ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ. της Φοιτήτριας του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών
|
|
|
- Ειρηναίος Ταρσούλη
- 8 χρόνια πριν
- Προβολές:
Transcript
1 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΟΜΗΧΑΝΙΚΗΣ ΜΕΤΑΤΡΟΠΗΣ ΕΝΕΡΓΕΙΑΣ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ της Φοιτήτριας του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών ΓΕΩΡΓΙΑΣ ΠΑΝΑΓΙΩΤΗ ΧΑΜΠΕΡΗ Α.Μ.: 6877 ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΣΥΣΤΗΜΑΤΟΣ ΑΝΕΛΚΥΣΤΗΡΑ ΣΕ ΜΙΚΡΗ ΚΛΙΜΑΚΑ Επιβλέπων: Δρ.-Μηχ. Επαμεινώνδας Μητρονίκας, Επίκουρος Καθηγητής Ν ο 358 Πάτρα, Φεβρουάριος 2013 ΠΑΝΕΠΙΣΤΗΜΙΟΥΠΟΛΗ ΠΑΤΡΑΣ ΡΙΟ - ΠΑΤΡΑ Τηλ: Τηλ: Τηλ: Fax: e.c.tatakis@ece.upatras.gr

2 ~ ii ~

3 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΟΜΗΧΑΝΙΚΗΣ ΜΕΤΑΤΡΟΠΗΣ ΕΝΕΡΓΕΙΑΣ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ της Φοιτήτριας του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών ΓΕΩΡΓΙΑΣ ΠΑΝΑΓΙΩΤΗ ΧΑΜΠΕΡΗ Α.Μ.: 6877 ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΣΥΣΤΗΜΑΤΟΣ ΑΝΕΛΚΥΣΤΗΡΑ ΣΕ ΜΙΚΡΗ ΚΛΙΜΑΚΑ Επιβλέπων: Δρ.-Μηχ. Επαμεινώνδας Μητρονίκας, Επίκουρος Καθηγητής Ν ο 6877/2013 Πάτρα, Φεβρουάριος 2013

4 ~ II ~

5 ΠΙΣΤΟΠΟΙΗΣΗ Πιστοποιείται ότι η διπλωματική εργασία με θέμα: " ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΣΥΣΤΗΜΑΤΟΣ ΑΝΕΛΚΥΣΤΗΡΑ ΣΕ ΜΙΚΡΗ ΚΛΙΜΑΚΑ" της φοιτήτριας του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών ΓΕΩΡΓΙΑΣ ΠΑΝΑΓΙΩΤΗ ΧΑΜΠΕΡΗ (Α.Μ. 6877) Παρουσιάστηκε δημόσια και εξετάστηκε στο Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών στις 25/02/2013 Ο Επιβλέπων Ο Διευθυντής του Τομέα Μητρονίκας Επαμεινώνδας Επίκουρος Καθηγητής Αντώνιος Αλεξανδρίδης Καθηγητής ~ III ~

6 ~ IV ~

7 Αριθμός Διπλωματικής Εργασίας: 6877/2013 ΤΙΤΛΟΣ: "ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΣΥΣΤΗΜΑΤΟΣ ΑΝΕΛΚΥΣΤΗΡΑ ΣΕ ΜΙΚΡΗ ΚΛΙΜΑΚΑ" Φοιτήτρια: Επιβλέπων: Χαμπέρη Γεωργία του Παναγιώτη Δρ.-Μηχ. Μητρονίκας Επαμεινώνδας, Επίκουρος Καθηγητής Περίληψη Η παρούσα διπλωματική εργασία, η οποία εκπονήθηκε στο Εργαστήριο Ηλεκτρομηχανικής Μετατροπής Ενέργειας του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών, πραγματεύεται την κατασκευή ενός επιβατηγού ανελκυστήρα σε μικρή κλίμακα. Σκοπός είναι η μελέτη και η κατασκευή της μικρογραφίας ενός ανελκυστήρα για την μεταφορά προσώπων, του οποίου η λειτουργία θα ελέγχεται μέσω τυπωμένου κυκλώματος. Αρχικά παρατίθεται μια σύντομη ανάλυση της ιστορίας των ανελκυστήρων, τα κυριότερα μέρη τους, των διαφόρων κατηγοριών που υπάρχουν αλλά και κάποιων βασικών στοιχείων τους. Στη συνέχεια, περιγράφεται η αρχή λειτουργίας των ασύγχρονων τριφασικών κινητήρων και παρουσιάζονται τα βασικά κατασκευαστικά χαρακτηριστικά και τα είδη αυτών. Ακολουθεί μια σύντομη περιγραφή του μικροεπεξεργαστή που χρησιμοποιήθηκε, καθώς και των δυνατοτήτων που προσφέρει. Το επόμενο βήμα είναι η ανάλυση της λογικής που θα ακολουθεί ο ανελκυστήρας κατά την λειτουργία του, η περιγραφή των εξαρτημάτων που χρησιμοποιήθηκαν για την υλοποίηση της παραπάνω λογικής αλλά και του τρόπου σύνδεση τους με τους ακροδέκτες των δυο μικροελεγκτών. Για την ευκολότερη υλοποίηση της λογικής που υιοθετήθηκε, σχεδιάστηκαν και κατασκευάστηκαν δύο τυπωμένα κυκλώματα. Το πρώτο ελέγχει όλα τα στοιχεία που υπάρχουν στο εσωτερικό του θαλάμου, ενώ το δεύτερο όσα βρίσκονται εξωτερικά και συγκεκριμένα τα μπουτόν κλήσης των ορόφων, τους αισθητήρες προσέγγισης και τα ρελέ που οδηγούν τον κινητήρα. Επιπλέον, γίνεται μια σύντομη αναφορά στο δίκτυο CAN το οποίο χρησιμοποιήθηκε για την επικοινωνία των τυπωμένων κυκλωμάτων που κατασκευάστηκαν. Επίσης, παρατίθονται τα πλήρη διαγράμματα ροής του κώδικα και τα σχέδια των τυπωμένων κυκλωμάτων. Τέλος, ακολουθούν τα συμπεράσματα από την λειτουργία της κατασκευής και τα σχόλια για μελλοντικές βελτιώσεις. ~ V ~

8 ~ VI ~

9 ΠΡΟΛΟΓΟΣ Η παρούσα εργασία εκπονήθηκε στο Εργαστήριο Ηλεκτρομηχανικής Μετατροπής της Ενέργειας του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών του Πανεπιστημίου Πατρών στα πλαίσια της διπλωματικής εργασίας της φοιτήτριας Χαμπέρη Γεωργίας, υπό την επίβλεψη του Επίκουρου Καθηγητή Μητρονίκα Επαμεινώνδα. Σκοπός της εργασίας αυτής είναι η μελέτη και η κατασκευή της μικρογραφίας ενός επιβατικού ανελκυστήρα. Η κίνηση του θαλάμου του ανελκυστήρα επιτυγχάνεται με τη χρήση ενός ασύγχρονου τριφασικού κινητήρα, του οποίου η λειτουργία θα ελέγχεται μέσω ενός τυπωμένου κυκλώματος. Αναλυτικά, στο Κεφάλαιο 1, παρατίθεται ο ορισμός της έννοιας του ανελκυστήρα και μια σύντομη ιστορική αναδρομή. Επιπλέον, αναλύονται τα κυριότερα μέρη της εγκατάστασης ενός ανελκυστήρα και οι κατηγορίες στις οποίες διακρίνονται ανάλογα με την αρχή λειτουργίας, τον χειρισμό κατά τη λειτουργία, τη χρήση αλλά και την δυνατότητα ρύθμισης της ταχύτητα τους. Τέλος, δίνονται στοιχεία που αφορούν την σωστή εγκατάσταση και την συντήρηση ενός ανελκυστήρα. Στο Κεφάλαιο 2, παρουσιάζονται τα κατασκευαστικά χαρακτηριστικά των ασύγχρονων τριφασικών κινητήρων, τα είδη και η αρχή λειτουργίας τους. Ακόμα, αναλύονται κάποιες βασικές παράμετροι των μηχανών αυτών, όπως η ολίσθηση, η συχνότητα και η αλλαγή της φοράς περιστροφής. Τέλος, παρατίθονται το ισοδύναμο κύκλωμα που απορρέει από το μοντέλο της Α.Μ. μαζί με τις εξισώσεις που το συνοδεύουν και το διανυσματικό διάγραμμα. Στο Κεφάλαιο 3, περιγράφεται ο μικροελεγκτής dspic30f4011, με σύντομη αναφορά στην αρχιτεκτονική του και στις περιφερειακές μονάδες που ενσωματώνονται στο ολοκληρωμένο αυτό. Από τα περιφερειακά αυτά, εκτενέστερα αναλύονται οι Θύρες Εισόδου- Εξόδου, οι Χρονιστές, οι Μετατροπείς Σήματος από Αναλογικό σε Ψηφιακό, οι Γεννήτριες PWM και η Μονάδα CAN, η οποία αποτελεί μια ικανοποιητική επιλογή για την μεταφορά δεδομένων από ένα μικροελεγκτή σε περιβάλλον με θόρυβο, χωρίς να αλλοιωθούν οι τιμές τους. Στο τέλος του κεφαλαίου αυτού, αναφέρεται τα αναπτυξιακά εργαλεία που χρησιμοποιήθηκαν για την συγγραφή και την αποσφαλμάτωση του κώδικα που θα εκτελεί ο μικροελεγκτής. Στο Κεφάλαιο 4, αναλύεται η λογική που θα ακολουθεί ο ανελκυστήρας κατά την λειτουργία του και τα στοιχεία που απαιτούνται για την υλοποίηση της λογικής αυτής. ~ VII ~

10 Συγκεκριμένα, περιγράφεται η αρχή λειτουργίας των στοιχείων αυτών, αλλά και ο ενδεδειγμένος τρόπος σύνδεσης τους σε κάποιο ακροδέκτη του μικροελεγκτή. Στο τέλος, δίνεται το πλήρες διάγραμμα ροής του κώδικα που υλοποιεί την επιθυμητή λογική λειτουργίας του ανελκυστήρα. Στο Κεφάλαιο 5, παρατίθονται τα συμπεράσματα από την λειτουργία της κατασκευής αλλά και μελλοντικές προσθήκες στην κατασκευή για την βελτίωση της. Τέλος, καταγράφεται η Βιβλιογραφία που χρησιμοποιήθηκε για την συγγραφή της παρούσας εργασίας και στα Παραρτήματα δίνονται τα σχέδια μέσω του προγράμματος KiCad των τυπωμένων κυκλωμάτων, οι φωτογραφίες της κατασκευής, καθώς και τα τεχνικά φυλλάδια των κατασκευαστών ορισμένων στοιχείων που χρησιμοποιήθηκαν. Στο σημείο αυτό θα ήθελα να ευχαριστήσω θερμά τον επιβλέποντα της διπλωματικής μου εργασίας, Επίκουρο Καθηγητή κ. Μητρονίκα Επαμεινώνδα, για την ανάθεση αυτού του ενδιαφέροντος θέματος, την επίβλεψη, την καθοδήγηση και τις πολύτιμες συμβουλές του κατά την εκπόνηση της παρούσας εργασίας. Επιπλέον, θα ήθελα να ευχαριστήσω τον υποψήφιο διδάκτορα κ. Σπυρόπουλο Διονύσιο, ο οποίος βοήθησε στην υλοποίηση αυτής της εργασίας με τις γνώσεις του και τις συμβουλές του. Επίσης, θα ήθελα να ευχαριστήσω τους υπεύθυνους του Πανεπιστημιακού Μηχανουργείου και ιδιαίτερα τον κ. Χατζηπαναγιώτου Γεώργιο, που συνέβαλλαν στην υλοποίηση των διαφόρων εργασιών. Τέλος, ευχαριστώ πολύ την οικογένεια μου και τους φίλους μου για την κατανόηση, την υπομονή και την υποστήριξη τους καθ όλη τη διάρκεια των σπουδών μου. ~ VIII ~

11 ΠΕΡΙΕΧΟΜΕΝΑ ΚΕΦΑΛΑΙΟ 1 Ανελκυστήρες 1.1. Εισαγωγή Ορισμός Ιστορική αναδρομή Κύρια μέρη εγκατάστασης ανελκυστήρα Φρεάτιο Θάλαμος Πόρτες Ανελκυστήρων Αντίβαρο Οδηγοί-Ευθυντήριοι ράβδοι Συρματόσχοινα ανάρτησης Τροχαλία τριβής Ηλεκτρομαγνητική πέδη (φρένο) Προσκρουστήρες Κινητήρας Υδραυλικοί ανελκυστήρες: Έμβολο κύλινδρος Υδραυλικοί ανελκυστήρες: Δοχείο λαδιού Υδραυλικοί ανελκυστήρες: Αντλία Μηχανοστάσιο Διάκριση Ανελκυστήρων Αρχή λειτουργίας Χειρισμός κατά τη λειτουργία Χρήση ανελκυστήρα Δυνατότητα ρύθμισης της ταχύτητας Συστήματα Ελέγχου Λειτουργίας Ανελκυστήρα (βαθμός αυτοματοποίησης) ~ i ~
.")
12 1.7. Μεμονωμένοι Ανελκυστήρες Ομάδες Ανελκυστήρων Ειδικές Κατηγορίες Ανελκυστήρων Ασθενοφόροι Ανελκυστήρες Ανελκυστήρες Μεγάλων Φορτιών Ανελκυστήρες Μικρών Φορτιών Ανελκυστήρες Φαγητών Ατέρμονες Ανελκυστήρες Ατόμων Χειρισμός κατά τη λειτουργία Ανελκυστήρες απλής λειτουργίας Αυτόματοι ανελκυστήρες Χαρακτηριστικά γνωρίσματα μιας σωστής εγκατάστασης επιβατηγού ανελκυστήρα Απαιτήσεις Εγκατάστασης Ανελκυστήρων Συντήρηση Ανελκυστήρων Δυνατότητα ρύθμισης της ταχύτητας ΚΕΦΑΛΑΙΟ 2 Τριφασικός Ασύγχρονος Κινητήρας 2.1. Περιγραφή ασύγχρονων τριφασικών κινητήρων Κατασκευαστικά στοιχεία ασύγχρονων τριφασικών κινητήρων Είδη ασύγχρονων τριφασικών κινητήρων Τυλίγματα Ασύγχρονων Μηχανών Αρχή λειτουργίας ασύγχρονων τριφασικών κινητήρων Συχνότητα και ολίσθηση Αλλαγή φοράς περιστροφής Λειτουργία σε μόνιμη κατάσταση ~ ii ~

13 2.9. Ισοδύναμο κύκλωμα και εξισώσεις τάσεων στην Α.Μ Ηλεκτρομαγνητική δομή ασύγχρονου κινητήρα - Διανυσματικό διάγραμμα ΚΕΦΑΛΑΙΟ 3 Περιγραφή Του Μικροεπεξεργαστή 3.1. Σύντομη Παρουσίαση Μικροελεγκτή Γενική Περιγραφή Ενός Μικροελεγκτή Συνοπτική περιγραφή του dspic30f Περιφερειακές μονάδες Θύρες Εισόδου/ Εξόδου - Ε/Ε Χρονιστές Μετατροπείς σήματος από αναλογικό σε ψηφιακό Γεννήτριες PWM Θύρα CAN Τα αναπτυξιακά εργαλεία του dspic30f Ενσωματωμένα εργαλεία του MPLAB IDE ΚΕΦΑΛΑΙΟ 4 Μελέτη Κυκλώματος Ελέγχου 4.1. Περιγραφή Κατασκευής Λογική Ανελκυστήρα Στοιχεία ανελκυστήρα Διάταξη Εισόδων και Εξόδων Περιγραφή Στοιχείων Κυκλώματος Ελέγχου Γραμμικά τροφοδοτικά ~ iii ~

14 Ο αντιστροφέας 74HCT MCP Σήμα RESET Μπουτόν και Διακόπτες Ρελέ (Relay) Led (Light Emitting Diode) Seven Segment Display (SSD) Διακόπτες Προσέγγισης (Proximity Switch) Ανάπτυξη Κώδικα Κυκλώματος Ελέγχου Εισαγωγή Διάγραμμα Ροής Εκτέλεση Του Προγραμματισμού ΚΕΦΑΛΑΙΟ 5 Συμπεράσματα Μελλοντικές Κινήσεις 5.1. Συμπεράσματα Μελλοντικές Κινήσεις ΒΙΒΛΙΟΓΡΑΦΙΑ ΠΑΡΑΡΤΗΜΑ Α ΤΟ ΤΥΠΩΜΕΝΟ ΚΥΚΛΩΜΑ ΤΗΣ ΚΑΤΑΣΚΕΥΗΣ ΠΑΡΑΡΤΗΜΑ Β ΤΕΛΙΚΗ ΜΟΡΦΗ ΔΙΑΤΑΞΗΣ - ΦΩΤΟΓΡΑΦΙΕΣ ΠΑΡΑΡΤΗΜΑ Γ ΤΕΧΝΙΚΑ ΦΥΛΛΑΔΙΑ DATASHEETS ~ iv ~

15 ΚΕΦΑΛΑΙΟ 1 Ανελκυστήρες [20],[21] 1.1. Εισαγωγή Στα πλαίσια της παρούσας διπλωματικής κατασκευάστηκε η μικρογραφία ενός επιβατικού ανελκυστήρα, μελετήθηκε η λογική λειτουργίας του αλλά και το τυπωμένο κύκλωμα που τον ελέγχει. Αρχικά όμως κρίθηκε σκόπιμο να γίνει μια σύντομη ανάλυση της ιστορίας των ανελκυστήρων, τα κυριότερα μέρη του, των διαφόρων κατηγοριών που υπάρχουν αλλά και κάποιων βασικών στοιχείων τα οποία αναλύονται παρακάτω Ορισμός Ανελκυστήρας ή ανυψωτήρας ονομάζεται κάθε μόνιμα εγκαταστημένη συσκευή που χρησιμοποιείται για την ανύψωση βαρών, προσώπων ή πραγμάτων. Εξυπηρετεί καθορισμένα επίπεδα, έχει θάλαμο προσιτό στους χρήστες και κινείται μεταξύ κατακόρυφων οδηγών ή οδηγών με κλίση μικρότερη από 15 ο ως προς την κατακόρυφο. Σήμερα για τον ανελκυστήρα που χρησιμοποιείται στα πολυώροφα κτίρια έχει επικρατήσει ο γαλλικός όρος ασανσέρ 1.3. Ιστορική αναδρομή Ο ανελκυστήρας ως μέσο μεταφοράς ανθρώπων και εμπορευμάτων έχει μια μακρά ιστορία με πολλές προσπάθειες. περισσότερο ή λιγότερο επιτυχημένες, επιστημονικές ή στα πλαίσια ερευνών. Η ιστορία έχει επιδείξει πολλές φορές διάφορες καταστάσεις στις οποίες χρησιμοποιήθηκαν ιδιόρρυθμης κατασκευής υποτυπώδη ανυψωτικά μηχανήματα για τη χρησιμοποίηση των οποίων απαιτείτο η ανθρώπινη δύναμη, η ζωική έλξη αλλά και η δύναμη του νερού. ~ 1 ~

16 Το πρώτο αξιόλογο βήμα για την εξέλιξη του ανελκυστήρα έγινε το 236 π.χ. από τον Αρχιμήδη, το μεγάλο Έλληνα Μαθηματικό και Φυσικό από τις Συρακούσες, ο οποίος, όπως αναφέρεται από το Ρωμαίο Αρχιτέκτονα Βιτρούβιο κατασκεύασε τον πρώτο ανελκυστήρα. Στο τεράστιο παλάτι του Νέρωνα, που χτίσθηκε τον 1 ο Αιώνα μ.χ. μετά τη μεγάλη φωτιά της Ρώμης, χρησιμοποιήθηκαν συγκεκριμένα εργαλεία τα οποία θα μπορούσαν να χαρακτηριστούν ανελκυστήρες και που οι αρχαιολόγοι απέδειξαν πως λειτουργούσαν με τη χρησιμοποίηση ανθρώπινης και ζωικής έλξης. Το 17 ο αιώνα ο Γάλλος Βελαγέ εφηύρε ένα σύστημα ανελκυστήρα με χρησιμοποίηση αντίβαρου. Στις αρχές του 18 ου αιώνα κατασκευάστηκαν οι πρώτοι υδραυλικοί στην Αγγλία. Το 1835 κατασκευάστηκε ο πρώτος μηχανικός ανελκυστήρας, πάλι στην Αγγλία, που θεωρείται ο πρόδρομος των σημερινών. Στις ΗΠΑ κατασκευάστηκε το 1850 ο πρώτος ανελκυστήρας με ατμό, ο οποίος τελειοποιήθηκε το 1852 από τον Έλισσα Ότις, οποίος εφηύρε τον πρώτο αξιόπιστο φρένο ασφαλείας που τον κατέστησε ασφαλή σε περίπτωση αστοχίας του μηχανισμού ανύψωσης. Το σχέδιο της πατέντας του μηχανισμού που επινόησε ο Ότις έφερε επανάσταση στη βιομηχανία ανελκυστήρων. Από τη στιγμή της εφεύρεσης έως σήμερα ο βασικός σχεδιασμός του φρένου ασφαλείας δεν έχει αλλάξει σημαντικά. Ο πρώτος ηλεκτρικός ανελκυστήρας κατασκευάστηκε το 1880 στη Γερμανία από το βιομήχανο εφευρέτη Βέρνερ φον Ζίμενς (Siemens). Από τότε ακολούθησαν πάρα πολλές βελτιώσεις, ιδίως σε ότι αφορά την ασφάλεια του συστήματος. Έτσι γενικεύτηκε η χρήση τους δίνοντας τη δυνατότητα να κατασκευαστούν πολυώροφα κτίρια και ουρανοξύστες. Σήμερα υπάρχουν πάρα πολλές και ποικίλες μορφές ανελκυστήρων ανάλογες με τις διάφορες μορφές χρήσης τους Κύρια μέρη εγκατάστασης ανελκυστήρα Τα κυριότερα μέρη από τα οποία αποτελείται η εγκατάσταση ενός ανελκυστήρα είναι τα ακόλουθα: ~ 2 ~

17 Φρεάτιο Είναι ο χώρος που κινούνται τα μέρη του ανελκυστήρα που μετέχουν σε ευθύγραμμη κίνηση και ειδικότερα ο θάλαμος και το αντίβαρο, αν υπάρχει. Κατασκευάζεται από άκαυστο υλικό με τοιχώματα από μπετόν ή από μπατική τοιχοποιία. Τα τοιχώματα του φρεατίου πρέπει να σχηματίζουν μια συνεχή κατακόρυφη επιφάνεια από λεία σκληρά στοιχεία (πχ. μεταλλικά φύλλα, σκληρό σοβά, ή άλλο οικοδομικό υλικό) και να παρουσιάζουν τον ίδιο συντελεστή τριβής. Οι είσοδοι φρέατος κλείνονται με μεταλλικές πόρτες που φέρουν κατάλληλη διάταξη επαφών, έτσι ώστε να αποκλείεται η κίνησης του θαλάμου αν όλες οι πόρτες δεν είναι καλά κλεισμένες. Σχήμα 1.1 Φρεάτιο ηλεκτροκίνητου ανελκυστήρα έλξεως [13] Κάθε πόρτα ανοίγει μόνο όταν το δάπεδο του θαλαμίσκου βρεθεί μέσα σε ζώνη ύψους 15 εκατοστών πάνω ή κάτω του δαπέδου του ορόφου στον οποίον πρόκειται να σταθμεύσει. Όταν ο θάλαμος δεν έχει πόρτες τότε η επιφάνεια του φρέατος που βρίσκεται προς την πλευρά των εισόδων πρέπει να είναι λεία τόσο για λόγους ασφαλείας όσο και για λόγους καλαισθησίας. Τέλος, το φρεάτιο πρέπει να αφήνει ένα κενό περίπου 140 εκατοστών πάνω/κάτω από το θάλαμο όταν αυτός βρίσκεται στην ακραία πάνω/κάτω θέση αντίστοιχα. Το κενό αυτό προστατεύει τους τεχνίτες που εργάζονται στον πυθμένα, κάτω από τη βάση επικάθησης ή εργάζονται πάνω στην οροφή του θαλαμίσκου. ~ 3 ~

18 Θάλαμος Ο θάλαμος αποτελείται από την καμπίνα και το πλαίσιο ανάρτησης και ολισθαίνει πάνω στις κατευθυντήριες ράβδους. Για να αποφεύγεται η υπερφόρτιση του θαλάμου, η ωφέλιμη επιφάνεια του πρέπει να μην ξεπερνάει κάποιο συγκεκριμένο εμβαδό, το οποίο να περιορίζει τον αριθμό των επιβαινόντων. Ωφέλιμη επιφάνεια του θαλάμου ονομάζεται η επιφάνεια που μετριέται σε ύψος ενός μέτρου πάνω από το δάπεδο του θαλάμου, χωρίς να λαμβάνονται υπόψη οι χειρολαβές, η οποία διατίθεται για την μεταφορά των επιβατών ή των φορτίων. Η μέγιστη και η ελάχιστη επιφάνεια καθορίζονται από τους ισχύοντες κανονισμούς, οι οποίοι παρατίθενται στο επόμενο κεφάλαιο. Σχήμα 1.2 Θάλαμος ανελκυστήρα [13] Πόρτες Ανελκυστήρων Οι πόρτες του φρεατίου και του θαλάμου πρέπει να έχουν ελάχιστο ελεύθερο πλάτος 0,65m και ελάχιστο ελεύθερο ύψος 2m. Αυτές οι διαστάσεις αφορούν βασικά ~ 4 ~

19 τους απλούς ανελκυστήρες 3 εως 6 ατόμων. Οι πόρτες των ανελκυστήρων διαιρούνται σε τρεις κατηγορίες: α) Χειροκίνητες: Οι πόρτες αυτές ανοίγουν και κλείνουν με ώθηση μόνο όταν ο θαλαμίσκος βρίσκεται πίσω από αυτές και με μια ανοχή 15 cm πάνω ή κάτω από το δάπεδο του ορόφου. Οι πόρτες του φρεατίου κλείνουν με ειδικό μάνδαλο, το οποίο δεν επιτρέπει τη λειτουργία του ανελκυστήρα αν ο πύρος μανδάλωσης δεν μπει ακριβώς μέσα στο φύλλο της πόρτας. Ταυτόχρονα το μάνδαλο αποτρέπει το άνοιγμα της πόρτας όταν ο θάλαμος βρίσκεται σε κίνηση. β) Ημιαυτόματες: Στην κατηγορία αυτή ανήκουν οι περισσότερες πόρτες που απαντώνται σήμερα στους ανελκυστήρες. Έτσι, οι πόρτες των ανελκυστήρων των πολυκατοικιών είναι ημιαυτόματες. Με τον όρο ημιαυτόματη πόρτα εννοούμε ότι η πόρτα κλείνει μόνη της και ανοίγει ύστερα από πίεση με το χέρι. Στην περίπτωση των ημιαυτόματων πορτών ο θάλαμος συνήθως δεν έχει δικές του πόρτες. Σε αυτή την κατηγορία υπάρχουν επίσης μανδαλώσεις όπως στην προηγούμενη. γ) Αυτόματες: Μια πόρτα ανελκυστήρα ονομάζεται αυτόματη όταν ανοίγει και κλείνει μόνη της χωρίς καμία ανθρώπινη επέμβαση από έξω ή από μέσα. Τοποθετούνται κυρίως σε μεγάλα δημόσια ή ιδιωτικά κτίρια. Αποφεύγεται η χρησιμοποίηση τους σε κοινές πολυκατοικίες γιατί έτσι αυξάνεται το κόστος της κατασκευής. Οι αυτόματες πόρτες διακρίνονται σε: i) Πλευρικού ανοίγματος ii) Τηλεσκοπικές iii) Κεντρικού ανοίγματος Οι αυτόματες τηλεσκοπικές πόρτες αυξάνουν το πλάτος ανοίγματος κατά περίπου 30% σε σύγκριση με τυπικές δίφυλλες αυτόματες πόρτες Επιπλέον αποτελούν μια κομψότατη λύση που χαρίζει ιδιαίτερη ομορφιά. Οι επιβατηγοί ανελκυστήρες σε κτίρια γραφείων μπορεί να έχουν αυτόματες πόρτες, τηλεσκοπικές ή δίφυλλες κεντρικού ανοίγματος. Οι επιβατηγοί ανελκυστήρες που χρησιμοποιούνται στα ~ 5 ~

20 νοσοκομεία έχουν τηλεσκοπικές πόρτες πλευρικού ανοίγματος που τις χαρακτηρίζει μεγάλο εύρος εισόδου Αντίβαρο O κινητήρας ενός ανελκυστήρα εφαρμόζει δύναμη πάνω στο σύστημα θαλάμουαντίβαρου που είναι ίση με τη διαφορά του βάρους του θαλάμου και του αντίβαρου. Αυτός είναι άλλωστε ο σκοπός του αντίβαρου, γιατί αν δεν υπήρχε αυτό ο κινητήρας θα έπρεπε να ανυψώσει ολόκληρο το βάρος του θαλάμου συν το φορτίο του. Το πλαίσιο του αντίβαρου ολισθαίνει πάνω σε οδηγούς στερεωμένους κατά μήκος του φρεατίου. Οι οδηγοί αντίβαρου για τις μικρές εγκαταστάσεις ανελκυστήρων είναι δυο τεντωμένα συρματόσχοινα, ενώ για τις μεγαλύτερες υπάρχουν οδηγοί ίδιας μορφής με τους οδηγούς του θαλάμου. Το βάρος του αντίβαρου πρέπει να είναι ίσο προς το βάρος του θαλαμίσκου συν το μισό του ωφέλιμου φορτίου, δηλαδή: G=F+0,5*Q, (1.1.) όπου G: το βάρος του αντίβαρου F: το βάρος του θαλαμίσκου Q: το ωφέλιμο φορτίο Το βάρος F πλαισίου και θαλαμίσκου για ανελκυστήρας προσώπων είναι: Αριθμός ατόμων Βάρος σε Kg Οδηγοί-Ευθυντήριοι ράβδοι Οι οδηγοί χρησιμοποιούνται υποχρεωτικά σε κάθε ανελκυστήρα και χρησιμεύουν στην καθοδήγηση του πλαισίου του θαλάμου και του αντίβαρου. Είναι κατασκευασμένοι από χάλυβα διατομής σχήματος Τ και έχουν επιμελώς κατεργασμένη και ενισχυμένη επιφάνεια ολίσθησης των ολισθητήρων του θαλάμου. Όταν η στερέωση των αγωγών αυτών γίνεται στο πάνω μέρος του φρέατος, όπως συμβαίνει κατά κανόνα, καταπονούνται σε εφελκυσμό, ενώ όταν στερεωθούν στον ~ 6 ~

21 πυθμένα του φρέατος καταπονούνται σε λυγισμό. Κάθε θάλαμος πρέπει να οδηγείται από δυο τουλάχιστον άκαμπτους χαλύβδινους οδηγούς. Σχήμα 1.3 Ενδεικτικός οδηγός ανελκυστήρα [20] Συρματόσχοινα ανάρτησης Χρησιμοποιούνται για το ανέβασμα και το κατέβασμα του θαλάμου και του αντίβαρου και χαρακτηρίζονται από μία τυποποιημένη σειρά ονομαστικών διαμέτρων, που αντιστοιχούν σε συγκεκριμένα φορτία θραύσης. Στην περίπτωση που έχουμε έμμεση ανάρτηση τα συρματόσχοινα ανύψωσης δίνουν κίνηση με την βοήθεια τροχαλιών. Τα συρματόσχοινα ανάρτησης του θαλάμου και του αντίβαρου πρέπει να είναι της ίδιας ποιότητας, διαμέτρου αλλά και τύπου. Για να εξασφαλιστεί πλήρης συνένωση των συρματιδίων, θα πρέπει η συγκόλληση στα άκρα τους να γίνεται στέρεα και ασφαλής, οι κώνοι τους να είναι ομοιόμορφοι, ενώ όλα τα συρματόσχοινα θα πρέπει να έχουν ίδιο μήκος. Ο ελάχιστος αριθμός των συρματόσχοινων είναι 2, ενώ η ελάχιστη διάμετρος των συρματόσχοινων ανάρτησης είναι τα 8mm για τους ηλεκτροκίνητους ανελκυστήρες και τα 6mm για τους υδραυλικούς Τροχαλία τριβής Κατασκευάζεται από δύο επιμέρους τροχαλίες τοποθετημένες σε κοινό χαλύβδινο άξονα ισχυρής κατασκευής μέσω ενός ζεύγους ρουλεμάν η κάθε μία, που ~ 7 ~
22 εδράζεται σε ανεξάρτητα αυτολιπαινόμενα έδρανα. Ο άξονας στηρίζεται στα δύο ακραία σημεία του πάνω σε μία σιδηροκατασκευή τοποθετημένη στην άνω απόληξη του εμβόλου. Οι τροχαλίες αυτές είναι κατασκευασμένες με μεγάλη ακρίβεια, με αυλάκια υποδοχής ημικυκλικού σχήματος για να αποφεύγεται η ανισοταχής κίνηση των συρματόσχοινων, η ολίσθησή και η γρήγορη φθορά τους. Σε παλαιότερους μηχανισμούς αντί για τροχαλία τριβής υπήρχε τύμπανο. Στο τύμπανο οι αυλακώσεις είχαν σχήμα έλικας και το συρματόσχοινο ή η αλυσίδα παρασυρόταν με οποιοδήποτε άλλο μέσο εκτός από την τριβή. (α) Σχήμα 1.4 (α) Τροχαλία Τυμπάνου, (β) Τροχαλία Τριβής [20] (β) Ηλεκτρομαγνητική πέδη (φρένο) Ο ανελκυστήρας πρέπει να είναι εφοδιασμένος με σύστημα πέδησης που να ενεργοποιείται αυτόματα. Το φρένο χρησιμοποιείται για την ακινητοποίηση του ανελκυστήρα. Αποτελείται από ένα ηλεκτρομαγνήτη, δύο μπράτσα επενδυμένα εσωτερικά με φερμουΐτ και ένα σύστημα μοχλών. Όταν ο ηλεκτρομαγνήτης δεν τροφοδοτείται, τότε τα μπράτσα εφαρμόζουν μια ροπή πέδησης στο τύμπανο του άξονα και ο ανελκυστήρας ακινητοποιείται. Αυτή η ροπή εξασφαλίζεται με τη βοήθεια δύο ελατηρίων και ενός περικοχλίου (παξιμάδι) ρύθμισης. Όταν ο ηλεκτρομαγνήτης τροφοδοτείται ανοίγουν τα μπράτσα και ελευθερώνεται το τύμπανο. Το φρένο του ανελκυστήρα κλείνει αυτόματα σε περίπτωση διακοπής ρεύματος, ή βλάβης του κυκλώματος ελέγχου. Για μεγαλύτερη ασφάλεια οι επαφές που ~ 8 ~

