Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ. Επενεργητές Αισθητήρες Σύστηµα Ελέγχου
|
|
|
- Αγάπη Μιχαλολιάκος
- 6 χρόνια πριν
- Προβολές:
Transcript




1 Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου
2 Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης υψηλών επιταχύνσεων, δυνατότητα λειτουργίας σε ένα µεγάλο εύρος ταχυτήτων και συνεχή περιστροφή (ακόµα και σε χαµηλές ταχύτητες λειτουργίας), και ακρίβεια στη παρακολούθηση της επιβαλλόµενης τροχιάς. Ροµποτικοί Επενεργητές Σερβοκινητήρες Πνευµατικοί Υδραυλικοί Ηλεκτρικοί




3 Επενεργητές: Ηλεκτρικοί ή Υδραυλικοί? Οι ηλεκτρικοί κινητήρες εµφανίζουν τα εξής πλεονεκτήµατα: ευρεία διάθεση της χρησιµοποιούµενης ηλεκτρικής ενέργειας, χαµηλό κόστος και µεγάλη ποικιλία προϊόντων, υψηλός συντελεστής µετατροπής ισχύος, εύκολη συντήρηση, δεν ρυπαίνουν το περιβάλλον εργασίας. Ταυτόχρονα όµως παρουσιάζουν τους παρακάτω περιορισµούς: εξαιτίας της επίδρασης της βαρύτητας στο βραχίονα µπορεί να προκληθεί βραχυκύκλωµα. Στις περιπτώσεις αυτές απαιτείται η χρήση ειδικών φρένων, χρειάζονται ειδική προστασία όταν λειτουργούν σε εύφλεκτο περιβάλλον. Οι υδραυλικοί κινητήρες παρουσιάζουν αρκετά αξιοσηµείωτα µειονεκτήµατα: ανάγκη ύπαρξης πηγής υδραυλικής ισχύος, υψηλό κόστος, µικρή ποικιλία προϊόντων µε ιδιαίτερες δυσκολίες κατασκευής τους σε µικρές διαστάσεις, χαµηλός συντελεστής µετατροπής ισχύος, αυξηµένες ανάγκες συντήρησης, ρύπανση του περιβάλλοντος εργασίας εξαιτίας διαρροών υδραυλικού ρευστού. Πλεονεκτήµατα υδραυλικών κινητήρων: δεν παρουσιάζουν προβλήµατα βραχυκυκλώσεων, είναι αυτολυπαινόµενοι, µε το υδραυλικό ρευστό να εκτελεί εκτός των άλλων χρέη ψυκτικού µέσου, είναι ιδιαιτέρως ασφαλείς σε επικίνδυνα περιβάλλοντα, παρουσιάζουν πολύ υψηλές σχέσεις ισχύος-βάρους.
4 Επενεργητές: Ηλεκτρικοί ή Υδραυλικοί? συνεχ. Αν εξετάσουµε τις δύο παραπάνω κλάσεις κινητήρων από πλευράς λειτουργίας: και οι δύο τύποι σερβοκινητήρων παρουσιάζουν καλή δυναµική συµπεριφορά, οι ηλεκτρικοί σερβοκινητήρες εµφανίζουν µεγαλύτερη ευκολία ελέγχου. Η παρατήρηση αυτή σχετίζεται µε την άµεση εξάρτηση της δυναµικής συµπεριφοράς των υδραυλικών σερβοκινητήρων από τη θερµοκρασία στην οποία βρίσκεται το χρησιµοποιούµενο ρευστό. οι ηλεκτρικοί σερβοκινητήρες δίνουν χαµηλές ροπές σε υψηλές ταχύτητες. Επειδή στις συνήθεις ροµποτικές εφαρµογές απαιτούνται υψηλές ροπές είναι αναγκαία η χρήση µειωτήρων. Οι τελευταίοι µεσολαβούν ανάµεσα στον κινητήρα και την άρθρωση δηµιουργώντας ελαστικότητα και χάρη. Απ την άλλη οι υδραυλικοί σερβοκινητήρες µπορούν να αποδίδουν µεγάλες ροπές σε µικρές ταχύτητες, µε αποτέλεσµα να µην απαιτείται η ενδιάµεση χρήση µειωτήρων. Όπως προκύπτει από τις παραπάνω παρατηρήσεις : η χρήση υδραυλικών σερβοκινητήρων κρίνεται απαραίτητη κυρίως στους βραχίονες που είναι επιφορτισµένοι µε τη διακίνηση µεγάλων ωφέλιµων φορτίων. Στην περίπτωση αυτή οι υδραυλικοί κινητήρες όχι µόνο είναι πιο κατάλληλοι από τους αντίστοιχους ηλεκτρικούς, αλλά επιπλέον το κόστος της υδραυλικής εγκατάστασης αποτελεί ένα σχετικά µικρό ποσοστό της συνολικής επένδυσης του ροµποτικού συστήµατος. Πάντως σε όλες εκείνες τις εφαρµογές που δεν έχουµε µεγάλα ωφέλιµα φορτία, προτιµάται η χρήση ηλεκτρικών σερβοκινητήρων.
5 Ηλεκτρονικό Υποσύστηµα Αισθητήρες Ηλεκτρονικά Ισχύος Ηλεκτρονικά Συστήµατα Μετατροπής Σηµάτων ΗΛΕΚΤΡΟΝΙΚΟ ΥΠΟΣΥΣΤΗΜΑ ΑΙΣΘΗΤΗΡΕΣ ΚΑΙ ΗΛΕΚΤΡΟΝΙΚΑ ΧΑΜΗΛΗΣ ΙΣΧΥΟΣ ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ (ΕΝΙΣΧΥΤΕΣ) ΜΕΤΑΤΡΟΠΕΙΣ ΣΗΜΑΤΩΝ (A/D Converters, D/A Converters)
.")
6 Αισθητήρες proprioceptive sensors µετρούν : θέση αρθρώσεων ποτενσιόµετρα (potentiometers), optical encoders (absolute / incremental) resolvers, ταχύτητα αρθρώσεων ταχύµετρα (tachometers), δυνάµεις και ροπές αισθητήρες δύναµης-ροπής (force-torque sensors). heteroceptive sensors αισθητήρες αφής (tactile sensors), αισθητήρες προσέγγισης (proximity sensors), αισθητήρες εύρους (range sensors): υπερηχητικοί (ultrasonic sensors), Laser Range Finders, αισθητήρες υπερύθρων (infrared sensors), κάµερες.




7 Encoders 4-bit Absolute Encoder 4-bit Absolute Gray Encoder Absolute Encoder µε ανάλυση 10-bits
8 Ενισχυτές Ισχύος Ανεξάρτητα από το είδος των χρησιµοποιούµενων σερβοκινητήρων (ηλεκτρικών, υδραυλικών, πνευµατικών): Ρύθµιση ροής ισχύος από την κύρια τροφοδοσία του συστήµατος προς τους επενεργητές-κινητήρες για την εκτέλεση της επιθυµητής κίνησης των αρθρώσεων. Η ρύθµιση αυτή υλοποιείται µε τη βοήθεια κατάλληλου σήµατος ελέγχου. Η ισχύς που σχετίζεται µε το σήµα ελέγχου είναι συνήθως ηλεκτρική. Ηλεκτρικοί Κινητήρες: η τροφοδοσία τους µε τάση ή ρεύµα κατάλληλης µορφής, ανάλογα µε το είδος του χρησιµοποιούµενου σερβοκινητήρα. Η τάση τροφοδοσίας για κινητήρες συνεχούς ρεύµατος : µόνιµων µαγνητών: συνεχής τάση καθοριζόµενη από σήµα ελέγχου του ενισχυτή χωρίς ψήκτρες: εναλλασσόµενη τάση. Η τιµή της και η συχνότητα καθορίζονται από το σήµα ελέγχου του ενισχυτή. Για τα εύρη ισχύος που απαιτούνται στην κίνηση αρθρώσεων, τα οποία είναι τάξης µεγέθους µερικών kw, χρησιµοποιούνται συνήθως ενισχυτές τρανζίστορ (transistor amplifiers) που εφαρµόζουν τεχνικές διαµόρφωσης εύρους παλµού (pulse-width modulation, PWM). Για έλεγχο κινητήρων συνεχούς ρεύµατος µόνιµων µαγνητών: µετατροπείς συνεχούς ρεύµατοςσε-συνεχές ρεύµα (dc-to-dc converters choppers), χωρίς ψήκτρες: µετατροπείς συνεχούς ρεύµατος-σεεναλλασσόµενο (dc-to-ac- converters inverters). Με αυτού του είδους τους ενισχυτές επιτυγχάνονται συντελεστές µετατροπής ισχύος της τάξεως του 0.9, ενώ το κέρδος ενίσχυσης φτάνει µία τάξη µεγέθους ΙΣΧΥΣ ΚΥΡΙΑΣ ΤΡΟΦΟΔΟΣΙΑΣ ΕΝΙΣΧΥΤΗΣ ΙΣΧΥΟΣ ΙΣΧΥΣ ΕΛΕΓΧΟΥ ΙΣΧΥΣ ΚΙΝΗΤΗΡΑ ΑΠΟΡΡΙΠΤΟΜΕΝΗ ΙΣΧΥΣ (π.χ. Θερµότητα)
9 Σύστηµα Ελέγχου Επεξεργασία Σήµατος Επεξεργασία Σήµατος Ενίσχυση Επενεργητές Αισθητήρες Μετάδοση Κίνησης Μηχανισµός Αισθητήρες Μηχανολογικό Υποσύστηµα Περιβάλλον Σύστηµα Ελέγχου Ηλεκτρονικό Υποσύστηµα
10 Σύστηµα Ελέγχου ΡΟΜΠΟΤΙΚΟΣ ΒΡΑΧΙΟΝΑΣ ΠΑΡΑΓΩΓΗ ΚΙΝΗΣΗΣ ΡΟΜΠΟΤΙΚΟΣ ΒΡΑΧΙΟΝΑΣ ΠΑΡΑΓΩΓΗ ΚΙΝΗΣΗΣ ΕΠΕΝΕΡΓΗΤΕΣ ΑΡΘΡΩΣΕΩΝ ΑΙΣΘΗΤΗΡΕΣ ΘΕΣΗΣ ΑΡΘΡΩΣΕΩΝ ΕΠΕΝΕΡΓΗΤΕΣ ΑΡΘΡΩΣΕΩΝ ΕΛΕΓΚΤΗΣ ΣΗΜΑΤΑ ΕΝΤΟΛΩΝ ΕΛΕΓΚΤΗΣ ΣΗΜΑΤΑ ΕΝΤΟΛΩΝ Σύστηµα Ανοικτού Βρόχου Σύστηµα Κλειστού Βρόχου
 Θέση (Ταχύτητα) Στοιχεία")
11 Διάγραµµα Ελέγχου Άρθρωσης Εντολή Εισόδου + - Σ Ελεγκτής και Επενεργητές Άρθρωση Βραχίονα (Εγκατάσταση) Θέση (Ταχύτητα) Στοιχεία Ανάδρασης


12 Δοµικό Διάγραµµα Είσοδος / Έξόδος Γένεση Προφίλ Κίνησης Κεντρικό Σύστηµα Ελέγχου Ελέγχου Άρθρωσης µε Έλεγχο Θέσης PID Ελεγκτής Κίνησης R E x PID DAC C Αποκωδικοποιητής Κίνησης Ενίσχυση Incremental Εncoder Κινητήρας

13 Αρχιτεκτονική Ελέγχου για Mobile Robots PC µε πρόγραµµα ελέγχου OFF BOARD Η/Υ Κεντρικός Ελεγκτής ON BOARD ΗΛΕΚΤΡΟΝΙΚΟ ΥΠΟΣΥΣΤΗΜΑ ΕΛΕΓΧΟΥ Έλεγχος Αισθητήρων Έλεγχος Κίνησης Έλεγχος Υπερήχων Οδοµετρία Έλεγχος Κινητήρων Υπέρηχοι Προφυλακτήρες Optical Encoders Κινητήρες ΗΛΕΚΤΡΟΛΟΓΙΚΟ ΥΠΟΣΥΣΤΗΜΑ ΑΙΣΘΗΤΗΡΕΣ ΜΗΧΑΝΟΛΟΓΙΚΟ ΥΠΟΣΥΣΤΗΜΑ Μετάδοση Κίνησης + Σύστηµα Διεύθυνσης

14 Case Study: PUMA 560

15 Αρχιτεκτονική Ελέγχου του PUMA 560


16 Διασύνδεση των Υποσυστηµάτων ενός Ελεγκτή Mark II



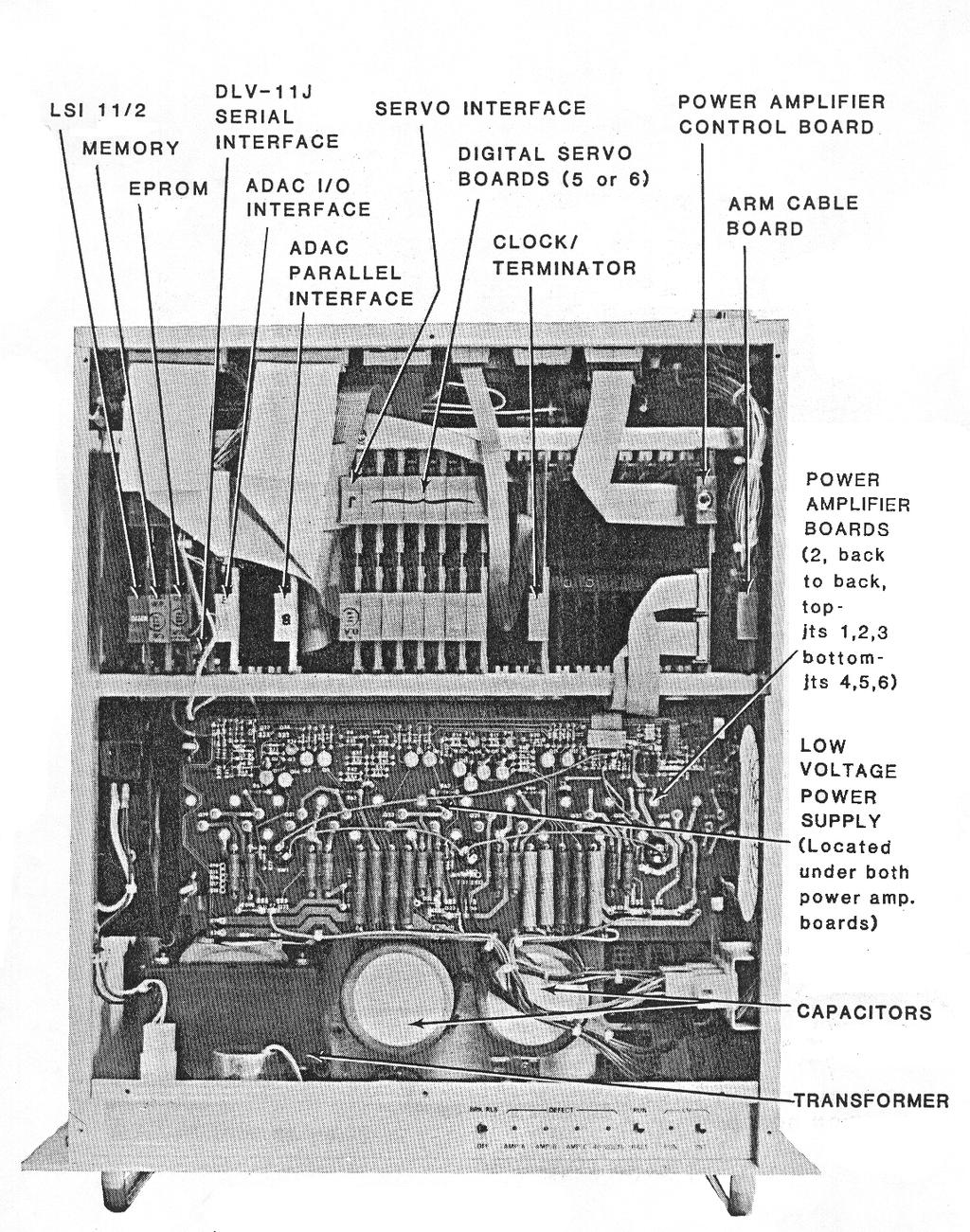
17 Εσωτερικό του Ελεγκτή του PUMA 560 (Κάτοψη)


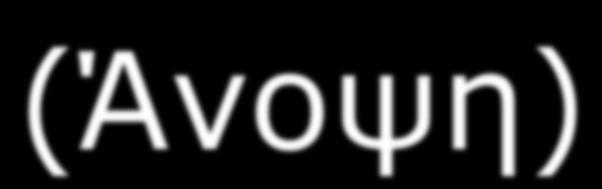
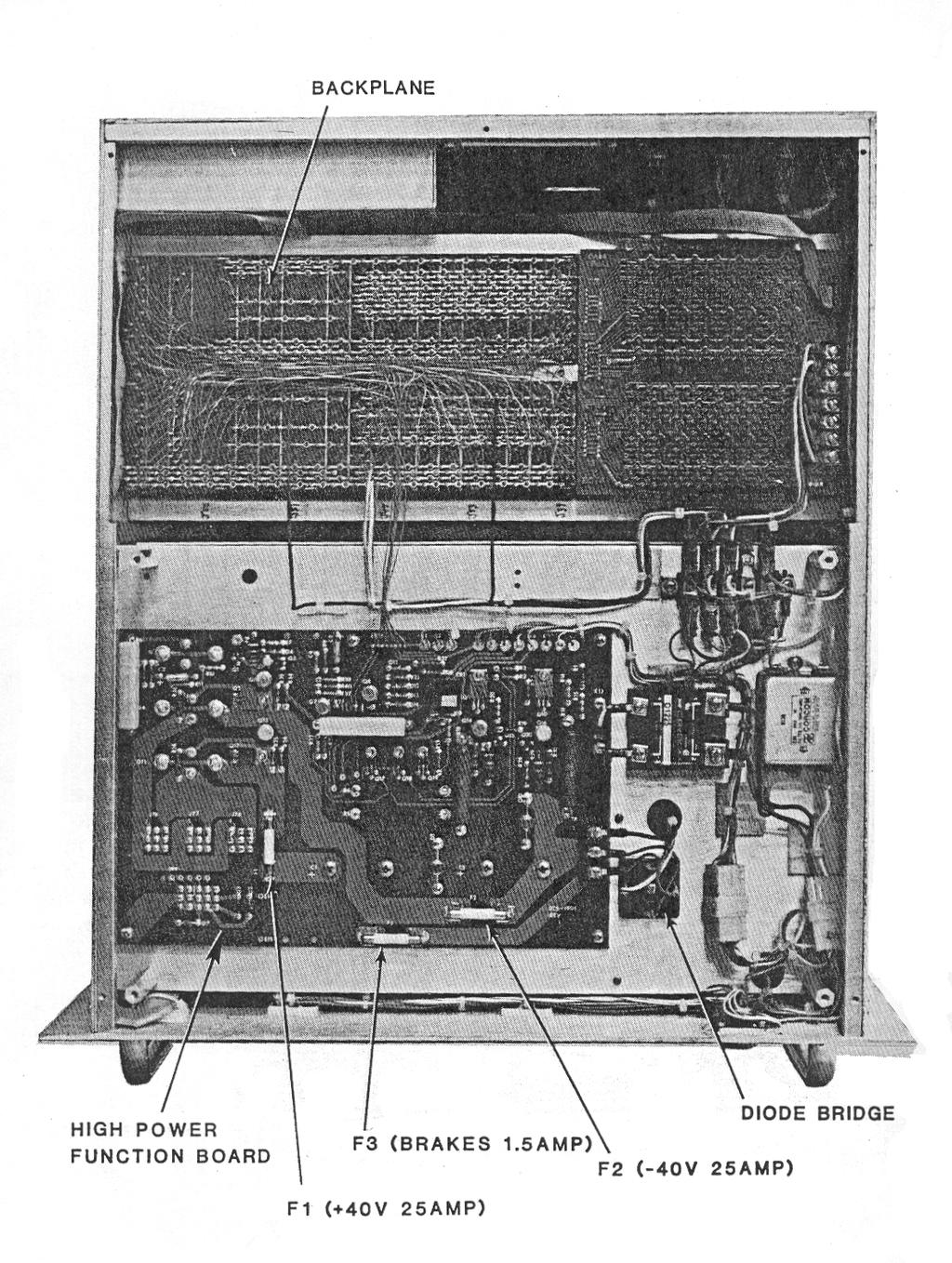
18 Εσωτερικό του Ελεγκτή του PUMA 560 (Άνοψη)
Ροµποτικοί Επενεργητές Σερβοκινητήρες Πνευµατικοί Υδραυλικοί Ηλεκτρικοί
 Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
10. ΗΛΕΚΤΡΟΛΟΓΙΚΟ ΚΑΙ ΗΛΕΚΤΡΟΝΙΚΟ ΥΠΟΣΥΣΤΗΜΑ
 10. ΗΛΕΚΤΡΟΛΟΓΙΚΟ ΚΑΙ ΗΛΕΚΤΡΟΝΙΚΟ ΥΠΟΣΥΣΤΗΜΑ 10.0 Εισαγωγή Μετά τη µελέτη του κινηµατικού και του δυναµικού µοντέλου ενός ροµποτικού βραχίονα, τα οποία ουσιαστικά αναφέρονται στο µηχανολογικό υποσύστηµα,
10. ΗΛΕΚΤΡΟΛΟΓΙΚΟ ΚΑΙ ΗΛΕΚΤΡΟΝΙΚΟ ΥΠΟΣΥΣΤΗΜΑ 10.0 Εισαγωγή Μετά τη µελέτη του κινηµατικού και του δυναµικού µοντέλου ενός ροµποτικού βραχίονα, τα οποία ουσιαστικά αναφέρονται στο µηχανολογικό υποσύστηµα,
1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης
 www.robolab.tuc.gr 1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας R/C σέρβο βηματικός κινητήρας 2 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας
www.robolab.tuc.gr 1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας R/C σέρβο βηματικός κινητήρας 2 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας
Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης
 Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης Αντώνιος Γαστεράτος, Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Παραγωγής και Διοίκησης, Δημοκρίτειο Πανεπιστήμιο Θράκης μηχανοτρονική διαδικασία σχεδιασμού
Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης Αντώνιος Γαστεράτος, Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Παραγωγής και Διοίκησης, Δημοκρίτειο Πανεπιστήμιο Θράκης μηχανοτρονική διαδικασία σχεδιασμού
y 1 Output Input y 2 Σχήµα 1.1 Βασική δοµή ενός συστήµατος ελέγχου κλειστού βρόγχου
 Τ.Ε.Ι. ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜHΜΑ ΗΛΕΚΤΡΟΛΟΓIΑΣ Σηµειώσεις για το εργαστήριο του µαθήµατος ΣΥΣΤΗΜΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ I ΓΑΥΡΟΣ ΚΩΝ/ΝΟΣ ΚΟΖΑΝΗ 2008 Κεφάλαιο 1 ο Ορισµός Συστηµάτων
Τ.Ε.Ι. ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜHΜΑ ΗΛΕΚΤΡΟΛΟΓIΑΣ Σηµειώσεις για το εργαστήριο του µαθήµατος ΣΥΣΤΗΜΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ I ΓΑΥΡΟΣ ΚΩΝ/ΝΟΣ ΚΟΖΑΝΗ 2008 Κεφάλαιο 1 ο Ορισµός Συστηµάτων
Ανάκτηση θερμοκρασιακού πεδίου σε περιστρεφόμενο (εν κινήσει)
") Κεφάλαιο 6 Ανάκτηση θερμοκρασιακού πεδίου σε περιστρεφόμενο (εν κινήσει) ρότορα Η σύνδεση του στρεφόμενου τμήματος της μηχανής με την μετρολογική διάταξη (αναλογικά όργανα μέτρησης ή υπολογιστή) παρουσιάζει
Κεφάλαιο 6 Ανάκτηση θερμοκρασιακού πεδίου σε περιστρεφόμενο (εν κινήσει) ρότορα Η σύνδεση του στρεφόμενου τμήματος της μηχανής με την μετρολογική διάταξη (αναλογικά όργανα μέτρησης ή υπολογιστή) παρουσιάζει
3η Α Σ Κ Η Σ Η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ ΚΛΕΙΣΤΟ ΣΥΣΤΗΜΑ Α. ΤΕΛΕΣΤΙΚΟΣ ΕΝΙΣΧΥΤΗΣ ΩΣ ΣΤΟΙΧΕΙΟ ΣΥΓΚΡΙΣΗΣ
 η Α Σ Κ Η Σ Η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ ΚΛΕΙΣΤΟ ΣΥΣΤΗΜΑ Α. ΤΕΛΕΣΤΙΚΟΣ ΕΝΙΣΧΥΤΗΣ ΩΣ ΣΤΟΙΧΕΙΟ ΣΥΓΚΡΙΣΗΣ ΣΚΟΠΟΣ : Σκοπός της άσκησης είναι η μελέτη του βασικού στοιχείου ενός κλειστού συστήματος του
η Α Σ Κ Η Σ Η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ ΚΛΕΙΣΤΟ ΣΥΣΤΗΜΑ Α. ΤΕΛΕΣΤΙΚΟΣ ΕΝΙΣΧΥΤΗΣ ΩΣ ΣΤΟΙΧΕΙΟ ΣΥΓΚΡΙΣΗΣ ΣΚΟΠΟΣ : Σκοπός της άσκησης είναι η μελέτη του βασικού στοιχείου ενός κλειστού συστήματος του
PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών
 Διαμόρφωση εύρους παλμών") PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη
PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη
εν υπάρχει συµφωνία ως προς τον ορισµό. 1949 Μηχανή Αριθµητικού Ελέγχου (MIT Servo Lab) Βραχίονες για χειρισµό πυρηνικού υλικού (Master Slave, 1948)
 Βραχίονες για χειρισµό πυρηνικού υλικού (Master Slave, 1948)") Κεφάλαιο 1 Εισαγωγή 1-1 Τι είναι Ροµπότ; εν υπάρχει συµφωνία ως προς τον ορισµό. Σύµφωνα µε το Αµερικανικό Ινστιτούτο Ροµποτικής (Rbt Institute f America, RIA) είναι ένας επαναπρογραµµατιζόµενος βραχίονας
Κεφάλαιο 1 Εισαγωγή 1-1 Τι είναι Ροµπότ; εν υπάρχει συµφωνία ως προς τον ορισµό. Σύµφωνα µε το Αµερικανικό Ινστιτούτο Ροµποτικής (Rbt Institute f America, RIA) είναι ένας επαναπρογραµµατιζόµενος βραχίονας
1. Σέρβο (R/C Servo) 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης
 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης") www.robolab.tuc.gr 1. Σέρβο (R/C Servo) 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σέρβο (R/C servo) (1) Το σέρβο είναι συσκευή που αποτελείται
www.robolab.tuc.gr 1. Σέρβο (R/C Servo) 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σέρβο (R/C servo) (1) Το σέρβο είναι συσκευή που αποτελείται
Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2. Προγραμματισμός Φυσικών Συστημάτων. Συστήματα Πραγματικών Εφαρμογών. Νέα Ψηφιακά Αντικείμενα
 Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
ΕΡΓΑΣΤΗΡΙΑΚΗ ΕΦΑΡΜΟΓΗ 1 ΤO ΡΟΜΠΟΤ INTELLITEK ER-2u
 Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΧΕΙΜ5-6 ΗΜΕΡΟΜΗΝΙΑ: ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 3 ΕΛΕΓΧΟΣ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΧΕΙΜ5-6 ΗΜΕΡΟΜΗΝΙΑ: ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 3 ΕΛΕΓΧΟΣ
Κεφάλαιο 1 Εισαγωγή.
 Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2008 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : ΑΥΤΟΜΑΤΙΣΜΟΙ ΚΑΙ
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2008 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : ΑΥΤΟΜΑΤΙΣΜΟΙ ΚΑΙ
Εισαγωγή στην Ρομποτική
 Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Θέματα Εξετάσεων Ασκήσεις στο Mάθημα: "ΡΟΜΠΟΤΙΚΗ Ι: ΑΝΑΛΥΣΗ, ΕΛΕΓΧΟΣ, ΕΡΓΑΣΤΗΡΙΟ" 1 η Σειρά Θεμάτων Θέμα 1-1 Έστω ρομποτικός
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Θέματα Εξετάσεων Ασκήσεις στο Mάθημα: "ΡΟΜΠΟΤΙΚΗ Ι: ΑΝΑΛΥΣΗ, ΕΛΕΓΧΟΣ, ΕΡΓΑΣΤΗΡΙΟ" 1 η Σειρά Θεμάτων Θέμα 1-1 Έστω ρομποτικός
Σεµινάριο Αυτοµάτου Ελέγχου
 ΤΕΙ ΠΕΙΡΑΙΑ Τµήµα Αυτοµατισµού Σεµινάριο Αυτοµάτου Ελέγχου Ειδικά θέµατα Ανάλυσης συστηµάτων Σύνθεσης συστηµάτων ελέγχου Μελέτης στοχαστικών συστηµάτων. Καλλιγερόπουλος Σεµινάριο Αυτοµάτου Ελέγχου Ανάλυση
ΤΕΙ ΠΕΙΡΑΙΑ Τµήµα Αυτοµατισµού Σεµινάριο Αυτοµάτου Ελέγχου Ειδικά θέµατα Ανάλυσης συστηµάτων Σύνθεσης συστηµάτων ελέγχου Μελέτης στοχαστικών συστηµάτων. Καλλιγερόπουλος Σεµινάριο Αυτοµάτου Ελέγχου Ανάλυση
Συστήματα Αυτόματου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Ψηφιακός Έλεγχος Συστημάτων Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Ψηφιακός Έλεγχος Συστημάτων Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΗΛΕΚΤΡΙΚΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Α. ΑΣΚΗΣΕΙΣ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ
 ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ. ΓΕΝΙΚΑ ΗΛΕΚΤΡΙΚΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Α. ΑΣΚΗΣΕΙΣ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ Σε ένα ανοιχτό σύστημα με συνάρτηση μεταφοράς G η έξοδος Υ και είσοδος Χ συνδέονται με τη σχέση: Y=G*Χ
ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ. ΓΕΝΙΚΑ ΗΛΕΚΤΡΙΚΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Α. ΑΣΚΗΣΕΙΣ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ Σε ένα ανοιχτό σύστημα με συνάρτηση μεταφοράς G η έξοδος Υ και είσοδος Χ συνδέονται με τη σχέση: Y=G*Χ
Ηλεκτρική Ενέργεια. Ηλεκτρικό Ρεύμα
 Ηλεκτρική Ενέργεια Σημαντικές ιδιότητες: Μετατροπή από/προς προς άλλες μορφές ενέργειας Μεταφορά σε μεγάλες αποστάσεις με μικρές απώλειες Σημαντικότερες εφαρμογές: Θέρμανση μέσου διάδοσης Μαγνητικό πεδίο
Ηλεκτρική Ενέργεια Σημαντικές ιδιότητες: Μετατροπή από/προς προς άλλες μορφές ενέργειας Μεταφορά σε μεγάλες αποστάσεις με μικρές απώλειες Σημαντικότερες εφαρμογές: Θέρμανση μέσου διάδοσης Μαγνητικό πεδίο
ΙΑΤΑΞΗ ΜΕΤΡΗΣΗΣ ΤΩΝ ΥΝΑΜΕΩΝ ΚΟΠΗΣ ΜΕ ΧΡΗΣΗ ΤΟΥ ΛΟΓΙΣΜΙΚΟΥ LABVIEW
 ΙΑΤΑΞΗ ΜΕΤΡΗΣΗΣ ΤΩΝ ΥΝΑΜΕΩΝ ΚΟΠΗΣ ΜΕ ΧΡΗΣΗ ΤΟΥ ΛΟΓΙΣΜΙΚΟΥ LABVIEW Η έννοια της µέτρησης καθώς και η µέτρηση καθαυτή είναι άρρηκτα συνδεδεµένη µε την επιστηµονική µεθοδολογία. Επίσης ο κάθε άνθρωπος αντιµετωπίζει
ΙΑΤΑΞΗ ΜΕΤΡΗΣΗΣ ΤΩΝ ΥΝΑΜΕΩΝ ΚΟΠΗΣ ΜΕ ΧΡΗΣΗ ΤΟΥ ΛΟΓΙΣΜΙΚΟΥ LABVIEW Η έννοια της µέτρησης καθώς και η µέτρηση καθαυτή είναι άρρηκτα συνδεδεµένη µε την επιστηµονική µεθοδολογία. Επίσης ο κάθε άνθρωπος αντιµετωπίζει
Το υποσύστηµα "αίσθησης" απαιτήσεις και επιδόσεις φυσικά µεγέθη γενική δοµή και συγκρότηση
 Το υποσύστηµα "αίσθησης" απαιτήσεις και επιδόσεις φυσικά µεγέθη γενική δοµή και συγκρότηση Το υποσύστηµα "αίσθησης" είσοδοι της διάταξης αντίληψη του "περιβάλλοντος" τροφοδοσία του µε καθορίζει τις επιδόσεις
Το υποσύστηµα "αίσθησης" απαιτήσεις και επιδόσεις φυσικά µεγέθη γενική δοµή και συγκρότηση Το υποσύστηµα "αίσθησης" είσοδοι της διάταξης αντίληψη του "περιβάλλοντος" τροφοδοσία του µε καθορίζει τις επιδόσεις
Εργαστήριο Συστημάτων Αυτομάτου Ελέγχου Άσκηση 1 Το Σερβοσύστημα MS150 1
 Εργαστήριο Συστημάτων Αυτομάτου Ελέγχου Άσκηση 1 Το Σερβοσύστημα MS150 1 Άσκηση 1: Το Σερβοσύστημα MS150 1) Εξοικείωση με τη διασύνδεση των βαθμίδων του DC σερβοσυστήματος MS150 2) Μέτρηση της σταθεράς
Εργαστήριο Συστημάτων Αυτομάτου Ελέγχου Άσκηση 1 Το Σερβοσύστημα MS150 1 Άσκηση 1: Το Σερβοσύστημα MS150 1) Εξοικείωση με τη διασύνδεση των βαθμίδων του DC σερβοσυστήματος MS150 2) Μέτρηση της σταθεράς
Μάθημα: Ρομποτικός Έλεγχος
 Διατμηματικό Πρόγραμμα Μεταπτυχιακών Σπουδών «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» Ε.Μ.Π., Ακαδημαϊκό Έτος 011-1 Μάθημα: Ρομποτικός Έλεγχος Αυτόματος Έλεγχος Ρομπότ (Μη-Γραμμικός Ρομποτικός Έλεγχος Κων/νος Τζαφέστας
Διατμηματικό Πρόγραμμα Μεταπτυχιακών Σπουδών «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» Ε.Μ.Π., Ακαδημαϊκό Έτος 011-1 Μάθημα: Ρομποτικός Έλεγχος Αυτόματος Έλεγχος Ρομπότ (Μη-Γραμμικός Ρομποτικός Έλεγχος Κων/νος Τζαφέστας
Δυναμική Μηχανών I. Μοντελοποίηση Ηλεκτρικών και Υδραυλικών Συστημάτων
 Δυναμική Μηχανών I Μοντελοποίηση Ηλεκτρικών και Υδραυλικών Συστημάτων Χειμερινό Εξάμηνο 2014 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Δημήτριος Τζεράνης, Ph.D. Περιεχόμενα Μοντελοποίηση Ηλεκτρικών Συστημάτων Μεταβλητές
Δυναμική Μηχανών I Μοντελοποίηση Ηλεκτρικών και Υδραυλικών Συστημάτων Χειμερινό Εξάμηνο 2014 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Δημήτριος Τζεράνης, Ph.D. Περιεχόμενα Μοντελοποίηση Ηλεκτρικών Συστημάτων Μεταβλητές
Κινητήρες μιας νέας εποχής
 Κινητήρες μιας νέας εποχής H ABB παρουσιάζει μια νέα γενιά κινητήρων υψηλής απόδοσης βασισμένη στην τεχνολογία σύγχρονης μαγνητικής αντίστασης. Η ΑΒΒ στρέφεται στην τεχνολογία κινητήρων σύγχρονης μαγνητικής
Κινητήρες μιας νέας εποχής H ABB παρουσιάζει μια νέα γενιά κινητήρων υψηλής απόδοσης βασισμένη στην τεχνολογία σύγχρονης μαγνητικής αντίστασης. Η ΑΒΒ στρέφεται στην τεχνολογία κινητήρων σύγχρονης μαγνητικής
Συλλογή μεταφορά και έλεγχος Δεδομένων. 1.4 Απλά και σύνθετα συστήματα αυτοματισμού.
 Συλλογή μεταφορά και έλεγχος Δεδομένων 1.4 Απλά και σύνθετα συστήματα αυτοματισμού. Το είδαμε μέχρι τώρα Δομή συστήματος αυτοματισμού Ο ελεγκτής προϋποθέτει την ύπαρξη κάποιων στοιχείων, στα οποία θα επιδράσει
Συλλογή μεταφορά και έλεγχος Δεδομένων 1.4 Απλά και σύνθετα συστήματα αυτοματισμού. Το είδαμε μέχρι τώρα Δομή συστήματος αυτοματισμού Ο ελεγκτής προϋποθέτει την ύπαρξη κάποιων στοιχείων, στα οποία θα επιδράσει
ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
Ηλεκτρικές Μηχανές Βιομηχανικοί Αυτοματισμοί. Ημιανορθωτής. Πλήρης ανορθωτής
 Ημιανορθωτής 1 Πλήρης ανορθωτής 2 1 Πλήρης τριφασικός ανορθωτής 3 Φίλτρα στη έξοδο του Ανορθωτή Η έξοδος των ανορθωτών μπορεί να εξομαλυνθεί ακόμα περισσότερο με τη χρήση φίλτρων διέλευσης χαμηλών συχνοτήτων
Ημιανορθωτής 1 Πλήρης ανορθωτής 2 1 Πλήρης τριφασικός ανορθωτής 3 Φίλτρα στη έξοδο του Ανορθωτή Η έξοδος των ανορθωτών μπορεί να εξομαλυνθεί ακόμα περισσότερο με τη χρήση φίλτρων διέλευσης χαμηλών συχνοτήτων
Κωδικοί Ρ01ΧΧ και Ρ02ΧΧ
 Κωδικοί Ρ01ΧΧ και Ρ02ΧΧ κωδικός P0010 P0011 P0012 P0013 P0014 P0015 P0020 P0021 P0022 P0023 P0065 P0066 P0067 P0100 P0101 P0102 P0103 P0105 Περιγραφή βλάβης - εξάρτημα Πλευρά 1, Ρύθμιση εκκεντροφόρου Πλευρά
Κωδικοί Ρ01ΧΧ και Ρ02ΧΧ κωδικός P0010 P0011 P0012 P0013 P0014 P0015 P0020 P0021 P0022 P0023 P0065 P0066 P0067 P0100 P0101 P0102 P0103 P0105 Περιγραφή βλάβης - εξάρτημα Πλευρά 1, Ρύθμιση εκκεντροφόρου Πλευρά
ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΧΕΙΜ17-18 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 2 ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΧΕΙΜ17-18 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 2 ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2014
 ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2014 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2014 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΚΛΕΙΣΤΟ ΣΥΣΤΗΜΑ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ
 ΚΛΕΙΣΤΟ ΣΥΣΤΗΜΑ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ Στο παραπάνω σχήμα εικονίζεται το διάγραμμα βαθμίδων του συστήματος. H επιθυμητή ταχύτητα καθορίζεται από το σήμα εισόδου R και η πληροφορία για την πραγματική ταχύτητα
ΚΛΕΙΣΤΟ ΣΥΣΤΗΜΑ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ Στο παραπάνω σχήμα εικονίζεται το διάγραμμα βαθμίδων του συστήματος. H επιθυμητή ταχύτητα καθορίζεται από το σήμα εισόδου R και η πληροφορία για την πραγματική ταχύτητα
ΤΕΙ - ΧΑΛΚΙ ΑΣ. παθητικά: προκαλούν την απώλεια ισχύος ενός. ενεργά: όταν τροφοδοτηθούν µε σήµα, αυξάνουν
 1. Εισαγωγικά στοιχεία ηλεκτρονικών - Ι.Σ. ΧΑΛΚΙΑ ΗΣ διαφάνεια 1 1. ΘΕΜΕΛΙΩ ΕΙΣ ΕΝΝΟΙΕΣ ΚΑΙ ΕΙΣΑΓΩΓΙΚΑ ΣΤΟΙΧΕΙΑ ΗΛΕΚΤΡΟΝΙΚΗΣ Ηλεκτρικό στοιχείο: Κάθε στοιχείο που προσφέρει, αποθηκεύει και καταναλώνει
1. Εισαγωγικά στοιχεία ηλεκτρονικών - Ι.Σ. ΧΑΛΚΙΑ ΗΣ διαφάνεια 1 1. ΘΕΜΕΛΙΩ ΕΙΣ ΕΝΝΟΙΕΣ ΚΑΙ ΕΙΣΑΓΩΓΙΚΑ ΣΤΟΙΧΕΙΑ ΗΛΕΚΤΡΟΝΙΚΗΣ Ηλεκτρικό στοιχείο: Κάθε στοιχείο που προσφέρει, αποθηκεύει και καταναλώνει
Σερβοκινητήρες πρόωσης σε συστήματα CNC
 Σερβοκινητήρες πρόωσης σε συστήματα CNC τύπος DC μόνιμου μαγνήτη επίδραση ανάδρασης ταχογεννήτρια Γ.Βοσνιάκος-ΕΡΓΑΛΕΙΟΜΗΧΑΝΕΣ Σερβοκινητήρες πρόωσης σε συστήματα CNC Άδεια Χρήσης Το παρόν υλικό υπόκειται
Σερβοκινητήρες πρόωσης σε συστήματα CNC τύπος DC μόνιμου μαγνήτη επίδραση ανάδρασης ταχογεννήτρια Γ.Βοσνιάκος-ΕΡΓΑΛΕΙΟΜΗΧΑΝΕΣ Σερβοκινητήρες πρόωσης σε συστήματα CNC Άδεια Χρήσης Το παρόν υλικό υπόκειται
Σχεδιασμός Τροχιάς Ρομποτικών Χειριστών
 Σχολή Ηλεκτρολόγων Μηχ/κών και Μηχ/κών Υπολογιστών, Ε.Μ.Π., Ακαδημαϊκό Έτος 00809, 7ο Εξάμηνο Μάθημα: Ρομποτική Ι Αυτόματος Έλεγχος Ρομπότ Κων/νος Τζαφέστας Τομέας Σημάτων, Ελέγχου & Ρομποτικής Σχολή Ηλεκτρ.
Σχολή Ηλεκτρολόγων Μηχ/κών και Μηχ/κών Υπολογιστών, Ε.Μ.Π., Ακαδημαϊκό Έτος 00809, 7ο Εξάμηνο Μάθημα: Ρομποτική Ι Αυτόματος Έλεγχος Ρομπότ Κων/νος Τζαφέστας Τομέας Σημάτων, Ελέγχου & Ρομποτικής Σχολή Ηλεκτρ.
Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Κούρογλου Αλέξανδρος. Μαθητής Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Κούρογλου Αλέξανδρος Μαθητής Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Κούρογλου Αλέξανδρος Μαθητής Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Εισαγωγή στον Αυτόματο Έλεγχο Συστήματα, Εφαρμογές, Αισθητήρια
 Εισαγωγή στον Αυτόματο Έλεγχο 2016-2017 Συστήματα, Εφαρμογές, Αισθητήρια Δρ. Γεώργιος Παπαλάμπρου Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο Ναυτικής Μηχανολογίας
Εισαγωγή στον Αυτόματο Έλεγχο 2016-2017 Συστήματα, Εφαρμογές, Αισθητήρια Δρ. Γεώργιος Παπαλάμπρου Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο Ναυτικής Μηχανολογίας
7-2 Έλεγχος Ανοικτού Βρόχου
 Κεφάλαιο 7 Γραµµικός Έλεγχος 7-1 Εισαγωγή Υποθέτουµε ότι έχουµε µία επιθυµητή τροχιά για κάθε άρθρωση που περιγράφεται από τη χρονική συνάρτηση q d (t). Το πρόβληµα που αντιµετωπίζουµε σε αυτό το κεφάλαιο
Κεφάλαιο 7 Γραµµικός Έλεγχος 7-1 Εισαγωγή Υποθέτουµε ότι έχουµε µία επιθυµητή τροχιά για κάθε άρθρωση που περιγράφεται από τη χρονική συνάρτηση q d (t). Το πρόβληµα που αντιµετωπίζουµε σε αυτό το κεφάλαιο
Ανεμογεννήτρια Polaris P15 50 kw
 Ανεμογεννήτρια Polaris P15 50 kw Τεχνική περιγραφή Μια ανεμογεννήτρια (Α/Γ) 50kW παράγει ενέργεια για να τροφοδοτηθούν αρκετές κατοικίες. Επίσης μπορεί να χρησιμοποιηθεί για να τροφοδοτηθούν με ρεύμα απομονωμένα
Ανεμογεννήτρια Polaris P15 50 kw Τεχνική περιγραφή Μια ανεμογεννήτρια (Α/Γ) 50kW παράγει ενέργεια για να τροφοδοτηθούν αρκετές κατοικίες. Επίσης μπορεί να χρησιμοποιηθεί για να τροφοδοτηθούν με ρεύμα απομονωμένα
ΕΛΕΓΧΟΣ ΗΛΕΚΤΡΟΫ ΡΑΥΛΙΚΩΝ ΣΕΡΒΟΣΥΣΤΗΜΑΤΩΝ ΒΑΣΙΣΜΕΝΟΣ ΣΤΗ ΥΝΑΜΙΚΗ
 ΕΛΕΓΧΟΣ ΗΛΕΚΤΡΟΫ ΡΑΥΛΙΚΩΝ ΣΕΡΒΟΣΥΣΤΗΜΑΤΩΝ ΒΑΣΙΣΜΕΝΟΣ ΣΤΗ ΥΝΑΜΙΚΗ Ιωάννης Νταβλιάκος, Ευάγγελος Παπαδόπουλος Σχολή Μηχανολόγων Μηχανικών ΕΜΠ, Εργαστήριο Αυτοµάτου Ελέγχου email: gdavliak@central.ntua.gr,
ΕΛΕΓΧΟΣ ΗΛΕΚΤΡΟΫ ΡΑΥΛΙΚΩΝ ΣΕΡΒΟΣΥΣΤΗΜΑΤΩΝ ΒΑΣΙΣΜΕΝΟΣ ΣΤΗ ΥΝΑΜΙΚΗ Ιωάννης Νταβλιάκος, Ευάγγελος Παπαδόπουλος Σχολή Μηχανολόγων Μηχανικών ΕΜΠ, Εργαστήριο Αυτοµάτου Ελέγχου email: gdavliak@central.ntua.gr,
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΑΙΣΘΗΤΗΡΙΑ ΣΤΑΘΜΗΣ. Σχήμα 1: Ηλεκτρικός μετρητής με πλωτήρα
 1) Ηλεκτρικός μετρητής με πλωτήρα ΑΙΣΘΗΤΗΡΙΑ ΣΤΑΘΜΗΣ Ένας ηλεκτρικός μετρητής με πλωτήρα είναι έτσι σχεδιασμένος ώστε να ακολουθεί την μεταβαλλόμενη στάθμη ενός υγρού. Όταν αυτή αλλάζει η κίνηση του πλωτήρα
1) Ηλεκτρικός μετρητής με πλωτήρα ΑΙΣΘΗΤΗΡΙΑ ΣΤΑΘΜΗΣ Ένας ηλεκτρικός μετρητής με πλωτήρα είναι έτσι σχεδιασμένος ώστε να ακολουθεί την μεταβαλλόμενη στάθμη ενός υγρού. Όταν αυτή αλλάζει η κίνηση του πλωτήρα
Εξεταστέα Ύλη. Λύκειο Αγίου Γεωργίου Λάρνακας Τεχνολογία Γ' Λυκείου. Σχολική χρονιά:
 Λύκειο Αγίου Γεωργίου Λάρνακας Τεχνολογία Γ' Λυκείου Σχολική χρονιά: 2014-2015 Εξεταστέα Ύλη Εργονομία Ορισμός εργονομίας Προσαρμοστικότητα (σελ. 3) και συνέπειες μη προσαρμογής Τομείς που λαμβάνει υπόψη
Λύκειο Αγίου Γεωργίου Λάρνακας Τεχνολογία Γ' Λυκείου Σχολική χρονιά: 2014-2015 Εξεταστέα Ύλη Εργονομία Ορισμός εργονομίας Προσαρμοστικότητα (σελ. 3) και συνέπειες μη προσαρμογής Τομείς που λαμβάνει υπόψη
Ενισχυτές Μετρήσεων. 3.1 Ο διαφορικός Ενισχυτής
 3 Ενισχυτές Μετρήσεων 3.1 Ο διαφορικός Ενισχυτής Πολλές φορές ένας ενισχυτής σχεδιάζεται ώστε να αποκρίνεται στη διαφορά µεταξύ δύο σηµάτων εισόδου. Ένας τέτοιος ενισχυτής ονοµάζεται ενισχυτής διαφοράς
3 Ενισχυτές Μετρήσεων 3.1 Ο διαφορικός Ενισχυτής Πολλές φορές ένας ενισχυτής σχεδιάζεται ώστε να αποκρίνεται στη διαφορά µεταξύ δύο σηµάτων εισόδου. Ένας τέτοιος ενισχυτής ονοµάζεται ενισχυτής διαφοράς
Άσκηση 2: Τελεστικός Ενισχυτής. Αντικείμενο. Απαιτούμενες Θεωρητικές Γνώσεις. 2.1 Συγκριτές
 Εργαστήριο Συστημάτων Αυτομάτου Ελέγχου Άσκηση Τελεστικός Ενισχυτής Άσκηση : Τελεστικός Ενισχυτής Αντικείμενο ) Άθροιση με τελεστικό ενισχυτή ) Έλεγχος κέρδους τελεστικού ενισχυτή Απαιτούμενες Θεωρητικές
Εργαστήριο Συστημάτων Αυτομάτου Ελέγχου Άσκηση Τελεστικός Ενισχυτής Άσκηση : Τελεστικός Ενισχυτής Αντικείμενο ) Άθροιση με τελεστικό ενισχυτή ) Έλεγχος κέρδους τελεστικού ενισχυτή Απαιτούμενες Θεωρητικές
ΔΠΜΣ «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» «ΕΡΓΑΣΤΗΡΙΟ ΡΟΜΠΟΤΙΚΗΣ» Άσκηση 2. Έλεγχος Pendubot
 Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Ηλεκτρ. Μηχ/κών και Μηχ/κών Υπολογιστών Τομέας Σημάτων, Ελέγχου και Ρομποτικής ΔΠΜΣ «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» «ΕΡΓΑΣΤΗΡΙΟ ΡΟΜΠΟΤΙΚΗΣ» Άσκηση 2. Έλεγχος Pendubot Υπεύθυνος
Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Ηλεκτρ. Μηχ/κών και Μηχ/κών Υπολογιστών Τομέας Σημάτων, Ελέγχου και Ρομποτικής ΔΠΜΣ «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» «ΕΡΓΑΣΤΗΡΙΟ ΡΟΜΠΟΤΙΚΗΣ» Άσκηση 2. Έλεγχος Pendubot Υπεύθυνος
ΕΝΟΤΗΤΑ 10: ΟΔΗΓΗΣΗ ΚΙΝΗΤΗΡΩΝ
 ΕΝΟΤΗΤΑ 10: ΟΔΗΓΗΣΗ ΚΙΝΗΤΗΡΩΝ Στόχος και Περίγραμμα της Ενότητας 10 Στόχος της παρουσίασης Παρουσίαση της βασικής ιδέα και απλών παραδειγμάτων για την οδήγηση DC και βηματικών κινητήρων με το Arduino.
ΕΝΟΤΗΤΑ 10: ΟΔΗΓΗΣΗ ΚΙΝΗΤΗΡΩΝ Στόχος και Περίγραμμα της Ενότητας 10 Στόχος της παρουσίασης Παρουσίαση της βασικής ιδέα και απλών παραδειγμάτων για την οδήγηση DC και βηματικών κινητήρων με το Arduino.
Έλεγχος Αλληλεπίδρασης με το. Έλεγχος «Συμμόρφωσης» ή «Υποχωρητικότητας» (Compliance Control)
") Έλεγχος Αλληλεπίδρασης με το Περιβάλλον Έλεγχος «Συμμόρφωσης» ή «Υποχωρητικότητας» (Compliance Control) Έλεγχος Εμπέδησης (Impeance Control) Αλληλεπίδραση με το περιβάλλον Η αλληλεπίδραση με το περιβάλλον
Έλεγχος Αλληλεπίδρασης με το Περιβάλλον Έλεγχος «Συμμόρφωσης» ή «Υποχωρητικότητας» (Compliance Control) Έλεγχος Εμπέδησης (Impeance Control) Αλληλεπίδραση με το περιβάλλον Η αλληλεπίδραση με το περιβάλλον
Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής.
 ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής. Α) Σκοπός: Σκοπός της παρούσας άσκησης είναι να επιδειχθεί ο έλεγχος των στροφών
ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής. Α) Σκοπός: Σκοπός της παρούσας άσκησης είναι να επιδειχθεί ο έλεγχος των στροφών
Στην περίπτωση που έχουμε δυο εισόδους (V 1 και V 2 ) στην είσοδο του τελεστικού ενισχυτή, όπως το παρακάτω σχήμα :
 στην είσοδο του τελεστικού ενισχυτή, όπως το παρακάτω σχήμα :") ΑΣΚΗΣΗ η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ ΣΕΡΒΟΚΙΝΗΤΗΡΑ DC ΜΕ ΜΟΝΙΜΟ ΜΑΓΝΗΤΗ ΕΠΙΔΡΑΣΗ ΤΟΥ ΚΕΡΔΟΥΣ ΣΤΟΝ ΕΛΕΓΧΟ ΤΑΧΥΤΗΤΑΣ Α. ΕΝΑΛΛΑΚΤΙΚΗ ΥΛΟΠΟΙΗΣΗ ΤΕΛΕΣΤΙΚΟΥ ΕΝΙΣΧΥΤΗ Σε προηγούμενη άσκηση εξετάσαμε την λειτουργία του
ΑΣΚΗΣΗ η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ ΣΕΡΒΟΚΙΝΗΤΗΡΑ DC ΜΕ ΜΟΝΙΜΟ ΜΑΓΝΗΤΗ ΕΠΙΔΡΑΣΗ ΤΟΥ ΚΕΡΔΟΥΣ ΣΤΟΝ ΕΛΕΓΧΟ ΤΑΧΥΤΗΤΑΣ Α. ΕΝΑΛΛΑΚΤΙΚΗ ΥΛΟΠΟΙΗΣΗ ΤΕΛΕΣΤΙΚΟΥ ΕΝΙΣΧΥΤΗ Σε προηγούμενη άσκηση εξετάσαμε την λειτουργία του
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
Εργαστήριο Σ.Α.Ε. Ι. Το Σερβοσύστημα MS150. Υφαντής Α. Καρέλης Δ. Θεοχαράτος Χρ. Τσαγκάρης Β. Σουλιώτης Γ. Γιαννακόπουλος Κ. Ράπτης Π.
 Εργαστήριο Σ.Α.Ε. Ι Το Σερβοσύστημα MS150 Υφαντής Α. Καρέλης Δ. Θεοχαράτος Χρ. Τσαγκάρης Β. Σουλιώτης Γ. Γιαννακόπουλος Κ. Ράπτης Π. Σύστημα Αυτομάτου Ελέγχου Ελέγχεται η κατάσταση μιας διαδικασίας, π.χ.
Εργαστήριο Σ.Α.Ε. Ι Το Σερβοσύστημα MS150 Υφαντής Α. Καρέλης Δ. Θεοχαράτος Χρ. Τσαγκάρης Β. Σουλιώτης Γ. Γιαννακόπουλος Κ. Ράπτης Π. Σύστημα Αυτομάτου Ελέγχου Ελέγχεται η κατάσταση μιας διαδικασίας, π.χ.
2η Α Σ Κ Η Σ Η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ ΑΝΟΙΚΤΟ ΣΥΣΤΗΜΑ
 2η Α Σ Κ Η Σ Η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ ΑΝΟΙΚΤΟ ΣΥΣΤΗΜΑ Α. ΚΙΝΗΤΗΡΑΣ ΧΩΡΙΣ ΦΟΡΤΙΟ ΣΚΟΠΟΣ : Σκοπός της άσκησης είναι η χάραξη των χαρακτηριστικών ταχύτητας / εισόδου του D.C. κινητήρα με έλεγχο στο
2η Α Σ Κ Η Σ Η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ ΑΝΟΙΚΤΟ ΣΥΣΤΗΜΑ Α. ΚΙΝΗΤΗΡΑΣ ΧΩΡΙΣ ΦΟΡΤΙΟ ΣΚΟΠΟΣ : Σκοπός της άσκησης είναι η χάραξη των χαρακτηριστικών ταχύτητας / εισόδου του D.C. κινητήρα με έλεγχο στο
10 - ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ
 10 - ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Ηλεκτρική μηχανή ονομάζεται κάθε διάταξη η οποία μετατρέπει τη μηχανική ενεργεια σε ηλεκτρική ή αντίστροφα ή μετατρεπει τα χαρακτηριστικά του ηλεκτρικού ρεύματος. Οι ηλεκτρικες
10 - ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Ηλεκτρική μηχανή ονομάζεται κάθε διάταξη η οποία μετατρέπει τη μηχανική ενεργεια σε ηλεκτρική ή αντίστροφα ή μετατρεπει τα χαρακτηριστικά του ηλεκτρικού ρεύματος. Οι ηλεκτρικες
ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ AC ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΜΕΣΩ ΤΗΣ ΣΕΡΒΟΠΕΔΗΣ LUCAS NULLE
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΔΥΤΙΚΗΣ ΕΛΛΑΔΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ 1374 ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ AC ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΜΕΣΩ ΤΗΣ ΣΕΡΒΟΠΕΔΗΣ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΔΥΤΙΚΗΣ ΕΛΛΑΔΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ 1374 ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ AC ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΜΕΣΩ ΤΗΣ ΣΕΡΒΟΠΕΔΗΣ
Ανεξάρτητααπό τον τύπο του ρυθµιστή πρέπει να διαθέτει δυο κύρια χαρακτηριστικά: Ακρίβεια λειτουργίας Ευστάθεια
 ΡΥΘΜΙΣΤΕΣ ΣΤΡΟΦΩΝ Ανεξάρτητααπό τον τύπο του ρυθµιστή πρέπει να διαθέτει δυο κύρια χαρακτηριστικά: Ακρίβεια λειτουργίας Ευστάθεια Το πρώτο αναφέρεται σε µόνιµη λειτουργία δηλαδή σε σταθερές στροφές. Το
ΡΥΘΜΙΣΤΕΣ ΣΤΡΟΦΩΝ Ανεξάρτητααπό τον τύπο του ρυθµιστή πρέπει να διαθέτει δυο κύρια χαρακτηριστικά: Ακρίβεια λειτουργίας Ευστάθεια Το πρώτο αναφέρεται σε µόνιµη λειτουργία δηλαδή σε σταθερές στροφές. Το
Σύστημα. Θόρυβος. Σχήμα 1.1 Παράσταση ενός ανοιχτού συστήματος
 Ενότητα1: Εισαγωγή Σύστημα Σύστημα είναι ένα σύνολο φυσικών στοιχείων, πραγμάτων, ατόμων, μεγεθών ή εννοιών, που σχηματίζουν μιαν ενότητα και λειτουργούν ως μια ενότητα. Ένα σύστημα που επικοινωνεί με
Ενότητα1: Εισαγωγή Σύστημα Σύστημα είναι ένα σύνολο φυσικών στοιχείων, πραγμάτων, ατόμων, μεγεθών ή εννοιών, που σχηματίζουν μιαν ενότητα και λειτουργούν ως μια ενότητα. Ένα σύστημα που επικοινωνεί με
Έλεγχος Κίνησης ISL. Intelligent Systems Labοratory
 Έλεγχος Κίνησης ISL Intelligent Systems Labοratory 1 Ηέννοιατηςκίνησης "µηχανική κίνηση είναι η µεταβολή της θέσης ενός υλικού σηµείου στο χώρο" µηχανική κίνηση = θέση στο χώρο υλικό σηµείο = µάζα κίνηση
Έλεγχος Κίνησης ISL Intelligent Systems Labοratory 1 Ηέννοιατηςκίνησης "µηχανική κίνηση είναι η µεταβολή της θέσης ενός υλικού σηµείου στο χώρο" µηχανική κίνηση = θέση στο χώρο υλικό σηµείο = µάζα κίνηση
www.biofial.com www.biofial.gr
 Νοέµβριος 2013 Θεοχάρης Χ. ηµήτριος Μηχανολόγος Μηχανικός Α.Π.Θ. ιευθυντής Παραγωγής BIOFIAL HYDRAULICS Ενεργειακή απόδοση υδραυλικών ανελκυστήρων Πραγµατικότητα και προοπτικές Key Words: Υδραυλικός Ανελκυστήρας,
Νοέµβριος 2013 Θεοχάρης Χ. ηµήτριος Μηχανολόγος Μηχανικός Α.Π.Θ. ιευθυντής Παραγωγής BIOFIAL HYDRAULICS Ενεργειακή απόδοση υδραυλικών ανελκυστήρων Πραγµατικότητα και προοπτικές Key Words: Υδραυλικός Ανελκυστήρας,
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5. Ρυθμίζοντας τη Φορά Περιστροφής. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι
 ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι ΕΛΕΓΧΟΣ ΣΤΑΘΜΗΣ ΥΓΡΟΥ ΕΞΑΜΕΝΗΣ 1. ΠΕΡΙΓΡΑΦΗ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΙΑΤΑΞΗΣ Τα βασικά µέρη της εργαστηριακής διάταξης είναι κατασκευασµένα από την εταιρεία LUCAS-NULLE.
ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι ΕΛΕΓΧΟΣ ΣΤΑΘΜΗΣ ΥΓΡΟΥ ΕΞΑΜΕΝΗΣ 1. ΠΕΡΙΓΡΑΦΗ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΙΑΤΑΞΗΣ Τα βασικά µέρη της εργαστηριακής διάταξης είναι κατασκευασµένα από την εταιρεία LUCAS-NULLE.
Τμήμα Ηλεκτρολόγων Μηχανικών ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΡΟΠΗΣ ΤΑΧΥΤΗΤΑΣ ΕΠΑΓΩΓΙΚΩΝ ΚΙΝΗΤΗΡΩΝ
 Ένας που κατασκευάζεται ώστε να παρουσιάζει μεγάλη αντίσταση δρομέα η ροπή εκκίνησης του είναι αρκετά υψηλή αλλά το ίδιο υψηλή είναι και η ολίσθηση του στις κανονικές συνθήκες λειτουργίας Όμως επειδή Pconv=(1-s)PAG,
Ένας που κατασκευάζεται ώστε να παρουσιάζει μεγάλη αντίσταση δρομέα η ροπή εκκίνησης του είναι αρκετά υψηλή αλλά το ίδιο υψηλή είναι και η ολίσθηση του στις κανονικές συνθήκες λειτουργίας Όμως επειδή Pconv=(1-s)PAG,
9. ΕΛΕΓΧΟΣ ΑΛΛΗΛΕΠΙ ΡΑΣΗΣ ΜΕ ΤΟ ΠΕΡΙΒΑΛΛΟΝ. Εξετάζουµε διάφορα µοντέλα ελέγχου αλληλεπίδρασης του βραχίονα µε το περιβάλλον.
 9. ΕΛΕΓΧΟΣ ΑΛΛΗΛΕΠΙ ΡΑΣΗΣ ΜΕ ΤΟ ΠΕΡΙΒΑΛΛΟΝ 9.0 Εισαγωγικά Εξετάζουµε διάφορα µοντέλα ελέγχου αλληλεπίδρασης του βραχίονα µε το περιβάλλον. 9.1 Έλεγχος «Συµµόρφωσης» ή «Υποχωρητικότητας» (Comliance Control)
9. ΕΛΕΓΧΟΣ ΑΛΛΗΛΕΠΙ ΡΑΣΗΣ ΜΕ ΤΟ ΠΕΡΙΒΑΛΛΟΝ 9.0 Εισαγωγικά Εξετάζουµε διάφορα µοντέλα ελέγχου αλληλεπίδρασης του βραχίονα µε το περιβάλλον. 9.1 Έλεγχος «Συµµόρφωσης» ή «Υποχωρητικότητας» (Comliance Control)
Συγκρότηση εργαλειομηχανών CNC
 Συγκρότηση εργαλειομηχανών CNC Μετρητικές διατάξεις θέσης Αισθητήρες Επενεργητές Μηχανισμοί κίνησης Κινητήρες Γ.Βοσνιάκος-ΕΡΓΑΛΕΙΟΜΗΧΑΝΕΣ Συγκρότηση Εργαλειομηχανών CNC Άδεια Χρήσης Το παρόν υλικό υπόκειται
Συγκρότηση εργαλειομηχανών CNC Μετρητικές διατάξεις θέσης Αισθητήρες Επενεργητές Μηχανισμοί κίνησης Κινητήρες Γ.Βοσνιάκος-ΕΡΓΑΛΕΙΟΜΗΧΑΝΕΣ Συγκρότηση Εργαλειομηχανών CNC Άδεια Χρήσης Το παρόν υλικό υπόκειται
Έλεγχος Κίνησης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Αυτόματος Έλεγχος Συστημάτων Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Αυτόματος Έλεγχος Συστημάτων Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
Βασική Κατηγοριοποίηση Αισθητήρων Γιώργος Βασιλείου
 Βασική Κατηγοριοποίηση Αισθητήρων Γιώργος Βασιλείου Εισαγωγή Τι είναι οι αισθητήρες και ποιος ο ρόλος τους στα ρομπότ; Μετρούν μια φυσική ποσότητα. Μετατρέπουν σε σήμα που μπορεί να διαβαστεί από παρατηρητή
Βασική Κατηγοριοποίηση Αισθητήρων Γιώργος Βασιλείου Εισαγωγή Τι είναι οι αισθητήρες και ποιος ο ρόλος τους στα ρομπότ; Μετρούν μια φυσική ποσότητα. Μετατρέπουν σε σήμα που μπορεί να διαβαστεί από παρατηρητή
: Εισαγωγή στη Θεωρία και Τεχνολογία του Αυτοµάτου Ελέγχου
 2.3.08.6: Εισαγωγή στη Θεωρία και Τεχνολογία του Αυτοµάτου Ελέγχου Περιεχόµενα του Μαθήµατος Εισαγωγή, ιστορική αναδροµή Μαθηµατικά µοντέλα φυσικών συστηµάτων Συναρτήσεις µεταφοράς, πόλοι & µηδενιστές
2.3.08.6: Εισαγωγή στη Θεωρία και Τεχνολογία του Αυτοµάτου Ελέγχου Περιεχόµενα του Μαθήµατος Εισαγωγή, ιστορική αναδροµή Μαθηµατικά µοντέλα φυσικών συστηµάτων Συναρτήσεις µεταφοράς, πόλοι & µηδενιστές
