ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ ΣΗΜΕΙΩΣΕΙΣ
|
|
|
- Στέφανος Παπαστεφάνου
- 8 χρόνια πριν
- Προβολές:
Transcript
1 ΤΕΙ ΠΕΙΡΑΙΑ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΙΑΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ ΣΗΜΕΙΩΣΕΙΣ Καθηγητής Α. Τ. ΡΟΥΤΟΥΛΑΣ ρ ΧΗΜΙΚΟΣ ΜΗΧΑΝΙΚΟΣ ΑΘΗΝΑ 2000

2 ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ ΕΙΣΑΓΩΓΗ.... ΒΑΣΙΚΕΣ ΕΝΝΟΙΕΣ ΤΩΝ ΣΥΣΤΗΜΑΤΩΝ....2 ΒΑΣΙΚΕΣ ΕΝΝΟΙΕΣ ΤΩΝ ΑΥΤΟΜΑΤΙΣΜΩΝ ΑΝΑΛΥΣΗ ΚΑΙ ΣΥΝΘΕΣΗ ΤΩΝ ΑΥΤΟΜΑΤΙΣΜΩΝ ΤΑ ΕΙ Η ΤΩΝ ΑΥΤΟΜΑΤΙΣΜΩΝ ΟΙ ΤΡΟΠΟΙ ΚΑΤΑΤΑΞΗΣ ΤΩΝ ΑΥΤΟΜΑΤΙΣΜΩΝ Αυτοµατισµοί ανοικτού και αυτοµατισµοί κλειστού κυκλώµατος Αναλογικά, ψηφιακά και υβριδικά συστήµατα αυτοµατισµού Συστήµατα αυτοµατισµού απλά, µε µνήµη και έξυπνα συστήµατα Υδραυλικά, Πνευµατικά, Ηλεκτρικά, Ηλεκτρονικά κ.λ.π. συστήµατα αυτοµατισµού ΑΥΤΟΜΑΤΟΣ ΕΛΕΓΧΟΣ Η ΈΝΝΟΙΑ ΤΟΥ ΕΛΕΓΧΟΥ ΒΑΣΙΚΕΣ ΠΑΡΑΜΕΤΡΟΙ ΤΟΥ ΕΛΕΓΧΟΥ Ακρίβεια Ευαισθησία ΟΜΙΚΑ ΙΑΓΡΑΜΜΑΤΑ ΚΑΙ ΣΧΕΣΕΙΣ οµικά στοιχεία σε σειρά οµικά στοιχεία σε παράλληλη σύνδεση ΕΛΕΓΚΤΕΣ ΒΙΟΜΗΧΑΝΙΚΩΝ ΙΕΡΓΑΣΙΩΝ ΑΝΑΛΟΓΙΚΟΣ ΕΛΕΓΚΤΗΣ (P) ΑΝΑΛΟΓΙΚΟΣ - ΟΛΟΚΛΗΡΩΤΙΚΟΣ ΕΛΕΓΚΤΗΣ (PΙ) ΑΝΑΛΟΓΙΚΟΣ - ΟΛΟΚΛΗΡΩΤΙΚΟΣ - ΙΑΦΟΡΙΚΟΣ ΕΛΕΓΚΤΗΣ (PID) Κύκλωµα αυτοµατισµού στάθµης ΣΕΡΒΟΣΥΣΤΗΜΑΤΑ ΕΙΣΑΓΩΓΗ ΣΥΝΑΡΤΗΣΗ ΜΕΤΑΦΟΡΑΣ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE Βασικοί κανόνες µετασχηµατισµού LAPLACE Παραδείγµατα Αντίστροφος µετασχηµατισµός LAPLACE Συναρτήσεις µεταφοράς ρυθµιστών - συστηµάτων ΜΕΤΑΤΡΟΠΕΙΣ (TRANSDUCERS) ΟΝΟΜΑΤΟΛΟΓΙΑ ΣΤΟΙΧΕΙΑ ΜΕΤΑΤΡΟΠΕΩΝ ΒΑΣΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΣΦΑΛΜΑΤΑ ΜΕΤΑΤΡΟΠΕΩΝ ΥΝΑΜΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΜΕΤΑΤΡΟΠΕΩΝ ΠΕΡΙΒΑΛΛΟΝΤΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΜΕΤΑΤΡΟΠΕΩΝ ΚΡΙΤΗΡΙΑ ΕΠΙΛΟΓΗΣ ΜΕΤΑΤΡΟΠΕΩΝ ΒΑΣΙΚΕΣ ΑΡΧΕΣ ΜΕΤΑΤΡΟΠΗΣ ΜΕΤΡΗΣΕΙΣ ΦΥΣΙΚΩΝ ΜΕΓΕΘΩΝ Μέτρηση Μετατόπισης Μέτρηση Θερµοκρασίας Μέτρηση Πίεσης Μέτρηση Στάθµης Υγρών ΤΕΛΕΣΤΙΚΟΣ ΕΝΙΣΧΥΤΗΣ ΑΘΡΟΙΣΤΙΚΟΣ ΕΝΙΣΧΥΤΗΣ ΟΛΟΚΛΗΡΩΤΗΣ ΤΥΠΙΚΑ ΠΑΡΑ ΕΙΓΜΑΤΑ Απλός αναλογικός ελεγκτής Αναλογικός και ολοκληρωτικός ελεγκτής

3 8 ΗΛΕΚΤΡΟΥ ΡΑΥΛΙΚΗ ΣΕΡΒΟΒΑΛΒΙ Α -Υ ΡΑΥΛΙΚΟ ΣΥΣΤΗΜΑ ΚΑΤΑΣΚΕΥΗ ΛΕΙΤΟΥΡΓΙΑ ΕΙ Η ΒΑΛΒΙ ΩΝ ΚΕΡ ΟΣ ΡΟΗΣ ΒΑΛΒΙ ΑΣ ΜΑΘΗΜΑΤΙΚΟ ΜΟΝΤΕΛΟ - ΣΥΝΑΡΤΗΣΗ ΜΕΤΑΦΟΡΑΣ ΣΕΡΒΟΒΑΛΒΙ ΑΣ ΜΑΘΗΜΑΤΙΚΟ ΜΟΝΤΕΛΟ - ΣΥΝΑΡΤΗΣΗ ΜΕΤΑΦΟΡΑΣ Υ ΡΑΥΛΙΚΟΥ ΚΙΝΗΤΗΡΑ (Υ/Κ) ΜΕ ΦΟΡΤΙΟ ΣΕΡΒΟΜΗΧΑΝΙΣΜΟΣ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ Υ ΡΑΥΛΙΚΟΥ ΚΙΝΗΤΗΡΑ ΜΕ ΦΟΡΤΙΟ ΜΕ ΚΛΕΙΣΤΟ ΒΡΟΓΧΟ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΟΙ ΛΟΓΙΚΟΙ ΕΛΕΓΚΤΕΣ (P.L.C.) ΓΕΝΙΚΑ ΕΙΣΑΓΩΓΗ ΟΜΗ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΟΥ ΛΟΓΙΚΟΥ ΕΛΕΓΚΤΗ ΗHARDWARE ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΩΝ ΛΟΓΙΚΩΝ ΕΛΕΓΚΤΩΝ ΛΟΓΙΣΜΙΚΟ (SOFTWARE) ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΩΝ ΛΟΓΙΚΩΝ ΕΛΕΓΚΤΩΝ Τµήµατα προγράµµατος Πρόγραµµα ΒΑΣΙΚΗ ΟΜΗ ΓΛΩΣΣΑΣ ΙΑΓΡΑΜΜΑΤΟΣ ΕΠΑΦΩΝ (LADDER) ΒΑΣΙΚΗ ΟΜΗ ΓΛΩΣΣΑΣ ΛΙΣΤΑΣ ΕΝΤΟΛΩΝ (STATEMENT LIST) ΒΑΣΙΚΗ ΟΜΗ ΛΟΓΙΚΟΥ ΙΑΓΡΑΜΜΑΤΟΣ CSF (CONTROL SYSTEM FLOWCHART) ΒΑΣΙΚΗ ΟΜΗ ΓΛΩΣΣΑΣ MATRIX ηµιουργία προγράµµατος MATRIX ΓΕΝΙΚΗ ΙΑ ΙΚΑΣΙΑ ΥΛΟΠΟΙΗΣΗΣ ΠΡΟΓΡΑΜΜΑΤΟΣ Βασικά παραδείγµατα και εφαρµογές P.L.C ΜΕΘΟ ΟΛΟΓΙΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΣΥΣΧΕΤΙΣΜΩΝ ΚΙΝΗΣΕΩΝ ΕΜΒΟΛΩΝ ΣΕ ΓΛΩΣΣΕΣ LADDER ΚΑΙ STL Γενικά Προγραµµατισµός P.L.C. σε γλώσσα LADDER Προγραµµατισµός P.L.C. σε γλώσσα STL (STATEMENT LIST) ΠΑΡΑ ΕΙΓΜΑΤΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΣΥΣΧΕΤΙΣΜΩΝ ΚΙΝΗΣΕΩΝ ΕΜΒΟΛΩΝ ΣΕ ΓΛΩΣΣΕΣ LADDER ΚΑΙ STL ΚΥΚΛΟΣ L ΥΟ ΕΜΒΟΛΩΝ (ΚΙΝΗΣΕΙΣ Α+ Β+ Β- Α-) ΠΟΛΥΠΛΟΚΟ ΠΑΡΑ ΕΙΓΜΑ ΜΕ ΚΙΝΗΣΕΙΣ A+B+C+ B- Β+ (Τ)B-D-C-A ΒΙΒΛΙΟΓΡΑΦΙΑ
 ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΩΝ ΛΟΓΙΚΩΝ ΕΛΕΓΚΤΩΝ... 66 9.5. Τµήµατα προγράµµατος... 66 9.5.2 Πρόγραµµα... 67 9.")
4 ΕΙΣΑΓΩΓΗ. Βασικές έννοιες των συστηµάτων Με την λέξη «αυτοµατισµός» επικράτησε στην καθηµερινή ζωή να εννοούµε την υποκατάσταση ανθρώπινης εργασίας από µηχανήµατα που µπορούν να εργάζονται µε µεγαλύτερη ανεξαρτησία από τους ανθρώπους. Αυτή η άποψη είναι τελείως ξεπερασµένη σήµερα, γιατί παρά πολλά συστήµατα αυτοµατισµού επιτελούν λειτουργίες που βρίσκονται τελείως έξω από τα όρια των δυνατοτήτων, όχι µόνο µε του µέσου ανθρώπου, αλλά και όλων των ανθρώπων µαζί. Πάρα πολλές αυτοµατοποιηµένες λειτουργίες δεν θα ήταν δυνατό να γίνουν από ανθρώπους έτσι και αλλιώς. Στο µάθηµα αυτό θα χρησιµοποιούµε την λέξη «αυτοµατισµός» σαν συντοµογραφία της έννοιας «σύστηµα αυτοµατισµού». Θα ασχοληθούµε µε τις εφαρµογές των συστηµάτων αυτοµατισµού στην βιοµηχανία των µηχανολογικών κατασκευών και της ενέργειας. Τα συστήµατα αυτοµατισµού είναι µία ειδική περίπτωση συστηµάτων. Ο γενικότερος δυνατός ορισµός της έννοιας «σύστηµα» είναι αυτός που χρησιµοποιεί η θερµοδυναµική : Σύστηµα είναι ένα πεπερασµένο τµήµα του χώρου µε σαφή και πλήρη όρια. Υπάρχει και ένας άλλος ορισµός που χρησιµοποιείται στην θεωρία των συστηµάτων : Σύστηµα είναι µία οµάδα αντικειµένων που έχουν κάποιους συσχετισµούς µεταξύ τους, τέτοιους ώστε να µπορούµε να τα θεωρήσουµε σαν ένα ενιαίο σύνολο. Είναι άσκοπο να επιµείνουµε στις λεπτές διαφορές µεταξύ των διαφόρων ορισµών της έννοιας του συστήµατος : Αλλά σαν σύστηµα αυτοµατισµού θα θεωρούµε ένα σύστηµα, που είναι τέτοιο ώστε σε ορισµένες δράσεις που ασκούµε σ αυτό, να έχει καθορισµένες και γνωστές µας εκ των προτέρων αντιδράσεις. Ένα σύστηµα αυτοµατισµού πρέπει να έχει τα εξής δύο χαρακτηριστικά : (Ι) Να υπάρχουν ορισµένα σηµεία ή τµήµατα του συστήµατος, στα οποία να είναι δυνατή η αλλαγή της κατάστασής τους (δηλ. κάποιας ιδιότητας ή ιδιοτήτων τους) µε δράση προερχόµενη έξω από το σύστηµα και (ΙΙ) Να υπάρχουν ορισµένα σηµεία ή τµήµατα του συστήµατος, στα οποία να επέρχεται µια προκαθορισµένη µεταβολή της κατάστασης (δηλ. ιδιότητας ή ιδιοτήτων) σαν συνέπεια των δράσεων στα παραπάνω σηµεία του (Ι). ΛΟΙΠΑ ΣΥΣΤΗΜΑΤΑ ΣΥΣΤΗΜΑΤΑ ΛΟΙΠΕΣ ΜΗΧΑΝΕΣ ΜΗΧΑΝΕΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ (ΑΥΤΟΜΑΤΙΣΜΟΙ) Σ. Κατηγορίες συστηµάτων

5 Ένα σύστηµα αυτοµατισµού είναι µία ειδική περίπτωση µηχανής. Μηχανή γενικά είναι ένα σύστηµα που χρησιµοποιούµε για να µεταφέρουµε ή / και να µετατρέψουµε ενέργεια. Στο σύστηµα αυτοµατισµού η ενέργεια γίνεται δεκτή κατά αυστηρά προκαθορισµένο τρόπο και µετατρέπεται ή µεταφέρεται επίσης κατά αυστηρά προκαθορισµένο τρόπο. Έτσι έχουµε µία ιεράρχηση των εννοιών «σύστηµα», «µηχανή» και «σύστηµα αυτοµατισµού» σύµφωνα µε το σχήµα Σ.. Παρατηρούµε ότι από την ευρύτερη έννοια του συστήµατος ως τη στενότερη έννοια του συστήµατος αυτοµατισµού έχουµε µια ολοένα και ακριβέστερη περιγραφή έννοιας. Οι αυτοµατισµοί ας πούµε, είναι τα πιο «συστηµατικά», µε την καθηµερινή έννοια της λέξης, συστήµατα. Η συµπεριφορά τους µπορεί να περιγραφεί µε µαθηµατικές µεθόδους πολύ ευκολότερα και πολύ πιο λεπτοµερειακά από την συµπεριφορά των άλλων συστηµάτων. Οι µαθηµατικές αυτές µέθοδοι δεν περιορίζονται µόνο σε εξισώσεις και παρόµοιες µαθηµατικές εκφράσεις, αλλά και σε χρησιµοποίηση συµβολικών διαγραµµάτων, πινάκων και κωδικοποιήσεων, που περιγράφουν µε ακρίβεια όλα τα ουσιώδη µέρη και όλη την λειτουργία ενός αυτοµατισµού. Ένα σηµαντικό µέρος του µαθήµατος είναι αφιερωµένο στις διάφορες αυτές µαθηµατικές και συµβολικές µεθόδους περιγραφής των αυτοµατισµών. Εδώ πρέπει να παραδεχτούµε µία όχι και τόσο καλή κατάσταση : υστυχώς, τα σύµβολα, εκτός από µερικές ειδικές περιπτώσεις, πολύ απέχουν από του να είναι πραγµατικά γενικής αποδοχής. Για το ίδιο πράγµα µπορεί να υπάρχουν και τρία και τέσσερα διαφορετικής εµφάνισης σύµβολα, ανάλογα µε τα ισχύοντα πρότυπα στις βιοµηχανικά προηγµένες χώρες. Θα καταβληθεί προσπάθεια να χρησιµοποιήσουµε όσο γίνεται λιγότερα, απλούστερα και προπαντός της ευρύτερης αποδοχής (τουλάχιστον στην Ευρώπη) σύµβολα, µε την ελπίδα να µην συµβάλλουµε στην σύγχυση και να παρακολουθήσουµε τις προσπάθειες διεθνοποίησης των συµβόλων..2 Βασικές έννοιες των αυτοµατισµών Θα αρχίσουµε ήδη από το τµήµα αυτό να χρησιµοποιούµε ένα τρόπο παράστασης των αυτοµατισµών, που λέγεται παράσταση µε «δοµικά διαγράµµατα» (BLOCK DIAGRAMS). Στα διαγράµµατα αυτά τα δοµικά στοιχεία των αυτοµατισµών ή και ολόκληροι αυτοµατισµοί ή τµήµατά τους, παριστάνονται µε απλά ορθογώνια παραλληλόγραµµα, χωρίς να διευκρινίζεται η κατασκευή τους και η εσωτερική τους οργάνωση. Η έµφαση δίνεται στην περιγραφή των αλληλεπιδράσεων του στοιχείου µε το περιβάλλον του. Ο τρόπος αυτός παράστασης, χωρίς να είναι πάντα ο καταλληλότερος, έχει ωστόσο το πλεονέκτηµα της γενικότητας, της ανεξαρτησίας δηλαδή από τον συγκεκριµένο τρόπο κατασκευής των στοιχείων που αποτελούν τον αυτοµατισµό, και της απλότητας πράγµατα που διευκολύνουν την µαθηµατική και την θεωρητική µελέτη των αυτοµατισµών. Στο ακόλουθο σχήµα Σ.2 έχουµε την παράσταση σε δοµικό διάγραµµα ενός ολόκληρου συστήµατος αυτοµατισµού Τ. Ολόκληρος ο Τ παριστάνεται µε ένα ορθογώνιο (BLOCK). Με βέλη που καταλήγουν στο BLOCK ή φεύγουν από αυτό παριστάνονται οι δράσεις που εφαρµόζουµε επάνω στο σύστηµα ή οι αντίστοιχες αντιδράσεις του συστήµατος Τ. Τα βέλη δηλαδή παριστάνουν τις µεταβολές του τύπου (Ι) ή (ΙΙ) που αναφέραµε στα χαρακτηριστικά των αυτοµατισµών στο προηγούµενο τµήµα 0.. Όλες αυτές οι δράσεις και αντιδράσεις µαζί ονοµάζονται «σήµατα» (SIGMALS). Ένα σήµα του τύπου (Ι), όπως τα x, x,..., 2 x v, ονοµάζεται «σήµα εισόδου» (INPUT SIGNAL) ή απλά «είσοδος» (INPUT) του αυτοµατισµού Τ. Ενώ ένα σήµα του τύπου (ΙΙ), όπως τα y y,,..., 2 «έξοδος» (OUTPUT) του αυτοµατισµού Τ. Σύµφωνα µε τον ορισµό του αυτοµατισµού, οι έξοδοι x x x v y µ, ονοµάζεται «σήµα εξόδου» (OUTPUT SIGNAL) ή απλά y y,,..., 2 y µ πρέπει να είναι συναρτήσεις των εισόδων,,...,. Έτσι σε κάθε οµάδα εισόδων θα αντιστοιχεί µία προβλεπτή οµάδα 2 εξόδων. 2

6 ιαταραχές ξ ξ2 ξλ Είσοδοι X y Έξοδοι X2 Xv T ζ,ζ2,...,ζκ Y=F(X) y2 ym Σ.2 Το απλούστερο δυνατό δοµικό διάγραµµα ενός αυτοµατισµού Τ Οι συναρτήσεις αυτές µπορούν να παρασταθούν όλες µαζί από µία διανυσµατική ή πινακοποιηµένη συνάρτηση Υ=F(X) : y y y µ και Χ= ( x,,..., ) x2 x v όπου Υ= (,,..., ) 2 Η συνάρτηση αυτή F υπάρχει πάντα για οποιοδήποτε αυτοµατισµό και ονοµάζεται «συνάρτηση µεταφοράς σηµάτων» ή «συνάρτηση µεταφοράς» του αυτοµατισµού αυτού (TRANSFER FUNCTION). Μόνο ο τρόπος, µε τον οποίο δίνεται (π.χ. υπό µορφή εξισώσεων, διαφορικών ή ολοκληρωτικών εξισώσεων, καµπυλών σε διαγράµµατα συντεταγµένων, διανυσµατικών σχέσεων, σχέσεων πινάκων (µητρών), πινακοποιηµένων αριθµητικών τιµών, δυαδικών σχέσεων, διαφόρων ειδικευµένων συµβόλων της θεωρίας των αυτοµατισµών κ.λ.π.) διαφέρει από αυτοµατισµό σε αυτοµατισµό. Η F είναι δυνατό να περιλαµβάνει βέβαια και παραµέτρους, όπως οι ζ, ζ,..., ζ 2 k στο παραπάνω παράδειγµα. Οι παράµετροι αυτές του αυτοµατισµού Τ είναι και αυτές ιδιότητες διαφόρων τµηµάτων ή σηµείων του Τ που µπορούν να µεταβληθούν και αυτές, αλλά δεν συµπεριλαµβάνονται στην τρέχουσα INPUT X. Μπορεί όµως να συµπεριλαµβανόταν σε προηγούµενη INPUT ή να εξαρτώνται από προηγούµενες INPUTS, όπως συµβαίνει στα συστήµατα αυτοµατισµού που διαθέτουν µνήµη. Οι παράµετροι πρέπει να είναι τέτοιες, ώστε να προσδιορίζουν πλήρως την κατάσταση του συστήµατος αυτοµατισµού και την συνάρτηση µεταφοράς F. Η ύπαρξη της συνάρτησης µεταφοράς δίνει την δυνατότητα της µαθηµατικής επεξεργασίας του κάθε συγκεκριµένου προβλήµατος, που επιχειρούµε να λύσουµε µε τον κάθε αυτοµατισµό. Στην πραγµατικότητα όλο το βάρος της µαθηµατικής επεξεργασίας πέφτει στην εύρεση και επεξεργασία της συνάρτησης µεταφοράς. Η παραπάνω παρουσίαση είναι κάπως εξιδανικευµένη. Γιατί στην πραγµατικότητα υπάρχουν συχνά και άλλες, ανεπιθύµητες, µεταβολές ιδιοτήτων, οι λεγόµενες διαταραχές ξ, ξ,..., ξ λ (DISTURBANCES) οι οποίες µπορούν να παραµορφώσουν τις εξόδους ή και να προκαλέσουν ανεπιθύµητες εξόδους, τις αναφερόµενες σαν «παρασιτικές εξόδους» ή απλά «παράσιτα» (NOISE), ή ακόµα και να καταργήσουν την συνάρτηση µεταφοράς και να πάψει το σύστηµα να είναι αυτοµατισµός. 2 3
 2 Η συνάρτηση αυτή F υπάρχει πάντα για οποιοδήποτε αυτοµατισµό και ονοµάζεται «συνάρτηση µεταφοράς σηµάτων» ή «συνάρτηση µεταφοράς» του αυτοµατισµού αυτού (TRANSFER FUNCTION).")