23 τροφοδοτούν τον ηλεκτρομαγνήτη του φρένου, βρίσκονται στο ρελέ ισχύος που τροφοδοτεί τον κινητήρα. Το φρένο ρυθμίζεται με τέτοιο τρόπο, ώστε σε περίπτωση διακοπής του ρεύματος να ακινητοποιεί το θάλαμο κατά την κάθοδο του με φορτίο μεγαλύτερο κατά 25% του ονομαστικού του. Στους ανελκυστήρες μεγάλων ταχυτήτων και ρυθμιζόμενων στροφών, το φρένο ακινητοποιεί μόνο τον ανελκυστήρα αφού αυτός σταματήσει. Το φρενάρισμα γίνεται ηλεκτρομαγνητικά με την ανάπτυξη αντίρροπων μαγνητικών πεδίων προς το πεδίο που περιστρέφει το δρομέα. Η λειτουργία του φρένου στους ανελκυστήρες στηρίζεται στην ύπαρξη ωστικών ελατηρίων με τα σημεία άρθρωσης να βρίσκονται στη φορά της δύναμης τριβής. Λόγω του κινδύνου της θραύσης του ελατηρίου, πολλοί κατασκευαστές χρησιμοποιούν δύο παράλληλα ελατήρια έλξης. Σχήμα 1.5 Φρένο ανελκυστήρα [20] ~ 9 ~
24 Οι τριβές που δημιουργούνται όταν φρενάρει ο ανελκυστήρας φθείρουν την επένδυση (φερμουΐτ) του φρένου. Η διατήρησή της σε καλή κατάσταση σηματοδοτεί και την καλή λειτουργία του φρένου. Η επένδυση αυτή στερεώνεται είτε με πριτσίνια από μαλακό σίδηρο, είτε με βίδες, φυσικά έξω από την επιφάνεια πέδησης. Υπάρχει περίπτωση η επένδυση να κολληθεί, όμως δεν πρέπει να μαλακώνει από τις υψηλές θερμοκρασίες που δημιουργούνται από τα συχνά φρεναρίσματα Προσκρουστήρες Πρέπει να τοποθετούνται στο κατώτερο όριο της διαδρομής του θαλάμου και του αντίβαρου. Το σημείο λειτουργίας του προσκρουστήρα, κάτω από την προβολή του θαλάμου, πρέπει να χαρακτηρίζεται από ένα εμπόδιο με ύψος τέτοιο ώστε να ικανοποιείται ο σχετικός κανονισμός. Η απορρόφησης ενέργειας των προσκρουστήρων χαρακτηρίζεται από το γεγονός ότι θα πρέπει να ακινητοποιείται ο θάλαμος στο πλήρες φορτίο, με επιβράδυνση μικρότερη από την επιτάχυνση της βαρύτητας αυτού. Στους ανελκυστήρες τυμπάνου και στους ανελκυστήρες με αλυσίδες ως μέσο ανάρτησης πρέπει να τοποθετούνται προσκρουστήρες στην κορυφή του θαλάμου και να λειτουργούν στο ανώτερο όριο της διαδρομής. Σχήμα 1.6 Ενδεικτικός προσκρουστήρας θαλάμου [13] ~ 10 ~
25 Κινητήρας Για την κίνηση του θαλάμου χρησιμοποιείται συνήθως ένας ασύγχρονος ηλεκτροκινητήρας Ο κινητήρας είναι συνήθως τριφασικός για τάση 380V με συχνότητα 50 Hz. Συνήθως είναι διπολικός ή τετραπολικός. Οι προδιαγραφές του πρέπει να είναι τέτοιες ώστε η ροπή εκκινήσεως να είναι περίπου διπλάσια της ονομαστικής. Για μεγάλες ισχείς (αλλά και για μικρότερη ισχύ σε ανελκυστήρες τελευταίας γενιάς) χρησιμοποιείται συνήθως κινητήρας οδηγούμενός από ηλεκτρονικό μετατροπέα ισχύος. Στο παρακάτω σχήμα απεικονίζεται ο κινητήρας μαζί με την τροχαλία τριβής. Σχήμα 1.7 Σύστημα κινητήρα-τροχαλία τριβής ηλεκτροκίνητου ανελκυστήρα έλξεως [13] Υδραυλικοί ανελκυστήρες: Έμβολο κύλινδρος Οι μηχανισμοί με έμβολο χρησιμοποιούνται σε υδραυλικούς ανελκυστήρες. Το έμβολο κατασκευάζεται είτε συμπαγές σαν άξονας, είτε από χαλυβδοσωλήνα χωρίς ραφή, με ενισχυμένο τοίχωμα για ικανοποιητική αντοχή στις διάφορες καταπονήσεις. Πρέπει επίσης να είναι τορναρισμένο και ρεκτιφιαρισμένο για να επιτευχθεί απόλυτα λεία επιφάνεια και κυκλική διατομή για την καλή λειτουργία των στεγανοποιητικών ~ 11 ~
26 στοιχείων καθώς και εκείνων της έδρασης (κουζινέτων). Το κάτω άκρο του κλείνεται με σιδηρά φλάντζα και έχει συγκολλημένο σιδερένιο δακτύλιο για να μην είναι δυνατή η έξοδός του από τον κύλινδρο. Το έμβολο περιβάλλεται από έναν κύλινδρο που κατασκευάζεται από χαλυβδοσωλήνα χωρίς ραφή, κατάλληλου πάχους ώστε να υπερκαλύπτονται οι ανάγκες για αντοχή σε πίεση και τις λοιπές συνθήκες λειτουργίας. Το κάτω άκρο του είναι κλεισμένο με σιδηρά φλάντζα και έχει προσαρμοσμένη κωνική προεξοχή για ορθό κεντράρισμα του εμβόλου μέσα στον κύλινδρο. Στο επάνω άκρο του είναι προσαρμοσμένη με κοχλίωση η κεφαλή, η οποία φέρει δύο δακτυλίους οδηγήσεως του εμβόλου (κουζινέτα). Η στεγανότητα επιτυγχάνεται με δύο ελαστικούς δακτυλίους. Ο ένας δακτύλιος ονομάζεται τσιμούχα και αποτρέπει την διέλευση λαδιού από τον κύλινδρο προς τα έξω και ο άλλος δακτύλιος αποκαλείται ξύστρα, με τον οποίο εμποδίζεται η είσοδος ξένων σωματιδίων στον κύλινδρο κατά την κάθοδο του εμβόλου. Στο επάνω μέρος του κυλίνδρου υπάρχει επίσης μία ειδική λεκάνη για την συλλογή του λαδιού που στραγγίζεται από την επιφάνεια του εμβόλου κατά την κάθοδο του εμβόλου ή στην περίπτωση που διαφεύγει από τους δακτυλίους στεγανότητας. Το λάδι που συλλέγεται οδηγείται φιλτραρισμένο μέσω σωλήνα στην δεξαμενή λαδιού. Τέλος υπάρχει και ένας κρουνός εξαέρωσης. Ανάμεσα στον κύλινδρο και το έμβολο υπάρχει διάκενο για την άνετη ροή του λαδιού. Στο σημείο τροφοδοσίας του κυλίνδρου, που είναι ταυτόχρονα και η είσοδος και η έξοδος του λαδιού, είναι τοποθετημένη ειδική βαλβίδα ασφαλείας, υδραυλική αρπάγη, η οποία ενεργοποιείται στην περίπτωση διαρροής στον σωλήνα τροφοδοσίας ή και θραύσης αυτού και εφόσον η ταχύτητα του θαλάμου υπερβεί κατά 0,3m/s την ονομαστική ταχύτητα Υδραυλικοί ανελκυστήρες: Δοχείο λαδιού Είναι συγκολλητό, κατασκευασμένο από χαλύβδινη λαμαρίνα με ενισχυμένες αναδιπλώσεις. Στο κατώτερο σημείο του δοχείου βρίσκεται ο κρουνός εκκένωσης, μέσω του οποίου κατά την διάρκεια της συντηρήσεως δίνεται η δυνατότητα για εκκένωση από το λάδι και ταυτόχρονα απομάκρυνση υγρασίας που τυχόν βρίσκεται στο δοχείο. Στο εσωτερικό του δοχείου τοποθετείται ειδική βάση, όπου μέσω ~ 12 ~
27 αντικραδασμικών ζευγών αναρτάται το συγκρότημα κινητήρας-αντλία. Αυτή η διάταξη αναρτήσεως συνδυάζεται με μόνωση στα καπάκια του δοχείου για την αποφυγή μετάδοσης του θορύβου. Οι μονώσεις συνδυάζονται με σιγαστήρα αποσβέσεως των παλμών προκειμένου να μειώνεται στο ελάχιστο η μετάδοση κραδασμών και θορύβου. Η στάθμη του λαδιού στο δοχείο ελέγχεται από τον δείκτη λαδιού, ο οποίος είναι συνήθως βιδωμένος πάνω στον κρουνό εξαέρωσης. Το ελάχιστο επίπεδο του λαδιού πρέπει να είναι τόσο ώστε να καλύπτονται ο κινητήρας και η αντλία, ακόμη και όταν το έμβολο είναι πλήρες ανεβασμένο. Το λάδι βοηθάει στην ψύξη του συστήματος αλλά και στην μείωση του θορύβου. Πάνω στο καπάκι του δοχείου τοποθετούνται: μπλοκ βαλβίδων στόμιο πληρώσεως λαδιού με εξαερισμό μανόμετρο διακόπτης υψηλής και χαμηλής πίεσης κουτιά ηλεκτρολογικών συνδέσεων Σχήμα 1.8 Ενδεικτικό δοχείο λαδιού [13] ~ 13 ~
28 Υδραυλικοί ανελκυστήρες: Αντλία Η ανύψωση του εμβόλου γίνεται με λάδι που παρέχεται από την αντλία. Συνήθως η αντλία είναι κοχλιωτή, χαμηλών παλμών και θορύβου, δουλεύει μέσα σε λάδι και συνδέεται σταθερά στον κινητήρα με φλάντζα, ενώ η κίνηση μεταδίδεται σε αυτήν με την σύνδεση των αξόνων τους μέσω σφηνών. Η σύνδεση αυτή είναι απόλυτα αξιόπιστη και δεν χρειάζεται συντήρηση. Στην είσοδο της αντλίας υπάρχει φίλτρο που χρησιμεύει για την συγκράτηση ξένων σωματιδίων, όπως ρινίσματα. Η επιλογή της αντλίας γίνεται σε συνδυασμό με την επιλογή του κατάλληλου εμβόλου έτσι ώστε να επιτευχθεί η επιθυμητή ταχύτητα Μηχανοστάσιο Είναι ο χώρος στον οποίον εγκαθίστανται ο κινητήριος ή ανυψωτικός μηχανισμός του ανελκυστήρα, ο πίνακας του χειριστηρίου κυκλώματος (Controller), ο πίνακας τροφοδοσίας με ηλεκτρικό ρεύμα του ηλεκτροκινητήρα, ο ρυθμιστής ταχύτητας και ο οροφοδιαλογέας (αν υπάρχει). Είναι ο προβλεπόμενος χώρος που ικανοποιεί όλες τις προδιαγραφές, ώστε να είναι ιδανική η λειτουργικότητα του από κάθε άποψη αφ ότου τοποθετηθεί και εγκατασταθεί σε πλήρη λειτουργία ο κινητήριος μηχανισμός του ανελκυστήρα. Συνήθως βρίσκεται στο δώμα, αλλά αν υπάρχουν περιορισμοί ως προς το ύψος του κτιρίου τοποθετείται στο υπόγειο. Το μηχανοστάσιο πρέπει να φωτίζεται από ηλεκτρικό κύκλωμα, ανεξάρτητο του κυκλώματος κίνησης του ανελκυστήρα, να είναι κατασκευασμένο από άφλεκτα ή άκαυστα υλικά και να διαθέτει θύρα που να ανοίγει προς τα έξω πάνω στην οποία να αναγράφεται: «ΧΩΡΟΣ ΗΛΕΚΤ/ΚΗΣ ΕΓΚΑΤΑΣΤΑΣΗΣ ΜΗΧΑΝΟΣΤΑΣΙΟ ΑΠΑΓΟΡΕΥΕΤΑΙ Η ΕΙΣΟΔΟΣ ΣΤΟΥΣ ΜΗ ΕΧΟΝΤΕΣ ΕΡΓΑΣΙΑ». Τέλος, το μηχανοστάσιο απαιτείται να είναι έτσι κατασκευασμένο, ώστε να μην γίνεται συσσώρευση σωματιδίων και σκόνης στο εσωτερικό του, αλλά να διατηρείται καθαρό σε συνεχή βάση. ~ 14 ~
29 Σχήμα 1.9 Απεικόνιση ολοκληρωμένης εγκατάστασης ηλεκτροκίνητου ανελκυστήρα έλξεως [20] ~ 15 ~
30 Σχήμα 1.10 Απεικόνιση ολοκληρωμένης εγκατάστασης υδραυλικού ανελκυστήρα [20] 1.5. Διάκριση Ανελκυστήρων Η διάκριση των ανελκυστήρων γίνεται με βάση συγκεκριμένα κριτήρια τα οποία φαίνονται παρακάτω: Αρχή λειτουργίας Με βάση την αρχή λειτουργίας τους χωρίζονται στις εξής κατηγορίες: Ανελκυστήρας με τροχαλία τριβής είναι αυτός στον οποίο η κίνηση οφείλεται στην τριβή που αναπτύσσεται μεταξύ των συρματόσχοινων ανάρτησης και των ~ 16 ~
31 αυλακώσεων της τροχαλίας του κινητήριου μηχανισμού. Η τροχαλία τριβής έχει ένα αυλάκι για κάθε συρματόσχοινο. Ανελκυστήρας με τύμπανο είναι εκείνος στον οποίο η κίνηση μεταδίδεται από το τύμπανο απευθείας στον θάλαμο. Σε παλαιότερους μηχανισμούς, αντί της τροχαλίας τριβής υπήρχε τύμπανο με αυλακώσεις σε σχήμα έλικας που αποσκοπούσαν στην περιέλιξη του συρματόσχοινου γύρω από το τύμπανο. Υδραυλικός ανελκυστήρας είναι ο ανελκυστήρας στον οποίον η αναγκαία για την ανύψωση του φορτίου ενέργεια εξασφαλίζεται από μια ηλεκτροκίνητη αντλία, η οποία μεταβιβάζει υδραυλικό ρευστό (λάδι) σε μια ανυψωτική μονάδα (έμβολο - κύλινδρος) που επενεργεί έμμεσα ή άμεσα στον θάλαμο Χειρισμός κατά τη λειτουργία Με βάση τον χειρισμό κατά την λειτουργίας τους υπάρχουν οι ακόλουθες δυο κατηγορίες: Ανελκυστήρες απλής λειτουργίας είναι αυτοί στους οποίους δεν υπάρχει απομνημόνευση των κλήσεων, είτε γίνονται από την μπουτονιέρα του θαλάμου, είτε από τις εξωτερικές μπουτονιέρες. Ο τύπος αυτός του ανελκυστήρα είναι αντιοικονομικός (άσκοπες διαδρομές του θαλάμου) και δεν συνιστάται σε κτίρια με μεγάλη χρήση των ανελκυστήρων. Αυτόματοι ανελκυστήρες είναι αυτοί που διαθέτουν σύστημα απομνημόνευσης των κλήσεων. Διακρίνονται σε α) ανελκυστήρες αυτόματοι ανόδου καθόδου (full collective) και σε β) ανελκυστήρες αυτόματοι κατά μια κατεύθυνση (καθόδου down collective) Χρήση ανελκυστήρα Ανάλογα με την λειτουργία για την οποία προορίζονται οι ανελκυστήρες διακρίνονται στις ακόλουθες κατηγορίες: Επιβατηγούς για μεταφορά προσώπων ~ 17 ~
32 Φορτηγούς για μεταφορά φορτίων (Εργοστασίων, Γκαράζ, Μικρών Φορτίων, Φαγητών) Δυνατότητα ρύθμισης της ταχύτητας Ανάλογα με την δυνατότητα ή όχι ρύθμισης της ταχύτητας διακρίνουμε τις εξής κατηγορίες: Ανελκυστήρες μιας ταχύτητας είναι αυτοί που ο κινητήριος μηχανισμός τους στρέφεται πάντα με την ίδια ταχύτητα. Χρησιμοποιούνται κατά κύριο λόγο στις μικρές πολυκατοικίες. Ανελκυστήρες δυο ταχυτήτων (μικρή και μεγάλη) είναι αυτοί που ο κινητήριος μηχανισμός τους στρέφεται πότε με την μία ταχύτητα και πότε με την άλλη. Ο θάλαμος στο διάστημα μεταξύ των ορόφων κινείται με την μεγαλύτερη ταχύτητα και όταν πλησιάζει στην στάση επιβραδύνει και κινείται με την μικρότερη ταχύτητα για να γίνεται η στάθμευση ομαλότερα και η ισοστάθμιση ακριβέστερα. Οι συγκεκριμένοι ανελκυστήρες χρησιμοποιούνται κυρίως στα κτίρια που παρουσιάζουν μεγαλύτερη κίνηση. Ανελκυστήρες συνεχώς μεταβαλλόμενης ταχύτητας, αναφέρεται μόνο στους ανελκυστήρες με τροχαλία τριβής. Στις συνηθισμένες κατασκευές κατοικιών σήμερα, όπου επιβάλλεται η εγκατάσταση ανελκυστήρων, επιλέγεται ανελκυστήρας τριβής, δυο ταχυτήτων, απλός ή αυτόματος, ή ανελκυστήρας υδραυλικός ονομαστικής ταχύτητας 0,65 m/sec Συστήματα Ελέγχου Λειτουργίας Ανελκυστήρα (βαθμός αυτοματοποίησης) Το σύστημα με το οποίο ελέγχεται η λειτουργία μιας εγκατάστασης ανελκυστήρων επηρεάζει σε μεγάλο βαθμό τόσο την αποτελεσματικότητα της εγκατάστασης όσο και το κόστος της. Ανάλογα με το σύστημα ελέγχου λειτουργίας που διαθέτει μια εγκατάσταση ανελκυστήρων έχουμε τις ακόλουθες κατηγορίες: ~ 18 ~
33 A. ΜΕΜΟΝΩΜΕΝΟΥΣ ΑΝΕΛΚΥΣΤΗΡΕΣ 1. Απλής λειτουργίας (απλοί ανελκυστήρες) 2. Αυτόματης λειτουργίας (αυτόματοι ανελκυστήρες) 2.1. Λειτουργία COLLECTIVE-SELECTIVE ανόδου-καθόδου 2.2. Λειτουργία COLLECTIVE-SELECTIVE καθόδου B. ΟΜΑΔΕΣ ΑΝΕΛΚΥΣΤΗΡΩΝ Οι δύο αυτές κατηγορίες ανελκυστήρων αναλύονται στις δύο επόμενες παραγράφους Μεμονωμένοι Ανελκυστήρες Α. Ανελκυστήρες απλής λειτουργίας Η απλή λειτουργία είναι αυτή που συναντάμε στους συνήθεις ανελκυστήρες των πολυκατοικιών. Ο ανελκυστήρας μπορεί να κληθεί απ έξω μόνο όταν δεν είναι κατειλημμένος ή δεν οδεύει προς ικανοποίηση άλλης κλήσης. Όταν ο επιβάτης εισέλθει και πιέσει το κουμπί του ορόφου που θέλει να εξέλθει, τότε ο ανελκυστήρας θα οδεύσει προς τον όροφο αυτό χωρίς καμιά ενδιάμεση στάση, έστω και αν πιέζουν τα κουμπιά άλλοι επιβάτες στους ενδιάμεσους ορόφους. Ακόμη, αν εισέλθουν μέσα στο θάλαμο δύο ή περισσότεροι επιβάτες με διαφορετικό προορισμό ορόφου, ο ανελκυστήρας θα πάει κατ ευθείαν στον όροφο κλήσης του πρώτου. Από τα παραπάνω μπορεί να γίνει κατανοητό ότι το σύστημα απλής λειτουργίας δεν διαθέτει σύστημα απομνημόνευσης των κλήσεων. Η εξυπηρέτηση μιας κλήσεως γίνεται με χρονική προτεραιότητα, η οποία ξεκινά από τη στιγμή που θα ελευθερωθεί ο θάλαμος. Στη περίπτωση του απλού ανελκυστήρα, η εξωτερική μπουτονιέρα κλήσης έχει ένα κουμπί σε κάθε όροφο. Επίσης έχει φωτεινό σήμα ΚΑΤΕΙΛΗΜΜΕΝΟΣ ή βέλη που δείχνουν σε ποια διεύθυνση κινείται ο θάλαμος ή και τα δύο. Επιπλέον, μπορεί πάνω από τις εισόδους των ορόφων να τοποθετηθεί και δείκτης της θέσης ~ 19 ~
34 στην οποία βρίσκεται ο θαλαμίσκος. Η εσωτερική μπουτονιέρα (κομβιοδόχος) έχει τα μπουτόν των ορόφων, το μπουτόν STOP, το μπουτόν κώδωνος κινδύνου κλπ. Β. Λειτουργία COLLECTIVE-SELECTIVE ανόδου-καθόδου Με το σύστημα COLLECTIVE-SELECTIVE ο ανελκυστήρας ''απομνημονεύει'' τις κλήσεις. Αυτό επιτυγχάνεται με τη βοήθεια ρελέ αυτοσυγκράτησης ή ηλεκτρονικού υλικού. Όταν γίνει μια κλήση ανόδου ή καθόδου, διεγείρεται το αντίστοιχο ρελέ και μένει σε συγκράτηση μέχρι ο ανελκυστήρας να εξυπηρετήσει τη κλήση αυτή. Το αυτοσυγκρατούμενο ρελέ έχει ένα πηνίο με δύο τυλίγματα. Το ένα τύλιγμα έχει πολλές σπείρες και δημιουργεί ένα ισχυρό μαγνητικό πεδίο ικανό να οπλίσει το ρελέ. Το δεύτερο τύλιγμα αποτελείται από λίγες σπείρες και είναι τυλιγμένο σε αντίθετη κατεύθυνση ως προς το πρώτο. Όταν η κλήση απαντηθεί, έρχεται από τον επιλογέα ένα στιγμιαίο ρεύμα στο δεύτερο τύλιγμα, ικανό να προκαλέσει ένα μαγνητικό πεδίο αντίθετο του πρώτου, που απομαγνητίζει τον πυρήνα και ρίχνει το ρελέ. Οι καταγραφόμενες κλήσεις θαλάμου εσωτερικές ή εξωτερικές εξυπηρετούνται κατά τη διεύθυνση της πορείας του θαλάμου κατά σειρά ορόφων και όχι κατά σειρά χρονικής προτεραιότητας των κλήσεων. Το σύστημα COLLECTIVE-SELECTIVE μπορεί να είναι: ΑΝΟΔΟΥ-ΚΑΘΟΔΟΥ (FULL COLLECTIVE) ΜΟΝΟ ΚΑΘΟΔΟΥ (DOWN COLLECTIVE) Όσον αφορά τις εσωτερικές κλήσεις τα δύο συστήματα είναι όμοια. Διαφέρουν μόνο στις εξωτερικές κλήσεις. Στο σύστημα ΑΝΟΔΟΥ-ΚΑΘΟΔΟΥ η εξωτερική κομβιοδόχος(μπουτονιέρα) έχει σε όλους τους ορόφους δύο κουμπιά. Όταν ο ανελκυστήρας ανέρχεται εκτελεί τις καταγεγραμμένες κλήσεις προς την άνοδο αγνοώντας τις κλήσεις προς τη κάθοδο. Όταν τερματιστεί η ανοδική πορεία του θαλαμίσκου, τότε θα εξυπηρετήσει τις κλήσεις προς τη κάθοδο, αγνοώντας φυσικά τις καινούριες κλήσεις προς την άνοδο. ~ 20 ~
35 Στο σύστημα COLLECTIVE-SELECTIVE ανόδου-καθόδου, οι εξωτερικές μπουτονιέρες στις ενδιάμεσες στάσεις έχουν δύο μπουτόν ένα για κλήση προς τη κάθοδο και ένα για κλήση προς την άνοδο και αντίστοιχα δύο φωτεινές ενδείξεις (βέλη). Όταν κάποιος πιέσει ένα μπουτόν, η κλήση αυτή καταγράφεται και διατηρείται στη μνήμη του κοντρόλ, γεγονός που επιβεβαιώνεται με το άναμμα της αντίστοιχης προς τη κλήση φωτεινής ένδειξης (βέλος). Αυτή σβήνει μόνο όταν απαντηθεί η κλήση. Στις ακραίες στάσεις φυσικά υπάρχει μόνο ένα κουμπί και ένα βέλος. Η εγκατάσταση μπορεί να διαθέτει και σύστημα φωτεινής ένδειξης της θέσης του θαλαμίσκου και βέλη ένδειξης της πορείας του μέσα και έξω από το θάλαμο. Συχνά, αντί για τα παραπάνω τοποθετούνται σε κάθε όροφο δύο ανάγλυφα βέλη. Το πάνω βέλος ανάβει λίγο πριν ο θάλαμος φθάσει στον όροφο με προσεχή πορεία προς τα πάνω και το κάτω στη περίπτωση προσεχούς πορείας προς τα κάτω. Μένουν αναμμένα μέχρι να φύγει ο θάλαμος από τον όροφο. Ταυτόχρονα, με το άναμμα του βέλους έχουμε και ηχητική προειδοποίηση του επιβάτη ότι ο θάλαμος καταφθάνει. Η συγκεκριμένη διάταξη ονομάζεται Χωλ Λάντερν (Hall-Lantern). Σχήμα 1.11 Διατάξεις Χωλ Λάντερν (Hall-Lantern) [22] Τέλος αν κάνουμε μια μικρή σύγκριση ενός απλού ανελκυστήρα με ανελκυστήρα FULL COLLECTIVE θα διαπιστώσουμε ότι ο ανελκυστήρας FULL COLLECTIVE εξυπηρετεί τους διακινούμενους κατά το καλύτερο δυνατό τρόπο. ~ 21 ~
36 Κατά την προς τα πάνω πορεία του εξυπηρετεί όλες τις ανοδικές κλήσεις, ενώ κινούμενος προς τα κάτω εξυπηρετεί όλες τις καθοδικές κλήσεις. Δεν υπάρχουν νεκρές διαδρομές (κίνηση με άδειο θαλαμίσκο) και έτσι ο χρόνος εξυπηρέτησης των διακινουμένων μειώνεται σημαντικά. Γ. Σύστημα COLLECTIVE-SELECTIVE καθόδου (DOWN COLLECTIVE) Σχήμα 1.12 Σύστημα λειτουργίας ενός ανελκυστήρα DOWN COLLECTIVE (καθόδου) [22] ~ 22 ~
37 Αυτό το σύστημα χρησιμοποιείται σε κτίρια που είναι απίθανη η περίπτωση μετακίνησης ατόμων μεταξύ ορόφων (π.χ. κτίρια γραφείων που οι όροφοι έχουν διάφορα γραφεία άσχετα μεταξύ τους). Το σύστημα καθόδου διαφέρει μόνο στο ότι τα πάνω κουμπιά στις εξωτερικές μπουτονιέρες έχουν καταργηθεί, δηλαδή ο ανελκυστήρας απαντάει στις εξωτερικές μόνο κατά τη καθοδική του πορεία και σε όλες τις κλήσεις που γίνονται μέσα από το θαλαμίσκο. Η μόνη διαφορά στις μπουτονιέρες και τη φωτεινή σήμανση σε σχέση με το σύστημα ανόδου-καθόδου συνίσταται στο ότι και στους ενδιάμεσους ορόφους οι μπουτονιέρες έχουν ένα μόνο κουμπί και φυσικά μια φωτεινή ένδειξη (βέλος) πορείας. Τέλος το σύστημα DOWN COLLECTIVE εξοικονομεί χρόνο και χρήμα, γιατί εξυπηρετεί όλες τις κλήσεις καθόδου στη διάρκεια μιας προς τα κάτω διαδρομής του θαλαμίσκου, ενώ στον απλό ανελκυστήρα κάθε κλήση εξυπηρετείται ξεχωριστά Ομάδες Ανελκυστήρων Σε μεγάλα κτίρια (π.χ. νοσοκομεία, εμπορικά καταστήματα κλπ.)υπάρχει η ανάγκη χρησιμοποίησης περισσοτέρων του ενός ανελκυστήρων, οι οποίοι για την καλύτερη εξυπηρέτηση των διακινουμένων θα πρέπει να λειτουργούν ομαδικά και όχι ανεξάρτητα. Σε κάθε όροφο υπάρχει μια κοινή κομβιοδόχος (μπουτονιέρα) και κάθε κλήση εξυπηρετείται από τον ανελκυστήρα που βρίσκεται πλησιέστερα στον όροφο και κινείται προς την επιθυμητή κατεύθυνση. Όταν ένας από τους ανελκυστήρες ανταποκριθεί στην κλήση, τότε το ρελέ κλήσεως αποδιεγείρεται, αφού δεν υπάρχει πλέον ανάγκη στάθμευσης στον όροφο και άλλου θαλαμίσκου. Το πιο απλό παράδειγμα ομαδικής λειτουργίας είναι η περίπτωση δύο ανελκυστήρων. Το σύστημα τότε λέγεται DUPLEX COLLECTIVE SELECTIVE. Όταν συνεργάζονται τρεις ή περισσότεροι ανελκυστήρες χρησιμοποιείται σύστημα ηλεκτρονικού προγραμματισμού. Έτσι, για να επιτυγχάνεται η μέγιστη απόδοση της ομάδας πρέπει να υπάρχει αυτόματος προγραμματισμός της κίνησης των ανελκυστήρων ανάλογα με τη ζήτηση που τους παρουσιάζεται την κάθε στιγμή. ~ 23 ~
38 Βασική μονάδα αυτού του συστήματος είναι ένας ηλεκτρονικός υπολογιστής που μετρά συνεχώς: Τις κλήσεις κάθε θαλαμίσκου και το προορισμό τους Τις κλήσεις κάθε ορόφου Τον αριθμό θαλαμίσκων που κινούνται προς κάθε κατεύθυνση Το χρονικό διάστημα στάθμευσης κάθε θαλαμίσκου Το φορτίο κάθε θαλαμίσκου την κάθε στιγμή Έτσι, μπορούμε να κατανοήσουμε ότι ο Η/Υ όχι μόνο προσδιορίζει, αλλά και προβλέπει, με τη βοήθεια στατιστικών μεθόδων, τη φύση και τη προέλευση της ζήτησης εξυπηρέτησης, με αποτέλεσμα: Τη σημαντική ελάττωση του μέσου χρόνου αναμονής των επιβατών στους ορόφους, γιατί οι θάλαμοι διευθετούνται έτσι ώστε να βρίσκονται κοντά στα σημεία ζήτησης Την ελάττωση του μέσου χρόνου διαδρομής, γιατί επιτυγχάνεται έτσι στατιστικά ο ελάχιστος αριθμός στάσεων για κάθε θαλαμίσκο. Σε περίπτωση που εμφανιστεί αιχμή κίνησης προς τα πάνω ή προς τα κάτω, τότε ο Η/Υ στέλνει αυτόματα στο ισόγειο ή στον ανώτατο όροφο αντίστοιχα όλους τους θαλαμίσκους για την καλύτερη εξυπηρέτηση των διακινουμένων. Όταν εξυπηρετηθεί και η τελευταία εσωτερική κλήση, τότε οι θάλαμοι επιστρέφουν στο ισόγειο χωρίς ενδιάμεση στάση. Στις περιπτώσεις ελαφριάς ή μέσης κυκλοφορίας ή κυκλοφορίας χωρίς ιδιαιτερότητες οι ανελκυστήρες εξυπηρετούν το κτίριο κατά ζώνες. Το κτίριο χωρίζεται σε ένα αριθμό περιοχών ή ζωνών και όταν κάποιος όροφος πρέπει να τύχει ιδιαίτερης εξυπηρέτησης, τότε ο όροφος αυτός μπορεί να αποτελέσει ζώνη από μόνος του ή να συμπεριληφθεί σε ζώνη με λιγότερους ορόφους. Όταν σε μια ζώνη δεν υπάρχουν κλήσεις, ένας θάλαμος έρχεται και σταθμεύει σε ένα προκαθορισμένο ~ 24 ~
39 όροφο της ζώνης αυτής που ονομάζεται βασικός όροφος της ζώνης. Σαν τέτοιος επιλέγεται ο όροφος της ζώνης που επιθυμούμε να τύχει μεγαλύτερης εξυπηρέτησης Ειδικές Κατηγορίες Ανελκυστήρων Ασθενοφόροι Ανελκυστήρες Οι ανελκυστήρες αυτοί έχουν ειδικά μελετηθεί για τη μεταφορά ασθενών σε κλινικές, νοσοκομεία και γενικότερα σε χώρους που στεγάζονται κέντρα υγείας. Ο τρόπος κίνησης τους, η ταχύτητα τους καθώς επίσης και η επιφάνεια του θαλάμου έχουν μελετηθεί ώστε να εξυπηρετούν με το καλύτερο δυνατό τρόπο τη μεταφορά των ασθενών. Οι ασθενοφόροι ανελκυστήρες λειτουργούν με σύστημα χειρισμού με δυο ταχύτητες, έχουν συσκευή υπερφόρτισης και συνοδεύονται από οδηγό. Οι διαστάσεις του θαλάμου είναι τέτοιες ώστε να μπορεί χωρίς δυσκολία να μεταφέρεται φορείο με ασθενή με τις απαραίτητες για κάθε περίπτωση συσκευές, όπως βάση για την τοποθέτηση ορών κ.α. Κατά τη διαδρομή του ο θάλαμος του ανελκυστήρα όταν τον χειρίζεται οδηγός αγνοεί όλες τις εξωτερικές κλήσεις και υπακούει μόνο στην εσωτερική κλήση που του έχει δοθεί. Για τις περιπτώσεις εγκλωβισμού των μεταφερόμενων, εκτός από τις απαραίτητες ηχητικές συσκευές, είναι απαραίτητη μια τηλεφωνική σύνδεση ανάμεσα στο θάλαμο και στο τηλεφωνικό κέντρο του κτιρίου. Όταν ο ανελκυστήρας δεν μεταφέρει ασθενείς χρησιμοποιείται για τη μεταφορά ατόμων και λειτουργεί αυτόματα με το σύστημα χειρισμού Ανελκυστήρες Μεγάλων Φορτιών Έτσι ονομάζονται οι ανελκυστήρες που χρησιμοποιούνται για την ανύψωση φορτίων μεγάλου βάρους και εξυπηρετούν εργοστάσια, αποθήκες και γενικά βιοτεχνικούς και βιομηχανικούς χώρους. Αποκαλούνται και ως φορτηγοί ανελκυστήρες και η χρησιμοποίηση τους για τη μεταφορά ατόμων απαγορεύεται. Η κίνηση του θαλάμου γίνεται με οδηγό ή με σύστημα αυτόματης συλλογήςεπιλογής κλήσεων (SELECTIVE-COLLECTIVE). Το πλαίσιο ανάρτησης του θαλάμου είναι ισχυρής κατασκευής και η ανάρτηση του θαλάμου και του αντίβαρου ~ 25 ~
40 γίνεται με ιδιαίτερες τροχαλίες, προσαρμοσμένες κατάλληλα σε ειδικό πλαίσιο. Ο θάλαμος είναι κατασκευασμένος από λαμαρίνα πάχους 2 mm, έχει σταθερό δάπεδο με επίστρωση από άκαυστο υλικό μεγάλης αντοχής σε φθορές και παραμορφώσεις. Η ισοστάθμιση είναι οπωσδήποτε απαραίτητη για τη σωστή στάθμευση στους ορόφους, ώστε να διευκολύνεται η φόρτωση και εκφόρτωση του θαλάμου χωρίς να δημιουργούνται ιδιαίτερα προβλήματα. Οι πόρτες του φρεατίου αποτελούνται συνήθως από δυο φύλλα με λειτουργία ημιαυτόματη. Σχήμα 1.13 Ανελκυστήρας Φορτίων [13] Οι οδηγοί του θαλάμου και του αντίβαρου, τα αρμοκάλυπτρα καθώς και οι κοχλίες σύνδεσης πρέπει να εκλεγούν ύστερα από σοβαρή μελέτη των συνθηκών κίνησης του ανελκυστήρα, το φορτίο που πρόκειται να ανυψωθεί (είδος και βάρος φορτίου) καθώς και από την αντοχή τους, ώστε να ανταποκρίνονται στις καταπονήσεις που μπορεί να δεχθούν σε περίπτωση λειτουργίας της συσκευής αρπάγης. Επιπλέον, πρέπει να δίνεται ιδιαίτερη προσοχή στα χρησιμοποιούμενα συρματόσχοινα, δηλαδή στο πλήθος τους και στην ονομαστική τους διάμετρο. Το πραγματικό φορτίο θραύσης τους καθώς και η σωστή πρόσδεση τους αποτελούν σοβαρό παράγοντα για την καλή λειτουργία του ανελκυστήρα. Ακόμα, οι τροχαλίες ανάρτησης και εκτροπής των συρματόσχοινων πρέπει να ζυγίζονται σωστά και οι αυλακώσεις να μην περιέχουν ξένα σώματα, όπως γράσα, ρινίσματα σιδήρου κτλ. για την αποφυγή μεταπήδησης των συρματόσχοινων από τις ~ 26 ~
41 αυλακώσεις σε περίπτωση ανώμαλης κίνησης του θαλάμου ή του αντίβαρου του ανελκυστήρα. Η βάση έδρασης του μηχανισμού κίνησης πρέπει να έχει την απαιτούμενη επιφάνεια, το κατάλληλο βάρος καθώς και τη σωστή αγκύρωση, τόσο για τη σωστή στήριξη του μηχανισμού, όσο και για την αποφυγή πιθανής μετατόπισης εξαιτίας των δυνάμεων έλξης στην τροχαλία τριβής. Τέλος, στους ανελκυστήρες μεγάλων φορτίων δεν είναι απαραίτητη η ηχομόνωση, όμως είναι απαραίτητο ένα σύστημα κατάσβεσης πυρκαγιάς, η οποία μπορεί να εκδηλωθεί από διάφορες αιτίες και ιδιαίτερα σε χώρους μεταφοράς εύφλεκτων υλών Ανελκυστήρες Μικρών Φορτιών Σύμφωνα με τα πρότυπα του ΕΛ.Ο.Τ, ανελκυστήρας μικρών φορτίων θα ονομάζεται κάθε μόνιμη εγκαταστημένη ανυψωτική συσκευή που εξυπηρετεί καθορισμένα επίπεδο στάσεων και έχει θάλαμο ο οποίος, εξαιτίας των διαστάσεων και της κατασκευής του, δεν επιτρέπει την είσοδο ατόμων και ο οποίος κινείται κατά μήκος μεταξύ κατακόρυφων οδηγών ή οδηγών με κλίση μικρότερη από 15 ο ως προς την κατακόρυφο. Τα χαρακτηριστικά των ανελκυστήρων μικρών φορτίων που συνιστώνται για συνήθη χρήση είναι τα εξής: Ονομαστικό φορτίο σε χιλιόγραμμα: Ονομαστική ταχύτητα σε μέτρα ανά δευτερόλεπτο: Στην κατηγορία αυτή ανήκουν οι ανελκυστήρες που χρησιμοποιούνται για την ανύψωση μικρών φορτίων (μέχρι 250 kg). Τοποθετούνται κυρίως σε χώρους όπου η μεταφορά εμπορευμάτων και άλλων ειδών, όπως κρέατα, χημικά προϊόντα ή ακάθαρτα είδη ρουχισμού για διαφορετικούς λόγους δεν μπορεί να πραγματοποιηθεί με τους ανελκυστήρες ατόμων. Κατά ~ 27 ~
42 συνέπεια, οι ανελκυστήρες αυτοί εξυπηρετούν αποθήκες, βιοτεχνικούς χώρους και κλινικές. Το φρεάτιο του ανελκυστήρα δεν μπορεί να έχει επιφάνεια μεγαλύτερη από 1 m 2 και η κατασκευή του γίνεται από μπετόν, τούβλο, λαμαρίνα ή πλέγμα. Ο θάλαμος αυτών των ανελκυστήρων είναι μεταλλικός με πλευρικά τοιχώματα και οροφή. Οι πόρτες του φρεατίου έχουν ελάχιστο ύψος 1m και φέρουν επαφές ασφαλείας και σύστημα προμανδάλωσης. Κατά συνέπεια η κίνηση του θαλάμου είναι αδύνατη σε περίπτωση που κάποια πόρτα παραμένει ανοιχτή. Η στάθμευση του θαλάμου μπορεί να γίνεται στη στάθμη του δαπέδου του ορόφου η ψηλότερα, ανάλογα με τις ανάγκες που παρουσιάζονται σε κάθε περίπτωση. Η ταχύτητα του θαλάμου του ανελκυστήρα δεν πρέπει να είναι μεγαλύτερη από 0,40 m/s. Η ανάρτηση του θαλάμου και του αντίβαρου γίνεται με δύο τουλάχιστον συρματόσχοινα με διάμετρο όχι μικρότερης των 0,5 mm. Ο μηχανισμός κίνησης μπορεί να λειτουργεί με τροχαλία τριβής ή με τύμπανο. Το μηχανοστάσιο των ανελκυστήρων μικρών φορτίων μπορεί να βρίσκεται μέσα στον όροφο της τελευταίας στάσης του ανελκυστήρα, στη ταράτσα ή στο υπόγειο. Το μικρότερο ύψος του μηχανοστασίου είναι 1 m και η προσπέλαση του πρέπει να γίνεται από κοινόχρηστο χώρο. Τα εμπορεύματα και γενικότερα όλα τα είδη που μεταφέρονται με αυτούς τους ανελκυστήρες πρέπει να ασφαλίζονται με τέτοιο τρόπο ώστε η μετακίνηση τους μέσα στο θάλαμο να είναι αδύνατη. Η πρόσκρουση του φορτίου που μεταφέρεται, εκτός από τις ζημιές που μπορεί να προκαλέσει στην εγκατάσταση του ανελκυστήρα, έχει και πολλές φορές δυσάρεστες συνέπειες στο ίδιο το φορτίο. Σε ανελκυστήρες μικρών φορτίων που λειτουργούν σε αποθήκες ή βιοτεχνίες με εύφλεκτες ύλες καθώς επίσης και σε εργοστάσια βάμβακος πρέπει να λαμβάνονται ιδιαίτερα μέτρα προστασίας σε περίπτωση πυρκαγιάς. Τέλος, οι καλωδιώσεις στο φρεάτιο καθώς και οι συνδέσεις στα κουτιά των διακλαδώσεων πρέπει να ελέγχονται σχολαστικά σε κάθε συντήρηση ή σε κάθε βλάβη του ανελκυστήρα. ~ 28 ~
43 Ανελκυστήρες Φαγητών Στη κατηγορία αυτή ανήκουν οι ανελκυστήρες με μικρή ανυψωτική ικανότητα μέχρι 100kg. Τοποθετούνται σε εστιατόρια, ξενοδοχεία, πλοία και γενικά σε χώρους που η επικοινωνία με τα μαγειρεία που κυρίως βρίσκονται στο υπόγειο είναι απαραίτητη. Ο θάλαμος αυτών των ανελκυστήρων είναι συνήθως μεταλλικής κατασκευής ή είναι συνήθως ανοξείδωτος και φέρει δύο ή τρία ράφια για την τοποθέτηση των δίσκων. Οι διαστάσεις του θαλάμου είναι συνήθως 70x70cm και το ύψος του δεν υπερβαίνει τα 80cm. Είναι απαραίτητη μια ηλεκτρική συσκευή που να διακόπτει το κύκλωμα χειρισμού του ανελκυστήρα όταν ανοίξει μια πόρτα κατά τη διαδρομή του θαλάμου, ενώ διατάξεις ασφάλειας, όπως ρυθμιστής ταχύτητας ή συσκευή αρπάγης δεν είναι απαραίτητες. Οι μπουτονιέρες των ορόφων έχουν πλήκτρα αποστολής-κλήσης και Stop, ενώ σε πολλές περιπτώσεις υπάρχει φωτεινή ένδειξη της κίνησης του θαλάμου που είναι μόνιμος κατά τη διάρκεια της λειτουργίας του ανελκυστήρα. Σχήμα 1.14 Ανελκυστήρας Φαγητού [13] Οι πόρτες του φρεατίου αποτελούνται από δύο φύλλα, που σύρονται κατακόρυφα μέσα στο φρεάτιο κατά την αντίθετη φορά. Η τοποθέτηση των φύλλων της πόρτας γίνεται σε ύψος 80cm από το δάπεδο του ορόφου. Το μηχανοστάσιο μπορεί να τοποθετηθεί μέσα στον τελευταίο όροφο και η επιθεώρησή του να γίνεται ~ 29 ~
44 από μόνιμα ή όχι τοποθετημένη σκάλα στην είσοδο του. Ο εξαερισμός του φρεατίου ή του μηχανοστασίου δεν είναι απαραίτητος. Ο μηχανισμός κίνησης αυτών των ανελκυστήρων αποτελείται από κινητήρα μικρής ισχύος και μειωτήρα στροφών. Η ταχύτητα του θαλάμου για μικρές διαδρομές είναι συνήθως 0,20-0,30 m/s. Η ανάρτηση του θαλάμου γίνεται με συρματόσχοινα, ενώ η περίπτωση ανάρτησης με αλυσίδα αποφεύγεται λόγω του θορύβου που δημιουργείται μέσα στο βαρούλκο. Τέλος, ως μέσο κίνησης χρησιμοποιείται τροχαλία τριβής ή τύμπανο Ατέρμονες Ανελκυστήρες Ατόμων Οι ατέρμονοι ανελκυστήρες έχουν εγκαταλειφθεί εδώ και πολλά χρόνια. Τα βασικά μειονεκτήματα τους και οι κυριότεροι λόγοι που συνετέλεσαν στην εκτόπιση τους είναι: Η πολύπλοκη και αρκετά δαπανηρή κατασκευή τους Η μικρή ταχύτητα κίνησης τους Στην Αθήνα ατέρμονες ανελκυστήρες ατόμων υπήρχαν εγκατεστημένοι στο παλιό Ταχυδρομείο, στο μέγαρο του Μετοχικού Ταμείου καθώς και σε κτίριο της οδού Κοραή. Το φρεάτιο αυτών των ανελκυστήρων κατασκευάζεται από μπετόν, τούβλο ή από σύνδεση μεταλλικών ελασμάτων και δοκών που επενδύεται συχνά με διαφανές ανθεκτικό υλικό. Οι ατέρμονες ανελκυστήρες ατόμων είναι εφοδιασμένοι με πολλούς, συνήθως ξύλινους, θαλάμους και κάθε θάλαμος δένεται σε δύο ατέρμονες κυλινδρικές αλυσίδες που βρίσκονται σε δύο εκ διαμέτρου αντίθετες γωνίες. Έτσι, η ανάρτηση του θαλάμου γίνεται από δύο σημεία και με αυτό τον τρόπο επιτυγχάνεται η περιφορά των θαλάμων από την άνοδο στην κάθοδο με μια παράλληλη μετατόπιση. Η ταχύτητα πορείας των θαλάμων δεν είναι μεγαλύτερη από 0,30 m/s. Για να είναι δυνατή η επιβίβαση και αποβίβαση των επιβατών του ανελκυστήρα στους ~ 30 ~
45 θαλάμους, που βρίσκονται συνεχώς σε κίνηση, ο θάλαμος είναι εφοδιασμένος με χειρολαβές τοποθετημένες στα πλαϊνά μέρη για τη διευκόλυνση των ατόμων κατά την είσοδο τους. Για την άμεση ακινητοποίηση του ανελκυστήρα, σε περίπτωση κινδύνου, υπάρχει σε όλες τις εισόδους των ορόφων τοποθετημένος σε κατάλληλη θέση, ειδικός πληκτροδιακόπτης. Ο μηχανισμός κίνησης του ατέρμονα ανελκυστήρα ατόμων αποτελείται από μειωτήρα στροφών με ατέρμονα κοχλία, ηλεκτροκινητήρα και ηλεκτρικό φρένο. Σχήμα 1.15 Ατέρμονες Ανελκυστήρες Ατόμων [25] Χειρισμός κατά τη λειτουργία Ανελκυστήρες απλής λειτουργίας Στους ανελκυστήρες αυτούς δεν υπάρχει απομνημόνευση των κλήσεων, είτε γίνονται από την μπουτονιέρα του θαλάμου, είτε από τις εξωτερικές μπουτονιέρες. Συνεπώς, προτεραιότητα στη χρήση του ανελκυστήρα έχει ο επιβάτης, ο οποίος πίεσε πρώτος το μπουτόν του αντίστοιχου ορόφου μέσα από το θάλαμο, ή το μπουτόν κλήσης από τις εξωτερικές μπουτονιέρες. Σημειωτέον ότι, όταν υπάρχει επιβάτης στο θάλαμο, μέσω ενός κοντάκτ (διακόπτης επαφής) που βρίσκεται στο δάπεδο του ~ 31 ~
46 θαλάμου, απομονώνονται οι εξωτερικές κλήσεις. Στις εξωτερικές μπουτονιέρες αυτών των ανελκυστήρων, υπάρχει ένα μπουτόν κλήσης, ενδείξεις ανόδου-καθόδου, καθώς και η ένδειξη «κατειλημμένος». Ο τύπος αυτός του ανελκυστήρα είναι αντιοικονομικός στη χρήση του (άσκοπες διαδρομές του θαλάμου) και δε συνιστάται σε κτίρια με μεγάλη χρήση των ανελκυστήρων Αυτόματοι ανελκυστήρες Αυτόματοι ανελκυστήρες είναι αυτοί που διαθέτουν σύστημα απομνημόνευσης των κλήσεων Χαρακτηριστικά γνωρίσματα μιας σωστής εγκατάστασης επιβατηγού ανελκυστήρα Για να θεωρηθεί άρτια τεχνικά και αισθητικά μια εγκατάσταση ανελκυστήρα θα πρέπει να παρουσιάζει: Ασφάλεια τόσο κατά τη κίνηση, όσο και κατά την είσοδο-έξοδο των ατόμων Απλή και εύκολη χρήση από οποιοδήποτε άτομο. Αθόρυβη, όσο γίνεται, λειτουργία όλων των μηχανισμών Ικανοποιητική ταχύτητα κατά τη κίνηση από όροφο σε όροφο χωρίς κλυδωνισμούς Ομαλή επιτάχυνση και επιβράδυνση κατά τις στάσεις Καλή εμφάνιση σε αρμονική σχέση με την οικοδομή Απαιτήσεις Εγκατάστασης Ανελκυστήρων [20] Σε οποιοδήποτε κτίριο, με βάση τον Κτιριοδομικό κανονισμό άρθρο 29, που κατασκευάζεται και το οποίο έχει ισόγειο ή πυλωτή και τρεις ορόφους, ή στο οποίο το ύψος από το δάπεδο του ισογείου μέχρι το δάπεδο του τελευταίου ορόφου είναι ~ 32 ~
47 μεγαλύτερο από εννέα (9) μέτρα, είναι υποχρεωτική η εγκατάσταση ενός τουλάχιστον ανελκυστήρα ωφελίμου φορτίου 600 κιλών ή οκτώ ατόμων. Για κτίρια δημόσιας χρήσης, η απαίτηση αυτή ισχύει εφόσον υπάρχει έστω και ένας όροφος. Η εγκατάσταση του ανελκυστήρα αυτού θα είναι σύμφωνη με τις οδηγίες του προτύπου Ε.Ν και του Κτιριοδομικού κανονισμού. Οι διαστάσεις του θαλάμου, και συνεπώς του φρεατίου σε συνάρτηση με το ονομαστικό φορτίο και τον αριθμό των ατόμων που θα εξυπηρετεί ο ανελκυστήρας, δίνονται από τους ακόλουθους πίνακες (Ε. Ν παράγραφος 8). Πίνακας 1.1 Διαστάσεις του θαλάμου σε συνάρτηση με τον αριθμό των ατόμων που θα εξυπηρετεί ο ανελκυστήρας Αριθμός Ελάχιστη ωφέλιμη Αριθμός Ελάχιστη ωφέλιμη επιβατών επιφάνεια θαλάμου επιβατών επιφάνεια θαλάμου [m 2 ] [m 2 ] 1 0, ,87 2 0, ,01 3 0, ,15 4 0, ,29 5 0, ,43 6 1, ,57 7 1, ,71 8 1, ,85 9 1, , , ,13 Για επιβάτες πέρα των 20 προστίθενται 0,115 m 2 για κάθε επιπλέον επιβάτη. ~ 33 ~
48 Πίνακας 1.2 Διαστάσεις του θαλάμου σε συνάρτηση με το ονομαστικό φορτίο Ονομαστικό Μέγιστη ωφέλιμη Ονομαστικό Μέγιστη ωφέλιμη φορτίο, μάζα επιφάνεια θαλάμου φορτίο, μάζα επιφάνεια θαλάμου [Κg] [m 2 ] [Κg] [m 2 ] 100 (1) 0, , (2) 0, , , , , , , , , , , , , , , , , , , , , , , , , (3) 5,00 (1) Ελάχιστο για ανελκυστήρα 1 ατόμου (2) Ελάχιστο για ανελκυστήρα 2 ατόμων (3) Για φορτία πέρα των 2500 Κg προστίθενται 0,16m 2 για κάθε επιπλέον φορτίο 100 Kg. Για ενδιάμεσα φορτία η επιφάνεια προσδιορίζεται με γραμμική παρεμβολή. ~ 34 ~
49 Ο αριθμός καθώς και ο τύπος των ανελκυστήρων που θα επιλεγούν για ένα κτίριο είναι συνάρτηση της κυκλοφοριακής μελέτης του κτιρίου, καθώς και οικονομικών και τεχνικών κριτηρίων. Κυρίως όμως η εμφάνιση του ανελκυστήρα πρέπει να είναι προσαρμοσμένη στη γενικότερη αισθητική του κτιρίου. Η κυκλοφοριακή μελέτη ενός κτιρίου έχει ως σκοπό να προσδιορίσει το μέγεθος, την ταχύτητα, τον αριθμό και το σύστημα λειτουργίας των ανελκυστήρων για την καλύτερη δυνατή εξυπηρέτηση των ατόμων που κατοικούν ή εργάζονται στο κτίριο. Για την εκπόνηση της μελέτης αυτής είναι απαραίτητες, σε γενικές γραμμές, οι παρακάτω πληροφορίες: a) Το είδος του κτιρίου (γραφεία, κατοικίες, ξενοδοχείο κλπ.) καθώς και ο αριθμός των ορόφων και η επιφάνεια τους. b) Ο θεωρητικός πληθυσμός του κτιρίου, οι ώρες άφιξης και αναχώρησης των ενοίκων και οι ώρες συσσώρευσης των επισκεπτών στο κτίριο. c) Η ανάγκη εγκατάστασης ανελκυστήρα φορτίων ή γκαράζ ή νοσοκομειακού ανελκυστήρα Συντήρηση Ανελκυστήρων Η συντήρηση των ανελκυστήρων είναι υποχρεωτική σύμφωνα με τις διατάξεις του άρθρου 11 της ΑΠ 18173/ Αφορά τους παλιούς, αλλά και τους νέους ανελκυστήρες και πραγματοποιείται σύμφωνα με τις κείμενες διατάξεις από τους αδειούχους συντηρητές Δ' ειδικότητας. Σκοπός της συντήρησης του ανελκυστήρα είναι η διατήρηση σε καλή κατάσταση συγκεκριμένων τμημάτων και εξαρτημάτων της εγκατάστασης για την αποφυγή ατυχημάτων. Συγκεκριμένα καθιερώνεται τακτική συντήρηση μια φορά το μήνα για τους ανελκυστήρες κοινής χρήσης με αριθμό πλήρων διαδρομών την εβδομάδα. Το όριο αυτό υπολογίζεται από τη σχέση: α = σ * Η * n, όπου: σ = ο αριθμός ζεύξεων του ηλεκτροκινητήρα α = ο αριθμός των πλήρων διαδρομών ~ 35 ~
50 Η = ο αριθμός των ωρών λειτουργίας την εβδομάδα. η = συντελεστής λειτουργίας ίσος με Δυνατότητα ρύθμισης της ταχύτητας Η δυνατότητα ρύθμισης αναφέρεται μόνο στους ανελκυστήρες με τροχαλία τριβής. Για ταχύτητες κίνησης των ανελκυστήρων προσώπων μέχρι 0,5 m/s, χρησιμοποιούνται ηλεκτρικοί κινητήρες Ε.Ρ. με ένα τύλιγμα. Έτσι, ο θάλαμος του ανελκυστήρα κινείται στην προβλεπόμενη διαδρομή του με την ίδια ταχύτητα, η δε στάση σε κάποιον όροφο γίνεται με τη βοήθεια του φρένου. Για ταχύτητες όμως μεγαλύτερες, από 0,5 έως και 0,90 m/s, οι χρησιμοποιούμενοι κινητήρες διαθέτουν και ένα δεύτερο τύλιγμα με μεγαλύτερο αριθμό ζευγών πόλων, και συνεπώς λιγότερες στροφές του δρομέα του κινητήρα. Λίγο πριν την προβλεπόμενη στάθμευση του θαλάμου του ανελκυστήρα σε κάποιον όροφο (περίπου 50-60cm) δίνεται εντολή από τον πίνακα χειρισμού και τροφοδοτείται το δεύτερο τύλιγμα, ο ανελκυστήρας κινείται με μικρότερη ταχύτητα, και κατά τον τρόπο αυτό επιτυγχάνεται ομαλότερη στάθμευση και ακριβέστερη ισοστάθμιση στους ορόφους. Για ταχύτητες ανελκυστήρων μεγαλύτερες από 0,90 m/s, χρησιμοποιείται το σύστημα συνεχούς ρύθμισης ταχύτητας. Μέσω ενός ηλεκτρονικού μετατροπέα ισχύος, ελέγχεται κάθε στιγμή η ταχύτητα του ανελκυστήρα και προσαρμόζεται σε ένα πρότυπο διάγραμμα κίνησης. Κατά τον τρόπο αυτό, επιτυγχάνεται προοδευτική αύξηση της ταχύτητας στο ξεκίνημα, και προοδευτική μείωσή της πριν τη στάση. Το φρένο χρησιμοποιείται μόνο για την ακινητοποίηση του κινητήρα, όταν ο θάλαμος σταθμεύσει. ~ 36 ~
51 ΚΕΦΑΛΑΙΟ 2 Τριφασικός Ασύγχρονος Κινητήρας[1], [2], [16], [17], [20] 2.1. Περιγραφή ασύγχρονων τριφασικών κινητήρων Στην παρούσα εργασία, για την κίνηση του θαλάμου του ανελκυστήρα χρησιμοποιήθηκε ένας τριφασικός ασύγχρονος κινητήρας. Οι τριφασικές ασύγχρονες μηχανές, οι οποίες ονομάζονται και επαγωγικές μηχανές, χρησιμοποιούνται σχεδόν αποκλειστικά ως κινητήρες εξαιτίας των μειονεκτημάτων που παρουσιάζουν όταν λειτουργούν ως γεννήτριες. Για το λόγο αυτό αναφέρονται συχνά ως ασύγχρονοι κινητήρες. Οι ασύγχρονοι τριφασικοί κινητήρες είναι μηχανές που μετατρέπουν την εναλλασσόμενη ηλεκτρική ενέργεια του τριφασικού δικτύου σε μηχανική. Το τύλιγμα του οπλισμού του στάτη του κινητήρα τροφοδοτείται με τριφασικό ρεύμα και αναπτύσσεται στο εσωτερικό της μηχανής περιστρεφόμενο μαγνητικό πεδίο, που επιδρά στο δρομέα και παράγει ροπή περιστροφής. Σχήμα 2.1 Εξωτερική όψη ασύγχρονου κινητήρα [13] ~ 37 ~
52 Ο ασύγχρονος κινητήρας εφευρέθηκε από τον Mikhail Osipovich Dolivo- Dobrovolsky το Επαγωγικοί κινητήρες με μορφή αντίστοιχη της σημερινής ήταν εμπορικά διαθέσιμοι από το Από τότε έως το 1970 οι βελτιώσεις στην ποιότητα των υλικών κατασκευής, στις τεχνικές χύτευσης και στη μόνωση των τυλιγμάτων επέτρεψε τη δραστική μείωση του μεγέθους και του κόστους κατασκευής των ασύγχρονων κινητήρων. Η μείωση στις διαστάσεις των ασύγχρονων κινητήρων δεν είχε συνοδευτεί από ουσιαστική βελτίωση του βαθμού απόδοσης, έως την πετρελαϊκή κρίση του 1973, εξαιτίας του μικρού κόστους της ηλεκτρικής ενέργειας. Όμως, στη συνέχεια, όλοι οι κατασκευαστές ανέπτυξαν επαγωγικούς κινητήρες με το χαρακτηρισμό υψηλής απόδοσης (high efficiency induction motors). Ένας τέτοιος ασύγχρονος κινητήρας φαίνεται στο σχήμα της προηγούμενης σελίδας Κατασκευαστικά στοιχεία ασύγχρονων τριφασικών κινητήρων Για να χαρακτηριστεί μια μηχανή ως τριφασική πρέπει προφανώς το τύλιγμα του στάτη της να είναι τριφασικό. Φυσικά υπάρχουν και μονοφασικές και διφασικές μηχανές με τύλιγμα στάτη μονοφασικό ή διφασικό αντίστοιχα, αλλά έχουν περιορισμένη χρήση. Το τύλιγμα αυτό παίρνει ρεύμα από το δίκτυο και δημιουργεί ένα μαγνητικό πεδίο, το οποίο επάγει στο δρομέα ρεύματα. Τα ρεύματα αυτά μαζί με το πεδίο που τα δημιούργησε προκαλούν δυνάμεις και κατά συνέπεια ηλεκτρομαγνητική ροπή, υπό την επίδραση δε αυτής ο δρομέας τίθεται σε περιστροφική κίνηση. Η κατασκευή της μηχανής πρέπει να είναι τέτοια, ώστε το απαραίτητο ρεύμα, ή ακριβέστερα τα απαραίτητα «αμπερελίγματα», να είναι όσο γίνεται πιο μικρό. Αυτό μπορούμε να το πετύχουμε όταν το διάκενο μεταξύ στάτη και δρομέα γίνει όσο το δυνατόν μικρότερο. Αυτό είναι το κύριο μέτρο. Μπορούμε ακόμη να δώσουμε στις αυλακώσεις κατάλληλο σχήμα για να μικρύνουμε περισσότερο το αναγκαίο ρεύμα για τη δημιουργία του επιθυμητού μαγνητικού πεδίου. Έτσι, στις μέχρι τώρα κατασκευές συναντάμε αυλακώσεις στο στάτη ανοιχτές κατά το ήμισυ ή τελείως κλειστές αυλακώσεις. Όσο μικραίνει το άνοιγμα μιας αυλακώσεως τόσο μικρότερη γίνεται η σκέδαση και τόση μεγαλύτερη ασφάλεια έχουμε έναντι των φυγοκεντρικών ~ 38 ~
53 δυνάμεων για τα τυλίγματα του δρομέα. Όσο μεγαλώνει το μέγεθος της μηχανής τόσο προβληματικό γίνεται, διότι μεγαλώνουν οι δυσκολίες κατά την τοποθέτηση των τυλιγμάτων και το κόστος κατασκευής της μηχανής αυξάνει. Στο σχήμα που ακολουθεί βλέπουμε μερικούς χαρακτηριστικούς τύπους αυλακώσεων στάτη και δρομέα. Σχήμα 2.2 Μορφές αυλακώσεων στάτη και δρομέα [2] Η περιέλιξη των τυλιγμάτων που τοποθετούνται στις αυλακώσεις γίνεται κατά τρεις τρόπους: ~ 39 ~
54 Η περιέλιξη γίνεται εκτός της μηχανής χρησιμοποιώντας ένα καλούπι. Το τύλιγμα αποκτά την τελική του μορφή και κατόπιν εισάγεται στις αυλακώσεις τοποθετώντας με το χέρι κάθε αγωγό. Οι αγωγοί έχουν κυκλική διατομή και διάμετρο μέχρι 2,5mm. Η περιέλιξη γίνεται επί της μηχανής. Ο αγωγός περνά μέσα από μία αυλάκωση, της οποίας τα τοιχώματα φέρουν μονωτική κάλυψη, εισέρχεται κατόπιν σε μία άλλη προκαθορισμένη αυλάκωση, στη συνέχεια εισέρχεται πάλι στην προηγούμενη και έτσι συνεχίζεται η περιέλιξη μέχρι να αποκτήσει το τύλιγμα την ολοκληρωμένη μορφή του. Τα τυλίγματα παίρνουν την τελική μορφή τους εκτός της μηχανής, μονώνονται και τοποθετούνται κατ' ευθείαν μέσα στις αυλακώσεις. Να σημειωθεί ότι στις δύο πρώτες περιπτώσεις οι αυλακώσεις του στάτη πρέπει να είναι τουλάχιστον κατά το ήμισυ ανοιχτές, ενώ στην τελευταία περίπτωση πρέπει να είναι εντελώς ανοιχτές. Επίσης να σημειωθεί ότι με την εξέλιξη της τεχνολογίας οι κατασκευαστές ηλεκτρικών μηχανών χρησιμοποιούν πια περιελικτικές μηχανές για την πλήρη περιέλιξη χωρίς να επέμβει ένας τεχνίτης. Αυτό είναι δυνατό κυρίως για μηχανές χαμηλής ισχύος, περίπου μέχρι 10kW. Η απλούστερη μορφή αυλακώσεων είναι ασφαλώς η τελείως ανοιχτή, αλλά έχει τα εξής σοβαρά μειονεκτήματα: 1. Διατηρώντας σταθερό το διάκενο, μεγαλώνει το ρεύμα μαγνήτισης όσο μεγαλώνει η μαγνητική αντίσταση. Γι αυτό χρησιμοποιείται αυτός ο τύπος αυλακώσεων όταν έχουμε ειδικές ανάγκες (πχ υψηλές τάσεις όπου απαιτείται ειδική μόνωση), 2. Προκαλούν διακυμάνσεις του μαγνητικού πεδίου που θέλουμε να επικρατεί στο διάκενο, επειδή ακριβώς το διάκενο δεν είναι σταθερό, αλλά λόγω των αυλακώσεων παρουσιάζει διακυμάνσεις και συνεπώς έχουμε μεταβαλλόμενη μαγνητική αντίσταση. Οι διακυμάνσεις του πεδίου προκαλούν αυξημένες ~ 40 ~

