. Η δεύτερη είσοδος είναι δηλαδή ο ρυθμιστικός παράγοντας. Η παραπάνω διάταξη χρησιμοποιείται για να υλοποιηθεί διακόπτης on/off. Μέσω του Control desk ελέγχουμε την τιμή της σταθεράς on=1 & off=0, η οποία αποτελεί την δεύτερη είσοδο των έξι διακοπτών. Συνεπώς, όταν θέτουμε την σταθερά ίση με ένα, περνά η πρώτη είσοδος και, όταν την θέτουμε ίση με μηδέν, περνά η τρίτη είσοδος. Την τρίτη είσοδο την έχουμε ορίσει μηδέν και έτσι διακόπτεται η λειτουργία των IGBTs (κατάσταση off). Οι παλμοί που δημιουργούνται από τον ελεγκτή οδηγούνται στα block master bit out ds110bit_out_c0 έως C5. Tα block master bit out είναι o συνδετικός κρίκος του αρχείου Simulink και της κάρτας ελέγχου. Οι πραγματικοί παλμοί, που θα σταλθούν στις βάσεις των IGBTs, θα είναι οι αντίστοιχοι παλμοί των block master bit out. Το mater bit out είναι ειδικό block της κάρτας και δίνεται στη βιβλιοθήκη της κάρτας. Οι τιμές που έχουν τα master bit με κωδικό στο τέλος C_0 και C_1 στέλνονται στις βάσεις των IGBTs του πρώτου σκέλους του αντιστροφέα κ.ο.κ. Επιλέγουμε η είσοδος των block master bit out να είναι τύπου boolean, Στο Σχήμα 2.23,το block με την ονομασία ACD DS1104ACD_C7, που φαίνεται παρακάτω, αντιστοιχεί σε A/D μετατροπέα. Ειδικότερα εισάγει στον ελεγκτή τις τιμές που προσδιορίζουν οι μετρητικές διατάξεις τάσης και ρεύματος. Στο Σχήμα 2.23 μετά τον A/D converter ακολουθεί το block της πέδησης. Αυτό έχει ως είσοδο την μέτρηση της ανορθωμένης συνεχούς τάσης και το εσωτερικό του φαίνεται στο Σχήμα 2.26
48 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 47. Σχήμα 2.26 Εσωτερικό του block της πέδησης στο τμήμα ελέγχου που θα φορτωθεί στην κάρτα. Ο μετρητής τάσης έχει τάση εξόδου 10V για τάση μέτρησης 650V. Έτσι, αν για παράδειγμα η έξοδος του ανορθωτή V dc λάβει τιμή 650V, τότε η έξοδος του μετρητή είναι 10V και η τιμή του block του A/D στον ελεγκτή θα είναι 1. Ομοίως, αν η V dc είναι 325V, αντίστοιχα η έξοδος του Α/D θα είναι 0.5 κ.λπ. Γι αυτό το λόγο, για να έχουμε το πλάτος της V dc πολλαπλασιάζουμε την έξοδο του block του A/D με την τιμή 650, όπως φαίνεται στο Σχήμα Τέλος η έξοδος του block Braking (παλμοί που στέλνονται στην βάση ενός IGBT) οδηγείται στο block master bit out ds110bit_out_c7 (βλέπε Σχήμα 2.23). Μέσω του master bit out ds110bit_out_c7 στέλνονται παλμοί στη βάση του ηλεκτρονικού διακόπτη που ελέγχει τη πέδηση, όταν αυτό χρειαστεί. Στον ελεγκτή του Σχήματος 2.23 υπάρχει και ένας δεύτερος Α/D, ο οποίος εισάγει την μέτρηση της πολικής τάση του κινητήρα. Το σήμα που εισάγουμε δεν έχει κάποιο ενεργό ρόλο στο τμήμα ελέγχου, αλλά είναι σημαντικό να γίνεται παρακολούθησή του μέσω του Control desk Προβλήματα που παρατηρήθηκαν κατά την πειραματική υλοποίηση Στην κατασκευή του ψηφιακού ελεγκτή με ημιτονοειδή PWM διαμόρφωσης παρατηρήθηκαν τα παρακάτω προβλήματα τα οποία αντιμετωπίστηκαν με βελτιώσεις που έγιναν στις επόμενες διατάξεις. α) Η συχνότητα του φέροντος σήματος ήταν σταθερή 1 khz ώστε να δημιουργείται με ικανοποιητική ακρίβεια το τριγωνικό σήμα. Ωστόσο, η τιμή του συντελεστή διαμόρφωσης συντελεστής διαμόρφωσης συχνότητας m f δεν ήταν σταθερή και έπαιρνε διάφορες τιμές (ακόμη και δεκαδικές τιμές) με συνέπεια να προκαλείται έντονη παρουσία αρμονικών στην τάση εξόδου. β) Παρατηρήθηκε σοβαρό πρόβλημα στη δυναμική λειτουργία, δηλαδή κατά την αλλαγή της ταχύτητας του κινητήρα. Ειδικότερα, με την αλλαγή της ταχύτητας αναφοράς άλλαζε απότομα
49 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 48. τιμή της συχνότητας του ημίτονου αναφοράς με αποτέλεσμα να άλλαζε απότομα η ταχύτητα του κινητήρα και το μεταβατικό ήταν ιδιαίτερα έντονο. Για να αντιμετωπιστεί το πρόβλημα, αρχικά επιχειρήθηκε να τοποθετηθεί ράμπα, ώστε να γίνεται ομαλή η μετάβαση, από τη μια ταχύτητα στην άλλη. Παρόλα αυτά δεν αντιμετωπίστηκε το πρόβλημα, γιατί και η ράμπα είχε διακριτά βήματα μεταβολής 1. Για να αντιμετωπιστούν τα παραπάνω προβλήματα, έπρεπε να τροποποιήσουμε τον ελεγκτή-τμήμα ελέγχου, ώστε να έχουμε σταθερό m f καθώς και ομαλές μεταβολές στην ταχύτητα. Το βελτιωμένο τμήμα ελέγχου αρχικά κατασκευάστηκε και ελέγχθηκε στο πρόγραμμα προσομοίωσης Simulink και έπειτα ελέγχθηκε πειραματικά. 2.4 Προσομοίωση βαθμωτού ελέγχου με ημιτονοειδή PWM διαμόρφωση στο πρόγραμμα Simulink με βελτιωμένο τμήμα ελέγχου (Σταθερό m f ) Περιγραφή μοντέλου προσομοίωσης Το μοντέλο προσομοίωσης παραμένει ίδιο με αυτό που περιγράφηκε στην και το μόνο που αλλάζει είναι το τμήμα ελέγχου, που φαίνεται στο Σχήμα Τo τμήμα ελέγχου στο Σχήμα 2.27 σχεδιάστηκε για να αντιμετωπιστούν τα προβλήματα που περιγράφηκαν στην προηγούμενη ενότητα ( 2.3.3). Το πρόβλημα ήταν η ακαριαία μεταβολή του όρου ω e t του ημιτόνου αναφοράς σε κάθε αλλαγή της ταχύτητας αναφοράς. Η διαφορά στο νέο τμήμα ελέγχου σε σχέση με το αυτό του Σχήματος 2.23 είναι ότι ο όρος ω e t του ημιτόνου αναφοράς δημιουργείται με διαφορετικό τρόπο. Όπως αναφέρθηκε και στην ο όρος ω e t στο τμήμα ελέγχου του Σχήματος 2.23 προέκυπτε από το γινόμενο της κυκλικής συχνότητας ω e και του χρόνου t που λαμβανόταν από το block Clock. Στο τμήμα ελέγχου του Σχήματος 2.27, για να κατασκευαστεί ο όρος ω e t του ημιτόνου αναφοράς, εισέρχεται ένας ολοκληρωτής του παρακάτω σχήματος. Το παραπάνω block ολοκληρώνει ως προς το χρόνο την κυκλική συχνότητα (ω e ) και η έξοδος του είναι ο όρος ω e t, του ημιτόνου αναφοράς. 1 Όπως φαίνεται και στο Σχήμα 2.23, ο όρος ωe t του ημιτόνου αναφοράς προκύπτει από το γινόμενο του όρου t (clock time) και την κυκλική συχνότητα ω e, που την κατασκευάζουμε από το command της ταχύτητας. Τα δύο αυτά στοιχεία είναι μεταξύ τους ανεξάρτητα. Όταν άλλαζε η κυκλική συχνότητα ω e, έστω και με μικρά βήματα που εισήγαγε η ράμπα, το γινόμενο ω e t είχε ακαριαία μεταβολή. Για αυτό το λόγο άλλαζε ακαριαία και η θεμελιώδης εφαρμοζόμενη τάση στα άκρα του κινητήρα, που είχε συνέπεια να «χτυπά» στις μεταβολές της ταχύτητας.
50 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 49. Σχήμα 2.27 Τμήμα ελέγχου στην προσομοίωση το οποίο διατηρεί σταθερό το m f. Στο τμήμα ελέγχου του Σχήματος 2.27, για να δημιουργήσουμε το φέρον σήμα ώστε να είναι συγχρονισμένο με το ημίτονο αναφοράς, αξιοποιούμε τον όρο ω e t. Η συχνότητα του φέροντος θα είναι ίση με την συχνότητα του ημιτόνου αναφοράς πολλαπλασιασμένη με την τιμή 21. Με την χρήση της συνάρτησης mod δημιουργούμε μια κυματομορφή με συχνότητα ίση με αυτή που θα έχει το φέρον σήμα και έπειτα με το Look up table την μετατρέπουμε σε τριγωνική. Συγκεκριμένα η συνάρτηση mod : Modulus after division έχει δύο εισόδους την x και y και ισχύει: MOD(x,y) = x n y όπου n =floor(x./y) (2.9) Η συνάρτηση floor αποκόπτει τα δεκαδικά ψηφία του πηλίκου. Στην περίπτωσή του τμήματος ελέγχου στο Σχήμα 2.27 έχουμε είσοδο τον όρο x=21 ω e t ή x=21 f e 2πt και ο όρος y=2π. Η έξοδος της συνάρτησης mod είναι μια περιοδική συνάρτηση με συχνότητα 21 f e. Έπειτα διαιρείται με το 2π και αποκτά μοναδιαίο πλάτος. Κατόπιν με Look up table λαμβάνεται η επιθυμητή τριγωνική κυματομορφή. Με το παραπάνω τμήμα ελέγχου, επιτυγχάνεται να διατηρείται το m f σταθερό και μάλιστα σε επιθυμητή τιμή (περιττό πολλαπλάσιο του 3), ώστε οι αρμονικές της τάσης να μειώνονται στο ελάχιστο. Για παράδειγμα, αν η ταχύτητα αναφοράς είναι 1200rpm, που αντιστοιχεί σε τάση συχνότητας 40Hz, το φέρον τριγωνικό σήμα θα είναι 40 21=840Ηz. Η τιμή 21 επιλέχθηκε, γιατί στα 50Hz η συχνότητα του φέροντος είναι 21 50=1050Hz. Υπενθυμίζουμε ότι το τμήμα ελέγχου αδυνατεί να κατασκευάσει τριγωνικό φέρον για συχνότητες του φέροντος μεγαλύτερες της τάξης των 1kΗz (βλέπε σελ 37).

51 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση Αποτελέσματα προσομοίωσης Επειδή ο συντελεστής διαμόρφωσης συχνότητας m f είναι σταθερός η συχνότητα του φέροντος σήματος θα μεταβάλλεται ανάλογα με τη ταχύτητα αναφοράς. Όσο αυξάνει η συχνότητα αναφοράς αντίστοιχα αυξάνει η συχνότητα του φέροντος σήματος με αποτέλεσμα στις μεγάλες συχνότητες να μην σχηματίζεται σωστά το τριγωνικό φέρον σήμα στον ψηφιακό ελεγκτή και να δημιουργείται σημαντικό πρόβλημα στην υλοποίηση της PWM διαμόρφωσης. Επίσης μειώνεται σημαντικά η τάξη των αρμονικών τάσης στις χαμηλές ταχύτητες, λόγω της χαμηλής συχνότητας του φέροντος σήματος. Στο Σχήμα 2.28 βλέπουμε τα τριγωνικά φέροντα σήματα που προκύπτουν για ταχύτητες αναφοράς 500rpm,1000rpm, 1500rpm όπου είναι φανερή η διαφορά στις συχνότητες των αντιστοίχων τριγωνικών σημάτων. Για παράδειγμα, το πλάτος της κυματομορφής του φέροντος για ταχύτητα αναφοράς 1500rpm παίρνει τιμές από 0.85 έως 1, ενώ κάτι τέτοιο δεν ισχύει για την κυματομορφή που αντιστοιχεί για ταχύτητα αναφοράς 1000rpm. Στο τμήμα ελέγχου του Σχήματος 2.27, όταν η επιθυμητή ταχύτητα είναι 200rpm η θεμελιώδης συχνότητα της τάσης θα είναι (200/1500) 50=6,66Ηz. Συνεπώς το φέρον θα έχει συχνότητα μόλις 21 6,6=140Hz. Από τα παραπάνω συμπεραίνουμε ότι δεν θα υπήρχε το παραπάνω πρόβλημα αν ο συντελεστής διαμόρφωσης συχνότητας m f μπορούσε να έχει μεταβλητή τιμή, αλλά ακέραιη και περιττά πολλαπλάσια του 3 και μάλιστα να διασφαλίζονταν ώστε η συχνότητα του φέροντος σήματος να είναι τουλάχιστον 1kHz για όλες της ταχύτητες αναφοράς. Αυτό θα επιδιωχθεί στην επόμενη διάταξη, η οποία άλλωστε είναι και η καλύτερη δυνατή που μπορεί να επιτευχθεί με ημιτονοειδή PWM διαμόρφωση και χρήση τριγωνικού παλμού. Σχήμα 2.28 Τριγωνικό φέρον σήμα για ταχύτητες αναφοράς 500rpm 1000rpm 1500rpm.

52 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση Περιγραφή ψηφιακού ελεγκτή βαθμωτού ελέγχου με ημιτονοειδή PWM διαμόρφωση, όπου m f σταθερό Στο Σχήμα 2.29 παρουσιάζεται ο ελεγκτής που θα φορτωθεί στην κάρτα dspace και θα υλοποιήσει το νέο τμήμα ελέγχου που περιγράφηκε στην προηγούμενη ενότητα. Η αρχή λειτουργίας του ελεγκτή του Σχήματος 2.29 έχει περιγραφεί στην Το νέο στοιχείο είναι το block με την ονομασία Rate Limiter. Πρόκειται για ράμπα, για να έχουμε πιο ομαλές μεταβάσεις από την μια ταχύτητα στην άλλη. Το block Rate Limiter έχει είσοδο την ταχύτητα αναφοράς καθώς και τις σταθερές high και low, οι οποίες καθορίζουν τον ρυθμό (rpm/sec) με τον οποίο θα μεταβάλλεται η ταχύτητα. Με την προσθήκη του block Rate Limiter και του ολοκληρωτή, οι μεταβάσεις από την μια ταχύτητα στην άλλη δεν παρουσίαζαν κανένα πρόβλημα, όπως στην πρώτη περίπτωση ( 2.3.3).Συγκεκριμένα ελέγχθηκε η γωνία ω e t του ημιτόνου αναφοράς και σε συνδυασμό με την ράμπα Rate Limiter οι μεταβάσεις της ταχύτητας γινόντουσαν ομαλά. Ωστόσο, επειδή το τριγωνικό φέρον σήμα για ένα μεγάλο εύρος ταχυτήτων ήταν σε πολύ χαμηλά επίπεδα, δεν ήταν δυνατόν να υλοποιηθεί με ικανοποιητική ακρίβεια η αναλογία U S /f e (θυμίζουμε U S /f e =4.4). Για παράδειγμα, στη ταχύτητα αναφοράς 750rpm το τριγωνικό φέρον έχει συχνότητα μόλις 21 25Ηz =524Hz. Για να αντιμετωπιστεί το πρόβλημα έπρεπε να διατηρείται το φέρον σε υψηλή συχνότητα ανεξάρτητα της ταχύτητας. Για να επιτευχθεί αυτό, έπρεπε να αυξάνεται η τιμή του ενισχυτή m f για χαμηλές ταχύτητες αναφοράς. Αυτό επιτυγχάνεται στην διάταξη που παρουσιάζεται στην συνέχεια. Σχήμα 2.29 Τμήμα ελέγχου-ελεγκτής που υλοποιεί βαθμωτό έλεγχο με ημιτονοειδή διαμόρφωση PWM, όπου m f είναι σταθερό.
53 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση Προσομοίωση βαθμωτού ελέγχου με ημιτονοειδή διαμόρφωση PWM στο πρόγραμμα Simulink με βελτιωμένο τμήμα ελέγχου (Μεταβλητό m f ) Περιγραφή μοντέλου προσομοίωσης Όπως αναφέρθηκε στην 2.4, στο τμήμα ελέγχου του Σχήματος 2.27 η συχνότητα του φέροντος υπολογίζεται από το γινόμενο m f f e, όπου f e η θεμελιώδης αρμονική της τάσης και m f =21. Για τις χαμηλές τιμές της θεμελιώδους f e η συχνότητα του φέροντος είναι πολύ χαμηλή. Το m f δεν μπορεί να λάβει μεγαλύτερη τιμή από 21 γιατί, όπως έχει αναφερθεί στην 2.2.5, το άνω όριο της συχνότητας που μπορεί να παραχθεί είναι περίπου 1kΗz (η τιμή του m f είναι 21, αφού 21 50Hz =1050Ηz).Η λύση στο πρόβλημα που δημιουργείται από το σταθερό m f, είναι αν μεταβάλλεται το m f αναλόγως την f e που θα επιβληθεί, ώστε το γινόμενο m f f e να δίνει ικανοποιητική συχνότητα για το φέρον. Δηλαδή η τιμή του ενισχυτή με την ονομασία m f του σχήματος 2.27 να μην είναι σταθερή, αλλά να μεταβάλλεται αναλογικά με τη συχνότητα. Η σχέση των αρμονικών είναι f h =(jm f ±k) f e (εξίσωση 2.8), όπου f e η θεμελιώδης αρμονική της επιθυμητής ταχύτητας. Επομένως, για να είναι όσο το δυνατόν σε μεγαλύτερες συχνότητες οι αρμονικές, πρέπει για τις χαμηλές ταχύτητες-συχνότητες το m f να είναι μεγάλο. Συνεπώς θα πρέπει, όσο μειώνεται η ταχύτητα αναφοράς άρα και συχνότητα f e, το m f να αυξάνεται, και ταυτόχρονα, όταν αυξάνεται η ταχύτητα αναφοράς άρα και η συχνότητα f e, να μειώνεται το m f, ώστε να μην ξεπεράσει η συχνότητα του φέροντος το 1kΗz. Αυτή η νέα κατάσταση, όπου το m f και η f e παίρνουν τιμές αντιστρόφως ανάλογες, θα έχει ως συνέπεια το γινόμενο m f f e να έχει σχεδόν σταθερή τιμή. Επιθυμούμε το γινόμενο m f f e να λαμβάνει την μέγιστη τιμή, δηλαδή το φέρον να έχει συχνότητα περίπου 1kHz. Επίσης, οι τιμές του m f θα πρέπει να είναι περιττά πολλαπλάσια του τρία. Άρα μια περιοχή ταχυτήτων αναφοράς θα έχει m f =21, η επόμενη m f =27 κ.ο.κ. Η υλοποίηση του τμήματος ελέγχου στην προσομοίωση, όπου το m f μεταβάλλεται αναλογικά με τη συχνότητα φαίνεται στο Σχήμα Το επιπλέον στοιχείο σε σχέση με το τμήμα ελέγχου του Σχήματος 2.29, είναι ότι προστέθηκε το block με τίτλο m f (Σχήμα 2.31), το οποίο υλοποιεί την αναλογική μεταβολή του m f (έξοδος του block) με τη συχνότητα αναφοράς (είσοδος του block). Επίσης ο ενισχυτής m f έχει αντικατασταθεί από έναν πολλαπλασιαστή, πού έχει δυο εισόδους, τον όρο ω e t =2πf e και την υπολογισμένη τιμή του m f.
54 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 53. Σχήμα 2.30 Τμήμα ελέγχου στο πρόγραμμα προσομοίωσης που διατηρεί την συχνότητα του φέροντος σταθερή και το m f μεταβλητό- περιττό πολλαπλάσιο του 3. Σχήμα Εσωτερικό του block με την ονομασία m f.υπολογισμός m f αναλόγως την ταχύτητα αναφοράς. Παρακάτω περιγράφεται η λειτουργία του block με την ονομασία m f. Η είσοδος για τον υπολογισμό του m f είναι ο όρος 1/Νr επειδή θέλουμε να πετύχουμε μικρή τιμή εισόδου για μεγάλη ταχύτητα αναφοράς, ώστε να διατηρείται το m f μικρό για μεγάλες ταχύτητες και αντίστροφα. Ο ενισχυτής που ακολουθεί έχει τιμή Η τιμή αυτή επιλέχθηκε για τον εξής λόγο: Αρχικά από το τμήμα ελέγχου του Σχήματος 2.29, για ταχύτητα 1430rpm, m f =21 η συχνότητα του φέροντος είναι σχεδόν 21 47,66 1kHz. Στο Σχήμα 2.31, όταν η ταχύτητα αναφοράς είναι 1430rpm, τότε γίνεται η διαίρεση 30030/1430, που έχει αποτέλεσμα 21. Συνεπώς αν η ταχύτητα αναφοράς είναι μικρότερη, το m f θα είναι μεγαλύτερο.

55 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 54. Για να πετύχουμε ώστε το m f να είναι περιττό πολλαπλάσιο του 3, ακολουθούμε τη παρακάτω διαδικασία υπολογισμών Η διαίρεση 30030/Νr έχει αποτελέσματα πραγματικούς αριθμούς και συνεπώς στο πηλίκο της διαίρεσης με το 3 και έπειτα με το block uιnt8 αποκόπτονται τα δεκαδικά ψηφία του πηλίκου. Έτσι, ο ακέραιος που προκύπτει πολλαπλασιάζεται με το 3 με αποτέλεσμα το m f είναι πάντα πολλαπλάσιο του 3. Υπάρχει περίπτωση το πολλαπλάσιο του 3 να είναι άρτιος αριθμός. Στη περίπτωση αυτή μετατρέπεται στον επόμενο περιττό αριθμό, δηλαδή αν είναι 24 γίνεται 27. Αυτό υλοποιείται μέσω του διακόπτη Switch. Έτσι, αν η τιμή m f του που υπολογίστηκε είναι περιττός αριθμός, τότε η διαίρεση με το δύο θα έχει ως αποτέλεσμα το πηλίκο να είναι δεκαδικός αριθμός (π.χ 27/2=13.5). Το δεκαδικό ψηφίο του αριθμού αυτού αποκόπτεται από το block uint8. Το αποτέλεσμα του πολλαπλασιασμού με το 2 που ακολουθεί είναι να παραχθεί ο αμέσως προηγούμενος άρτιος αριθμός. Έτσι η έξοδος του διακόπτη Switch είναι πάντοτε περιττός αριθμός. Από τα παραπάνω προκύπτει ότι αν μια περιοχή ταχυτήτων έχει m f =21, οι αμέσως πιο χαμηλές θα έχουν m f =27 κ.ο.κ. Αποτέλεσμα αυτής της μεθόδου είναι να έχουμε φέρον κύμα που κυμαίνεται γύρω από τα 1kΗz ανεξάρτητα από την επιβαλλομένη ταχύτητα. Για παράδειγμα για ταχύτητα αναφοράς είναι 500rpm (η θεμελιώδης συχνότητα είναι 16,66Ηz) το m f =63 άρα η συχνότητα του φέροντος f c = =1049Hz, ομοίως για ταχύτητα αναφοράς 550rpm (η θεμελιώδης συχνότητα είναι 20Ηz) το m f =57 άρα η συχνότητα του φέροντος f c = =1.045Hz και για 1500rpm η θεμελιώδης είναι 50Ηz, το m f =21, άρα η συχνότητα του φέροντος f c =50 21=1.050Hz. Με άλλα λόγια η συχνότητα του φέροντος σήματος κυμαίνεται γύρω από τη συχνότητα 1 khz με m f περιττό πολλαπλάσιο του Αποτελέσματα προσομοίωσης Στο Σχήμα 2.32 φαίνονται τα φέροντα σήματα για ταχύτητες αναφοράς 550rpm, 1000rpm και 1500rpm. Συγκρίνοντας το σχήμα αυτό με το Σχήματος 2.28 παρατηρούμε ότι η συχνότητα του φέροντος σήματος είναι σχεδόν σταθερή (περίπου 1 khz) για όλες τις ταχύτητες αναφοράς. Σχήμα 2.32 Αποτελέσματα προσομοίωσης: Τριγωνικές κυματομορφές του φέροντος ( 1kHz) για ταχύτητες αναφοράς (550rpm, 1000rpm, 1500rpm).

56 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση Πειραματική υλοποίηση βαθμωτού ελέγχου με ημιτονοειδή PWM διαμόρφωση, όπου m f μεταβλητό (m f περιττό πολλαπλάσιο του 3) Περιγραφή ψηφιακού ελεγκτή Στο Σχήμα 2.33 φαίνεται ο ελεγκτής που θα φορτωθεί στην κάρτα dspace και θα υλοποιήσει το νέο τμήμα ελέγχου που περιγράφηκε στην Φυσικά η μόνη διαφορά με τον ελεγκτή του Σχήματος 2.29 είναι η διαδικασία κατασκευής του φέροντος σήματος. Πολύ σημαντικό block του ψηφιακού ελεγκτή είναι το Look up table, έτσι ώστε ο αντιστροφέας να τροφοδοτεί τον κινητήρα με την επιθυμητή τάση. Όπως έχει αναλυθεί στην το Look up table ρυθμίζει το πλάτος του ημιτόνου αναφοράς και έχει ενεργό ρόλο μόνο στη μη γραμμική περιοχή. Για τιμές της ταχύτητας από 300rpm έως 1200rpm, η ενίσχυση είναι μονάδα. Για παράδειγμα αν η ταχύτητα αναφοράς είναι 750rpm (25Hz) η τάση εξόδου του αντιστροφέα ήταν ακριβώς 110V και το Look up Table δεν ενισχύει το πλάτος του ημιτόνου αναφοράς. (βρισκόμαστε στην γραμμική περιοχή). Αν όμως βρισκόμαστε στη μη γραμμική περιοχή, το Look up table ενισχύει το πλάτος του ημιτόνου αναφοράς. Η ενίσχυση που εισάγει το block Look up table ρυθμίστηκε, ως εξής: αν π.χ η ταχύτητα αναφοράς είναι 1250rpm, η τάση του αντιστροφέα πρέπει να είναι 186.3V. Αν νοητά αφαιρέσουμε το Look up table, και έχουμε μόνο με τον ενισχυτή ma_boost (βλέπε Σχήμα 2.33) με κέρδος μονάδα, το σύστημά μας δίνει τάση 183V. Αν το κέρδος του ενισχυτή ma_boost μεταβληθεί από 1 σε 1.03, τότε η τάση εξόδου του αντιστροφέα είναι 186V. Έτσι βρήκαμε πόσο πρέπει να ενισχύσουμε την τάση για ταχύτητες από 1200rpm έως 1250rpm. Ομοίως για τις ταχύτητες έως 1500rpm. Έτσι κατασκευάστηκε το Look up Table. Στις χαμηλές ταχύτητες <300rpm φροντίζουμε να δίνεται παραπάνω τάση από ότι ορίζει η αναλογία U S /f e, για να μην εμφανίζονται φαινόμενα μειωμένης τάσης. Σχήμα 2.33 Ελεγκτής πουι υλοποιεί βαθμωτό έλεγχο με ημιτονοειδή διαμόρφωση PWM για μεταβαλλόμενο m f (m f :περιττό πολλαπλάσιο του 3) Σ

57 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση Πειραματικά αποτελέσματα Όπως περιγράψαμε παραπάνω, το φέρον είναι πάντα κοντά σε τιμές των 1kHz, ανεξάρτητα της ταχύτητας αναφοράς και ο συντελεστής m f είναι πάντα περιττό πολλαπλάσιο του 3. Παρακάτω δίνονται οι κυματομορφές του ημιτόνου αναφοράς καθώς και του τριγωνικού φέροντος που χρησιμοποιήθηκαν από τον ελεγκτή του Σχήματος 2.34, ώστε να παραχθούν οι παλμοί ελέγχου. Στο Σχήμα 2.34 για ταχύτητα αναφοράς 750rpm βλέπουμε τα αντίστοιχο φέρον και ημίτονο αναφοράς Παρατηρούμε στο Σχήμα 2.34 ότι, τη στιγμή που το ημίτονο αναφοράς γίνεται μηδέν, τότε και το τριγωνικό φέρον είναι επίσης μηδέν. Άρα έχουμε συγχρονισμένη διαμόρφωση. Επίσης παρατηρούμε στο Σχήμα 2.34 ότι η τιμή του πλάτους του φέροντος σήματος δεν είναι σταθερή, αλλά έχει μια μικρή διακύμανση. Η αιτία αυτού οφείλεται στη ψηφιακή (δειγματοληπτική) υλοποίηση του. Τέλος, στο Σχήμα 2.35 βλέπουμε πως μεταβάλλεται το ημίτονο αναφοράς σε αλλαγή της ταχύτητας αναφοράς από 750rpm σε 1000rpm, ώστε η μετάβαση να γίνεται ομαλά. Σχήμα 2.34 Ημίτονο αναφοράς και τριγωνικό φέρον που δημιουργεί ο ψηφιακός ελεγκτής, ώστε να παραχθούν παλμοί ελέγχου για ταχύτητα αναφοράς 750rpm.

58 Έλεγχος κινητήρα με ημιτονοειδή PWM διαμόρφωση. 57. Σχήμα 2.35 Μεταβάλλή του ημιτόνου αναφοράς σε αλλαγή της ταχύτητας αναφοράς από 750rpm σε 1000rpm.
59 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector Στο κεφάλαιο 3 αρχικά γίνεται εισαγωγή στη θεωρία του αντιστροφέα διαμόρφωσης διανύσματος χώρου-space Vector. Κατόπιν αναλύεται το μοντέλο προσομοίωσης, ο τρόπος παραγωγής των παλμών ελέγχου για βαθμωτό έλεγχο με την διαμόρφωση Space Vector και αναλύονται τα αποτελέσματα που προκύπτουν. Τέλος γίνεται περιγραφή του ψηφιακού ελεγκτή που υλοποιεί την Space Vector PWM διαμόρφωση και παρουσιάζονται τα αποτελέσματα της πειραματικής υλοποίησης.
60 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector Θεωρία αντιστροφέα ισχύος διαμόρφωσης διανύσματος χώρου Space Vector Η διαμόρφωση διανύσματος χώρου (space vector modulation) βασίζεται στον έλεγχο της θέσης του διανύσματος χώρου της τάσης, ελέγχοντας την λειτουργική κατάσταση (αγωγή- ON/σβέση-OFF) των ηλεκτρονικών διακοπτών. Η τεχνική αυτή διαφέρει από τις προηγούμενες στο γεγονός ότι δεν γίνεται χωριστή διαμόρφωση για κάθε μια από τις φάσεις. Αντίθετα, η διαμόρφωση γίνεται στο διάνυσμα χώρου της τάσης και είναι κοινή για τις τρεις φάσεις. Επίσης, δεν απαιτείται η σύγκριση του σήματος αναφοράς με τριγωνικό φέρον σήμα γι αυτό και χαρακτηρίζεται ως carrierless modulation. Στον αντιστροφέα του Σχήματος 3.1(α), οι τάσεις V A0, V B0 και V C0 είναι οι τάσεις εξόδου του αντιστροφέα στους ακροδέκτες A, B και C ως προς την αρνητική dc-τάση εισόδου. Οι τάσεις αυτές καθορίζονται από τη λειτουργική κατάσταση των ηλεκτρονικών διακοπτών. Για παράδειγμα, η τάση V A0 καθορίζεται από τη λειτουργική κατάσταση των ηλεκτρονικών διακοπτών Τ 1 και Τ 4 ή με άλλα λόγια τη λειτουργική κατάσταση ενός διακόπτη S A με δυνατές τιμές 1 και 0, όπως δίνονται στον Πίνακα 3.1. Όταν η κατάσταση του διακόπτη S A είναι 1, ο Τ 1 άγει και ο Τ 4 είναι ανοικτός, ενώ αντίθετα όταν η κατάσταση του διακόπτη S A είναι 0, ο Τ 1 είναι ανοικτός και ο Τ 4 άγει. Ομοίως μπορούν να καθοριστούν οι καταστάσεις των διακοπτών S B και S C για τις άλλες δύο φάσεις. Έτσι, το κύκλωμα του αντιστροφέα μπορεί να παρουσιαστεί χρησιμοποιώντας τους τρεις διακόπτες S A, S B και S C, όπως δίνεται στο Σχήμα 3.1(β). Οι πολικές τάσεις μεταξύ των φάσεων είναι V ΑΒ = V AO V BO (3.1) V ΒC = V BO V BO (3.2) V CΑ = V CO V AO (3.3)
61 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 60. Σχήμα 3.1 Τριφασικός αντιστροφέας ισχύος: (α) σχέδιο µε τους ηλεκτρονικούς διακόπτες Τ1έως Τ6 και (β)σχέδιο µε τους συµβολικούς διακόπτες SA, SB και SC. και οι φασικές τάσεις για συµµετρικό τριφασικό σύστημα ( V A +V B +V C =0) είναι V A VAB VCA = (3.4) 3 V B VBC VAB = (3.5) 3 Χρησιμοποιώντας την εξίσωση του μετασχηματισμού Park, V C VCA VBC = (3.6) 3 οι εξισώσεις των τάσεων στο ακίνητο σύστημα αξόνων αναφοράς q S d S δίνονται από τις σχέσεις
62 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 61. V = V (3.7) s sq A V s sd VC VB = (3.8) 3 V s sd V A 2V = B (3.9) 3 Σχήμα 3.2 Οκτώ (8) συνδυασµοί λειτουργικών καταστάσεων των συμβολικών διακοπτών, SA, SB και SC. Στο Σχήμα 3.2 παρουσιάζονται οι οκτώ (8) δυνατοί συνδυασμοί λειτουργικών καταστάσεων των ηλεκτρονικών διακοπτών Τ 1 έως Τ 6 και στον Πίνακα 3.2 δίνονται οι συνδυασμοί τιμών των συμβολικών διακοπτών S A, S B και S C, οι αντίστοιχες τιμές των φασικών και πολικών τάσεων καθώς και οι τάσεις στο σύστημα q s d s. Υπάρχουν έξι (6) καταστάσεις που δίνουν μη-μηδενικές τάσεις εξόδου (Σχήμα 3.2 (α) έως (στ) και δύο (2)
63 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 62. καταστάσεις στις οποίες οι τάσεις εξόδου είναι μηδέν (Σχήμα 3.2 (ζ) και (η)). Η κάθε μια από αυτές τις καταστάσεις αντιστοιχεί σε διαφορετική θέση του διανύσματος χώρου της τάσης, όπως φαίνεται στο Σχήμα 3.3. Οι έξι ενεργές καταστάσεις ( u 1 έως u 6 ) αντιστοιχούν σε θέσεις του διανύσματος χώρου της τάσης που προσδιορίζεται από την έκφραση και δίνουν μη-μηδενικές τάσεις, ενώ στις καταστάσεις για k = 0, 7 τα τυλίγματα του κινητήρα είναι βραχυκυκλωμένα και συνεπώς οι καταστάσεις αυτές δίνουν μηδενικές τάσεις, δηλαδή u = u = π π 2 j ( k 1) u k = Vdce για k= 1,2,,6 (3.10) 3 Παρατηρούμε ότι οι έξι ενεργές καταστάσεις ( u 1 έως u 6 ) σχηματίζουν ένα εξάγωνο και οι δύο πλευρές κάθε τριγώνου του εξαγώνου αυτού αντιστοιχούν σε δύο καταστάσεις του αντιστροφέα, όπου στη μία κατάσταση είναι κλειστοί (ΟΝ) δύο διακόπτες του επάνω τμήματος
64 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 63. του αντιστροφέα ενώ στην άλλη κατάσταση είναι κλειστοί (ΟΝ) δύο διακόπτες του κάτω τμήματος του αντιστροφέα. Επίσης, παρατηρούμε ότι αν η εναλλαγή των καταστάσεων είναι διαδοχική ακολουθώντας το εξάγωνο του Σχήματος 3.3, τότε σε κάθε εναλλαγή θα έχουμε αλλαγή της κατάστασης μόνο σε δύο διακόπτες του αντιστροφέα, δηλαδή θα αλλάζουν κατάσταση οι δύο διακόπτες ενός σκέλους (μιας φάσης) του αντιστροφέα. Τα έξι τρίγωνα του Σχήμα 3.3 Διανύσματα χώρου τάσης στο ακίνητο σύστημα συντεταγμένων. εξαγώνου ονομάζονται τομείς (sectors). Έτσι, αν για παράδειγμα έχουμε εναλλαγή καταστάσεων στον τομέα 1, δηλαδή έχουμε εναλλαγή από την u 1 στην u 2 τότε αλλάζει κατάσταση μόνο ο συμβολικός διακόπτης S B (Σχήμα 3.2, από S B =0 γίνεται S B =1), δηλαδή αλλάζουν κατάσταση οι ηλεκτρονικοί διακόπτες Τ 2 και Τ 5 (στην u 1 ήταν Τ 2 =OFF και T 5 =ON και στη κατάσταση u 2 γίνονται Τ 2 =ON και T 5 =OFF). Από τα παραπάνω προκύπτει το συμπέρασμα ότι, για να έχουμε τη μικρότερη δυνατή διακοπτική συχνότητα f s, (ή αντίστοιχα τη μεγαλύτερη δυνατή περίοδο δειγματοληψίας T S για τον έλεγχο των διακοπτών, όπου Ts = 1/(2 fs ) ) θα πρέπει η εναλλαγή των καταστάσεων να είναι της μορφής ( u k, u k+ 1 ), δηλαδή μετακίνηση της λειτουργίας διαδοχικά από το ένα τρίγωνο στο άλλο. Έτσι, για να πετύχουμε, ώστε η μέση τιμή του διανύσματος χώρου της τάσης να είναι ίση με το σήμα αναφοράς θα πρέπει να επιλεγούν τα χρονικά διαστήματα όπου θα εφαρμόζονται οι κατάλληλες λειτουργικές καταστάσεις. Δηλαδή ανάλογα σε ποιο τομέα βρίσκεται το διάνυσμα χώρου αναφοράς, θα πρέπει να καθοριστεί πόσο χρόνο της περιόδου δειγματοληψίας T S θα πρέπει να λειτουργεί η κατάσταση u k, πόσο η u k+ 1 καθώς επίσης πόσο χρόνο θα πρέπει η τάση να είναι μηδέν, δηλαδή πόσο χρόνο θα καταλαμβάνει κάποια από τις δύο μη-ενεργές καταστάσεις. Επειδή επιδιώκουμε να έχουμε χαμηλές αρμονικές ρεύματος, θα πρέπει οι μηδενικές καταστάσεις να προηγούνται ή να ακολουθούν
65 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 64. τις ενεργές καταστάσεις. Προτιμούμε η κατάσταση u 0 να προηγείται ή να ακολουθεί των u 1, u 3 και u 5, ενώ η κατάσταση u 7 να προηγείται ή να ακολουθεί των καταστάσεων u 2, u 4 και u 6, ώστε να ικανοποιείται το κριτήριο της μικρότερης διακοπτικής συχνότητας. Έτσι, αν για παράδειγμα, αν το διάνυσμα χώρου αναφοράς της τάσης είναι μέσα στον τομέα 1, η εναλλαγή καταστάσεων θα είναι u 0 u 1 u 2 u 7 αν είναι στο τομέα 2, η εναλλαγή των καταστάσεων θα είναι u 7 u 2 u 3 u 0 κλπ. Για να προσδιοριστούν τα χρονικά διαστήματα που καταλαμβάνει η κάθε κατάσταση μέσα σε μια περίοδο δειγματοληψίας T S, θα εξετάσουμε ενδεικτικά τη περίπτωση όπου το * διάνυσμα χώρου αναφοράς u s βρίσκεται μέσα στον τομέα 1 (Σχήμα 3.4). Αν t α είναι το διάστημα που καταλαμβάνει η κατάσταση u 1, t b το διάστημα που καταλαμβάνει η κατάσταση u 2 και t0 /2 = ( Ts ta tb)/2 είναι το διάστημα που καταλαμβάνει η κάθε μια από τις δύο μη-ενεργές καταστάσεις u 0 και u 7, έχουμε Ts t0/2 ta tb t0/2 * s = u dt u dt udt u dt u dt (3.11) Αν θεωρήσουμε ότι το διάνυσµα χώρου αναφοράς us * είναι σταθερό κατά τη διάρκεια της περιόδου Ts τότε από την εξίσωση (3.11) προκύπτει ή * ja t ref 0 t0 us e Ts = u0 + u1ta + u2tb + u 7 (3.12) 2 2 * ja ref s e Ts = 1ta + 2tb + 0t0 u u u u (3.13) ή t t u u u (3.14) * ja ref a b s e = Ts Ts αφού u 0 = u 7, όπου * * j a ref * * s = s e = usd + jusq u u (3.15) και α ref = ω r t (3.16)
66 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 65. Σχήμα 3.4 Διανύσµατα χώρου τάσης στο ακίνητο σύστημα συντεταγμένων. Το διάνυσµα χώρου αναφοράς είναι στον τοµέα 1. Στην εξίσωση (3.12), η περίοδος δειγματοληψίας T S θα είναι T S =t α +t b +t o (3.17) Από την (3.14) προκύπτει ότι το διάνυσµα χώρου της τάσης αναφοράς u είναι το άθροισμα των δύο διανυσμάτων χώρου u 1 ( ta / Ts) και u 2 ( tb / Ts), όπως άλλωστε φαίνεται στο Σχήμα 3.4. Με άλλα λόγια το διάνυσµα χώρου αναφοράς είναι το άθροισμα των δύο διανυσµάτων χώρου των δύο πλευρών του τριγώνου του τοµέα μέσα στον οποίον βρίσκεται το διάνυσµα χώρου αναφοράς, πολλαπλασιασμένα επί ένα ποσοστό της περιόδου δειγματοληψίας. Συνεπώς, για να δηµιουργήσουµε ένα διάνυσµα χώρου τάσης ίσο µε το διάνυσµα αναφοράς, θα πρέπει να ξέρουμε τον τοµέα, στον οποίο βρίσκεται το διάνυσµα αναφοράς, και να ρυθµίσουµε τα ποσοστά χρόνων (duty cycles) t α / T S και t b / T S. Ή αντίστοιχα, ελέγχοντας τα ποσοστά χρόνων t α / T S και t b / T S των δύο γειτονικών λειτουργικών καταστάσεων μπορούμε να ρυθµίσουµε το διάνυσµα χώρου της τάσης εξόδου, ώστε να είναι ίσο µε το διάνυσµα αναφοράς. * s
67 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 66. Από τις εξισώσεις(3.14), (3.15) και (3.17) σε συνδυασμό µε την εξίσωση (3.10) * μπορούμε να υπολογίσουμε τους χρόνους t α, t b και t o ως προς τις δύο συνιστώσες u sd και u * sq. Δηλαδή, αν αντικαταστήσουμε τα π j 2 2 u 1 = Vdce (3.18) 3 5 j π 6 2 u 2 = Vdce (3.19) 3 στην εξίσωση (3.14) και χρησιμοποιώντας την (3.15) προκύπτει j a ref * * 2 * * 3 t b ta 1 t b us = u s e = usd + jusq = Vdc + j + (3.20) 3 2 Ts Ts 2Ts Σχήμα 3.5 Λειτουργικό διάγραµµα του ελεγκτή διαμόρφωσης διανύσµατος χώρου.
68 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 67. Από την παραπάνω εξίσωση προσδιορίζονται οι χρόνοι t α και t b των ενεργών καταστάσεων t 3 T cos s * aref = u sin a + (3.21) 2 Vdc 3 a s ref t a * 3 T s * u sd = usq + 2 Vdc 3 (3.22) T 3 s * 2 b = s cos aref 2 V dc 3 t u (3.23) t b 3 Ts 2 = u 2 V 3 dc ενώ ο χρόνος της μηδενικής τάσης είναι t o = T S - (t α +t b ) (3.25) Αν το διάνυσµα χώρου της τάσης αναφοράς βρίσκεται σε έναν από τους υπόλοιπους πέντε τομείς του εξαγώνου του Σχήματος 3.4, μπορούν, ακολουθώντας την ίδια διαδικασία όπως παραπάνω, να υπολογιστούν οι αντίστοιχοι χρόνοι των εκάστοτε δύο γειτονικών λειτουργικών καταστάσεων και ο χρόνος της μηδενικής τάσης. Έτσι δημιουργείται ένας πίνακας τιμών (look-up table) και από τις τιμές των δύο συνιστωσών u * * sd και u sq (αρκούν για να προσδιοριστεί ο τοµέας μέσα στον οποίο βρίσκεται το διάνυσµα αναφοράς) μπορούμε να καθορίσουμε τα (t α /T S ) και (t b /T S ). Στο Σχήμα. 3.5 δίνεται το λειτουργικό διάγραµµα του ελεγκτή µε διαμόρφωση διανύσµατος χώρου. Το διάνυσµα χώρου της τάσης αναφοράς μπορεί να δίνεται είτε µε βαθµωτό έλεγχο τάσης V/f είτε µε ανυσματικό έλεγχο τάσης (η τεχνική του ανυσματικού ελέγχου θα παρουσιαστεί στη συνέχεια). Από τις τιμές των δύο συνιστωσών u * sd και u * sq του διανύσµατος χώρου αναφοράς και µέσω του πίνακα τιμών προσδιορίζονται τα t α /T S και t b / T S και στη συνέχεια οι παλμοί ελέγχου των διακοπτών ισχύος. Στο Σχήμα 3.6(α) παρουσιάζονται οι παλμοί ελέγχου για τους τρεις διακόπτες του επάνω τµήµατος του αντιστροφέα ισχύος (T1, Τ2 και Τ3), όπου φαίνονται και τα διαστήματα που καταλαμβάνει η κάθε κατάσταση λειτουργίας στη διάρκεια μιας περιόδου δειγματοληψίας T S, όταν το διάνυσµα αναφοράς είναι μέσα στο τοµέα 1. Στο Σχήμα 3.6(β) παρουσιάζονται οι παλμοί ελέγχου των τριών επάνω διακοπτών, όταν το διάνυσµα της τάσης αναφοράς είναι μέσα στον τοµέα 2, κλπ. Σε κάθε περίπτωση, οι παλμοί των διακοπτών του κάτω τµήµατος του αντιστροφέα (T4, Τ5 και Τ6) θα είναι αντίθετοι µε τους παλμούς των διακοπτών του επάνω τµήµατος του αντιστροφέα (T1, Τ2 και Τ3, αντίστοιχα). * sd (3.24)
69 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 68. (α) (β) Σχήμα 3. 6 Παλμοί ελέγχου των διακοπτών του επάνω τµήµατος του αντιστροφέα ισχύος µε διαµόρφωση διανύσµατος χώρου, όταν: (α) το διάνυσµα αναφοράς είναι στον τοµέα 1 και (β) όταν το διάνυσµα αναφοράς είναι στον τοµέα 2.

