ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ. του Φοιτητή του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών
|
|
|
- Ἀλαλά Δράκος
- 7 χρόνια πριν
- Προβολές:
Transcript
1 ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ του Φοιτητή του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών ΧΡΗΣΤΟΥ ΧΡΗΣΤΟΥ ΠΑΠΑΣΤΑΥΡΟΥ Α.Μ.: ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΤΟΥ ΚΙΝΗΤΗΡΙΟΥ ΣΥΣΤΗΜΑΤΟΣ ΕΝΟΣ ΗΛΕΚΤΡΟΚΙΝΗΤΟΥ ΔΙΚΥΚΛΟΥ Επιβλέπων: Επαμεινώνδας Μητρονίκας, Επίκουρος Καθηγητής Ν ο /2018 Πάτρα, Μάρτιος 2018
2 Πανεπιστήμιο Πατρών, Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Χρήστος Παπασταύρος 2018 Με την επιφύλαξη παντός δικαιώματος Το σύνολο της εργασίας αποτελεί πρωτότυπο έργο, παραχθέν από το Χρήστο Παπασταύρο και δεν παραβιάζει δικαιώματα τρίτων καθ οιονδήποτε τρόπο. Υλικό που περιέχεται στην εργασία, το οποίο δεν έχει παραχθεί από τον ίδιο, είναι ευδιάκριτο και αναφέρεται ρητώς εντός του κειμένου της εργασίας ως προϊόν εργασίας τρίτου, σημειώνοντας με παρομοίως σαφή τρόπο τα στοιχεία ταυτοποίησης του, ενώ παράλληλα βεβαιώνεται πως στην περίπτωση χρήσης αυτούσιων γραφικών αναπαραστάσεων, εικόνων, γραφημάτων κλπ., ο συγγραφέας έχει λάβει τη χωρίς περιορισμούς άδεια του κατόχου των πνευματικών δικαιωμάτων για τη συμπερίληψη κι επακόλουθη δημοσίευση του υλικού αυτού.
3 ~ ii ~
4 ΠΙΣΤΟΠΟΙΗΣΗ Πιστοποιείται ότι η διπλωματική εργασία με θέμα: "ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΤΟΥ ΚΙΝΗΤΗΡΙΟΥ ΣΥΣΤΗΜΑΤΟΣ ΕΝΟΣ ΗΛΕΚΤΡΟΚΙΝΗΤΟΥ ΔΙΚΥΚΛΟΥ" του φοιτητή του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών: ΧΡΗΣΤΟΥ ΧΡΗΣΤΟΥ ΠΑΠΑΣΤΑΥΡΟΥ (Α.Μ ) Παρουσιάστηκε δημόσια και εξετάστηκε στο Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών στις 2/3/2018 Ο Επιβλέπων Η διευθύντρια του Τομέα Επαμεινώνδας Μητρονίκας Επίκουρος Καθηγητής Ελευθερία Πυργιώτη Αναπληρώτρια Καθηγήτρια ~ iii ~
5 ~ iv ~
6 Πρόλογος Αριθμός Διπλωματικής Εργασίας: /2018 ΤΙΤΛΟΣ: "ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΤΟΥ ΚΙΝΗΤΗΡΙΟΥ ΣΥΣΤΗΜΑΤΟΣ ΕΝΟΣ ΗΛΕΚΤΡΟΚΙΝΗΤΟΥ ΔΙΚΥΚΛΟΥ" Φοιτητής: Επιβλέπων: Παπασταύρος Χρήστος του Χρήστου Επαμεινώνδας Μητρονίκας, Επίκουρος Καθηγητής Περίληψη Η παρούσα διπλωματική εργασία, η οποία εκπονήθηκε στο Εργαστήριο Ηλεκτρομηχανικής Μετατροπής Ενέργειας του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών, πραγματεύεται την κατασκευή του κινητηρίου συστήματος ενός ηλεκτροκίνητου δίκυκλου. Σκοπός είναι η κατασκευή του τριφασικού αντιστροφέα τάσης και η ενσωμάτωση του ελέγχου σε αυτόν. Αρχικά, γίνεται μια αναδρομή στην ιστορία της ηλεκτροκίνησης, συγκεκριμένα στη λειτουργία των ηλεκτρικών δίκυκλων και αναλύονται οι κατηγορίες στις οποίες αυτά χωρίζονται. Στη συνέχεια, περιγράφεται συνοπτικά η λειτουργία των σύγχρονων κινητήρων, παρατίθενται οι κατηγορίες στις οποίες διακρίνονται καθώς και τα κριτήρια διάκρισης, ενώ αναλύεται η λειτουργία των κινητήρων Brushless DC (BLDC) και Brushless AC (BLAC). Ακολούθως, μελετάται θεωρητικά η λειτουργία των τριφασικών αντιστροφέων τάσης και αναλύεται ο προς κατασκευή αντιστροφέας που θα οδηγήσει τον κινητήρα του ποδηλάτου. Κατόπιν, παρατίθενται τα αποτελέσματα που προέκυψαν από την προσομοίωση του κινητηρίου συστήματος και του ενσωματωμένου σε αυτό ελέγχου μέσω του λογισμικού προσομοίωσης κυκλωμάτων Simulink του Matlab. Στη συνέχεια, περιγράφεται η κατασκευή του τριφασικού αντιστροφέα τάσης, τα εξαρτήματα που τον αποτελούν και δίνονται τα κριτήρια με τα οποία αυτά τα στοιχεία επιλέχθηκαν. Ακολουθεί μια σύντομη περιγραφή του μικροελεγκτή που χρησιμοποιήθηκε, των δυνατοτήτων που προσφέρει, καθώς και της λογικής ελέγχου που υλοποιεί. Τέλος, παρατίθενται οι πειραματικές μετρήσεις σε μορφή παλμογραφημάτων και τα συμπεράσματα σχετικά με τη λειτουργία του κινητηρίου συστήματος. ~ v ~
7 Πρόλογος ΠΡΟΛΟΓΟΣ Η παρούσα εργασία υλοποιήθηκε στα πλαίσια της διπλωματικής εργασίας του φοιτητή Χρήστου Παπασταύρου, υπό την επίβλεψη του Επίκουρου Καθηγητή Μητρονίκα Επαμεινώνδα. Εκπονήθηκε στο Εργαστήριο Ηλεκτρομηχανικής Μετατροπής Ενέργειας του τμήματος Ηλεκτρολόγων Μηχανικών & Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών και πραγματεύεται την κατασκευή του κινητήριου συστήματος ενός ηλεκτρικού δίκυκλου και συγκεκριμένα ενός ηλεκτρικού ποδηλάτου. Σκοπός είναι η κατασκευή του τριφασικού αντιστροφέα τάσης που θα οδηγεί τον κινητήρα Brushless DC (BLDC), ο οποίος είναι ενσωματωμένος στο εν λόγω ηλεκτρικό ποδήλατο. Αναλυτικά, στο Κεφάλαιο 1, γίνεται μια σύντομη αναδρομή στην ιστορία της ηλεκτροκίνησης, συμπεριλαμβανομένου του ηλεκτρικού ποδηλάτου και αναλύονται οι κατηγορίες στις οποίες διακρίνονται τα ηλεκτρικά ποδήλατα. Στο Κεφάλαιο 2, περιγράφεται ο σύγχρονος κινητήρας μόνιμου μαγνήτη Brushless DC (BLDC) και Brushless AC (BLAC). Συγκεκριμένα, περιγράφεται η αρχή λειτουργίας των σύγχρονων κινητήρων και αναλύονται οι κατηγορίες στις οποίες αυτοί διακρίνονται ανάλογα με τα κατασκευαστικά τους χαρακτηριστικά. Στο Κεφάλαιο 3, μελετώνται οι μετατροπείς ισχύος και αναλύονται οι τριφασικοί αντιστροφείς τάσης. Περιγράφονται δύο τεχνικές ελέγχου των τριφασικών αντιστροφέων, με πρώτη τη χρήση τετραγωνικών παλμών και με δεύτερη την ημιτινοειδή διαμόρφωση του εύρους των παλμών (SPWM). Τέλος αναλύεται η μέθοδος που χρησιμοποιήθηκε στον τριφασικό αντιστροφέα της κατασκευής. Στο Κεφάλαιο 4, παρατίθενται τα αποτελέσματα της προσομοίωσης του κινητηρίου συστήματος μέσω του προγράμματος Matlab και συγκεκριμένα μέσω του λογισμικού προσομοίωσης κυκλωμάτων Simulink. Συγκεκριμένα δίνονται οι παλμογραφήσεις του ρεύματος, της ηλεκτρομαγνητικής ροπής, της μαγνητικής ροής διακένου και της ταχύτητας του κινητήρα για λειτουργία υπό διαφορετική φόρτιση στον άξονα του. ~ vi ~
8 Πρόλογος Στο Κεφάλαιο 5, περιγράφεται η κατασκευή του τριφασικού αντιστροφέα τάσης. Αναλυτικότερα, παρουσιάζονται τα επιμέρους κυκλώματα, που τον απαρτίζουν, τα οποία είναι το κύκλωμα ισχύος, το κύκλωμα παλμοδότησης, το κύκλωμα ελέγχου και τα τροφοδοτικά συνεχούς τάσης. Στο Κεφάλαιο 6, δίνεται μία σύντομη περιγραφή του μικροελεγκτή STM32F405RG,που χρησιμοποιήθηκε για την παραγωγή των παλμών έναυσης των ημιαγωγικών διακοπτικών στοιχείων, των δυνατοτήτων του και των περιφερειακών που ενσωματώνει. Αναλύονται τα περιφερειακά τα οποία χρησιμοποιήθηκαν για τον έλεγχο του αντιστροφέα, και είναι: οι Γεννήτριες PWM, οι Μονάδες Μετατροπής Σήματος από Αναλογικό σε Ψηφιακό (ADC), οι Θύρες Εισόδου-Εξόδου (GPIO) και οι χρονιστές. Στο Κεφάλαιο 7, παρατίθενται οι πειραματικές μετρήσεις με τη μορφή κυματομορφών, που ελήφθησαν από τον παλμογράφο. Για την εξακρίβωση της ορθής λειτουργίας του αντιστροφέα, ελήφθησαν μετρήσεις τόσο για τη λειτουργία ανοιχτού βρόχου όσο και για κλειστού. Στο Κεφάλαιο 8, δίνονται τα συμπεράσματα που προκύπτουν από τη λειτουργία του αντιστροφέα μαζί με κάποιες παρατηρήσεις. Τέλος, καταγράφεται η βιβλιογραφία και η βιβλιογραφία των εικόνων που χρησιμοποιήθηκαν για τη συγγραφή της παρούσας διπλωματικής εργασίας και στα Παραρτήματα δίνονται τα σχέδια των τυπωμένων κυκλωμάτων, οι φωτογραφίες της κατασκευής, καθώς και τα τεχνικά φυλλάδια των κατασκευαστών από τα σημαντικότερα στοιχεία που χρησιμοποιήθηκαν. Σε αυτό το σημείο θέλω να ευχαριστήσω θερμά τον επιβλέποντα της διπλωματικής μου εργασίας, Επίκουρο καθηγητή κ. Μητρονίκα Επαμεινώνδα για την ανάθεση αυτού του θέματος και τη συνεργασία. Επιπλέον, θα ήθελα να εκφράσω τις θερμές μου ευχαριστίες στον υποψήφιο Διδάκτορα κ. Παπαθανασόπουλο Δημήτριο, ο οποίος βοήθησε σημαντικά στην υλοποίηση αυτής της εργασίας με τις γνώσεις του και τις καίριες συμβουλές του, καθ όλη τη διάρκεια της προσπάθειας μου. Ακόμα, ευχαριστώ τον προπτυχιακό φοιτητή Άλεξ Μίρτσεβ, που μου έδωσε την προσομοίωση του ελέγχου ροπής στα πλαίσια της ~ vii ~
9 Πρόλογος διπλωματικής του εργασίας με τίτλο: «ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΤΡΙΦΑΣΙΚΟΥ ΑΝΤΙΣΤΡΟΦΕΑ ΤΑΣΗΣ ΓΙΑ ΤΟΝ ΕΛΕΓΧΟ ΣΥΓΧΡΟΝΟΥ ΚΙΝΗΤΗΡΑ ΜΟΝΙΜΟΥ ΜΑΓΝΗΤΗ ΕΝΟΣ ΗΛΕΚΤΡΟΚΙΝΗΤΟΥ ΟΧΗΜΑΤΟΣ» την οποία βελτίωσα, προσάρμοσα στις ανάγκες του συστήματος μου και τελικά μετέτρεψα σ έλεγχο ταχύτητας. Επίσης, θα ήθελα να ευχαριστήσω τον κ. Πέτρου Κώστα, ο οποίος ετοίμασε το τυπωμένο κύκλωμα του αντιστροφέα βάσει των σχεδίων μου. Τέλος θα ήθελα να ευχαριστήσω την οικογένεια μου και τους φίλους μου για την υποστήριξη και την υπομονή τους κατά τη διάρκεια αυτού του απαιτητικού εγχειρήματος. ~ viii ~
10 ΠΕΡΙΕΧΟΜΕΝΑ ΚΕΦΑΛΑΙΟ ΗΛΕΚΤΡΟΚΙΝΗΣΗ Εισαγωγή Ιστορική αναδρομή Ηλεκτρικό ποδήλατο Κατηγορίες ηλεκτρικών ποδηλάτων Το ποδήλατο της παρούσας διπλωματικής... 7 ΚΕΦΑΛΑΙΟ ΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ ΜΟΝΙΜΟΥ ΜΑΓΝΗΤΗ Κατηγορίες σύγχρονων κινητήρων Σύγχρονοι κινητήρες μόνιμου μαγνήτη Κατηγορίες κινητήρων μόνιμου μαγνήτη Ανάλυση αρχής λειτουργίας κινητήρα BLDC Αρχή λειτουργίας αισθητήρων Hall Διαστήματα αγωγής τυλιγμάτων και οι μεταβάσεις τους Βασικές εξισώσεις τραπεζοειδούς κινητήρα BLDC Βασικές εξισώσεις ημιτονοειδούς κινητήρα BLAC Πλεονεκτήματα και μειονεκτήματα κινητήρων μόνιμου μαγνήτη ΚΕΦΑΛΑΙΟ ΤΡΙΦΑΣΙΚΟΙ ΑΝΤΙΣΤΡΟΦΕΙΣ ΤΑΣΗΣ Κατηγορίες ηλεκτρονικών μετατροπέων ισχύος Αντιστροφείς τάσης Έλεγχος τριφασικού αντιστροφέα με τετραγωνικούς παλμούς Έλεγχος τριφασικού αντιστροφέα με διαμόρφωση του εύρους των παλμών Ημιτονοειδής διαμόρφωση του εύρους των παλμών Οδήγηση σύγχρονου κινητήρα με μόνιμους μαγνήτες από τριφασικό αντιστροφέα ΚΕΦΑΛΑΙΟ ΠΡΟΣΟΜΟΙΩΣΗ ΤΡΙΦΑΣΙΚΟΥ ΑΝΤΙΣΤΡΟΦΕΑ Προσομοίωση συστήματος στο εργαλείο Simulink Αποτελέσματα προσομοίωσης για φορτίο στον άξονα Τ=15 Nm ~ ix ~
11 4.3. Αποτελέσματα προσομοίωσης για φορτίο στον άξονα Τ=10 Nm Συμπεράσματα ΚΕΦΑΛΑΙΟ ΣΧΕΔΙΑΣΜΟΣ ΤΡΙΦΑΣΙΚΟΥ ΑΝΤΙΣΤΡΟΦΕΑ Γενική περιγραφή τριφασικού αντιστροφέα τάσης Κύκλωμα ισχύος Ημιαγωγικά διακοπτικά στοιχεία Δίοδοι ελεύθερης διέλευσης Ψυκτικά σώματα Πυκνωτές Κύκλωμα παλμοδότησης Ενισχυτής Οπτοζεύκτης Οδηγός πύλης Κύκλωμα ελέγχου Σήματα ελέγχου Μετρητικά ρεύματος και τάσης Μικροελεγκτής Τροφοδοτικά συνεχούς τάσης ΚΕΦΑΛΑΙΟ ΠΑΛΜΟΔΟΤΗΣΗ ΤΡΙΦΑΣΙΚΟΥ ΑΝΤΙΣΤΡΟΦΕΑ ΤΑΣΗΣ Μικροελεγκτές Περιγραφή του μικροελεγκτή STM32F405RG Περιφερειακές μονάδες του STM32F405RG Χρονιστές Ψηφιακές θύρες εισόδου-εξόδου Μετατροπείς σήματος από αναλογικό σε ψηφιακό Αναπτυξιακά εργαλεία μικροελεγκτή Atollic TrueSTUDIO ST-Link Ανάλυση προγράμματος ελέγχου αντιστροφέα Πίνακες ακίδων με τη λειτουργία τους Έλεγχος ανοικτού βρόχου ~ x ~
12 Έλεγχος κλειστού βρόχου ΚΕΦΑΛΑΙΟ ΠΕΙΡΑΜΑΤΙΚΕΣ ΜΕΤΡΗΣΕΙΣ Πειραματικές μετρήσεις Παλμογραφήματα ανοιχτού βρόχου Παλμοραφήματα για λειτουργία με λόγο κατάτμησης 50% Παλμογραφήματα για λειτουργία με λόγο κατάτμησης 100% Παλμογραφήματα κλειστού βρόχου ΚΕΦΑΛΑΙΟ ΣΥΜΠΕΡΑΣΜΑΤΑ Λειτουργία αντιστροφέα ΒΙΒΛΙΟΓΡΑΦΙΑ ΠΑΡΑΡΤΗΜΑ Α ΣΧΕΔΙΑ ΤΥΠΩΜΕΝΟΥ ΚΥΚΛΩΜΑΤΟΣ ΠΑΡΑΡΤΗΜΑ Β ΦΩΤΟΓΡΑΦΙΕΣ ΚΑΤΑΣΚΕΥΗΣ ΠΑΡΑΡΤΗΜΑ Γ ΤΕΧΝΙΚΑ ΦΥΛΛΑΔΙΑ ΚΑΤΑΣΚΕΥΑΣΤΩΝ ~ xi ~
13 ~ xii ~

14 ΚΕΦΑΛΑΙΟ 1 ΗΛΕΚΤΡΟΚΙΝΗΣΗ 1.1. Εισαγωγή Τα τελευταία δέκα χρόνια σημειώθηκε κατακόρυφη αύξηση σε παγκόσμιο επίπεδο των παραγόμενων ηλεκτρικών αυτοκινήτων, για λόγους που συνδέονται με την αύξηση της τιμής του πετρελαίου παγκοσμίως, με τη προσπάθεια μείωσης της ρύπανσης του περιβάλλοντος και των αερίων που επιδεινώνουν το φαινόμενο του θερμοκηπίου, αλλά κυρίως για τεχνικούς λόγους. Ένας από τους βασικότερους τεχνικούς λόγους, που έχουν καταστήσει τα ηλεκτρικά αυτοκίνητα ευρύτερα χρησιμοποιούμενα, είναι η αλματώδης πρόοδος που έχει σημειωθεί στη τεχνολογία των συσσωρευτών (μπαταρίες). Πλέον, έχει επιτευχθεί οι μπαταρίες να χαρακτηρίζονται από μεγάλη πυκνότητα ενέργειας (Wh/kg) και έτσι να είναι κατάλληλες να καλύψουν τις ανάγκες για μεταφορά σε μεγαλύτερες χιλιομετρικές αποστάσεις απ ότι παλαιότερα. Ωστόσο, σημειώνεται αύξηση και στη χρήση άλλων ηλεκτρικών οχημάτων, πέραν των αυτοκινήτων, όπως είναι τα ηλεκτρικά ποδήλατα. Οι λόγοι όπως και στα ηλεκτρικά οχήματα συνδέονται άμεσα με την πρόοδο της τεχνολογίας των συσσωρευτών. Σ αντίθεση, ωστόσο, με τα αυτοκίνητα, τα ηλεκτρικά ποδήλατα είναι πολύ πιο φιλικά σε τιμή και συνεπώς πιο δελεαστικά για το ευρύ κοινό. Είναι εξαιρετικά ευέλικτα, κάτι που τα καθιστά κατάλληλα για καθημερινή χρήση σε αστικό περιβάλλον Ιστορική αναδρομή Πρώτα ηλεκτρικά οχήματα Τα πρώτα ηλεκτρικά οχήματα έκαναν την εμφάνιση τους στα μέσα του 19 ου αιώνα [1], όμως η μικρή πυκνότητα ενέργειας των συσσωρευτών που χρησιμοποιούνταν τότε, απέτρεψε την ευρεία χρήση τους. Η πρόοδος στον τομέα των συσσωρευτών περί το 1880, οδήγησε τελικά στη μαζική παραγωγή ηλεκτρικών αυτοκινήτων το 1884 στο Λονδίνο (σχ. 1.1). Σημειώνεται πως είχε ήδη εμφανιστεί το ηλεκτρικό τραμ στη Ρωσία το 1880 [2], ηλεκτροδοτούμενο, βέβαια, από τις γραμμές επί των οποίων κινούταν και όχι από συσσωρευτές (σχ. 1.2). Παράλληλα, είχαν παρουσιαστεί και μερικά πρωτότυπα ηλεκτρικών δίκυκλων, τα οποία δεν έτυχαν αποδοχής. Σχήμα 1.1: Ηλεκτρικό αμάξι, 1895 [3] -1-

15 Χρυσή εποχή Στις αρχές του 20 ου αιώνα, όταν οι μηχανές εσωτερικής καύσης δεν ήταν η πρώτη επιλογή κινητήριων συστημάτων, τα ηλεκτρικά αυτοκίνητα χρησιμοποιούνταν για ιδιωτική χρήση, από μια μερίδα εύπορων ανθρώπων παγκοσμίως. Παρά τα μειονεκτήματα που παρουσίαζαν, τόσο όσον αφορά την αυτονομία τους, όσο και το κόστος τους, αλλά και το γεγονός ότι το δίκτυο ηλεκτροδότησης ήταν συρρικνωμένο ακόμη, τα ηλεκτρικά αυτοκίνητα υπερείχαν των αντίστοιχων αυτοκινήτων με μηχανή εσωτερικής καύσης. Υπερείχαν στο ότι ήταν πιο απλά στην οδήγηση τους, δε χρειαζόταν χειροκίνητη εκκίνηση τους (μανιβέλα), δεν είχαν κιβώτιο ταχυτήτων, και δεν συνοδεύονταν από τις δονήσεις και τις δυσάρεστες οσμές των βενζινοκίνητων αυτοκινήτων. Συρρίκνωση της βιομηχανίας ηλεκτρικών αυτοκινήτων Το απόγειο των πωλήσεων των ηλεκτρικών αυτοκινήτων ήταν περί το 1910, από το οποίο έτος και μετά άρχισαν να κυριαρχούν τα αυτοκίνητα με μηχανές εσωτερικής καύσης. Η εναλλαγή της κυριαρχίας οφείλεται σε αρκετούς παράγοντες, που σχετίζονται με την εφεύρεση του ηλεκτρικού εκκινητήρα (μίζα), εφεύρεση που αντικατέστησε τη χρήση μανιβέλας για την εκκίνηση του αυτοκινήτου, και κυρίως τη μεγαλύτερη αυτονομία που είχαν τα βενζινοκίνητα οχήματα. Τέλος, καθοριστική ήταν η δημιουργία βελτιωμένου οδικού δικτύου, καθώς πλέον ευνοούνταν τα ταξίδια σε μεγάλες αποστάσεις. Μέχρι το 1920 οι περισσότεροι κατασκευαστές ηλεκτρικών αυτοκινήτων είχαν σταματήσει την παραγωγή τους. Ωστόσο, ηλεκτρικά οχήματα είχαν ήδη εδραιωθεί ως μέσα μεταφοράς (τραίνα, τραμ, μετρό) και συνεχίζουν να εξυπηρετούν το κοινό μέχρι και σήμερα. Σχήμα 1.2: Ηλεκτρικό τραμ στο Βερολίνο, 1882 [4] -2-
 που οδηγήθηκε στην επιφάνεια του φεγγαριού στις 31 Ιουλίου του 1971.")
16 Αναθέρμανση ενδιαφέροντος Στις αρχές του 1960, έγιναν κάποιες προσπάθειες για μαζική παραγωγή ηλεκτρικών αυτοκινήτων, οι οποίες όμως ναυάγησαν και υπήρξε μονάχα παραγωγή μικρής κλίμακας ορισμένων εξ αυτών. Εμφανίστηκαν αρκετά πρωτότυπα σχέδια, με πιο σημαντικό τα πρώτο επανδρωμένο buggy (σχ. 1.3) που οδηγήθηκε στην επιφάνεια του φεγγαριού στις 31 Ιουλίου του Επρόκειτο για ένα όχημα του οποίου το κινητήριο σύστημα αποτελούταν από μια μηχανή συνεχούς ρεύματος για κάθε τροχό, τροφοδοτούμενη από ένα ζευγάρι μπαταριών των 36V. Σχήμα 1.3: Ηλεκτρικό Buggy στην επιφάνεια του φεγγαριού [5] Οι μετέπειτα παγκόσμιες ενεργειακές κρίσεις και οι διακυμάνσεις στην τιμή των υδρογονανθράκων, οδήγησαν σε περαιτέρω εντατικοποίηση των προσπαθειών για την παραγωγή ηλεκτρικών οχημάτων. Η Αμερικάνικη εταιρεία General Motors (GM) δημιούργησε ένα πρωτότυπο ηλεκτρικό όχημα το 1976 και το 1990 ανακοίνωσε ότι σκόπευε να ξεκινήσει τη μαζική παραγωγή ηλεκτρικών αυτοκινήτων. Στις αρχές της δεκαετίας του 1990, στην Καλιφόρνια της Αμερικής, έγιναν νομικές ενέργειες από την Κυβέρνηση της, που πίεζαν τους κατασκευαστές μη ηλεκτρικών αυτοκινήτων, να μειώσουν βαθμιαία τους ρύπους που εξέπεμπαν τα παραγόμενα αυτοκίνητα με τελικό σκοπό να εκπέμπουν μηδενικούς ρύπους (zero-emissions vehicles). Οι κατασκευαστές, φαινομενικά, συμβιβάστηκαν με τις επιταγές της κυβέρνησης της Καλιφόρνια και προχώρησαν στην παραγωγή ηλεκτρικών οχημάτων (σχ. 1.4), τα οποία, όμως, δεν προωθούσαν επαρκώς στους καταναλωτές. Έτσι, δόθηκε η εσφαλμένη εντύπωση ότι το αγοραστικό κοινό δεν ενδιαφερόταν για τα ηλεκτρικά αυτοκίνητα. Τελικά, οι κατασκευαστές κινήθηκαν νομικά εναντίον της κυβέρνησης της Καλιφόρνια, δικαιώθηκαν στις αποφάσεις του δικαστηρίου και συνέχισαν απρόσκοπτα την παραγωγή αυτοκινήτων με υψηλές εκπομπές ρύπων. -3-

, με την πρώτη παραγγελία να ολοκληρώνεται το 2008.")
17 Σχήμα 1.4: Ένα από τα πρώτα ηλεκτρικά αυτοκίνητα που παρήχθησαν μετά τις πιέσεις για λιγότερο ρυπογόνα οχήματα, το Honda EV plus [6] Ηλεκτρικά αυτοκίνητα μεγάλης αυτονομίας Το 2004 η κατασκευάστρια εταιρεία Tesla Motors με έδρα την Καλιφόρνια, ξεκίνησε την παραγωγή του ηλεκτρικού αυτοκινήτου της Tesla Roadster (σχ. 1.5), με την πρώτη παραγγελία να ολοκληρώνεται το Ήταν το πρώτο αυτοκίνητο που μπορούσε νομίμως να κινηθεί σε εθνικές οδούς, καθώς και το πρώτο που μπορούσε να διανύσει 320 χιλιόμετρα με μία μόνο φόρτιση των επαναφορτιζόμενων συσσωρευτών ιόντων λιθίου του. Σχήμα 1.5: Tesla Roadster [7] -4-
. Σχήμα 1.")
![6: Ετήσιες πωλήσεις ηλεκτρικών αυτοκινήτων ανά τον κόσμο από το 2011 μέχρι το 2016 [8] 1.3.](/docs-images/81/83809274/images/18-1.jpg "Ηλεκτρικό ποδήλατο Παράλληλα με την επέκταση της αγοράς των ηλεκτρικών αυτοκινήτων, η αγορά των ηλεκτρικών δίκυκλων σημειώνει ανάλογη μεγέθυνση.")
18 Το εν λόγω ηλεκτρικό αυτοκίνητο ξεκίνησε μια επανάσταση στο χώρο της ηλεκτροκίνησης και ως εκ τούτου, ολοένα και περισσότεροι κατασκευαστές μπήκαν στην αγορά του ηλεκτρικού αυτοκινήτου. Σήμερα, πλέον, τα ηλεκτρικά αυτοκίνητα καταλαμβάνουν ολοένα και μεγαλύτερο μερίδιο της αγοράς και οι πωλήσεις τους αυξάνονται αλματωδώς (σχ. 1.6). Σχήμα 1.6: Ετήσιες πωλήσεις ηλεκτρικών αυτοκινήτων ανά τον κόσμο από το 2011 μέχρι το 2016 [8] 1.3. Ηλεκτρικό ποδήλατο Παράλληλα με την επέκταση της αγοράς των ηλεκτρικών αυτοκινήτων, η αγορά των ηλεκτρικών δίκυκλων σημειώνει ανάλογη μεγέθυνση. Ιδιαίτερα με τη βελτίωση των μπαταριών που χρησιμοποιούνται σήμερα, οι οποίες είναι πιο ελαφριές και ταυτόχρονα προσφέρουν μεγαλύτερη αυτονομία, τα ηλεκτρικά ποδήλατα αποτελούν μια οικονομική λύση για όχημα πόλης. Ειδικά σε χώρες των οποίων η υποδομή περιλαμβάνει ποδηλατοδρόμους, όπως για παράδειγμα η Ολλανδία, πολλοί κάτοικοι μεταβαίνουν από τα συμβατικά στα ηλεκτρικά ποδήλατα. Στο σχήμα 1.7 φαίνεται ένα διάγραμμα που φανερώνει την τάση της αγοράς ηλεκτρικών ποδηλάτων. Σχήμα 1.7: Πωλήσεις ηλεκτρικών ποδηλάτων [9] -5-
19 1.4. Κατηγορίες ηλεκτρικών ποδηλάτων Το βασικό κριτήριο με το οποίο, ιδανικά, θα γινόταν η κατηγοριοποίηση είναι η ισχύς του ενσωματωμένου στο δίκυκλο ηλεκτρικού κινητήρα. Ανάλογα την ισχύ του, και το πως αυτή αποδίδεται στο δίκυκλο, τα δίκυκλα διακρίνονται σε ηλεκτρικά ποδήλατα, σε ηλεκτρικά μοτοποδήλατα και σε ηλεκτρικές μοτοσυκλέτες. Η κατηγοριοποίηση των ηλεκτρικών ποδηλάτων, όμως, αποτελεί σύνθετο έργο, καθώς εμπλέκονται και νομικοί παράγοντες [10] όσον αφορά το πότε ένα δίκυκλο κατατάσσεται σε μία από τις παραπάνω κατηγορίες. Από τη στιγμή που εμπλέκεται ο νομικός παράγοντας, η κατάσταση περιπλέκεται, αφού η νομοθεσία από χώρα σε χώρα διαφοροποιείται ή ακόμη διαφοροποιείται και κατά τόπους εντός της ίδιας χώρας. Ένα διαφορετικό κριτήριο, που βοηθάει στην κατηγοριοποίηση των ηλεκτρικών δικύκλων, είναι το κατά πόσον ο κινητήρας του ηλεκτρικού δίκυκλου υποβοηθά τον αναβάτη όσο αυτός κάνει πετάλι, ή δίνει κίνηση κατ απαίτηση. Στη συνέχεια δίνονται οι τρεις κατηγορίες στις οποίες διακρίνονται τα ηλεκτρικά δίκυκλα σύμφωνα με το ανωτέρω κριτήριο. Pedal-assist Ο αναβάτης όσο κάνει πετάλι (σχ. 1.8) δέχεται υποβοήθηση από τον ηλεκτρικό κινητήρα, ανάλογα με την ένταση με την οποία κάνει πετάλι, μειώνοντας έτσι το μηχανικό έργο που χρειάζεται να καταβληθεί προκειμένου να κινηθεί το ποδήλατο. Οι κινητήρες που χρησιμοποιούνται σε τέτοιου είδους δίκυκλα είναι μικρής ισχύος και συνήθως δεν ξεπερνούν τα 200W, ενώ η τελική ταχύτητα σπάνια ξεπερνά τα 25 km/h. Τα δίκυκλα, που δεν ξεπερνούν τα προαναφερθέντα όρια, συγκαταλέγονται στα ηλεκτρικά ποδήλατα, ενώ σε αντίθετη περίπτωση στα ηλεκτρικά μοτοποδήλατα ή στις ηλεκτρικές μοτοσυκλέτες (σε περίπτωση που η τελική ταχύτητα ξεπερνά τα 45 km/h). Συχνά τα δίκυκλα που εμπίπτουν στην κατηγορία pedal-assist ονομάζονται pedelecs (pedal electric cycle) ενώ τα πιο ισχυρά ονομάζονται S-pedelecs (Speed-pedal electric cycle). Σχήμα 1.8: Σχηματικό ενός pedelec Power-on-demand Στη λειτουργία αυτή ο αναβάτης κατ απαίτηση μέσω του ηλεκτρικού γκαζιού (σχ. 1.9), που υπάρχει στο τιμόνι του δίκυκλου, θέτει σ εφαρμογή τη λειτουργία του ηλεκτρικού κινητήρα. Ανάλογα με την απαίτηση σε γκάζι ρυθμίζεται και η ταχύτητα του κινητήρα. Παράλληλα, ο αναβάτης μπορεί να κάνει πετάλι, με τη διαφορά ότι δεν καθορίζεται η -6-

20 ταχύτητα του κινητήρα από την ταχύτητα περιστροφής του πεταλιού, όπως γινόταν στην περίπτωση pedal-assist. Τα ηλεκτρικά δίκυκλα, που λειτουργούν με βάση αυτό το σύστημα, συνήθως κατηγοριοποιούνται ως ηλεκτρικές μοτοσυκλέτες και μοτοποδήλατα, σύμφωνα πάντα με την κατά τόπους νομοθεσία, η οποία καθορίζει το όριο ισχύος κάθε κατηγορίας. Σχήμα 1.9: Σχηματικό ενός power-on-demand δίκυκλου [12] Power-on-demand και pedal-assist Η τελευταία κατηγορία πρόκειται στην ουσία για το συνδυασμό των δύο προηγούμενων κατηγοριών, αφού ο αναβάτης έχει τη δυνατότητα να χειρίζεται το δίκυκλο τόσο μέσω του γκαζιού, όσο και μέσω του πόσο γρήγορα κάνει πετάλι. Συνήθως υπάρχει ένας αισθητήρας στα πετάλια του δίκυκλου, που ανιχνεύει την περιστροφή και την ταχύτητα της, ο οποίος μόλις ανιχνεύσει περιστροφή, αλλάζει τη λειτουργία από «power-on-demand» σε «pedal-assist». Συνήθως αυτά τα δίκυκλα εμπίπτουν στην κατηγορία των ηλεκτρικών μοτοσυκλετών ή των μοτοποδηλάτων Το ποδήλατο της παρούσας διπλωματικής Το ποδήλατο που χρησιμοποιήθηκε και για το οποίο κατασκευάστηκε ο ελεγκτής φαίνεται στο σχήμα Σχήμα 1.10: Το ηλεκτρικό ποδήλατο της κατασκευής [13] -7-

21 Σημειώνεται πως το ποδήλατο αυτό δεν προμηθεύτηκε ως ηλεκτρικό, αλλά μετατράπηκε στη συνέχεια με την εγκατάσταση ενός ειδικού πακέτου εξαρτημάτων. Το πακέτο αυτό περιείχε τον ηλεκτρικό κινητήρα, το ηλεκτρικό γκάζι, το φρένο και τους αισθητήρες στα πετάλια και στο στάτη του κινητήρα. Η μετατροπή και η εγκατάσταση του εν λόγω ηλεκτρικού κινητήριου συστήματος ολοκληρώθηκε σε προγενέστερη διπλωματική εργασία [14]. Η λειτουργία των εξαρτημάτων, που αναφέρθηκαν προηγουμένως, αναλύεται εκτενώς σε επόμενα κεφάλαια. Τα μόνα στοιχεία, που είναι αναγκαίο να δοθούν σε αυτό το σημείο, είναι η ισχύς και ο τύπος του κινητήρα που χρησιμοποιήθηκε. Πρόκειται για ένα σύγχρονο κινητήρα μόνιμου μαγνήτη ισχύος 500 W με ονομαστική τάση λειτουργίας τα 36V. Τα εξαρτήματα, που χρησιμοποιήθηκαν για τη μετατροπή, φαίνονται στο σχήμα Σχήμα 1.11: GWL/Power E-bike conversion kit α) ηλεκτρικό γκάζι και φρένο β) αισθητήρας στα πετάλια γ) τροχός κινητήρας 36 V/500 W [15] Σημειώνεται πως το ποδήλατο που χρησιμοποιήθηκε υπάγεται στην κατηγορία «poweron-demand» και «pedal-assist», αφού έχει εγκατεστημένο ηλεκτρικό γκάζι, αλλά και ειδικούς αισθητήρες ανίχνευσης περιστροφής των πεταλιών. -8-
22 ΚΕΦΑΛΑΙΟ 2 ΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ ΜΟΝΙΜΟΥ ΜΑΓΝΗΤΗ 2.1. Κατηγορίες σύγχρονων κινητήρων Ο δρομέας ενός σύγχρονου κινητήρα, σε αντίθεση με αυτόν ενός ασύγχρονου, κινείται σύγχρονα με το μαγνητικό πεδίο του στάτη. Οι σύγχρονοι κινητήρες, προκειμένου να λειτουργήσουν, προϋποθέτουν την ύπαρξη ενός δεύτερου μαγνητικού πεδίου πέραν αυτού του στάτη, το οποίο προέρχεται από το δρομέα. Ανάλογα με το πώς προκύπτει το μαγνητικό πεδίο του δρομέα, οι σύγχρονοι κινητήρες διακρίνονται σε μη διεγειρόμενους και σε διεγειρόμενους από συνεχές ρεύμα [16]. Κινητήρες διεγειρόμενοι από συνεχές ρεύμα (direct-current excited) Πρόκειται για κινητήρες ισχύος συνήθως μεγαλύτερης του 1 kw, οι οποίοι χρειάζονται μια πηγή συνεχούς τάσης συνδεδεμένη στο δρομέα ώστε να παρέχεται η απαιτούμενη για τη λειτουργία διέγερση. Η σύνδεση συνήθως υλοποιείται με δακτυλίους ολίσθησης. Κινητήρες χωρίς διέγερση (non-excited motors) Πρόκειται για κινητήρες των οποίων ο δρομέας είναι κατασκευασμένος από ατσάλι. Το μαγνητικό πεδίο του στάτη μαγνητίζει το δρομέα με συνέπεια να επάγονται οι απαραίτητοι μαγνητικοί πόλοι για την περιστροφή του. Διακρίνονται σε: Κινητήρες αντίδρασης (reluctance motors) Κινητήρες υστέρησης (hysteresis motors) Κινητήρες μόνιμου μαγνήτη (permanent magnet motors) Δεδομένου ότι ο κινητήρας που χρησιμοποιήθηκε στην παρούσα διπλωματική είναι μόνιμου μαγνήτη, η ανάλυση θα περιοριστεί σε αυτήν την κατηγορία κινητήρων χωρίς διέγερση, ενώ οι κινητήρες υστέρησης και αντίδρασης δε θα αναλυθούν Σύγχρονοι κινητήρες μόνιμου μαγνήτη Οι συγκεκριμένοι κινητήρες έχουν ενσωματωμένους στον ατσάλινο δρομέα μόνιμους μαγνήτες, οι οποίοι παράγουν το απαιτούμενο πεδίο διέγερσης. Το πεδίο αυτό αλληλοεπιδρά με το περιστρεφόμενο πεδίο του στάτη, δημιουργείται ροπή μεταξύ των δύο πεδίων και τελικά έχουμε κίνηση του δρομέα. Στη σύγχρονη πλέον ταχύτητα το πεδίο του δρομέα κλειδώνει στο πεδίο του στάτη κι έτσι έχουμε περιστροφή του δρομέα σε συχνότητα ανάλογη με αυτή της περιστροφής του πεδίου του στάτη. Τέλος, για την εκκίνηση τους απαιτείται μείωση της συχνότητας του περιστρεφόμενου πεδίου του στάτη και σταδιακή αύξηση της μέχρι την επιθυμητή τιμή. Αυτό συμβαίνει καθώς ο δρομέας λόγω της αδράνειας του, ιδιαίτερα αν αυτή είναι μεγάλη, όπως συμβαίνει σε κινητήρες μεγάλης ισχύος, δεν μπορεί να ακολουθήσει ακαριαία την περιστροφή του μαγνητικού πεδίου του δρομέα κι έτσι δεν μπορεί να επιταχυνθεί στη σύγχρονη ταχύτητα. -9-
23 Κατηγορίες κινητήρων μόνιμου μαγνήτη Οι σύγχρονοι κινητήρες μόνιμου μαγνήτη κατά κανόνα δεν έχουν ψήκτρες (brushless) και συνεπώς η μετάβαση του ρεύματος πρέπει να γίνεται ηλεκτρονικά με τη χρήση κατάλληλων διακοπτικών στοιχείων. Μία πρώτη κατηγοριοποίηση προκύπτει από τον τρόπο με τον οποίο ανιχνεύεται η ανάγκη για μετάβαση του ρεύματος. Υπάρχουν, λοιπόν, κινητήρες brushless που χρησιμοποιούν κατάλληλους αισθητήρες Hall ή encoders και κινητήρες που δε χρησιμοποιούν αισθητήρες (sensorless), αλλά διαφορετικές τεχνικές για την ανίχνευση της ανάγκης για μετάβαση. Σημειώνεται πως οι σύγχρονοι κινητήρες μπορούν να είναι διφασικοί ή τριφασικοί. Ένα ακόμη κριτήριο κατηγοριοποίησης προκύπτει από τη μορφή της επαγόμενης τάσης (ηλεκτρεγερτικής δύναμης) ή ισοδύναμα από την κατανομή των τυλιγμάτων του στάτη. Ανάλογα με το πόσο πυκνά ή αραιά είναι τα τυλίγματα σε συγκεκριμένα σημεία του στάτη, μπορεί να προκύψει η επιθυμητή μορφή της επαγόμενης τάσης και κατ επέκταση οι δύο παρακάτω κατηγορίες κινητήρων Brushless (σχ. 2.1): Οι ημιτονοειδείς σύγχρονοι κινητήρες μόνιμου μαγνήτη (sinusoidal permanent magnet synchronous motors), με ημιτονοειδή αντι-ηλεκτρεγερτική δύναμη Οι τραπεζοειδείς σύγχρονοι κινητήρες μόνιμου μαγνήτη (trapezoidal permanent magnet synchronous motors), με τραπεζοειδή αντι-ηλεκτρεγερτική δύναμη Σχήμα 2.1: Οι δυο μορφές των ηλεκτρεγερτικών δυνάμεων [17] Στις μηχανές της πρώτης κατηγορίας απαιτείται η τροφοδοσία να αποτελείται από ημιτονοειδή ρεύματα, η μορφή των οποίων επιτυγχάνεται μέσω της διακοπτικής ρύθμισης -10-
24 της συνεχούς τάσης στην είσοδο του αντιστροφέα που ελέγχει τον κινητήρα. Το μεγαλύτερο πλεονέκτημα των εν λόγω μηχανών είναι ότι η ημιτονοειδής τάση εξ επαγωγής (το πλάτος της οποίας εξαρτάται από την ταχύτητα περιστροφής του δρομέα), που αλληλοεπιδρά με τα ημιτονοειδή ρεύματα, οδηγεί στην παραγωγή σταθερής ροπής με πολύ μικρή κυμάτωση. Κατά τ άλλα, οι μηχανές αυτές συμπεριφέρονται όπως οι κλασσικές σύγχρονες μηχανές και γι αυτό το λόγο συχνά συναντώνται στη βιβλιογραφία και ως «Brushless AC». Αντίθετα, οι μηχανές με τραπεζοειδώς κατανεμημένα τυλίγματα, οδηγούνται από ρεύματα τετραγωνικής μορφής στο στάτη και συγκεκριμένα σ ένα τριφασικό κινητήρα τα ρεύματα αυτά έχουν διαφορά φάσης 120 ο. Λόγω του γεγονότος ότι η εξίσωση της ροπής στη συγκεκριμένη μηχανή, μέσω του ελέγχου που εφαρμόζεται, είναι στην ουσία ευθέως ανάλογη με το ρεύμα του στάτη, όπως συμβαίνει στις μηχανές συνεχούς ρεύματος, οι μηχανές αυτές χαρακτηρίζονται και ως «Brushless DC». Επίσης, το πλάτος της τάσης εξ επαγωγής είναι ευθέως ανάλογο της γωνιακής ταχύτητας του κινητήρα [18]. E = 2NlrBw (2.1) T = 1 dl i2 1 dr Β2 + 4N 2 dθ 2 dθ π Brlπi (2.2) όπου: N ο αριθμός των τυλιγμάτων ανά φάση, l το μήκος του δρομέα, r η εσωτερική ακτίνα του δρομέα, B η πυκνότητα της μαγνητικής ροής του δρομέα, w η γωνιακή ταχύτητα του δρομέα, i το φασικό ρεύμα, L η επαγωγή των τυλιγμάτων μίας φάσης, θ η θέση του δρομέα και τέλος R η αντίσταση των τυλιγμάτων της μιας φάσης. Το πλεονέκτημα αυτής της μεθόδου ελέγχου, είναι η εξαιρετική απλότητα της και η ανεξαρτησία από πολύπλοκες μαθηματικές πράξεις. Το τίμημα, όμως, είναι η ύπαρξη κυμάτωσης στην παραγόμενη ροπή του κινητήρα, ιδιαίτερα κατά τη μετάβαση του ρεύματος από τη μία φάση στην άλλη. Σε αυτό το σημείο αξίζει να σημειωθεί, πως μηχανές με ημιτονοειδώς κατανεμημένα τυλίγματα μπορούν να οδηγηθούν μέσω τετραγωνικών παλμών ρεύματος, με κόστος την εμφάνιση περαιτέρω κυμάτωσης στην παραγόμενη ροπή. Στην παρούσα διπλωματική αυτή ακριβώς είναι η περίπτωση, ασκείται δηλαδή έλεγχος μέσω τετραγωνικών παλμών σε μηχανή με ημιτονοειδώς κατανεμημένα τυλίγματα. Ο λόγος που επιλέχθηκε αυτή η προσέγγιση θα αναλυθεί εκτενώς στη συνέχεια του παρόντος κειμένου. Κριτήριο κατηγοριοποίησης των σύγχρονων κινητήρων μόνιμου μαγνήτη αποτελεί ο τρόπος σχεδιασμού του δρομέα. Συγκεκριμένα διακρίνονται σε κινητήρες με επιφανειακά τοποθετημένους μαγνήτες στην περιφέρεια του δρομέα (surface-mounted magnets), με μαγνήτες τοποθετημένους στο εσωτερικό της περιφέρειας του δρομέα (surface-inset magnets) και «σφηνωμένους» μαγνήτες στο εσωτερικό του δρομέα (interior magnets). Κινητήρες με μαγνήτες τοποθετημένους στο εξωτερικό της περιφέρειας του δρομέα Οι πιο απλοί σε τοποθέτηση είναι οι κινητήρες με επιφανειακά τοποθετημένους μαγνήτες (σχ. 2.2) και παρουσιάζουν τη μεγαλύτερη πυκνότητα μαγνητικής ροής στο διάκενο τους, αφού αυτό αποτελείται από αέρα και δεν παρεμβάλλεται κάποιο άλλο υλικό. Βασικό μειονέκτημα τους, ωστόσο είναι το γεγονός ότι δεν μπορούν να λειτουργήσουν σε υψηλές ταχύτητες (συνήθως δεν ξεπερνούν τις 3000 στροφές/λεπτό), αφού λόγω των φυγοκεντρικών δυνάμεων που αναπτύσσονται κατά την περιστροφή του δρομέα, υπάρχει κίνδυνος αποκόλλησης των μαγνητών. -11-


25 Σχήμα 2.2: Δρομέας με μαγνήτες τοποθετημένους στο εξωτερικό της περιφέρειας του [19] Κινητήρες με μαγνήτες τοποθετημένους στο εσωτερικό της περιφέρειας του δρομέα Οι μηχανές αυτές είναι πιο στιβαρές, όσον αφορά την κατασκευή τους, αφού οι μαγνήτες πλέον δεν μπορούν να αποκολληθούν κατά την περιστροφή του δρομέα (σχ. 2.3). Υπάρχει η δυνατότητα,δηλαδή, να λειτουργήσουν σε υψηλότερες ταχύτητες απ ότι οι προηγούμενες μηχανές. Ωστόσο, οι επαγωγές των d και q αξόνων παύουν να είναι ίσες μεταξύ τους, με συνέπεια να εμφανίζεται επαγωγική ροπή αντίδρασης. Σχήμα 2.3: Δρομέας με μαγνήτες τοποθετημένους στο εσωτερικό της περιφέρειας του Κινητήρες με μαγνήτες τοποθετημένους στο εσωτερικό του δρομέα Ομοίως με τους κινητήρες, που έχουν τους μαγνήτες τους τοποθετημένους εσωτερικά της περιφέρειας του δρομέα, οι κινητήρες με εσωτερικά τοποθετημένους μαγνήτες παρουσιάζουν μηχανική στιβαρότητα. Επίσης, απαιτούν ιδιαίτερη προσοχή κατά τη σχεδίαση τους προκειμένου να ελέγχεται η μαγνητική ροή και να επιτυγχάνεται υψηλή απόδοση, αφού ο δρομέας στην περίπτωση τους έχει τη μικρότερη αδράνεια. Δύο δυνατές τοποθετήσεις των μαγνητών στο εσωτερικό του δρομέα φαίνονται στο σχήμα

, στις οποίες οι γραμμές της μαγνητικής ροής μεταξύ δρομέα και στάτη ακολουθούν αξονική διεύθυνση.")
26 Σχήμα 2.4: Δρομέας με μαγνήτες τοποθετημένους στο εσωτερικό του Τέλος, άλλο ένα κριτήριο για την κατηγοριοποίηση των κινητήρων μόνιμου μαγνήτη, είναι η κατανομή του μαγνητικού πεδίου στο εσωτερικό της μηχανής (σχ. 2.5). Με βάση αυτό προκύπτουν δύο κατηγορίες: Μηχανές με ακτινική ροή (radial flux BLDC), στις οποίες οι γραμμές της μαγνητικής ροής μεταξύ δρομέα και στάτη ακολουθούν ακτινική διεύθυνση. Μηχανές αξονικής ροής (axial flux BLDC), στις οποίες οι γραμμές της μαγνητικής ροής μεταξύ δρομέα και στάτη ακολουθούν αξονική διεύθυνση. Σχήμα 2.5: Μηχανές με ακτινική και αξονική ροή [20] Σημειώνεται,πως χρησιμοποιούνται ευρύτερα λόγω της απλούστερης κατασκευής τους οι μηχανές με ακτινική διεύθυνση ροής, ενώ οι μηχανές με αξονική διεύθυνση συναντώνται σπανιότερα. Επίσης, η ανάλυση που προηγήθηκε για τον τρόπο τοποθέτησης των μόνιμων μαγνητών, αφορούσε μηχανές ακτινικής διεύθυνσης ροής. -13-

27 2.3. Ανάλυση αρχής λειτουργίας κινητήρα BLDC Η φιλοσοφία του ελέγχου μιας τριφασικής μηχανής ως BLDC,είτε με ημιτονοειδώς ή τραπεζοειδώς κατανεμημένα τυλίγματα, είναι πολύ απλή και κατ αρχάς προϋποθέτει να διαρρέονται δύο από τα τρία τυλίγματα από ρεύμα, ενώ το τρίτο να είναι ανενεργό. Συγκεκριμένα, στο ένα από τα δύο ενεργά τυλίγματα το ρεύμα εισέρχεται ενώ από το δεύτερο εξέρχεται. Σ έναν πλήρη ηλεκτρικό κύκλο γίνονται έξι μεταβάσεις (commutations), δηλαδή έξι φορές το ρεύμα αλλάζει το μονοπάτι αγωγής του και μεταβαίνει από τον ένα κλάδο στον άλλο, υπό ταυτόχρονη, όμως, αγωγή και στους δύο κλάδους. Η ροπή παράγεται από την αλληλεπίδραση του πεδίου, που δημιουργείται από το στάτη, και του πεδίου που υπάρχει λόγω των μόνιμων μαγνητών. Βασική, επίσης, προϋπόθεση για τον έλεγχο μιας μηχανής ως BLDC, είναι η γνώση σε κάθε χρονική στιγμή της θέσης του δρομέα. Σχήμα 2.6: Οι έξι μεταβάσεις του ρεύματος σ έναν πλήρη ηλεκτρικό κύκλο [21] Όπως φαίνεται στο σχήμα 2.6, υπάρχουν έξι καταστάσεις (διαδρομές) αγωγής, πράγμα που σημαίνει πως κάθε κατάσταση έχει διάρκεια 60 ηλεκτρικών μοιρών. Οι καταστάσεις αυτές οριοθετούνται, από τα σήματα των τριών αισθητήρων Hall, εφόσον υπάρχουν εγκατεστημένοι αισθητήρες στο στάτη του κινητήρα (sensored), ή, εναλλακτικά, χρησιμοποιούνται τεχνικές εντοπισμού της θέσης με βάση την τιμή της επαγόμενης τάσης στο στάτη (sensorless). Δεδομένου ότι ο κινητήρας, που χρησιμοποιήθηκε στην παρούσα διπλωματική, είχε εγκατεστημένους αισθητήρες Hall, η ανάλυση που θ ακολουθήσει περιορίζεται στο sensored BLDC έλεγχο Αρχή λειτουργίας αισθητήρων Hall Οι εν λόγω αισθητήρες στηρίζονται στο φαινόμενο Hall (σχ. 2.7), το οποίο παρατηρείται όταν ένας αγωγός ή ημιαγωγός διαρρεόμενος από ένα ρεύμα πυκνότητας J, δέχεται την επίδραση ενός μαγνητικού πεδίου B. Λόγω της ανωτέρω αλληλεπίδρασης, εμφανίζεται ένα ηλεκτρικό πεδίο Ε, το οποίο είναι το εξωτερικό γινόμενο J x B, με αντίστοιχη φορά και κατ επέκταση εμφανίζεται διαφορά δυναμικού με φορά αυτή του διανύσματος E. Συγκεκριμένα, κάθε φορά που ένας μαγνητικός πόλος του δρομέα περνάει κοντά από έναν αισθητήρα, αυτός ενεργοποιείται και μας δίνει ένα υψηλό ή χαμηλό σήμα (τάση). Ο συνδυασμός των τριών σημάτων που προέρχονται από τους τρείς αισθητήρες Hall, μας δίνει όλη την πληροφορία που χρειαζόμαστε για τη θέση του δρομέα. Ο κάθε αισθητήρας Hall παραμένει ενεργοποιημένος για 180 ηλεκτρικές μοίρες. -14-


28 Όσον αφορά την τοποθέτηση τους, αυτή γίνεται συνήθως ανά 120 μοίρες του στάτη (σπανιότερα ανά 60) και είναι μια δύσκολη διαδικασία, που απαιτεί ακρίβεια γιατί σε διαφορετική περίπτωση η παραμικρή απόκλιση μπορεί να οδηγήσει σε εσφαλμένη πληροφορία για τη θέση του δρομέα. Σχήμα 2.7: Φαινόμενο Hall[22] Διαστήματα αγωγής τυλιγμάτων και οι μεταβάσεις τους Όπως αναφέρθηκε προηγουμένως, ο συνδυασμός των τριών σημάτων των αισθητήρων Hall μας δίνει πληροφορία για τη θέση του δρομέα και κατ επέκταση τη δυνατότητα να «ενεργοποιήσουμε» τα κατάλληλα τυλίγματα. Στο σχήμα 2.8 φαίνεται η σειρά με την οποία ενεργοποιούνται τα τυλίγματα, ως συνάρτηση, πάντα, των αισθητήρων Hall, καθώς και τα χαρακτηριστικά μεγέθη ενός κινητήρα BLDC. Σχήμα 2.8: Χαρακτηριστικά μεγέθη ενός κινητήρα BLDC [23] -15-
29 Στο σχήμα 2.8 παρατηρώντας κανείς τα φασικά ρεύματα, συμπεραίνει πως η μορφή τους δεν είναι απόλυτα τετραγωνική, αλλά αντίθετα υπάρχει εκθετική μεταβατική συμπεριφορά, τόσο στη μείωση όσο και στην αύξηση τους, πράγμα το οποίο είναι απόλυτα λογικό και οφείλεται στο R-L κύκλωμα που δημιουργείται από τα τυλίγματα του στάτη. Επίσης, παρατηρούνται διαστήματα μηδενισμού των φασικών ρευμάτων, κάτι επίσης αναμενόμενο αφού σε κάθε χρονική στιγμή άγουν μόνο δύο εκ των τριών τυλιγμάτων. Οι φάσεις που είναι σε αγωγή καθορίζονται αποκλειστικά από το συνδυασμό των σημάτων Hall. Τέλος, όσον αφορά την παραγόμενη ροπή, υπάρχει η αναμενόμενη κυμάτωση (ημιταλάντωση) η οποία οφείλεται στην αλληλεπίδραση ημιτονοειδών μεγεθών με παλμικά μεγέθη. Οι κυριότεροι λόγοι, που συμβάλλουν σε αυτό το γεγονός, είναι οι μεταβάσεις του ρεύματος από τη μια φάση στην άλλη, αφού στο σημείο της μετάβασης παρατηρείται η βύθιση της ροπής και το γεγονός ότι η κατανομή του μαγνητικού πεδίου δεν είναι απόλυτα ομοιόμορφη, αλλά παρουσιάζει διακυμάνσεις συναρτήσει της θέσης του δρομέα Βασικές εξισώσεις τραπεζοειδούς κινητήρα BLDC Στο σχήμα 2.9 δίνεται το ισοδύναμο κύκλωμα ενός τριφασικού κινητήρα BLDC. Σχήμα 2.9: Τριφασικό ισοδύναμο κύκλωμα BLDC [24] Επομένως σε κάθε μετάβαση θα άγουν δύο από τις τρείς φάσεις, όπως φαίνεται παρακάτω. Έστω ότι παίρνουμε το παράδειγμα της φάσης Α (σχ. 2.10). Σχήμα 2.10: Αγωγή της φάσης Α -16-
30 Σύμφωνα με την παραπάνω συνδεσμολογία και για θετικό ρεύμα I A, παίρνουμε την παρακάτω διαφορική εξίσωση για τη μηχανή: όπου: V DC = 2RI + 2L di dt + (E ga E gb ) (2.3) ή για αρνητικό ρεύμα I A, παίρνουμε: V DC = 2RI + 2L di dt + (E ga E gb ) (2.4) V DC είναι η εφαρμοζόμενη συνεχής τάση στην είσοδο του αντιστροφέα R είναι η αντίσταση των τυλιγμάτων του στάτη κάθε φάσης L είναι η αυτεπαγωγή των τυλιγμάτων κάθε φάσης E ga E gb η πολική ηλεκτρεγερτική δύναμη (ΗΕΔ) 2.5. Βασικές εξισώσεις ημιτονοειδούς κινητήρα BLAC Ομοίως με τους κινητήρες BLDC, το ισοδύναμο τους κύκλωμα αποτελείται από την αντίσταση, την αυτεπαγωγή των τυλιγμάτων και από μία ημιτονοειδή, όμως, ΗΕΔ, όπως φαίνεται παρακάτω. Σχήμα 2.11: Μονοφασικό ισοδύναμο BLAC Με βάση το μονοφασικό ισοδύναμο (σχ. 2.11) και λαμβάνοντας υπόψη τί συμβαίνει στο σύνολο της μηχανής, παίρνουμε τον παρακάτω πίνακα. V a [ V b ] = [ Vc (2.5) όπου: R R R I a ] [ V a, V b, V c είναι οι φασικές τάσεις Ι a, Ι b, Ι c είναι τα φασικά ρεύματα L M 0 0 I b ] + d [ 0 L M 0 dt Ic 0 0 L M R είναι η αντίσταση των τυλιγμάτων κάθε φάσης L είναι η αυτεπαγωγή των τυλιγμάτων κάθε φάσης I a ] [ Ib Ic ] + [ e a e b ] ec M είναι η αμοιβαία επαγωγή -17-
31 Για την ηλεκτρική ισχύ στην έξοδο της μηχανής ισχύει ότι: P el = e a I a + e b I b + e c I c (2.6) Η ηλεκτρομαγνητική ροπή ισχύει ότι είναι το πηλίκο της ισχύος προς τη γωνιακή ταχύτητα περιστροφής του δρομέα: όπου: T e = P el w = e ai a +e b I b +e c I c w (2.7) w είναι η γωνιακή ταχύτητα περιστροφής του δρομέα T e είναι η ηλεκτρομαγνητική ροπή Όσον αφορά τη μηχανική σχέση μεταξύ γωνιακής επιτάχυνσης και ηλεκτρομαγνητικής ροπής ισχύει η παρακάτω σχέση. dw = p T e T load dt J (2.8) όπου: T load είναι η ροπή του φορτίου στον άξονα J είναι η ροπή αδράνειας του δρομέα P είναι ο αριθμός των ζευγών πόλων Όλες οι εξισώσεις που αναφέρονται προηγουμένως παρουσιάζονται σε σταθερό πλαίσιο αναφοράς με συνέπεια όλα τα ηλεκτρικά μεγέθη να μεταβάλλονται με την ηλεκτρική συχνότητα περιστροφής. Το γεγονός αυτό καθιστά τον έλεγχο δύσκολο και προκειμένου αυτός να απλοποιηθεί οι μεταβλητές πρέπει να αναπαρασταθούν σε σύγχρονα στρεφόμενο d-q πλαίσιο προσανατολισμένο στο στάτη (σχ.2.12). Η αναπαράσταση των μεγεθών στο εν λόγω πλαίσιο αναφοράς έχει ως συνέπεια οι μεταβλητές να αποκτούν σταθερές τιμές. Σχήμα 2.12: Σύγχρονα στρεφόμενο πλαίσιο d-q και σταθερό πλαίσιο abc -18-
32 Προκειμένου να μεταβεί κανείς από το σταθερό abc πλαίσιο στο σύγχρονα στρεφόμενο d-q απαιτείται η χρήση της μήτρας μετασχηματισμού Park. Ο μετασχηματισμός Park, δίνεται ακολούθως. [ i qs ] = 2 i [cos θ 2π r cos(θ r ) cos(θ 3 r + 2π ) 3 ds 3 sin θ r sin(θ r 2π ) sin(θ 3 r + 2π )] [ ] (2.9) 3 ic i a ib [ V qs ] = 2 V [cos θ 2π r cos(θ r ) cos(θ 3 r + 2π ) 3 ds 3 sin θ r sin(θ r 2π ) sin(θ 3 r + 2π )] [ 3 V a V b Vc ] (2.10) όπου: Συνεπώς οι εξισώσεις (2.5) γίνονται μέσω εφαρμογής του μετασχηματισμού Park: V qs = Ri qs + L di qs dt + e q (2.11) V ds = Ri ds + L di ds dt e d (2.12) e q = w r λ d = w r (i ds L d + λ m ) (2.13) e d = w r λ q = w r (i qs L q ) (2.14) T e = 3 2 p[λ mi qs + (L d L q )i qs i ds ] (2.15) L d είναι η επαγωγή του d άξονα L q είναι η επαγωγή του q άξονα λ d είναι η ροή σκέδασης του d άξονα λ q είναι η ροή σκέδασης του q άξονα λ m είναι η ροή που οφείλεται στους μόνιμους μαγνήτες θ r είναι η ηλεκτρική θέση του δρομέα 2.6. Πλεονεκτήματα και μειονεκτήματα κινητήρων μόνιμου μαγνήτη Σύγκριση με κινητήρες συνεχούς ρεύματος Ένα βασικό πλεονέκτημα των σύγχρονων μηχανών με μόνιμους μαγνήτες προκύπτει από το γεγονός ότι η μετάβαση του ρεύματος γίνεται ηλεκτρονικά μέσω διακοπτών ισχύος και όχι μηχανικά μέσω ψηκτρών. Αυτόματα, αυτό σημαίνει πως αυξάνεται η αξιοπιστία του συστήματος, καθώς εξαλείφονται προβλήματα σχετιζόμενα με τις ψήκτρες, όπως για παράδειγμα οι σπινθηρισμοί και η φθορά των ψηκτρών εξαιτίας της τριβής. Έτσι, μειώνεται ο κίνδυνος ανάφλεξης όπως το συνολικό κόστος και η συχνότητα συντήρησης του -19-
33 συστήματος. Ταυτόχρονα, μειώνεται το βάρος του συστήματος λόγω της απουσίας του συλλέκτη και των ψηκτρών, ενώ ο κινητήρας λειτουργεί πιο αθόρυβα. Τέλος, ο βαθμός απόδοσης του συστήματος αυξάνεται, αφού δεν υφίσταται πτώση τάσης πάνω στις ψήκτρες, όπως συμβαίνει στις μηχανές συνεχούς ρεύματος. Όμως, υπάρχουν και κάποια μειονεκτήματα σε σύγκριση με της μηχανές συνεχούς ρεύματος, όπως για παράδειγμα είναι η αδυναμία να ασκηθεί έλεγχος στο πεδίο της διέγερσης, αφού αυτό προέρχεται από τους μόνιμους μαγνήτες. Ο έλεγχος της ταχύτητας είναι πιο σύνθετος απ ότι στις μηχανές συνεχούς και επίσης απαιτείται γνώση για τη θέση του δρομέα σε κάθε χρονική στιγμή. Τέλος, οι κινητήρες συνεχούς ρεύματος έχουν τη δυνατότητα να προσφέρουν μεγαλύτερη ροπή κατά την εκκίνηση τους. Σύγκριση με επαγωγικούς (ασύγχρονους) κινητήρες Ένα βασικό πλεονέκτημα των σύγχρονων κινητήρων με μόνιμους μαγνήτες έναντι των ασύγχρονων κινητήρων, είναι ο βαθμός απόδοσης υπό πλήρες φορτίο ο οποίος είναι σαφώς μεγαλύτερος. Επίσης, οι επαγωγικοί κινητήρες είναι κατά κανόνα μεγαλύτεροι σε διαστάσεις από τους αντίστοιχης ισχύος κινητήρες με μόνιμους μαγνήτες και συνεπώς είναι πιο δελεαστικοί για εφαρμογές στις οποίες υπάρχει περιορισμένος χώρος. Τέλος, οι κινητήρες μόνιμου μαγνήτη αποδίδουν σταθερή ροπή σε όλο σχεδόν το φάσμα τους, ανεξαρτήτως της ταχύτητας τους (σχ. 2.13). Σχήμα 2.13: Ροπή και ισχύς σύγχρονου κινητήρα ως συνάρτηση της ταχύτητας [25] Όσον αφορά τα μειονεκτήματα, οι επαγωγικοί κινητήρες δεν απαιτούν την ύπαρξη ενός κυκλώματος οδήγησης για τη λειτουργία τους, σε αντίθεση με τους κινητήρες μόνιμου μαγνήτη οι οποίοι για να ξεκινήσουν χρειάζονται μεταβολή της συχνότητας της εφαρμοζόμενης τάσης από μία μικρή τιμή μέχρι την ονομαστική τιμή της. Επίσης χρειάζεται ιδιαίτερη προσοχή ώστε να μη σημειώνεται αύξηση της θερμοκρασίας κατά τη λειτουργία των κινητήρων με μόνιμους μαγνήτες, καθώς οι ιδιότητες των μόνιμων μαγνητών φθίνουν με την αύξηση της θερμοκρασίας. Παρακάτω συνοψίζονται τα βασικότερα πλεονεκτήματα και μειονεκτήματα των σύγχρονων κινητήρων με μόνιμους μαγνήτες. Μικρές απαιτήσεις σε συντήρηση Μικρότερος όγκος -20-

34 Μειωμένος θόρυβος κατά τη λειτουργία Αυξημένη αξιοπιστία Μεγαλύτερος βαθμός απόδοσης Μεγάλη διάρκεια ζωής Μικρότερη αδράνεια δρομέα Απαραίτητη η γνώση της θέσης του δρομέα Υψηλό αρχικό κόστος Απαραίτητη ύπαρξη κυκλώματος οδήγησης Αδυναμία άμεσου ελέγχου πεδίου διέγερσης Αδυναμία λειτουργίας σε υψηλές θερμοκρασίες Σχήμα 2.14: Απεικόνιση σύγχρονου κινητήρα με μόνιμους μαγνήτες [26] -21-
35 ΚΕΦΑΛΑΙΟ 3 ΤΡΙΦΑΣΙΚΟΙ ΑΝΤΙΣΤΡΟΦΕΙΣ ΤΑΣΗΣ 3.1. Κατηγορίες ηλεκτρονικών μετατροπέων ισχύος Αντικείμενο της παρούσας διπλωματικής είναι στην ουσία η μελέτη και κατασκευή ενός τριφασικού αντιστροφέα τάσης, ο οποίος θα ελέγχει τη λειτουργία του σύγχρονου κινητήρα με μόνιμους μαγνήτες, που είναι εγκατεστημένος στο ποδήλατο. Ο τριφασικός αντιστροφέας τάσης, υπάγεται στην ευρύτερη κατηγορία των μετατροπέων ισχύος και συγκεκριμένα στους ηλεκτρονικούς μετατροπείς. Με τον όρο ηλεκτρονικός μετατροπέας ισχύος εννοείται η διάταξη που μετατρέπει την ηλεκτρική ισχύ από μια μορφή σε μία άλλη. Οι εν λόγω μετατροπείς αποτελούνται από ηλεκτρονικά ισχύος (MOSFET, IGBT, SCR κλπ.), τα οποία ελέγχονται από συμβατικά ηλεκτρονικά χαμηλής ισχύος. Με βάση τη μορφή της ισχύος που δέχονται στην είσοδο τους και με αυτή στην οποία τη μετατρέπουν, διακρίνονται σε τέσσερις κατηγορίες. Μετατροπείς συνεχούς τάσης σ εναλλασσόμενη Είναι ευρύτερα γνωστοί ως αντιστροφείς (inverters) και μετατρέπουν τη συνεχή τάση στην είσοδο τους σε εναλλασσόμενη, ρυθμιζόμενης συχνότητας και ενεργού τιμής. Μετατροπείς συνεχούς τάσης σε συνεχή Είναι γνωστοί ως DC-DC μετατροπείς και μετατρέπουν τη συνεχή τάση στην είσοδο τους σε συνεχή τάση ορισμένου πλάτους και ενδεχομένως αντίστροφης πολικότητας. Παραδείγματα τέτοιων μετατροπέων χωρίς μετασχηματιστή είναι ο buck,boost,buck-boost, CUK, ενώ μετατροπείς που χρησιμοποιούν μετασχηματιστή είναι ο flyback και ο forward. Μετατροπείς εναλλασσόμενης τάσης σε συνεχή Είναι γνωστοί ως ανορθωτές και μετατρέπουν την εναλλασσόμενη (μονοφασική ή τριφασική) τάση στην είσοδο τους σε συνεχή τάση ρυθμιζόμενου πλάτους. Μετατροπείς εναλλασσόμενης τάσης σε εναλλασσόμενη Είναι μετατροπείς οι οποίοι μετατρέπουν την εναλλασσόμενη τάση στην είσοδο τους σε εναλλασσόμενη τάση διαφορετικού πλάτους ή/και συχνότητας, ενδεχομένως και διαφορετικού αριθμού φάσεων. Συνήθως για την υλοποίηση τους περιλαμβάνουν έναν ανορθωτή και έναν αντιστροφέα τάσης ή ρεύματος. Οι μετατροπείς συνοδεύονται από κάποια πλεονεκτήματα τα όποια τους καθιστούν εξαιρετική επιλογή για τη μετατροπή της ενέργειας από τη μια μορφή στην άλλη. Υψηλός βαθμός απόδοσης Μικρό βάρος και όγκος εξαιτίας της συρρίκνωσης των πηνίων που χρησιμοποιούνται Αξιοπιστία Ελάχιστη συντήρηση -22-
36 Μοναδικό μειονέκτημα είναι η εμφάνιση ανώτερων αρμονικών τόσο στην είσοδο, όσο και στην έξοδο, οι οποίες όμως με κατάλληλο φιλτράρισμα και σχεδιαστική μέριμνα μπορούν να εξαλειφθούν Αντιστροφείς τάσης Όπως αναφέρθηκε προηγουμένως, οι αντιστροφείς τάσης μετατρέπουν τη συνεχή τάση στην είσοδο τους σε εναλλασσόμενη και στην παρούσα διπλωματική ο αντιστροφέας που κατασκευάστηκε τροφοδοτεί ένα σύγχρονο κινητήρα μόνιμου μαγνήτη. Η τροφοδοσία στην είσοδο του παρόντος αντιστροφέα προέρχεται από μια συστοιχία συσσωρευτών. Οι αντιστροφείς ανάλογα με τον αριθμό των φάσεων και των διακοπτικών στοιχείων που χρησιμοποιούν για τη λειτουργία τους διακρίνονται στις παρακάτω κατηγορίες: μονοφασικοί αντιστροφείς σε συνδεσμολογία ημιγέφυρας, οι οποίοι χρησιμοποιούν δύο ελεγχόμενα διακοπτικά στοιχεία μονοφασικοί αντιστροφείς σε συνδεσμολογία πλήρους γέφυρας, οι οποίοι χρησιμοποιούν τέσσερα ελεγχόμενα διακοπτικά στοιχεία τριφασικοί αντιστροφείς, οι οποίοι χρησιμοποιούν έξι ελεγχόμενα διακοπτικά στοιχεία Οι τριφασικοί αντιστροφείς ανάλογα με την κυματομορφή της τάσης στην έξοδο τους διακρίνονται σε δύο κατηγορίες: Αντιστροφείς τετραγωνικών παλμών Σε αυτήν την κατηγορία το πλάτος της τάσης εξόδου εξαρτάται αποκλειστικά από το πλάτος της τάσης στην είσοδο, καθώς δεν υπάρχει δυνατότητα ρύθμισής του πλάτους από τον αντιστροφέα στην προκειμένη περίπτωση. Ο έλεγχος του αντιστροφέα σε αυτήν την περίπτωση περιορίζεται μόνο στη ρύθμιση της συχνότητας της κυματομορφής εξόδου Αντιστροφείς με ρύθμιση του εύρους των παλμών (PWM) Οι εν λόγω αντιστροφείς ρυθμίζουν τόσο την ενεργό τιμή της τάσης στην έξοδο του αντιστροφέα, όσο και τη συχνότητα της. Αυτό επιτυγχάνεται μέσω του ελέγχου της έναυσης και της σβέσης των διακοπτικών στοιχείων. Σημειώνεται πως υπάρχουν διάφορες μέθοδοι ελέγχου PWM, που πετυχαίνουν διαφορετικές μορφές τάσεων στην έξοδο. Ένας τριφασικός αντιστροφέας αποτελείται από τρεις κλάδους συνδεδεμένους παράλληλα προς την πηγή συνεχούς τάσης στην είσοδο του, ενώ κάθε κλάδος περιέχει δύο ελεγχόμενα ημιαγωγικά διακοπτικά στοιχεία. Ιδιαίτερη προσοχή χρειάζεται κατά τη λειτουργία του αντιστροφέα προκειμένου να μην άγουν ταυτόχρονα δύο ημιαγωγικά στοιχεία του ίδιου κλάδου, διότι σ αυτήν την περίπτωση θα υπήρχε βραχυκύκλωμα της πηγής εισόδου με πολύ πιθανή συνέπεια την καταστροφή των εν λόγω στοιχείων. Συνεπώς τα στοιχεία αυτά πρέπει να άγουν συμπληρωματικά και ταυτόχρονα να υπάρχει ένα διάστημα «νεκρού χρόνου» ανάμεσα στη σβέση του ενός και την έναυση του άλλου, ώστε να εξαλειφθεί η πιθανότητα βραχυκυκλώματος. Σε επόμενο κεφάλαιο γίνεται λόγος για την εισαγωγή διαστήματος νεκρού χρόνου. Παρακάτω φαίνεται το κύκλωμα ενός τριφασικού αντιστροφέα τάσης με έξι ημιαγωγικά διακοπτικά στοιχεία. -23-
37 Σχήμα 3.1: Τριφασικός αντιστροφέας τάσης με έξι διακοπτικά στοιχεία [27] Στο σχήμα 3.1 δεν απεικονίζονται για λόγους απλότητας τα κυκλώματα ελέγχου των έξι διακοπτικών στοιχείων. Κάθε ημιαγωγικό στοιχείο επιτρέπει τη ροή ρεύματος μόνο κατά τη μία φορά, ενώ η αντιπαράλληλη δίοδος επιτρέπει στο ρεύμα να ρέει κατά την αντίθετη φορά. Η ύπαρξη της αντιπαράλληλης διόδου είναι απαραίτητη, όταν ο αντιστροφέας τροφοδοτεί ένα ωμικό-επαγωγικό φορτίο όπως είναι ο κινητήρας, καθώς το ρεύμα που διαρρέει τα τυλίγματα του κινητήρα δεν πρέπει να μηδενιστεί ακαριαία. Στην αντίθετη περίπτωση που δεν υπήρχαν οι αντιπαράλληλες δίοδοι, το άνοιγμα των διακοπτικών στοιχείων θα διέκοπτε το κύκλωμα και κατ επέκταση τη ροή του ρεύματος με συνέπεια να εμφανίζονταν ενδεχομένως καταστροφικές υπερτάσεις στ άκρα των διακοπτικών στοιχείων. Σημειώνεται πως κάποια ημιαγωγικά διακοπτικά στοιχεία λόγω της κατασκευής (φυσικής δομής) τους, όπως είναι τα MOSFET, έχουν ενσωματωμένη την αντιπαράλληλη δίοδο. Η συχνότητα της τάσης εξόδου εξαρτάται κατά κύριο λόγο από τη διακοπτική συχνότητα των ημιαγωγικών στοιχείων καθώς και από άλλους παράγοντες οι οποίοι θα συζητηθούν αναλυτικά στη συνέχεια. Σ αυτό το σημείο, αξίζει να επισημανθεί ένα βασικό μειονέκτημα, που προκύπτει από τη διακοπτική λειτουργία των αντιστροφέων, και δεν είναι άλλο από την εμφάνιση ανώτερων αρμονικών στις κυματομορφές του ρεύματος. Οι εν λόγω αρμονικές απαιτούν ειδικό σχεδιασμό και προσθήκη φίλτρων, ώστε να αποκόπτονται προκειμένου να βελτιώνεται η συνολική λειτουργία του συστήματος. Αυτό το έργο γίνεται ακόμη δυσκολότερο όταν οι αρμονικές βρίσκονται κοντά στη συχνότητα της βασικής αρμονικής και γενικά όταν η συχνότητα τους είναι χαμηλή. Οι αρμονικές χαμηλών συχνοτήτων οδηγούν σε αυξημένες απαιτήσεις για τις επαγωγές που συμμετέχουν στα φίλτρα, με άμεση συνέπεια να αυξάνεται το κόστος αλλά και ο όγκος του μετατροπέα. Συγκεκριμένα, όταν το φορτίο που τροφοδοτείται από τον αντιστροφέα είναι ένας κινητήρας, φορτίο που αν και κατά κανόνα δεν υπάγεται στα ευαίσθητα φορτία, όπως είναι οι υπολογιστές και τα πάσης φύσεως ηλεκτρονικά, χρειάζεται προσοχή διότι η παρουσία των ανώτερων αρμονικών ρεύματος μπορεί να προκαλέσει ταλαντώσεις στη ροπή και κατ επέκταση στον άξονα του κινητήρα, ή ακόμη και θερμική καταπόνηση της μόνωσης των τυλιγμάτων. Σημειώνεται δε, πως λόγω της ωμικής-επαγωγικής φύσης των τυλιγμάτων του -24-


38 κινητήρα, αυτά λειτουργούν ως ένα χαμηλοδιαβατό φίλτρο με συνέπεια να φιλτράρονται κάποιες από τις ανώτερες αρμονικές του ρεύματος Έλεγχος τριφασικού αντιστροφέα με τετραγωνικούς παλμούς Η πιο απλή μορφή ελέγχου είναι εκείνη των τετραγωνικών παλμών [28], κατά την οποία κάθε ημιαγωγικό στοιχείο άγει για 180 ηλεκτρικές μοίρες και για τις υπόλοιπες 180 παραμένει σβηστό. Κάθε χρονική στιγμή άγουν ταυτόχρονα τρία ημιαγωγικά διακοπτικά στοιχεία και οι τρεις φάσεις συνδέονται εναλλάξ στον αρνητικό ή το θετικό πόλο της συνεχούς τροφοδοσίας για διάρκεια μισής περιόδου. Η τριφασική τάση εξόδου επιτυγχάνεται παλμοδοτώντας με διαφορά φάσης τα στοιχεία του κάθε κλάδου. Στο σχήμα 3.2 φαίνονται με σαφήνεια οι κυματομορφές της φασικής και της πολικής τάσης στην έξοδο του αντιστροφέα. Σχήμα 3.2: Φασικές (αριστερά) και πολικές (δεξιά) κυματομορφές τάσης εξόδου τριφασικού αντιστροφέα ελεγχόμενου από τετραγωνικούς παλμούς [28] Το μεγαλύτερο πλεονέκτημα της εν λόγω παλμοδότησης είναι ότι η τρίτη αρμονική, καθώς και τα περιττά πολλαπλάσια αυτής δεν εμφανίζονται στις πολικές τάσεις. Αυτό συμβαίνει επειδή η πολική τάση προκύπτει ως η διαφορά μεταξύ δύο φασικών τάσεων, με συνέπεια η τρίτη αρμονική της κάθε τάσης να αλληλοαναιρείται με την τρίτη αρμονική της άλλης φασικής τάσης. Αυτό συμβαίνει πάντα, αρκεί ο αστέρας να μην είναι γειωμένος ή το φορτίο να είναι συνδεδεμένο σε τρίγωνο. Ωστόσο, η συγκεκριμένη παλμοδότηση περιορίζεται στον έλεγχο της συχνότητας των κυματομορφών και όχι της ενεργού τιμής τους Έλεγχος τριφασικού αντιστροφέα με διαμόρφωση του εύρους των παλμών Η πιο σύνθετη, αλλά και ευρύτερα χρησιμοποιούμενη μορφή ελέγχου βασίζεται στη ρύθμιση της χρονικής διάρκειας κατά την οποία τα διακοπτικά στοιχεία άγουν και παραμένουν σβηστά. Με αυτόν τον τρόπο παρέχεται η δυνατότητα ρύθμισης της ενεργού -25-
.")
39 τιμής της βασικής αρμονικής της τάσης εξόδου παράλληλα προς τη ρύθμιση της συχνότητας της. Το έργο της δημιουργίας των σημάτων που ελέγχουν τα ημιαγωγικά στοιχεία αναλαμβάνει ο μικροελεγκτής του αντιστροφέα και σχηματίζει μια γεννήτρια PWM (Pulse Width Modulation). Υπάρχουν διάφορες μέθοδοι για τη δημιουργία PWM σημάτων, εκ των οποίων οι πιο συχνά χρησιμοποιούμενες είναι η δημιουργία PWM μέσω τριγώνου (σχ. 3.4) και μέσω ράμπας (σχ. 3.3). Σχήμα 3.3: Δημιουργία PWM σήματος μέσω ράμπας [29] Όπως φαίνεται στο σχήμα 3.3, η έξοδος της γεννήτριας PWM προκύπτει από τη σύγκριση μιας ράμπας, της οποίας η συχνότητα είναι προκαθορισμένη, με ένα σταθερό σήμα. Συγκεκριμένα, όσο το σταθερό σήμα είναι μεγαλύτερο από τη ράμπα, η έξοδος της γεννήτριας PWM είναι 1, ενώ η έξοδος γίνεται 0 όταν η ράμπα είναι μεγαλύτερη από το σταθερό σήμα. Η ανωτέρω λογική μπορεί κάλλιστα να αντιστραφεί, ανάλογα πάντα με την επιθυμητή λειτουργία. Συνοπτικά, το πλάτος του σταθερού σήματος μπορεί να ρυθμιστεί προκειμένου να μεταβάλλεται ο λόγος κατάτμησης (duty cycle) του σήματος PWM. Αντίστοιχη είναι η φιλοσοφία και στη δημιουργία PWM σημάτων μέσω τριγώνου, όπως φαίνεται στο σχήμα 3.4. Σχήμα 3.4: Δημιουργία PWM σήματος μέσω τριγώνου [30] Όπως βλέπουμε, ένα σταθερό σήμα συγκρίνεται αυτή τη φορά μ ένα τρίγωνο και το αποτέλεσμα της λογικής πράξης δίνει το λόγο κατάτμησης της γεννήτριας PWM. -26-


40 Ημιτονοειδής διαμόρφωση του εύρους των παλμών Προκειμένου οι κυματομορφές στην έξοδο του αντιστροφέα να προσεγγίζουν κατά το δυνατόν περισσότερο το ημίτονο, χρησιμοποιείται η συγκεκριμένη τεχνική. Στην ημιτονοειδή διαμόρφωση (Sinusoidal Pulse Width Modulation-SPWM), οι τάσεις στην έξοδο είναι μία σειρά παλμών, κυμαινόμενης διάρκειας (πλάτους) και συχνότητας, την οποία ορίζουμε εμείς. Μέσω της τεχνικής αυτής, ένα ημίτονο συγκρίνεται μ ένα τριγωνικό σήμα και το αποτέλεσμα της σύγκρισης αυτής είναι 1 όταν το ημίτονο είναι μεγαλύτερο του τριγώνου και 0 στην αντίθετη περίπτωση. Αλλάζοντας το πηλίκο του πλάτους του τριγώνου προς το πλάτος του ημιτόνου (συντελεστής διαμόρφωσης πλάτους), μεταβάλλεται το εύρος των παλμών του σήματος εξόδου. Με αυτή τη διαδικασία παράγεται ένα σήμα ελέγχου το οποίο τροφοδοτείται στο πάνω ημιαγωγικό στοιχείο ενός κλάδου, ενώ το συμπληρωματικό του σήματος τροφοδοτείται στο κάτω ημιαγωγικό στοιχείο του κλάδου. Στο σχήμα 3.5 συνοψίζεται η διαδικασία που μόλις περιεγράφηκε. Σχήμα 3.5: Δημιουργία παλμών με SPWM και η προκύπτουσα πολική τάση [31] Όσον αφορά το αρμονικό περιεχόμενο της τάσης εξόδου, προκύπτει ότι η βασική αρμονική βρίσκεται στη συχνότητα του ημιτόνου (σήμα αναφοράς) που συγκρίνεται με το τρίγωνο (σήμα φορέα). Εμφανίζονται και ανώτερες αρμονικές οι οποίες χωρίζονται σε ζώνες με κεντρική συχνότητα αυτή του φέροντος σήματος (F tri ) καθώς και τα πολλαπλάσια αυτής. Συγκεκριμένα: n F tri ± k F sin (3.1) όπου: n=1,2,3,.. και k=1,3,5,7 για άρτιο n και k=2,4,6,8 για περιττό n -27-
 M A = A sin A tri 1 A sin είναι το πλάτος του ημιτόνου αναφοράς A tri είναι το πλάτος του τριγώνου V d είναι το πλάτος της συνεχούς τάσης στην είσοδο του αντιστροφέα Για τη δημιουργία τριφασικών")
41 όπου: Τέλος, το πλάτος της βασικής αρμονικής δίνεται από τον τύπο: V peak φ,1 = M A V d (3.2) M A = A sin A tri 1 A sin είναι το πλάτος του ημιτόνου αναφοράς A tri είναι το πλάτος του τριγώνου V d είναι το πλάτος της συνεχούς τάσης στην είσοδο του αντιστροφέα Για τη δημιουργία τριφασικών κυματομορφών χρησιμοποιούνται τρία ημίτονα αναφοράς (ένα για κάθε φάση) με διαφορά φάσης 120 ο μεταξύ τους, τα οποία συγκρίνονται με το ίδιο τρίγωνο. Η συχνότητα της βασικής αρμονικής καθορίζεται από το ημίτονο αναφοράς, και το πλάτος της από το λόγο των πλατών του ημιτόνου προς του φορέα Οδήγηση σύγχρονου κινητήρα με μόνιμους μαγνήτες από τριφασικό αντιστροφέα Οι σύγχρονοι κινητήρες με μόνιμους μαγνήτες ανεξαρτήτως αν είναι τραπεζοειδής ή ημιτονοειδής μπορούν να οδηγηθούν από τριφασικό αντιστροφέα τάσης. Ανάλογα με τον τύπο του κινητήρα διαμορφώνεται και ο εφαρμοζόμενος έλεγχος. Για την οδήγηση του σύγχρονου κινητήρα της παρούσας διπλωματικής αξιοποιούνται τα σήματα των τριών αισθητήρων Hall, οι οποίοι είναι τοποθετημένοι με απόσταση 120 ο μεταξύ τους, προκειμένου να προσδιοριστεί η θέση του δρομέα και κατ επέκταση οι παλμοί που θα ελέγξουν τα έξι διακοπτικά στοιχεία του αντιστροφέα (σχ. 3.6). Σχήμα 3.6: Κύκλωμα οδήγησης BLDC κινητήρα, φιλοσοφία ελέγχου και κυματομορφές [32] Κάθε 120 ο (ηλεκτρικές) ενεργοποιείται ένας αισθητήρας Hall ο οποίος και παραμένει ενεργοποιημένος για 180 ο (ηλεκτρικές). Στο σχήμα 3.7 φαίνονται τα έξι διαστήματα, καθένα εκ των οποίων χαρακτηρίζεται από ένα μοναδικό συνδυασμό των σημάτων των αισθητήρων -28-

42 Hall. Ταυτόχρονα, απεικονίζεται το διάστημα αγωγής των ημιαγωγικών διακοπτικών στοιχείων ως συνάρτηση των σημάτων από τους αισθητήρες. Σχήμα 3.7: Παλμοί ελέγχου συναρτήσει των σημάτων Hall και φασικές τάσεις [33] Όπως φαίνεται στο σχήμα 3.7 τα ημιαγωγικά στοιχεία ελέγχονται από τα σήματα PWMxH και PWMxL, τα οποία σήματα παράγονται μέσω της τεχνικής διαμόρφωσης του εύρους των παλμών. Με αυτόν τον τρόπο υπάρχει η δυνατότητα ρύθμισης της ενεργού τιμής της τάσης εξόδου του αντιστροφέα και κατ επέκταση της ταχύτητας του BLDC κινητήρα. Όπως αναμενόταν έχουμε τεμαχισμό (chopping) των σημάτων ελέγχου και ανάλογα με το λόγο κατάτμησης που προκύπτει από τον εν λόγω τεμαχισμό, προκύπτει και η ταχύτητα περιστροφής του δρομέα. Τέλος, αν και στο σχήμα 3.7 φαίνεται το αντίθετο, δεν είναι απαραίτητο να ελέγχονται και τα δύο στοιχεία ενός κλάδου μέσω της τεχνικής διαμόρφωσης του εύρους των παλμών. Αντιθέτως, αρκεί το ένα από τα δύο ημιαγωγικά στοιχεία να ελέγχονται με αυτή τη μέθοδο, καθώς κάθε χρονική στιγμή άγουν δύο στοιχεία (ένα πάνω κι ένα κάτω, σε διαφορετικούς κλάδους). Επομένως, το δεύτερο στοιχείο του κλάδου μπορεί να ελέγχεται μέσω τετραγωνικών παλμών κι έτσι να μειώνονται οι διακοπτικές απώλειες. Συνηθίζεται τα πάνω στοιχεία των κλάδων να ελέγχονται μέσω τετραγωνικών παλμών, ενώ τα κάτω μέσω της τεχνικής διαμόρφωσης του εύρους των παλμών. -29-
43 ΚΕΦΑΛΑΙΟ 4 ΠΡΟΣΟΜΟΙΩΣΗ ΤΡΙΦΑΣΙΚΟΥ ΑΝΤΙΣΤΡΟΦΕΑ 4.1. Προσομοίωση συστήματος στο εργαλείο Simulink Η προσομοίωση του συστήματος έγινε με το πρόγραμμα Matlab και συγκεκριμένα με το εργαλείο Simulink. Στο σχήμα 4.1 φαίνεται το μοντέλο του κυκλώματος προς προσομοίωση. Κομμάτι της προσομοίωσης, και συγκεκριμένα ο έλεγχος ροπής, αποτελεί έργο άλλης διπλωματικής [34]. Ο εν λόγω έλεγχος προσαρμόστηκε στα μεγέθη του κινητήρα της παρούσας διπλωματικής, βελτιώθηκε και μετατράπηκε σε έλεγχο ταχύτητας. Σχήμα 4.1: Πλήρες μοντέλο Simulink Στη συνέχεια παρατίθενται τα επιμέρους μοντέλα του αρχείου προσομοίωσης (σχ ). Σχήμα 4.2: Τριφασική Γέφυρα MOSFET -30-
44 Σχήμα 4.3: Σύγχρονη Μηχανή Μόνιμου Μαγνήτη Η λογική έναυσης και σβέσης των MOSFET υλοποιείται μέσω της παλμοδότησης Space Vector Pulse Width Modulation (SVPWM). Οι παράμετροι που απαιτούνται για την υλοποίηση του ελέγχου του αντιστροφέα είναι οι τιμές δύο φασικών ρευμάτων σε κάθε χρονική στιγμή, η θέση του δρομέα και οι παράμετροι της μηχανής. Σχήμα 4.4: Μπλοκ μετατροπής από φασικό σε στρεφόμενο d-q πλαίσιο -31-
45 Συγκεκριμένα χρησιμοποιείται ένας βέλτιστος αλγόριθμος [35], ο οποίος υλοποιείται με δύο ελεγκτές υστέρησης (hysteresis controllers). Ο πρώτος ελεγκτής υστέρησης (σχ. 4.5) δέχεται ως είσοδο τη διαφορά μεταξύ της αναφοράς του ρεύματος I d και της υπολογισμένης τιμής του από τις στιγμιαίες τιμές των φασικών ρευμάτων Ι a, Ι b, Ι c. Η έξοδος του είναι 0, εάν η προηγούμενη διαφορά κυμαίνεται από -0.5 έως 0.5, ενώ γίνεται 1 όταν συμβαίνει το αντίθετο. Η έξοδος αυτή συμβολίζεται ως d Id. Ο δεύτερος ελεγκτής δέχεται ως είσοδο τη διαφορά μεταξύ της αναφοράς της ηλεκτρομαγνητικής ροπής T e και της υπολογισμένης τιμής της. Η έξοδός του είναι: 1, εάν η προαναφερθείσα διαφορά είναι μεγαλύτερη από , εάν η προαναφερθείσα διαφορά κυμαίνεται μεταξύ και , εάν η προαναφερθείσα διαφορά είναι μικρότερη από και συμβολίζεται ως d T. Σχήμα 4.5: Hysteresis Controllers Αξιοποιώντας τη θέση (γωνία) του δρομέα σε ηλεκτρικές μοίρες, ευρίσκεται ο τομέας (sector) στον οποίο κείται κάθε χρονική στιγμή ο δρομέας. Έτσι, λοιπόν, προκύπτει ο βέλτιστος πίνακας έναυσης και σβέσης των MOSFET (πίνακας 4.1). -32-
46 d Id d T Sector 1 Sector 2 Sector 3 Sector 4 Sector 5 Sector 6 1 u 2 u 3 u 4 u 5 u 6 u u 7 u 8 u 7 u 8 u 7 u 8-1 u 6 u 1 u 2 u 3 u 4 u 5 1 u 3 u 4 u 5 u 6 u 1 u u 8 u 7 u 8 u 7 u 8 u 7-1 u 5 u 6 u 1 u 2 u 3 u 4 Πίνακας 4.1: Optimum switching vector look-up table Υπενθυμίζεται ότι: u 1 = [1 0 0],u 2 = [1 1 0], u 3 = [0 1 0], u 4 = [0 1 1], u 5 = [0 0 1], u 6 = [1 0 1], u 7 = [1 1 1], u 8 = [0 0 0] Σχήμα 4.6: Μπλοκ δημιουργίας παλμών για τις πύλες των MOSFET Οι παράμετροι της προσομοίωσης, που χρησιμοποιήθηκαν, είναι: Συνεχής τάση εισόδου V DC = 36V Ημιτονοειδής σύγχρονος τριφασικός κινητήρας μόνιμου μαγνήτη κυλινδρικού δρομέα με: R s = 0.24 Ω L d = L q = H Μόνιμη μαγνήτιση λ af = V s Ροπή αδράνειας δρομέα J = kg m 2 Αριθμός ζευγών πόλων p=23 Στη συνέχεια παρατίθενται τα αποτελέσματα της προσομοίωσης για διάφορες τιμές του φορτίου στον άξονα της μηχανής. -33-
47 4.2. Αποτελέσματα προσομοίωσης για φορτίο στον άξονα Τ=15 Nm Σχήμα 4.7: (α) Ηλεκτρομαγνητική ροπή και (β) Ταχύτητα περιστροφής δρομέα Σχήμα 4.8: (α) Φασικά ρεύματα στάτη και (β) Ρεύματα στάτη σε σύγχρονα στρεφόμενο d- q πλαίσιο -34-
 Ηλεκτρομαγνητική ροπή και (β) Μαγνητική ροή")

48 Σχήμα 4.9: (α) Ηλεκτρομαγνητική ροπή και (β) Μαγνητική ροή διακένου 4.3. Αποτελέσματα προσομοίωσης για φορτίο στον άξονα Τ=10 Nm Σχήμα 4.10: (α) Ηλεκτρομαγνητική ροπή και (β) Ταχύτητα περιστροφής δρομέα -35-
 Φασικά ρεύματα στάτη και (β)")
 Ηλεκτρομαγνητική ροπή και")
49 Σχήμα 4.11: (α) Φασικά ρεύματα στάτη και (β) Ρεύματα στάτη σε σύγχρονα στρεφόμενο d-q πλαίσιο Σχήμα 4.12: (α) Ηλεκτρομαγνητική ροπή και (β) Μαγνητική ροή διακένου -36-
50 4.4. Συμπεράσματα Όπως αναμενόταν, η διακύμανση της ροπής φορτίου ήταν σε ευθεία αναλογία με τις τιμές των φασικών ρευμάτων του στάτη. Συγκεκριμένα, αύξηση της ροπής φορτίου συνεπαγόταν αύξηση των φασικών ρευμάτων. Επίσης, παρατηρήθηκε εξαιρετικά ομαλή συμπεριφορά της καμπύλης στροφών, τόσο κατά την επιτάχυνση-επιβράδυνση, όσο και κατά τη διάρκεια που αυτή διατηρούταν σταθερή. Τέλος, όσον αφορά τη ροή του διακένου, ήταν και αυτή σε ευθεία αναλογία με την απαιτούμενη ροπή στον άξονα του κινητήρα. Είναι ασφαλές, λοιπόν, να ειπωθεί ότι η προσομοίωση λειτουργεί και μοντελοποιεί με ακρίβεια το πραγματικό σύστημα, ενώ ο εφαρμοζόμενος έλεγχος ταχύτητας μέσω PI ελεγκτή και αναφοράς ταχύτητας που δίνεται από το χρήστη, λειτουργεί εξαιρετικά. -37-
51 ΚΕΦΑΛΑΙΟ 5 ΣΧΕΔΙΑΣΜΟΣ ΤΡΙΦΑΣΙΚΟΥ ΑΝΤΙΣΤΡΟΦΕΑ 5.1. Γενική περιγραφή τριφασικού αντιστροφέα τάσης Σε προηγούμενα κεφάλαια αναλύθηκε η θεωρία λειτουργίας του τριφασικού αντιστροφέα και το μοντέλο της προσομοίωσης του. Στο κεφάλαιο αυτό αναλύεται ο σχεδιασμός του αντιστροφέα, ο οποίος έχει χωριστεί σε τέσσερα διακριτά μέρη. Αυτά είναι: το κύκλωμα ισχύος, το κύκλωμα παλμοδότησης, τα τροφοδοτικά διαφόρων επίπεδων τάσης και τέλος το κύκλωμα ελέγχου. Κάθε ένα από αυτά τα τέσσερα διακριτά κυκλώματα αποτελείται από κάποια ηλεκτρονικά στοιχεία, τα οποία έχουν επιλέγει ώστε να πληρούν ορισμένες προδιαγραφές που δίνονται στη συνέχεια Κύκλωμα ισχύος Το κύκλωμα ισχύος του αντιστροφέα είναι το τμήμα το οποίο διαρρέεται από μεγάλα ρεύματα. Η είσοδος του συνδέεται με την πηγή συνεχούς τάσης (τροφοδοτικό ή μπαταρίες) και η έξοδος του συνδέεται με τα τυλίγματα του στάτη του κινητήρα. Τα πιο σημαντικά στοιχεία που το απαρτίζουν είναι τα ημιαγωγικά διακοπτικά στοιχεία, οι πυκνωτές εισόδου και οι δίοδοι ελεύθερης διέλευσης Ημιαγωγικά διακοπτικά στοιχεία Το πιο βασικό κομμάτι του κυκλώματος ισχύος είναι τα ημιαγωγικά διακοπτικά στοιχεία, καθώς αυτά ευθύνονται για τη μετατροπή της συνεχούς τάσης στην είσοδο του αντιστροφέα σε εναλλασσόμενη στην έξοδο του. Αυτό επιτυγχάνεται μέσω της κατάλληλης έναυσης και σβέσης αυτών. Σε εφαρμογές ηλεκτροκίνησης και γενικότερα εφαρμογές μεγάλης ισχύος συναντώνται συνηθέστερα τα παρακάτω τέσσερα είδη διακοπτικών στοιχείων: Θυρίστορ GTO Θυρίστορ IGBT MOSFET Πέραν των κατασκευαστικών διαφορών που παρουσιάζουν μεταξύ τους, κάθε ένα από τα παραπάνω διακοπτικά στοιχεία χρησιμοποιείται σε διαφορετικές εφαρμογές με κύρια κριτήρια τη μέγιστη τάση αποκοπής, το ρεύμα διαμέσου αυτών και τη συχνότητα έναυσης και σβέσης αυτών. Θυρίστορ Το θυρίστορ έχει τρείς ακροδέκτες: την άνοδο, την κάθοδο και την πύλη (σχ. 5.1). Η ελεγχόμενη έναυσή του επιτυγχάνεται όταν πληρούνται δύο προϋποθέσεις, η διαφορά δυναμικού μεταξύ ανόδου και καθόδου να είναι θετική και ταυτόχρονα να υπάρχει ροή ρεύματος από την πύλη προς την κάθοδο. Μόλις τεθεί σε αγωγή το στοιχείο, παρουσιάζεται μικρή αντίσταση αγωγής ευνοώντας, έτσι, τη χρήση του σε εφαρμογές με μεγάλα ρεύματα. Ωστόσο, άπαξ και επιτευχθεί η έναυση η πύλη παύει να ασκεί τον παραμικρό έλεγχο στη σβέση του στοιχείου. Προκειμένου να σβήσει, πρέπει το ρεύμα διαμέσου αυτού να είναι -38-

 Παρουσιάζει δομικές και λειτουργικές ομοιότητες με το συμβατικό θυρίστορ.")
52 μικρότερο από μια κρίσιμη τιμή που ονομάζεται ρεύμα συγκράτησης και ταυτόχρονα η διαφορά δυναμικού μεταξύ της ανόδου και της καθόδου να είναι αρνητική. Καθίσταται, έτσι, απαραίτητη η ύπαρξη εξωτερικού κυκλώματος σβέσης. Το μεγαλύτερο μειονέκτημα του εν λόγω στοιχείου, όμως, είναι οι μεγάλοι χρόνοι έναυσης και σβέσης που παρουσιάζει, καθιστώντας το, έτσι, ακατάλληλο για εφαρμογές διακοπτικής συχνότητας που ξεπερνά τις μερικές δεκάδες Hz. Σχήμα 5.1: Θυρίστορ με τους ακροδέκτες του [36] GTO Θυρίστορ (Gate Turn Off Thyristor) Παρουσιάζει δομικές και λειτουργικές ομοιότητες με το συμβατικό θυρίστορ. Κύρια διαφορά τους είναι ότι το GTO θυρίστορ μπορεί να ελεγχθεί πλήρως από την πύλη του, τόσο όσον αφορά την έναυση, αλλά και όσον αφορά τη σβέση του, η οποία μπορεί να επιτευχθεί εφαρμόζοντας αρνητικό παλμό τάσης μεταξύ της πύλης και της καθόδου. Η έναυση επιτυγχάνεται όπως και στο θυρίστορ, με τη διαφορά ότι για να εξασφαλιστεί η έναυση του, ο παλμός ρεύματος εφαρμόζεται για μεγαλύτερη χρονική διάρκεια. Όσον αφορά τη διακοπτική συχνότητα που μπορεί να επιτευχθεί μέσω του GTO, αυτή είναι σαφώς μεγαλύτερη του Θυρίστορ και μπορεί ν αγγίξει το 1 khz. Τυπικές τιμές ενός GTO κι ενός απλού θυρίστορ δίνονται στο σχήμα 5.2. Σχήμα 5.2: Χαρακτηριστικές τιμές GTO Θυρίστορ [37] IGBT (Insulated Gate Bipolar Transistor) Έχει τρεις ακροδέκτες, το συλλέκτη, τον εκπομπό και την πύλη. Παρουσιάζει υψηλή εμπέδηση εισόδου και είναι πλήρως ελέγξιμο από την πύλη του. Οι χρόνοι έναυσης και σβέσης του είναι μικροί, της τάξης των 10 μs-100 μs, καθιστώντας το ελκυστικό για εφαρμογές διακοπτικής συχνότητας μέχρι τα 100 khz, τάσης 2.5 kv, και ρεύματος 1kA. -39-
![MOSFET Ισχύος Είναι ένα ελεγχόμενο από τάση ημιαγωγικό στοιχείο [38] με τρεις ακροδέκτες, την υποδοχή (Drain), την πύλη (Gate) και την πηγή (Source).](/docs-images/81/83809274/images/53-0.jpg "Είναι πλήρως ελέγξιμο μέσω της πύλης του, με την έννοια ότι για την έναυση του πρέπει να εφαρμοστεί κατάλληλη τάση (με τιμή μεγαλύτερη από την τάση κατωφλίου) μεταξύ της πύλης και της πηγής, ενώ για")
53 MOSFET Ισχύος Είναι ένα ελεγχόμενο από τάση ημιαγωγικό στοιχείο [38] με τρεις ακροδέκτες, την υποδοχή (Drain), την πύλη (Gate) και την πηγή (Source). Είναι πλήρως ελέγξιμο μέσω της πύλης του, με την έννοια ότι για την έναυση του πρέπει να εφαρμοστεί κατάλληλη τάση (με τιμή μεγαλύτερη από την τάση κατωφλίου) μεταξύ της πύλης και της πηγής, ενώ για τη σβέση του αρκεί η εφαρμοζόμενη στους δύο ακροδέκτες τάση να είναι μικρότερη από την τιμή κατωφλίου (gate threshold voltage). Η πύλη του MOSFET συμπεριφέρεται ως πυκνωτής, πράγμα που σημαίνει ότι παρουσιάζει υψηλή εμπέδηση εισόδου, απαιτείται δε, μικρή ισχύς για τον έλεγχο του στοιχείου. Παρουσιάζει μικρή αντίσταση κατά την αγωγή του, η οποία όμως αυξάνεται όσο αυξάνεται η θερμοκρασία του στοιχείου, σ αντίθεση με τους χρόνους έναυσης και σβέσης του στοιχείου οι οποίοι είναι ανεξάρτητοι της θερμοκρασίας. Οι χρόνοι αυτοί είναι εξαιρετικά μικροί, της τάξης 10 ns-100 ns, καθιστώντας το MOSFET κατάλληλο για εφαρμογές υψηλής συχνότητας. Τυπικές τιμές που μπορούν να βρεθούν στο εμπόριο είναι V DS = 100 V, I DS = 100 A. Στο σχήμα 5.3 φαίνονται οι περιοχές τάσης, ρεύματος και συχνότητας στις οποίες κυριαρχεί το κάθε από τα τέσσερα στοιχεία που αναλύθηκαν προηγουμένως. Σχήμα 5.3: Σύγκριση ημιαγωγικών διακοπτικών στοιχείων με βάση τις οριακές περιοχές λειτουργίας τους [39] Σε αυτό το σημείο, αξίζει να σημειωθούν τα κριτήρια [40] με τα οποία επιλέγονται τα ημιαγωγικά διακοπτικά στοιχεία, ανάλογα με τις ανάγκες της εκάστοτε εφαρμογής. Αυτά είναι: -40-

54 Η τάση και η αντίσταση αγωγής του στοιχείου που καθορίζουν τις απώλειες κατά την αγωγή Οι χρόνοι έναυσης και σβέσης του στοιχείου που καθορίζουν τη μέγιστη διακοπτική συχνότητα και κατ επέκταση τις διακοπτικές απώλειες Η ισχύς που καλείται να διαχειριστεί ο μετατροπέας, δηλαδή τα όρια τάσης και ρεύματος που θα αντιμετωπίσουν τα στοιχεία Η ισχύς που απαιτείται για τον έλεγχο του στοιχείου Οι απαιτήσεις για ψύξη και η επάρκεια χώρου για τη χρήση κατάλληλων ψυκτικών σωμάτων Κόστος και η διαθεσιμότητα των στοιχείων στο εμπόριο Οι απαιτήσεις της συγκεκριμένης εφαρμογής επιβάλλουν διακοπτική συχνότητα της τάξης των 10 khz, τάση V και ισχύ 500 W. Αυτόματα, λόγω της απαιτούμενης διακοπτικής συχνότητας και σύμφωνα με όσα έχουν προαναφερθεί, αποκλείεται η χρήση GTO και συμβατικών Θυρίστορ. Τα IGBT είναι κατάλληλα γι αυτές τις τιμές συχνοτήτων, ωστόσο το κόστος τους και οι πλεονάζουσες δυνατότητες τους σε σύγκριση με τα MOSFET, αποκλείουν και αυτά. Συνεπώς, επιλέγονται MOSFET ισχύος ως ημιαγωγικά διακοπτικά στοιχεία για την εφαρμογή. Μετά από έρευνα αγοράς και κατόπιν σύγκρισης με διαφορετικά ημιαγωγικά στοιχεία τύπου MOSFET, επιλέχθηκε το PSMN8R5-100PS (σχ.5.4) της εταιρείας NXP. Το datasheet του επισυνάπτεται στο ΠΑΡΑΡΤΗΜΑ Γ. Τα κυριότερα χαρακτηριστικά που οδήγησαν στην επιλογή του είναι τα εξής: Μέγιστη τάση αποκοπής V DS = 100V Μέγιστο συνεχές ρεύμα διέλευσης ίσο με: I DS = 100 Α στους 25 ο C και I DS = 75 A στους 100 ο C Μικρή αντίσταση αγωγής: R DSon = 5.4 mω στους 25 ο C Μικροί χρόνοι έναυσης και σβέσης ίσοι με: t d(on) = 20ns και t d(off) = 87ns Μικρό κόστος Όπως γίνεται φανερό από τα παραπάνω, το στοιχείο υπερκαλύπτει τις ανάγκες της εφαρμογής, καθώς είναι υπερδιαστασιολογημένο, εξασφαλίζοντας έτσι την προστασία του στοιχείου σε περιπτώσεις υπερτάσεων και διέλευσης ρευμάτων μεγαλύτερων των ονομαστικών. Ταυτόχρονα, έχει μικρή αντίσταση αγωγής με άμεση συνέπεια να χαρακτηρίζεται από μειωμένες απώλειες κατά την αγωγή του και κατ επέκταση να έχει μεγαλύτερο βαθμό απόδοσης. Τέλος, το μικρότερο του κόστος συγκριτικά με άλλα στοιχεία μικρότερων δυνατοτήτων, ήταν ένας λόγος που το κατέστησε πρώτη επιλογή. Σχήμα 5.4: MOSFET ισχύος PSMN8R5-100PS [41] -41-
55 Δίοδοι ελεύθερης διέλευσης Οι δίοδοι ισχύος είναι ημιαγωγικά στοιχεία, οι οποίες άγουν όταν πολώνονται ορθά και παρουσιάζουν μικρή πτώση τάσης στ άκρα τους. Είναι αναπόσπαστο κομμάτι του κυκλώματος του αντιστροφέα, καθώς τοποθετούνται παράλληλα προς κάθε ημιαγωγικό διακοπτικό στοιχείο, ώστε να παρέχουν εναλλακτικό δρόμο για το ρεύμα από το φορτίο προς την πηγή. Σε διαφορετική περίπτωση, η μη ύπαρξη τους θα είχε ως συνέπεια την εμφάνιση υπερτάσεων, καθώς θα είχαμε απότομο μηδενισμό του ρεύματος διαμέσου των τυλιγμάτων της μηχανής (ωμικό-επαγωγικό φορτίο). Οι εν λόγω δίοδοι επιλέγονται με κριτήριο το μέγιστο ρεύμα που ενδέχεται να τις διαρρεύσει. Από κατασκευής τους, τα MOSFET ισχύος έχουν ενσωματωμένη μια αντιπαράλληλη δίοδο μεταξύ υποδοχής και πηγής. Σύμφωνα με τα χαρακτηριστικά της διόδου που αναγράφονται στο φυλλάδιο του κατασκευαστή, οι απαιτήσεις της εφαρμογής υπερκαλύπτονται και δεν υπάρχει ανάγκη για προσθήκη επιπρόσθετης διόδου ελεύθερης διέλευσης. Τα χαρακτηριστικά αυτά είναι: μέγιστο συνεχές ρεύμα ίσο με: I S = 100 A μέγιστο παλμικό ρεύμα ίσο με: I SM = 429 A πτώση τάσης κατά την ορθή πόλωση ίση με: V SD = 0,82 V Ψυκτικά σώματα Η λειτουργία των ημιαγωγικών διακοπτικών στοιχείων σε υψηλές συχνότητες έχει ως συνέπεια τόσο την εμφάνιση απωλειών αγωγής, όσο και διακοπτικών απωλειών. Οι απώλειες αυτές εκφράζονται ως θερμότητα στα ημιαγωγικά διακοπτικά στοιχεία και αυξάνουν τη θερμοκρασία τους. Αύξηση της θερμοκρασίας πέραν ενός ορίου συνεπάγεται την καταστροφή του στοιχείου, ενώ μία μονίμως αυξημένη θερμοκρασία κάτω από αυτό το όριο μειώνει τη λειτουργικότητα και αξιοπιστία του στοιχείου, παρόλο που δεν το καταστρέφει. Έτσι, καθίσταται απαραίτητη η διαχείριση και ο περιορισμός των απωλειών. Ένας τρόπος διαχείρισης αυτών των απωλειών είναι η απαγωγή της θερμότητας από τα διακοπτικά στοιχεία με τη χρήση κατάλληλων ψυκτικών σωμάτων. Τα ψυκτικά αυτά, εκτρέπουν στην ουσία τη θερμότητα από τα στοιχεία και τη διοχετεύουν στο περιβάλλον, διατηρώντας τη θερμοκρασία των στοιχείων σε λειτουργία όσο το δυνατόν πιο χαμηλή. Τα ψυκτικά σώματα είναι θερμοαγώγιμα μεταλλικά κράματα τα όποια έχουν μεγάλη επιφάνεια αλλά μικρό όγκο, ώστε να διαχέουν αποτελεσματικά τη θερμότητα στο περιβάλλον. Τοποθετούνται σε όσο το δυνατόν στενότερη επαφή με τα ημιαγωγικά διακοπτικά στοιχεία στην «πλάτη τους» γίνεται. Ανάμεσα στα δύο αντικείμενα τοποθετείται θερμικά, αλλά όχι ηλεκτρικά αγώγιμη ταινία εξασφαλίζοντας την ηλεκτρική απομόνωση μεταξύ του διακοπτικού στοιχείου και του ψυκτικού. Οι συνολικές απώλειες (P total ) σε κάθε ξεχωριστό MOSFET είναι το άθροισμα των διακοπτικών απωλειών (P sw ),των απωλειών αγωγής (P cond ) και των απωλειών διαρροής (P L ), οι οποίες όμως είναι πολύ μικρές και θεωρούνται αμελητέες στους υπολογισμούς. Οφείλονται δε, τόσο στα διακοπτικά στοιχεία, όσο και στις διόδους ελεύθερης διέλευσης [42]. Απώλειες Αγωγής: P MOS cond = 1 T SW 0 T SW R DS(on) i 2 D (t)dt όπου: R DS(on) είναι η αντίσταση αγωγής στους 100 ο C 2 = R DS(on) I D,rms (5.1) -42-
56 P DIODE cond = 1 T SW 0 T SW R D i 2 S (t)dt όπου: R D είναι η αντίσταση αγωγής της διόδου στους 100 ο C Άρα οι συνολικές απώλειες αγωγής είναι: P cond = P MOS cond +P DIODE cond = 3,9 + 1,31 = 5,21W Διακοπτικές απώλειες: 2 = R D I S,rms (5.2) MOS = f SW u DS (t) i D (t)dt P SW_ON DIODE = f SW P SW_ON P SW_OFF t ri +t fu 0 t ri +t fu 0 t ru +t fi 0 MOS = f SW u DS (t) i D (t)dt = f SW (U DD I Don t ri+t fu Q rr U DD ) (5.3) u DS (t) i F (t)dt = f SW 1 Q 4 rr U Drr (5.4) = f SW (U DD I Doff t ru+t fi ) (5.5) 2 όπου: t ri ο χρόνος ανόδου του ρεύματος, t fu ο χρόνος μηδενισμού της τάσης, Q rr το φορτίο ανάστροφης ανάκτησης, U DD η τάση στ άκρα του MOSFET, I Don το ρεύμα που διαρρέει το MOSFET κατά την έναυση του και f SW η διακοπτική συχνότητα του αντιστροφέα. Σημειώνεται ότι οι παράμετροι t ri, t fu, Q rr βρίσκονται στο φυλλάδιο του κατασκευαστή, ενώ οι υπόλοιπες παράμετροι καθορίζονται από την εκάστοτε εφαρμογή. Στην παρούσα εφαρμογή η συχνότητα λειτουργίας θα περιοριστεί στα khz, ωστόσο για τους υπολογισμούς των διακοπτικών απωλειών τέθηκε συχνότητα ίση με 20 khz, ώστε να υπάρχει ένα περιθώριο ασφαλείας. Έτσι παίρνουμε: MOS P SW = P SW_ON + P DIODE MOS SW_ON + P SW_OFF = 0,51 + 0,42 + 0,02 = 0,95 W (5.6) Συνεπώς οι συνολικές απώλειες είναι: P total = P cond + P SW = 5,21 + 0,95 = 5,15 W Έχοντας υπολογίσει τις αναμενόμενες απώλειες του ενός MOSFET, μπορεί να υπολογιστεί η τιμή της θερμικής αντίστασης του ψυκτικού σώματος, σύμφωνα με τον παρακάτω τύπο [43]: R thsa = T J T A P total (R thjc + R thcs ), όπου: R thsa είναι η θερμική αντίσταση του ψυκτικού σώματος (sink-ambient) T J είναι η μέγιστη θερμοκρασία επαφής (junction), T J = 100 ο C T A είναι η θερμοκρασία περιβάλλοντος (ambient), T A = 25 o C P total είναι οι απώλειες που εκλύονται από δύο MOSFET, P total = 12,32 W R thjc είναι η θερμική αντίσταση μεταξύ επαφής και θήκης (junction-case) R thcs είναι η θερμική αντίσταση μεταξύ θήκης και ψυκτικού σώματος(case-sink) Συνεπώς θα πρέπει: R thsa = 7 o C/W Σύμφωνα με τα προηγούμενα, προκειμένου να ψυχθούν αποτελεσματικά δύο MOSFET ισχύος, απαιτείται η χρήση ενός ψυκτικού σώματος με θερμική αντίσταση μικρότερη από R thsa = 7 o C/W. Κατόπιν έρευνας αγοράς με κριτήρια την εν λόγω αντίσταση, το μέγεθος του

57 ψυκτικού και το κόστος του, κρίθηκε κατάλληλο να χρησιμοποιηθούν τα ψυκτικά σώματα της εταιρείας Fischer με κωδικό SK , τα οποία παρουσιάζουν θερμική αντίσταση ίση με 4.5 o C/W και φαίνονται στο σχήμα 5.5. Σχήμα 5.5: Ψυκτικά Fischer SK 481 [44] Πυκνωτές Το κύκλωμα ισχύος του τριφασικού αντιστροφέα τάσης ολοκληρώνεται με τους πυκνωτές. Συνολικά χρησιμοποιήθηκαν εννιά πυκνωτές, τρεις ηλεκτρολυτικοί και έξι MKT. Καθένας από τους τρεις ηλεκτρολυτικούς πυκνωτές έχει ονομαστική τάση λειτουργίας τα 100V και χωρητικότητα 1 mf. Σκοπός των ηλεκτρολυτικών πυκνωτών είναι η περαιτέρω εξομάλυνση της τάσης εισόδου, είτε αυτή προέρχεται από συσσωρευτές, είτε από τροφοδοτικό συνεχούς τάσης. Όσον αφορά τους ΜΚΤ, αυτοί είναι τοποθετημένοι όσο το δυνατόν πλησιέστερα στα MOSFET (δύο πυκνωτές ανά φάση), έχουν ονομαστική τάση λειτουργίας 100V και χωρητικότητα 1μF. Σκοπός τους είναι να αποκόπτουν τυχόν υπερτάσεις που παρουσιάζονται κατά το άνοιγμα και το κλείσιμο των διακοπτικών στοιχείων Κύκλωμα παλμοδότησης Το κύκλωμα παλμοδότησης είναι στην ουσία ο μεσολαβητής ανάμεσα στο κύκλωμα ελέγχου και στο κύκλωμα ισχύος. Λαμβάνει τις εντολές από το κύκλωμα ελέγχου και τις υλοποιεί, δίνει, δηλαδή, τους παλμούς στις πύλες των έξι MOSFET, ελέγχοντας την έναυση και τη σβέση αυτών. Η πορεία που ακολουθούν τα σήματα, ξεκινάει από το μικροελεγκτή ο οποίος, όπως θ αναλυθεί παρακάτω, ανάλογα με το εγκατεστημένο πρόγραμμα δίνει κάποια σήματα ελέγχου (παλμούς). Στη συνέχεια, τα έξι αυτά σήματα ενισχύονται μέσω ενός ολοκληρωμένου (hex inverter), το οποίο ταυτόχρονα τα αντιστρέφει. Στο αμέσως επόμενο στάδιο τα ήδη ενισχυμένα και αντεστραμμένα σήματα εισέρχονται στους οπτοζεύκτες (optocouplers), οι οποίοι είναι ολοκληρωμένα, που αντιστρέφουν εκ νέου το σήμα στην είσοδο τους και ταυτόχρονα απομονώνουν οπτικά το κύκλωμα στην είσοδο τους από αυτό στην έξοδο τους. Στο τρίτο και τελευταίο στάδιο του κυκλώματος παλμοδότησης, τα σήματα στην έξοδο των οπτοζευκτών οδηγούνται στους οδηγούς πύλης (gate drivers), οι οποίοι είναι και αυτοί ολοκληρωμένα. Τα ολοκληρωμένα αυτά ενισχύουν περαιτέρω τα σήματα στην είσοδο τους, ώστε να μπορέσουν να οδηγήσουν επιτυχώς τις πύλες των MOSFET στην επιθυμητή κατάσταση έναυσης ή σβέσης. -44-
58 Ενισχυτής Τα σήματα στην έξοδο του επεξεργαστή είναι παλμοί τάσης 0 V ή 3,3 V, τα οποία πρέπει να ενισχυθούν προτού να είναι ικανά να οδηγήσουν επόμενα στάδια του κυκλώματος παλμοδότησης. Αυτό γιατί ο επεξεργαστής δεν έχει τη δυνατότητα να παρέχει επαρκές ρεύμα για την τροφοδότηση του συνόλου των παλμών που δίνει. Την ενίσχυση των σημάτων εξόδου του επεξεργαστή αναλαμβάνει το ολοκληρωμένο SN74HC04N της εταιρείας Texas Instruments, το οποίο περιλαμβάνει έξι πύλες NOT. Κάθε ένα σήμα από τα έξι σήματα εξόδου του επεξεργαστή, εισέρχεται σε μία από τις έξι πύλες του ολοκληρωμένου, ενισχύεται και αντιστρέφεται. Στο σχήμα 5.6 φαίνεται το ολοκληρωμένο και το λογικό του διάγραμμα. Σχήμα 5.6: Το ολοκληρωμένο SN74HC04N της εταιρείας Texas Instruments [45] Οπτοζεύκτης Φεύγοντας από τη βαθμίδα του ενισχυτή, καθένα από τα έξι, πλέον ενισχυμένα σήματα, εισέρχεται σ έναν οπτοζεύκτη (optocoupler). Ο οπτοζεύκτης είναι και αυτός ένα ολοκληρωμένο, το οποίο προσφέρει οπτική απομόνωση μεταξύ του κυκλώματος παλμοδότησης- ελέγχου και του κυκλώματος ισχύος. Προκειμένου να επιτευχθεί η εν λόγω απομόνωση μεταξύ της εισόδου του οπτοζεύκτη και της εξόδου του, χρησιμοποιείται μια φωτοδίοδος κι ένα φωτοτρανζίστορ στην είσοδο και την έξοδο αντίστοιχα. Η φωτοδίοδος όπως και οι συμβατικές δίοδοι, άγει όταν τεθεί υπό τάση, με τη διαφορά ότι η φωτοδίοδος εκπέμπει φως στο υπέρυθρο φάσμα κατά την αγωγή της. Το φως αυτό οδηγείται στη βάση ενός φωτοτρανζίστορ μεσώ ενός διακένου απομόνωσης (συνήθως γυαλί, πλαστικό ή αέρας), θέτοντας έτσι σε αγωγή η αποκοπή το φωτοτρανζίστορ. Με αυτόν τον τρόπο γίνεται διαχωρισμός των δυναμικών της γης στην είσοδο και στην έξοδο του οπτοζεύκτη, καθώς το διάκενο απομόνωσης δεν μπορεί να διαρρέεται από ρεύμα υπό συνθήκες κανονικής λειτουργίας. Για την εφαρμογή αυτή, επιλέχθηκε το ολοκληρωμένο 6N137, το οποίο αναστρέφει εκ νέου το σήμα στην είσοδο του και στο σχήμα 5.7 φαίνεται ο πίνακας αληθείας και το σχηματικό του διάγραμμα. -45-
59 Σχήμα 5.7: Το σχηματικό του ολοκληρωμένου 6Ν137 και ο πίνακας αληθείας του [46] Οδηγός πύλης Ο οδηγός πύλης είναι ένα ολοκληρωμένο και αποτελεί το τρίτο και τελευταίο στάδιο του κυκλώματος παλμοδότησης και ο ρόλος του είναι να μετασχηματίσει σε κατάλληλα επίπεδα ισχύος και τάσης τους παλμούς που έρχονται στην είσοδο του, ώστε να μπορεί να οδηγήσει καταλλήλως τα MOSFET. Για το σκοπό αυτό επιλέχθηκε το ολοκληρωμένο IR2113 της International Rectifier, το οποίο υποστηρίζει υψηλή συχνότητα λειτουργίας, ενώ χαρακτηρίζεται ως High and Low Side Driver, αφού έχει δύο εισόδους και δύο εξόδους και συνεπώς μπορεί να οδηγήσει δύο MOSFET του ιδίου κλάδου, μέσω της συνδεσμολογίας Bootstrap η οποία θα αναλυθεί εκτενώς στη συνέχεια. Στο σχήμα 5.8 φαίνεται το pinout του εν λόγω ολοκληρωμένου. Σχήμα 5.8: Το pinout του ολοκληρωμένου IR2113 [47] Το IR2113 δέχεται δύο επίπεδα τάσης τροφοδοσίας, και στην εφαρμογή μας συγκεκριμένα τα 5V, 15V. Συγκεκριμένα τα 5V των παλμών στα κανάλια εισόδου μετασχηματίζονται σε 15V στην έξοδο, ώστε να οδηγήσουν τις πύλες των MOSFET. Στο σχήμα 5.9 φαίνεται η προτεινόμενη από τον κατασκευαστή συνδεσμολογία του οδηγού. -46-