55 απώλειες στο δρομέα και επί πλέον δημιουργούν ανεπιθύμητες ανώτερες αρμονικές στην ηλεκτρομαγνητική ροπή. Ο στάτης μιας ασύγχρονης μηχανής έχει την μορφή που φαίνεται στο επόμενο σχήμα. Σχήμα 2.3 Στάτης ασύγχρονης μηχανής [18] Ο δρομέας, το περιστρεφόμενο μέρος της ασύγχρονης μηχανής που βρίσκεται και επί του άξονα της, κατασκευάζεται όπως και ο στάτης από δυναμοελάσματα για την μείωση των απωλειών ενέργειας λόγω δινορευμάτων. Τα ελάσματα είναι διαμορφωμένα κατά τέτοιο τρόπο ώστε να δημιουργούν στην εξωτερική επιφάνεια του τυμπάνου και κατά την διεύθυνση του άξονα του κινητήρα αυλάκια. Για την ελάττωση του μαγνητικού θορύβου ο αριθμός των αυλακώσεων του δρομέα είναι πάντοτε διαφορετικός από τον αριθμό αυλακώσεων του στάτη. Το ίδιο αποτέλεσμα έχουμε και όταν οι αυλακώσεις του δρομέα έχουν μια μικρή κλίση ως προς τις αυλακώσεις του στάτη Είδη ασύγχρονων τριφασικών κινητήρων Η μορφή του τυλίγματος του δρομέα καθορίζει και τον τύπο της ασύγχρονης μηχανής. Έτσι έχουμε Α.Μ με βραχυκυκλωμένο δρομέα οπότε και χρησιμοποιούμε τον όρο Α.Μ με κλωβό, Α.Μ με δρομέα με δακτυλίους οπότε μιλάμε για Α.Μ με δακτυλιοφόρο δρομέα καθώς και Α.Μ με δρομέα χωρίς αυλακώσεις: ~ 41 ~
56 a) Α.Μ με κλωβό: Μέσα στις αυλακώσεις χύνεται ρευστό αλουμίνιο το οποίο αποτελεί τον ηλεκτρικό αγωγό. Ο αγωγός αυτός που μπορεί να είναι από χαλκό ή αλουμίνιο δεν είναι μονωμένος με τον σίδηρο. Τα ρεύματα κατά το μέγιστο μέρος ρέουν δια μέσω του αγωγού, διότι αυτός έχει πολύ μεγαλύτερη αγωγιμότητα από την αγωγιμότητα του σιδήρου. Εκτός αυτού, μεταξύ του χάλκινου ή αλουμινένιου αγωγού και του σιδήρου υπάρχει μια σχετικά μεγάλη αντίσταση επαφής. Εξαίρεση αποτελεί ο κλωβός που αποτελείται από μπάρες, οι οποίες μπορούν να είναι μονωμένες, διότι στην περίπτωση αυτή δεν έχουμε χύτευση, οι αγωγοί είναι ήδη έτοιμοι και τοποθετούνται στις αυλακώσεις. Συνήθως οι δακτύλιοι βραχυκυκλώσεως και τα πτερύγια εξαερισμού χυτεύονται μαζί με τους αγωγούς. Ο αγωγός κάθε μια αυλάκωσης του δρομέα αποτελεί μια φάση. Έτσι λοιπόν μπορεί να θεωρηθεί ότι ο ένας δακτύλιος συνδέει τις φάσεις σε αστέρα και ο άλλος βραχυκυκλώνει τα άκρα αυτών. Σχήμα 2.4 Τομή Κινητήρα με βραχυκυκλωμένο κλωβό [20] b) Α.Μ με δακτυλιοφόρο δρομέα: Ο δρομέας φέρει αυλακώσεις μέσα στις οποίες τοποθετείται ένα τύλιγμα όμοιο με το τύλιγμα του στάτη. Τα τυλίγματα εναλλασσόμενου ρεύματος θα τα εξετάσουμε παρακάτω. Στο δρομέα σχεδόν πάντοτε, οι τρεις φάσεις συνδέονται σε αστέρα και τα τρία άκρα τους συνδέονται με τους τρεις δακτυλίους. Στους δακτυλίους εφάπτονται ψήκτρες που συνδέονται ~ 42 ~
57 με ένα εξωτερικό κύκλωμα τριών ωμικών αντιστάσεων που είναι συνδεδεμένες σε αστέρα. Σχήμα 2.5 Κινητήρας με δακτυλιοφόρο δρομέα [20] c) Α.Μ με δρομέα χωρίς αυλακώσεις: Εάν κατασκευάσουμε το δρομέα από σίδηρο χωρίς αυλακώσεις, τότε εντός αυτού δημιουργούνται δινορεύματα, τα οποία μαζί με το μαγνητικό πεδίο προκαλούν μια ροπή. Ασύγχρονες μηχανές με δρομείς τέτοιου είδους χρησιμοποιούνται για μεγάλο αριθμό στροφών (π.χ rpm), διότι παρουσιάζουν μεγάλη αντοχή κατά των φυγόκεντρων δυνάμεων. Ο δρομέας γενικά μιας ασύγχρονης μηχανής έχει την εξής μορφή που φαίνεται στο επόμενο σχήμα: Σχήμα 2.6 Δρομέας ασύγχρονης μηχανής [18] ~ 43 ~
58 2.4. Τυλίγματα Ασύγχρονων Μηχανών Η ουσιώδης διαφορά μεταξύ τυλιγμάτων συνεχούς ρεύματος και εναλλασσομένου είναι το γεγονός ότι, στα δεύτερα δεν υπάρχουν οι συνδέσεις μεταξύ κάθε μιας πλευράς ενός πηνίου και ενός τομέα του συλλέκτη, αφού δεν υπάρχει συλλέκτης, ο οποίος μαζί με τις ψήκτρες αποτελεί ένα ανορθωτή σχηματίζοντας έτσι την συνεχή τάση. Όπως στις μηχανές συνεχούς ρεύματος έτσι και εδώ διακρίνουμε τυλίγματα απλής και διπλής στρώσης, δηλαδή σε κάθε αυλάκι βρίσκονται μια ή δυο πλευρές πηνίων. Τα τυλίγματα με μια στρώση είναι απλούστερα στην κατασκευή τους και συνεπώς εύκολη η διόρθωση και η επισκευή τους εν αντιθέσει με τα διπλής στρώσης. Επίσης, καταλαμβάνουν μεγαλύτερο χώρο σε σύγκριση με τα τυλίγματα διπλής στρώσης όταν πρόκειται για την ίδια μηχανή, δηλαδή για την δημιουργία ίδιας τάσης και ίδιας ισχύος. Τέλος, η μηχανή με τύλιγμα διπλής στρώσης είναι μικρότερη και συνεπώς απαιτεί λιγότερα υλικά για την κατασκευή της. Γενικά, οι μηχανές κατασκευάζονται με τυλίγματα διπλής στρώσης. Αν Ν είναι ο αριθμός των αυλακώσεων, m ο αριθμός των φάσεων και 2p ο αριθμός των πόλων, τότε ορίζουμε ένα χαρακτηριστικό αριθμό q= (2.1) ο οποίος δηλώνει τον αριθμό των αυλακώσεων ανά πόλο και ανά φάση. Πρέπει όμως να διευκρινισθεί ότι εδώ η σημασία ενός πόλου είναι διαφορετική από ότι στη μηχανή συνεχούς ρεύματος, όπου ένας πόλος σημαίνει ένα προεξέχον μέρος του στάτη που φέρει το τύλιγμα διέγερσης. Εδώ ένας πόλος σημαίνει μια ζώνη επί της κυλινδρικής επιφάνειας, στην οποία όλες οι υπάρχουσες εκεί πλευρές των πηνίων διαρρέονται από ρεύμα της ίδιας κατεύθυνσης. Μια τέτοια ζώνη περιλαμβάνει ένα ορισμένο αριθμό αυλακώσεων μέσα στις οποίες βρίσκονται οι πλευρές των πηνίων. Στο σχήμα που ακολουθεί φαίνονται διάφορα τυλίγματα με διαφορετικό q. ~ 44 ~
59 Σχήμα 2.7 Διάφορα τυλίγματα με διαφορετικό q [2] Οι εγκάρσιες συνδέσεις ονομάζονται κεφαλές του τυλίγματος. Τύμπανο λέγεται εκείνο το μέρος της μηχανής στο οποίο αναπτύσσεται τάση εξ' επαγωγής. Ο ασύγχρονος κινητήρας έχει δύο τυλίγματα εναλλασσόμενου ρεύματος, ένα στο στάτη και ένα στον δρομέα. Όλα τα στοιχεία του στάτη θα έχουν τον δείκτη 1 και όλα τα στοιχεία του δρομέα του δείκτη Αρχή λειτουργίας ασύγχρονων τριφασικών κινητήρων Η αρχή λειτουργίας των ασύγχρονων μηχανών βασίζεται στο φαινόμενο της ανάπτυξης ηλεκτρεγερτικών δυνάμεων με επαγωγή στους αγωγούς του δρομέα (από το φαινόμενο αυτό προκύπτει και το όνομα επαγωγικοί κινητήρες). Πιο συγκεκριμένα, το τύλιγμα του στάτη τροφοδοτείται με ρεύμα από το δίκτυο και δημιουργεί ένα μαγνητικό πεδίο στο διάκενο μεταξύ στάτη και δρομέα το οποίο επάγει στο δρομέα τάσεις. Οι τάσεις αυτές έχουν ως αποτέλεσμα τη ροή ρευμάτων στα τυλίγματα του δρομέα. Τα ρεύματα αυτά μαζί με το πεδίο που τα δημιούργησε προκαλούν δυνάμεις και κατά συνέπεια ηλεκτρομαγνητική ροπή υπό την επίδραση της οποίας ο δρομέας τίθεται σε περιστροφική κίνηση. Πιο συγκεκριμένα, στην τριφασική ασύγχρονη μηχανή το ρεύμα που διαρρέει τα τρία τυλίγματα του στάτη έχει συχνότητα f και δημιουργεί ένα στρεφόμενο μαγνητικό πεδίο στο διάκενο μεταξύ στάτη και δρομέα. Το πεδίο αυτό στρέφεται με το σύγχρονο αριθμό στροφών n s = f s / p όπου p ο αριθμός των ζευγών των πόλων της μηχανής.o αριθμός στροφών n s ανά λεπτό ονομάζεται σύγχρονος αριθμός στροφών. ~ 45 ~
60 Το στρεφόμενο μαγνητικό πεδίο είναι μια κύμανση, δηλαδή μια συνάρτηση χρόνου και τόπου που περιγράφεται από την εξίσωση: B(x,t) = B max *sin(ωt + π * ) (2.2) όπου: τ p = απόσταση μεταξύ δύο διαδοχικών πόλων (πολική απόσταση) ω= 2πf s x = απόσταση επί της περιφέρειας του εσωτερικού κύκλου, που σχηματίζεται κατά την εγκάρσια τομή του στάτη υπολογισμένη από ορισμένο σημείο που επιλέγεται ελεύθερα. Προϋπόθεση για να δημιουργηθεί αυτό το στρεφόμενο μαγνητικό πεδίο με σταθερό εύρος και σταθερό αριθμό στροφών είναι η ύπαρξη τριών συμμετρικών τυλιγμάτων τοποθετημένων κατά 120 ο μεταξύ τους στο χώρο και τροφοδοτούμενων από ημιτονοειδές τριφασικό σύστημα τάσεων με διαφορά φάσης 120 ο μεταξύ τους. Το πεδίο αυτό, όπως προ είπαμε, επάγει στο δρομέα τάσεις με αποτέλεσμα να δημιουργούνται ρεύματα τα οποία σχηματίζουν μαζί με το ίδιο το πεδίο ηλεκτρομαγνητική ροπή, που τείνει να περιστρέψει το δρομέα κατά τη φορά του πεδίου και να αντισταθεί στο αίτιο που προκάλεσε την κίνηση. Επομένως ο δρομέας προσπαθεί να φτάσει το στρεφόμενο πεδίο ώστε μόλις γίνει η σχετική μεταξύ τους ταχύτητα ίση με μηδέν, να μηδενιστεί και το ρεύμα. Δεν κατορθώνει όμως ποτέ να φτάσει το μαγνητικό πεδίο, δηλαδή δεν αποκτά ποτέ σύγχρονη ταχύτητα n s, διότι τότε δεν θα είχαμε ρεύμα εξ' επαγωγής και η ροπή θα ήταν μηδέν. Μία ελάχιστη ροπή όμως, είναι απαραίτητη για την αντιμετώπιση όποιου μηχανικού φορτίου υπάρχει στον άξονα της μηχανής π.χ. τριβές. Σε μία ιδανική κατάσταση (μηδενικό φορτίο) θα είχαμε σύγχρονη ταχύτητα. Λέμε, λοιπόν, ότι ο δρομέας παρουσιάζει κάποια ολίσθηση s, δηλαδή περιστρέφεται ασύγχρονα. Γι αυτό και η μηχανή ονομάζεται ασύγχρονη. Ο ορισμός της ολίσθησης θα δοθεί αναλυτικά παρακάτω. Εάν ο δρομέας περιστρέφεται με ορισμένη ολίσθηση και αυξηθεί το φορτίο, τότε θα αυξηθεί η ολίσθηση, δηλαδή θα μειωθεί ο αριθμός των στροφών. Το ρεύμα εξ' επαγωγής και μέσω αυτού και η ροπή, αυξάνεται. Η αύξηση αυτή γίνεται μέχρι ενός ορισμένου σημείου, το οποίο ονομάζεται σημείο ανατροπής, η δε αντιστοιχούσα ~ 46 ~
61 ροπή λέγεται ροπή ανατροπής και η αντίστοιχη ολίσθηση ονομάζεται ολίσθηση ανατροπής. Πέρα από το σημείο αυτό η ροπή μειώνεται, άρα η ροπή ανατροπής είναι η μέγιστη δυνατή ροπή της ασύγχρονης μηχανής. Η περιοχή από το συγχρονισμό μέχρι το σημείο ανατροπής λέγεται περιοχή ευστάθειας. Έξω από την περιοχή αυτή και για ταχύτητες μικρότερες της σύγχρονης επικρατεί αστάθεια. Εάν ο δρομέας στρέφεται με ταχύτητα μεγαλύτερη του στρεφόμενου πεδίου, τότε η μηχανή λειτουργεί ως γεννήτρια, δηλαδή προσφέρει μέσο του στάτη προς το δίκτυο ηλεκτρική ενέργεια, η δε ολίσθηση γίνεται αρνητική. Υπάρχει και μια τρίτη κατάσταση λειτουργίας, η οποία είναι χαρακτηριστική κατά την ακόλουθη εφαρμογή: ένας κινητήρας προσπαθεί να ανυψώσει ένα φορτίο (π.χ. έναν ανελκυστήρα). Έστω ότι το φορτίο δημιουργεί μια ηλεκτρομαγνητική ροπή μεγαλύτερη από εκείνη που μπορεί να παράγει ο κινητήρας. Τότε ο δρομέας αναγκάζεται να στραφεί σε αντίθετη φορά από εκείνη που «ήθελε» αυτός. Η ολίσθηση παραμένει θετική, αλλά μεγαλύτερη από την ολίσθηση της περιοχής όπου λειτουργεί η μηχανή ως κινητήρας. Η περιοχή αυτή χαρακτηρίζεται από το γεγονός, ότι η ασύγχρονη μηχανή δέχεται ενέργεια και από το δίκτυο προς το στάτη (ηλεκτρική ενέργεια) και από το μηχανικό φορτίο στον άξονα (μηχανική ενέργεια) και ονομάζεται περιοχή πέδης. Οι πιο πάνω καταστάσεις λειτουργίας της ασύγχρονης μηχανής, φαίνονται στην καμπύλη M e =f(n) ή Μ e =f(s), η οποία παριστάνει την ηλεκτρομαγνητική ροπή μιας ασύγχρονης μηχανής ως συνάρτηση των στροφών ή της ολίσθησης. Σχήμα 2.8 Πλήρης χαρακτηριστική ροπής -ταχύτητας μιας ασύγχρονης μηχανής [17] ~ 47 ~
62 2.6. Συχνότητα και ολίσθηση Εάν ο στάτης μιας Α.Μ τροφοδοτείται από το δίκτυο και ο δρομέας είναι ανοικτός τότε η μηχανή προσλαμβάνει το ρεύμα εν κενώ, το οποίο καλύπτει θερμικές απώλειες και δημιουργεί το μαγνητικό πεδίο. Ο σύγχρονος αριθμός στροφών n s, ορίζεται από την σχέση n s = f s /p (2.3) Κοντά σ' αυτόν βρίσκεται ο ονομαστικός αριθμός στροφών της μηχανής, λίγο μικρότερος όταν πρόκειται για κινητήρα, λίγο μεγαλύτερος όταν πρόκειται για γεννήτρια. Όταν δίνεται ο σύγχρονος αριθμός n s και η συχνότητα f s προκύπτει ο αριθμός p που εκφράζει τα ζεύγη των πόλων. Εάν n η ταχύτητα του δρομέα, τότε αυτός σχετικά προς το στρεφόμενο πεδίο στρέφεται με ταχύτητα: n = n s - n (2.4) Τα εναλλασσόμενα ηλεκτρικά μεγέθη του δρομέα έχουν τη συχνότητα: f R = p * n R (2.5) Είναι αυτονόητο ότι ισχύει η σχέση: f s = f R + p * n (2.6) όπου:f s = συχνότητα στάτη f R = συχνότητα δρομέα n = αριθμός στροφών δρομέα Εάν ο δρομέας στρέφεται αντίθετα από τη φορά του μαγνητικού πεδίου τότε το n γίνεται αρνητικό. Το ρεύμα του δρομέα δημιουργεί και αυτό ένα μαγνητικό πεδίο, το οποίο ως προς το δρομέα στρέφεται με n R, αλλά ως προς τον στάτη με n s. Τα δύο πεδία δημιουργούν την ηλεκτρομαγνητική ροπή (μέχρι τώρα λέγαμε, ότι η ροπή παράγεται ~ 48 ~
 Το μέγεθος s εκφράζει την ποσοστιαία διαφορά της ταχύτητας του δρομέα από τη σύγχρονη ταχύτητα του στρεφόμενου μαγνητικού πεδίου.")
63 από το ρεύμα και το πεδίο) και είναι φυσικό να έχουν μεταξύ τους σχετική ταχύτητα ίση με μηδέν. Σπουδαίο μέγεθος της Α.Μ. είναι η ολίσθηση, η οποία ορίζεται από την εξίσωση: s = = (2.7) Το μέγεθος s εκφράζει την ποσοστιαία διαφορά της ταχύτητας του δρομέα από τη σύγχρονη ταχύτητα του στρεφόμενου μαγνητικού πεδίου. Στην κατάσταση ηρεμίας έχουμε n=0 και επομένως s=1, ενώ για n=n s έχουμε s=0. Εάν ο δρομέας στραφεί γρηγορότερα από το στρεφόμενο πεδίο (n>n s ), τότε η ολίσθηση γίνεται αρνητική(μηχανή λειτουργεί σαν γεννήτρια). Προκύπτει επομένως η σχέση: s = (2.8) που συνδέει τις δύο συχνότητες f s και f R με την ολίσθηση Αλλαγή φοράς περιστροφής Στα πλαίσια αυτής της διπλωματικής, προκειμένου να κινείται ο θάλαμος ανάμεσα στους ορόφους απαιτείται να εναλλάσσεται η φορά κίνησής του και επομένως η αλλαγή φοράς περιστροφής του κινητήρα. Σχήμα 2.9 Αλλαγή φοράς περιστροφής [20] ~ 49 ~
64 Η αλλαγή της φοράς κίνησης του θαλάμου του ανελκυστήρα, επιτυγχάνεται με την αλλαγή της φοράς περιστροφής του μαγνητικού πεδίου. Όπως φαίνεται και στην προηγούμενη εικόνα, για να γίνει αυτή η αλλαγή αντιμεταθέτουμε τις συνδέσεις των δύο από τους τρείς αγωγούς και επομένως δύο από τις τρεις φάσεις του κινητήρα Λειτουργία σε μόνιμη κατάσταση Ένα μεγάλο πλεονέκτημα του ασύγχρονου κινητήρα σε σύγκριση με τον σύγχρονο κινητήρα είναι το γεγονός ότι μπορεί να ξεκινήσει από μόνος του χωρίς να ληφθούν ιδιαίτερα μέτρα. Είναι όμως αναγκαίο η ροπή που αναπτύσσει ο ασύγχρονος κινητήρας να είναι μεγαλύτερη από την ροπή του φορτίου, μέχρι να αποκατασταθεί η ισορροπία, διότι πρέπει να αντιμετωπισθεί η αδράνεια. Η γενική εξίσωση που εκφράζει την ισορροπία των ροπών είναι: M e = M L +J * (2.9) όπου: Μ e = ηλεκτρομαγνητική ροπή Μ L = ροπή φορτίου J * =M Β = ροπή επιταχύνσεως J = ροπή αδράνειας Η επιτάχυνση διαρκεί τόσο χρόνο, έως ότου γίνει Μ e =M L Σχήμα 2.10 Χαρακτηριστικές ηλεκτρομαγνητικής ροπής M e και ροπής φορτίου M L [2] ~ 50 ~
65 Στο προηγούμενο σχήμα βλέπουμε την ηλεκτρομαγνητική ροπή M e και τη ροπή φορτίου M L ως συναρτήσεις του αριθμού στροφών. Στην μόνιμη κατάσταση λειτουργίας αποκαθίσταται ο ονομαστικός αριθμός στροφών n N ο οποίος αντιστοιχεί στο σημείο της τομής των καμπυλών M e =f(n) και Μ L =f(n). Το σημείο ονομαστικής λειτουργίας που έχει συντεταγμένες (Μ N,n N ) πρέπει να είναι τέτοιο, ώστε να ανταποκρίνεται στις απαιτήσεις που τίθενται από τη θερμική αντοχή της μηχανής, από τον καλό βαθμό απόδοσης, από τη δυνατότητα υπερφόρτισης και από τον κατάλληλο συντελεστή ισχύος. Η εκκίνηση της Α.Μ. παρουσιάζει δύο προβλήματα. Το πρώτο είναι το μεγάλο ρεύμα εκκίνησης και το δεύτερο η μικρή ροπή εκκίνησης Μ ea. Το μεγάλο ρεύμα τόσο στο στάτη όσο και στο δρομέα δημιουργεί μεγάλες απώλειες σύμφωνα με τον τύπο P Cu = m * I 2 * R και μεγάλη πτώση τάσης στο δίκτυο. Το ρεύμα εκκίνησης συνήθως κυμαίνεται μεταξύ 2.5*I N και 10*I N. Το δεύτερο πρόβλημα είναι η σχετικά μικρή ροπή εκκίνησης Μ ea, ώστε να μη μπορούμε πάντα να ξεκινήσουμε με φορτισμένο το δρομέα. Η Α.Μ. έχει, όμως, το πλεονέκτημα να μας προσφέρει η ίδια τη δυνατότητα να αντιμετωπίζουμε και τα δύο προβλήματα με τον ακόλουθο τρόπο: Η μέγιστη ροπή Μ K είναι ανεξάρτητη από την ωμική αντίσταση του δρομέα R R, ενώ η ολίσθηση s k εξαρτάται από την R R. Είναι λοιπόν δυνατόν αυξάνοντας την αντίσταση του δρομέα να μετακινήσουμε την καμπύλη ροπής - ταχύτητας προς τα αριστερά, δημιουργώντας έτσι μεγάλη ροπή εκκίνησης και ταυτόχρονα μειώνοντας το ρεύμα εκκίνησης, όπως φαίνεται στο επόμενο σχήμα: Σχήμα 2.11 Έλεγχος της ταχύτητας του επαγωγικού κινητήρα με δακτυλιοφόρο δρομέα, με τη μεταβολή της αντίστασης του δρομέα [20] ~ 51 ~
66 Έτσι η μηχανή με δακτυλιοφόρο δρομέα προσφέρει τη δυνατότητα να συνδέσουμε στο δρομέα μια μεταβλητή αντίσταση R v και να ρυθμίσουμε τη ροπή εκκίνησης M ea. Στη μηχανή με βραχυκυκλωμένο δρομέα δεν έχουμε αυτή τη δυνατότητα, αλλά μπορούμε να εκμεταλλευτούμε μια άλλη δυνατότητα που μας προσφέρει το επιδερμικό φαινόμενο. Σε ότι αφορά τώρα την ευστάθεια, διαπιστώνουμε ότι λόγω της μορφής της συνάρτησης M e =f(n) δεν έχουμε ευστάθεια σε όλα τα σημεία αυτής. Η συνθήκη ευστάθειας προκύπτει από τη μελέτη της χαρακτηριστικής της Α.Μ. σε συνδυασμό με τη χαρακτηριστική του φορτίου. Αποδεικνύεται ότι ευστάθεια έχουμε όταν ισχύει: > (2.10) Για να έχουμε ευστάθεια σε κάποιο σημείο λειτουργίας, πρέπει η αύξηση της ροπής Μ L να είναι μεγαλύτερη από την αύξηση της ροπής της μηχανής M e. Σύμφωνα με το σχήμα που ακολουθεί, μόλις μεγαλώσει η ροπή του φορτίου Μ L κατά ΔΜ L για οποιονδήποτε λόγο τότε θα μεγαλώσει και η ταχύτητα n s κατά Δn s. Θα μειωθεί όμως η ηλεκτρομαγνητική ροπή Μ e και έτσι αναγκαστικά θα έχουμε επιβράδυνση, με αποτέλεσμα να επανέλθουμε στο σημείο Ρ N. Τώρα, εάν μειωθεί η Μ L κατά -ΔΜ L τότε ο αριθμός στροφών τείνει να μειωθεί κατά -Δn s. Τότε όμως μεγαλώνει η Μ e και αμέσως έχουμε επιτάχυνση, με αποτέλεσμα την επάνοδο στην αρχική κατάσταση. Τα προηγούμενα ισχύουν για τη γραμμική περιοχή της ροπής Μ e δηλαδή για 0 s s k. Σχήμα 2.12 Ορισμός ευστάθειας στην ασύγχρονη μηχανή [2] ~ 52 ~
67 Στην υπόλοιπη περιοχή, δηλαδή στην περιοχή αστάθειας, συμβαίνουν ακριβώς τα αντίθετα. Μια μικρή αύξηση της M L προκαλεί ταυτόχρονη αύξηση της n και Μ e, με αποτέλεσμα να απομακρυνόμαστε διαρκώς από την αρχική κατάσταση. Η περιοχή ευστάθειας εκτείνεται, λοιπόν, από τη σύγχρονη ταχύτητα μέχρι το σημείο ανατροπής Ισοδύναμο κύκλωμα και εξισώσεις τάσεων στην Α.Μ Στη μόνιμη κατάσταση λειτουργίας οι τάσεις και τα ρεύματα είναι ημιτονοειδείς συναρτήσεις και η ταχύτητα της μηχανής σταθερή. Τότε για το στάτη και το δρομέα ισχύουν οι ακόλουθες εξισώσεις τάσεων = (R S + j*x S )* + j*x SR * (Για το στάτη) (2.11) = (R R + j*s*x R )* + j*s*x RS * (Για το δρομέα) (2.12) ενώ στο ακόλουθο σχήμα φαίνεται το απλοποιημένο μονοφασικό ισοδύναμο με τα μεγέθη του δρομέα ανηγμένα στο στάτη: Σχήμα 2.13 Ισοδύναμο κύκλωμα ασύγχρονης μηχανής [20] Το X RS ' εκφράζει την ανηγμένη τιμή της επαγωγικής αντίστασης του δρομέα και να σημειωθεί επίσης ότι ο δρομέας θεωρείται βραχυκυκλωμένος συνήθως οπότε U R =0. Εάν έχουμε δακτυλιοφόρο δρομέα θεωρούμε την εξωτερική αντίσταση ' συμπεριλαμβανομένη στην R R. ~ 53 ~
68 2.10. Ηλεκτρομαγνητική δομή ασύγχρονου κινητήρα - Διανυσματικό διάγραμμα Θα παρουσιάσουμε επίσης ένα αντιπροσωπευτικό διάγραμμα για την ηλεκτρομαγνητική δομή ενός ασύγχρονου κινητήρα και θα παρουσιάσουμε και το διανυσματικό του διάγραμμα ώστε να ολοκληρωθεί η παρουσίαση της ασύγχρονης μηχανής. Στο παρακάτω σχήμα παρουσιάζεται οπτικά μία άποψη της ηλεκτρομαγνητικής δομής του ασύγχρονου κινητήρα. Σχήμα 2.14 Ηλεκτρομαγνητική δομή ασύγχρονου κινητήρα [20] Από το ισοδύναμο μονοφασικό κύκλωμα του επαγωγικού κινητήρα προκύπτουν οι ακόλουθες εξισώσεις για τα κυκλώματα του στάτη και του δρομέα: u = R s * + L s * - M* (2.13) 0 = R r * + L r * - M* (2.14) όπου: R s =αντίσταση στάτη R r =αντίσταση δρομέα ~ 54 ~
69 L s =αυτεπαγωγή στάτη L r =αυτεπαγωγή δρομέα M=αμοιβαία επαγωγή Και επειδή όπως προαναφέραμε στη μόνιμη κατάσταση ισορροπίας θεωρούμε ημιτονοειδή μεγέθη, οι εξισώσεις αυτές γράφονται: V= * + j*ω* * - j*ω*m* (2.15) 0= * + j*s*ω* * - j*ω*s*m* (2.16) όπου:s=ολίσθηση και ω = 2πf s (2.17) Ακολουθεί το διανυσματικό διάγραμμα των τάσεων, των ρευμάτων και των μαγνητικών πεδίων της Α.Μ. Σχήμα 2.15 Διανυσματικό διάγραμμα των τάσεων, των ρευμάτων και των μαγνητικών πεδίων του επαγωγικού κινητήρα [20] ~ 55 ~
70 ~ 56 ~
71 ΚΕΦΑΛΑΙΟ 3 Περιγραφή Του Μικροεπεξεργαστή [3], [5] 3.1. Σύντομη Παρουσίαση Μικροελεγκτή Στα πλαίσια της παρούσας διπλωματικής εργασίας κατασκευάστηκε ηλεκτρονικό κύκλωμα το οποίο υλοποιεί το κύκλωμα ελέγχου του ανελκυστήρα. Για τον σκοπό αυτό καταφύγαμε στην χρήση του μικροεπεξεργαστή dspic30f4011 της εταιρίας Microchip. Η χρήση του μικροεπεξεργαστή σε παρόμοιες εφαρμογές είναι ευρέως διαδεδομένη σήμερα. Ο προγραμματισμός του γίνεται είτε σε γλώσσα χαμηλού επιπέδου assembly, είτε σε γλώσσα C. Η αλματώδης ανάπτυξη και εξέλιξη των επεξεργαστών τα τελευταία χρόνια έχουν αναδείξει τα σύγχρονα μικροϋπολογιστικά συστήματα ως τη βέλτιστη λύση για την υλοποίηση πολύπλοκων και ταχύτατων λογικών ελέγχου, αυξάνοντας την αξιοπιστία, τη χρηστικότητα και την απόδοση των διαφόρων τοπολογιών ισχύος. Τα μικροϋπολογιστικά συστήματα που ενσωματώνουν τα απαραίτητα περιφερειακά για την υλοποίηση μεθόδων ελέγχου λέγονται μικροελεγκτές. Γενικότερα, ο μικροελεγκτής είναι ένας τύπος μικροεπεξεργαστή με έμφαση στην αυτάρκεια και στην υψηλή τιμή απόδοσης/κόστους, σε αντίθεση με ένα μικροεπεξεργαστή γενικού σκοπού. Η μοναδική διαφορά μεταξύ μικροεπεξεργαστή και μικροελεγκτή είναι ότι ο πρώτος αποτελείται από τρία μόνο μέρη: Την αριθμητική και λογική μονάδα (ALU) Τη μονάδα ελέγχου (CU) Τη μνήμη (Memory-Registers) ενώ Ο δεύτερος περιλαμβάνει εκτός από τα παραπάνω και άλλες μονάδες όπως RAM, ROM, Εισόδους, Εξόδους, κτλ. ~ 57 ~
72 Ο μικροελεγκτής είναι ένα ολοκληρωμένο υψηλού βαθμού ολοκλήρωσης (Large Scale Integration chip), που εκτελεί αριθμητικές και λογικές λειτουργίες, καθώς και τις απαραίτητες λειτουργίες ελέγχου. Για την πραγματοποίηση όμως των σκοπών αυτών, υπάρχουν πολλοί τρόποι, με αποτέλεσμα να υπάρχουν μικροελεγκτές διαφόρων χαρακτηριστικών και δυνατοτήτων. Η εκλογή του κατάλληλου μικροελεγκτή για μία ορισμένη εφαρμογή είναι ζωτικής σημασίας για την επιτυχή πραγματοποίηση του τελικού σκοπού. Σημεία που λαμβάνονται υπόψη κατά την επιλογή ενός με είναι: Η αρχιτεκτονική του μικροελεγκτή Πόσα chipsαπαιτούνται για ένα πλήρες μικροϋπολογιστικό σύστημα Το μήκος της λέξης και ο τρόπος με τον οποίο ορίζονται τα διάφορα τμήματα της κάθε εντολής Το σύνολο των εντολών, ο τρόπος εκτέλεσής των, η ευκολία με την οποία εκτελούνται Η τεχνολογία κατασκευής του Τυχόν περιορισμοί που υπάρχουν σε ισχύ και μέγεθος Πόσο καινούργιος είναι Αν διαθέτει μονάδα συγχρονισμού με εξωτερικά γεγονότα Ο τύπος της μνήμης, η οργάνωση της για πρόγραμμα και στοιχεία, καθώς και οι δυνατοί τρόποι προσπέλασής της Ο τύπος εισόδων/εξόδων και ο τρόπος επικοινωνίας με το εξωτερικό περιβάλλον Η τιμή του Στο κεφάλαιο αυτό γίνεται αρχικά μια σύντομη περιγραφή του μικροεπεξεργαστή που χρησιμοποιήθηκε, καθώς και των δυνατοτήτων του, ώστε να διευκολυνθεί η μελέτη και ο σχεδιασμός της κατασκευής. ~ 58 ~
73 3.2. Γενική Περιγραφή Ενός Μικροελεγκτή Σε αντίθεση με τους επεξεργαστές γενικού σκοπού, οι σύγχρονοι μικροελεγκτές δεν υλοποιούν ένα εξωτερικό δίαυλο δεδομένων ή διευθύνσεων, επειδή ενσωματώνουν τη μνήμη RAMκαι ROMστο ίδιο chipμε τον επεξεργαστή. Εξαιτίας του παραπάνω γεγονότος, απαιτούνται λιγότερες ακίδες και το ολοκληρωμένο μπορεί να τοποθετηθεί σε ένα μικρότερο και φθηνότερο πακέτο. Τοποθετώντας τη μνήμη και τα υπόλοιπα περιφερειακά σε ένα πακέτο αυξάνεται το κόστος του chipαλλά μειώνεται το κόστος του συστήματος, αν αυτό υλοποιούταν με ανεξάρτητες μονάδες. Άλλο ένα πλεονέκτημα της ολοκλήρωσης των περιφερειακών είναι ο λιγότερος απαιτούμενος χώρος στην πλακέτα, καθώς επίσης και η μείωση των παρασιτικών τάσεων στα σήματα. Τούτο είναι πολύ σημαντικό όταν χρησιμοποιείται σε διατάξεις ηλεκτρονικών ισχύος, όπου εμφανίζονται υψηλές μεταβολές τάσεων και ρευμάτων. Ένας μικροελεγκτής συνήθως ενσωματώνει τα παρακάτω χαρακτηριστικά: Κεντρική μονάδα επεξεργασίας Είσοδοι - Έξοδοι, σειριακές θύρες Άλλες σειριακές επικοινωνίες όπως I 2 C, SPI, CANγια τη διασύνδεση μεταξύ μικροσυστημάτων. Χρονιστές και Watchdog RAM για αποθήκευση δεδομένων ROM, EPROM, EEPROM, ή FLASHMEMORYγια αποθήκευση του προγράμματος Γεννήτρια ρολογιού- συνήθως ένας ταλαντωτής για toχρονισμό κρυστάλλου quartz, συντονιστή ή RCκύκλωμα. Μετατροπείς από αναλογικό σε ψηφιακό και αντίστροφα. Εξειδικευμένα περιφερειακά όπως γεννήτρια PWM ~ 59 ~
74 3.3. Συνοπτική περιγραφή του dspic30f4011 Από την οικογένεια επεξεργαστών της Microchip το chip του μικροελεγκτή 30F4011 είναι ένα ολοκληρωμένο με 40 pin. Το σχήμα παρακάτω απεικονίζει τον dspic30f4011. Σχήμα 3.1 Ολοκληρωμένο dspic30f4011[5] Στους πίνακες που ακολουθούν παρουσιάζεται το είδος καθώς και η λειτουργία που μπορεί να επιτελέσει το κάθε ένα από τα 40 pin του μικροελεγκτή. ~ 60 ~

