D Alembert s Solution to the Wave Equation
|
|
|
- Δάμαλις Παπανδρέου
- 6 χρόνια πριν
- Προβολές:
Transcript
1 D Alembert s Solution to the Wave Equation MATH 467 Partial Differential Equations J. Robert Buchanan Department of Mathematics Fall 2018
2 Objectives In this lesson we will learn: a change of variable technique which simplifies the wave equation, d Alembert s solution to the wave equation which avoids the summing of a Fourier series solution.
3 Wave Equation Consider the initial value problem for the unbounded, homogeneous one-dimensional wave equation u tt = c 2 u xx for < x < and t > 0 u(x, 0) = f (x) u t (x, 0) = g(x).
4 Wave Equation Consider the initial value problem for the unbounded, homogeneous one-dimensional wave equation u tt = c 2 u xx for < x < and t > 0 u(x, 0) = f (x) u t (x, 0) = g(x). Rewrite the PDE by making the change of variables ξ = x + c t η = x c t.
5 Change of Variables First partial derivatives: Second partial derivatives: u x = u ξ ξ x + u η η x = u ξ + u η u t = u ξ ξ t + u η η t = c(u ξ u η ) u xx = u ξξ ξ x + u ξη η x + u ηξ ξ x + u ηη η x = u ξξ + 2u ξη + u ηη u tt = c(u ξξ ξ t + u ξη η t ) c(u ηξ ξ t + u ηη η t ) = c 2 (u ξξ 2u ξη + u ηη )
6 Substitution into Wave Equation u tt = c 2 u xx c 2 (u ξξ 2u ξη + u ηη ) = c 2 (u ξξ + 2u ξη + u ηη )
7 Substitution into Wave Equation u tt = c 2 u xx c 2 (u ξξ 2u ξη + u ηη ) = c 2 (u ξξ + 2u ξη + u ηη ) u ξη = 0
8 Substitution into Wave Equation u tt = c 2 u xx c 2 (u ξξ 2u ξη + u ηη ) = c 2 (u ξξ + 2u ξη + u ηη ) u ξη = 0 Integrate both sides of the equation. u ξ = φ(ξ) u(ξ, η) = φ(ξ) dξ = Φ(ξ) + Ψ(η) Functions Φ and Ψ are arbitrary smooth functions.
9 Return to the Original Variables u(ξ, η) = Φ(ξ) + Ψ(η) u(x, t) = Φ(x + c t) + Ψ(x c t) This is referred to as d Alembert s general solution to the wave equation.
10 Return to the Original Variables u(ξ, η) = Φ(ξ) + Ψ(η) u(x, t) = Φ(x + c t) + Ψ(x c t) This is referred to as d Alembert s general solution to the wave equation. Question: can Φ and Ψ be chosen to satisfy the initial conditions?
11 Plucked String (1 of 2) u(x, t) = Φ(x + c t) + Ψ(x c t) u(x, 0) = Φ(x) + Ψ(x) = f (x) u t (x, 0) = c Φ (x) c Ψ (x) = 0 0 = Φ (x) Ψ (x) Integrate the last equation. Φ(x) = Ψ(x) + K where K is an arbitrary constant.
12 Plucked String (1 of 2) Integrate the last equation. u(x, t) = Φ(x + c t) + Ψ(x c t) u(x, 0) = Φ(x) + Ψ(x) = f (x) u t (x, 0) = c Φ (x) c Ψ (x) = 0 0 = Φ (x) Ψ (x) Φ(x) = Ψ(x) + K where K is an arbitrary constant. Substituting into the equation for the initial displacement produces 2Ψ(x) + K = f (x) Ψ(x) = 1 (f (x) K ) 2 Φ(x) = 1 (f (x) + K ). 2
13 Plucked String (2 of 2) Consequently if f is twice differentiable, then u(x, t) = 1 [f (x + c t) + f (x c t)] 2 solves the initial value problem describing the plucked string.
14 Struck String (1 of 2) u(x, t) = Φ(x + c t) + Ψ(x c t) u(x, 0) = Φ(x) + Ψ(x) = 0 u t (x, 0) = c Φ (x) c Ψ (x) = g(x) Differentiating the 2nd equation reveals Φ (x) = Ψ (x)
15 Struck String (1 of 2) u(x, t) = Φ(x + c t) + Ψ(x c t) u(x, 0) = Φ(x) + Ψ(x) = 0 u t (x, 0) = c Φ (x) c Ψ (x) = g(x) Differentiating the 2nd equation reveals Φ (x) = Ψ (x) Substituting into the 3rd equation produces 2c Φ (x) = g(x) Φ(x) = 1 2c Ψ(x) = 1 2c x 0 x 0 g(s) ds + K g(s) ds K.
16 Struck String (2 of 2) Consequently if g is continuously differentiable, then [ x+c t x c t g(s) ds u(x, t) = 1 2c 0 [ = 1 x+c t g(s) ds + 2c = 1 2c 0 x+c t x c t g(s) ds 0 0 x c t ] g(s) ds ] g(s) ds solves the initial value problem describing the struck string.
17 Nonzero Displacement and Velocity By the Principle of Superposition, the general solution is u(x, t) = 1 2 [f (x c t) + f (x + c t)] + 1 2c x+c t x c t g(s) ds.
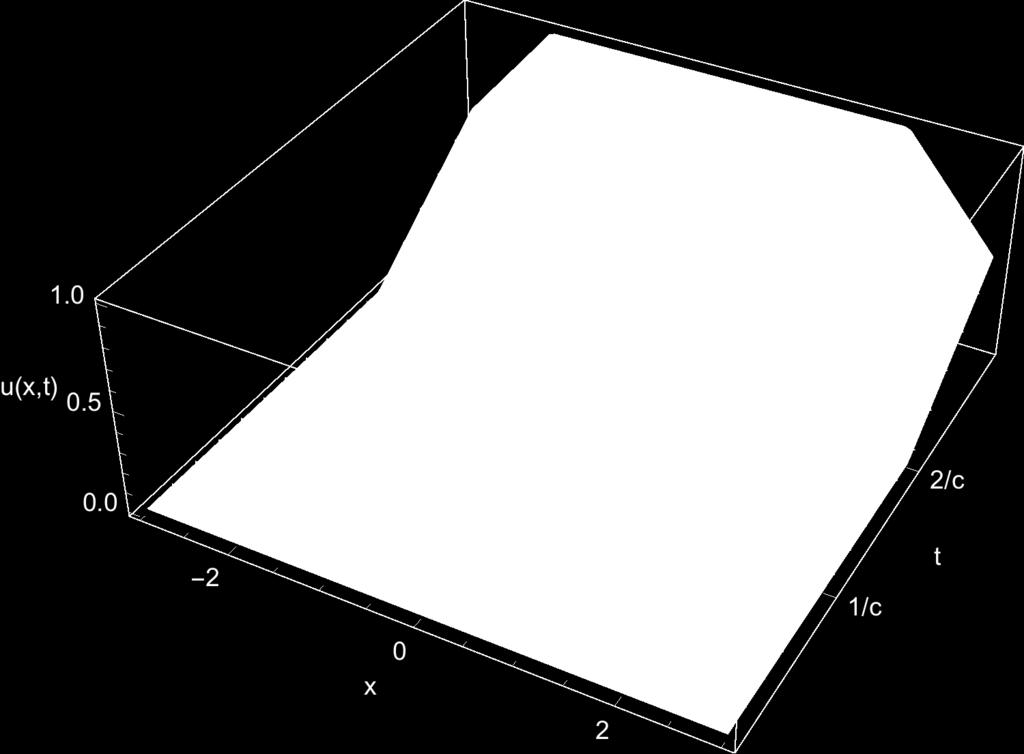
18 Example: Plucked String Determine the solution to the initial value problem: u tt = c 2 u xx for < x < and t > 0 { 2 if 1 < x < 1 u(x, 0) = f (x) = 0 otherwise u t (x, 0) = 0
19 Solution (1 of 7) Using d Alembert s solution u(x, t) = 1 [f (x + c t) + f (x c t)]. 2 Note: Along lines where x + c t is constant the term f (x + c t) is constant. Likewise along lines where x c t is constant the term f (x c t) is constant. These lines are called characteristics.
20 Solution (2 of 7) f (x) = f (x + c t) = 1 f (x + c t) = 2 { 2 if 1 < x < 1 0 otherwise { 2 if 1 < x + c t < 1 0 otherwise { 1 if 1 c t < x < 1 c t 0 otherwise
21 Solution (2 of 7) f (x) = f (x + c t) = 1 f (x + c t) = 2 1 f (x c t) = 2 { 2 if 1 < x < 1 0 otherwise { 2 if 1 < x + c t < 1 0 otherwise { 1 if 1 c t < x < 1 c t 0 otherwise { 1 if 1 + c t < x < 1 + c t 0 otherwise
22 Solution (2 of 7) f (x) = f (x + c t) = 1 f (x + c t) = 2 1 f (x c t) = 2 { 2 if 1 < x < 1 0 otherwise { 2 if 1 < x + c t < 1 0 otherwise { 1 if 1 c t < x < 1 c t 0 otherwise { 1 if 1 + c t < x < 1 + c t 0 otherwise Remark: the characteristics where x + c t = ±1 and x c t = ±1 help determine the solution.
23 t Solution (3 of 7) Region 6 Region 5 Region 4 2/c 1/c Region 1 Region 2 Region 3 x - c t = -1 x - c t = 1 x + c t = -1 x + c t = x
24 Solution (4 of 7) Region 1: {(x, t) x + c t < 1} Region 2: {(x, t) 1 < x c t and x + c t < 1} Region 3: {(x, t) 1 < x c t} Region 4: {(x, t) 1 < x + c t and 1 < x c t < 1} Region 5: {(x, t) 1 < x + c t and x c t < 1} Region 6: {(x, t) 1 < x + c t < 1 and x c t < 1}
25 Solution (5 of 7) u(x, t) = 1 2 f (x + c t) + 1 f (x c t) 2 0 if x + c t < 1 2 if 1 < x c t < 1 and 1 < x + c t < 1 0 if 1 < x c t = 1 if 1 < x + c t and 1 < x c t < 1 0 if 1 < x + c t and x c t < 1 1 if 1 < x + c t < 1 and x c t < 1
26 t Solution (6 of 7) 2/c 1/c u=0 u=1 u=1 u=0 u=2 u= x x - c t = -1 x - c t = 1 x + c t = -1 x + c t = 1
")
27 Solution (7 of 7)
28 Example: Struck String Determine the solution to the initial value problem: u tt = c 2 u xx for < x < and t > 0 u(x, 0) = 0 u t (x, 0) = g(x) = { 1 if 1 < x < 1 0 otherwise
29 Solution (1 of 6) Define the function G(z) = z 0 1 if z < 1 g(w) dw = z if 1 z 1 1 if z > 1. then u(x, t) = 1 [G(x + c t) G(x c t)]. 2c As in the previous example, the characteristics x + c t = ±1 and x c t = ±1 divide the xt-plane into six regions.
30 t Solution (2 of 6) Region 6 Region 5 Region 4 2/c 1/c Region 1 Region 2 Region 3 x - c t = -1 x - c t = 1 x + c t = -1 x + c t = x
31 Solution (3 of 6) Region 1: {(x, t) x + c t < 1} Region 2: {(x, t) 1 < x c t and x + c t < 1} Region 3: {(x, t) 1 < x c t} Region 4: {(x, t) 1 < x + c t and 1 < x c t < 1} Region 5: {(x, t) 1 < x + c t and x c t < 1} Region 6: {(x, t) 1 < x + c t < 1 and x c t < 1}
32 Solution (4 of 6) u(x, t) = 1 2c G(x + c t) 1 G(x c t) 2c 0 if x + c t < 1 2c t if 1 < x c t and x + c t < 1 = 1 0 if 1 < x c t 2c 1 x + c t if 1 < x + c t and 1 < x c t < 1 2 if 1 < x + c t and x c t < x + c t if x c t < 1 and 1 < x + c t < 1
33 Solution (5 of 6) 2/c x - c t = -1 t x-ct=1 x + c t = -1 1/c x+ct= x 1 2 3
")
34 Solution (6 of 6)
35 Domain of Dependence (1 of 2) In general the solution to the initial value problem: u tt = c 2 u xx for < x < and t > 0 u(x, 0) = f (x) u t (x, 0) = g(x) can be expressed as u(x, t) = 1 2 [f (x + c t) + f (x c t)] + 1 2c At the point (x 0, t 0 ) then u(x 0, t 0 ) = 1 2 [f (x 0 + c t 0 ) + f (x 0 c t 0 )] + 1 2c x+c t x c t x0 +c t 0 x 0 c t 0 g(s) ds. g(s) ds.
36 Domain of Dependence (2 of 2) u(x 0, t 0 ) = 1 2 [f (x 0 + c t 0 ) + f (x 0 c t 0 )] + 1 2c x0 +c t 0 x 0 c t 0 g(s) ds. Remarks: u(x 0, t 0 ) depends only on the values of f (x 0 ± c t) and g(s) for x 0 c t 0 s x 0 + c t 0. The interval [x 0 c t 0, x 0 + c t 0 ] is called the domain of dependence.
37 Domain of Dependence Illustrated t 0 t (x 0, t 0 ) x 0 - c t 0 x 0 x 0 + c t 0 x
38 Domain of Influence The point (x 0, t 0 ) influences the solution u(x, t) for t t 0 at all points between the characteristics passing through (x 0, t 0 ). t t 0 = ±1 x x 0 c c(t t 0 ) = ±(x x 0 ) ±x 0 + c(t t 0 ) = ±x
39 Domain of Influence Illustrated t x = x 0 - c(t - t 0 ) x = x 0 + c(t - t 0 ) t 0 (x 0, t 0 ) x 0 x
40 Finite Length String D Alembert s solution to the wave equation can be adapted to the wave equation with 0 < x < L. u tt = c 2 u xx for 0 < x < L and t > 0 u(0, t) = u(l, t) = 0 u(x, 0) = f (x) u t (x, 0) = g(x)
41 Case: Plucked String u tt = c 2 u xx for 0 < x < L and t > 0 u(0, t) = u(l, t) = 0 u(x, 0) = f (x) u t (x, 0) = 0 We have used separation of variables and Fourier series to determine u(x, t) = a n cos c n π t sin n π x L L n=1
42 Case: Plucked String u tt = c 2 u xx for 0 < x < L and t > 0 u(0, t) = u(l, t) = 0 u(x, 0) = f (x) u t (x, 0) = 0 We have used separation of variables and Fourier series to determine u(x, t) = a n cos c n π t sin n π x L L n=1 [ = 1 ] nπ(x + c t) nπ(x c t) a n sin + a n sin 2 L L n=1 n=1 = 1 [f (x + c t) + f (x c t)], 2 where f (x) is the odd, 2L-periodic extension of the initial displacement.
43 Case: Struck String u tt = c 2 u xx for 0 < x < L and t > 0 u(0, t) = u(l, t) = 0 u(l, t) = 0 u(x, 0) = 0 u t (x, 0) = g(x) We have used separation of variables and Fourier series to determine u(x, t) = n=1 b n sin c n π t L sin n π x L
44 Case: Struck String u tt = c 2 u xx for 0 < x < L and t > 0 u(0, t) = u(l, t) = 0 u(l, t) = 0 u(x, 0) = 0 u t (x, 0) = g(x) We have used separation of variables and Fourier series to determine u(x, t) = = 1 2 b n sin c n π t L n=1 n=1 sin n π x L [ nπ(x c t) b n cos b n cos L ] nπ(x + c t). L
45 Integrating Term by Term u(x, t) = 1 2 = 1 2 = 1 2 = 1 2c = 1 2c [ nπ(x c t) b n cos b n cos L n=1 nπ x+c t b n sin nπs L x c t L ds ( ) [ nπ ] b n sin nπs ds L L n=1 x+c t x c t n=1 x+c t x c t x+c t x c t ( [ n=1 g(s) ds b n cnπ L ] sin nπs L ) ] nπ(x + c t) L where g(x) is the odd, 2L-periodic extension of the initial velocity. ds
46 Example Find the solution to the initial boundary value problem u tt = 4u xx for 0 < x < 1 and t > 0 u(0, t) = u(l, t) = 0 u(x, 0) = 0 u t (x, 0) = 0 if x < 1/4 1 if 1/4 x 3/4 0 if 3/4 < x < 1. Let g(x) be the odd, 2-periodic extension of u t (x, 0).
47 Solution (1 of 6) Let g o (x) be the odd, 2-periodic extension of u t (x, 0). g o (x) = 0 if 0 < x < 1/4 1 if 1/4 < x < 3/4 0 if 3/4 < x < 5/4 1 if 5/4 < x < 7/4 0 if 7/4 < x < 2
48 Solution (2 of 6) g o (x) x
49 Solution (3 of 6) Define the function G(x) = x 0 g o (s) ds.
50 Solution (3 of 6) Define the function G(x) = G(x) = = x 0 g o (s) ds. x 0 0 ds if x < 1/4 x 1/4 1 ds if 1/4 x 3/4 3/4 1/4 1 ds if 3/4 < x < 5/4 1/4 1 ds + x 5/4 ( 1) ds if 5/4 < x < 7/4 1/4 1 ds + 7/4 5/4 ( 1) ds if 7/4 < x < 2 3/4 3/4 0 if x < 1/4 x 1/4 if 1/4 x 3/4 1/2 if 3/4 < x < 5/4 x + 7/4 if 5/4 < x < 7/4 0 if 7/4 < x < 2
51 Solution (4 of 6) G(x + 2t) = G(x 2t) = 0 if x + 2t < 1/4 x + 2t 1/4 if 1/4 x + 2t 3/4 1/2 if 3/4 < x + 2t < 5/4 x 2t + 7/4 if 5/4 < x + 2t < 7/4 0 if 7/4 < x + 2t < 2 0 if x 2t < 1/4 x 2t 1/4 if 1/4 x 2t 3/4 1/2 if 3/4 < x 2t < 5/4 x + 2t + 7/4 if 5/4 < x 2t < 7/4 0 if 7/4 < x 2t < 2
52 Solution (5 of 6) Using d Alembert s solution to the wave equation, then u(x, t) = 1 [G((x + c t) 2c (mod 2)) G((x c t) (mod 2))] = 1 [G((x + 2t) 4 (mod 2)) G((x 2t) (mod 2))].
")
53 Solution (6 of 6)
54 Homework Read Sections 5.2 and 5.3 Exercises: 6 10
Second Order Partial Differential Equations
 Chapter 7 Second Order Partial Differential Equations 7.1 Introduction A second order linear PDE in two independent variables (x, y Ω can be written as A(x, y u x + B(x, y u xy + C(x, y u u u + D(x, y
Chapter 7 Second Order Partial Differential Equations 7.1 Introduction A second order linear PDE in two independent variables (x, y Ω can be written as A(x, y u x + B(x, y u xy + C(x, y u u u + D(x, y
forms This gives Remark 1. How to remember the above formulas: Substituting these into the equation we obtain with
 Week 03: C lassification of S econd- Order L inear Equations In last week s lectures we have illustrated how to obtain the general solutions of first order PDEs using the method of characteristics. We
Week 03: C lassification of S econd- Order L inear Equations In last week s lectures we have illustrated how to obtain the general solutions of first order PDEs using the method of characteristics. We
( y) Partial Differential Equations
 Partial Differential Equations") Partial Dierential Equations Linear P.D.Es. contains no owers roducts o the deendent variables / an o its derivatives can occasionall be solved. Consider eamle ( ) a (sometimes written as a ) we can integrate
Partial Dierential Equations Linear P.D.Es. contains no owers roducts o the deendent variables / an o its derivatives can occasionall be solved. Consider eamle ( ) a (sometimes written as a ) we can integrate
Fourier Series. MATH 211, Calculus II. J. Robert Buchanan. Spring Department of Mathematics
 Fourier Series MATH 211, Calculus II J. Robert Buchanan Department of Mathematics Spring 2018 Introduction Not all functions can be represented by Taylor series. f (k) (c) A Taylor series f (x) = (x c)
Fourier Series MATH 211, Calculus II J. Robert Buchanan Department of Mathematics Spring 2018 Introduction Not all functions can be represented by Taylor series. f (k) (c) A Taylor series f (x) = (x c)
1 String with massive end-points
 1 String with massive end-points Πρόβλημα 5.11:Θεωρείστε μια χορδή μήκους, τάσης T, με δύο σημειακά σωματίδια στα άκρα της, το ένα μάζας m, και το άλλο μάζας m. α) Μελετώντας την κίνηση των άκρων βρείτε
1 String with massive end-points Πρόβλημα 5.11:Θεωρείστε μια χορδή μήκους, τάσης T, με δύο σημειακά σωματίδια στα άκρα της, το ένα μάζας m, και το άλλο μάζας m. α) Μελετώντας την κίνηση των άκρων βρείτε
Example Sheet 3 Solutions
 Example Sheet 3 Solutions. i Regular Sturm-Liouville. ii Singular Sturm-Liouville mixed boundary conditions. iii Not Sturm-Liouville ODE is not in Sturm-Liouville form. iv Regular Sturm-Liouville note
Example Sheet 3 Solutions. i Regular Sturm-Liouville. ii Singular Sturm-Liouville mixed boundary conditions. iii Not Sturm-Liouville ODE is not in Sturm-Liouville form. iv Regular Sturm-Liouville note
Parametrized Surfaces
 Parametrized Surfaces Recall from our unit on vector-valued functions at the beginning of the semester that an R 3 -valued function c(t) in one parameter is a mapping of the form c : I R 3 where I is some
Parametrized Surfaces Recall from our unit on vector-valued functions at the beginning of the semester that an R 3 -valued function c(t) in one parameter is a mapping of the form c : I R 3 where I is some
Exercises 10. Find a fundamental matrix of the given system of equations. Also find the fundamental matrix Φ(t) satisfying Φ(0) = I. 1.
 satisfying Φ(0) = I. 1.") Exercises 0 More exercises are available in Elementary Differential Equations. If you have a problem to solve any of them, feel free to come to office hour. Problem Find a fundamental matrix of the given
Exercises 0 More exercises are available in Elementary Differential Equations. If you have a problem to solve any of them, feel free to come to office hour. Problem Find a fundamental matrix of the given
Homework 8 Model Solution Section
 MATH 004 Homework Solution Homework 8 Model Solution Section 14.5 14.6. 14.5. Use the Chain Rule to find dz where z cosx + 4y), x 5t 4, y 1 t. dz dx + dy y sinx + 4y)0t + 4) sinx + 4y) 1t ) 0t + 4t ) sinx
MATH 004 Homework Solution Homework 8 Model Solution Section 14.5 14.6. 14.5. Use the Chain Rule to find dz where z cosx + 4y), x 5t 4, y 1 t. dz dx + dy y sinx + 4y)0t + 4) sinx + 4y) 1t ) 0t + 4t ) sinx
Chapter 6: Systems of Linear Differential. be continuous functions on the interval
 Chapter 6: Systems of Linear Differential Equations Let a (t), a 2 (t),..., a nn (t), b (t), b 2 (t),..., b n (t) be continuous functions on the interval I. The system of n first-order differential equations
Chapter 6: Systems of Linear Differential Equations Let a (t), a 2 (t),..., a nn (t), b (t), b 2 (t),..., b n (t) be continuous functions on the interval I. The system of n first-order differential equations
CHAPTER 101 FOURIER SERIES FOR PERIODIC FUNCTIONS OF PERIOD
 CHAPTER FOURIER SERIES FOR PERIODIC FUNCTIONS OF PERIOD EXERCISE 36 Page 66. Determine the Fourier series for the periodic function: f(x), when x +, when x which is periodic outside this rge of period.
CHAPTER FOURIER SERIES FOR PERIODIC FUNCTIONS OF PERIOD EXERCISE 36 Page 66. Determine the Fourier series for the periodic function: f(x), when x +, when x which is periodic outside this rge of period.
Απόκριση σε Μοναδιαία Ωστική Δύναμη (Unit Impulse) Απόκριση σε Δυνάμεις Αυθαίρετα Μεταβαλλόμενες με το Χρόνο. Απόστολος Σ.
 Απόκριση σε Δυνάμεις Αυθαίρετα Μεταβαλλόμενες με το Χρόνο. Απόστολος Σ.") Απόκριση σε Δυνάμεις Αυθαίρετα Μεταβαλλόμενες με το Χρόνο The time integral of a force is referred to as impulse, is determined by and is obtained from: Newton s 2 nd Law of motion states that the action
Απόκριση σε Δυνάμεις Αυθαίρετα Μεταβαλλόμενες με το Χρόνο The time integral of a force is referred to as impulse, is determined by and is obtained from: Newton s 2 nd Law of motion states that the action
Areas and Lengths in Polar Coordinates
 Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Spherical Coordinates
 Spherical Coordinates MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Spherical Coordinates Another means of locating points in three-dimensional space is known as the spherical
Spherical Coordinates MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Spherical Coordinates Another means of locating points in three-dimensional space is known as the spherical
Differential equations
 Differential equations Differential equations: An equation inoling one dependent ariable and its deriaties w. r. t one or more independent ariables is called a differential equation. Order of differential
Differential equations Differential equations: An equation inoling one dependent ariable and its deriaties w. r. t one or more independent ariables is called a differential equation. Order of differential
3.4 SUM AND DIFFERENCE FORMULAS. NOTE: cos(α+β) cos α + cos β cos(α-β) cos α -cos β
 cos α + cos β cos(α-β) cos α -cos β") 3.4 SUM AND DIFFERENCE FORMULAS Page Theorem cos(αβ cos α cos β -sin α cos(α-β cos α cos β sin α NOTE: cos(αβ cos α cos β cos(α-β cos α -cos β Proof of cos(α-β cos α cos β sin α Let s use a unit circle
3.4 SUM AND DIFFERENCE FORMULAS Page Theorem cos(αβ cos α cos β -sin α cos(α-β cos α cos β sin α NOTE: cos(αβ cos α cos β cos(α-β cos α -cos β Proof of cos(α-β cos α cos β sin α Let s use a unit circle
Section 8.3 Trigonometric Equations
 99 Section 8. Trigonometric Equations Objective 1: Solve Equations Involving One Trigonometric Function. In this section and the next, we will exple how to solving equations involving trigonometric functions.
99 Section 8. Trigonometric Equations Objective 1: Solve Equations Involving One Trigonometric Function. In this section and the next, we will exple how to solving equations involving trigonometric functions.
Areas and Lengths in Polar Coordinates
 Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Solutions to Exercise Sheet 5
 Solutions to Eercise Sheet 5 jacques@ucsd.edu. Let X and Y be random variables with joint pdf f(, y) = 3y( + y) where and y. Determine each of the following probabilities. Solutions. a. P (X ). b. P (X
Solutions to Eercise Sheet 5 jacques@ucsd.edu. Let X and Y be random variables with joint pdf f(, y) = 3y( + y) where and y. Determine each of the following probabilities. Solutions. a. P (X ). b. P (X
Math 5440 Problem Set 4 Solutions
 Math 5440 Math 5440 Problem Set 4 Solutions Aaron Fogelson Fall, 03 : (Logan,.8 # 4) Find all radial solutions of the two-dimensional Laplace s equation. That is, find all solutions of the form u(r) where
Math 5440 Math 5440 Problem Set 4 Solutions Aaron Fogelson Fall, 03 : (Logan,.8 # 4) Find all radial solutions of the two-dimensional Laplace s equation. That is, find all solutions of the form u(r) where
DESIGN OF MACHINERY SOLUTION MANUAL h in h 4 0.
 DESIGN OF MACHINERY SOLUTION MANUAL -7-1! PROBLEM -7 Statement: Design a double-dwell cam to move a follower from to 25 6, dwell for 12, fall 25 and dwell for the remader The total cycle must take 4 sec
DESIGN OF MACHINERY SOLUTION MANUAL -7-1! PROBLEM -7 Statement: Design a double-dwell cam to move a follower from to 25 6, dwell for 12, fall 25 and dwell for the remader The total cycle must take 4 sec
Partial Differential Equations in Biology The boundary element method. March 26, 2013
 The boundary element method March 26, 203 Introduction and notation The problem: u = f in D R d u = ϕ in Γ D u n = g on Γ N, where D = Γ D Γ N, Γ D Γ N = (possibly, Γ D = [Neumann problem] or Γ N = [Dirichlet
The boundary element method March 26, 203 Introduction and notation The problem: u = f in D R d u = ϕ in Γ D u n = g on Γ N, where D = Γ D Γ N, Γ D Γ N = (possibly, Γ D = [Neumann problem] or Γ N = [Dirichlet
Math 5440 Problem Set 4 Solutions
 Math 544 Math 544 Problem Set 4 Solutions Aaron Fogelson Fall, 5 : (Logan,.8 # 4) Find all radial solutions of the two-dimensional Laplace s equation. That is, find all solutions of the form u(r) where
Math 544 Math 544 Problem Set 4 Solutions Aaron Fogelson Fall, 5 : (Logan,.8 # 4) Find all radial solutions of the two-dimensional Laplace s equation. That is, find all solutions of the form u(r) where
Concrete Mathematics Exercises from 30 September 2016
 Concrete Mathematics Exercises from 30 September 2016 Silvio Capobianco Exercise 1.7 Let H(n) = J(n + 1) J(n). Equation (1.8) tells us that H(2n) = 2, and H(2n+1) = J(2n+2) J(2n+1) = (2J(n+1) 1) (2J(n)+1)
Concrete Mathematics Exercises from 30 September 2016 Silvio Capobianco Exercise 1.7 Let H(n) = J(n + 1) J(n). Equation (1.8) tells us that H(2n) = 2, and H(2n+1) = J(2n+2) J(2n+1) = (2J(n+1) 1) (2J(n)+1)
Chapter 6: Systems of Linear Differential. be continuous functions on the interval
 Chapter 6: Systems of Linear Differential Equations Let a (t), a 2 (t),..., a nn (t), b (t), b 2 (t),..., b n (t) be continuous functions on the interval I. The system of n first-order differential equations
Chapter 6: Systems of Linear Differential Equations Let a (t), a 2 (t),..., a nn (t), b (t), b 2 (t),..., b n (t) be continuous functions on the interval I. The system of n first-order differential equations
CHAPTER 25 SOLVING EQUATIONS BY ITERATIVE METHODS
 CHAPTER 5 SOLVING EQUATIONS BY ITERATIVE METHODS EXERCISE 104 Page 8 1. Find the positive root of the equation x + 3x 5 = 0, correct to 3 significant figures, using the method of bisection. Let f(x) =
CHAPTER 5 SOLVING EQUATIONS BY ITERATIVE METHODS EXERCISE 104 Page 8 1. Find the positive root of the equation x + 3x 5 = 0, correct to 3 significant figures, using the method of bisection. Let f(x) =
DiracDelta. Notations. Primary definition. Specific values. General characteristics. Traditional name. Traditional notation
 DiracDelta Notations Traditional name Dirac delta function Traditional notation x Mathematica StandardForm notation DiracDeltax Primary definition 4.03.02.000.0 x Π lim ε ; x ε0 x 2 2 ε Specific values
DiracDelta Notations Traditional name Dirac delta function Traditional notation x Mathematica StandardForm notation DiracDeltax Primary definition 4.03.02.000.0 x Π lim ε ; x ε0 x 2 2 ε Specific values
Phys460.nb Solution for the t-dependent Schrodinger s equation How did we find the solution? (not required)
") Phys460.nb 81 ψ n (t) is still the (same) eigenstate of H But for tdependent H. The answer is NO. 5.5.5. Solution for the tdependent Schrodinger s equation If we assume that at time t 0, the electron starts
Phys460.nb 81 ψ n (t) is still the (same) eigenstate of H But for tdependent H. The answer is NO. 5.5.5. Solution for the tdependent Schrodinger s equation If we assume that at time t 0, the electron starts
Lecture 26: Circular domains
 Introductory lecture notes on Partial Differential Equations - c Anthony Peirce. Not to be copied, used, or revised without eplicit written permission from the copyright owner. 1 Lecture 6: Circular domains
Introductory lecture notes on Partial Differential Equations - c Anthony Peirce. Not to be copied, used, or revised without eplicit written permission from the copyright owner. 1 Lecture 6: Circular domains
Math221: HW# 1 solutions
 Math: HW# solutions Andy Royston October, 5 7.5.7, 3 rd Ed. We have a n = b n = a = fxdx = xdx =, x cos nxdx = x sin nx n sin nxdx n = cos nx n = n n, x sin nxdx = x cos nx n + cos nxdx n cos n = + sin
Math: HW# solutions Andy Royston October, 5 7.5.7, 3 rd Ed. We have a n = b n = a = fxdx = xdx =, x cos nxdx = x sin nx n sin nxdx n = cos nx n = n n, x sin nxdx = x cos nx n + cos nxdx n cos n = + sin
ECE Spring Prof. David R. Jackson ECE Dept. Notes 2
 ECE 634 Spring 6 Prof. David R. Jackson ECE Dept. Notes Fields in a Source-Free Region Example: Radiation from an aperture y PEC E t x Aperture Assume the following choice of vector potentials: A F = =
ECE 634 Spring 6 Prof. David R. Jackson ECE Dept. Notes Fields in a Source-Free Region Example: Radiation from an aperture y PEC E t x Aperture Assume the following choice of vector potentials: A F = =
PARTIAL NOTES for 6.1 Trigonometric Identities
 PARTIAL NOTES for 6.1 Trigonometric Identities tanθ = sinθ cosθ cotθ = cosθ sinθ BASIC IDENTITIES cscθ = 1 sinθ secθ = 1 cosθ cotθ = 1 tanθ PYTHAGOREAN IDENTITIES sin θ + cos θ =1 tan θ +1= sec θ 1 + cot
PARTIAL NOTES for 6.1 Trigonometric Identities tanθ = sinθ cosθ cotθ = cosθ sinθ BASIC IDENTITIES cscθ = 1 sinθ secθ = 1 cosθ cotθ = 1 tanθ PYTHAGOREAN IDENTITIES sin θ + cos θ =1 tan θ +1= sec θ 1 + cot
Matrices and Determinants
 Matrices and Determinants SUBJECTIVE PROBLEMS: Q 1. For what value of k do the following system of equations possess a non-trivial (i.e., not all zero) solution over the set of rationals Q? x + ky + 3z
Matrices and Determinants SUBJECTIVE PROBLEMS: Q 1. For what value of k do the following system of equations possess a non-trivial (i.e., not all zero) solution over the set of rationals Q? x + ky + 3z
Srednicki Chapter 55
 Srednicki Chapter 55 QFT Problems & Solutions A. George August 3, 03 Srednicki 55.. Use equations 55.3-55.0 and A i, A j ] = Π i, Π j ] = 0 (at equal times) to verify equations 55.-55.3. This is our third
Srednicki Chapter 55 QFT Problems & Solutions A. George August 3, 03 Srednicki 55.. Use equations 55.3-55.0 and A i, A j ] = Π i, Π j ] = 0 (at equal times) to verify equations 55.-55.3. This is our third
EE512: Error Control Coding
 EE512: Error Control Coding Solution for Assignment on Finite Fields February 16, 2007 1. (a) Addition and Multiplication tables for GF (5) and GF (7) are shown in Tables 1 and 2. + 0 1 2 3 4 0 0 1 2 3
EE512: Error Control Coding Solution for Assignment on Finite Fields February 16, 2007 1. (a) Addition and Multiplication tables for GF (5) and GF (7) are shown in Tables 1 and 2. + 0 1 2 3 4 0 0 1 2 3
On the Galois Group of Linear Difference-Differential Equations
 On the Galois Group of Linear Difference-Differential Equations Ruyong Feng KLMM, Chinese Academy of Sciences, China Ruyong Feng (KLMM, CAS) Galois Group 1 / 19 Contents 1 Basic Notations and Concepts
On the Galois Group of Linear Difference-Differential Equations Ruyong Feng KLMM, Chinese Academy of Sciences, China Ruyong Feng (KLMM, CAS) Galois Group 1 / 19 Contents 1 Basic Notations and Concepts
Second Order RLC Filters
 ECEN 60 Circuits/Electronics Spring 007-0-07 P. Mathys Second Order RLC Filters RLC Lowpass Filter A passive RLC lowpass filter (LPF) circuit is shown in the following schematic. R L C v O (t) Using phasor
ECEN 60 Circuits/Electronics Spring 007-0-07 P. Mathys Second Order RLC Filters RLC Lowpass Filter A passive RLC lowpass filter (LPF) circuit is shown in the following schematic. R L C v O (t) Using phasor
derivation of the Laplacian from rectangular to spherical coordinates
 derivation of the Laplacian from rectangular to spherical coordinates swapnizzle 03-03- :5:43 We begin by recognizing the familiar conversion from rectangular to spherical coordinates (note that φ is used
derivation of the Laplacian from rectangular to spherical coordinates swapnizzle 03-03- :5:43 We begin by recognizing the familiar conversion from rectangular to spherical coordinates (note that φ is used
2 Composition. Invertible Mappings
 Arkansas Tech University MATH 4033: Elementary Modern Algebra Dr. Marcel B. Finan Composition. Invertible Mappings In this section we discuss two procedures for creating new mappings from old ones, namely,
Arkansas Tech University MATH 4033: Elementary Modern Algebra Dr. Marcel B. Finan Composition. Invertible Mappings In this section we discuss two procedures for creating new mappings from old ones, namely,
4.6 Autoregressive Moving Average Model ARMA(1,1)
") 84 CHAPTER 4. STATIONARY TS MODELS 4.6 Autoregressive Moving Average Model ARMA(,) This section is an introduction to a wide class of models ARMA(p,q) which we will consider in more detail later in this
84 CHAPTER 4. STATIONARY TS MODELS 4.6 Autoregressive Moving Average Model ARMA(,) This section is an introduction to a wide class of models ARMA(p,q) which we will consider in more detail later in this
Finite difference method for 2-D heat equation
 Finite difference method for 2-D heat equation Praveen. C praveen@math.tifrbng.res.in Tata Institute of Fundamental Research Center for Applicable Mathematics Bangalore 560065 http://math.tifrbng.res.in/~praveen
Finite difference method for 2-D heat equation Praveen. C praveen@math.tifrbng.res.in Tata Institute of Fundamental Research Center for Applicable Mathematics Bangalore 560065 http://math.tifrbng.res.in/~praveen
Jesse Maassen and Mark Lundstrom Purdue University November 25, 2013
 Notes on Average Scattering imes and Hall Factors Jesse Maassen and Mar Lundstrom Purdue University November 5, 13 I. Introduction 1 II. Solution of the BE 1 III. Exercises: Woring out average scattering
Notes on Average Scattering imes and Hall Factors Jesse Maassen and Mar Lundstrom Purdue University November 5, 13 I. Introduction 1 II. Solution of the BE 1 III. Exercises: Woring out average scattering
SPECIAL FUNCTIONS and POLYNOMIALS
 SPECIAL FUNCTIONS and POLYNOMIALS Gerard t Hooft Stefan Nobbenhuis Institute for Theoretical Physics Utrecht University, Leuvenlaan 4 3584 CC Utrecht, the Netherlands and Spinoza Institute Postbox 8.195
SPECIAL FUNCTIONS and POLYNOMIALS Gerard t Hooft Stefan Nobbenhuis Institute for Theoretical Physics Utrecht University, Leuvenlaan 4 3584 CC Utrecht, the Netherlands and Spinoza Institute Postbox 8.195
Section 9.2 Polar Equations and Graphs
 180 Section 9. Polar Equations and Graphs In this section, we will be graphing polar equations on a polar grid. In the first few examples, we will write the polar equation in rectangular form to help identify
180 Section 9. Polar Equations and Graphs In this section, we will be graphing polar equations on a polar grid. In the first few examples, we will write the polar equation in rectangular form to help identify
Section 7.6 Double and Half Angle Formulas
 09 Section 7. Double and Half Angle Fmulas To derive the double-angles fmulas, we will use the sum of two angles fmulas that we developed in the last section. We will let α θ and β θ: cos(θ) cos(θ + θ)
09 Section 7. Double and Half Angle Fmulas To derive the double-angles fmulas, we will use the sum of two angles fmulas that we developed in the last section. We will let α θ and β θ: cos(θ) cos(θ + θ)
6.3 Forecasting ARMA processes
 122 CHAPTER 6. ARMA MODELS 6.3 Forecasting ARMA processes The purpose of forecasting is to predict future values of a TS based on the data collected to the present. In this section we will discuss a linear
122 CHAPTER 6. ARMA MODELS 6.3 Forecasting ARMA processes The purpose of forecasting is to predict future values of a TS based on the data collected to the present. In this section we will discuss a linear
Homework 3 Solutions
 Homework 3 Solutions Igor Yanovsky (Math 151A TA) Problem 1: Compute the absolute error and relative error in approximations of p by p. (Use calculator!) a) p π, p 22/7; b) p π, p 3.141. Solution: For
Homework 3 Solutions Igor Yanovsky (Math 151A TA) Problem 1: Compute the absolute error and relative error in approximations of p by p. (Use calculator!) a) p π, p 22/7; b) p π, p 3.141. Solution: For
CRASH COURSE IN PRECALCULUS
 CRASH COURSE IN PRECALCULUS Shiah-Sen Wang The graphs are prepared by Chien-Lun Lai Based on : Precalculus: Mathematics for Calculus by J. Stuwart, L. Redin & S. Watson, 6th edition, 01, Brooks/Cole Chapter
CRASH COURSE IN PRECALCULUS Shiah-Sen Wang The graphs are prepared by Chien-Lun Lai Based on : Precalculus: Mathematics for Calculus by J. Stuwart, L. Redin & S. Watson, 6th edition, 01, Brooks/Cole Chapter
The Negative Neumann Eigenvalues of Second Order Differential Equation with Two Turning Points
 Applied Mathematical Sciences, Vol. 3, 009, no., 6-66 The Negative Neumann Eigenvalues of Second Order Differential Equation with Two Turning Points A. Neamaty and E. A. Sazgar Department of Mathematics,
Applied Mathematical Sciences, Vol. 3, 009, no., 6-66 The Negative Neumann Eigenvalues of Second Order Differential Equation with Two Turning Points A. Neamaty and E. A. Sazgar Department of Mathematics,
Name: Math Homework Set # VI. April 2, 2010
 Name: Math 4567. Homework Set # VI April 2, 21 Chapter 5, page 113, problem 1), (page 122, problem 1), (page 128, problem 2), (page 133, problem 4), (page 136, problem 1). (page 146, problem 1), Chapter
Name: Math 4567. Homework Set # VI April 2, 21 Chapter 5, page 113, problem 1), (page 122, problem 1), (page 128, problem 2), (page 133, problem 4), (page 136, problem 1). (page 146, problem 1), Chapter
If we restrict the domain of y = sin x to [ π, π ], the restrict function. y = sin x, π 2 x π 2
![If we restrict the domain of y = sin x to [ π, π ], the restrict function. y = sin x, π 2 x π 2](/thumbs/53/31933086.jpg "If we restrict the domain of y = sin x to [ π, π ], the restrict function. y = sin x, π 2 x π 2") Chapter 3. Analytic Trigonometry 3.1 The inverse sine, cosine, and tangent functions 1. Review: Inverse function (1) f 1 (f(x)) = x for every x in the domain of f and f(f 1 (x)) = x for every x in the
Chapter 3. Analytic Trigonometry 3.1 The inverse sine, cosine, and tangent functions 1. Review: Inverse function (1) f 1 (f(x)) = x for every x in the domain of f and f(f 1 (x)) = x for every x in the
Inverse trigonometric functions & General Solution of Trigonometric Equations. ------------------ ----------------------------- -----------------
 Inverse trigonometric functions & General Solution of Trigonometric Equations. 1. Sin ( ) = a) b) c) d) Ans b. Solution : Method 1. Ans a: 17 > 1 a) is rejected. w.k.t Sin ( sin ) = d is rejected. If sin
Inverse trigonometric functions & General Solution of Trigonometric Equations. 1. Sin ( ) = a) b) c) d) Ans b. Solution : Method 1. Ans a: 17 > 1 a) is rejected. w.k.t Sin ( sin ) = d is rejected. If sin
If we restrict the domain of y = sin x to [ π 2, π 2
 Chapter 3. Analytic Trigonometry 3.1 The inverse sine, cosine, and tangent functions 1. Review: Inverse function (1) f 1 (f(x)) = x for every x in the domain of f and f(f 1 (x)) = x for every x in the
Chapter 3. Analytic Trigonometry 3.1 The inverse sine, cosine, and tangent functions 1. Review: Inverse function (1) f 1 (f(x)) = x for every x in the domain of f and f(f 1 (x)) = x for every x in the
Integrals in cylindrical, spherical coordinates (Sect. 15.7)
") Integrals in clindrical, spherical coordinates (Sect. 5.7 Integration in spherical coordinates. Review: Clindrical coordinates. Spherical coordinates in space. Triple integral in spherical coordinates.
Integrals in clindrical, spherical coordinates (Sect. 5.7 Integration in spherical coordinates. Review: Clindrical coordinates. Spherical coordinates in space. Triple integral in spherical coordinates.
Space Physics (I) [AP-3044] Lecture 1 by Ling-Hsiao Lyu Oct Lecture 1. Dipole Magnetic Field and Equations of Magnetic Field Lines
![Space Physics (I) [AP-3044] Lecture 1 by Ling-Hsiao Lyu Oct Lecture 1. Dipole Magnetic Field and Equations of Magnetic Field Lines](/thumbs/51/28406191.jpg "Space Physics (I) [AP-3044] Lecture 1 by Ling-Hsiao Lyu Oct Lecture 1. Dipole Magnetic Field and Equations of Magnetic Field Lines") Space Physics (I) [AP-344] Lectue by Ling-Hsiao Lyu Oct. 2 Lectue. Dipole Magnetic Field and Equations of Magnetic Field Lines.. Dipole Magnetic Field Since = we can define = A (.) whee A is called the
Space Physics (I) [AP-344] Lectue by Ling-Hsiao Lyu Oct. 2 Lectue. Dipole Magnetic Field and Equations of Magnetic Field Lines.. Dipole Magnetic Field Since = we can define = A (.) whee A is called the
Lecture 2: Dirac notation and a review of linear algebra Read Sakurai chapter 1, Baym chatper 3
 Lecture 2: Dirac notation and a review of linear algebra Read Sakurai chapter 1, Baym chatper 3 1 State vector space and the dual space Space of wavefunctions The space of wavefunctions is the set of all
Lecture 2: Dirac notation and a review of linear algebra Read Sakurai chapter 1, Baym chatper 3 1 State vector space and the dual space Space of wavefunctions The space of wavefunctions is the set of all
The Simply Typed Lambda Calculus
 Type Inference Instead of writing type annotations, can we use an algorithm to infer what the type annotations should be? That depends on the type system. For simple type systems the answer is yes, and
Type Inference Instead of writing type annotations, can we use an algorithm to infer what the type annotations should be? That depends on the type system. For simple type systems the answer is yes, and
What happens when two or more waves overlap in a certain region of space at the same time?
 Wave Superposition What happens when two or more waves overlap in a certain region of space at the same time? To find the resulting wave according to the principle of superposition we should sum the fields
Wave Superposition What happens when two or more waves overlap in a certain region of space at the same time? To find the resulting wave according to the principle of superposition we should sum the fields
Appendix to On the stability of a compressible axisymmetric rotating flow in a pipe. By Z. Rusak & J. H. Lee
 Appendi to On the stability of a compressible aisymmetric rotating flow in a pipe By Z. Rusak & J. H. Lee Journal of Fluid Mechanics, vol. 5 4, pp. 5 4 This material has not been copy-edited or typeset
Appendi to On the stability of a compressible aisymmetric rotating flow in a pipe By Z. Rusak & J. H. Lee Journal of Fluid Mechanics, vol. 5 4, pp. 5 4 This material has not been copy-edited or typeset
Ενότητα 3: Ακρότατα συναρτήσεων μίας ή πολλών μεταβλητών. Νίκος Καραμπετάκης Τμήμα Μαθηματικών
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 3: Ακρότατα συναρτήσεων μίας ή πολλών μεταβλητών Νίκος Καραμπετάκης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 3: Ακρότατα συναρτήσεων μίας ή πολλών μεταβλητών Νίκος Καραμπετάκης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
Mock Exam 7. 1 Hong Kong Educational Publishing Company. Section A 1. Reference: HKDSE Math M Q2 (a) (1 + kx) n 1M + 1A = (1) =
 (1 + kx) n 1M + 1A = (1) =") Mock Eam 7 Mock Eam 7 Section A. Reference: HKDSE Math M 0 Q (a) ( + k) n nn ( )( k) + nk ( ) + + nn ( ) k + nk + + + A nk... () nn ( ) k... () From (), k...() n Substituting () into (), nn ( ) n 76n 76n
Mock Eam 7 Mock Eam 7 Section A. Reference: HKDSE Math M 0 Q (a) ( + k) n nn ( )( k) + nk ( ) + + nn ( ) k + nk + + + A nk... () nn ( ) k... () From (), k...() n Substituting () into (), nn ( ) n 76n 76n
1. (a) (5 points) Find the unit tangent and unit normal vectors T and N to the curve. r(t) = 3cost, 4t, 3sint
 (5 points) Find the unit tangent and unit normal vectors T and N to the curve. r(t) = 3cost, 4t, 3sint") 1. a) 5 points) Find the unit tangent and unit normal vectors T and N to the curve at the point P, π, rt) cost, t, sint ). b) 5 points) Find curvature of the curve at the point P. Solution: a) r t) sint,,
1. a) 5 points) Find the unit tangent and unit normal vectors T and N to the curve at the point P, π, rt) cost, t, sint ). b) 5 points) Find curvature of the curve at the point P. Solution: a) r t) sint,,
Numerical Analysis FMN011
 Numerical Analysis FMN011 Carmen Arévalo Lund University carmen@maths.lth.se Lecture 12 Periodic data A function g has period P if g(x + P ) = g(x) Model: Trigonometric polynomial of order M T M (x) =
Numerical Analysis FMN011 Carmen Arévalo Lund University carmen@maths.lth.se Lecture 12 Periodic data A function g has period P if g(x + P ) = g(x) Model: Trigonometric polynomial of order M T M (x) =
Solution Series 9. i=1 x i and i=1 x i.
 Lecturer: Prof. Dr. Mete SONER Coordinator: Yilin WANG Solution Series 9 Q1. Let α, β >, the p.d.f. of a beta distribution with parameters α and β is { Γ(α+β) Γ(α)Γ(β) f(x α, β) xα 1 (1 x) β 1 for < x
Lecturer: Prof. Dr. Mete SONER Coordinator: Yilin WANG Solution Series 9 Q1. Let α, β >, the p.d.f. of a beta distribution with parameters α and β is { Γ(α+β) Γ(α)Γ(β) f(x α, β) xα 1 (1 x) β 1 for < x
Finite Field Problems: Solutions
 Finite Field Problems: Solutions 1. Let f = x 2 +1 Z 11 [x] and let F = Z 11 [x]/(f), a field. Let Solution: F =11 2 = 121, so F = 121 1 = 120. The possible orders are the divisors of 120. Solution: The
Finite Field Problems: Solutions 1. Let f = x 2 +1 Z 11 [x] and let F = Z 11 [x]/(f), a field. Let Solution: F =11 2 = 121, so F = 121 1 = 120. The possible orders are the divisors of 120. Solution: The
SCHOOL OF MATHEMATICAL SCIENCES G11LMA Linear Mathematics Examination Solutions
 SCHOOL OF MATHEMATICAL SCIENCES GLMA Linear Mathematics 00- Examination Solutions. (a) i. ( + 5i)( i) = (6 + 5) + (5 )i = + i. Real part is, imaginary part is. (b) ii. + 5i i ( + 5i)( + i) = ( i)( + i)
SCHOOL OF MATHEMATICAL SCIENCES GLMA Linear Mathematics 00- Examination Solutions. (a) i. ( + 5i)( i) = (6 + 5) + (5 )i = + i. Real part is, imaginary part is. (b) ii. + 5i i ( + 5i)( + i) = ( i)( + i)
ANSWERSHEET (TOPIC = DIFFERENTIAL CALCULUS) COLLECTION #2. h 0 h h 0 h h 0 ( ) g k = g 0 + g 1 + g g 2009 =?
 COLLECTION #2. h 0 h h 0 h h 0 ( ) g k = g 0 + g 1 + g g 2009 =?") Teko Classes IITJEE/AIEEE Maths by SUHAAG SIR, Bhopal, Ph (0755) 3 00 000 www.tekoclasses.com ANSWERSHEET (TOPIC DIFFERENTIAL CALCULUS) COLLECTION # Question Type A.Single Correct Type Q. (A) Sol least
Teko Classes IITJEE/AIEEE Maths by SUHAAG SIR, Bhopal, Ph (0755) 3 00 000 www.tekoclasses.com ANSWERSHEET (TOPIC DIFFERENTIAL CALCULUS) COLLECTION # Question Type A.Single Correct Type Q. (A) Sol least
ES440/ES911: CFD. Chapter 5. Solution of Linear Equation Systems
 ES440/ES911: CFD Chapter 5. Solution of Linear Equation Systems Dr Yongmann M. Chung http://www.eng.warwick.ac.uk/staff/ymc/es440.html Y.M.Chung@warwick.ac.uk School of Engineering & Centre for Scientific
ES440/ES911: CFD Chapter 5. Solution of Linear Equation Systems Dr Yongmann M. Chung http://www.eng.warwick.ac.uk/staff/ymc/es440.html Y.M.Chung@warwick.ac.uk School of Engineering & Centre for Scientific
Μονοβάθμια Συστήματα: Εξίσωση Κίνησης, Διατύπωση του Προβλήματος και Μέθοδοι Επίλυσης. Απόστολος Σ. Παπαγεωργίου
 Μονοβάθμια Συστήματα: Εξίσωση Κίνησης, Διατύπωση του Προβλήματος και Μέθοδοι Επίλυσης VISCOUSLY DAMPED 1-DOF SYSTEM Μονοβάθμια Συστήματα με Ιξώδη Απόσβεση Equation of Motion (Εξίσωση Κίνησης): Complete
Μονοβάθμια Συστήματα: Εξίσωση Κίνησης, Διατύπωση του Προβλήματος και Μέθοδοι Επίλυσης VISCOUSLY DAMPED 1-DOF SYSTEM Μονοβάθμια Συστήματα με Ιξώδη Απόσβεση Equation of Motion (Εξίσωση Κίνησης): Complete
Econ 2110: Fall 2008 Suggested Solutions to Problem Set 8 questions or comments to Dan Fetter 1
 Eon : Fall 8 Suggested Solutions to Problem Set 8 Email questions or omments to Dan Fetter Problem. Let X be a salar with density f(x, θ) (θx + θ) [ x ] with θ. (a) Find the most powerful level α test
Eon : Fall 8 Suggested Solutions to Problem Set 8 Email questions or omments to Dan Fetter Problem. Let X be a salar with density f(x, θ) (θx + θ) [ x ] with θ. (a) Find the most powerful level α test
Problem Set 9 Solutions. θ + 1. θ 2 + cotθ ( ) sinθ e iφ is an eigenfunction of the ˆ L 2 operator. / θ 2. φ 2. sin 2 θ φ 2. ( ) = e iφ. = e iφ cosθ.
 sinθ e iφ is an eigenfunction of the ˆ L 2 operator. / θ 2. φ 2. sin 2 θ φ 2. ( ) = e iφ. = e iφ cosθ.") Chemistry 362 Dr Jean M Standard Problem Set 9 Solutions The ˆ L 2 operator is defined as Verify that the angular wavefunction Y θ,φ) Also verify that the eigenvalue is given by 2! 2 & L ˆ 2! 2 2 θ 2 +
Chemistry 362 Dr Jean M Standard Problem Set 9 Solutions The ˆ L 2 operator is defined as Verify that the angular wavefunction Y θ,φ) Also verify that the eigenvalue is given by 2! 2 & L ˆ 2! 2 2 θ 2 +
Exercises to Statistics of Material Fatigue No. 5
 Prof. Dr. Christine Müller Dipl.-Math. Christoph Kustosz Eercises to Statistics of Material Fatigue No. 5 E. 9 (5 a Show, that a Fisher information matri for a two dimensional parameter θ (θ,θ 2 R 2, can
Prof. Dr. Christine Müller Dipl.-Math. Christoph Kustosz Eercises to Statistics of Material Fatigue No. 5 E. 9 (5 a Show, that a Fisher information matri for a two dimensional parameter θ (θ,θ 2 R 2, can
University of Illinois at Urbana-Champaign ECE 310: Digital Signal Processing
 University of Illinois at Urbana-Champaign ECE : Digital Signal Processing Chandra Radhakrishnan PROBLEM SET : SOLUTIONS Peter Kairouz Problem Solution:. ( 5 ) + (5 6 ) + ( ) cos(5 ) + 5cos( 6 ) + cos(
University of Illinois at Urbana-Champaign ECE : Digital Signal Processing Chandra Radhakrishnan PROBLEM SET : SOLUTIONS Peter Kairouz Problem Solution:. ( 5 ) + (5 6 ) + ( ) cos(5 ) + 5cos( 6 ) + cos(
Section 8.2 Graphs of Polar Equations
 Section 8. Graphs of Polar Equations Graphing Polar Equations The graph of a polar equation r = f(θ), or more generally F(r,θ) = 0, consists of all points P that have at least one polar representation
Section 8. Graphs of Polar Equations Graphing Polar Equations The graph of a polar equation r = f(θ), or more generally F(r,θ) = 0, consists of all points P that have at least one polar representation
Reminders: linear functions
 Reminders: linear functions Let U and V be vector spaces over the same field F. Definition A function f : U V is linear if for every u 1, u 2 U, f (u 1 + u 2 ) = f (u 1 ) + f (u 2 ), and for every u U
Reminders: linear functions Let U and V be vector spaces over the same field F. Definition A function f : U V is linear if for every u 1, u 2 U, f (u 1 + u 2 ) = f (u 1 ) + f (u 2 ), and for every u U
Practice Exam 2. Conceptual Questions. 1. State a Basic identity and then verify it. (a) Identity: Solution: One identity is csc(θ) = 1
 Identity: Solution: One identity is csc(θ) = 1") Conceptual Questions. State a Basic identity and then verify it. a) Identity: Solution: One identity is cscθ) = sinθ) Practice Exam b) Verification: Solution: Given the point of intersection x, y) of the
Conceptual Questions. State a Basic identity and then verify it. a) Identity: Solution: One identity is cscθ) = sinθ) Practice Exam b) Verification: Solution: Given the point of intersection x, y) of the
b. Use the parametrization from (a) to compute the area of S a as S a ds. Be sure to substitute for ds!
 to compute the area of S a as S a ds. Be sure to substitute for ds!") MTH U341 urface Integrals, tokes theorem, the divergence theorem To be turned in Wed., Dec. 1. 1. Let be the sphere of radius a, x 2 + y 2 + z 2 a 2. a. Use spherical coordinates (with ρ a) to parametrize.
MTH U341 urface Integrals, tokes theorem, the divergence theorem To be turned in Wed., Dec. 1. 1. Let be the sphere of radius a, x 2 + y 2 + z 2 a 2. a. Use spherical coordinates (with ρ a) to parametrize.
MATH423 String Theory Solutions 4. = 0 τ = f(s). (1) dτ ds = dxµ dτ f (s) (2) dτ 2 [f (s)] 2 + dxµ. dτ f (s) (3)
![MATH423 String Theory Solutions 4. = 0 τ = f(s). (1) dτ ds = dxµ dτ f (s) (2) dτ 2 [f (s)] 2 + dxµ. dτ f (s) (3)](/thumbs/81/84712331.jpg "MATH423 String Theory Solutions 4. = 0 τ = f(s). (1) dτ ds = dxµ dτ f (s) (2) dτ 2 [f (s)] 2 + dxµ. dτ f (s) (3)") 1. MATH43 String Theory Solutions 4 x = 0 τ = fs). 1) = = f s) ) x = x [f s)] + f s) 3) equation of motion is x = 0 if an only if f s) = 0 i.e. fs) = As + B with A, B constants. i.e. allowe reparametrisations
1. MATH43 String Theory Solutions 4 x = 0 τ = fs). 1) = = f s) ) x = x [f s)] + f s) 3) equation of motion is x = 0 if an only if f s) = 0 i.e. fs) = As + B with A, B constants. i.e. allowe reparametrisations
Pg The perimeter is P = 3x The area of a triangle is. where b is the base, h is the height. In our case b = x, then the area is
 Pg. 9. The perimeter is P = The area of a triangle is A = bh where b is the base, h is the height 0 h= btan 60 = b = b In our case b =, then the area is A = = 0. By Pythagorean theorem a + a = d a a =
Pg. 9. The perimeter is P = The area of a triangle is A = bh where b is the base, h is the height 0 h= btan 60 = b = b In our case b =, then the area is A = = 0. By Pythagorean theorem a + a = d a a =
Laplace s Equation on a Sphere
 Laplace s Equation on a Sphere J. Robert Buchanan Department of Mathematics Millersville University P.O. Box, Millersville, PA 7 Bob.Buchanan@millersville.edu April, Problem Description Consider the heat
Laplace s Equation on a Sphere J. Robert Buchanan Department of Mathematics Millersville University P.O. Box, Millersville, PA 7 Bob.Buchanan@millersville.edu April, Problem Description Consider the heat
Review Test 3. MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question.
 Review Test MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. Find the exact value of the expression. 1) sin - 11π 1 1) + - + - - ) sin 11π 1 ) ( -
Review Test MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. Find the exact value of the expression. 1) sin - 11π 1 1) + - + - - ) sin 11π 1 ) ( -
Trigonometric Formula Sheet
 Trigonometric Formula Sheet Definition of the Trig Functions Right Triangle Definition Assume that: 0 < θ < or 0 < θ < 90 Unit Circle Definition Assume θ can be any angle. y x, y hypotenuse opposite θ
Trigonometric Formula Sheet Definition of the Trig Functions Right Triangle Definition Assume that: 0 < θ < or 0 < θ < 90 Unit Circle Definition Assume θ can be any angle. y x, y hypotenuse opposite θ
Trigonometry 1.TRIGONOMETRIC RATIOS
 Trigonometry.TRIGONOMETRIC RATIOS. If a ray OP makes an angle with the positive direction of X-axis then y x i) Sin ii) cos r r iii) tan x y (x 0) iv) cot y x (y 0) y P v) sec x r (x 0) vi) cosec y r (y
Trigonometry.TRIGONOMETRIC RATIOS. If a ray OP makes an angle with the positive direction of X-axis then y x i) Sin ii) cos r r iii) tan x y (x 0) iv) cot y x (y 0) y P v) sec x r (x 0) vi) cosec y r (y
CHAPTER 48 APPLICATIONS OF MATRICES AND DETERMINANTS
 CHAPTER 48 APPLICATIONS OF MATRICES AND DETERMINANTS EXERCISE 01 Page 545 1. Use matrices to solve: 3x + 4y x + 5y + 7 3x + 4y x + 5y 7 Hence, 3 4 x 0 5 y 7 The inverse of 3 4 5 is: 1 5 4 1 5 4 15 8 3
CHAPTER 48 APPLICATIONS OF MATRICES AND DETERMINANTS EXERCISE 01 Page 545 1. Use matrices to solve: 3x + 4y x + 5y + 7 3x + 4y x + 5y 7 Hence, 3 4 x 0 5 y 7 The inverse of 3 4 5 is: 1 5 4 1 5 4 15 8 3
HOMEWORK 4 = G. In order to plot the stress versus the stretch we define a normalized stretch:
 HOMEWORK 4 Problem a For the fast loading case, we want to derive the relationship between P zz and λ z. We know that the nominal stress is expressed as: P zz = ψ λ z where λ z = λ λ z. Therefore, applying
HOMEWORK 4 Problem a For the fast loading case, we want to derive the relationship between P zz and λ z. We know that the nominal stress is expressed as: P zz = ψ λ z where λ z = λ λ z. Therefore, applying
k A = [k, k]( )[a 1, a 2 ] = [ka 1,ka 2 ] 4For the division of two intervals of confidence in R +
[a 1, a 2 ] = [ka 1,ka 2 ] 4For the division of two intervals of confidence in R +](/thumbs/73/69566903.jpg "k A = [k, k]( )[a 1, a 2 ] = [ka 1,ka 2 ] 4For the division of two intervals of confidence in R +") Chapter 3. Fuzzy Arithmetic 3- Fuzzy arithmetic: ~Addition(+) and subtraction (-): Let A = [a and B = [b, b in R If x [a and y [b, b than x+y [a +b +b Symbolically,we write A(+)B = [a (+)[b, b = [a +b
Chapter 3. Fuzzy Arithmetic 3- Fuzzy arithmetic: ~Addition(+) and subtraction (-): Let A = [a and B = [b, b in R If x [a and y [b, b than x+y [a +b +b Symbolically,we write A(+)B = [a (+)[b, b = [a +b
Appendix A. Curvilinear coordinates. A.1 Lamé coefficients. Consider set of equations. ξ i = ξ i (x 1,x 2,x 3 ), i = 1,2,3
, i = 1,2,3") Appendix A Curvilinear coordinates A. Lamé coefficients Consider set of equations ξ i = ξ i x,x 2,x 3, i =,2,3 where ξ,ξ 2,ξ 3 independent, single-valued and continuous x,x 2,x 3 : coordinates of point
Appendix A Curvilinear coordinates A. Lamé coefficients Consider set of equations ξ i = ξ i x,x 2,x 3, i =,2,3 where ξ,ξ 2,ξ 3 independent, single-valued and continuous x,x 2,x 3 : coordinates of point
SOLUTIONS TO MATH38181 EXTREME VALUES AND FINANCIAL RISK EXAM
 SOLUTIONS TO MATH38181 EXTREME VALUES AND FINANCIAL RISK EXAM Solutions to Question 1 a) The cumulative distribution function of T conditional on N n is Pr T t N n) Pr max X 1,..., X N ) t N n) Pr max
SOLUTIONS TO MATH38181 EXTREME VALUES AND FINANCIAL RISK EXAM Solutions to Question 1 a) The cumulative distribution function of T conditional on N n is Pr T t N n) Pr max X 1,..., X N ) t N n) Pr max
Problem 3.1 Vector A starts at point (1, 1, 3) and ends at point (2, 1,0). Find a unit vector in the direction of A. Solution: A = 1+9 = 3.
 and ends at point (2, 1,0). Find a unit vector in the direction of A. Solution: A = 1+9 = 3.") Problem 3.1 Vector A starts at point (1, 1, 3) and ends at point (, 1,0). Find a unit vector in the direction of A. Solution: A = ˆx( 1)+ŷ( 1 ( 1))+ẑ(0 ( 3)) = ˆx+ẑ3, A = 1+9 = 3.16, â = A A = ˆx+ẑ3 3.16
Problem 3.1 Vector A starts at point (1, 1, 3) and ends at point (, 1,0). Find a unit vector in the direction of A. Solution: A = ˆx( 1)+ŷ( 1 ( 1))+ẑ(0 ( 3)) = ˆx+ẑ3, A = 1+9 = 3.16, â = A A = ˆx+ẑ3 3.16
Statistical Inference I Locally most powerful tests
 Statistical Inference I Locally most powerful tests Shirsendu Mukherjee Department of Statistics, Asutosh College, Kolkata, India. shirsendu st@yahoo.co.in So far we have treated the testing of one-sided
Statistical Inference I Locally most powerful tests Shirsendu Mukherjee Department of Statistics, Asutosh College, Kolkata, India. shirsendu st@yahoo.co.in So far we have treated the testing of one-sided
Jackson 2.25 Homework Problem Solution Dr. Christopher S. Baird University of Massachusetts Lowell
 Jackson 2.25 Hoework Proble Solution Dr. Christopher S. Baird University of Massachusetts Lowell PROBLEM: Two conducting planes at zero potential eet along the z axis, aking an angle β between the, as
Jackson 2.25 Hoework Proble Solution Dr. Christopher S. Baird University of Massachusetts Lowell PROBLEM: Two conducting planes at zero potential eet along the z axis, aking an angle β between the, as
Equations. BSU Math 275 sec 002,003 Fall 2018 (Ultman) Final Exam Notes 1. du dv. FTLI : f (B) f (A) = f dr. F dr = Green s Theorem : y da
 Final Exam Notes 1. du dv. FTLI : f (B) f (A) = f dr. F dr = Green s Theorem : y da") BSU Math 275 sec 002,003 Fall 2018 (Ultman) Final Exam Notes 1 Equations r(t) = x(t) î + y(t) ĵ + z(t) k r = r (t) t s = r = r (t) t r(u, v) = x(u, v) î + y(u, v) ĵ + z(u, v) k S = ( ( ) r r u r v = u
BSU Math 275 sec 002,003 Fall 2018 (Ultman) Final Exam Notes 1 Equations r(t) = x(t) î + y(t) ĵ + z(t) k r = r (t) t s = r = r (t) t r(u, v) = x(u, v) î + y(u, v) ĵ + z(u, v) k S = ( ( ) r r u r v = u
C.S. 430 Assignment 6, Sample Solutions
 C.S. 430 Assignment 6, Sample Solutions Paul Liu November 15, 2007 Note that these are sample solutions only; in many cases there were many acceptable answers. 1 Reynolds Problem 10.1 1.1 Normal-order
C.S. 430 Assignment 6, Sample Solutions Paul Liu November 15, 2007 Note that these are sample solutions only; in many cases there were many acceptable answers. 1 Reynolds Problem 10.1 1.1 Normal-order
Εργαστήριο Ανάπτυξης Εφαρμογών Βάσεων Δεδομένων. Εξάμηνο 7 ο
 Εργαστήριο Ανάπτυξης Εφαρμογών Βάσεων Δεδομένων Εξάμηνο 7 ο Procedures and Functions Stored procedures and functions are named blocks of code that enable you to group and organize a series of SQL and PL/SQL
Εργαστήριο Ανάπτυξης Εφαρμογών Βάσεων Δεδομένων Εξάμηνο 7 ο Procedures and Functions Stored procedures and functions are named blocks of code that enable you to group and organize a series of SQL and PL/SQL
Local Approximation with Kernels
 Local Approximation with Kernels Thomas Hangelbroek University of Hawaii at Manoa 5th International Conference Approximation Theory, 26 work supported by: NSF DMS-43726 A cubic spline example Consider
Local Approximation with Kernels Thomas Hangelbroek University of Hawaii at Manoa 5th International Conference Approximation Theory, 26 work supported by: NSF DMS-43726 A cubic spline example Consider
SOLUTIONS TO MATH38181 EXTREME VALUES AND FINANCIAL RISK EXAM
 SOLUTIONS TO MATH38181 EXTREME VALUES AND FINANCIAL RISK EXAM Solutions to Question 1 a) The cumulative distribution function of T conditional on N n is Pr (T t N n) Pr (max (X 1,..., X N ) t N n) Pr (max
SOLUTIONS TO MATH38181 EXTREME VALUES AND FINANCIAL RISK EXAM Solutions to Question 1 a) The cumulative distribution function of T conditional on N n is Pr (T t N n) Pr (max (X 1,..., X N ) t N n) Pr (max
Geodesic Equations for the Wormhole Metric
 Geodesic Equations for the Wormhole Metric Dr R Herman Physics & Physical Oceanography, UNCW February 14, 2018 The Wormhole Metric Morris and Thorne wormhole metric: [M S Morris, K S Thorne, Wormholes
Geodesic Equations for the Wormhole Metric Dr R Herman Physics & Physical Oceanography, UNCW February 14, 2018 The Wormhole Metric Morris and Thorne wormhole metric: [M S Morris, K S Thorne, Wormholes
Solution to Review Problems for Midterm III
 Solution to Review Problems for Mierm III Mierm III: Friday, November 19 in class Topics:.8-.11, 4.1,4. 1. Find the derivative of the following functions and simplify your answers. (a) x(ln(4x)) +ln(5
Solution to Review Problems for Mierm III Mierm III: Friday, November 19 in class Topics:.8-.11, 4.1,4. 1. Find the derivative of the following functions and simplify your answers. (a) x(ln(4x)) +ln(5
Strain gauge and rosettes
 Strain gauge and rosettes Introduction A strain gauge is a device which is used to measure strain (deformation) on an object subjected to forces. Strain can be measured using various types of devices classified
Strain gauge and rosettes Introduction A strain gauge is a device which is used to measure strain (deformation) on an object subjected to forces. Strain can be measured using various types of devices classified
2. Μηχανικό Μαύρο Κουτί: κύλινδρος με μια μπάλα μέσα σε αυτόν.
 Experiental Copetition: 14 July 011 Proble Page 1 of. Μηχανικό Μαύρο Κουτί: κύλινδρος με μια μπάλα μέσα σε αυτόν. Ένα μικρό σωματίδιο μάζας (μπάλα) βρίσκεται σε σταθερή απόσταση z από το πάνω μέρος ενός
Experiental Copetition: 14 July 011 Proble Page 1 of. Μηχανικό Μαύρο Κουτί: κύλινδρος με μια μπάλα μέσα σε αυτόν. Ένα μικρό σωματίδιο μάζας (μπάλα) βρίσκεται σε σταθερή απόσταση z από το πάνω μέρος ενός