TRANSPORTO PRIEMONIŲ DINAMIKA
|
|
|
- Παναγιωτάκης Βονόρτας
- 6 χρόνια πριν
- Προβολές:
Transcript


1 Marijonas Bogdevičius RANSPORO PRIEMONIŲ DINAMIKA Projekto kodas VP-.-ŠMM 7-K--3 Studijų programų atnaujinimas pagal ES reikalavimus, gerinant studijų kokybę ir taikant inovatyvius studijų metodus Vilnius echnika
2 VilniAUS GEDIMINO ECHNIKOS UNIVERSIEAS Marijonas Bogdevičius RANSPORO PRIEMONIŲ DINAMIKA Mokomoji knyga Vilnius echnika
3 M. Bogdevičius. ransporto priemonių dinamika: mokomoji knyga. Vilnius: echnika,, 5 p. [4,4 aut. l. 9 6] Knygoje pateikta transporto priemonių klasifikavimas, pagrindinės sąvokos ir apibrėžimai bei transporto priemonių istorijos fragmentai, trumpai supažindinama su Lietuvos ir pasaulio automobilių inžinierių organizacijomis bei studentų galimybėmis įsijungti į šių organizacijų veiklas. Pagrindinis dėmesys skiriamas transporto priemonių judėjimo tyrimų metodams, dinaminių modelių generavimui bei judėjimo lygčių išvedimo metodams, kurių žinojimas yra būtinas, norint įgyti išsamias žinias apie transporto priemonių judėjimo dėsningumus. Nemažas dėmesys skiriamas sausumos transporto kelių charakteristikoms, jų nustatymo metodams, komfortabilumo problemoms. Išsamiai išdėstomi šiuolaikiniai automobilio rato ir kelio sąveikos tyrimo metodai, pateikti šios sąveikos tyrimų rezultatai. Supažindinama su geležinkelio aširačio sąveikos su bėgiu tyrimo metodai, pateikti šios sąveikos tyrimų rezultatai. Knyga skirta transporto inžinerijos specialistams, bakalaurantams, magistrantams bei doktorantams. Ji gali būti naudinga ir kitų sričių specialistams. Leidinį rekomendavo VGU ransporto inžinerijos fakulteto studijų komitetas Recenzavo: Doc. dr. Jolanta Janutėnienė, Klaipėdos universitetas Doc. Dr. Olegas Prentkovskis, Vilniaus Gedimino technikos universitetas Leidinys parengtas ir išleistas už Europos struktūrinių fondų lėšas, jomis finansuojant VGU ransporto inžinerijos, Biomechanikos ir Aviacinės mechanikos inžinerijos projektą Studijų programų atnaujinimas pagal ES reikalavimus, gerinant studijų kokybę ir taikant inovatyvius studijų metodus pagal Lietuvos 7 3 m. Žmogiškųjų išteklių veiksmų programos prioriteto Mokymasis visą gyvenimą VP-.-ŠMM-7-K priemonę Studijų kokybės gerinimas, tarptautiškumo didinimas. Projekto kodas Nr. VP-.-ŠMM 7-K--3, finansavimo ir administravimo sutartis Nr. VP-.-ŠMM-7-K--3. VGU leidyklos ECHNIKA 393-S mokomosios metodinės literatūros knyga Redaktorė Stasė Simutytė Maketuotoja Daiva Šepetauskaitė eisbn doi:.3846/393-s Marijonas Bogdevičius, Vilniaus Gedimino technikos universitetas,
4 urinys. Pagrindinės sąvokos ir apibrėžimai. Istorijos fragmentai Pagrindinės sąvokos ir apibrėžimai ransporto priemonių klasifikavimas ransporto priemonių istorijos fragmentai Lietuvos ir pasaulio automobilių inžinierių organizacijos ransporto priemonių judėjimo tyrimo metodai Koordinačių sistemos Funkcijos skleidimas Furjė ir eiloro eilute Kūno pasukimas erdvėje Matricos tikrinės reikšmės ir vektoriai Harmoninė analizė Atsitiktiniai stacionarūs priverstiniai virpesiai ransporto priemonių dinaminių modelių elementai ir judėjimo lygtys ransporto priemonės dinaminis modelis Kūno ir kūnų sistemos masių inercijos momentai Jėgų klasifikacija amprieji elementai, standumo jėgos ir jėgų momentai ampriųjų elementų jungimas Slopinimo elementai, slopinimo jėgos ir momentai Slopinimo elementų jungimas Kūno judėjimo lygčių užrašymo būdai D Alambero ir Lagranžo lygtys Niutono ir Oilerio lygčių sistema Hamiltono principas Dviejų kūnų sujungimo tampriuoju ir slopinimo elementais, standumo ir slopinimo matricos Sausumos transporto kelių charakteristikos. Komfortabilumas Automobilių kelių nelygumai, jų charakteriskos Automobilio kelių nelygumų generavimo būdai Geležinkelio nelygumai, jų charakteristikos ir nelygumų generavimo būdai Virpesių poveikis žmogaus organizmui Literatūra
5 5. Automobilio rato sąveika su keliu Padanga ir jos sandara Padangos kontakte veikiančios jėgos ir momentai Padangos modeliai Lugre padangos modelis Paceikos modelis HSRI modelis Dugofo modelis Elastingos padangos modelis Kiti padangos modeliai... 9 Penkto skyriaus literatūra Geležinkelio aširačio sąveikos su bėgiu teorijos Herco ir Kalkerio teorija Euristinis netiesinis modelis Miulerio modelis Kitos aširačio sąveikos su bėgiu teorijos... Šešto skyriaus literatūra
6 . Pagrindinės sąvokos ir apibrėžimai. Istorijos fragmentai.. Pagrindinės sąvokos ir apibrėžimai Analizė - analizė (kredito ir finansų įstaigos) tyrimas, kruopštus aplinkybių bei priežastinių ryšių nustatymas. Analizė (gr.ανάλυση, iš sen. gr. veiksmaž. άναλύειν išskaidyti ) vieningas sistematinis tyrimas, kurio metu objektas arba subjektas skaidomas į atskiras dalis, o šios yra tiriamos, tvarkomos, rūšiuojamos. Dinamika mechanikos dalis, kurioje nagrinėjamos kūnų judėjimo greičio kitimo priežastys. Pagrindiniai klasikinės dinamikos principai buvo suformuluoti tik 687 m., kai pasirodė garsus Niutono dėsnių veikalas Philosophiae Naturalis Principia Mathematica (Matematiniai gamtos filosofijos pagrindai) [Vikipedija]. Dinaminė sistema sistema, sudaryta iš materialiųjų kūnų, kurie gali keisti savo padėtį ervėje ir laike. Ratas įrenginys, skirtas sukamąjį judesį pakeisti į slenkamąjį judėsį. ransporto priemonė techninis įtaisas arba gyvūnas, skirtas kroviniams (keleiviams, medžiagoms, įrenginiams, įvairioms prekėms ir kt.) vežti [Vikipedija]. Dinaminis modelis schema, kurioje nurodomos kūnų inercinės charakteristikos (masės, masių inercijos momentai), veikiančios išorinės jėgos, pagrindiniai matmenys, tamprūs ir pasipriešinimo elementai ir kiti dyždžiai, kurie padeda suprasti dinaminės sistemos judėjimo priežastis ir padeda išvesti judėjimo lygtis. Matematinis modelis matematinių objektų (lygtys, integralai, matricos, vektoriai ir kt.) rinkinys, kuriuo galima matematiškai aprašyti tyrimo objektą. ransporto priemonės stabilumas transporto priemonės gebėjimas sugrįžti į pradinę judėjimo trajektoriją, atlikus staigų nukrypimą nuo judėjimo trajektorijos. 5
7 Ratų suvedimas atstumas tarp ratų užpakalinių briaunų, minus atstumas tarp priekinių briaunų. Ratų išvirtimas kampas tarp vertikalės ir automobilio rato sukimosi plokštumos, kuris laikomas neigiamu, jei ratai viršutine puse nukreipti į vidų, arba teigiamu, jei viršutine puse į išorę. Kasteris kampas tarp vertikalės ir rato sukimosi išilginėje automobilio plokštumoje ašies projekcijos. ransporto priemonės (P) dinamika nagrinėja P pagreitėjimą, stabdymą, svyravimus veikiant išoriniams ir vidiniams veiksniams (jėgoms ir jėgų momentams), keleivių komfortabilumo sąlygas, P atskirų mazgų dinaminius ir hidrodinaminius procesus, važiuoklės sąveiką su kelio paviršiumi, P stabilumą. Svarbiausi P dinamikos tyrimo atvejai pateikti. lentelėje.. lentelė. ransporto priemonės dinamikos atskiri atvejai P dinamikos P judėjimo ypatumas tipas Dinaminis procesas. Išilginė dinamika Važiavimas ir stabdymas. Šoninė dinamika (vingiavimas) Vairavimas posūkyje, nesimetriškas važiavimas, nesimetriškas stabdymas 6


8 . lentelės pabaiga 3. Vertikali dinamika Kelio paviršiaus nelygumai, padangos, pakabos dinamika 4. Vertikalus svyravimas Važiavimas per nelygų kelio paviršių 5. Išilginis svyravimas Važiavimas, stabdymas, pasvirimo gradientas 6. Ratų judėjimo dinamika Važiavimas, stabdymas, sukinėjimas 7
9 .. ransporto priemonių klasifikavimas ransporto priemonė techninis įtaisas arba gyvūnas, skirtas kroviniams (keleiviams, medžiagoms, įrenginiams, įvairoms prekėms ir kt.) vežti [Vikipedija]. ransporto priemonės skirstomos įvairiai pagal aplinką, kurioje keliauja, pagal variklio buvimą ir jo tipą, pagal kitus konstrukcinius ypatumus. Sausumos transporto priemonės: Naudojančios aplinkos energiją Burinės rogės, buriniai vežimėliai Naudojančios gyvūnus Nešuliniai gyvuliai Jojamieji gyvūnai Gyvulių tempiami vežimai ir rogės Arklinis tramvajus Naudojančios žmogaus energiją Pasispiriamos ir kitos, nenaudojančios pavarų ir pan. mechanizmų Paspirtukai Riedlentės Riedučiai Naudojančios pavaras ir pan. mechanines priemones Dviračiai (dviračiai, triračiai) Velomobiliai Rankinės drezinos Naudojančios variklius Ratinės bėgių Būna su garo mašinomis, vidaus degimo varikliais, elektros varikliais. Lokomotyvai (garvežys, motorvežis, elektrovežis) Drezinos ramvajus 8
10 Ratinės kelių ir bekelės Su vidaus degimo varikliais ir pan. varikliais (turbinomis) Motoriniai dviračiai ir mopedai Motociklai Automobiliai lengvieji automobiliai sunkvežimiai autobusai ir mikroautobusai vilkikai Ratiniai traktoriai Su elektros varikliais roleibusai Elektromobiliai Vikšrinės Sniegaeigiai Vikšriniai traktoriai Vikšriniai visureigiai ankai Kitokios Aerorogės Liftai ir keltuvai Konvejeriai Vamzdynai (vandentiekis, naftotiekiai, dujotiekiai ir kt.) Upių ir jūrų transporto priemonės: Naudojančios aplinkos energiją Plaustai ir sieliai Banglentės Burlentės, burinės valtys ir buriniai laivai Naudojančios žmogaus energiją Irklinės valtys ir irkliniai laivai Naudojančios variklius Garlaiviai ir kitokie grimzliniai laivai Povandeniniai laivai, batiskafai 9
11 Laivai su povandeniniais sparnais Laivai su oro pagalve Ekranoplanai Oro transporto priemonės: Naudojančios aplinkos energiją Oro balionai Parašiutai Skraidyklės Sklandytuvai Naudojančios variklius Dirižabliai Sraigtasparniai Autožyrai Lėktuvai Raketos Kosminio transporto priemonės Kosminiai laivai Dirbtiniai palydovai Kosminis liftas.3. ransporto priemonių istorijos fragmentai Pagrindiniai klasikinės dinamikos principai buvo suformuluoti tik 687 m., kai pasirodė garsus Niutono dėsnių veikalas Philosophiae Naturalis Principia Mathematica (Matematiniai gamtos filosofijos pagrindai) [Vikipedija]. Lietuvos Niutonas, taip galima pavadinti Kazimierą Simonavičių [žr. Vikipedija]. Kazimieras Simonavičius (kartais Kazimieras Semenavičius, lenkų kalba Kazimierz Siemienowicz; apie 6 m. balandžio 8 d. apie 65) artilerijos inžinierius, raketų išradėjas, Lietuvos Didžiosios Kunigaikštystės bajoras ir karininkas. 65 m. Amsterdame Kazimieras Simonavičius išleido veikalą Didysis artilerijos menas (lot. Artis Magnae Artilleriae Pars prima),
: skyrius skirtas patrankų kalibrui, jų konstrukcijai ir pritaikymui skyriuje nagrinėjama parako ir kitų")
12 kuris greitai išgarsėjo visoje Europoje. ai pirmoji pasaulyje knyga, pateikusi daugiapakopės raketos ir raketinės artilerijos sukūrimo teoriją bei brėžinius. Veikalą sudarė 5 skyriai (iš viso 35 puslapiai teksto ir 6 iliustracijos, brėžiniai): skyrius skirtas patrankų kalibrui, jų konstrukcijai ir pritaikymui skyriuje nagrinėjama parako ir kitų artilerijoje naudojamų medžiagų technologija 3 skyrius Apie raketas įdomiausias ir vertingiausias, aprašantis svarbiausius atradimus raketos aukščio ir jos reak tyvinės tūtos pločio santykį, daugiapakopę raketą, raketų stabilizavimą sparneliais, raketų bateriją (lygiagrečiojo jungimo daugiapakopę raketą). Aprašoma daugiau kaip paraku užtaisomų raketų pavyzdžių, jų gamyba ir savybės. Svarbu yra tai, kad K.Simonavičius aprašymuose viską grindė matematiniais skaičiavimais ir fizikos dėsniais 4 ir 5 skyriai, kuriuose apibendrinti karo ir pramogai skirtos pirotechnikos laimėjimai. K. Simonavičiaus aprašyta daugiapakopė raketa. pav. Lietuvos banko išleista proginė 5 litų sidabrinė moneta, skirta paminėti K. Simonavičiaus knygos Didysis artilerijos menas 35-ąsias metines, ir daugiapakopė raketa



13 Vienas didžiausių žmonių išradimų yra rato išradimas.





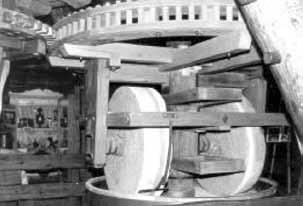
14 . pav. Ratų vystymosi raida [Holzspeichenräder (Benz-Viktoria-Wagen; 893)] 3

, kuris pervežė apie 4 keleivių, vidutinis greitis km/val. (.4 pav.")
15 88 m. Hancock sukūrė transporto priemonę (naudojo garo energiją), kurią pavadino Diligence (variklio galia AG) (.3 pav.). Paaiškinimas: AG arklio galia ( AG lygi 745,7 W). Dažnai arklio galioms nusakyti vartojamas neteisingas terminas arklio jėga..3 pav. ransporto priemonė Diligence (Newsletter to the Members of EAEC Automotive Engineer s Societies, issue 4, May, 9) 833 m. Hancock sukūrė pirmą autobusą Enterprise (garo variklis), kuris pervežė apie 4 keleivių, vidutinis greitis km/val. (.4 pav.)..4 pav. ransporto priemonė Enterprise (Newsletter to the Members of EAEC Automotive Engineer s Societies, issue 4, May, 9) 4

 Hancocko nuosavas")
16 836 m. Hancock sukūrė patobulintą autobusą (garo variklis), kurio talpa keleiviai, maksimalus greitis 33 km/val. Autobusas Automation nuvažiavo 6758 km, pervežė apie 4 keleivių, vidutinis greitis km/val. (.5 pav.)..5 pav. Patobulintas autobusas (Newsletter to the Members of EAEC Automotive Engineer s Societies, issue 4, Mat, 9) Hancocko nuosavas automobilis parodytas (.6 pav.)..6 pav. Hancocko nuosavas automobilis Phaeton (Newsletter to the Members of EAEC Automotive Engineer s Societies, issue 4, May, 9) 5



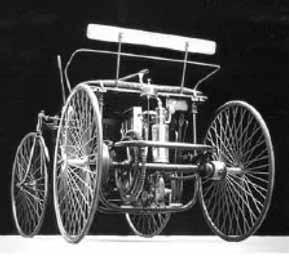
17 .7 pav. raktorius ir triračiai automobiliai.4. Lietuvos ir pasaulio automobilių inžinierių organizacijos Šiandien Lietuvos automobilių tyrėjai susijungė į automobilių inžinierių sąjungą (LAIS, LAIS yra Pasaulinės automobilių inžinierių sąjungos narė ( FISIA International Federation of Automotive Engineering Societies, FISIA remia studentų veiklą. Kasmet vyksta Formulės- studentų regioninės ir pasaulinės lenktynės..8 pav. parodyti Japonijos Formulė- studentiškų lenktynių fragmentai. 6

18 .8 pav. Japonijos Formulės- studentiškų lenktynių fragmentai 7
19 . ransporto priemonių judėjimo tyrimo metodai.. Koordinačių sistemos ransporto priemonių dinamikoje, nagrinėjant kūnų sistemos judėjimą, įvedama bendroji koordinačių sistema OXYZ, kurios atžvilgiu stebimas kiekvieno kūno masių centro koordinačių ir kūno pasukimo kampų kitimas. arptautinė standartų organizacija (ISO) standartu ISO 8855 nustato koordinačių ašių padėtį, kaip parodyta. pav. Ašis X k nukreipiama į priekį išilgai transporto priemonės, žiūrint iš X k viršūnės, Y k ašis nukreipta į dešinę pusę ir yra statmena X k ašiai; Z k ašis nukreipta į viršų ir yra statmena OX k Y k plokštumai. eigiami posūkio kampai apie X k,y k ir Z k standartuose numatyti pagal dešiniojo sraigto taisyklę. Pasukimo kampas apie X k ašį virtimo kampas ϕ ; pasukimo kampas apie Y k išilginio supimo kampas θ, o pasukimo kampas apie Z k nukrypimo nuo kurso kampas ψ (. pav). Amerikos ransporto inžinierių organizacija (SAE) standartu SAE J67 nustato kitokią koordinačių sistemą: ašis X k nukreipiama į priekį išilgai transporto priemonės; žiūrint iš X k viršūnės, Y k ašis nukreipta į kairiąją pusę ir yra statmena X k ašiai; Z k ašis nukreipta žemyn ir yra statmena OX k Y k plokštumai. 8
20 . pav. Kūnų koordinačių sistemos. pav. Kūno pasukimo kampai: OX ayz a a automobilio koordinačių sistema Rato geometriniame centre įvedama rato koordinačių sistema XRYRZ R, o rato ir kelio paviršiaus kontakto taške P įvedama koordinačių sistema XPYPZ P. Kotakto taške P rato greitis yra lygus V P, kampas tarp ašies X P ir greičio V P yra lygus α (skersridės kampas). Rato plokštuma pasvirusi kampu ε R (pasukimo kampas apie X P ašį). 9
21 Rato ir kelio kontakto taške veikianti jėga suskaidoma į dedamąsias: F XR, F YR. Apie ašis X P iry P veikia sukimo momentai M XP ir M YP (.3 pav.)..3 pav. Pasvirusio rato koordinačių sistemos ir veikiančios jėgos ir momentai čia A.. Funkcijos skleidimas Furjė ir eiloro eilute Kiekvieną periodinę funkciją f () t galima išskleisti Furjė eilute: f t A A sin πkt / B cos π kt /, (.a) B A ()= + ( )+ ( ) k k k k= k= = f () t sin ( π kt / ) dt, = f () t cos ( π kt / ) dt, f t dt, = () k
22 funkcijos f () t periodas; A funkcijos vidutinė reikšmė per periodą. Kiekvieną periodinę funkciją f ϕ ( ) galima išskleisti Furjė eilute: čia ( )= + ( )+ ( ) f ϕ A A sin kϕ B cos kϕ, (.b) π A = f ( ϕ ) dϕ, π π k k= k= Ak = f ( ϕ ) sin( kϕ) dϕ Bk f k d π = ( ϕ ) cos( ϕ) ϕ. π Kiekvieną periodinę funkciją f ( x), kai periodas yra L, galima išskleisti Furjė eilute: f ( x)= A + A k π π L kx B π sin( ) k cos( L kx ), (.c) k k= k= čia A L L f x dx, = ( ) A k L L f x π sin( kx) dx B L = ( ) k L L f x π cos( kx) dx. L = ( ) Furjė eilutę galima užrašyti kompleksine forma: f t ()= k= t i πk k ce čia c = A ib ( ) k k k, Kompleksinė amplitudė lygi: c k ; (.) πk = ωk. i k t = f () t e π dt. (.3)
23 Dažnių ωk rinkinys vadinamas funkcijos f ( t ) spektru. Šiuo atveju spektras yra diskretinis. Įstatę ck išraišką į (.), gausime: t t i πk i πk dt. f (t ) = e f (t ) e k = (.4) Diferencijuojamą funkciją f ( q ) taško q aplinkoje galima iš skleisti eiloro eilute: df ( q ) d ( q ) f ( q ) = f ( q ) + (q q ) + (q q ) +! dq! dq... + n d ( q ) (q q ) n + Rn ( q ), n n! dq (.5) čia Rn (q ) liekamasis narys. egu turime n kintamųjų diferencijuojamą funkciją f ( q, q,..., qn ). Diferencijuojamą funkciją f ( q, q,..., qn ) taško {q } aplinkoje išskleisime eiloro eilute: f ({q}) = f ({q }) +! ({q} {q })! f ({q }) ( q {q} { } {q }) + f ({q }) ({q} {q }) Rn ( x ), {q} f ({q }) vadinamoji Hesės matrica. čia {q} (.6)
24 a) b) c) d) 3
25 e).4 pav. Funkcijos f ( x)= sin ( x)+ 5, sin( 6x) cos( x) 3 skleidimas Furjė eilute: a harmonika; b harmonikos; c 3 harmonikos; d 5 harmonikos; e 6 harmonikos.3. Kūno pasukimas erdvėje Posūkio matrica [ A] yra kvadratinė, jos elementai yra realieji skaičiai. Be to, posūkio matrica yra ortogonalioji matrica, ir jos determinantas lygus vienetui, todėl [ A] = [ A], det ([ A] )=. Įvesime nejudančią (inercinę) koordinačių sistemą OXYZ, su nagrinėjamu kūnu sujungtą judančia koordinačių sistema OXYZ. Nagrinėjant kūno sukimąsi erdvėje labai svarbu, kokia eilės tvarka vyksta sukimasis apie ašis. Priminsime, kad teigiama sukimosi kryptis apie atitinkamą ašį yra prieš laikrodžio rodyklės sukimosi kryptį, jeigu žiūrėsime iš šios ašies galo. Atliksime kūno sukimą apie ašis X, π Y ir Z kampu. Pirmiausia pasuksime apie X ašį, o paskui apie Y ir Z ašis (,5 pav. a). Dabar pakartosime tą patį kūno sukimą, bet pirmiausia suksime kūną apie Z ašį, o paskui apie Y ir X ašis (.5 pav. b). Palyginę sukimo rezultatus, matome, kad kūno orientacijos erdvėje yra skirtingos. a) 4
: {}, i {}, j {}, k o išilgai kūno koordinačių pagal sistemos ašis X, Y ir")
26 b).5 pav. Kūno sukimas: a X, Y ir Z ašis π/ kampu; b Z, Y ir X ašis π/ kampu Įvesime pagal X, Y ir Z ašis vienetinius vektorius (ortus): {}, i {}, j {}, k o išilgai kūno koordinačių pagal sistemos ašis X, Y ir {} Z vienetinius vektorius: { i }, { j }, { k }. ada bet kokį vektorių r galima užrašyti XYZ ir X, Y, Z koordinačių sistemose (.6 pav.): {}= r rx{}+ i ry{}+ j rz {}, k (.7) {}= r rx{ i}+ ry{}+ j rz{ k }, (.8) čia x = {} {} r r i x r r i ; = { } { } y = {} {} r r j y ; r r j ; = { } { } ; z = {} {} r r k z r r k ; = {} { }, arba {} r = rx, ry, rz ; { r} = rx, ry, rz..6 pav. Dvi koordinačių sistemos: OXYZ nejudanti (inercinė); OXYZ judanti 5
27 Užrašysime koordinačių sistemos OXYZ ortus { i }, { j }, k per koordinačių sistemos OXYZ ortus i { i}= a{}+ i a{}+ j a3{} k ; { j}= a{}+ i a{}+ j a3 {} k ; { k }= a i a j a k 3{}+ 3{}+ 33{}, ( 3 3) {}, {}, j {}: k čia anm n=,, ; m =,, krypties kosinusai, a e e nm n = { } { }, m kai { e}= {}; i e j { e }= { k }. 3 { }= {};{ e }= {}; k { e }= { i }; { e }= { j }; Įstatę ortus iš (.9) į (.8), gausime 3 { } (.9) ( x y 3 z){}+ ( x y 3 z){}+ r a r a r a r i {}= a r + a r + a r j + ( a3rx+ a3ry+ a33rz ){}= k = r {}+ i r {}+ j r {}, k x y z (.) arba matricine forma {}= r [ A]{ r }, (.) {} ir { r } tas pats vektorius, užrašytas OXYZ ir OXYZ [ ] krypties kosinusų matrica, čia r koor dinačių sistemose, atitinkamai; A arba koordinačių transformacijos matrica: a a a3 A [ ]= a a a 3. (.) a3 a3 a33 Koordinačių transformacijos matrica yra posūkio matrica, kadangi ji yra kvadratinė ir ortogonalioji matrica, ir jai galioja sąlygos: [ A] = [ A], det ([ A] )=, [ A] [ A]= [ E]. 6
28 Koordinačių sistemoje OXYZ ortai {}, i {}, j {} k lygūs: {} i = [ ],, ; j {} = [ ],, ; k 7 {} = [ ],,. (.3) ada pagal (.7) išraiškas OXYZ koordinačių sistemoje užrašyti { i }, { j }, { k } yra lygūs: i { } = [ a a a ]; j a a a 3 { } = [ 3 ], { k } = [ a a a ]. (.4) Iš (.4) išraiškų matome, kad matricos [ A] stulpeliai yra ortų { i }, { j }, { k }, užrašytų OXYZ koordinačių sistemoje, elementai, t. y. r {}: [ A]= { i },{ j},{ k }. (.5) aikant (.) išraišką, galima išreikšti vektorių r { } per vektorių { r}= [ A] {}= r [ A] {} r. (.6) arkime, turime du vektorius {} r ir {}, b užrašytus OXYZ koordinačių sistemoje, ir du vektorius { r } ir { b }, užrašytus OXYZ koordinačių sistemoje. ada vektorių {} r ir {} b vektorinę sandaugą galima užrašyti tokiu pavidalu: ( ) [ r ]{}= b [ A] { r }{ b }. (.7) Bet{}= b [ A]{ b }, (.8) tada iš (.7) išraiškos gauname: ([ ][ ]){ }= ([ ][ ]){ } r A b A r b. (.9) Sulyginę matricas prie vektoriaus { b } (.9) lygybės kairėje ir dešinėje pusėse, gauname: [ r ][ A]= [ A][ r ]. (.)
29 [ ], gauname: Iš dešinės pusės padauginę (.8) lygybę iš A ~ [ A]{ r} r A r A = [ ]= [ ][ ][ ]. (.) Analogiškai galima gauti ir kitą išraišką: ~ [ A] {} r = [ r ]= [ A] [ r ][ A]. (.) arkime, du kūnai i ir j sukasi apie bendrą ašį, kuri sutampa su kūnų X i ir X j ašimis (.7 pav.)..7 pav. Dviejų kūnų sukimasis apie bendrą ašį Pasinaudojus dviejų vektorių skaliarine ir vektorine sandaugomis, nagrinėjamu atveju galima gauti tokias išraiškas: { j } { j }= cos( α ), (.3) i j j i jj ii sin α. (.4) Padauginę iš kairės pusės išraišką (.86) iš vektoriaus {} i i, gauname: { }= {} ( ) {} i ~ i ji j { j}= ( ) sin α. (.5) 8
30 iš Užrašius kūnų i ir j ortus šių kūnų koordinačių sistemoje XYZ i i i X jy j Z j, (.3) ir (.5) galima perrašyti tokiu pavidalu: { ji } [ Ai ] Aj { jj}= cos( α) { k } [ A ] A { j }= sin ( α). (.6) i i j j ( ) ir cos( α) reikšmes, galime rasti kampą α : ( sc), kai s>, c > Žinodami sin α arctg π, kai s>, c = π arctg( sc), kai s>, c < α = π + arctg( sc), kai s<, c <, (.7) 3 π, kai s<, c = π arctg( sc), kai s<, c > = { } [ ] { } = { } [ ] { j}. čia s ki Ai Aj j j ; c j i Ai Aj j Nagrinėjant kūno sukimąsi, reikia žinoti posūkio (koordinačių transformacijos) matricą. Posūkio matricą galima apskaičiuoti naudojant Kardano, Oilerio kampus, Oilerio parametrus [3]. Naudojant Kardano kampus θ, θ, θ čia s i ( ) posūkio matrica lygi: 9 3 cc 3 cs 3 s A( θ) = ssc + c s s ss + cc sc, (.8) ss 3 cs s3 cs s3+ sc3 cc = ( i ) sin θ ; c i cos θ i, i =, 3,. = ( ) Ryšys tarp kūno kampinio greičio { ω}, užrašyto OXYZ koordinačių sistemoje, ir Kardano kampų vektoriaus laiko išvestinės {} θ yra lygus: { ω}= G ( θ) {} θ, (.9)
31 čia { ω} = ωxωω y z ; {} θ Kardano kampų išvestinių pagal laiką vektorius, θ θ θ {} θ = d d d 3 dt dt dt ; (.3) s G ( θ) = c cs. (.3) s cc Kampinio greičio vektorių ω { } galima užrašyti taip: ϕ ϕ ϕ ϕ { ω} = d = d x d x d z dt dt dt, (.3) dt čia { ϕ} posūkio kampų vektorius; ϕx, ϕy, ϕz posūkio kampai apie XYZ,, ašis atitinkamai. Posūkio kampų vektoriaus { ϕ} variacija (variacija be galo mažas pokytis) lygi: δϕ { }= G ( θ) {} θ. (.33) Kampinio greičio vektoriaus { ω}, užrašyto kūno koordinačių sistemoje OXYZ, ryšys su Kardano kampų vektoriumi {} θ yra: { ω}= G ( θ) {} θ, (.33) čia G cc θ = cs s ( ) kampinio greičio vektorių ω { ϕ ϕ ϕ ϕ ω } = d = d d d dt dt dt dt s c, (.34) { } galima užrašyti taip: x y z 3, (.35) čia ϕ { } posūkio kampai apie XYZ ašis atitinkamai.
32 Posūkio kampų vektoriaus ϕ { } variacija lygi: δϕ { }= G ( θ) δ{} θ. (.36) Kampinių pagreičių vektoriai OXYZ ir OXYZ koordinačių sistemose yra lygūs: dω ω G θ θ G θ θ dt {}+ ( ) { }, (.37) dω dt = { }= ( ) ω G θ θ G θ θ. (.38) = { }= ( ) {}+ ( ) { } Ryšys tarp kampinių greičių vektorių { ω} ir { ω} yra lygus: [ ω ]= [ A][ ω ][ A] ; (.39) [ ω ]= [ A] [ ω ][ A], (.4) čia [ ω ]= ωz ω y ω ω x z ω ω y x ( ) ; [ ω ]= ωz ω y ω ω x z ω ω y x. Posūkio matricos A θ išvestinės pagal laiką yra lygios: ( ) = [ ] ( ) = ( ) A θ ω A θ A θ ω [ ], (.4) ( ) = [ ] + [ ] [ ]= [ ] + [ ][ ] A θ ω A ω A A ω A ω. (.4) Kūno taško P koordinačių vektorius { R p } OXYZ koordinačių sistemoje yra lygus: { Rp}= { Rc}+ { Rcp}= { Rc}+ A( θ) { r cp}, (.43) 3
33 čia R c { } kūno masių centro vektorius OXYZ koordinačių sistemo { cp}= ( θ) { cp} vektorius tarp kūno taškų c ir P OXYZ je; R A r { } OXYZ koordinačių siste koordinačių sistemoje. Kūno taško P greičių vektorius V p moje yra lygus: V R R A r R R { p}= { p}= { c}+ { cp}= { c}+ [ ω]{ cp}= = { Rc}+ [ ω][ A]{ r cp}= = { R c}+ [ A][ ω]{ r cp}. { V p } OXYZ koordinačių sis Kūno taško P pagreičių vektorius temoje yra lygus: { V p}= { Rc}+ A rcp Rc A { }= { }+ [ ] ω { rcp }+ +[ A][ r cp. ω] { } Virtualūs poslinkiai ir posūkiai: [ ]= [ ][ ]= [ ] δ A δ ϕ A A δ ϕ ; δ ϕ A δ (.44) = [ ] [ A] { p}= { c}+ [ ]{ cp}= { c}+ [ ]{ cp}= δ R δ R δ A r δ R δϕ R = δ{ Rc}+ [ A] ϕ { r cp} δ{ Rp}= δ[ A]{ rcp}= [ A] δ ϕ= [ A] rcp δϕ { } ; (.45) ; (.46). Kūną sukant kampais ϕx, ϕy, ϕz apie X, Y, Z ašis, posūkio matricos turi tokias išraiškas: ; sin( ϕx) cos( ϕx) ( ) = ( ) ( ) A ϕ x cos ϕ x sin ϕ x 3
34 A cos( ϕy) sin( ϕy) ( ϕ y ) = sin( ϕy) cos( ϕy) ; cos( ϕz) sin( ϕz) A( ϕ z ) = sin( ϕz) cos( ϕz). (.47) Nagrinėjant kūno judėjimą, kai kūnas pasisuka mažais kampais, t. y. { ϕ}, posūkio matrica yra lygi: A( ϕ) = [ E]+ [ ϕ ], (.48) arba A( ϕ) = [ E]+ [ ϕ ]+ [ ϕ ][ ϕ ]= [ E]+ [ ϕ ]+ [ ϕ ], (.49) arba bendruoju aveju j n A( ϕ) = [ E]+ [ ϕ] j= j!. (.5).4. Matricos tikrinės reikšmės ir vektoriai arkime, turime tiesinę diferencialinę lygčių sistemą: r A r B {}= [ ]{}+ { }. (.5) Homogeninės lygčių sistemos r A r {}= [ ]{} (.5) sprendinį užrašysime tokiu pavidalu: λt {}= r e { X}. (.53) 33
35 Įstatę sprendinį (.6) į (.5) lygtį, gausime: [ A]{ X}= λ { X}, (.54) [ ] kvadratinė matrica; { X} nežinomasis vektorius; λ ne čia A žinomasis daugiklis. Lygčių sistemą (.54) galima užrašyti tokiu pavidalu: ([ A] [ E] λ){ X}=, (.55) čia [ E] vienetinė matrica. Homogeninė tiesinių lygčių sistema (.55) turi nenulinį sprendinį tik tada, kai jos determinantas lygus nuliui: an λ an an a a λ a n det ([ A] λ[ E] )= = (.56) a n an ann λ Gauta lygtis yra n-tojo laipsnio algebrinė lygtis, kurios kairioji pusė yra n-tojo laipsnio daugianaris nežinomojo parametro λ atžvilgiu: n i D( λ)= Cλ = C + Cλ+ Cλ + C λ čn. (.57) i= Daugianaris D λ daugianariu, o lygtis D( λ)= i ( ) vadinamas matricos [ A] charakteringuoju 34 n (.58) matricos [ A] charakteringąja lygtimi. Bendruoju atveju n-tojo laipsnio daugianaris turi n šaknų. Parametras λ vadinamas matricos [ A] tikrine reikšme. Charakteringojo daugianario šaknys λ i, i=,,... n, gali būti realiosios, kompleksinės ir kartotinės. Lygties (.9) sprendinys { X} vadinamas tikriniu matricos [ A] vektoriumi. Vektoriai { X} nustatomi konstantos tikslumu. ikrinės reikšmės λ i, o{ X} i tikriniai vektoriai, i=,,... n.
36 [ ] simetrinė matrica, tai { X} i ortogonalieji vektoriai. { } ir λ j, { X} j. Lygčių sis Kai A Nagrinėsime du sprendinius: λ i, X i temą (.55) galima užrašyti: [ A]{ X} = λ X i i { } i, (.59) [ A]{ X} = λ { X}. (.6) j j j { }, o Lygtį (.59) iš kairės pusės padauginsime iš vektoriaus X j lygtį (.6) iš vektoriaus X i { } : X { } A X X X j [ ]{ } = λ i i { } j { } i, (.6) X { } A X X X i [ ]{ } = λ j j { } i { } j. (.6) [ ] yra Iš lygties (.6) atimsime lygtį (.6) ir kadangi matrica A simetrinė, tai gausime: ( λ λ ){ X} { X} =. (.63) i j j i { } ir { X} j skalia Iš (.63) lygties matyti, kad dviejų vektorių X i rinė sandauga yra lygi: kai i j { X} { X} =, j i,, kai i= j { },{ X} j ortogonalieji vektoriai. { } ir { X} j, t. y. čia X i Sunormavus vektorius X i X i { X} { } = i { X} ; i X i { X} { } = j X j { }, (.64) { },{ X} vienetiniai vektoriai, j čia X i galima gauti tokią išraišką: λ i, { X} [ A]{ X} = i j, kai i= j. (.65) kai i j 35
37 Iš ortonormuotųjų vektorių ortogonaliąją matricą: [ ]= { } { } { } { } i= n X i,,...,, galima sudaryti X X, X,..., X. (.66) n ada (.65) išraišką galima užrašyti tokiu pavidalu: λ [ X] [ A][ X ]= λ. (.67) λn Lygčių sistemos (.5) sprendinį galima užrašyti taip: n λ r t X e it Λt { ()}= { } Ci = [ X] e { C}, (.68) i= λ t čia e Λ t = diag e i ( )= i λ t e λ t e. (.69) λ t e n Įrašykime naują vektorių: { r() t }= [ X] { u() t }, (.7) čia { u() t } modalinių koordinačių vektorius. ada lygčių sistemą (.4) galima užrašyti taip: {}= u [ X] [ A][ X]{}+ u [ X] { B}, (.7) ir lygčių sistema, įvertinus (.7) išraišką, susiskaido į n nepriklausomų pirmosios eilės lygčių: u λ u = g () t, i=,,... n, (.7) i i i i { } { }= [ ] () čia gi () t vektoriaus g X Bt i-tasis elementas. 36
38 Panaudojant matricos charakteringąjį daugianarį D( λ), galima nustatyti dinaminės sistemos stabilumą. am tikslui, panaudojant charakteringojo daugianario koeficientus C i, reikia suformuoti Gurvico matricą, pavyzdžiui, kai charakteringas daugianaris yra ketvirtos eilės, tada Gurvico matrica lygi: C C3 C C C [ G]= 4. (.73) C C3 C C C4 Dinaminė sistema yra stabili, kai visi pagrindiniai Gurvico matricos minorai yra teigiami, t. y. k >, kai k =,,... n. (.74) = C ; = CC CC 3 ; 3 = CC C 3 C C 3 C4C ir t. t. egu dinaminės sistemos judėjimo lygčių sistema: { } [ M]{}+ q [ C]{}+ q [ K]{}= q F() t, [ ] [ ] [ ] (.75) čia M, C, K masių, slopinimo ir standumo matricos, atitinkamai; {}{}{} q, q, q pagreičių, greičių ir poslinkių vektoriai, atitinkamai; F () t išorinių jėgų vektorius. egu šioje lygčių sistemoje yra n nežinomųjų. Homogeninės lygčių sistemos [ M]{}+ q [ C]{}+ q [ K]{}= q (.76) sprendinį užrašysime tokiu pavidalu: {}= q { X} e λ t. (.77) Įstatę sprendinį (.77) į (.76) lygtį, gausime: ( λ [ M]+ λ[ C]+ [ K] ){ X}= {}, (.78) 37
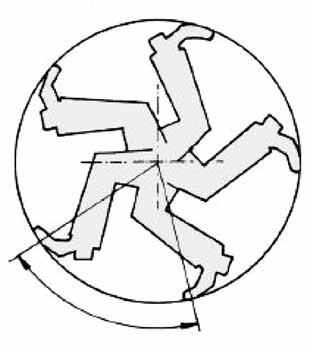
39 čia { X} nežinomasis vektorius, kuris vadinamas dinaminės sistemos savąja forma; λ nežinomasis daugiklis. Panagrinėsime atvejį, kai slopinimo matrica yra lygi nuliui, t. y. [ C]=, tada lygčių sistema (.78) yra ( λ [ M ]+ [ K ]){ X }= {}. (.79) egu λ= iωt, ω savasis kampinis dažnis; i kompleksinis menamas skaičius, i =, tada lygčių sistema (.79) yra lygi: ( ω [ ]+ [ ]){ }= {} M K X. (.8) Homogeninė lygčių sistema (.8) turi nenulinį sprendinį tik tada, kai jos determinantas lygus nuliui: det ( ω [ M]+ [ K ])=. Gauta lygtis yra n-tojo laipsnio algebrinė lygtis, kurios kairioji pusė yra n-tojo laipsnio daugianaris nežinomojo savojo kampinio dažnio ω atžvilgiu: n i n D( ω )= Ciω = C + Cω + Cω 4 + Cnω. (. 8) i= Daugianaris D( ω) vadinamas matricos [ M] [ K] charakteringuoju daugianariu, o lygtis D( ω)= (.8) [ ] [ ] matricos M K charakteringąja lygtimi. Savieji dažniai išdėstomi didėjančia tvarka: ω ω ω3... ωn. Dinaminė (mechaninė) sistema esant tam tikram savajam dažniui ω k virpa (deformuojasi) ir jos deformavimosi formą apibūdina savoji forma vektorius{ X k }. Kaip savųjų formų pavyzdys,.8 pav. parodytos plonos plokštelės pirmos keturios savosios formos. 38

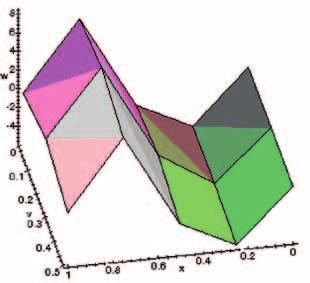
40 a) b) c) 39


41 d) e).8 pav. Plonos plokštelės pirmosios keturios savosios formos: a plokštelės schema; b pirmoji savoji forma ; c antroji savoji forma; d trečioji savoji forma; e ketvirtoji savoji forma Normalizuosime savuosius vektorius Xk, k,,..., n pagal masių matricą [ M ], X Nk. (.83) X M X { }= { } [ ]{ } k k 4 { } = Normalizuoti savieji vektoriai turi tokias savybes: { X } [ M]{ X }= [ E]; X K X Nk Nk { } [ ]{ }= [ ] Nk Nk λ, (.84)
42 [ E] vienetinė matrica; [ E]= ω ω [ λ]= savųjų dažnių kvadratų matrica. ω n Įvesime naują vektorių: { qt ()}=[ XN ]{ u() t }, (.85) { ()} modalinių koordinačių vektorius, [ X N ] modalinė ma čia u t trica sudaryta iš sistemos normalizuotų savųjų vektorių, [ XN]= { XN},{ XN},...,{ XNn}. Įstatę vektorių (.85) į lygčių sistemą (.75) ir iš kairės pusės padauginę iš X N arba [ ], gausime n nepriklausomų lygčių: {}+ u [ λ]{}= u [ XN ] { F() t } (.86) u + ω u = g () t k =... n (.87) k k k k k n g t X F t. (.88) ()= () j= jk j Bendras (.87) lygties sprendinys yra lygus: t uk ()= t gk ( τ) sin ( ωk ( t τ) ) dτ. (.89) ωk 4
43 Panagrinėsime atvejį, kai slopinimo matrica nelygi nuliui, t. y [ C]. Įstatę (.875) į (.76) ir iš kairės pusės padauginę iš [ X N ], gausime n nepriklausomų lygčių: arba {}+ u [ X ] [ C][ X ]{}+ u [ λ ]{}= u [ X ] F() t (.9) N N N { } u + { X } [ C]{ X } u + ω u = g () t k =...n (.9) k n j= Nk Nj k k k k Kartais slopinimo matrica išreiškiama per standumo ir masių matricas, t. y. [ C]= α[ K]+ β [ M ]. (.9) n { } [ ]{ } k ada narys XNk C XNj u j= lygus: n { X } [ C]{ X } u = (.9) lygčių sistemoje bus Nk Nj k j= n ( { Nk} [ ]{ Nj}+ { Nk} [ ]{ Nj} ) k = j= = α X K X β X M X u n ( k jk jk ) k = ( k + ) k j= = αω δ + βδ u αω β u,, kai j = k čia δ jk Kronekerio daugiklis, δ jk =., kai j k Įstatę (.93) į (.9) lygtis, gausime: ( ) + = k k k k k k (.93) u + αω + β u ω u g (). t (.94) Standartinės k-osios (.94) lygties pavidalas yra: k k k k k k k u + ξωu + ω u = g (), t (.95) čia ξ k slopinimo koeficientas, kuris lygus: ξk = αωk + ω β. (.96) k 4
44 Lygties (.95) sprendinys yra: t ξkωk t uk t gk e ( τ) ()= ( τ) sin ( ωk ξk ( t τ) ) dτ. ωk ξk (.97) Įvesime naują vektorių: q {}= r. q (.98) Lygčių sistemą (.76) užrašysime kaip pirmos eilės diferencialinių lygčių sistemą, kurioje bendras lygčių skaičius bus lygus n : [ E] [ ] q [ ] [ E] q arba [ ] [ E] q {} = M K M C q [ M] { F() t } (.99) [ ] [ ] [ ] [ ] { } [ B]{} r [ A]{}= r f () t, (.) čia [ A]= [ E] M K M C [ ] [ ] [ ] [ ] E [ [ ] [ ] B]= [ ] [ E] ; ; {} { f () t }= [ M] { F() t }. (.) Norėdami surasti sistemos (.) tikrines reikšmes ir vektorius, vektorių f t { ()} prilyginsime nuliui, t. y. 43
45 [ B]{} r [ A]{}= r {}. (.) egu lygčių sistemos sprendinys turi tokį pavidalą: {}= r {} r e λ t, (.3) čia λ tikrinė reikšmė; {} r dešinysis tikrinis vektorius. Įstatę sprendinį (.3) į lygčių sistemą (.), gausime: ([ A] λ[ B] ){}= r {}. (.4) Išsprendę tikrinių reikšmių uždavinį (.4), gauname n tikrinių reikšmių ir tikrinių vektorių, t. y. λ j, { r j }, j =,,..., n. Be to, bendruoju atveju tikrinės reikšmės ir vektoriai yra kompleksiniai skaičiai, λ = α + iω ; r Re r Im r, (.5) j j j čia Re, Im realiąją ir kintamąją dalis. { j}= { j}+ { j} ( ) ( ) funkcijos, išskiriančios kompleksinio skaičiaus Įvesime naują vektorių n r ri ui r r... r N R u, (.6) {}= { } = { } { } { } = [ ]{} i= čia [ R] dešiniųjų tikrinių vektorių matrica; [ ]= { } { } { } R r r... r N ; u {} modalinių koordinačių vektorius. Įstatę vektorių (.6) į lygčių sistemą (.), gausime { } [ B][ R]{} u [ A][ R]{}= u f () t. (.7) Kairieji tikriniai vektoriai nustatomi išsprendus tikrinių reikšmių uždavinį: ( )= {} l {} [ A] ν[ B] (.8) 44
46 arba ([ A] ν[ B] ){ l}= {}. (.9) čia {} l kairysis tikrinis vektorius; ν tikrinė reikšmė. ikrinės reikšmės apskaičiuotos išsprendus (.4) ir (.9) tikrinių reikšmių uždavinius, gausime: λ j = ν, j tada galioja tokia sąlyga: det ([ ] [ ])= ([ ] [ ]) A λ B det A λ B. (.) Sudarome kairiųjų tikrinių vektorių modelinę matricą: [ ]= { } { } { } L l, l,..., l N. (.) Sudarysime tokią lygčių sistemą: ([ A] λ j[ B] ){ rj}= {}. (.) ([ A] λk [ B] ){ lk }= {} Pirmąją lygtį padauginę iš { l k }, o antrąją lygtį iš { r j }, gausime { lk } ([ A] λ j[ B] ){ rj}= { rj} ([ A] λk [ B] ){ lk }=. (.3) Pirmąją lygtį atimsime iš antros, tada gausime: ( χk λ j){ r j} [ B ]{ l }= k. (.4) Kai galioja tokia lygybė { rj} [ B] { lk}= { lk} [ B]{ rj}, (.5) ortogonalumo sąlyga:, { rj} [ B] { lk}= { lk} [ B]{ rj}=, kai j k kai j = k (.6) 45
47 [ L] [ B][ R]= [ E] (.7) arba ([ R] [ B] )[ L]= [ E] bet tada ( ), [ ]= [ ] [ ] ir L R B { k} ([ ] j[ ]){ j}= l A λ B r (.8) (.9) { l } [ A]{ r }=λ, (.) k j k j nes { lk } j[ B]{ rj}=, λ, k = j. odėl galioja tokia priklausomybė j [ L] [ A][ R]= [ λ ], (.) [ λ] diag ( λ j ) diagonalinė matrica. ada lygčių sistema (.7) yra: [ B][ R]{} u [ A][ R]{}= u { f }. Ir gautą lygčių sistemą padauginę iš kairės transponuotą kairiųjų tikrinių vektorių modalinę, gausime: [ L] [ B][ R]{} u [ L] [ A][ R]{}= u [ L] { f} (.a) arba {} u [ λ ]{}= u [ L] { f}. (.b) Gavome nepriklausomų lygčių sistemą: u λ u = h, j j j j 46
48 h = L f j n k= kj k j Lygties (.3) sprendinys yra: =,..., N. (.3) t λjt λj( t τ) uj()= t uj( ) e + hj ( τ) e dτ. (.4) Kai matrica [ B]= [ E] vienetinė matrica, tada L [ ] [ B][ R]= [ L] [ R]= [ E] ir [ L] = [ R], ortogonalumo sąlyga bus lygi: (.5) [ R] [ A][ R]= [ λ ]. (.6) Vektorių {}= r [ R]{} q įstatę į (.7), gausime: {} u [ ]{}= u [ R] λ { f}. (.7) Lygčių sistemą (.76) galima užrašyti kaip pirmos eilės diferencialinių lygčių sistemą, kurios matricos yra simetrinės matricos: [ ] [ ] [ ] [ ] [ ] [ ] K q K q [ ] [ ] =, (.8) K C q M q F() t arba [ A]{} r [ B]{}= r { f }, (.9) čia [ K A ]= [ ] [ ] K ; [ [ ] [ ] B]= [ K] [ C] M r t ()= qt () ; f t qt () ()= [ ] [ ] =, F() t. (.3) F() t Matricos [ A] ir [ B] simetrinės matricos. 47
49 Modalinė matrica [ R] lygi: X X X n [ R]= { r} { r } { r N } = { },{ },...,{ },,..., { X}, X u,...,λ n λ λ { }{ } { X }. n (.3) ikrinė reikšmė, kai ji yra kompleksinė, yra lygi: λk = αk + iωk. (.3) Funkciją e λ galima užrašyti taip: e α e e ω = t α e ω = ( + ) t. egu dešiniųjų ir kairiųjų tikrinių vektorių sudėtis yra lygi: { } X j { rj}= j X λ { j} { } Yj ; { l j}= j Y λ { j} ada ortogonalumo sąlyga yra lygi:, { lk } [ B]{ rj}=, arba kai j k kai = k. (.33) (.34a) [ L] [ B][ R]= [ E]. (.34b) E ) būdas: [ [ ] [ ] B]= vienetinė matrica, [ ] [ E], kai j k { Yk } { X j}+ λλ k j{ Yk} { X j}=, kai j = k Y [ ] [ X]+ [ λ ][ Y] [ X]= [ E] (.35) [ λ]= diag ( λ j)= diag ( λ, λ,... λ n). 48
50 [ K ] [ ] ) būdas: [ B ] = simetrinė matrica. [ ] [ M ], kai j k {Yk } [ K ]{ X j } λ k λ j {Yk } [ M ]{ X j } ==, kai j = k (.36a) arba matricine forma: [ λ ][Y ] [ M ][ X ] + [Y ] [ K ][ X ] = [ E ]. (.36b) Įstatę (.36) išraišką į (.9) lygčių sistemą ir iš kairės padau ginę [ L ], gausime: [ L ] [ A][ R ]{u} [ L ] [ B ][ R ]{u } = [ L ] { f } arba γ j u j u j = h j, (.38) n čia h j = Lkj f k. k = Pavyzdys. Duota trijų lygčių sistema: [ M ]{q } + [C ]{q } + [ K ]{q} = {F ( t )},, 5 M = ;, 5, C =, ;,,, q ; K =, 4, {q} = q. q,, 3 Suformuojame A ir B matricas: [ ] [ K ] [ K ] [ A] = K C ; [ B ] = [ ] [ ] [ ] 49 (.37) [ ]. [ M ]
51 Pradinę lygčių sistemą užrašome kaip pirmojo laipsnio lygčių sistemą: čia [ A]{} r [ B]{}= r { f } r t ()= qt () ; f t qt () ()= F() t,,,, 4,,,, A = ;,,,, 4,,,,,,,,, 4,,,, B =. 5,, 5, Sprendžiame tikrinių reikšmių uždavinį (.65): ([ A] λ[ B] ){}= r {}. Dešiniųjų tikrinių reikšmių vektorius ir dešiniųjų tikrinių vektorių matrica yra lygūs: 5
52 [ λ]=, + i, 447, i, 447, + i, 997 ;, i, 997, + i, 4, i, 4, 89 i, 8, 89+ i, 8, 58 i, 36, 58 + i, 36, 36 i, 33, 36 + i, 33, 89+ i, 8, 89 i, 8 + i i, 36 i, 33, 36 + i, 33, 89 i, 8, 89+ i, 8, 58 + i, 36, 58 i, 36,36 i, 33, 36 + i, 33 [ R]=, i, i, 63 + i, 63 + i, 47+ i, 47 i, i, 535 i + i i, 47+ i, 47 i, 535 i, i, 63 + i, 63 i, 47+ i, 47+ i Sprendžiame kairiųjų tikrinių reikšmių uždavinį: {} l [ A] λ [ B]. ( L ) = {} Kairiųjų tikrinių reikšmių vektorius ir kairiųjų tikrinių vektorių matrica yra lygūs:, + i, 45, i, 45, + i, { λ L }= ;, i,, + i 4,, i, 4, 89 i, 8, 89+ i, 8, 58 i, 36, 58 + i, 36, 36 i, 33, 36 + i, 33, 89+ i, 8, 89 i, 8 + i i, 36 i, 33, 36 + i, 33, 89 i, 8, 89+ i, 8, 58 + i, 36, 58 i, 36,36 i, 33, 36 + i, 33, i, i, 63 + i, 63 + i, 47+ i, 47 i, i, 535 i + i i, 47+ i, 47 i, 535 i, i, 63 + i, 63 i, [ R i, i ]=, 89 i, 8, 89+ i, 8, 58 i, 36, 58 + i, 36, 36 i, 33, 36 + i, 33, 89+ i, 8, 89 i, 8 + i i, 36 i, 33, 36 + i, 33, 89 i, 8, 89+ i, 8, 58 + i, 36, 58 i, 36, 36 i, 33, 36 + i, 33, i, i, 63 + i, 63 + i, 47+ i, 47 i, i, 535 i + i i, 47+ i, 47 i, 535 i, i, 63 + i, 63 i, 47+ i, 47+ i 5
53 Matome, kad dešiniųjų pusių tikrinių reikšmių vektorius {λ} ir kairiųjų tikrinių reikšmių vektorius {λ L } yra tarpusavyje lygūs: {λ} = {λ L }. Dešiniųjų pusių tikrinių reikšmių matrica yra lygi:, + i, 45 45, i,, + i, [λ] = i,,, i, 4 i,, 4 Patikrinsime sąlygas, kad trijų matricų sandauga yra lygi vienetinei matricai ir tikrinių reikšmių matricoms, t. y. [ L ] [ B ][ R ] = [ E ],, i + i + i [ L] [ B][ R ] = i + i i [ L ] [ A][ R ] = [λ ], + i i + i + i i, + i + i + i i + i i i i i i i + i i i i i + i i i + i + i i + i + i + i i + i + i i + i, + i, 45 i i i i + i, i, 45 i i + i + i, + i, + i [ L] [ A][ B ] = i + i i, i, i + i + i + i + i + i, + i, 4 i + i + i i + i, i, 4 i. Kaip matyti iš gautų rezultatų, šios sąlygos yra įvykdytos..5. Harmoninė analizė egu sistemos judėjimo lygčių sistema yra: [ M ]{q } + [C ]{q } + [ K ]{q} = {F ( t )}. 5 (.39)
54 Žadinimo vektorių {F ( t )} suskaidysime: {F ( t )} = {Fc } cos ( Ωt ) + {Fs }sin ( Ωt ) (.4) arba kompleksinė forma: {F ( t )} = {Fcp } eiωt + {Fsp } e iωt, čia {Fcp } {Fsp } nes = ({Fc } i {Fs }) ; = ({Fc } + i {Fs }), (.4) (.4) {F ( t )} = ({Fc } i {Fs }) eiωt + ({Fc } + i {Fs }) e iωt = ({Fc } i {Fs }) ( cos ( Ωt ) + i sin ( Ωt ) ) + ({Fc } + i {Fs }) ( cos ( Ωt ) i sin ( Ωt ) ) = {Fc } cos ( Ωt ) + {Fs } sin ( Ωt ) + i {Fc } sin ( Ωt ) {Fs } cos ( Ωt ) + {Fc } cos ( Ωt ) + {Fs } sin ( Ωt ) + i {Fc } sin ( Ωt ) + {Fs } cos ( Ωt ) = {Fc } cos ( Ωt ) + {Fs } sin ( Ωt ). ) Atvejis: Sistemos () sprendinių ieškosime tokiu pavidalu: {q} = {qc } cos ( Ωt ) + {qs }sin ( Ωt ). (.43) Įstatę (.) ir (.5) išraiškas į (.), gausime lygčių sistemą: Ω [ M ] + [ K ] qc {Fc } + Ω [C ] = Ω [C ] Ω [ M ] + [ K ] qs {Fs } 53 (.44)
55 arba [ H ]{qcs } = {Fcs }. (.45) Virpesių amplitudes nustatome: {q} = {qc } cos ( Ωt ) + {qs }sin ( Ωt ) = { A} cos ( Ωt ϕ ) (.46) qsj ϕ j = arctg (.47) qcj. ) Atvejis: kompleksinė forma Žadinimo jėgų vektorių užrašome (.4) pavidalu. Sistemos (.39) sprendinį užrašysime tokiu pavidalu: A j = qcj + qsj ; {q} = {qcp } eiωt + {qsm } e iωt. (.48) Įstatę (.4) ir (.48) išraiškas į (.39) lygčių sistemą, gausime: ( Ω ( Ω [ M ] + iω [C ] + [ K ]){qcp } = {Fcp } [ M ] iω [C ] + [ K ]){qsm } = {Fsm }. (.49) Sistemos (.49) sprendimai yra lygūs: {qcp } = H p Fcp, ( ] = ( Ω {qsm } = [ H m ][ Fsm ], ) [ M ] iω [ C ] + [ K ] ) čia: H p = Ω [ M ] + iω [C ] + [ K ] [Hm (.5) ;. (.5) Sistemos (.49) sprendinys tada bus lygus: {q} = {qcp } eiωt + {qsm } e iωt = Re ({qcp } eiωt ). (.5) Pavyzdys. Nustatyti P kūnų poslinkių, greičių ir pagreičių svyravimo amplitudes priklausomai nuo dažnio. P dinaminis modelis pateiktas.9 pav. 54
56 .9 pav. P dinaminis modelis P kinetinė, potencinė energijos ir disipatyvinė funkcija yra lygios: ( ) m x + m x + m3 x 3 + I 3 x 4 + m4 x 5 ; E p = k ( x q ( t ) ) + k ( x q ( t τ ) ) + k3 x3 a x4 x + k4 x3 + a x4 x + k5 x3 a3 x4 x5 ; Φ = c ( x z ( t ) ) + c ( x z ( t τ ) ) + c3 ( x 3 a x 4 x ) + c4 ( x 3 + a x 4 x ) + c5 ( x 3 a3 x 4 x 5 ), Ek = ( ( ( ) ( ) ) ) čia q ( t ), q ( t τ ) kinematiniai žadinimai į pirmąją ir antrąją mases. egu kinematinis žadinimas į pirmąją ir antrąją ašį yra lygūs: q ( t ) = hc cos(ωt ) + hs sin(ωt ) ; q ( t τ ) = hc cos(ω ( t τ )) + hs sin(ω ( t τ )), čia τ = a + a ; v P judėjimo greitis. v 55
57 Pradiniai duomenys: m = 75 kg ; m = 75 kg ; m3 = kg ; I3 = 75 kgm ; m4 = 8 kg. k = k = 3, 65 N / m; c 5 k = k = 3, 65 N / m; k =, N / m ; c = c =, Ns / m ; c = c = 3, Ns / m ; =, Ns/ m; a = 5, m; a =, 75 m a3 = 9, m; hc =, m; hs =, m. Gauti rezultatai parodyti. pav. 3 3 a) b) 56
58 c). pav. P kūnų virpesių amplitudės: a poslinkiai; b greičiai; c pagreičiai; x juoda spalva; x mėlyna spalva; x3 raudona spalva; x4 žalia spalva; x5 geltona spalva.6. Atsitiktiniai stacionarūs priverstiniai virpesiai egu sistemos judėjimo lygčių sistema lygi: [ M ]{q } + [C ]{q } + [ K ]{q} = [ B ]{F }, (.53) čia [ M ], [C ], [ K ] masių, slopinimo ir standumo matricos; {q},{q },{q } poslinkių, greičių ir pagreičių vektoriai. Vektorius {F ( t )} atsitiktinės charakteristikos žinomas, būtent, spektrinis tankis S F ( ω). Funkcijos f ( t ) koreliacinė funkcija lygi: RFk ( t, t ) = M Fk ( t ), Fk* ( t ) = M Φ k eiωt d ω Φ*k ed ωiωt = i ( ωt ωt ) R Φ k, Φ*k d ωd ω, e čia Fk ( t ) centruota F ( t ) funkcija, 57 (.54)
59 Fk ( t ) = Fk ( t ) Fvid ( t ). (.55) Centruotą funkciją Fk ( t ) galima užrašyti panaudojant Furjė integralą: Fk ( t ) = Φ k ( ω)eiωt d ω (.56) arba vektorine forma: {F } = {Φ ( ω)}eiωt dt. (.57) Pointegrinė funkcija (.55) priklausys nuo laiko momentų skirtumo, jeigu funkcija R Φ k ( ω) Φ*k ( ω ) = Sk ( ω ) δ ( ω ω). (.58) okiu atveju integruodami (.58) pagal ω, gausime RFk ( t, t ) = S Fk ( ω)eiωτ d ω, (.59) S Fk ( ω) spektrinis tankis. čia τ = t t ; Analogiškai galima gauti tarpusavio koreliacinę funkciją: RFk Fl ( t, t ) = eiωτ S Fk Fl ( ω) d ω. (.6) Lygčių sistemos (.53) sprendinio ieškosime tokio pavidalo: {q} = {q } eiωt d ω. (.6) Įstatę (.56) ir (.59) į (.53) lygtį, gausime ( ω [ M ] + iω[c ] + [ K ]){q } = [ B]{Φ} arba (.6) {q } = ( ω [ M ] + iω[c ] + [ K ]) [ B ]{Φ} = W ( iω) {Φ}, (.63) ( čia W ( iω) = ω M + iω[c ] + [ K ] ) [ B ]. Skaliarine forma sprendinys (.6) lygus 58
60 q W iω Φ ω. (.64) ko n = ( ) ( ) i= ki ada sprendinys (.64) lygus: n i iωτ qk Wki iω Φ i ω e dω. (.65) = ( ) ( ) i= Sprendinio (.465) tarpusavio koreliacinė funkcija lygi: ( )= () ( ) Rqq t, t M * qk t qk t k l = M * i ωt ω t qk( ω) ql( ω) e ( ) dωdω = n n * Wkj ( iω) Wlρ( iω) M * Φ j( iω) Φρ( iω ) j= ρ= i ( ωt e ω t ) dωdω ). Pasinaudoję (.66) išraiška, gausime i t t Rq q = M qk ( ) ql ( ) e ( ω ω) ω ω dωdω = k l n n (.66) W iωw iω S ω e dω. (.67) j= ρ= kj ( ) ( ) ( ) * lρ FjFρ Kad sprendinys būtų stacionarus, t. y. kad kiekvienas vektoriaus { qt ()}elementas būtų stacionari atsitiktinė funkcija, turi būti patenkinta sąlyga: ( ) ( ) M * qk ω ql ω Sqk ω δ ω ω = ( ), (.68) čia S qk ( ω ) sprendinio vektoriaus k elemento spektrinis tankis. Įstatę (.68) į (.67), gausime: qk iωτ ( ) = S ω e dω n n j= ρ=, FjFρ iωτ ( ) * iωτ Wkj ( iω) Wkρ ( iω) S ( ω) e dω (.69) 59
61 arba n n * iωτ Sq ( ω) Wkj( iω) Wk iω SFF ω e k ρ ( ) ( ) j ρ =. (.7) j= ρ= Iš čia plaukia: n n * qk kj kρ FF j ρ j= ρ= S ω W iω W iω S ω. (.7) ( )= ( ) ( ) ( ) Analogiškai tarpusavio spektrinis tankis lygus n n * qq k l kj kρ FjFρ j= ρ= S ω W iω W iω S ω. (.7) Kai S gausime ( )= ( ) ( ) ( ) FF j ω SF kai j = ρ j ( )= ρ, kai j ρ,, ; n n * qk kj kj Fj KJ Fj j= j= ( )= ( )= ( ) S ω W W S ω W S ω, (.73) S n * ( ω)= W W S ( ω). (.74) qq k l kj lj FF k l j= Komponentės q k dispersija lygi n n * Dq = Sq ( ) d = WkjWk SF F d k ω ω k ρ ω, (.75) j ρ π π j= ρ= arba S kai j SFF ω F = ρ j ( )= j ρ, kai j ρ, tada n Dq = Wkj SF ( ) d k ω j ω. (.76) π j=, ; 6
62 Greičių ir pagreičių dispersijos yra lygios: n Dq k = Wkj ω S F j ( ω) d ω ; π j = Dq k = (.78) 4 n Wkj ω S F j ( ω) d ω. π j = (.79) egu sistemos judėjimo lygčių sistema lygi: [ M ]{q } + [C ]{q } + [ K ]{q} = [ B ]{F ( t )} + [ D ]{F ( t )}. (.8) Sužadinimus, veikiančius sistemą, F, F,..., Fn galima išreikšti įvertinus jų vėlinimą pirmojo sužadinimo atžvilgiu: F ( t ) = h ( t ) ; F ( t ) = h ( t ) = h ( t t ) ; (.8) F3 ( t ) = h3 ( t ) = h ( t t3 ),.... Fn ( t ) = hn ( t ) = h ( t tn ). egu žinome spektrinį tankį Sh ( ω). Sužadinimus galima užrašyti panaudojus Furjė integralą: iω t t Fk = h ( t tk ) = h ( ω)e ( k ) d ω, ( k =,, 3,...n ). (.8) iω t t F k = h ( t tk ) = i h ( ω)ωe ( k ) d ω. (.83) egu sistemos (7) sprendinį ieškosime tokio pavidalo {q ( t )} = i ωt q ( ω)e d ω. (.84) Įstatę (.43), (.44) ir (.45) į (.4), gausime ( ω [ M ] + iω[c ] + [ K ]){q } = [ B][ H ]{h } + iω[ D][ H ]{h } (.85) arba 6
63 ( ) [ ]+ [ ] { }= [ ]+ [ ]+ [ ] ( )[ ]{ } q ω M iω C K B iω D H h, (.86) { } = čia h h, h,... h,,...,, ; iωt i t i t [ H]= diag( e ω e 3 ω,,,... e n,,,..., )= e iωt e iωt3 e iωt n. (.87) čia Sprendinį (.84) galima perrašyti: { }= ( ) { } q W iω h, (.88) ( ) [ ]+ [ ] ( ) = [ ]+ [ ]+ [ ] W iω ω M iω C K B iω D H arba skaliarine forma 6 ( )[ ], (.89) q W iω h ω A iω h ω, (.9) k k n = ( ) ( )= ( ) ( ) j= n j= kj kj čia A W iω. = ( ) k Sprendinio spektrinis tankis lygus k ( )= ( ) ( ) S ω A iω S ω, k =,,..., h. h ( ) Dq ( ω)= Ak ( iω) Sh ( ω) dω k ; π
, x P ( qk qkrib ) = e dt = Φ ( ) Φ ( X ), π X q q q X= k")
64 Dq k ( ω) = Ak ( iω) ω Sh ( ω) d ω ; π Dq k ( ω) = 4 Ak ( iω) ω Sh ( ω) d ω. π Jeigu sprendinys pasiskirsto pagal normalinį dėsnį, tai galime surasti tikimybę to, kad kintamasis qk viršys žinomą ribą qkrib, ( qk qkrib ), x P ( qk qkrib ) = e dt = Φ ( ) Φ ( X ), π X q q q X= k = k. čia X = krib ; m yk = ; D yk σ yk σy k Pavyzdys. Priverstiniai stochastiniai virpesiai. Nagrinėjamas ketvičio P modelis. P judėjimo greitis km m. = v 7 = val. s Kelio nelygumų spektrinis tankis lygus: Sz = 83, ω4 v 545, ω v3 + 43, v5 ω6 + 9, 4 ω4 v 38,5 ω v3 + 7,7 v 6.. pav. P ketvirčio dinaminis modelis 63
65 Kūnų sistemos judėjimo lygčių sistema: ( ) + ( + ) = ()+ (); mq + c+ c q k k q cq kq kz t cz t mq + cq cq + kq kq =. m egu q q c c c m + + q c c k + k k k k 64 q q + q kz = q + cz [ M]{}+ q [ C]{}+ q [ K]{}= q { U}. {}={ Y} e st ; {}= q s{ Y} e st ;{}= { } z = ; z = szest. ze st k ( s [ M]+ sc [ ]+ [ K] ){ Y}= q s Y e st ; + sc z ; ( [ ]+ [ ]+ [ ]){ ( )}= ( ) s M sc K Y s B s {}; u k+ sc [ B]= ; {}= u {}. z Y( s) s M sc K B s {}= u W( s) {} u. ( ) ( ) { }= [ ]+ [ ]+ [ ] s =ω; i ( ) ( ) ( ) = [ ]+ [ ]+ [ ] W s s M sc K B s. ( ) ( ) ( ) = ( ) = [ ]+ [ ]+ [ ] W s W iω ω M iwc K B iω. S ω W iω W iω S ω yk nu nu ( )= ( ) ( ) ( ) j= l= kj * kl ujul ;
66 Kai k=, ( )= ( ) ( ) ( )= * y uu S ω W iω W iω S ω W ( iω) S uu ( ω)= ( Re ( W ( iω) )+ Im( W ( iω) )) Suu ( ω); ( )= ( ) ( ) ( )= * y uu S ω W iω W iω S ω W ( iω) S uu ( ω)= ( Re ( W ( iω) )+ Im( W ( iω) )) Suu ( ω), čia priimta, kad spektrinis tankis S u u tankiai S uu ω ( ) ir S uu ( ω) ir tarpusavio spektriniai ( ) yra lygūs nuliui. ω Dy( ω)= Sy( ω) dω; σ y = D y ; π Dy ( ω)= ω Sy ( ω) dω ; σ y = D y ; π 4 D y ( ω)= ω Sy ( ω) dω ; σ π y = D y ; Dy( ω)= Sy( ω) dω; σ π y = D y ; Dy ( ω)= Sy ( ωω ) dω ; σ y = D y ; π 4 D y ( ω)= Sy( ωω ) dω ; σ y = D y. π 65
67 ikrinės reikšmės, λ = α + iω α ,597,597 ω 64,46 64,46 7,334 7,334 Dažnis, Hz,53,53,6555,6555 Dviejų masių vidutinių kvadratinių nuokrypių priklausomybė nuo judėjimo greičio parodyta. pav. a) b) 66
68 c). pav. Dviejų masių vidutinių kvadratinių nuokrypių priklausomybė nuo judėjimo greičio: a poslinkis; b greitis; c pagreitis; mėlyna spalva piromoji masė; raudona spalva antroji masė 67
69 3. ransporto priemonių dinaminių modelių elementai ir judėjimo lygtys 3.. ransporto priemonės dinaminis modelis Gamtoje visi esantys kūnai yra deformuojami (kūnas vientisa sistema arba sistema su paskirstytais parametrais), tačiau tokių kūnų judėjimo analizė yra sudėtinga, todėl inžineriniuose skaičiavimuose transporto priemonė nagrinėjama kaip nedeformuojamų kūnų, kurie sujungti tam tikrais elementais, sistema. Šiuo atveju turime dinaminę sistemą su sutelktais parametrais. okiose sistemose nedidelės masės kūnai neįvertinami, deformuojami kūnai pakeičiami tampriai deformuojamais ir neinerciniais ryšiais. Kiti kūnai, kuriems paliekamos inercinės savybės, laikomi materialiais taškais (koncentruotos masės) arba absoliučiai standžiais kūnais. okių kūnų padėties kitimas erdvėje ir laike apibrėžiamas nepriklausomomis koordinatėmis. Šių koordinačių skaičius vadinamas laisvės laipsnių skaičiumi (LLS). rimatėje erdvėje laisvojo kūno padėtis ir orientacija apibrėžiama trimis koordinatėmis ir trimis sukimo apie ašis kampais, t. y. kūnas turi šešis laisvės laipsnius (trys koordinatės ir trys kampai). Plokštumoje kūno padėtis ir orientacija apibrėžiama dviem koordinatėmis ir posūkio kampu apie ašį, statmeną nagrinėjamai plokštumai, t. y. plokštumoje kūnas turi tris laisvės laipsnius (dvi koordinatės ir kampas). Didinant laisvės laipsnių skaičių, P dinaminių procesų tikslumas didėja. Su laisvės laipsnio sąvoka artimai susijusi kita sąvoka apibendrintosios koordinatės sąvoka. Apibendrintosios koordinatės dar vadinamos apibendrintomis Lagranžo koordinatėmis. Koordinatės nepriklausomi parametrai, nusakantys materialiųjų taškų padėtį erdvėje. Kai ryšiai holonominiai (geometriniai), apibendrintųjų koordinačių skaičius lygus mechaninės sistemos laisvės laipsnių skaičiui. Apibendrintoji koordinatė turi tiesioginį atitikmenį nagrinėjamąjį poslinkį arba pasisukimo kampą. Kiekvieną apibendrintąją koordinatę atitinka apibendrintoji jėga. 68
70 Sutelktųjų parametrų sistemos dinaminis modelis susideda iš keturių pagrindinių elementų: absoliučiai standžių kūnų, tampriųjų elementų, virpesių slopinimo elementų ir P sistemos judesių reguliavimo elementų. Sukomponavus šiuos elementus ir sudaromas sutelktųjų parametrų sistemos dinaminis modelis. Dinaminiame modelyje pažymimos apibendrintosios koordinatės, virpesių žadinimo jėgos ir jėgų momentai, virpesius sukeliantys poslinkiai (pavyzdžiui, kelio nelygumai, sukeliantys juo važiuojančio automobilio virpesius), pagrindinių elementų parametrai (masės, masių inercijos momentai, standumai, pasipriešinimo koeficientai) ir kiti, virpesių nagrinėjimui reikalingi, duomenys (3. pav.). a) b) 69
71 c) 3. pav. P dinaminiai modeliai: a geležinkelio vagonas; b automobilis; c dviaukštis autobusas 3.. Kūno ir kūnų sistemos masių inercijos momentai Absoliučiai standžių (nesideformuojančių) kūnų gamtoje nėra. ačiau tiriant P atskiras sistemas, jų dalis, statinį ar kitokį elementą, galima išskirti tas jų dalis, kurių deformacijų leistina nepaisyti (pavyzdžiui, stovai, rėmai ir t. t.). Deformuojamąjį virpamosios sistemos elementą dinaminiame modelyje dažnai leistina aproksimuoti vienu ar keliais absoliučiai standžiais kūnais, su kitomis dalimis sujungtais tampriaisiais ir slopinimo ryšiais. Jeigu P kūnas juda slenkamuoju judesiu (nesisuka, bet slenka), tai jis dinaminiame modelyje apibūdinamas vienu parametru jo mase m. Jeigu P dinaminiame modelyje kūnas sukasi, judantis sukamuoju judesiu kūnas dinaminiame modelyje išreiškiamas ašiniais ir išcentriniais masių inercijos momentais (masių inercijos tenzorius), judantis sukamuoju ir slenkamuoju judesiu mase ir minėtais inercijos momentais. Visų inercijos momentų SI matavimo vienetas yra kg m. 7
72 Kūnas gali judėti tam tikra kryptimi (slenkamasis judesys), suktis apie tam tikrą ašį (sukamasis judesys) ir atlikti du judesius kartu. Materialusis kūnas turi inercines charakteruistikas: masė ir masių inercijos momentai. SI vienetų sistemoje kūno masė matuojama kg, o masių inercijos momentas matuojamas kg/m. Nagrinėjant kūno slenkamąjį judėjimą reikia žinoti kūnų mases (pagal antrąjį Niutono dėsnį: m d q n = Fi t (), o nagrinėjant kūno dt i= sukimąsi apie tam tikrą ašį reikia žinoti masių inercijos momentą (pagal antrąjį Niutono dėsnį): Iz Mi t d ϕ n z = (). dt i= Kūno, kurio medžiagos tankis yra ρ( xyz,, ), kūno masė lygi: m = ( ) ρ x, yzdv,, (3.) V kai medžiagos tankis yra pastovus, kūno masė lygi: m=ρ V, (3.) čia V kūno tūris, ρ kūno medžiagos tankis, kg m 3. Slenkamojo judesio kūno kinetinė energija lygi: E kinetinė = {} v [ M]{} v, (3.3) čia {} v = vx, vy, vz kūno greičio vektorius, M matrica, ( ) [ ] kūno masių ρ xyz,, dv m [ M ]= ρ( xyz,, ) dv = m. ρ( xyz,, ) dv m (3.4) 7
73 Kiekvienas materialus kūnas turi šešis masių inercijos momentus: Ixx, Iyy, Izz, Ixy, Ixz, Iyz. Pirmieji trys masių inercijos momentai yra ašiniai masių inercijos momentai Ixx, Iyy, Izz, o likusieji trys išcentriniai masių inercijos momentai Ixy, Ixz, I yz. Visi šeši kūno masių inercijos momentai sudaro kūno masių inercijos tenzorių I I I [ I ]= I I I I I I xx xy xz yx yy yz zx zy zz = ρ[ r ] [ r ] dv, (3.5) V čia [ r ] antisimetrinė matrica; rz ry [ r ]= rz rx ; ry r x {} r = r r r ; x y z (3.6) {} r kūno taško vektorius, užrašytas OXYZ koordinačių sistemoje; Ixx = ρ ry + rz dv ; Iyy = ρ rx + rz dv ; V ( ) ( ) Izz = ρ rx + ry dv ; I xy V V ( ) = ρ r rdv; I = ρ r rdv ; I = ρ r rdv ; (3.7) V x y xz V x z yz V y z I xy = I ; I = I ; I = I. (3.8) yx xz zx yz zy 7
 ada kūno masių inercijos tenzorius yra: Ixx [ I ]= I yy. (3.) I zz Besisukančio kūno kinetinė energija lygi: E kinetinė = { } [ I]{ } ω ω, (3.")
74 3. pav. Kūno koordinačių sistema OXYZ Kūno masių inercijos tenzorius yra simetrinė matrica. Centrinių ašių atžvilgiu kūno masių išcentrinai inercijos momentai lygūs nuliui, būtent: I xy =, I xz =, I yz =. (3.9) ada kūno masių inercijos tenzorius yra: Ixx [ I ]= I yy. (3.) I zz Besisukančio kūno kinetinė energija lygi: E kinetinė = { } [ I]{ } ω ω, (3.) { } = x y z čia ω ω, ω, ω kūno kampinio greičio vektorius. 73




75 3. lentelė. Pagrindinių kūnų masių inercijos momentai Rutulys Ixx = Iyy = Izz = ma 5 Ixy = Ixz = I yz = Plonas diskas Ixx = Izz = ma 4 ; Iyy = ma { R}= { Rc}+{ r} Ixy = Ixz = I yz = Cilindras Ixx = Izz = m( 3a + h ); ; Iyy = ma Ixy = Ixz = I yz = Plona plokštelė Ixx = ma ; Iyy = m a + ( b ); Izz = mb ; Ixy = Ixz = I yz = 74
 masių inercijos momentus ir užrašyti masių inercijos tenzorių. 3.3 pav. Stačiakampis gretasienis ( ) c b a = + ( ) = + Ixx = ρ yi + zi dv ρ yi zi dxdydz i i i m b c 3 ( ); 75")
76 3. lentelės pabaiga Plonas strypas Ixx = Izz = ml ; I yy = ; Ixy = Ixz = I yz = Kūgis 3 Ixx = Izz = m( 4a + h ) ; 8 Iyy = 3 ma ; Ixy = Ixz = I yz = Pirmas pavyzdys: rasti stačiakampio gretasienio (3.3 pav.) masių inercijos momentus ir užrašyti masių inercijos tenzorių. 3.3 pav. Stačiakampis gretasienis ( ) c b a = + ( ) = + Ixx = ρ yi + zi dv ρ yi zi dxdydz i i i m b c 3 ( ); 75
![Iyy = m a + ( c ); 3 c b a Ixy = ρxiydv i = ρxiydxdydz i i i i = c b ρa yidyidz i Ixz = mac ; Iyz mbc 4 = 4 c = ; ρabdzi = mab 4 4 ; mb ( + c ) mab mac 3 4 4 [ I ]= mab m( a + c ) mbc 4 3 4.](/docs-images/74/69904299/images/77-0.jpg "mac mbc ma ( + b ) 4 4 3 Bendroje koordinačių sistemoje OXYZ kūno masių centras nusakomas vektoriumi { R c } (3.4 pav.). aško P padėtis i-tojo kūno koordinačių sistemoje CXYZ i i i i nustatoma vektoriumi {}.")
77 Iyy = m a + ( c ); 3 c b a Ixy = ρxiydv i = ρxiydxdydz i i i i = c b ρa yidyidz i Ixz = mac ; Iyz mbc 4 = 4 c = ; ρabdzi = mab 4 4 ; mb ( + c ) mab mac [ I ]= mab m( a + c ) mbc mac mbc ma ( + b ) Bendroje koordinačių sistemoje OXYZ kūno masių centras nusakomas vektoriumi { R c } (3.4 pav.). aško P padėtis i-tojo kūno koordinačių sistemoje CXYZ i i i i nustatoma vektoriumi {}. r Be to, bendrosios koordinačių sistemos OXYZ ir i-tojo kūno koordinačių sistemos ašys yra lygiagrečios. CXYZ i i i i 3.4 pav. Kūnas bendroje koordinačių sistemoje OXYZ 76
78 Kūno masių centras bendroje koordinačių sistemoje OXYZ nustomas vektoriumi { R c }: { Rc }= ρ { RdV }. (3.) m V aško P padėtis bendroje koordinačių sistemoje OXYZ nustoma vektoriumi R { }: { R}= { Rc }+ {}. r (3.3) Kūno masių inercijos tenzorius bendroje koordinačių sistemoje OXYZ lygus: nes I I I [ I ]= I I I I I I xx xy xz yx yy yz zx zy zz = ρ R R dv = ρ R R c c dv + V V ρ r r dv ρ R c r dv ρ r Rc dv ; (3.4) V V [ ] [ ] + [ ] + [ ] [ ] ρ R R dv R R ρdv m R R c c = c c = c c ; V [ ] [ ] = [ ] V ρ r r dv Icc ; (3.5) V ρ R r dv R c [ ] = c ρ[ r] dv = ; (3.6) V ρ[ r] R c dv = ρ[ r] dv R c =, V ρ rdv V {} = V V V, kadagi kūno koordinačių sistema įvesta masių kūno centre. ada gauname, kad kūno masių inercijos tenzorius bendroje koordinačių sistemoje OXYZ lygus: 77
![[ I]= [ Icc ]+ m R c R c, (3.7) arba išplėstine forma kūno masių inercijos momentai lygūs: ( ) xx xcxc yc zc I = I + m R + R ( ) zz zczc xc yc I = I + m R + R ( ) yy ycyc xc zc ; I = I + m R + R ; (3.](/docs-images/74/69904299/images/79-0.jpg "8) Ixy = Ixcyc mrxcryc ; I = I mr R ; Iyz = Iyczc mrycrzc. xz xczc xc zc Kūno masių inercijos tenzorius masių centro atžvilgiu lygus: [ Icc ]= [ I] m R c R c. (3.")
79 [ I]= [ Icc ]+ m R c R c, (3.7) arba išplėstine forma kūno masių inercijos momentai lygūs: ( ) xx xcxc yc zc I = I + m R + R ( ) zz zczc xc yc I = I + m R + R ( ) yy ycyc xc zc ; I = I + m R + R ; (3.8) Ixy = Ixcyc mrxcryc ; I = I mr R ; Iyz = Iyczc mrycrzc. xz xczc xc zc Kūno masių inercijos tenzorius masių centro atžvilgiu lygus: [ Icc ]= [ I] m R c R c. (3.9) ; Antras pavyzdys: rasti stačiakampio gretasienio masių inercijos momentus ir užrašyti masių inercijos tenzorių kūno masių centro atžvilgiu (3.5 pav). 3.5 pav. Stačiakampis gretasienis 78
80 Masių centro vektorius lygus: xc x c b a i a { Rc }= yc = ρ yi dxidyidzi = b. m z c z i c Stačiakampio gretasienio masių inercijos momentai kūno masių centro atžvilgiu lygūs: m b c Ixcxc = Ixx m( yc + zc )= ( b + c ) m + 3 = m b c ( + ) ; m a c Iycyc = Iyy m( xc + zc )= ( a + c ) m + 3 = m a c ( + ) ; m a b Izczc = Izz m( xc + yc )= ( a + b ) m + 3 = m a b ( + ) ; m m Ixcyc = Ixy + mxcyc = ab + ab = ; 4 4 m m Ixczc = Ixz + mxczc = ac + ac = ; 4 4 m m Iyczc = Iyz + myczc = bc + bc =. 4 4 Stačiakampio gretasienio masių inercijos tenzorius masių centro atžvilgiu lygus: m b c ( + ) m [ Icc ]= ( a + c ). m ( a + b ) 79
81 Panagrinėsime bedrąjį atvejį, kai i-tojo kūno koordinačių sistemos CXYZ i i i i ašys nėra lygiargrečios bendrosios koordinačių sistemos OXYZ ašims. aško P padėtis bendroje koordinačių sistemoje OXYZ nustoma vektorium R { } (žiūrėti 3.4 pav.): { R}= { Rc}+ { Rcp}= { Rc}+ [ A]{}, r (3.) čia[ A] koordinačių transformacijos matrica (posūkio matrica). Kūno masių inercijos tenzorius bendroje koordinačių sistemoje OXYZ lygus: Ixx Ixy Ixz [ I ]= Iyx Iyy I yz = ρ R R dv = V Izx Izy Izz ρ R A r A R c + [ ][ ] [ ] c + [ A][ r ][ A] dv V ( ) ρ R R c c dv + V [ ][ ] [ ] [ ][ ][ ] + ρ A r A A r A dv V ( ) = ρ R A r A dv ρ A r A R c c dv V [ ][ ][ ] + [ ][ ] [ ] = ρ Rc Rc dv A ρ r r dv A V V V + [ ] [ ] [ ] [ ] + R A r dv A A r dv A R c [ ] ρ[ ] [ ] + [ ] ρ [ ] [ ] c. (3.) V Kadangi kūno koordinačių sistema CXYZ i i i i centre, tai integralai : ρ r dv, ρ r dv V [ ] = yra lygūs nuliui. V [ ] = V įvesta kūno masių 8
![ada kūno masių inercijos tenzorius bendroje koordinačių sistemoje OXYZ lygus: [ I]= m R c R c + [ A] ρ[ r ] [ r ] dv[ A] = m R c R c + m R R c c A Icc A [ ]= [ ] [ ] V čia: Icc ρ r r dv.](/docs-images/74/69904299/images/82-0.jpg "V + [ ][ ][ ], (3.) Iš (3.) išraiškos galima surasti masių inercijos tenzorių I cc masių centro ašių atžvilgiu, t. y. [ ] [ I ]= [ A] [ I][ A] m[ A] R R [ A]. (3.3) cc Kiekviena transporto priemonė (P) sudaryta iš tam tikro skaičiaus materialiųjų kūnų.")
82 ada kūno masių inercijos tenzorius bendroje koordinačių sistemoje OXYZ lygus: [ I]= m R c R c + [ A] ρ[ r ] [ r ] dv[ A] = m R c R c + m R R c c A Icc A [ ]= [ ] [ ] V čia: Icc ρ r r dv. V + [ ][ ][ ], (3.) Iš (3.) išraiškos galima surasti masių inercijos tenzorių I cc masių centro ašių atžvilgiu, t. y. [ ] [ I ]= [ A] [ I][ A] m[ A] R R [ A]. (3.3) cc Kiekviena transporto priemonė (P) sudaryta iš tam tikro skaičiaus materialiųjų kūnų. Nagrinėjant P judėjimą reikia žinoti kūnų mases, masių inercijos tenzorius, masių centrus bendroje kordinačių sistemoje. Suradus P masių centro vektorių, galima nustatyti P masių inercijos tenzorių masių centro atžvilgiu. c c 3.7 pav. ransporto priemonė kaip tam tikrų kūnų sistema egu žinome bendroje koordinačių sistemoje OXYZ kiekvieno kūno masių centro vektorius { R ci }. 8

83 3.7 pav. Kūnų sistema Materialiųjų kūnų sistemos masių centro koordinatės yra nustatomos taip: n mi R i= { Rc }= n m arba x n i= mx i ci i c = = n m i= i { } i ci ; y n my i i c = = n m i= i ci ; z 8 n mz i ci i c = = n m i= i (3.4). (3.5) Kūnų sistemos masių inercijos tenzorius bendroje koordinačių sistemoje OXYZ lygus: n [ Icc ]= [ Icci ]+ m R ci R ci. (3.6) i=
84 a) b) 3.8 pav. ransporto priemonė kaip tam tikrų kūnų sistema: a P masių išdėstymo schema; b P masių išdėstymas erdvėje 83
85 3.3. Jėgų klasifikacija Išorinės jėgos, veikiančios P, taip pat ir vidinės jėgos, atsirandančios jos ryšiuose, labai skiriasi savo prigimtimi. Jėgos klasifikuojamos taip pat skirtingai pagal darbo proceso pobūdį, pagal kilmę ir t. t. Nagrinėsime labiausiai paplitusių jėgų klasifikavimą, t. y. jėgų klasifikavimas pagal jėgų fizinę prasmę dinaminiuose procesuose. Veikiančios jėgos skirstomos: Pozicinės jėgos; Slopinimo jėgos; Žadinimo jėgos; Mišriosios jėgos. Pozicinės jėgos jėgos, kurias apibrėžia sistemos momentinė konfigūracija, t. y. nukrypimai nuo pradinės, dažniausiai pusiausvyros, padėties. uo atveju, kai pozicinės jėgos kryptis yra priešinga sistemos nukrypimui nuo pradinės padėties, tokia jėga vadinama atstatomąja jėga. okio tipo jėga yra standumo jėga, sukelta vidinių ar išorinių ryšių tamprių deformacijų. Kai galioja Huko dėsnis, standumo jėga yra lygi: Fp = kq ; čia k standumo koeficientas. Atstatomųjų jėgų atsiradimas nebūtinai sietinas su tamprumo savybe, jos gali būti kitos kilmės, pavyzdžiui, Archimedo jėga, svorio jėga, elektromagneto traukos (atostūmio) jėga. Dėl netiesinio ryšio su apibendrintąja koordinate q atstatomąją jėgą ne visada galima išreikšti pavidalu Fp = kq. ada patogu naudotis standumo charakteristikomis, kurios parodytos 3.9 pav. Skiriamos standžiosios ir minkštosios netiesinės standumo charakteristikos. Standžiosiomis laikomos charakteristikos su tolydžiai didėjančiu nuolydžiu (3.9 pav. b), o minkštosiomis su mažėjančiu nuolydžiu (3.9 pav. c). Kai kurios charakteristikos turi lūžius ir trūkius (3.9 pav. d, e). Sudėtingesniais atvejais pozicinės jėgos analitiškai aprašomos kaip kelių apibendrintų koordinačių funkcijos. iesinėse P kelių laisvės laipsnių sistemose pozicinės jėgos gali būti išreiškiamos lygčių sistema: 84
86 { Fp}= [ K]{}, q (3.7) čia { Fp},{} q apibendrintų jėgų ir apibendrintų koordinačių vektoriai; Fp, q F p, q { Fp}= ; {}= q, F q pn, n [ K ] standumo matrica: k k... kn k k k n [ K ]= kn kn... knn { } potencinės (konservatyviosios jėgos), tai standumo Kai F p matrica simetrinė, t. y. [ K] = [ K]. a) b) c) d) e) 3.9 pav. Standumo charakteristikos: a tiesinė; b netiesinė standi; c netiesinė minkšta; d, e laiptuotos 85
87 Slopinimo jėgos. Judant P tam tikriems elementams, be atstatymo jėgų, visada veikia pasipriešinimo jėgos { F pas }, kurios dažniausiai priklauso nuo atitinkamų sistemos kūnų taškų greičių. Jos atlieka neigiamą darbą, pasireiškiantį mechaninės energijos išsklaidymu. Prie tokių jėgų priklauso trinties jėgos (kūnų sujungimuose), aplinkos pasipriešinimo jėgos, vidinės trinties jėgos sistemos elementų medžiagoje ir jėgos, atsirandančios deformuojant specialius slopintuvus (dempferiai, amortizatoriai). Slopinimo jėgų krytis bet kuriuo sistemos elementų judėjimo momentu yra priešinga judėjimo greičiui. Vieno laisvės laipsnio sistemai slopinimo jėgos charakteristika aprašoma funkcija Fpas ( q ). Pasipriešinimo jėgos priklausomybė nuo greičio gali būti ir netiesinė (3. pav.). Sausosios trinties charakteristikos yra trūkaus pavidalo. Kaip parodyta 3. pav. c, trinties charakteristika, atitinkanti Amontovo ir Kulono dėsnį, priklauso ne nuo greičio didumo, o tik nuo jo krypties, 3. pav. d, e parodytos patikslintos sausos trinties charakteristikos. a) b) c) d) e) 3. pav. Slopinimo jėgų charakteristikos: a tiesinė; b netiesinė; c Amontovo ir Kulono trinties jėgos charakteristika; d, e patikslintos sausos trinties charakteristikos 86
88 rinties jėga, N Slopinimo jėgų tiesinės charakteristikos matematinė išraiška yra lygi: Fsl = cq, (3.7) netiesinės charakteristikos galima išraiška gali būti tokia: Fsl = c q + c q, (3.8) 3 3 patikslintos sausos trinties charakteristikos gali būti: Fsl = F sign ( q )+ cq, (3.9) Fsl = F sign ( q ) c q + c q, (3.3) dq čia c, c3 koeficientai; F rimties trinties jėga; q greitis. dt Sausos trinties jėgos priklausomybę, atitinkančią paprasčiausią Amontovo ir Kulono dėsnį, galima užrašyti keliais būdais: 3 3 būdas q Ftr = Ftr, = Ftr, sign( q ), (3.3) q čia F tr, trinties jėgos reikšmė;, kai q > sign( q )=, kai q =. kai q <, būdas πq Ftr = Ftr, arctan, kai ε π ε 4 q max, (3.3) čia ε mažas parametras, ε<5,. 3. pav. rinties jėgos funkcijos: ε= (juoda spalva); ε=, (mėlyna spalva); ε=5, (raudona); ε=, (žalia spalva); 87
89 Kelių laisvės laipsnių P sistemose tiesinio slopinimo jėgos, kaip ir pozicinės jėgos, gali būti pateiktos matricine forma: { Fpas}= [ C]{} q, (3.33) { } {} [ ] čia Fpas, q slopinimo jėgų vektorius ir greičių vektorius; C slopinimo matrica, c c... c n c c c n [ C]=.... (3.34) cn cn... cnn Žadinimo jėgos. Atstatymo ir slopinimo jėgų charakteristikos priklauso tik nuo P mechaninės sistemos savybių, o pačios jėgos yra vienokios poslinkių ir greičių funkcijos, tuo tarpu žadinimo jėgos yra išreikštinės laiko funkcijos, nepriklausomos nuo sistemos savybių. Kaip žadinimo jėgų pavyzdžius galima nurodyti neatsvertų rotorių išcentrines jėgas (inercinis žadinimas); jėgas, sukuriamas periodiškai kintančio slėgio vidaus degimo variklių cilindruose; periodines elektromagnetines jėgas ir kt. Žadinimo jėgų kitimų dėsniai gali būti labai įvairūs. Labiausiai paplitę yra tokie: Harmoninė jėga; Periodinė jėga; Periodiniai mažos trukmės impulsai; Neperiodinės jėgos; Atsitiktinės jėgos (procesai) amprieji elementai, standumo jėgos ir jėgų momentai P dinaminį modelį sudaro tamprieji elementai, kurie deformuojasi, ir kadangi jų masė yra gana maža, jų masė prilyginta nuliui (bemasiai elementai). Juos deformuojant atsiranda atstatomosios jėgos ir momentai. amprūs elementai stengiasi grąžinti kūną į pradinę padėtį, kurioje tos jėgos ir jėgų momentai jau neveiktų (statinė pusiausvyra). Paprasčiausias tokio elemento pavyzdys yra spyruoklė. 88
90 Cilindrinę spyruoklę dažniausiai galima aproksimuoti tempiamu (gniuždomu) tampriuoju elementu (3. pav.). 3. pav. amprusis elementas Atstatomosios jėgos ir atstatomųjų jėgų momentai, kylantys de formuojamuose tampriuosiuose elementuose, vadinami tamprumo jė gomis ir tamprumo jėgų momentais. ampriųjų elementų tampriaisiais poslinkiais (tiesiniais ir kam piniais) vadinami tampriųjų elementų deformaciniai poslinkiai, suke liantys tamprumo jėgas arba momentus. amprumo jėgų ir momentų veikimo kryptys yra priešingos tam priųjų poslinkių kryptims; jėgų ir momentų moduliai (dydžiai) yra tampriųjų elementų poslinkių funkcijos: Ft = Ft ( q ), M t = M t ( q ), čia Ft, M t tamprumo jėgos ir tamprumo jėgų momentas; q tam priojo elemento tiesinis ar kampinis poslinkis. Priešingo ženklo tamprumo jėgos tamprumo jėgos projekcijos į tampriojo tiesinio poslinkio kryptį priklausomybė nuo to poslinkio vadinama jėgine tamprumo charakteristika. Paprasčiausia yra tiesi nė jėginė charakteristika: Ft = kq ; M t = k ϕ ; (3.35) Ft = k ( q q ) ; M t = k ( ϕ ϕ ). (3.35) arba 89
91 amprusis elementas, kurio jėginė tamprumo charakteristika tiesinė, vadinamas tiesiniu; visi kiti netiesiniais. Koeficientas k vadinamas tempiamo (gniuždomo) arba sukamo elemento standumo koeficientu. Netiesines jėgines charakteristikas galima linearizuoti tam tikro taško aplinkoje. arkime, kad tamprųjį poslinkį q galima išreikšti taip: q= q + q, (3.36) čia q pastovioji poslinkio dedamoji; q kintamoji poslinkio dedamoji, kurios didžiausia reikšmė yra daug kartų mažesnė už pastovųjį dydį q, t. y. q << q. ada galima teigti, kad nedideli virpesiai vyksta didelių tampriųjų poslinkių q aplinkoje. Šiuo atveju netiesinę tolydinę funkciją Ft ( q) galima linearizuoti poslinkio q aplinkoje. olydinė funkcija Ft( q)= Ft( q + q ) skleidžiama eiloro eilute apie pastovųjį dydį q : F q + q F q t ( )= ( )+ 3 ( ) dft q dq d Ft q q + q + dq t q= q q= q ( ) d Ft + q (3.36) dt q= q Kadangi q yra mažas dydis, tai dydžiai q, q 3, yra daug mažesnis už jį ir, apytiksliai interpretuojant funkciją Ft( q) Ft( q ), jų galima nepaisyti. ada (3.36) lygybėje palikus narį su q, gaunama linearizuota poslinkio q aplinkoje jėginė tamprumo charakteristika: F q F q t ( ) ( ) t ( ) dft q čia k = dq ( ) dft q dq q= q q q = standumo koeficientas. q = kq, (3.37) Pavyzdys. Linearizuoti funkciją Ft ( q)= aq 3 taško q aplinkoje. 9
92 ( ) dft q ada k = dq = 3aq ; q= q ( ) ( )= ( ) F q F q F q aq dft ( q) dq q = ( 3 aq ) q = kq. t t t 3 q= q 3.5. ampriųjų elementų jungimas Sudarant P dinaminius modelius dažnai tenka jungti keletą tampriųjų elementų į vieną ir rasti tokio redukuoto elemento standumo koeficientą. Lygiagrečiai sujungtus tampriuosius elementus (3.3 pav.), kurių standumo koeficientai k, k,..., k n, galima pakeisti vienu ekvivalentiniu (redukuotuoju) tampriuoju elementu, kurio standumo koeficientas k. 3.3 pav. Lygiagrečiai sujungtų tampriųjų elementų redukavimas vienu tampriuoju elementu n k = k = k+ k + k k. (3.38) i= i n ampraus elemento jėginė tamprumo charakteristika (jėga) yra lygi: F = k( q q ). (3.39) Nuosekliai tarp savęs sujungtų tampriųjų elementų ekvivalentinio (redukuotojo) tampriojo elemento standumo koeficientas k nustatomas (3.4 pav.): 9
93 3.4 pav. Nuosekliai sujungtų tampriųjų elementų redukavimas vienu tampriuoju elementu n = = (3.4a) k k k k k k i= i 3 arba kk k3... kn k = kk... kn + k k... kn kk... kn 3 3 n. (3.4b) Redukuoto tampriojo elemento jėginė tamprumo charakteristika (jėga) yra lygi: F = k( q q ). (3.4) ampriojo elemento potencinė energija lygi: Π= k( q q ). (3.4) 3.6. Slopinimo elementai, slopinimo jėgos ir momentai P dinaminį modelį sudaro be masės slopinimo elementai, kurie deformuojasi. Juos deformuojant, atsiranda atstatomosios jėgos ir momentai, kurie priklauso nuo deformavimosi greičio. Paprasčiausias tokio elemento pavyzdys yra hidraulinis cilindras ir stūmoklis (3.5 pav.) 3.5 pav. Slopinimo elementas 9
94 Atstatomosios jėgos ir atstatomųjų jėgų momentai, kylantys slo pinimo elementuose, vadinami slopinimo jėgomis ir slopinimo jėgų momentais. Slopinimo jėgų ir momentų veikimo kryptys yra priešingos grei čių kryptims; jėgų modulis (ir momentų dydis) yra slopinimo elemen tų greičių funkcijos: Fs = Fs ( q ), M s = M s ( q ), čia Fs, M s slopinimo jėgos ir slopinim jėgų momentas; q slopi nimo elemento tiesinis ar kampinis greitis. Priešingo ženklo slopinimo jėgos projekcijos į slopinimo tiesinio greičio kryptį priklausomybė nuo to greičio vadinama jėgine slopinimo charakteristika. Paprasčiausia yra tiesinė jėginė charakteristika: Fs = cq ; M s = cϕ ; (3.44a) arba Fs = c ( q q ) ; M s = c ( ϕ ϕ ). (3.44b) Slopinimo elementas, kurio jėginė slopinimo charakteristika tie sinė, vadinamas tiesiniu; visi kiti netiesiniais. Koeficientas c vadinamas tempiamo (gniuždomo) arba sukamo elemento pasipriešinimo koeficientu. Netiesines jėgines charakteristikas galima linearizuoti tam tikro taško aplinkoje. arkime, kad tamprųjį poslinkį q galima išreikšti taip: q = q + q (3.45) čia q pastovioji greičio dedamoji; q kintamoji greičio dedamo ji, kurios didžiausia reikšmė yra daug kartų mažesnė už pastovųjį dydį q, t. y. q << q. ada galima teigti, kad nedideli virpesiai vyksta didelių greičių q aplinkoje. Šiuo atveju netiesinę tolydinę funkciją Fs ( q ) galima linearizuoti poslinkio q aplinkoje. olydine funkcija Fs ( q ) = Fs ( q + q ) skleidžiama eiloro eilute apie pastovųjį dydį q : Fs ( q + q ) = Fs ( q ) + dfs ( q ) d Fs ( q ) q + dq dq q = q 93 q + q = q
95 3 d F + 3 dq s q = q q 3 (3.46) Kadangi q yra mažas dydis, tai dydžiai q, q 3, yra daug mažesnis už jį ir, apytiksliai interpretuojant funkciją Fs( q ) Fs( q ), jų galima nepaisyti. ada (3.46) lygybėje palikus narį su q, gaunama linearizuota poslinkio q aplinkoje jėginė tamprumo charakteristika: F q F q s ( ) ( ) s ( ) dfs ( q ) dq q q = q = cq, (3.47) dfs q čia c = pasipriešinimo koeficientas. dq q = q Pavyzdys. Linearizuoti funkciją Fs ( q )= aq 3 taško q aplinkoje. ( ) dfs q ada c = dq = 3aq ; q = q ( ) ( )= ( ) F q F q F q aq dfs ( q ) dq q 3 aq q = cq. = ( ) s s s 3 q = q 3.7. Slopinimo elementų jungimas Sudarant P dinaminius modelius dažnai tenka jungti keletą slopinimo elementų į vieną ir rasti tokio redukuoto elemento pasipriešinimo koeficientą. iriamus lygiagrečiai sujungtus slopinimo elementus (3.6 pav.), kurių pasipriešinimo koeficientai c, c,..., c n, galima pakeisti vienu ekvivalentiniu (redukuotuoju) slopinimo elementu, kurio pasipriešinimo koeficientas c. 94
96 3.6 pav. Lygiagrečiai sujungtų slopinimo elementų redukavimas vienu slopinimo elementu n c= c = c+ c + c c. (3.48) i= i n Slopinimo elemento jėginė charakteristika (pasipriešinimo jėga) yra lygi: Fs = c ( q q ). (3.49) Nuosekliai tarp savęs sujungtų slopinimo elementų ekvivalentinio (redukuotojo) slopinimo elemento pasipriešinimo koeficientas c nustatomas (3.7 pav.): arba 3.7 pav. Nuosekliai sujungtų slopinimo elementų redukavimas vienu slopinimo elementu n = = , (3.5a) c c c c c c i= i 3 n 95
97 cc c3... cn c = cc... cn + c c... cn cc... cn 3 3. (3.5b) Redukuoto slopinimo elemento jėginė charakteristika (pasipriešnimo jėga) yra lygi: Fs = c ( q q ). (3.5) Slopinimo elemento disipatyvinė funkcija lygi: Φ= c( q q ). (3.5) 3.8. Kūno judėjimo lygčių užrašymo būdai D Alambero ir Lagranžo lygtys Bet kokios materialių taškų sistemos su idealiaisiais ryšiais bendroji suma aktyviųjų ir inercinių jėgų atliekamo darbo bet kuria galima kryptimi ir bet kuriuo laiko momentu lygi nuliui (D Alambero principas). D Alambero principo matematinę išraišką, kai materialiųjų taškų skaičius lygus N, galima užrašyti tokiu pavidalu: N ({ Fak, i}+ { Fini, }) δ{ ri }=, (3.53) i= { } { } i-tąjį tašką veikiančios aktyvioji ir inercinė jė čia Fak, i, Fini, gos; δ{ r i } galimas poslinkių vektorius, t. y. be galo mažų poslinkių vektorius ( δ{ r i } poslinkių vektoriaus variacija). arkime, kūno koordinačių sistema yra O, X, Y, Z. ada bet kokio kūno taško P poslinkių vektoriaus variacija lygi: { }= { }+ { } { }= { }+ { } { }= δ r δ r δϕ r δ r δ ϕ r i i i pi i i pi = δ{ r } r δ{ ϕ }, (3.54) i pi i { } pasukimo vektoriaus variacija; δ{ r i } kūno koordina čia δϕ i čių pradžios (taškas O ) poslinkių variacija; r p vektorius. 96 { } taško P padėties
98 Įstatę (3.54) išraišką į (3.53) lygtį, gausime: N i= N ({ Fak, i}+ { Fini, }) ( δ{ ri} r pi δ{ ϕi} )= ({ Fak, i}+ { Fini, }) δ{ ri} N ({ ak i}+ { ini} ) [ ] δϕ { }= i= čia M, M i= N,, i i ({ aki, }+ { Fin, i} ) δ{ ri}+ i= + { Mak, i}+ { Mini, } δϕ { i}, F F r F ( ), (3.55) { ak, i} { ini, } aktyviųjų inercinių jėgų pagrindiniai momentai: { Mak, i}= r pi { Faki, }; { Min, i}= r pi { Fini, }. (3.56) arkime, mechanizmas yra sudarytas iš N g grandžių, ir jo kinematinės poros yra idealios. okiu atveju D Alambero principo matematinę išraišką galima užrašyti šiuo būdu: N g g ( { Fak, i}+ { Fini, }) δ{ ri}+ { Mak, i}+ { Mini, } i= i= δϕ { i}=. N ( ) δ{ ϕ }=. i (3.57) arkime, mechanizmas turi n laisvės laipsnių; apibendrintųjų koor dinačių vektorius yra {} q = [ q, q,..., q ], (3.58) n tada i-tojo kūno koordinačių pradžios poslinkių ir pasukimo kampų variacijos lygios: { } n ri δ{ ri}= δq j j= q, j n { ϕi} δϕ { i}= δ q j. (3.59) q j= j 97
99 Įstatę (3.59) išraiškas į (3.57) ir įvertinę, kad variacijos δq j, gauname mechanizmo judėjimo lygčių sistemą: Ng N ( { Fak, i}+ { Fini, }),, i= j i= { } { r i} g + ( { Mak i}+ { Mini} ) q j =,,..., n. (3.6) ϕ i q j =, Išskyrus iš veikiančių aktyviųjų jėgų apibendrintąsias jėgas Q j, kurių atliekamas darbas galimų poslinkių δq j kryptimi lygus Qjδ qj, D Alambero ir Lagranžo lygtis bus tokia: Ng Ng ( { Fpi, }+ { Fin, i} ) δ{ ri}+ { M pi, }+ { Min, i} i= i= ( ) δ{ ϕ }+ Q δq =, i n j= j j (3.6) { } { } pasipriešinimo jėgų ir momentų pagrindiniai vek čia Ppi,, M pi, toriai. Įvertinę, kad poslinkių, pasukimo kampų vektorių bei apibendrintųjų koordinačių variacijos nelygios nuliui, gauname: Ng ({ Fpi}+ { Fin i} ) i= { ri} q ( ) N,,,, j i= g + { M pi}+ { Min i} { } ϕ i q j + Q =, j =,,..., n. (3.6) Lygtis (3.6) gali būti taikoma nustatant apibendrintąsias jėgas Q j. Lagranžo antrojo laipsnio lygtis apibendrintai koordinatei q k yra lygi: j d dt E q k k E q k k + Φ q k E + q p k = Q, (3.63) k čia E k, E p P kinetinė, potencinė energijos, atitinkamai; P disipatyvinė funkcija; Q k apibendrinta jėga, veikianti P kūną apibendrintos koordinatės q k kryptimi. 98
100 3.8.. Niutono ir Oilerio lygčių sistema Nagrinėsime kūno judėjimą bendroje koordinačių sistemoje OXYZ. am tikrame kūno taške įvesime koordinačių sistemą O XYZ, kuri judės kartu su kūnu. Bet kokio kūno taško P poslinkių vektorius OXYZ koordinačių sistemoje lygus: {R p } = {R} + {R p } = {R} + [ A]{r p }, (3.64) { } čia {R} taško O koordinačių vektorius; R p vektorius tarp taškų O ir P; r p vektorius tarp taškų O ir P O XYZ koordinačių sistemoje; [ A] koordinačių transformacijos matrica (posūkio matrica) tarp OXYZ ir O XYZ koordinačių sistemų. { } { } Vektoriaus R p variacija yra lygi: { } { } { } δ R p = δ {R} + δ [ A] r p = δ {R} + [ A] δ [ ϕ ] r p = = δ {R} [ A] r p δ {ϕ}, (3.65) arba matricine forma: {R } δ R p = [ E ], [ A] r p δ = [ S ] δ { x}, {ϕ} (3.66) [ S ] = [ E ], [ A] r p ; {x} = {R} ; {ϕ} (3.67) { } čia {ϕ} kūno pasukimo apie O XYZ ašis vektorius. aško P greičių ir pagreičių vektoriai lygūs: {R p } = {R } + [ A][ω ]{r p } ; (3.68) {R p } = {R } + [ A][ω ] {r p } + [ A] ω {r p }, (3.69) 99
101 arba sutrumpinta forma: R { R p}= [ E] [ A] r p { }, a S + { }= [ ]{ ẋ}+ { a}, (3.7) { ω } čia x R { } = { } {, ω } ; { a }= [ A][ ] { r p } ω ; (3.7) [ ] kampinio greičio vektoriaus { ω } antisimetrinė matrica. ω Pagal D Alambero principą (3.53), { } { } { } δ R R p p F dm, (3.7) m ( ) = { } kūną veikianti išorinė jėga, proporcinga kūno masei (tūrinė čia F jėga). Įstatę (3.66) ir (3.69) išraiškas į (3.7) ir įvertinę, kad variacijų vektorius nelygus nuliui, t. y. δ{} x, gauname: E [ A] r p d m{ x }+ [ S] { a } dm [ S] { F} dm = m ([ A] r p ) r p r p m m (3.73) Iš lygčių sistemos (3.73) gauname kūno slenkamojo ir sukamojo judesio judėjimo lygčių sistemas: čia [ M]{ R } [ M ]{ ω }= { F}+ [ A] ω { S} ; [ M ]{ R }+ [ M ]{ ω }= [ ω ][ I ]{ ω } { f }, (3.74) [ M]= [ E] dm ; M A r ip dm ; m M M [ ]= [ ] [ ]= [ ] ; [ M ]= r dm = [ I ] { }= [ ] { } m ; ip { }= { } f r ip A F dm ; S rp dm ; m
102 [ I ] kūno masių inercijos tenzorius kūno taško O atžvilgiu: y p + z p [ I ] = y p x p m z p x p x p y p x p + z p z p y p x p z p y p z p dm = x p + y p I xx I x y I xz = I yx I y y I yz. (3.75) I I I z y zz zx Jeigu kūno koordinačių sistema O XYZ įvesta kūno masių centre, tada (3.74) lygčių sistema supaprastėja: [ M ] R = {F } ; (3.76) { } [ M ]{ω } = [ω ][ I ]{ω} { f}. Lygčių sistema (3.74) arba (3.76) vadinama Niutono ir Oilerio lygčių sistema Hamiltono principas Mechaninės sistemos judėjimo lygtis galima užrašyti taikant Hamiltono principą, kurį patogu naudoti, jeigu žinoma mechaninės sistemos energija (kinetinė ir potencinė) ir nekonservatyviųjų jėgų darbas. Hamiltono principo matematinė išraiška yra: t t t t δldt + δadt =, (3.77) čia δl Lagranžo funkcijos variacija: δl = δ δπ ; (3.78) δ, δπ sistemos kinetinės ir potencinės energijų variacijos; δa nekonservatyviųjų jėgų darbo variacija:
103 δa F δ q F k k = { } {}; (3.79) { } nekonservatyviųjų jėgų vektorius; δ q {} apibendrintųjų koordinačių vektorius. Nekonservatyviosios jėgos tai jėgos, kurių darbas priklauso ne tik nuo sistemos pradinės ir galutinės būsenos. Prie nekonservatyviųjų jėgų priklauso trinties jėgos ir išorinės jėgos, kurios kinta laike. Kai kūną veikia klampiosios trinties jėgos, patogu naudotis Relėjaus disipatyvine funkcija: D= {} q [ C]{} q, (3.8) čia C [ ] slopinimo matrica. ada klampiųjų trinties jėgų vektorius lygus: D { Fc }=. (3.8) { q } arkime, nagrinėjamos sistemos kinetinė ir potencinė energijos yra lygios: = {} q [ M]{} q, Π= {} [ ]{} q K q, (3.8) čia [ M], [ K] sistemos masių ir standumo matricos; {} q, {} q apibendrintųjų koordinačių ir greičių vektoriai. Lagranžo funkcijos variacija lygi: t t L L δldt+ δ{} q δ q t { q} + {} t L dt = { q } δ {} q + { } t t q dt t L t d L + δ{} q { } t δ{} q dt q dt { q}, (3.83) t čia L { } = q q d dt L q K q ; { } [ ]{} d dt { } = [ ]{} ( M q ) = [ M]{} q.
104 arkime, nekonservatyviųjų jėgų darbas yra lygus: δa = δ {q} ({F } [C ]{q }). (3.84) Įstatę gautas išraiškas į Hamiltono principo matematinę išraišką (3.77), gauname: t t δ {q} [ K ]{q} [ M ]{q } + {F } [C ]{q } dt + {q} =. {q } t3 {q} t (3.85) Įvertinę tai, kad apibendrintųjų poslinkių variacija nelygi nuliui ir (3.85) lygties konstanta lygi nuliui, gauname judėjimo lygčių sistemą:. (3.86) [ M ]{q } + [C ]{q } + [ K ]{q} = {F } + {q} Dviejų kūnų sujungimo tampriuoju ir slopinimo elementais, standumo ir slopinimo matricos Nagrinėsime dviejų kūnų judėjimą bendroje OXYZ koordinačių sistemoje. Pirmojo (i-tojo) kūno masių centro padėtis apibrėžiama vektoriumi {Rci }, o antrojo (j-ojo) kūno padėtis apibūdinama vektoriumi Rcj. amprusis elementas prijuntas prie i-tojo ir j-ojo kūnų taškuose Pi ir Pj, atitinkamai. aško Pi padėtis i-tojo kūno koordinačių sistemoje Ci X iyi Zi apibrėžiama vektoriumi rpi, o taško Pj padėtis j-ojo kūno koordinačių sistemoje C j X jy j Z j apibrėžiama vektoriumi rpj. { } { } { } 3.8 pav. Dviejų kūnų sujungimas tampriuoju ir slopinimo elementais 3
105 Pradiniai kūnų pasukimo kampų vektoriai yra: { ϕ i }, { ϕ j }, atitinkamai. Priimame, kad kūnų posūkio kampai yra maži, t. y. vektorų { ϕ i }, ϕ j { } elementai yra maži kampai. aškų Pi ir Pj koordinačių vektoriai yra lygūs: { }= { }+ ( ) Rpi Rci Ai ϕi { rpi}+ { qci}+ Ai( ϕi) { rpi}= { }+ { }+ [ ]+ [ ] ( ){ }= { } { ϕ }= R q E ϕ r R r ci ci i pi pi pi i { } qci { Rpi}+ [ E] rpi, Rpi Bi q i { i} = { }+ [ ]{ } (3.87) ϕ R A r dv A A r dv A R c [ ] ρ[ ] [ ] + [ ] ρ[ ] [ ] c V V { Rcj}+ { qcj}+ ([ E]+ ϕ j ){ rpj}= { Rpj}+ { qcj} r pj { ϕj}= { } { } q { Rpj }+ [ E] rpj, ϕ cj j { }= { }+ ( ) = { Rpj }+ Bj { q j}, (3.88) { }+ { } čia: Rpi Rci Ai ϕ i rpi rpi ; (3.89) { }= { }+ ( ) { }+ { } Rpj Rcj Aj ϕ j rpj r pj ; (3.9) [ Bi]= [ E], r pi ; Bj = [ E ], r pj ; (3.9) r { rpi}= r r xpi ypi zpi ; r pi = r r zpi ypi r r zpi xpi r ypi r xpi ; (3.9) r { rpj}= r r xpj ypj zpj ; r pj = r r zpj ypj 4 r r zpj xpj r ypj r xpj. (3.93)
106 qci { { } qcj qi}= ; q j { ϕi} { { } }=. (3.94) { ϕ j} Vektorius tarp taškų Pi ir Pj yra lygus: { Rpji}= { Rpj}+ Bj { qj} { Rpi } [ Bi]{ qi}= { Rpji}+ Bj { qj} [ Bi]{ qi}, (3.95) { Rpji}= { Rpj} { Rpi}. (3.96) Atstumo tarp taškų Pi ir Pj pailgėjimas yra lygus: L ij { } qi = { Rpji } [ Bi] { Rpji } Bj L ij q j, { } = D { q } ij ij, (3.97) čia: Dij = Rpji Bi Rpji Bj L { } [ ] { }, ; (3.98) ij Lij = { Rpji} { Rpji} ; q qi { { } ij}=. (3.99) { q j} ampriojo elemento potencinė energija yra lygi: Epij = kij Lij = { qij } Dij kij Dij { qij}= { qij} Kij qij { }, čia K ij K ij tampriojo elemento standumo matrica. ij ij (3.) Epij = Dij kij Dij { q } { q } =. (3.) Atstumo tarp taškų Pi ir Pj pailgėjimo greitis yra lygus: 5
107 d L dt ij = L ij = Dij { q ij}. (3.) Slopinimo elemento disipatyvinė funkcija yra lygi: Φ čia: C ij C = c L = { q } Dij cij Dij { q ij}= { q ij} ij ij ij ij ij slopinimo matrica. ij Φ ij 6 ij { ij} C q, (3.3) ij = Dij cij Dij { q } { q } =. (3.4) Nagrinėjant kūnų judėjimą plokštumoje, matrica [ B i ]ir vektorius { q i } yra lygūs: Judėjimas plokštumoje XY: rypi [ Bi ]= q E rpi [ ] r xpi,, ; q { i}= q ϕ Judėjimas ploštumoje XZ: rzpi [ Bi ]= E rpi q [ ] r xpi,, ; q { i}= q ϕ Judėjimas ploštumoje YZ: rzpi [ Bi ]= q E rpi [ ] r ypi,, ; q { i}= q ϕ xci yci zi xci zci yi yci zci xi. (3.5). (3.6). (3.7)
108 4. Sausumos transporto kelių charakteristikos. Komfortabilumas 4.. Automobilių kelių nelygumai, jų charakteriskos Automobilių kelių danga susideda iš kelių asfaltbetonio sluoksnių (viršutinis, apatinis ir pagrindo sluoksniai), pagrindo sluoksnio ir žemės sankasos. Asfaltbetonis mišinys, gaminamas iš mineralinių medžiagų ir bitumo. Kiekvienas mišinio komponentas turi skirtingas fizines mechanines savybes, kurios kinta nuo temperatūros, laiko ir slėgio. Eksploatacijos metu kelio danga veikiama transporto priemonių apkrovomo bei klimatinių faktorių. Pagal šiuos poveikius galima skirti tris dangų defektų bei irimo rūšis: ) šlities įtempimų atsiradimas veikiant apkrovai; ) tempimo įtempimų atsiradimas esant temperatūrų skirtumams; 3) dangos irimas veikiant transporto priemonių apkrovoms kartu su kintamomis klimatinėmis sąlygomis. Šlities įtempimai atsiranda esant aukštai aplinkos temperatūrai. Kelio dangos paviršius įšila ir gali atsirasti pavojingi šlities įtempimai, dėl kurių atsiranda šlities deformacijos. Dėl šlities deformacijų dangos paviršiuje gali atsirasti plyšiai ir bangos. Kelio dangoje išilginės ir skersinės bangos atsiranda esant dideliam transporto priemonių judėjimui nedideliais greičiais. empimo įtempimai atsiranda esant žemai aplinkos temperatūrai. Dėl šios priežasties dangoje gali atsirasti mikroplyšių, kurie eksploatacijos metu gali išvirsti į plyšius. Mikroplyšių, esant žemai aplinkos temperatūrai, atsiranda naudojant transporto priemonių ratus su dygliais. Žemoje temperatūroje asfaltbetonio danga daug trapesnė (mažėja bitumo klampis) negu normalioje temperatūroje ( C). ransporto priemonės padangoje esančio dyglio kontaktinis slėgis į dangos paviršių siekia daugiau kaip 3, MPa. okio didumo normaliniai ir tangentiniai slėgiai į dangos paviršių sudaro galimybių 7
109 kelio dangoje atsirasti nematomiems mikroplyšiams. Patekus vandeniui į tokius mikroplyšius ir po to jam užšalus, dėl didelio ledo tūrinio plėtimosi koeficiento β 5, -6 / C vyksta mikroplyšių didėjimo procesas. Asfaltbetonio dangos irimas pasireiškia tiek jos paviršiuje, tiek jos viduje. Veikiant kintamoms apkrovoms, dangos paviršiuje esančios smulkios dalelės atitrūksta nuo masyvo. aip laipsniškai mažėja dangos storis. Veikiant drėgmei, šalčiui, kintamoms apkrovoms, dangos viduje vyksta mineralinių medžiagų irimas. Vykstant tokiam procesui dyla ir yra kelio danga. Pagal kelio dangos liekamąsias deformacijas galima suskirstyti jos defektus: šlitis pagal visą dangos storį esant lygiam dangos paviršiui (atsiranda dėl dangos medžiagos nuovargio, keičiasi medžiagos struktūra); viršutinio dangos sluoksnio šlitis esant lygiam dangos paviršiui (iš apatinių dangos sluoksnių išspausto bitumo susikaupimas viršutiniame sluoksnyje); tam tikro dėsningumo skersinės bangos (bangos ilgis ne didesnis kaip,7 m; defektas atsiranda stabdymo ruožuose dėl nepakankamo stiprumo šličiai, didelių tangentinių apkrovų ir paviršiaus įšilimo); vienetiniai nelygumai (dėl jų atsiranda paviršiaus bangos); vėžės paviršiuje (atsiranda veikiant didelėms transporto apkrovoms). Panagrinėsime kelio dangoje bangų ir vėžių susidarymo procesą. Riedant transporto priemonės (P) ratui kelio dangos paviršiumi, rato padangos kontakto su paviršiumi vietoje atsiranda normalinis p n ir tangentinis p t slėgiai (4. pav.). Šių slėgių pasiskirstymas kontakto plote priklauso nuo oro slėgio padangoje, nuo rato funkcijos (varantysis ar varomasis ratas), ar ratas stabdomas. 8

110 a) b) c) d) e) f) 4. pav. ransporto priemonės rato padangos deformacijos schemos ir slėgiai, veikiantys kontakto metu: a normalinis slėgis, kai padangoje mažas slėgis; b normalinis slėgis į kelio dangą, kai padangoje nominalus slėgis; c varančiojo rato padangos normalinis slėgis; d varančiojo rato tangentinis slėgis; e varomojo rato kontakto plotas; f varančiojo rato kontakto plotas. Veikiant normaliniam ir tangentiniam slėgiui, kelio danga deformuojasi. Periodiškai apkraunant kelio dangą tokiais slėgiais, joje atsiranda liekamieji tangentiniai ir normaliniai įtempimai. Dėl šių įtempimų kelio dangoje atsiranda liekamosios tangentinės ir normalinės deformacijos. Veikiant tangentiniams įtempimams kelio dangos medžiaga pasislenka transporto priemonės judėjimo kryptimi ir susidaro skersinės bangos (4. a pav.). Rato su kelio danga kontakto plote veikia normalinis slėgis, dėl kurio dangoje susidaro tangentiniai įtempimai, kurie išstumia kelio dangos medžiagą statmena judėjimo kryptimi (4. b pav.). 9


111 Ratas užvažiuoja ant susidariusios kelio dangos paviršiuje bangos, ją deformuoja ir ji išnyksta. Kiekvienai P pravažiavus kelio dangos paviršiuje, statmenai judėjimo kryptimi, atsiranda liekamosios deformacijos. P pravažiuojant tuo pačiu kelio dangos paviršiumi, mažėja dangos sluoksnis ir susidaro liekamosios deformacijos vėžių pavidalu (4. b pav.). Vadinasi, nuo P rato normalinio slėgio į kelio dangos paviršių gali susidaryti vėžės. Veikiant dideliam normaliniam slėgiui ir stabdant ratą, rato ir kelio dangos paviršiaus kontakto plote atsiranda dideli tangentiniai slėgiai. Dėl jų veikimo gali atsirasti šlitis tarp dangos sluoksnių (4. c pav.). a) b) c) 4. pav. Kelio dangos šlitis veikiant P rato normaliniams p n ir tangentiniams p τ slėgiams: a rato stabdymas; b provėžų susidarymas; c dangos sluoksnių šlitis Vasaros laikotarpio maksimalios ir minimalios kelio dangos temperatūros parodytos 4.3 pav. 4.3 pav. Minimalios ir maksimalios asfaltbetonio dangos temperatūros

112 Automobilių kelio paviršius, kad ir labai gero kelio, nėra idealiai lygus. Laikui bėgant kelias dėvisi, kelio nelygumai didėja. Kelio paviršiaus nusidėvėjimas ir irimas priklauso nuo kelio paviršiaus būklės ir kokybės, temperatūros pokyčių, kelio sankasos kokybės ir transporto srautų poveikio kelio paviršiui. Visi šie faktoriai veikia nevienodai, skirtingais laiko momentais, todėl automobilių kelių paviršiaus nelygumai turi stochastinį (atsitiktinį) pobūdį. Kelio paviršiaus nelygumus, stochastinius dydžius galima aprašyti tokiais parametrais: vidutiniu kvadratiniu dydžiu; tikimybės tankio funkcija; autokoreliacine funkcija; spektriniu tankiu. Automobilių kelių klasifikacija pagal kategorijas ir reikšmes pateikta 4. lentelėje. 4. lentelė. Automobilių kelių klasifikacija pagal kategorijas ir reikšmes ( Kelio paviršiaus nelygumus galima aprašyti funkcija (4.4 pav.): z = z( xy, ),
, galima neįvertinti kelio nelygumų kitimo laike (kelio nelygumai kinta lėtai).")
113 t. y. funkcija dviejų nepriklausomų kintamųjų: x ilgis, y plotis. Bendruoju atveju funkcija z(x,y) nestacionari, t. y. kelio nelygumai keičiasi kelio eksploatacijos metu. Nagrinėjant kelio paviršių pagal kelio tipą (asfaltuotas kelias, betoninis kelias, grindinys, žvirkelis ir kt.), galima neįvertinti kelio nelygumų kitimo laike (kelio nelygumai kinta lėtai). uomet kelio nelygumų funkciją z(x,y) galima apytiksliai nagrinėti kaip stacionarią, stochastinę, pagal normalinį skirstinį pasiskirčiusią, ergodinę su nuline vidutine reikšme funkciją. okią funkciją visiškai apibrėžia dvimatė koreliacinė funkcija: R ξη, lim z x, yzx ( ξ, y η) dxdy. 4xy x y x ( )= ( ) + + y x y 4.4 pav. Automobilių kelio nelygumų funkcija z(x, y) Išmatuoti kelio nelygumus dviejų koordinačių (x, y) kryptimis yra sunku ir paskaičiuoti dviejų kintamųjų koreliacinę funkciją yra imlus procesas. odėl šią problemą galima suspaprastinti. Kadangi mus domina kelio charakteristikos išilgine ir skersine kryptimis, kurios sukelia P ratų, kėbulo ir keleivių svyravimus, todėl galima nustatyti tik tas kelio stochastines charakteristikas, kurios sukelia P virpesius. Darant tokias prielaidas, kelio nelygumus galima nagrinėti
114 dviem stochastinėmis funkcijomis: z(x) nelygumų aukštis kelio išilgine kryptimi ir kelio skerspjūvio pasvirimo kampas ψ( x). P judėjimas keliu bus charakterizuojamas tokiais dydžiais: z(x) = ( zk ( x)+ zd ( x) ); ψ(x) = ( zk ( x)+ zd ( x) ), (4.) b čia zk ( x), zd ( x) kelio profilis po kairiuoju ir dešiniuoju P ratais, atitinkamai; b atstumas tarp P ratų. Statistiškai aprašyti kelio nelygumus reikia žinoti dvi koreliacines funkcijas: R z ()= l lim L z ( x ) z ( x + ldl ) ; L L Rψ ()= l lim ψ( x) ψ( x+ ldl ) L L arba du spektrinius tankius: L (4.) Sz( Ω)= Rz( x) cos( Ωx) dx ; π Sψ( Ω)= Rψ( x) cos( Ωx) dx, (4.3) π Ω kelio nelygumų dažnis (ciklas / m), Ω= π, L h kelio bangos L h harmoninė dedamoji, L kelio ilgis. Šios charakteristikos ( R z ( τ), R ψ ( τ) arba S z ( Ω), S ψ ( Ω)) visiškai apibrėžia kelio statistines charakteristikas. Dažnai naudojama normuota ir tarpusavio normuota koreliacinės funkcijos: Rz ( τ) Rz ( τ) rz ( τ)= Rz ( ) = Rψ ( τ) Rψ ( τ) ; rψ ( τ)= Dz Rψ ( ) =, (4.4) Dψ Rzψ ( τ) Rzψ ( τ) rzψ ( τ)= R ( ) R ( ) =. DD z ψ z ψ Koreliacinės funkcijos (4.) ir spektriniai tankiai (4.3) yra kelio profilio charakteristikos, kurios sukelia P virpesius. Aprašant kelio 3
115 nelygumų poveikį P judėjimui įvairiu greičiu, būtina kelio profilio stochastines charakteristikas, kurios priklauso nuo išilginės koordinatės, pereiti prie laiko funkcijų. Koreliacinei funkcijai x ir l pakeičiami tokiais dydžiais: x = vt, l = vτ, (4.5) čia v P judėjimo greitis; t laikas; τ laiko argumentas. ada korelicinės funkcijos (4.) bus lygios: L Rz ( τ)= lim z( vt) z( vt + τ) dτ ; L čia λ= l L R ( ψ τ)= lim vt vt d L ψ( ) ψ( + τ) τ. (4.6) L L Ryšis erdvinių koordinačių ir laiko yra: v v f = =λ v ; ω= π = πf = Ω v, l l kelio nelygumų dažnis, /m. egu duota kelio profilio spektrinis tankis: S z ( λ)= Aλ N, tada šį spektrinį tankį užrašysime kaip laiko funkciją: S ( f )= cf z N ; S z ( ω)= Dω N čia C = Av N ; D Av N N π. = ( ) Automobilių kelių nelygumus (kelio paviršiaus kokybę) galima įvertinti pagal nelygumų spektrinį tankį: L πiωx Sz ( Ω)= lim z( x) e dx, (4.7) x L, 4
116 ( ) kelio profilio spektrinis tankis, ( m ciklas čia S z Ω 3 / ) ; Ω kelio nelygumų dažnis, ( ciklas / m ); L kelio ilgis, m; z( x) kelio nelygumų aukštis, m. Automobilių kelių nelygumus galima įvertinti pagal kelio profilio spektrinį tankį S z ( Ω) (ISO standartas98). 4. lentelėje pateikta automobilių kelių kokybė įvertinant nelygumų spektrinį tankį. 4. lentelė. Automobilių kelių nelygumų spektrinis tankis pagal ISO Automobilių kelių nelygumų spektrinis tankis S z ( Ω) 6 Kelio būklė Intervalas Geometrinis vidurkis A (labai geras) <8 4 B (geras) C (vidutinis) D (prastas) E (labai prastas) F G H 3 768< Kai kurių automobilių kelių statistinės charakteristikos pateiktos 4.3 lentelėje. 4.3 lentelė. Automobilių kelių statistinės charakteristikos Keliai Geros kokybės asfaltbetonio danga Cementbetonis irto kelio ruožo ilgis, m Vidutinis nelygumų aukštis, cm Normuota koreliacinė funkcija,8,6 l 5l r() l 85, e, = + 5, e, cos( 6, l) 9,5,4 r () l e 5, l = 5
117 Grindinys Gruntinis kelias Periodiškai greiderio lyginamas kelias Skreperio lygintas kelias Blogos kokybės gruntinis kelias Nepagerintas kaimo kelias 9 3,5 3,8,35,9 r () l 3 = e 45, l 5 6,34 8, l 5, l r () l = 6, e + 4, e cos(, 5l) ,6 7,4 4 6, l r5 () l = e l l r6 () l 65, e, = +, 35e, cos( 8, l) 4,5, l 5, r7 () l = e 8,7 7l 5 l r () l 65, e, = +, 35e, cos( 5, l) lentelės pabaiga 5 5 r9 () l = e α cos( βl) α=, 4, ; β=, 5 4, l Kitas parametras, kuris įvertina kelio nekygumus, yra IRI indeksas (International Roughness Index) (ASM). IRI indeksas matuojamas ilgio vienetais: mm/m, m/km. Jis gerai koreliuoja su P keleivių pagreičiais (komforto kriterijus) ir rato padangos apkrovimu (P valdymas). Įvairių šalių automobilių keliai turi skirtingus paramaterus, tačiau, panaudojant IRI indeksus, įvairių šalių tyrėjai gali tarpusavyje lyginti automobilių kelių kokybę. IRI universalus, labai paplitęs parametras, charakterizuojantis kelio būklę ir P judėjimo charakteristikas. Norint išmatuoti IRI indeksą, nagrinėjamas ketvirtis P dinaminis modelis (dar vadinamas auksiniu automobiliu golden car (4.5 pav.), kurio parametrai parodyti 4.3 lentelėje. Auksinio automobilio dinaminį modelį sudaro: m automobilio rato ir ašies masė, kg; m ketvirčio automobilio kėbulo masė, kg; k padangos standumo koeficientas, N/m; k pakabos standumo koeficientas, N/m; pakabos slopinimo koeficientas. Matuojamu keliu P važiuoja 8 km/val. greičiu ir matuojami masės m ir masės m pagreičiai, kelio paviršiaus 6
118 išilginė koordinatė, važiavimo greitis. Skaičiuojant IRI indeksą padangos ir kelio kontakto ilgis yra lygus Lk=,5 m. Matematiškai IRI indeksas skaičiuojamas taip: Lv / IRI = q q dt, (4.8) L čia IRI indeksas, matuojams m/km; q, q pirmos ir antros masės greičiai; v judėjimo greitis, v=8 km/val.; L matuojamo kelio ilgis, km. 4.5 pav. Ketvirčio automobilio ( auksinio automobilio ) dinaminis modelis 4.4 lentelė. Ketvirčio automobilio ( auksinio automobilio ) parametrai Parametrai Reikšmė Vienetas k / m = b 63,3 / s k / m = b 653, / s c / m = b3 6, / s m / m =µ,5 c kg / s Auksinio automobilio judėjimo lygčių sistema yra: 7
119 m q c c c m + + q c c q + q k + k k k k q kz = q (4.9a) arba b b b q q + q b3 b + b + µ µ q z 3 q = µ. (4.9b) b b q ( ) yra filtruojamas. Kai Matuojamas kelio nelygumų aukštis z x išmatuotas kelio nelygumų aukštis yra diskretinis, t. y. aukštis zi( xi) matuotas tam tikruose kelio taškuose x i, tai sulygintas kelio profilio aukštis yra lygus: i+ NK zx ( i) = zx ( j), (4.) NK j= i čia NK taškų skaičius, kuriuose skaičiuojama nelygumų aukščio vidutinė reikšmė. Apytikslės IRI indekso reikšmės priklausomai nuo kelio tipo pateiktos 4.5 lentelėje. 4.5 lentelė. IRI indekso reikšmė IRI indekso ribos, Kelio tipas mm/m Važiavimo greičio ribos, km/val Oro uosto kelio danga > Nauja kelio danga 3 9 Sena kelio danga 6 8 Neasfaltuotas kelias Prastos kokybė asfaltuotas kelias Nelygus neasfaltuotas kelias
120 4.. Automobilio kelių nelygumų generavimo būdai Nagrinėjant stochastines dinamines sistemas, kurios bendru atveju yra netiesinės, veikiant stochastiniams sužadinimams reikia mokėti generuoti stochastinius signalus (poveikius į dinaminę sistemą), kai yra žinomos statistinės charakteristikos. am tikslui galima panaudoti algoritmus, kurie remiasi nepriklausomų skaičių sekos ξ[ n] tiesine transformacija, kai sekos skaičiai dažniausiai pasiskirsto pagal normalinį arba tolydinį skirstinį (diskretinis baltas triukšmas), į seką f [ n] koreliuojantį pagal dėsnį: R n M f k f k n = R ( nh), n =,,,..., (4.) ff { } [ ]= [ ] [ = ] 9 ff čia h nepriklausomo kintamojo t diskretizacijos žingsnis. oliau norint gauti reikiamą f [ n] dėsnį naudojama neinercinė netiesinė transformacija. Labiausiai paplitusioms koreliacinėms funkcijoms sudaryti efektyvūs diskretinio modeliavimo algoritmai, kurie turi tokį pavidalą: f [ n]= aξ[ n]+ aξ[ n ] alξ[ n l] bf[ n ] b f [ n ]... b f [ n m]= (4.) l m k= k k= k a ξ[ n k] b f n k [ ] m Nagrinėjant transporto priemonių (P) dinamiką reikia vertinti sudėtingą rato ir paviršiaus sąveiką (4.6 pav.): padanga arba vikšrinė važiuoklė sulygina pradinį stochastinį kelio paviršių, kuris, veikiamas jėgų, veikiančių kontakte, deformuojasi. Mažai deformuojantiems gruntams galima vertinti tik padangos ar vikšrinės važiuoklės lyginamąsias savybes. Padangos lyginamųjų savybių efektas pasireiškia tuo, kad aukšto dažnio paviršiaus dedamosios (harmonikos) nevertinamos. Kelio paviršiaus mikroprofilio aukštis po padanga lygus: x max z( x)= z( ξ) dξ, (4.3) L k xmin.
121 čia L k kontakto ilgis; xmin = x ; xmax = x +. L k L k L 4.6 pav. Padangos sąveika su kelio paviršiumi x Kai P juda v greičiu, įvertinę, kad t =, išraišką () galime v užrašyti: t max z()= t z() t dt, (4.4) Lk tmin Lk čia tmin = t v ; t t Lk max = + v. Padangos lyginamosios savybės gali nuslopinti aukšto dažnio kelio profilio virpesius iki tam tikro ribinio dažnio: ω rib π π πv = = =. (4.5) L v L k k Iš (4.5) išraiškos matome, kad ribinis dažnis tiesiog proporcingas judėjimo greičiui ir atvirkščiai proporcingas kontakto ilgiui. Kai L k (kontaktas taškas), ribinis dažnis ω, t. y. padanga praleidžia visus stochastinio proceso qt () dažnius. Didėjant kontakto ilgiui L k, ribinis dažnis mažėja, t. y. stochastinio proceso S q ( ω) vis didesnė aukšto dažnio dalis yra slopinama.
122 Kelio paviršiaus mikroprofilio aukštis po padanga diskretiniu atveju yra lygus: n+ k z( n)= z() l, n= k +, k +,..., N k, (4.6) nl l= n k čia k = nl ; nl taškų skaičius kontakte ( Lk nl h = *, h diskretizacijos žingsnis). Padanaga nėra tokia elastinga, kad užpildytų kiekvieną kelio profilio įdubimą. odel kelio nelygumų aukštis apskaičiuotas pagal (4..) formulę yra apytikslis. Žinodami kelio nelygumų statistines charakteristikas (autokoreliacinė funkcija, spektrinis tankis) galime sužinoti, kaip šios charakteristikos pasikeis įvertinus padangos savybę lyginti kelio nelygumus. Išdiferncijuosime (4..) išraišką pagal išilginę koordinatę: d dl z l z l Lk Lk p()= p()= z l+ z l L k. (4.7) Autokoreliacinė funkcija šios verikalių nelygumų išvestinės yra lygi: R zp Lk Lk Lk ( l)= z l+ z l z l L LL lim L Lk + + l z l dl +, k (4.8) čia L kelio ilgis. Suintegravę kiekvieną narį atskirai, gauname: R zp L Lk Lk ( l)= lim z l+ z l+ + l dl L LL a k L L z l + L + L k + z l k Lk l dl z l z l Lk + l dl + L Lk + L + z l z l k l dl. (4.9)
123 Nagrinėjant stacionarę stochastinę funkciją, perkeliant koordinačių pradžią, pati autokoreliacinė funkcija nesikeičia. odėl išraiškos (4.9) pirmas ir ketvirtas integralai yra kelio profilio autokoreliacinės funkcijos: L k k k lim lim L L z l L L z l l dl L L z l L L Lk + z l l dl = L lim ()( + ) = ( ) L L z l z l l dl R. z Išraiškoje (4.9) antrą ir trečią narius galima supaprastinti: lim L L k k L z l L L z l + + l dl = L k lim L L z l L L = z l lim L k L k L z l L + (4.) + ( + ) Lk l dl = Rq( l+ Lk ) (4.) Lk z l l dl Rz l Lk + = ( ). (4.) Įstatę visus rezultatus (4.), (4.), (4.) į (4.9), gausime padangos sulygintų kelio vertikalių nelygumų išvestinės autokoreliacinę funkciją: Rz( l) Rz( l+ Lk) Rz( l Lk ) Rz ( l)=. (4.3) p Lk Norėdami nustatyti padangos sulygintų kelio vertikalių nelygumų išvestinės spektrinį tankį, pasinaudosime pagrindine priklausomybe tarp spektrinio tankio ir autokoreliacinės funkcijos: Sz λ, Lk Rz l cos λ l d l, (4.4) p ( )= ( ) ( ) ( ) p čia λ bangos dažnis. Kai kelio profilio nelygumai registruojami kaip laiko funkcija z(), t spektrinis tankis priklauso nuo bangos kampinių dažnių ω.
124 Ryšis tarp bagos dažnio ir dažnio f, yra f =λ v a, v a P judėjimo greitis. Įstatę (4.4) išraišką į (4.9), gauname: S ' zp λ, Lk Rz l cos λ l d l Rz( l Lk ) cos( λ l) d l L ( )= ( ) ( ) + k ( ) ( ) } Rz l Lk cos λ ld l. (4.5) Paskutinis narys (4.5) išraiškoje yra nesulyginto kelio nelygumų spektrinis tankis, t. y. Rz( l) cos( λ l) d( l)= Sz( λ ). (4.6) Įvedus pagalbinį pakeitimą l = l+ L k antras narys (4.6) išraiškoje yra lygus: ( ) ( ) = ( ) ( ) = J = Rz l+ Lk cos λ l d l Rz l cos λ( l Lk d l Rz( l) cos ( λ( l Lk) cos( λlk ) d l + Rz( l) cos ( λ l)cos( λlk) d l + z( ) ( ) ( k) R l sin λ l sin λ L d l. (4.7) Įvertinus (4.4) išraišką, galutinė (4.7) išraiškos forma: L k J Sz λ cos( λlk) Rz l cos λ l cos( λ l ) d l = ( ) ( ) ( ) Rz l sin λ l)sin( λlk d l Rz l sin λ l sin λ Lk)d l. ( ) ( ) + ( ) ( ) ( 3
125 Išraiškoje (4.6) trečiasis narys, pakeitus L k a į L k, yra lygus: L k J3 Sz λ cos( λlk) Rz l cos λ l cos( λlk ) d l Lk = ( ) ( ) ( ) + ( ) ( ) ( ) ( ) ( ) Rz l sin λ l)sin( λlk d l Rz l sin λ l sin λlk d l. Sudėję J ir J 3 integralus, gausime: J J S λ cos( λl ). (4.8) + = ( ) 3 z k Įstatę (4.7) ir (4.8) išraiškas į (4.6), gausime: S ' zp λ, Lk L S z λ ( cos( λ L k) ). (4.9) ( )= ( ) k Žinoma, kad stacionarinė stochastinė funkcija su normaliniu skirstiniu, o tokia funkcija yra kelio mikroprofilio nelygumai, funkcijos ir jos išvestinės spektriniai tankia skiriasi tik daugikliu, kuris lygus dažnio kvadratui λ, t. y. S zp λ, Lk Sz λ cos( λlk) L λ ( )= ( )( ) Kai L k, tada lim S λ, L S λ. L zp k z. k ( )= ( ), (4.3) Iš (4.3) išraiškos plaukia, kad padangos sulyginto kelio profilio nelygumų spektrinis tankis nepriklauso nuo P važiavimo greičio. Spektrinį tankį galima išreikšti per apskritiminį dažnį f, ( / s ) arba kampinį dažnį ω, tada f =λ v a ir ω= πλv a, (4.3) 4
126 S S z z va f f, Lk Sz f cos( L f v L k ) ; (4.3) a ( )= ( ) k 8π va ω ω Lk Sz ω L v L, cos( k ). (4.33) ω π a ( )= ( ) k Padangos ir kelio kontakto ploto ilgį L k apytiksliai galima nustatyti: L ah D ah, (4.34) k = ( ) čia a parametras, kinta intervale, a =,..., ; D padangos išorinis skersmuo; H padangos profilio aukštis. Diskretinio modeliavimo algoritmai naudojant skirtingas autokoreliacines funkcijas parodyti 4.6 lentelėje. iωτ 4.6 lentelė. Autokoreliacinės funkcijos Rff ( τ)= Sff ( ω) e dω π Eilės Nr. Autokoreliacinė funkcija R τ ( ) Modeliavimo algoritmas Rekurentinė išraiška: [ ]= [ ]+ [ ] f n a ξ n bf n De α τ čia a = σ ρ ; b =ρ; ρ = e γ ; γ = αh ; σ= D. h diskretizacijos žingsnis nepriklausomo kintamojo t 5
127 3 De ατ cos( βτ) ατ ( De cos( βτ)+ α β sin ( βτ) 4.6 lentelės tęsinys Rekurentinė išraiška: [ ]= [ ]+ [ ] f n a ξ n bf n ( ) čia a = σc= σ c ± c 4c / ; a =σ c / c ; b ρcos γ ; b = ( ) ( ) ( ) = ρ ; c = ρρ cos γ ; ρ = e γ 4 ; c = ρ ; γ = αh ; λ = β h ; σ= D. h diskretizacijos žingsnis nepriklausomo kintamojo t Rekurentinė išraiška: [ ]= [ ]+ [ ] f n a ξ n bf n ( ) čia a = σc= σ c ± c 4c / ; a =σ c / c ; b ρcos γ ; b = ρ ; = ( ) c = ρρ ( ) cos( γ )+ + ρ ρsin γ ; α β 4 c ( ) [ ] ( ) ( ); = ρ + 4ρ α sin γ cos γ β ρ = e γ ; γ = αh ; λ = β h ; σ= D. h diskretizacijos žingsnis nepriklausomo kintamojo t 6
128 4 ατ ( De cos( βτ) α β sin ( βτ) 4.6 lentelės tęsinys Rekurentinė išraiška: f [ n]= aξ[ n]+ aξ[ n ]+ bf[ n ]+ b f [ n ] ( ) čia a = σc= σ c ± c 4c / ; a =σ c / c ; b ρcos γ ; b = ρ ; = ( ) c = ρρ ( ) cos( γ ) α β 4 c ( + ρ ) ρsin ( γ ); ( ) ( ); = ρ + 4ρ α sin γ cos γ β ρ = e γ ; γ = αh ; λ = β h ; σ= D. h diskretizacijos žingsnis nepriklausomo kintamojo t Rekurentinė išraiška: p f [ n]= ckξ[ n k], k= ( ) sin ατ 5 D ατ σ γ γ k čia ck = e, γ ; 4 π γ = αh ; σ= D. h diskretizacijos žingsnis nepriklausomo kintamojo t 7
129 6 D ατ, kai τ kai τ > α ( ) α 4.6 lentelės pabaiga Rekurentinė išraiška: p f [ n]= c ξ [ n k], čia c = N = γ + k= σ N e γ k ; ; γ = αh ; σ= D. h diskretizacijos žingsnis nepriklausomo kintamojo pavyzdys. Nagrinėjamas betonis kelias, kurio nelygumų aukštis aprašomas autokoreliacine finkcija: α τ α τ ( )= + ( ) Rz τ σ e σ e cos βτ, 3 3 kai: σ = m ; σ = 387. m ; α = ; α= 5 ; β=6. Rato padangos kontakto ilgis L k =,5 m. Panaudojant duotą betoninio kelio autokoreliacinę funkcuiją, sugeneruoto pradinio kelio profilio aukštis z(x) ir sulyginto profilio aukštis, priklausomai nuo važiavimo greičio, parodyti 4.7 pav., o aukščio kitimo greitis: dz dz dt = dx dz dx dt = dx v, parodytas 4.8 pav. 8


130 a) b) c) 4.7 pav. Betoninio kelio ir sulyginto kelio nelygumų aukštis: a v=6 km/val.; b 9 km/val.; c km/val. 9

131 a) b) c) 4.8 pav. Betoninio kelio ir sulyginto kelio nelygumų aukščio kitimo greitis: a v=6 km/val.; b 9 km/val.; c km/val. 3
 6 4 3 ω + 9, 4 ω v 38, 5 ω v + 7, 7 v 6 čia v judėjimo greitis, m/s; ω kaminis dažnis, rad/s. arba 4.9 pav.")
132 Vienas iš galimų kelio nelygumų spektrinis tankis (kelias yra grindinys) gali būti ( 4.9 pav.): S q i = , ω v 545, ω v + 43, v, (4.35) ω + 9, 4 ω v 38, 5 ω v + 7, 7 v 6 čia v judėjimo greitis, m/s; ω kaminis dažnis, rad/s. arba 4.9 pav. Spektrinis tankis: kelias grindinys Kitas kelio paviršiaus nelygumų aukščio generavimo būdas gali būti: z t ()= N 5, dfv π ( Azs sin kdft + k 5 ( kdf ) ( π ψ, sk )+ Bzc cos( πkdft + ψck ) = (4.36a) N 5, dfv x z( x)= π ( Azs sin πkdf k 5, ( kdf ) = v ψsk Bzc cos πkd x ψck, v (4.36b) čia A zs, B zs amplitudės, m; df dažnio žingsnis, Hz; ψ sk, ψ ck pradinės fazės, N bendras narių skaičius. Pradinė fazė tai atsitiktinis dydis, kuris tolygiai pasiskirstęs intervale ψ π.. π. [ ] 3
133 Pats paprasčiausias būdas sugeneruoti kelio paviršiaus profilį gali būti: NH π π kx) + Azck cos( kx) L L (4.37a) π π kvt ) + Azck cos( kvt ), L L (4.38b) z ( x ) = Azsk sin( arba k = NH z ( t ) = Azsk sin( k = čia Azsk, Bzsk koeficientai prie sinuso ir kosinuso, atitinkamai, m; v judėjimo greitis, m/s; L kelio makroprofilio periodas; harmo nikų skaičius. urėdami kelio profilio funkciją z ( x ), sulygintą kelio profilio aukštį su koordinate xi galime apskaičiuoti: z ( xi ) = Lk xi + Lk / xi Lk / z ( x )dx. (4.39) 4.3. Geležinkelio nelygumai, jų charakteristikos ir nelygumų generavimo būdai Bėgiai yra pagrindinis laikantysis viršutinės bėgių kelio kons trukcijos elementas. Šis viršutinės bėgių kelio konstrukcijos elemen tas yra tiesiogiai veikiamas apkrovų, kurias sukelia riedmenų ratai, todėl bėgiai turi atlaikyti dideles dinamines apkrovas vertikalia, išilgi ne ir skersine kryptimi. Siekiant užtikrinti saugų traukinių eismą, bė giai turi būti reikiamo stiprumo ir atsparūs dilimui. Bėgiai negali būti eksploatuojami, jei juose atsiranda defektų, keliančių pavojų saugiam traukinių eismui []. Bėgių defektai klasifikuojami pagal jų rūšį, vietą, pagal bėgio aukštį ir ilgį, pagrindinę defekto atsiradimo priežastį, o esant defektui suvirinimo siūlėje pagal suvirinimo būdą. Bėgių nuodyla tai bėgių galvutės nudilimas, atsirandantis dėl riedmenų ratų ir bėgio galvutės sąveikos [] (4. pav.). 3


134 Vagonui stabdant arba pagreitėjant, kai aširatis praslysta bėgių paviršiumi, aširatyje ir bėgio paviršiuje atsiranda iščiuožų (4. pav.). 4. pav. Bėgių defektai Nagrinėjant vagono judėjimo dinamiką labai svarbu vertinti bėgių nelygumus išilgine, skersine kryptimis, lokalinius nelygumus (bėgių suvirinta vieta, bėgių sandūra ir kt.) ir aširačių paviršiaus nelygumus. Dažniausiai pasitaikantys bėgių nelygumai ir jų matematinės išraiškos parodytos 4.7 ir 4.8 lentelėse. 4. pav. Aširačio defektas (iščiuoža) 33
135 4.7 lentelė. Bėgių nelygumai ir jų matematinės išraiškos ipas Lygtis Forma Jokių pažeidimų Nulis Plokštuma ant rato d x f ( x)= π cos L 3 4 Sinusinis d πx gofruotumas f ( x)= sin L Įlinkęs πx sujungimas f ( x)= d ± cos L Įdubęs suvirinimas Iškilęs suvirinimas Atsitiktinio profilio rato paviršiaus kontūras Atsitiktinio profilio bėgio paviršius d x f ( x)= π cos L d x f ( x)= π cos L uri būti nustatytos rato paviršiaus x ir y koordinatės uri būti nustatytos rato paviršiaus x ir y koordinatės Čia f (x) pažeidimo formos funkcija; x esamo taško bėgio koordinatė; d pažeidimo gylis; L visas pažeidimo ilgis. 34
136 4.8 lentelė. Lygtys, naudojamos nudėvėtų ratų plokštumų, bėgių įlinkimui ir suvirinimo profiliams aprašyti Modelio pavadinimas DARS DIFF Nudėvėtų ratų plokštumas d x z( x)= π cos a < x< a d x z( x)= + π cos a a/ < x< a / πx z( x)= d cos L < x< L/ πx z( x)= d + cos L L/ < x< L z x d L x d L / x d L x d x L / ( )= ( )+ < < ( )= ( )+ < < z x Bėgių įlinkimas ar suvirinti profiliai NU- CARS* SUBI z( x)= d z x x x a a de + e e x a3 a a + e e a3 a d = 38, mma ; = 5mm; a = 5mm d x x a r r cos cos cos / r ( )= ( ) a/ < x< a / r rato spindulys Ä L L Ä L [ ] [ ] L L de + e e z( x)= d L L L L + e e L = mml ; = 6, mm z( x)=. L x < x m L L d z x L x x L L ( )= m xm < x < x m d z x L x x L L ( )= m xm < x< xm + z( x)=. L x < x m + RACK VIC d x ( x)= π cos a < x< a d x ( x)= π cos a < x< a 35 α L πx z( x)= cos π L < x< L/ α L πx z( x)= cos π L L/ < x< L α bėgio įlinkio kampas d x z( x)= π cos L < x< L NUCARS nudėvėtų ratų plokštumas yra imamas kaip rato spindulio variacija. Visi kiti modeliai rato nudėvėjimą aprašo kaip funkciją nuo kelio nelygumo.
137 Formulių, pateiktų 4.8 lentelėje, žymėjimai: d rato nudėvėtos vietos gylis, sujungimo ar virintos vietos įlinkio gylis; a nudėvėtos rato plokštumos ilgis; L įlinkusio bėgio sudūrimo ar suvirintos įlinkusios bėgio vietos ilgis. Kitas būdas tiksliau matematiškai aprašyti aširačių defektus (pažaidas) yra realųjį aširačių profilį skleisti Furjė eilute. Aširačio spindulys užrašomas kaip centrinio kampo α funkcija: R ( α ) = R R ( ), (4..) R R R α čia R R pradinis aširačio spindulys; R R ( α ) aširačio spindulio pokytis. Generuojant aširačio iščiuožas galima nurodyti centrinius kampus α i ir α i+, tarp kurių yra iščiuoža (4. pav). 4. pav. Aširačio profilis su keliomis iščiuožomis Aširačio spindulio funkciją R R ( α ) skleidžiame Furjė eilute: R α A A sin kα B cos kα, (4.4) R NH k k= k= ( )= + ( )+ ( ) k 36
138 čia A = π f ( α ) dα; Ak f k d π = ( α ) sin( α) α ; π π π Bk = f ( α ) cos( kα) dα ; NH harmonikų skaičius. π 4.4. Virpesių poveikis žmogaus organizmui Virpesių poveikis žmogui visų pirma susijęs su svyravimais, kurie atsiranda veikiant kintamai jėgai. okių svyravimų priežastys gali būti susijusios ne tik su jėginiu, bet ir kinematiniu žadinimu. Pagrindiniai virpesių parametrai: svyravimų amplitudė Amm,, svyravimų dažnis f, Hz, svyravimų greitis vms, ir svyravimo pagreitis ams,. Pagal svyravimų dažnį virpesiai skirstomi: ypač žemo dažnio iki Hz žemo dažnio nuo 3 5 Hz aukšto dažnio daugiau nei 5 Hz. Virpesių spektro pobūdis analogiškas triukšmo spektrams. Įvertinus tai, kad absoliučios parametrų reikšmės kinta labai plačiu intervalu, vibroakustinių tyrimų praktikoje analogiškai triukšmui naudojamos parametrų lygio sąvokos. Pagreičio lygis tai charakteristika, lyginanti pagreičio vidutinę kvadratinę reikšmę su pagreičio etalonine reikšme: avkr La = lg, (4.4) a čia L a pagreičio lygis, db; a vkr pagreičio vidutinė kvadratinė reikšmė, m/s 6 m/s; a pagreičio etaloninė reikšmė, lygi m/s. Greičio lygis tai charakteristika, lyginanti greičio vidutinę kvadratinę reikšmę su greičio etalonine reikšme: vvkr Lv = lg, (4.4) v čia L v greičio lygis, db; v vkr greičio vidutinė kvadratinė reikšmė, 8 m/s; v greičio etaloninė reikšmė, lygi m/s. v = 5 m s. 37
139 Fizikinio dydžio f ()vidutinė t kvadratinė reikšmė laiko intervale t [ t, t ] yra lygi: f vkr = t t t t () f t dt. (4.43) Pagal atsiradimo šaltinį darbo vietose virpesiai skirstomi į tris kategorijas: I transporto; II transporto-technologinė ( a tipo, kai žmogus yra veikiamas vibracijos darbo vietoje prie stacionarių mašinų, b tipo, kai vibracija veikia žmogų protinio darbo vietose); III technologinė. Vibracija dar skiriama į: viso kūno kai ji perduodama per stovinčio ar gulinčio žmogaus atramos paviršius į jo kūną ir veikia organizmą; rankas veikianti vibracija kai vibracija vibruojančių įrenginių / priemonių perduodama į rankas. Pagal veikimo kryptį viso kūno vibracija skirstoma ortogonalinės koordinačių sistemos ašių kryptimis (4.3 pav.) : vertikaliąją nuo kojų galvos link (Z ašis); horizontaliąją, einančią nuo nugaros į krūtinę (X ašis); horizontaliąją, einančią nuo kūno dešinės pusės į kairę (Y ašis). 38
140 4.3 pav. Žmogaus kūno vibracijų kryptys Dažniausiai leidžiami pagreičio ir greičio lygiai Z ašies kryptimi didesni negu X Y ašių kryptimis; I kategorijos virpesiams didesni negu II kategorijos virpesiams. Virpesių poveikis priklauso nuo svyravimo proceso galios kontakto vietoje, poveikio laiko, kontakto vietos, poveikio krypties, kūno audinių slopinimo savybių, rezonanso veiksnių ir daugelio kitų savybių. Ypač kenksmingi žmogui virpesiai, kurių dažnis artimas skirtingų kūno dalių savajam dažniui (4.4 pav.). Daugumos vidaus organų savasis dažnis 3 9 Hz (širdies dažnis artimas 5 6 Hz), pečių juostos 6 Hz. Ypač didelę reikšmę rezonansas turi regos organams. Regėjimo sutrikimai kyla veikiant 6 9 Hz virpesiams, kurie atitinka akių obuolių savąjį dažnį. 39
141 4.4 pav. Žmogaus kūno dalių savieji dažniai arp profesinių susirgimų vibracijų patologija yra antroje vietoje (po dulkių). Veikiant vibracijai pirmiausia nukenčia nervų sistema ir analizatoriai: vestibuliarinis, regos, jutiminis. Ilgalaikis virpesių poveikis skatina vibroligos vystimąsi, kuri pasireiškia biologinių audinių pažeidimais: rankų drebėjimas; raumenų atrofija (baltų pirštų sindromas); kraujagyslių elastingumo sumažėjimas; 4) nervų jautrumo sumažėjimas; kaulų audinių išsigimimas. Ligos vystimąsi skatina padidėjusi raumenų įtampa, žema temperatūra ir psichoemocinis stresas. Vibroliga priklauso prie profesinių susirgimų, kurių efektyvus gydymas galimas tik ankstyvoje stadijoje. Žmogaus kūną galima nagrinėti kaip dinaminę sistemą arba tam tikros sistemos dalį, pvz., sistemos Žmogus transporto priemonė. okiai sistemai virpant vyksta energijos pasidalijimas tarp žmogaus ir transporto priemonės. 4
142 Sprendžiant gyvo organizmo dinamikos problemas visų pirma reikia parinkti dinaminį modelį. Paprastai tokiems tikslams sudaroma mechaninė sistema, susidedanti iš tam tikro skaičiaus koncentruotų masių, sujungtų tarpusavyje tampriais ir slopinimo ryšiais (4.5 pav.). uri būti daroma prielaida, kad dinaminio modelio parametrai nekinta tyrimo metu. Kiekvienas tokios sistemos elementas paprastai turi tik vieną savybę, pavyzdžiui, kūnas turi masę, tačiau jis nedeformuojamas, idealiai tamprus; ryšiai sukuria pasipriešinimą, proporcingą sistemos judesio greičiams, ir t. t. okie labai supaprastinti modeliai gali būti naudojami žemų virpesių dažnių tyrimams. 4.5 pav. Žmogaus, kaip biomechaninės sistemos, dinaminis modelis, turintis 5 laisvės laipsnių Visą kūną veikiančius virpesius (vibracijos poveikį) reglamentuoja HN 5:994, rankas veikiančią vibraciją HN 59:996. LS EN ISO 5349-:4 Mechaniniai virpesiai. Per rankas perduodamos vibracijos matavimas ir poveikio žmogui įvertinimas. dalis. Bendrieji reikalavimai LS EN ISO 5349-:4 Mechaniniai virpesiai. Per rankas perduodamos vibracijos matavimas ir poveikio žmogui įvertinimas. 4
143 dalis. Praktiniai matavimo darbo vietoje nurodymai (ISO :). Higienos požiūriu virpesiai charakterizuojami: komfortas, kai virpesiai nesukelia neigiamo erzinančio poveikio; darbingumo išlaikymas, kai virpesiai nesukelia neigiamo poveikio arba darbigumo galimybių praradimo; virpesių sauga, kai virpesiai nesukelia organizmui kenksmingo poveikio; sužalojimas virpesiais, kai virpesių poveikis nepakenčiamas arba atsiranda traumų pavojus. Mašinų ar sudėtingų įrenginių higieninis virpesių normavimas apribojamas jų arba jų elementų virpesių lygiu. Galiojantys virpesių intensyvumo lygio normatyvų reikalavimai sudaryti įvertinant žmogaus subjektyvaus virpesių poveikio pojūčius, taip pat fiziologines, biochemines, funkcines ir biomechanines organizmo reakcijas. Virpesių poveikis žmogaus organizmui nusakomas keturiomis pagrindinėmis charakteristikomis: intensyvumu; spektrine sudėtimi; poveikio trukme; poveikio kryptimi. Intensyvumo rodikliai: vidutinės aritmetinės arba amplitudinės pagreičių reikšmės; virpesių greitis arba virpesių amplitudės. Intensyvumą galima vertinti dviem būdais: tikraisiais absoliučiais dydžiais arba virpesių dydžio logaritminiais vienetais decibelais. L p = p lg, (4.44) p čia p virpesių matuojamo parametro reikšmė; p pradinė matuojamo parametro reikšmė. 4
144 Normuojant virpesių lygį jo spektrinė sudėtis vertinama oktavomis arba /3 oktavos pločio juostomis. 4.9 lentelė. Vidutiniai geometriniai dažniai ir juos atitinkančių juostų ribinės reikšmės Vidutiniai geometriniai Dažnių juostų ribinės reikšmės, Hz dažniai, Hz /3 oktavos Oktava,8,7,89,7,4,,89,,7,4,5,,4,7,4,6,4,78,4,8,,78-,4,4,8,5,4,8,4,8 3,5,8-3,5,8 5,6 4, 3,5 4,4,8 5,6 5, 4,4 5,6,8 5,6 6,3 5,6 7, 5,6, 8, 7, 8,9 5,6,, 8,9, 5,6,,5, 4, 6, 4, 7,8, 7,8,4 5,,4 8, 44 3,5 8, 35,5 44 4, 35,5 44,7 44 5, 44,7 56, , 56, 7, , 7,8 89, 44 88, 89,, ,, 4, , 4,8 77, Vipresių poveikiui nustatyti dar galima naudoti energetinį dažninį įvertinimą. Šis vertinimas pagrįstas mechaninės virpesių energijos įvertinimu: 43
145 nv i= A v ω Z ω, (4.45) = ( ) ( ) čia virpesių poveikio trukmė, v harmonikos amplitudės, Z ωi modulio reikšmė. i i ( ωi ) virpesių greičio i-tosios ( ) įėjimo mechaninio impedanso Pagal žmogaus kūno sugertą vidutinį galingumą: nv = ( ) ( ) N k ω a ω i= i i i, ( ) virpesių pagreičio i-tosios harmonikos amplitudės; čia a ωi k i ( ω i ) koeficientas, įvertinanatis žmogaus savybių dažnines charakteristikas. Leistini virpesių lygiai normatyvinėje medžiagoje nustatyti vertinant, kad jų poveikio trukmė 8 valandos, t. y. visa darbo diena. Negalima projektuoti ir eksploatuoti įrenginių, kurių virpesių lygis viršija leistinas normas. Vis dėlto, kai būtina eksploatuoti įrenginius, kurių virpesių lygis viršija leistinas normas, tuomet reikia trumpinti jų poveikio trukmę. 4. lentelė. Darbo laiko reikalavimai viršijant virpesių lygio normas Normos viršijimas darbo vietoje, ne daugiau kaip db kartais Leidžiama virpesių poveikio trukmė minutėmis, ne daugiau kaip dirbant su stacionariais įrenginiais laivuose, katilų skyriuose , , arptautinės normatyvų leistinos normos reglamentuojamos ISO standartais. 44
146 Virpesių poveikis priklauso nuo virpesių spektro sudėties, jų krypties, poveikio vietos, poveikio trukmės ir nuo žmogaus individualių savybių (4.6 pav.). 4.6 pav. Virpesių žalingas poveikis žmogaus organizmui Automobiliu važiavimo komfortas vertinamas pagreičio vidutine kvadratine reikšme: a vkr = t t t a t () t dt, (4.46) at () svertinis pagreitis (slenkamasis judesys, m/ s ar sukamasis judesys, rad / s ). Pagal gautą pagreičio vidutinę kvadratinę reikšmę a vkr ir virpesių trukmę = t t, panaudojant standartą ISO 63 (997), nustatoma leidžiama virpesių trukmė. 45
147 Matavimo trukmė turi būti tokia, kad būtų užtikrintas priimtas statistinis tikslumas ir virpesių metu pasireikštų tipiškas poveikis, kuris turi būti įvertintas. Matavimo trukmė turi būti registruojama. Kai pagreičio virpesiai vyksta pagal harmoninį dėsnį: at ()= Asin ( ω t), ω= πf, (4.47) čia A amplitudė, ms ; f dažnis, Hz. ada pagreičio vidutinė kvadratinė reikšmė lygi: a vkr = t t t a t () t dt = A. (4.48) Vertikalių virpesių poveikis žmogaus organizmui nustatomas parametru K: K = avkr f, kai < f 4 K =, kai 4< f 8 a vkr K =6 avkr f, kai 8< f 8, (4.49) o horizontalių virpesių poveikis žmogaus organizmui nustatomas: K = 8, kai < f a vkr K = 56 avkr f, kai < f 8. (4.5) Funkcijos (4.49) ir (4.5) gali būti naudojamos nustatant virpesių poveikį panaudojant eksperimentų išmatuotus pagreičius (4.7 pav.). 46
148 4.7 pav. Virpesių poveikio įvertinimas: a vertikalus poveikis; b horizontalus poveikis Iš 4 pav. matoma, kad didžiausias vertikalių virpesių poveikis žmogaus organizmui yra dažnių intervale f = 4 8Hz. Į šį dažnių intervalą patenka kai kurių žmogaus organų savieji dažniai, pavyzdžiui, širdies savasis dažnis yra 5 6 Hz. Kelių transporto priemonių parametras K turi tenkinti tokią sąlygą (4.8 pav.): < K < (4.5). 4.8 pav. Virpesių poveikio įvertinimas įvertinant poveikio trukmę 47


149 Panaudojant 4.8 pav., virpesių poveikį galima įvertinti taip: sritis C-C tinkama; sritis D-D netinkama; sritis E-E4 labai netrinkama. Vertikaliųjų virpesių poveikio žmogaus organizmui izolinijos pateiktos 4.9 pav. 4.9 pav. Vertikaliųjų virpesių jutimo izolinijos: a pagreitis; f dažnis, Hz; virpesiai nejuntami; virpesiai juntami; 3 virpesiai juntami aiškiai; ė nemalonus poveikis; 5 nepakeliamas poveikis ISO 63 standarto pateiktos vertikaliųjų virpesių jutimo izolinijos pateiktos 4. pav. 4. pav. Vertikaliųjų virpesių įtaka pagal ISO 63 standartą: a pagreitis; f dažnis, Hz 48
150 ais atvejais, kai pagrindiniame vertinimo metode gali būti nepakankamai įvertintas vibracijos poveikis (atsitiktiniai smūgiai, laikini virpesiai) m, nustatoma slenkamoji vidutinė kvadratinė vertė arba virpesių dozės vertės ketvirtasis laispnis. aikant slenkamosios vidutinės kvadratinės vertės įvertinimo metodą, taikomas trumpas integravimo laikas. Virpesių dydis apibrėžiamas kaip didžiausia pereinamųjų virpesių vertė (DPVV), kuri yra didžiausia a t ( ) vertė, kuri yra lygi: w t aw t ( )= a () t dt τ t τ arba t t t aw t ( )= a () t e τ dt τ 49 (4.5a), (4.5 b) čia at () momentinis svertinis pagreitis; τ slenkamojo vidurkio integravimo laikas; t stebėjimo laikas; t laikas. Didžiausia pereinamųjų virpesių vertė (DPVV) išreiškiama taip: ( w ) DPVV max a t. (4.53) ai reiškia didžiausią aw ( t ) dydį, išmatuotą matavimo laiku = t t. = ( ) Matuojant DPVV rekomenduojama takyti τ= s. Virpesių dozės ketvirtuoju laipsniu metodas yra geresnis įvertinant smailes nei nustatant pagrindiniu įvertinimo metodu, nes vidurkinimo pagrindu vietoj pagreičio laiko funkcijos antrojo laipsnio taikomas ketvirtas laipsnis. Kai P juda nelygiu keliu (duobėtas kelias, grindinys), virpesių poveikį žmogui įvertinti labiau tinka naudoti virpesių dozės vertę VDV, kuri yra lygi: VDV = t t t a t 4 t dt () 4 čia at () momentinis svertinis pagreitis., (4.54)
151 VDV parametras įvertina ne tik vidutinę signalo reikšmę, bet ir poveikio trukmę, jautrus pagreičio staigiems kitimams, tinkamesnis, kai matuojamas signalas yra statistiškai nestacionarus. VDV parametro mato vienetas yra ms (,75). Kai virpesių poveikis susideda iš dviejų ar daugiau skirtingos apimties laiko trukmių i, virpesių dozės vertė, apibūdinanti bendrą poveikį, turi būti apskaičiuota taip: VDV bendra = VDV 4 4. (4.55) i Pagal Didžiosios Britanijos standartą BS 684, kai VDV parametras pasiekia reikšmę 5 ms,75, važiavimo komfortas yra labai blogas. P važiavimo laikas, kai parametras VDV pasiekia reikšmę 5 ms,75, yra lygus: = t, (4.56) VDVt čia 5 laikas, s; t laikas, s. Laikas 5 gali būti važiavimo diskomforto kriterijumi. Kai galima išmatuoti pagreičius X, Y ir Z ašių kryptimis, VDV parametras nustatomas taip: ( ) VDV = VDV + VDV + VDV. (4.57) bendras x y z Laiko 5 reikšmės priklausomai nuo kelio tipo ir važiavimo greičio parodytos 4. lentelėje. 4. lentelė. Laiko 5 reikšmės priklausomai nuo kelio tipo ir važiavimo greičio Kelio tipas Greitis, km/val Grindinys 94 min. 77 min. 66 min. 375 min. Priemiesčio kelias 6 min. 73 min. 54 min. 35 min. Duobėtas kelias 5 min. 5
152 Egzistuoja ryšis tarp kelio nelygumus charakterizuojančio parametro IRI indekso ir P bazinio vertikalaus pagreičio a b (Ahlin, K. and Granlund) a b v = 6, IRI, (4.58) 8 čia v P važaivimo greitis, km/val. Kai kurių kelių baziniai pagreičiai parodyti 4. lentelėje. 4. lentelė. Bazinių pagreičių reikšmės Kelių tipas Bazinis pagreitis, ms km/val. 4 km/val. 6 km/val. 8 km/val. 5 IRI Indeksas, mm/m Automagistralė,4,4,3,35,8 Grindinys,5,65,7,8 5,46 Priemiesčio kelias,5,,8,3 8,65 Duobėtas kelias,78 9,75 Kitas parametras, kuris gali būti naudojamas įvertinti virpesių poveikį žmogui, yra ekscesas K a : 4 N Ka = ( ai avid ), (4.59) 4 Nσ i= čia a vid vidutinė pagreičių reikšmė; σ vidutinis kvadratinis pagreitis; N matavimo taškų skaičius. Kai ekscesas lygus 3, pagreitis pasiskirsto pagal normalinį skirstinį. Vertinant keleivių vežimo komfortabilumą geležinkeliu naudojamas Šperlingo kriterijus: a Sp = c ( f ) 3 89,, (4.6) f čia c(f) dažnio ir virpesių krypties koeficientas; a pagreičio amplitudė, cm / s ; f dažnis, Hz.
153 4.3 lentelėje pateiktos Šperligo kriterijaus S p reikšmes. 4.3 lentelė. Šperligo kriterijaus S p reikšmės Eilės Nr. Būsenos pobūdis S p reikšmė Labai gera, Gera,,5 3 Pakankama keleiviniams vagonams,5 3, 4 Ribinė keleiviniams vagonams 3, 3,5 5 Ribinė lokomotyvams 3,5 3,75 6 Ribinė atsižvelgiant į žmogaus fiziologiją 4,5 Literatūra ASM Standard Practice for Computing International Roughness Index of Roads from Longitudinal Profile Measurements, ASM Standards 4.3, Road and Paving Materials; Vehicle-Pavement Systems, E96-98 (3), 8.. Железнодорожный транспорт: Энциклопедия / Гл. ред. Конарев Н. С. Москва: Большая Российская энциклопедия, c. Bėgių defektų ir pažeidimų klasifikatorius. 4. Vilnius: SPAB Lietuvos geležinkeliai. 35 p. Blakely, K MSC/NASRAN Basic Dynamic Anglysis. Vers. 68, he MacNeal-Schwendler Corp. Bommer, A. L. G. 5. Non-linear Car-Model for Smooth-Road Behavior. Master s hesis. BS 684 Measurement and Evaluation of Human Exposure to Whole-body Mechanical Vibration and Repeated Shock. British Standards Institution, 987. Causemann, P Automotive Shock Absorbers. ZF Sachs technical paper, Verlag Moderne Industrie. Cucuz, S Schwingempfindung von Pkw-Insazzen. Dissertation University Braunschweig. Dossing, O Structural esting. Part and : Mechanical Mobility Measurements, Bruel and Kjear. Fahy, F.; Walker, J. G Fundamentals of Noise and Vibration. Routledge, New York. 5
154 Franklin, G. F.; Powell, J. D.; Emami-Naeini, A Feedback Control of Dynamic Systems. Addison-Wesley Publishing Company. French, P. J Intelligent Dumper and Hauler Suspension System (IDHSS). ACARP Project no. C43, Australian Coal Research Limite. Geležinkelio kelio priežiūros taisyklės.. Vilnius: SPAB Lietuvos geležinkeliai. 3 p. Geluk, C Vehicle Vibration Comfort: the Influence of Dry Friction in the Suspension. Master s hesis [interaktyvus]. Prieiga per internetą: Gillespie,. D. 99. Fundamentals of Vehicle Dynamics. SAE-International. Heylen, W.; Lamens, S.; Sas, P Modal Analysis heory and esting. KUL Press, Leuven. ISO 63 Mechanical Vibration and Shock-Evaluation of Human Exposure to Whole-body Vibration. International Organization for Standardization, 997. ISO 63 Mechanical Vibration and Shock Evaluation of Human Exposure to Wholebody Vibration, ISO 63-:3. International Organisation for Standardization, 3. ISO 868 Mechanical Vibration, Road Surface Profiles, Reporting of Measured Data, ISO 868:995, International Organisation for Standardization, 995. ISO Reporting Vehicle Road Surface Irregularities. echnical Report, ISO, ISO/C8/SC/WG4 N57, 98. King, R.; Crolla, D.; Ash, H.. Identification of Subjective-Objective Vehicle Handling Links Using Neural Networks for the Foresight Vehicle. SAE paper, --6. Kolm, H.; Kudritzki, D.; Wachinger, M Optimiering des Fahrkomforts durch betrachtung der Dampfungseigenschaften der Radaufhangung. VDI-Berichte 35. p. Kreuger, H.; Neukum, A. A.. Workload Approach to the Evaluation of Vehicle Handling Characteristics. SAE paper. Leurs, W.; Gielen, L.; Brughmans, M.; Dierckx, B Calculation of Rigid Body Properties From FRF Data: Practical Implementation and est Case. 5th IMAC Japan. Lewitzke, C.; Lee, P.. Application of Elastomeric Components for Noise and Vibration Isolation in the Automotive Industry. Sae-paper,
155 Milliken, W. F.; Milliken, D. L Race Car Vehicle Dynamics. SAE- International. Mitschke, M Dynamik der Kraftfahrzeuge. Band B: Schwingungen, Springer Verlag. P. v. d. Loo. 3. he Development of the Smart Strut Improved Sliding Pillar Front Active Suspension System for Mining rucks. Birrana Engineering echnical Paper. Pare, C Experimental Evaluation of Semiactive Magneto-Rheologial Suspensions for Passenger Vehicles. Master s hesis. Pielemeier, W.; Greenberg, J.; Meier, R.; Jeyabalan, V.; Otto, N.. Some Factors in the Subjective Evaluation of Laboratory Simulated Drive. SAE paper. Schmechtig, K.; Lennarsson, B. A.. Simple and Efficient Description of Car Body Movements for the Use in Virtual Prototyping and Ride Comfort Evaluation. SAE paper. Shaver, R. M.; Liu, K. J. 5. Body/Chassis Dynamic Response Under Experimental Modal est. SAE-paper Singh, R.. Dynamic Design of Automotive Systems: Engine Mounts and Structural Joints. Sadhana, Vol. 5, Part 3. Printed in India p. VDI-57 Einwirkungen Mechanischer Schwingungen auf denmenschen Ganzkorperschwingungen, VDI 57 Blatt :, Beuth Verlag GmbH,. Verver, M. 4. Numerical ools for Comfort Analysis of Automotive Seating. Phd-hesis. White, R. G.; Walker, J. G. 98. Noise and Vibration. Ellis Horwood Limited, Chichester. Zong, C.; Guo, K.; Guan, H.. Research on Closed-loop Comprehensive Evaluation Method of Vehicle Handling and Stability. SAE paper. 54


156 5. Automobilio rato sąveika su keliu 5.. Padanga ir jos sandara Padanga yra sudėtingas inžinerinis objektas, sudarytas iš gumos mišinio ir įvairiausių sintetinių medžiagų, sujungtų tarpusavyje karštos vulkanizacijos būdu. Gumos mišinių sudėtis, jos ingredientai, dozės ir gamybos technologijos yra kiekvieno gamintojo itin saugomos paslaptys. Karkasas / karkaso gijos 5. pav. Radialinės padangos struktūros bendras vaizdas 5. pav. Diagonalinės padangos struktūros bendras vaizdas 55

157 5.3 pav. Radialinės padangos detali struktūra Padangos struktūrinės sudedamosios dalys yra daugmaž visų gamintojų panašios ir lengviau atpažįstamos, tačiau viešai ir detaliai apie jas nėra niekur skelbiama. Padangos sudedamosios dalys yra: Gumos sluoksnis (angl. rubber coating) vienalytis gumos mišinio sluoksnis, gaubiantis padangos vidinę struktūros dalį ir pasižymintis būtent tai padangai ir jos paskirčiai būdingomis charakteristikomis, leidžiančiomis išsiskirti iš kitų padangų; Vidinis ratas (angl. innerliner) padangos vidinę dalį dengiantis plonas gumos mišinio sluoksnis, pasitaikantis padangose, kuriose naudojama papildoma dujų kamera ir be jos; užtikrina vidinės ertmės, užpildytos oru, hermetizavimą Karkaso gijų sluoksnis (angl. body ply) padangos karkasą dengiantis plonas gumos mišinio sluoksnis ir radialinių gijų sluoksnis, apimantis briaunos lanką ir borto užpildą; suteikia padangai formą ir užtikrina jos charakteristikas Karkasas (angl. body plies) karkaso gijos, gaubiančios ir jungiančios vieną ir kitą, priešais esančius, padangos kraštus; suteikia padangai formą, užtikrina struktūros stiprumą, reikalingą oro slėgiui, smūgiams ir apkrovoms atlaikyti, nulemia maksimalų padangos kam 56
158 pinį greitį ir valdomumo savybes. Karkasą sudaro vienas (5. pav.) ar keletas plonų sintetinių siūlų ar audinių sluoksnių, pagamintų iš viskozės, nailono, poliefiro, plieno ir kt medžiagų. Diagonalinės padangos karkaso gijų orientacija gali būti įstriža, o radialinės padangos skersa padangos riedėjimo krypčiai; Briaunos lankas (angl. bead bundle) bronza dengtų, pintų ir tarpusavyje supintų bei susuktų, lanką sudarančių plieninių vielų masyvas (lankas gali būti sudarytas ir iš anksčiau minėtų siūlų), įterptas į gumos mišinio sluoksnį; tvirtai laiko padangą reikiamoje padėtyje ant ratlankio ir užtikrina jos sandarumą; Briaunos sandarinimo paviršius (angl. abrasion gum strip) elastingo gumos mišinio sluoksnis tarp briaunos lanko ir ratlankio; užtikrina padangos sandarumą ir sukibimą su ratlankiu, suteikia papildomą briaunos lanko standumą; Briaunos lanko užpildas (angl. bead filler) ertmės užpildas tarp padangos briaunos lanko ir karkaso gijų, dėl savo formos dar vadinamas viršūne; užpildo geometriniai matmenys ir mechaninės savybės turi įtakos padangos charakteristikoms; Šoninė sienelė (angl. sidewall) agresyvioms eksploatacijos sąlygoms ir ultravioletiniams saulės spinduliams atsparus gumos mišinio sluoksnis; apsaugo karkaso gijas nuo aplinkos išorinių poveikių ir mechaninių deformacijų. Šoninė sienelė dažnai turi informacinius užrašus, baltas juostas ar kt. dekoratyvus; Šoninės sienelės sutvirtinimai (angl. sidewall reinforcements) papildomas, storesnis gumos mišinio sluoksnis, kartais dar vadinamas plaukmenimis; padanga gali turėti papildomus pastiprinimus šoninių sienelių apatinėje dalyje ratlankių apsaugai nuo deformacijų, maksimaliai leistinai ašinei apkrovai padidinti, padėti išlaikyti taisyklingą formą esant mažesniam už rekomenduojamą arba išvis nesant oro slėgio padangoje; Stabilizuojantis gijų (diržų) sluoksnis (angl. stabilizer ply skim arba belt skim) gumos mišiniu dengtas gijų sluoksnis, kuriame gijos išdėstytos persiklojant viena kitos atžvilgiu (karkaso gijoms); apsaugo padangą nuo deformacijų ir suteikia papildomo tvirtumo; Stabilizuojančios gijos (diržai) (angl. stabilizer plies (belts)) plieninių gijų arba sintetinių siūlų sluoksnis, persiklojantis vienas kito 57
159 atžvilgiu į skirtingas puses; sutvirtina karkasą ir suteikia papildomą padangos atsparumą smūgiams į atraminį, besiliečiantį su pagrindu, paviršių. Padangos savybes veikia gijų storis, išdėstymo tankis bei persiklojimo kampas; Gumos intarpai (angl. belt wedges) elastingo gumos mišinio juostelių intarpai tarp stabilizuojančių gijų (diržų) padangos besiremiančios plokštumos kraštuose; sumažina trintį ir pažaidų atsiradimo galimybę tarp stabilizuojančių gijų (diržų) padangai riedant ir/arba deformuojantis; Petukai (angl. shoulder inserts) elastingo gumos mišinio juostelių intarpai tarp besiremiančios plokštumos padangos kraštuose stabilizuojančių (diržų) ir karkaso gijų; užtikrina besiremiančios plokštumos padangos vientisumą radialine kryptimi, išlaiko sluoksnių vientisumą; Protektorius (angl. tread) sintetinių, kompozicinių ir natūralios gumos mišinių sluoksnis, turintis specialų raštą: griovelius, formuojančius blokelių formą ir skiriančius vieną protektoriaus blokelį nuo kito, lameles, įrėžtas į padangos protektoriaus bloką (dažniau pasitaiko žieminėse padangose); užtikrina sankibumą su atraminiu paviršiumi padangai riedant, stabdant, greitėjant, keičiant judėjimo trajektoriją. Protektorius ant padangos uždedamas karštos vulkanizacijos būdu ir yra suprojektuotas norint užtikrinti nepageidaujamų elementų šalinimą iš tarpbesiremiančių atraminio ir padangos plokštumų, sumažinti keliamą triukšmą ir užtikrinti tolygų dėvėjimąsi; Papildomas sluoksnis po protektoriumi (angl. undertread) pasitaiko ne visose padangose, tačiau papildomas gumos mišinio sluoksnis po protektoriumi leidžia sumažinti padangos riedėjimo varžą, kuro sąnaudas ir pagerinti kt. padangos savybes; Adhezijos sluoksnis po protektoriumi (angl. subtread) plonas rišantysis gumos mišinio sluoksnis sluoksnių sujungimui, priklijavimui vienam prie kito pagerinti; užtikrina protektoriaus sluoksnio ir papildomo sluoksnio po protektoriumi arba stabilizuojančių gijų sluoksnių pritvirtinimą prie padangos karkaso, uždengia stabilizuojančių gijų galus; Nailoninės gijos (nailoninė kepurė) (angl. nylon cap ply) nailoninių gijų sluoksnis sutvirtina stabilizuojančių gijų sluoksnį arba besiremiančios plokštumos kraštuose stabilizuojančių gijų dalį; apsaugo padangą nuo deformacijų ir suteikia formos reikiamą elastingu 58
160 mą ir užtikrina jos stabilumą veikiant didelėms išcentrinėms jėgoms riedant maksimaliu greičiu. 5.. Padangos kontakte veikiančios jėgos ir momentai Viena iš pagrindinių rato charakteristikų yra išilginio sankybio koeficiento µ x priklausomybė nuo išilginio santykinio slydimo s x, vadinamoji µ x s x diagrama (5.4 pav.). 5.4 pav. Charankteringa µ x s x diagrama Kad suprastume šios diagramos esmę ir su ja susijusius fizinius procesus, vykstančius sistemoje Ratas-kelias, nagrinėsime judančios transporto priemonės ratą. Ratas su pneumatine padanga nagrinėjamas kaip kietas deformuojamas kūnas, kuris sąveikauja su kelio paviršiumi. Sąveikos sritis yra plotas, kuris vadinamas kontakto pėdsaku, kurio geometrinis centras nukrypęs tam tikru atstumu nuo vertikalios ašies, pereinančios per rato centrą. Rato ir kelio kontakte apskritimine kryptimi atsiranda dvi zonos: padangos protektorius suspaudžiamas (kontakto pradžioje); kita zona protektorius ištempiamas (po kontakto). Kontakto plote vyksta praslydimas arba padangos sluoksnių šlitis, kuriuose tangentiniai įtempimai didesni už sankibio jėgų įtempimus. ransporto priemonės rato linijinis greitis v a rato centre nesutampa su apskritiminiu rato greičiu R d ω R kontakte ( R d rato dinaminis spindulys, ω R rato kampinis greitis). Dėl šių greičių nesutapimo atsiranda praslydimo greitis (5.5 pav.). Praslydimo greitis v s rato ir kelio kontakte yra lygus: Pagreitėjimas: v = R ω v, (5.a) s d R a 59
161 Stabdymas: vs = va Rdω R. (5.b) a) b) 5.5 pav. Padangos deformacija: a stabdymas; b pagreitėjimas Rato teorijoje įvedama santykinio išilginio ir skersinio slydimo koeficientų sąvokos: s x vs =, (5.3a) v a vy sy =. (5.3b) va čia v y rato greitis, statmenas išilginiam rato greičiui. 6
162 Priklausomai nuo transporto priemonės judėjimo kinematinių parametrų (greičių) galimi penki santykinio išilginio slydimo koeficiento atvejai (5.6 pav.). Laisvai riedantis ratas Pagreitėjimas s x = su praslydimu s x < su praslydimu s x = v = R ω v< R d ω R v = s d R s x = s x µ x vs = R ω d R s x = su praslydimu s x < Stabdymas su praslydimu s x = v> R d ω R ω R = vs = v RdωR vs sx = v s x = 5.6 pav. Rato santykinio išilginio slydimo koeficiento atvejai 6
163 Išilginės jėgos F x ir vertikalios jėgos F z,veikiančios į ratą, santykis vadinamas santykine išilgine jėga arba išilginiu sankybio koeficientu: Fx µ x =. (5.4) Fz Skersinės F y ir vertikalios jėgos F z, veikiančios į ratą, santykis vadinamas santykine skersine jėga arba skersiniu sankybio koeficientu: Fy µ y =. (5.5) Fz Iš µ x s x diagramos matoma, kad didėjant santykiniam išilginiam slydimo koeficientui s x išilginis sankybio koeficientas µ x didėja beveik tiesiškai. Šioje srityje, pavyzdžiui, s x [...,], praslydimas yra nedidelis ir jis šiek tiek turi įtakos transporto priemonės stabilumui ir jos valdymui. Kai yra tam tikra s x reikšmė ( s x =,..., ), išilginis sankybio koeficientas pasiekia maksimalią reikšmę µ x, max. Rato santykinis išilginis slydimo koeficientas, kuriam esant pasiekiama maksimali išilginio sankybio koeficiento reikšmė, vadinamas kriziniu s xkr,. oliau didėjant santykiniam išilginiam slydimo koeficientui s x ( s x > s xkr, ) išilginis sankybio koeficientas µ x mažėja. Kai s x = ratas visiškai užblokuotas (nesisuka, ω R = ), o kai s x =, tada ratas visiškai prasisuka ( v a = ). Kai sx > sx, kr, transporto priemonė praranda stabilumą, ji yra nevaldoma. Mokslininkai bandė analitiškai aprašyti µ x s x kreivę, t. y. gauti matematines priklausomybes µ x = µ x( sx ), tačiau iki šiol nėra gauta universaliųjų µ x = µ x( sx ) funkcijų. Diagramos µ x s x maksimumas priklauso nuo: vertikalios prispaudimo jėgos; kelio paviršiaus būklės; P pradinio stabdymo ar pagreitėjimo greičio; slėgio padangoje. ransporto priemonės judėjimo stabilumui įtakos turi jėga, veikianti rato ir kelio kontakte statmenai rato judėjimo krypčiai (skersinė jėga). Skersinė jėga atsiranda veikiant: 6
164 šoniniam vėjui; išcentrinei jėgai, kai P daro posūkį; P svorio jėgos dedamajai skersine kryptimi. Skersinė jėga F y deformuoja padangą ir rato skersine kryptimi atsiranda papildomas slydimas, kuris apibrėžiamas skersiniu sankibio koeficientu s y (5.6 pav). Skersinės jėgos poveikis ratui parodytas 5.7 pav. 5.7 pav. Skersinės jėgos poveikis ratui: a stabdymas ({ v }= { va} { Rdω R} ); b pagreitėjimas{ v }= { RdωR} { va} Rato ir kelio kontakte kampas tarp rato sukimosi plokštumos ir rato judėjimo krypties vadinamas įstrižojo riedėjimo kampu α (arba skersridės kampas). Įstrižai riedančio rato kontakto užpakalinėje dalyje kelio reakcija į ratą yra didesnė negu priekinėje kontakto dalyje. odėl šios reakcijos generuoja sukimos momentą apie vertikalią ašį z ir sukimos momentas M z suka riedanti ratą taip, kad rato trajektorija sutaptų su rato sukimosi plokštuma. oks momentas vadinamas stabilizuojamuoju rato momentu. Reali rato ir kelio kontakte veikianti sankybio jėga F µ yra lygi: F = da, (5.6) µ τxy A kontaktas čia τ xy kontakto plote veikiantys tangentiniai įtempimai; A kontaktas kontakto plotas. Vertikali kelio reakcija, veikianti kontakte, yra lygi: F = σ da, (5.7) z A kontaktas z čia σ z kontakto plote veikiantys normaliniai įtempimai. 63
 τ τ π π x xm n x a x a y b = + sin cos, (5.")
 čia σ zm, τ xm, τ ym normalinių ir tangentinių įtempimų amplitudės, atitinkamai; a ir b kontakto ilgis ir")
165 64 Apytiksliai normalinius įtempimus σ z ir tangentinius įtempimus τ xy, τ xy galima išreikšti tokiu pavidalu: σ σ z zm n n x a y a =, (5.8a) τ τ π π x xm n x a x a y b = + sin cos, (5.8b) τ τ π y ym n x a y b = sin, (5.8c) čia σ zm, τ xm, τ ym normalinių ir tangentinių įtempimų amplitudės, atitinkamai; a ir b kontakto ilgis ir plotis. Normalinių σ z ir tangentinių τ x, τ y įtempimų pasiskirstymas kontakto plote parodyti 5.8 pav. a) b)

166 c) 5.8 pav. Normalinių σ z ir tangentinių τ x, τ y įtempimų pasiskirstymas kontakto plote: a =,5 m; b =, m; σ zm =, 4 MPa, =, MPa, τ ym =, 63 MPa τ xm Realiąją sankybio jėgą, veikiančią rato ir kelio kontakte, galima nustatyti energijos balanso metodu. P rato mechaninis darbas, atliktas per laiko vienetą, N R yra lygus pasipriešinimo jėgų galingumui N P : N R = N, (5.9) P čia NR = mrvv a a ; NP = Nµ + Nm + Nst, dv m R rato masė; v a a, v a = P greitis ir pagreitis, atitinkamai; N µ sankybio jėgų galingumas; N m kitų pasipriešinimo jėgų dt (aerodinaminė jėga, trinties jėga; sunkio jėgos dedamoji ir kt.) galingumas; N st stabdymo jėgų galingumas: N = F v a ; (5.) µ µ ( ) N = M I st st R R R ω ω. (5.) odėl sankybio jėga lygi: Fµ = ( NR Nst Nm)= mrvava ( Mst IRωR) ωr Nm va v. a (5.) 65
167 Kontakte veikiančią jėgą galima suskaidyti į dedamąsias { Fµ }= { Fµ x}+ { Fµ y}, (5.3) arba µ Σ µ x µ y. (5.4) { }= { }+ { } P rato teorijoje naudojamas sankybio jėgų apskritimas, kuris išreiškia išilginės ir skersinės sankybio jėgų tarpusavio priklausomybes. Vienas iš pirmųjų mokslininkų, kuris nagrinėjo išilginių ir skersinių sankybio jėgų tarpusavio priklausomybes, buvo vokiečių mokslininkas V. Kamas (V. Kamm). odėl sankybio jėgų apskritimas dar vadinamas Kamo apskritimu. 5.9 pav. Kamo sankybio jėgų apskritimas Kamo apskritimas apibrėžia rato sankybio jėgų kraštines sąlygas: { Fµ }= Fµ x + Fµ y µ max Fz (5.5) čia µ max maksimalus sankybio koeficientas, ( )= ( )+ ( ) µ max s µ µ x s µ µ y s. (5.6) Nelygybę (5.5) galima naudoti tik apytiksliam slydimo ribų įvertinimui, kadangi µ max reikšmė priklauso nuo slydimo ir gali kisti plačiose ribose. Kartais naudojamas apytikslus sankybio koeficientas: µ µ x µ x µ y max µ + µ y max =, (5.7) 66






 Šoninis slydimas Išilginis")

168 čia µ x max, µ y max sankybio koeficientai esant pilnam slydimui išilgine ir skersine kryptimis. Įvedamas ir skersinės jėgos atsargos koeficientas: Fµ y K =. (5.8) µ y Fµ Σ Kai K µ y, tai P judėjimas yra stabilus, o kai K y µ, tai P praranda stabilumą. Rato ir kelio kontakte veikiančios jėgos ir momentai pagal SAE ir ISO standartus parodyti 5. lentelėje 5. lentelė. Pagal SAE ir ISO standartus rato ir kelio kontakte veikiančios jėgos ir momentai V x > SAE Pritaikytas SAE ISO Pritaikytas ISO Šoninis kampas (vaizdas iš viršaus) Išvirtimo kampas (vaizdas iš galo) Šoninis slydimas Išilginis slydimas tanα = V sy Vx κ = V sx Vx tanα = V sy Vx κ = V sx Vx tanα = V sy Vx κ = V sx Vx tanα = V sy Vx κ = V sx Vx Posūkio slydimas Nėra apibrėžta ψ ϕ = V x Nėra apibrėžta ψ ϕ = V x γ = γ > 67

169 5. lentelės pabaiga Išilginės jėgos Šoninės jėgos Statmenos jėgos F z < F z > F z > F z > Momentas apie x ašį Momentas apie y ašį M y > M y > M y < M y < Momentas apie z ašį Sankybio koeficiento apytikslės reikšmės pateiktos 5. ir 5.3 lentelėse. 5. lentelė. Sankybio koeficiento ir riedėjimo varžos reikšmės važiuojant 6 8 km/h greičiu Kelias µ x f Asfaltbetonio ir cementbetonio kelias sausas, švarus,7,9,,5 šlapias,4,6,5,8 purvinas,,45,6, apsnigtas,,4,,5 apledėjęs,9,3,, Skaldos padengas kelias,5,65,4,7 Grindinys sausas,6,7,5,35 šlapias,4,5,3,4 68
170 5. lentelės pabaiga Skaldyto akmens tašeliai sausi,4,6,,3 šlapi,5,4,5,35 Gruntkelis sausas, kietas,5,6,3,5 drėgnas,,4,4, ištižęs,5,3,6,3 Smėlis sausas,,3,,3 drėgnas,4,5,6, Molis sausas,4,5,3,5 drėgnas, plastiškas,,4,,35 ištižęs,5,5,3,5 natūrali pieva,,4,5,5 sausas arimas,4,7,5,3 sausas ledas,6,5,5, Sniegas: sausas, purus,,4,,3 suplaktas,,4,7, 5.3 lentelė. Sankybio koeficientas, kai kelias padengtas sniegu ir ledu Kelio danga Suvažinėtas sniegas Nesuvažinėtas sniegas Sniegas ir ledas, padengtas tik iškritusiu sniegu Detalesnis dangos būklės aprašymas ransporto priemonių suvažinėtas sniegas, nesudarantis sutrombuoto sniego ir ledo sluoksnio ik iškritęs ant asfalto sniegas, nesuvažinėtas transporto priemonių ratais pirmasis pervažiavimas Suvažinėtas sniegas ir ledas, kurį dengia tik iškritęs nesuvažinėtas iki cm storio sniego sluoksnis Sankibumo koeficientas φ,4,37,5,4,8,45 69
171 Sniegas ir ledas, sumaišytas su smėliu ir purvu Sniegas ir ledas Sniegas ir ledas prieš sankryžas Gilus sniegas Sausas asfaltas žiemos sąlygomis Apšerkšnijęs asfaltas Glotnus ledas Ledas ir padangos su grandinėmis Juodas ledas Suvažinėtas sniegas ir ledas, sumaišytas su smėliu ir purvu, kurių detalių skersmuo 3 6 mm Ištisas sniego sluoksnis, suvažinėtas iki ledinio paviršiaus pavidalo Ištirpintas stovinčių automobilių variklių bei užšalęs glotnaus paviršiaus sniegas, nupoliruotas stabdomų automobilių ratų oks gilus ir nepažeistas sniegas, kad transporto priemonė sėda ant dugno, bet neužstringa Niekuo nepadengtas sausas asfaltas žiemos sąlygomis Balta danga ant asfalto, matoma vairuotojui ir lengvai atpažįstama kaip šerkšnas Storas užšalusio vandens sluoksnis, nepažeistas dyglių ir grandinėlių Storas nepažeistas užšalusio vandens sluoksnis važiuojant ratais su plieninėmis grandinėmis Storas ištisinis ledo sluoksnis, atrodantis kaip šlapia, juoda važiuojamoji dalis, sunkiai pastebimas vairuotojui 5.3. Padangos modeliai 5.3 lentelės pabaiga Priklausomai nuo purvo kiekio (mažai daug),5,45,,39,9,,9.95,59,7,48,58,54,9,,8,, Lugre padangos modelis Koncentruotų parametrų Lugre padangos modelis Įvertinami šie Lugre (LuGre) padangos modelio parametrai: normalinė jėga F z ; išilginis sankybio koeficientas statikoje µ c ir sankybio koeficientas, kai prasideda slydimas µ s, padangos išorinio paviršiaus standumo σ ir slopinimo σ koeficientai, protektoriaus poslinkis z (5. pav.). 7
172 5. pav. Lugre padangos modelio schema Pagal Lugre padangos modelį padangos kontakte veikianti išilginė sankybio jėga yra lygi: dz Fx = σz+ σ + σ vs Fz, (5.9) dt dz vs = vs σ z, dt g( vs ) gv ( s)= θµ ( c + ( µ s µ c) e δ ), δ= 5, vs, vstr čia gv ( s ) Stribeckio funkcija; θ parametras, įvertinantis padangos viršutinių sluoksnių įtaką ( θ= 4,... ), v str Stribeckio greitis; v s slydimo greitis, vs = ω RRd v, kai vyksta rato pagreitėjimas; vs = v ω RRd, kai vyksta rato stabdymas. ω R rato kampinis greitis; R d dinaminis ratos spindulys; v rato linijinis greitis. Lugre modelio parametrų reišmės parodytos į 5.4 lentelėje. 5.4 lentelė. Lugre padangos modelio parametrų reikšmės Parametras σ σ σ µ c µ s v str Reikšmė 4 4,9487,8,5,9,5 Vienetas /m s/m s/m m/s 7
173 Vienmatis išskirstytų parametrų Lugre padangos modelis Išskirstytų parametrų Lugre padangos modelyje įvertinamas padangos protektoriaus poslinkio z( t,ξ)kitimas laike ir išilgai padangos ir kelio kontakto (5. pav.). 5. pav. Išskirstytų parametrų Lugre padangos modelio schema Kontakte slydimo greitis yra lygus: vs = v ω RRd. Išilginis santykinis slydimo koeficientas lygus: n RRd kai RRd v sx = n ω, ω v, kai =., kai ωrrd > v Išskirstytų parametrų Lugre padangos modelio pagrindinės priklausomybės yra: L Fx = dfx( t,ξ, (5.) ) ( ) + dz t, ξ dfx( t, ξ)= σz( t, ξ)+ σ σ vs dfz ( t, ξ), dt (5.) dz ( t, ξ) v = s vs σ z( t, ξ), dt g( v ) (5.) ( ) gv ( )= µ + µ µ s c s c s e v s v str γ, (5.3) 7
174 čia L padangos ir kelio paviršiaus kontakto ilgis. Protektoriaus poslinkio z diferencialas ir greitis yra lygūs: z t z t dz = (, ξ ) dt + (, ξ ) dξ, t ξ ( ) = ( ) + ( ) dz t, ξ z t, ξ z t, ξ dt t ξ dξ. (5.4) dt Nagrinėdami padangos slydimą, sakykime, kad dξ = R d ω R. (5.5) dt ada panaudoję priklausomybes (5.4..4), (5.4..6), (5.4..7), gausime z( t, ξ) + z ( t, ξ ) t ξ Rw d R s vs = v σ z( t, ξ). (5.6) g v 73 ( ) Sakykime, kad kontakto zonoje vertikali jėga yra kintama, jos diferencialas lygus: df ξ f ξ dξ z ( )= ( ). (5.7) z ada padangos kontakte veikianti išilginė sankybio jėga yra lygi: ( ) + L dz t, ξ dfx( t, ξ)= σ z( t, ξ)+ σ σ vs fz ( ξ) dξ. (5.8) dt Praktikoje naudojamos šios prispaudimo f z ( ξ) funkcijos: Eksponentinė priklausomybė f ( ξ)= f e L, kai λ ; (5.9) z z λξ Parabolės priklausomybė F 3 z ξ L fz ( ξ)= ; (5.3) L L Sinuso priklausomybė: f z πfz πξ ( ξ)= L sin. (5.3) L s
175 Kai padangos kontakte veikiantys greičiai Rw d R, vv, s yra pastovūs, tada gauname, kad lokalinė koordinatės z išvestinė yra lygi nuliui, t. y. z ( t,ξ ) ir lygtis, aprašanti z( t,ξ) koordinatės kitimą = t pagal išskirstytų parametrų Lugre padangos modelį, yra: čia C vs Rw d R = vs σ z( t, ξ). (5.3) ξ g( vs ) Esant kraštinei sąlygai z( t,ξ= )=, lygties sprendinys yra lygus: z( t, ξ) C ( ) z( ξ)= C e σ vs = g ( v ) Rw s d ( ) g v ` ξ s sign( vs ), (5.33) σ Nusistovėjusiam rato judėjimui dz t,ξ veikianti išilginė sankybio jėga F dt x lygi: L R. ( ) ( ) 74 ( ) =, padangos kontakte Fx()= t σz( t, ξ)+ σvs fz ξ dξ. (5.34) Pastoviam prispaudimo jėgos pasiskirstymui, kai sumarinė vertikali jėga lygi F z, padangos kontakte veikianti išilginė sankybio jėga F x yra lygi: L C C Fx = e g( vs) sign( vs)+ σ v s F L z, (5.35) g vs Rw d R čia C = ( ). σ vs Kai prispaudimo funkcija f z ( ξ)yra pasiskirsčiusi pagal eksponentės dėsnį (5.9), padangos kontakte veikianti išilginė sankybio jėga F x yra lygi: Lfz Fx = LC ( C + vs) vs Fz LC σ σ λσ + λ λ ( )
176 Lf z e λ σc λ LC λe LC + σ vs ( λ LC ). λ ( LC λ ) ( ) (5.36) Kai prispaudimo funkcija f z ( ξ ) pasiskirsto pagal sinuso dėsnį (5.3), padangos kontakte veikianti išilginė sankybio jėga Fx yra lygi: Fx = ( Fz ) LC ( σ C + σ v ) + π σ v + π σ C e LC. s s L C + π (5.37) Kai prispaudimo funkcija f z ( ξ ) pasiskirsto pagal parabolės dėsnį (5.3), padangos kontakte veikianti išilginė sankybio jėga Fx yra lygi: Fx = Fz σc + 6 LC L3C3 + 6σC e LC ( LC ) + σ vs L3C3. L3C3 ( ) (5.38) Išskirstytų parametrų Lugre modelio parametrų reikšmės parody tos 5.5 lentelėje. 5.5 lentelė. Išskirstytų parametrų Lugre padangos modelio parametrų reikšmės Parametras Reikšmė Vienetas σ 8,54 /m σ s/m σ,8 s/m µc,8 µs,55 vstr,5 m/s Paceikos modelis Mokslinkas Pacejka H.B. pasiūlė padangos modelį (Pacejka Magic Formula), kuriame įvertinami sekantys parametrai: normalinė jėga; išilginis santykinis slydimas; skersridės kampas; išvirtimo kam pas. Pacejkos pateikta bedroji formulė nustatyti kontakte veikiančias jėgas priklauso nuo keturių parametrų (B, C, D, E) yra lygi: ( )) ( y ( x ) = Dsin Carctg Bx E ( Bx arctg ( Bx ) ), čia y ( x ) kontakte veikianti jėga arba momentas; 75 (5.39)
177 Y ( X ) = y ( x ) + Sv, x = X + Sh, (5.4) čia: Sv, S h atitinkamo parametro postumis vertikale arba horizon talia kryptimi; B, C, D, E parametrai, kurie priklauso nuo modelio pagrindinių parametrų; X argumentas (išilginis santykinis slydimas s x arba skersridės kampas α). Parametrų B, C, D, E išraiškos yra lygios: D = ( b Fz + b ) Fz ; C = bx ; (b F B= z 3 ) + b4 Fz e b5 Fz CD, (5.4) E = b6 Fz + b7 Fz + b8 ; S h = b9 Fz + b ; Sv =. rijų parametrų sandaugą BCD lygi standumo koeficientui išilgine padangos kryptimi arba skersridės kampo kryptimi, atitinkamai. Sankybio jėga veikianti išilgai padangos yra lygi: Fx = D x sin ( C x arctg ( Bx Φ x ) ), (5.4) čia: Bx, C x, Dx, Φ x parametrai nustatomi pagal tokias išraiškas: C x =, 65 ; Bx (b = x3 Dx = ( bxfz + bx ) Fz ; ) Fz + bx 4 Fz e bx 5 Fz C x Dx Ex = bx 6 Fz + bx 7 Fz + bx8 ; (5.43) Ex arctg ( Bx σ ), Bx F čia: σ = λ ; Fz = z ; Fz vertikali jėga, N. Sankybio jėgos Fx priklausomybė nuo išilginio santykinio slydi mo koeficiento s x prie skirtingų vertikalių jėgų Fz parodytos 5. pav. Φ x = ( Ex ) σ 76
178 5. pav. Jėgos Fx priklausomybė nuo išilginio santykinio slydimo koeficiento λ prie skirtingų vertikalių jėgų Fz Sankybio jėga veikianti padangos skersine kryptimi yra lygi: ( ) Fy = D y sin C x arctg ( By Φy ) + S yv, (5.44) čia: By, C x, Dy, Φ y parametrai nustatomi pagal tokias išraiškas: C y =, 3 ; By = ( Dy = ( byfz + by ) Fz ; by 3sin by 4 arctg ( by 5 Fz ) S yh = by 9 γ; C y Dy ); E y = by 6 Fz + by 7 Fz + by 8 ( ) S yv = by Fz + by Fz γ Φ y = ( E y ) ( α + S yh ) + By = by γ By. E arctg B ( α + S yh ) By ( (5.44) ) Sankybio jėgos Fy priklausomybės nuo skersridės kampo α prie skirtingų vertikalių jėgų Fz parodytos 5.3 pav. Sankybio jėgos Fy priklausomybės nuo skersridės kampo α prie skirtingų padangos iš virtimo kampo γ parodytos 5.4 pav. 77
179 5.3 pav. Jėgos Fy priklausomybė nuo skersridė kampo α prie skirtingų vertikalių jėgų Fz 5.4 pav. Jėgos Fy priklausomybė nuo skersridės kampo α prie skirtingų vertikalių jėgų Fz Stabilizuojantis sukimo momentas yra lygus: M z = D msin ( Cm arctg ( Bm Φm ) ) + S mv, (5.45) čia: Bm, Cm, Dm, Φ m parametrai nustatomi pagal tokias išraiškas: Cm =, 4; Bm (b = m3 Dm = ( bmfz + bm ) Fz ; ) Fz + bm 4 Fz e bm 5 Fz Cm Dm 78 ;
180 E m = b x 6F z + b m F z + b ; 7 m 8 S mh = b γ 9 ; S = b F + b F m ( ) mv m z m z γ; E ( α )+ arctg α+ B ( ) + m Φ m = E m S mh By = bm γ B ; E m m m Em = Em b γ. 3 m ( Bm( Smh )) Stabilizuojančio momento M z priklausomybės nuo skersridės kampo α prie skirtingų vertikalių jėgų F z parodytos 5.5 pav. 5.5 pav. Jėgospriklausomybė nuo skersridės kampo prie skirtingų vertikalių jėgų Koeficientų bij (i = x, y, m; j =..3) reikšmės parodytos 5.6 lentelėje. 5.6 lentelė. Koeficientų bij reikšmės b x b x b x b x3 b x4 b x5 b x6 b x7 b x8 b x9 b x b x b x b x3,5,3 4 49,6 6,,8,6,56,486,,,, b y b y b y b y3 b y4 b y5 b y6 b y7 b y8 b y9 b y b y b y b y3,3, 78,8,8,354,77,8 4,8, b m b m b m b m3 b m4 b m5 b m6 b m7 b m8 b m9 b m b m b m b m3,4,7,8,86,73,,7,643 4,4,5,66,945,3,7 79
181 HSRI modelis Greitkelio saugumo tyrimo instituto ( JAV) (Highway Safety Research Institute, USA) mokslininkai L. Segel, H. Dugoff, P. Favcher sukūrė padangos modelį, kuriame įvertinama: normalinė jėga; išilginis santykinis slydimas; išilginis ir kampinis kontakto standumas; sankybio koeficientas. Išilginis santykinis slydimo koeficientas yra lygus: s x n vx kai RRd vx = kai n, ω, = ωrrd, kai ω R < v n 8 R d x (5.46a) RRd kai RRd vx sx = kai n ω, ω, =,(5.46b) vx, kai ωrrd > vx čia v x išilgai padangos linijinis greitis; ω, R d padangos kampinis greitis ir dinaminis spindulys, atitinkamai. Sankybio koeficientas išilgai padangos yra lygus: µ = µ + ( α max Av s x sx tg ), (5.47) čia: µ max maksimalus sankybio koeficientas (statinis µ max = 83, ); A s koeficientas, įvertinantis sankybio koeficiento sumažėjimą ( A s, 5) Sankybio jėga, veikianti išilgai padangos, yra lygi: C» Fz, kai H λ Fx =, (5.48) λ C» Fz, kai H< λ H 4H o sankybio jėga, veikianti padangos skersine kryptimi, yra lygi: C Fz tg( α), kai H < λ, (5.49) Fy = λ C Fz tg( α) λ H 4H,kai H
182 čia skersridės kampas; C s, C standumo koeficientai išilgine padangos kryptimi ir skersridės kampo kryptimi, atitinkamai C = df s C = df x y, ; H modelio parametras, dsx d H = C Ctg ss x α α. (5.5) ( s ) F ( ) F x µ z λ µ z + ( ) Kai H < nedidelis sukibimas, o kai H, tai padangos ir kelio pavirčiaus kontakte egzistuoja, tai kontakte egzistuoja sukibimas (adhezija) ir slydimas. Kai išilginis santykinis slydimo koeficientas λ ir skersridės kampas yra pakankamai dideli (vyksta didelis slydimas x ir y ašių kryptimis), tada kontakte veikiančias sankybio jėgas ( Fx, Fy ) galima nustatyti taip: Cssx Fx = FR ; ( C s ) + ( C α α ) s x F = Cαα F R ( C s ) + ( C α), (5.5) s x α čia FR = Fx + F y, jėgos Fx, Fy nustatomos iš (5.48) ir (5.49) išraiškų. Sankybio jėgos, veikianti išilgai padangos F x priklausomybė nuo išilginio santykinio slydimo koeficiento λ prie skirtingų skersridės kampų α parodyta 5.6 pav. Sankybio jėgos veikianti skersai padangos F y priklausomybė nuo išilginio santykinio slydimo koeficiento λ prie skirtingų skersridės kampų α parodyta 5.7 pav. 8
183 Sankybio jėgos veikianti skersai padangos F y priklausomybė nuo sankybio jėgos, veikiančios išilgai padangos F x prie skirtingų skersridės kampų parodyta α 5.8 pav. 5.6 pav. Sankybio jėgos veikianti išilgai padangos F x priklausomybė nuo išilginio santykinio slydimo koeficiento s x prie skirtingų skersridės kampų α, kai F = 3 z N ; C = 4 N ; C s α =5 N / rad ; v x = 6 km/val.; A s =, 5; µ max = 83, 5.4 pav. Sankybio jėgos veikianti skersai padangos F y priklausomybė nuo išilginio santykinio slydimo koeficiento s x prie skirtingų skersridės kampų α α, kai F = 3 z N ; C = 4N ; C s α =5N / rad ; v x = 6 km/val.; A s =, 5 ; µ max = 83, 8

184 5.5 pav. Sankybio jėgos veikianti skersai padangos F y priklausomybė nuo sankybio jėgos veikiančios išilgai padangos F x prie skirtingų skersridės kampų α α, kai F = 3 z N ; C = 4 N ; C s α =5 N / rad ; v x = 6 km/val.; A s =, 5 ; µ max = 83, Dugofo modelis Dugofo modelis (969) labai panašus į Pacejkos ir Šarpo padangų modelius. Dugofo modelyje priimta, kad padangos ir kelio sąveikos kontakto plote slėgis yra pastovus. ačiau tokia priimta prielaida nesumažina šio padangos modelio efektyvumo, nes padangos standumai išilgai padangos ir skersridės kampo kryptimi yra nepriklausomi. Dugofo padangos medelyje įvertinama: normalinė jėga; išilginis santykinis slydimas; išilginis ir kampinis kontakto standumas; sankybio koeficientas. Išilginis santykinis slydimo koeficientas yra lygus: s x RdωR vx, kai vyksta stabdymas vx = RdωR vx, kai vyksta pagreitėjimas RdωR (5.5) Sankybio jėga,veikianti išilgai padangos, yra lygi: 83
185 F x = C λ sx + s x f ( σ), (5.53) o sankybio jėga, veikianti padangos skersine kryptimi,yra lygi: ( ) Fy = C f ( σ ), + sx (5.54) čia σ parametras, kuris yra lygus: µfz( sx) σ = ( Cs s x) + C α ( α), (5.55) funkcija f ( σ) yra lygi: ( ) ( ) < σ σ, kai σ f ( σ)=, (5.56), kai σ C s, C standumo koeficientai išilgine padangos kryptimi ir skersridės kampo kryptimi, atitinkamai; µ išilginis sankybio koeficientas; F z normalinė jėga. Panaudojant Dugofo padangos modelį, galima nustatyti trinties jėgų apskritimo paramatrus: čia F x F F x + F x y sx = C s s Fy + Fx + F x ; F y y Sankybio koeficientas tada lygus: x y µ a = F + F 84 =, (5.57) ( ) = C tg. (5.58) sx. (5.59) Fz Kai parametras yra σ >, tada išilginio ir skersinio sankybio jėgos yra mažesnės už jėgą µf z / ir nustomos pagal (5.58) išraiškas.
186 Kai parametras yra σ <, tada taškas jėgų apskritime yra už apskritimo ribų, tada išilginio ir skersinio sankybio jėgos nustatomos: F x FC z sx = ( Cs ) + C tg ( α ) s x µ λ µ 4 µ ( ) α ( ) a, (5.6) µ FC z α tg µ Fy =. (5.6) ( Cs s x) + C ( ) a ( ) α tg α 4 µ Jeigu µ < µ a, tada taškas jėgų apskritime yra už apskritimo ribų, tada išilginio ir skersinio sankybio jėgos nustatomos: F F x y s x µ µ = Cs s µ 4 µ = C tg s x a a ( ) µ µ µ 4 µ x a a,, (5.6) Sankybio jėgos veikianti išilgai padangos F x F y priklausomybė nuo išilginio santykinio slydimo koeficiento λ prie skirtingų skersridės kampų α parodyta 5.9 pav. ir 5. pav. 5.7 pav. Jėgos F x priklausomybė nuo išilginio santykinio slydimo koeficiento λ prie skirtingų vertikalių jėgų F z, kai kampų α =, rad, kai C λ = 4 N ; C α =5 N / rad ; µ=, 85
187 5.7 pav. Sankybio jėgos veikianti skersai padangos F y priklausomybė nuo skersridės kampo α prie skirtingų vertikalių jėgų F z, kai C λ = 4 N; C α =5 N / rad ; λ =, ; µ =, Elastingos padangos modelis Elastingos padangos modelį sukūrė Fiala (Fiala, 954). Detalus elastingos padangos modelio pristatymas pateiktas R. Rajamani knygoje ransporto priemonių dinamika ir valdymas (Springer, 6). Elastingos padangos modelis vienas iš paprasčiausių padangos modelių, tačiau juo remiantis galima gauti įvairių padangos charakteristikų. Esant nedideliam skersridės kampui α, kontakte padanga deformuojasi skersine kryptimi. Kontakte padanga nagrinėjama kaip tamprus kūnas, kurio standumo koeficientas skersine kryptimi, tenkantis ilgio vienetui, yra ky ( x), skersinis poslinkis γ( x) 5 (8 pav.). Bendras kontakto ilgis yra a, o kontakto plotis b. Kontakte skersinis poslinkis yra lygus: ( )= = ( ) γ x sx tg α x, čia α skersridės kampas. Kontakte veikianti elementari skersinė jėga lygi: 86 (5.63) df k γ x dx (5.64) y = ( ) y ir, suintegravę pagal kontakto ilgį a, gausime kontakte veikiančią skersinę jėgą ir stabilizavimo momentą:
188 a a Fy = kyγ( x) dx= kysxdx = kysa, (5.65) a a 3 M k x x a dx k sx x a dx k sa F a z = yγ( )( ) = y ( ) = y =. (5.66) y 3 3 Standumo koeficientas skersridės kampo kryptimi yra lygus: dfy Cα = =ka y. (5.67) dα 5. pav. Elstingos padangos modelio schema Esant dideliam skersridės kampui, slėgis kontakte yra pastovus: p x µ Fz a b ( )= ( )( ). (5.68) Maksimali skersridės jėga gali pasiekti dydį µf z. 87
189 Kontakte slydimo nėra, kai įvykdoma sąlyga: ak γ ( x) µ F. (5.69) y z Iš (5.69) sąlygos plaukia, kad maksimalus skersinis poslinkis lygus: µ γmax = F z. (5.7) ak y Nagrinėjamas atvejis, kad skersinis poslinkis yra didesnis už maksimalų poslinkį γ max (5. pav.): γ γ( x)= x γ max s max,, x x s x x a s, (5.7) čia x s kontakto taškas, kuriame prasideda slydimas. Skersridės jėga lygi: x a s γ a max Fy = kyγ( x) dx= ky xdx+ γmaxkydx = x γ max s xs k x + k γ ( a x ). (5.7) Sakykime, kad γ tg( α)= s = x s y s y max s max, x s γ max µ Fz = =. (5.73) s ak s y ada skersridės (5.7) jėga yra lygi: F y Fz = Fz ( ) µ µ. (5.74) 8aks y 88
190 5. pav. Skersinis poslinkis ir slydimo zona Stabilizavimo momentas yra lygus: x a s γ a max Mz = kyγ( x) x xs dx= ky xdx kyγmax xadx = x 5 kyγmaxxs kyγmax a. (5.75) 6 M µ Fz µ Fz z kyaγmaxxs kyγmax xs 6 8kas 48aks = = ( ) ( ) s y xs 3 3 y. (5.76) Sakykime, kad kontakte slėgis pasiskirsto pagal parabolės dėsnį u p( x)= p, u = a x. (5.77) a Vertikali jėga, veikianti kontakte, yra lygi: a 8 Fz = bpudu ( ) = bp a. (5.78) 3 a Ir slėgio konstantą galima nustatyti iš (5.78): p 3Fz =. 8ba Galutinė slėgio pasiskirstymo kontakte funkcija yra lygi: 89
191 p ( x) = 3Fz a x 8ba a 3Fz = ( x ( a x ) ). 8ba3 (5.79) Įveskime skersinio standumo į ploto vienetą koeficientą k ya N/m3: ky. (5.8) k ya = b ada galioja ryšis: k ya γ ( x )slydimas = µp ( x ), k ya γ ( x )slydimas = θ= 4ba k ya 3µFz 3Fz 8ba3 ( x ( a x ) ), ; γ ( x )slydimas = (5.8) ( x ( a x ) ). aθ aške xs prasideda slydimas γ ( xs ) = sxs = ( xs ( a xs ) ) ; aθ xs = a ( θs ). (5.8) Slydimo sritis yra xs < x a. Skersridės jėga lygi: xs γ ( xs ) xs Fy = b k ya x a dx + b xs k ya aθ x ( a x ) dx = x 3 8bk ya a3 xs 3 = µfz s, a 6 aθ a bet xs = a ( sθ ), tada skersridės jėga lygi: ( 3 Fy = µfz ( sθ ) ). 9 (5.83)
192 Kai < x a tada s θ ir F s, o kai s = θ, tada F Kai s θ, tada F y y <µ F, (5.84a) y z =µ F. (5.84b) z =µ F sign() s (5.84c) z yra pilnas slydimas. Galutinės skersridės jėgos priklausomybės, kai slėgis pasiskirsto pagal parabolės dėsnį, yra: F y čia θ = 4 ba k 3µ F ( ) 3 µ Fz ( sθ), s = µ Fsign z () s, s > θ z ya. Stabilizavimo momentas lygus: θ (5.85) kai s >, a M b F a x dx F a x s xs z = y( ) = z a a µ a, (5.86a) Esant sąlygai F y µ F ; z 3 kai s > θ, M z = ; (5.86b) kai s θ, ( ) 3 4 Mz µ Fza θs 3 θs 3 θs θs. (5.86c) = ( ) + ( ) ( ) 9
193 Pagal Pacejka ir Šarpa (99), bendroji kontakte veikianti jėga yra lygi: 3 4 µfz 3σθ ( 3θσ ) + ( 3θσ ) ( θs ), kai σ σm F = 3 7 µfz, kai σ > σm 4ba k ya ; σ = σx + σy, θ= θ 3µFz (5.87) σm slydimo pradžios koeficientas. Kontakte veikiančios jėgos yra lygios: σy σ Fx = x F ; Fy = F, σ σ R ω vx pagreitėjimas; čia σ x = d R Rd ωr (5.88) čia σm = Rd ωr vx stabdymas; vx v σ y = x tg ( α ). Rd ωr σx = (5.89) Kiti padangos modeliai Mokslininkai M. Nagai, S. Yamatak ir Y. Hirano pasiūlė paprastą priklausomybę nustatyti padangos sankybio jėgą, veikiančią padangos skersine kryptimi: Fy = K x π Cα α, µfz arctg π µfz (5.9) čia, skersridės kampas; K x, koeficientas, įvertinantis išilginės jėgos įtaką; C standumo koeficientas skersridės kampo kryptimi, atitinkamai C = dfy ; µ išilginis sankybio koeficientas. d Sankybio jėgos Fy priklausomybės nuo skersridės kampo α prie skirtingų vertikalių jėgų Fz parodytos 5.3 pav. 9
194 5.3 pav. Jėgos F y priklausomybė nuo skersridės kampo α prie skirtingų vertikalių jėgų F z, kai K x = 9; C = 3 rad / N µ =, Penkto skyriaus literatūra Andrejewski, R.. Dynamika pneumatycznego kola jednego Naukowo- echniczne. Warszawa. Canudus, de Wit C.; siotras, P.; Velenis, E.; Basset, M.; Gissenger, G. Dynamic Friction Model for Road/ire Longitudinal Interaction. Vehicle system dynamics. October 4,. Dugoff, H.; Fanchrer, P. S.; Segel, L. ire Performance Characteristics Affecting Vehicle Response to Steering and Braking Control Inputs. Highway Safety Research Institute, University of Michigan, Ann Arhor (969) Final Report National Bureau of Standarts Contact CS-46. Nagai, M.; Yamatak, S.; Hirano, Y Integrated Control Law of Active Rear Steering Control. In Proc. 3rd International Symposium on Advanced Vehicle Control p. Pacejka, H. B.; Sharp, R. S. 99. Shear Force Generation by Pneumatics yres in Steady State Conditions: a Review of Modeling Aspects. Vehicle system dynamics,, 76 p. Rajesh Rajamani. 6. Vehicle Dynamics and Control. Springer. Reza, N. Jazar. 8. Vehicle Dynamics: heory and Applications. Springer. 93
195 6. Geležinkelio aširačio sąveikos su bėgiu teorijos 6.. Herco ir Kalkerio teorija ampriųjų kūnų tarpusavio kontakte veikiantys įtempimai nustatomi panaudojant Herco sukurtą teoriją. H. Hercas (Heinrich Hertz) ( ) vokiečių fizikas. Jis patikslino šviesos teoriją ir pirmasis įrodė elektromagnetinių bangų egzistavimą. Dviejų tampriųjų kūnų kontakte veikia tangentiniai τzx, τzy ir normaliniai σ zz įtempimai. Kai vyksta dviejų kūnų slydimas vienas kito atžvilgiu, kontakte tam tikruose taškuose atsiranda slydimas, t. y. dviejų kūnų kontakto taške kūnų greičiai yra skirtingi. arp dviejų kūnų trinties jėga nelygi nuliui, kai yra tarp kūnų kontaktas, kūnų greičiai yra skirtingi ir prispaudimo jėga nelygi nuliui. odėl kontakto plote atsiranda trinties jėgos ir šių jėgų momentas. Nagrinėjant aširačio ir bėgio paviršiaus sąveiką, panaudojant Herco teoriją, reikia žinoti kreivumo kūnų spindulius. Aširačio ir bėgio geometrija yra gana sudėtinga, t. y. kiekvieno kūno paviršiuje kreivumo spindulys yra kintamas 6. pav. 6. pav. Bėgio ir aširačio geometrija ir sąveika 94
196 Aširačio ir bėgio kontakto geometrija elipsė, kurios pusašės yra a ir b. Priklausomai nuo judėjimo sąlygų, aširačio ir bėgio kontakte atsiranda sritys, kuriose nėra slydimo ir yra nedidelis slydimas 6. pav. 6. pav. Aširačio ir bėgio kontakto geometrija ir slydimo ir sukibimo sritys Aširačio ir bėgio kontakto centre įvedama koordinačių sistema xk, yk, zk. Ašis x k nukreipta aširačio judėjimo kryptimi, z k nukreipta statmenai bėgio paviršiui, o y k statmena plokštumai, kurią sudaro x k ir z k ašys. Iš koordianačių centro kiekvienos ašies kryptimi nukreipti vienetiniai vektoriai e, e, e, be to, galioja priklausomybė 3 e = e e. 3 Įvesime kreivumo spindulius: RR, RB ir RR, RB. Aširačio spinduliai: RR, RR ir bėgio spinduliai: RB, RB. Spinduliai su indeksu guli plokštumoje, kurią sudaro vienetiniai vektoriai e, e3, spinduliai su indeksu guli plokštumoje, kurią sudaro vienetiniai vektoriai e, e. Kontakto ploto pusašių reikšmės yra lygios: 95
197 a= m 3 3 ( ν ) F ( ) E A+ B z ; b= n 3 3 ( ν ) F ( ) E A+ B z, (6.) čia F z prispaudimo jėga; AB, parametrai, kurie yra lygūs: A = + ; B = + ; (6.) R R R R R B R B m, n Herco parametrai, kurie priklauso nuo kampo ϑ : ϑ= arr cos( A B A+ B ) (6.3) π π, ϑ, tai a> b π ϑ = tai a= b < ϑ π, tai a< b ir nustatomi iš 6. lentelės; E tamprumo modulis; ν Puasono koefi cientas. Kai aširačio ir bėgio medžiagų mechaninės savybės yra skirtingos, tada tamprumo, šlities moduliai ir Puasono koeficiento atitinkamos išraiškos yra lygios: E G = ( ( + ν ) ; = + G GR G ν νr ν = + G GR G B B ; B ; G GG R B = GR + G ν = νr + ν E 4 GR GB B B ; (6.4). Kontakte veikiančios sankibio jėgos ir momentas yra lygūs: f xk = τ zxda ; f yk = τ zy da ; Mzk τzy xk τ zxyk da. (6.5) A A = ( ) Pagal Herco teoriją, kontakte veikiantis slėgis pasiskirsto pagal dėsnį (6.3 pav.): A 96

198 3Fz xk yk p( xk, yk)= ab a π b (6.6) 6.3 pav. Slėgio pasiskirstymas aširačio ir bėgio kontakte: Fz = KN 6. lentelė Herco kontakto teorijos parametrų reikšmės q m n g=b/a=n/m q m n g=b/ a=n/m 9,5 6,4,8,66 95,944,6,89 36,89,34,356,893,8,79,5 7,48,5,554 5,846,,74,6,69,76,8,84,65 3 6,5,964,9 5,759,378,55 4 3,3,88,64,77,486, ,79,55,6 5,678,6,4 8 7,86,85,363 3,64,754,365 6,64,3,47 35,64,96,34 3,83,43,8 4,567,36,65 3,73,493,8 45,53,397, 35,397,53, 5,493,73,8 4,36,567,65 6,43 3,83,8 97
199 45,96,64,34 7,3 6,64,47 5,754,64,365 7,85 7,86,363 55,6,678,4 74,55 9,79,6 6,486,77,483 76,88 3,3,64 65,378,759,55 78,964 6,5,9 7,84,8,65 78,69,6,76 75,,846,74 78,5,5 7,48,554 8,8,893,79 79,,34 36,89,365 85,6,944,89 79,5,8 6,4,66 9,, 8 Pagal Kalkerio teoriją, kontakte veikiančių jėgų vektorius yra lygus: { F }= [ H]{ V }, (6.7) k čia { Fk}= Fxk Fyk Mzk ; V s f [ H ]= s f f 3 ; f3 f33 { } slydimo greičių vektorius; f f = abgc = abgc 3 3 = ( ) 3 f33 = ( ab) GC33 f ab GC ; (6.8) C ij Kalkerio parametrai, Cij Cij ab,ν nustatomi iš 6. lentelės. = ( ) 6. lentelės pabaiga 98
200 6. lentelė. Kalkerio C ij parametrai C C C3 C33 g n=,5,5,5,5,5,5,5,5, π /( 4 ( ν)) / 4 π g /( 3 ( ν)) [ + ν( Λ/ + ln 4 5)] π /( 6( ν ) g) a/b b/a,,5 3,3 4,85,5,5,53,33,473,73 6,4 8,8,7,,59 3,37 4,8,59,63,66,48,63,8 3,46 4,7 5,66,3,68 3,44 4,8,68,75,8,6,75,89,49,96 3,7,4,78 3,53 4,8,78,88,98,7,83,98,,3,77,5,88 3,6 4,83,88 3, 3,4,83,99,7,74,93,,6,98 3,7 4,9,98 3,4 3,3,93,3,8,56,68,86,7 3,9 3,8 4,97 3,9 3,8 3,48,3,4,9,43,5,6,8 3,9 3,9 5,5 3,9 3,4 3,65,3,5,4,34,37,4,9 3,9 4, 5, 3,9 3,54 3,8,3,36,5,7,7,7, 3,4 4, 5, 3,4 3,67 3,98,33,47,63,,9,6,9 3,5 4, 5,3 3,5 3,8 4,6,44,59,77,6,,6,8 3,65 4,36 5,4 3,65 3,99 4,39,58,75,94,,4,95,7 3,8 4,54 5,58 3,8 4, 4,67,76,95,8,5,97,85,6 4,6 4,78 5,8 4,6 4,5 5,4,,3,5,,9,75,5 4,37 5, 6, 4,37 4,9 5,56,35,6,96,96,8,65,4 4,84 5,57 6,57 4,84 5,48 6,3,88 3,4 3,7,9,75,55,3 5,57 6,34 7,34 5,57 6,4 7,5 3,79 4,3 5,,87,67,45, 6,96 7,78 8,8 6,96 8,4 9,79 5,7 6,63 7,89,83,6,34,,7,7,9,7,8 6,, 4,6 8,,8,53,3 Aširačio ratų (kairiojo ir dešiniojo) kontakte su bėgiais slydimo greičiai lygūs: { V }= [ A ] { V }+ [ A ][ ω ][ A ] { r }, (6.9a) sk 3 c 3 c 3 { V }= [ A ] { V }+ [ A ][ ω ][ A ] { r }, (6.9b) sd 3 c 3 c 3 { } aširačio masių centro greičių vektorius bendroje koordina [ ] antisimetrinė matrica, sugeneruota iš aširačio čia V c čių sistemoje; ω c masių centro kampinio greičio vektoriaus { ω }=[ ϕ Ω ϕ ], 99 ck cd c 3
201 ω [ c ]= ϕ Ω ϕ ϕ 3 3 apie X c, Y c ir Z c ašis, atitikamai; Ω ϕ ; ϕ,, ϕ 3 aširačio kampiniai greičiai [ A 3 ] koordinačių transformacijos matrica, [ ]= ( ) ( ) ( ) cos ϕ3 sin ϕ3 A3 A3 ϕ3 A( ϕ) = sin( ϕ3) cos( ϕ3) cos( ϕ) sin( ϕ) sin( ϕ) cos( ϕ) { r ck }, r d { } aširačio kairiojo ir dešiniojo ratų kontakto vektoriai užrašyti aširačio koordinačių sistemoje, [ ] { rck }= a RRk ; { r }= a R. cd [ ] Rd 6.. Euristinis netiesinis modelis Euristinis netiesinis aširačio ir bėgio sąveikos modelis buvo sukurtas mokslininkų Z. Shen, J. Hendrick, J. Elkins (983). Pirmu priartėjimu sankybio jėgos skaičiuojamos panaudojant tiesinį Kalkerio modelį (6.7), t. y. F xk { Fk }= Fyk = [ H]{ Vs}. M zk Po to skaičiuojama atstojamoji jėga: FΣ = Fxk + Fyk. (6.) Slydimo jėga yra lygi: F F F Fz 3 Fs = Fz Σ Σ Σ µ + µ 3 µ Fz 7 µ Fz, kai FΣ 3 µ Fz,(6.) µ Fz, FΣ > 3µ Fz ;
202 čia µ trinties koeficientas, ( ) B ε µ = µ Ae A, (6.) čia µ statinis trinties koeficientas, ε kontakto taško bendras santykinis slydimas, ε=..., ; AB, parametrai, µ A =, ( A= 4, ; B= 6, ; µ =, 55, kai sausa trintis; µ A= 4, ; B=, ; µ =, 3, kai drėgnas paviršius). Pagal euristinį netiesinį modelį sankybio jėgos lygios: Fs FxkN F F F = s xk ; FykN = F F yk. (6.3) Σ Σ 6.3. Miulerio modelis Pagal Miulerio modelį sankybio jėgos lygios: F = ξ F ; F = ξ F, (6.4) x x xy y y xy čia ξ x, ξ y santykiniai slydimai x ir y ašių kryptimis, V V x y ξ x = ; ξ y = ; (6.5) Vcx Vcx V cx aširačio masių centro judėjimo greitis ; V x, V y greičiai kontakto taške; F xy Kc = m Kc + ξ P µ m Kc = P ( 35 P ( 4,, P )). ; P= 3 F z ; (6.6)
. 6.4 pav. Bėgio R65 paviršius Aširačio rato profilis aproksimuojamas tam tikrų taškų skaičiumi.")
203 6.4. Kitos aširačio sąveikos su bėgiu teorijos Kairysis ir dešinysis bėgių paviršiai suskaidyti į tam tikrą skaičių erdvinių devynių mazgų izoparametrinių baigtinių elementų (6.4 pav.). 6.4 pav. Bėgio R65 paviršius Aširačio rato profilis aproksimuojamas tam tikrų taškų skaičiumi. Priklausomai nuo aširačio padėties geležinkelyje ieškoma kiekvieno rato profilio penetracija P į bėgio paviršių (6.5 pav.).
Matematika 1 4 dalis
 Matematika 1 4 dalis Analizinės geometrijos elementai. Tiesės plokštumoje lygtis (bendroji, kryptinė,...). Taško atstumas nuo tiesės. Kampas tarp dviejų tiesių. Plokščiosios kreivės lygtis Plokščiosios
Matematika 1 4 dalis Analizinės geometrijos elementai. Tiesės plokštumoje lygtis (bendroji, kryptinė,...). Taško atstumas nuo tiesės. Kampas tarp dviejų tiesių. Plokščiosios kreivės lygtis Plokščiosios
Matematika 1 3 dalis
 Matematika 1 3 dalis Vektorių algebros elementai. Vektorių veiksmai. Vektorių skaliarinės, vektorinės ir mišriosios sandaugos ir jų savybės. Vektoriai Vektoriumi vadinama kryptinė atkarpa. Jei taškas A
Matematika 1 3 dalis Vektorių algebros elementai. Vektorių veiksmai. Vektorių skaliarinės, vektorinės ir mišriosios sandaugos ir jų savybės. Vektoriai Vektoriumi vadinama kryptinė atkarpa. Jei taškas A
Vilniaus universitetas. Edmundas Gaigalas A L G E B R O S UŽDUOTYS IR REKOMENDACIJOS
 Vilniaus universitetas Edmundas Gaigalas A L G E B R O S UŽDUOTYS IR REKOMENDACIJOS Vilnius 1992 T U R I N Y S 1. Vektorinė erdvė............................................. 3 2. Matricos rangas.............................................
Vilniaus universitetas Edmundas Gaigalas A L G E B R O S UŽDUOTYS IR REKOMENDACIJOS Vilnius 1992 T U R I N Y S 1. Vektorinė erdvė............................................. 3 2. Matricos rangas.............................................
I dalis KLAUSIMŲ SU PASIRENKAMUOJU ATSAKYMU TEISINGI ATSAKYMAI
 008 M. FIZIKOS VALSTYBINIO BRANDOS EGZAMINO VERTINIMO INSTRUKCIJA Pagrindinė sesija Kiekvieno I dalies klausimo teisingas atsakymas vertinamas tašku. I dalis KLAUSIMŲ SU PASIRENKAMUOJU ATSAKYMU TEISINGI
008 M. FIZIKOS VALSTYBINIO BRANDOS EGZAMINO VERTINIMO INSTRUKCIJA Pagrindinė sesija Kiekvieno I dalies klausimo teisingas atsakymas vertinamas tašku. I dalis KLAUSIMŲ SU PASIRENKAMUOJU ATSAKYMU TEISINGI
X galioja nelygyb f ( x1) f ( x2)
 f ( x2)") Monotonin s funkcijos Tegul turime funkciją f : A R, A R. Apibr žimas. Funkcija y = f ( x) vadinama monotoniškai did jančia (maž jančia) aib je X A, jei x1< x2 iš X galioja nelygyb f ( x1) f ( x2) ( f
Monotonin s funkcijos Tegul turime funkciją f : A R, A R. Apibr žimas. Funkcija y = f ( x) vadinama monotoniškai did jančia (maž jančia) aib je X A, jei x1< x2 iš X galioja nelygyb f ( x1) f ( x2) ( f
Dviejų kintamųjų funkcijos dalinės išvestinės
 Dviejų kintamųjų funkcijos dalinės išvestinės Dalinės išvestinės Tarkime, kad dviejų kintamųjų funkcija (, )yra apibrėžta srityje, o taškas 0 ( 0, 0 )yra vidinis srities taškas. Jei fiksuosime argumento
Dviejų kintamųjų funkcijos dalinės išvestinės Dalinės išvestinės Tarkime, kad dviejų kintamųjų funkcija (, )yra apibrėžta srityje, o taškas 0 ( 0, 0 )yra vidinis srities taškas. Jei fiksuosime argumento
Ketvirtos eilės Rungės ir Kutos metodo būsenos parametro vektoriaus {X} reikšmės užrašomos taip:
 PRIEDAI 113 A priedas. Rungės ir Kuto metodas Rungės-Kutos metodu sprendiamos diferencialinės lygtys. Norint skaitiniu būdu išspręsti diferencialinę lygtį, reikia žinoti ieškomos funkcijos ir jos išvestinės
PRIEDAI 113 A priedas. Rungės ir Kuto metodas Rungės-Kutos metodu sprendiamos diferencialinės lygtys. Norint skaitiniu būdu išspręsti diferencialinę lygtį, reikia žinoti ieškomos funkcijos ir jos išvestinės
I.4. Laisvasis kūnų kritimas
 I4 Laisvasis kūnų kitimas Laisvuoju kitimu vadinamas judėjimas, kuiuo judėtų kūnas veikiamas tik sunkio jėos, nepaisant oo pasipiešinimo Kūnui laisvai kintant iš nedidelio aukščio h (dau mažesnio už Žemės
I4 Laisvasis kūnų kitimas Laisvuoju kitimu vadinamas judėjimas, kuiuo judėtų kūnas veikiamas tik sunkio jėos, nepaisant oo pasipiešinimo Kūnui laisvai kintant iš nedidelio aukščio h (dau mažesnio už Žemės
Temos. Intervalinės statistinės eilutės sudarymas. Santykinių dažnių histogramos brėžimas. Imties skaitinių charakteristikų skaičiavimas
 Pirmasis uždavinys Temos. Intervalinės statistinės eilutės sudarymas. Santykinių dažnių histogramos brėžimas. Imties skaitinių charakteristikų skaičiavimas Uždavinio formulavimas a) Žinoma n = 50 tiriamo
Pirmasis uždavinys Temos. Intervalinės statistinės eilutės sudarymas. Santykinių dažnių histogramos brėžimas. Imties skaitinių charakteristikų skaičiavimas Uždavinio formulavimas a) Žinoma n = 50 tiriamo
06 Geometrin e optika 1
 06 Geometrinė optika 1 0.1. EIKONALO LYGTIS 3 Geometrinėje optikoje įvedama šviesos spindulio sąvoka. Tai leidžia Eikonalo lygtis, kuri išvedama iš banginės lygties monochromatinei bangai - Helmholtco
06 Geometrinė optika 1 0.1. EIKONALO LYGTIS 3 Geometrinėje optikoje įvedama šviesos spindulio sąvoka. Tai leidžia Eikonalo lygtis, kuri išvedama iš banginės lygties monochromatinei bangai - Helmholtco
Spalvos. Šviesa. Šviesos savybės. Grafika ir vizualizavimas. Spalvos. Grafika ir vizualizavimas, VDU, Spalvos 1
 Spalvos Grafika ir vizualizavimas Spalvos Šviesa Spalvos Spalvų modeliai Gama koregavimas Šviesa Šviesos savybės Vandens bangos Vaizdas iš šono Vaizdas iš viršaus Vaizdas erdvėje Šviesos bangos Šviesa
Spalvos Grafika ir vizualizavimas Spalvos Šviesa Spalvos Spalvų modeliai Gama koregavimas Šviesa Šviesos savybės Vandens bangos Vaizdas iš šono Vaizdas iš viršaus Vaizdas erdvėje Šviesos bangos Šviesa
Specialieji analizės skyriai
 Specialieji analizės skyriai. Trigonometrinės Furje eilutės Moksle ir technikoje dažnai susiduriame su periodiniais reiškiniais, apibūdinamais periodinėmis laiko funkcijomis: f(t). 2 Paprasčiausia periodinė
Specialieji analizės skyriai. Trigonometrinės Furje eilutės Moksle ir technikoje dažnai susiduriame su periodiniais reiškiniais, apibūdinamais periodinėmis laiko funkcijomis: f(t). 2 Paprasčiausia periodinė
0.1. Bendrosios sąvokos
 .1. BENDROSIOS SĄVOKOS 1.1. Bendrosios sąvokos.1.1. Diferencialinės lygtys su mažuoju parametru F ) x n),x n 1),...,x,x,t;ε =, xt;ε) C n T), T [,+ ), < ε ε ) F x n) t;ε),x n 1) t;ε),...,x t;ε),xt;ε),t;ε,
.1. BENDROSIOS SĄVOKOS 1.1. Bendrosios sąvokos.1.1. Diferencialinės lygtys su mažuoju parametru F ) x n),x n 1),...,x,x,t;ε =, xt;ε) C n T), T [,+ ), < ε ε ) F x n) t;ε),x n 1) t;ε),...,x t;ε),xt;ε),t;ε,
1. Individualios užduotys:
 IV. PAPRASTOSIOS DIFERENCIALINĖS LYGTYS. Individualios užduots: - trumpa teorijos apžvalga, - pavzdžiai, - užduots savarankiškam darbui. Pirmosios eilės diferencialinių lgčių sprendimas.. psl. Antrosios
IV. PAPRASTOSIOS DIFERENCIALINĖS LYGTYS. Individualios užduots: - trumpa teorijos apžvalga, - pavzdžiai, - užduots savarankiškam darbui. Pirmosios eilės diferencialinių lgčių sprendimas.. psl. Antrosios
1 TIES ES IR PLOK TUMOS
 G E O M E T R I J A Gediminas STEPANAUSKAS 1 TIES ES IR PLOK TUMOS 11 Plok²tumos ir ties es plok²tumoje normalin es lygtys 111 Vektorin e forma Plok²tumos α padetis koordina iu sistemos Oxyz atºvilgiu
G E O M E T R I J A Gediminas STEPANAUSKAS 1 TIES ES IR PLOK TUMOS 11 Plok²tumos ir ties es plok²tumoje normalin es lygtys 111 Vektorin e forma Plok²tumos α padetis koordina iu sistemos Oxyz atºvilgiu
ANALIZINĖ GEOMETRIJA III skyrius (Medžiaga virtualiajam kursui)
") ngelė aškienė NLIZINĖ GEMETRIJ III skrius (Medžiaga virtualiajam kursui) III skrius. TIESĖS IR PLKŠTUMS... 5. Tiesės lgts... 5.. Tiesės [M, a r ] vektorinė lgtis... 5.. Tiesės [M, a r ] parametrinės lgts...
ngelė aškienė NLIZINĖ GEMETRIJ III skrius (Medžiaga virtualiajam kursui) III skrius. TIESĖS IR PLKŠTUMS... 5. Tiesės lgts... 5.. Tiesės [M, a r ] vektorinė lgtis... 5.. Tiesės [M, a r ] parametrinės lgts...
Specialieji analizės skyriai
 Specialieji analizės skyriai. Specialieji analizės skyriai Kompleksinio kinamojo funkcijų teorija Furje eilutės ir Furje integralai Operacinis skaičiavimas Lauko teorijos elementai. 2 Kompleksinio kintamojo
Specialieji analizės skyriai. Specialieji analizės skyriai Kompleksinio kinamojo funkcijų teorija Furje eilutės ir Furje integralai Operacinis skaičiavimas Lauko teorijos elementai. 2 Kompleksinio kintamojo
2015 M. MATEMATIKOS VALSTYBINIO BRANDOS EGZAMINO UŽDUOTIES VERTINIMO INSTRUKCIJA Pagrindinė sesija. I dalis
 PATVIRTINTA Ncionlinio egzminų centro direktorius 0 m. birželio d. įskymu Nr. (..)-V-7 0 M. MATEMATIKOS VALSTYBINIO BRANDOS EGZAMINO UŽDUOTIES VERTINIMO INSTRUKCIJA Pgrindinė sesij I dlis Užd. Nr. 4 7
PATVIRTINTA Ncionlinio egzminų centro direktorius 0 m. birželio d. įskymu Nr. (..)-V-7 0 M. MATEMATIKOS VALSTYBINIO BRANDOS EGZAMINO UŽDUOTIES VERTINIMO INSTRUKCIJA Pgrindinė sesij I dlis Užd. Nr. 4 7
Elektronų ir skylučių statistika puslaidininkiuose
 lktroų ir skylučių statistika puslaidiikiuos Laisvų laidumo lktroų gracija, t.y. lktroų prėjimas į laidumo juostą, gali vykti kaip iš dooriių lygmų, taip ir iš valtiės juostos. Gracijos procsas visuomt
lktroų ir skylučių statistika puslaidiikiuos Laisvų laidumo lktroų gracija, t.y. lktroų prėjimas į laidumo juostą, gali vykti kaip iš dooriių lygmų, taip ir iš valtiės juostos. Gracijos procsas visuomt
FDMGEO4: Antros eilės kreivės I
 FDMGEO4: Antros eilės kreivės I Kęstutis Karčiauskas Matematikos ir Informatikos fakultetas 1 Koordinačių sistemos transformacija Antrosios eilės kreivių lgtis prastinsime keisdami (transformuodami) koordinačių
FDMGEO4: Antros eilės kreivės I Kęstutis Karčiauskas Matematikos ir Informatikos fakultetas 1 Koordinačių sistemos transformacija Antrosios eilės kreivių lgtis prastinsime keisdami (transformuodami) koordinačių
1.4. Rungės ir Kuto metodas
 .4. RUNGĖS IR KUTO METODAS.4. Rungės ir Kuto metodas.4.. Prediktoriaus-korektoriaus metodas Palyginkime išreikštinį ir simetrinį Eulerio metodus. Pirmojo iš jų pagrindinis privalumas tas, kad išreikštinio
.4. RUNGĖS IR KUTO METODAS.4. Rungės ir Kuto metodas.4.. Prediktoriaus-korektoriaus metodas Palyginkime išreikštinį ir simetrinį Eulerio metodus. Pirmojo iš jų pagrindinis privalumas tas, kad išreikštinio
LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS Vandens ūkio ir žemėtvarkos fakultetas Fizikos katedra. Juozas Navickas FIZIKA. I dalis MOKOMOJI KNYGA
 LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS Vandens ūkio ir žemėtvarkos fakultetas Fizikos katedra Juozas Navickas FIZIKA I dalis MOKOMOJI KNYGA KAUNAS, ARDIVA 8 UDK 53(75.8) Na95 Juozas Navickas FIZIKA, I dalis
LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS Vandens ūkio ir žemėtvarkos fakultetas Fizikos katedra Juozas Navickas FIZIKA I dalis MOKOMOJI KNYGA KAUNAS, ARDIVA 8 UDK 53(75.8) Na95 Juozas Navickas FIZIKA, I dalis
04 Elektromagnetinės bangos
 04 Elektromagnetinės bangos 1 0.1. BANGINĖ ŠVIESOS PRIGIMTIS 3 Šiame skyriuje išvesime banginę lygtį iš elektromagnetinio lauko Maksvelo lygčių. Šviesa yra elektromagnetinė banga, kurios dažnis yra optiniame
04 Elektromagnetinės bangos 1 0.1. BANGINĖ ŠVIESOS PRIGIMTIS 3 Šiame skyriuje išvesime banginę lygtį iš elektromagnetinio lauko Maksvelo lygčių. Šviesa yra elektromagnetinė banga, kurios dažnis yra optiniame
4.1 Skaliarinė sandauga erdvėje R n Tarkime, kad duota vektorinė erdvė R n. Priminsime, kad šios erdvės elementai yra vektoriai vektoriu
 IV DEKARTO KOORDINAČIU SISTEMA VEKTORIAI 41 Skaliarinė sandauga erdvėje R n Tarkime, kad duota vektorinė erdvė R n Priminsime, kad šios erdvės elementai yra vektoriai α = (a 1,, a n ) Be mums jau žinomu
IV DEKARTO KOORDINAČIU SISTEMA VEKTORIAI 41 Skaliarinė sandauga erdvėje R n Tarkime, kad duota vektorinė erdvė R n Priminsime, kad šios erdvės elementai yra vektoriai α = (a 1,, a n ) Be mums jau žinomu
MECHANINIS DARBAS, GALIA, ENERGIJA. TVERMĖS DĖSNIAI MECHANIKOJE. HIDRODINAMIKA
 LIETUVOS FIZIKŲ DRAUGIJA ŠIAULIŲ UNIVERSITETO JAUNŲJŲ FIZIKŲ MOKYKLA FOTONAS MECHANINIS DARBAS, GALIA, ENERGIJA TVERMĖS DĖSNIAI MECHANIKOJE HIDRODINAMIKA III KURSO III TURO METODINIAI NURODYMAI IR UŢDUOTYS
LIETUVOS FIZIKŲ DRAUGIJA ŠIAULIŲ UNIVERSITETO JAUNŲJŲ FIZIKŲ MOKYKLA FOTONAS MECHANINIS DARBAS, GALIA, ENERGIJA TVERMĖS DĖSNIAI MECHANIKOJE HIDRODINAMIKA III KURSO III TURO METODINIAI NURODYMAI IR UŢDUOTYS
0.1. Bendrosios sąvokos
 0.1. BENDROSIOS SĄVOKOS 1 0.1. Bendrosios sąvokos 0.1.1. Diferencialinės lygtys su mažuoju parametru F ) x n),x n 1),...,x,x,t;ε = 0, xt;ε) C n T), T [0,+ ), 0 < ε ε 0 ) F x n) t;ε),x n 1) t;ε),...,x t;ε),xt;ε),t;ε
0.1. BENDROSIOS SĄVOKOS 1 0.1. Bendrosios sąvokos 0.1.1. Diferencialinės lygtys su mažuoju parametru F ) x n),x n 1),...,x,x,t;ε = 0, xt;ε) C n T), T [0,+ ), 0 < ε ε 0 ) F x n) t;ε),x n 1) t;ε),...,x t;ε),xt;ε),t;ε
Paprastosios DIFERENCIALINĖS LYGTYS
 Paprastosios DIFERENCIALINĖS LYGTYS prof. Artūras Štikonas Paskaitų kursas Matematikos ir informatikos fakultetas Diferencialinių lygčių ir skaičiavimo matematikos katedra Naugarduko g. 24, LT-3225 Vilnius,
Paprastosios DIFERENCIALINĖS LYGTYS prof. Artūras Štikonas Paskaitų kursas Matematikos ir informatikos fakultetas Diferencialinių lygčių ir skaičiavimo matematikos katedra Naugarduko g. 24, LT-3225 Vilnius,
Paprastosios DIFERENCIALINĖS LYGTYS
 Paprastosios DIFERENCIALINĖS LYGTYS prof. Artūras Štikonas Paskaitų kursas Matematikos ir informatikos fakultetas Taikomosios matematikos institutas, Diferencialinių lygčių katedra Naugarduko g. 24, LT-3225
Paprastosios DIFERENCIALINĖS LYGTYS prof. Artūras Štikonas Paskaitų kursas Matematikos ir informatikos fakultetas Taikomosios matematikos institutas, Diferencialinių lygčių katedra Naugarduko g. 24, LT-3225
Su pertrūkiais dirbančių elektrinių skverbtis ir integracijos į Lietuvos elektros energetikos sistemą problemos
 Su pertrūkiais dirbančių elektrinių skverbtis ir integracijos į Lietuvos elektros energetikos sistemą problemos Rimantas DEKSNYS, Robertas STANIULIS Elektros sistemų katedra Kauno technologijos universitetas
Su pertrūkiais dirbančių elektrinių skverbtis ir integracijos į Lietuvos elektros energetikos sistemą problemos Rimantas DEKSNYS, Robertas STANIULIS Elektros sistemų katedra Kauno technologijos universitetas
A priedas. Diagnostikoje naudojami tarptautiniai ISO standartai
 Priedai A priedas. Diagnostikoje naudojami tarptautiniai ISO standartai B priedas. Patikslintas tiesiakrumplės pavaros matematinis modelis C priedas. Patikslintas tiesiakrumplė pavaros matematinis modelis
Priedai A priedas. Diagnostikoje naudojami tarptautiniai ISO standartai B priedas. Patikslintas tiesiakrumplės pavaros matematinis modelis C priedas. Patikslintas tiesiakrumplė pavaros matematinis modelis
Fizika. doc. dr. Vytautas Stankus. Fizikos katedra Matematikos ir gamtos mokslų fakultetas Kauno Technologijos Universitetas
 Fizika doc. dr. Vytautas Stankus Fizikos katedra Matematikos ir gamtos mokslų fakultetas Kauno Technologijos Universitetas Studentų 50 58 kab. Darbo tel.: 861033946 Vytautas.Stankus@ktu.lt Bendrosios fizikos
Fizika doc. dr. Vytautas Stankus Fizikos katedra Matematikos ir gamtos mokslų fakultetas Kauno Technologijos Universitetas Studentų 50 58 kab. Darbo tel.: 861033946 Vytautas.Stankus@ktu.lt Bendrosios fizikos
FUNKCIJOS. veiksmu šioje erdvėje apibrėžkime dar viena. a = {a 1,..., a n } ir b = {b 1,... b n } skaliarine sandauga
 VII DAUGELIO KINTAMU JU FUNKCIJOS 71 Bendrosios sa vokos Iki šiol mes nagrinėjome funkcijas, apibrėžtas realiu skaičiu aibėje Nagrinėsime funkcijas, kurios apibrėžtos vektorinėse erdvėse Tarkime, kad R
VII DAUGELIO KINTAMU JU FUNKCIJOS 71 Bendrosios sa vokos Iki šiol mes nagrinėjome funkcijas, apibrėžtas realiu skaičiu aibėje Nagrinėsime funkcijas, kurios apibrėžtos vektorinėse erdvėse Tarkime, kad R
Įžanginių paskaitų medžiaga iš knygos
 MATEMATINĖ LOGIKA Įžanginių paskaitų medžiaga iš knygos Aleksandras Krylovas. Diskrečioji matematika: vadovėlis aukštųjų mokyklų studentams. Vilnius: Technika, 2009. 320 p. ISBN 978-9955-28-450-5 1 Teiginio
MATEMATINĖ LOGIKA Įžanginių paskaitų medžiaga iš knygos Aleksandras Krylovas. Diskrečioji matematika: vadovėlis aukštųjų mokyklų studentams. Vilnius: Technika, 2009. 320 p. ISBN 978-9955-28-450-5 1 Teiginio
MATEMATINĖ LOGIKA. Įžanginių paskaitų medžiaga iš knygos
 MATEMATINĖ LOGIKA Įžanginių paskaitų medžiaga iš knygos Aleksandras Krylovas. Diskrečioji matematika: vadovėlis aukštųjų mokyklų studentams. Vilnius: Technika, 2009. 320 p. ISBN 978-9955-28-450-5 Teiginio
MATEMATINĖ LOGIKA Įžanginių paskaitų medžiaga iš knygos Aleksandras Krylovas. Diskrečioji matematika: vadovėlis aukštųjų mokyklų studentams. Vilnius: Technika, 2009. 320 p. ISBN 978-9955-28-450-5 Teiginio
III. MATRICOS. DETERMINANTAI. 3.1 Matricos A = lentele žymėsime taip:
 III MATRICOS DETERMINANTAI Realiu ju skaičiu lentele 3 Matricos a a 2 a n A = a 2 a 22 a 2n a m a m2 a mn vadinsime m n eilės matrica Trumpai šia lentele žymėsime taip: A = a ij ; i =,, m, j =,, n čia
III MATRICOS DETERMINANTAI Realiu ju skaičiu lentele 3 Matricos a a 2 a n A = a 2 a 22 a 2n a m a m2 a mn vadinsime m n eilės matrica Trumpai šia lentele žymėsime taip: A = a ij ; i =,, m, j =,, n čia
Rotaciniai vožtuvai HRB 3, HRB 4
 Techninis aprašymas Rotaciniai vožtuvai HRB 3, HRB 4 Aprašymas HRB rotacinius vožtuvus galima naudoti kartu su elektros pavaromis AMB 162 ir AMB 182. Savybės: Mažiausias pratekėjimas šioje klasėje Uniklalus
Techninis aprašymas Rotaciniai vožtuvai HRB 3, HRB 4 Aprašymas HRB rotacinius vožtuvus galima naudoti kartu su elektros pavaromis AMB 162 ir AMB 182. Savybės: Mažiausias pratekėjimas šioje klasėje Uniklalus
Papildomo ugdymo mokykla Fizikos olimpas. Mechanika Dinamika 1. (Paskaitų konspektas) 2009 m. sausio d. Prof.
 2009 m. sausio d. Prof.") Papildoo ugdyo okykla izikos olipas Mechanika Dinaika (Paskaitų konspektas) 9. sausio -8 d. Prof. Edundas Kuokštis Vilnius Paskaita # Dinaika Jei kineatika nagrinėja tik kūnų judėjią, nesiaiškindaa tą
Papildoo ugdyo okykla izikos olipas Mechanika Dinaika (Paskaitų konspektas) 9. sausio -8 d. Prof. Edundas Kuokštis Vilnius Paskaita # Dinaika Jei kineatika nagrinėja tik kūnų judėjią, nesiaiškindaa tą
... 5 A.. RS-232C ( ) RS-232C ( ) RS-232C-LK & RS-232C-MK RS-232C-JK & RS-232C-KK
 RS-232C ( ) RS-232C-LK & RS-232C-MK RS-232C-JK & RS-232C-KK") RS-3C WIWM050 014.1.9 P1 :8... 1... 014.0.1 1 A... 014.0. 1... RS-3C()...01.08.03 A.. RS-3C()...01.08.03 3... RS-3C()... 003.11.5 4... RS-3C ()... 00.10.01 5... RS-3C().008.07.16 5 A.. RS-3C().0 1.08.
RS-3C WIWM050 014.1.9 P1 :8... 1... 014.0.1 1 A... 014.0. 1... RS-3C()...01.08.03 A.. RS-3C()...01.08.03 3... RS-3C()... 003.11.5 4... RS-3C ()... 00.10.01 5... RS-3C().008.07.16 5 A.. RS-3C().0 1.08.
2.5. KLASIKINĖS TOLYDŽIŲ FUNKCIJŲ TEOREMOS
 .5. KLASIKINĖS TOLYDŽIŲ FUNKCIJŲ TEOREMOS 5.. Pirmoji Bolcao Koši teorema. Jei fucija f tolydi itervale [a;b], itervalo galuose įgyja priešigų želų reišmes, tai egzistuoja tos tašas cc, ( ab ; ), uriame
.5. KLASIKINĖS TOLYDŽIŲ FUNKCIJŲ TEOREMOS 5.. Pirmoji Bolcao Koši teorema. Jei fucija f tolydi itervale [a;b], itervalo galuose įgyja priešigų želų reišmes, tai egzistuoja tos tašas cc, ( ab ; ), uriame
AUTOMATINIO VALDYMO TEORIJA
 Saulius LISAUSKAS AUTOMATINIO VALDYMO TEORIJA Projekto kodas VP1-.-ŠMM-7-K-1-47 VGTU Elektronikos fakulteto I pakopos studijų programų esminis atnaujinimas Vilnius Technika 1 VILNIAUS GEDIMINO TECHNIKOS
Saulius LISAUSKAS AUTOMATINIO VALDYMO TEORIJA Projekto kodas VP1-.-ŠMM-7-K-1-47 VGTU Elektronikos fakulteto I pakopos studijų programų esminis atnaujinimas Vilnius Technika 1 VILNIAUS GEDIMINO TECHNIKOS
Paprastosios DIFERENCIALINĖS LYGTYS
 Paprastosios DIFERENCIALINĖS LYGTYS prof. Artūras Štikonas Paskaitų kursas Matematikos ir informatikos fakultetas Diferencialinių lgčių ir skaičiavimo matematikos katedra Naugarduko g. 24, LT-3225 Vilnius,
Paprastosios DIFERENCIALINĖS LYGTYS prof. Artūras Štikonas Paskaitų kursas Matematikos ir informatikos fakultetas Diferencialinių lgčių ir skaičiavimo matematikos katedra Naugarduko g. 24, LT-3225 Vilnius,
 W τ R W j N H = 2 F obj b q N F aug F obj b q Ψ F aug Ψ ( ) ϱ t + + p = 0 = 0 Ω f = Γ Γ b ϱ = (, t) = (, t) Ω f Γ b ( ) ϱ t + + p = V max 4 3 2 1 0-1 -2-3 -4-4 -3-2 -1 0 1 2 3 4 x 4 x 1 V mn V max
W τ R W j N H = 2 F obj b q N F aug F obj b q Ψ F aug Ψ ( ) ϱ t + + p = 0 = 0 Ω f = Γ Γ b ϱ = (, t) = (, t) Ω f Γ b ( ) ϱ t + + p = V max 4 3 2 1 0-1 -2-3 -4-4 -3-2 -1 0 1 2 3 4 x 4 x 1 V mn V max
Statistinė termodinamika. Boltzmann o pasiskirstymas
 Statistinė termodinamika. Boltzmann o pasiskirstymas DNR molekulių vaizdas DNR struktūros pakitimai. Keičiantis DNR molekulės formai keistųsi ir visos sistemos entropija. Mielėse esančio DNR struktūros
Statistinė termodinamika. Boltzmann o pasiskirstymas DNR molekulių vaizdas DNR struktūros pakitimai. Keičiantis DNR molekulės formai keistųsi ir visos sistemos entropija. Mielėse esančio DNR struktūros
AIBĖS, FUNKCIJOS, LYGTYS
 AIBĖS, FUNKCIJOS, LYGTYS Aibės sąvoka ir pavyzdžiai Atskirų objektų rinkiniai, grupės, sistemos, kompleksai matematikoje vadinami aibėmis. Šie atskiri objektai vadinami aibės elementais. Kai elementas
AIBĖS, FUNKCIJOS, LYGTYS Aibės sąvoka ir pavyzdžiai Atskirų objektų rinkiniai, grupės, sistemos, kompleksai matematikoje vadinami aibėmis. Šie atskiri objektai vadinami aibės elementais. Kai elementas
Matematinės analizės konspektai
 Matematinės analizės konspektai (be įrodymų) Marius Gedminas pagal V. Mackevičiaus paskaitas 998 m. rudens semestras (I kursas) Realieji skaičiai Apibrėžimas. Uždarųjų intervalų seka [a n, b n ], n =,
Matematinės analizės konspektai (be įrodymų) Marius Gedminas pagal V. Mackevičiaus paskaitas 998 m. rudens semestras (I kursas) Realieji skaičiai Apibrėžimas. Uždarųjų intervalų seka [a n, b n ], n =,
LIETUVOS JAUNŲ J Ų MATEMATIKŲ MOKYKLA
 LIETUVOS JAUNŲ J Ų MATEMATIKŲ MOKYKLA tema. APSKRITIMŲ GEOMETRIJA (00 0) Teorinę medžiagą parengė bei antrąją užduotį sudarė Vilniaus pedagoginio universiteto docentas Edmundas Mazėtis. Apskritimas tai
LIETUVOS JAUNŲ J Ų MATEMATIKŲ MOKYKLA tema. APSKRITIMŲ GEOMETRIJA (00 0) Teorinę medžiagą parengė bei antrąją užduotį sudarė Vilniaus pedagoginio universiteto docentas Edmundas Mazėtis. Apskritimas tai
EKONOMETRIJA 1 (Regresinė analizė)
") EKONOMETRIJA 1 Regresinė analizė Kontrolinis Sudarė M.Radavičius 004 05 15 Kai kurių užduočių sprendimai KOMENTARAS. Kai kuriems uždaviniams tik nusakytos sprendimų gairės, kai kurie iš jų suskaidyti į
EKONOMETRIJA 1 Regresinė analizė Kontrolinis Sudarė M.Radavičius 004 05 15 Kai kurių užduočių sprendimai KOMENTARAS. Kai kuriems uždaviniams tik nusakytos sprendimų gairės, kai kurie iš jų suskaidyti į
Matematinis modeliavimas
 ALGIRDAS AMBRAZEVIƒIUS Matematinis modeliavimas Vilniaus universitetas 2006 2 TURINYS 1 SKYRIUS PAPRASƒIAUSI MATEMATINIAI MODELIAI 4 11 Pagrindines s vokos 4 12 Fundamentaliu gamtos desniu taikymas 10
ALGIRDAS AMBRAZEVIƒIUS Matematinis modeliavimas Vilniaus universitetas 2006 2 TURINYS 1 SKYRIUS PAPRASƒIAUSI MATEMATINIAI MODELIAI 4 11 Pagrindines s vokos 4 12 Fundamentaliu gamtos desniu taikymas 10
IV. FUNKCIJOS RIBA. atvira. intervala. Apibrėžimas Sakysime, kad skaičius b yra funkcijos y = f(x) riba taške x 0, jei bet kokiam,
 riba taške x 0, jei bet kokiam,") 41 Funkcijos riba IV FUNKCIJOS RIBA Taško x X aplinka vadiname bet koki atvira intervala, kuriam priklauso taškas x Taško x 0, 2t ilgio aplinka žymėsime tokiu būdu: V t (x 0 ) = ([x 0 t, x 0 + t) Sakykime,
41 Funkcijos riba IV FUNKCIJOS RIBA Taško x X aplinka vadiname bet koki atvira intervala, kuriam priklauso taškas x Taško x 0, 2t ilgio aplinka žymėsime tokiu būdu: V t (x 0 ) = ([x 0 t, x 0 + t) Sakykime,
PNEUMATIKA - vožtuvai
 Mini vožtuvai - serija VME 1 - Tipas: 3/2, NC, NO, monostabilūs - Valdymas: Mechaninis ir rankinis - Nominalus debitas (kai 6 barai, Δp = 1 baras): 60 l/min. - Prijungimai: Kištukinės jungtys ø 4 žarnoms
Mini vožtuvai - serija VME 1 - Tipas: 3/2, NC, NO, monostabilūs - Valdymas: Mechaninis ir rankinis - Nominalus debitas (kai 6 barai, Δp = 1 baras): 60 l/min. - Prijungimai: Kištukinės jungtys ø 4 žarnoms
1 Tada teigini Ne visi šie vaikinai yra studentai galima išreikšti formule. 2 Ta pati teigini galima užrašyti ir taip. 3 Formulė U&B C reiškia, kad
 45 DISKREČIOJI MATEMATIKA. LOGIKA. PAVYZDŽIAI Raidėmis U, B ir C pažymėti teiginiai: U = Vitas yra studentas ; B = Skirmantas yra studentas ; C = Jonas yra studentas. 1 Tada teigini Ne visi šie vaikinai
45 DISKREČIOJI MATEMATIKA. LOGIKA. PAVYZDŽIAI Raidėmis U, B ir C pažymėti teiginiai: U = Vitas yra studentas ; B = Skirmantas yra studentas ; C = Jonas yra studentas. 1 Tada teigini Ne visi šie vaikinai
. (2 taškai) (1 taškas) . (2 taškai) . (2) (2 taškai)
 (1 taškas) . (2 taškai) . (2) (2 taškai)") 0 m. ietuvos 6-ojo fizikos čempionato UŽDUOČŲ SPRENDMA 0 m. gruodžio 6 d. (Kiekvienas uždavinys vertinamas 0 taškų, visa galimų taškų suma 00). Pervyniojant transformatoriaus ritę buvo pastebėta, kad ritėje
0 m. ietuvos 6-ojo fizikos čempionato UŽDUOČŲ SPRENDMA 0 m. gruodžio 6 d. (Kiekvienas uždavinys vertinamas 0 taškų, visa galimų taškų suma 00). Pervyniojant transformatoriaus ritę buvo pastebėta, kad ritėje
2008 m. matematikos valstybinio brandos egzamino VERTINIMO INSTRUKCIJA Pagrindinė sesija
 008 M MATEMATIKOS VALSTYBINIO BRANDOS EGZAMINO UŽDUOTIES VERTINIMO INSTRUKCIJA 008 m matematikos valstybinio brandos egzamino VERTINIMO INSTRUKCIJA Pagrindinė sesija 7 uždavinių atsakymai I variantas Užd
008 M MATEMATIKOS VALSTYBINIO BRANDOS EGZAMINO UŽDUOTIES VERTINIMO INSTRUKCIJA 008 m matematikos valstybinio brandos egzamino VERTINIMO INSTRUKCIJA Pagrindinė sesija 7 uždavinių atsakymai I variantas Užd
III.Termodinamikos pagrindai
 III.ermodinamikos pagrindai III.. Dujų plėtimosi darbas egu dujos yra cilindre su nesvariu judančiu stūmokliu, kurio plotas lygus S, ir jas veikia tik išorinis slėgis p. Pradinius dujų parametrus pažymėkime
III.ermodinamikos pagrindai III.. Dujų plėtimosi darbas egu dujos yra cilindre su nesvariu judančiu stūmokliu, kurio plotas lygus S, ir jas veikia tik išorinis slėgis p. Pradinius dujų parametrus pažymėkime
Elektrotechnikos pagrindai
 Valentinas Zaveckas Elektrotechnikos pagrindai Projekto kodas VP1-2.2-ŠMM 07-K-01-023 Vilnius Technika 2012 Studijų programų atnaujinimas pagal ES reikalavimus, gerinant studijų kokybę ir taikant inovatyvius
Valentinas Zaveckas Elektrotechnikos pagrindai Projekto kodas VP1-2.2-ŠMM 07-K-01-023 Vilnius Technika 2012 Studijų programų atnaujinimas pagal ES reikalavimus, gerinant studijų kokybę ir taikant inovatyvius
r F F r F = STATIKA 1 Q = qmax 2
 STTIK Mechanika fizinių moksų šaka, naginėjanti mateiaiuosius objektus: kūnus, kūnų sistemas, tų sistemų pusiausvyą, judėjimo dėsnius i mechaninę tapusavio sąveiką. Statika moksas apie pavienius mateiaiuosius
STTIK Mechanika fizinių moksų šaka, naginėjanti mateiaiuosius objektus: kūnus, kūnų sistemas, tų sistemų pusiausvyą, judėjimo dėsnius i mechaninę tapusavio sąveiką. Statika moksas apie pavienius mateiaiuosius
1 Įvadas Neišspręstos problemos Dalumas Dalyba su liekana Dalumo požymiai... 3
 Skaičių teorija paskaitų konspektas Paulius Šarka, Jonas Šiurys 1 Įvadas 1 1.1 Neišspręstos problemos.............................. 1 2 Dalumas 2 2.1 Dalyba su liekana.................................
Skaičių teorija paskaitų konspektas Paulius Šarka, Jonas Šiurys 1 Įvadas 1 1.1 Neišspręstos problemos.............................. 1 2 Dalumas 2 2.1 Dalyba su liekana.................................
2009 m. matematikos valstybinio brandos egzamino VERTINIMO INSTRUKCIJA Pagrindinė sesija 1 6 uždavinių atsakymai
 M. MATEMATIKOS VALSTYBINIO BRANDOS EGZAMINO UŽDUOTIES VERTINIMO INSTRUKCIJA PATVIRTINTA Nacionalinio egzaminų centro direktoriaus -6- įsakymu Nr. (..)-V-8 m. matematikos valstybinio brandos egzamino VERTINIMO
M. MATEMATIKOS VALSTYBINIO BRANDOS EGZAMINO UŽDUOTIES VERTINIMO INSTRUKCIJA PATVIRTINTA Nacionalinio egzaminų centro direktoriaus -6- įsakymu Nr. (..)-V-8 m. matematikos valstybinio brandos egzamino VERTINIMO
1. Vektoriu veiksmai. Vektoriu skaliarinė, vektorinė ir mišrioji sandaugos
 1. Vektoriu veiksmai. Vektoriu skaliarinė, vektorinė ir mišrioji sandaugos Vektoriu užrašymas MAPLE Vektorius MAPLE galime užrašyti daugeliu būdu. Juos grafiškai vaizduosime paketo Student[LinearAlgebra]
1. Vektoriu veiksmai. Vektoriu skaliarinė, vektorinė ir mišrioji sandaugos Vektoriu užrašymas MAPLE Vektorius MAPLE galime užrašyti daugeliu būdu. Juos grafiškai vaizduosime paketo Student[LinearAlgebra]
ŠVIESOS SKLIDIMAS IZOTROPINĖSE TERPĖSE
 ŠVIESOS SKLIDIMAS IZOTROPIĖSE TERPĖSE 43 2.7. SPIDULIUOTĖS IR KŪO SPALVOS Spinduliuotės ir kūno optiniam apibūdinimui naudojama spalvos sąvoka. Spalvos reiškinys yra nepaprastas. Kad suprasti spalvos esmę,
ŠVIESOS SKLIDIMAS IZOTROPIĖSE TERPĖSE 43 2.7. SPIDULIUOTĖS IR KŪO SPALVOS Spinduliuotės ir kūno optiniam apibūdinimui naudojama spalvos sąvoka. Spalvos reiškinys yra nepaprastas. Kad suprasti spalvos esmę,
Ekonometrija. Trendas ir sezoninė laiko eilutės komponentė
 Ekonometrija. Trendas ir sezoninė laiko eilutės komponentė dėst. T. Rekašius, 2012 m. lapkričio 19 d. 1 Duomenys Visi trečiam laboratoriniam darbui reikalingi duomenys yra tekstinio formato failuose http://fmf.vgtu.lt/~trekasius/destymas/2012/ekomet_lab3_xx.dat,
Ekonometrija. Trendas ir sezoninė laiko eilutės komponentė dėst. T. Rekašius, 2012 m. lapkričio 19 d. 1 Duomenys Visi trečiam laboratoriniam darbui reikalingi duomenys yra tekstinio formato failuose http://fmf.vgtu.lt/~trekasius/destymas/2012/ekomet_lab3_xx.dat,
 1951 {0, 1} N = N \ {0} n m M n, m N F x i = (x i 1,..., xi m) x j = (x 1 j,..., xn j ) i j M M i j x i j m n M M M M T f : F m F f(m) f M (f(x 1 1,..., x1 m),..., f(x n 1,..., xn m)) T R F M R M R x
1951 {0, 1} N = N \ {0} n m M n, m N F x i = (x i 1,..., xi m) x j = (x 1 j,..., xn j ) i j M M i j x i j m n M M M M T f : F m F f(m) f M (f(x 1 1,..., x1 m),..., f(x n 1,..., xn m)) T R F M R M R x
8. LENKIAMŲ PLOKŠTELIŲ ELEMENTAI
 8. LENKIAMŲ PLOKŠELIŲ ELEMENAI 8.1. LENKIAMŲ PLOKŠELIŲ EORIJA Įtempimai: storį: paprastai operuojama įrąžomis įtempimų atstojamosiomis per plokštelės z τ z t τ z M t = zdz, M =...., M =.. t t = τzdz, =
8. LENKIAMŲ PLOKŠELIŲ ELEMENAI 8.1. LENKIAMŲ PLOKŠELIŲ EORIJA Įtempimai: storį: paprastai operuojama įrąžomis įtempimų atstojamosiomis per plokštelės z τ z t τ z M t = zdz, M =...., M =.. t t = τzdz, =
Vilijandas Bagdonavi ius. Julius Jonas Kruopis MATEMATIN E STATISTIKA
 VILNIAUS UNIVERSITETO MATEMATIKOS IR INFORMATIKOS FAKULTETAS Vilijandas Bagdonavi ius Julius Jonas Kruopis MATEMATIN E STATISTIKA Vadovelis IV DALIS DAUGIAMAT E STATISTIKA Vilniaus universiteto leidykla
VILNIAUS UNIVERSITETO MATEMATIKOS IR INFORMATIKOS FAKULTETAS Vilijandas Bagdonavi ius Julius Jonas Kruopis MATEMATIN E STATISTIKA Vadovelis IV DALIS DAUGIAMAT E STATISTIKA Vilniaus universiteto leidykla
II dalis Teisingas atsakymas į kiekvieną II dalies klausimą vertinamas 1 tašku g/mol
 PATVIRTINTA Nacionalinio egzaminų centro direktoriaus 05 m. birželio 8 d. įsakymu Nr. (.3.)-V-73 05 M. CHEMIJOS VALSTYBINIO BRANDOS EGZAMINO UŽDUOTIES VERTINIMO INSTRUKCIJA. Pagrindinė sesija I dalis Teisingas
PATVIRTINTA Nacionalinio egzaminų centro direktoriaus 05 m. birželio 8 d. įsakymu Nr. (.3.)-V-73 05 M. CHEMIJOS VALSTYBINIO BRANDOS EGZAMINO UŽDUOTIES VERTINIMO INSTRUKCIJA. Pagrindinė sesija I dalis Teisingas
Kompiuterinė lazerių fizika. Viktorija Pyragaitė
 Kompiuterinė lazerių fizika Viktorija Pyragaitė VILNIAUS UNIVERSITETAS FIZIKOS FAKULTETAS Viktorija Pyragaitė KOMPIUTERINĖ LAZERIŲ FIZIKA Elektroninis leidinys Mokomoji knyga Vilnius 2013 Apsvarstė ir
Kompiuterinė lazerių fizika Viktorija Pyragaitė VILNIAUS UNIVERSITETAS FIZIKOS FAKULTETAS Viktorija Pyragaitė KOMPIUTERINĖ LAZERIŲ FIZIKA Elektroninis leidinys Mokomoji knyga Vilnius 2013 Apsvarstė ir
Matematinės analizės egzamino klausimai MIF 1 kursas, Bioinformatika, 1 semestras,
 MIF kurss, Bioinformtik, semestrs, 29 6 Tolydžios tške ir intervle funkciju pibrėžimi Teorem Jei f C[, ], f() = A , ti egzistuoj toks c [, ], kd f(c) = 2 Konverguojnčios ir diverguojnčios eikutės
MIF kurss, Bioinformtik, semestrs, 29 6 Tolydžios tške ir intervle funkciju pibrėžimi Teorem Jei f C[, ], f() = A , ti egzistuoj toks c [, ], kd f(c) = 2 Konverguojnčios ir diverguojnčios eikutės
1 iš 15 RIBOTO NAUDOJIMO
 iš 5 PATVIRTINTA Nacionalinio egzaminų centro direktoriau 00-06-08 įakymu Nr. 6.-S- 00 m. matematiko valtybinio brando egzamino VERTINIMO INSTRUKCIJA Pagrindinė eija 8 uždavinių atakymai Užd. Nr. 5 6 7
iš 5 PATVIRTINTA Nacionalinio egzaminų centro direktoriau 00-06-08 įakymu Nr. 6.-S- 00 m. matematiko valtybinio brando egzamino VERTINIMO INSTRUKCIJA Pagrindinė eija 8 uždavinių atakymai Užd. Nr. 5 6 7
1. Įvadas. Laisvųjų dalelių kvantinės mechanikos elementai
 1. Įvadas. Laisvųjų dalelių kvantinės mechanikos elementai 1.1. Branduolio nukleonų energijos diskretumo aiškinimas. Dalelė stačiakampėje potencialo duobėje Dalelės banginė funkcija tai koordinačių ir
1. Įvadas. Laisvųjų dalelių kvantinės mechanikos elementai 1.1. Branduolio nukleonų energijos diskretumo aiškinimas. Dalelė stačiakampėje potencialo duobėje Dalelės banginė funkcija tai koordinačių ir
Gabija Maršalkaitė Motiejus Valiūnas. Astronomijos pratybų užduočių komplektas
 Gabija Maršalkaitė Motiejus Valiūnas Astronomijos pratybų užduočių komplektas Vilnius 2014 1 Įvadas 1.1 Astronomijos olimpiados Lietuvoje kylant moksleivių susidomėjimu astronomijos olimpiada buvo pastebėta,
Gabija Maršalkaitė Motiejus Valiūnas Astronomijos pratybų užduočių komplektas Vilnius 2014 1 Įvadas 1.1 Astronomijos olimpiados Lietuvoje kylant moksleivių susidomėjimu astronomijos olimpiada buvo pastebėta,
ΜΕΤΑΠΤΥΧΙΑΚΗ ΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ. Ελευθερίου Β. Χρυσούλα. Επιβλέπων: Νικόλαος Καραμπετάκης Καθηγητής Α.Π.Θ.
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ ΜΕΤΑΠΤΥΧΙΑΚΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ ΘΕΩΡΗΤΙΚΗ ΠΛΗΡΟΦΟΡΙΚΗ ΚΑΙ ΘΕΩΡΙΑ ΣΥΣΤΗΜΑΤΩΝ ΚΑΙ ΕΛΕΓΧΟΥ Αναγνώριση συστημάτων με δεδομένη συνεχή και κρουστική συμπεριφορά
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ ΜΕΤΑΠΤΥΧΙΑΚΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ ΘΕΩΡΗΤΙΚΗ ΠΛΗΡΟΦΟΡΙΚΗ ΚΑΙ ΘΕΩΡΙΑ ΣΥΣΤΗΜΑΤΩΝ ΚΑΙ ΕΛΕΓΧΟΥ Αναγνώριση συστημάτων με δεδομένη συνεχή και κρουστική συμπεριφορά
m i N 1 F i = j i F ij + F x
 N m i i = 1,..., N m i Fi x N 1 F ij, j = 1, 2,... i 1, i + 1,..., N m i F i = j i F ij + F x i mi Fi j Fj i mj O P i = F i = j i F ij + F x i, i = 1,..., N P = i F i = N F ij + i j i N i F x i, i = 1,...,
N m i i = 1,..., N m i Fi x N 1 F ij, j = 1, 2,... i 1, i + 1,..., N m i F i = j i F ij + F x i mi Fi j Fj i mj O P i = F i = j i F ij + F x i, i = 1,..., N P = i F i = N F ij + i j i N i F x i, i = 1,...,
Pav1 Žingsnio perdavimo funkcija gali būti paskaičiuota integruojant VIPF. Paskaičiavus VIPF FFT gaunamo amplitudinė_dažninė ch_ka.
 Įvadas į filtrus Skaitmeniniai filtrai, tai viena iš svarbiausių siganalų apdorojimo dalių. Kadangi skaitmeniniai filtrai turi nepalyginamai daugiau pranašumų nei analoginiai filtrai, tai nulėmė jų populiarumą.
Įvadas į filtrus Skaitmeniniai filtrai, tai viena iš svarbiausių siganalų apdorojimo dalių. Kadangi skaitmeniniai filtrai turi nepalyginamai daugiau pranašumų nei analoginiai filtrai, tai nulėmė jų populiarumą.
DISPERSINĖ, FAKTORINĖ IR REGRESINĖ ANALIZĖ Laboratorinis darbas Nr. 2
 DISPERSINĖ, FAKTORINĖ IR REGRESINĖ ANALIZĖ Laboratorinis darbas Nr. 2 Marijus Radavičius, Tomas Rekašius 2010 m. vasario 23 d. Santrauka Antras laboratorinis darbas skirtas išmokti sudarinėti daugialypės
DISPERSINĖ, FAKTORINĖ IR REGRESINĖ ANALIZĖ Laboratorinis darbas Nr. 2 Marijus Radavičius, Tomas Rekašius 2010 m. vasario 23 d. Santrauka Antras laboratorinis darbas skirtas išmokti sudarinėti daugialypės
FRANKO IR HERCO BANDYMAS
 VILNIAUS UNIVERSITETAS Kietojo kūno elektronikos katedra Atomo ir branduolio fizikos laboratorija Laboratorinis darbas Nr. FRANKO IR HERCO BANDYMAS Parengė A. Poškus 013-08-31 Turinys Darbo tikslas 1.
VILNIAUS UNIVERSITETAS Kietojo kūno elektronikos katedra Atomo ir branduolio fizikos laboratorija Laboratorinis darbas Nr. FRANKO IR HERCO BANDYMAS Parengė A. Poškus 013-08-31 Turinys Darbo tikslas 1.
M A T E M A T I K O S P R A K T I K U M A S S U M A T H C A D
 LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS MATEMATIKOS KATEDRA Antanas Lapinskas M A T E M A T I K O S P R A K T I K U M A S S U M A T H C A D (MOKOMOJI KNYGA) AKADEMIJA 006 UDK 0049 (0754) Sudarė: doc dr Antanas
LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS MATEMATIKOS KATEDRA Antanas Lapinskas M A T E M A T I K O S P R A K T I K U M A S S U M A T H C A D (MOKOMOJI KNYGA) AKADEMIJA 006 UDK 0049 (0754) Sudarė: doc dr Antanas
KADETAS (VII ir VIII klasės)
") ADETAS (VII ir VIII klasės) 1. E 10 000 Galima tikrinti atsakymus. adangi vidutinė kainasumažėjo, tai brangiausia papūga kainavo daugiau kaip 6000 litų. Vadinasi, parduotoji papūga kainavo daugiau kaip
ADETAS (VII ir VIII klasės) 1. E 10 000 Galima tikrinti atsakymus. adangi vidutinė kainasumažėjo, tai brangiausia papūga kainavo daugiau kaip 6000 litų. Vadinasi, parduotoji papūga kainavo daugiau kaip
V skyrius ĮVAIRŪS PALŪKANŲ APSKAIČIAVIMO KLAUSIMAI
 V skyrius ĮVAIRŪS PALŪKANŲ APSKAIČIAVIMO KLAUSIMAI Uždirbtų palūkanų suma priklauso ne tik nuo palūkanų normos dydžio, bet ir nuo palūkanų kapitalizavimo dažnio Metinė palūkanų norma nevisada atspindi
V skyrius ĮVAIRŪS PALŪKANŲ APSKAIČIAVIMO KLAUSIMAI Uždirbtų palūkanų suma priklauso ne tik nuo palūkanų normos dydžio, bet ir nuo palūkanų kapitalizavimo dažnio Metinė palūkanų norma nevisada atspindi
EUROPOS CENTRINIS BANKAS
 2005 12 13 C 316/25 EUROPOS CENTRINIS BANKAS EUROPOS CENTRINIO BANKO NUOMONĖ 2005 m. gruodžio 1 d. dėl pasiūlymo dėl Tarybos reglamento, iš dalies keičiančio Reglamentą (EB) Nr. 974/98 dėl euro įvedimo
2005 12 13 C 316/25 EUROPOS CENTRINIS BANKAS EUROPOS CENTRINIO BANKO NUOMONĖ 2005 m. gruodžio 1 d. dėl pasiūlymo dėl Tarybos reglamento, iš dalies keičiančio Reglamentą (EB) Nr. 974/98 dėl euro įvedimo
Remigijus Leipus. Ekonometrija II. remis
 Remigijus Leipus Ekonometrija II http://uosis.mif.vu.lt/ remis Vilnius, 2013 Turinys 1 Trendo ir sezoniškumo vertinimas bei eliminavimas 4 1.1 Trendo komponentės vertinimas ir eliminavimas........ 4 1.2
Remigijus Leipus Ekonometrija II http://uosis.mif.vu.lt/ remis Vilnius, 2013 Turinys 1 Trendo ir sezoniškumo vertinimas bei eliminavimas 4 1.1 Trendo komponentės vertinimas ir eliminavimas........ 4 1.2
TERMODINAMIKA. 1. Pagrindinės sąvokos ir apibrėžimai
 TERMODINAMIKA 1. Pagrindinės sąvks ir apibrėžimai Įvadas Termdinamika (T) graikiškas ždisiš dviejų daliųterm (šiluma) + dinamika (jėga). Tai fundamentalus bendrsis inžinerijs mkslas apie energiją : js
TERMODINAMIKA 1. Pagrindinės sąvks ir apibrėžimai Įvadas Termdinamika (T) graikiškas ždisiš dviejų daliųterm (šiluma) + dinamika (jėga). Tai fundamentalus bendrsis inžinerijs mkslas apie energiją : js
Arenijaus (Arrhenius) teorija
 teorija") Rūgštys ir bazės Arenijaus (Arrhenius) teorija Rūgštis: Bazė: H 2 O HCl(d) H + (aq) + Cl - (aq) H 2 O NaOH(k) Na + (aq) + OH - (aq) Tuomet neutralizacijos reakcija: Na + (aq) + OH - (aq) + H + (aq) + Cl
Rūgštys ir bazės Arenijaus (Arrhenius) teorija Rūgštis: Bazė: H 2 O HCl(d) H + (aq) + Cl - (aq) H 2 O NaOH(k) Na + (aq) + OH - (aq) Tuomet neutralizacijos reakcija: Na + (aq) + OH - (aq) + H + (aq) + Cl
LIETUVOS RESPUBLIKOS ÐVIETIMO IR MOKSLO MINISTERIJA NACIONALINIS EGZAMINØ CENTRAS 2014 METŲ MATEMATIKOS VALSTYBINIO BRANDOS EGZAMINO REZULTATŲ
 LIETUVOS RESPUBLIKOS ÐVIETIMO IR MOKSLO MINISTERIJA NACIONALINIS EGZAMINØ CENTRAS 014 METŲ MATEMATIKOS VALSTYBINIO BRANDOS EGZAMINO REZULTATŲ STATISTINĖ ANALIZĖ 014 m. birželio 5 d. matematikos valstybinį
LIETUVOS RESPUBLIKOS ÐVIETIMO IR MOKSLO MINISTERIJA NACIONALINIS EGZAMINØ CENTRAS 014 METŲ MATEMATIKOS VALSTYBINIO BRANDOS EGZAMINO REZULTATŲ STATISTINĖ ANALIZĖ 014 m. birželio 5 d. matematikos valstybinį
Taikomieji optimizavimo metodai
 Taikomieji optimizavimo metodai 1 LITERATŪRA A. Apynis. Optimizavimo metodai. V., 2005 G. Dzemyda, V. Šaltenis, V. Tiešis. Optimizavimo metodai, V., 2007 V. Būda, M. Sapagovas. Skaitiniai metodai : algoritmai,
Taikomieji optimizavimo metodai 1 LITERATŪRA A. Apynis. Optimizavimo metodai. V., 2005 G. Dzemyda, V. Šaltenis, V. Tiešis. Optimizavimo metodai, V., 2007 V. Būda, M. Sapagovas. Skaitiniai metodai : algoritmai,
KLASIKIN E MECHANIKA
 KLASIKIN E MECHANIKA Algirdas MATULIS Puslaidininkiu zikos institutas Vadoveliu serijos papildymas auk²tuju mokyklu tiksliuju mokslu specialybiu studentams Email: amatulis@takas.lt Mob.: +370 654 543 06
KLASIKIN E MECHANIKA Algirdas MATULIS Puslaidininkiu zikos institutas Vadoveliu serijos papildymas auk²tuju mokyklu tiksliuju mokslu specialybiu studentams Email: amatulis@takas.lt Mob.: +370 654 543 06
KOMPIUTERINIS PROJEKTAVIMAS
 LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS Vandens ūkio ir žemėtvarkos fakultetas Statybinių konstrukcijų katedra Tatjana Sankauskienė KOMPIUTERINIS PROJEKTAVIMAS AutoCAD sistemoje Mokomoji knyga inžinerinių specialybių
LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS Vandens ūkio ir žemėtvarkos fakultetas Statybinių konstrukcijų katedra Tatjana Sankauskienė KOMPIUTERINIS PROJEKTAVIMAS AutoCAD sistemoje Mokomoji knyga inžinerinių specialybių
Praeita paskaita. Grafika ir vizualizavimas Atkirtimai dvimatėje erdvėje. Praeita paskaita. 2D Transformacijos. Grafika ir vizualizavimas, VDU, 2010
 Praeita paskaita Grafika ir vizualizavimas Atkirtimai dvimatėje erdvėje Atkarpos Tiesės lgtis = mx+ b kur m krpties koeficientas, o b aukštis, kuriame tiesė kerta ašį Susikirtimo taško apskaičiavimui sulginamos
Praeita paskaita Grafika ir vizualizavimas Atkirtimai dvimatėje erdvėje Atkarpos Tiesės lgtis = mx+ b kur m krpties koeficientas, o b aukštis, kuriame tiesė kerta ašį Susikirtimo taško apskaičiavimui sulginamos
Atsitiktinių paklaidų įvertinimas
 4.4.4. tsitiktinių paklaidų įvertinimas tsitiktinės paklaidos įvertinamos nurodant du dydžius: pasikliaujamąjį intervalą ir pasikliaujamąją tikimybę. tsitiktinių paklaidų atveju, griežtai tariant, nėra
4.4.4. tsitiktinių paklaidų įvertinimas tsitiktinės paklaidos įvertinamos nurodant du dydžius: pasikliaujamąjį intervalą ir pasikliaujamąją tikimybę. tsitiktinių paklaidų atveju, griežtai tariant, nėra
2 laboratorinis darbas. TIKIMYBINIAI MODELIAI
 laboratorns darbas laboratorns darbas. TIKIMYBINIAI MODELIAI DARBO TIKSLAS - šstudjuot atstktnų dydžų r vektorų skrstnus, skrstno (passkrstymo) funkcją, tanko funkcją, skatnes charakterstkas r jų savybes.
laboratorns darbas laboratorns darbas. TIKIMYBINIAI MODELIAI DARBO TIKSLAS - šstudjuot atstktnų dydžų r vektorų skrstnus, skrstno (passkrstymo) funkcją, tanko funkcją, skatnes charakterstkas r jų savybes.
ELEMENTARIOJI TEORIJA
 ELEMENTARIOJI TEORIJA Pirmosios kombinatorikos þinios siekia senàsias Rytø ðalis, kuriose mokëta suskaièiuoti këlinius bei derinius ir sudarinëti magiðkuosius kvadratus, ypaè populiarius viduramþiais.
ELEMENTARIOJI TEORIJA Pirmosios kombinatorikos þinios siekia senàsias Rytø ðalis, kuriose mokëta suskaièiuoti këlinius bei derinius ir sudarinëti magiðkuosius kvadratus, ypaè populiarius viduramþiais.
9. KEVALŲ ELEMENTAI. Pavyzdžiai:
 9. KEVALŲ ELEMENTAI Kealai Tai ploni storio krptii kūnai, sudarti iš kreių plokštuų. Geoetrija nusakoa iduriniu pairšiui ir storiu t. Kiekiena pairšiaus taške galia rasti di kreies, atitinkančias inialius
9. KEVALŲ ELEMENTAI Kealai Tai ploni storio krptii kūnai, sudarti iš kreių plokštuų. Geoetrija nusakoa iduriniu pairšiui ir storiu t. Kiekiena pairšiaus taške galia rasti di kreies, atitinkančias inialius
STOGO ŠILUMINIŲ VARŽŲ IR ŠILUMOS PERDAVIMO KOEFICIENTO SKAIČIAVIMAS
 STOGO ŠILUMINIŲ VAŽŲ I ŠILUMOS PEDAVIMO KOEFICIENTO SKAIČIAVIMAS ST 2.05.02:2008 2 priedas 1. Stogo suminė šiluminė varža s (m 2 K/W) apskaičiuojama pagal formulę [4.6]: s 1 2... n ( g q ); (2.1) čia:
STOGO ŠILUMINIŲ VAŽŲ I ŠILUMOS PEDAVIMO KOEFICIENTO SKAIČIAVIMAS ST 2.05.02:2008 2 priedas 1. Stogo suminė šiluminė varža s (m 2 K/W) apskaičiuojama pagal formulę [4.6]: s 1 2... n ( g q ); (2.1) čia:
FIZ 313 KOMPIUTERINĖ FIZIKA. Laboratorinis darbas FIZIKOS DIFERENCIALINIŲ LYGČIŲ SPRENDIMAS RUNGĖS KUTOS METODU
 EUROPOS SĄJUNGA Europos socialinis fondas KURKIME ATEITĮ DRAUGE! 2004-2006 m. Bendrojo programavimo dokumento 2 prioriteto Žmogiškųjų išteklių plėtra 4 priemonė Mokymosi visą gyvenimą sąlygų plėtra Projekto
EUROPOS SĄJUNGA Europos socialinis fondas KURKIME ATEITĮ DRAUGE! 2004-2006 m. Bendrojo programavimo dokumento 2 prioriteto Žmogiškųjų išteklių plėtra 4 priemonė Mokymosi visą gyvenimą sąlygų plėtra Projekto
Laboratorinis darbas Nr. 2
 M A T E M A T I N Ė S T A T I S T I K A Laboratorinis darbas Nr. 2 Marijus Radavičius, Tomas Rekašius 2005 m. spalio 23 d. Reziumė Antras laboratorinis darbas skirtas išmokti generuoti tikimybinių skirstinių
M A T E M A T I N Ė S T A T I S T I K A Laboratorinis darbas Nr. 2 Marijus Radavičius, Tomas Rekašius 2005 m. spalio 23 d. Reziumė Antras laboratorinis darbas skirtas išmokti generuoti tikimybinių skirstinių
Taikomoji branduolio fizika
 VILNIAUS UNIVERSITETAS Taikomoji branduolio fizika Parengė A. Poškus Vilnius 2015-05-20 Turinys 1. Neutronų sąveika su medžiaga...1 1.1. Neutronų sąveikos su medžiaga rūšys...1 1.2. Neutrono sukeltų branduolinių
VILNIAUS UNIVERSITETAS Taikomoji branduolio fizika Parengė A. Poškus Vilnius 2015-05-20 Turinys 1. Neutronų sąveika su medžiaga...1 1.1. Neutronų sąveikos su medžiaga rūšys...1 1.2. Neutrono sukeltų branduolinių
Pagrindiniai pasiekimai kokybin je molekulių elektronin s sandaros ir cheminių reakcijų teorijoje. V.Gineityt
 Pagrindiniai pasiekimai kokybin je molekulių elektronin s sandaros ir cheminių reakcijų teorijoje V.Gineityt Gamtos moksluose teorijoms keliami du pagrindiniai uždaviniai: paaiškinti stebimų objektų savybes
Pagrindiniai pasiekimai kokybin je molekulių elektronin s sandaros ir cheminių reakcijų teorijoje V.Gineityt Gamtos moksluose teorijoms keliami du pagrindiniai uždaviniai: paaiškinti stebimų objektų savybes
Analizės uždavinynas. Vytautas Kazakevičius m. lapkričio 1 d.
 Analizės uždavinynas Vytautas Kazakevičius m. lapkričio d. ii Vienmatė analizė Faktorialai, binominiai koeficientai. Jei a R, n, k N {}, tai k! = 3 k, (k + )!! = 3 5 (k + ), (k)!! = 4 6 (k); a a(a ) (a
Analizės uždavinynas Vytautas Kazakevičius m. lapkričio d. ii Vienmatė analizė Faktorialai, binominiai koeficientai. Jei a R, n, k N {}, tai k! = 3 k, (k + )!! = 3 5 (k + ), (k)!! = 4 6 (k); a a(a ) (a
Įvadas į laboratorinius darbus
 M A T E M A T I N Ė S T A T I S T I K A Įvadas į laboratorinius darbus Marijus Radavičius, Tomas Rekašius 2005 m. rugsėjo 26 d. Reziumė Laboratorinis darbas skirtas susipažinti su MS Excel priemonėmis
M A T E M A T I N Ė S T A T I S T I K A Įvadas į laboratorinius darbus Marijus Radavičius, Tomas Rekašius 2005 m. rugsėjo 26 d. Reziumė Laboratorinis darbas skirtas susipažinti su MS Excel priemonėmis
SIGNALAI TELEKOMUNIKACIJŲ SISTEMOSE
 VILNIAUS UNIVERSITETAS Kietojo kūno elektronikos katedra SIGNALAI TELEKOMUNIKACIJŲ SISTEMOSE Mokymo priemonė Parengė A. Poškus 4 Turinys. ĮVADAS..... Telekomunikaijų sistemos struktūrinė shema. Pagrindinės
VILNIAUS UNIVERSITETAS Kietojo kūno elektronikos katedra SIGNALAI TELEKOMUNIKACIJŲ SISTEMOSE Mokymo priemonė Parengė A. Poškus 4 Turinys. ĮVADAS..... Telekomunikaijų sistemos struktūrinė shema. Pagrindinės
Diskrečioji matematika
 VILNIAUS UNIVERSITETAS Gintaras Skersys Julius Andrikonis Diskrečioji matematika Pratybų medžiaga Versija: 28 m. sausio 22 d. Vilnius, 27 Turinys Turinys 2 Teiginiai. Loginės operacijos. Loginės formulės
VILNIAUS UNIVERSITETAS Gintaras Skersys Julius Andrikonis Diskrečioji matematika Pratybų medžiaga Versija: 28 m. sausio 22 d. Vilnius, 27 Turinys Turinys 2 Teiginiai. Loginės operacijos. Loginės formulės