75 Σχήμα 3.2 Περιγραφή των ακροδεκτών του μικροεπεξεργαστή [5] ~ 61 ~
![Σχήμα 3.3 Περιγραφή των ακροδεκτών του μικροεπεξεργαστή (συνέχεια) [5] Το πιο σημαντικό τμήμα του μικροελεγκτή είναι η κεντρική μονάδα επεξεργασίας (CPU).](/docs-images/20/644252/images/76-0.png "Οι μικροελεγκτές της οικογένειας dspic30fέχουν ως κεντρική μονάδα επεξεργασίας μία 16bit (data) αρχιτεκτονική, τροποποιημένη κατά Harvard, με βελτιωμένο πακέτο εντολών, περιλαμβάνοντας σημαντική")
76 Σχήμα 3.3 Περιγραφή των ακροδεκτών του μικροεπεξεργαστή (συνέχεια) [5] Το πιο σημαντικό τμήμα του μικροελεγκτή είναι η κεντρική μονάδα επεξεργασίας (CPU). Οι μικροελεγκτές της οικογένειας dspic30fέχουν ως κεντρική μονάδα επεξεργασίας μία 16bit (data) αρχιτεκτονική, τροποποιημένη κατά Harvard, με βελτιωμένο πακέτο εντολών, περιλαμβάνοντας σημαντική υποστήριξη και σε DSP λειτουργίες. Η CPU έχει εντολές των 24bitμε μεταβλητό μήκος του κώδικα λειτουργίας (opcode). Ο απαριθμητής προγράμματος έχει μήκος 24-bit και μπορεί να διευθυνσιοδοτήσει μέχρι 4Μ*24bit μνήμης για το πρόγραμμα χρήστη. Ο ενσωματωμένος μηχανισμός προφόρτωσης (prefetch) που εκτελείται σε ένα μόνο κύκλο αυξάνει την απόδοση προσδίδοντας προβλέψιμη εκτέλεση. Όλες οι εντολές ~ 62 ~
77 εκτελούνται σε ένα κύκλο, εκτός από τις εντολές που αλλάζουν τη ροή του προγράμματος, τις μετακινήσεις λέξεων διπλής ακρίβειας και τις εντολές πινάκων. Ο dspic30f4011 διαθέτει δεκαέξι 16bit καταχωρητές εργασίας (Working registers) στο μοντέλο προγραμματισμού. Κάθε ένας από τους καταχωρητές εργασίας μπορεί να χρησιμοποιηθεί σαν δεδομένο, σαν διεύθυνση ή σαν καταχωρητής μετατόπισης διεύθυνσης. Ο 16 ος καταχωρητής εργασίας (W15) λειτουργεί ως ένας δείκτης στοίβας (stack pointer) για διακοπές και ανακλήσεις υπορουτινών. Το πακέτο εντολών του dspic30f4011 διαθέτει δυο είδη εντολών: τις εντολές MCU και τις εντολές DSP. Και τα δυο είδη εντολών είναι ενσωματωμένα στην αρχιτεκτονική και εκτελούνται από μια κοινή μονάδα εκτέλεσης. Το πακέτο εντολών περιλαμβάνει πολλούς τρόπους διευθυνσιοδότησης και έχει σχεδιαστεί για βέλτιστη αποτελεσματικότητα του C compiler. Η μνήμη του επεξεργαστή και όλοι οι καταχωρητές είναι οργανωμένοι σε μήκος των 16bit. Ο dspic30f περιλαμβάνει δύο διαφορετικά τμήματα δεδομένων. Τα τμήματα αυτά των δεδομένων μπορεί να προσπελαστούν ξεχωριστά (για DSP εντολές) ή μαζί σαν ένα συνεχές εύρος διευθύνσεων (για τις εντολές MCU). Η μνήμη δεδομένων προσπελαύνεται χρησιμοποιώντας δύο μονάδες παραγωγής διευθύνσεων (AGU) και διαφορετικούς δρόμους δεδομένων. Γενικότερα τα χαρακτηριστικά που συγκεντρώνει η αρχιτεκτονική της κεντρικής μονάδας επεξεργασίας του dspic30f4011 είναι: 83 βασικές εντολές. Εντολές των 24bit με 16bit μονοπάτι (path) δεδομένων. 48Kbytes ενσωματωμένης Flash μνήμης προγράμματος. 2Kbytes ενσωματωμένης μνήμης δεομένων RAM. 1Kbyte μνήμης EEPROM Λειτουργία υπό 30MIPS Έως 40MHz εξωτερικό ρολόι 4MHz έως 10MHz ταλαντωτής με ενεργό PLL (4x,8x,16x) ~ 63 ~
78 30 πηγές διακοπών εξωτερικές πηγές διακοπής επίπεδα προτεραιότητας για κάθε πηγή διακοπής διακοπές Trap στον επεξεργαστή Πίνακας 16x16 καταχωρητών εργασίας. Δεν θα πρέπει να παραληφθεί ότι ο συγκεκριμένος μικροελεγκτής παρέχει τη δυνατότητα της DSPλειτουργίας. Τα πλεονεκτήματα που παρέχονται από τη DSPλειτουργία είναι τα ακόλουθα: Ταυτόχρονη διπλή εισαγωγή δεδομένων (dual data fetch) Δύο συσσωρευτές των 40bit με προαιρετική λογική κορεσμού. 17bit x 17bit μονού κύκλου πολλαπλασιαστή ακεραίων ή δεκαδικών. Όλες οι DSP εντολές είναι μονού κύκλου. 16bit δεξιά ή αριστερή μετατόπιση (shift) μονού κύκλου Περιφερειακές μονάδες Βασικό γνώρισμα ενός μικροελεγκτή, που τον ξεχωρίζει από έναν επεξεργαστή, είναι η ενσωμάτωση περιφερειακών στο ίδιο ολοκληρωμένο. Στο συγκεκριμένο μικροελεγκτή πολλά είναι τα περιφερειακά που τον πλαισιώνουν. Στη συνέχεια παρουσιάζονται, συνοπτικά, τα περιφερειακά αυτά και αναλύονται τα πιο σημαντικά που σχετίζονται με τον έλεγχο ηλεκτρονικών μετατροπέων ισχύος. Ψηφιακές θύρες εισόδου εξόδου 2 Χρονιστές (Timers) Input capture module. Μονάδα εύρεσης και αποτύπωσης χρονικής στιγμής συμβάντος Output compare module Quadrature Encoder Interface ~ 64 ~
79 10bit μετατροπέα από αναλογικό σε ψηφιακό σήμα. Θύρα ασύγχρονης επικοινωνίας RS-232 UART. 3 Γεννήτριες PWM. Μονάδες σειριακής επικοινωνίας βασισμένη στα πρωτόκολλα SPI και I2C. Μονάδα CAN. Το σχεδιάγραμμα που δίνεται στο σχήμα που ακολουθεί παρουσιάζει το μικροελεγκτή σε επικοινωνία με τα περιφερειακά του. Όπως μπορεί εύκολα να γίνει αντιληπτό, ο αριθμός των ακίδων του επεξεργαστή είναι περιορισμένος για αυτό έχει γίνει πολύπλεξη των σημάτων των περιφερειακών μεταξύ τους. Η ενεργοποίηση της κάθε ακίδας γίνεται από τον κώδικα μέσω ορισμένων καταχωρητών ειδικής λειτουργίας (SFR). Ο μικροελεγκτής διαθέτει πέντε ψηφιακές θύρες εισόδου-εξόδου συγκεκριμένου αριθμού ακίδων. Όποια ακίδα δεν χρησιμοποιείται από κάποιο άλλο περιφερειακό μπορεί να χρησιμοποιηθεί ως θύρα εισόδου ή εξόδου. Παρακάτω περιγράφονται κάποια από τα σπουδαιότερα περιφερειακά που χρησιμοποιήθηκαν στην παρούσα διπλωματική εργασία. ~ 65 ~
![Σχήμα 3.4 Block διάγραμμα του μικροελεγκτή [3] 3.5.](/docs-images/20/644252/images/80-0.png "Θύρες Εισόδου/ Εξόδου - Ε/Ε Όπως φαίνεται και στο προηγούμενο σχήμα, υπάρχουν πέντε θύρες ψηφιακών εισόδων-εξόδων και για τον περιορισμό του αριθμού των ακίδων έχει γίνει πολύπλεξη των σημάτων αυτών")
80 Σχήμα 3.4 Block διάγραμμα του μικροελεγκτή [3] 3.5. Θύρες Εισόδου/ Εξόδου - Ε/Ε Όπως φαίνεται και στο προηγούμενο σχήμα, υπάρχουν πέντε θύρες ψηφιακών εισόδων-εξόδων και για τον περιορισμό του αριθμού των ακίδων έχει γίνει πολύπλεξη των σημάτων αυτών με τις εξόδους των υπόλοιπων περιφερειακών. Όταν ένα περιφερειακό είναι ενεργοποιημένο και χρησιμοποιεί κάποια έξοδο τότε το αντίστοιχο pin παύει να αποτελεί είσοδο - έξοδο γενικού σκοπού. Υπάρχει περίπτωση κάποιο περιφερειακό να είναι ενεργοποιημένο αλλά να μην χρησιμοποιεί ~ 66 ~
81 όλα τα pin που του αντιστοιχούν. Τότε τα αδρανή pin μπορούν να χρησιμοποιηθούν ως είσοδοι ή έξοδοι γενικού σκοπού. Όλοι οι ακροδέκτες έχουν τρεις καταχωρητές οι οποίοι συνδέονται άμεσα με την λειτουργία των pin. Η ενεργοποίηση της κάθε ακίδας ως είσοδο ή έξοδο γίνεται από τον κώδικα μέσω των καταχωρητών TRISx, όπου x το χαρακτηριστικό γράμμα της θύρας. Αν το bit κατεύθυνσης δεδομένων είναι λογικό 1 τότε ο ακροδέκτης είναι είσοδος. Όλοι οι ακροδέκτες θυρών καθορίζονται ως είσοδοι μετά από μια επανεκκίνηση. Ο καταχωρητής LATx παρέχει δεδομένα στις εξόδους, ενώ ο διαβάζοντας τον καταχωρητή PORTx ενημερωνόμαστε για την κατάσταση των εισόδων. Οποιοδήποτε bit, οι καταχωρητές και τα σχετικά δεδομένα του το οποίο δεν είναι έγκυρο για μια συγκεκριμένη συσκευή απενεργοποιείται. Αυτό σημαίνει ότι ο αντίστοιχοι καταχωρητές LATx και TRISx και ο ακροδέκτης θα αναγνωσθούν ως μηδέν. Ο καταχωρητής TRISx ελέγχει τη κατεύθυνση των ακροδεκτών, δηλαδή καθορίζει αν ο ακροδέκτης θα λειτουργεί ως είσοδος ή σαν έξοδος. Ο καταχωρητής LATx παρέχει τα δεδομένα στις εξόδους και έχει τη δυνατότητα τόσο εγγραφής όσο και ανάγνωσης. Η ανάγνωση του καταχωρητή PORTx διεγείρει την κατάσταση των ακροδεκτών εισόδου, ενώ η εγγραφή του καταχωρητή αυτού τροποποιεί τα περιεχόμενα του καταχωρητή LATx. Μια παράλληλη θύρα που μοιράζεται έναν ακροδέκτη με ένα περιφερειακό είναι γενικά υπάκουη στο περιφερειακό. Τα δεδομένα του απομονωτή εξόδου του περιφερειακού και τα σήματα ελέγχου οδηγούνται σε ένα ζευγάρι πολυπλεκτών. Οι πολυπλέκτες αυτοί επιλέγουν το αν το περιφερειακό ή η αντίστοιχη θύρα θα χρησιμοποιήσουν τα δεδομένα εξόδου και τα σήματα ελέγχου του. Η χρήση των καταχωρητών ADPCFG και TRISx ελέγχει τη λειτουργία των αναλογικών ακροδεκτών. Οι ακροδέκτες θυρών που επιθυμούμε να είναι αναλογικές είσοδοι πρέπει να έχουν το αντίστοιχο ψηφίο του καταχωρητήtrisxενεργοποιημένο, δηλαδή λογικό1. Αναλογικά επίπεδα σε οποιοδήποτε ακροδέκτη που έχει καθορισθεί ως ψηφιακή είσοδος, συμπεριλαμβανομένων και των ακροδεκτών ΑΝx, μπορεί να οδηγήσουν τον ~ 67 ~
82 εσωτερικό απομονωτή να καταναλώσει ρεύμα πέραν των προδιαγραφών της συσκευής. Ένας κύκλος εντολής απαιτείται για την εναλλαγή της τιμής μιας θύρας ή μεταξύ της εγγραφής και της ανάγνωσης της ίδια θύρας. Τυπικά μια τέτοια εντολή είναι ένα NOP Χρονιστές Υπάρχει αποκλειστικά ένας χρονιστής των 16-bit (ο timer 1) και 2 χρονιστές των 32-bit,που μπορούν να λειτουργήσουν και σαν 2 χρονιστές των 16bit ο καθένας. Έτσι έχουμε τους 2χρονιστές των 32-bit (timer2/3 και timer 4/5) ή τους 4 χρονιστές των 16-bit (timer 2, timer 3,timer 4 και timer 5). Όλοι οι παραπάνω χρονιστές ελέγχονται από τους αντίστοιχους καταχωρητές (όπου x ο αύξων αριθμός του χρονιστή): TMRx:To 16-bit περιεχόμενο του timer x. PRx: Η 16-bit περίοδος του timer x. TxCON: Ο καταχωρητής ελέγχου της λειτουργίας του timer x. Ο timer 1 έχει τρεις διαφορετικούς τρόπους λειτουργίας: A. Λειτουργία ως χρονιστής, όπου αυξάνει σε κάθε κύκλο του εσωτερικού ρολογιού του επεξεργαστή μέχρι μία προκαθορισμένη, από το πρόγραμμα του χρήστη, τιμή B. Λειτουργία ως σύγχρονος μετρητής παλμών, όπου αυξάνει για κάθε παλμό που προέρχεται από εξωτερική πηγή και είναι συγχρονισμένος με το εσωτερικό ρολόι. C. Λειτουργία ως ασύγχρονος μετρητής παλμών, όπου αυξάνει σε κάθε παλμό που προέρχεται από εξωτερική πηγή. ~ 68 ~
83 Σε κάθε περίπτωση ο timer 1 ρυθμίζεται έτσι ώστε όταν επιτευχθεί το επιθυμητό χρονικό διάστημα διακόπτει την κανονική λειτουργία του προγράμματος του χρήστη και εξυπηρετεί τον timer. Ο timer 2/3 και ο timer 4/5 υποστηρίζουν όλα τα παραπάνω χαρακτηριστικά εκτός από τον ασύγχρονο τρόπο λειτουργίας. Και οι δύο αυτοί χρονιστές μπορούν να χρησιμοποιηθούν και ως timers των 32-bit. Επιπροσθέτως ο timer 2/3 μπορεί να χρησιμοποιηθεί από ένα άλλο περιφερειακό, το μετατροπέα σήματος από αναλογικό σε ψηφιακό (A/D converter) Μετατροπείς σήματος από αναλογικό σε ψηφιακό. Η μονάδα μετατροπής σήματος από αναλογικό σε ψηφιακό διαθέτει 9 ακίδες εισόδου. Οι ακίδες αυτές συνδέονται σε 4 κανάλια δειγματοληψίας και αποθήκευσης (Sample and Hold - S/H). Η δειγματοληψία των σημάτων μπορεί να είναι σειριακή ή παράλληλη ενώ η μετατροπή σε ψηφιακό σήμα είναι σειριακή. Ο μέγιστος δυνατός ρυθμός δειγματοληψίας μπορεί να φτάσει το 1 Msps για δειγματοληψία ενός μόνο καναλιού χρησιμοποιώντας δύο S/H για το ίδιο σήμα. Αν τα υπό δειγματοληψία σήματα είναι περισσότερα ο ρυθμός δειγματοληψίας πέφτει ανάλογα. Η ADC μονάδα μετατρέπει οποιοδήποτε αναλογικό σήμα από 0-5V σε ψηφιακό εύρους 10- bit. Η αρχικοποίηση και ο προγραμματισμός της μονάδας μετατροπής σήματος από αναλογικό σε ψηφιακό γίνεται μέσω των καταχωρητών ειδικού σκοπού: ADCON1 Καταχωρητής ελέγχου λειτουργίας ADCON2 Καταχωρητής ελέγχου λειτουργίας ADCON3 Καταχωρητής ελέγχου λειτουργίας ADCHS Συνδέει τις επιθυμητές εισόδους στα κανάλια δειγματοληψίας και αποθήκευσης (S/H) ADPCFG Επιλέγει αν οι ακίδες θα χρησιμοποιηθούν σαν αναλογικές είσοδοι ή σαν ψηφιακές είσοδοι/έξοδοι γενικού σκοπού ADCSSL Επιλέγει σε ποιες εισόδους θα γίνει ακολουθιακή δειγματοληψία ~ 69 ~
84 Μέσω των παραπάνω καταχωρητών μπορεί να γίνει διαφορική μέτρηση α) μεταξύ σημάτων, β) μεταξύ σημάτων και γης και γ) μεταξύ σήματος και μιας ακίδας (pin) αναφοράς Γεννήτριες PWM Στο μικροελεγκτή dspic30f4011, οι τρεις γεννήτριες διαμόρφωσης παλμών PWM παράγουν δύο σήματα η κάθε μία, το σήμαhigh και το σήμα Low, τα οποία μπορεί να είναι συμπληρωματικά ή ανεξάρτητα. Η ύπαρξη τριών γεννητριών παραγωγής PWM καθιστά τονdspic30f4011 κατάλληλο για τον έλεγχο τόσο μονοφασικών όσο και τριφασικών διατάξεων ηλεκτρονικών ισχύος. Επιπλέον η μονάδα PWM έχει τη δυνατότητα εισαγωγής νεκρού χρόνου καθώς και τη δυνατότητα για έλεγχο μέσω ράμπας ή τριγωνικής κυματομορφής. Η ανάλυση φτάνει τα 16bit, ενώ επιτρέπονται οι αλλαγές στο λόγο κατάτμησης μέχρι και δύο φορές σε μία περίοδο. Επίσης υπάρχουν επιπλέον ακίδες ανίχνευσης σφαλμάτων ώστε να οδηγηθεί η έξοδος της PWM σε κάποιες συγκεκριμένες προεπιλεγμένες καταστάσεις. Ο έλεγχος του περιφερειακού παραγωγής παλμών PWM γίνεται μέσω 5 καταχωρητών ειδικής λειτουργίας, που είναι οι εξής: PTCON Καταχωρητής ελέγχου χρονισμού PTMR Καταχωρητής χρονισμού PTPER Καταχωρητής ρύθμισης περιόδου PWMCON1 Καταχωρητής ελέγχου της PWM PWMCON2 Καταχωρητής ελέγχου της PWM DTCON1 Καταχωρητής ελέγχου νεκρού χρόνου DTCON2 Καταχωρητής ελέγχου νεκρού χρόνου PDC1 Καταχωρητής ελέγχου του λόγου κατάτμησης της 1 ης PWM PDC2 Καταχωρητής ελέγχου του λόγου κατάτμησης της 2 ης PWM PDC3 Καταχωρητής ελέγχου του λόγου κατάτμησης της 3 ης PWM ~ 70 ~
85 Στην ουσία οι παλμοί PWM παράγονται μετά από τη σύγκριση του μετρητή PTMR με τον καταχωρητή PDCx. Όταν οι δύο αυτοί καταχωρητές είναι ίσοι παράγεται παλμός στην έξοδο μέχρι ο μετρητής PTMR να γίνει ίσος με τον καταχωρητή ελέγχου της περιόδου PTPER Θύρα CAN Όπως αναφέρθηκε και προηγουμένως, οι μικροεπεξεργαστές χρησιμοποιούνται για την υλοποίηση ενός αλγόριθμου. Μετά την εκτέλεση του αλγορίθμου προκύπτουν οι τιμές για τις εξόδους. Η βέλτιστη επιλογή για τη μετάδοση των δεδομένων εξόδου από έναν μικροεπεξεργαστή μέσα σε ένα περιβάλλον θορύβων, που μπορεί να αλλοιώσουν τις τιμές των εξόδων, είναι ένα δίκτυο CAN (Controlled Area Network). Ο μικροεπεξεργαστής dspic30f4011 της Microchip διαθέτει μία μονάδα CAN, η οποία είναι στην ουσία μια σειριακή διεπαφή με σκοπό την επικοινωνία με άλλα περιφερειακά ή άλλους μικροεπεξεργαστές. Σχήμα 3.5 Δίκτυο CAN [5] Για την διασύνδεση της μονάδας CAN του μικροεπεξεργαστή με το φυσικό δίαυλο επικοινωνίας χρησιμοποιείται το ολοκληρωμένο MCP2551, το οποίο ~ 71 ~
86 περιγράφεται αναλυτικότερα σε επόμενο κεφάλαιο. Το ολοκληρωμένο αυτό παρέχει τη δυνατότητα διαφορικής εκπομπής και λήψης στη μονάδα CAN του μικροεπεξεργαστή και είναι πλήρως συμβατό με την τυποποίηση ISO Πρέπει ακόμη να αναφερθεί ότι λειτουργεί σε ταχύτητες έως 1Mb/s. Τυπικά κάθε κόμβος ενός δικτύου CAN πρέπει να έχει μία συσκευή, η οποία θα μετατρέπει τα ψηφιακά σήματα που παράγονται από τη μονάδα CAN του μικροεπεξεργαστή σε σήματα κατάλληλα για τη μετάδοση διαμέσου του φυσικού δίαυλου επικοινωνίας, δηλαδή της καλωδίωσης Τα αναπτυξιακά εργαλεία του dspic30f4011 Σημαντική βοήθεια στην ανάπτυξη εφαρμογών προσφέρει το πακέτο αναπτυξιακών εργαλείων της Microchip. Την πιο σημαντική θέση στα αναπτυξιακά εργαλεία κατέχει το MPLAB Integrated Development Environment (IDE). Το εργαλείο αυτό τρέχει σε Windows, είναι πολύ εύκολο στη χρήση και περιλαμβάνει βιβλιοθήκες με έτοιμες ρουτίνες για γρήγορη ανάπτυξη εφαρμογών και ταχύτατη εύρεση σφαλμάτων (debugging). επίσης προσφέρει ένα γραφικό περιβάλλον για το χρήστη που ενοποιεί τη χρήση λογισμικών και υλικών εργαλείων της Microchip αλλά και τρίτων κατασκευαστών. Τέλος, παρέχει ευκολία στην εναλλαγή εργαλείων, στη χρήση προσομοιωτή για τον εκάστοτε μικροεπεξεργαστή και στον πραγματικό προγραμματισμό και εύρεση σφαλμάτων όλα αυτά μέσα από μία κονσόλα λειτουργιών. Σχήμα 3.6 Απεικόνιση κύκλου σάρωσης [3] ~ 72 ~
87 Για τον προγραμματισμό αλλά και για την αποσφαλμάτωση είναι διαθέσιμο το ICD2, το οποίο είναι ένας debugger και programmer πραγματικού χρόνου και χαμηλού κόστους, για όλους τους PIC MCUs και dspic DSCs, το οποίο και χρησιμοποιήθηκε στην παρούσα εργασία. Η διαδικασία ανάπτυξης μιας εφαρμογής σε μικροεπεξεργαστή συχνά περιγράφεται με τον όρο κύκλος σάρωσης. Γράφεται ο κώδικας, ελέγχεται και μετά τροποποιείται ώστε να δημιουργηθεί μια εφαρμογή που να λειτουργεί σωστά. Η διαδικασία αυτή παριστάνεται με μορφή διαγράμματος στο προηγούμενο σχήμα Ενσωματωμένα εργαλεία του MPLAB IDE Το IDE είναι ένα περιβάλλον που συντάσσει όλα τα εργαλεία υπό μια απλή γραφική διεπαφή χρήστη. Όταν γραφτεί μια φορά ο κώδικας του προγράμματος, μπορεί μα μετατραπεί σε εκτελέσιμες οδηγίες και να «φορτωθεί» σε ένα μικροελεγκτή για τον έλεγχο της λειτουργίας του. Σε αυτή τη διαδικασία απαιτούνται πολλαπλά εργαλεία: Σχήμα 3.7 Project manager [3] ~ 73 ~
88 Project Manager: Ο Project Manager παρέχει ολοκλήρωση και επικοινωνία μεταξύ του MPLAB IDE και των εργαλείων της γλώσσας προγραμματισμού (σχήμα που ακολουθεί) Editor: Ο Editor είναι ένας πλήρης κειμενογράφος προγράμματος, ο οποίος εμφανίζεται σαν παράθυρο μέσα στον debugger. Assembler/Linker and Language Tools: O assembler μπορεί να χρησιμοποιηθεί από μόνος του για ένα μόνο αρχείο ή μπορεί να χρησιμοποιηθεί σε συνεργασία με τον linker για να παράγουν ένα project από διαφορετικά source files ή βιβλιοθήκες. Ο linker είναι υπεύθυνος για την τοποθέτηση του κώδικα στις σωστές θέσεις μνήμης στον μικροελεγκτή. Debugger: Ο debugger επιτρέπει σημεία διακοπής (breakpoints), βηματική εκτέλεση, παράθυρα παρακολούθησης και όλα τα χαρακτηριστικά που προσφέρουν οι σύγχρονοι debugger. Simulator: Ο προσομοιωτής χρησιμοποιεί το PC για να προσομοιώσει εντολές και μερικές λειτουργίες των περιφερειακών των dspic μικροελεγκτών. Programmers: Το MPLAB IDE σε συνεργασία με το MPLAB ICD 2 μπορεί να κατεβάσει κώδικα μέσα στους μικροελεγκτές. Προσφέρει πλήρη έλεγχο στον προγραμματισμό κώδικα και δεδομένων καθώς και configuration bits για την επιλογή της κατάλληλης λειτουργίας των μικροελεγκτών. In-Circuit Debugger: Επίσης το MPLAB IDE σε συνεργασία με το MPLAB ICD 2 παρέχουν μία οικονομική λύση, εναλλακτική των εξομοιωτών. Χρησιμοποιώντας κάποιους από τους πόρους του μικροελεγκτή μπορεί να κατεβάσει τον κώδικα μέσα στον μικροελεγκτή να θέσει σημεία διακοπής, να κάνει μονά βήματα και να παρακολουθήσει καταχωρητές και μεταβλητές. ~ 74 ~
89 Προκειμένου να δημιουργηθεί ο κώδικας που είναι εκτελέσιμος από τον μικροελεγκτή, τα πηγαία αρχεία πρέπει να τοποθετηθούν σε ένα project. Ο κώδικας μπορεί έπειτα να δομηθεί (build) στην εκτελέσιμη μορφή κώδικα με τα επιλεγμένα γλωσσικά εργαλεία (assembler, μεταγλωττιστές, linkers, κ.λπ.). Στο MPLAB IDE, ο project manager ελέγχει αυτήν την διαδικασία. ~ 75 ~
90 ~ 76 ~
91 ΚΕΦΑΛΑΙΟ 4 Μελέτη Κυκλώματος Ελέγχου 4.1. Περιγραφή Κατασκευής Για την κατασκευή της παρούσας διπλωματικής εργασίας χρησιμοποιήθηκε μια μικρογραφία ενός ανελκυστήρα, η οποία είχε κατασκευαστεί σε προηγούμενη διπλωματική, αλλά έγιναν αρκετές τροποποιήσεις. Πρώτα από όλα, έγιναν κάποιες αλλαγές στην κατασκευή ώστε να είναι πιο σταθερός ο θάλαμος κατά την κίνηση του και προστέθηκε και μια τροχαλία με σφικτήρα στο πάνω μέρος του ανελκυστήρα ώστε να συγκρατεί το συρματόσχοινο στην θέση του και για να μην πατινάρει το συρματόσχοινο πάνω στην τροχαλία. Επιπλέον, το αντίβαρο μεταφέρθηκε εξωτερικά του φρεατίου, προστέθηκε ένας σωλήνας μέσα στον οποίο τοποθετήθηκε ώστε να μειωθούν οι ταλαντώσεις και μια τροχαλία παρέκκλισης για την αποφυγή της τριβής του συρματόσχοινου στο φρεάτιο. Όλα οι προηγούμενες τροποποιήσεις έγιναν στο Μηχανουργείο του Πανεπιστημίου Πατρών. Τέλος, αφαιρέθηκαν όλοι οι οριακοί διακόπτες και τα μπουτόν που προϋπήρχαν και αντικαταστάθηκαν από διακόπτες προσέγγισης (proximity switch) και καινούρια μπουτόν. Για την κίνηση του θαλάμου χρησιμοποιήθηκε ένας ασύγχρονος τριφασικός κινητήρας, ο οποίος προϋπήρχε από την προηγούμενη διπλωματική. Ο ασύγχρονοι τριφασικοί κινητήρες, η λειτουργία και τα χαρακτηριστικά τους αναλύθηκαν λεπτομερώς στο δεύτερο κεφάλαιο Λογική Ανελκυστήρα Για την υλοποίηση του ανελκυστήρα επιλέχθηκε να ακολουθηθεί κατάλληλη λογική ώστε ο ανελκυστήρας να δουλεύει με τέτοιο τρόπο ώστε να εξυπηρετεί όσο το δυνατόν καλύτερα και γρηγορότερα τους επιβάτες. Η λογική αυτή αναλύεται παρακάτω: ~ 77 ~
92 Εάν ο θάλαμος βρίσκεται σε ηρεμία και δεχτεί κάποια κλήση, θα ανταποκριθεί άμεσα στην πρώτη σε σειρά εντολή. Εάν ηρεμεί σε κάποιο τυχαίο όροφο και δεχθεί κλήση από τον 3 ο όροφο (με φορά προφανώς προς τα κάτω), τότε αν ενώ ανεβαίνει ο θάλαμος πατηθεί το μπουτόν ΠΑΝΩ από ανώτερο σε σχέση με τη θέση του θαλάμου όροφο τότε θα σταματάει στον όροφο αυτό. Αλλιώς θα συνεχίζει κανονικά τη πορεία του. Αντίστοιχα, αν ηρεμεί σε κάποιο όροφο και δεχθεί κλήση από το ισόγειο (με φορά προφανώς προς τα πάνω), τότε αν ενώ κατεβαίνει ο θάλαμος πατηθεί το μπουτόν ΚΑΤΩ από κατώτερο σε σχέση με τη θέση του θαλάμου όροφο τότε θα σταματάει στον όροφο αυτό. Αλλιώς θα συνεχίζει κανονικά τη πορεία του. Εάν τώρα ηρεμεί σε κάποιο τυχαίο όροφο και κληθεί σε κάποιον ανώτερο όροφο (εκτός του 3 ου ) με φορά προς τα κάτω ή από κάποιον κατώτερο όροφο (εκτός του ισογείου) με φορά προς τα πάνω, τότε ο θάλαμος δεν θα σταματήσει σε ενδιάμεσες κλήσεις. Αυτό θα συμβεί διότι για παράδειγμα αν ο θάλαμος βρίσκεται στο ισόγειο και τον καλέσει κάποιος στον 2 ο με φορά κάτω (2 ) και αμέσως μετά κάποιος άλλος πατήσει 1 με φορά προς τα πάνω (1 ) δεν είναι σίγουρο ότι η δεύτερη κλήση θα αφορά τον 2 ο όροφο και όχι τον 3 ο με συνέπεια να είχαμε πολλές αντιφάσεις όταν ο θάλαμος θα έφτανε στον 2 ο όροφο. Ομοίως για την αντίθετη κίνηση. Εάν όμως η πρώτη κλήση είναι 2, σε ενδεχόμενη κλήση 1 ο θάλαμος θα σταματήσει στον αντίστοιχο όροφο. Αυτό θα ισχύσει εφόσον η δεύτερη εντολή έχει δοθεί πριν ο θάλαμος φτάσει στον αντίστοιχο όροφο (δηλ. η εντολή 1 να δοθεί πριν φτάσει στον 1 ο ). Ομοίως για πρώτη κλήση 2 σε ενδεχόμενη 1 θα σταματήσει κατά την κάθοδο. ~ 78 ~
93 Εάν κάποιος επιβιβαστεί στο θάλαμο από ηρεμία και καθυστερήσει για 6 sec να πατήσει κάποιο μπουτόν και παράλληλα υπάρξει κάποια εξωτερική κλήση, τότε ''χάνει'' το θάλαμο και το σύστημα υπακούει την εξωτερική εντολή. Το «STOP» ακινητοποιεί το θάλαμο για κάποιο χρόνο στο σημείο που βρίσκεται ανεξαρτήτως κατεύθυνσης κίνησης και ακυρώνει όλες τις εντολές κλήσης. Μετά την λήξη του χρόνου αυτού κινείται μέχρι τον επόμενο όροφο. Εάν πριν το πάτημα του STOP ο θάλαμος κινούνταν καθοδικά τότε θα κινηθεί προς τα κάτω μέχρι τον επόμενο όροφο, ενώ αν πριν ο θάλαμος ανέβαινε τότε αντίστοιχα θα ανεβεί μέχρι τον επόμενο όροφο. Ο γενικός διακόπτης έχει τη δυνατότητα να νεκρώσει την καμπίνα μόνο αν βρίσκεται σε ακινησία. Αν ο διακόπτης βρεθεί στη θέση OFF ενώ το θάλαμος κινείται δεν θα έχει καμία επίδραση. Αν ο θάλαμος είναι ακίνητος όταν ο διακόπτης βρεθεί στη θέση OFF τότε μπλοκάρονται όλα τα μπουτόν κλήσης της καμπίνας. Με το πάτημα του μπουτόν ALARM ενεργοποιείται μια σειρήνα η οποία ηχεί για 12sec. Η λειτουργία αυτή δεν επηρεάζεται από το αν ο θάλαμος κινείται ή όχι. (Στην πράξη, αντί για ηχητική ειδοποίηση, χρησιμοποιήθηκε ένα led και το οποίο άναβε ώστε να υποδηλώνει πότε πατήθηκε το μπουτόν ALARM) Σε περίπτωση σφάλματος ενός ή και των δυο από τους ενδιάμεσους αισθητήρες, ο θάλαμος θα ακινητοποιείται στον αμέσως επόμενο όροφο ή στους ακραίους ορόφους (Ισόγειο ή Τρίτος) Στοιχεία ανελκυστήρα Για να είναι δυνατή η υλοποίηση της προηγούμενης λογικής κρίθηκε αναγκαίο να χρησιμοποιηθούν ορισμένα στοιχεία, όπως αρκετά μπουτόν, ενδεικτικές λυχνίες (led), διακόπτες προσέγγισης, διακόπτης δύο θέσεων (ON-OFF), Seven Segment Display (SSD) και ρελέ, τα οποία και αναλύονται στη συνέχεια. ~ 79 ~
94 Το ''μυαλό'' όμως της κατασκευής είναι ο μικροεπεξεργαστής που χρησιμοποιήθηκε, δηλαδή ο dspic30f4011 της εταιρίας Microchip και ο οποίος περιγράφεται αναλυτικά στο τρίτο κεφάλαιο. Όπως προέκυψε από αυτή την ανάλυση και από τη λογική του προγράμματος μας, οι είσοδοι και οι έξοδοι ενός μικροεπεξεργαστή dspic30f4011 δεν επαρκούν για τον έλεγχο όλων των στοιχείων που θα χρειαστούν. Επομένως, επιλέχθηκε να χρησιμοποιηθούν δύο τέτοιοι μικροελεγκτές, οποίοι θα επικοινωνούν μεταξύ τους κάνοντας χρήσης του πρωτοκόλλου CAN το οποίο αναφέρθηκε στο τρίτο κεφάλαιο. Συνεπώς, θα κατασκευαστούν δύο πλακέτες για τον έλεγχο του ανελκυστήρα και η κάθε μια θα έχει ένα ξεχωριστό μικροελεγκτή. Η πρώτη θα περιλαμβάνει όλα τα στοιχεία που υπάρχουν μέσα στον θάλαμο του ανελκυστήρα (εσωτερικά μπουτόν, διακόπτες, ενδεικτικές λυχνίες) και η δεύτερη θα περιλαμβάνει όλα τα εξωτερικά στοιχεία (εξωτερικά μπουτόν, λυχνίες, διακόπτες προσέγγισης) καθώς και τον έλεγχο των δυο ρελέ που θα εναλλάσσουν την φορά περιστροφής του ασύγχρονου τριφασικού κινητήρα. Επομένως, από τους ακροδέκτες του μικροεπεξεργαστή χρησιμοποιήθηκαν αρκετές ψηφιακές είσοδοι καθώς και έξοδοι, δύο σήματα για την επικοινωνία με το αναπτυξιακό και τον προγραμματισμό του μικροελεγκτή, δυο σήματα για επικοινωνία των δύο μικροελεγκτών μεταξύ τους μέσω του πρωτοκόλλου CAN και τέλος το σήμα MCLR για επανεκκίνηση με μπουτόν (Reset). Η αρχιτεκτονική και ο προγραμματισμός του μικροελεγκτή αναλύθηκε στο τρίτο κεφάλαιο. Ο μικροελεγκτής τροφοδοτείται με 5V μέσω ενός τροφοδοτικού, η κατασκευή του οποίου περιγράφεται σε επόμενη παράγραφο. Αναλυτικά τα στοιχεία που χρησιμοποιήθηκαν για την υλοποίηση του ελέγχου του ανελκυστήρα είναι τα ακόλουθα. I. Για το τυπωμένο κύκλωμα του θαλάμου: 4 μπουτόν (ισόγειο, 1ος, 2ος, 3ος) + αντίστοιχες ενδεικτικές λυχνίες 1 μπουτόν STOP 1 μπουτόν ALARM + ενδεικτική λυχνία αντί για σειρήνα 1 γενικός διακόπτη 2 θέσεων (ON-OFF) ~ 80 ~
95 II. Για το τυπωμένο κύκλωμα των ορόφων: Ισόγειο: 1 μπουτόν κλήσης (με φορά προς τα πάνω) 1 ος : 2 μπουτόν κλήσης (με φορά προς τα πάνω και προς τα κάτω) 2 ος : 2 μπουτόν κλήσης (με φορά προς τα πάνω και προς τα κάτω) 3 ος : 2 μπουτόν κλήσης (με φορά προς τα κάτω) Αντίστοιχες ενδεικτικές λυχνίες (με φορά προς τα πάνω και προς τα κάτω) σε κάθε όροφο Επιπλέον στην πλακέτα των ορόφων χρησιμοποιήθηκαν: 4 επαγωγικοί διακόπτες για ανίχνευση θέσης του θαλάμου 2 ρελέ για την επιλογή της φοράς κίνησης του ανελκυστήρα 4.4. Διάταξη Εισόδων και Εξόδων Στον πίνακα που ακολουθεί φαίνονται αναλυτικά όλες οι θύρες εισόδου και εξόδου του μικροελεγκτή που χρησιμοποιήθηκαν, καθώς και τα στοιχεία που συνδέθηκαν στην κάθε μια θύρα και για τις δυο πλακέτες: Για το τυπωμένο κύκλωμα του θαλάμου: Είσοδοι Μπουτόν Ισογείου Μπουτόν 1ου Ορόφου Μπουτόν 2ου Ορόφου Μπουτόν 3ου Ορόφου Μπουτόν STOP Μπουτόν ALARM Διακόπτης ΟΝ-OFF Φωτοκύτταρο Αισθητήρας Βάρους PIN Μικροεπεξεργαστή RE0 RE1 RE2 RE3 RE4 RE5 RE8 RC15 RC13 ~ 81 ~
96 Έξοδοι Λυχνία Ισογείου Λυχνία 1ου Ορόφου Λυχνία 2ου Ορόφου Λυχνία 3ου Ορόφου Λυχνία Υπέρβαρο Λυχνία Εμπόδιο Σειρήνα Ένδειξη ορόφου (7-SEGMENT DISPLAY) PIN Μικροεπεξεργαστή RF4 RF5 RF6 RD0 RD2 RD3 RD1 RB0-RB6 Για το τυπωμένο κύκλωμα των ορόφων: Είσοδοι Μπουτόν Ισογείου Μπουτόν 1 Μπουτόν 1 Μπουτόν 2 Μπουτόν 2 Μπουτόν 3 Τερματικός Διακόπτης Ισογείου Τερματικός Διακόπτης 1ου Ορόφου Τερματικός Διακόπτης 2ου Ορόφου Τερματικός Διακόπτης 3ου Ορόφου PIN Μικροεπεξεργαστή RE0 RE1 RE2 RE3 RE4 RE5 RD0 RD2 RD1 RD3 ~ 82 ~
97 Έξοδοι Λυχνία Ισογείου Λυχνία 1 Λυχνία 1 Λυχνία 2 Λυχνία 2 Λυχνία 3 Ρελέ για Κίνηση Ρελέ για Κίνηση PIN Μικροεπεξεργαστή RΒ0 RB1 RB2 RB3 RB4 RB5 RB6 RB7 Όλα αυτά τα στοιχεία που χρησιμοποιήθηκαν για την κατασκευή, τόσο των πλακετών όσο και της μικρογραφίας του ανελκυστήρα, καθώς και οι λόγοι που επιλέχθηκαν, περιγράφονται αναλυτικά στις παραγράφους που ακολουθούν Περιγραφή Στοιχείων Κυκλώματος Ελέγχου[3], [5], [6], [7], [9] Γραμμικά τροφοδοτικά[11] Υπάρχουν πολλοί τύποι τροφοδοτικών. Τα περισσότερα είναι σχεδιασμένα να μετατρέπουν υψηλή τάση AC σε μία κατάλληλη χαμηλότερη ώστε να τροφοδοτήσουμε ηλεκτρονικά κυκλώματα και συσκευές. Συγκεκριμένα, τόσο ο μικροελεγκτής που χρησιμοποιήθηκε όσο και τα μπουτόν, τα relay, οι αντιστροφείς και τα led χρειάζονται για τη λειτουργία τους συγκεκριμένες συνεχείς τάσεις ως τροφοδοσίες. Έτσι κατασκευάστηκαν δύο γραμμικά τροφοδοτικά, μικρής ισχύος, καθένα από τα οποία μετατρέπει την μονοφασική εναλλασσόμενη τάση του δικτύου (230V) σε συνεχή τάση(5vκαι 12V). Πιο αναλυτικά, ένας μετασχηματιστής χρησιμοποιείται για τον υποβιβασμό της τάσης του δικτύου, μία ανορθωτική γέφυρα μετατρέπει την τάση σε συνεχή, ένα σταθεροποιητικό τάσης δίνει την επιθυμητή τάση εξόδου, ενώ χρησιμοποιούμε και πυκνωτές που λειτουργούν ως φίλτρα πριν και μετά το σταθεροποιητικό τάσης. ~ 83 ~
98 Στις επόμενες ενότητες εξηγείται αναλυτικά για ποιο λόγο είναι απαραίτητη η χρήση των προηγούμενων εξαρτημάτων για την κατασκευή του τροφοδοτικού και ποιος ο ρόλος του καθενός. Το σύνολο του τροφοδοτικού μπορεί να απεικονιστεί σε μπλοκ διάγραμμα όπως φαίνεται παρακάτω. Σχήμα 4.1 Διάγραμμα Τροφοδοτικού [11] Μετασχηματιστής: Ρυθμίζει την στάθμη AC μετασχηματίζοντας την κυρίως τάση (220V) σε μικρότερη ή μεγαλύτερη Ανορθωτής: Είναι το πρώτο στάδιο της μετατροπής της εναλλασσόμενης τάσης (AC) σε συνεχή τάση (DC) Εξομάλυνση: Μειώνει την κυμάτωση της DC τάσης που εμφανίζεται μετά την ανόρθωση Σταθεροποιητής: Εξαλείφει την κυμάτωση διατηρώντας σταθερή τάση εξόδου ανεξάρτητα από τις μεταβολές του ρεύματος I. Μετασχηματιστής Ο μετασχηματιστής εκμεταλλεύεται τους νόμους της επαγωγής και μετασχηματίζει τα στοιχεία του ρεύματος, την τάση V και την ένταση Ι. Λειτουργεί μόνο με τάση AC και αποτελείται από δύο ή περισσότερα τυλίγματα, το πρωτεύον που τροφοδοτείται από την τάση του δικτύου και το δευτερεύον ή τα δευτερεύοντα τα οποία δίνουν μικρότερες ή μεγαλύτερες τάσεις. Τα τυλίγματα τυλίγονται γύρω από ένα υλικό με βάση το σίδηρο, τον πυρήνα, που βοηθάει τον μετασχηματισμό αυξάνοντας την αυτεπαγωγή. Αν το δευτερεύον δίνει μεγαλύτερη τάση έχουμε μετασχηματιστές ανύψωσης τάσης, αν το δευτερεύον δίνει μικρότερη τάση έχουμε τους μετασχηματιστές υποβιβασμού τάσης και τέλος αν τα δευτερεύοντα δίνουν και μεγαλύτερες και μικρότερες τάσεις από την τάση του δικτύου τότε έχουμε τους μικτούς μετασχηματιστές. Οι μετασχηματιστές σπαταλούν πολύ λίγη ενέργεια, οπότε ~ 84 ~
99 η ενέργεια εξόδου είναι σχεδόν ίση με την ενέργεια εισόδου. Η απόδοση ενός μετασχηματιστή φτάνει από 80% μέχρι 95%, ενώ το υπόλοιπο είναι απώλειες (δινορεύματα, υστέρησης, σκέδασης κ.ά.). Η αναλογία των σπειρών κάθε τυλίγματος καθορίζει τις τάσεις του μετασχηματιστή. Ένας μετασχηματιστής υποβιβασμού τάσης έχει πολλές σπείρες στο πρωτεύον τύλιγμα που συνδέεται στην κυρίως τάση (220V) και λίγες σπείρες στο δευτερεύον που παρέχει την χαμηλή τάση εξόδου. n = = (4.1) V 1 : Τάση στο πρωτεύον V 2 : Τάση στο δευτερεύον Ν 1 : Αριθμός σπειρών στο πρωτεύον Ν 2 : Αριθμός σπειρών στο δευτερεύον Σχήμα 4.2 Έξοδος Μετασχηματιστή [11] II. Ανορθωτής Όπως αναφέραμε, ο ανορθωτής είναι το πρώτο στάδιο της μετατροπής της εναλλασσόμενης τάσης (AC) σε συνεχή τάση (DC - ρεύμα που "κυλάει" προς μία μόνο φορά), η οποία περιέχει όμως και μία εναλλασσόμενη συνιστώσα (alternating component) 50Hz για την μισή ανόρθωση και 100Hz για την πλήρη ανόρθωση, την οποία θα φιλτράρουμε παρακάτω με έναν πυκνωτή. Υπάρχουν διάφοροι τρόποι συνδεσμολογίας διόδων για να πραγματοποιηθεί ένας ανορθωτής. Ο πιο σημαντικός και συνηθισμένος είναι η "διπλή ανόρθωση με γέφυρα" και προσφέρει ανόρθωση πλήρους κύματος. Ανόρθωση πλήρους κύματος επιτυγχάνεται επίσης και με δύο ~ 85 ~
100 διόδους σε έναν μετασχηματιστή με μεσαία λήψη αλλά αυτή η μέθοδος χρησιμοποιείται σπάνια. Απλή ανόρθωση: Μία μόνο δίοδος μπορεί να χρησιμοποιηθεί σαν ανορθωτής αλλά η δίοδος άγει μόνο κατά την διάρκεια της θετικής ημιπεριόδου. Σε αυτή την περίπτωση, όπως φαίνεται και στο σχήμα που ακολουθεί, υπάρχει ρεύμα μόνο για το μισό της περιόδου και το κύκλωμα ονομάζεται ανορθωτής μισού κύματος. Σχήμα 4.3 Ημιανόρθωση [11] Διπλή ανόρθωση με γέφυρα: Η ανόρθωση με γέφυρα αποτελείται από 4 διόδους και κυκλοφορεί στον εμπόριο σαν ένα εξάρτημα αλλά μπορεί επίσης να κατασκευαστεί με 4 διόδους. Ονομάζεται ανορθωτής πλήρους κύματος γιατί οι δίοδοι άγουν ανά δύο σε κάθε ημιπερίοδο (αρνητική και θετική) του σήματος εισόδου. Το κύριο χαρακτηριστικό της συγκεκριμένης ανόρθωσης είναι ότι χρησιμοποιείται μετασχηματιστής χωρίς μεσαία λήψη. Επίσης κάθε δίοδος έχει στα άκρα της κατά την ανάστροφη περίοδο την τάση του μετασχηματιστή. Σχήμα 4.4 Πλήρης Ανόρθωση [11] ~ 86 ~
101 III. Εξομάλυνση Η εξομάλυνση (φιλτράρισμα) επιτυγχάνεται με ένα ηλεκτρολυτικό πυκνωτή μεγάλης χωρητικότητας συνδεδεμένο παράλληλα με το φορτίο. Ο πυκνωτής αποθηκεύει ενέργεια (γρήγορη φόρτιση) κατά τη διάρκεια της περιόδου αγωγής και την αποδίδει την ενέργεια στο φορτίο (εκφόρτιση) κατά τη διάρκεια της περιόδου μη αγωγής. Η εξομάλυνση αυξάνει την μέση τάση DC (1.41 x RMS). Για παράδειγμα 12V RMS AC μετά από ανορθωτή πλήρους κύματος θα μειωθούν περίπου σε 10.6V RMS DC (τα 1.4V θα χαθούν λόγω πτώση τάσης στις διόδους V ανά δίοδο πιο συγκεκριμένα). Με την τοποθέτηση του πυκνωτή εξομάλυνσης θα έχουμε 10.6x1.41=14.9V DC. Το παρακάτω διάγραμμα παρουσιάζει την μη φιλτραρισμένη κυμάτωση DC (διακεκομμένη γραμμή) και την φιλτραρισμένη (έντονη γραμμή). Σχήμα 4.5 Μη φιλτραρισμένη κυμάτωση DC (διακεκομμένη γραμμή) και φιλτραρισμένη (έντονη γραμμή) [11] IV. Σταθεροποιητής Οι σταθεροποιητές τάσης είναι ολοκληρωμένα κυκλώματα προρυθμισμένα σε κάποιες τάσεις εξόδου (συνήθως 5 έως 24V) και ως μία συγκεκριμένη ένταση ρεύματος. Οι περισσότεροι σταθεροποιητές περιέχουν κυκλώματα προστασίας υπερφόρτωσης και υπερθέρμανσης. Αρκετοί σταθεροποιητές έχουν τρεις επαφές ή περισσότερες, μοιάζοντας σαν τρανζίστορ ισχύος και έχουν και μία τρύπα με σκοπό να βιδωθούν πάνω σε ψήκτρα εάν είναι απαραίτητο ~ 87 ~
102 Είναι σημαντικό η τάση εισόδου τους να είναι μερικά Volts παραπάνω από την σταθεροποιημένη τάση εξόδου. Ο ρόλος του σταθεροποιητή είναι να εξαλείφει κάθε κυμάτωση που απομένει από τον πυκνωτή εξομάλυνσης και να αποδίδει μία σταθερή τάση εξόδου. Πλέον η τάση εξόδου του σταθεροποιητή είναι κατάλληλη για να τροφοδοτήσουμε οποιαδήποτε συσκευή ή κύκλωμα. Σχήμα 4.6 Έξοδος Σταθεροποιητικού τάσης [11] Συγκεκριμένα, για το τροφοδοτικό των 5V χρησιμοποιήθηκε ένας μετασχηματιστής του εμπορίου με δύο δευτερεύοντα τυλίγματα (230V/2x6V), τα οποία παραλληλίσθηκαν. Ακολουθεί μία ανορθωτική γέφυρα και ένας ηλεκτρολυτικός πυκνωτής εξομάλυνσης (2200μF), στη συνέχεια το σταθεροποιητικό τάσης (LM7805) και τέλος ένας ακόμα ηλεκτρολυτικός πυκνωτής εξομάλυνσης (2200μF) και ένας αντιπαρασιτικός πυκνωτής MKT (100nF). Αντίστοιχα για το τροφοδοτικό των 5V χρησιμοποιήθηκε ένας μετασχηματιστής του εμπορίου με δύο δευτερεύοντα τυλίγματα (230V/2x12V), τα οποία παραλληλίσθηκαν. Ακολουθεί μία ανορθωτική γέφυρα και ένας ηλεκτρολυτικός πυκνωτής εξομάλυνσης (2200μF), στη συνέχεια το σταθεροποιητικό τάσης (LM7812) και τέλος ένας ακόμα ηλεκτρολυτικός πυκνωτής εξομάλυνσης (2200μF) και ένας αντιπαρασιτικός πυκνωτής MKT (100nF). ~ 88 ~
103 Σχήμα 4.7 Σταθεροποιητικό Τάσης LM 7805 [13] Τα στοιχεία που χρησιμοποιήθηκαν για το τροφοδοτικό είναι τα ακόλουθα: 2 Μετασχηματιστές (PCB 5VA 2x6V και PCB 5VA 2x12V της εταιρείας Block) 2 Σταθεροποιητικά Τάσης (LM7805 καιlm7812 της εταιρείας Fairchild Semiconductor) 4 Ηλεκτρολυτικοί Πυκνωτές 2 Γέφυρες Ανόρθωσης Το σχηματικό διάγραμμα των τροφοδοτικών που κατασκευάστηκαν στο πλαίσιο αυτής της διπλωματικής για το κύκλωμα ελέγχου(kicad) παρατίθονται στο ΠΑΡΑΡΤΗΜΑ A που ακολουθεί στο τέλος της διπλωματικής Ο αντιστροφέας 74HCT04 Το 74HCT04 είναι ένα ολοκληρωμένο που περιλαμβάνει 6 πύλες NOT και τροφοδοτείται με συνεχή τάση 5V. Εκεί οι παλμοί αντιστρέφονται και οδηγούνται στα Led, στα Relay και στο Seven Segment Display. Η χρήση του είναι απαραίτητη καθώς το ρεύμα του μικροελεγκτή δεν είναι ικανό να οδηγήσει όλες τις εξόδους του. ~ 89 ~
104 Σχήμα 4.8 Αντιστροφέας 74HCT04 [13] MCP2551[6], [7] Το ολοκληρωμένο MCP2551, της εταιρείας Microchip, είναι ένας πομποδέκτης διαύλου CAN υψηλής ταχύτητας. Αποτελεί το ενδιάμεσο ανάμεσα σε ένα ελεγκτή που υλοποιεί το πρωτόκολλο CAN και το φυσικό δίαυλο. Το MCP2551 παρέχει δυνατότητα διαφορικής μετάδοσης και λήψης και είναι πλήρως συμβατό με το πρότυπο ISO-11898, ακόμα και για εφαρμογές 24V. Μπορεί να λειτουργήσει σε ταχύτητες μέχρι 1Mb/s. Τυπικά, κάθε κόμβος σε ένα σύστημα CAN πρέπει να έχει μια συσκευή όπως αυτό το ολοκληρωμένο, που να μετατρέπει τα ψηφιακά σήματα που δημιουργεί ο ελεγκτής CAN σε σήματα κατάλληλα για μετάδοση στο καλώδιο του διαύλου (διαφορική μετάδοση). Το ολοκληρωμένο αυτό επίσης παρέχει απομόνωση από σπινθηρισμούς υψηλής τάσης που μπορεί να δημιουργηθούν στον δίαυλο CAN από εξωτερικές πηγές. Οι ακροδέκτες του MCP2551 και η εσωτερική δομή του φαίνονται στις επόμενες εικόνες: Σχήμα 4.9 Το MCP2551 και οι ακροδέκτες του [7] ~ 90 ~
105 Σχήμα 4.10 Η εσωτερική δομή του MCP2551 [7] To pin Rs του MCP2551 επιτρέπει τρεις καταστάσεις λειτουργίας: Υψηλή Ταχύτητα (High Speed), η λειτουργία αυτή επιλέγεται συνδέοντας το pin Rs στο V ss. Σ αυτή την λειτουργία η έξοδος του πομπού έχει γρήγορη άνοδο και πτώση για να υποστηρίξει υψηλούς ρυθμούς μετάδοσης. Έλεγχος Κλίσης (Slope Control), η λειτουργία ελέγχου κλίσης μειώνει τις EMI (Electro-Magnetic Interference - Ηλεκτρομαγνητικές Παρεμβολές) περιορίζοντας τους χρόνους ανόδου και πτώσης στους αγωγούς CANH και CANL. Η κλίση (ή αλλιώς ρυθμός μεταβολής) ελέγχεται συνδέοντας εξωτερικά μια αντίσταση (R EXT ) ανάμεσα στα pins Rs και V OL. Η κλίση είναι ανάλογη του ρεύματος που περνάει από το pin Rs. Η επιλογή της εξωτερικής αντίστασης γίνεται με βάση την επόμενη καμπύλη: Σχήμα 4.11 Καμπύλη επιλογής εξωτερικής αντίστασης [7] ~ 91 ~
106 Αναμονή (Standby),η συσκευή μπορεί να τεθεί σε λειτουργίαstandby (αναμονή) θέτοντας το pin R s σε υψηλό επίπεδο. Στη λειτουργία αυτή ο πομπός είναι κλειστός και ο δέκτης λειτουργεί με χαμηλό ρεύμα. Το pin RXD (pin 4) είναι ακόμα ενεργό αλλά το ολοκληρωμένο λειτουργεί σε μικρότερη ταχύτητα. Ο τυχόν μικροελεγκτής που το ελέγχει μπορεί να παρακολουθεί το pin RXD και όταν ανιχνεύσει δραστηριότητα να θέτει το ολοκληρωμένο σε κανονική λειτουργία μέσω του pin R s Σήμα RESET Προκειμένου ο μικροελεγκτής να λειτουργήσει σωστά, πρέπει να εφαρμόζονται 0V στο reset pin. Το κουμπί που συνδέεται στο pin MCLR στη γείωση (GND) δεν είναι απαραίτητο. Ωστόσο, υπάρχει σχεδόν πάντα, διότι επιτρέπει στον μικροελεγκτή να επιστρέψει με ασφάλεια στις κανονικές συνθήκες λειτουργίας εάν κάτι πάει στραβά. Πατώντας αυτό το κουμπί, 0V εφαρμόζονται στο pin, ο μικροελεγκτής μηδενίζεται και η υλοποίηση του προγράμματος αρχίζει από την αρχή Μπουτόν και Διακόπτες Οι διακόπτες και τα μπουτόν είναι πιθανότατα οι απλούστερες συσκευές για την ανίχνευση της εμφάνισης μιας τάσης σε ένα μικροελεγκτή στον ακροδέκτη εισόδου. Ωστόσο, δεν είναι τόσο απλό όσο φαίνεται. Ο λόγος για αυτό είναι η αναπήδηση της επαφής. Η αναπήδηση της επαφής είναι ένα κοινό πρόβλημα στους μηχανικούς διακόπτες. Όταν οι επαφές ακουμπήσουν, η ορμή και η ελαστικότητα τους ενεργούν από κοινού και προκαλούν αναπήδηση. Το αποτέλεσμα είναι ένα παλμικό ηλεκτρικό ρεύμα αντί για μια καθαρή μετάβαση από το μηδέν έως το πλήρες ρεύμα, όπως φαίνεται στο επόμενο σχήμα. ~ 92 ~
107 Σχήμα 4.12 Αναπήδηση της επαφής [9] Αυτό κυρίως συμβαίνει λόγω κραδασμών, ελαφρά ακατέργαστα στίγματα και βρωμιές ανάμεσα στις επαφές. Μπορεί να είναι ανεπαίσθητο όταν χρησιμοποιούνται αυτά τα εξαρτήματα στην καθημερινή ζωή, επειδή η αναπήδηση συμβαίνει πολύ γρήγορα να επηρεάσει περισσότερο τον εξοπλισμό. Ωστόσο, προκαλεί προβλήματα σε ορισμένα αναλογικά κυκλώματα και κυκλώματα λογικής που αντιδρούν αρκετά γρήγορα και ερμηνεύει on/off παλμούς ως μια ροή δεδομένων. Ούτως ή άλλως, η όλη διαδικασία δεν διαρκεί πολύ (λίγα χιλιοστά του δευτερολέπτου), αλλά αυτός ο χρόνος είναι αρκετός ώστε να καταγραφεί από τον μικροελεγκτή. Όταν μόνο ένα πιεζόμενο κουμπί χρησιμοποιείται ως ένας μετρητής πηγή σήματος, συμβαίνουν σφάλματα σε σχεδόν 100% των περιπτώσεων. Αυτό το πρόβλημα μπορεί να λυθεί εύκολα συνδέοντας ένα απλό RC κύκλωμα, όπως φαίνεται στην επόμενη εικόνα, για να καταστείλει γρήγορες αλλαγές της τάσης. Σχήμα 4.13 RC Κύκλωμα για αποφυγή αναπήδησης επαφής [9] ~ 93 ~

108 Εκτός από αυτές τις λύσεις υλικού, υπάρχει επίσης μια απλή λύση λογισμικού. Όταν το πρόγραμμα ελέγχει τη λογική κατάσταση ενός pin εισόδου και εντοπίσει κάποια αλλαγή, ο έλεγχος πρέπει να γίνει ακόμα μία φορά μετά από μια ορισμένη καθυστέρηση. Εάν το πρόγραμμα επιβεβαιώνει την αλλαγή, αυτό σημαίνει ότι ένας διακόπτης/μπουτόν άλλαξε θέση. Τα πλεονεκτήματα αυτής της λύσης είναι ότι είναι δωρεάν, οι συνέπειες της αναπήδησης της επαφής έχουν εξαλειφθεί και μπορεί να εφαρμοστεί ακόμα και για χαμηλής ποιότητας επαφές. Σχήμα 4.14 Το Button που χρησιμοποιήθηκε [8] Τα μπουτόν που χρησιμοποιήθηκαν τελικά είναι τα series push button MSP 121CN/A 30 V/DC 650 mα της εταιρείας Knitter-Switch. Το datasheet,στο οποίο φαίνονται τα τεχνικά χαρακτηριστικά των μπουτόν που χρησιμοποιήθηκαν, ακολουθεί στο ΠΑΡΑΡΤΗΜΑ Γ Ρελέ (Relay)[9], [24] Τα ρελέ είναι ένας ηλεκτρικός διακόπτης που ανοίγει και κλείνει υπό τον έλεγχο άλλου ηλεκτρικού κυκλώματος. Στο πλαίσιο της διπλωματικής θα χρησιμοποιηθούν 2 ρελέ για την αλλαγή της φοράς περιστροφής του ασύγχρονου τριφασικού κινητήρα και επομένως την αλλαγή της φοράς κίνησης του θαλάμου όταν αυτό επιθυμείται. Στην αρχική μορφή του, ένας ηλεκτρομαγνήτης ενεργοποιούσε το διακόπτη, με το άνοιγμα ή κλείσιμο μιας ή περισσότερων επαφών. Εφευρέθηκε από τον Τζόζεφ Χένρυ το Επειδή ένας ηλεκτρονόμος είναι ικανός να ελέγχει ένα κύκλωμα ~ 94 ~
109 εξόδου υψηλότερης ισχύος από το κύκλωμα εισόδου, μπορεί να θεωρηθεί, γενικά, μια μορφή ηλεκτρικού ενισχυτή. Τα ρελέ χρησιμοποιούνται για να ενεργοποιηθούν/απενεργοποιηθούν υψηλής ισχύος συσκευές, όπως κινητήρες, μετασχηματιστές, θερμαντήρες, λαμπτήρες. Υπάρχουν διάφοροι τύποι των ρελέ, αλλά όλοι λειτουργούν με τον ίδιο τρόπο. Σχήμα 4.15 Διάφορα Ρελέ [9] Κάθε επαφή ενός ηλεκτρονόμου μπορεί να είναι Κανονικά-Ανοικτή (Normally Open, NO), Κανονικά-Κλειστή (Normally Closed, NC) ή μεταγωγικός (changeover), ανάλογα με τον τύπο της. Μια επαφή Κανονικά-Ανοικτή συνδέει το κύκλωμα όταν ο ηλεκτρονόμος ενεργοποιείται το κύκλωμα αποσυνδέεται όταν ο ηλεκτρονόμος είναι ανενεργός. Μια τέτοια επαφή καλείται επίσης Επαφή Μορφής A ή επαφή "make". Η επαφή μορφής Α είναι ιδανική για εφαρμογές που απαιτούν την ενεργοποίηση μιας πηγής υψηλής τάσης από απόσταση. Μια επαφή Κανονικά-Κλειστή αποσυνδέει το κύκλωμα όταν ο ηλεκτρονόμος ενεργοποιείται το κύκλωμα συνδέεται όταν ο ηλεκτρονόμος είναι ανενεργός. Μια τέτοια επαφή καλείται επίσης Επαφή Μορφής B ή επαφή "break". Η επαφή μορφής Β είναι ιδανική για εφαρμογές που απαιτούν το κύκλωμα να παραμένει κλειστό (ενεργό) μέχρι ο ηλεκτρονόμος να ενεργοποιηθεί. ~ 95 ~
110 Μια επαφή Μεταγωγική μπορεί να ελέγχει δύο κυκλώματα. Ισοδυναμεί με μια επαφή κανονικά-ανοικτή και μια επαφή κανονικά-κλειστή που έχουν ένα κοινό ακροδέκτη. Μια τέτοια επαφή καλείται επίσης Επαφή Μορφής C. Συνήθως ένας ηλεκτρονόμος αποτελείται από περισσότερες από μία ελεγχόμενες επαφές. Οι επαφές χωρίζονται σε κύριες και βοηθητικές. Οι κύριες διαρρέονται συχνά από ισχυρότερα ρεύματα και έτσι είναι αυτές που διακόπτουν το κύριο κύκλωμα και συνήθως είναι Κανονικά-Ανοικτές. Οι βοηθητικές έχουν όπως υπονοεί και το όνομά τους επικουρικό χαρακτήρα και ο ρόλος τους είναι να βοηθούν στον έλεγχο των αυτοματισμών (που είναι ο κύριος τομέας χρήσης των ηλεκτρονόμων). Για παράδειγμα βοηθούν στην ενεργοποίηση/απενεργοποίηση βοηθητικών κυκλωμάτων όπως ενδεικτικές λυχνίες. Όταν ηλεκτρικό ρεύμα διαρρέει το πηνίο του ηλεκτρονόμου, το παραγόμενο μαγνητικό πεδίο έλκει έναν οπλισμό που είναι μηχανικά συνδεδεμένος σε μια κινούμενη επαφή. Έτσι, η κινούμενη επαφή είτε συνδέεται με μια σταθερή επαφή είτε αποσυνδέεται από τη σταθερή επαφή. Μόλις το ηλεκτρικό ρεύμα στο πηνίο διακοπεί, ο οπλισμός επιστέφει στη θέση ηρεμίας του εξαιτίας μιας δύναμης επαναφοράς, που είναι ίση με το ήμισυ της μαγνητικής. Η δύναμη επαναφοράς παρέχεται συνήθως από ένα ελατήριο, αλλά και η βαρύτητα χρησιμοποιείται συχνά σε βιομηχανικούς εκκινητές μηχανών. Η μεταβολή της μαγνητικής ροής στο πηνίο γεννά ένα ηλεκτρικό ρεύμα, το λεγόμενο "επαγωγικό", που έχει αντίθετη φορά από εκείνο που παρέχεται στο πηνίο. Για τη λειτουργία του πηνίου και τη μετακίνηση των επαφών απαιτείται σχετικά μεγάλη ένταση ηλεκτρικού ρεύματος, αλλά - μόλις ο οπλισμός κλείσει - το ηλεκτρικό ρεύμα που απαιτείται για να κρατήσει τον οπλισμό κλειστό είναι ένα μικρό κλάσμα του αρχικού, τυπικά το 1 / 10. Οι ηλεκτρονόμοι κατασκευάζονται για να λειτουργούν γρήγορα. Σε μια εφαρμογή χαμηλής τάσης, αυτό γίνεται για τη μείωση του θορύβου. Σε μια εφαρμογή υψηλής τάσης ή υψηλής έντασης ρεύματος, αυτό γίνεται για τη μείωση των σπινθηρισμών (ηλεκτρικών εκφορτίσεων μορφής τόξου). Εάν το πηνίο διεγείρεται με συνεχές (DC) ρεύμα, ανεξάρτητα από το ηλεκτρικό ρεύμα που ρέει διαμέσου των επαφών, μια δίοδος μπαίνει συνήθως παράλληλα με το πηνίο. Όταν το πηνίο διεγείρεται, αποκαθίσταται ένα μαγνητικό πεδίο. Όταν το πηνίο ~ 96 ~
111 αποδιεγείρεται, το καταρρέον μαγνητικό πεδίο δημιουργεί μια αιχμή ηλεκτρικού ρεύματος που θα μπορούσε να βλάψει το υπόλοιπο κύκλωμα. Αν το πηνίο διεγείρεται με εναλλασσόμενο (AC) ρεύμα, ένα μικρό χάλκινο δαχτυλίδι πτυχώνεται στο άκρο του σωληνοειδούς πηνίου. Το εναλλασσόμενο ρεύμα μηδενίζεται 100 φορές το δευτερόλεπτο. Σε κάθε χρονική στιγμή μηδενισμού, δεν υπάρχει καμιά μαγνητική δύναμη που να συγκρατεί τις επαφές κλειστές. Σε αναλογία με τις λειτουργίες της πρωτότυπης ηλεκτρομαγνητικής συσκευής, ένας ηλεκτρονόμος στερεάς κατάστασης κατασκευάζεται με ένα θυρίστορ ή άλλη συσκευή διακοπής στερεάς κατάστασης. Για να επιτευχθεί ηλεκτρική απομόνωση, μια δίοδος φωτοεκπομπής LED χρησιμοποιείται με ένα φωτοτρανζίστορ. Όπως και στους απομονωτές, έτσι και στα ρελέ δεν υπάρχει γαλβανική σύνδεση (ηλεκτρική επαφή) μεταξύ εισόδου και εξόδου των κυκλωμάτων. Τα ρελέ συνήθως απαιτούν και υψηλή τάση και υψηλό ρεύμα για την έναρξη λειτουργίας τους, αλλά υπάρχουν επίσης και μικροσκοπικά τα οποία μπορούν να ενεργοποιηθούν από χαμηλό ρεύμα που προκύπτει άμεσα από ένα pin μικροελεγκτή. Σχήμα 4.16 Χρησιμοποιούμενο κύκλωμα για Ρελέ [9] Η επόμενη εικόνα δείχνει το πιο συχνά χρησιμοποιούμενο κύκλωμα και το οποίο χρησιμοποιήθηκε και στα πλαίσια αυτής της διπλωματικής. Προκειμένου να αποφευχθεί η εμφάνιση της υψηλή τάση αυτεπαγωγής, η οποία προκαλείται από ~ 97 ~
112 αιφνίδια διακοπή της ροής του ρεύματος μέσα από το πηνίο, μια δίοδος αντεστραμμένης πολικότητας είναι συνδεδεμένη παράλληλα στο πηνίο. Σκοπός αυτής της διόδου είναι να "κόψει" την τάση κορυφής. Για τον έλεγχο του κινητήρα του ανελκυστήρα, όπως φαίνεται και στην παραπάνω εικόνα, συνδέθηκε στη πύλη ενός τρανζίστορ το pin εξόδου του μικροελεγκτή. Τα τρανζίστορ αυτά λειτουργούν ως ανοιχτοί διακόπτες, δηλαδή όσο τους δίνουμε παλμό στην πύλη τους, άγουν και επομένως τα 12 V εφαρμόζονται στα άκρα του πηνίου του ρελέ. Εάν μηδενίσουμε την τάση στην πύλη σβήνουν και τα ρελέ ''ξε-οπλίζουν''. Χρησιμοποιήθηκαν τα τρανζίστορ BS170 της εταιρείας Fairchild Semiconductor και τα ρελέ της εταιρείας Finder και συγκεκριμένα από την σειρά 55 ( ), 4PCO, 12 VDC, των οποίων το datasheet παρατίθεται στο ΠΑΡΑΡΤΗΜΑ Γ Led (Light Emitting Diode) [9], [10], [15] Δίοδος Εκπομπής Φωτός, (LED, Light Emitting Diode), αποκαλείται ένας ημιαγωγός ο οποίος εκπέμπει φωτεινή ακτινοβολία στενού φάσματος όταν του παρέχεται μία ηλεκτρική τάση κατά τη φορά ορθής πόλωσης (forward-based). Θα χρησιμοποιηθούν στην κατασκευή μας ως ενδεικτικές λυχνίες, ώστε να υποδηλώνουν οπτικά ποια μπουτόν έχουν πατηθεί. Σχήμα 4.17 Διάφορα Led [15] Το χρώμα του φωτός που εκπέμπεται εξαρτάται από την χημική σύσταση του ημιαγώγιμου υλικού που χρησιμοποιείται, και μπορεί να είναι υπεριώδες, ορατό ή υπέρυθρο. Το μήκος κύματος του φωτός που εκπέμπεται, και, κατά συνέπεια, το ~ 98 ~
113 χρώμα του, εξαρτάται από το χάσμα ενέργειας των υλικών, τα οποία χρησιμοποιούνται για την δημιουργία του περάσματος p-n, όπου: p = Υλικό νοθευμένο με αποδέκτες. n = Υλικό νοθευμένο με δότες. Η βασική αρχή των LED είναι μια επαφή p-n η οποία πολώνεται ορθά για να εγχέει ηλεκτρόνια και οπές μέσα στις p- και n- πλευρές αντίστοιχα. Το εγχεόμενο φορτίο μειονότητας επανασυνδέεται με το φορτίο πλειονότητας στην περιοχή απογύμνωσης ή στην ουδέτερη περιοχή. Σε ημιαγωγούς αμέσου διάκενου η επανασύνδεση οδηγεί σε εκπομπή φωτός αφού η ακτινοβόλα επανασύνδεσης κυριαρχεί σε υλικά υψηλής ποιότητας. Σε υλικά έμμεσου χάσματος, η απόδοση εκπομπής φωτός είναι αρκετά φτωχή και οι περισσότερες από τις διαδρομές επανασύνδεσης είναι μη ακτινοβόλες με παραγωγή θερμότητας μάλλον παρά φωτός. Μια δίοδος εκπομπής φωτός (light emitting Diode, LED) είναι στην ουσία μια ένωση pn που έχει κατασκευαστεί από ένα ημιαγωγό άμεσου ενεργειακού χάσματος, όπως για παράδειγμα το GaAs, και στην οποία η επανασύνδεση των ζευγών ηλεκτρονίων - οπών (ΖΗΟ) έχει ως αποτέλεσμα την εκπομπή φωτονίων. Η ενέργεια των εκπεμπόμενων φωτονίων, hv, ισούται κατά προσέγγιση με το ενεργειακό χάσμα E g. E g = E φωτονίου = h*v (4.2) Η δομή ενός LED πρέπει να είναι τέτοια ώστε τα εκπεμπόμενα φωτόνια να μπορούν να απομακρύνονται από την διάταξη χωρίς να επαναπορροφώνται από το ημιαγώγιμο υλικό. Αυτό σημαίνει ότι η p-περιοχή πρέπει να είναι επαρκώς ρηχή, ή διαφορετικά πρέπει να χρησιμοποιήσουμε διατάξεις ετεροδομών. Μπορούμε να χρησιμοποιήσουμε πολλά ημιαγώγιμα υλικά άμεσου ενεργειακού διακένου, τα οποία μπορούν εύκολα να νοθευτούν και να χρησιμοποιηθούν για την κατασκευή εμπορικών LED που εκπέμπουν ακτινοβολία στην ερυθρή και την υπέρυθρη περιοχή μηκών κύματος του φάσματος. Μια σημαντική κατηγορία εμπορικών ημιαγώγιμων ~ 99 ~
114 υλικών, που εκπέμπουν ακτινοβολία στην ορατή περιοχή είναι τα τριαδικά κράματα III-V. Τα LED παράγουν περισσότερο φως ανά Watt συγκριτικά με της λάμπες πυράκτωσης, είναι πιο αποδοτικά και χαμηλώνουν το αρχικό κόστος. Επίσης είναι πολύ μικρά (μικρότερα από 2mm) και μπορούν να τοποθετηθούν σε πίνακες αποτύπωσης. Τα LED έχουν γρήγορη απόκριση και μεγάλους χρόνους ζωής και είναι δύσκολο να υποστούν ζημιά από κραδασμούς, όπως συμβαίνει με τις λάμπες πυράκτωσης και φθορισμού. Σήμερα είναι ακριβότερα στην αγορά τους απ ότι οι κοινές τεχνολογίες φωτισμού, όμως αυτό το κόστος αντισταθμίζεται με την χαμηλή κατανάλωση ενέργειας που έχουν. Τέλος είναι αρκετά ευαίσθητα στη τάση και κατ επέκταση στο ρεύμα που τα τροφοδοτεί. Έτσι πολλές φορές χρησιμοποιούνται σειρές αντιστάσεων ή πηγές ελέγχου του ρεύματος. Σχήμα 4.18 Τρόπος σύνδεσης Led [9] Έχουν δύο άκρα- μια άνοδο και μια κάθοδο. Εάν συνδέσετε μια δίοδος σωστά με την τάση παροχής ρεύματος θα εκπέμπουν φως, αλλά αν γυρίσετε το led ανάποδα και εφαρμόσετε την ίδια τάση τροφοδοσίας (έστω και για μια στιγμή) θα καούν. Οι εφαρμογές των LED μπορούν να χωριστούν σε τρεις κατηγορίες: Ορατή απεικόνιση, όπου το φως κατευθύνεται περισσότερο ή λιγότερο στο ανθρώπινο μάτι για να μεταφέρει ένα μήνυμα ή μια έννοια. Η χαμηλή κατανάλωση ενέργειας, το χαμηλό κόστος συντήρησης και το μικρό μέγεθος των σημερινών LED έχει οδηγήσει στην εφαρμογή τους σε μια πληθώρα εγκαταστάσεων και εξοπλισμού για την ορατή απεικόνιση. Τοποθετούνται σε ~ 100 ~
115 μεγάλες επιφάνειες για την αποτύπωση δεδομένων και μηνυμάτων στα στάδια, στους σταθμούς των τρένων και των λεωφορείων, στα αεροδρόμια, στα λιμάνια, στους δρόμους ως πινακίδες ή ως σηματοδότες, στις συναυλίες. Εξ αιτίας της μεγάλης διάρκειας ζωής τους και των μικρών χρόνων απόκτησης, τα LED χρησιμοποιούνται στην αυτοκινητοβιομηχανία ως σηματοδότες φρένων και στροφής (φλας). Έτσι αυξάνεται και ο παράγοντας ασφάλειας που μπορεί να παρέχει ένα όχημα αφού ο οδηγός έχει στην διάθεσή του περισσότερο χρόνο αντίδρασης. Φωταγώγηση, όπου το φως από τα LED ανακλάται από αντικείμενα για να μπορούν αυτά να είναι ορατά. Με την εξέλιξη των LED υψηλής απόδοσης και ισχύος έγινε δυνατή η χρήση τους για φωτισμό και φωταγώγηση. Τα LED χρησιμοποιούνται στα φώτα των δρόμων ή σε αρχιτεκτονικές κατασκευές που απαιτείται φωτισμός με εναλλαγή χρωμάτων. Επίσης χρησιμοποιούνται και ως κύρια φώτα στα αυτοκίνητα, στις μοτοσυκλέτες και στα ποδήλατα. Επίσης τα LED χρησιμοποιούνται όλο και περισσότερο στον φωτισμό ενυδρείων. Μπορούν να παρέχουν το απαιτούμενο φως με μικρότερη εκπομπή θερμότητας και έτσι βοηθούν στην συντήρηση της βέλτιστης θερμοκρασίας του ενυδρείου. Επειδή μπορούν να παράγουν φως με συγκεκριμένο μήκος κύματος είναι ιδανικά για να παρέχουν ένα συγκεκριμένο χρώμα-φάσμα για τον χρωματισμό των κοραλλιών, των ψαριών, των ανεμώνων κ.α. Τα LED είναι ακόμα ιδανικά για χρήση στης τηλεοράσεις, στους φορητούς υπολογιστές και στους προβολείς (projectors) DLP. Παράγωγη φωτός για μέτρηση και αλληλεπίδραση με διαδικασίες που δεν γίνονται αντιληπτές από το ανθρώπινο μάτι. Το φως έχει και άλλες χρήσεις έκτος από την όραση. Τα LED χρησιμοποιούνται για μερικές από αυτές της εφαρμογές. Αυτές χωρίζονται σε τρεις κατηγορίες: i) επικοινωνία ii) αισθητήρες iii) αλληλεπίδραση φωτός με την ύλη. Το φως των LED μπορεί να τροποποιηθεί πολύ γρήγορα και έτσι χρησιμοποιείται στις οπτικές ίνες και στις οπτικές επικοινωνίες ελεύθερου ~ 101 ~
116 χώρου. Αυτές περιλαμβάνουν τα τηλεχειριστήρια των τηλεοράσεων και των βίντεο, όπου χρησιμοποιούνται τα LED υπερύθρου. Οι οπτομονωτές χρησιμοποιούν ένα LED και μια φωτοδίοδο ή ένα φωτοτρανζίστορ για να παρέχουν ένα «μονοπάτι» σήματος με ηλεκτρική μόνωση μεταξύ δυο διαδρομών. Αυτοί είναι αρκετά χρήσιμοι στον ιατρικό εξοπλισμό, όπου τα σήματα από τον αισθητήρα χαμηλής τάσης που είναι συνδεδεμένος με τον ανθρώπινο οργανισμό πρέπει να είναι ηλεκτρικά μονωμένα. Πολλά συστήματα αισθητήρων χρησιμοποιούν το φως ως πηγή σήματος. Τα LED είναι ιδανική πηγή για να αντεπεξέλθει στις απαιτήσεις των αισθητήρων. Χρησιμοποιούνται στους αισθητήρες κίνησης ή στις οθόνες αφής εντοπίζοντας το φως που ανακλάται από το δάχτυλο ή την ακίδα. Μια άλλη χρήση των LED είναι στις καλλιέργειες φυτών κυρίως γιατί είναι ενεργειακά αποδοτικά, παράγουν θερμότητα που δεν είναι ικανή να τα καταστρέψει γιατί είναι μικρή, και μπορούν να παρέχουν την βέλτιστη οπτική συχνότητα για την ανάπτυξή τους Seven Segment Display (SSD) Ένα Seven-segment display (SSD) είναι μια μορφή ηλεκτρονικής συσκευής προβολής για εμφάνιση δεκαδικών ψηφίων, που είναι η εναλλακτική λύση για τις πιο πολύπλοκες οθόνες. Σχήμα Seven Segment Display [9] ~ 102 ~
117 Χρησιμοποιούνται ευρέως στα ψηφιακά ρολόγια, τους ηλεκτρονικούς μετρητές, και άλλες ηλεκτρονικές συσκευών για την εμφάνιση αριθμητικών πληροφοριών. Θα χρησιμοποιηθούν προκειμένου να ενημερώνουν το χρήστη σε ποιο όροφο είναι σταθμευμένο το ασανσέρ ή από ποιον όροφο διέρχεται ο θάλαμος κατά την κίνηση του. Ουσιαστικά, μια οθόνη LED δεν είναι τίποτε περισσότερο από 8 ενδεικτικές λυχνίες (LED) καλουπωμένες στην ίδια πλαστική θήκη. Τα επτά τμήματα σχηματίζουν τον αριθμό και το όγδοο απεικονίζει την υποδιαστολή. Οι άνοδοι ή οι κάθοδοι όλων των διόδων είναι συνδεδεμένες σε ένα κοινό σημείο, επομένως υπάρχουν SSD κοινής ανόδου ή κοινής καθόδου, αντίστοιχα. Σχήμα 4.20 Τρόπος Σύνδεσης SSD Κοινής Καθόδου [9] Τα τμήματα επισημαίνονται με τα γράμματα από a έως g, συν το dp, όπως φαίνεται στην προηγούμενη εικόνα. Κατά τη σύνδεση, κάθε δίοδος αντιμετωπίζεται ξεχωριστά, πράγμα που σημαίνει ότι κάθε led θα πρέπει να έχει τη δική του αντίσταση για περιορισμό του ρεύματος. Το Seven Segment Display που χρησιμοποιήθηκε είναι το sa52-11hwa της εταιρείας King Bright, το datasheet των οποίων παρατίθεται στο ΠΑΡΑΡΤΗΜΑ Γ. ~ 103 ~
118 Διακόπτες Προσέγγισης (Proximity Switch) [19] Ο αισθητήρες προσέγγισης είναι ένα σημαντικό στοιχείο μιας από τις λειτουργίες ενός αυτοματοποιημένου συστήματος. Είναι συνήθως δυαδικοί και αναφέρονται επίσης με το όνομα διακόπτες προσέγγισης (proximity switches). Είναι ηλεκτρονικοί και ανιχνεύουν την παρουσία ή την διέλευση ενός αντικειμένου χωρίς να υπάρχει επαφή, άρα και μηχανική φθορά, ακόμα και σε μεγάλες ταχύτητες. Γι αυτό το λόγο προτιμήθηκαν για την κατασκευή μας έναντι των οριακών διακοπτών, καθώς έτσι θα έχουμε λιγότερες μηχανικές φθορές επομένως λιγότερες πιθανότητες να καταστραφούν. Επιπρόσθετα, έχουν τα ακόλουθα πλεονεκτήματα που τους καθιστούν ιδανικούς για τον ανελκυστήρα: Η διάρκεια λειτουργίας τους είναι μεγάλη, επειδή δεν έχουν επαφές και κινούμενα μέρη, τα οποία συνήθως φθείρονται εύκολα. Ο χρόνος από τη μια κατάσταση στην άλλη (ON/OFF) είναι πολύ μικρός, γι αυτό και η συχνότητα λειτουργίας τους μπορεί να είναι μεγάλη. Δεν παρουσιάζουν τα μειονεκτήματα σπινθηρισμών των επαφών, ούτε άλλα μειονεκτήματα που συνήθως προκύπτουν από τις μηχανικές ατέλειες. Υπάρχουν δυο τύποι διακοπτών, οι επαγωγικοί που ανιχνεύουν μόνο μεταλλικά αντικείμενα και οι χωρητικοί οι οποίοι είναι κατάλληλοι για ανίχνευση μονωτικών αντικειμένων, υγρών ή υλικών σε μορφή σκόνης, καθώς επίσης και κυλινδρικής και παραλληλεπίπεδης μορφής. Ο χωρητικός αισθητήρας προσέγγισης, βασίζει την αρχή λειτουργίας του, στην αλλαγή της χωρητικότητας πυκνωτή σε ένα κύκλωμα ταλάντωσης RC, όταν πλησιάσει την ενεργό επιφάνεια του αισθητήρα ένα οποιοδήποτε αντικείμενο. Ο επαγωγικός αισθητήρας προσέγγισης είναι ο περισσότερο διαδεδομένος τύπος αισθητήρα. Όταν παρουσιαστεί μπροστά από την ενεργό επιφάνειά του, κάποιο μεταλλικό αντικείμενο, τότε η έξοδός του αλλάζει κατάσταση. Αυτήν την ιδιότητα του επαγωγικού αισθητήρα την εκμεταλλευόμαστε σε διάφορες εφαρμογές. ~ 104 ~
119 Σχήμα 4.21 Διακόπτης προσέγγισης [13] Όταν τροφοδοτηθεί με ρεύμα ο επαγωγικός αισθητήρας, τότε δημιουργείται εναλλασσόμενο μαγνητικό πεδίο, μπροστά από την ενεργό επιφάνειά του. Αν εισέλθει μέσα στο μαγνητικό αυτό πεδίο, κάποιο μεταλλικό αντικείμενο (σίδερο, αλουμίνιο, χαλκός κτλ.), τότε προκαλείται ισχυρή απόσβεση της ταλάντωσης, αντιστρέφεται η έξοδος του κυκλώματος σκανδάλης και αλλάζει η κατάσταση της εξόδου του αισθητήρα. Πιο κάτω αναφέρονται ορισμένα βασικά χαρακτηριστικά των επαγωγικών αισθητήρων, τα οποία πρέπει να γνωρίζουμε, για να επιλέξουμε τον κατάλληλο αισθητήρα για κάθε περίπτωση: Τάση λειτουργίας Απόσταση αίσθησης Διαστάσεις Κατάσταση εξόδου στη θέση ηρεμίας Επιπρόσθετα, το κύκλωμα του επαγωγικού αισθητήρα μπορεί να παρουσιάζει τις ακόλουθες θετικές ιδιότητες: Προστασία από ανάστροφη πόλωση Προστασία από βραχυκύκλωμα Προστασία από στιγμιαίες υπερτάσεις. ~ 105 ~
120 Γενικά, οι επαγωγικοί αισθητήρες έχουν μεγάλη διάρκεια ζωής και δε χρειάζονται συντήρηση. Μπορούν να τοποθετηθούν και σε αντίξοες συνθήκες λειτουργίας, όπως είναι η παρουσία υγρών, σκόνης, δονήσεων κτλ. Σχήμα 4.22 Επαγωγικός διακόπτης προσέγγισης κυλινδρικής μορφής [13] Οι κυλινδρικοί διακόπτες προτιμήθηκαν έναντι των παραλληλεπίπεδων γιατί είναι μικρότεροι σε μέγεθος άρα διευκολύνεται η στήριξη σε περιοχές με δύσκολη πρόσβαση και είναι πιο γρήγορη η εγκατάσταση και η θέση τους σε λειτουργία. Στην πράξη, τα αντικείμενα προς ανίχνευση είναι συνήθως από χάλυβα και μεγέθους μεγαλύτερου της επιφάνειας του επαγωγικού διακόπτη. Για να εξασφαλιστεί η ανίχνευση. πρέπει η απόσταση μεταξύ αντικειμένου και επιφάνειας να είναι μικρότερη ή ίση της ονομαστικής απόστασης. Για την ανίχνευση της θέσης του θαλάμου θα χρησιμοποιηθούν επαγωγικοί διακόπτες προσέγγισης κυλινδρικής μορφής διαμέτρου 12mm της εταιρείας AECO και συγκεκριμένα οι διακόπτες προσέγγισης SI12-C2 PNP NO με κωδικό Ι Το datasheetτων proximity switches που χρησιμοποιήθηκαν παρατίθεται στο ΠΑΡΑΡΤΗΜΑ Γ. ~ 106 ~
121 4.6. Ανάπτυξη Κώδικα Κυκλώματος Ελέγχου Εισαγωγή Αφού λοιπόν περιγράψαμε αναλυτικά τον μικροελεγκτή μας και τα χαρακτηριστικά του προγράμματος MPLAB IDE, τη λογική πάνω στην οποία βασίσαμε την διπλωματική εργασία και τις θύρες εισόδου εξόδου που χρησιμοποιήθηκαν, θα περιγράψουμε το πλήρες διάγραμμα ροής του κώδικα, που αποτελεί άλλωστε και το ουσιαστικότερο αντικείμενο αυτής της εργασίας. Η αριθμητική μονάδα του μικροελεγκτή dspic30f4011 είναι ικανή να χειριστεί αριθμούς τόσο ακεραίους όσο και πραγματικούς είτε απλής είτε διπλής ακρίβειας. Στην παρούσα διπλωματική επιλέξαμε να χρησιμοποιήσουμε στην πλειοψηφία τους πραγματικούς αριθμούς τύπου unsigned int Διάγραμμα Ροής Το διάγραμμα ροής του κώδικα του κυκλώματος ελέγχου, το οποίο προκύπτει από την λογική της λειτουργίας του ανελκυστήρα που αναλύθηκε σε προηγούμενο κεφάλαιο, φαίνεται παρακάτω. Πρώτα ακολουθεί το διάγραμμα ροής του τυπωμένου κυκλώματος των ορόφων και στη συνέχεια του θαλάμου. I. ~ 107 ~
122 II. Διάγραμμα ροής του τυπωμένου κυκλώματος του ορόφου: ~ 108 ~
123 III. Διάγραμμα ροής του τυπωμένου κυκλώματος του θαλάμου: ~ 109 ~
124 Εκτέλεση Του Προγραμματισμού[3] Ο προγραμματισμός του μικροελεγκτή dspic30f4011 μπορεί να γίνει είτε σε συμβολική γλώσσα assemblyείτε σε γλώσσα ανώτερου επιπέδου C.Οι μεταβλητές στη γλώσσα Cμπορούν να είναι ακέραιοι ή αριθμοί κινητής υποδιαστολής. Για τη δήλωση των μεταβλητών μέσα στο πρόγραμμα χρησιμοποιήθηκαν οι πίνακες που ακολουθούν: Πίνακας 4.1 Δήλωση ακέραιων αριθμών και εύρος τιμών[3] Type Bits Min Max char, signed char unsigned char short, signed short unsigned short int, signed int unsigned int long, signed long unsigned long long long**, signed long long** unsigned long long** Πίνακας 4.2Δήλωση αριθμών κινητής υποδιαστολής και εύρος τιμών[3] Type Bits E Min E Max N Min N Max float double* long double ~ 110 ~
125 Ειδικότερα για την εύρεση λαθών σε πρόγραμμα (debugging) μέσω του MPLAB IDE παρέχονται οι εξής δύο δυνατότητες: a) Με χρήση του προσομοιωτή (simulator) όπου το πραγματικό σύστημα απουσιάζει και η λειτουργία του μ/ε προσομοιώνεται πλήρως από την κεντρική μονάδα επεξεργασίας του προσωπικού υπολογιστή b) Με χρήση του υλικού ICD 2 (Incircuit debugger2) και του πραγματικού συστήματος, που περιλαμβάνει τον μ/ε, τα μπουτόν, τους αισθητήρες, τα ρελέ και όλα τα υπόλοιπα στοιχεία που χρησιμοποιήθηκαν. Στα πλαίσια αυτής της διπλωματικής χρησιμοποιήθηκαν και οι δύο προηγούμενες μέθοδοι για τον έλεγχο του προγράμματος που αναπτύχθηκε, ώστε το τελικό αποτέλεσμα να είναι το επιθυμητό. ~ 111 ~
126 ~ 112 ~
127 ΚΕΦΑΛΑΙΟ 5 Συμπεράσματα Μελλοντικές Κινήσεις 5.1. Συμπεράσματα Το κυριότερο συμπέρασμα που προκύπτει από την παρούσα διπλωματική είναι ότι με την λογική που επιλέχθηκε να υλοποιηθεί επιτυγχάνεται μικρότερη αναμονή των επιβατών στους ορόφους και ταχύτερη εξυπηρέτηση τους. Αυτό οφείλεται στο γεγονός ότι ο θάλαμος δεν εκτελεί κάθε φορά μόνο μια κλήση αλλά τις συνδυάζει με τον βέλτιστο δυνατό τρόπο μειώνοντας κατά συνέπεια τις διαδρομές που πραγματοποιεί. Επομένως, επιτυγχάνεται οικονομικότερη λειτουργία του συστήματος σε σύγκριση με έναν απλό ανελκυστήρα χωρίς απομνημόνευση κλήσεων και ελαττώνεται η φθορά που υφίσταται η κατασκευή Μελλοντικές Κινήσεις Η παρούσα κατασκευή θα μπορούσε στο μέλλον να βελτιωθεί εκ νέου με την προσθήκη ρυθμιστή ταχύτητας, ο οποίος θα ελέγχει τις στροφές του κινητήρα για ομαλότερη στάση και σωστότερη ισοστάθμιση σε κάθε όροφο. Επιπλέον, η εγκατάσταση ηλεκτρομαγνητικής πέδης (φρένο) στον κινητήρα και ένας αισθητήρας βάρους στο δάπεδο της καμπίνας, για την ανίχνευση υπέρβαρου φορτίου, θα καθιστούσαν την κατασκευή ασφαλέστερη. Ένας επιπλέον τομέας στον οποίο θα μπορούσε να υπάρξει βελτίωση είναι η τοποθέτηση αυτόματων πορτών φρεατίου σε κάθε όροφο αλλά και μια εσωτερική πόρτα στη καμπίνα του θαλάμου υπό τον έλεγχο φωτοκύτταρου που θα ανιχνεύει την διέλευση επιβατών. Τέλος, η προσθήκη φωτισμού στην καμπίνα θα βελτίωνε κατά πολύ την εμφάνιση της κατασκευής. ~ 113 ~
128 ~ 114 ~
129 ΒΙΒΛΙΟΓΡΑΦΙΑ [1] Α.Ν. Σαφάκας, "Ηλεκτρικές Μηχανές Α'', Πανεπιστήμιο Πατρών, Πάτρα 2007 [2] Α.Ν. Σαφάκας, "Ηλεκτρικές Μηχανές Β'', Πανεπιστήμιο Πατρών, Πάτρα 2007 [3] Ε.Κ. Τατάκης, "Σημειώσεις Εργαστηρίου Ηλεκτρονικών Ισχύος ΙΙ", Πάτρα 2009 [4] Microchip, ''MPLAB C30 C COMPILER USER S GUIDE'', 2007 [5] "dspic30f4011/4012 Data Sheet ", Microchip, 2006 [6] Microchip, "dspic30f4011, Section 23, CAN", 2006 [7] Microchip, MCP2551, "High-Speed CAN Transceiver", 2010 [8] RS Online: [9] Book: PIC Microcontrollers - Programming in C, Chapter 4: Examples: [10] Light Emitting Diodes: [11] Ανάλυση τροφοδοτικών: [12] Επίσημη ιστοσελίδα microchip: ~ 115 ~
130 [13] Διαδίκτυο: [14] Wikipedia: [15] Δίοδος Εκπομπής Φωτός : F%CF%82_%CE%95%CE%BA%CF%80%CE%BF%CE%BC%CF%80%CE %AE%CF%82_%CE%A6%CF%89%CF%84%CF%8C%CF%82 [16] Διαμαντά Ευδοκία, «Μελέτη και υλοποίηση μεθόδου διανυσματικού ελέγχου τριφασικού κινητήρα για λειτουργία με μέγιστο βαθμό απόδοσης», Διπλωματική εργασία, Εργαστήριο Ηλεκτρομηχανικής Μετατροπής Ενέργειας, Πανεπιστήμιο Πατρών, 2010 [17] Τριφασικοί Ασύγχρονοι Επαγωγικοί Κινητήρες: _Motors.pdf [18] Γ. Στρατάκης, Ηλεκτρικές Μηχανές Βιομηχανικοί Αυτοματισμοί: [19] Groupe Shneider, Telemecanique, Ανιχνευτές Προσέγγισης -Επαγωγικοί και Χωρητικοί, Τεχνικό Εγχειρίδιο [20] Υπουργείο Εθνικής Παιδείας και Θρησκευμάτων, Παιδαγωγικό Ινστιτούτο, Δούμος Ευθύμιος, Ευθυμίου Ιωάννης, Κοτζαμπάσης Μιχάλης, "Ανελκυστήρες", Τεχνικά Επαγγελματικά Εκπαιδευτήρια, Τομέας Ηλεκτρολογικός, 2 ος Κύκλος, Αθήνα 2001 ~ 116 ~
131 [21] Μιχαήλ Μ. Κάσιος, «Ανελκυστήρες Χωρίς Μηχανοστάσιο», Διπλωματική εργασία, Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή Μηχανολόγων Μηχανικών, Τομέας Μηχανολογικών Κατασκευών & Αυτόματου Ελέγχου, Αθήνα 2007 [22] Κανατάς Πέτρος, «Γενικά Περί Ανελκυστήρων», Πτυχιακή Εργασία, ΤΕΙ Δυτικής Μακεδονίας, Σχολή Τεχνολογικών Εφαρμογών, Τμήμα Μηχανολογίας, Τομέας Κατασκευαστικός, Ακαδημαϊκό έτος: [23] Γαντζούδης Σωτήρης, Λαγουδάκος Μιχαήλ, Μπινιάρης Αθανάσιος, Ηλεκτρικές Μηχανές, Κεφάλαιο 4, Ασύγχρονοι Τριφασικοί Κινητήρες (Α.Τ.Κ.), εκδ. ΟΕΔΒ [24] Ρελέ (Relay), Wikipedia: 4%CF%81%CE%BF%CE%BD%CF%8C%CE%BC%CE%BF%CF%82 [25] ~ 117 ~
132 ~ 118 ~

133 ΠΑΡΑΡΤΗΜΑ Α ΤΟ ΤΥΠΩΜΕΝΟ ΚΥΚΛΩΜΑ ΤΗΣ ΚΑΤΑΣΚΕΥΗΣ. Σχηματικό Διάγραμμα γραμμικών τροφοδοτικών ~ 119 ~

134 Τυπωμένο κύκλωμα γραμμικών τροφοδοτικών ~ 120 ~

135 Σχηματικό Διάγραμμα πλακέτας θαλάμου ~ 121 ~

136 Τυπωμένο κύκλωμα πλακέτας Θαλάμου ~ 122 ~

137 Σχηματικό Διάγραμμα πλακέτας ορόφων ~ 123 ~

138 Τυπωμένο κύκλωμα πλακέτας Ορόφων ~ 124 ~
139 ΠΑΡΑΡΤΗΜΑ Β ΤΕΛΙΚΗ ΜΟΡΦΗ ΔΙΑΤΑΞΗΣ - ΦΩΤΟΓΡΑΦΙΕΣ Σχήμα 1 Τυπωμένο Κύκλωμα Καμπίνας ~ 125 ~
140 Σχήμα 2 Τυπωμένο Κύκλωμα Ορόφων Σχήμα 3 Τυπωμένο Κύκλωμα Τροφοδοτικού ~ 126 ~
141 Σχήμα 4 Ασύγχρονος Τριφασικός Κινητήρας και Σφικτήρας στην τροχαλία Σχήμα 5 Ασύγχρονος Τριφασικός Κινητήρας και Τροχαλία Παρέκκλισης ~ 127 ~
142 Σχήμα 6 Διάταξη Ανελκυστήρα ~ 128 ~
143 Σχήμα 7 Πίνακας και Κύκλωμα Ελέγχου ~ 129 ~
144 ~ 130 ~

145 ΠΑΡΑΡΤΗΜΑ Γ ΤΕΧΝΙΚΑ ΦΥΛΛΑΔΙΑ DATASHEETS ~ 131 ~
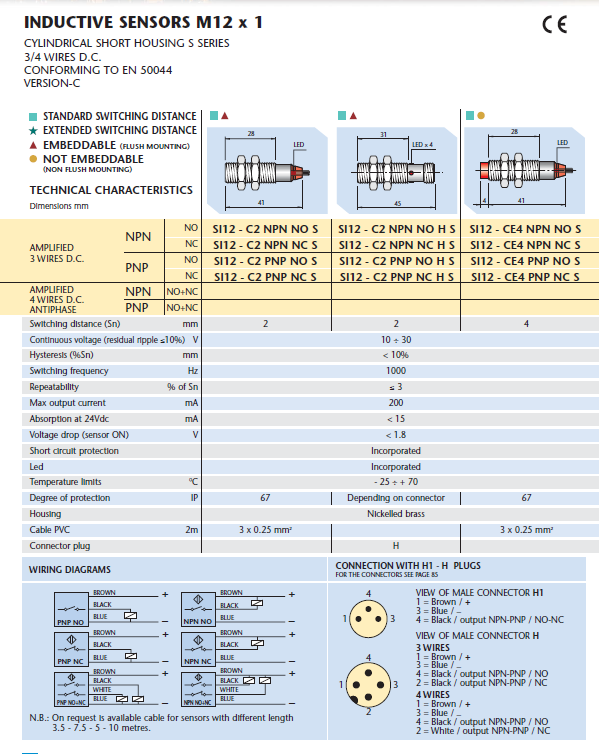
146 ~ 132 ~
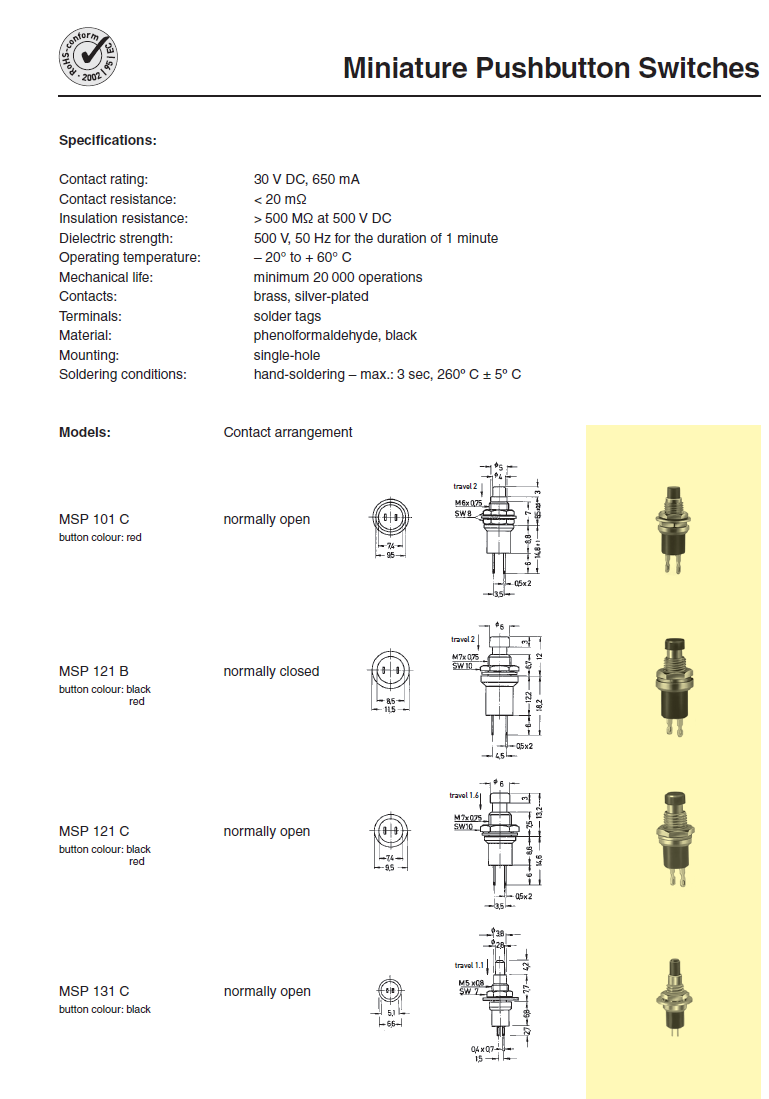
147 ~ 133 ~
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΠΑΡΑΡΤΗΜΑ ΧΑΝΙΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΗΣ. Πτυχιακή εργασία με θέμα ΥΛΟΠΟΙΗΣΗ ΜΟΝΤΕΛΟΥ ΑΝΕΛΚΥΣΤΗΡΑ ΜΕ PLC
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΠΑΡΑΡΤΗΜΑ ΧΑΝΙΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΗΣ Πτυχιακή εργασία με θέμα ΥΛΟΠΟΙΗΣΗ ΜΟΝΤΕΛΟΥ ΑΝΕΛΚΥΣΤΗΡΑ ΜΕ PLC Σπουδαστής : Σταυγιανουδάκης Νικόλαος Τηλ: 6978111709 Επιβλέπον
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΠΑΡΑΡΤΗΜΑ ΧΑΝΙΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΗΣ Πτυχιακή εργασία με θέμα ΥΛΟΠΟΙΗΣΗ ΜΟΝΤΕΛΟΥ ΑΝΕΛΚΥΣΤΗΡΑ ΜΕ PLC Σπουδαστής : Σταυγιανουδάκης Νικόλαος Τηλ: 6978111709 Επιβλέπον
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. Η σχεδίαση, η κατασκευή, η συναρµολόγηση, η µελέτη εγκατάστασης και ο τελικός έλεγχος του ανελκυστήρα θα γίνουν σύµφωνα µε
 ΕΛΛΗΝΙΚΗ ΗΜΟΚΡΑΤΙΑ ΝΟΜΟΣ ΘΕΣΣΑΛΟΝΙΚΗΣ ΗΜΟΣ ΧΑΛΚΗ ΟΝΟΣ /ΝΣΗ ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ ΤΜΗΜΑ ΤΕΧΝΙΚΩΝ ΕΡΓΩΝ, ΜΕΛΕΤΩΝ ΚΑΙ ΣΥΓΚΟΙΝΩΝΙΩΝ Αρ.µελέτης:89/2017 ΘΕΜΑ:«Προµήθεια υδραυλικού ανελκυστήρα» ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ
ΕΛΛΗΝΙΚΗ ΗΜΟΚΡΑΤΙΑ ΝΟΜΟΣ ΘΕΣΣΑΛΟΝΙΚΗΣ ΗΜΟΣ ΧΑΛΚΗ ΟΝΟΣ /ΝΣΗ ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ ΤΜΗΜΑ ΤΕΧΝΙΚΩΝ ΕΡΓΩΝ, ΜΕΛΕΤΩΝ ΚΑΙ ΣΥΓΚΟΙΝΩΝΙΩΝ Αρ.µελέτης:89/2017 ΘΕΜΑ:«Προµήθεια υδραυλικού ανελκυστήρα» ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΤΑΧΥΚΙΝΗΤΟ ΒΙΟΜΗΧΑΝΙΚΟ ΡΟΛΟ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ
 ΤΑΧΥΚΙΝΗΤΟΥ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Ταχυκίνητα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων και πιστοποιούνται βάσει
ΤΑΧΥΚΙΝΗΤΟΥ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Ταχυκίνητα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων και πιστοποιούνται βάσει
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΤΑΧΥΚΙΝΗΤΟ ΒΙΟΜΗΧΑΝΙΚΟ ΡΟΛΟ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ
 ΤΑΧΥΚΙΝΗΤΟΥ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Ταχυκίνητα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων συμμορφώνονται με την
ΤΑΧΥΚΙΝΗΤΟΥ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Ταχυκίνητα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων συμμορφώνονται με την
1.1 Δοχείο λαδιού. 1.2 Αντλία / Ηλεκτροκινητήρας ΥΔΡΑΥΛΙΚΟΙ ΑΝΕΛΚΥΣΤΗΡΕΣ. 1. Κινητήριος Μηχανισμός
 ΥΔΡΑΥΛΙΚΟΙ ΑΝΕΛΚΥΣΤΗΡΕΣ 1. Κινητήριος Μηχανισμός O κινητήριος μηχανισμός αποτελείται από την αντλία, τον κινητήρα, το σύστημα βαλβίδων, την χειροκίνητη «πρέσα» χειραντλία απεγκλωβισμού και το δοχείο λαδιού
ΥΔΡΑΥΛΙΚΟΙ ΑΝΕΛΚΥΣΤΗΡΕΣ 1. Κινητήριος Μηχανισμός O κινητήριος μηχανισμός αποτελείται από την αντλία, τον κινητήρα, το σύστημα βαλβίδων, την χειροκίνητη «πρέσα» χειραντλία απεγκλωβισμού και το δοχείο λαδιού
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΗΛΕΚΤΡΟΚΙΝΗΤΟΥ ΔΙΑΙΡΟΥΜΕΝΟΥ ΡΟΛΟΥ E.M.D.R.S
 ΗΛΕΚΤΡΟΚΙΝΗΤΟΥ ΔΙΑΙΡΟΥΜΕΝΟΥ ΡΟΛΟΥ E.M.D.R.S 0 Τα Ηλεκτροκίνητα Διαιρούμενα Ρολά αποτελούν διατάξεις οι οποίες προορίζονται για την κάλυψη μεγάλων ανοιγμάτων (>12m), όπου καθίσταται αδύνατη η τοποθέτηση
ΗΛΕΚΤΡΟΚΙΝΗΤΟΥ ΔΙΑΙΡΟΥΜΕΝΟΥ ΡΟΛΟΥ E.M.D.R.S 0 Τα Ηλεκτροκίνητα Διαιρούμενα Ρολά αποτελούν διατάξεις οι οποίες προορίζονται για την κάλυψη μεγάλων ανοιγμάτων (>12m), όπου καθίσταται αδύνατη η τοποθέτηση
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΒΙΟΜΗΧΑΝΙΚΟ ΡΟΛΟ ΤΡΙΦΑΣΙΚΟΥ ΚΙΝΗΤΗΡΑ RSM
 ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ RSM 0 Τα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων και πιστοποιούνται βάσει του Ευρωπαϊκού Προτύπου EN 13241-1. Διαθέτουν προσαρμοζόμενη
ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ RSM 0 Τα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων και πιστοποιούνται βάσει του Ευρωπαϊκού Προτύπου EN 13241-1. Διαθέτουν προσαρμοζόμενη
ΚΕΦΑΛΑΙΟ 2. Ενότητα 2.4 ΥΔΡΑΥΛΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ ΣΤΟΧΟΙ
 ΚΕΦΑΛΑΙΟ 2 Ενότητα 2.4 ΥΔΡΑΥΛΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ ΣΤΟΧΟΙ Μετά την ολοκλήρωση της ενότητας αυτής θα μπορείτε: Να περιγράφετε την αρχή λειτουργίας ενός υδραυλικού αυτοματισμού. Να εξηγείτε τη λειτουργία ενός
ΚΕΦΑΛΑΙΟ 2 Ενότητα 2.4 ΥΔΡΑΥΛΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ ΣΤΟΧΟΙ Μετά την ολοκλήρωση της ενότητας αυτής θα μπορείτε: Να περιγράφετε την αρχή λειτουργίας ενός υδραυλικού αυτοματισμού. Να εξηγείτε τη λειτουργία ενός
ΕΕ 2.1.2: Ελέγχει ότι δεν ξεκινάει ο ανελκυστήρας αν όλες οι πόρτες δεν είναι κλειστές και κλειδωμένες
 ΕΕ 2.1.1 : Τοποθετεί τις συντήρησης πινακίδες εργασιών Πληροφόρηση χρηστών ανελκυστήρα ότι αυτός είναι εκτός λειτουργίας λόγω εργασιών συντήρησης Τοποθετώντας σε εμφανές σημείο πινακίδες που να ειδοποιούν
ΕΕ 2.1.1 : Τοποθετεί τις συντήρησης πινακίδες εργασιών Πληροφόρηση χρηστών ανελκυστήρα ότι αυτός είναι εκτός λειτουργίας λόγω εργασιών συντήρησης Τοποθετώντας σε εμφανές σημείο πινακίδες που να ειδοποιούν
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. Εικόνα 1
 ΤΑΧΥΚΙΝΗΤΗΣ ΠΟΡΤΑΣ RSD ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΙΩΝ 0 Οι Ταχυκίνητες Πόρτες (ταχυπόρτες) είναι ηλεκτρικά κινούμενες διατάξεις, κατάλληλα κατασκευασμένες για βιομηχανικούς χώρους, αποθήκες και χώρους υγειονομικού
ΤΑΧΥΚΙΝΗΤΗΣ ΠΟΡΤΑΣ RSD ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΙΩΝ 0 Οι Ταχυκίνητες Πόρτες (ταχυπόρτες) είναι ηλεκτρικά κινούμενες διατάξεις, κατάλληλα κατασκευασμένες για βιομηχανικούς χώρους, αποθήκες και χώρους υγειονομικού
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΧΕΙΡΟΚΙΝΗΤΟΥ ΔΙΑΙΡΟΥΜΕΝΟΥ ΡΟΛΟΥ M.M.D.R.S
 ΧΕΙΡΟΚΙΝΗΤΟΥ ΔΙΑΙΡΟΥΜΕΝΟΥ ΡΟΛΟΥ M.M.D.R.S 0 Τα Χειροκίνητα Διαιρούμενα Ρολά αποτελούν διατάξεις οι οποίες προορίζονται για την κάλυψη μεγάλων ανοιγμάτων (>12m), όπου καθίσταται αδύνατη η τοποθέτηση ενός
ΧΕΙΡΟΚΙΝΗΤΟΥ ΔΙΑΙΡΟΥΜΕΝΟΥ ΡΟΛΟΥ M.M.D.R.S 0 Τα Χειροκίνητα Διαιρούμενα Ρολά αποτελούν διατάξεις οι οποίες προορίζονται για την κάλυψη μεγάλων ανοιγμάτων (>12m), όπου καθίσταται αδύνατη η τοποθέτηση ενός
Ανυψωτικές & Μεταφορικές Μηχανές Ακαδημαϊκό έτος: 2011-2012 Ε.Μ.Π. Σχολή Μηχανολόγων Μηχανικών Τομέας ΜΚ & ΑΕ. Σελίδα 1 από 8
 Βοηθητικά στοιχεία Υπολογιστικού Θέµατος 1 Στο Σχήµα 1 απεικονίζεται µία τυπική διάταξη ανελκυστήρα προσώπων, καθώς και µία τυπική µορφή φρέατος διαδροµής. (α) Σχήµα 1: (α) τυπική διάταξη ανελκυστήρα προσώπων
Βοηθητικά στοιχεία Υπολογιστικού Θέµατος 1 Στο Σχήµα 1 απεικονίζεται µία τυπική διάταξη ανελκυστήρα προσώπων, καθώς και µία τυπική µορφή φρέατος διαδροµής. (α) Σχήµα 1: (α) τυπική διάταξη ανελκυστήρα προσώπων
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. Κόλλιας Ε.Π.Ε. Σελίδα 2/5 E , Ver 1 st, Διεύθυνση : 3 ο χλμ. Εθνικής Οδού Κατερίνης Θεσσαλονίκης Κατερίνη
 ΤΑΧΥΚΙΝΗΤΗΣ ΑΝΑΔΙΠΛΟΥΜΕΝΗΣ ΠΟΡΤΑΣ RD04 0 No Ονομασία Στοιχείου No Ονομασία Στοιχείου 1 Διάταξη μετάδοσης κίνησης 9 Φύλλο PVC ενισχυμένο με ίνες λινού 2 Ηλεκτρικό συγκρότημα κίνησης 10 Προφίλ αλουμινίου
ΤΑΧΥΚΙΝΗΤΗΣ ΑΝΑΔΙΠΛΟΥΜΕΝΗΣ ΠΟΡΤΑΣ RD04 0 No Ονομασία Στοιχείου No Ονομασία Στοιχείου 1 Διάταξη μετάδοσης κίνησης 9 Φύλλο PVC ενισχυμένο με ίνες λινού 2 Ηλεκτρικό συγκρότημα κίνησης 10 Προφίλ αλουμινίου
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΒΙΟΜΗΧΑΝΙΚΟ ΡΟΛΟ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ
 ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων και πιστοποιούνται βάσει του Ευρωπαϊκού Προτύπου
ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων και πιστοποιούνται βάσει του Ευρωπαϊκού Προτύπου
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
«ΛΥΣΕΙΣ ΓΙΑ ΤΗΝ ΑΣΦΑΛΕΙΑ & ΤΟΝ ΕΚΣΥΓΧΡΟΝΙΣΜΟ ΤΟΥ ΑΝΕΛΚΥΣΤΗΡΑ» (Κ.Υ.Α. Αρ.οικ.Φ.9.2./29362/1957/ΦΕΚ.1797Β`/ 21-12-2005)
") «ΛΥΣΕΙΣ ΓΙΑ ΤΗΝ ΑΣΦΑΛΕΙΑ & ΤΟΝ ΕΚΣΥΓΧΡΟΝΙΣΜΟ ΤΟΥ ΑΝΕΛΚΥΣΤΗΡΑ» (Κ.Υ.Α. Αρ.οικ.Φ.9.2./29362/1957/ΦΕΚ.1797Β`/ 21-12-2005) Φροντίζουμε για εσάς... Η εταιρεία μας έπειτα από εκτενή μελέτη για την σωστή αλλά
«ΛΥΣΕΙΣ ΓΙΑ ΤΗΝ ΑΣΦΑΛΕΙΑ & ΤΟΝ ΕΚΣΥΓΧΡΟΝΙΣΜΟ ΤΟΥ ΑΝΕΛΚΥΣΤΗΡΑ» (Κ.Υ.Α. Αρ.οικ.Φ.9.2./29362/1957/ΦΕΚ.1797Β`/ 21-12-2005) Φροντίζουμε για εσάς... Η εταιρεία μας έπειτα από εκτενή μελέτη για την σωστή αλλά
Νομοθετικό πλαίσιο. Με βάση τη νομοθεσία αυτή η διαδικασία έκδοσης άδειας ανελκυστήρα είναι η εξής :
 Νομοθετικό πλαίσιο Μέχρι το 1985 η κατασκευή, λειτουργία και συντήρηση των ανελκυστήρων καθορίζονταν από τα βασιλικά διατάγματα 37 του ΒΔ 1968 και 890 του 1965, «Περί κατασκευής και λειτουργίας ηλεκτροκίνητων
Νομοθετικό πλαίσιο Μέχρι το 1985 η κατασκευή, λειτουργία και συντήρηση των ανελκυστήρων καθορίζονταν από τα βασιλικά διατάγματα 37 του ΒΔ 1968 και 890 του 1965, «Περί κατασκευής και λειτουργίας ηλεκτροκίνητων
ΤΕΙ ΠΕΙΡΑΙΑ ΣΤΕΦ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ. ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΑΥΤΟΜΑΤΟΥ ΑΝΕΛΚΥΣΤΗΡΑ 3ων ΣΤΑΣΕΩΝ ΜΕ ΣΕΙΡΙΑΚΗ ΕΠΙΚΟΙΝΩΝΙΑ ΘΑΛΑΜΟΥ
 ΤΕΙ ΠΕΙΡΑΙΑ ΣΤΕΦ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΑΥΤΟΜΑΤΟΥ ΑΝΕΛΚΥΣΤΗΡΑ 3ων ΣΤΑΣΕΩΝ ΜΕ ΣΕΙΡΙΑΚΗ ΕΠΙΚΟΙΝΩΝΙΑ ΘΑΛΑΜΟΥ ΣΠΟΥΔΑΣΤΗΣ: ΜΑΓΕΙΡΑΣ ΝΙΚΟΛΑΟΣ (Α.Μ 36497) ΕΠΟΠΤΗΣ ΚΑΘΗΓΗΤΗΣ:
ΤΕΙ ΠΕΙΡΑΙΑ ΣΤΕΦ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΑΥΤΟΜΑΤΟΥ ΑΝΕΛΚΥΣΤΗΡΑ 3ων ΣΤΑΣΕΩΝ ΜΕ ΣΕΙΡΙΑΚΗ ΕΠΙΚΟΙΝΩΝΙΑ ΘΑΛΑΜΟΥ ΣΠΟΥΔΑΣΤΗΣ: ΜΑΓΕΙΡΑΣ ΝΙΚΟΛΑΟΣ (Α.Μ 36497) ΕΠΟΠΤΗΣ ΚΑΘΗΓΗΤΗΣ:
Kollias Industrial Doors
 Kollias Industrial Doors ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΑΝΑΔΙΠΛΟΥΜΕΝΗΣ ΠΟΡΤΑΣ RD06 0 Οι Αναδιπλούμενες Πόρτες RD06 αποτελούν διατάξεις προοριζόμενες για την κάλυψη ανοιγμάτων, λειτουργώντας ως διαχωριστικό πέτασμα
Kollias Industrial Doors ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΑΝΑΔΙΠΛΟΥΜΕΝΗΣ ΠΟΡΤΑΣ RD06 0 Οι Αναδιπλούμενες Πόρτες RD06 αποτελούν διατάξεις προοριζόμενες για την κάλυψη ανοιγμάτων, λειτουργώντας ως διαχωριστικό πέτασμα
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ
 ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτωνκαι πιστοποιούνται βάσει του Ευρωπαϊκού Προτύπου
ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτωνκαι πιστοποιούνται βάσει του Ευρωπαϊκού Προτύπου
ΑΝΑΚΟΙΝΩΣΗ ΠΡΟΣΚΛΗΣΗΣ ΕΚΔΗΛΩΣΗΣ ΕΝΔΙΑΦΕΡΟΝΤΟΣ ΓΙΑ ΤΗΝ ΠΑΡΟΧΗ ΥΠΗΡΕΣΙΩΝ ΕΠΙΣΚΕΥΗΣ ΚΑΙ ΣΥΝΤΗΡΗΣΗΣ ΤΟΥ ΝΟΣΟΚΟΜΕΙΟΥ ΝΑΟΥΣΑΣ
 ΓΕΝΙΚΟ ΝΟΣΟΚΟΜΕΙΟ ΗΜΑΘΙΑΣ ΥΓ. ΜΟΝΑΔΑ ΝΑΟΥΣΑΣ ΑΡ.ΠΡΩΤ. 8749/9-12-2013 ΑΝΑΚΟΙΝΩΣΗ ΠΡΟΣΚΛΗΣΗΣ ΕΚΔΗΛΩΣΗΣ ΕΝΔΙΑΦΕΡΟΝΤΟΣ ΓΙΑ ΤΗΝ ΠΑΡΟΧΗ ΥΠΗΡΕΣΙΩΝ ΕΠΙΣΚΕΥΗΣ ΚΑΙ ΣΥΝΤΗΡΗΣΗΣ ΤΟΥ ΝΟΣΟΚΟΜΕΙΟΥ ΝΑΟΥΣΑΣ Το Νοσοκομείο
ΓΕΝΙΚΟ ΝΟΣΟΚΟΜΕΙΟ ΗΜΑΘΙΑΣ ΥΓ. ΜΟΝΑΔΑ ΝΑΟΥΣΑΣ ΑΡ.ΠΡΩΤ. 8749/9-12-2013 ΑΝΑΚΟΙΝΩΣΗ ΠΡΟΣΚΛΗΣΗΣ ΕΚΔΗΛΩΣΗΣ ΕΝΔΙΑΦΕΡΟΝΤΟΣ ΓΙΑ ΤΗΝ ΠΑΡΟΧΗ ΥΠΗΡΕΣΙΩΝ ΕΠΙΣΚΕΥΗΣ ΚΑΙ ΣΥΝΤΗΡΗΣΗΣ ΤΟΥ ΝΟΣΟΚΟΜΕΙΟΥ ΝΑΟΥΣΑΣ Το Νοσοκομείο
ΣΧΕΔΙΑΣΜΟΣ ΕΓΧΕΙΡΙΔΙΟ ΣΧΕΔΙΑΣΗΣ ΑΝΕΛΚΥΣΤΗΡΩΝ ΟΛΟΚΛΗΡΩΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΑΝΕΛΚΥΣΤΗΡΩΝ ΣΧΕΔΙΑΣΜΟΣ ΜΗΧΑΝΟΣΤΑΣΙΩΝ
 ΕΓΧΕΙΡΙΔΙΟ ΣΧΕΔΙΑΣΗΣ ΑΝΕΛΚΥΣΤΗΡΩΝ ΜΟΝΑΔΑ ΙΣΧΥΟΣ ΣΧΕΔΙΑΣΜΟΣ ΜΗΧΑΝΟΣΤΑΣΙΩΝ ΦΡΕΑΤΙΟ min. 700 Απευθύνεται σε μελετητές: ΑΡΧΙΤΕΚΤΟΝΕΣ ΠΟΛΙΤΙΚΟΥΣ ΜΗΧΑΝΙΚΟΥΣ ΜΗΧΑΝΟΛΟΓΟΥΣ ΜΗΧΑΝΙΚΟΥΣ ΗΛΕΚΤΡΟΛΟΓΟΥΣ ΜΗΧΑΝΙΚΟΥΣ ΣΧΕΔΙΑΣΗ
ΕΓΧΕΙΡΙΔΙΟ ΣΧΕΔΙΑΣΗΣ ΑΝΕΛΚΥΣΤΗΡΩΝ ΜΟΝΑΔΑ ΙΣΧΥΟΣ ΣΧΕΔΙΑΣΜΟΣ ΜΗΧΑΝΟΣΤΑΣΙΩΝ ΦΡΕΑΤΙΟ min. 700 Απευθύνεται σε μελετητές: ΑΡΧΙΤΕΚΤΟΝΕΣ ΠΟΛΙΤΙΚΟΥΣ ΜΗΧΑΝΙΚΟΥΣ ΜΗΧΑΝΟΛΟΓΟΥΣ ΜΗΧΑΝΙΚΟΥΣ ΗΛΕΚΤΡΟΛΟΓΟΥΣ ΜΗΧΑΝΙΚΟΥΣ ΣΧΕΔΙΑΣΗ
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΑΝΟΙΓΟΜΕΝΟ ΠΛΑΙΣΙΟ - OFRS
 ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΑΝΟΙΓΟΜΕΝΟ ΠΛΑΙΣΙΟ - OFRS 0 Τα Βιομηχανικά Ρολά με Ανοιγόμενο Πλαίσιο είναι σύνθετες διατάξεις, οι οποίες αποτελούνται από ένα Βιομηχανικό Ρολό και ένα Αρθρωτά Εδραζόμενο Μεταλλικό
ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΑΝΟΙΓΟΜΕΝΟ ΠΛΑΙΣΙΟ - OFRS 0 Τα Βιομηχανικά Ρολά με Ανοιγόμενο Πλαίσιο είναι σύνθετες διατάξεις, οι οποίες αποτελούνται από ένα Βιομηχανικό Ρολό και ένα Αρθρωτά Εδραζόμενο Μεταλλικό
ΣΥΣΤΗΜΑΤΑ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ.
 ΣΥΣΤΗΜΑΤΑ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ www.kolliasdoors.com ΤΕΧΝΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΥΔΡΑΥΛΙΚΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ ΤΗΛΕΣΚΟΠΙΚΟΥ ΧΕΙΛΟΥΣ - HDLΤ 0 Οι Υδραυλικές Ράμπες με Τηλεσκοπικά Εκτεινόμενο Χείλος, αποτελούν μια
ΣΥΣΤΗΜΑΤΑ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ www.kolliasdoors.com ΤΕΧΝΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΥΔΡΑΥΛΙΚΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ ΤΗΛΕΣΚΟΠΙΚΟΥ ΧΕΙΛΟΥΣ - HDLΤ 0 Οι Υδραυλικές Ράμπες με Τηλεσκοπικά Εκτεινόμενο Χείλος, αποτελούν μια
ΧΑΤΖΗΜΑΡΚΟΥ ΙΩΑΝΝΗΣ&ΥΙΟΣ Ο.Ε ΤΕΧΝΙΚΗ & ΕΜΠΟΡΙΚΗ ΕΤΑΙΡΕΙΑ ΑΝΕΛΚΥΣΤΗΡΩΝ ΕΛΕΥΘΕΡΙΑΣ 79-81 Τ.Κ 18345 ΜΟΣΧΑΤΟ ΤΗΛ 2104813088 FAX.
 ΧΑΤΖΗΜΑΡΚΟΥ ΙΩΑΝΝΗΣ&ΥΙΟΣ Ο.Ε ΤΕΧΝΙΚΗ & ΕΜΠΟΡΙΚΗ ΕΤΑΙΡΕΙΑ ΑΝΕΛΚΥΣΤΗΡΩΝ ΕΛΕΥΘΕΡΙΑΣ 79-81 Τ.Κ 18345 ΜΟΣΧΑΤΟ ΤΗΛ 2104813088 FAX.2104831624 e-mail:intralift@intralift.gr www.intralift.gr Intralift is a registered
ΧΑΤΖΗΜΑΡΚΟΥ ΙΩΑΝΝΗΣ&ΥΙΟΣ Ο.Ε ΤΕΧΝΙΚΗ & ΕΜΠΟΡΙΚΗ ΕΤΑΙΡΕΙΑ ΑΝΕΛΚΥΣΤΗΡΩΝ ΕΛΕΥΘΕΡΙΑΣ 79-81 Τ.Κ 18345 ΜΟΣΧΑΤΟ ΤΗΛ 2104813088 FAX.2104831624 e-mail:intralift@intralift.gr www.intralift.gr Intralift is a registered
«Κατασκευή ανελκυστήρα στο κεντρικό κτίριο της Διοίκησης» ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ - ΠΡΟΔΙΑΓΡΑΦΕΣ ΑΝΕΛΚΥΣΤΗΡΑ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ (Τ.Ε.Ι.) ΘΕΣΣΑΛΙΑΣ ΔΙΕΥΘΥΝΣΗ: ΠΛΗΡΟΦΟΡΙΚΗΣ & ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ ΤΜΗΜΑ: ΜΕΛΕΤΩΝ - ΚΑΤΑΣΚΕΥΩΝ «Κατασκευή ανελκυστήρα στο κεντρικό κτίριο της Διοίκησης»
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ (Τ.Ε.Ι.) ΘΕΣΣΑΛΙΑΣ ΔΙΕΥΘΥΝΣΗ: ΠΛΗΡΟΦΟΡΙΚΗΣ & ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ ΤΜΗΜΑ: ΜΕΛΕΤΩΝ - ΚΑΤΑΣΚΕΥΩΝ «Κατασκευή ανελκυστήρα στο κεντρικό κτίριο της Διοίκησης»
8 η ΕΝΟΤΗΤΑ Ανυψωτικά μηχανήματα
 ΣΧΟΛΗ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΜΠ ΔΟΜΙΚΕΣ ΜΗΧΑΝΕΣ & ΚΑΤΑΣΚΕΥΑΣΤΙΚΕΣ ΜΕΘΟΔΟΙ 8 η ΕΝΟΤΗΤΑ Ανυψωτικά μηχανήματα Διδάσκων: Σ. Λαμπρόπουλος Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες Χρήσης Creative
ΣΧΟΛΗ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΜΠ ΔΟΜΙΚΕΣ ΜΗΧΑΝΕΣ & ΚΑΤΑΣΚΕΥΑΣΤΙΚΕΣ ΜΕΘΟΔΟΙ 8 η ΕΝΟΤΗΤΑ Ανυψωτικά μηχανήματα Διδάσκων: Σ. Λαμπρόπουλος Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες Χρήσης Creative
ΣΥΣΤΗΜΑΤΑ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ.
 ΣΥΣΤΗΜΑΤΑ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ www.kolliasdoors.com ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΥΔΡΑΥΛΙΚΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ ΤΗΛΕΣΚΟΠΙΚΟΥ ΧΕΙΛΟΥΣ - HDLΤ 0 Οι Υδραυλικές Ράμπες Φορτοεκφόρτωσης με Τηλεσκοπικά Εκτεινόμενο Χείλος είναι
ΣΥΣΤΗΜΑΤΑ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ www.kolliasdoors.com ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΥΔΡΑΥΛΙΚΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ ΤΗΛΕΣΚΟΠΙΚΟΥ ΧΕΙΛΟΥΣ - HDLΤ 0 Οι Υδραυλικές Ράμπες Φορτοεκφόρτωσης με Τηλεσκοπικά Εκτεινόμενο Χείλος είναι
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΥΔΡΑΥΛΙΚΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ ΜΕ ΤΗΛΕΣΚΟΠΙΚΟ ΧΕΙΛΟΣ HTSLDL
 ΥΔΡΑΥΛΙΚΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ ΜΕ ΤΗΛΕΣΚΟΠΙΚΟ ΧΕΙΛΟΣ HTSLDL 0 Οι Υδραυλικές Ράμπες Φορτοεκφόρτωσης με Τηλεσκοπικά Εκτεινόμενο Χείλος είναι ηλεκτροϋδραυλικά κινούμενες διατάξεις, οι οποίες χρησιμοποιούνται
ΥΔΡΑΥΛΙΚΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ ΜΕ ΤΗΛΕΣΚΟΠΙΚΟ ΧΕΙΛΟΣ HTSLDL 0 Οι Υδραυλικές Ράμπες Φορτοεκφόρτωσης με Τηλεσκοπικά Εκτεινόμενο Χείλος είναι ηλεκτροϋδραυλικά κινούμενες διατάξεις, οι οποίες χρησιμοποιούνται
ΠΡΟΣΟΧΗ Οι επεμβάσεις απεγκλωβισμού πρέπει να γίνονται μόνο από αρμόδια και εκπαιδευμένα άτομα.
 ΠΡΟΣΟΧΗ Οι επεμβάσεις απεγκλωβισμού πρέπει να γίνονται μόνο από αρμόδια και εκπαιδευμένα άτομα. Αφιερωμένο στους αξέχαστους Ήρωες- Πυροσβέστες που έπεσαν στο βωμό του καθήκοντος και στους συναδέλφους
ΠΡΟΣΟΧΗ Οι επεμβάσεις απεγκλωβισμού πρέπει να γίνονται μόνο από αρμόδια και εκπαιδευμένα άτομα. Αφιερωμένο στους αξέχαστους Ήρωες- Πυροσβέστες που έπεσαν στο βωμό του καθήκοντος και στους συναδέλφους
ΒΙΒΛΙΟΘΗΚΗ ΛΕΞΙΛΟΓΙΟ ΑΝΕΛΚΥΣΤΗΡΑ
 ΒΙΒΛΙΟΘΗΚΗ ΛΕΞΙΛΟΓΙΟ ΑΝΕΛΚΥΣΤΗΡΑ Αλυσίδα ηλεκτρικής ασφάλειας (Electric safety chain): Το σύνολο των ηλεκτρικών διατάξεων ασφαλείας, που είναι συνδεδεμένες σε σειρά. Ανελκυστήρας (Lift): Μόνιμα εγκατεστημένη
ΒΙΒΛΙΟΘΗΚΗ ΛΕΞΙΛΟΓΙΟ ΑΝΕΛΚΥΣΤΗΡΑ Αλυσίδα ηλεκτρικής ασφάλειας (Electric safety chain): Το σύνολο των ηλεκτρικών διατάξεων ασφαλείας, που είναι συνδεδεμένες σε σειρά. Ανελκυστήρας (Lift): Μόνιμα εγκατεστημένη
ΟΝΟΜ/ΩΝΥΜΟ:ΣΤΕΦΑΝΟΣ ΓΚΟΥΝΤΟΥΣΟΥΔΗΣ Α.Μ:6750 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ:ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ (ΕΡΓΑΣΤΗΡΙΟ)
") ΟΝΟΜ/ΩΝΥΜΟ:ΣΤΕΦΑΝΟΣ ΓΚΟΥΝΤΟΥΣΟΥΔΗΣ Α.Μ:6750 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ:ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ (ΕΡΓΑΣΤΗΡΙΟ) Περιγραφή Λειτουργίας Σύγχρονου Κινητήρα Σκοπός: Η παρούσα εργασία έχει σκοπό να περιγράψει τη λειτουργία ενός
ΟΝΟΜ/ΩΝΥΜΟ:ΣΤΕΦΑΝΟΣ ΓΚΟΥΝΤΟΥΣΟΥΔΗΣ Α.Μ:6750 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ:ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ (ΕΡΓΑΣΤΗΡΙΟ) Περιγραφή Λειτουργίας Σύγχρονου Κινητήρα Σκοπός: Η παρούσα εργασία έχει σκοπό να περιγράψει τη λειτουργία ενός
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ (ΘΕΡΙΝΑ)
") ΦΥΣΙΚΗ ΠΡΟΣΝΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ (ΘΕΡΙΝ) 3/3/019 ΤΖΓΚΡΚΗΣ ΓΙΝΝΗΣ ΘΕΜ A Να γράψετε στην κόλλα σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση.
ΦΥΣΙΚΗ ΠΡΟΣΝΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ (ΘΕΡΙΝ) 3/3/019 ΤΖΓΚΡΚΗΣ ΓΙΝΝΗΣ ΘΕΜ A Να γράψετε στην κόλλα σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση.
γ) το μέτρο της γωνιακής ταχύτητας του δίσκου τη στιγμή κατά την οποία έχει ξετυλιχθεί όλο το σχοινί.
 το μέτρο της γωνιακής ταχύτητας του δίσκου τη στιγμή κατά την οποία έχει ξετυλιχθεί όλο το σχοινί.") 1. Ο ομογενής και ισοπαχής δίσκος του σχήματος έχει ακτίνα και μάζα, είναι οριζόντιος και μπορεί να περιστρέφεται, χωρίς τριβές, γύρω από κατακόρυφο ακλόνητο άξονα που διέρχεται από το κέντρο του. Ο δίσκος
1. Ο ομογενής και ισοπαχής δίσκος του σχήματος έχει ακτίνα και μάζα, είναι οριζόντιος και μπορεί να περιστρέφεται, χωρίς τριβές, γύρω από κατακόρυφο ακλόνητο άξονα που διέρχεται από το κέντρο του. Ο δίσκος
ΓΕΝΙΚΗ ΔΙΕΥΘΥΝΣΗ ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ ΚΑΙ ΜΗΧΑΝΟΡΓΑΝΩΣΗΣ ΔΙΕΥΘΥΝΣΗ ΣΥΝΤΗΡΗΣΗΣ ΚΑΙ ΛΕΙΤΟΥΡΓΙΑΣ ΕΓΚΑΤΑΣΤΑΣΕΩΝ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΓΕΝΙΚΗ ΔΙΕΥΘΥΝΣΗ ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ ΚΑΙ ΜΗΧΑΝΟΡΓΑΝΩΣΗΣ ΔΙΕΥΘΥΝΣΗ ΣΥΝΤΗΡΗΣΗΣ ΚΑΙ ΛΕΙΤΟΥΡΓΙΑΣ ΕΓΚΑΤΑΣΤΑΣΕΩΝ Τμήμα Λειτουργίας Εγκαταστάσεων ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ Πληροφορίες:
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΓΕΝΙΚΗ ΔΙΕΥΘΥΝΣΗ ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ ΚΑΙ ΜΗΧΑΝΟΡΓΑΝΩΣΗΣ ΔΙΕΥΘΥΝΣΗ ΣΥΝΤΗΡΗΣΗΣ ΚΑΙ ΛΕΙΤΟΥΡΓΙΑΣ ΕΓΚΑΤΑΣΤΑΣΕΩΝ Τμήμα Λειτουργίας Εγκαταστάσεων ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ Πληροφορίες:
2. ΓΕΝΝΗΤΡΙΕΣ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ
 28 2. ΓΕΝΝΗΤΡΙΕΣ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Οι γεννήτριες εναλλασσόµενου ρεύµατος είναι δύο ειδών Α) οι σύγχρονες γεννήτριες ή εναλλακτήρες και Β) οι ασύγχρονες γεννήτριες Οι σύγχρονες γεννήτριες παράγουν
28 2. ΓΕΝΝΗΤΡΙΕΣ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Οι γεννήτριες εναλλασσόµενου ρεύµατος είναι δύο ειδών Α) οι σύγχρονες γεννήτριες ή εναλλακτήρες και Β) οι ασύγχρονες γεννήτριες Οι σύγχρονες γεννήτριες παράγουν
Η ΙΣΤΟΡΙΑ ΤΟΥ ΑΝΕΛΚΥΣΤΗΡΑ
 Η ΙΣΤΟΡΙΑ ΤΟΥ ΑΝΕΛΚΥΣΤΗΡΑ Ανελκυστήρας ή ανυψωτήρας ονομάζεται κάθε εγκατάσταση που χρησιμοποιείται για την ανύψωση βαρών, προσώπων ή πραγμάτων και κινείται σε κατακόρυφο άξονα. Σήμερα έχει επικρατήσει
Η ΙΣΤΟΡΙΑ ΤΟΥ ΑΝΕΛΚΥΣΤΗΡΑ Ανελκυστήρας ή ανυψωτήρας ονομάζεται κάθε εγκατάσταση που χρησιμοποιείται για την ανύψωση βαρών, προσώπων ή πραγμάτων και κινείται σε κατακόρυφο άξονα. Σήμερα έχει επικρατήσει
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΑΝΕΛΚΥΣΤΗΡΑ ΜΕΤΑΦΟΡΑΣ ΦΟΡΕΙΩΝ
 ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΑΝΕΛΚΥΣΤΗΡΑ ΜΕΤΑΦΟΡΑΣ ΦΟΡΕΙΩΝ ΚΙΝΗΤΗΡΙΟΣ ΜΗΧΑΝΙΣΜΟΣ 1. 1 Γενικά Ο κινητήρας, η τροχαλία τριβής, η πέδη, ο ηλεκτρονικός πίνακας χειρισμών-κίνησης, ο μηχανισμός κίνησης «άνοιξε-κλείσε»
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΑΝΕΛΚΥΣΤΗΡΑ ΜΕΤΑΦΟΡΑΣ ΦΟΡΕΙΩΝ ΚΙΝΗΤΗΡΙΟΣ ΜΗΧΑΝΙΣΜΟΣ 1. 1 Γενικά Ο κινητήρας, η τροχαλία τριβής, η πέδη, ο ηλεκτρονικός πίνακας χειρισμών-κίνησης, ο μηχανισμός κίνησης «άνοιξε-κλείσε»
ΤΑΧΥΚΙΝΗΤΗΣ ΠΟΡΤΑΣ RSD
 0 ΤΑΧΥΚΙΝΗΤΗΣ ΠΟΡΤΑΣ RSD Οι Ταχυκίνητες Πόρτες (Ταχυπόρτες) είναι ηλεκτρικά κινούμενες διατάξεις, που κατασκευάζονται από αλουμίνιο και φύλλα ενισχυμένου PVC και προορίζονται για την κάλυψη μικρών και,
0 ΤΑΧΥΚΙΝΗΤΗΣ ΠΟΡΤΑΣ RSD Οι Ταχυκίνητες Πόρτες (Ταχυπόρτες) είναι ηλεκτρικά κινούμενες διατάξεις, που κατασκευάζονται από αλουμίνιο και φύλλα ενισχυμένου PVC και προορίζονται για την κάλυψη μικρών και,
ΣΥΣΤΗΜΑΤΑ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ.
 ΣΥΣΤΗΜΑΤΑ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ www.kolliasdoors.com ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΥΔΡΑΥΛΙΚΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ ΑΡΘΡΩΤΟΥ ΧΕΙΛΟΥΣ - HDL 0 Οι Υδραυλικές Ράμπες Φορτοεκφόρτωσης είναι ηλεκτροϋδραυλικά κινούμενες διατάξεις,
ΣΥΣΤΗΜΑΤΑ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ www.kolliasdoors.com ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΥΔΡΑΥΛΙΚΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ ΑΡΘΡΩΤΟΥ ΧΕΙΛΟΥΣ - HDL 0 Οι Υδραυλικές Ράμπες Φορτοεκφόρτωσης είναι ηλεκτροϋδραυλικά κινούμενες διατάξεις,
ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΕΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ
 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΕΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ Σκοπός της εργασίας Σκοπός της εργασίας αυτής είναι να μάθουμε τι είναι μια γεννήτρια και να μάθουμε, κυρίως, τον τρόπο με τον οποίο λειτουργεί
ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΕΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ Σκοπός της εργασίας Σκοπός της εργασίας αυτής είναι να μάθουμε τι είναι μια γεννήτρια και να μάθουμε, κυρίως, τον τρόπο με τον οποίο λειτουργεί
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. Εικόνα 1. Κόλλιας Ε.Π.Ε. Σελίδα 2/5 E , Ver 1 st, Διεύθυνση : 3 ο χλμ. Εθνικής Οδού Κατερίνης Θεσσαλονίκης Κατερίνη
 ΤΑΧΥΚΙΝΗΤΗΣ ΠΟΡΤΑΣ RSD 0 Οι Ταχυκίνητες Πόρτες (Ταχυπόρτες) είναι ηλεκτρικά κινούμενες διατάξεις, που κατασκευάζονται από αλουμίνιο και φύλλα ενισχυμένου PVC και προορίζονται για την κάλυψη μικρών και,
ΤΑΧΥΚΙΝΗΤΗΣ ΠΟΡΤΑΣ RSD 0 Οι Ταχυκίνητες Πόρτες (Ταχυπόρτες) είναι ηλεκτρικά κινούμενες διατάξεις, που κατασκευάζονται από αλουμίνιο και φύλλα ενισχυμένου PVC και προορίζονται για την κάλυψη μικρών και,
ΠΡΟΣΚΛΗΣΗ ΕΝΔΙΑΦΕΡΟΝΤΟΣ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΥΠΟΥΡΓΕΙΟ ΥΓΕΙΑΣ ΔΙΟΙΚΗΣΗ 3ης ΥΓΕΙΟΝΟΜΙΚΗΣ ΠΕΡΙΦΕΡΕΙΑΣ (ΜΑΚΕΔΟΝΙΑΣ) ΔΙΕΥΘΥΝΣΗ ΟΡΓΑΝΩΣΗΣ ΚΑΙ ΟΙΚΟΝΟΜΙΚΗΣ ΥΠΟΣΤΗΡΙΞΗΣ ΤΜΗΜΑ ΠΡΟΜΗΘΕΙΩΝ Θεσσαλονίκη,01.08.17 Αρ. Πρ. 27118 Ταχ.διεύθυνση
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΥΠΟΥΡΓΕΙΟ ΥΓΕΙΑΣ ΔΙΟΙΚΗΣΗ 3ης ΥΓΕΙΟΝΟΜΙΚΗΣ ΠΕΡΙΦΕΡΕΙΑΣ (ΜΑΚΕΔΟΝΙΑΣ) ΔΙΕΥΘΥΝΣΗ ΟΡΓΑΝΩΣΗΣ ΚΑΙ ΟΙΚΟΝΟΜΙΚΗΣ ΥΠΟΣΤΗΡΙΞΗΣ ΤΜΗΜΑ ΠΡΟΜΗΘΕΙΩΝ Θεσσαλονίκη,01.08.17 Αρ. Πρ. 27118 Ταχ.διεύθυνση
Kollias Industrial Doors
 Kollias Industrial Doors ΟΔΗΓΙΕΣ ΤΟΠΟΘΕΤΗΣΗΣ ΒΙΟΜΗΧΑΝΙΚΗΣ ΣΠΑΣΤΗΣ ΠΟΡΤΑΣ ΜΟΝΟΥ ΟΔΗΓΟΥ D90 0 Η εταιρεία στα πλαίσια της υποστήριξης προς τους πελάτες της και της βέλτιστης αξιοποίησης των προϊόντων της,
Kollias Industrial Doors ΟΔΗΓΙΕΣ ΤΟΠΟΘΕΤΗΣΗΣ ΒΙΟΜΗΧΑΝΙΚΗΣ ΣΠΑΣΤΗΣ ΠΟΡΤΑΣ ΜΟΝΟΥ ΟΔΗΓΟΥ D90 0 Η εταιρεία στα πλαίσια της υποστήριξης προς τους πελάτες της και της βέλτιστης αξιοποίησης των προϊόντων της,
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. Κόλλιας ΕΠΕ Σελίδα 2/6 D.Z, Ver 2 nd, Διεύθυνση : 3 ο χλμ. Εθνικής Οδού Κατερίνης Θεσσαλονίκης Κατερίνη
 Kollias Industrial Doors ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΑΝΑΔΙΠΛΟΥΜΕΝΗΣ ΠΟΡΤΑΣ RD12 0 ΣΤΟΙΧΕΙΑ ΔΙΑΤΑΞΗΣ ΑΝΑΔΙΠΛΟΥΜΕΝΗΣ ΠΟΡΤΑΣ RD12 Οι Αναδιπλούμενες Πόρτες Μεγάλων Διαστάσεων αποτελούν διατάξεις προοριζόμενες για την
Kollias Industrial Doors ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΑΝΑΔΙΠΛΟΥΜΕΝΗΣ ΠΟΡΤΑΣ RD12 0 ΣΤΟΙΧΕΙΑ ΔΙΑΤΑΞΗΣ ΑΝΑΔΙΠΛΟΥΜΕΝΗΣ ΠΟΡΤΑΣ RD12 Οι Αναδιπλούμενες Πόρτες Μεγάλων Διαστάσεων αποτελούν διατάξεις προοριζόμενες για την
Οι μηχανές ΕΡ είναι γεννήτριες που μετατρέπουν τη μηχανική ισχύ σε ηλεκτρική και κινητήρες που μετατρέπουν την ηλεκτρική σε μηχανική
 Οι μηχανές ΕΡ είναι γεννήτριες που μετατρέπουν τη μηχανική ισχύ σε ηλεκτρική και κινητήρες που μετατρέπουν την ηλεκτρική σε μηχανική Υπάρχουν 2 βασικές κατηγορίες μηχανών ΕΡ: οι σύγχρονες και οι επαγωγικές
Οι μηχανές ΕΡ είναι γεννήτριες που μετατρέπουν τη μηχανική ισχύ σε ηλεκτρική και κινητήρες που μετατρέπουν την ηλεκτρική σε μηχανική Υπάρχουν 2 βασικές κατηγορίες μηχανών ΕΡ: οι σύγχρονες και οι επαγωγικές
ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ ΠΙΣΤΟΠΟΙΗΣΗΣ ΑΡΧΙΚΗΣ ΕΠΑΓΓΕΛΜΑΤΙΚΗΣ ΚΑΤΑΡΤΙΣΗΣ ΕΙΔΙΚΟΤΗΤΑΣ Ι.Ε.Κ. "ΤΕΧΝΙΚΟΣ ΑΝΕΛΚΥΣΤΗΡΩΝ"
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ, ΕΡΕΥΝΑΣ ΚΑΙ ΘΡΗΣΚΕΥΜΑΤΩΝ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ ΠΙΣΤΟΠΟΙΗΣΗΣ ΑΡΧΙΚΗΣ ΕΠΑΓΓΕΛΜΑΤΙΚΗΣ ΚΑΤΑΡΤΙΣΗΣ ΕΙΔΙΚΟΤΗΤΑΣ Ι.Ε.Κ. "" ΠΕΡΙΕΧΟΜΕΝΑ 1. Εξετάσεις Πιστοποίησης Αρχικής Επαγγελματικής Κατάρτισης
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ, ΕΡΕΥΝΑΣ ΚΑΙ ΘΡΗΣΚΕΥΜΑΤΩΝ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ ΠΙΣΤΟΠΟΙΗΣΗΣ ΑΡΧΙΚΗΣ ΕΠΑΓΓΕΛΜΑΤΙΚΗΣ ΚΑΤΑΡΤΙΣΗΣ ΕΙΔΙΚΟΤΗΤΑΣ Ι.Ε.Κ. "" ΠΕΡΙΕΧΟΜΕΝΑ 1. Εξετάσεις Πιστοποίησης Αρχικής Επαγγελματικής Κατάρτισης
ΤΕΧΝΙΚΗ ΕΚΘΕΣΗ. Εργασίες συντήρησης ανελκυστήρων δήμου Ωραιοκάστρου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΕΡΙΦΕΡΕΙΑ ΚΕΝΤΡ. ΜΑΚΕΔΟΝΙΑΣ ΝΟΜΟΣ ΘΕΣΣΑΛΟΝΙΚΗΣ ΔΗΜΟΣ ΩΡΑΙΟΚΑΣΤΡΟΥ Δ/ΝΣΗ ΤΕΧΝ. ΥΠΗΡΕΣΙΩΝ & ΠΟΛΕΟΔΟΜΙΑΣ ΤΜΗΜΑ Η/Μ ΕΡΓΩΝ & ΣΥΓΚΟΙΝΩΝΙΩΝ Εργασίες συντήρησης ανελκυστήρων δήμου Ωραιοκάστρου
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΕΡΙΦΕΡΕΙΑ ΚΕΝΤΡ. ΜΑΚΕΔΟΝΙΑΣ ΝΟΜΟΣ ΘΕΣΣΑΛΟΝΙΚΗΣ ΔΗΜΟΣ ΩΡΑΙΟΚΑΣΤΡΟΥ Δ/ΝΣΗ ΤΕΧΝ. ΥΠΗΡΕΣΙΩΝ & ΠΟΛΕΟΔΟΜΙΑΣ ΤΜΗΜΑ Η/Μ ΕΡΓΩΝ & ΣΥΓΚΟΙΝΩΝΙΩΝ Εργασίες συντήρησης ανελκυστήρων δήμου Ωραιοκάστρου
ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ - ΣΥΝΤΗΡΗΣΗΣ
 Kollias Industrial Doors ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ - ΣΥΝΤΗΡΗΣΗΣ ΧΕΙΡΟΚΙΝΗΤΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ MDL 0 Περιεχόμενα A. Προσοχή 3 B. Τεχνική Περιγραφή 4 Γ. Γενικές Προειδοποιήσεις 5 Δ. Προδιαγραφές Ελέγχου 6 Ε.
Kollias Industrial Doors ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ - ΣΥΝΤΗΡΗΣΗΣ ΧΕΙΡΟΚΙΝΗΤΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ MDL 0 Περιεχόμενα A. Προσοχή 3 B. Τεχνική Περιγραφή 4 Γ. Γενικές Προειδοποιήσεις 5 Δ. Προδιαγραφές Ελέγχου 6 Ε.
ΓΚΙΟΚΑΣ ΠΑΝΑΓΙΩΤΗΣ. ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας μιας ηλεκτρικής γεννήτριας Σ.Ρ. με διέγερση σειράς.
 ΓΚΙΟΚΑΣ ΠΑΝΑΓΙΩΤΗΣ ΑΜ:6749 ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας μιας ηλεκτρικής γεννήτριας Σ.Ρ. με διέγερση σειράς. ΣΚΟΠΟΣ: Για να λειτουργήσει μια γεννήτρια, πρέπει να πληρούνται οι παρακάτω βασικές
ΓΚΙΟΚΑΣ ΠΑΝΑΓΙΩΤΗΣ ΑΜ:6749 ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας μιας ηλεκτρικής γεννήτριας Σ.Ρ. με διέγερση σειράς. ΣΚΟΠΟΣ: Για να λειτουργήσει μια γεννήτρια, πρέπει να πληρούνται οι παρακάτω βασικές
2 ο Γυμνάσιο Μεταμόρφωσης Σχολικό έτος Τάξη:Α1 Διονύσιος Μαγουλάς. Εργασία στο μάθημα της Τεχνολογίας με θέμα:
 2 ο Γυμνάσιο Μεταμόρφωσης Σχολικό έτος 2017-2018 Τάξη:Α1 Διονύσιος Μαγουλάς Εργασία στο μάθημα της Τεχνολογίας με θέμα: ΠΕΡΙΕΧΟΜΕΝΑ 1.Ανάλυση της γενικής τεχνολογικής ενότητας στην οποία ανήκει το έργο.
2 ο Γυμνάσιο Μεταμόρφωσης Σχολικό έτος 2017-2018 Τάξη:Α1 Διονύσιος Μαγουλάς Εργασία στο μάθημα της Τεχνολογίας με θέμα: ΠΕΡΙΕΧΟΜΕΝΑ 1.Ανάλυση της γενικής τεχνολογικής ενότητας στην οποία ανήκει το έργο.
Κινητήρας παράλληλης διέγερσης
 Κινητήρας παράλληλης διέγερσης Ισοδύναμο κύκλωμα V = E + I T V = I I T = I F L R F I F R Η διέγερση τοποθετείται παράλληλα με το κύκλωμα οπλισμού Χαρακτηριστική φορτίου Έλεγχος ταχύτητας Μεταβολή τάσης
Κινητήρας παράλληλης διέγερσης Ισοδύναμο κύκλωμα V = E + I T V = I I T = I F L R F I F R Η διέγερση τοποθετείται παράλληλα με το κύκλωμα οπλισμού Χαρακτηριστική φορτίου Έλεγχος ταχύτητας Μεταβολή τάσης
Γεωργικά Μηχανήματα (Εργαστήριο)
") Ελληνική Δημοκρατία Τεχνολογικό Εκπαιδευτικό Ίδρυμα Ηπείρου Γεωργικά Μηχανήματα (Εργαστήριο) Ενότητα 8 : Γεωργικός Ελκυστήρας Σύστημα Διεύθυνσης - Σύστημα Πέδησης Δρ. Δημήτριος Κατέρης Εργαστήριο 8 ο ΣΥΣΤΗΜΑ
Ελληνική Δημοκρατία Τεχνολογικό Εκπαιδευτικό Ίδρυμα Ηπείρου Γεωργικά Μηχανήματα (Εργαστήριο) Ενότητα 8 : Γεωργικός Ελκυστήρας Σύστημα Διεύθυνσης - Σύστημα Πέδησης Δρ. Δημήτριος Κατέρης Εργαστήριο 8 ο ΣΥΣΤΗΜΑ
Γεννήτρια συνεχούς ρεύματος ξένης διέγερσης
 ΑΣΚΗΣΗ 5 Γεννήτρια συνεχούς ρεύματος ξένης διέγερσης 1 Α. Θεωρητικές επεξηγήσεις: Μια ηλεκτρική μηχανή συνεχούς ρεύματος παράγει τάση συνεχούς μορφής όταν χρησιμοποιείται ως γεννήτρια, ενώ ένας κινητήρας
ΑΣΚΗΣΗ 5 Γεννήτρια συνεχούς ρεύματος ξένης διέγερσης 1 Α. Θεωρητικές επεξηγήσεις: Μια ηλεκτρική μηχανή συνεχούς ρεύματος παράγει τάση συνεχούς μορφής όταν χρησιμοποιείται ως γεννήτρια, ενώ ένας κινητήρας
ΑΣΚΗΣΗ 1 η ΜΕΛΕΤΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΡΙΦΑΣΙΚΗΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ (ΕΝΑΛΛΑΚΤΗΡΑ) ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ ΤΟΥ ΙΣΟΔΥΝΑΜΟΥ ΚΥΚΛΩΜΑΤΟΣ
 ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ ΤΟΥ ΙΣΟΔΥΝΑΜΟΥ ΚΥΚΛΩΜΑΤΟΣ") ΑΣΚΗΣΗ 1 η ΜΕΛΕΤΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΡΙΦΑΣΙΚΗΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ (ΕΝΑΛΛΑΚΤΗΡΑ) ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ ΤΟΥ ΙΣΟΔΥΝΑΜΟΥ ΚΥΚΛΩΜΑΤΟΣ Σκοπός της άσκησης: 1. Ο πειραματικός προσδιορισμός της χαρακτηριστικής λειτουργίας
ΑΣΚΗΣΗ 1 η ΜΕΛΕΤΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΡΙΦΑΣΙΚΗΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ (ΕΝΑΛΛΑΚΤΗΡΑ) ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ ΤΟΥ ΙΣΟΔΥΝΑΜΟΥ ΚΥΚΛΩΜΑΤΟΣ Σκοπός της άσκησης: 1. Ο πειραματικός προσδιορισμός της χαρακτηριστικής λειτουργίας
Περιεχόμενα. 1. Οδηγοί και εξαρτήματα φρεατίου. 3. Μηχανές και παρελκόμενα μηχανικών ανελκυστήρων
 Περιεχόμενα 1. Οδηγοί και εξαρτήματα φρεατίου 2. Έμβολα μονάδες ισχύος 3. Μηχανές και παρελκόμενα μηχανικών ανελκυστήρων 4. Πλαίσια ανάρτησης Υδραυλικών 5. Πλαίσια ανάρτησης Μηχανικών 6. Θάλαμοι 7. Θύρες
Περιεχόμενα 1. Οδηγοί και εξαρτήματα φρεατίου 2. Έμβολα μονάδες ισχύος 3. Μηχανές και παρελκόμενα μηχανικών ανελκυστήρων 4. Πλαίσια ανάρτησης Υδραυλικών 5. Πλαίσια ανάρτησης Μηχανικών 6. Θάλαμοι 7. Θύρες
ΗΛΕΚΤΡΙΚΟ ΣΥΣΤΗΜΑ ΑΥΤΟΚΙΝΗΤΟΥ
 ΗΛΕΚΤΡΙΚΟ ΣΥΣΤΗΜΑ ΑΥΤΟΚΙΝΗΤΟΥ Α.Σ.ΠΑΙ.Τ.Ε. ΤΜΗΜΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΗΛΕΚΤΡΟΛΟΓΩΝ ΚΑΙ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΑΙΣΘΗΤΗΡΕΣ: ΜΕΡΟΣ ΙΙ ΑΙΣΘΗΤΗΡΑΣ ΡΟΗΣ ΜΑΖΑΣ ΑΕΡΑ (MAF) Στέλνει ένα ηλεκτρικό σήμα στον "εγκέφαλο",
ΗΛΕΚΤΡΙΚΟ ΣΥΣΤΗΜΑ ΑΥΤΟΚΙΝΗΤΟΥ Α.Σ.ΠΑΙ.Τ.Ε. ΤΜΗΜΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΗΛΕΚΤΡΟΛΟΓΩΝ ΚΑΙ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΑΙΣΘΗΤΗΡΕΣ: ΜΕΡΟΣ ΙΙ ΑΙΣΘΗΤΗΡΑΣ ΡΟΗΣ ΜΑΖΑΣ ΑΕΡΑ (MAF) Στέλνει ένα ηλεκτρικό σήμα στον "εγκέφαλο",
ΕΙΣΑΓΩΓΗ ΣΤΗ ΜΗΧΑΝΟΛΟΓΙΑ (7 Ο ΕΞΑΜΗΝΟ)
") ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΜΕΤΑΛΛΕΙΩΝ - ΜΕΤΑΛΛΟΥΡΓΩΝ ΕΙΣΑΓΩΓΗ ΣΤΗ ΜΗΧΑΝΟΛΟΓΙΑ (7 Ο ΕΞΑΜΗΝΟ) Νίκος Μ. Κατσουλάκος Μηχανολόγος Μηχανικός Ε.Μ.Π., PhD, Msc ΜΑΘΗΜΑ 4-2 ΑΤΡΑΚΤΟΙ ΑΞΟΝΕΣ - ΣΤΡΟΦΕΙΣ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΜΕΤΑΛΛΕΙΩΝ - ΜΕΤΑΛΛΟΥΡΓΩΝ ΕΙΣΑΓΩΓΗ ΣΤΗ ΜΗΧΑΝΟΛΟΓΙΑ (7 Ο ΕΞΑΜΗΝΟ) Νίκος Μ. Κατσουλάκος Μηχανολόγος Μηχανικός Ε.Μ.Π., PhD, Msc ΜΑΘΗΜΑ 4-2 ΑΤΡΑΚΤΟΙ ΑΞΟΝΕΣ - ΣΤΡΟΦΕΙΣ
Τεχνικές Προδιαγραφές
 Σελίδα 1 από 7 Τεχνικές Προδιαγραφές Προδιαγραφές 1.1 Γενικά Χαρακτηριστικά Χρήση Ανελκυστήρα Τύπος ανελκυστήρα Συνεργαζόμενοι θάλαμοι Φορτίο Ταχύτητα Διαδρομή Επιβατών Ηλεκτρομηχανικός χωρίς μηχανοστάσιο
Σελίδα 1 από 7 Τεχνικές Προδιαγραφές Προδιαγραφές 1.1 Γενικά Χαρακτηριστικά Χρήση Ανελκυστήρα Τύπος ανελκυστήρα Συνεργαζόμενοι θάλαμοι Φορτίο Ταχύτητα Διαδρομή Επιβατών Ηλεκτρομηχανικός χωρίς μηχανοστάσιο
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. Η υδραυλική ράμπα αποτελείται από τέσσερα (4) τμήματα:
 τμήματα:") ΥΔΡΑΥΛΙΚΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ HDL 0 Οι Υδραυλικές Ράμπες Φορτοεκφόρτωσης είναι ηλεκτροϋδραυλικά κινούμενες διατάξεις, οι οποίες χρησιμοποιούνται για την γεφύρωση του κενού χώρου, που δημιουργείται
ΥΔΡΑΥΛΙΚΗΣ ΡΑΜΠΑΣ ΦΟΡΤΟΕΚΦΟΡΤΩΣΗΣ HDL 0 Οι Υδραυλικές Ράμπες Φορτοεκφόρτωσης είναι ηλεκτροϋδραυλικά κινούμενες διατάξεις, οι οποίες χρησιμοποιούνται για την γεφύρωση του κενού χώρου, που δημιουργείται
ΟΝΟΜ/ΝΥΜΟ: ΜΠΑΛΑΜΠΑΝΗ ΓΕΩΡΓΙΑ ΑΜ:6105 ΜΑΘΗΜΑ: ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΕΡΓΑΣΙΑ ΤΙΤΛΟΣ: ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΗΤΡΙΑΣ
 ΟΝΟΜ/ΝΥΜΟ: ΜΠΑΛΑΜΠΑΝΗ ΓΕΩΡΓΙΑ ΑΜ:6105 ΜΑΘΗΜΑ: ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΕΡΓΑΣΙΑ ΤΙΤΛΟΣ: ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΗΤΡΙΑΣ 1 Η γεννήτρια ή ηλεκτρογεννήτρια είναι μηχανή που βασίζεται στους νόμους της
ΟΝΟΜ/ΝΥΜΟ: ΜΠΑΛΑΜΠΑΝΗ ΓΕΩΡΓΙΑ ΑΜ:6105 ΜΑΘΗΜΑ: ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΕΡΓΑΣΙΑ ΤΙΤΛΟΣ: ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΗΤΡΙΑΣ 1 Η γεννήτρια ή ηλεκτρογεννήτρια είναι μηχανή που βασίζεται στους νόμους της
Ιωάννης Τριπιδάκης. Οικοδομική Ι Δίκτυα Κτιρίων και Πόλεων. Ανελκυστήρες. Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Αρχιτεκτόνων Μηχανικών
 Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Αρχιτεκτόνων Μηχανικών Τομέας IV : Συνθέσεων Τεχνολογικής Αιχμής Ιωάννης Τριπιδάκης Μηχανολόγος - Ηλεκτρολόγος Μηχανικός, Διδάκτωρ ΕΜΠ Οικοδομική Ι Δίκτυα Κτιρίων και
Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Αρχιτεκτόνων Μηχανικών Τομέας IV : Συνθέσεων Τεχνολογικής Αιχμής Ιωάννης Τριπιδάκης Μηχανολόγος - Ηλεκτρολόγος Μηχανικός, Διδάκτωρ ΕΜΠ Οικοδομική Ι Δίκτυα Κτιρίων και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
Κόλλιας Βιομηχανικά Ρολά
 Kollias Industrial Doors ΟΔΗΓΙΕΣ ΤΟΠΟΘΕΤΗΣΗΣ ΒΙΟΜΗΧΑΝΙΚΗΣ ΣΠΑΣΤΗΣ ΠΟΡΤΑΣ MONOY ΟΔΗΓΟΥ D90 0 Η εταιρεία Κόλλιας ΕΠΕ στα πλαίσια της υποστήριξης προς τους πελάτες της και της βέλτιστης αξιοποίησης των προϊόντων
Kollias Industrial Doors ΟΔΗΓΙΕΣ ΤΟΠΟΘΕΤΗΣΗΣ ΒΙΟΜΗΧΑΝΙΚΗΣ ΣΠΑΣΤΗΣ ΠΟΡΤΑΣ MONOY ΟΔΗΓΟΥ D90 0 Η εταιρεία Κόλλιας ΕΠΕ στα πλαίσια της υποστήριξης προς τους πελάτες της και της βέλτιστης αξιοποίησης των προϊόντων
Βαλβίδα ελέγχου KV1P KV1S. Οδηγίες ρύθμισης - συντήρησης
 Βαλβίδα ελέγχου KV1P KV1S Οδηγίες ρύθμισης - συντήρησης Βαλβίδες KV1P και KV1S Γενικά Η βαλβίδα KV1P είναι η πιο απλή βαλβίδα της σειράς KV. Είναι κατάλληλη για μικρές ταχύτητες ανόδου και, μέχρι 0,16
Βαλβίδα ελέγχου KV1P KV1S Οδηγίες ρύθμισης - συντήρησης Βαλβίδες KV1P και KV1S Γενικά Η βαλβίδα KV1P είναι η πιο απλή βαλβίδα της σειράς KV. Είναι κατάλληλη για μικρές ταχύτητες ανόδου και, μέχρι 0,16
Πτυχιακή Εργασία. Εγκατάσταση ανελκυστήρα και η σχετική νομοθεσία του
 Τεχνολογικό Εκπαιδευτικό Ίδρυμα Καβάλας Σχολή Τεχνολογικών Εφαρμογών Τμήμα Μηχανολογίας Τομέας Ενέργεια - Περιβάλλον Πτυχιακή Εργασία Εγκατάσταση ανελκυστήρα και η σχετική νομοθεσία του ΒΑΣΙΛΙΚΗ ΤΣΟΥΛΙΑΓΚΑ:
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Καβάλας Σχολή Τεχνολογικών Εφαρμογών Τμήμα Μηχανολογίας Τομέας Ενέργεια - Περιβάλλον Πτυχιακή Εργασία Εγκατάσταση ανελκυστήρα και η σχετική νομοθεσία του ΒΑΣΙΛΙΚΗ ΤΣΟΥΛΙΑΓΚΑ:
ΠΝΕΥΜΑΤΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ
 Ενότητα 2.3 Κεφάλαιο 2 ΠΝΕΥΜΑΤΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ ΣΤΟΧΟΙ Μετά την ολοκλήρωση της ενότητας αυτής θα μπορείτε: Να αναφέρετε την αρχή λειτουργίας των πνευματικών αυτοματισμών. Να περιγράφετε τα δομικά στοιχεία
Ενότητα 2.3 Κεφάλαιο 2 ΠΝΕΥΜΑΤΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ ΣΤΟΧΟΙ Μετά την ολοκλήρωση της ενότητας αυτής θα μπορείτε: Να αναφέρετε την αρχή λειτουργίας των πνευματικών αυτοματισμών. Να περιγράφετε τα δομικά στοιχεία
ΠΝΕΥΜΑΤΙΚΑ ΣΥΣΤΗΜΑΤΑ
 ΠΝΕΥΜΑΤΙΚΑ ΣΥΣΤΗΜΑΤΑ Πλεονεκτήματα 1. Εύκολη & οικονομική χρήση 2. Διαθεσιμότητα ατμοσφαιρικού αέρα 3. Δεν εκρήγνυνται 4. Δεν μολύνουν 5. Ικανότητα ανάπτυξης μεγάλων δυνάμεων 6. Διαθεσιμότητα & χαμηλό
ΠΝΕΥΜΑΤΙΚΑ ΣΥΣΤΗΜΑΤΑ Πλεονεκτήματα 1. Εύκολη & οικονομική χρήση 2. Διαθεσιμότητα ατμοσφαιρικού αέρα 3. Δεν εκρήγνυνται 4. Δεν μολύνουν 5. Ικανότητα ανάπτυξης μεγάλων δυνάμεων 6. Διαθεσιμότητα & χαμηλό
Διεύθυνση : 3 ο χλμ. Εθνικής Οδού Κατερίνης Θεσσαλονίκης Κατερίνη. Tηλ: Φαξ: Web:
 Kollias Industrial Doors ΟΔΗΓΙΕΣ ΤΟΠΟΘΕΤΗΣΗΣ ΒΙΟΜΗΧΑΝΙΚΗΣ ΣΠΑΣΤΗΣ ΠΟΡΤΑΣ ΔΙΠΛΟΥ ΟΔΗΓΟΥ DD90L 0 Η εταιρεία Κόλλιας ΕΠΕ στα πλαίσια της υποστήριξης προς τους πελάτες της και της βέλτιστης αξιοποίησης των
Kollias Industrial Doors ΟΔΗΓΙΕΣ ΤΟΠΟΘΕΤΗΣΗΣ ΒΙΟΜΗΧΑΝΙΚΗΣ ΣΠΑΣΤΗΣ ΠΟΡΤΑΣ ΔΙΠΛΟΥ ΟΔΗΓΟΥ DD90L 0 Η εταιρεία Κόλλιας ΕΠΕ στα πλαίσια της υποστήριξης προς τους πελάτες της και της βέλτιστης αξιοποίησης των
Τεχνικές Προδιαγραφές φυγοκεντρικού decanter DECAPRESS DP573/41212/FD με FSG-Drive
 Decanting centrifuges - Standard HILLER Τεχνικές Προδιαγραφές φυγοκεντρικού decanter DECAPRESS DP5731212/FD με FSG-Drive Περιγραφή Το φυγοκεντρικό decanter για την παραγωγή ελαιολάδου αποτελείται από τον
Decanting centrifuges - Standard HILLER Τεχνικές Προδιαγραφές φυγοκεντρικού decanter DECAPRESS DP5731212/FD με FSG-Drive Περιγραφή Το φυγοκεντρικό decanter για την παραγωγή ελαιολάδου αποτελείται από τον
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : ΤΕΧΝΟΛΟΓΙΑ ΗΛΕΚΤΡΙΚΩΝ
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : ΤΕΧΝΟΛΟΓΙΑ ΗΛΕΚΤΡΙΚΩΝ
ΣΥΜΠΙΕΣΤΕΣ ΗΛΕΚΤΡΙΚΟ ΣΥΣΤΗΜΑ
 9. Ηλεκτρικό Σύστημα Συμπιεστών Ανάλογα με την κατασκευή τους και το είδος του εναλλασσόμενου ρεύματος που απαιτούν για τη λειτουργία τους, οι ηλεκτροκινητήρες διακρίνονται σε: Μονοφασικούς. Τριφασικούς.
9. Ηλεκτρικό Σύστημα Συμπιεστών Ανάλογα με την κατασκευή τους και το είδος του εναλλασσόμενου ρεύματος που απαιτούν για τη λειτουργία τους, οι ηλεκτροκινητήρες διακρίνονται σε: Μονοφασικούς. Τριφασικούς.
μετασχηματιστή. ΤΜΗΜΑ: ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας ενός μονοφασικού
 ΤΜΗΜΑ: ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας ενός μονοφασικού μετασχηματιστή. ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: κ. Δημήτριος Καλπακτσόγλου ΕΡΓΑΣΙΑ ΤΗΣ: Αικατερίνης-Χρυσοβαλάντης Γιουσμά Α.Ε.Μ:
ΤΜΗΜΑ: ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας ενός μονοφασικού μετασχηματιστή. ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: κ. Δημήτριος Καλπακτσόγλου ΕΡΓΑΣΙΑ ΤΗΣ: Αικατερίνης-Χρυσοβαλάντης Γιουσμά Α.Ε.Μ:
Εγκατάσταση Νέων Ανελκυστήρων
 Ανελκυστήρες Εγκατάσταση Νέων Ανελκυστήρων Μηχανικοί Ανελκυστήρες Ανελκυστήρες Αυτοκινήτων ΕΓΚΑΤΆΣΤΑΣΗ ΝΈΩΝ ΑΝΕΛΚΥΣΤΉΡΩΝ Υδραυλικοί Ανελκυστήρες Στο χώρο της εγκατάστασης χρησιμοποιούμε πάντα δικές μας
Ανελκυστήρες Εγκατάσταση Νέων Ανελκυστήρων Μηχανικοί Ανελκυστήρες Ανελκυστήρες Αυτοκινήτων ΕΓΚΑΤΆΣΤΑΣΗ ΝΈΩΝ ΑΝΕΛΚΥΣΤΉΡΩΝ Υδραυλικοί Ανελκυστήρες Στο χώρο της εγκατάστασης χρησιμοποιούμε πάντα δικές μας
Μάθημα 11 Αναλυτικότερα, η Σχεδίαση των Εγκαταστάσεων
 Μάθημα 11 Αναλυτικότερα, η Σχεδίαση των Εγκαταστάσεων Κίνησης Περίληψη. Βασικό βήμα στη σχεδίαση εγκαταστάσεων κίνησης, είναι ο υπολογισμός των ηλεκτρικών γραμμών διατομή καλωδίου και υλικά προστασίας
Μάθημα 11 Αναλυτικότερα, η Σχεδίαση των Εγκαταστάσεων Κίνησης Περίληψη. Βασικό βήμα στη σχεδίαση εγκαταστάσεων κίνησης, είναι ο υπολογισμός των ηλεκτρικών γραμμών διατομή καλωδίου και υλικά προστασίας
Τεχνικές Προδιαγραφές φυγοκεντρικού decanter DECAPRESS DP573/51012/FD με FSG-Drive
 Decanting centrifuges - Standard HILLER Τεχνικές Προδιαγραφές φυγοκεντρικού decanter DECAPRESS DP573/51012/FD με FSG-Drive Περιγραφή Το φυγοκεντρικό decanter για την παραγωγή ελαιολάδου αποτελείται από
Decanting centrifuges - Standard HILLER Τεχνικές Προδιαγραφές φυγοκεντρικού decanter DECAPRESS DP573/51012/FD με FSG-Drive Περιγραφή Το φυγοκεντρικό decanter για την παραγωγή ελαιολάδου αποτελείται από
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ...6
 ΠΕΡΙΕΧΟΜΕΝΑ 1 ΜΕΛΕΤΗ:...2 1.1 Γενικά Χαρακτηριστικά...2 1.2 Τεχνικά Χαρακτηριστικά...2 1.3 Υδραυλικό Σετ...2 1.4 Είδη εμπορίας...3 1.5 Θάλαμος...3 1.6 Πίνακας...4 1.7 Πόρτες...4 1.8 Ηλεκτρική εγκατάσταση...4
ΠΕΡΙΕΧΟΜΕΝΑ 1 ΜΕΛΕΤΗ:...2 1.1 Γενικά Χαρακτηριστικά...2 1.2 Τεχνικά Χαρακτηριστικά...2 1.3 Υδραυλικό Σετ...2 1.4 Είδη εμπορίας...3 1.5 Θάλαμος...3 1.6 Πίνακας...4 1.7 Πόρτες...4 1.8 Ηλεκτρική εγκατάσταση...4
Εσωτερικές Εγκαταστάσεις Αερίου για Βιομηχανική Χρήση
 Εσωτερικές Εγκαταστάσεις Αερίου για Βιομηχανική Χρήση Νομοθετικό πλαίσιο: Υ.Α. Δ3/Α/5286/26-05-1997 «Κανονισμός εσωτερικών εγκαταστάσεων φυσικού αερίου με πίεση λειτουργίας άνω των 50 mbar και μέγιστη
Εσωτερικές Εγκαταστάσεις Αερίου για Βιομηχανική Χρήση Νομοθετικό πλαίσιο: Υ.Α. Δ3/Α/5286/26-05-1997 «Κανονισμός εσωτερικών εγκαταστάσεων φυσικού αερίου με πίεση λειτουργίας άνω των 50 mbar και μέγιστη
ΟΔΗΓΙΕΣ ΛΕΙΤΟΥΡΓΙΑΣ ΡΟΛΛΟΥ. Λειτουργία χειροκίνητων ρολλών
 ΟΔΗΓΙΕΣ ΛΕΙΤΟΥΡΓΙΑΣ ΡΟΛΛΟΥ Λειτουργία χειροκίνητων ρολλών Τα χειροκίνητα ρολά λειτουργούν με την βοήθεια των ελατηρίων που βρίσκονται στον άξονα του ρολού. Για να ανεβάσουμε το ρολό το πιάνουμε από το
ΟΔΗΓΙΕΣ ΛΕΙΤΟΥΡΓΙΑΣ ΡΟΛΛΟΥ Λειτουργία χειροκίνητων ρολλών Τα χειροκίνητα ρολά λειτουργούν με την βοήθεια των ελατηρίων που βρίσκονται στον άξονα του ρολού. Για να ανεβάσουμε το ρολό το πιάνουμε από το
Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC.
 Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC. Ονόματα μαθητών Γεωργίου Χρίστος Η1β, Γεωργίου Αντώνης Η1β Ονόματα καθηγητών: Αγγελίδης Λουκής, Πετρίδης Πέτρος Περίληψη Σκοπός της
Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC. Ονόματα μαθητών Γεωργίου Χρίστος Η1β, Γεωργίου Αντώνης Η1β Ονόματα καθηγητών: Αγγελίδης Λουκής, Πετρίδης Πέτρος Περίληψη Σκοπός της
ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ ΘΕΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΕΞΕΤΑΖΟΜΕΝΗ ΥΛΗ: ΡΕΥΣΤΑ -ΣΤΕΡΕΟ 24/02/2019
 ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ ΘΕΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΕΞΕΤΑΖΟΜΕΝΗ ΥΛΗ: ΡΕΥΣΤΑ -ΣΤΕΡΕΟ 24/02/2019 ΘΕΜΑ A Στις ερωτήσεις 1-4 να γράψετε στο φύλλο απαντήσεων τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί στη
ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ ΘΕΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΕΞΕΤΑΖΟΜΕΝΗ ΥΛΗ: ΡΕΥΣΤΑ -ΣΤΕΡΕΟ 24/02/2019 ΘΕΜΑ A Στις ερωτήσεις 1-4 να γράψετε στο φύλλο απαντήσεων τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί στη
β. F = 2ρΑυ 2 γ. F = 1 2 ραυ 2 δ. F = 1 3 ραυ 2
 Στις ερωτήσεις 1-4 να επιλέξετε μια σωστή απάντηση. 1. Ένα σύστημα ελατηρίου - μάζας εκτελεί απλή αρμονική ταλάντωση πλάτους Α. Αν τετραπλασιάσουμε την ολική ενέργεια της ταλάντωσης αυτού του συστήματος
Στις ερωτήσεις 1-4 να επιλέξετε μια σωστή απάντηση. 1. Ένα σύστημα ελατηρίου - μάζας εκτελεί απλή αρμονική ταλάντωση πλάτους Α. Αν τετραπλασιάσουμε την ολική ενέργεια της ταλάντωσης αυτού του συστήματος
Ανεμογεννήτρια Polaris P15 50 kw
 Ανεμογεννήτρια Polaris P15 50 kw Τεχνική περιγραφή Μια ανεμογεννήτρια (Α/Γ) 50kW παράγει ενέργεια για να τροφοδοτηθούν αρκετές κατοικίες. Επίσης μπορεί να χρησιμοποιηθεί για να τροφοδοτηθούν με ρεύμα απομονωμένα
Ανεμογεννήτρια Polaris P15 50 kw Τεχνική περιγραφή Μια ανεμογεννήτρια (Α/Γ) 50kW παράγει ενέργεια για να τροφοδοτηθούν αρκετές κατοικίες. Επίσης μπορεί να χρησιμοποιηθεί για να τροφοδοτηθούν με ρεύμα απομονωμένα
Κόλλιας ΕΠΕ Σελίδα 2/8 E , Ver 2 nd, Ταχυδρομική Διεύθυνση: ΤΘ : , Κατερίνη
 Kollias Industrial Doors ΟΔΗΓΙΕΣ ΤΟΠΟΘΕΤΗΣΗΣ RSD 0 Η εταιρεία Κόλλιας ΕΠΕ στα πλαίσια της υποστήριξης προς τους πελάτες της και της βέλτιστης αξιοποίησης των προϊόντων της, δημιούργησε τον παρακάτω οδηγό
Kollias Industrial Doors ΟΔΗΓΙΕΣ ΤΟΠΟΘΕΤΗΣΗΣ RSD 0 Η εταιρεία Κόλλιας ΕΠΕ στα πλαίσια της υποστήριξης προς τους πελάτες της και της βέλτιστης αξιοποίησης των προϊόντων της, δημιούργησε τον παρακάτω οδηγό
ΠΑΡΟΥΣΙΑΣΗ V20 SMART ENERGY PACK ΜΕΤΑΤΡΟΠΗ ΥΔΡΑΥΛΙΚΟΥ ΑΝΕΛΚΥΣΤΗΡΑ ΣΕ ΗΛΕΚΤΡΟΜΗΧΑΝΙΚΟ ΑΝΕΛΚΥΣΤΗΡΑ PMSM ΧΩΡΙΣ ΜΗΧΑΝΟΣΤΑΣΙΟ ΜΕ V20 SMART ENERGY PACK.
 ΠΑΡΟΥΣΙΑΣΗ V20 SMART ENERGY PACK ΜΕΤΑΤΡΟΠΗ ΥΔΡΑΥΛΙΚΟΥ ΑΝΕΛΚΥΣΤΗΡΑ ΣΕ ΗΛΕΚΤΡΟΜΗΧΑΝΙΚΟ ΑΝΕΛΚΥΣΤΗΡΑ PMSM ΧΩΡΙΣ ΜΗΧΑΝΟΣΤΑΣΙΟ ΜΕ V20 SMART ENERGY PACK. ΚΙΝΗΤΗΡΕΣ ΤΥΠΟΥ PMSM ( Permanent Magnet Synchronous Motors
ΠΑΡΟΥΣΙΑΣΗ V20 SMART ENERGY PACK ΜΕΤΑΤΡΟΠΗ ΥΔΡΑΥΛΙΚΟΥ ΑΝΕΛΚΥΣΤΗΡΑ ΣΕ ΗΛΕΚΤΡΟΜΗΧΑΝΙΚΟ ΑΝΕΛΚΥΣΤΗΡΑ PMSM ΧΩΡΙΣ ΜΗΧΑΝΟΣΤΑΣΙΟ ΜΕ V20 SMART ENERGY PACK. ΚΙΝΗΤΗΡΕΣ ΤΥΠΟΥ PMSM ( Permanent Magnet Synchronous Motors
ΑΣΚΗΣΗ 5 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ. 1. Η μελέτη της δομής και της αρχής λειτουργίας ενός ασύγχρονου τριφασικού κινητήρα.
 Σκοπός της άσκησης: ΑΣΚΗΣΗ 5 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ Σκοπός της εργαστηριακής άσκησης είναι: 1. Η μελέτη της δομής και της αρχής λειτουργίας ενός ασύγχρονου τριφασικού κινητήρα. 1. Γενικά Οι
Σκοπός της άσκησης: ΑΣΚΗΣΗ 5 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ Σκοπός της εργαστηριακής άσκησης είναι: 1. Η μελέτη της δομής και της αρχής λειτουργίας ενός ασύγχρονου τριφασικού κινητήρα. 1. Γενικά Οι
ΤΕΧΝΙΚΕΣ ΠΡΟ ΙΑΓΡΑΦΕΣ
 ΕΛΛΗΝΙΚΗ ΗΜΟΚΡΑΤΙΑ ΠΕΡΙΦΕΡΕΙΑ ΚΡΗΤΗΣ ΗΜΟΣ ΧΑΝΙΩΝ ΙΕΥΘΥΝΣΗ ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ ΕΡΓΟ: ΠΡΟΜΗΘΕΙΑ Υ Ρ. ΑΝΕΛΚΥΣΤΗΡΑ 8 ΑΤΟΜΩΝ ΚΑΤΑΛΛΗΛΟ ΓΙΑ ΑΜΕΑ ΣΤΟ 14 Ο ΗΜΟΤΙΚΟ ΧΑΝΙΩΝ ΦΟΡΕΑΣ: ΗΜΟΣ ΧΑΝΙΩΝ ΠΡΟΥΠΟΛΟΓΙΣΜΟΣ: 14.760,00
ΕΛΛΗΝΙΚΗ ΗΜΟΚΡΑΤΙΑ ΠΕΡΙΦΕΡΕΙΑ ΚΡΗΤΗΣ ΗΜΟΣ ΧΑΝΙΩΝ ΙΕΥΘΥΝΣΗ ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ ΕΡΓΟ: ΠΡΟΜΗΘΕΙΑ Υ Ρ. ΑΝΕΛΚΥΣΤΗΡΑ 8 ΑΤΟΜΩΝ ΚΑΤΑΛΛΗΛΟ ΓΙΑ ΑΜΕΑ ΣΤΟ 14 Ο ΗΜΟΤΙΚΟ ΧΑΝΙΩΝ ΦΟΡΕΑΣ: ΗΜΟΣ ΧΑΝΙΩΝ ΠΡΟΥΠΟΛΟΓΙΣΜΟΣ: 14.760,00
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ
 ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ 12. Ένας οριζόντιος ομογενής δίσκος ακτίνας μπορεί να περιστρέφεται χωρίς τριβές, γύρω από κατακόρυφο
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ 12. Ένας οριζόντιος ομογενής δίσκος ακτίνας μπορεί να περιστρέφεται χωρίς τριβές, γύρω από κατακόρυφο
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2006
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2006 ΛΥΣΕΙΣ ΕΞΕΤΑΣΤΙΚΟΥ ΔΟΚΙΜΙΟΥ ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα: Τεχνολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2006 ΛΥΣΕΙΣ ΕΞΕΤΑΣΤΙΚΟΥ ΔΟΚΙΜΙΟΥ ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα: Τεχνολογία
Γεννήτριες ΣΡ Κινητήρες ΣΡ
 Γεννήτριες ΣΡ Κινητήρες ΣΡ Τα βασικά τμήματα μίας ΜΣΡ είναι ο στάτης και ο δρομέας Προορισμός του στάτη είναι: Να στηρίζει την ηλεκτρική μηχανή Να δημιουργεί καθορισμένη μαγνητική ροή στο εσωτερικό της
Γεννήτριες ΣΡ Κινητήρες ΣΡ Τα βασικά τμήματα μίας ΜΣΡ είναι ο στάτης και ο δρομέας Προορισμός του στάτη είναι: Να στηρίζει την ηλεκτρική μηχανή Να δημιουργεί καθορισμένη μαγνητική ροή στο εσωτερικό της
ΟΔΗΓΙΕΣ ΤΟΠΟΘΕΤΗΣΗΣ. Κόλλιας ΕΠΕ Σελίδα 2/12 D.Z, Ver 2 nd, Διεύθυνση : 3 ο χλμ. Εθνικής Οδού Κατερίνης Θεσσαλονίκης Κατερίνη
 Kollias Industrial Doors ΟΔΗΓΙΕΣ ΤΟΠΟΘΕΤΗΣΗΣ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ RSM 0 Η εταιρεία Κόλλιας ΕΠΕ στα πλαίσια της υποστήριξης προς τους πελάτες της και της βέλτιστης αξιοποίησης των προϊόντων της, δημιούργησε
Kollias Industrial Doors ΟΔΗΓΙΕΣ ΤΟΠΟΘΕΤΗΣΗΣ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ RSM 0 Η εταιρεία Κόλλιας ΕΠΕ στα πλαίσια της υποστήριξης προς τους πελάτες της και της βέλτιστης αξιοποίησης των προϊόντων της, δημιούργησε
Σχήμα 2.1α. Πτυσσόμενη και περιελισσόμενη μετρητική ταινία
 2. ΟΡΓΑΝΑ ΜΕΤΡΗΣΗΣ ΧΑΡΑΞΗΣ 2.1 Μετρητικές ταινίες Οι μετρητικές ταινίες, πτυσσόμενες (αρθρωτές) ή περιελισσόμενες σε θήκη, είναι κατασκευασμένες από χάλυβα ή άλλο ελαφρύ κράμα και έχουν χαραγμένες υποδιαιρέσεις
2. ΟΡΓΑΝΑ ΜΕΤΡΗΣΗΣ ΧΑΡΑΞΗΣ 2.1 Μετρητικές ταινίες Οι μετρητικές ταινίες, πτυσσόμενες (αρθρωτές) ή περιελισσόμενες σε θήκη, είναι κατασκευασμένες από χάλυβα ή άλλο ελαφρύ κράμα και έχουν χαραγμένες υποδιαιρέσεις
Εγχειρίδιο. MOVITRAC B Ασφαλής απενεργοποίηση Εφαρμογές. Έκδοση 06/2007 11468807 / EL
 Ηλεκτρομειωτήρες \ Βιομηχανικοί μειωτήρες \ Ηλεκτρονικά κινητήριων μηχανισμών \ Αυτοματισμοί \ Υπηρεσίες Ασφαλής απενεργοποίηση Εφαρμογές Έκδοση 06/007 68807 / EL Εγχειρίδιο SEW-EURODRIVE Driving the world
Ηλεκτρομειωτήρες \ Βιομηχανικοί μειωτήρες \ Ηλεκτρονικά κινητήριων μηχανισμών \ Αυτοματισμοί \ Υπηρεσίες Ασφαλής απενεργοποίηση Εφαρμογές Έκδοση 06/007 68807 / EL Εγχειρίδιο SEW-EURODRIVE Driving the world
KLEEMANN ΛΥΣΕΙΣ ΑΝΑΚΑΙΝΙΣΗΣ. Σχεδίαση κατά παραγγελία Τυποποιημένα πακέτα Πακέτο πλήρους ανελκυστήρα- πλήρης αποξήλωση
 ΛΥΣΕΙΣ ΑΝΑΚΑΙΝΙΣΗΣ KLEEMANN ΛΥΣΕΙΣ ΑΝΑΚΑΙΝΙΣΗΣ H σειρά της KLEEMANN Modernisation Solutions σας προσφέρει εξατομικευμένες, αξιόπιστες και συμβατές λύσεις. Είτε επιλέξετε ολική ή μερική ανακαίνιση, σχεδίαση
ΛΥΣΕΙΣ ΑΝΑΚΑΙΝΙΣΗΣ KLEEMANN ΛΥΣΕΙΣ ΑΝΑΚΑΙΝΙΣΗΣ H σειρά της KLEEMANN Modernisation Solutions σας προσφέρει εξατομικευμένες, αξιόπιστες και συμβατές λύσεις. Είτε επιλέξετε ολική ή μερική ανακαίνιση, σχεδίαση
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2008 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : ΑΥΤΟΜΑΤΙΣΜΟΙ ΚΑΙ
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2008 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : ΑΥΤΟΜΑΤΙΣΜΟΙ ΚΑΙ
22. ΚΑΥΣΤΗΡΕΣ PELLETS
 Τα πάντα για τις ΚΕΝΤΡΙΚΕΣ ΘΕΡΜΑΝΣΕΙΣ 375 22. ΚΑΥΣΤΗΡΕΣ PELLETS Ο καυστήρας pellet είναι μία συσκευή που αποστολή έχει την τροφοδοσία του λέβητα με καύσιμο, του άναμμα της φλόγας, την παροχή του αέρα καύσης
Τα πάντα για τις ΚΕΝΤΡΙΚΕΣ ΘΕΡΜΑΝΣΕΙΣ 375 22. ΚΑΥΣΤΗΡΕΣ PELLETS Ο καυστήρας pellet είναι μία συσκευή που αποστολή έχει την τροφοδοσία του λέβητα με καύσιμο, του άναμμα της φλόγας, την παροχή του αέρα καύσης
Εξοπλισμός κουρμπαρίσματος
 Εξοπλισμός κουρμπαρίσματος Ευρεία γκάμα για συγκεκριμένες ανάγκες κουρμπαρίσματος και διαμόρφωσης άκρων. Ποιότητα που μπορείτε να εμπιστευτείτε. Τύπος μοντέλων Σελίδα Κουρμπαδόροι Υδραυλικές εγκαταστάσεις
Εξοπλισμός κουρμπαρίσματος Ευρεία γκάμα για συγκεκριμένες ανάγκες κουρμπαρίσματος και διαμόρφωσης άκρων. Ποιότητα που μπορείτε να εμπιστευτείτε. Τύπος μοντέλων Σελίδα Κουρμπαδόροι Υδραυλικές εγκαταστάσεις
ΣΥΝΟΨΗ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ
 ΣΥΝΟΨΗ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ ΠΛΗΡΟΦΟΡΙΚΟΣ ΕΛΕΓΧΟΣ & ΠΛΕ ΕΞΟΜΟΙΩΣΗ ΑΝΤΛΗΤΙΚΟΥ ΣΥΓΚΡΟΤΗΜΑΤΟΣ ΑΡΔΕΥΤΙΚΟΥ ΔΙΚΤΥΟΥ ΣΥΝΤΑΚΤΗΣ: ΦΩΤΙΑΔΗΣ ΚΩΝΣΤΑΝΤΙΝΟΣ ΕΙΣΗΓΗΤΗΣ : ΤΡΩΓΑΔΑΣ ΝΙΚΟΛΑΟΣ Ιούνιος 1997 http://users.teilar.gr/%7etrogadas/didask/antlitik.htm
ΣΥΝΟΨΗ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ ΠΛΗΡΟΦΟΡΙΚΟΣ ΕΛΕΓΧΟΣ & ΠΛΕ ΕΞΟΜΟΙΩΣΗ ΑΝΤΛΗΤΙΚΟΥ ΣΥΓΚΡΟΤΗΜΑΤΟΣ ΑΡΔΕΥΤΙΚΟΥ ΔΙΚΤΥΟΥ ΣΥΝΤΑΚΤΗΣ: ΦΩΤΙΑΔΗΣ ΚΩΝΣΤΑΝΤΙΝΟΣ ΕΙΣΗΓΗΤΗΣ : ΤΡΩΓΑΔΑΣ ΝΙΚΟΛΑΟΣ Ιούνιος 1997 http://users.teilar.gr/%7etrogadas/didask/antlitik.htm
ΤΕΙ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΙΑΣ ΤΟΜΕΑΣ ΚΑΤΑΣΚΕΥΑΣΤΙΚΟΣ
 ΤΕΙ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΙΑΣ ΤΟΜΕΑΣ ΚΑΤΑΣΚΕΥΑΣΤΙΚΟΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΘΕΜΑ : ΑΝΕΛΚΥΣΤΗΡΑΣ ΧΩΡΙΣ ΜΗΧΑΝΟΣΤΑΣΙΟ (MRL) ΥΠΕΥΘΥΝΟΣ ΚΑΘΗΓΗΤΗΣ : Dr.- Ing. ΜΩΥΣΙΑΔΗΣ ΑΝΑΣΤΑΣΙΟΣ ΣΠΟΥΔΑΣΤΗΣ
ΤΕΙ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΙΑΣ ΤΟΜΕΑΣ ΚΑΤΑΣΚΕΥΑΣΤΙΚΟΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΘΕΜΑ : ΑΝΕΛΚΥΣΤΗΡΑΣ ΧΩΡΙΣ ΜΗΧΑΝΟΣΤΑΣΙΟ (MRL) ΥΠΕΥΘΥΝΟΣ ΚΑΘΗΓΗΤΗΣ : Dr.- Ing. ΜΩΥΣΙΑΔΗΣ ΑΝΑΣΤΑΣΙΟΣ ΣΠΟΥΔΑΣΤΗΣ
Προϋποθέσεις τοποθέτησης
 Προϋποθέσεις τοποθέτησης για SUNNY CENTRAL 250, 250HE Περιεχόμενα Σε αυτό το έγγραφο περιγράφονται οι διαστάσεις, οι ελάχιστες αποστάσεις που πρέπει να λαμβάνονται υπόψη, οι ποσότητες εισερχόμενου και
Προϋποθέσεις τοποθέτησης για SUNNY CENTRAL 250, 250HE Περιεχόμενα Σε αυτό το έγγραφο περιγράφονται οι διαστάσεις, οι ελάχιστες αποστάσεις που πρέπει να λαμβάνονται υπόψη, οι ποσότητες εισερχόμενου και