7 Υπάρχουν αυτοµατισµοί, που από την κατασκευή τους έχουν να αντιµετωπίσουν πολύ σπάνια διαταραχές. Υπάρχουν όµως και άλλοι, που είναι πολύ ευαίσθητοι σε διαταραχές. Βέβαια, αντίστοιχα µε την σπουδαιότητα και την ευαισθησία κάθε αυτοµατισµού, καταβάλλονται ανάλογες προσπάθειες να εξουδετερώνονται οι διαταραχές και τα παράσιτα. Αξίζει να τονισθεί ότι τα σήµατα εισόδου είναι πάντοτε ενδεικτικά δράσεων από έξω από τον αυτοµατισµό επάνω του, δηλαδή αντιπροσωπεύουν πάντα µία συναλλαγή ενέργειας µε το περιβάλλον του αυτοµατισµού. εν συµβαίνει όµως το ίδιο µε όλα τα σήµατα εξόδου. Μερικά απ αυτά µπορούν να παραµένουν σαν εσωτερικές µεταβολές στον αυτοµατισµό, ενώ άλλα µπορεί να αξιοποιούνται σαν σήµατα εισόδου σε άλλα συστήµατα. ηλαδή οι έξοδοι δεν αντιπροσωπεύουν πάντα µία συναλλαγή ενέργειας µε το περιβάλλον. Το ίδιο συµβαίνει και µε τις διαταραχές. Άλλες µπορεί να είναι ανεπιθύµητες εξωτερικές επιδράσεις και άλλες µπορεί να είναι εσωτερικές ανωµαλίες του αυτοµατισµού (βλάβες, απορυθµίσεις κ.λ.π.)..3 Ανάλυση και σύνθεση των αυτοµατισµών Μέσα σ ένα αυτοµατισµό (σύστηµα αυτοµατισµού) µπορούµε συνήθως να διακρίνουµε υποσυστήµατα που έχουν τα χαρακτηριστικά (Ι) και (ΙΙ) του αυτοµατισµού που περιγράψαµε στο τµήµα.. Εποµένως τα υποσυστήµατα αυτά είναι υποαυτοµατισµοί. Όλα σχεδόν τα δοµικά στοιχεία ενός αυτοµατισµού είναι αυτοµατισµοί επίσης. Υπάρχουν και µερικά δοµικά στοιχεία τόσο απλά, που δεν αξίζει τον κόπο να τα υπολογίζουµε σαν αυτοµατισµούς, αλλά στην πραγµατικότητα είναι. Και µία απλή διακλάδωση συρµάτων που διαµοιράζει ένα σήµα, από την απόλυτα αυστηρή πλευρά του ορισµού, είναι αυτοµατισµός. Άλλωστε, αν έστω και ένα σηµαντικό δοµικό στοιχείο δεν είχε συµπεριφορά αυτοµατισµού, δηλαδή προβλεπτή συµπεριφορά, άρα δεν ήταν αυτοµατισµός. Έτσι κάθε αυτοµατισµός που δεν είναι πάρα πολύ απλός µπορεί να αναλυθεί σε υποαυτοµατισµούς. Η διαπίστωση αυτή αποδίδεται στο παρακάτω σχήµα Σ.3. A (y,y2) = fa(x,x2,x3) X X2 B (u,u2,u3) = = fb(x,x2) u2 u3 u F E u2 u5 C (y,y2,u7) = = fc(u2,u5,u6) y y2 u2 u4 u6 u7 D X3 (u4,u6) = = fd(x3,u2) Σ.3 Παράδειγµα αναλυτικού δοµικού διαγράµµατος ενός αυτοµατισµού Α µε δοµικά στοιχεία B, C, D. Στο σχήµα αυτό έχουµε ένα παράδειγµα αυτοµατισµού Α, του οποίου το BLOCK αναλύεται στα BLOCKS τριών υποαυτοµατισµών ή ίσως απλών δοµικών στοιχείων B, C, D. Για απλότητα, υποθέτουµε ότι δεν υπάρχουν διαταραχές ούτε µεταβαλλόµενες παράµετροι. Ένα τέτοιο σχήµα δεν είναι παρά ένα αναλυτικότερο δοµικό διάγραµµα του αυτοµατισµού Α. Το BLOCK του ίδιου του 4

8 Α δεν είναι απαραίτητο να εµφανίζεται στο σχήµα, γι αυτό το εµφανίζουµε µε στικτή γραµµή. Σε άλλες περιπτώσεις δεν θα το εµφανίζουµε καθόλου. Ο αυτοµατισµός Α έχει εισόδους,, και εξόδους 2 3 x x x x x u u u x u y, y. Ο αυτοµατισµός Β έχει 2 u, u, u και εξόδους εισόδους, και εξόδους,,. Ο αυτοµατισµός C έχει εισόδους y y y,,. Τέλος ο D έχει εισόδους, και εξόδους,. Παρατηρούµε ότι δύο ενδιάµεσες έξοδοι, η u, u δεν χρησιµοποιούνται για εισόδους σε άλλους αυτοµατισµούς. Π.χ. η 7 u µπορεί να είναι µία πίεση µέσα σε κάποιο τµήµα του C, την οποία επιθυµούµε να ρυθµίζουµε µόνο. Το πολύ να έχουµε και ένα µανόµετρο που να την δείχνει. Στο σχήµα αυτό έχουµε και δύο καινούρια σύµβολα : Ένα µικρό κύκλο στη θέση Ε. Το κυκλικό αυτό σύµβολο σηµαίνει µία συγχώνευση δύο ή περισσοτέρων σηµάτων σε ένα, κατά ένα απλό τρόπο, π.χ. απλή πρόσθεση ή αφαίρεση ή ένα πολλαπλασιασµό δύο σηµάτων, ώστε να µην αξίζει τον κόπο να παρασταθεί µε ένα ολόκληρο BLOCK. Στην συγκεκριµένη περίπτωση µπορεί π.χ. στην θέση Ε να u u προστίθενται τα σήµατα u, 2 u και να παράγουν το σήµα 4 u. 5 Μια τελεία στη θέση F. Το σύµβολο αυτό σηµαίνει µία διακλάδωση σήµατος προς δύο ή περισσότερες κατευθύνσεις. Το σήµα υποτίθεται ότι δεν υφίσταται µε τον διαχωρισµό του αυτή ποιοτική µεταβολή. Και αν υφίσταται ποσοτική µεταβολή (αν π.χ. καθένα από τα δύο ή περισσότερα σήµατα που βγαίνουν από τη διακλάδωση είναι ασθενέστερο από το αρχικό σήµα) τότε αυτή θα πρέπει να είναι χωρίς σηµασία (π.χ. ασήµαντη ή χωρίς συνέπειες). Στην συγκεκριµένη περίπτωση µπορεί π.χ. το σήµα u να είναι µια ηλεκτρική τάση και 2 στο σηµείο F να µεταδίδεται και στους δυο αυτοµατισµούς C και D. Γνωρίζουµε ότι η ηλεκτρική τάση δεν µειώνεται όταν µεταδίδεται µε τον τρόπο αυτό (τα C και D είναι σε παράλληλη διάταξη ως προς το F). Η ανάλυση ενός µεγαλύτερου αυτοµατισµού σε υποαυτοµατισµούς είναι µία πολύ καλή µέθοδος για την κατανόηση του τρόπου λειτουργίας ενός αυτοµατισµού. Είναι η κύρια µέθοδος σχεδίασης συνθετότερων αυτοµατισµών, των οποίων η άµεση σύλληψη είναι πολύ δύσκολη ως αδύνατη εξ αιτίας της πολυπλοκότητάς τους. Ένα µεγάλο µέρος του µαθήµατος θα διατεθεί στην ανάλυση και την σύνθεση αυτοµατισµών, προς και από τα απλούστερα δοµικά τους στοιχεία. 2 ΤΑ ΕΙ Η ΤΩΝ ΑΥΤΟΜΑΤΙΣΜΩΝ Αναφέρονται, χωρίς πολλές λεπτοµερειακές επεξηγήσεις και συγκρίσεις, οι κατηγορίες των αυτοµατισµών σύµφωνα µε τέσσερις διαφορετικούς τρόπους κατάταξης. 2. Οι τρόποι κατάταξης των αυτοµατισµών Οι τέσσερις τρόποι διάκρισης και οι αντίστοιχες κατηγορίες αυτοµατισµών είναι οι εξής : Α. Ανάλογα µε την φύση της σχέσης εισόδου και εξόδου, οι αυτοµατισµοί διακρίνονται σε «συστήµατα αυτοµατισµού ανοικτού κυκλώµατος» (OPEN - LOOP CONTROL SYSTEMS) και σε «συστήµατα αυτοµατισµού κλειστού κυκλώµατος» (CLOSED - LOOP CONTROL SYSTEMS). Το δεύτερο είδος των αυτοµατισµών είναι γνωστό και µε την ονοµασία «συστήµατα αυτοµάτου ελέγχου» ή συντοµογραφικά «Σ.Α.Ε.» (FEEDBACK CONTROL SYSTEMS). 5

9 Β. Ανάλογα µε τις δυνατότητες µνήµης που διαθέτουν, τα συστήµατα αυτοµατισµού διακρίνονται σε «αναλογικά» (ANALOG SYSTEMS), σε «ψηφιακά» (DIGITAL SYSTEMS) και σε «υβριδικά» (HYBRID SYSTEMS). Γ. Ανάλογα µε τις δυνατότητες µνήµης που διαθέτουν, τα συστήµατα αυτοµατισµού διακρίνονται σε «απλά» (SIMPLE SYSTEMS), σε «συστήµατα µε µνήµη» (SYSTEMS WITH MEMORY) και σε «έξυπνα συστήµατα» (ARTIFICIALLY INTELLIGENT SYSTEMS).. Ανάλογα µε την φύση των µέσων που χρησιµοποιούν, τα συστήµατα αυτοµατισµού διακρίνονται σε «υδραυλικά» (HYDRAULIC SYSTEMS), σε «πνευµατικά» (PENEUMATIC SYSTEMS), σε «ηλεκτρικά» (ELECTRIC SYSTEMS), σε «ηλεκτρονικά» (ELECTRΟΝIC SYSTEMS). Στο παρελθόν υπήρξαν και µηχανικά συστήµατα αυτοµατισµού και για το µέλλον υπάρχουν πιθανότητες να εµφανισθούν και µερικά άλλα είδη µέσα στον τρόπο κατάταξης αυτό, όπως π.χ. οπτικά συστήµατα. Προς το παρόν όµως τα τέσσερα είδη (υδραυλικά, πνευµατικά, ηλεκτρικά και ηλεκτρονικά) είναι ουσιαστικά τα µόνα σε βιοµηχανική χρήση. Οι παραπάνω τέσσερις τρόποι διάκρισης είναι τελείως ανεξάρτητοι µεταξύ τους. Π.χ. ένα σύστηµα µπορεί να είναι υδραυλικό σύστηµα αυτοµάτου ελέγχου υβριδικό µε µνήµη. Ένα άλλο µπορεί να είναι πνευµατικό σύστηµα ανοικτού κυκλώµατος ψηφιακό απλό, κ.ο.κ.. εν αποκλείονται και µικτοί τύποι, όπως π.χ. ηλεκτροπνευµατικό σύστηµα αυτοµάτου ελέγχου ψηφιακό απλό κ.λ.π Αυτοµατισµοί ανοικτού και αυτοµατισµοί κλειστού κυκλώµατος Το χαρακτηριστικό των αυτοµατισµών κλειστού κυκλώµατος ή συστηµάτων αυτοµάτου ελέγχου ή Σ.Α.Ε. είναι ότι σ αυτούς υπάρχει επηρεασµός όχι µόνο της OUTPUT από την INPUT, αλλά και της INPUT από την OUTPUT. Τρόποι, µε τους οποίους µπορεί να γίνει αυτό, δείχνονται στα δοµικά διαγράµµατα του σχήµατος Σ Σ 2.. Παραδείγµατα δοµικών διαγραµµάτων αυτοµατισµών κλειστού κυκλώµατος (,3,5) και ανοικτού κυκλώµατος(2,4,6). Στο σύστηµα αυτοµατισµού κλειστού κυκλώµατος το σήµα εξόδου έχει την δυνατότητα, µόλις παρουσιάσει µια απόκλιση από µία ή περισσότερες συνθήκες που οφείλει να εκπληρώνει, να παράγει ένα σήµα που τροποποιεί ένα ή περισσότερα σήµατα εισόδου (ή σε κάποιες άλλες 6
, σε «πνευµατικά» (PENEUMATIC SYSTEMS), σε «ηλεκτρικά» (ELECTRIC SYSTEMS),")
10 περιπτώσεις, να χρησιµοποιείται το ίδιο σαν πρόσθετη είσοδος) έτσι ώστε το σήµα εξόδου να επανέρχεται στα πλαίσια της παραπάνω συνθήκης (ή των παραπάνω συνθηκών). Κατά τον τρόπο αυτό τυχόν αποκλίσεις της OUTPUT, που προκαλούνται από διάφορες διαταραχές, διορθώνονται από το ίδιο το σύστηµα αυτοµατισµού. Σε ένα σύστηµα αυτοµατισµού ανοικτού κυκλώµατος τυχόν απόκλιση της OUTPUT από τις επιθυµητές συνθήκες που πρέπει να εκπληρώνει δεν έχει την δυνατότητα να επηρεάσει την INPUT κατά κανένα τρόπο. Έτσι η INPUT συνεχίζεται όπως είναι και η τυχόν απόκλιση της OUTPUT δεν διορθώνεται, εκτός αν γίνει εξωτερική επέµβαση, δηλ. από κάπου έξω από το σύστηµα αυτοµατισµού. Στο δοµικό διάγραµµα ενός αυτοµατισµού είναι εύκολο να διακρίνουµε αν αυτός είναι κλειστού ή ανοικτού κυκλώµατος. Στον αυτοµατισµό κλειστού κυκλώµατος, µπορούµε εύκολα να επισηµάνουµε ένα τουλάχιστον (µπορεί και περισσότερους) κλειστό βρόχο, τον οποίο τα σήµατα διατρέχουν κατά την ίδια φορά (ωρολογιακή ή ανθωρολογιακή) σε όλη την περιφέρεια του. Η OUTPUT «ανατροφοδοτεί» την INPUT χρησιµοποιώντας αυτούς τους βρόχους. Με αυτό τον κλειστό βρόχο (CLOSED LOOP) οφείλουν και την ονοµασία τους τα συστήµατα αυτά αυτοµατισµού. Στα συστήµατα ανοικτού κυκλώµατος αυτοί οι κλειστοί βρόχοι δεν υπάρχουν Αναλογικά, ψηφιακά και υβριδικά συστήµατα αυτοµατισµού Τα σήµατα των συστηµάτων αυτοµατισµού χωρίζονται σε δυο µεγάλες κατηγορίες, σε αναλογικά και σε ψηφιακά συστήµατα. Αντίστοιχα διακρίνουµε αναλογικά και ψηφιακά συστήµατα αυτοµατισµού. Σ Παραδείγµατα της µεταβολής αναλογικών σηµάτων εισόδου X και εξόδου Υ συναρτήσει του χρόνου t. Τα σήµατα εισόδου και εξόδου των αναλογικών συστηµάτων παρουσιάζουν µία αρκετά οµαλή και συνεχή µεταβολή ως προς τον χρόνο, ώστε να µπορούν να παρασταθούν µε συνεχείς συναρτήσεις 7

11 του χρόνου (βλ. σχ. Σ 2..2.). Η έξοδος Υ «προλαβαίνει» και παρακολουθεί κατά συνεχή τρόπο την είσοδο Χ. Στο παραπάνω σχήµα, στα διαγράµµατα και 2 βλέπουµε µια έξοδο Υ να παρακολουθεί οµαλά µία είσοδο Χ. Και τα δύο σήµατα είναι απεριοδικά. Στις περιπτώσεις 3-4 και5-6 έχουµε εισόδους περιοδικές και αντίστοιχες περιοδικές εξόδους µε την ίδια περίοδο Τ. Τα σήµατα αυτά είναι όλα αναλογικά. Σ Παραδείγµατα της µεταβολής ψηφιακών σηµάτων εισόδου X και εξόδου Υ συναρτήσει του χρόνου t. Τα σήµατα εισόδου και εξόδου των ψηφιακών συστηµάτων αυτοµατισµού παρουσιάζουν πολύ απότοµες µεταβολές, τόσο απότοµες που να µπορούν να παρασταθούν µε κάθετα επί τον άξονα του χρόνου ευθύγραµµα τµήµατα - άλµατα. Ενώ στο µεταξύ δύο αλµάτων χρονικό διάστηµα παρουσιάζουν σταθερότητα (βλ. σχ. Σ ). Κατά την απειροελάχιστα µικρή χρονική διάρκεια ενός άλµατος του σήµατος εισόδου το σύστηµα αυτοµατισµού δεν προλαβαίνει ουσιαστικά να αντιδράσει αλλιώς παρά µόνο µε ένα αντίστοιχο άλµα του σήµατος εξόδου, όπως δείχνεται στα διαγράµµατα 4 και 5 του Σ Στα διαγράµµατα και 2 του ίδιου σχήµατος Σ βλέπουµε τη µεταβολή δύο κανονικών ψηφιακών σηµάτων. Αλλά στο διάγραµµα 3 του Σ έχουµε ένα ψηφιακό σήµα που έχει το ιδιαίτερο χαρακτηριστικό να έχει πάρα πολύ µικρή χρονική διάρκεια µεταξύ µερικών αλµάτων του. Ένα τέτοιο σήµα ονοµάζεται «παλµικό σήµα» ή «παλµός» (PULSE). Τα πιο ευαίσθητα ψηφιακά συστήµατα αυτοµατισµού µπορούν να αντιδράσουν και σε είσοδο παλµική (π.χ. το σύστηµα µε INPUT - OUTPUT όπως στο σχ. Σ ) ή /και να παράγουν παλµική έξοδο. Χρησιµοποιούνται όµως και συστήµατα αυτοµατισµού, στα οποία συνυπάρχουν ψηφιακά µαζί µε αναλογικά σήµατα στις εισόδους ή/ και στις εξόδους. Υπάρχουν και σήµατα που έχουν µικτό ψηφιακό και αναλογικό χαρακτήρα, όπως το σήµα στο διάγραµµα 3 του σχ. Σ (υβριδικά σήµατα). Τα συστήµατα που χρησιµοποιούν µαζί ψηφιακά και αναλογικά σήµατα ή έστω υβριδικά σήµατα ονοµάζονται υβριδικά συστήµατα αυτοµατισµού. Στα διαγράµµατα και 2 του σχ. Σ έχουµε τις γραφικές παραστάσεις του σήµατος εισόδου και εξόδου ενός υβριδικού αυτοµατισµού. Ο αυτοµατισµός αυτός συµβαίνει να έχει ψηφιακή είσοδο και αναλογική έξοδο. 8

12 Φυσικά µπορεί σε άλλα υβριδικά συστήµατα να συµβαίνει και το αντίθετο, ή να συνυπάρχουν και τα δυο είδη σηµάτων στην είσοδο κ.λ.π.. Σ Παραδείγµατα της µεταβολής ως προς τον χρόνο σηµάτων που χρησιµοποιούν υβριδικά συστήµατα αυτοµατισµού Σ ιαγράµµατα σηµάτων εισόδου και εξόδου ενός ψηφιακού συστήµατος αυτοµατισµού µε µνήµη 2..3 Συστήµατα αυτοµατισµού απλά, µε µνήµη και έξυπνα συστήµατα. Ανάλογα µε τις δυνατότητες µνήµης που έχουν τα συστήµατα αυτοµατισµού διακρίνονται σε απλά ή χωρίς µνήµη, σε συστήµατα µε µνήµη και σε συστήµατα έξυπνα. Σε ένα σύστηµα αυτοµατισµού µε µνήµη, µία OUTPUT δεν εξαρτάται µόνο από την τρέχουσα INPUT, αλλά και από προηγούµενες INPUT σε προηγούµενους κύκλους λειτουργίας του συστήµατος. Ένα τέτοιο σύστηµα έχει την ικανότητα να θυµάται τις προγενέστερες αυτές INPUT και αυτό το επιτυγχάνει ρυθµίζοντας κάποιες παραµέτρους του ανάλογα µε αυτές τις προγενέστερες INPUT. Ενώ σ ένα απλό σύστηµα αυτοµατισµού χωρίς µνήµη, κάθε προγενέστερη INPUT αγνοείται και η OUTPUT καθορίζεται αποκλειστικά από την τρέχουσα INPUT. Το σχήµα Σ µας βοηθά να κατανοήσουµε την διαφορά αυτή. Στο διάγραµµα του σχήµατος αυτού έχουµε το σήµα εισόδου, που βλέπουµε ότι επαναλαµβάνεται πάντα το ίδιο. Αλλά 9

13 στο διάγραµµα 2 βλέπουµε ότι το σήµα εξόδου που προκύπτει δεν είναι πάντα το ίδιο. Αποκτά µία τιµή >0 σε ανταπόκριση κάθε σήµατος εισόδου περιττής τάξης (στο ο στο 3 ο, στο 5 ο κ.λ.π.) και µία τιµή =0 σε ανταπόκριση κάθε σήµατος εισόδου άρτιας τάξης (στο 2 ο στο 4 ο κ.λ.π.). Εποµένως το σύστηµα αυτό θυµάται τις τάξης (περιττής ή άρτιας) είναι η προηγούµενη και η παρούσα είσοδος και αντιδρά ανάλογα. Άρα είναι σύστηµα αυτοµατισµού µε µνήµη, πολύ απλή βέβαια, αλλά πάντως µνήµη. Σε ένα σύστηµα χωρίς µνήµη το σήµα εξόδου θα ήταν πάντα το ίδιο για ίδιες εισόδους. Οι προγενέστερες INPUT που λαµβάνει υπ όψη του ένα σύστηµα αυτοµατισµού µε µνήµη µπορεί να είναι πολύ λίγες και πολύ απλές (µόνο µία παλµική INPUT στο προηγούµενο παράδειγµα) ως πάρα πολλές και εξαιρετικά περίπλοκες. Οι πιο σύνθετες από αυτές αναφέρονται κάτω από την γενική ονοµασία «πρόγραµµα». Ένα έξυπνο σύστηµα αυτοµατισµού είναι ένα σύστηµα µε ισχυρή µνήµη, που οπωσδήποτε δέχεται προγράµµατα, αλλά που έχει την επιπλέον δυνατότητα να αναπροσαρµόζει ή να αλλάζει µόνο του τα προγράµµατά του αντιδρώντας σε διάφορες κατηγορίες εισόδων που δέχεται από το περιβάλλον κατά την διάρκεια της λειτουργίας του. Υπάρχουν πολλές διαβαθµίσεις έξυπνων συστηµάτων, µε ποσοτικές και ποιοτικές διαφορές µεταξύ τους. Στο κάτω άκρο, το όριο µεταξύ των ισχυρότερων συστηµάτων µε µνήµη και των λιγότερο έξυπνων συστηµάτων δεν είναι σαφές. Στο επάνω άκρο, θεωρητικά τουλάχιστον, υπάρχει η δυνατότητα να κατασκευασθούν έξυπνα συστήµατα µε εντελώς ανθρώπινα χαρακτηριστικά σκέψης. Όµως τέτοια συστήµατα αρχίζουν εντελώς να ξεφεύγουν από τον ορισµό του αυτοµατισµού που έχουµε δεχθεί εδώ. Γιατί το σύστηµα - άνθρωπος φαίνεται ότι διαθέτει ατέλειες ή προτερήµατα τέτοια, που το κάνουν να µην έχει σχεδόν ποτέ την ίδια ακριβώς έξοδο σε µία δεδοµένη σειρά από εισόδους, όσο και αν εκπαιδευθεί και όση εµπειρία και αν αποκτήσει Υδραυλικά, Πνευµατικά, Ηλεκτρικά, Ηλεκτρονικά κ.λ.π. συστήµατα αυτοµατισµού Στην βιοµηχανική πρακτική, η κατάταξη των συστηµάτων αυτοµατισµού σε κατηγορίες σύµφωνα µε τον τρόπο λειτουργίας και την φύση γενικά των µέσων που χρησιµοποιούν είναι πολύ διαδεδοµένη. Αυτό συµβαίνει γιατί υπάρχει εξειδίκευση των κατασκευαστών συστηµάτων αυτοµατισµού και δοµικών στοιχείων αυτοµατισµών σε ορισµένα είδη µέσων που απαιτούν ορισµένο σύνολο γνώσεων και µεθοδολογιών κατασκευής, πώλησης και χρήσης (γενικά αυτό που λέµε «KNOW - HOW»). Από την πλευρά όµως του χρήστη των αυτοµατισµών δεν µπορεί να υπάρξει εξειδίκευση του ίδιου βάθους, γιατί οι περισσότεροι αυτοµατισµοί είναι µικτού τύπου. Αυτό συµβαίνει όχι τυχαία, αλλά επειδή κάθε κατηγορία µέσων αυτοµατισµού έχει ιδιαίτερα πλεονεκτήµατα και ιδιαίτερα µειονεκτήµατα, µε συνέπεια αλλού να µην µπορεί να καλύψει τις ειδικές απαιτήσεις του χρήστη και αλλού να παρουσιάζεται συµφερότερη οικονοµικά κάποια άλλη κατηγορία µέσων. Πολύ συχνά η εξειδίκευση των πλεονεκτηµάτων και µειονεκτηµάτων καταλήγει σε σχεδίαση αυτοµατισµών µικτού τύπου. Τα πρώτα συστήµατα αυτοµατισµού της βιοµηχανικής επανάστασης ήταν µηχανικά συστήµατα. Χρησιµοποιούσαν δηλ. δοµικά στοιχεία από κατάλληλα στερεά εξαρτήµατα (µοχλούς, τροχούς, ιµάντες, ελατήρια κ.λ.π.). Τα συστήµατα αυτά κυριάρχησαν µέχρι και το πρώτο τέταρτο του αιώνα µας, αλλά σήµερα έχουν µόνο ιστορική αξία, αν και πολύ συχνά συναντάµε µηχανικά εξαρτήµατα µέσα σε άλλα είδη αυτοµατισµών. Τα µηχανικά συστήµατα, παρ όλο που χρησιµοποιούσαν απλά µηχανικά εξαρτήµατα, µπορούσαν να έχουν µεγάλη αποτελεσµατικότητα (κλασσικό το παράδειγµα του ρυθµιστή του WATT) και, χάρη στην καταπληκτική επινοητικότητα των κατασκευαστών τους, σχεδόν απίστευτες για εµάς, που έχουµε συνηθίσει στην χρήση των σύγχρονων συστηµάτων, δυνατότητες. Οι αυτόµατες εργαλειοµηχανές, που εµφανίσθηκαν στην δεύτερη δεκαετία του αιώνα µας, έκαναν σχεδόν ότι κάνουν και οι σηµερινές προγραµµατιζόµενες εργαλειοµηχανές αλλά µε µηχανικά αποκλειστικά εξαρτήµατα και πολλές από αυτές είναι ακόµα σε χρήση, ενώ µέχρι και σχετικά πρόσφατα εξακολουθούσαν να κατασκευάζονται. Μέχρι και ο 0
 ως πάρα πολλές και")
14 προγραµµατιζόµενος µηχανικός υπολογιστής σχεδόν κατασκευάστηκε και µάλιστα στα µέσα του 9 ου αιώνα από τον BABBAGE στην Αγγλία (σώζεται σήµερα ένα τµήµα του). Τελικά όµως τα µηχανικά συστήµατα δεν µπορούν να συναγωνισθούν σε κόστος, ευελιξία και αξιοπιστία τα σηµερινά σε χρήση συστήµατα. Σήµερα χρησιµοποιούµε στην βιοµηχανία τέσσερα είδη αυτοµατισµών : τους υδραυλικούς, τους πνευµατικούς, τους ηλεκτρικούς και τους ηλεκτρονικούς αυτοµατισµούς. Όπως είπαµε, πολύ συχνά συναντάµε και µικτούς τύπους από δύο ή και περισσότερα είδη αυτοµατισµού. Τα υδραυλικά συστήµατα αυτοµατισµών χρησιµοποιούν υδραυλικά ρευστά για την µετάδοση κινήσεων και δυνάµεων. Έχουν τη δυνατότητα ανάπτυξης µεγάλων δυνάµεων και ισχύων, αλλά έχουν αργές αντιδράσεις. Τα συναντάµε σχεδόν οπουδήποτε χρειάζεται µετάδοση ισχυρών δυνάµεων. Υπάρχουν αποκλειστικά υδραυλικά συστήµατα στη βιοµηχανία, αλλά πολύ συχνά τα συναντάµε σαν υποσυστήµατα άλλων αυτοµατισµών µικτού τύπου, σαν τελικά υποσυστήµατα που αναλαµβάνουν τις κινήσεις και την µετάδοση δυνάµεων. Τα πνευµατικά συστήµατα χρησιµοποιούν πεπιεσµένο αέρα κατά τον ίδιο περίπου τρόπο όπως τα υδραυλικά. Οι ικανότητες σε δυνάµεις είναι µικρότερες σε σχέση µε τα υδραυλικά συστήµατα, αλλά οι ταχύτητες δράσης τους πολύ καλύτερες. Θα δούµε ότι για πολλούς λόγους είναι πάρα πολύ διαδεδοµένα στην βιοµηχανία. Τα ηλεκτρικά συστήµατα αυτοµατισµού χρησιµοποιούν ηλεκτρικά σήµατα που προκαλούν µετατοπίσεις και κινήσεις αλλά σε άλλες εξόδους. Οι δυνατότητες τους σε δυνάµεις, ιδίως στατικές δυνάµεις, υπόκεινται σε πολλούς περιορισµούς γιατί θέλουν ειδικές προφυλάξεις κατά υπερφορτίσεων. Μπορούν όµως να µεταφέρουν µε πολύ µεγάλη αξιοπιστία και πολύ µεγαλύτερη από τους πνευµατικούς αυτοµατισµούς ταχύτητα περίπλοκα συστήµατα σε πολύ µεγάλες αποστάσεις. Γι αυτό είναι τα πιο διαδεδοµένα συστήµατα σήµερα και τα βρίσκουµε σαν υποσυστήµατα τουλάχιστον στους περισσότερους βιοµηχανικούς αυτοµατισµούς. Τα ηλεκτρονικά συστήµατα αυτοµατισµού χρησιµοποιούν και αυτά το ηλεκτρικό ρεύµα σαν φορέα σηµάτων, αλλά σε εντάσεις πολύ χαµηλότερες µε συνέπεια να συνδυάζουν την ταχύτητα µε πολύ µικρό όγκο. Από πλευράς κόστους υπερέχουν απόλυτα των άλλων συστηµάτων, όταν χρειάζονται περίπλοκοι αυτοµατισµοί, ιδίως προγραµµατιζόµενα συστήµατα µε µνήµη. Είναι τα µόνα πρακτικά εφαρµόσιµα συστήµατα στους έξυπνους αυτοµατισµούς. εν έχουν όµως την δυνατότητα να µεταφέρουν δυνάµεις και οι ικανότητές τους να µεταφέρουν ηλεκτρικές ισχείς είναι πολύ περιορισµένες. Γι αυτό στη βιοµηχανία τα συναντάµε περισσότερο σαν κέντρα µεγαλύτερων µικτών αυτοµατισµών. Πρέπει να πούµε ότι η διάκριση σε υδραυλικά, πνευµατικά, ηλεκτρικά, ηλεκτρονικά συστήµατα αυτοµατισµού αν και πρακτικά χρήσιµη στην εποχή µας, έχει πολλές ελλείψεις και ασάφειες. Π.χ. υπάρχουν ηλεκτρικά συστήµατα µε ηλεκτρονικούς διακόπτες (THYRISTORS) που δεν έχουν κινούµενα εξαρτήµατα. Υπάρχουν πνευµατικοί αυτοµατισµοί - µινιατούρες µε τρόπο λειτουργίας ίδιο µε τον τρόπο λειτουργίας των λογικών ηλεκτρονικών κυκλωµάτων (FLUIDICS από τις λέξεις FLUID & LOGICS). Υπάρχουν εξαρτήµατα αυτοµατισµών που είναι δύσκολο να καταταγούν σε συγκεκριµένη κατηγορία (π.χ. πιεζοστάτες). Σε µερικούς βιοµηχανικούς αυτοµατισµούς χρησιµοποιούνται όλα τα είδη των κυµάτων σαν φορείς σηµάτων : Υπέρηχοι, ραδιοκύµατα, φωτεινές δέσµες, υπέρυθρες ακτίνες, δέσµες LASER που διαδίδονται µέσα από λεπτούς σωληνίσκους (OPTICAL FIBERS) που µπορούν να παρουσιάζουν κάµψεις και στροφές. Ιδίως αυτές οι «οπτικές ίνες» προµηνύουν την εµφάνιση πέµπτης κατηγορίας αυτοµατισµών, των οπτικών αυτοµατισµών που πιθανότατα θα συναγωνισθούν σκληρά τους ηλεκτρικούς αυτοµατισµούς στην µετάδοση σηµάτων. Και η εξαφάνιση των µηχανικών αυτοµατισµών µας βεβαιώνει στο όχι και πολύ µακρινό µέλλον κάποια άλλη διάκριση σε κατηγορίες θα υπάρχει για τους αυτοµατισµούς. Αλλά µε τα σηµερινά δεδοµένα οι τέσσερις κατηγορίες αυτές είναι η καλύτερη διάκριση που µπορούµε να έχουµε.

15 3 ΑΥΤΟΜΑΤΟΣ ΕΛΕΓΧΟΣ 3. Η Έννοια του ελέγχου Ο αυτόµατος έλεγχος είναι το σύνολο των ενεργειών µε τις οποίες ένα ελεγχόµενο µέγεθος διατηρεί µία επιθυµητή τιµή (βέβαια µε κάποιο δεδοµένο σφάλµα). Ο έλεγχος µπορεί να είναι ανοικτού ή κλειστού κυκλώµατος. Στα συστήµατα ανοικτού κυκλώµατος όπως φαίνεται στο σχήµα Σ 3. ο ελεγκτής δίνει µία και µοναδική εντολή και δεν επαληθεύει την τιµή που επιτυγχάνεται στη διεργασία. ΕΙΣΟ ΟΣ ΣΤΟΙΧΕΙΟ ΕΛΕΓΧΟΥ ΕΝΕΡΓΟΠΟΙΗΤΗΣ H ΙΕΡΓΑΣΙΑ ΣΗΜΑ ΕΝΤΟΛΗΣ ΕΛΕΓΚΤΗΣ ΣΗΜΑ ΑΝΑΦΟΡΑΣ (ΕΠΙΘΥΜΗΤΗ ΤΙΜΗ) Σ 3. Σύστηµα Ανοικτού Κυκλώµατος Η έξοδος ακολουθεί την επιθυµητή τιµή κατά κανόνα, πλην περιπτώσεων δράσης παραγόντων που ονοµάζονται διαταραχές οι οποίες παράγουν σφάλµατα µερικές φορές σηµαντικά. Οι διαταραχές µπορεί να είναι φύσης ηλεκτρικής, µηχανικής, ρευστοµηχανικής και γενικά προκαλούνται από µεταβολές πίεσης, θερµοκρασίας, φορτίου και µηχανικών κινήσεων. Στα συστήµατα κλειστού κυκλώµατος όπως φαίνεται στο Σχήµα Σ 3.2 ο ελεγκτής παρέχει στο στοιχείο ελέγχου µία εντολή που είναι το αποτέλεσµα σύγκρισης µεταξύ του σήµατος αναφοράς (επιθυµητής τιµής) και του σήµατος ανάδρασης. ΕΙΣΟ ΟΣ ΣΤΟΙΧΕΙΟ ΕΛΕΓΧΟΥ ΕΝΕΡΓΟΠΟΙΗΤΗΣ H ΙΕΡΓΑΣΙΑ ΕΛΕΓΚΤΗΣ + ΣΗΜΑ ΑΝΑΦΟΡΑΣ - ΑΝΑ ΡΑΣΗ ΜΕΤΑΤΡΟΠΕΑΣ Σ 3.2 Σύστηµα Κλειστού Κυκλώµατος 2
 Σ 3.")
16 Η δράση των διαταραχών εξουδετερώνεται συνεχώς και το µέγεθος που ελέγχουµε διατηρείται σταθερή στην επιθυµητή τιµή (τιµή αναφοράς) µε τιµή σφάλµατος πολύ µικρή. 3.2 Βασικές παράµετροι του ελέγχου Οι παράµετροι που χαρακτηρίζουν ένα µοντέλο αυτοµατισµού είναι : 3.2. Ακρίβεια Η ακρίβεια είναι η προσέγγιση µε την οποία το ρυθµιζόµενο µέγεθος διατηρεί την επιθυµητή τιµή αναφοράς. Ορίζουµε σφάλµα την διαφορά µεταξύ της τιµής αναφοράς και της τιµής του V ρυθµιζόµενου µεγέθους. ( ) r V Απόλυτο σφάλµα ε = a V r V e r e Σχετικό σφάλµα Ευαισθησία e ε = V V a V r Ως ευαισθησία ορίζεται η πιο µικρή τιµή µεταβολής της τιµής αναφοράς που µπορεί να προκαλέσει µεταβολή στην έξοδο του συστήµατος Ευστάθεια Η ευστάθεια δείχνει την δυνατότητα του συστήµατος να φθάνει στη θέση ισορροπίας µε συµπεριφορά περιοδικής µορφής ή µορφή αποσβενυµένης ταλάντωσης. Όταν το σύστηµα σταθεροποιείται σε ταλάντωση σταθερού ή αυξανόµενου πλάτους τότε λέµε ότι είναι ασταθές Σχήµα Σ 3.3. Σ 3.3 Ευστάθεια Συστηµάτων 3

17 3.2.4 Χρόνος απόκρισης Ορίζουµε ως χρόνο απόκρισης, τον απαραίτητο χρόνο, ώστε το σύστηµα να φθάσει στην κατάσταση ισορροπίας. Όλες οι παράµετροι αναφέρονται σε συνθήκες λειτουργίας του συστήµατος στατικές ή δυναµικές. 3.3 οµικά διαγράµµατα και σχέσεις Η ανάλυση της µελέτης λειτουργίας ενός συστήµατος αυτοµατισµού επιτυγχάνεται µε σχηµατικά δοµικά διαγράµµατα. Με αυτά εκφράζεται κάθε σχέση που διέπει το εισερχόµενο µέγεθος µε το εξερχόµενο στο µελετούµενο σύστηµα. ΦΥΣΙΚΟ ΣΤΟΙΧΕΙΟ ΤΟΥ V F ΣΥΣΤΗΜΑΤΟΣ ΠΟΥ ΥΦΙΣΤΑΤΑΙ V2 ΕΙΣΟ ΟΣ Ε ΟΜΕΝΗ ΕΠΕΞΕΡΓΑΣΙΑ ΕΞΟ ΟΣ Η µαθηµατική σχέση που υπάρχει µεταξύ αυτών των δύο σηµάτων εισόδου και εξόδου, ονοµάζεται συνάρτηση µεταφοράς του δοµικού διαγράµµατος. Έχουµε V = F 2 V. Τα δοµικά στοιχεία που χρησιµοποιούνται για την συγκρότηση των δοµικών διαγραµµάτων είναι τα ακόλουθα: 3.3. Κόµβος σύγκρισης V V V V + V3 = V2 V + V3 = 3 2 _ V2 V V V οµικά στοιχεία σε σειρά Ε F X F 2 U Συνάρτηση µεταφοράς G= F F 2 4

18 X 2 F 2 Απόδειξη : X = E F U = X F G= 2 U G= E X X F 2 F G= F F οµικά στοιχεία σε παράλληλη σύνδεση F X + Ε F 2 X 2 + U Συνάρτηση µεταφοράς = + G F F 2 Απόδειξη : X X = E F F G= U E = E 2 2 F G E + = E ( ) F 2 F G= + F οµικά στοιχεία µε ανάδραση E X + F U - U Συνάρτηση µεταφοράς F F G= + F 2 5

19 Απόδειξη : U = X F X = U F U = X F = ( E X ) F = ( E U F ) F = E F U F F G= U E F F U U+ U F F = E F = E G = 2 + F 2 Αποδεικνύεται ότι στο σχηµατικό σύστηµα αυτοµατισµού ισχύει η σχέση : W = U E = + G K I G II G I G II E + G I G II U - Κ Υπάρχουν δύο πεδία εφαρµογής του αυτοµάτου ελέγχου :. Έλεγχος βιοµηχανικών διεργασιών, στον οποίο η ελεγχόµενη µεταβλητή διατηρείται σταθερή χρονικά και ίση µε µία τιµή αναφοράς αµετάβλητη. 2. Έλεγχος σερβοσυστηµάτων ή σερβοµηχανισµών, όπου η ελεγχόµενη µεταβλητή λαµβάνει προγραµµατισµένες χρονικά τιµές ή τιµές που ακολουθούν τη µεταβολή της εισόδου που γίνεται όχι µε προκαθορισµένο τρόπο. Παρακάτω δίνονται παραδείγµατα αυτοµατισµών και των δοµικών τους διαγραµµάτων στα Σχήµατα Σ

20 7
21 Σ Σ 3.7 8
22 4 ΕΛΕΓΚΤΕΣ ΒΙΟΜΗΧΑΝΙΚΩΝ ΙΕΡΓΑΣΙΩΝ Τα συστήµατα αυτοµατισµού που χρησιµοποιούνται για τις βιοµηχανικές διεργασίες είναι γενικά ηλεκτρικού ή πνευµατικού τύπου. Τα πνευµατικά συστήµατα χρησιµοποιούν σαν σήµατα εντολών και ανάδρασης παροχές πεπιεσµένου αέρα, πίεσης 0,2 - At. Τα ηλεκτρικά συστήµατα (ελεγκτές) χρησιµοποιούν ηλεκτρικά σήµατα έντασης µερικών ma. Σε κάθε σύστηµα ελέγχου προσαρµόζουµε την ειδική του συνάρτηση λειτουργίας κατά τρόπο τέτοιο ώστε να επιτυγχάνουµε τον πιο ευσταθή και γρήγορο έλεγχο. Με την προσαρµογή αυτή δίνουµε στον µηχανισµό έλεγχου (ελεγκτή) χαρακτηριστικά τύπου : P: Αναλογικά (PROPORTIONAL) Ι : Ολοκληρωτικού (INTEGRAL) D: ιαφορικά (DERIVATE) Ο ελεγκτής µπορεί να θεωρηθεί ότι αποτελείται από τρία δοµικά στοιχεία παράλληλα, εκ των οποίων το πρώτο αντιστοιχεί στην αναλογική σχέση, το δεύτερο στην σχέση ολοκλήρωσης, και το τρίτο στην σχέση διαφόρισης - παραγώγου. Στην αναλογική σχέση έχουµε σήµα εξόδου ανάλογο του σφάλµατος : ( ) K p x x 0. Στη σχέση ολοκλήρωσης έχουµε σήµα εξόδου ανάλογο του ολοκληρώµατος του σφάλµατος : K ( x ) t i x0 0 Στη σχέση διαφόρισης έχουµε σήµα εξόδου ανάλογο της παραγώγου του σφάλµατος : K dx. d dt Οι συντελεστές των τριών σχέσεων (δοµικών στοιχείων) µπορούν να ρυθµίζονται κατά τέτοιο τρόπο ώστε να διαφοροποιούν το σήµα εξόδου. 4. Αναλογικός ελεγκτής (P) Το δοµικό διάγραµµα λειτουργίας του φαίνεται στο σχ. Σ 4. dt. ΒΑΛΒΙ Α ΕΛΕΓΧΟΥ ΙΕΡΓΑΣΙΑ ΜΕΓΕΘΟΣ ΕΛΕΓΧΟΜΕΝΟ ΕΝΤΟΛΗ ΑΝΑΛΟΓΙΚΟΣ ΕΛΕΓΚΤΗΣ ΑΝΑ ΡΑΣΗ ΤΙΜΗ ΑΝΑΦΟΡΑΣ Σ 4. Η βαλβίδα ελέγχου λαµβάνει θέση ανοίγµατος ανάλογη προς την απόκλιση του ελεγχόµενου µεγέθους από την επιθυµητή τιµή. Αυτό φαίνεται καλύτερα στο σχήµα Σ
23 Για κάθε τιµή του ελεγχόµενου µεγέθους υπάρχει µία µοναδική θέση της βαλβίδας ελέγχου εντός της αναλογικής περιοχής (proportional band). Όταν το άνοιγµα της βαλβίδας αντιστοιχίσει στην επιθυµητή τιµή του ελεγχόµενου µεγέθους τότε φτάνει στη θέση 50%. Όταν το µέγεθος ελέγχου έχει τιµή µεγαλύτερη από την επιθυµητή, η βαλβίδα ελέγχου µετακινείται προς το κλείσιµο, ώστε να µειώσει την παροχή του ελεγχόµενου µέσου που απαιτείται από την διεργασία και τελικά να επαναφέρει το ελεγχόµενο µέγεθος στην επιθυµητή τιµή. Αντίστροφα αν το ελεγχόµενο µέγεθος έχει τιµή µικρότερη από την επιθυµητή, η βαλβίδα ελέγχου µετακινείται προς το άνοιγµα, ( %) ώστε µε αύξηση της παροχής να ρυθµίσει τη διεργασία. Στο παρακάτω σχήµα Σ 4.3 φαίνεται η πορεία του ελέγχου µε αναλογικό ελεγκτή και µεταβολές φορτίου προσωρινές και µόνιµες. Σ. 4.2 Σ
24 4.2 Αναλογικός - ολοκληρωτικός ελεγκτής (PΙ) Αυτός ο τύπος ελεγκτή είναι ο πιο διαδεδοµένος στο βιοµηχανικό αυτοµατισµό. Η µονάδα ελέγχου διαθέτει δύο δοµικά στοιχεία παράλληλα. Το σχηµατικό διάγραµµα κλειστού κυκλώµατος του PI ελεγκτή φαίνεται στο Σχ. Σ 4.4. Γενικά οι ελεγκτές PI διαθέτουν δύο ρυθµίσεις. Μία για να µεταβάλλεται το πλάτος της αναλογικής περιοχής (PB) και µία δεύτερη για να µεταβάλλεται ο χρόνος απόκρισης Tr. Η δράση ενός ελεγκτή PI για µία βαθµωτή µεταβολή του ελεγχόµενου µεγέθους της διεργασίας φαίνεται στο διάγραµµα του Σχ. Σ 4.5. Στο χρόνο t, το ελεγχόµενο µέγεθος και η επιθυµητή τιµή ταυτίζονται στο 0 x. 0 Μετά τη βαθµωτή µεταβολή του µεγέθους από την τιµή x στην 0 x έχουµε ως συνέπεια τη µεταβολή του σήµατος του ελεγκτή (ρυθµιστικού σήµατος) από y σε y λόγω της αναλογικής K p x x0 σχέσης ( ). Στη συνέχεια επίδραση της ολοκληρωτικής δράσης µεταβάλλει το σήµα του ελεγκτή από τη τιµή y σε y και την y µέχρι το χρόνο t I ΒΑΛΒΙ Α ΕΛΕΓΧΟΥ ΙΕΡΓΑΣΙΑ ΜΕΓΕΘΟΣ ΕΛΕΓΧΟΜΕΝΟ ΕΝΤΟΛΗ ΕΛΕΓΚΤΗΣ PI ΑΝΑ ΡΑΣΗ ΤΙΜΗ ΑΝΑΦΟΡΑΣ Σ 4.4 Σ
25 Μετά το ελεγχόµενο µέγεθος ακολουθώντας το κλείσιµο της βαλβίδας ελέγχου τείνει να γυρίσει στην επιθυµητή τιµή x µέχρι το χρόνο 0 t. Το σήµα του ελεγκτή y µεταβάλλει τη συνάρτηση 3 µεταβολής του αντίστοιχα και σταθεροποιείται τελικά στην τιµή y, διαφορετική από την y 4 0 δεδοµένου ότι άλλαξε το φορτίο. Έχουµε τελικά επαναφορά του x στο x λόγω της ρυθµιστικής 0 δράσης του ελεγκτή PI παρά τη µεταβολή του φορτίου που συνέβη και εξακολουθεί να συµβαίνει, και έχει σαν συνέπεια τη µεταβολή της τιµής του σήµατος ρύθµισης από την τιµή y στην y. Θα εξετάσουµε παράδειγµα µε ρύθµιση θερµοκρασίας σε τιµή 25 0 C όπως φαίνεται στο Σχήµα Σ Σ. 4.6 Ξεκινάµε από τη συνθήκη ισορροπίας του ελεγχόµενου µεγέθους στην επιθυµητή τιµή των 25 0 C, µε ένα ρυθµιστικό σήµα που προκαλεί άνοιγµα της βαλβίδας κατά 50%. Η διεργασία υφίσταται µια µόνιµη µεταβολή (προσθήκη ποσότητας) προς µια µεγαλύτερη φόρτιση. Αρχικά εµφανίζεται µια µείωση της θερµοκρασίας του σήµατος που προκαλεί µια ρύθµιση (διόρθωση) αναλογική. Στη συνέχεια δηµιουργείται µια απόκλιση που διορθώνεται από την ολοκληρωτική δράση που προστίθεται στη προηγούµενη. Η βάνα φθάνει έτσι σε µια θέση που επιτρέπει να διατηρείται η θερµοκρασία στην προκαθορισµένη τιµή ( 25 0 C ). Η χαρακτηριστική συνάρτηση του ρυθµιστή PI µπορεί να γραφεί µε την µορφή : t ( ) ( ) y K p x Ki x y = x + x dt ANAΛ OΓIKO OΛOKΛ HPΩ TIKO Για µία βαθµωτή µεταβολή της ελεγχόµενης µεταβλητής x το ρυθµιστικό σήµα γίνεται : 22
26 y K K i p y 0 = T r K = BP = p ( x x ) + K ( x x ) t 0 i 0 y= x x + t BP T r όπου ΒΡ : Αναλογική ζώνη Τ r : Χρόνος απόκρισης ολοκλήρωσης 4.3 Αναλογικός - Ολοκληρωτικός - ιαφορικός ελεγκτής (PID) Αυτός ο τύπος ελεγκτή χρησιµοποιείται κυρίως όταν στην ελεγχόµενη διεργασία υπάρχει µια συνεχής γραµµική µεταβολή της ελεγχόµενης µεταβλητής. Το σχηµατικό διάγραµµα του PID ελεγκτή φαίνεται στο σχήµα Σ4.7 και σχήµα Σ 4.8. ΒΑΛΒΙ Α ΕΛΕΓΧΟΥ ΙΕΡΓΑΣΙΑ ΜΕΓΕΘΟΣ ΕΛΕΓΧΟΜΕΝΟ ΕΝΤΟΛΗ ΕΛΕΓΚΤΗΣ P ID ΑΝΑ ΡΑΣΗ ΤΙΜΗ ΑΝΑΦΟΡΑΣ ΕΙΣΟ ΟΣ ΑΝΑΛΟΓΙΚΟ P ΕΞΟ ΟΣ ΟΛΟΚΛΗΡΩΤΙΚΟ I ΙΑΦΟΡΙΚΟ D Σ4.7 και Σ 4.8 Τα τρία δοµικά στοιχεία του αυτοµατισµού παράλληλα συνδεδεµένα, µπορούν να συµµετέχουν στο συνολικό σήµα µε συντελεστές που επιδέχονται ρύθµιση. 23
27 Η χαρακτηριστική συνάρτηση ενός PID ρυθµιστή είναι η ακόλουθη : ( ) ( ) y K p x Ki x K y = x + x dt ANAΛOΓIKO( P) 0 OΛOKΛHPΩ TIKO( I) t d dx dt IAΦOPIKO( D) Η δράση ενός PID ελεγκτή για µία γραµµική µεταβολή της ελεγχόµενης µεταβλητής φαίνεται στο Σχήµα Σ 4.9. Σ 4.9 Στο χρόνο t η ελεγχόµενη µεταβλητή και η επιθυµητή τιµή ταυτίζονται στη τιµή 0 x. Το 0 παρεχόµενο από τον ρυθµιστή PID σήµα είναι y. 0 Στο χρόνο t αρχίζει µια µεταβολή της ελεγχόµενης µεταβλητής που προκύπτει από µία προοδευτική µεταβολή φορτίου. Το µέρος του σήµατος από την επίδραση µιας διαφορικής δράσης είναι η µεταβολή από y σε y ίσο µε 0 K d V... x V = dx. x dt Παρεµβαίνουν φυσικά και οι δράσεις αναλογική και ολοκληρωτική. Η αναλογική ξεκινώντας από το y µεταβάλλει το σήµα εξόδου µε µία σχέση γραµµική που είναι συνάρτηση της αναλογικής ζώνης (Β.Ρ) 24
28 t Η ολοκληρωτική δράση δίνεται από την σχέση : ( x ) K x i 0 0 Μετά το χρόνο t η δράση της βαλβίδας µειώνει την ελεγχόµενη µεταβλητή στην τιµή 2 x που 0 είναι επιθυµητή και επιτυγχάνεται στο χρόνο t όπου το ρυθµιστικό σήµα έχει πλέον µια καινούρια 3 τιµή που αντιστοιχεί στη µεταβολή του φορτίου Κύκλωµα αυτοµατισµού στάθµης Η διατήρηση της στάθµης σε δοχείο ανεξάρτητα από τις συνθήκες ροής στην έξοδο φαίνεται σχηµατικά στο Σχήµα Σ4.. dt ΕΙΣΟ ΟΣ ΡΕΥΣΤΟΥ ΒΑΛΒΙ Α ΣΕΡΒΟΜΗΧΑΝΙΣΜΟΣ ΕΝΤΟΛΗΣ ΕΞΑΜΕΝΗ m ΕΛΕΓΚΤΗΣ PI ΜΕΤΑΤΡΟΠΕΑΣ ΑΝΙΧΝΕΥΤΗΣ ΣΤΑΘΜΗΣ ΕΞΟ ΟΣ ΡΕΥΣΤΟΥ ΑΝΑ ΡΑΣΗ 0,2-At m/ω ΤΟΠΟΘΕΤΗΣΗ ΕΠΙΘΥΜΗΤΗΣ ΤΙΜΗΣ ΣΤΑΘΜΗΣ ΜΕΤΑΤΡΟΠΕΑΣ P/Amperes ΚΑΤΑΓΡΑΦΙΚΟ Σ4. Ο ανιχνευτής παρέχει σήµα ανάλογο του βάθους (στάθµης) σε m ενώ ο µετατροπέας (Transducer) µετατρέπει το σήµα σε πίεση P. Ο ελεγκτής PI δέχεται το σήµα και παρέχει σε σχέση µε την επιθυµητή τιµή στάθµης µια ρυθµιστική εντολή στην βαλβίδα παροχής ρευστού τέτοια ώστε, ανεξάρτητα από τις συνθήκες ροής στην έξοδο του ρευστού η στάθµη στην δεξαµενή να παραµένει σταθερή. 25
29 5 ΣΕΡΒΟΣΥΣΤΗΜΑΤΑ 5. Εισαγωγή Τα σερβοσυστήµατα κατατάσσονται ως εξής : Σταθερής τιµής, και είναι εκείνα στα οποία η ελεγχόµενη µεταβλητή παραµένει σταθερή για συγκεκριµένο χρόνο. Προγραµµατιζόµενης τιµής και είναι εκείνα στα οποία η ελεγχόµενη µεταβλητή ακολουθεί ένα ορισµένο πρόγραµµα µεταβολών. Μεταβαλλόµενης τιµής και είναι αυτά στα οποία η ελεγχόµενη µεταβλητή ακολουθεί τις διακυµάνσεις µίας ή περισσοτέρων παραµέτρων όχι προδιαγεγραµµένων. Το δοµικό σχηµατικό διάγραµµα ενός σερβοσυστήµατος φαίνεται στο σχήµα Σ 5.. ΜΟΝΑ Α ΕΛΕΓΧΟΥ ΜΕΤΑΒΛΗΤΗ ΓΙΑ ΕΛΕΓΧΟ ΣΗΜΑ ΑΝΑΦΟΡΑΣ V ε V 2 ΕΝΙΣΧΥ- ΤΗΣ ΣΤΟΙΧΕΙΟ ΕΛΕΓΧΟΥ ΕΝΕΡΓΟΠΟΙΗΤΗΣ H ΙΕΡΓΑΣΙΑ ΕΞΟ ΟΣ ΜΕΤΑΒΛΗΤΗΣ ΑΝΑ ΡΑΣΗ ΜΕΤΑΤΡΟΠΕΑΣ Σ 5. Το σήµα αναφοράς υφίσταται µονίµως µια σύγκριση µε αυτό που προκύπτει από την ανάδραση. Το σφάλµα ελέγχου ε = V V 2 ενισχύεται και µεταφέρεται στο όργανο ελέγχου το οποίο µε τη σειρά του σηµατοδοτεί τον ενεργοποιητή (π.χ. κινητήρας, έµβολο κ.λ.π.). Ο ρυθµιστής κάνει απευθείας την σύγκριση µεταξύ των σηµείων αναφοράς και ανάδρασης και παράγει σαν έξοδο µια ρυθµιστική δράση. Το όργανο ή στοιχείο ελέγχου ή βαλβίδα είναι το στοιχείο που δρα απευθείας στην µεταβλητή που θέλουµε να ρυθµίσουµε. Τα σερβοσυστήµατα ακριβείας που χρησιµοποιούνται στις π.χ. εργαλειοµηχανές CNC και στα ROBOT, λειτουργούν υπό µορφή κλειστού βρόχου και µάλιστα πολλαπλού, µε ανάδραση θέσης ταχύτητας, ρεύµατος. Οι µεταβλητές λοιπόν που θέλουµε να ρυθµίσουµε σε αυτήν τη περίπτωση ρυθµίζονται µε ηλεκτρονικό ρυθµιστή. 5.2 Συνάρτηση Μεταφοράς Κάθε δοµικό στοιχείο που απαρτίζει ένα σύστηµα αυτοµατισµού, χαρακτηρίζεται από τη δική του συνάρτηση µεταφοράς, που εκφράζει τον µαθηµατικό λόγο µεταξύ των σηµάτων εξόδου και εισόδου. Αυτό ισχύει όχι µόνο για σήµατα χρονικά σταθερά αλλά και για σήµατα µεταβλητά ως προς το χρόνο. E f U 26
30 Τα δοµικά στοιχεία ονοµάζονται γραµµικά όταν η συνάρτηση µεταφοράς είναι ένας απλός U συντελεστής αναλογίας f = = K. E Γραµµικά ονοµάζονται τα στοιχεία, όταν η συνάρτηση χαρακτηρίζεται από µια διαφορική εξίσωση πρώτης τάξης. Στην πρώτη περίπτωση το σήµα εξόδου εξαρτάται από την τιµή του σήµατος εισόδου, και η συνάρτηση µεταφοράς είναι µια σταθερά. Στη δεύτερη περίπτωση το σήµα εξόδου δεν εξαρτάται από την τιµή του σήµατος εισόδου αλλά επιπλέον και από τη διακύµανσή ως προς το χρόνο. Σ αυτή τη περίπτωση η σχέση µεταξύ των σηµάτων εισόδου και εξόδου δεν µπορεί να είναι µια απλή αλγεβρική έκφραση, αλλά ολοκληρωτική - διαφορική. Για να απλοποιήσουµε την ολοκληρωτική - διαφορική σχέση, χρησιµοποιούµε το µετασχηµατισµό LAPLACE. Για τον µετασχηµατισµό LAPLACE περνάµε, από συναρτήσεις χρονικές των σηµάτων E(t), f(t) σε συναρτήσεις της µεταβλητής S στο µιγαδικό πεδίο. Έτσι µπορούµε να εκφράσουµε σε κάθε περίπτωση την συνάρτηση µεταφοράς σαν σχέση µεταξύ U( S) των σηµάτων εισόδου και εξόδου µε µία αλγεβρική απλή έκφραση. Έτσι έχουµε f ( S) =. E( S) 5.3 Μετασχηµατισµός LAPLACE Η δράση αυτού του µετασχηµατισµού συνίσταται στην αντικατάσταση µιας συνάρτησης f(t) µίας µεταβλητής ως προς το χρόνο t µε µία αντίστοιχη αλλά µε έκφραση ως προς µία µιγαδική µεταβλητή S. Αυτή την αντίστοιχη συνάρτηση ορίζουµε f(s). Η µεταβλητή S µπορεί να παρασταθεί στο πεδίο των µιγαδικών αριθµών µε µία συνάρτηση S = δ + jω όπου δ είναι το πραγµατικό µέρος και ω το φανταστικό. Η µαθηµατική συνάρτηση του µετασχηµατισµού LAPLACE είναι : [ ] ( ) e st f ( S) = L f ( t) = f t dt Βασικοί κανόνες µετασχηµατισµού LAPLACE ) L[ K f ( t) ] = K L f( t) = K f S όπου L : το σύµβολο του µετασχηµατισµού [ ] ( ) f ( ) + f ( ) = f + f = f + f [ ] [ ( )] [ ( )] ( ) ( ) ) L t t L t L t S S ( ) 3) L df t [ ( )] ( ) dt S L f t S f S = = 4) L[ f( t) dt] = ( ) S L f t = S f S Παραδείγµατα Βαθµωτή µεταβολή : [ ] ( ) 27
31 f( t) = u( t) = {... t t< 0 t= st st L[ f( t) ] = e dt = = 0 = S S S 0 e t= 0 Ευθύγραµµη µεταβολή : f ( t) = Kt+ K 0 st 0 K L[ f ( t) ] = L[ Kt] + L[ K ] = Kt e dt+ = S 0 K S K S Αντίστροφος µετασχηµατισµός LAPLACE Όταν η εξίσωση µετασχηµατιστεί κατά LAPLACE, η επίλυσή της είναι αλγεβρική ή και προκύπτει µία συνάρτηση f(s) γνωστή. Προκειµένου να βρούµε την αρχικά ζητούµενη συνάρτηση f(t), πρέπει να καταφύγουµε ή στην µαθηµατική τους σχέση, ή στους πίνακες µετασχηµατισµών, ώστε την γνωστή συνάρτηση f(s) να την µετατρέψουµε συναρτήσεις f (S) των οποίων οι αντιστοιχούσες f (t) είναι γνωστές και περιλαµβάνονται στους πίνακες. Η µαθηµατική σχέση της αντίστροφης µετασχηµατισµένης LAPLACE είναι : 6+ jω f( t) f( S) j = e 2π 6 jω Ο πίνακας των βασικών µετασχηµατισµένων LAPLACE είναι στο Σχήµα Σ Ας θεωρήσουµε το παράδειγµα της συνάρτησης f ( S) = S( S+ ) Για να βρούµε την αντίστροφή µετασχηµατισµένη κατά LAPLACE f(t), µετατρέπουµε την f(s) ως 2 εξής : f ( S) = S( S+ ) = 2 S 2 S+ µε ( ) 2 2 f S = και f ( S) =, οπότε από το Σ 5.2 S 2 S+ βλέπουµε ότι η 2 2 t αντιστοιχεί στην f ( t ) = 2 και η αντιστοιχεί στην f ( t) = 2 S S+ 2 e, οπότε : f ( t) = ( t) ( t) = 2 f f e t Συναρτήσεις µεταφοράς ρυθµιστών - συστηµάτων y ) Αναλογικού (P) : y= K x G= = p p x K Εδώ δεν χρειάζεται µετασχηµατισµός LAPLACE 2) Ρυθµιστής PID Εδώ έχουµε την προσθήκη του διαφορικού όρου K dx όπου : d dt dx L K S S L( x) d d x d dt K L T = = και συνολικά : G = K + + S p T S T d, r 3) Σύστηµα που περιγράφεται µε διαφορική εξίσωση ης τάξης st ds 28
32 dy τ + y= f ( t ) όπου : dt τ : χρονική σταθερά του συστήµατος f(t) y y : σήµα εξόδου G f(t) : σήµα εισόδου χρονικά µεταβαλλόµενο t : χρόνος Παίρνοντας τους µετασχηµατισµούς LAPLACE της εξίσωσης έχοµε : τ L dy Ly L[ f( t) ] [ ( ) τ SLy Ly L f t ] dt + = + = Ly G= = L f ( t) S+ [ ] τ F (s) F (t) s n t...( n=, 2, 3,...) s n ( n )! e at s a n at t e ( s a) n ( n )! 2 2 sinh at s a a s 2 2 coshat s a...( a b) ( s a)( s+ a) a b e at e bt [ ] s at bt...( a b) [ ae be ] ( s a)( s+ a) a b 2 2 sin at s + a a s cosat 2 2 s + a 2 2 ( s a) + b b e at sin bt s a e at cos bt 2 2 ( s a) + b s 2 2 s + a 2 2a t sin at ( ) Σ
y 1 Output Input y 2 Σχήµα 1.1 Βασική δοµή ενός συστήµατος ελέγχου κλειστού βρόγχου
 Τ.Ε.Ι. ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜHΜΑ ΗΛΕΚΤΡΟΛΟΓIΑΣ Σηµειώσεις για το εργαστήριο του µαθήµατος ΣΥΣΤΗΜΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ I ΓΑΥΡΟΣ ΚΩΝ/ΝΟΣ ΚΟΖΑΝΗ 2008 Κεφάλαιο 1 ο Ορισµός Συστηµάτων
Τ.Ε.Ι. ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜHΜΑ ΗΛΕΚΤΡΟΛΟΓIΑΣ Σηµειώσεις για το εργαστήριο του µαθήµατος ΣΥΣΤΗΜΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ I ΓΑΥΡΟΣ ΚΩΝ/ΝΟΣ ΚΟΖΑΝΗ 2008 Κεφάλαιο 1 ο Ορισµός Συστηµάτων
1) Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι
 Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι") 1) Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι επιπτώσεις της 4) Μαθηματικό υπόβαθρο για την μελέτη των
1) Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι επιπτώσεις της 4) Μαθηματικό υπόβαθρο για την μελέτη των
Έλεγχος Κίνησης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Αυτόματος Έλεγχος Συστημάτων Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Αυτόματος Έλεγχος Συστημάτων Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
Η Βασική Δομή Συστημάτων Ελέγχου Κίνησης
 Η Βασική Δομή Συστημάτων Ελέγχου Κίνησης Σύστημα ονομάζουμε ένα σύνολο στοιχείων κατάλληλα συνδεδεμένων μεταξύ τους για να επιτελέσουν κάποιο έργο Είσοδο ονομάζουμε τη διέγερση, εντολή ή αιτία η οποία
Η Βασική Δομή Συστημάτων Ελέγχου Κίνησης Σύστημα ονομάζουμε ένα σύνολο στοιχείων κατάλληλα συνδεδεμένων μεταξύ τους για να επιτελέσουν κάποιο έργο Είσοδο ονομάζουμε τη διέγερση, εντολή ή αιτία η οποία
Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής.
 ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής. Α) Σκοπός: Σκοπός της παρούσας άσκησης είναι να επιδειχθεί ο έλεγχος των στροφών
ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής. Α) Σκοπός: Σκοπός της παρούσας άσκησης είναι να επιδειχθεί ο έλεγχος των στροφών
Ρυθµιστές PID. Βρόχος Ανατροφοδότησης Αναλογικός Ρυθµιστής (Ρ) Ολοκληρωτικός Ρυθµιστής (Ι) ιαφορικός Ρυθµιστής (D) Ρύθµιση PID
 Ολοκληρωτικός Ρυθµιστής (Ι) ιαφορικός Ρυθµιστής (D) Ρύθµιση PID") Ρυθµιστές PID Βρόχος Ανατροφοδότησης Αναλογικός Ρυθµιστής (Ρ) Ολοκληρωτικός Ρυθµιστής (Ι) ιαφορικός Ρυθµιστής (D) Ρύθµιση PID 1 Βρόχος Ανατροφοδότησης! Θεωρούµε το βρόχο ανατροφοδότησης SP ιεργασία D G
Ρυθµιστές PID Βρόχος Ανατροφοδότησης Αναλογικός Ρυθµιστής (Ρ) Ολοκληρωτικός Ρυθµιστής (Ι) ιαφορικός Ρυθµιστής (D) Ρύθµιση PID 1 Βρόχος Ανατροφοδότησης! Θεωρούµε το βρόχο ανατροφοδότησης SP ιεργασία D G
4.3. Γραµµικοί ταξινοµητές
 Γραµµικοί ταξινοµητές Γραµµικός ταξινοµητής είναι ένα σύστηµα ταξινόµησης που χρησιµοποιεί γραµµικές διακριτικές συναρτήσεις Οι ταξινοµητές αυτοί αναπαρίστανται συχνά µε οµάδες κόµβων εντός των οποίων
Γραµµικοί ταξινοµητές Γραµµικός ταξινοµητής είναι ένα σύστηµα ταξινόµησης που χρησιµοποιεί γραµµικές διακριτικές συναρτήσεις Οι ταξινοµητές αυτοί αναπαρίστανται συχνά µε οµάδες κόµβων εντός των οποίων
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων
 Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
Είδη Διορθωτών: Υπάρχουν πολλών ειδών διορθωτές. Μία βασική ταξινόμησή τους είναι οι «Ειδικοί Διορθωτές» και οι «Κλασσικοί Διορθωτές».
 ΔΙΟΡΘΩΣΗ ΣΑΕ Είδη Διορθωτών: Οι Διορθωτές έχουν την δική τους (Σ.Μ). Ενσωματώνονται στον βρόχο του ΣΑΕ και δρουν πάνω στην αρχική Σ.Μ κατά τρόπο ώστε να της προσδώσουν την επιθυμητή συμπεριφορά, την οποία
ΔΙΟΡΘΩΣΗ ΣΑΕ Είδη Διορθωτών: Οι Διορθωτές έχουν την δική τους (Σ.Μ). Ενσωματώνονται στον βρόχο του ΣΑΕ και δρουν πάνω στην αρχική Σ.Μ κατά τρόπο ώστε να της προσδώσουν την επιθυμητή συμπεριφορά, την οποία
Σύστημα (system) είναι ένα σύνολο φυσικών στοιχείων, πραγμάτων ατόμων, μεγεθών ή εννοιών, που σχηματίζουν μιαν ενότητα και δρα σαν μια ενότητα.
 είναι ένα σύνολο φυσικών στοιχείων, πραγμάτων ατόμων, μεγεθών ή εννοιών, που σχηματίζουν μιαν ενότητα και δρα σαν μια ενότητα.") Σύστημα (system) είναι ένα σύνολο φυσικών στοιχείων, πραγμάτων ατόμων, μεγεθών ή εννοιών, που σχηματίζουν μιαν ενότητα και δρα σαν μια ενότητα. π.χ. Το ηλιακό σύστημα, το σύνολο δηλαδή των πλανητών του
Σύστημα (system) είναι ένα σύνολο φυσικών στοιχείων, πραγμάτων ατόμων, μεγεθών ή εννοιών, που σχηματίζουν μιαν ενότητα και δρα σαν μια ενότητα. π.χ. Το ηλιακό σύστημα, το σύνολο δηλαδή των πλανητών του
Ο Βρόχος Ρύθµισης µε Ανατροφοδότηση
 Ο Βρόχος Ρύθµισης µε Ανατροφοδότηση Ο Βρόχος Ανατροφοδότησης Στοιχεία ιεργασίας και Όργανα Μέτρησης ιατάξεις ιαγραµµάτων Βαθµίδας Μέτρα Απόδοσης Ρύθµισης Επιλογή Μεταβλητών Ρύθµισης 1 Ο βρόχος ανατροφοδότησης!
Ο Βρόχος Ρύθµισης µε Ανατροφοδότηση Ο Βρόχος Ανατροφοδότησης Στοιχεία ιεργασίας και Όργανα Μέτρησης ιατάξεις ιαγραµµάτων Βαθµίδας Μέτρα Απόδοσης Ρύθµισης Επιλογή Μεταβλητών Ρύθµισης 1 Ο βρόχος ανατροφοδότησης!
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 1 η : Εισαγωγή
 Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 1 η : Εισαγωγή Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΒΙΟΜΗΧΑΝΙΚΟΥ ΣΧΕΔΙΑΣΜΟΥ ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 1 η : Εισαγωγή Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΒΙΟΜΗΧΑΝΙΚΟΥ ΣΧΕΔΙΑΣΜΟΥ ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΥΑΙΣΘΗΣΙΑ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ
 ΤΕΙ ΠΕΙΡΑΙΑ -ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΟΝΙΚΩΝ ΦΙΛΤΡΩΝ ΧΕΙΜΕΡΙΝΟ 2017-18 ΕΥΑΙΣΘΗΣΙΑ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ 1. ΕΥΑΙΣΘΗΣΙΑ Ενα κύκλωµα, το οποίο κάνει µια συγκεκριµένη λειτουργία εκφραζόµενη
ΤΕΙ ΠΕΙΡΑΙΑ -ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΟΝΙΚΩΝ ΦΙΛΤΡΩΝ ΧΕΙΜΕΡΙΝΟ 2017-18 ΕΥΑΙΣΘΗΣΙΑ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ 1. ΕΥΑΙΣΘΗΣΙΑ Ενα κύκλωµα, το οποίο κάνει µια συγκεκριµένη λειτουργία εκφραζόµενη
ΤΕΙ ΠΕΙΡΑΙΑ. Συστήµατα Αυτοµάτου Ελέγχου Ι. Ασκήσεις Πράξης. . Καλλιγερόπουλος Σ. Βασιλειάδου. Χειµερινό εξάµηνο 2008/09
 ΤΕΙ ΠΕΙΡΑΙΑ Τµήµα Αυτοµατισµού Συστήµατα Αυτοµάτου Ελέγχου Ι Ασκήσεις Πράξης. Καλλιγερόπουλος Σ. Βασιλειάδου Χειµερινό εξάµηνο 008/09 Ασκήσεις Λειτουργικά διαγράµµατα βαθµίδων Βρείτε τις επιµέρους βαθµίδες
ΤΕΙ ΠΕΙΡΑΙΑ Τµήµα Αυτοµατισµού Συστήµατα Αυτοµάτου Ελέγχου Ι Ασκήσεις Πράξης. Καλλιγερόπουλος Σ. Βασιλειάδου Χειµερινό εξάµηνο 008/09 Ασκήσεις Λειτουργικά διαγράµµατα βαθµίδων Βρείτε τις επιµέρους βαθµίδες
1.1. Διαφορική Εξίσωση και λύση αυτής
 Εισαγωγή στις συνήθεις διαφορικές εξισώσεις 9 Διαφορική Εξίσωση και λύση αυτής Σε ότι ακολουθεί με τον όρο συνάρτηση θα εννοούμε μια πραγματική συνάρτηση μιας πραγματικής μεταβλητής, ορισμένη σε ένα διάστημα
Εισαγωγή στις συνήθεις διαφορικές εξισώσεις 9 Διαφορική Εξίσωση και λύση αυτής Σε ότι ακολουθεί με τον όρο συνάρτηση θα εννοούμε μια πραγματική συνάρτηση μιας πραγματικής μεταβλητής, ορισμένη σε ένα διάστημα
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων
 Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
ΙΑΓΩΝΙΣΜΑ ΣΤΗ ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ ΚΑΤΕΥΘΥΝΣΗΣ ΣΤΙΣ ΜΗΧΑΝΙΚΕΣ ΚΑΙ ΗΛΕΚΤΡΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ
 ΙΑΓΩΝΙΣΜΑ ΣΤΗ ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ ΚΑΤΕΥΘΥΝΣΗΣ ΣΤΙΣ ΜΗΧΑΝΙΚΕΣ ΚΑΙ ΗΛΕΚΤΡΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ Θέµα Α Στις ερωτήσεις -4 να βρείτε τη σωστή απάντηση. Α. Για κάποιο χρονικό διάστηµα t, η πολικότητα του πυκνωτή και
ΙΑΓΩΝΙΣΜΑ ΣΤΗ ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ ΚΑΤΕΥΘΥΝΣΗΣ ΣΤΙΣ ΜΗΧΑΝΙΚΕΣ ΚΑΙ ΗΛΕΚΤΡΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ Θέµα Α Στις ερωτήσεις -4 να βρείτε τη σωστή απάντηση. Α. Για κάποιο χρονικό διάστηµα t, η πολικότητα του πυκνωτή και
website:
 Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 6 Μαρτίου 2017 1 Εισαγωγή Κάθε φυσικό σύστημα
Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 6 Μαρτίου 2017 1 Εισαγωγή Κάθε φυσικό σύστημα
Έλεγχος Κίνησης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Συστήματα Ελέγχου Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Συστήματα Ελέγχου Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΠΛΗΡΗΣΑΥΤΟΜΑΤΟΠΟΙΗΣΗ ΣΤΗ ΝΑΥΤΙΚΗ ΤΕΧΝΟΛΟΓΙΑ. Η εργασία του µελλοντικού µηχανικού
 ΠΛΗΡΗΣΑΥΤΟΜΑΤΟΠΟΙΗΣΗ ΣΤΗ ΝΑΥΤΙΚΗ ΤΕΧΝΟΛΟΓΙΑ Controls Bearing Seal H ΣΥΓΧΡΟΝΗ ΦΙΛΟΣΟΦΙΑ ΕΛΕΓΧΟΥ ΜΗΧΑΝΩΝ Bowthruster St. Thruster E-Thruster Waterjets FPP CPP 1 2 Η εργασία του µελλοντικού µηχανικού ΣΑΕ
ΠΛΗΡΗΣΑΥΤΟΜΑΤΟΠΟΙΗΣΗ ΣΤΗ ΝΑΥΤΙΚΗ ΤΕΧΝΟΛΟΓΙΑ Controls Bearing Seal H ΣΥΓΧΡΟΝΗ ΦΙΛΟΣΟΦΙΑ ΕΛΕΓΧΟΥ ΜΗΧΑΝΩΝ Bowthruster St. Thruster E-Thruster Waterjets FPP CPP 1 2 Η εργασία του µελλοντικού µηχανικού ΣΑΕ
Είναι το ηλεκτρικό ρεύµα διανυσµατικό µέγεθος;
 Είναι το ηλεκτρικό ρεύµα διανυσµατικό µέγεθος; Για να εξετάσουµε το κύκλωµα LC µε διδακτική συνέπεια νοµίζω ότι θα πρέπει να τηρήσουµε τους ορισµούς που δώσαµε στα παιδιά στη Β Λυκείου. Ας ξεκινήσουµε
Είναι το ηλεκτρικό ρεύµα διανυσµατικό µέγεθος; Για να εξετάσουµε το κύκλωµα LC µε διδακτική συνέπεια νοµίζω ότι θα πρέπει να τηρήσουµε τους ορισµούς που δώσαµε στα παιδιά στη Β Λυκείου. Ας ξεκινήσουµε
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων
 Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
Παράδειγµα Θεωρείστε το σύστηµα: αυτοκίνητο επάνω σε επίπεδη επιφάνεια κάτω από την επίδραση δύναµης x( t ) : v(t)
 : v(t)") Παράδειγµα Θεωρείστε το σύστηµα: αυτοκίνητο επάνω σε επίπεδη επιφάνεια κάτω από την επίδραση δύναµης x( t ) : p(t) v(t) v(t) Πίεση στό γκάζι Σήµα εισόδου t ΣΥΣΤΗΜΑ Ταχύτης του αυτοκινήτου Σήµα εξόδου t
Παράδειγµα Θεωρείστε το σύστηµα: αυτοκίνητο επάνω σε επίπεδη επιφάνεια κάτω από την επίδραση δύναµης x( t ) : p(t) v(t) v(t) Πίεση στό γκάζι Σήµα εισόδου t ΣΥΣΤΗΜΑ Ταχύτης του αυτοκινήτου Σήµα εξόδου t
ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΣΧΟΛΗ ΕΠΙΣΤΗΜΩΝ ΤΗΣ ΔΙΟΙΚΗΣΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΟΙΚΟΝΟΜΙΑΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΝΟΤΗΤΑ 0: ΒΑΣΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΚΑΙ ΤΥΠΟΙ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Δρ Γιώργος
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΣΧΟΛΗ ΕΠΙΣΤΗΜΩΝ ΤΗΣ ΔΙΟΙΚΗΣΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΟΙΚΟΝΟΜΙΑΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΝΟΤΗΤΑ 0: ΒΑΣΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΚΑΙ ΤΥΠΟΙ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Δρ Γιώργος
Σύστημα και Μαθηματικά μοντέλα συστημάτων
 Σύστημα και Μαθηματικά μοντέλα συστημάτων Όταν μελετούμε έναν συγκεκριμένο μηχανισμό η μια φυσική διεργασία επικεντρώνουμε το ενδιαφέρον μας στα φυσικά μεγέθη του μηχανισμού τα οποία μας ενδιαφέρει να
Σύστημα και Μαθηματικά μοντέλα συστημάτων Όταν μελετούμε έναν συγκεκριμένο μηχανισμό η μια φυσική διεργασία επικεντρώνουμε το ενδιαφέρον μας στα φυσικά μεγέθη του μηχανισμού τα οποία μας ενδιαφέρει να
ΚΕΦΑΛΑΙΟ 10. Μελέτη ηλεκτρικών δικτύων στην Ηµιτονική Μόνιµη Κατάσταση
 26 ΚΕΦΑΛΑΙΟ 0 Μελέτη ηλεκτρικών δικτύων στην Ηµιτονική Μόνιµη Κατάσταση 0. ) Γενικά για την Ηµιτονική Μόνιµη Κατάσταση ( Η.Μ.Κ.) Η µελέτη ενός ηλεκτρικού δικτύου γίνεται πρώτιστα στο στο πεδίο του χρόνου.
26 ΚΕΦΑΛΑΙΟ 0 Μελέτη ηλεκτρικών δικτύων στην Ηµιτονική Μόνιµη Κατάσταση 0. ) Γενικά για την Ηµιτονική Μόνιµη Κατάσταση ( Η.Μ.Κ.) Η µελέτη ενός ηλεκτρικού δικτύου γίνεται πρώτιστα στο στο πεδίο του χρόνου.
NETCOM S.A. ΨΗΦΙΑΚΟΣ ΕΛΕΓΧΟΣ ΠΑΛΜΟΜΕΤΑΤΡΟΠΕΩΝ DIGITAL CONTROL OF SWITCHING POWER CONVERTERS
 NETCOM S.A. ΨΗΦΙΑΚΟΣ ΕΛΕΓΧΟΣ ΠΑΛΜΟΜΕΤΑΤΡΟΠΕΩΝ DIGITAL CONTROL OF SWITCHING POWER CONVERTERS Αρχή λειτουργίας των Αναλογικών και ψηφιακών Παλμομετατροπεων Ο παλμός οδήγησης ενός παλμομετατροπέα, με αναλογική
NETCOM S.A. ΨΗΦΙΑΚΟΣ ΕΛΕΓΧΟΣ ΠΑΛΜΟΜΕΤΑΤΡΟΠΕΩΝ DIGITAL CONTROL OF SWITCHING POWER CONVERTERS Αρχή λειτουργίας των Αναλογικών και ψηφιακών Παλμομετατροπεων Ο παλμός οδήγησης ενός παλμομετατροπέα, με αναλογική
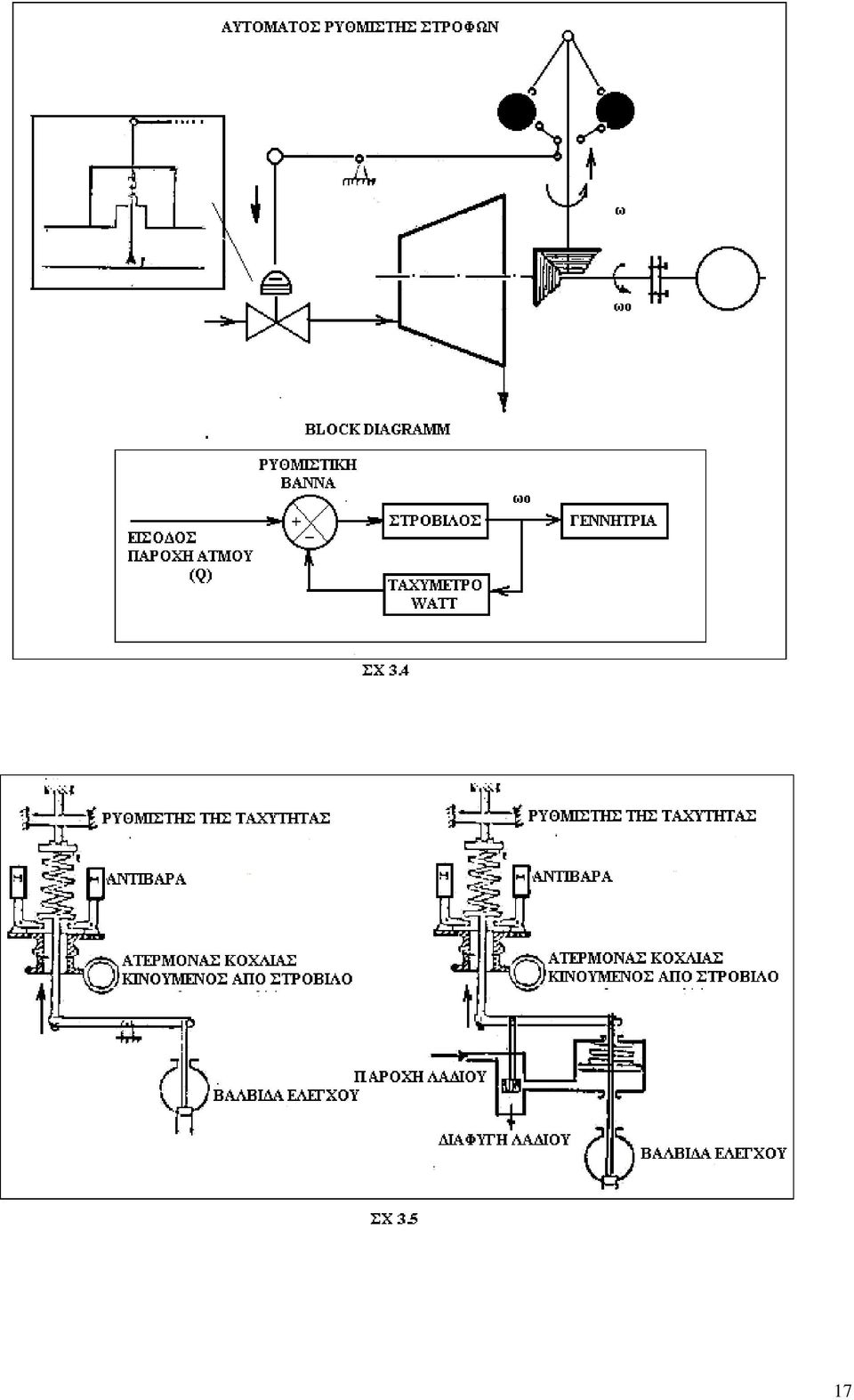
Ανεξάρτητααπό τον τύπο του ρυθµιστή πρέπει να διαθέτει δυο κύρια χαρακτηριστικά: Ακρίβεια λειτουργίας Ευστάθεια
 ΡΥΘΜΙΣΤΕΣ ΣΤΡΟΦΩΝ Ανεξάρτητααπό τον τύπο του ρυθµιστή πρέπει να διαθέτει δυο κύρια χαρακτηριστικά: Ακρίβεια λειτουργίας Ευστάθεια Το πρώτο αναφέρεται σε µόνιµη λειτουργία δηλαδή σε σταθερές στροφές. Το
ΡΥΘΜΙΣΤΕΣ ΣΤΡΟΦΩΝ Ανεξάρτητααπό τον τύπο του ρυθµιστή πρέπει να διαθέτει δυο κύρια χαρακτηριστικά: Ακρίβεια λειτουργίας Ευστάθεια Το πρώτο αναφέρεται σε µόνιµη λειτουργία δηλαδή σε σταθερές στροφές. Το
Εισαγωγή στα ψηφιακά Συστήµατα Μετρήσεων
 1 Εισαγωγή στα ψηφιακά Συστήµατα Μετρήσεων 1.1 Ηλεκτρικά και Ηλεκτρονικά Συστήµατα Μετρήσεων Στο παρελθόν χρησιµοποιήθηκαν µέθοδοι µετρήσεων που στηριζόταν στις αρχές της µηχανικής, της οπτικής ή της θερµοδυναµικής.
1 Εισαγωγή στα ψηφιακά Συστήµατα Μετρήσεων 1.1 Ηλεκτρικά και Ηλεκτρονικά Συστήµατα Μετρήσεων Στο παρελθόν χρησιµοποιήθηκαν µέθοδοι µετρήσεων που στηριζόταν στις αρχές της µηχανικής, της οπτικής ή της θερµοδυναµικής.
οµή δικτύου ΣΧΗΜΑ 8.1
 8. ίκτυα Kohonen Το µοντέλο αυτό των δικτύων προτάθηκε το 1984 από τον Kοhonen, και αφορά διαδικασία εκµάθησης χωρίς επίβλεψη, δηλαδή δεν δίδεται καµία εξωτερική επέµβαση σχετικά µε τους στόχους που πρέπει
8. ίκτυα Kohonen Το µοντέλο αυτό των δικτύων προτάθηκε το 1984 από τον Kοhonen, και αφορά διαδικασία εκµάθησης χωρίς επίβλεψη, δηλαδή δεν δίδεται καµία εξωτερική επέµβαση σχετικά µε τους στόχους που πρέπει
Άσκηση 3. Ποιοτική Μελέτη των νόμων ελέγχου δύο και τριών όρων (συσκευή: Προσομοιωτής ελέγχου PCS327: Σχ.1) Απαραίτητες γνώσεις
 Απαραίτητες γνώσεις") Άσκηση 3 Ποιοτική Μελέτη των νόμων ελέγχου δύο και τριών όρων (συσκευή: Προσομοιωτής ελέγχου PCS327: Σχ.1) Απαραίτητες γνώσεις 1) Αυτόματος έλεγχος δύο και τριών όρων 2) Εμπειρικαί μέθοδοι εκλογής των
Άσκηση 3 Ποιοτική Μελέτη των νόμων ελέγχου δύο και τριών όρων (συσκευή: Προσομοιωτής ελέγχου PCS327: Σχ.1) Απαραίτητες γνώσεις 1) Αυτόματος έλεγχος δύο και τριών όρων 2) Εμπειρικαί μέθοδοι εκλογής των
Μεθοδολογίες παρεµβολής σε DTM.
 Μάθηµα : Αλγοριθµικές Βάσεις στη Γεωπληροφορική ιδάσκων : Συµεών Κατσουγιαννόπουλος Μεθοδολογίες παρεµβολής σε DTM.. Μέθοδοι παρεµβολής. Η παρεµβολή σε ψηφιακό µοντέλο εδάφους (DTM) είναι η διαδικασία
Μάθηµα : Αλγοριθµικές Βάσεις στη Γεωπληροφορική ιδάσκων : Συµεών Κατσουγιαννόπουλος Μεθοδολογίες παρεµβολής σε DTM.. Μέθοδοι παρεµβολής. Η παρεµβολή σε ψηφιακό µοντέλο εδάφους (DTM) είναι η διαδικασία
Συστήματα Αυτόματου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Ψηφιακός Έλεγχος Συστημάτων Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Ψηφιακός Έλεγχος Συστημάτων Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Ισοδυναµία τοπολογιών βρόχων.
 Ισοδυναµία τοπολογιών βρόχων. Κατά κανόνα, συµφέρει να ανάγουµε τις «πολύπλοκες» τοπολογίες βρόχων σε έναν απλό κλειστό βρόχο, µε µία συνάρτηση µεταφοράς στον κατ ευθείαν κλάδο και µία συνάρτηση µεταφοράς
Ισοδυναµία τοπολογιών βρόχων. Κατά κανόνα, συµφέρει να ανάγουµε τις «πολύπλοκες» τοπολογίες βρόχων σε έναν απλό κλειστό βρόχο, µε µία συνάρτηση µεταφοράς στον κατ ευθείαν κλάδο και µία συνάρτηση µεταφοράς
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
Σεµινάριο Αυτοµάτου Ελέγχου
 ΤΕΙ ΠΕΙΡΑΙΑ Τµήµα Αυτοµατισµού Σεµινάριο Αυτοµάτου Ελέγχου Ειδικά θέµατα Ανάλυσης συστηµάτων Σύνθεσης συστηµάτων ελέγχου Μελέτης στοχαστικών συστηµάτων. Καλλιγερόπουλος Σεµινάριο Αυτοµάτου Ελέγχου Ανάλυση
ΤΕΙ ΠΕΙΡΑΙΑ Τµήµα Αυτοµατισµού Σεµινάριο Αυτοµάτου Ελέγχου Ειδικά θέµατα Ανάλυσης συστηµάτων Σύνθεσης συστηµάτων ελέγχου Μελέτης στοχαστικών συστηµάτων. Καλλιγερόπουλος Σεµινάριο Αυτοµάτου Ελέγχου Ανάλυση
Ανάλυση υναµικής ιεργασιών
 Ανάλυση υναµικής ιεργασιών Αντιπροσώπευση µε το Μοντέλο Κατάστασης- Χώρου (State-Space Space Models) υναµική Γραµµικών Συστηµάτων 1ης και 2ης Τάξης Συστήµατα SISO και MIMO Ο Μετασχηµατισµός Laplace για
Ανάλυση υναµικής ιεργασιών Αντιπροσώπευση µε το Μοντέλο Κατάστασης- Χώρου (State-Space Space Models) υναµική Γραµµικών Συστηµάτων 1ης και 2ης Τάξης Συστήµατα SISO και MIMO Ο Μετασχηµατισµός Laplace για
ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΩΝ
 ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΩΝ Ενότητα 3: Συστήματα Αυτόματου Ελέγχου Διδάσκων: Γεώργιος Στεφανίδης Πολυτεχνική Σχολή Τμήμα Πολιτικών Μηχανικών Σκοποί ενότητας Στην ενότητα αυτή θα ασχοληθούμε με τα Συστήματα
ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΩΝ Ενότητα 3: Συστήματα Αυτόματου Ελέγχου Διδάσκων: Γεώργιος Στεφανίδης Πολυτεχνική Σχολή Τμήμα Πολιτικών Μηχανικών Σκοποί ενότητας Στην ενότητα αυτή θα ασχοληθούμε με τα Συστήματα
ΕΠΙΛΥΣΗ ΓΡΑΜΜΙΚΩΝ.Ε. ΜΕ ΚΡΟΥΣΤΙΚΕΣ ΙΕΓΕΡΣΕΙΣ
 ΣΧΟΛΗ. Ν. ΟΚΙΜΩΝ ΜΑΘΗΜΑ: ΘΕΩΡΙΑ ΚΥΚΛΩΜΑΤΩΝ ΙΙ ΕΙΣΑΓΩΓΗ ΣΤΑ Σ.Α.Ε. ΕΠΙΛΥΣΗ ΓΡΑΜΜΙΚΩΝ.Ε. ΜΕ ΚΡΟΥΣΤΙΚΕΣ ΙΕΓΕΡΣΕΙΣ ρ. Α. Μαγουλάς Οκτώβριος 4 Η συνάρτηση δ ( και η παράγωγός της Ορίζεται ως εξής: δ ( ανωµαλο
ΣΧΟΛΗ. Ν. ΟΚΙΜΩΝ ΜΑΘΗΜΑ: ΘΕΩΡΙΑ ΚΥΚΛΩΜΑΤΩΝ ΙΙ ΕΙΣΑΓΩΓΗ ΣΤΑ Σ.Α.Ε. ΕΠΙΛΥΣΗ ΓΡΑΜΜΙΚΩΝ.Ε. ΜΕ ΚΡΟΥΣΤΙΚΕΣ ΙΕΓΕΡΣΕΙΣ ρ. Α. Μαγουλάς Οκτώβριος 4 Η συνάρτηση δ ( και η παράγωγός της Ορίζεται ως εξής: δ ( ανωµαλο
Υποθέστε ότι ο ρυθμός ροής από ένα ακροφύσιο είναι γραμμική συνάρτηση της διαφοράς στάθμης στα δύο άκρα του ακροφυσίου.
 ΕΡΩΤΗΜΑ Δίνεται το σύστημα δεξαμενών του διπλανού σχήματος, όπου: q,q : h,h : Α : R : οι παροχές υγρού στις δύο δεξαμενές, τα ύψη του υγρού στις δύο δεξαμενές, η διατομή των δεξαμενών και η αντίσταση ροής
ΕΡΩΤΗΜΑ Δίνεται το σύστημα δεξαμενών του διπλανού σχήματος, όπου: q,q : h,h : Α : R : οι παροχές υγρού στις δύο δεξαμενές, τα ύψη του υγρού στις δύο δεξαμενές, η διατομή των δεξαμενών και η αντίσταση ροής
Μαθηµατικό Παράρτηµα 2 Εξισώσεις Διαφορών
 Γιώργος Αλογοσκούφης, Δυναµική Μακροοικονοµική, Αθήνα 206 Μαθηµατικό Παράρτηµα 2 Εξισώσεις Διαφορών Στο παράρτηµα αυτό εξετάζουµε τις ιδιότητες και τους τρόπους επίλυσης εξισώσεων διαφορών. Oι εξισώσεις
Γιώργος Αλογοσκούφης, Δυναµική Μακροοικονοµική, Αθήνα 206 Μαθηµατικό Παράρτηµα 2 Εξισώσεις Διαφορών Στο παράρτηµα αυτό εξετάζουµε τις ιδιότητες και τους τρόπους επίλυσης εξισώσεων διαφορών. Oι εξισώσεις
ΚΕΦΑΛΑΙΟ 2. Ανάλυση Ηλεκτρικού Σήµατος
 ΚΕΦΑΛΑΙΟ Ανάλυση Ηλεκτρικού Σήµατος. Εισαγωγή Τα σήµατα εξόδου από µετρητικές διατάξεις έχουν συνήθως τη µορφή ηλεκτρικών σηµάτων. Πριν από την καταγραφή ή περαιτέρω επεξεργασία, ένα σήµα υφίσταται µια
ΚΕΦΑΛΑΙΟ Ανάλυση Ηλεκτρικού Σήµατος. Εισαγωγή Τα σήµατα εξόδου από µετρητικές διατάξεις έχουν συνήθως τη µορφή ηλεκτρικών σηµάτων. Πριν από την καταγραφή ή περαιτέρω επεξεργασία, ένα σήµα υφίσταται µια
Κεφάλαιο 3 ο : ΕΙΣΑΓΩΓΗ στις ΤΗΛΕΠΙΚΟΙΝΩΝΙΕΣ. ΗΛΕΚΤΡΟΜΑΓΝΗΤΙΚΟ ΚΥΜΑ και ΤΕΧΝΙΚΕΣ ΙΑΜΟΡΦΩΣΗΣ
 Μάθηµα 1ο Θέµα Εισαγωγή στις τηλεπικοινωνίες 1. Τι ορίζουµε µε τον όρο τηλεπικοινωνία; 2. Ποιες οι βασικότερες ανταλλασσόµενες πληροφορίες, ανάλογα µε τη φύση και το χαρακτήρα τους; 3. Τι αποκαλούµε ποµπό
Μάθηµα 1ο Θέµα Εισαγωγή στις τηλεπικοινωνίες 1. Τι ορίζουµε µε τον όρο τηλεπικοινωνία; 2. Ποιες οι βασικότερες ανταλλασσόµενες πληροφορίες, ανάλογα µε τη φύση και το χαρακτήρα τους; 3. Τι αποκαλούµε ποµπό
Υλοποιήσεις Ψηφιακών Φίλτρων
 Ψηφιακή Επεξεργασία Σηµάτων 10 Υλοποιήσεις Ψηφιακών Φίλτρων Α. Εισαγωγή Οποιοδήποτε γραµµικό χρονικά αµετάβλητο σύστηµα διακριτού χρόνου χαρακτηρίζεται πλήρως από τη συνάρτηση µεταφοράς του η οποία έχει
Ψηφιακή Επεξεργασία Σηµάτων 10 Υλοποιήσεις Ψηφιακών Φίλτρων Α. Εισαγωγή Οποιοδήποτε γραµµικό χρονικά αµετάβλητο σύστηµα διακριτού χρόνου χαρακτηρίζεται πλήρως από τη συνάρτηση µεταφοράς του η οποία έχει
ΙΑΤΑΞΗ ΜΕΤΡΗΣΗΣ ΤΩΝ ΥΝΑΜΕΩΝ ΚΟΠΗΣ ΜΕ ΧΡΗΣΗ ΤΟΥ ΛΟΓΙΣΜΙΚΟΥ LABVIEW
 ΙΑΤΑΞΗ ΜΕΤΡΗΣΗΣ ΤΩΝ ΥΝΑΜΕΩΝ ΚΟΠΗΣ ΜΕ ΧΡΗΣΗ ΤΟΥ ΛΟΓΙΣΜΙΚΟΥ LABVIEW Η έννοια της µέτρησης καθώς και η µέτρηση καθαυτή είναι άρρηκτα συνδεδεµένη µε την επιστηµονική µεθοδολογία. Επίσης ο κάθε άνθρωπος αντιµετωπίζει
ΙΑΤΑΞΗ ΜΕΤΡΗΣΗΣ ΤΩΝ ΥΝΑΜΕΩΝ ΚΟΠΗΣ ΜΕ ΧΡΗΣΗ ΤΟΥ ΛΟΓΙΣΜΙΚΟΥ LABVIEW Η έννοια της µέτρησης καθώς και η µέτρηση καθαυτή είναι άρρηκτα συνδεδεµένη µε την επιστηµονική µεθοδολογία. Επίσης ο κάθε άνθρωπος αντιµετωπίζει
Κεφάλαιο 5. Το Συμπτωτικό Πολυώνυμο
 Κεφάλαιο 5. Το Συμπτωτικό Πολυώνυμο Σύνοψη Στο κεφάλαιο αυτό παρουσιάζεται η ιδέα του συμπτωτικού πολυωνύμου, του πολυωνύμου, δηλαδή, που είναι του μικρότερου δυνατού βαθμού και που, για συγκεκριμένες,
Κεφάλαιο 5. Το Συμπτωτικό Πολυώνυμο Σύνοψη Στο κεφάλαιο αυτό παρουσιάζεται η ιδέα του συμπτωτικού πολυωνύμου, του πολυωνύμου, δηλαδή, που είναι του μικρότερου δυνατού βαθμού και που, για συγκεκριμένες,
sin ϕ = cos ϕ = tan ϕ =
 Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΟΜΙΚΩΝ ΕΡΓΩΝ ΜΗΧΑΝΙΚΗ 1 ΠΑΡΑ ΕΙΓΜΑ 1 ΚΑΤΑΣΚΕΥΗ ΙΑΓΡΑΜΜΑΤΩΝ MQN ΣΕ ΟΚΟ ιδάσκων: Αριστοτέλης Ε. Χαραλαµπάκης Εισαγωγή Με το παράδειγµα αυτό αναλύεται
Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΟΜΙΚΩΝ ΕΡΓΩΝ ΜΗΧΑΝΙΚΗ 1 ΠΑΡΑ ΕΙΓΜΑ 1 ΚΑΤΑΣΚΕΥΗ ΙΑΓΡΑΜΜΑΤΩΝ MQN ΣΕ ΟΚΟ ιδάσκων: Αριστοτέλης Ε. Χαραλαµπάκης Εισαγωγή Με το παράδειγµα αυτό αναλύεται
1.1.3 t. t = t2 - t1 1.1.4 x2 - x1. x = x2 x1 . . 1
 1 1 o Κεφάλαιο: Ευθύγραµµη Κίνηση Πώς θα µπορούσε να περιγραφεί η κίνηση ενός αγωνιστικού αυτοκινήτου; Πόσο γρήγορα κινείται η µπάλα που κλώτσησε ένας ποδοσφαιριστής; Απαντήσεις σε τέτοια ερωτήµατα δίνει
1 1 o Κεφάλαιο: Ευθύγραµµη Κίνηση Πώς θα µπορούσε να περιγραφεί η κίνηση ενός αγωνιστικού αυτοκινήτου; Πόσο γρήγορα κινείται η µπάλα που κλώτσησε ένας ποδοσφαιριστής; Απαντήσεις σε τέτοια ερωτήµατα δίνει
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2008 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : ΑΥΤΟΜΑΤΙΣΜΟΙ ΚΑΙ
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2008 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : ΑΥΤΟΜΑΤΙΣΜΟΙ ΚΑΙ
Εισαγωγή στην Ανάλυση Συστηµάτων Αυτοµάτου Ελέγχου: Χρονική Απόκριση και Απόκριση Συχνότητας
 ΚΕΣ Αυτόµατος Έλεγχος Εισαγωγή στην Ανάλυση Συστηµάτων Αυτοµάτου Ελέγχου: Χρονική Απόκριση και Απόκριση Συχνότητας 6 Ncola Tapaoul Βιβλιογραφία Ενότητας Παρασκευόπουλος [5]: Κεφάλαιο 4 Παρασκευόπουλος
ΚΕΣ Αυτόµατος Έλεγχος Εισαγωγή στην Ανάλυση Συστηµάτων Αυτοµάτου Ελέγχου: Χρονική Απόκριση και Απόκριση Συχνότητας 6 Ncola Tapaoul Βιβλιογραφία Ενότητας Παρασκευόπουλος [5]: Κεφάλαιο 4 Παρασκευόπουλος
Εξαρτημένες Πηγές και Τελεστικός Ενισχυτής
 Ανάλυση Κυκλωμάτων Εξαρτημένες Πηγές και Τελεστικός Ενισχυτής Φώτης Πλέσσας fplessas@inf.uth.gr Εισαγωγή Οι εξαρτημένες πηγές είναι πολύ ενδιαφέροντα ηλεκτρικά στοιχεία, αφού αποτελούν αναπόσπαστα στοιχεία
Ανάλυση Κυκλωμάτων Εξαρτημένες Πηγές και Τελεστικός Ενισχυτής Φώτης Πλέσσας fplessas@inf.uth.gr Εισαγωγή Οι εξαρτημένες πηγές είναι πολύ ενδιαφέροντα ηλεκτρικά στοιχεία, αφού αποτελούν αναπόσπαστα στοιχεία
Μαθηματική Εισαγωγή Συναρτήσεις
 Φυσικός Ραδιοηλεκτρολόγος (MSc) ο Γενικό Λύκειο Καστοριάς Καστοριά, Ιούλιος 14 A. Μαθηματική Εισαγωγή Πράξεις με αριθμούς σε εκθετική μορφή Επίλυση βασικών μορφών εξισώσεων Συναρτήσεις Στοιχεία τριγωνομετρίας
Φυσικός Ραδιοηλεκτρολόγος (MSc) ο Γενικό Λύκειο Καστοριάς Καστοριά, Ιούλιος 14 A. Μαθηματική Εισαγωγή Πράξεις με αριθμούς σε εκθετική μορφή Επίλυση βασικών μορφών εξισώσεων Συναρτήσεις Στοιχεία τριγωνομετρίας
Κ. Χριστοδουλίδης: Μαθηµατικό Συµπλήρωµα για τα Εισαγωγικά Μαθήµατα Φυσικής Παράγωγος. x ορίζεται ως
 Κ Χριστοδουλίδης: Μαθηµατικό Συµπλήρωµα για τα Εισαγωγικά Μαθήµατα Φυσικής 5 Παράγωγος Παράγωγος Η παράγωγος της συνάρτησης f f () στο σηµείο f ( ) lim 0 ορίζεται ως f ( + ) f ( ) () Παράγωγοι ανώτερης
Κ Χριστοδουλίδης: Μαθηµατικό Συµπλήρωµα για τα Εισαγωγικά Μαθήµατα Φυσικής 5 Παράγωγος Παράγωγος Η παράγωγος της συνάρτησης f f () στο σηµείο f ( ) lim 0 ορίζεται ως f ( + ) f ( ) () Παράγωγοι ανώτερης
Γενικά χαρακτηριστικά ανάδρασης
 Ενισχυτικές Διατάξεις 1 Γενικά χαρακτηριστικά ανάδρασης Κάθε ηλεκτρονικό κύκλωµα, για το οποίο η δυναµική συµπεριφορά καθορίζεται από κάποιας µορφή σχέση µεταξύ εισόδου (διέγερση) και εξόδου (απόκριση),
Ενισχυτικές Διατάξεις 1 Γενικά χαρακτηριστικά ανάδρασης Κάθε ηλεκτρονικό κύκλωµα, για το οποίο η δυναµική συµπεριφορά καθορίζεται από κάποιας µορφή σχέση µεταξύ εισόδου (διέγερση) και εξόδου (απόκριση),
Συλλογή μεταφορά και έλεγχος Δεδομένων. 1.4 Απλά και σύνθετα συστήματα αυτοματισμού.
 Συλλογή μεταφορά και έλεγχος Δεδομένων 1.4 Απλά και σύνθετα συστήματα αυτοματισμού. Το είδαμε μέχρι τώρα Δομή συστήματος αυτοματισμού Ο ελεγκτής προϋποθέτει την ύπαρξη κάποιων στοιχείων, στα οποία θα επιδράσει
Συλλογή μεταφορά και έλεγχος Δεδομένων 1.4 Απλά και σύνθετα συστήματα αυτοματισμού. Το είδαμε μέχρι τώρα Δομή συστήματος αυτοματισμού Ο ελεγκτής προϋποθέτει την ύπαρξη κάποιων στοιχείων, στα οποία θα επιδράσει
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 2015
 Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 205 ΘΕΜΑ Ο (2,0 μονάδες) Ο ηλεκτρικός θερμοσίφωνας χρησιμοποιείται για τη θέρμανση νερού σε μια προκαθορισμένη επιθυμητή θερμοκρασία (θερμοκρασία
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 205 ΘΕΜΑ Ο (2,0 μονάδες) Ο ηλεκτρικός θερμοσίφωνας χρησιμοποιείται για τη θέρμανση νερού σε μια προκαθορισμένη επιθυμητή θερμοκρασία (θερμοκρασία
ΜΙΓΑ ΙΚΟΣ ΛΟΓΙΣΜΟΣ ΚΑΙ ΟΛΟΚΛ. ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΙ ΓΡΑΠΤΕΣ ΕΞΕΤΑΣΕΙΣ ΙΑΝΟΥΑΡΙΟΥ 2010 ΛΥΣΕΙΣ ΤΩΝ ΘΕΜΑΤΩΝ. =. Οι πρώτες µερικές u x y
 ΜΙΓΑ ΙΚΟΣ ΛΟΓΙΣΜΟΣ ΚΑΙ ΟΛΟΚΛ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΙ ΓΡΑΠΤΕΣ ΕΞΕΤΑΣΕΙΣ ΙΑΝΟΥΑΡΙΟΥ ΛΥΣΕΙΣ ΤΩΝ ΘΕΜΑΤΩΝ ΘΕΜΑ α) Καταρχήν θα µελετήσουµε την συνάρτηση f Η f γράφεται f ( ) = ( x + )( x ) ( x ) ή ακόµα f ( ) = u( x,
ΜΙΓΑ ΙΚΟΣ ΛΟΓΙΣΜΟΣ ΚΑΙ ΟΛΟΚΛ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΙ ΓΡΑΠΤΕΣ ΕΞΕΤΑΣΕΙΣ ΙΑΝΟΥΑΡΙΟΥ ΛΥΣΕΙΣ ΤΩΝ ΘΕΜΑΤΩΝ ΘΕΜΑ α) Καταρχήν θα µελετήσουµε την συνάρτηση f Η f γράφεται f ( ) = ( x + )( x ) ( x ) ή ακόµα f ( ) = u( x,
Μηχανική ΙI. Λογισµός των µεταβολών. Τµήµα Π. Ιωάννου & Θ. Αποστολάτου 2/2000
 Τµήµα Π Ιωάννου & Θ Αποστολάτου 2/2000 Μηχανική ΙI Λογισµός των µεταβολών Προκειµένου να αντιµετωπίσουµε προβλήµατα µεγιστοποίησης (ελαχιστοποίησης) όπως τα παραπάνω, όπου η ποσότητα που θέλουµε να µεγιστοποιήσουµε
Τµήµα Π Ιωάννου & Θ Αποστολάτου 2/2000 Μηχανική ΙI Λογισµός των µεταβολών Προκειµένου να αντιµετωπίσουµε προβλήµατα µεγιστοποίησης (ελαχιστοποίησης) όπως τα παραπάνω, όπου η ποσότητα που θέλουµε να µεγιστοποιήσουµε
k c (1) F ελ f ( t) F απ http://www.didefth.gr/mathimata/ 1
 F ελ f ( t) F απ http://www.didefth.gr/mathimata/ 1") Την παρακάτω ανάλυση στο θέµα των Εξαναγκασµένων Ταλαντώσεων έκαναν οι : ρ. Μιχάλης Αθανασίου ρ. Απόστολος Κουιρουκίδης Φυσικοί, Επιστηµονικοί Συνεργάτες ΤΕΙ Σερρών, στα Τµήµατα Πληροφορικής -Επικοινωνιών
Την παρακάτω ανάλυση στο θέµα των Εξαναγκασµένων Ταλαντώσεων έκαναν οι : ρ. Μιχάλης Αθανασίου ρ. Απόστολος Κουιρουκίδης Φυσικοί, Επιστηµονικοί Συνεργάτες ΤΕΙ Σερρών, στα Τµήµατα Πληροφορικής -Επικοινωνιών
Σήματα και Συστήματα. Διάλεξη 1: Σήματα Συνεχούς Χρόνου. Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής
 Σήματα και Συστήματα Διάλεξη 1: Σήματα Συνεχούς Χρόνου Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Εισαγωγή στα Σήματα 1. Σκοποί της Θεωρίας Σημάτων 2. Κατηγορίες Σημάτων 3. Χαρακτηριστικές Παράμετροι
Σήματα και Συστήματα Διάλεξη 1: Σήματα Συνεχούς Χρόνου Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Εισαγωγή στα Σήματα 1. Σκοποί της Θεωρίας Σημάτων 2. Κατηγορίες Σημάτων 3. Χαρακτηριστικές Παράμετροι
Μαθηματική Εισαγωγή Συναρτήσεις
 Φυσικός Ραδιοηλεκτρολόγος (MSc) ο Γενικό Λύκειο Καστοριάς A. Μαθηματική Εισαγωγή Πράξεις με αριθμούς σε εκθετική μορφή Επίλυση βασικών μορφών εξισώσεων Συναρτήσεις Στοιχεία τριγωνομετρίας Διανύσματα Καστοριά,
Φυσικός Ραδιοηλεκτρολόγος (MSc) ο Γενικό Λύκειο Καστοριάς A. Μαθηματική Εισαγωγή Πράξεις με αριθμούς σε εκθετική μορφή Επίλυση βασικών μορφών εξισώσεων Συναρτήσεις Στοιχεία τριγωνομετρίας Διανύσματα Καστοριά,
ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΧΕΙΜ17-18 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 2 ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΧΕΙΜ17-18 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 2 ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ
1. Κινηµατική. x dt (1.1) η ταχύτητα είναι. και η επιτάχυνση ax = lim = =. (1.2) Ο δεύτερος νόµος του Νεύτωνα παίρνει τη µορφή: (1.
 η ταχύτητα είναι. και η επιτάχυνση ax = lim = =. (1.2) Ο δεύτερος νόµος του Νεύτωνα παίρνει τη µορφή: (1.") 1. Κινηµατική Βιβλιογραφία C. Kittel W. D. Knight M. A. Rueman A. C. Helmholz και B. J. Moe Μηχανική. Πανεπιστηµιακές Εκδόσεις Ε.Μ.Π. 1998. Κεφ.. {Μαθηµατικό Συµπλήρωµα Μ1 Παράγωγος} {Μαθηµατικό Συµπλήρωµα
1. Κινηµατική Βιβλιογραφία C. Kittel W. D. Knight M. A. Rueman A. C. Helmholz και B. J. Moe Μηχανική. Πανεπιστηµιακές Εκδόσεις Ε.Μ.Π. 1998. Κεφ.. {Μαθηµατικό Συµπλήρωµα Μ1 Παράγωγος} {Μαθηµατικό Συµπλήρωµα
Μηχανική ΙI Ροή στο χώρο των φάσεων, θεώρηµα Liouville
 Τµήµα Π. Ιωάννου & Θ. Αποστολάτου 16/5/2000 Μηχανική ΙI Ροή στο χώρο των φάσεων, θεώρηµα Liouville Στη Χαµιλτονιανή θεώρηση η κατάσταση του συστήµατος προσδιορίζεται κάθε στιγµή από ένα και µόνο σηµείο
Τµήµα Π. Ιωάννου & Θ. Αποστολάτου 16/5/2000 Μηχανική ΙI Ροή στο χώρο των φάσεων, θεώρηµα Liouville Στη Χαµιλτονιανή θεώρηση η κατάσταση του συστήµατος προσδιορίζεται κάθε στιγµή από ένα και µόνο σηµείο
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER
 4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
ΚΥΡΙΑ ΣΤΟΙΧΕΙΑ ΜΑΘΗΜΑΤΟΣ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι Καθηγητής: Δ. ΔΗΜΟΓΙΑΝΝΟΠΟΥΛΟΣ Εργαστηριακοί Συνεργάτες: Σ. ΒΑΣΙΛΕΙΑΔΟΥ, Α. ΟΙΚΟΝΟΜΙΔΗΣ,
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι Καθηγητής: Δ. ΔΗΜΟΓΙΑΝΝΟΠΟΥΛΟΣ Εργαστηριακοί Συνεργάτες: Σ. ΒΑΣΙΛΕΙΑΔΟΥ, Α. ΟΙΚΟΝΟΜΙΔΗΣ,
5. (Λειτουργικά) Δομικά Διαγράμματα
 Δομικά Διαγράμματα") 5. (Λειτουργικά) Δομικά Διαγράμματα Γενικά, ένα λειτουργικό δομικό διάγραμμα έχει συγκεκριμένη δομή που περιλαμβάνει: Τις δομικές μονάδες (λειτουργικά τμήματα ή βαθμίδες) που συμβολίζουν συγκεκριμένες
5. (Λειτουργικά) Δομικά Διαγράμματα Γενικά, ένα λειτουργικό δομικό διάγραμμα έχει συγκεκριμένη δομή που περιλαμβάνει: Τις δομικές μονάδες (λειτουργικά τμήματα ή βαθμίδες) που συμβολίζουν συγκεκριμένες
Άσκηση: Ένα σύστηµα µε είσοδο u(t), έξοδο y(t) και διάνυσµα κατάστασης x(t) = (x 1 (t) x 2 (t)) T περιγράφεται από το ακόλουθο διάγραµµα:
, έξοδο y(t) και διάνυσµα κατάστασης x(t) = (x 1 (t) x 2 (t)) T περιγράφεται από το ακόλουθο διάγραµµα:") 1 Άσκηση: Ένα σύστηµα µε είσοδο u(t), έξοδο y(t) και διάνυσµα κατάστασης x(t) = (x 1 (t) x 2 (t)) T περιγράφεται από το ακόλουθο διάγραµµα: Όπου Κ R α) Να βρεθεί η περιγραφή στο χώρο κατάστασης και η συνάρτηση
1 Άσκηση: Ένα σύστηµα µε είσοδο u(t), έξοδο y(t) και διάνυσµα κατάστασης x(t) = (x 1 (t) x 2 (t)) T περιγράφεται από το ακόλουθο διάγραµµα: Όπου Κ R α) Να βρεθεί η περιγραφή στο χώρο κατάστασης και η συνάρτηση
Συστήματα Αυτομάτου Ελέγχου & Ρυθμίσεως Μηχανών
 Συστήματα Αυτομάτου Ελέγχου & Ρυθμίσεως Μηχανών Κων/νος Ι. Κυριακόπουλος Καθηγητής ΕΜΠ (hhp://users.ntua.gr/kkyria/) Kostas J. Kyriakopoulos - Σ.Α.Ε. ΙΙ 1 Δομή της Ύλης του Μαθήματος Εισαγωγή στο Χώρο
Συστήματα Αυτομάτου Ελέγχου & Ρυθμίσεως Μηχανών Κων/νος Ι. Κυριακόπουλος Καθηγητής ΕΜΠ (hhp://users.ntua.gr/kkyria/) Kostas J. Kyriakopoulos - Σ.Α.Ε. ΙΙ 1 Δομή της Ύλης του Μαθήματος Εισαγωγή στο Χώρο
Ευστάθεια Συστηµάτων Αυτοµάτου Ελέγχου: Αλγεβρικά κριτήρια
 ΚΕΣ : Αυτόµατος Έλεγχος ΚΕΣ Αυτόµατος Έλεγχος Ευστάθεια Συστηµάτων Αυτοµάτου Ελέγχου: Αλγεβρικά κριτήρια 6 Nicol Tptouli Ευστάθεια και θέση πόλων Σ.Α.Ε ΚΕΣ : Αυτόµατος Έλεγχος Βιβλιογραφία Ενότητας Παρασκευόπουλος
ΚΕΣ : Αυτόµατος Έλεγχος ΚΕΣ Αυτόµατος Έλεγχος Ευστάθεια Συστηµάτων Αυτοµάτου Ελέγχου: Αλγεβρικά κριτήρια 6 Nicol Tptouli Ευστάθεια και θέση πόλων Σ.Α.Ε ΚΕΣ : Αυτόµατος Έλεγχος Βιβλιογραφία Ενότητας Παρασκευόπουλος
Βιομηχανικοί Ελεγκτές
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #12: Παραδείγματα Αναλογικών Συστημάτων Ελέγχου Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #12: Παραδείγματα Αναλογικών Συστημάτων Ελέγχου Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες
NTÙÍÉÏÓ ÃÊÏÕÔÓÉÁÓ - ÖÕÓÉÊÏÓ www.geocities.com/gutsi1 -- www.gutsias.gr
 Έστω µάζα m. Στη µάζα κάποια στιγµή ασκούνται δυο δυνάµεις. ( Βλ. σχήµα:) Ποιά η διεύθυνση και ποιά η φορά κίνησης της µάζας; F 1 F γ m F 2 ιατυπώστε αρχή επαλληλίας. M την της Ποιό φαινόµενο ονοµάζουµε
Έστω µάζα m. Στη µάζα κάποια στιγµή ασκούνται δυο δυνάµεις. ( Βλ. σχήµα:) Ποιά η διεύθυνση και ποιά η φορά κίνησης της µάζας; F 1 F γ m F 2 ιατυπώστε αρχή επαλληλίας. M την της Ποιό φαινόµενο ονοµάζουµε
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ & ΘΡΑΚΗΣ
 ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ & ΘΡΑΚΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε Πτυχιακή εργασία ΜΕΛΕΤΗ ΣΥΣΤΗΜΑΤΟΣ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΘΕΣΗΣ ΓΡΑΦΙΔΑΣ ΕΚΤΥΠΩΤΗ ΕΚΠΟΝΗΣΗ: ΚΟΛΙΩΤΣΑ ΜΑΡΙΑ ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΤΣΙΡΙΓΩΤΗΣ
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ & ΘΡΑΚΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε Πτυχιακή εργασία ΜΕΛΕΤΗ ΣΥΣΤΗΜΑΤΟΣ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΘΕΣΗΣ ΓΡΑΦΙΔΑΣ ΕΚΤΥΠΩΤΗ ΕΚΠΟΝΗΣΗ: ΚΟΛΙΩΤΣΑ ΜΑΡΙΑ ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΤΣΙΡΙΓΩΤΗΣ
N 1 :N 2. i i 1 v 1 L 1 - L 2 -
 ΕΝΟΤΗΤΑ V ΙΣΧΥΣ - ΤΡΙΦΑΣΙΚΑ ΣΥΣΤΗΜΑΤΑ 34 Μετασχηµατιστής Ο µετασχηµατιστής είναι µια διάταξη που αποτελείται από δύο πηνία τυλιγµένα σε έναν κοινό πυρήνα από σιδηροµαγνητικό υλικό. Το πηνίο εισόδου λέγεται
ΕΝΟΤΗΤΑ V ΙΣΧΥΣ - ΤΡΙΦΑΣΙΚΑ ΣΥΣΤΗΜΑΤΑ 34 Μετασχηµατιστής Ο µετασχηµατιστής είναι µια διάταξη που αποτελείται από δύο πηνία τυλιγµένα σε έναν κοινό πυρήνα από σιδηροµαγνητικό υλικό. Το πηνίο εισόδου λέγεται
Ψηφιακός Έλεγχος. 6 η διάλεξη Σχεδίαση στο χώρο κατάστασης. Ψηφιακός Έλεγχος 1
 Ψηφιακός Έλεγχος 6 η διάλεξη Σχεδίαση στο χώρο κατάστασης Ψηφιακός Έλεγχος Μέθοδος μετατόπισης ιδιοτιμών Έστω γραμμικό χρονικά αμετάβλητο σύστημα διακριτού χρόνου: ( + ) = + x k Ax k Bu k Εφαρμόζουμε γραμμικό
Ψηφιακός Έλεγχος 6 η διάλεξη Σχεδίαση στο χώρο κατάστασης Ψηφιακός Έλεγχος Μέθοδος μετατόπισης ιδιοτιμών Έστω γραμμικό χρονικά αμετάβλητο σύστημα διακριτού χρόνου: ( + ) = + x k Ax k Bu k Εφαρμόζουμε γραμμικό
7. Ταλαντώσεις σε συστήµατα µε πολλούς βαθµούς ελευθερίας
 7 Ταλαντώσεις σε συστήµατα µε πολλούς βαθµούς ελευθερίας Συζευγµένες ταλαντώσεις Βιβλιογραφία F S Crawford Jr Κυµατική (Σειρά Μαθηµάτων Φυσικής Berkeley, Τόµος 3 Αθήνα 979) Κεφ H J Pai Φυσική των ταλαντώσεων
7 Ταλαντώσεις σε συστήµατα µε πολλούς βαθµούς ελευθερίας Συζευγµένες ταλαντώσεις Βιβλιογραφία F S Crawford Jr Κυµατική (Σειρά Μαθηµάτων Φυσικής Berkeley, Τόµος 3 Αθήνα 979) Κεφ H J Pai Φυσική των ταλαντώσεων
Ενισχυτές Μετρήσεων. 3.1 Ο διαφορικός Ενισχυτής
 3 Ενισχυτές Μετρήσεων 3.1 Ο διαφορικός Ενισχυτής Πολλές φορές ένας ενισχυτής σχεδιάζεται ώστε να αποκρίνεται στη διαφορά µεταξύ δύο σηµάτων εισόδου. Ένας τέτοιος ενισχυτής ονοµάζεται ενισχυτής διαφοράς
3 Ενισχυτές Μετρήσεων 3.1 Ο διαφορικός Ενισχυτής Πολλές φορές ένας ενισχυτής σχεδιάζεται ώστε να αποκρίνεται στη διαφορά µεταξύ δύο σηµάτων εισόδου. Ένας τέτοιος ενισχυτής ονοµάζεται ενισχυτής διαφοράς
ΒΑΣΙΚΗ ΔΟΜΗ ΑΥΤΟΜΑΤΙΣΜΟΥ
 ΚΕΦΑΛΑΙΟ 2 Ενότητα 2.1 ΒΑΣΙΚΗ ΔΟΜΗ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΤΟΧΟΙ Μετά την ολοκλήρωση της ενότητας αυτής θα μπορείτε: Να περιγράφετε ένα απλό σύστημα Αυτοματισμού Να διακρίνετε ένα Ανοικτό από ένα Κλειστό σύστημα
ΚΕΦΑΛΑΙΟ 2 Ενότητα 2.1 ΒΑΣΙΚΗ ΔΟΜΗ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΤΟΧΟΙ Μετά την ολοκλήρωση της ενότητας αυτής θα μπορείτε: Να περιγράφετε ένα απλό σύστημα Αυτοματισμού Να διακρίνετε ένα Ανοικτό από ένα Κλειστό σύστημα
Κεφάλαιο 5 Διασύνδεση Αναλογικών & Ψηφιακών Συστηµάτων
 Κεφάλαιο 5 Διασύνδεση Αναλογικών & Ψηφιακών Συστηµάτων Αναλογικές & Ψηφιακές Διατάξεις Control Systems Laboratory Τα διάφορα μεγέθη των φυσικών διεργασιών τα μετράμε με αισθητήρες που ουσιαστικά παρέχουν
Κεφάλαιο 5 Διασύνδεση Αναλογικών & Ψηφιακών Συστηµάτων Αναλογικές & Ψηφιακές Διατάξεις Control Systems Laboratory Τα διάφορα μεγέθη των φυσικών διεργασιών τα μετράμε με αισθητήρες που ουσιαστικά παρέχουν
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2011
 ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2011 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2011 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
Μετασχηµατισµοί Laplace, Αναλογικά Συστήµατα, ιαφορικές Εξισώσεις
 ΚΕΦΑΛΑΙΟ 2 Μετασχηµατισµοί Laplace, Αναλογικά Συστήµατα, ιαφορικές Εξισώσεις 2.1 ΕΙΣΑΓΩΓΗ Όπως έχουµε δει, για να προσδιορίσουµε τις αποκρίσεις ενός κυκλώµατος, πρέπει να λύσουµε ένα σύνολο διαφορικών
ΚΕΦΑΛΑΙΟ 2 Μετασχηµατισµοί Laplace, Αναλογικά Συστήµατα, ιαφορικές Εξισώσεις 2.1 ΕΙΣΑΓΩΓΗ Όπως έχουµε δει, για να προσδιορίσουµε τις αποκρίσεις ενός κυκλώµατος, πρέπει να λύσουµε ένα σύνολο διαφορικών
Όσο χρονικό διάστηµα είχε τον µαγνήτη ακίνητο απέναντι από το πηνίο δεν παρατήρησε τίποτα.
 1 ΗΛΕΚΤΡΟΜΑΓΝΗΤΙΚΗ ΑΓΩΓΗ (Ε επ ). 5-2 ΗΛΕΚΤΡΟΜΑΓΝΗΤΙΚΗ ΑΓΩΓΗ Γνωρίζουµε ότι το ηλεκτρικό ρεύµα συνεπάγεται τη δηµιουργία µαγνητικού πεδίου. Όταν ένας αγωγός διαρρέεται από ρεύµα, τότε δηµιουργεί γύρω του
1 ΗΛΕΚΤΡΟΜΑΓΝΗΤΙΚΗ ΑΓΩΓΗ (Ε επ ). 5-2 ΗΛΕΚΤΡΟΜΑΓΝΗΤΙΚΗ ΑΓΩΓΗ Γνωρίζουµε ότι το ηλεκτρικό ρεύµα συνεπάγεται τη δηµιουργία µαγνητικού πεδίου. Όταν ένας αγωγός διαρρέεται από ρεύµα, τότε δηµιουργεί γύρω του
α) Η γενική εξίσωση του αρµονικού κύµατος είναι. Συγκρίνοντάς την µε µία από τις δύο εξισώσεις των τρεχόντων κυµάτων, έστω την εξίσωση
 Η γενική εξίσωση του αρµονικού κύµατος είναι. Συγκρίνοντάς την µε µία από τις δύο εξισώσεις των τρεχόντων κυµάτων, έστω την εξίσωση") Λύση ΑΣΚΗΣΗ 1 α) Η γενική εξίσωση του αρµονικού κύµατος είναι. Συγκρίνοντάς την µε µία από τις δύο εξισώσεις των τρεχόντων κυµάτων, έστω την εξίσωση, προκύπτει: και Με αντικατάσταση στη θεµελιώδη εξίσωση
Λύση ΑΣΚΗΣΗ 1 α) Η γενική εξίσωση του αρµονικού κύµατος είναι. Συγκρίνοντάς την µε µία από τις δύο εξισώσεις των τρεχόντων κυµάτων, έστω την εξίσωση, προκύπτει: και Με αντικατάσταση στη θεµελιώδη εξίσωση
ΑΣΚΗΣΗ 7. Θερµοϊονικό φαινόµενο - ίοδος λυχνία
 ΑΣΚΗΣΗ 7 Θερµοϊονικό φαινόµενο - ίοδος λυχνία ΣΥΣΚΕΥΕΣ : Πηγή συνεχούς 0-50 Volts, πηγή 6V/2A, βολτόµετρο συνεχούς, αµπερόµετρο συνεχούς, βολτόµετρο, ροοστάτης. ΘΕΩΡΗΤΙΚΗ ΕΙΣΑΓΩΓΗ Όταν η θερµοκρασία ενός
ΑΣΚΗΣΗ 7 Θερµοϊονικό φαινόµενο - ίοδος λυχνία ΣΥΣΚΕΥΕΣ : Πηγή συνεχούς 0-50 Volts, πηγή 6V/2A, βολτόµετρο συνεχούς, αµπερόµετρο συνεχούς, βολτόµετρο, ροοστάτης. ΘΕΩΡΗΤΙΚΗ ΕΙΣΑΓΩΓΗ Όταν η θερµοκρασία ενός
Συλλογή μεταφορά και. Κεφάλαιο 2 ο ΜΕΤΡΗΣΕΙΣ - ΑΙΣΘΗΤΗΡΙΑ
 Συλλογή μεταφορά και έλεγχος Δεδομένων Κεφάλαιο 2 ο ΜΕΤΡΗΣΕΙΣ - ΑΙΣΘΗΤΗΡΙΑ Αισθητήρια (sensors) είναι κυκλώματα που δέχονται ένα σήμα ή μια διέγερση από το περιβάλλον και απαντούν με ένα ηλεκτρικό σήμα.
Συλλογή μεταφορά και έλεγχος Δεδομένων Κεφάλαιο 2 ο ΜΕΤΡΗΣΕΙΣ - ΑΙΣΘΗΤΗΡΙΑ Αισθητήρια (sensors) είναι κυκλώματα που δέχονται ένα σήμα ή μια διέγερση από το περιβάλλον και απαντούν με ένα ηλεκτρικό σήμα.
ΚΕΦΑΛΑΙΑ 3,4. Συστήµατα ενός Βαθµού ελευθερίας. k Για E 0, η (1) ισχύει για κάθε x. Άρα επιτρεπτή περιοχή είναι όλος ο άξονας
 ισχύει για κάθε x. Άρα επιτρεπτή περιοχή είναι όλος ο άξονας") ΚΕΦΑΛΑΙΑ,4. Συστήµατα ενός Βαθµού ελευθερίας. Να βρεθούν οι επιτρεπτές περιοχές της κίνησης στον άξονα ' O για την απωστική δύναµη F, > και για ενέργεια Ε. (α) Είναι V και οι επιτρεπτές περιοχές της κίνησης
ΚΕΦΑΛΑΙΑ,4. Συστήµατα ενός Βαθµού ελευθερίας. Να βρεθούν οι επιτρεπτές περιοχές της κίνησης στον άξονα ' O για την απωστική δύναµη F, > και για ενέργεια Ε. (α) Είναι V και οι επιτρεπτές περιοχές της κίνησης
Εισαγωγή στην Τεχνολογία Αυτοματισμού
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ Εισαγωγή στην Τεχνολογία Αυτοματισμού Ενότητα # 3: Μετασχηματισμός Laplace: Συνάρτηση μεταφοράς
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ Εισαγωγή στην Τεχνολογία Αυτοματισμού Ενότητα # 3: Μετασχηματισμός Laplace: Συνάρτηση μεταφοράς
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
Κεφάλαιο 6. Εισαγωγή στη µέθοδο πεπερασµένων όγκων επίλυση ελλειπτικών και παραβολικών διαφορικών εξισώσεων
 Κεφάλαιο 6 Εισαγωγή στη µέθοδο πεπερασµένων όγκων επίλυση ελλειπτικών παραβολικών διαφορικών εξισώσεων 6.1 Εισαγωγή Η µέθοδος των πεπερασµένων όγκων είναι µία ευρέως διαδεδοµένη υπολογιστική µέθοδος επίλυσης
Κεφάλαιο 6 Εισαγωγή στη µέθοδο πεπερασµένων όγκων επίλυση ελλειπτικών παραβολικών διαφορικών εξισώσεων 6.1 Εισαγωγή Η µέθοδος των πεπερασµένων όγκων είναι µία ευρέως διαδεδοµένη υπολογιστική µέθοδος επίλυσης
ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499
 ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499 ΡΥΘΜΙΣΤΕΣ ΓΩΝΙΑΣ, ΕΝΟΠΟΙΗΜΕΝΟΙ ΕΛΕΓΚΤΕΣ ΡΟΗΣ ΙΣΧΥΟΣ ρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα
ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499 ΡΥΘΜΙΣΤΕΣ ΓΩΝΙΑΣ, ΕΝΟΠΟΙΗΜΕΝΟΙ ΕΛΕΓΚΤΕΣ ΡΟΗΣ ΙΣΧΥΟΣ ρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα
«Επικοινωνίες δεδομένων»
 Εργασία στο μάθημα «Διδακτική της Πληροφορικής» με θέμα «Επικοινωνίες δεδομένων» Αθήνα, Φεβρουάριος 2011 Χρονολογική απεικόνιση της εξέλιξης των Τηλεπικοινωνιών Χρονολογική απεικόνιση της εξέλιξης των
Εργασία στο μάθημα «Διδακτική της Πληροφορικής» με θέμα «Επικοινωνίες δεδομένων» Αθήνα, Φεβρουάριος 2011 Χρονολογική απεικόνιση της εξέλιξης των Τηλεπικοινωνιών Χρονολογική απεικόνιση της εξέλιξης των
14 Εφαρµογές των ολοκληρωµάτων
 14 Εφαρµογές των ολοκληρωµάτων 14.1 Υπολογισµός εµβαδών µε την µέθοδο των παράλληλων διατοµών Θεωρούµε µια ϕραγµένη επίπεδη επιφάνεια A µε οµαλό σύνορο, δηλαδή που περιγράφεται από µια συνεχή συνάρτηση.
14 Εφαρµογές των ολοκληρωµάτων 14.1 Υπολογισµός εµβαδών µε την µέθοδο των παράλληλων διατοµών Θεωρούµε µια ϕραγµένη επίπεδη επιφάνεια A µε οµαλό σύνορο, δηλαδή που περιγράφεται από µια συνεχή συνάρτηση.
Σύστημα. Θόρυβος. Σχήμα 1.1 Παράσταση ενός ανοιχτού συστήματος
 Ενότητα1: Εισαγωγή Σύστημα Σύστημα είναι ένα σύνολο φυσικών στοιχείων, πραγμάτων, ατόμων, μεγεθών ή εννοιών, που σχηματίζουν μιαν ενότητα και λειτουργούν ως μια ενότητα. Ένα σύστημα που επικοινωνεί με
Ενότητα1: Εισαγωγή Σύστημα Σύστημα είναι ένα σύνολο φυσικών στοιχείων, πραγμάτων, ατόμων, μεγεθών ή εννοιών, που σχηματίζουν μιαν ενότητα και λειτουργούν ως μια ενότητα. Ένα σύστημα που επικοινωνεί με
5.1 Θεωρητική εισαγωγή
 ΨΗΦΙΑΚΑ ΚΥΚΛΩΜΑΤΑ - ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 5 ΚΩ ΙΚΟΠΟΙΗΣΗ BCD Σκοπός: Η κατανόηση της µετατροπής ενός τύπου δυαδικής πληροφορίας σε άλλον (κωδικοποίηση/αποκωδικοποίηση) µε τη µελέτη της κωδικοποίησης BCD
ΨΗΦΙΑΚΑ ΚΥΚΛΩΜΑΤΑ - ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 5 ΚΩ ΙΚΟΠΟΙΗΣΗ BCD Σκοπός: Η κατανόηση της µετατροπής ενός τύπου δυαδικής πληροφορίας σε άλλον (κωδικοποίηση/αποκωδικοποίηση) µε τη µελέτη της κωδικοποίησης BCD
Περίθλαση από ακµή και από εµπόδιο.
 ρ. Χ. Βοζίκης Εργαστήριο Φυσικής ΙΙ 63 6. Άσκηση 6 Περίθλαση από ακµή και από εµπόδιο. 6.1 Σκοπός της εργαστηριακής άσκησης Σκοπός της άσκησης αυτής, καθώς και των δύο εποµένων, είναι η γνωριµία των σπουδαστών
ρ. Χ. Βοζίκης Εργαστήριο Φυσικής ΙΙ 63 6. Άσκηση 6 Περίθλαση από ακµή και από εµπόδιο. 6.1 Σκοπός της εργαστηριακής άσκησης Σκοπός της άσκησης αυτής, καθώς και των δύο εποµένων, είναι η γνωριµία των σπουδαστών
Συνήθεις διαφορικές εξισώσεις προβλήματα οριακών τιμών
 Συνήθεις διαφορικές εξισώσεις προβλήματα οριακών τιμών Οι παρούσες σημειώσεις αποτελούν βοήθημα στο μάθημα Αριθμητικές Μέθοδοι του 5 ου εξαμήνου του ΤΜΜ ημήτρης Βαλουγεώργης Καθηγητής Εργαστήριο Φυσικών
Συνήθεις διαφορικές εξισώσεις προβλήματα οριακών τιμών Οι παρούσες σημειώσεις αποτελούν βοήθημα στο μάθημα Αριθμητικές Μέθοδοι του 5 ου εξαμήνου του ΤΜΜ ημήτρης Βαλουγεώργης Καθηγητής Εργαστήριο Φυσικών
Συστήματα Αυτόματου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Χαρακτηριστικά των Συστημάτων Ελέγχου Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Χαρακτηριστικά των Συστημάτων Ελέγχου Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν
Συστήματα Αυτομάτου Ελέγχου ΙΙ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου ΙΙ Ενότητα #1: Ποιοτικά Χαρακτηριστικά Συστημάτων Κλειστού Βρόχου Δημήτριος Δημογιαννόπουλος Τμήμα
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου ΙΙ Ενότητα #1: Ποιοτικά Χαρακτηριστικά Συστημάτων Κλειστού Βρόχου Δημήτριος Δημογιαννόπουλος Τμήμα
, όπου οι σταθερές προσδιορίζονται από τις αρχικές συνθήκες.
 Στην περίπτωση της ταλάντωσης µε κρίσιµη απόσβεση οι δύο γραµµικώς ανεξάρτητες λύσεις εκφυλίζονται (καταλήγουν να ταυτίζονται) Στην περιοχή ασθενούς απόσβεσης ( ) δύο γραµµικώς ανεξάρτητες λύσεις είναι
Στην περίπτωση της ταλάντωσης µε κρίσιµη απόσβεση οι δύο γραµµικώς ανεξάρτητες λύσεις εκφυλίζονται (καταλήγουν να ταυτίζονται) Στην περιοχή ασθενούς απόσβεσης ( ) δύο γραµµικώς ανεξάρτητες λύσεις είναι
ΕΛΕΓΧΟΣ ΠΑΡΑΓΩΓΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΕΛΕΓΧΟΣ ΠΑΡΑΓΩΓΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ Ενότητα: Αναγνώριση Διεργασίας - Προσαρμοστικός Έλεγχος (Process Identification) Αλαφοδήμος Κωνσταντίνος
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΕΛΕΓΧΟΣ ΠΑΡΑΓΩΓΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ Ενότητα: Αναγνώριση Διεργασίας - Προσαρμοστικός Έλεγχος (Process Identification) Αλαφοδήμος Κωνσταντίνος