ΣΧΕΔΙΑΣΜΟΣ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΜΗΧΑΝΙΣΜΟΥ ΑΝΥΨΩΣΗΣ ΦΟΡΤΙΩΝ ΜΕ ΣΥΣΤΗΜΑ ΥΠΟΒΟΗΘΗΣΗΣ. Δημέας Φώτιος
|
|
|
- Μυρίνα Κοτζιάς
- 8 χρόνια πριν
- Προβολές:
Transcript
1 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΚΑΙ ΑΕΡΟΝΑΥΠΗΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΜΗΧΑΝΟΥΡΓΙΚΗΣ ΤΕΧΝΟΛΟΓΙΑΣ ΣΧΕΔΙΑΣΜΟΣ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΜΗΧΑΝΙΣΜΟΥ ΑΝΥΨΩΣΗΣ ΦΟΡΤΙΩΝ ΜΕ ΣΥΣΤΗΜΑ ΥΠΟΒΟΗΘΗΣΗΣ Διπλωματική εργασία Α.Μ Επιβλέπων καθηγητής: Ασπράγκαθος Ν. ΠΑΤΡΑ 2012

2 Πρόλογος Η παρούσα εργασία αποτελεί τη διατριβή μου για την ολοκλήρωση των σπουδών και την απόκτηση του διπλώματος στο τμήμα «Μηχανολόγων & Αεροναυπηγών Μηχανικών» του Πανεπιστημίου Πατρών. Θα ήθελα να ευχαριστήσω πρωτίστως τον επιβλέποντα καθηγητή μου, κύριο Νικόλαο Ασπράγκαθο, που με βοήθησε καθ όλη τη διάρκεια της ενασχόλησής μου με τη διπλωματική εργασία, για τις πολλές προτάσεις που μου υπέδειξε και κυρίως για την υποστήριξή του. Επίσης, θα ήθελα να ευχαριστήσω όλους τους συνάδελφους της ερευνητικής ομάδας του εργαστηρίου για την πολύτιμη βοήθειά τους. Φυσικά, πρέπει να εκφράσω τις πιο θερμές ευχαριστίες στην οικογένειά μου που με στήριξε και μου συμπαραστάθηκε ανελλιπώς σε όλη τη διάρκεια των σπουδών μου. Πάτρα, Φεβρουάριος 2012 Πανεπιστήμιο Πατρών 2

3 Περίληψη Οι σύγχρονοι ρυθμοί ζωής και η ανάπτυξη της τεχνολογίας έχουν δημιουργήσει την ανάγκη της τεχνητής αύξησης της ανθρώπινης μυϊκής δύναμης για διεκπεραίωση διαφόρων διεργασιών. Στον τομέα της βιομηχανίας έχουν δοθεί λύσεις με διαφόρων ειδών μηχανές διακίνησης υλικών που είναι ευρέως διαδεδομένες και επιτρέπουν στο άνθρωπο το χειρισμό πολύ βαρέων αντικειμένων με ελάχιστη προσπάθεια. Κύριο μειονέκτημα των συστημάτων αυτών όμως είναι ότι περιορίζουν την ευελιξία στο χειρισμό τους. Η συγκεκριμένη εργασία στοχεύει στη σχεδίαση ενός ανυψωτικού μηχανισμού που θα άρει τους περιορισμούς των συμβατικών συστημάτων και θα επιτρέπει στον άνθρωπο τον άμεσο χειρισμό ενός αντικειμένου χωρίς χειριστήριο, μειώνοντας το βάρος που αισθάνεται και διευκολύνοντας το χειρισμό βαρέων φορτίων. Ένα τέτοιο σύστημα συνδυάζει μηχανολογικά, ηλεκτρολογικά και στοιχεία αυτομάτου ελέγχου. Στο πρώτο μέρος της εργασίας περιγράφεται η δομή του συστήματος και σχεδιάζεται ένας γερανός με αρθρωτό βραχίονα δυο βαθμών ελευθερίας που θα βρίσκει εφαρμογή σε βιομηχανικό περιβάλλον. Η μορφή του γερανού επιλέγεται να είναι τέτοια ώστε η κίνηση στο οριζόντιο επίπεδο να μην απαιτεί εξωτερική παροχή ισχύος και να μην επηρεάζει την κίνηση στην κατακόρυφη διεύθυνση. Στη συνέχεια σχεδιάζεται το σύστημα ελέγχου στο οποίο δίνεται και η μεγαλύτερη βαρύτητα. Αρχικά γίνεται μαθηματική μοντελοποίηση του συστήματος, επιλέγεται ο νόμος ελέγχου και αφού σχεδιαστεί αναλυτικά ο ελεγκτής ακολουθεί προσομοίωση σε περιβάλλον Matlab. Από τα αποτελέσματα της προσομοίωσης προκύπτουν χρήσιμα συμπεράσματα για την απόδοση της λειτουργίας υποβοήθησης και τα οποία χρησιμοποιούνται για τη βελτιστοποίηση του ελεγκτή. Για να κριθεί η εγκυρότητα των θεωρητικών μετρήσεων, κατασκευάζεται πειραματική διάταξη μικρής κλίμακας και γίνεται ψηφιακή υλοποίηση του ελεγκτή. Στα πλαίσια της παρούσας εργασίας δεν κατασκευάζεται πλήρως ο γερανός, παρά μόνο το σύστημα ανύψωσης. Ο διαχωρισμός των λειτουργιών του γερανού επιτρέπουν τα χαρακτηριστικά του υπό κλίμακας μοντέλου να συμβαδίζουν με του αρχικού. Οι μετρήσεις που λαμβάνονται από την πειραματική διάταξη συγκρίνονται με τις αντίστοιχες θεωρητικές και γίνεται η αξιολόγηση της αποτελεσματικότητας του συστήματος. Πανεπιστήμιο Πατρών 3

4 Abstract The modern ways of life and the development of technology have created a need for an artificial increase of human muscle strength for handling various processes. In industry, there has been a variety of solutions with material handling machines that are widely used and allow a person to handle very heavy loads with minimal effort. Nevertheless, the main disadvantage of these systems is that they limit the flexibility of the manipulation. This work aims to designing a lift mechanism which withdraws the limitation of conventional systems and allows a person to handle an object with direct manual manipulation, reducing the perceived weight and facilitating the operation of a heavy load. Such a system combines mechanical, electrical and automatic control components. In the first part of the paper, the system structure is described and is designed a two degrees of freedom articulated boom crane which can be applied in industrial environment. The form of the crane is chosen such that the movement in the horizontal plane does not require an external power supply and does not affect the motion in the vertical direction. Then, the control system is designed which is given great attention. At first, the mathematical modeling of the system is created, the control law is selected and after the detailed design of the controller, follows the simulation in Matlab environment. From the simulation results, valuable conclusions about the efficiency of the operation are obtained which are used to optimize the controller. In order to proceed to the validity of the theoretical measurements, a small-scale experimental setup is constructed and the derived digital controller is implemented. In the context of this work is not constructed the full scale crane system, but only the lifting device. The separation of the crane functions allows the characteristics of the scaled model to be consistent with the original. The experimental measurements which are taken from the setup are compared with the corresponding theoretical and eventually the effectiveness of the system is evaluated. Πανεπιστήμιο Πατρών 4

5 Περιεχόμενα Κεφάλαιο 1. Εισαγωγή Αντικείμενο εργασίας Ανασκόπηση βιβλιογραφίας Στόχοι εργασίας Κεφάλαιο 2. Σχεδιασμός βραχίονα Εισαγωγή Αρχικά χαρακτηριστικά σχεδιασμού Προδιαγραφές Συστήματα ασφαλείας Θεμελιώδης σχεδιασμός Λειτουργική ανάλυση Θεμελιώδης σχεδιασμός συστημάτων ασφαλείας Έλεγχος εφικτότητας - αξιολόγηση Λεπτομερής σχεδιασμός Αναλυτικός σχεδιασμός βραχίονα Αναλυτικός σχεδιασμός συστήματος ανύψωσης Αναλυτικός σχεδιασμός συστημάτων ασφαλείας Αξιολόγηση σχεδιασμού βραχίονα Κεφάλαιο 3. Σχεδιασμός συστήματος ελέγχου Εισαγωγή Προσδιορισμός στοιχείων συστήματος ελέγχου Μοντελοποίηση συστήματος Μοντελοποίηση δυναμικών χαρακτηριστικών συστήματος Σχεδίαση ελεγκτή Απλός αναλογικός ελεγκτής Σύνθετος αναλογικός ελεγκτής Προσομοίωση μοντέλου Κεφάλαιο 4. Εργαστηριακό σκέλος Εισαγωγή Περιγραφή πειραματικής διάταξης Υλικά στοιχεία Πανεπιστήμιο Πατρών 5

6 4.2.2 Λογισμικό Υλοποίηση ελεγκτή Διαδικασία εκτέλεσης πειραμάτων Αποτελέσματα πειραμάτων Μέτρηση ελεγκτή σταθερού στατικού κέρδους Μέτρηση ελεγκτή με προγραμματιζόμενο στατικό κέρδος Μέτρηση απόδοσης συστήματος ασφαλείας Κεφάλαιο 5. Συμπεράσματα Προοπτικές Βιβλιογραφία Παράρτημα A Αναπτυχθέντα προγράμματα Παράρτημα B Τεχνικά χαρακτηριστικά στοιχείων πειραματικής διάταξης Παράρτημα C Συμπληρωματικές οδηγίες πειραματικής διάταξης Παράρτημα D Κατασκευαστικά σχέδια βραχίονα Πανεπιστήμιο Πατρών 6

7 Κεφάλαιο 1. Εισαγωγή 1.1 Αντικείμενο εργασίας Στη βιομηχανία σήμερα το υψηλό επίπεδο αυτοματοποίησης των διεργασιών έχει απαλλάξει το ανθρώπινο δυναμικό από βαριές εργασίες. Μηχανές ανύψωσης και μεταφοράς φορτίων είναι εγκατεστημένες σχεδόν σε κάθε γραμμή παραγωγής έχοντας τον κύριο ρόλο στην εκτέλεση διεργασιών. Παρόλα αυτά, σε γραμμές συναρμολόγησης η ευελιξία που απαιτείται στο χειρισμό ενός αντικειμένου δεν μπορεί να επιτευχθεί από την εγκατεστημένη τεχνολογία παρά μόνο από τον άνθρωπο. Έτσι εμφανίζεται ακόμα το φαινόμενο μεταφοράς βαρέων αντικειμένων από τους εργαζόμενους, πράγμα που συντελεί σε υπερβολική κούραση και μυϊκούς πόνους. Θα ήταν ιδιαίτερα επιθυμητό ένα σύστημα που θα βοηθούσε στην ανύψωση και μεταφορά φορτίων φέροντας το μεγαλύτερο μέρος του φορτίου και μειώνοντας τον φόρτο του χειριστή. Επίσης, για να κριθεί αυτό το σύστημα αποτελεσματικό θα πρέπει να μην περιορίζει την ευελιξία και να δρα σαν φυσική προέκταση των άκρων του χειριστή. Ζητείται λοιπόν να σχεδιαστεί ένα ολοκληρωμένο σύστημα ανύψωσης και μεταφοράς φορτίων το οποίο θα μπορεί να εφαρμοστεί στη βιομηχανία σε περιπτώσεις που απαιτείται ιδιαίτερη ακρίβεια και ευελιξία. Θα δοθεί ιδιαίτερη προσοχή στο σχεδιασμό του νόμου ελέγχου και θα κατασκευαστεί πειραματική διάταξη μικρής κλίμακας για τη μέτρηση της απόδοσης του συστήματος. Η κατασκευή του πλήρους συστήματος ανύψωσης και μεταφοράς είναι εκτός του πλαισίου της παρούσας εργασίας. 1.2 Ανασκόπηση βιβλιογραφίας Η πρώτη ερευνητική δραστηριότητα στην ιδέα της τεχνητής αύξησης της ανθρώπινης δύναμης ξεκίνησε στις αρχές του 1960 από το υπουργείο άμυνας των Ηνωμένων Πολιτειών Αμερικής για την ανάπτυξη ενός τεχνητού εξωσκελετού που φερόμενος από τον στρατιώτη θα προσαύξανε τις ικανότητες του σε ανύψωση και μεταφορά φορτίων. Αυτό και παρόμοια συστήματα που δημιουργήθηκαν παρουσίαζαν αρκετά προβλήματα λόγω της πολυπλοκότητας της ανθρώπινης κίνησης. Μια 25-ετία αργότερα οι Kazerooni et al. [1] βελτίωσαν τον αρχικό εξωσκελετό εισάγοντας καινοτόμα στοιχεία και τον έφεραν σε επίπεδο χρήσιμο για τη βιομηχανία και το στρατό (εικόνα 1.1). Εικόνα 1.1 Πρωτότυπο εξωσκελετού Οι Lee et al. [2] ανέπτυξαν ένα κινητό σύστημα υποβοήθησης που αποτελείται από ένα ρομπότ έξι βαθμών ελευθερίας και μια κινητή βάση που επέτρεπε τη συνεργασία ρομπότ ανθρώπου για μεταφορά βαρέων αντικειμένων (εικόνα 1.2). Στο άκρο του βραχίονα (εικόνα 1.3) υπάρχει ένας μοχλός με αισθητήρες δύναμης και ροπής. Ο άνθρωπος ασκεί μια δύναμη στο χειριστήριο, ανάλογη της κίνησης που Πανεπιστήμιο Πατρών 7


8 επιθυμεί, και ο βραχίονας ακολουθεί την κίνηση αυτή μέσω ελέγχου σύνθετης μηχανικής αντίστασης. Με αυτό τον τρόπο αποτρέπεται ο κίνδυνος ανατροπής του ρομπότ σε περιπτώσεις πλήρους έκτασης του βραχίονα. Παρόμοια ήταν η εργασία και των Hayashibara et al. [3] που χρησιμοποίησαν ένα κινητό ρομπότ για μεταφορά ενός μεγάλου σε μήκος αντικειμένου σε συνεργασία με έναν άνθρωπο κάνοντας έλεγχο θέσης και αντισταθμίζοντας μέρος του φορτίου. Εικόνα 1.2. Κινητό ρομπότ Εικόνα 1.3. Κινητό ρομπότ Οι Miyoshi et al. [4] [5] έχουν προσαρμόσει συστήματα υποβοήθησης σε μια γερανογέφυρα με ηλεκτροκίνητο βαρούλκο δίνοντας έμφαση στην κατακόρυφη κίνηση (εικόνα 1.4). Το φορτίο αναρτάται από συρματόσχοινο στο οποίο παρεμβάλλεται ένας αισθητήρας δύναμης. Ο χρήστης ανάλογα με τη δύναμη που ασκεί στο ίδιο το φορτίο καθορίζει την ταχύτητα και τη διεύθυνση με την οποία αυτό θα κινηθεί. Λόγω της εύκαμπτης κατασκευής έχει χρησιμοποιηθεί ένα εύρωστο σύστημα ελέγχου. Το πλεονέκτημα της συγκεκριμένης μεθόδου είναι η ευελιξία που δίνεται στον χρήστη καθώς αυτός μπορεί να τοποθετήσει και τα δυο χέρια του στο αντικείμενο που μεταφέρει. Χρήση ενός αρθρωτού γερανού έχουν κάνει και οι Doi et al. [6] για την εφαρμογή υποβοήθησης με τη διαφορά ότι το κινητήριο σύστημα είναι πνευματικό (εικόνα 1.5). Ο χρήστης χειρίζεται απευθείας το φορτίο και το σύστημα υπολογίζει τη δύναμη που ασκείται μετρώντας την πίεση στο έμβολο. Ανάλογα με τη δύναμη του χρήστη μια αναλογική βαλβίδα οδηγεί το έμβολο ανυψώνοντας ή χαμηλώνοντας το αντικείμενο. Ενδιαφέρον εδώ παρουσιάζει η μαθηματική μοντελοποίηση του ανθρώπινου παράγοντα με νευρωνικά δίκτυα. Πανεπιστήμιο Πατρών 8
![[3] που χρησιμοποίησαν ένα κινητό ρομπότ για μεταφορά ενός μεγάλου σε μήκος αντικειμένου σε συνεργασία με έναν άνθρωπο κάνοντας έλεγχο θέσης και αντισταθμίζοντας μέρος του φορτίου. Εικόνα 1.2.](/docs-images/40/7664198/images/page_8.jpg "Κινητό ρομπότ Εικόνα 1.3. Κινητό ρομπότ Οι Miyoshi et al.")
.")
9 Εικόνα 1.4. Ηλεκτροκίνητη γερανογέφυρα Εικόνα 1.5. Πνευματικός βραχίονας Οι Osamura et al. [7] έχουν επιτύχει έλεγχο υποβοήθησης για το ανοιγοκλείσιμο συρόμενης πόρτας ενός οχήματος ώστε να μειωθεί η δύναμη που απαιτείται για τη λειτουργία (εικόνα 1.6). Ένας αισθητήρας δύναμης, τοποθετημένος στο χερούλι της πόρτας, αναγνωρίζει τη δύναμη που ασκείται από το χρήστη και τη δίνει ως είσοδο στο σύστημα ελέγχου. Ο ελεγκτής έχει ενσωματωμένο ένα μοντέλο ιδανικής πόρτας από το οποίο προκύπτει η ταχύτητα αναφοράς της πόρτας. Ως ανάδραση στο σύστημα δίνεται η πραγματική ταχύτητα της πόρτας και ένας απλός αναλογικός ελεγκτής αναλαμβάνει την οδήγηση του κινητήρα. Εικόνα 1.6. Πειραματική διάταξη συρόμενης πόρτας με υποβοήθηση Από τους Rahman et al. [8] [9] έχει γίνει έρευνα ως προς τις ψυχοσωματικές σχέσεις μεταξύ του πραγματικού βάρους του φορτίου και του βάρους που αντιλαμβάνεται ο χρήστης σε τέτοια συστήματα με υποβοήθηση. Από αυτές τις εργασίες έχουν βγει χρήσιμα συμπεράσματα για τον τρόπο που πρέπει να σχεδιάζονται τα συστήματα ελέγχου και ασφαλείας για να είναι όσο το δυνατόν πιο φιλικά προς τον άνθρωπο. Για την εκτέλεση των πειραμάτων χρησιμοποιείται η πειραματική διάταξη στην εικόνα 1.7, η οποία αποτελείται από έναν κοχλία συνδεδεμένο με σερβοκινητήρα για την εκτέλεση της κίνησης, έναν αισθητήρα δύναμης καθώς και από έναν ηλεκτρονικό υπολογιστή για τον έλεγχο. Πανεπιστήμιο Πατρών 9

10 Εικόνα 1.7. Πειραματική διάταξη κατακόρυφου συστήματος υποβοήθησης Τέλος, εργασίες των Colgate et al. [10] καθώς και των Haegele et al. [11], μιλώντας για «Ευφυείς Συσκευές Υποβοήθησης» (Intelligent Assisted Devices IAD) και για Robot Assistants, κάνουν μια ανασκόπηση παρόμοιων συστημάτων που έχουν εφαρμοστεί στη βιομηχανία, των προβλημάτων τους και των δυνατοτήτων βελτίωσής τους. Στις εικόνες 1.8 και 1.9 απεικονίζονται οι δυο βασικότερες ευφυείς συσκευές υποβοήθησης ενώ στις εικόνες 1.10 και 1.11 τα αντίστοιχα παραδείγματα εφαρμογής τους. Εικόνα 1.8. IAD ενός βαθμού ελευθερίας Εικόνα 1.9. IAD τριών βαθμών ελευθερίας Πανεπιστήμιο Πατρών 10

11 Εικόνα Παράδειγμα εφαρμογής IAD ενός βαθμού ελευθερίας Εικόνα Παράδειγμα εφαρμογής IAD τριών βαθμών ελευθερίας Στον πίνακα 1.1 γίνεται ένα συγκριτικό των νόμων ελέγχου που χρησιμοποιήθηκαν στις παραπάνω εργασίες με αναφορά στο είδος του ελεγκτή, στις εισόδους/εξόδους που χρησιμοποιεί καθώς και τα χαρακτηριστικά απόδοσης. Πανεπιστήμιο Πατρών 11

12 Περιγραφή εφαρμογής Φορητός εξωσκελετός 6 βαθμών ελευθερίας (degrees of freedom DOF) [1] 7-DOF κινητό αρθρωτό ρομπότ για μεταφορά φορτίου [2] Περιγραφή controller Αναλογικός ελεγκτής Impedance control μεταξύ δύναμης που ασκεί ο άνθρωπος και της ταχύτητας του άκρου Είσοδοι Έξοδοι Αισθητήρες Δύναμη Ταχύτητα χειριστή, θέση περιστροφής αρθρώσεων αρθρώσεων εξωσκελετού εξωσκελετού Βάρος φορτίου, Δύναμη χειριστή Ταχύτητα άκρου εργασίας Άνω των δύο αισθητήρων δύναμης / ροπής Δύο αισθητήρες δύναμης / ροπής Χαρακτηριστικά απόδοσης Ακολουθεί τη φυσική κίνηση του ανθρώπου φέροντας το μεγαλύτερο μέρος του φορτίου. Ο χειριστής προκαθορίζει το ποσοστό του φορτίου που θα φέρει το ρομπότ. Μικρή ταχύτητα λόγω κινδύνου ανατροπής του ρομπότ. 7-DOF κινητό αρθρωτό ρομπότ για μεταφορά επιμήκους αντικειμένου [3] Impedance control μεταξύ προσανατολισμού του φορτίου και της ταχύτητας του άκρου Βάρος / θέση φορτίου Ταχύτητα άκρου εργασίας, θέση άκρου εργασίας Αισθητήρας 6- αξόνων δύναμης / ροπής, κάμερα Υπολογίζεται έμμεσα η δύναμη του χειριστή. Το επίμηκες αντικείμενο διατηρείται οριζόντιο ακολουθώντας την κίνηση του χειριστή. Γερανογέφυρα, βαρούλκο [4] Γερανός με πνευματικό έμβολο [6] Συρόμενη πόρτα [7] Robust control Αναλογικός ελεγκτής Αναλογικός ελεγκτής Σύνθετη δύναμη από τον αισθητήρα Δύναμη χειριστή Δύναμη χειριστή, ταχύτητα αντικειμένου Ταχύτητα φορτίου Ταχύτητα φορτίου Ταχύτητα κινητήρα Πίνακας 1.1 Συγκριτικό ελεγκτών Αισθητήρας δύναμης Αισθητήρας πίεσης Αισθητήρας δύναμης, παλμογεννήτρια Ο χειριστής μεταφέρει το ίδιο το φορτίο και όχι τον αισθητήρα. Η δύναμη που ασκεί υπολογίζεται έμμεσα. Υψίσυχνες ταλαντώσεις λόγω εύκαμπτης κατασκευής Ο χειριστής μεταφέρει το ίδιο το φορτίο και όχι τον αισθητήρα. Η δύναμη που ασκεί υπολογίζεται έμμεσα. Αργή απόκριση. Ο χειριστής ελέγχει τον ίδιο τον αισθητήρα. Αυτόματος έλεγχος ταχύτητας μέσω ανάδρασης. Πανεπιστήμιο Πατρών 12

13 Στην πλειοψηφία των συστημάτων που αναφέρθηκαν στην ανασκόπηση επιτυγχάνονται οι στόχοι της εκάστοτε έρευνας, που είναι η υποβοήθηση στην ανύψωση και μεταφορά φορτίων. Η βασική υλοποίηση είναι η μέτρηση της δύναμης που ασκεί ο χειριστής μέσω ενός η περισσότερων αισθητήρων και η κατάλληλη οδήγηση του κινητήριου συστήματος από τον ελεγκτή. Στα περισσότερα συστήματα γίνεται άμεσα χειρισμός του αισθητήρα δύναμης. Με αυτό τον τρόπο απαιτούνται χειριστήρια και μειώνεται η ευελιξία του χειρισμού. Γενικά οι ελεγκτές, ανεξάρτητα από τον έλεγχο που εκτελούν (θέσης, δύναμης, ταχύτητας), παρουσιάζουν ομοιότητα μεταξύ τους. Παρά τις εφαρμογές που μπορούν να έχουν τέτοια συστήματα στους τομείς της βιομηχανία, της υγείας και λοιπών, το γεγονός ότι δεν έχουν υιοθετηθεί ακόμα ευρέως οφείλεται στο ιδιαίτερα υψηλό τους κόστος. Κύριοι λόγοι του υψηλού κόστους είναι η πολυπλοκότητα των λύσεων που απαιτεί ακριβό εξοπλισμό (κινητήρια συστήματα, αισθητήρες, επεξεργαστική ισχύ). 1.3 Στόχοι εργασίας Στη συγκεκριμένη εργασία στόχος είναι να σχεδιαστεί ένας βραχίονας χαμηλού κόστους με σύστημα υποβοήθησης στον κατακόρυφο άξονα που θα επιτρέπει όμως και την κίνηση στο οριζόντιο επίπεδο. Επειδή ο βραχίονας θα προορίζεται για εφαρμογές σε βιομηχανικό περιβάλλον, και πιο συγκεκριμένα σε γραμμές μεταφοράς και συναρμολόγησης, ο χειρισμός του φορτίου δε θέλουμε να γίνεται με τη χρήση χειριστηρίων αλλά με άμεσο χειρισμό του ίδιου του φορτίου. Στο πρώτο μέρος της εργασίας γίνεται μελέτη για τα βασικά χαρακτηριστικά της κατασκευής, τίθενται οι προδιαγραφές και βάση αυτών ακολουθεί ο σχεδιασμός του βραχίονα. Το δεύτερο μέρος περιλαμβάνει τη μοντελοποίηση του συστήματος, το σχεδιασμό του ελεγκτή και προσομοίωση της απόδοσής του σε υπολογιστικό περιβάλλον. Τέλος, κατασκευάζεται η πειραματική διάταξη και λαμβάνονται πειραματικές μετρήσεις για να συγκριθούν με τις θεωρητικές και να κριθεί η αποτελεσματικότητά τους. Πανεπιστήμιο Πατρών 13
, παρουσιάζουν ομοιότητα μεταξύ τους.")
14 Κεφάλαιο 2. Σχεδιασμός βραχίονα 2.1 Εισαγωγή Προτού αρχίσει ο σχεδιασμός ενός νέου συστήματος υποβοήθησης για ανύψωση φορτίων είναι απαραίτητο να γίνει περιγραφή των ήδη εγκατεστημένων συστημάτων στη βιομηχανία και να αναλυθούν τα προβλήματα και οι περιορισμοί που εμφανίζουν. Επειδή το φάσμα των εφαρμογών ανυψωτικών μηχανών είναι ιδιαίτερα ευρύ περιορίζεται η αναφορά τους σε συστήματα εντός μιας γραμμής παραγωγής κατά τα στάδια συναρμολόγησης και μεταφοράς. Ο πιο κοινός τύπος τέτοιων συστημάτων ανύψωσης και μεταφοράς είναι οι γερανοί. Μια γενική κατηγοριοποίηση των γερανών είναι η εξής [12]: Γερανοί για ανύψωση και μετακίνηση φορτίων σε μικρό χώρο εργασίας, όπως στη νοητή κυψέλη γύρω από μια εργαλειομηχανή Γερανογέφυρες για ανύψωση και μετακίνηση φορτίων σε ευρύτερο χώρο εργασίας, όπως τον εσωτερικό χώρο μιας αποθήκης Μια ταξινόμηση που παρουσιάζει εξαιρετικό ενδιαφέρον είναι αυτή που αναφέρεται στον τρόπο παροχής ισχύος για την ανύψωση και μεταφορά του φορτίου. Έτσι διακρίνονται οι εξής επί μέρους τρόποι: Χειροκίνητες ανυψωτικές μηχανές. Ο τρόπος αυτός εφαρμόζεται για την ανύψωση μικρών φορτίων, για μικρά ύψη και για μικρή διάρκεια κίνησης και τη δύναμη για την ανύψωση την εφαρμόζει το χέρι του ανθρώπου. Παροχή ισχύος με υδραυλική πίεση. Ο τρόπος αυτός παρουσιάζει μεγάλη δυνατότητα παροχής ισχύος με χαμηλό κόστος συντήρησης αλλά με μεγάλη κατανάλωση ενέργειας ανά μονάδα διακινούμενου φορτίου Παροχή ισχύος με πεπιεσμένο αέρα. Τα πλεονεκτήματα του τρόπου αυτού είναι τα ίδια με του προηγούμενου και στα μειονεκτήματά του πρέπει να προστεθεί η ανάγκη ύπαρξης αεροφυλακίων και η απώλεια ενέργειας από τις σωληνώσεις. Χρήση μηχανών εσωτερικής καύσης, μια όχι και τόσο συνηθισμένη μέθοδος εντός βιομηχανικών χώρων. Χρήση ηλεκτροκινητήρων, που είναι και ο πιο διαδεδομένος τρόπος παροχής ισχύος. Κύρια πλεονεκτήματα είναι η δυνατότητα άμεσης εκκίνησης υπό φορτίο, η γρήγορη και εύκολη αντιστροφή της κίνησης, η μικρή απαιτούμενη ισχύς, το χαμηλό λειτουργικό κόστος, το υψηλό επίπεδο αυτοματισμού που μπορεί να επιτευχθεί, η σχετικά αθόρυβη λειτουργία κ.ά. Το κοινό στοιχείο που παρουσιάζουν όλες οι παραπάνω κατηγορίες είναι ο τρόπος χειρισμού τους από τον άνθρωπο ο οποίος γίνεται με χειριστήριο χειρός. Ανάλογα με την κίνηση που επιθυμεί ο χρήστης πατάει το αντίστοιχο κουμπί και δίνεται εντολή στο κινητήριο σύστημα να την εκτελέσει. Ταυτόχρονα ο χειριστής συνηθίζεται να τοποθετεί το άλλο χέρι του στο αναρτημένο φορτίο για να εκτελεί μικρομετατοπίσεις. Πανεπιστήμιο Πατρών 14

15 Τα κύρια μειονεκτήματα αυτής της μεθόδου είναι, πρώτον, η μικρή ταχύτητα του κινούμενου φορτίου, η οποία δεν μπορεί να μεταβληθεί, δεύτερον, η μικρή ευελιξία που δίνεται στον άνθρωπο να εκτελέσει τοποθετήσεις που απαιτούν ακρίβεια και τρίτον, η αναγκαιότητα εκμάθησης των λειτουργιών πριν τη χρήση του γερανού. Οι παράγοντες αυτοί συντελούν σε καθυστέρηση εκτέλεσης διεργασιών και συνεπώς μιας ολόκληρης γραμμής παραγωγής. Έρευνες σε γερανογέφυρα τριών βαθμών ελευθερίας που αντικατεστάθη το συμβατικό χειριστήριο με συστήματα ελέγχου υποβοήθησης [5] έδειξαν ότι μειώθηκε ο χρόνος εκτέλεσης μιας διεργασίας κατά 50%. Ο χρήστης μπορούσε πλέον να τοποθετεί και τα δυο χέρια του στο φορτίο μετακινώντας το με την ταχύτητα που επιθυμούσε επιτυγχάνοντας μεγαλύτερη ακρίβεια και χωρίς να έχει προηγούμενη εμπειρία με τέτοια συστήματα. Επιπλέον η αίσθηση του βάρους του φορτίου ήταν πολύ μικρότερη από το πραγματικό λόγω του συστήματος υποβοήθησης. 2.2 Αρχικά χαρακτηριστικά σχεδιασμού Για το σχεδιασμό βραχίονα με υποβοήθηση τίθεται ως προϋπόθεση η απλότητα της κατασκευής που συνεπάγεται άμεσα και το κόστος της, χωρίς να γίνουν υποχωρήσεις ως προς την ασφάλεια και την ευελιξία. Επιλέγεται λοιπόν να σχεδιαστεί ένας γερανός δαπέδου για μικρό χώρο εργασίας που θα φέρει σύστημα υποβοήθησης για την κατακόρυφη κίνηση ενώ θα κινείται ελεύθερα στο οριζόντιο επίπεδο. Για την εγκατάστασή του δεν θα πρέπει να προβλέπονται κριτήρια όπως ειδική θεμελίωση ενώ η τελική συναρμολόγηση θα πρέπει να είναι όσο το δυνατό πιο απλή. Μια τέτοια κατασκευή θα έχει μικρό κόστος, θα είναι εύκολη στην εγκατάσταση, τη συναρμολόγηση και δε θα χρειάζεται συχνή συντήρηση. Για την κίνηση στο οριζόντιο επίπεδο δε θα χρησιμοποιηθεί εξωτερική παροχή ισχύος αλλά θα γίνει σχεδιασμός ώστε να παρουσιάζει ελάχιστη τριβή και να μπορεί να εκτελεστεί εύκολα από το χειριστή ασκώντας μια μικρή δύναμη. Κάτι τέτοιο είναι δυνατό χρησιμοποιώντας στις αρθρώσεις έδρανα κύλισης. Για να καλύπτεται όσο το δυνατό μεγαλύτερη επιφάνεια εργασίας επιλέγεται ο γερανός να φέρει δυο αρθρώσεις με κατακόρυφο άξονα περιστροφής. Για την παροχή ισχύος θα χρησιμοποιηθεί ένας ηλεκτροκινητήρας λόγω των πλεονεκτημάτων που αναφέρθηκαν στην παράγραφο 2.1 και επιπλέον επειδή μπορεί να γίνει πολύ εύκολα έλεγχος της ταχύτητάς του με κατάλληλο σύστημα. Η ανάρτηση του φορτίου θα γίνει με συρματόσχοινο το οποίο θα τυλίγεται σε τύμπανο. Ο κινητήρας που θα είναι μηχανικά συζευγμένος με το τύμπανο θα αποτελούν τον ανυψωτικό μηχανισμό και μέσω του συρματόσχοινου θα ελέγχουν την ταχύτητα ανύψωσης του φορτίου. Η τοποθέτηση του ανυψωτικού μηχανισμού θα πρέπει να γίνει με τρόπο ώστε το ίδιο βάρος του να μην καταπονεί τον οριζόντιο βραχίονα με επιπλέον καμπτικές δυνάμεις. Επιλέγεται επομένως να τοποθετηθεί πλησίον της κατακόρυφης βάσης όπως στην εικόνα Πανεπιστήμιο Πατρών 15

16 2.1. Αυτή η θέση έχει το μειονέκτημα ότι το μήκος του συρματόσχοινου αλλάζει με την σύμπτυξη - έκταση του βραχίονα με αποτέλεσμα να εκτελούνται ανεπιθύμητες κινήσεις του φορτίου. Η λύση του προβλήματος αυτού επιτυγχάνεται με χρήση τροχαλιών για την οδήγηση του συρματόσχοινου και παρουσιάζεται αναλυτικά στο κεφάλαιο Εικόνα 2.1 Πλάγια όψη γερανού Για την κίνηση του φορτίου από τον άνθρωπο θέλουμε να επιτύχουμε έλεγχο ταχύτητας ώστε να μπορεί ο χειριστής να μεταβάλει συνεχώς την ταχύτητα κίνησης του φορτίου. Για να μπορεί το φορτίο να μετακινείται με άμεσο χειρισμό θα πρέπει το σύστημα ελέγχου να αναγνωρίζει την εξωτερική δύναμη που ασκείται από τον άνθρωπο. Αυτό θα γίνει με την παρεμβολή ενός αισθητήρα δύναμης στο άκρο του συρματόσχοινου πριν την ανάρτηση του φορτίου. Ο ελεγκτής με τη σειρά του θα μεταβάλει την ταχύτητα του κινητήρα κατάλληλα ώστε να κινεί το φορτίο και ο άνθρωπος να αισθάνεται ότι φέρει μόνο ένα μέρος του πραγματικού βάρους. Στη θέση που θα βρίσκεται ο αισθητήρας δύναμης θα τοποθετηθεί μια διεπαφή του συστήματος ελέγχου που θα επιτρέπει το χειρισμό διαφόρων λειτουργιών από το χρήστη και θα τον ενημερώνει για συμβάντα. Συγκεντρωμένα τα αρχικά χαρακτηριστικά της κατασκευής παρατίθενται στον πίνακα 2.1. Πανεπιστήμιο Πατρών 16

17 Γερανός Σύστημα ανύψωσης Σύστημα ελέγχου - Γερανός δαπέδου δυο βαθμών ελευθερίας - Ελεύθερη κίνηση στο οριζόντιο επίπεδο με έδρανα κύλισης - Όσο το δυνατό μεγαλύτερος χώρος εργασίας - Ευκολία στην κατασκευή & συναρμολόγηση - Μικρό κόστος κατασκευής - Εξωτερική παροχή ισχύος με ηλεκτροκινητήρα & μειωτήρα - Χρήση συρματόσχοινου και τυμπάνου τύλιξης - Τοποθέτηση του μηχανισμού σε σημείο που να μην επιβαρύνει τον βραχίονα - Παθητικά συστήματα ασφαλείας Πίνακας 2.1 Αρχικά χαρακτηριστικά σχεδιασμού - Χρήση αισθητήρα δύναμης - Χρήση χειριστηρίου για διεπαφή με τον χρήστη - Έλεγχος ταχύτητας στροφών του κινητήρα - Συστήματα ελέγχου ασφαλούς λειτουργίας 2.3 Προδιαγραφές Στο στάδιο μετάφρασης των αρχικών χαρακτηριστικών σε μετρήσιμα μεγέθη προκύπτουν οι προδιαγραφές του υπό σχεδίαση συστήματος. Επιλέγεται η κατασκευή να ακολουθεί τα πρότυπα ANSI [13] και AISC [14] που αφορούν ανυψωτικά μηχανήματα και χαλύβδινες κατασκευές αντίστοιχα. Επίσης ο σχεδιασμός ακολουθεί τους ελληνικούς ισχύοντες κανονισμούς που αφορούν τεχνικό έλεγχο ανυψωτικών μηχανημάτων [15]. Ξεκινώντας από το πιο σημαντικό χαρακτηριστικό που είναι το ωφέλιμο φορτίο του γερανού, λαμβάνοντας υπόψη ότι προορίζεται κυρίως για γραμμές συναρμολόγησης και κάνοντας μια μικρή έρευνα αγοράς των συμβατικών συστημάτων ανύψωσης που διατίθενται, επιλέγεται το μέγιστο ονομαστικό φορτίο να είναι 100 κιλά. Ως συντελεστής υπερφόρτωσης για γερανούς ορίζεται το ελάχιστο 15% της ονομαστικής τιμής. Η ταχύτητα ανύψωσης υπό πλήρες φορτίο, για να επιτυγχάνεται υψηλή παραγωγικότητα, πρέπει να είναι 18m/min ή 30cm/s. Το άνοιγμα του βραχίονα (Α) του γερανού, όπως φαίνεται στην εικόνα 2.2, θα πρέπει να φτάνει τα 2500mm με ελάχιστη τιμή (Β) τα 800mm ώστε η ωφέλιμη ακτίνα (C) να είναι τουλάχιστον 1700mm. Το μέγιστο ύψος του γερανού (D) από τη βάση έως το υψηλότερο σημείο του δεν θα πρέπει να ξεπερνά τα 3000mm ενώ το ωφέλιμο ύψος από το έδαφος έως το σημείο πρόσδεσης (E) να είναι τουλάχιστον 2000mm. Αυτές οι τιμές είναι ικανές να προσφέρουν στο γερανό έναν μεγάλο και ευέλικτο χώρο εργασίας για κάθε είδους διεργασία. Το υλικό κατασκευής θα είναι συνήθης κατασκευαστικός χάλυβας. Το συνολικό βάρος της κατασκευής χωρίς φορτίο δεν θα πρέπει να ξεπερνάει τα 250kg. Συνοπτικά οι προδιαγραφές αναφέρονται στον πίνακα 2.2. Πανεπιστήμιο Πατρών 17

18 - Μέγιστο βάρος γερανού: 250kg - Μέγιστο ύψος γερανού: 3000mm - Μέγιστο ωφέλιμο φορτίο: 100kg - Ελάχιστο ωφέλιμο ύψος: 2000mm - Συντελεστής υπερφόρτωσης: 15% - Ελάχιστη έκταση βραχίονα: 2500mm - Ταχύτητα ανύψωσης: 30cm/s - Ελάχιστη ωφέλιμη ακτίνα: 1700mm - Υλικό κατασκευής: χάλυβας - Εναρμόνιση με πρότυπα ANSI/AISC Πίνακας 2.2 Προδιαγραφές σχεδιασμού Εικόνα 2.2 Διαστάσεις γερανού 2.4 Συστήματα ασφαλείας Η ασφάλεια ενός συστήματος ανύψωσης φορτίων είναι ένα κριτήριο που πρέπει να ληφθεί πολύ σοβαρά υπόψη κατά το σχεδιασμό καθώς πιθανά σχεδιαστικά λάθη μπορούν να οδηγήσουν έως και σε θανατηφόρα ατυχήματα. Τα συνηθέστερα ατυχήματα ανυψωτικών μηχανών είναι: Ανατροπές ανυψωτικών από κακή τοποθέτηση φορτίων ή υπερβολική ταχύτητα Τραυματισμός / θάνατος εργαζομένων σε χώρους κυκλοφορίας ανυψωτικών μέσων ή κάτω από ανυψωμένα φορτία Πανεπιστήμιο Πατρών 18

19 Τραυματισμός / θάνατος εργαζομένων ως αποτέλεσμα χρήσης ανυψωτικού μέσου για ανύψωση ανθρώπων Ηλεκτροπληξίες από επαφής ανυψωτικών μέσων ή εξαρτημάτων τους με ηλεκτροφόρα δίκτυα Τα συνηθέστερα αίτια ατυχημάτων με ανυψωτικά μηχανήματα είναι: Αδιαφορία και έλλειψη ενημέρωσης Εσφαλμένος χειρισμός ανυψωτικών μέσων από χειριστές Απασχόληση στα ανυψωτικά μέσα μη αδειούχων ή άπειρων χειριστών Κίνηση προσωπικού σε χώρους εργασίας ανυψωτικών μηχανισμών Εσφαλμένη φόρτωση Ελλιπής συντήρηση / έλεγχος ανυψωτικών μέσων Απουσία / κακή λειτουργία συστημάτων ασφαλείας Για την αποφυγή των παραπάνω ατυχημάτων ο γερανός που θα σχεδιαστεί θα περιέχει τα παρακάτω παθητικά συστήματα ασφαλείας. Στήριξη της βάσης στο έδαφος με κοχλίες αποτρέποντας τον κίνδυνο ανατροπής που παρουσιάζουν φορητά ανυψωτικά μηχανήματα. Εμφανής επιγραφή του μέγιστου ωφέλιμου φορτίου στο σώμα του βραχίονα. Φωτεινή ένδειξη του αναρτημένου φορτίου και προειδοποιητική ένδειξη όταν υπάρχει υπερφόρτωση. Προγραμματισμός του ελεγκτή να μην εκκινεί ο κινητήρας όταν υπάρχει υπερφόρτωση. Εργονομικός σχεδιασμός του χειριστηρίου με σαφή ένδειξη των λειτουργιών που εκτελεί κάθε διακόπτης και της κατάστασης του συστήματος υποβοήθησης. Διακόπτης απενεργοποίησης εκτάκτου ανάγκης με μηχανική μανδάλωση που θα διακόπτει την τροφοδοσία του κινητήρα. Ηλεκτρονικός περιορισμός της ταχύτητας του κινητήρα ώστε να μην υπερβεί την προδιαγραμμένη τιμή. Η σχεδιαστική πρόταση στην παρούσα εργασία εκτός από τον βραχίονα αποτελείται και από ένα κινητήριο σύστημα που παρουσιάζει ευελιξία και ευφυή έλεγχο όμοιο με των βιομηχανικών ρομπότ. Σύμφωνα με τους κανονισμούς ασφαλείας των βιομηχανικών ρομπότ [16] επιδιώκεται ο φυσικός διαχωρισμός ανθρώπου από το ενεργοποιημένο ρομπότ με κάγκελα ασφαλείας, προειδοποιήσεις και αλληλοασφαλίσεις. Για τη σωστή λειτουργία όμως του συστήματος υποβοήθησης είναι απαραίτητη η επαφή ανθρώπου μηχανής. Αναθεωρώντας τους υπάρχοντες κανονισμούς η Ένωση Βιομηχανιών Ρομπότ (Robotics Industries Association) έχει εκδώσει ένα προσχέδιο κανονισμό ασφαλείας κατάλληλο για ευφυείς συσκευές υποβοήθησης [17]. Σύμφωνα με το νέο κανονισμό η επικοινωνία μεταξύ ανθρώπου συσκευής πρέπει να είναι ξεκάθαρη και οι τρόποι λειτουργίας να είναι λίγοι και καλώς υποδεικνυόμενοι γιατί τα περισσότερα ατυχήματα συμβαίνουν από απρόβλεπτες κινήσεις των μηχανών. Η συσκευή πρέπει να αναγνωρίζει την πρόθεση του ανθρώπου να κινήσει το φορτίο υπό Πανεπιστήμιο Πατρών 19

20 κανονικές συνθήκες και να την ξεχωρίζει από σήματα θορύβου και περιπτώσεις έκτακτης ανάγκης. Αυτή η δυνατότητα δίνεται στο σύστημα με χρήση αισθητήρα δύναμης. Οι προδιαγραφές που τέθηκαν χρησιμοποιούνται στα κεφάλαια του θεμελιώδη και του λεπτομερή σχεδιασμού για τον σχεδιασμό συστημάτων που ανταποκρίνονται στους κανόνες και στους κανονισμούς ασφάλειας. 2.5 Θεμελιώδης σχεδιασμός Ο θεμελιώδης σχεδιασμός είναι το στάδιο που ακολουθεί την ανάλυση του προβλήματος και περιλαμβάνει τη γέννηση σχεδιαστικών ιδεών, τη λειτουργική ανάλυση, τον έλεγχο εφικτότητας και την αξιολόγηση των σχεδιαστικών ιδεών. Η σειρά εκτέλεσης δεν είναι απαραίτητα η ίδια διότι σε κάθε βήμα μπορεί να προκύψει η ανάγκη μετάβασης σε προηγούμενο. Η διαδικασία επαναλαμβάνεται έως ότου προκύψουν ιδέες που να ικανοποιούν τις προδιαγραφές. Μια πρώτη διατύπωση ιδεών έγινε στο κεφάλαιο 2.2 κατά την περιγραφή των αρχικών χαρακτηριστικών του σχεδιασμού. Το πρόβλημα της ανύψωσης και μεταφοράς φορτίων από τον άνθρωπο σε βιομηχανικούς χώρους επιλέχθηκε να λυθεί κάνοντας επανασχεδιασμό των ήδη υπαρχόντων προτάσεων και εισάγοντας καινοτόμα στοιχεία. Αυτά είναι η υποβοήθηση κατά την ανύψωση κατάβαση του φορτίου ώστε ο χειριστής να το αισθάνεται πολύ ελαφρύτερο καθώς και η διαφορετική διαμόρφωση ενός γερανού που θα επιτρέπει την εύκολη μετακίνησή του στο οριζόντιο επίπεδο με μεγάλη ευελιξία Λειτουργική ανάλυση Οι κύριες λειτουργίες που προκύπτουν από την ανάλυση του προβλήματος είναι η κίνηση του φορτίο στον κατακόρυφο άξονα (ανύψωση κατάβαση) και η κίνηση στο οριζόντιο επίπεδο. Αυτές οι δυο λειτουργίες μπορεί να εκτελούνται ταυτόχρονα αλλά διαχωρίζονται ως προς τους μηχανισμούς που τις εκτελούν. Μερικές λειτουργίες που είναι λιγότερο εμφανείς αλλά εξίσου σημαντικές είναι η λειτουργία υποβοήθησης, η λειτουργία ανάρτησης, σύνδεσης αποσύνδεσης του φορτίου και η λειτουργία ελέγχου ασφάλειας της κατασκευής. Για τη λειτουργία της κίνησης του φορτίου στον κατακόρυφο άξονα είναι απαραίτητη η χρήση εξωτερικής παροχής ισχύος μιας και γίνεται λόγος για υποβοήθηση. Η απαιτούμενη ισχύς για την ανύψωση φορτίων έως 100kg θα δίνεται από ηλεκτροκινητήρα ο οποίος θα συνδυαστεί με μειωτήρα ταχύτητας. Επιτυγχάνεται έτσι μικρό κόστος απόκτησης και λειτουργίας, εύκολος έλεγχος ταχύτητας, γρήγορη απόκριση και αντιστροφή της κίνησης. Ο τρόπος ελέγχου των στροφών του κινητήρα, και κατ επέκταση της ταχύτητας του φορτίου, εξαρτάται από το είδος του κινητήρα. Οι κινητήρες εναλλασσόμενου ρεύματος (Alternating Current AC) μπορούν να οδηγηθούν με inverter [18] [19] ενώ οι κινητήρες συνεχούς ρεύματος (Direct Current DC) με Πανεπιστήμιο Πατρών 20

21 διαμόρφωση πλάτους παλμών. Στους συμβατικούς μηχανισμούς ανύψωσης (τύπου βαρούλκου) συνηθίζονται οι κινητήρες AC γιατί δεν απαιτείται μετασχηματισμός και ανόρθωση του ρεύματος όπως στους DC. Η λειτουργία της κίνησης στο οριζόντιο επίπεδο επιλέγεται να γίνεται χειροκίνητα χωρίς εξωτερική πηγή ισχύος. Για να είναι δυνατό αυτό πρέπει ο μηχανισμός να παρουσιάζει ελάχιστη τριβή στις αρθρώσεις του για να μπορεί να μετακινείται εύκολα από τον άνθρωπο ασκώντας πολύ μικρή δύναμη. Μερικοί τρόποι είναι με χρήση εδράνων κύλισης ή ολίσθησης και μικρό βάρος βραχίονα για μείωση των ροπών αδράνειας. Η οριζόντια κίνηση πρέπει να καλύπτει όσο το δυνατό μεγαλύτερο χώρο εργασίας για να είναι αποδοτικός ο βραχίονας. Μια διαμόρφωση είναι αυτή των ρομπότ SCARA (Selective Compliance Assembly Robot Arm) [20] δυο συνδέσμων που παρέχει στιβαρότητα στην κατακόρυφη διεύθυνση και ενδοτικότητα στο οριζόντιο επίπεδο. Η υποβοήθηση είναι η λειτουργία που απαιτεί τη μεγαλύτερη προσοχή. Συνδέεται άμεσα με τη λειτουργία της κατακόρυφης κίνησης και στοχεύει στην κατάλληλη μεταβολή της κατακόρυφης ταχύτητας του φορτίου για να ακολουθεί την κίνηση του χειριστή. Στην υποβοήθηση περιέχεται η λειτουργία του ελέγχου, κατά την οποία ένας controller δέχεται ως είσοδο τη δύναμη που ασκεί ο χειριστής στο φορτίο και στέλνει στην έξοδο την επιθυμητή ταχύτητα του φορτίου. Η είσοδος θα είναι ένας αισθητήρας δύναμης και η έξοδος, ο ρυθμιστής στροφών του κινητήρα. Για τη λειτουργία της ανάρτησης του φορτίου μπορεί να επιλεγεί συρματόσχοινο που θα τυλίγεται σε τύμπανο μηχανικά συζευγμένο με τον άξονα του κινητήριου συστήματος. Το κινητήριο σύστημα θα είναι τοποθετημένο πάνω στον βραχίονα. Ανάλογα με τη φορά κίνησης του κινητήρα αντίστοιχη θα είναι και η φορά κίνησης του φορτίου. Στο ελεύθερο άκρο του συρματόσχοινου θα υπάρχει γάντζος για την εύκολη σύνδεση και αποσύνδεση του φορτίου. Εκτός από γάντζο είναι δυνατή η τοποθέτηση και άλλων άκρων εργασίας όπως μαγνητικής αρπάγης, αρπάγης αναρρόφησης κ.α. Τέλος, το σύστημα ελέγχου θα ελέγχει συνεχώς την «υγεία» της κατασκευής μέσω αισθητήρων και θα διακόπτει την κίνηση σε περίπτωση υπέρβασης των ασφαλών ορίων των μεταβλητών για την αποφυγή ατυχήματος ή τραυματισμού Θεμελιώδης σχεδιασμός συστημάτων ασφαλείας Όπως προέκυψε από τις προδιαγραφές, η επικοινωνία μεταξύ ανθρώπου και μηχανής πρέπει να είναι ξεκάθαρη και οι τρόποι λειτουργίας της εμφανώς υποδεικνυόμενοι για αποφευχθεί ο κίνδυνος ατυχήματος. Σύμφωνα με αυτά ακολουθεί ο θεμελιώδης σχεδιασμός των συστημάτων ασφαλείας που θα η κατασκευή. Το υπό σχεδίαση σύστημα θα περιλαμβάνει δυο λειτουργίες κίνησης. Τη χειροκίνητη, όπου ο χειριστής θα ελέγχει τον κινητήρα με τον συμβατικό τρόπο (με διακόπτες, έχοντας το χέρι του στο χειριστήριο) και την λειτουργία με υποβοήθηση που θα έχει τα χέρια του στο φορτίο και θα μπορεί να το μετακινεί ασκώντας σε αυτό μια μικρή δύναμη. Στο χειριστήριο θα υπάρχει φωτεινή ένδειξη για το ποια από τις δυο λειτουργίες είναι Πανεπιστήμιο Πατρών 21
22 ενεργοποιημένη ώστε να δίνεται η ανάλογη προσοχή από τον άνθρωπο. Ο αισθητήρας δύναμης θα μετρά τη δύναμη που ασκείται στο συρματόσχοινο και την εισάγει στο σύστημα ελέγχου. Όταν το σύστημα θα τίθεται σε λειτουργία με υποβοήθηση θα ζυγίζεται το αναρτημένο φορτίο από τον αισθητήρα και θα αφαιρείται από την είσοδο ώστε ο ελεγκτής να γνωρίζει ανά πάσα στιγμή την δύναμη που ασκείται από το χειριστή. Ταυτόχρονα με κατάλληλο φιλτράρισμα του σήματος εισόδου για την αποκοπή θορύβου μέτρησης και υψίσυχνων ταλαντώσεων θα επιτυγχάνεται η σαφής επικοινωνία ανθρώπου συσκευής εκμηδενίζοντας την πιθανότητα ατυχήματος από μη αναμενόμενες κινήσεις του φορτίου. Σε περιπτώσεις εκτάκτου ανάγκης, όπως στην ξαφνική αποσύνδεση του φορτίου ενώ είναι ενεργοποιημένη η λειτουργία υποβοήθησης, το σύστημα θα προγραμματιστεί ώστε να ακινητοποιείται αυτόματα. Στην περίπτωση που ο χειριστής απομακρυνθεί από τη συσκευή έχοντας ενεργοποιημένη τη λειτουργία υποβοήθησης, το σύστημα μετρώντας το χρόνο που δεν ασκείται εξωτερική τιμή άνω ενός ορίου, θα απενεργοποιεί την υποβοήθηση επίσης αυτόματα. Η ενεργοποίηση της λειτουργίας υποβοήθησης θα γίνεται μόνο αν πατηθεί ένας συγκεκριμένος διακόπτης ενώ η επαναφορά σε χειροκίνητη θα γίνεται πατώντας οποιονδήποτε από τους διακόπτες χειροκίνητης λειτουργίας. Επομένως το σύστημα θα κινείται μόνο όταν ο άνθρωπος έχει τα χέρια του στο φορτίο και ασκεί κάποια δύναμη σε αυτό και θα απενεργοποιείται αυτόματα σε περιπτώσεις ανάγκης. Ως προς την ασφαλή συγκράτηση του φορτίου όταν δεν είναι τοποθετημένο στο έδαφος οι περισσότερες ανυψωτικές μηχανές χρησιμοποιούν διαφόρων ειδών πέδηση. Στην παρούσα εργασία προτείνεται η χρήση συστήματος μετάδοσης της κίνησης με υψηλή σχέση όπως για παράδειγμα με το ζεύγος ατέρμονα κοχλία κορώνας που δεν καθιστά αναγκαία την εγκατάσταση συστημάτων πέδησης Έλεγχος εφικτότητας - αξιολόγηση Οι σχεδιαστικές προτάσεις που αναπτύχθηκαν κάνουν χρήση συμβατικών υλικών και διαδικασιών παραγωγής. Το σύστημα ανύψωσης στη γενική του μορφή είναι ευρέως διαδεδομένο, μπορεί να παραχθεί μαζικά και έχει μικρό κόστος. Τα καινοτόμα στοιχεία που εισάγονται σε αυτό, όπως η ειδική διαμόρφωση του βραχίονα, δεν αλλάζουν τον τρόπο κατασκευής του. Επίσης το σύστημα υποβοήθησης αποτελεί μια προσάρτηση στο ήδη υπάρχον ηλεκτρικό σύστημα ανύψωσης χρησιμοποιώντας ηλεκτρικά και ηλεκτρονικά στοιχεία γενικής χρήσης και χαμηλού κόστους. Η απαιτούμενη τεχνολογία για την επίτευξη του στόχου βρίσκεται σε ώριμο στάδιο. Ο γερανός είναι ένα κλασικό μηχανολογικό σύστημα με απλή λειτουργία όπως επίσης και το ηλεκτρομηχανολογικό σύστημα ανύψωσης. Ένας βαθμός πολυπλοκότητας εμφανίζεται μόνο στο μαθηματικό μοντέλο του συστήματος ελέγχου λόγω της εύκαμπτης κατασκευής, το οποίο όμως επιλύεται με σύγχρονες μεθόδους ελέγχου. Η επεξεργαστική ισχύς που απαιτείται για την σωστή λειτουργία του ελέγχου θα παρέχεται από επεξεργαστές μικροϋπολογιστών χαμηλού κόστους και εύκολα προγραμματίσιμων. Πανεπιστήμιο Πατρών 22
23 2.6 Λεπτομερής σχεδιασμός Ο λεπτομερής σχεδιασμός είναι το στάδιο που ακολουθεί τον θεμελιώδη σχεδιασμό και αφορά την υλοποίηση των ιδεών της προηγούμενης φάσης, τον αναλυτικό σχεδιασμό της κατασκευής που να ικανοποιεί τις απαιτήσεις και την τελική αξιολόγηση ποιότητας και κόστους Αναλυτικός σχεδιασμός βραχίονα Ο βραχίονας του γερανού θα είναι μια μεταλλική κατασκευή με διαμόρφωση όπως αυτή των ρομπότ SCARA τοποθετημένη σε βάση δαπέδου για να καλύπτεται όσο το δυνατόν μεγαλύτερος χώρος εργασίας. Οι προδιαγραφές όπως τέθηκαν στο κεφάλαιο 2.3 είναι: Ωφέλιμη ακτίνα στο οριζόντιο επίπεδο: 2000mm Μέγιστο άνοιγμα βραχίονα: 2500mm Ωφέλιμο ύψος: 2000mm Μέγιστο ύψος: 3000mm Μέγιστο ονομαστικό φορτίο ανύψωσης: 100kg Συντελεστής υπερφόρτωσης: 15% Στην εικόνα 2.3 απεικονίζεται η πλάγια όψη και η κάτοψη του βραχίονα που σχεδιάστηκε σύμφωνα με τις προδιαγραφές. Όπως φαίνεται στο σχήμα ο βραχίονας αποτελείται από μια κατακόρυφη κυλινδρική δοκό και από δυο οριζόντιες ορθογώνιες. Η κατακόρυφη δοκός εδράζεται στο έδαφος μέσω της βάσης που είναι συγκολλημένη στο κάτω άκρο της. Στο άνω άκρο της είναι τοποθετημένη η οριζόντια δοκός 1 η οποία περιστρέφεται γύρω από τον κατακόρυφο άξονα που διέρχεται από το κέντρο της βάσης. Για την αποφυγή υψηλών μηχανικών τάσεων έχει τοποθετηθεί νεύρο δυσκαμψίας στη δοκό 1. Η οριζόντια δοκός 2 εδράζεται στο άκρο της 1 και περιστρέφεται γύρω από κατακόρυφο άξονα που διέρχεται από το κοινό σημείο τους. Το σύστημα ανύψωσης (κινητήρας, τύμπανο), το οποίο δε φαίνεται στο σχήμα, θα τοποθετηθεί πλησίον της κατακόρυφης βάσης και το κατακόρυφο τμήμα του συρματόσχοινου θα διέρχεται από την τροχαλία στο άκρο της δοκού 2. Επειδή το μήκος του οριζόντιου τμήματος του συρματόσχοινου από το τύμπανο τύλιξης μέχρι την τροχαλία πρέπει να είναι σταθερό, τοποθετείται ένας οδηγός στον κοινό άξονα των δοκών 1 και 2. Έτσι επιτυγχάνεται το συρματόσχοινο να είναι συνεχώς παράλληλο με τις οριζόντιες δοκούς και να μην ασκεί δυνάμεις επαναφοράς κατά την κίνηση στο οριζόντιο επίπεδο. Αναλυτικά τα κατασκευαστικά σχέδια που προέκυψαν από το σχεδιασμό παρατίθενται στο παράρτημα D. Πανεπιστήμιο Πατρών 23
24 Εικόνα 2.3 Πλάγια όψη και κάτοψη του βραχίονα Ως υλικό για όλα τα επιμέρους εξαρτήματα επιλέγεται κατασκευαστικός χάλυβας βαθμού S275JR (St 44-2) [21] με όριο διαρροής 275MPa. Το υλικό αυτό είναι ευρέως διαθέσιμο, έχει χαμηλό κόστος και είναι εύκολα κατεργάσιμο. Η αντοχή των εξαρτημάτων λαμβάνεται από το κριτήριο ισοδύναμων τάσεων Von Mises [22] και από αυτές προκύπτουν και οι μετατοπίσεις. Ο υπολογισμός της αντοχής γίνεται με τη μέθοδο των πεπερασμένων στοιχείων χρησιμοποιώντας το σχεδιαστικό υπολογιστικό λογισμικό Catia V5 [23]. Ξεκινώντας από το σημείο φόρτισης του βραχίονα και καταλήγοντας στο σημείο έδρασης, περιγράφονται αναλυτικά παρακάτω τα επιμέρους στοιχεία της κατασκευής και στο καθένα γίνεται μελέτη της αντοχής του υπό το μέγιστο φορτίο. Πανεπιστήμιο Πατρών 24
25 Οριζόντια δοκός 2 Ως «οριζόντια δοκός 2» ονομάζεται το τμήμα του βραχίονα μεταξύ της περιφερειακής άρθρωσης και της τροχαλίας όπως φαίνεται στην εικόνα 2.4. Περιλαμβάνει εκτός από την ορθογώνια δοκό, έναν σύνδεσμο για τη λειτουργία της άρθρωσης, δυο νεύρα δυσκαμψίας, την τροχαλία και δυο ελάσματα προέκτασης στα οποία στηρίζεται η τροχαλία. Η τροχαλία χρειάζεται για την κάμψη του συρματόσχοινου κατά 90 μοίρες, ενώ στο άκρο του ελάσματος προέκτασης υπάρχει ειδική διαμόρφωση για τη στήριξη των καλωδίων του συστήματος ανύψωσης. Εικόνα 2.4 Πλάγια όψη και κάτοψη οριζόντιας δοκού 2 Υπολογισμός αντοχής Ο τρόπος φόρτισης του τμήματος απεικονίζεται στην εικόνα 2.5 όπου φαίνεται μέρος του συρματόσχοινου τυλιγμένου στην τροχαλία. Η δύναμη Τ, όπως έχει σχεδιαστεί, είναι η δύναμη που ασκείται στο συρματόσχοινο και ισοδυναμεί με το βάρος του αναρτημένου φορτίου. Το μέγιστο φορτίο μπορεί να είναι m=100kg, οπότε η δύναμη Τ προσαυξημένη με το συντελεστή ασφάλειας είναι: Τ = mg(1 + 25%) = (1.25) = ( 2.1 ) Εικόνα 2.5 Διάγραμμα ελευθέρου σώματος Πανεπιστήμιο Πατρών 25
26 Το εξεταζόμενο τμήμα υπό αυτές τις δυνάμεις καταπονείται σε θλίψη και κάμψη ενώ οι άξονες της τροχαλίας και του συνδέσμου σε διάτμηση. Στην εικόνα 2.6 απεικονίζονται με χρωματική κλίμακα οι ισοδύναμες τάσεις όπως προέκυψαν από το υπολογιστικό πακέτο με το δοκίμιο να δέχεται το μέγιστο επιτρεπτό φορτίο. Παρατηρείται ότι το κύριο σώμα καταπονείται με τάσεις έως 50MPa. Σε σημεία όπου η διατομή του υλικού είναι πολύ μικρή, όπως στα άκρα των νεύρων δυσκαμψίας, εμφανίζεται τοπικά μέγιστη τάση 250MPa που είναι κάτω του επιτρεπτού ορίου. Τα διανύσματα μετατοπίσεων απεικονίζονται στην εικόνα 2.7. Όπως αναμένεται η μέγιστη μετατόπιση συμβαίνει στο ελεύθερο άκρο του δοκιμίου και ισούται με 4.84mm. Το ίδιο βάρος του τμήματος υπολογίζεται στα 12.70Kg και δεν επηρεάζει την κατανομή της φόρτισης. Εικόνα 2.6 Ισοδύναμες τάσεις από κριτήριο Von Mises Εικόνα 2.7 Διανύσματα μετατοπίσεων Οριζόντια δοκός 1 Συνέχεια του τμήματος «οριζόντια δοκός 2» αποτελεί το κομμάτι «οριζόντια δοκός 1» το οποίο αποτελείται όπως φαίνεται στην εικόνα 2.8 από την κύρια δοκό ορθογωνικής διατομής, τον κατακόρυφο άξονα με δυο έδρανα κύλισης (ρουλεμάν) για τη λειτουργία Πανεπιστήμιο Πατρών 26
27 της άρθρωσης, δυο ελάσματα δυσκαμψίας, μια κατακόρυφη βοηθητική δοκό στήριξης, δυο κύλιστρα και μια βάση στήριξης των κυλίστρων. Εικόνα 2.8 Πλάγια όψη οριζόντιας δοκού 1 Το τμήμα αυτό της κατασκευής εδράζεται στην κατακόρυφη κυλινδρική βάση σε δυο σημεία όπως φαίνεται στην εικόνα 2.9. Το πρώτο είναι στην κορυφή της κυλινδρικής βάσης πάνω σε έδρανα κύλισης και το δεύτερο είναι πιο χαμηλά στην επιφάνεια του κυλίνδρου μέσω των κυλίστρων. Αυτή η διαμόρφωση μετατρέπει τη ροπή κάμψης, λόγω του μήκους της προβόλου δοκού, σε ένα ζεύγος δυνάμεων με διαφορετικά σημεία εφαρμογής κατανέμοντας καλύτερα τις δυνάμεις στήριξης. Επίσης η άρθρωση επιτρέπει την περιστροφή του βραχίονα γύρω από τον κατακόρυφο άξονα της βάσης περί 360 μοίρες. Εικόνα 2.9 Πλάγια όψη και τομές λεπτομερειών Πανεπιστήμιο Πατρών 27
28 Εκτός από την άρθρωση με την κατακόρυφη βάση, υπάρχει και η περιφερειακή άρθρωση με το τμήμα «οριζόντια δοκός 2» το οποίο απεικονίζεται στην εικόνα Η περιφερειακή άρθρωση επιτυγχάνεται με έναν ειδικά διαμορφωμένο άξονα και δυο έδρανα κύλισης (εικόνα 2.11). Η σύνδεση είναι λυόμενη και επιτρέπει την περιστροφή σε γωνία 290 μοιρών περί τον κατακόρυφο άξονα. Με τη συνεργασία των δυο αρθρώσεων ο βραχίονας μπορεί να καλύπτει ένα μεγάλο χώρο εργασίας στο οριζόντιο επίπεδο. Στην εικόνα 2.12 φαίνονται οι δυο ακραίες θέσεις του βραχίονα, σε πλήρη έκταση και πλήρη σύμπτυξη, με τον χώρο εργασίας να είναι ο δακτύλιος εντός των δύο διακεκομμένων κύκλων. Εικόνα 2.10 Κάτοψη βραχίονα και πλάγια όψη λεπτομέρειας της περιφερειακής άρθρωσης Εικόνα 2.11 Ημιτομή Ε-Ε από εικόνα 2.10 Πανεπιστήμιο Πατρών 28
29 Εικόνα 2.12 Κάτοψη οριζόντιου χώρου εργασίας Υπολογισμός αντοχής Το τμήμα του βραχίονα «οριζόντια δοκός 1» δέχεται έμμεσα τη φόρτιση από το βάρος της αναρτημένης μάζας μέσω της περιφερειακής άρθρωσης. Οι δυνάμεις που το καταπονούν διαφέρουν ανάλογα με τη γωνία που σχηματίζεται στην άρθρωση μεταξύ των δυο οριζόντιων δοκών 1 και 2. Όταν οι δοκοί είναι παράλληλες τότε σχηματίζεται γωνία 0 μοιρών και ο βραχίονας είναι σε πλήρη έκταση. Σε αυτή την περίπτωση το υπό εξέταση τμήμα καταπονείται στη μέγιστη κάμψη γιατί η απόσταση του σημείου εφαρμογής της δύναμης από τη στήριξη (τη βάση) είναι μέγιστη. Μόλις η γωνία γίνει 90 μοίρες και οι δυο δοκοί έρθουν κάθετα τότε η κύρια καταπόνηση οφείλεται σε ροπή στρέψης και λιγότερο σε κάμψης. Οι παραπάνω ακραίες περιπτώσεις φόρτισης εξετάζονται ξεχωριστά. Η κατακόρυφη απόσταση των δυο αξόνων περιστροφής είναι 1345mm και το βάρος του τμήματος 45kg. Πανεπιστήμιο Πατρών 29
30 Καταπόνηση σε κάμψη Μεταφέροντας τις δυνάμεις από το άκρο εργασίας στην άρθρωση προκύπτει μια κατακόρυφη δύναμη W1 και μια ροπή η οποία ισοδυναμεί με ένα ζεύγος δυνάμεων W2 και W3 (εικόνα 2.13). Η κατακόρυφη δύναμη W1 ισούται με την δύναμη Τ της εξίσωσης (2.1) προσαυξημένη με το ίδιο βάρος του τμήματος «οριζόντια δοκός 2»: W1 = T kg g = N = N ( 2.3 ) Η ισοδύναμη ροπή που προκύπτει από τη μεταφορά της δύναμης είναι το άθροισμα των ροπών λόγο Τ και του ιδίου βάρους της δοκού 2: Μ = Τ 1.119m T 0.036m kg g 1.119m 2 = Nm ( 2.4 ) Οι δυνάμεις W2 και W3 είναι ζεύγος ίσου μέτρου δυνάμεων που έχουν το ίδιο αποτέλεσμα με τη ροπή Μ. Η κάθετη απόσταση των φορέων τους είναι l=0.142m άρα οι δυνάμεις ισούνται με: M = W2 l 2 + W3 l 2 = W l W2 = W3 = M l = Ν = 9844Ν ( 2.5 ) Εικόνα 2.13 Διάγραμμα ελευθέρου σώματος καταπόνησης σε κάμψη Όπως προκύπτει από τα αποτελέσματα της ανάλυσης (εικόνα 2.14) οι τάσεις που ασκούνται στο κύριο σώμα είναι έως 60MPa και τοπικά στα σημεία στήριξης φτάνουν τα 130MPa. Οι αντίστοιχες μετατοπίσεις (εικόνα 2.15) είναι πολύ μικρές με τη μέγιστη να εμφανίζεται στο ελεύθερο άκρο και να ισούται με 2.02mm. Η κλίση στο σημείο αυτό από τον οριζόντιο άξονα είναι Πανεπιστήμιο Πατρών 30
31 Εικόνα 2.14 Ισοδύναμες τάσεις από κριτήριο Von Mises Εικόνα 2.15 Διανύσματα μετατοπίσεων Πανεπιστήμιο Πατρών 31
 όπως στην εικόνα 2.16. Εικόνα 2.")
32 Καταπόνηση σε στρέψη Στην περίπτωση όπου οι δυο οριζόντιες δοκοί του βραχίονα σχηματίζουν ορθή γωνία το ζεύγος δυνάμεων W2, W3 περιστρέφεται κατά 90 μοίρες και καταπονεί το υπό εξέταση δοκίμιο σε στρέψη με ροπή Μ1=Μ (από εξίσωση 2.4) όπως στην εικόνα Εικόνα 2.16 Διάγραμμα ελευθέρου σώματος σε στρέψη Τα αποτελέσματα της ανάλυσης δίνουν μέγιστη τάση στο σώμα του δοκιμίου στα 45MPa και τοπική συγκέντρωση τάσεων σε επιφάνειες μικρής διατομής με μέγιστη τα 180MPa (εικόνα 2.17). Η μέγιστη μετατόπιση στην ακμή της δοκού είναι 1.14mm (εικόνα 2.18). Εικόνα 2.17 Ισοδύναμες τάσεις από κριτήριο Von Mises Πανεπιστήμιο Πατρών 32
33 Εικόνα 2.18 Διανύσματα μετατοπίσεων Πανεπιστήμιο Πατρών 33
34 Βάση Η βάση είναι το τμήμα στο οποίο εδράζεται ο οριζόντιος βραχίονας. Αποτελείται από μια κυλινδρική δοκό μεγάλου μήκους που στο ένα άκρο έχει συγκολλημένο έλασμα με νεύρα δυσκαμψίας περιμετρικά για την στήριξη στο έδαφος και στο άλλο άκρο ειδική διαμόρφωση για την έδραση του οριζόντιου τμήματος (εικόνα 2.19). Εικόνα 2.19 Κάτοψη και πλάγια όψη βάσης Υπολογισμός αντοχής Η μελέτη καταπόνησης της βάσης εκτελείται για την περίπτωση που ο βραχίονας είναι πλήρως εκτεταμένος ώστε η απόσταση του σημείου εφαρμογής της δύναμης από τον άξονα της βάσης να είναι μέγιστη. Στη θέση αυτή η καμπτική ροπή γίνεται μέγιστη και ισούται με άθροισμα της ροπής του φορτίου και των ροπών από το βάρος του βραχίονα: M = 100kg g (1.345m m) kg g (1.345m m) + 45kg g 1.345m = 2941Nm 2 Η ροπή αυτή μεταφέρεται στη βάση ως ζεύγος δυνάμεων W2, W3 (εικόνα 2.20) με μέτρο: W2 = W3 = M = 2941 Nm = 6840Nm l 0.45 Επίσης η κατακόρυφη δύναμη W1 ισούται με: W1 = (100kg + 12,5kg + 45kg)g = 1545N Από τα αποτελέσματα της ανάλυσης παρατηρείται ότι η μέγιστη εμφανιζόμενη τάση είναι 33.4MPa (εικόνα 2.21) και η μέγιστη μετατόπιση 3.98mm (εικόνα 2.22). Εικόνα 2.20 Διάγραμμα ελευθέρου σώματος βάσης Πανεπιστήμιο Πατρών 34
35 Εικόνα 2.21 Ισοδύναμες τάσεις από κριτήριο Von Mises Εικόνα 2.22 Διανύσματα μετατοπίσεων Πανεπιστήμιο Πατρών 35
36 Οδηγός συρματόσχοινου Για να είναι δυνατή η κίνηση του βραχίονα στο οριζόντιο επίπεδο δεν πρέπει να ασκούνται σε αυτόν δυνάμεις επαναφοράς από το συρματόσχοινο. Στην εικόνα 2.23 φαίνεται ένα σύστημα δύο τροχαλιών με τη βάση τους που τοποθετείται στην περιφερειακή άρθρωση του βραχίονα και λειτουργεί ως οδηγός για το συρματόσχοινο. Το εξάρτημα αυτό εδράζεται στον άξονα της άρθρωσης και μπορεί να περιστρέφεται ελεύθερα. Με αυτό τον τρόπο επιτυγχάνεται το μήκος του οριζόντιου τμήματος του συρματόσχοινου να είναι συνεχώς σταθερό και η θέση του φορτίο να μην επηρεάζεται από την οριζόντια κίνηση του βραχίονα. Αναλυτικά οι δυνάμεις που ασκούνται στον βραχίονα από το συρματόσχοινο φαίνονται στην κάτοψη της εικόνας Για μια τυχαία γωνία a της περιφερειακής άρθρωσης η δυνάμεις T ισοδυναμούν με το βάρος που είναι αναρτημένο το συρματόσχοινο. Το συρματόσχοινο, που είναι σχεδιασμένο με διακεκομμένη γραμμή, διερχόμενο από τον οδηγό μένει συνεχώς παράλληλο με τον βραχίονα. Έτσι καμία από τις δυνάμεις Τ, δεν δημιουργεί ροπή που να τείνει να στρέψει το βραχίονα. Ο οδηγός δέχεται από το συρματόσχοινο συνισταμένη δύναμη Τ η οποία αντισταθμίζεται από τον κατακόρυφο άξονα της άρθρωσης με ίση και αντίθετη δύναμη που διέρχεται από το κέντρο του και επίσης δε δημιουργεί ροπές. Εικόνα 2.23 Κάτω και πλάγια όψη οδηγού Εικόνα 2.24 Δυνάμεις που ασκούνται από το συρματόσχοινο στο βραχίονα σε τυχαία θέση Πανεπιστήμιο Πατρών 36
37 2.6.2 Αναλυτικός σχεδιασμός συστήματος ανύψωσης Το σύστημα ανύψωσης θα αναλαμβάνει την κίνηση του φορτίου στο κατακόρυφο φορτίο και θα επιτελεί τη λειτουργία της υποβοήθησης. Αποτελείται από τον κινητήρα, το τύμπανο τύλιξης του συρματόσχοινου, το ίδιο το συρματόσχοινο, το άκρος εργασίας, το χειριστήριο και το σύστημα ελέγχου. Η αρχή λειτουργίας του είναι όμοια με του ηλεκτρικού βαρούλκου με τη διαφορά ότι στο συγκεκριμένο σύστημα επιτελείται και έλεγχος ταχύτητας. Για να μην καταπονείται ο βραχίονας υπό το βάρος των τμημάτων του ανυψωτήρα, αυτά τοποθετούνται πλησίον της κατακόρυφης βάσης του γερανού όπως στην εικόνα Το συρματόσχοινο που είναι τυλιγμένο στο τύμπανο οδηγείται μέσω τροχαλιών στο άκρο του βραχίονα και καταλήγει σε ένα εξάρτημα ανάρτησης φορτίων (γάντζος). Στο άκρο του συρματόσχοινου παρεμβάλλεται ένας αισθητήρας δύναμης για να μετρά την τάση του νήματος. Ο αισθητήρας είναι τοποθετημένος εντός πλαστικού περιβλήματος που φέρει χειριστήρια και ενδεικτικές λυχνίες. Η μεταφορά των ηλεκτρικών σημάτων από το άκρο εργασίας στο σύστημα ελέγχου γίνεται με καλώδια που είναι προστατευμένα από ελαστική μεμβράνη και σχηματίζουν σπείρωμα. Εικόνα 2.25 Σύστημα ανύψωσης Κινητήρας τύμπανο τύλιξης Στο κεφάλαιο έγινε περιγραφή των διαφόρων τύπων ηλεκτροκινητήρα που χρησιμοποιούνται σε αντίστοιχες εφαρμογές. Στη συγκεκριμένη περίπτωση και σύμφωνα με τις προδιαγραφές που έχουν τεθεί, το μέγιστο φορτίο ανύψωσης είναι μάζας 100kg και η ταχύτητα ανύψωσής του 18m/min. Η απαιτούμενη ισχύς του κινητήρα πρέπει να είναι: W = 100kg g 18m 60s = Watt ( 2.6 ) Συνυπολογίζοντας απώλεια ισχύος στις μηχανικές συνδέσεις, επιλέγεται κινητήρας DC ισχύος 450Watt, o οποίος φέρει πλανητικό σύστημα οδοντωτών τροχών και επιτυγχάνει υψηλή σχέση μετάδοσης όπως φαίνεται στον πίνακα 2.3. Τα πλεονεκτήματα αυτού του Πανεπιστήμιο Πατρών 37
38 τύπου κινητήρα είναι μικρό μέγεθος, μικρό κόστος και πολύ γρήγορη απόκριση καθώς ο ρότορας περιστρέφεται σε χαμηλές στροφές. Επίσης η υψηλή σχέση μετάδοσης λειτουργεί ως φρένο όταν δεν εφαρμόζεται ηλεκτρική τάση στον κινητήρα και δεν απαιτείται έτσι εξωτερικός μηχανισμός πέδησης. Τάση λειτουργίας 90VDC Ονομαστική ταχύτητα περιστροφής 35rpm Ονομαστικό ρεύμα 5Α Ονομαστική ροπή 100Nm Ταχύτητα περιστροφής χωρίς φορτίο 40rpm Σχέση μετάδοσης 90:1 Πίνακας 2.3. Τεχνικά χαρακτηριστικά κινητήρα Το τύμπανο τύλιξης του συρματόσχοινου συνδέεται με τον άξονα εξόδου του μειωτήρα όπως στην εικόνα Το σύστημα στερεώνεται στη μεταλλική βάση του σχήματος η οποία τοποθετείται πάνω στον οριζόντιο βραχίονα του γερανού. Εικόνα 2.26 Πλάγια όψη συστήματος κινητήρα τυμπάνου Επειδή το συρματόσχοινο είναι συνεχώς τεντωμένο, η ταχύτητα στο άκρο εργασίας είναι ίση με την επιτρόχιο ταχύτητα του τυμπάνου. Συνεπώς η ταχύτητα ανύψωσης V του φορτίου εξαρτάται από την ακτίνα του τυμπάνου R: R = V ω 18m min = 35rpm 0.3m s = = 0.08m ( 2.7 ) 3.66rad s Η δυνατότητα ανύψωσης για ακτίνα R=0.08m ισούται με: F = 100Nm 0.08m = 1250N ( 2.8 ) Συρματόσχοινο Το συρματόσχοινο του συστήματος ανύψωσης επιλέγετε σύμφωνα με την τυποποίηση DIN 655 [παράρτημα Β vi] να είναι Τύπου D 6x19+1H και διαμέτρου 4mm με μέγιστο δυνατό φορτίο: σ = 800 kg mm mm2 = 4840kg ( 2.9 ) Πανεπιστήμιο Πατρών 38

39 Χειριστήριο Το χειριστήριο του συστήματος που σχεδιάστηκε ακολουθεί εργονομική σχεδίαση ώστε να είναι πολύ εύκολη η χρήση του γερανού από τον άνθρωπο. Όπως φαίνεται στις εικόνες 2.27 & 2.28, αποτελείται από το κυρίως σώμα, τη λαβή, μια οθόνη ενδείξεων, λυχνίες και διακόπτες. Στο άνω μέρος του σώματος υπάρχει οπή για να περνάει το συρματόσχοινο και να συνδέεται στον αισθητήρα δύναμης που βρίσκεται εντός. Στο κάτω μέρος του αισθητήρα είναι συνδεδεμένος κοχλίας για την προσάρτηση εξαρτημάτων σύνδεσης (γάντζος κ.ά.). Το βάρος του χειριστηρίου φέρεται από το άνω μέρος του αισθητήρα ώστε να μην επηρεάζει τη μέτρηση. Η λαβή δέχεται μια μικρή μετατόπιση παράλληλα στον άξονά της η οποία ανοίγει και κλείνει δυο διακόπτες on/off που ενσωματώνει. Ο χρήστης μετακινώντας με το χέρι του τη λαβή πάνω ή κάτω, δίνει εντολή στον κινητήρα να κινηθεί στην αντίστοιχη διεύθυνση. Στο σώμα υπάρχουν δυο μπουτόν και δυο ενδεικτικές λυχνίες. Στην πρόσοψη είναι ο διακόπτης ενεργοποίησης της λειτουργίας υποβοήθησης με την αντίστοιχη σήμανση. Πλάγια βρίσκεται διακόπτης κινδύνου (E- Stop) με μανδάλωση ο οποίος αν πατηθεί επανέρχεται στην αρχική θέση μόνο με περιστροφή του. Επίσης υπάρχει μια μικρή οθόνη προειδοποιητικών ενδείξεων. Εικόνα Τρισδιάστατο μοντέλο χειριστηρίου Εικόνα 2.27 Πρόοψη και κάτοψη του χειριστηρίου Πανεπιστήμιο Πατρών 39
40 2.6.3 Αναλυτικός σχεδιασμός συστημάτων ασφαλείας Στο συγκεκριμένο κεφάλαιο γίνεται ο αναλυτικός σχεδιασμών των συστημάτων ασφαλείας που θα φέρει ο βραχίονας σύμφωνα με τις προδιαγραφές που έχουν τεθεί. Επιγραμματικά πρέπει να είναι σαφής προς τον χρήστη κάθε λειτουργία του βραχίονα ώστε να αποφευχθούν λάθος χειρισμοί, απρόβλεπτες κινήσεις και εσφαλμένη χρήση. Στήριξη γερανού Αρχικά ένας από τους μεγαλύτερους κινδύνους συστημάτων ανύψωσης, και κυρίως των φορητών, είναι η ανατροπή τους. Παρότι ο γερανός που σχεδιάζεται συνδέεται σταθερά στο δάπεδο με κοχλίες, υπάρχει ακόμα η πιθανότητα ανατροπής από λάθος φόρτωση ή υπερβολική ταχύτητα. Στο σχεδιασμό του βραχίονα λήφθηκε υπόψη συντελεστής υπερφόρτωσης 15%. Για την κατακόρυφη βάση όμως ακολουθήθηκε διαφορετική προσέγγιση με διαμορφώσεις που προσδίδουν μεγαλύτερο συντελεστή ασφαλείας χωρίς να αυξάνεται σημαντικά το κόστος και το βάρος της κατασκευής. Στην εικόνα 2.29 απεικονίζεται λεπτομερώς το τμήμα της βάσης που έρχεται σε επαφή με το έδαφος. Το έλασμα έδρασης και τα νεύρα δυσκαμψίας έχουν μεγάλες διαστάσεις (450mm και 350mm αντίστοιχα) για να γίνεται ομοιόμορφα η κατανομή των τάσεων αλλά μικρό πάχος για να μην αυξάνεται το βάρος. Οι οπές για τη στήριξη έχουν τοποθετηθεί στην περιφέρεια ενός νοητού κύκλου διαμέτρου 380mm για να εμφανίζονται μικρότερες δυνάμεις στους κοχλίες. Ελάχιστη καταπόνηση παρουσιάζει επίσης και η κατακόρυφη κυλινδρική δοκός μεγάλου μήκους, η οποία έχει λεπτότοιχη διατομή και μεγάλη διάμετρο. Το αποτέλεσμα του σχεδιασμού αυτού, όπως προέκυψε από την ανάλυση, δίνει στην κατασκευή υπό πλήρες ονομαστικό φορτίο μέγιστη εμφανιζόμενη τάση 33,4MPa (εικόνα 2.21). Ο συντελεστής ασφάλειας για αυτή την τιμή ισούται με την πολύ ασφαλή τιμή: ν = 375MPa 33.4MPa = 11.2 ( 2.10 ) Εικόνα 2.29 Πλάγια όψη και κάτοψη λεπτομέρειας βάσης Πανεπιστήμιο Πατρών 40
41 Αποτροπή υπερφόρτωσης Η υπερφόρτωση ανυψωτικών μηχανισμών είναι ένας από τα κύρια αίτια ατυχημάτων. Ο χρήστης αρχικά πρέπει να γνωρίζει την ανυψωτική ικανότητα του συστήματος. Για αυτό το λόγο ο οριζόντιος βραχίονας φέρει ευδιάκριτη επιγραφή του μέγιστου φορτίου και στις δύο πλευρές του (εικόνα 2.30). Εικόνα 2.30 Τρισδιάστατο μοντέλο βραχίονα με επιγραφή Το χειριστήριο του άκρου εργασίας περιλαμβάνει φωτεινή οθόνη η οποία συνδέεται με το σύστημα ελέγχου και ενημερώνει το χρήστη για το βάρος που είναι αναρτημένο ανά πάσα στιγμή (εικόνα 2.31). Αυτό είναι δυνατό μέσω του αισθητήρα δύναμης που είναι ενσωματωμένος στο χειριστήριο. Μια από τις καινοτομίες του συστήματος είναι ότι σε περίπτωση υπερφόρτωσης αναβοσβήνει η ένδειξη του βάρους στην οθόνη και η κόκκινη ενδεικτική λυχνία που βρίσκεται από πάνω για να ενημερωθεί άμεσα ο χρήστης. Τότε η λειτουργία του κινητήρα καθίσταται αδύνατη έως ότου αφαιρεθεί φορτίο. Η συγκεκριμένη δικλείδα ασφαλείας προγραμματίζεται στον ελεγκτή και δεν μπορεί να παρακαμφθεί από το χρήστη. Αποτρέπεται έτσι η περίπτωση της λειτουργίας του ανυψωτικού μηχανισμού σε υπερφόρτωση. Εικόνα 2.31 Τρισδιάστατο μοντέλο χειριστηρίου Πανεπιστήμιο Πατρών 41
42 Λειτουργίες ανύψωσης Οι λειτουργίες ελέγχου, όπως αναφέρθηκαν στο κεφάλαιο 2.5, είναι η χειροκίνητη και η λειτουργία με υποβοήθηση. Στη χειροκίνητη ο χρήστης ελέγχει τον κινητήρα έχοντας το χέρι του στη λαβή του χειριστηρίου. Οι πιθανές θέσεις της λαβής είναι -1 για κίνηση προς τα κάτω, 0 για ισορροπία και 1 για κίνηση προς τα πάνω. Στις θέσεις -1 και 1 ο κινητήρας λειτουργεί στη μέγιστη ταχύτητα. Η λαβή επανέρχεται αυτόματα στη θέση 0. Κατά τη χειροκίνητη λειτουργία δεν είναι αναμμένη καμία λυχνία και στην οθόνη εμφανίζονται εναλλάξ ανά δυο δευτερόλεπτα τα μηνύματα «Βάρος: x Kg (Weight: x Kg)» και «Χειροκίνητη Λειτουργία (Manual Mode)». Για την αλλαγή σε λειτουργία υποβοήθησης, ο εργονομικός σχεδιασμός του χειριστηρίου επιτρέπει στο χρήστη, ενώ έχει το χέρι του στη λαβή, το πάτημα με τον αντίχειρα του διακόπτη «Float Mode» (εικόνα 2.31). Μόλις πατηθεί, το σύστημα ελέγχου αποθηκεύει τη μέτρηση του βάρους και την εμφανίζει στην οθόνη. Όταν ολοκληρωθεί η αντιστάθμιση βάρους, ανάβει η πράσινη ενδεικτική λυχνία που σημαίνει ότι η λειτουργία υποβοήθησης είναι ενεργή και ο χρήστης μπορεί πλέον να κινήσει το φορτίο με άμεσο χειρισμό του. Η επαναφορά στη χειροκίνητη λειτουργία γίνεται είτε με το πάτημα του μπουτόν «Float Mode» είτε με τη μετακίνηση της λαβής στις θέσεις -1 ή 1. Στη δεύτερη περίπτωση που μετακινηθεί η λαβή, ο κινητήρας για να συνεχίσει στη χειροκίνητη λειτουργία πρέπει η λαβή να επανέλθει στη θέση 0. Επίσης αν ο χρήστης απομακρυνθεί από τον ανυψωτικό μηχανισμό ενώ αυτός βρίσκεται σε λειτουργία υποβοήθησης το σύστημα θα επαναφέρει αυτόματα τη χειροκίνητη λειτουργία ύστερα από 15 δευτερόλεπτα μη άσκησης εξωτερικής δύναμης. Και στις δυο λειτουργίες η κίνηση του φορτίου είναι δυνατή μόνο όταν ο χρήστης έχει τοποθετημένο το χέρι του στη λαβή ή ασκεί κάποια δύναμη στο φορτίο. Στο χειριστήριο υπάρχει φωτεινή ένδειξη για το ποια λειτουργία είναι ενεργοποιημένη ενώ προλαμβάνονται περιπτώσεις αμέλειας με αυτόματη διακοπή του συστήματος. Περιπτώσεις εκτάκτου ανάγκης Σε περιπτώσεις που επείγει η άμεση ακινητοποίηση του συστήματος, υπάρχει στο χειριστήριο διακόπτης κινδύνου με έντονο κόκκινο χρώμα. Με το πάτημά του σταματάει οποιαδήποτε εντολή κίνησης του κινητήρα στο εκτελέσιμο πρόγραμμα και ταυτόχρονα διακόπτεται με μηχανικό ηλεκτρονόμο (ρελέ) η τροφοδοσία του κινητήρα για άμεση ακινητοποίηση. Στο σύστημα ελέγχου υπάρχει η δυνατότητα να συνδεθούν επιπλέον διακόπτες ανάγκης εν σειρά που θα μπορούν να τοποθετηθούν σε διάφορες θέσεις της κυψέλης εργασίας. Τέλος το σύστημα, ενώ βρίσκεται σε λειτουργία υποβοήθησης, έχει τη δυνατότητα να αντιλαμβάνεται περιπτώσεις που το φορτίο έρχεται σε επαφή με το έδαφος ή αναπάντεχης αποσύνδεσης του φορτίου και να σταματάει τον κινητήρα. Πανεπιστήμιο Πατρών 42
43 2.6.4 Αξιολόγηση σχεδιασμού βραχίονα Συνοψίζοντας τα αποτελέσματα που προέκυψαν από τον λεπτομερή σχεδιασμό γίνεται αξιολόγηση του προϊόντος και έλεγχος για το αν πληροί τις προδιαγραφές. Ο βραχίονας που σχεδιάστηκε έχει ύψος 2950mm και οριζόντιο άνοιγμα 2500mm. Λόγω της διαμόρφωσης και των εξαρτημάτων πρόσδεσης, το ωφέλιμο ύψος του χώρου εργασίας είναι 2520mm και το πλάτος του οριζόντιου δακτυλίου 1710mm. Αυτές οι τιμές είναι εντός των προδιαγραφών και τις ικανοποιούν. Ο συνολικός όγκος του χώρου εργασίας υπολογίζεται στα 43m 3. Το βάρος του βραχίονα μαζί με το σύστημα ανύψωσης ανέρχεται στα 170kg και είναι αρκετά ελαφρύτερο από τους συνήθεις γερανούς αντίστοιχου μήκους και των προδιαγραφών, χωρίς να γίνονται υποχωρήσεις στο μέγιστο ωφέλιμο φορτίο και στη στιβαρότητα της κατασκευής. Το μικρό βάρος επιφέρει χαμηλό κόστος και εύκολο χειρισμό, μεταφορά και συναρμολόγηση. Από άποψη ασφάλειας ο βραχίονας έχει σχεδιαστεί για να δέχεται υπερφορτώσεις μέχρι ένα βαθμό. Το σύστημα ελέγχου μέσω του αισθητήρα δύναμης μπορεί να αναγνωρίζει περίπτωση υπερφόρτωσης και να μην επιτρέπει τη λειτουργία του κινητήρα για την προστασία του χειριστή και του εξοπλισμού. Επιπλέον δικλείδες ασφαλείας έχουν τοποθετηθεί για περιπτώσεις εκτάκτου ανάγκης. Επιγραφές, φωτεινές ενδείξεις και λυχνίες καθιστούν ξεκάθαρη την επικοινωνία της μηχανής προς τον άνθρωπο όπως ορίζουν οι κανονισμοί ασφαλείας. Αντιστρόφως, η μηχανή αντιλαμβάνεται ξεκάθαρα την πρόθεση του ανθρώπου να κινήσει το φορτίο με φιλτράρισμα των μη επιθυμητών διαταραχών εξασφαλίζοντας την ασφαλή λειτουργία. Πανεπιστήμιο Πατρών 43
44 Κεφάλαιο 3. Σχεδιασμός συστήματος ελέγχου 3.1 Εισαγωγή Στο συγκεκριμένο κεφάλαιο μελετάται το σύστημα ελέγχου του μηχανισμού υποβοήθησης. Το σύστημα ελέγχου είναι ο εγκέφαλος της κατασκευή γιατί σε αυτό συνδέονται όλα τα ηλεκτρικά και ηλεκτρονικά στοιχεία και καθορίζει τη συμπεριφορά του συστήματος. Αποτελείται από εισόδους (αισθητήρες), εξόδους (κινητήρας) και τη μονάδα ελέγχου η οποία προγραμματίζεται έτσι ώστε να εξασφαλίζεται η επιθυμητή απόκριση του συστήματος Η διαδικασία σχεδίασης ενός συστήματος ελέγχου, όπως αναφέρεται στη βιβλιογραφία [24] και η οποία θα ακολουθηθεί στις επόμενες παραγράφους, αποτελείται από τα παρακάτω βήματα: 1. Προσδιορισμός των στόχων και μεταβλητών που πρέπει να ελεγχθούν. Ορισμός και προδιαγραφές του τρόπου μέτρησης της απόδοσης του συστήματος. 2. Ορισμός και μοντελοποίηση του συστήματος. 3. Σχεδίαση του συστήματος ελέγχου και του ολοκληρωμένου συστήματος σχεδίασης και ανάλυσης. 3.2 Προσδιορισμός στοιχείων συστήματος ελέγχου Στόχος του υπό σχεδίαση συστήματος είναι να λειτουργεί σε συνεργασία με τον άνθρωπο για την ανύψωση και κατάβαση φορτίων φέροντας το μεγαλύτερο μέρος της μάζας του φορτίου. Η εγκατάσταση του προτεινόμενου συστήματος φαίνεται απλοποιημένη στην εικόνα 3.1. Εικόνα 3.1 Μηχανισμός υποβοήθησης δύναμης Πανεπιστήμιο Πατρών 44
45 Το φορτίο θα μπορεί να κινηθεί στον κατακόρυφο άξονα z από τον κινητήρα και η κίνηση θα ελέγχεται από τον ελεγκτή. Ο αισθητήρας δύναμης θα μετρά το άθροισμα του βάρους του φορτίου και της δύναμη που ασκεί ο χειριστής και θα το δίνει ως είσοδο στο σύστημα ελέγχου. Στη συνέχεια ο ελεγκτής θα υπολογίζει την απαραίτητη ταχύτητα του κινητήρα τέτοια ώστε να παρέχεται αρκετή μηχανική δύναμη για να βοηθήσει το χειριστή στη διαδικασία ανύψωσης ή κατάβασης του φορτίου. Η επιθυμητή αυτή ταχύτητα v αποτελεί την έξοδο του συστήματος και εκφράζεται ως ποσοστό επί τοις εκατό των στροφών του κινητήρα. Οι στροφές ελέγχονται από έναν ελεγκτή διαμόρφωσης πλάτους παλμών (PWM controller) και συνδέονται με την ταχύτητα v με μια σχέση μετάδοσης. Όταν δεν ασκείται εξωτερική δύναμη, το σύστημα θα βρίσκεται σε ακινησία και ο αισθητήρας θα δέχεται μόνο το βάρος του φορτίου. Μόλις ο χρήστης ασκήσει μια δύναμη fh θα λειτουργήσει ο κινητήρας και το φορτίο θα κινηθεί με ταχύτητα v. Η προσπάθεια του ελεγκτή πρέπει να είναι τέλεια συγχρονισμένη με την προσπάθεια του χειριστή για να έχει ο τελευταίος ελαφρύτερη αίσθηση του φορτίου. Όταν η fh πάψει να ασκείται πρέπει το σύστημα να ακινητοποιηθεί. Η μέτρηση της απόδοσης του συστήματος θα γίνει ως εξής. Θα αναρτηθεί στον αισθητήρα γνωστό φορτίο και θα μετρηθεί η απόκριση σε μοναδιαία είσοδο. Για την επαλήθευση της ορθότητας της θεωρητικής απόκρισης, που θα υπολογιστεί από τη μαθηματική μοντελοποίηση, θα κατασκευαστεί πειραματική διάταξη μικρής κλίμακας οπότε οι τιμές που θα θεωρηθούν στο μαθηματικό μοντέλο θα είναι σύμφωνες με την πειραματική διάταξη. 3.3 Μοντελοποίηση συστήματος Η μοντελοποίηση της διαδικασίας θα γίνει ξεχωριστά στα επιμέρους στοιχεία και στο τέλος θα προκύψει το συνολικό μοντέλο από τη σύνθεσή τους. Ξεκινώντας από τον ενεργοποιητή έχει επιλεχθεί στη συγκεκριμένη εγκατάσταση να είναι ένας κινητήρας συνεχούς ρεύματος (DC motor) και ένας ελεγκτής που ρυθμίζει την ταχύτητά του (PWM controller). Ο ελεγκτής PWM χρησιμοποιεί μια τεχνική ελέγχου της ισχύς αδρανειακών ηλεκτρικών συσκευών με ψηφιακό τρόπο. Με το κλείσιμο ενός διακόπτη δημιουργείται ένας τετραγωνικός παλμός με εύρος όσο η τάση εισόδου του PWM ελεγκτή και πλάτος όσο ο χρόνος που παραμένει κλειστός ο διακόπτης. Μόλις ανοίξει ο διακόπτης η τάση εξόδου είναι μηδέν. Η περιοδική επανάληψη με πολύ υψηλή συχνότητα αυτής της διαδικασίας μπορεί να οδηγήσει μια ηλεκτρική συσκευή και μεταβολή του πλάτος των παλμών ισοδυναμεί με μεταβολή της τάσης τροφοδοσίας στη συσκευή. Ο λόγος του χρόνου που είναι πατημένος ο διακόπτης προς την περίοδο μεταξύ δυο διαδοχικών παλμών αποτελεί τον κύκλο εργασίας (duty cycle) και μετράται σε ποσοστό επί τοις %. Για παράδειγμα, στην οδήγηση ενός κινητήρα ονομαστικής τάσης 12V DC με ελεγκτή PWM, για κύκλο εργασίας 50% ισοδυναμεί με τροφοδοσία του κινητήρα με 6VDC. Επομένως για τη μοντελοποίηση του ελεγκτή PWM αρκεί να θεωρήσουμε ότι η είσοδος στον κινητήρα Πανεπιστήμιο Πατρών 45
46 μεταβάλλεται από -12V έως +12V και η σχέση με το ποσοστό κύκλου εργασίας είναι γραμμική. Οι κινητήρες συνεχούς ρεύματος εμφανίζονται πολύ συχνά ως ενεργοποιητές σε συστήματα ελέγχου. Μπορούν να παρέχουν περιστροφική κίνηση αλλά και μεταφορική αν συνδυαστούν με κατάλληλο σύστημα μετάδοσης. Τα ηλεκτρικά στοιχεία του κυκλώματος του κινητήρα συνεχούς ρεύματος μαζί με το μηχανικό του σύστημα φαίνονται στην εικόνα 3.2. Εικόνα 3.2 Μοντέλο κινητήρα DC Η εξίσωση για το κύκλωμα του ρότορα που προκύπτει από το νόμο του Kirchhoff [25] είναι: V = Ri a (t) + L di a(t) dt + U b ( 3.1 ) ενώ η εξίσωση για το μηχανικό σύστημα σύμφωνα με το νόμο του Νεύτωνα είναι: Ι dω(t) dt = T m cω(t) ( 3.2 ) Η αντιηλεκτρεγερτική δύναμη Ub συνδέεται με τη γωνιακή ταχύτητα από τον τύπο: U b = K e ω ( 3.3 ) και η σχέση μεταξύ Tm και iα: T m = K T i a ( 3.4 ) Χρησιμοποιώντας μετασχηματισμό Laplace τις εξισώσεις 3.1 και 3.2 στο πεδίο προκύπτουν οι εξισώσεις στο πεδίο συχνοτήτων: V = Ri a + Li a s + U b ( 3.5 ) Ιωs = T m cω ( 3.6 ) Αντικαθιστούμε τις σχέσεις 3.3 και 3.4 στις 3.5 και 3.6 οπότε προκύπτουν οι εξισώσεις: V = Ri a + Li a s + K e ω ( 3.7 ) Ιωs = K T i a cω ( 3.8 ) Πανεπιστήμιο Πατρών 46
47 Τέλος, λύνοντας τις 3.7 και 3.8 ως προς i a προκύπτει η συνάρτηση μεταφοράς του κινητήρα όπου ω η έξοδος και V η είσοδος: ω V = K (Is+c)(Ls+R)+K 2 ( 3.9 ) Η συνάρτηση μεταφοράς (3.9) εκφραζόμενη σε δομικό διάγραμμα απεικονίζεται στην εικόνα 3.3. Οι τιμές V, R, L, I, K και c επεξηγούνται στον πίνακα 3.1 και επιλέγονται έτσι ώστε να ταιριάζουν με τα χαρακτηριστικά του κινητήρα που θα χρησιμοποιηθεί στην πειραματική διάταξη. Εικόνα 3.3 Δομικό διάγραμμα κινητήρα Η ροπή T d είναι η εξωτερική ροπή που ασκείται στο τύμπανο από το αναρτημένο βάρος μέσω του συρματόσχοινου. Υπολογίζεται από το υποσύστημα load torque το οποίο αποτελεί επίσης μέρος της εγκατάστασης και η συνάρτηση μεταφοράς του (σχέση 3.10) είναι ένας σταθερός συντελεστής μετασχηματισμού από το βάρος του αναρτημένου φορτίου F L [N] στη ροπή Τ d [Nm] που ασκείται στον άξονα του κινητήρα μέσω του συρματόσχοινου. Τ d F L = r n η g ( 3.10 ) Έτσι, υπό συγκεκριμένο βάρος και ίδιες συνθήκες, η μέγιστη ανοδική ταχύτητα είναι ελάχιστα μικρότερη από τη μέγιστη καθοδική πράγμα φυσικό για τον χειριστή. Η απόκριση του κινητήρα σε είσοδο T d είναι πολύ μικρότερη από την απόκριση σε είσοδο V οπότε η διαφορά στην ταχύτητα ανόδου καθόδου είναι ανεπαίσθητη. Αναφέρεται όμως για λόγους πληρότητας. Πανεπιστήμιο Πατρών 47
48 Σύμβολο Σχόλιο Τιμή V Τάση τροφοδότησης 12 Volt R Αντίσταση κυκλώματος 5 Ω L Αυτεπαγωγή κυκλώματος 0.01 H I Ροπή αδράνειας 5.65e-6 kgm 2 c Συντελεστής απόσβεσης 2.5e-5 Nms Ke Σταθερά αντιηλεκτρεγερτικής δύναμης 3.6e-2 Nm/A K t Σταθερά ροπής κινητήρα 3.6e-2 Nm/A n Σχέση μετάδοσης 139:1 r Ακτίνα τυμπάνου m η g Αποδοτικότητα μειωτήρα 0.81 Πίνακας 3.1. Τιμές παραμέτρων εγκατάστασης Η βηματική απόκριση του κινητήρα για είσοδο 100% κύκλου εργασίας, που απεικονίζεται στο διάγραμμα 3.1, υπολογίστηκε από τη συνάρτηση μεταφοράς της σχέσης 3.9. Οι μονάδες στον κατακόρυφο άξονα είναι σε μέτρα ανά δευτερόλεπτο και εκφράζουν την επιτρόχιο ταχύτητα του τυμπάνου. Η χρονική σταθερά του κινητήρα είναι αρκετά μικρή και αυτό οφείλεται κυρίως στη μικρή ροπή αδράνειας των στοιχείων που περιστρέφονται. Διάγραμμα 3.1 Απόκριση κινητήρα σε βηματική είσοδο Πανεπιστήμιο Πατρών 48
49 Η είσοδος στον ελεγκτή δίνεται από τον αισθητήρα ως το άθροισμα (FL) του βάρους του φορτίου (mg), της ασκούμενης δύναμης από το χειριστή (Fh) και της δύναμης του φορτίου λόγω επιτάχυνσης (mv ) όπως στην εικόνα 3.4. Από το διάγραμμα ελευθέρου σώματος υπολογίζουμε τη σύνθετη δύναμη που αντιλαμβάνεται ο αισθητήρας: F L = mg + f h mv ( 3.11 ) Η ταχύτητα v δεν προκαλείται από τη δύναμη f h αλλά από το κινητήριο σύστημα μέσω του συρματόσχοινου. Για αυτό το λόγο το η διεύθυνση του διανύσματος mv έχει αντίθετη φορά από το διάνυσμα f h. Εικόνα 3.4 Διάγραμμα ελευθέρου σώματος Θεωρώντας γνωστή τη μάζα m του φορτίου μπορεί να γίνει αντιστάθμιση της βαρύτητας και η είσοδο στον controller να είναι η σύνθετη δύναμη F s : F s = F L mg = f h mv ( 3.12 ) 3.4 Μοντελοποίηση δυναμικών χαρακτηριστικών συστήματος Το σύστημα λόγω της εύκαμπτης κατασκευής παρουσιάζει υψίσυχνες ταλαντώσεις όπως φαίνονται στην εικόνα 3.5. Αυτές οφείλονται σε μικρομετατοπίσεις του φορτίου και παρότι έχουν μικρό εύρος, εισάγονται στο σύστημα σαν εξωτερικές δυνάμεις. Πανεπιστήμιο Πατρών 49
50 Manitude (db) Διπλωματική Εργασία Εικόνα 3.5 Παράδειγμα υψίσυχνων ταλαντώσεων Οι συχνότητες αυτές αλλάζουν με τη μεταβολή της μάζας του φορτίου, οπότε η μοντελοποίηση όλων αυτών των ταλαντώσεων αποτελεί χρονοβόρα διαδικασία χωρίς να είναι σίγουρο ότι θα ανταποκρίνεται στην πραγματικότητα γιατί είναι πολλοί άγνωστοι παράγοντες που επιδρούν. Για απλοποίηση λοιπόν οι συχνότητες υπολογίζονται πειραματικά με μετασχηματισμό Fourier του σήματος εισόδου από τον αισθητήρα. Στο διάγραμμα 3.2 απεικονίζεται το εύρος των συχνοτήτων που εισάγονται στο σύστημα αρχικά ασκώντας με το χέρι μια μικρή δύναμη στο αναρτημένο φορτίο και στη συνέχεια (διάγραμμα 3.3) αφήνοντας το φορτίο ελεύθερο να αιωρείται. Οι μετρήσεις αυτές λήφθηκαν μέσω του λογισμικού Labview [26] και είναι ενδεικτικές για να γίνει αντιληπτό το εύρος των συχνοτήτων που εισάγονται στο σύστημα. Το λογισμικό προσέφερε περιορισμένες δυνατότητες για αυτή τη διαδικασία και οι μετρήσεις είναι πιθανό να παρουσιάζουν αποκλίσεις από την πραγματικότητα Frequency (Hz) Διάγραμμα 3.2 Διάγραμμα εύρους συχνοτήτων σε χειρισμό φορτίου Πανεπιστήμιο Πατρών 50
51 Magnitude (db) Διπλωματική Εργασία 1,8 1,6 1,4 1,2 1 0,8 0,6 0,4 0, Frequency (Hz) Διάγραμμα 3.3 Διάγραμμα εύρους συχνοτήτων σε ελεύθερο φορτίο Παρατηρείται ότι η δύναμη που ασκείται από το χειριστή ξεχωρίζει στο πρώτο διάγραμμα λόγω του μεγάλου εύρους της στις συχνότητες 1 έως 3Hz. Στις συχνότητες άνω των 3Hz το εύρος των ταλαντώσεων είναι πολύ μικρότερο και δεν οφείλεται στη δύναμη του χειριστή αλλά στους παράγοντες που προαναφέρθηκαν και πρέπει να αποκοπούν. Πανεπιστήμιο Πατρών 51
52 3.5 Σχεδίαση ελεγκτή Για τον έλεγχο τοποθετείται ελεγκτής σε σειρά με τον ενεργοποιητή ώστε να καθορίζεται η ταχύτητα του κινητήρα v από τη σύνθετη δύναμη F s. Έστω G c (s) η συνάρτηση μεταφοράς του controller έτσι ώστε: v = G c (s)f s ( 3.13 ) Το προτεινόμενο σύστημα ελέγχου φαίνεται στο δομικό διάγραμμα της εικόνας 3.6. Εικόνα 3.6 Δομικό διάγραμμα συστήματος ελέγχου Στην κλασική θεωρία ελέγχου ένα σύστημα κλειστού βρόγχου χρησιμοποιεί μια μέτρηση του σήματος εξόδου την οποία συγκρίνει με την επιθυμητή έξοδο για να παράγει ένα σήμα σφάλματος που χρησιμοποιείται από τον ελεγκτή για τη ρύθμιση του ενεργοποιητή, στοχεύοντας παράλληλα στην ελαχιστοποίηση του σφάλματος και εξωτερικών διαταραχών. Ο βρόγχος ανάδρασης στο προτεινόμενο σύστημα ελέγχου δεν έχει τοποθετηθεί από το σχεδιαστή για τη μέτρηση της εξόδου αλλά αποτελεί μέρος της εγκατάστασης. Επομένως η είσοδος στον ελεγκτή δεν είναι σήμα σφάλματος αλλά η σύνθετη δύναμη του αισθητήρα και στόχος, σε αντίθεση με αυτόν της κλασσικής θεωρίας ελέγχου, είναι να μεγιστοποιηθεί η ευαισθησία του συστήματος στην είσοδο. Πανεπιστήμιο Πατρών 52
53 3.5.1 Απλός αναλογικός ελεγκτής Ο ελεγκτής G c (s) στην απλούστερη περίπτωση θα μπορούσε να αποτελείται από ένα κέρδος k p [ % duty ] που θα εκφράζει το συντελεστή μετασχηματισμού από την σύνθετη N δύναμη F s [Ν] στον κύκλο εργασίας του κινητήρα [% duty]. Εάν ο χειριστής επιθυμεί ακριβή τοποθέτηση το κέρδος k p πρέπει να είναι μικρό, ενώ αν επιθυμεί η αίσθηση του φορτίου να είναι ελάχιστη πρέπει το k p να είναι μεγάλο. Κύριο μειονέκτημα είναι ότι ο απλός αναλογικός ελεγκτής, εκτός από την ενίσχυση της δύναμης εισόδου, θα ενισχύει υψίσυχνες ταλαντώσεις λόγω της εύκαμπτης κατασκευής και το θόρυβο μέτρησης του αισθητήρα εισάγοντάς τες στην εγκατάσταση με κίνδυνο εμφάνισης αστάθειας. Η θεωρητική απόκριση του συστήματος κλειστού βρόγχου για μοναδιαία είσοδο f h και κέρδος k p = 100[ % duty ] χωρίς τη μοντελοποίηση υψίσυχνων ταλαντώσεων και N θορύβου μέτρησης φαίνεται στο διάγραμμα 3.4. Συγκρίνοντάς την με την απόκριση του ανοιχτού βρόγχου παρατηρείται ότι βρόγχος ανάδρασης δρα αρνητικά διότι αυξάνει το χρόνο που χρειάζεται το σύστημα για να φτάσει στη μόνιμη κατάσταση. Αυτό συμβαίνει γιατί όταν ο χειριστής ασκήσει δύναμη f h στο φορτίο, αμέσως ο κινητήρας θα κινήσει το φορτίο προς την ίδια διεύθυνση και η δύναμη λόγω επιτάχυνσης θα αφαιρεθεί από την είσοδο. Οι τιμές που παίρνει ο βρόγχος ανάδρασης κατά τη διάρκεια της προσομοίωσης φαίνονται στο διάγραμμα 3.5. Διάγραμμα 3.4. Θεωρητική απόκριση συστήματος κλειστού βρόγχου Πανεπιστήμιο Πατρών 53
54 Διάγραμμα 3.5. Θεωρητική απόκριση βρόγχου ανάδρασης Παρατηρείται ότι στην εκκίνηση του κινητήρα που επιταχύνεται το φορτίο, η αδρανειακή δύναμη λόγω επιτάχυνσης παίρνει τη μέγιστη τιμή της ενώ μετά από λίγο που η ταχύτητα είναι σταθερή η ανάδραση μηδενίζεται. Το αντίστοιχο συμβαίνει και κατά το σταμάτημα του κινητήρα. Αυτό το φαινόμενο αυξάνει σε ένα βαθμό το χρόνο απόκρισης του συστήματος αλλά εντός ενός ανεκτού περιθωρίου Σύνθετος αναλογικός ελεγκτής Επειδή η εξασθένιση του θορύβου μέτρησης και των ταλαντώσεων είναι αναγκαία για τον σωστό έλεγχο του συστήματος, στην αναλογική δράση του ελεγκτή προστίθεται μία επιπλέον δράση φίλτρου [24]. Ο νέος ελεγκτής έχει τη μορφή: G c (s) = k p a s 2 +2ζω n s+ω n 2 ( 3.14 ) που είναι ένα σύστημα δεύτερης τάξης με φυσική συχνότητα ω n και συντελεστή απόσβεσης ζ. Ο ελεγκτής (3.14) με κατάλληλη παραμετροποίηση μπορεί να λειτουργήσει ως βαθυπερατό φίλτρο αποκόπτοντας τις ανεπιθύμητες συχνότητες. Αρχικά θέλουμε το στατικό κέρδος του ελεγκτή να είναι k p έτσι ώστε στη μόνιμη κατάσταση η ταχύτητα υπό δύναμη f h να είναι v = k p f h. Άρα ο συντελεστής α επιλέγεται να είναι: α = ω n 2 ( 3.15 ) Αντικαθιστώντας στην εξίσωση (3.14) προκύπτει: Πανεπιστήμιο Πατρών 54
55 G c (s) = k p ω n 2 s 2 +2ζω n s+ω n 2 ( 3.16 ) Ο συντονισμός παραμενουσών ταλαντώσεων είναι πολύ επικίνδυνος για την κατασκευή, επομένως ο συντελεστής απόσβεσης ζ επιλέγεται ως εξής. Σε ένα σύστημα δεύτερης τάξης το κριτήριο για να υπάρχει συντονισμός είναι: 1 2ζ 2 0 ζ ζ ( 3.17 ) Άρα θέλουμε ζ Εάν 0 < ζ < 1 οι πόλοι του συστήματος είναι μιγαδικοί συζυγείς και απεικονίζονται στο πεδίο του χρόνου (εικόνα 3.7) ως s1, s2. Εικόνα 3.7 Πόλοι συστήματος στο πεδίο του χρόνου Η χρονική σταθερά τ που καθορίζει το πόσο γρήγορο είναι το σύστημα ισούται με: τ = 1 ζω n ( 3.18 ) Το συγκεκριμένο σύστημα θέλουμε να είναι αρκετά γρήγορο για να αποκρίνεται χωρίς καθυστερήσεις καταστέλλοντας τις ταλαντώσεις. Επιλέγοντας την οριακή τιμή ζ=0.707 για να μην υπάρχει συντονισμός και ω n = 2π rad/s παίρνουμε τ = 1 ζω n = 0.225s άρα χρόνο αποκατάστασης t s = 4τ = 0.9sec. Tο υποσύστημα έχει συνάρτηση μεταφοράς: H(s) = s s ( 3.19 ) Κάνοντας το διάγραμμα (3.6) απόκρισης συχνότητας παρατηρείται ότι η συχνότητα αποκοπής ω c για την οποία έχουμε μέτρο -3dB είναι 6.28 rad/s και ισούται με τη φυσική συχνότητα ω n του συστήματος. Συχνότητες έως fc = ω c /2π = 1Hz περνάνε από το σύστημα με καθόλου ή πολύ μικρή αλλοίωση του πλάτους τους ενώ συχνότητες πάνω από fc = 1Hz αποκόπτονται με κλίση -20db/δεκάδα. Επίσης για καμία συχνότητα δεν υπάρχει φαινόμενο συντονισμού. Πανεπιστήμιο Πατρών 55
56 Διάγραμμα 3.6. Διάγραμμα απόκρισης συχνότητας της συνάρτησης Η(s) Αυξάνοντας το συντελεστή απόσβεσης ζ από την κατώτερη οριακή τιμή και διατηρώντας το ω n σταθερό, αναμένεται να μειωθεί η χρονική σταθερά τ. Πράγματι για ζ=1 που είναι η οριακή τιμή για το σύστημα δεύτερης τάξης (για ζ>1 το σύστημα είναι υπέρθεση 1 ης τάξεως υποσυστημάτων), παίρνουμε τ = 1 ζω n = 0.16s και η νέα συνάρτηση μεταφοράς είναι: H (s) = s s ( 3.20 ) Συγκρίνοντας την απόκριση συχνότητας των συναρτήσεων Η και Η στο διάγραμμα 3.7 παρατηρείται ότι η συχνότητα αποκοπής της Η στο σημείο που αυτή τέμνεται με την οριζόντια διακεκομμένη, ισούται με ω c = 4rad/s και είναι αρκετά μικρότερη από της Η. Αυτό σημαίνει ότι η νέα συνάρτηση θα αποκόπτει συχνότητες μεγαλύτερες των 0.64Hz περιορίζοντας την ευελιξία στο χειρισμό του συστήματος. Πανεπιστήμιο Πατρών 56
57 Διάγραμμα 3.7. Διάγραμμα απόκρισης συχνότητας των συναρτήσεων Η(s) και Η'(s) Συνεπώς από τις δυο οριακές τιμές του συντελεστή απόσβεσης για το υποσύστημα δεύτερης τάξης που αναλύθηκε επιλέγεται η μικρότερη ( ζ = ) με την οποία επιτυγχάνεται η αποκοπή των ανεπιθύμητων συχνοτήτων υψηλότερων του 1Hz και ο χαμηλός χρόνος αποκατάστασης που δεν καθυστερεί τη μετάβαση στη μόνιμη κατάσταση. 3.6 Προσομοίωση μοντέλου Για τον έλεγχο της αποτελεσματικότητα των controller που σχεδιάστηκαν στο κεφάλαιο 3.5, γίνεται υλοποίηση του σχηματικού διαγράμματος του προτεινόμενου συστήματος (εικόνα 3.6) σε περιβάλλον Matlab / Simulink, τοποθετούνται οι controller και ακολουθεί προσομοίωσή του. Το Simulink, που αποτελεί μέρος του Matlab, επιτρέπει την κατασκευή μοντέλων συστημάτων ελέγχου με γραφικό τρόπο χρησιμοποιώντας έτοιμες βιβλιοθήκες. Στην εικόνα 3.8 απεικονίζεται το μοντέλο του συστήματος που κατασκευάστηκε. Πανεπιστήμιο Πατρών 57
58 Εικόνα 3.8 Σχηματικό διάγραμμα μοντέλου προσομοίωσης Ως είσοδο του συστήματος έχει οριστεί το υποσύστημα Human force που περιγράφει τη δύναμη που ασκεί ο χειριστής στο φορτίο σε διάφορα χρονικά διαστήματα ώστε να προσομοιώνει μια διαδικασία ανύψωσης και κατάβασης. Ο controller σχεδιάζεται σε μορφή συνάρτησης μεταφοράς στο πεδίο συχνοτήτων s. Το υποσύστημα DC-Motor αποτελείται από το δομικό διάγραμμα του κινητήρα που προέκυψε από τη μοντελοποίηση. Η έξοδος του συστήματος είναι η ταχύτητα του αναρτημένου φορτίου και συνδέεται σε έναν καταγραφέα για τη γραφική απεικόνιση. Για να παρθούν σωστά συμπεράσματα για την απόδοση του controller που χρησιμοποιείται κάθε φορά είναι αναγκαία η εισαγωγή στο μοντέλο των υψίσυχνων ταλαντώσεων λόγω της εύκαμπτης κατασκευής και του θορύβου μέτρησης. Αυτό προσομοιώνεται με το στοιχείο noise που δημιουργεί ένα τυχαίο σήμα σύμφωνα με την κατανομή Gauss με μέση τιμή 0 και εύρος 0.05Ν. Οι τιμές αυτές προκύπτουν από την μοντελοποίηση των δυναμικών χαρακτηριστικών του συστήματος που έγινε στο κεφάλαιο 3.4. Αρχικά γίνεται προσομοίωση του απλού αναλογικού ελεγκτή. Επιλέγεται κέρδος k p = 100 %duty N και μάζα φορτίου m=1kg. Οι υπόλοιπες τιμές των παραμέτρων δίνονται στον πίνακα 3.1. Αναμένεται για δύναμη χειριστή f h = 1N το φορτίο να κινηθεί με τη μέγιστη ταχύτητα. Στο διάγραμμα 3.8 φαίνεται η απόκριση του συστήματος. Πανεπιστήμιο Πατρών 58
59 Διάγραμμα 3.8. Διάγραμμα ταχύτητας φορτίου μάζας 1kg με χρήση απλού αναλογικού ελεγκτή (k p=100) Πράγματι το φορτίο φτάνει τη μέγιστη ταχύτητα που είναι 0.06m/s. Το θετικό πρόσημο δηλώνει κατάβαση ενώ το αρνητικό ανάβαση. Ο απλός αναλογικός ελεγκτής επιτυγχάνει τη λειτουργία της υποβοήθησης αλλά δεν κάνει τίποτα για να αποκόψει τις ταλαντώσεις που μπορούν να έχουν καταστροφικές συνέπειες για την κατασκευή, τον κινητήρα και την ασφάλεια οπότε απορρίπτεται ως λύση. Υπό τις ίδιες συνθήκες (k p = 100 %duty N, m = 1kg, f h = 1N) αντικαθιστούμε τον απλό αναλογικό ελεγκτή με τον σύνθετο που έχει συνάρτηση μεταφοράς: Gc(s) = s s ( 3.21 ) Παίρνοντας το γράφημα της ταχύτητας στο διάγραμμα 3.9 παρατηρείται ότι οι υψηλές συχνότητες έχουν εξαφανιστεί και συνεπώς η κίνηση είναι πολύ ομαλή. Στη μόνιμη κατάσταση η ταχύτητα παραμένει σταθερή κάτι που συνεπάγεται τη σωστή λειτουργία του συστήματος υποβοήθησης. Ο χρόνος αποκατάστασης είναι 0.6 δευτερόλεπτα, τιμή που είναι πολύ γρήγορη για τέτοια συστήματα. Πανεπιστήμιο Πατρών 59
60 Διάγραμμα 3.9. Διάγραμμα ταχύτητας φορτίου μάζας 1kg με χρήση σύνθετου αναλογικού ελεγκτή (kp=100) Για να ερευνήσουμε την απόκριση του συστήματος υπό μεγαλύτερο φορτίο, αυξάνουμε τη μάζα στα 2kg και 3kg και εκτελούμε πάλι τις προσομοιώσεις. Οι τιμές του ελεγκτή και της δύναμης του χειριστή παραμένουν ίδιες. Στα διαγράμματα 3.10 και 3.11 που προκύπτουν, παρατηρείται ότι το σύστημα συμπεριφέρεται αρκετά καλά έχοντας όμως μεγαλύτερο χρόνο αποκατάστασης και εμφανίζοντας περισσότερες ταλαντώσεις. Αυτό οφείλεται στο γεγονός ότι όσο αυξάνεται η μάζα του αναρτημένου φορτίου τόσο μεγαλύτερες οι δυνάμεις που εισάγονται στο σύστημα λόγω αδρανειακών δυνάμεων και το σύστημα δυσκολεύεται να αναγνωρίσει τη δύναμη που ασκεί ο χειριστής. Πανεπιστήμιο Πατρών 60
61 Διάγραμμα Διάγραμμα ταχύτητας φορτίου μάζας 2kg με χρήση σύνθετου αναλογικού ελεγκτή (kp=100) Διάγραμμα Διάγραμμα ταχύτητας φορτίου μάζας 3kg με χρήση σύνθετου αναλογικού ελεγκτή (kp=100) Πανεπιστήμιο Πατρών 61
62 Προς επίλυση του προβλήματος των ταλαντώσεων που εμφανίζονται σε μεγάλες τιμές της μάζας m, εισάγεται η έννοια του προγραμματισμού του στατικού κέρδους του ελεγκτή ανάλογα με το βάρος του φορτίου. Κάτι τέτοιο είναι δυνατό διότι το σύστημα μπορεί να μετρά το βάρος όταν είναι ελεύθερα αναρτημένο μέσω του αισθητήρα δύναμης και να υπολογίζει το κατάλληλο κέρδος πριν ενεργοποιηθεί η λειτουργία υποβοήθησης. Το κέρδος θα υπολογίζεται έτσι ώστε ασκώντας σε μάζα βάρους x εξωτερική δύναμη x/α, ο κινητήρας να παίρνει εντολή να λειτουργεί στο 100%. Το α είναι ο λόγος του πραγματικού βάρους προς αυτό που αισθάνεται ο άνθρωπος. Το k p είναι το κέρδος μετασχηματισμού από τη δύναμη fh [N] σε %duty του κινητήρα, άρα: k p = 100 = 100 x f h α = 100a x ( 3.22 ) Επιλέγοντας την τιμή α=10, ένα φορτίο μάζας 1kg θα μπορεί να μετακινηθεί με τη μέγιστη ταχύτητα ασκώντας σε αυτό 1N, ένα φορτίο 10kg θα απαιτεί 10N και ούτω καθεξής. Στην περίπτωση που το σύστημα αυτό εφαρμοστεί στον βραχίονα που σχεδιάστηκε στο κεφάλαιο 2 και αναρτηθεί σε αυτόν μάζα 100kg, τότε ο χειριστής θα μπορεί να τη μετακινεί με τη μέγιστη ταχύτητα έχοντας την αίσθηση ότι μεταφέρει 10kg ενώ θα μπορεί να εκτελεί τοποθετήσεις ακρίβειας στο 1/10 της μέγιστης ασκώντας μόνο 1kg δύναμης. Στα διαγράμματα 3.12 και 3.13 γίνεται προσομοίωση του μοντέλου με προγραμματιζόμενο κέρδος ελεγκτή για μάζες 2kg και 3kg αντίστοιχα. Παρατηρείται ότι η συμπεριφορά του συστήματος πλέον δε μεταβάλλεται αυξάνοντας τη μάζα. Ο χρόνος αποκατάστασης παραμένει σταθερός και οι παραμένουσες ταλαντώσεις, που πλέον είναι μικρότερες σε σχέση με τη δύναμη διέγερσης, αποκόπτονται. Το αποτέλεσμα του προγραμματισμού του κέρδους είναι πολύ ομαλή κίνηση του φορτίου ανεξάρτητα από τη μάζα που είναι αναρτημένη. Πανεπιστήμιο Πατρών 62
63 Διάγραμμα Διάγραμμα ταχύτητας φορτίου μάζας 2kg με χρήση προγραμματισμό κέρδους (kp=50.9) Διάγραμμα Διάγραμμα ταχύτητας φορτίου μάζας 3kg με χρήση προγραμματισμό κέρδους (kp=33.4) Πανεπιστήμιο Πατρών 63
64 Κεφάλαιο 4. Εργαστηριακό σκέλος 4.1 Εισαγωγή Για να κριθεί η αποτελεσματικότητα του ελεγκτή που σχεδιάστηκε στο προηγούμενο κεφάλαιο κατασκευάζουμε το σύστημα ανύψωσης με το μηχανισμό υποβοήθησης και το υποβάλουμε σε πειραματικές μετρήσεις. Αρχικά γίνεται περιγραφή των στοιχείων από τα οποία αποτελείται η πειραματική διάταξη και γίνεται η υλοποίηση του controller. Ακολουθεί η λήψη μετρήσεων και τέλος γίνεται η αξιολόγηση του συστήματος. 4.2 Περιγραφή πειραματικής διάταξης Η πειραματική διάταξη που κατασκευάστηκε αποτελείται από τα στοιχεία εκείνα που κρίθηκαν απαραίτητα για την αξιολόγηση του συστήματος υποβοήθησης στον κατακόρυφο άξονα. Αυτά είναι ο ενεργοποιητής (σύστημα κινητήρα τυμπάνου συρματόσχοινου), οι αισθητήρες και ο ελεγκτής. Ο βραχίονας δεν υλοποιήθηκε διότι χρησιμοποιείται μόνο για την κίνηση του φορτίου στο οριζόντιο επίπεδο και δεν επηρεάζει τη λειτουργία της κατακόρυφης Υλικά στοιχεία Κατά το σχεδιασμό της πειραματικής εγκατάστασης τέθηκε ως προδιαγραφή το μέγιστο επιτρεπόμενο αναρτημένο φορτίο να είναι 5kg. Η τιμή αυτή είναι αρκετή για να δώσει αποδεκτά αποτελέσματα για την εξαγωγή συμπερασμάτων χωρίς να αυξάνει το κόστος της εγκατάστασης Σύστημα ανύψωσης Ξεκινώντας από τον κινητήρα, επιλέχθηκε ένας συνεχούς ρεύματος τύπου brushed με ενσωματωμένο πλανητικό σύστημα γραναζιών (εικόνα 4.1). Ο συγκεκριμένος τύπος μειωτήρα έχει το πλεονέκτημα ότι επιτυγχάνει υψηλή σχέση μετάδοσης που δρα ως φρένο για το αναρτημένο φορτίο και η λειτουργία με συνεχές ρεύμα επιτρέπει τον έλεγχο της ταχύτητάς του με pwm. Τα κύρια χαρακτηριστικά του κινητήρα φαίνονται στον πίνακα 4.1 και αναλυτικά στο παράρτημα Β i. Πανεπιστήμιο Πατρών 64


65 Τάση λειτουργίας 12V DC Ονομαστικό ρεύμα 0.65 Α Ρεύμα εκκίνησης 2.40 Α Ταχύτητα περιστροφής χωρίς φορτίο 21 rpm Ονομαστική ταχύτητα περιστροφής 18 rpm Ονομαστική ροπή 1.7 Nm Σχέση μετάδοσης 139:1 Πίνακας 4.1 Κύρια χαρακτηριστικά κινητήρα Εικόνα 4.1 Κινητήρας Για τη στήριξη και τη σύνδεση του κινητήρα με το τύμπανο τύλιξης του συρματόσχοινου αγοράστηκε ένας μηχανισμός χειροκίνητου βαρούλκου κατασκευασμένος από χάλυβα και τροποποιήθηκε κατάλληλα όπως φαίνεται στις εικόνες 4.2 και 4.3. Η υψηλή σχέση μετάδοσης του μειωτήρα δεν επιτρέπει την ελεύθερη περιστροφή του τυμπάνου όταν ο κινητήρας είναι απενεργοποιημένος, ακόμα και όταν είναι αναρτημένο πλήρες φορτίο. Συνεπώς δεν είναι απαραίτητη η τοποθέτηση μηχανισμού πέδησης για την ακινητοποίηση του τυμπάνου. Εικόνα 4.2 Άνω όψη συστήματος τύλιξης συρματόσχοινου κινητήρα Πανεπιστήμιο Πατρών 65

66 Εικόνα 4.3 Πρόσθια όψη συστήματος τύλιξης συρματόσχοινου κινητήρα Το συρματόσχοινο που επιλέχθηκε για την ανάρτηση του φορτίου είναι, σύμφωνα με την τυποποίηση DIN 655 [παράρτημα B vi], τύπου D 6x7+1H και διαμέτρου 3mm. Η ικανότητα ανύψωσής του είναι: F = s A = 415 kg mm mm2 = 1300kg ( 4.1 ) Η τιμή αυτή παρότι είναι αρκετές τάξεις μεγέθους μεγαλύτερη από τη μάζα των φορτίων που θα δοκιμαστούν, είναι αποδεκτή διότι είναι η μικρότερη διάσταση συρματόσχοινου και κυρίως γιατί έχει ίδια συμπεριφορά με το συρματόσχοινο που επιλέχθηκε για την κατασκευή στο κεφάλαιο Αισθητήρας δύναμης Στο συρματόσχοινο πριν το σημείο ανάρτησης παρεμβάλλεται ο αισθητήρας δύναμης ο οποίος είναι τύπου S και έχει τη δυνατότητα μέτρησης από 0 έως 100kg σε εφελκυσμό (εικόνα 4.4). Η τιμή του μέγιστου φορτίου υπερβαίνει κατά πολύ τα 5kg που έχουν τεθεί ως προδιαγραφή για την πειραματική διάταξη. Όμως η ακρίβεια της σε συνδυασμό με το χαμηλό του κόστος τον καθιστούν ιδανικό. Ο αισθητήρας τοποθετήθηκε εντός πλαστικού ηλεκτρολογικού κουτιού για προστασία από σκόνη και στεγανότητα (εικόνα 4.5). Στην πρόσοψη του κουτιού τοποθετήθηκαν επίσης τρεις διακόπτες και δυο ενδεικτικές λυχνίες για να διευκολύνουν την διεξαγωγή των πειραμάτων. Πανεπιστήμιο Πατρών 66
67 Εικόνα 4.4 Αισθητήρας δύναμης Εικόνα 4.5 Θήκη αισθητήρα με μπουτόν και LED Η αρχή λειτουργίας του αισθητήρα δύναμης βασίζεται στη μεταβολή της ηλεκτρικής αντίστασης ενός μηκυνσιόμετρου όταν αυτό παραμορφώνεται. Αποτελείται συνολικά από 4 μηκυνσιόμετρα σε διάταξης γέφυρας Wheatstone [26] η οποία μπορεί να δώσει εξαιρετικά μεγάλη ακρίβεια. Η έξοδος του αισθητήρα δεν είναι απόλυτη τιμή αλλά σχετική με την τάση διέγερσης και έχει μονάδες mv/v. Η μετατροπή σε μονάδες δύναμης γίνεται σύμφωνα με την εξίσωση 4.2. Βαθμονόμηση αισθητήρα Πριν τη χρήση του αισθητήρα είναι απαραίτητο να γίνει βαθμονόμησή του σύμφωνα με τα τεχνικά χαρακτηριστικά που δίνει ο κατασκευαστής (πίνακας 4.2, αναλυτικά στο παράρτημα B ii). Η συνάρτηση μετατροπής της σχετικής τάσης από την έξοδο του αισθητήρα (mv/v) σε μονάδες δύναμης είναι: Δύναμη = Α Τάση εξόδου mv + B ( 4.2 ) Όπου ο συντελεστής Α υπολογίζεται ως εξής: V Ονομαστικό φορτίο = Α ονομαστική τάση εξόδου ( 4.3 ) => Α = Ονομαστικό φορτίο/ ονομαστική τάση εξόδου => Α = 100 (kg) (mv V) = kg (mv V) Και η τιμή Β υπολογίζεται από τη μέτρηση της εξόδου του αισθητήρα υπό μηδενικό φορτίο: Β = Α Τάση εξόδου (χωρίς φορτίο) = kg ( 4.4 ) Αντικαθιστώντας τα Α και Β στην 4.2 προκύπτει η συνάρτηση μετατροπής 4.4. Επειδή η βαθμονόμηση έγινε χρησιμοποιώντας χιλιόγραμμα δύναμης (kgf), η τιμή που προκύπτει έχει ίδιες μονάδες: Δύναμη [kgf] = Τάση εξόδου ( 4.5 ) Πανεπιστήμιο Πατρών 67
68 Η ακρίβεια της μέτρηση του αισθητήρα δίνεται ως 0.02% F.S. (Full Scale η τάση εξόδου υπό πλήρη φόρτιση) και υπολογίζεται: Ακρίβεια = 0.02% mv/v = mv/v ( 4.6 ) Ο αισθητήρας στα πειράματα φορτίζεται με ελάχιστη τιμή το 1kg oπότε η τάξη εξόδου είναι: 1kg 100kg mv V mv = V δηλαδή έχουμε ακρίβεια ±20% του 1kg που ισοδυναμεί με 0.2kg. Αυξάνοντας τη δύναμη που ασκείται στον αισθητήρα η ακρίβεια μέτρησης παραμένει σταθερή αλλά μειώνεται ως ποσοστό. Ονομαστικό φορτίο Τάση διέγερσης Ακρίβεια Ονομαστική τάση εξόδου 100 kg 5 V DC 0.02% F.S mv/v Πίνακας 4.2. Χαρακτηριστικά αισθητήρα δύναμης Παλμογεννήτρια Η πραγματική ταχύτητα περιστροφής του τυμπάνου μετράται έμμεσα με τη βοήθεια μιας οπτικής παλμογεννήτριας (optical encoder). Ο αισθητήρας αυτός συνδέεται μηχανικά με τον άξονα του κινητήρα και περιστρέφεται με την ίδια ταχύτητα. Στην έξοδό του βγάζει τετραγωνικούς παλμούς όπου το πλήθος τους είναι συνάρτηση της γωνίας περιστροφής του άξονα, επομένως με παραγώγιση ως προς το χρόνο υπολογίζεται η ταχύτητα περιστροφής. O encoder που χρησιμοποιήθηκε ήταν το μοντέλο της RS ο οποίος σε μια πλήρη περιστροφή του άξονά του δίνει στην έξοδο 3000 παλμούς. Εικόνα 4.6. Παλμογεννήτρια Ελεγκτής Περιφερειακά ελεγκτή Όσον αφορά τον ελεγκτή αυτός θα είναι ένας ηλεκτρονικός υπολογιστής (Η/Υ) και η υλοποίηση του controller θα γίνει σε προγραμματιστικό περιβάλλον. Ο επεξεργαστής του H/Y είναι Intel, αρχιτεκτονικής x86, με συχνότητα πυρήνα 2100MHz ενώ για τον Πανεπιστήμιο Πατρών 68
69 προγραμματισμό του ελεγκτή χρησιμοποιήθηκε το λογισμικό Labview [27]. Η λειτουργία του Labview αναφέρεται στο κεφάλαιο Για την επικοινωνία του Η/Υ με τους αισθητήρες και τους ενεργοποιητές χρησιμοποιήθηκαν μετατροπείς Phidgets [28]. Αυτοί είναι ολοκληρωμένα ηλεκτρονικά συστήματα χαμηλού κόστους που συνδέονται με Η/Υ μέσω ενιαίου σειριακού διαύλου (Universal Serial Bus USB) και επιτρέπουν τη διεπαφή με φυσικά συστήματα. Για την οδήγηση του κινητήρα χρησιμοποιήθηκε ο ελεγκτής PhidgetMotorControl HC (εικόνα 4.7). Κύρια χαρακτηριστικά του συγκεκριμένου ελεγκτή [παράρτημα B iii] είναι ότι μπορεί να ελέγξει την ταχύτητα και την επιτάχυνση και στις δυο διευθύνσεις με τη μέθοδο PWM. Δέχεται κινητήρες από 6 έως 15V DC μέγιστης ισχύος 210W και η συχνότητα ανανέωσης των τιμών στην έξοδό του είναι 50Hz. Η σύνδεση του αισθητήρα δύναμης έγινε μέσω του ενισχυτή μετατροπέα PhidgetBridge 4-input (εικόνα 4.8). Ο ρυθμός δειγματοληψίας, που είναι το σημαντικότερο χαρακτηριστικό, φτάνει έως 125Hz [παράρτημα Β iv] και η ανάλυση στα 24bit. Η συχνότητα αυτή υποδεικνύει ότι στο σύστημα θα εισάγονται τιμές ανά 8ms, χρόνος ικανοποιητικός για την πειραματική διάταξη. Ο μετατροπέας PhidgetEncoder Highspeed 4-input (εικόνα 4.9) χρησιμοποιήθηκε για τη σύνδεση του Η/Υ με την παλμογεννήτρια. Όπως αναφέρεται στα χαρακτηριστικά του [παράρτημα Β v], έχει τη δυνατότητα μέτρησης έως παλμών το δευτερόλεπτο και ρυθμό μεταφοράς δεδομένων 125Hz. Τέλος για τη σύνδεση των διακοπτών και των ενδεικτικών λυχνιών χρησιμοποιήθηκαν οι ψηφιακές έξοδοι είσοδοι του μικροϋπολογιστή Phidget SBC2 (εικόνα 4.10). Η σύνδεση του SBC2 με τον Η/Υ έγινε με πρωτόκολλο ενσύρματης τοπικής δικτύωση (Ethernet). Να σημειωθεί ότι το SBC2 είναι ουσιαστικά ένας ηλεκτρονικός υπολογιστής που έχει εισόδους USB μπορώντας έτσι να συνδεθεί με τα Phidget που προαναφέρθηκαν και να αναλάβει τον έλεγχο τους. Εικόνα 4.7. PhidgetMotorControl HC Εικόνα 4.8. PhidgetBridge 4-Input Πανεπιστήμιο Πατρών 69

70 Εικόνα 4.9. PhidgetEncoder Highspeed Εικόνα Phidget SBC Συνδεσμολογία Στην εικόνα 4.11 απεικονίζεται σχηματικά η συνδεσμολογία όλων των στοιχείων της πειραματικής εγκατάστασης. Αρχικά για τη σύνδεση του ηλεκτρονικού υπολογιστή με τα Phidgets χρησιμοποιείται καλώδιο USB εκτός από το SBC2 που συνδέεται μέσω καλωδίου δικτύου UTP στη θύρα Ethernet. Ο controller του κινητήρα συνδέεται στην τροφοδοσία αλλά και στον κινητήρα με καλώδιο εύκαμπτο διαμέτρου 1.5mm. Για όλες τις υπόλοιπες συνδέσεις χρησιμοποιείται εύκαμπτο καλώδιο διαμέτρου 0.5mm. Εικόνα Συνδεσμολογία καλωδίων Πανεπιστήμιο Πατρών 70
71 Φωτογραφίες διάταξης Μια συνολική άποψη της πειραματική διάταξη εν ώρα λειτουργίας απεικονίζεται στις εικόνες 4.12 έως Εικόνα Σύστημα κινητήρα - τυμπάνου - συρματόσχοινο - παλμογεννήτριας Εικόνα Πρόσοψη εγκατάστασης με αναρτημένο φορτίο Πανεπιστήμιο Πατρών 71
72 Εικόνα Ηλεκτρονικός υπολογιστής εν ώρα λειτουργίας σε ρόλο ελεγκτή Πανεπιστήμιο Πατρών 72
73 4.2.2 Λογισμικό Το λογισμικό που χρησιμοποιήθηκε για τον έλεγχο του συστήματος είναι το Labview της National Instruments. Το συγκεκριμένο πρόγραμμα δίνει τη δυνατότητα προγραμματισμού με οπτική γλώσσα σε γραφικό περιβάλλον και έχει επιστημονική χρήση σε συστήματα μέτρησης και ελέγχου. Η γλώσσα προγραμματισμού που χρησιμοποιείται στο Labview είναι γλώσσα ροής δεδομένων. Η εκτέλεση του κώδικα καθορίζεται από την κατασκευή γραφικών δομικών διαγραμμάτων τα οποία συνδέει ο προγραμματιστής με εικονικά καλώδια δημιουργώντας κόμβους διαφόρων λειτουργιών. Ένα πρόγραμμα του Labview αποτελείται πρώτον από τον πηγαίο κώδικα, που είναι το δομικό διάγραμμα με τις καλωδιώσεις, και δεύτερον από τη γραφική διεπαφή η οποία χρησιμεύει στην μετάδοση της πληροφορίας μεταξύ υπολογιστή και χρήστη. Στη γραφική διεπαφή απεικονίζονται τιμές μεταβλητών, διαγράμματα σήματα εισόδων εξόδων, διακόπτες λειτουργιών, ενδεικτικές λυχνίες κτλ. Η επικοινωνία του Labview με τα Phidgets παρέχονται έτοιμες βιβλιοθήκες από τον κατασκευαστή των Phidget. Στην παρούσα εργασία χρησιμοποιήθηκε η έκδοση Labview 2010 μαζί με την προσθήκη Control Design & Simulation 2010 που προσέφερε επιπλέον δυνατότητες ελέγχου. Μια σύντομη περιγραφή της λειτουργίας του προγράμματος που κατασκευάστηκε και χρησιμοποιήθηκε για την εκτέλεση των πειραμάτων παρατίθεται στην εικόνα 4.15 σε μορφή διαγράμματος ροής. Όπως φαίνεται στο διάγραμμα το πρόγραμμα αποτελείται από αρκετές υπορουτίνες που είναι απαραίτητες για τη λειτουργία των περιφερειακών μονάδων και την τήρηση των προδιαγραφών ασφαλείας. Το κύριο μέρος του προγράμματος που αναλαμβάνει τον αυτόματο έλεγχο περιλαμβάνει μια επαναληπτική διαδικασία ανάγνωσης τιμών εισόδων, επεξεργασία δεδομένων, έξοδος αποτελεσμάτων. Οι είσοδοι είναι οι τιμές του αισθητήρας, της παλμογεννήτριας και διάφορων διακοπτών ενώ οι έξοδοι είναι η ταχύτητα του κινητήρα και ενδεικτικές λυχνίες. Το σύστημα είναι ψηφιακό οπότε και λειτουργεί σε διακριτό χρόνο. Η περίοδος εκτέλεσης του βρόγχου επανάληψης ισοδυναμεί με την περίοδο δειγματοληψίας. Ο χρόνος αυτός επιλέγεται στα 8ms, όσος και ο μικρότερος δυνατός που διατίθεται από τα Phidgets Συστήματα ασφαλείας Στον κώδικα έχουν προγραμματιστεί αρκετά συστήματα ασφαλείας για αποφυγή ατυχημάτων και προστασία του εξοπλισμού που διακόπτουν τη λειτουργία του συστήματος σε περίπτωση ανάγκης. Αρχικά όταν ξεκινάει η εκτέλεση του προγράμματος γίνεται έλεγχος του υλικού. Αν κάποια περιφερειακή συσκευή δεν επικοινωνεί σωστά με τον Η/Υ τότε διακόπτεται η λειτουργία. Εάν δεν υπάρχουν προβλήματα τότε το σύστημα μπαίνει σε κατάσταση χειροκίνητης λειτουργίας που μπορεί να κινηθεί μόνο με το πάτημα των διακοπτών «Πάνω/Κάτω» του χειριστηρίου. Η κατάσταση αυτόματης λειτουργίας ενεργοποιείται με το πάτημα του διακόπτη «Auto mode» του χειριστηρίου και εφόσον πληρούνται οι εξής προϋποθέσεις: Πανεπιστήμιο Πατρών 73
74 Ο κινητήρας να μην είναι σε λειτουργία (να μην κινείται το φορτίο) Το αναρτημένο φορτίο να είναι κάτω από το επιτρεπτό όριο Έτσι η μέτρηση του βάρους θα είναι ακριβής και η λειτουργία υποβοήθησης θα ξεκινά από την ηρεμία. Κατά τη διάρκεια της λειτουργίας υποβοήθησης το πρόγραμμα θα μπορεί να επανέρθει στην χειροκίνητη κατάσταση αν συμβεί κάτι από τα παρακάτω: Με το πάτημα οποιουδήποτε διακόπτη του χειριστηρίου Με την τοποθέτηση του φορτίου στο έδαφος για να αποσυνδεθεί Η επαναφορά σε χειροκίνητη λειτουργία με το πάτημα κάποιου διακόπτη επιτυγχάνεται με μανδάλωση σε επίπεδο λογισμικού, ενώ με την τοποθέτηση του φορτίου στο έδαφος ή οπουδήποτε αλλού ο αισθητήρας δύναμης αντιλαμβάνεται την αλλαγή και μόλις η δύναμη εισόδου πέσει κάτω από το ήμισυ του βάρους του φορτίου (είναι αποθηκευμένο στη μνήμη ως μεταβλητή) σταματάει την κίνηση. Ο χειριστής έτσι μπορεί να τοποθετήσει το αντικείμενο πάνω σε μια επιφάνεια ενώ το σύστημα βρίσκεται σε λειτουργία υποβοήθησης, να το αποσυνδέσει με ασφάλεια και ύστερα να απομακρύνει τον βραχίονα. Χωρίς αυτή τη λειτουργία το φορτίο με το που ακουμπούσε το έδαφος θα εκτελούσε ταλάντωση χτυπώντας το έδαφος και έχοντας καταστροφικές συνέπειες. Επιπλέον το φορτίο σταματάει και ο κινητήρας απενεργοποιείται εγκαίρως ώστε το συρματόσχοινο να μην χαλαρώσει, κάτι πολύ επικίνδυνο. Το πρόγραμμα έχει επίσης τη δυνατότητα να αντιληφθεί περιπτώσεις κινδύνου ενώ βρίσκεται σε λειτουργία υποβοήθησης. Πρώτον, στην περίπτωση που πατηθεί ο διακόπτης εκτάκτου ανάγκης (e-stop) το σύστημα απενεργοποιείται με ηλεκτρική μανδάλωση σε επίπεδο υλικού και ταυτόχρονα διακόπτεται η λειτουργία του προγράμματος και αναβοσβήνει λυχνία κινδύνου. Δεύτερον, στην περίπτωση που αφαιρεθεί το φορτίο από το χειριστή ενώ αιωρείται ή ακόμα και στην ακραία περίπτωση που κοπεί κάποιο συρματόσχοινο, ο κινητήρας θα σταματήσει. Εδώ ενεργοποιείται η συνθήκη όπου η δύναμη που δίνεται ως είσοδο πέσει κάτω από το ήμισυ του βάρους, απενεργοποιώντας τον κινητήρα. Αναλυτικά ο κώδικας και η περιγραφή του αναφέρονται στο παράρτημα Α iii. Πανεπιστήμιο Πατρών 74
75 Αρχή Άνοιγμα φυσικής διεπαφής Σύνδεση περιφερειακών (Phidgets) Επιτυχής Έλεγχος σύνδεσης Ανεπιτυχής Αρχικοποίηση μεταβλητών προγράμματος Έναρξη λειτουργίας Απενεργοποίηση συστημάτων Ανάγνωση τιμών εισόδου Επεξεργασία τιμών εισόδου Ψευδής Έλεγχος σφάλματος Αληθής Εμφάνιση σφάλματος Έλεγχος ορθότητας αποτελεσμάτων Αληθής Απόδοση τιμών στις μεταβλητές εξόδου Εμφάνιση τιμών στην οθόνη Ψευδής Εμφάνιση επιτυχούς λειτουργίας Έλεγχος τερματισμού Αληθής Ψευδής Τέλος Εικόνα 4.15 Διάγραμμα ροής προγράμματος Πανεπιστήμιο Πατρών 75
76 4.3 Υλοποίηση ελεγκτή Στο πρόγραμμα που κατασκευάστηκε για την εκτέλεση των πειραμάτων είναι αναγκαία η τοποθέτηση του ελεγκτή. Το Labview προσφέρει αρκετούς τρόπους υλοποίησης ελεγκτή όπως με συνάρτηση μεταφοράς, μοντέλο χώρου κατάστασης και PID. Μιας και ο αναλυτικός σχεδιασμός του ελεγκτή έγινε σε συνάρτηση μεταφοράς, επιλέγεται και στο πρόγραμμα ο ίδιος τύπος. Ο αναλυτικός ελεγκτής όμως είναι εκφρασμένος στο επίπεδο συχνοτήτων συνεχούς χρόνου ενώ στην εγκατάσταση το σύστημα είναι ψηφιακό και λειτουργεί σε διακριτό χρόνο. Ο αναλυτικός ελεγκτής όπως προέκυψε από τις σχέσεις 3.19 και 3.22, έχει τη μορφή: Gc(s) = k p s s ( 4.7 ) Για να εκφράσουμε την συνάρτηση σε ψηφιακή μορφή χρησιμοποιούμε το μετασχηματισμό Ζ [29]. Αν διακριτοποιηθεί η συνάρτηση 4.7 με τη συχνότητα δειγματοληψίας του συστήματος (fs=125hz) προκύπτει η παλμική συνάρτηση μεταφοράς η οποία με το μετασχηματισμό Z δίνει μια ρητή συνάρτηση μεταφοράς του διακριτού συστήματος. Εκτελώντας τον μετασχηματισμό (παράρτημα A ii) παίρνουμε τον ελεγκτή που θα χρησιμοποιηθεί στην εγκατάσταση: Gc(z) = k p z z z ( 4.8 ) Στο διάγραμμα απόκρισης συχνότητας (διάγραμμα 4.1) συγκρίνονται οι συναρτήσεις στο πεδίο συχνοτήτων και στο πεδίο Ζ. Παρατηρείται ότι είναι τα δυο διαγράμματα δεν καμία διαφορά ιδιαίτερα στο μέτρο μέχρι τη συχνότητα 100rad/s. Όσο πλησιάζουν το ήμισυ της συχνότητα δειγματοληψίας παρουσιάζουν μια μικρή απόκλιση άνευ σημασίας διότι δεν εμφανίζεται συντονισμός συχνοτήτων. Πάνω από το ήμισυ της συχνότητας δειγματοληψίας η Gc(z) δεν ορίζεται διότι δεν τηρείται το θεώρημα Shannon. Πανεπιστήμιο Πατρών 76
77 Διάγραμμα 4.1. Διάγραμμα απόκρισης συχνότητας controller στο επίπεδο S και Ζ 4.4 Διαδικασία εκτέλεσης πειραμάτων Για τη λήψη μετρήσεων, η εκτέλεση των πειραμάτων γίνεται με τρόπο ώστε να μπορούν να εξαχθούν χρήσιμα συμπεράσματα αλλά και να μπορούν τα πειράματα να αναπαραχθούν υπό τις ίδιες συνθήκες. Η διαδικασία που επιλέχθηκε για τη μέτρηση της κίνησης και το σταμάτημα σε αιώρηση, είναι η ανάβαση και κατάβαση του φορτίου μεταξύ δυο σημείων Α και Β με άμεσο χειρισμό. Τα δυο σημεία απέχουν 50cm μεταξύ τους και το σημείο Α απέχει 10cm από το έδαφος. Αναλυτικά η διαδικασία περιέχει τα εξής βήματα: 1. Ενεργοποίηση συστημάτων. 2. Προσέγγιση άκρου εργασίας στο φορτίο προς ανάρτηση χρησιμοποιώντας τη χειροκίνητη λειτουργία (προαιρετικό). 3. Σύνδεση φορτίου. 4. Ανύψωση φορτίου μέχρι το σημείο Α χρησιμοποιώντας τη χειροκίνητη λειτουργία. Ακινητοποίηση φορτίου. 5. Αλλαγή σε λειτουργία υποβοήθησης. Μόλις γίνει μέτρηση του βάρους από το σύστημα θα ανάψει πράσινη ενδεικτική λυχνία που δείχνει ότι η λειτουργία ενεργοποιήθηκε. 6. Χειρίζοντας το ίδιο το φορτίο γίνεται ανύψωση με υποβοήθηση μέχρι το σημείο Β. Κατά το χειρισμό ο χρήστης βλέπει την ταχύτητα του κινητήρα (% της μέγιστης) στην οθόνη και προσπαθεί να κινήσει το φορτίο στο 100% της Πανεπιστήμιο Πατρών 77
78 ταχύτητας ασκώντας την ελάχιστη δύναμη που απαιτείται. Στο σημείο Β παύει να ασκεί δύναμη. 7. Με την ίδια διαδικασία γίνεται κατάβαση του φορτίου στο σημείο Α (με άμεσο χειρισμό του φορτίου). Στο σημείο Α παύει να ασκείται δύναμη. 8. Με χειροκίνητη λειτουργία γίνεται κατάβαση του φορτίου στο έδαφος. 9. Αποσύνδεση του φορτίου. 10. Απενεργοποίηση συστημάτων. Στο τέλος της διαδικασίας παίρνονται τα διαγράμματα της σύνθετης δύναμης του αισθητήρα και της ταχύτητας του φορτίου συναρτήσει του χρόνου. Για τη μέτρηση της απόδοσης της αυτόματης διακοπής όταν το σύστημα βρίσκεται σε λειτουργία με υποβοήθηση και τοποθετείται το φορτίο στο έδαφος, η διαδικασία είναι ίδια μέχρι το βήμα 3 και συνεχίζει ως εξής. 4. Ανύψωση φορτίου μέχρι το σημείο Β χρησιμοποιώντας τη χειροκίνητη λειτουργία. Ακινητοποίηση φορτίου. 5. Αλλαγή σε λειτουργία υποβοήθησης. Μόλις γίνει μέτρηση του βάρους από το σύστημα θα ανάψει πράσινη ενδεικτική λυχνία που δείχνει ότι η λειτουργία ενεργοποιήθηκε. 6. Χειρίζοντας το ίδιο το φορτίο γίνεται κατάβαση με υποβοήθηση μέχρι το έδαφος. Κατά το χειρισμό ο χρήστης βλέπει την ταχύτητα του κινητήρα (% της μέγιστης) στην οθόνη και προσπαθεί να κινήσει το φορτίο στο 100% της ταχύτητας ασκώντας την ελάχιστη δύναμη που απαιτείται. 7. Το σύστημα απενεργοποιείται. 8. Αποσύνδεση του φορτίου. 9. Απενεργοποίηση συστημάτων. Στο τέλος της διαδικασίας παίρνεται το διάγραμμα της ταχύτητας του φορτίου συναρτήσει του χρόνου και πριν την αποσύνδεση του φορτίου μετράται η τιμή δύναμης του αισθητήρα. Πανεπιστήμιο Πατρών 78
79 4.5 Αποτελέσματα πειραμάτων Στο συγκεκριμένο κεφάλαιο παρατίθενται τα αποτελέσματα των μετρήσεων της ταχύτητας του φορτίου και της δύναμης του χειριστή σε συνάρτηση με το χρόνο ώστε να βγουν συμπεράσματα για την απόδοση του συστήματος υποβοήθησης. Έγινε δοκιμή του αναλυτικού ελεγκτή της συνάρτησης 4.8, αρχικά χρησιμοποιώντας σταθερό κέρδος k p = 100 και στη συνέχεια χρησιμοποιώντας προγραμματιζόμενο κέρδος σύμφωνα με τη σχέση Οι πειραματικές τιμές που προέκυψαν συγκρίνονται με αυτές της προσομοίωσης για επιβεβαίωση της ορθότητας των δεύτερων. Όλες οι μετρήσεις λήφθηκαν χρησιμοποιώντας μάζες 1kg, 2kg και 3kg. Στα γραφήματα θετικό πρόσημο σημαίνει κίνηση με φορά προς τα πάνω ενώ το αρνητικό το αντίθετο Μέτρηση ελεγκτή σταθερού στατικού κέρδους Όπως είχε σχεδιαστεί αρχικά ο ελεγκτής, αποτελούταν από ένα σταθερό κέρδος k p = 100 που επέτρεπε στο χειριστή την κίνηση του φορτίου με τη μέγιστη ταχύτητα ασκώντας σε αυτό συγκεκριμένη δύναμη ανεξάρτητα του βάρους του φορτίου. Όπως προέκυψε από την προσομοίωση, ενώ τα αποτελέσματα ήταν πολύ ικανοποιητικά για μάζα 1kg, όσο αυξανόταν η μάζα του φορτίου τόσο χειρότερη απόκριση είχε το σύστημα. Διάγραμμα 4.2 Διάγραμμα V(t), F(t) για m=1kg και kp=100 Πανεπιστήμιο Πατρών 79
80 Στο διάγραμμα 4.2 σχεδιάζεται το γράφημα της ταχύτητας του φορτίου και της σύνθετης εισόδου του αισθητήρα σε συνάρτηση με το χρόνο για μάζα 1kg και κέρδος k p = 100. Όπως φαίνεται είναι δυνατή η μετακίνηση με σταθερή ταχύτητα 0.06m/s ασκώντας δύναμη περίπου 1.3N. Το σύστημα αποκρίνεται πολύ γρήγορα και χωρίς να εμφανίζει ιδιαίτερες διαταραχές. Στη συνέχεια αυξάνεται η μάζα στα 2kg και στα συνέχεια στα 3kg κρατώντας το k p σταθερό. Στην πρώτη περίπτωση (διάγραμμα 4.3) η κίνηση παρουσιάζει ομαλότητα και το σύστημα αποκρίνεται πολύ γρήγορα. Στο σταμάτημα ύστερα από καθοδική κίνηση η ακινητοποίηση καθυστερεί. Ο χειριστής ασκεί διπλάσια δύναμη από αυτή που απαιτείται κυρίως στην ανοδική κίνηση. Διάγραμμα 4.3 Διάγραμμα V(t), F(t) για m=2kg και kp=100 Με 3kg φορτίο (διάγραμμα 4.4) παρατηρείται αργή εκκίνηση προς την ανοδική φορά με τον χειριστή πάλι να ασκεί δύναμη μεγαλύτερη από την απαιτούμενη. Στην καθοδική φορά παρατηρείται ένα μικρό άλμα της ταχύτητας πριν την εκκίνηση και ένα μεγαλύτερο στο τέλος της κίνησης. Τα άλματα αυτά είναι ανεπιθύμητα και πρέπει να επαλειφθούν. Κατά τη διάρκεια της κίνησης η ταχύτητα εμφανίζει διακυμάνσεις. Πανεπιστήμιο Πατρών 80
81 Διάγραμμα 4.4 Διάγραμμα V(t), F(t) για m=3kg και kp= Μέτρηση ελεγκτή με προγραμματιζόμενο στατικό κέρδος Κατά την μέτρηση του ελεγκτή σταθερού κέρδους παρατηρήθηκε σημαντική διαφορά στη συμπεριφορά του συστήματος με την αύξηση της μάζας του φορτίου. Όμοια διαφοροποίηση είχε δείξει και η προσομοίωσή του. Επειδή στόχος είναι η συμπεριφορά του συστήματος να είναι συγκεκριμένη και προβλέψιμη ανεξάρτητα της μάζας που αναρτάται εισήχθη η έννοια του προγραμματιζόμενου κέρδους. Έτσι πριν την ενεργοποίηση της λειτουργίας υποβοήθησης, ο ελεγκτής θα ζυγίζει το αναρτημένο φορτίο και θα υπολογίζει το κέρδος k p έτσι ώστε ο χειριστής να μετακινεί το φορτίο έχοντας αίσθηση 1/10 του πραγματικού βάρους. Με το κέρδος να υπολογίζεται αυτόματα από τον υπολογιστή, επαναλαμβάνονται οι μετρήσεις για τα ίδια βάρη. Για 1kg το κέρδος υπολογίζεται 100 οπότε τα αποτελέσματα είναι ίδια και δεν ξαναπαίρνεται μέτρηση. Για 2kg υπολογίστηκε κέρδος k p = 54 και όπως φαίνεται στο διάγραμμα 4.5, με δύναμη 2Ν το φορτίο κινείται αρκετά ομαλά στη μέγιστη ταχύτητα. Η απόκριση είναι πολύ γρήγορη και στην εκκίνηση και στο σταμάτημα χωρίς να εμφανίζονται άλματα στην ταχύτητα. Επιπλέον ο χειριστής δεν τείνει να ασκήσει περισσότερη δύναμη από όση απαιτείται. Πανεπιστήμιο Πατρών 81
82 Διάγραμμα 4.5 Διάγραμμα V(t), F(t) για m=2kg και kp=54 Ακολούθως, στο διάγραμμα 4.6 για μάζα 3kg υπολογίστηκε κέρδος k p = 33. Σε αντίθεση με την περίπτωση που το k p ήταν 100, με το νέο κέρδος η ταχύτητα του φορτίου είναι πολύ ομαλή, δεν εμφανίζονται καθόλου άλματα ταχύτητας και το σύστημα αποκρίνεται αρκετά γρήγορα. Ο χειριστής ασκεί ελάχιστα παραπάνω δύναμη από αυτή που απαιτείται αλλά μόνο στην ανάβαση. Πανεπιστήμιο Πατρών 82
83 Διάγραμμα 4.6 Διάγραμμα V(t), F(t) για m=3kg και kp=33 Συγκρίνοντας τα αποτελέσματα των μετρήσεων με αυτόματο προγραμματισμό κέρδους με αυτά του σταθερού κέρδους βγαίνει το συμπέρασμα ότι με το προγραμματιζόμενο κέρδος το σύστημα έχει πολύ καλύτερη και φυσική συμπεριφορά. Ο χειριστής έχει καλύτερο έλεγχο της ταχύτητας του φορτίου ιδιαίτερα όταν αυξάνεται η μάζα του. Η εξάλειψη των αλμάτων ταχύτητας και η ομαλή κίνηση κάνουν το σύστημα προβλέψιμο και συνεπώς πιο ασφαλές για τον άνθρωπο Μέτρηση απόδοσης συστήματος ασφαλείας Το σύστημα ελέγχου περιλαμβάνει διάφορα συστήματα ασφάλειας ένα εκ των οποίων είναι η αυτόματη διακοπή του κινητήρα σε περίπτωση που το φορτίο ακουμπήσει στο έδαφος ή κάποια άλλη επιφάνεια ώστε να μην χαλαρώσει το συρματόσχοινο. Για τη μέτρηση της απόδοσης της αυτόματης διακοπής όταν το σύστημα βρίσκεται σε λειτουργία με υποβοήθηση λήφθηκε νέα σειρά μετρήσεων για μάζες 1kg, 2kg και 3kg. Ξεκινώντας με μάζα 1kg, στο διάγραμμα 4.7 δίνεται η γραφική παράσταση της ταχύτητας και της δύναμης εισόδου. Παρατηρείται ότι το διάγραμμα διακόπτεται απότομα σε χρόνο 1.6s κάνοντας μία κορυφή στη δύναμη. Αυτό συμβαίνει διότι ο χειριστής ασκώντας μια δύναμη 1Ν στο φορτίο με φορά προς τα κάτω, αυτό κινείται καθοδικά και τη χρονική στιγμή 1.6s έρχεται σε επαφή με το έδαφος. Λόγω της Πανεπιστήμιο Πατρών 83
84 αντίδρασης του εδάφους ο αισθητήρας δέχεται μια δύναμη με αντίθετη φορά από αυτή του χειριστή και αρκετά μεγαλύτερη. Στο πρόγραμμα έχει υλοποιηθεί μια συνθήκη έτσι ώστε αν συμβεί κάτι τέτοιο να σταματήσει τον κινητήρα και να επαναφέρει το σύστημα σε χειροκίνητη λειτουργία. Η καταγραφή των μετρήσεων γίνεται μόνο αν το σύστημα βρίσκεται σε λειτουργία υποβοήθησης άρα συμπεραίνουμε ότι μόλις το φορτίο ακούμπησε το έδαφος, το σύστημα μπήκε σε χειροκίνητη λειτουργία και ο κινητήρας σταμάτησε. Στην περίπτωση που δεν υπήρχε η αυτόματη διακοπή μόλις το φορτίο άγγιζε το έδαφος, ο αισθητήρας δύναμης θα αισθανόταν μηδενικό φορτίο. Επειδή όμως γίνεται αντιστάθμιση βαρύτητας, ο controller θα αντιδρούσε με το να σηκώσει το φορτίο αμέσως. Ωστόσο, μόλις το φορτίο άφηνε το έδαφος η βαρύτητα θα εμφανιζόταν ξανά και το φορτίο θα ξανακατέβαινε. Αυτή η διαδικασία θα συνεχιζόταν περιοδικά προκαλώντας ζημιές στο φορτίο και στο σύστημα ανύψωσης και πιθανόν και τραυματισμό κάποιου χειριστή. Επίσης εάν το σύστημα ήταν πολύ αργό και δεν αντιλαμβανόταν άμεσα τη μεταβολή της δύναμης τότε ο κινητήρας θα συνέχιζε να λειτουργεί και το συρματόσχοινο θα χαλάρωνε επιφέροντας επιπλέον κινδύνους. Διάγραμμα 4.7 Διάγραμμα V(t), F(t) για m=1kg σε αυτόματη διακοπή Στα διαγράμματα 4.8 και 4.9 φαίνεται αντίστοιχα η απόδοση του συστήματος αυτόματης διακοπής για μάζες 2kg και 3kg. Πανεπιστήμιο Πατρών 84
85 Διάγραμμα 4.8 Διάγραμμα V(t), F(t) για m=2kg σε αυτόματη διακοπή Διάγραμμα 4.9 Διάγραμμα V(t), F(t) για m=3kg σε αυτόματη διακοπή Πανεπιστήμιο Πατρών 85
86 Παρατηρείται ότι όσο μεγαλύτερη είναι η αναρτημένη μάζα τόσο μεγαλύτερη είναι η δύναμη που απαιτείται για την ενεργοποίηση του συστήματος ασφαλείας. Η δύναμη αυτή ρυθμίζεται πριν την ενεργοποίηση της λειτουργίας υποβοήθησης να είναι στο μισό του βάρους του φορτίου. Το χαρακτηριστικό αυτό πρώτον διευκολύνει την τοποθέτηση βαρέων αντικειμένων στο έδαφος, σε πάγκους εργασίας, σε παλέτες κ.ά.. Εφόσον τοποθετηθεί το φορτίο, ο άνθρωπος δε χρειάζεται να χρησιμοποιήσει το χειριστήριο για να σταματήσει τη λειτουργία υποβοήθησης κερδίζοντας πολύτιμο χρόνο. Κατά δεύτερον, σε περίπτωση αποσύνδεσης του φορτίου ενώ αιωρείται αναρτημένο, θα διακοπεί η λειτουργία του συστήματος και ο κινητήρας θα σταματήσει. Πανεπιστήμιο Πατρών 86
87 Κεφάλαιο 5. Συμπεράσματα Προοπτικές Στα πλαίσια της εργασίας αυτής σχεδιάστηκε και αναπτύχθηκε ένας ανυψωτικός μηχανισμός που φέρει ηλεκτρονικό σύστημα υποβοήθησης ώστε να επιτρέπει στον άνθρωπο τον άμεσο χειρισμό ενός φορτίου με πολύ μεγάλη ευελιξία και χωρίς χρήση χειριστηρίου. Ένα τέτοιο σύστημα θα βρίσκει εφαρμογή σε βιομηχανικούς χώρους και πιο συγκεκριμένα σε γραμμές μεταφοράς συναρμολόγησης όπου το επίπεδο της ευελιξίας και της ταχύτητας που προσφέρουν τα συμβατικά συστήματα κατά το χειρισμό τους δεν επαρκεί για την εκτέλεση απαιτητικών διεργασιών. Ως αποτέλεσμα, ο άνθρωπος επωμίζεται όλο το βάρος ενός φορτίου με σοβαρές μακροχρόνιες συνέπειες στην υγεία του. Για την αντιμετώπιση αυτού του προβλήματος σχεδιάστηκε ένας γερανός δαπέδου με βραχίονα δυο αρθρώσεων που μπορεί να κινηθεί στο οριζόντιο επίπεδο χωρίς εξωτερική παροχή ισχύος παρά μόνο ασκώντας σε αυτόν μια μικρή δύναμη με το χέρι. Στον βραχίονα θα μπορεί να προσαρτηθεί ηλεκτροκίνητο σύστημα ανυψωτήρα με συρματόσχοινο (βαρούλκο) για την κατακόρυφη κίνηση. Δίνοντας βάση στην απλότητα και την ασφάλεια της κατασκευής σχεδιάστηκε μια μεταλλική κατασκευή με φέρουσα ικανότητα 100kg, καλυπτόμενο χώρο εργασίας 17m 2 και βάρους μόνο 170kg. Ο ανυψωτικός μηχανισμός αποτελείται από έναν κινητήρα συνεχούς ρεύματος μηχανικά συνδεδεμένο με έναν αορτήρα τύλιξης του συρματόσχοινου. Στο ελεύθερο άκρο του συρματόσχοινου είναι τοποθετημένο ένα χειριστήριο που προσφέρει εργονομία στον χειρισμό του ηλεκτρικού συστήματος και των λειτουργιών του. Στη συνέχεια εξετάστηκε λεπτομερώς το σύστημα ελέγχου της κατακόρυφης κίνησης που θα επιτελεί την υποβοήθηση. Επιλέχθηκε το σύστημα να φέρει αισθητήρα δύναμης που θα μπορεί να μετρά το βάρος του αναρτημένου φορτίου και τη δύναμη που ασκεί ο χειριστής σε αυτό. Γνωρίζοντας ανά πάσα στιγμή τις δυο αυτές μεταβλητές ο χρήστης θα μπορεί μετακινώντας το ίδιο το φορτίο, και όχι μέσω χειριστηρίου, να εκτελεί οποιαδήποτε κίνηση εντός του χώρου εργασίας και να αισθάνεται το βάρος του φορτίου σημαντικά μικρότερο. Το πρόβλημα της σχεδιαστικής πρότασης έγκειται στο γεγονός ότι χρησιμοποιείται μόνο ένας αισθητήρας δύναμης οπότε το σύστημα πρέπει με κάποιον τρόπο να αναγνωρίζει τις συνιστώσες του σήματος εισόδου από τον αισθητήρα. Χρήση περισσότερων αισθητήρων θα αύξανε το κόστος οπότε η λύση δόθηκε με μέτρηση του βάρους του φορτίου αμέσως πριν την ενεργοποίηση της λειτουργίας υποβοήθησης και ενώ αυτό αιωρείται αναρτημένο. Αφαιρώντας τη μέτρηση αυτή από την τιμή εισόδου θα προκύπτει η σύνθετη δύναμη που ασκεί ο χειριστής. Σύνθετη διότι εμφανίζονται επίσης δυνάμεις από επιταχύνσεις-επιβραδύνσεις κατά την εκκίνηση-σταμάτημα του φορτίου αντίστοιχα αλλά και από παραμένουσες ταλαντώσεις λόγω της εύκαμπτης κατασκευής. Ο ελεγκτής που σχεδιάστηκε για το σύστημα ελέγχου αποτελείται από δυο μέρη. Αρχικά από μια αναλογική δράση Kp [ m s N ] η οποία μετασχηματίζει τη δύναμη εισόδου σε επιθυμητή ταχύτητα για τον κινητήρα. Όσο μεγαλύτερος επιλέγεται ο συντελεστής Kp τόσο λιγότερη δύναμη απαιτείται να ασκήσει ο χειριστής για να κινήσει το φορτίο με μια Πανεπιστήμιο Πατρών 87
88 συγκεκριμένη ταχύτητα. Το δεύτερο μέρος του ελεγκτή είναι ένα υποσύστημα δεύτερης τάξης που δρα ως βαθυπερατό φίλτρο για την αποκοπή του θορύβου μέτρησης και των υψίσυχνων ταλαντώσεων που εισάγονταν από τον αισθητήρα. Το προτεινόμενο σύστημα μοντελοποιήθηκε με τη βοήθεια των προγραμμάτων Matlab και Simulink για να προσομοιωθεί η απόδοσή του. Ξεκινώντας με το μοντέλο του κινητήρα παρατηρήθηκε ότι σε βηματική είσοδο αποκρινόταν πάρα πολύ γρήγορα κυρίως λόγω της μικρής ροπής αδράνειας και της χαμηλής ταχύτητας περιστροφής. Επομένως κρίθηκε ότι η εισαγωγή της πραγματικής ταχύτητας στο σύστημα ελέγχου ως βρόγχος ανάδρασης δεν θα προσέφερε τίποτα μιας και θα ισούται με την ταχύτητα αναφοράς. Ο μόνος βρόγχος ανάδρασης που εισάγεται είναι η δύναμη λόγω επιτάχυνσης του φορτίου και ο οποίος αποτελεί μέρος της εγκατάστασης. Η προσομοίωση του συνολικού μοντέλου επαναλήφθηκε για διάφορες μάζες. Αρχικά με το σταθερό κέρδος του αναλογικού ελεγκτή όσο αυξανόταν η μάζα που αναρτούσαμε γίνονταν περισσότερο έντονες οι διαταραχές που υπεισέρχονταν στο σύστημα και αλλοιωνόταν η συμπεριφορά κυρίως στις αλλαγές της κινητικής κατάστασης. Ύστερα χρησιμοποιήθηκε προγραμματισμός του στατικού κέρδους σύμφωνα με το βάρος του φορτίου. Τα αποτελέσματα της προσομοίωσης με τον προγραμματισμό του κέρδους έδειξαν όμοια συμπεριφορά του συστήματος ανεξάρτητα της αναρτημένης μάζας και ότι ήταν δυνατή η κίνηση ενός φορτίου στη μέγιστη ταχύτητα του κινητήρα ασκώντας σε αυτό δύναμη ίση με το ένα δέκατο του βάρους του. Για την επαλήθευση των θεωρητικών αποτελεσμάτων κατασκευάστηκε στο εργαστήριο ο ανυψωτικός μηχανισμός του γερανού και υλοποιήθηκε ψηφιακά το σύστημα ελέγχου. Η πειραματική διάταξη ήταν υπό κλίμακα και έγιναν δοκιμές με μικρά φορτία τα αποτελέσματα των οποίων θα μπορούσαν να αναχθούν σε μεγάλη κλίμακα. Συγκεκριμένα αναρτήθηκαν φορτία μάζας 1kg, 2kg και 3kg και ζητήθηκε από τον χειριστή να τα μετακινήσει με τη μέγιστη ταχύτητα του κινητήρα ασκώντας σε αυτά την ελάχιστη δυνατή δύναμη. Η δύναμη αυτή, σύμφωνα με το προγραμματιζόμενο κέρδος, ήταν το 1/10 του βάρους τους και όπως αποδείχθηκε, επετεύχθη η ζητούμενη υποβοήθηση με τον χειριστή να μετακινεί το φορτίο με πολύ φυσική κίνηση και να το αισθάνεται σημαντικά ελαφρύτερο. Τα αποτελέσματα των πειραμάτων έδειξαν να συμβαδίζουν με τα αντίστοιχα θεωρητικά. Επιπλέον, στην πειραματική διάταξη υλοποιήθηκαν τα συστήματα ασφαλείας σύμφωνα με τις προδιαγραφές που είχαν τεθεί και λήφθηκαν μετρήσεις για την αποδοτικότητά τους. Ειδικά το σύστημα αυτόματης διακοπής του κινητήρα στις περιπτώσεις επαφής του φορτίου στο έδαφος και αποσύνδεσης του φορτίου λειτούργησε όπως αναμενόταν προστατεύοντας τον χρήστη από απρόβλεπτες ενέργειες και τον ίδιο τον εξοπλισμό. Προοπτικές Πανεπιστήμιο Πατρών 88
89 Έχοντας επιτύχει τη ζητούμενη υποβοήθηση στο σύστημα ανύψωσης της πειραματικής διάταξης, θα μπορούσε να γίνει αλλαγή του κινητήρα με αντίστοιχο μεγαλύτερης ισχύος ώστε να επαναληφθούν οι μετρήσεις με μεγαλύτερο αναρτημένο βάρος. Χρησιμοποιώντας το ίδιο σύστημα ελέγχου, τα αποτελέσματα θεωρητικά αναμένεται να είναι όμοια με της παρούσας εργασίας γιατί το κέρδος του ελεγκτή εξαρτάται από το βάρος. Θα παρουσίαζε ενδιαφέρον όμως να μετρηθεί η ευκολία κατά το χειρισμό πολύ μεγαλύτερων φορτίων και κατά πόσο επαρκεί ο ελεγκτής που σχεδιάστηκε για την αποκοπή των διαταραχών. Στη συνέχεια, θα μπορούσε να κατασκευαστεί ο γερανός που σχεδιάστηκε αναλυτικά στο κεφάλαιο 2 και σύμφωνα με τα κατασκευαστικά σχέδια που παρατίθενται στο παράρτημα D. Σε αυτόν θα προσαρτηθεί το μεγάλης κλίμακας ανυψωτικό σύστημα και θα μπορούν να ληφθούν μετρήσεις της συνολικής απόδοσης που το φορτίο θα κινείται ταυτόχρονα, εκτός από την κατακόρυφη διεύθυνση, και στο οριζόντιο επίπεδο. Εφόσον κριθεί η αποτελεσματικότητα του ολοκληρωμένου ανυψωτικού συστήματος μπορεί να γίνει εμπορική αξιοποίησή του με πολύ καλές προοπτικές ως καινοτόμο προϊόν. Πανεπιστήμιο Πατρών 89
90 Βιβλιογραφία [1] H. Kazerooni, J.-L. Racine, L. Huang και R. Steger, «On the control of Berkeley Lower Extremity Exosceleton,» Proceeding of the 2005 IEEE Int. Conf. on Robotics and Automation, pp , [2] H. Lee, T. Takubo, H. Arai και K. Tanie, «Control of mobile manipulators for power assist systems,» Proc. of 1999 IEEE Int. Conf. on systems, Man and Cybernetics (SMC'99), pp , Vol [3] Y. Hayashibara, K. Tanie και H. Arai, «Assist system for carrying a long object with a human - Analysis of a human cooperative behavior in the vertical direction,» Proceedings of the 1999 IEEE/RSJ Int. Conf. on intelligent robots and systems, pp , [4] T. Miyoshi, Y. Suzuki και K. Terashima, «Construction of traveling crane embedded power assist function,» IASTED International conference robotics and applications '03, pp , [5] T. Miyoshi, Y. Suzuki και K. Terashima, «Evaluation of effectiveness of powerassisted wire suspension system compared to conventional machine,» Proc. of the 2009 IEEE Int. Conf. on Mechatronics and Automation, pp , 9-12 Aug [6] T. Doi, H. Yamada, T. Ikemoto και H. Natarani, «Simulation of pneumatic hand crane type power assist system,» Journal of robotics and mechatronics, pp , Vol.20 no [7] K. Osamura, S. Kobayashi, M. Hirata και H. Okamoto, «Power assist control for slide doors,» SICE Annual Conference 07, pp , Sept [8] M. Rahman, R. Ikeura, M. Nobe και H. Sawai, «Human operator's weight perception of an object vertically lifted with a power assist system,» Proc. IEEE/SICE Int. Symp. Syst. Integr., pp , Dec [9] M. Rahman, R. Ikeura, M. Nobe και H. Sawai, «Worst-cases prediction by human in lifting objects with a power assist robot system: Effectiveness of a novel control strategy to improve the system performances in worst-cases,» Proc. of the rd IEEE RAS & EMBS, pp , Sept [10] J. E. Colgate, M. Peshkin και S. Klostemeyer, «Intelligent assist devices in industrial applications: A review,» Proc. of the 2003 IEEE/RSJ Int. Conf. of Intelligent robots and systems, pp , October [11] M. Haegele, J. Neugebauer και R. D. Schraft, «From robots to robot assistants,» Proc. of the 32nd ISR, April Πανεπιστήμιο Πατρών 90
91 [12] Α. Δέντσορας, Μηχανές διακίνησης υλικών, Πάτρα: Πανεπιστημιακές σημειώσεις, [13] ANSI Specification B [14] AISC, Steel Construction Manualm 14th Edition, [15] Φ. 1186/Β`/ , Κανονισμός Ελέγχων Ανυψωτικών Μηχανημάτων. [16] ANSI/RIA, Robot safety requirements standard, R [17] Τ15.1 Draft standard for trial use for intelligent assist devices- Personnel safety requirements, [18] Ν. Ασπράγκαθος, Ηλεκτροτεχνία και ηλεκτρικές μηχανές Τόμος Β', Πάτρα: Πανεπιστήμιο Πατρών, [19] Σ. Βασιλακόπουλου, Ηλεκτρικές Μηχανές, Αθήνα: Ίδρυμα Ευγενίδου, [20] Ν. Ασπράγκαθος, Μηχανική, Έλεγχος και Προργραμματισμός των Βιομηχανικών Ρομπότ, Πάτρα: Πανεπιστήμιο Πατρών, [21] European structural steel standard EN : [22] Θ. Κερμανίδης, Αντοχή Υλικών Ι, Πάτρα, [23] « [Ηλεκτρονικό]. [24] R. Dorf και R. Bishop, Σύγχρονα συστήματα αυτομάτου ελέγχου, 11η Έκδοση, Αθήνα: Τζιόλα, [25] Ν. Ασπράγκαθος, Ηλεκτροτεχνία και ηλεκτρικές μηχανές Τόμος Α', Πάτρα: Πανεπιστήμιο Πατρών, [26] Δ. Μιχαλόπουλος, Μηχανολογικές Μετρήσεις, Πάτρα: Πανεπιστήμιο Πατρών, [27] « [Ηλεκτρονικό]. [28] « [Ηλεκτρονικό]. [29] Σ. Φασόης, Συστήματα & Αυτόματος Έλεγχος ΙΙ, Πάτρα: Πανεπιστημιακές Εκδόσεις, Πανεπιστήμιο Πατρών 91
92 Παράρτημα A Αναπτυχθέντα προγράμματα i) Μοντέλο προσομοίωσης σε Matlab Η προσομοίωση του μοντέλου έγινε σε Matlab έκδοσης (R2010b) με τη βοήθεια του Simulink (ενσωματωμένο στο Matlab). Για την κατασκευή του μοντέλου δίνονται πρώτα ως μεταβλητές οι παράμετροι του συστήματος στη γραμμή εντολών του Matlab και στη συνέχεια κατασκευάζεται το μοντέλο στο Simulink. Παράμετροι συστήματος % File Model_parameters.m v0.1 % Motor parameters J=5.65e-6; b=2.5e-5; K=0.036; R=5; L=0.01; r=0.028; n=139; hg=0.81; % Plant parameters m=1; g=9.81; a=10; noise_var1=0.02; noise_var2=0.05; noise_ts2=0.02; noise_ts1=0.008; sat_upper_limit=100; sat_lower_limit=-100; % New model on Simulink new_system('model.mdl') Πανεπιστήμιο Πατρών 92
93 Κατασκευή μοντέλου Στην εικόνα Α.1 απεικονίζεται το σχέδιο του κεντρικού μοντέλου στο Simulink το οποίο αποτελείται από διάφορα στοιχεία και υποσυστήματα. Για τη δημιουργία του χρησιμοποιήθηκε η βιβλιοθήκη Simulink. Εικόνα Α.1 Περιεχόμενα κεντρικού μοντέλου "Model.mdl" Ακολουθεί η αναλυτική περιγραφή των επιμέρους στοιχείων του κεντρικού μοντέλου. Υποσύστημα Human force : Μοντελοποιείται η δύναμη που δίνεται ως είσοδο από το χειριστή ώστε να προσομοιωθεί μια διαδικασία ανύψωσης και κατάβασης του φορτίου. Εικόνα Α.2 Υποσύστημα "Human force" Τα Step 1 έως 4 παίρνουν τις εξής τιμές: Step1: Step time=1, Final value=1 Step2: Step time=4, Final value=-1 Πανεπιστήμιο Πατρών 93
94 Step3: Step time=5, Final value=-1 Step4: Step time=8, Final value=1 Έχουν ως κοινό: Initial value=0, Sample time=0 Αθροίζοντας τα Step με ένα στοιχείο πρόσθεσης και πολλαπλασιάζοντάς τα με m*g/a, προκύπτει η απαιτούμενη δύναμη του χειριστή σε σχέση με το χρόνο ανάλογα με το αναρτημένο φορτίο και έχει μονάδες Newton. Υποσύστημα Noise1 & Noise2 : Μοντελοποίηση του θορύβου μέτρησης και παραμενουσών ταλαντώσεων με χρήση γεννήτριας τυχαίων αριθμών. Ο θόρυβος μέτρησης δίνεται από το Noise1 το οποίο παίρνει τιμές: Variance = noise_var1 Sample time = noise_ts1 Ενώ παραμένουσες ταλαντώσεις από το Noise2 με τιμές: Variance = noise_var2 Sample time = noise_ts2 Κοινές τιμές και για τα δυο είναι: Mean = 0 Seed = 0 Βάρος και αντιστάθμιση βάρους: Οι τιμές για τον υπολογισμό του βάρους γίνονται διαβάζοντας τις μεταβλητές m και g με τη χρήση Constant Source block όπως είναι τα weight και weight compensation Ελεγκτής: Ο ελεγκτής που σχεδιάστηκε αποτελείται από ένα κέρδος Kp και ένα υποσύστημα δεύτερης τάξης. Το κέρδος μοντελοποιείται από ένα Gain block Kp το οποίο υπολογίζει το κέρδος ανάλογα με τη μάζα σύμφωνα με τον τύπο 100*a/(m*g). Το υποσύστημα δεύτερης τάξης δίνεται ως συνάρτηση μεταφοράς με χρήση ενός block Transfer Function. Για την προστασία του κινητήρα χρησιμοποιείται κορεσμός της εξόδου του ελεγκτή με το block Saturation με όρια: Upper limit = sat_upper_limit Lower limit = sat_lower_limit Πανεπιστήμιο Πατρών 94
95 Υποσύστημα DC-Motor Το υποσύστημα αυτό περιγράφει τον κινητήρα με το τύμπανο τύλιξης του συρματόσχοινου. Έχει εισόδους %duty και torque [Nm], έξοδο την ταχύτητα του φορτίου και περιγράφεται από την εικόνα Α.3. Εικόνα Α.3 Υποσύστημα κινητήρα - τυμπάνου Load torque Επειδή η ταχύτητα του κινητήρα εξαρτάται από το φορτίο που είναι αναρτημένο, χρησιμοποιείται ένα gain block Load torque το οποίο μετατρέπει τη σύνθετη δύναμη που δέχεται ο αισθητήρας σε ροπή στον άξονα του κινητήρα σύμφωνα με τη σχέση r/(n*hg). Η επίδραση του βάρους όμως στην ταχύτητα δεν υφίσταται όταν ο κινητήρας και συνεπώς το φορτίο είναι ακίνητα λόγω της στατικής τριβής. Γι αυτό χρησιμοποιούνται τα block Normalize, Abs και Product τα οποία δρουν ως διακόπτης πριν την είσοδο στον κινητήρα. Όταν η δύναμη από το Human force είναι μηδενική τότε το αποτέλεσμα του πολλαπλασιασμού στο Product είναι μηδέν. Ενώ όταν η δύναμη είναι μη μηδενική, η έξοδος του Abs είναι μονάδα και το αποτέλεσμα στο Product ισούται με fsensor. Οπτικοποίηση αποτελεσμάτων με Velocity και simout Το block Velocity είναι τύπου Scope και χρησιμοποιείται για τη γρήγορη δημιουργία της γραφικής παράστασης της ταχύτητας συναρτήσει του χρόνου. Το block simout δημιουργεί στον χώρο του Matlab ένα διάνυσμα με την ονομασία simout που περιέχει τις τιμές της ταχύτητας κατά την προσομοίωση. Ταυτόχρονα δημιουργεί και ένα διάνυσμα tout ίδιου μεγέθους που περιέχει τις τιμές του χρόνου. Αυτά τα δύο χρησιμοποιούνται για τη δημιουργία πιο λεπτομερών διαγραμμάτων. Πανεπιστήμιο Πατρών 95
96 Παράμετροι Simulink Για την εκτέλεση της προσομοίωσης επιλέχτηκε χρόνος 9 δευτερολέπτων, ικανός για να έρθει το σύστημα στη μόνιμη κατάσταση και στις δυο διευθύνσεις και να ληφθούν χρήσιμα συμπεράσματα. Για την επίλυση του συστήματος επιλέχθηκε η ode45 (Dormant-Prince) με αυτόματα μεταβλητό βήμα. ii) Σχεδιασμός ψηφιακού ελεγκτή Ο σχεδιασμός του ψηφιακού ελεγκτή έγινε με τη χρήση του Matlab. Αρχικά ορίστηκε η συνάρτηση μεταφοράς στο επίπεδο S που προέκυψε από το κεφάλαιο 4.3 και στη συνέχεια χρησιμοποιήθηκε η συνάρτηση c2d (continuous- to discrete-time model) για το μετασχηματισμό Z με περίοδο δειγματοληψίας Τs. Οι εντολές που χρησιμοποιήθηκαν είναι: sys=tf([39.478],[ ]) %Ορισμός συνάρτησης μεταφοράς στο επίπεδο s c2d(sys,0.008) %Χρήση της συνάρτησης c2d για τον μετασχηματισμό z με Τs=0.008s iii) Πρόγραμμα πειραματικής διάταξης σε Labview Ο έλεγχος της πειραματικής διάταξης υλοποιήθηκε σε Labview 2010 μαζί με την προσθήκη του Control Design & Simulation 2010 module. Tο αναπτυχθέν πρόγραμμα αποτελείται από δυο μέρη. Την κύρια διεπαφή (εικόνα Α.4), απ όπου γίνεται ο χειρισμός των στοιχείων και η εμφάνιση των ενδείξεων κατά την εκτέλεση του προγράμματος, και το δομικό διάγραμμα (εικόνα Α.5), το οποίο περιλαμβάνει τον πηγαίο κώδικα. Η κύρια διεπαφή είναι βοηθητικό στοιχείο του προγράμματος που χρησιμεύει για την οπτικοποίηση διαφόρων λειτουργιών, σε αντίθεση με το δομικό διάγραμμα που είναι βασικό στοιχείο και σε αυτό προγραμματίζονται όλες οι λειτουργίες. Πανεπιστήμιο Πατρών 96
97 Εικόνα Α.4 Κύρια διεπαφή προγράμματος Εικόνα Α.5 Δομικό διάγραμμα (πηγαίος κώδικας) Πανεπιστήμιο Πατρών 97
98 Το εκτελέσιμο πρόγραμμα αποτελείται από τρία στάδια: Αρχικοποίηση Έλεγχος Τερματισμός Αυτά εκτελούνται διαδοχικά κατά την εκτέλεση του προγράμματος και η λειτουργία του καθενός περιγράφεται αναλυτικά παρακάτω. Αρχικά όμως πρέπει να γίνει περιγραφή των συμβόλων και των γραμμών που χρησιμοποιούνται στο δομικό διάγραμμα και σε τι αναφέρονται. Ξεκινώντας από τις γραμμές που υπάρχουν στο διάγραμμα, αυτές αναφέρονται σε μεταφορά δεδομένων μεταξύ τμημάτων του προγράμματος και παρομοιάζονται με ηλεκτρικές καλωδιώσεις. Οι καλωδιώσεις συνδέονται στα διάφορα στοιχεία του προγράμματος στις θέσεις όμως με ίδιο τύπο μεταβλητής. Το διαφορετικό χρώμα και πάχος τους χρησιμεύει στο διαχωρισμό του τύπου των τιμών που μεταφέρουν σύμφωνα με τον πίνακα Α.1: Γραμμή Περιγραφή μεταβλητής Ακέραια 32bit Πραγματική 64bit Ψηφιακή 1bit (True / False) Αλφαριθμητική Σύμπλεγμα τριών στοιχείων (ψηφιακής, ακέραια, αλφαριθμητικής) για μεταφορά σημάτων σφάλματος Πίνακας Α.1. Περιγραφή καλωδιώσεων προγράμματος Τα ποιο απλά στοιχεία του προγράμματος είναι αυτά της δήλωσης σταθερών και εκχώρησης μεταβλητών. Τα πρώτα έχουν την υποδοχή για την καλωδίωση στο δεξιό τους μέρος και διαχωρίζονται από τα δεύτερα τα οποία έχουν την υποδοχή στο αριστερό μέρος. Το χρώμα τους αντιστοιχεί στον τύπο της μεταβλητής που φέρουν και ο χρωματισμός είναι ίδιος με των καλωδιώσεων. Παράδειγμα μεταβλητών και σταθερών δίνεται στον πίνακα Α.2. Δήλωση σταθεράς τύπου ακεραίου Δήλωση σταθεράς τύπου πραγματικού Δήλωση λογικής σταθεράς (False) Εκχώρηση σε μεταβλητή τύπου πραγματικού Εκχώρηση σε μεταβλητή τύπου Boolean Πίνακας Α.2. Σταθερές & Μεταβλητές Πανεπιστήμιο Πατρών 98
99 Για την επεξεργασία των ακέραιων και πραγματικών μεταβλητών χρησιμοποιούνται οι συνήθης τελεστές πρόσθεσης, πολλαπλασιασμού, σύγκρισης κ.ά. Για τις λογικές μεταβλητές χρησιμοποιούνται πύλες OR, AND, NOT κ.ά. Στην εικόνα Α.6 περιγράφονται οι τελεστές και οι πύλες που χρησιμοποιήθηκαν. Εικόνα Α.6 Τελεστές προγράμματος Στο πρόγραμμα υπάρχουν επίσης στοιχεία με μπλε φόντο τα οποία είναι υποπρογράμματα που εκτελούν διάφορες λειτουργίες των Phidgets όπως ανάγνωση τιμών και παρέχονται έτοιμες από τον κατασκευαστή των Phidgets ώστε να ενσωματωθούν στο κυρίως πρόγραμμα του Labview. Τέλος, για την έλεγχο του προγράμματος χρησιμοποιούνται δομές επανάληψης (συγκεκριμένα μία) και δομές επιλογής. Ακολουθεί περιγραφή των τριών σταδίων του αναπτυχθέντος προγράμματος. Αρχικοποίηση Είναι το πρώτο στάδιο στην εκτέλεση του προγράμματος και εκτελεί μία φορά μερικές διαδικασίες απαραίτητες για τη σωστή λειτουργία των περιφερειακών μονάδων. Όπως φαίνεται στην εικόνα Α.6, που αποτελεί κομμάτι του προγράμματος, γίνεται η σύνδεση των περιφερειακών συσκευών και η αρχικοποίηση τους. Αρχικά δίνεται στο καλώδιο σφάλματος μηδενική τιμή που είναι κοινή για όλες τις συσκευές. Στη συνέχεια το καλώδιο σφάλματος συνδέεται στα στοιχεία open για το άνοιγμα των Phidgets. Για τα Phidgets που συνδέονται μέσω USB στο open πρέπει να συνδεθεί και μια σταθερά που συμβολίζει το σειριακό αριθμό του καθενός (πχ ). Για το SBC2 που συνδέεται με Ethernet χρειάζεται επίσης να δοθεί το hostname, ο κωδικός χρήστη και χρόνος timeout. Μόλις εκτελεστεί το άνοιγμα των συσκευών καταχωρείται στις μεταβλητές attached Πανεπιστήμιο Πατρών 99
, ένας δείκτης ανάγνωσης (0) και το κέρδος (128).")
100 αληθής τιμή εάν η επικοινωνία είναι επιτυχής και ψευδής στην αντίθετη περίπτωση. Για το PhidgetBridge πρέπει να δοθεί επίσης ρυθμός δειγματοληψίας (8ms), ένας δείκτης ανάγνωσης (0) και το κέρδος (128). Στις μεταβλητές var και flag που χρησιμεύουν για τον έλεγχο των συστημάτων ασφαλείας δίνεται τιμή False. Μόλις ολοκληρωθούν όλες οι διαδικασίες του σταδίου αρχικοποίησης το πρόγραμμα συνεχίζει στο στάδιο ελέγχου. Εικόνα Α.7 Αρχικοποίηση Πανεπιστήμιο Πατρών 100

101 Έλεγχος Το στάδιο αυτό περιλαμβάνει ένα βρόγχο επανάληψης while do που ενεργοποιείται μόλις τελειώσει το στάδιο της αρχικοποίησης και επαναλαμβάνεται μέχρι να δοθεί σήμα διακοπής. Κατά την εκτέλεση του βρόγχου γίνεται αρχικά ανάγνωση τιμών από τις εισόδους, ύστερα επεξεργασία των δεδομένων και τέλος εκχώρηση αποτελεσμάτων στις εξόδους. Για την εκτέλεση δυο διαδοχικών επαναλήψεων ορίζεται ένας χρόνος αναμονής ίσος με το ρυθμό δειγματοληψίας (8ms). Για καλύτερη ανάλυση γίνεται μεγέθυνση της εικόνας Α.5 και χωρίζεται σε τμήματα που καθένα περιγράφεται ξεχωριστά. Αρχικά στην Α.8 αρχικά φαίνεται ο ορισμός του χρόνου αναμονής. Γίνεται ανάγνωση τιμών των ψηφιακών εσόδων 0 έως 2 του Interface Kit που προέρχονται από το χειριστήριο και το αποτέλεσμα της ανάγνωσης περνάει από μια σειρά ψηφιακών πυλών για τη δημιουργία των μανδαλώσεων και των δικλείδων ασφαλείας. Οι μεταβλητές Up, Down ενεργοποιούν τις αντίστοιχες ενδεικτικές λυχνίες του γραφικού περιβάλλοντος κατά την λειτουργία του κινητήρα και ανάλογα με τη φορά κίνησης του φορτίου. Στη μεταβλητή Float εκχωρείται αληθής τιμή όταν είναι πατημένος ο ομώνυμος διακόπτης του χειριστηρίου και στην OK μόλις είναι ενεργοποιημένη η λειτουργία υποβοήθησης. Για τις ενδεικτικές λυχνίες του χειριστηρίου χρησιμοποιούνται οι έξοδοι 1 και 2 του Interface Kit. Εικόνα Α.8 Τμήμα 1 ελέγχου Πανεπιστήμιο Πατρών 101
 η συνθήκη γίνεται αληθής ενεργοποιώντας μια")
102 Κατά την έναρξη του προγράμματος είναι ενεργοποιημένη η χειροκίνητη λειτουργία και η συνθήκη της εικόνας Α.9 είναι ψευδής. Μόλις πατηθεί ο διακόπτης Float και πληρούνται οι συνθήκες ασφάλειας (ο κινητήρας να μη λειτουργεί και να μην είναι πατημένοι οι διακόπτες up, down) η συνθήκη γίνεται αληθής ενεργοποιώντας μια βοηθητική μεταβλητή var. Επειδή όμως ο βρόγχος επανάληψης μπορεί να εκτελεστεί αρκετές φορές όσο είναι πατημένος ο διακόπτης Float, χρησιμοποιείται μια εμφωλευμένη συνθήκη επιλογής η οποία απενεργοποιεί την πρώτη συνθήκη επιλογής. Η αυτόματη λειτουργία θα ενεργοποιηθεί μόλις ο χειριστής αφήσει τον διακόπτη Float. Εικόνα Α.9 Τμήμα 2 ελέγχου για τις δυο καταστάσεις της εμφωλευμένης δομής επιλογής Στο τμήμα στην εικόνα Α.10 γίνεται ανάγνωση της τιμής του αισθητήρα δύναμης και γράφεται η συνάρτηση μετατροπής από mv σε μονάδες δύναμης Newton. Η δύναμη εισάγεται σε τρεις δομές επιλογής. Η πρώτη δομή ενεργοποιείται μόλις είναι πατημένος ο διακόπτης Float του χειριστηρίου και εκχωρεί στη μεταβλητή Object Weight (N) το βάρος του φορτίου ώστε να μπορεί να γίνει αντιστάθμιση. Η δεύτερη δομή επιλογής περιέχει ένα στοιχείο Fast Fourier Transform Point by Point και έναν καταγραφέα της κυματομορφής. Ενεργοποιείται μόλις πατηθεί ο αντίστοιχος διακόπτης στο γραφικό περιβάλλον και χρησιμεύει για την εύρεση των δυναμικών χαρακτηριστικών του συστήματος. Η τρίτη δομή επιλογής στην οποία εισάγεται η δύναμη του αισθητήρα φαίνεται στην εικόνα Α.11 και περιέχει τον ελεγκτή του συστήματος. Εκτός από τη δύναμη δέχεται ως είσοδο σε ακέραια μορφή την επιθυμητή κίνηση κατά την χειροκίνητη λειτουργία (-1 για κίνηση προς τα κάτω, +1 για κίνηση προς τα άνω, 0 για ακινητοποίηση) και την πραγματική ταχύτητα του φορτίου όπως υπολογίζεται από την παλμογεννήτρια. Αρχικά στην τιμή της δύναμης αφαιρείται η μεταβλητή Object Weight (N) επιτυγχάνοντας αντιστάθμιση βάρους. Το αποτέλεσμα που είναι η δύναμη του χειριστή περνάει από ένα βαθυπερατό φίλτρο τύπου Butterworth (1 ης τάξης, fs=125ηz, fc=5hz) για να συνδεθεί σε ένα καταγραφέα για την εξαγωγή του διαγράμματος σε σχέση με το χρόνο. Πανεπιστήμιο Πατρών 102

103 Εικόνα Α.10 Τμήμα 3 ελέγχου Εικόνα Α.11 Τμήμα 4 ελέγχου Πανεπιστήμιο Πατρών 103

104 Ταυτόχρονα η δύναμη του χειριστή εισάγεται σε ένα στοιχείο Deadzone με εύρος - 0.3Ν έως 0.3Ν για την πλήρη αποκοπή του θορύβου όταν δεν ασκείται δύναμη από το χειριστή και το φορτίο πρέπει να ακινητοποιηθεί πλήρως. Η έξοδος του Deadzone καταλήγει στο στοιχείο Transfer Function το οποίο περιέχει τη ρητή συνάρτηση μεταφοράς του υποσυστήματος δεύτερης τάξης του ψηφιακού controller. Το αποτέλεσμα του Transfer Function πολλαπλασιάζεται αλγεβρικά με την έξοδο μιας δομής επιλογής. Η συγκεκριμένη δομή όταν είναι ψευδής έχει ως έξοδο μια σταθερή τιμή του κέρδους Kp που δίνεται από το χρήστη ενώ όταν είναι αληθής υπολογίζει το κέρδος Kp ανάλογα με το αναρτημένο βάρος. Σε κάθε περίπτωση έχει υλοποιηθεί ο controller και έχει έξοδο την επιθυμητή τιμή (%duty) του κινητήρα. Η τιμή αυτή εισάγεται στο στοιχείο Saturation που θέτει άνω και κάτω όριο στην ταχύτητα του κινητήρα, 100 και -100 αντίστοιχα, για την προστασία του ίδιου του κινητήρα και του ελεγκτή του. Τέλος συμπεριλαμβάνεται μια δομή επιλογής που ενεργοποιείται από τον αντίστοιχο διακόπτη του γραφικού περιβάλλοντος για την καταγραφή της ταχύτητας. Η ταχύτητα υπολογίζεται από την παλμογεννήτρια όπως φαίνεται στην εικόνα Α.12. Αρχικά γίνεται ανάγνωση της θέσης της παλμογεννήτριας, ακολουθεί παραγώγιση και οι κατάλληλες μετατροπές για να καταλήξει σε ταχύτητα με μονάδες μέτρα ανά δευτερόλεπτο. Εικόνα Α.12 Τμήμα 5 Ελέγχου Η έξοδος του controller δίνεται στον κινητήρα μέσω του MotorControllerHC όπως φαίνεται στην εικόνα Α.13. Για την εμφάνιση της ταχύτητας αυτής στην οθόνη του υπολογιστή εκχωρείται στη μεταβλητή Input Velocity που απεικονίζεται στην κύρια διεπαφή με ένα αναλογικό δείκτη. Η επιτάχυνση του κινητήρα επιλέγεται η μέγιστη (100) και παραμένει σταθερή. Πανεπιστήμιο Πατρών 104
105 Εικόνα Α.13 Τμήμα 7 Ελέγχου και Τερματισμού Τερματισμός Ο βρόγχος επανάληψης τερματίζεται μόλις πατηθεί ο διακόπτης Stop ή αν εμφανιστεί κάποιο σφάλμα στην επικοινωνία του υπολογιστή με τις περιφερειακές μονάδες. Μόλις τερματίζει η επανάληψη δίνεται στον κινητήρα η τιμή 0 ώστε να ακινητοποιηθεί. Για την ολοκλήρωση του προγράμματος χρησιμοποιούνται τα στοιχεία Close τα οποία σταματούν την επικοινωνία με τις περιφερειακές μονάδες και τις αποδεσμεύουν (εικόνα Α.13). Κύρια διεπαφή Κατά την εκτέλεση του προγράμματος ο χρήστης μπορεί να ενημερώνεται για την κατάσταση της λειτουργίας από την κύρια διεπαφή που εμφανίζεται στην οθόνη του υπολογιστή. Αυτή περιλαμβάνει λυχνίες που ανάβουν και σβήνουν ανάλογα με την κατάσταση των λογικών μεταβλητών, γραφήματα της ταχύτητας και της δύναμης του χειριστή σε σχέση με το χρόνο μαζί με τους διακόπτες για την ενεργοποίησή τους, αναλογικές ενδείξεις και διακόπτες αλλαγής λειτουργιών όπως στην εικόνα Α.14. Πανεπιστήμιο Πατρών 105

106 Εικόνα Α.14 Γραφική διεπαφή Πανεπιστήμιο Πατρών 106
107 Παράρτημα B Τεχνικά χαρακτηριστικά στοιχείων πειραματικής διάταξης i) Κινητήρας ii) Αισθητήρας δύναμης Πανεπιστήμιο Πατρών 107
108 Product Load Cell Model CZL301C-100kg Precision %F.S Rated Output mv/v Non-linearity %F.S Hysteresis %F.S Repeatability %F.S Creep %F.S./30min Temp. effect on zero %F.S./10C Temp. effect on span %F.S./10C Zero balance %F.S. ±1 Input impedance Ω 350±5 Output impedance Ω 350±5 Insulation resistance ΜΩ 5000 Recommended excitation VDC 9~12 Allowed excitation VDC 5~18 Compensated temp. range o C -10~+40 Operating temp. range o C -20~+55 Safe overload %F.S. 120 Ultimate overload %F.S. 120 Connection Excitation Red:+ Black:- Signal Green:+ White:- Πανεπιστήμιο Πατρών 108

109 iii) Ελεγκτής κινητήρα iv) Ενισχυτής - μετατροπέας αισθητήρα Πανεπιστήμιο Πατρών 109

110 v) Μετατροπέας παλμογεννήτριας Πανεπιστήμιο Πατρών 110
111 vi) Τυποποίηση συρματόσχοινων κατά DIN 655 Πανεπιστήμιο Πατρών 111
112 Παράρτημα C Συμπληρωματικές οδηγίες πειραματικής διάταξης Για την αναπαραγωγή των πειραμάτων που εκτελέστηκαν είναι απαραίτητο κάποιος να έχει διαβάσει με προσοχή όλο το κείμενο της διπλωματικής και κυρίως το κεφάλαιο 4 και το παράρτημα Α και Β. Σε αυτά έχει γίνει αναλυτική περιγραφή των υλικών στοιχείων που χρησιμοποιήθηκαν, τη συνδεσμολογία τους, τα τεχνικά χαρακτηριστικά κλπ. Επίσης στα προγράμματα που αναπτύχθηκαν υπάρχουν σχόλια για καλύτερη κατανόησή τους. Για την περίπτωση που οι εικόνες του κειμένου δεν είναι ευδιάκριτες έχουν επισυναφθεί στο συνοδευτικό CD της έντυπης εργασίας σε υψηλή ανάλυση. Στο CD υπάρχουν επίσης ο πηγαίος κώδικας του προγράμματος που δημιουργήθηκε στο Labview καθώς και το εκτελέσιμο πρόγραμμα που δεν απαιτεί την ύπαρξη του Labview στον H/Y για να τρέξει. Εάν ανακατασκευαστεί η πειραματική διάταξη ώστε να μπορεί να φέρει περισσότερο φορτίο πρέπει να δοθεί προσοχή στη σύνδεση του άξονα του κινητήρα με το τύμπανο τύλιξης. Κατά την κατασκευή της διάταξης λόγω του μικρού μέγιστου φορτίου επιλέχθηκε άξονας από αλουμίνιο ο οποίος όμως δεν επαρκεί για φορτία άνω των 5kg. Συνίσταται να κατασκευαστεί συμπαγής άξονας από χάλυβα και η στήριξη του κινητήρα να γίνει με κοχλίες διαμέτρου μεγαλύτερης των 5mm. Τα υπόλοιπα μέρη της κατασκευής (βάση, τύμπανο, συρματόσχοινο, αισθητήρας δύναμης) έχουν ικανότητα να φέρουν φορτίο έως 100kg και υπερφόρτωση έως 150kg. Πανεπιστήμιο Πατρών 112
113 Παράρτημα D Κατασκευαστικά σχέδια βραχίονα Ακολουθούν τα κατασκευαστικά σχέδια του γερανού και της βάσης του συστήματος ανύψωσης. Πανεπιστήμιο Πατρών 113
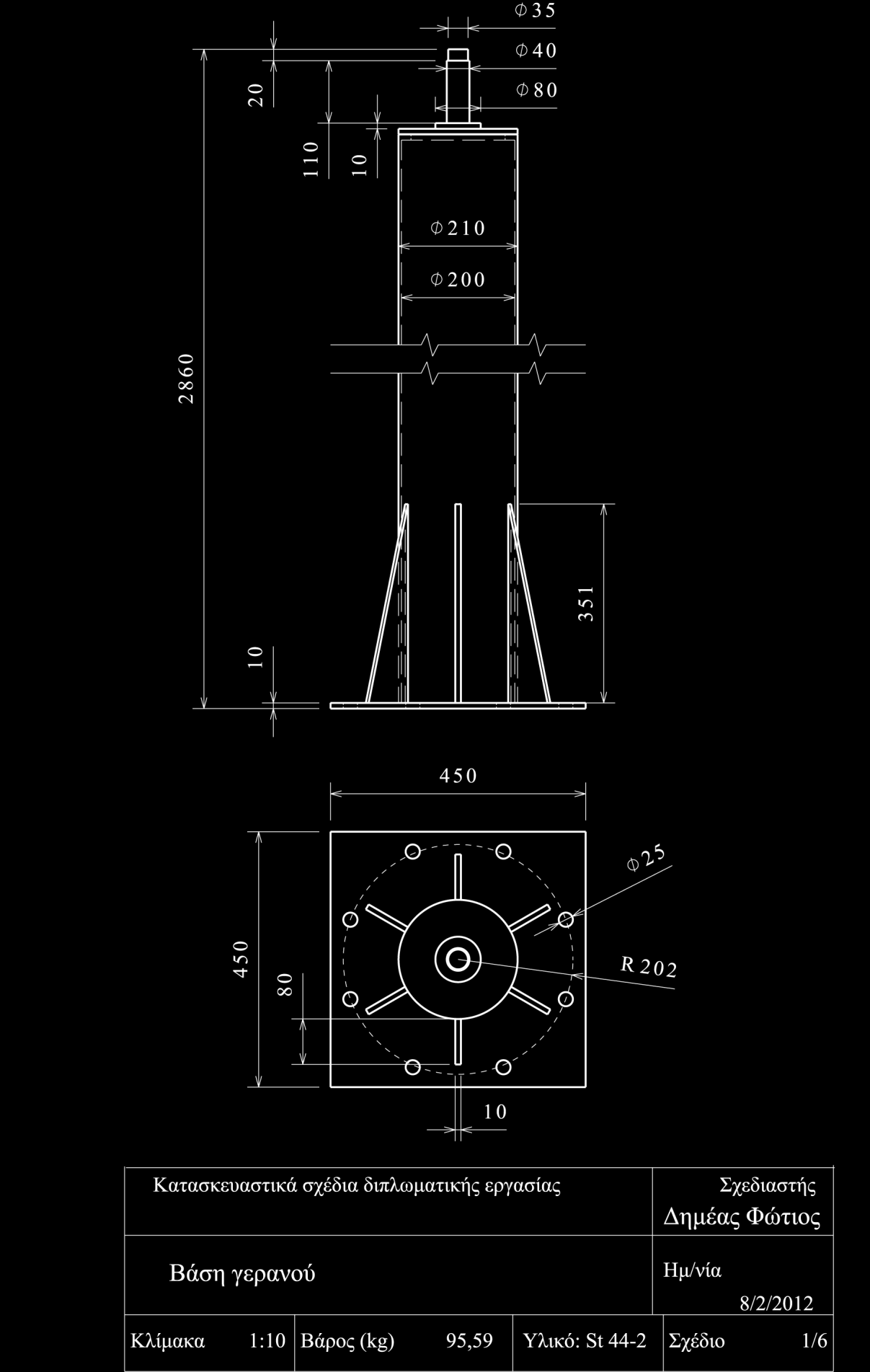
114 Πανεπιστήμιο Πατρών 114
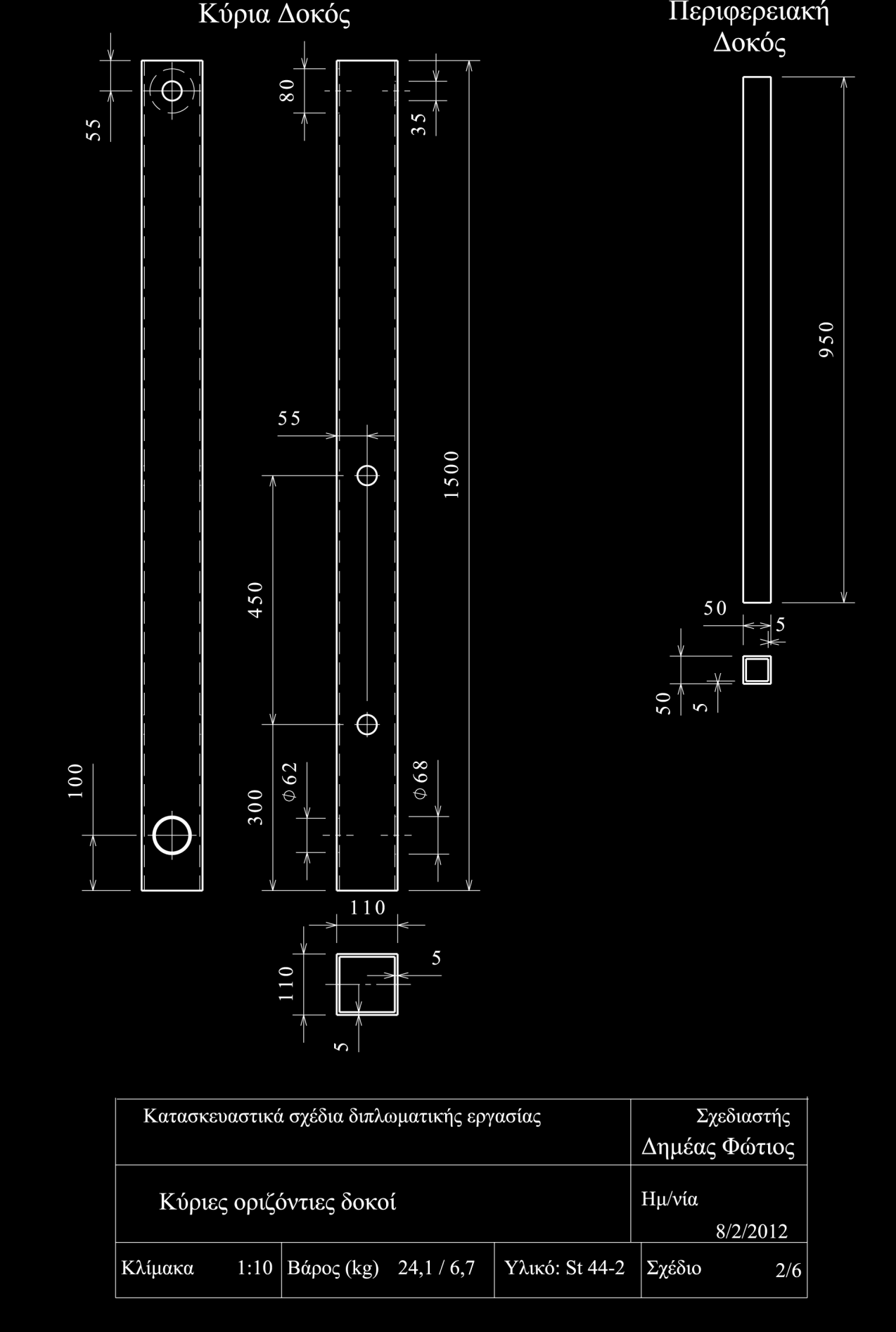
115 Πανεπιστήμιο Πατρών 115
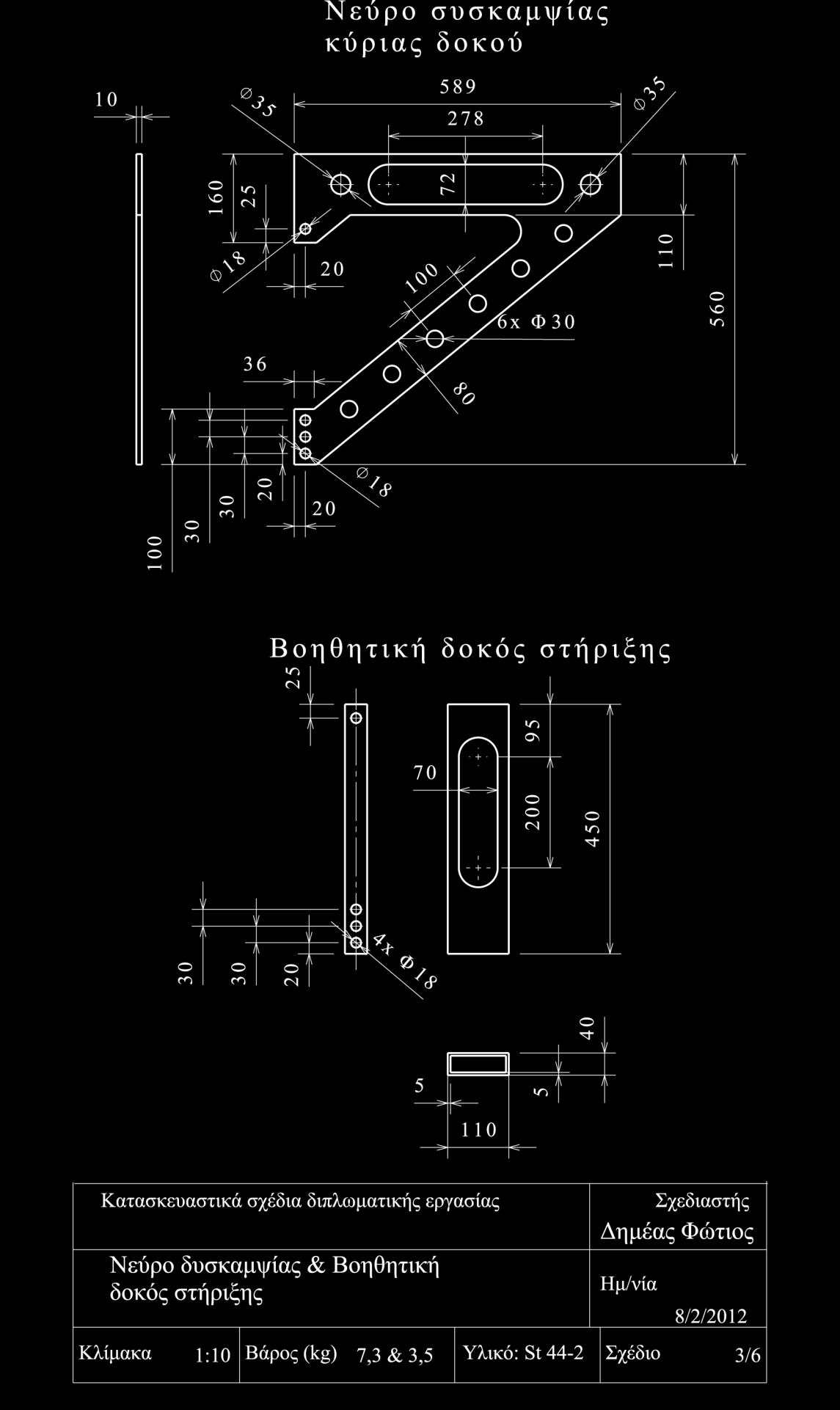
116 Πανεπιστήμιο Πατρών 116
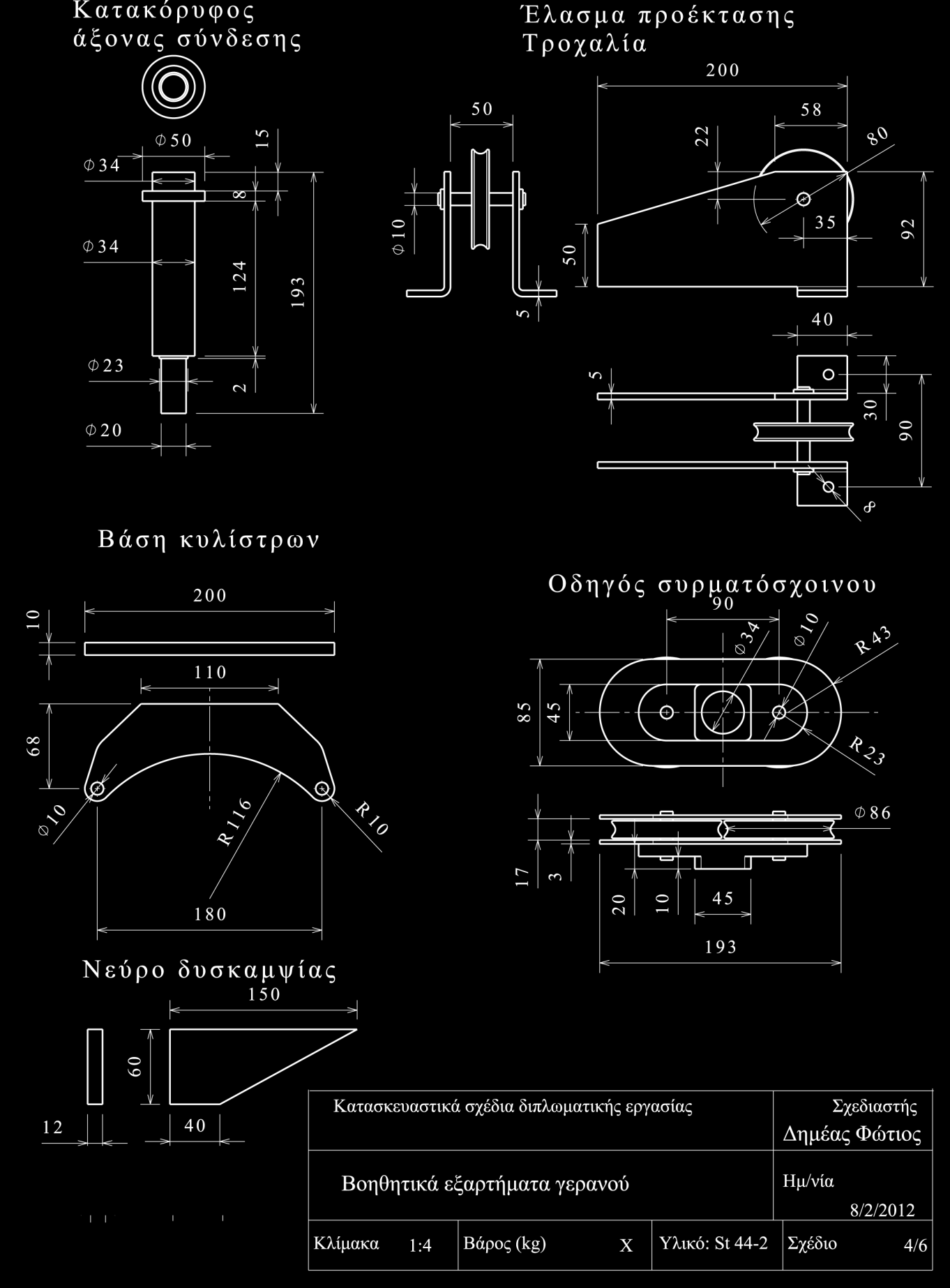
117 Πανεπιστήμιο Πατρών 117

118 Πανεπιστήμιο Πατρών 118
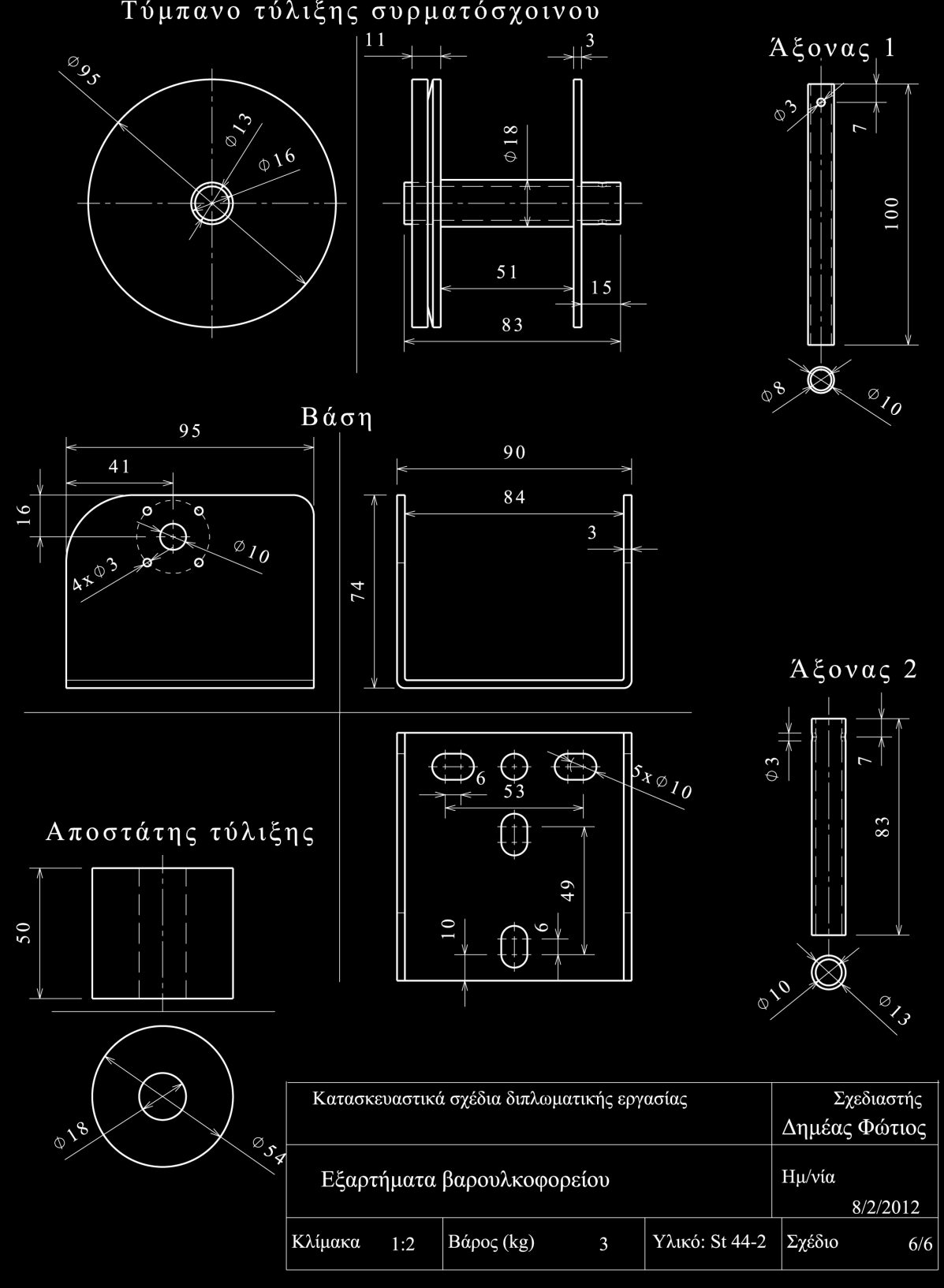
119 Πανεπιστήμιο Πατρών 119
8 η ΕΝΟΤΗΤΑ Ανυψωτικά μηχανήματα
 ΣΧΟΛΗ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΜΠ ΔΟΜΙΚΕΣ ΜΗΧΑΝΕΣ & ΚΑΤΑΣΚΕΥΑΣΤΙΚΕΣ ΜΕΘΟΔΟΙ 8 η ΕΝΟΤΗΤΑ Ανυψωτικά μηχανήματα Διδάσκων: Σ. Λαμπρόπουλος Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες Χρήσης Creative
ΣΧΟΛΗ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΜΠ ΔΟΜΙΚΕΣ ΜΗΧΑΝΕΣ & ΚΑΤΑΣΚΕΥΑΣΤΙΚΕΣ ΜΕΘΟΔΟΙ 8 η ΕΝΟΤΗΤΑ Ανυψωτικά μηχανήματα Διδάσκων: Σ. Λαμπρόπουλος Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες Χρήσης Creative
ΕΡΓΑΣΤΗΡΙΟ ΣΤΟΙΧΕΙΩΝ ΜΗΧΑΝΩΝ Ι
 ΑΛΕΞΑΝΔΡΕΙΟ ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΘΕΣΣΑΛΟΝΙΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΟΧΗΜΑΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΣΤΟΙΧΕΙΩΝ ΜΗΧΑΝΩΝ Ι ΔΙΔΑΣΚΩΝ: ΔΡ. ΜΗΧ. ΜΑΛΙΑΡΗΣ ΓΕΩΡΓΙΟΣ ΕΡΓΑΣΙΑ ΣΤΟ ΜΑΘΗΜΑ ΕΡΓΑΣΤΗΡΙΟ ΣΤΟΙΧΕΙΩΝ
ΑΛΕΞΑΝΔΡΕΙΟ ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΘΕΣΣΑΛΟΝΙΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΟΧΗΜΑΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΣΤΟΙΧΕΙΩΝ ΜΗΧΑΝΩΝ Ι ΔΙΔΑΣΚΩΝ: ΔΡ. ΜΗΧ. ΜΑΛΙΑΡΗΣ ΓΕΩΡΓΙΟΣ ΕΡΓΑΣΙΑ ΣΤΟ ΜΑΘΗΜΑ ΕΡΓΑΣΤΗΡΙΟ ΣΤΟΙΧΕΙΩΝ
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ. Άσκηση 1. (Ροπή αδράνειας - Θεμελιώδης νόμος στροφικής κίνησης)
") ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση. (Ροπή αδράνειας - Θεμελιώδης νόμος στροφικής κίνησης) Ένας ομογενής οριζόντιος δίσκος, μάζας Μ και ακτίνας R, περιστρέφεται γύρω από κατακόρυφο ακλόνητο άξονα z, ο οποίος διέρχεται
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση. (Ροπή αδράνειας - Θεμελιώδης νόμος στροφικής κίνησης) Ένας ομογενής οριζόντιος δίσκος, μάζας Μ και ακτίνας R, περιστρέφεται γύρω από κατακόρυφο ακλόνητο άξονα z, ο οποίος διέρχεται
Κινητήρες μιας νέας εποχής
 Κινητήρες μιας νέας εποχής H ABB παρουσιάζει μια νέα γενιά κινητήρων υψηλής απόδοσης βασισμένη στην τεχνολογία σύγχρονης μαγνητικής αντίστασης. Η ΑΒΒ στρέφεται στην τεχνολογία κινητήρων σύγχρονης μαγνητικής
Κινητήρες μιας νέας εποχής H ABB παρουσιάζει μια νέα γενιά κινητήρων υψηλής απόδοσης βασισμένη στην τεχνολογία σύγχρονης μαγνητικής αντίστασης. Η ΑΒΒ στρέφεται στην τεχνολογία κινητήρων σύγχρονης μαγνητικής
ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ- 2018
 ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ- 2018 Κώστας Γαλιώτης, καθηγητής Τμήμα Χημικών Μηχανικών galiotis@chemeng.upatras.gr 1 Περιεχόμενα ενότητας Α Βασικές έννοιες Στατική υλικού σημείου Αξιωματικές αρχές Νόμοι Νεύτωνα
ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ- 2018 Κώστας Γαλιώτης, καθηγητής Τμήμα Χημικών Μηχανικών galiotis@chemeng.upatras.gr 1 Περιεχόμενα ενότητας Α Βασικές έννοιες Στατική υλικού σημείου Αξιωματικές αρχές Νόμοι Νεύτωνα
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ
 ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ 12. Ένας οριζόντιος ομογενής δίσκος ακτίνας μπορεί να περιστρέφεται χωρίς τριβές, γύρω από κατακόρυφο
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ 12. Ένας οριζόντιος ομογενής δίσκος ακτίνας μπορεί να περιστρέφεται χωρίς τριβές, γύρω από κατακόρυφο
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2010
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 010 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα: Βασικά Στοιχεία Εφαρμοσμένης Μηχανικής
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 010 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα: Βασικά Στοιχεία Εφαρμοσμένης Μηχανικής
ΕΙΣΑΓΩΓΗ ΣΤΗ ΜΗΧΑΝΟΛΟΓΙΑ (7 Ο ΕΞΑΜΗΝΟ)
") ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΜΕΤΑΛΛΕΙΩΝ - ΜΕΤΑΛΛΟΥΡΓΩΝ ΕΙΣΑΓΩΓΗ ΣΤΗ ΜΗΧΑΝΟΛΟΓΙΑ (7 Ο ΕΞΑΜΗΝΟ) Νίκος Μ. Κατσουλάκος Μηχανολόγος Μηχανικός Ε.Μ.Π., PhD, Msc ΜΑΘΗΜΑ 4-2 ΑΤΡΑΚΤΟΙ ΑΞΟΝΕΣ - ΣΤΡΟΦΕΙΣ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΜΕΤΑΛΛΕΙΩΝ - ΜΕΤΑΛΛΟΥΡΓΩΝ ΕΙΣΑΓΩΓΗ ΣΤΗ ΜΗΧΑΝΟΛΟΓΙΑ (7 Ο ΕΞΑΜΗΝΟ) Νίκος Μ. Κατσουλάκος Μηχανολόγος Μηχανικός Ε.Μ.Π., PhD, Msc ΜΑΘΗΜΑ 4-2 ΑΤΡΑΚΤΟΙ ΑΞΟΝΕΣ - ΣΤΡΟΦΕΙΣ
7 η ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ
 7 η ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ΑΚΤΙΝΙΚΟ Ε ΡΑΝΟ ΟΛΙΣΘΗΣΗΣ 7.1 Εδρανα Τα έδρανα αποτελούν φορείς στήριξης και οδήγσης κινούµενων µηχανολογικών µερών, όπως είναι οι άξονες, -οι οποίοι καταπονούνται µόνο σε κάµψη
7 η ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ΑΚΤΙΝΙΚΟ Ε ΡΑΝΟ ΟΛΙΣΘΗΣΗΣ 7.1 Εδρανα Τα έδρανα αποτελούν φορείς στήριξης και οδήγσης κινούµενων µηχανολογικών µερών, όπως είναι οι άξονες, -οι οποίοι καταπονούνται µόνο σε κάµψη
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΒΙΟΜΗΧΑΝΙΚΟ ΡΟΛΟ ΤΡΙΦΑΣΙΚΟΥ ΚΙΝΗΤΗΡΑ RSM
 ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ RSM 0 Τα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων και πιστοποιούνται βάσει του Ευρωπαϊκού Προτύπου EN 13241-1. Διαθέτουν προσαρμοζόμενη
ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ RSM 0 Τα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων και πιστοποιούνται βάσει του Ευρωπαϊκού Προτύπου EN 13241-1. Διαθέτουν προσαρμοζόμενη
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΗΛΕΚΤΡΟΚΙΝΗΤΟΥ ΔΙΑΙΡΟΥΜΕΝΟΥ ΡΟΛΟΥ E.M.D.R.S
 ΗΛΕΚΤΡΟΚΙΝΗΤΟΥ ΔΙΑΙΡΟΥΜΕΝΟΥ ΡΟΛΟΥ E.M.D.R.S 0 Τα Ηλεκτροκίνητα Διαιρούμενα Ρολά αποτελούν διατάξεις οι οποίες προορίζονται για την κάλυψη μεγάλων ανοιγμάτων (>12m), όπου καθίσταται αδύνατη η τοποθέτηση
ΗΛΕΚΤΡΟΚΙΝΗΤΟΥ ΔΙΑΙΡΟΥΜΕΝΟΥ ΡΟΛΟΥ E.M.D.R.S 0 Τα Ηλεκτροκίνητα Διαιρούμενα Ρολά αποτελούν διατάξεις οι οποίες προορίζονται για την κάλυψη μεγάλων ανοιγμάτων (>12m), όπου καθίσταται αδύνατη η τοποθέτηση
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΧΕΙΡΟΚΙΝΗΤΟΥ ΔΙΑΙΡΟΥΜΕΝΟΥ ΡΟΛΟΥ M.M.D.R.S
 ΧΕΙΡΟΚΙΝΗΤΟΥ ΔΙΑΙΡΟΥΜΕΝΟΥ ΡΟΛΟΥ M.M.D.R.S 0 Τα Χειροκίνητα Διαιρούμενα Ρολά αποτελούν διατάξεις οι οποίες προορίζονται για την κάλυψη μεγάλων ανοιγμάτων (>12m), όπου καθίσταται αδύνατη η τοποθέτηση ενός
ΧΕΙΡΟΚΙΝΗΤΟΥ ΔΙΑΙΡΟΥΜΕΝΟΥ ΡΟΛΟΥ M.M.D.R.S 0 Τα Χειροκίνητα Διαιρούμενα Ρολά αποτελούν διατάξεις οι οποίες προορίζονται για την κάλυψη μεγάλων ανοιγμάτων (>12m), όπου καθίσταται αδύνατη η τοποθέτηση ενός
ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ 2016
 ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ 2016 Κώστας Γαλιώτης, καθηγητής Τμήμα Χημικών Μηχανικών galiotis@chemeng.upatras.gr 1 Περιεχόμενα ενότητας Α Βασικές έννοιες Στατική υλικού σημείου Αξιωματικές αρχές Νόμοι Νεύτωνα Εξισώσεις
ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ 2016 Κώστας Γαλιώτης, καθηγητής Τμήμα Χημικών Μηχανικών galiotis@chemeng.upatras.gr 1 Περιεχόμενα ενότητας Α Βασικές έννοιες Στατική υλικού σημείου Αξιωματικές αρχές Νόμοι Νεύτωνα Εξισώσεις
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΤΑΧΥΚΙΝΗΤΟ ΒΙΟΜΗΧΑΝΙΚΟ ΡΟΛΟ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ
 ΤΑΧΥΚΙΝΗΤΟΥ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Ταχυκίνητα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων και πιστοποιούνται βάσει
ΤΑΧΥΚΙΝΗΤΟΥ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Ταχυκίνητα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων και πιστοποιούνται βάσει
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΑΥΕΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΑΠΑΝΤΗΣΕΙΣ Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014
 ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014") ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΑΥΕΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΑΠΑΝΤΗΣΕΙΣ Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/04 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΑΥΕΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΑΠΑΝΤΗΣΕΙΣ Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/04 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ
 ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 3 ο ΔΙΑΓΩΝΙΣΜΑ ΘΕΜΑΤΑ ΘΕΜΑ Α Στις ημιτελείς προτάσεις 1-4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση,
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 3 ο ΔΙΑΓΩΝΙΣΜΑ ΘΕΜΑΤΑ ΘΕΜΑ Α Στις ημιτελείς προτάσεις 1-4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση,
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. [ATLAS T50 solar tracker]
![ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. [ATLAS T50 solar tracker]](/thumbs/25/5346398.jpg "ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. [ATLAS T50 solar tracker]") ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ [ATLAS T50 solar tracker] Τεχνική περιγραφή T50 Greek Revision A-05 10-AUG-2010 Κύρια Χαρακτηριστικά Πλεονεκτήματα Πρωτοποριακή Σχεδίαση Στιβαρό χωροδικτύωμα για μηδενικές ταλαντώσεις
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ [ATLAS T50 solar tracker] Τεχνική περιγραφή T50 Greek Revision A-05 10-AUG-2010 Κύρια Χαρακτηριστικά Πλεονεκτήματα Πρωτοποριακή Σχεδίαση Στιβαρό χωροδικτύωμα για μηδενικές ταλαντώσεις
ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΪΟΥ/ ΙΟΥΝΙΟΥ 2014
 ΤΕΧΝΙΚΗ ΣΧΟΛΗ ΜΑΚΑΡΙΟΣ Γ ΣΧΟΛΙΚΗ ΧΡΟΝΙΑ 03-04 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΪΟΥ/ ΙΟΥΝΙΟΥ 04 Κατεύθυνση: Θεωρητική Μάθημα: Εφαρμοσμένη Μηχανική Επιστήμη Τάξη: Β' Αριθμός Μαθητών: 0 Κλάδος: Μηχανολογίας
ΤΕΧΝΙΚΗ ΣΧΟΛΗ ΜΑΚΑΡΙΟΣ Γ ΣΧΟΛΙΚΗ ΧΡΟΝΙΑ 03-04 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΪΟΥ/ ΙΟΥΝΙΟΥ 04 Κατεύθυνση: Θεωρητική Μάθημα: Εφαρμοσμένη Μηχανική Επιστήμη Τάξη: Β' Αριθμός Μαθητών: 0 Κλάδος: Μηχανολογίας
Μελέτη προβλημάτων ΠΗΙ λόγω λειτουργίας βοηθητικών προωστήριων μηχανισμών
 «ΔιερΕΥνηση Και Aντιμετώπιση προβλημάτων ποιότητας ηλεκτρικής Ισχύος σε Συστήματα Ηλεκτρικής Ενέργειας (ΣΗΕ) πλοίων» (ΔΕΥ.Κ.Α.Λ.Ι.ΩΝ) πράξη ΘΑΛΗΣ-ΕΜΠ, πράξη ένταξης 11012/9.7.2012, MIS: 380164, Κωδ.ΕΔΕΙΛ/ΕΜΠ:
«ΔιερΕΥνηση Και Aντιμετώπιση προβλημάτων ποιότητας ηλεκτρικής Ισχύος σε Συστήματα Ηλεκτρικής Ενέργειας (ΣΗΕ) πλοίων» (ΔΕΥ.Κ.Α.Λ.Ι.ΩΝ) πράξη ΘΑΛΗΣ-ΕΜΠ, πράξη ένταξης 11012/9.7.2012, MIS: 380164, Κωδ.ΕΔΕΙΛ/ΕΜΠ:
ΘΕΜΑ ΈΡΕΥΝΑΣ: Η ΣΧΕΣΗ ΑΝΑΜΕΣΑ ΣΤΗ
 Μαθήτρια: Αίγλη Θ. Μπορονικόλα Καθηγητής : Ιωάννης Αντ. Παπατσώρης ΜΑΘΗΜΑ: ΈΡΕΥΝΑ & ΤΕΧΝΟΛΟΓΙΑ ΘΕΜΑ ΈΡΕΥΝΑΣ: Η ΣΧΕΣΗ ΑΝΑΜΕΣΑ ΣΤΗ ΓΩΝΙΑ ΚΕΚΛΙΜΕΝΟΥ ΕΠΙΠΕΔΟΥ ΚΑΙ ΤΗ ΔΥΝΑΜΗ ΕΛΞΗΣ ΓΙΑ ΝΑ ΙΣΟΡΡΟΠΗΣΕΙ ΕΝΑ ΣΩΜΑ
Μαθήτρια: Αίγλη Θ. Μπορονικόλα Καθηγητής : Ιωάννης Αντ. Παπατσώρης ΜΑΘΗΜΑ: ΈΡΕΥΝΑ & ΤΕΧΝΟΛΟΓΙΑ ΘΕΜΑ ΈΡΕΥΝΑΣ: Η ΣΧΕΣΗ ΑΝΑΜΕΣΑ ΣΤΗ ΓΩΝΙΑ ΚΕΚΛΙΜΕΝΟΥ ΕΠΙΠΕΔΟΥ ΚΑΙ ΤΗ ΔΥΝΑΜΗ ΕΛΞΗΣ ΓΙΑ ΝΑ ΙΣΟΡΡΟΠΗΣΕΙ ΕΝΑ ΣΩΜΑ
1501 - Έλεγχος Κίνησης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Οδοντωτοί Τροχοί (Γρανάζια) - Μέρος Β Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Οδοντωτοί Τροχοί (Γρανάζια) - Μέρος Β Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ. Η ενέργεια ταλάντωσης ενός κυλιόμενου κυλίνδρου
 A A N A B P Y A 9 5 ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ Η ενέργεια ταλάντωσης ενός κυλιόμενου κυλίνδρου Στερεό σώμα με κυλινδρική συμμετρία (κύλινδρος, σφαίρα, σφαιρικό κέλυφος, κυκλική στεφάνη κλπ) μπορεί να
A A N A B P Y A 9 5 ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ Η ενέργεια ταλάντωσης ενός κυλιόμενου κυλίνδρου Στερεό σώμα με κυλινδρική συμμετρία (κύλινδρος, σφαίρα, σφαιρικό κέλυφος, κυκλική στεφάνη κλπ) μπορεί να
Σχεδιαστικά Προγράμματα Επίπλου
 Σχεδιαστικά Προγράμματα Επίπλου Καθηγήτρια ΦΕΡΦΥΡΗ ΣΩΤΗΡΙΑ Τμήμα ΣΧΕΔΙΑΣΜΟΥ & ΤΕΧΝΟΛΟΓΙΑΣ ΞΥΛΟΥ - ΕΠΙΠΛΟΥ Σχεδιαστικά Προγράμματα Επίπλου Η σχεδίαση με τον παραδοσιακό τρόπο απαιτεί αυξημένο χρόνο, ενώ
Σχεδιαστικά Προγράμματα Επίπλου Καθηγήτρια ΦΕΡΦΥΡΗ ΣΩΤΗΡΙΑ Τμήμα ΣΧΕΔΙΑΣΜΟΥ & ΤΕΧΝΟΛΟΓΙΑΣ ΞΥΛΟΥ - ΕΠΙΠΛΟΥ Σχεδιαστικά Προγράμματα Επίπλου Η σχεδίαση με τον παραδοσιακό τρόπο απαιτεί αυξημένο χρόνο, ενώ
ΕΡΓΑΣΤΗΡΙΑΚΗ ΕΦΑΡΜΟΓΗ 1 ΤO ΡΟΜΠΟΤ INTELLITEK ER-2u
 Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΤΑΧΥΚΙΝΗΤΟ ΒΙΟΜΗΧΑΝΙΚΟ ΡΟΛΟ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ
 ΤΑΧΥΚΙΝΗΤΟΥ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Ταχυκίνητα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων συμμορφώνονται με την
ΤΑΧΥΚΙΝΗΤΟΥ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Ταχυκίνητα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων συμμορφώνονται με την
Σχήμα 1 Διαστημόμετρο (Μ Κύρια κλίμακα, Ν Βερνιέρος)
") Άσκηση Μ1 Θεωρητικό μέρος Μήκος και μάζα (βάρος) Όργανα μέτρησης μήκους Διαστημόμετρο Με το διαστημόμετρο μετράμε μήκη μέχρι και μερικά μέτρα, σε χαμηλές απαιτήσεις ως προς την ακρίβεια. Το κύριο μέρος
Άσκηση Μ1 Θεωρητικό μέρος Μήκος και μάζα (βάρος) Όργανα μέτρησης μήκους Διαστημόμετρο Με το διαστημόμετρο μετράμε μήκη μέχρι και μερικά μέτρα, σε χαμηλές απαιτήσεις ως προς την ακρίβεια. Το κύριο μέρος
Ανεμογεννήτρια Polaris P15 50 kw
 Ανεμογεννήτρια Polaris P15 50 kw Τεχνική περιγραφή Μια ανεμογεννήτρια (Α/Γ) 50kW παράγει ενέργεια για να τροφοδοτηθούν αρκετές κατοικίες. Επίσης μπορεί να χρησιμοποιηθεί για να τροφοδοτηθούν με ρεύμα απομονωμένα
Ανεμογεννήτρια Polaris P15 50 kw Τεχνική περιγραφή Μια ανεμογεννήτρια (Α/Γ) 50kW παράγει ενέργεια για να τροφοδοτηθούν αρκετές κατοικίες. Επίσης μπορεί να χρησιμοποιηθεί για να τροφοδοτηθούν με ρεύμα απομονωμένα
ΑΠΟΣΒΕΣΗ ΤΑΛΑΝΤΩΣΕΩΝ ΔΥΝΑΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΠΟΣΒΕΣΗ ΤΑΛΑΝΤΩΣΕΩΝ ΔΥΝΑΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ έκδοση DΥΝI-VIS_2017a
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΠΟΣΒΕΣΗ ΤΑΛΑΝΤΩΣΕΩΝ ΔΥΝΑΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ έκδοση DΥΝI-VIS_2017a
Κεφάλαιο 1 Εισαγωγή.
 Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
Μηχανική Στερεού Ασκήσεις Εμπέδωσης
 Μηχανική Στερεού Ασκήσεις Εμπέδωσης Όπου χρειάζεται, θεωρείστε δεδομένο ότι g = 10m/s 2. 1. Μία ράβδος ΟΑ, μήκους L = 0,5m, περιστρέφεται γύρω από σταθερό άξονα που περνάει από το ένα άκρο της Ο, με σταθερή
Μηχανική Στερεού Ασκήσεις Εμπέδωσης Όπου χρειάζεται, θεωρείστε δεδομένο ότι g = 10m/s 2. 1. Μία ράβδος ΟΑ, μήκους L = 0,5m, περιστρέφεται γύρω από σταθερό άξονα που περνάει από το ένα άκρο της Ο, με σταθερή
Π. Ασβεστάς Γ. Λούντος Τμήμα Τεχνολογίας Ιατρικών Οργάνων
 Π. Ασβεστάς Γ. Λούντος Τμήμα Τεχνολογίας Ιατρικών Οργάνων Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/ E-mail: gloudos@teiath.gr Σύνθεση και Ανάλυση Δυνάμεων και Ροπών
Π. Ασβεστάς Γ. Λούντος Τμήμα Τεχνολογίας Ιατρικών Οργάνων Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/ E-mail: gloudos@teiath.gr Σύνθεση και Ανάλυση Δυνάμεων και Ροπών
ΣΧΕΔΙΑΣΗ ΑΤΡΑΚΤΩΝ. Λειτουργικές Παράμετροι
 Άτρακτος: περιστρεφόμενο στοιχείο κυκλικής (συνήθως) διατομής (πλήρους ή σωληνωτής) που χρησιμοποιείται για να μεταφέρει ισχύ ή κίνηση Άξονας: μη περιστρεφόμενο στοιχείο που δεν μεταφέρει ροπή και χρησιμοποιείται
Άτρακτος: περιστρεφόμενο στοιχείο κυκλικής (συνήθως) διατομής (πλήρους ή σωληνωτής) που χρησιμοποιείται για να μεταφέρει ισχύ ή κίνηση Άξονας: μη περιστρεφόμενο στοιχείο που δεν μεταφέρει ροπή και χρησιμοποιείται
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΒΙΟΜΗΧΑΝΙΚΟ ΡΟΛΟ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ
 ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων και πιστοποιούνται βάσει του Ευρωπαϊκού Προτύπου
ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτων και πιστοποιούνται βάσει του Ευρωπαϊκού Προτύπου
ΑΝΑΣΚΟΠΗΣΗ ΚΑΙ ΤΡΙΣΔΙΑΣΤΑΤΗ ΣΧΕΔΙΑΣΗ ΜΗΧΑΝΙΣΜΩΝ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΔΙΑΤΑΞΕΩΝ. Αργυρώ Λάσκαρη
 ΑΝΑΣΚΟΠΗΣΗ ΚΑΙ ΤΡΙΣΔΙΑΣΤΑΤΗ ΣΧΕΔΙΑΣΗ ΜΗΧΑΝΙΣΜΩΝ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΔΙΑΤΑΞΕΩΝ Αργυρώ Λάσκαρη Χανιά 2014 Δομή της παρουσίασης Εισαγωγή Ιστορική Αναδρομή Σχεδιασμός Μηχανισμός με τέσσερα μέλη Κυκλοειδής μειωτήρας
ΑΝΑΣΚΟΠΗΣΗ ΚΑΙ ΤΡΙΣΔΙΑΣΤΑΤΗ ΣΧΕΔΙΑΣΗ ΜΗΧΑΝΙΣΜΩΝ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΔΙΑΤΑΞΕΩΝ Αργυρώ Λάσκαρη Χανιά 2014 Δομή της παρουσίασης Εισαγωγή Ιστορική Αναδρομή Σχεδιασμός Μηχανισμός με τέσσερα μέλη Κυκλοειδής μειωτήρας
ΑΛΕΞΑΝΔΡΕΙΟ ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΘΕΣΣΑΛΟΝΙΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΟΧΗΜΑΤΩΝ
 2. ΣΤΑΤΙΚΗ Να χαραχθούν τα διαγράμματα [Ν], [Q], [M] στη δοκό του σχήματος: Να χαραχθούν τα διαγράμματα [Ν], [Q], [M] στον φορέα του σχήματος: Ασκήσεις υπολογισμού τάσεων Άσκηση 1 η (Αξονικός εφελκυσμός
2. ΣΤΑΤΙΚΗ Να χαραχθούν τα διαγράμματα [Ν], [Q], [M] στη δοκό του σχήματος: Να χαραχθούν τα διαγράμματα [Ν], [Q], [M] στον φορέα του σχήματος: Ασκήσεις υπολογισμού τάσεων Άσκηση 1 η (Αξονικός εφελκυσμός
3.6. Σύνθετα θέματα στερεού. Ομάδα Δ.
 3.5.61. Μια κινούμενη τροχαλία. 3.6. Σύνθετα θέματα στερεού. Ομάδα Δ. Γύρω από μια τροχαλία μάζας Μ=0,8kg έχουμε τυλίξει ένα αβαρές νήμα, στο άκρο του οποίου έχουμε δέσει ένα σώμα Σ μάζας m=0,1kg. Συγκρατούμε
3.5.61. Μια κινούμενη τροχαλία. 3.6. Σύνθετα θέματα στερεού. Ομάδα Δ. Γύρω από μια τροχαλία μάζας Μ=0,8kg έχουμε τυλίξει ένα αβαρές νήμα, στο άκρο του οποίου έχουμε δέσει ένα σώμα Σ μάζας m=0,1kg. Συγκρατούμε
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ [Υποκεφάλαιο 4.2 Οι κινήσεις των στερεών σωμάτων του σχολικού βιβλίου]
![ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ [Υποκεφάλαιο 4.2 Οι κινήσεις των στερεών σωμάτων του σχολικού βιβλίου]](/thumbs/52/29790189.jpg "ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ [Υποκεφάλαιο 4.2 Οι κινήσεις των στερεών σωμάτων του σχολικού βιβλίου]") ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΟΝΟΜ/ΩΝΥΜΟ:ΣΤΕΦΑΝΟΣ ΓΚΟΥΝΤΟΥΣΟΥΔΗΣ Α.Μ:6750 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ:ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ (ΕΡΓΑΣΤΗΡΙΟ)
") ΟΝΟΜ/ΩΝΥΜΟ:ΣΤΕΦΑΝΟΣ ΓΚΟΥΝΤΟΥΣΟΥΔΗΣ Α.Μ:6750 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ:ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ (ΕΡΓΑΣΤΗΡΙΟ) Περιγραφή Λειτουργίας Σύγχρονου Κινητήρα Σκοπός: Η παρούσα εργασία έχει σκοπό να περιγράψει τη λειτουργία ενός
ΟΝΟΜ/ΩΝΥΜΟ:ΣΤΕΦΑΝΟΣ ΓΚΟΥΝΤΟΥΣΟΥΔΗΣ Α.Μ:6750 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ:ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ (ΕΡΓΑΣΤΗΡΙΟ) Περιγραφή Λειτουργίας Σύγχρονου Κινητήρα Σκοπός: Η παρούσα εργασία έχει σκοπό να περιγράψει τη λειτουργία ενός
ΕΚΦΕ Χανίων «Κ. Μ. Κούμας» Νίκος Αναστασάκης Γιάννης Σαρρής
 ΕΚΦΕ Χανίων «Κ. Μ. Κούμας» Νίκος Αναστασάκης Γιάννης Σαρρής Σκοπός Στόχοι Άσκησης Οι μαθητές να: Αναγνωρίζουν τις δυνάμεις που ασκούνται στα σώματα και αντιλαμβάνονται τις σχέσεις μεταξύ τους,
ΕΚΦΕ Χανίων «Κ. Μ. Κούμας» Νίκος Αναστασάκης Γιάννης Σαρρής Σκοπός Στόχοι Άσκησης Οι μαθητές να: Αναγνωρίζουν τις δυνάμεις που ασκούνται στα σώματα και αντιλαμβάνονται τις σχέσεις μεταξύ τους,
ΤΕΙ ΠΑΤΡΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΗΠΙΩΝ ΜΟΡΦΩΝ ΕΝΕΡΓΕΙΑΣ. Μελέτη Ηλεκτρικού Κινητήρα
 ΤΕΙ ΠΑΤΡΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΗΠΙΩΝ ΜΟΡΦΩΝ ΕΝΕΡΓΕΙΑΣ Μελέτη Ηλεκτρικού Κινητήρα Τύπος Ηλεκτρικού Κινητήρα Ασύγχρονος μονοφασικός ηλεκτρικός κινητήρας βραχυκυκλωμένου δρομέα. Α. Γενική Θεωρητική
ΤΕΙ ΠΑΤΡΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΗΠΙΩΝ ΜΟΡΦΩΝ ΕΝΕΡΓΕΙΑΣ Μελέτη Ηλεκτρικού Κινητήρα Τύπος Ηλεκτρικού Κινητήρα Ασύγχρονος μονοφασικός ηλεκτρικός κινητήρας βραχυκυκλωμένου δρομέα. Α. Γενική Θεωρητική
Ευρωπαϊκή Ολυμπιάδα Φυσικών Επιστημών 2011 Πανελλήνιος προκαταρκτικός διαγωνισμός στη Φυσική. Σχολείο: Ονόματα των μαθητών της ομάδας: 1) 2) 3)
 2) 3)") ΠΑΝΕΚΦΕ Ευρωπαϊκή Ολυμπιάδα Φυσικών Επιστημών 2011 Πανελλήνιος προκαταρκτικός διαγωνισμός στη Φυσική Σχολείο: Ονόματα των μαθητών της ομάδας: 1) 2) 3) Σχήμα 1 Εργαστηριακή Άσκηση: Μέτρηση της μάζας κινούμενου
ΠΑΝΕΚΦΕ Ευρωπαϊκή Ολυμπιάδα Φυσικών Επιστημών 2011 Πανελλήνιος προκαταρκτικός διαγωνισμός στη Φυσική Σχολείο: Ονόματα των μαθητών της ομάδας: 1) 2) 3) Σχήμα 1 Εργαστηριακή Άσκηση: Μέτρηση της μάζας κινούμενου
Για τις παραπάνω ροπές αδράνειας ισχύει: α. β. γ. δ. Μονάδες 5
 ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΘΕΡΙΝΑ Α (ΑΠΑΝΤΗΣΕΙΣ) ΗΜΕΡΟΜΗΝΙΑ: 01-03-2015 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ M-ΑΓΙΑΝΝΙΩΤΑΚΗ ΑΝ.-ΠΟΥΛΗ Κ. ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΘΕΡΙΝΑ Α (ΑΠΑΝΤΗΣΕΙΣ) ΗΜΕΡΟΜΗΝΙΑ: 01-03-2015 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ M-ΑΓΙΑΝΝΙΩΤΑΚΗ ΑΝ.-ΠΟΥΛΗ Κ. ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας
ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΪΟΥ ΙΟΥΝΙΟΥ 2017 ΜΕΣΗΣ ΤΕΧΝΙΚΗΣ ΚΑΙ ΕΠΑΓΓΕΛΜΑΤΙΚΗΣ ΕΚΠΑΙΔΕΥΣΗΣ
 ΣΧΟΛΙΚΗ ΧΡΟΝΙΑ: 2016-2017 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΪΟΥ ΙΟΥΝΙΟΥ 2017 ΜΕΣΗΣ ΤΕΧΝΙΚΗΣ ΚΑΙ ΕΠΑΓΓΕΛΜΑΤΙΚΗΣ ΕΚΠΑΙΔΕΥΣΗΣ Επιτρεπόμενη διάρκεια γραπτού 2,5ώρες (150 λεπτά). Μάθημα: ΒΑΣΙΚΑ ΣΤΟΙΧΕΙΑ ΕΦΑΡΜΟΣΜΕΝΗΣ
ΣΧΟΛΙΚΗ ΧΡΟΝΙΑ: 2016-2017 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΪΟΥ ΙΟΥΝΙΟΥ 2017 ΜΕΣΗΣ ΤΕΧΝΙΚΗΣ ΚΑΙ ΕΠΑΓΓΕΛΜΑΤΙΚΗΣ ΕΚΠΑΙΔΕΥΣΗΣ Επιτρεπόμενη διάρκεια γραπτού 2,5ώρες (150 λεπτά). Μάθημα: ΒΑΣΙΚΑ ΣΤΟΙΧΕΙΑ ΕΦΑΡΜΟΣΜΕΝΗΣ
γ) το μέτρο της γωνιακής ταχύτητας του δίσκου τη στιγμή κατά την οποία έχει ξετυλιχθεί όλο το σχοινί.
 το μέτρο της γωνιακής ταχύτητας του δίσκου τη στιγμή κατά την οποία έχει ξετυλιχθεί όλο το σχοινί.") 1. Ο ομογενής και ισοπαχής δίσκος του σχήματος έχει ακτίνα και μάζα, είναι οριζόντιος και μπορεί να περιστρέφεται, χωρίς τριβές, γύρω από κατακόρυφο ακλόνητο άξονα που διέρχεται από το κέντρο του. Ο δίσκος
1. Ο ομογενής και ισοπαχής δίσκος του σχήματος έχει ακτίνα και μάζα, είναι οριζόντιος και μπορεί να περιστρέφεται, χωρίς τριβές, γύρω από κατακόρυφο ακλόνητο άξονα που διέρχεται από το κέντρο του. Ο δίσκος
Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής
 ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
Τμήμα Ηλεκτρολόγων Μηχανικών ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΡΟΠΗΣ ΤΑΧΥΤΗΤΑΣ ΕΠΑΓΩΓΙΚΩΝ ΚΙΝΗΤΗΡΩΝ
 Ένας που κατασκευάζεται ώστε να παρουσιάζει μεγάλη αντίσταση δρομέα η ροπή εκκίνησης του είναι αρκετά υψηλή αλλά το ίδιο υψηλή είναι και η ολίσθηση του στις κανονικές συνθήκες λειτουργίας Όμως επειδή Pconv=(1-s)PAG,
Ένας που κατασκευάζεται ώστε να παρουσιάζει μεγάλη αντίσταση δρομέα η ροπή εκκίνησης του είναι αρκετά υψηλή αλλά το ίδιο υψηλή είναι και η ολίσθηση του στις κανονικές συνθήκες λειτουργίας Όμως επειδή Pconv=(1-s)PAG,
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. Κόλλιας Ε.Π.Ε. Σελίδα 2/5 E , Ver 1 st, Διεύθυνση : 3 ο χλμ. Εθνικής Οδού Κατερίνης Θεσσαλονίκης Κατερίνη
 ΤΑΧΥΚΙΝΗΤΗΣ ΑΝΑΔΙΠΛΟΥΜΕΝΗΣ ΠΟΡΤΑΣ RD04 0 No Ονομασία Στοιχείου No Ονομασία Στοιχείου 1 Διάταξη μετάδοσης κίνησης 9 Φύλλο PVC ενισχυμένο με ίνες λινού 2 Ηλεκτρικό συγκρότημα κίνησης 10 Προφίλ αλουμινίου
ΤΑΧΥΚΙΝΗΤΗΣ ΑΝΑΔΙΠΛΟΥΜΕΝΗΣ ΠΟΡΤΑΣ RD04 0 No Ονομασία Στοιχείου No Ονομασία Στοιχείου 1 Διάταξη μετάδοσης κίνησης 9 Φύλλο PVC ενισχυμένο με ίνες λινού 2 Ηλεκτρικό συγκρότημα κίνησης 10 Προφίλ αλουμινίου
Φρεζάρισμα. Με το φρεζάρισμα μπορούμε να κατεργαστούμε επίπεδες ή καμπύλες επιφάνειες, εσοχές, αυλάκια ακόμα και οδοντωτούς τροχούς.
 ΦΡΕΖΕΣ ΦΡΕΖΕΣ Είναι εργαλειομηχανές αφαίρεσης υλικού από διάφορες εργασίες με μηχανική κοπή. Η κατεργασία διαμόρφωσης των μεταλλικών υλικών στη φρέζα, ονομάζεται φρεζάρισμα. Φρεζάρισμα Με το φρεζάρισμα
ΦΡΕΖΕΣ ΦΡΕΖΕΣ Είναι εργαλειομηχανές αφαίρεσης υλικού από διάφορες εργασίες με μηχανική κοπή. Η κατεργασία διαμόρφωσης των μεταλλικών υλικών στη φρέζα, ονομάζεται φρεζάρισμα. Φρεζάρισμα Με το φρεζάρισμα
Διοίκηση Εργοταξίου. Διδάσκων: Γιάννης Χουλιάρας ΤΕΙ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε.
 ΤΕΙ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. Διοίκηση Εργοταξίου Διδάσκων: Γιάννης Χουλιάρας Στοιχεία περιστροφικής κίνησης (άξονες, άτρακτοι, έδρανα) Άξονες και άτρακτοι Οι άξονες είναι κυλινδρικά κατά
ΤΕΙ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. Διοίκηση Εργοταξίου Διδάσκων: Γιάννης Χουλιάρας Στοιχεία περιστροφικής κίνησης (άξονες, άτρακτοι, έδρανα) Άξονες και άτρακτοι Οι άξονες είναι κυλινδρικά κατά
ΝΕΕΣ ΔΥΝΑΤΟΤΗΤΕΣ CONSTEEL
 ΝΕΕΣ ΔΥΝΑΤΟΤΗΤΕΣ CONSTEEL Version 9.0 08. 04.201 5 www.ergocad.eu www. consteelsoftware.com ΠΕΡΙΕΧΟΜΕΝΑ 1. ΜΟΝΑΔΙΚΕΣ ΛΕΙΤΟΥΡΓΙΕΣ 3 1.1 ΟΔΗΓΟΣ ΓΩΝΙΑΣ ΚΟΜΒΟΥ ΠΛΑΙΣΙΟΥ.3 1.2 ΑΥΤΟΜΑΤΗ ΕΠΙΛΟΓΗ ΤΟΥ ΚΑΘΟΡΙΣΤΙΚΟΥ
ΝΕΕΣ ΔΥΝΑΤΟΤΗΤΕΣ CONSTEEL Version 9.0 08. 04.201 5 www.ergocad.eu www. consteelsoftware.com ΠΕΡΙΕΧΟΜΕΝΑ 1. ΜΟΝΑΔΙΚΕΣ ΛΕΙΤΟΥΡΓΙΕΣ 3 1.1 ΟΔΗΓΟΣ ΓΩΝΙΑΣ ΚΟΜΒΟΥ ΠΛΑΙΣΙΟΥ.3 1.2 ΑΥΤΟΜΑΤΗ ΕΠΙΛΟΓΗ ΤΟΥ ΚΑΘΟΡΙΣΤΙΚΟΥ
Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης
 Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης Αντώνιος Γαστεράτος, Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Παραγωγής και Διοίκησης, Δημοκρίτειο Πανεπιστήμιο Θράκης μηχανοτρονική διαδικασία σχεδιασμού
Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης Αντώνιος Γαστεράτος, Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Παραγωγής και Διοίκησης, Δημοκρίτειο Πανεπιστήμιο Θράκης μηχανοτρονική διαδικασία σχεδιασμού
Κεφάλαιο 6β. Περιστροφή στερεού σώματος γύρω από σταθερό άξονα
 Κεφάλαιο 6β Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Ροπή Ροπή ( ) είναι η τάση που έχει μια δύναμη να περιστρέψει ένα σώμα γύρω από κάποιον άξονα. d είναι η κάθετη απόσταση του άξονα περιστροφής
Κεφάλαιο 6β Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Ροπή Ροπή ( ) είναι η τάση που έχει μια δύναμη να περιστρέψει ένα σώμα γύρω από κάποιον άξονα. d είναι η κάθετη απόσταση του άξονα περιστροφής
Kollias Industrial Doors
 Kollias Industrial Doors ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΑΝΑΔΙΠΛΟΥΜΕΝΗΣ ΠΟΡΤΑΣ RD06 0 Οι Αναδιπλούμενες Πόρτες RD06 αποτελούν διατάξεις προοριζόμενες για την κάλυψη ανοιγμάτων, λειτουργώντας ως διαχωριστικό πέτασμα
Kollias Industrial Doors ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΑΝΑΔΙΠΛΟΥΜΕΝΗΣ ΠΟΡΤΑΣ RD06 0 Οι Αναδιπλούμενες Πόρτες RD06 αποτελούν διατάξεις προοριζόμενες για την κάλυψη ανοιγμάτων, λειτουργώντας ως διαχωριστικό πέτασμα
ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 5 ΣΤΡΟΒΙΛΟΚΙΝΗΤΗΡΩΝ
 ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΘΕΡΜΟΚΙΝΗΤΗΡΩΝ ΚΑΙ ΘΕΡΜΙΚΩΝ ΣΤΡΟΒΙΛΟΜΗΧΑΝΩΝ ΔΙΔΑΚΤΙΚΗ ΠΕΡΙΟΧΗ: ΕΡΓΑΣΤΗΡΙΟ ΣΤΡΟΒΙΛΟΚΙΝΗΤΗΡΩΝ Υπεύθυνος: Επικ. Καθηγητής Δρ. Α. ΦΑΤΣΗΣ ΕΡΓΑΣΤΗΡΙΑΚΗ
ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΘΕΡΜΟΚΙΝΗΤΗΡΩΝ ΚΑΙ ΘΕΡΜΙΚΩΝ ΣΤΡΟΒΙΛΟΜΗΧΑΝΩΝ ΔΙΔΑΚΤΙΚΗ ΠΕΡΙΟΧΗ: ΕΡΓΑΣΤΗΡΙΟ ΣΤΡΟΒΙΛΟΚΙΝΗΤΗΡΩΝ Υπεύθυνος: Επικ. Καθηγητής Δρ. Α. ΦΑΤΣΗΣ ΕΡΓΑΣΤΗΡΙΑΚΗ
ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 4 ΚΕΦΑΛΑΙΟ
 ΠΡΟΒΛΗΜΑ 1 ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 4 ΚΕΦΑΛΑΙΟ Η λεπτή, ομογενής ράβδος ΟΑ του σχήματος έχει μήκος, μάζα και μπορεί να περιστρέφεται σε κατακόρυφο επίπεδο γύρω από οριζόντιο ακλόνητο άξονα (άρθρωση) που διέρχεται
ΠΡΟΒΛΗΜΑ 1 ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 4 ΚΕΦΑΛΑΙΟ Η λεπτή, ομογενής ράβδος ΟΑ του σχήματος έχει μήκος, μάζα και μπορεί να περιστρέφεται σε κατακόρυφο επίπεδο γύρω από οριζόντιο ακλόνητο άξονα (άρθρωση) που διέρχεται
ΣΥΝΟΨΗ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ
 ΣΥΝΟΨΗ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ ΠΛΗΡΟΦΟΡΙΚΟΣ ΕΛΕΓΧΟΣ & ΠΛΕ ΕΞΟΜΟΙΩΣΗ ΑΝΤΛΗΤΙΚΟΥ ΣΥΓΚΡΟΤΗΜΑΤΟΣ ΑΡΔΕΥΤΙΚΟΥ ΔΙΚΤΥΟΥ ΣΥΝΤΑΚΤΗΣ: ΦΩΤΙΑΔΗΣ ΚΩΝΣΤΑΝΤΙΝΟΣ ΕΙΣΗΓΗΤΗΣ : ΤΡΩΓΑΔΑΣ ΝΙΚΟΛΑΟΣ Ιούνιος 1997 http://users.teilar.gr/%7etrogadas/didask/antlitik.htm
ΣΥΝΟΨΗ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ ΠΛΗΡΟΦΟΡΙΚΟΣ ΕΛΕΓΧΟΣ & ΠΛΕ ΕΞΟΜΟΙΩΣΗ ΑΝΤΛΗΤΙΚΟΥ ΣΥΓΚΡΟΤΗΜΑΤΟΣ ΑΡΔΕΥΤΙΚΟΥ ΔΙΚΤΥΟΥ ΣΥΝΤΑΚΤΗΣ: ΦΩΤΙΑΔΗΣ ΚΩΝΣΤΑΝΤΙΝΟΣ ΕΙΣΗΓΗΤΗΣ : ΤΡΩΓΑΔΑΣ ΝΙΚΟΛΑΟΣ Ιούνιος 1997 http://users.teilar.gr/%7etrogadas/didask/antlitik.htm
7 η 8 η ΕργαστηριακήΆσκηση ΕΦΑΡΜΟΓΕΣ ΥΓΡΗΣ ΛΙΠΑΝΣΗΣ ΣΕ Ε ΡΑΝΑ
 7 η 8 η ΕργαστηριακήΆσκηση ΕΦΑΡΜΟΓΕΣ ΥΓΡΗΣ ΛΙΠΑΝΣΗΣ ΣΕ Ε ΡΑΝΑ ΠΕΡΙ ΛΙΠΑΝΣΗΣ ΚΑΙ ΣΧΕΤΙΚΩΝ ΜΗΧΑΝΙΣΜΩΝ ΑΚΤΙΝΙΚΑ Ε ΡΑΝΑ ΟΛΙΣΘΗΣΗΣ ΩΣΤΙΚΑ Ε ΡΑΝΑ ΟΛΙΣΘΗΣΗΣ Εργαστήριο Τριβολογίας Ιούνιος 2011 Αθανάσιος Μουρλάς
7 η 8 η ΕργαστηριακήΆσκηση ΕΦΑΡΜΟΓΕΣ ΥΓΡΗΣ ΛΙΠΑΝΣΗΣ ΣΕ Ε ΡΑΝΑ ΠΕΡΙ ΛΙΠΑΝΣΗΣ ΚΑΙ ΣΧΕΤΙΚΩΝ ΜΗΧΑΝΙΣΜΩΝ ΑΚΤΙΝΙΚΑ Ε ΡΑΝΑ ΟΛΙΣΘΗΣΗΣ ΩΣΤΙΚΑ Ε ΡΑΝΑ ΟΛΙΣΘΗΣΗΣ Εργαστήριο Τριβολογίας Ιούνιος 2011 Αθανάσιος Μουρλάς
ΑΡΧΗ 1ης ΣΕΛΙΔΑΣ ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : ΦΕΒΡΟΥΑΡΙΟΣ 2017 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 6
 ΑΡΧΗ 1ης ΣΕΛΙΔΑΣ ΘΕΜΑ 1 Ο : ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : ΦΕΒΡΟΥΑΡΙΟΣ 017 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 6 Στις παρακάτω ερωτήσεις 1 έως 4 να γράψετε στο τετράδιό
ΑΡΧΗ 1ης ΣΕΛΙΔΑΣ ΘΕΜΑ 1 Ο : ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : ΦΕΒΡΟΥΑΡΙΟΣ 017 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 6 Στις παρακάτω ερωτήσεις 1 έως 4 να γράψετε στο τετράδιό
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ. Άσκηση 1. (Κινητική ενέργεια λόγω περιστροφής. Έργο και ισχύς σταθερής ροπής)
") ΕΚΦΩΝΗΣΕΣ ΑΣΚΗΣΕΩΝ Άσκηση 1 (Κινητική ενέργεια λόγω περιστροφής Έργο και ισχύς σταθερής ροπής) Ένας κύβος και ένας δίσκος έχουν ίδια μάζα και αφήνονται από το ίδιο ύψος να κινηθούν κατά μήκος δύο κεκλιμένων
ΕΚΦΩΝΗΣΕΣ ΑΣΚΗΣΕΩΝ Άσκηση 1 (Κινητική ενέργεια λόγω περιστροφής Έργο και ισχύς σταθερής ροπής) Ένας κύβος και ένας δίσκος έχουν ίδια μάζα και αφήνονται από το ίδιο ύψος να κινηθούν κατά μήκος δύο κεκλιμένων
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. Εικόνα 1
 ΤΑΧΥΚΙΝΗΤΗΣ ΠΟΡΤΑΣ RSD ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΙΩΝ 0 Οι Ταχυκίνητες Πόρτες (ταχυπόρτες) είναι ηλεκτρικά κινούμενες διατάξεις, κατάλληλα κατασκευασμένες για βιομηχανικούς χώρους, αποθήκες και χώρους υγειονομικού
ΤΑΧΥΚΙΝΗΤΗΣ ΠΟΡΤΑΣ RSD ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΙΩΝ 0 Οι Ταχυκίνητες Πόρτες (ταχυπόρτες) είναι ηλεκτρικά κινούμενες διατάξεις, κατάλληλα κατασκευασμένες για βιομηχανικούς χώρους, αποθήκες και χώρους υγειονομικού
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
Δοκιμή Αντίστασης σε Θρυμματισμό (Los Angeles)
") Δοκιμή Αντίστασης σε Θρυμματισμό (Los Angeles) 1. Εισαγωγή Γενική Περιγραφή Δοκιμής Η δοκιμή της αντοχής των αδρανών σε τριβή και κρούση ή αλλιώς «δοκιμή Los Angeles (LA)» υπάγεται στους ελέγχους σκληρότητας
Δοκιμή Αντίστασης σε Θρυμματισμό (Los Angeles) 1. Εισαγωγή Γενική Περιγραφή Δοκιμής Η δοκιμή της αντοχής των αδρανών σε τριβή και κρούση ή αλλιώς «δοκιμή Los Angeles (LA)» υπάγεται στους ελέγχους σκληρότητας
«Αριθμητική και πειραματική μελέτη της διεπιφάνειας χάλυβασκυροδέματος στις σύμμικτες πλάκες με χαλυβδόφυλλο μορφής»
 ΠΕΡΙΛΗΨΗ ΤΗΣ ΔΙΔΑΚΤΟΡΙΚΗΣ ΔΙΑΤΡΙΒΗΣ «Αριθμητική και πειραματική μελέτη της διεπιφάνειας χάλυβασκυροδέματος στις σύμμικτες πλάκες με χαλυβδόφυλλο μορφής» του Θεμιστοκλή Τσαλκατίδη, Δρ. Πολιτικού Μηχανικού
ΠΕΡΙΛΗΨΗ ΤΗΣ ΔΙΔΑΚΤΟΡΙΚΗΣ ΔΙΑΤΡΙΒΗΣ «Αριθμητική και πειραματική μελέτη της διεπιφάνειας χάλυβασκυροδέματος στις σύμμικτες πλάκες με χαλυβδόφυλλο μορφής» του Θεμιστοκλή Τσαλκατίδη, Δρ. Πολιτικού Μηχανικού
ΜΑΘΗΜΑ: ΤΕΧΝΟΛΟΓΙΑ. Διάρκεια εξέτασης: Τρεις (3) ώρες. Δομή εξεταστικού δοκιμίου και βαθμολογία: ΜΕΡΟΣ Α: Αποτελείται από έξι θέματα των 5 μονάδων
 ώρες. Δομή εξεταστικού δοκιμίου και βαθμολογία: ΜΕΡΟΣ Α: Αποτελείται από έξι θέματα των 5 μονάδων") Διάρκεια εξέτασης: Τρεις (3) ώρες. Δομή εξεταστικού δοκιμίου και βαθμολογία: ΜΑΘΗΜΑ: ΤΕΧΝΟΛΟΓΙΑ ΜΕΡΟΣ Α: Αποτελείται από έξι θέματα των 5 μονάδων ΜΕΡΟΣ Β: Αποτελείται από πέντε θέματα των 6 μονάδων ΜΕΡΟΣ
Διάρκεια εξέτασης: Τρεις (3) ώρες. Δομή εξεταστικού δοκιμίου και βαθμολογία: ΜΑΘΗΜΑ: ΤΕΧΝΟΛΟΓΙΑ ΜΕΡΟΣ Α: Αποτελείται από έξι θέματα των 5 μονάδων ΜΕΡΟΣ Β: Αποτελείται από πέντε θέματα των 6 μονάδων ΜΕΡΟΣ
ΤΕΧΝΟΛΟΓΙΑ ΠΑΡΑΓΩΓΗΣ Ι 155 7.6 ΦΡΕΖΕΣ
 ΤΕΧΝΟΛΟΓΙΑ ΠΑΡΑΓΩΓΗΣ Ι 155 7.6 ΦΡΕΖΕΣ Η φρέζα όπως και ο τόρνος αποτελεί μία από τις βασικότερες εργαλειομηχανές ενός μηχανουργείου. Κατά την κοπή στην φρέζα, το κοπτικό εργαλείο αποκόπτει από το αντικείμενο
ΤΕΧΝΟΛΟΓΙΑ ΠΑΡΑΓΩΓΗΣ Ι 155 7.6 ΦΡΕΖΕΣ Η φρέζα όπως και ο τόρνος αποτελεί μία από τις βασικότερες εργαλειομηχανές ενός μηχανουργείου. Κατά την κοπή στην φρέζα, το κοπτικό εργαλείο αποκόπτει από το αντικείμενο
F r. www.ylikonet.gr 1
 3.5. Έργο Ενέργεια. 3.5.1. Έργο δύναµης- ροπής και Κινητική Ενέργεια. Το οµοαξονικό σύστηµα των δύο κυλίνδρων µε ακτίνες R 1 =0,1m και R =0,5m ηρεµεί σε οριζόντιο επίπεδο. Τυλίγουµε γύρω από τον κύλινδρο
3.5. Έργο Ενέργεια. 3.5.1. Έργο δύναµης- ροπής και Κινητική Ενέργεια. Το οµοαξονικό σύστηµα των δύο κυλίνδρων µε ακτίνες R 1 =0,1m και R =0,5m ηρεµεί σε οριζόντιο επίπεδο. Τυλίγουµε γύρω από τον κύλινδρο
12. Δυναμομέτρηση Εμβολοφόρου Βενζινοκινητήρα με τη χρήση Υδραυλικής Πέδης Νερού
 12. Δυναμομέτρηση Εμβολοφόρου Βενζινοκινητήρα με τη χρήση Υδραυλικής Πέδης Νερού Προαπαιτούμενες γνώσεις: (α) Θεωρητικές γνώσεις κατάστρωσης Ενεργειακού Ισολογισμού Μ.Ε.Κ. και (β) Θεωρητικές γνώσεις για
12. Δυναμομέτρηση Εμβολοφόρου Βενζινοκινητήρα με τη χρήση Υδραυλικής Πέδης Νερού Προαπαιτούμενες γνώσεις: (α) Θεωρητικές γνώσεις κατάστρωσης Ενεργειακού Ισολογισμού Μ.Ε.Κ. και (β) Θεωρητικές γνώσεις για
ΛΥΚΕΙΟ ΑΓΙΟΥ ΣΠΥΡΙΔΩΝΑ ΣΧΟΛΙΚΗ ΧΡΟΝΙΑ 2011-2012 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Β ΛΥΚΕΙΟΥ
 ΛΥΚΕΙΟ ΑΓΙΟΥ ΠΥΡΙΔΩΝΑ ΧΟΛΙΚΗ ΧΡΟΝΙΑ 2011-2012 ΓΡΑΠΤΕ ΠΡΟΑΓΩΓΙΚΕ ΕΞΕΤΑΕΙ ΦΥΙΚΗ ΚΑΤΕΥΘΥΝΗ Β ΛΥΚΕΙΟΥ ΗΜΕΡΟΜΗΝΙΑ: 31-05-2012 ΔΙΑΡΚΕΙΑ: 07.45 10.15 Οδηγίες 1. Το εξεταστικό δοκίμιο αποτελείται από 9 σελίδες.
ΛΥΚΕΙΟ ΑΓΙΟΥ ΠΥΡΙΔΩΝΑ ΧΟΛΙΚΗ ΧΡΟΝΙΑ 2011-2012 ΓΡΑΠΤΕ ΠΡΟΑΓΩΓΙΚΕ ΕΞΕΤΑΕΙ ΦΥΙΚΗ ΚΑΤΕΥΘΥΝΗ Β ΛΥΚΕΙΟΥ ΗΜΕΡΟΜΗΝΙΑ: 31-05-2012 ΔΙΑΡΚΕΙΑ: 07.45 10.15 Οδηγίες 1. Το εξεταστικό δοκίμιο αποτελείται από 9 σελίδες.
Στοιχεία Μηχανών. Εαρινό εξάμηνο 2017 Διδάσκουσα: Σωτηρία Δ. Χουλιαρά
 Στοιχεία Μηχανών Εαρινό εξάμηνο 2017 Διδάσκουσα: Σωτηρία Δ. Χουλιαρά Ύλη μαθήματος -ΒΑΣΙΚΕΣ ΑΡΧΕΣ ΜΗΧΑΝΙΚΗΣ ΥΛΙΚΩΝ -ΑΞΟΝΕΣ -ΚΟΧΛΙΕΣ -ΙΜΑΝΤΕΣ -ΟΔΟΝΤΩΤΟΙ ΤΡΟΧΟΙ ΒΑΘΜΟΛΟΓΙΑ ΜΑΘΗΜΑΤΟΣ: 25% πρόοδος 15% θέμα
Στοιχεία Μηχανών Εαρινό εξάμηνο 2017 Διδάσκουσα: Σωτηρία Δ. Χουλιαρά Ύλη μαθήματος -ΒΑΣΙΚΕΣ ΑΡΧΕΣ ΜΗΧΑΝΙΚΗΣ ΥΛΙΚΩΝ -ΑΞΟΝΕΣ -ΚΟΧΛΙΕΣ -ΙΜΑΝΤΕΣ -ΟΔΟΝΤΩΤΟΙ ΤΡΟΧΟΙ ΒΑΘΜΟΛΟΓΙΑ ΜΑΘΗΜΑΤΟΣ: 25% πρόοδος 15% θέμα
3.3. Δυναμική στερεού.
 3.3.. 3.3.1. Ροπή και γωνιακή επιτάχυνση Μια οριζόντια τετράγωνη πλάκα ΑΒΓΔ, πλευράς 1m και μάζας 20kg μπορεί να στρέφεται γύρω από σταθερό άξονα z που περνά από το κέντρο της. Η πλάκα αποκτά γωνιακή ταχύτητα
3.3.. 3.3.1. Ροπή και γωνιακή επιτάχυνση Μια οριζόντια τετράγωνη πλάκα ΑΒΓΔ, πλευράς 1m και μάζας 20kg μπορεί να στρέφεται γύρω από σταθερό άξονα z που περνά από το κέντρο της. Η πλάκα αποκτά γωνιακή ταχύτητα
Στεφάνου Μ. 1 Φυσικός
 1 ΕΡΓΟ ΕΝΕΡΓΕΙΑ Α. ΤΟ ΠΡΟΒΛΗΜΑ Βιομηχανική επανάσταση ατμομηχανές καύσιμα μηχανές απόδοση μιας μηχανής φως θερμότητα ηλεκτρισμός κ.τ.λ Οι δυνάμεις δεν επαρκούν πάντα στη μελέτη των αλληλεπιδράσεων Ανεπαρκείς
1 ΕΡΓΟ ΕΝΕΡΓΕΙΑ Α. ΤΟ ΠΡΟΒΛΗΜΑ Βιομηχανική επανάσταση ατμομηχανές καύσιμα μηχανές απόδοση μιας μηχανής φως θερμότητα ηλεκτρισμός κ.τ.λ Οι δυνάμεις δεν επαρκούν πάντα στη μελέτη των αλληλεπιδράσεων Ανεπαρκείς
S. Bi. Automations Σταματίου Βιομηχανικοί Αυτοματισμοί
 Industrial Automation S. Bi. Automations Σταματίου Βιομηχανικοί Αυτοματισμοί Προϊόντα Βιομηχανικού Αυτοματισμού Έξυπνες λύσεις για τη σύγχρονη βιομηχανία SMART STOP ΕΞΥΠΝΟΣ ΔΙΑΧΕΙΡΙΣΤΗΣ ΒΙΟΜΗΧΑΝΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ
Industrial Automation S. Bi. Automations Σταματίου Βιομηχανικοί Αυτοματισμοί Προϊόντα Βιομηχανικού Αυτοματισμού Έξυπνες λύσεις για τη σύγχρονη βιομηχανία SMART STOP ΕΞΥΠΝΟΣ ΔΙΑΧΕΙΡΙΣΤΗΣ ΒΙΟΜΗΧΑΝΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ
Γ ΤΑΞΗ ΕΠΑΛ (ΟΜΑΔΑ Α ) & ΜΑΘΗΜΑΤΩΝ ΕΙΔΙΚΟΤΗΤΑΣ ΕΠΑΛ
 & ΜΑΘΗΜΑΤΩΝ ΕΙΔΙΚΟΤΗΤΑΣ ΕΠΑΛ") ΑΡΧΗ ΗΣ ΣΕΛΙΔΑΣ Γ ΤΑΞΗ ΕΠΑΛ (ΟΜΑΔΑ Α ) & ΜΑΘΗΜΑΤΩΝ ΕΙΔΙΚΟΤΗΤΑΣ ΕΠΑΛ ΤΕΤΑΡΤΗ 9/04/07 - ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ΠΕΝΤΕ (5) ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ ο ) Να χαρακτηρίσετε τις προτάσεις που
ΑΡΧΗ ΗΣ ΣΕΛΙΔΑΣ Γ ΤΑΞΗ ΕΠΑΛ (ΟΜΑΔΑ Α ) & ΜΑΘΗΜΑΤΩΝ ΕΙΔΙΚΟΤΗΤΑΣ ΕΠΑΛ ΤΕΤΑΡΤΗ 9/04/07 - ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΣΤΟΙΧΕΙΑ ΜΗΧΑΝΩΝ ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ΠΕΝΤΕ (5) ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ ο ) Να χαρακτηρίσετε τις προτάσεις που
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ
 ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτωνκαι πιστοποιούνται βάσει του Ευρωπαϊκού Προτύπου
ΒΙΟΜΗΧΑΝΙΚΟΥ ΡΟΛΟΥ ΜΕ ΣΥΣΤΗΜΑ ΑΓΚΥΡΩΣΗΣ ΤΟΥ ΠΕΤΑΣΜΑΤΟΣ 0 Τα Βιομηχανικά Ρολά είναι ηλεκτρικά κινούμενες διατάξεις, που προορίζονται για την κάλυψη ανοιγμάτωνκαι πιστοποιούνται βάσει του Ευρωπαϊκού Προτύπου
ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ Ομάδας Προσανατολισμού Θετικών Σπουδών Τζιόλας Χρήστος. και Α 2
 ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ Ομάδας Προσανατολισμού Θετικών Σπουδών Τζιόλας Χρήστος 1. Ένα σύστημα ελατηρίου σταθεράς = 0 π N/ και μάζας = 0, g τίθεται σε εξαναγκασμένη ταλάντωση. Αν είναι Α 1 και Α τα πλάτη της ταλάντωσης
ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ Ομάδας Προσανατολισμού Θετικών Σπουδών Τζιόλας Χρήστος 1. Ένα σύστημα ελατηρίου σταθεράς = 0 π N/ και μάζας = 0, g τίθεται σε εξαναγκασμένη ταλάντωση. Αν είναι Α 1 και Α τα πλάτη της ταλάντωσης
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Β ΛΥΚΕΙΟΥ (ΠΡΟΕΤΟΙΜΑΣΙΑ) ΗΜΕΡΟΜΗΝΙΑ: 19/03/2017 (ΑΠΑΝΤΗΣΕΙΣ) ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ
 ΗΜΕΡΟΜΗΝΙΑ: 19/03/2017 (ΑΠΑΝΤΗΣΕΙΣ) ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ") ΔΙΑΓΩΝΙΣΜΑ ΕΚΠ ΕΤΟΥΣ 206-207 ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Β ΛΥΚΕΙΟΥ (ΠΡΟΕΤΟΙΜΑΣΙΑ) ΗΜΕΡΟΜΗΝΙΑ: 9/03/207 (ΑΠΑΝΤΗΣΕΙΣ) ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό
ΔΙΑΓΩΝΙΣΜΑ ΕΚΠ ΕΤΟΥΣ 206-207 ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Β ΛΥΚΕΙΟΥ (ΠΡΟΕΤΟΙΜΑΣΙΑ) ΗΜΕΡΟΜΗΝΙΑ: 9/03/207 (ΑΠΑΝΤΗΣΕΙΣ) ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό
Τ.Ε.Ι. ΠΑΤΡΑΣ / Σ.Τ.ΕΦ. Πάτρα Τμήμα: ΜΗΧΑΝΟΛΟΓΙΑΣ. Εξέταση στο μάθημα «Ηλεκτρικές Μηχανές»
 Τ.Ε.Ι. ΠΑΤΡΑΣ / Σ.Τ.ΕΦ. Πάτρα 26-1-2012 Τμήμα: ΜΗΧΑΝΟΛΟΓΙΑΣ Εξέταση στο μάθημα «Ηλεκτρικές Μηχανές» ΠΡΟΣΟΧΗ: Για οποιοδήποτε σύμβολο χρησιμοποιήσετε στις πράξεις σας, να γράψετε ξεκάθαρα τι αντιπροσωπεύει
Τ.Ε.Ι. ΠΑΤΡΑΣ / Σ.Τ.ΕΦ. Πάτρα 26-1-2012 Τμήμα: ΜΗΧΑΝΟΛΟΓΙΑΣ Εξέταση στο μάθημα «Ηλεκτρικές Μηχανές» ΠΡΟΣΟΧΗ: Για οποιοδήποτε σύμβολο χρησιμοποιήσετε στις πράξεις σας, να γράψετε ξεκάθαρα τι αντιπροσωπεύει
ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ- 2015
 ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ- 2015 1. Εισαγωγικές έννοιες στην μηχανική των υλικών Κώστας Γαλιώτης, καθηγητής Τμήμα Χημικών Μηχανικών 1 Περιεχόμενο μαθήματος Μηχανική των Υλικών: τμήμα των θετικών επιστημών που
ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ- 2015 1. Εισαγωγικές έννοιες στην μηχανική των υλικών Κώστας Γαλιώτης, καθηγητής Τμήμα Χημικών Μηχανικών 1 Περιεχόμενο μαθήματος Μηχανική των Υλικών: τμήμα των θετικών επιστημών που
ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ- 2015
 ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ- 015 3. Δοκοί (φορτία NQM) Κώστας Γαλιώτης, καθηγητής Τμήμα Χημικών Μηχανικών 3. Δοκοί (φορτία NQΜ)/ Μηχανική Υλικών 1 Σκοποί ενότητας Να εξοικειωθεί ο φοιτητής με τα διάφορα είδη φορτίων.
ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ- 015 3. Δοκοί (φορτία NQM) Κώστας Γαλιώτης, καθηγητής Τμήμα Χημικών Μηχανικών 3. Δοκοί (φορτία NQΜ)/ Μηχανική Υλικών 1 Σκοποί ενότητας Να εξοικειωθεί ο φοιτητής με τα διάφορα είδη φορτίων.
Θέματα Παγκύπριων Εξετάσεων
 Θέματα Παγκύπριων Εξετάσεων 2009 2014 Σελίδα 1 από 24 Ταλαντώσεις 1. Το σύστημα ελατήριο-σώμα εκτελεί απλή αρμονική ταλάντωση μεταξύ των σημείων Α και Β. (α) Ο χρόνος που χρειάζεται το σώμα για να κινηθεί
Θέματα Παγκύπριων Εξετάσεων 2009 2014 Σελίδα 1 από 24 Ταλαντώσεις 1. Το σύστημα ελατήριο-σώμα εκτελεί απλή αρμονική ταλάντωση μεταξύ των σημείων Α και Β. (α) Ο χρόνος που χρειάζεται το σώμα για να κινηθεί
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014
 ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014") ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/014 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α1 Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/014 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α1 Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί
ΦΥΣΙΚΗ Ο.Π Β Λ-Γ Λ ΧΡΗΣΤΟΣ ΚΑΡΑΒΟΚΥΡΟΣ ΙΩΑΝΝΗΣ ΤΖΑΓΚΑΡΑΚΗΣ
 ΦΥΣΙΚΗ Ο.Π Β Λ-Γ Λ 25/11/2018 ΧΡΗΣΤΟΣ ΚΑΡΑΒΟΚΥΡΟΣ ΙΩΑΝΝΗΣ ΤΖΑΓΚΑΡΑΚΗΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1-Α4 και δίπλα το γράμμα που αντιστοιχεί
ΦΥΣΙΚΗ Ο.Π Β Λ-Γ Λ 25/11/2018 ΧΡΗΣΤΟΣ ΚΑΡΑΒΟΚΥΡΟΣ ΙΩΑΝΝΗΣ ΤΖΑΓΚΑΡΑΚΗΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1-Α4 και δίπλα το γράμμα που αντιστοιχεί
ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ ΠΡΟΣΠΑΘΕΙΑ ΣΑΣ ΚΙ 2014
 ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΕΝΩΣΗ ΚΥΠΡΙΩΝ ΦΥΣΙΚΩΝ
 28 Η ΠΑΓΚΥΠΡΙΑ ΟΛΥΜΠΙΑΔΑ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ (Πρώτη Φάση) Κυριακή, 15 Δεκεμβρίου, 2013 Ώρα: 10:00-13:00 Οδηγίες: 1) Το δοκίμιο αποτελείται από πέντε (5) σελίδες και πέντε (5) θέματα. 2) Να απαντήσετε σε
28 Η ΠΑΓΚΥΠΡΙΑ ΟΛΥΜΠΙΑΔΑ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ (Πρώτη Φάση) Κυριακή, 15 Δεκεμβρίου, 2013 Ώρα: 10:00-13:00 Οδηγίες: 1) Το δοκίμιο αποτελείται από πέντε (5) σελίδες και πέντε (5) θέματα. 2) Να απαντήσετε σε
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
Προτεινόμενο διαγώνισμα Φυσικής Α Λυκείου
 Προτεινόμενο διαγώνισμα Φυσικής Α Λυκείου Θέμα 1 ο Σε κάθε μια από τις παρακάτω προτάσεις 1-5 να επιλέξετε τη μια σωστή απάντηση: 1. Όταν ένα σώμα ισορροπεί τότε: i. Ο ρυθμός μεταβολής της ταχύτητάς του
Προτεινόμενο διαγώνισμα Φυσικής Α Λυκείου Θέμα 1 ο Σε κάθε μια από τις παρακάτω προτάσεις 1-5 να επιλέξετε τη μια σωστή απάντηση: 1. Όταν ένα σώμα ισορροπεί τότε: i. Ο ρυθμός μεταβολής της ταχύτητάς του
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Β ΛΥΚΕΙΟΥ (ΠΡΟΕΤΟΙΜΑΣΙΑ) ΗΜΕΡΟΜΗΝΙΑ: 19/03/2017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ
 ΗΜΕΡΟΜΗΝΙΑ: 19/03/2017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ") ΔΙΑΓΩΝΙΣΜΑ ΕΚΠ ΕΤΟΥΣ 2016-2017 ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Β ΛΥΚΕΙΟΥ (ΠΡΟΕΤΟΙΜΑΣΙΑ) ΗΜΕΡΟΜΗΝΙΑ: 19/03/2017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον
ΔΙΑΓΩΝΙΣΜΑ ΕΚΠ ΕΤΟΥΣ 2016-2017 ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Β ΛΥΚΕΙΟΥ (ΠΡΟΕΤΟΙΜΑΣΙΑ) ΗΜΕΡΟΜΗΝΙΑ: 19/03/2017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013
 ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013 ΘΕΜΑ Α Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1- Α4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013 ΘΕΜΑ Α Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1- Α4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή
ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ 2017
 ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ 017 3. Διαγράμματα NQM Κώστας Γαλιώτης, καθηγητής Τμήμα Χημικών Μηχανικών galiotis@chemeng.upatras.gr Α3. Διαγράμματα NQΜ/ Μηχανική Υλικών 1 Σκοποί ενότητας Να εξοικειωθεί ο φοιτητής
ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ 017 3. Διαγράμματα NQM Κώστας Γαλιώτης, καθηγητής Τμήμα Χημικών Μηχανικών galiotis@chemeng.upatras.gr Α3. Διαγράμματα NQΜ/ Μηχανική Υλικών 1 Σκοποί ενότητας Να εξοικειωθεί ο φοιτητής
Διατάξεις εκκίνησης κινητήρων ΣΡ
 Διατάξεις εκκίνησης κινητήρων ΣΡ Η διάταξη ελέγχου και προστασίας του κινητήρα ΣΡ πρέπει: 1. Να προστατεύει τον κινητήρα από βραχυκυκλώματα στην ίδια τη διάταξη προστασίας 2. Να προστατεύει τον κινητήρα
Διατάξεις εκκίνησης κινητήρων ΣΡ Η διάταξη ελέγχου και προστασίας του κινητήρα ΣΡ πρέπει: 1. Να προστατεύει τον κινητήρα από βραχυκυκλώματα στην ίδια τη διάταξη προστασίας 2. Να προστατεύει τον κινητήρα
ΓΑΛΑΝΑΚΗΣ ΓΙΩΡΓΟΣ ΔΗΜΗΤΡΑΚΟΠΟΥΛΟΣ ΜΙΧΑΛΗΣ
 ΘΕΜΑ Α Στις ερωτήσεις -4 να γράψετε στο τετράδιό σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί η σωστή απάντηση. Ένας ακίνητος τρoχός δέχεται σταθερή συνιστάμενη ροπή ως προς άξονα διερχόμενο
ΘΕΜΑ Α Στις ερωτήσεις -4 να γράψετε στο τετράδιό σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί η σωστή απάντηση. Ένας ακίνητος τρoχός δέχεται σταθερή συνιστάμενη ροπή ως προς άξονα διερχόμενο
Φυσική Γ Λυκείου Θετικού Προσανατολισμού Σχ. έτος ο Διαγώνισμα Κρούσεις - Ταλαντώσεις Θέμα 1ο
 1ο Διαγώνισμα Κρούσεις - Ταλαντώσεις Θέμα 1ο Στις παρακάτω προτάσεις 1.1 1.4 να γράψετε στο τετράδιο σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη ϕράση που τη συμπληρώνει σωστά.
1ο Διαγώνισμα Κρούσεις - Ταλαντώσεις Θέμα 1ο Στις παρακάτω προτάσεις 1.1 1.4 να γράψετε στο τετράδιο σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη ϕράση που τη συμπληρώνει σωστά.
ΘΕΜΑ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ
 ΑΝΩΤΑΤΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΤ. ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. ΤΟΜΕΑΣ ΚΑΤΑΣΚΕΥΑΣΤΙΚΟΣ ΘΕΜΑ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ ΑΝΑΠΤΥΞΗ XLS ΓΙΑ ΤΟΝ ΥΠΟΛΟΓΙΣΜΟ ΤΩΝ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ΤΩΝ
ΑΝΩΤΑΤΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΤ. ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. ΤΟΜΕΑΣ ΚΑΤΑΣΚΕΥΑΣΤΙΚΟΣ ΘΕΜΑ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ ΑΝΑΠΤΥΞΗ XLS ΓΙΑ ΤΟΝ ΥΠΟΛΟΓΙΣΜΟ ΤΩΝ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ΤΩΝ
Press Brake Productivity - Οδηγίες ταχείας εκκίνησης
 Πώς να ξεκινήσετε Press Brake Productivity - Οδηγίες ταχείας εκκίνησης Σας ευχαριστούμε που αγοράσατε ένα ποιοτικό προϊόν που κατασκευάστηκε από την Wila Για περισσότερα από 80 χρόνια, η Wila προσφέρει
Πώς να ξεκινήσετε Press Brake Productivity - Οδηγίες ταχείας εκκίνησης Σας ευχαριστούμε που αγοράσατε ένα ποιοτικό προϊόν που κατασκευάστηκε από την Wila Για περισσότερα από 80 χρόνια, η Wila προσφέρει
Αντοχή κατασκευαστικών στοιχείων σε κόπωση
 11.. ΚΟΠΩΣΗ Ενώ ο υπολογισμός της ροπής αντίστασης της μέσης τομής ως το πηλίκο της ροπής σχεδίασης προς τη μέγιστη επιτρεπόμενη τάση, όπως τα μεγέθη αυτά ορίζονται κατά ΙΑS, προσβλέπει στο να εξασφαλίσει
11.. ΚΟΠΩΣΗ Ενώ ο υπολογισμός της ροπής αντίστασης της μέσης τομής ως το πηλίκο της ροπής σχεδίασης προς τη μέγιστη επιτρεπόμενη τάση, όπως τα μεγέθη αυτά ορίζονται κατά ΙΑS, προσβλέπει στο να εξασφαλίσει
ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : ΦΕΒΡΟΥΑΡΙΟΣ 2019 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 5
 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : ΦΕΒΡΟΥΑΡΙΟΣ 019 ΘΕΜΑ 1 Ο : ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 5 Στις παρακάτω ερωτήσεις 1 έως 4 να γράψετε στο τετράδιό σας τον αριθμό της
ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : ΦΕΒΡΟΥΑΡΙΟΣ 019 ΘΕΜΑ 1 Ο : ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 5 Στις παρακάτω ερωτήσεις 1 έως 4 να γράψετε στο τετράδιό σας τον αριθμό της
[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]
![[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]](/thumbs/61/46095927.jpg "[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]") ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 5: ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΕΡΓΟ ΔΥΝΑΜΗΣ ΣΤΗ ΣΤΡΟΦΙΚΗ ΚΙΝΗΣΗ 34. Μία κατακόρυφη ράβδος μάζας μήκους, μπορεί να περιστρέφεται στο κατακόρυφο επίπεδο γύρω από
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 5: ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΕΡΓΟ ΔΥΝΑΜΗΣ ΣΤΗ ΣΤΡΟΦΙΚΗ ΚΙΝΗΣΗ 34. Μία κατακόρυφη ράβδος μάζας μήκους, μπορεί να περιστρέφεται στο κατακόρυφο επίπεδο γύρω από