70 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 69. Ένα πλεονέκτημα της διαμόρφωσης διανυσµάτων χώρου είναι ότι επιτυγχάνονται μεγαλύτερες τάσεις εξόδου του αντιστροφέα στη γραµµική περιοχή διαμόρφωσης σε σύγκριση µε την κλασσική ημιτονοειδή PWM διαμόρφωση. Παρατηρούμε στο Σχήμα 3.7 ότι η ακτίνα του κύκλου που εγγράφεται στο εσωτερικό του εξαγώνου είναι 2 0 Vdc r = Vdc cos30 = (3.26) 3 3 δηλαδή, μπορούν να επιτευχθούν τάσεις στη γραµµική περιοχή κατά 2/ 3 = μεγαλύτερες ως προς τις τάσεις της ημιτονοειδούς PWM διαμόρφωσης (υπενθυμίζεται ότι το πλάτος της θεμελιώδους αρμονικής είναι U ph =m a V dc 2 όπου m a <1). Με άλλα λόγια, στη διαμόρφωση διανύσµατος χώρου επιτυγχάνεται στη γραµµική περιοχή συντελεστής διαμόρφωσης πλάτους µεγαλύτερος κατά σε σύγκριση µε την κλασική ημιτονοειδή PWM διαμόρφωση. Η μέγιστη rms ημιτονοειδής τάση που μπορεί να επιτευχθεί στη γραµµική περιοχή είναι V dc / 6 ή Vdc / 6 = (3.27) u ph1 της rms τιμής της θεμελιώδους αρμονικής u ph1 της τετραγωνικής κυµατοµορφής τάσης (λειτουργία αντιστροφέα έξι-παλμών), όπου u ph1 = ( 2 / π ) V. Η γραµµική περιοχή διαμόρφωσης περιλαμβάνει τον σκιασµένο κύκλο του Σχήματος 3.7 και το μέγιστο πλάτος του διανύσµατος τάσης αναφοράς δίνεται από την εξίσωση (3.25). dc Σχήμα 3.7 Γραµµική περιοχή διαμόρφωσης διανύσµατος χώρου.
71 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 70. Σχήμα 3.8 Περιοχή υπερδιαµόρφωσης διανύσµατος χώρο. Για μεγαλύτερες τάσεις ώστε ο αντιστροφέας να λειτουργεί σε όλο το εύρος συχνοτήτων, το πλάτος του διανύσµατος τάσης αναφοράς είναι μεγαλύτερο του εγγραφόμενου κύκλου του Σχήμα 3.7 και ο αντιστροφέας λειτουργεί στη περιοχή της υπερδιαµόρφωσης (overmodulation). Η περιοχή αυτή είναι ο στενός σκιασµένος δακτύλιος του Σχήμα 3.8 που εκτείνεται από την εξωτερική περιφέρεια της γραµµικής περιοχής μέχρι την περιφέρεια κύκλου που δίνει την τετραγωνική κυµατοµορφή τάσης. Στο εσωτερικό του δακτυλίου αυτού μπορεί να κινηθεί το διάνυσµα της τάσης αναφοράς και να δώσει τάσεις µε θεμελιώδη αρμονική από µμέχρι ίση µε τη θεμελιώδη αρμονική της τετραγωνικής κυµατοµορφής τάσης (λειτουργία αντιστροφέα έξι παλμών). Σχήμα 3.9 Διανύσµατα χώρου τάσης και αναφοράς στον τοµέα 6 κατά την λειτουργία υπερδιαµόρφωσης.
72 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 71. Στην υπερδιαµόρφωση, το διάνυσµα χώρου της τάσης εξόδου του αντιστροφέα δεν μπορεί να παρακολουθήσει το διάνυσµα αναφοράς, µε αποτέλεσμα να παρατηρούνται περιοχές όπου η κυµατοµορφή της τάσης να αποκλίνει από την ημιτονοειδή της μορφή. Ως γνωστό, αυτό έχει ως αποτέλεσμα να αυξάνονται οι αρμονικές χαμηλής τάξης. Στο Σχήμα 3.9 σχεδιάζεται µε διακεκοµµένη γραμμή η τροχιά που ακολουθεί το διάνυσµα χώρου αναφοράς στον τοµέα 6 κατά την υπερδιαµόρφωση. Καθώς μπαίνει το διάνυσµα χώρου αναφοράς από τον τοµέα 5 στον τοµέα 6 το διάνυσµα χώρου της τάσης εξόδου μπορεί να το παρακολουθεί από το σηµείο Α µέχρι το Β. Από το σηµείο Β µέχρι το Γ το διάνυσµα χώρου της τάσης εξόδου κινείται πάνω στο ευθύγραµµο τµήµα ΒΓ και στη συνέχεια από το σηµείο Γ µέχρι το Δ (όταν θα µπει στον τοµέα 1) µπορεί να παρακολουθεί το διάνυσµα της τάσης αναφοράς. Στο Σχήμα 3.10 δίνονται διάφορες θέσεις του διανύσµατος χώρου της τάσης εξόδου καθώς κινείται από το σημείο Α στο Δ, προσπαθώντας να παρακολουθήσει το διάνυσµα της τάσης αναφοράς και στο Σχήμα 3.11 παρουσιάζεται η τροχιά που διαγράφει το διάνυσµα χώρου της τάσης εξόδου. Σχήμα 3.10 Θέσεις του διανύσµατος χώρου της τάσης εξόδου καθώς κινείται από το σηµείο Α στο Δ, κατά την λειτουργία υπερδιαµόρφωσης.
73 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 72. Σχήμα 3.11 Τροχιά που διαγράφει το διάνυσµα χώρου της τάσης εξόδου κατά την λειτουργία υπερδιαµόρφωσης. Στα τόξα ΑΒ και ΓΔ, οι χρόνοι t α και t b των ενεργών καταστάσεων καθώς και ο χρόνος t ο της μηδενικής τάσης υπολογίζονται ακολουθώντας την διαδικασία που περιγράφηκε στις προηγούμενες σελίδες. Ειδικότερα, για τον τοµέα 6 είναι 3 T 2 3 T 2 t u a u (3.28) s * s * a = s cos ref = sd 2Vdc 3 2Vdc 3 * 3 T cos s * aref 3 T s * u sd tb = s sin aref usq 2V u = dc 3 2Vdc 3 (3.29) και t T ( t t ) = + (3.30) 0 s a b Το τόξο ΒΓ είναι εκτός του εξαγώνου και συνεπώς δεν μπορεί το διάνυσµα της τάσης αναφοράς να το παρακολουθήσει το διάνυσµα της τάσης εξόδου. Αυτό άλλωστε επιβεβαιώνεται και από τις παραπάνω εξώσεις ως προς τους χρόνους λειτουργίας των καταστάσεων, γιατί θα δούµε ότι αν αντικαταστήσουµε τις εξίσωση (3.28) και (3.29) στην (3.30) και τις εφαρµόσουµε για όλα τα σημεία του τόξου ΒΓ προκύπτει χρόνος μηδενικής κατάστασης αρνητικός t 0 <0. Αυτό σημαίνει ότι σε αυτό το διάστηµα, το διάνυσµα χώρου της τάσης εξόδου καθυστερεί ή προπορεύεται του διανύσµατος αναφοράς, κινούμενο πάνω στο ευθύγραµµο τµήµα ΒΓ και επίσης υπάρχουν µόνο οι ενεργές καταστάσεις u 6 και u 1, δηλαδή ο χρόνος μηδενικής τάσης είναι μηδέν (t o =0). Συνεπώς t α =T S -t b (3.31)
74 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 73. Αν χρησιµοποιήσουµε τις εξισώσεις (3.28) και (3.29) στην εξίσωση (3.31), υπολογίζονται οι χρόνοι t α και t b για τη λειτουργία στο τµήµα ΒΓ (τοµέα 6), έτσι t a = T s 3sina 2cosa ref ref + cosa ref (3.32) και t b = T s 3sina 3sina ref ref cosa + cosa ref ref (3.33) Από τα παραπάνω συμπεραίνεται ότι το κριτήριο για να ελέγχουμε πότε ο αντιστροφέας μπαίνει στην περιοχή υπερδιαµόρφωσης είναι το πλάτος της τάσης, ενώ το κριτήριο για να καθορίζουμε τις εξισώσεις που θα υπολογίζουν τους χρόνους λειτουργίας των καταστάσεων t α και t b είναι ο χρόνος της μηδενικής τάσης t o. Δηλαδή, αν η rms τάση αναφοράς είναι μεγαλύτερη της V dc / 6 και οι χρόνοι t α και t b των λειτουργικών καταστάσεων που προσδιορίζονται από τις εξισώσεις της γραµµικής λειτουργίας δώσουν t o 0, τότε το διάνυσµα της τάσης αναφοράς βρίσκεται στο εσωτερικό του εξαγώνου και οι ισχύουν οι εξισώσεις της γραµµικής λειτουργίας για τους χρόνους t α και t b. Αντίθετα, αν δώσουν t o <0, τότε το διάνυσµα της τάσης αναφοράς είναι εκτός του εξαγώνου και θα πρέπει ο χρόνος μηδενικής τάσης να είναι μηδέν (t o =0). Στη περίπτωση αυτή, οι εξισώσεις που προσδιορίζουν τους χρόνους t α και t b είναι αντίστοιχες των εξισώσεων (3.32) και (3.33). Οι προηγούμενες εξισώσεις αναφέρονται στον τοµέα 6 και αντίστοιχες μπορούν να προσδιοριστούν για τους υπόλοιπους τομείς του εξαγώνου. Καθώς αυξάνει η τάση αναφοράς, μειώνονται τα τόξα γύρω από τις καταστάσεις u k και αντίστοιχα αυξάνουν τα μεταξύ τους ευθύγραμμα τμήματα μέχρις ότου η τάση αναφοράς γίνει =(2/3) V dc, δηλαδή ίση με την ακτίνα του κύκλου που περιβάλλει το εξάγωνο. Η μέγιστη τιμή της θεμελιώδους αρμονικής της τάσης εξόδου που μπορεί να επιτευχθεί όσο u * S <(2/3) V dc (δηλαδή, όσο υπάρχει στο εσωτερικό του εξαγώνου έστω και ένα πολύ µικρό τµήµα της κυκλικής τροχιάς που διαγράφει το διάνυσµα της τάσης αναφοράς) είναι περίπου της θεμελιώδους αρμονικής u ph1 της τετραγωνικής κυµατοµορφής της τάσης. Όταν τα τόξα θα έχουν μηδενιστεί πλήρως, το διάνυσµα χώρου της τάσης εξόδου θα κινείται µόνο πάνω στις πλευρές του εξαγώνου. Στη περίπτωση αυτή, ο χρόνος µηδενικής τάσης θα είναι µόνιµα μηδέν (t o =0) και η τάση εξόδου θα ρυθµίζεται µόνο από τους χρόνους των ενεργών καταστάσεων. Δηλαδή, αν και το διάνυσµα χώρου της τάσης αναφοράς θα κινείται στη περιφέρεια κύκλου που περικλείει το εξάγωνο των λειτουργικών καταστάσεων, το διάνυσµα της τάσης εξόδου θα κινείται από τη µία κορυφή του εξαγώνου στην άλλη και το πλάτος της τάσης εξόδου θα ελέγχεται ρυθμίζοντας το χρόνο που θα παραμένει το διάνυσµα στη κάθε κορυφή. Η διάρκεια λειτουργίας κάθε κατάστασης ως συνάρτηση της τάσης εξόδου είναι µια µη-γραµµική συνάρτηση που προσδιορίζεται είτε µε μεθόδους αριθμητικής ανάλυσης είτε πειραματικά και δίνεται ως πίνακας δεδομένων στον ελεγκτή. Ανακεφαλαιώνοντας τα παραπάνω, συµπεραίνουµε ότι η διαμόρφωση διανύσµατος χώρου χωρίζεται σε τρεις περιοχές λειτουργίας: u * S
75 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 74. α)γραμμική περιοχή. Στη περιοχή αυτή, το διάνυσμα της τάσης αναφοράς είναι 0 * 1 s u Vdc (3.34) 3 και η κυκλική τροχιά του διανύσματος είναι πάντοτε μέσα στον σκιασμένο κύκλο του Σχήματος 3.7 που εγγράφεται στο εσωτερικό του εξαγώνου. Η rms τιμή της θεμελιώδους αρμονικής της τάσης εξόδου είναι 0 u 0.907u (3.35) όπου u ph1 η rms θεμελιώδη αρμονική της τετραγωνικής κυματομορφής τάσης. s ph1 β ) Περιοχή υπερδιαμόρφωσης Ι. Το διάνυσμα της τάσης αναφοράς είναι 1 2 V 3 3 * dc < s < Vdc u (3.36) και η κυκλική τροχιά του διανύσματος είναι στο εσωτερικό του δακτύλιου που σχηματίζεται από τον κύκλο της γραμμικής περιοχής και τον εξωτερικό κύκλο που περικλείει το εξάγωνο, Σχήμα 3.8. Η rms τιμή της θεμελιώδους αρμονικής της τάσης εξόδου που μπορεί να επιτευχθεί στη περιοχή αυτή είναι u < u < u (3.37) ph1 s ph1 γ) Περιοχή υπερδιαμόρφωσης ΙΙ. Το διάνυσμα της τάσης αναφοράς είναι * 2 s = u (3.38) V 3 dc και η τροχιά του διανύσματος είναι ο κύκλος που περικλείει το εξάγωνο. Η rms τιμή της θεμελιώδους αρμονικής της τάσης εξόδου είναι Στη περιοχή αυτή δεν ελέγχεται το πλάτος της τάσης αναφοράς, αλλά η διάρκεια παραμονής του διανύσματος της τάσης εξόδου σε κάθε κορυφή του εξαγώνου των λειτουργικών u ph 1 u s u ph 1 (3.39) 1 Η τιμή u ph1 της μέγιστης τάσης προσδιορίζεται αν πάρουμε τα ολοκληρώματα των τάσεων των έξι λειτουργικών καταστάσεων στους αντίστοιχους χρόνους.
76 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 75. καταστάσεων. 3.2 Προσομοίωση στο πρόγραμμα Simulink βαθμωτού ελέγχου με διαμόρφωση διανύσματος χώρου Space Vector Περιγραφή μοντέλου προσομοίωσης Σχήμα 3.12 Μοντέλο προσομοίωσης στο πρόγραμμα Simulink που υλοποιεί βαθμωτό έλεγχο με διαμόρφωση διανύσματος χώρου Space Vector. Στο Σχήμα 3.12 βλέπουμε το μοντέλο προσομοίωσης στο πρόγραμμα Simulink, που υλοποιεί βαθμωτό έλεγχο με διαμόρφωση διανύσματος χώρου Space Vector. Φυσικά το μόνο που αλλάζει σε σχέση με το μοντέλο προσομοίωσης της ημιτονοειδούς PWM διαμόρφωσης, που αναλύθηκε στο κεφάλαιο 2, είναι το τμήμα ελέγχου. Το τμήμα ελέγχου απαρτίζεται από τα block Speed Controller και SVM generator, το εσωτερικό των οποίων φαίνεται στα Σχήματα 3.13 και Η είσοδος του block Speed controller είναι η ταχύτητα αναφοράς Ν * (rpm). Η σύγχρονη ταχύτητα του κινητήρα προσδιορίζεται από την εξίσωση N 1m =60*f e /(p) [rpm] (3.40)
77 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 76. όπου η f e η θεμελιώδης συχνότητα της τάσης τροφοδοσίας και p τα ζεύγη των πόλων. Στην περίπτωσή μας είναι p=2. Σχήμα 3.13 Μοντέλο προσομοίωσης : Εσωτερικό του block Speed controller. Σχήμα 3.14 Μοντέλο προσομοίωσης : Εσωτερικό του block SVM generator. Συνεπώς αναλόγως την ταχύτητα αναφοράς, η συχνότητα της τάσης τροφοδοσίας θα προσδιορίζεται από τον τύπο : f e = N * /30. Γι αυτό τον λόγο στο Σχήμα 3.13 η τιμή του ενισχυτή rpm_to_hz είναι 1/30. Έχοντας υπολογίσει τη συχνότητα της τάσης τροφοδοσίας, εύκολα προκύπτει η rms τιμή της τάσης αναφοράς, αφού U S /f e =220/50=4.4. Το πλάτος της τάσης αναφοράς θα είναι * U S = f = f. Για τον λόγο αυτό ο ενισχυτής στο Σχήμα 3.13 με την ονομασία e e V/f έχει τιμή Επίσης στο Σχήμα 3.13 το block Sign έχει είσοδο την ταχύτητα αναφοράς και, αν είναι θετική, η έξοδός του είναι +1, ενώ, αν είναι αρνητική, είναι -1. Έτσι προσδιορίζεται η φορά περιστροφής του δρομέα (direction). Όπως φαίνεται στο Σχήμα 3.12, το block SVM generator έχει είσοδο την ανορθωμένη συνεχή τάση V dc καθώς επίσης και τις εξόδους του block Speed controller. Στο block SVM
 η συχνότητα αποκοπής του dc φίλτρου (για φιλτραριστεί η V dc και να χρησιμοποιηθεί στους υπολογισμούς), β) η")
 στο τριφασικό σύστημα και το εσωτερικό του block φαίνεται στο Σχήμα 3.")
78 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 77. generator (Space Vector Modulation) παράγονται οι παλμοί ελέγχου και το εσωτερικό του φαίνεται στο Σχήμα Στο παράθυρο διαλόγου του block SVM generator, που φαίνεται παρακάτω, ορίζονται: α) η συχνότητα αποκοπής του dc φίλτρου (για φιλτραριστεί η V dc και να χρησιμοποιηθεί στους υπολογισμούς), β) η διακοπτική συχνότητα του αντιστροφέα, f C =1kHz γ) η δειγματοληψία του block SVM generator, Τ S =50μsec. Υπενθυμίζεται ότι προσομοιώνεται ο χρόνος δειγματοληψίας της κάρτας ελέγχου dspace DS1104. Στο Σχήμα 3.14, στο block 3phases sin generator κατασκευάζονται οι τάσεις αναφοράς (command) στο τριφασικό σύστημα και το εσωτερικό του block φαίνεται στο Σχήμα 3.15 (από το block speed controller είναι γνωστά το πλάτος, η συχνότητα και η πολικότητά της τάσης αναφοράς). Σχήμα 3.15 Εσωτερικό του block 3phases sin generator. Στο Σχήμα 3.14, στο εσωτερικό του block low pass bus filter υπάρχει ένα dc φίλτρο το οποίο φιλτράρει την ανορθωμένη συνεχή τάση V dc ώστε να χρησιμοποιηθεί στον υπολογισμό
79 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 78. των χρόνων των ενεργών καταστάσεων των διακοπτών t α και t b. Στο block dq transformation γίνεται ο μετασχηματισμός του Park (στο block 3phases sin generator έχει δημιουργηθεί η τριφασική τάση αναφοράς V abc ) και το εσωτερικό του φαίνεται στο Σχήμα Συγκεκριμένα στο block dq transformation υλοποιούνται οι εξισώσεις (3.7) και (3.8) V = V s sq A s s Αναλόγως το πρόσημο και το μέτρο των V sq και V sd υπολογίζεται η γωνία (angle) του * * j a * * διανύσματος της τάσης u, όπου e ref u u * s V s sd V = C V 3 u = u = + j. s s sd sq B Σχήμα 3.16 Εσωτερικό του block dq transform : Υλοποίηση μετασχηματισμού Park. Το διάνυσμα χώρου της τάσης περιστρέφεται με κέντρο την αρχή των αξόνων, εντός του εξαγώνου που ορίζουν οι έξι ενεργές καταστάσεις των διακοπτών του αντιστροφέα ισχύος (βλέπε Σχήμα 3.4). Όπως φαίνεται στο Σχήμα 3.14, το block dq vector sector έχει είσοδο την γωνία του διανύσματος χώρου της τάσης και στην έξοδο δίνει τον τομέα στον οποίο βρίσκεται το διάνυσμα. Οι τομείς μέσα στους οποίους κινείται το διάνυσμα της τάσης φαίνονται στο Σχήμα 3.4 ( 3.1), π.χ ο τομέας 6 ορίζεται να είναι μεταξύ 30 ο και 90 ο μοιρών. Με βάση το Σχήμα 3.4 δημιουργήθηκε το block dq vector sector, το εσωτερικό του οποίου φαίνεται στο Σχήμα Όπως βλέπουμε στο Σχήμα 3.17, όταν η γωνία του διανύσματος (Angle) παίρνει τιμές, για παράδειγμα μεταξύ 30 ο και 90 ο μοιρών, τότε η αντίστοιχη έξοδος της πύλης AND γίνεται μονάδα και όλες οι υπόλοιπες είναι φυσικά μηδέν. Επειδή μεταξύ 30 ο και 90 ο μοιρών είναι ο τομέας 6 (Σχήμα 3.4), η έξοδος της πύλης AND ενισχύεται κατά την τιμή 6. H έξοδος της πύλης AND είναι τύπου Boolean (δηλαδή ή μηδέν ή μονάδα) και μετατρέπεται σε πραγματικό αριθμό στο block Convert, ώστε να ενισχυθεί κατά την επιθυμητή τιμή. Ομοίως και για τους υπόλοιπους τομείς.
80 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 79. Σχήμα 3.17 Εσωτερικό του block dq vector sector. Αναλόγως τη γωνία που βρίσκεται το διάνυσμα χώρου της τάσης, καθορίζεσαι ο τομέας. Στο Σχήμα 3.14 βλέπουμε το block ramp generator, το οποίο έχει εξόδους δύο κυματομορφές. Ειδικότερα στην έξοδο trig παίρνουμε τετραγωνικούς παλμούς συχνότητας 1kHz, ενώ έξοδο ramp παίρνουμε περιοδική κυματομορφή ράμπας συχνότητας 1kHz, όπου f C =1kHz η διακοπτική συχνότητα των διακοπτών του αντιστροφέα (f C έχει οριστεί 1kΗz ως παράμετρος του block SVM generator ). Οι έξοδοι του block ramp generator θα χρησιμεύσουν στα block switching time calculator και gate logic, όπως θα δούμε στην συνέχεια. Το block ramp generator δημιουργεί μια κυματομορφή συχνότητας 1kHz, η οποία θα χρησιμεύσει όπως θα δούμε στη συνέχεια για την παραγωγή των παλμών ελέγχου. Η κατάσταση αυτή είναι όμοια με την περίπτωση της ημιτονοειδούς PWM διαμόρφωσης, όπου εκεί το τμήμα ελέγχου δημιουργούσε το τριγωνικό φέρον, η συχνότητα του οπίου προσδιόριζε και την διακοπτική συχνότητα του αντιστροφέα. Όπως και στην ημιτονοειδή PWM διαμόρφωση, λόγω ότι το τμήμα ελέγχου εκτελείται κάθε 50μsec (για λόγους προσομοίωσης της λειτουργίας της κάρτας ελέγχου), υπάρχει μια μέγιστη συχνότητα της κυματομορφής της ράμπας, η οποία μπορεί να παραχθεί από το τμήμα ελέγχου. Γι αυτό το λόγο η τιμή της συχνότητας της ράμπας είναι 1kHz.
81 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 80. Στο Σχήμα 3.14 βλέπουμε το block με την ονομασία switching time calculator, το εσωτερικό του οποίου φαίνεται στο Σχήμα Το block switching time calculator έχει s s εισόδους τις τάσεις V sq και V sd, που έχουν προκύψει από τον μετασχηματισμό Park, καθώς και τον τομέα που βρίσκεται κάθε στιγμή το διάνυσμα της τάσης. Οι παραπάνω είσοδοι δίνουν τις πληροφορίες (πλάτος και συχνότητα περιστροφής) για τον προσδιορισμό του διανύσματος χώρου της τάσης. Η έξοδός του block switching time calculator είναι τα διανύσματα L_on και L_off. Σχήμα 3.18 Εσωτερικό του block switching time calculator. Τα L_on και L_off αντιστοιχούν στα διανύσματα χώρου αναφοράς, των δύο πλευρών του τριγώνου του κάθε τοµέα, στον οποίο κινείται το διάνυσμα της τάσης αναφοράς. Π.χ, όταν το διάνυσμα της τάσης είναι στον τομέα 1, το L_on αντιστοιχεί στο διάνυσμα της ενεργής κατάστασης u 1 και το L_off στο διάνυσμα u 2 (βλέπε Σχήμα 3.4). Η εναλλαγή σε δύο ενεργές καταστάσεις του αντιστροφέα γίνεται με συχνότητα f C, όπου f C η διακοπτική συχνότητα του αντιστροφέα και γι αυτό το λόγο το block switching time calculator εκτελείται κάθε 1msec (T S =1/f C =1msec). Ειδικότερα, οι παλμοί συχνότητας 1kHz που δημιουργήσαμε στο block ramp generator χρησιμοποιούνται, ώστε τα block που υπολογίζουν τα διανύσματα χώρου αναφοράς L_on και L_off, να εκτελούνται με περίοδο T S =1/f C =1msec (triggering), όπως φαίνεται στο Σχήμα Στο block switching time calculator έχει τρία σκέλη που αντιστοιχούν στις τρείς φάσεις. Τα διανύσματα χώρου L_on και L_off απεικονίζονται γραφικά ως ημιτονοειδείς κυματομορφές με συχνότητα ίση με αυτή της τάσης αναφοράς. Αυτό γίνεται γιατί τα L_on και L_off είναι ουσιαστικά συνιστώσες του διανύσματος χώρου της τάσης, το οποίο περιστρέφεται εντός της περιφέρειας του εξαγώνου από 0 έως 2π με συχνότητα ίση με αυτή της τάσης αναφοράς. Το διάνυσµα χώρου της τάσης αναφοράς ισούται με το άθροισμα των δύο διανυσµάτων χώρου αναφοράς (L_on και L_off) των δύο πλευρών του τριγώνου του τοµέα, μέσα στον οποίον βρίσκεται το διάνυσµα χώρου αναφοράς, πολλαπλασιασμένα επί ένα ποσοστό της περιόδου δειγματοληψίας (βλέπε Σχήμα 3.4):
82 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 81. t t u u u (3.15) * ja ref a b s e = Ts Ts Ο πολλαπλασιασμός των L_on και L_off με ένα ποσοστό της περιόδου δειγματοληψίας γίνεται στο block gate logic, το εσωτερικό του οποίου φαίνεται στο Σχήμα Συγκεκριμένα, για να προκύψουν τα ποσοστά t α /T S και t b /T S, συγκρίνονται οι κυματομορφές των L_on και L_off με την κυματομορφή ράμπας συχνότητας f C = 1/T S. Στο block gate logic από την σύγκριση της κυματομορφής του L_on με την κυματομορφή ράμπας συχνότητας f C, προκύπτει τελικά το ποσοστό δειγματοληψίας t α /T S για κάθε διακοπτική περίοδο και κατόπιν παράγονται παλμοί διάρκειας t α /T S. Ομοίως προκύπτουν παλμοί διάρκειας t b / T S από την σύγκριση του L_off με την κυματομορφή της ράμπας. Οι παλμοί που προκύπτουν οδηγούνται στην πύλη AND, όπου υλοποιείται η σχέση t on = t α +t b. Υπενθυμίζουμε ότι T S = t on + t off = t α + t b + t o, όπου t α και t b οι χρόνοι των ενεργών καταστάσεων των διακοπτών και t o = t off ο χρόνος της μη-ενεργούς κατάστασης του αντιστροφέα. Με την πύλη NOT δημιουργούνται οι παλμοί ελέγχου για τους διακόπτες του κάτω σκέλους του αντιστροφέα. Η διαδικασία που αναλύθηκε γίνεται ξεχωριστά για κάθε φάση. Σχήμα 3.19 Εσωτερικό του block gate logic. Στο block αυτό παράγονται οι παλμοί ελέγχου που θα σταλθούν στον inverter Αποτελέσματα προσομοίωσης. Ένα πλεονέκτημα του αντιστροφέα διαμόρφωσης διανυσµάτος χώρου είναι ότι επιτυγχάνονται μεγαλύτερες τάσεις εξόδου στη γραµµική περιοχή διαμόρφωσης σε σύγκριση µε την κλασσική ημιτονοειδή PWM διαμόρφωση. Όπως έχει αναφερθεί και στην θεωρητική ανάλυση ( 3.1), μπορούν να επιτευχθούν τάσεις στη γραµµική περιοχή κατά 2/ 3 = μεγαλύτερες ως προς τις τάσεις της ημιτονοειδούς PWM διαμόρφωσης. Υπενθυμίζεται ότι το μέγιστο πλάτος της θεμελιώδους αρμονικής στη γραμμική περιοχή στην ημιτονοειδή διαμόρφωση είναι U ph = V dc /2, ενώ για τον αντιστροφέα διανύσματος χώρου είναι

83 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 82. U ph = V dc / 3. Με άλλα λόγια, στη διαμόρφωση διανύσματος χώρου επιτυγχάνεται στη γραµµική περιοχή συντελεστής διαμόρφωσης πλάτους μεγαλύτερος κατά σε σύγκριση µε την κλασική ημιτονοειδή PWM διαμόρφωση. Η μέγιστη φασική rms ημιτονοειδής τάση που μπορεί να επιτευχθεί στη γραµµική περιοχή είναι V dc / 6,δηλαδή στην περίπτωσή μας περίπου 210V (rms). Σχήμα 3.20 Διακοπτική πολική τάση και η αντίστοιχη θεμελιώδης (380V rms συχνότητας 50Hz) με διαμόρφωση διανύσματος χώρου. Στο Σχήμα 3.20 φαίνεται η διακοπτική πολική τάση με διαμόρφωση διανύσματος χώρου, όπου η θεμελιώδης αρμονική είναι στα 380V rms (50Hz). Βρισκόμαστε στην περιοχή της υπερδιαμόρφωσης και ειδικότερα στην πρώτη περιοχή όπου η κυκλική τροχιά του διανύσματος χώρου της τάσης διέρχεται και εσωτερικά και εξωτερικά του εξαγώνου, (που ορίζουν οι ενεργές καταστάσεις του αντιστροφέα) όπως φαίνεται στο Σχήμα Όταν η κυκλική τροχιά εγγράφεται εκτός του εξαγώνου, τότε έχουμε παλμό τάσης μεγαλύτερης διάρκειας, όπως διακρίνεται στο Σχήμα Επειδή η αρχή λειτουργίας του αντιστροφέα διανύσματος χώρου βασίζεται στην βέλτιστη αξιοποίηση όλων των λειτουργικών καταστάσεων των διακοπτών του αντιστροφέα, η γραμμική περιοχή έχει μεγάλο εύρος και ισχύει για πολική τάση έως 3 210V =364V, κάτι που δεν ισχύει για την ημιτονοειδή PWM διαμόρφωση, της οποίας η γραμμική περιοχή της ισχύει έως τάση 3 182V =315V (πολική rms). Η κυματομορφή της πολικής διακοπτικής τάσης για θεμελιώδη αρμονική 380V(rms), συχνότητας 50Hz με ημιτονοειδή PWM διαμόρφωση φαίνεται στο Σχήμα Η διακοπτική συχνότητα του αντιστροφέα είναι 1kHz και για τις δύο τεχνικές διαμόρφωσης. Είναι προφανές από την σύγκριση των διακοπτικών τάσεων των Σχημάτων 3.20 και 3.21, ότι με την διαμόρφωση διανύσματος χώρου μπορούμε να «αποφύγουμε» τους τετραγωνικούς παλμούς που παράγονται με την ημιτονοειδή PWM διαμόρφωση για την ίδια τάση. Αυτό έχει αποτέλεσμα οι αρμονικές στην έξοδο του αντιστροφέα να είναι μειωμένες με την μέθοδο της διαμόρφωσης διανύσματος χώρου.

84 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 83. Σχήμα 3.21 Διακοπτική πολική τάση και η αντίστοιχη θεμελιώδης (380V rms συχνότητας 50Hz) με ημιτονοειδή PWM διαμόρφωση. 3.4 Πειραματική υλοποίηση βαθμωτού ελέγχου με διαμόρφωση διανύσματος χώρου -Space Vector Περιγραφή ελεγκτή που υλοποιεί διαμόρφωση διανύσματος χώρου - Space Vector Στο Σχήμα 3.22 βλέπουμε τον ψηφιακό ελεγκτή που υλοποιεί βαθμωτό έλεγχο με διαμόρφωση διανύσματος χώρου- Space Vector PWM. Από την ταχύτητα αναφοράς Ν* [rpm] προκύπτει η τάση αναφοράς μέσω των ενισχυτών Freq και V/f, όπως έχει περιγραφεί στην προσομοίωση. Στο block SVM generator παράγονται οι παλμοί ελέγχου που θα οδηγηθούν στις βάσεις των διακόπτων του αντιστροφέα. Επίσης βλέπουμε το block Braking που υλοποιεί την πέδηση, το οποίο είναι ίδιο με αυτό που χρησιμοποιήθηκε στον ημιτονοειδή PWM ελεγκτή. Τέλος στα block Speed measure και Irms (Measure) μετρούμε την rms τιμή του ρεύματος και την ταχύτητα του δρομέα και θα αναλυθούν στη συνέχεια. Στο Σχήμα 3.22 βλέπουμε ότι υπάρχει σύνδεση του block Braking με το block SVM generator και αυτό γίνεται για το λόγο ότι ο υπολογισμός των χρόνων των ενεργών καταστάσεων t α και t b απαιτεί την τιμή της συνεχούς τάσης του ανορθωτή V dc (το block DS1104ADC_C5 εισάγει την μέτρηση της V dc ). Το block Switch ελέγχει αν η τάση γίνει μικρότερη από μια ελάχιστη τιμή (513V) και τότε οι χρόνοι t α και t b που χρειάζεται η τεχνική Space Vector υπολογίζονται με βάση την ελάχιστη τιμή των 513V και αγνοεί τη πραγματική τιμή της dc τάσης. Αυτό χρησιμοποιείται στο σταμάτημα του κινητήρα ώστε να μην παρατηρούνται υψηλά ρεύματα λόγω της χαμηλής τάσης κατά την διάρκεια του μεταβατικού.
. Στο Σχήμα 3.")
85 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 84. Σχήμα 3.22 Ψηφιακός ελεγκτής που υλοποιεί βαθμωτό έλεγχο με διαμόρφωση διανύσματος χώρου- Space Vector. Δημιουργία παλμών ελέγχου Η διαδικασία παραγωγής των παλμών ελέγχου στον ψηφιακό ελεγκτή δεν είναι ακριβώς η ίδια με αυτήν που περιγράψαμε στην προσομοίωση ( 3.2.1). Στο Σχήμα 3.22 το block SVM generator έχει εισόδους την ταχύτητα αναφοράς, την τάση αναφοράς και την ανορθωμένη V dc (Ν * [rpm, Volts *, V dc Bus) και στην έξοδό του δίνει τους παλμούς ελέγχου. Αρχικά, όπως φαίνεται στο Σχήμα 3.22, δίνεται η ταχύτητα αναφοράς (Ν * [rpm]= π.χ 750rpm), ακολουθεί το block της ράμπας, που καθορίζει το ρυθμό αύξησης και μείωσης της ταχύτητας. Από την ταχύτητα αναφοράς, όπως και στην προσομοίωση, υπολογίζουμε την τάση αναφοράς Volts *, ώστε να υλοποιείται ο βαθμωτός έλεγχος U S /f e. Το εσωτερικό του block SVM generator φαίνεται στο Σχήμα 3.23
86 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 85. Σχήμα 3.23 Ψηφιακός ελεγκτής Space Vector:Εσωτερικό του block SVM generator. Στο block 3phases sin generator δημιουργείται η τριφασική τάση αναφοράς. Κατόπιν στο block dq transform γίνεται ο μετασχηματισμός του Park και η τριφασική τάση αναφοράς s s αναλύεται σε δύο συνιστώσες V sq και V sd στο ακίνητο σύστημα αξόνων αναφοράς q S - d S. Επίσης στο block dq transform υπολογίζεται η γωνία (Angle),που έχει κάθε στιγμή το στρεφόμενο διάνυσμα της τάσης. Στο block dq vector sector από την τιμή της γωνίας κάθε χρονική στιγμή, γνωρίζουμε τον τομέα (sector) στον οποίο βρίσκεται το διάνυσμα της τάσης. Το block SVM generator μέχρι το σημείο που περιγράψαμε είναι ίδιο με αντίστοιχο της προσομοίωσης. Σε αυτό το σημείο έχουμε τις πληροφορίες για το πλάτος και τη συχνότητα περιστροφής του διανύσματος χώρου της τάσης αναφοράς. Απομένει να «αξιοποιήσουμε» την πληροφορία που έχουμε, ώστε να προσδιορίσουμε πόσο χρόνο οι διακόπτες του αντιστροφέα θα είναι ανοικτοί ή κλειστοί. Στο μοντέλο προσομοίωσης που περιγράψαμε στην 3.2, για να παραχθούν οι παλμοί ελέγχου, γινόταν σύγκριση κυματομορφής ράμπας με τις κυματομορφές των διανυσμάτων χώρου αναφοράς L_off και L_on. Αν έπρεπε ο ψηφιακός ελεγκτής της πειραματικής διάταξης να δημιουργήσει κυματομορφή ράμπας, τότε θα είχαμε περιορισμούς στη διακοπτική συχνότητα του αντιστροφέα, όπως αναλύθηκε στην για το τριγωνικό φέρον σήμα στην ημιτονοειδή PWM διαμόρφωση. Με άλλα λόγια για δεδομένη τιμή δειγματοληψίας, ο ελεγκτής θα μπορούσε να δημιουργήσει κυματομορφή ράμπας, όπου η συχνότητά της θα είχε μια μέγιστη τιμή, π.χ 1kHz, με αποτέλεσμα η συχνότητα της διακοπτικής λειτουργίας του αντιστροφέα να είναι περιορισμένη. Για να δημιουργήσει ο ψηφιακός ελεγκτής κυματομορφή ράμπας συχνότητας μεγαλύτερη του 1kHz, τότε θα απαιτούνταν μικρότερος χρόνος δειγματοληψίας, γεγονός όμως αδύνατο, λόγω περιορισμών του επεξεργαστή της κάρτας ελέγχου. Για να αντιμετωπιστεί το παραπάνω πρόβλημα, κρίνεται σκόπιμο να αφαιρεθεί από τον τρόπο παραγωγής των παλμών ελέγχου η διαδικασία σύγκρισης κυματομορφών. Αυτό επιτυγχάνεται με το block DS1104_DSP_PWMSV, το οποίο λαμβάνεται από την βιβλιοθήκη της κάρτας και φαίνεται παρακάτω.
87 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 86. Σχήμα 3.24 Block της κάρτας DS1104 όπου υπολογίζονται οι παλμοί ελέγχου. Το παραπάνω block έχει εισόδους τα ποσοστά t α /Ts και t b /Ts (T 1 /T p και T 2 /T p αντίστοιχα) και τον τομέα του εξαγώνου (που ορίζουν οι έξι ενεργές καταστάσεις των διακοπτών του αντιστροφέα ισχύος) στον οποίο βρίσκεται το διάνυσμα της τάσης. Στο block υπολογίζονται οι παλμοί ελέγχου οι οποίοι θα σταλθούν στις βάσεις των διακοπτών του αντιστροφέα. Τέλος η είσοδος PWM Stop έχει ρόλο διακόπτη. Με τη χρήση του block του Σχήματος 3.24 μπορεί να αυξηθεί ο χρόνος δειγματοληψίας, γιατί δεν απαιτείται η δημιουργία κυματομορφής υψηλής συχνότητας. Έτσι έχοντας μεγαλύτερο χρόνο δειγματοληψίας, υπάρχει περισσότερος υπολογιστικός χρόνος και είναι δυνατόν να προστεθούν επιπλέον λειτουργίες (block) στον ελεγκτή. Ο ελεγκτής που υλοποιεί την διαμόρφωση Space vector λειτουργεί με χρόνο δειγματοληψίας 100μsec, ενώ στον ελεγκτή της ημιτονοειδούς PWM ήταν 50μsec, γιατί έπρεπε να κατασκευαστεί το τριγωνικό φέρον. Για να λειτουργήσει το block του Σχήματος 3.24, πρέπει να υπολογιστούν οι χρόνοι t α και t b των ενεργών καταστάσεων (ο υπολογισμός των χρόνων t α και t b, έχει αναφερθεί στην παράγραφο 3.1). Εν συντομία αναφέρουμε ότι, όταν π.χ το διάνυσμα της τάσης κινείται στον τομέα 1, που ορίζουν οι καταστάσεις u 1 και u 2, αρκεί η επίλυση του συστήματος των εξισώσεων (3.14) και (3.15) ως προς t α και t b. t u u u * ja ref a b s e = Ts Ts * * j a ref * * s = s e = usd + jusq u u t Εξισώνοντας τα δεύτερα μέλη και αντικαθιστώντας όπου π j 2 2 u 1 = Vdce και 3 u 2 2 = Vdce 3 5 j π 6 όπου u 1 και u 2 ορίζονται από την εξίσωση (3.10): 2 j ( k 1) u k = Vdce για k= 1,2,,6 3 υπολογίζονται οι χρόνοι t α και t b, όταν το διάνυσμα της τάσης βρίσκεται στον τομέα 1 π π
88 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 87. και t t a b * 3 T s * u sd = usq + 2 Vdc 3 3 Ts 2 = u 2 V 3 dc * sd (3.22) (3.24) Ομοίως για τους υπόλοιπους τομείς. Αφού υπολογιστούν οι χρόνοι t α και t b για όλους τους τομείς του εξαγώνου, δημιουργείται το block, το οποίο αναλόγως τον τομέα που βρίσκεται το διάνυσμα χώρου της τάσης, θα έχει ως έξοδο τα αντίστοιχα t α και t b. Στo block αυτό δίνουμε την ονομασία t α & t b calculation και το εσωτερικό του φαίνεται στο Σχήμα 3.25: Το block t α & t b calculation έχει είσοδο την ανορθωμένη συνεχή τάση V dc, τις τάσεις s s αναφοράς V sq και V sd, που προέκυψαν από τον μετασχηματισμό του Park, τον τομέα που βρίσκεται το διάνυσμα της τάσης κάθε χρονική στιγμή και η έξοδος του είναι τα ποσοστά t α /Ts και t b /Ts. Η V dc αρχικά ενισχύεται κατά την τιμή 2/3, έπειτα αντιστρέφεται, ώστε να υλοποιηθεί ο πρώτος όρος των εξισώσεων 3.22 και Στα block Branch A, που βλέπουμε στο Σχήμα 3.25, υπολογίζονται οι χρόνοι t α, ενώ στο Branch Β υπολογίζονται οι χρόνοι t b, αναλόγως τον τομέα που βρίσκεται το διάνυσμα της τάσης. Ειδικότερα στα block Branch A και Branch Β η πρώτη είσοδος (sector) καθορίζει ποια συνάρτηση θα είναι η έξοδός, π.χ όταν η είσοδος sector είναι 1, τότε περνά η έξοδος της πρώτης συνάρτησης κ.ο.κ. Σχήμα 3.25 Εσωτερικό του block t α & t b calculation, όπου υπολογίζονται οι χρόνοι t α και t b, αναλόγως το τομέα που βρίσκεται το διάνυσμα της τάσης.
89 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 88. Συνοψίζοντας, αρχικά δίνεται η ταχύτητα αναφοράς, προσδιορίζεται το διάνυσμα χώρου, κατόπιν υπολογίζονται οι θεωρητικοί χρόνοι t α και t b και το block DS1104_DSP_PWMSV παράγει τους κατάλληλους παλμούς ελέγχου, ώστε να παραχθεί η τάση αναφοράς με την μέθοδο Space Vector. Φόρτωση ελεγκτή στην κάρτα DS1104. Στο Σχήμα 3.23 φαίνεται παρακάτω. διακρίνεται το block με την ονομασία Rate Transition, το οπoίο Το block SVM generator έχει είσοδο την συνεχή τάση του ανορθωτή V dc. Το block Braking, από το οποίο προέρχεται η είσοδος V dc, έχει οριστεί να λειτουργεί με δειγματοληψία διαφορετική από αυτή των υπόλοιπων block και συγκεκριμένα 200μsec. Η εισαγωγή στο block SVM generator πληροφοριών που «τρέχουν» με διαφορετικό χρόνο δειγματοληψίας γίνεται μόνο μέσω του block Rate transition. Το block Braking εκτελείται κάθε 200μsec, γιατί δεν είναι απαραίτητο να ελέγχεται η τάση του ανορθωτή με μεγαλύτερη συχνότητα δειγματοληψίας. Αν χρειαστεί να τεθεί σε λειτουργία η πέδηση, τα αποτελέσματα θα είναι το ίδιο ικανοποιητικά, ακόμα και αν ο χρόνος δειγματοληψίας είναι μεγαλύτερος από 200μsec. Με την χρήση του block Rate transition είναι δυνατόν να τρέχουν παράλληλα πολλές διαφορετικές λειτουργίες του ελεγκτή, άλλες με μικρούς χρόνους δειγματοληψίας και άλλες με μεγάλους. Με αυτό τον τρόπο «εξοικονομείται» υπολογιστικός χρόνος π.χ από την λειτουργία της πέδησης, και έτσι γίνεται εφικτή η πρόσθεση νέων block. Με άλλα λόγια, για ένα δεδομένο χρόνο δειγματοληψίας Δt, αν δεν γινόταν «εξοικονόμηση υπολογιστικού χρόνου», δεν θα μπορούσαμε να προσθέσουμε στον ελεγκτή επιπλέον block. Για να είναι δυνατόν κάποια block να τρέχουν σε διαφορετικούς χρόνους δειγματοληψίας, πρέπει να γίνουν οι απαραίτητες ρυθμίσεις κατά την διαδικασία φόρτωσης του ελεγκτή από το Simulink στην κάρτα. Στο Σχήμα 3.22, από το κύριο μενού του Simulink επιλέγουμε Simulation Configuration parameters και εμφανίζεται το παράθυρο διαλόγου του Σχήματος 3.26.

90 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 89. Σχήμα 3.26 Ρυθμίσεις κατά την διαδικασία φόρτωσης του ελεγκτή, ώστε ορισμένα block να εκτελούνται με διαφορετικούς χρόνους δειγματοληψίας. Όπως φαίνεται στο Σχήμα 3.26, ο χρόνος δειγματοληψίας ορίζεται 100 μsec και παράλληλα επιλέγεται η εκτέλεση του αρχείου ως MultiTasking. Για την ημιτονοειδή PWM, η αντίστοιχη επιλογή ήταν SingleTasking και ο αντίστοιχος χρόνος δειγματοληψίας 50μsec. Στο Σχήμα 3.23, στο block SVM generator με τη χρήση του block Rate Transition εισήχθη ένα δεδομένο-πληροφορία, το οποίο εκτελείται με διαφορετική δειγματοληψία από την κύρια δειγματοληψία του block. Τα block που ακολουθούν το block Rate Transition (στην προκειμένη περίπτωση ο ενισχυτής U2 ), για να εκτελούνται με τη δειγματοληψία του block Braking, πρέπει στο παράθυρο διαλόγου τους να ορίζεται η δειγματοληψία (Sample time) ίση με την τιμή -1. Με την τιμή αυτή υιοθετείται ο χρόνος δειγματοληψίας που έχει οριστεί στο αμέσως προηγούμενο block. Σε γενικές γραμμές στην αρχή από κάθε ομάδα block ορίζεται ο χρόνος δειγματοληψίας, και έπειτα τα block που ακολουθούν παίρνουν την τιμή -1, εφόσον συνδέονται με τα αρχικά block κατά την φορά ροής των δεδομένων. Για παράδειγμα στο Σχήμα 3.22 στις σταθερές high, low και N * [rpm] ορίζουμε και στις τρεις χρόνο δειγματοληψίας 100μsec.Στα block που ακολουθούν ορίζεται -1.
91 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 90. Μέτρηση ρεύματος και ταχύτητας μέσω της κάρτας DS1104. Στο Σχήμα 3.22 φαίνεται το block με την ονομασία Irms (Measure) και σκοπός του είναι να μετρά την rms τιμή του ρεύματος. Στο Σχήμα 3.27 φαίνεται το εσωτερικό του. Σχήμα 3.27 Μέτρηση της rms τιμής ρεύματος. Tα block DS11004ADC_6 και DS11004ADC_7 εισάγουν την μέτρηση του ρεύματος στον ελεγκτή από δύο φάσεις του αντιστροφέα. Τα αναλογικά σήματα που λαμβάνουμε από την έξοδο του μετρητικών διατάξεων οδηγούνται σε δύο A/D της κάρτας. Στην προκειμένη περίπτωση είναι οι A/D με αριθμό 6 και 7. Η συσκευή μέτρησης του ρεύματος LEM έχει αντιστοίχηση για ανώτατη είσοδο 20Α έχει μέγιστη έξοδο 10V και επίσης η τιμή 10V είναι η μέγιστη τιμή εισόδου που δέχεται ο A/D της κάρτας. Αν για παράδειγμα το ρεύμα της φάσης είναι 20Α, τότε η έξοδος του block DS11004ADC_6 θα ισούται με 1 και, αν το ρεύμα είναι 10A, αντίστοιχα η έξοδος θα είναι 0.5. Για να έχουμε λοιπόν το πλάτος του ρεύματος πολλαπλασιάζουμε την έξοδο του block του A/D με την τιμή 20, όπως φαίνεται στο Σχήμα Η έξοδος των block DS11004ADC_6 και DS11004ADC_7 δεν είναι ακριβώς ημιτονοειδή σήματα και συνεπώς για να υπολογιστεί η rms τιμή του ρεύματος είναι απαραίτητο το φιλτράρισμα των σημάτων. Στο Σχήμα 3.22 φαίνεται το block Speed measure, το εσωτερικό του οποίου φαίνεται στο Σχήμα Πριν περιγράψουμε το block Speed measure, κρίνεται σκόπιμο να αναφερθούμε στην πειραματική μέτρηση της ταχύτητας, η οποία γίνεται με οπτικό κωδικοποιητή στοφών. Ο μετρητής αυτός προσαρμόζεται στον άξονα της DC γεννήτριας και η λειτουργία του σε γενικές γραμμές είναι η εξής: Εντός του κωδικοποιητή υπάρχει κυκλικός δίσκος, προσαρμοσμένος στον άξονα, ο οποίος περιστρέφεται με την μηχανική ταχύτητα του κινητήρα. Ο κυκλικός δίσκος έχει εγκοπές και στην προκειμένη περίπτωση 4096 εγκοπές. Επίσης υπάρχει πομπός φωτός, ο οποίος μόνιμα εκπέμπει κάθετα στον κυκλικό δίσκο. Όταν το φως περάσει από μία εγκοπή, ανιχνεύεται από ένα δέκτη φωτός ο οποίος έχει μηχανισμό με φωτοαντιστάσεις, που όταν μεταβληθούν από την ύπαρξη φωτός, δημιουργείται τετραγωνικός παλμός.
92 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 91. Σχήμα 3.28 Εσωτερικό του block Speed measure. Συνεπώς, αν σε ένα χρονικό διάστημα Δt, το φως περάσει Ν φορές από το δίσκο, στην έξοδο του κωδικοποιητή θα εμφανιστούν Ν παλμοί (στο ίδιο χρονικό διάστημα Δt). Συνεπώς η ταχύτητα θα είναι ανάλογη του όρου : N / 4096 Δt (ταχύτητα =Διάστημα/χρόνος) ή 2π N ω= rad/sec (3.41) 4096 Δt Για ένα δεδομένο χρονικό διάστημα Δt, όσο μεγαλύτερη είναι η τιμή της ταχύτητας του άξονα, τόσοι περισσότεροι παλμοί (θα εμπεριέχονται στο χρόνο Δt) και αντιστρόφως. Η έξοδος του κωδικοποιητή στροφών είναι ένας αριθμός παλμών ανά Δt, όπου Δt είναι ο χρόνος δειγματοληψίας της ταχύτητας. Ο χρόνος δειγματοληψίας πρέπει να είναι αρκετά μικρός, ώστε να καταγραφεί ως νέα πληροφορία μια ενδεχόμενη μεταβολή στην ταχύτητα. Ωστόσο, αν είναι πολύ μικρός, τότε στο χρόνο Δt θα λαμβάνεται μικρός αριθμός παλμών και συνεπώς δεν θα είναι ακριβής η μέτρησης. Στον ελεγκτή που υλοποίηθηκε, η δειγματοληψία της ταχύτητας ορίστηκε Δt= 10msec. Επειδή μια περιστροφή του άξονα κατά 360 ο θα έχει αποτέλεσμα ο κωδικοποιητής στροφών να δημιουργήσει 4096 παλμούς, ο κωδικοποιητή μας δίνει και πληροφορία για την θέση του άξονα. Η έξοδος του κωδικοποιητή στροφών συνδέεται με την κάρτα dspace DS1104. Στο Σχήμα 3.28 το block με την ονομασία DS1104ENC_POS_C1 εισάγει την μέτρηση της ταχύτητας (το όνομα του block προέρχεται από τα αρχικά του encode_position). Η έξοδος του block είναι ο αριθμός των παλμών Ν που μετρούνται κάθε χρονικό διάστημα Δt. Στη συνέχεια, η έξοδος Ν στη συνέχεια ενισχύεται κατά την τιμή 2π/( 4096 Δt ) μέσω του ενισχυτή w [rad/sec], ώστε να υλοποιείται η εξίσωση (3.41). Το μενού διαλόγου του ενισχυτή w [rad/sec] δίνεται στη συνέχεια

93 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 92. Πρέπει να σημειώσουμε ότι, για να καταγράφεται με ακρίβεια η ταχύτητα, είναι απαραίτητο ο ενισχυτής w [rad/sec] να λειτουργεί και αυτός με την ίδια περίοδο δειγματοληψίας, Δt = 10msec όπως του κωδικοποιητή στροφών. Δηλαδή η τιμή του Sample time, όπως φαίνεται στο παραπάνω σχήμα, πρέπει να είναι ίδια με αυτή που χρησιμοποιείται για να υπολογιστεί η τιμή της ενίσχυσης. Διαφορετικά θα στέλνεται λανθασμένη πληροφορία για την ταχύτητα Πειραματικά αποτελέσματα διαμόρφωσης διανύσματος χώρου Μέσω του Control desk είναι δυνατόν να καταγραφούν οι κυματομορφές των ηλεκτρικών σημάτων που επεξεργάζονται από την κάρτα (Βλέπε Παράρτημα Β). Στην ενότητα αυτή καταγράψαμε ηλεκτρικά μεγέθη, καθώς και την απόκριση του κινητηρίου συστήματος, που οδηγείται με διαμόρφωση διανύσματος χώρου. Στη διαμόρφωση Space Vector, απαραίτητη για προσδιορισμό των παλμών ελέγχου είναι η ανορθωμένη συνεχής τάση V dc. Για να χρησιμοποιηθεί στους υπολογισμούς όμως, χρησιμοποιήθηκε κατάλληλο χαμηλοπερατό φίλτρο. Οι κυματομορφές της V dc, φιλτραρισμένη ή μη φαίνονται στο Σχήμα 3.29.
 α) Συνεχής εισόδου που μετρά η μετρητική διάταξη.")
 βλέπουμε την κυματομορφή του ρεύματος η οποία μετρήθηκε, όταν το φορτίο στον")
94 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 93. (α) Σχήμα 3.29 (β) α) Συνεχής εισόδου που μετρά η μετρητική διάταξη. β) Φιλτραρισμένη συνεχής τάση. Στο Σχήμα 3.30(α) βλέπουμε την κυματομορφή του ρεύματος η οποία μετρήθηκε, όταν το φορτίο στον άξονα είναι Τ=1Nm. Η διακοπτική συχνότητα του αντιστροφέα είναι 5kHz.
.")
95 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 94. Σχήμα 3.30 Μέτρηση ρεύματος γραμμής κατά την οδήγηση του κινητήρα με διαμόρφωση space vector. Στο Σχήμα 3.31 βλέπουμε την απόκριση του κινητηρίου συστήματος σε μια μεταβολή της ταχύτητας από 500rpm σε 1200rpm. Το φορτίο ήταν η DC γεννήτρια με το ρεύμα διέγερσης μηδέν (τ = 0.3Nm). Ο χρόνος απόκρισης της ταχύτητας στην μεταβολή αυτή, είναι σχεδόν 1.4sec. Ο ρυθμός με τον οποίο αυξάνεται ή μειώνεται η ταχύτητα ρυθμίζεται στον ψηφιακό ελεγκτή (βλέπε Σχήμα 3.22) από τις τιμές των σταθερών high και low. Η τιμή της σταθεράς high για την απόκριση του Σχήματος 3.31 είναι ίση με 500rpm/sec (γι αυτό άλλωστε προκύπτει χρόνος απόκρισης 1.4sec). Σχήμα 3.31: Απόκριση ταχύτητας κινητήριου συστήματος με διαμόρφωση space vector (500rpm 1200rpm)

96 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 95. Σχήμα 3.32 Διακύμανση ταχύτητας του δρομέα. Όπως είναι αναμενόμενο η ταχύτητα του δρομέα δεν είναι σταθερή, αλλά έχει διακύμανση όπως φαίνεται στο Σχήμα 3.32, που είναι λεπτομέρεια του Σχήματος Η διακύμανση αυτή δικαιολογείται γιατί το σύστημα είναι ανοιχτού βρόγχου. Επίσης παρατηρείται ότι, ενώ έχει δοθεί εντολή για 1200 στροφές, η πραγματική ταχύτητα είναι πάνω από 1200rpm, ενώ θα έπρεπε, λόγω του ασύγχρονου κινητήρα, να είναι κάτω από τις 1200rpm. Αυτό οφείλεται σε προσεγγίσεις στους υπολογισμούς της συχνότητας αναφοράς οι οποίες εν διορθώνονται επειδή το σύστημα είναι ανοικτού βρόχου. Επίσης παρατηρούμε στο Σχήμα 3.32 ότι η τιμή της ταχύτητας αλλάζει κάθε 10msec, όση είναι άλλωστε και η δειγματοληψία της ταχύτητας. Στο Σχήμα 3.33(α) βλέπουμε πάλι ένα μεταβατικό στη ταχύτητα και στο Σχήμα 3.33(β) την αντίστοιχη μεταβολή του rms ρεύματος. Το πείραμα έγινε με σε λειτουργία κενού. Επειδή δεν υπάρχει φορτίο, η rms τιμή του ρεύματος αυξάνεται ελάχιστα κατά τη διάρκεια των μεταβολών της ταχύτητας [Σχήμα 3.33(β)].

97 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 96. (α) (β) Σχήμα 3.33 (α)μεταβολή ταχύτητας 700rpm 1200rpm 700rpm (β)μεταβολή Irms για το μεταβατικό της ταχύτητας. Επίσης μετρήθηκε η απόκριση του συστήματος σε μεταβολή της ροπής φορτίου. Αρχικά, ενώ ο κινητήρας λειτουργούσε με φορτίο 1Nm, αυξήθηκε απότομα το ρεύμα διέγερσης της γεννήτριας και το φορτίο έλαβε τιμή 6 Nm περίπου. Στο Σχήμα 3.34 φαίνεται η απόκριση της ταχύτητας στην μεταβολή της ροπής καθώς και η μεταβολή της rms τιμής του ρεύματος. Όπως ήταν αναμενόμενο, μειώθηκε η ταχύτητα και αυξήθηκε το ρεύμα. Ο χρόνος απόκρισης ήταν περίπου 0.5 sec.

98 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 97. (α) (β) Σχήμα 3.34 (α)μεταβολή ταχύτητας σε αύξηση φορτίου από 1Nm 6Nm. (β)μεταβολή του Irms στο μεταβατικό της ροπής 1Nm 6Nm. Έγινε και δεύτερο πείραμα μεταβολής της ροπής φορτίου, όπου ο κινητήρας λειτουργούσε υπό φορτίο 4.5Nm στη συνέχεια μηδενίστηκε το εξωτερικό φορτίο και και μετά από μικρό χρονικό διάστημα επανήλθε στην αρχική του φόρτιση. Στα Σχήματα 3.35 (α) και (β) δίνονται τα διαγράμματα της ταχύτητας και της rms τιμής του ρεύματος αντίστοιχα.
 (β) Σχήμα 3.35 (α) Μεταβολή ταχύτητας σε μεταβολή του φορτίου από4.5νm 0.")

99 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 98. (α) (β) Σχήμα 3.35 (α) Μεταβολή ταχύτητας σε μεταβολή του φορτίου από4.5νm 0.3Nm (β) Μεταβολή του Irms σε μεταβολή του φορτίου από4.5νm 0.3Nm 4.5Nm Στο Σχήμα 3.36 δίνεται το κυκλωματικό διάγραμμα της πειραματικής διάταξης που εφαρμόστηκε.
100 Αντιστροφέας ισχύος διαμόρφωσης διανύσματος χώρου-space Vector. 99. Σχήμα 3.36 Κυκλωματικό διάγραμμα πειραματικής διάταξης. Στην πρώτο πείραμα μεταβολής της ροπής μετακινήσαμε χειροκίνητα τον διακόπτη που ελέγχει την γωνία του Thyristor μεταβάλλοντας το ρεύμα διέγερσης, όπως φαίνεται στο παραπάνω σχήμα. Στην δεύτερη περίπτωση συνδέθηκε εξωτερική αντίσταση R φ στο κύκλωμα οπλισμού της DC γεννήτριας
101 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα Στο κεφάλαιο 4 αρχικά γίνεται εισαγωγή στη θεωρία του ανυσματικού ελέγχου επαγωγικών κινητήρων και έπειτα γίνεται αναφορά ειδικότερα στον έμμεσο ανυσματικό έλεγχο ταχύτητας επαγωγικού κινητήρα. Κατόπιν προσομοιώνουμε το ανυσματικά ελεγχόμενο κινητήριο σύστημα με δύο μοντέλα στο πρόγραμμα Simulink, το μαθηματικό μοντέλο και το πλήρες μοντέλο. Από τα μοντέλα προσομοίωσης προσδιοριστήκαν και ελεγχθήκαν οι παράμετροι του ΡΙ ελεγκτή ταχύτητας για να χρησιμοποιηθούν στην πειραματική υλοποίηση. Τέλος γίνεται περιγραφή του ψηφιακού ελεγκτή που υλοποιεί
102 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 101 πειραματικά τον ανυσματικό έλεγχο και παρουσιάζονται τα αποτελέσματα της εργαστηριακής υλοποίησης. 4.1 Θεωρία έμμεσου ανυσματικού ελέγχου ταχύτητας επαγωγικού κινητήρα Εισαγωγή στον ανυσματικό έλεγχο επαγωγικών κινητήρων Όλα τα ηλεκτρικά και μαγνητικά μεγέθη μιας τριφασικής ηλεκτρικής μηχανής εναλλασσόμενου ρεύματος είναι χρονικά μεταβαλλόμενα. Τα μεγέθη αυτά μπορούν να παρασταθούν με διανύσματα χρόνου και χώρου, πάνω στο μιγαδικό επίπεδο. Τα διανύσματα χώρου μπορεί να είναι στρεφόμενα ή στατικά, ανάλογα με το σύστημα αξόνων αναφοράς που έχει επιλεγεί. Τα ίδια συμπεράσματα μπορούν να προκύψουν και για τα διανύσματα χρόνου. Μπορούμε να μετασχηματίσουμε το τριφασικό σύστημα σε «διφασικό» και επιπλέον όλα τα χρονικά μεταβαλλόμενα μεγέθη μπορούν να μετασχηματιστούν σε χρονικά αμετάβλητα ή αντίστοιχα όλα τα στρεφόμενα διανύσματα χρόνου σε στατικά, επιλέγοντας κατάλληλο σύστημα αξόνων αναφοράς. Με τον μετασχηματισμό d-q του ηλεκτρικού κυκλώματος δημιουργείται ισοδύναμο κύκλωμα για τον επαγωγικό κινητήρα και αναλόγως το σύστημα αναφοράς προκύπτουν οι σχέσεις που περιγράφουν τον κινητήρα. Στην εργασία δεν θα αναλυθεί πώς προκύπτουν οι εξισώσεις του δυναμικού μοντέλου της μηχανής για κάθε σύστημα αναφοράς που χρησιμοποιείται, αλλά θα λαμβάνονται χωρίς απόδειξη, γιατί η περαιτέρω ανάλυση είναι εκτός του σκοπού της εργασίας. Ο ανυσματικός έλεγχος ή έλεγχος προσανατολισμένου πεδίου πλεονεκτεί έναντι του βαθμωτού ελέγχου, γιατί εξασφαλίζει καλύτερη δυναμική απόκριση του συστήματος και έλεγχο ροπής στις χαμηλές ταχύτητες ακόμη και στη μηδενική ταχύτητα. Η βασική αρχή του ανυσματικού ελέγχου στηρίζεται στον ανεξάρτητο έλεγχο του ρεύματος ροπής και της μαγνητικής ροής διέγερσης. Είναι γνωστό ότι αυτό γίνεται εύκολα στους κινητήρες συνεχούς ρεύματος, αφού μπορούν τα ρεύματα τυμπάνου και διέγερσης να ελέγχονται ανεξάρτητα. Επίσης στους κινητήρες συνεχούς ρεύματος ο έλεγχος είναι ευκολότερος σε σύγκριση με τους κινητήρες εναλλασσόμενου ρεύματος, γιατί οι μεταβλητές ελέγχου είναι βαθμωτά μεγέθη, και το σύστημα συλλέκτη-ψηκτρών διατηρεί σταθερή γωνία 90 ο μεταξύ των διανυσμάτων χώρου του ρεύματος τυμπάνου και της ροής διέγερσης. Η εξίσωση της ηλεκτρομαγνητικής ροπής των κινητήρων συνεχούς ρεύματος (αγνοώντας την επίδραση του πεδίου αντίδρασης και του μαγνητικού κορεσμού) είναι, T = cλ I = c I I (4.1) e f a 1 f a
103 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 102 όπου λ f και I f είναι η ροή και το ρεύμα διέγερσης (ρεύμα πεδίου), αντίστοιχα και Ι a το ρεύμα τυμπάνου (ρεύμα ροπής). Στους επαγωγικούς κινητήρες απαιτείται ένα ανυσματικό σύστημα ελέγχου (απαιτείται έλεγχος του πλάτους και της φάσης του ρεύματος του στάτη) με αποτέλεσμα να αυξάνει η πολυπλοκότητα της ελέγχου και να δυσκολεύει η μέθοδος υλοποίησή της. Το ρεύμα του στάτη αναλύεται σε δύο συνιστώσες, το ρεύμα πεδίου (κατά τον διαμήκη d-άξονα, συμφασικό με το διάνυσμα της ροής του δρομέα) και το ρεύμα ροπής (κατά τον εγκάρσιο q-άξονα), όπως φαίνονται στο Σχήμα 4.1 Η ανάλυση του ρεύματος στις δύο συνιστώσες του γίνεται για σύστημα αξόνων αναφοράς προσανατολισμένο στον άξονα του διανύσματος της ροής. Γι αυτό το λόγο ο έλεγχος ονομάζεται έλεγχος προσανατολισμένου πεδίου δρομέα. Για να υλοποιηθούν τα παραπάνω, θα πρέπει να είναι γνωστή σε κάθε στιγμή η θέση του διανύσματος της ροής του δρομέα. Η εξίσωση της ηλεκτρομαγνητικής ροπής των επαγωγικών κινητήρων στο σύγχρονα περιστρεφόμενο σύστημα αξόνων αναφοράς είναι T c λ i c λ i (4. 2) e e e e e = r r sq = r rd sq e Η ροή του δρομέα είναι ανάλογη της συνιστώσας i sd του ρεύματος του στάτη και συνεπώς η εξίσωση της ηλεκτρομαγνητικής ροπής των επαγωγικών κινητήρων μπορεί να γραφτεί ως Από την εξίσωση (4.3) προκύπτει ότι ο έλεγχος της ροπής του επαγωγικού κινητήρα μπορεί T e e e = cr1isdisq (4.3) να επιτευχθεί ελέγχοντας ανεξάρτητα τις δύο συνιστώσες του ρεύματος του στάτη. Σχήμα 4.1 Διανυσματικό διάγραμμα της ροής του δρομέα και του ρεύματος του στάτη στον ανυσματικό έλεγχο του επαγωγικού κινητήρα. Ο μετασχηματισμός d-q προσανατολισμένου πεδίου δρομέα μετατρέπει τα εναλλασσόμενα μεγέθη του στάτη σε βαθμωτά μεγέθη και έτσι η τεχνική του ανυσματικού ελέγχου μετατρέπει τον έλεγχο των επαγωγικών κινητήρων σε έλεγχο αντίστοιχο των κινητήρων συνεχούς ρεύματος. Στο Σχήμα 4.2 φαίνεται ο συσχετισμός ανάμεσα στον έλεγχο των κινητήρων συνεχούς ανεξάρτητης διέγερσης και τον ανυσματικό έλεγχο των επαγωγικών κινητήρων. Ο αστερίσκος χαρακτηρίζει τα σήματα εντολής ή αναφοράς (command ή reference
104 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 103 signals). Η ροή του πεδίου διέγερσης λ f των κινητήρων συνεχούς ρεύματος αντιστοιχίζεται ' e στη ροή του δρομέα λ r των επαγωγικών κινητήρων και ομοίως το ρεύμα διέγερσης I f αντιστοιχίζεται στο ρεύμα πεδίου i e sd. Επίσης, το ρεύμα τυμπάνου I α των κινητήρων συνεχούς ρεύματος αντιστοιχίζεται στο ρεύμα ροπής i e sq των επαγωγικών κινητήρων. Ένα κινητήριο σύστημα ανυσματικού ελέγχου επαγωγικού κινητήρα επιτυγχάνει πολύ καλύτερη δυναμική συμπεριφορά σε σύγκριση με ένα αντίστοιχο με κινητήρα συνεχούς ρεύματος. Ο επαγωγικός κινητήρας έχει συνήθως πολύ μικρότερη σταθερά χρόνου και μικρότερη ροπή αδράνειας, με αποτέλεσμα η ταχύτητα απόκρισης στον έλεγχο ροπής να είναι πολύ γρήγορη. Επιπλέον, οι επαγωγικοί κινητήρες είναι οικονομικότεροι στην κατασκευή, δεν απαιτούν συντήρηση, είναι περισσότερο αξιόπιστοι και έχουν μεγαλύτερο βαθμό απόδοσης σε σύγκριση με τους κινητήρες συνεχούς ρεύματος. Ωστόσο, ο ανυσματικός έλεγχος είναι πολύ πιο δυσκολότερος στην υλοποίησή του και συνεπώς το σύστημα ελέγχου έχει υψηλότερο κόστος σε σύγκριση με το σύστημα ελέγχου των κινητήρων συνεχούς ρεύματος. Σχήμα 4. 2 Ανυσματικός έλεγχος επαγωγικού κινητήρα σε αναλογία με τον έλεγχο του κινητήρα συνεχούς ρεύματος ανεξάρτητης διέγερσης.
105 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα Αρχή λειτουργίας του ανυσματικού ελέγχου επαγωγικών κινητήρων Στην τεχνική του ανυσματικού ελέγχου επαγωγικού κινητήρα εφαρμόζεται σύστημα αξόνων αναφοράς προσανατολισμένου πεδίου δρομέα και συνεπώς απαιτείται η γνώση της e θέσης του διανύσματος χώρου της ροής του δρομέα λ r. Έστω θ e είναι η γωνία που e s σχηματίζει το διάνυσμα λ ως προς τον οριζόντιο d -άξονα (πραγματικό άξονα) του r ακίνητου συστήματος αξόνων αναφοράς του στάτη (Σχήμα 4.3). Τα ρεύματα των τριών φάσεων μπορούν να μετασχηματιστούν στο ακίνητο σύστημα αξόνων αναφοράς του στάτη s s d q. s isa i 2 1 cos2 3 cos4 3 sq π π i s = sb i 3 0 sin2π 3 sin4π 3 sd i sc και στη συνέχεια στο σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς e s i cos e sin sq θ θe i sq e = s i sin θe cosθ sd e isd προσανατολισμένο στον άξονα του διανύσματος της ροής r λ, όπου d e e, q (4.4) (4.5) t e e e (4.6) 0 θ = ω ( ξ) dξ + θ (0) Το πλάτος του διανύσματος του ρεύματος του στάτη στο ακίνητο σύστημα αξόνων αναφοράς είναι Σχήμα 4.3 Διανυσματικό διάγραμμα του ρεύματος του στάτη στα τρία συστήματα αξόνων αναφοράς (ακίνητο, δρομέα και σύγχρονα στρεφόμενο).
106 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 105 iˆ = ( i ) + ( i ) (4.7) s s 2 s 2 s sq sd και στο σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς είναι e e 2 e 2 ( ) ( ) ˆs s sq sd s i = i + i = i (4.8) Συνεπώς, το πλάτος του διανύσματος του ρεύματος του στάτη είναι το ίδιο ανεξάρτητα του συστήματος αξόνων αναφοράς (Σχήμα 4.3). Η φάση του διανύσματος ως προς το σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς είναι Θυμίζουμε ότι, λόγω των διαφορετικών συστημάτων αξόνων αναφοράς, το i είναι e στρεφόμενο διάνυσμα ενώ το διάνυσμα i s είναι ακίνητο. Συνεπώς η στιγμιαία τιμή του ρεύματος του στάτη στο ακίνητο σύστημα αξόνων αναφοράς είναι χρονικά μεταβαλλόμενη, ενώ είναι χρονικά αμετάβλητη στο σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς. Η ταχύτητα περιστροφής του διανύσματος i s είναι η σύγχρονη ταχύτητα ω e. Ομοίως η ταχύτητα περιστροφής του διανύσματος λ r είναι η σύγχρονη ταχύτητα ω e, δηλαδή το άθροισμα της ταχύτητας του δρομέα ω r και της ταχύτητας ολίσθησης ωsl = ωe ωr. Συνεπώς τα διανύσματα i s και λ r είναι ακίνητα ως προς το σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς, αφού η σχετική ταχύτητα μεταξύ των διανυσμάτων και του συστήματος αξόνων είναι μηδέν. Με άλλα λόγια, στο σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς e e d q τα πλάτη των i s και λ r είναι χρονικά αμετάβλητες ποσότητες (βαθμωτά μεγέθη) και συνεπώς μπορούν εύκολα να χρησιμοποιηθούν ως μεταβλητές ελέγχου. Από τα παραπάνω επιβεβαιώνεται ότι, για να υλοποιηθεί ο ανυσματικός έλεγχος στον επαγωγικό κινητήρα, είναι απαραίτητο να είναι γνωστή η θέση του διανύσματος της ροής του δρομέα λ, δηλαδή η γωνία του πεδίου του δρομέα θ e (Σχήμα 4.3), e r και συνεπώς 1 ( e e ) r sq sd γ tan i i = (4.9) θe = θr + θsl (4.10) t t ( ) (4.11) 0 0 θ = ω + ω dt = ω dt e r sl e όπου θ r η γωνία της θέσης του δρομέα και θ sl η γωνία ολίσθησης θ sl = θ sl = t 0 ω dt Υπάρχουν δύο τεχνικές ανυσματικού ελέγχου, ανάλογα με τη μέθοδο υπολογισμού της γωνίας του πεδίου θ e. Ο άμεσος ανυσματικός έλεγχος ή άμεσος έλεγχος προσανατολισμένου πεδίου, όταν η γωνία του πεδίου θ e προσδιορίζεται από τα ρεύματα και εναλλακτικά τις τάσεις στους ακροδέκτες του κινητήρα ή την ηλεκτρεγερτική δύναμη ή την ταχύτητα περιστροφής του δρομέα. Αν η γωνία του πεδίου θ e προσδιορίζεται μόνο από το δυναμικό μοντέλο του κινητήρα και τη μέτρηση της ταχύτητας περιστροφής, χωρίς να απαιτούνται μετρήσεις των τάσεων και ρευμάτων του κινητήρα, τότε έχουμε τον έμμεσο ανυσματικό έλεγχο ή έμμεσο έλεγχο προσανατολισμένου πεδίου. sl s s
107 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 106 Τα βήματα ενεργειών που ακολουθούνται στον ανυσματικό έλεγχο του επαγωγικού κινητήρα είναι συνοπτικά τα παρακάτω: 1. Υπολογίζεται η γωνία του πεδίου του δρομέα θ e (άμεσα ή έμμεσα, ανάλογα με την τεχνική ελέγχου). e * 2. Προσδιορίζεται το ρεύμα πεδίου ( i sd ) για τη παραγωγή της απαιτούμενης ροής e * δρομέα ( λ r ). e * 3. Από τη ροή δρομέα ( λ r ) που προσδιορίστηκε από το προηγούμενο βήμα και την * e απαιτούμενη ροπή ( T e) προσδιορίζεται το ρεύμα ροπής ( i sq ) *. Αν η ροή του e δρομέα είναι σταθερή, ο έλεγχος ροπής γίνεται αποκλειστικά από το ρεύμα ( i sq ) *. e e s s 4. Εφαρμόζεται ο αντίστροφος μετασχηματισμός (από d q στο d q ), ώστε από e * e τα ρεύματα ( i sd ) και ( i sq ) * s * s να προσδιοριστούν τα ρεύματα ( i sd ) και ( i sq ) *. s s 5. Εφαρμόζεται ο αντίστροφος μετασχηματισμός (από d q στο τριφασικό σύστημα s * s A-B-C), ώστε από τα ρεύματα ( i sd ) και ( i sq ) * να προσδιοριστούν τα τριφασικά ρεύματα αναφοράς i *, *, * sa isb i sc. 6. Ο αντιστροφέας ισχύος τροφοδοτεί τον επαγωγικό κινητήρα με τριφασικό σύστημα ρευμάτων, που καθορίζεται από τα ρεύματα αναφοράς i *, i *, i *. sa sb sc Τα τριφασικά ρεύματα αναφοράς i *, *, * sa isb i sc θα μπορούσαν να προσδιοριστούν απ e e ευθείας από το d q σύστημα αξόνων. Στη περίπτωση αυτή, τα βήματα 4 και 5 γίνονται: 4. Προσδιορίζεται το πλάτος του ρεύματος του στάτη i ˆs* από τις δύο συνιστώσες του e * e ( i sd ) και ( i sq )*, σύμφωνα με την εξίσωση (4.8). Από την εξίσωση (4.9) προσδιορίζεται η φάση του ρεύματος του στάτη γ s στο σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς και από την εξίσωση θs = θe + γr στο ακίνητο σύστημα αξόνων αναφοράς. 5. Από το πλάτος i ˆs* και τη φάση θ s του ρεύματος, προσδιορίζονται οι κυματομορφές των τριφασικών ρευμάτων αναφοράς i = iˆ cosθ (4.12) * * sa s s * ˆ* 2 sb = s cos s i i θ * ˆ* 4 sc = s cos s i i θ π 3 π 3 (4.13) (4.14) Ανακεφαλαιώνοντας τα παραπάνω, στον ανυσματικό έλεγχο του επαγωγικού κινητήρα η μαγνητική ροή και η ηλεκτρομαγνητική ροπή ελέγχονται ανεξάρτητα μέσω των δύο συνιστωσών του ρεύματος του στάτη, όπως στις μηχανές συνεχούς ρεύματος, της διαμήκης συνιστώσας (ρεύμα πεδίου) i sd και της εγκάρσιας συνιστώσας (ρεύμα ροπής) i sq, αντίστοιχα. Συνεπώς, αν και ο επαγωγικός κινητήρας δεν έχει χωριστά τυλίγματα διέγερσης και τυμπάνου, ο ανυσματικός έλεγχος πετυχαίνει αποσύζευξη και ανεξάρτητο έλεγχο των δύο
108 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 107 συνιστωσών του ρεύματος τροφοδοσίας. Έτσι, το ρόλο του συστήματος συλλέκτη-ψηκτρών στον επαγωγικό κινητήρα παίζει ο αντιστροφέας ισχύος και η μονάδα ελέγχου. Για την υλοποίηση του ανυσματικού ελέγχου απαιτείται η γνώση της γωνίας του πεδίου του δρομέα θ e και ανάλογα με τον τρόπο υπολογισμού της γωνίας θ e ο ανυσματικός έλεγχος χαρακτηρίζεται ως άμεσος ή έμμεσος Έμμεσος ανυσματικός έλεγχος επαγωγικών κινητήρων Στον έμμεσο ανυσματικό έλεγχο η σύνθεση του σύγχρονα στρεφόμενου συστήματος αξόνων αναφοράς βασίζεται αποκλειστικά στη μέτρηση της ταχύτητας περιστροφής και στο δυναμικό μοντέλο του κινητήρα. Δεν υπάρχει οποιαδήποτε εξάρτηση από τα ηλεκτρικά μεγέθη του κινητήρα. Από το δυναμικό μοντέλο του επαγωγικού κινητήρα, οι εξισώσεις του δρομέα στο σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς είναι dλ e rq e e r rq e r rd dt + Ri + ( ω ω ) λ = 0 (4.15) dλ dt e rd e e + Ri ( ω ω ) λ = 0 (4.16) r rd e r rq όπου λ = Li + L i (4.17) e e e rq r rq m sq λ = Li + L i (4.18) e e e rd r rd m sd Από τις εξισώσεις (4.17) και (4.18) έχουμε
109 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα Lm i = λ i L L e e e rq rq sq r r (4.19) 1 Lm i = λ i L L e e e rd rd sd r r (4.20) και αντικαθιστώντας τις εξισώσεις (4.17) και (4.18) γίνονται e dλrq Rr e Lm e e + λ rq Ri r sq + ω sl λ rd = 0 dt L L r r (4.21) όπου ωsl = ωe ωr η ταχύτητα ολίσθησης. e dλrd Rr e Lm e e + λ rd Ri r sd + ω sl λ rq = 0 dt L L r r (4.22) Για να είναι το διάνυσμα της ροής του δρομέα προσανατολισμένο κατά τον διαμήκη άξονα d e, θα πρέπει να έχει συνιστώσα μόνο κατά τον άξονα αυτόν, έτσι ˆ e λ = λ (4.23) ενώ η συνιστώσα κατά τον εγκάρσιο άξονα q e θα πρέπει να είναι μηδέν r rd e dλrq e λrq = = 0 (4.24) dt Αντικαθιστώντας τις εξισώσεις (4.23) και (4.24) στις (4.21) και (4.22) έχουμε ω sl = 1 Lm e i ˆ sq λ T (4.25) r R dλˆ r 1 ˆ Lm e + λr isd = 0 (4.26) dt T T R R
110 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 109 όπου TR = Lr Rr η σταθερά χρόνου του κυκλώματος του δρομέα. Χρησιμοποιώντας τις εξισώσεις (4.23) και (4.24), η εξίσωση της ροπής γίνεται e e e e ( ) 3 Lm T = P λ i λ i 2 L e rd sq rq sd r 3 Lm e T ˆ e = P isqλr 2 L r (4.27) (4.28) Οι παραπάνω εξισώσεις (4.26) και (4.28), σε συνδυασμό με την μηχανική εξίσωση του φορτίου T J dω P dt r e TL = (4.29) περιγράφουν το δυναμικό μοντέλο του επαγωγικού κινητήρα στον έμμεσο ανυσματικό έλεγχο, όπως δίνεται στο Σχήμα 4.4. Η απόκριση του ρεύματος i sq στη παραγωγή ροπής είναι άμεση, αλλά παρουσιάζει καθυστέρηση, λόγω του ρεύματος i sd. Επίσης, είναι εμφανής η αποσύζευξη των δύο κυκλωμάτων κατά τους άξονες d και q, όπως στον κινητήρα συνεχούς ρεύματος. Σχήμα 4..4 Λειτουργικό διάγραμμα του μοντέλου του επαγωγικού κινητήρα στον έμμεσο ανυσματικό έλεγχο. Στα Σχήματα 4.5 και 4.6 παρουσιάζονται τα λειτουργικά διαγράμματα του έμμεσου * * * ανυσματικού ελέγχου, όταν τα ρεύματα αναφοράς isa, isb, i sc προσδιορίζονται μέσω του e e s s αντίστροφου μετασχηματισμού από το σύστημα d q στο d q και απ ευθείας από τα e * e * ρεύματα πεδίου ( i sd ) και ροπής ( i sq ) του σύγχρονα στρεφόμενου συστήματος αναφοράς, * αντίστοιχα, όπως εξηγήθηκε στην προηγούμενη ενότητα. Η ροπή αναφοράς T e υπολογίζεται από τον ελεγκτή ταχύτητας (ελεγκτή ΡΙ και περιοριστή ροπής). Πιο συγκεκριμένα η γωνιακή ταχύτητα του δρομέα ω r μετράται με την ταχογεννήτρια που είναι τοποθετημένη στον άξονα * του δρομέα και συγκρίνεται με την γωνιακή ταχύτητα αναφοράς ω r. Η διαφορά * Δ ωr = ωr ωr είναι το στιγμιαίο σφάλμα ταχύτητας και οδηγείται στον ελεγκτή ταχύτητας. Όταν αυξηθεί η ταχύτητα αναφοράς, το σφάλμα ταχύτητας Δω r είναι θετικό και η έξοδος του * ελεγκτή ταχύτητας είναι θετική ροπή αναφοράς (ο κινητήρας επιταχύνεται, T > 0 ). Αντίθετα, e
111 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 110 όταν μειωθεί η ταχύτητα αναφοράς, το σφάλμα ταχύτητας Δω r είναι αρνητικό και η έξοδος του * ελεγκτή ταχύτητας είναι αρνητική ροπή αναφοράς (ο κινητήρας επιβραδύνεται, T < 0 ). Ο ελεγκτής ταχύτητας αποτελείται από ένα αναλογικό ολοκληρωτικό ελεγκτή (ΡΙ controller) και τον περιοριστή ροπής. Ο ελεγκτής ΡΙ μηδενίζει το σφάλμα μόνιμης κατάστασης και σταθεροποιεί τη λειτουργία της μονάδας οδήγησης ρυθμίζοντας το πλάτος και τον χρόνο απόσβεσης των ταλαντώσεων ταχύτητας που προκαλεί η οποιαδήποτε μεταβολή της λειτουργικής κατάστασης του συστήματος (π.χ. μεταβολή της ταχύτητας αναφοράς, μεταβολή της ροπής φορτίου). Σε συστήματα ελέγχου κλειστού βρόχου θα μπορούσαν εναλλακτικά να χρησιμοποιηθούν αναλογικοί διαφορικοί ελεγκτές (PD) και αναλογικοί ολοκληρωτικοί διαφορικοί ελεγκτές (PID). Ωστόσο δεν προτιμώνται σε στατικούς μετατροπείς συχνότητας κινητήριων συστημάτων, γιατί η διαφορική βαθμίδα που εμπεριέχουν ενισχύει τις υψηλές συχνότητες, και έτσι ενισχύεται ο θόρυβος και αυξάνουν οι ταλαντώσεις της ταχύτητας και του ρεύματος. Ο περιοριστής ροπής θέτει ανώτερα όρια στη μέγιστη μεταβολή της ροπής. Τα όρια αυτά εξαρτώνται από την ισχύ του κινητήρα και από το είδος της εφαρμογής. Συνήθως είναι διπλάσια έως τριπλάσια της ονομαστικής ροπής, ώστε το σύστημα να έχει ικανοποιητική δυναμική συμπεριφορά και να περιορίζονται οι απότομες μεταβολές της ταχύτητας που θα προκαλούσαν προβλήματα αστάθειας και έντονους κραδασμούς στα έδρανα και στο μηχανικό φορτίο. Το λειτουργικό διάγραμμα της μονάδας υπολογισμού των ρευμάτων αναφοράς και της e * συχνότητας ολίσθησης δίνεται στο Σχήμα 4.7 και υπολογίζει τα ρεύματα αναφοράς ( i sq ) και e * ( i sd ) από τις εξισώσεις (4.28) και (4.26), αντίστοιχα, και τη συχνότητα ολίσθησης από την * εξίσωση (4.25). Η ροή αναφοράς του δρομέα ( λ ) προσδιορίζεται μέσω της ταχύτητας περιστροφής του κινητήρα. Επίσης στο Σχήμα 4.7 για ταχύτητες μικρότερες της βασικής ταχύτητας, η ροή αναφοράς του δρομέα έχει την ονομαστική της τιμή (περιοχή σταθερής ροπής). Για ταχύτητες μεγαλύτερες της βασικής ταχύτητας, η ροή μειώνεται καθώς αυξάνει η ταχύτητα και ρυθμίζεται μέσω ενός πίνακα τιμών ώστε να διατηρείται σταθερή η ισχύς του κινητήρα (περιοχή σταθερής ισχύος). Για τον έλεγχο των ηλεκτρονικών διακοπτών του αντιστροφέα ισχύος εφαρμόζεται η τεχνική του PWM ελέγχου ρεύματος με βρόχο υστέρησης και θα αναλυθεί στην επόμενη ενότητα. Η γωνία πεδίου είναι και τα μοναδιαία διανύσματα sinθ e και cosθ e υπολογίζονται από τις τριγωνομετρικές εξισώσεις r t ( ) (4.29) 0 θ = ω + ω dt e r sl e cosθ = cos( θ + θ ) = cosθ cosθ sin θ sin θ (4.30) e r sl r sl r sl sin θ = sin( θ + θ ) = sin θ cosθ + cosθ sin θ (4.31) e r sl r sl r sl όπου θ r η γωνία στροφής του δρομέα και θ sl η γωνία ολίσθησης.
112 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 111 Ο έμμεσος ανυσματικός έλεγχος εξαρτάται από τις παραμέτρους του δυναμικού μοντέλου του επαγωγικού κινητήρα και ειδικότερα, από την αυτεπαγωγή μαγνήτισης L m και τη σταθερά χρόνου του δρομέα T R. Συνεπώς, εξαρτώνται από τον μαγνητικό κορεσμό και τη θερμοκρασία. Η οποιαδήποτε απόκλιση από τις πραγματικές τιμές των παραμέτρων (λόγω λανθασμένης αρχικής εκτίμησης ή μεταβολής των) θα οδηγούσε σε λανθασμένο υπολογισμό της συχνότητας ολίσθησης ω sl και της γωνίας του πεδίου θ e. Αυτό θα είχε ως αποτέλεσμα, αύξηση των ρευμάτων του κινητήρα και συνεπώς αύξηση της θερμοκρασίας λειτουργίας του και αύξηση των απωλειών με αντίστοιχη μείωση του βαθμού απόδοσης του συστήματος. Επίσης θα προκαλούσε προβλήματα αστάθειας και ταλαντώσεις ροπής, ιδιαίτερα σε μεταβατικές καταστάσεις. Σε αντίθεση με τον άμεσο ανυσματικό έλεγχο, όπου ο υπολογισμός της γωνίας πεδίου θ e βασίζεται κυρίως στα σήματα ανάδρασης των ηλεκτρικών ή μαγνητικών μεγεθών του κινητήρα, ο έμμεσος ανυσματικός έλεγχος στηρίζεται μόνο στο σήμα ανάδρασης της ταχύτητας και στο δυναμικό μοντέλο του επαγωγικού κινητήρα. Συνεπώς, αναμένεται η επίδραση των μεταβολών των παραμέτρων στον έμμεσο ανυσματικό έλεγχο, κυρίως λόγω θερμοκρασίας και κορεσμού, να είναι πολύ πιο έντονη σε σύγκριση με τον άμεσο ανυσματικό έλεγχο.
113 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα Σχήμα 4.5 Λειτουργικό διάγραμμα έμμεσου ανυσματικού ελέγχου επαγωγικού κινητήρα (τα ρεύματα αναφοράς * * * isa, isb, isc προσδιορίζονται μέσω του αντίστροφου μετασχηματισμού από το σύστημα d e q e στο σύστημα d s q s ). 112
114 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα Σχήμα. 4.6 Λειτουργικό διάγραμμα έμμεσου ανυσματικού ελέγχου επαγωγικού κινητήρα (τα ρεύματα αναφοράς * * * isa, isb, isc προσδιορίζονται απ ευθείας από τα ρεύματα πεδίου e * e * (isd ) και ροπής (isq ) του σύγχρονα στρεφόμενου συστήματος αναφοράς). 113
115 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 114 Σχήμα 4.7 Λειτουργικό διάγραμμα της μονάδας υπολογισμού των ρευμάτων αναφοράς και της συχνότητας ολίσθησης στον έμμεσο ανυσματικό έλεγχο του επαγωγικού κινητήρα Αντιστροφέας ισχύος PWM ελέγχου ρεύματος Από τα Σχήματα 4.6 και 4.5 βλέπουμε ότι υπολογίζονται τελικά στο τριφασικό σύστημα τα τρία ρεύματα αναφοράς και στέλνονται στον Inverter. Συνεπώς το κύκλωμα οδήγησης του Inverter πρέπει να αξιοποιήσει την πληροφορία των ρευμάτων αναφοράς που τους δίνεται και να παράξει τους παλμούς ελέγχου, που θα σταλθούν στις βάσεις των IGBTs. Στόχος είναι στο τέλος να λάβουμε στα τυλίγματα του κινητήρα πραγματικά ρεύματα ίσα με αυτά της αναφοράς. Για να γίνει αυτό, εφαρμόζεται η τεχνική PWM ελέγχου ρεύματος με βρόχο υστέρησης (PWM hysteresis band current control). Η τεχνική αυτή βασίζεται στον έλεγχο του ρεύματος, όπως περιγράφεται στο σχήμα 4.8 Το κύκλωμα ελέγχου παράγει το ημιτονοειδές σήμα αναφοράς, επιθυμητού πλάτους και συχνότητας, το οποίο συγκρίνεται με τη κυματομορφή του πραγματικού ρεύματος της φάσης. Αν το ρεύμα της φάσης υπερβεί το όριο που ορίζει ο βρόχος υστέρησης, σβήνει (OFF) ο ηλεκτρονικός διακόπτης της επάνω ζώνης του αντιστροφέα της αντίστοιχης φάσης και ανάβει (ΟΝ) ο ηλεκτρονικός διακόπτης της κάτω ζώνης. Για παράδειγμα για την φάση Α, αν το ρεύμα υπερβεί το ανώτερο όριο που ορίζει ο βρόχος υστέρησης σβήνει το Τ 1 και ανάβει το Τ 4. Αυτό έχει ως αποτέλεσμα η τάση εξόδου να μεταβληθεί από + /2 σε /2 και το ρεύμα να αρχίζει να μειώνεται. Όταν το ρεύμα μειωθεί κάτω από το κατώτερο όριο ανάβει το Τ 1 και σβήνει το Τ 4 και συνεπώς αλλάζει η πολικότητα της τάσης εξόδου και αρχίζει να αυξάνει το ρεύμα. Έτσι το ρεύμα βρίσκεται πάντοτε σε μια ζώνη ελέγχου που καθορίζεται από δύο ημιτονοειδή σήματα που καθορίζουν το ανώτερο και το κατώτερο όριο ελέγχου, με άλλα λόγια το εύρος του βρόχου υστέρησης. V d V d

116 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 115 Σχήμα 4. 8 Αρχή λειτουργίας του PWM ελέγχου ρεύματος με βρόχο υστέρησης. Σχήμα 4. 9 Λειτουργικό διάγραμμα του PWM ελεγκτή ρεύματος με βρόχο υστέρησης. Στο κεφάλαιο 2 αναλύθηκε η τεχνική PWM, οπού γινόταν σύγκριση του ημιτόνου αναφοράς με τριγωνικό φέρον σήμα συχνότητας τάσης khz. Όσο υψηλότερης τάξης είναι το φέρον, εξαλείφονται οι αρμονικές χαμηλής τάξης, ανεβαίνοντας τη τάξη των αρμονικών, ώστε η αυτεπαγωγή μαγνήτισης του κινητήρα να εξομαλύνει ικανοποιητικά την κυματομορφή του ρεύματος. Επίσης θεωρήθηκε ότι η τάση εισόδου του αντιστροφέα είναι σταθερή dc τάση. Με άλλα λόγια θεωρήθηκε ότι η τιμή της χωρητικότητας του πυκνωτή είναι άπειρη και φιλτράρει
117 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 116 τέλεια τη κυματομορφή της τάσης. Ωστόσο, αυτό είναι μια ιδανική κατάσταση, γιατί η χωρητικότητα του πυκνωτή δεν μπορεί να είναι άπειρη και συνεπώς η τάση εισόδου του αντιστροφέα παρουσιάζει πάντοτε διακυμάνσεις, με αποτέλεσμα να αυξάνονται οι αρμονικές της τάσης εξόδου του. Το πρόβλημα αυτό αντιμετωπίζεται με την μέθοδο PWM ελέγχου ρεύματος με βρόχο υστέρησης, επειδή ελέγχεται το ρεύμα εξόδου, ώστε η κυματομορφή του να είναι ημιτονοειδής επιθυμητού πλάτους και συχνότητας και με όσο το δυνατόν μικρότερου πλάτους αρμονικές. Επίσης, επειδή δεν χρησιμοποιεί φέρον σήμα για την υλοποίηση της διαμόρφωση χαρακτηρίζεται ως carrierless PWM σε αντίθεση με την τεχνική PWM πηγής τάσης που χαρακτηρίζεται ως carrier-based PWM. Ο αντιστροφέας ισχύος PWM ελέγχου ρεύματος είναι πηγής ρεύματος. Επειδή η τεχνική αυτή βασίζεται στον άμεσο έλεγχο της στιγμιαίας κυματομορφής του ρεύματος, η τυχόν διακύμανση της dc τάσης εισόδου δεν επηρεάζει το ρεύμα εξόδου. Για τον ίδιο λόγο, κύριο χαρακτηριστικό αυτού του αντιστροφέα ισχύος είναι η πολύ γρηγορότερη απόκριση σε σύγκριση με τον αντιστροφέα PWM πηγής τάσης. Στο Σχήμα 4.9 δίνεται το λειτουργικό διάγραμμα του PWM ελεγκτή ρεύματος με βρόχο υστέρησης. Το 2Δ i είναι το εύρος του βρόχου υστέρησης και καθορίζει το μέγεθος των διακυμάνσεων του ρεύματος και αντίστοιχα των αρμονικών του. Όσο μειώνεται το εύρος του βρόχου υστέρησης μειώνονται οι αρμονικές του ρεύματος, αλλά αντίστοιχα αυξάνει η διακοπτική συχνότητα των ηλεκτρονικών ισχύος και συνεπώς αυξάνουν οι διακοπτικές απώλειες, ενώ σε μεγάλες συχνότητες δημιουργούνται έντονα προβλήματα στην ομαλή έναυση και σβέση των ηλεκτρονικών διακοπτών. Η διακοπτική συχνότητα δεν είναι σταθερή και δεν μπορεί άμεσα να ρυθμιστεί, σε αντίθεση με τον PWM αντιστροφέα τάσης, όπου είναι ίση με τη συχνότητα του φέρον σήματος. Σε μικρές ταχύτητες περιστροφής του κινητήρα η διακοπτική ταχύτητα μπορεί να είναι πολύ μεγάλη και επίσης δεν μπορεί να λειτουργήσει σε μικρά επίπεδα ρεύματος, μικρότερα του εύρους βρόχου υστέρησης. Γι αυτό τον λόγο έχουν προταθεί παραλλαγές της παραπάνω τεχνικής, ώστε η δειγματοληψία να γίνεται με σταθερή συχνότητα. Έτσι, αν και η διακοπτική συχνότητα δεν είναι σταθερή, περιορίζεται το ανώτερο όριο της από τη συχνότητα δειγματοληψίας. Η τεχνική αυτή είναι γνωστή ως δέλτα διαμόρφωση (delta modulation). Στο Σχήμα 4.10 δίνεται το λειτουργικό διάγραμμα του ελεγκτή και στο σχήμα περιγράφεται η αρχή λειτουργίας της τεχνικής ελέγχου.. Σχήμα Λειτουργικό διάγραμμα του ελεγκτή ρεύματος δέλτα διαμόρφωσης.
118 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 117 Σχήμα 4.11 Αρχή λειτουργίας της τεχνικής ελέγχου ρεύματος δέλτα διαμόρφωσης. 4.2 Μαθηματικό μοντέλο προσομοίωσης ανυσματικού ελέγχου ταχύτητας επαγωγικού κινητήρα Περιγραφή μαθηματικού μοντέλου προσομοίωσης Στην ενότητα αυτή θα παρουσιαστεί το μοντέλο του σερβοκινητηρίου συστήματος του ανυσματικά ελεγχόμενου επαγωγικού κινητήρα στο πεδίο της συχνότητας με εξισώσεις μετασχηματισμού Laplace. Ειδικότερα θα παρουσιαστούν το δυναμικό μοντέλο του κινητήρα, των μετρητικών βαθμιδών, του inverter και των ελεγκτών. Το μαθηματικό αυτό μοντέλο προσομοίωσης αναπτύσσεται στο πρόγραμμα Simulink και βοηθά στον προσδιορισμό των παραμέτρων του ελεγκτή, ώστε το σύστημα να έχει την επιθυμητή δυναμική απόκριση.
119 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 118 Παρότι η ρύθμιση των παραμέτρων του ελεγκτή σε αυτό το μοντέλο έχει κυρίως θεωρητικό χαρακτήρα, βοηθά στην κατανόηση του σχεδιασμού συστημάτων αυτομάτου ελέγχου και τα αποτελέσματα, που παρέχει η ανάλυση αυτή, βοηθούν στην εύρεση των πειραματικών τιμών των ελεγκτών. Ωστόσο, πρέπει να γίνει σαφές ότι η ανάλυση που ακολουθεί γίνεται για αναλογικό σύστημα ελέγχου ενώ η πειραματική υλοποίηση γίνεται σε ψηφιακό σύστημα. Στην προκειμένη περίπτωση χρησιμοποιείται ένας ελεγκτής PI για τον έλεγχο της ταχύτητας και το μοντέλο φαίνεται στο Σχήμα Σε ένα βέλτιστο σύστημα ελέγχου o χρόνος ανόδου και αποκατάστασης της ταχύτητας να είναι όσο το δυνατόν μικρότεροι και ταυτόχρονα η υπερύψωση να είναι το πολύ 4-5%. Σχήμα 4.12 Λειτουργικό διάγραμμα του σερβοκινητήριου συστήματος με ελεγκτή ΡΙ ταχύτητας. Η τιμή της ταχύτητας αναφοράς ορίζεται από το block speed * [rpm] και έπειτα στον ενισχυτή rpm to rad/sec μετατρέπεται σε rad/sec. Η ταχύτητα αναφοράς συγκρίνεται με την έξοδο wr του block motor και το σφάλμα οδηγείται στον ελεγκτή ΡΙ. Η έξοδος του ΡΙ δίνει το σήμα ελέγχου, δηλαδή την τάση αναφοράς που πρέπει να εφαρμόσει ο inverter στον κινητήρα, ώστε να μειωθεί το σφάλμα της ταχύτητας. Το block motor του επαγωγικού κινητήρα έχει δύο εισόδους, (όπως και στην πραγματικότητα) την τάση τροφοδοσίας και το φορτίο (το φορτίο ορίζεται από το block ΤL ), ενώ οι έξοδοι είναι φυσικά η ταχύτητά του και το ρεύμα που αναπτύσσεται. Η έξοδος wr του block motor μετατρέπεται από rad/sec σε rpm και προβάλλεται σε παλμογράφο, ενώ παράλληλα οδηγείται στο block wr counter και κατόπιν συγκρίνεται με την ταχύτητα αναφοράς. Το block motor περικλείει το λειτουργικό διάγραμμα του ανυσματικά ελεγχόμενου κινητήρα και το εσωτερικό του φαίνεται στο Σχήμα 4.13.
120 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 119 Σχήμα 4.13 Λειτουργικό διάγραμμα του ανυσματικά ελεγχόμενου επαγωγικού κινητήρα. Όπως αναφέρθηκε στη θεωρητική ανάλυση ( 3.1), για την υλοποίηση του ανυσματικού ελέγχου οι εξισώσεις που περιγράφουν την λειτουργία του κινητήρα στο τριφασικό σύστημα μετασχηματίζονται στο σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς, προσανατολισμένο στον άξονα του διανύσματος της ροής του δρομέα. Στο λειτουργικό διάγραμμα του Σχήματος 4.13, οι εξισώσεις του δυναμικού μοντέλου του επαγωγικού κινητήρα (4.15 έως 4.18) επιλύονται ως προς την μηχανική ταχύτητα wr (έξοδος 1) και το ρεύμα i q (έξοδος 2) συναρτήσει και του φορτίου TL (είσοδος 1) και της τάσης u sq (είσοδος 2). Η επίλυση γίνεται μέσω του μετασχηματισμού Laplace. Θυμίζουμε για την τάση τροφοδοσίας e e στο σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς ότι ισχύει u sq = u sq =U S και u sd =0 και γι αυτό άλλωστε η είσοδος στο block motor είναι μόνο η u sq. Η συνάρτηση μεταφοράς του ελεγκτή ΡΙ είναι: G pi (s)= k p + k i = s 1 ns p όπου T ns = stns K + st k k p i (4.32) και υλοποιείται στο block PI, το εσωτερικό του οποίου φαίνεται στο Σχήμα Σχήμα 4.14 Εσωτερικό του block PI. Υλοποίηση συνάρτησης μεταφοράς του ελεγκτή. Στο εσωτερικό του block PI βλέπουμε τον αναλογικό και τον ολοκληρωτικό όρο του ελεγκτή, ενώ παράλληλα παρατηρούμε ότι στην έξοδο της ολοκληρωτικής βαθμίδας του PI αλλά και στην έξοδο του block του ελεγκτή υπάρχει περιοριστής. Ο περιοριστής θέτει ανώτατα όρια στις τιμές εξόδου του ελεγκτή, γιατί π.χ κατά την εκκίνηση το σφάλμα στην είσοδο του ελεγκτή είναι μεγάλο, συνεπώς και η έξοδός του θα είναι μεγάλη. Με τους περιοριστές
121 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 120 επιτυγχάνεται το σύστημα να έχει ικανοποιητική δυναμική συμπεριφορά και να αποφεύγονται οι απότομες μεταβολές της ταχύτητας, που θα προκαλούσαν προβλήματα αστάθειας. Επίσης οι περιοριστές προστατεύουν τον κινητήρα από υψηλά ρεύματα που αναπτύσσονται. Τα όρια ορίζονται ανάλογα με την ισχύ και κατασκευή του κινητήρα και το είδος της εφαρμογής. Όπως βλέπουμε στο Σχήμα 4.12, η τάση αναφοράς που προκύπτει από την έξοδο του ΡΙ οδηγείται στο block του inverter, η έξοδος του οποίου είναι η τάση του στάτη κατά τον q e - άξονα ( u e sq = u qs ). Ο αντιστροφέας συμπεριφέρεται ως μια βαθμίδα πρώτης τάξης με κέρδος K inv και σταθερά χρόνου T inv και συγκεκριμένα η συνάρτηση μεταφοράς είναι G K inv inv ( s) = (4.33) 1+ stinv Το κέρδος K inv εξαρτάται από το λόγο της συνεχούς τάσης τροφοδοσίας του K inv 2 Vdc = (4.34) π V phmax αντιστροφέα V dc προς τη μέγιστη θεμελιώδη φασική τάση V phmax, δηλαδή Το κέρδος K inv είναι πάντοτε μικρότερο της μονάδας, επειδή ισχύει V dc = (2/π)V phmax μόνο στην περίπτωση όπου οι πτώσεις τάσεις στους ηλεκτρονικούς διακόπτες και οι αρμονικές τάσεις που εισάγει ο διακοπτικός έλεγχος της τάσης είναι μηδέν. Η σταθερά χρόνου T inv είναι ίση με τη περίοδο ενός διακοπτικού κύκλου ελέγχου. Για παράδειγμα, στη περίπτωση του ημιτονοειδούς PWM ελέγχου, η σταθερά χρόνου T inv είναι ίση με τη περίοδο του φέροντος σήματος 1 Τ = (4.35) inv Στο μοντέλο προσομοίωσης η τιμή του κέρδους του inveter ορίστηκε K inv =0.9, ενώ η σταθερά χρόνου ορίστηκε για διακοπτική συχνότητα 10kHz, δηλαδή T inv =10-4 sec. Στο Σχήμα 4.12 το block wr counter αντιστοιχεί στη βαθμίδα μέτρησης της ταχύτητας του κινητήρα. Ο μετρητής της ταχύτητας περιστροφής μπορεί να είναι ηλεκτρομηχανικού (ταχογεννήτρια) ή ηλεκτρονικού τύπου (κωδικοποιητής στροφών). Η ταχογεννήτρια παράγει ένα αναλογικό σήμα με πλάτος ανάλογο της ταχύτητας περιστροφής. Η ταχογεννήτρια παρουσιάζει αδράνεια στη μέτρηση της ταχύτητας και επιπλέον συνοδεύεται από ένα χαμηλοπερατό φίλτρο πρώτης τάξης για τη μείωση της κυμάτωσης και συνεπώς περιγράφεται από μια βαθμίδα πρώτης τάξης, G ( s) s όπου K s1 και T s1 είναι το κέρδος και η σταθερά χρόνου της βαθμίδας αντίστοιχα. Ο κωδικοποιητής στροφών παράγει μια τετραγωνική κυματομορφή με συχνότητα ανάλογη της ταχύτητας περιστροφής και μέσω κατάλληλων ηλεκτρονικών διατάξεων παρέχει μια συνεχή K f c s1 = (4.36) 1+ st s1
122 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 121 τάση με πλάτος ανάλογο της ταχύτητας περιστροφής. Επειδή, αυτή η συνεχής τάση συνοδεύεται από κυμάτωση, χρησιμοποιείται ένα χαμηλοπερατό φίλτρο πρώτης τάξης. Έτσι, ο κωδικοποιητής στροφών περιγράφεται από μια συνάρτηση μεταφοράς όμοια με αυτή της ταχογεννήτριας. Στο μοντέλο προσομοίωσης το κέρδος K s1 ορίστηκε μονάδα, θεωρώντας ότι δεν μειώνεται το πλάτος της πληροφορίας, ενώ η σταθερά χρόνου ορίστηκε T s1 =10-3 sec Αποτελέσματα προσομοίωσης μαθηματικού μοντέλου Για να ληφθούν τα αποτελέσματα της προσομοίωσης, πρέπει πρώτα να αντικαταστήσουμε στο block motor τις μηχανικές και ηλεκτρικές σταθερές του επαγωγικού κινητήρα, στον οποίο θα ασκηθεί ανυσματικός έλεγχος. Όπως βλέπουμε στο Σχήμα 4.13 πρέπει να υπολογιστούν: οι δύο πόλοι Τ 1 και Τ 2 του ηλεκτρικού κινητήρα, η μηχανική χρονική σταθερά Τ α1, ο συντελεστής Κ L, (που συσχετίζει την ηλεκτρομαγνητική ροπή που παράγεται με το ρεύμα ροπής i q, λαμβάνοντας υπόψην κατασκευαστικά χαρακτηριστικά και την ροή του δρομέα) κ.ο.κ. Στο Παράρτημα Γ παρουσιάζεται η διαδικασία μέτρησης των κατασκευαστικών χαρακτηριστικών του κινητήρα, (στον οποίο θα ασκηθεί ανυσματικός έλεγχος) που είναι απαραίτητα για τον υπολογισμό των μηχανικών και ηλεκτρικών σταθερών. Ειδικότερα μετρήθηκαν τα παρακάτω: αυτεπαγωγή σκέδασης του δρομέα και του στάτη L Sl = L Rl = ' Η, αντίσταση στάτη R S =4.5Ω, αντίσταση δρομέα R R = 2.725Ω, αμοιβαία 2 αυτεπαγωγή μαγνήτισης L m =0.4632Η και ροπή αδράνειας J= kg m. Άρα η αυτεπαγωγή του τυλίγματος του στάτη και του δρομέα θα είναι L S = L ' R =L m +L Sl = ,01777= H. Για τον κινητήρα ισχύει: Σταθερά χρόνου κινητήρα : T R = L / ' R ' R R = sec (4.37) 1 Σταθερά ροπής κινητήρα : Κ α = R + L / T S S R = 0,13854 (4.38) LS Lm Ηλεκτρική σταθερά χρόνου Τ α = R + L S 2 S / L / T ' R R -3 = 4, sec (4.39) Μηχανική σταθερά χρόνου T α1 =[ K L * L S * i sd e * J P ] -1 = 5, sec (4.40) Όπου Κ L = 3 2 L P L 2 m r' i e sd και P τα ζεύγη των πόλων Θυμίζουμε ότι στον ανυσματικό έλεγχο, η ροή του δρομέα εξαρτάται μόνο από την συνιστώσα κατά τον άξονα d του ρεύματος του στάτη, i e e sd. To ρεύμα i sd προσδιορίζεται από
123 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 122 την εξίσωση ροής του δρομέα: i e sd =1,51183Α ) λ ' e rd = L m i sd e, όπου ' e rd λ = US ω e = 0,7Wb. Συνεπώς Tα 1 Πόλοι κινητήρα Τ 1,2 = 2Κ α 1 ± Τα Κ 1 Τ α1 α (4.42) Άρα Τ 1 =0, (μηχανικός πόλος) Τ 2 = 0, (ηλεκτρικός πόλος) Έχοντας υπολογίσει τις παραμέτρους του block του ανυσματικά ελεγχόμενου κινητήρα, κατασκευάζουμε το μαθηματικό μοντέλο του κινητηρίου συστήματος. Με τη βοήθεια του μοντέλου αυτού θα έχουμε μια πρώτη εκτίμηση για τις τιμές του ελεγκτή στο πλήρες μοντέλο. Οι τιμές του ελεγκτή στο μαθηματικό μοντέλο προσδιοριστήκαν με επαναληπτική διαδικασία, ώστε να προκύψει η βέλτιστη δυνατή απόκριση. Προέκυψαν οι τιμές ki=40, kp=1. Η απόκριση του μαθηματικού μοντέλου για ταχύτητα αναφοράς 1500rpm και φορτίο TL=5Nm φαίνεται στο Σχήμα Σχήμα 4.15 Μαθηματικό μοντέλο προσομοίωσης: Απόκριση ταχύτητας κινητηρίου συστήματος κατά την εκκίνηση (0 1500rpm). O χρόνος ανόδου είναι 0.06sec, η υπερύψωση 3.53%, δηλαδή 1553rpm, και ο χρόνος αποκατάστασης 0.171sec. Εκτός από την απόκριση της ταχύτητας μας ενδιαφέρει και η τιμή του ρεύματος που αναπτύσσεται κατά την εκκίνηση και ο περιορισμός αυτός λαμβάνεται υπόψη στη επιλογή των τιμών ki και kp του ελεγκτή. Για το μοντέλο του Σχήματος 4.12, για ταχύτητα αναφοράς 1500rpm και φορτίο TL=5Nm το ρεύμα που αναπτύσσεται φαίνεται στο Σχήμα 4.16.
124 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 123 Σχήμα 4.16 Μαθηματικό μοντέλο προσομοίωσης: ρεύμα εκκίνησης i q. Η απόκριση της ταχύτητας στο Σχήμα 4.15 θα μπορούσε να ήταν ταχύτερη, αν οι τιμές ki και kp του ελεγκτή είχαν διαφορετικές τιμές. Αυτό όμως θα είχε ως αποτέλεσμα η τιμή του ρεύματος i q να είναι ιδιαίτερα υψηλή (ακόμα μεγαλύτερη από αυτήν του Σχήματος 4.16). Το μαθηματικό μοντέλο έχει σημαντικές διαφορές από το πλήρες μοντέλο προσομοίωσης και κυρίως το χρόνος δειγματοληψίας της ταχύτητας. Επίσης η έξοδος του ελεγκτή PI στο πλήρες μοντέλο είναι η ροπή αναφοράς, ενώ στο μαθηματικό μοντέλο είναι η τάση αναφοράς και για αυτούς του λόγους τα αποτελέσματα δεν είναι απολύτως δεσμευτικά. Οι τιμές του ελεγκτή του ΡΙ στο μαθηματικό μοντέλο είναι μια αρχική ένδειξη των τελικών τιμών του ελεγκτή. Στο μοντέλο της πλήρους προσομοίωσης οι τιμές του ελεγκτή θα οριστικοποιηθούν, έτσι ώστε τα αποτελέσματα της προσομοίωσης να κρίνονται ικανοποιητικά.
125 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα Πλήρες μοντέλο προσομοίωσης έμμεσου ανυσματικού ελέγχου επαγωγικού κινητήρα Περιγραφή πλήρους μοντέλου Στο πρόγραμμα Simulink δημιουργείται το μοντέλο προσομοίωσης έμμεσου ανυσματικού ελέγχου ταχύτητας, όπως φαίνεται στα Σχήματα 4.17 και Σχήμα 4.17 Μοντέλο προσομοίωσης έμμεσου ανυσματικού ελέγχου ταχύτητας. Στο block Field Oriented Control, Induction Motor Drive εμπεριέχεται το τμήμα ισχύος, το τμήμα ελέγχου και ο κινητήρας του σερβοκινητηρίου συστήματος, όπως φαίνεται στο Σχήμα Επίσης στο Σχήμα 4.17 βλέπουμε το block της τροφοδοσίας, τα block speed command και torque command, μέσω των οποίων δίνεται η ταχύτητα αναφοράς και το φορτίο στον άξονα του κινητήρα αντίστοιχα. Τα αποτελέσματα της προσομοίωσης είναι η ταχύτητα του δρομέα, το ρεύμα του στάτη, η ηλεκτρομαγνητική ροπή και η ανορθωμένη συνεχής τάση. Όπως φαίνεται στο Σχήμα 4.18, το τμήμα ισχύος περιλαμβάνει την ανορθωτική διάταξη, το block της πέδησης, τον αντιστροφέα καθώς και το block Measures, στο οποίο μετρούμε τα ρεύματα με τα οποία τροφοδοτείται ο κινητήρας. Η μέτρηση του ρεύματος οδηγείται στο τμήμα ελέγχου, γιατί είναι απαραίτητη για την υλοποίηση της τεχνικής PWM ελέγχου ρεύματος. Το τμήμα ελέγχου αποτελείται από τα block Speed Controller και το block F.O.C (Field-Oriented Control). Το block Speed Controller έχει εισόδους την ταχύτητα αναφοράς (command) και την πραγματική ταχύτητα του κινητήρα. Στο Σχήμα 4.18, το block με την ονομασία Rad2Rpm είναι μετρητικό όργανο της ταχύτητας και στέλνει το σήμα ανάδρασης της ταχύτητας στο block Speed Controller. Το block Speed Controller υπολογίζει το σφάλμα της ταχύτητας και ένας ελεγκτής ΡΙ προσδιορίζει τη ροπή που πρέπει να ασκηθεί (ροπή αναφοράς ή Torque * ), ώστε η ταχύτητα του δρομέα να είναι ίση με την ταχύτητα αναφοράς. Η ροπή αναφοράς εισέρχεται στο block F.O.C, το οποίο είναι υπεύθυνο για την παραγωγή των παλμών ελέγχου.
126 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 125 Σχήμα 4.18 Μοντέλο προσομοίωσης έμμεσου ανυσματικού ελέγχου: τμήμα ελέγχου και τμήμα ισχύος προσομοίωσης. Όπως είναι γνωστό, για μεγαλύτερες ταχύτητες της σύγχρονης η μαγνητική ροή στο διάκενο μειώνεται και ο κινητήρας λειτουργεί με μειωμένη ροπή στρέψης (το σημείο λειτουργίας στην καμπύλη μαγνήτισης μετατοπίζεται για μικρότερες τιμές της ροής). Έτσι αν η ταχύτητα αναφοράς είναι μεγαλύτερη της σύγχρονης, το block Speed Controller προσδιορίζει την μειωμένη τιμή της ροής αναφοράς (Flux * ). Συνοψίζοντας, το block Speed Controller, δίνει τις τιμές της ροπής αναφοράς και της ροής αναφοράς, ώστε η ταχύτητα του κινητήρα να ισούται με την ταχύτητα αναφοράς. Η ροπή αναφοράς και η ροή αναφοράς οδηγούνται στο block F.O.C., το οποίο στη συνέχεια θα δημιουργήσει τους παλμούς ελέγχου. Στο block F.O.C για την παραγωγή των παλμών ελέγχου εφαρμόζεται η διαμόρφωση PWM ελέγχου ρεύματος, όπου συγκρίνονται τα ρεύματα που μετρούνται από το block Measures με τα ρεύματα αναφοράς. Τα ρεύματα αναφοράς υπολογίζονται στο block F.O.C. και ειδικότερα προσδιορίζονται από την ροπή και τη ροή αναφοράς καθώς και από τη μέτρηση της ταχύτητας του κινητήρα. Στη συνέχεια ακολουθεί η ανάλυση των block Speed Controller και F.O.C.. Όπως αναφέρθηκε προηγουμένως το block Speed Controller έχει εισόδους την ταχύτητα αναφοράς (Ν * ) και την ταχύτητα του κινητήρα (Ν) και το εσωτερικό του φαίνεται στο Σχήμα 4.19.
127 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 126 Σχήμα 4.19 Εσωτερικό του block Speed Controller : Υπολογισμός ροπής και η ροής αναφοράς. Το σήμα ανάδρασης της ταχύτητας (Ν) αρχικά διέρχεται από φίλτρο ( Low pass filter ), ώστε να σταθεροποιηθεί η τιμή του, και κατόπιν συγκρίνεται με την ταχύτητα αναφοράς. Το σφάλμα οδηγείται στον ΡΙ, η συνάρτηση μεταφοράς του οποίου είναι: k p + k i /s. Όπως βλέπουμε στο Σχήμα 4.19, ο αναλογικός όρος υλοποιείται με τον ενισχυτή proportional gain, ενώ ο ολοκληρωτικός όρος από τον ενισχυτή Integral gain και έναν ολοκληρωτή. Στην έξοδο του ολοκληρωτή υπάρχει και ένας περιοριστής ο ρόλος του οποίου θα αναλυθεί στην συνέχεια. Στην εκκίνηση επειδή, η ταχύτητα του άξονα είναι μηδέν, το σφάλμα έχει μεγάλη τιμή, συνεπώς και η έξοδος του ελεγκτή ΡΙ θα είναι μεγάλη. Μια μεγάλη τιμή της ροπής αναφοράς θα προκαλούσε υψηλές τιμές στο ρεύμα του στάτη, με συνέπεια να επιβαρυνθούν οι μονώσεις των τυλιγμάτων. Γι αυτό τοποθετούνται δύο περιοριστές-κορεστές, ένας στην έξοδο του ολοκληρωτικού όρου του ΡΙ και ένας στην έξοδο του ελεγκτή, με όρια δύο με τρεις φορές την ονομαστική ροπή του κινητήρα. Με αυτόν τον τρόπο επιτυγχάνεται το σύστημα να έχει ικανοποιητική δυναμική συμπεριφορά και να περιορίζονται οι απότομες μεταβολές της ταχύτητας, που θα προκαλούσαν προβλήματα αστάθειας και έντονους κραδασμούς στα έδρανα και στο μηχανικό φορτίο. Οι τιμές των ορίων ορίζονται αναλόγως τις μονώσεις των τυλιγμάτων καθώς και το είδος της εφαρμογής. Όσο μεγαλύτερο είναι το ρεύμα εκκίνησης, τόσο μεγαλύτερη η ροπή στον δρομέα, συνεπώς γρηγορότερα η ταχύτητα εξόδου θα γίνει ίση με την ταχύτητα αναφοράς. Επομένως τα όρια στους περιοριστές επηρεάζουν τον χρόνο ανόδου της ταχύτητας. Για ταχύτητες μέχρι τη σύγχρονη η μαγνητική ροή, όπως εξηγήθηκε, παραμένει σταθερή, ενώ για μεγαλύτερες της σύγχρονης μειώνεται σύμφωνα με την καμπύλη μαγνήτισης του σιδηρομαγνητικού υλικού. Η μείωση αυτή υλοποιείται από το block Flux table. Όπως βλέπουμε στο Σχήμα 4.19, το Flux table έχει είσοδο την απόλυτη τιμή της ταχύτητας αναφοράς (μέσω της συνάρτησης u ) και έξοδο την ροή αναφοράς. Για ταχύτητες μέχρι τη σύγχρονη το μέτρο της μαγνητικής ροής είναι Φ=U S /2πf e =220/(2π50) = 0.7Wb και συνεπώς το Flux table έχει σταθερή τιμή εξόδου. Όταν οι ταχύτητες αναφοράς είναι μεγαλύτερες της σύγχρονης, π.χ από 1500rpm έως 1600rpm, το Flux table ορίζει τη ροή αναφοράς να είναι κ.ο.κ. Το εσωτερικό του block F.O.C φαίνεται στο Σχήμα Υπενθυμίζουμε από την θεωρητική ανάλυση ( 4.1.2) ότι, για να εφαρμοστεί η τεχνική του ανυσματικού ελέγχου, εφαρμόζεται σύστημα αξόνων αναφοράς προσανατολισμένου πεδίου δρομέα (Speed regulation) και συνεπώς απαιτείται η γνώση της θέσης του διανύσματος χώρου της ροής του

128 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 127 δρομέα λ e r. Ειδικότερα στο μοντέλο προσομοίωσης υλοποιείται έμμεσος ανυσματικός έλεγχος και η γνώση της θέσης του διανύσματος χώρου της ροής του δρομέα θα βρεθεί από την ταχύτητα εξόδου. Ως Teta ορίζεται η γωνία που σχηματίζει το διάνυσμα χώρου της ροής του δρομέα, ως προς τον οριζόντιο άξονα του d s -άξονα στάτη του ακίνητου συστήματος αξόνων αναφοράς του στάτη. Σχήμα 4.20 Εσωτερικό του block F.O.C. Στο block F.O.C. παράγονται οι παλμοί ελέγχου. Η είσοδος Ι_ΑΒC εισάγει τις μετρήσεις των τριφασικών ρευμάτων από το block Measures, όπως φαίνεται στο Σχήμα4.18. Τo τριφασικό ρεύμα οδηγείται στο block ABC- DQ, όπου αναλύεται σε δύο συνιστώσες id και iq στο σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς. Το εσωτερικό του block ABC-DQ φαίνεται στο Σχήμα 4.21 Σχήμα 4.21 Εσωτερικό του block ABC-DQ, όπου μετασχηματίζονται τα τριφασικά ρεύματα σε δύο συνιστώσες στο σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς d e- q e.
129 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 128 Στις συναρτήσεις του block ABC-DQ, η είσοδος Ι_ΑΒC μετασχηματίζεται στο ακίνητο σύστημα αξόνων αναφοράς του στάτη (εξίσωση 4.4) s sd s και κατόπιν τα ρεύματα i και i sq μετασχηματίζονται στο σύγχρονα στρεφόμενο σύστημα αξόνων αναφοράς d e- q e (προσανατολισμένο στον άξονα του διανύσματος της ροής λ r μέσω του πίνακα μετασχηματισμού e K s ) e s i sq cos( Teta) sin( fteta) i sq = e i sin( Teta) cos( Teta) sd s i sd (όπου Teta η γωνία που σχηματίζει το διάνυσμα χώρου της ροής του δρομέα, ως προς τον οριζόντιο άξονα του d s -άξονα στάτη του ακίνητου συστήματος αξόνων αναφοράς του στάτη). e e Οι έξοδοι iq και id του block ABC-DQ αντιστοιχούν στα ρεύματα i sq και i sd και δίνουν κάθε χρονική στιγμή την πληροφορία από τον κινητήρα για την ροπή και την ολίσθηση (iq) καθώς και για την ροή (id). Στο Σχήμα 4.20, στο block Flux Calculation υπολογίζεται η τιμή του διανύσματος της ροής του δρομέα. Από την θεωρητική ανάλυση γνωρίζουμε ότι dλ r ' dt 1 + λr ' T R - L m T R e i sd =0 όπου T = R R η σταθερά χρόνου του κυκλώματος του δρομέα. Η επίλυση της διαφορικής r Lr εξίσωσης με την μέθοδο Laplace είναι : λr' = L m 1 + st R e i sd. (4.43) Το εσωτερικό του block Flux Calculation, που φαίνεται στο Σχήμα 4.22, έχει είσοδο το e ρεύμα id= i sd. Με τον ενισχυτή L m δημιουργείται ο αριθμητής της εξίσωσης 4.43, ενώ με το block που ακολουθεί στο Σχήμα 4.22, μετασχηματίζουμε τον όρο 1/( 1+ str ) σε συνάρτηση χρόνου. Σχήμα 4.22 Block Flux Calculation : Υπολογισμός διανύσματος της ροής του δρομέα.
130 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 129 e e Στο block ABC-DQ για τον υπολογισμό των i sq και i sd είναι απαραίτητη η γωνία Teta ή διαφορετικά η γωνία που σχηματίζει το διάνυσμα χώρου της ροής του δρομέα, ως προς τον οριζόντιο άξονα d s -άξονα του ακίνητου συστήματος αξόνων αναφοράς του στάτη. Η ταχύτητα περιστροφής του διανύσματος λ r ισούται με τη σύγχρονη ταχύτητα ω e, δηλαδή το άθροισμα της ταχύτητας του δρομέα ω m και της ταχύτητας ολίσθησης ωsl = ωe ωm. Συνεπώς ισχύει Teta = θ m + θ sl (4.44) Η μηχανική ταχύτητα ω m λαμβάνεται από τo μετρητικό όργανο, ενώ η μηχανική ταχύτητα ολίσθησης προσδιορίζεται από την εξίσωση 4.24: ω sl = 1 λ r ' L m T R e i sq. To block Teta calculation, το εσωτερικό του οποίου φαίνεται στο Σχήμα 4.23, υπολογίζει την e ω sl και υλοποιεί την εξίσωση Teta = θ m + θ (η είσοδος 1 (iq) είναι το ρεύμα i sd έχει υπολογιστεί από το block ABC-DQ, ενώ η είσοδος 2 (Phir) είναι το μέτρο του διανύσματος χώρου '. Η είσοδος 3 είναι η μηχανική ταχύτητα σε rad/sec). λ r sl Σχήμα 4.23 Εσωτερικό του block Teta calculation. Teta = θ m + θ sl. Στο Σχήμα 4.23, το block Wsl υλοποιεί την εξίσωση ω sl = λr' L 1 m T R e i sq και κατόπιν προσθέτουμε την μηχανική ταχύτητα ω m. Κατόπιν ακολουθεί block στο οποίο ολοκληρώνουμε το άθροισμα ω m + ω sl και προκύπτει η γωνία θ m + θ του διανύσματος της ροής του δρομέα. «Σκοπός» των block ABC-DQ, Flux Calculation, και Teta Calculation είναι να υπολογιστεί η γωνία του πεδίου του δρομέα (Teta), ώστε να υλοποιηθεί ο ανυσματικός έλεγχος. Η γωνία του πεδίου του δρομέα είναι η φάση του τριφασικού ρεύματος αναφοράς, e e ενώ το μέτρο ορίζεται από τα ρεύματα ( i sq )*, ( sd )*, τα οποία προκύπτουν από τη ροπή αναφοράς (Torque*) και τη ροή αναφοράς (Flux*). Υπενθυμίζεται ότι, για να είναι το διανύσμα της ροής του δρομέα προσανατολισμένο κατά τον διαμήκη άξονα d e, θα πρέπει να έχει συνιστώσα μόνο κατά τον άξονα d e, δηλαδή λ r = λ e rd και η συνιστώσα κατά τον άξονα q e είναι μηδέν. Αν αντικαταστήσουμε στην εξίσωση (4.26) λ e e r = λ rd προκύπτει λ r ' = L m sd. Συνεπώς η αναφορά του ρεύματος πεδίου θα ισούται με id* = i e sd i i sl * = (Flux*)/L m, όπως φαίνεται στο Σχήμα 4.20 ( Η ροή αναφοράς Flux * έχει προκύψει από το block Speed Controller.
131 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 130 e Το ρεύμα αναφοράς ροπής ( i sq )* υπολογίζεται στο block iqs* Calculation στο οποίο επιλύεται ως προς iq η εξίσωση ροπής (4.28): e 2 ( i sq ) * = iq * = 3 1 p Lr L m λ r' T e * * όπου Τ e η ροπή αναφοράς του ελεγκτή ΡΙ. e e Τα ρεύματα αναφοράς ροπής και πεδίου ( i sq )* και ( i sd )* στο σύγχρονα στρεφόμενο σύστημα αξόνων που υπολογίσαμε μετασχηματίζονται στο τριφασικό σύστημα στο block DQ-ABC, όπου υλοποιείται η παρακάτω εξίσωση. Στο Σχήμα 4.20, τα ρεύματα αναφοράς Ιabc* και τα ρεύματα Ιabc που μετρούμε από το block Measures οδηγούνται στο block Current regulator, όπου παράγονται οι παλμοί ελέγχου με την μέθοδο PWM ελέγχου ρεύματος με βρόχο υστέρησης. Από τη σύγκριση των ρευμάτων αναφοράς Ιabc* με τις κυματομορφές των ρευμάτων Ιabc προκύπτουν οι παλμοί ελέγχου. Η σύγκριση γίνεται ως εξής: στα ρεύματα αναφοράς ορίζεται ένα ανώτερο όριο και ένα κατώτερο όριο, τα οποία δεν πρέπει να ξεπέρνιουνται από τα ρεύματα των φάσεων Iabc. Όταν το ρεύμα της φάσης υπερβεί το άνω όριο που ορίζεται, τότε σβήνει ο διακόπτης της επάνω ζώνης του αντιστροφέα της αντίστοιχης φάσης και ανάβει ο διακόπτης της κάτω ζώνης. Αυτό έχει αποτέλεσμα να έχουμε μείωση στην τάση εξόδου και το ρεύμα αρχίζει να μειώνεται. Όταν το ρεύμα φτάσει στο κάτω όριο αντιστρέφεται η προηγούμενη κατάσταση. Έτσι το ρεύμα βρίσκεται σε μία ζώνη ελέγχου που καθορίζεται από δύο ημιτονοειδή σήματα. Η ζώνη ελέγχου στην περίπτωσή μας είναι π.χ 0,01Α.. Το άνω όριο ορίζεται Ιabc* + 0,01/2 και το κάτω Ιabc* - 0,01/2 (τα ρεύματα αναφοράς είναι τέλεια ημίτονα).τα παραπάνω υλοποιούνται στο block Current regulator, το εσωτερικό του οποίου φαίνεται στο Σχήμα Σχήμα 4.24 Block Current Regulator : υλοποίηση PWM ελέγχου ρεύματος
132 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 131 Όπως φαίνεται στο Σχήμα 4.24 οι τιμές των Ιabc και Iabc * συγκρίνονται και υπολογίζεται η διαφορά τους κάθε στιγμή. Η διαφορά τους οδηγείται στο block relay, όπου, αν είναι μεγαλύτερη από 0,01/2, τότε η έξοδος του γίνεται 0 και παραμένει στην ίδια τιμή μέχρι η διαφορά να γίνει -0,01/2. Τότε η έξοδος του block relay θα γίνει 1. Κάθε έξοδος του block relay στέλνεται στον διακόπτη της επάνω ζώνης της αντίστοιχης φάσης. Στον κάτω διακόπτη στέλνεται η συμπληρωματική έξοδος, όπως φαίνεται και στο παραπάνω σχήμα. Έτσι παράγονται οι παλμοί με την διαμόρφωση PWM ελέγχου ρεύματος Αποτελέσματα προσομοίωσης πλήρους μοντέλου Μετά την περιγραφή του μοντέλου ακολουθούν τα αποτελέσματα της προσομοίωσης. Το ζητούμενο είναι να προσδιοριστούν οι συντελεστές kp και ki του αναλογικό - ολοκληρωτικού ελεγκτή, ώστε να έχουμε τη βέλτιστη απόκριση. Από την ανάλυση στο μαθηματικό μοντέλο έχουν προκύψει κάποιες τιμές. Αυτές αποτελούν όμως μια ένδειξη πληροφορία, γιατί στην προσομοίωση του πλήρους μοντέλου λαμβάνονται υπόψη και άλλες παράμετροι, που αγνοούνται στο μοντέλο Laplace. Σημαντική διαφορά των δύο μοντέλων είναι η περίοδος δειγματοληψίας. Ειδικότερα ο κωδικοποιητής στροφών στέλνει την πληροφορία της ταχύτητας κάθε χρονικό διάστημα Δt ως μια παλμοσειρά. Για να δίνει αυτή η παλμοσειρά την πληροφορία της πραγματικής ταχύτητας με αξιοπιστία, πρέπει στον χρόνο δειγματοληψίας Δt να υπάρχει ικανοποιητικός αριθμός παλμοί (όπως έχει αναφερθεί στο κεφάλαιο 3, σελ.90) με αποτέλεσμα η δειγματοληψία να είναι της τάξης msec. Δηλαδή, ο βρόγχος ελέγχου της ταχύτητας, άρα και ο ελεγκτής ΡΙ, λειτουργεί με βήμα της τάξης msec. Θα ήταν ιδανικό να λειτουργούσε με πολύ μικρότερη περίοδο δειγματοληψίας και θα μπορούσε να ελέγχει σχεδόν ανά πάσα στιγμή το σφάλμα στην ταχύτητα (όπως λειτουργεί το μοντέλο Laplace και γι αυτό δεν μπορούν να χρησιμοποιηθούν τα αποτελέσματά του κατευθείαν), αλλά αυτό δεν μπορεί να γίνει, λόγω του μετρητικού οργάνου της ταχύτητας. Βρέθηκε ότι η δειγματοληψία της ταχύτητας 6 msec δίνει ικανοποιητικά αποτελέσματα σε ένα μεγάλο εύρος ταχυτήτων και η τιμή αυτή χρησιμοποιήθηκε στο πλήρες μοντέλο προσομοίωσης και στην πειραματική διάταξη. Μετά από την διαδικασία δοκιμή σφάλμα δοκιμή καταλήξαμε ότι οι βέλτιστες τιμές των παραμέτρων kp και ki του ελεγκτή ΡΙ είναι kp=0.048 και ki=0.56 Σημαντική παράμετρος είναι τα όρια του περιοριστή ροπής στην έξοδο του PI. Όπως αναφέρθηκε προηγουμένως, τα όρια του περιοριστή επηρεάζουν σημαντικά τον χρόνο ανόδου. Για παράδειγμα κατά την εκκίνηση όσο μεγαλύτερα ρεύματα, τόσο μεγαλύτερη ροπή, συνεπώς γρηγορότερα η ταχύτητα του δρομέα θα φθάσει στην επιθυμητή ταχύτητα. Συνεπώς τα όρια στους περιοριστές, καθορίζουν τον ελάχιστο χρόνο ανόδου της ταχύτητας. Συνήθως τα όρια είναι δύο με τρεις φορές η ονομαστική ροπή. Στην προκειμένη περίπτωση η
133 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 132 ονομαστική ροπή του κινητήρα είναι τ ον = P ον ω ον, όπου Ρ ον =1.5kW και n ον = 1450rpm, Συνεπώς είναι τ ον =9.88 Νm. Τα όρια του περιοριστή ορίσθηκαν ± 25 Νm. Στο μοντέλο προσομοίωσης η μέγιστη διακοπτική συχνότητα του αντιστροφέα ορίστηκε 5kHz. Στην τεχνική PWM ελέγχου ρεύματος ( 4.14), η μέγιστη διακοπτική συχνότητα του αντιστροφέα επηρεάζει το εύρος του άνω και του κάτω ορίου των ημιτόνων αναφοράς (το εύρος ορίστηκε 0.01Α). Επίσης, για την υλοποίηση του ανυσματικού ελέγχου είναι απαραίτητα τα κατασκευαστικά χαρακτηριστικά του κινητήρα, τα οποία δίνονται στο Παράρτημα Γ, δηλαδή η αντίσταση και η αντίδραση του δρομέα, η αδράνεια του κινητήρα κτλ. Οι τιμές των κατασκευαστικών χαρακτηριστικών, που προέκυψαν από τα αντίστοιχα πειράματα (π.χ ακινητοποιημένου δρομέα) ενδεχομένως να έχουν μια μικρή απόκλιση από τις πραγματικές τιμές του κινητήρα. Αυτό θα έχει ως συνέπεια τα αποτελέσματα της προσομοίωσης να έχουν και αυτά μια σχετική απόκλιση σε σχέση με αυτά της πειραματικής υλοποίησης, όπως θα δούμε στην 4.4. Για ταχύτητα αναφοράς 1500rpm και φορτίο 8Νm το μοντέλο προσομοίωσης δίνει τα αποτελέσματα που φαίνονται στο Σχήμα Με μώβ γραμμή είναι τα σήματα αναφοράς (command), δηλαδή η ταχύτητα αναφοράς και η ροπή αναφοράς, ενώ με κίτρινη γραμμή είναι η απόκριση του κινητήρα. Κατά την εκκίνηση το ρεύμα του στάτη είναι αυξημένο (μέγιστη rms τιμή 20Α, γιατί η ηλεκτρομαγνητική ροπή που εφαρμόζεται είναι η μέγιστη δυνατή, δηλαδή η τιμή που έχει οριστεί στα όρια του περιοριστή (25Nm). Μόλις η ταχύτητα του δρομέα λάβει την τιμή της ταχύτητας αναφοράς (t αν = 0.163sec), η ροπή αναφοράς μειώνεται σταδιακά και σταθεροποιείται στην τιμή του φορτίου του άξονα, δηλαδή στην περίπτωσή μας στα 8Nm. (α) (β)
134 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 133 (γ) Σχήμα 4.25 Απόκριση κινητήριου συστήματος σε μεταβολή της ταχύτητας από rpm. (α) ρεύμα στάτη (β) ταχύτητα δρομέα (γ) ηλεκτομαγνητική ροπή. Στο Σχήμα 4.25 παρατηρείται υπερύψωση 6.4% στην ταχύτητα καθώς και αρκετά μεγάλος χρόνος αποκατάστασης 0.45sec, για το λόγο ότι ο ΡΙ μειώνει ομαλά (με μικρά βήματα) τη ροπή αναφοράς. Αυτό γίνεται για τον λόγο ότι, αν η ροπή αναφοράς μεταβαλλόταν με πιο γρήγορο ρυθμό, τότε λόγω της αδράνειας του δρομέα και λόγω του μεγάλου χρόνου δειγματοληψίας (6 msec) του ελεγκτή, η ταχύτητα θα έπαιρνε τιμές σημαντικά κάτω από τις 1500rpm και δεν θα σταθεροποιούνταν στην επιθυμητή ταχύτητα, αλλά θα εκτελούσε ταλάντωση με κέντρο την ταχύτητα αναφοράς. Όπως βλέπουμε στο Σχήμα 4.25 (β), μετά το διάστημα υπερύψωσης η ταχύτητα προσεγγίζει τις 1500rpm, κάνοντας μια μικρή ταλάντωση, έως τις 1480rpm περίπου και έπειτα σταθεροποιείται στην τιμή της ταχύτητας αναφοράς. Όταν έχουμε στον άξονα ένα μηχανικό φορτίο, αλλάζει η ροπή αδράνειας του κινητήριου συστήματος (επιπρόσθετα μπορεί να αλλάξει και η γεωμετρία του κινητηρίου συστήματος). Η κατάσταση αυτή όμως δεν μπορεί να προσομοιωθεί και γενικότερα είναι ένα μειονέκτημα του ανυσματικού ελέγχου επαγωγικού κινητήρα. Η ροπή αδράνειας, η οποία χρησιμοποιείται στους υπολογισμούς του block F.O.C., είναι αυτή του κινητήρα χωρίς το συνυπολογισμό του φορτίου και αυτός είναι ένας λόγος πιθανής απόκλισης των αποτελεσμάτων της προσομοίωσης και της πειραματικής υλοποίησης. Στο Σχήμα 4.26 βλέπουμε πως αποκρίνεται το κινητήριο σύστημα σε διαταραχή στο φορτίο. Αρχικά ο κινητήρας εκκινεί χωρίς φορτίο, και σε χρόνο t=0.6sec συνδέεται φορτίο 3Nm. Στο Σχήμα 4.26(α), επειδή ο κινητήρας εκκινεί εν κενώ, παρατηρείται μεγαλύτερη υπερύψωση στην ταχύτητα σε σχέση με το Σχήμα 4.25 (β), ενώ ταυτόχρονα ο χρόνος ανόδου και αποκατάστασης είναι μικρότερος.
135 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 134 (α) (β) Σχήμα 4.26 Απόκριση κινητήρα σε μεταβολή της ταχύτητας από rpm και κατόπιν σε διαταραχή φορτίου (α) ταχύτητα δρομέα (β) ηλεκτρομαγνητική ροπή. Τη χρονική στιγμή t=0.6sec, το φορτίο αλλάζει ακαριαία από 0Nm σε 3Nm. Η ροπή αναφοράς αυξάνεται σταδιακά στη νέα τιμή του φορτίου. Κατά τη διάρκεια του μεταβατικού στην ροπή, η ταχύτητα του δρομέα μειώνεται στις 1450rpm, και έπειτα ισορροπεί ξανά στην ταχύτητα αναφοράς (1500rpm). Όπως φαίνεται στο Σχήμα 4.26(β), η διαταραχή στο φορτίο αποσβένεται σε χρόνο t =0.2sec. Η απόσβεση της διαταραχής είναι σχετικά αργή για τους ίδιους λόγους που περιγράψαμε για την απόκριση του Σχήματος Στο Σχήμα 4.27 βλέπουμε την απόκριση του κινητηρίου συστήματος για μεταβολή της ταχύτητας αναφοράς από 1500rpm σε -1500rpm με φορτίο 3Nm, καθώς και την λειτουργία της πέδησης. Όταν αλλάζει η ταχύτητα αναφοράς από 1500rpm σε -1500rpm, ο ΡΙ της ταχύτητας κάνει αρνητική τη ροπή αναφοράς στα -25Νm. Σε αυτό το διάστημα η ηλεκτρική μηχανή λειτουργεί ως γεννήτρια και η κινητική ενέργεια μετατρέπεται σε ηλεκτρική, με συνέπεια να αυξάνεται η τάση εισόδου του αντιστροφέα, όπως φαίνεται στο Σχήμα 4.27(γ). Όταν η συνεχής τάση εισόδου του αντιστροφέα ξεπεράσει μια ανώτατη τιμή, τότε επεμβαίνει ο ελεγκτής της πέδησης ( 2.2.4) και ένα μέρος του αρνητικού ρεύματος, περνά από την αντίσταση δυναμικής πέδησης. Αυτό έχει αποτέλεσμα να μειωθεί η τάση εισόδου, όπως φαίνεται στο Σχήμα 4.27, και όταν φτάσει σε μια κατώτατη τιμή (που έχουμε ορίσει), τότε η λειτουργία της πέδησης απενεργοποιείται, και η τάση εισόδου επανέρχεται στα φυσιολογικά επίπεδα.
 απόκριση ταχύτητας (β) απόκριση ροπής (γ) λειτουργία πέδησης.")
136 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 135 Σχήμα 4.27 Απόκριση κινητηρίου συστήματος για αλλαγή της ταχύτητας αναφοράς από 1500rpm 1500rpm (α) απόκριση ταχύτητας (β) απόκριση ροπής (γ) λειτουργία πέδησης. Το χρονικό διάστημα που απαιτείται για να μεταβληθεί η ταχύτητα του δρομέα από 1500rpm σε -1500rpm είναι 0.15sec, ενώ για να σταθεροποιηθεί στις -1500rpm απαιτείται χρόνος 0.35sec και η υπερύψωση είναι 16%. Στο Σχήμα 4.27(β) παρατηρούμε ότι η ροπή του κινητήρα αποκλίνει από την ροπή αναφοράς του ελεγκτή. Η κατάσταση αυτή είναι ανεπιθύμητη, ωστόσο η γρήγορη μεταβολή στην ταχύτητα (0.15sec), η ηλεκτρική και μηχανική αδράνεια του κινητήρα δικαιολογούν την απόκλιση αυτή. Υπενθυμίζουμε 2 ' LS Lm / L r Ηλεκτρική σταθερά χρόνου Τ α = =4, , R + L / T ροπή αδράνειας J= S 2 kg m. S R

137 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα Πειραματική υλοποίηση έμμεσου ανυσματικού ελέγχου ταχύτητας επαγωγικού κινητήρα Περιγραφή ψηφιακού ελεγκτή, που υλοποιεί έμμεσο ανυσματικό έλεγχο ταχύτητας Στο Σχήμα 4.28 βλέπουμε τον ψηφιακό ελεγκτή, που φορτώνεται στην κάρτα ελέγχου DS1104, και υλοποιεί τον έμμεσο ανυσματικό έλεγχο ταχύτητας. Σχήμα 4.28 Ψηφιακός ελεγκτής, που υλοποιεί έμμεσο ανυσματικό έλεγχο ταχύτητας επαγωγικού κινητήρα. Τα block Speed Controller και F.O.C. είναι ίδια με αυτά που περιγάφηκαν στο πλήρες μοντέλο προσομοίωσης ( 4.3.1). Τo block Braking, που υλοποιεί την πέδηση, είναι το ίδιο σε όλους τους ελεγκτές που έχουν περιγραφεί. Tο block DS1104ADC_C8 εισάγει τη μέτρηση της τάσης στους ακροδέκτες του κινητήρα. Το σήμα της ταχύτητας αναφοράς Ν * [rpm], αφού περάσει από το block Rate Limiter οδηγείται στο block Speed Controller, ενώ η τιμή της ταχύτητας του δρομέα λαμβάνεται από το block Speed measure. Οι έξοδοι του block Speed Controller, δηλαδή η ροπή αναφοράς και η ροή αναφοράς, οδηγούνται από το block F.O.C. για την δημιουργία των ρευμάτων αναφοράς iq * και id * αντίστοιχα.
138 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 137 Στο block F.O.C (Σχήμα 4.29) από τα ρεύματα αναφοράς iq * και id * και από τη γωνία του διανύσματος της ροής του δρομέα δημιουργούνται τα τριφασικά ρεύματα αναφοράς (η γωνία του διανύσματος της ροής του δρομέα προσδιορίζεται από τη μηχανική ταχύτητα του δρομέα και από το δυναμικό μοντέλο του κινητήρα). Τα ρεύματα αναφοράς συγκρίνονται με τα πραγματικά ρεύματα των φάσεων και με την τεχνική PWM ελέγχου ρεύματος παράγονται οι παλμοί ελέγχου, οι οποίοι θα οδηγηθούν στις βάσεις των διακοπτών του αντιστροφέα. Σχήμα 4.29 Εσωτερικό του block F.O.C του ψηφιακού ελεγκτή. Όπως βλέπουμε στο Σχήμα 4.29, από το block Iabc (Measure) εισάγονται οι μετρήσεις των ρευμάτων των φάσεων, για να συγκριθούν με τα τριφασικά ρεύματα αναφοράς Ιabc *. Το εσωτερικό του block Iabc (Measure) φαίνεται στο Σχήμα 4.30 Σχήμα 4.30 Εσωτερικό του block Ιabc (Measure). Μέτρηση ρευμάτων των φάσεων.
139 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 138 Τα block DS1104ADC_C6 και DS1104ADC_C8 εισάγουν στον ελεγκτή τη μέτρηση των ρευμάτων των φάσεων. Η μέτρηση γίνεται για δύο φάσεις και συνθέτουμε την τρίτη φάση. Θα μπορούσαμε να μετρήσουμε και τα τρία ρεύματα, αλλά η μέτρηση και της τρίτης φάσης θα απαιτούσε επιπλέον υπολογιστικό χρόνο και αυτό θα είχε αποτέλεσμα ο ελεγκτής να «τρέχει» πιο αργά. Η δειγματοληψία της ταχύτητας ορίστηκε να είναι 6msec. Η τιμή αυτή ορίστηκε, ώστε στο χρονικό αυτό διάστημα να εμπεριέχονται αρκετοί παλμοί από την έξοδο του κωδικοποιητή στροφών, ώστε να αποδίδεται με ακρίβεια η πραγματική ταχύτητα του δρομέα (βλέπε κεφάλαιο 3, σελ.90). Συνεπώς και το block Speed Controller άρα και οι εντολές (command) της ροπής αναφοράς (Torque * ) και της ροής αναφοράς (Flux * ) θα ανανεώνονται κάθε 6msec (δηλαδή ο ελεγκτής της ταχύτητας τρέχει με περίοδο 6msec). Επειδή το block F.O.C. λειτουργεί με χρόνο δειγματοληψίας 60μsec., η ροπή αναφοράς (Torque * ), η ροή αναφοράς (Flux * ) και η μέτρηση της ταχύτητας εισέρχονται στο block F.O.C. μέσω του block Rate transition. Το block F.O.C. απαιτεί υπολογιστική περίοδο 60μsec για το λόγο ότι εισάγει και επεξεργάζεται τις μετρήσεις των ρευμάτων, επεξεργάζεται το σήμα ανάδρασης της ταχύτητας συνθέτει πολλές κυματομορφές και εκτελεί πληθώρα μαθηματικών πράξεων. Το block Speed Controller δεν έχει αλλαγές σε σχέση με αυτό που περιγράφηκε στην προσομοίωση. Στο Σχήμα 4.28, το block Speed measure εισάγει στον ελεγκτή την τιμή της πραγματικής ταχύτητας του δρομέα και το εσωτερικό του φαίνεται στο Σχήμα 4.31 (το block Speed measure έχει αναλυθεί στο κεφάλαιο 3, σελ.90). Σχήμα 4.31 Εσωτερικό του block Speed measure. Έχει εξόδους την ταχύτητα του δρομέα και την θέση του.
140 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 139 Το block DS1104ENC_POS_C1 εισάγει στον ελεγκτή την έξοδο του κωδικοποιητή στροφών. Ο κωδικοποιητής στροφών, αναλόγως την ταχύτητα του δρομέα, έχει έξοδο τον αντίστοιχο αριθμό παλμών Ν ανά περίοδο δειγματοληψίας (Δt=6msec).H ταχύτητα υπολογίζεται από τον τύπο: 2π N ω= 4096 Δt [rad/sec] Το block Speed measure, μας παρέχει επίσης και την πληροφορία για την θέση του άξονα. Συγκεκριμένα, σε μια πλήρη περιστροφή του άξονα, θα παραχθούν 4096 παλμοί (δηλαδή η διακριτική ικανότητα είναι ο μοίρες) και συνεπώς αναλόγως τον αριθμό των παλμών γνωρίζουμε και τη θέση του άξονα. Γι αυτό το λόγο η τιμή του ενισχυτή Thesis είναι 360/4096. Στο block DS1104ENC_POS_C1 η έξοδος Enc position μηδενίζεται όταν παραχθούν 4096 παλμοί. Όπως φαίνεται στο Σχήμα 4.28, αντί να δώσουμε εντολή για κάποια επιθυμητή ταχύτητα αναφοράς, μπορούμε να δώσουμε εντολή για περιστροφή του άξονα κατά γωνία αναφοράς Τh * [deg]. Τότε η είσοδος Ν * του block Speed Controller θα λάβει κάποια τιμή και ο κινητήρας θα εκκινήσει. Με την περιστροφή θα παραχθούν παλμοί από τον κωδικοποιητή στροφών άρα και από το block Speed measure, με αποτέλεσμα το σφάλμα θέσης να μειώνεται και να τείνει στο μηδέν, οπότε και η είσοδος Ν * του block Speed Controller μηδενίζεται. Έτσι ο άξονας έχει περιστραφεί κατά την γωνία που έχουμε ορίσει (Τh * [deg]). Το σφάλμα που στέλνεται στο block Speed Controller, ελέγχεται από αναλογικό ελεγκτή, η τιμή του οποίου ορίζεται θεωρητικά από την ολική κατανεμημένη σταθερά χρόνου του συστήματος.

141 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα Πειραματικά αποτελέσματα έμμεσου ανυσματικού ελέγχου Στην ενότητα αυτή παρουσιάζονται τα αποτελέσματα της πειραματικής υλοποίησης του ανυσματικού ελέγχου. Για ταχύτητα αναφοράς 1500rpm και φορτίο την DC γεννήτρια (τ=0.4nm) το κινητήριο σύστημα της πειραματικής διάταξης αποκρίθηκε όπως φαίνεται στο Σχήμα Σχήμα 4.32 Απόκριση κινητηρίου συστήματος σε εκκίνηση rpm. Οι παράμετροι του ελεγκτή, που ορίστηκαν, ελέγχθηκαν αρχικά στο μοντέλο προσομοίωσης και είναι kp=0.05, ki=0.56, ενώ τα όρια του περιοριστή στην έξοδο του ΡΙ ορίστηκαν ±25Νm (όπως και στην προσομοίωση του πλήρους μοντέλου). O χρόνος στον οποίο η ταχύτητα του δρομέα φθάνει τις 1500rpm είναι 0.129sec, ενώ η υπερύψωση είναι 1644rpm, δηλαδή 9.6%. Από την στιγμή της εκκίνησης, η ταχύτητα του δρομέα σταθεροποιείται στις 1500rpm έπειτα από χρόνο 0.577sec. Σε σχέση με τα αντίστοιχα αποτελέσματα της προσομοίωσης η υπερύψωση είναι μικρότερη, ενώ οι χρόνοι ανόδου και αποκατάστασης είναι μεγαλύτεροι. Ήταν αναμενόμενο να υπάρχουν διαφορές μεταξύ προσομοίωσης και πειραματικής υλοποίησης, για το λόγο ότι δεν γνωρίζουμε με ακρίβεια τα κατασκευαστικά χαρακτηριστικά του επαγωγικού κινητήρα, στοιχειό απαραίτητο για τον ανυσματικό έλεγχο. Η rms τιμή του ρεύματος που αναπτύχθηκε κατά την εκκίνηση φαίνεται στο Σχήμα 4.33

142 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 141 Σχήμα 4.33 Rms τιμή του ρεύματος που αναπτύσσεται κατά την εκκίνηση από rpm, όταν ο περιοριστής ροπής του φορτίου έχει όρια ±25Νm Όπως βλέπουμε η μέγιστη τιμή της rms του ρεύματος είναι 28Α, ενώ το ονομαστικό ρεύμα είναι 3.2Α. Για να περιορίσουμε την καταπόνηση του κινητήρα, θέτουμε τα όρια του περιοριστή της ροπής ±12Νm. Η απόκριση του κινητηρίου συστήματος για εκκίνηση από rpm με νέα μικρότερα όρια στον περιοριστή της ροπής έχει όπως φαίνεται στο Σχήμα Τα όρια του περιοριστή επηρεάζουν σημαντικά την απόκριση του κινητήρα και συγκεκριμένα στο Σχήμα 4.34 ο χρόνος στον οποίο η ταχύτητα του δρομέα φθάνει πρώτη φορά τις 1500rpm είναι 0.36sec, ενώ η υπερύψωση είναι 1544rpm, δηλαδή 2.93%. Από την στιγμή της εκκίνησης, η ταχύτητα του δρομέα σταθεροποιείται στις 1500rpm έπειτα από χρόνο 0.751sec, ενώ η μέγιστη rms τιμή του ρεύματος μετρήθηκε 10Α.

143 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 142 Σχήμα 4.34 Απόκριση κινητηρίου συστήματος σε εκκίνηση rpm, όπου ο περιοριστής ροπής του ελεγκτή έχει όρια ±12Νm. Στο Σχήμα 4.35 βλέπουμε την απόκριση του ανυσματικά ελεγχόμενου κινητήρα, όταν βρίσκεται σε λειτουργία, και συγκεκριμένα την απόκριση για μεταβολή της ταχύτητας από 1000rpm σε 1500rpm καθώς και την αντίστοιχη μεταβολή της rms τιμής του ρεύματος (φορτίο τ=1νm, όρια περιοριστή ±10Νm) Το ρεύμα που αναπτύσσεται κατά την αλλαγή της ταχύτητας αναφοράς είναι 3.31A, ενώ ο χρόνος ανόδου είναι 0.41sec, η υπερύψωση 3.6% και ο χρόνος αποκατάστασης 0.728sec. Θυμίζουμε ότι στη μέθοδο PWM ελέγχου ρεύματος, που εφαρμόζεται στον ελεγκτή, το κύκλωμα ελέγχου παράγει το ημιτονοειδές σήμα αναφοράς, επιθυμητού πλάτους και συχνότητας, το οποίο συγκρίνεται με τη κυματομορφή του πραγματικού ρεύματος της φάσης. Αν το ρεύμα της φάσης υπερβεί το όριο που ορίζει ο βρόχος υστέρησης, σβήνει (OFF) ο ηλεκτρονικός διακόπτης της επάνω ζώνης του αντιστροφέα της αντίστοιχης φάσης και ανάβει (ΟΝ) ο ηλεκτρονικός διακόπτης της κάτω ζώνης. Για παράδειγμα, αν το ρεύμα της φάσης υπερβεί το ανώτερο όριο που ορίζει ο βρόχος υστέρησης σβήνει το Τ 1 και ανάβει το Τ 4. Αυτό έχει ως αποτέλεσμα η τάση εξόδου να μεταβληθεί από + V d /2 σε V d /2 και το ρεύμα να αρχίζει να μειώνεται. Όταν το ρεύμα μειωθεί κάτω από το κατώτερο όριο ανάβει το Τ 1 και σβήνει το Τ 4 και συνεπώς αλλάζει η πολικότητα της τάσης εξόδου και αρχίζει να αυξάνει το ρεύμα. Έτσι το ρεύμα βρίσκεται πάντοτε σε μια ζώνη ελέγχου που καθορίζεται από δύο
144 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 143 (α) (β) Σχήμα 4.35 (α) απόκριση ταχύτητας από 1000rpm σε 1500rpm (β) rms τιμή του ρεύματος κατά την μεταβολή της ταχύτητας. ημιτονοειδή σήματα που καθορίζουν το ανώτερο και το κατώτερο όριο ελέγχου, με άλλα λόγια το εύρος του βρόχου υστέρησης. Το πραγματικό ρεύμα που προκύπτει από την διαμόρφωση PWM ελέγχου ρεύματος φαίνεται στο Σχήμα 4.36.

145 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 144 Σχήμα 4.36 Τα ρεύμα αναφοράς και πραγματικό ρεύμα, που προκύπτει από την τεχνική PWM ελέγχου ρεύματος Στο Σχήμα 4.36 βλέπουμε ότι το πραγματικό ρεύμα της φάσης δεν είναι εντός των ορίων, που ορίζονται από τον βρόγχο της υστέρησης. Όταν το ρεύμα αναφοράς περνά το όριο που έχει οριστεί, αλλάζει η κατάσταση του αντίστοιχου διακόπτη του αντιστροφέα και αλλάζει και η τάση εξόδου του αντιστροφέα. Παρόλα αυτά το ρεύμα «αργεί» να αποκριθεί στην αλλαγή της τάσης, εξαιτίας της μεγάλης ηλεκτρικής σταθεράς του κινητήρα του εργαστηρίου. LS Lm Ηλεκτρική σταθερά χρόνου Τ α = R + L S 2 S / L / T ' r R = sec Στο Σχήμα 4.36 παρατηρούμε ότι το ρεύμα αναφοράς δεν είναι τέλειο ημίτονο και αυτό γιατί το τμήμα ελέγχου και, ειδικότερα το block F.O.C., για τη σύνθεση της γωνίας του ρεύματος αναφοράς χρησιμοποιεί τα ρεύματα του κινητήρα. Παρά την «ηλεκτρική αδράνεια» που βλέπουμε στο Σχήμα 4.36, όταν το ρεύμα ξεπεράσει το όριο που έχουμε ορίσει, η τάση εξόδου του αντιστροφέα θα μεταβληθεί από + /2 σε /2. Η τάση εξόδου του αντιστροφέα φαίνεται στο Σχήμα 4.37 V d V d

146 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 145 Σχήμα 4.37 Τάση εξόδου που προκύπτει από την μέθοδο PWM ελέγχου ρεύματος. Η τάση εξόδου του αντιστροφέα έχει κυμάτωση, λόγω της κυμάτωσης της τάσης εισόδου του αντιστροφέα V dc. Όπως αναφέρθηκε στην 4.4.1, ο ελεγκτής που φορτώνεται στην κάρτα υλοποιεί και έλεγχο θέσης. Στο Σχήμα 4.38 βλέπουμε την απόκριση του κινητηρίου συστήματος για γωνία αναφοράς 90 ο. Σχήμα 4.38 Απόκτιση του κινητηρίου συστήματος σε μεταβολή της θέσης του άξονα 0 ο 90 ο. Στο Σχήμα 4.38 ο άξονας του κινητήρα περιστρέφεται ενενήντα μοίρες και έπειτα
147 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 146 παραμένει ακινητοποιημένος στην νέα θέση του. Ο χρόνος ανόδου είναι 0.279sec και η υπερύψωσή είναι μηδενική. Ο χρόνος ανόδου μπορεί να μειωθεί, αν αυξηθεί η τιμή του αναλογικού ελεγκτή θέσης. Η ταχύτητα και το ρεύμα που αναπτύσσονται για τη μεταβολή της θέσης του άξονα από 0 σε 90 ο μοίρες φαίνονται στο Σχήμα 4.39 και Σχήμα Σχήμα 4.39 Μεταβολή ταχύτητας σε μεταβολή της θέσης του άξονα 0 ο 90 ο. Αρχικά η ταχύτητα αυξάνεται απότομα έως τις 227rpm, κατόπιν μειώνεται και έπειτα από μια ταλάντωση ακινητοποιείται. Η ταλάντωση της ταχύτητας φαίνεται και στην απόκριση της θέσης (Σχήμα 4.38), στο σημείο που αλλάζει η κλίση της καμπύλης. Το ρεύμα αναφοράς που αναπτύσσεται φαίνεται στο Σχήμα 4.40 Σχήμα 4.40 Ρεύμα αναφοράς που αναπτύσσεται σε μεταβολή της θέσης του άξονα 0 ο 90 ο.
148 Έμμεσος ανυσματικός έλεγχος ταχύτητας επαγωγικού κινητήρα 147 Στο Σχήμα 4.40 βλέπουμε την ακαριαία αύξηση του ρεύματος αναφοράς, για να εκκινήσει ο κινητήρας. Όμως για να μειωθεί η ταχύτητα αρχικά μειώνεται και κατόπιν γίνεται αρνητικό για να «φρενάρει» τον άξονα. Το ρεύμα παραμένει σταθερό, για να διατηρήσει ακίνητο τον άξονα στην νέα θέση.
149 ΣΥΜΠΕΡΑΣΜΑΤΑ Στην εργασία μας υλοποιήσαμε βαθμωτό έλεγχο με ημιτονοειδή PWM διαμόρφωση, διαμόρφωση διανύσματος χώρου τάσης (Space Vector) και έμμεσο ανυσματικό έλεγχο σε επαγωγικό κινητήρα. Η διαδικασία που ακολουθήθηκε ήταν αρχικά μελέτη καθενός από τα παραπάνω συστήματα σε μοντέλο προσομοίωσης εξισώσεων Laplace (μελέτη στο πεδίο της συχνότητας), στη συνέχεια μελέτη στο πλήρες μοντέλο χρησιμοποιώντας το πρόγραμμα Matlab/Simulink και τέλος πειραματική υλοποίηση σε πρότυπη διάταξη στο εργαστήριο Ηλεκτρικών Μηχανών. Για την ημιτονοειδή PWM διαμόρφωση το κεντρικό συμπέρασμα είναι ότι ο ψηφιακός ελεγκτής αδυνατεί να κατασκευάσει τριγωνικό φέρον σήμα για συχνότητα μεγαλύτερη του 1kHz, με συνέπεια την ύπαρξη αυξημένων τιμών αρμονικών και μικρή αξιοποίηση της διακοπτικής ικανότητας του αντιστροφέα. Έτσι επιβεβαιώθηκε ότι δεν συνίσταται ο ψηφιακός ελεγκτής για υλοποίηση συστημάτων βαθμωτού ελέγχου ταχύτητας κινητήρων με σύγκριση τριγωνικού παλμού με το σήμα αναφοράς της ταχύτητας. Μελετήθηκαν τα προβλήματα που προέκυψαν στη φάση αυτή της εργασίας και υλοποιήθηκαν τρεις διαφορετικές τεχνικές μέχρι τελικά να οδηγηθούμε στη βέλτιστη η οποία δίνει ικανοποιητικά αποτελέσματα ως προς τις αρμονικές και επίσης ικανοποιητική δυναμική συμπεριφορά. Στην υλοποίηση του ελεγκτή Space Vector επιβεβαιώθηκαν τα συγκριτικά πλεονεκτήματα ως προς τις προηγούμενες τεχνικές, γιατί μπορεί το σύστημα να λειτουργεί με μεγαλύτερη συχνότητα διαμόρφωσης, και επίσης το κινητήριο σύστημα έχει πολύ καλύτερη δυναμική συμπεριφορά. Στην ημιτονοειδή PWM και τη Space vector διαμόρφωση το σύστημα ελέγχου ταχύτητας λειτουργούσε σε ανοιχτό βρόχο. Στον ανυσματικό έλεγχο ταχύτητας και θέσης το σύστημα λειτουργούσε σε κλειστό βρόχο και χρησιμοποιήθηκε η τεχνική του βρόχου υστέρησης για τον έλεγχο του ρεύματος ροπής. Προσδιορίστηκαν οι παράμετροι του ΡΙ ελεγκτή ταχύτητας, ώστε το σύστημα να έχει ικανοποιητική δυναμική συμπεριφορά σε μεταβατικά ροπής, ταχύτητας και θέσης. Στόχος της διπλωματικής εργασίας ήταν η μελέτη, ο σχεδιασμός και τελικά η υλοποίηση ψηφιακών ελεγκτών για όλες τις παραπάνω τεχνικές ελέγχου. Μελλοντικές ενέργειες που προτείνονται είναι η αναζήτηση τεχνικών ελέγχου για ψηφιακούς ελεγκτές που θα αυξάνουν τη συχνότητα διαμόρφωσης στην ημιτονοειδή PWM διαμόρφωση με τη χρήση τριγωνικού παλμού καθώς επίσης και η βελτιστοποίηση του συστήματος ανυσματικού ελέγχου ταχύτητας και θέσης, ώστε να προσδιορίζονται αυτόματα οι παράμετροι των ΡΙ ελεγκτών για κάθε λειτουργική κατάσταση. Ακόμη, προτείνεται η χρήση της διαμόρφωσης Space vector στον ανυσματικό έλεγχο χρησιμοποιώντας ένα πρόσθετο ΡΙ ελεγκτή ρεύματος. Στην περίπτωση αυτή το σύστημα θα έχει σταθερή συχνότητα διαμόρφωσης και πολύ καλύτερη συμπεριφορά στη περιοχή ταχυτήτων κοντά στην ονομαστική σύγχρονη ταχύτητα, γιατί θα υπάρχει δυνατότητα άμεσου ελέγχου της τάσης, ώστε να αποφεύγεται ο κορεσμός του ελεγκτή που μπορεί να παρατηρηθεί κατά την τεχνική του βρόχου υστέρησης ελέγχου ρεύματος.
150 Πειραματική διάταξη 149 Παράρτημα Α Πειραματική Διάταξη Α-1 Παρουσίαση πειραματικής διάταξης Στο Παράρτημα Α δίνεται φωτογραφικό υλικό της πειραματικής διάταξης του εργαστηρίου ηλεκτρικών μηχανών καθώς και τα τεχνικά έντυπα των συσκευών που χρησιμοποιήθηκαν. Στη φωτογραφία Α-1 βλέπουμε τον επαγωγικό κινητήρα (1.5kW) συνδεδεμένο με DC γεννήτρια, ενώ στη φωτογραφία Α-2 βλέπουμε το μετρητικό όργανο ροπής που είναι συνδεδεμένο με τη γεννήτρια. Μέσω της συσκευής αυτής ρυθμίζουμε το ρεύμα διέγερσης της DC γεννήτριας, και με αυτό τον τρόπο μεταβάλουμε το φορτίο στον άξονα του κινητήρα (επίσης μπορούμε να συνδέσουμε εξωτερική αντίσταση στο κύκλωμα οπλισμού της γεννήτριας). Στην συσκευή μετρούμε την ροπή (Nm) και την ταχύτητα (rpm) του άξονα του κινητηρίου συστήματος.


151 Πειραματική διάταξη 150 Φωτογραφία Α-1 Φωτογραφία Α-2 Στη φωτογραφία Α-3 βλέπουμε τον αντιστροφέα ισχύος που χρησιμοποιήθηκε. Τα τεχνικά χαρακτηριστικά του αντιστροφέα δίνονται στο έντυπο του κατασκευαστή που επισυνάπτεται στο τέλος του παραρτήματος.
152 Πειραματική διάταξη 151 Φωτογραφία Α-3 Οι παλμοί ελέγχου οδηγούνται στις εισόδους με τις ονομασίες CH1 και CH2, οι ακροδέκτες της τριφασικής τροφοδοσίας είναι οι R,S και T και η έξοδος του αντιστροφέα προς τον κινητήρα είναι W,U και V. Το κιτρινοπράσινο καλώδιο είναι η γείωση. Από τους ακροδέκτες με τις επιγραφές UD και +UD/BR (τέρμα δεξιά) μετρούμε την ανορθωμένη συνεχή τάση (η μέτρηση είναι απαραίτητη για τον έλεγχο της τάσης του πυκνωτή) και στους ακροδέκτες +UD/BR και ΒR συνδέουμε την δυναμική αντίσταση πέδησης. Στη φωτογραφία Α-4 βλέπουμε την κάρτα ελέγχου dspace DS1104. Οι παλμοί τάσης οδηγούνται στο κύκλωμα ελέγχου του αντιστροφέα μέσω των δύο λευκών καλωδίων που συνδέονται στο κέντρο της κάρτας. Το μαύρο καλώδιο που συνδέεται με την κάρτα εισάγει τα δεδομένα του οπτικού κωδικοποιητή στροφών στη κάρτα. Ο οπτικός κωδικοποιητής είναι προσαρμοσμένος στον άξονα της DC γεννήτριας (φωτογραφία Α-5).
 στους οποίους εισάγουμε τις μετρήσεις από μετρητικά όργανα. Το κιβώτιο των μετρητικών διατάξεων φαίνεται στη φωτογραφία Α-6.")
153 Πειραματική διάταξη 152 Φωτογραφία Α-4 Φωτογραφία Α-5 Στην φωτογραφία Α-4, στο αριστερό σκέλος της κάρτας ελέγχου, παρατηρούμε τους ακροδέκτες των A/D (καθώς και των D/A) στους οποίους εισάγουμε τις μετρήσεις από μετρητικά όργανα. Το κιβώτιο των μετρητικών διατάξεων φαίνεται στη φωτογραφία Α-6.
. Τέλος στην φωτογραφία Α-7 βλέπουμε συνολικά την πειραματική διάταξη που περιγράψαμε, με την οποία ασκούμε έλεγχο στον κινητήρα μέσω της κάρτας ελέγχου.")
154 Πειραματική διάταξη 153 Φωτογραφία Α-6 Επειδή οι παλμοί εξόδου της κάρτας έχουν πλάτος 0-5V ενώ ο αντιστροφέας ισχύος ελέγχεται με παλμούς τάσης 0-15V, γι αυτό χρησιμοποιείται ενισχυτική διάταξη από 5V (το κύκλωμα της κάρτας δίνεται στη συνέχεια). Τέλος στην φωτογραφία Α-7 βλέπουμε συνολικά την πειραματική διάταξη που περιγράψαμε, με την οποία ασκούμε έλεγχο στον κινητήρα μέσω της κάρτας ελέγχου. Φωτογραφία Α-6

155 Πειραματική διάταξη 154

156 SEMISTACK - IGBT Circuit I rms V ac (V dc ) Types B6CI SKS 35F B6U+E1CIF+B6CI 21 V SEMITOP Stack Three-phase inverter 1) SKS 35F B6U+E1CIF+B6CI 21 V12 SK 60 GB 128 SK 60 GAL 123 SK 95 D 12 P 35/325F SKHI 20opA Preliminary Data Features Compact design Hall Effect Current Sensor Circuit for soft charge the capacitors IGBT Braking chopper Vce monitoring Symbol Conditions Values Units I rms max No overload; 10 khz 35 A T amb = 35 C 150% overload, 60s every 10min (I ov /I N ) 42/28 A 200% overload, 10s every 10min (I ov /I N ) 48/24 A V ce max 1200 V f sw max Absolute maximum switching frequency 15 khz f sw maxcsl Advise maximum switching frequency 10 khz C Type EPCOS B43303A /400 µf/v C eqvl Equivalent capacitor bank 2040/800 µf/v T ds% Discharge time of the capacitor bank - s V DC max Max DC voltage applied to capacitor bank 750 V Rectifier 380 V ac V net max Max network voltage (line side) -20%/+15% T vj Junction temperature for continous operation ºC T stg without requirement of reforming of capacitors ºC T amb ºC V isol 60Hz/1min 2500 V w Aprox. total weight - Kg Cooling Fan, DC power supply 24 V Current Consumption (per fan) 0.11 A Required air flow (per fan) 42.5 m 3 /h Losses B6CI, Converter at P max, T amb = 35 ºC 503 W Efficiency 97 % Current Hall-type LEM LA 55-P sensor Thermal trip normally closed 71 ºC Others Relay Metaltex J1NAC3 components Options Typical Applications AC Motor Control Elevator Industrial Tests Functional Test Short Circuit Test Visual Inspection - 1) Photo non- contractual B6U+E1CIF+B6CI 1 Power Electronics Systems - SEMISTACK 6/11/2007 by SEMIKRON

157 SEMISTACK - IGBT Dimensions in mm Stack design may vary depending upon the version. Please contact SEMIKRON for further details 2 Power Electronics Systems - SEMISTACK 6/11/2007 by SEMIKRON
158 SEMISTACK - IGBT Electrical Data Connectors Connector Pin Symbol Description Values Units min. typical max. CN1:1 TOP W Top phase W input signal 0/15 (CMOS) V CN1:2 ER W Vce phase W error output signal 0/15 (CMOS) V CN1:3 BOT W Bot phase W input signal 0/15 (CMOS) V CN1:4 GND Ground 0 V CN1:5 Vin(BRK) Break input signal 0/15 (CMOS) V CN1:6 ER BRK Vce Break error output signal 0/15 (CMOS) V CN1:7 +Vs Supply voltage 14,0 15,6 V CN1:8 +Vs Supply voltage 14,0 15,6 V CN1:9 GND Ground 0 V CN1:10 GND Ground 0 V CN2:1 TOP U Top phase U input signal 0/15 (CMOS) V CN2:2 ER U Vce phase U error output signal 0/15 (CMOS) V CN2:3 BOT U Bot phase U input signal 0/15 (CMOS) V CN2:4 GND Ground 0 V CN2:5 TOP V Top phase V input signal 0/15 (CMOS) V CN2:6 ER V Vce phase V error output signal 0/15 (CMOS) V CN2:7 BOT V Bot phase V input signal 0/15 (CMOS) V CN2:8 GND Ground 0 V CN2:9 +Vs Supply voltage 14, ,6 V CN2:10 +Vs Supply voltage 14, ,6 V CN2:11 GND Ground 0 V CN2:12 GND Ground 0 V CN2:13 NC CN2:14 NC CN3:1 +15V Supply Voltage (positive) 14, ,5 V CN3:2-15V Supply Voltage (negative) -14, ,5 V CN3:3 GND Ground 0 V CN3:4 HALL U Output Hall phase U CN3:5 HALL V Output Hall phase V CN3:6 NC CN3:7 GND Ground 0 V CN3:8 +15V Supply Voltage (positive) 14, ,5 V CN3:9-15V Supply Voltage (negative) -14, ,5 V CN3:10 CN4:1 R Input Phase R V CN4:2 S Input Phase S V CN4:3 T Input Phase T V CN4:4 NC CN4:5 Earth Earth CN4:6 NC CN4:7 W Output W Inverter Phase V CN4:8 U Output U Inverter Phase V CN4:9 V Output V Inverter Phase V CN4:10 -UD DC Link Negative CN4:11 BR Break Resistor Input CN4:12 +UD/BR DC Link Positive Reference and Break Resistor Input K1:1 NC K1:2 CIS Charge Input Signal / Positive FAN Power 0 0/18 26,5 V Supply K1:3 GND Ground / Reference FAN Power Supply 0 V K1:4 NC This technical information specifies semiconductor devices but promises no characteristics. No warranty or guarantee expressed or implied is made regarding delivery, performance or suitability. 3 Power Electronics Systems - SEMISTACK 6/11/2007 by SEMIKRON

159
160
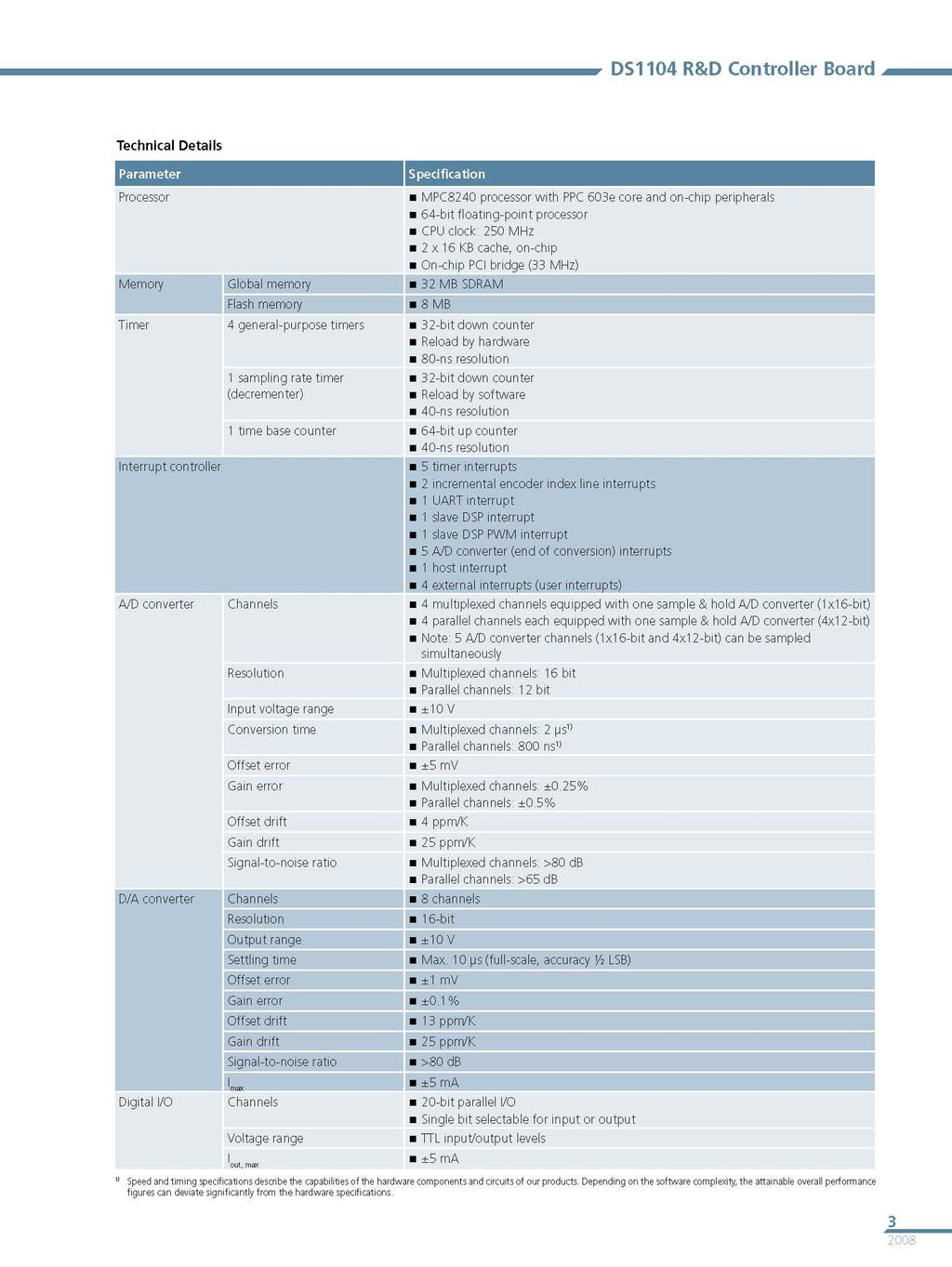
161
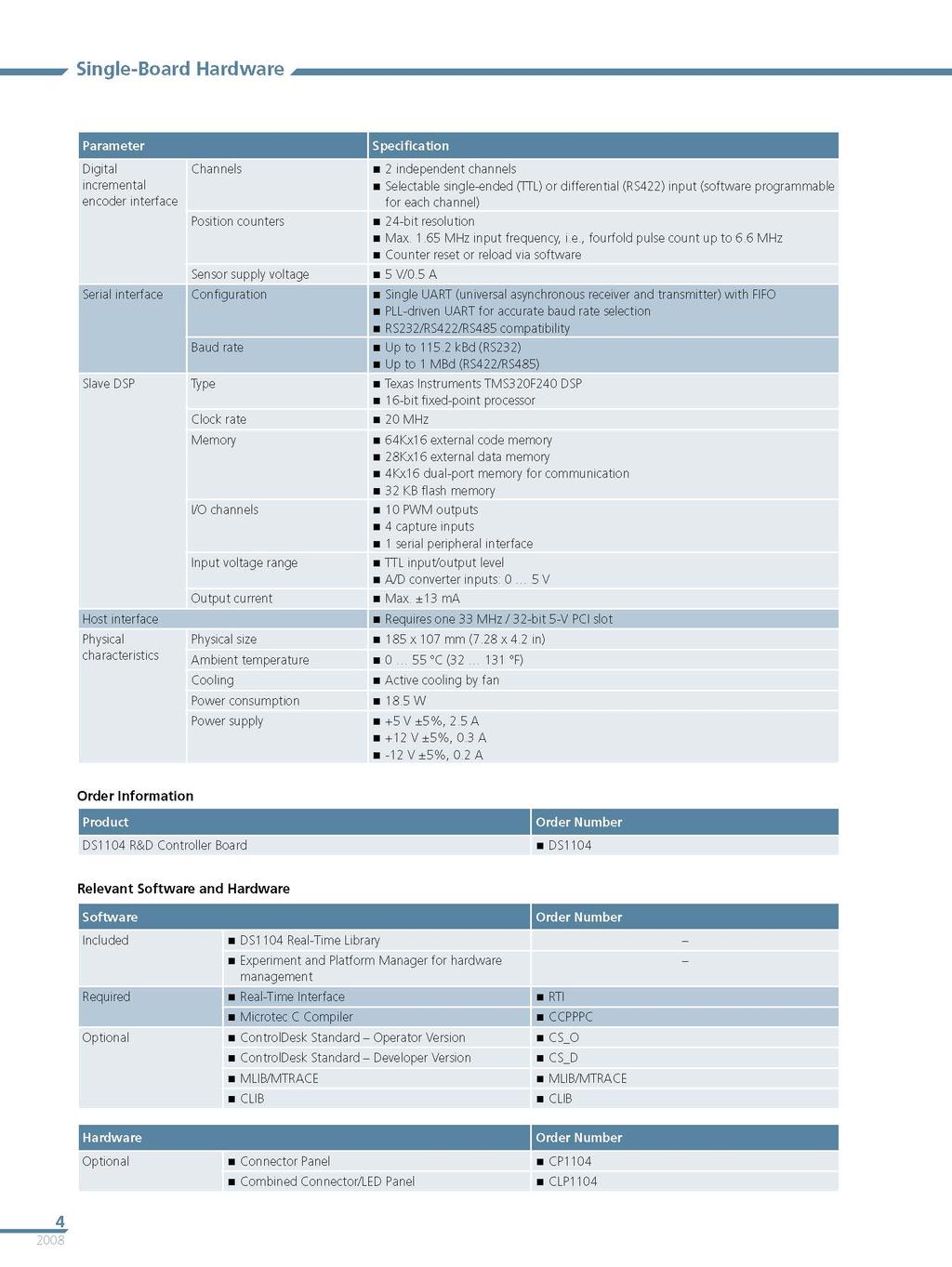
162
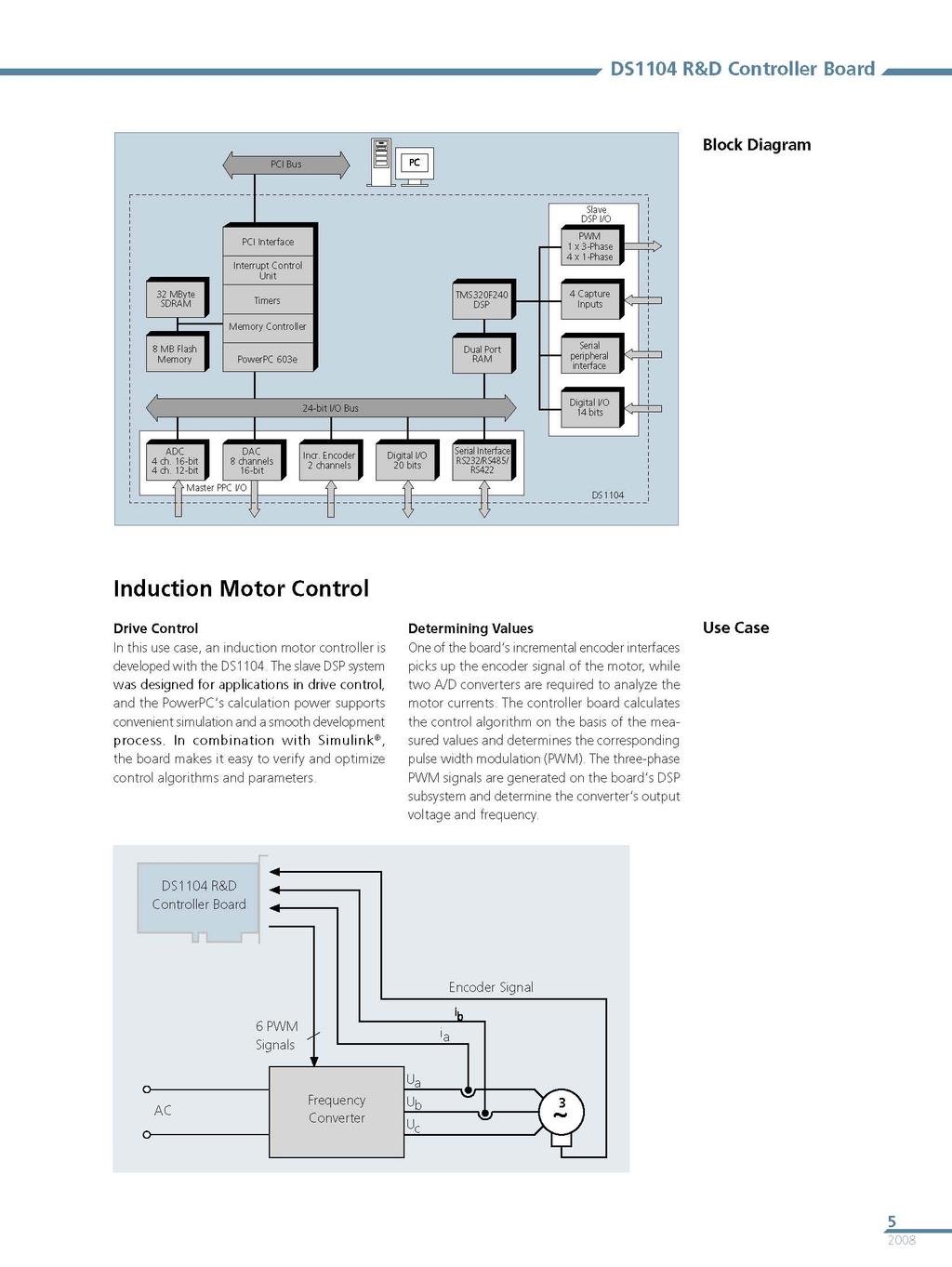
163
164
165
166
167 Εισαγωγή στο Control desk 166 Παράρτημα Β Εισαγωγή στο Control desk Β-1 Εισαγωγή στο Control desk Το πρόγραμμα Control desk έχει πρωτεύοντα ρόλο στην πειραματική διαδικασία και σε στην ενότητα αυτή θα γίνει μια σύντομη παρουσίαση και περιγραφή της λειτουργίας του. Το πρόγραμμα αυτό είναι ο συνδετικός κρίκος του τμήματος ελέγχου-ελεγκτή που έχουμε κατασκευάσει στο περιβάλλον του Simulink και της κάρτας ελέγχου dspace και επιτρέπει στον χειριστή να ρυθμίζει τις παραμέτρους του ελεγκτή, να παρατηρεί, να παίρνει μετρήσεις και γενικά να εποπτεύει την λειτουργία της πειραματικής διάταξης. Για παράδειγμα, μέσω του Control desk δίνονται οι εντολές για αλλαγή στην ταχύτητα, ορίζεται ο ρυθμός μεταβολής της ταχύτητας κτλ. Επίσης η κάρτα ελέγχου dspace διαθέτει A/D μετατροπείς και μπορούμε να μετρούμε σήματα από εξωτερικές μετρητικές διατάξεις (LEM). Οι μετρήσεις αυτές μπορούν να απεικονιστούν στην οθόνη του H/Y μέσω του Control desk. Το βασικό χαρακτηριστικό του


168 Εισαγωγή στο Control desk 167 προγράμματος Control Desk είναι ότι είναι φιλικό προς τον χρήστη ώστε να μπορούν εύκολα να χειρίζονται το κινητήριο σύστημα και άτομα χωρίς να έχουν ειδικές γνώσεις ελέγχου. Για τον ημιτονοειδή PWM ελεγκτή δημιουργήθηκε επιφάνεια εργασίας στο Control desk, μέσω της οποίας ελέγχουμε και εποπτεύουμε την πειραματική διαδικασία, όπως φαίνεται στο Σχήμα Β-1. Σχήμα Β-1 Επιφάνεια εργασίας του προγράμματος Control desk μέσω του οποίου ελέγχεται το πείραμα.
169 Εισαγωγή στο Control desk 168 Όταν ο ελεγκτής φορτωθεί στην κάρτα με την διαδικασία (Build) που περιγράφηκε στην (Σχήμα 2.24), τότε όλα τα ονόματα των blocks, που υπάρχουν στον ελεγκτή, εμφανίζονται στο κάτω παράθυρο της επιφάνειας εργασίας του Control desk (Σχήμα Β-1). Για παράδειγμα στο Σχήμα Β-1 βλέπουμε το block της ταχύτητας αναφοράς N* [rpm], τα block high και low, που ορίζουν το ρυθμό μεταβολής της ταχύτητας κ.λ.π. Όλες τις τιμές των block, π.χ της ταχύτητας αναφοράς, μπορούμε να τις απεικονίσουμε στην επιφάνεια εργασίας και να ελέγξουμε την τιμή τους κατά τη διάρκεια του πειράματος. Για παράδειγμα μπορούμε να δώσουμε εντολή για μεταβολή της ταχύτητας αναφοράς N* [rpm] μέσω του block που βλέπουμε στο παρακάτω σχήμα. Το block με την ονομασία Speed (command) (διακρίνεται στο Σχήμα Β-1) απεικονίζει κάθε στιγμή την ταχύτητα αναφοράς και μέσω αυτού μεταβάλουμε την τιμή της. Το block εισάγεται από την βιβλιοθήκη του Control desk, όπως θα αναλυθεί παρακάτω. Για να αντιστοιχίσουμε π.χ την ταχύτητα αναφοράς με ένα block στο Control desk, πράττουμε ως εξής: από το κάτω παράθυρο της επιφάνειας εργασίας, επιλέγουμε το όνομα του block π.χ N* [rpm] της ταχύτητας αναφοράς, όπως φαίνεται στο Σχήμα Β-1. Κατόπιν «σέρνουμε» την λέξη Value, που αντιστοιχεί στην μεταβλητή N* [rpm], πάνω στο block, το οποίο θέλουμε να ελέγχει την τιμή της ταχύτητας αναφοράς-στην περίπτωσή μας το block Speed (command). Αυτή η διαδικασία επαναλαμβάνεται για κάθε στοιχείο του ελεγκτή που θέλουμε να εμφανιστεί στην επιφάνεια εργασίας του Control desk. Όταν κάνουμε κλικ πάνω στο block του Control desk που είναι αντιστοιχισμένο με ένα block του ελεγκτή (π.χ την ταχύτητα αναφοράς), τότε πρέπει να εμφανίζεται στο κάτω παράθυρο της επιφάνειας εργασίας η κόκκινη αλυσίδα, όπως φαίνεται στο Σχήμα Β-1. Έτσι φαίνεται ότι το συγκεκριμένο block-όργανο ελέγχει την τιμή της μεταβλητής (την ταχύτητα αναφοράς στην προκειμένη περίπτωση του Σχήματος Β-1). Στο Control desk, όπως αναφέρθηκε προηγουμένως, υπάρχει δυνατότητα να παρακολουθούμε ηλεκτρικά μεγέθη κατά την διαδικασία του πειράματος. Συγκεκριμένα στο Σχήμα Β-1 βλέπουμε την τιμή της ανορθωμένης συνεχούς τάσης V dc. Η διαδικασία φόρτωσης είναι ακριβώς όμοια με αυτή που περιγράψαμε προηγουμένως, με μόνη διαφορά ότι από την βιβλιοθήκη του Control desk εισάγουμε block που αντιστοιχεί σε όργανο απεικόνισης τιμής (Display). Η εισαγωγή των block-οργάνων που φαίνονται στο Σχήμα B-1, όπως του παλμογράφου, του διακόπτη on/off, των block που απλά απεικονίζουν μια μέτρηση κτλ γίνεται με την διαδικασία που φαίνεται στo Σχήμα Β-2. Ειδικότερα επιλέγοντας από το κεντρικό μενού View Control bars Instrument selector εμφανίζεται στα δεξιά λίστα με όργανα-block της βιβλιοθήκης του Control desk. Για παράδειγμα, όπως φαίνεται στο Σχήμα Β-1, το όργανο που ελέγχει την ταχύτητα αναφοράς, τις μεταβλητές high και low, τη μεταβλητή Vdc high (όριο

 που ρυθμίζει αν θα")
170 Εισαγωγή στο Control desk 169 της πέδησης), τoν συντελεστή mf και ma είναι ένα Selection box, το οποίο λαμβάνεται από τη λίστα που φαίνεται στο Σχήμα Β-2. Επίσης η ανορθωμένη συνεχής τάση V dc παρακολουθείται μέσω του οργάνου-block με τίτλο Vdc [Volt]. Για να εισαχθεί το οργάνουblock επιλέγουμε από τη λίστα το πέμπτο όργανο (Display). Ομοίως για τα υπόλοιπα. Σχήμα Β-2. Διαδικασία εισαγωγής block-οργάνων στην επιφάνεια εργασίας του Control desk Στα Σχήματα Β-1 και Β-2 πάνω αριστερά βλέπουμε τον διακόπτη (START/STOP) που ρυθμίζει αν θα σταλθούν παλμοί ελέγχου ή όχι. Ο διακόπτης έχει αντιστοιχηθεί και ελέγχει την τιμή της σταθεράς on=1 & off=0 ο ρόλος της οποίας φαίνεται στο Σχήμα Β-3. Το Σχήμα Β-3
171 Εισαγωγή στο Control desk 170 είναι αντιγραφή του Σχήματος 2.25 σελ.33 του κεφαλαίου 2, όπου έχουμε εξηγήσει την χρησιμότητα της σταθεράς on=1 & off=0. Μέσω του Control desk αλλάζουμε την τιμή της από μηδέν σε ένα, αναλόγως αν θέλουμε να παράγονται από την κάρτα ελέγχου οι παλμοί τάσης ή όχι. Σχήμα Β-3 Block V/f gates του ελεγκτή που υλοποιεί ημιτονοειδή PWM διαμόρφωση. Ο έλεγχος από το Control desk της τιμή της on=1 & off=0 καθορίζει αν θα σταλθούν παλμοί ελέγχου στο κύκλωμα ελέγχου του αντιστροφέα. Στο κεντρικό μενού του παράθυρου του Control desk διακρίνουμε τα παρακάτω εικονίδια Όταν πατηθεί, το Control desk βρίσκεται σε κατάσταση edit mode. Πρέπει να πατηθεί, όταν είναι αναγκαίο να γίνει κάποια προσθήκη στην επιφάνεια εργασίας π.χ για να εισάγουμε ένα block από την βιβλιοθήκη του Control desk.. Όταν πατηθεί το εικονίδιο, το Control desk τίθεται σε κατάσταση run mode. Δηλαδή η κάρτα ελέγχου dspace «διαβάζει» το τμήμα ελέγχου (Simulink) που έχουμε φορτώσει αν δοθεί εντολή από το Control desk, τότε στέλνονται παλμοί ελέγχου από την κάρτα στο κύκλωμα ελέγχου του inverter και το πείραμα βρίσκεται σε πλήρη εξέλιξη.


172 Εισαγωγή στο Control desk 171 Στο Control desk έχουμε τη δυνατότητα να απεικονίσουμε γραφικά τις κυματομορφές σημάτων που επεξεργάζεται ο ελεγκτής, π.χ στην ημιτονοειδή PWM διαμόρφωση μπορούμε να απεικονίσουμε τα ημίτονά αναφοράς και το τριγωνικό φέρον, όπως φαίνεται στα Σχήματα Β-1 και Β-4. Από τον κατάλογο των block του ψηφιακού ελεγκτή, που είναι στο κάτω παράθυρο της επιφανείας εργασίας, αν επιλέξουμε τη λέξη Value και το σύρουμε πάνω στον παλμογράφο του Σχήματος Β-4, τότε εμφανίζεται η κυματομορφή του επιθυμητού σήματος. Σχήμα Β-4 Παλμογράφος στο Control desk. Οι λειτουργίες του παλμογράφου ρυθμίζονται από το block του Σχήματος Β-5. Σχήμα Β-5 Έλεγχος Παλμογράφων Με το block του Σχήματος Β-5 ελέγχουμε τις λειτουργίες του παλμογράφου. Συγκεκριμένα με την επιλογή Stop/Start ακινητοποιείται το εικονιζόμενο σήμα, ώστε να παρατηρηθεί καλύτερα. Ως Length ορίζεται το μήκος του οριζόντιου άξονα του παλμογράφου (που αντιστοιχεί στον χρόνο). Αν θέλουμε να εστιάσουμε σε ένα σημείο, μειώνουμε την τιμή στο Length, ενώ, αν θέλουμε να κάνουμε zoom out, το αυξάνουμε.
Τμήμα Ηλεκτρολόγων Μηχανικών ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ ΣΤΟΥΣ ΕΠΑΓΩΓΙΚΟΥΣ ΚΙΝΗΤΗΡΕΣ
 Το κανονικό εύρος λειτουργίας ενός τυπικού επαγωγικού κινητήρα (κλάσης Α, Β και C) περιορίζεται κάτω από 5% για την ολίσθηση ενώ η μεταβολή της ταχύτητας πέρα από αυτό το εύρος είναι σχεδόν ανάλογη του
Το κανονικό εύρος λειτουργίας ενός τυπικού επαγωγικού κινητήρα (κλάσης Α, Β και C) περιορίζεται κάτω από 5% για την ολίσθηση ενώ η μεταβολή της ταχύτητας πέρα από αυτό το εύρος είναι σχεδόν ανάλογη του
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444
 ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 ΣΥΝΘΕΣΗ DC ΚΑΙ ΧΑΜΗΛΗΣ ΣΥΧΝΟΤΗΤΑΣ AC Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ 1 Τα Θέματα Διακοπτικός πόλος
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 ΣΥΝΘΕΣΗ DC ΚΑΙ ΧΑΜΗΛΗΣ ΣΥΧΝΟΤΗΤΑΣ AC Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ 1 Τα Θέματα Διακοπτικός πόλος
ΑΣΚΗΣΗ 1 η ΜΕΛΕΤΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΡΙΦΑΣΙΚΗΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ (ΕΝΑΛΛΑΚΤΗΡΑ) ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ ΤΟΥ ΙΣΟΔΥΝΑΜΟΥ ΚΥΚΛΩΜΑΤΟΣ
 ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ ΤΟΥ ΙΣΟΔΥΝΑΜΟΥ ΚΥΚΛΩΜΑΤΟΣ") ΑΣΚΗΣΗ 1 η ΜΕΛΕΤΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΡΙΦΑΣΙΚΗΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ (ΕΝΑΛΛΑΚΤΗΡΑ) ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ ΤΟΥ ΙΣΟΔΥΝΑΜΟΥ ΚΥΚΛΩΜΑΤΟΣ Σκοπός της άσκησης: 1. Ο πειραματικός προσδιορισμός της χαρακτηριστικής λειτουργίας
ΑΣΚΗΣΗ 1 η ΜΕΛΕΤΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΡΙΦΑΣΙΚΗΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ (ΕΝΑΛΛΑΚΤΗΡΑ) ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ ΤΟΥ ΙΣΟΔΥΝΑΜΟΥ ΚΥΚΛΩΜΑΤΟΣ Σκοπός της άσκησης: 1. Ο πειραματικός προσδιορισμός της χαρακτηριστικής λειτουργίας
ΑΣΚΗΣΗ 4 η ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ ΣΥΓΧΡΟΝΟΥ ΤΡΙΦΑΣΙΚΟΥ ΚΙΝΗΤΗΡΑ
 ΑΣΚΗΣΗ 4 η ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ ΣΥΓΧΡΟΝΟΥ ΤΡΙΦΑΣΙΚΟΥ ΚΙΝΗΤΗΡΑ Σκοπός της άσκησης: Σκοπός της άσκησης είναι: 1. Να εξοικειωθεί ο σπουδαστής με την διαδικασία εκκίνησης ενός σύγχρονου τριφασικού
ΑΣΚΗΣΗ 4 η ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ ΣΥΓΧΡΟΝΟΥ ΤΡΙΦΑΣΙΚΟΥ ΚΙΝΗΤΗΡΑ Σκοπός της άσκησης: Σκοπός της άσκησης είναι: 1. Να εξοικειωθεί ο σπουδαστής με την διαδικασία εκκίνησης ενός σύγχρονου τριφασικού
ΑΣΚΗΣΗ 6 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ
 ΑΣΚΗΣΗ 6 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α), η κατανόηση της λειτουργίας της γεννήτριας
ΑΣΚΗΣΗ 6 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α), η κατανόηση της λειτουργίας της γεννήτριας
ΑΣΚΗΣΗ 8 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ
 ΑΣΚΗΣΗ 8 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της λειτουργίας του κινητήρα συνεχούς
ΑΣΚΗΣΗ 8 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της λειτουργίας του κινητήρα συνεχούς
ΑΣΚΗΣΗ 5 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ. 1. Η μελέτη της δομής και της αρχής λειτουργίας ενός ασύγχρονου τριφασικού κινητήρα.
 Σκοπός της άσκησης: ΑΣΚΗΣΗ 5 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ Σκοπός της εργαστηριακής άσκησης είναι: 1. Η μελέτη της δομής και της αρχής λειτουργίας ενός ασύγχρονου τριφασικού κινητήρα. 1. Γενικά Οι
Σκοπός της άσκησης: ΑΣΚΗΣΗ 5 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ Σκοπός της εργαστηριακής άσκησης είναι: 1. Η μελέτη της δομής και της αρχής λειτουργίας ενός ασύγχρονου τριφασικού κινητήρα. 1. Γενικά Οι
Οι μηχανές ΕΡ είναι γεννήτριες που μετατρέπουν τη μηχανική ισχύ σε ηλεκτρική και κινητήρες που μετατρέπουν την ηλεκτρική σε μηχανική
 Οι μηχανές ΕΡ είναι γεννήτριες που μετατρέπουν τη μηχανική ισχύ σε ηλεκτρική και κινητήρες που μετατρέπουν την ηλεκτρική σε μηχανική Υπάρχουν 2 βασικές κατηγορίες μηχανών ΕΡ: οι σύγχρονες και οι επαγωγικές
Οι μηχανές ΕΡ είναι γεννήτριες που μετατρέπουν τη μηχανική ισχύ σε ηλεκτρική και κινητήρες που μετατρέπουν την ηλεκτρική σε μηχανική Υπάρχουν 2 βασικές κατηγορίες μηχανών ΕΡ: οι σύγχρονες και οι επαγωγικές
3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
 Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΤΑ ΣΗΕ I ΣΥΓΧΡΟΝΗ ΓΕΝΝΗΤΡΙΑ ΘΕΣΣΑΛΟΝΙΚΗ
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΤΑ ΣΗΕ I ΣΥΓΧΡΟΝΗ ΓΕΝΝΗΤΡΙΑ ΘΕΣΣΑΛΟΝΙΚΗ
ΑΣΚΗΣΗ 5 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ ΔΙΕΓΕΡΣΗΣ ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΚΑΜΠΥΛΕΣ
 ΑΣΚΗΣΗ 5 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ ΔΙΕΓΕΡΣΗΣ ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΚΑΜΠΥΛΕΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της λειτουργίας της γεννήτριας συνεχούς ρεύματος
ΑΣΚΗΣΗ 5 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ ΔΙΕΓΕΡΣΗΣ ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΚΑΜΠΥΛΕΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της λειτουργίας της γεννήτριας συνεχούς ρεύματος
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
 Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Τμήμα Ηλεκτρολόγων Μηχανικών ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΡΟΠΗΣ ΤΑΧΥΤΗΤΑΣ ΕΠΑΓΩΓΙΚΩΝ ΚΙΝΗΤΗΡΩΝ
 Αν είναι γνωστή η συμπεριφορά των μαγνητικών πεδίων στη μηχανή, είναι δυνατός ο προσεγγιστικός προσδιορισμός της χαρακτηριστικής ροπής-ταχύτητας του επαγωγικού κινητήρα Όπως είναι γνωστό η επαγόμενη ροπή
Αν είναι γνωστή η συμπεριφορά των μαγνητικών πεδίων στη μηχανή, είναι δυνατός ο προσεγγιστικός προσδιορισμός της χαρακτηριστικής ροπής-ταχύτητας του επαγωγικού κινητήρα Όπως είναι γνωστό η επαγόμενη ροπή
ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
Κινητήρας παράλληλης διέγερσης
 Κινητήρας παράλληλης διέγερσης Ισοδύναμο κύκλωμα V = E + I T V = I I T = I F L R F I F R Η διέγερση τοποθετείται παράλληλα με το κύκλωμα οπλισμού Χαρακτηριστική φορτίου Έλεγχος ταχύτητας Μεταβολή τάσης
Κινητήρας παράλληλης διέγερσης Ισοδύναμο κύκλωμα V = E + I T V = I I T = I F L R F I F R Η διέγερση τοποθετείται παράλληλα με το κύκλωμα οπλισμού Χαρακτηριστική φορτίου Έλεγχος ταχύτητας Μεταβολή τάσης
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
Στον άπειρο ζυγό και μέσω μιας γραμμής μεταφοράς ισχύος συνδέεται κάποια βιομηχανία
 ΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ Στον άπειρο ζυγό και μέσω μιας γραμμής μεταφοράς ισχύος συνδέεται κάποια βιομηχανία Οι 2 από τους 3 κινητήρες αυτής της βιομηχανίας είναι επαγωγικοί και διαθέτουν επαγωγικούς συντελεστές
ΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ Στον άπειρο ζυγό και μέσω μιας γραμμής μεταφοράς ισχύος συνδέεται κάποια βιομηχανία Οι 2 από τους 3 κινητήρες αυτής της βιομηχανίας είναι επαγωγικοί και διαθέτουν επαγωγικούς συντελεστές
ΑΣΚΗΣΗ 7 η ΧΑΡΑΚΤΗΡΙΣΤΙΚΗ ΡΟΠΗΣ ΣΤΡΟΦΩΝ ΑΣΥΓΧΡΟΝΟΥ ΤΡΙΦΑΣΙΚΟΥ ΚΙΝΗΤΗΡΑ ΒΡΑΧΥΚΥΚΛΩΜΕΝΟΥ ΔΡΟΜΕΑ
 ΑΣΚΗΣΗ 7 η ΧΑΡΑΚΤΗΡΙΣΤΙΚΗ ΡΟΠΗΣ ΣΤΡΟΦΩΝ ΑΣΥΓΧΡΟΝΟΥ ΤΡΙΦΑΣΙΚΟΥ ΚΙΝΗΤΗΡΑ ΒΡΑΧΥΚΥΚΛΩΜΕΝΟΥ ΔΡΟΜΕΑ Σκοπός της άσκησης: Σκοπός της εργαστηριακής άσκησης είναι: 1. Η μελέτη του τρόπου εκκίνησης και λειτουργίας
ΑΣΚΗΣΗ 7 η ΧΑΡΑΚΤΗΡΙΣΤΙΚΗ ΡΟΠΗΣ ΣΤΡΟΦΩΝ ΑΣΥΓΧΡΟΝΟΥ ΤΡΙΦΑΣΙΚΟΥ ΚΙΝΗΤΗΡΑ ΒΡΑΧΥΚΥΚΛΩΜΕΝΟΥ ΔΡΟΜΕΑ Σκοπός της άσκησης: Σκοπός της εργαστηριακής άσκησης είναι: 1. Η μελέτη του τρόπου εκκίνησης και λειτουργίας
ΑΣΚΗΣΗ 6 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ ΒΡΑΧΥΚΥΚΛΩΜΕΝΟΥ ΔΡΟΜΕΑ
 ΑΣΚΗΣΗ 6 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ ΒΡΑΧΥΚΥΚΛΩΜΕΝΟΥ ΔΡΟΜΕΑ Σκοπός της άσκησης: Σκοπός της εργαστηριακής άσκησης είναι: 1. Ο πειραματικός προσδιορισμός των απωλειών σιδήρου και των μηχανικών απωλειών
ΑΣΚΗΣΗ 6 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ ΒΡΑΧΥΚΥΚΛΩΜΕΝΟΥ ΔΡΟΜΕΑ Σκοπός της άσκησης: Σκοπός της εργαστηριακής άσκησης είναι: 1. Ο πειραματικός προσδιορισμός των απωλειών σιδήρου και των μηχανικών απωλειών
2. ΓΕΝΝΗΤΡΙΕΣ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ
 28 2. ΓΕΝΝΗΤΡΙΕΣ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Οι γεννήτριες εναλλασσόµενου ρεύµατος είναι δύο ειδών Α) οι σύγχρονες γεννήτριες ή εναλλακτήρες και Β) οι ασύγχρονες γεννήτριες Οι σύγχρονες γεννήτριες παράγουν
28 2. ΓΕΝΝΗΤΡΙΕΣ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Οι γεννήτριες εναλλασσόµενου ρεύµατος είναι δύο ειδών Α) οι σύγχρονες γεννήτριες ή εναλλακτήρες και Β) οι ασύγχρονες γεννήτριες Οι σύγχρονες γεννήτριες παράγουν
ΤΡΙΦΑΣΙΚΟΙ ΚΙΝΗΤΗΡΕΣ Ε.Ρ ΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ ΗΛΕΚΤΡΙΚΗ ΠΡΟΩΣΗ
 1 ΤΡΙΦΑΣΙΚΟΙ ΚΙΝΗΤΗΡΕΣ Ε.Ρ Έχουμε δύο είδη τριφασικών κινητήρων Ε.Ρ., τους σύγχρονους και τους ασύγχρονους. Ο στάτης των δύο αυτών ειδών είναι όμοιος με αυτόν των σύγχρονων γεννητριών. Έχει τριφασικό τύλιγμα,
1 ΤΡΙΦΑΣΙΚΟΙ ΚΙΝΗΤΗΡΕΣ Ε.Ρ Έχουμε δύο είδη τριφασικών κινητήρων Ε.Ρ., τους σύγχρονους και τους ασύγχρονους. Ο στάτης των δύο αυτών ειδών είναι όμοιος με αυτόν των σύγχρονων γεννητριών. Έχει τριφασικό τύλιγμα,
ΑΣΚΗΣΕΙΣ ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΙΙ
 ΑΣΚΗΣΕΙΣ ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΙΙ ΣΥΓΧΡΟΝΕΣ ΜΗΧΑΝΕΣ Ε.Ρ. 1. Μια σύγχρονη γεννήτρια με ονομαστικά στοιχεία: 2300V, 1000kV, 60Hz, διπολική με συντελεστής ισχύος 0,8 επαγωγικό και σύνδεση σε αστέρα έχει σύγχρονη
ΑΣΚΗΣΕΙΣ ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΙΙ ΣΥΓΧΡΟΝΕΣ ΜΗΧΑΝΕΣ Ε.Ρ. 1. Μια σύγχρονη γεννήτρια με ονομαστικά στοιχεία: 2300V, 1000kV, 60Hz, διπολική με συντελεστής ισχύος 0,8 επαγωγικό και σύνδεση σε αστέρα έχει σύγχρονη
Τμήμα Ηλεκτρολόγων Μηχανικών ΜΕΤΑΒΑΤΙΚΑ ΦΑΙΝΟΜΕΝΑ ΚΑΤΆ ΤΗ ΛΕΙΤΟΥΡΓΙΑ ΣΓ
 Όταν κατά τη λειτουργία μιας ΣΓ η ροπή στον άξονα της ή το φορτίο της μεταβληθούν απότομα, η λειτουργία της παρουσιάζει κάποιο μεταβατικό φαινόμενο για κάποια χρονική διάρκεια μέχρι να επανέλθει στη στάσιμη
Όταν κατά τη λειτουργία μιας ΣΓ η ροπή στον άξονα της ή το φορτίο της μεταβληθούν απότομα, η λειτουργία της παρουσιάζει κάποιο μεταβατικό φαινόμενο για κάποια χρονική διάρκεια μέχρι να επανέλθει στη στάσιμη
Ηλεκτρικές Μηχανές ΙΙ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 7: Μέθοδοι Εκκίνησης και Πέδησης Ασύγχρονων Τριφασικών Κινητήρων Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 7: Μέθοδοι Εκκίνησης και Πέδησης Ασύγχρονων Τριφασικών Κινητήρων Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων
Ηλεκτρικές Μηχανές ΙΙ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 2: Ασύγχρονος Τριφασικός Κινητήρας Αρχή Λειτουργίας Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων Μηχανικών
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 2: Ασύγχρονος Τριφασικός Κινητήρας Αρχή Λειτουργίας Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων Μηχανικών
ΑΣΚΗΣΗ 1 ΜΟΝΟΦΑΣΙΚΟΣ ΜΕΤΑΣΧΗΜΑΤΙΣΤΗΣ
 ΑΣΚΗΣΗ 1 ΜΟΝΟΦΑΣΙΚΟΣ ΜΕΤΑΣΧΗΜΑΤΙΣΤΗΣ Α.1 ΘΕΩΡΗΤΙΚΗ ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΜΟΝΟΦΑΣΙΚΟ ΜΕΤΑΣΧΗΜΑΤΙΣΤΗ Ο μετασχηματιστής είναι μια ηλεκτρική διάταξη που μετατρέπει εναλλασσόμενη ηλεκτρική ενέργεια ενός επιπέδου τάσης
ΑΣΚΗΣΗ 1 ΜΟΝΟΦΑΣΙΚΟΣ ΜΕΤΑΣΧΗΜΑΤΙΣΤΗΣ Α.1 ΘΕΩΡΗΤΙΚΗ ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΜΟΝΟΦΑΣΙΚΟ ΜΕΤΑΣΧΗΜΑΤΙΣΤΗ Ο μετασχηματιστής είναι μια ηλεκτρική διάταξη που μετατρέπει εναλλασσόμενη ηλεκτρική ενέργεια ενός επιπέδου τάσης
ΑΣΚΗΣΗ 3 η ΠΑΡΑΛΛΗΛΗ ΛΕΙΤΟΥΡΓΙΑ ΣΥΓΧΡΟΝΗΣ ΤΡΙΦΑΣΙΚΗΣ ΓΕΝΝΗΤΡΙΑΣ ΜΕ ΤΡΙΦΑΣΙΚΟ ΣΥΣΤΗΜΑ ΙΣΧΥΟΣ
 ΑΣΚΗΣΗ 3 η ΠΑΡΑΛΛΗΛΗ ΛΕΙΤΟΥΡΓΙΑ ΣΥΓΧΡΟΝΗΣ ΤΡΙΦΑΣΙΚΗΣ ΓΕΝΝΗΤΡΙΑΣ ΜΕ ΤΡΙΦΑΣΙΚΟ ΣΥΣΤΗΜΑ ΙΣΧΥΟΣ Σκοπός της άσκησης: Σκοπός της άσκησης είναι: 1. Να γνωρίσει ο σπουδαστής την διαδικασία παραλληλισμού μιας σύγχρονης
ΑΣΚΗΣΗ 3 η ΠΑΡΑΛΛΗΛΗ ΛΕΙΤΟΥΡΓΙΑ ΣΥΓΧΡΟΝΗΣ ΤΡΙΦΑΣΙΚΗΣ ΓΕΝΝΗΤΡΙΑΣ ΜΕ ΤΡΙΦΑΣΙΚΟ ΣΥΣΤΗΜΑ ΙΣΧΥΟΣ Σκοπός της άσκησης: Σκοπός της άσκησης είναι: 1. Να γνωρίσει ο σπουδαστής την διαδικασία παραλληλισμού μιας σύγχρονης
Τ.Ε.Ι. ΠΑΤΡΑΣ / Σ.Τ.ΕΦ. Πάτρα Τμήμα: ΜΗΧΑΝΟΛΟΓΙΑΣ. Εξέταση στο μάθημα «Ηλεκτρικές Μηχανές»
 Τ.Ε.Ι. ΠΑΤΡΑΣ / Σ.Τ.ΕΦ. Πάτρα 26-1-2012 Τμήμα: ΜΗΧΑΝΟΛΟΓΙΑΣ Εξέταση στο μάθημα «Ηλεκτρικές Μηχανές» ΠΡΟΣΟΧΗ: Για οποιοδήποτε σύμβολο χρησιμοποιήσετε στις πράξεις σας, να γράψετε ξεκάθαρα τι αντιπροσωπεύει
Τ.Ε.Ι. ΠΑΤΡΑΣ / Σ.Τ.ΕΦ. Πάτρα 26-1-2012 Τμήμα: ΜΗΧΑΝΟΛΟΓΙΑΣ Εξέταση στο μάθημα «Ηλεκτρικές Μηχανές» ΠΡΟΣΟΧΗ: Για οποιοδήποτε σύμβολο χρησιμοποιήσετε στις πράξεις σας, να γράψετε ξεκάθαρα τι αντιπροσωπεύει
Διατάξεις εκκίνησης κινητήρων ΣΡ
 Διατάξεις εκκίνησης κινητήρων ΣΡ Η διάταξη ελέγχου και προστασίας του κινητήρα ΣΡ πρέπει: 1. Να προστατεύει τον κινητήρα από βραχυκυκλώματα στην ίδια τη διάταξη προστασίας 2. Να προστατεύει τον κινητήρα
Διατάξεις εκκίνησης κινητήρων ΣΡ Η διάταξη ελέγχου και προστασίας του κινητήρα ΣΡ πρέπει: 1. Να προστατεύει τον κινητήρα από βραχυκυκλώματα στην ίδια τη διάταξη προστασίας 2. Να προστατεύει τον κινητήρα
Ηλεκτρικές Μηχανές ΙΙ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 1: Βασικές Αρχές Ηλεκτρικών Μηχανών Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 1: Βασικές Αρχές Ηλεκτρικών Μηχανών Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης
5. ΜΟΝΟΦΑΣΙΚΟΙ ΚΑΙ ΑΛΛΟΙ ΚΙΝΗΤΗΡΕΣ
 73 5. ΜΟΝΟΦΑΣΙΚΟΙ ΚΑΙ ΑΛΛΟΙ ΚΙΝΗΤΗΡΕΣ Στην συνέχεια εξετάζονται οι µονοφασικοί επαγωγικοί κινητήρες αλλά και ορισµένοι άλλοι όπως οι τριφασικοί σύγχρονοι κινητήρες που υπάρχουν σε µικρό ποσοστό σε βιοµηχανικές
73 5. ΜΟΝΟΦΑΣΙΚΟΙ ΚΑΙ ΑΛΛΟΙ ΚΙΝΗΤΗΡΕΣ Στην συνέχεια εξετάζονται οι µονοφασικοί επαγωγικοί κινητήρες αλλά και ορισµένοι άλλοι όπως οι τριφασικοί σύγχρονοι κινητήρες που υπάρχουν σε µικρό ποσοστό σε βιοµηχανικές
ΑΣΚΗΣΗ 1 η ΜΕΤΑΣΧΗΜΑΤΙΣΤΕΣ ΙΣΧΥΟΣ ΕΙΣΑΓΩΓΗ. Στόχοι της εργαστηριακής άσκησης είναι η εξοικείωση των σπουδαστών με την:
 Σκοπός της Άσκησης: ΑΣΚΗΣΗ η ΜΕΤΑΣΧΗΜΑΤΙΣΤΕΣ ΙΣΧΥΟΣ ΕΙΣΑΓΩΓΗ Στόχοι της εργαστηριακής άσκησης είναι η εξοικείωση των σπουδαστών με την: α. Κατασκευή μετασχηματιστών. β. Αρχή λειτουργίας μετασχηματιστών.
Σκοπός της Άσκησης: ΑΣΚΗΣΗ η ΜΕΤΑΣΧΗΜΑΤΙΣΤΕΣ ΙΣΧΥΟΣ ΕΙΣΑΓΩΓΗ Στόχοι της εργαστηριακής άσκησης είναι η εξοικείωση των σπουδαστών με την: α. Κατασκευή μετασχηματιστών. β. Αρχή λειτουργίας μετασχηματιστών.
ΑΣΚΗΣΗ 2 η ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΑΥΤΟΝΟΜΗΣ ΛΕΙΤΟΥΡΓΙΑΣ ΣΥΓΧΡΟΝΗΣ ΤΡΙΦΑΣΙΚΗΣ ΓΕΝΝΗΤΡΙΑΣ ΜΕ ΦΟΡΤΙΟ
 ΑΣΚΗΣΗ 2 η ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΑΥΤΟΝΟΜΗΣ ΛΕΙΤΟΥΡΓΙΑΣ ΣΥΓΧΡΟΝΗΣ ΤΡΙΦΑΣΙΚΗΣ ΓΕΝΝΗΤΡΙΑΣ ΜΕ ΦΟΡΤΙΟ Σκοπός της άσκησης: Σκοπός της άσκησης είναι η μελέτη των χαρακτηριστικών λειτουργίας μιας σύγχρονης γεννήτριας
ΑΣΚΗΣΗ 2 η ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΑΥΤΟΝΟΜΗΣ ΛΕΙΤΟΥΡΓΙΑΣ ΣΥΓΧΡΟΝΗΣ ΤΡΙΦΑΣΙΚΗΣ ΓΕΝΝΗΤΡΙΑΣ ΜΕ ΦΟΡΤΙΟ Σκοπός της άσκησης: Σκοπός της άσκησης είναι η μελέτη των χαρακτηριστικών λειτουργίας μιας σύγχρονης γεννήτριας
ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ & ΣΥΣΤΗΜΑΤΩΝ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΥΣΤΗΜΑΤΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ & ΣΥΣΤΗΜΑΤΩΝ Διδάσκων : Δημήτρης Τσιπιανίτης Γεώργιος Μανδέλλος
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΥΣΤΗΜΑΤΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ & ΣΥΣΤΗΜΑΤΩΝ Διδάσκων : Δημήτρης Τσιπιανίτης Γεώργιος Μανδέλλος
Η λειτουργία του κινητήρα βασίζεται σε τάσεις και ρεύματα που παράγονται εξ επαγωγής στο δρομέα και οφείλονται στο μαγνητικό πεδίο του στάτη
 Η λειτουργία του κινητήρα βασίζεται σε τάσεις και ρεύματα που παράγονται εξ επαγωγής στο δρομέα και οφείλονται στο μαγνητικό πεδίο του στάτη Επειδή ο επαγωγικός κινητήρας λειτουργεί εντελώς όμοια με ένα
Η λειτουργία του κινητήρα βασίζεται σε τάσεις και ρεύματα που παράγονται εξ επαγωγής στο δρομέα και οφείλονται στο μαγνητικό πεδίο του στάτη Επειδή ο επαγωγικός κινητήρας λειτουργεί εντελώς όμοια με ένα
«Προηγµένες Υπηρεσίες Τηλεκπαίδευσης στο Τ.Ε.Ι. Σερρών»,
 «Προηγµένες Υπηρεσίες Τηλεκπαίδευσης στο Τ.Ε.Ι. Σερρών», Μέτρο: «Εισαγωγή και Αξιοποίηση των νέων Τεχνολογιών στην Εκπαίδευση» του Επιχειρησιακού Προγράµµατος Κοινωνία της Πληροφορίας ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ
«Προηγµένες Υπηρεσίες Τηλεκπαίδευσης στο Τ.Ε.Ι. Σερρών», Μέτρο: «Εισαγωγή και Αξιοποίηση των νέων Τεχνολογιών στην Εκπαίδευση» του Επιχειρησιακού Προγράµµατος Κοινωνία της Πληροφορίας ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ
Περιεχόμενα. Πρόλογος...13
 Περιεχόμενα Πρόλογος...3 Κεφάλαιο : Στοιχεία ηλεκτρικών κυκλωμάτων...5. Βασικά ηλεκτρικά μεγέθη...5.. Ηλεκτρικό φορτίο...5.. Ηλεκτρικό ρεύμα...5..3 Τάση...6..4 Ενέργεια...6..5 Ισχύς...6..6 Σύνοψη...7.
Περιεχόμενα Πρόλογος...3 Κεφάλαιο : Στοιχεία ηλεκτρικών κυκλωμάτων...5. Βασικά ηλεκτρικά μεγέθη...5.. Ηλεκτρικό φορτίο...5.. Ηλεκτρικό ρεύμα...5..3 Τάση...6..4 Ενέργεια...6..5 Ισχύς...6..6 Σύνοψη...7.
ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ: 2 η
 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ: 2 η Τίτλος Άσκησης: ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ και ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ «Λειτουργία Γεννήτριας Συνεχούς Ρεύματος Ξένης διέγερσης και σχεδίαση της χαρακτηριστικής φορτίου» «Λειτουργία
ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ: 2 η Τίτλος Άσκησης: ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ και ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ «Λειτουργία Γεννήτριας Συνεχούς Ρεύματος Ξένης διέγερσης και σχεδίαση της χαρακτηριστικής φορτίου» «Λειτουργία
Τμήμα Ηλεκτρολόγων Μηχανικών ΜΟΝΟΦΑΣΙΚΟΙ ΚΙΝΗΤΗΡΕΣ
 Το βασικό μειονέκτημα που εμφανίζεται στη σχεδίαση των μονοφασικών επαγωγικών κινητήρων είναι ότι αντίθετα από τις 3-φασικές πηγές ισχύος οι 1-φασικές πηγές δεν παράγουν στρεφόμενο μαγνητικό πεδίο Το μαγνητικό
Το βασικό μειονέκτημα που εμφανίζεται στη σχεδίαση των μονοφασικών επαγωγικών κινητήρων είναι ότι αντίθετα από τις 3-φασικές πηγές ισχύος οι 1-φασικές πηγές δεν παράγουν στρεφόμενο μαγνητικό πεδίο Το μαγνητικό
Στο στάτη της μηχανής εφαρμόζεται ένα 3-φασικό σύστημα ρευμάτων το οποίο παράγει στο εσωτερικό της στρεφόμενο ομογενές μαγνητικό πεδίο
 Στον ΣΚ 2 πόλων το μαγνητικό πεδίο του δρομέα BR παράγεται από το ρεύμα διέγερσης IF Στο στάτη της μηχανής εφαρμόζεται ένα 3-φασικό σύστημα ρευμάτων το οποίο παράγει στο εσωτερικό της στρεφόμενο ομογενές
Στον ΣΚ 2 πόλων το μαγνητικό πεδίο του δρομέα BR παράγεται από το ρεύμα διέγερσης IF Στο στάτη της μηχανής εφαρμόζεται ένα 3-φασικό σύστημα ρευμάτων το οποίο παράγει στο εσωτερικό της στρεφόμενο ομογενές
Περιεχόμενα. Πρόλογος...13
 Περιεχόμενα Πρόλογος...3 Κεφάλαιο : Στοιχεία ηλεκτρικών κυκλωμάτων...5. Βασικά ηλεκτρικά μεγέθη...5.. Ηλεκτρικό φορτίο...5.. Ηλεκτρικό ρεύμα...5..3 Τάση...6..4 Ενέργεια...6..5 Ισχύς...6..6 Σύνοψη...7.
Περιεχόμενα Πρόλογος...3 Κεφάλαιο : Στοιχεία ηλεκτρικών κυκλωμάτων...5. Βασικά ηλεκτρικά μεγέθη...5.. Ηλεκτρικό φορτίο...5.. Ηλεκτρικό ρεύμα...5..3 Τάση...6..4 Ενέργεια...6..5 Ισχύς...6..6 Σύνοψη...7.
ΑΣΚΗΣΗ 9 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ
 ΑΣΚΗΣΗ 9 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι: α) η ασφαλής εκκίνηση β) η χάραξη της χαρακτηριστικής
ΑΣΚΗΣΗ 9 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι: α) η ασφαλής εκκίνηση β) η χάραξη της χαρακτηριστικής
Ηλεκτρικοί Κινητήρες Γεννήτριες (εισαγωγικές σημειώσεις)
") 5279: Ηλεκτρομηχανολογικός Εξοπλισμός Διεργασιών 7 ο εξάμηνο Ηλεκτρικοί Κινητήρες Γεννήτριες (εισαγωγικές σημειώσεις) Θ. Παπαθανασίου, Επικ. Καθηγητής ΕΜΠ https://courses.chemeng.ntua.gr/sme/ Ηλεκτρικοί
5279: Ηλεκτρομηχανολογικός Εξοπλισμός Διεργασιών 7 ο εξάμηνο Ηλεκτρικοί Κινητήρες Γεννήτριες (εισαγωγικές σημειώσεις) Θ. Παπαθανασίου, Επικ. Καθηγητής ΕΜΠ https://courses.chemeng.ntua.gr/sme/ Ηλεκτρικοί
ΓΕΝΝΗΤΡΙΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΓΕΝΝΗΤΡΙΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΚΕΦΑΛΑΙΟ 3 3.1 ΕΙΣΑΓΩΓΗ Μια ηλεκτρική µηχανή συνεχούς ρεύµατος χρησιµοποιείται ως γεννήτρια, όταν ο άξονάς της στρέφεται από µια κινητήρια µηχανή (prim movr). Η κινητήρια µηχανή
ΓΕΝΝΗΤΡΙΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΚΕΦΑΛΑΙΟ 3 3.1 ΕΙΣΑΓΩΓΗ Μια ηλεκτρική µηχανή συνεχούς ρεύµατος χρησιµοποιείται ως γεννήτρια, όταν ο άξονάς της στρέφεται από µια κινητήρια µηχανή (prim movr). Η κινητήρια µηχανή
Άσκηση 10 Στοιχεία ηλεκτρονικής τεχνολογίας
 Άσκηση 10 Στοιχεία ηλεκτρονικής τεχνολογίας ΔΙΟΔΟΣ Οι περισσότερες ηλεκτρονικές συσκευές όπως οι τηλεοράσεις, τα στερεοφωνικά συγκροτήματα και οι υπολογιστές χρειάζονται τάση dc για να λειτουργήσουν σωστά.
Άσκηση 10 Στοιχεία ηλεκτρονικής τεχνολογίας ΔΙΟΔΟΣ Οι περισσότερες ηλεκτρονικές συσκευές όπως οι τηλεοράσεις, τα στερεοφωνικά συγκροτήματα και οι υπολογιστές χρειάζονται τάση dc για να λειτουργήσουν σωστά.
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΤΑ ΣΗΕ I ΣΥΓΧΡΟΝΗ ΓΕΝΝΗΤΡΙΑ ΘΕΣΣΑΛΟΝΙΚΗ
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΤΑ ΣΗΕ I ΣΥΓΧΡΟΝΗ ΓΕΝΝΗΤΡΙΑ ΘΕΣΣΑΛΟΝΙΚΗ
ΟΝΟΜ/ΝΥΜΟ: ΜΠΑΛΑΜΠΑΝΗ ΓΕΩΡΓΙΑ ΑΜ:6105 ΜΑΘΗΜΑ: ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΕΡΓΑΣΙΑ ΤΙΤΛΟΣ: ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΗΤΡΙΑΣ
 ΟΝΟΜ/ΝΥΜΟ: ΜΠΑΛΑΜΠΑΝΗ ΓΕΩΡΓΙΑ ΑΜ:6105 ΜΑΘΗΜΑ: ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΕΡΓΑΣΙΑ ΤΙΤΛΟΣ: ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΗΤΡΙΑΣ 1 Η γεννήτρια ή ηλεκτρογεννήτρια είναι μηχανή που βασίζεται στους νόμους της
ΟΝΟΜ/ΝΥΜΟ: ΜΠΑΛΑΜΠΑΝΗ ΓΕΩΡΓΙΑ ΑΜ:6105 ΜΑΘΗΜΑ: ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΕΡΓΑΣΙΑ ΤΙΤΛΟΣ: ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΗΤΡΙΑΣ 1 Η γεννήτρια ή ηλεκτρογεννήτρια είναι μηχανή που βασίζεται στους νόμους της
Απαντήσεις Θεμάτων Τελικής Αξιολόγησης (Εξετάσεις Ιουνίου) στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 2015/2016, Ημερομηνία: 14/06/2016
 στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 2015/2016, Ημερομηνία: 14/06/2016") Απαντήσεις Θεμάτων Τελικής Αξιολόγησης (Εξετάσεις Ιουνίου) στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 05/06, Ημερομηνία: 4/06/06 Θέμα ο (Βαθμοί:4,0) Τα δεδομένα που ελήφθησαν από τις δοκιμές βραχυκύκλωσης
Απαντήσεις Θεμάτων Τελικής Αξιολόγησης (Εξετάσεις Ιουνίου) στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 05/06, Ημερομηνία: 4/06/06 Θέμα ο (Βαθμοί:4,0) Τα δεδομένα που ελήφθησαν από τις δοκιμές βραχυκύκλωσης
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444
 ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 DC ΔΙΑΚΟΠΤΙΚA ΤΡΟΦΟΔΟΤΙΚΑ, ΜΕΤΑΤΡΟΠΕΙΣ ΜΕ ΗΛΕΚΤΡΙΚΗ ΑΠΟΜΟΝΩΣΗ Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 DC ΔΙΑΚΟΠΤΙΚA ΤΡΟΦΟΔΟΤΙΚΑ, ΜΕΤΑΤΡΟΠΕΙΣ ΜΕ ΗΛΕΚΤΡΙΚΗ ΑΠΟΜΟΝΩΣΗ Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ
ΤΕΙ ΚΑΒΑΛΑΣ 2012. 1.1 Εισαγωγή Αντικείμενο πτυχιακής εργασίας.σελ. 2. 1.2 Περιεχόμενα εγχειριδίου Αναφοράς Προγραμμάτων.. σελ. 3
 1 ΠΕΡΙΕΧΟΜΕΝΑ 1.1 Εισαγωγή Αντικείμενο πτυχιακής εργασίας.σελ. 2 1.2 Περιεχόμενα εγχειριδίου Αναφοράς Προγραμμάτων.. σελ. 3 1.3 Παράδειγμα τριφασικού επαγωγικού κινητήρα..σελ. 4-9 1.4 Σχεδίαση στο Visio
1 ΠΕΡΙΕΧΟΜΕΝΑ 1.1 Εισαγωγή Αντικείμενο πτυχιακής εργασίας.σελ. 2 1.2 Περιεχόμενα εγχειριδίου Αναφοράς Προγραμμάτων.. σελ. 3 1.3 Παράδειγμα τριφασικού επαγωγικού κινητήρα..σελ. 4-9 1.4 Σχεδίαση στο Visio
ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΙΚΩΝ ΜΕΤΡΗΣΕΩΝ Ι. Σημειώσεις Εργαστηριακών Ασκήσεων
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ Σχολή Ηλεκτρολόγων Μηχανικών & Μηχανικών Υπολογιστών Τομέας Ηλεκτρικών Βιομηχανικών Διατάξεων και Συστημάτων Αποφάσεων ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΙΚΩΝ ΜΕΤΡΗΣΕΩΝ Ι Σημειώσεις Εργαστηριακών
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ Σχολή Ηλεκτρολόγων Μηχανικών & Μηχανικών Υπολογιστών Τομέας Ηλεκτρικών Βιομηχανικών Διατάξεων και Συστημάτων Αποφάσεων ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΙΚΩΝ ΜΕΤΡΗΣΕΩΝ Ι Σημειώσεις Εργαστηριακών
ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Γ
 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Γ ΜΑΘΗΜΑ 2 Ισοδύναμο Ηλεκτρικό Κύκλωμα Σύγχρονων Μηχανών Ουρεϊλίδης Κωνσταντίνος, Υποψ. Διδακτωρ Υπολογισμός Αυτεπαγωγής και αμοιβαίας επαγωγής Πεπλεγμένη μαγνητική ροή συναρτήσει των
ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Γ ΜΑΘΗΜΑ 2 Ισοδύναμο Ηλεκτρικό Κύκλωμα Σύγχρονων Μηχανών Ουρεϊλίδης Κωνσταντίνος, Υποψ. Διδακτωρ Υπολογισμός Αυτεπαγωγής και αμοιβαίας επαγωγής Πεπλεγμένη μαγνητική ροή συναρτήσει των
Απαντήσεις Θεμάτων Τελικής Αξιολόγησης (Εξετάσεις Ιουνίου) στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 2013/2014, Ημερομηνία: 24/06/2014
 στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 2013/2014, Ημερομηνία: 24/06/2014") Θέμα ο Απαντήσεις Θεμάτων Τελικής Αξιολόγησης (Εξετάσεις Ιουνίου) στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 03/04, Ημερομηνία: 4/06/04 Σε μονοφασικό Μ/Σ ονομαστικής ισχύος 60kA, 300/30, 50Hz, ελήφθησαν
Θέμα ο Απαντήσεις Θεμάτων Τελικής Αξιολόγησης (Εξετάσεις Ιουνίου) στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 03/04, Ημερομηνία: 4/06/04 Σε μονοφασικό Μ/Σ ονομαστικής ισχύος 60kA, 300/30, 50Hz, ελήφθησαν
ΟΝΟΜ/ΩΝΥΜΟ:ΣΤΕΦΑΝΟΣ ΓΚΟΥΝΤΟΥΣΟΥΔΗΣ Α.Μ:6750 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ:ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ (ΕΡΓΑΣΤΗΡΙΟ)
") ΟΝΟΜ/ΩΝΥΜΟ:ΣΤΕΦΑΝΟΣ ΓΚΟΥΝΤΟΥΣΟΥΔΗΣ Α.Μ:6750 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ:ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ (ΕΡΓΑΣΤΗΡΙΟ) Περιγραφή Λειτουργίας Σύγχρονου Κινητήρα Σκοπός: Η παρούσα εργασία έχει σκοπό να περιγράψει τη λειτουργία ενός
ΟΝΟΜ/ΩΝΥΜΟ:ΣΤΕΦΑΝΟΣ ΓΚΟΥΝΤΟΥΣΟΥΔΗΣ Α.Μ:6750 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ:ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ (ΕΡΓΑΣΤΗΡΙΟ) Περιγραφή Λειτουργίας Σύγχρονου Κινητήρα Σκοπός: Η παρούσα εργασία έχει σκοπό να περιγράψει τη λειτουργία ενός
ΕΞΕΤΑΣΤΙΚΗ ΠΕΡΙΟΔΟΣ ΙΟΥΝΙΟΥ 2007
 ΤΕΙ ΠΕΙΡΑΙΑ ΣΧΟΛΗ ΣΤΕΦ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΔΙΔΑΣΚΩΝ: Δρ. Π. Β. Μαλατέστας, Καθηγητής ΗΜΕΡΟΜΗΝΙΑ : 5//7 Μάθημα : Ηλεκτρική Κίνηση ΕΞΕΤΑΣΤΙΚΗ ΠΕΡΙΟΔΟΣ ΙΟΥΝΙΟΥ 7 ΘΕΜΑ ο (4%) Κινητήρας με γραμμική χαρακτηριστική
ΤΕΙ ΠΕΙΡΑΙΑ ΣΧΟΛΗ ΣΤΕΦ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΔΙΔΑΣΚΩΝ: Δρ. Π. Β. Μαλατέστας, Καθηγητής ΗΜΕΡΟΜΗΝΙΑ : 5//7 Μάθημα : Ηλεκτρική Κίνηση ΕΞΕΤΑΣΤΙΚΗ ΠΕΡΙΟΔΟΣ ΙΟΥΝΙΟΥ 7 ΘΕΜΑ ο (4%) Κινητήρας με γραμμική χαρακτηριστική
25.2. Εισαγωγή Θεωρητικές Επεξηγήσεις Λειτουργίας
 φαρμογή 5 Τριφασικός παγωγικός Κινητήρας : Με Τυλιγμένο Δρομέα ( ο μέρος) 5.. Σκοποί της φαρμογής Μαθησιακοί Στόχοι Να μπορείτε να εξετάζετε την κατασκευή ενός τριφασικού επαγωγικού κινητήρα με τυλιγμένο
φαρμογή 5 Τριφασικός παγωγικός Κινητήρας : Με Τυλιγμένο Δρομέα ( ο μέρος) 5.. Σκοποί της φαρμογής Μαθησιακοί Στόχοι Να μπορείτε να εξετάζετε την κατασκευή ενός τριφασικού επαγωγικού κινητήρα με τυλιγμένο
ΣΥΜΠΙΕΣΤΕΣ ΗΛΕΚΤΡΙΚΟ ΣΥΣΤΗΜΑ
 9. Ηλεκτρικό Σύστημα Συμπιεστών Ανάλογα με την κατασκευή τους και το είδος του εναλλασσόμενου ρεύματος που απαιτούν για τη λειτουργία τους, οι ηλεκτροκινητήρες διακρίνονται σε: Μονοφασικούς. Τριφασικούς.
9. Ηλεκτρικό Σύστημα Συμπιεστών Ανάλογα με την κατασκευή τους και το είδος του εναλλασσόμενου ρεύματος που απαιτούν για τη λειτουργία τους, οι ηλεκτροκινητήρες διακρίνονται σε: Μονοφασικούς. Τριφασικούς.
ΣΥΓΧΡΟΝΕΣ ΓΕΝΝΗΤΡΙΕΣ
 ΣΥΓΧΡΟΝΕΣ ΓΕΝΝΗΤΡΙΕΣ Για τη λειτουργία των σύγχρονων γεννητριών (που ονομάζονται και εναλλακτήρες) απαραίτητη προϋπόθεση είναι η τροοδοσία του τυλίγματος του δρομέα με συνεχές ρεύμα Καθώς περιστρέεται
ΣΥΓΧΡΟΝΕΣ ΓΕΝΝΗΤΡΙΕΣ Για τη λειτουργία των σύγχρονων γεννητριών (που ονομάζονται και εναλλακτήρες) απαραίτητη προϋπόθεση είναι η τροοδοσία του τυλίγματος του δρομέα με συνεχές ρεύμα Καθώς περιστρέεται
ΑΣΚΗΣΗ 11 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΣΥΝΘΕΤΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ
 ΑΣΚΗΣΗ 11 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΣΥΝΘΕΤΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση των τρόπων ελέγχου της ταχύτητας
ΑΣΚΗΣΗ 11 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΣΥΝΘΕΤΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση των τρόπων ελέγχου της ταχύτητας
Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας
 Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας Ενότητα: Άσκηση 5: Η σύγχρονη μηχανή (γεννήτρια/κινητήρας ) Νικόλαος Βοβός, Γαβριήλ Γιαννακόπουλος, Παναγής Βοβός Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας Ενότητα: Άσκηση 5: Η σύγχρονη μηχανή (γεννήτρια/κινητήρας ) Νικόλαος Βοβός, Γαβριήλ Γιαννακόπουλος, Παναγής Βοβός Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Αφεντουλίδου Όλγα ΑΜ:6904. Ηλεκτρικές Μηχανές. Μέθοδοι εκκίνησης τριφασικού επαγωγικού κινητήρα
 Αφεντουλίδου Όλγα ΑΜ:6904 Ηλεκτρικές Μηχανές Μέθοδοι εκκίνησης τριφασικού επαγωγικού κινητήρα 1 Εισαγωγή Από τα διάφορα είδη ηλεκτρικών μηχανών εναλλασσόμενου ρεύματος, ο τριφασικός ασύγχρονος ή επαγωγικός
Αφεντουλίδου Όλγα ΑΜ:6904 Ηλεκτρικές Μηχανές Μέθοδοι εκκίνησης τριφασικού επαγωγικού κινητήρα 1 Εισαγωγή Από τα διάφορα είδη ηλεκτρικών μηχανών εναλλασσόμενου ρεύματος, ο τριφασικός ασύγχρονος ή επαγωγικός
ΗΜΥ 340 Μηχανική Ηλεκτρικής Ισχύος Περιστρεφόμενες μηχανές ac
 ΗΜΥ 340 Μηχανική Ηλεκτρικής Ισχύος Περιστρεφόμενες μηχανές ac Δρ. Ηλίας Κυριακίδης Αναπληρωτής Καθηγητής ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ 2006
ΗΜΥ 340 Μηχανική Ηλεκτρικής Ισχύος Περιστρεφόμενες μηχανές ac Δρ. Ηλίας Κυριακίδης Αναπληρωτής Καθηγητής ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ 2006
ΙΤ=ΙS RT RS. Uεπ. Άσκηση 5 Ηλεκτρικοί κινητήρες DC
 Άσκηση 5 Ηλεκτρικοί κινητήρες DC 5.1 Σκοπός της Άσκησης Σκοπός την Άσκησης είναι η μελέτη του τρόπου λειτουργίας και ελέγχου των ηλεκτρικών κινητήρων DC. Αναλύονται ο τρόπος εκκίνησης και ρύθμισης της
Άσκηση 5 Ηλεκτρικοί κινητήρες DC 5.1 Σκοπός της Άσκησης Σκοπός την Άσκησης είναι η μελέτη του τρόπου λειτουργίας και ελέγχου των ηλεκτρικών κινητήρων DC. Αναλύονται ο τρόπος εκκίνησης και ρύθμισης της
ΓΚΙΟΚΑΣ ΠΑΝΑΓΙΩΤΗΣ. ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας μιας ηλεκτρικής γεννήτριας Σ.Ρ. με διέγερση σειράς.
 ΓΚΙΟΚΑΣ ΠΑΝΑΓΙΩΤΗΣ ΑΜ:6749 ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας μιας ηλεκτρικής γεννήτριας Σ.Ρ. με διέγερση σειράς. ΣΚΟΠΟΣ: Για να λειτουργήσει μια γεννήτρια, πρέπει να πληρούνται οι παρακάτω βασικές
ΓΚΙΟΚΑΣ ΠΑΝΑΓΙΩΤΗΣ ΑΜ:6749 ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας μιας ηλεκτρικής γεννήτριας Σ.Ρ. με διέγερση σειράς. ΣΚΟΠΟΣ: Για να λειτουργήσει μια γεννήτρια, πρέπει να πληρούνται οι παρακάτω βασικές
Νεοπτόλεµος Γ. Τζέκας
 Αριστοτέλειο Πανεπιστήµιο Θεσσαλονίκης Πολυτεχνική Σχολή Τµήµα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών ΚΑΤΑΣΚΕΥΗ ΜΟΝΤΕΛΟΥ ΓΙΑ ΕΛΕΓΧΟ ΤΑΧΥΤΗΤΑΣ ΜΟΝΟΦΑΣΙΚOY ΕΠΑΓΩΓΙΚOY ΚΙΝΗΤΗΡA Νεοπτόλεµος Γ. Τζέκας
Αριστοτέλειο Πανεπιστήµιο Θεσσαλονίκης Πολυτεχνική Σχολή Τµήµα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών ΚΑΤΑΣΚΕΥΗ ΜΟΝΤΕΛΟΥ ΓΙΑ ΕΛΕΓΧΟ ΤΑΧΥΤΗΤΑΣ ΜΟΝΟΦΑΣΙΚOY ΕΠΑΓΩΓΙΚOY ΚΙΝΗΤΗΡA Νεοπτόλεµος Γ. Τζέκας
Δίνεται η επαγόμενη τάση στον δρομέα συναρτήσει του ρεύματος διέγερσης στις 1000στρ./λεπτό:
 ΑΣΚΗΣΗ 1 Η Ένας κινητήρας συνεχούς ρεύματος ξένης διέγερσης, έχει ονομαστική ισχύ 500kW, τάση 1000V και ρεύμα 560Α αντίστοιχα, στις 1000στρ/λ. Η αντίσταση οπλισμού του κινητήρα είναι RA=0,09Ω. Το τύλιγμα
ΑΣΚΗΣΗ 1 Η Ένας κινητήρας συνεχούς ρεύματος ξένης διέγερσης, έχει ονομαστική ισχύ 500kW, τάση 1000V και ρεύμα 560Α αντίστοιχα, στις 1000στρ/λ. Η αντίσταση οπλισμού του κινητήρα είναι RA=0,09Ω. Το τύλιγμα
Μηχανές εναλλασσομένου ρεύματος
 Μηχανές εναλλασσομένου ρεύματος 1 Εισαγωγή Οι μηχανές εναλλασσόμενου ρεύματος (Ε.Ρ.) αποτελούν τη συντριπτική πλειονότητα των ηλεκτρικών μηχανών που χρησιμοποιούνται στη βιομηχανία, κυρίως λόγω της επικράτησης
Μηχανές εναλλασσομένου ρεύματος 1 Εισαγωγή Οι μηχανές εναλλασσόμενου ρεύματος (Ε.Ρ.) αποτελούν τη συντριπτική πλειονότητα των ηλεκτρικών μηχανών που χρησιμοποιούνται στη βιομηχανία, κυρίως λόγω της επικράτησης
ΗΛΕΚΤΡΙΚΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Α. ΑΣΚΗΣΕΙΣ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ
 ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ. ΓΕΝΙΚΑ ΗΛΕΚΤΡΙΚΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Α. ΑΣΚΗΣΕΙΣ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ Σε ένα ανοιχτό σύστημα με συνάρτηση μεταφοράς G η έξοδος Υ και είσοδος Χ συνδέονται με τη σχέση: Y=G*Χ
ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ. ΓΕΝΙΚΑ ΗΛΕΚΤΡΙΚΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Α. ΑΣΚΗΣΕΙΣ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ Σε ένα ανοιχτό σύστημα με συνάρτηση μεταφοράς G η έξοδος Υ και είσοδος Χ συνδέονται με τη σχέση: Y=G*Χ
μετασχηματιστή. ΤΜΗΜΑ: ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας ενός μονοφασικού
 ΤΜΗΜΑ: ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας ενός μονοφασικού μετασχηματιστή. ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: κ. Δημήτριος Καλπακτσόγλου ΕΡΓΑΣΙΑ ΤΗΣ: Αικατερίνης-Χρυσοβαλάντης Γιουσμά Α.Ε.Μ:
ΤΜΗΜΑ: ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας ενός μονοφασικού μετασχηματιστή. ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: κ. Δημήτριος Καλπακτσόγλου ΕΡΓΑΣΙΑ ΤΗΣ: Αικατερίνης-Χρυσοβαλάντης Γιουσμά Α.Ε.Μ:
Τμήμα Ηλεκτρολόγων Μηχανικών ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΡΟΠΗΣ ΤΑΧΥΤΗΤΑΣ ΕΠΑΓΩΓΙΚΩΝ ΚΙΝΗΤΗΡΩΝ
 Ένας που κατασκευάζεται ώστε να παρουσιάζει μεγάλη αντίσταση δρομέα η ροπή εκκίνησης του είναι αρκετά υψηλή αλλά το ίδιο υψηλή είναι και η ολίσθηση του στις κανονικές συνθήκες λειτουργίας Όμως επειδή Pconv=(1-s)PAG,
Ένας που κατασκευάζεται ώστε να παρουσιάζει μεγάλη αντίσταση δρομέα η ροπή εκκίνησης του είναι αρκετά υψηλή αλλά το ίδιο υψηλή είναι και η ολίσθηση του στις κανονικές συνθήκες λειτουργίας Όμως επειδή Pconv=(1-s)PAG,
Ηλεκτρονικά Ισχύος II
 Ηλεκτρονικά Ισχύος II Ενότητα 2: Μετατροπείς Συνεχούς Τάσης σε Εναλλασσόμενη Τάση (DC-AC Converters ή Inverters) Δρ.-Μηχ. Εμμανουήλ Τατάκης, Καθηγητής Πολυτεχνική Σχολή Τμ. Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Ηλεκτρονικά Ισχύος II Ενότητα 2: Μετατροπείς Συνεχούς Τάσης σε Εναλλασσόμενη Τάση (DC-AC Converters ή Inverters) Δρ.-Μηχ. Εμμανουήλ Τατάκης, Καθηγητής Πολυτεχνική Σχολή Τμ. Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Ηλεκτρικές Μηχανές ΙI. Ενότητα 10: Ροπή κινητήρα Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε
 Ηλεκτρικές Μηχανές ΙI Ενότητα 10: Ροπή κινητήρα Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό
Ηλεκτρικές Μηχανές ΙI Ενότητα 10: Ροπή κινητήρα Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό
Στα τυλίγματα απόσβεσης ενός ΣΚ μπορεί να αναπτυχθεί κάποια ροπή εκκίνησης χωρίς εξωτερική τροφοδοσία του κυκλώματος διέγερσης
 Στα τυλίγματα απόσβεσης ενός ΣΚ μπορεί να αναπτυχθεί κάποια ροπή εκκίνησης χωρίς εξωτερική τροφοδοσία του κυκλώματος διέγερσης Μια μηχανή που κατασκευάζεται με τυλίγματα απόσβεσης ονομάζεται επαγωγική
Στα τυλίγματα απόσβεσης ενός ΣΚ μπορεί να αναπτυχθεί κάποια ροπή εκκίνησης χωρίς εξωτερική τροφοδοσία του κυκλώματος διέγερσης Μια μηχανή που κατασκευάζεται με τυλίγματα απόσβεσης ονομάζεται επαγωγική
Ηλεκτρονικά Ισχύος II
 Ηλεκτρονικά Ισχύος II Ενότητα 2: Μετατροπείς Συνεχούς Τάσης σε Εναλλασσόμενη Τάση (DC-AC Converters ή Inverters) Δρ.-Μηχ. Εμμανουήλ Τατάκης, Καθηγητής Πολυτεχνική Σχολή Τμ. Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Ηλεκτρονικά Ισχύος II Ενότητα 2: Μετατροπείς Συνεχούς Τάσης σε Εναλλασσόμενη Τάση (DC-AC Converters ή Inverters) Δρ.-Μηχ. Εμμανουήλ Τατάκης, Καθηγητής Πολυτεχνική Σχολή Τμ. Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Αρχή λειτουργίας στοιχειώδους γεννήτριας εναλλασσόμενου ρεύματος
 Αρχή λειτουργίας στοιχειώδους γεννήτριας εναλλασσόμενου ρεύματος ΣΤΟΧΟΣ : Ο μαθητής να μπορεί να, εξηγεί την αρχή λειτουργίας στοιχειώδους γεννήτριας εναλλασσόμενου ρεύματος, κατανοεί τον τρόπο παραγωγής
Αρχή λειτουργίας στοιχειώδους γεννήτριας εναλλασσόμενου ρεύματος ΣΤΟΧΟΣ : Ο μαθητής να μπορεί να, εξηγεί την αρχή λειτουργίας στοιχειώδους γεννήτριας εναλλασσόμενου ρεύματος, κατανοεί τον τρόπο παραγωγής
ΑΣΚΗΣΗ 10 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΔΙΕΓΕΡΣΗΣ ΣΕΙΡΑΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ
 ΑΣΚΗΣΗ 10 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΔΙΕΓΕΡΣΗΣ ΣΕΙΡΑΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση των τρόπων ελέγχου της ταχύτητας ενός
ΑΣΚΗΣΗ 10 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΔΙΕΓΕΡΣΗΣ ΣΕΙΡΑΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση των τρόπων ελέγχου της ταχύτητας ενός
Τμήμα Ηλεκτρολόγων Μηχανικών ΑΥΤΟΝΟΜΗ ΛΕΙΤΟΥΡΓΙΑ ΣΥΓΧΡΟΝΗΣ ΓΕΝΗΤΡΙΑΣ
 ΑΥΤΟΝΟΜΗ ΛΕΙΤΟΥΡΓΙΑ ΣΥΓΧΡΟΝΗΣ ΓΕΝΗΤΡΙΑΣ Οι βασικοί παράγοντες που επηρεάζουν τη συμπεριφορά μιας ΣΓ όταν αυτή λειτουργεί με κάποιο φορτίο είναι αφενός ο συντελεστής ισχύος του φορτίου και αφετέρου το αν
ΑΥΤΟΝΟΜΗ ΛΕΙΤΟΥΡΓΙΑ ΣΥΓΧΡΟΝΗΣ ΓΕΝΗΤΡΙΑΣ Οι βασικοί παράγοντες που επηρεάζουν τη συμπεριφορά μιας ΣΓ όταν αυτή λειτουργεί με κάποιο φορτίο είναι αφενός ο συντελεστής ισχύος του φορτίου και αφετέρου το αν
Μέθοδοι Ελέγχου Ηλεκτρικών Κινητήρων Σ.Ρ.
 Μέθοδοι Ελέγχου Ηλεκτρικών Κινητήρων Σ.Ρ. Ευθυμίου Σωτήρης Δέδες Παναγιώτης 26/06/2014 Εισαγωγή Σκοπός αυτής της παρουσίασης είναι η συνοπτική περιγραφή τριών διαφορετικών μεθόδων ελέγχου κινητήρων Σ.Ρ.
Μέθοδοι Ελέγχου Ηλεκτρικών Κινητήρων Σ.Ρ. Ευθυμίου Σωτήρης Δέδες Παναγιώτης 26/06/2014 Εισαγωγή Σκοπός αυτής της παρουσίασης είναι η συνοπτική περιγραφή τριών διαφορετικών μεθόδων ελέγχου κινητήρων Σ.Ρ.
Προστασία Σ.Η.Ε. Ενότητα 2: Θεμελιώδεις αρχές λειτουργίας των ηλεκτρονόμων και χαρακτηριστικές
 Προστασία Σ.Η.Ε Ενότητα 2: Θεμελιώδεις αρχές λειτουργίας των ηλεκτρονόμων και χαρακτηριστικές Νικόλαος Βοβός Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών 1 Σημείωμα Αδειοδότησης
Προστασία Σ.Η.Ε Ενότητα 2: Θεμελιώδεις αρχές λειτουργίας των ηλεκτρονόμων και χαρακτηριστικές Νικόλαος Βοβός Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών 1 Σημείωμα Αδειοδότησης
ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499
 ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499 ΣΤΑΤΑ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ ΑΕΡΓΟΥ ΙΣΧΥΟΣ (S) ρ Ανρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέµατα Βαθµίες
ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499 ΣΤΑΤΑ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ ΑΕΡΓΟΥ ΙΣΧΥΟΣ (S) ρ Ανρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέµατα Βαθµίες
Τμήμα Ηλεκτρολόγων Μηχανικών ΜΟΝΟΦΑΣΙΚΟΙ ΚΙΝΗΤΗΡΕΣ
 1. Είναι δυνατό να χρησιμοποιείται ΑΜ/Σ για τη συνεχή ρύθμιση της τάσης γραμμής. Αυτή είναι η πιο δαπανηρή μέθοδος ελέγχου της ταχύτητας με ρύθμιση της τάσης και χρησιμοποιείται μόνο όταν απαιτείται πολύ
1. Είναι δυνατό να χρησιμοποιείται ΑΜ/Σ για τη συνεχή ρύθμιση της τάσης γραμμής. Αυτή είναι η πιο δαπανηρή μέθοδος ελέγχου της ταχύτητας με ρύθμιση της τάσης και χρησιμοποιείται μόνο όταν απαιτείται πολύ
Απαραίτητη προϋπόθεση για να λειτουργήσει μία σύγχρονη γεννήτρια είναι η τροφοδοσία του τυλίγματος του δρομέα με ΣΡ
 ΣΥΓΧΡΟΝΕΣ ΓΕΝΝΗΤΡΙΕΣ Απαραίτητη προϋπόθεση για να λειτουργήσει μία σύγχρονη γεννήτρια είναι η τροφοδοσία του τυλίγματος του δρομέα με ΣΡ Αυτό το ρεύμα δημιουργεί μαγνητικό πεδίο στο εσωτερικό της γεννήτριας
ΣΥΓΧΡΟΝΕΣ ΓΕΝΝΗΤΡΙΕΣ Απαραίτητη προϋπόθεση για να λειτουργήσει μία σύγχρονη γεννήτρια είναι η τροφοδοσία του τυλίγματος του δρομέα με ΣΡ Αυτό το ρεύμα δημιουργεί μαγνητικό πεδίο στο εσωτερικό της γεννήτριας
Σύγχρονες Τεχνικές Ελέγχου Ηλεκτρικών Μηχανών Επαγωγής
 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ www.electroepistimi.blogspot.com Σύγχρονες Τεχνικές Ελέγχου Ηλεκτρικών Μηχανών Επαγωγής Ιάκωβος Στ. Μανωλάς Διπλωματούχος Ηλεκτρολόγος Μηχανικός & Μηχανικός Υπολογιστών Ε.Μ.Π. Υποψήφιος
ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ www.electroepistimi.blogspot.com Σύγχρονες Τεχνικές Ελέγχου Ηλεκτρικών Μηχανών Επαγωγής Ιάκωβος Στ. Μανωλάς Διπλωματούχος Ηλεκτρολόγος Μηχανικός & Μηχανικός Υπολογιστών Ε.Μ.Π. Υποψήφιος
Γεννήτρια συνεχούς ρεύματος ξένης διέγερσης
 ΑΣΚΗΣΗ 5 Γεννήτρια συνεχούς ρεύματος ξένης διέγερσης 1 Α. Θεωρητικές επεξηγήσεις: Μια ηλεκτρική μηχανή συνεχούς ρεύματος παράγει τάση συνεχούς μορφής όταν χρησιμοποιείται ως γεννήτρια, ενώ ένας κινητήρας
ΑΣΚΗΣΗ 5 Γεννήτρια συνεχούς ρεύματος ξένης διέγερσης 1 Α. Θεωρητικές επεξηγήσεις: Μια ηλεκτρική μηχανή συνεχούς ρεύματος παράγει τάση συνεχούς μορφής όταν χρησιμοποιείται ως γεννήτρια, ενώ ένας κινητήρας
2. Όλες οι απαντήσεις να δοθούν στο εξεταστικό δοκίμιο το οποίο θα επιστραφεί.
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2014 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2014 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
Γεννήτριες ΣΡ Κινητήρες ΣΡ
 Κινητήρες ΣΡ Ως γεννήτρια ΣΡ χαρακτηρίζεται η ηλεκτρική μηχανή που κατά τη λειτουργία της λαμβάνει κινητική ενέργεια και τη μετατρέπει σε ηλεκτρική με τη μορφή συνεχούς ρεύματος Η ΗΕΔ που δημιουργείται
Κινητήρες ΣΡ Ως γεννήτρια ΣΡ χαρακτηρίζεται η ηλεκτρική μηχανή που κατά τη λειτουργία της λαμβάνει κινητική ενέργεια και τη μετατρέπει σε ηλεκτρική με τη μορφή συνεχούς ρεύματος Η ΗΕΔ που δημιουργείται
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2014
 ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 014 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 014 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΑΡΧΕΣ ΛΕΙΤΟΥΡΓΙΑΣ ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ
 ΑΡΧΕΣ ΛΕΙΤΟΥΡΓΙΑΣ ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Οι ηλεκτρικές μηχανές εναλλασσομένου ρεύματος (ΕΡ) χωρίζονται σε δύο κατηγορίες: στις σύγχρονες (που χρησιμοποιούνται συνήθως ως γεννήτριες)
ΑΡΧΕΣ ΛΕΙΤΟΥΡΓΙΑΣ ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Οι ηλεκτρικές μηχανές εναλλασσομένου ρεύματος (ΕΡ) χωρίζονται σε δύο κατηγορίες: στις σύγχρονες (που χρησιμοποιούνται συνήθως ως γεννήτριες)
3.1 Η δίοδος στο κύκλωμα. Στατική και δυναμική χαρακτηριστική
 1 3. Κυκλώματα διόδων 3.1 Η δίοδος στο κύκλωμα. Στατική και δυναμική χαρακτηριστική Στην πράξη η δίοδος προσεγγίζεται με τμηματική γραμμικοποίηση, όπως στο σχήμα 3-1, όπου η δυναμική αντίσταση της διόδου
1 3. Κυκλώματα διόδων 3.1 Η δίοδος στο κύκλωμα. Στατική και δυναμική χαρακτηριστική Στην πράξη η δίοδος προσεγγίζεται με τμηματική γραμμικοποίηση, όπως στο σχήμα 3-1, όπου η δυναμική αντίσταση της διόδου
ΚΕΦΑΛΑΙΟ 8 Ο : ΤΡΙΦΑΣΙΚΑ ΔΙΚΤΥΑ
 ΚΕΦΑΛΑΙΟ 8 Ο : ΤΡΙΦΑΣΙΚΑ ΔΙΚΤΥΑ 1 Τα τριφασικά δίκτυα χρησιμοποιούνται στην παραγωγή και μεταφορά ηλεκτρικής ενέργειας για τους εξής λόγους: 1. Οικονομία στο αγώγιμο υλικό (25% λιγότερος χαλκός). 2. Η
ΚΕΦΑΛΑΙΟ 8 Ο : ΤΡΙΦΑΣΙΚΑ ΔΙΚΤΥΑ 1 Τα τριφασικά δίκτυα χρησιμοποιούνται στην παραγωγή και μεταφορά ηλεκτρικής ενέργειας για τους εξής λόγους: 1. Οικονομία στο αγώγιμο υλικό (25% λιγότερος χαλκός). 2. Η
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5. Ρυθμίζοντας τη Φορά Περιστροφής. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
4. ΤΡΙΦΑΣΙΚΟΙ ΑΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ
 56 4. ΤΡΙΦΑΣΙΚΟΙ ΑΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ Οι ασύγχρονοι κινητήρες που ονοµάζονται και επαγωγικοί κινητήρες διακρίνονται σε µονοφασικούς και τριφασικούς. Στην συνέχεια θα εξετασθούν οι τριφασικοί ασύγχρονοι
56 4. ΤΡΙΦΑΣΙΚΟΙ ΑΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ Οι ασύγχρονοι κινητήρες που ονοµάζονται και επαγωγικοί κινητήρες διακρίνονται σε µονοφασικούς και τριφασικούς. Στην συνέχεια θα εξετασθούν οι τριφασικοί ασύγχρονοι
ΑΣΚΗΣΗ 2 η ΜΕΤΑΣΧΗΜΑΤΙΣΤΕΣ ΙΣΧΥΟΣ ΛΕΙΤΟΥΡΓΙΑ ΜΕ ΦΟΡΤΙΟ
 ΑΣΚΗΣΗ η ΜΕΤΑΣΧΗΜΑΤΙΣΤΕΣ ΙΣΧΥΟΣ ΛΕΙΤΟΥΡΓΙΑ ΜΕ ΦΟΡΤΙΟ Σκοπός της Άσκησης: Στόχος της εργαστηριακής άσκησης είναι η μελέτη των χαρακτηριστικών λειτουργίας ενός μονοφασικού μετασχηματιστή υπό φορτίο. 1. Λειτουργία
ΑΣΚΗΣΗ η ΜΕΤΑΣΧΗΜΑΤΙΣΤΕΣ ΙΣΧΥΟΣ ΛΕΙΤΟΥΡΓΙΑ ΜΕ ΦΟΡΤΙΟ Σκοπός της Άσκησης: Στόχος της εργαστηριακής άσκησης είναι η μελέτη των χαρακτηριστικών λειτουργίας ενός μονοφασικού μετασχηματιστή υπό φορτίο. 1. Λειτουργία
Άσκηση 10 ANTIKEIMENO: ΣΤΟΧΟΙ ΑΥΤΟΥ ΤΟΥ ΠΕΙΡΑΜΑΤΟΣ: ΕΞΟΠΛΙΣΜΟΣ ΠΟΥ ΘΑ ΧΡΕΙΑΣΤΟΥΜΕ: Σύγχρονη τριφασική γεννήτρια. Η Σύγχρονη τριφασική γεννήτρια.
 Άσκηση 10 ANTIKEIMENO: Η Σύγχρονη τριφασική γεννήτρια. ΣΤΟΧΟΙ ΑΥΤΟΥ ΤΟΥ ΠΕΙΡΑΜΑΤΟΣ: Κατανόηση των βασικών αρχών λειτουργίας της σύγχρονης τριφασικής γεννήτριας. ΕΞΟΠΛΙΣΜΟΣ ΠΟΥ ΘΑ ΧΡΕΙΑΣΤΟΥΜΕ: Τροφοδοτικό
Άσκηση 10 ANTIKEIMENO: Η Σύγχρονη τριφασική γεννήτρια. ΣΤΟΧΟΙ ΑΥΤΟΥ ΤΟΥ ΠΕΙΡΑΜΑΤΟΣ: Κατανόηση των βασικών αρχών λειτουργίας της σύγχρονης τριφασικής γεννήτριας. ΕΞΟΠΛΙΣΜΟΣ ΠΟΥ ΘΑ ΧΡΕΙΑΣΤΟΥΜΕ: Τροφοδοτικό
Ηλεκτρικές Μηχανές ΙΙ Εργαστήριο
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Εργαστήριο Ενότητα 6: Χαρακτηριστική Φόρτισης Σύγχρονης Γεννήτριας Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Εργαστήριο Ενότητα 6: Χαρακτηριστική Φόρτισης Σύγχρονης Γεννήτριας Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων
Γεννήτριες ΣΡ Κινητήρες ΣΡ
 Γεννήτριες ΣΡ Κινητήρες ΣΡ - Στοιχειώδεις Ηλεκτρικές Μηχανές Επαγωγή λέγεται το φαινόμενο κατά το οποίο αναπτύσσεται ΗΕΔ: a. Στα άκρα αγωγού όταν αυτός κινείται με ταχύτητα υ μέσα σε μαγνητικό πεδίο επαγωγής
Γεννήτριες ΣΡ Κινητήρες ΣΡ - Στοιχειώδεις Ηλεκτρικές Μηχανές Επαγωγή λέγεται το φαινόμενο κατά το οποίο αναπτύσσεται ΗΕΔ: a. Στα άκρα αγωγού όταν αυτός κινείται με ταχύτητα υ μέσα σε μαγνητικό πεδίο επαγωγής
10 - ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ
 10 - ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Ηλεκτρική μηχανή ονομάζεται κάθε διάταξη η οποία μετατρέπει τη μηχανική ενεργεια σε ηλεκτρική ή αντίστροφα ή μετατρεπει τα χαρακτηριστικά του ηλεκτρικού ρεύματος. Οι ηλεκτρικες
10 - ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Ηλεκτρική μηχανή ονομάζεται κάθε διάταξη η οποία μετατρέπει τη μηχανική ενεργεια σε ηλεκτρική ή αντίστροφα ή μετατρεπει τα χαρακτηριστικά του ηλεκτρικού ρεύματος. Οι ηλεκτρικες
Τεχνολογίες Ελέγχου στα Αιολικά Συστήματα
 Τεχνολογίες Ελέγχου στα Αιολικά Συστήματα Ενότητα 4: Έλεγχος ισχύος που συνδέεται στο δίκτυο Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σημείωμα
Τεχνολογίες Ελέγχου στα Αιολικά Συστήματα Ενότητα 4: Έλεγχος ισχύος που συνδέεται στο δίκτυο Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σημείωμα
Μελέτη προβλημάτων ΠΗΙ λόγω λειτουργίας βοηθητικών προωστήριων μηχανισμών
 «ΔιερΕΥνηση Και Aντιμετώπιση προβλημάτων ποιότητας ηλεκτρικής Ισχύος σε Συστήματα Ηλεκτρικής Ενέργειας (ΣΗΕ) πλοίων» (ΔΕΥ.Κ.Α.Λ.Ι.ΩΝ) πράξη ΘΑΛΗΣ-ΕΜΠ, πράξη ένταξης 11012/9.7.2012, MIS: 380164, Κωδ.ΕΔΕΙΛ/ΕΜΠ:
«ΔιερΕΥνηση Και Aντιμετώπιση προβλημάτων ποιότητας ηλεκτρικής Ισχύος σε Συστήματα Ηλεκτρικής Ενέργειας (ΣΗΕ) πλοίων» (ΔΕΥ.Κ.Α.Λ.Ι.ΩΝ) πράξη ΘΑΛΗΣ-ΕΜΠ, πράξη ένταξης 11012/9.7.2012, MIS: 380164, Κωδ.ΕΔΕΙΛ/ΕΜΠ: