ΜΕΤΑΠΤΥΧΙΑΚΗ ΔΙΑΤΡΙΒΗ
|
|
|
- Ζακχαῖος Κουταλιανός
- 6 χρόνια πριν
- Προβολές:
Transcript
 Ή ΦΟΡΗΤΗ ΣΥΣΚΕΥΗ ΠΡΟΓΡΑΜΜΑ ΜΕΤΑΠΤΥΧΙΑΚΩΝ ΣΠΟΥΔΩΝ ΑΚΑΔΗΜΑΪΚΟΥ ΕΤΟΥΣ 2016-17 ΣΧΕΔΙΑΣΗ & ΕΠΕΞΕΡΓΑΣΙΑ ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΣΥΣΤΗΜΑΤΩΝ (SYSTEMS ENGINEERING) Σχολή Μηχανικών Παραγωγής &")
1 ΣΤΡΑΤΙΩΤΙΚΗ ΣΧΟΛΗ ΕΥΕΛΠΙΔΩΝ Τμήμα Στρατιωτικών Επιστημών Ε Λ ΕΛΕΓΧΟΣ Λ Η Ν Ι Κ ΤΗΛΕΧΕΙΡΙΖΟΜΕΝΟΥ Η Δ Η Μ Ο Κ Ρ Α Τ Ι ΡΟΜΠΟΤΙΚΟΥ Α ΟΧΗΜΑΤΟΣ ΜΕ ΤΗ ΒΟΗΘΕΙΑ ΔΙΙΔΡΥΜΑΤΙΚΟ ΚΙΝΗΤΟΥ ΔΙΑΤΜΗΜΑΤΙΚΟ ΤΗΛΕΦΩΝΟΥ (SMARTPHONE) Ή ΦΟΡΗΤΗ ΣΥΣΚΕΥΗ ΠΡΟΓΡΑΜΜΑ ΜΕΤΑΠΤΥΧΙΑΚΩΝ ΣΠΟΥΔΩΝ ΑΚΑΔΗΜΑΪΚΟΥ ΕΤΟΥΣ ΣΧΕΔΙΑΣΗ & ΕΠΕΞΕΡΓΑΣΙΑ ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΣΥΣΤΗΜΑΤΩΝ (SYSTEMS ENGINEERING) Σχολή Μηχανικών Παραγωγής & Διοίκησης (ΠΔ 96 /2015/ΦΕΚ 163Α'/ ) ΜΕΤΑΠΤΥΧΙΑΚΗ ΔΙΑΤΡΙΒΗ Έλεγχος τηλεχειριζόμενου ρομποτικού οχήματος με τη βοήθεια κινητού τηλεφώνου (smartphone) ή φορητής συσκευής Υπό: ΔΗΜΗΤΡΙΟΥ ΜΠΟΤΩΝΗ Α.Μ.: ΑΠΡΙΛΙΟΣ i
2 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ ii
3 Η Μεταπτυχιακή Διατριβή του Δημήτριου Μποτώνη εγκρίνεται: ΤΡΙΜΕΛΗΣ ΕΞΕΤΑΣΤΙΚΗ ΕΠΙΤΡΟΠΗ Νικόλαος Δούκας, Επίκουρος Καθηγητής (Επιβλέπων)..... Νικόλαος Μπάρδης, Αναπληρωτής Καθηγητής. Σάββας Πιπερίδης, Ε.ΔΙ.Π.. iii
4 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ Copyright υπό Δημήτριου Μποτώνη Έτος iv
5 v
6 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ ΠΕΡΙΛΗΨΗ ΕΙΣΑΓΩΓΗ 1. Στρατιωτικές εφαρμογές το πρόβλημα 2. Σχετική έρευνα αντίστοιχες εφαρμογές 3. Στόχοι της παρούσας εργασίας ΚΕΦΑΛΑΙΟ 1: Θεωρητικό υπόβαθρο 1. Παρουσίαση σχεδίασης 2. Τεχνολογίες υποστήριξης ΚΕΦΑΛΑΙΟ 2: Σχεδίαση - κατασκευή 1. Σχεδίαση 2. Επεξήγηση μεθόδου αποφυγής εμποδίων 3. Επεξήγηση μεθόδου επιστροφής στο φάρο υπέρυθρων ΚΕΦΑΛΑΙΟ 3: Πειράματα και αποτελέσματα 1. Μέτρηση ακρίβειας ανίχνευσης φάρου 2. Μέτρηση μέγιστης απόστασης προσέγγισης στο φάρο 3. Παρεμβολές από το ορατό φως παρεμβολές από ισχυρές πηγές υπέρυθρων 4. Προσδιορισμός περιορισμών κίνησης 5. Περιορισμοί στην πυκνότητα και το μέγεθος των εμποδίων vi
7 ΚΕΦΑΛΑΙΟ 4: Αξιολόγηση των αποτελεσμάτων 1. Περιορισμοί 2. Προτερήματα σημεία υπεροχής ΚΕΦΑΛΑΙΟ 5: Συμπεράσματα και μελλοντική ανάπτυξη ΒΙΒΛΙΟΓΡΑΦΙΑ - ΙΣΤΟΤΟΠΟΙ ΠΑΡΑΡΤΗΜΑ Α: Εξαρτήματα ΠΑΡΑΡΤΗΜΑ Β: Συνδεσμολογία αισθητήρων κινητήρων ΠΑΡΑΡΤΗΜΑ Γ: Κώδικας (Arduino Mega 2560 r3) ΠΑΡΑΡΤΗΜΑ Δ: Χειρισμός ΠΑΡΑΡΤΗΜΑ E: Πίνακες τεχνικών χαρακτηριστικών vii
8
9 ΠΕΡΙΛΗΨΗ Η παρούσα μεταπτυχιακή διατριβή έχει ως στόχο την κατασκευή ενός μη επανδρωμένου οχήματος το οποίο ελέγχεται με τηλεχειρισμό από φορητή συσκευή με λειτουργικό android (smartphone ή tablet) και θα μπορούσε να χρησιμοποιηθεί ως πλατφόρμα για τη διασύνδεση επιπλέον εξοπλισμού μελλοντικά. Η κατασκευή έχει στρατιωτικό προσανατολισμό. Αυτό σημαίνει ότι το όχημα, εκτός από απλό τον τηλεχειρισμό, πρέπει να είναι ικανό να εκτελέσει κάποιες απλές αυτόνομες λειτουργίες, όπως η αυτόνομη περιπολία, η παρακολούθηση ενός φάρου και εκτέλεση πορείας προς αυτόν (είτε βρίσκεται σταθερά σε ένα σημείο είτε κινείται) και να ενσωματώνει μια υποτυπώδη τεχνική αποφυγής εμποδίων, οι οποίες θεωρούνται ως βασικό υπόβαθρο για την εκτέλεση πολλαπλών μελλοντικών αποστολών. Τέλος, λόγω της αύξησης των επιχειρήσεων εντός κατοικημένων τόπων και κτιρίων, αποφασίστηκε το όχημα να κατασκευαστεί ως όχημα εσωτερικού χώρου. 1
10 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ 2
11 ΕΙΣΑΓΩΓΗ 1. Στρατιωτικές εφαρμογές το πρόβλημα Οι σύγχρονες επιχειρήσεις, σε μεγάλο ποσοστό, λαμβάνουν χώρα εντός κτιρίων και κατοικημένων τόπων γενικά. Για το σκοπό αυτό χρειάζονται μικρά οχήματα, με μεγάλη αυτονομία, με δυνατότητες τηλεχειρισμού και αυτόνομης κίνησης εντός εσωτερικών χώρων. Τα οχήματα αυτά θα πρέπει να μπορούν να αναλάβουν βοηθητικές αποστολές που θα διευκολύνουν τις επιχειρήσεις των τμημάτων που ενεργούν ή πρόκειται να ενεργήσουν στον εν λόγω χώρο, με σκοπό να μειώσουν τις απώλειες σε έμψυχο δυναμικό. Τα χαρακτηριστικά που καλούνται να διαθέτουν αυτά τα οχήματα είναι κυρίως τα εξής: 1. Ικανοποιητική αυτονομία. 2. Ικανότητα κίνησης σε ένα χώρο με πολλά εμπόδια, που δεν είναι δυνατό να χαρτογραφηθεί εκ των προτέρων (ενδεχομένως και η αποστολή τους να είναι η χαρτογράφηση του χώρου αυτού). 3. Πρέπει να είναι εύκολα στη μεταφορά, άρα πρέπει να έχουν μικρές διαστάσεις και μικρό βάρος. 4. Πρέπει ο χειρισμός τους να είναι εύκολος και απλός, ώστε να μπορούν να χρησιμοποιηθούν σε συνθήκες μάχης από άτομα μη εξειδικευμένα στον τομέα της ρομποτικής. 3
12 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ 5. Πρέπει να έχουν χαμηλό κόστος και να μην απαιτείται για την κατασκευή τους εξειδικευμένη τεχνολογία. Αυτό διότι λόγω της αποστολής τους και δεδομένου ότι θα χρησιμοποιούνται σε εχθρικά περιβάλλοντα, αναπόφευκτα θα έχουν μεγάλες απώλειες, οπότε θεωρούνται αναλώσιμα. 6. Ικανότητα μεταφοράς ενός περιορισμένου φορτίου (ώστε να μπορούν να εκτελέσουν πληθώρα αποστολών, ανάλογα με το φορτίο, όπως αναγνώριση, φύλαξη χώρου, ανίχνευση πολεμικών ουσιών ή ραδιενέργειας σε ένα χώρο κ.α.). 4

13 2. Σχετική Έρευνα αντίστοιχες εφαρμογές Ο τομές των επίγειων ρομποτικών οχημάτων εσωτερικού χώρου παρουσιάζει τεράστια εξέλιξη. Χαρακτηριστικά αναφέρονται ορισμένα παραδείγματα μικρών σε μέγεθος πειραματικών και επιχειρησιακών ρομποτικών οχημάτων και οι περισσότερο διαδεδομένες τεχνικές αυτόνομης αποφυγής εμποδίων: 1. irobot 110 FirstLook: 2.1 Το irobot 110 FirstLook (εικ. 2.1) είναι ένα μικρό ρομποτικό όχημα με μήκος περίπου 25 εκατοστά, και βάρος 2,26 κιλά. Χρησιμοποιεί ερπύστριες για την κίνησή του. Έχει στιβαρή σχεδίαση με σκοπό να επιτρέπει στο χειριστή του να το πετάξει σε κάποιο σημείο (μπορεί να το πετάξει από σκάλες ή να το εκτοξεύσει μέσα σε ένα κτίριο από το παράθυρο). Αντέχει σε πτώσεις 4,8 μέτρων περίπου σε τσιμέντο. Οι αισθητήρες του επιτρέπουν τον εντοπισμό 5

14 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ και την αναγνώριση κινδύνων σε κλειστούς χώρους, ενώ μπορεί να λειτουργεί υπό όλες τις καιρικές συνθήκες και υπό συνθήκες χαμηλής παρατήρησης. Οι αισθητήρες του περιλαμβάνουν τέσσερις κάμερες, μία σε κάθε πλευρά του οχήματος, οι οποίες λειτουργούν και στο φάσμα των υπέρυθρων. Στο «κατάρτι» του οχήματος βρίσκεται μία πέμπτη κάμερα με πεδίο ορατότητας 270 ο. Διαθέτει φώτα. Διαθέτει επίσης μηχανισμό που του επιτρέπει να υπερπηδά εμπόδια ύψους 17 περίπου εκατοστών (7 in). Είναι επίσης αδιάβροχο σε βάθος 1 μέτρου. Είναι τηλεχειριζόμενο, διαθέτοντας τρεις εναλλακτικές μορφές τηλεχειρισμού. Οι κύριες αποστολές που μπορεί να αναλάβει είναι: ανίχνευση εκρηκτικών ουσιών, καταστροφή εκρηκτικών ουσιών (Explosive Ordnance Disposal EOD), ανίχνευση ΧΒΡΠ ουσιών, έλεγχος οχημάτων σε σημεία ελέγχου, παρατήρηση και ανίχνευση δρομολογίων εντός κτιρίων. Τέλος, το όχημα μπορεί να εξοπλιστεί με διάφορους επιπλέον αισθητήρες και εξοπλισμό ώστε να μπορέσει να εκτελέσει επιπλέον αποστολές (μηχανικός βραχίονας, εξειδικευμένες κάμερες και αισθητήρες κα) (23). 2. MLT-F Jack Russel Compact Surveillamce Robot: 2.2 6

15 Το ρομποτικό αυτό όχημα (εικ. 2.2) είναι ένα πολύ μικρό όχημα με μήκος περίπου 11 εκατοστά και βάρος μικρότερο από 4 κιλά. Έχει σχεδιαστεί ώστε να μεταφέρεται εύκολα. Διαθέτει κάμερα στο εμπρόσθιο μέρος και μικρόφωνο. Έχει στιβαρή σχεδίαση με σκοπό να μπορεί να εκτοξεύεται μέσα σε κτίριο από παράθυρο (ή σε δυσπρόσιτες περιοχές) και αντέχει σε πτώσεις 3 περίπου μέτρων. Διαθέτει ερπύστριες και σύστημα υπέρβασης εμποδίων. Είναι τηλεχειριζόμενο, με δυνατότητα εναλλαγής μεθόδου τηλεχειρισμού. Χρησιμοποιείται κυρίως για αναγνώριση και επιτήρηση εσωτερικού χώρου στα πλαίσια επιχειρήσεων εντός κτιρίου (24). 3. Όσον αφορά στις μεθόδους αποφυγής εμποδίων από ρομποτικά οχήματα σε πραγματικό χρόνο, χρησιμοποιώντας χαμηλού κόστους υπέρυθρους αισθητήρες ή αισθητήρες υπερήχων, αυτές μπορούν συνοπτικά να περιγραφούν ως εξής (2): Ο απλούστερος αλγόριθμος ονομάζεται «αλγόριθμος του εντόμου» (the bug algorithm): όταν το όχημα συναντά ένα εμπόδιο, απλά κινείται κυκλικά γύρω από το εμπόδιο έως ότου βρει το σημείο που απέχει λιγότερο από το σκοπό του και μετά κινείται προς το στόχο. Αλγόριθμος Δυνητικού Πεδίου (Potential Field Algorithm): ο αλγόριθμος αυτός υποθέτει ότι το όχημα κατευθύνεται από θεωρητικές 7
 και αποτελεί υπο-εργασία του.")
16 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ δυνάμεις που το ελκύουν ή το απωθούν από το στόχο του. Η διαδρομή του είναι αποτέλεσμα της συνισταμένης των δυνάμεων αυτών. Αυτός ο αλγόριθμος εντάσσεται στο γενικότερο πλαίσιο του σχεδιασμού διαδρομής (path planning) και αποτελεί υπο-εργασία του. Αλγόριθμος Ιστογράμματος Πεδίου Διανυσμάτων (Vector Field Histogram VFH): αρχικά δημιουργούνται ιστογράμματα για αριθμό μετρήσεων αισθητήρων, όπως στο ακόλουθο σχήμα. Ο άξονας x αντιπροσωπεύει τις γωνίες των μετρήσεων των αισθητήρων, ενώ ο άξονας y αντιπροσωπεύει την πιθανότητα να υπάρχει εμπόδιο στην αντίστοιχη κατεύθυνση. Βάσει αυτού υπολογίζεται η ύπαρξη διαδρόμων που μπορεί να κινηθεί το όχημα και επιλέγεται ο βέλτιστος. 8
 τέτοιων φυσαλίδων χρησιμοποιείται για την δημιουργία μιας διαδρομής ανάμεσα σε ένα αρχικό και ένα τελικό σημείο.")
17 Τεχνική «ζώνης φυσαλίδας» (bubble band technique): βάσει των χαρακτηριστικών του οχήματος και των μετρήσεων των αισθητήρων, ορίζεται μια «φυσαλίδα» που περιέχει το μέγιστο χώρο που μπορεί να κινηθεί το όχημα, προς οποιαδήποτε κατεύθυνση. Μια αλληλουχία (ζώνη) τέτοιων φυσαλίδων χρησιμοποιείται για την δημιουργία μιας διαδρομής ανάμεσα σε ένα αρχικό και ένα τελικό σημείο. Φυσικά, υπάρχουν πολλές ακόμα τεχνικές αποφυγής εμποδίων, οι οποίες δεν μπορούν να αναγραφούν όλες. 9
18 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ 3. Στόχοι της παρούσας εργασίας Ο στόχος της παρούσας εργασίας είναι να κατασκευαστεί μια πλατφόρμα που να ενσωματώνει τα χαρακτηριστικά των αυτόνομων ρομποτικών οχημάτων της προηγούμενης παραγράφου. Για κάθε ένα από τα χαρακτηριστικά, κατά απόλυτη αντιστοιχία με την παράγραφο 1: 1. Η αυτονομία επιτυγχάνεται με τη χρήση ηλεκτρικών και ηλεκτρονικών εξαρτημάτων που δεν καταναλώνουν πολλή ενέργεια. Ακόμα και με τη χρήση απλών μπαταριών του εμπορίου το όχημα διαθέτει επαρκή ενέργεια για παρατεταμένη λειτουργία. 2. Το όχημα ενσωματώνει κάποιες απλές λειτουργίες αποφυγής εμποδίων, χρησιμοποιώντας υπέρυθρους αισθητήρες, αισθητήρα υπερήχων και απτικούς αισθητήρες (μια απλοποιημένη μέθοδος σε σχέση με τις τεχνικές που παρουσιάστηκαν στην παράγραφο 2). 3. Οι διαστάσεις και το βάρος του οχήματος είναι όσο ενός μεσαίου προς μικρού τηλεκατευθυνόμενου παιχνιδιού, με αντίστοιχο βάρος. 4. Ο χειρισμός του οχήματος βασίζεται στο πρωτόκολλο Bluetooth, ενώ δεν απαιτεί εξειδικευμένο τηλεχειριστήριο (αρκεί ένα smartphone ή tablet με λειτουργικό σύστημα android ή ios). Οι λειτουργίες του είναι προσβάσιμες μέσω ενός απλού interface 9 πλήκτρων. 5. Το όχημα είναι κατασκευασμένο αποκλειστικά από υλικά εμπορίου (commercial off-the-shelf). Οι μπαταρίες που χρησιμοποιούνται είναι απλές μπαταρίες εμπορίου. 6. Δεδομένου ότι ένα φορτίο επιπλέον αισθητήρων ή μια απλή κάμερα έχουν πλέον μικρό βάρος, το όχημα μπορεί να μεταφέρει μια πληθώρα επιπλέον 10
19 φορτίων εάν χρειαστεί (π.χ. μια μικρή κάμερα, κάρτα SD για αποθήκευση δεδομένων, αισθητήρες ΧΒΡΠ κ.α.). 11
20 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ ΚΕΦΑΛΑΙΟ 1 Θεωρητικό Υπόβαθρο 1. Παρουσίαση σχεδίασης Το όχημα σχεδιάστηκε με σκοπό να εκτελεί τρεις βασικές λειτουργίες, οι οποίες κρίνονται βασικές για την εκτέλεση οποιασδήποτε αποστολής μπορεί να ανατεθεί στο όχημα (στις ενδεικτικές αποστολές, αναγράφονται και πιθανά επιπλέον φορτία που θα ήταν απαραίτητα για την εκτέλεση των αποστολών αυτών): 1. Απλή τηλεκατεύθυνση χωρίς καμία αυτόνομη λειτουργία. Ενδεικτικές αποστολές: επιτήρηση χώρου (κάμερα) διερεύνηση συγκεκριμένης τοποθεσίας από τον χειριστή του οχήματος (κάμερα) μεταφορά φορτίου σε συγκεκριμένη τοποθεσία (κυτίο μεταφοράς) ναρκοθέτηση καταστροφή στόχου (εκρηκτικό φορτίο) ανίχνευση και καταγραφή πολεμικών χημικών βιολογικών ουσιών ή ραδιενέργειας (αντίστοιχοι αισθητήρες σύστημα αποθήκευσης δεδομένων όπως κάρτα SD) Έλεγχος οχημάτων σε σημεία ελέγχου (με χρήση ευρυγώνιας κάμερας στην οροφή του οχήματος). 12
21 2. Αυτόνομη παρακολούθηση ενός στόχου, ο οποίος επισημαίνεται με ένα φάρο (ο στόχος θα μπορούσε να είναι είτε κινητός είτε ακίνητος), για ένα ορισμένο χρονικό διάστημα. Ενδεικτικές αποστολές: αυτόματη επιστροφή σε κάποιο αρχικό σημείο, αυτόματη επιστροφή σε σημείο φόρτισης (επαναφορτιζόμενες μπαταρίες, σύστημα φόρτισης και σταθμός πρόσδεσης) παρακολούθηση ενός άλλου ρομποτικού οχήματος ώστε να είναι δυνατή η καθοδήγηση πολλαπλών οχημάτων από ένα χειριστή παρακολούθηση σημασμένου στόχου ή κατεύθυνση προς σημασμένο σημείο (σύστημα σήμανσης από τον χειριστή) 3. Εκτέλεση αυτόνομης περιπολίας μέσα σε ένα συγκεκριμένο εσωτερικό χώρο για ένα ορισμένο χρονικό διάστημα. Ενδεικτικές αποστολές: επιτήρηση χώρου (κάμερα) λειτουργία φύλαξης (κάμερα, αισθητήρες κίνησης) απαγόρευση περιοχής (εκρηκτικό φορτίο, αισθητήρες κίνησης). καταγραφή συνθηκών εντός αποθήκης (σύστημα αισθητήρων, σύστημα αποθήκευσης δεδομένων όπως κάρτα SD). 13
22 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ 2. Τεχνολογίες υποστήριξης 1. Πομποί υπέρυθρων (IR Transmitter) Οι πομποί υπέρυθρων (IR Transmitters) είναι δίοδοι εκπομπής φωτός (light emitting diode LED) που εκπέμπουν υπέρυθρη ακτινοβολία. Για χάρη συντομίας, αναγράφονται και ως IR LED. Η ακτινοβολία τους είναι αόρατη για το ανθρώπινο μάτι. Υπάρχουν διαφορετικές κατηγορίες πομπών υπέρυθρων, ανάλογα με το μήκος κύματος στο οποίο εκπέμπουν και την ισχύ εκπομπής τους (10). Στην φαίνεται ένα τυπικό IR LED Δέκτες υπέρυθρων Οι υπέρυθροι δέκτες καλούνται και υπέρυθροι αισθητήρες, αφού ανιχνεύουν την εκπεμπόμενη ακτινοβολία από έναν πομπό υπέρυθρων. Συναντώνται ως φωτοδίοδοι και φωτοτρανζίστορ. Οι υπέρυθρες φωτοδίοδοι διαφέρουν από τις κανονικές φωτοδιόδους διότι ανιχνεύουν μόνο υπέρυθρη ακτινοβολία. Όπως και με τους πομπούς υπερύθρων, οι δέκτες υπερύθρων διαφέρουν ανάλογα με το μήκος κύματος της ακτινοβολίας που μπορούν να ανιχνεύσουν και διάφορα τεχνικά χαρακτηριστικά λειτουργίας. 14
. Στην 1.2.2 φαίνεται μία τυπική φωτοδίοδος. 1.2.2 3.")
23 Όταν οι πομποί υπέρυθρων συνδυάζονται με τους δέκτες υπέρυθρης ακτινοβολίας, θα πρέπει το μήκος κύματος της ακτινοβολίας που εκπέμπει ο πομπός να είναι ίδιο με το μήκος κύματος που μπορεί να ανιχνεύσει ο δέκτης, ώστε να μπορεί ο πομπός να είναι ορατός στον δέκτη (10). Στην φαίνεται μία τυπική φωτοδίοδος Αισθητήρες Μέτρησης Απόστασης Υπερήχων Οι αισθητήρες μέτρησης απόστασης υπερήχων είναι αισθητήρες που μετρούν την απόσταση από ένα αντικείμενο χρησιμοποιώντας κύματα υπερήχων. Εκπέμπουν ένα ηχητικό κύμα με συγκεκριμένη συχνότητα και ανιχνεύουν την ανάκλαση του κύματος όταν αυτή επιστρέφει. Μετρώντας το χρόνο ανάμεσα στην εκπομπή και την ανίχνευση της ανάκλασης, υπολογίζεται η απόσταση ανάμεσα στον αισθητήρα και κάποιο αντικείμενο, χρησιμοποιώντας τον τύπο: απόσταση = ταχύτητα του ήχου χρόνος 2 κατά τον τρόπο που απεικονίζεται στην (27). 15

24 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ Πρωτόκολλο Bluetooth Το πρωτόκολλο Bluetooth είναι ένα τυποποιημένο πρωτόκολλο για αποστολή και λήψη δεδομένων μέσω μιας ασύρματης σύνδεσης στα 2.4 GHz. Χρησιμοποιείται για ασύρματη, μικρής εμβέλειας μεταφορά δεδομένων μέσω ηλεκτρονικών συσκευών, με μικρές ενεργειακές απαιτήσεις και με μικρό κόστος. Η εμβέλεια του πρωτοκόλλου Bluetooth περιορίζεται σε αποστάσεις μικρότερων των 100 μέτρων και συστήνεται για μεταφορά σχετικά μικρού όγκου δεδομένων (11). 16
25 ΚΕΦΑΛΑΙΟ 2 Σχεδίαση - Κατασκευή 1. Σχεδίαση Το όχημα σχεδιάστηκε ώστε: Να ανιχνεύει ένα φάρο υπέρυθρης ακτινοβολίας, να κατευθύνεται προς αυτόν και να σταματά μερικά εκατοστά μπροστά του. Αν υπάρχει ενδιάμεσα κάποιο ή κάποια εμπόδια, να τα αποφύγει, χρησιμοποιώντας μια απλή τεχνική αποφυγής εμποδίων. Εάν περάσει χρόνος ενός λεπτού και δεν έχει βρει το φάρο, σταματά. Να περιπολεί αυτόνομα σε ένα εσωτερικό χώρο για δύο λεπτά, αποφεύγοντας εμπόδια και καλύπτοντας το χώρο. Να είναι δυνατή η πλήρης τηλεκατεύθυνση του οχήματος με τη χρήση μιας απλής φορητής συσκευής (smartphone ή tablet) με λειτουργικό android ή ios. Η σχεδίαση έχει ως εξής: 1. Σκελετός - κινητήρες: το αυτόνομο ρομποτικό όχημα αποτελείται από ένα τυποποιημένο μεταλλικό σασί 4Χ4 με τέσσερις ηλεκτροκινητήρες, όπου ο κάθε ηλεκτροκινητήρας κινεί ένα τροχό. Ο ελεγκτής που χρησιμοποιείται για τη σύνδεση των κινητήρων με τον υπολογιστή είναι το Adafruit Motor Shield V2 for Arduino. 17
26 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ 2. Αισθητήρες: το όχημα διαθέτει τους εξής αισθητήρες: Έναν αισθητήρα υπερήχων για την ανίχνευση εμποδίων εμπρός. Τέσσερις αισθητήρες υπέρυθρων τοποθετημένους σε μια υπερυψωμένη κατασκευή περιμετρικά (ιστίο), ώστε να ανιχνεύει την κατεύθυνση στην οποία βρίσκεται ο φάρος. Έναν υπέρυθρο αισθητήρα προσέγγισης για την ανίχνευση της απόστασης του φάρου στο εμπρόσθιο τμήμα. Δύο προφυλακτήρες (απτικοί αισθητήρες), ώστε να αναγνωρίζει και να αντιδρά σε προσκρούσεις στα πλάγια του οχήματος. 3. Ελεγκτές: ο υπολογιστής που χρησιμοποιείται για την επεξεργασία των δεδομένων των αισθητήρων, τον προγραμματισμό του οχήματος και τον τηλεχειρισμό του είναι ένας μικροελεγκτής Funduino Mega 2560, συμβατός με Arduino Mega 2560 r3. Ο ελεγκτής που χρησιμοποιείται για τη σύνδεση των κινητήρων με τον υπολογιστή είναι το Adafruit Motor Shield V2 for Arduino. 4. Τηλεχειρισμός: το σύστημα τηλεχειρισμού που έχει επιλεγεί είναι το Adafruit Bluefruit LE UART, το οποίο μεταφέρει στον υπολογιστή εντολές από συσκευή με λειτουργικό android ή ios. 5. Τροφοδοσία: οι κινητήρες τροφοδοτούνται από 5 μπαταρίες ΑΑ (7,5V). Ο υπολογιστής και οι αισθητήρες τροφοδοτούνται από μπαταρία 9V. 6. Φάρος: Ο φάρος διαθέτει 2 τύπους πομπών υπέρυθρης ακτινοβολίας: Πολλαπλούς πομπούς υπέρυθρων υψηλής έντασης, οι οποίοι ανιχνεύονται από το όχημα και προσδιορίζουν τη θέση του φάρου σε σχέση με αυτό. 18
27 Πολλαπλούς πομπούς υπέρυθρων χαμηλής έντασης, οι οποίοι ανιχνεύονται από το όχημα όταν προσεγγίσει σε ικανοποιητική απόσταση τον φάρο (μερικά εκατοστά). Ο φάρος τροφοδοτείται από τέσσερις μπαταρίες ΑΑ. Λεπτομερής λίστα των εξαρτημάτων που χρησιμοποιούνται, τεχνικά χαρακτηριστικά, διαγράμματα λογικής και ο πλήρης κώδικας παρατίθενται στα παραρτήματα. Ο τύπος της κίνησης που χρησιμοποιείται είναι η οδήγηση με ολίσθηση τροχών (1), όπως φαίνεται σχηματικά στην εικόνα Στις φωτογραφίες και απεικονίζονται το όχημα και ο φάρος ολοκληρωμένα. 19


28 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ Επεξήγηση μεθόδου αποφυγής εμποδίων 20

29 Η λογική που διέπει τη μέθοδο αποφυγής εμποδίων με τον αισθητήρα υπερήχων καθώς αναζητά το φάρο αναλύεται στα διαγράμματα και και περιγράφεται ως εξής: 1. Αρχικά το όχημα στρέφει προς το φάρο. 2. Προχωρά προς το φάρο. 3. Εάν ο αισθητήρας υπερήχων εντοπίσει εμπόδιο σε απόσταση μικρότερη των 10 εκατοστών, αναστρέφει πορεία για χρονικό διάστημα 1 δευτερολέπτου. 4. Στρέφει αριστερά ή δεξιά (ανάλογα με το χρονικό διάστημα που έχει παρέλθει από την ενεργοποίηση της εντολής) για 0,5 δευτερόλεπτα. 5. Κινείται εμπρός για 1,5 δευτερόλεπτα, με αποτέλεσμα να βρεθεί δίπλα στο εμπόδιο. 6. Κινείται πάλι προς το φάρο (και η διαδικασία είναι δυνατόν να επαναληφθεί). ΠΟΡΕΙΑ ΕΜΠΡΟΣ ΕΜΠΡΟΣ ΔΕΞΙΑ ΣΤΡΟΦΗ ΔΕΞΙΑ ΑΡΧΗ ΠΟΥ ΒΡΙΣΚΕΤΑΙ Ο ΦΑΡΟΣ; ΤΕΛΟΣ ΑΡΙΣΤΕΡΑ ΣΤΡΟΦΗ ΑΡΙΣΤΕΡΑ ΠΙΣΩ ΤΥΧΑΙΑ ΣΤΡΟΦΗ ΔΕΞΙΑ Ή ΑΡΙΣΤΕΡΑ
30 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ ΝΑΙ ΝΑΙ ΟΧΙ ΟΧΙ ΟΧΙ ΟΧΙ ΝΑΙ ΝΑΙ ΝΑΙ ΟΧΙ
31 Η λογική που διέπει τη λειτουργία περιπολίας και την αποφυγή εμποδίων κατά τη διάρκειά της αναλύεται στο διάγραμμα και αναλύεται ως εξής: 1. Αρχικά το όχημα κινείται εμπρός. 2. Εάν ο αισθητήρας υπερήχων εντοπίσει εμπόδιο σε απόσταση μικρότερη των 20 εκατοστών, αναστρέφει πορεία για χρονικό διάστημα 1 δευτερολέπτου. 3. Στρέφει αριστερά ή δεξιά τυχαία (βασιζόμενο σε γεννήτρια τυχαίων αριθμών) για 0,5 δευτερόλεπτα. 4. Κινείται εμπρός και η διαδικασία επαναλαμβάνεται. 5. Η λειτουργία παύει με την πάροδο 120 sec. Αυτό διότι έχει υπολογιστεί ότι με την ταχύτητα κίνησης του οχήματος και με μια λογική πυκνότητα εμποδίων (όπως αναλύεται παρακάτω) το όχημα μπορεί μέσα στο χρόνο αυτό να καλύψει πλήρως χώρο μεγέθους μιας μεγάλης αίθουσας. 23
32 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ ΕΝΕΡΓΟΣ BUMPER; ΕΜΠΟΔΙΟ ΕΓΓΥΤΕΡΑ 20 CM; ΠΛΗΚΤΡΟ 4 ΑΙΣΘ. ΥΠΕΡΗΧΩΝ: ΕΛΕΓΧΟΣ ΓΙΑ ΕΜΠΟΔΙΟ ΕΜΠΡΟΣ ΤΑΧΥΤΗΤΑ 100 BUMPERS: ΑΠΟΦΥΓΗ ΣΥΓΚΡΟΥΣΗΣ ΕΜΠΡΟΣ ΠΕΡΑΣΑΝ 120 SEC; ΤΕΛΟΣ ΝΑΙ ΟΧΙ ΟΧΙ ΝΑΙ ΤΥΧΑΙΑ ΣΤΡΟΦΗ 90 ΜΟΙΡΩΝ ΔΕΞΙΑ Ή ΑΡΙΣΤΕΡΑ
33 Και οι δύο λειτουργίες μπορεί να διακοπούν και να ενεργοποιηθεί μέσω των προφυλακτήρων η αποφυγή εμποδίου από την αριστερή ή τη δεξιά πλευρά, ανάλογα με τον προφυλακτήρα που ενεργοποιήθηκε. Η λογική που διέπει την αποφυγή του δεξιού προφυλακτήρα (και αντίστοιχα του αριστερού) αναλύεται στο διάγραμμα και περιγράφεται ως εξής: 1. Καθώς το όχημα κινείται, ενεργοποιείται ο δεξιός προφυλακτήρας. 2. Διακόπτεται η κίνηση. 3. Οπισθοπορεία για 1 δευτερόλεπτο. 4. Στροφή αριστερά (δεξιά για τον αριστερό προφυλακτήρα) για 0,5 δευτερόλεπτα. 5. Εμπροσθοπορεία για 1,5 δευτερόλεπτα, με αποτέλεσμα να βρεθεί δίπλα στο εμπόδιο. 6. Συνεχίζεται η κίνηση κανονικά. 25
34 ΕΝΕΡΓΟΠΟΙΗΣΗ BUMPER STOP ΟΠΙΣΘΕΝ ΓΙΑ 1 SEC ΑΡΙΣΤΕΡΗ ΣΤΡΟΦΗ ΓΙΑ 0.5 SEC ΕΜΠΡΟΣ ΓΙΑ 1.5 SEC ΔΕΞΙΑ ΣΤΡΟΦΗ ΓΙΑ 0.5 SEC ΤΕΛΟΣ ΑΠΟΦΥΓΗΣ ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ ΔΕΞΙΟΣ BUMPER ΕΝΕΡΓΟΣ ΑΡΙΣΤΕΡΟΣ BUMPER ΕΝΕΡΓΟΣ
. Οι συσκευές χρησιμοποιούνται σε ζεύγη. Οι αισθητήρες IR της μίας ανιχνεύουν 2.")

35 3. Επεξήγηση μεθόδου επιστροφής στο φάρο υπέρυθρων Η μέθοδος αυτή βασίζεται στη χρήση του ζεύγους φάρων Pololu IR Beacon Transceiver. Στις εικόνες και εικονίζεται μία συσκευή Pololu IR Beacon Transceiver. Περιμετρικά της κυκλικής πλακέτας έχουν τοποθετηθεί έξι υπέρυθρα LED και τέσσερις αισθητήρες υπέρυθρων (ΙR). Οι συσκευές χρησιμοποιούνται σε ζεύγη. Οι αισθητήρες IR της μίας ανιχνεύουν τα LED της άλλης. Εξάγουν μια αναλογική τιμή για κάθε αισθητήρα ΙR, ώστε να είναι δυνατός ο προσδιορισμός για κάθε συσκευή της πλευράς με την οποία «βλέπει» την άλλη. Σε κάθε συσκευή οι αισθητήρες IR ονομάζονται «Βόρειος», «Νότιος», «Ανατολικός» και «Δυτικός». Η κάθε συσκευή διαθέτει 4 αναλογικές εξόδους, μία για κάθε αισθητήρα IR
 έχει οπτική επαφή με τα LED της πρώτης.")
36 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ Στην εικόνα 2.3.3, η πρώτη συσκευή αντιλαμβάνεται ότι ο «Ανατολικός» αισθητήρας ΙR της (Ε) έχει οπτική επαφή με τα LED της δεύτερης συσκευής. Η δεύτερη συσκευή αντιλαμβάνεται ότι ο «Δυτικός» αισθητήρας IR της (W) έχει οπτική επαφή με τα LED της πρώτης. Στο ιστίο του οχήματος βρίσκεται τοποθετημένη η μία από τις δύο συσκευές, ενώ στο μηχανισμό του φάρου βρίσκεται η δεύτερη. Το όχημα, γνωρίζοντας σε ποια πλευρά του βρίσκεται η δεύτερη συσκευή, στρέφει προς αυτή και κινείται προς το φάρο. Σε περίπτωση που κατά τη διάρκεια της κίνησης ανιχνευθεί εμπόδιο, ακολουθείται η διαδικασία αποφυγής εμποδίων που έχει περιγραφεί στην προηγούμενη παράγραφο (26). 28

37 ΚΕΦΑΛΑΙΟ 3 Πειράματα και αποτελέσματα 1. Μέτρηση ακρίβειας ανίχνευσης φάρου Κατά τη διάρκεια πολλαπλών μετρήσεων, έγινε αντιληπτό ότι μειωνόταν η ακρίβεια εντοπισμού του φάρου, ειδικά σε μικρές αποστάσεις. O αισθητήρας που βρισκόταν πάνω στο ιστίο του οχήματος εντόπιζε συχνά σε λανθασμένη κατεύθυνση τον αισθητήρα του φάρου. Για τη διόρθωση του προβλήματος αυτού προστέθηκαν στον αισθητήρα του ιστίου του οχήματος μικρές χάρτινες κατασκευές (χοάνες) που περιόρισαν το οπτικό πεδίο των αισθητήρων υπέρυθρων, όπως εικονίζεται στη φωτογραφία 3.1.1:
38 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ Ως αποτέλεσμα, βελτιώθηκε η ακρίβεια εντοπισμού της κατεύθυνσης του φάρου ακόμα και σε αποστάσεις έως 10 εκατοστών. Τέλος, διαπιστώθηκε ότι οποιαδήποτε απόσταση και αν υπάρχει μεταξύ του ζεύγους των αισθητήρων υπέρυθρων (φάρος και ιστίο), οι αναλογικές τιμές που εξάγονται είναι ίδιες (οι αναλογικές τιμές που εξάγονται δεν αντιστοιχούν στην ισχύ με την οποία δέχεται υπέρυθρη ακτινοβολία ο αισθητήρας). Αυτό είχε σαν αποτέλεσμα να μην μπορεί να χρησιμοποιηθεί το ζεύγος pololu για τον προσδιορισμό της απόστασης μεταξύ του οχήματος και του φάρου. 30

39 2. Μέτρηση μέγιστης απόστασης προσέγγισης στο φάρο Η αυτόνομη λειτουργία της προσέγγισης στο φάρο, σταματά όταν το όχημα βρεθεί σε απόσταση 10 εκατοστών από αυτόν. Αυτό επιτυγχάνεται με τον περιορισμό της έντασης των μικρών λυχνιών LED υπέρυθρων. Οι διατάξεις φαίνονται στις φωτογραφίες 3.1.2, και Οι διακόπτες ενεργοποιούν έκαστος ένα interrupt στον κώδικα, οπότε το όχημα ξεκινά αυτομάτως τη διαδικασία αποφυγής εμποδίου. Οι διακόπτες είναι απλοί μηχανικοί διακόπτες ON/OFF

40 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ
41 Οι αντιστάσεις που χρησιμοποιούνται είναι 220Ω. Στο όχημα βρίσκονται 3 αντιστάσεις συνδεδεμένες σε σειρά (συνολικά 660Ω), ενώ στο φάρο η κάθε λυχνία περιορίζεται από 1 αντίσταση. Η απόσταση ανίχνευσης του φάρου, εάν μεταβληθεί η αντίσταση της διάταξης του φάρου, φαίνεται στον παρακάτω πίνακα 3.1.5: ΑΝΤΙΣΤΑΣΗ LED 220Ω 440Ω 660Ω ΑΠΟΣΤΑΣΗ ΑΝΙΧΝΕΥΣΗΣ 10 cm 02 cm Απαιτείται επαφή οχήματος - φάρου
42 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ 3. Παρεμβολές από το ορατό φως παρεμβολές από ισχυρές πηγές υπέρυθρων Κατά τη διάρκεια των δοκιμών και κατόπιν μετρήσεων σε διάφορες συνθήκες φωτισμού και δεν παρατηρήθηκε καμία διαφορά ανάλογα με τις συνθήκες αυτές. Δοκιμάστηκαν οι εξής συνθήκες: Σκοτεινό δωμάτιο Δωμάτιο με φωτισμό από φωτιστικά LED Δωμάτιο με φωτισμό με λαμπτήρες πυρακτώσεως Δωμάτιο που φωτίζεται με το φως του ηλίου Ανοικτός χώρος κατά τη διάρκεια της ημέρας Έγινε προσπάθεια παρεμβολών από ισχυρή σχετικά πηγή υπέρυθρων. Για το σκοπό αυτό χρησιμοποιήθηκε τηλεχειριστήριο τηλεόρασης. Οι παρεμβολές ήταν επιτυχημένες, και κατόρθωσαν να δημιουργήσουν σύγχυση στον αισθητήρα. Παρ όλα αυτά, εξ αιτίας των χάρτινων κατασκευών στους αισθητήρες του ιστίου χρειαζόταν οπτική επαφή μεταξύ ενός αισθητήρα και του τηλεχειριστηρίου μέσα από τη χοάνη ώστε να υπερισχύσει το σήμα της παρεμβολής. Τέλος έγινε προσπάθεια παρεμβολής των αισθητήρων υπέρυθρων χρησιμοποιώντας φως λέιζερ και ισχυρό φως LED απ ευθείας στους αισθητήρες. Και οι δύο προσπάθειες δεν κατέληξαν σε παρεμβολή κανενός αισθητήρα. 34
43 4. Προσδιορισμός περιορισμών κίνησης Δοκιμάστηκε η δυνατότητα κίνησης του οχήματος σε διαφορετικά εδάφη και διαπιστώθηκαν ορισμένοι περιορισμοί στην κίνησή του, κυρίως λόγω των διαθέσιμων τροχών. Τα αποτελέσματα παρουσιάζονται στον πίνακα 3.1.6: ΕΔΑΦΟΣ Πλακάκι λείο έδαφος (τυπικό δάπεδο εσωτερικού οικίας) Τσιμέντο (όχι απόλυτα λεία στρωμένο) Χαλί λεπτό (τυπικό χαλί διαδρόμου) Χαλί χοντρό (τυπικό χαλί σαλονιού) Φλοκάτη Πλάκα πεζοδρομίου πλάκα μη λεία ΑΠΟΤΕΛΕΣΜΑ Κανένας περιορισμός Δυσκολία στην κίνηση λόγω κακής πρόσφυσης Δυσκολία στην κίνηση λόγω τριβής Μεγάλη δυσκολία στην κίνηση λόγω τριβής Αδυναμία κίνησης Δυσκολία στην κίνηση άλλοτε λόγω κακής πρόσφυσης και άλλοτε λόγω τριβής Δεν πραγματοποιήθηκε δοκιμή του οχήματος σε υγρό έδαφος, σε λάσπη και χώμα λόγω της ευαισθησίας των ηλεκτρονικών τμημάτων του. Όσον αφορά στις αυτόνομες λειτουργίες του οχήματος, δοκιμάστηκαν διάφορες ταχύτητες. Οι τελική ταχύτητα που επιλέχθηκε ήταν η ταχύτητα των 100 rpm. Σε μικρότερες ταχύτητες από αυτή, η το όχημα δυσκολευόταν να κινηθεί ακόμα και σε λείο έδαφος. Σε μεγαλύτερες ταχύτητες από τα 100 rpm, το όχημα αντιδρούσε καθυστερημένα στις εντολές που λάμβανε από τον αισθητήρα υπερήχων και επίσης οι απτικές επαφές με εμπόδια δημιουργούσαν ζημιές στους προφυλακτήρες. 35
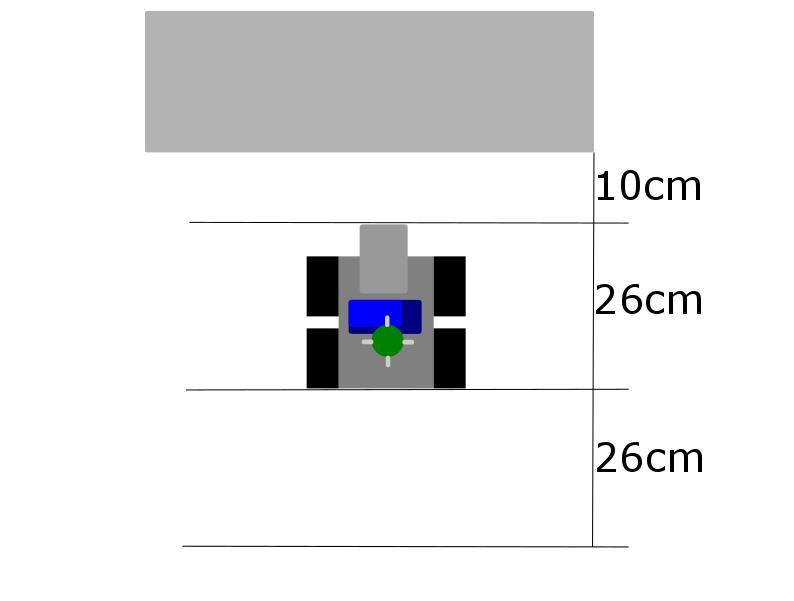
44 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ 5. Περιορισμοί στην πυκνότητα και το μέγεθος των εμποδίων 1. Λειτουργία αυτόνομης προσέγγισης φάρου Κατά την αποφυγή εμποδίων, το όχημα εκτελεί αρχικά οπισθοπορεία για 1 sec. Με την ορισμένη ταχύτητα 100 rpm σε ιδανικό έδαφος, αυτό φέρνει το όχημα πίσω κατά 1 μήκος οχήματος (26 cm). Λαμβάνοντας υπ όψη και το γεγονός ότι η μέγιστη απόσταση ανίχνευσης ενός εμποδίου από τον υπέρυθρο αισθητήρα είναι 10cm, τότε καταλήγουμε στο συμπέρασμα ότι για μια τυπική αποφυγή εμποδίου το όχημα απαιτεί ιδανικά απόσταση μεταξύ εμποδίων cm, δηλαδή 62cm. 2. Λειτουργία αυτόνομης περιπολίας Στη λειτουργία αυτόνομης περιπολίας η μέγιστη απόσταση ανίχνευσης εμποδίου από τον υπέρυθρο αισθητήρα είναι 20cm. Το όχημα τότε εκτελεί επιτόπια στροφή, άρα δεν χρειάζεται μεγαλύτερο χώρο από 20 cm. Όμως, οι προφυλακτήρες όταν έρθουν σε επαφή με εμπόδιο, δίνουν εντολή για εκτέλεση οπισθοπορείας για 1 sec, δηλαδή ένα μήκος οχήματος. Άρα το όχημα απαιτεί ιδανικά απόσταση μεταξύ εμποδίων cm, δηλαδή 52 cm. Τα παραπάνω φαίνονται στα σχήματα (περιορισμοί σε λειτουργία προσέγγισης φάρου) και (περιορισμοί σε λειτουργία αυτόνομης περιπολίας). 36

45
46 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ Τέλος, πρέπει να επισημανθεί ότι λόγω της φύσης των αισθητήρων, το όχημα δεν μπορεί να διακρίνει λεπτά κατακόρυφα εμπόδια (π.χ. λεπτά πόδια επίπλων, συρματόσχοινα ή σύρματα κ.τ.λ.). 38
47 ΚΕΦΑΛΑΙΟ 4 Αξιολόγηση των αποτελεσμάτων 1. Περιορισμοί 1. Σκάλες κατακόρυφα εμπόδια Το όχημα αδυνατεί λόγω κατασκευής να υπερβεί κατακόρυφα εμπόδια, έστω και μικρού ύψους. Οι σκάλες επίσης αποτελούν εμπόδιο, είτε πρόκειται για ανωφέρεια είτε πρόκειται για κατωφέρεια. Για την επίλυση του προβλήματος αυτού εξετάζονται δύο λύσεις: Προσαρμογή αισθητήρα υπερήχων ή υπέρυθρων στο εμπρόσθιο τμήμα του οχήματος, με κλίση προς το έδαφος, ώστε να μπορεί να μετρηθεί η υψομετρική διαφορά με το επίπεδο κίνησης του οχήματος. Με αυτό τον τρόπο θα είναι δυνατή η ανίχνευση σκάλας μπροστά από το όχημα. Χρήση μηχανισμού υπερπήδησης εμποδίων (flipper) ή χρήση μηχανισμού κατακόρυφων ερπυστριών στο εμπρόσθιο τμήμα του οχήματος. Αυτός ο μηχανισμός ενδεχομένως να μπορέσει να χρησιμοποιηθεί και σε περίπτωση ανατροπής του οχήματος. 2. Εμπόδια: για να είναι διακριτά πρέπει να είναι συγκεκριμένων διαστάσεων Ο αισθητήρας υπερήχων εμφανίζει δυσκολία στη διάκριση λεπτών εμποδίων (λεπτά πόδια επίπλων, λεπτών κατακόρυφων σωληνώσεων κ.τ.λ.). Οι πιθανές λύσεις που εξετάζονται είναι οι εξής: Χρήση αισθητήρων μεγαλύτερης διακριτικότητας 39
48 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ Χρήση πολλαπλών αισθητήρων και συνδυασμός των μετρήσεών τους (συνδυασμός πολλαπλών αισθητήρων υπερήχων ή συνδυασμός αισθητήρων υπερήχων με υπέρυθρους αισθητήρες) Χρήση αισθητήρα υπέρυθρων προσαρμοσμένο σε σερβοκινητήρα, ώστε να σαρώνει το χώρο μπροστά από το όχημα και να διακόπτει την κίνηση όταν διακρίνει εμπόδιο. 3. Δυσκολία κίνησης σε συγκεκριμένες επιφάνειες, όπως χαλιά, τραχιές επιφάνειες, κ.α. Η λύση που προτείνεται στην περίπτωση αυτή είναι η χρήση ερπυστριών αντί των τροχών, προσδίδοντας έτσι στο όχημα καλύτερη πέδηση και κύλιση. 4. Το όχημα δεν έχει στρατιωτικές προδιαγραφές Σε σχέση με τα οχήματα που περιεγράφηκαν στην παράγραφο 2 της εισαγωγής, καθίσταται προφανές ότι το εξεταζόμενο όχημα δεν είναι τελικό προϊόν ούτε είναι επιχειρησιακό. Τα οχήματα που εξετάζονται στην εισαγωγή έχουν στρατιωτικές προδιαγραφές και αποτελούν επιχειρησιακά μοντέλα. Το πιο αξιοσημείωτο χαρακτηριστικό τους είναι η αυξημένη αντοχή, που τους επιτρέπει ακόμα και να εκτοξευτούν σε ένα σημείο. Αυτό προϋποθέτει στιβαρή κατασκευή, τόσο εξωτερικά όσο και εσωτερικά, χρήση εξαρτημάτων συγκεκριμένων προδιαγραφών, όπως και δυνατότητα επαναφοράς σε κανονική θέση μετά από ανατροπή. Επίσης, θεωρείται αυτονόητο ότι ένα όχημα στρατιωτικών προδιαγραφών θα πρέπει να είναι ανθεκτικό σε δύσκολες περιβαλλοντικές συνθήκες (βροχή, υγρασία, σκόνη, λάσπη). Οι αισθητήρες των οχημάτων αυτών είναι υψηλής ποιότητας και έχουν την ικανότητα να αποδίδουν σε αντίξοες συνθήκες. 40
49 Για τη μετατροπή του οχήματος σε όχημα στρατιωτικών προδιαγραφών απαιτείται η ολική επανασχεδίασή του βασιζόμενη σε ίδιες μεν αρχές, αλλά με βελτιστοποιημένη κατασκευή και αναβαθμισμένους αισθητήρες. 41
50 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ 2. Προτερήματα σημεία υπεροχής 1. Απλότητα κατασκευής τιμή αναλωσιμότητα Το όχημα έχει κατασκευαστεί με φθηνά εξαρτήματα που προέρχονται από το λιανικό εμπόριο. Κατά συνέπεια, είναι φθηνό και αναλώσιμο. Είναι ήδη ικανό να διεξάγει απλές αποστολές αναγνώρισης και περιπολίας εάν προσαρμοστεί σε αυτό μια κάμερα. Εάν αφαιρεθεί ο ιστός και στη θέση του προσαρμοστεί φακός και κάμερα, μπορεί να εκτελέσει αποστολές επιθεώρησης οχήματος σε σημείο ελέγχου. Το όχημα είναι απλό στη χρήση και δεν απαιτεί καμία εξειδικευμένη γνώση. Ο τηλεχειρισμός του μπορεί να εκτελεστεί από οποιοδήποτε smartphone ή tablet, εφόσον εγκατασταθεί μια απλή εφαρμογή σε αυτό. 2. Αυτόνομες λειτουργίες Οι αυτόνομες λειτουργίες προσδίδουν στο όχημα τη δυνατότητα να εκτελέσει αποστολές χωρίς να απαιτείται η συνεχής επίβλεψή του. Παραδείγματος χάριν, θα ήταν δυνατή η χρήση κάμερας και κάρτας αποθήκευσης SD ώστε να καταγράφεται η δραστηριότητα σε έναν εκτεταμένο εσωτερικό χώρο χωρίς την επίβλεψη από τον χειριστή του. Αυτή η δυνατότητα θα μπορούσε να συνδυαστεί με τη λειτουργία επιστροφής στο φάρο υπέρυθρων, ώστε το όχημα να μπορεί, αφού υλοποιηθεί κατάλληλη μετατροπή του, να φορτίζει τις μπαταρίες του σε προκαθορισμένο χώρο φόρτισης. Με αυτό τον τρόπο, ένας χειριστής θα μπορούσε να επιβλέπει περισσότερα από ένα οχήματα. 42
51 ΚΕΦΑΛΑΙΟ 5 Συμπεράσματα και μελλοντική ανάπτυξη Αν και πρόκειται για μια φθηνή πειραματική συσκευή με περιορισμένες αυτόνομες δυνατότητες, το όχημα μπορεί να εξελιχθεί σε πλατφόρμα πολλαπλών ρόλων, ακόμα και αν δεν ανακατασκευαστεί ώστε να έχει στρατιωτικές προδιαγραφές. Για το άμεσο μέλλον προτείνονται οι εξής εξελίξεις: 1. Μετατροπή σε ερπυστριοφόρο όχημα Κατ αρχήν προτείνεται η μετατροπή του οχήματος σε ερπυστριοφόρο (αλλαγή των τροχών με ερπύστριες). Αυτό θα προσδώσει στο όχημα καλύτερη συμπεριφορά και επιδόσεις σε εδάφη που συναντά δυσκολία κίνησης. Μπορεί να εξεταστεί η χρήση σασί με σύστημα υπερπήδησης εμποδίων (flippers). Αυτό θα προσδώσει στο όχημα τη δυνατότητα να υπερπηδά μικρά εμπόδια. 2. Εξέταση προσθήκης επιπλέον αισθητήρων υπερήχων υπέρυθρων Θα πρέπει να εξεταστεί η προσθήκη επιπλέον αισθητήρων. Αρχικά θα μπορούσαν να προσαρμοστούν αισθητήρες υπερήχων περιμετρικά του οχήματος, ώστε να παρέχουν ολόπλευρη κάλυψη με σκοπό τη λήψη περισσότερο περίπλοκων αποφάσεων για την αποφυγή εμποδίων. Επίσης η προσαρμογή ενός αισθητήρα 43
52 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ υπερήχων εμπρός με κλίση προς το έδαφος, ώστε να ανιχνεύεται η ύπαρξη κενού εμπρός από το όχημα. Έπειτα, θα μπορούσε να εξεταστεί η προσθήκη ενός αισθητήρα υπέρυθρων προσαρμοσμένο σε σερβοκινητήρα, ώστε να ανιχνεύει ακόμα και μικρότερα ή λεπτότερα εμπόδια. 3. Εξέταση της διαμόρφωσης του φορτίου που πρέπει να φέρει, ανάλογα με το είδος της αποστολής που ανατίθεται να εκτελέσει Ανάλογα με το είδος της αποστολής που θα του ανατεθεί, θα πρέπει να εξεταστεί και η διαμόρφωση του φορτίου του οχήματος. Ενδεικτικά αναφέρονται ορισμένες αποστολές και προτεινόμενα φορτία: Περιπολία αναγνώριση περιοχής (αυτόνομη και με απλή τηλεκατεύθυνση) επιθεώρηση οχήματος σε σημείο ελέγχου: Εμπρόσθια κάμερα, κάρτα αποθήκευσης δεδομένων SD, φώτα LED περιμετρικά του οχήματος. Ανίχνευση ραδιενέργειας και πολεμικών χημικών ουσιών: Εμπρόσθια κάμερα, κάρτα αποθήκευσης δεδομένων SD, αισθητήρας Geiger με αυτόνομη πηγή ενέργειας, δεσμίδα αισθητήρων ΧΠΟ (ο συνδυασμός των αισθητήρων για την ανίχνευση χημικών πολεμικών ουσιών γίνεται λαμβάνοντας υπ όψη τις αναμενόμενες απειλές ή τις απειλές που θεωρούνται σοβαρότερες). Χαρτογράφηση δωματίου: περιμετρικοί αισθητήρες υπέρυθρων, κάρτα αποθήκευσης SD, χρήση του φάρου υπέρυθρων ως σημείο αναφοράς. Αναζήτηση εκρηκτικών: Εμπρόσθια κάμερα. Μπορεί να εξεταστεί η προσαρμογή μικρού βραχίονα (μετατροπή με σκοπό την εκτέλεση απλών αποστολών EOD). 44
53 Μεταφορά φορτίου στα πλαίσια της ομάδας μάχης: Εμπρόσθια κάμερα, σχάρα μεταφοράς, αντικατάσταση των κινητήρων με ισχυρότερους. 4. Σμίκρυνση του οχήματος Προτείνεται η επανασχεδίαση του οχήματος με σκοπό τη μείωση του μεγέθους του. Εάν το όχημα επανασχεδιαστεί ώστε να διαθέτει μικρότερο μέγεθος (μικρότερο των 10 εκατοστών ίδιο μέγεθος με μια χειροβομβίδα και πολύ μικρότερο βάρος) διατηρώντας τις ίδιες δυνατότητες όσον αφορά στις αυτόνομες λειτουργίες και με την προθήκη κάμερας, θα είναι δυνατή η χρήση ενός ή περισσότερων ως αναλώσιμα οχήματα αναγνώρισης από τον κάθε μαχητή ατομικά, σε συνδυασμό με το κινητό του τηλέφωνο. Δηλαδή, θα μπορούσε ο κάθε μαχητής να φέρει ένα μικρό όχημα αναγνώρισης στον φόρτο του. Θα μπορούσε επίσης να εξεταστεί η μεταφορά του οχήματος εντός κελύφους, το οποίο θα το προστατεύει από πτώσεις. Ο μαχητής θα μπορούσε να ενεργοποιεί μηχανισμό στο προστατευτικό κέλυφος αντίστοιχο με αυτόν μιας χειροβομβίδας και να το εκτοξεύει στο σημείο που επιθυμεί. Μετά την πτώση το κέλυφος θα απελευθερώνει το όχημα ώστε να εκτελέσει την αποστολή που επιθυμεί ο χειριστής του. 45
54 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ Βιβλιογραφία - Ιστότοποι 1. Παρουσίαση Δρ. Νικόλαου Τσουρβελούδη «Έντροχα Ρομποτικά Οχήματ (ΕΡΟ) Κινηματική», όπως παρουσιάστηκε το 2016 στη ΣΣΕ, στα πλαίσια του μαθήματος «Μη Επανδρωμένα Ρομποτικά Οχήματα», στο Β Εξάμηνο του Διιδρυματικού Διατμηματικού Προγράμματος Μεταπτυχιακών Σπουδών «Σχεδίαση και Επεξεργασία Συστημάτων». 2. Simple, Real-Time Obstacle Avoidance Algorithm for Mobile Robots, των Ioan Susnea, Viorel Minzu, Grigore Vasiliu. Department of Control Engineering, University Dunarea de Jos, Δεκέμβριος DG02S-A130GEARMOTOR datasheet της DAGU Hi-Tech Electronic Co., LTD 4. DG012-BV Multi chassis 4WD kit (basic vesrsion) printed manual 5. Pololu IR Beacon Quick-Start Sheet της Pololu Corporation 6. Adafruit Motor Shield V2 for Arduino (created by lady ada), από την ιστοσελίδα (29/7/16) 7. Product User s Manual HC-SR04 Ultrasonic Sensor της Cytron Technologies 8. Phototransistor Products Specification HPTB3b-14D της HUEY JANN ELECTRONICS INDUSTRY CO., LTD. 9. 5mm Round Standard T-1 ¾ Type Infrared LED Technical Data Sheet της Lucky Light Electronics Co., Ltd. 46
55 10. (26/03/17) (23/06/17) (31/03/17) (31/03/17) (31/03/17) (31/03/17) (31/03/17) (31/03/17) (31/03/17) (31/03/17) (31/03/17) (31/03/17) (31/03/17) (02/04/17) (02/04/17) (02/04/17) (04/04/17) html#basicunderstanding (23/6/17) 47


 Arduino Mega")
56 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ ΠΑΡΑΡΤΗΜΑ Α Εξαρτήματα Πλαίσιο και κινητήρες από το σετ Multi-chassis 4WD kit με 4 κινητήρες (DC) DG02S-A130 Gearmotor (12) Arduino Mega clone (Funduino Mega 2560) (13) 48



57 Adafruit Motor Shield V2 for Arduino (ελεγκτής για τους κινητήρες) (14) Adafruit Bluefruit LE UART (Bluetooth για σύνδεση με κινητό τηλέφωνο) (14) 49

 Pololu IR beacon")
58 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ HC-SR04 Ultrasonic range sensor (αποστασιόμετρο υπερήχων) (16) Buzzer (17) Pololu IR beacon receiver set (18) 50
 Απλή")
")


59 Δύο διακόπτες (για το σύστημα bumper) Απλή Φωτοδίοδος (για το σύστημα προσέγγισης) (19) Mini breadboards, καλώδια, αντιστάσεις, απλοί διακόπτες on-off κτλ. (16, 21, 22) 51

60 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ ΠΑΡΑΡΤΗΜΑ B Συνδεσμολογία αισθητήρων - κινητήρων 52
61 53

62 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ 54
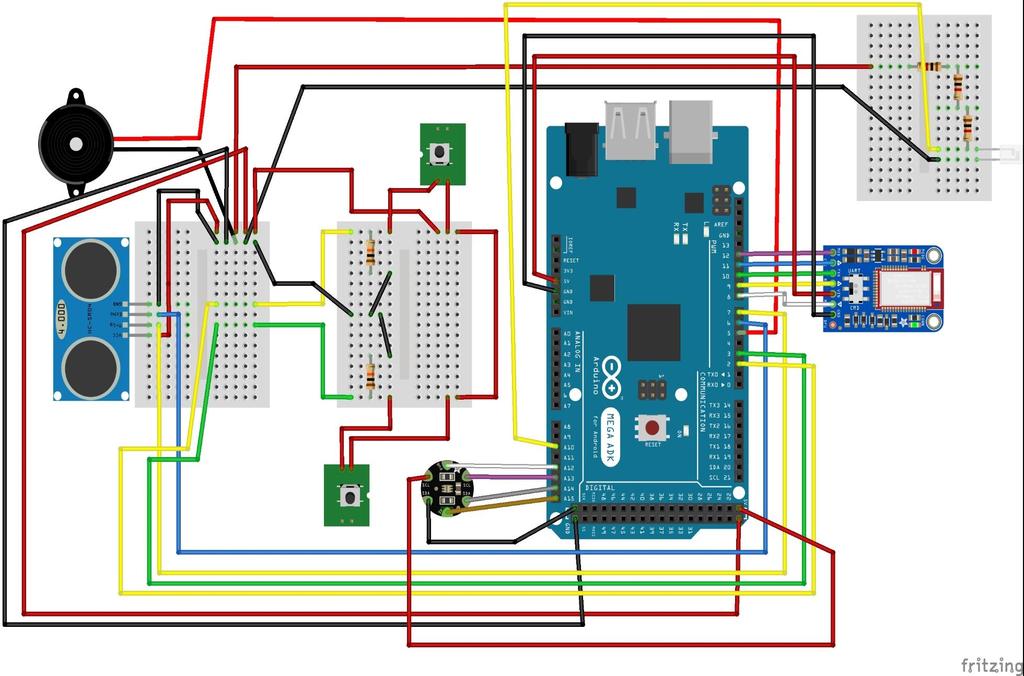
63 Επεξήγηση συνδεσμολογίας αισθητήρων Το Adafruit Bluetooth LE UART είναι το Bluetooth module που χρησιμοποιείται για τη μεταβίβαση εντολών από τη συσκευή android προς το όχημα. Χρησιμοποιεί τα digital pins 8, 9, 10, 11, 12 στο Arduino. Επίσης χρειάζεται 5V και pin γείωσης (GND). Ο αισθητήρας υπερήχων HC-SR04 χρησιμοποιεί τα digital pins 6,7 στο Arduino. Επίσης χρειάζεται 5V και pin γείωσης (GND). To buzzer χρησιμοποιεί το digital pin 5. Επίσης χρειάζεται 5V και pin γείωσης (GND). Τα bumpers χρησιμοποιούν τα digital pins 2, 3 (για το Arduino Mega είναι interrupt pins). Το Pololu IR beacon χρησιμοποιεί τα analog pins 12, 13, 14,15, το digital pin 31 (enable pin, προαιρετικά) και επίσης χρειάζεται 5V και pin γείωσης. O αισθητήρας προσέγγισης χρησιμοποιεί το analog pin 10. Χρειάζεται επίσης 5V και pin γείωσης. Το motor shield δεσμεύει τα digital pins 20, 21. Επεξήγηση αυτοσχέδιου αισθητήρα προσέγγισης Ο φάρος (beacon) που χρησιμοποιείται για την προσέγγιση του οχήματος εκπέμπει, εκτός της IR ακτινοβολίας του Pololu IR set, μια μικρής ισχύος ακτινοβολία IR από λυχνίες IR σε διαφορετικό μήκος κύματος. Το απλό phototransistor, με τη συγκεκριμένη συνδεσμολογία αντιστάσεων, μπορεί να την ανιχνεύσει σε απόσταση περίπου 10 εκατοστών, οπότε το όχημα θεωρεί ότι προσέγγισε με επιτυχία το φάρο. 55
64 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ ΠΑΡΑΡΤΗΜΑ Γ Κώδικας (Arduino Mega 2560 r3) Παρακάτω παρατίθεται ο πλήρης κώδικας, για Arduino Mega Έχει συνταχθεί με τον compiler Arduino έκδοσης Μαζί με τον παρακάτω κώδικα πρέπει να συμπεριληφθούν και τα συνοδευτικά modules BluefruitConfig.h και packetparser.cpp, τα οποία περιλαμβάνονται στις βιβλιοθήκες του Adaftuit Bluefruit LE UART. //MOTORSHIELD SETTINGS #include <Wire.h> #include <Adafruit_MotorShield.h> #include "utility/adafruit_ms_pwmservodriver.h" // Create the motor shield object with the default I2C address Adafruit_MotorShield AFMS = Adafruit_MotorShield(); //Create DC Motor objects Adafruit_DCMotor *motor1 = AFMS.getMotor(1); Adafruit_DCMotor *motor2 = AFMS.getMotor(2); Adafruit_DCMotor *motor3 = AFMS.getMotor(3); Adafruit_DCMotor *motor4 = AFMS.getMotor(4); //HC-SR04 Ultrasonic Sensor Settings const int echopin = 6; const int trigpin = 7; long duration, distance; //IR Receiver pins const int westpin = A13; const int southpin = A15; const int eastpin = A12; const int northpin = A14; const int enablepin = 31; //Bumper pins and variables const int leftpin = 2; const int rightpin = 3; const int bumperout = 13; volatile int avoidright = 0; volatile int avoidleft = 0; //Buzzer Pin const int buzzpin = 5; //Distance from beacon IR photodiode const int dispin = A10; //Set inrange variable (beacon in range or not) 56
65 boolean inrange = false; //Set initial speed to lowest value int speed = 4; int RUNAT = 0; //BLUETOOTH SETTINGS #include <string.h> #include <Arduino.h> #include <SPI.h> #if not defined (_VARIANT_ARDUINO_DUE_X_) && not defined (_VARIANT_ARDUINO_ZERO_) #include <SoftwareSerial.h> #endif #include "Adafruit_BLE.h" #include "Adafruit_BluefruitLE_SPI.h" #include "Adafruit_BluefruitLE_UART.h" #include "BluefruitConfig.h" #define BUFSIZE 128 #define VERBOSE_MODE true #define BLE_READPACKET_TIMEOUT 500 #define BLUEFRUIT_SWUART_RXD_PIN 9 #define BLUEFRUIT_SWUART_TXD_PIN 10 #define BLUEFRUIT_UART_CTS_PIN 11 #define BLUEFRUIT_UART_RTS_PIN 8 #ifdef Serial1 #define BLUEFRUIT_HWSERIAL_NAME Serial1 #endif #define BLUEFRUIT_UART_MODE_PIN 12 #define FACTORYRESET_ENABLE 0 #define MINIMUM_FIRMWARE_VERSION "0.6.6" #define MODE_LED_BEHAVIOUR "MODE" SoftwareSerial bluefruitss = SoftwareSerial(BLUEFRUIT_SWUART_TXD_PIN, BLUEFRUIT_SWUART_RXD_PIN); Adafruit_BluefruitLE_UART ble(bluefruitss, BLUEFRUIT_UART_MODE_PIN, BLUEFRUIT_UART_CTS_PIN, BLUEFRUIT_UART_RTS_PIN); void error(const FlashStringHelper*err) { Serial.println(err); while (1); } uint8_t readpacket(adafruit_ble *ble, uint16_t timeout); float parsefloat(uint8_t *buffer); void printhex(const uint8_t * data, const uint32_t numbytes); extern uint8_t packetbuffer[]; void setup(void) { //Allocate bumper pins and declare interrupts and variables pinmode (leftpin, INPUT); pinmode (rightpin, INPUT); pinmode(bumperout, OUTPUT); digitalwrite(bumperout, LOW); attachinterrupt(digitalpintointerrupt(rightpin), rightbumper, LOW); attachinterrupt(digitalpintointerrupt(leftpin), leftbumper, LOW); //Allocate IR Receiver pins pinmode(westpin, INPUT); pinmode(southpin, INPUT); 57
66 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ pinmode(eastpin, INPUT); pinmode(northpin, INPUT); //Allocate ultrasonic sensor pins pinmode(trigpin, OUTPUT); pinmode(echopin, INPUT); //Allocate Buzzer pin pinmode(buzzpin, OUTPUT); //Allocate distance from beacon sensor PIN pinmode(dispin, INPUT); //Start the motor shield AFMS.begin(); //Set initial motor speeds motor1->setspeed(100); motor2->setspeed(100); motor3->setspeed(100); motor4->setspeed(100); //Bluetooth Settings char Dir = "RELEASE"; while (!Serial); // required for Flora & Micro delay(500); Serial.begin(9600); /* Initialise the module */ Serial.print(F("Initialising the Bluefruit LE module: ")); if (!ble.begin(verbose_mode) ) { error(f("couldn't find Bluefruit, make sure it's in CoMmanD mode & check wiring?")); } Serial.println( F("OK!") ); if ( FACTORYRESET_ENABLE ) { Serial.println(F("Performing a factory reset: ")); if (! ble.factoryreset() ){ error(f("couldn't factory reset")); } } ble.echo(false); Serial.println("Requesting Bluefruit info:"); ble.info(); Serial.println(F("Please use Adafruit Bluefruit LE app to connect in Controller mode")); Serial.println(F("Then activate/use the sensors, color picker, game controller, etc!")); Serial.println(); ble.verbose(false); // debug info is a little annoying after this point! while (! ble.isconnected()) { delay(500); } Serial.println(F("******************************")); if ( ble.isversionatleast(minimum_firmware_version) ) { Serial.println(F("Change LED activity to " MODE_LED_BEHAVIOUR)); ble.sendcommandcheckok("at+hwmodeled=" MODE_LED_BEHAVIOUR); } Serial.println( F("Switching to DATA mode!") ); ble.setmode(bluefruit_mode_data); 58
67 } Serial.println(F("******************************")); //Shuffle random function for random number later randomseed(analogread(0)); void loop(void) { //Bumper input initially OFF digitalwrite(bumperout, LOW); //IR beacon initially set out of range for the loop inrange = false; //Bluetooth Settings uint8_t len = readpacket(&ble, BLE_READPACKET_TIMEOUT); if (len == 0) return; //Color if (packetbuffer[1] == 'C') { uint8_t red = packetbuffer[2]; uint8_t green = packetbuffer[3]; uint8_t blue = packetbuffer[4]; Serial.print ("RGB #"); if (red < 0x10) Serial.print("0"); Serial.print(red, HEX); if (green < 0x10) Serial.print("0"); Serial.print(green, HEX); if (blue < 0x10) Serial.print("0"); Serial.println(blue, HEX); } //Buttons if (packetbuffer[1] == 'B') { uint8_t buttnum = packetbuffer[2] - '0'; boolean pressed = packetbuffer[3] - '0'; //Initial Reads from sensors //Read beacon variables volatile int N = analogread(northpin); volatile int S = analogread(southpin); volatile int E = analogread(eastpin); volatile int W = analogread(westpin); //Ultrasonic pulse away - calcultions digitalwrite(trigpin, LOW); delay(10); digitalwrite(trigpin, HIGH); delay(10); digitalwrite(trigpin, LOW); //Calculate the duration of the interval duration=pulsein(echopin, HIGH); //Calculate the distance from sensor (duration/29/2 gives cm) distance=duration/29/2; //Display on Serial Monitor 59
68 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ Serial.print(distance); Serial.print(" cm"); Serial.println(); delay(50); //Is the beacon in range? int range = analogread(dispin); if (range < 900) { inrange = true; } //Directions (arrow buttons) if (pressed) { switch(buttnum){ case 5: motor1->run(forward); motor2->run(forward); motor3->run(forward); motor4->run(forward); Serial.println ("FORWARD"); break; case 6: motor1->run(backward); motor2->run(backward); motor3->run(backward); motor4->run(backward); Serial.println ("BACKWARD"); break; case 8: motor1->run(backward); motor2->run(backward); motor3->run(forward); motor4->run(forward); Serial.println ("ROTATE RIGHT"); break; case 7: motor1->run(forward); motor2->run(forward); motor3->run(backward); motor4->run(backward); Serial.println ("ROTATE LEFT"); break; //Increase Speed (button 1) case 1: ++speed; RUNAT = speed * 25; motor1->setspeed(runat); motor2->setspeed(runat); motor3->setspeed(runat); motor4->setspeed(runat); Serial.print ("SPEED SET TO "); Serial.println (RUNAT); for (int x= 0; x <= speed; x++) { digitalwrite(buzzpin, HIGH); delay(50); digitalwrite(buzzpin, LOW); delay(50); } if (speed > 9) { 60
69 speed = 9; } break; //Reduce Speed (button 2) case 2: --speed; RUNAT = speed * 25; motor1->setspeed(runat); motor2->setspeed(runat); motor3->setspeed(runat); motor4->setspeed(runat); Serial.print ("SPEED SET TO "); Serial.println (RUNAT); for (int x= 0; x <= speed; x++) { digitalwrite(buzzpin, HIGH); delay(50); digitalwrite(buzzpin, LOW); delay(50); } if (speed < 0) { speed = 0; } break; //Autonomous RTB case 3: // Set a medium speed (best for practical purposes) motor1->setspeed(100); motor2->setspeed(100); motor3->setspeed(100); motor4->setspeed(100); // Start the loop for(int time = 0; time < 600; time++){ // Check for the beacon's location - get readings from analog IR sensors volatile int N = analogread(northpin); volatile int S = analogread(southpin); volatile int E = analogread(eastpin); volatile int W = analogread(westpin); // Check possible obstacle distance from ultrasonic sensor // Ultrasonic pulse away - calcultions digitalwrite(trigpin, LOW); delay(10); digitalwrite(trigpin, HIGH); delay(10); digitalwrite(trigpin, LOW); //Calculate the duration of the interval duration=pulsein(echopin, HIGH); //Calculate the distance from sensor (duration/29/2 gives cm) distance=duration/29/2; //Is the beacon in range? range = analogread(dispin); if (range < 900) { inrange = true; Serial.println("BEACON IN RANGE"); digitalwrite(buzzpin, HIGH); delay(500); 61
70 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ } digitalwrite(buzzpin, LOW); delay(500); if (inrange == true) { motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); inrange = false; break; } else if (avoidright >= 5) { Serial.println("RIGHT BUMPER ACTIVATED"); digitalwrite(buzzpin, HIGH); motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); delay(500); motor1->run(backward); motor2->run(backward); motor3->run(backward); motor4->run(backward); delay(1000); motor1->run(forward); motor2->run(forward); motor3->run(backward); motor4->run(backward); delay(500); motor1->run(forward); motor2->run(forward); motor3->run(forward); motor4->run(forward); delay(1500); digitalwrite(buzzpin, LOW); avoidright = 0; } else if (avoidleft >= 5) { Serial.println("LEFT BUMPER ACTIVATED"); digitalwrite(buzzpin, HIGH); motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); delay(500); motor1->run(backward); motor2->run(backward); motor3->run(backward); motor4->run(backward); delay(1000); motor1->run(backward); motor2->run(backward); motor3->run(forward); motor4->run(forward); delay(500); motor1->run(forward); motor2->run(forward); motor3->run(forward); motor4->run(forward); delay(1500); digitalwrite(buzzpin, LOW); 62
71 avoidleft = 0; }else if (distance < 10) { motor1->run(backward); motor2->run(backward); motor3->run(backward); motor4->run(backward); delay(1000); if (time < 300){ motor1->run(backward); motor2->run(backward); motor3->run(forward); motor4->run(forward); delay(500); } if (time >= 300) { motor1->run(forward); motor2->run(forward); motor3->run(backward); motor4->run(backward); delay(500); } motor1->run(forward); motor2->run(forward); motor3->run(forward); motor4->run(forward); delay(1500); motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); } else if (N > 500 && S > 500 && E < 900 && W > 500) { motor1->run(backward); motor2->run(backward); motor3->run(forward); motor4->run(forward); Serial.println("EAST"); } else if (N > 500 && S > 500 && E >500 && W < 900) { motor1->run(forward); motor2->run(forward); motor3->run(backward); motor4->run(backward); Serial.println("WEST"); } else if (N < 900 && S > 500 && E > 500 && W > 500) { motor1->run(forward); motor2->run(forward); motor3->run(forward); motor4->run(forward); Serial.println("NORTH"); } else if (N > 500 && S < 900 && E > 500 && W > 500) { int randnumber = random(100); if (randnumber < 50) { motor1->run(backward); motor2->run(backward); motor3->run(forward); motor4->run(forward); delay(1800); motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); 63
72 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ } else { motor1->run(forward); motor2->run(forward); motor3->run(backward); motor4->run(backward); delay(1800); motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); } Serial.println("SOUTH"); } digitalwrite(bumperout, LOW); delay(100); } break; //Autonomous Patrol for 2 mins (button 4) case 4: motor1->setspeed(100); motor2->setspeed(100); motor3->setspeed(100); motor4->setspeed(100); // Start the loop for (int time = 0; time < 1200; time++) { // Ultrasonic pulse away - calcultions digitalwrite(trigpin, LOW); delay(10); digitalwrite(trigpin, HIGH); delay(10); digitalwrite(trigpin, LOW); //Calculate the duration of the interval duration=pulsein(echopin, HIGH); //Calculate the distance from sensor (duration/29/2 gives cm) distance=duration/29/2; //Bumper turns (microcrashes) if (avoidright >= 5) { Serial.println("RIGHT BUMPER ACTIVATED"); digitalwrite(buzzpin, HIGH); motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); delay(500); motor1->run(backward); motor2->run(backward); motor3->run(backward); motor4->run(backward); delay(1000); motor1->run(forward); motor2->run(forward); motor3->run(backward); motor4->run(backward); delay(500); motor1->run(forward); motor2->run(forward); 64
73 motor3->run(forward); motor4->run(forward); delay(1500); digitalwrite(buzzpin, LOW); avoidright = 0; } if (avoidleft >=5) { Serial.println("LEFT BUMPER ACTIVATED"); digitalwrite(buzzpin, HIGH); motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); delay(500); motor1->run(backward); motor2->run(backward); motor3->run(backward); motor4->run(backward); delay(1000); motor1->run(backward); motor2->run(backward); motor3->run(forward); motor4->run(forward); delay(500); motor1->run(forward); motor2->run(forward); motor3->run(forward); motor4->run(forward); delay(1500); digitalwrite(buzzpin, LOW); avoidleft = 0; } //Turn when faced with obstacle (ultrasonic) if (distance < 20){ //Randomly turn left or right int randnumber = random(100); if (randnumber < 50) { motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); delay(500); motor1->run(backward); motor2->run(backward); motor3->run(forward); motor4->run(forward); delay(1000); motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); } else { motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); delay(500); motor1->run(forward); 65
74 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ motor2->run(forward); motor3->run(backward); motor4->run(backward); delay(1000); motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); } } else { motor1->run(forward); motor2->run(forward); motor3->run(forward); motor4->run(forward); } digitalwrite(bumperout, LOW); digitalwrite(buzzpin, HIGH); delay(50); digitalwrite(buzzpin, LOW); delay(50); } motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); digitalwrite(buzzpin, HIGH); delay(500); digitalwrite(buzzpin, LOW); delay(500); break; default: motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); break; } } else { motor1->run(release); motor2->run(release); motor3->run(release); motor4->run(release); } } // GPS Location if (packetbuffer[1] == 'L') { float lat, lon, alt; lat = parsefloat(packetbuffer+2); lon = parsefloat(packetbuffer+6); alt = parsefloat(packetbuffer+10); Serial.print("GPS Location\t"); Serial.print("Lat: "); Serial.print(lat, 4); // 4 digits of precision! Serial.print('\t'); Serial.print("Lon: "); Serial.print(lon, 4); // 4 digits of precision! Serial.print('\t'); Serial.print(alt, 4); Serial.println(" meters"); } // Accelerometer 66
75 } if (packetbuffer[1] == 'A') { float x, y, z; x = parsefloat(packetbuffer+2); y = parsefloat(packetbuffer+6); z = parsefloat(packetbuffer+10); Serial.print("Accel\t"); Serial.print(x); Serial.print('\t'); Serial.print(y); Serial.print('\t'); Serial.print(z); Serial.println(); } // Magnetometer if (packetbuffer[1] == 'M') { float x, y, z; x = parsefloat(packetbuffer+2); y = parsefloat(packetbuffer+6); z = parsefloat(packetbuffer+10); Serial.print("Mag\t"); Serial.print(x); Serial.print('\t'); Serial.print(y); Serial.print('\t'); Serial.print(z); Serial.println(); } // Gyroscope if (packetbuffer[1] == 'G') { float x, y, z; x = parsefloat(packetbuffer+2); y = parsefloat(packetbuffer+6); z = parsefloat(packetbuffer+10); Serial.print("Gyro\t"); Serial.print(x); Serial.print('\t'); Serial.print(y); Serial.print('\t'); Serial.print(z); Serial.println(); } // Quaternions if (packetbuffer[1] == 'Q') { float x, y, z, w; x = parsefloat(packetbuffer+2); y = parsefloat(packetbuffer+6); z = parsefloat(packetbuffer+10); w = parsefloat(packetbuffer+14); Serial.print("Quat\t"); Serial.print(x); Serial.print('\t'); Serial.print(y); Serial.print('\t'); Serial.print(z); Serial.print('\t'); Serial.print(w); Serial.println(); } void rightbumper() { avoidright = ++avoidright; } void leftbumper() { avoidleft = ++avoidleft; } 67
.")
76 ΔΗΜΗΤΡΙΟΣ ΜΠΟΤΩΝΗΣ ΠΑΡΑΡΤΗΜΑ Δ Χειρισμός Κατ αρχήν ο χρήστης πρέπει να εγκαταστήσει στη συσκευή του την εφαρμογή Bluefruit LE (από το Android Playstore εφ όσον πρόκειται για συσκευή με λειτουργικό σύστημα android ή από το Apple Store εφ όσον πρόκειται για συσκευή με λειτουργικό ios). Αφού ενεργοποιήσει τη λειτουργία Bluetooth της συσκευής του και εκκινήσει την εφαρμογή, θα κληθεί να συνδέσει το όχημα με τη φορητή συσκευή. Αφού υλοποιηθεί αυτό το βήμα, θα πρέπει να επιλέξει τη λειτουργία Control Pad από το μενού που θα εμφανιστεί στη συσκευή του. Μόλις κάνει την επιλογή αυτή, εμφανίζεται στην οθόνη του το χειριστήριο του οχήματος: 68
Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 1. Προγραμματισμός Φυσικών Συστημάτων. Νέα Ψηφιακά Αντικείμενα
 Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 1 ΜΕΤΡΩΝΤΑΣ ΑΠΟΣΤΑΣΗ ΜΕ ΤΟΝ ΑΙΣΘΗΤΗΡΑ ΥΠΕΡΗΧΩΝ (SR04). Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Νέα Ψηφιακά Αντικείμενα Αισθητήρες
Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 1 ΜΕΤΡΩΝΤΑΣ ΑΠΟΣΤΑΣΗ ΜΕ ΤΟΝ ΑΙΣΘΗΤΗΡΑ ΥΠΕΡΗΧΩΝ (SR04). Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Νέα Ψηφιακά Αντικείμενα Αισθητήρες
Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία ΡομποΚαθαριστής Μέρος Β : Το Πρόγραμμα. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping).
.") Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής Μέρος Β : Το Πρόγραμμα. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής Μέρος Β : Το Πρόγραμμα. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής
Φύλλο εργασίας 9 - Αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων
 Φύλλο εργασίας 9 - Αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων Σε αυτήν τη δραστηριότητα θα κατασκευάσουμε ένα αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων. Εκτός από τον μικροελεγκτή Arduino, το breadboard,
Φύλλο εργασίας 9 - Αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων Σε αυτήν τη δραστηριότητα θα κατασκευάσουμε ένα αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων. Εκτός από τον μικροελεγκτή Arduino, το breadboard,
ΕΝΟΤΗΤΑ 7: ΑΙΣΘΗΤΗΡΕΣ ΥΠΕΡΥΘΡΩΝ
 ΕΝΟΤΗΤΑ 7: ΑΙΣΘΗΤΗΡΕΣ ΥΠΕΡΥΘΡΩΝ Σκοπός και περίγραμμα της Ενότητας 7 Σκοπός της παρουσίασης ΒΑΣΙΚΕΣ ΓΝΩΣΕΙΣ ΥΠΕΡΥΘΡΟΥ ΦΩΤΟΣ Χρήση αισθητήρα υπέρυθρων για τον εντοπισμό αντικειμένων, εμποδίων, παρουσίας
ΕΝΟΤΗΤΑ 7: ΑΙΣΘΗΤΗΡΕΣ ΥΠΕΡΥΘΡΩΝ Σκοπός και περίγραμμα της Ενότητας 7 Σκοπός της παρουσίασης ΒΑΣΙΚΕΣ ΓΝΩΣΕΙΣ ΥΠΕΡΥΘΡΟΥ ΦΩΤΟΣ Χρήση αισθητήρα υπέρυθρων για τον εντοπισμό αντικειμένων, εμποδίων, παρουσίας
Ενσωματωμένα Συστήματα
 Ενσωματωμένα Συστήματα για εφαρμογές πραγματικού χρόνου Εφαρμογές με τον Arduino Ιωάννης Καλόμοιρος Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Πληροφορικής Μάθημα 10 1 Συναρτήσεις αναλογικής εξόδου: PWM Το
Ενσωματωμένα Συστήματα για εφαρμογές πραγματικού χρόνου Εφαρμογές με τον Arduino Ιωάννης Καλόμοιρος Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Πληροφορικής Μάθημα 10 1 Συναρτήσεις αναλογικής εξόδου: PWM Το
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT. ΚΕΦΑΛΑΙΟ 7ο. Δραστηριότητες για το ΝΧΤ-G και το Robolab
 ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 7ο Δραστηριότητες για το ΝΧΤ-G και το Robolab Α. Αποφυγή εμποδίων Θα επιδιώξουμε να προγραμματίσουμε το όχημα-ρομπότ μας ώστε να είναι σε θέση
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 7ο Δραστηριότητες για το ΝΧΤ-G και το Robolab Α. Αποφυγή εμποδίων Θα επιδιώξουμε να προγραμματίσουμε το όχημα-ρομπότ μας ώστε να είναι σε θέση
Remote drive. Μία από τις βασικές αρχές της TOYOTA είναι το ΚΑΙΖΕΝ η ΔΙΑΡΚΗΣ ΒΕΛΤΙΩΣΗ.
 Remote drive Remote drive Μία από τις βασικές αρχές της TOYOTA είναι το ΚΑΙΖΕΝ η ΔΙΑΡΚΗΣ ΒΕΛΤΙΩΣΗ. Στα πλαίσια του ΚΑΙΖΕΝ και ακολουθώντας την τάση της Ευρωπαϊκής αλλά και της εγχώριας αγοράς, η Toyota
Remote drive Remote drive Μία από τις βασικές αρχές της TOYOTA είναι το ΚΑΙΖΕΝ η ΔΙΑΡΚΗΣ ΒΕΛΤΙΩΣΗ. Στα πλαίσια του ΚΑΙΖΕΝ και ακολουθώντας την τάση της Ευρωπαϊκής αλλά και της εγχώριας αγοράς, η Toyota
Ενσωματωμένα Συστήματα
 Ενσωματωμένα Συστήματα Ενότητα: ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ARDUINO Δρ. Μηνάς Δασυγένης mdasyg@ieee.org Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών
Ενσωματωμένα Συστήματα Ενότητα: ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ARDUINO Δρ. Μηνάς Δασυγένης mdasyg@ieee.org Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών
ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017)
") ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017) Περιγραφή της Άσκησης Ο σκοπός της πρώτης άσκησης είναι κυρίως η εξοικείωση με το περιβάλλον προγραμματισμού του Arduino, γι αυτό και δεν είναι ιδιαίτερα σύνθετη. Αρχικά, θα
ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017) Περιγραφή της Άσκησης Ο σκοπός της πρώτης άσκησης είναι κυρίως η εξοικείωση με το περιβάλλον προγραμματισμού του Arduino, γι αυτό και δεν είναι ιδιαίτερα σύνθετη. Αρχικά, θα
Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping).
.") Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής Δεδομένων, Μονάδα Επεξεργασίας
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής Δεδομένων, Μονάδα Επεξεργασίας
Προγραμματισμο ς σε Arduino
 Προγραμματισμο ς σε Arduino Arduino UNO & Innoesys Educational Shield www.devobox.com Ηλεκτρονικά Εξαρτήματα & Υλικά Κατασκευής Πρωτοτύπων Λέανδρου 79, 10443, Κολωνός +30 210 51 55 513, info@devobox.com
Προγραμματισμο ς σε Arduino Arduino UNO & Innoesys Educational Shield www.devobox.com Ηλεκτρονικά Εξαρτήματα & Υλικά Κατασκευής Πρωτοτύπων Λέανδρου 79, 10443, Κολωνός +30 210 51 55 513, info@devobox.com
ΔΡΑΣΤΗΡΙΟΤΗΤΑ ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO- 01a
 ΔΡΑΣΤΗΡΙΟΤΗΤΑ ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO- 01a Βασικό κύκλωμα προγραμματισμός μικροελεγκτή Πλακέτα Arduino, 1 Να δημιουργήσετε και να προγραμματίσετε ένα πολύ απλό σύστημα που να αναβοσβήνει ένα λαμπάκι (έξοδος)
ΔΡΑΣΤΗΡΙΟΤΗΤΑ ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO- 01a Βασικό κύκλωμα προγραμματισμός μικροελεγκτή Πλακέτα Arduino, 1 Να δημιουργήσετε και να προγραμματίσετε ένα πολύ απλό σύστημα που να αναβοσβήνει ένα λαμπάκι (έξοδος)
Το κύκλωμα σε breadboard
 Φύλλο εργασίας 8 - Ανιχνευτής απόστασης Σε αυτήν τη δραστηριότητα θα κατασκευάσουμε έναν ανιχνευτή απόστασης. Θα χρησιμοποιήσουμε τον αισθητήρα υπερήχων (ή απόστασης) HC-SR04 για τον υπολογισμό της απόστασης.
Φύλλο εργασίας 8 - Ανιχνευτής απόστασης Σε αυτήν τη δραστηριότητα θα κατασκευάσουμε έναν ανιχνευτή απόστασης. Θα χρησιμοποιήσουμε τον αισθητήρα υπερήχων (ή απόστασης) HC-SR04 για τον υπολογισμό της απόστασης.
Το υποσύστηµα "αίσθησης" απαιτήσεις και επιδόσεις φυσικά µεγέθη γενική δοµή και συγκρότηση
 Το υποσύστηµα "αίσθησης" απαιτήσεις και επιδόσεις φυσικά µεγέθη γενική δοµή και συγκρότηση Το υποσύστηµα "αίσθησης" είσοδοι της διάταξης αντίληψη του "περιβάλλοντος" τροφοδοσία του µε καθορίζει τις επιδόσεις
Το υποσύστηµα "αίσθησης" απαιτήσεις και επιδόσεις φυσικά µεγέθη γενική δοµή και συγκρότηση Το υποσύστηµα "αίσθησης" είσοδοι της διάταξης αντίληψη του "περιβάλλοντος" τροφοδοσία του µε καθορίζει τις επιδόσεις
ΔΗΜΙΟΥΡΓΙΑ ΕΝΟΣ ΡΟΜΠΟΤ ΑΠΟ ΗΛΕΚΤΡΟΝΙΚΑ ΣΚΟΥΠΙΔΙΑ
 ΔΗΜΙΟΥΡΓΙΑ ΕΝΟΣ ΡΟΜΠΟΤ ΑΠΟ ΗΛΕΚΤΡΟΝΙΚΑ ΣΚΟΥΠΙΔΙΑ ΕΣΠΕΡΙΝΟ ΓΥΜΝΑΣΙΟ ΜΕ ΛΥΚΕΙΑΚΕΣ ΤΑΞΕΙΣ ΛΙΒΑΔΕΙΑΣ ΣΧΟΛΙΚΟ ΕΤΟΣ 2013 2014 Το πρόγραμμα εντάσσεται στη θεματολογία «Ανακύκλωση σκουπιδιών στα πλαίσια της περιβαλλοντικής
ΔΗΜΙΟΥΡΓΙΑ ΕΝΟΣ ΡΟΜΠΟΤ ΑΠΟ ΗΛΕΚΤΡΟΝΙΚΑ ΣΚΟΥΠΙΔΙΑ ΕΣΠΕΡΙΝΟ ΓΥΜΝΑΣΙΟ ΜΕ ΛΥΚΕΙΑΚΕΣ ΤΑΞΕΙΣ ΛΙΒΑΔΕΙΑΣ ΣΧΟΛΙΚΟ ΕΤΟΣ 2013 2014 Το πρόγραμμα εντάσσεται στη θεματολογία «Ανακύκλωση σκουπιδιών στα πλαίσια της περιβαλλοντικής
RobotArmy Περίληψη έργου
 RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
ΑΣΚΗΣΗ 2 (29 Νοεμβρίου 2016)
") ΑΣΚΗΣΗ 2 (29 Νοεμβρίου 2016) Περιγραφή της Άσκησης Στόχος της άσκησης είναι η δημιουργία ενός συστήματος διαχείρισης φωτισμού. Μία φωτομεταβαλλόμενη αντίσταση (LDR) θα διαπιστώνει την ποσότητα του φωτός
ΑΣΚΗΣΗ 2 (29 Νοεμβρίου 2016) Περιγραφή της Άσκησης Στόχος της άσκησης είναι η δημιουργία ενός συστήματος διαχείρισης φωτισμού. Μία φωτομεταβαλλόμενη αντίσταση (LDR) θα διαπιστώνει την ποσότητα του φωτός
Βασική Κατηγοριοποίηση Αισθητήρων Γιώργος Βασιλείου
 Βασική Κατηγοριοποίηση Αισθητήρων Γιώργος Βασιλείου Εισαγωγή Τι είναι οι αισθητήρες και ποιος ο ρόλος τους στα ρομπότ; Μετρούν μια φυσική ποσότητα. Μετατρέπουν σε σήμα που μπορεί να διαβαστεί από παρατηρητή
Βασική Κατηγοριοποίηση Αισθητήρων Γιώργος Βασιλείου Εισαγωγή Τι είναι οι αισθητήρες και ποιος ο ρόλος τους στα ρομπότ; Μετρούν μια φυσική ποσότητα. Μετατρέπουν σε σήμα που μπορεί να διαβαστεί από παρατηρητή
Πτυχιακή Εργασία Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Η Ασύρματη Επικοινωνία, χρησιμοποιώντας
 Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Πολυτεχνείο Κρήτης Τμήμα ΗΜΜΥ Χειμερινό Εξάμηνο Intelligence Lab. Αυτόνομοι Πράκτορες. Κουσανάκης Βασίλης
 Πολυτεχνείο Κρήτης Τμήμα ΗΜΜΥ Χειμερινό Εξάμηνο 2012-2013 Intelligence Lab Αυτόνομοι Πράκτορες Κουσανάκης Βασίλης 2006030096 Αναφορά εργασίας εξαμήνου Mobile robots Rat s life Mapping Localization Είναι
Πολυτεχνείο Κρήτης Τμήμα ΗΜΜΥ Χειμερινό Εξάμηνο 2012-2013 Intelligence Lab Αυτόνομοι Πράκτορες Κουσανάκης Βασίλης 2006030096 Αναφορά εργασίας εξαμήνου Mobile robots Rat s life Mapping Localization Είναι
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 8. Μετρώντας Επιτάχυνση με το Accelerόμετρο (ADXL 335) Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων") Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 8 Μετρώντας Επιτάχυνση με το Accelerόμετρο (ADXL 335). Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 8 Μετρώντας Επιτάχυνση με το Accelerόμετρο (ADXL 335). Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο
Κατασκευή Ρομπότ. Από τη θεωρία στην πράξη. Μάκης Χατζόπουλος
 Κατασκευή Ρομπότ Από τη θεωρία στην πράξη Μάκης Χατζόπουλος Λέκτορας Εφαρμογών Τμήμα Μηχανικών Βιομηχανικής Σχεδίασης και Παραγωγής Σχολή Μηχανικών - Πανεπιστήμιο Δυτικής Αττικής Τι κοινό έχουν αυτές οι
Κατασκευή Ρομπότ Από τη θεωρία στην πράξη Μάκης Χατζόπουλος Λέκτορας Εφαρμογών Τμήμα Μηχανικών Βιομηχανικής Σχεδίασης και Παραγωγής Σχολή Μηχανικών - Πανεπιστήμιο Δυτικής Αττικής Τι κοινό έχουν αυτές οι
Ανίχνευση Κίνησης Παρουσίας. Κέντρο εκπαίδευσης ISC
 Ανίχνευση Κίνησης Παρουσίας Κέντρο εκπαίδευσης ISC July 2009 > Ανίχνευση κίνησης και παρουσίας Περιεχόμενα Τι είναι ο ανιχνευτής κίνησης? Ανιχνευτές κίνησης & οφέλη για τον πελάτη Ανιχνευτές κίνησης στην
Ανίχνευση Κίνησης Παρουσίας Κέντρο εκπαίδευσης ISC July 2009 > Ανίχνευση κίνησης και παρουσίας Περιεχόμενα Τι είναι ο ανιχνευτής κίνησης? Ανιχνευτές κίνησης & οφέλη για τον πελάτη Ανιχνευτές κίνησης στην
ΦΥΛΛΟ ΑΠΑΝΤΗΣΕΩΝ. Όνομα και Επώνυμο: Όνομα Πατέρα:.. Όνομα Μητέρας:.. Σχολείο:.. Τάξη / Τμήμα:... Εξεταστικό Κέντρο:..
 ΦΥΛΛΟ ΑΠΑΝΤΗΣΕΩΝ Όνομα και Επώνυμο: Όνομα Πατέρα:.. Όνομα Μητέρας:.. Σχολείο:.. Τάξη / Τμήμα:... Εξεταστικό Κέντρο:.. ΘΕΜΑ 1 Ο ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ A.1. Παράλληλα συνδεδεμένες είναι οι αντιστάσεις στα κυκλώματα:
ΦΥΛΛΟ ΑΠΑΝΤΗΣΕΩΝ Όνομα και Επώνυμο: Όνομα Πατέρα:.. Όνομα Μητέρας:.. Σχολείο:.. Τάξη / Τμήμα:... Εξεταστικό Κέντρο:.. ΘΕΜΑ 1 Ο ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ A.1. Παράλληλα συνδεδεμένες είναι οι αντιστάσεις στα κυκλώματα:
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ
 Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
Καινοτόµο σύστηµα αξιοποίησης φυσικού φωτισµού µε αισθητήρες στο επίπεδο εργασίας
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΦΩΤΟΤΕΧΝΙΑΣ Καινοτόµο σύστηµα αξιοποίησης φυσικού φωτισµού µε αισθητήρες στο επίπεδο εργασίας Ευάγγελος-Νικόλαος
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΦΩΤΟΤΕΧΝΙΑΣ Καινοτόµο σύστηµα αξιοποίησης φυσικού φωτισµού µε αισθητήρες στο επίπεδο εργασίας Ευάγγελος-Νικόλαος
ΕΙΔΗ ΑΙΣΘΗΤΗΡΙΩΝ ΚΑΙ ΑΡΧΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΟΥΣ
 ΕΙΔΗ ΑΙΣΘΗΤΗΡΙΩΝ ΚΑΙ ΑΡΧΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΟΥΣ Α. Περιμετρικοί ανιχνευτές 1. Μαγνητικές επαφές Είναι κατάλληλες για τον εντοπισμό ανοιγμάτων. Αποτελούνται από δύο μαγνητικά τμήματα από τα οποία το ένα τοποθετείται
ΕΙΔΗ ΑΙΣΘΗΤΗΡΙΩΝ ΚΑΙ ΑΡΧΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΟΥΣ Α. Περιμετρικοί ανιχνευτές 1. Μαγνητικές επαφές Είναι κατάλληλες για τον εντοπισμό ανοιγμάτων. Αποτελούνται από δύο μαγνητικά τμήματα από τα οποία το ένα τοποθετείται
Πακέτο Lego Mindstorms
 Πακέτο Lego Mindstorms Τούβλο NXT και Κινητήρες, Αισθητήρες Α. Κινητήρες Οι κινητήρες είναι αυτοί που κινούν το ρομπότ μας. Οι κινητήρες συνδέονται με καλώδια στις θύρες εξόδου A,B ή C του NXT. Αν μάλιστα
Πακέτο Lego Mindstorms Τούβλο NXT και Κινητήρες, Αισθητήρες Α. Κινητήρες Οι κινητήρες είναι αυτοί που κινούν το ρομπότ μας. Οι κινητήρες συνδέονται με καλώδια στις θύρες εξόδου A,B ή C του NXT. Αν μάλιστα
Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2. Προγραμματισμός Φυσικών Συστημάτων. Συστήματα Πραγματικών Εφαρμογών. Νέα Ψηφιακά Αντικείμενα
 Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Arduino Teachers Workshop
 Arduino Teachers Workshop Εισαγωγή στο Arduino Προγραμματισμός στο Arduino IDE Επικοινωνία με τον υπολογιστή μέσω USB Πλακέτα εύκολων συνδέσεων Breadboard Projects Led Blink Αναλογική ανάγνωση Ποτενσιόμετρου
Arduino Teachers Workshop Εισαγωγή στο Arduino Προγραμματισμός στο Arduino IDE Επικοινωνία με τον υπολογιστή μέσω USB Πλακέτα εύκολων συνδέσεων Breadboard Projects Led Blink Αναλογική ανάγνωση Ποτενσιόμετρου
ΦΩΤΕΛΛΗΣ Α.Ε. ΣΥΣΤΗΜΑΤΑ ΑΣΦΑΛΕΙΑΣ
 Α. ΓΕΝΙΚΑ Η εγκατάσταση ενός ολοκληρωμένου συστήματος συναγερμού αποσκοπεί στην προστασία χώρων όπως οικίες, επιχειρήσεις, βιομηχανίες, στρατιωτικές εγκαταστάσεις κλπ. σε περιπτώσεις: Ανεπιθύμητης εισόδου
Α. ΓΕΝΙΚΑ Η εγκατάσταση ενός ολοκληρωμένου συστήματος συναγερμού αποσκοπεί στην προστασία χώρων όπως οικίες, επιχειρήσεις, βιομηχανίες, στρατιωτικές εγκαταστάσεις κλπ. σε περιπτώσεις: Ανεπιθύμητης εισόδου
ΣΥΣΤΗΜΑ ΟΠΙΣΘΕΝ ΜΕ ΑΙΣΘΗΤΗΡΕΣ RTG 2012 (Plate Sensor 2012)
") 5040291500-WEB- ΣΥΣΤΗΜΑ ΟΠΙΣΘΕΝ ΜΕ ΑΙΣΘΗΤΗΡΕΣ RTG 2012 (Plate Sensor 2012) ΚΥΡΙΑ ΤΕΧΝΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΚΑΙ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΤΟΥ ΠΡΟΪΟΝΤΟΣ Τροφοδοσία 12 Vcc (10V 15V ). Απορρόφηση >50 ma (μόνο με τον πίνακα
5040291500-WEB- ΣΥΣΤΗΜΑ ΟΠΙΣΘΕΝ ΜΕ ΑΙΣΘΗΤΗΡΕΣ RTG 2012 (Plate Sensor 2012) ΚΥΡΙΑ ΤΕΧΝΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΚΑΙ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΤΟΥ ΠΡΟΪΟΝΤΟΣ Τροφοδοσία 12 Vcc (10V 15V ). Απορρόφηση >50 ma (μόνο με τον πίνακα
ΕΡΓΑΣΤΗΡΙΑΚΗ ΕΦΑΡΜΟΓΗ 1 ΤO ΡΟΜΠΟΤ INTELLITEK ER-2u
 Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Σχεδιαστικές προδιαγραφές
 Εισαγωγή Τα τελευταία χρόνια, ένα σημαντικό πεδίο δράσης της επιστήμης της Ρομποτικής αφορά στον τομέα της ανάπτυξης και εξέλιξης αυτόνομων οχημάτων επίγειων, εναέριων, πλωτών, υποβρύχιων και διαστημικών.
Εισαγωγή Τα τελευταία χρόνια, ένα σημαντικό πεδίο δράσης της επιστήμης της Ρομποτικής αφορά στον τομέα της ανάπτυξης και εξέλιξης αυτόνομων οχημάτων επίγειων, εναέριων, πλωτών, υποβρύχιων και διαστημικών.
ΟΛΟΚΛΗΡΩΜΕΝΟ ΜΕΤΑΦΡΑΣΤΙΚΟ ΣΥΣΤΗΜΑ IMS STC
 ΟΛΟΚΛΗΡΩΜΕΝΟ ΜΕΤΑΦΡΑΣΤΙΚΟ ΣΥΣΤΗΜΑ IMS STC ΠΕΡΙΕΧΟΜΕΝΑ 1 ΕΙΣΑΓΩΓΗ 3 2 ΜΟΝΑΔΕΣ ΛΕΙΤΟΥΡΓΙΑΣ 4 2.1 ΚΕΝΤΡΙΚΗ ΜΟΝΑΔΑ ΕΚΠΟΜΠΗΣ IR IMS STC 621/641/661 4 2.2 ΠΑΝΕΛ ΕΚΠΟΜΠΗΣ IR IMS STC 622/642/662 5 2.3 ΜΟΝΑΔΑ ΜΕΤΑΦΡΑΣΤΗ
ΟΛΟΚΛΗΡΩΜΕΝΟ ΜΕΤΑΦΡΑΣΤΙΚΟ ΣΥΣΤΗΜΑ IMS STC ΠΕΡΙΕΧΟΜΕΝΑ 1 ΕΙΣΑΓΩΓΗ 3 2 ΜΟΝΑΔΕΣ ΛΕΙΤΟΥΡΓΙΑΣ 4 2.1 ΚΕΝΤΡΙΚΗ ΜΟΝΑΔΑ ΕΚΠΟΜΠΗΣ IR IMS STC 621/641/661 4 2.2 ΠΑΝΕΛ ΕΚΠΟΜΠΗΣ IR IMS STC 622/642/662 5 2.3 ΜΟΝΑΔΑ ΜΕΤΑΦΡΑΣΤΗ
Ασύρματο A/V sender στα 5,8 GHz
 ΕΛΛΗΝΙΚΑ Ασύρματο A/V sender στα 5,8 GHz ΠΕΡΙΕΧΟΜΕΝΑ Για το MV7230 Θέσεις Κοντρόλ και Παρελκόμενων Λειτουργία Χρήσης Εγκατάσταση Επίλυση προβλημάτων Περισσότερες Εφαρμογές Προσοχή Χαρακτηριστικά Για το
ΕΛΛΗΝΙΚΑ Ασύρματο A/V sender στα 5,8 GHz ΠΕΡΙΕΧΟΜΕΝΑ Για το MV7230 Θέσεις Κοντρόλ και Παρελκόμενων Λειτουργία Χρήσης Εγκατάσταση Επίλυση προβλημάτων Περισσότερες Εφαρμογές Προσοχή Χαρακτηριστικά Για το
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5. Ρυθμίζοντας τη Φορά Περιστροφής. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Περιγραφή της 3 ης εργαστηριακής εφαρμογής: ρομποτικό σύστημα LEGO NXT
 www.robolab.tuc.gr Περιγραφή της 3 ης εργαστηριακής εφαρμογής: ρομποτικό σύστημα LEGO NXT ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Το ρομποτικό σύστημα LEGO NXT περισσότερες πληροφορίες: http://mindstorms.lego.com/
www.robolab.tuc.gr Περιγραφή της 3 ης εργαστηριακής εφαρμογής: ρομποτικό σύστημα LEGO NXT ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Το ρομποτικό σύστημα LEGO NXT περισσότερες πληροφορίες: http://mindstorms.lego.com/
Οδηγίες Χρήσης Ασύρματης Φορητής WiFi Κάμερας
 Οδηγίες Χρήσης Ασύρματης Φορητής WiFi Κάμερας Κομβίο Επαναφοράς RESET Θύρα κάρτας SD Πίσω κάλυμμα Διακόπτης λειτουργίας Θυρα Φόρτισης Οπή Βάσης στήριξης Ένδειξη λειτουργίας Μικρόφωνο Αισθητήρας στάθμης
Οδηγίες Χρήσης Ασύρματης Φορητής WiFi Κάμερας Κομβίο Επαναφοράς RESET Θύρα κάρτας SD Πίσω κάλυμμα Διακόπτης λειτουργίας Θυρα Φόρτισης Οπή Βάσης στήριξης Ένδειξη λειτουργίας Μικρόφωνο Αισθητήρας στάθμης
ΕΓΧΕΙΡΙΔΙΟ ΣΥΝΑΡΜΟΛΟΓΗΣΗΣ ΚΑΙ ΛΕΙΤΟΥΡΓΙΑΣ
 ΕΓΧΕΙΡΙΔΙΟ ΣΥΝΑΡΜΟΛΟΓΗΣΗΣ ΚΑΙ ΛΕΙΤΟΥΡΓΙΑΣ Το συγκεκριμένο όχημα πληρεί τις παρακάτω προδιαγραφές: GB6675-2003/EN71 GB19865/EN62115 Ιδανικό για ηλικία: 4-8 ετών Κωδ./Code: 412154 Τηλεχειριστήριο τεσσάρων
ΕΓΧΕΙΡΙΔΙΟ ΣΥΝΑΡΜΟΛΟΓΗΣΗΣ ΚΑΙ ΛΕΙΤΟΥΡΓΙΑΣ Το συγκεκριμένο όχημα πληρεί τις παρακάτω προδιαγραφές: GB6675-2003/EN71 GB19865/EN62115 Ιδανικό για ηλικία: 4-8 ετών Κωδ./Code: 412154 Τηλεχειριστήριο τεσσάρων
ΚΕΦΑΛΑΙΟ 5 ΠΡΟΣΟΜΟΙΩΤΗΣ PLC SIMATIC S7-300
 ΚΕΦΑΛΑΙΟ 5 ΠΡΟΣΟΜΟΙΩΤΗΣ PLC SIATIC S7-300 5. Σκοπός του προσομοιωτή. Χωρίς τον προσομοιωτή ο έλεγχος της ορθότητας ενός προγράμματος μπορεί να γίνει μόνο offline με τη χρήση του λογισμικού STEP 7 της Siemens
ΚΕΦΑΛΑΙΟ 5 ΠΡΟΣΟΜΟΙΩΤΗΣ PLC SIATIC S7-300 5. Σκοπός του προσομοιωτή. Χωρίς τον προσομοιωτή ο έλεγχος της ορθότητας ενός προγράμματος μπορεί να γίνει μόνο offline με τη χρήση του λογισμικού STEP 7 της Siemens
Εγχειρίδιο Χρήσης. Ασύρματο ραντάρ οπισθοπορείας TL-3036
 Εγχειρίδιο Χρήσης Ασύρματο ραντάρ οπισθοπορείας TL-3036 Περιεχόμενα Περιεχόμενα...1 Εισαγωγή...2 Χαρακτηριστικά...3 Τεχνικές Προδιαγραφές...3 Εγκατάσταση...4 Συμβουλές Εγκατάστασης Αισθητήρων...5 Τοποθέτηση
Εγχειρίδιο Χρήσης Ασύρματο ραντάρ οπισθοπορείας TL-3036 Περιεχόμενα Περιεχόμενα...1 Εισαγωγή...2 Χαρακτηριστικά...3 Τεχνικές Προδιαγραφές...3 Εγκατάσταση...4 Συμβουλές Εγκατάστασης Αισθητήρων...5 Τοποθέτηση
FOSSCOMM 2013 6ο Συνέδριο Κοινοτήτων Ανοιχτού Λογισμικού Σάββατο 20 Απριλίου 2013. Ομάδα Σχολής Ικάρων Εργαστήριο Arduino
 FOSSCOMM 2013 6ο Συνέδριο Κοινοτήτων Ανοιχτού Λογισμικού Σάββατο 20 Απριλίου 2013 Ομάδα Σχολής Ικάρων Εργαστήριο Arduino Arduino Workshop LAB 1 : Παιχνίδι με έναν αισθητήρα φωτός Τι θα χρειαστούμε: 1 LED
FOSSCOMM 2013 6ο Συνέδριο Κοινοτήτων Ανοιχτού Λογισμικού Σάββατο 20 Απριλίου 2013 Ομάδα Σχολής Ικάρων Εργαστήριο Arduino Arduino Workshop LAB 1 : Παιχνίδι με έναν αισθητήρα φωτός Τι θα χρειαστούμε: 1 LED
Φύλλο εργασίας 6. Αποφυγή εμποδίων. Χωριστείτε σε ομάδες 2-3 ατόμων και απαντήστε στις ερωτήσεις του φύλλου εργασίας.
 Φύλλο εργασίας 6 Αποφυγή εμποδίων Ο στόχος του φύλλου εργασίας είναι η κατασκευή και ο προγραμματισμός ρομπότ το οποίο θα διασχίζει ένα διάδρομο με πολλά εμπόδια, θα τα αποφεύγει και θα τερματίζει με ασφάλεια
Φύλλο εργασίας 6 Αποφυγή εμποδίων Ο στόχος του φύλλου εργασίας είναι η κατασκευή και ο προγραμματισμός ρομπότ το οποίο θα διασχίζει ένα διάδρομο με πολλά εμπόδια, θα τα αποφεύγει και θα τερματίζει με ασφάλεια
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ EV3 Επίπεδο Ι
 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ EV3 Επίπεδο Ι Δρ. Γιώργος Α. Δημητρίου Εργαστήριο Ρομποτικής και Αυτομάτων Συστημάτων & Ακαδημία Ρομποτικής Τμήμα Πληροφορικής και Μηχανικών Υπολογιστών Σχολή Μηχανικής και Εφαρμοσμένων
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ EV3 Επίπεδο Ι Δρ. Γιώργος Α. Δημητρίου Εργαστήριο Ρομποτικής και Αυτομάτων Συστημάτων & Ακαδημία Ρομποτικής Τμήμα Πληροφορικής και Μηχανικών Υπολογιστών Σχολή Μηχανικής και Εφαρμοσμένων
Θέμα 2 ο. Δίνεται Κ ηλ = Ν m 2 /C 2 και επιτάχυνση της βαρύτητας στην επιφάνεια της Γης 10 m/s 2.
 Γ Γυμνασίου 7 Μαρτίου 2015 Θεωρητικό Μέρος Θέμα 1 ο Α. Ένας μαθητής φορτίζει θετικά μια μεταλλική σφαίρα. Η μάζα της σφαίρας i. παραμένει σταθερή, ii. αυξάνεται, iii. μειώνεται Επιλέξτε τη σωστή απάντηση
Γ Γυμνασίου 7 Μαρτίου 2015 Θεωρητικό Μέρος Θέμα 1 ο Α. Ένας μαθητής φορτίζει θετικά μια μεταλλική σφαίρα. Η μάζα της σφαίρας i. παραμένει σταθερή, ii. αυξάνεται, iii. μειώνεται Επιλέξτε τη σωστή απάντηση
Μάθημα 2 Δραστηριότητα 2: Δημιουργώντας το Μετεωρολογικό Σταθμό. Επανεξέταση των βασικών εννοιών της C και του προγραμματισμού.
 Σκοπός Σχεδίαση Συστημάτων με τον Arduino Μάθημα 2 Δραστηριότητα 2: Δημιουργώντας το Μετεωρολογικό Σταθμό. Επανεξέταση των βασικών εννοιών της C και του προγραμματισμού. Κατανόηση των βημάτων στη συστηματική
Σκοπός Σχεδίαση Συστημάτων με τον Arduino Μάθημα 2 Δραστηριότητα 2: Δημιουργώντας το Μετεωρολογικό Σταθμό. Επανεξέταση των βασικών εννοιών της C και του προγραμματισμού. Κατανόηση των βημάτων στη συστηματική
Φύλλο Εργασίας. Μάθημα 7 Τεχνητοί δορυφόροι και Σύγχρονα Επαγγέλματα ΙΙ
 Φύλλο Εργασίας Μάθημα 7 Τεχνητοί δορυφόροι και Σύγχρονα Επαγγέλματα ΙΙ Σχολείο:. Τάξη: Ημερομηνία: Δραστηριότητα 1: Προβολή Αφήγησης με βίντεο (7 λεπτά) Δραστηριότητα 2: Προβολή εικόνων (2 λεπτά) Παρακολουθήστε
Φύλλο Εργασίας Μάθημα 7 Τεχνητοί δορυφόροι και Σύγχρονα Επαγγέλματα ΙΙ Σχολείο:. Τάξη: Ημερομηνία: Δραστηριότητα 1: Προβολή Αφήγησης με βίντεο (7 λεπτά) Δραστηριότητα 2: Προβολή εικόνων (2 λεπτά) Παρακολουθήστε
2017 Κατασκευάζω και Προγραμματίζω με τον μικροελεγκτή Arduino
 2017 Κατασκευάζω και Προγραμματίζω με τον μικροελεγκτή Arduino Αριστείδης Παλιούρας e-mail: arispaliouras@gmail.com ISBN: 978-960-93-8945-7 Κατασκευάζω και Προγραμματίζω με τον μικροελεγκτή Arduino Copyright
2017 Κατασκευάζω και Προγραμματίζω με τον μικροελεγκτή Arduino Αριστείδης Παλιούρας e-mail: arispaliouras@gmail.com ISBN: 978-960-93-8945-7 Κατασκευάζω και Προγραμματίζω με τον μικροελεγκτή Arduino Copyright
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 2 ο Κινητήρες και Δομή Επανάληψης Σημειώσεις Καθηγητή Τώρα θα δούμε πως μπορούν να τροποποιηθούν τα προγράμματα
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 2 ο Κινητήρες και Δομή Επανάληψης Σημειώσεις Καθηγητή Τώρα θα δούμε πως μπορούν να τροποποιηθούν τα προγράμματα
ΑΙΣΘΗΤΗΡΕΣ ΚΑΙ ΜΟΤΟΡΕΣ ΠΡΑΚΤΙΚΑ ΘΕΜΑΤΑ ΧΡΗΣΗΣ. Υποψήφιος Διδάκτωρ
 ΑΙΣΘΗΤΗΡΕΣ ΚΑΙ ΜΟΤΟΡΕΣ ΠΡΑΚΤΙΚΑ ΘΕΜΑΤΑ ΧΡΗΣΗΣ Δημιουργός: Επιβλέπων: Σκούπρας Παύλος Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ 1 ΔΟΜΗ ΠΑΡΑΔΕΙΓΜΑΤΩΝ Εφαρμογές πριν τους αισθητήρες Ανάγκες που οδηγούν στη χρήση
ΑΙΣΘΗΤΗΡΕΣ ΚΑΙ ΜΟΤΟΡΕΣ ΠΡΑΚΤΙΚΑ ΘΕΜΑΤΑ ΧΡΗΣΗΣ Δημιουργός: Επιβλέπων: Σκούπρας Παύλος Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ 1 ΔΟΜΗ ΠΑΡΑΔΕΙΓΜΑΤΩΝ Εφαρμογές πριν τους αισθητήρες Ανάγκες που οδηγούν στη χρήση
Mini DVR. Οδηγίες χρήσης MDS 660
 Mini DVR MDS 660 Βασικά χαρακτηριστικά Σύστημα ανίχνευσης κίνησης με ενσωματωμένο σύστημα καταγραφής εικόνας. Από τη στιγμή που ανιχνεύεται εισβολή στον επιτηρούμενο χώρο το αισθητήριο ανίχνευσης κίνησης
Mini DVR MDS 660 Βασικά χαρακτηριστικά Σύστημα ανίχνευσης κίνησης με ενσωματωμένο σύστημα καταγραφής εικόνας. Από τη στιγμή που ανιχνεύεται εισβολή στον επιτηρούμενο χώρο το αισθητήριο ανίχνευσης κίνησης
Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC.
 Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC. Ονόματα μαθητών Γεωργίου Χρίστος Η1β, Γεωργίου Αντώνης Η1β Ονόματα καθηγητών: Αγγελίδης Λουκής, Πετρίδης Πέτρος Περίληψη Σκοπός της
Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC. Ονόματα μαθητών Γεωργίου Χρίστος Η1β, Γεωργίου Αντώνης Η1β Ονόματα καθηγητών: Αγγελίδης Λουκής, Πετρίδης Πέτρος Περίληψη Σκοπός της
Εγχειρίδιο χρήσης. Ασύρματο εσωτερικό ραντάρ GSC-P829
 Εγχειρίδιο χρήσης Ασύρματο εσωτερικό ραντάρ GSC-P829 ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΛΕΙΤΟΥΡΓΙΑΣ Ο GSC-P829 παθητικός υπέρυθρος ανιχνευτής συνδυάζει ψηφιακή, διπλού-πυρήνα ελέγχου, ασαφής λογικής, τεχνολογία επεξεργασίας
Εγχειρίδιο χρήσης Ασύρματο εσωτερικό ραντάρ GSC-P829 ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΛΕΙΤΟΥΡΓΙΑΣ Ο GSC-P829 παθητικός υπέρυθρος ανιχνευτής συνδυάζει ψηφιακή, διπλού-πυρήνα ελέγχου, ασαφής λογικής, τεχνολογία επεξεργασίας
«Προγραµµατισµός του LEGO Mindstorm NXT για το διαγωνισµό "Move the Ball!"»
 ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΚΠ 413 / ΕΚΠ 606 ΑΥΤΟΝΟΜΟΙ ΠΡΑΚΤΟΡΕΣ Εργασία Εξαµήνου Προγραµµατισµός του LEGO Mindstorm NXT για το διαγωνισµό "Move the Ball!"
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΚΠ 413 / ΕΚΠ 606 ΑΥΤΟΝΟΜΟΙ ΠΡΑΚΤΟΡΕΣ Εργασία Εξαµήνου Προγραµµατισµός του LEGO Mindstorm NXT για το διαγωνισµό "Move the Ball!"
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 4. Οδηγώντας έναν DC Κινητήρα. Το κύκλωμα της Λειτουργίας DC Κινητήρα
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 4 Οδηγώντας έναν DC Κινητήρα. Το κύκλωμα της Λειτουργίας DC Κινητήρα Τρανζίστορ στη Λειτουργία ενός DC Κινητήρα. Η Χρήση της Διόδου. Το Πρόγραμμα που Οδηγεί
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 4 Οδηγώντας έναν DC Κινητήρα. Το κύκλωμα της Λειτουργίας DC Κινητήρα Τρανζίστορ στη Λειτουργία ενός DC Κινητήρα. Η Χρήση της Διόδου. Το Πρόγραμμα που Οδηγεί
ΕΝΟΤΗΤΑ 10: ΟΔΗΓΗΣΗ ΚΙΝΗΤΗΡΩΝ
 ΕΝΟΤΗΤΑ 10: ΟΔΗΓΗΣΗ ΚΙΝΗΤΗΡΩΝ Στόχος και Περίγραμμα της Ενότητας 10 Στόχος της παρουσίασης Παρουσίαση της βασικής ιδέα και απλών παραδειγμάτων για την οδήγηση DC και βηματικών κινητήρων με το Arduino.
ΕΝΟΤΗΤΑ 10: ΟΔΗΓΗΣΗ ΚΙΝΗΤΗΡΩΝ Στόχος και Περίγραμμα της Ενότητας 10 Στόχος της παρουσίασης Παρουσίαση της βασικής ιδέα και απλών παραδειγμάτων για την οδήγηση DC και βηματικών κινητήρων με το Arduino.
ΠΑΡΑΡΤΗΜΑ IV. ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΑΡΑΡΤΗΜΑ IV Ασκήσεις για το Robolab
 ΠΑΡΑΡΤΗΜΑ IV Παρακάτω παραθέτουμε μία σειρά ασκήσεων για το Robolab ομαδοποιημένων σε κατηγορίες : Επιμέλεια : Κυριακού Γεώργιος 1 Φύλλο Ασκήσεων (πρόκληση με κινητήρες) ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΑΡΑΡΤΗΜΑ
ΠΑΡΑΡΤΗΜΑ IV Παρακάτω παραθέτουμε μία σειρά ασκήσεων για το Robolab ομαδοποιημένων σε κατηγορίες : Επιμέλεια : Κυριακού Γεώργιος 1 Φύλλο Ασκήσεων (πρόκληση με κινητήρες) ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΑΡΑΡΤΗΜΑ
Εξοικείωση με το NXT-G
 Εξοικείωση με το NXT-G Εντολές Λίγα λόγια για τους κινητήρες Οι κινητήρες μπορούν να προγραμματιστούν να ξεκινούν και να σταματούν τη στιγμή που θέλουμε. Η εντολή κίνησης κινητήρα motor είναι πολύ απλή.
Εξοικείωση με το NXT-G Εντολές Λίγα λόγια για τους κινητήρες Οι κινητήρες μπορούν να προγραμματιστούν να ξεκινούν και να σταματούν τη στιγμή που θέλουμε. Η εντολή κίνησης κινητήρα motor είναι πολύ απλή.
Arduino applications for drone development & programming. 18 th Panhellenic Conference in Informatics 2 nd 4 th of October, 2014
 Arduino applications for drone development & programming 18 th Panhellenic Conference in Informatics 2 nd 4 th of October, 2014 Η Ομάδας μας Παπαδόπουλος Παναγιώτης Γουλής Γεώργιος Τσαγκρινός Γεώργιος
Arduino applications for drone development & programming 18 th Panhellenic Conference in Informatics 2 nd 4 th of October, 2014 Η Ομάδας μας Παπαδόπουλος Παναγιώτης Γουλής Γεώργιος Τσαγκρινός Γεώργιος
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2011
 ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2011 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2011 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
Αθήνα 29 ΝΟΕ, 2016 ΘΕΜΑ: ΑΙΤΗΜΑ ΑΓΟΡΑΣ ΥΛΙΚΩΝ ΓΙΑ ΤΟ ΕΡΓΑΣΤΗΡΙΟ ΣΥΛΛΟΓΗΣ & ΕΠΕΞΕΡΓΑΣΙΑΣ ΔΕΔΟΜΕΝΩΝ
 Αθήνα 29 ΝΟΕ, 2016 ΘΕΜΑ: ΑΙΤΗΜΑ ΑΓΟΡΑΣ ΥΛΙΚΩΝ ΓΙΑ ΤΟ ΕΡΓΑΣΤΗΡΙΟ ΣΥΛΛΟΓΗΣ & ΕΠΕΞΕΡΓΑΣΙΑΣ ΔΕΔΟΜΕΝΩΝ Προς, Ο πειραματικός εξοπλισμός αυτής της πρότασης / σ αυτό το αίτημα, θα μας δώσει τη δυνατότητα να δημιουργήσουμε
Αθήνα 29 ΝΟΕ, 2016 ΘΕΜΑ: ΑΙΤΗΜΑ ΑΓΟΡΑΣ ΥΛΙΚΩΝ ΓΙΑ ΤΟ ΕΡΓΑΣΤΗΡΙΟ ΣΥΛΛΟΓΗΣ & ΕΠΕΞΕΡΓΑΣΙΑΣ ΔΕΔΟΜΕΝΩΝ Προς, Ο πειραματικός εξοπλισμός αυτής της πρότασης / σ αυτό το αίτημα, θα μας δώσει τη δυνατότητα να δημιουργήσουμε
Τίτλος : Μικρός ταινιόδρομος
 Τίτλος : Μικρός ταινιόδρομος Περιγραφή Να σχεδιαστεί πρόγραμμα σε Logo, το οποίο θα ελέγχει τη λειτουργία ενός μικρού ταινιόδρομου. Το πρόγραμμα θα πρέπει να εκτελεί τις ακόλουθες λειτουργίες: 1) Start/Stop
Τίτλος : Μικρός ταινιόδρομος Περιγραφή Να σχεδιαστεί πρόγραμμα σε Logo, το οποίο θα ελέγχει τη λειτουργία ενός μικρού ταινιόδρομου. Το πρόγραμμα θα πρέπει να εκτελεί τις ακόλουθες λειτουργίες: 1) Start/Stop
ΠΑΝΑΓΙΩΤΗΣ ΚΟΥΤΣΙΩΡΑΣ Α.Μ.: ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ. Αναφορά Πρακτικής Εργασίας: Μετατροπέας Κώδικα BCD Σε Κώδικα GRAY
 ΤΜΗΜΑ ΕΠΙΣΤΗΜΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΛΟΠΟΝΝΗΣΟΥ ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ Αναφορά Πρακτικής Εργασίας: Μετατροπέας Κώδικα BCD Σε Κώδικα GRAY ΠΑΝΑΓΙΩΤΗΣ ΚΟΥΤΣΙΩΡΑΣ Α.Μ.: 2025201100037 Χειμερινό
ΤΜΗΜΑ ΕΠΙΣΤΗΜΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΛΟΠΟΝΝΗΣΟΥ ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ Αναφορά Πρακτικής Εργασίας: Μετατροπέας Κώδικα BCD Σε Κώδικα GRAY ΠΑΝΑΓΙΩΤΗΣ ΚΟΥΤΣΙΩΡΑΣ Α.Μ.: 2025201100037 Χειμερινό
Η Καινοτομία συναντά την Αμυντική Βιομηχανία
 Η Καινοτομία συναντά την Αμυντική Βιομηχανία Διημερίδα Καινοτομίας 8 & 9 Μαρτίου 2018 Β ΠΑΠΑΝΤΩΝΙΟΥ Από το 1992 η είναι μια εταιρεία εξειδικευμένη στην ρομποτική και τον αυτοματισμό. Μέχρι σήμερα έχει
Η Καινοτομία συναντά την Αμυντική Βιομηχανία Διημερίδα Καινοτομίας 8 & 9 Μαρτίου 2018 Β ΠΑΠΑΝΤΩΝΙΟΥ Από το 1992 η είναι μια εταιρεία εξειδικευμένη στην ρομποτική και τον αυτοματισμό. Μέχρι σήμερα έχει
Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές. Εισαγωγή στο Arduino. Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών
 με μικροελεγκτές. Εισαγωγή στο Arduino. Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών") Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές Εισαγωγή στο Arduino Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών Τι είναι Μικροελεγκτής; Ηλεκτρονική συσκευή που διαχειρίζεται ηλεκτρονικά
Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές Εισαγωγή στο Arduino Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών Τι είναι Μικροελεγκτής; Ηλεκτρονική συσκευή που διαχειρίζεται ηλεκτρονικά
INNOVATOR S51324 Σετ 5.1 Ηχείων Οικιακού Κινηματογράφου
 INNOVATOR S51324 Σετ 5.1 Ηχείων Οικιακού Κινηματογράφου Εγχειρίδιο Χρήσης ΕΙΣΑΓΩΓΗ Ευχαριστούμε που επιλέξατε τα ηχεία Innovator S51324 5.1. Με τα ηχεία αυτά μπορείτε να απολαύσετε ήχο 5.1 καναλιών από
INNOVATOR S51324 Σετ 5.1 Ηχείων Οικιακού Κινηματογράφου Εγχειρίδιο Χρήσης ΕΙΣΑΓΩΓΗ Ευχαριστούμε που επιλέξατε τα ηχεία Innovator S51324 5.1. Με τα ηχεία αυτά μπορείτε να απολαύσετε ήχο 5.1 καναλιών από
i. ένας προβολέας πολύ μικρών διαστάσεων ii. μια επίπεδη φωτεινή επιφάνεια αποτελούμενη από πολλές λάμπες σε λειτουργία
 ΟΔΗΓΙΕΣ: 1. Η επεξεργασία των θεμάτων θα γίνει γραπτώς σε χαρτί Α4 ή σε τετράδιο που θα σας δοθεί (το οποίο θα παραδώσετε στο τέλος της εξέτασης). Εκεί θα σχεδιάσετε και όσα γραφήματα ζητούνται στο Θεωρητικό
ΟΔΗΓΙΕΣ: 1. Η επεξεργασία των θεμάτων θα γίνει γραπτώς σε χαρτί Α4 ή σε τετράδιο που θα σας δοθεί (το οποίο θα παραδώσετε στο τέλος της εξέτασης). Εκεί θα σχεδιάσετε και όσα γραφήματα ζητούνται στο Θεωρητικό
ΠΕΡΙΕΧΟΜΕΝΟ. ΜΑΘΗΜΑ: ΡΟΜΠΟΤΙΚΗ (3Ε) Γ τάξη Ημερήσιου ΕΠΑ.Λ. και Γ τάξη Εσπερινού ΕΠΑ.Λ.
 Γ τάξη Ημερήσιου ΕΠΑ.Λ. και Γ τάξη Εσπερινού ΕΠΑ.Λ.") ΑΣΚΗΣΗ 25 - ΤΗΛΕΜΑΤΙΚΗ ΣΥΣΚΕΥΗ Μαθησιακά αποτελέσματα Ο μαθητής/μαθήτρια να μπορεί να: ΓΝΩΣΕΙΣ - Περιγράφει τη λειτουργία της τηλεματικής συσκευής. ΔΕΞΙΟΤΗΤΕΣ - Κατασκευάζει τηλεματική συσκευή. - Εγκαθιστά
ΑΣΚΗΣΗ 25 - ΤΗΛΕΜΑΤΙΚΗ ΣΥΣΚΕΥΗ Μαθησιακά αποτελέσματα Ο μαθητής/μαθήτρια να μπορεί να: ΓΝΩΣΕΙΣ - Περιγράφει τη λειτουργία της τηλεματικής συσκευής. ΔΕΞΙΟΤΗΤΕΣ - Κατασκευάζει τηλεματική συσκευή. - Εγκαθιστά
PLV Electronics Κολάρο Φέρμας PLV Electronics
 PLV Electronics Κολάρο Φέρμας PLV Electronics PLV 050- Dog Traiiner Οδηγίίες Χρήσης Πίνακας Περιεχομένων Πίνακας Περιεχομένων...2 2. Συσκευασία...3 3. Περιγραφή της συσκευής...4 4. Προετοιμασία της συσκευής...5
PLV Electronics Κολάρο Φέρμας PLV Electronics PLV 050- Dog Traiiner Οδηγίίες Χρήσης Πίνακας Περιεχομένων Πίνακας Περιεχομένων...2 2. Συσκευασία...3 3. Περιγραφή της συσκευής...4 4. Προετοιμασία της συσκευής...5
Οδηγός Εγκατάστασης και Λειτουργίας Έξυπνου Ασύρματου κουδουνιού πόρτας ZV400P. Εμπρόσθια Όψη Κουδουνιού. Ανιχνευτής κίνησης. Υπέρυθρος ανιχνευτής
 Οδηγός Εγκατάστασης και Λειτουργίας Έξυπνου Ασύρματου κουδουνιού πόρτας ZV400P Εμπρόσθια Όψη Κουδουνιού Υπέρυθρος ανιχνευτής Ανιχνευτής κίνησης Κάμερα γωνίας ανίχνευσης 166 μοιρών Μικρόφωνο Ηχείο LED υπέρυθρου
Οδηγός Εγκατάστασης και Λειτουργίας Έξυπνου Ασύρματου κουδουνιού πόρτας ZV400P Εμπρόσθια Όψη Κουδουνιού Υπέρυθρος ανιχνευτής Ανιχνευτής κίνησης Κάμερα γωνίας ανίχνευσης 166 μοιρών Μικρόφωνο Ηχείο LED υπέρυθρου
ΚΛΕΙΣΤΟ ΚΥΚΛΩΜΑ ΤΗΛΕΟΡΑΣΗΣ
 ΚΛΕΙΣΤΟ ΚΥΚΛΩΜΑ ΤΗΛΕΟΡΑΣΗΣ Ορισμός Με τον όρο κλειστό κύκλωμα τηλεόρασης (Closed Circuit TV System) όπως χρησιμοποιείται ευρέως για παροχή Υπηρεσιών Ασφαλείας, εννοούμε κάθε σύστημα που χρησιμοποιεί κάμερες
ΚΛΕΙΣΤΟ ΚΥΚΛΩΜΑ ΤΗΛΕΟΡΑΣΗΣ Ορισμός Με τον όρο κλειστό κύκλωμα τηλεόρασης (Closed Circuit TV System) όπως χρησιμοποιείται ευρέως για παροχή Υπηρεσιών Ασφαλείας, εννοούμε κάθε σύστημα που χρησιμοποιεί κάμερες
ΑυτοµατισµόςΚτιρίου -Κατοικίας Έλεγχοςφωτισµού. Εξοικονόµηση Ενέργειας µε άνεση
 ΑυτοµατισµόςΚτιρίου -Κατοικίας Έλεγχοςφωτισµού Εξοικονόµηση Ενέργειας µε άνεση Ηπροσφοράµας 4 Τεχνολογία Bus (KNX ή C-bus) Ολοκληρωµένη λύση Κεντρικός Έλεγχος & οπτικοποίηση Κατανοµή Λογικής µονάδων Bus
ΑυτοµατισµόςΚτιρίου -Κατοικίας Έλεγχοςφωτισµού Εξοικονόµηση Ενέργειας µε άνεση Ηπροσφοράµας 4 Τεχνολογία Bus (KNX ή C-bus) Ολοκληρωµένη λύση Κεντρικός Έλεγχος & οπτικοποίηση Κατανοµή Λογικής µονάδων Bus
Σημειώσεις κεφαλαίου 16 Αρχές επικοινωνίας με ήχο και εικόνα
 Σημειώσεις κεφαλαίου 16 Αρχές επικοινωνίας με ήχο και εικόνα ΠΩΣ ΛΕΙΤΟΥΡΓΟΥΝ ΟΙ ΗΛΕΚΤΡΟΝΙΚΕΣ ΕΠΙΚΟΙΝΩΝΙΕΣ Ένα σύστημα ηλεκτρονικής επικοινωνίας αποτελείται από τον πομπό, το δίαυλο (κανάλι) μετάδοσης και
Σημειώσεις κεφαλαίου 16 Αρχές επικοινωνίας με ήχο και εικόνα ΠΩΣ ΛΕΙΤΟΥΡΓΟΥΝ ΟΙ ΗΛΕΚΤΡΟΝΙΚΕΣ ΕΠΙΚΟΙΝΩΝΙΕΣ Ένα σύστημα ηλεκτρονικής επικοινωνίας αποτελείται από τον πομπό, το δίαυλο (κανάλι) μετάδοσης και
Σύστηµα Καθοδήγησης σε Parking DUPLINE
 Σύστηµα Καθοδήγησης σε Parking DUPLINE Ανιχνεύει τις ελεύθερες θέσεις πάρκινγκ και οδηγεί τον οδηγό σε αυτές από τη συντοµότερη δυνατή διαδροµή Ανίχνευση αυτοκινήτου µε αισθητήρα υπερήχων ultrasonic Ο
Σύστηµα Καθοδήγησης σε Parking DUPLINE Ανιχνεύει τις ελεύθερες θέσεις πάρκινγκ και οδηγεί τον οδηγό σε αυτές από τη συντοµότερη δυνατή διαδροµή Ανίχνευση αυτοκινήτου µε αισθητήρα υπερήχων ultrasonic Ο
ΑΙΣΘΗΤΗΡΑΣ ΣΧΕΤΙΚΗΣ ΥΓΡΑΣΙΑΣ. Η πιο συνηθισμένη έκφραση για την υγρασία του αέρα είναι η σχετική υγρασία (Relative Ηumidity, RH).
.") ΑΙΣΘΗΤΗΡΑΣ ΣΧΕΤΙΚΗΣ ΥΓΡΑΣΙΑΣ Η πιο συνηθισμένη έκφραση για την υγρασία του αέρα είναι η σχετική υγρασία (Relative Ηumidity, RH). Η σχετική υγρασία είναι ο λόγος επί τοις εκατό (%) της μάζας των υδρατμών
ΑΙΣΘΗΤΗΡΑΣ ΣΧΕΤΙΚΗΣ ΥΓΡΑΣΙΑΣ Η πιο συνηθισμένη έκφραση για την υγρασία του αέρα είναι η σχετική υγρασία (Relative Ηumidity, RH). Η σχετική υγρασία είναι ο λόγος επί τοις εκατό (%) της μάζας των υδρατμών
Πλακέτα Arduino. 1ο ΕΠΑΛ Περάματος - 7ο ΕΚ Πειραιά
 Πλακέτα Arduino Το 2005 oι Massimo Banzi και David Cueartielles στο Ivrea Δημιουργούν την υπολογιστική πλατφόρμα Arduino. Το Arduino είναι βασισμένο σε μια απλή μητρική πλακέτα ανοικτού κώδικα, με ενσωματωμένο
Πλακέτα Arduino Το 2005 oι Massimo Banzi και David Cueartielles στο Ivrea Δημιουργούν την υπολογιστική πλατφόρμα Arduino. Το Arduino είναι βασισμένο σε μια απλή μητρική πλακέτα ανοικτού κώδικα, με ενσωματωμένο
Ένα μοναδικό σε σχεδιασμό ασύρματο σύστημα συναγερμού με τεράστιες δυνατότητες και λειτουργιές
 ΑΣΥΡΜΑΤΟ ΣΥΣΤΗΜΑ ΣΥΝΑΓΕΡΜΟΥ GSM- BLUETOOTH 10 ZONES 007M3G ΟΔΗΓΙΕΣ ΧΕΙΡΙΣΜΟΥ ΚΑΙ ΕΓΚΑΤΑΣΤΑΣΗΣ Ένα μοναδικό σε σχεδιασμό ασύρματο σύστημα συναγερμού με τεράστιες δυνατότητες και λειτουργιές Εξαιρετικά λεπτό
ΑΣΥΡΜΑΤΟ ΣΥΣΤΗΜΑ ΣΥΝΑΓΕΡΜΟΥ GSM- BLUETOOTH 10 ZONES 007M3G ΟΔΗΓΙΕΣ ΧΕΙΡΙΣΜΟΥ ΚΑΙ ΕΓΚΑΤΑΣΤΑΣΗΣ Ένα μοναδικό σε σχεδιασμό ασύρματο σύστημα συναγερμού με τεράστιες δυνατότητες και λειτουργιές Εξαιρετικά λεπτό
Κωνσταντίνος Γκαλονάκης. Arduino: Προγραμματισμός στην πράξη
 Κωνσταντίνος Γκαλονάκης Arduino: Προγραμματισμός στην πράξη 1 Σύνδεση του Arduino με τον Η/Υ και προγραμματισμός αυτού. 1. Εγκατάσταση περιβάλλοντος Arduino IDE Για να προγραμματίσετε τη μονάδα σας θα
Κωνσταντίνος Γκαλονάκης Arduino: Προγραμματισμός στην πράξη 1 Σύνδεση του Arduino με τον Η/Υ και προγραμματισμός αυτού. 1. Εγκατάσταση περιβάλλοντος Arduino IDE Για να προγραμματίσετε τη μονάδα σας θα
ΡΟΜΠΟΤΙΚΗ ΜΕ ARDUINO - ARDUINO ΚΑΙ ΕΙΚΟΝΑ. Δημιουργός: Δρ.Αθανάσιος Μπαλαφούτης Επιβλέπων: Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ
 ΡΟΜΠΟΤΙΚΗ ΜΕ ARDUINO - ARDUINO ΚΑΙ ΕΙΚΟΝΑ Δημιουργός: Δρ.Αθανάσιος Μπαλαφούτης Επιβλέπων: Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ 1 ARDUINO ΚΑΙ ΕΙΚΟΝΑ ΠΕΡΙΕΧΟΜΕΝΑ Σειριακή επικοινωνία με Jpeg Κάμερα Σύνδεση
ΡΟΜΠΟΤΙΚΗ ΜΕ ARDUINO - ARDUINO ΚΑΙ ΕΙΚΟΝΑ Δημιουργός: Δρ.Αθανάσιος Μπαλαφούτης Επιβλέπων: Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ 1 ARDUINO ΚΑΙ ΕΙΚΟΝΑ ΠΕΡΙΕΧΟΜΕΝΑ Σειριακή επικοινωνία με Jpeg Κάμερα Σύνδεση
ΑΣΚΗΣΗ 8 η : ΣΥΣΤΗΜΑΤΑ ΕΙΔΟΠΟΙΗΣΗΣ
 Εργαστήριο ΜΕΚ και Τεχνολογίας Αυτοκινήτου Καθηγητής: Χριστολουκάς Δημήτριος ΑΣΚΗΣΗ 8 η : ΣΥΣΤΗΜΑΤΑ ΕΙΔΟΠΟΙΗΣΗΣ Ηχητική ειδοποίηση (κόρνες) Σύμφωνα με τον κανονισμό, ένα όχημα με κινητήρα πρέπει να χρησιμοποιεί
Εργαστήριο ΜΕΚ και Τεχνολογίας Αυτοκινήτου Καθηγητής: Χριστολουκάς Δημήτριος ΑΣΚΗΣΗ 8 η : ΣΥΣΤΗΜΑΤΑ ΕΙΔΟΠΟΙΗΣΗΣ Ηχητική ειδοποίηση (κόρνες) Σύμφωνα με τον κανονισμό, ένα όχημα με κινητήρα πρέπει να χρησιμοποιεί
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου
 Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου") Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
10η Ενότητα: Το υποσύστημα "αίσθησης"
 10η Ενότητα: Το υποσύστημα "αίσθησης" απαιτήσεις και επιδόσεις φυσικά μεγέθη γενική δομή και συγκρότηση ΤΕΙ Πειραιά Καθηγητής Γ. Χαμηλοθώρης ΜΗΧΑΤΡΟΝΙΚΗ ISL I nt el l i gent Syst ems Lab 1 Το υποσύστημα
10η Ενότητα: Το υποσύστημα "αίσθησης" απαιτήσεις και επιδόσεις φυσικά μεγέθη γενική δομή και συγκρότηση ΤΕΙ Πειραιά Καθηγητής Γ. Χαμηλοθώρης ΜΗΧΑΤΡΟΝΙΚΗ ISL I nt el l i gent Syst ems Lab 1 Το υποσύστημα
ΕΙΔΙΚΗ ΘΕΜΑΤΙΚΗ ΔΡΑΣΤΗΡΙΟΤΗΤΑ Β ΗΝ - Β ΟΧ. Αισθητήρες και συλλογή δεδομένων από τα τμήματα ενός αυτοκινήτου και το περιβάλλον του
 ΕΙΔΙΚΗ ΘΕΜΑΤΙΚΗ ΔΡΑΣΤΗΡΙΟΤΗΤΑ Β ΗΝ - Β ΟΧ Αισθητήρες και συλλογή δεδομένων από τα τμήματα ενός αυτοκινήτου και το περιβάλλον του Τι είναι αισθητήρας; Αισθητήρας ονομάζεται μία συσκευή που ανιχνεύει ένα
ΕΙΔΙΚΗ ΘΕΜΑΤΙΚΗ ΔΡΑΣΤΗΡΙΟΤΗΤΑ Β ΗΝ - Β ΟΧ Αισθητήρες και συλλογή δεδομένων από τα τμήματα ενός αυτοκινήτου και το περιβάλλον του Τι είναι αισθητήρας; Αισθητήρας ονομάζεται μία συσκευή που ανιχνεύει ένα
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 3 ο Αισθητήρες και Δομή Επιλογής Σημειώσεις Καθηγητή ραστηριότητα 12 η : σταμάτημα με αισθητήρα υπερήχων
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 3 ο Αισθητήρες και Δομή Επιλογής Σημειώσεις Καθηγητή ραστηριότητα 12 η : σταμάτημα με αισθητήρα υπερήχων
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3
 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 1 ο : Περιγραφή του EV3 και του περιβάλλοντος προγραμματισμού του Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου 2 3 4 ΑΝΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Πώς
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 1 ο : Περιγραφή του EV3 και του περιβάλλοντος προγραμματισμού του Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου 2 3 4 ΑΝΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Πώς
ΕΛΛΗΝΙΚΑ. Περιγραφή. 1. Ενεργοποίηση/Απενεργοποίηση 2. Ρύθμιση 3. Βραχίονας 4. Ενδείκτης ισχύος 5. Ανίχνευση κίνησης (Ενεργοποίηση)
") Εισαγωγή Ο ανιχνευτής κίνησης είναι ιδανικός για κρυφή ασφάλεια και παρατήρηση. Στο περίβλημα PIR υπάρχει μια συσκευή ανάγνωσης κάρτας SD (δεν περιλαμβάνεται κάρτα SD) για εγγραφή, ενσωματωμένη με τη μοναδική
Εισαγωγή Ο ανιχνευτής κίνησης είναι ιδανικός για κρυφή ασφάλεια και παρατήρηση. Στο περίβλημα PIR υπάρχει μια συσκευή ανάγνωσης κάρτας SD (δεν περιλαμβάνεται κάρτα SD) για εγγραφή, ενσωματωμένη με τη μοναδική
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 4 ο Πρόκληση με αισθητήρες αφής Σημειώσεις Καθηγητή Έξοδος από σπηλιά Φύλλο Εργασιών 4 : Πρόκληση με αισθητήρες
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 4 ο Πρόκληση με αισθητήρες αφής Σημειώσεις Καθηγητή Έξοδος από σπηλιά Φύλλο Εργασιών 4 : Πρόκληση με αισθητήρες
ΑΣΚΗΣΗ 7 η : ΣΥΣΤΗΜΑ ΥΑΛΟΚΑΘΑΡΙΣΤΗΡΩΝ
 Εργαστήριο ΜΕΚ και Τεχνολογίας Αυτοκινήτου Καθηγητής: Χριστολουκάς Δημήτριος ΑΣΚΗΣΗ 7 η : ΣΥΣΤΗΜΑ ΥΑΛΟΚΑΘΑΡΙΣΤΗΡΩΝ Υαλοκαθαριστήρες παρμπίζ Ο κύριος σκοπός του συστήματος υαλοκαθαριστήρων είναι να καθαρίζουν
Εργαστήριο ΜΕΚ και Τεχνολογίας Αυτοκινήτου Καθηγητής: Χριστολουκάς Δημήτριος ΑΣΚΗΣΗ 7 η : ΣΥΣΤΗΜΑ ΥΑΛΟΚΑΘΑΡΙΣΤΗΡΩΝ Υαλοκαθαριστήρες παρμπίζ Ο κύριος σκοπός του συστήματος υαλοκαθαριστήρων είναι να καθαρίζουν
Άσκηση 3 Η φωτο-εκπέµπουσα δίοδος (Light Emitting Diode)
") Άσκηση 3 Η φωτο-εκπέµπουσα δίοδος (Light Emitting Diode) Εισαγωγή Στην προηγούµενη εργαστηριακή άσκηση µελετήσαµε την δίοδο ανόρθωσης ένα στοιχείο που σχεδιάστηκε για να λειτουργεί ως µονόδροµος αγωγός.
Άσκηση 3 Η φωτο-εκπέµπουσα δίοδος (Light Emitting Diode) Εισαγωγή Στην προηγούµενη εργαστηριακή άσκηση µελετήσαµε την δίοδο ανόρθωσης ένα στοιχείο που σχεδιάστηκε για να λειτουργεί ως µονόδροµος αγωγός.
Μέρος Α Γνωριμία με το περιβάλλον προγραμματισμού του ρομπότ OTTO
 OTTO ROBOT Εκπαιδευτικές Δραστηριότητες Μέρος Α Γνωριμία με το περιβάλλον προγραμματισμού του ρομπότ OTTO Δραστηριότητα 1 - Γνωριμία, περιγραφή Otto Τι είναι το ρομπότ Otto; Είναι ένα αλληλεπιδραστικό
OTTO ROBOT Εκπαιδευτικές Δραστηριότητες Μέρος Α Γνωριμία με το περιβάλλον προγραμματισμού του ρομπότ OTTO Δραστηριότητα 1 - Γνωριμία, περιγραφή Otto Τι είναι το ρομπότ Otto; Είναι ένα αλληλεπιδραστικό
Εισαγωγή στη ρομποτική Γίνε κατασκευαστής
 Εισαγωγή στη ρομποτική Γίνε κατασκευαστής Περιεχόμενα Εισαγωγή... 3 Η συμβατότητα του Edison με τα LEGO... 4 Αποστολή 1 Ο Ed-εκσκαφέας... 5 Αποστολή 2 Ο Ed-εκτυπωτής... 18 Αποστολή 3 Η δική μας αποστολή!...
Εισαγωγή στη ρομποτική Γίνε κατασκευαστής Περιεχόμενα Εισαγωγή... 3 Η συμβατότητα του Edison με τα LEGO... 4 Αποστολή 1 Ο Ed-εκσκαφέας... 5 Αποστολή 2 Ο Ed-εκτυπωτής... 18 Αποστολή 3 Η δική μας αποστολή!...
ΣΥΣΤΗΜΑ ΟΠΙΣΘΕΝ ΜΕ ΑΙΣΘΗΤΗΡΕΣ PLUG 2011 (External Sensor Plug 2011)
") 5040291400-WEB- ΣΥΣΤΗΜΑ ΟΠΙΣΘΕΝ ΜΕ ΑΙΣΘΗΤΗΡΕΣ PLUG 2011 (External Sensor Plug 2011) ΚΥΡΙΑ ΤΕΧΝΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΚΑΙ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΤΟΥ ΠΡΟΪΟΝΤΟΣ Τροφοδοσία 12 Vcc (10V 15V). Απορρόφηση >50 ma (μόνο με
5040291400-WEB- ΣΥΣΤΗΜΑ ΟΠΙΣΘΕΝ ΜΕ ΑΙΣΘΗΤΗΡΕΣ PLUG 2011 (External Sensor Plug 2011) ΚΥΡΙΑ ΤΕΧΝΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΚΑΙ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΤΟΥ ΠΡΟΪΟΝΤΟΣ Τροφοδοσία 12 Vcc (10V 15V). Απορρόφηση >50 ma (μόνο με
Εισαγωγή στη Ρομποτική και τον Προγραμματισμό με τη χρήση του ρομπότ Thymio & του λογισμικού Aseba
 5 ο Πανελλήνιο Επιστημονικό Συνέδριο Ένταξη και Χρήση των ΤΠΕ στην Εκπαιδευτική Διαδικασία Εισαγωγή στη Ρομποτική και τον Προγραμματισμό με τη χρήση του ρομπότ Thymio & του λογισμικού Aseba Κόμης Βασίλης
5 ο Πανελλήνιο Επιστημονικό Συνέδριο Ένταξη και Χρήση των ΤΠΕ στην Εκπαιδευτική Διαδικασία Εισαγωγή στη Ρομποτική και τον Προγραμματισμό με τη χρήση του ρομπότ Thymio & του λογισμικού Aseba Κόμης Βασίλης
Εφαρμογές αναλογικών / Ψηφιακών
 Εφαρμογές αναλογικών / Ψηφιακών 1 ΕΙΣΑΓΩΓΗ Σε αυτήν την ενότητα θα δούμε μερικές ακόμα εφαρμογές ψηφιακών / αναλογικών εισόδων/ εξόδων που μπορούμε να φτιάξουμε με την βοήθεια του Arduino, χρησιμοποιώντας
Εφαρμογές αναλογικών / Ψηφιακών 1 ΕΙΣΑΓΩΓΗ Σε αυτήν την ενότητα θα δούμε μερικές ακόμα εφαρμογές ψηφιακών / αναλογικών εισόδων/ εξόδων που μπορούμε να φτιάξουμε με την βοήθεια του Arduino, χρησιμοποιώντας
ΕΓΧΕΙΡΙΔΙΟ ΠΙΝΑΚΑ ΕΛΕΓΧΟΥ FSM-1 (FSM-1, FBMulti-1/S) (για ΤΑΧΥΚΙΝΗΤΗ ΠΟΡΤΑ RD)
 (για ΤΑΧΥΚΙΝΗΤΗ ΠΟΡΤΑ RD)") ΕΓΧΕΙΡΙΔΙΟ ΠΙΝΑΚΑ ΕΛΕΓΧΟΥ FSM-1 (FSM-1, FBMulti-1/S) (για ) 0 Εισαγωγή O πίνακας ελέγχου FSM-1 είναι ένα εξαιρετικά προηγμένο προϊόν, εξοπλισμένο με μια προγραμματιζόμενη μονάδα επεξεργασίας δεδομένων,
ΕΓΧΕΙΡΙΔΙΟ ΠΙΝΑΚΑ ΕΛΕΓΧΟΥ FSM-1 (FSM-1, FBMulti-1/S) (για ) 0 Εισαγωγή O πίνακας ελέγχου FSM-1 είναι ένα εξαιρετικά προηγμένο προϊόν, εξοπλισμένο με μια προγραμματιζόμενη μονάδα επεξεργασίας δεδομένων,
Έλεγχος κινητήρα συνεχούς ρεύματος με τρανζίστορ και Arduino
 Έλεγχος κινητήρα συνεχούς ρεύματος με τρανζίστορ και Arduino Στην κατασκευή αυτή ο σκοπός ήταν να ελέγξουμε την ταχύτητα ενός κινητήρα συνεχούς ρεύματος με τη χρήση ενός τρανζίστορ που θα χρησιμοποιηθεί
Έλεγχος κινητήρα συνεχούς ρεύματος με τρανζίστορ και Arduino Στην κατασκευή αυτή ο σκοπός ήταν να ελέγξουμε την ταχύτητα ενός κινητήρα συνεχούς ρεύματος με τη χρήση ενός τρανζίστορ που θα χρησιμοποιηθεί
ΕΚΦΕ Ν. ΙΩΝΙΑΣ ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ Εργαστηριακή Άσκηση 1 Παρατήρηση Καταγραφή φασμάτων Σχετικοί υπολογισμοί
 ΕΚΦΕ Ν. ΙΩΝΙΑΣ ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ Εργαστηριακή Άσκηση 1 Παρατήρηση Καταγραφή φασμάτων Σχετικοί υπολογισμοί ΟΝΟΜΑΤΕΠΩΝΥΜΟ :.. Τάξη Τμήμα : ΒΑΘΜΟΣ : Ημερομηνία : Β. ΦΥΛΛΟ ΕΡΓΑΣΙΑΣ Εργασία
ΕΚΦΕ Ν. ΙΩΝΙΑΣ ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ Εργαστηριακή Άσκηση 1 Παρατήρηση Καταγραφή φασμάτων Σχετικοί υπολογισμοί ΟΝΟΜΑΤΕΠΩΝΥΜΟ :.. Τάξη Τμήμα : ΒΑΘΜΟΣ : Ημερομηνία : Β. ΦΥΛΛΟ ΕΡΓΑΣΙΑΣ Εργασία