Απαντήσεις Θεμάτων Τελικής Αξιολόγησης (Εξετάσεις Ιουνίου) στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 2013/2014, Ημερομηνία: 24/06/2014
 στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 2013/2014, Ημερομηνία: 24/06/2014") Θέμα ο Απαντήσεις Θεμάτων Τελικής Αξιολόγησης (Εξετάσεις Ιουνίου) στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 03/04, Ημερομηνία: 4/06/04 Σε μονοφασικό Μ/Σ ονομαστικής ισχύος 60kA, 300/30, 50Hz, ελήφθησαν
Θέμα ο Απαντήσεις Θεμάτων Τελικής Αξιολόγησης (Εξετάσεις Ιουνίου) στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 03/04, Ημερομηνία: 4/06/04 Σε μονοφασικό Μ/Σ ονομαστικής ισχύος 60kA, 300/30, 50Hz, ελήφθησαν
3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
 Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
1) Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι
 Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι") 1) Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι επιπτώσεις της 4) Μαθηματικό υπόβαθρο για την μελέτη των
1) Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι επιπτώσεις της 4) Μαθηματικό υπόβαθρο για την μελέτη των
3.6 Ευθεία και Αντίστροφη υναµική
 3.6 Ευθεία και Αντίστροφη υναµική Στη δυναµική µας απασχολούν δύο ειδών προβλήµατα, το ευθύ δυναµικό πρόβληµα και το αντίστροφο δυναµικό πρόβληµα. Το αντίστροφο πρόβληµα αφορά στον προσδιορισµό των ροπών
3.6 Ευθεία και Αντίστροφη υναµική Στη δυναµική µας απασχολούν δύο ειδών προβλήµατα, το ευθύ δυναµικό πρόβληµα και το αντίστροφο δυναµικό πρόβληµα. Το αντίστροφο πρόβληµα αφορά στον προσδιορισµό των ροπών
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444
 ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444.οργανωτικά Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Το βιβλίο Ned Mohan First course on Power Electronics
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444.οργανωτικά Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Το βιβλίο Ned Mohan First course on Power Electronics
Κεφάλαιο 5 Διασύνδεση Αναλογικών & Ψηφιακών Συστηµάτων
 Κεφάλαιο 5 Διασύνδεση Αναλογικών & Ψηφιακών Συστηµάτων Αναλογικές & Ψηφιακές Διατάξεις Control Systems Laboratory Τα διάφορα μεγέθη των φυσικών διεργασιών τα μετράμε με αισθητήρες που ουσιαστικά παρέχουν
Κεφάλαιο 5 Διασύνδεση Αναλογικών & Ψηφιακών Συστηµάτων Αναλογικές & Ψηφιακές Διατάξεις Control Systems Laboratory Τα διάφορα μεγέθη των φυσικών διεργασιών τα μετράμε με αισθητήρες που ουσιαστικά παρέχουν
Ψηφιακός Έλεγχος. 12 η διάλεξη Ψηφιακός έλεγχος τεχνητού χεριού. Ψηφιακός Έλεγχος 1
 Ψηφιακός Έλεγχος 1 η διάλεξη Ψηφιακός έλεγχος τεχνητού χεριού Ψηφιακός Έλεγχος 1 Θέλουμε να κάνουμε έλεγχο τεχντητού χεριού που πιάνει και μεταφέρει εύθραστα γυάλινα δοχεία διαφόρων μεγεθών. Ο στόχος είναι
Ψηφιακός Έλεγχος 1 η διάλεξη Ψηφιακός έλεγχος τεχνητού χεριού Ψηφιακός Έλεγχος 1 Θέλουμε να κάνουμε έλεγχο τεχντητού χεριού που πιάνει και μεταφέρει εύθραστα γυάλινα δοχεία διαφόρων μεγεθών. Ο στόχος είναι
Νεοπτόλεµος Γ. Τζέκας
 Αριστοτέλειο Πανεπιστήµιο Θεσσαλονίκης Πολυτεχνική Σχολή Τµήµα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών ΚΑΤΑΣΚΕΥΗ ΜΟΝΤΕΛΟΥ ΓΙΑ ΕΛΕΓΧΟ ΤΑΧΥΤΗΤΑΣ ΜΟΝΟΦΑΣΙΚOY ΕΠΑΓΩΓΙΚOY ΚΙΝΗΤΗΡA Νεοπτόλεµος Γ. Τζέκας
Αριστοτέλειο Πανεπιστήµιο Θεσσαλονίκης Πολυτεχνική Σχολή Τµήµα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών ΚΑΤΑΣΚΕΥΗ ΜΟΝΤΕΛΟΥ ΓΙΑ ΕΛΕΓΧΟ ΤΑΧΥΤΗΤΑΣ ΜΟΝΟΦΑΣΙΚOY ΕΠΑΓΩΓΙΚOY ΚΙΝΗΤΗΡA Νεοπτόλεµος Γ. Τζέκας
Γεφυρώνοντας τις ανάγκες των πελατών
 Γεφυρώνοντας τις ανάγκες των πελατών Οι κινούμενες γέφυρες έχουν πολλές κοινές απαιτήσεις ελέγχου με τις εφαρμογές διαχείρισης υλικών, όπως είναι οι γερανοί και τα βαρούλκα. Έχοντας αυτό ως δεδομένο, το
Γεφυρώνοντας τις ανάγκες των πελατών Οι κινούμενες γέφυρες έχουν πολλές κοινές απαιτήσεις ελέγχου με τις εφαρμογές διαχείρισης υλικών, όπως είναι οι γερανοί και τα βαρούλκα. Έχοντας αυτό ως δεδομένο, το
Συλλογή μεταφορά και έλεγχος Δεδομένων. ΕΙΣΑΓΩΓΗ (μέρος 1 ο ) Γ Ηλ/κών Τεχνικοί Υπολογιστικών Συστημάτων και Δικτύων
 Γ Ηλ/κών Τεχνικοί Υπολογιστικών Συστημάτων και Δικτύων") Συλλογή μεταφορά και έλεγχος Δεδομένων ΕΙΣΑΓΩΓΗ (μέρος 1 ο ) Γ Ηλ/κών Τεχνικοί Υπολογιστικών Συστημάτων και Δικτύων ΣΚΟΠΟΣ ΤΟΥ ΚΕΦΑΛΑΙΟΥ ΜΑΘΗΣΙΑΚΟΙ ΣΤΟΧΟΙ Σκοπός του κεφαλαίου είναι η εισαγωγή στην έννοια
Συλλογή μεταφορά και έλεγχος Δεδομένων ΕΙΣΑΓΩΓΗ (μέρος 1 ο ) Γ Ηλ/κών Τεχνικοί Υπολογιστικών Συστημάτων και Δικτύων ΣΚΟΠΟΣ ΤΟΥ ΚΕΦΑΛΑΙΟΥ ΜΑΘΗΣΙΑΚΟΙ ΣΤΟΧΟΙ Σκοπός του κεφαλαίου είναι η εισαγωγή στην έννοια
e.mail: e.mitronikas@ee.upatras.gr, a.n.safacas@ee.upatras.gr
 ΕΞΕΛΙΞΕΙΣ ΣΤΗΝ ΤΕΧΝΟΛΟΓΙΑ ΤΩΝ ΚΙΝΗΤΗΡΩΝ ΜΙΚΡΗΣ ΚΑΙ ΕΛΑΧΙΣΤΗΣ ΙΣΧΥΟΣ Ε. Μητρονίκας, Λέκτορας, Α. Σαφάκας, Καθηγητής Πανεπιστήµιο Πατρών Τµήµα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Εργαστήριο
ΕΞΕΛΙΞΕΙΣ ΣΤΗΝ ΤΕΧΝΟΛΟΓΙΑ ΤΩΝ ΚΙΝΗΤΗΡΩΝ ΜΙΚΡΗΣ ΚΑΙ ΕΛΑΧΙΣΤΗΣ ΙΣΧΥΟΣ Ε. Μητρονίκας, Λέκτορας, Α. Σαφάκας, Καθηγητής Πανεπιστήµιο Πατρών Τµήµα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Εργαστήριο
Ανύψωση τάσης στην έξοδο της γεννήτριας παραγωγής. Υποβιβασμός σε επίπεδα χρησιμοποίησης. Μετατροπή υψηλής τάσης σε χαμηλή με ρεύματα χαμηλής τιμής
 Είδη μετασχηματιστών Μετασχηματιστές Ισχύος Μετασχηματιστές Μονάδος Ανύψωση τάσης στην έξοδο της γεννήτριας παραγωγής Μετασχηματιστές Υποσταθμού Υποβιβασμός σε επίπεδα διανομής Μετασχηματιστές Διανομής
Είδη μετασχηματιστών Μετασχηματιστές Ισχύος Μετασχηματιστές Μονάδος Ανύψωση τάσης στην έξοδο της γεννήτριας παραγωγής Μετασχηματιστές Υποσταθμού Υποβιβασμός σε επίπεδα διανομής Μετασχηματιστές Διανομής
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 1 η : Εισαγωγή
 Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 1 η : Εισαγωγή Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΒΙΟΜΗΧΑΝΙΚΟΥ ΣΧΕΔΙΑΣΜΟΥ ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 1 η : Εισαγωγή Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΒΙΟΜΗΧΑΝΙΚΟΥ ΣΧΕΔΙΑΣΜΟΥ ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Ν. Κυρτάτος, Καθηγητής ΕΜΠ, Δ/ντής ΕΝΜ, Γ. Παπαλάμπρου, Λέκτορας ΕΜΠ, Σ. Τοπάλογλου, ΥΔ ΣΝΜΜ/ΕΜΠ
 Η ΝΕΑ ΜΕΓΑΛΗ ΠΕΙΡΑΜΑΤΙΚΗ ΚΛΙΝΗ ΔΟΚΙΜΩΝ ΥΒΡΙΔΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΠΡΟΩΣΗΣ ΠΛΟΙΩΝ ΜΕ ΘΕΡΜΙΚΟΥΣ ΚΑΙ ΗΛΕΚΤΡΙΚΟΥΣ ΚΙΝΗΤΗΡΕΣ ΚΑΙ ΣΥΣΤΗΜΑ ΑΠΟΡΡΥΠΑΝΣΗΣ ΚΑΥΣΑΕΡΙΩΝ, ΤΟΥ ΕΡΓΑΣΤΗΡΙΟΥ ΝΑΥΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ ΕΜΠ Ν. Κυρτάτος,
Η ΝΕΑ ΜΕΓΑΛΗ ΠΕΙΡΑΜΑΤΙΚΗ ΚΛΙΝΗ ΔΟΚΙΜΩΝ ΥΒΡΙΔΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΠΡΟΩΣΗΣ ΠΛΟΙΩΝ ΜΕ ΘΕΡΜΙΚΟΥΣ ΚΑΙ ΗΛΕΚΤΡΙΚΟΥΣ ΚΙΝΗΤΗΡΕΣ ΚΑΙ ΣΥΣΤΗΜΑ ΑΠΟΡΡΥΠΑΝΣΗΣ ΚΑΥΣΑΕΡΙΩΝ, ΤΟΥ ΕΡΓΑΣΤΗΡΙΟΥ ΝΑΥΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ ΕΜΠ Ν. Κυρτάτος,
Δυναμική Ηλεκτρικών Μηχανών
 Δυναμική Ηλεκτρικών Μηχανών Ενότητα 1: Εισαγωγή Βασικές Αρχές Επ. Καθηγήτρια Τζόγια Χ. Καππάτου Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται
Δυναμική Ηλεκτρικών Μηχανών Ενότητα 1: Εισαγωγή Βασικές Αρχές Επ. Καθηγήτρια Τζόγια Χ. Καππάτου Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται
Αυτά τα πειράµατα έγιναν από τους Michael Faraday και Joseph Henry.
 Επαγόµενα πεδία Ένα µαγνητικό πεδίο µπορεί να µην είναι σταθερό, αλλά χρονικά µεταβαλλόµενο. Πειράµατα που πραγµατοποιήθηκαν το 1831 έδειξαν ότι ένα µεταβαλλόµενο µαγνητικό πεδίο µπορεί να επάγει ΗΕΔ σε
Επαγόµενα πεδία Ένα µαγνητικό πεδίο µπορεί να µην είναι σταθερό, αλλά χρονικά µεταβαλλόµενο. Πειράµατα που πραγµατοποιήθηκαν το 1831 έδειξαν ότι ένα µεταβαλλόµενο µαγνητικό πεδίο µπορεί να επάγει ΗΕΔ σε
ÏÅÖÅ. Α. 3. Στις οπτικοηλεκτρονικές διατάξεις δεν ανήκει: α. η δίοδος laser β. το τρανζίστορ γ. η φωτοδίοδος δ. η δίοδος φωτοεκποµπής LED Μονάδες 5
 Επαναληπτικά Θέµατα ΟΕΦΕ 007 Γ ΛΥΚΕΙΟΥ ΤΕΧΝΟΛΟΓΙΚΗ ΚΑΤΕΥΘΥΝΣΗ ΗΛΕΚΤΡΟΛΟΓΙΑ ΟΜΑ Α Α Για τις παρακάτω προτάσεις Α. έως και Α.4 να γράψετε στο τετράδιό σας τον αριθµό της πρότασης και δίπλα σε κάθε αριθµό
Επαναληπτικά Θέµατα ΟΕΦΕ 007 Γ ΛΥΚΕΙΟΥ ΤΕΧΝΟΛΟΓΙΚΗ ΚΑΤΕΥΘΥΝΣΗ ΗΛΕΚΤΡΟΛΟΓΙΑ ΟΜΑ Α Α Για τις παρακάτω προτάσεις Α. έως και Α.4 να γράψετε στο τετράδιό σας τον αριθµό της πρότασης και δίπλα σε κάθε αριθµό
Πανεπιστήµιο Κύπρου. Τµήµα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών. ΗΜΥ 100 Εισαγωγή στην Τεχνολογία
 Πανεπιστήµιο Κύπρου Τµήµα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών ΗΜΥ 100 Εισαγωγή στην Τεχνολογία Εισαγωγή στις Ηλεκτρικές Μηχανές Ο κινητήρας συνεχούς ρεύµατος µε διέγερση σειράς Σκοποί: Η εύρεση
Πανεπιστήµιο Κύπρου Τµήµα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών ΗΜΥ 100 Εισαγωγή στην Τεχνολογία Εισαγωγή στις Ηλεκτρικές Μηχανές Ο κινητήρας συνεχούς ρεύµατος µε διέγερση σειράς Σκοποί: Η εύρεση
ΚΕΦΑΛΑΙΟ ΕΝΙΣΧΥΤΗΣ ΚΟΙΝΟΥ ΣΥΛΛΕΚΤΗ ΑΚΟΛΟΥΘΗΤΗΣ ΤΑΣΗΣ
 ΚΕΦΑΛΑΙΟ 4 41 ΕΝΙΣΧΥΤΗΣ ΚΟΙΝΟΥ ΣΥΛΛΕΚΤΗ ΑΚΟΛΟΥΘΗΤΗΣ ΤΑΣΗΣ Η συνδεσµολογία κοινού συλλέκτη φαίνεται στο σχήµα 41 Αν σχηµατίσουµε το ac ισοδύναµο θα δούµε ότι ο συλλέκτης συνδέεται στη γη και αποτελεί κοινό
ΚΕΦΑΛΑΙΟ 4 41 ΕΝΙΣΧΥΤΗΣ ΚΟΙΝΟΥ ΣΥΛΛΕΚΤΗ ΑΚΟΛΟΥΘΗΤΗΣ ΤΑΣΗΣ Η συνδεσµολογία κοινού συλλέκτη φαίνεται στο σχήµα 41 Αν σχηµατίσουµε το ac ισοδύναµο θα δούµε ότι ο συλλέκτης συνδέεται στη γη και αποτελεί κοινό
ΠΛΗΡΗΣΑΥΤΟΜΑΤΟΠΟΙΗΣΗ ΣΤΗ ΝΑΥΤΙΚΗ ΤΕΧΝΟΛΟΓΙΑ. Η εργασία του µελλοντικού µηχανικού
 ΠΛΗΡΗΣΑΥΤΟΜΑΤΟΠΟΙΗΣΗ ΣΤΗ ΝΑΥΤΙΚΗ ΤΕΧΝΟΛΟΓΙΑ Controls Bearing Seal H ΣΥΓΧΡΟΝΗ ΦΙΛΟΣΟΦΙΑ ΕΛΕΓΧΟΥ ΜΗΧΑΝΩΝ Bowthruster St. Thruster E-Thruster Waterjets FPP CPP 1 2 Η εργασία του µελλοντικού µηχανικού ΣΑΕ
ΠΛΗΡΗΣΑΥΤΟΜΑΤΟΠΟΙΗΣΗ ΣΤΗ ΝΑΥΤΙΚΗ ΤΕΧΝΟΛΟΓΙΑ Controls Bearing Seal H ΣΥΓΧΡΟΝΗ ΦΙΛΟΣΟΦΙΑ ΕΛΕΓΧΟΥ ΜΗΧΑΝΩΝ Bowthruster St. Thruster E-Thruster Waterjets FPP CPP 1 2 Η εργασία του µελλοντικού µηχανικού ΣΑΕ
Ιατρικά Ηλεκτρονικά. Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε
 Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/courses/tio127/ https://eclass.teiath.gr/courses/tio101/
Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/courses/tio127/ https://eclass.teiath.gr/courses/tio101/
Συστήµατα DAQ. 6.1 Εισαγωγή
 6 Συστήµατα DAQ 6.1 Εισαγωγή Με τον όρο Acquisition (Απόκτηση) περιγράφουµε τον τρόπο µε τον οποίο µεγέθη όπως η πίεση, η θερµοκρασία, το ρεύµα µετατρέπονται σε ψηφιακά δεδοµένα και απεικονίζονται στην
6 Συστήµατα DAQ 6.1 Εισαγωγή Με τον όρο Acquisition (Απόκτηση) περιγράφουµε τον τρόπο µε τον οποίο µεγέθη όπως η πίεση, η θερµοκρασία, το ρεύµα µετατρέπονται σε ψηφιακά δεδοµένα και απεικονίζονται στην
3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
 Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Έλεγχος Κίνησης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Εισαγωγή στον Έλεγχο Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Εισαγωγή στον Έλεγχο Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΡΕΥΝΗΤΙΚΟ ΕΡΩΤΗΜΑ:ΠΩΣ ΕΠΙΔΡΑ Η ΡΟΜΠΟΤΙΚΗ ΣΤΗ ΒΙΟΜΗΧΑΝΙΑ; ΒΙΟΜΗΧΑΝΙΚΑ ΡΟΜΠΟΤ ΚΑΙ ΕΞΟΙΚΟΝΟΜΙΣΗ ΕΝΕΡΓΕΙΑΣ
 ΕΡΕΥΝΗΤΙΚΗ ΟΜΑΔΑ: REPLETE ΜΕΛΟΣ ΟΜΑΔΑΣ: ΤΑΣΙΑΝΗ ΦΛΩΡΕΝΤΙΑ ΕΡΕΥΝΗΤΙΚΟ ΕΡΩΤΗΜΑ:ΠΩΣ ΕΠΙΔΡΑ Η ΡΟΜΠΟΤΙΚΗ ΣΤΗ ΒΙΟΜΗΧΑΝΙΑ; ΤΕΤΡΑΜΗΝΟ: Α ΒΙΟΜΗΧΑΝΙΚΑ ΡΟΜΠΟΤ ΚΑΙ ΕΞΟΙΚΟΝΟΜΙΣΗ ΕΝΕΡΓΕΙΑΣ Η ανάπτυξη της τεχνολογίας
ΕΡΕΥΝΗΤΙΚΗ ΟΜΑΔΑ: REPLETE ΜΕΛΟΣ ΟΜΑΔΑΣ: ΤΑΣΙΑΝΗ ΦΛΩΡΕΝΤΙΑ ΕΡΕΥΝΗΤΙΚΟ ΕΡΩΤΗΜΑ:ΠΩΣ ΕΠΙΔΡΑ Η ΡΟΜΠΟΤΙΚΗ ΣΤΗ ΒΙΟΜΗΧΑΝΙΑ; ΤΕΤΡΑΜΗΝΟ: Α ΒΙΟΜΗΧΑΝΙΚΑ ΡΟΜΠΟΤ ΚΑΙ ΕΞΟΙΚΟΝΟΜΙΣΗ ΕΝΕΡΓΕΙΑΣ Η ανάπτυξη της τεχνολογίας
ΗλιακοίΣυλλέκτες. Γιάννης Κατσίγιαννης
 ΗλιακοίΣυλλέκτες Γιάννης Κατσίγιαννης Ηλιακοίσυλλέκτες Ο ηλιακός συλλέκτης είναι ένα σύστηµα που ζεσταίνει συνήθως νερό ή αέρα χρησιµοποιώντας την ηλιακή ακτινοβολία Συνήθως εξυπηρετεί ανάγκες θέρµανσης
ΗλιακοίΣυλλέκτες Γιάννης Κατσίγιαννης Ηλιακοίσυλλέκτες Ο ηλιακός συλλέκτης είναι ένα σύστηµα που ζεσταίνει συνήθως νερό ή αέρα χρησιµοποιώντας την ηλιακή ακτινοβολία Συνήθως εξυπηρετεί ανάγκες θέρµανσης
Συστήματα Αυτομάτου Ελέγχου-Εργαστήριο
 4.6.4. Γενική Περιγραφή Σεναρίου Γνωστικό αντικείμενο: Συστήματα Αυτομάτου Ελέγχου (ΣΑΕ)- Σερβομηχανισμός MS150 - Κινητήρας συνεχούς ρεύματος» με ανατροφοδότηση Θεματική ταξινομία: Εξάμηνο: 8 Περιόδου:
4.6.4. Γενική Περιγραφή Σεναρίου Γνωστικό αντικείμενο: Συστήματα Αυτομάτου Ελέγχου (ΣΑΕ)- Σερβομηχανισμός MS150 - Κινητήρας συνεχούς ρεύματος» με ανατροφοδότηση Θεματική ταξινομία: Εξάμηνο: 8 Περιόδου:
ΠΕΡΙΕΧΟΜΕΝΑ ΚΕΦΑΛΑΙΟ I: ΕΙΣΑΓΩΓΗ ΣΤΑ ΗΛΕΚΤΡΟΝΙΚΑ
 ΠΕΡΙΕΧΟΜΕΝΑ ΚΕΦΑΛΑΙΟ I: ΕΙΣΑΓΩΓΗ ΣΤΑ ΗΛΕΚΤΡΟΝΙΚΑ 1.1 ΕΙΣΑΓΩΓΗ ΣΤΑ ΑΝΑΛΟΓΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ 1 1.1.1 Αναλογικά σήματα 1 1.1.2 Οι αντιστάσεις 3 1.1.3 Οι πυκνωτές 7 1.1.4 Τα πηνία 11 1.1.5 Οι δίοδοι 13 1.1.6
ΠΕΡΙΕΧΟΜΕΝΑ ΚΕΦΑΛΑΙΟ I: ΕΙΣΑΓΩΓΗ ΣΤΑ ΗΛΕΚΤΡΟΝΙΚΑ 1.1 ΕΙΣΑΓΩΓΗ ΣΤΑ ΑΝΑΛΟΓΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ 1 1.1.1 Αναλογικά σήματα 1 1.1.2 Οι αντιστάσεις 3 1.1.3 Οι πυκνωτές 7 1.1.4 Τα πηνία 11 1.1.5 Οι δίοδοι 13 1.1.6
ΚΑΤΑΣΚΕΥΗ ΜΕ ΧΡΗΣΗ Η/Υ Computer Aided Manufacturing - CAM) Οφέλη
 Οφέλη") ΚΑΤΑΣΚΕΥΗ ΜΕ ΧΡΗΣΗ Η/Υ Computer Aided Manufacturing - CAM) Οφέλη 1. Ο άµεσος και εύκολα µεταβαλλόµενος έλεγχος µέσω Η/Υ των διαφόρων οµάδων αυτόµατων µηχανών. 2. Αυξηµένη παραγωγικότητα λόγω καλύτερης
ΚΑΤΑΣΚΕΥΗ ΜΕ ΧΡΗΣΗ Η/Υ Computer Aided Manufacturing - CAM) Οφέλη 1. Ο άµεσος και εύκολα µεταβαλλόµενος έλεγχος µέσω Η/Υ των διαφόρων οµάδων αυτόµατων µηχανών. 2. Αυξηµένη παραγωγικότητα λόγω καλύτερης
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444
 ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 ΕΛΕΓΧΟΣ ΚΙΝΗΤΗΡΩΝ DC ΚΑΙ AC ΣΥΣΤΗΜΑΤΑ ΑΔΙΑΛΕΙΠΤΗΣ ΠΑΡΟΧΗΣ Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέματα
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 ΕΛΕΓΧΟΣ ΚΙΝΗΤΗΡΩΝ DC ΚΑΙ AC ΣΥΣΤΗΜΑΤΑ ΑΔΙΑΛΕΙΠΤΗΣ ΠΑΡΟΧΗΣ Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέματα
Ποιότητα Ηλεκτρικής Ενέργειας. Φίλτρα Αρµονικών Ρεύµατος
 Ποιότητα Ηλεκτρικής Ενέργειας Φίλτρα Αρµονικών Ρεύµατος Γενικά Προβλήµατα που δηµιουργούν οι αρµονικές Μείωση του cosφ Αυξηµένες απώλειες στα καλώδια Συντονισµός-Καταστροφή πυκνωτών και µετασχηµατιστών
Ποιότητα Ηλεκτρικής Ενέργειας Φίλτρα Αρµονικών Ρεύµατος Γενικά Προβλήµατα που δηµιουργούν οι αρµονικές Μείωση του cosφ Αυξηµένες απώλειες στα καλώδια Συντονισµός-Καταστροφή πυκνωτών και µετασχηµατιστών