60 Σχήμα 5.9: Η προτεινόμενη από τον κατασκευαστή συνδεσμολογία του οδηγού πύλης Όπως φαίνεται κι από το σχήμα 5.9, τα δύο κανάλια εξόδου ΗΟ,LO οδηγούνται μέσω μιας αντίστασης στις πύλες των MOSFET. Η τιμή αυτής της αντίστασης καθορίζει την ταχύτητα έναυσης και σβέσης του τρανζίστορ, αφού από αυτήν εξαρτάται η τιμή του ρεύματος προς την πύλη του MOSFET. Όσο μικρότερη τιμή έχει αυτή η αντίσταση, τόσο ταχύτερη είναι η έναυση και η σβέση του στοιχείου. Να σημειωθεί ότι για λόγους προστασίας των πυλών των MOSFET, ανάμεσα στην πύλη και την πηγή του κάθε στοιχείου συνδέθηκε μία αντίσταση της τάξης των 10 kω και μια δίοδος Zener των 18V, ώστε τυχόν υπερτάσεις να διοχετεύονται μέσω της διόδου στην πηγή των στοιχείων. Με αυτόν τον τρόπο οι πύλες των στοιχείων δεν τίθενται υπό τάση μεγαλύτερη των 18V. Η συνδεσμολογία Bootstrap, επιτρέπει τον απευθείας έλεγχο του κάτω (low side) MOSFET ενός κλάδου από την τάση Vcc η οποία και εφαρμόζεται ανάμεσα στην πύλη και την πηγή του εν λόγω MOSFET. Αντίθετα, ο έλεγχος του πάνω (high side) MOSFET ενός κλάδου γίνεται μέσω μιας διόδου και της φόρτισης κι εκφόρτισης ενός πυκνωτή. Απαιτείται λοιπόν επιλογή κατάλληλης διόδου και πυκνωτή, ώστε η συνδεσμολογία Bootstrap να λειτουργεί σωστά. Η αρχή λειτουργίας της συνδεσμολογίας Bootstrap συνοψίζεται στο σχήμα Σχήμα 5.10: Διαδρομή ρευμάτων φόρτισης κι εκφόρτισης συνδεσμολογίας Bootstrap [48] -47-
61 Όταν άγει το κάτω τρανζίστορ, ο πυκνωτής C BOOT φορτίζεται μέσω της διόδου D BOOT και του κάτω τρανζίστορ από την πηγή V CC,όπως φαίνεται με κόκκινο στο σχήμα Η τάση στην οποία φορτίζεται ο πυκνωτής είναι V CC-V Dboot. Μόλις σταματήσει να άγει το κάτω τρανζίστορ, η τάση του φορτισμένου πλέον πυκνωτή εφαρμόζεται στους ακροδέκτες B,S του ολοκληρωμένου και τελικά μεταξύ της πύλης και της πηγής του πάνω MOSFET, θέτοντας το, έτσι, σε αγωγή. Σε αυτό το σημείο, ο πυκνωτής εκφορτίζεται μέσω της διαδρομής που σημειώνεται με μπλε χρώμα στο σχήμα Η μέθοδος Bootstrap, αν και είναι οικονομική και απλή, παρουσιάζει κάποια μειονεκτήματα, ένα εκ των οποίων είναι ο περιορισμός του ελάχιστου λόγου κατάτμησης (duty cycle) και του χρόνου έναυσης και σβέσης των τρανζίστορ που οδηγούνται. Αυτό συμβαίνει, διότι ο πυκνωτής C BOOT χρειάζεται κάποιον ελάχιστο χρόνο προκειμένου να φορτιστεί στα κατάλληλα επίπεδα. Το σημαντικότερο μειονέκτημα που παρουσιάζει η συνδεσμολογία αυτή είναι η αρνητική τάση, που εμφανίζεται στην πηγή του πάνω διακοπτικού στοιχείου κατά τη διάρκεια τους σβέσης του, διότι έχει ως αποτέλεσμα το ρεύμα του φορτίου να οδηγηθεί απότομα στη δίοδο ελεύθερης διέλευσης του κάτω διακοπτικού στοιχείου. Πρόβλημα μπορεί να δημιουργηθεί τόσο στο ίδιο το ολοκληρωμένο λόγω τους τους αρνητικής τάσης, όσο και στον πυκνωτή C BOOT, ο οποίος ενδέχεται να υπερφορτιστεί. Αναφορικά με την επιλογή τους κατάλληλης D BOOT, αυτή πρέπει να παρουσιάζει μικρή πτώση τάσης κατά την αγωγή τους και μικρό χρόνο ανάστροφης ανάκτησης. Γι αυτόν το σκοπό επιλέχθηκε η δίοδος UF4007 τους εταιρείας Fairchild Semiconductor. Κριτήριο επιλογής για τον πυκνωτή C BOOT αποτελεί η χωρητικότητα, που απαιτείται ώστε να παρέχεται το απαραίτητο φορτίο για την έναυση του MOSFET και ταυτόχρονα να διατηρείται σταθερή η τάση του πυκνωτή κατά την αγωγή του πάνω στοιχείου. Για τους υπολογισμούς χρησιμοποιήθηκε ο ακόλουθος τύπος: Q TOTAL = Q GATE + (I LKCAP + I LKGS + I QBS + I LK + I LKDIODE ) t ON + Q LS (5.7) όπου: Q GATE : συνολικό φορτίο πύλης I LKCAP : ρεύμα διαρροής Bootstrap πυκνωτή I LKGS : ρεύμα διαρροής διακοπτικού στοιχείου I QBS : ρεύμα ηρεμίας συνδεσμολογίας Bootstrap I LK : ρεύμα διαρροής συνδεσμολογίας Bootstrap I LKDIODE : ρεύμα διαρροής διόδου Bootstrap t ON : χρόνος αγωγής διακοπτικού στοιχείου Q LS : ορίζεται ως 3 nc για όλους τους οδηγούς πύλης υψηλής τάσης Με βάση τα φυλλάδια των κατασκευαστών των MOSFET, των οδηγών πύλης και τους διόδου Bootstrap προκύπτει ότι: Q TOTAL = 128 nc Η χωρητικότητα του πυκνωτή υπολογίζεται από τον τύπο: C = Q TOTAL ΔV BOOT (5.8) -48-
62 Θεωρώντας μέγιστη πτώση τάσης στον πυκνωτή Bootstrap ΔV BOOT = 1 V, τότε η ελάχιστη χωρητικότητα του είναι C BOOT = 128 nf. Για τη συγκεκριμένη εφαρμογή επιλέχτηκαν πυκνωτές τανταλίου των 4,7 μf στα 25 V. Η χωρητικότητα τους είναι εμφανώς μεγαλύτερη από την ελάχιστη θεωρητική, ωστόσο προτιμήθηκε προκειμένου να εξαλειφθεί το ενδεχόμενο ταχείας εκφόρτισης τους κατά την αγωγή του πάνω MOSFET Κύκλωμα ελέγχου Ο «εγκέφαλος» του αντιστροφέα είναι ο μικροελεγκτής που υπάρχει στην πλακέτα και είναι υπεύθυνος για τη λήψη και επεξεργασία των εισερχόμενων σε αυτό σημάτων. Τέτοια σήματα προέρχονται από: τους αισθητήρες Hall τον ηλεκτρικό επιταχυντή (γκάζι) το ηλεκτρικό φρένο τους αισθητήρες ανίχνευσης κίνησης των πεταλιών τα μετρητικά ρεύματος τα μετρητικά τάσης Σήματα ελέγχου Αισθητήρες Hall Οι αισθητήρες Hall είναι τοποθετημένοι στο στάτη της μηχανής και η τάση τροφοδοσίας τους είναι τα 5V. Οι τρεις αυτοί αισθητήρες ανάλογα με τη δυαδική λέξη που σχηματίζει η έξοδος τους, δίνουν πληροφορίες όσον αφορά τη θέση του δρομέα. Οι τρεις έξοδοι των αισθητήρων τροφοδοτούνται ως είσοδοι στον μικροελεγκτή και στην ουσία καθορίζουν την αγωγή των κατάλληλων MOSFET σε κάθε χρονική στιγμή. Ηλεκτρικός επιταχυντής Ο ηλεκτρικός επιταχυντής είναι στην ουσία ένα ποτενσιόμετρο το οποίο τροφοδοτείται με 3,3 V και η μεταβλητή έξοδος του τροφοδοτείται ως είσοδος στο μικροελεγκτή. Η τιμή της μεταβλητής τάσης καθορίζει την επιθυμητή ταχύτητα του κινητήρα. Ηλεκτρικό φρένο Το ηλεκτρικό φρένο εκτός από το μηχανικό ρόλο που παίζει στο φρενάρισμα, περιλαμβάνει ένα διακόπτη ο οποίος στέλνει ένα ψηφιακό σήμα στον επεξεργαστή, ανάλογα με το αν είναι πατημένο ή όχι. Το ψηφιακό αυτό σήμα έχει σκοπό να ακυρώσει τυχόν ενέργειες επιτάχυνσης του κινητήρα. Αισθητήρες ανίχνευσης κίνησης πεταλιών Ρόλος του εν λόγω αισθητήρα είναι να ενημερώνεται ο επεξεργαστής εάν τα πετάλια περιστρέφονται, δηλαδή εάν ο αναβάτης κάνει πετάλι τη συγκεκριμένη χρονική στιγμή. Η λειτουργία τους βασίζεται στο φαινόμενο Hall και ανάλογα με τη συχνότητα των παλμών που επιστρέφονται στον επεξεργαστή από την έξοδο του αισθητήρα, ο επεξεργαστής ρυθμίζει αναλόγως την ταχύτητα του κινητήρα. -49-
63 Μετρητικά ρεύματος και τάσης Ο ρόλος των εν λόγω μετρητικών είναι να παρακολουθούν σε κάθε χρονική στιγμή τις τιμές της τάσης και του ρεύματος στην είσοδο του αντιστροφέα. Ανάλογα με την τιμή που μετράται, διακόπτεται ή συνεχίζεται η λειτουργία του αντιστροφέα Μετρητικό τάσης Στην ουσία πρόκειται για μια διάταξη και όχι κάποιο ολοκληρωμένο κύκλωμα. Η τάση που μετράει η διάταξη κυμαίνεται από V, πράγμα που σημαίνει ότι πρέπει να μετασχηματιστεί η διαφορά δυναμικού αυτή σε επίπεδα συμβατά με αυτά του επεξεργαστή. Επομένως, πρέπει να κατέβει στα 3,3 V. Αυτό επιτυγχάνεται στην ουσία μ έναν διαιρέτη τάσης και έναν τελεστικό ενισχυτή που τοποθετείται παράλληλα στην είσοδο του μετατροπέα. Προσοχή χρειάζεται για την επιλογή των τιμών των αντιστάσεων ώστε να πληρούν δύο προϋποθέσεις, με πρώτη να μετασχηματίζουν στο σωστό επίπεδο την τάση εισόδου. Αυτό επιτυγχάνεται ως ακολούθως: Έστω οι δύο αντιστάσεις του διαιρέτη τάσης R 1, R 2, V BAT η τάση στην είσοδο και έστω ότι η λήψη γίνεται από την αντίσταση R 2,όπως φαίνεται στο σχήμα 5.11 Σχήμα 5.11: Διαιρέτης τάσης Τότε: V R2 = R 2 R 1 +R 2 V BAT, απ όπου προκύπτει για V BAT = 36 V και V R2 = 3,3 V ότι R 1 = 10R 2. Δεύτερη προϋπόθεση για την επιλογή αντιστάσεων είναι το ρεύμα που τις διαρρέει να είναι αρκετά μικρό ώστε να μην εκφορτίζουν σημαντικά τους συσσωρευτές. Εάν, επομένως, επιλεγούν R 2 = 10 kω, και R 1 = 100 kω, τότε το ρεύμα μέσω αυτών είναι: Ι = V BAT R 1 +R 2 = 0,33 ma Προφανώς το ρεύμα αυτό είναι ασήμαντο, και δεν συμβάλλει ουσιαστικά στην περαιτέρω εκφόρτιση των συσσωρευτών. Προκειμένου να διασφαλιστεί η σωστή λειτουργία της διάταξης μέτρησης τάσης, χρησιμοποιείται ένας τελεστικός ενισχυτής σε συνδεσμολογία μοναδιαίας αρνητικής ανατροφοδότησης. Πρόκειται στην ουσία για έναν buffer τάσης, του οποίου η έξοδος ισούται με την είσοδο και παρουσιάζει μεγάλη εμπέδηση εισόδου. Το πλεονέκτημα της μεγάλης εμπέδησης εισόδου (της τάξης των MΩ), είναι ότι ο διαιρέτης τάσης δεν επηρεάζεται από το φορτίο που τροφοδοτεί. -50-

64 Στο σχήμα 5.12 φαίνεται η πλήρης διάταξη μέτρησης τάσης συμπεριλαμβανομένου και του buffer τάσης. Σχήμα 5.12: Πλήρης διάταξη μέτρησης τάσης Ο τελεστικός ενισχυτής που χρησιμοποιήθηκε είναι ο LM358 της εταιρείας Texas Instruments. Μετρητικό ρεύματος Όπως αναφέρθηκε προηγουμένως, η γνώση της τιμής του ρεύματος σε κάθε χρονική στιγμή είναι απαραίτητη για λόγους ασφάλειας. Για τη μέτρηση του ρεύματος στην είσοδο του αντιστροφέα επιλέχθηκε το μετρητικό ACS712 (σχ. 5.14) της εταιρείας Allegro Microsystems. Το εν λόγω ολοκληρωμένο βασίζει τη μέτρηση του ρεύματος στο φαινόμενο Hall. Όταν διαρρέεται από ρεύμα, δημιουργείται ένα μαγνητικό πεδίο το οποίο ανιχνεύεται από τον ενσωματωμένο αισθητήρα Hall του μετρητικού, κι ανάλογα με την ένταση του μαγνητικού πεδίου εμφανίζεται τάση στην έξοδο του ολοκληρωμένου. Αυτή η τάση αυξάνει γραμμικά με την αύξηση του ρεύματος που διαρρέει το στοιχείο, όπως φαίνεται στο σχήμα Σχήμα 5.13: Τάση στην έξοδο του μετρητικού ACS712 ως συνάρτηση του ρεύματος που μετράται [49] -51-

65 Σχήμα 5.14: Σχηματικό διάγραμμα μετρητικού ACS Μικροελεγκτής Το πλέον σημαντικό κομμάτι του κυκλώματος ελέγχου, ο μικροελεγκτής είναι ένα ολοκληρωμένο κύκλωμα το οποίο εκτελεί αριθμητικές και λογικές λειτουργίες, που απώτερο σκοπό έχουν το σωστό έλεγχο, μέσω της κατάλληλης παλμοδότησης, της έναυσης και της σβέσης των MOSFET των τριών φάσεων. Για τη συγκεκριμένη εφαρμογή επιλέχθηκε ο μικροελεγκτής STM32F405RG της εταιρείας ST Microelectronics (σχ. 5.16). Πρόκειται για ένα ολοκληρωμένο 64 ακροδεκτών (σχ. 5.15) με ονομαστική τάση λειτουργίας τα 3,3 V, γεγονός που δικαιολογεί τις μετατροπές τάσεων, που αναφέρθηκαν προηγουμένως, σε αυτό το επίπεδο. Σχήμα 5.15: Pinout του μικροελεγκτή STM32F405RG [50] Καθώς πρόκειται για ένα πολύ σημαντικό στοιχείο του τριφασικού αντιστροφέα, η ανάλυση της λειτουργίας, της διασύνδεσης με τα υπόλοιπα εξαρτήματα και του προγραμματισμού του, θ αναλυθούν εκτενώς σε επόμενο κεφάλαιο. Σχήμα 5.16: Ο μικροελεγκτής STM32F405RG [51] -52-
66 5.5. Τροφοδοτικά συνεχούς τάσης Το τελευταίο κομμάτι του τριφασικού αντιστροφέα αποτελούν τα τροφοδοτικά συνεχούς τάσης. Ρόλος τους είναι να μετατρέπουν την τάση στην είσοδο τους σε διαφορετικά επίπεδα, ανάλογα με τις απαιτήσεις της εφαρμογής. Στην προκειμένη εφαρμογή χρησιμοποιήθηκαν τρία τροφοδοτικά, καθένα με διαφορετικό επίπεδο τάσης στην έξοδο του. Συγκεκριμένα, τα τρία αυτά επίπεδα είναι 5V, 15V και 3,3V. Κάθε ένα από τα εν λόγω τροφοδοτικά, τροφοδοτεί διαφορετικά στοιχεία του κυκλώματος, όπως αναλύεται στη συνέχεια. Τροφοδοτικό συνεχούς τάσης 15V Το τροφοδοτικό αυτό δέχεται στην είσοδο του την τάση των συσσωρευτών και με κατάλληλη συνδεσμολογία δίνει στην έξοδο του 15V. Τα 15V χρησιμοποιούνται από τους οδηγούς πύλης, ώστε να οδηγήσουν τις πύλες των MOSFET ισχύος. Πρόκειται στην ουσία για ένα DC-DC μετατροπέα και μάλιστα για έναν μετατροπέα υποβιβασμού τάσης (Buck), η συνδεσμολογία του οποίου φαίνεται στο σχήμα Το σταθεροποιητικό τάσης που χρησιμοποιήθηκε για τα 15V ήταν το LM2576HVT-Fixed της εταιρείας Texas Instruments. Σχήμα 5.17: Τροφοδοτικό συνεχούς τάσης 15V [52] Όπως φαίνεται στο σχήμα 5.17, το σταθεροποιητικό τάσης χρειάζεται κάποια επιπλέον ηλεκτρονικά στοιχεία προκειμένου να λειτουργήσει. Κατ αρχάς χρειάζεται δύο ηλεκτρολυτικούς πυκνωτές στην είσοδο και την έξοδο, οι οποίοι χρησιμεύουν για την εξομάλυνση της τάσης. Επίσης χρειάζεται ένα πηνίο, ώστε ν αποθηκεύει ενέργεια και μια δίοδο που να παρέχει στο ρεύμα διαδρομή όταν αρχίσει το πηνίο να διοχετεύει την ενέργεια του στο κύκλωμα. Στο φυλλάδιο του σταθεροποιητικού, ο κατασκευαστής προτείνει τις τιμές που πρέπει να έχουν τα παραπάνω στοιχεία. Οι τιμές των πυκνωτών, που πρότεινε ο κατασκευαστής για το συγκεκριμένο σταθεροποιητικό, ήταν: C IN = 220 μf, C OUT = 1000 μf. Όσον αφορά τη δίοδο, ο κατασκευαστής πρότεινε τη χρήση διόδου Schottky, λόγω της ταχύτητας της και της μικρής πτώσης τάσης κατά την αγωγή της. Τέλος, πρότεινε τη χρήση πηνίου ονομαστικού ρεύματος 3A και επαγωγής L=220μH. Τροφοδοτικό συνεχούς τάσης 5V Ομοίως με το τροφοδοτικό των 15V, το τροφοδοτικό αυτό δέχεται στην είσοδο του την τάση των συσσωρευτών και δίνει στην έξοδο του 5V. Τα 5V τροφοδοτούν τους αισθητήρες Hall, τα πετάλια, το μετρητικό ρεύματος, τους οπτοζεύκτες και τους οδηγούς της πύλης. -53-
67 Για την εφαρμογή αυτή επιλέχθηκε το σταθεροποιητικό τάσης LM2592HV-Fixed της εταιρείας Texas Instruments (σχ. 5.18). Σχήμα 5.18: Τροφοδοτικό συνεχούς τάσης 5V [53] Αντίστοιχα με το τροφοδοτικό των 15V ο κατασκευαστής και σε αυτήν την περίπτωση δίνει τις προτεινόμενες τιμές των στοιχείων που ολοκληρώνουν το τροφοδοτικό των 5V. Οι τιμές των πυκνωτών, που πρότεινε ο κατασκευαστής για το συγκεκριμένο σταθεροποιητικό, ήταν: C IN = 220 μf, C OUT = 220 μf. Όσον αφορά τη δίοδο, ο κατασκευαστής πρότεινε τη χρήση διόδου Schottky, λόγω της ταχύτητας της και της μικρής πτώσης τάσης κατά την αγωγή της. Τέλος, πρότεινε τη χρήση πηνίου ονομαστικού ρεύματος 2A και επαγωγής L=47μH. Τροφοδοτικό συνεχούς τάσης 3,3V Το τροφοδοτικό αυτό παίρνει στην είσοδο του 5V, τα οποία υποβιβάζει στα 3,3V, προκειμένου να τροφοδοτήσει τον επεξεργαστή, τους ενισχυτές (SN74HC04), τους τελεστικούς ενισχυτές, το γκάζι και τέλος το ηλεκτρικό φρένο. Για το σκοπό αυτό επιλέχθηκε το γραμμικό τροφοδοτικό LD1117V33C της εταιρείας ST Microelectronics (σχ. 5.19). Σχήμα 5.19: Γραμμικό τροφοδοτικό συνεχούς τάσης 3,3V [54] -54-
68 ΚΕΦΑΛΑΙΟ 6 ΠΑΛΜΟΔΟΤΗΣΗ ΤΡΙΦΑΣΙΚΟΥ ΑΝΤΙΣΤΡΟΦΕΑ ΤΑΣΗΣ 6.1. Μικροελεγκτές Όπως έχει αναφερθεί σε προηγούμενο κεφάλαιο, ο μικροελεγκτής είναι η καρδιά του τριφασικού αντιστροφέα, καθώς είναι εξ ολοκλήρου υπεύθυνος για τα σήματα που ελέγχουν τα ημιαγωγικά διακοπτικά στοιχεία ισχύος. Εδώ και αρκετά χρόνια οι μικροελεγκτές έχουν αντικαταστήσει τις αναλογικές διατάξεις ελέγχου, απλουστεύοντας, έτσι, σε μεγάλο βαθμό των έλεγχο σε εφαρμογές ισχύος. Ταυτόχρονα, οι δυνατότητες του ελέγχου που μπορεί να υλοποιηθεί, είναι αυξημένες, όπως αυξημένη είναι η απόδοση και η αξιοπιστία. Ο μικροελεγκτής είναι ένα είδος μικροεπεξεργαστή με τη διαφορά ότι ο πρώτος ενσωματώνει, εκτός από την αριθμητική και λογική μονάδα (ALU), τη μονάδα ελέγχου, τη μνήμη, και άλλες μονάδες όπως η μνήμη Flash,RAM, καθώς και εισόδους-εξόδους. Δεδομένου ότι υπάρχουν διαφορετικές οικογένειες μικροελεγκτών από διαφορετικούς κατασκευαστές με διαφορετικές δυνατότητες ανάμεσα στους μικροελεγκτές, χρειάζεται ιδιαίτερη προσοχή κατά την επιλογή του μικροελεγκτή, ώστε να είναι κατάλληλος για την προς υλοποίηση εφαρμογή. Στη συνέχεια δίνονται μερικά βασικά κριτήρια, που πρέπει να ληφθούν υπόψη, για τη σωστή επιλογή ενός μικροελεγκτή. Η αρχιτεκτονική του Η συχνότητα λειτουργίας του (clock) Το είδος της ενσωματωμένης μνήμης (RAM, Flash) Η χωρητικότητα της μνήμης στην οποία αποθηκεύεται το πρόγραμμα Τα περιφερειακά του Η δυνατότητα επικοινωνίας με άλλες συσκευές και γενικά το περιβάλλον Ο κατασκευαστής και κατά πόσον υπάρχει διαθέσιμη υποστήριξη από αυτόν Η τιμή του Σε αυτό το σημείο, αξίζει να εμβαθύνουμε στο κριτήριο επιλογής με βάση τα περιφερειακά που αναφέρθηκε προηγουμένως, διότι αυτό είναι καθοριστικής σημασίας, αφού η ύπαρξη ή μη ενός περιφερειακού μπορεί να κρίνει κατάλληλο ή ακατάλληλο, αντίστοιχα, ένα μικροελεγκτή. Τα περιφερειακά που συναντώνται συνηθέστερα στις σύγχρονες οικογένειες μικροελεγκτών είναι τα ακόλουθα: Μετατροπείς σήματος από αναλογικό σε ψηφιακό (ADC) Μετατροπείς σήματος από ψηφιακό σε αναλογικό (DAC) Χρονιστές (Timers) Σειριακές θύρες επικοινωνίας όπως CAN,Ι 2 C Γεννήτριες σημάτων PWM (βασισμένες σε χρονιστές) Είσοδοι-έξοδοι -55-
69 Με βάση τα προηγούμενα, επιλέχθηκε ο μικροελεγκτής STM32F405RG της εταιρείας ST Microelectronics, ο οποίος προγραμματίζεται σε γλώσσα C με τη βοήθεια των βιβλιοθηκών CMSIS Περιγραφή του μικροελεγκτή STM32F405RG Ο πυρήνας της CPU του μικροελεγκτή είναι της οικογένειας ARM Cortex M4 των 32-bit και περιλαμβάνει μονάδα κινητής υποδιαστολής (Floating Point Unit-FPU). Στηρίζει, επίσης, και λειτουργίες DSP (Digital Signal Processing). Η χωρητικότητα της Flash μνήμης στην οποία αποθηκεύεται το εκτελέσιμο πρόγραμμα είναι 1MB, ενώ υπάρχει και μνήμη RAM 192KB. Όσον αφορά τις ακίδες του μικροελεγκτή, αυτές είναι 64 και κάθε μια από αυτές μπορεί να προγραμματιστεί για ένα σύνολο διαφορετικών λειτουργιών κατά περίπτωση. Η μέγιστη επιτεύξιμη συχνότητα ρολογιού είναι τα 168 MHz με χρήση εξωτερικού κρυστάλλου (ταλαντωτή) και κατάλληλου κυκλώματος συντονισμού, ενώ εργοστασιακά λειτουργεί στα 16 MHz με κύκλωμα RC ακρίβειας 1% Περιφερειακές μονάδες του STM32F405RG Μερικές από τις περιφερειακές μονάδες που έχουν πρακτικό ενδιαφέρον και χρησιμότητα για την εφαρμογή μας παρατίθενται και αναλύονται στη συνέχεια οι πιο σημαντικές εξ αυτών. Ο συγκεκριμένος μικροελεγκτής περιέχει: 14 χρονιστές εκ των οποίων οι δυο χρησιμοποιούνται για έλεγχο PWM 3 μετατροπείς ADC των 12-bit 2 μετατροπείς DAC των 12-bit Ψηφιακές θύρες εισόδου-εξόδου Μονάδα CAN 16 εξωτερικά interrupts Χρονιστές Στην εφαρμογή χρησιμοποιήθηκαν δύο χρονιστές και συγκεκριμένα οι TIM1, TIM4. Ο TIM1 λόγω του ότι είναι προηγμένος χρονιστής (advanced timer), έχει τη δυνατότητα να δίνει συμπληρωματικά σήματα στα κανάλια του, κάτι που τον κάνει ιδιαίτερα ελκυστικό για εφαρμογές PWM, όπως η συγκεκριμένη. Χρησιμοποιήθηκαν έξι από τα κανάλια του για την παλμοδότηση των MOSFET ισχύος. Τα τρία εξ αυτών παλμοδοτούσαν τα πάνω MOSFET των κλάδων, ενώ τ άλλα τρία παλμοδοτούσαν συμπληρωματικά τα κάτω MOSFET. Ο TIM4 χρησιμοποιήθηκε, όντας απλός χρονιστής, για τη λειτουργία input capture των αισθητήρων Hall. Με τη λειτουργία input capture, ο χρονιστής ανιχνεύει την αλλαγή του σήματος στην είσοδο του, καταγράφει το περιστατικό κι έτσι στην προκειμένη περίπτωση αντιλαμβάνεται ο επεξεργαστής πως κάποιος αισθητήρας Hall άλλαξε κατάσταση, είτε από 0 σε 1, είτε το αντίθετο. Με αυτόν τον τρόπο, όταν ανιχνεύεται αλλαγή, γίνεται μετάβαση σε διαφορετική κατάσταση αγωγής των MOSFET ισχύος, όπως αναλύθηκε εκτενώς σε προηγούμενο κεφάλαιο. Χρησιμοποιήθηκαν λοιπόν, τρία κανάλια του TIM4, ένα για κάθε αισθητήρα Hall του κινητήρα. -56-

70 Ψηφιακές θύρες εισόδου-εξόδου Κάθε μια από τις θύρες εισόδου-εξόδου είναι πολυπλεγμένη με τις εξόδους διαφόρων περιφερειακών, ώστε να επιτευχθεί εξοικονόμηση ακίδων, όπως φαίνεται στο σχήμα 6.1. Σχήμα 6.1: Μπλοκ διάγραμμα μικροελεγκτή STM32F405RG [55] Ανάλογα με το ποια ακίδα θα χρησιμοποιηθεί ως ψηφιακή είσοδος ή έξοδος, πρέπει να ενεργοποιηθεί και η αντίστοιχη θύρα στην οποία υπάγεται η ακίδα. Αυτό συμβαίνει κατά το στάδιο των αρχικοποιήσεων στην αρχή του κύκλου του προγράμματος. Οι περισσότερες ακίδες του μικροελεγκτή αντέχουν τάσεις έως και τα 5V, δίνοντας έτσι ευελιξία όσον αφορά τη χρήση τους και μέγιστη συχνότητα λειτουργίας τους είναι τα 100 MHz. Τέλος, κάθε ακίδα μπορεί να σε κατάσταση pull-up ή pull-down, ανάλογα με τις ανάγκες της εφαρμογής. Τονίζεται πως μια ακίδα δεν μπορεί να χρησιμοποιηθεί ταυτόχρονα ως είσοδος και ως έξοδος. Σε επόμενο εδάφιο σημειώνονται οι ακίδες που χρησιμοποιήθηκαν στην εφαρμογή ως ψηφιακές είσοδοι-έξοδοι. -57-
71 Μετατροπείς σήματος από αναλογικό σε ψηφιακό Οι ADC μετατροπείς των 12-bit χρησιμοποιούν 4096 στάθμες ( με το 4095 ν αντιστοιχεί στα 3,3 V) για τα σήματα που μετατρέπουν σε ψηφιακά. Αυτό σημαίνει ότι έχουν ακρίβεια 0,81 mv, ακρίβεια περισσότερο από επαρκή για την εφαρμογή του αντιστροφέα. Η συχνότητα του ρολογιού των ADC μετατροπέων είναι τα 30 MHz και ενδεικτικά ο χρόνος μετατροπής με ανάλυση 12-bit (συμπεριλαμβανομένης και της δειγματοληψίας) είναι σύμφωνα με τον κατασκευαστή 16,40 μs. Οι χρόνοι αυτοί σημειώνεται πως είναι πολύ μικρότεροι από τις σταθερές χρόνου του αντιστροφέα και του προς έλεγχο κινητήρα. Στη συγκεκριμένη εφαρμογή, ένα από τα πιο σημαντικά στοιχεία του ελέγχου της ταχύτητας του κινητήρα που είναι το γκάζι, υλοποιήθηκε εξ ολοκλήρου μέσω ενός μετατροπέα ADC του μικροελεγκτή. Συγκεκριμένα, η μεταβλητή έξοδος του γκαζιού (ποτενσιόμετρο) δινόταν ως είσοδος στον μικροελεγκτή, ο οποίος τη μετέτρεπε σε ψηφιακή και με κατάλληλες μαθηματικές μετατροπές ρύθμιζε στην ουσία το λόγο κατάτμησης του αντιστροφέα και κατ επέκταση την ταχύτητα του κινητήρα Αναπτυξιακά εργαλεία μικροελεγκτή Απαραίτητα για τη δημιουργία του κώδικα που θα τρέξει ο μικροελεγκτής, αλλά και για τον προγραμματισμό του είναι τα αναπτυξιακά εργαλεία. Συνήθως, το πιο σημαντικό από αυτά είναι το ολοκληρωμένο περιβάλλον ανάπτυξης (Integrated Development Environment- IDE), στο οποίο γίνεται η συγγραφή του κώδικα, αλλά και η αποσφαλμάτωση (debugging). Πολύ σημαντικό είναι και το εργαλείο το οποίο αναλαμβάνει τη μεταφορά του κώδικα από τον υπολογιστή στο μικροελεγκτή του αντιστροφέα. Ως IDE επιλέχθηκε το Atollic TrueSTUDIO for ARM, το οποίο ανάμεσα σε πολλά άλλα IDE προσφέρει το πλεονέκτημα του ότι είναι δωρεάν η χρήση του από οποιονδήποτε και διατίθεται επίσημα από την ιστοσελίδα του κατασκευαστή. Ένα ακόμη πιο σημαντικό πλεονέκτημα είναι ότι η εταιρεία ST προτείνει το συγκεκριμένο περιβάλλον για τον προγραμματισμό των μικροελεγκτών που κατασκευάζει, πράγμα που σημαίνει ότι υπάρχει πλήρης συμβατότητα μεταξύ μικροελεγκτή και IDE. Σημειώνεται ότι, συχνά, η πορεία, που ακολουθείται για τον προγραμματισμό ενός μικροελεγκτή, είναι η ακόλουθη: Συγγραφή κώδικα Αποσφαλμάτωση Έλεγχος ορθής λειτουργίας Φόρτωση κώδικα στο μικροελεγκτή Atollic TrueSTUDIO Πρόκειται στην ουσία για έναν κειμενογράφο ο οποίος αρχικά αναλαμβάνει το έργο της συγγραφής του κώδικα. Περιλαμβάνει τις βιβλιοθήκες CMSIS που είναι κατάλληλες για τον προγραμματισμό των μικροελεγκτών της οικογένειας STM32F4 και περιέχουν συναρτήσεις και εντολές που διευκολύνουν το έργο του προγραμματιστή, καθώς δε χρειάζεται να δημιουργεί εκ νέου συναρτήσεις για βασικές λειτουργίες, εξοικονομώντας, έτσι, πολύτιμο χρόνο. Μόλις ολοκληρωθεί η συγγραφή του κώδικα, γίνεται αποσφαλμάτωση και τυχόν λάθη, συντακτικά ή λογικά, εξαλείφονται. Αυτό επιτυγχάνεται μέσω του ενσωματωμένου debugger -58-
72 του εν λόγω IDE, το όποιο δίνει τη δυνατότητα αποσφαλμάτωσης πραγματικού χρόνου (realtime debugging) κατά την εκτέλεση του προγράμματος ST-Link To ST-Link είναι ένα πρωτόκολλο επικοινωνίας μεταξύ του υπολογιστή, και συγκεκριμένα του IDE, και του προς προγραμματισμό μικροελεγκτή. Είναι στην ουσία το εργαλείο με το οποίο το πρόγραμμα εγγράφεται στον μικροελεγκτή και ταυτόχρονα γεφυρώνει την επικοινωνία μεταξύ μικροελεγκτή και IDE, ώστε να μπορέσει να λάβει χώρα η αποσφαλμάτωση Ανάλυση προγράμματος ελέγχου αντιστροφέα Ο κώδικας είναι υπεύθυνος για την κατάλληλη ερμηνεία των σημάτων εισόδου και κατ επέκταση τον έλεγχο του αντιστροφέα τάσης. Προηγουμένως έγινε μεμονωμένη αναφορά στα περιφερειακά του μικροελεγκτή που χρησιμοποιήθηκαν και αξίζει σε αυτό το σημείο να δοθεί η συνολική εικόνα και το πώς τα περιφερειακά αυτά συντονίστηκαν μέσω του κώδικα και επιτέλεσαν το έργο του ελέγχου. Πρώτα, όμως, πρέπει να καταγραφούν όλες οι ακίδες (pins) του μικροελεγκτή που χρησιμοποιήθηκαν, καθώς και η λειτουργία τους Πίνακες ακίδων με τη λειτουργία τους Πίνακας 6.1: PWM pins ΣΗΜΑ ΟΝΟΜΑ ΑΚΙΔΑΣ ΑΡΙΘΜΟΣ ΑΚΙΔΑΣ PWM1H PA9 42 PWM1L PB14 35 PWM2H PA8 41 PWM2L PB13 34 PWM3H PA10 43 PWM3L PB15 36 Πίνακας 6.2: Input Capture pins ΣΗΜΑ ΟΝΟΜΑ ΑΚΙΔΑΣ ΑΡΙΘΜΟΣ ΑΚΙΔΑΣ Hall_A PB7 59 Hall_B PB6 58 Hall_C PB8 61 Pedal PB
73 Πίνακας 6.3: Digital I/Os ΣΗΜΑ ΟΝΟΜΑ ΑΚΙΔΑΣ ΑΡΙΘΜΟΣ ΑΚΙΔΑΣ LED_A PC7 38 LED_B PC6 37 LED_C PB12 33 Start-stop PC10 51 Break PB5 57 Πίνακας 6.4: ADC pins ΣΗΜΑ ΟΝΟΜΑ ΑΚΙΔΑΣ ΑΡΙΘΜΟΣ ΑΚΙΔΑΣ Voltage Sense PA3 17 Current Sense PA2 16 Throttle PC0 8 Πίνακας 6.5: Programming pins ΣΗΜΑ ΟΝΟΜΑ ΑΚΙΔΑΣ ΑΡΙΘΜΟΣ ΑΚΙΔΑΣ Reset NRST 7 SWDIO PA13 46 SWCLK PA Έλεγχος ανοικτού βρόχου Η φιλοσοφία του ελέγχου ανοικτού βρόχου στηρίζεται στον έλεγχο της ταχύτητας του κινητήρα ανάλογα με την απαίτηση που υπαγορεύει το γκάζι. Συγκεκριμένα, ο λόγος κατάτμησης των σημάτων PWM ρυθμίζεται απευθείας, από την αναλογική είσοδο PC0. Αυτό σημαίνει ότι τα 3,3 V στην είσοδο του ADC, που αντιστοιχούν στην τιμή 4095, θα πρέπει να αντιστοιχιστούν σε λόγο κατάτμησης 100%. Πράγματι, με αυτήν τη φιλοσοφία υλοποιήθηκε ο έλεγχος ανοιχτού βρόχου και υπήρξε γραμμική συσχέτιση μεταξύ της εξόδου του ADC και του λόγου κατάτμησης. Στο σχήμα 6.2 δίνεται το διάγραμμα ροής που περιγράφει με σαφήνεια τη λειτουργία ανοιχτού βρόχου του αντιστροφέα. -60-
74 Έλεγχος κλειστού βρόχου Σχήμα 6.2: Διάγραμμα ροής ανοιχτού βρόχου Σε αντίθεση με τον έλεγχο ανοιχτού βρόχου όπου το σύστημα δεν παρείχε καμία ανατροφοδότηση στον αντιστροφέα, πλέον κλείνοντας ο βρόχος, παρέχεται ανατροφοδότηση ταχύτητας (σχ. 6.3). Σχήμα 6.3: Δομικό διάγραμμα κλειστού βρόχου [56] -61-
75 Όπως φαίνεται στο σχήμα 6.3, η αναφορά της ταχύτητας προέρχεται από το ποτενσιόμετρο του γκαζιού, ενώ η πραγματική ταχύτητα του κινητήρα μετράται από το μικροελεγκτή σε συνεργασία με τα σήματα Hall που δέχεται. Ακολούθως, υπολογίζεται το σφάλμα ανάμεσα στην επιθυμητή (αναφοράς) ταχύτητα και την πραγματική (μετρηθείσα) και περνάει μέσα από έναν PI ελεγκτή. Ο ελεγκτής ρυθμισμένος με τα κατάλληλα κέρδη δίνει στην έξοδο του το λόγο κατάτμησης, ώστε να εξαλείφει το σφάλμα μεταξύ πραγματικής και ταχύτητας αναφοράς. Στο σχήμα 6.4 φαίνεται το διάγραμμα ροής για τον έλεγχο κλειστού βρόχου. Σχήμα 6.4: Διάγραμμα ροής κλειστού βρόχου -62-


76 ΚΕΦΑΛΑΙΟ 7 ΠΕΙΡΑΜΑΤΙΚΕΣ ΜΕΤΡΗΣΕΙΣ 7.1. Πειραματικές μετρήσεις Προκειμένου να επιβεβαιωθεί η ορθή λειτουργία του τριφασικού αντιστροφέα τάσης, έγιναν διάφορες πειραματικές δοκιμές, με βασικότερη τη σύνδεση στον παλμογράφο και καταγραφή των πιο σημαντικών μεγεθών. Τα παλμογραφήματα χωρίζονται σε δύο σκέλη, και συγκεκριμένα στον έλεγχο ανοικτού και στον έλεγχο κλειστού βρόχου. Υποδιαιρούνται δε, σε λειτουργία με λόγο κατάτμησης 50% και 100% σε κάθε περίπτωση. Σημείωνεται πως οι μετρήσεις ελήφθησαν για τάση τροφοδοσίας προερχόμενη από ένα τροφοδοτικό συνεχούς τάσης των 30V και όχι από τις συστοιχίες των συσσωρευτών για λόγους ασφαλείας, αφού το εν λόγω τροφοδοτικό παρέχει τη δυνατότητα περιορισμού του ρεύματος τροφοδοσίας Παλμογραφήματα ανοιχτού βρόχου Παλμοραφήματα για λειτουργία με λόγο κατάτμησης 50% Σχήμα 7.1: Παλμοί ελέγχου στην πύλη του MOSFET 2-High (κόκκινο) και του MOSFET 2- Low (μπλε) Σχήμα 7.2: Πολική τάση V AB (κόκκινο) συναρτήσει του αισθητήρα Hall A (μπλε) -63-
77 Σχήμα 7.3: Πολική τάση V AB (κόκκινο) συναρτήσει του αισθητήρα Hall A (μπλε) σε εστίαση Σχήμα 7.4: Πολική τάση V BC (κόκκινο) συναρτήσει του αισθητήρα Hall B (μπλε) -64-
78 Σχήμα 7.5: Πολική τάση V BC (κόκκινο) συναρτήσει του αισθητήρα Hall B (μπλε) σε εστίαση Σχήμα 7.6: Πολική τάση V CΑ (κόκκινο) συναρτήσει του αισθητήρα Hall C (μπλε) -65-
 συναρτήσει")
 συναρτήσει φασικού")
79 Σχήμα 7.7: Πολική τάση V CΑ (κόκκινο) συναρτήσει του αισθητήρα Hall C (μπλε) σε εστίαση Σχήμα 7.8: Πολική τάση V AB (μπλε) συναρτήσει φασικού ρεύματος I A (πράσινο) -66-
 συναρτήσει του αισθητήρα Hall A (μπλε) σε εστίαση")
80 Σχήμα 7.9: Φασικό ρεύμα I A (πράσινο) συναρτήσει του αισθητήρα Hall A (μπλε) Σχήμα 7.10: Φασικό ρεύμα I A (πράσινο) συναρτήσει του αισθητήρα Hall A (μπλε) σε εστίαση -67-
81 Σχήμα 7.11: Φασικό ρεύμα I B (πράσινο) συναρτήσει του αισθητήρα Hall B (μπλε) Σχήμα 7.12: Φασικό ρεύμα I B (πράσινο) συναρτήσει του αισθητήρα Hall B (μπλε) σε εστίαση -68-
 συναρτήσει του αισθητήρα Hall C (μπλε) σε εστίαση -69-")
82 Σχήμα 7.13: Φασικό ρεύμα I C (πράσινο) συναρτήσει του αισθητήρα Hall C (μπλε) Σχήμα 7.14: Φασικό ρεύμα I C (πράσινο) συναρτήσει του αισθητήρα Hall C (μπλε) σε εστίαση -69-
83 Παλμογραφήματα για λειτουργία με λόγο κατάτμησης 100% Σχήμα 7.15: Παλμοί ελέγχου στην πύλη του MOSFET 2-High (μπλε) και του MOSFET 2- Low (κόκκινο) Σχήμα 7.16: Πολική τάση V AB (κόκκινο) συναρτήσει του αισθητήρα Hall A (μπλε) -70-
84 Σχήμα 7.17: Πολική τάση V BC (κόκκινο) συναρτήσει του αισθητήρα Hall B (μπλε) Σχήμα 7.18: Πολική τάση V CΑ (κόκκινο) συναρτήσει του αισθητήρα Hall C (μπλε) -71-
85 Σχήμα 7.19: Πολική τάση V AB (μπλε) συναρτήσει φασικού ρεύματος I A (πράσινο) Σχήμα 7.20: Πολική τάση V AB (μπλε) συναρτήσει φασικού ρεύματος I A (πράσινο) σε εστίαση -72-
86 Σχήμα 7.21: Φασικό ρεύμα I A (πράσινο) συναρτήσει του αισθητήρα Hall A (μπλε) Σχήμα 7.22: Φασικό ρεύμα I A (πράσινο) συναρτήσει του αισθητήρα Hall A (μπλε) σε εστίαση -73-
87 Σχήμα 7.23: Φασικό ρεύμα I B (πράσινο) συναρτήσει του αισθητήρα Hall B (μπλε) Σχήμα 7.24: Φασικό ρεύμα I B (πράσινο) συναρτήσει του αισθητήρα Hall B (μπλε) σε εστίαση -74-
 συναρτήσει")
 συναρτήσει του")
88 Σχήμα 7.25: Φασικό ρεύμα I C (πράσινο) συναρτήσει του αισθητήρα Hall C (μπλε) Σχήμα 7.26: Φασικό ρεύμα I C (πράσινο) συναρτήσει του αισθητήρα Hall C (μπλε) σε εστίαση -75-
 και του MOSFET 2- Low (κόκκινο) Σχήμα 7.")
89 7.3. Παλμογραφήματα κλειστού βρόχου Σχήμα 7.27: Παλμοί ελέγχου στην πύλη του MOSFET 2-High (μπλε) και του MOSFET 2- Low (κόκκινο) Σχήμα 7.28: Πολική τάση V AB (κόκκινο) συναρτήσει του αισθητήρα Hall A (μπλε) -76-
 συναρτήσει του αισθητήρα Hall B (μπλε) 30:")
90 Σχήμα 7.29: Πολική τάση V BC (κόκκινο) συναρτήσει του αισθητήρα Hall B (μπλε) Σχήμα 7.30: Πολική τάση V CΑ (κόκκινο) συναρτήσει του αισθητήρα Hall C (μπλε) -77-
 συναρτήσει")
 συναρτήσει φασικού")
91 Σχήμα 7.31: Πολική τάση V AB (μπλε) συναρτήσει φασικού ρεύματος I A (πράσινο) Σχήμα 7.32: Πολική τάση V AB (μπλε) συναρτήσει φασικού ρεύματος I A (πράσινο) σε εστίαση -78-
 συναρτήσει του αισθητήρα Hall")
92 Σχήμα 7.33: Φασικό ρεύμα I A (πράσινο) συναρτήσει του αισθητήρα Hall A (μπλε) κατά την αύξηση του φορτίου της μηχανής -79-
93 ΚΕΦΑΛΑΙΟ 8 ΣΥΜΠΕΡΑΣΜΑΤΑ 8.1. Λειτουργία αντιστροφέα Όπως φαίνεται από τα παλμογραφήματα του Κεφαλαίου 7, ο τριφασικός αντιστροφέας λειτουργεί σύμφωνα με τις θεωρητικές αρχές που διέπουν τόσο αυτόν, όσο και τις μηχανές Brushless DC με μόνιμο μαγνήτη. Τα σήματα Hall είναι αυτά που υπαγορεύουν την αγωγή των MOSFET ισχύος, με έξι πιθανούς συνδυασμούς οι οποίοι εναλλάσσονται κάθε 60 ηλεκτρικές μοίρες. Τα σήματα των αισθητήρων Hall, όπως φαίνεται στα παλμογραφήματα του Κεφαλαίου 7, είναι απαλλαγμένα από θόρυβο και συνεπώς δεν υπάρχει το ενδεχόμενο εσφαλμένης παλμοδότησης. Αυτό αποδεικνύει τον ορθό σχεδιασμό του αντιστροφέα και την αποτελεσματική λειτουργία του κώδικα που διαβάζει αυτά τα σήματα. Γίνεται φανερό πως ο κώδικας, που τρέχει ο μικροελεγκτής του αντιστροφέα, είναι πλήρως λειτουργικός, αξιοποιεί κατάλληλα τα σήματα στην είσοδο του και δίνει κάθε φορά τους σωστούς παλμούς, του κατάλληλου πλάτους στις πύλες των MOSFET. Με αυτόν τον τρόπο ρυθμίζεται η ταχύτητα του κινητήρα στα επιθυμητά επίπεδα. Αξίζει να σημειωθεί πως η διακοπτική (chopping) λειτουργία του αντιστροφέα έχει ως συνέπεια να ακούγεται ένας υψίσυχνος ήχος κατά τη λειτουργία της μηχανής, ο οποίος ωστόσο είναι αμυδρός και σε καμία περίπτωση δεν ενοχλεί. Ωστόσο, εξάλειψη αυτού του θορύβου μπορεί να επιτευχθεί με την αύξηση της διακοπτικής συχνότητας πέραν του εύρους των ακουστικών συχνοτήτων που μπορεί ν αντιληφθεί το ανθρώπινο αυτί. Κάτι τέτοιο δε συνιστάται, όμως, καθώς με την αύξηση της διακοπτικής συχνότητας υπάρχει και ανάλογη αύξηση των διακοπτικών απωλειών των MOSFET, όπως έχει αναλυθεί σε προηγούμενα κεφάλαια. Σε λειτουργία με λόγο κατάτμησης 100% οι παλμοί ελέγχου στις πύλες και των κάτω MOSFET είναι πλέον συνεχείς. Παρατηρώντας κανείς τις εικόνες 7.1 και 7.15 θα διαπιστώσει ότι η τάση ελέγχου της πύλης του πάνω MOSFET μειώνεται εκθετικά χωρίς, ωστόσο, να εμποδίζεται η καλή λειτουργία του αντιστροφέα. Αυτό οφείλεται στο γεγονός ότι ο πυκνωτής Bootstrap, που χρησιμοποιήθηκε, δεν ήταν επαρκής όσον αφορά τη χωρητικότητά του και εν τελεί χρειαζόταν πυκνωτής μεγαλύτερης χωρητικότητας. Ενδεχομένως, αυτή η εκθετική εκφόρτιση να μη γινόταν σε τόσο μεγάλο βαθμό εάν αυξανόταν η τάση στην είσοδο του αντιστροφέα. Αυτό γιατί αύξηση της τάσης στην είσοδο συνεπάγεται αύξηση της τάσης εξόδου και τελικά μεγαλύτερη ταχύτητα περιστροφής του κινητήρα. Με τη σειρά της η αυξημένη ταχύτητα περιστροφής του κινητήρα συνεπάγεται ταχύτερη εναλλαγή των συνδυασμών των σημάτων Hall κι έτσι ταχύτερη εναλλαγή των MOSFET που άγουν με συνέπεια ο πυκνωτής της τοπολογίας Bootstrap να άγει για μικρότερο χρονικό διάστημα κι έτσι να εκφορτίζεται λιγότερο. Οι αιχμές που παρατηρούνται στις κυματομορφές των πολικών τάσεων είναι αναμενόμενες και συμβαίνουν κάθε φορά που γίνεται εναλλαγή ενός ζεύγους διακοπτικών στοιχείων, δηλαδή κάθε φορά που ένα σήμα Hall αλλάζει κατάσταση. Οι αιχμές αυτές εμφανίζονται όταν ένα εκ των δύο στοιχείων, που άγουν εκείνη τη στιγμή, οδηγείται σε σβέση. Το ρεύμα που διαρρέει τα εν λόγω στοιχεία, όμως, δεν μπορεί να μηδενιστεί ακαριαία με συνέπεια να εμφανίζεται μια υπέρταση, μικρής χρονικής διάρκειας, η οποία αποσβένεται όταν τεθούν σε αγωγή οι αντιπαράλληλες δίοδοι. -80-
94 Τέλος, οι κυματομορφές των φασικών ρευμάτων απέχουν από τη θεωρητική τετραγωνική μορφή τους. Αντίθετα, παρουσιάζουν μια βύθιση η οποία οφείλεται στην εναλλαγή του ζεύγους MOSFET που άγει. Ωστόσο, τα φασικά ρεύματα σύμφωνα με τη θεωρία των μηχανών Brushless DC, παρουσιάζουν διαστήματα μηδενισμού, κάτι που οφείλεται στο γεγονός ότι κάθε χρονική στιγμή μόνο δύο από τα τρία τυλίγματα της μηχανής διαρρέονται από ρεύμα. Η παρούσα διπλωματική ολοκληρώθηκε επιτυχώς, λοιπόν, και ο αντιστροφέας που υλοποιήθηκε είναι πλήρως λειτουργικός και συμβαδίζει με τη θεωρία που το διέπει. Μελλοντικές επεκτάσεις της παρούσας διπλωματικής θα μπορούσαν να συμπεριλάβουν το διανυσματικό έλεγχο του κινητήρα, οδήγηση, δηλαδή, με ημιτονοειδή ρεύματα. Κάτι τέτοιο θα ήταν εφικτό, καθώς υπάρχουν μετρητικά ρεύματος σε δύο από τις τρείς φάσεις, με αποτέλεσμα το ρεύμα της τρίτης φάσης να μπορεί να ανακατασκευαστεί με χρήση των άλλων δύο μετρηθέντων ρευμάτων. Έτσι, έχοντας γνώση των φασικών ρευμάτων θα μπορούσε να εφαρμοστεί ο διανυσματικός έλεγχος, φέρνοντας καλύτερα αποτελέσματα όσον αφορά τη παραγόμενη ηλεκτρομαγνητική ροπή. Εξάλλου, ο μικροελεγκτής του αντιστροφέα έχει περισσότερο από επαρκή υπολογιστική ισχύ για να υλοποιηθεί η εν λόγω βελτίωση. -81-
95 ΒΙΒΛΙΟΓΡΑΦΙΑ [1] en.wikipedia.org - History of the electric vehicle [2] en.wikipedia.org Tram [3] en.wikipedia.org - History of the electric vehicle Thomas_Parker_Electric_car.jpg [4] en.wikipedia.org History of trams _Siemens_1881_in_Lichterfelde.jpg#/media/File:First_electric_tram- _Siemens_1881_in_Lichterfelde.jpg [5] en.wikipedia.org - History of the electric vehicle 5LunarRover.jpg [6] en.wikipedia.org - History of the electric vehicle [7] en.wikipedia.org - Tesla Roadster (2008) _Flickr_-_Alexandre_Pr%C3%A9vot_(1).jpg [8] en.wikipedia.org - Electric car use by country [9] - Here's Why E-Bike Sales Are Booming In Europe [10] en.wikipedia.org - Electric bicycle [11] en.wikipedia.org Electric bicycle [12] en.wikipedia.org Electric bicycle
96 [13] Διπλωματική εργασία του φοιτητή Παπαθανασόπουλου Δημήτριου, Πανεπιστήμιο Πατρών, Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών, Εργαστήριο Ηλεκτρομηχανικής Μετατροπής Ενέργειας, «ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΤΟΥ ΗΛΕΚΤΡΟΚΙΝΗΤΗΡΙΟΥ ΣΥΣΤΗΜΑΤΟΣ ΗΛΕΚΤΡΙΚΟΥ ΔΙΚΥΚΛΟΥ», Ιούνιος 2013 [14] Διπλωματική εργασία του φοιτητή Παπαθανασόπουλου Δημήτριου, Πανεπιστήμιο Πατρών, Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών, Εργαστήριο Ηλεκτρομηχανικής Μετατροπής Ενέργειας, «ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΤΟΥ ΗΛΕΚΤΡΟΚΙΝΗΤΗΡΙΟΥ ΣΥΣΤΗΜΑΤΟΣ ΗΛΕΚΤΡΙΚΟΥ ΔΙΚΥΚΛΟΥ», Ιούνιος 2013 [15] Διπλωματική εργασία του φοιτητή Παπαθανασόπουλου Δημήτριου, Πανεπιστήμιο Πατρών, Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών, Εργαστήριο Ηλεκτρομηχανικής Μετατροπής Ενέργειας, «ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΤΟΥ ΗΛΕΚΤΡΟΚΙΝΗΤΗΡΙΟΥ ΣΥΣΤΗΜΑΤΟΣ ΗΛΕΚΤΡΙΚΟΥ ΔΙΚΥΚΛΟΥ», Ιούνιος 2013 [16] en.wikipedia.org Synchronous motor [17] nptel.ac.in Sinusoidal and trapezoidal BEMF [18] Application report SPRABQ6, Trapezoidal Control of BLDC Motors Using Hall Effect Sensors, Texas Instruments July [19] R. Krishnan, Permanent Magnet Synchronous and Brushless DC Motor Drives USA: Taylor and Francis Group, 2010 [20] nidec.com Fundamental Technology for Innovative Motors [21] W. Brown Brushless DC Motor Control Made Easy Microchip AN857, 2002 [22] en.wikipedia.org Hall effect _for_electrons.png [23] openi.nlm.nih.gov Διάγραμμα με χαρακτηριστικά μεγέθη μηχανής BLDC [24] academia.edu Position Estimator and Simplified Current Control Strategy for Brushless DC Motors using DSP Technology ol_strategy_for_brushless-dc_motors_using_dsp_technology [25] archive.cnx.org Torque curve phics11.png -83-
97 [26] functionbay.co.kr Permanent magnet synchronous motor [27] automation.com BLDC Motor Control [28] Δρ. Μηχ. Εμμανουήλ Τατάκης, Καθηγητής, Ανοιχτά μαθήματα Ηλεκτρονικά Ισχύος ΙΙ Ενότητα 2: Μετατροπείς Συνεχούς τάσης σε Εναλλασσόμενη Τάση [29] mathworks.com - PWM Generator [30] archive.sensorsmag A Digitally Programmable Pulse-Width-Modulation Converter [31] Δρ. Μηχ. Εμμανουήλ Τατάκης, Καθηγητής, Ανοιχτά μαθήματα Ηλεκτρονικά Ισχύος ΙΙ Ενότητα 2: Μετατροπείς Συνεχούς τάσης σε Εναλλασσόμενη Τάση [32] set tech.com BLDC Motor Control Master [33] Fujitsu Microelectronics Europe Application Note, BLDC DRIVE WITH THE PPG, mcu-an e-v10 [34] Διπλωματική εργασία του φοιτητή Μίρτσεβ Αλεξ, Πανεπιστήμιο Πατρών, Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών, Εργαστήριο Ηλεκτρομηχανικής Μετατροπής Ενέργειας, «ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΤΡΙΦΑΣΙΚΟΥ ΑΝΤΙΣΤΡΟΦΕΑ ΤΑΣΗΣ ΓΙΑ ΤΟΝ ΕΛΕΓΧΟ ΣΥΓΧΡΟΝΟΥ ΚΙΝΗΤΗΡΑ ΜΟΝΙΜΟΥ ΜΑΓΝΗΤΗ ΕΝΟΣ ΗΛΕΚΤΡΟΚΙΝΗΤΟΥ ΟΧΗΜΑΤΟΣ», Φεβρουάριος 2018 [35] P. Vas, Sensorless Vector and Direct Torque Control Oxford: Oxford University Press,1998 [36] SCR [37] en.wikipedia.org - Gate turn-off thyristor [38] Δρ. Μηχ. Εμμανουήλ Τατάκης, Καθηγητής, Ηλεκτρονικά Στοιχεία Ισχύος και Βιομηχανικές Εφαρμογές Θεματική Ενότητα 1: Απώλειες στα ημιαγωγικά στοιχεία ισχύος, Δομή και χαρακτηριστικές των ημιαγωγικών στοιχείων ισχύος [39] en.wikipedia.org Power semiconductor device main.svg -84-
98 [40] Διπλωματική εργασία του φοιτητή Παπαθανασόπουλου Δημήτριου, Πανεπιστήμιο Πατρών, Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών, Εργαστήριο Ηλεκτρομηχανικής Μετατροπής Ενέργειας, «ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΤΟΥ ΗΛΕΚΤΡΟΚΙΝΗΤΗΡΙΟΥ ΣΥΣΤΗΜΑΤΟΣ ΗΛΕΚΤΡΙΚΟΥ ΔΙΚΥΚΛΟΥ», Ιούνιος 2013 [41] PMSN8R5-100PS NXP Datasheet [42] Application Note, How to select the right CoolMOS and its Power Handling Capability, January ApplicationNote_MOSFET_CoolMOS_How_to_select_the_right_CoolMOS-AN-v01_00- EN.pdf?fileId=db3a304412b b40acf [43] Application report SLVA452, Compensating the Current-Mode-Controlled Boost Converter, Texas Instruments July [44] farnell.com Fischer Elektronik [45] SN74HC04N Texas Instruments Datasheet [46] 6N137 Fairchild Semiconductor Datasheet [47] IR2113PBF High and Low Side Driver International Rectifier Datasheet [48] Application Note, 6076, Design and Application Guide of Bootstrap Circuit for High- Voltage Gate-Drive IC, Fairchild Semiconductor, [49] ACS712 Allegro Microsystems Datasheet [50] STM32F405xx/STM32F407xx ST Microelectronics Datasheet [51] findic.us - STM32F405RGT6 [52] LM2576xx Series SIMPLE SWITCHER 3-A Step-Down Voltage Regulator Texas Instruments Datasheet [53] LM2592HV SIMPLE SWITCHER Power Converter 150-kHz 2-A Step-Down Voltage Regulator Texas Instruments Datasheet [54] Adjustable and fixed low drop positive voltage regulator ST Microelectronics Datasheet [55] STM32F405xx/STM32F407xx ST Microelectronics Datasheet -85-
99 [56] digikey.ca Using Closed Loop Control in BLDC Systems

100 ΠΑΡΑΡΤΗΜΑ Α ΣΧΕΔΙΑ ΤΥΠΩΜΕΝΟΥ ΚΥΚΛΩΜΑΤΟΣ Σχήμα 1: Πρώτη σελίδα σχηματικού διαγράμματος ηλεκτρονικού μετατροπέα ισχύος Σχήμα 2: Δεύτερη σελίδα σχηματικού διαγράμματος ηλεκτρονικού μετατροπέα ισχύος -87-

101 Σχήμα 3: Τρίτη σελίδα σχηματικού διαγράμματος ηλεκτρονικού μετατροπέα ισχύος -88-

102 Σχήμα 4: Εμπρόσθια όψη τυπωμένου κυκλώματος ηλεκτρονικού μετατροπέα ισχύος Σχήμα 5: Οπίσθια όψη τυπωμένου κυκλώματος ηλεκτρονικού μετατροπέα ισχύος -89-

103 Σχήμα 6: Σχέδιο τυπωμένου κυκλώματος ηλεκτρονικού μετατροπέα ισχύος -90-
104 -91-

105 ΠΑΡΑΡΤΗΜΑ Β ΦΩΤΟΓΡΑΦΙΕΣ ΚΑΤΑΣΚΕΥΗΣ Σχήμα 1: Τριφασικός αντιστροφέας τάσης σε λειτουργία -92-

106 Σχήμα 2: Τριφασικός αντιστροφέας τάσης συνδεδεμένος στο ποδήλατο -93-
107 -94-

108 ΠΑΡΑΡΤΗΜΑ Γ ΤΕΧΝΙΚΑ ΦΥΛΛΑΔΙΑ ΚΑΤΑΣΚΕΥΑΣΤΩΝ -95-
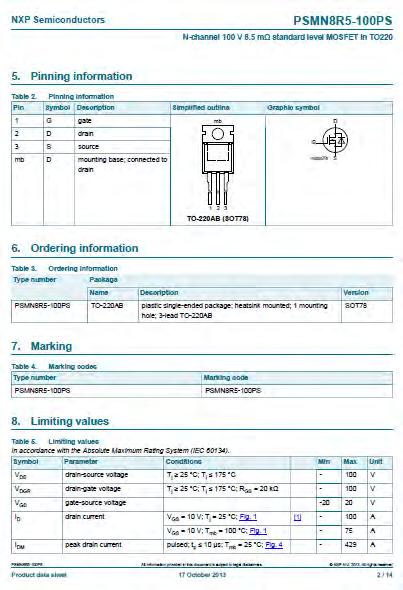
109 -96-
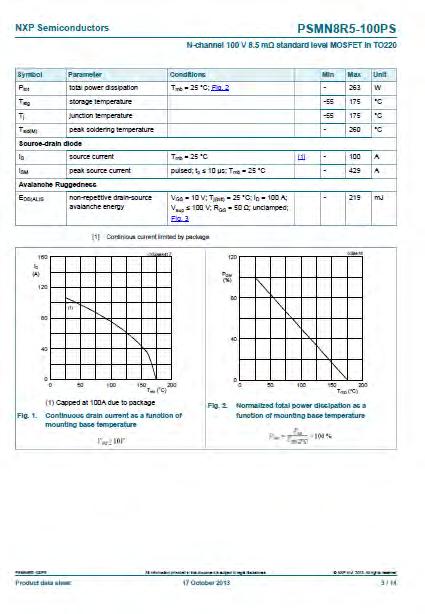
110 -97-
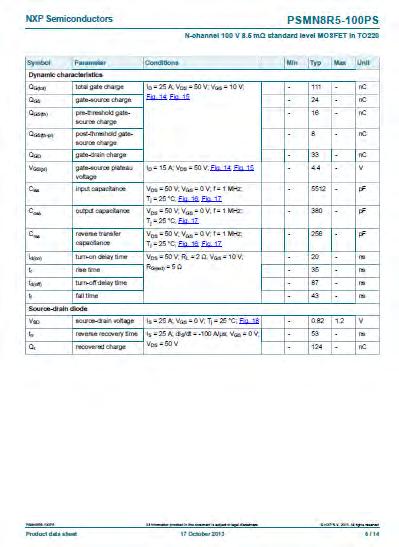
111 -98-
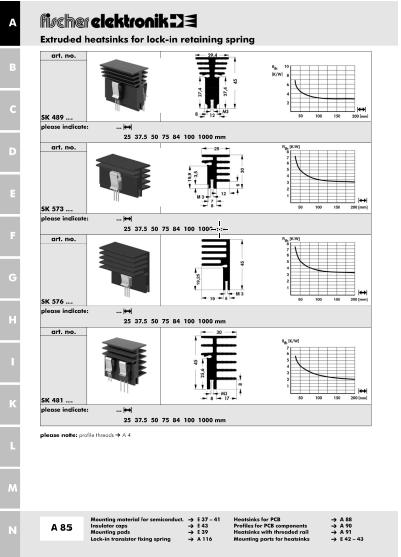
112 -99-
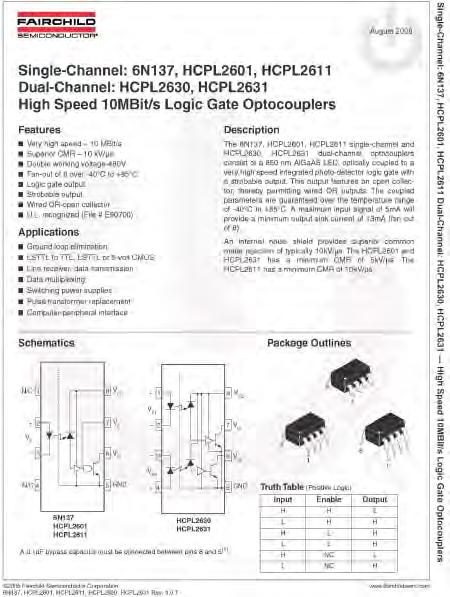
113 -100-
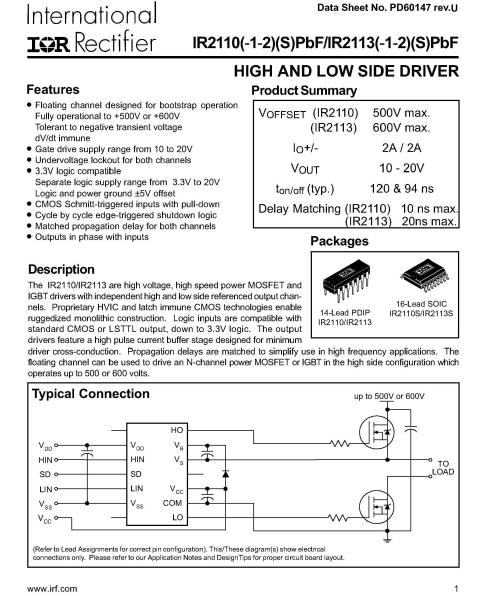
114 -101-
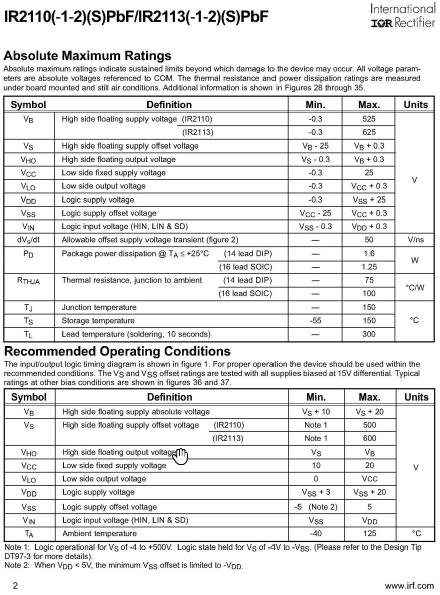
115 -102-
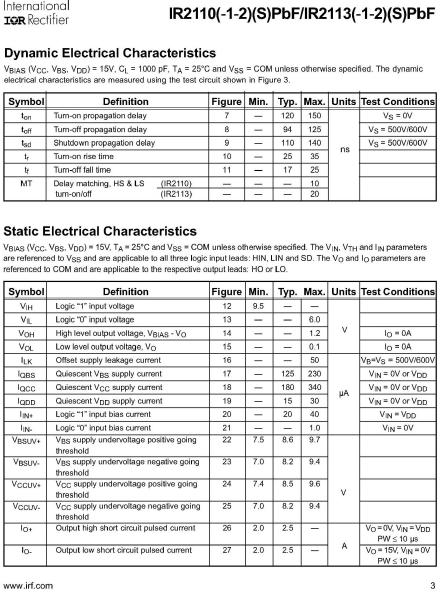
116 -103-
117 -104-
118 -105-
119 -106-
120 -107-
121 -108-
122 -109-
123 -110-
124 -111-
125 -112-
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
Κινητήρας παράλληλης διέγερσης
 Κινητήρας παράλληλης διέγερσης Ισοδύναμο κύκλωμα V = E + I T V = I I T = I F L R F I F R Η διέγερση τοποθετείται παράλληλα με το κύκλωμα οπλισμού Χαρακτηριστική φορτίου Έλεγχος ταχύτητας Μεταβολή τάσης
Κινητήρας παράλληλης διέγερσης Ισοδύναμο κύκλωμα V = E + I T V = I I T = I F L R F I F R Η διέγερση τοποθετείται παράλληλα με το κύκλωμα οπλισμού Χαρακτηριστική φορτίου Έλεγχος ταχύτητας Μεταβολή τάσης
10 - ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ
 10 - ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Ηλεκτρική μηχανή ονομάζεται κάθε διάταξη η οποία μετατρέπει τη μηχανική ενεργεια σε ηλεκτρική ή αντίστροφα ή μετατρεπει τα χαρακτηριστικά του ηλεκτρικού ρεύματος. Οι ηλεκτρικες
10 - ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Ηλεκτρική μηχανή ονομάζεται κάθε διάταξη η οποία μετατρέπει τη μηχανική ενεργεια σε ηλεκτρική ή αντίστροφα ή μετατρεπει τα χαρακτηριστικά του ηλεκτρικού ρεύματος. Οι ηλεκτρικες
ΟΝΟΜ/ΝΥΜΟ: ΜΠΑΛΑΜΠΑΝΗ ΓΕΩΡΓΙΑ ΑΜ:6105 ΜΑΘΗΜΑ: ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΕΡΓΑΣΙΑ ΤΙΤΛΟΣ: ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΗΤΡΙΑΣ
 ΟΝΟΜ/ΝΥΜΟ: ΜΠΑΛΑΜΠΑΝΗ ΓΕΩΡΓΙΑ ΑΜ:6105 ΜΑΘΗΜΑ: ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΕΡΓΑΣΙΑ ΤΙΤΛΟΣ: ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΗΤΡΙΑΣ 1 Η γεννήτρια ή ηλεκτρογεννήτρια είναι μηχανή που βασίζεται στους νόμους της
ΟΝΟΜ/ΝΥΜΟ: ΜΠΑΛΑΜΠΑΝΗ ΓΕΩΡΓΙΑ ΑΜ:6105 ΜΑΘΗΜΑ: ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΕΡΓΑΣΙΑ ΤΙΤΛΟΣ: ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΗΤΡΙΑΣ 1 Η γεννήτρια ή ηλεκτρογεννήτρια είναι μηχανή που βασίζεται στους νόμους της
ΑΣΚΗΣΗ 5 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ. 1. Η μελέτη της δομής και της αρχής λειτουργίας ενός ασύγχρονου τριφασικού κινητήρα.
 Σκοπός της άσκησης: ΑΣΚΗΣΗ 5 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ Σκοπός της εργαστηριακής άσκησης είναι: 1. Η μελέτη της δομής και της αρχής λειτουργίας ενός ασύγχρονου τριφασικού κινητήρα. 1. Γενικά Οι
Σκοπός της άσκησης: ΑΣΚΗΣΗ 5 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ Σκοπός της εργαστηριακής άσκησης είναι: 1. Η μελέτη της δομής και της αρχής λειτουργίας ενός ασύγχρονου τριφασικού κινητήρα. 1. Γενικά Οι
Ηλεκτρικοί Κινητήρες Γεννήτριες (εισαγωγικές σημειώσεις)
") 5279: Ηλεκτρομηχανολογικός Εξοπλισμός Διεργασιών 7 ο εξάμηνο Ηλεκτρικοί Κινητήρες Γεννήτριες (εισαγωγικές σημειώσεις) Θ. Παπαθανασίου, Επικ. Καθηγητής ΕΜΠ https://courses.chemeng.ntua.gr/sme/ Ηλεκτρικοί
5279: Ηλεκτρομηχανολογικός Εξοπλισμός Διεργασιών 7 ο εξάμηνο Ηλεκτρικοί Κινητήρες Γεννήτριες (εισαγωγικές σημειώσεις) Θ. Παπαθανασίου, Επικ. Καθηγητής ΕΜΠ https://courses.chemeng.ntua.gr/sme/ Ηλεκτρικοί
Οι μηχανές ΕΡ είναι γεννήτριες που μετατρέπουν τη μηχανική ισχύ σε ηλεκτρική και κινητήρες που μετατρέπουν την ηλεκτρική σε μηχανική
 Οι μηχανές ΕΡ είναι γεννήτριες που μετατρέπουν τη μηχανική ισχύ σε ηλεκτρική και κινητήρες που μετατρέπουν την ηλεκτρική σε μηχανική Υπάρχουν 2 βασικές κατηγορίες μηχανών ΕΡ: οι σύγχρονες και οι επαγωγικές
Οι μηχανές ΕΡ είναι γεννήτριες που μετατρέπουν τη μηχανική ισχύ σε ηλεκτρική και κινητήρες που μετατρέπουν την ηλεκτρική σε μηχανική Υπάρχουν 2 βασικές κατηγορίες μηχανών ΕΡ: οι σύγχρονες και οι επαγωγικές
Ηλεκτρικές Μηχανές ΙΙ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 2: Ασύγχρονος Τριφασικός Κινητήρας Αρχή Λειτουργίας Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων Μηχανικών
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 2: Ασύγχρονος Τριφασικός Κινητήρας Αρχή Λειτουργίας Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων Μηχανικών
ΑΣΚΗΣΗ 4 η ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ ΣΥΓΧΡΟΝΟΥ ΤΡΙΦΑΣΙΚΟΥ ΚΙΝΗΤΗΡΑ
 ΑΣΚΗΣΗ 4 η ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ ΣΥΓΧΡΟΝΟΥ ΤΡΙΦΑΣΙΚΟΥ ΚΙΝΗΤΗΡΑ Σκοπός της άσκησης: Σκοπός της άσκησης είναι: 1. Να εξοικειωθεί ο σπουδαστής με την διαδικασία εκκίνησης ενός σύγχρονου τριφασικού
ΑΣΚΗΣΗ 4 η ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ ΣΥΓΧΡΟΝΟΥ ΤΡΙΦΑΣΙΚΟΥ ΚΙΝΗΤΗΡΑ Σκοπός της άσκησης: Σκοπός της άσκησης είναι: 1. Να εξοικειωθεί ο σπουδαστής με την διαδικασία εκκίνησης ενός σύγχρονου τριφασικού
ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ: 2 η
 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ: 2 η Τίτλος Άσκησης: ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ και ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ «Λειτουργία Γεννήτριας Συνεχούς Ρεύματος Ξένης διέγερσης και σχεδίαση της χαρακτηριστικής φορτίου» «Λειτουργία
ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ: 2 η Τίτλος Άσκησης: ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ και ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ «Λειτουργία Γεννήτριας Συνεχούς Ρεύματος Ξένης διέγερσης και σχεδίαση της χαρακτηριστικής φορτίου» «Λειτουργία
Ηλεκτρικές Μηχανές ΙΙ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 9: Μέθοδοι Εκκίνησης Μονοφασικών Κινητήρων Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 9: Μέθοδοι Εκκίνησης Μονοφασικών Κινητήρων Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες
ΓΚΙΟΚΑΣ ΠΑΝΑΓΙΩΤΗΣ. ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας μιας ηλεκτρικής γεννήτριας Σ.Ρ. με διέγερση σειράς.
 ΓΚΙΟΚΑΣ ΠΑΝΑΓΙΩΤΗΣ ΑΜ:6749 ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας μιας ηλεκτρικής γεννήτριας Σ.Ρ. με διέγερση σειράς. ΣΚΟΠΟΣ: Για να λειτουργήσει μια γεννήτρια, πρέπει να πληρούνται οι παρακάτω βασικές
ΓΚΙΟΚΑΣ ΠΑΝΑΓΙΩΤΗΣ ΑΜ:6749 ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας μιας ηλεκτρικής γεννήτριας Σ.Ρ. με διέγερση σειράς. ΣΚΟΠΟΣ: Για να λειτουργήσει μια γεννήτρια, πρέπει να πληρούνται οι παρακάτω βασικές
ΑΣΚΗΣΗ 1 η ΜΕΛΕΤΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΡΙΦΑΣΙΚΗΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ (ΕΝΑΛΛΑΚΤΗΡΑ) ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ ΤΟΥ ΙΣΟΔΥΝΑΜΟΥ ΚΥΚΛΩΜΑΤΟΣ
 ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ ΤΟΥ ΙΣΟΔΥΝΑΜΟΥ ΚΥΚΛΩΜΑΤΟΣ") ΑΣΚΗΣΗ 1 η ΜΕΛΕΤΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΡΙΦΑΣΙΚΗΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ (ΕΝΑΛΛΑΚΤΗΡΑ) ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ ΤΟΥ ΙΣΟΔΥΝΑΜΟΥ ΚΥΚΛΩΜΑΤΟΣ Σκοπός της άσκησης: 1. Ο πειραματικός προσδιορισμός της χαρακτηριστικής λειτουργίας
ΑΣΚΗΣΗ 1 η ΜΕΛΕΤΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΡΙΦΑΣΙΚΗΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ (ΕΝΑΛΛΑΚΤΗΡΑ) ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ ΤΟΥ ΙΣΟΔΥΝΑΜΟΥ ΚΥΚΛΩΜΑΤΟΣ Σκοπός της άσκησης: 1. Ο πειραματικός προσδιορισμός της χαρακτηριστικής λειτουργίας
ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
Ηλεκτρικές Μηχανές ΙΙ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 7: Μέθοδοι Εκκίνησης και Πέδησης Ασύγχρονων Τριφασικών Κινητήρων Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 7: Μέθοδοι Εκκίνησης και Πέδησης Ασύγχρονων Τριφασικών Κινητήρων Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων
ΤΕΙ ΚΑΒΑΛΑΣ 2012. 1.1 Εισαγωγή Αντικείμενο πτυχιακής εργασίας.σελ. 2. 1.2 Περιεχόμενα εγχειριδίου Αναφοράς Προγραμμάτων.. σελ. 3
 1 ΠΕΡΙΕΧΟΜΕΝΑ 1.1 Εισαγωγή Αντικείμενο πτυχιακής εργασίας.σελ. 2 1.2 Περιεχόμενα εγχειριδίου Αναφοράς Προγραμμάτων.. σελ. 3 1.3 Παράδειγμα τριφασικού επαγωγικού κινητήρα..σελ. 4-9 1.4 Σχεδίαση στο Visio
1 ΠΕΡΙΕΧΟΜΕΝΑ 1.1 Εισαγωγή Αντικείμενο πτυχιακής εργασίας.σελ. 2 1.2 Περιεχόμενα εγχειριδίου Αναφοράς Προγραμμάτων.. σελ. 3 1.3 Παράδειγμα τριφασικού επαγωγικού κινητήρα..σελ. 4-9 1.4 Σχεδίαση στο Visio
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
ΑΣΚΗΣΗ 1 η ΜΕΤΑΣΧΗΜΑΤΙΣΤΕΣ ΙΣΧΥΟΣ ΕΙΣΑΓΩΓΗ. Στόχοι της εργαστηριακής άσκησης είναι η εξοικείωση των σπουδαστών με την:
 Σκοπός της Άσκησης: ΑΣΚΗΣΗ η ΜΕΤΑΣΧΗΜΑΤΙΣΤΕΣ ΙΣΧΥΟΣ ΕΙΣΑΓΩΓΗ Στόχοι της εργαστηριακής άσκησης είναι η εξοικείωση των σπουδαστών με την: α. Κατασκευή μετασχηματιστών. β. Αρχή λειτουργίας μετασχηματιστών.
Σκοπός της Άσκησης: ΑΣΚΗΣΗ η ΜΕΤΑΣΧΗΜΑΤΙΣΤΕΣ ΙΣΧΥΟΣ ΕΙΣΑΓΩΓΗ Στόχοι της εργαστηριακής άσκησης είναι η εξοικείωση των σπουδαστών με την: α. Κατασκευή μετασχηματιστών. β. Αρχή λειτουργίας μετασχηματιστών.
ΑΣΚΗΣΗ 5 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ ΔΙΕΓΕΡΣΗΣ ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΚΑΜΠΥΛΕΣ
 ΑΣΚΗΣΗ 5 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ ΔΙΕΓΕΡΣΗΣ ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΚΑΜΠΥΛΕΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της λειτουργίας της γεννήτριας συνεχούς ρεύματος
ΑΣΚΗΣΗ 5 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ ΔΙΕΓΕΡΣΗΣ ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΚΑΜΠΥΛΕΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της λειτουργίας της γεννήτριας συνεχούς ρεύματος
μετασχηματιστή. ΤΜΗΜΑ: ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας ενός μονοφασικού
 ΤΜΗΜΑ: ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας ενός μονοφασικού μετασχηματιστή. ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: κ. Δημήτριος Καλπακτσόγλου ΕΡΓΑΣΙΑ ΤΗΣ: Αικατερίνης-Χρυσοβαλάντης Γιουσμά Α.Ε.Μ:
ΤΜΗΜΑ: ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΘΕΜΑ: Περιγράψτε τον τρόπο λειτουργίας ενός μονοφασικού μετασχηματιστή. ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: κ. Δημήτριος Καλπακτσόγλου ΕΡΓΑΣΙΑ ΤΗΣ: Αικατερίνης-Χρυσοβαλάντης Γιουσμά Α.Ε.Μ:
ΑΣΚΗΣΗ 8 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ
 ΑΣΚΗΣΗ 8 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της λειτουργίας του κινητήρα συνεχούς
ΑΣΚΗΣΗ 8 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΞΕΝΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της λειτουργίας του κινητήρα συνεχούς
ΟΝΟΜ/ΩΝΥΜΟ:ΣΤΕΦΑΝΟΣ ΓΚΟΥΝΤΟΥΣΟΥΔΗΣ Α.Μ:6750 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ:ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ (ΕΡΓΑΣΤΗΡΙΟ)
") ΟΝΟΜ/ΩΝΥΜΟ:ΣΤΕΦΑΝΟΣ ΓΚΟΥΝΤΟΥΣΟΥΔΗΣ Α.Μ:6750 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ:ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ (ΕΡΓΑΣΤΗΡΙΟ) Περιγραφή Λειτουργίας Σύγχρονου Κινητήρα Σκοπός: Η παρούσα εργασία έχει σκοπό να περιγράψει τη λειτουργία ενός
ΟΝΟΜ/ΩΝΥΜΟ:ΣΤΕΦΑΝΟΣ ΓΚΟΥΝΤΟΥΣΟΥΔΗΣ Α.Μ:6750 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ:ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ (ΕΡΓΑΣΤΗΡΙΟ) Περιγραφή Λειτουργίας Σύγχρονου Κινητήρα Σκοπός: Η παρούσα εργασία έχει σκοπό να περιγράψει τη λειτουργία ενός
Ηλεκτρονικά Ισχύος II
 Ηλεκτρονικά Ισχύος II Ενότητα 2: Μετατροπείς Συνεχούς Τάσης σε Εναλλασσόμενη Τάση (DC-AC Converers ή Inverers) Δρ.-Μηχ. Εμμανουήλ Τατάκης, Καθηγητής Πολυτεχνική Σχολή Τμ. Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Ηλεκτρονικά Ισχύος II Ενότητα 2: Μετατροπείς Συνεχούς Τάσης σε Εναλλασσόμενη Τάση (DC-AC Converers ή Inverers) Δρ.-Μηχ. Εμμανουήλ Τατάκης, Καθηγητής Πολυτεχνική Σχολή Τμ. Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Τμήμα Ηλεκτρολόγων Μηχανικών ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΡΟΠΗΣ ΤΑΧΥΤΗΤΑΣ ΕΠΑΓΩΓΙΚΩΝ ΚΙΝΗΤΗΡΩΝ
 Ένας που κατασκευάζεται ώστε να παρουσιάζει μεγάλη αντίσταση δρομέα η ροπή εκκίνησης του είναι αρκετά υψηλή αλλά το ίδιο υψηλή είναι και η ολίσθηση του στις κανονικές συνθήκες λειτουργίας Όμως επειδή Pconv=(1-s)PAG,
Ένας που κατασκευάζεται ώστε να παρουσιάζει μεγάλη αντίσταση δρομέα η ροπή εκκίνησης του είναι αρκετά υψηλή αλλά το ίδιο υψηλή είναι και η ολίσθηση του στις κανονικές συνθήκες λειτουργίας Όμως επειδή Pconv=(1-s)PAG,
Απαντήσεις Θεμάτων Τελικής Αξιολόγησης (Εξετάσεις Ιουνίου) στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 2013/2014, Ημερομηνία: 24/06/2014
 στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 2013/2014, Ημερομηνία: 24/06/2014") Θέμα ο Απαντήσεις Θεμάτων Τελικής Αξιολόγησης (Εξετάσεις Ιουνίου) στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 03/04, Ημερομηνία: 4/06/04 Σε μονοφασικό Μ/Σ ονομαστικής ισχύος 60kA, 300/30, 50Hz, ελήφθησαν
Θέμα ο Απαντήσεις Θεμάτων Τελικής Αξιολόγησης (Εξετάσεις Ιουνίου) στο Μάθημα «Ηλεκτροτεχνία Ηλεκτρικές Μηχανές» ΕΕ 03/04, Ημερομηνία: 4/06/04 Σε μονοφασικό Μ/Σ ονομαστικής ισχύος 60kA, 300/30, 50Hz, ελήφθησαν
2. ΓΕΝΝΗΤΡΙΕΣ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ
 28 2. ΓΕΝΝΗΤΡΙΕΣ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Οι γεννήτριες εναλλασσόµενου ρεύµατος είναι δύο ειδών Α) οι σύγχρονες γεννήτριες ή εναλλακτήρες και Β) οι ασύγχρονες γεννήτριες Οι σύγχρονες γεννήτριες παράγουν
28 2. ΓΕΝΝΗΤΡΙΕΣ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Οι γεννήτριες εναλλασσόµενου ρεύµατος είναι δύο ειδών Α) οι σύγχρονες γεννήτριες ή εναλλακτήρες και Β) οι ασύγχρονες γεννήτριες Οι σύγχρονες γεννήτριες παράγουν
Γεννήτρια συνεχούς ρεύματος παράλληλης. διέγερσης
 ΑΣΚΗΣΗ 6 Γεννήτρια συνεχούς ρεύματος παράλληλης διέγερσης 1 Α. Θεωρητικές επεξηγήσεις: Στις γεννήτριες παράλληλης διέγερσης το τύλιγμα διέγερσης συνδέεται παράλληλα με το κύκλωμα του δρομέα, όπως φαίνεται
ΑΣΚΗΣΗ 6 Γεννήτρια συνεχούς ρεύματος παράλληλης διέγερσης 1 Α. Θεωρητικές επεξηγήσεις: Στις γεννήτριες παράλληλης διέγερσης το τύλιγμα διέγερσης συνδέεται παράλληλα με το κύκλωμα του δρομέα, όπως φαίνεται
Γεννήτρια συνεχούς ρεύματος ξένης διέγερσης
 ΑΣΚΗΣΗ 5 Γεννήτρια συνεχούς ρεύματος ξένης διέγερσης 1 Α. Θεωρητικές επεξηγήσεις: Μια ηλεκτρική μηχανή συνεχούς ρεύματος παράγει τάση συνεχούς μορφής όταν χρησιμοποιείται ως γεννήτρια, ενώ ένας κινητήρας
ΑΣΚΗΣΗ 5 Γεννήτρια συνεχούς ρεύματος ξένης διέγερσης 1 Α. Θεωρητικές επεξηγήσεις: Μια ηλεκτρική μηχανή συνεχούς ρεύματος παράγει τάση συνεχούς μορφής όταν χρησιμοποιείται ως γεννήτρια, ενώ ένας κινητήρας
PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών
 Διαμόρφωση εύρους παλμών") PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη
PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη
3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
 Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Τμήμα Ηλεκτρολόγων Μηχανικών ΜΟΝΟΦΑΣΙΚΟΙ ΚΙΝΗΤΗΡΕΣ
 Το βασικό μειονέκτημα που εμφανίζεται στη σχεδίαση των μονοφασικών επαγωγικών κινητήρων είναι ότι αντίθετα από τις 3-φασικές πηγές ισχύος οι 1-φασικές πηγές δεν παράγουν στρεφόμενο μαγνητικό πεδίο Το μαγνητικό
Το βασικό μειονέκτημα που εμφανίζεται στη σχεδίαση των μονοφασικών επαγωγικών κινητήρων είναι ότι αντίθετα από τις 3-φασικές πηγές ισχύος οι 1-φασικές πηγές δεν παράγουν στρεφόμενο μαγνητικό πεδίο Το μαγνητικό
ΤΕΛΟΣ 1ΗΣ ΑΠΟ 4 ΣΕΛΙ ΕΣ
 ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΝΕΟ ΚΑΙ ΠΑΛΑΙΟ ΣΥΣΤΗΜΑ ΠΑΝΕΛΛΑ ΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΗΜΕΡΗΣΙΩΝ ΕΠΑΓΓΕΛΜΑΤΙΚΩΝ ΛΥΚΕΙΩΝ ΚΑΙ HMEΡΗΣΙΩΝ ΚΑΙ ΕΣΠΕΡΙΝΩΝ ΕΠΑΓΓΕΛΜΑΤΙΚΩΝ ΛΥΚΕΙΩΝ (ΟΜΑ Α A ΚΑΙ ΜΑΘΗΜΑΤΩΝ ΕΙ ΙΚΟΤΗΤΑΣ ΟΜΑ Α Β ) ΕΥΤΕΡΑ 6
ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΝΕΟ ΚΑΙ ΠΑΛΑΙΟ ΣΥΣΤΗΜΑ ΠΑΝΕΛΛΑ ΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΗΜΕΡΗΣΙΩΝ ΕΠΑΓΓΕΛΜΑΤΙΚΩΝ ΛΥΚΕΙΩΝ ΚΑΙ HMEΡΗΣΙΩΝ ΚΑΙ ΕΣΠΕΡΙΝΩΝ ΕΠΑΓΓΕΛΜΑΤΙΚΩΝ ΛΥΚΕΙΩΝ (ΟΜΑ Α A ΚΑΙ ΜΑΘΗΜΑΤΩΝ ΕΙ ΙΚΟΤΗΤΑΣ ΟΜΑ Α Β ) ΕΥΤΕΡΑ 6
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444
 ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 ΣΥΝΘΕΣΗ DC ΚΑΙ ΧΑΜΗΛΗΣ ΣΥΧΝΟΤΗΤΑΣ AC Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ 1 Τα Θέματα Διακοπτικός πόλος
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 ΣΥΝΘΕΣΗ DC ΚΑΙ ΧΑΜΗΛΗΣ ΣΥΧΝΟΤΗΤΑΣ AC Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ 1 Τα Θέματα Διακοπτικός πόλος
ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΕΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ
 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΕΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ Σκοπός της εργασίας Σκοπός της εργασίας αυτής είναι να μάθουμε τι είναι μια γεννήτρια και να μάθουμε, κυρίως, τον τρόπο με τον οποίο λειτουργεί
ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΤΡΟΠΟΣ ΛΕΙΤΟΥΡΓΕΙΑΣ ΜΙΑΣ ΣΥΓΧΡΟΝΗΣ ΓΕΝΝΗΤΡΙΑΣ Σκοπός της εργασίας Σκοπός της εργασίας αυτής είναι να μάθουμε τι είναι μια γεννήτρια και να μάθουμε, κυρίως, τον τρόπο με τον οποίο λειτουργεί
Αφεντουλίδου Όλγα ΑΜ:6904. Ηλεκτρικές Μηχανές. Μέθοδοι εκκίνησης τριφασικού επαγωγικού κινητήρα
 Αφεντουλίδου Όλγα ΑΜ:6904 Ηλεκτρικές Μηχανές Μέθοδοι εκκίνησης τριφασικού επαγωγικού κινητήρα 1 Εισαγωγή Από τα διάφορα είδη ηλεκτρικών μηχανών εναλλασσόμενου ρεύματος, ο τριφασικός ασύγχρονος ή επαγωγικός
Αφεντουλίδου Όλγα ΑΜ:6904 Ηλεκτρικές Μηχανές Μέθοδοι εκκίνησης τριφασικού επαγωγικού κινητήρα 1 Εισαγωγή Από τα διάφορα είδη ηλεκτρικών μηχανών εναλλασσόμενου ρεύματος, ο τριφασικός ασύγχρονος ή επαγωγικός
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444
 ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 DC ΔΙΑΚΟΠΤΙΚA ΤΡΟΦΟΔΟΤΙΚΑ, ΜΕΤΑΤΡΟΠΕΙΣ ΜΕ ΗΛΕΚΤΡΙΚΗ ΑΠΟΜΟΝΩΣΗ Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 DC ΔΙΑΚΟΠΤΙΚA ΤΡΟΦΟΔΟΤΙΚΑ, ΜΕΤΑΤΡΟΠΕΙΣ ΜΕ ΗΛΕΚΤΡΙΚΗ ΑΠΟΜΟΝΩΣΗ Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ
ΑΣΚΗΣΕΙΣ ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΙΙ
 ΑΣΚΗΣΕΙΣ ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΙΙ ΣΥΓΧΡΟΝΕΣ ΜΗΧΑΝΕΣ Ε.Ρ. 1. Μια σύγχρονη γεννήτρια με ονομαστικά στοιχεία: 2300V, 1000kV, 60Hz, διπολική με συντελεστής ισχύος 0,8 επαγωγικό και σύνδεση σε αστέρα έχει σύγχρονη
ΑΣΚΗΣΕΙΣ ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΙΙ ΣΥΓΧΡΟΝΕΣ ΜΗΧΑΝΕΣ Ε.Ρ. 1. Μια σύγχρονη γεννήτρια με ονομαστικά στοιχεία: 2300V, 1000kV, 60Hz, διπολική με συντελεστής ισχύος 0,8 επαγωγικό και σύνδεση σε αστέρα έχει σύγχρονη
ΤΡΙΦΑΣΙΚΟΙ ΚΙΝΗΤΗΡΕΣ Ε.Ρ ΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ ΗΛΕΚΤΡΙΚΗ ΠΡΟΩΣΗ
 1 ΤΡΙΦΑΣΙΚΟΙ ΚΙΝΗΤΗΡΕΣ Ε.Ρ Έχουμε δύο είδη τριφασικών κινητήρων Ε.Ρ., τους σύγχρονους και τους ασύγχρονους. Ο στάτης των δύο αυτών ειδών είναι όμοιος με αυτόν των σύγχρονων γεννητριών. Έχει τριφασικό τύλιγμα,
1 ΤΡΙΦΑΣΙΚΟΙ ΚΙΝΗΤΗΡΕΣ Ε.Ρ Έχουμε δύο είδη τριφασικών κινητήρων Ε.Ρ., τους σύγχρονους και τους ασύγχρονους. Ο στάτης των δύο αυτών ειδών είναι όμοιος με αυτόν των σύγχρονων γεννητριών. Έχει τριφασικό τύλιγμα,
5. ΜΟΝΟΦΑΣΙΚΟΙ ΚΑΙ ΑΛΛΟΙ ΚΙΝΗΤΗΡΕΣ
 73 5. ΜΟΝΟΦΑΣΙΚΟΙ ΚΑΙ ΑΛΛΟΙ ΚΙΝΗΤΗΡΕΣ Στην συνέχεια εξετάζονται οι µονοφασικοί επαγωγικοί κινητήρες αλλά και ορισµένοι άλλοι όπως οι τριφασικοί σύγχρονοι κινητήρες που υπάρχουν σε µικρό ποσοστό σε βιοµηχανικές
73 5. ΜΟΝΟΦΑΣΙΚΟΙ ΚΑΙ ΑΛΛΟΙ ΚΙΝΗΤΗΡΕΣ Στην συνέχεια εξετάζονται οι µονοφασικοί επαγωγικοί κινητήρες αλλά και ορισµένοι άλλοι όπως οι τριφασικοί σύγχρονοι κινητήρες που υπάρχουν σε µικρό ποσοστό σε βιοµηχανικές
Περιεχόμενα. Πρόλογος...13
 Περιεχόμενα Πρόλογος...3 Κεφάλαιο : Στοιχεία ηλεκτρικών κυκλωμάτων...5. Βασικά ηλεκτρικά μεγέθη...5.. Ηλεκτρικό φορτίο...5.. Ηλεκτρικό ρεύμα...5..3 Τάση...6..4 Ενέργεια...6..5 Ισχύς...6..6 Σύνοψη...7.
Περιεχόμενα Πρόλογος...3 Κεφάλαιο : Στοιχεία ηλεκτρικών κυκλωμάτων...5. Βασικά ηλεκτρικά μεγέθη...5.. Ηλεκτρικό φορτίο...5.. Ηλεκτρικό ρεύμα...5..3 Τάση...6..4 Ενέργεια...6..5 Ισχύς...6..6 Σύνοψη...7.
ΕΞΕΤΑΣΤΙΚΗ ΠΕΡΙΟΔΟΣ ΙΟΥΝΙΟΥ 2007
 ΤΕΙ ΠΕΙΡΑΙΑ ΣΧΟΛΗ ΣΤΕΦ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΔΙΔΑΣΚΩΝ: Δρ. Π. Β. Μαλατέστας, Καθηγητής ΗΜΕΡΟΜΗΝΙΑ : 5//7 Μάθημα : Ηλεκτρική Κίνηση ΕΞΕΤΑΣΤΙΚΗ ΠΕΡΙΟΔΟΣ ΙΟΥΝΙΟΥ 7 ΘΕΜΑ ο (4%) Κινητήρας με γραμμική χαρακτηριστική
ΤΕΙ ΠΕΙΡΑΙΑ ΣΧΟΛΗ ΣΤΕΦ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΔΙΔΑΣΚΩΝ: Δρ. Π. Β. Μαλατέστας, Καθηγητής ΗΜΕΡΟΜΗΝΙΑ : 5//7 Μάθημα : Ηλεκτρική Κίνηση ΕΞΕΤΑΣΤΙΚΗ ΠΕΡΙΟΔΟΣ ΙΟΥΝΙΟΥ 7 ΘΕΜΑ ο (4%) Κινητήρας με γραμμική χαρακτηριστική
3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
 Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Περιεχόμενα. Πρόλογος...13
 Περιεχόμενα Πρόλογος...3 Κεφάλαιο : Στοιχεία ηλεκτρικών κυκλωμάτων...5. Βασικά ηλεκτρικά μεγέθη...5.. Ηλεκτρικό φορτίο...5.. Ηλεκτρικό ρεύμα...5..3 Τάση...6..4 Ενέργεια...6..5 Ισχύς...6..6 Σύνοψη...7.
Περιεχόμενα Πρόλογος...3 Κεφάλαιο : Στοιχεία ηλεκτρικών κυκλωμάτων...5. Βασικά ηλεκτρικά μεγέθη...5.. Ηλεκτρικό φορτίο...5.. Ηλεκτρικό ρεύμα...5..3 Τάση...6..4 Ενέργεια...6..5 Ισχύς...6..6 Σύνοψη...7.
ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Γ
 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Γ ΜΑΘΗΜΑ 2 Ισοδύναμο Ηλεκτρικό Κύκλωμα Σύγχρονων Μηχανών Ουρεϊλίδης Κωνσταντίνος, Υποψ. Διδακτωρ Υπολογισμός Αυτεπαγωγής και αμοιβαίας επαγωγής Πεπλεγμένη μαγνητική ροή συναρτήσει των
ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Γ ΜΑΘΗΜΑ 2 Ισοδύναμο Ηλεκτρικό Κύκλωμα Σύγχρονων Μηχανών Ουρεϊλίδης Κωνσταντίνος, Υποψ. Διδακτωρ Υπολογισμός Αυτεπαγωγής και αμοιβαίας επαγωγής Πεπλεγμένη μαγνητική ροή συναρτήσει των
Προηγμένος έλεγχος ηλεκτρικών μηχανών
 Προηγμένος έλεγχος ηλεκτρικών μηχανών Ενότητα 8: Άμεσος Διανυσματικός Έλεγχος Ασύγχρονων Μηχανών με προσανατολισμό στην μαγνητική ροή του στάτη Επαμεινώνδας Μητρονίκας - Αντώνιος Αλεξανδρίδης Πολυτεχνική
Προηγμένος έλεγχος ηλεκτρικών μηχανών Ενότητα 8: Άμεσος Διανυσματικός Έλεγχος Ασύγχρονων Μηχανών με προσανατολισμό στην μαγνητική ροή του στάτη Επαμεινώνδας Μητρονίκας - Αντώνιος Αλεξανδρίδης Πολυτεχνική
ΘΕΜΑ 1ο Για τις ερωτήσεις να γράψετε στο τετράδιό σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση.
 ΠΡΟΤΕΙΝΟΜΕΝΑ ΘΕΜΑΤΑ 2010 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Κακαζιάνης Πέτρος ΘΕΜΑ 1ο Για τις ερωτήσεις 1.1 1.13 να γράψετε στο τετράδιό σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί
ΠΡΟΤΕΙΝΟΜΕΝΑ ΘΕΜΑΤΑ 2010 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Κακαζιάνης Πέτρος ΘΕΜΑ 1ο Για τις ερωτήσεις 1.1 1.13 να γράψετε στο τετράδιό σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί
ΣΥΣΤΗΜΑΤΑ ΗΛΕΚΤΡΟΚΙΝΗΣΗΣ ΑΣΥΓΧΡΟΝΟΥ ΚΙΝΗΤΗΡΑ : ΠΛΕΟΝΕΚΤΗΜΑΤΑ, ΜΕΙΟΝΕΚΤΗΜΑΤΑ ΚΑΙ ΣΥΓΧΡΟΝΕΣ ΤΑΣΕΙΣ ΜΕΙΩΣΗΣ ΑΠΩΛΕΙΩΝ
 ΣΥΣΤΗΜΑΤΑ ΗΛΕΚΤΡΟΚΙΝΗΣΗΣ ΑΣΥΓΧΡΟΝΟΥ ΚΙΝΗΤΗΡΑ : ΠΛΕΟΝΕΚΤΗΜΑΤΑ, ΜΕΙΟΝΕΚΤΗΜΑΤΑ ΚΑΙ ΣΥΓΧΡΟΝΕΣ ΤΑΣΕΙΣ ΜΕΙΩΣΗΣ ΑΠΩΛΕΙΩΝ Δ. Ράπτης, Α. Κλαδάς Εργαστήριο Ηλεκτρικών Μηχανών και Ηλεκτρονικών Ισχύος Τομέας Ηλεκτρικής
ΣΥΣΤΗΜΑΤΑ ΗΛΕΚΤΡΟΚΙΝΗΣΗΣ ΑΣΥΓΧΡΟΝΟΥ ΚΙΝΗΤΗΡΑ : ΠΛΕΟΝΕΚΤΗΜΑΤΑ, ΜΕΙΟΝΕΚΤΗΜΑΤΑ ΚΑΙ ΣΥΓΧΡΟΝΕΣ ΤΑΣΕΙΣ ΜΕΙΩΣΗΣ ΑΠΩΛΕΙΩΝ Δ. Ράπτης, Α. Κλαδάς Εργαστήριο Ηλεκτρικών Μηχανών και Ηλεκτρονικών Ισχύος Τομέας Ηλεκτρικής
Πείραμα επαγόμενου ρεύματος
 Επαγόμενα πεδία Ένα μαγνητικό πεδίο μπορεί να μην είναι σταθερό, αλλά χρονικά μεταβαλλόμενο. Πειράματα που πραγματοποιήθηκαν το 1831 (από τους Michael Faraday και Joseph Henry) έδειξαν ότι ένα μεταβαλλόμενο
Επαγόμενα πεδία Ένα μαγνητικό πεδίο μπορεί να μην είναι σταθερό, αλλά χρονικά μεταβαλλόμενο. Πειράματα που πραγματοποιήθηκαν το 1831 (από τους Michael Faraday και Joseph Henry) έδειξαν ότι ένα μεταβαλλόμενο
6 Εισαγωγή στα Συστήματα Ηλεκτρικής Ενέργειας
 Πρόλογος Σ το βιβλίο αυτό περιλαμβάνεται η ύλη του μαθήματος «Εισαγωγή στα Συστήματα Ηλεκτρικής Ενέργειας» που διδάσκεται στους φοιτητές του Γ έτους σπουδών του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Πρόλογος Σ το βιβλίο αυτό περιλαμβάνεται η ύλη του μαθήματος «Εισαγωγή στα Συστήματα Ηλεκτρικής Ενέργειας» που διδάσκεται στους φοιτητές του Γ έτους σπουδών του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
ΗΜΥ 340 Μηχανική Ηλεκτρικής Ισχύος Ασύγχρονοι κινητήρες
 ΗΜΥ 340 Μηχανική Ηλεκτρικής Ισχύος Ασύγχρονοι κινητήρες Δρ. Ηλίας Κυριακίδης Αναπληρωτής Καθηγητής ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ 2007 Ηλίας
ΗΜΥ 340 Μηχανική Ηλεκτρικής Ισχύος Ασύγχρονοι κινητήρες Δρ. Ηλίας Κυριακίδης Αναπληρωτής Καθηγητής ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ 2007 Ηλίας
ΤΡΙΦΑΣΙΚΑ ΣΥΣΤΗΜΑΤΑ ΤΡΙΦΑΣΙΚΑ ΣΥΣΤΗΜΑΤΑ
 Φορτίο 3. Σημείο έγχυσης ισχύος Φορτίο 1. 600 kva cosφ=0.8 επαγωγικό 10+j35 Ω/φάση Φορτίο 2. 1100 kva cosφ=0.9 χωρητικό P = 600 kw cosφ=0.85 επαγωγικό Φορτίο 4 P=750 kw Q=150 kvar Μονογραμμικό κύκλωμα
Φορτίο 3. Σημείο έγχυσης ισχύος Φορτίο 1. 600 kva cosφ=0.8 επαγωγικό 10+j35 Ω/φάση Φορτίο 2. 1100 kva cosφ=0.9 χωρητικό P = 600 kw cosφ=0.85 επαγωγικό Φορτίο 4 P=750 kw Q=150 kvar Μονογραμμικό κύκλωμα
Ηλεκτρικές Μηχανές ΙΙ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 1: Βασικές Αρχές Ηλεκτρικών Μηχανών Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 1: Βασικές Αρχές Ηλεκτρικών Μηχανών Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης
Μαγνητικά Πεδία σε Σύγχρονες Μηχανές. 3.1 Μαγνητικά πεδία σε μηχανές με ομοιόμορφο διάκενο.
 Χ. Δημουλιά, Σύγχρονες Ηλεκτρικές Μηχανές Κεφάλαιο 3 1 Κεφάλαιο 3 Μαγνητικά Πεδία σε Σύγχρονες Μηχανές 3.1 Μαγνητικά πεδία σε μηχανές με ομοιόμορφο διάκενο. Θα εξετάσουμε εδώ το μαγνητικό πεδίο στο διάκενο
Χ. Δημουλιά, Σύγχρονες Ηλεκτρικές Μηχανές Κεφάλαιο 3 1 Κεφάλαιο 3 Μαγνητικά Πεδία σε Σύγχρονες Μηχανές 3.1 Μαγνητικά πεδία σε μηχανές με ομοιόμορφο διάκενο. Θα εξετάσουμε εδώ το μαγνητικό πεδίο στο διάκενο
Στα τυλίγματα απόσβεσης ενός ΣΚ μπορεί να αναπτυχθεί κάποια ροπή εκκίνησης χωρίς εξωτερική τροφοδοσία του κυκλώματος διέγερσης
 Στα τυλίγματα απόσβεσης ενός ΣΚ μπορεί να αναπτυχθεί κάποια ροπή εκκίνησης χωρίς εξωτερική τροφοδοσία του κυκλώματος διέγερσης Μια μηχανή που κατασκευάζεται με τυλίγματα απόσβεσης ονομάζεται επαγωγική
Στα τυλίγματα απόσβεσης ενός ΣΚ μπορεί να αναπτυχθεί κάποια ροπή εκκίνησης χωρίς εξωτερική τροφοδοσία του κυκλώματος διέγερσης Μια μηχανή που κατασκευάζεται με τυλίγματα απόσβεσης ονομάζεται επαγωγική
Μηχανές εναλλασσομένου ρεύματος
 Μηχανές εναλλασσομένου ρεύματος 1 Εισαγωγή Οι μηχανές εναλλασσόμενου ρεύματος (Ε.Ρ.) αποτελούν τη συντριπτική πλειονότητα των ηλεκτρικών μηχανών που χρησιμοποιούνται στη βιομηχανία, κυρίως λόγω της επικράτησης
Μηχανές εναλλασσομένου ρεύματος 1 Εισαγωγή Οι μηχανές εναλλασσόμενου ρεύματος (Ε.Ρ.) αποτελούν τη συντριπτική πλειονότητα των ηλεκτρικών μηχανών που χρησιμοποιούνται στη βιομηχανία, κυρίως λόγω της επικράτησης
Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας
 Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας Ενότητα: Άσκηση 5: Η σύγχρονη μηχανή (γεννήτρια/κινητήρας ) Νικόλαος Βοβός, Γαβριήλ Γιαννακόπουλος, Παναγής Βοβός Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας Ενότητα: Άσκηση 5: Η σύγχρονη μηχανή (γεννήτρια/κινητήρας ) Νικόλαος Βοβός, Γαβριήλ Γιαννακόπουλος, Παναγής Βοβός Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Ηλεκτρικές Μηχανές ΙΙ Εργαστήριο
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Εργαστήριο Ενότητα 1: Προσδιορισμός των Σταθερών του Ισοδύναμου Κυκλώματος Ασύγχρονης Μηχανής Ηρακλής Βυλλιώτης
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Εργαστήριο Ενότητα 1: Προσδιορισμός των Σταθερών του Ισοδύναμου Κυκλώματος Ασύγχρονης Μηχανής Ηρακλής Βυλλιώτης
ΣΥΜΠΙΕΣΤΕΣ ΗΛΕΚΤΡΙΚΟ ΣΥΣΤΗΜΑ
 9. Ηλεκτρικό Σύστημα Συμπιεστών Ανάλογα με την κατασκευή τους και το είδος του εναλλασσόμενου ρεύματος που απαιτούν για τη λειτουργία τους, οι ηλεκτροκινητήρες διακρίνονται σε: Μονοφασικούς. Τριφασικούς.
9. Ηλεκτρικό Σύστημα Συμπιεστών Ανάλογα με την κατασκευή τους και το είδος του εναλλασσόμενου ρεύματος που απαιτούν για τη λειτουργία τους, οι ηλεκτροκινητήρες διακρίνονται σε: Μονοφασικούς. Τριφασικούς.
ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ & ΣΥΣΤΗΜΑΤΩΝ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΥΣΤΗΜΑΤΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ & ΣΥΣΤΗΜΑΤΩΝ Διδάσκων : Δημήτρης Τσιπιανίτης Γεώργιος Μανδέλλος
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΥΣΤΗΜΑΤΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ & ΣΥΣΤΗΜΑΤΩΝ Διδάσκων : Δημήτρης Τσιπιανίτης Γεώργιος Μανδέλλος
Αυτά τα πειράµατα έγιναν από τους Michael Faraday και Joseph Henry.
 Επαγόµενα πεδία Ένα µαγνητικό πεδίο µπορεί να µην είναι σταθερό, αλλά χρονικά µεταβαλλόµενο. Πειράµατα που πραγµατοποιήθηκαν το 1831 έδειξαν ότι ένα µεταβαλλόµενο µαγνητικό πεδίο µπορεί να επάγει ΗΕΔ σε
Επαγόµενα πεδία Ένα µαγνητικό πεδίο µπορεί να µην είναι σταθερό, αλλά χρονικά µεταβαλλόµενο. Πειράµατα που πραγµατοποιήθηκαν το 1831 έδειξαν ότι ένα µεταβαλλόµενο µαγνητικό πεδίο µπορεί να επάγει ΗΕΔ σε
Ηλεκτρικές Μηχανές ΙΙ Εργαστήριο
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Εργαστήριο Ενότητα 3: Μέθοδοι Eκκίνησης Mονοφασικού Aσύγχρονου Kινητήρα Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Εργαστήριο Ενότητα 3: Μέθοδοι Eκκίνησης Mονοφασικού Aσύγχρονου Kινητήρα Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων
Ηλεκτρικές Μηχανές ΙI. Ενότητα 3: Ισοδύναμο κύκλωμα σύγχρονης Γεννήτριας Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε
 Ηλεκτρικές Μηχανές ΙI Ενότητα 3: Ισοδύναμο κύκλωμα σύγχρονης Γεννήτριας Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
Ηλεκτρικές Μηχανές ΙI Ενότητα 3: Ισοδύναμο κύκλωμα σύγχρονης Γεννήτριας Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
Στον άπειρο ζυγό και μέσω μιας γραμμής μεταφοράς ισχύος συνδέεται κάποια βιομηχανία
 ΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ Στον άπειρο ζυγό και μέσω μιας γραμμής μεταφοράς ισχύος συνδέεται κάποια βιομηχανία Οι 2 από τους 3 κινητήρες αυτής της βιομηχανίας είναι επαγωγικοί και διαθέτουν επαγωγικούς συντελεστές
ΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ Στον άπειρο ζυγό και μέσω μιας γραμμής μεταφοράς ισχύος συνδέεται κάποια βιομηχανία Οι 2 από τους 3 κινητήρες αυτής της βιομηχανίας είναι επαγωγικοί και διαθέτουν επαγωγικούς συντελεστές
Προηγμένος έλεγχος ηλεκτρικών μηχανών
 Προηγμένος έλεγχος ηλεκτρικών μηχανών Ενότητα 9: Άμεσος Διανυσματικός Έλεγχος Ασύγχρονων Μηχανών με προσανατολισμό στην μαγνητική ροή του δρομέα Επαμεινώνδας Μητρονίκας - Αντώνιος Αλεξανδρίδης Πολυτεχνική
Προηγμένος έλεγχος ηλεκτρικών μηχανών Ενότητα 9: Άμεσος Διανυσματικός Έλεγχος Ασύγχρονων Μηχανών με προσανατολισμό στην μαγνητική ροή του δρομέα Επαμεινώνδας Μητρονίκας - Αντώνιος Αλεξανδρίδης Πολυτεχνική
ΜΟΝΟΦΑΣΙΚΟΣ ΑΣΥΓΧΡΟΝΟΣ (ΕΠΑΓΩΓΙΚΟΣ) ΚΙΝΗΤΗΡΑΣ ΜΕΘΟΔΟΙ ΕΚΚΙΝΗΣΗΣ
 ΚΙΝΗΤΗΡΑΣ ΜΕΘΟΔΟΙ ΕΚΚΙΝΗΣΗΣ") ΜΟΝΟΦΑΣΙΚΟΣ ΑΣΥΓΧΡΟΝΟΣ (ΕΠΑΓΩΓΙΚΟΣ) ΚΙΝΗΤΗΡΑΣ ΜΕΘΟΔΟΙ ΕΚΚΙΝΗΣΗΣ 24/12/2017 ΣΟΦΙΑ ΔΟΛΜΑ ΜΕΘΟΔΟΙ ΕΚΚΙΝΗΣΗΣ ΜΟΝΟΦΑΣΙΚΟΥ ΑΣΥΓΧΡΟΝΟΥ (ΕΠΑΓΩΓΙΚΟΥ) ΚΙΝΗΤΗΡΑ Ένας επαγωγικός ή ασύγχρονος κινητήρας είναι στην ουσία
ΜΟΝΟΦΑΣΙΚΟΣ ΑΣΥΓΧΡΟΝΟΣ (ΕΠΑΓΩΓΙΚΟΣ) ΚΙΝΗΤΗΡΑΣ ΜΕΘΟΔΟΙ ΕΚΚΙΝΗΣΗΣ 24/12/2017 ΣΟΦΙΑ ΔΟΛΜΑ ΜΕΘΟΔΟΙ ΕΚΚΙΝΗΣΗΣ ΜΟΝΟΦΑΣΙΚΟΥ ΑΣΥΓΧΡΟΝΟΥ (ΕΠΑΓΩΓΙΚΟΥ) ΚΙΝΗΤΗΡΑ Ένας επαγωγικός ή ασύγχρονος κινητήρας είναι στην ουσία
ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499
 ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499 ΟΜΗ ΙΑΚΟΠΤΙΚΩΝ ΜΕΤΑΤΡΟΠΕΩΝ ρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέµατα Επιλογή διακοπτών
ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499 ΟΜΗ ΙΑΚΟΠΤΙΚΩΝ ΜΕΤΑΤΡΟΠΕΩΝ ρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέµατα Επιλογή διακοπτών
ΑΣΚΗΣΗ 11 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΣΥΝΘΕΤΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ
 ΑΣΚΗΣΗ 11 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΣΥΝΘΕΤΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση των τρόπων ελέγχου της ταχύτητας
ΑΣΚΗΣΗ 11 η ΚΙΝΗΤΗΡΑΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΣΥΝΘΕΤΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση των τρόπων ελέγχου της ταχύτητας
Ηλεκτρικές Μηχανές ΙI. Ενότητα 10: Ροπή κινητήρα Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε
 Ηλεκτρικές Μηχανές ΙI Ενότητα 10: Ροπή κινητήρα Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό
Ηλεκτρικές Μηχανές ΙI Ενότητα 10: Ροπή κινητήρα Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2009
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 009 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 009 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
Δυναμική και Έλεγχος E-L Ηλεκτρομηχανικών Συστημάτων
 Δυναμική και Έλεγχος E-L Ηλεκτρομηχανικών Συστημάτων Ενότητα 6: Δυναμική μηχανής συνεχούς ρεύματος Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών
Δυναμική και Έλεγχος E-L Ηλεκτρομηχανικών Συστημάτων Ενότητα 6: Δυναμική μηχανής συνεχούς ρεύματος Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών
ΑΣΚΗΣΗ 6 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ
 ΑΣΚΗΣΗ 6 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α), η κατανόηση της λειτουργίας της γεννήτριας
ΑΣΚΗΣΗ 6 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΠΑΡΑΛΛΗΛΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α), η κατανόηση της λειτουργίας της γεννήτριας
Γεννήτριες ΣΡ Κινητήρες ΣΡ
 Γεννήτριες ΣΡ Κινητήρες ΣΡ - Στοιχειώδεις Ηλεκτρικές Μηχανές Επαγωγή λέγεται το φαινόμενο κατά το οποίο αναπτύσσεται ΗΕΔ: a. Στα άκρα αγωγού όταν αυτός κινείται με ταχύτητα υ μέσα σε μαγνητικό πεδίο επαγωγής
Γεννήτριες ΣΡ Κινητήρες ΣΡ - Στοιχειώδεις Ηλεκτρικές Μηχανές Επαγωγή λέγεται το φαινόμενο κατά το οποίο αναπτύσσεται ΗΕΔ: a. Στα άκρα αγωγού όταν αυτός κινείται με ταχύτητα υ μέσα σε μαγνητικό πεδίο επαγωγής
Συλλογή μεταφορά και έλεγχος Δεδομένων ΘΟΡΥΒΟΣ - ΓΕΙΩΣΕΙΣ
 Συλλογή μεταφορά και έλεγχος Δεδομένων ΘΟΡΥΒΟΣ - ΓΕΙΩΣΕΙΣ ΘΟΡΥΒΟΣ - ΓΕΙΩΣΕΙΣ Σε ένα ηλεκτρικό κύκλωμα δημιουργούνται ανεπιθύμητα ηλεκτρικά σήματα, που οφείλεται σε διάφορους παράγοντες, καθώς επίσης και
Συλλογή μεταφορά και έλεγχος Δεδομένων ΘΟΡΥΒΟΣ - ΓΕΙΩΣΕΙΣ ΘΟΡΥΒΟΣ - ΓΕΙΩΣΕΙΣ Σε ένα ηλεκτρικό κύκλωμα δημιουργούνται ανεπιθύμητα ηλεκτρικά σήματα, που οφείλεται σε διάφορους παράγοντες, καθώς επίσης και
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444
 ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 ΗΛΕΚΤΡΟΜΑΓΝΗΤΙΚΗ ΑΛΛΗΛΕΠΙΔΡΑΣΗ, ΕΛΕΓΧΟΣ ΘΕΡΜΟΚΡΑΣΙΑΣ, ΤΕΧΝΙΚΕΣ ΣΥΝΤΟΝΙΣΜΟΥ Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 ΗΛΕΚΤΡΟΜΑΓΝΗΤΙΚΗ ΑΛΛΗΛΕΠΙΔΡΑΣΗ, ΕΛΕΓΧΟΣ ΘΕΡΜΟΚΡΑΣΙΑΣ, ΤΕΧΝΙΚΕΣ ΣΥΝΤΟΝΙΣΜΟΥ Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2009
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 9 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 9 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΣΤΟΧΟΙ : Ο μαθητής να μπορεί να :
 ΠΗΝΙΟ ΣΤΟΧΟΙ : Ο μαθητής να μπορεί να : Αναφέρει τι είναι το πηνίο Αναφέρει από τι αποτελείται το πηνίο Αναφέρει τις ιδιότητες του πηνίου Αναφέρει το βασικό χαρακτηριστικό του πηνίου Αναφέρει τη σχέση
ΠΗΝΙΟ ΣΤΟΧΟΙ : Ο μαθητής να μπορεί να : Αναφέρει τι είναι το πηνίο Αναφέρει από τι αποτελείται το πηνίο Αναφέρει τις ιδιότητες του πηνίου Αναφέρει το βασικό χαρακτηριστικό του πηνίου Αναφέρει τη σχέση
Ηλεκτρικές Μηχανές ΙI. Ενότητα 5: Γεννήτριες εκτύπων πόλων και διεγέρσεις Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε
 Ηλεκτρικές Μηχανές ΙI Ενότητα 5: Γεννήτριες εκτύπων πόλων και διεγέρσεις Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
Ηλεκτρικές Μηχανές ΙI Ενότητα 5: Γεννήτριες εκτύπων πόλων και διεγέρσεις Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
ΑΣΚΗΣΗ 2 η ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΑΥΤΟΝΟΜΗΣ ΛΕΙΤΟΥΡΓΙΑΣ ΣΥΓΧΡΟΝΗΣ ΤΡΙΦΑΣΙΚΗΣ ΓΕΝΝΗΤΡΙΑΣ ΜΕ ΦΟΡΤΙΟ
 ΑΣΚΗΣΗ 2 η ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΑΥΤΟΝΟΜΗΣ ΛΕΙΤΟΥΡΓΙΑΣ ΣΥΓΧΡΟΝΗΣ ΤΡΙΦΑΣΙΚΗΣ ΓΕΝΝΗΤΡΙΑΣ ΜΕ ΦΟΡΤΙΟ Σκοπός της άσκησης: Σκοπός της άσκησης είναι η μελέτη των χαρακτηριστικών λειτουργίας μιας σύγχρονης γεννήτριας
ΑΣΚΗΣΗ 2 η ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΑΥΤΟΝΟΜΗΣ ΛΕΙΤΟΥΡΓΙΑΣ ΣΥΓΧΡΟΝΗΣ ΤΡΙΦΑΣΙΚΗΣ ΓΕΝΝΗΤΡΙΑΣ ΜΕ ΦΟΡΤΙΟ Σκοπός της άσκησης: Σκοπός της άσκησης είναι η μελέτη των χαρακτηριστικών λειτουργίας μιας σύγχρονης γεννήτριας
ΣΥΓΧΡΟΝΕΣ ΓΕΝΝΗΤΡΙΕΣ
 ΣΥΓΧΡΟΝΕΣ ΓΕΝΝΗΤΡΙΕΣ Για τη λειτουργία των σύγχρονων γεννητριών (που ονομάζονται και εναλλακτήρες) απαραίτητη προϋπόθεση είναι η τροοδοσία του τυλίγματος του δρομέα με συνεχές ρεύμα Καθώς περιστρέεται
ΣΥΓΧΡΟΝΕΣ ΓΕΝΝΗΤΡΙΕΣ Για τη λειτουργία των σύγχρονων γεννητριών (που ονομάζονται και εναλλακτήρες) απαραίτητη προϋπόθεση είναι η τροοδοσία του τυλίγματος του δρομέα με συνεχές ρεύμα Καθώς περιστρέεται
Ηλεκτρικές Μηχανές Ι. Ενότητα 7: Εισαγωγή στις Μηχανές Συνεχούς Ρεύματος Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε
 Ηλεκτρικές Μηχανές Ι Ενότητα 7: Εισαγωγή στις Μηχανές Συνεχούς Ρεύματος Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
Ηλεκτρικές Μηχανές Ι Ενότητα 7: Εισαγωγή στις Μηχανές Συνεχούς Ρεύματος Τσιαμήτρος Δημήτριος Τμήμα Ηλεκτρολόγων Μηχανικών Τ.Ε Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
ΑΡΧΕΣ ΛΕΙΤΟΥΡΓΙΑΣ ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ
 ΑΡΧΕΣ ΛΕΙΤΟΥΡΓΙΑΣ ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Οι ηλεκτρικές μηχανές εναλλασσομένου ρεύματος (ΕΡ) χωρίζονται σε δύο κατηγορίες: στις σύγχρονες (που χρησιμοποιούνται συνήθως ως γεννήτριες)
ΑΡΧΕΣ ΛΕΙΤΟΥΡΓΙΑΣ ΗΛΕΚΤΡΙΚΩΝ ΜΗΧΑΝΩΝ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Οι ηλεκτρικές μηχανές εναλλασσομένου ρεύματος (ΕΡ) χωρίζονται σε δύο κατηγορίες: στις σύγχρονες (που χρησιμοποιούνται συνήθως ως γεννήτριες)
ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΛΟΥΚΑΣ ΕΠΑΜΕΙΝΩΝΔΑΣ ΑΜ: 6788 ΘΕΜΑ: ΠΕΡΙΓΡΑΨΤΕ ΤΙΣ ΜΕΘΟΔΟΥΣ ΕΚΚΙΝΗΣΗΣ ΤΡΙΦΑΣΙΚΟΥ ΑΣΥΓΧΡΟΝΟΥ (ΕΠΑΓΩΓΙΚΟΥ) ΚΙΝΗΤΗΡΑ. ΗΜ.ΝΙΑ: 30/11/2017 ΠΕΡΙΕΧΟΜΕΝΑ ΣΚΟΠΟΣ ΕΙΣΑΓΩΓΗ
ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΛΟΥΚΑΣ ΕΠΑΜΕΙΝΩΝΔΑΣ ΑΜ: 6788 ΘΕΜΑ: ΠΕΡΙΓΡΑΨΤΕ ΤΙΣ ΜΕΘΟΔΟΥΣ ΕΚΚΙΝΗΣΗΣ ΤΡΙΦΑΣΙΚΟΥ ΑΣΥΓΧΡΟΝΟΥ (ΕΠΑΓΩΓΙΚΟΥ) ΚΙΝΗΤΗΡΑ. ΗΜ.ΝΙΑ: 30/11/2017 ΠΕΡΙΕΧΟΜΕΝΑ ΣΚΟΠΟΣ ΕΙΣΑΓΩΓΗ
Διατάξεις εκκίνησης κινητήρων ΣΡ
 Διατάξεις εκκίνησης κινητήρων ΣΡ Η διάταξη ελέγχου και προστασίας του κινητήρα ΣΡ πρέπει: 1. Να προστατεύει τον κινητήρα από βραχυκυκλώματα στην ίδια τη διάταξη προστασίας 2. Να προστατεύει τον κινητήρα
Διατάξεις εκκίνησης κινητήρων ΣΡ Η διάταξη ελέγχου και προστασίας του κινητήρα ΣΡ πρέπει: 1. Να προστατεύει τον κινητήρα από βραχυκυκλώματα στην ίδια τη διάταξη προστασίας 2. Να προστατεύει τον κινητήρα
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444
 ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444.οργανωτικά Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Το βιβλίο Ned Mohan First course on Power Electronics
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444.οργανωτικά Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Το βιβλίο Ned Mohan First course on Power Electronics
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5. Ρυθμίζοντας τη Φορά Περιστροφής. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
ΑΣΚΗΣΗ 7 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΣΥΝΘΕΤΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ
 ΑΣΚΗΣΗ 7 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΣΥΝΘΕΤΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της λειτουργίας της γεννήτριας συνεχούς
ΑΣΚΗΣΗ 7 η ΓΕΝΝΗΤΡΙΑ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΣΥΝΘΕΤΗΣ ΔΙΕΓΕΡΣΗΣ ΜΕΛΕΤΗ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΛΕΙΤΟΥΡΓΙΑΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της λειτουργίας της γεννήτριας συνεχούς
Άσκηση 10 Στοιχεία ηλεκτρονικής τεχνολογίας
 Άσκηση 10 Στοιχεία ηλεκτρονικής τεχνολογίας ΔΙΟΔΟΣ Οι περισσότερες ηλεκτρονικές συσκευές όπως οι τηλεοράσεις, τα στερεοφωνικά συγκροτήματα και οι υπολογιστές χρειάζονται τάση dc για να λειτουργήσουν σωστά.
Άσκηση 10 Στοιχεία ηλεκτρονικής τεχνολογίας ΔΙΟΔΟΣ Οι περισσότερες ηλεκτρονικές συσκευές όπως οι τηλεοράσεις, τα στερεοφωνικά συγκροτήματα και οι υπολογιστές χρειάζονται τάση dc για να λειτουργήσουν σωστά.
Κεφάλαιο 1 Εισαγωγή.
 Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
Τμήμα Ηλεκτρολόγων Μηχανικών ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ ΣΤΟΥΣ ΕΠΑΓΩΓΙΚΟΥΣ ΚΙΝΗΤΗΡΕΣ
 Το κανονικό εύρος λειτουργίας ενός τυπικού επαγωγικού κινητήρα (κλάσης Α, Β και C) περιορίζεται κάτω από 5% για την ολίσθηση ενώ η μεταβολή της ταχύτητας πέρα από αυτό το εύρος είναι σχεδόν ανάλογη του
Το κανονικό εύρος λειτουργίας ενός τυπικού επαγωγικού κινητήρα (κλάσης Α, Β και C) περιορίζεται κάτω από 5% για την ολίσθηση ενώ η μεταβολή της ταχύτητας πέρα από αυτό το εύρος είναι σχεδόν ανάλογη του
ΣΤΟΙΧΕΙΑ ΠΡΑΓΜΑΤΙΚΩΝ ΜΗΧΑΝΩΝ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΣΤΟΙΧΕΙΑ ΠΡΑΓΜΑΤΙΚΩΝ ΜΗΧΑΝΩΝ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΒΑΣΙΚΑ ΤΜΗΜΑΤΑ ΗΛΕΚΤΡΙΚΗΣ ΜΗΧΑΝΗΣ ΣΡ Αναλύοντας τη δομή μιας πραγματικής μηχανής ΣΡ, αναφέρουμε τα ακόλουθα βασικά μέρη: Στάτης: αποτελεί το ακίνητο τμήμα
ΣΤΟΙΧΕΙΑ ΠΡΑΓΜΑΤΙΚΩΝ ΜΗΧΑΝΩΝ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΒΑΣΙΚΑ ΤΜΗΜΑΤΑ ΗΛΕΚΤΡΙΚΗΣ ΜΗΧΑΝΗΣ ΣΡ Αναλύοντας τη δομή μιας πραγματικής μηχανής ΣΡ, αναφέρουμε τα ακόλουθα βασικά μέρη: Στάτης: αποτελεί το ακίνητο τμήμα
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
Ηλεκτρικοί Κινητήρες μικρής ισχύος, δομή και έλεγχος
 Ηλεκτρικοί Κινητήρες μικρής ισχύος, δομή και έλεγχος Ενότητα 6: Κινητήρες τύπου Universal Επαμεινώνδας Μητρονίκας Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών & Τεχνολογίας Υπολογιστών Σημείωμα Αδειοδότησης
Ηλεκτρικοί Κινητήρες μικρής ισχύος, δομή και έλεγχος Ενότητα 6: Κινητήρες τύπου Universal Επαμεινώνδας Μητρονίκας Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών & Τεχνολογίας Υπολογιστών Σημείωμα Αδειοδότησης
ΤΕΛΟΣ 1ΗΣ ΑΠΟ 4 ΣΕΛΙ ΕΣ
 ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΝΕΟ ΚΑΙ ΠΑΛΑΙΟ ΣΥΣΤΗΜΑ ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΠΑΝΕΛΛΑ ΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΗΜΕΡΗΣΙΩΝ ΕΠΑΓΓΕΛΜΑΤΙΚΩΝ ΛΥΚΕΙΩΝ ΚΑΙ HMEΡΗΣΙΩΝ ΚΑΙ ΕΣΠΕΡΙΝΩΝ ΕΠΑΓΓΕΛΜΑΤΙΚΩΝ ΛΥΚΕΙΩΝ (ΟΜΑ Α A ΚΑΙ ΜΑΘΗΜΑΤΩΝ ΕΙ ΙΚΟΤΗΤΑΣ ΟΜΑ Α
ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΝΕΟ ΚΑΙ ΠΑΛΑΙΟ ΣΥΣΤΗΜΑ ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΠΑΝΕΛΛΑ ΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΗΜΕΡΗΣΙΩΝ ΕΠΑΓΓΕΛΜΑΤΙΚΩΝ ΛΥΚΕΙΩΝ ΚΑΙ HMEΡΗΣΙΩΝ ΚΑΙ ΕΣΠΕΡΙΝΩΝ ΕΠΑΓΓΕΛΜΑΤΙΚΩΝ ΛΥΚΕΙΩΝ (ΟΜΑ Α A ΚΑΙ ΜΑΘΗΜΑΤΩΝ ΕΙ ΙΚΟΤΗΤΑΣ ΟΜΑ Α
Τμήμα Ηλεκτρολόγων Μηχανικών ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΡΟΠΗΣ ΤΑΧΥΤΗΤΑΣ ΕΠΑΓΩΓΙΚΩΝ ΚΙΝΗΤΗΡΩΝ
 Αν είναι γνωστή η συμπεριφορά των μαγνητικών πεδίων στη μηχανή, είναι δυνατός ο προσεγγιστικός προσδιορισμός της χαρακτηριστικής ροπής-ταχύτητας του επαγωγικού κινητήρα Όπως είναι γνωστό η επαγόμενη ροπή
Αν είναι γνωστή η συμπεριφορά των μαγνητικών πεδίων στη μηχανή, είναι δυνατός ο προσεγγιστικός προσδιορισμός της χαρακτηριστικής ροπής-ταχύτητας του επαγωγικού κινητήρα Όπως είναι γνωστό η επαγόμενη ροπή
Ηλεκτροκινητήρας Εναλλασσόμενου Ρεύματος τύπου κλωβού. Άσκηση 9. Ηλεκτροκινητήρας εναλλασσόμενου ρεύματος τύπου κλωβού
 ANTIKEIMENO: Άσκηση 9 Ηλεκτροκινητήρας εναλλασσόμενου ρεύματος τύπου κλωβού ΣΤΟΧΟΙ ΑΥΤΟΥ ΤΟΥ ΠΕΙΡΑΜΑΤΟΣ: Κατανόηση της λειτουργίας του ηλεκτροκινητήρα εναλλασσόμενου ρεύματος τύπου κλωβού Υπολογισμός μηχανικών
ANTIKEIMENO: Άσκηση 9 Ηλεκτροκινητήρας εναλλασσόμενου ρεύματος τύπου κλωβού ΣΤΟΧΟΙ ΑΥΤΟΥ ΤΟΥ ΠΕΙΡΑΜΑΤΟΣ: Κατανόηση της λειτουργίας του ηλεκτροκινητήρα εναλλασσόμενου ρεύματος τύπου κλωβού Υπολογισμός μηχανικών
4. ΤΡΙΦΑΣΙΚΟΙ ΑΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ
 56 4. ΤΡΙΦΑΣΙΚΟΙ ΑΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ Οι ασύγχρονοι κινητήρες που ονοµάζονται και επαγωγικοί κινητήρες διακρίνονται σε µονοφασικούς και τριφασικούς. Στην συνέχεια θα εξετασθούν οι τριφασικοί ασύγχρονοι
56 4. ΤΡΙΦΑΣΙΚΟΙ ΑΣΥΓΧΡΟΝΟΙ ΚΙΝΗΤΗΡΕΣ Οι ασύγχρονοι κινητήρες που ονοµάζονται και επαγωγικοί κινητήρες διακρίνονται σε µονοφασικούς και τριφασικούς. Στην συνέχεια θα εξετασθούν οι τριφασικοί ασύγχρονοι
Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας
 Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας Ενότητα: Άσκηση 6: Αντιστάθμιση γραμμών μεταφοράς με σύγχρονους αντισταθμιστές Νικόλαος Βοβός, Γαβριήλ Γιαννακόπουλος, Παναγής Βοβός Τμήμα Ηλεκτρολόγων
Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας Ενότητα: Άσκηση 6: Αντιστάθμιση γραμμών μεταφοράς με σύγχρονους αντισταθμιστές Νικόλαος Βοβός, Γαβριήλ Γιαννακόπουλος, Παναγής Βοβός Τμήμα Ηλεκτρολόγων
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΤΑ ΣΗΕ I ΣΥΓΧΡΟΝΗ ΓΕΝΝΗΤΡΙΑ ΘΕΣΣΑΛΟΝΙΚΗ
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΤΑ ΣΗΕ I ΣΥΓΧΡΟΝΗ ΓΕΝΝΗΤΡΙΑ ΘΕΣΣΑΛΟΝΙΚΗ
Ηλεκτρικές Μηχανές ΙΙ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 3: Εξισώσεις Μόνιμης Κατάστασης Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Ηλεκτρικές Μηχανές ΙΙ Ενότητα 3: Εξισώσεις Μόνιμης Κατάστασης Ηρακλής Βυλλιώτης Τμήμα Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444
 ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 ΔΙΑΚΟΠΤΙΚΟΙ ΜΕΤΑΤΡΟΠΕΙΣ DC -DC Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέματα Ανάλυση διακοπτικών μετατροπέων:
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444 ΔΙΑΚΟΠΤΙΚΟΙ ΜΕΤΑΤΡΟΠΕΙΣ DC -DC Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέματα Ανάλυση διακοπτικών μετατροπέων: