ΠΛΑΤΦΟΡΜΕΣ-ΒΡΑΧΙΟΝΕΣ-3D ΣΧΕΔΙΑΣΗ: Ερπύστριες. ΟΜΑΔΑ 3 Επιμέλεια:Χρήστος Αντωνίου. Υπεύθυνος καθηγητής: Ανδρέας Χατζηορφανός
|
|
|
- Ευφημία Καραμήτσος
- 8 χρόνια πριν
- Προβολές:
Transcript

1 ΠΛΑΤΦΟΡΜΕΣ-ΒΡΑΧΙΟΝΕΣ-3D ΣΧΕΔΙΑΣΗ: Ερπύστριες ΟΜΑΔΑ 3 Επιμέλεια:Χρήστος Αντωνίου Υπεύθυνος καθηγητής: Ανδρέας Χατζηορφανός

2 Περιεχόμενα ΘΕΩΡΙΑ... 4 ΤΙ ΕΙΝΑΙ ΟΙ ΕΡΠΥΣΤΡΕΙΕΣ... 4 ΙΣΤΟΡΙΑ... 4 ΠΛΕΟΝΕΚΤΗΜΑΤΑ... 5 ΜΕΙΟΝΕΚΤΗΜΑΤΑ... 5 Έρευνα αγοράς για πλατφόρμες με ερπύστριες ) KIT TRACKED CHASSIS PLATFORM... 6 Γενική περιγραφή:... 6 Χαρακτηριστικά:... 7 Τιμή:... 7 Παραδείγματα εφαρμογών:... 7 Χρήσιμοι σύνδεσμοι: )DFRobotShop Rover V2 - Arduino Compatible Tracked Robot (Basic Kit)... 8 Γενική περιγραφή:... 9 Χαρακτηριστικά:... 9 Τιμή: Χρήσιμες εφαρμογές: Χρήσιμοι σύνδεσμοι: α)MULTI CHASSIS (mini platform - Tank Version) Γενική περιγραφή Τιμή Χαρακτηριστικά: Παραδείγματα εφαρμογών: Χρήσιμοι σύνδεσμοι β)MULTI CHASSIS-(RESCUE PLATFORM BIG) Γενική περιγραφή: Χαρακτηριστικά: Τιμή: Παραδείγματα εφαρμογών Χρήσιμοι σύνδεσμοι: )ROVER 5 CHASSIS Γενικά χαρακτηριστικά: Τιμή: Χαρακτηριστικά: Παραδείγματα εφαρμογών: Χρήσιμοι σύνδεσμοι:... 17
MULTI CHASSIS-(RESCUE PLATFORM BIG)... 13 Γενική περιγραφή:... 13 Χαρακτηριστικά:... 15 Τιμή:.")
3

4 ΕΡΠΥΣΤΡΙΕΣ ΘΕΩΡΙΑ ΤΙ ΕΙΝΑΙ ΟΙ ΕΡΠΥΣΤΡΕΙΕΣ Οι ερπύστριες είναι ένα σύστημα πρόωσης των οχημάτων στην οποία οδηγείται μια συνεχή ζώνη πελμάτων από δύο ή περισσοτέρων τροχών. Αυτό το συγκρότημα είναι χαρακτηριστικά φτιαγμένο από αρθρωτό χάλυβα με πλάκες στην περίπτωση στρατιωτικών οχημάτων, ή καουτσούκ ενισχυμένα με σύρματα από χάλυβα στην περίπτωση γεωργικών οχημάτων. Η μεγάλη επιφάνεια των κομματιών διανέμει το βάρος του οχήματος καλύτερα από χάλυβα ή καουτσούκ ελαστικά σε ένα αντίστοιχο όχημα, επιτρέποντας στο όχημα να διασχίσει μαλακό έδαφος με μικρότερη πιθανότητα να κολλήσει. Στα εξέχοντα πέλματα η μεταλλικές πλάκες είναι τόσο ανθεκτικές στα χτυπήματα, ειδικά σε σύγκριση με ελαστικά που χρησιμοποιούνται στις ρόδες. Άρα οι ερπύστριες αποσκοπούν στην υπέρβαση κάποιων δύσκολων εμποδίων όπως σε ανώμαλο και τραχύ έδαφος. (έλεγξε τη σύνταξη του κειμένου σε ορισμένα σημεία) ΙΣΤΟΡΙΑ Πιθανότατα η πρώτη εφαρμογή τους να έγινε μάλλον για την ανέγερση προϊστορικών μεγάλων λίθων και μεγάλων πέτρινων αγαλμάτων.στη σύγχρονη εποχή οι ερπύστριες σχεδιαστήκαν από τον Richard Lovell Edgeworth το 1770 ενώ τα επόμενα χρόνια έγιναν προσπάθειες από πολλούς εφευρέτες και μαθηματικούς για την πρώτη ερπύστρια του Lombard Steam Log Hauler και στη συνέχεια άλλων δυο πρωτοποριακών ερπυστριών το 1908 και το 1909 που άνοιξαν το δρόμο για μεγάλη ανάπτυξη και παραγωγή ερπυστριών. Hornsby 1909 Roberts 1908 Έτσι μετά 1910 ξεκίνησε και η εφαρμογή των ερπυστριών στις πολεμικές μηχανές δημιουργώντας έτσι ένα κινούμενο πανίσχυρο όπλο, το τανκ. Tank leopard(υπερσύγχρονο δολοφονικό όπλο,μηχανή

5 Η εφαρμογή των ερπυστριών στην γεωργία και στις οικοδομές με τη χρήση μπουλντόζων και ειδικών οχημάτων για την όργωση των χωραφιών ξεκίνησε το 1925με την κατασκευή του τρακτέρ από την εταιρία Holt Manufacturing Company. ΠΛΕΟΝΕΚΤΗΜΑΤΑ Τα ερπυστριοφόρα οχήματα έχουν καλύτερη κινητικότητα από πλατφόρμες που χρησιμοποιούν ελαστικά( ρόδες)σε ανώμαλο έδαφος. Τα ερπυστριοφορα εξομαλύνουν τις προσκρούσεις, γλιστρούν πάνω από μικρά εμπόδια και είναι σε θέση να διελεύσουν στα χαρακώματα. Τα κομμάτια των ερπυστριών είναι πιο σκληρά από τα ελαστικά, δεδομένου ότι δεν μπορούν να τρυπηθούν ή να σχιστούν. Το ερπυστριοφορο είναι πολύ λιγότερο πιθανό να κολλήσει σε μαλακό έδαφος, λάσπη, ή χιόνι, δεδομένου ότι διανέμει το βάρος του οχήματος σε μια ευρύτερη περιοχή της επαφής, μειώνοντας έτσι την επίγεια πίεση. Ακόμα,μπορεί να ωθήσει ή να τραβήξει τα μεγάλα φορτία. Αντέχει ακόμα και σε χιόνι ΜΕΙΟΝΕΚΤΗΜΑΤΑ Έχουν σχετικά χαμηλή ταχύτητα. Είναι αντιληπτά τα ερπυστριοφορα καθώς αφήνουν σημάδια στο εδαφος.ειναι πολύπλοκες μηχανές και δεν έχουν μεγάλη διαρκεια.επισης σε περίπτωση που υπάρξει βλάβη σε ένα σημείο των ερπυστριοφορων τότε ακινητοποιείται όλο το οχημα.τελος είναι δύσκολη η επισκευή και πολύ ακριβή.

6 Έρευνα αγοράς για πλατφόρμες με ερπύστριες 1) KIT TRACKED CHASSIS PLATFORM Γενική περιγραφή: Το όχημα διασχίζει πάνω από τα αντικείμενα στην πορεία του και μπορεί να διαβεί ανώμαλο έδαφος.ακόμα η πλατφόρμα ανάλογα με το πώς θα τη φτιάξουμε και θα τη συναρμολογήσουμε μπορεί να έχει 2 ταχύτητες. Η πρώτη ταχύτητα μπορεί να είναι η φυσιολογική(standard): 203.7:1 δηλαδή για 203 στροφές του κινητήρα θα γίνεται μια στροφή της ρόδας.tελος μπορεί να έχει την υψηλή ταχύτητα(high speed): 58:1,για 58 στροφές του κινητήρα κάνει 1 στροφή η ρόδα.
: 203.7:1 δηλαδή για 203 στροφές του κινητήρα θα γίνεται μια στροφή της ρόδας.")
7 Χαρακτηριστικά: Κιβώτιο ταχυτήτων: Δύο δυνατότητες Α)203.7:1 Β)58:1 2 Μπαταρίες AA,η καθεμία των 1.5 Volt(προτείνονται αλκαλικές) Διαστάσεις: 90mm(μήκος) x 5.5mm(πλάτος) x 6.3mm(ύψος) Τιμή: 20$ Παραδείγματα εφαρμογών: Συνδεδεμένο με Netduino:
 Τιμή: 20$ Παραδείγματα εφαρμογών: Συνδεδεμένο με Netduino:")
8 Αναλυτική συναρμολόγηση και εκπληκτική δημιουργία ρομπότ: Δοκιμή πλατφόρμας: Αυξημένη ταχύτητα στις ερπύστριες: Προσπάθεια ανάβασης: Χρήσιμοι σύνδεσμοι: Προμηθευτές: Οδηγίες χρήσης: ROBOTICS\kit tracked.pdf (ο σύνδεσμος δεν λειτουργεί) 2)DFRobotShop Rover V2 - Arduino Compatible Tracked Robot (Basic Kit)

9 Γενική περιγραφή: Το όχημα διασχίζει πάνω από τα αντικείμενα στην πορεία του και μπορεί να διαβεί ανώμαλο έδαφος. Χρησιμοποιείται είτε ως αυτόνομο όχημα(arduino) είτε μπορούμε να το συνδέσουμε με άλλα αξεσουάρ(π.χ τηλεχειριστήριο).ακόμα η πλατφόρμα έχει 22:1 δηλαδή για 22 στροφές του κινητήρα γίνεται μια στροφή της ρόδας πράγμα που κάνει τη πλατφόρμα πολύ γρήγορη. Χαρακτηριστικά: Ροπή: 800gf.cm.m Διαστάσεις: 200mm(μήκος) x 108mm(πλάτος) x 58mm(ύψος) Κιβώτιο ταχυτήτων: 22:1 4 Μπαταρίες AA,η καθεμία των 1.5 Volt(προτείνονται αλκαλικές) Ταχύτητα: 12.5cm/s Βάρος: 260g
 x 108mm(πλάτος) x 58mm(ύψος) Κιβώτιο ταχυτήτων: 22:1 4 Μπαταρίες AA,η καθεμία των 1.")
10 4 led λαμπάκια Τιμή: 95$ Χρήσιμες εφαρμογές: Συναρμολόγηση: Αναλυτική συναρμολόγηση: Με ασύρματοι καμερα: Εκπληκτικές δυνατότητες: Χρήσιμοι σύνδεσμοι: Προμηθευτές: Οδηγίες χρήσης: ROBOTICS\cds-photocell-datasheet led.pdf ROBOTICS\dfrobotshop-rover-bracket-v2.pdf ROBOTICS\dfrobotshop-rover-user-guide.pdf 3α)MULTI CHASSIS (mini platform - Tank Version)
MULTI CHASSIS (mini platform - Tank Version)")
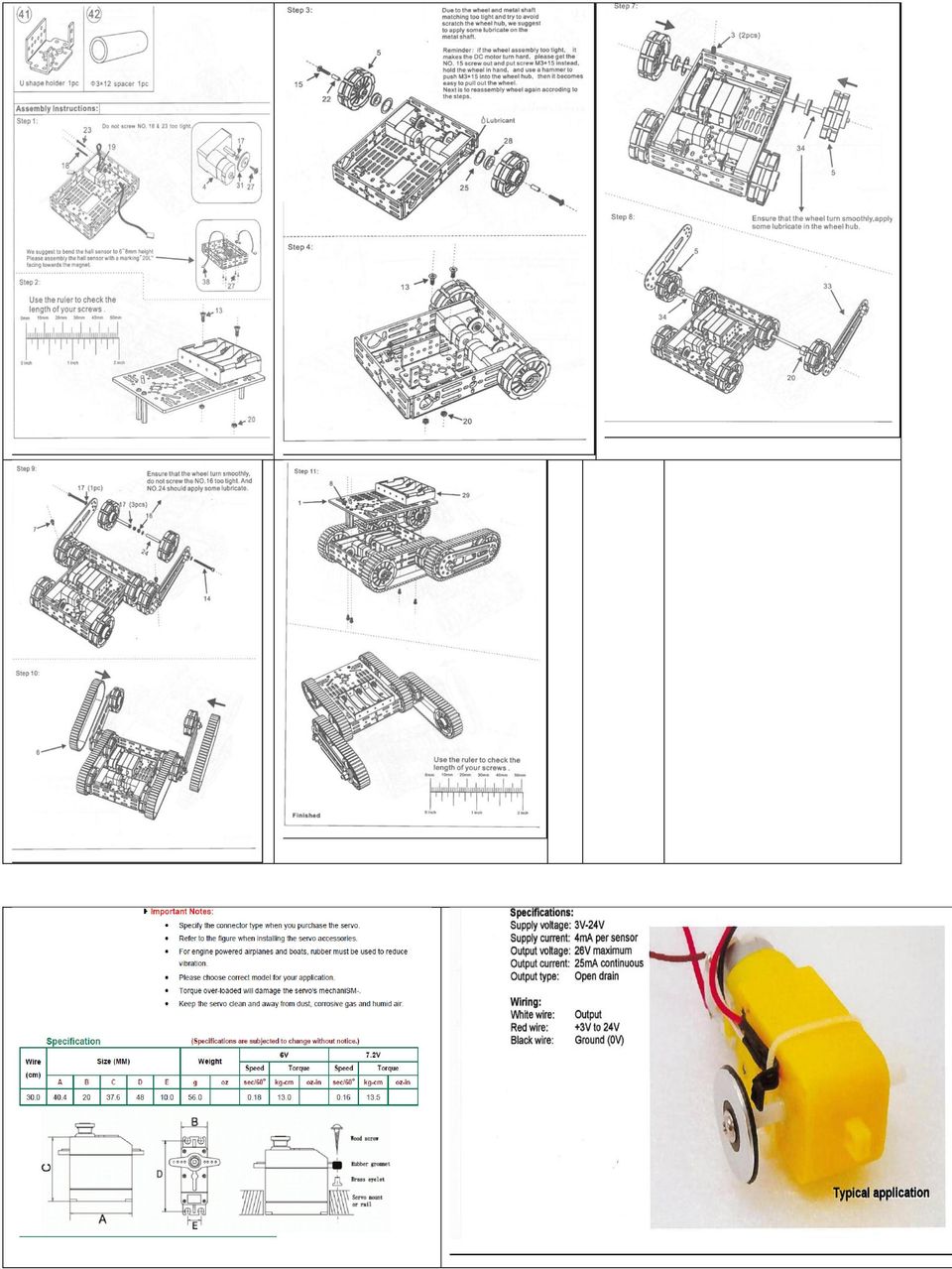
11 Γενική περιγραφή Είναι μία εύκολη στη συναρμολόγηση και χρήση πλατφόρμα. Εντούτοις πρόκειται για μία στιβαρή κατασκευή που δίνει αρκετό χώρο για τη προσθήκη διαφόρων αισθητήρων και ελεγκτών. Η συναρμολόγησή του είναι εύκολη, όπως φαίνεται και στο διπλανό σχήμα Τιμή 42 Διάμετρος τροχού - 52 mm Χαρακτηριστικά: Μέγεθος mm (μήκος) x 149 mm (πλάτος) x 60 mm (ύψος) Ροπή:800gf.cm.m Προτεινόμενη τάση:3v Ταχύτητα:18cm/min

12 Παραδείγματα εφαρμογών: Χρήσιμοι σύνδεσμοι Προμηθευτές: Οδηγίες συναρμολόγησης: multi-chassis tank001.pdf tank version.pdf

13 3β)MULTI CHASSIS-(RESCUE PLATFORM BIG) Γενική περιγραφή: Πρόκειται για μια πλατφόρμα με άφθονο χώρο για επέκταση να προσθέσετε διάφορους αισθητήρες ελεγκτές, οδηγούς και σπουδαίες δυνατότητες. Κάθε ρόδα είναι από αλουμίνιο πάχους 2,5 mm. Περιέχει έναν servo με οποίο μπορούμε να μετακινήσουμε όσες μοίρες θέλουμε τις ρόδες. Το κιτ παρέχει 2 μοτέρ με κιβώτιο με γρανάζια με σχέση μετάδοσης 48:1 (48 στροφές του μοτέρ αντιστοιχούν σε μία στροφή της ρόδας). Αυτό δίνει αρκετή ροπή στο σύστημα ώστε μπορεί να κινείται σε ανώμαλο έδαφος όπως γρασίδι ή άμμος.
.")
14
15 Χαρακτηριστικά: Ολοκληρωμένο Kit μέγεθος:272mm (μήκος) x 222mm( πλάτος) x 60mm( ύψος) Διάμετρος τροχού - 52 mm Ροπή:800gf.cm.m Maximum ταση:20v Ταχύτητα:38cm/min Τιμή: 120$ Παραδείγματα εφαρμογών: Εξηγήσεις για το προϊόν: Κίνηση πάνω σε γρασίδι και ανέβασμα σκαλιών: Χρήσιμοι σύνδεσμοι: Προμηθευτές: has&dispatch=products.search Οδηγίες χρήσης: multi.pdf multi-chassis encoder001.pdf S06NFSTD.pdf multi rescue instructions booklet.pdf

16 4)ROVER 5 CHASSIS Γενικά χαρακτηριστικά: Μπορούμε να αντικαταστήσουμε τις ερπύστριες ακόμη και με παραδοσιακούς τροχούς τύπου.επίσης, πολύ εύκολα μπορεί να ελεγχθεί απομακρυσμένα μέσω Arduino. Η πλατφόρμα μπορεί να ρυμουλκήσει ένα αξιοπρεπές ποσό βάρους. Δεν έχει δοκιμαστεί ειδικά για την ικανότητα μεταφοράς, αλλά νομίζω ότι μπορεί να χειριστεί μια-δυο κιλά βάρος.εχει ροπή 87:1 δηλαδή για κάθε 87 στροφές του κινητήρα γίνεται μια ολόκληρη στροφή της ρόδας. Είναι κατασκευασμένο από πλαστικό με πλαστικό γρανάζια και τροχούς. Και η πλατφόρμα μπορεί να ρυθμιστεί ώστε να έχουν διαφορετικό μήκος, ωστόσο η βασική πλατφόρμα 15,5 εκατοστά.ακομα μπορεί να φτάσει έως και 23 εκατοστά.τελος το κιβώτιο ταχυτήτων μπορεί να περιστραφεί έως και 5 μοίρες και οι ερπύστριες μπορούν να αντικατασταθούν από κανονικούς τροχούς.

17 Τιμή: 61$(Eλλάδα) 58$(Εξωτερικό) Χαρακτηριστικά: Ταχυτητα:28cm/s Διαστάσεις: 255mm(πλάτος) x 245mm(μήκος)x 74mm (ύψος) 2 μοτέρ και 2 κιβώτια ταχυτήτων 6 x μπαταρία ΑΑ(1,5 V) Προτεινόμενη τάση: 7,2V Ένταση στο κινητηρα:2,5a Παραδείγματα εφαρμογών: Πως αποφεύγει ένα λαβύρινθο από βιβλία: Με ανιχνευτή κίνησης: Πολλαπλές δοκιμασίες για τη πλατφόρμα: Λειτουργία με ρόδες: Έλεγχος ερπυστριών: Χρήσιμοι σύνδεσμοι: Προμηθευτές:

18 Οδηγίες:ROBOTICS\RP6 motor FOR ROVER 5.pdf ΠΟΛΥ ΧΡΗΣΙΜΟ:ROBOTICS\https 5 Introduction.pdf ROBOTICS\S06NFSTD.pdf Καλή εργασία, πρόσεξε όμως: Το κείμενο σε ορισμένα σημεία θέλει συντακτικές διορθώσεις Λείπει η αρίθμηση των σελίδων Οι εικόνες θέλουν αρίθμηση και λεζάντα Το κείμενο θέλει πλήρη στοίχιση Το διάστιχο σε βασικό κείμενο δεν είναι παντού το ίδιο Γενικότερα χρειάζεται προσοχή το θέμα της ομοιογένειας Μην διαγράψεις ότι σου έχω γράψει με κόκκινο, τα χρειάζομαι για τον επανέλεγχο της εργασίας σου

19 ΜΕΛΕΤΗ ΚΑΙ ΣΧΕΔΙΑΣΗ ΑΥΤΟΝΟΜΟΥ ΡΟΜΠΟΤΙΚΟΥ ΟΧΗΜΑΤΟΣ Όνομα: Άγγελος Δελής Τάξη: Α1 Καθηγητής: κ. Χατζηορφανός Σχολ. Έτος:

20 ΕΡΓΑΣΙΑ ΡΟΜΠΟΤΙΚΗΣ ΑΓΓΕΛΟΣ ΔΕΛΗΣ ΠΕΡΙΕΧΟΜΕΝΑ: Κίνηση με πόδια σελ. 3 o Σταθερότητα των ρομπότ σελ. 3 o Βηματισμός των ρομπότ..σελ. 4 o Παθητικός βηματισμός σελ. 5 o Κίνηση ρομπότ με ένα πόδι.σελ. 5 o Κίνηση ρομπότ με δύο πόδια...σελ. 6 o Κίνηση ρομπότ με τέσσερα πόδια σελ. 6 o Κίνηση ρομπότ με έξι πόδια σελ. 6 o Κίνηση ρομπότ με παραπάνω από έξι πόδια σελ. 7 Προγράμματα σχεδίασης και προσομοίωσης.σελ. 8 o Blender.σελ. 8 o Orgre 3D..σελ. 8 o Google Sketchup..σελ. 8 Έρευνα αγοράς ρομπότ με πόδια...σελ. 9 o Hexapod robot hexy-blue...σελ. 10 o Manoi AT01 humanroid robot σελ. 11 Πηγές σελ. 12 2

21 ΚΙΝΗΣΗ ΜΕ ΠΟΔΙΑ Ένα ρομπότ μπορεί να κινηθεί με πολλούς τρόπους. Αυτός είναι ένας λόγος που υπάρχουν τόσα πολλά διαφορετικά στην όψη και την λειτουργία ρομπότ. Οι συνηθέστεροι και κύριοι τρόποι κίνησης των ρομπότ είναι οι επίγειοι τρόποι. Επίγεια κίνηση μπορεί να γίνει είτε με τροχούς είτε με πόδια. Το ρομπότ με τροχούς μετακινείται όπως ένα αυτοκίνητο ή ένα ποδήλατο ή ακόμη και ένα τανκ. Το ρομπότ με πόδια μετακινείται όπως μερικά ζώα. Τα τελευταία χρόνια παρατηρούνται κινήσεις ρομπότ που δεν είναι προφανείς. Για παράδειγμα, ρομπότ που κολυμπάνε (Υποβρύχια ρομπότ), ρομπότ που πετάνε (Ιπτάμενα ρομπότ), ρομπότ που αναρριχούνται (για παράδειγμα κατακόρυφη αναρρίχηση με βεντούζες σε τοίχους και άλλες επίπεδες επιφάνειες), ρομπότ που στηρίζονται και κινούνται με μία σφαίρα, ρομπότ που σέρνονται όπως το φίδι (το λεγόμενο ζικ-ζακ), και όπως η κάμπια (μαζεύεται και αμέσως μετά τεντώνεται) κ.α. Για την κίνηση στα βαδίζοντα ρομπότ, οι επιστήμονες λαμβάνουν πολλά υπ όψιν τους. Θα πρέπει ο μηχανικός του εξοπλισμός να είναι το δυνατόν μικρότερος (για πρακτικούς λόγους) και ελαφρύτερος (αλλιώς το ρομπότ θα έχει επιπλέον βάρος, με αποτέλεσμα να απαιτεί περισσότερη ενέργεια για να γίνει κάποια κίνηση). Επιπλέον πολύ σημαντικό ρόλο παίζει η ακρίβεια. Εάν για παράδειγμα το ρομπότ πρέπει να φτάσει σε κάποιο σημείο, τότε πρέπει να φτάσει στον προορισμό χωρίς απόκλιση. Πρέπει λοιπόν να υπάρχουν μηχανισμοί διόρθωσης λαθών για την κίνηση. Επιθυμητό επίσης θα ήτανε το ρομπότ όταν βαδίζει να έχει μια ικανοποιητική ταχύτητα (διαφορετική σε κάθε περίπτωση). Είναι συμφέρον τα ρομπότ να είναι γρήγορα. Η μορφολογία του εδάφους δεν είναι ποτέ δεδομένη. Πρέπει να υπάρχουν τρόποι το ρομπότ να μπορεί να κινηθεί ακόμη και σε δύσβατες περιοχές με τραχύ έδαφος. Όταν βρεθούνε σε περιοχές που το ρομπότ δεν μπορεί να προσπελάσει, τότε δεν πρέπει να τις πλησιάζει. Αυτό μπορεί να γίνει με μηχανισμούς που παίζουν ρόλο ματιών. Σε κάθε χρονική στιγμή το ρομπότ θα πρέπει να ξέρει πού βρίσκεται. Άρα πρέπει να υπάρχει τρόπος αυτοεντοπισμού. Εικόνα. Ρομπότ με πόδια. Σταθερότητα των ρομπότ Ενώ τα περισσότερα ζώα στην γη κινούνται με πόδια, στον κλάδο της ρομποτικής, αυτό είναι πολύ δύσκολη υπόθεση, αφού τα ρομπότ θα πρέπει να κινούνται χωρίς να πέφτουνε στο έδαφος. Υπάρχουν πολλά στοιχεία που επηρεάζουνε την ισορροπία των ρομπότ όπως: Ο αριθμός, η επιφάνεια και η γωνία των άκρων του ρομπότ που ακουμπάει το έδαφος, το σημείο που βρίσκεται το κέντρο ισορροπίας, η δομή του εδάφους (νερό, λάσπη, άμμο κ.τ.λ.), η τριβή του σημείου επαφής κ.α. Σταθερότητα σημαίνει η δυνατότητα να διατηρήσει το ρομπότ όρθια θέση με τα πόδια του. Υπάρχουνε δύο μορφές σταθερότητας στα ρομπότ, η στατική και η δυναμική σταθερότητα: 1) Στατική σταθερότητα: Στην στατική σταθερότητα, όπως βλέπουμε στην παρακάτω εικόνα, Εικόνα. 3
22 Εικόνα. 3. Παραπάνω βλέπουμε ένα ρομπότ που ισορροπεί με στατική σταθερότητα τα ρομπότ μπορούν να στέκονται ακίνητα χωρίς να πέφτουν στο έδαφος. Αυτή είναι μια χρήσιμη μέθοδος που όμως είναι δύσκολο να επιτευχθεί, αφού έχει προϋπόθεση να υπάρχουν αρκετά πόδια ώστε να παρέχεται στο ρομπότ ξεκάθαρα η σταθερότητά του κατά την διάρκεια της κίνησης. Στην στατική σταθερότητα ανήκουνε ακίνητα ρομπότ με τουλάχιστον τρία πόδια, τα οποία πρέπει να είναι σωστά τοποθετημένα ώστε το κέντρο βάρος του ρομπότ να βρίσκεται μέσα σε κάποια συγκεκριμένα όρια. Τι γίνεται όμως όταν κάποιο πόδι μετακινείται για να γίνει βήμα; Τότε το ρομπότ πέφτει; Στατική σταθερότητα βαδίσματος σημαίνει ότι τα πόδια του ρομπότ μπορεί να «παγώσουν» οποιαδήποτε χρονική στιγμή κατά την διάρκεια της κίνησης, χωρίς το ρομπότ να χάσει την ισορροπία του. Για να υπάρχει στατική σταθερότητα κατά την διάρκεια της κίνησης, απαιτούνται τουλάχιστον έξη πόδια για να παρέχεται στο ρομπότ η σωστή ισορροπία αφού τότε πάντα υπάρχουνε τρία πόδια στο έδαφος. Για παράδειγμα, ο άνθρωπος δεν είναι στατικά σταθερός. Για να σταθεί όρθιος (κάτι το οποίο χρειάζεται προσπάθεια) στην πραγματικότητα χρησιμοποιεί μυς, τένοντες και νεύρα. Αυτή η ισορροπία του ανθρώπου είναι υποσυνείδητη και μαθαίνεται από την βρεφική ηλικία. 2) Δυναμική σταθερότητα: Στην δυναμική σταθερότητα τα ρομπότ ισορροπούνε λαμβάνοντας υπ όψιν και την στάση του σώματός τους. Για παράδειγμα ένα ρομπότ που έχει μόνο ένα πόδι ισορροπεί με δυναμική σταθερότητα. Στην περίπτωση αυτή όμως το ρομπότ δεν πρέπει να σταματήσει ποτέ να πηδάει, για να συνεχίσει να ισορροπεί. Στην περίπτωση των ανθρωποειδών ρομπότ, εάν για παράδειγμα το ρομπότ κινήσει το πόδι του μπροστά, τότε επηρεάζεται το κέντρο βάρους και η ισορροπία διαταράσσεται. Σε αυτήν την περίπτωση στην στατική σταθερότητα το ρομπότ θα έπεφτε. Στην δυναμική σταθερότητα όμως το ρομπότ θα προσαρμόσει την κίνηση (π.χ. με την κατάλληλη κλήση στην μέση) ώστε το κέντρο βάρους να βρίσκεται πάντα πάνω από το πόδι που στηρίζεται στο έδαφος. Στην εικόνα 4 είναι ξεκάθαρες οι κινήσεις που κάνει το ρομπότ για να προσπεράσει ένα εμπόδιο. Όπως φαίνεται το σώμα έχει κάθε φορά θέση τέτοια ώστε το κέντρο βάρους του να βρίσκεται σε κατάλληλο σημείο. Δυναμική σταθερότητα βαδίσματος σημαίνει ότι η σταθερότητα μπορεί να διατηρηθεί μόνο κατά την διάρκεια της κίνησης. σταθερότητα. Εικόνα. 4. Παραπάνω βλέπουμε ένα ρομπότ που ισορροπεί με δυναμική Βηματισμός των ρομπότ Ο βηματισμός καθορίζει την συχνότητα με την οποία εναλλάσσεται η υποστήριξη ποδιού στο έδαφος κατά την διάρκεια της κίνησης. Ο βηματισμός χωρίζεται σε δύο κατηγορίες: Περιοδικός βηματισμός, όπου επαναλαμβάνεται η ίδια συχνότητα με την οποία εναλλάσσεται η υποστήριξη ποδιού στο έδαφος Μη περιοδικός ή ελεύθερος βηματισμός, όπου δεν υπάρχει περιοδικότητα στο βήμα. Ο ρυθμός των βημάτων εξαρτάται από τον αριθμό των ποδιών. Η κίνηση ενός ρομπότ με πόδια ονομάζεται βάδισμα μόνο εάν κατά την διάρκεια της κίνησης υπάρχει πάντα ένα τουλάχιστον πόδι που στηρίζει το σώμα. Εάν υπάρχει κάποια 4


