Οδηγός Αναφοράς Προόδου Pre CDR
|
|
|
- Μένθη Κύρα Αθανασιάδης
- 6 χρόνια πριν
- Προβολές:
Transcript



1 Οδηγός Αναφοράς Προόδου Pre CDR
.")

2 ΑΝΑΦΟΡΑ ΠΡΟΟΔΟΥ - ΓΕΝΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT Σε γενικά πλαίσια η εξέλιξη του project ακολουθεί το προβλεπόμενο χρονοδιάγραμμα. Αρχικά μετά την επιλογή των εξαρτημάτων έγινε ο σχεδιασμός και η κατασκευή του CanSat σε μεγάλο μέγεθος για να πειραματιστούμε στην λειτουργία των αρθρωμάτων και στον προγραμματισμό τους (Έκδοση ). Πρώτα χρησιμοποιήσαμε ένα Arduino mini αλλά είδαμε πως δεν επαρκούσε ούτε η μνήμη RAM αλλά ούτε η μνήμη Flash ROM. Έτσι αποφασίσαμε να φτιάξουμε το δικό μας Arduino με τον μεγαλύτερο ATMEGA 284P, στο οποίο μέχρι στιγμής χρησιμοποιούμε 33% της ROM και το 6% της RAM. Επίσης φτιάξαμε και τον σταθμό βάσης με ένα Arduino mini. Η κατασκευή και των δύο αρχικά δοκιμάστηκε σε Breadboard αλλά τελικά έγινε σε διάτρητη perfboard ώστε να είναι πιο σταθερή. Έπειτα έγινε η 2η έκδοση του CanSat ώστε να χωρέσει στις διαστάσεις ενός κουτιού αναψυκτικού. Σ αυτή την έκδοση ουσιαστικά χρησιμοποιήσαμε το σχέδιο της ης αλλά έγινε σε τρία επίπεδα. Εδώ λείπει η μικροκάμερα JPEG και οι δύο σερβοκινητήρες για την κίνηση του οχήματος καθώς και οι ρόδες. Αυτά θα προστεθούν στην επόμενη έκδοση. Εδώ πρέπει να πούμε ότι έγιναν μερικές αλλαγές σε σχέση με τον αρχικό σχεδιασμό. Α) Η κάμερα που αρχικά ήταν μια OV7670 χωρίς buffer θα αντικατασταθεί με την αρκετά ελαφρύτερη και μικρότερη JPEG μικροκάμερα, για λόγους χώρου αλλά και επίσης για οικονομία θυρών I/O στο arduino, καθώς και οικονομία στον όγκο δεδομένων εφόσον η δεύτερη κάνει και συμπίεση JPEG. Β) Αρχικά σχεδιάζαμε να βάλουμε σερβοκινητήρες με πλαστικά γρανάζια τύπου SG90 ή FS90. Μετά τις πρώτες πτώσεις είδαμε ότι τα πλαστικά γρανάζια σπάνε, έτσι θα τους αντικαταστήσουμε με αντίστοιχους που έχουν μεταλλικά γρανάζια. Παράλληλα έγινε η κατασκευή της κεραίας τύπου Quagi της οποίας οι επιδόσεις ακόμη δοκιμάζονται. Επίσης γράψαμε ένα δοκιμαστικό πρόγραμμα σε Processing το οποίο παρουσιάζει με γραφικό τρόπο την κατάσταση του CanSat. Αυτό θα τρέχει στον φορητό υπολογιστή του σταθμού βάσης και στην πραγματικότητα θα είναι ένα απομακρυσμένο cockpit για το CanSat. Τέλος η ομάδα του αλεξίπτωτου δοκίμασε 2-3 αλεξίπτωτα τύπου cross και καταλήξαμε σε ένα αλλά δεν είμαστε και τόσο ικανοποιημένοι με τη συμπεριφορά του. Κάναμε αρκετά tests όπως εμβέλεια τηλεμετρίας, GPS, μέτρηση απολαβής της κεραίας, αντοχή σε πτώσεις από μεγάλο ύψος, χρόνος πτήσης του αλεξίπτωτου κλπ. Σε ότι αφορά την προβολή του project στον έξω κόσμο, έχουμε φτιάξει το λογότυπό μας, την σελίδα στο Facebook και ένα blog. Αναρτήσαμε αφίσες στους πίνακες ανακοινώσεων του σχολείου και σκοπεύουμε να κάνουμε μια παρουσίαση στους συμμαθητές μας και σε δημοσιογράφους των τοπικών Μ.Μ.Ε. η έκδοση 2η έκδοση
3 ΛΙΣΤΑ ΚΑΘΗΚΟΝΤΩΝ Σχεδιασμός αποστολής πριν την υποβολή της πρότασης [Done] Σχεδιασμός δευτερεύουσας αποστολής [Done] Αναζήτηση στο διαδίκτυο παρόμοιων αποστολών [Done] Θεωρητικό υπόβαθρο [Done] Έρευνα για την δυνατότητα υλοποίησης της αποστολής [Done] Οργάνωση ομάδας [Done] Ανάθεση ρόλων [Done] Δημιουργία λογότυπου [Done] Δημιουργία ομαδοσυνεργατικών εργαλείων (λογαρ. Google Facebook) [Done] Δημιουργία χρονοδιαγράμματος και έναρξη εργασιών κατασκευής [Done] Επιμόρφωση ομάδας [In Progress] Επιμόρφωση σε θέματα προγραμματισμού [Done] Επιμόρφωση σε θέματα ηλεκτρονικών [Done] Επιμόρφωση σε θέματα τηλεπικοινωνιών - κεραιών [Done] Επιμόρφωση στους μικροελεγκτές και το Arduino [Done] Επιμόρφωση στην ηλεκτροτεχνία και τις μπαταρίες [Not Done] Αρχικός σχεδιασμός [In Progress] Σχεδιασμός ηλεκτρονικού κυκλώματος [Done] Σχεδιασμός αρχικού λογικού διαγράμματος [Done] Επιλογή και προμήθεια των υλικών [In Progress] Σχεδιασμός μηχανολογικής κατασκευής [In Progress] Κατασκευή πρωτεύουσας αποστολής [Done] Συνδεσμολογία και δοκιμή εξαρτημάτων σε Breadboard [Done] Συνδεσμολογία σε Perfboard (έκδοση ) [Done] Αρχικός κώδικας πρωτεύουσας αποστολής [Done] Διόρθωση και βελτιστοποίηση κώδικα [Done] Συνδεσμολογία σε Perfboard (έκδοση 2) [Done] Μηχανολογική κατασκευή κελύφους [Done] Κατασκευή δευτερεύουσας αποστολής [In Progress] Σχεδιασμός οχήματος [Done] Μηχανολογική κατασκευή οχήματος [Not Done] Συνδεσμολογία σε Perfboard (έκδοση 3) [Not Done] Κατασκευή τυπωμένων κυκλωμάτων (έκδοση 3) [Not Done] Τροποποίηση λογισμικού για την αποστολή εικόνων [Not Done] Τροποποίηση λογισμικού για λειτουργία Self Balancing [In Progress] Τροποποίηση λογισμικού για πλοήγηση του οχήματος [Not Done] Κατασκευή σταθμού βάσης [In Progress] Σχεδιασμός κυκλώματος σταθμού [Done] Κατασκευή σταθμού βάσης σε Perfboard [Done] Σχεδιασμός και υπολογισμός κεραίας βάσης [Done] Κατασκευή κεραίας βάσης [Done] Κατασκευή κώδικα επικοινωνίας με το CanSat [Done] Πρόγραμμα εποπτείας και χειρισμού του CanSat σε γραφικό περιβάλλον [In Progress] Πρότυπα δημιουργίας γραφικών παραστάσεων και παρουσίασης αποτελεσμάτων [Not Done] Κατασκευή αλεξίπτωτου [In Progress] Επιλογή τύπου [Done] Κατασκευή φύλλου excel για γρήγορο υπολογισμό [Done] 2
4 Αρχική κατασκευή με νάιλον και δοκιμές [Done] Κατασκευή με ύφασμα ομπρέλας σε ραπτομηχανή [Done] Δοκιμές ταχύτητας πτώσης με μπουκάλι νερού [Done] Δοκιμές ρίψης του CanSat από drone σε ύψος 50μ [Done] Δοκιμές ρίψης από ύψος 00μ και την δυνατότητα λήψης σταθερής φωτογραφίας [Not Done] Τελική κατασκευή με ύφασμα ripstop [Not Done] Προβολή και προώθηση [In Progress] Δημιουργία σελίδων σε μέσα κοινωνικής δικτύωσης [Done] Ανάρτηση αφίσας στους πίνακες ανακοινώσεων του σχολείου [Done] Δελτίο τύπου [Not Done] Παρουσίαση του διαγωνισμού σε μαθητές και καθηγητές του σχολείου μας [Not Done] Συνέντευξη σε τοπικά Μ.Μ.Ε. [Not Done] 3
5 ΑΝΑΦΟΡΑ ΣΧΕΔΙΟΥ Η διαδικασία κατασκευής ενός δορυφόρου είναι πολύπλοκη και δαπανηρή. Για αυτόν το λόγο, σε μια πραγματική αποστολή δορυφόρου υπάρχουν έγγραφα τα οποία πρέπει να παραδίδονται πριν, κατά τη διάρκεια και μετά την κατασκευή του δορυφόρου. Αυτά τα έγγραφα έχουν στόχο να παρέχουν λεπτομερείς πληροφορίες σχετικά με τον υπό κατασκευή δορυφόρο και να επιβεβαιώσουν ότι πληροί όλα τα κριτήρια και τις προϋποθέσεις αναφορικά με την αποστολή και το περιβάλλον της εκτόξευσης. Η διαδικασία του σχεδιασμού και της κατασκευής ενός CanSat είναι σαφώς απλούστερη από αυτήν η οποία ακολουθείται για έναν δορυφόρο πραγματικής κλίμακας. Παρ όλα αυτά, πιστεύουμε ότι η έκθεση των μαθητών στις σωστές πρακτικές του τομέα θα είναι ιδιαίτερα πολύτιμη για την εκπαιδευτική τους εμπειρία. Οι παρούσες οδηγίες παρέχουν πληροφορίες σχετικά με το αναμενόμενο περιεχόμενο κάθε κεφαλαίου της αναφοράς σχεδίου. Οι πληροφορίες αυτές θα διασφαλίσουν ότι η εργασία την οποία πραγματοποιείτε είναι πλήρως ευθυγραμμισμένη με τους σκοπούς της αποστολής σας και θα βοηθήσουν εμάς να εντοπίσουμε πιθανά προβλήματα στα νωρίτερα στάδια της διαδικασίας. Θα μας βοηθήσει, ακόμα, να κρίνουμε την ικανότητα του CanSat σας να πετάξει σύμφωνα με τις μηχανικές προδιαγραφές και τις προδιαγραφές ασφαλείας. Παρακάτω σε αυτό το αρχείο δίνεται μία Πρότυπη Αναφορά Σχεδίου με μια προκαθορισμένη δομή την οποία μπορείτε να τροποποιήσετε, ώστε να περιγράφει διάσταση του CanSat project σας. Δεν υπάρχει περιορισμός ως προς τον αριθμό των σελίδων αλλά το κείμενο θα πρέπει να είναι καλά δομημένο και να χρησιμοποιούνται παραρτήματα για περισσότερο λεπτομερείς πληροφορίες προκειμένου να κρατηθεί το κυρίως κείμενο όσο το δυνατόν περιεκτικότερο. Τέτοιες λεπτομερείς πληροφορίες μπορεί να αφορούν για παράδειγμα λεπτομέρειες του επιστημονικού υποβάθρου του project, τεχνικά σχέδια ή φύλλα δεδομένων. Το έγγραφο θα πρέπει να είναι γραμμένο με καθαρό και περιεκτικό τρόπο ο οποίος θα επιτρέπει σε κάποιον ο οποίος δε γνωρίζει το πείραμα να αντιληφθεί το σκοπό και το σχεδιασμό του. Η Αναφορά Σχεδίου θα πρέπει να παρέχει στην ESA, τους διοργανωτές των εθνικών διαγωνισμών και την κριτική επιτροπή όλες τις σημαντικές πληροφορίες σχετικές με το πείραμα. Κατά τη διάρκεια όλων των φάσεων της πειραματικής διαδικασίας η Αναφορά Σχεδίου είναι το μόνο έγγραφο για τη λεπτομερή περιγραφή του πειράματος. Τα κεφάλαια μπορούν έπειτα να τροποποιηθούν και επιπλέον ενότητες μπορούν να προστεθούν από την ομάδα εάν χρειαστεί. Η Τελική Αναφορά Σχεδίου (PLR - Pre-Launch Report) θα αποτελέσει ένα από τα βαθμολογούμενα κριτήρια για την κριτική επιτροπή του διαγωνισμού CanSat in Greece. 4
6 Περιεχόμενα Περιεχόμενα ΕΙΣΑΓΩΓΗ. Οργάνωση της ομάδας και ρόλοι των μελών 6.2 Στόχοι της αποστολής 8 ΠΕΡΙΓΡΑΦΗ ΤΟΥ CANSAT 9 2. Επισκόπηση αποστολής Μηχανολογικό/κατασκευαστικό σχέδιο Ηλεκτρολογικό σχέδιο Λογισμικό Σύστημα ανάκτησης Εξοπλισμός σταθμού βάσης 20 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΤΟΥ PROJECT Χρονικό πλάνο της προετοιμασίας του CanSat Απαιτούμενοι πόροι Κόστος Εξωτερική υποστήριξη Πλάνο δοκιμών 23 4 ΠΛΑΝΟ ΠΡΟΩΘΗΣΗΣ 25 5 ΠΡΟΔΙΑΓΡΑΦΕΣ 26 5

7 ΕΙΣΑΓΩΓΗ. Οργάνωση της ομάδας και ρόλοι των μελών Οργανόγραμμα της ομάδας μας Η ομάδα μας, με την ονομασία Ursa Minor, αποτελείται από επτά (7) μαθητές της Β τάξης του τομέα πληροφορικής του ΕΠΑ.Λ. Έχει την καθοδήγηση του καθηγητή πληροφορικής κ. Σταύρου Φώτογλου ο οποίος διδάσκει τα εργαστηριακά μαθήματα. Λίγα λόγια για τον καθηγητή μας: Είναι Ηλεκτρονικός Η/Υ συστημάτων και εργάζεται ως καθηγητής πληροφορικής μέσης εκπαίδευσης για 22 χρόνια. Του αρέσει πολύ η εκπαίδευση και ιδιαίτερα η διδασκαλία της πληροφορικής και των ηλεκτρονικών. Προσπαθεί να μας καθοδηγεί και να μας ενθαρρύνει αφού πολλά πράγματα που συναντήσαμε στην εργασία αυτή ήταν πρωτόγνωρα για μας και φάνταζαν πολύ δύσκολα. Λίγα λόγια για εμάς: Σταύρος Πάνος: Είναι μαθητής της Β τάξης πληροφορικής. Ασχολείται περισσότερο με τον υπολογιστή του και περισσότερο με το Gaming. Έχει αναλάβει την κατασκευή των ηλεκτρονικών του δορυφόρου και του σταθμού εδάφους. Με την βοήθεια του καθηγητή πραγματοποίησε τις συνδεσμολογίες των κυκλωμάτων, αρχικά σε breadboard και στη συνέχεια σε διάτρητη πλακέτα πρωτοτύπων perfboard. Μέχρι στιγμής έχει συναρμολογήσει την 2η έκδοση του CanSat που είναι βελτίωση της αρχικής. Θοδωρής Κακιούζης: Είναι μαθητής της Β τάξης πληροφορικής. Ασχολείται γενικώς με τα βίντεο-παιχνίδια αλλά πιο με το σχεδιασμό και το προγραμματισμό τους. Έχει αναλάβει τον προγραμματισμό του CanSat καθώς και την κατασκευή του προγράμματος επικοινωνίας στον σταθμό βάσης. 6
8 Παναγιώτης Ζήσης: Είναι μαθητής της Β τάξης πληροφορικής. Ασχολείται με κυρίως με τον προγραμματισμό αλλά του αρέσει και πολύ η μηχανολογία οπότε ασχολείται και με την επισκευή μηχανοκινήτων κυρίως δίτροχες μηχανές. Έχει αναλάβει την μηχανολογική κατασκευή του CanSat καθώς επίσης και την κατασκευή της κεραίας. Μέχρι στιγμής έχει φτιάξει το περίβλημα της 2ης έκδοσης καθώς και την κεραία τύπου Quagi. Στη συνέχεια θα ασχοληθεί με την κατασκευή του τελικού οχήματος. Κώστας Παπαδιάς: Είναι μαθητής της Β τάξης πληροφορικής. Ασχολείται με τις ηλεκτρονικές κατασκευές και όχι μόνο, αλλά και με την παραγωγή μουσικής κυρίως την δημιουργία κάποιων instumentals. Έχει αναλάβει την κατασκευή του αλεξίπτωτου και την μηχανολογική κατασκευή. Μέχρι στιγμής έχει κατασκευάσει δύο εκδόσεις αλεξίπτωτων με καλά αποτελέσματα και βοήθησε στην κατασκευή της κεραίας. Θάνος Κορδατζής: Είναι μαθητής της Β τάξης πληροφορικής. Ασχολείται με τον προγραμματισμό και τη ζωγραφική. Έχει αναλάβει την ανάλυση δεδομένων και την κατασκευή των τελικών γραφημάτων. Επίσης συμμετέχει στον προγραμματισμό και την τεκμηρίωση του δορυφόρου και του σταθμού βάσης. Επιπλέον είναι ο καλλιτέχνης της ομάδας γιατί σχεδίασε το λογότυπό μας. Θωμάς Βασιλειάδης: Είναι μαθητής της Β τάξης πληροφορικής. Ασχολείται με τον προγραμματισμό και την γυμναστική Έχει αναλάβει την προώθηση του project. Συντηρεί και ενημερώνει τις ιστοσελίδες και τα μέσα κοινωνικής δικτύωσης. Επίσης βοηθάει στην συναρμολόγηση των ηλεκτρονικών κυκλωμάτων. Δημήτρης Βασιλάκος: Είναι μαθητής της Β τάξης πληροφορικής. Ασχολείται με τον προγραμματισμό, το ποδόσφαιρο και το gaming, επίσης του αρέσει η μηχανολογία και βοηθάει στην μηχανολογική κατασκευή. Έχει αναλάβει την τηλεμετρία του δορυφόρου και την κατασκευή της κεραίας. Τα μέλη της ομάδας μέχρι στιγμής ασχολούνται περίπου 4 ώρες / εβδομάδα στο σχολείο εντός ωραρίου σε εργαστηριακά μαθήματα όπως Υλικό και Δίκτυα, Προγραμματισμός Η/Υ και Σχεδιασμός και Ανάπτυξη ιστότοπων στα οποία οι ασκήσεις έχουν σχέση με τις εργασίες του διαγωνισμού. Εκεί με τον καθηγητή σχεδιάζουμε τα επόμενα βήματα. Επιπλέον κάθε Τρίτη έχουμε συνάντηση εκτός ωραρίου για 2-3 ώρες. Τέλος τα μέλη ασχολούνται ατομικά στο σπίτι τους 2-4 ώρες και συνεργάζονται μέσω messenger και ομαδοσυνεργατικών εφαρμογών όπως google drive και google docs. Συνολικά ασχολούμαστε περίπου 9- ώρες / εβδομάδα. Στο επόμενο διάστημα και όσο πλησιάζουμε στον διαγωνισμό, οι ώρες θα αυξηθούν. 7
9 .2 Στόχοι της αποστολής Η δευτερεύουσα αποστολή μας είναι εμπνευσμένη από το όχημα sojourner που έστειλε η NASA στον πλανήτη Άρη με το Pathfider το 997. Το sojourner ήταν ένα ρομπότ-όχημα με ρόδες που τράβαγε φωτογραφίες και από τον πλανήτη και της έστελνε πίσω στην Γη. Οι στόχοι του ρομπότ ήταν να ερευνήσει το κλίμα και τη γεωλογία του Άρη και έρευνες για το αν ο πλανήτης έχει ευνοϊκές συνθήκες για μελλοντική εξερεύνηση από τους ανθρώπους. Ο στόχος της αποστολής μας είναι να μας δώσει κάποιες φωτογραφίες από τον αέρα και από το έδαφος, την υγρασία, πίεση και την θερμοκρασία που θα τα λάβουμε από τον σταθμό εδάφους. Το CanSat μας θα αποχωριστεί από τον πύραυλο όταν αυτός φτάσει στο απόγειο. Κατά την πτώση του με το αλεξίπτωτο θα στέλνει στον σταθμό εδάφους μετρήσεις υγρασίας, θέσης στον χώρο και μεταβολή του μαγνητικού πεδίου. Με εντολές που εμείς θα στείλουμε θα βγάλει και μερικές φωτογραφίες και θα τις αποθηκεύσει στη μνήμη SD. Όταν θα προσεδαφιστεί, θα ανοίξει το προστατευτικό κέλυφος και από μέσα θα βγει το όχημα. Με τηλεχειρισμό θα πλοηγήσουμε το όχημα και θα βγάλουμε επιπλέον φωτογραφίες από το έδαφος. Όλες οι φωτογραφίες θα αποσταλούν στον σταθμό βάσης μέσω του καναλιού τηλεμετρίας Η αποστολή μας για είναι επιτυχής πρέπει να λάβουμε όλα τα δεδομένα που θα μας στείλει το CanSat μας στον σταθμό εδάφους. Πρέπει να επιτευχθούν οι παρακάτω στόχοι:. Πλήρη τηλεχειρισμό του CanSat από τον σταθμό εδάφους. Δηλαδή εποπτεία κατάστασης μπαταριών, έντασης σήματος, αλλαγή ταχύτητας αποστολής δεδομένων, τοποθέτηση σε κατάσταση αναμονής (χαμηλή κατανάλωση ρεύματος), πλοήγηση του οχήματος, αποστολή φωτογραφιών. 2. Πλοήγηση του CanSat στο έδαφος έστω για λίγα μέτρα και αποστολή φωτογραφιών στον σταθμό βάσης. 3. Όλα τα δεδομένα πρέπει να μεταφερθούν μέσα από το κανάλι τηλεμετρίας που είναι μικρού εύρους. Αν και τα δεδομένα είναι αποθηκευμένα και στην μνήμη SD, εμείς θεωρούμε ότι δεν μπορούμε να πάρουμε το όχημα εφόσον θεωρητικά είναι σε άλλον πλανήτη, επομένως όλες οι πληροφορίες της SD πρέπει να αποσταλούν με αργό ρυθμό στον επίγειο σταθμό. Τα αποτελέσματα που σκοπεύουμε να αποκομίσουμε είναι τα εξής: Μεταβολή της υγρασίας κατά την πτώση του CanSat. Αν υπάρχει μεταβολή της έντασης του μαγνητικού πεδίου. Μεταβολή της θερμοκρασίας και της ατμοσφαιρικής πίεσης κατά την πτώση. Τα δεδομένα τα οποία θα συλλέξουμε και για τις δύο αποστολές είναι τα εξής: Ατμοσφαιρική πίεση. Θερμοκρασία αέρα από 2 ή 3 διαφορετικά θερμόμετρα. Γεωγραφικές συντεταγμένες. Υγρασία ατμόσφαιρας. Θέση του οχήματος στον χώρο την κάθε χρονική στιγμή. Μεταβολή της έντασης του μαγνητικού πεδίου του πλανήτη. Κατανάλωση ρεύματος του CanSat. Φωτογραφίες κατά την πτώση και από το έδαφος σε ανάλυση 640x480 εικονοστοιχεία. 8

10 2 ΠΕΡΙΓΡΑΦΗ ΤΟΥ CANSAT 2. Επισκόπηση αποστολής Θα σχεδιάσουμε και θα κατασκευάσουμε ένα CanSat το οποίο θα εκτοξευθεί με τη βοήθεια πυραύλου σε υψόμετρο 000 μέτρων και στη συνέχεια θα διαχωριστεί από αυτόν. Θα προσγειωθεί με τη βοήθεια αλεξιπτώτου τέτοιου ώστε να μην έχει ταχύτητα καθόδου μεγαλύτερη από 8 μέτρα το δευτερόλεπτο. Κατά την πτώση με το αλεξίπτωτο θα μετρήσει την θερμοκρασία του αέρα, την μεταβολή της ατμοσφαιρικής πίεσης, την ταχύτητα καθόδου, την μεταβολή της υγρασίας, την μεταβολή του μαγνητικού πεδίου και θα βγάλει -2 φωτογραφίες. Τα δεδομένα εκτός από τις φωτογραφίες, τα στέλνει σε πραγματικό χρόνο στον επίγειο σταθμό με τουλάχιστον 5 μετρήσεις / δευτερόλεπτο. Μετά την προσγείωση, θα ανοίξει το προστατευτικό κέλυφος και από μέσα θα βγει το όχημα CanSat. Ο χειριστής του επίγειου σταθμού θα ελέγξει την θέση στο χώρο και θα δώσει εντολή για την κίνηση του οχήματος. Θα βγάλει μια φωτογραφία του εδάφους και θα ελέγξει την θέση. Κατ αυτό τον τρόπο το όχημα θα πλοηγηθεί για μερικά μέτρα. Με εντολή θα αποστείλει όλες τις φωτογραφίες στον σταθμό εδάφους. Όλα τα δεδομένα όπως θερμοκρασία, πίεση, υγρασία κλπ. συνεχίζουν να μεταδίδονται με ρυθμό κάθε 4 δευτερόλεπτα. Όπως φαίνεται στο παρακάτω block διάγραμμα, για την μέτρηση θερμοκρασίας, πίεσης και υγρασίας χρησιμοποιούμε τον αισθητήρα BME280 της Bosch. Για την θέση στο χώρο δηλ. γυροσκόπιο και μαγνητόμετρο χρησιμοποιούμε το MPU9250. Για σύστημα GPS χρησιμοποιούμε το άρθρωμα NEO-6M. Τέλος η κάμερα είναι μια έγχρωμη JPEG κάμερα με σειριακή σύνδεση. Η μετάδοση των δεδομένων γίνεται μέσω ραδιοκυμάτων UHF από το άρθρωμα RFM69HCW. Σχηματικό διάγραμμα: 9

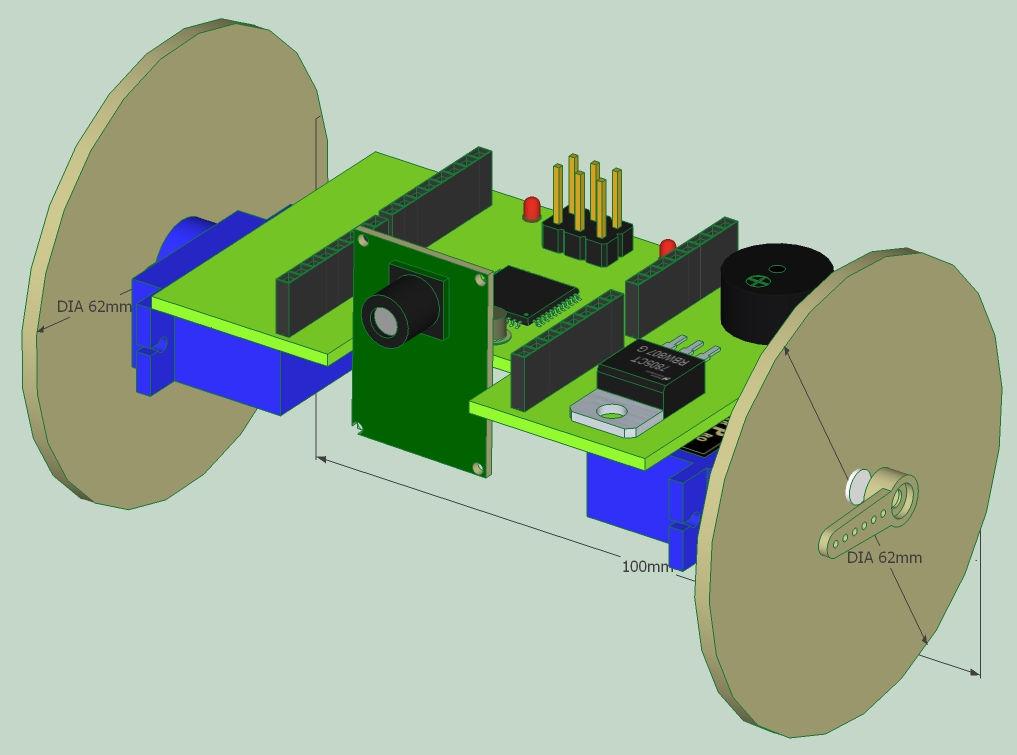
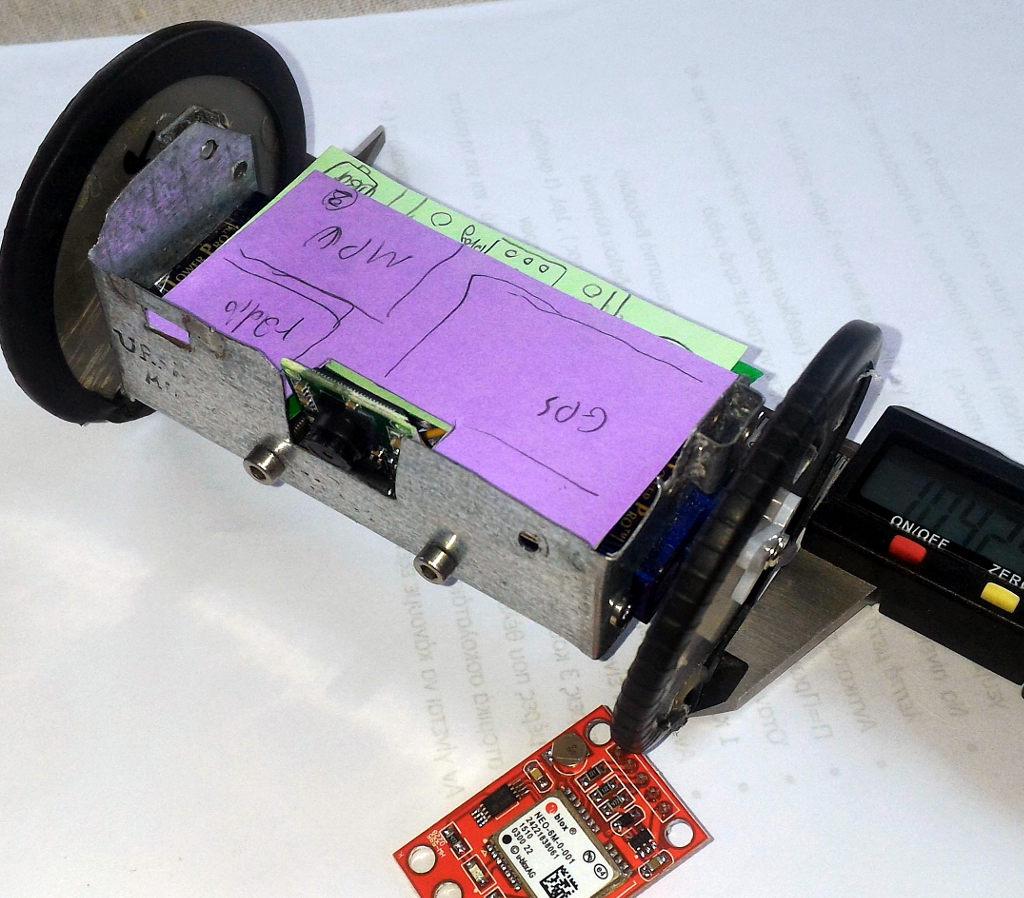
11 Στο παραπάνω block διάγραμμα, αριστερά φαίνονται οι συσκευές εισόδου ή αισθητήρες, δεξιά οι συσκευές εξόδου ή ενεργοποιητές και στη μέση είναι οι συσκευές αποθήκευσης και επικοινωνίας δηλαδή εισόδου / εξόδου. Όλα αυτά ελέγχονται από τον μικροελεγκτή 8bit ATMEGA 284P ο οποίος προγραμματίζεται με γλώσσα wiring και χρησιμοποιεί βιβλιοθήκες και προγραμματιστικό περιβάλλον IDE Arduino. Τα δύο servo motors δίνουν κίνηση στις δύο ρόδες του οχήματος. Με την βοήθεια του γυροσκοπίου το όχημα ισορροπεί ώστε η κεραία του GPS να κοιτάζει πάντα προς τα πάνω. 2.2 Μηχανολογικό/κατασκευαστικό σχέδιο Στην 2η έκδοση το κέλυφος κατασκευάστηκε από σωλήνα PVC διαμέτρου Φ63. Ο σωλήνας κόπηκε στη μέση παράλληλα με τον άξονα του κυλίνδρου. Τα τοιχώματα έχουν πάχος 4mm και παρουσιάζει εξαιρετική αντοχή στις πτώσεις. Μέσα τοποθετήθηκαν όλα τα ηλεκτρονικά και οι μπαταρίες. Στην 3η έκδοση θα τοποθετηθούν οι σερβοκινητήρες, οι τροχοί και η μικροκάμερα. Για τις ρόδες θα δοκιμάσουμε Teflon το οποίο θα το κατεργαστούμε σε τόρνο. Παρουσιάζουμε ένα πρώιμο μοντέλο. Παρουσίαση εξαρτημάτων που θα τοποθετηθούν στο σασί της 3ης έκδοσης:. Δύο ρόδες διαμέτρου 62mm κατασκευασμένες από P.V.C. ή Teflon. 0



12 2. Δύο σερβοκινητήρες FS90MG ή MG90 Διαστάσεις : mm Βάρος : 4g Ροπή :.5kg.cm/20.87oz.in (4.8V) Τάση λειτουργίας : 4,8 6V 3. Μι κρ οκ άμερα JPEG Διαστάσεις : mm Βάρος : Τάση λειτουργίας : 5V Ένταση ρεύματος : 75mA 4. Τ έσ σερις μπαταρίες NiMH 000mAH 5. Πλακέτες με τα ηλεκτρονικά εξαρτήματα σε τρία επίπεδα.
13 2
14 3
15 2.3 Ηλεκτρολογικό σχέδιο Η τάση τροφοδοσίας από τις μπαταρίες τροφοδοτεί τις συσκευές που απαιτούν 5V όπως ο μικροελεγκτής, οι σερβοκινητήρες, το G.P.S., και η μικροκάμερα. Τα άλλα αρθρώματα τροφοδοτούνται με τάση 3,3V η οποία παρέχεται από τον σταθεροποιητή. Για την μετατροπή των σημάτων SPI από 5V σε 3,3V χρησιμοποιούμε διαιρέτες τάσης και για το I2C διόδους και τρανζίστορ όπως φαίνεται στο ηλεκτρονικό κύκλωμα. Η κάρτα SD και το radio modem που είναι γρήγορες συσκευές συνδέονται στον δίαυλο SPI. Η επιλογή της κάθε συσκευής γίνεται με τα σήματα SS για το radio modem και SDSS για την SD. Ο αισθητήρας θερμοκρασίας, πίεσης και υγρασίας BME280 και το γυροσκόπιο συνδέονται στον δίαυλο I2C. Ο μικροελεγκτής διαθέτει 2 Hardware USARTS (σειριακές θύρες), και την η την χρησιμοποιούμε για τον προγραμματισμό και την εκσφαλμάτωση. Την 2η την χρησιμοποιούμε για την μικροκάμερα JPEG που στέλνει τα δεδομένα σειριακά στα 38400bps. Επειδή το G.P.S. είναι το πιο αργό, 9600bps χρησιμοποιούμε για επικοινωνία μια Software Serial. Οι δύο σερβοκινητήρες συνδέονται σε δύο ψηφιακά pin του μικροελεγκτή. Επίσης υπάρχει ένας αισθητήρας απόστασης εμποδίων και δεν έχουμε αποφασίσει αν θα είναι υπέρυθρος ή ultrasonic. Αυτό θα εξαρτηθεί από την τελική μάζα και τις διαστάσεις. Σε μια ψηφιακή θύρα συνδέεται και το buzzer το οποίο λειτουργεί στα 5V και θα χτυπάει κατόπιν εντολής ή απώλειας τηλεμετρίας για εντοπισμό του CanSat. Τέλος ο πιεστικός διακόπτης (push button) θα πατιέται για προστασία δεδομένων πριν κοπεί η παροχή ρεύματος σε περίπτωση εγγραφής εκείνη την στιγμή στην κάρτα μνήμης. Τέλος η τάση της μπαταρίας συνδέεται σε μια αναλογική είσοδο για να βλέπουμε την υπολειπόμενη ενέργεια της μπαταρίας. 4
 60bytes. Εμείς για την ώρα έχουμε ρυθμό μετάδοσης 38400bps.")
16 Λειτουργία πομπού RF Ο πομπός ραδιοσυχνοτήτων είναι το module RFM69HCW στην μπάντα UHF 434MHz. Έχει ισχύ εκπομπής 00mW ή +20dBm. Εκπέμπει σε μορφή πακέτων με δυνατότητα επιβεβαίωσης λήψης την οποία χρησιμοποιούμε. Το κάθε πακέτο έχει μέγεθος ωφέλιμου φορτίου (payload) 60bytes. Εμείς για την ώρα έχουμε ρυθμό μετάδοσης 38400bps. Η διαμόρφωση είναι GFSK με εύρος καναλιού τα 50KHz. Πλάνο κατανάλωσης ισχύος Εξάρτημα Μέγιστη ένταση Τάση λειτουργίας ATMEGA 284P 50 ma?test? 5V G.P.S. 70 ma 5V Camera 75 ma 5V Servos 2x20 ma?test? 5V BME280 ma 3,3V MPU ma 3,3V SD Card 00 ma 3,3V Radio Modem 35 ma 3,3V Χρόνος λειτουργίας Μπαταρίες Χρησιμοποιούμε 4 μπαταρίες NiMH μεγέθους AAA και συνολικής χωρητικότητας 000mAH. Οι μπαταρίες συνδέονται σε σειρά, επομένως η μέγιστη τάση είναι 4x,2V = 4,8V. Επειδή δεν έχουμε αποφασίσει ακόμα αν θα χρησιμοποιήσουμε τελικά αυτές τις μπαταρίες, δεν παρουσιάζουμε 5
17 καμπύλες εκφόρτισης και γραφήματα χρόνου λειτουργίας ανάλογα με το φορτίο. (Αυτά θα προστεθούν στο CDR) 6
18 Ηλεκτρονικό κύκλωμα 7
19 2.4 Λογισμικό Διάγραμμα ροής 8
20 Τα δεδομένα στέλνονται σε πακέτα των 60bytes στον σταθμό βάσης. Τα δεδομένα της βασικής αποστολής (θερμοκρασία, υψόμετρο, πίεση) και επιπλέον τιμές γυροσκοπίου, τάση μπαταρίας, 2η θερμοκρασία στέλνονται με το πρόθεμα St (Status). Αυτά των γεωγραφικών συντεταγμένων 9
21 στέλνονται με το πρόθεμα Gs (GPS Status) και αυτά που αφορούν απαντήσεις από το CanSat με το πρόθεμα Re (Reply). Η ταχύτητα μετάδοσης μπορεί να μεταβληθεί από πακέτο / 5sec έως 5 πακέτα / sec. Επίσης και το σχήμα αποστολής δηλ. π.χ. κάθε 3 St θα στέλνει Gs. Αν υποθέσουμε ότι στέλνουμε 2 πακέτα / sec θα συλλέγονται 20bytes / sec ή 7200bytes / min. Αν ο χρόνος της αποστολής μας από την εκτόξευση και μετά είναι 20 λεπτά τότε θα συλλέξουμε 4 Kbyte. Βέβαια έχουμε και τα δεδομένα των φωτογραφιών με σαφώς μεγαλύτερο όγκο. Όπως παρουσιάζεται στο παραπάνω σχήμα το συνολικό πακέτο έχει μήκος 72 bytes. Αυτό σημαίνει ότι με ρυθμό 38400bps, το πακέτο θα χρειαστεί 5msec για να μεταδοθεί. Εδώ δεν υπολογίζουμε τον χρόνο για την επιβεβαίωση από την άλλη πλευρά και τον χρόνο επανεκπομπής σε περίπτωση σφάλματος. Τα δεδομένα αποθηκεύονται τοπικά σε μορφή αρχείου κειμένου τύπου csv και χαρακτήρα διαχωρισμού (delimiter) το ;. Αυτό γίνεται για να έχουμε εύκολη εισαγωγή στα λογιστικά φύλλα. Η γλώσσα που θα χρησιμοποιήσουμε για το CanSat μας είναι wiring που είναι επέκταση της C++. Το προγραμματιστικό περιβάλλον που θα χρησιμοποιήσουμε είναι το Arduino IDE. 20



22 2.5 Σύστημα ανάκτησης Θα χρησιμοποιήσουμε ένα αλεξίπτωτο τύπου cross. Μέχρι στιγμής είναι φτιαγμένο από ύφασμα ομπρέλας ραμμένο σε ραπτομηχανή. Τα σχοινιά είναι ανθεκτικό νάιλον που χρησιμοποιείται για την επισκευή διχτυών αλιείας. Το δικό μας CanSat θα πέφτει οριζόντια ώστε η κάμερα να βγάλει μερικές φωτογραφίες από τον αέρα και όταν προσγειωθεί και οι δύο ρόδες να ακουμπήσουν στο έδαφος. Έτσι στην 2η έκδοση που μέχρι στιγμής έχουμε κατασκευάσει, το αλεξίπτωτο θα συνδέεται όπως φαίνεται στις φωτογραφίες. Για τον υπολογισμό φτιάξαμε ένα αρχείο excel ώστε γρήγορα να μεταβάλουμε τα δεδομένα. 2
23 Με δοκιμές από υψόμετρο 9,4 μέτρα και διαφορετικές μάζες, ο χρόνος πτώσης συμφωνούσε με αυτόν στους υπολογισμούς. Οι δοκιμές παρουσιάζονται στην παρ


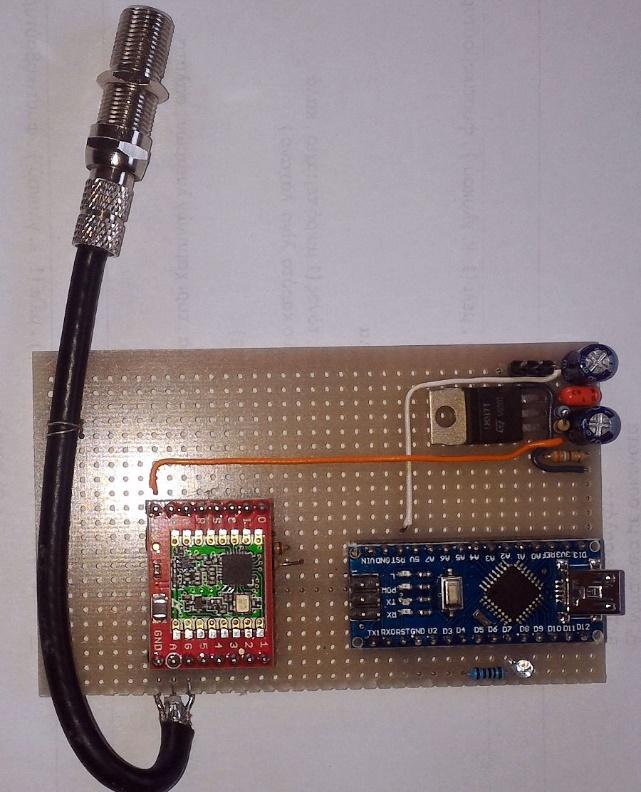
24 2.6 Εξοπλισμός σταθμού βάσης Ο σταθμός βάσης αποτελείται από ένα Arduino micro και ένα radio modem RFM69HCW όμοιο μ αυτό του CanSat. Το Arduino συνδέεται μέσω της θύρας USB στον φορητό υπολογιστή. Στην είσοδο της κεραίας του module RFM69HCW συνδέεται μια κατευθυντική κεραία τύπου Quagi 8 στοιχείων συντονισμένη στους 434MHz και με κέρδος 2-3dbi. Η κεραία έχει σύνθετη αντίσταση 50Ω και για την σύνδεση με την πλακέτα χρησιμοποιούμε ομοαξονική γραμμή μεταφοράς 50Ω χαμηλής εξασθένισης LMR200 μήκους 5m. Οι συνδετήρες και από τις δυο πλευρές είναι τύπου F. Στον υπολογιστή εκτελείται το πρόγραμμα τηλεμετρίας του CanSat. Είναι γραμμένο σε γλώσσα processing και διαθέτει γραφικό περιβάλλον στο οποίο φαίνονται τα εξής: Η θέση του cansat στον χώρο. Η γεωγραφική θέση του CanSat σε χάρτη google map. Η τελευταία φωτογραφία που λήφθηκε. Η κατάσταση μπαταρίας. Επιπλέον διαθέτει κουμπιά για χειρισμό του οχήματος. Επίσης το πρόγραμμα αποθηκεύει σε αρχείο όλα τα δεδομένα που έλαβε από το CanSat. Η επικοινωνία μεταξύ βάσης και CanSat γίνεται στην μπάντα UHF ISM και συγκεκριμένα στη συχνότητα των 434MHz. Η ταχύτητα επικοινωνίας είναι 38400bps. Η διαμόρφωση GFSK και το εύρος ζώνης του καναλιού είναι 50KHz. 23
25 24
26 3 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΤΟΥ PROJECT 3. Χρονικό πλάνο της προετοιμασίας του CanSat Λόγω φόρτου εργασίας δεν προλάβαμε να σχεδιάσουμε το χρονοδιάγραμμα Gantt. Αυτό θα γίνει σίγουρα στο CDR. Παραθέτουμε ενδεικτικά ένα χρονοπρογραμματισμό για το επόμενο διάστημα. Σχεδιασμός 3ης έκδοσης [έως 5 Φεβρουαρίου] Κατασκευή οχήματος [έως 5 Φεβρουαρίου] Τροποποίηση λογισμικού για όχημα [έως 8 Φεβρουαρίου] Δοκιμή πλοήγησης [έως 20 Φεβρουαρίου] Κατασκευή προγράμματος βάσης Η/Υ [έως 26 Φεβρουαρίου] Δοκιμή κάμερας και αποστολή εικόνας [έως 4 Μαρτίου] Δοκιμή πτώσης από 200μ και αποδέσμευσης αλεξίπτωτου [έως 5 Μαρτίου] Δοκιμές βελτιστοποιήσεις [έως 30 Μαρτίου] 3.2 Απαιτούμενοι πόροι 3.2. Κόστος Πίνακας κοστολόγησης υλικών CanSat Α/Α Ονομασία υλικού MCU ATMEGA284 2 RFM69HCW module 3 Κάρτα μνήμης SD 4GB 4 Μικροκάμερα JPEG 5 Αισθητήρας BME280 6 Γυροσκόπιο MPU Σταθεροποιητής LD7V33 8 Servo MG90 9 Buzzer 0 Led διάφορα Transistors BC547C 2 Pin Heads - βάσεις 3 Αντιστάτες διάφοροι 4 Πυκνωτές διάφοροι 5 Κρύσταλλος 6MHz 6 Πλακέτα perfboard 7 Μπαταρίες NiMH 000maH 8 Διάφορα υλικά μηχανολ. κατασκευής 9 Διάφορα υλικά για αλεξίπτωτο (σχοινί) Ποσότητα Τιμή μονάδας 5 4, ,5 4 0,5 6,5 2 0,5 0,5 2 0, 0, 0, Τελική τιμή 5 4, ,5 4 0, ,5 3 0, ,5 Για τον σταθμό βάσης το κόστος ανέρχεται στα

27 3.2.2 Εξωτερική υποστήριξη Η υποστήριξη που έχουμε είναι μόνο εσωτερική. Συγκεκριμένα από καθηγητές άλλων ειδικοτήτων όπως Ηλεκτρονικής, Ηλεκτρολογίας και Μηχανολογίας. Αυτοί, εκτός από τα εργαλεία και τα μηχανήματα, μας δίνουν οδηγίες και μας βοηθούν σε διάφορα τεχνικά θέματα. 3.3 Πλάνο δοκιμών. Δοκιμή αισθητήρων βασικής αποστολής 2. Δοκιμή αισθητήρων δευτερεύουσας αποστολής 3. Δοκιμή τηλεμετρίας 4. Δοκιμή εμβέλειας 5. Μέτρηση του P.E.R. (Packet Error Rate) 6. Δοκιμή αποθήκευσης στην SD 7. Δοκιμή μηχανικής αντοχής 8. Δοκιμή αποστολής φωτογραφιών 9. Δοκιμή ισορροπίας και κίνησης 0. Δοκιμή αλεξίπτωτου. Δοκιμή αποδέσμευσης από το κέλυφος 2. Δοκιμή πτήσης από m 3. Δοκιμή ενεργειακής επάρκειας 4. Δοκιμή προηγμένης τηλεμετρίας 5. Δοκιμή του προγράμματος σταθμού βάσης σε γραφικό περιβάλλον Για να μετρήσουμε με ακρίβεια τον χρόνο πτώσης του αλεξίπτωτου, τραβήξαμε βίντεο της πτώσης και το τοποθετήσαμε στο timeline ενός προγράμματος επεξεργασίας βίντεο. Επίσης είδαμε και την σταθερότητα της πτήσης πετώντας το από ύψος 50m με ένα drone. 26

28 Δοκιμές ταχύτητας του αλεξίπτωτου 27
29 4 ΠΛΑΝΟ ΠΡΟΩΘΗΣΗΣ Μέχρι στιγμής για την προώθηση του διαγωνισμού και της ομάδας μας έχουν πραγματοποιηθεί τα εξής: Αρχικά δημιουργήσαμε λογαριασμό στο Facebook και φτιάξαμε σελίδα ανοιχτή σε όλους [ ]. Εκεί δημοσιεύουμε φωτογραφίες και βίντεο όπου παρουσιάζονται τα στάδια της εξέλιξης του έργου. Έπειτα φτιάξαμε blog [ ]. Εδώ, κατά την ολοκλήρωση της αποστολής θα αναρτηθεί όλο το υλικό ιδίως τεχνικά άρθρα και σχέδια ανοιχτά σε όλους, για χρήση σε επόμενες αποστολές CanSat. H Σελίδα στο internet : Τοποθετήσαμε σύνδεσμο στον ιστότοπο του σχολείου [ ] ο οποίος οδηγεί στη σελίδα του Facebook. Σε γενικές γραμμές είμαστε λίγο πίσω σε θέματα προώθησης σε σχέση με άλλες ομάδες. Για το επόμενο διάστημα σκοπεύουμε να προωθήσουμε τον διαγωνισμό σε τοπικά μέσα όπως εφημερίδες και ραδιόφωνα. Επίσης σκοπεύουμε να κάνουμε μια παρουσίαση στους υπόλοιπους συμμαθητές μας. Ακολουθεί λίστα των συνδέσμων της ομάδας μας: Facebook: Blog : Σελίδα : Σελίδα σχολείου : 28
30 5 ΠΡΟΔΙΑΓΡΑΦΕΣ Προκειμένου το CanSat να μπορέσει να εκτοξευθεί με ασφάλεια με τον πύραυλο, θα πρέπει να πληροί τις προδιαγραφές οι οποίες αναφέρονται στις οδηγίες συμμετοχής του διαγωνισμού. Μέχρι στιγμής το CanSat της ομάδας μας βρίσκεται στην έκδοση 2 που είναι μια ενδιάμεση έκδοση. Δεν περιέχει τους σερβοκινητήρες, ρόδες και μικροκάμερα. Η μάζα της τελικής έκδοσης θα αλλάξει και θα πλησιάσει τα 350g. Αν ξεπεράσουμε την μάζα των προδιαγραφών θα σκεφτούμε τρόπους να κάνουμε το CanSat μας ελαφρύτερο, όπως αλλαγή μπαταρίας, ελαφρότερα υλικά περιβλήματος κλπ. Τα χαρακτηριστικά διαστάσεων, μάζας και αλεξίπτωτου του πίνακα, είναι για την τρέχουσα έκδοση V2. Χαρακτηριστικά Μέτρηση (μονάδα) Ύψος του CanSat (mm) 07 Μάζα του CanSat (g) 260 Διάμετρος του CanSat (mm) 63 Μήκος του συστήματος ανάκτησης (mm) 000 Προγραμματισμένος χρόνος πτήσης (s) 25 Υπολογισμένη ταχύτητα καθόδου (m/s) 8 Χρησιμοποιούμενη Ραδιοσυχνότητα (hz) Ενεργειακή κατανάλωση (wh) 0,54 max Συνολικό κόστος ( ) 3,5 Εκ μέρους της ομάδας επιβεβαιώνω ότι το CanSat μας πληροί όλες τις προδιαγραφές οι οποίες θεσπίστηκαν για τον διαγωνισμό στις επίσημες Οδηγίες Συμμετοχής. Πρέβεζα Σταύρος Πάνος Αρχηγός Ομάδας Ursa Minor 29
Οδηγίες Συμμετοχής Φοιτητικού Διαγωνισμού
 Οδηγίες Συμμετοχής Φοιτητικού Διαγωνισμού Περιεχόμενα Προκήρυξη 3 Προϋποθέσεις συµµετοχής 3 Υπεύθυνος Οµάδας 3 Η εκτόξευση του πυραύλου 4 Η Αποστολή του Δορυφόρου 6 Πρωτεύουσα αποστολή 6 Δευτερεύουσα αποστολή
Οδηγίες Συμμετοχής Φοιτητικού Διαγωνισμού Περιεχόμενα Προκήρυξη 3 Προϋποθέσεις συµµετοχής 3 Υπεύθυνος Οµάδας 3 Η εκτόξευση του πυραύλου 4 Η Αποστολή του Δορυφόρου 6 Πρωτεύουσα αποστολή 6 Δευτερεύουσα αποστολή
Οδηγίες Συμμετοχής Μαθητικού Διαγωνισμού
 Οδηγίες Συμμετοχής Μαθητικού Διαγωνισμού Περιεχόμενα Προκήρυξη 3 Προϋποθέσεις συµµετοχής 3 Υπεύθυνος Οµάδας 3 Η εκτόξευση του πυραύλου 4 Η Αποστολή του Δορυφόρου 5 Πρωτεύουσα αποστολή 5 Δευτερεύουσα αποστολή
Οδηγίες Συμμετοχής Μαθητικού Διαγωνισμού Περιεχόμενα Προκήρυξη 3 Προϋποθέσεις συµµετοχής 3 Υπεύθυνος Οµάδας 3 Η εκτόξευση του πυραύλου 4 Η Αποστολή του Δορυφόρου 5 Πρωτεύουσα αποστολή 5 Δευτερεύουσα αποστολή
Little Investigator of Fluorescence Emission Οδηγός Αναφοράς Προόδου Pre CDR
 Little Investigator of Fluorescence Emission Οδηγός Αναφοράς Προόδου Pre CDR CanSat in Greece 2018 1 #launching_your_dreams ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT Η μεγαλύτερη πρόκληση που αντιμετωπίσαμε μέχρι τώρα, αφορά
Little Investigator of Fluorescence Emission Οδηγός Αναφοράς Προόδου Pre CDR CanSat in Greece 2018 1 #launching_your_dreams ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT Η μεγαλύτερη πρόκληση που αντιμετωπίσαμε μέχρι τώρα, αφορά
ASPiRE UoWM Pre-CDR Report
 ASPiRE UoWM Pre-CDR Report Cansat in Greece 2019 2 #LaunchingYourDreams Pre-CDR Κατάσταση του Project 3 1 Εισαγωγή 4 1.1 Οργάνωση της ομάδας και ρόλοι των μελών. 4 1.2 Στόχοι της Αποστολής 6 2 Περιγραφή
ASPiRE UoWM Pre-CDR Report Cansat in Greece 2019 2 #LaunchingYourDreams Pre-CDR Κατάσταση του Project 3 1 Εισαγωγή 4 1.1 Οργάνωση της ομάδας και ρόλοι των μελών. 4 1.2 Στόχοι της Αποστολής 6 2 Περιγραφή
ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ
 Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
Cansat in Greece #LaunchingYourDreams PLR. Κατάσταση του Project 3
 ASPiRE UOWM PLR Cansat in Greece 2019 2 #LaunchingYourDreams PLR Κατάσταση του Project 3 1 Εισαγωγή 5 1.1 Οργάνωση της ομάδας και ρόλοι των μελών. 5 1.2 Στόχοι της Αποστολής 6 2 Περιγραφή του CanSat 7
ASPiRE UOWM PLR Cansat in Greece 2019 2 #LaunchingYourDreams PLR Κατάσταση του Project 3 1 Εισαγωγή 5 1.1 Οργάνωση της ομάδας και ρόλοι των μελών. 5 1.2 Στόχοι της Αποστολής 6 2 Περιγραφή του CanSat 7
Bread Online. Παναγιώτης Ιωαννίδης Επιβλέπων καθηγητής: Μηνάς Δασυγένης
 Bread Online Σχεδιασμός και μετατροπή μιας απλής οικιακής συσκευής σε επαναπρογραμματιζόμενη συσκευή IP Παναγιώτης Ιωαννίδης Επιβλέπων καθηγητής: Μηνάς Δασυγένης Πανεπιστήμιο Δυτικής Μακεδονίας Τμήμα Μηχανικών
Bread Online Σχεδιασμός και μετατροπή μιας απλής οικιακής συσκευής σε επαναπρογραμματιζόμενη συσκευή IP Παναγιώτης Ιωαννίδης Επιβλέπων καθηγητής: Μηνάς Δασυγένης Πανεπιστήμιο Δυτικής Μακεδονίας Τμήμα Μηχανικών
ΜΙΚΡΟΕΛΕΓΚΤΗΣ PICAXE 18M2
 ΘΕΜΑ : ΜΙΚΡΟΕΛΕΓΚΤΗΣ PICAXE 18M2 ΔΙΑΡΚΕΙΑ:? περίοδος Οι μικροελεγκτές είναι υπολογιστές χωρίς περιφερειακά, σε ολοκληρωμένα κυκλώματα. Μπορούν να συνδυάσουν αρκετές από τις βασικές λειτουργίες άλλων ειδικών
ΘΕΜΑ : ΜΙΚΡΟΕΛΕΓΚΤΗΣ PICAXE 18M2 ΔΙΑΡΚΕΙΑ:? περίοδος Οι μικροελεγκτές είναι υπολογιστές χωρίς περιφερειακά, σε ολοκληρωμένα κυκλώματα. Μπορούν να συνδυάσουν αρκετές από τις βασικές λειτουργίες άλλων ειδικών
Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές. Εισαγωγή στο Arduino. Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών
 με μικροελεγκτές. Εισαγωγή στο Arduino. Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών") Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές Εισαγωγή στο Arduino Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών Τι είναι Μικροελεγκτής; Ηλεκτρονική συσκευή που διαχειρίζεται ηλεκτρονικά
Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές Εισαγωγή στο Arduino Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών Τι είναι Μικροελεγκτής; Ηλεκτρονική συσκευή που διαχειρίζεται ηλεκτρονικά
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 1. Arduino + LabVIEW: Μέτρηση Έντασης Φωτός με Φωτοαντίσταση. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 1 Arduino + LabVIEW: Μέτρηση Έντασης Φωτός με Φωτοαντίσταση. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 1 Arduino + LabVIEW: Μέτρηση Έντασης Φωτός με Φωτοαντίσταση. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο
Οδηγίες Συμμετοχής Μαθητικού Διαγωνισμού
 Οδηγίες Συμμετοχής Μαθητικού Διαγωνισμού Περιεχόμενα Προκήρυξη 3 Προϋποθέσεις συµµετοχής 3 Υπεύθυνος Οµάδας 3 Η εκτόξευση του πυραύλου 4 Η Αποστολή του Δορυφόρου 6 Πρωτεύουσα αποστολή 6 Δευτερεύουσα αποστολή
Οδηγίες Συμμετοχής Μαθητικού Διαγωνισμού Περιεχόμενα Προκήρυξη 3 Προϋποθέσεις συµµετοχής 3 Υπεύθυνος Οµάδας 3 Η εκτόξευση του πυραύλου 4 Η Αποστολή του Δορυφόρου 6 Πρωτεύουσα αποστολή 6 Δευτερεύουσα αποστολή
Μάθημα 1 ΑΙΣΘΗΤΗΡΕΣ Ο Αισθητήρας Δύναμης. Επανεξέταση των βασικών εννοιών της C και του προγραμματισμού.
 Σκοπός Σχεδίαση Συστημάτων με τον Arduino Μάθημα 1 ΑΙΣΘΗΤΗΡΕΣ Ο Αισθητήρας Δύναμης. Επανεξέταση των βασικών εννοιών της C και του προγραμματισμού. Κατανόηση των βημάτων στη συστηματική ανάπτυξη ενός προγράμματος.
Σκοπός Σχεδίαση Συστημάτων με τον Arduino Μάθημα 1 ΑΙΣΘΗΤΗΡΕΣ Ο Αισθητήρας Δύναμης. Επανεξέταση των βασικών εννοιών της C και του προγραμματισμού. Κατανόηση των βημάτων στη συστηματική ανάπτυξη ενός προγράμματος.
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 3 Μέτρηση Θερμοκρασίας Σύστημα Ελέγχου Θερμοκρασίας. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 3 Μέτρηση Θερμοκρασίας Σύστημα Ελέγχου Θερμοκρασίας με Θερμοστάτη. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Σκοπός Βασική δομή ενός προγράμματος στο LabVIEW.
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 3 Μέτρηση Θερμοκρασίας Σύστημα Ελέγχου Θερμοκρασίας με Θερμοστάτη. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Σκοπός Βασική δομή ενός προγράμματος στο LabVIEW.
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 2 USB και Σειριακή Επικοι- νωνία Σ Σειριακή Επικοινωνία
 Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 2 USB και Σειριακή Επικοινωνία. Σειριακή Επικοινωνία USB Σύνδεση / Πρωτόκολλο Σκοπός Εντολή επιλογής (if) Εντολή Επανάληψης (while) Πίνακες 1 Μέρος Α : Σκοπός
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 2 USB και Σειριακή Επικοινωνία. Σειριακή Επικοινωνία USB Σύνδεση / Πρωτόκολλο Σκοπός Εντολή επιλογής (if) Εντολή Επανάληψης (while) Πίνακες 1 Μέρος Α : Σκοπός
Σχεδιασμός και υλοποίηση κυκλώματος μέτρησης κατανάλωσης ισχύος
 Σχεδιασμός και υλοποίηση κυκλώματος μέτρησης κατανάλωσης ισχύος Φοιτητής Φετινίδης Αναστάσιος Επιβλέπων Δασυγένης Μηνάς Μάρτιος 2014 1 Περιεχόμενα παρουσίασης Εισαγωγή Θεωρητικό υπόβαθρο Υλικό μέρος του
Σχεδιασμός και υλοποίηση κυκλώματος μέτρησης κατανάλωσης ισχύος Φοιτητής Φετινίδης Αναστάσιος Επιβλέπων Δασυγένης Μηνάς Μάρτιος 2014 1 Περιεχόμενα παρουσίασης Εισαγωγή Θεωρητικό υπόβαθρο Υλικό μέρος του
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5. Ρυθμίζοντας τη Φορά Περιστροφής. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Τελική Αναφορά Σχεδίου PLR
 Τελική Αναφορά Σχεδίου PLR CanSat in Greece 2018 1 #launching_your_dreams Περιεχόμενα ΑΝΑΦΟΡΑ ΠΡΟΟΔΟΥ - ΓΕΝΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣΣφάλμα! Δεν έχει οριστεί σελιδοδείκτης. ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT ΛΙΣΤΑ ΚΑΘΗΚΟΝΤΩΝ
Τελική Αναφορά Σχεδίου PLR CanSat in Greece 2018 1 #launching_your_dreams Περιεχόμενα ΑΝΑΦΟΡΑ ΠΡΟΟΔΟΥ - ΓΕΝΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣΣφάλμα! Δεν έχει οριστεί σελιδοδείκτης. ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT ΛΙΣΤΑ ΚΑΘΗΚΟΝΤΩΝ
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΑΥΤΟΜΑΤΙΣΜΟΣ
 ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΑΥΤΟΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΗ Η Ρομποτική είναι ο κλάδος της επιστήμης που κατασκευάζει και μελετά μηχανές που μπορούν να αντικαταστήσουν τον άνθρωπο στην εκτέλεση μιας εργασίας. Tι είναι το ΡΟΜΠΟΤ
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΑΥΤΟΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΗ Η Ρομποτική είναι ο κλάδος της επιστήμης που κατασκευάζει και μελετά μηχανές που μπορούν να αντικαταστήσουν τον άνθρωπο στην εκτέλεση μιας εργασίας. Tι είναι το ΡΟΜΠΟΤ
Αθήνα 29 ΝΟΕ, 2016 ΘΕΜΑ: ΑΙΤΗΜΑ ΑΓΟΡΑΣ ΥΛΙΚΩΝ ΓΙΑ ΤΟ ΕΡΓΑΣΤΗΡΙΟ ΣΥΛΛΟΓΗΣ & ΕΠΕΞΕΡΓΑΣΙΑΣ ΔΕΔΟΜΕΝΩΝ
 Αθήνα 29 ΝΟΕ, 2016 ΘΕΜΑ: ΑΙΤΗΜΑ ΑΓΟΡΑΣ ΥΛΙΚΩΝ ΓΙΑ ΤΟ ΕΡΓΑΣΤΗΡΙΟ ΣΥΛΛΟΓΗΣ & ΕΠΕΞΕΡΓΑΣΙΑΣ ΔΕΔΟΜΕΝΩΝ Προς, Ο πειραματικός εξοπλισμός αυτής της πρότασης / σ αυτό το αίτημα, θα μας δώσει τη δυνατότητα να δημιουργήσουμε
Αθήνα 29 ΝΟΕ, 2016 ΘΕΜΑ: ΑΙΤΗΜΑ ΑΓΟΡΑΣ ΥΛΙΚΩΝ ΓΙΑ ΤΟ ΕΡΓΑΣΤΗΡΙΟ ΣΥΛΛΟΓΗΣ & ΕΠΕΞΕΡΓΑΣΙΑΣ ΔΕΔΟΜΕΝΩΝ Προς, Ο πειραματικός εξοπλισμός αυτής της πρότασης / σ αυτό το αίτημα, θα μας δώσει τη δυνατότητα να δημιουργήσουμε
ΤΑΞΗ ΣΤ ΕΙΡΗΝΗ ΠΕΤΡΑΚΗ (ΔΑΣΚΑΛΑ ΣΥΜΒΟΥΛΟΣ ΣΧ.Τ.) ΕΝΟΤΗΤΕΣ Α.Π.: ΔΟΜΕΣ ΕΝΕΡΓΕΙΑ ΗΛΕΚΤΡΙΣΜΟΣ ΜΗΧΑΝΙΣΜΟΙ - ΤΡΟΧΑΛΙΕΣ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ («EGG BOX»)
 ΕΝΟΤΗΤΕΣ Α.Π.: ΔΟΜΕΣ ΕΝΕΡΓΕΙΑ ΗΛΕΚΤΡΙΣΜΟΣ ΜΗΧΑΝΙΣΜΟΙ - ΤΡΟΧΑΛΙΕΣ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ («EGG BOX»)") ΕΝΟΤΗΤΕΣ Α.Π.: ΤΑΞΗ ΣΤ ΔΟΜΕΣ ΕΝΕΡΓΕΙΑ ΗΛΕΚΤΡΙΣΜΟΣ ΜΗΧΑΝΙΣΜΟΙ - ΤΡΟΧΑΛΙΕΣ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ («EGG BOX») ΕΙΡΗΝΗ ΠΕΤΡΑΚΗ (ΔΑΣΚΑΛΑ ΣΥΜΒΟΥΛΟΣ ΣΧ.Τ.) Παιδιά, ας προσπαθήσουμε να λύσουμε το πιο κάτω ΠΡΟΒΛΗΜΑ:
ΕΝΟΤΗΤΕΣ Α.Π.: ΤΑΞΗ ΣΤ ΔΟΜΕΣ ΕΝΕΡΓΕΙΑ ΗΛΕΚΤΡΙΣΜΟΣ ΜΗΧΑΝΙΣΜΟΙ - ΤΡΟΧΑΛΙΕΣ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ («EGG BOX») ΕΙΡΗΝΗ ΠΕΤΡΑΚΗ (ΔΑΣΚΑΛΑ ΣΥΜΒΟΥΛΟΣ ΣΧ.Τ.) Παιδιά, ας προσπαθήσουμε να λύσουμε το πιο κάτω ΠΡΟΒΛΗΜΑ:
Φύλλο εργασίας 9 - Αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων
 Φύλλο εργασίας 9 - Αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων Σε αυτήν τη δραστηριότητα θα κατασκευάσουμε ένα αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων. Εκτός από τον μικροελεγκτή Arduino, το breadboard,
Φύλλο εργασίας 9 - Αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων Σε αυτήν τη δραστηριότητα θα κατασκευάσουμε ένα αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων. Εκτός από τον μικροελεγκτή Arduino, το breadboard,
ΕΦΑΡΜΟΓΕΣ ΤΗΛΕΠIΚΟΙΝΩΝΙΑΚΩΝ ΔΙΑΤΑΞΕΩΝ
 ΕΦΑΡΜΟΓΕΣ ΤΗΛΕΠIΚΟΙΝΩΝΙΑΚΩΝ ΔΙΑΤΑΞΕΩΝ ΟΙΚΟΝOΜΟΥ ΧΑΡΗΣ (6424) ΦΩΚΟΣ ΝΙΚΟΛΑΟΣ(6592) ΚΑΜΒΥΣΗΣ ΝΙΚΟΛΑΟΣ(7178) 2013-2014 ΠΕΡΙΕΧΟΜΕΝΑ Σκοπός της εργασίας Ανάλυση Arduino Uno Δημιουργία πληροφορίας Αποστολή και
ΕΦΑΡΜΟΓΕΣ ΤΗΛΕΠIΚΟΙΝΩΝΙΑΚΩΝ ΔΙΑΤΑΞΕΩΝ ΟΙΚΟΝOΜΟΥ ΧΑΡΗΣ (6424) ΦΩΚΟΣ ΝΙΚΟΛΑΟΣ(6592) ΚΑΜΒΥΣΗΣ ΝΙΚΟΛΑΟΣ(7178) 2013-2014 ΠΕΡΙΕΧΟΜΕΝΑ Σκοπός της εργασίας Ανάλυση Arduino Uno Δημιουργία πληροφορίας Αποστολή και
Μέτρηση Θερμοκρασίας με τον αισθητήρα TMP36. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων. Βασική δομή ενός προγράμματος στο LabVIEW.
 Σκοπός Μάθημα 2 Δραστηριότητα 1 Μέτρηση Θερμοκρασίας με τον αισθητήρα TMP36. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front panel). Σχεδίαση
Σκοπός Μάθημα 2 Δραστηριότητα 1 Μέτρηση Θερμοκρασίας με τον αισθητήρα TMP36. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front panel). Σχεδίαση
ΠΕΙΡΑΜΑΤΙΚΟ ΓΥΜΝΑΣΙΟ ΠΑΤΡΩΝ TO ΠΕΡΙΒΑΛΛΟΝ ΕΙΝΑΙ ΔΙΚΗ ΜΑΣ ΥΠΟΘΕΣΗ
 ΠΕΙΡΑΜΑΤΙΚΟ ΓΥΜΝΑΣΙΟ ΠΑΤΡΩΝ TO ΠΕΡΙΒΑΛΛΟΝ ΕΙΝΑΙ ΔΙΚΗ ΜΑΣ ΥΠΟΘΕΣΗ Ενότητα 1: εισαγωγή Στα πλαίσια της συμμετοχής μας στο έργο GAIA πραγματοποιήσαμε διάφορες δράσεις στο σχολείο οι οποίες αποτέλεσαν και
ΠΕΙΡΑΜΑΤΙΚΟ ΓΥΜΝΑΣΙΟ ΠΑΤΡΩΝ TO ΠΕΡΙΒΑΛΛΟΝ ΕΙΝΑΙ ΔΙΚΗ ΜΑΣ ΥΠΟΘΕΣΗ Ενότητα 1: εισαγωγή Στα πλαίσια της συμμετοχής μας στο έργο GAIA πραγματοποιήσαμε διάφορες δράσεις στο σχολείο οι οποίες αποτέλεσαν και
Educational Laboratory of Multi Instruments (ELMI) for LabVIEW TM and MultiSIM TM
 for LabVIEW TM and MultiSIM TM") Educational Laboratory of Multi Instruments (ELMI) for LabVIEW TM and MultiSIM TM I Εκπαιδευτική Μονάδα Εργαστηριακών Ασκήσεων για προγραμματισμό LabVIEW TM και MultiSIM TM της National Instruments (Portable
Educational Laboratory of Multi Instruments (ELMI) for LabVIEW TM and MultiSIM TM I Εκπαιδευτική Μονάδα Εργαστηριακών Ασκήσεων για προγραμματισμό LabVIEW TM και MultiSIM TM της National Instruments (Portable
Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου. Ενότητα 2
 Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου Ενότητα 2 Τι είναι το PLC ΠΕΡΙΕΧΟΜΕΝΑ 2 Τι είναι το PLC. 2.1 Πλεονεκτήματα των PLC. 2.2 Η δομή ενός PLC. 2.3 Τα PLC της αγοράς. 2.4 Αρχή λειτουργίας ενός PLC.
Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου Ενότητα 2 Τι είναι το PLC ΠΕΡΙΕΧΟΜΕΝΑ 2 Τι είναι το PLC. 2.1 Πλεονεκτήματα των PLC. 2.2 Η δομή ενός PLC. 2.3 Τα PLC της αγοράς. 2.4 Αρχή λειτουργίας ενός PLC.
Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Εργαστήριο Κυκλωμάτων και Μετρήσεων
 Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Εργαστήριο Κυκλωμάτων και Μετρήσεων Εργαστήριο 10 Μετάδοση και Αποδιαμόρφωση Ραδιοφωνικών Σημάτων Λευκωσία, 2010 Εργαστήριο 10
Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Εργαστήριο Κυκλωμάτων και Μετρήσεων Εργαστήριο 10 Μετάδοση και Αποδιαμόρφωση Ραδιοφωνικών Σημάτων Λευκωσία, 2010 Εργαστήριο 10
Εγχειρίδιο Ζωντανών Μεταδόσεων Εξελιγμένων Υπηρεσιών Βίντεο Πανελληνίου Σχολικού Δικτύου Εγχειρίδιο τεχνικού μετάδοσης
 Πανεπιστήμιο Κρήτης Εγχειρίδιο Ζωντανών Μεταδόσεων Εξελιγμένων Υπηρεσιών Βίντεο Πανελληνίου Σχολικού Δικτύου Εγχειρίδιο τεχνικού μετάδοσης Πανεπιστήμιο Κρήτης Περιεχόμενα 1. ΖΩΝΤΑΝΕΣ ΜΕΤΑΔΟΣΕΙΣ... 3 1.1.
Πανεπιστήμιο Κρήτης Εγχειρίδιο Ζωντανών Μεταδόσεων Εξελιγμένων Υπηρεσιών Βίντεο Πανελληνίου Σχολικού Δικτύου Εγχειρίδιο τεχνικού μετάδοσης Πανεπιστήμιο Κρήτης Περιεχόμενα 1. ΖΩΝΤΑΝΕΣ ΜΕΤΑΔΟΣΕΙΣ... 3 1.1.
«ΑΣΥΡΜΑΤΟ ΣΥΣΤΗΜΑ ΕΠΙΤΗΡΗΣΗΣ, ΚΑΤΑΓΡΑΦΗΣ & ΕΛΕΓΧΟΥ ΑΝΤΛΙΟΣΤΑΣΙΩΝ» Τεχνική έκθεση Προδιαγραφές Προϋπολογισμός
 Δ/ΝΣΗ ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ ΤΜΗΜΑ ΑΡΔΕΥΣΗΣ ΤΙΤΛΟΣ ΜΕΛΕΤΗΣ «ΑΣΥΡΜΑΤΟ ΣΥΣΤΗΜΑ ΕΠΙΤΗΡΗΣΗΣ, ΚΑΤΑΓΡΑΦΗΣ & ΕΛΕΓΧΟΥ ΑΝΤΛΙΟΣΤΑΣΙΩΝ» Τεχνική έκθεση Προδιαγραφές Προϋπολογισμός Προϋπολογ. : 9.963,00 Με ΦΠΑ 23% Χρήση
Δ/ΝΣΗ ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ ΤΜΗΜΑ ΑΡΔΕΥΣΗΣ ΤΙΤΛΟΣ ΜΕΛΕΤΗΣ «ΑΣΥΡΜΑΤΟ ΣΥΣΤΗΜΑ ΕΠΙΤΗΡΗΣΗΣ, ΚΑΤΑΓΡΑΦΗΣ & ΕΛΕΓΧΟΥ ΑΝΤΛΙΟΣΤΑΣΙΩΝ» Τεχνική έκθεση Προδιαγραφές Προϋπολογισμός Προϋπολογ. : 9.963,00 Με ΦΠΑ 23% Χρήση
Ημερήσιο Γενικό Λύκειο Σητείας. Σχ. έτος
 Ημερήσιο Γενικό Λύκειο Σητείας Σχ. έτος 2015-2016 Προγραμματισμός μικρο ελεγκτή Arduino για μέτρηση μετεωρολογικών δεδομένων. Υπεύθυνος καθηγητής:τσιφετάκης Μανώλης Οι μαθητές: Αϊλαμάκη Κατερίνα--Αισωπάκη
Ημερήσιο Γενικό Λύκειο Σητείας Σχ. έτος 2015-2016 Προγραμματισμός μικρο ελεγκτή Arduino για μέτρηση μετεωρολογικών δεδομένων. Υπεύθυνος καθηγητής:τσιφετάκης Μανώλης Οι μαθητές: Αϊλαμάκη Κατερίνα--Αισωπάκη
Lab 1: Experimenting on Arduino & AI Sense
 Lab 1: Experimenting on Arduino & AI Sense 1. Εισαγωγή A. Arduino Robokit Το Robokit, όπως και όλες οι πλακέτες τύπου Arduino, λειτουργεί χάρη σε έναν μικροελεγκτή. Ως μικροελεγκτή μπορούμε να φανταστούμε
Lab 1: Experimenting on Arduino & AI Sense 1. Εισαγωγή A. Arduino Robokit Το Robokit, όπως και όλες οι πλακέτες τύπου Arduino, λειτουργεί χάρη σε έναν μικροελεγκτή. Ως μικροελεγκτή μπορούμε να φανταστούμε
ΦΩΤΕΛΛΗΣ Α.Ε. ΣΥΣΤΗΜΑΤΑ ΑΣΦΑΛΕΙΑΣ
 Α. ΓΕΝΙΚΑ Η εγκατάσταση ενός ολοκληρωμένου συστήματος συναγερμού αποσκοπεί στην προστασία χώρων όπως οικίες, επιχειρήσεις, βιομηχανίες, στρατιωτικές εγκαταστάσεις κλπ. σε περιπτώσεις: Ανεπιθύμητης εισόδου
Α. ΓΕΝΙΚΑ Η εγκατάσταση ενός ολοκληρωμένου συστήματος συναγερμού αποσκοπεί στην προστασία χώρων όπως οικίες, επιχειρήσεις, βιομηχανίες, στρατιωτικές εγκαταστάσεις κλπ. σε περιπτώσεις: Ανεπιθύμητης εισόδου
Παραδείγματα Δεδομένων: Οι τιμές στο κυλικείο, μια λίστα από ονόματα, τα σήματα της τροχαίας.
 Δεδομένα Πληροφορίες Δεδομένα: Μια ομάδα από σύμβολα, αριθμούς, λέξεις που αντιπροσωπεύουν κάτι και θα χρησιμοποιηθούν σε μια επεξεργασία. Παραδείγματα Δεδομένων: Οι τιμές στο κυλικείο, μια λίστα από ονόματα,
Δεδομένα Πληροφορίες Δεδομένα: Μια ομάδα από σύμβολα, αριθμούς, λέξεις που αντιπροσωπεύουν κάτι και θα χρησιμοποιηθούν σε μια επεξεργασία. Παραδείγματα Δεδομένων: Οι τιμές στο κυλικείο, μια λίστα από ονόματα,
για τις ρυθμίσεις LabView μέσα από το κανάλι και του καλωδίου USB.
 1o ΕΠΑΛ- Ε.Κ. Συκεών -Τομέας: Ηλεκτρονικής, Ηλεκτρολογίας και Αυτοματισμού Εκπαιδευτικοί: Μπουλταδάκης Στέλιος Μαυρίδης Κώστας Δραστηριότητα: 11 Μάθημα: Εργαστήριο Δικτύων Υπολογιστών Αντικείμενο : Μέτρηση
1o ΕΠΑΛ- Ε.Κ. Συκεών -Τομέας: Ηλεκτρονικής, Ηλεκτρολογίας και Αυτοματισμού Εκπαιδευτικοί: Μπουλταδάκης Στέλιος Μαυρίδης Κώστας Δραστηριότητα: 11 Μάθημα: Εργαστήριο Δικτύων Υπολογιστών Αντικείμενο : Μέτρηση
Σημειώσεις κεφαλαίου 16 Αρχές επικοινωνίας με ήχο και εικόνα
 Σημειώσεις κεφαλαίου 16 Αρχές επικοινωνίας με ήχο και εικόνα ΠΩΣ ΛΕΙΤΟΥΡΓΟΥΝ ΟΙ ΗΛΕΚΤΡΟΝΙΚΕΣ ΕΠΙΚΟΙΝΩΝΙΕΣ Ένα σύστημα ηλεκτρονικής επικοινωνίας αποτελείται από τον πομπό, το δίαυλο (κανάλι) μετάδοσης και
Σημειώσεις κεφαλαίου 16 Αρχές επικοινωνίας με ήχο και εικόνα ΠΩΣ ΛΕΙΤΟΥΡΓΟΥΝ ΟΙ ΗΛΕΚΤΡΟΝΙΚΕΣ ΕΠΙΚΟΙΝΩΝΙΕΣ Ένα σύστημα ηλεκτρονικής επικοινωνίας αποτελείται από τον πομπό, το δίαυλο (κανάλι) μετάδοσης και
Κεφάλαιο 1.6: Συσκευές αποθήκευσης
 Κεφάλαιο 1.6: Συσκευές αποθήκευσης 1.6.1 Συσκευές αποθήκευσης Μνήμη τυχαίας προσπέλασης - RAM Η μνήμη RAM (Random Access Memory Μνήμη Τυχαίας Προσπέλασης), κρατεί όλη την πληροφορία (δεδομένα και εντολές)
Κεφάλαιο 1.6: Συσκευές αποθήκευσης 1.6.1 Συσκευές αποθήκευσης Μνήμη τυχαίας προσπέλασης - RAM Η μνήμη RAM (Random Access Memory Μνήμη Τυχαίας Προσπέλασης), κρατεί όλη την πληροφορία (δεδομένα και εντολές)
Ενημερωτικός Οδηγός Μαθητικού Διαγωνισμού
 Ενημερωτικός Οδηγός Μαθητικού Διαγωνισμού Περιεχόμενα Εισαγωγή 3 Ο µαθητικός διαγωνισµός CanSat in Greece 3 Η Ιδέα 3 Η Ιστορία 3 Το Όραµα 4 Τι προσφέρει ο διαγωνισµός στους µαθητές; 4 Διοργανωτής 4 Οι
Ενημερωτικός Οδηγός Μαθητικού Διαγωνισμού Περιεχόμενα Εισαγωγή 3 Ο µαθητικός διαγωνισµός CanSat in Greece 3 Η Ιδέα 3 Η Ιστορία 3 Το Όραµα 4 Τι προσφέρει ο διαγωνισµός στους µαθητές; 4 Διοργανωτής 4 Οι
ΠΛΗΡΟΦΟΡΙΚH ΓΙΑ ΤΗΝ ΤEΧΝΗ Η ΕΞAΜΗΝΟ
 ΠΛΗΡΟΦΟΡΙΚH ΓΙΑ ΤΗΝ ΤEΧΝΗ Η ΕΞAΜΗΝΟ ΑΜΑΛIΑ ΦΩΚA ΕΠIΚΟΥΡΗ ΚΑΘΗΓHΤΡΙΑ Περιεχόμενο Μαθήματος 2 Arduino Τι είναι το Arduino; 3 μικρή συσκευή (μικροεπεξεργαστής) που συνδέεται με USB στον υπολογιστή μια πλατφόρμα
ΠΛΗΡΟΦΟΡΙΚH ΓΙΑ ΤΗΝ ΤEΧΝΗ Η ΕΞAΜΗΝΟ ΑΜΑΛIΑ ΦΩΚA ΕΠIΚΟΥΡΗ ΚΑΘΗΓHΤΡΙΑ Περιεχόμενο Μαθήματος 2 Arduino Τι είναι το Arduino; 3 μικρή συσκευή (μικροεπεξεργαστής) που συνδέεται με USB στον υπολογιστή μια πλατφόρμα
ΠΕΡΙΕΧΟΜΕΝΟ. ΜΑΘΗΜΑ: ΡΟΜΠΟΤΙΚΗ (3Ε) Γ τάξη Ημερήσιου ΕΠΑ.Λ. και Γ τάξη Εσπερινού ΕΠΑ.Λ.
 Γ τάξη Ημερήσιου ΕΠΑ.Λ. και Γ τάξη Εσπερινού ΕΠΑ.Λ.") ΑΣΚΗΣΗ 25 - ΤΗΛΕΜΑΤΙΚΗ ΣΥΣΚΕΥΗ Μαθησιακά αποτελέσματα Ο μαθητής/μαθήτρια να μπορεί να: ΓΝΩΣΕΙΣ - Περιγράφει τη λειτουργία της τηλεματικής συσκευής. ΔΕΞΙΟΤΗΤΕΣ - Κατασκευάζει τηλεματική συσκευή. - Εγκαθιστά
ΑΣΚΗΣΗ 25 - ΤΗΛΕΜΑΤΙΚΗ ΣΥΣΚΕΥΗ Μαθησιακά αποτελέσματα Ο μαθητής/μαθήτρια να μπορεί να: ΓΝΩΣΕΙΣ - Περιγράφει τη λειτουργία της τηλεματικής συσκευής. ΔΕΞΙΟΤΗΤΕΣ - Κατασκευάζει τηλεματική συσκευή. - Εγκαθιστά
Εγχειρίδιο Ζωντανών Μεταδόσεων Εξελιγμένων Υπηρεσιών Βίντεο Πανελληνίου Σχολικού Δικτύου Εγχειρίδιο τεχνικού μετάδοσης
 Πανεπιστήμιο Κρήτης Εγχειρίδιο Ζωντανών Μεταδόσεων Εξελιγμένων Υπηρεσιών Βίντεο Πανελληνίου Σχολικού Δικτύου Εγχειρίδιο τεχνικού μετάδοσης Πανεπιστήμιο Κρήτης Περιεχόμενα 1. ΖΩΝΤΑΝΕΣ ΜΕΤΑΔΟΣΕΙΣ... 3 1.1.
Πανεπιστήμιο Κρήτης Εγχειρίδιο Ζωντανών Μεταδόσεων Εξελιγμένων Υπηρεσιών Βίντεο Πανελληνίου Σχολικού Δικτύου Εγχειρίδιο τεχνικού μετάδοσης Πανεπιστήμιο Κρήτης Περιεχόμενα 1. ΖΩΝΤΑΝΕΣ ΜΕΤΑΔΟΣΕΙΣ... 3 1.1.
ΕΝΟΤΗΤΑ 7: ΑΙΣΘΗΤΗΡΕΣ ΥΠΕΡΥΘΡΩΝ
 ΕΝΟΤΗΤΑ 7: ΑΙΣΘΗΤΗΡΕΣ ΥΠΕΡΥΘΡΩΝ Σκοπός και περίγραμμα της Ενότητας 7 Σκοπός της παρουσίασης ΒΑΣΙΚΕΣ ΓΝΩΣΕΙΣ ΥΠΕΡΥΘΡΟΥ ΦΩΤΟΣ Χρήση αισθητήρα υπέρυθρων για τον εντοπισμό αντικειμένων, εμποδίων, παρουσίας
ΕΝΟΤΗΤΑ 7: ΑΙΣΘΗΤΗΡΕΣ ΥΠΕΡΥΘΡΩΝ Σκοπός και περίγραμμα της Ενότητας 7 Σκοπός της παρουσίασης ΒΑΣΙΚΕΣ ΓΝΩΣΕΙΣ ΥΠΕΡΥΘΡΟΥ ΦΩΤΟΣ Χρήση αισθητήρα υπέρυθρων για τον εντοπισμό αντικειμένων, εμποδίων, παρουσίας
Προγραμματισμο ς σε Arduino
 Προγραμματισμο ς σε Arduino Arduino UNO & Innoesys Educational Shield www.devobox.com Ηλεκτρονικά Εξαρτήματα & Υλικά Κατασκευής Πρωτοτύπων Λέανδρου 79, 10443, Κολωνός +30 210 51 55 513, info@devobox.com
Προγραμματισμο ς σε Arduino Arduino UNO & Innoesys Educational Shield www.devobox.com Ηλεκτρονικά Εξαρτήματα & Υλικά Κατασκευής Πρωτοτύπων Λέανδρου 79, 10443, Κολωνός +30 210 51 55 513, info@devobox.com
Κεφάλαιο 1 Εισαγωγή.
 Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΠΕΡΙΦΕΡΕΙΑΚΗ ΔΙΕΥΘΥΝΣΗ ΜΥΤΙΛΗΝΗΣ ΤΜΗΜΑ ΟΙΚΟΝΟΜΙΚΩΝ ΥΠΟΘΕΣΕΩΝ Κτίριο Διοίκησης Λόφος Πανεπιστημίου 81 100 Μυτιλήνη Πληροφορίες: Δ. Δήμου Μυτιλήνη, 8.12.2011 Τηλ.: 22510 36862 Αριθ.
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΠΕΡΙΦΕΡΕΙΑΚΗ ΔΙΕΥΘΥΝΣΗ ΜΥΤΙΛΗΝΗΣ ΤΜΗΜΑ ΟΙΚΟΝΟΜΙΚΩΝ ΥΠΟΘΕΣΕΩΝ Κτίριο Διοίκησης Λόφος Πανεπιστημίου 81 100 Μυτιλήνη Πληροφορίες: Δ. Δήμου Μυτιλήνη, 8.12.2011 Τηλ.: 22510 36862 Αριθ.
Η συσκευή υποστηρίζει την αποστολή/λήψη μηνυμάτων. Πιέστε το πλήκτρο μηνυμάτων για να γράψετε ένα νέο. Επιλέξτε Μενού Μήνυμα Γράψε Μήνυμα στην
 Οδηγίες Χρήσης 1 1.Μηνύμα Η συσκευή υποστηρίζει την αποστολή/λήψη μηνυμάτων SMS. Πιέστε το πλήκτρο μηνυμάτων για να γράψετε ένα νέο μήνυμα. Σύνταξη μηνύματος Επιλέξτε Μενού Μήνυμα Γράψε Μήνυμα στην συνέχεια
Οδηγίες Χρήσης 1 1.Μηνύμα Η συσκευή υποστηρίζει την αποστολή/λήψη μηνυμάτων SMS. Πιέστε το πλήκτρο μηνυμάτων για να γράψετε ένα νέο μήνυμα. Σύνταξη μηνύματος Επιλέξτε Μενού Μήνυμα Γράψε Μήνυμα στην συνέχεια
ΑΣΚΗΣΗ 8 Tutorial by TeSLa Συνδεσμολογία κυκλώματος Διαδικασία Προγραμματισμού
 Α.Τ.Ε.Ι. ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΫΠΟΛΟΓΙΣΤΩΝ ΑΣΚΗΣΗ 8 Tutorial by TeSLa Συνδεσμολογία κυκλώματος Διαδικασία Προγραμματισμού Θεσσαλονίκη, Ιανουάριος 2007 Η Άσκηση 8 του εργαστηρίου
Α.Τ.Ε.Ι. ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΫΠΟΛΟΓΙΣΤΩΝ ΑΣΚΗΣΗ 8 Tutorial by TeSLa Συνδεσμολογία κυκλώματος Διαδικασία Προγραμματισμού Θεσσαλονίκη, Ιανουάριος 2007 Η Άσκηση 8 του εργαστηρίου
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Σχολή Τεχνολογικών Εφαρμογών Τμήμα Πληροφορικής & Επικοινωνιών
 Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Σχολή Τεχνολογικών Εφαρμογών Τμήμα Πληροφορικής & Επικοινωνιών Υλοποίηση δικτύου ασύρματης ραδιοεπικοινωνίας μεταξύ δύο ενσωματωμένων κόμβων (κόμβος ταυτοποίησης
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Σχολή Τεχνολογικών Εφαρμογών Τμήμα Πληροφορικής & Επικοινωνιών Υλοποίηση δικτύου ασύρματης ραδιοεπικοινωνίας μεταξύ δύο ενσωματωμένων κόμβων (κόμβος ταυτοποίησης
Εγχειρίδιο Ζωντανών Μεταδόσεων Υπηρεσιών Βίντεο. Πανεπιστημίου Κρήτης. Εγχειρίδιο τεχνικού μετάδοσης
 Εγχειρίδιο Ζωντανών Μεταδόσεων Υπηρεσιών Βίντεο Πανεπιστημίου Κρήτης Εγχειρίδιο τεχνικού μετάδοσης Περιεχόμενα 1. ΖΩΝΤΑΝΕΣ ΜΕΤΑΔΟΣΕΙΣ... 3 1.1. ΕΙΣΑΓΩΓΗ... 3 1.2. ΠΡΟΕΤΟΙΜΑΣΙΑ ΓΙΑ ΤΗΝ ΜΕΤΑΔΟΣΗ, ΑΙΤΗΜΑ...
Εγχειρίδιο Ζωντανών Μεταδόσεων Υπηρεσιών Βίντεο Πανεπιστημίου Κρήτης Εγχειρίδιο τεχνικού μετάδοσης Περιεχόμενα 1. ΖΩΝΤΑΝΕΣ ΜΕΤΑΔΟΣΕΙΣ... 3 1.1. ΕΙΣΑΓΩΓΗ... 3 1.2. ΠΡΟΕΤΟΙΜΑΣΙΑ ΓΙΑ ΤΗΝ ΜΕΤΑΔΟΣΗ, ΑΙΤΗΜΑ...
Φύλλο εργασίας 6 - Θερμόμετρο εξωτερικού χώρου. Το κύκλωμα σε breadboard
 Φύλλο εργασίας 6 - Θερμόμετρο εξωτερικού χώρου Σε αυτήν την δραστηριότητα θα κατασκευάσουμε ένα θερμόμετρο εξωτερικού χώρου. Θα χρησιμοποιήσουμε τον αισθητήρα θερμοκρασίας LM35 και για την ένδειξη της
Φύλλο εργασίας 6 - Θερμόμετρο εξωτερικού χώρου Σε αυτήν την δραστηριότητα θα κατασκευάσουμε ένα θερμόμετρο εξωτερικού χώρου. Θα χρησιμοποιήσουμε τον αισθητήρα θερμοκρασίας LM35 και για την ένδειξη της
Βασικά χαρακτηριστικά
 1 of 6 10/09/2013 13:34 Ηλεκτρονικός πίνακας ελέγχου (πλακέτα) για ρολλά, τύπου S-2055, της εταιρείας AUTOTECH. Είναι κατάλληλος για ρολλά που τροφοδοτούνται από μονοφασικό εναλλασσόμενο ρεύμα 230 V AC
1 of 6 10/09/2013 13:34 Ηλεκτρονικός πίνακας ελέγχου (πλακέτα) για ρολλά, τύπου S-2055, της εταιρείας AUTOTECH. Είναι κατάλληλος για ρολλά που τροφοδοτούνται από μονοφασικό εναλλασσόμενο ρεύμα 230 V AC
ΘΕΜΑ 1 ο. α. τα μήκη κύματος από 100m έως 50m ονομάζονται κύματα νύχτας και τα μήκη κύματος από 50m έως 10m ονομάζονται κύματα ημέρας.
 ΑΡΧΗ 1ΗΣ ΣΕΛΙΔΑΣ Γ ΤΑΞΗ ΕΠΑΛ (ΟΜΑΔΑ Α ) & ΜΑΘΗΜΑΤΩΝ ΕΙΔΙΚΟΤΗΤΑΣ ΕΠΑΛ (ΟΜΑΔΑ Β ) ΠΑΡΑΣΚΕΥΗ 06/05/016 - ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΗΛΕΚΤΡΟΝΙΚΕΣ ΕΠΙΚΟΙΝΩΝΙΕΣ ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ΕΞΙ (6) ΘΕΜΑ 1 ο ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ
ΑΡΧΗ 1ΗΣ ΣΕΛΙΔΑΣ Γ ΤΑΞΗ ΕΠΑΛ (ΟΜΑΔΑ Α ) & ΜΑΘΗΜΑΤΩΝ ΕΙΔΙΚΟΤΗΤΑΣ ΕΠΑΛ (ΟΜΑΔΑ Β ) ΠΑΡΑΣΚΕΥΗ 06/05/016 - ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΗΛΕΚΤΡΟΝΙΚΕΣ ΕΠΙΚΟΙΝΩΝΙΕΣ ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ΕΞΙ (6) ΘΕΜΑ 1 ο ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ
Εφαρμογές Σειριακής Επικοινωνίας
 Εφαρμογές Σειριακής Επικοινωνίας Εισαγωγή Στο μάθημα αυτό θα μάθουμε πώς να χρησιμοποιούμε την βιβλιοθήκη serial για την επικοινωνία από την πλατφόρμα Arduino πίσω στον υπολογιστή μέσω της θύρας usb. Τι
Εφαρμογές Σειριακής Επικοινωνίας Εισαγωγή Στο μάθημα αυτό θα μάθουμε πώς να χρησιμοποιούμε την βιβλιοθήκη serial για την επικοινωνία από την πλατφόρμα Arduino πίσω στον υπολογιστή μέσω της θύρας usb. Τι
ΡΟΜΠΟΤΙΚΗ. ΕΡΓΑΣΙΑ ΠΑΝΩ ΣΤΗΝ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΝΧΤ ΚΑΙ ΤΑ ΠΡΩΤΟΚΟΛΛΑ ΕΠΙΚΟΙΝΩΝΙΑΣ BLUETOOTH, I2C και serial communication
 ΡΟΜΠΟΤΙΚΗ ΕΡΓΑΣΙΑ ΠΑΝΩ ΣΤΗΝ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΝΧΤ ΚΑΙ ΤΑ ΠΡΩΤΟΚΟΛΛΑ ΕΠΙΚΟΙΝΩΝΙΑΣ BLUETOOTH, I2C και serial communication ΜΠΑΝΤΗΣ ΑΝΤΩΝΙΟΣ 533 ΤΣΙΚΤΣΙΡΗΣ ΔΗΜΗΤΡΙΟΣ 551 ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΤΟΥ ΡΟΜΠΟΤ LEGO NXT Το ρομπότ
ΡΟΜΠΟΤΙΚΗ ΕΡΓΑΣΙΑ ΠΑΝΩ ΣΤΗΝ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΝΧΤ ΚΑΙ ΤΑ ΠΡΩΤΟΚΟΛΛΑ ΕΠΙΚΟΙΝΩΝΙΑΣ BLUETOOTH, I2C και serial communication ΜΠΑΝΤΗΣ ΑΝΤΩΝΙΟΣ 533 ΤΣΙΚΤΣΙΡΗΣ ΔΗΜΗΤΡΙΟΣ 551 ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΤΟΥ ΡΟΜΠΟΤ LEGO NXT Το ρομπότ
ATS2020 Μαθησιακός Σχεδιασμός
 ATS2020 Μαθησιακός Σχεδιασμός CC BY-NC-SA Συγγραφέας: Άντρη Αρμεύτη Σχολείο: Γυμνάσιο Λύκειο Λευκάρων Υποστηρίκτρια: Μαρία Κωνσταντίνου (Παιδαγωγικό Ινστιτούτο) Χώρα: Κύπρος Γλώσσα: Ελληνικά Γενική περιγραφή
ATS2020 Μαθησιακός Σχεδιασμός CC BY-NC-SA Συγγραφέας: Άντρη Αρμεύτη Σχολείο: Γυμνάσιο Λύκειο Λευκάρων Υποστηρίκτρια: Μαρία Κωνσταντίνου (Παιδαγωγικό Ινστιτούτο) Χώρα: Κύπρος Γλώσσα: Ελληνικά Γενική περιγραφή
Κεφάλαιο 2.4: Εργασία με εικονίδια
 Κεφάλαιο 2.4: Εργασία με εικονίδια 2.4.1 Συχνότερα εμφανιζόμενα εικονίδια των Windows Τα πιο συνηθισμένα εικονίδια, που μπορεί να συναντήσουμε, είναι: Εικονίδια συστήματος: Τα Windows εμφανίζουν τα στοιχεία
Κεφάλαιο 2.4: Εργασία με εικονίδια 2.4.1 Συχνότερα εμφανιζόμενα εικονίδια των Windows Τα πιο συνηθισμένα εικονίδια, που μπορεί να συναντήσουμε, είναι: Εικονίδια συστήματος: Τα Windows εμφανίζουν τα στοιχεία
ΔΙΔΑΚΤΙΚΟ ΣΕΝΑΡΙΟ ΔΗΜΙΟΥΡΓΙΑ ΣΥΣΤΗΜΑΤΟΣ ΔΙΕΞΑΓΩΓΗΣ ΠΑΙΧΝΙΔΙΟΥ ΕΡΩΤΗΣΕΩΝ/ΑΠΑΝΤΗΣΕΩΝ ΜΕ ΧΡΗΣΗ ARDUINO - QUIZ GAME ΦΥΛΛΟ ΕΡΓΑΣΙΑΣ 3
 ΔΙΔΑΚΤΙΚΟ ΣΕΝΑΡΙΟ ΔΗΜΙΟΥΡΓΙΑ ΣΥΣΤΗΜΑΤΟΣ ΔΙΕΞΑΓΩΓΗΣ ΠΑΙΧΝΙΔΙΟΥ ΕΡΩΤΗΣΕΩΝ/ΑΠΑΝΤΗΣΕΩΝ 1 Ο ΕΠΑ.Λ. ΓΕΡΑΣ Σχολικό Έτος: Καθηγητής: ΜΕ ΧΡΗΣΗ ARDUINO - QUIZ GAME Τάξη:.. Τμήμα:.. Ομάδα:.. Ημερομηνία:.. Ονοματεπώνυμο
ΔΙΔΑΚΤΙΚΟ ΣΕΝΑΡΙΟ ΔΗΜΙΟΥΡΓΙΑ ΣΥΣΤΗΜΑΤΟΣ ΔΙΕΞΑΓΩΓΗΣ ΠΑΙΧΝΙΔΙΟΥ ΕΡΩΤΗΣΕΩΝ/ΑΠΑΝΤΗΣΕΩΝ 1 Ο ΕΠΑ.Λ. ΓΕΡΑΣ Σχολικό Έτος: Καθηγητής: ΜΕ ΧΡΗΣΗ ARDUINO - QUIZ GAME Τάξη:.. Τμήμα:.. Ομάδα:.. Ημερομηνία:.. Ονοματεπώνυμο
ΟΙΚΟΝΟΜΙΚΩΝ ΥΠΗΡΕΣΙΩΝ ΛΟΓΙΣΤΗΡΙΟΥ ΠΡΟΜΗΘΕΙΩΝ Πλ. Νίκης 1 50100 Γεωργιάδου Μαρία 24613-50344 24610-34068 dkon@kozanh.gr
 Ελληνική Εκδήλωση ενδιαφέροντος gps Α Ν Α Ρ Τ Η Τ Ε Α Σ Τ Ο Δ Ι Α Δ Ι Κ Τ Υ Ο Κ ο ζ ά ν η, 20-08- 2 0 1 5 Α ρ ι θ μ. π ρ ω τ. 4 6 3 1 7 Δ/ΝΣΗ ΤΜΗΜΑ ΓΡΑΦΕΙΟ Ταχ. Δ/νση Ταχ. Κωδ. Πληροφορίες Τηλέφωνο Fax
Ελληνική Εκδήλωση ενδιαφέροντος gps Α Ν Α Ρ Τ Η Τ Ε Α Σ Τ Ο Δ Ι Α Δ Ι Κ Τ Υ Ο Κ ο ζ ά ν η, 20-08- 2 0 1 5 Α ρ ι θ μ. π ρ ω τ. 4 6 3 1 7 Δ/ΝΣΗ ΤΜΗΜΑ ΓΡΑΦΕΙΟ Ταχ. Δ/νση Ταχ. Κωδ. Πληροφορίες Τηλέφωνο Fax
WIRELESS SENSOR NETWORKS (WSN)
") WIRELESS SENSOR NETWORKS (WSN) Δρ. Ιωάννης Παναγόπουλος Εργαστήριο Υπολογιστικών Συστημάτων Καθ. Γεώργιος Παπακωνσταντίνου Αθήνα 2008 ΕΙΣΑΓΩΓΗ ΣΤΑ WSN Σε συγκεκριμένες εφαρμογές, επιθυμείται η μέτρηση
WIRELESS SENSOR NETWORKS (WSN) Δρ. Ιωάννης Παναγόπουλος Εργαστήριο Υπολογιστικών Συστημάτων Καθ. Γεώργιος Παπακωνσταντίνου Αθήνα 2008 ΕΙΣΑΓΩΓΗ ΣΤΑ WSN Σε συγκεκριμένες εφαρμογές, επιθυμείται η μέτρηση
Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2. Προγραμματισμός Φυσικών Συστημάτων. Συστήματα Πραγματικών Εφαρμογών. Νέα Ψηφιακά Αντικείμενα
 Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Εγκατάσταση του Arduino IDE
 ΑΣΠΑΙΤΕ Συλλογή και Επεξεργασία Δεδομένων Εργαστήριο ΠΕΡΙΕΧΟΜΕΝΑ: Πώς να κατεβάσετε και να εγκαταστήσετε το Ολοκληρωμένο Περιβάλλον Ανάπτυξης (IDE), για το προγραμματισμό του Arduino. Χρησιμοποιώντας το
ΑΣΠΑΙΤΕ Συλλογή και Επεξεργασία Δεδομένων Εργαστήριο ΠΕΡΙΕΧΟΜΕΝΑ: Πώς να κατεβάσετε και να εγκαταστήσετε το Ολοκληρωμένο Περιβάλλον Ανάπτυξης (IDE), για το προγραμματισμό του Arduino. Χρησιμοποιώντας το
ΠΑΝΑΓΙΩΤΗΣ ΚΟΥΤΣΙΩΡΑΣ Α.Μ.: ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ. Αναφορά Πρακτικής Εργασίας: Μετατροπέας Κώδικα BCD Σε Κώδικα GRAY
 ΤΜΗΜΑ ΕΠΙΣΤΗΜΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΛΟΠΟΝΝΗΣΟΥ ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ Αναφορά Πρακτικής Εργασίας: Μετατροπέας Κώδικα BCD Σε Κώδικα GRAY ΠΑΝΑΓΙΩΤΗΣ ΚΟΥΤΣΙΩΡΑΣ Α.Μ.: 2025201100037 Χειμερινό
ΤΜΗΜΑ ΕΠΙΣΤΗΜΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΛΟΠΟΝΝΗΣΟΥ ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ Αναφορά Πρακτικής Εργασίας: Μετατροπέας Κώδικα BCD Σε Κώδικα GRAY ΠΑΝΑΓΙΩΤΗΣ ΚΟΥΤΣΙΩΡΑΣ Α.Μ.: 2025201100037 Χειμερινό
ΕΡΓΑΣΤΗΡΙΟ 4 ΕΙΣΑΓΩΓΗ ΣΤΟN ARDUINO: ΨΗΦΙΑΚΗ ΕΙΣΟΔΟΣ/ΕΞΟΔΟΣ
 ΕΡΓΑΣΤΗΡΙΟ 4 ΕΙΣΑΓΩΓΗ ΣΤΟN ARDUINO: ΨΗΦΙΑΚΗ ΕΙΣΟΔΟΣ/ΕΞΟΔΟΣ Σκοπός της άσκησης Οι φοιτητές θα εξοικειωθούν με την πλακέτα του μικροελεγκτή και θα αναγνωρίσουν τα βασικά της στοιχεία. Επίσης θα εξοικειωθούν
ΕΡΓΑΣΤΗΡΙΟ 4 ΕΙΣΑΓΩΓΗ ΣΤΟN ARDUINO: ΨΗΦΙΑΚΗ ΕΙΣΟΔΟΣ/ΕΞΟΔΟΣ Σκοπός της άσκησης Οι φοιτητές θα εξοικειωθούν με την πλακέτα του μικροελεγκτή και θα αναγνωρίσουν τα βασικά της στοιχεία. Επίσης θα εξοικειωθούν
Ενισχυτικές Διατάξεις 1. Ο Τελεστικός ενισχυτής 741
 Ενισχυτικές Διατάξεις 1 Ο Τελεστικός ενισχυτής 741 Ενισχυτικές Διατάξεις 2 Iστορική Αναδρομή 1964 Ο Bob Widlar σχεδιαζει το πρώτο ΤΕ: τον 702. Μόνο 9 transistors, απολαβή OL: 1000 Πολύ ακριβός : $300 per
Ενισχυτικές Διατάξεις 1 Ο Τελεστικός ενισχυτής 741 Ενισχυτικές Διατάξεις 2 Iστορική Αναδρομή 1964 Ο Bob Widlar σχεδιαζει το πρώτο ΤΕ: τον 702. Μόνο 9 transistors, απολαβή OL: 1000 Πολύ ακριβός : $300 per
Τίτλος: GPS Βρες το δρόμο σου
 Τίτλος: GPS Βρες το δρόμο σου Θέματα: διασταύρωση σφαιρών, συστήματα με συντεταγμένες, απόσταση, ταχύτητα και χρόνος, μετάδοση σήματος Διάρκεια: 90 λεπτά Ηλικία: 16+ Διαφοροποίηση: Πιο ψηλό επίπεδο: μπορεί
Τίτλος: GPS Βρες το δρόμο σου Θέματα: διασταύρωση σφαιρών, συστήματα με συντεταγμένες, απόσταση, ταχύτητα και χρόνος, μετάδοση σήματος Διάρκεια: 90 λεπτά Ηλικία: 16+ Διαφοροποίηση: Πιο ψηλό επίπεδο: μπορεί
ΟΛΟΚΛΗΡΩΜΕΝΟ ΜΕΤΑΦΡΑΣΤΙΚΟ ΣΥΣΤΗΜΑ IMS STC
 ΟΛΟΚΛΗΡΩΜΕΝΟ ΜΕΤΑΦΡΑΣΤΙΚΟ ΣΥΣΤΗΜΑ IMS STC ΠΕΡΙΕΧΟΜΕΝΑ 1 ΕΙΣΑΓΩΓΗ 3 2 ΜΟΝΑΔΕΣ ΛΕΙΤΟΥΡΓΙΑΣ 4 2.1 ΚΕΝΤΡΙΚΗ ΜΟΝΑΔΑ ΕΚΠΟΜΠΗΣ IR IMS STC 621/641/661 4 2.2 ΠΑΝΕΛ ΕΚΠΟΜΠΗΣ IR IMS STC 622/642/662 5 2.3 ΜΟΝΑΔΑ ΜΕΤΑΦΡΑΣΤΗ
ΟΛΟΚΛΗΡΩΜΕΝΟ ΜΕΤΑΦΡΑΣΤΙΚΟ ΣΥΣΤΗΜΑ IMS STC ΠΕΡΙΕΧΟΜΕΝΑ 1 ΕΙΣΑΓΩΓΗ 3 2 ΜΟΝΑΔΕΣ ΛΕΙΤΟΥΡΓΙΑΣ 4 2.1 ΚΕΝΤΡΙΚΗ ΜΟΝΑΔΑ ΕΚΠΟΜΠΗΣ IR IMS STC 621/641/661 4 2.2 ΠΑΝΕΛ ΕΚΠΟΜΠΗΣ IR IMS STC 622/642/662 5 2.3 ΜΟΝΑΔΑ ΜΕΤΑΦΡΑΣΤΗ
Εισαγωγή στους Ταλαντωτές Οι ταλαντωτές είναι από τα βασικότερα κυκλώματα στα ηλεκτρονικά. Χρησιμοποιούνται κατά κόρον στα τηλεπικοινωνιακά συστήματα
 Πανεπιστήμιο Θεσσαλίας Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Η/Υ Υλοποίηση και Εργαστηριακή Αναφορά Ring και Hartley Ταλαντωτών Φοιτητής: Ζωγραφόπουλος Γιάννης Επιβλέπων Καθηγητής: Πλέσσας Φώτιος
Πανεπιστήμιο Θεσσαλίας Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Η/Υ Υλοποίηση και Εργαστηριακή Αναφορά Ring και Hartley Ταλαντωτών Φοιτητής: Ζωγραφόπουλος Γιάννης Επιβλέπων Καθηγητής: Πλέσσας Φώτιος
ΣΗΜΕΙΩΣΕΙΣ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ
 Ο ηλεκτρονικός υπολογιστής είναι μια ηλεκτρονική συσκευή που έχει την ικανότητα να επεξεργάζεται μεγάλο όγκο πληροφοριών και δεδομένων με ταχύτητα και ακρίβεια. Επίσης ένας η/υ μπορεί να αποθηκεύσει πληροφορίες,
Ο ηλεκτρονικός υπολογιστής είναι μια ηλεκτρονική συσκευή που έχει την ικανότητα να επεξεργάζεται μεγάλο όγκο πληροφοριών και δεδομένων με ταχύτητα και ακρίβεια. Επίσης ένας η/υ μπορεί να αποθηκεύσει πληροφορίες,
Καταχωρήστε το προϊόν σας και λάβετε υποστήριξη από τη διεύθυνση. SDV7220/12. Εγχειρίδιο χρήσης
 Καταχωρήστε το προϊόν σας και λάβετε υποστήριξη από τη διεύθυνση www.philips.com/welcome SDV7220/12 Εγχειρίδιο χρήσης Πίνακας περιεχομένων 1 Σημαντικό 28 Ασφάλεια 28 Ανακύκλωση 28 2 Το SDV7220/12 29 Επισκόπηση
Καταχωρήστε το προϊόν σας και λάβετε υποστήριξη από τη διεύθυνση www.philips.com/welcome SDV7220/12 Εγχειρίδιο χρήσης Πίνακας περιεχομένων 1 Σημαντικό 28 Ασφάλεια 28 Ανακύκλωση 28 2 Το SDV7220/12 29 Επισκόπηση
ΑΣΚΗΣΗ 7 η : ΣΥΣΤΗΜΑ ΥΑΛΟΚΑΘΑΡΙΣΤΗΡΩΝ
 Εργαστήριο ΜΕΚ και Τεχνολογίας Αυτοκινήτου Καθηγητής: Χριστολουκάς Δημήτριος ΑΣΚΗΣΗ 7 η : ΣΥΣΤΗΜΑ ΥΑΛΟΚΑΘΑΡΙΣΤΗΡΩΝ Υαλοκαθαριστήρες παρμπίζ Ο κύριος σκοπός του συστήματος υαλοκαθαριστήρων είναι να καθαρίζουν
Εργαστήριο ΜΕΚ και Τεχνολογίας Αυτοκινήτου Καθηγητής: Χριστολουκάς Δημήτριος ΑΣΚΗΣΗ 7 η : ΣΥΣΤΗΜΑ ΥΑΛΟΚΑΘΑΡΙΣΤΗΡΩΝ Υαλοκαθαριστήρες παρμπίζ Ο κύριος σκοπός του συστήματος υαλοκαθαριστήρων είναι να καθαρίζουν
ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ ΜΕ ΤΗ ΧΡΗΣΗ ΤΟΥ MULTILOG
 1 ο ΕΚΦΕ (Ν. ΣΜΥΡΝΗΣ) Δ Δ/ΝΣΗΣ Δ. Ε. ΑΘΗΝΑΣ 1 Α. ΣΤΟΧΟΙ ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ ΜΕ ΤΗ ΧΡΗΣΗ ΤΟΥ MULTILOG Η πραγματοποίηση αρμονικής ταλάντωσης μικρού πλάτους με τη χρήση μάζας δεμένης σε ελατήριο. Η εφαρμογή
1 ο ΕΚΦΕ (Ν. ΣΜΥΡΝΗΣ) Δ Δ/ΝΣΗΣ Δ. Ε. ΑΘΗΝΑΣ 1 Α. ΣΤΟΧΟΙ ΑΠΛΗ ΑΡΜΟΝΙΚΗ ΤΑΛΑΝΤΩΣΗ ΜΕ ΤΗ ΧΡΗΣΗ ΤΟΥ MULTILOG Η πραγματοποίηση αρμονικής ταλάντωσης μικρού πλάτους με τη χρήση μάζας δεμένης σε ελατήριο. Η εφαρμογή
Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC.
 Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC. Ονόματα μαθητών Γεωργίου Χρίστος Η1β, Γεωργίου Αντώνης Η1β Ονόματα καθηγητών: Αγγελίδης Λουκής, Πετρίδης Πέτρος Περίληψη Σκοπός της
Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC. Ονόματα μαθητών Γεωργίου Χρίστος Η1β, Γεωργίου Αντώνης Η1β Ονόματα καθηγητών: Αγγελίδης Λουκής, Πετρίδης Πέτρος Περίληψη Σκοπός της
Ομάδα εργασίας Ιονίου Πανεπιστημίου στο Πρόγραμμα ΛΑΕΡΤΗΣ. Εργαστήριο Υπολογιστικής Μοντελοποίησης (CMODLAB)
") Ομάδα εργασίας Ιονίου Πανεπιστημίου στο Πρόγραμμα ΛΑΕΡΤΗΣ Εργαστήριο Υπολογιστικής Μοντελοποίησης (CMODLAB) Εργαστήριο Υπολογιστικής Μοντελοποίησης (CMODLAB) Σύντομη περιγραφή συστήματος Περιγραφή πειραματικής
Ομάδα εργασίας Ιονίου Πανεπιστημίου στο Πρόγραμμα ΛΑΕΡΤΗΣ Εργαστήριο Υπολογιστικής Μοντελοποίησης (CMODLAB) Εργαστήριο Υπολογιστικής Μοντελοποίησης (CMODLAB) Σύντομη περιγραφή συστήματος Περιγραφή πειραματικής
ΠΕΡΙΕΧΟΜΕΝΑ ΚΕΦΑΛΑΙΟ I: ΕΙΣΑΓΩΓΗ ΣΤΑ ΗΛΕΚΤΡΟΝΙΚΑ
 ΠΕΡΙΕΧΟΜΕΝΑ ΚΕΦΑΛΑΙΟ I: ΕΙΣΑΓΩΓΗ ΣΤΑ ΗΛΕΚΤΡΟΝΙΚΑ 1.1 ΕΙΣΑΓΩΓΗ ΣΤΑ ΑΝΑΛΟΓΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ 1 1.1.1 Αναλογικά σήματα 1 1.1.2 Οι αντιστάσεις 3 1.1.3 Οι πυκνωτές 7 1.1.4 Τα πηνία 11 1.1.5 Οι δίοδοι 13 1.1.6
ΠΕΡΙΕΧΟΜΕΝΑ ΚΕΦΑΛΑΙΟ I: ΕΙΣΑΓΩΓΗ ΣΤΑ ΗΛΕΚΤΡΟΝΙΚΑ 1.1 ΕΙΣΑΓΩΓΗ ΣΤΑ ΑΝΑΛΟΓΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ 1 1.1.1 Αναλογικά σήματα 1 1.1.2 Οι αντιστάσεις 3 1.1.3 Οι πυκνωτές 7 1.1.4 Τα πηνία 11 1.1.5 Οι δίοδοι 13 1.1.6
ΤΟ ΕΣΩΤΕΡΙΚΟ ΤΟΥ ΥΠΟΛΟΓΙΣΤΗ
 ΤΟ ΕΣΩΤΕΡΙΚΟ ΤΟΥ ΥΠΟΛΟΓΙΣΤΗ ΕΙΣΑΓΩΓΗ Οι υπολογιστές αποτελούνται από πολλά ηλεκτρονικά εξαρτήματα. Κάθε εξάρτημα έχει ειδικό ρόλο στη λειτουργία του υπολογιστή. Όλα όμως έχουν σχεδιαστεί, για να συνεργάζονται,
ΤΟ ΕΣΩΤΕΡΙΚΟ ΤΟΥ ΥΠΟΛΟΓΙΣΤΗ ΕΙΣΑΓΩΓΗ Οι υπολογιστές αποτελούνται από πολλά ηλεκτρονικά εξαρτήματα. Κάθε εξάρτημα έχει ειδικό ρόλο στη λειτουργία του υπολογιστή. Όλα όμως έχουν σχεδιαστεί, για να συνεργάζονται,
Σχεδιασμός και υλοποίηση μια έξυπνης ενσωματωμένης κεντρικής μονάδας συναγερμού IP
 Πανεπιστήμιο Δυτικής Μακεδονίας Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών http://arch.icte.uowm.gr Σχεδιασμός και υλοποίηση μια έξυπνης
Πανεπιστήμιο Δυτικής Μακεδονίας Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών http://arch.icte.uowm.gr Σχεδιασμός και υλοποίηση μια έξυπνης
ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017)
") ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017) Περιγραφή της Άσκησης Ο σκοπός της πρώτης άσκησης είναι κυρίως η εξοικείωση με το περιβάλλον προγραμματισμού του Arduino, γι αυτό και δεν είναι ιδιαίτερα σύνθετη. Αρχικά, θα
ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017) Περιγραφή της Άσκησης Ο σκοπός της πρώτης άσκησης είναι κυρίως η εξοικείωση με το περιβάλλον προγραμματισμού του Arduino, γι αυτό και δεν είναι ιδιαίτερα σύνθετη. Αρχικά, θα
EASYDRIVE. Σύντομος οδηγός. για να ξεκινήσετε την πλοήγηση αμέσως. Με χρήσιμα παραδείγματα & πρακτικές συμβουλές
 EASYDRIVE Σύντομος οδηγός για να ξεκινήσετε την πλοήγηση αμέσως Με χρήσιμα παραδείγματα & πρακτικές συμβουλές Περιλαμβάνει: την Οθόνη Πλοήγησης, την Οθόνη Επεξεργασίας Χάρτη, και την λειτουργικότητα Hardware
EASYDRIVE Σύντομος οδηγός για να ξεκινήσετε την πλοήγηση αμέσως Με χρήσιμα παραδείγματα & πρακτικές συμβουλές Περιλαμβάνει: την Οθόνη Πλοήγησης, την Οθόνη Επεξεργασίας Χάρτη, και την λειτουργικότητα Hardware
PHANTOM 3. Οδηγός Γρήγορης Εκκίνησης STANDARD V1.0
 PHANTOM 3 STANDARD Οδηγός Γρήγορης Εκκίνησης V1.0 Phantom 3 Standard Ήρθε η ώρα να γνωρίσετε το Phantom σας! Η κάμερα του Phantom 3 Standard καταγράφει βίντεο με ανάλυση έως 2.7K (Ultra HD) στα 30 καρέ/
PHANTOM 3 STANDARD Οδηγός Γρήγορης Εκκίνησης V1.0 Phantom 3 Standard Ήρθε η ώρα να γνωρίσετε το Phantom σας! Η κάμερα του Phantom 3 Standard καταγράφει βίντεο με ανάλυση έως 2.7K (Ultra HD) στα 30 καρέ/
RobotArmy Περίληψη έργου
 RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
Φύλλο Εργασίας. Μάθημα 7 Τεχνητοί δορυφόροι και Σύγχρονα Επαγγέλματα ΙΙ
 Φύλλο Εργασίας Μάθημα 7 Τεχνητοί δορυφόροι και Σύγχρονα Επαγγέλματα ΙΙ Σχολείο:. Τάξη: Ημερομηνία: Δραστηριότητα 1: Προβολή Αφήγησης με βίντεο (7 λεπτά) Δραστηριότητα 2: Προβολή εικόνων (2 λεπτά) Παρακολουθήστε
Φύλλο Εργασίας Μάθημα 7 Τεχνητοί δορυφόροι και Σύγχρονα Επαγγέλματα ΙΙ Σχολείο:. Τάξη: Ημερομηνία: Δραστηριότητα 1: Προβολή Αφήγησης με βίντεο (7 λεπτά) Δραστηριότητα 2: Προβολή εικόνων (2 λεπτά) Παρακολουθήστε
LFT169 - LFR169 ΠΟΜΠΟΣ ΚΑΙ ΔΕΚΤΗΣ ΨΗΦΙΑΚΩΝ ΚΑΙ ΑΝΑΛΟΓΙΚΩΝ ΣΗΜΑΤΩΝ
 LFT169 - LFR169 ΠΟΜΠΟΣ ΚΑΙ ΔΕΚΤΗΣ ΨΗΦΙΑΚΩΝ ΚΑΙ ΑΝΑΛΟΓΙΚΩΝ ΣΗΜΑΤΩΝ Οδηγίες Παραμετροποίησης Power Electronics Control Ε.Π.Ε. Τύποι Συσκευών: LFT169 - LFR169 Περιγραφή: Πομπός και Δέκτης Τηλεχειρισμού 169MHz
LFT169 - LFR169 ΠΟΜΠΟΣ ΚΑΙ ΔΕΚΤΗΣ ΨΗΦΙΑΚΩΝ ΚΑΙ ΑΝΑΛΟΓΙΚΩΝ ΣΗΜΑΤΩΝ Οδηγίες Παραμετροποίησης Power Electronics Control Ε.Π.Ε. Τύποι Συσκευών: LFT169 - LFR169 Περιγραφή: Πομπός και Δέκτης Τηλεχειρισμού 169MHz
Η Ελληνική Πύλη Ρομποτικής στην 77η ΔΕΘ
 Η Ελληνική Πύλη Ρομποτικής στην 77η ΔΕΘ Για δεύτερη συνεχόμενη χρονιά η Διεθνής Έκθεση Θεσσαλονίκης φιλοξένησε την Ελληνική Πύλη Ρομποτικής σε εκθεσιακό περίπτερο στο οποίο παρουσιάστηκαν ρομποτικές εφαρμογές
Η Ελληνική Πύλη Ρομποτικής στην 77η ΔΕΘ Για δεύτερη συνεχόμενη χρονιά η Διεθνής Έκθεση Θεσσαλονίκης φιλοξένησε την Ελληνική Πύλη Ρομποτικής σε εκθεσιακό περίπτερο στο οποίο παρουσιάστηκαν ρομποτικές εφαρμογές
Κατασκευή και προγραμματισμός ηλεκτρονικών μουσικών οργάνων
 Κατασκευή και προγραμματισμός ηλεκτρονικών μουσικών οργάνων Δραστηριότητα στο πλαίσιο του Ομίλου Προγραμματισμού Ηλεκτρονικών Παιχνιδιών, του Πρότυπου Πειραματικού Δημοτικού Σχολείου Φλώρινας κατά το σχολικό
Κατασκευή και προγραμματισμός ηλεκτρονικών μουσικών οργάνων Δραστηριότητα στο πλαίσιο του Ομίλου Προγραμματισμού Ηλεκτρονικών Παιχνιδιών, του Πρότυπου Πειραματικού Δημοτικού Σχολείου Φλώρινας κατά το σχολικό
Κεφάλαιο 1 Ε Π Α Ν Α Λ Η Ψ Η. Αρχές Δικτύων Επικοινωνιών
 Κεφάλαιο 1 Ε Π Α Ν Α Λ Η Ψ Η Αρχές Δικτύων Επικοινωνιών Τι είναι επικοινωνία; Είναι η διαδικασία αποστολής πληροφοριών από ένα πομπό σε κάποιο δέκτη. Η Τηλεπικοινωνία είναι η επικοινωνία από απόσταση (τηλε-).
Κεφάλαιο 1 Ε Π Α Ν Α Λ Η Ψ Η Αρχές Δικτύων Επικοινωνιών Τι είναι επικοινωνία; Είναι η διαδικασία αποστολής πληροφοριών από ένα πομπό σε κάποιο δέκτη. Η Τηλεπικοινωνία είναι η επικοινωνία από απόσταση (τηλε-).
1. Από ποια μέρη αποτελείται η περιστροφική αντλία πετρελαίου ; Πώς διανέμεται το καύσιμο στους διάφορους κυλίνδρους ;
 Απαντήσεις στο διαγώνισμα του 6 ου κεφαλαίου 1. Από ποια μέρη αποτελείται η περιστροφική αντλία πετρελαίου ; 197 1. τον κινητήριο άξονα ( περιστρέφεται με τις μισές στροφές του στροφάλου για 4-χρονο κινητήρα
Απαντήσεις στο διαγώνισμα του 6 ου κεφαλαίου 1. Από ποια μέρη αποτελείται η περιστροφική αντλία πετρελαίου ; 197 1. τον κινητήριο άξονα ( περιστρέφεται με τις μισές στροφές του στροφάλου για 4-χρονο κινητήρα
ΠΑΝΕΚΦE ΠΑΝΕΛΛΗΝΙΑ ΕΝΩΣΗ ΥΠΕΥΘΥΝΩΝ ΕΡΓΑΣΤΗΡΙΑΚΩΝ ΚΕΝΤΡΩΝ ΦΥΣΙΚΩΝ ΕΠΙΣΤΗΜΩΝ
 ΠΑΝΕΚΦE ΠΑΝΕΛΛΗΝΙΑ ΕΝΩΣΗ ΥΠΕΥΘΥΝΩΝ ΕΡΓΑΣΤΗΡΙΑΚΩΝ ΚΕΝΤΡΩΝ ΦΥΣΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΕΡΓΑΣΤΗΡΙΑΚΟ ΚΕΝΤΡΟ ΦΥΣΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΒΟΡΕΙΟΥ ΣΥΓΚΡΟΤΗΜΑΤΟΣ ΔΩΔΕΚΑΝΗΣΟΥ 17 η Ευρωπαϊκή Ολυμπιάδα Επιστημών EUSO 2019 Τοπικός Προκριματικός
ΠΑΝΕΚΦE ΠΑΝΕΛΛΗΝΙΑ ΕΝΩΣΗ ΥΠΕΥΘΥΝΩΝ ΕΡΓΑΣΤΗΡΙΑΚΩΝ ΚΕΝΤΡΩΝ ΦΥΣΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΕΡΓΑΣΤΗΡΙΑΚΟ ΚΕΝΤΡΟ ΦΥΣΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΒΟΡΕΙΟΥ ΣΥΓΚΡΟΤΗΜΑΤΟΣ ΔΩΔΕΚΑΝΗΣΟΥ 17 η Ευρωπαϊκή Ολυμπιάδα Επιστημών EUSO 2019 Τοπικός Προκριματικός
Υδρόμετρα. Συστήματα Ανάγνωσης Μετρητών από Απόσταση AMR
 Υδρόμετρα Συστήματα Ανάγνωσης Μετρητών από Απόσταση AMR Ο σχεδιασμός των Ηλεκτρονικών Προϊόντων μας Ανταγωνίζεται τις Καλύτερες Μάρκες του Κόσμου. Είναι προφανές ότι στη σημερινή αγορά τα υδρόμετρα αναμένεται
Υδρόμετρα Συστήματα Ανάγνωσης Μετρητών από Απόσταση AMR Ο σχεδιασμός των Ηλεκτρονικών Προϊόντων μας Ανταγωνίζεται τις Καλύτερες Μάρκες του Κόσμου. Είναι προφανές ότι στη σημερινή αγορά τα υδρόμετρα αναμένεται
Περιεχόμενα του Οδηγού Αναφοράς Pre CDR
 Περιεχόμενα του Οδηγού Αναφοράς Pre CDR Α. Εισαγωγικά στοιχεία. Η Συμμετοχή 2. Η Ομάδα 3. Βιογραφικά σημειώματα συμμετεχόντων 4. Οργανόγραμμα ομάδας 5. Ρόλοι μελών ομάδας B. Αναφορά σχεδίου. Περιγραφή
Περιεχόμενα του Οδηγού Αναφοράς Pre CDR Α. Εισαγωγικά στοιχεία. Η Συμμετοχή 2. Η Ομάδα 3. Βιογραφικά σημειώματα συμμετεχόντων 4. Οργανόγραμμα ομάδας 5. Ρόλοι μελών ομάδας B. Αναφορά σχεδίου. Περιγραφή
ΚΑΤΑΛΟΓΟΣ ΠΡΟΪΟΝΤΩΝ 2014
 ΚΑΤΑΛΟΓΟΣ ΠΡΟΪΟΝΤΩΝ 2014 POLYMECHANICS Μπενάκη 5 Πεύκα Θεσσαλονίκη Τηλ: +302315 318802 www.polymechanics.gr info@polymechanics.gr ΚΑΤΑΛΟΓΟΣ ΠΡΟΪΟΝΤΩΝ 2014 Σειρά καταγραφικών συστήµατων Ultima Πληροφορίες
ΚΑΤΑΛΟΓΟΣ ΠΡΟΪΟΝΤΩΝ 2014 POLYMECHANICS Μπενάκη 5 Πεύκα Θεσσαλονίκη Τηλ: +302315 318802 www.polymechanics.gr info@polymechanics.gr ΚΑΤΑΛΟΓΟΣ ΠΡΟΪΟΝΤΩΝ 2014 Σειρά καταγραφικών συστήµατων Ultima Πληροφορίες
 Register your product and get support at www.philips.com/welcome SDV6120/10 EL Εγχειρίδιο χρήσης Πίνακας περιεχομένων 1 Σημαντικό 4 Ασφάλεια 4 Ανακύκλωση 4 2 Το SDV6120 5 Επισκόπηση 5 3 Ξεκινώντας 6 Εγκατάσταση
Register your product and get support at www.philips.com/welcome SDV6120/10 EL Εγχειρίδιο χρήσης Πίνακας περιεχομένων 1 Σημαντικό 4 Ασφάλεια 4 Ανακύκλωση 4 2 Το SDV6120 5 Επισκόπηση 5 3 Ξεκινώντας 6 Εγκατάσταση
Ηλεκτρικές Ταλαντώσεις: Εξαναγκασμένη Ηλεκτρική Ταλάντωση
 Σκοπός της άσκησης Ηλεκτρικές Ταλαντώσεις: Εξαναγκασμένη Ηλεκτρική Ταλάντωση Να παρατηρήσουν οι μαθητές στην πράξη το φαινόμενο του συντονισμού στην εξαναγκασμένη ηλεκτρική ταλάντωση Να αντιληφθούν τον
Σκοπός της άσκησης Ηλεκτρικές Ταλαντώσεις: Εξαναγκασμένη Ηλεκτρική Ταλάντωση Να παρατηρήσουν οι μαθητές στην πράξη το φαινόμενο του συντονισμού στην εξαναγκασμένη ηλεκτρική ταλάντωση Να αντιληφθούν τον
ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ LIVETRIP TRAVELLER
 ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ LIVETRIP TRAVELLER Η εφαρμογή LiveTripTraveller διατίθεται για κινητά τηλέφωνα με λειτουργικό σύστημα Android. Στο υπο-ιστοσελίδα www.livetrips.com/sources μπορείτε να κατεβάσετε την εφαρμογή
ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ LIVETRIP TRAVELLER Η εφαρμογή LiveTripTraveller διατίθεται για κινητά τηλέφωνα με λειτουργικό σύστημα Android. Στο υπο-ιστοσελίδα www.livetrips.com/sources μπορείτε να κατεβάσετε την εφαρμογή
ΔΗΜΙΟΥΡΓΙΑ ΕΝΟΣ ΡΟΜΠΟΤ ΑΠΟ ΗΛΕΚΤΡΟΝΙΚΑ ΣΚΟΥΠΙΔΙΑ
 ΔΗΜΙΟΥΡΓΙΑ ΕΝΟΣ ΡΟΜΠΟΤ ΑΠΟ ΗΛΕΚΤΡΟΝΙΚΑ ΣΚΟΥΠΙΔΙΑ ΕΣΠΕΡΙΝΟ ΓΥΜΝΑΣΙΟ ΜΕ ΛΥΚΕΙΑΚΕΣ ΤΑΞΕΙΣ ΛΙΒΑΔΕΙΑΣ ΣΧΟΛΙΚΟ ΕΤΟΣ 2013 2014 Το πρόγραμμα εντάσσεται στη θεματολογία «Ανακύκλωση σκουπιδιών στα πλαίσια της περιβαλλοντικής
ΔΗΜΙΟΥΡΓΙΑ ΕΝΟΣ ΡΟΜΠΟΤ ΑΠΟ ΗΛΕΚΤΡΟΝΙΚΑ ΣΚΟΥΠΙΔΙΑ ΕΣΠΕΡΙΝΟ ΓΥΜΝΑΣΙΟ ΜΕ ΛΥΚΕΙΑΚΕΣ ΤΑΞΕΙΣ ΛΙΒΑΔΕΙΑΣ ΣΧΟΛΙΚΟ ΕΤΟΣ 2013 2014 Το πρόγραμμα εντάσσεται στη θεματολογία «Ανακύκλωση σκουπιδιών στα πλαίσια της περιβαλλοντικής
ΑΔΜΗΕ ΜΑΪΟΣ 2017 ΔΙΕΥΘΥΝΣΗ ΣΥΝΤΗΡΗΣΗΣ ΣΥΣΤΗΜΑΤΟΣ ΜΕΤΑΦΟΡΑΣ ΤΟΜΕΑΣ ΜΕΤΡΗΣΕΩΝ ΚΑΙ ΟΡΓΑΝΩΝ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΟΙ ΜΟΡΦΟΤΡΟΠΕΙΣ ΠΟΛΛΑΠΛΩΝ ΔΥΝΑΤΟΤΗΤΩΝ
 ΑΔΜΗΕ ΜΑΪΟΣ 2017 ΔΙΕΥΘΥΝΣΗ ΣΥΝΤΗΡΗΣΗΣ ΣΥΣΤΗΜΑΤΟΣ ΜΕΤΑΦΟΡΑΣ ΤΟΜΕΑΣ ΜΕΤΡΗΣΕΩΝ ΚΑΙ ΟΡΓΑΝΩΝ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΟΙ ΜΟΡΦΟΤΡΟΠΕΙΣ ΠΟΛΛΑΠΛΩΝ ΔΥΝΑΤΟΤΗΤΩΝ ΣΚΟΠΟΣ Η τεχνική αυτή περιγραφή αφορά τα τεχνικά χαρακτηριστικά
ΑΔΜΗΕ ΜΑΪΟΣ 2017 ΔΙΕΥΘΥΝΣΗ ΣΥΝΤΗΡΗΣΗΣ ΣΥΣΤΗΜΑΤΟΣ ΜΕΤΑΦΟΡΑΣ ΤΟΜΕΑΣ ΜΕΤΡΗΣΕΩΝ ΚΑΙ ΟΡΓΑΝΩΝ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΟΙ ΜΟΡΦΟΤΡΟΠΕΙΣ ΠΟΛΛΑΠΛΩΝ ΔΥΝΑΤΟΤΗΤΩΝ ΣΚΟΠΟΣ Η τεχνική αυτή περιγραφή αφορά τα τεχνικά χαρακτηριστικά
ΕΚΦΕ ΧΑΝΙΩΝ ΧΡΗΣΗ MULTILOG
 1 ΠΕΙΡΑΜΑΤΙΚΟΣ ΕΛΕΓΧΟΣ ΤΟΥ ΝΟΜΟΥ ΤΗΣ Η/Μ ΕΠΑΓΩΓΗΣ ΜΕ ΧΡΗΣΗ MULTILOG OΡΓΑΝΑ- ΥΛΙΚΑ Πηνία 300-600-1200-24000 σπειρών 2 ισχυροί ευθύγραμμοι μαγνήτες. Καλώδια συνδέσεων Σύστημα συγχρονικής λήψης και απεικόνισης
1 ΠΕΙΡΑΜΑΤΙΚΟΣ ΕΛΕΓΧΟΣ ΤΟΥ ΝΟΜΟΥ ΤΗΣ Η/Μ ΕΠΑΓΩΓΗΣ ΜΕ ΧΡΗΣΗ MULTILOG OΡΓΑΝΑ- ΥΛΙΚΑ Πηνία 300-600-1200-24000 σπειρών 2 ισχυροί ευθύγραμμοι μαγνήτες. Καλώδια συνδέσεων Σύστημα συγχρονικής λήψης και απεικόνισης
 Register your product and get support at www.philips.com/welcome SDV5120/10 EL Εγχειρίδιο χρήσης Πίνακας περιεχομένων 1 Σημαντικό 4 Ασφάλεια 4 Ανακύκλωση 4 Ελληνικά 2 Το SDV5120 5 Επισκόπηση 5 3 Ξεκινώντας
Register your product and get support at www.philips.com/welcome SDV5120/10 EL Εγχειρίδιο χρήσης Πίνακας περιεχομένων 1 Σημαντικό 4 Ασφάλεια 4 Ανακύκλωση 4 Ελληνικά 2 Το SDV5120 5 Επισκόπηση 5 3 Ξεκινώντας
Ενσωματωμένα Συστήματα
 Ενσωματωμένα Συστήματα Ενότητα: ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ARDUINO Δρ. Μηνάς Δασυγένης mdasyg@ieee.org Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών
Ενσωματωμένα Συστήματα Ενότητα: ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ARDUINO Δρ. Μηνάς Δασυγένης mdasyg@ieee.org Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών
Σύστημα Αυτόματης Ταυτοποίησης. AIS Automatic Identification System
 Σύστημα Αυτόματης Ταυτοποίησης AIS Automatic Identification System Ορισμός Απαίτηση από τον ΙΜΟ (international Maritime Organization) από το 2004 (για πλοία με χωρητικότητας μεγαλύτερη από 300 gt) Παρέχει
Σύστημα Αυτόματης Ταυτοποίησης AIS Automatic Identification System Ορισμός Απαίτηση από τον ΙΜΟ (international Maritime Organization) από το 2004 (για πλοία με χωρητικότητας μεγαλύτερη από 300 gt) Παρέχει
Προετοιµασία Οµάδων 13 Εκτόξευση & Βράβευση Οµάδων 16
 Οδηγίες Συμμετοχής Περιεχόμενα Εισαγωγή 3 Τι είναι το CanSat; 3 Η εκπαιδευτική αξία του CanSat 3 Επισκόπηση του Διαγωνισµού 4 Προκήρυξη 4 Επιλογή Oµάδων 5 CanSat Training Workshop 5 Προετοιµασία Οµάδων
Οδηγίες Συμμετοχής Περιεχόμενα Εισαγωγή 3 Τι είναι το CanSat; 3 Η εκπαιδευτική αξία του CanSat 3 Επισκόπηση του Διαγωνισµού 4 Προκήρυξη 4 Επιλογή Oµάδων 5 CanSat Training Workshop 5 Προετοιµασία Οµάδων
ΙΚΤΥΑ ΕΠΙΚΟΙΝΩΝΙΩΝ Ασκήσεις για το φυσικό στρώμα. λ από τον ρυθμό μετάδοσής της. Υποθέτοντας ότι ο κόμβος A
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ ΚΑΙ ΜΗΧ. ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΕΠΙΚΟΙΝΩΝΙΩΝ, ΗΛΕΚΤΡΟΝΙΚΗΣ ΚΑΙ ΣΥΣΤΗΜΑΤΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΙΚΤΥΑ ΕΠΙΚΟΙΝΩΝΙΩΝ Ασκήσεις για το φυσικό στρώμα 1. Στο δίκτυο
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ ΚΑΙ ΜΗΧ. ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΕΠΙΚΟΙΝΩΝΙΩΝ, ΗΛΕΚΤΡΟΝΙΚΗΣ ΚΑΙ ΣΥΣΤΗΜΑΤΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΙΚΤΥΑ ΕΠΙΚΟΙΝΩΝΙΩΝ Ασκήσεις για το φυσικό στρώμα 1. Στο δίκτυο