Rotacija krutog tijela
|
|
|
- Παντελεήμων Μακρής
- 6 χρόνια πριν
- Προβολές:
Transcript

1 Rotacija krutog tijela
 promjena stanja gibanja tijela Kruto tijelo pod djelovanjem")
 i rotacija")
2 6. Rotacija krutog tijela Djelovanje sile na tijelo promjena oblika tijela (deformacija) promjena stanja gibanja tijela Kruto tijelo pod djelovanjem vanjskih sila ne mijenja svoj oblik - ramaci čestica krutog tijela ostaju uvijek isti - idealiacija Gibanje krutog tijela: translacija (CM) i rotacija (os kro CM)
3 6. Rotacija krutog tijela Translacija krutog tijela Pri ROTACIJI krutog tijela sve njegove čestice gibaju se istom kutnom brinom po kružnicama čija središta leže na istom pravcu koji se ove OS ROTACIJE (rotacija krutog tijela oko nepomične osi). Tijelo se giba TRANSLATORNO ako linija koja poveuje bilo koje dvije njegove čestice adržava svoj smjer u prostoru, tj. ako pri gibanju ostaje paralelna svom početnom položaju. Sve točke tijela imaju iste brine i akceleracije. Dovoljno je ponavati gibanje CM. Rotacija krutog tijela

 i")
4 6. Rotacija krutog tijela Općenito gibanje krutog tijela: translacija (CM) i rotacija (os kro CM)
5 6.3. Rotacija krutog tijela oko nepomične osi Sve točke tijela ivode gibanje po kružnicama čija središta leže na osi rotacije. Na rotaciju oko nepomične osi utječe samo moment okomite sile. ω Ivod j. gibanja: ' M = r F i i i r i r i m i F ti M = r F = r m a = α m r i i ti i i ti i i M = M = α m r = I α i i i i i O I = i m r i i - moment inercije M = I α - j. gibanja (II Newtonov akon a F = m a rotaciju krutog tijela oko nepomične osi)
6 6.3. Rotacija krutog tijela oko nepomične osi Ako je M = 0, tada je α = 0, te će tijelo ili mirovati ili se jednoliko vrtjeti. Ako je M = const. tijelo će se vrtjeti oko nepomične osi konstantnom kutnom akceleracijom (α = const.).
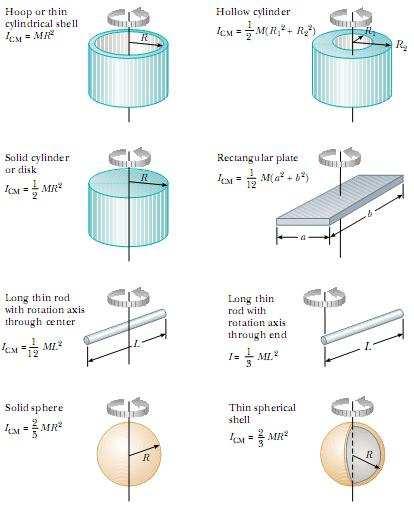
7 6.4. Moment inercije (tromosti) - veličina karakteristična a svako tijelo koje rotira - utječe na rotaciju slično kao što masa utječe na translaciju tijela tijela s većim I teže je arotirati nego ona s manjim = mjera tromosti tijela pri rotaciji n I = lim miri = r dm n i = 1 I m = = V = ρ r dv ρ lim V 0 dm dv I = ρ r dv - a homogeno tijelo
8 6.4. Moment inercije (tromosti) Primjer: Iračunaj moment inercije homogenog štapa oko osi a) kro središte štapa b) oko jednog kraja štapa x dx ml a) I = L 1 b) I = ml 3 x L dx
9 6.4. Moment inercije (tromosti) Primjer: Iračunaj moment inercije homogenog prstena oko osi kro središte prstena, okomitu na ravninu prstena. R I = mr
10

11 6.4. Moment inercije (tromosti) Steinerov poučak Moment tromosti ovisi o osi oko koje tijelo rotira. os rotacije os kro CM x = x ' + x y = y ' + y CM CM I CM 0 = = 0 M D
12 6.4. Moment inercije (tromosti) Steinerov poučak I = I + M D CM Moment inercije tijela oko neke osi jednak je momentu inercije oko osi koja prolai kro centar mase i paralelna je toj osi, uvećanoj a umnožak mase tijela i kvadrata udaljenosti tih dviju osi. os rotacije os kro CM D M
13 6.4. Moment inercije (tromosti) Steinerov poučak Primjer: Odredite moment inercije štapa obirom na os koja prolai jednim njegovim krajem. x dx ml a) I CM = L 1 b) I = ml 3 x L dx c) Steinerov poučak: L ml ml ml I = ICM + m = + = 1 4 3
 [kg m /s] - smjer: pravilo desne ruke Zakretni impuls krutog tijela: L = ri m vi, vi = ω ri i L = m r ω = I ω i i i i - a bilo koju nepomičnu os oko koje rotira kruto tijelo")
14 6.5. Moment količine gibanja (kutna količina gibanja, moment impulsa, akretni impuls, angularni moment, orbitalni moment) Zakretni impuls materijalne točke m, impulsa p: L = r p ( M = r F ) [kg m /s] - smjer: pravilo desne ruke Zakretni impuls krutog tijela: L = ri m vi, vi = ω ri i L = m r ω = I ω i i i i - a bilo koju nepomičnu os oko koje rotira kruto tijelo
15 6.5. Moment količine gibanja - ako homogeno tijelo rotira oko svoje osi simetrije L i w imaju L = Iω isti smjer i leže na osi rotacije - općenito (a nesimetrično tijelo) L i w ne moraju imati isti smjer Jednadžba gibanja a rotaciju krutog tijela L = r p i i i - akretni impuls materijelne točke krutog tijela d L dr d p dt dt dt d ri pi vi mi vi 0 dt = = i i i = pi + ri = ri F i = M i d dt M Li = i i i - a kruto tijelo
16 6.5. Moment količine gibanja Jednadžba gibanja a rotaciju krutog tijela M = F = d L dt d p dt Ukupni moment vanjskih sila (obirom na točku O) jednak je vremenskoj promjeni ukupnog akretnog impulsa (obirom na istu točku O). L M M F = I ω dl dt = I α = = = m a ( ) d dt I ( ) ω

17 6.6. Zakon očuvanja akretnog impulsa


18 6.6. Zakon očuvanja akretnog impulsa
19 6.6. Zakon očuvanja akretnog impulsa d L - j. gibanja a rotaciju krutog tijela: M = dt d M = L = dt - atvoreni sustav (ΣF i =0, ΣM i =0) : 0 L = const U atvorenom sustavu ukupni akretni impuls je očuvan (po inosu i smjeru) ako je reultantni moment sila, koji djeluje na taj sustav, jednak nuli. Poseban slučaj: vrtnja sustava oko nepomične osi : L = I ω = const I ω = I ω = const 1 1
20 6.7. Gibanje vrka Zvrk je rotaciono simetrično tijelo koje se vrlo bro vrti oko svoje osi simetrije, pri čemu je stalno učvršćeno u jednoj točki koja leži na toj osi. a) gibanje slobodnog vrka (M=0); vrk je poduprt u svom težištu d L M = = 0 L = const dt Smjer i inos akretnog impulsa su konstantni jer nema vanjskog momenta sile. O G
21 6.7. Gibanje vrka b) precesija vrka (M 0); vrk nije poduprt u težištu - težina stvara moment oko O M = r G - os vrka se akreće, a težište se giba po kružnici - M je okomit na L; L mijenja smjer a inos mu je konstantan - vrh vektora L opisuje kružnicu (precesija) M = Ω L L = Ω = I M I ω ω M = d L dt Kutna brina precesije proporcionalna je momentu sile, a obrnuto proporcionalna momentu inercije i kutnoj brini vrka.

22 6.8. Rad, snaga i kinetička energija pri rotaciji Kinetička energija materijalne točke m i : K = 1 m v i i i Kinetička energija krutog tijela: 1 1 K = K = m v = m r ω i i i i i i i i I = miri -moment inercije i K = 1 Iω -kinetička energija

23 6.8. Rad, snaga i kinetička energija pri rotaciji Rad vanjske sile na tijelo koje rotira: dw = F d s = F rdθ dw = Mdθ ( sinφ ) Snaga pri rotaciji: dw dθ P = = M = M ω dt dt ( P = F v) d d d d M = ω ω θ ω Iα = I I I dt = ω dθ dt = dθ Md θ = dw = I ω d ω ω f 1 1 W = Mdθ = Iωdω = Iω f Iωi = EK ω i Ukupni rad koji obave vanjske sile pri rotaciji krutog tijela oko čvrste osi jednak je promjeni kinetičke energije rotacije.
24 Primjer: Za sustav tijela na slici odredi moment inercije i kinetičku energiju rotacije.



25 Primjer: a sustav na slici iračunaj kutnu akceleraciju kotača, akceleraciju utega i napetost niti.


26 6.9. Kotrljanje krutog tijela K = suma rotacijske kinetičke energije oko CM i kinetičke energije CM

27 Primjer: Odredi brinu CM sfere kada se spusti ni kosinu.

28 Primjer: Sfera mase m 1 i blok mase m poveani su užetom preko koloture radijusa R i mase M (prsten koloture). Blok kliže be trenja. Nañi linearnu akceleraciju ovih tijela koristeći akretni impuls i moment. Zakretni impuls obirom na os rotacije koloture: Zakretni moment a istu os:
Dinamika tijela. a g A mg 1 3cos L 1 3cos 1
 Zadatak, Štap B duljine i mase m pridržan užetom u točki B, miruje u vertikalnoj ravnini kako je prikazano na skii. reba odrediti reakiju u ležaju u trenutku kad se presječe uže u točki B. B Rješenje:
Zadatak, Štap B duljine i mase m pridržan užetom u točki B, miruje u vertikalnoj ravnini kako je prikazano na skii. reba odrediti reakiju u ležaju u trenutku kad se presječe uže u točki B. B Rješenje:
- pravac n je zadan s točkom T(2,0) i koeficijentom smjera k=2. (30 bodova)
 i koeficijentom smjera k=2. (30 bodova)") MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
Dinamika krutog tijela ( ) Gibanje krutog tijela. Gibanje krutog tijela. Pojmovi: C. Složeno gibanje. A. Translacijsko gibanje krutog tijela. 14.
 Gibanje krutog tijela. Gibanje krutog tijela. Pojmovi: C. Složeno gibanje. A. Translacijsko gibanje krutog tijela. 14.") Pojmo:. Vektor se F (transacja). oment se (rotacja) Dnamka krutog tjea. do. oment tromost masa. Rad krutog tjea A 5. Knetka energja k 6. oment kona gbanja 7. u momenta kone gbanja momenta se f ( ) Gbanje
Pojmo:. Vektor se F (transacja). oment se (rotacja) Dnamka krutog tjea. do. oment tromost masa. Rad krutog tjea A 5. Knetka energja k 6. oment kona gbanja 7. u momenta kone gbanja momenta se f ( ) Gbanje
Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika
 3. Dinamika Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika Kinematika (grč. kinein = gibati) je dio mehanike koji opisuje
3. Dinamika Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika Kinematika (grč. kinein = gibati) je dio mehanike koji opisuje
Rad, snaga, energija. Tehnička fizika 1 03/11/2017 Tehnološki fakultet
 Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
1.4 Tangenta i normala
 28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
Gravitacija. Gravitacija. Newtonov zakon gravitacije. Odredivanje gravitacijske konstante. Keplerovi zakoni. Gravitacijsko polje. Troma i teška masa
 Claudius Ptolemeus (100-170) - geocentrični sustav Nikola Kopernik (1473-1543) - heliocentrični sustav Tycho Brahe (1546-1601) precizno bilježio putanje nebeskih tijela 1600. Johannes Kepler (1571-1630)
Claudius Ptolemeus (100-170) - geocentrični sustav Nikola Kopernik (1473-1543) - heliocentrični sustav Tycho Brahe (1546-1601) precizno bilježio putanje nebeskih tijela 1600. Johannes Kepler (1571-1630)
Prostorni spojeni sistemi
 Prostorni spojeni sistemi K. F. (poopćeni) pomaci i stupnjevi slobode tijela u prostoru: 1. pomak po pravcu (translacija): dva kuta kojima je odreden orijentirani pravac (os) i orijentirana duljina pomaka
Prostorni spojeni sistemi K. F. (poopćeni) pomaci i stupnjevi slobode tijela u prostoru: 1. pomak po pravcu (translacija): dva kuta kojima je odreden orijentirani pravac (os) i orijentirana duljina pomaka
Matematika 1 - vježbe. 11. prosinca 2015.
 Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
PROSTORNI STATIČKI ODREĐENI SUSTAVI
 PROSTORNI STATIČKI ODREĐENI SUSTAVI - svi elementi ne leže u istoj ravnini q 1 Z F 1 F Y F q 5 Z 8 5 8 1 7 Y y z x 7 X 1 X - svi elementi su u jednoj ravnini a opterećenje djeluje izvan te ravnine Z Y
PROSTORNI STATIČKI ODREĐENI SUSTAVI - svi elementi ne leže u istoj ravnini q 1 Z F 1 F Y F q 5 Z 8 5 8 1 7 Y y z x 7 X 1 X - svi elementi su u jednoj ravnini a opterećenje djeluje izvan te ravnine Z Y
Fizika 1. Auditorne vježbe 5. Dunja Polić. Dinamika: Newtonovi zakoni. Fakultet elektrotehnike, strojarstva i brodogradnje Studij računarstva
 Fakultet elektrotehnike, strojarstva i brodogradnje Studij računarstva Školska godina 2006/2007 Fizika 1 Auditorne vježbe 5 Dinamika: Newtonovi zakoni 12. prosinca 2008. Dunja Polić (dunja.polic@fesb.hr)
Fakultet elektrotehnike, strojarstva i brodogradnje Studij računarstva Školska godina 2006/2007 Fizika 1 Auditorne vježbe 5 Dinamika: Newtonovi zakoni 12. prosinca 2008. Dunja Polić (dunja.polic@fesb.hr)
Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika
 1. Kinematika Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika Kinematika (grč. kinein = gibati) je dio mehanike koji
1. Kinematika Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika Kinematika (grč. kinein = gibati) je dio mehanike koji
( , treći kolokvij) 3. Na dite lokalne ekstreme funkcije z = x 4 + y 4 2x 2 + 2y 2 3. (20 bodova)
 3. Na dite lokalne ekstreme funkcije z = x 4 + y 4 2x 2 + 2y 2 3. (20 bodova)") A MATEMATIKA (.6.., treći kolokvij. Zadana je funkcija z = e + + sin(. Izračunajte a z (,, b z (,, c z.. Za funkciju z = 3 + na dite a diferencijal dz, b dz u točki T(, za priraste d =. i d =.. c Za koliko
A MATEMATIKA (.6.., treći kolokvij. Zadana je funkcija z = e + + sin(. Izračunajte a z (,, b z (,, c z.. Za funkciju z = 3 + na dite a diferencijal dz, b dz u točki T(, za priraste d =. i d =.. c Za koliko
Zadatak Rješenje: skica problema O R b φ a. Dinamika gibanja krutog tijela. Kinetička energija krutog tijela. E-L jednadžbe
 Homogeni štap mase M i duljine 2a kreće se bez trenja u sfernom udubljenju polumjera R tako da stalno ostaje u okomitoj ravnini koja prolazi kroz centar sfere. Na dite kinetičku energiju štapa. Rješenje:
Homogeni štap mase M i duljine 2a kreće se bez trenja u sfernom udubljenju polumjera R tako da stalno ostaje u okomitoj ravnini koja prolazi kroz centar sfere. Na dite kinetičku energiju štapa. Rješenje:
Funkcije dviju varjabli (zadaci za vježbu)
") Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
Geometrijske karakteristike poprenih presjeka nosaa. 9. dio
 Geometrijske karakteristike poprenih presjeka nosaa 9. dio 1 Sile presjeka (unutarnje sile): Udužna sila N Poprena sila T Moment uvijanja M t Moment savijanja M Napreanja 1. Normalno napreanje σ. Posmino
Geometrijske karakteristike poprenih presjeka nosaa 9. dio 1 Sile presjeka (unutarnje sile): Udužna sila N Poprena sila T Moment uvijanja M t Moment savijanja M Napreanja 1. Normalno napreanje σ. Posmino
ČVRSTOĆA 13. GEOMETRIJSKE KARAKTERISTIKE RAVNIH PRESJEKA ŠTAPA
 ČVRSTOĆA 13. GEOMETRIJSKE KARAKTERISTIKE RAVNIH PRESJEKA ŠTAPA STATIČKI MOMENTI I MOMENTI INERCIJE RAVNIH PLOHA Kao što pri aksijalnom opterećenju štapa apsolutna vrijednost naprezanja zavisi, između ostalog,
ČVRSTOĆA 13. GEOMETRIJSKE KARAKTERISTIKE RAVNIH PRESJEKA ŠTAPA STATIČKI MOMENTI I MOMENTI INERCIJE RAVNIH PLOHA Kao što pri aksijalnom opterećenju štapa apsolutna vrijednost naprezanja zavisi, između ostalog,
Kružno gibanje. Pojmovi. Radijus vektor (r), duljina luka (s) Kut (φ), kutna brzina (ω), obodna brzina (v)
, duljina luka (s) Kut (φ), kutna brzina (ω), obodna brzina (v)") Predavanja 2 Kružno gibanje Pojmovi Kod kružnog gibanja položaj čestice jednoznačno je određen kutom kojeg radijus vektor zatvara s referentnim pravcem Radijus vektor (r), duljina luka (s) Kut (φ), kutna
Predavanja 2 Kružno gibanje Pojmovi Kod kružnog gibanja položaj čestice jednoznačno je određen kutom kojeg radijus vektor zatvara s referentnim pravcem Radijus vektor (r), duljina luka (s) Kut (φ), kutna
MEHANIKA KRUTOG TIJELA
 Poglavlje 7 MEHANIKA KRUTOG TIJELA U prethodnim smo poglavljima svodili tijela na čestični model, koji je bio uveden već u prvome poglavlju. Čak i kada je bilo očito da se radi o nekom realnom prostranom
Poglavlje 7 MEHANIKA KRUTOG TIJELA U prethodnim smo poglavljima svodili tijela na čestični model, koji je bio uveden već u prvome poglavlju. Čak i kada je bilo očito da se radi o nekom realnom prostranom
Dinamika krutog tijela. 14. dio
 Dnaka kutog tjela 14. do 1 Pojov: 1. Vekto sle F (tanslacja). Moent sle (otacja) 3. Moent toost asa 4. Rad kutog tjela A 5. Knetka enegja E k 6. Moent kolna gbanja 7. u oenta kolne gbanja oenta sle M (
Dnaka kutog tjela 14. do 1 Pojov: 1. Vekto sle F (tanslacja). Moent sle (otacja) 3. Moent toost asa 4. Rad kutog tjela A 5. Knetka enegja E k 6. Moent kolna gbanja 7. u oenta kolne gbanja oenta sle M (
Repetitorij-Dinamika. F i Zakon očuvanja impulsa (ZOI): i p i = j p j. Zakon očuvanja energije (ZOE):
: i p i = j p j. Zakon očuvanja energije (ZOE):") Repetitorij-Dinamika Dinamika materijalne točke Sila: F p = m a = lim t 0 t = d p dt m a = i F i Zakon očuvanja impulsa (ZOI): i p i = j p j i p ix = j p jx te i p iy = j p jy u 2D sustavu Zakon očuvanja
Repetitorij-Dinamika Dinamika materijalne točke Sila: F p = m a = lim t 0 t = d p dt m a = i F i Zakon očuvanja impulsa (ZOI): i p i = j p j i p ix = j p jx te i p iy = j p jy u 2D sustavu Zakon očuvanja
Vrijedi relacija: Suma kvadrata cosinusa priklonih kutova sile prema koordinatnim osima jednaka je jedinici.
 Za adani sustav prostornih sila i j k () oktant i j k () oktant koje djeluju na materijalnu toku odredite: a) reultantu silu? b) ravnotežnu silu? a) eultanta sila? i j k 8 Vektor reultante: () i 8 j k
Za adani sustav prostornih sila i j k () oktant i j k () oktant koje djeluju na materijalnu toku odredite: a) reultantu silu? b) ravnotežnu silu? a) eultanta sila? i j k 8 Vektor reultante: () i 8 j k
Linearna algebra 2 prvi kolokvij,
 1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
( , 2. kolokvij)
") A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
r i Projekcije vektora položaja r i su odgovarajuće koordinate tačke xi
 Središte sistema materijalnih tačaka. Neka je proivoljni sistem sačinjen od konačnog broja materijalnih tačaka čija međusobna rastojanja mogu biti i promenljiva. Svaka materijalna tačka sistema ima svoju
Središte sistema materijalnih tačaka. Neka je proivoljni sistem sačinjen od konačnog broja materijalnih tačaka čija međusobna rastojanja mogu biti i promenljiva. Svaka materijalna tačka sistema ima svoju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET SIGNALI I SISTEMI. Zbirka zadataka
 UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
OM2 V3 Ime i prezime: Index br: I SAVIJANJE SILAMA TANKOZIDNIH ŠTAPOVA
 OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
Rad, energija i snaga
 Rad, energija i snaga Željan Kutleša Sandra Bodrožić Rad Rad je skalarna fizikalna veličina koja opisuje djelovanje sile F na tijelo duž pomaka x. = = cos Oznaka za rad je W, a mjerna jedinica J (džul).
Rad, energija i snaga Željan Kutleša Sandra Bodrožić Rad Rad je skalarna fizikalna veličina koja opisuje djelovanje sile F na tijelo duž pomaka x. = = cos Oznaka za rad je W, a mjerna jedinica J (džul).
2.7 Primjene odredenih integrala
 . INTEGRAL 77.7 Primjene odredenih integrala.7.1 Računanje površina Pořsina lika omedenog pravcima x = a i x = b te krivuljama y = f(x) i y = g(x) je b P = f(x) g(x) dx. a Zadatak.61 Odredite površinu
. INTEGRAL 77.7 Primjene odredenih integrala.7.1 Računanje površina Pořsina lika omedenog pravcima x = a i x = b te krivuljama y = f(x) i y = g(x) je b P = f(x) g(x) dx. a Zadatak.61 Odredite površinu
Gauss, Stokes, Maxwell. Vektorski identiteti ( ),
,") Vektorski identiteti ( ), Gauss, Stokes, Maxwell Saša Ilijić 21. listopada 2009. Saša Ilijić, predavanja FER/F2: Vektorski identiteti, nabla, Gauss, Stokes, Maxwell... (21. listopada 2009.) Skalarni i
Vektorski identiteti ( ), Gauss, Stokes, Maxwell Saša Ilijić 21. listopada 2009. Saša Ilijić, predavanja FER/F2: Vektorski identiteti, nabla, Gauss, Stokes, Maxwell... (21. listopada 2009.) Skalarni i
Općenito, iznos normalne deformacije u smjeru normale n dan je izrazom:
 Otporost mterijl. Zdtk ZDTK: U točki čeliče kostrukije postvlje su tri osjetil z mjereje deformij prem slii. ri opterećeju kostrukije izmjeree su reltive ormle (dužiske deformije: b ( - b 3 - -6 - ( b
Otporost mterijl. Zdtk ZDTK: U točki čeliče kostrukije postvlje su tri osjetil z mjereje deformij prem slii. ri opterećeju kostrukije izmjeree su reltive ormle (dužiske deformije: b ( - b 3 - -6 - ( b
7. Titranje, prigušeno titranje, harmonijsko titranje
 7. itranje, prigušeno titranje, harmonijsko titranje IRANJE Općenito je titranje mijenjanje bilo koje mjerne veličine u nekom sustavu oko srednje vrijednosti. U tehnici titranje podrazumijeva takvo gibanje
7. itranje, prigušeno titranje, harmonijsko titranje IRANJE Općenito je titranje mijenjanje bilo koje mjerne veličine u nekom sustavu oko srednje vrijednosti. U tehnici titranje podrazumijeva takvo gibanje
M086 LA 1 M106 GRP. Tema: Baza vektorskog prostora. Koordinatni sustav. Norma. CSB nejednakost
 M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
ELEKTROTEHNIČKI ODJEL
 MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
II. ANALITIČKA GEOMETRIJA PROSTORA
 II. NLITIČK GEMETRIJ RSTR I. I (Točka. Ravia.) d. sc. Mia Rodić Lipaović 9./. Točka u postou ( ; i, j, k ) Kateijev pavokuti koodiati sustav k i j T T (,, ) oložaj točke u postou je jedoačo odeñe jeim
II. NLITIČK GEMETRIJ RSTR I. I (Točka. Ravia.) d. sc. Mia Rodić Lipaović 9./. Točka u postou ( ; i, j, k ) Kateijev pavokuti koodiati sustav k i j T T (,, ) oložaj točke u postou je jedoačo odeñe jeim
Algebra Vektora. pri rješavanju fizikalnih problema najčešće susrećemo skalarne i vektorske
 Algebra Vektora 1 Algebra vektora 1.1 Definicija vektora pri rješavanju fizikalnih problema najčešće susrećemo skalarne i vektorske veličine za opis skalarne veličine trebamo zadati samo njezin iznos (npr.
Algebra Vektora 1 Algebra vektora 1.1 Definicija vektora pri rješavanju fizikalnih problema najčešće susrećemo skalarne i vektorske veličine za opis skalarne veličine trebamo zadati samo njezin iznos (npr.
Savijanje nosaa. Savijanje ravnog štapa prizmatinog poprenog presjeka. a)isto savijanje. b) Savijanje silama. b) Savijanje silama.
isto savijanje. b) Savijanje silama. b) Savijanje silama.") Štap optereen na savijanje naivamo nosa ili grea. Savijanje nosaa a) Napreanja ( i τ) b) Deformacije progib (w) Os štapa se ko savijanja akrivljuje to je elastina ili progibna linija nosaa. Savijanje ravnog
Štap optereen na savijanje naivamo nosa ili grea. Savijanje nosaa a) Napreanja ( i τ) b) Deformacije progib (w) Os štapa se ko savijanja akrivljuje to je elastina ili progibna linija nosaa. Savijanje ravnog
MATEMATIKA I 1.kolokvij zadaci za vježbu I dio
 MATEMATIKA I kolokvij zadaci za vježbu I dio Odredie c 0 i kosinuse kueva koje s koordinanim osima čini vekor c = a b ako je a = i + j, b = i + k Odredie koliki je volumen paralelepipeda, čiji se bridovi
MATEMATIKA I kolokvij zadaci za vježbu I dio Odredie c 0 i kosinuse kueva koje s koordinanim osima čini vekor c = a b ako je a = i + j, b = i + k Odredie koliki je volumen paralelepipeda, čiji se bridovi
PITANJA IZ OČUVANJA ENERGIJE I ROTACIJSKOG GIBANJA
 PITANJA IZ OČUVANJA ENERGIJE I ROTACIJSKOG GIBANJA 1. Potencijalna energija tijela mase m smanjila se za 6J. Iz toga slijedi da je rad izvršen djelovanjem gravitacijske sile na masu tijela: a) 6J i visina
PITANJA IZ OČUVANJA ENERGIJE I ROTACIJSKOG GIBANJA 1. Potencijalna energija tijela mase m smanjila se za 6J. Iz toga slijedi da je rad izvršen djelovanjem gravitacijske sile na masu tijela: a) 6J i visina
Rad, snaga i energija. Dinamika. 12. dio
 Rad, snaga i energija Dinaika 1. dio Veliine u ehanici 1. Skalari. Vektori 3. Tenzori II. reda 4. Tenzori IV. reda 1. Skalari: 3 0 1 podatak + jerna jedinica (tenzori nultog reda). Vektori: 3 1 3 podatka
Rad, snaga i energija Dinaika 1. dio Veliine u ehanici 1. Skalari. Vektori 3. Tenzori II. reda 4. Tenzori IV. reda 1. Skalari: 3 0 1 podatak + jerna jedinica (tenzori nultog reda). Vektori: 3 1 3 podatka
Izradio: Željan Kutleša, mag.educ.phys. Srednja tehnička prometna škola Split
 DINAMIKA Izradio: Željan Kutleša, mag.educ.phys. Srednja tehnička prometna škola Split Ova knjižica prvenstveno je namijenjena učenicima Srednje tehničke prometne škole Split. U knjižici su korišteni zadaci
DINAMIKA Izradio: Željan Kutleša, mag.educ.phys. Srednja tehnička prometna škola Split Ova knjižica prvenstveno je namijenjena učenicima Srednje tehničke prometne škole Split. U knjižici su korišteni zadaci
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f
 D f") IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
- osnovni zakoni gibanja (Newtonovi aksiomi) - gibanja duž ravne podloge i kosine - sila trenja - vrste sila
 - gibanja duž ravne podloge i kosine - sila trenja - vrste sila") Dinamika - osnovni zakoni gibanja (Newtonovi aksiomi) - gibanja duž ravne podloge i kosine - sila trenja - vrste sila Osnovni zakoni gibanja: Newtonovi aksiomi Sir Isaac Newton (1642. 1727.) by Sir Godfrey
Dinamika - osnovni zakoni gibanja (Newtonovi aksiomi) - gibanja duž ravne podloge i kosine - sila trenja - vrste sila Osnovni zakoni gibanja: Newtonovi aksiomi Sir Isaac Newton (1642. 1727.) by Sir Godfrey
KINEMATIKA I DINAMIKA KRUTOG TIJELA
 KINEMTIK I DINMIK KRUTOG TIJEL 6. OPĆI POJMOVI I DEFINICIJE U kineatici točke proučavali so brine i ubranja jedne točke i opisivali rane vrste gibanja točke u raličiti koordinatni sustavia. U ovo dijelu
KINEMTIK I DINMIK KRUTOG TIJEL 6. OPĆI POJMOVI I DEFINICIJE U kineatici točke proučavali so brine i ubranja jedne točke i opisivali rane vrste gibanja točke u raličiti koordinatni sustavia. U ovo dijelu
Cauchyjev teorem. Postoji više dokaza ovog teorema, a najjednostvniji je uz pomoć Greenove formule: dxdy. int C i Cauchy Riemannovih uvjeta.
 auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
Dimenzioniranje nosaa. 1. Uvjeti vrstoe
 Dimenzioniranje nosaa 1. Uvjeti vrstoe 1 Otpornost materijala prouava probleme 1. vrstoe,. krutosti i 3. elastine stabilnosti konstrukcija i dijelova konstrukcija od vrstog deformabilnog materijala. Moraju
Dimenzioniranje nosaa 1. Uvjeti vrstoe 1 Otpornost materijala prouava probleme 1. vrstoe,. krutosti i 3. elastine stabilnosti konstrukcija i dijelova konstrukcija od vrstog deformabilnog materijala. Moraju
Princip inercije. Ako tijelo ostavimo na nekom mjestu ono će ostati mirovati ili se gibati jednolikom brzinom po pravcu.
 Princip inercije Ako tijelo ostavimo na nekom mjestu ono će ostati mirovati ili se gibati jednolikom brzinom po pravcu. Razvio koncept dinamike Pretpostavio je da je gibanje tijela nečim uzrokovano Definirao
Princip inercije Ako tijelo ostavimo na nekom mjestu ono će ostati mirovati ili se gibati jednolikom brzinom po pravcu. Razvio koncept dinamike Pretpostavio je da je gibanje tijela nečim uzrokovano Definirao
Ortogonalne transformacije
 Promatramo dva koordinatna S i S sa zajedničkim ishodištem z x z k i x k i j j y y jedinične vektore koordinatnog S možemo izraziti pomoću jediničnih vektora koordinatnog S i = ( i i) i + ( i j) j + (
Promatramo dva koordinatna S i S sa zajedničkim ishodištem z x z k i x k i j j y y jedinične vektore koordinatnog S možemo izraziti pomoću jediničnih vektora koordinatnog S i = ( i i) i + ( i j) j + (
Elementi spektralne teorije matrica
 Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Osnove elektrotehnike I popravni parcijalni ispit VARIJANTA A
 Osnove elektrotehnike I popravni parcijalni ispit 1..014. VARIJANTA A Prezime i ime: Broj indeksa: Profesorov prvi postulat: Što se ne može pročitati, ne može se ni ocijeniti. A C 1.1. Tri naelektrisanja
Osnove elektrotehnike I popravni parcijalni ispit 1..014. VARIJANTA A Prezime i ime: Broj indeksa: Profesorov prvi postulat: Što se ne može pročitati, ne može se ni ocijeniti. A C 1.1. Tri naelektrisanja
2. Bez kalkulatora odredi vrijednosti trigonometrijskih funkcija za brojeve (kutove) iz točaka u 1.zadatku.
 iz točaka u 1.zadatku.") . Na brojevnoj kružnici označi točke: A (05π), A 2 ( 007π 2 ), A 3 ( 553π 3 ) i A 4 ( 40 o ). 2. Bez kalkulatora odredi vrijednosti trigonometrijskih funkcija za brojeve (kutove) iz točaka u.zadatku. 3.
. Na brojevnoj kružnici označi točke: A (05π), A 2 ( 007π 2 ), A 3 ( 553π 3 ) i A 4 ( 40 o ). 2. Bez kalkulatora odredi vrijednosti trigonometrijskih funkcija za brojeve (kutove) iz točaka u.zadatku. 3.
Matematička analiza 1 dodatni zadaci
 Matematička analiza 1 dodatni zadaci 1. Ispitajte je li funkcija f() := 4 4 5 injekcija na intervalu I, te ako jest odredite joj sliku i inverz, ako je (a) I = [, 3), (b) I = [1, ], (c) I = ( 1, 0].. Neka
Matematička analiza 1 dodatni zadaci 1. Ispitajte je li funkcija f() := 4 4 5 injekcija na intervalu I, te ako jest odredite joj sliku i inverz, ako je (a) I = [, 3), (b) I = [1, ], (c) I = ( 1, 0].. Neka
Numerička matematika 2. kolokvij (1. srpnja 2009.)
") Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
n F Δ s= F d s [ J ] =m g h Kinetičku energiju tijelo posjeduje usljed kretanja na nekom putu. zatranslaciju: E k = (m v² ) 2 za rotaciju: E k
![n F Δ s= F d s [ J ] =m g h Kinetičku energiju tijelo posjeduje usljed kretanja na nekom putu. zatranslaciju: E k = (m v² ) 2 za rotaciju: E k](/thumbs/78/77347234.jpg "n F Δ s= F d s [ J ] =m g h Kinetičku energiju tijelo posjeduje usljed kretanja na nekom putu. zatranslaciju: E k = (m v² ) 2 za rotaciju: E k") 1. Definisati mehanički rad, snagu, energiju i napisati formule u slučaju translacije i rotacije. Rad se određuje proizvodom sile koja djeluje na tijelo i rastojanja koje tijelo pređe usljed djelovanja
1. Definisati mehanički rad, snagu, energiju i napisati formule u slučaju translacije i rotacije. Rad se određuje proizvodom sile koja djeluje na tijelo i rastojanja koje tijelo pređe usljed djelovanja
2 tg x ctg x 1 = =, cos 2x Zbog četvrtog kvadranta rješenje je: 2 ctg x
 Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
SEMINAR IZ KOLEGIJA ANALITIČKA KEMIJA I. Studij Primijenjena kemija
 SEMINAR IZ OLEGIJA ANALITIČA EMIJA I Studij Primijenjena kemija 1. 0,1 mola NaOH je dodano 1 litri čiste vode. Izračunajte ph tako nastale otopine. NaOH 0,1 M NaOH Na OH Jak elektrolit!!! Disoira potpuno!!!
SEMINAR IZ OLEGIJA ANALITIČA EMIJA I Studij Primijenjena kemija 1. 0,1 mola NaOH je dodano 1 litri čiste vode. Izračunajte ph tako nastale otopine. NaOH 0,1 M NaOH Na OH Jak elektrolit!!! Disoira potpuno!!!
Fizika 1. Auditorne vježbe 3 Kružna gibanja. Dunja Polić. Fakultet elektrotehnike, strojarstva i brodogradnje Studij računarstva. 17. listopada 2008.
 Fakultet elektrotehnike, strojarstva i brodogradnje Studij računarstva Školska godina 008/009 Fizika 1 Auditorne vježbe 3 Kružna gibanja 17. listopada 008. Dunja Polić dunja.polic@fesb.hr Ponavljanje jednoliko
Fakultet elektrotehnike, strojarstva i brodogradnje Studij računarstva Školska godina 008/009 Fizika 1 Auditorne vježbe 3 Kružna gibanja 17. listopada 008. Dunja Polić dunja.polic@fesb.hr Ponavljanje jednoliko
DEFORMACIJA. parametri deformacije u sustavu laboratorija
 ROTACIJE DEFORMACIJA Sferične jezgre nalazimo oko punih ljusaka. U jezgrama koje imaju nepopunjene ljuske, kvadrupolna interakcija valentnih protona i neutrona uzrokuje deformaciju srednjeg polja. Osnovno
ROTACIJE DEFORMACIJA Sferične jezgre nalazimo oko punih ljusaka. U jezgrama koje imaju nepopunjene ljuske, kvadrupolna interakcija valentnih protona i neutrona uzrokuje deformaciju srednjeg polja. Osnovno
RAD, SNAGA I ENERGIJA
 RAD, SNAGA I ENERGIJA SADRŢAJ 1. MEHANIĈKI RAD SILE 2. SNAGA 3. MEHANIĈKA ENERGIJA a) Kinetiĉka energija b) Potencijalna energija c) Ukupna energija d) Rad kao mera za promenu energije 4. ZAKON ODRŢANJA
RAD, SNAGA I ENERGIJA SADRŢAJ 1. MEHANIĈKI RAD SILE 2. SNAGA 3. MEHANIĈKA ENERGIJA a) Kinetiĉka energija b) Potencijalna energija c) Ukupna energija d) Rad kao mera za promenu energije 4. ZAKON ODRŢANJA
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović
 DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
I.13. Koliki je napon između neke tačke A čiji je potencijal 5 V i referentne tačke u odnosu na koju se taj potencijal računa?
 TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
( x) ( ) dy df dg. =, ( x) e = e, ( ) ' x. Zadatak 001 (Marinela, gimnazija) Nađite derivaciju funkcije f(x) = a + b x. ( ) ( )
 ( ) dy df dg. =, ( x) e = e, ( ) ' x. Zadatak 001 (Marinela, gimnazija) Nađite derivaciju funkcije f(x) = a + b x. ( ) ( )") Zadatak (Mariela, gimazija) Nađite derivaciju fukcije f() a + b c + d Rješeje Neka su f(), g(), h() fukcije ezavise varijable, a f (), g (), h () derivacije tih fukcija po Osova pravila deriviraja Derivacija
Zadatak (Mariela, gimazija) Nađite derivaciju fukcije f() a + b c + d Rješeje Neka su f(), g(), h() fukcije ezavise varijable, a f (), g (), h () derivacije tih fukcija po Osova pravila deriviraja Derivacija
3.1 Granična vrednost funkcije u tački
 3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
π π ELEKTROTEHNIČKI ODJEL i) f (x) = x 3 x 2 x + 1, a = 1, b = 1;
 f (x) = x 3 x 2 x + 1, a = 1, b = 1;") 1. Provjerite da funkcija f definirana na segmentu [a, b] zadovoljava uvjete Rolleova poučka, pa odredite barem jedan c a, b takav da je f '(c) = 0 ako je: a) f () = 1, a = 1, b = 1; b) f () = 4, a =,
1. Provjerite da funkcija f definirana na segmentu [a, b] zadovoljava uvjete Rolleova poučka, pa odredite barem jedan c a, b takav da je f '(c) = 0 ako je: a) f () = 1, a = 1, b = 1; b) f () = 4, a =,
18. listopada listopada / 13
 18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
MEHANIKA FLUIDA HIDROSTATIKA 5. Osnovna jednadžba gibanja (II. Newtonov zakon) čestice idealnog fluida i realnog fluida u relativnom mirovanju
 čestice idealnog fluida i realnog fluida u relativnom mirovanju") MENIK LUID IDTTIK 5. IDTTIK snovna jednadžba ibanja (II. Newtonov akon) čestice idealno fluida i realno fluida u relativnom mirovanju σ d av d fdv+ σd n V V t av d fdv+ ( pn+ σ ) V V d U anemarenje viskoni
MENIK LUID IDTTIK 5. IDTTIK snovna jednadžba ibanja (II. Newtonov akon) čestice idealno fluida i realno fluida u relativnom mirovanju σ d av d fdv+ σd n V V t av d fdv+ ( pn+ σ ) V V d U anemarenje viskoni
Elektron u magnetskom polju
 Quantum mechanics 1 - Lecture 13 UJJS, Dept. of Physics, Osijek 4. lipnja 2013. Sadržaj 1 Bohrov magneton Stern-Gerlachov pokus Vrtnja elektrona u magnetskom polju 2 Nuklearna magnetska rezonancija (NMR)
Quantum mechanics 1 - Lecture 13 UJJS, Dept. of Physics, Osijek 4. lipnja 2013. Sadržaj 1 Bohrov magneton Stern-Gerlachov pokus Vrtnja elektrona u magnetskom polju 2 Nuklearna magnetska rezonancija (NMR)
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A
, grupa A") Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
Dinamika krutog tijela ( ) Gibanje krutog tijela. Gibanje krutog tijela. C. Složeno gibanje. Pojmovi: A. Translacijsko gibanje krutog tijela. 12.
 Gibanje krutog tijela. Gibanje krutog tijela. C. Složeno gibanje. Pojmovi: A. Translacijsko gibanje krutog tijela. 12.") Pojmo:. Vekor sle F (ranslacja). omen sle (roacja) Dnamka kruog jela. do. omen romos masa. Rad kruog jela A 5. Kneka energja k 6. omen kolna gbanja L 7. u momena kolne gbanja momena sle L f ( ) Gbanje
Pojmo:. Vekor sle F (ranslacja). omen sle (roacja) Dnamka kruog jela. do. omen romos masa. Rad kruog jela A 5. Kneka energja k 6. omen kolna gbanja L 7. u momena kolne gbanja momena sle L f ( ) Gbanje
Mehanika dr.sc. Robert Beuc. Fizika Studij Fizioterapije
 Mehanika dr.sc. Robert Beuc izika Studij izioterapije 1 Mehanika 2 Gibanje Jednoliko pravocrtno gibanje Jednoliko promjenljivo pravocrtno gibanje Slobodni pad Kružno gibanje Mirovanje s obzirom na pomicanje
Mehanika dr.sc. Robert Beuc izika Studij izioterapije 1 Mehanika 2 Gibanje Jednoliko pravocrtno gibanje Jednoliko promjenljivo pravocrtno gibanje Slobodni pad Kružno gibanje Mirovanje s obzirom na pomicanje
Masa, Centar mase & Moment tromosti
 FAKULTET ELEKTRTEHNIKE, STRARSTVA I BRDGRADNE - SPLIT Katedra za dinamiku i vibracije Mehanika 3 (Dinamika) Laboratorijska vježba Masa, Centar mase & Moment tromosti Ime i rezime rosinac 008. Zadatak:
FAKULTET ELEKTRTEHNIKE, STRARSTVA I BRDGRADNE - SPLIT Katedra za dinamiku i vibracije Mehanika 3 (Dinamika) Laboratorijska vježba Masa, Centar mase & Moment tromosti Ime i rezime rosinac 008. Zadatak:
numeričkih deskriptivnih mera.
 DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
Dijagrami: Greda i konzola. Prosta greda. II. Dijagrami unutarnjih sila. 2. Popre nih sila TZ 3. Momenata savijanja My. 1. Uzdužnih sila N. 11.
 Dijagrami:. Udužnih sia N Greda i konoa. Popre nih sia TZ 3. Momenata savijanja My. dio Prosta greda. Optere ena koncentriranom siom F I. Reaktivne sie:. M A = 0 R B F a = 0. M B = 0 R A F b = 0 3. F =
Dijagrami:. Udužnih sia N Greda i konoa. Popre nih sia TZ 3. Momenata savijanja My. dio Prosta greda. Optere ena koncentriranom siom F I. Reaktivne sie:. M A = 0 R B F a = 0. M B = 0 R A F b = 0 3. F =
Inženjerska grafika geometrijskih oblika (5. predavanje, tema1)
") Inženjerska grafika geometrijskih oblika (5. predavanje, tema1) Prva godina studija Mašinskog fakulteta u Nišu Predavač: Dr Predrag Rajković Mart 19, 2013 5. predavanje, tema 1 Simetrija (Symmetry) Simetrija
Inženjerska grafika geometrijskih oblika (5. predavanje, tema1) Prva godina studija Mašinskog fakulteta u Nišu Predavač: Dr Predrag Rajković Mart 19, 2013 5. predavanje, tema 1 Simetrija (Symmetry) Simetrija
PARCIJALNI IZVODI I DIFERENCIJALI. Sama definicija parcijalnog izvoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je,
 PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
PRAVAC. riješeni zadaci 1 od 8 1. Nađite parametarski i kanonski oblik jednadžbe pravca koji prolazi točkama. i kroz A :
 PRAVAC iješeni adaci od 8 Nađie aameaski i kanonski oblik jednadžbe aca koji olai očkama a) A ( ) B ( ) b) A ( ) B ( ) c) A ( ) B ( ) a) n a AB { } i ko A : j b) n a AB { 00 } ili { 00 } i ko A : j 0 0
PRAVAC iješeni adaci od 8 Nađie aameaski i kanonski oblik jednadžbe aca koji olai očkama a) A ( ) B ( ) b) A ( ) B ( ) c) A ( ) B ( ) a) n a AB { } i ko A : j b) n a AB { 00 } ili { 00 } i ko A : j 0 0
M086 LA 1 M106 GRP Tema: Uvod. Operacije s vektorima.
 M086 LA 1 M106 GRP Tema:.. 5. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 2 M086 LA 1, M106 GRP.. 2/17 P 1 www.fizika.unios.hr/grpua/
M086 LA 1 M106 GRP Tema:.. 5. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 2 M086 LA 1, M106 GRP.. 2/17 P 1 www.fizika.unios.hr/grpua/
Klasifikacija blizu Kelerovih mnogostrukosti. konstantne holomorfne sekcione krivine. Kelerove. mnogostrukosti. blizu Kelerove.
 Klasifikacija blizu Teorema Neka je M Kelerova mnogostrukost. Operator krivine R ima sledeća svojstva: R(X, Y, Z, W ) = R(Y, X, Z, W ) = R(X, Y, W, Z) R(X, Y, Z, W ) + R(Y, Z, X, W ) + R(Z, X, Y, W ) =
Klasifikacija blizu Teorema Neka je M Kelerova mnogostrukost. Operator krivine R ima sledeća svojstva: R(X, Y, Z, W ) = R(Y, X, Z, W ) = R(X, Y, W, Z) R(X, Y, Z, W ) + R(Y, Z, X, W ) + R(Z, X, Y, W ) =
ISPITNI ZADACI FORMULE. A, B i C koeficijenti (barem jedan A ili B različiti od nule)
") FORMULE Implicitni oblik jednadžbe pravca A, B i C koeficijenti (barem jedan A ili B različiti od nule) Eksplicitni oblik jednadžbe pravca ili Pravci paralelni s koordinatnim osima - Kada je u općoj jednadžbi
FORMULE Implicitni oblik jednadžbe pravca A, B i C koeficijenti (barem jedan A ili B različiti od nule) Eksplicitni oblik jednadžbe pravca ili Pravci paralelni s koordinatnim osima - Kada je u općoj jednadžbi
Podloge za predavanja iz Mehanike 1 STATIČKI MOMENT SILE + SPREG SILA. Laboratori j z a m umerič k u m e h a n i k u
 Plge a preavanja i ehanike 1 STATIČKI OENT SILE + SPREG SILA Labratri j a m umerič k u m e h a n i k u 1 Statički mment sile Sila u insu 225 N jeluje na ključ prema slici. Oreiti mment sile birm na tčku
Plge a preavanja i ehanike 1 STATIČKI OENT SILE + SPREG SILA Labratri j a m umerič k u m e h a n i k u 1 Statički mment sile Sila u insu 225 N jeluje na ključ prema slici. Oreiti mment sile birm na tčku
1 Promjena baze vektora
 Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
Fizika 1. Auditorne vježbe 6 Rad. Energija. Snaga. Ivica Sorić. Fakultet elektrotehnike, strojarstva i brodogradnje Studij računarstva
 Fakultet elektrotehnike, strojarstva i brodogradnje Studij računarstva Školska godina 008/009 Fizika 1 Auditorne vježbe 6 Rad. Energija. Snaga. 19. prosinca 008. Ivica Sorić (suri@fesb.hr) Ponavljanje
Fakultet elektrotehnike, strojarstva i brodogradnje Studij računarstva Školska godina 008/009 Fizika 1 Auditorne vježbe 6 Rad. Energija. Snaga. 19. prosinca 008. Ivica Sorić (suri@fesb.hr) Ponavljanje
Eliminacijski zadatak iz Matematike 1 za kemičare
 Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
Matematičke metode u marketingumultidimenzionalno skaliranje. Lavoslav ČaklovićPMF-MO
 Matematičke metode u marketingu Multidimenzionalno skaliranje Lavoslav Čaklović PMF-MO 2016 MDS Čemu služi: za redukciju dimenzije Bazirano na: udaljenosti (sličnosti) među objektima Problem: Traži se
Matematičke metode u marketingu Multidimenzionalno skaliranje Lavoslav Čaklović PMF-MO 2016 MDS Čemu služi: za redukciju dimenzije Bazirano na: udaljenosti (sličnosti) među objektima Problem: Traži se
1. Duljinska (normalna) deformacija ε. 2. Kutna (posmina) deformacija γ. 3. Obujamska deformacija Θ
 deformacija ε. 2. Kutna (posmina) deformacija γ. 3. Obujamska deformacija Θ") Deformaije . Duljinska (normalna) deformaija. Kutna (posmina) deformaija γ 3. Obujamska deformaija Θ 3 Tenor deformaija tenor drugog reda ij γ γ γ γ γ γ 3 9 podataka+mjerna jedinia 4 Simetrinost tenora
Deformaije . Duljinska (normalna) deformaija. Kutna (posmina) deformaija γ 3. Obujamska deformaija Θ 3 Tenor deformaija tenor drugog reda ij γ γ γ γ γ γ 3 9 podataka+mjerna jedinia 4 Simetrinost tenora
Impuls i količina gibanja
 FAKULTET ELEKTROTEHNIKE, STROJARSTVA I BRODOGRADNJE - SPLIT Katedra za dinamiku i vibracije Mehanika 3 (Dinamika) Laboratorijska vježba 4 Impuls i količina gibanja Ime i prezime prosinac 2008. MEHANIKA
FAKULTET ELEKTROTEHNIKE, STROJARSTVA I BRODOGRADNJE - SPLIT Katedra za dinamiku i vibracije Mehanika 3 (Dinamika) Laboratorijska vježba 4 Impuls i količina gibanja Ime i prezime prosinac 2008. MEHANIKA
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu
 Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
Magnetska svojstva materijala
 Magnetska svojstva materijala Pod utjecajem magnetskog polja tvari postaju magnetične. Magnetičnost prikazujemo preko veličine koju zovemo magnetizacija. Magnetizacija, M, se definira kao srednja gustoća
Magnetska svojstva materijala Pod utjecajem magnetskog polja tvari postaju magnetične. Magnetičnost prikazujemo preko veličine koju zovemo magnetizacija. Magnetizacija, M, se definira kao srednja gustoća
OBRTNA TELA. Vladimir Marinkov OBRTNA TELA VALJAK
 OBRTNA TELA VALJAK P = 2B + M B = r 2 π M = 2rπH V = BH 1. Zapremina pravog valjka je 240π, a njegova visina 15. Izračunati površinu valjka. Rešenje: P = 152π 2. Površina valjka je 112π, a odnos poluprečnika
OBRTNA TELA VALJAK P = 2B + M B = r 2 π M = 2rπH V = BH 1. Zapremina pravog valjka je 240π, a njegova visina 15. Izračunati površinu valjka. Rešenje: P = 152π 2. Površina valjka je 112π, a odnos poluprečnika
POVRŠINA TANGENCIJALNO-TETIVNOG ČETVEROKUTA
 POVRŠIN TNGENIJLNO-TETIVNOG ČETVEROKUT MLEN HLP, JELOVR U mnoštvu mnogokuta zanimljiva je formula za površinu četverokuta kojemu se istoobno može upisati i opisati kružnica: gje su a, b, c, uljine stranica
POVRŠIN TNGENIJLNO-TETIVNOG ČETVEROKUT MLEN HLP, JELOVR U mnoštvu mnogokuta zanimljiva je formula za površinu četverokuta kojemu se istoobno može upisati i opisati kružnica: gje su a, b, c, uljine stranica
PRIMJER 3. MATLAB filtdemo
 PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
TRIGONOMETRIJSKE FUNKCIJE I I.1.
 TRIGONOMETRIJSKE FUNKCIJE I I Odredi na brojevnoj trigonometrijskoj kružnici točku Et, za koju je sin t =,cost < 0 Za koje realne brojeve a postoji realan broj takav da je sin = a? Izračunaj: sin π tg
TRIGONOMETRIJSKE FUNKCIJE I I Odredi na brojevnoj trigonometrijskoj kružnici točku Et, za koju je sin t =,cost < 0 Za koje realne brojeve a postoji realan broj takav da je sin = a? Izračunaj: sin π tg
4 INTEGRALI Neodredeni integral Integriranje supstitucijom Parcijalna integracija Odredeni integral i
 Sdržj 4 INTEGRALI 64 4. Neodredeni integrl........................ 64 4. Integrirnje supstitucijom.................... 68 4. Prcijln integrcij....................... 7 4.4 Odredeni integrl i rčunnje površine
Sdržj 4 INTEGRALI 64 4. Neodredeni integrl........................ 64 4. Integrirnje supstitucijom.................... 68 4. Prcijln integrcij....................... 7 4.4 Odredeni integrl i rčunnje površine
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15
 1 / 15") MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
TRIGONOMETRIJA TROKUTA
 TRIGONOMETRIJA TROKUTA Standardne oznake u trokutuu ABC: a, b, c stranice trokuta α, β, γ kutovi trokuta t,t,t v,v,v s α,s β,s γ R r s težišnice trokuta visine trokuta simetrale kutova polumjer opisane
TRIGONOMETRIJA TROKUTA Standardne oznake u trokutuu ABC: a, b, c stranice trokuta α, β, γ kutovi trokuta t,t,t v,v,v s α,s β,s γ R r s težišnice trokuta visine trokuta simetrale kutova polumjer opisane
Izdavač HINUS Zagreb, Miramarska 13 B tel. (01) , , fax (01)
 , , fax (01)") Izdavač HINUS Zagreb, Miramarska 3 B tel. (0) 65 4 96, 668738, 6 55 8 fax (0) 6 55 8 e-mail hinus@zg.htnet.hr Urednik Mr. sc. Hrvoje Zrnčić Recenzenti Prof. dr. sc. Ivica Picek Prof. Anđela Gojević ISBN
Izdavač HINUS Zagreb, Miramarska 3 B tel. (0) 65 4 96, 668738, 6 55 8 fax (0) 6 55 8 e-mail hinus@zg.htnet.hr Urednik Mr. sc. Hrvoje Zrnčić Recenzenti Prof. dr. sc. Ivica Picek Prof. Anđela Gojević ISBN
SISTEMI NELINEARNIH JEDNAČINA
 SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
šupanijsko natjecanje iz zike 2017/2018 Srednje ²kole 1. grupa Rje²enja i smjernice za bodovanje 1. zadatak (11 bodova)
") šupanijsko natjecanje iz zike 017/018 Srednje ²kole 1. grupa Rje²enja i smjernice za bodovanje 1. zadatak (11 bodova) U prvom vremenskom intervalu t 1 = 7 s automobil se giba jednoliko ubrzano ubrzanjem
šupanijsko natjecanje iz zike 017/018 Srednje ²kole 1. grupa Rje²enja i smjernice za bodovanje 1. zadatak (11 bodova) U prvom vremenskom intervalu t 1 = 7 s automobil se giba jednoliko ubrzano ubrzanjem
0.1. Pojam mehanike. Mehanika tekućina i plinova (mehanika fluida)
") 1 0. Uvod u mehaniku 0.1. Pojam mehanike Zakoni klasične fizike još se u 16. stoljeću počinju primjenjivati za rješavanje tehničkih problema. Na taj način počinje razvoj posebne grane fizike koju nazivamo
1 0. Uvod u mehaniku 0.1. Pojam mehanike Zakoni klasične fizike još se u 16. stoljeću počinju primjenjivati za rješavanje tehničkih problema. Na taj način počinje razvoj posebne grane fizike koju nazivamo