23 στιγμή όπου κανένα πόδι δεν στηρίζει το ρομπότ, τότε η κίνηση λέγεται τρέξιμο. Ενώ το βάδισμα μπορεί να είναι είτε στατικό είτε δυναμικό, το τρέξιμο μπορεί να είναι μόνο δυναμικό. Παθητικός Βηματισμός Για να κινηθούνε τα βαδίζοντα ρομπότ απαιτείται πολύ ενέργεια. Πολλοί μελετητές υποστηρίζουνε ότι είναι ασύμφορο να δημιουργηθούνε ρομπότ με πόδια που περπατάνε. Αυτό το πρόβλημα κλήθηκαν να διορθώσουνε άλλοι επιστήμονες δημιουργώντας τα βαδίζοντα ρομπότ με παθητικό βηματισμό. Στον παθητικό βηματισμό το ρομπότ εκμεταλλεύεται και τους νόμους της φυσικής. Αντί να γίνεται χρήση μόνο υψηλής δυναμικής ηλεκτρονικών μόνιτορ, γίνεται επιπλέον, εκμετάλλευση της συχνότητα κίνησης και του βάρους των ποδιών. Στην εικόνα 5 βλέπουμε ένα παράδειγμα παθητικού βηματισμού. Όταν εφαρμόζεται αυτή η μέθοδος βηματισμού, τα προβλήματα ισορροπίας και ελέγχου της κίνησης αυξάνονται. Γι αυτό το λόγω οι επιστήμονες προσπαθούν να την συνδυάσουν με την δυναμική σταθερότητα για να κατασκευαστεί ρομπότ που καταναλώνει λιγότερη ενέργεια. Παθητικός βηματισμός χρησιμοποιείται περισσότερο στα δίποδα ρομπότ, γιατί τότε η μέθοδος αυτή βηματισμού είναι πιο αποτελεσματική. Εικόνα. 5. Παθητικός βηματισμός. Κίνηση ρομπότ με ένα πόδι Η κίνηση αυτή κεντρίζει το ενδιαφέρον πολλών ανθρώπων, και λίγοι είναι αυτοί που θα την πιστέψουν πριν την δούνε με τα ίδια τους τα μάτια! Ο λόγος είναι ότι δεν υπάρχει τέτοια κίνηση στην φύση και φαίνεται πρωτόγνωρη σε όλους. Επιπλέον, ο κλάδος αυτός της κίνησης των ρομπότ με ένα πόδι είναι πολύ πρόσφατος, με αποτέλεσμα να μην ξέρουνε οι άνθρωποι την μέχρι τώρα τεχνολογία. Τα ρομπότ που έχουν μόνο ένα πόδι ισορροπούνε πολύ δύσκολα. Συγκεκριμένα το ρομπότ κάνει συνεχείς μετατροπές στην γωνία του ποδιού του έτσι ώστε να ελέγχει την συμπεριφορά του σώματος του. Αυτή η μέθοδος κίνησης είναι πολύ δύσκολη και ασύμφορη, αφού η κατασκευή είναι πολύπλοκη και καταναλώνεται πολύ ενέργεια. Επιπρόσθετα, για να κινηθεί το ρομπότ προς κάποια κατεύθυνση θα πρέπει απαραιτήτως το δάπεδο να είναι λείο. Σε αντίθετη περίπτωση το ρομπότ δεν φτάνει ποτέ στον προορισμό του, αφού η τραχύτητα του εδάφους το εξαναγκάζει να αποκλίνει συνεχώς από την πορεία του για να διατηρήσει την ισορροπία του. Εικόνα. 7. Παραπάνω βλέπουμε ένα ρομπότ (hoper) με ένα πόδι που ισορροπεί με δυναμική σταθερότητα. 5
24 Κίνηση ρομπότ με δύο πόδια Για να γίνει το ρομπότ «ο καλύτερος φίλος του ανθρώπου» πρέπει να μάθει να βαδίζει στο πλάι του. Αυτό το γνωρίζουν καλά οι κατασκευαστές ρομπότ και δεκαετίες τώρα προσπαθούν να διδάξουν όσο καλύτερα μπορούν το βάδισμα στα δίποδα ρομπότ. Το δίποδο ρομπότ όμως καταναλώνει βαδίζοντας δέκα φορές περισσότερη ενέργεια από ό,τι ένας άνθρωπος κάτι το οποίο είναι απογοητευτικά ασύμφορο. Παρ όλα αυτά, αυτή η κίνηση είναι ιδιαίτερα διαδεδομένη. Τα ρομπότ με δύο πόδια έχουνε στατική σταθερότητα μόνο σε μικρές χρονικές στιγμές. Όταν το κέντρο βάρους του σώματός τους βρίσκεται ακριβώς πάνω από το πόδι του ρομπότ. Περισσότερο χρησιμοποιείται η δυναμική σταθερότητα. Επειδή ισορροπούνε δύσκολα η ταχύτητα κίνησής τους είναι αργή. Εικόνα. 8. Η κίνηση των δίποδων ρομπότ μοιάζει με αυτήν των τροχοφόρων Στον παθητικό βηματισμό όπως βλέπουμε στην εικόνα 8, η κίνηση του δίποδου ρομπότ (όπως και ο τρόπος που βαδίζουν οι άνθρωποι) μοιάζει κατά κάποιον τρόπο με την κίνηση του τροχού, όπου η ακτίνα του τροχού παίζει τον ρόλο των ποδιών. Γίνονται προσπάθειες από επιστήμονες να δημιουργήσουνε δίποδο ρομπότ που βαδίζει σύμφωνα με την κίνηση ενός τροχού, έτσι ώστε να αυξηθεί η ταχύτητα κίνησής του και να μειωθεί η ενέργεια που καταναλώνει. Εδώ πρέπει να συμπληρωθεί ότι στα δίποδα ρομπότ που είναι της μορφής της εικόνας 8, όπως και στα ρομπότ που κινούνται με ένα πόδι, υπάρχει μια έξτρα απώλεια ενέργειας, που οφείλεται στην κίνηση πάνω-κάτω που κάνει το κέντρο βάρους του σώματος. Κίνηση ρομπότ με τέσσερα πόδια Το βάδισμα με τέσσερα πόδια θυμίζει σε όλους κινήσεις τετράποδων ζώων. Τα περισσότερα εμπορικά τετράποδα ρομπότ μοιάζουν με σκύλους και απευθύνονται σε ζωόφιλο κοινό ή σε μικρά παιδιά. Είναι δύσκολο να διατηρηθεί η ισορροπία καθ όλη την διάρκεια της κίνησης στα τετράποδα ρομπότ. Χρειάζεται κάθε φορά να προσαρμοστούν τα πόδια, έτσι ώστε το κέντρο βάρους του ρομπότ να βρίσκεται σε συγκεκριμένα όρια. Σε περίπτωση όμως που το έδαφος είναι τραχύ, εύκολα μπορεί να ακολουθήσει πτώση. Στα τετράποδα ρομπότ είναι εφικτή η στατική σταθερότητα, αλλά όχι πάντα. Παίζει ρόλο πού βρίσκεται το κέντρο βάρους κάθε φορά. Παρ όλα αυτά έχει πρόσφατα δημιουργηθεί τετράποδο ρομπότ το οποίο δεν χάνει την ισορροπία του κατά την διάρκεια του βαδίσματος ακόμη κι όταν δέχεται σπρώξιμο. Κίνηση ρομπότ με έξι πόδια Τα ρομπότ με έξι πόδια κινούνται έχοντας πάντα τρία πόδια στο έδαφος, ενώ τρία πόδια μετατοπίζονται ταυτόχρονα για να γίνει η μετακίνηση. Αυτό έχει ως αποτέλεσμα να έχουνε πολύ καλή ισορροπία. Αυτός είναι και ο λόγος που είναι τα αγαπημένα των κατασκευαστών. Λόγω των πολλών ποδιών, χρησιμοποιούνε στατική σταθερότητα, αλλά αυτό τα κάνει αργά και ασύμφορα, αφού απαιτούνε πολύ ενέργεια. Υπάρχει βέβαια και η περίπτωση να αυξηθεί η ταχύτητά τους, εάν εφαρμοστεί δυναμική σταθερότητα. Στα εξάποδα ρομπότ, η ισορροπία κατά την διάρκεια της κίνησης είναι δεδομένη, αφού πάντα τρία πόδια βρίσκονται στο έδαφος. Από την οικογένεια των ρομπότ με πόδια, τα εξάποδα θεωρούνται από πολλούς τα καταλληλότερα για πλήθος εφαρμογών, και ιδιαίτερα όταν απαιτείται πολύ καλή ισορροπία και υπάρχει πολύ τραχύ έδαφος. Κίνηση ρομπότ με περισσότερα από έξι πόδια Τα ρομπότ με πολλά πόδια είναι γενικά ασύμφορα και πολύπλοκα. Έχουνε κατασκευαστεί πολλά ρομπότ με περισσότερα από 6 πόδια. Υποστηρίζεται ότι τα επιπλέον πόδια μπορούν να βοηθήσουν επιπλέον την κίνηση, για να γίνεται με πιο σωστό τρόπο. Τα πολλά πόδια όμως απαιτούνε επιπλέον ενέργεια και προσθέτουνε στο ρομπότ βάρος. 6
25 Άρα προτιμότερο είναι να χρησιμοποιούνται έξη πόδια, αφού και έτσι η ισορροπία είναι δεδομένη. Η ενέργεια που καταναλώνουνε τα ρομπότ που έχουνε πάνω από έξη πόδια είναι τόσο μεγαλύτερη, που δεν συμφέρει από άποψη ενέργειας να βελτιωθεί η κίνηση με αυτόν τον τρόπο. 7
26 Προγράμματα σχεδίασης και προσομοίωσης Blender Το Blender ( ) είναι ένα πρόγραμμα ανοιχτού κώδικα για τη σχεδίαση 3D γραφικών Είναι διαθέσιμο για όλα τα κύρια λειτουργικά συστήματα όπως τα Windows, τα Linux και τα Mac OS X. Επίσης υποστηρίζεται και από Solaris. Το Blender διαθέτει προχωρημένα εργαλεία για δημιουργία υλικού καθώς επίσης υποστηρίζει τη χρήση της γλώσσας προγραμματισμού Python για εσωτερικό scripting. Χρησιμοποιείται για μοντελοποίηση, rigging (διαδικασία σχηματισμού αρθρώσεων-σκελετού), προσομοιώσεις, animation, rendering, μη γραμμική επεξεργασία και δημιουργία 3D εφαρμογών όπως είναι τα βιντεοπαιχνίδια. Μερικά από τα χαρακτηριστικά του είναι: Υποστήριξη για δικτυώματα πολυγώνου, γρήγορη υποδιαίρεση επιφάνειας μοντελοποίησης, καμπύλες Bezier, επιφάνειες NURBS, metaball, ψηφιακό sculpting, και ανυσματικές γραμματοσειρές. Ευέλικτη δυνατότητα εσωτερικού rendering και ενσωμάτωση με το πρόγραμμα YafaRay1. Μη γραμμική επεξεργασία βίντεο/ήχου. Υποστήριξη της γλώσσας Python για προγραμματισμό λογικής και επιπλέον scripting. Έλεγχος σε πραγματικό χρόνο κατά την προσομοίωση Ogre 3D Το Ogre 3D ( είναι μια μηχανή γραφικών πραγματικού χρόνου. Το όνομα του προέρχεται από τα αρχικά των λέξεων Object-Oriented Graphics Rendering Engine, δηλαδή πρόκυται για μια αντικειμενοστραφή μηχανή αναπαράστασης γραφικών. Είναι ένα πρόγραμμα σχεδίασης σε 3D περιβάλλον, open source και σχεδιασμένο σε γλώσσα προγραμματισμού C++ για να διευκολύνει τους χρήστες του να δημιουργούν εφαρμογές, αξιοποιώντας τα τρισδιάστατα γραφικά του. Ενα βασικό πλεονέκτημα του είναι ότι υποστηρίζεται από τα περισσότερα λειτουργικά συστήματα (Linux, Windows, Mac OS X) σε αρκετά καλό βαθμό, καθώς επίσης υποστηρίζει GL και Direct3D APIs. Η βασική λειτουργία του Ogre 3D είναι το rendering, δηλαδή η απεικόνιση του 3D μοντέλου σε 2D. Αυτό αποτελεί από τα μεγαλύτερα μειονεκτήματα του, καθώς ο χρήστης πρέπει πρώτα να δημιουργήσει το μοντέλο σε ένα άλλο περιβάλλον όπως το Blender και στην συνέχεια να χρησιμοποιηθεί από το Ogre, γεγονός που το καθιστά δύσχρηστο. Σύγκριση και επιλογή ανάμεσα σε Blender και Ogre3d Η πολύ καλή γνώση της γλώσσας C++ από τον χρήστη, αποτελεί βασική προϋπόθεση για τη χρήση του προγράμματος Ogre3d, καθώς διαφοροποιείται σημαντικά στο συγκεκριμένο κομμάτι σε με τα υπόλοιπα εργαλεία όπου η ικανότητα συγγραφής κώδικα περιορίζεται σε επίπεδο scripting και είναι προαιρετική. Το Ogre3d σε αντίθεση με το Blender είναι ένα πρόγραμμα με αρκετές ιδιαιτερότητες, οι οποίες το δυσκολεύουν να γίνει προσιτό από τους χρήστες. Για όλους αυτούς τους λόγους καθώς επίσης και της ανάγκης δημιουργίας του μοντέλου πρώτα σε ένα άλλο πρόγραμμα σχεδίασης, επιλέχθηκε το Blender καταλληλότερο πρόγραμμα για την υλοποίηση της εργασίας αυτής. GOOGLE SKETCHUP Υπάρχουν πολύ λίγα πράγματα που η Google δεν κάνει σωστά και αυτό επεκτείνεται μέχρι στο να κάνει την τέχνη του 3D προσβάσιμη ακόμη και στον πιο άπειρο δημιουργό με το Google SketchUp. Το Google SketchUp καταργεί τη μόδα των ακριβών προγραμμάτων δημιουργίας 3D μοντέλων, όπως το 3DSMax και το Cinema4D και παρουσιάζει μία δωρεάν, εύκολη στη χρήση εναλλακτική με την οποία μπορείς ακόμα και να ανεβάσεις τις δημιουργίες σου στο Google Earth για να τις δει όλος ο κόσμος. Η τελευταία έκδοση ενσωμάτωσε μέχρι και τους Χάρτες Google ώστε η γεωγραφική επισήμανση των μοντέλων σας να είναι πιο εύκολη από ποτέ. Υπάρχει μία φρέσκια έλλειψη τεχνικών όρων στο Google SketchUp και άγνωστοι στους αρχάριους όροι, όπως για παράδειγμα το εργαλείο Εξώθησης (Extrude) μετονομάστηκε στο πιο προφανές «Σπρώξιμο/Τράβηγμα» (Push/Pull). Υπάρχουν πολλές βοηθητικές συμβουλές και οδηγοί εκεί που βοηθάνε στο να καταπιαστείτε με το εργαλείο προσκόλλησης (snapping) όταν σχεδιάζετε ορθογώνια, κύκλους και άλλα σχήματα. Το Google Sketchup προβλέπει έξυπνα το πού θέλεις να ενωθούν οι άκρες και τις κολλάει κλείνοντάς τες για σένα, γλιτώνοντας πολύ χρόνο αναζήτησης και κόπου. Το SketchUp δεν υπολείπεται σε λειτουργικότητα παρόλη την ευκολία χρήσης του και περιέχει τη συνηθισμένη συλλογή σχεδίων και εργαλείων γεμίσματος που θα περίμενε κανείς, εύκολα προσβάσιμη στη γραμμή εργαλείων κατά μήκος της κορυφής της οθόνης. Οι συμβουλές του Εκπαιδευτή εμφανίζονται στα δεξιά της οθόνης, όταν πιστεύει ότι τις χρειάζεστε. Άλλες επιλογές είναι προσβάσιμες μέσω του μενού, ή μπορείτε να τοποθετήσετε επιπλέον παλέτες στο περιβάλλον εργασίας σας για να αποφύγετε την περιπλάνηση στα μενού. Άξια προσοχής είναι η παλέτα Υλικών (Materials), που περιέχει πάνω από 100 διαφορετικά προκαθορισμένα δείγματα, όπως για παράδειγμα βλάστηση, μέταλλα και γυαλί. Η παλέτα Ρυθμίσεων Σκιών αξίζει να βρίσκεται πρόχειρη μιας και επιτρέπει την εφαρμογή ρεαλιστικών σκιών με απλές 8
27 μπάρες. Το πραγματικά ωραίο κομμάτι πάντως, είναι όταν εξάγετε τα σχέδιά Google SketchUp σας στο Google Earth. Μπορείτε να στέλνετε εικόνες των 3D σχεδίων σας μέσω ή να τα ανεβάσετε σε μία δωρεάν αποθήκη στο 3D Web Warehouse της Google. Διαφορετικά, μπορείτε να τα επισημάνετε γεωγραφικά με μια κίνηση χρησιμοποιώντας τους Χάρτες Google που πλέον ενσωματώθηκαν στο Google Sketchup. Όταν προσθέτετε γεωγραφικό σημείο στο μοντέλο σας, θα λάβετε μια εικόνα που πλέον περιέχει 3D πληροφορίες εδάφους με έγχρωμη εναέρια φωτογραφία. Υπάρχουν πάντως μερικά προβλήματα με το Google SketchUp. Το πιο ενοχλητικό είναι να προσπαθείς να κατασκευάσεις θολωτές επιφάνειες λόγω της δυσκίνητης φύσης του εργαλείου Extrude, παρόλο που το να τραβάς και να σπρώχνεις ευθείες γραμμές είναι αρκετά πιο εύκολο. Δεδομένου του ότι είναι δωρεάν, προφανώς δεν διαθέτει κάποια από τα προχωρημένα χαρακτηριστικά σαν αυτά που έχουν οι μεγάλοι του αντίπαλοι. Το Google SketchUp παρέχει μια φρέσκια και απλή προσέγγιση στον σχεδιασμό τρισδιάστατων γραφικών και μοντέλων και είναι ιδανικό για αρχάριους στην τεχνολογία σχεδιασμού μέσω υπολογιστή (CAD). Εικόνα 9: Στην εικόνα φαίνεται η σχεδίαση ενός ρομπότ με το Google Sketchup. 9
28 \ΕΡΕΥΝΑ ΑΓΟΡΑΣ ΡΟΜΠΟΤ ΜΕ ΠΟΔΙΑ Hexapod Robot Hexy - Blue Μοντέλο: HEXY1-BLUE 5 Τεμάχια σε στοκ Hexapod Robot Hexy - Blue ArcBotics Hexy η Hexapod είναι ένα πλήρως αρθρωτό κιτ ρομπότ έχει έξι πόδια, 19κινητήρες σερβο καιτροφοδοτείται από Arduino, διατηρώντας παράλληλα την τιμή χαμηλά. Hexy είναι: - Εύκολο να προγραμματίσετε περισσότερες λειτουργίες. Arduino μικρο-ελεγκτή, Python κίνηση γεννήτρια ελεγκτής - Εύκολη συναρμολόγηση - Πλήρης βήμα-προς-βήμα tutorials, - Πλήρως συμβατό με Arduino, ο ελεγκτής Servotor32 χρησιμοποιεί το ίδιο τσιπ με το Arduino Leonardo - Έρχεται με κινήσεις επίδειξης προ-διαθέσιμα, χορός κλπ. - Open-Source Κώδικα Ορίστε και ένα βίντεο που βρήκα για αυτό το robot 10
29 Manoi AT01 Humanoid Robot (Type C Body) 2, Μοντέλο: HR008 Βάρος αποστολής: 2κιλά 10 Τεμάχια σε στοκ Το Manoi ΑΤ01 ανθρωποειδές ρομπότ (τύπου C σώματος). Αυτό το ρομπότ έχει σχεδιαστεί για «Athletic Cup», το οποίο είναι ένας διαγωνισμός ταχύτητας με τα πόδια μεταξύ ανθρωποειδή ρομπότ. Ο Τύπος Γ Σώματος είναι ιδανικό για διαγωνισμούς ρομποτικής. Διαθέτει αποσπώμενες προσόψεις. Αυτό το ρομπότ αθλητής διαθέτει ακριβής ψηφιακά servos καθώς και ένα RCB-3ελεγκτή από την Κόντο. Μπορεί να κάνει χωρίς τριβές, φυσικές κινήσεις και πράξεις σχεδόν ακαριαία στις εντολές σας. Ο πίνακας ελέγχου είναι σε θέση να ελέγξει μέχρι και24 servo. Το Manoi ΑΤ01 οδηγείται με 17 servos που παρέχουν 17 βαθμούς ελευθερίας(dof). Το ρομπότ μπορεί να κινηθεί πίσω, προς τα εμπρός, να κάνει push-ups, να περπατήσει, να τρέξει, να παίξει ποδόσφαιρο, και ακόμη να χορέψει. Ο RCB-3 ελεγκτής διαθέτει αναλογικές εισόδους ώστε να μπορούν εύκολα να ενσωματωθούν επιπλέον αισθητήρες, και γυροσκόπια. 11
30 ΠΗΓΗ: programmata/%cf%84%ce%b5%cf%87%ce%bd%ce%b9%ce%ba%ce%bf- %CF%83%CF%87%CE%B5%CE%B4%CE%B9%CE%BF-%CE%BC%CE%B5-autocad- %CF%83%CE%B5-%CE%B1%CF%80%CE%BB%CE%AC- %CE%B1%CF%85%CF%84%CE%BF%CF%84%CE%B5%CE%BB%CE%AE- %CE%BC%CE%B1%CE%B8%CE%AE%CE%BC%CE%B1%CF%84%CE%B1-detail?Itemid=0 12
31 ΕΡΓΑΣΙΑ ΓΙΑ ΤΟ PROJECT ΣΠΥΡΟΣ ΖΑΧΑΡΗΣ Γενικες πληροφοριες για ρομποτικη διαφορικη οδηγηση Γενικά, υπάρχουν διάφοροι τύποι ρομπότ των οποίων η κίνηση βασίζεται σε μέσα, όπως πόδια, βραχίονες, φτερά, πτερύγια, κτλ. Παρόλα αυτά, η πλειοψηφία των ρομπότ χρησιμοποιεί τροχούς για την κίνησή τους. Οι τροχοί είναι το πιο σύνηθες όργανο δράσης στα ρομπότ κυρίως καθώς συμβάλουν στην απλότητα του συστήματος, αφού ελέγχονται με μεγάλη ευκολία. Παράλληλα, δίνουν τη δυνατότητα σε ένα ρομπότ να αναπτύξει μεγαλύτερες ταχύτητες από αυτές που θα μπορούσε να αναπτύξει αν χρησιμοποιούσε ως όργανα δράσης άλλα μέσα κίνησης, όπως για παράδειγμα πόδια. Από την άλλη πλευρά όμως, τα συστήματα που βασίζουν την κίνησή τους σε τροχούς δεν είναι ολονομικά. Ένα ρομπότ που μετακινείται μέσω συστήματος τροχών, μπορεί να ελεγχθεί με διαφορετικούς τρόπους. Είτε με ταυτόχρονη κίνηση τροχών, όπως για παράδειγμα ένα αυτοκίνητο, είτε με ανεξάρτητη κίνηση τροχών. Στην πρώτη περίπτωση το σύστημα αποτελείται από έναν μηχανισμό κίνησης (κινητήρας) για τους τροχούς, και έναν μηχανισμό κίνησης για την στρέψη των τροχών. Η δεύτερη περίπτωση ονομάζεται διαφορική οδήγηση (differential drive), κατά την οποία, οι δύο κινητήριοι τροχοί του οχήματος μπορούν να περιστρέφονται ανεξάρτητα, ο άξονας όμως της περιστροφής τους είναι κοινός και σταθερός. Αυτός ο τρόπος οδήγησης δεν χρησιμοποιεί τιμόνι, αλλά αποτελείται από έναν μηχανισμό κίνησης για τον αριστερό και έναν για τον δεξιό τροχό, με αποτέλεσμα το όχημα να στρίβει περιστρέφοντας τους δύο τροχούς του με διαφορετικές ταχύτητες ή/και φορά περιστροφής. Για να κινηθεί το όχημα ευθεία, για παράδειγμα, θα πρέπει να περιστραφούν και οι δύο τροχοί του με την ίδια ταχύτητα. Για να στρίψει δεξιά θα πρέπει να περιστραφεί ο αριστερός τροχός με μεγαλύτερη ταχύτητα από τον δεξιό. Για να στρίψει επιτόπου δεξιά θα πρέπει ο δεξιός τροχός να περιστραφεί προς τα πίσω και ο αριστερός προς τα εμπρός. Τα συστήματα αυτού του τρόπου οδήγησης χρησιμοποιούν συνήθως και έναν βοηθητικό τροχό με δυνατότητα περιστροφής (caster wheel), όπως φαίνεται και στο παρακάτω σχήμα.
32 Ρομποτ με ροδες για ερευνα-διασωση και εξερευνιση ξενων πλανητων Η πρόβλεψη σεισμών εξακολουθεί να είναι μια εξαιρετικά δύσκολη προσπάθεια. Οι σεισμολόγοι αδυνατούν να προβλέψουν με αξιοπιστία ένα σεισμό, έστω και έναν μήνα νωρίτερα, πόσο μάλλον την ημέρα που θα γίνει αυτός. Έτσι, με σκοπό τον μετριασμό των θυμάτων από τις φυσικές καταστροφές, πρέπει να δοθεί μεγαλύτερη βαρύτητα στο έργο της αναζήτησης και της διάσωσης. Για αυτόν τον λόγο υπάρχει έντονη ερευνητική προσπάθεια στην κατεύθυνση για δημιουργία ρομποτικών συστημάτων, που θα χρησιμοποιηθούν για τον εντοπισμό επιζώντων σε χαλάσματα Ρομποτ με ροδες για εξερευνηση στον Αρη Συστημα πλουγισης ρομποτικων οχηματων που εχουν σταλει στον Αρη και εχουν πλατφορμες με ροδες: Κάθε όχημα έχει έξι ρόδες συνδεδεμένες με τέτοιο σύστημα που επιτρέπει να είναι και οι έξι πάντα στο έδαφος. Το σύστημα πλοήγησης επιτρέπει στο όχημα να υπερπηδά εμπόδια, όπως βράχοι ή τρύπες
33 διαμέτρου 250 mm or 10 inches. Κάθε τροχός μπορεί να σκαρφαλώσει σε μαλακό αμμώδες έδαφος και έχει το δικό του κινητήρα. Οι δύο μπροστινοί και οι δύο πίσω τροχοί επιτρέπουν στο όχημα να περιστρέφεται 360 μοίρες. Το όχημα μπορεί να σταθεί με κλίση 45 μοιρών χωρίς να αναποδογυρίζει. Πάντως για την αποφυγή ατυχημάτων το πρόγραμμα του υπολογιστή του δεν του επιτρέπει κλίσεις μεγαλύτερες των 30 μοιρών. Η μέση ταχύτητα του είναι 10 mm/s. Είναι επίσης προγραμματισμένο να οδηγεί για 10 δευτερόλεπτα και μετά να σταματάει, να παρατηρεί το έδαφος και να συνεχίζει.
34 Ερευνητικα προγραμματα ρομποτικης για ερευνα και διασωση GUARDIANS project Το έργο αυτό χρηματοδοτήθηκε από το FP6 και συμμετείχαν οκτώ Ευρωπαίοι Εταίροι. Σκοπός του έργου ήταν η δημιουργία ενός σμήνους από αυτόνομα ρομπότ με σκοπό την λειτουργία τους για την ανίχνευση επιζώντων σε αστικά περιβάλλοντα. Τα ρομποτικά οχήματα που αναπτύχθηκαν, είχαν τη δυνατότητα να ανιχνεύουν επικίνδυνες ουσίες στο περιβάλλον και με ένα σετ από προηγμένους αισθητήρες να αναζητούν και να εντοπίζουν εγκλωβισμένους ανθρώπους. Το πρόγραμμα έληξε τον Ιανουάριο VIEWFINDER project Το έργο του FP6 ( ) χρηματοδοτείται από την Ευρωπαϊκή Ένωση. Αποτελείται από εννέα Ευρωπαίους Εταίρους και επιδιώκει να χρησιμοποιήσει ένα αυτόνομο ρομποτικό σύστημα με σκοπό την ανίχνευση του εδάφους κατά την ύπαρξη μίας πυρκαγιάς, βοηθώντας το προσωπικό διάσωσης και καθοδηγώντας το για την ανίχνευση επιζώντων. Επιπλέον, το έργο αυτό εξετάζει βασικά θέματα που αφορούν την αυτόνομη κατασκευή
35 χάρτη, την ανασυγκρότηση και διασύνδεση τοπικών πληροφοριών, τη χρήση διεπαφών μεταξύ ανθρώπων-ρομπότ και την αυτόνομη πλοήγηση αυτών. SARNET project Το έργο αυτό είναι ένα δίκτυο αριστείας με σκοπό την υποστήριξη της έρευνας σε σοβαρά ατυχήματα σε πυρηνικούς σταθμούς ενέργειας. Παρά τα μέτρα πρόληψης των ατυχημάτων και τα μέτρα διαχείρισης που έχουν θεσπιστεί σε πυρηνικούς σταθμούς, και παρότι παραμένει πολύ μικρή η πιθανότητα λανθασμένης λειτουργίας, ένα πιθανό συμβάν μπορεί να εξελιχθεί σε σοβαρό ατύχημα με αποτέλεσμα την τήξη του πυρήνα, και την επακόλουθη διασπορά των ραδιενεργών υλικών στο περιβάλλον. Το δίκτυο SARNET έχει συσταθεί υπό την αιγίδα των προγραμμάτων πλαισίων της Ευρωπαϊκής Επιτροπής για την έρευνα και στοχεύει στην αναζήτηση τεχνολογιών για την αντιμετώπιση αυτών των κινδύνων, συμπεριλαμβανομένης της τεχνολογίας της ρομποτικής. Ερευνα αγορας για ρομποτικους τροχους και πλατφορμες με ροδες
36 (16,5 "x 12" x 5 ") Διαστάσεις: 420 x 300 χιλιοστά x 130 χιλιοστά Παχος τροχών: 120 χιλ. Συνιστώμενη τάση: 2-7.5V
37 Κατασκευασμένο απο αλουμίνιο Τιμη $ ΒΙΝΤΕΟ Ταχύτητα: 80 cm / s Ηλεκτρονικά, φωτογραφική μηχανή, κινητήρες σερβο πωλούνται ξεχωριστά Διαστάσεις: 27 εκατοστά (μήκος) Χ 20cm (πλάτος) x 6 cm (ύψος) (ορθογώνια βάση) 27 εκατοστά (μήκος) Χ 20cm (πλάτος) χ 7 cm (ύψος) (ανώτερο κατάστρωμα) Τιμη $ ΒΙΝΤΕΟ E9FWPE
38
39 Μέγεθος: 55mm x 48,3 χιλιοστά x 23 χιλιοστά Βάρος: 45g Διαστάσεις: 170 χιλιοστά διάμετρος βάσης Βάρος: 445g Τιμη $ ΒΙΝΤΕΟ pbi
40 Δεν υπαρχουν διαθεσιμες διαστασεις δυστυχως 3 x 1.5V μπαταρίες για την παροχή ενέργειας ΒΙΝΤΕΟ me
41 ΙΔΕΕΣ ΓΙΑ ΤΗΝ ΜΟΡΦΗ ΠΟΥ ΜΠΟΡΟΥΜΕ ΝΑ ΔΩΣΟΥΜΕ ΣΤΟ ΡΟΜΠΟΤ
42
43
44 Οι παραπανω εικονες απεικονιζουν ρομποτ που κινουνται με ροδες και με μπιλιες.το συγκεκριμενο ρομποτ είναι αποκλειστικη πατεντα της modular robotics που κατασκευασε το moss. Το συγκεκριμενο ειδος κινησης το θεωρω ιδιαιτερα ενδιαφερον και πιστευω πως είναι μια εξυπνη λυση (μπιλιες ροδες) σε συνδυασμο με την πολυμορφικοτητα το καθιστουν μια εξαιρετικη επιλογη ΠΡΟΓΡΑΜΑΤΑ 3D ΣΧΕΔΙΑΣΗΣ Εκτος από τον τομεα τον ρομποτικων πλατφορμων με ροδες εχω αναλαβει και το κομματι της 3D σχεδιασης το οποιο βρισκεται σε αρκετα προοιμο σταδιο καθως στης συνεδριασης της ολομελειας δεν εχει αποφασιστει η τελικη μορφη του ρομποτ. Εχω κανει μια ερευνα με τα προγραμματα 3D σχεδιασης και αφου μιλησα και με τα υπολοιπα μελη της ομαδας καταληξαμε στο google sketchup ΣΥΝΤΟΜΗ ΠΕΡΙΓΡΑΦΗ GOOGLE SKETCHUP Το Google SketchUp είναι ένα πρόγραμμα που μπορεί κάποιος να χρησιμοποιήσει για να δημιουργήσει, τροποποιήσει και να μοιραστεί 3D μοντέλα. Είναι ευκολότερο να το μάθει σε σχέση με άλλα 3D προγράμματα μοντελοποίησης, και για τον λόγο αυτό πολλοί άνθρωποι το χρησιμοποιούν ήδη. Το Google SketchUp είναι ένα πρόγραμμα που σας δίνει τη δυνατότητα να φτιάξετε όλους τους τύπους τρισδιάστατων σχεδίων. Φανταστείτε ότι αγοράσετε ένα σπίτι και πρέπει να το επιπλώσετε. Λοιπόν, με αυτό το πρόγραμμα μπορείτε να το δείτε σε εικονική μορφή και τρισδιάστατο, να αλλάξετε τα έπιπλα, το στυλ, ό,τι θέλετε μέχρι να αντανακλά το προσωπικό σας στυλ. Το Google SketchUp συνοδεύεται από μία γκαλερί 3D που σας δίνει τη δυνατότητα να ψάξετε για μοντέλα και να μοιραστείτε τα δικά σας. Πρόκειται για μοντέλα οποιουδήποτε τύπου: έπιπλα, σπίτια, αυτοκίνητα, αγάλματα Στα χαρακτηριστικά του Google SketchUp περιλαμβάνονται: Ευκολία στη χρήση. Δυνατότητα εύρεσης τους μέρους του μοντέλου όπου χτυπά ο ήλιος. Πειραματισμός με χρώματα και υφές. Xρησιμος ιστοτοπος οπου υπαρχει οδηγος για αρχαριους σχεδιαστες Αλες επιλογες προγραματων 3D σχεδιασης Blender ο Blender έχει αποδειχθεί ότι είναι ένα εξαιρετικά γρήγορο και ευέλικτο εργαλείο σχεδιασμού, προσφέροντας μια μοναδική προσέγγιση στον κόσμο των τριών διαστάσεων. Μπορείτε εύκολα να κατασκευάσετε και να διαχειριστείτε σύνθετα περιβάλλοντα. Είναι πολύ δημοφιλές και χρησιμοποιείται απο εκατομμύρια ανθρώπους. Lnkscape Το Inkscape είναι ένα πρόγραμμα επεξεργασίας διανυσματικών γραφικών ελεύθερης άδειας χρήσης. Διαθέτει όλες τις λειτουργίες των εμπορικών προγραμμάτων, έχει
45 αρκετά εργαλεία για την επίτευξη επαγγελματικών εργασιών. Ιδανικό για επιχειρήσεις και οικιακούς χρήστες, το δημοφιλές σχεδιαστικό opensource πρόγραμμα. gcad3d Ειδικεύεται σε τρισδιάστατο σχέδιο και μπορεί να χρησιμοποιηθεί τόσο απο μαθητές και φοιτητές όσο και απο μηχανολόγους, αρχιτέκτονες και τοπογράφους. Το user interface του δεν μοιάζει με αυτό του AutoCAD ή άλλων προγραμμάτων. Είναι εφαρμογή με πλούσιες ικανότητες αλλά ελαφρώς δύσκολη στην χρήση. FreeCAD Δωρεάν λογισμικό με βιβλιοθήκες και εφαρμογές για το AutoCAD. Το πρόγραμμα είναι σχεδιασμένο με κύριο στόχο την μηχανολογική ανάπτυξη και το βιομηχανικό σχέδιο, αλλά λόγω του αρθρωτού σχεδιασμού είναι αρκετά παραμετροποιήσιμο ώστε να χρησιμοποιηθεί και σε άλλες εφαρμογές. ΠΗΓΕΣ : Wikipedia Robotstore CF%83%CE%B5-%CF%84%CE%BF-curiosity-%CE%B3%CE%B9%CE%B1- %CF%84%CE%B7%CE%BD- %CE%B1%CF%80%CE%BF%CF%83%CF%84%CE%BF%CE%BB%CE%AE- %CF%84%CE%BF%CF%85-%CF%83%CF%84/
46 Ερευνητική εργασία (Project): «ΜΕΛΕΤΗ ΚΑΙ ΣΧΕΔΙΑΣΗ ΑΥΤΟΝΟΜΟΥ ΡΟΜΠΟΤΙΚΟΥ ΟΧΗΜΑΤΟΣ» Θέμα : Είδη Ρομποτικών Βραχιόνων Έρευνα Αγοράς Επιμέλεια : Νίκος Χριστοδούλου Επιβλέπων Διδάσκοντας : κ. Αντρέας Χατζηορφανος Ημερομηνία Υποβολής : 18\12\2013 Εργασία Α Τετραμήνου Αρσάκεια Τοσιτσεια Σχολεία Εκάλης
47
48 Περιεχόμενα Ρομποτικός βραχίονας... 4 Γενική περιγραφή... 4 Στοιχειά ρομποτικού βραχίονα... 5 Ωφέλιμο φορτίο - Επαναληψιμότητα - Ακρίβεια...4 Ταξινόμηση ρομποτικών βραχιόνων βάσει της γεωμετρικής τους διαμόρφωσης...4 Καρτεσιανοί βραχίονες Βραχίονες Gantry 6-9 Κυλινδρικοί βραχίονες Σφαιρική βραχίονες Βραχίονες SCARA Αρθρωτοί βραχίονες- Κατασκευή Έρευνα αγοράς OWI Robotic Arm Edge Γενική περιγραφή βραχίονα Χαρακτηριστικά βραχίονα Οπτικό-ακουστικό υλικό για βραχίονα 33 Έρευνα αγοράς Alloy 6 DOF Robot Arm Γενική περιγραφή βραχίονα Χαρακτηριστικά βραχίονα Χαρακτηριστικά βραχίονα.42 Πηγές - Βιβλιογραφία
49 Ρομποτικός βραχίονας Γενική περιγραφή Ο (μηχανικός) βραχίονας του ρομπότ περιέχει το κυρίως σώμα και τον καρπό που έχει στο τέλος του το εργαλείο (τελικό στοιχείο δράσης). Το εργαλείο μπορεί να είναι μια κεφαλή συγκόλλησης, ένα πιστόλι χρωματίσματος, ένα μηχανικό εργαλείο ή ένας πιάστρας (αρπαγή) που ανοιγοκλείνει κατάλληλα, ανάλογα με την εφαρμογή στην οποία πρόκειται να χρησιμοποιηθεί το ρομπότ. Επειδή όλα τα εργαλεία στερεώνονται στο τέλος των ρομπότ γι' αυτό λέγονται και "τελικά στοιχεία δράσης". Το κυρίως σώμα του ρομποτικού βραχίονα αποτελείται από τη βάση, τις αρθρώσεις και τους συνδέσμους. Η βάση είναι στερεωμένη στο περιβάλλον εργασίας του ρομπότ. Η βάση συνδέεται με ζεύγη αρθρώσεων και συνδέσμων τα οποία αποτελούν στην ουσία μια αλυσίδα αρθρώσεων συνδέσμων. Στο τέλος της αλυσίδας αυτής βρίσκεται το εργαλείο τελικής δράσης. Οι σύνδεσμοι είναι στερεά σώματα, που αποτελούν το σκελετό του ρομπότ. Οι αρθρώσεις είναι μηχανισμοί που επιτρέπουν τη σχετική κίνηση μεταξύ των συνδέσμων. Το εργαλείο τελικής δράσης είναι το εργαλείο με το οποίο το ρομπότ εκτελεί εργασίες. Ανάλογα με την εργασία που θα εκτελέσει ο ρομποτικός βραχίονας, προσαρμόζονται σε αυτόν διάφορα εργαλεία τελικής δράσης. Το πιο σύνηθες εργαλείο τελικής δράσης είναι η αρπάγη (Εικόνα 1). Εικόνα 1 Αρπάγη 12 Είναι σημαντικό να σημειωθεί ότι συχνά το εργαλείο τελικής δράσης είναι πακτωμένο σε μεταλλική βάση που απολήγει συνήθως σε κοχλία, ο οποίος
50 προσαρμόζεται στην τελευταία άρθρωση του ρομποτικού βραχίονα. Το εργαλείο τελικής δράσης μαζί με τη βάση στήριξής του σχηματίζουν ενιαίο στερεό σώμα που αποτελεί τον τελευταίο σύνδεσμο του ρομποτικού βραχίονα. Σε πολλές εφαρμογές υπάρχει ένα σημείο του εργαλείου τελικής δράσης, όπως, για παράδειγμα, η μύτη σε ένα κατσαβίδι ή το σημείο ένωσης των δακτύλων μιας αρπάγης, η θέση του οποίου είναι σημαντική για την αποτελεσματική εκτέλεση της εργασίας του ρομποτικού βραχίονα. Το σημείο αυτό ονομάζεται κύριο σημείο του εργαλείου τελικής δράσης. Είναι προφανές ότι η θέση του κύριου σημείου του εργαλείου τελικής δράσης μπορεί να μεταβάλλεται ανάλογα με την εφαρμογή που εκτελεί ο ρομποτικός βραχίονας. Οι σύνδεσμοι καθώς και οι αρθρώσεις αριθμούνται από τη βάση προς το εργαλείο τελικής δράσης. Ενδεικτική απεικόνιση ρομποτικού βραχίονα (βάση, αρθρώσεις, σύνδεσμοι, εργαλείο τελικής δράσης σε μορφή αρπάγης, κύριο σημείο του εργαλείου τελικής δράσης) δίνεται στο παρακάτω σχήμα. ( εικόνα 1.2 ) Στοιχειά ρομποτικού βραχίονα Χώρος Εργασίας Ως χώρος εργασίας ορίζεται ο τρισδιάστατος χώρος τον οποίο μπορεί να σαρώσει η άκρη του ρομποτικού μηχανισμού. Το μέγεθος και η γεωμετρική
51 μορφή του χώρου αυτού εξαρτώνται από την κατασκευαστική δομή του ρομπότ, κάτι που θα γίνει φανερό και στη συνέχεια. Ωφέλιμο Φορτίο Επαναληψιμότητα Ακρίβεια Από τα πιο σημαντικά μεγέθη ενός βιομηχανικού βραχίονα είναι το ωφέλιμο φορτίο, η Επαναληψιμότητα και η ακρίβεια. Πιο συγκεκριμένα τα παραπάνω μεγέθη αναφέρονται στα εξής: Ωφέλιμο Φορτίο: είναι το βάρος που μπορεί να μεταφέρει το άκρο του βραχίονα. Ως σημείο εφαρμογής του βάρους θεωρείται η φλάντζα του καρπού. Το προδιαγραφόμενο αυτό φορτίο δεν είναι σταθερό και εξαρτάται από την ταχύτητα με την οποία πρόκειται να κινηθεί ο καρπός. Επαναληψιμότητα: εκφράζει τη δυνατότητα του βραχίονα να γυρίσει στο ίδιο σημείο μετά από αρκετές επαναλήψεις και δίνεται ως εύρος μέσα στο οποίο ο βραχίονας θα τερματίσει την κίνηση. Η απόκλιση οφείλεται στο ότι κατά τη λειτουργία του το ρομπότ είναι δυνατό να χάσει λίγο από τη μέτρηση της θέσης με αποτέλεσμα να μη μπορεί να επιστρέψει στη συγκεκριμένη θέση μετά από ορισμένους κύκλους λειτουργίας. Δεδομένου ότι στις συνήθεις βιομηχανικές εφαρμογές οι επιθυμητές κινήσεις διδάσκονται στο ρομπότ, αντιλαμβάνεται κανείς τη σπουδαιότητα της επαναληψιμότητας. Ακρίβεια: είναι η ικανότητα του ρομπότ να πηγαίνει ακριβώς στη θέση που του έχει δοθεί εντολή να πάει. Η ακρίβεια εξαρτάται κυρίως από τη διακριτότητα των εξαρτημάτων ελέγχου, τη μηχανολογική σύνδεση των μελών του και το ελάχιστο επιτρεπόμενο σφάλμα που επιβάλλει η ευστάθεια της λειτουργίας των Σέρβο. Η ακρίβεια επηρεάζεται από το είδος και το μέγεθος του εκάστοτε φορτίου, σε αντίθεση με την επαναληψιμότητα, γι αυτό και ορισμένοι κατασκευαστές προδιαγράφουν μόνο την τελευταία. Ταξινόμηση Βραχιόνων βάσει της Γεωμετρικής Διαμόρφωσής τους Ο τύπος και η διαδοχή των αρθρώσεων ενός βραχίονα επιτρέπει την ταξινόμηση των ρομπότ σε διάφορες κατηγορίες, οι οποίες αναφέρονται παρακάτω. Οι αρθρώσεις που μας απασχολούν στο σημείο αυτό είναι οι τρεις πρώτες του βραχίονα και κατά


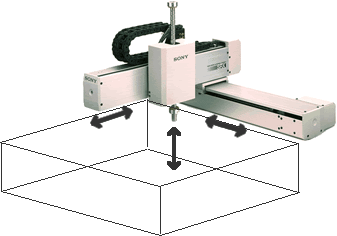
52 συνέπεια εξαιρούνται οι αρθρώσεις του καρπού. Θα έχουμε λοιπόν τα εξής: Καρτεσιανοί Βραχίονες: η καρτεσιανή γεωμετρία υλοποιείται με τρεις διαδοχικές πρισματικές αρθρώσεις. Οι άξονες των αρθρώσεων αυτών είναι ανά δύο κάθετοι μεταξύ τους. Η καρτεσιανή δομή παρέχει μεγάλη δυσκαμψία και σταθερή ακρίβεια σε ολόκληρο το χώρο εργασίας που είναι ένα παραλληλεπίπεδο. Βασικό μειονέκτημα της κατασκευής είναι η μειωμένη επιδεξιότητα κίνησης, λόγω της πρισματικής φύσης των αρθρώσεων. (Χαρακτηριστικές εικόνες καρτεσιανών βραχιόνων απεικονίζονται παρακάτω)..
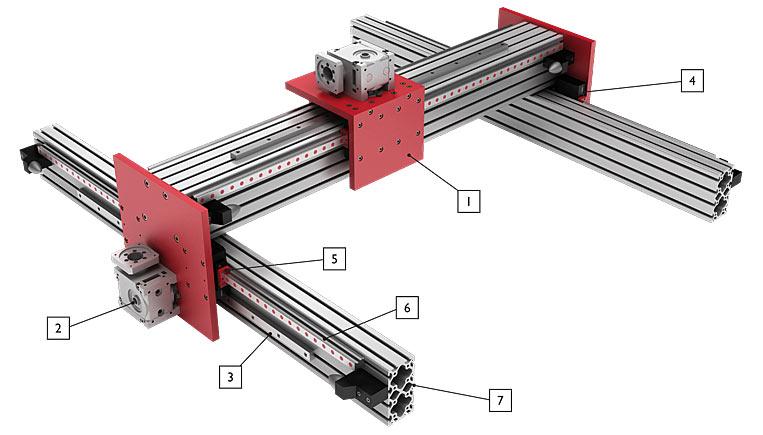
53 Βραχίονες Gantry: Οι βραχίονες Gantry είναι στην ουσία καρτεσιανοί, διαφέρουν όμως από τους τελευταίους στον τρόπο προσέγγισης του αντικειμένου ενδιαφέροντος. Ειδικότερα ο βραχίονας Gantry προσεγγίζει το αντικείμενο από πάνω, τη στιγμή που ένας κλασικός καρτεσιανός βραχίονας προσεγγίζει το αντικείμενο από το πλάι. Άμεσες συνέπειες της διαφοροποίησης αυτής είναι η αύξηση του χώρου εργασίας και της δυσκαμψίας, καθώς επίσης και η δυνατότητα χειρισμού μεγάλων και βαριών αντικειμένων.(χαρακτηριστικές εικόνες βραχιόνων gantry απεικονίζονται παρακάτω)
54
55
56
57 Κυλινδρικοί Βραχίονες: στους κυλινδρικούς βραχίονες η πρώτη πρισματική άρθρωση της καρτεσιανής δομής έχει αντικατασταθεί από μία περιστροφική άρθρωση. Οι συγκεκριμένοι βραχίονες χαρακτηρίζονται από καλή δυσκαμψία, όμως η ακρίβεια της θέσης του καρπού μειώνεται καθώς η οριζόντια μετατόπιση αυξάνεται. Ο χώρος εργασίας στην περίπτωση αυτή είναι τμήμα κυλίνδρου. Σημαντικό μειονέκτημα της συγκεκριμένης γεωμετρίας είναι το ότι ο βραχίονας εισέρχεται στο χώρο εργασίας και τον περιορίζει.,( Χαρακτηριστικές εικόνες κυλινδρικών βραχιόνων απεικονίζονται παρακάτω )
58
59 Σφαιρικοί Βραχίονες: στους βραχίονες αυτούς αντικαθίσταται πλέον και η δεύτερη πρισματική άρθρωση της καρτεσιανής δομής με περιστροφική. Η μηχανολογική πολυπλοκότητα αυξάνει, ενώ η δυσκαμψία μειώνεται. Επιπλέον η ακρίβεια του καρπού μειώνεται με την αύξηση της ακτινικής
60 απόστασης. Ο χώρος εργασίας είναι τμήμα σφαίρας και περιέχει ένα μέρος της βάσης με άμεση συνέπεια τη δυνατότητα χειρισμού αντικειμένων που βρίσκονται στο έδαφος.(χαρακτηριστικές εικόνες σφαιρικών βραχιόνων είναι παρακάτω)
61
62
63 Βραχίονες SCARA: η γεωμετρία SCARA είναι ειδική και περιλαμβάνει δύο περιστροφικές και μία πρισματική άρθρωση τοποθετημένες κατά τέτοιο τρόπο ώστε οι άξονες κίνησης να είναι παράλληλοι μεταξύ τους. Το όνομα SCARA. Το λογισμικό που αναπτύχθηκε προσομοιώνει, σε περιβάλλον VRML, τον τρόπο κίνησης και λειτουργίας ενός πραγματικού ρομποτικού βραχίονα SCARA ενώ, ο χειρισμός του γίνεται μέσω της πλατφόρμας του MATLAB. Το πρωτότυπο του βραχίονα SCARA (ακρωνύμιο Selective Compliant Assembly Robot) εμφανίστηκε το 1978 από τον καθηγητή Hiroshi Makino, στο πανεπιστήμιο Yamanashi στην Ιαπωνία. Η εκπληκτική του απλότητα ήταν ευφυής (παρατηρώντας τον να λειτουργεί, θυμίζει ένα ανθρώπινο βραχίονα), καθώς με λιγότερες κινήσεις μπορούσε να κάνει αποτελεσματικότερα εργασίες συναρμολόγησης, με μεγαλύτερη ταχύτητα και περισσότερη ακρίβεια. Χρησιμοποιήθηκε για εμπορική συναρμολόγηση για πρώτη φορά το 1981, και από τότε συνεχίζει να κατέχει τον καλύτερο συνδυασμό τιμής απόδοσης, όσον αφορά τη συναρμολόγηση με υψηλές ταχύτητες, καθώς έκτοτε η εξέλιξη στην παραγωγή των μικρών ηλεκτρονικών προϊόντων ήταν αλματώδης. Η γεωμετρία του πρωτότυπου
64 βραχίονα SCARA περιλαμβάνει δύο περιστροφικές αρθρώσεις (θ 1, θ 2 ) και μια πρισματική άρθρωση (d 3 ), τοποθετημένες έτσι ώστε οι άξονες των αρθρώσεων να είναι παράλληλοι μεταξύ τους (Εικόνα 1). Οι βραχίονες SCARA έχουν μεγάλη δυσκαμψία σε κατακόρυφη φόρτιση και ελαστικότητα σε οριζόντια, κάτι όμως που τους δίνει μεγάλο πλεονέκτημα σε κινήσεις συναρμολόγησης και πακεταρίσματος (pick-and-place). Εικόνα 1: πρότυπος βραχίονας SCARA Η οικογένεια ρομποτικών βραχιόνων SCARA περιλαμβάνει διάφορες παραλλαγές του πρότυπου βραχίονα, αναλόγως με τις εργασίες που καλείται να επιτελέσει. Έτσι υπάρχουν βραχίονες SCARA για βαριά φορτία, για εξαιρετικά γρήγορες κινήσεις ή για μακρινές αποστάσεις. Στην παρούσα εφαρμογή χρησιμοποιήθηκε το μοντέλο του βραχίονα SCARA E2C351S της εταιρίας Epson (Εικόνα 2.α). Η διαφορά του προαναφερθέν βραχίονα σε σχέση με τον πρότυπο βραχίονα SCARA της εικόνας 1, είναι η ύπαρξη μιας επιπρόσθετης περιστροφικής άρθρωσης (θ 4 ) στον κατακόρυφο άξονα κίνησης της αρπάγης, η οποία προσδίδει μεγαλύτερη ευελιξία στον προσανατολισμό του άκρου του βραχίονα. Έτσι, οι πρώτες δύο αρθρώσεις είναι περιστροφικές και συνδέονται από έναν σύνδεσμο μήκους L 1 = 2.25dm. Ο δεύτερος σύνδεσμος έχει μήκος L 2 = 1.25dm και ενώνει τον άξονα της δεύτερη περιστροφικής με αυτόν της τρίτης (πρισματικής) και της τέταρτης (περιστροφικής) άρθρωσης.
65 Εικόνα 2.α: Ο βραχίονας SCARA E2C351S Εικόνα 2.β:Ο Εικονικός βραχίονας SCARA E2C351S Από τα τεχνικά χαρακτηριστικά του βραχίονα SCARA E2C351S κατασκευάστηκε σε περιβάλλον VRML ένα αντίγραφο του βραχίονα, όπως παρουσιάζεται στην παραπάνω εικόνα 2.β. Στον εικονικό κόσμο προστέθηκε ένας πάγκος εργασίας πάνω στον οποίο είναι δυνατόν να τοποθετηθούν εικονικά αντικείμενα τα οποία είναι δυνατόν να χειριστεί ο βραχίονας. Οι δυνατές τιμές των αρθρώσεων καθώς, το είδος τους, και το μέγεθος των συνδέσμων, είναι τα στοιχεία που καθορίζουν το χώρο εργασίας του ρομπότ, στον οποίο ανήκουν όλα τα σημεία στα οποία μπορεί να φτάσει το άκρο του ρομπότ. Στην εικόνα 3.β παρουσιάζεται ο χώρος εργασίας του βραχίονα όπως αυτός είναι βαθμονομημένος με βάση ένα πλαίσιο συντεταγμένων που υπάρχει στην μία άκρη του τραπεζιού. Οι άξονες x-y-z. του πλαισίου συντεταγμένων του τραπεζιού αντιστοιχούν στον χρωματικό κώδικα RGB (Red-Green-Blue). Η ίδια ακριβώς σύμβαση χρησιμοποιείται για το πλαίσιο συντεταγμένων της αρπάγης και της βάσης του βραχίονα (Εικόνα 3.α). Τέλος, μέσα από το παράθυρο απεικόνισης του βραχίονα, μπορούμε να περιηγηθούμε στον εικονικό κόσμο, με τη βοήθεια του ποντικιού.
66 Εικόνα 3.α Εικόνα 3.β Πλαίσια συντεταγμένων του τραπεζιού, της αρπάγης και της βάσης του βραχίονα, όπως επίσης και ο χώρος εργασίας του βραχίονα στο βαθμονομημένο πλαίσιο του τραπεζιού (η βαθμονόμηση είναι σε dm). ΠΩΣ ΚΑΤΑΣΚΕΥΑΖΕΤΑΙ ΕΝΑΣ ΒΡΑΧΙΟΝΑΣ Αρθρωτός ρομποτικός βραχίονας компьютерная помощь на дому новости Винницы
67 Σχήμα 1 : Αρθρωτός ρομποτικός βραχίονας Ο ρομποτικός αρθρωτός βραχίονας που κατασκευάστηκε αποτελεί μικρογραφία βραχίονα που χρησιμοποιείται στην βιομηχανία. Ορισμένες από τις λειτουργίες που μπορεί να υλοποιήσει είναι: να πραγματοποιεί μεταφορικές εργασίες,να συναρμολογεί συσκευές και μηχανισμούς, να ταξινομεί αποθήκες, να εκτελεί εργασίες όπως μέτρηση της θερμοκρασίας σε θερμό και γενικά επικίνδυνο για τον άνθρωπο περιβάλλον. Η επιλογή για την δημιουργία αυτού του είδους βραχίονα ( αρθρωτού ) έγινε γιατί έχει μεγαλύτερη μηχανική ευελιξία, ταχύτερη κίνηση των μελών του και προσεγγίζει περισσότερο το ανθρώπινο χέρι. Χαρακτηριστικά της κατασκευής Ο βραχίονας έχει 4 βαθμούς ελευθερίας και ο χώρος εργασίας του είναι ημισφαίριο. Οι κινήσεις του κάθε μέλους φαίνονται στο παρακάτω σχήμα.
68 Σχήμα 2 : Κινήσεις κάθε μέλους. Οι κινήσεις του κάθε μέλους είναι: Περιστροφή βάσης: 0ο-180ο Περιστροφή ώμου(shoulder): -10ο - 170ο Περιστροφή αγκώνα(elbow): -45ο - 180ο Περιστροφή καρπού(wrist): 0ο - 180ο Άνοιγμα-κλείσιμο αρπάγης: περίπου 35mm Μέγιστο ύψος βραχίονα: 44cm (μετρημένο από την βάση) Ο βραχίονας κινείται με σέρβο τα οποία προσφέρουν ακρίβεια και ταχύτητα στις κινήσεις. Η επιλογή τους έγινε με κριτήριο την ροπή περιστροφή (torque). Τα χαρακτηρίστηκα του κάθε σέρβο φαίνονται παρακάτω: Futaba s3003(ώμος, shoulder) Speed: V V Torque: V 4.1 6V Dimensions: 40 x 20 x 36mm Weight: 37g Rextor RX-325B(αγκώνας, elbow) Speed: V V Torque: V 6.0 6V Dimensions: 40.6 x 20 x 38.9mm Weight: 39.2g Robbe 10g micro servo(καρπός,wrist) Speed: V V Torque: 4.8V
69 1.20 6V Dimensions: 22.6 x 11.7 x 23.1mm Weight: 10g HXT900 9g (αρπάγη, gripper) Speed: V Torque: V Dimensions: 21 x 12 x 22mm Weight: 9g Τα υλικά που χρησιμοποιήθηκαν είναι πλεξιγκλάς και αλουμίνιο για την βάση και τα μέλη του βραχίονα καθώς βίδες και ντίζες των 2mm, 3mm και 5mm για την στήριξη των σέρβο και την ενίσχυση του βραχίονα. Η κοπή τους έγινε σε C.N.C. μηχάνημα. Ένα βασικό πρόβλημα της κατασκευής ήταν η στήριξη του στρεφόμενου δίσκου της βάσης. Αυτό επιλύθηκε τοποθετώντας στην βάση κυκλικά χάλκινους σωλήνες των 5mm που στο πάνω μέρος τους στερεώνονταν μια μπίλια η οποία επιτρέπει στο δίσκο να περιστρέφεται ελεύθερα και σταθερά. Σχήμα 3 : Μηχανισμός στήριξης στρεφόμενου δίσκου, κάτοψη. Σχήμα 4 : Μηχανισμός στήριξης στρεφόμενου δίσκου, πλάγια όψη.
70 Οι υπόλοιπες αρθρώσεις του Σχήμα 5 : Άρθρωση ώμου (shoulder) Σχήμα 6 : Άρθρωση αγκώνα (elbow) Σχήμα 7 : Άρθρωση καρπού (wrist) Το τελικό εργαλείο δράσης του είναι η αρπάγη ( gripper ). Η λειτουργιά της είναι να συγκρατεί αντικείμενα προς μεταφορά. Η δύναμη, που απαιτείται για να συγκρατεί αντικείμενα παράγεται από σέρβο. Στην αρπάγη είναι στερεωμένος ο αισθητήρας
71 θερμοκρασίας LM35 ( LM35 Precision Centigrade Temperature Sensor, datasheet: Σχήμα 8 : Αρπάγη (gripper) Έλεγχος του ρομποτικού αρθρωτού βραχίονα Ο έλεγχος των σέρβο γίνεται από την πλατφόρμα ανάπτυξης arduino ( ) που ενσωματώνει τον μικροελεγκτή ATMega 328 της Atmel. Τα σέρβο συνδέονται στο arduino μέσο βοηθητικής πλακέτας το κύκλωμα της οποίας φαίνεται παρακάτω. Σχήμα 9 : Κύκλωμα βοηθητικής πλακέτας. Τα (0-5)V του κυκλώματος προέρχονται από τροφοδοτικό ηλεκτρονικού υπολογιστή (0-5V στα 2A). Ο χειρισμός του ρομποτικού βραχίονα και η ένδειξη της θερμοκρασίας από το σημείο μέτρησης πραγματοποιούνται από πρόγραμμα που έχει γραφτεί σε processing (για
72 περισσότερες πληροφορίες, Το πρόγραμμα αποτελείτε από τρία μέρη και το λειτουργικό του περιβάλλον απεικονίζεται στο σχήμα 11. Το joystick που κατευθύνει τον βραχίονα πατώντας τα κουμπιά με τα βέλη. Το simulation που αναγράφονται οι γωνίες που έχει κινηθεί το κάθε σέρβο θεωρώντας θετική φορά την αντιωρολογιακή. Ο τριγωνομετρικός κύκλος (0o είναι η τομή του μοναδιαίου κύκλου με τον οριζόντιο άξονα) αποτελεί το σύστημα μέτρησης (σχήμα10). Σχήμα 10 : Τριγωνομετρικός κύκλος.
73 Έρευνα αγοράς OWI Robotic Arm Edge
74

75 ΓΕΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΒΡΑΧΙΟΝΑ Αυτός ο βραχίονας αποτελεί έναν αρθρωτό βραχίονα και βρέθηκε στον διαδικτυακό ιστότοπο robotstore.com. Ο συγκεκριμένος αρθρωτός βραχίονας κοστίζει 54 ευρώ με Φ.Π.Α και μπορεί να λειτουργήσει και χωρίς το τηλεχειριστήριο του. Επιπλέον αυτός ο βραχίονας λειτουργεί και με πρόγραμμα arduino αποτελείται από 3 αρθρώσεις και έχει βαθμό ελευθερίας κίνησης 2.Τέλος η τιμή του χωρίς το τηλεχειριστήριο του ανέρχεται στα 44 ευρώ. ( ΑΥΤΗ Η ΕΙΚΟΝΑ ΑΠΕΙΚΟΝΙΖΕΙ ΤΙΣ 3 ΑΡΘΡΩΣΕΙΣ ΤΟΥ ΒΡΑΧΙΟΝΑ )
ΕΡΠΥΣΤΡΙΕΣ: ΕΡΕΥΝΑ ΑΓΟΡΑΣ ΕΡΠΥΣΤΡΙΕΣ ΘΕΩΡΙΑ
 ΕΡΠΥΣΤΡΙΕΣ ΕΡΠΥΣΤΡΙΕΣ: ΕΡΕΥΝΑ ΑΓΟΡΑΣ ΕΡΠΥΣΤΡΙΕΣ ΘΕΩΡΙΑ ΘΕΩΡΙΑ Τι είναι οι ερπύστριες Ιστορία τους Πλεονεκτήματα Μειονεκτήματα ROVER 5 CHASSIS MULTI CHASSIS (RESCUE PLATFORM BIG) ΕΡΕΥΝΑ ΑΓΟΡΑΣ KIT TRACKED
ΕΡΠΥΣΤΡΙΕΣ ΕΡΠΥΣΤΡΙΕΣ: ΕΡΕΥΝΑ ΑΓΟΡΑΣ ΕΡΠΥΣΤΡΙΕΣ ΘΕΩΡΙΑ ΘΕΩΡΙΑ Τι είναι οι ερπύστριες Ιστορία τους Πλεονεκτήματα Μειονεκτήματα ROVER 5 CHASSIS MULTI CHASSIS (RESCUE PLATFORM BIG) ΕΡΕΥΝΑ ΑΓΟΡΑΣ KIT TRACKED
Βηµατίζοντα Ροµπότ. Τµήµα Μηχανολογίας Τ.Ε.Ι. Κρήτης
 Βηµατίζοντα Ροµπότ I. ΕΙΣΑΓΩΓΗ Στην φύση παρατηρείται ποικιλία κινήσεων. Για παράδειγµα τα καγκουρό πηδάνε, τα πουλιά πετάνε, ο άνθρωπος περπατάει κ.τ.λ. Για να περπατήσουν όµως τα ζώα χρειάζεται ένας
Βηµατίζοντα Ροµπότ I. ΕΙΣΑΓΩΓΗ Στην φύση παρατηρείται ποικιλία κινήσεων. Για παράδειγµα τα καγκουρό πηδάνε, τα πουλιά πετάνε, ο άνθρωπος περπατάει κ.τ.λ. Για να περπατήσουν όµως τα ζώα χρειάζεται ένας
ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ
 Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
Σχεδιαστικές προδιαγραφές
 Εισαγωγή Τα τελευταία χρόνια, ένα σημαντικό πεδίο δράσης της επιστήμης της Ρομποτικής αφορά στον τομέα της ανάπτυξης και εξέλιξης αυτόνομων οχημάτων επίγειων, εναέριων, πλωτών, υποβρύχιων και διαστημικών.
Εισαγωγή Τα τελευταία χρόνια, ένα σημαντικό πεδίο δράσης της επιστήμης της Ρομποτικής αφορά στον τομέα της ανάπτυξης και εξέλιξης αυτόνομων οχημάτων επίγειων, εναέριων, πλωτών, υποβρύχιων και διαστημικών.
ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ
 ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ 1 ΕΙΣΑΓΩΓΗ 1.1 Ορισµοί και Ιστορικά Στοιχεία Η Ροµποτική είναι εκείνος ο κλάδος της επιστήµης του µηχανικού που ασχολείται µε τη σύλληψη, το σχεδιασµό, την κατασκευή και
ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ 1 ΕΙΣΑΓΩΓΗ 1.1 Ορισµοί και Ιστορικά Στοιχεία Η Ροµποτική είναι εκείνος ο κλάδος της επιστήµης του µηχανικού που ασχολείται µε τη σύλληψη, το σχεδιασµό, την κατασκευή και
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου
 Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου") Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής
 ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
Πτυχιακή Εργασία Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Η Ασύρματη Επικοινωνία, χρησιμοποιώντας
 Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Σχεδιαστικά Προγράμματα Επίπλου
 Σχεδιαστικά Προγράμματα Επίπλου Καθηγήτρια ΦΕΡΦΥΡΗ ΣΩΤΗΡΙΑ Τμήμα ΣΧΕΔΙΑΣΜΟΥ & ΤΕΧΝΟΛΟΓΙΑΣ ΞΥΛΟΥ - ΕΠΙΠΛΟΥ Σχεδιαστικά Προγράμματα Επίπλου Η σχεδίαση με τον παραδοσιακό τρόπο απαιτεί αυξημένο χρόνο, ενώ
Σχεδιαστικά Προγράμματα Επίπλου Καθηγήτρια ΦΕΡΦΥΡΗ ΣΩΤΗΡΙΑ Τμήμα ΣΧΕΔΙΑΣΜΟΥ & ΤΕΧΝΟΛΟΓΙΑΣ ΞΥΛΟΥ - ΕΠΙΠΛΟΥ Σχεδιαστικά Προγράμματα Επίπλου Η σχεδίαση με τον παραδοσιακό τρόπο απαιτεί αυξημένο χρόνο, ενώ
Έργο Δύναμης Έργο σταθερής δύναμης
 Παρατήρηση: Σε όλες τις ασκήσεις του φυλλαδίου τα αντικείμενα θεωρούμε ότι οι δυνάμεις ασκούνται στο κέντρο μάζας των αντικειμένων έτσι ώστε αυτά κινούνται μόνο μεταφορικά, χωρίς να μπορούν να περιστραφούν.
Παρατήρηση: Σε όλες τις ασκήσεις του φυλλαδίου τα αντικείμενα θεωρούμε ότι οι δυνάμεις ασκούνται στο κέντρο μάζας των αντικειμένων έτσι ώστε αυτά κινούνται μόνο μεταφορικά, χωρίς να μπορούν να περιστραφούν.
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ
 ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ 12. Ένας οριζόντιος ομογενής δίσκος ακτίνας μπορεί να περιστρέφεται χωρίς τριβές, γύρω από κατακόρυφο
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ 12. Ένας οριζόντιος ομογενής δίσκος ακτίνας μπορεί να περιστρέφεται χωρίς τριβές, γύρω από κατακόρυφο
RobotArmy Περίληψη έργου
 RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ. Άσκηση 1. (Ροπή αδράνειας - Θεμελιώδης νόμος στροφικής κίνησης)
") ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση. (Ροπή αδράνειας - Θεμελιώδης νόμος στροφικής κίνησης) Ένας ομογενής οριζόντιος δίσκος, μάζας Μ και ακτίνας R, περιστρέφεται γύρω από κατακόρυφο ακλόνητο άξονα z, ο οποίος διέρχεται
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση. (Ροπή αδράνειας - Θεμελιώδης νόμος στροφικής κίνησης) Ένας ομογενής οριζόντιος δίσκος, μάζας Μ και ακτίνας R, περιστρέφεται γύρω από κατακόρυφο ακλόνητο άξονα z, ο οποίος διέρχεται
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ. = 2r, τότε:
 ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση 1. (Διατήρηση της στροφορμής) Η Γη στρέφεται σε ελλειπτική τροχιά γύρω από τον Ήλιο. Το κοντινότερο σημείο στον Ήλιο ονομάζεται Περιήλιο (π) και το πιο απομακρυσμένο Αφήλιο (α).
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση 1. (Διατήρηση της στροφορμής) Η Γη στρέφεται σε ελλειπτική τροχιά γύρω από τον Ήλιο. Το κοντινότερο σημείο στον Ήλιο ονομάζεται Περιήλιο (π) και το πιο απομακρυσμένο Αφήλιο (α).
ΠΑΡΑΡΤΗΜΑ IV. ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΑΡΑΡΤΗΜΑ IV Ασκήσεις για το Robolab
 ΠΑΡΑΡΤΗΜΑ IV Παρακάτω παραθέτουμε μία σειρά ασκήσεων για το Robolab ομαδοποιημένων σε κατηγορίες : Επιμέλεια : Κυριακού Γεώργιος 1 Φύλλο Ασκήσεων (πρόκληση με κινητήρες) ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΑΡΑΡΤΗΜΑ
ΠΑΡΑΡΤΗΜΑ IV Παρακάτω παραθέτουμε μία σειρά ασκήσεων για το Robolab ομαδοποιημένων σε κατηγορίες : Επιμέλεια : Κυριακού Γεώργιος 1 Φύλλο Ασκήσεων (πρόκληση με κινητήρες) ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΑΡΑΡΤΗΜΑ
ΚΡΟΥΣΕΙΣ. γ) Δ 64 J δ) 64%]
![ΚΡΟΥΣΕΙΣ. γ) Δ 64 J δ) 64%]](/thumbs/65/53613594.jpg "ΚΡΟΥΣΕΙΣ. γ) Δ 64 J δ) 64%]") 1. Μικρή σφαίρα Σ1, μάζας 2 kg που κινείται πάνω σε λείο επίπεδο με ταχύτητα 10 m/s συγκρούεται κεντρικά και ελαστικά με ακίνητη σφαίρα Σ2 μάζας 8 kg. Να υπολογίσετε: α) τις ταχύτητες των σωμάτων μετά
1. Μικρή σφαίρα Σ1, μάζας 2 kg που κινείται πάνω σε λείο επίπεδο με ταχύτητα 10 m/s συγκρούεται κεντρικά και ελαστικά με ακίνητη σφαίρα Σ2 μάζας 8 kg. Να υπολογίσετε: α) τις ταχύτητες των σωμάτων μετά
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT. ΚΕΦΑΛΑΙΟ 7ο. Δραστηριότητες για το ΝΧΤ-G και το Robolab
 ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 7ο Δραστηριότητες για το ΝΧΤ-G και το Robolab Α. Αποφυγή εμποδίων Θα επιδιώξουμε να προγραμματίσουμε το όχημα-ρομπότ μας ώστε να είναι σε θέση
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 7ο Δραστηριότητες για το ΝΧΤ-G και το Robolab Α. Αποφυγή εμποδίων Θα επιδιώξουμε να προγραμματίσουμε το όχημα-ρομπότ μας ώστε να είναι σε θέση
Διαγώνισμα Γ Λυκείου Θετικού προσανατολισμού. Διαγώνισμα Μηχανική Στερεού Σώματος. Τετάρτη 12 Απριλίου Θέμα 1ο
 Διαγώνισμα Μηχανική Στερεού Σώματος Τετάρτη 12 Απριλίου 2017 Θέμα 1ο Στις παρακάτω προτάσεις 1.1 1.4 να επιλέξτε την σωστή απάντηση (4 5 = 20 μονάδες ) 1.1. Η γωνιακή επιτάχυνση ενός ομογενούς δίσκου που
Διαγώνισμα Μηχανική Στερεού Σώματος Τετάρτη 12 Απριλίου 2017 Θέμα 1ο Στις παρακάτω προτάσεις 1.1 1.4 να επιλέξτε την σωστή απάντηση (4 5 = 20 μονάδες ) 1.1. Η γωνιακή επιτάχυνση ενός ομογενούς δίσκου που
Αρχιτεκτονική σχεδίαση με ηλεκτρονικό υπολογιστή
 Γ Αρχιτεκτονική σχεδίαση με ηλεκτρονικό υπολογιστή Η χρήση των ηλεκτρονικών υπολογιστών στο τεχνικό σχέδιο, και ιδιαίτερα στο αρχιτεκτονικό, αποτελεί πλέον μία πραγματικότητα σε διαρκή εξέλιξη, που επηρεάζει
Γ Αρχιτεκτονική σχεδίαση με ηλεκτρονικό υπολογιστή Η χρήση των ηλεκτρονικών υπολογιστών στο τεχνικό σχέδιο, και ιδιαίτερα στο αρχιτεκτονικό, αποτελεί πλέον μία πραγματικότητα σε διαρκή εξέλιξη, που επηρεάζει
ΛΥΚΕΙΟ ΑΓΙΟΥ ΣΠΥΡΙΔΩΝΑ ΣΧΟΛΙΚΗ ΧΡΟΝΙΑ 2011-2012 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Β ΛΥΚΕΙΟΥ
 ΛΥΚΕΙΟ ΑΓΙΟΥ ΠΥΡΙΔΩΝΑ ΧΟΛΙΚΗ ΧΡΟΝΙΑ 2011-2012 ΓΡΑΠΤΕ ΠΡΟΑΓΩΓΙΚΕ ΕΞΕΤΑΕΙ ΦΥΙΚΗ ΚΑΤΕΥΘΥΝΗ Β ΛΥΚΕΙΟΥ ΗΜΕΡΟΜΗΝΙΑ: 31-05-2012 ΔΙΑΡΚΕΙΑ: 07.45 10.15 Οδηγίες 1. Το εξεταστικό δοκίμιο αποτελείται από 9 σελίδες.
ΛΥΚΕΙΟ ΑΓΙΟΥ ΠΥΡΙΔΩΝΑ ΧΟΛΙΚΗ ΧΡΟΝΙΑ 2011-2012 ΓΡΑΠΤΕ ΠΡΟΑΓΩΓΙΚΕ ΕΞΕΤΑΕΙ ΦΥΙΚΗ ΚΑΤΕΥΘΥΝΗ Β ΛΥΚΕΙΟΥ ΗΜΕΡΟΜΗΝΙΑ: 31-05-2012 ΔΙΑΡΚΕΙΑ: 07.45 10.15 Οδηγίες 1. Το εξεταστικό δοκίμιο αποτελείται από 9 σελίδες.
ΦΥΣΙΚΗ Ο.Π Γ ΛΥΚΕΙΟΥ 22 / 04 / 2018
 Γ ΛΥΚΕΙΟΥ 22 / 04 / 2018 ΦΥΣΙΚΗ Ο.Π ΘΕΜΑ Α Α1. Μία ηχητική πηγή που εκπέμπει ήχο συχνότητας κινείται με σταθερή ταχύτητα πλησιάζοντας ακίνητο παρατηρητή, ενώ απομακρύνεται από άλλο ακίνητο παρατηρητή.
Γ ΛΥΚΕΙΟΥ 22 / 04 / 2018 ΦΥΣΙΚΗ Ο.Π ΘΕΜΑ Α Α1. Μία ηχητική πηγή που εκπέμπει ήχο συχνότητας κινείται με σταθερή ταχύτητα πλησιάζοντας ακίνητο παρατηρητή, ενώ απομακρύνεται από άλλο ακίνητο παρατηρητή.
ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ Ομάδας Προσανατολισμού Θετικών Σπουδών Τζιόλας Χρήστος. και Α 2
 ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ Ομάδας Προσανατολισμού Θετικών Σπουδών Τζιόλας Χρήστος 1. Ένα σύστημα ελατηρίου σταθεράς = 0 π N/ και μάζας = 0, g τίθεται σε εξαναγκασμένη ταλάντωση. Αν είναι Α 1 και Α τα πλάτη της ταλάντωσης
ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ Ομάδας Προσανατολισμού Θετικών Σπουδών Τζιόλας Χρήστος 1. Ένα σύστημα ελατηρίου σταθεράς = 0 π N/ και μάζας = 0, g τίθεται σε εξαναγκασμένη ταλάντωση. Αν είναι Α 1 και Α τα πλάτη της ταλάντωσης
ΚΕΦΑΛΑΙΟ 3: ΔΥΝΑΜΕΙΣ Μέρος 1ο
 ΚΕΦΑΛΑΙΟ 3: ΔΥΝΑΜΕΙΣ Μέρος 1ο Φυσική Β Γυμνασίου Βασίλης Γαργανουράκης http://users.sch.gr/vgargan Εισαγωγή Στο προηγούμενο κεφάλαιο μελετήσαμε τις κινήσεις των σωμάτων. Το επόμενο βήμα είναι να αναζητήσουμε
ΚΕΦΑΛΑΙΟ 3: ΔΥΝΑΜΕΙΣ Μέρος 1ο Φυσική Β Γυμνασίου Βασίλης Γαργανουράκης http://users.sch.gr/vgargan Εισαγωγή Στο προηγούμενο κεφάλαιο μελετήσαμε τις κινήσεις των σωμάτων. Το επόμενο βήμα είναι να αναζητήσουμε
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013
 ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013 ΘΕΜΑ Α Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1- Α4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013 ΘΕΜΑ Α Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1- Α4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή
8 η ΕΝΟΤΗΤΑ Ανυψωτικά μηχανήματα
 ΣΧΟΛΗ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΜΠ ΔΟΜΙΚΕΣ ΜΗΧΑΝΕΣ & ΚΑΤΑΣΚΕΥΑΣΤΙΚΕΣ ΜΕΘΟΔΟΙ 8 η ΕΝΟΤΗΤΑ Ανυψωτικά μηχανήματα Διδάσκων: Σ. Λαμπρόπουλος Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες Χρήσης Creative
ΣΧΟΛΗ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΜΠ ΔΟΜΙΚΕΣ ΜΗΧΑΝΕΣ & ΚΑΤΑΣΚΕΥΑΣΤΙΚΕΣ ΜΕΘΟΔΟΙ 8 η ΕΝΟΤΗΤΑ Ανυψωτικά μηχανήματα Διδάσκων: Σ. Λαμπρόπουλος Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες Χρήσης Creative
Η Καινοτομία συναντά την Αμυντική Βιομηχανία
 Η Καινοτομία συναντά την Αμυντική Βιομηχανία Διημερίδα Καινοτομίας 8 & 9 Μαρτίου 2018 Β ΠΑΠΑΝΤΩΝΙΟΥ Από το 1992 η είναι μια εταιρεία εξειδικευμένη στην ρομποτική και τον αυτοματισμό. Μέχρι σήμερα έχει
Η Καινοτομία συναντά την Αμυντική Βιομηχανία Διημερίδα Καινοτομίας 8 & 9 Μαρτίου 2018 Β ΠΑΠΑΝΤΩΝΙΟΥ Από το 1992 η είναι μια εταιρεία εξειδικευμένη στην ρομποτική και τον αυτοματισμό. Μέχρι σήμερα έχει
2. Μια μοτοσυκλέτα τρέχει με ταχύτητα 108 km/h. α) Σε πόσο χρόνο διανύει τα 120 m; β) Πόσα μέτρα διανύει σε 5 s;
 Σε πόσο χρόνο διανύει τα 120 m; β) Πόσα μέτρα διανύει σε 5 s;") 1. Αυτοκίνητο κινείται σε ευθύγραμμο δρόμο με σταθερή φορά και το ταχύμετρο του (κοντέρ) δείχνει συνεχώς 36 km/h. α) Τι είδους κίνηση κάνει το αυτοκίνητο; β) Να μετατρέψετε την ταχύτητα του αυτοκινήτου
1. Αυτοκίνητο κινείται σε ευθύγραμμο δρόμο με σταθερή φορά και το ταχύμετρο του (κοντέρ) δείχνει συνεχώς 36 km/h. α) Τι είδους κίνηση κάνει το αυτοκίνητο; β) Να μετατρέψετε την ταχύτητα του αυτοκινήτου
Κεφάλαιο 6β. Περιστροφή στερεού σώματος γύρω από σταθερό άξονα
 Κεφάλαιο 6β Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Ροπή Ροπή ( ) είναι η τάση που έχει μια δύναμη να περιστρέψει ένα σώμα γύρω από κάποιον άξονα. d είναι η κάθετη απόσταση του άξονα περιστροφής
Κεφάλαιο 6β Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Ροπή Ροπή ( ) είναι η τάση που έχει μια δύναμη να περιστρέψει ένα σώμα γύρω από κάποιον άξονα. d είναι η κάθετη απόσταση του άξονα περιστροφής
Γ ΛΥΚΕΙΟΥ ΟΙ ΚΙΝΗΣΕΙΣ ΤΩΝ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ
 Όποτε χρησιμοποιείτε το σταυρό ή το κλειδί της εργαλειοθήκης σας για να ξεσφίξετε τα μπουλόνια ενώ αντικαθιστάτε ένα σκασμένο λάστιχο αυτοκινήτου, ολόκληρος ο τροχός αρχίζει να στρέφεται και θα πρέπει
Όποτε χρησιμοποιείτε το σταυρό ή το κλειδί της εργαλειοθήκης σας για να ξεσφίξετε τα μπουλόνια ενώ αντικαθιστάτε ένα σκασμένο λάστιχο αυτοκινήτου, ολόκληρος ο τροχός αρχίζει να στρέφεται και θα πρέπει
[50m/s, 2m/s, 1%, -10kgm/s, 1000N]
![[50m/s, 2m/s, 1%, -10kgm/s, 1000N]](/thumbs/64/51024975.jpg "[50m/s, 2m/s, 1%, -10kgm/s, 1000N]") ΚΕΦΑΛΑΙΟ 5 ο - ΜΕΡΟΣ Α : ΚΡΟΥΣΕΙΣ ΕΝΟΤΗΤΑ 1: ΚΡΟΥΣΕΙΣ 1. Σώμα ηρεμεί σε οριζόντιο επίπεδο. Βλήμα κινούμενο οριζόντια με ταχύτητα μέτρου και το με ταχύτητα, διαπερνά το σώμα χάνοντας % της κινητικής του
ΚΕΦΑΛΑΙΟ 5 ο - ΜΕΡΟΣ Α : ΚΡΟΥΣΕΙΣ ΕΝΟΤΗΤΑ 1: ΚΡΟΥΣΕΙΣ 1. Σώμα ηρεμεί σε οριζόντιο επίπεδο. Βλήμα κινούμενο οριζόντια με ταχύτητα μέτρου και το με ταχύτητα, διαπερνά το σώμα χάνοντας % της κινητικής του
Β ΛΥΚΕΙΟΥ - ΓΕΝΙΚΕΣ ΑΣΚΗΣΕΙΣ
 Β ΛΥΚΕΙΟΥ - ΓΕΝΙΚΕΣ ΑΣΚΗΣΕΙΣ 1. Ποια η σημασία των παρακάτω μεγεθών; Αναφερόμαστε στην κυκλική κίνηση. Α. Επιτρόχια επιτάχυνση: Β. Κεντρομόλος επιτάχυνση: Γ. Συχνότητα: Δ. Περίοδος: 2. Ένας τροχός περιστρέφεται
Β ΛΥΚΕΙΟΥ - ΓΕΝΙΚΕΣ ΑΣΚΗΣΕΙΣ 1. Ποια η σημασία των παρακάτω μεγεθών; Αναφερόμαστε στην κυκλική κίνηση. Α. Επιτρόχια επιτάχυνση: Β. Κεντρομόλος επιτάχυνση: Γ. Συχνότητα: Δ. Περίοδος: 2. Ένας τροχός περιστρέφεται
Τεχνολογία Πολυμέσων. Ενότητα 3: Επεξεργασία 3D γραφικών & 3D Animation - Blender Νικολάου Σπύρος Τμήμα Μηχανικών Πληροφορικής ΤΕ
 Τεχνολογία Πολυμέσων Ενότητα 3: Επεξεργασία 3D γραφικών & 3D Animation - Blender Νικολάου Σπύρος Τμήμα Μηχανικών Πληροφορικής ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
Τεχνολογία Πολυμέσων Ενότητα 3: Επεξεργασία 3D γραφικών & 3D Animation - Blender Νικολάου Σπύρος Τμήμα Μηχανικών Πληροφορικής ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 2 ο Κινητήρες και Δομή Επανάληψης Σημειώσεις Καθηγητή Τώρα θα δούμε πως μπορούν να τροποποιηθούν τα προγράμματα
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 2 ο Κινητήρες και Δομή Επανάληψης Σημειώσεις Καθηγητή Τώρα θα δούμε πως μπορούν να τροποποιηθούν τα προγράμματα
Φύλλα εργασίας. MicroWorlds Pro. Πολυμεσικές Εφαρμογές με την χρήση της γλώσσας LOGO Στο Γυμνάσιο. Β. Χ. Χρυσοχοΐδης
 Φύλλα εργασίας MicroWorlds Pro Πολυμεσικές Εφαρμογές με την χρήση της γλώσσας LOGO Στο Γυμνάσιο Β. Χ. Χρυσοχοΐδης Πρόεδρος Συλλόγου Εκπαιδευτικών Πληροφορικής Φλώρινας 2 «Σχεδίαση και ανάπτυξη δραστηριοτήτων
Φύλλα εργασίας MicroWorlds Pro Πολυμεσικές Εφαρμογές με την χρήση της γλώσσας LOGO Στο Γυμνάσιο Β. Χ. Χρυσοχοΐδης Πρόεδρος Συλλόγου Εκπαιδευτικών Πληροφορικής Φλώρινας 2 «Σχεδίαση και ανάπτυξη δραστηριοτήτων
ΕΝΩΣΗ ΚΥΠΡΙΩΝ ΦΥΣΙΚΩΝ
 ΕΝΩΣΗ ΚΥΠΡΙΩΝ ΦΥΣΙΚΩΝ 28 Η ΠΑΓΚΥΠΡΙΑ ΟΛΥΜΠΙΑΔΑ ΦΥΣΙΚΗΣ Β ΛΥΚΕΙΟΥ Κυριακή, 13 Απριλίου, 2014 Ώρα: 10:00-13:00 Παρακαλώ διαβάστε πρώτα τα πιο κάτω, πριν απαντήσετε οποιαδήποτε ερώτηση. Γενικές οδηγίες: 1.
ΕΝΩΣΗ ΚΥΠΡΙΩΝ ΦΥΣΙΚΩΝ 28 Η ΠΑΓΚΥΠΡΙΑ ΟΛΥΜΠΙΑΔΑ ΦΥΣΙΚΗΣ Β ΛΥΚΕΙΟΥ Κυριακή, 13 Απριλίου, 2014 Ώρα: 10:00-13:00 Παρακαλώ διαβάστε πρώτα τα πιο κάτω, πριν απαντήσετε οποιαδήποτε ερώτηση. Γενικές οδηγίες: 1.
ΓΑΛΑΝΑΚΗΣ ΓΙΩΡΓΟΣ ΔΗΜΗΤΡΑΚΟΠΟΥΛΟΣ ΜΙΧΑΛΗΣ
 ΘΕΜΑ Α Στις ερωτήσεις -4 να γράψετε στο τετράδιό σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί η σωστή απάντηση. Ένας ακίνητος τρoχός δέχεται σταθερή συνιστάμενη ροπή ως προς άξονα διερχόμενο
ΘΕΜΑ Α Στις ερωτήσεις -4 να γράψετε στο τετράδιό σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί η σωστή απάντηση. Ένας ακίνητος τρoχός δέχεται σταθερή συνιστάμενη ροπή ως προς άξονα διερχόμενο
Μηχανική Στερεού Ασκήσεις Εμπέδωσης
 Μηχανική Στερεού Ασκήσεις Εμπέδωσης Όπου χρειάζεται, θεωρείστε δεδομένο ότι g = 10m/s 2. 1. Μία ράβδος ΟΑ, μήκους L = 0,5m, περιστρέφεται γύρω από σταθερό άξονα που περνάει από το ένα άκρο της Ο, με σταθερή
Μηχανική Στερεού Ασκήσεις Εμπέδωσης Όπου χρειάζεται, θεωρείστε δεδομένο ότι g = 10m/s 2. 1. Μία ράβδος ΟΑ, μήκους L = 0,5m, περιστρέφεται γύρω από σταθερό άξονα που περνάει από το ένα άκρο της Ο, με σταθερή
Θέματα Παγκύπριων Εξετάσεων
 Θέματα Παγκύπριων Εξετάσεων 2009-2015 Σελίδα 1 από 13 Μηχανική Στερεού Σώματος 1. Στο πιο κάτω σχήμα φαίνονται δύο όμοιες πλατφόρμες οι οποίες μπορούν να περιστρέφονται χωρίς τριβές, γύρω από κατακόρυφο
Θέματα Παγκύπριων Εξετάσεων 2009-2015 Σελίδα 1 από 13 Μηχανική Στερεού Σώματος 1. Στο πιο κάτω σχήμα φαίνονται δύο όμοιες πλατφόρμες οι οποίες μπορούν να περιστρέφονται χωρίς τριβές, γύρω από κατακόρυφο
Μέτρηση μηκών και ακτίνων καμπυλότητας σφαιρικών επιφανειών
 Μ7 Μέτρηση μηκών και ακτίνων καμπυλότητας σφαιρικών επιφανειών 1. Σκοπός Τα διαστημόμετρα, τα μικρόμετρα και τα σφαιρόμετρα είναι όργανα που χρησιμοποιούνται για την μέτρηση της διάστασης του μήκους, του
Μ7 Μέτρηση μηκών και ακτίνων καμπυλότητας σφαιρικών επιφανειών 1. Σκοπός Τα διαστημόμετρα, τα μικρόμετρα και τα σφαιρόμετρα είναι όργανα που χρησιμοποιούνται για την μέτρηση της διάστασης του μήκους, του
Kιβώτιο ταχυτήτων διπλού συμπλέκτη Porsche Doppelkupplung. Η ιστορία επιτυχίας του PDK: ένα bestseller σε μόλις πέντε χρόνια
 Kιβώτιο ταχυτήτων διπλού συμπλέκτη Porsche Doppelkupplung Η ιστορία επιτυχίας του PDK: ένα bestseller σε μόλις πέντε χρόνια Στουτγάρδη. Στη δεκαετία του '80 η Porsche ανέπτυξε μια παγκόσμια τεχνολογική
Kιβώτιο ταχυτήτων διπλού συμπλέκτη Porsche Doppelkupplung Η ιστορία επιτυχίας του PDK: ένα bestseller σε μόλις πέντε χρόνια Στουτγάρδη. Στη δεκαετία του '80 η Porsche ανέπτυξε μια παγκόσμια τεχνολογική
Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα.
 ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ ΣΤΕΡΕΟΎ ΣΏΜΑΤΟΣ Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα. Ένα υλικό σημείο μπορεί να κάνει μόνο μεταφορική
ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ ΣΤΕΡΕΟΎ ΣΏΜΑΤΟΣ Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα. Ένα υλικό σημείο μπορεί να κάνει μόνο μεταφορική
ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ.
 ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΦΥΣΙΚΗ Ο.Π. Αν η κρούση της σφαίρας με τον κατακόρυφο τοίχο είναι ελαστική, τότε ισχύει:. = και =.. < και =. γ. < και <. δ. = και <.
 Γ ΛΥΚΕΙΟΥ 22 / 04 / 2018 ΦΥΣΙΚΗ Ο.Π ΘΕΜΑ Α Α1. Μία ηχητική πηγή που εκπέμπει ήχο συχνότητας κινείται με σταθερή ταχύτητα πλησιάζοντας ακίνητο παρατηρητή, ενώ απομακρύνεται από άλλο ακίνητο παρατηρητή.
Γ ΛΥΚΕΙΟΥ 22 / 04 / 2018 ΦΥΣΙΚΗ Ο.Π ΘΕΜΑ Α Α1. Μία ηχητική πηγή που εκπέμπει ήχο συχνότητας κινείται με σταθερή ταχύτητα πλησιάζοντας ακίνητο παρατηρητή, ενώ απομακρύνεται από άλλο ακίνητο παρατηρητή.
Ταυτότητα εκπαιδευτικού σεναρίου. Γνώσεις και πρότερες ιδέες των μαθητών. Σκοπός και στόχοι
 Τίτλος: Υποδοχή εξωγήινων Ταυτότητα εκπαιδευτικού σεναρίου Σύντομη περιγραφή: Οι μαθητές και οι μαθήτριες καλούνται να κάνουν μια απλή κατασκευή με την χρήση του εκπαιδευτικού πακέτου Lego NXT Mindstorms.
Τίτλος: Υποδοχή εξωγήινων Ταυτότητα εκπαιδευτικού σεναρίου Σύντομη περιγραφή: Οι μαθητές και οι μαθήτριες καλούνται να κάνουν μια απλή κατασκευή με την χρήση του εκπαιδευτικού πακέτου Lego NXT Mindstorms.
Εισαγωγή στην Ρομποτική
 Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
ΘΕΜΑ: «Tα υβριδικά αυτοκίνητα»
 ΘΕΜΑ: «Tα υβριδικά αυτοκίνητα» Καράμπελα Καράπαπα Επιμέλεια εργασίας: Ζωή Ιωάννα ΤΙ ΕΙΝΑΙ ΤΟ ΥΒΡΙΔΙΚΟ ΑΥΤΟΚΙΝΗΤΟ; Αυτός ο τύπος αυτοκινήτου ονομάζεται έτσι επειδή συνδυάζει δύο μορφές ενέργειας για να
ΘΕΜΑ: «Tα υβριδικά αυτοκίνητα» Καράμπελα Καράπαπα Επιμέλεια εργασίας: Ζωή Ιωάννα ΤΙ ΕΙΝΑΙ ΤΟ ΥΒΡΙΔΙΚΟ ΑΥΤΟΚΙΝΗΤΟ; Αυτός ο τύπος αυτοκινήτου ονομάζεται έτσι επειδή συνδυάζει δύο μορφές ενέργειας για να
Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2. Προγραμματισμός Φυσικών Συστημάτων. Συστήματα Πραγματικών Εφαρμογών. Νέα Ψηφιακά Αντικείμενα
 Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Νόμοι των Δυνάμεων 1ος & 3ος Νόμος Νεύτωνα
 Νόμοι των Δυνάμεων 1ος & 3ος Νόμος Νεύτωνα 1. Το κιβώτιο του σχήματος ισορροπεί πάνω σε οριζόντιο επίπεδο. Η μάζα του είναι m =5kg. Α. Σχεδίασε τις δυνάμεις που δέχεται το κιβώτιο, από την γη και από το
Νόμοι των Δυνάμεων 1ος & 3ος Νόμος Νεύτωνα 1. Το κιβώτιο του σχήματος ισορροπεί πάνω σε οριζόντιο επίπεδο. Η μάζα του είναι m =5kg. Α. Σχεδίασε τις δυνάμεις που δέχεται το κιβώτιο, από την γη και από το
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Βασικές Έννοιες Μέχρι στιγμής αντιμετωπίζαμε κάθε σώμα που μελετούσαμε την κίνηση του ως υλικό
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Βασικές Έννοιες Μέχρι στιγμής αντιμετωπίζαμε κάθε σώμα που μελετούσαμε την κίνηση του ως υλικό
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΑΥΕΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΑΠΑΝΤΗΣΕΙΣ Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014
 ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014") ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΑΥΕΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΑΠΑΝΤΗΣΕΙΣ Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/04 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΑΥΕΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΑΠΑΝΤΗΣΕΙΣ Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/04 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3
 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 3 ο : ΣΤΡΟΦΕΣ Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Πώς να στρίβετε το robot ένα προκαθορισμένο αριθμό μοιρών 2.
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 3 ο : ΣΤΡΟΦΕΣ Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Πώς να στρίβετε το robot ένα προκαθορισμένο αριθμό μοιρών 2.
ΣΤΟΙΧΕΙΑ ΕΚΠΑΙΔΕΥΤΙΚΟΥ
 ΕΡΕΥΝΗΤΙΚΗ ΕΡΓΑΣΙΑ ΣΤΗΝ ΤΕΧΝΟΛΟΓΙΑ ΣΥΝΟΠΤΙΚΗ ΠΕΡΙΓΡΑΦΗ ΠΡΟΤΑΣΗΣ ΣΤΟΙΧΕΙΑ ΕΚΠΑΙΔΕΥΤΙΚΟΥ ΟΝΟΜΑΤΕΠΩΝΥΜΟ ΑΓΓΕΛΟΠΟΥΛΟΣ ΓΕΩΡΓΙΟΣ ΕΙΔΙΚΟΤΗΤΑ ΠΕ1204 1. ΠΕΡΙΓΡΑΦΗ 1.1 ΤΙΤΛΟΣ ΕΡΕΥΝΗΤΙΚΗΣ ΕΡΓΑΣΙΑΣ Μέτρηση μήκους,
ΕΡΕΥΝΗΤΙΚΗ ΕΡΓΑΣΙΑ ΣΤΗΝ ΤΕΧΝΟΛΟΓΙΑ ΣΥΝΟΠΤΙΚΗ ΠΕΡΙΓΡΑΦΗ ΠΡΟΤΑΣΗΣ ΣΤΟΙΧΕΙΑ ΕΚΠΑΙΔΕΥΤΙΚΟΥ ΟΝΟΜΑΤΕΠΩΝΥΜΟ ΑΓΓΕΛΟΠΟΥΛΟΣ ΓΕΩΡΓΙΟΣ ΕΙΔΙΚΟΤΗΤΑ ΠΕ1204 1. ΠΕΡΙΓΡΑΦΗ 1.1 ΤΙΤΛΟΣ ΕΡΕΥΝΗΤΙΚΗΣ ΕΡΓΑΣΙΑΣ Μέτρηση μήκους,
αξιοποίηση των ΤΠΕ: Η logo στη διδακτική διδακτική πράξη
 Παιδαγωγική αξιοποίηση Δρ. Ι. Μπέλλου, Σχ αξιοποίηση των ΤΠΕ: Η logo στη διδακτική διδακτική πράξη Μια προσέγγιση για τη Γ Γυμνασίου Σχ. Σύμβουλος ΠΕ19 Δρ. Ιωάννα Μπέλλου Σχ. Σύμβουλος ΠΕ19 Μια διδακτική
Παιδαγωγική αξιοποίηση Δρ. Ι. Μπέλλου, Σχ αξιοποίηση των ΤΠΕ: Η logo στη διδακτική διδακτική πράξη Μια προσέγγιση για τη Γ Γυμνασίου Σχ. Σύμβουλος ΠΕ19 Δρ. Ιωάννα Μπέλλου Σχ. Σύμβουλος ΠΕ19 Μια διδακτική
ΑΣΚΗΣΕΙΣ ΕΠΑΝΑΛΗΨΗΣ. Δίνεται ότι η ροπή αδράνειας του δίσκου ως προς τον άξονα Κ είναι Ι= M R
 ΑΣΚΗΣΕΙΣ ΕΠΑΝΑΛΗΨΗΣ 1 Η ράβδος ΟΑ του σχήματος μπορεί να στρέφεται γύρω από τον άξονα z z χωρίς τριβές Tη στιγμή t=0 δέχεται την εφαπτομενική δύναμη F σταθερού μέτρου 0 Ν, με φορά όπως φαίνεται στο σχήμα
ΑΣΚΗΣΕΙΣ ΕΠΑΝΑΛΗΨΗΣ 1 Η ράβδος ΟΑ του σχήματος μπορεί να στρέφεται γύρω από τον άξονα z z χωρίς τριβές Tη στιγμή t=0 δέχεται την εφαπτομενική δύναμη F σταθερού μέτρου 0 Ν, με φορά όπως φαίνεται στο σχήμα
ΕΝΩΣΗ ΚΥΠΡΙΩΝ ΦΥΣΙΚΩΝ
 ΕΝΩΣΗ ΚΥΠΡΙΩΝ ΦΥΣΙΚΩΝ 5 Η ΠΑΓΚΥΠΡΙΑ ΟΛΥΜΠΙΑ Α ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ (Πρώτη Φάση) Κυριακή, 6 Ιανουαρίου, Παρακαλώ διαβάστε πρώτα τα πιο κάτω, πριν απαντήσετε οποιαδήποτε ερώτηση Γενικές Οδηγίες: ) Είναι πολύ
ΕΝΩΣΗ ΚΥΠΡΙΩΝ ΦΥΣΙΚΩΝ 5 Η ΠΑΓΚΥΠΡΙΑ ΟΛΥΜΠΙΑ Α ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ (Πρώτη Φάση) Κυριακή, 6 Ιανουαρίου, Παρακαλώ διαβάστε πρώτα τα πιο κάτω, πριν απαντήσετε οποιαδήποτε ερώτηση Γενικές Οδηγίες: ) Είναι πολύ
7. Ένα σώμα εκτελεί Α.Α.Τ. Η σταθερά επαναφοράς συστήματος είναι.
 ΚΕΦΑΛΑΙΟ 1 ο : ΜΗΧΑΝΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ΕΝΟΤΗΤΑ 1.2: ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ (ΕΝΕΡΓΕΙΑΚΗ ΠΡΟΣΕΓΓΙΣΗ, ΑΡΧΙΚΗ ΦΑΣΗ, ΣΥΣΤΗΜΑ ΕΛΑΤΗΡΙΟΥ ΣΩΜΑΤΟΣ, ΟΡΜΗ) 6α. Σφαίρα μάζας ισορροπεί δεμένη στο πάνω άκρο κατακόρυφου
ΚΕΦΑΛΑΙΟ 1 ο : ΜΗΧΑΝΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ΕΝΟΤΗΤΑ 1.2: ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ (ΕΝΕΡΓΕΙΑΚΗ ΠΡΟΣΕΓΓΙΣΗ, ΑΡΧΙΚΗ ΦΑΣΗ, ΣΥΣΤΗΜΑ ΕΛΑΤΗΡΙΟΥ ΣΩΜΑΤΟΣ, ΟΡΜΗ) 6α. Σφαίρα μάζας ισορροπεί δεμένη στο πάνω άκρο κατακόρυφου
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ
 ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 3 ο ΔΙΑΓΩΝΙΣΜΑ ΘΕΜΑΤΑ ΘΕΜΑ Α Στις ημιτελείς προτάσεις 1-4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση,
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 3 ο ΔΙΑΓΩΝΙΣΜΑ ΘΕΜΑΤΑ ΘΕΜΑ Α Στις ημιτελείς προτάσεις 1-4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση,
ΛΥΚΕΙΟ ΑΓΙΟΥ ΣΠΥΡΙΔΩΝΑ ΣΧΟΛΙΚΗ ΧΡΟΝΙΑ ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΙΟΥ ΤΑΞΗ: Β ΗΜΕΡ.: 31/05/2011
 ΛΥΚΕΙΟ ΙΟΥ ΣΠΥΡΙΔΩΝ ΣΧΟΛΙΚΗ ΧΡΟΝΙ 2010 2011 ΡΠΤΕΣ ΠΡΟΩΙΚΕΣ ΕΞΕΤΣΕΙΣ ΜΙΟΥ ΤΞΗ: ΗΜΕΡ.: 31/05/2011 ΜΘΗΜ: ΦΥΣΙΚΗ ΚΤΕΥΘΥΝΣΗΣ ΔΙΡΚΕΙ: 2,5 ώρες Οδηγίες: α) Το εξεταστικό δοκίμιο αποτελείται από 2 μέρη, 8 σελίδες
ΛΥΚΕΙΟ ΙΟΥ ΣΠΥΡΙΔΩΝ ΣΧΟΛΙΚΗ ΧΡΟΝΙ 2010 2011 ΡΠΤΕΣ ΠΡΟΩΙΚΕΣ ΕΞΕΤΣΕΙΣ ΜΙΟΥ ΤΞΗ: ΗΜΕΡ.: 31/05/2011 ΜΘΗΜ: ΦΥΣΙΚΗ ΚΤΕΥΘΥΝΣΗΣ ΔΙΡΚΕΙ: 2,5 ώρες Οδηγίες: α) Το εξεταστικό δοκίμιο αποτελείται από 2 μέρη, 8 σελίδες
2/4/2010. ρ. Φασουλάς Ιωάννης. Απαιτούµενες γνώσεις: Ανάγκη εκπαίδευσης των φοιτητών στον προγραµµατισµό και λειτουργία των βιοµηχανικών ροµπότ
 Τµήµα Μηχανολογίας Τ.Ε.Ι. Κρήτης ΕΚΠΑΙ ΕΥΤΙΚΟ ΛΟΓΙΣΜΙΚΟ ΓΙΑ ΤΟΝ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟ ΕΝΟΣ ΕΙΚΟΝΙΚΟΥ ΡΟΜΠΟΤΙΚΟΥ ΒΡΑΧΙΟΝΑ ΤΥΠΟΥ SCARA ρ. Φασουλάς Ιωάννης Η Ροµ οτική στις σύγχρονες βιοµηχανικές µονάδες αραγωγής
Τµήµα Μηχανολογίας Τ.Ε.Ι. Κρήτης ΕΚΠΑΙ ΕΥΤΙΚΟ ΛΟΓΙΣΜΙΚΟ ΓΙΑ ΤΟΝ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟ ΕΝΟΣ ΕΙΚΟΝΙΚΟΥ ΡΟΜΠΟΤΙΚΟΥ ΒΡΑΧΙΟΝΑ ΤΥΠΟΥ SCARA ρ. Φασουλάς Ιωάννης Η Ροµ οτική στις σύγχρονες βιοµηχανικές µονάδες αραγωγής
[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]
![[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]](/thumbs/61/46095927.jpg "[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]") ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 5: ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΕΡΓΟ ΔΥΝΑΜΗΣ ΣΤΗ ΣΤΡΟΦΙΚΗ ΚΙΝΗΣΗ 34. Μία κατακόρυφη ράβδος μάζας μήκους, μπορεί να περιστρέφεται στο κατακόρυφο επίπεδο γύρω από
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 5: ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΕΡΓΟ ΔΥΝΑΜΗΣ ΣΤΗ ΣΤΡΟΦΙΚΗ ΚΙΝΗΣΗ 34. Μία κατακόρυφη ράβδος μάζας μήκους, μπορεί να περιστρέφεται στο κατακόρυφο επίπεδο γύρω από
Εισαγωγή στη Ρομποτική και τον Προγραμματισμό με τη χρήση του ρομπότ Thymio & του λογισμικού Aseba
 5 ο Πανελλήνιο Επιστημονικό Συνέδριο Ένταξη και Χρήση των ΤΠΕ στην Εκπαιδευτική Διαδικασία Εισαγωγή στη Ρομποτική και τον Προγραμματισμό με τη χρήση του ρομπότ Thymio & του λογισμικού Aseba Κόμης Βασίλης
5 ο Πανελλήνιο Επιστημονικό Συνέδριο Ένταξη και Χρήση των ΤΠΕ στην Εκπαιδευτική Διαδικασία Εισαγωγή στη Ρομποτική και τον Προγραμματισμό με τη χρήση του ρομπότ Thymio & του λογισμικού Aseba Κόμης Βασίλης
ΦΥΣΙΚΗ Ο.Π. ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ
 Κανάρη 6, Δάφνη Τηλ. 10 97194 & 10 976976 ΦΥΣΙΚΗ Ο.Π. ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ ΘΕΜΑ Α Ι. Στις ερωτήσεις A1-A4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και το γράμμα που αντιστοιχεί στη σωστή απάντηση.
Κανάρη 6, Δάφνη Τηλ. 10 97194 & 10 976976 ΦΥΣΙΚΗ Ο.Π. ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ ΘΕΜΑ Α Ι. Στις ερωτήσεις A1-A4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και το γράμμα που αντιστοιχεί στη σωστή απάντηση.
Ο ΡΟΛΟΣ ΤΗΣ ΒΑΡΥΤΗΤΑΣ ΣΤΟ ΤΡΕΞΙΜΟ.
 Ο ΡΟΛΟΣ ΤΗΣ ΒΑΡΥΤΗΤΑΣ ΣΤΟ ΤΡΕΞΙΜΟ. "...Ο άνθρωπος θα μεταφέρει πάντα μεγαλύτερο μέρος του βάρους του προς το σημείο στο οποίο επιθυμεί να κινηθεί από ότι προς οποιοδήποτε άλλο σημείο....όσο πιο γρήγορα
Ο ΡΟΛΟΣ ΤΗΣ ΒΑΡΥΤΗΤΑΣ ΣΤΟ ΤΡΕΞΙΜΟ. "...Ο άνθρωπος θα μεταφέρει πάντα μεγαλύτερο μέρος του βάρους του προς το σημείο στο οποίο επιθυμεί να κινηθεί από ότι προς οποιοδήποτε άλλο σημείο....όσο πιο γρήγορα
ΕΡΓΑΣΤΗΡΙΑΚΗ ΕΦΑΡΜΟΓΗ 1 ΤO ΡΟΜΠΟΤ INTELLITEK ER-2u
 Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
ΔΙΑΓΩΝΙΣΜΑ ΣΤΗΝ ΟΡΙΖΟΝΤΙΑ ΒΟΛΗ ΚΑΙ ΟΜΑΛΗ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ
 ΦΥΣΙΚΗ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ B ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗΝ ΟΡΙΖΟΝΤΙΑ ΒΟΛΗ ΚΑΙ ΟΜΑΛΗ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ Επώνυμο: Όνομα: Τμήμα: Αγρίνιο 10-11-013 ΘΕΜΑ 1 ο Α) Να επιλέξετε τη σωστή απάντηση σε καθεμία από τις επόμενες
ΦΥΣΙΚΗ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ B ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗΝ ΟΡΙΖΟΝΤΙΑ ΒΟΛΗ ΚΑΙ ΟΜΑΛΗ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ Επώνυμο: Όνομα: Τμήμα: Αγρίνιο 10-11-013 ΘΕΜΑ 1 ο Α) Να επιλέξετε τη σωστή απάντηση σε καθεμία από τις επόμενες
ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ
 ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΘΕΜΑΤΑ ΘΕΜΑ Α Στις προτάσεις Α1α-Α4β να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση, η οποία
ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΘΕΜΑΤΑ ΘΕΜΑ Α Στις προτάσεις Α1α-Α4β να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση, η οποία
ταχύτητα μέτρου. Με την άσκηση κατάλληλης σταθερής ροπής, επιτυγχάνεται
 ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 4: ΣΤΡΟΦΟΡΜΗ 26. Δύο σημειακές σφαίρες που η καθεμιά έχει μάζα συνδέονται μεταξύ τους με οριζόντια αβαρή ράβδο. Το σύστημα περιστρέφεται γύρω από κατακόρυφο
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 4: ΣΤΡΟΦΟΡΜΗ 26. Δύο σημειακές σφαίρες που η καθεμιά έχει μάζα συνδέονται μεταξύ τους με οριζόντια αβαρή ράβδο. Το σύστημα περιστρέφεται γύρω από κατακόρυφο
Πώς μπορούμε να δημιουργούμε γεωμετρικά σχέδια με τη Logo;
 Κεφάλαιο 2 Εισαγωγή Πώς μπορούμε να δημιουργούμε γεωμετρικά σχέδια με τη Logo; Η Logo είναι μία από τις πολλές γλώσσες προγραμματισμού. Κάθε γλώσσα προγραμματισμού έχει σκοπό τη δημιουργία προγραμμάτων
Κεφάλαιο 2 Εισαγωγή Πώς μπορούμε να δημιουργούμε γεωμετρικά σχέδια με τη Logo; Η Logo είναι μία από τις πολλές γλώσσες προγραμματισμού. Κάθε γλώσσα προγραμματισμού έχει σκοπό τη δημιουργία προγραμμάτων
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ. Μηχανική Στερεού Σώματος. Ροπή Δυνάμεων & Ισορροπία Στερεού Σώματος. Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος Ροπή Δυνάμεων & Ισορροπία Στερεού Σώματος Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Εισαγωγή Στην Α Λυκείου είχαμε μελετήσει τη δύναμη προκειμένου
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος Ροπή Δυνάμεων & Ισορροπία Στερεού Σώματος Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Εισαγωγή Στην Α Λυκείου είχαμε μελετήσει τη δύναμη προκειμένου
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός https://phsicscourses.wordpress.com/ Θεωρία Υπάρχουν κάποιες περιπτώσεις μελέτης τις οποίες
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός https://phsicscourses.wordpress.com/ Θεωρία Υπάρχουν κάποιες περιπτώσεις μελέτης τις οποίες
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ Ο.Π / Β ΛΥΚΕΙΟΥ (ΑΠΑΝΤΗΣΕΙΣ) ΗΜΕΡΟΜΗΝΙΑ: 12/11/2017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ
 ΗΜΕΡΟΜΗΝΙΑ: 12/11/2017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ") ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΟΠ / Β ΛΥΚΕΙΟΥ (ΑΠΑΝΤΗΣΕΙΣ) ΗΜΕΡΟΜΗΝΙΑ: 1/11/017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1-Α4
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΟΠ / Β ΛΥΚΕΙΟΥ (ΑΠΑΝΤΗΣΕΙΣ) ΗΜΕΡΟΜΗΝΙΑ: 1/11/017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1-Α4
το άκρο Β έχει γραμμική ταχύτητα μέτρου.
 ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ 1. Μια ράβδος ΑΒ περιστρέφεται με σταθερή γωνιακή ταχύτητα γύρω από έναν σταθερό οριζόντιο άξονα που περνάει από ένα σημείο πάνω
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ 1. Μια ράβδος ΑΒ περιστρέφεται με σταθερή γωνιακή ταχύτητα γύρω από έναν σταθερό οριζόντιο άξονα που περνάει από ένα σημείο πάνω
Διαγώνισμα Μηχανική Στερεού Σώματος
 Διαγώνισμα Μηχανική Στερεού Σώματος Θέμα Α Στις ημιτελείς προτάσεις Α1-Α4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση η οποία τη συμπληρώνει σωστά
Διαγώνισμα Μηχανική Στερεού Σώματος Θέμα Α Στις ημιτελείς προτάσεις Α1-Α4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση η οποία τη συμπληρώνει σωστά
ΜΗΧΑΝΙΚΗΣ. Εργαστήριο ΟΧΗΜΑΤΑ ΔΙΑΣΩΣΗΣ. Κατασκευές 1 έως 35 ΠΡΟΣΟΧΗ!
 Εργαστήριο ΜΗΧΑΝΙΚΗΣ ΟΧΗΜΑΤΑ ΔΙΑΣΩΣΗΣ Κατασκευές 1 έως 5 1 - Στοιβάζοντας δύο δοκάρια - Στοιβάζοντας δοκάρια με δύο πασσάλους - Ένωση δοκαριών 4 - Στοιβάζοντας τρία δοκάρια 5 - Στοιβάζοντας δοκάρια κάθετα
Εργαστήριο ΜΗΧΑΝΙΚΗΣ ΟΧΗΜΑΤΑ ΔΙΑΣΩΣΗΣ Κατασκευές 1 έως 5 1 - Στοιβάζοντας δύο δοκάρια - Στοιβάζοντας δοκάρια με δύο πασσάλους - Ένωση δοκαριών 4 - Στοιβάζοντας τρία δοκάρια 5 - Στοιβάζοντας δοκάρια κάθετα
Τμήμα Ηλεκτρολόγων Μηχανικών ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ ΣΤΟΥΣ ΕΠΑΓΩΓΙΚΟΥΣ ΚΙΝΗΤΗΡΕΣ
 Το κανονικό εύρος λειτουργίας ενός τυπικού επαγωγικού κινητήρα (κλάσης Α, Β και C) περιορίζεται κάτω από 5% για την ολίσθηση ενώ η μεταβολή της ταχύτητας πέρα από αυτό το εύρος είναι σχεδόν ανάλογη του
Το κανονικό εύρος λειτουργίας ενός τυπικού επαγωγικού κινητήρα (κλάσης Α, Β και C) περιορίζεται κάτω από 5% για την ολίσθηση ενώ η μεταβολή της ταχύτητας πέρα από αυτό το εύρος είναι σχεδόν ανάλογη του
ΨΗΦΙΑΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΒΟΗΘΗΜΑ «ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ» 5 o ΔΙΑΓΩΝΙΣΜΑ ΜΑΡΤΙΟΣ 2017: ΘΕΜΑΤΑ
 ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΘΕΜΑΤΑ ΘΕΜΑ Α Στις προτάσεις 1-4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση, η οποία
ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΘΕΜΑΤΑ ΘΕΜΑ Α Στις προτάσεις 1-4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση, η οποία
γ) το μέτρο της γωνιακής ταχύτητας του δίσκου τη στιγμή κατά την οποία έχει ξετυλιχθεί όλο το σχοινί.
 το μέτρο της γωνιακής ταχύτητας του δίσκου τη στιγμή κατά την οποία έχει ξετυλιχθεί όλο το σχοινί.") 1. Ο ομογενής και ισοπαχής δίσκος του σχήματος έχει ακτίνα και μάζα, είναι οριζόντιος και μπορεί να περιστρέφεται, χωρίς τριβές, γύρω από κατακόρυφο ακλόνητο άξονα που διέρχεται από το κέντρο του. Ο δίσκος
1. Ο ομογενής και ισοπαχής δίσκος του σχήματος έχει ακτίνα και μάζα, είναι οριζόντιος και μπορεί να περιστρέφεται, χωρίς τριβές, γύρω από κατακόρυφο ακλόνητο άξονα που διέρχεται από το κέντρο του. Ο δίσκος
ΚΙΝΗΣΕΙΣ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ
 ΚΙΝΗΣΕΙΣ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ 1. Ένας δίσκος στρέφεται γύρω από σταθερό άξονα ο οποίος διέρχεται από το κέντρο του και είναι κάθετος στο επίπεδο του. Η γωνιακή ταχύτητα περιστροφής του δίσκου σε συνάρτηση με
ΚΙΝΗΣΕΙΣ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ 1. Ένας δίσκος στρέφεται γύρω από σταθερό άξονα ο οποίος διέρχεται από το κέντρο του και είναι κάθετος στο επίπεδο του. Η γωνιακή ταχύτητα περιστροφής του δίσκου σε συνάρτηση με
Γ.Κονδύλη 1 & Όθωνος-Μ αρούσι Τ ηλ. Κέντρο: , /
 Γ.Κονδύλη & Όθωνος-Μ αρούσι Τ ηλ. Κέντρο:20-6.24.000, http:/ / www.akadimos.gr ΠΡΟΤΕΙΝΟΜΕΝΑ ΘΕΜΑΤΑ 204 ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ Επιμέλεια Θεμάτων: Παπαδόπουλος Πασχάλης ΘΕΜΑ
Γ.Κονδύλη & Όθωνος-Μ αρούσι Τ ηλ. Κέντρο:20-6.24.000, http:/ / www.akadimos.gr ΠΡΟΤΕΙΝΟΜΕΝΑ ΘΕΜΑΤΑ 204 ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ Επιμέλεια Θεμάτων: Παπαδόπουλος Πασχάλης ΘΕΜΑ
Κεφάλαιο 10 Περιστροφική Κίνηση. Copyright 2009 Pearson Education, Inc.
 Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόμενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσματικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναμική της Περιστροφικής Κίνησης, Ροπή και
Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόμενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσματικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναμική της Περιστροφικής Κίνησης, Ροπή και
2) Βάρος και κυκλική κίνηση. Β) Κυκλική κίνηση
 Βάρος και κυκλική κίνηση. Β) Κυκλική κίνηση") Β) Κυκλική κίνηση 1) Υπολογισμοί στην ομαλή κυκλική κίνηση. Μια μικρή σφαίρα, μάζας 2kg, εκτελεί ομαλή κυκλική κίνηση, σε κύκλο κέντρου Ο και ακτίνας 0,5m, όπως στο σχήμα. Τη χρονική στιγμή t=0 η σφαίρα
Β) Κυκλική κίνηση 1) Υπολογισμοί στην ομαλή κυκλική κίνηση. Μια μικρή σφαίρα, μάζας 2kg, εκτελεί ομαλή κυκλική κίνηση, σε κύκλο κέντρου Ο και ακτίνας 0,5m, όπως στο σχήμα. Τη χρονική στιγμή t=0 η σφαίρα
7. Επαναλήψεις (Loops) Προγραμματισμός EV3 Ακαδημία Ρομποτικής 58
 Προγραμματισμός EV3 Ακαδημία Ρομποτικής 58") 7. Επαναλήψεις (Loops) Προγραμματισμός EV3 Ακαδημία Ρομποτικής 58 Στόχοι Μαθήματος 1. Πώς να επαναλάβετε μια δράση 2. Μάθετε πώς να χρησιμοποιείτε το Loop Blocks Προγραμματισμός EV3 Ακαδημία Ρομποτικής
7. Επαναλήψεις (Loops) Προγραμματισμός EV3 Ακαδημία Ρομποτικής 58 Στόχοι Μαθήματος 1. Πώς να επαναλάβετε μια δράση 2. Μάθετε πώς να χρησιμοποιείτε το Loop Blocks Προγραμματισμός EV3 Ακαδημία Ρομποτικής
Ενότητα 2: Εντολές Επανάληψης
 Ενότητα 2: Εντολές Επανάληψης Όταν κάποια εντολή ή ολόκληρη ομάδα εντολών επαναλαμβάνεται τότε δεν είναι απαραίτητο να τις γράψουμε πολλές φορές αλλά χρησιμοποιούμε την εντολή ΕΠΑΝΑΛΑΒΕ Συντάσσεται ως
Ενότητα 2: Εντολές Επανάληψης Όταν κάποια εντολή ή ολόκληρη ομάδα εντολών επαναλαμβάνεται τότε δεν είναι απαραίτητο να τις γράψουμε πολλές φορές αλλά χρησιμοποιούμε την εντολή ΕΠΑΝΑΛΑΒΕ Συντάσσεται ως
Για τις παραπάνω ροπές αδράνειας ισχύει: α. β. γ. δ. Μονάδες 5
 ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΘΕΡΙΝΑ Α (ΑΠΑΝΤΗΣΕΙΣ) ΗΜΕΡΟΜΗΝΙΑ: 01-03-2015 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ M-ΑΓΙΑΝΝΙΩΤΑΚΗ ΑΝ.-ΠΟΥΛΗ Κ. ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΘΕΡΙΝΑ Α (ΑΠΑΝΤΗΣΕΙΣ) ΗΜΕΡΟΜΗΝΙΑ: 01-03-2015 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ M-ΑΓΙΑΝΝΙΩΤΑΚΗ ΑΝ.-ΠΟΥΛΗ Κ. ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας
ΔΙΑΓΩΝΙΣΜΑ ΦΥΣΙΚΗ ΘΕΤ. & ΤΕΧΝ. ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ
 ΔΙΑΓΩΝΙΣΜΑ ΦΥΣΙΚΗ ΘΕΤ. & ΤΕΧΝ. ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΘΕΜΑ Α Στις ημιτελείς προτάσεις Α1-Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση. Α1.
ΔΙΑΓΩΝΙΣΜΑ ΦΥΣΙΚΗ ΘΕΤ. & ΤΕΧΝ. ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΘΕΜΑ Α Στις ημιτελείς προτάσεις Α1-Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση. Α1.
ΔΙΑΓΩΝΙΣΜΑ 05 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Διάρκεια: 3 ώρες ΣΥΝΟΛΟ ΣΕΛΙ ΩΝ: ΠΕΝΤΕ (5) U β A
 U β A") Σελίδα 1 από 5 ΔΙΑΓΩΝΙΣΜΑ 05 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Διάρκεια: 3 ώρες ΣΥΝΟΛΟ ΣΕΛΙ ΩΝ: ΠΕΝΤΕ (5) ΘΕΜΑ Α Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1- Α και
Σελίδα 1 από 5 ΔΙΑΓΩΝΙΣΜΑ 05 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Διάρκεια: 3 ώρες ΣΥΝΟΛΟ ΣΕΛΙ ΩΝ: ΠΕΝΤΕ (5) ΘΕΜΑ Α Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1- Α και
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014
 ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014") ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/014 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α1 Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/014 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α1 Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί
ΦΥΣΙΚΗ Β ΓΥΜΝΑΣΙΟΥ ΚΕΦΑΛΑΙΟ 3 Ο ΔΥΝΑΜΕΙΣ
 ΦΥΣΙΚΗ Β ΓΥΜΝΑΣΙΟΥ ΚΕΦΑΛΑΙΟ 3 Ο ΔΥΝΑΜΕΙΣ 3.1 Η έννοια της δύναμης ΣΤΟΙΧΕΙΑ ΘΕΩΡΙΑΣ Στο κεφάλαιο των κινήσεων ασχοληθήκαμε με τη μελέτη της κίνησης χωρίς να μας απασχολούν τα αίτια που προκαλούν την κίνηση
ΦΥΣΙΚΗ Β ΓΥΜΝΑΣΙΟΥ ΚΕΦΑΛΑΙΟ 3 Ο ΔΥΝΑΜΕΙΣ 3.1 Η έννοια της δύναμης ΣΤΟΙΧΕΙΑ ΘΕΩΡΙΑΣ Στο κεφάλαιο των κινήσεων ασχοληθήκαμε με τη μελέτη της κίνησης χωρίς να μας απασχολούν τα αίτια που προκαλούν την κίνηση
R 2. Να επιλέξετε τη σωστή απάντηση και να αιτιολογήσετε την επιλογή σας.
 1. Δύο τροχοί συνδέονται με ιμάντα, όπως φαίνεται στο σχήμα. Οι συχνότητες περιστροφής του συνδέονται με τη σχέση: A R 2 Γ R 1 B Δ 2. Ο ωροδείκτης και ο λεπτοδείκτης ενός ρολογιού δείχνουν ακριβώς 12h.
1. Δύο τροχοί συνδέονται με ιμάντα, όπως φαίνεται στο σχήμα. Οι συχνότητες περιστροφής του συνδέονται με τη σχέση: A R 2 Γ R 1 B Δ 2. Ο ωροδείκτης και ο λεπτοδείκτης ενός ρολογιού δείχνουν ακριβώς 12h.
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2006
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2006 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΛΥΣΕΙΣ ΕΞΕΤΑΣΤΙΚΟΥ ΔΟΚΙΜΙΟΥ Μάθημα: Τεχνολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2006 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΛΥΣΕΙΣ ΕΞΕΤΑΣΤΙΚΟΥ ΔΟΚΙΜΙΟΥ Μάθημα: Τεχνολογία
Αντικείμενα, συμπεριφορές, γεγονότα
 Αντικείμενα, συμπεριφορές, γεγονότα O προγραμματισμός αποτελεί ένα τρόπο επίλυσης προβλημάτων κατά τον οποίο συνθέτουμε μια ακολουθία εντολών με σκοπό την επίτευξη συγκεκριμένων στόχων. Ας ξεκινήσουμε
Αντικείμενα, συμπεριφορές, γεγονότα O προγραμματισμός αποτελεί ένα τρόπο επίλυσης προβλημάτων κατά τον οποίο συνθέτουμε μια ακολουθία εντολών με σκοπό την επίτευξη συγκεκριμένων στόχων. Ας ξεκινήσουμε
ΦΥΣΙΚΗ Ο.Π. ΘΕΜΑ Α Στις ερωτήσεις Α1 Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση.
 Γ ΓΕΛ / 04 / 09 ΦΥΣΙΚΗ Ο.Π ΘΕΜΑ Α Στις ερωτήσεις Α Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση. Α. Σώμα εκτελεί απλή αρμονική ταλάντωση
Γ ΓΕΛ / 04 / 09 ΦΥΣΙΚΗ Ο.Π ΘΕΜΑ Α Στις ερωτήσεις Α Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση. Α. Σώμα εκτελεί απλή αρμονική ταλάντωση
ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ ΠΡΟΣΠΑΘΕΙΑ ΣΑΣ ΚΙ 2014
 ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΑΡΧΗ 1ης ΣΕΛΙΔΑΣ ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : ΦΕΒΡΟΥΑΡΙΟΣ 2017 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 6
 ΑΡΧΗ 1ης ΣΕΛΙΔΑΣ ΘΕΜΑ 1 Ο : ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : ΦΕΒΡΟΥΑΡΙΟΣ 017 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 6 Στις παρακάτω ερωτήσεις 1 έως 4 να γράψετε στο τετράδιό
ΑΡΧΗ 1ης ΣΕΛΙΔΑΣ ΘΕΜΑ 1 Ο : ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : ΦΕΒΡΟΥΑΡΙΟΣ 017 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 6 Στις παρακάτω ερωτήσεις 1 έως 4 να γράψετε στο τετράδιό
ΕΝΩΣΗ ΦΥΣΙΚΩΝ ΚΥΠΡΟΥ
 33 Η ΠΑΓΚΥΠΡΙΑ ΟΛΥΜΠΙΑΔΑ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ (Α Φάση) Κυριακή, 16 Δεκεμβρίου 2018 Ώρα: 10:00-13:00 Οδηγίες: 1) Το δοκίμιο αποτελείται από επτά (7) σελίδες και πέντε (5) θέματα. 2) Να απαντήσετε σε όλα τα
33 Η ΠΑΓΚΥΠΡΙΑ ΟΛΥΜΠΙΑΔΑ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ (Α Φάση) Κυριακή, 16 Δεκεμβρίου 2018 Ώρα: 10:00-13:00 Οδηγίες: 1) Το δοκίμιο αποτελείται από επτά (7) σελίδες και πέντε (5) θέματα. 2) Να απαντήσετε σε όλα τα
ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ ΠΡΟΣΠΑΘΕΙΑ ΣΑΣ ΚΙ 2014
 ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
Στον άπειρο ζυγό και μέσω μιας γραμμής μεταφοράς ισχύος συνδέεται κάποια βιομηχανία
 ΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ Στον άπειρο ζυγό και μέσω μιας γραμμής μεταφοράς ισχύος συνδέεται κάποια βιομηχανία Οι 2 από τους 3 κινητήρες αυτής της βιομηχανίας είναι επαγωγικοί και διαθέτουν επαγωγικούς συντελεστές
ΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ Στον άπειρο ζυγό και μέσω μιας γραμμής μεταφοράς ισχύος συνδέεται κάποια βιομηχανία Οι 2 από τους 3 κινητήρες αυτής της βιομηχανίας είναι επαγωγικοί και διαθέτουν επαγωγικούς συντελεστές
1. Σέρβο (R/C Servo) 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης
 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης") www.robolab.tuc.gr 1. Σέρβο (R/C Servo) 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σέρβο (R/C servo) (1) Το σέρβο είναι συσκευή που αποτελείται
www.robolab.tuc.gr 1. Σέρβο (R/C Servo) 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σέρβο (R/C servo) (1) Το σέρβο είναι συσκευή που αποτελείται
ΕΚΦΩΝΗΣΕΙΣ. Να γράψετε στο τετράδιό σας τον αριθµό καθεµιάς από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράµµα που αντιστοιχεί στη σωστή απάντηση.
 Επαναληπτικά Θέµατα ΟΕΦΕ 008 1 Γ' ΛΥΚΕΙΟΥ ΘΕΤΙΚΗ & ΤΕΧΝΟΛΟΓΙΚΗ ΚΑΤΕΥΘΥΝΣΗ ΕΚΦΩΝΗΣΕΙΣ ΦΥΣΙΚΗ ΘΕΜΑ 1 ο Να γράψετε στο τετράδιό σας τον αριθµό καθεµιάς από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράµµα που
Επαναληπτικά Θέµατα ΟΕΦΕ 008 1 Γ' ΛΥΚΕΙΟΥ ΘΕΤΙΚΗ & ΤΕΧΝΟΛΟΓΙΚΗ ΚΑΤΕΥΘΥΝΣΗ ΕΚΦΩΝΗΣΕΙΣ ΦΥΣΙΚΗ ΘΕΜΑ 1 ο Να γράψετε στο τετράδιό σας τον αριθµό καθεµιάς από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράµµα που