ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες
|
|
|
- Φίλανδρος Αυγερινός
- 10 χρόνια πριν
- Προβολές:
Transcript
1 ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Πράκτορες και Περιβάλλοντα Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης

2 Σήµερα Πράκτορες χαρακτηριστικά στοιχεία είδη πρακτόρων αυτόνοµοι πράκτορες Περιβάλλοντα χαρακτηρισµοί και ιδιότητες Μάθηση ενισχυτική µάθηση Ροµ οτικοί Πράκτορες

3 Πράκτορας και Περιβάλλον

4 Πράκτορας αισθητήρες: επενεργητές: αισθητήρες: µάτια, χέρια, αυτιά, πόδια, µύτη, στόµα,... επενεργητές: κάµερες, ανιχνευτές υπέρυθρων,... αισθητήρες: πληκτρολόγιο, κινητήρες, βραχίονες, αρχεία, ρόδες, πακέτα... δικτύου,... επενεργητές: εκτύπωση στην οθόνη, εγγραφή στο δίσκο, Πράκτορας (agent) έχει αισθητήρες (sensors) και ε ενεργητές (actuators) αντιλαµβάνεται το εριβάλλον µέσω των αισθητήρων επεµβαίνει στο εριβάλλον µέσω των ε ενεργητών ανθρώ ινοι (human) πράκτορες ροµ οτικοί (robotic) πράκτορες λογισµικοί (software) πράκτορες
 έχει αισθητήρες (sensors) και ε ενεργητές (actuators) αντιλαµβάνεται το εριβάλλον µέσω των αισθητήρων")
5 Πράκτορας Αντιλήψεις (percepts) η πληροφορία από τους αισθητήρες σε κάθε χρονική στιγµή Ενέργειες (actions) η εκδήλωση των επενεργητών σε κάθε χρονική στιγµή Ακολουθία αντιλήψεων (percept sequence) πλήρες ιστορικό αντιλήψεων χρονικά ταξινοµηµένο Συνάρτηση ράκτορα (agent function) απεικόνιση από ακολουθίες αντιλήψεων σε ενέργειες εξωτερικός προσδιορισµός: πίνακας εσωτερική υλοποίηση: πρόγραµµα

6 Ένας Α λός Πράκτορας... [Α, [Β, [Α, Ακολουθία Καθαρό], Σκονισµένο] Καθαρό] αντιλήψεων [Β, [Α, Σκονισµένο] Καθαρό] Αναρρόφηση Ενέργεια Αριστερά εξιά εξιά... Αντιλήψεις ωµάτιο (Α/Β), Σκόνη (ναι/όχι) Ενέργειες Αριστερά, εξιά, Αναρρόφηση Program Vacuum_Cleaner... if (σκόνη) then αναρρόφηση if (Α) then δεξιά if (Β) then αριστερά...
![Σκονισµένο] Καθαρό] Αναρρόφηση Ενέργεια Αριστερά εξιά εξιά.](/docs-images/48/4989597/images/page_6.jpg ".. Αντιλήψεις ωµάτιο (Α/Β), Σκόνη (ναι/όχι) Ενέργειες Αριστερά, εξιά, Αναρρόφηση")
7 Ορθολογικοί Πράκτορες Μέτρο α όδοσης (performance measure) αντικειµενικός ορισµός επιτυχούς συµπεριφοράς του πράκτορα αρχή σχεδιασµού: τι θέλουµε να κάνει, όχι ώς θα το κάνει Ορθολογικός ράκτορας (rational agent) επιλέγει ενέργειες που µεγιστοποιούν το µέτρο απόδοσης χρησιµοποιεί την ακολουθία αντιλήψεων και την έµφυτη γνώση Ορθολογικότητα δε σηµαίνει παντογνωσία ή τελειότητα µεγιστοποίηση της αναµενόµενης απόδοσης

8 Αυτόνοµοι Πράκτορες Υ ολογισµός συνάρτησης ράκτορα ενσωµατωµένες προεπιλεγµένες ενέργειες (έµφυτη γνώση) επιλογή επόµενης ενέργειας µε βάση τις αντιλήψεις (απόφαση) τροποποίηση και βελτίωση της συνάρτησης (µάθηση) Αυτονοµία σταδιακή αποδέσµευση από την αρχική (έµφυτη) γνώση ικανότητα απόφασης και µάθησης τελική συµπεριφορά ανεξάρτητη από αρχική γνώση θεωρητικά, ένας πλήρως αυτόνοµος πράκτορας αρκεί

9 Περιβάλλον Εργασιών Περιβάλλον εργασιών (task environment) Μέτρο Performance measure, Environment, Actuators, Sensors Περιβάλλον=Πρόβληµα, Πράκτορας=Λύση Περιγραφή PEAS ποιότητα τιµή α όδοσης Περιβάλλον e-shops www επιλογή Ε ενεργητές αναζήτηση συνδέσµου κωδικοί σελίδες Αισθητήρες καταλληλότητα προϊόντων HTML Πράκτορας comparison για Internet storesσυµπλήρωση Shopping αποδοτικότηταεταιρίες µεταφορώνεκτύπωση αποδείξεων φόρµαςτρόποι τιµές πληρωµής

10 Ιδιότητες Περιβάλλοντος Παρατηρησιµότητα πλήρως παρατηρήσιµο (fully observable) µερικώς παρατηρήσιµο (partially observable) Προβλεψιµότητα αιτιοκρατικό (deterministic) στοχαστικό (stochastic) στρατηγικό (strategic) Εξάρτηση επεισοδιακό (episodic) ακολουθιακό (sequential)
 Εξάρτηση επεισοδιακό (episodic) ακολουθιακό")
11 Ιδιότητες Περιβάλλοντος Μεταβλητότητα στατικό (static) δυναµικό (dynamic) ηµιδυναµικό (semi dynamic) Περιγραφή ανταγωνιστικό (competitive) ή συνεργατικό (cooperative) διακριτό (discrete) συνεχές (continuous) Πλήθος µονοπρακτορικό (single-agent) πολυπρακτορικό (multi-agent)
 Πλήθος µονοπρακτορικό (single-agent)")
12 Περιβάλλοντα ύσκολα εριβάλλοντα µερικώς παρατηρήσιµα στοχαστικά ακολουθιακά δυναµικά συνεχή πολυπρακτορικά Εύκολα εριβάλλοντα πλήρως παρατηρήσιµα αιτιοκρατικά επεισοδιακά στατικά διακριτά µονοπρακτορικά

13 Σκάκι Σταυρόλεξο µε Παραδείγµατα Περιβαλλόντων Ιατρική Ελεγκτής Αλληλε ιδραστικός Ροµ ότ Ανάλυση Οδήγηση Πόκερ Τάβλι χρονόµετρο εκ αιδευτής εξαρτηµάτων διάγνωση διυλιστηρίου διαλογής εικόνων ταξί Μερικώς Πλήρως Αιτιοκρατικό Πλήρως Αγγλικής Μερικώς Πλήρως Αιτιοκρατικό Στοχαστικό ΣτρατηγικόΑκολουθιακό Στοχαστικό Στατικό Ακολουθιακό Ακολουθιακό Επεισοδιακό υναµικό Ηµι ιακριτό υναµικό Ηµι Συνεχές ιακριτό Πολλοί Ένας Συνεχές Ένας Πολλοί

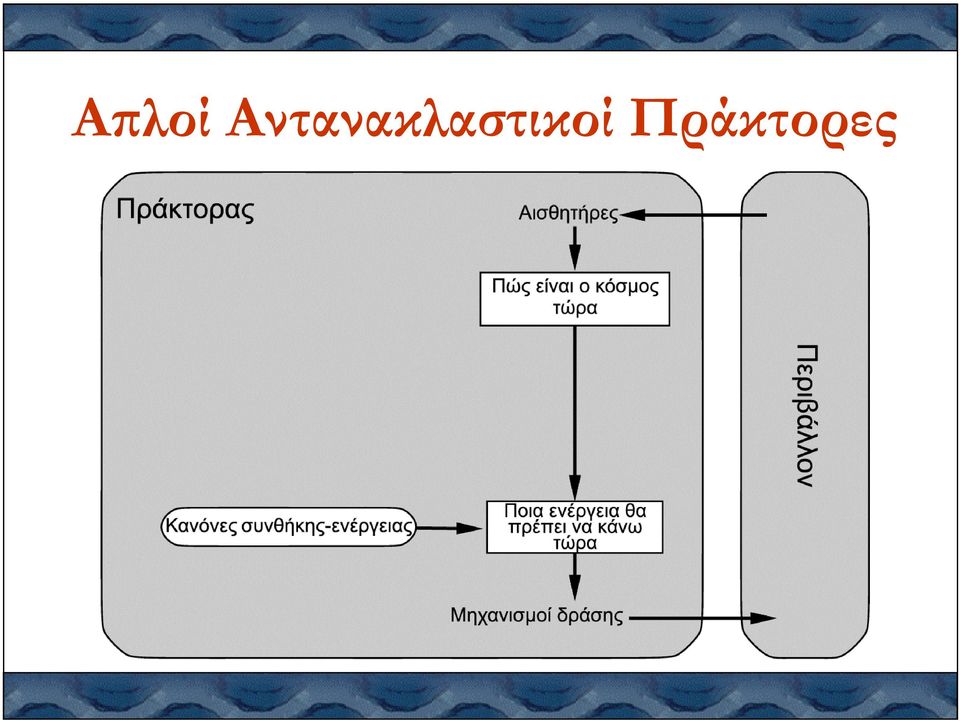
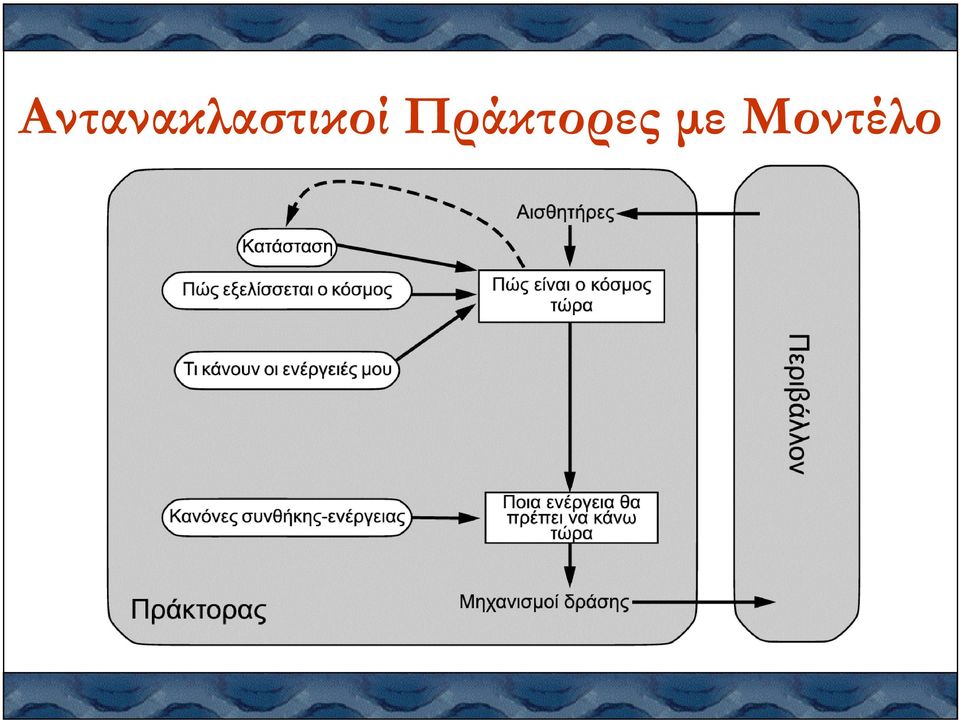
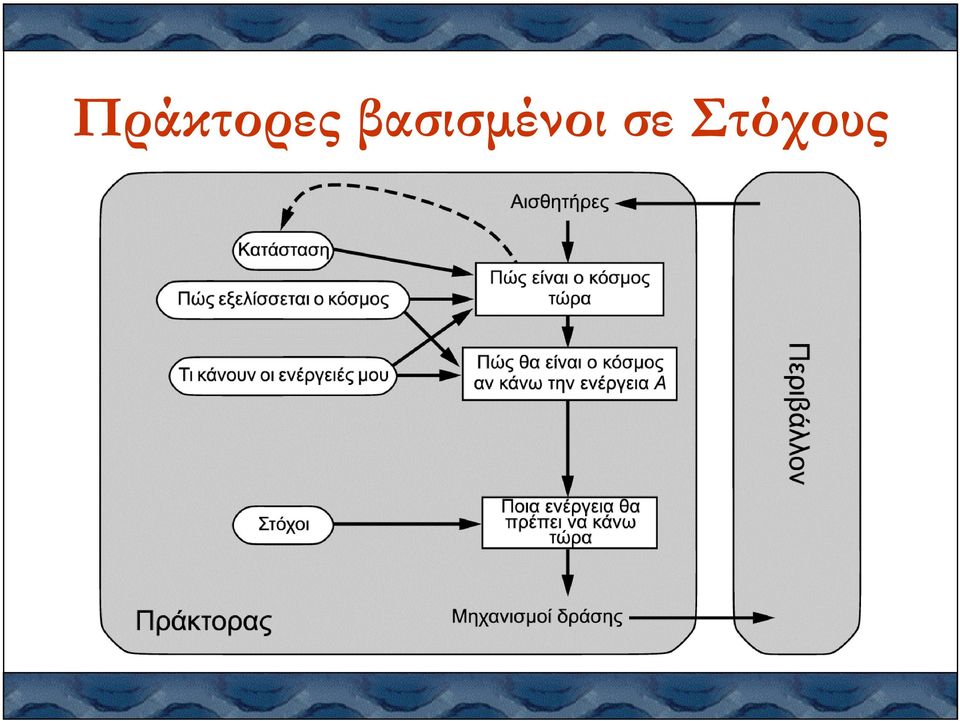
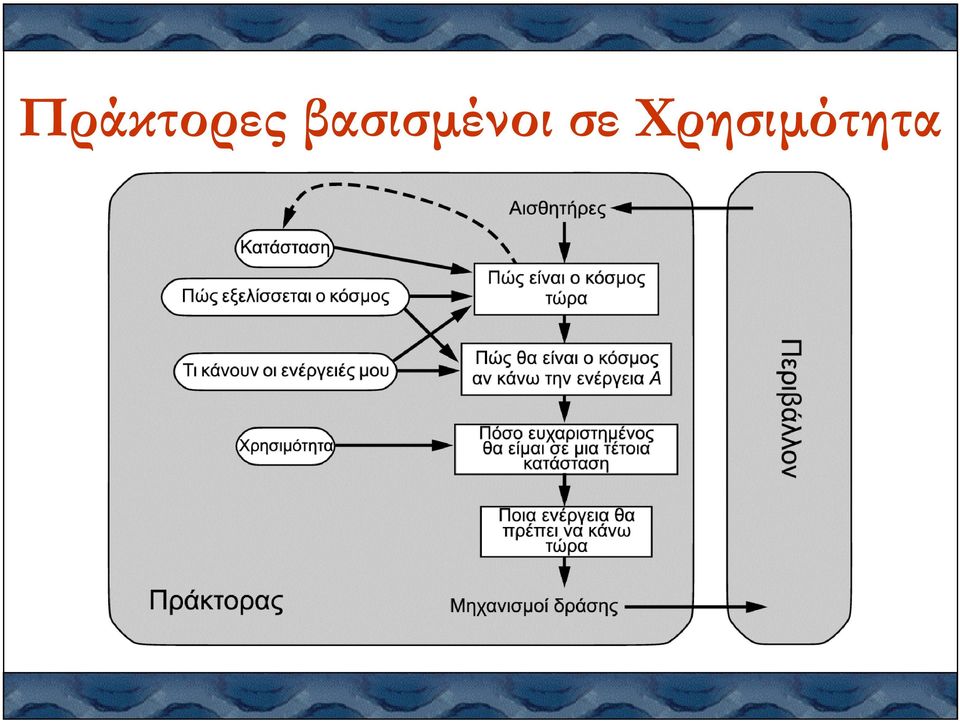
14 Υλο οίηση Πρακτόρων Υλο οίηση ράκτορα πίνακας ή πρόγραµµα; πρόγραµµα: υπολογίζει τη συνάρτηση πράκτορα αρχιτεκτονική: εκτελεί το πρόγραµµα πράκτορα πράκτορας = αρχιτεκτονική + πρόγραµµα Είδη ρογραµµάτων ρακτόρων απλοί αντανακλαστικοί (simple reflex) πράκτορες αντανακλαστικοί πράκτορες βασισµένοι σε µοντέλο (model-based) πράκτορες βασισµένοι σε στόχο (goal-based) πράκτορες βασισµένοι σε χρησιµότητα (utility-based)
 πράκτορες βασισµένοι σε στόχο (goal-based) πράκτορες βασισµένοι σε χρησιµότητα")
15 Α λοί Αντανακλαστικοί Πράκτορες
16 Αντανακλαστικοί Πράκτορες µε Μοντέλο
17 Πράκτορες βασισµένοι σε Στόχους
18 Πράκτορες βασισµένοι σε Χρησιµότητα
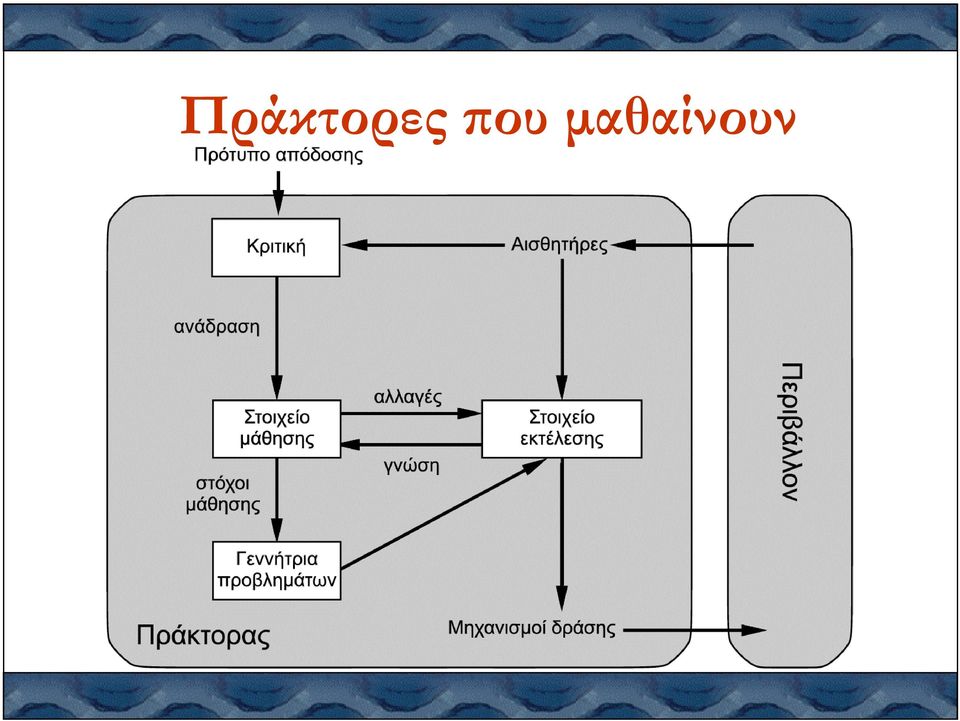
19 Μάθηση Πράκτορες ου µαθαίνουν προσχεδιασµένο πρόγραµµα = χρονοβόρα διαδικασία δυνατότητα µάθησης = αυτόµατη σχεδίαση προγράµµατος και τα 4 είδη πρακτόρων µπορούν να ενισχυθούν µε µάθηση Ενσωµάτωση µάθησης στοιχείο εκτέλεσης (performance element): ένα από τα 4 είδη στοιχείο µάθησης (learning element): υπεύθυνο για βελτιώσεις κριτική (critic): κρίση ως προς ένα σταθερό πρότυπο απόδοσης γεννήτρια προβληµάτων (problem generator): νέες εµπειρίες
: κρίση ως προς ένα σταθερό πρότυπο απόδοσης γεννήτρια προβληµάτων (problem")
20 Πράκτορες ου µαθαίνουν
21 Ο δικός µας ράκτορας Action Reward State
22 Action ActionΕ ίλυση ή Μάθηση; Reward Reward State State? Γνωστό µοντέλο Επίλυση Άγνωστο µοντέλο Μάθηση
23 Action Μεθοδολογίες Μάθησης Reward StateAction Reward Action State? State? Εκµάθηση µοντέλου (model-based learning) Εκµάθηση συνάρτησης (model-free learning)
24 Περιβάλλον Μάθησης συνεργατικό ανταγωνιστικό µονοπρακτορικό πολυπρακτορικό
25 Ροµ οτικοί Πράκτορες Ροµ ότ από την τσέχικη λέξη robota που σηµαίνει εργασία Χειριστήρια ροµ ότ (manipulators) αλυσίδα ελεγχόµενων αρθρώσεων µε σταθερή βάση ο συνηθέστερος τύπος βιοχηµανικού ροµπότ Κινητά ροµ ότ (mobile robots) δυνατότητα µετακίνησης στο φυσικό περιβάλλον οχήµατα εδάφους, αέρος, υποβρύχια, διαστηµικά Ανθρω οειδή ροµ ότ (humanoid robots) υβρίδιο (κινητό και χειριστήριο) που µιµείται τον άνθρωπο
26 Ροµ οτικό Υλικό Αισθητήρες παθητικοί (passive): συλλαµβάνουν σήµατα από το περιβάλλον ενεργητικοί (active): δηµιουργούν και συλλαµβάνουν σήµατα Ε ενεργητές βαθµοί ελευθερίας (degrees of freedom d.o.f.) βαθµοί ενέργειας (degrees of action d.o.a.) κινηµατική (kinematic) κατάσταση δυναµική (dynamic) κατάσταση ολονοµικά (holonomic) συστήµατα (d.o.a. = d.o.f.) µη ολονοµικά (nonholonomic) συστήµατα (d.o.a < d.o.f)
27 CCD infrared laser cameras (mono/stereo) Αισθητήρες cameras και Ε ενεργητές sonar infrared radars tactile range sensors sensors sensors electric pneumatic hydraulic differential (step) motors Ε ενεργητές (differential) proprioceptive force/torque GPS synchro drive actuators drive sensors artificial muscles Αισθητήρες
28 Μελέτη Σύγγραµµα Ενότητες ,
ΠΛΗ 405 Τεχνητή Νοηµοσύνη
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Πράκτορες και Περιβάλλοντα Αναζήτηση Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Ορισµοί της Τεχνητής Νοηµοσύνης κριτήρια νοηµοσύνης Καταβολές
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Πράκτορες και Περιβάλλοντα Αναζήτηση Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Ορισµοί της Τεχνητής Νοηµοσύνης κριτήρια νοηµοσύνης Καταβολές
Ευφυείς πράκτορες. Πράκτορες και Περιβάλλοντα
 Ευφυείς πράκτορες Πράκτορες και Περιβάλλοντα Πράκτορας είναι οτιδήποτε µπορεί να θεωρηθεί ότι αντιλαµβάνεται το περιβάλλον του (environment) µέσω αισθητήρων (sensors), και επενεργεί σε αυτό το περιβάλλον
Ευφυείς πράκτορες Πράκτορες και Περιβάλλοντα Πράκτορας είναι οτιδήποτε µπορεί να θεωρηθεί ότι αντιλαµβάνεται το περιβάλλον του (environment) µέσω αισθητήρων (sensors), και επενεργεί σε αυτό το περιβάλλον
ΤΜΗΜΑ ΔΙΟΙΚΗΣΗΣ ΕΠΙΧΕΙΡΗΣΕΩΝ
 ΤΕΙ Δυτικής Μακεδονίας ΤΜΗΜΑ ΔΙΟΙΚΗΣΗΣ ΕΠΙΧΕΙΡΗΣΕΩΝ 2015-2016 Τεχνητή Νοημοσύνη Ευφυείς Πράκτορες Διδάσκων: Τσίπουρας Μάρκος Εκπαιδευτικό Υλικό: Τσίπουρας Μάρκος http://ai.uom.gr/aima/ 2 Πράκτορες και
ΤΕΙ Δυτικής Μακεδονίας ΤΜΗΜΑ ΔΙΟΙΚΗΣΗΣ ΕΠΙΧΕΙΡΗΣΕΩΝ 2015-2016 Τεχνητή Νοημοσύνη Ευφυείς Πράκτορες Διδάσκων: Τσίπουρας Μάρκος Εκπαιδευτικό Υλικό: Τσίπουρας Μάρκος http://ai.uom.gr/aima/ 2 Πράκτορες και
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες
 Πράκτορες") ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Πράκτορες και Περιβάλλοντα Agents and Environments Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Σήµερα Πράκτορες είδη πρακτόρων
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Πράκτορες και Περιβάλλοντα Agents and Environments Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Σήµερα Πράκτορες είδη πρακτόρων
Τεχνητή Νοημοσύνη Ι. Ενότητα 2: Ευφυείς Πράκτορες. Μουστάκας Κωνσταντίνος Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών
 Τεχνητή Νοημοσύνη Ι Ενότητα 2: Ευφυείς Πράκτορες Μουστάκας Κωνσταντίνος Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σκοποί ενότητας Ευφυείς Πράκτορες 2 Περιεχόμενα ενότητας
Τεχνητή Νοημοσύνη Ι Ενότητα 2: Ευφυείς Πράκτορες Μουστάκας Κωνσταντίνος Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σκοποί ενότητας Ευφυείς Πράκτορες 2 Περιεχόμενα ενότητας
Πράκτορες και περιβάλλοντα Λογική PEAS (Performance measure, Environment, Actuators, Sensors) Τύποι περιβάλλοντος Τύποι πρακτόρων
 Τύποι περιβάλλοντος Τύποι πρακτόρων") Ευφυείς Πράκτορες Περίγραµµα Πράκτορες και περιβάλλοντα Λογική PEAS (Performance measure, Environment, Actuators, Sensors) Τύποι περιβάλλοντος Τύποι πρακτόρων Πράκτορες Ένας πράκτορας είναι µια οντότητα
Ευφυείς Πράκτορες Περίγραµµα Πράκτορες και περιβάλλοντα Λογική PEAS (Performance measure, Environment, Actuators, Sensors) Τύποι περιβάλλοντος Τύποι πρακτόρων Πράκτορες Ένας πράκτορας είναι µια οντότητα
ΠΛΗ 405 Τεχνητή Νοηµοσύνη
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Ιστορική Αναδροµή Πράκτορες και Περιβάλλοντα Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη άνθρωπος ορθολογισµός σκέψη δράση Να σκέφτεται
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Ιστορική Αναδροµή Πράκτορες και Περιβάλλοντα Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη άνθρωπος ορθολογισµός σκέψη δράση Να σκέφτεται
Τεχνητή Νοηµοσύνη. Γεώργιος Βούρος Καθηγητής. Τµήµα Ψηφιακών Συστηµάτων Πανεπιστήµιο Πειραιώς.
 Τεχνητή Νοηµοσύνη Γεώργιος Βούρος Καθηγητής Τµήµα Ψηφιακών Συστηµάτων Πανεπιστήµιο Πειραιώς e-mail: georgev@unipi.gr 1 Επισκόπηση Μαθήµατος n Ώρες Διδασκαλίας: g Τρίτη 8:15-11:00 n Ύλη µαθήµατος Ευδοξος
Τεχνητή Νοηµοσύνη Γεώργιος Βούρος Καθηγητής Τµήµα Ψηφιακών Συστηµάτων Πανεπιστήµιο Πειραιώς e-mail: georgev@unipi.gr 1 Επισκόπηση Μαθήµατος n Ώρες Διδασκαλίας: g Τρίτη 8:15-11:00 n Ύλη µαθήµατος Ευδοξος
ΠΛΗ 405 Τεχνητή Νοηµοσύνη
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη ιδάσκων Μιχαήλ Γ. Λαγουδάκης Ε ίκουρος Καθηγητής Τοµέας Πληροφορικής Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Το µάθηµα Στόχοι αντιµετώπιση δύσκολων
ΠΛΗ 405 Τεχνητή Νοηµοσύνη ιδάσκων Μιχαήλ Γ. Λαγουδάκης Ε ίκουρος Καθηγητής Τοµέας Πληροφορικής Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Το µάθηµα Στόχοι αντιµετώπιση δύσκολων
Πανεπιστήμιο Δυτικής Μακεδονίας. Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών. Τεχνητή Νοημοσύνη. Ενότητα 1: Τεχνητή Νοημοσύνη
 Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Τεχνητή Νοημοσύνη Ενότητα 1: Τεχνητή Νοημοσύνη Αν. καθηγητής Στεργίου Κωνσταντίνος kstergiou@uowm.gr Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Άδειες
Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Τεχνητή Νοημοσύνη Ενότητα 1: Τεχνητή Νοημοσύνη Αν. καθηγητής Στεργίου Κωνσταντίνος kstergiou@uowm.gr Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Άδειες
ΕΚΠ 413 / ΕΚΠ 606 Υ ολογισµός µε Πράκτορες στο ιαδίκτυο
 ΕΚΠ 413 / ΕΚΠ 606 Υ ολογισµός µε Πράκτορες στο ιαδίκτυο ιδάσκων Μιχαήλ Γ. Λαγουδάκης Ε ίκουρος Καθηγητής Τοµέας Πληροφορικής Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης ΕΚΠ
ΕΚΠ 413 / ΕΚΠ 606 Υ ολογισµός µε Πράκτορες στο ιαδίκτυο ιδάσκων Μιχαήλ Γ. Λαγουδάκης Ε ίκουρος Καθηγητής Τοµέας Πληροφορικής Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης ΕΚΠ
Ευφυείς Τεχνολογίες ----Πράκτορες
 Ευφυείς Τεχνολογίες ----Πράκτορες Ενότητα 3: Εισαγωγή στους Ευφυείς Πράκτορες Δημοσθένης Σταμάτης demos@it.teithe.gr www.it.teithe.gr/~demos Μαθησιακοί Στόχοι της ενότητας 3 H κατανόηση της φύσης των πρακτόρων
Ευφυείς Τεχνολογίες ----Πράκτορες Ενότητα 3: Εισαγωγή στους Ευφυείς Πράκτορες Δημοσθένης Σταμάτης demos@it.teithe.gr www.it.teithe.gr/~demos Μαθησιακοί Στόχοι της ενότητας 3 H κατανόηση της φύσης των πρακτόρων
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες
 Πράκτορες") ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Μερική Παρατηρησιµότητα Θεωρία Παιγνίων Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Reinforcement Learning (RL)
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Μερική Παρατηρησιµότητα Θεωρία Παιγνίων Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Reinforcement Learning (RL)
ΤΕΧΝΗΤΗ ΝΟΗΜΟΣΥΝΗ. Ενότητα 1: Εισαγωγή στην Τεχνητή Νοημοσύνη. Ρεφανίδης Ιωάννης Τμήμα Εφαρμοσμένης Πληροφορικής
 Ενότητα 1: Εισαγωγή στην Τεχνητή Νοημοσύνη Ρεφανίδης Ιωάννης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε
Ενότητα 1: Εισαγωγή στην Τεχνητή Νοημοσύνη Ρεφανίδης Ιωάννης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες
 Πράκτορες") ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Λήψη Α οφάσεων υ ό Αβεβαιότητα Decision Making under Uncertainty Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Εντο
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Λήψη Α οφάσεων υ ό Αβεβαιότητα Decision Making under Uncertainty Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Εντο
Ροµποτικοί Επενεργητές Σερβοκινητήρες Πνευµατικοί Υδραυλικοί Ηλεκτρικοί
 Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ. Επενεργητές Αισθητήρες Σύστηµα Ελέγχου
 Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Ε ανάληψη. Ορισµοί της Τεχνητής Νοηµοσύνης (ΤΝ) Καταβολές. Ιστορική αναδροµή. Πράκτορες. Περιβάλλοντα. κριτήρια νοηµοσύνης
 Καταβολές. Ιστορική αναδροµή. Πράκτορες. Περιβάλλοντα. κριτήρια νοηµοσύνης") ΠΛΗ 405 Τεχνητή Νοηµοσύνη Αναζήτηση Search Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Ορισµοί της Τεχνητής Νοηµοσύνης (ΤΝ) κριτήρια νοηµοσύνης Καταβολές συνεισφορά
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Αναζήτηση Search Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Ορισµοί της Τεχνητής Νοηµοσύνης (ΤΝ) κριτήρια νοηµοσύνης Καταβολές συνεισφορά
ΤΜΗΜΑ ΔΙΟΙΚΗΣΗΣ ΕΠΙΧΕΙΡΗΣΕΩΝ
 ΤΕΙ Δυτικής Μακεδονίας ΤΜΗΜΑ ΔΙΟΙΚΗΣΗΣ ΕΠΙΧΕΙΡΗΣΕΩΝ 2015-2016 Τεχνητή Νοημοσύνη Επίλυση προβλημάτων με αναζήτηση Διδάσκων: Τσίπουρας Μάρκος Εκπαιδευτικό Υλικό: Τσίπουρας Μάρκος http://ai.uom.gr/aima/ 2
ΤΕΙ Δυτικής Μακεδονίας ΤΜΗΜΑ ΔΙΟΙΚΗΣΗΣ ΕΠΙΧΕΙΡΗΣΕΩΝ 2015-2016 Τεχνητή Νοημοσύνη Επίλυση προβλημάτων με αναζήτηση Διδάσκων: Τσίπουρας Μάρκος Εκπαιδευτικό Υλικό: Τσίπουρας Μάρκος http://ai.uom.gr/aima/ 2
ΠΛΗ 405 Τεχνητή Νοηµοσύνη 2006. Ε ανάληψη. πεπερασµένα χρονικά περιθώρια ανά κίνηση. απευθείας αξιολόγηση σε ενδιάµεσους κόµβους
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Παιχνίδια Τύχης Λογικοί Πράκτορες Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Περιορισµοί χρόνου πεπερασµένα χρονικά περιθώρια ανά κίνηση
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Παιχνίδια Τύχης Λογικοί Πράκτορες Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Περιορισµοί χρόνου πεπερασµένα χρονικά περιθώρια ανά κίνηση
Εθνικό Μετσόβιο Πολυτεχνείο. Ανάπτυξη ευφυών πρακτόρων ηλεκτρονικών παιχνιδιών με τη χρήση Γενετικών Αλγορίθμων
 Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Τομέας Τεχνολογίας Πληροφορικής και Υπολογιστών Ανάπτυξη ευφυών πρακτόρων ηλεκτρονικών παιχνιδιών με τη χρήση Γενετικών
Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Τομέας Τεχνολογίας Πληροφορικής και Υπολογιστών Ανάπτυξη ευφυών πρακτόρων ηλεκτρονικών παιχνιδιών με τη χρήση Γενετικών
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες
 Πράκτορες") ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι Ροµ οτικοί Πράκτορες Αβεβαιότητα Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Πράκτορες χαρακτηριστικά στοιχεία είδη πρακτόρων αυτόνοµοι
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι Ροµ οτικοί Πράκτορες Αβεβαιότητα Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Πράκτορες χαρακτηριστικά στοιχεία είδη πρακτόρων αυτόνοµοι
ΠΛΗ 405 Τεχνητή Νοηµοσύνη
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Πληροφορηµένη Αναζήτηση Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Πράκτορας ε ίλυσης ροβληµάτων πράκτορας µε στόχο Αναζήτηση διατύπωση
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Πληροφορηµένη Αναζήτηση Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Πράκτορας ε ίλυσης ροβληµάτων πράκτορας µε στόχο Αναζήτηση διατύπωση
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες
 Πράκτορες") ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Θεωρία Παιγνίων Μαρκωβιανά Παιχνίδια Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Μερική αρατηρησιµότητα POMDPs
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Θεωρία Παιγνίων Μαρκωβιανά Παιχνίδια Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Μερική αρατηρησιµότητα POMDPs
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες
 Πράκτορες") ΕΚΠ 43 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Πιθανοτική Συλλογιστική στο Χρόνο Temporal robabilisic Reasoning Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης ΕΚΠ 43/606 Αυτόνοµοι
ΕΚΠ 43 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Πιθανοτική Συλλογιστική στο Χρόνο Temporal robabilisic Reasoning Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης ΕΚΠ 43/606 Αυτόνοµοι
Επίλυση προβλημάτων με αναζήτηση
 Επίλυση προβλημάτων με αναζήτηση Περιεχόμενα Μέθοδοι (πράκτορες) επίλυσης προβλημάτων Προβλήματα και Λύσεις Προβλήματα παιχνίδια Προβλήματα του πραγματικού κόσμου Αναζήτηση λύσεων Δέντρο αναζήτησης Στρατηγικές
Επίλυση προβλημάτων με αναζήτηση Περιεχόμενα Μέθοδοι (πράκτορες) επίλυσης προβλημάτων Προβλήματα και Λύσεις Προβλήματα παιχνίδια Προβλήματα του πραγματικού κόσμου Αναζήτηση λύσεων Δέντρο αναζήτησης Στρατηγικές
Ε ανάληψη. Προβλήµατα ικανο οίησης εριορισµών. ορισµός και χαρακτηριστικά Ε ίλυση ροβληµάτων ικανο οίησης εριορισµών
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Αναζήτηση µε Αντι αλότητα Adversarial Search Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Προβλήµατα ικανο οίησης εριορισµών ορισµός και
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Αναζήτηση µε Αντι αλότητα Adversarial Search Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Προβλήµατα ικανο οίησης εριορισµών ορισµός και
ΚΑΤΑΣΚΕΥΗ ΜΕ ΧΡΗΣΗ Η/Υ Computer Aided Manufacturing - CAM) Οφέλη
 Οφέλη") ΚΑΤΑΣΚΕΥΗ ΜΕ ΧΡΗΣΗ Η/Υ Computer Aided Manufacturing - CAM) Οφέλη 1. Ο άµεσος και εύκολα µεταβαλλόµενος έλεγχος µέσω Η/Υ των διαφόρων οµάδων αυτόµατων µηχανών. 2. Αυξηµένη παραγωγικότητα λόγω καλύτερης
ΚΑΤΑΣΚΕΥΗ ΜΕ ΧΡΗΣΗ Η/Υ Computer Aided Manufacturing - CAM) Οφέλη 1. Ο άµεσος και εύκολα µεταβαλλόµενος έλεγχος µέσω Η/Υ των διαφόρων οµάδων αυτόµατων µηχανών. 2. Αυξηµένη παραγωγικότητα λόγω καλύτερης
Ευφυείς Τεχνολογίες ----Πράκτορες
 Ευφυείς Τεχνολογίες ----Πράκτορες Ενότητα 4: Αρχιτεκτονικές Ευφυών Πρακτόρων Δημοσθένης Σταμάτης demos@it.teithe.gr www.it.teithe.gr/~demos Μαθησιακοί Στόχοι της ενότητας 4 H κατανόηση των διαφόρων μοντέλων/αρχιτεκτονικών
Ευφυείς Τεχνολογίες ----Πράκτορες Ενότητα 4: Αρχιτεκτονικές Ευφυών Πρακτόρων Δημοσθένης Σταμάτης demos@it.teithe.gr www.it.teithe.gr/~demos Μαθησιακοί Στόχοι της ενότητας 4 H κατανόηση των διαφόρων μοντέλων/αρχιτεκτονικών
Κεφάλαιο 27 Ευφυείς Πράκτορες (Intelligent Agents)
") Κεφάλαιο 27 Ευφυείς Πράκτορες (Intelligent Agents) Τεχνητή Νοηµοσύνη - Β' Έκδοση Ι. Βλαχάβας, Π. Κεφαλάς, Ν. Βασιλειάδης, Φ. Κόκκορας, Η. Σακελλαρίου Ταξινόµηση Πρακτόρων Βιολογικοί Πράκτορες Τεχνητοί
Κεφάλαιο 27 Ευφυείς Πράκτορες (Intelligent Agents) Τεχνητή Νοηµοσύνη - Β' Έκδοση Ι. Βλαχάβας, Π. Κεφαλάς, Ν. Βασιλειάδης, Φ. Κόκκορας, Η. Σακελλαρίου Ταξινόµηση Πρακτόρων Βιολογικοί Πράκτορες Τεχνητοί
Σχεδιασµός και δράση στον πραγµατικό κόσµο
 Σχεδιασµός και δράση στον πραγµατικό κόσµο Planning and Acting in the Real World Ενέργειες µε διάρκεια Init(Σασί(C 1 ) Σασί(C 2 ) Μηχανή(E 1, C 1, 30) Μηχανή(E 2, C 2, 60) Τροχοί(W 1, C 1, 30) Τροχοί(W
Σχεδιασµός και δράση στον πραγµατικό κόσµο Planning and Acting in the Real World Ενέργειες µε διάρκεια Init(Σασί(C 1 ) Σασί(C 2 ) Μηχανή(E 1, C 1, 30) Μηχανή(E 2, C 2, 60) Τροχοί(W 1, C 1, 30) Τροχοί(W
Τι είναι πράκτορας; Άνθρωπος Ρομπότ Πράκτορας λογισμικού. ...αλλά και μη ευφυή πράγματα όπως... οι θερμοστάτες!
 Νοήμονες Πράκτορες Τι είναι πράκτορας; Οποιαδήποτε οντότητα λειτουργεί μέσα σε ένα περιβάλλον, το οποίο αντιλαμβάνεται μέσω αισθητήρων και επιδρά πάνω του μέσω μηχανισμών δράσης. Άνθρωπος Ρομπότ Πράκτορας
Νοήμονες Πράκτορες Τι είναι πράκτορας; Οποιαδήποτε οντότητα λειτουργεί μέσα σε ένα περιβάλλον, το οποίο αντιλαμβάνεται μέσω αισθητήρων και επιδρά πάνω του μέσω μηχανισμών δράσης. Άνθρωπος Ρομπότ Πράκτορας
Ευφυείς Τεχνολογίες ----Πράκτορες
 Ευφυείς Τεχνολογίες ----Πράκτορες Ενότητα 8: Ευφυείς Πράκτορες Ανασκόπηση Τύποι-Εφαρμογές Δημοσθένης Σταμάτης demos@it.teithe.gr www.it.teithe.gr/~demos Ενότητα 8 Ανασκόπηση των Ευφυών Πρακτόρων και των
Ευφυείς Τεχνολογίες ----Πράκτορες Ενότητα 8: Ευφυείς Πράκτορες Ανασκόπηση Τύποι-Εφαρμογές Δημοσθένης Σταμάτης demos@it.teithe.gr www.it.teithe.gr/~demos Ενότητα 8 Ανασκόπηση των Ευφυών Πρακτόρων και των
ΠΛΗ 405 Τεχνητή Νοηµοσύνη
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Α οδοτικός Προτασιακός Συµ ερασµός Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Λογικοί ράκτορες πράκτορες βασισµένοι στη λογική Λογικές
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Α οδοτικός Προτασιακός Συµ ερασµός Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Λογικοί ράκτορες πράκτορες βασισµένοι στη λογική Λογικές
Επιμέλεια παρουσίασης: Αριστείδης Παλιούρας ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)?
?") 1 ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)? Τι είναι το ρομπότ (robot)? 1. Περιγράψτε με μια πρόταση την έννοια της λέξης ρομπότ (robot) Το ρομπότ είναι μια μηχανή που συλλέγει δεδομένα από το περιβάλλον του (αισθάνεται),
1 ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)? Τι είναι το ρομπότ (robot)? 1. Περιγράψτε με μια πρόταση την έννοια της λέξης ρομπότ (robot) Το ρομπότ είναι μια μηχανή που συλλέγει δεδομένα από το περιβάλλον του (αισθάνεται),
Ε ανάληψη. Α ληροφόρητη αναζήτηση
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Το ική Αναζήτηση Local Search Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Α ληροφόρητη αναζήτηση σε πλάτος, οµοιόµορφου κόστους, σε βάθος,
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Το ική Αναζήτηση Local Search Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Α ληροφόρητη αναζήτηση σε πλάτος, οµοιόµορφου κόστους, σε βάθος,
Ε ανάληψη. Παιχνίδια παιχνίδια ως αναζήτηση. Βέλτιστες στρατηγικές στρατηγική minimax. Βελτιώσεις κλάδεµα α-β
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Παιχνίδια Τύχης Παιχνίδια Ατελούς Πληροφόρησης Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Παιχνίδια παιχνίδια ως αναζήτηση Βέλτιστες στρατηγικές
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Παιχνίδια Τύχης Παιχνίδια Ατελούς Πληροφόρησης Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Παιχνίδια παιχνίδια ως αναζήτηση Βέλτιστες στρατηγικές
ΤΙΤΛΟΣ ΔΙΑΤΡΙΒΗΣ ΕΝΑΣ ΕΥΦΥΗΣ ΠΟΛΥΤΡΟΠΙΚΟΣ ΠΡΑΚΤΟΡΑΣ ΓΙΑ ΤΟ ΠΑΙΧΝΙΔΙ ANGRY BIRDS Η ΜΕΤΑΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΕΞΕΙΔΙΚΕΥΣΗΣ.
 ΤΙΤΛΟΣ ΔΙΑΤΡΙΒΗΣ ΕΝΑΣ ΕΥΦΥΗΣ ΠΟΛΥΤΡΟΠΙΚΟΣ ΠΡΑΚΤΟΡΑΣ ΓΙΑ ΤΟ ΠΑΙΧΝΙΔΙ ANGRY BIRDS Η ΜΕΤΑΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΕΞΕΙΔΙΚΕΥΣΗΣ Υποβάλλεται στην ορισθείσα από την Γενική Συνέλευση Ειδικής Σύνθεσης του Τμήματος Πληροφορικής
ΤΙΤΛΟΣ ΔΙΑΤΡΙΒΗΣ ΕΝΑΣ ΕΥΦΥΗΣ ΠΟΛΥΤΡΟΠΙΚΟΣ ΠΡΑΚΤΟΡΑΣ ΓΙΑ ΤΟ ΠΑΙΧΝΙΔΙ ANGRY BIRDS Η ΜΕΤΑΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΕΞΕΙΔΙΚΕΥΣΗΣ Υποβάλλεται στην ορισθείσα από την Γενική Συνέλευση Ειδικής Σύνθεσης του Τμήματος Πληροφορικής
Ε ανάληψη. Καταβολές. Ιστορική αναδροµή. Πράκτορες. Περιβάλλοντα. συνεισφορά άλλων επιστηµών στην ΤΝ. 1956 σήµερα
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Α ληροφόρητη Αναζήτηση Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Καταβολές συνεισφορά άλλων επιστηµών στην ΤΝ Ιστορική αναδροµή 1956
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Α ληροφόρητη Αναζήτηση Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Καταβολές συνεισφορά άλλων επιστηµών στην ΤΝ Ιστορική αναδροµή 1956
καθ. Βασίλης Μάγκλαρης
 ΣΤΟΧΑΣΤΙΚΕΣ ΔΙΕΡΓΑΣΙΕΣ & ΒΕΛΤΙΣΤΟΠΟΙΗΣΗ Αίθουσα 005 - Νέα Κτίρια ΣΗΜΜΥ Ε.Μ.Π. Ενισχυτική Μάθηση - Δυναμικός Προγραμματισμός: 1. Markov Decision Processes 2. Bellman s Optimality Criterion 3. Αλγόριθμος
ΣΤΟΧΑΣΤΙΚΕΣ ΔΙΕΡΓΑΣΙΕΣ & ΒΕΛΤΙΣΤΟΠΟΙΗΣΗ Αίθουσα 005 - Νέα Κτίρια ΣΗΜΜΥ Ε.Μ.Π. Ενισχυτική Μάθηση - Δυναμικός Προγραμματισμός: 1. Markov Decision Processes 2. Bellman s Optimality Criterion 3. Αλγόριθμος
Επίλυση προβληµάτων µε αναζήτηση
 Επίλυση προβληµάτων µε αναζήτηση Πράκτορες επίλυσης προβληµάτων (1/2) ιατύπωση στόχου: Σύνολο καταστάσεων του κόσµου ιατύπωση προβλήµατος Επιλογή επιπέδου λεπτοµέρειας (αφαίρεση) 3-2 Πράκτορες επίλυσης
Επίλυση προβληµάτων µε αναζήτηση Πράκτορες επίλυσης προβληµάτων (1/2) ιατύπωση στόχου: Σύνολο καταστάσεων του κόσµου ιατύπωση προβλήµατος Επιλογή επιπέδου λεπτοµέρειας (αφαίρεση) 3-2 Πράκτορες επίλυσης
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες
 Πράκτορες") ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Ροµ οτικός Εντο ισµός Robo Localizaion Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Χρονικά ιθανοτικά µοντέλα κρυφά
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Ροµ οτικός Εντο ισµός Robo Localizaion Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Χρονικά ιθανοτικά µοντέλα κρυφά
υναµ α ι µ κή τ ων Ρ οµ ο π µ ο π τ ο ικών Βραχιόνων
 υναµική των Ροµποτικών Βραχιόνων Ροµποτική Αρχιτεκτονική: η υναµική u Ροµποτική υναµική q, q& Ροµποτική Κινηµατική Περιβάλλον Θέση, Προσανατολισµός & και αλληλε ίδραση Η δυναµική ασχολείται µε την εξαγωγή
υναµική των Ροµποτικών Βραχιόνων Ροµποτική Αρχιτεκτονική: η υναµική u Ροµποτική υναµική q, q& Ροµποτική Κινηµατική Περιβάλλον Θέση, Προσανατολισµός & και αλληλε ίδραση Η δυναµική ασχολείται µε την εξαγωγή
ΧΑΡΟΚΟΠΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΤΗΛΕΜΑΤΙΚΗΣ
 ΧΑΡΟΚΟΠΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΤΗΛΕΜΑΤΙΚΗΣ ΤΕΧΝΗΤΗ ΝΟΗΜΟΣΥΝΗ ΒΑΣΙΚΕΣ ΕΝΝΟΙΕΣ ΠΡΑΚΤΟΡΩΝ ΠΕΡΙΓΡΑΦΗ ΠΡΟΒΛΗΜΑΤΩΝ ΚΑΙ ΑΝΑΖΗΤΗΣΗ ΛΥΣΗΣ Καραγιώργου Σοφία Γενικά Περί Πρακτόρων Με το όρο πράκτορα
ΧΑΡΟΚΟΠΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΤΗΛΕΜΑΤΙΚΗΣ ΤΕΧΝΗΤΗ ΝΟΗΜΟΣΥΝΗ ΒΑΣΙΚΕΣ ΕΝΝΟΙΕΣ ΠΡΑΚΤΟΡΩΝ ΠΕΡΙΓΡΑΦΗ ΠΡΟΒΛΗΜΑΤΩΝ ΚΑΙ ΑΝΑΖΗΤΗΣΗ ΛΥΣΗΣ Καραγιώργου Σοφία Γενικά Περί Πρακτόρων Με το όρο πράκτορα
ΠΛΗ 405 Τεχνητή Νοηµοσύνη
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Α οδοτικός Προτασιακός Συµ ερασµός Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Λογικές τυπικές γλώσσες λογική κάλυψη Προτασιακή λογική
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Α οδοτικός Προτασιακός Συµ ερασµός Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Λογικές τυπικές γλώσσες λογική κάλυψη Προτασιακή λογική
Ρομποτική. Τι είναι ένα ρομπότ ; Τι είναι ο αλγόριθμος ; Τι είναι το πρόγραμμα ; Επιμέλεια παρουσίασης : Κυριακού Γεώργιος
 Ρομποτική Τι είναι ένα ρομπότ ; Τι είναι ο αλγόριθμος ; Τι είναι το πρόγραμμα ; Που έχετε δει κάποιο ρομπότ ; Να απαριθμήσετε τα ρομπότ που έχετε δει σε ταινίες. Κάντε μία αντιπαράθεση με τα πραγματικά
Ρομποτική Τι είναι ένα ρομπότ ; Τι είναι ο αλγόριθμος ; Τι είναι το πρόγραμμα ; Που έχετε δει κάποιο ρομπότ ; Να απαριθμήσετε τα ρομπότ που έχετε δει σε ταινίες. Κάντε μία αντιπαράθεση με τα πραγματικά
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου
 Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου") Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Α ΤΑΞΗ. 1 η ΕΝΟΤΗΤΑ: Γνωρίζω τον υπολογιστή. Θα παρουσιαστεί µε τρόπο απλό και κατανοητό,
 1 η ΕΝΟΤΗΤΑ: Γνωρίζω τον υπολογιστή 1. εδοµένα, Πληροφορίες και Υπολογιστές 2. Πώς φτάσαµε στους σηµερινούς υπολογιστές 3. Το υλικό ενός υπολογιστικού συστήµατος 4. Το λογισµικό ενός υπολογιστικού συστήµατος
1 η ΕΝΟΤΗΤΑ: Γνωρίζω τον υπολογιστή 1. εδοµένα, Πληροφορίες και Υπολογιστές 2. Πώς φτάσαµε στους σηµερινούς υπολογιστές 3. Το υλικό ενός υπολογιστικού συστήµατος 4. Το λογισµικό ενός υπολογιστικού συστήµατος
Βοηθήματα για Άτομα με Κινητικά Προβλήματα
 Βοηθήματα για Άτομα με Κινητικά Προβλήματα Αλέξανδρος Πίνο e-mail: pino@di.uoa.gr Ηλεκτρολόγος Μηχανικός και Μηχανικός Η/Υ (ΔΠΘ), MSc Πληροφορικής «Συστήματα Επικοινωνιών και Δίκτυα» (ΕΚΠΑ) Αναπηρίες που
Βοηθήματα για Άτομα με Κινητικά Προβλήματα Αλέξανδρος Πίνο e-mail: pino@di.uoa.gr Ηλεκτρολόγος Μηχανικός και Μηχανικός Η/Υ (ΔΠΘ), MSc Πληροφορικής «Συστήματα Επικοινωνιών και Δίκτυα» (ΕΚΠΑ) Αναπηρίες που
Μελέτη και Υλοποίηση Ελεγκτών Ρομποτικών Συστημάτων με χρήση Αλγορίθμων Ενισχυτικής Μάθησης
 .. Μελέτη και Υλοποίηση Ελεγκτών Ρομποτικών Συστημάτων με χρήση Αλγορίθμων Ενισχυτικής Μάθησης Πολυτεχνείο Κρήτης 22 Ιουλίου, 2009 Διάρθρωση Εισαγωγή Μαρκοβιανές Διεργασίες Απόφασης (ΜΔΑ) Ενισχυτική Μάθηση
.. Μελέτη και Υλοποίηση Ελεγκτών Ρομποτικών Συστημάτων με χρήση Αλγορίθμων Ενισχυτικής Μάθησης Πολυτεχνείο Κρήτης 22 Ιουλίου, 2009 Διάρθρωση Εισαγωγή Μαρκοβιανές Διεργασίες Απόφασης (ΜΔΑ) Ενισχυτική Μάθηση
2/4/2010. ρ. Φασουλάς Ιωάννης. Απαιτούµενες γνώσεις: Ανάγκη εκπαίδευσης των φοιτητών στον προγραµµατισµό και λειτουργία των βιοµηχανικών ροµπότ
 Τµήµα Μηχανολογίας Τ.Ε.Ι. Κρήτης ΕΚΠΑΙ ΕΥΤΙΚΟ ΛΟΓΙΣΜΙΚΟ ΓΙΑ ΤΟΝ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟ ΕΝΟΣ ΕΙΚΟΝΙΚΟΥ ΡΟΜΠΟΤΙΚΟΥ ΒΡΑΧΙΟΝΑ ΤΥΠΟΥ SCARA ρ. Φασουλάς Ιωάννης Η Ροµ οτική στις σύγχρονες βιοµηχανικές µονάδες αραγωγής
Τµήµα Μηχανολογίας Τ.Ε.Ι. Κρήτης ΕΚΠΑΙ ΕΥΤΙΚΟ ΛΟΓΙΣΜΙΚΟ ΓΙΑ ΤΟΝ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟ ΕΝΟΣ ΕΙΚΟΝΙΚΟΥ ΡΟΜΠΟΤΙΚΟΥ ΒΡΑΧΙΟΝΑ ΤΥΠΟΥ SCARA ρ. Φασουλάς Ιωάννης Η Ροµ οτική στις σύγχρονες βιοµηχανικές µονάδες αραγωγής
Ε ανάληψη. Χρόνος και όροι. Ιεραρχία. ΠΛΗ 405 Τεχνητή Νοηµοσύνη 2006. χρονοπρογραµµατισµός εργασιών. ιεραρχικά δίκτυα εργασιών
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Σχεδιασµός και ράση σε µη Αιτιοκρατικά Πεδία Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Χρόνος και όροι χρονοπρογραµµατισµός εργασιών
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Σχεδιασµός και ράση σε µη Αιτιοκρατικά Πεδία Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Χρόνος και όροι χρονοπρογραµµατισµός εργασιών
ΕΥΦΥΗ ΡΟΜΠΟΤΙΚΑ ΣΥΣΤΗΜΑΤΑ Το Παράδειγμα του Ποδοσφαίρου
 ΕΥΦΥΗ ΡΟΜΠΟΤΙΚΑ ΣΥΣΤΗΜΑΤΑ Το Παράδειγμα του Ποδοσφαίρου Αθανάσιος Μπαλαφούτης, Δρ. Ηλεκτρολόγος Μηχ. & Μηχ. Η/Υ, Εκπαιδευτικός Σάμος 2016 ΤΕΧΝΗΤΗ ΝΟΗΜΟΣΥΝΗ ΚΑΙ ΡΟΜΠΟΤΙΚΗ Τι είναι Ρομπότ; Τα Ρομπότ είναι
ΕΥΦΥΗ ΡΟΜΠΟΤΙΚΑ ΣΥΣΤΗΜΑΤΑ Το Παράδειγμα του Ποδοσφαίρου Αθανάσιος Μπαλαφούτης, Δρ. Ηλεκτρολόγος Μηχ. & Μηχ. Η/Υ, Εκπαιδευτικός Σάμος 2016 ΤΕΧΝΗΤΗ ΝΟΗΜΟΣΥΝΗ ΚΑΙ ΡΟΜΠΟΤΙΚΗ Τι είναι Ρομπότ; Τα Ρομπότ είναι
ΚΕΦΑΛΑΙΟ 6 - Νοήμονες Πράκτορες
 ΚΕΦΑΛΑΙΟ 6 - Νοήμονες Πράκτορες Σύνοψη Οι νοήμονες (ή ευφυείς) πράκτορες αποτελούν σύγχρονα συστήματα Τεχνητής Νοημοσύνης στα οποία δυνητικά μπορούν να χρησιμοποιηθούν επιλεκτικά και σε συνδυασμό μέθοδοι
ΚΕΦΑΛΑΙΟ 6 - Νοήμονες Πράκτορες Σύνοψη Οι νοήμονες (ή ευφυείς) πράκτορες αποτελούν σύγχρονα συστήματα Τεχνητής Νοημοσύνης στα οποία δυνητικά μπορούν να χρησιμοποιηθούν επιλεκτικά και σε συνδυασμό μέθοδοι
y 1 Output Input y 2 Σχήµα 1.1 Βασική δοµή ενός συστήµατος ελέγχου κλειστού βρόγχου
 Τ.Ε.Ι. ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜHΜΑ ΗΛΕΚΤΡΟΛΟΓIΑΣ Σηµειώσεις για το εργαστήριο του µαθήµατος ΣΥΣΤΗΜΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ I ΓΑΥΡΟΣ ΚΩΝ/ΝΟΣ ΚΟΖΑΝΗ 2008 Κεφάλαιο 1 ο Ορισµός Συστηµάτων
Τ.Ε.Ι. ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜHΜΑ ΗΛΕΚΤΡΟΛΟΓIΑΣ Σηµειώσεις για το εργαστήριο του µαθήµατος ΣΥΣΤΗΜΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ I ΓΑΥΡΟΣ ΚΩΝ/ΝΟΣ ΚΟΖΑΝΗ 2008 Κεφάλαιο 1 ο Ορισµός Συστηµάτων
Προηγµένη ιασύνδεση µε τοπεριβάλλον
 Προηγµένη ιασύνδεση µε τοπεριβάλλον! Επεξεργασία φυσικής γλώσσας # Κατανόηση φυσικής γλώσσας # Παραγωγή φυσικής γλώσσας! Τεχνητή όραση! Ροµποτική Κατανόηση Φυσικής Γλώσσας! Αναγνώριση οµιλίας (Speech recognition)!
Προηγµένη ιασύνδεση µε τοπεριβάλλον! Επεξεργασία φυσικής γλώσσας # Κατανόηση φυσικής γλώσσας # Παραγωγή φυσικής γλώσσας! Τεχνητή όραση! Ροµποτική Κατανόηση Φυσικής Γλώσσας! Αναγνώριση οµιλίας (Speech recognition)!
ΠΡΟΓΡΑΜΜΑ ΤΕΛΙΚΩΝ ΕΞΕΤΑΣΕΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδηµαϊκό Έτος 2008-2009 Περίοδος Ιουνίου 2009 ΠΡΟΓΡΑΜΜΑ ΤΕΛΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 2ο ΕΞΑΜΗΝΟ ΩΡΑ 4ο ΕΞΑΜΗΝΟ ΩΡΑ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδηµαϊκό Έτος 2008-2009 Περίοδος Ιουνίου 2009 ΠΡΟΓΡΑΜΜΑ ΤΕΛΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 2ο ΕΞΑΜΗΝΟ ΩΡΑ 4ο ΕΞΑΜΗΝΟ ΩΡΑ
Εκπαιδευτικοί Στόχοι Παιδαγωγικές Στρατηγικές
 Εκπαιδευτικοί Στόχοι Παιδαγωγικές Στρατηγικές ρ. Κωνσταντίνα Βασιλοπούλου Περιεχόµενα ιδακτικό Μοντέλο Ανάλυση Αναγκών Μαθητή E-learning ιδασκαλία υποστηριζόµενη από υπολογιστές µέσω χρήσης
Εκπαιδευτικοί Στόχοι Παιδαγωγικές Στρατηγικές ρ. Κωνσταντίνα Βασιλοπούλου Περιεχόµενα ιδακτικό Μοντέλο Ανάλυση Αναγκών Μαθητή E-learning ιδασκαλία υποστηριζόµενη από υπολογιστές µέσω χρήσης
Αυτόνομοι Πράκτορες. ΝΑΟ Μουσικός
 Αυτόνομοι Πράκτορες ΝΑΟ Μουσικός Καρατζαφέρης Ευστάθιος Αλέξανδρος 2007 030 046 Πολυτεχνείο Κρήτης Σύντομη Περιγραφή Στόχος της εργασίας μας είναι η υλοποίηση της συμπεριφοράς αλλα και της λειτουργικότητας
Αυτόνομοι Πράκτορες ΝΑΟ Μουσικός Καρατζαφέρης Ευστάθιος Αλέξανδρος 2007 030 046 Πολυτεχνείο Κρήτης Σύντομη Περιγραφή Στόχος της εργασίας μας είναι η υλοποίηση της συμπεριφοράς αλλα και της λειτουργικότητας
Εισαγωγή στη Ροµποτική
 Εισαγωγή στη Ροµποτική Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007 Modern Times (1936) 1 Modern Times (c. 2000) 2 Ροµπότ και αυτοµατισµοί: Ιστορική
Εισαγωγή στη Ροµποτική Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007 Modern Times (1936) 1 Modern Times (c. 2000) 2 Ροµπότ και αυτοµατισµοί: Ιστορική
ΤΕΧΝΗΤΗ ΝΟΗΜΟΣΥΝΗ. Ενότητα 5: Παραδείγματα. Ρεφανίδης Ιωάννης Τμήμα Εφαρμοσμένης Πληροφορικής
 Ενότητα 5: Παραδείγματα Ρεφανίδης Ιωάννης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε άλλου τύπου άδειας
Ενότητα 5: Παραδείγματα Ρεφανίδης Ιωάννης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε άλλου τύπου άδειας
ΤΕΧΝΗΤΗ ΝΟΗΜΟΣΥΝΗ. Ενότητα 2: Δένδρο αναζήτησης. Ρεφανίδης Ιωάννης Τμήμα Εφαρμοσμένης Πληροφορικής
 Ενότητα 2: Δένδρο αναζήτησης Ρεφανίδης Ιωάννης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε άλλου τύπου
Ενότητα 2: Δένδρο αναζήτησης Ρεφανίδης Ιωάννης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε άλλου τύπου
TouchPad και πληκτρολόγιο
 TouchPad και πληκτρολόγιο Οδηγός χρήσης Copyright 2007 Hewlett-Packard Development Company, L.P. Η επωνυµία Windows είναι εµπορικό σήµα κατατεθέν της εταιρείας Microsoft Corporation στις Η.Π.Α. Οι πληροφορίες
TouchPad και πληκτρολόγιο Οδηγός χρήσης Copyright 2007 Hewlett-Packard Development Company, L.P. Η επωνυµία Windows είναι εµπορικό σήµα κατατεθέν της εταιρείας Microsoft Corporation στις Η.Π.Α. Οι πληροφορίες
Βιβλιογραφικές και ιστορικές σηµειώσεις Ασκήσεις Προβλήµατα Ικανοποίησης Περιορισµών
 Περιεχόµενα 1 Εισαγωγή... 31 1.1 Τι Είναι η Τεχνητή Νοηµοσύνη... 31 Ανθρώπινη δράση: Η προσέγγιση µε τη δοκιµασία Turing... 32 Ανθρώπινη σκέψη: Η προσέγγιση µε γνωστικά µοντέλα... 33 Ορθολογική σκέψη:
Περιεχόµενα 1 Εισαγωγή... 31 1.1 Τι Είναι η Τεχνητή Νοηµοσύνη... 31 Ανθρώπινη δράση: Η προσέγγιση µε τη δοκιµασία Turing... 32 Ανθρώπινη σκέψη: Η προσέγγιση µε γνωστικά µοντέλα... 33 Ορθολογική σκέψη:
TouchPad και πληκτρολόγιο
 TouchPad και πληκτρολόγιο Οδηγός χρήσης Copyright 2007 Hewlett-Packard Development Company, L.P. Η ονοµασία Windows είναι σήµα κατατεθέν της Microsoft Corporation στις Ηνωµένες Πολιτείες. Οι πληροφορίες
TouchPad και πληκτρολόγιο Οδηγός χρήσης Copyright 2007 Hewlett-Packard Development Company, L.P. Η ονοµασία Windows είναι σήµα κατατεθέν της Microsoft Corporation στις Ηνωµένες Πολιτείες. Οι πληροφορίες
«Προγραµµατισµός του LEGO Mindstorm NXT για το διαγωνισµό "Move the Ball!"»
 ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΚΠ 413 / ΕΚΠ 606 ΑΥΤΟΝΟΜΟΙ ΠΡΑΚΤΟΡΕΣ Εργασία Εξαµήνου Προγραµµατισµός του LEGO Mindstorm NXT για το διαγωνισµό "Move the Ball!"
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΚΠ 413 / ΕΚΠ 606 ΑΥΤΟΝΟΜΟΙ ΠΡΑΚΤΟΡΕΣ Εργασία Εξαµήνου Προγραµµατισµός του LEGO Mindstorm NXT για το διαγωνισµό "Move the Ball!"
Συσκευές κατάδειξης και πληκτρολόγιο Οδηγός χρήσης
 Συσκευές κατάδειξης και πληκτρολόγιο Οδηγός χρήσης Copyright 2008 Hewlett-Packard Development Company, L.P. Η ονοµασία Windows είναι σήµα κατατεθέν της Microsoft Corporation στις Ηνωµένες Πολιτείες. Οι
Συσκευές κατάδειξης και πληκτρολόγιο Οδηγός χρήσης Copyright 2008 Hewlett-Packard Development Company, L.P. Η ονοµασία Windows είναι σήµα κατατεθέν της Microsoft Corporation στις Ηνωµένες Πολιτείες. Οι
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΤΕΧΝΟΛΟΓΙΑΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΙ ΥΠΟΛΟΓΙΣΤΩΝ Ανάπτυξη μιας προσαρμοστικής πολιτικής αντικατάστασης αρχείων, με χρήση
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΤΕΧΝΟΛΟΓΙΑΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΙ ΥΠΟΛΟΓΙΣΤΩΝ Ανάπτυξη μιας προσαρμοστικής πολιτικής αντικατάστασης αρχείων, με χρήση
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εφαρμοσμένος & Υπολογιστικός Ηλεκτρομαγνητισμός Ηλ. Αιθ. 012, 013. Στοχαστικά Συστήματα & Επικοινωνίες Ηλ. Αμφ.
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εφαρμοσμένος & Υπολογιστικός Ηλεκτρομαγνητισμός Ηλ. Αιθ. 012, 013. Εργαστήριο Ψηφιακών Συστημάτων Ηλ. Εργ.
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εργαστηριακή και Βιομηχανική Ηλεκτρονική Ηλ. Αμφ. 2, 3. Γλώσσες Προγραμματισμού Ι. Ηλ. Αμφ. 1, 2, 3, 4, 5
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Ιουνίου 2017 Έκδοση 08.06.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Ιουνίου 2017 Έκδοση 08.06.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο
Πληροφορίες. Εισαγωγή στην Πληροφορική. Κατηγορίες υλισµικού. Περίληψη µαθήµατος (συνέχεια) Επεξεργαστής Μνήµη. Χειµερινό Εξάµηνο 2006-07
 Επεξεργαστής Μνήµη. Χειµερινό Εξάµηνο 2006-07") Πληροφορίες Εισαγωγή στην Πληροφορική Χειµερινό Εξάµηνο 2006-07 ρ. Παναγιώτης Χατζηδούκας (Π..407/80) Μόνο για την επόµενη Τετάρτη 25/10, το µάθηµα (12-13) δεν θα πραγµατοποιηθεί. Τα εργαστήρια θα ξεκινήσουν
Πληροφορίες Εισαγωγή στην Πληροφορική Χειµερινό Εξάµηνο 2006-07 ρ. Παναγιώτης Χατζηδούκας (Π..407/80) Μόνο για την επόµενη Τετάρτη 25/10, το µάθηµα (12-13) δεν θα πραγµατοποιηθεί. Τα εργαστήρια θα ξεκινήσουν
TouchPad και πληκτρολόγιο
 TouchPad και πληκτρολόγιο Οδηγός χρήσης Copyright 2007 Hewlett-Packard Development Company, L.P. Η επωνυµία Windows είναι εµπορικό σήµα κατατεθέν της εταιρείας Microsoft Corporation στις Η.Π.Α. Οι πληροφορίες
TouchPad και πληκτρολόγιο Οδηγός χρήσης Copyright 2007 Hewlett-Packard Development Company, L.P. Η επωνυµία Windows είναι εµπορικό σήµα κατατεθέν της εταιρείας Microsoft Corporation στις Η.Π.Α. Οι πληροφορίες
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Αρχιτεκτονική Υπολογιστών Ηλ. Αιθ. 001, 002. Ηλ. Αιθ. 003, 004 Ηλεκτρονική ΙΙΙ Ηλ. αιθ. 003, 004. Θεωρία Δικτύων & Κυκλωμάτων
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 v20180517 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 v20180517 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ
ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Σεπεμβρίου 2017 ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ Έκδοση 05.07.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 3-4ο
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Σεπεμβρίου 2017 ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ Έκδοση 05.07.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 3-4ο
Kalman Filter Γιατί ο όρος φίλτρο;
 Kalman Filter Γιατί ο όρος φίλτρο; Συνήθως ο όρος φίλτρο υποδηλώνει µια διαδικασία αποµάκρυνσης µη επιθυµητών στοιχείων Απότολατινικόόροfelt : το υλικό για το φιλτράρισµα υγρών Στη εποχή των ραδιολυχνίων:
Kalman Filter Γιατί ο όρος φίλτρο; Συνήθως ο όρος φίλτρο υποδηλώνει µια διαδικασία αποµάκρυνσης µη επιθυµητών στοιχείων Απότολατινικόόροfelt : το υλικό για το φιλτράρισµα υγρών Στη εποχή των ραδιολυχνίων:
Ευφυή Κινούμενα Ρομπότ
 Ευφυή Κινούμενα Ρομπότ Δρ Γιώργος Α. Δημητρίου Ακαδημία Ρομποτικής Τμήμα Πληροφορικής και Μηχανικών Υπολογιστών Σχολή Μηχανικής και Εφαρμοσμένων Επιστημών Πανεπιστήμιο Frederick, Λεμεσός, Κύπρος http://akrob.frederick.ac.cy
Ευφυή Κινούμενα Ρομπότ Δρ Γιώργος Α. Δημητρίου Ακαδημία Ρομποτικής Τμήμα Πληροφορικής και Μηχανικών Υπολογιστών Σχολή Μηχανικής και Εφαρμοσμένων Επιστημών Πανεπιστήμιο Frederick, Λεμεσός, Κύπρος http://akrob.frederick.ac.cy
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Ηλ. Αιθ. 003, 004 Ηλεκτρονική ΙΙΙ Ηλ. αιθ. 003, 004
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
Περιεχόµενα. Μέρος I Βασικά στοιχεία των Microsoft Windows XP Professional. Ευχαριστίες... 17 Εισαγωγή... 19
 Περιεχόµενα Ευχαριστίες... 17 Εισαγωγή... 19 Μέρος I Βασικά στοιχεία των Microsoft Windows XP Professional 1 Εισαγωγή στη διαχείριση των Microsoft Windows XP Professional... 25 Ξεκίνηµα µε τα Windows XP
Περιεχόµενα Ευχαριστίες... 17 Εισαγωγή... 19 Μέρος I Βασικά στοιχεία των Microsoft Windows XP Professional 1 Εισαγωγή στη διαχείριση των Microsoft Windows XP Professional... 25 Ξεκίνηµα µε τα Windows XP
ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2015-2016 Περίοδος Σεπτεμβρίου 2016 ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1-2o ΕΞΑΜΗΝΟ 3-4ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2015-2016 Περίοδος Σεπτεμβρίου 2016 ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1-2o ΕΞΑΜΗΝΟ 3-4ο ΕΞΑΜΗΝΟ
Reinforcement Learning Competition Invasive Species Domain - αυτόνομοι Πράκτορες Γιώργος Κεχαγιάς
 Reinforcement Learning Competition Invasive Species Domain - αυτόνομοι Πράκτορες 2015-16 Γιώργος Κεχαγιάς 2010030002 Ορισμός του προβλήματος Η οικονομική και η οικολογική καταστοροφή απο τα Invasive species
Reinforcement Learning Competition Invasive Species Domain - αυτόνομοι Πράκτορες 2015-16 Γιώργος Κεχαγιάς 2010030002 Ορισμός του προβλήματος Η οικονομική και η οικολογική καταστοροφή απο τα Invasive species
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Στοχαστικά Συστήματα & Επικοινωνίες Ηλ. Αμφ. 1, 2 Ηλ. Αιθ. 001, 002. Γλώσσες Προγραμματισμού Ι Ηλ. Αμφ.
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2015-2016 Περίοδος Ιουνίου 2016 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2015-2016 Περίοδος Ιουνίου 2016 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΟΡΘΗ ΕΠΑΝΑΛΗΨΗ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΟΡΘΗ ΕΠΑΝΑΛΗΨΗ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Σεπτεμβρίου 2018 Έκδοση 17/07/2018 ΗΜΕΡΟΜΗΝΙΑ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΟΡΘΗ ΕΠΑΝΑΛΗΨΗ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Σεπτεμβρίου 2018 Έκδοση 17/07/2018 ΗΜΕΡΟΜΗΝΙΑ
Α.Τ.Ε.Ι. Ηρακλείου Ψηφιακή Επεξεργασία Εικόνας ιδάσκων: Βασίλειος Γαργανουράκης. Ανθρώπινη Όραση - Χρωµατικά Μοντέλα
 Ανθρώπινη Όραση - Χρωµατικά Μοντέλα 1 Τι απαιτείται για την όραση Φωτισµός: κάποια πηγή φωτός Αντικείµενα: που θα ανακλούν (ή διαθλούν) το φως Μάτι: σύλληψη του φωτός σαν εικόνα Τρόποι µετάδοσης φωτός
Ανθρώπινη Όραση - Χρωµατικά Μοντέλα 1 Τι απαιτείται για την όραση Φωτισµός: κάποια πηγή φωτός Αντικείµενα: που θα ανακλούν (ή διαθλούν) το φως Μάτι: σύλληψη του φωτός σαν εικόνα Τρόποι µετάδοσης φωτός
ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB- SIMULINK
 ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB- SIMULINK SIMULINK ρ. Γεώργιος Φ. Φραγκούλης Καθηγητής ver. 0.2 10/2012 Εισαγωγή στο Simulink Το SIMULINK είναι ένα λογισµικό πακέτο που επιτρέπει τη µοντελοποίηση, προσοµοίωση οίωση
ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB- SIMULINK SIMULINK ρ. Γεώργιος Φ. Φραγκούλης Καθηγητής ver. 0.2 10/2012 Εισαγωγή στο Simulink Το SIMULINK είναι ένα λογισµικό πακέτο που επιτρέπει τη µοντελοποίηση, προσοµοίωση οίωση
εν υπάρχει συµφωνία ως προς τον ορισµό. 1949 Μηχανή Αριθµητικού Ελέγχου (MIT Servo Lab) Βραχίονες για χειρισµό πυρηνικού υλικού (Master Slave, 1948)
 Βραχίονες για χειρισµό πυρηνικού υλικού (Master Slave, 1948)") Κεφάλαιο 1 Εισαγωγή 1-1 Τι είναι Ροµπότ; εν υπάρχει συµφωνία ως προς τον ορισµό. Σύµφωνα µε το Αµερικανικό Ινστιτούτο Ροµποτικής (Rbt Institute f America, RIA) είναι ένας επαναπρογραµµατιζόµενος βραχίονας
Κεφάλαιο 1 Εισαγωγή 1-1 Τι είναι Ροµπότ; εν υπάρχει συµφωνία ως προς τον ορισµό. Σύµφωνα µε το Αµερικανικό Ινστιτούτο Ροµποτικής (Rbt Institute f America, RIA) είναι ένας επαναπρογραµµατιζόµενος βραχίονας
Χ. Α. Αλεξόπουλος. Τµήµα Μηχ. Η/Υ και Πληροφορικής Πανεπιστήµιο Πατρών
 ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΑΡΙΘΜΗΤΙΚΗ ΑΝΑΛΥΣΗ ΚΑΙ ΠΕΡΙΒΑΛΛΟΝΤΑ ΥΛΟΠΟΙΗΣΗΣ Χ. Α. Αλεξόπουλος Τµήµα Μηχ. Η/Υ και Πληροφορικής Πανεπιστήµιο Πατρών Πάτρα 2014 Αφιερωµένο σε δύο εκλεκτούς ανθρώπους, πανεπιστηµιακούς δασκάλους
ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΑΡΙΘΜΗΤΙΚΗ ΑΝΑΛΥΣΗ ΚΑΙ ΠΕΡΙΒΑΛΛΟΝΤΑ ΥΛΟΠΟΙΗΣΗΣ Χ. Α. Αλεξόπουλος Τµήµα Μηχ. Η/Υ και Πληροφορικής Πανεπιστήµιο Πατρών Πάτρα 2014 Αφιερωµένο σε δύο εκλεκτούς ανθρώπους, πανεπιστηµιακούς δασκάλους
Μέθοδοι Σχεδίασης κίνησης
 Μέθοδοι Σχεδίασης κίνησης Τασούδης Σταύρος Ο προγραμματισμός τροχιάς(trajectory planning) είναι η κίνηση από το σημείο Α προς το σημείο Β αποφεύγοντας τις συγκρούσεις με την πάροδο του χρόνου. Αυτό μπορεί
Μέθοδοι Σχεδίασης κίνησης Τασούδης Σταύρος Ο προγραμματισμός τροχιάς(trajectory planning) είναι η κίνηση από το σημείο Α προς το σημείο Β αποφεύγοντας τις συγκρούσεις με την πάροδο του χρόνου. Αυτό μπορεί
ΠΛΗ 405 Τεχνητή Νοηµοσύνη 2006. Ε ανάληψη. δοµή δεδοµένων για κατασκευή ευρετικών συναρτήσεων Ο αλγόριθµος GraphPlan
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Σχεδιασµός και ράση στον Πραγµατικό Κόσµο Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Γραφήµατα σχεδιασµού δοµή δεδοµένων για κατασκευή
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Σχεδιασµός και ράση στον Πραγµατικό Κόσµο Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Γραφήµατα σχεδιασµού δοµή δεδοµένων για κατασκευή
ΠΛΗ 405 Τεχνητή Νοηµοσύνη 2007. Ε ανάληψη. Προβλήµατα ικανο οίησης εριορισµών ορισµός και χαρακτηριστικά
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Αναζήτηση µε Αντι αλότητα Adversarial Search Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Προβλήµατα ικανο οίησης εριορισµών ορισµός και
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Αναζήτηση µε Αντι αλότητα Adversarial Search Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Προβλήµατα ικανο οίησης εριορισµών ορισµός και
Συσκευές δείκτη και πληκτρολόγιο Οδηγός χρήσης
 Συσκευές δείκτη και πληκτρολόγιο Οδηγός χρήσης Copyright 2009 Hewlett-Packard Development Company, L.P. Οι ονοµασίες Microsoft και Windows είναι σήµατα κατατεθέντα της Microsoft Corporation στις Η.Π.Α.
Συσκευές δείκτη και πληκτρολόγιο Οδηγός χρήσης Copyright 2009 Hewlett-Packard Development Company, L.P. Οι ονοµασίες Microsoft και Windows είναι σήµατα κατατεθέντα της Microsoft Corporation στις Η.Π.Α.
ΚΕΦΑΛΑΙΟ 20 ΕΠΑΝΑΧΡΗΣΙΜΟΠΟΙΗΣΗ ΛΟΓΙΣΜΙΚΟΥ
 ΚΕΦΑΛΑΙΟ 20 ΕΠΑΝΑΧΡΗΣΙΜΟΠΟΙΗΣΗ ΛΟΓΙΣΜΙΚΟΥ Στόχοι Περιγραφή πλεονεκτηµάτων-µειονεκτηµάτων µειονεκτηµάτων επαναχρησιµοποίησης λογισµικού Ανάπτυξη για-µε επαναχρησιµοποίηση Χαρακτηριστικά γενικών επαναχρησιµοποιούµενων
ΚΕΦΑΛΑΙΟ 20 ΕΠΑΝΑΧΡΗΣΙΜΟΠΟΙΗΣΗ ΛΟΓΙΣΜΙΚΟΥ Στόχοι Περιγραφή πλεονεκτηµάτων-µειονεκτηµάτων µειονεκτηµάτων επαναχρησιµοποίησης λογισµικού Ανάπτυξη για-µε επαναχρησιµοποίηση Χαρακτηριστικά γενικών επαναχρησιµοποιούµενων
ΠΡΟΣΟΜΟΙΩΣΗ. Προσομοίωση είναι η μίμηση της λειτουργίας ενός πραγματικού συστήματος και η παρακολούθηση της εξέλιξης του μέσα στο χρόνο.
 ΠΡΟΣΟΜΟΙΩΣΗ Προσομοίωση είναι η μίμηση της λειτουργίας ενός πραγματικού συστήματος και η παρακολούθηση της εξέλιξης του μέσα στο χρόνο. δημιουργία μοντέλου προσομοίωσης ( - χρήση μαθηματικών, λογικών και
ΠΡΟΣΟΜΟΙΩΣΗ Προσομοίωση είναι η μίμηση της λειτουργίας ενός πραγματικού συστήματος και η παρακολούθηση της εξέλιξης του μέσα στο χρόνο. δημιουργία μοντέλου προσομοίωσης ( - χρήση μαθηματικών, λογικών και
TouchPad και πληκτρολόγιο
 TouchPad και πληκτρολόγιο Οδηγός χρήσης Copyright 2007 Hewlett-Packard Development Company, L.P. Η ονοµασία Windows είναι εµπορικό σήµα κατατεθέν της εταιρείας Microsoft Corporation στις Η.Π.Α. Οι πληροφορίες
TouchPad και πληκτρολόγιο Οδηγός χρήσης Copyright 2007 Hewlett-Packard Development Company, L.P. Η ονοµασία Windows είναι εµπορικό σήµα κατατεθέν της εταιρείας Microsoft Corporation στις Η.Π.Α. Οι πληροφορίες
Crow s Passion for Smart Residential Security
 Crow s Passion for Smart Residential Security SERENITY Το σύστηµα SERENITY είναι ένα µοντέρνα σχεδιασµένο σύστηµα συναγερµού για να ταιριάζει στον χώρο σας. Με το σύστηµα SERENITY µπορείτε να απολαύσετε
Crow s Passion for Smart Residential Security SERENITY Το σύστηµα SERENITY είναι ένα µοντέρνα σχεδιασµένο σύστηµα συναγερµού για να ταιριάζει στον χώρο σας. Με το σύστηµα SERENITY µπορείτε να απολαύσετε
Μηχανική Λογισμικού για Διαδικτυακές & Φορητές Εφαρμογές
 Μεταπτυχιακό Δίπλωμα Ειδίκευσης Μηχανική Λογισμικού για Διαδικτυακές & Φορητές Εφαρμογές Δρ. Κακαρόντζας Γεώργιος Επίκουρος Καθηγητής Τμ. Μηχανικών Πληροφορικής Τ.Ε. Μηχανική Λογισμικού για Διαδικτυακές
Μεταπτυχιακό Δίπλωμα Ειδίκευσης Μηχανική Λογισμικού για Διαδικτυακές & Φορητές Εφαρμογές Δρ. Κακαρόντζας Γεώργιος Επίκουρος Καθηγητής Τμ. Μηχανικών Πληροφορικής Τ.Ε. Μηχανική Λογισμικού για Διαδικτυακές
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΤΕΧΝΟΛΟΓΙΑΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΙ ΥΠΟΛΟΓΙΣΤΩΝ Ανάπτυξη ενός ευφυούς πράκτορα λογισμικού για το παιχνίδι Super Mario
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΤΕΧΝΟΛΟΓΙΑΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΙ ΥΠΟΛΟΓΙΣΤΩΝ Ανάπτυξη ενός ευφυούς πράκτορα λογισμικού για το παιχνίδι Super Mario
Συσκευές κατάδειξης και πληκτρολόγιο Οδηγός χρήσης
 Συσκευές κατάδειξης και πληκτρολόγιο Οδηγός χρήσης Copyright 2008 Hewlett-Packard Development Company, L.P. Η ονοµασία Windows είναι εµπορικό σήµα κατατεθέν της εταιρείας Microsoft Corporation στις Η.Π.Α.
Συσκευές κατάδειξης και πληκτρολόγιο Οδηγός χρήσης Copyright 2008 Hewlett-Packard Development Company, L.P. Η ονοµασία Windows είναι εµπορικό σήµα κατατεθέν της εταιρείας Microsoft Corporation στις Η.Π.Α.
Αρχιτεκτονική πελάτη-εξυπηρέτη Οι διεργασίες που εκτελούνται στο δίκτυο είναι είτε πελάτες (clients) είτε εξυπηρέτες (servers). Εξυπηρέτης: παθητικός,
 είτε εξυπηρέτες (servers). Εξυπηρέτης: παθητικός,") Αρχιτεκτονική web εφαρµογών Σαράντης Πασκαλής Εθνικό και Καποδιστριακό Πανεπιστήµιο Αθηνών 1 Αρχιτεκτονική πελάτη-εξυπηρέτη Οι διεργασίες που εκτελούνται στο δίκτυο είναι είτε πελάτες
Αρχιτεκτονική web εφαρµογών Σαράντης Πασκαλής Εθνικό και Καποδιστριακό Πανεπιστήµιο Αθηνών 1 Αρχιτεκτονική πελάτη-εξυπηρέτη Οι διεργασίες που εκτελούνται στο δίκτυο είναι είτε πελάτες
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εισαγωγή στα Συστήματα Ηλεκτρικής Ενέργειας (ΣΗΕ) Ηλ. Αμφ. 1, 2, 3. Ηλεκτρομαγνητικά Πεδία Β. Ηλ. Αμφ.
 Ηλ. Αμφ. 1, 2, 3. Ηλεκτρομαγνητικά Πεδία Β. Ηλ. Αμφ.") ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2018-19 Περίοδος Ιουνίου 2019 'Εκδοση 20/05/2019 03/06/2019 04/06/2019 05/06/2019 06/06/2019
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2018-19 Περίοδος Ιουνίου 2019 'Εκδοση 20/05/2019 03/06/2019 04/06/2019 05/06/2019 06/06/2019