Fizica fluidelor Cursul 8
|
|
|
- Σωστράτη Βικελίδης
- 6 χρόνια πριν
- Προβολές:
Transcript
1 Fizica fluidelor Cursul 8 Victor E. Ambruș Universitatea de Vest din Timișoara
2 Capitolul V. Curgeri potențiale. V.1. Mișcarea potențială plană. V.2. Exemple de curgeri potențiale plane. V.3. Principiul superpoziției. V.4. Acțiunea hidrodinamică asupra obstacolului.
3 V.2.7. Soluțiile ecuației curgerii potențiale. Funcția de curent ψ și potențialul vitezelor φ satisfac ecuația Poisson: N Γ N k ψ = Γ i δ(x x i δ(y y i, φ = k j δ(x x j δ(y y j, i=1 unde am luat în considerare existența a N Γ vârtejuri punctiforme de intensitate Γ i și N k surse pozitive sau negative de intensitate k j. Soluția generală a ecuației Poisson se poate scrie după cum urmează: N Γ ψ(x = ψ 0 (x i=1 N Γ φ(x = φ 0 (x + i=1 j=1 Γ i 2π ln x x i + Γ i θ i 2π N k j=1 k θ j 2π, Nk + k j 2π ln x x j, (1 unde θ i = arctan y y i x x i reprezintă unghiul polar θ sub care se vede punctul (x, y față de (x i, y i. Funcțiile ψ 0 (x și φ 0 (x satisfac ecuația Laplace: j=1 ψ 0 (x = 0, φ 0 (x = 0.
4 V.2.7. Soluțiile ecuației curgerii potențiale. În coordonate cilindrice, soluția generală a ecuației Laplace se poate scrie după cum urmează: φ = n [ cos nθ ( A + n R n + A n R n + sin nθ ( B + n R n + B n R n], unde constantele A ± n și B ± n sunt fixate de condițiile pe frontieră. Dacă sistemul este periodic după θ, n poate lua doar valori întregi. Pentru calcularea vitezei în coordonate cilindrice, sunt utile formulele: u R = R φ = R 1 θ ψ, u θ = R 1 θ φ = R ψ. Aceste relații permit exprimarea lui ψ după cum urmează: ψ = [ ( cos nθ B + n R n + Bn R n + sin nθ ( A + n R n A n R n]. n
5 V.3. Principiul superpoziției. V.3.1. Condiții pe frontieră. Funcțiile φ și ψ sunt definite unic de distribuția de surse și de condițiile pe frontieră. De regulă, pe frontieră se impun valorile câmpului de viteză, ceea ce înseamnă condiții de tip Neumann pentru φ și ψ. Cele mai des întâlnite condiții pe frontieră sunt: 1. Perete impenetrabil: Componenta perpendiculară a vitezei la suprafața solidă trebuie să se anuleze: n φ = φ n = 0, ψ ds ψ = s = 0, unde n este normala la suprafața frontierei solide iar s parametrizează conturul acesteia; 2. Condiții la infinit: În unele probleme se cere ca viteza să aibă o anumită valoare la intrarea în canal: xφ = y ψ = U, y φ = xψ = 0, (2 unde s-a presupus că fluidul intră în canal pe direcția x. Deoarece ecuația Poisson e liniară, mișcarea datorată mai multor cauze se face ca și cum fiecare cauză ar exista independent. Soluția generală e o superpoziție a unor soluții particulare.
6 V.3.2. Potențialul dubletului. Să considerăm f (z = f + (z + f (z suma dintre o sursă f + (z = k 2π ln(z z + și un puț f (z = k 2π ln(z z, localizate în z ± = ±εe iα, având intensitățile ±k. Limita când ɛ 0, dar 2εk m duce la: f (z = meiα 2πz. (3 Funcția de mai sus definește dubletul în origine având momentul m și orientarea α. f (z este olomorfă peste tot, mai puțin în z = 0, unde are o singularitate polară (viteza nu este definită în acest punct. Potențialul vitezelor și funcția de curent sunt: φ = m m cos(θ α, ψ = sin(θ α. (4 2πR 2πR Liniile de curent se obțin ca soluții la ecuația cercului: (x + λ sin α 2 + (y λ cos α 2 = λ 2, (5 în timp ce câmpul de viteze este definit de (z = Re iθ : u x = m 2πR 2 cos(2θ α, u y = m sin(2θ α. (6 2πR2
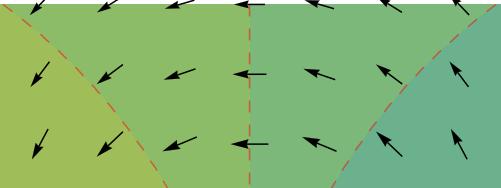
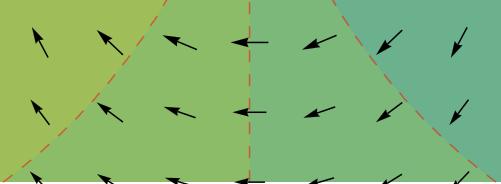
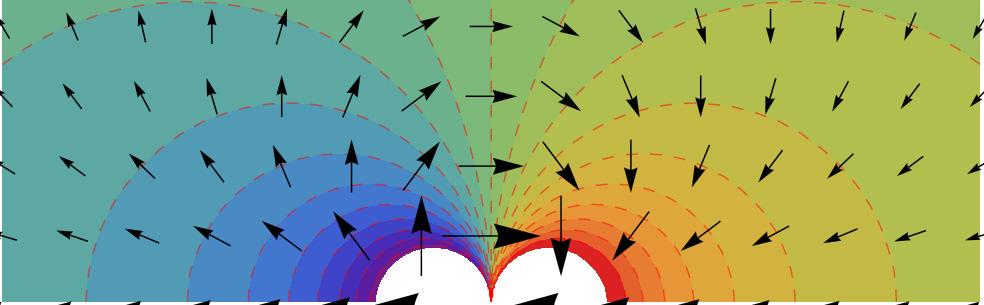
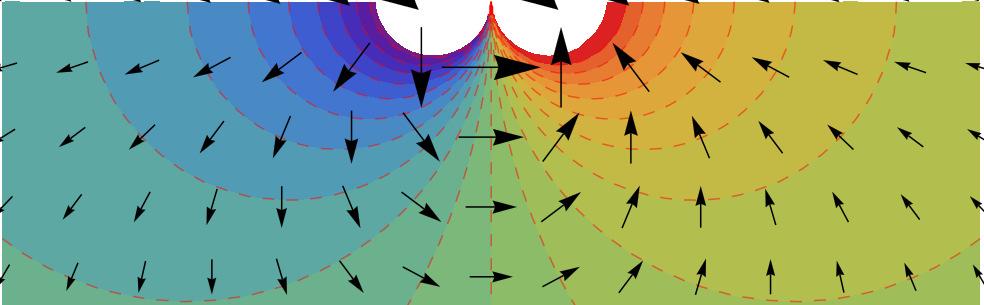
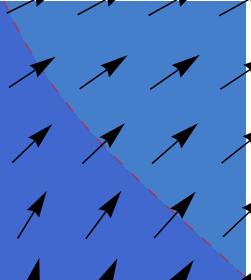
7 Potențialul dubletului m = 1, α = 0 m = 1, α = 0
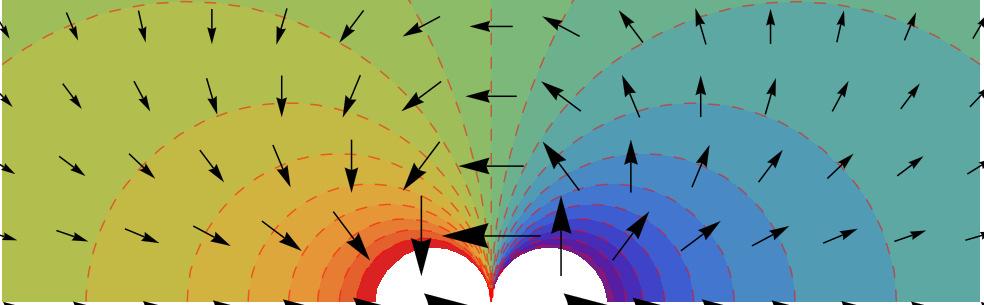
8 V.3.3. Mișcarea cu circulație în prezența obstacolului circular. Să considerăm f (z = U (z + a2 z Rezultă următoarele potențiale: φ = xu (1 + a2 R 2 + Γθ 2π, Câmpul de viteze este dat de: u θ = U sin θ (1 + a2 R 2 + Γ 2πR, + Γ ( z 2πi ln. a (1 ψ = yu a2 R 2 Γ 2π ln R a. u R = U cos θ (1 a2 R 2. Pe suprafața cilindrului, u R = 0 și u θ se anulează când: sin θ = Γ 4πaU. În cazul Γ 4πaU avem două puncte de stagnare (unul în caz de egalitate pe suprafață cilindrului. Când Γ > 4πaU, punctul de stagnare se deplasează pe dreapta cos θ = 0 în punctul unde R = Γ ( 2 4πaU πU Γ





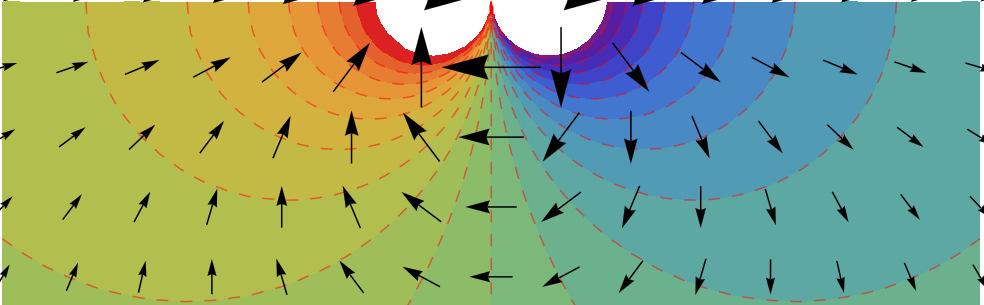
9 Mișcarea cu circulație în prezența obstacolului circular. 2 a = 1, U = Γ = 3.5πaU Γ = 4.5πaU
10 V.3.4. Metoda imaginilor. O aplicație a principiului superpoziției este că se pot introduce linii de curent eligibile pentru solidificare prin oglindirea funcției de curent: ψ(x, y ψ (x, y = ψ(x, y ψ(x, y. Transformarea de mai sus oferă o linie de curent la y = 0, care poate fi solidificată. Oglindirea lui ψ este echivalentă cu oglindirea sursei ω: unde ω (x, y = ω(x, y ω(x, y. ψ = ω ψ = ω, (7 În cazul potențialului vitezelor generat de o sursă q(x, y, putem introduce un perete plan prin transformarea q(x, y q (x, y = q(x, y + q(x, y, astfel că φ (x, y = φ(x, y + φ(x, y și u y = y φ (x, y se anulează când y = 0.



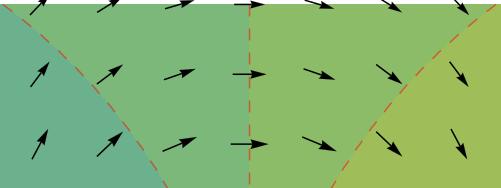
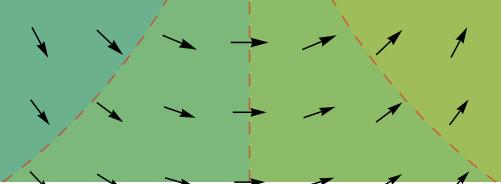
11 V.3.5. Sursa în prezența unui perete vertical. Să considerăm curgerea corespunzătoare unei surse de intensitate k localizată în x = x 0 în prezența unui perete la x = 0. Potențialul complex este: f (z = k 2π [ln(z x 0 + ln(z + x 0 ]. Rezultă pentru ψ și φ: ( arctan ψ = k 2π y x x 0 + arctan y , x + x 0 φ = k 4π ln { [(x x y 2 ][(x + x y 2 ] }. Rezultă câmpul de viteze: kx(x 2 + y 2 x0 2 u x = π[(x x y 2 ][(x + x y 2 ], ky(x 2 + y 2 + x0 2 u y = π[(x x y 2 ][(x + x y 2 ]
12 V.4. Acțiunea hidrodinamică asupra obstacolului. V.4.1. Forța asupra obstacolului. Densitatea liniară (în raport cu axa z a forței pe elementul de suprafață al obstacolului este dr = Pnds, unde n este normala exterioară la suprafața corpului iar s parametrizează conturul C al acestuia. Din moment ce obstacolul reprezintă o linie de curent solidificată, avem ψ[x(s, y(s] = const și n = ± ψ/ ψ, unde semnul este ales astfel încât n să aibă sensul înspre exteriorul suprafeței. Din condiția dψ/ds = 0 rezultă: Gradientul lui ψ devine: ψ = ψ y ψ x = dy ψ dx y. ( dy dx i + j, ψ = ψ ds y dx. (8 Rezultă nds = idy jdx iar forța pe C poate fi calculată folosind (z = x iy: R x ir y = i P dz, (9 C
13 V.4.2. Momentul forței asupra obstacolului. Densitatea liniară a momentului forței este dm = x Pnds. Din moment ce x și n se află în planul xoy, dm = (0, 0, dm iar Folosind n = idy jdx rezultă: dm = P(xn y yn x ds. dm = P(xdx + ydy. Integrând pe conturul C al obstacolului rezultă: { } M = Re Pzdz, (10 C unde s-a folosit Re(zdz = Re(xdx + ydy + iydx ixdy = xdx + ydy.
14 V.4.3. Formulele lui Blasius și Ciaplâghin. Pentru curgerile irotaționale se aplică teorema lui Bernoulli: 1 dp 2 u2 + ρ + Ω = const. Pentru curgerea incompresibilă în care forțele masice sunt neglijabile: P = 1 2 ρu2 + const. (11 Integrala pe contur închis a lui const e nulă, astfel că: R x ir y = iρ w 2 dz, (12 2 unde w = df /dz, ținând cont că df = df = dφ pe linia de curent. Pentru momentul forței rezultă: M = ρ { } 2 Re w 2 z dz. (13 Ecuațiile (12 și (13 poartă numele de formulele lui Blasius și Ciaplâghin. Teorema lui Cauchy permite evaluarea integralelor pe orice contur C atâta timp cât w 2 și w 2 z nu au singularități între C și C. C
15 V.4.4. Paradoxul lui d Alembert. Să considerăm obstacolul circular în mișcare cu circulație: f (z = U (z + a2 + Γ ( z z 2πi ln. a Pe contur avem z = Re iθ și dz = izdθ, astfel încât: { 2π R n+1 z n dz = ir n+1 dθ e i(n+1θ = n+1 (e2πi(n+1 1, n 1, 2πi, n = 1. 0 Pentru cazul n Z dar n 1, integrala de contur se anulează. Cu aceste considerente, rezultă: R x = 0, R y = ρuγ. (14 Forța pe direcția x reprezintă forța de rezistență la înaintare (drag și se notează cu D. Forța pe direcția y reprezintă portanța (lift și se notează cu L. Faptul că D = 0 pentru un cilindru care se deplasează într-un mediu fluid poartă numele de paradoxul lui d Alembert. Forțele de rezistență pentru astfel de curgeri sunt induse de caracterul neideal al fluidului, datorită căruia în aval apar vârtejuri care disipează energia cinetică a obstacolului.
16 IV.4.5. Efectul Magnus. În curgerile reale se impune ca viteza de alunecare între fluid și suprafețele solide să fie nulă. În cazul cilindrului în mișcarea cu circulație Γ 4πaU, viteza la suprafața cilindrului este: u R = 0, u θ Γ 2πa. (15 Această curgere corespunde unui cilindru în rotație cu viteza unghiulară Ω = Γ/2πa 2. Portanța asupra unui astfel de cilindru este: L = ρuγ = 2πa 2 ρωu. (16 Expresia (16 poartă numele de forță Kutta-Jukovski Semnul portanței se poate determina exprimând ec. (16 ca un produs vectorial între Ω = (0, 0, Ω și viteza relativă U R = ( U, 0, 0 a obiectului față de fluidul în repaus: L = 2πa 2 ρω U R, Astfel de forțe apar întotdeauna când un corp în rotație străbate un mediu fluid, deviația traiectoriei indusă de acest tip de forță purtând numele de efect Magnus.
17 Probleme 1. Teorema lui Bernoulli pentru curgeri staționare, incompresibile și irotaționale. Să se arate că pentru un fluid staționar, incompersibil și irotațional, ecuația Cauchy ρd t u = P se reduce la P ρu2 = const. (se neglijează forțele masice. 2. Folosind teorema lui Cauchy, să se studieze forța Kutta-Jukovski asupra unui corp cilindric în curgere cu circulație în prezența unei surse de intensitate k localizată în centrul cilindrului: f (z = U (z + a2 z + k iγ 2π ln z a. [Răspuns: D = ρuk, L = ρuγ.] 3. Curgerea în prezența unui obstacol cilindric e perturbată prin adăugarea unei viteze verticale mici: ψ = Uy (1 a2 Uγx. a Să se arate că punctele de stagnare se găsesc la R = a/(1 + γ 2 1/4 și θ { 1 arctan γ, π + 1 arctan γ}. 2 2 b Permite această curgere existența unui obstacol închis? R 2
18 Probleme 4. Considerând b, U, Q și Γ constante reale pozitive, să se găsească liniile de curent și să se calculeze presiunea pe axa x în raport cu o presiune de referință pentru următoarele curgeri: a ψ = b R cos(θ/2 [ cu θ < 180 ; b ψ = Uy + (Γ/2π ln( x 2 + (y b 2 ln( ] x 2 + (y + b 2 ; c φ = n= (k/2π ln( x 2 + (y 2na 2, cu y < a. 5. Să se studieze curgerea potențială staționară obținută prin combinarea unei curgeri uniforme cu viteza U de-a lungul axei x, a unei surse de intensitate k > 0 localizată în ( a, 0 și a unui puț de intensitate k la (a, 0 (cu a > 0. Presiunea pentru x p e constantă. Să se determine: a Potențialul vitezelor și funcția de curent; b Coordonatele punctelor de stagnare; c Presiunea de-a lungul axei y; d Să se găsească ecuația transcendentă care descrie linia de curent închisă.
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate.
 Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
5. FUNCŢII IMPLICITE. EXTREME CONDIŢIONATE.
 5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
Planul determinat de normală şi un punct Ecuaţia generală Plane paralele Unghi diedru Planul determinat de 3 puncte necoliniare
 1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
Metode iterative pentru probleme neliniare - contractii
 Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
(a) se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.
 se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.") Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile
 Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
Curs 14 Funcţii implicite. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi"
 Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Ecuaţia generală Probleme de tangenţă Sfera prin 4 puncte necoplanare. Elipsoidul Hiperboloizi Paraboloizi Conul Cilindrul. 1 Sfera.
 pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
Sisteme diferenţiale liniare de ordinul 1
 1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
Seminariile Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reziduurilor
 Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Curs 4 Serii de numere reale
 Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
a n (ζ z 0 ) n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea
 n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea") Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Capitolul 4. Integrale improprii Integrale cu limite de integrare infinite
 Capitolul 4 Integrale improprii 7-8 În cadrul studiului integrabilităţii iemann a unei funcţii s-au evidenţiat douăcondiţii esenţiale:. funcţia :[ ] este definită peintervalînchis şi mărginit (interval
Capitolul 4 Integrale improprii 7-8 În cadrul studiului integrabilităţii iemann a unei funcţii s-au evidenţiat douăcondiţii esenţiale:. funcţia :[ ] este definită peintervalînchis şi mărginit (interval
Definiţia generală Cazul 1. Elipsa şi hiperbola Cercul Cazul 2. Parabola Reprezentari parametrice ale conicelor Tangente la conice
 1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM 1 electronica.geniu.ro
 Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Integrala nedefinită (primitive)
") nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
Conice. Lect. dr. Constantin-Cosmin Todea. U.T. Cluj-Napoca
 Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
SEMINAR 14. Funcţii de mai multe variabile (continuare) ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0
 ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0") Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
R R, f ( x) = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.
 = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.") 5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor X) functia f 1
 functia f 1") Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor
 Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE
 DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii transversale, scrisă faţă de una dintre axele de inerţie principale:,
 REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
Algebra si Geometrie Seminar 9
 Algebra si Geometrie Seminar 9 Decembrie 017 ii Equations are just the boring part of mathematics. I attempt to see things in terms of geometry. Stephen Hawking 9 Dreapta si planul in spatiu 1 Notiuni
Algebra si Geometrie Seminar 9 Decembrie 017 ii Equations are just the boring part of mathematics. I attempt to see things in terms of geometry. Stephen Hawking 9 Dreapta si planul in spatiu 1 Notiuni
1. PROPRIETĂȚILE FLUIDELOR
 1. PROPRIETĂȚILE FLUIDELOR a) Să se exprime densitatea apei ρ = 1000 kg/m 3 în g/cm 3. g/cm 3. b) tiind că densitatea glicerinei la 20 C este 1258 kg/m 3 să se exprime în c) Să se exprime în kg/m 3 densitatea
1. PROPRIETĂȚILE FLUIDELOR a) Să se exprime densitatea apei ρ = 1000 kg/m 3 în g/cm 3. g/cm 3. b) tiind că densitatea glicerinei la 20 C este 1258 kg/m 3 să se exprime în c) Să se exprime în kg/m 3 densitatea
Asupra unei inegalităţi date la barajul OBMJ 2006
 Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
5.5. REZOLVAREA CIRCUITELOR CU TRANZISTOARE BIPOLARE
 5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
2.1 Sfera. (EGS) ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2
 ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2") .1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
.1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
Aplicaţii ale principiului I al termodinamicii la gazul ideal
 Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Functii Breviar teoretic 8 ianuarie ianuarie 2011
 Functii Breviar teoretic 8 ianuarie 011 15 ianuarie 011 I Fie I, interval si f : I 1) a) functia f este (strict) crescatoare pe I daca x, y I, x< y ( f( x) < f( y)), f( x) f( y) b) functia f este (strict)
Functii Breviar teoretic 8 ianuarie 011 15 ianuarie 011 I Fie I, interval si f : I 1) a) functia f este (strict) crescatoare pe I daca x, y I, x< y ( f( x) < f( y)), f( x) f( y) b) functia f este (strict)
MARCAREA REZISTOARELOR
 1.2. MARCAREA REZISTOARELOR 1.2.1 MARCARE DIRECTĂ PRIN COD ALFANUMERIC. Acest cod este format din una sau mai multe cifre şi o literă. Litera poate fi plasată după grupul de cifre (situaţie în care valoarea
1.2. MARCAREA REZISTOARELOR 1.2.1 MARCARE DIRECTĂ PRIN COD ALFANUMERIC. Acest cod este format din una sau mai multe cifre şi o literă. Litera poate fi plasată după grupul de cifre (situaţie în care valoarea
Laborator 11. Mulţimi Julia. Temă
 Laborator 11 Mulţimi Julia. Temă 1. Clasa JuliaGreen. Să considerăm clasa JuliaGreen dată de exemplu la curs pentru metoda locului final şi să schimbăm numărul de iteraţii nriter = 100 în nriter = 101.
Laborator 11 Mulţimi Julia. Temă 1. Clasa JuliaGreen. Să considerăm clasa JuliaGreen dată de exemplu la curs pentru metoda locului final şi să schimbăm numărul de iteraţii nriter = 100 în nriter = 101.
CURS MECANICA CONSTRUCŢIILOR
 CURS 10+11 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA SOLIDULUI RIGID In cadrul cinematicii punctului material s-a arătat ca a studia mişcarea unui punct înseamnă a determina la
CURS 10+11 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA SOLIDULUI RIGID In cadrul cinematicii punctului material s-a arătat ca a studia mişcarea unui punct înseamnă a determina la
Conice - Câteva proprietǎţi elementare
 Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
Lucian Maticiuc SEMINAR Conf. dr. Lucian Maticiuc. Capitolul VI. Integrala triplă. Teoria:
 Capitolul I: Integrala triplă Conf. dr. Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Analiza Matematică II, Semestrul II Conf. dr. Lucian MATICIUC Teoria: SEMINAR 3 Capitolul I. Integrala
Capitolul I: Integrala triplă Conf. dr. Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Analiza Matematică II, Semestrul II Conf. dr. Lucian MATICIUC Teoria: SEMINAR 3 Capitolul I. Integrala
Profesor Blaga Mirela-Gabriela DREAPTA
 DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
z a + c 0 + c 1 (z a)
") 1 Serii Laurent (continuare) Teorema 1.1 Fie D C un domeniu, a D şi f : D \ {a} C o funcţie olomorfă. Punctul a este pol multiplu de ordin p al lui f dacă şi numai dacă dezvoltarea în serie Laurent a funcţiei
1 Serii Laurent (continuare) Teorema 1.1 Fie D C un domeniu, a D şi f : D \ {a} C o funcţie olomorfă. Punctul a este pol multiplu de ordin p al lui f dacă şi numai dacă dezvoltarea în serie Laurent a funcţiei
a. 11 % b. 12 % c. 13 % d. 14 %
 1. Un motor termic funcţionează după ciclul termodinamic reprezentat în sistemul de coordonate V-T în figura alăturată. Motorul termic utilizează ca substanţă de lucru un mol de gaz ideal având exponentul
1. Un motor termic funcţionează după ciclul termodinamic reprezentat în sistemul de coordonate V-T în figura alăturată. Motorul termic utilizează ca substanţă de lucru un mol de gaz ideal având exponentul
III. Serii absolut convergente. Serii semiconvergente. ii) semiconvergentă dacă este convergentă iar seria modulelor divergentă.
 semiconvergentă dacă este convergentă iar seria modulelor divergentă.") III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...4
 SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
CONCURS DE ADMITERE, 17 iulie 2017 Proba scrisă la MATEMATICĂ
 UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ CONCURS DE ADMITERE, 7 iulie 207 Proba scrisă la MATEMATICĂ SUBIECTUL I (30 puncte) ) (0 puncte) Să se arate că oricare ar
UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ CONCURS DE ADMITERE, 7 iulie 207 Proba scrisă la MATEMATICĂ SUBIECTUL I (30 puncte) ) (0 puncte) Să se arate că oricare ar
Subiecte Clasa a VIII-a
 Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
VII.2. PROBLEME REZOLVATE
 Teoria Circuitelor Electrice Aplicaţii V PROBEME REOVATE R7 În circuitul din fiura 7R se cunosc: R e t 0 sint [V] C C t 0 sint [A] Se cer: a rezolvarea circuitului cu metoda teoremelor Kirchhoff; rezolvarea
Teoria Circuitelor Electrice Aplicaţii V PROBEME REOVATE R7 În circuitul din fiura 7R se cunosc: R e t 0 sint [V] C C t 0 sint [A] Se cer: a rezolvarea circuitului cu metoda teoremelor Kirchhoff; rezolvarea
Metode de interpolare bazate pe diferenţe divizate
 Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
Concurs MATE-INFO UBB, 1 aprilie 2017 Proba scrisă la MATEMATICĂ
 UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ Concurs MATE-INFO UBB, aprilie 7 Proba scrisă la MATEMATICĂ SUBIECTUL I (3 puncte) ) (5 puncte) Fie matricele A = 3 4 9 8
UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ Concurs MATE-INFO UBB, aprilie 7 Proba scrisă la MATEMATICĂ SUBIECTUL I (3 puncte) ) (5 puncte) Fie matricele A = 3 4 9 8
SEMINAR TRANSFORMAREA FOURIER. 1. Probleme
 SEMINAR TRANSFORMAREA FOURIER. Probleme. Să se precizeze dacă funcţiile de mai jos sunt absolut integrabile pe R şi, în caz afirmativ să se calculeze { transformata Fourier., t a. σ(t), t < ; b. f(t) σ(t)
SEMINAR TRANSFORMAREA FOURIER. Probleme. Să se precizeze dacă funcţiile de mai jos sunt absolut integrabile pe R şi, în caz afirmativ să se calculeze { transformata Fourier., t a. σ(t), t < ; b. f(t) σ(t)
SERII NUMERICE. Definiţia 3.1. Fie (a n ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0
 n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0") SERII NUMERICE Definiţia 3.1. Fie ( ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0 şirul definit prin: s n0 = 0, s n0 +1 = 0 + 0 +1, s n0 +2 = 0 + 0 +1 + 0 +2,.......................................
SERII NUMERICE Definiţia 3.1. Fie ( ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0 şirul definit prin: s n0 = 0, s n0 +1 = 0 + 0 +1, s n0 +2 = 0 + 0 +1 + 0 +2,.......................................
Curs 2 Şiruri de numere reale
 Curs 2 Şiruri de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Convergenţă şi mărginire Teoremă Orice şir convergent este mărginit. Demonstraţie Fie (x n ) n 0 un
Curs 2 Şiruri de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Convergenţă şi mărginire Teoremă Orice şir convergent este mărginit. Demonstraţie Fie (x n ) n 0 un
III. Statica III. Statica. Echilibrul mecanic al corpurilor. 1. Sistem de forțe concurente. Sistemul de forțe
 III. Statica III. Statica. Echilibrul mecanic al corpurilor. 1. Sistem de forțe concurente. Sistemul de forțe reprezintă totalitatea forțelor care acționează simultan asupra unui corp, Fig. 1. În Fig.
III. Statica III. Statica. Echilibrul mecanic al corpurilor. 1. Sistem de forțe concurente. Sistemul de forțe reprezintă totalitatea forțelor care acționează simultan asupra unui corp, Fig. 1. În Fig.
Subiecte Clasa a VII-a
 lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
Toate subiectele sunt obligatorii. Timpul de lucru efectiv este de 3 ore. Se acordă din oficiu 10 puncte. SUBIECTUL I.
 Modelul 4 Se acordă din oficiu puncte.. Fie numărul complex z = i. Calculaţi (z ) 25. 2. Dacă x şi x 2 sunt rădăcinile ecuaţiei x 2 9x+8 =, atunci să se calculeze x2 +x2 2 x x 2. 3. Rezolvaţi în mulţimea
Modelul 4 Se acordă din oficiu puncte.. Fie numărul complex z = i. Calculaţi (z ) 25. 2. Dacă x şi x 2 sunt rădăcinile ecuaţiei x 2 9x+8 =, atunci să se calculeze x2 +x2 2 x x 2. 3. Rezolvaţi în mulţimea
Curs 1 Şiruri de numere reale
 Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
Componente şi Circuite Electronice Pasive. Laborator 3. Divizorul de tensiune. Divizorul de curent
 Laborator 3 Divizorul de tensiune. Divizorul de curent Obiective: o Conexiuni serie şi paralel, o Legea lui Ohm, o Divizorul de tensiune, o Divizorul de curent, o Implementarea experimentală a divizorului
Laborator 3 Divizorul de tensiune. Divizorul de curent Obiective: o Conexiuni serie şi paralel, o Legea lui Ohm, o Divizorul de tensiune, o Divizorul de curent, o Implementarea experimentală a divizorului
CUPRINS 5. Reducerea sistemelor de forţe (continuare)... 1 Cuprins..1
... 1 Cuprins..1") CURS 5 REDUCEREA SISTEMELOR DE FORŢE (CONTINUARE) CUPRINS 5. Reducerea sistemelor de forţe (continuare)...... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 5.1. Teorema lui Varignon pentru sisteme
CURS 5 REDUCEREA SISTEMELOR DE FORŢE (CONTINUARE) CUPRINS 5. Reducerea sistemelor de forţe (continuare)...... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 5.1. Teorema lui Varignon pentru sisteme
COLEGIUL NATIONAL CONSTANTIN CARABELLA TARGOVISTE. CONCURSUL JUDETEAN DE MATEMATICA CEZAR IVANESCU Editia a VI-a 26 februarie 2005.
 SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
SEMINARUL 3. Cap. II Serii de numere reale. asociat seriei. (3n 5)(3n 2) + 1. (3n 2)(3n+1) (3n 2) (3n + 1) = a
(3n 2) + 1. (3n 2)(3n+1) (3n 2) (3n + 1) = a") Capitolul II: Serii de umere reale. Lect. dr. Lucia Maticiuc Facultatea de Hidrotehică, Geodezie şi Igieria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucia MATICIUC SEMINARUL 3. Cap. II Serii
Capitolul II: Serii de umere reale. Lect. dr. Lucia Maticiuc Facultatea de Hidrotehică, Geodezie şi Igieria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucia MATICIUC SEMINARUL 3. Cap. II Serii
1. (4p) Un mobil se deplasează pe o traiectorie curbilinie. Dependența de timp a mărimii vitezei mobilului pe traiectorie este v () t = 1.
 Un mobil se deplasează pe o traiectorie curbilinie. Dependența de timp a mărimii vitezei mobilului pe traiectorie este v () t = 1.") . (4p) Un mobil se deplasează pe o traiectorie curbilinie. Dependența de timp a mărimii vitezei mobilului pe traiectorie este v () t.5t (m/s). Să se calculeze: a) dependența de timp a spațiului străbătut
. (4p) Un mobil se deplasează pe o traiectorie curbilinie. Dependența de timp a mărimii vitezei mobilului pe traiectorie este v () t.5t (m/s). Să se calculeze: a) dependența de timp a spațiului străbătut
 4. CIRCUITE LOGICE ELEMENTRE 4.. CIRCUITE LOGICE CU COMPONENTE DISCRETE 4.. PORŢI LOGICE ELEMENTRE CU COMPONENTE PSIVE Componente electronice pasive sunt componente care nu au capacitatea de a amplifica
4. CIRCUITE LOGICE ELEMENTRE 4.. CIRCUITE LOGICE CU COMPONENTE DISCRETE 4.. PORŢI LOGICE ELEMENTRE CU COMPONENTE PSIVE Componente electronice pasive sunt componente care nu au capacitatea de a amplifica
2. STATICA FLUIDELOR. 2.A. Presa hidraulică. Legea lui Arhimede
 2. STATICA FLUIDELOR 2.A. Presa hidraulică. Legea lui Arhimede Aplicația 2.1 Să se determine ce masă M poate fi ridicată cu o presă hidraulică având raportul razelor pistoanelor r 1 /r 2 = 1/20, ştiind
2. STATICA FLUIDELOR 2.A. Presa hidraulică. Legea lui Arhimede Aplicația 2.1 Să se determine ce masă M poate fi ridicată cu o presă hidraulică având raportul razelor pistoanelor r 1 /r 2 = 1/20, ştiind
CONCURSUL DE MATEMATICĂ APLICATĂ ADOLF HAIMOVICI, 2017 ETAPA LOCALĂ, HUNEDOARA Clasa a IX-a profil științe ale naturii, tehnologic, servicii
 Clasa a IX-a 1 x 1 a) Demonstrați inegalitatea 1, x (0, 1) x x b) Demonstrați că, dacă a 1, a,, a n (0, 1) astfel încât a 1 +a + +a n = 1, atunci: a +a 3 + +a n a1 +a 3 + +a n a1 +a + +a n 1 + + + < 1
Clasa a IX-a 1 x 1 a) Demonstrați inegalitatea 1, x (0, 1) x x b) Demonstrați că, dacă a 1, a,, a n (0, 1) astfel încât a 1 +a + +a n = 1, atunci: a +a 3 + +a n a1 +a 3 + +a n a1 +a + +a n 1 + + + < 1
Curs 2 DIODE. CIRCUITE DR
 Curs 2 OE. CRCUTE R E CUPRN tructură. imbol Relația curent-tensiune Regimuri de funcționare Punct static de funcționare Parametrii diodei Modelul cu cădere de tensiune constantă Analiza circuitelor cu
Curs 2 OE. CRCUTE R E CUPRN tructură. imbol Relația curent-tensiune Regimuri de funcționare Punct static de funcționare Parametrii diodei Modelul cu cădere de tensiune constantă Analiza circuitelor cu
Problema a II - a (10 puncte) Diferite circuite electrice
 Diferite circuite electrice") Olimpiada de Fizică - Etapa pe judeţ 15 ianuarie 211 XI Problema a II - a (1 puncte) Diferite circuite electrice A. Un elev utilizează o sursă de tensiune (1), o cutie cu rezistenţe (2), un întrerupător
Olimpiada de Fizică - Etapa pe judeţ 15 ianuarie 211 XI Problema a II - a (1 puncte) Diferite circuite electrice A. Un elev utilizează o sursă de tensiune (1), o cutie cu rezistenţe (2), un întrerupător
Ecuatii trigonometrice
 Ecuatii trigonometrice Ecuatiile ce contin necunoscute sub semnul functiilor trigonometrice se numesc ecuatii trigonometrice. Cele mai simple ecuatii trigonometrice sunt ecuatiile de tipul sin x = a, cos
Ecuatii trigonometrice Ecuatiile ce contin necunoscute sub semnul functiilor trigonometrice se numesc ecuatii trigonometrice. Cele mai simple ecuatii trigonometrice sunt ecuatiile de tipul sin x = a, cos
Seminariile Capitolul IX. Integrale curbilinii
 Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 7 8 Capitolul IX. Integrale curbilinii. Să se calculee Im ) d, unde este segmentul
Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 7 8 Capitolul IX. Integrale curbilinii. Să se calculee Im ) d, unde este segmentul
Lucrul si energia mecanica
 Lucrul si energia mecanica 1 Lucrul si energia mecanica I. Lucrul mecanic este produsul dintre forta si deplasare: Daca forta este constanta, atunci dl = F dr. L 1 = F r 1 cos α, unde r 1 este modulul
Lucrul si energia mecanica 1 Lucrul si energia mecanica I. Lucrul mecanic este produsul dintre forta si deplasare: Daca forta este constanta, atunci dl = F dr. L 1 = F r 1 cos α, unde r 1 este modulul
Ecuatii exponentiale. Ecuatia ce contine variabila necunoscuta la exponentul puterii se numeste ecuatie exponentiala. a x = b, (1)
") Ecuatii exponentiale Ecuatia ce contine variabila necunoscuta la exponentul puterii se numeste ecuatie exponentiala. Cea mai simpla ecuatie exponentiala este de forma a x = b, () unde a >, a. Afirmatia.
Ecuatii exponentiale Ecuatia ce contine variabila necunoscuta la exponentul puterii se numeste ecuatie exponentiala. Cea mai simpla ecuatie exponentiala este de forma a x = b, () unde a >, a. Afirmatia.
Ovidiu Gabriel Avădănei, Florin Mihai Tufescu,
 vidiu Gabriel Avădănei, Florin Mihai Tufescu, Capitolul 6 Amplificatoare operaţionale 58. Să se calculeze coeficientul de amplificare în tensiune pentru amplficatorul inversor din fig.58, pentru care se
vidiu Gabriel Avădănei, Florin Mihai Tufescu, Capitolul 6 Amplificatoare operaţionale 58. Să se calculeze coeficientul de amplificare în tensiune pentru amplficatorul inversor din fig.58, pentru care se
Tranzistoare bipolare şi cu efect de câmp
 apitolul 3 apitolul 3 26. Pentru circuitul de polarizare din fig. 26 se cunosc: = 5, = 5, = 2KΩ, = 5KΩ, iar pentru tranzistor se cunosc următorii parametrii: β = 200, 0 = 0, μa, = 0,6. a) ă se determine
apitolul 3 apitolul 3 26. Pentru circuitul de polarizare din fig. 26 se cunosc: = 5, = 5, = 2KΩ, = 5KΩ, iar pentru tranzistor se cunosc următorii parametrii: β = 200, 0 = 0, μa, = 0,6. a) ă se determine
Dreapta in plan. = y y 0
 Dreapta in plan 1 Dreapta in plan i) Presupunem ca planul este inzestrat cu un reper ortonormat de dreapta (O, i, j). Fiecarui punct M al planului ii corespunde vectorul OM numit vector de pozitie al punctului
Dreapta in plan 1 Dreapta in plan i) Presupunem ca planul este inzestrat cu un reper ortonormat de dreapta (O, i, j). Fiecarui punct M al planului ii corespunde vectorul OM numit vector de pozitie al punctului
2. Sisteme de forţe concurente...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
1Ecuaţii diferenţiale
 1Ecuaţii diferenţiale 1.1 Introducere Definitia 1.1 Se numeşte ecuaţie diferenţială ordinarădeordin1: y 0 (x) =f (x, y (x)) (EDO) unde y este funcţia necunoscută, iar f este o funcţie de două variabile
1Ecuaţii diferenţiale 1.1 Introducere Definitia 1.1 Se numeşte ecuaţie diferenţială ordinarădeordin1: y 0 (x) =f (x, y (x)) (EDO) unde y este funcţia necunoscută, iar f este o funcţie de două variabile
Lectia VI Structura de spatiu an E 3. Dreapta si planul ca subspatii ane
 Subspatii ane Lectia VI Structura de spatiu an E 3. Dreapta si planul ca subspatii ane Oana Constantinescu Oana Constantinescu Lectia VI Subspatii ane Table of Contents 1 Structura de spatiu an E 3 2 Subspatii
Subspatii ane Lectia VI Structura de spatiu an E 3. Dreapta si planul ca subspatii ane Oana Constantinescu Oana Constantinescu Lectia VI Subspatii ane Table of Contents 1 Structura de spatiu an E 3 2 Subspatii
Lucrul mecanic şi energia mecanică.
 ucrul mecanic şi energia mecanică. Valerica Baban UMC //05 Valerica Baban UMC ucrul mecanic Presupunem că avem o forţă care pune în mişcare un cărucior şi îl deplasează pe o distanţă d. ucrul mecanic al
ucrul mecanic şi energia mecanică. Valerica Baban UMC //05 Valerica Baban UMC ucrul mecanic Presupunem că avem o forţă care pune în mişcare un cărucior şi îl deplasează pe o distanţă d. ucrul mecanic al
Fie I R un interval deschis, G R n, n 1, un domeniu şi f : I G R n. Forma generala a unei ecuaţii diferenţiale de ordinul întâi este: = f(x, y).
.") Ecuaţii diferenţiale Ecuaţii diferenţiale ordinare Ecuaţii cu derivate parţiale Ordinul unei ecuaţii Soluţia unei ecuaţii diferenţiale ordinare Fie I R un interval deschis, G R n, n 1, un domeniu şi f
Ecuaţii diferenţiale Ecuaţii diferenţiale ordinare Ecuaţii cu derivate parţiale Ordinul unei ecuaţii Soluţia unei ecuaţii diferenţiale ordinare Fie I R un interval deschis, G R n, n 1, un domeniu şi f
a) (3p) Sa se calculeze XY A. b) (4p) Sa se calculeze determinantul si rangul matricei A. c) (3p) Sa se calculeze A.
 (3p) Sa se calculeze XY A. b) (4p) Sa se calculeze determinantul si rangul matricei A. c) (3p) Sa se calculeze A.") Bac Variata Proil: mate-izica, iormatica, metrologie Subiectul I (3 p) Se cosidera matricele: X =, Y = ( ) si A= a) (3p) Sa se calculeze XY A b) (4p) Sa se calculeze determiatul si ragul matricei A c)
Bac Variata Proil: mate-izica, iormatica, metrologie Subiectul I (3 p) Se cosidera matricele: X =, Y = ( ) si A= a) (3p) Sa se calculeze XY A b) (4p) Sa se calculeze determiatul si ragul matricei A c)
Să se arate că n este număr par. Dan Nedeianu
 Primul test de selecție pentru juniori I. Să se determine numerele prime p, q, r cu proprietatea că 1 p + 1 q + 1 r 1. Fie ABCD un patrulater convex cu m( BCD) = 10, m( CBA) = 45, m( CBD) = 15 și m( CAB)
Primul test de selecție pentru juniori I. Să se determine numerele prime p, q, r cu proprietatea că 1 p + 1 q + 1 r 1. Fie ABCD un patrulater convex cu m( BCD) = 10, m( CBA) = 45, m( CBD) = 15 și m( CAB)
Integrale cu parametru
 1 Integrle proprii cu prmetru 2 3 Integrle proprii cu prmetru Definiţi 1.1 Dcă f : [, b ] E R, E R este o funcţie cu propriette că pentru orice y E, funcţi de vribilă x x f (x, y) este integrbilă pe intervlul
1 Integrle proprii cu prmetru 2 3 Integrle proprii cu prmetru Definiţi 1.1 Dcă f : [, b ] E R, E R este o funcţie cu propriette că pentru orice y E, funcţi de vribilă x x f (x, y) este integrbilă pe intervlul
Cursul Măsuri reale. D.Rusu, Teoria măsurii şi integrala Lebesgue 15
 MĂSURI RELE Cursul 13 15 Măsuri reale Fie (,, µ) un spaţiu cu măsură completă şi f : R o funcţie -măsurabilă. Cum am văzut în Teorema 11.29, dacă f are integrală pe, atunci funcţia de mulţime ν : R, ν()
MĂSURI RELE Cursul 13 15 Măsuri reale Fie (,, µ) un spaţiu cu măsură completă şi f : R o funcţie -măsurabilă. Cum am văzut în Teorema 11.29, dacă f are integrală pe, atunci funcţia de mulţime ν : R, ν()
15. Se dă bara O 1 AB, îndoită în unghi drept care se roteşte faţă de O 1 cu viteza unghiulară ω=const, axa se rotaţie fiind perpendiculară pe planul
 INEMTI 1. Se consideră mecanismul plan din figură, compus din manivelele 1 şi 2, respectiv biela legate intre ele prin articulaţiile cilindrice şi. Manivela 1 se roteşte cu viteza unghiulară constantă
INEMTI 1. Se consideră mecanismul plan din figură, compus din manivelele 1 şi 2, respectiv biela legate intre ele prin articulaţiile cilindrice şi. Manivela 1 se roteşte cu viteza unghiulară constantă
 10. STABILIZATOAE DE TENSIUNE 10.1 STABILIZATOAE DE TENSIUNE CU TANZISTOAE BIPOLAE Stabilizatorul de tensiune cu tranzistor compară în permanenţă valoare tensiunii de ieşire (stabilizate) cu tensiunea
10. STABILIZATOAE DE TENSIUNE 10.1 STABILIZATOAE DE TENSIUNE CU TANZISTOAE BIPOLAE Stabilizatorul de tensiune cu tranzistor compară în permanenţă valoare tensiunii de ieşire (stabilizate) cu tensiunea
CURS 9 MECANICA CONSTRUCŢIILOR
 CURS 9 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA NOŢIUNI DE BAZĂ ÎN CINEMATICA Cinematica studiază mişcările mecanice ale corpurilor, fără a lua în considerare masa acestora şi
CURS 9 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA NOŢIUNI DE BAZĂ ÎN CINEMATICA Cinematica studiază mişcările mecanice ale corpurilor, fără a lua în considerare masa acestora şi
T R A I A N ( ) Trigonometrie. \ kπ; k. este periodică (perioada principală T * =π ), impară, nemărginită.
 Trigonometrie. \ kπ; k. este periodică (perioada principală T * =π ), impară, nemărginită.") Trignmetrie Funcţia sinus sin : [, ] este peridică (periada principală T * = ), impară, mărginită. Funcţia arcsinus arcsin : [, ], este impară, mărginită, bijectivă. Funcţia csinus cs : [, ] este peridică
Trignmetrie Funcţia sinus sin : [, ] este peridică (periada principală T * = ), impară, mărginită. Funcţia arcsinus arcsin : [, ], este impară, mărginită, bijectivă. Funcţia csinus cs : [, ] este peridică
riptografie şi Securitate
 riptografie şi Securitate - Prelegerea 12 - Scheme de criptare CCA sigure Adela Georgescu, Ruxandra F. Olimid Facultatea de Matematică şi Informatică Universitatea din Bucureşti Cuprins 1. Schemă de criptare
riptografie şi Securitate - Prelegerea 12 - Scheme de criptare CCA sigure Adela Georgescu, Ruxandra F. Olimid Facultatea de Matematică şi Informatică Universitatea din Bucureşti Cuprins 1. Schemă de criptare
CURS VII-IX. Capitolul IV: Funcţii derivabile. Derivate şi diferenţiale. 1 Derivata unei funcţii. Interpretarea geometrică.
 Lect dr Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr Lucian MATICIUC CURS VII-IX Capitolul IV: Funcţii derivabile Derivate şi diferenţiale 1
Lect dr Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr Lucian MATICIUC CURS VII-IX Capitolul IV: Funcţii derivabile Derivate şi diferenţiale 1
ENUNŢURI ŞI REZOLVĂRI 2013
 ENUNŢURI ŞI REZOLVĂRI 8. Un conductor de cupru ( ρ =,7 Ω m) are lungimea de m şi aria secţiunii transversale de mm. Rezistenţa conductorului este: a), Ω; b), Ω; c), 5Ω; d) 5, Ω; e) 7, 5 Ω; f) 4, 7 Ω. l
ENUNŢURI ŞI REZOLVĂRI 8. Un conductor de cupru ( ρ =,7 Ω m) are lungimea de m şi aria secţiunii transversale de mm. Rezistenţa conductorului este: a), Ω; b), Ω; c), 5Ω; d) 5, Ω; e) 7, 5 Ω; f) 4, 7 Ω. l
( ) ( ) ( ) Funcţii diferenţiabile. cos x cos x 2. Fie D R o mulţime deschisă f : D R şi x0 D. Funcţia f este
 ( ) ( ) Funcţii diferenţiabile. cos x cos x 2. Fie D R o mulţime deschisă f : D R şi x0 D. Funcţia f este") o ( ) o ( ) sin π ( sec ) = = ; R 2 + kπ k Z cos cos 2 cos ( cosec ) = = ; R 2 { kπ k Z} sin sin ( arcsec ) = ; (, ) (, ) 2 ( arcosec ) = ; (, ) (, ) 2 Funcţii dierenţiabile. Fie D R o mulţime deschisă
o ( ) o ( ) sin π ( sec ) = = ; R 2 + kπ k Z cos cos 2 cos ( cosec ) = = ; R 2 { kπ k Z} sin sin ( arcsec ) = ; (, ) (, ) 2 ( arcosec ) = ; (, ) (, ) 2 Funcţii dierenţiabile. Fie D R o mulţime deschisă
2. CALCULE TOPOGRAFICE
 . CALCULE TOPOGRAFICE.. CALCULAREA DISTANŢEI DINTRE DOUĂ PUNCTE... CALCULAREA DISTANŢEI DINTRE DOUĂ PUNCTE DIN COORDONATE RECTANGULARE Distanţa în linie dreaptă dintre două puncte se poate calcula dacă
. CALCULE TOPOGRAFICE.. CALCULAREA DISTANŢEI DINTRE DOUĂ PUNCTE... CALCULAREA DISTANŢEI DINTRE DOUĂ PUNCTE DIN COORDONATE RECTANGULARE Distanţa în linie dreaptă dintre două puncte se poate calcula dacă
Sistem hidraulic de producerea energiei electrice. Turbina hidraulica de 200 W, de tip Power Pal Schema de principiu a turbinei Power Pal
 Producerea energiei mecanice Pentru producerea energiei mecanice, pot fi utilizate energia hidraulica, energia eoliană, sau energia chimică a cobustibililor în motoare cu ardere internă sau eternă (turbine
Producerea energiei mecanice Pentru producerea energiei mecanice, pot fi utilizate energia hidraulica, energia eoliană, sau energia chimică a cobustibililor în motoare cu ardere internă sau eternă (turbine
x 1 = x x 2 + t, x 2 = 2 x 1 + x 1 + e t, x 1 (0) = 1, x 2 (0) = 1; (c) Să se studieze stabilitatea soluţiei nule pentru sistemul
 = 1, x 2 (0) = 1; (c) Să se studieze stabilitatea soluţiei nule pentru sistemul") Seminar mecanică 1. Să se găsească soluţiile următoarelor probleme Cauchy şi să se indice intervalul maxim de existenţă a soluţiei: (a) x = 1 x, t 0, x(1) = 0; t (b) (1 t x) x = t + x, t R, x(0) = 0; (c)
Seminar mecanică 1. Să se găsească soluţiile următoarelor probleme Cauchy şi să se indice intervalul maxim de existenţă a soluţiei: (a) x = 1 x, t 0, x(1) = 0; t (b) (1 t x) x = t + x, t R, x(0) = 0; (c)
Seminar 5 Analiza stabilității sistemelor liniare
 Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
Lectia VII Dreapta si planul
 Planul. Ecuatii, pozitii relative Dreapta. Ecuatii, pozitii relative Aplicatii Lectia VII Dreapta si planul Oana Constantinescu Oana Constantinescu Lectia VII Planul. Ecuatii, pozitii relative Dreapta.
Planul. Ecuatii, pozitii relative Dreapta. Ecuatii, pozitii relative Aplicatii Lectia VII Dreapta si planul Oana Constantinescu Oana Constantinescu Lectia VII Planul. Ecuatii, pozitii relative Dreapta.
Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25
 Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25 LAGĂRELE CU ALUNECARE!" 25.1.Caracteristici.Părţi componente.materiale.!" 25.2.Funcţionarea lagărelor cu alunecare.! 25.1.Caracteristici.Părţi componente.materiale.
Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25 LAGĂRELE CU ALUNECARE!" 25.1.Caracteristici.Părţi componente.materiale.!" 25.2.Funcţionarea lagărelor cu alunecare.! 25.1.Caracteristici.Părţi componente.materiale.
CURS METODA OPERAŢIONALĂ DE INTEGRARE A ECUAŢIILOR CU DERIVATE PARŢIALE DE ORDIN II
 CURS METODA OPERAŢIONALĂ DE INTEGRARE A ECUAŢIILOR CU DERIVATE PARŢIALE DE ORDIN II. Utiizarea transformării Lapace Să considerăm probema hiperboică de forma a x + b x + c + d = f(t, x), (t, x) [, + )
CURS METODA OPERAŢIONALĂ DE INTEGRARE A ECUAŢIILOR CU DERIVATE PARŢIALE DE ORDIN II. Utiizarea transformării Lapace Să considerăm probema hiperboică de forma a x + b x + c + d = f(t, x), (t, x) [, + )
Câmpul electric. Suprafețe echipotențiale
 Câmpul electric. Suprafețe echipotențiale Obiective Scopul aceste lucrări de laborator este determinarea experimentală a curbelor de echipotențial și reprezentarea linilor de câmp electric în cazul a două
Câmpul electric. Suprafețe echipotențiale Obiective Scopul aceste lucrări de laborator este determinarea experimentală a curbelor de echipotențial și reprezentarea linilor de câmp electric în cazul a două
5.4. MULTIPLEXOARE A 0 A 1 A 2
 5.4. MULTIPLEXOARE Multiplexoarele (MUX) sunt circuite logice combinaţionale cu m intrări şi o singură ieşire, care permit transferul datelor de la una din intrări spre ieşirea unică. Selecţia intrării
5.4. MULTIPLEXOARE Multiplexoarele (MUX) sunt circuite logice combinaţionale cu m intrări şi o singură ieşire, care permit transferul datelor de la una din intrări spre ieşirea unică. Selecţia intrării
Circuite electrice in regim permanent
 Ovidiu Gabriel Avădănei, Florin Mihai Tufescu, Electronică - Probleme apitolul. ircuite electrice in regim permanent. În fig. este prezentată diagrama fazorială a unui circuit serie. a) e fenomen este
Ovidiu Gabriel Avădănei, Florin Mihai Tufescu, Electronică - Probleme apitolul. ircuite electrice in regim permanent. În fig. este prezentată diagrama fazorială a unui circuit serie. a) e fenomen este
BARAJ DE JUNIORI,,Euclid Cipru, 28 mai 2012 (barajul 3)
") BARAJ DE JUNIORI,,Euclid Cipru, 8 mi 0 (brjul ) Problem Arătţi că dcă, b, c sunt numere rele cre verifică + b + c =, tunci re loc ineglitte xy + yz + zx Problem Fie şi b numere nturle nenule Dcă numărul
BARAJ DE JUNIORI,,Euclid Cipru, 8 mi 0 (brjul ) Problem Arătţi că dcă, b, c sunt numere rele cre verifică + b + c =, tunci re loc ineglitte xy + yz + zx Problem Fie şi b numere nturle nenule Dcă numărul
CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1
... 1 Cuprins..1") CURS 3 SISTEME DE FORŢE (continuare) CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 3.1. Momentul forţei în raport cu un punct...2 Test de autoevaluare
CURS 3 SISTEME DE FORŢE (continuare) CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 3.1. Momentul forţei în raport cu un punct...2 Test de autoevaluare
u = 0 u = ϕ t + Π) = 0 t + Π = C(t) C(t) C(t) = K K C(t) ϕ = ϕ 1 + C(t) dt Kt 2 ϕ = 0
 = 0 t + Π = C(t) C(t) C(t) = K K C(t) ϕ = ϕ 1 + C(t) dt Kt 2 ϕ = 0") u = (u, v, w) ω ω = u = 0 ϕ u u = ϕ u = 0 ϕ 2 ϕ = 0 u t = u ω 1 ρ Π + ν 2 u Π = p + (1/2)ρ u 2 + ρgz ω = 0 ( ϕ t + Π) = 0 ϕ t + Π = C(t) C(t) C(t) = K K C(t) ϕ = ϕ 1 + C(t) dt Kt C(t) ϕ ϕ 1 ϕ = ϕ 1 p ρ
u = (u, v, w) ω ω = u = 0 ϕ u u = ϕ u = 0 ϕ 2 ϕ = 0 u t = u ω 1 ρ Π + ν 2 u Π = p + (1/2)ρ u 2 + ρgz ω = 0 ( ϕ t + Π) = 0 ϕ t + Π = C(t) C(t) C(t) = K K C(t) ϕ = ϕ 1 + C(t) dt Kt C(t) ϕ ϕ 1 ϕ = ϕ 1 p ρ
DETERMINAREA COEFICIENTULUI DE FRECARE LA ROSTOGOLIRE
 DETERMINAREA COEFICIENTULUI DE FRECARE LA ROSTOGOLIRE Scopul lucrării În lucrarea de faţă se determină valoarea coeficientului de frecare la rostogolire, utlizând un dispozitiv ce permite găsirea expresiei
DETERMINAREA COEFICIENTULUI DE FRECARE LA ROSTOGOLIRE Scopul lucrării În lucrarea de faţă se determină valoarea coeficientului de frecare la rostogolire, utlizând un dispozitiv ce permite găsirea expresiei