ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB- SIMULINK
|
|
|
- Ζένα Κουρμούλης
- 9 χρόνια πριν
- Προβολές:
Transcript
1 ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB- SIMULINK SIMULINK ρ. Γεώργιος Φ. Φραγκούλης Καθηγητής ver /2012

2 Εισαγωγή στο Simulink Το SIMULINK είναι ένα λογισµικό πακέτο που επιτρέπει τη µοντελοποίηση, προσοµοίωση οίωση και ανάλυση δυναµικών συστηµάτων άτων. Υποστηρίζει γραµµικά και µη γραµµικά συστήµατα, µοντελοποιηµένα σε συνεχή ή διακριτό χρόνο, ή ακόµη και υβριδικά συστήµατα (εν µέρει µοντελοποιηµένα σε συνεχή και εν µέρει σε διακριτό χρόνο). Υποστηρίζονται ακόµη συστήµατα µε τµηµατικά διαφορετικούς χρόνους δειγµατοληψίας. 2
.")
3 Εισαγωγή στο Simulink Για τη µοντελοποίηση, το SIMULINK παρέχει ένα γραφικό περιβάλλον διεπαφής (GUI) που επιτρέπει την κατασκευή µοντέλων ως δοµικών διαγραµµάτων, χρησιµοποιώντας λειτουργίες click-and-drag του ποντικιού. Το SIMULINK περιλαµβάνει ένα πλήθος βιβλιοθηκών δοµικών στοιχείων (blocks), τα βασικότερα από τα οποία είναι οι πηγές (sources), τα στοιχεία «απορρόφησης» (sinks), τα συνεχή γραµµικά στοιχεία, τα µη γραµµικά στοιχεία και τα στοιχεία σηµάτων και συστηµάτων. Είναι επίσης δυνατή η τροποποίηση και η δηµιουργία νέων δοµικών στοιχείων από το χρήστη. 3
, τα συνεχή γραµµικά στοιχεία, τα µη γραµµικά στοιχεία και τα στοιχεία σηµάτων και συστηµάτων.")
4 Εισαγωγή στο Simulink 4 Τα µοντέλα SIMULINK είναι ιεραρχικά (ένα µοντέλο µπορεί να περιέχει µπλοκ τα οποία περιέχουν µε τη σειρά τους άλλα µπλοκ), έτσι µπορούν να ιδωθούν σε διάφορα επίπεδα. Ένα σύστηµα που έχει ιεραρχική δοµή µπορεί να ιδωθεί αρχικά σε υψηλό επίπεδο ως ένα σύνολο διασυνδεµένων υποσυστηµάτων άτων, κάθε ένα από τα οποία µοντελοποιείται ως ένα µπλοκ. Στη συνέχεια, κάνοντας διπλό κλικ µε το ποντίκι στα επί µέρους µπλοκ, ο χρήστης µπορεί να κατέβει σε χαµηλότερα επίπεδα ώστε να δει αυξανόµενους βαθµούς λεπτοµέρειας.

5 Εισαγωγή στο Simulink Μετά τη δηµιουργία ενός µοντέλου, είναι δυνατή η προσοµοίωση οίωση του, χρησιµοποιώντας µια από τις διάφορες µεθόδους ολοκλήρωσης που παρέχει το SIMULINK. Χρησιµοποιώντας παλµογράφους (scopes) και άλλα µπλοκ απεικόνισης είναι δυνατή η παρακολούθηση των αποτελεσµάτων της προσοµοίωσης καθώς αυτή εξελίσσεται. Επιπλέον, είναι δυνατή η εξαγωγή αποτελεσµάτων της προσοµοίωσης στο χώρο εργασίας της MATLAB για περαιτέρω επεξεργασία. Είναι ακόµη δυνατή η χρήση του SIMULINK για προσοµοίωση αλλά και έλεγχο συστηµάτων σε πραγµατικό χρόνο, µέσω της εργαλειοθήκης πραγµατικού χρόνου (Real Time Workshop). 5

6 Βασικές Λειτουργίες του Simulink Τα µοντέλα δυναµικών συστηµάτων που κατασκευάζονται µε το SIMULINK αποθηκεύονται ως αρχεία µε την κατάληξη.mdl. Προκειµένου να δηµιουργήσουµε ένα νέο µοντέλο ή να ανοίξουµε ένα αποθηκευµένο µοντέλο, στο παράθυρο εντολών της MATLAB γράφουµε SIMULINK µε το οποίο ανοίγει ο browser των βιβλιοθηκών του SIMULINK. Από το παράθυρο του browser µπορούµε να δηµιουργήσουµε ένα νέο µοντέλο, ή να ανοίξουµε ένα αποθηκευµένο µοντέλο, 6

7 Κατασκευή απλού µοντέλου Simulink Στο command window γράφουµε >>simulink Στο παράθυρο που ανοίγει επιλέγουµε File/new/model Από το sources επιλέγουµε το step και το σέρνουµε στο παράθυρο του µοντέλου. 7

8 Κατασκευή απλού µοντέλου Simulink Από το sources επιλέγουµε και το σέρνουµε στο παράθυρο του µοντέλου. Κάνουµε διπλό κλικ πάνω στο signal generator και ορίζουµε την κατάλληλη συνάρτηση εισόδου. Αφήνουµε τις αρχικές τιµές Από το sinks επιλέγουµε το scope και το σέρνουµε στο παράθυρο του µοντέλου. Ενώνουµε µε βέλη όλα τα αντικείµενα. Από το µενού simulink επιλέγουµε start για να γίνει η προσοµοίωση. Στο γράφηµα που εµφανίζεται κάνουµε δεξί κλικ και επιλέγουµε autoscale. 8

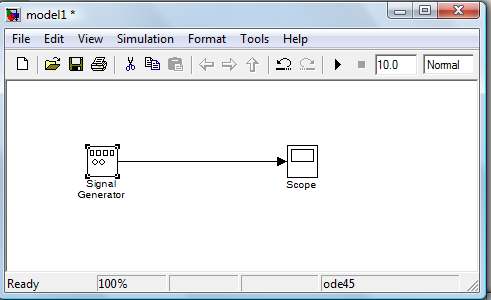
9 Παράδειγµα -1 9
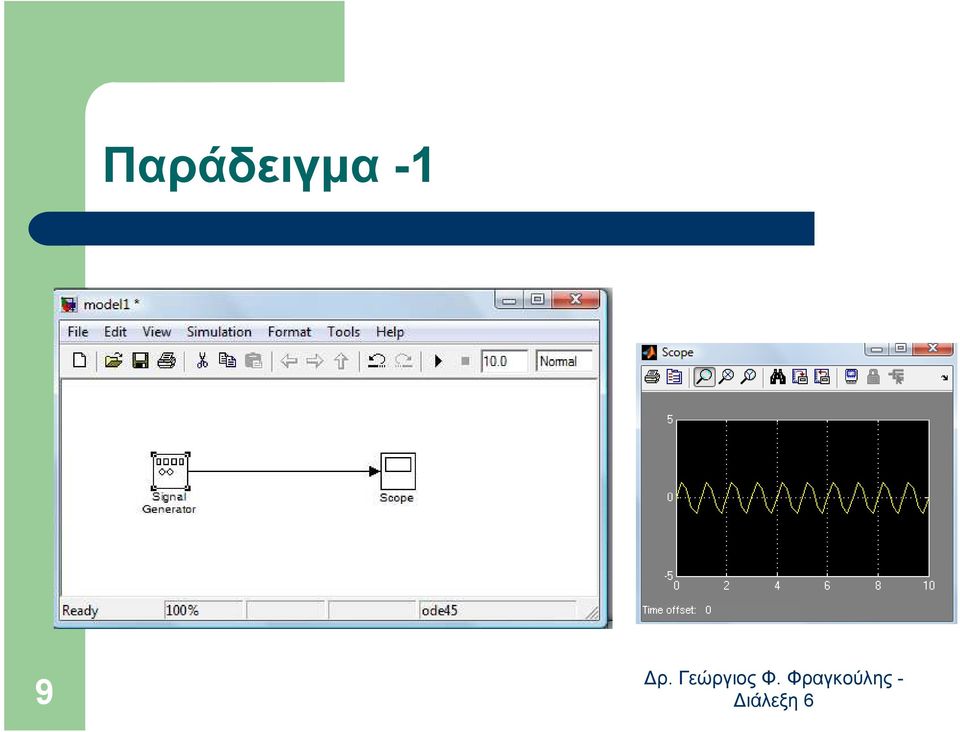

10 Παράδειγµα 1 (συνέχεια) Αλλάζοντας την συνάρτηση ή/και δίνοντας διαφορετικές τιµές στις frequence και amplitude παραµέτρους της αλλάζει ανάλογα το γράφηµα εξόδου 10

11 Παράδειγµα 2 Σ αυτό το παράδειγµα χρησιµοποιούµε από την βιβλιοθήκη signal routing το Mux για συνέλιξη σηµάτων και το Gain από το commonly used blocks καθώς και το simout (to workspace) από το Sinks και δηµιουργούµε το παρακάτω µοντέλο : 11
 από το Sinks και δηµιουργούµε το παρακάτω")
12 Παράδειγµα 2 12
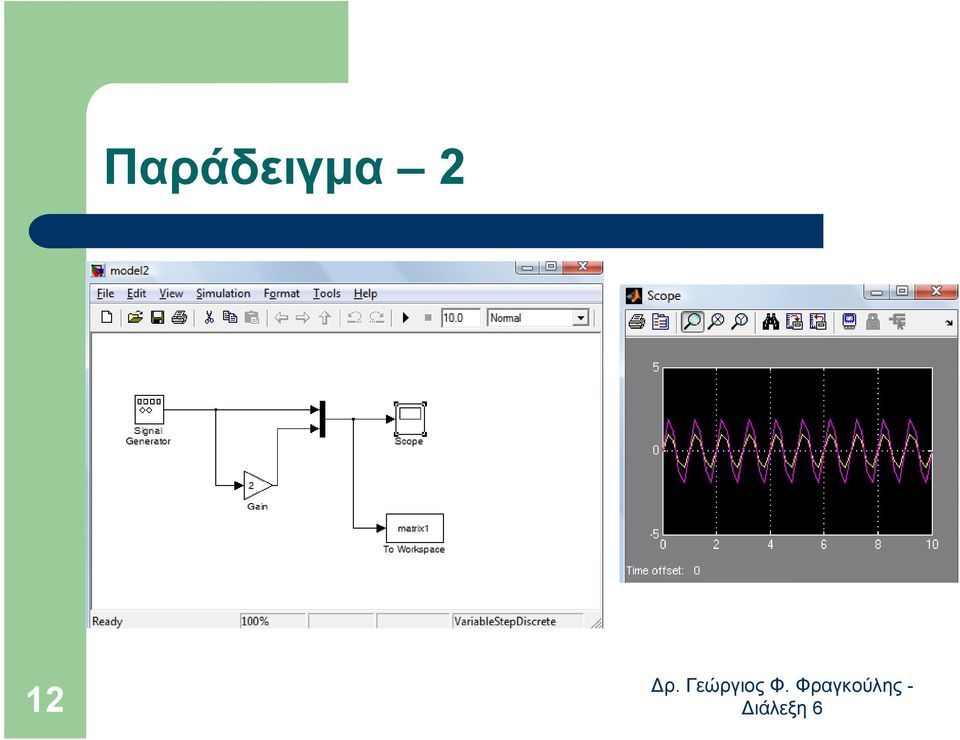
13 Επιστροφή τιµών στο Matlab από το Simulink Με το block workspace στέλνουµε πίσω στο Matlab την έξοδο του µοντέλου µας σε αριθµητικές τιµές, τις οποίες µπορώ να χρησιµοποιήσω όπως και κάθε άλλη µεταβλητή του Matlab. Το όνοµα της µεταβλητής καθορίζεται από το variable name του workspace (στο παράδειγµά µας είναι το matrix1) 13

14 Εργαλεία του SIMULINK Toolbox Ολοκληρωτής (Commonly used blocks) Με αυτό το εργαλείο κάνουµε πράξεις ολοκλήρωσης Παράγωγος (Derivative) 14

15 Εργαλεία του SIMULINK Toolbox State-space (Χώρος( κατάστασης) Transfer Function (Συνάρτηση µεταφοράς µε ρύθµιση πόλων) Zero-Pole (Συνάρτηση µετ. µε δυνατότητα ρύθµισης πόλων αλλά και µηδενικών 15


16 Εργαλεία του SIMULINK Toolbox Εισαγωγή συνάρτησης Παράδειγµα : 16

17 Εργαλεία του SIMULINK Toolbox Εύρεση απόλυτης τιµής Παράδειγµα : 17

18 Εργαλεία του SIMULINK Toolbox Εργαλείο άθροισης αριθµών ή σηµάτων Παράδειγµα : 18

19 Εργαλεία του SIMULINK Toolbox Εργαλεία βασικών πηγών : Πηγή σταθερής τιµής Γεννήτρια παλµών Βηµατική συνάρτηση Ηµιτονοειδές σήµα 19

20 Control systems Σ.Α.Ε. Στα επόµενα παραδείγµατα θα εξετάσουµε τις περιπτώσεις της µοντελοποίησης Συστηµάτων Αυτοµάτου Ελέγχου (ΣΑΕ- Control Systems). εν θα αναπτυχθούν θεωρητικά τα Σ.Α.Ε. αλλά θα παρουσιαστούν οι έννοιες συστηµάτων open loop, closed loop, transfer function, feedback, controller. 20

21 Simulation of an open loop system Από το continuous επιλέγουµε transfer function και το σέρνουµε στο παράθυρο του µοντέλου. Κάνουµε διπλό κλικ πάνω στο transfer function και ορίζουµε την κατάλληλη συνάρτηση. Από το sinks επιλέγουµε το scope και το σέρνουµε στο παράθυρο του µοντέλου. Ενώνουµε µε βέλη όλα τα αντικείµενα. Από το µενού simulink επιλέγουµε start για να γίνει η προσοµοίωση. Στο γράφηµα που εµφανίζεται κάνουµε δεξί κλικ και επιλέγουµε autoscale. 21
22 Παράδειγµα
23 Εντολές Matlab Η ανάπτυξη του συστήµατος µπορεί να γίνει και µε την βοήθεια εντολών του Matlab : Κώδικας num=2 den=[1 1 10] sys=tf(num, den) [y,x,t]=step(num, den) plot(t,y) 23
24 Παράδειγµα 4 - Closed Loop systems 24
25 Παράδειγµα 4 (απόκριση) Με απόκριση : 25
26 ιαφορές open loop & closed loop Παρατηρούµε την διαφορά στις 2 αποκρίσεις του ανοικτού και του κλειστού συστήµατος Βλέπουµε ότι πρέπει να βάλουµε κατάλληλη τιµή στο Gain,για να µπορέσει το κλειστό σύστηµα να έχει παραπλήσια απόκριση µε το ανοικτό σύστηµα 26
27 Συγκριση αποκρίσεων 27
28 Κώδικας Matlab κλειστού συστήµατος Ο αντίστοιχος κώδικας για το κλειστό σύστηµα είναι : Κώδικας num=1 den=[1 1 10] sys1=tf(num, den) sys2=1 sys=feedback(sys1, sys2) [y,x]=step(sys) plot(x,y) 28
Προγραμματισμός Ηλεκτρονικών Υπολογιστών 2 - Εργαστήριο
 Προγραμματισμός Ηλεκτρονικών Υπολογιστών 2 - Εργαστήριο Ενότητα 11: Simulink Διδάσκουσα: Τσαγκαλίδου Ροδή Τμήμα: Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες
Προγραμματισμός Ηλεκτρονικών Υπολογιστών 2 - Εργαστήριο Ενότητα 11: Simulink Διδάσκουσα: Τσαγκαλίδου Ροδή Τμήμα: Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες
ΕΙΣΑΓΩΓΗ ΣΤΟ SIMULINK
 EΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ Σχολή Χηµικών Μηχανικών Τοµέας ΙΙ, Aνάλυσης, Σχεδιασµού & Aνάπτυξης ιεργασιών & Συστηµάτων Εργαστήριο Αυτόµατης Ρύθµισης και Πληροφορικής ΕΙΣΑΓΩΓΗ ΣΤΟ SIMULINK Επιµέλεια: Εργαστήριο
EΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ Σχολή Χηµικών Μηχανικών Τοµέας ΙΙ, Aνάλυσης, Σχεδιασµού & Aνάπτυξης ιεργασιών & Συστηµάτων Εργαστήριο Αυτόµατης Ρύθµισης και Πληροφορικής ΕΙΣΑΓΩΓΗ ΣΤΟ SIMULINK Επιµέλεια: Εργαστήριο
Συστήματα Αυτομάτου Ελέγχου
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Καθ. Εφαρμογών: Σ. Βασιλειάδου Εργαστήριο Συστήματα Αυτομάτου Ελέγχου για Ηλεκτρολόγους Μηχανικούς Εργαστηριακές Ασκήσεις Χειμερινό
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Καθ. Εφαρμογών: Σ. Βασιλειάδου Εργαστήριο Συστήματα Αυτομάτου Ελέγχου για Ηλεκτρολόγους Μηχανικούς Εργαστηριακές Ασκήσεις Χειμερινό
To SIMULINK του Matlab
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΧΗΜΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ Β ΧΗΜΙΚΗΣ ΜΗΧΑΝΙΚΗΣ ΚΑΘ. Κ. ΚΥΠΑΡΙΣΣΙΔΗΣ, ΛΕΚΤΟΡΑΣ Χ. ΧΑΤΖΗΔΟΥΚΑΣ Τ.Θ. 472 54 124 ΘΕΣΣΑΛΟΝΙΚΗ Μάθημα: ΡΥΘΜΙΣΗ ΣΥΣΤΗΜΑΤΩΝ Ακαδ.
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΧΗΜΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ Β ΧΗΜΙΚΗΣ ΜΗΧΑΝΙΚΗΣ ΚΑΘ. Κ. ΚΥΠΑΡΙΣΣΙΔΗΣ, ΛΕΚΤΟΡΑΣ Χ. ΧΑΤΖΗΔΟΥΚΑΣ Τ.Θ. 472 54 124 ΘΕΣΣΑΛΟΝΙΚΗ Μάθημα: ΡΥΘΜΙΣΗ ΣΥΣΤΗΜΑΤΩΝ Ακαδ.
Συστήματα Αυτομάτου Ελέγχου
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Καθ. Εφαρμογών: Σ. Βασιλειάδου Εργαστήριο Συστήματα Αυτομάτου Ελέγχου για Ηλεκτρολόγους Μηχανικούς Εργαστηριακές Ασκήσεις Χειμερινό
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Καθ. Εφαρμογών: Σ. Βασιλειάδου Εργαστήριο Συστήματα Αυτομάτου Ελέγχου για Ηλεκτρολόγους Μηχανικούς Εργαστηριακές Ασκήσεις Χειμερινό
2014 Παρίσης Κ., Καθηγητής
 Είναι μια προέκταση του Matlab με την δυνατότητα μοντελοποίησης, προσομοίωσης και ανάλυσης συστημάτων μέσω ενός γραφικού περιβάλλοντος χρήστη (GUI). Η κατασκευή ενός μοντέλου είναι πολύ απλή και γρήγορη
Είναι μια προέκταση του Matlab με την δυνατότητα μοντελοποίησης, προσομοίωσης και ανάλυσης συστημάτων μέσω ενός γραφικού περιβάλλοντος χρήστη (GUI). Η κατασκευή ενός μοντέλου είναι πολύ απλή και γρήγορη
Δυναμική Μηχανών I. Διάλεξη 10. Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
 Δυναμική Μηχανών I Διάλεξη 10 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1 Περιεχόμενα Προσομοίωση απόκρισης συστήματος στο MATLAB μέσω της συνάρτησης ode45 (Runge-Kutta) Προσομοίωση απόκρισης
Δυναμική Μηχανών I Διάλεξη 10 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1 Περιεχόμενα Προσομοίωση απόκρισης συστήματος στο MATLAB μέσω της συνάρτησης ode45 (Runge-Kutta) Προσομοίωση απόκρισης
Δυναμική Μηχανών I. Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink
 Δυναμική Μηχανών I 5 6 Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε
Δυναμική Μηχανών I 5 6 Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε
12 o Εργαστήριο Σ.Α.Ε
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 12 o Εργαστήριο Σ.Α.Ε Ενότητα: Προσομοίωση Σ.Α.Ε. με SIMULINK Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 12 o Εργαστήριο Σ.Α.Ε Ενότητα: Προσομοίωση Σ.Α.Ε. με SIMULINK Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Simulation Users Manual
 Simulation Users Manual πτυχιακή αυτή ασχολήθηκε µε την εφαρµογή των συστηµάτων και των τεχνολογιών του αυτόµατου ελέγχου στην ελληνική βιοµηχανία. Συγκεκριµένα, ανέπτυξε και µοντελοποίησε ένα τµήµα της
Simulation Users Manual πτυχιακή αυτή ασχολήθηκε µε την εφαρµογή των συστηµάτων και των τεχνολογιών του αυτόµατου ελέγχου στην ελληνική βιοµηχανία. Συγκεκριµένα, ανέπτυξε και µοντελοποίησε ένα τµήµα της
MATLAB. Εισαγωγή στο SIMULINK. Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής
 MATLAB Εισαγωγή στο SIMULINK Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής Εισαγωγή στο Simulink - Βιβλιοθήκες - Παραδείγματα Εκκίνηση BLOCKS click ή Βιβλιοθήκες Νέο αρχείο click ή Προσθήκη block σε αρχείο
MATLAB Εισαγωγή στο SIMULINK Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής Εισαγωγή στο Simulink - Βιβλιοθήκες - Παραδείγματα Εκκίνηση BLOCKS click ή Βιβλιοθήκες Νέο αρχείο click ή Προσθήκη block σε αρχείο
Προσομoίωση Απόκρισης Συστήματος στο MATLAB
 Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Προσομoίωση Απόκρισης Συστήματος στο MATLAB Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Προσομoίωση Απόκρισης Συστήματος στο MATLAB του καθ. Ιωάννη
Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Προσομoίωση Απόκρισης Συστήματος στο MATLAB Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Προσομoίωση Απόκρισης Συστήματος στο MATLAB του καθ. Ιωάννη
ΕΡΓΑΣΤΗΡΙΟ ΑΝΑΛΟΓΙΚΩΝ & ΨΗΦΙΑΚΩΝ ΕΠΙΚΟΙΝΩΝΙΩΝ
 Σχολή Θετικών Επιστημών και Τεχνολογίας Τμήμα Επιστήμης και Τεχνολογίας Τηλεπικοινωνιών ΕΡΓΑΣΤΗΡΙΟ ΑΝΑΛΟΓΙΚΩΝ & ΨΗΦΙΑΚΩΝ ΕΠΙΚΟΙΝΩΝΙΩΝ ΕΠΙΚΟΙΝΩΝΙΕΣ ΙI Βασική Θεωρία Εργαστήριο 1 ο : Εισαγωγή στο Simulink
Σχολή Θετικών Επιστημών και Τεχνολογίας Τμήμα Επιστήμης και Τεχνολογίας Τηλεπικοινωνιών ΕΡΓΑΣΤΗΡΙΟ ΑΝΑΛΟΓΙΚΩΝ & ΨΗΦΙΑΚΩΝ ΕΠΙΚΟΙΝΩΝΙΩΝ ΕΠΙΚΟΙΝΩΝΙΕΣ ΙI Βασική Θεωρία Εργαστήριο 1 ο : Εισαγωγή στο Simulink
Χρήση του προγράµµατος MatLab στον αυτόµατο έλεγχο
 Χρήση του προγράµµατος MatLab στον αυτόµατο έλεγχο Κατά τη µελέτη ενός συστήµατος είναι απαραίτητο να επιλύσουµε το µαθηµατικό µοντέλο προκειµένου βρούµε την χρονική και αρµονική απόκριση αυτού. Προκειµένου
Χρήση του προγράµµατος MatLab στον αυτόµατο έλεγχο Κατά τη µελέτη ενός συστήµατος είναι απαραίτητο να επιλύσουµε το µαθηµατικό µοντέλο προκειµένου βρούµε την χρονική και αρµονική απόκριση αυτού. Προκειµένου
Συστήματα Αυτομάτου Ελέγχου ΙΙ Γιώργος Σούλτης 167
 Προσομοίωση πραγματικών συστημάτων στο MATLAB Είδαμε μέχρι τώρα πως μπορούμε να υπολογίσουμε την συνάρτηση μεταφοράς σε πραγματικά συστήματα. Ο υπολογισμός της συνάρτησης μεταφοράς στη ουσία είναι η «γραμμικοποίηση»
Προσομοίωση πραγματικών συστημάτων στο MATLAB Είδαμε μέχρι τώρα πως μπορούμε να υπολογίσουμε την συνάρτηση μεταφοράς σε πραγματικά συστήματα. Ο υπολογισμός της συνάρτησης μεταφοράς στη ουσία είναι η «γραμμικοποίηση»
Χρήση του Simulation Interface Toolkit για την Εξομοίωση και Πειραματισμό Συστημάτων Αυτομάτου Ελέγχου
 Χρήση του Simulation Interface Toolkit για την Εξομοίωση και Πειραματισμό Συστημάτων Αυτομάτου Ελέγχου Γ. Νικολακόπουλος, Μ. Κουνδουράκης, Α. Τζες και Γ. Γεωργούλας Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων
Χρήση του Simulation Interface Toolkit για την Εξομοίωση και Πειραματισμό Συστημάτων Αυτομάτου Ελέγχου Γ. Νικολακόπουλος, Μ. Κουνδουράκης, Α. Τζες και Γ. Γεωργούλας Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων
ΕΡΓΑΣΤΗΡΙΟ ΑΝΑΛΟΓΙΚΩΝ & ΨΗΦΙΑΚΩΝ ΕΠΙΚΟΙΝΩΝΙΩΝ
 Σχολή Οικονομίας Διοίκησης και Πληροφορικής Τμήμα Πληροφορικής και Τηλεπικοινωνιών ΕΡΓΑΣΤΗΡΙΟ ΑΝΑΛΟΓΙΚΩΝ & ΨΗΦΙΑΚΩΝ ΕΠΙΚΟΙΝΩΝΙΩΝ Αρχές Τηλ/ων Συστημάτων Εργαστήριο 1 ο : Εισαγωγή στο Simulink-Σήματα ημιτόνου-awgn
Σχολή Οικονομίας Διοίκησης και Πληροφορικής Τμήμα Πληροφορικής και Τηλεπικοινωνιών ΕΡΓΑΣΤΗΡΙΟ ΑΝΑΛΟΓΙΚΩΝ & ΨΗΦΙΑΚΩΝ ΕΠΙΚΟΙΝΩΝΙΩΝ Αρχές Τηλ/ων Συστημάτων Εργαστήριο 1 ο : Εισαγωγή στο Simulink-Σήματα ημιτόνου-awgn
ΕΡΓΑΣΤΗΡΙΟ ΑΝΑΛΟΓΙΚΩΝ & ΨΗΦΙΑΚΩΝ ΕΠΙΚΟΙΝΩΝΙΩΝ
 Σχολή Θετικών Επιστημών και Τεχνολογίας Τμήμα Επιστήμης και Τεχνολογίας Τηλεπικοινωνιών ΕΡΓΑΣΤΗΡΙΟ ΑΝΑΛΟΓΙΚΩΝ & ΨΗΦΙΑΚΩΝ ΕΠΙΚΟΙΝΩΝΙΩΝ ΕΠΙΚΟΙΝΩΝΙΕΣ Ι Εργαστήριο 1 ο : Εισαγωγή στο Simulink-Σήματα ημιτόνου-awgn
Σχολή Θετικών Επιστημών και Τεχνολογίας Τμήμα Επιστήμης και Τεχνολογίας Τηλεπικοινωνιών ΕΡΓΑΣΤΗΡΙΟ ΑΝΑΛΟΓΙΚΩΝ & ΨΗΦΙΑΚΩΝ ΕΠΙΚΟΙΝΩΝΙΩΝ ΕΠΙΚΟΙΝΩΝΙΕΣ Ι Εργαστήριο 1 ο : Εισαγωγή στο Simulink-Σήματα ημιτόνου-awgn
ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ΜΕΣΩ ΤΟΥ ΙΑ ΙΚΤΥΟΥ
 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ΜΕΣΩ ΤΟΥ ΙΑ ΙΚΤΥΟΥ ΕΛΕΓΧΟΣ ΓΩΝΙΑΚΗΣ ΘΕΣΗΣ ΚΙΝΗΤΗΡΑ DC ΕΡΓΑΣΤΗΡΙΟ ΣΑΕ ΤΟΥ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΤΗΣ SIENNA 1. ΠΕΡΙΓΡΑΦΗ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΙΑΤΑΞΗΣ Η εργαστηριακή διάταξη για το πείραµα ελέγχου γωνιακής
ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ΜΕΣΩ ΤΟΥ ΙΑ ΙΚΤΥΟΥ ΕΛΕΓΧΟΣ ΓΩΝΙΑΚΗΣ ΘΕΣΗΣ ΚΙΝΗΤΗΡΑ DC ΕΡΓΑΣΤΗΡΙΟ ΣΑΕ ΤΟΥ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΤΗΣ SIENNA 1. ΠΕΡΙΓΡΑΦΗ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΙΑΤΑΞΗΣ Η εργαστηριακή διάταξη για το πείραµα ελέγχου γωνιακής
ΕΡΓΑΣΤΗΡΙΟ ΑΝΑΛΟΓΙΚΩΝ & ΨΗΦΙΑΚΩΝ ΕΠΙΚΟΙΝΩΝΙΩΝ
 Σχολή Θετικών Επιστημών και Τεχνολογίας Τμήμα Επιστήμης και Τεχνολογίας Τηλεπικοινωνιών ΕΡΓΑΣΤΗΡΙΟ ΑΝΑΛΟΓΙΚΩΝ & ΨΗΦΙΑΚΩΝ ΕΠΙΚΟΙΝΩΝΙΩΝ Αρχές Τηλ/ων Συστημάτων Εργαστήριο 2 ο : Φάσμα σημάτων - AWGN Βοηθητικές
Σχολή Θετικών Επιστημών και Τεχνολογίας Τμήμα Επιστήμης και Τεχνολογίας Τηλεπικοινωνιών ΕΡΓΑΣΤΗΡΙΟ ΑΝΑΛΟΓΙΚΩΝ & ΨΗΦΙΑΚΩΝ ΕΠΙΚΟΙΝΩΝΙΩΝ Αρχές Τηλ/ων Συστημάτων Εργαστήριο 2 ο : Φάσμα σημάτων - AWGN Βοηθητικές
ΥΝΑΜΙΚΗ ΠΡΟΣΟΜΟΙΩΣΗ ΣΥΣΤΗΜΑΤΩΝ ΣΥΓΧΡΟΝΩΝ, ΑΣΥΧΡΟΝΩΝ ΚΑΙ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ ΜΗΧΑΝΩΝ ΣΕ ΠΕΡΙΒΑΛΛΟΝ MATLAB 6.1, 6.5
 ΣΧΟΛΗ ΝΑΥΤΙΚΩΝ ΟΚΙΜΩΝ Τοµέας Ηλεκτροτεχνίας και Ηλεκτρονικών Υπολογιστών Εργαστήρια Ηλεκτροτεχνίας 3 ο Έτος Μηχανικών ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΥΝΑΜΙΚΗ ΠΡΟΣΟΜΟΙΩΣΗ ΣΥΣΤΗΜΑΤΩΝ ΣΥΓΧΡΟΝΩΝ, ΑΣΥΧΡΟΝΩΝ ΚΑΙ ΣΥΝΕΧΟΥΣ
ΣΧΟΛΗ ΝΑΥΤΙΚΩΝ ΟΚΙΜΩΝ Τοµέας Ηλεκτροτεχνίας και Ηλεκτρονικών Υπολογιστών Εργαστήρια Ηλεκτροτεχνίας 3 ο Έτος Μηχανικών ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΥΝΑΜΙΚΗ ΠΡΟΣΟΜΟΙΩΣΗ ΣΥΣΤΗΜΑΤΩΝ ΣΥΓΧΡΟΝΩΝ, ΑΣΥΧΡΟΝΩΝ ΚΑΙ ΣΥΝΕΧΟΥΣ
Εισαγωγή στο MATLAB. Βιομηχανικός Αυτοματισμός Γιώργος Σούλτης
 Εισαγωγή στο MATLAB Όταν μιλάμε για ψηφιακή προσομοίωση εννοούμε την αριθμητική επίλυση των εξισώσεων μέσω ειδικού λογισμικού. Η ιλιγγιώδεις εξελίξεις στην πληροφορική δημιουργούν καθημερινά νέα δεδομένα.
Εισαγωγή στο MATLAB Όταν μιλάμε για ψηφιακή προσομοίωση εννοούμε την αριθμητική επίλυση των εξισώσεων μέσω ειδικού λογισμικού. Η ιλιγγιώδεις εξελίξεις στην πληροφορική δημιουργούν καθημερινά νέα δεδομένα.
ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΕΛΕΓΧΟΣ ΑΝΑΣΤΡΟΦΟΥ ΕΚΚΡΕΜΟΥΣ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΕΛΕΓΧΟΣ ΑΝΑΣΤΡΟΦΟΥ ΕΚΚΡΕΜΟΥΣ Χειράκης Δαμιανός ΑΕΜ: 3656 Επιβλέπων Καθηγητής: Τσιριγώτης Γεώργιος
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΕΛΕΓΧΟΣ ΑΝΑΣΤΡΟΦΟΥ ΕΚΚΡΕΜΟΥΣ Χειράκης Δαμιανός ΑΕΜ: 3656 Επιβλέπων Καθηγητής: Τσιριγώτης Γεώργιος
ΣΥΝΟΠΤΙΚΟΣ Ο ΗΓΟΣ MATLAB SIMULINK ΓΙΑ ΤΟ ΜΑΘΗΜΑ ΣΑΕ Ι ΑΡΝΑΟΥΤΑΚΗΣ ΝΕΚΤΑΡΙΟΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ ΚΑΙ ΙΟΙΚΗΣΗΣ ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ
 ΣΥΝΟΠΤΙΚΟΣ Ο ΗΓΟΣ MATLAB SIMULINK ΓΙΑ ΤΟ ΜΑΘΗΜΑ ΣΑΕ Ι ΑΡΝΑΟΥΤΑΚΗΣ ΝΕΚΤΑΡΙΟΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ ΚΑΙ ΙΟΙΚΗΣΗΣ ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΣΕΠΤΕΜΒΡΙΟΣ 2002 1 ΣΥΝΟΠΤΙΚΟΣ Ο ΗΓΟΣ MATLAB SIMULINK ΓΙΑ ΤΟ ΜΑΘΗΜΑ
ΣΥΝΟΠΤΙΚΟΣ Ο ΗΓΟΣ MATLAB SIMULINK ΓΙΑ ΤΟ ΜΑΘΗΜΑ ΣΑΕ Ι ΑΡΝΑΟΥΤΑΚΗΣ ΝΕΚΤΑΡΙΟΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ ΚΑΙ ΙΟΙΚΗΣΗΣ ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΣΕΠΤΕΜΒΡΙΟΣ 2002 1 ΣΥΝΟΠΤΙΚΟΣ Ο ΗΓΟΣ MATLAB SIMULINK ΓΙΑ ΤΟ ΜΑΘΗΜΑ
Υλοποιήσεις Ψηφιακών Φίλτρων
 Ψηφιακή Επεξεργασία Σηµάτων 10 Υλοποιήσεις Ψηφιακών Φίλτρων Α. Εισαγωγή Οποιοδήποτε γραµµικό χρονικά αµετάβλητο σύστηµα διακριτού χρόνου χαρακτηρίζεται πλήρως από τη συνάρτηση µεταφοράς του η οποία έχει
Ψηφιακή Επεξεργασία Σηµάτων 10 Υλοποιήσεις Ψηφιακών Φίλτρων Α. Εισαγωγή Οποιοδήποτε γραµµικό χρονικά αµετάβλητο σύστηµα διακριτού χρόνου χαρακτηρίζεται πλήρως από τη συνάρτηση µεταφοράς του η οποία έχει
2 η Εργαστηριακή Άσκηση Simulink
 2 η Εργαστηριακή Άσκηση Simulink Εξισωτές ZF και MMSE ΠΜΣ Προηγμένα Τηλεπικοινωνιακά Συστήματα και Δίκτυα Μάθημα Μοντελοποίηση, Ταυτοποίηση, Εξίσωση Τηλεπικοινωνιακών Διαύλων Διδάσκων: Νικόλαος Σαγιάς
2 η Εργαστηριακή Άσκηση Simulink Εξισωτές ZF και MMSE ΠΜΣ Προηγμένα Τηλεπικοινωνιακά Συστήματα και Δίκτυα Μάθημα Μοντελοποίηση, Ταυτοποίηση, Εξίσωση Τηλεπικοινωνιακών Διαύλων Διδάσκων: Νικόλαος Σαγιάς
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα. 4o Εργαστήριο Σ.Α.Ε
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 4o Εργαστήριο Σ.Α.Ε Ενότητα : Μελέτη και Σχεδίαση Σ.Α.Ε Με χρήση του MATLAB Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 4o Εργαστήριο Σ.Α.Ε Ενότητα : Μελέτη και Σχεδίαση Σ.Α.Ε Με χρήση του MATLAB Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν
ουλεύοντας µε το Finale (6η συνέχεια)
") ουλεύοντας µε το Finale (6η συνέχεια) MIDI Tool: Για την τελειότερη ακρόαση της παρτιτούρας µας Εισαγωγικά: Το Finale όπως και κάθε πρόγραµµα γραφής παρτιτούρας παρουσιάζει ένα µειονέκτηµα κατά την ακρόαση
ουλεύοντας µε το Finale (6η συνέχεια) MIDI Tool: Για την τελειότερη ακρόαση της παρτιτούρας µας Εισαγωγικά: Το Finale όπως και κάθε πρόγραµµα γραφής παρτιτούρας παρουσιάζει ένα µειονέκτηµα κατά την ακρόαση
Πανεπιστήμιο Δυτικής Μακεδονίας. Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών. Ηλεκτρονική Υγεία. Εργαστήριο 4 ο : MATLAB
 Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Ηλεκτρονική Υγεία Εργαστήριο 4 ο : MATLAB Αν. καθηγητής Αγγελίδης Παντελής e-mail: paggelidis@uowm.gr Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Άδειες
Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Ηλεκτρονική Υγεία Εργαστήριο 4 ο : MATLAB Αν. καθηγητής Αγγελίδης Παντελής e-mail: paggelidis@uowm.gr Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Άδειες
Συστήματα αυτομάτου ελέγχου (ΙΙ) Modern Control Theory
 Modern Control Theory") Σ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Συστήματα αυτομάτου ελέγχου (ΙΙ) Modern Control Theory (Προσομοίωση δυναμικών συστημάτων) Διδάσκων : Αναπληρωτής Καθηγητής 1 Προσομοίωση δυναμικών συστημάτων Θα
Σ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Συστήματα αυτομάτου ελέγχου (ΙΙ) Modern Control Theory (Προσομοίωση δυναμικών συστημάτων) Διδάσκων : Αναπληρωτής Καθηγητής 1 Προσομοίωση δυναμικών συστημάτων Θα
ΓΕΝΝΗΤΡΙΑ MUX ΚΑΤΑΓΡΑΦΙΚΟ ΗΜΙΤΟΝΙΚΟΥ ΣΗΜΑΤΟΣ. σχήμα A
 1 Με απλά βήματα θα κατασκευάσουμε ένα απλό μοντέλο,με σκοπό να κεντρίσουμε το ενδιαφέρον του αναγνώστη,αν και είναι κατανοητό ότι δεν έχουν ακόμη αναλυθεί οι μεγάλες δυνατότητες του προγράμματος, MATLAB-SIMULINK.
1 Με απλά βήματα θα κατασκευάσουμε ένα απλό μοντέλο,με σκοπό να κεντρίσουμε το ενδιαφέρον του αναγνώστη,αν και είναι κατανοητό ότι δεν έχουν ακόμη αναλυθεί οι μεγάλες δυνατότητες του προγράμματος, MATLAB-SIMULINK.
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΘΡΑΚΗΣ Τμήμα Μηχανικών Πληροφορικής Τ.Ε. ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Εργαστήριο
 ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΘΡΑΚΗΣ Τμήμα Μηχανικών Πληροφορικής Τ.Ε ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Εργαστήριο Καθηγητής: Τσιριγώτης Γεώργιος Καβάλα, 2014 1 ΕΙΣΑΓΩΓΗ ΣΤΟ SIMULINK Το MATLAB 1 είναι ένα μαθηματικό λογισμικό,
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΘΡΑΚΗΣ Τμήμα Μηχανικών Πληροφορικής Τ.Ε ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Εργαστήριο Καθηγητής: Τσιριγώτης Γεώργιος Καβάλα, 2014 1 ΕΙΣΑΓΩΓΗ ΣΤΟ SIMULINK Το MATLAB 1 είναι ένα μαθηματικό λογισμικό,
EΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ
 EΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ Σχολή Χηµικών Μηχανικών Τοµέας ΙΙ, Aνάλυσης, Σχεδιασµού & Aνάπτυξης ιεργασιών & Συστηµάτων Μονάδα Αυτόµατης Ρύθµισης και Πληροφορικης ΜΟΝΤΕΛΟΠΟΙΗΣΗ ΚΑΙ ΠΡΟΣΟΜΟΙΩΣΗ ΥΝΑΜΙΚΩΝ
EΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ Σχολή Χηµικών Μηχανικών Τοµέας ΙΙ, Aνάλυσης, Σχεδιασµού & Aνάπτυξης ιεργασιών & Συστηµάτων Μονάδα Αυτόµατης Ρύθµισης και Πληροφορικης ΜΟΝΤΕΛΟΠΟΙΗΣΗ ΚΑΙ ΠΡΟΣΟΜΟΙΩΣΗ ΥΝΑΜΙΚΩΝ
Σχεδίαση Σ.Α.Ε: Σχεδίαση µε το Γεωµετρικό Τόπο Ριζών
 ΚΕΣ : Αυτόµατος Έλεγχος ΚΕΣ Αυτόµατος Έλεγχος Σχεδίαση Σ.Α.Ε: Σχεδίαση µε το Γεωµετρικό Τόπο Ριζών ΚΕΣ : Αυτόµατος Έλεγχος Βιβλιογραφία Ενότητας Παρασκευόπουλος []: Εφαρµογές, Κεφάλαιο 9: Ενότητες 9.-9.4
ΚΕΣ : Αυτόµατος Έλεγχος ΚΕΣ Αυτόµατος Έλεγχος Σχεδίαση Σ.Α.Ε: Σχεδίαση µε το Γεωµετρικό Τόπο Ριζών ΚΕΣ : Αυτόµατος Έλεγχος Βιβλιογραφία Ενότητας Παρασκευόπουλος []: Εφαρµογές, Κεφάλαιο 9: Ενότητες 9.-9.4
ΑΣΚΗΣΗ Για τα µαθήµατα: Εισαγωγή στον Αυτόµατο Έλεγχο (5 ο Εξάµηνο ΣΗΜΜΥ) Σχεδίαση Συστηµάτων Αυτοµάτου Ελέγχου (6 ο Εξάµηνο ΣΗΜΜΥ)
 Σχεδίαση Συστηµάτων Αυτοµάτου Ελέγχου (6 ο Εξάµηνο ΣΗΜΜΥ)") ΑΣΚΗΣΗ 7-2-27 Για τα µαθήµατα: Εισαγωγή στον Αυτόµατο Έλεγχο (5 ο Εξάµηνο ΣΗΜΜΥ) Σχεδίαση Συστηµάτων Αυτοµάτου Ελέγχου (6 ο Εξάµηνο ΣΗΜΜΥ) Ακαδηµαϊκό Έτος: 27-28 ιδάσκων:γ. Π. Παπαβασιλόπουλος Επιµέλεια
ΑΣΚΗΣΗ 7-2-27 Για τα µαθήµατα: Εισαγωγή στον Αυτόµατο Έλεγχο (5 ο Εξάµηνο ΣΗΜΜΥ) Σχεδίαση Συστηµάτων Αυτοµάτου Ελέγχου (6 ο Εξάµηνο ΣΗΜΜΥ) Ακαδηµαϊκό Έτος: 27-28 ιδάσκων:γ. Π. Παπαβασιλόπουλος Επιµέλεια
Προσοµοίωση κυκλωµάτων ηλεκτρονικών ισχύος µε το λογισµικό Matlab/Simulink
 Αλεξάνδρειο Τεχνολογικό Ίδρυµα Θεσσαλονίκης Σχολή Τεχνολογικών Εφαρµογών Τµήµα Ηλεκτρονικής Πτυχιακή εργασία Προσοµοίωση κυκλωµάτων ηλεκτρονικών ισχύος µε το λογισµικό Matlab/Simulink Κωδικός: 09243YΣ
Αλεξάνδρειο Τεχνολογικό Ίδρυµα Θεσσαλονίκης Σχολή Τεχνολογικών Εφαρµογών Τµήµα Ηλεκτρονικής Πτυχιακή εργασία Προσοµοίωση κυκλωµάτων ηλεκτρονικών ισχύος µε το λογισµικό Matlab/Simulink Κωδικός: 09243YΣ
Εισαγωγή στο MATLAB. Συστήματα Αυτομάτου Ελέγχου ΙΙ Γιώργος Σούλτης
 Εισαγωγή στο MATLAB Η μελέτη των συστημάτων αυτομάτου ελέγχου στηρίζεται σε επιλύσεις γραμμικών διαφορικών εξισώσεων. Οι επιλύσεις αυτές παρόλο που μιλάμε για την πιο απλή μορφή διαφορικής εξίσωσης (γραμμική)
Εισαγωγή στο MATLAB Η μελέτη των συστημάτων αυτομάτου ελέγχου στηρίζεται σε επιλύσεις γραμμικών διαφορικών εξισώσεων. Οι επιλύσεις αυτές παρόλο που μιλάμε για την πιο απλή μορφή διαφορικής εξίσωσης (γραμμική)
Βιομηχανικοί Ελεγκτές
 Βιομηχανικοί Ελεγκτές Σημειώσεις Εργαστηρίου Έλεγχος Στάθμης Δοχείου με P.I.D. Ελεγκτή Περιεχόμενα 1. Τρόπος Εισαγωγής στο πρόγραμμα εξομοίωσης. 2. Τρόπος λειτουργίας εξομοιωτή. 3. Αναγνώριση ιδιοτήτων
Βιομηχανικοί Ελεγκτές Σημειώσεις Εργαστηρίου Έλεγχος Στάθμης Δοχείου με P.I.D. Ελεγκτή Περιεχόμενα 1. Τρόπος Εισαγωγής στο πρόγραμμα εξομοίωσης. 2. Τρόπος λειτουργίας εξομοιωτή. 3. Αναγνώριση ιδιοτήτων
ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB)
") ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB) ΤΕΙ Α.Μ.Θ. ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΘΗΓΗΤΗΣ ΤΣΙΡΙΓΩΤΗΣ ΓΕΩΡΓΙΟΣ ΚΑΒΑΛΑ 013 ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB) 1.1 ΕΞΟΜΟΙΩΣΗ ΑΝΑΛΟΓΙΚΩΝ Σ.Α.Ε 1. Εισαγωγή
ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB) ΤΕΙ Α.Μ.Θ. ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΘΗΓΗΤΗΣ ΤΣΙΡΙΓΩΤΗΣ ΓΕΩΡΓΙΟΣ ΚΑΒΑΛΑ 013 ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB) 1.1 ΕΞΟΜΟΙΩΣΗ ΑΝΑΛΟΓΙΚΩΝ Σ.Α.Ε 1. Εισαγωγή
Πληροφορική. Ενότητα 11: Α. Εισαγωγή στην επίλυση ΔΕ με Matlab: Αρμονικές Ταλαντώσεις. Β. Εισαγωγή στο/στη Simulink
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Πληροφορική Ενότητα 11: Α. Εισαγωγή στην επίλυση ΔΕ με Matlab: Αρμονικές Ταλαντώσεις. Β. Εισαγωγή στο/στη Simulink Κωνσταντίνος Καρατζάς
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Πληροφορική Ενότητα 11: Α. Εισαγωγή στην επίλυση ΔΕ με Matlab: Αρμονικές Ταλαντώσεις. Β. Εισαγωγή στο/στη Simulink Κωνσταντίνος Καρατζάς
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων
 Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
Συστήματα Αυτομάτου Ελέγχου & Ρυθμίσεως Μηχανών
 Συστήματα Αυτομάτου Ελέγχου & Ρυθμίσεως Μηχανών Κων/νος Ι. Κυριακόπουλος Καθηγητής ΕΜΠ (hhp://users.ntua.gr/kkyria/) Kostas J. Kyriakopoulos - Σ.Α.Ε. ΙΙ 1 Δομή της Ύλης του Μαθήματος Εισαγωγή στο Χώρο
Συστήματα Αυτομάτου Ελέγχου & Ρυθμίσεως Μηχανών Κων/νος Ι. Κυριακόπουλος Καθηγητής ΕΜΠ (hhp://users.ntua.gr/kkyria/) Kostas J. Kyriakopoulos - Σ.Α.Ε. ΙΙ 1 Δομή της Ύλης του Μαθήματος Εισαγωγή στο Χώρο
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ & ΘΡΑΚΗΣ
 ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ & ΘΡΑΚΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε Πτυχιακή εργασία ΜΕΛΕΤΗ ΣΥΣΤΗΜΑΤΟΣ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΘΕΣΗΣ ΓΡΑΦΙΔΑΣ ΕΚΤΥΠΩΤΗ ΕΚΠΟΝΗΣΗ: ΚΟΛΙΩΤΣΑ ΜΑΡΙΑ ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΤΣΙΡΙΓΩΤΗΣ
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ & ΘΡΑΚΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε Πτυχιακή εργασία ΜΕΛΕΤΗ ΣΥΣΤΗΜΑΤΟΣ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΘΕΣΗΣ ΓΡΑΦΙΔΑΣ ΕΚΤΥΠΩΤΗ ΕΚΠΟΝΗΣΗ: ΚΟΛΙΩΤΣΑ ΜΑΡΙΑ ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΤΣΙΡΙΓΩΤΗΣ
ιορθώσεις Συµπληρώσεις Αναµορφώσεις κειµένων: Γεώργιος Παυλίδης Κωνσταντίνος Σταυρόγλου
 Έκδοση 2 Μάρτιος 2004 Οι ασκήσεις αυτές βασίζονται στα αντίστοιχα εργαστήρια Ψηφιακής Επεξεργασίας Σήµατος το Πανεπιστηµίου του Berkeley, California Στα τελική διαµόρφωση του κειµένου έχουν βοηθήσει Βασικό
Έκδοση 2 Μάρτιος 2004 Οι ασκήσεις αυτές βασίζονται στα αντίστοιχα εργαστήρια Ψηφιακής Επεξεργασίας Σήµατος το Πανεπιστηµίου του Berkeley, California Στα τελική διαµόρφωση του κειµένου έχουν βοηθήσει Βασικό
Ο ΗΓΙΕΣ ΓΙΑ ΤΟ ΠΡΟΓΡΑΜΜΑ LINDO ΚΑΙ ΤΗΝ ΕΠΙΛΥΣΗ ΠΡΟΒΛΗΜΑΤΩΝ ΓΡΑΜΜΙΚΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ
 Ο ΗΓΙΕΣ ΓΙΑ ΤΟ ΠΡΟΓΡΑΜΜΑ LINDO ΚΑΙ ΤΗΝ ΕΠΙΛΥΣΗ ΠΡΟΒΛΗΜΑΤΩΝ ΓΡΑΜΜΙΚΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ Το LINDO (Linear Interactive and Discrete Optimizer) είναι ένα πολύ γνωστό λογισµικό για την επίλυση προβληµάτων γραµµικού,
Ο ΗΓΙΕΣ ΓΙΑ ΤΟ ΠΡΟΓΡΑΜΜΑ LINDO ΚΑΙ ΤΗΝ ΕΠΙΛΥΣΗ ΠΡΟΒΛΗΜΑΤΩΝ ΓΡΑΜΜΙΚΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ Το LINDO (Linear Interactive and Discrete Optimizer) είναι ένα πολύ γνωστό λογισµικό για την επίλυση προβληµάτων γραµµικού,
ΤΛΟΠΟΙΗΗ ΠΡΟΟΜΟΙΩΣΗ ΟΠΣΙΚΩΝ ΕΠΙΚΟΙΝΩΝΙΑΚΩΝ ΤΣΗΜΑΣΩΝ Ε ΠΕΡΙΒΑΛΛΟΝ MATLAB
 ΑΡΙΣΟΣΕΛΕΙΟ ΠΑΝΕΠΙΣΗΜΙΟ ΘΕΑΛΟΝΙΚΗ ΦΟΛΗ ΘΕΣΙΚΩΝ ΕΠΙΣΗΜΩΝ ΜΕΣΑΠΣΤΦΙΑΚΟ ΠΡΟΓΡΑΜΜΑ ΠΟΤΔΩΝ ΣΜΗΜΑΣΟ ΠΛΗΡΟΥΟΡΙΚΗ ΕΠΙΚΟΙΝΩΝΙΑΚΑ ΤΣΗΜΑΣΑ & ΣΕΦΝΟΛΟΓΙΕ ΤΛΟΠΟΙΗΗ ΠΡΟΟΜΟΙΩΣΗ ΟΠΣΙΚΩΝ ΕΠΙΚΟΙΝΩΝΙΑΚΩΝ ΤΣΗΜΑΣΩΝ Ε ΠΕΡΙΒΑΛΛΟΝ
ΑΡΙΣΟΣΕΛΕΙΟ ΠΑΝΕΠΙΣΗΜΙΟ ΘΕΑΛΟΝΙΚΗ ΦΟΛΗ ΘΕΣΙΚΩΝ ΕΠΙΣΗΜΩΝ ΜΕΣΑΠΣΤΦΙΑΚΟ ΠΡΟΓΡΑΜΜΑ ΠΟΤΔΩΝ ΣΜΗΜΑΣΟ ΠΛΗΡΟΥΟΡΙΚΗ ΕΠΙΚΟΙΝΩΝΙΑΚΑ ΤΣΗΜΑΣΑ & ΣΕΦΝΟΛΟΓΙΕ ΤΛΟΠΟΙΗΗ ΠΡΟΟΜΟΙΩΣΗ ΟΠΣΙΚΩΝ ΕΠΙΚΟΙΝΩΝΙΑΚΩΝ ΤΣΗΜΑΣΩΝ Ε ΠΕΡΙΒΑΛΛΟΝ
Συστήματα Αυτομάτου Ελέγχου & Ρυθμίσεως Μηχανών (h>p://)
") Συστήματα Αυτομάτου Ελέγχου & Ρυθμίσεως Μηχανών (h>p://) Κων/νος Ι. Κυριακόπουλος Καθηγητής ΕΜΠ (h>p://users.ntua.gr/kkyria/) Kostas J. Kyriakopoulos - Σ.Α.Ε. ΙΙ 1 Δομή της Ύλης του Μαθήματος Εισαγωγη
Συστήματα Αυτομάτου Ελέγχου & Ρυθμίσεως Μηχανών (h>p://) Κων/νος Ι. Κυριακόπουλος Καθηγητής ΕΜΠ (h>p://users.ntua.gr/kkyria/) Kostas J. Kyriakopoulos - Σ.Α.Ε. ΙΙ 1 Δομή της Ύλης του Μαθήματος Εισαγωγη
Προγραμματισμός Ηλεκτρονικών Υπολογιστών 2 - Εργαστήριο
 Προγραμματισμός Ηλεκτρονικών Υπολογιστών 2 - Εργαστήριο Ενότητα 9: Εισαγωγή στα Συστήματα Ανοικτού Ελέγχου Διδάσκουσα: Τσαγκαλίδου Ροδή Τμήμα: Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Προγραμματισμός Ηλεκτρονικών Υπολογιστών 2 - Εργαστήριο Ενότητα 9: Εισαγωγή στα Συστήματα Ανοικτού Ελέγχου Διδάσκουσα: Τσαγκαλίδου Ροδή Τμήμα: Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΑΠΟΚΡΙΣΗ ΣΥΣΤΗΜΑΤΩΝ ΣΤΟ ΠΕΔΙΟ ΤΟΥ ΧΡΟΝΟΥ ΚΑΙ ΤΩΝ ΣΥΧΝΟΤΗΤΩΝ
 ΑΠΟΚΡΙΣΗ ΣΥΣΤΗΜΑΤΩΝ ΣΤΟ ΠΕΔΙΟ ΤΟΥ ΧΡΟΝΟΥ ΚΑΙ ΤΩΝ ΣΥΧΝΟΤΗΤΩΝ ΣΚΟΠΟΣ ΤΗΣ ΑΣΚΗΣΗΣ Σημαντική πληροφορία για τη συμπεριφορά και την ευστάθεια ενός γραμμικού συστήματος, παίρνεται, μελετώντας την απόκρισή του
ΑΠΟΚΡΙΣΗ ΣΥΣΤΗΜΑΤΩΝ ΣΤΟ ΠΕΔΙΟ ΤΟΥ ΧΡΟΝΟΥ ΚΑΙ ΤΩΝ ΣΥΧΝΟΤΗΤΩΝ ΣΚΟΠΟΣ ΤΗΣ ΑΣΚΗΣΗΣ Σημαντική πληροφορία για τη συμπεριφορά και την ευστάθεια ενός γραμμικού συστήματος, παίρνεται, μελετώντας την απόκρισή του
ΑΕΝ / ΑΣΠΡΟΠΥΡΓΟΥ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΑΥΤΟΜΑΤΙΣΜΟΥ. Σημειώσεις για τη χρήση του MATLAB στα Συστήματα Αυτομάτου Ελέγχου
 ΑΕΝ / ΑΣΠΡΟΠΥΡΓΟΥ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΑΥΤΟΜΑΤΙΣΜΟΥ Σημειώσεις για τη χρήση του MATLAB στα Συστήματα Αυτομάτου Ελέγχου Κ. ΝΑΣΟΠΟΥΛΟΣ - Α. ΧΡΗΣΤΙ ΟΥ Κ. ΝΑΣΟΠΟΥΛΟΣ - Α. ΧΡΗΣΤΙ ΟΥ Οκτώβριος 011 MATLAB
ΑΕΝ / ΑΣΠΡΟΠΥΡΓΟΥ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΑΥΤΟΜΑΤΙΣΜΟΥ Σημειώσεις για τη χρήση του MATLAB στα Συστήματα Αυτομάτου Ελέγχου Κ. ΝΑΣΟΠΟΥΛΟΣ - Α. ΧΡΗΣΤΙ ΟΥ Κ. ΝΑΣΟΠΟΥΛΟΣ - Α. ΧΡΗΣΤΙ ΟΥ Οκτώβριος 011 MATLAB
1 η Εργαστηριακή Άσκηση MATLAB Εισαγωγή
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΗΠΕΙΡΟΥ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. Εργαστήριο Επεξεργασία Εικόνας & Βίντεο 1 η Εργαστηριακή Άσκηση MATLAB Εισαγωγή Νικόλαος Γιαννακέας Άρτα 2018 1 Εισαγωγή Το Matlab
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΗΠΕΙΡΟΥ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. Εργαστήριο Επεξεργασία Εικόνας & Βίντεο 1 η Εργαστηριακή Άσκηση MATLAB Εισαγωγή Νικόλαος Γιαννακέας Άρτα 2018 1 Εισαγωγή Το Matlab
Εισαγωγή στο MATLAB. Κολοβού Αθανασία, ΕΔΙΠ,
 Εισαγωγή στο MATLAB Κολοβού Αθανασία, ΕΔΙΠ, akolovou@di.uoa.gr Εγκατάσταση του Matlab Διανέμεται ελεύθερα στα μέλη του ΕΚΠΑ το λογισμικό MATLAB με 75 ταυτόχρονες (concurrent) άδειες χρήσης. Μπορείτε να
Εισαγωγή στο MATLAB Κολοβού Αθανασία, ΕΔΙΠ, akolovou@di.uoa.gr Εγκατάσταση του Matlab Διανέμεται ελεύθερα στα μέλη του ΕΚΠΑ το λογισμικό MATLAB με 75 ταυτόχρονες (concurrent) άδειες χρήσης. Μπορείτε να
ΚΕΦΑΛΑΙΟ 5. Matlab GUI για FWSVM και Global SVM
 ΚΕΦΑΛΑΙΟ 5 Matlab GUI για FWSVM και Global SVM Προκειμένου να γίνουν οι πειραματικές προσομοιώσεις του κεφαλαίου 4, αναπτύξαμε ένα γραφικό περιβάλλον (Graphical User Interface) που εξασφαλίζει την εύκολη
ΚΕΦΑΛΑΙΟ 5 Matlab GUI για FWSVM και Global SVM Προκειμένου να γίνουν οι πειραματικές προσομοιώσεις του κεφαλαίου 4, αναπτύξαμε ένα γραφικό περιβάλλον (Graphical User Interface) που εξασφαλίζει την εύκολη
10 o Εργαστήριο Σ.Α.Ε
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 10 o Εργαστήριο Σ.Α.Ε Ενότητα: Μελέτη και Σχεδίαση Ψηφιακών Σ.Α.Ε με LABVIEW PID Tuning Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 10 o Εργαστήριο Σ.Α.Ε Ενότητα: Μελέτη και Σχεδίαση Ψηφιακών Σ.Α.Ε με LABVIEW PID Tuning Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης
Ελεγκτικής. ΤΕΙ Ηπείρου (Παράρτηµα Πρέβεζας)
") Πληροφοριακά Συστήµατα ιοίκησης Management Information Systems Εργαστήριο 2 Τµήµα Χρηµατοοικονοµικής και Ελεγκτικής ΤΕΙ Ηπείρου (Παράρτηµα Πρέβεζας) ΑΝΤΙΚΕΙΜΕΝΟ: Προσοµοίωση (Simulation) και τυχαίες µεταβλητές
Πληροφοριακά Συστήµατα ιοίκησης Management Information Systems Εργαστήριο 2 Τµήµα Χρηµατοοικονοµικής και Ελεγκτικής ΤΕΙ Ηπείρου (Παράρτηµα Πρέβεζας) ΑΝΤΙΚΕΙΜΕΝΟ: Προσοµοίωση (Simulation) και τυχαίες µεταβλητές
8. Σηµειώσεις Access. Κατηγορίες φόρµας ως προς τον τρόπο προβολής των δεδοµένων
 Μάθηµα 8 ηµιουργία φορµών Μέσω των φορµών µπορούµε να εµφανίσουµε και να τροποποιήσουµε δεδοµένα από πίνακες και ερωτήµατα ή να εισαγάγουµε δεδοµένα σε πίνακες. Επίσης έχουµε τη δυνατότητα να καθορίζουµε
Μάθηµα 8 ηµιουργία φορµών Μέσω των φορµών µπορούµε να εµφανίσουµε και να τροποποιήσουµε δεδοµένα από πίνακες και ερωτήµατα ή να εισαγάγουµε δεδοµένα σε πίνακες. Επίσης έχουµε τη δυνατότητα να καθορίζουµε
ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB- SIMULINK
 ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB- SIMULINK ρ. Γεώργιος Φ. Φραγκούλης Καθηγητής Ver. 0.2 9/2012 ιανύσµατα & ισδιάστατοι πίνακες Ένα διάνυσµα u = (u1, u2,, u ) εισάγεται στη MATLAB ως εξής : u=[ u1, u2,, un ] ή u=[ u1
ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB- SIMULINK ρ. Γεώργιος Φ. Φραγκούλης Καθηγητής Ver. 0.2 9/2012 ιανύσµατα & ισδιάστατοι πίνακες Ένα διάνυσµα u = (u1, u2,, u ) εισάγεται στη MATLAB ως εξής : u=[ u1, u2,, un ] ή u=[ u1
M m l B r mglsin mlcos x ml 2 1) Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br
 Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br") ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΠΡΟΣΟΜΟΙΩΣΗ ΔΙΕΡΓΑΣΙΩΝ ΧΡΗΣΙΜΟΠΟΙΩΝΤΑΣ ΤΟ ΛΟΓΙΣΜΙΚΟ EXTEND. 1 ο εργαστήριο Διοίκησης και Παραγωγής Έργων
 ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΠΡΟΣΟΜΟΙΩΣΗ ΔΙΕΡΓΑΣΙΩΝ ΧΡΗΣΙΜΟΠΟΙΩΝΤΑΣ ΤΟ ΛΟΓΙΣΜΙΚΟ EXTEND 1 ο εργαστήριο Διοίκησης και Παραγωγής Έργων ΙΣΤΟΤΟΠΟΣ ΕΡΓΑΣΤΗΡΙΟΥ http://www.mech.upatras.gr/~adamides/dpe ΠΡΟΣΟΜΟΙΩΣΗ Η τεχνική
ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΠΡΟΣΟΜΟΙΩΣΗ ΔΙΕΡΓΑΣΙΩΝ ΧΡΗΣΙΜΟΠΟΙΩΝΤΑΣ ΤΟ ΛΟΓΙΣΜΙΚΟ EXTEND 1 ο εργαστήριο Διοίκησης και Παραγωγής Έργων ΙΣΤΟΤΟΠΟΣ ΕΡΓΑΣΤΗΡΙΟΥ http://www.mech.upatras.gr/~adamides/dpe ΠΡΟΣΟΜΟΙΩΣΗ Η τεχνική
Μέθοδοι µελέτης και βελτίωσης της ευστάθειας συστηµάτων. Συχνοτικά διαγράµµατα
 Μέθοδοι µελέτης και βελτίωσης της ευστάθειας συστηµάτων. Συχνοτικά διαγράµµατα Εισαγωγή Μελέτη συστήµατος αιώρησης µαγνητικού τρένου. Τις προηγούµενες δύο δεκαετίες, κατασκευάστηκαν πρωτότυπα µαγνητικά
Μέθοδοι µελέτης και βελτίωσης της ευστάθειας συστηµάτων. Συχνοτικά διαγράµµατα Εισαγωγή Μελέτη συστήµατος αιώρησης µαγνητικού τρένου. Τις προηγούµενες δύο δεκαετίες, κατασκευάστηκαν πρωτότυπα µαγνητικά
Βασικό Επίπεδο στο Modellus
 Βασικό Επίπεδο στο Modellus Το λογισµικό Modellus επιτρέπει στον χρήστη να οικοδοµήσει µαθηµατικά µοντέλα και να τα εξερευνήσει µε προσοµοιώσεις, γραφήµατα, πίνακες τιµών. Ο χρήστης πρέπει να γράψει τις
Βασικό Επίπεδο στο Modellus Το λογισµικό Modellus επιτρέπει στον χρήστη να οικοδοµήσει µαθηµατικά µοντέλα και να τα εξερευνήσει µε προσοµοιώσεις, γραφήµατα, πίνακες τιµών. Ο χρήστης πρέπει να γράψει τις
Α.Ε.Ι. ΠΕΙΡΑΙΑ TΕΧΝΟΛΟΓΙΚΟΥ ΤΟΜΕΑ. Συγκριτική Μελέτη Εφαρμογής Μεθόδων Ελέγχου Πνευματικού Συστήματος σε Περιβάλλον Προσομοίωσης ΝΤΙΜΕΡΗ ΕΛΕΝΗ
 Συγκριτική Μελέτη Εφαρμογής Μεθόδων Ελέγχου Πνευματικού Συστήματος σε Περιβάλλον Προσομοίωσης ΝΤΙΜΕΡΗ ΕΛΕΝΗ Πρόγραμμα Μεταπτυχιακών Σπουδών: Αυτοματισμός Παραγωγής και Υπηρεσιών ΔΙΑΤΡΙΒΗ Πειραιάς, Οκτώβριος
Συγκριτική Μελέτη Εφαρμογής Μεθόδων Ελέγχου Πνευματικού Συστήματος σε Περιβάλλον Προσομοίωσης ΝΤΙΜΕΡΗ ΕΛΕΝΗ Πρόγραμμα Μεταπτυχιακών Σπουδών: Αυτοματισμός Παραγωγής και Υπηρεσιών ΔΙΑΤΡΙΒΗ Πειραιάς, Οκτώβριος
ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ ΣΧΕΔΙΑΣΗ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΑΣΚΗΣΗ 2
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΗΜΑΤΩΝ ΕΛΕΓΧΟΥ ΚΑΙ ΡΟΜΠΟΤΙΚΗΣ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΗΜΑΤΩΝ ΕΛΕΓΧΟΥ ΚΑΙ ΡΟΜΠΟΤΙΚΗΣ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ
Ρυθµιστές PID. Βρόχος Ανατροφοδότησης Αναλογικός Ρυθµιστής (Ρ) Ολοκληρωτικός Ρυθµιστής (Ι) ιαφορικός Ρυθµιστής (D) Ρύθµιση PID
 Ολοκληρωτικός Ρυθµιστής (Ι) ιαφορικός Ρυθµιστής (D) Ρύθµιση PID") Ρυθµιστές PID Βρόχος Ανατροφοδότησης Αναλογικός Ρυθµιστής (Ρ) Ολοκληρωτικός Ρυθµιστής (Ι) ιαφορικός Ρυθµιστής (D) Ρύθµιση PID 1 Βρόχος Ανατροφοδότησης! Θεωρούµε το βρόχο ανατροφοδότησης SP ιεργασία D G
Ρυθµιστές PID Βρόχος Ανατροφοδότησης Αναλογικός Ρυθµιστής (Ρ) Ολοκληρωτικός Ρυθµιστής (Ι) ιαφορικός Ρυθµιστής (D) Ρύθµιση PID 1 Βρόχος Ανατροφοδότησης! Θεωρούµε το βρόχο ανατροφοδότησης SP ιεργασία D G
α) Κύκλος από δύο δοσµένα σηµεία Α, Β. Το ένα από τα δύο σηµεία ορίζεται ως κέντρο αν το επιλέξουµε πρώτο. β) Κύκλος από δοσµένο σηµείο και δοσµένο ευ
 Κύκλος από δύο δοσµένα σηµεία Α, Β. Το ένα από τα δύο σηµεία ορίζεται ως κέντρο αν το επιλέξουµε πρώτο. β) Κύκλος από δοσµένο σηµείο και δοσµένο ευ") ΕΙΣΑΓΩΓΗ ΣΤΟ ΛΟΓΙΣΜΙΚΟ SKETCHPAD ΜΕΡΟΣ Α Μιλώντας για ένα λογισµικό δυναµικής γεωµετρίας καλό θα ήταν να διακρίνουµε αρχικά 3 οµάδες εργαλείων µε τα οποία µπορούµε να εργαστούµε µέσα στο συγκεκριµένο περιβάλλον.
ΕΙΣΑΓΩΓΗ ΣΤΟ ΛΟΓΙΣΜΙΚΟ SKETCHPAD ΜΕΡΟΣ Α Μιλώντας για ένα λογισµικό δυναµικής γεωµετρίας καλό θα ήταν να διακρίνουµε αρχικά 3 οµάδες εργαλείων µε τα οποία µπορούµε να εργαστούµε µέσα στο συγκεκριµένο περιβάλλον.
Εισαγωγή στο Περιβάλλον Επιστημονικού Προγραμματισμού MATLAB-Simulink. Δημήτριος Τζεράνης Λεωνίδας Αλεξόπουλος
 Εισαγωγή στο Περιβάλλον Επιστημονικού Προγραμματισμού MATLAB-Simulink Δημήτριος Τζεράνης Λεωνίδας Αλεξόπουλος 1 Τι είναι τα Matlab και Simulink? Το Matlab (MATrix LABoratory) είναι ένα περιβάλλον επιστημονικού
Εισαγωγή στο Περιβάλλον Επιστημονικού Προγραμματισμού MATLAB-Simulink Δημήτριος Τζεράνης Λεωνίδας Αλεξόπουλος 1 Τι είναι τα Matlab και Simulink? Το Matlab (MATrix LABoratory) είναι ένα περιβάλλον επιστημονικού
Τυπικές χρήσεις της Matlab
 Matlab Μάθημα 1 Τι είναι η Matlab Ολοκληρωμένο Περιβάλλον Περιβάλλον ανάπτυξης Διερμηνευμένη γλώσσα Υψηλή επίδοση Ευρύτητα εφαρμογών Ευκολία διατύπωσης Cross platform (Wintel, Unix, Mac) Τυπικές χρήσεις
Matlab Μάθημα 1 Τι είναι η Matlab Ολοκληρωμένο Περιβάλλον Περιβάλλον ανάπτυξης Διερμηνευμένη γλώσσα Υψηλή επίδοση Ευρύτητα εφαρμογών Ευκολία διατύπωσης Cross platform (Wintel, Unix, Mac) Τυπικές χρήσεις
Αρχή ή τέλος ή κοµβικό σηµείο. Λειτουργία εισόδου / εξόδου. Έλεγχος. Πράξεις / ενέργειες. Βρόχος R7 φορές
 ΣΤΟΙΧΕΙΑ ΠΟΥ ΑΠΑΡΤΙΖΟΥΝ ΕΝΑ Λ.. TEST_PROGRAM Αρχή ή τέλος ή κοµβικό σηµείο ΝΕΧΤ A dip_switch Λειτουργία εισόδου / εξόδου C 0 LOOP A A+1 R7 f A+2 Έλεγχος Πράξεις / ενέργειες Βρόχος R7 φορές Πράξεις... DELAY
ΣΤΟΙΧΕΙΑ ΠΟΥ ΑΠΑΡΤΙΖΟΥΝ ΕΝΑ Λ.. TEST_PROGRAM Αρχή ή τέλος ή κοµβικό σηµείο ΝΕΧΤ A dip_switch Λειτουργία εισόδου / εξόδου C 0 LOOP A A+1 R7 f A+2 Έλεγχος Πράξεις / ενέργειες Βρόχος R7 φορές Πράξεις... DELAY
Εκπαιδευτικό λογισµικό κατασκευής φασµάτων Educational SPECtrum. ESPECsoftware
 Εκπαιδευτικό λογισµικό κατασκευής φασµάτων Educational SPECtrum ESPECsoftware Ως οδηγίες χρήσης του λογισµικού ESPECsoftware δίνονται εδώ οι επιλύσεις µιας σειράς παραδειγµάτων. 1) Να κατασκευαστούν τα
Εκπαιδευτικό λογισµικό κατασκευής φασµάτων Educational SPECtrum ESPECsoftware Ως οδηγίες χρήσης του λογισµικού ESPECsoftware δίνονται εδώ οι επιλύσεις µιας σειράς παραδειγµάτων. 1) Να κατασκευαστούν τα
Σχήµα 4.1: Εισαγωγή βρόγχου while-loop.
 Ο βρόγχος While-loop 1. Ο βρόγχος while-loop εκτελείται έως ότου ικανοποιηθεί µία προκαθορισµένη συνθήκη. 2. Ο αριθµός των επαναλήψεων ενός βρόγχου while-loop δεν είναι εκ των προτέρων προκαθορισµένος,
Ο βρόγχος While-loop 1. Ο βρόγχος while-loop εκτελείται έως ότου ικανοποιηθεί µία προκαθορισµένη συνθήκη. 2. Ο αριθµός των επαναλήψεων ενός βρόγχου while-loop δεν είναι εκ των προτέρων προκαθορισµένος,
παράθυρα ιδακτικό υλικό µαθητή Πλήκτρα για να το παράθυρο Λωρίδα τίτλου Πλαίσιο παραθύρου
 ιδακτικό υλικό µαθητή παράθυρα Κατά τη διάρκεια της µελέτης µας γράφουµε και διαβάζουµε, απλώνοντας πάνω στο γραφείο τετράδια και βιβλία. Ξεκινώντας ανοίγουµε αυτά που µας ενδιαφέρουν πρώτα και συνεχίζουµε
ιδακτικό υλικό µαθητή παράθυρα Κατά τη διάρκεια της µελέτης µας γράφουµε και διαβάζουµε, απλώνοντας πάνω στο γραφείο τετράδια και βιβλία. Ξεκινώντας ανοίγουµε αυτά που µας ενδιαφέρουν πρώτα και συνεχίζουµε
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων
 Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
( t) όπου το * αντιστοιχεί σε συνέλιξη και. (t 2) * x 2
 όπου το * αντιστοιχεί σε συνέλιξη και. (t 2) * x 2") Πανεπιστήµιο Κύπρου Πολυτεχνική Σχολή Τµήµα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών ΗΜΥ 0: ΣΗΜΑΤΑ ΚΑΙ ΣΥΣΤΗΜΑΤΑ Ι Ακαδηµαϊκό έτος 0-3 -- Εαρινό Εξάµηνο Σειρά Ασκήσεων αρ. 6 Παρασκευή 5 Απριλίου
Πανεπιστήµιο Κύπρου Πολυτεχνική Σχολή Τµήµα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών ΗΜΥ 0: ΣΗΜΑΤΑ ΚΑΙ ΣΥΣΤΗΜΑΤΑ Ι Ακαδηµαϊκό έτος 0-3 -- Εαρινό Εξάµηνο Σειρά Ασκήσεων αρ. 6 Παρασκευή 5 Απριλίου
ΜΕΛΕΤΗ Σ.Α.Ε. µε χρήση του CONTROL SYSTEM TOOLBOX του MATLAB
 Σ.Ν.. ΕΡΓΑΣΤΗΡΙΑ ΗΛΕΚΤΡΟΤΕΧΝΙΑΣ ο Έτος ΘΕΩΡΙΑ ΚΥΚΛΩΜΑΤΩΝ ΙΙ ΜΕΛΕΤΗ Σ.Α.Ε. µε χρήση του CONTROL SYSTEM TOOLBOX του MATLAB - Σύντοµη εισαγωγή στο Control System Toolbox - Παρουσίαση Εφαρµογών ( συνοδεύεται
Σ.Ν.. ΕΡΓΑΣΤΗΡΙΑ ΗΛΕΚΤΡΟΤΕΧΝΙΑΣ ο Έτος ΘΕΩΡΙΑ ΚΥΚΛΩΜΑΤΩΝ ΙΙ ΜΕΛΕΤΗ Σ.Α.Ε. µε χρήση του CONTROL SYSTEM TOOLBOX του MATLAB - Σύντοµη εισαγωγή στο Control System Toolbox - Παρουσίαση Εφαρµογών ( συνοδεύεται
Προσομοίωση Μηχανολογικών συστημάτων Σχήμα 2.71 Σχήμα 2.72
 Προσομοίωση Μηχανολογικών συστημάτων Ας δούμε πρώτα τις βιβλιοθήκες που σχετίζονται με τα μηχανολογικά συστήματα μεταφοράς. Στο σχήμα 2.71 βλέπουμε τις βιβλιοθήκες αυτές Translational elements Rotational
Προσομοίωση Μηχανολογικών συστημάτων Ας δούμε πρώτα τις βιβλιοθήκες που σχετίζονται με τα μηχανολογικά συστήματα μεταφοράς. Στο σχήμα 2.71 βλέπουμε τις βιβλιοθήκες αυτές Translational elements Rotational
ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι
 ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι ΕΛΕΓΧΟΣ ΣΤΑΘΜΗΣ ΥΓΡΟΥ ΕΞΑΜΕΝΗΣ 1. ΠΕΡΙΓΡΑΦΗ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΙΑΤΑΞΗΣ Τα βασικά µέρη της εργαστηριακής διάταξης είναι κατασκευασµένα από την εταιρεία LUCAS-NULLE.
ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι ΕΛΕΓΧΟΣ ΣΤΑΘΜΗΣ ΥΓΡΟΥ ΕΞΑΜΕΝΗΣ 1. ΠΕΡΙΓΡΑΦΗ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΙΑΤΑΞΗΣ Τα βασικά µέρη της εργαστηριακής διάταξης είναι κατασκευασµένα από την εταιρεία LUCAS-NULLE.
ΧΡΗΣΙΜΟΠΟΙΩΝΤΑΣ ΤΟ ARIS
 ΧΡΗΣΙΜΟΠΟΙΩΝΤΑΣ ΤΟ ARIS 1. Εγκατάσταση Εισάγοντας το CD στον υπολογιστή σας, θα εκτελεστεί το auto - run και θα σας εµφανίσει ένα παράθυρο µε επιλογές εγκατάστασης. (εάν δεν εκτελεστεί το auto - run, εκτελέστε
ΧΡΗΣΙΜΟΠΟΙΩΝΤΑΣ ΤΟ ARIS 1. Εγκατάσταση Εισάγοντας το CD στον υπολογιστή σας, θα εκτελεστεί το auto - run και θα σας εµφανίσει ένα παράθυρο µε επιλογές εγκατάστασης. (εάν δεν εκτελεστεί το auto - run, εκτελέστε
Θεωρείστε το σύστηµα του ανεστραµµένου εκκρεµούς-οχήµατος του Σχ. 1 το οποίο περιγράφεται από το δυναµικό µοντέλο
 ΨΣΕ 3 η Εργαστηριακή Άσκηση Γραµµικοποιήση µε ανατροφοδότηση εξόδου και έλεγχος Κινούµενου Ανεστραµµένου Εκκρεµούς Θεωρείστε το σύστηµα του ανεστραµµένου εκκρεµούς-οχήµατος του Σχ. το οποίο περιγράφεται
ΨΣΕ 3 η Εργαστηριακή Άσκηση Γραµµικοποιήση µε ανατροφοδότηση εξόδου και έλεγχος Κινούµενου Ανεστραµµένου Εκκρεµούς Θεωρείστε το σύστηµα του ανεστραµµένου εκκρεµούς-οχήµατος του Σχ. το οποίο περιγράφεται
Excel (dashboards, συγκεντρωτικοί πίνακες)
") : Excel (dashboards, συγκεντρωτικοί πίνακες) Ευθύµιος Ταµπούρης Μαρία Ζώτου tambouris@uom.gr mzotou@uom.gr Ορισµός εύρων Όταν θέλουµε να χρησιµοποιήσουµε εύρη τιµών για υπολογισµούς πολλαπλές φορές, ορίζουµε
: Excel (dashboards, συγκεντρωτικοί πίνακες) Ευθύµιος Ταµπούρης Μαρία Ζώτου tambouris@uom.gr mzotou@uom.gr Ορισµός εύρων Όταν θέλουµε να χρησιµοποιήσουµε εύρη τιµών για υπολογισµούς πολλαπλές φορές, ορίζουµε
ΠΛΗΡΟΦΟΡΙΚΗ Ι Εργαστήριο 1 MATLAB ΠΛΗΡΟΦΟΡΙΚΗ Ι ΕΡΓΑΣΤΗΡΙΟ 1. Θέμα εργαστηρίου: Εισαγωγή στο MATLAB και στο Octave
 ΠΛΗΡΟΦΟΡΙΚΗ Ι ΕΡΓΑΣΤΗΡΙΟ 1 Θέμα εργαστηρίου: Εισαγωγή στο MATLAB και στο Octave Περιεχόμενο εργαστηρίου: - Το περιβάλλον ανάπτυξης προγραμμάτων Octave - Διαδικασία ανάπτυξης προγραμμάτων MATLAB - Απλά
ΠΛΗΡΟΦΟΡΙΚΗ Ι ΕΡΓΑΣΤΗΡΙΟ 1 Θέμα εργαστηρίου: Εισαγωγή στο MATLAB και στο Octave Περιεχόμενο εργαστηρίου: - Το περιβάλλον ανάπτυξης προγραμμάτων Octave - Διαδικασία ανάπτυξης προγραμμάτων MATLAB - Απλά
Προγραμματισμός Ηλεκτρονικών Υπολογιστών 2 - Εργαστήριο
 Προγραμματισμός Ηλεκτρονικών Υπολογιστών 2 - Εργαστήριο Ενότητα 10: Σύστημα ελέγχου κλειστού βρόχου Διδάσκουσα: Τσαγκαλίδου Ροδή Τμήμα: Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
Προγραμματισμός Ηλεκτρονικών Υπολογιστών 2 - Εργαστήριο Ενότητα 10: Σύστημα ελέγχου κλειστού βρόχου Διδάσκουσα: Τσαγκαλίδου Ροδή Τμήμα: Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
Πληροφοριακά Συστήµατα ιοίκησης Τµήµα Χρηµατοοικονοµικής και Ελεγκτικής Management Information Systems Εργαστήριο 6 ΤΕΙ Ηπείρου (Παράρτηµα Πρέβεζας)
") Πληροφοριακά Συστήµατα ιοίκησης Τµήµα Χρηµατοοικονοµικής και Ελεγκτικής Management Information Systems Εργαστήριο 6 ΤΕΙ Ηπείρου (Παράρτηµα Πρέβεζας) ΑΝΤΙΚΕΙΜΕΝΟ: ΒΕΛΤΙΣΤΟΠΟΙΗΣΗ (OPTIMIZATION) (2 ο σετ
Πληροφοριακά Συστήµατα ιοίκησης Τµήµα Χρηµατοοικονοµικής και Ελεγκτικής Management Information Systems Εργαστήριο 6 ΤΕΙ Ηπείρου (Παράρτηµα Πρέβεζας) ΑΝΤΙΚΕΙΜΕΝΟ: ΒΕΛΤΙΣΤΟΠΟΙΗΣΗ (OPTIMIZATION) (2 ο σετ
ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ - 1 η ΣΕΙΡΑ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΧΕΙΜ17-18 ΗΜΕΡΟΜΗΝΙΑ: ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ - 1 η ΣΕΙΡΑ CONTROL
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΧΕΙΜ17-18 ΗΜΕΡΟΜΗΝΙΑ: ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ - 1 η ΣΕΙΡΑ CONTROL
ΟΤΑ Επιχειρησιακή Νοηµοσύνη. Ενότητα: Bc1.1.6 Παρακολούθηση (monitoring) εκτέλεσης Επιχειρησιακών Διαδικασιών και εξαγωγή «µετρήσιµων» (metrics)
 εκτέλεσης Επιχειρησιακών Διαδικασιών και εξαγωγή «µετρήσιµων» (metrics)") ΟΤΑ Επιχειρησιακή Νοηµοσύνη Ενότητα: Bc1.1.6 Παρακολούθηση (monitoring) εκτέλεσης Επιχειρησιακών Διαδικασιών και εξαγωγή «µετρήσιµων» (metrics) Πρακτική Άσκηση (επίπεδο 1): Η άσκηση ζητά να εκτελεσθεί
ΟΤΑ Επιχειρησιακή Νοηµοσύνη Ενότητα: Bc1.1.6 Παρακολούθηση (monitoring) εκτέλεσης Επιχειρησιακών Διαδικασιών και εξαγωγή «µετρήσιµων» (metrics) Πρακτική Άσκηση (επίπεδο 1): Η άσκηση ζητά να εκτελεσθεί
Εκπαιδευτικό λογισµικό µονοβάθµιου ταλαντωτή Educational Single Degree Of Freedom Software. ESDOFsoftware
 Εκπαιδευτικό λογισµικό µονοβάθµιου ταλαντωτή Educational Single Degree Of Freedom Software ESDOFsoftware Ως οδηγίες χρήσης του λογισµικού ESDOFsoftware δίνονται εδώ οι επιλύσεις µιας σειράς παραδειγµάτων.
Εκπαιδευτικό λογισµικό µονοβάθµιου ταλαντωτή Educational Single Degree Of Freedom Software ESDOFsoftware Ως οδηγίες χρήσης του λογισµικού ESDOFsoftware δίνονται εδώ οι επιλύσεις µιας σειράς παραδειγµάτων.
Εγκατάσταση. Εγκατάσταση του Wamp
 Εγκατάσταση Εγκατάσταση του Wamp Η εγκατάσταση χωρίζεται σε δύο µέρη. Πρώτα θα εγκαταστήσουµε το Wamp, ώστε να µετατρέψουµε τον υπολογιστή µας σε Web Server και µετά θα εγκαταστήσουµε το Joomla. Η εγκατάσταση
Εγκατάσταση Εγκατάσταση του Wamp Η εγκατάσταση χωρίζεται σε δύο µέρη. Πρώτα θα εγκαταστήσουµε το Wamp, ώστε να µετατρέψουµε τον υπολογιστή µας σε Web Server και µετά θα εγκαταστήσουµε το Joomla. Η εγκατάσταση
5o Εργαστήριο Σ.Α.Ε Ενότητα : Ελεγκτές PID
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 5o Εργαστήριο Σ.Α.Ε Ενότητα : Ελεγκτές PID Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 5o Εργαστήριο Σ.Α.Ε Ενότητα : Ελεγκτές PID Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε
ΑΝΤΙΣΤΑΘΜΙΣΗ ΑΕΡΓΟΥ ΙΣΧΥΟΣ
 ΕΙΚΟΝΙΚΗ ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 2 ΑΝΤΙΣΤΑΘΜΙΣΗ ΑΕΡΓΟΥ ΙΣΧΥΟΣ Εισαγωγή Στα πειράµατα της εικονικής άσκησης 1 δόθηκε η ευκαιρία να παρατηρήσουµε τα προβλήµατα που δηµιουργεί η ροή αέργου ισχύος στο δίκτυο,
ΕΙΚΟΝΙΚΗ ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 2 ΑΝΤΙΣΤΑΘΜΙΣΗ ΑΕΡΓΟΥ ΙΣΧΥΟΣ Εισαγωγή Στα πειράµατα της εικονικής άσκησης 1 δόθηκε η ευκαιρία να παρατηρήσουµε τα προβλήµατα που δηµιουργεί η ροή αέργου ισχύος στο δίκτυο,
Εργαλεία Προγραμματισμού Ψηφιακής Επεξεργασίας Εικόνας: Το Matlab Image Processing Toolbox
 ΚΕΣ 03 Αναγνώριση προτύπων και ανάλυση εικόνας Εργαλεία Προγραμματισμού Ψηφιακής Επεξεργασίας Εικόνας: Το Matlab Image Processing Toolbox Τμήμα Επιστήμης και Τεχνολογίας Τηλεπικοινωνιών Πανεπιστήμιο Πελοποννήσου
ΚΕΣ 03 Αναγνώριση προτύπων και ανάλυση εικόνας Εργαλεία Προγραμματισμού Ψηφιακής Επεξεργασίας Εικόνας: Το Matlab Image Processing Toolbox Τμήμα Επιστήμης και Τεχνολογίας Τηλεπικοινωνιών Πανεπιστήμιο Πελοποννήσου
Σύντοµες οδηγίες χρήσης atube Catcher
 Σύντοµες οδηγίες χρήσης atube Catcher ελλατόλας Στέλιος 2 ο Ε.Κ.Φ.Ε. Ηρακλείου Κρήτης Περιεχόµενα Εγκατάσταση του προγράµµατος...4 Λειτουργία του προγράµµατος...6 Βασική λειτουργία (κατέβασµα ένα - ένα
Σύντοµες οδηγίες χρήσης atube Catcher ελλατόλας Στέλιος 2 ο Ε.Κ.Φ.Ε. Ηρακλείου Κρήτης Περιεχόµενα Εγκατάσταση του προγράµµατος...4 Λειτουργία του προγράµµατος...6 Βασική λειτουργία (κατέβασµα ένα - ένα
SIMATIC MANAGER SIMATIC MANAGER
 1 Προγραμματισμός του PLC. 1. Γενικά Μια προσεκτική ματιά σε μια εγκατάσταση που θέλουμε να αυτοματοποιήσουμε, μας δείχνει ότι αυτή αποτελείται από επιμέρους τμήματα τα οποία είναι συνδεδεμένα μεταξύ τους
1 Προγραμματισμός του PLC. 1. Γενικά Μια προσεκτική ματιά σε μια εγκατάσταση που θέλουμε να αυτοματοποιήσουμε, μας δείχνει ότι αυτή αποτελείται από επιμέρους τμήματα τα οποία είναι συνδεδεμένα μεταξύ τους
Συστήματα Αυτόματου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Συνάρτηση Μεταφοράς Σ.Δ.Δ. Διακριτοποίηση Συν. Μεταφοράς Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Συνάρτηση Μεταφοράς Σ.Δ.Δ. Διακριτοποίηση Συν. Μεταφοράς Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες
Simulink. 2006 The MathWorks, Inc.
 Ενότητα 4η: Μοντελοποίηση συστηµάτων µε το γραφικόπεριβάλλον SIMULINK. Εισαγωγή στο Simulink Παραδείγµατα συστηµάτων και µοντέλων µε το Simulink Ανάπτυξηµοντέλων & προσοµοίωση. Περιβάλλον & βιβλιοθήκες.
Ενότητα 4η: Μοντελοποίηση συστηµάτων µε το γραφικόπεριβάλλον SIMULINK. Εισαγωγή στο Simulink Παραδείγµατα συστηµάτων και µοντέλων µε το Simulink Ανάπτυξηµοντέλων & προσοµοίωση. Περιβάλλον & βιβλιοθήκες.
Οι πράξεις που χρειάζονται για την επίλυση αυτών των προβληµάτων (αφού είναι απλές) µπορούν να τεθούν σε µια σειρά και πάρουν µια αλγοριθµική µορφή.
 µπορούν να τεθούν σε µια σειρά και πάρουν µια αλγοριθµική µορφή.") Η Αριθµητική Ανάλυση χρησιµοποιεί απλές αριθµητικές πράξεις για την επίλυση σύνθετων µαθηµατικών προβληµάτων. Τις περισσότερες φορές τα προβλήµατα αυτά είναι ή πολύ περίπλοκα ή δεν έχουν ακριβή αναλυτική
Η Αριθµητική Ανάλυση χρησιµοποιεί απλές αριθµητικές πράξεις για την επίλυση σύνθετων µαθηµατικών προβληµάτων. Τις περισσότερες φορές τα προβλήµατα αυτά είναι ή πολύ περίπλοκα ή δεν έχουν ακριβή αναλυτική
Ισοδυναµία τοπολογιών βρόχων.
 Ισοδυναµία τοπολογιών βρόχων. Κατά κανόνα, συµφέρει να ανάγουµε τις «πολύπλοκες» τοπολογίες βρόχων σε έναν απλό κλειστό βρόχο, µε µία συνάρτηση µεταφοράς στον κατ ευθείαν κλάδο και µία συνάρτηση µεταφοράς
Ισοδυναµία τοπολογιών βρόχων. Κατά κανόνα, συµφέρει να ανάγουµε τις «πολύπλοκες» τοπολογίες βρόχων σε έναν απλό κλειστό βρόχο, µε µία συνάρτηση µεταφοράς στον κατ ευθείαν κλάδο και µία συνάρτηση µεταφοράς
SPICE Directive:.model NBJT npn(is = 2f Bf = 100)
") ΙΠΟΛΙΚΑ ΤΡΑΝΖΙΣΤΟΡ Χαρακτηριστικές εισόδου και εξόδου Κέρδος ρεύµατος Το διπολικό τρανζίστορ χαρακτηρίζεται από το κέρδος ρεύµατος που ορίζεται ως ο λόγος του ρεύµατος στο συλλέκτη προς το ρεύµα στη βάση
ΙΠΟΛΙΚΑ ΤΡΑΝΖΙΣΤΟΡ Χαρακτηριστικές εισόδου και εξόδου Κέρδος ρεύµατος Το διπολικό τρανζίστορ χαρακτηρίζεται από το κέρδος ρεύµατος που ορίζεται ως ο λόγος του ρεύµατος στο συλλέκτη προς το ρεύµα στη βάση
ΑΠΟΚΡΙΣΗ ΙΚΤΥΟΥ R-L σε ΤΕΤΡΑΓΩΝΙΚΟ και ΤΡΙΓΩΝΙΚΟ ΠΑΛΜΟ
 ΜΑΘΗΜΑ: ΑΝΑΛΥΣΗ ΣΥΣΤΗΜΑΤΩΝ ΕΙΣΑΓΩΓΗ ΣΤΑ Σ.Α.Ε. ΑΠΟΚΡΙΣΗ ΙΚΤΥΟΥ R- σε ΤΕΤΡΑΓΩΝΙΚΟ και ΤΡΙΓΩΝΙΚΟ ΠΑΛΜΟ ρ. Α. Μαγουλάς Μάρτιος 2017 1 1. Εισαγωγή Στο παρακάτω σχήµα φαίνεται ένα απλό δίκτυο R. ιέγερση (είσοδος)
ΜΑΘΗΜΑ: ΑΝΑΛΥΣΗ ΣΥΣΤΗΜΑΤΩΝ ΕΙΣΑΓΩΓΗ ΣΤΑ Σ.Α.Ε. ΑΠΟΚΡΙΣΗ ΙΚΤΥΟΥ R- σε ΤΕΤΡΑΓΩΝΙΚΟ και ΤΡΙΓΩΝΙΚΟ ΠΑΛΜΟ ρ. Α. Μαγουλάς Μάρτιος 2017 1 1. Εισαγωγή Στο παρακάτω σχήµα φαίνεται ένα απλό δίκτυο R. ιέγερση (είσοδος)
MOSFET. Shockley W L W L
 MOSFET Χαρακτηριστικές εισόδου, εξόδου ιαγωγιµότητα Η λειτουργία του MOSFET στην ενεργό περιοχή περιγράφεται από την εξίσωση του Shockley I D = K V ( V ) 2 GS T όπου V Τ η τάση κατωφλίου και Κ σταθερά.
MOSFET Χαρακτηριστικές εισόδου, εξόδου ιαγωγιµότητα Η λειτουργία του MOSFET στην ενεργό περιοχή περιγράφεται από την εξίσωση του Shockley I D = K V ( V ) 2 GS T όπου V Τ η τάση κατωφλίου και Κ σταθερά.
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα. Τεχνική Σχεδίαση
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Τεχνική Σχεδίαση Ενότητα: ΕΡΓΑΣΤΗΡΙΟ 1 - ΘΕΩΡΗΤΙΚΗ ΑΝΑΛΥΣΗ ΚΥΚΛΩΜΑΤΟΣ Ι ΧΡΗΣΗΣ ΚΑΝΟΝΩΝ KIRCHOFF ΘΕΟΔΩΡΟΣ ΓΚΑΝΕΤΣΟΣ Τμήμα Μηχ.
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Τεχνική Σχεδίαση Ενότητα: ΕΡΓΑΣΤΗΡΙΟ 1 - ΘΕΩΡΗΤΙΚΗ ΑΝΑΛΥΣΗ ΚΥΚΛΩΜΑΤΟΣ Ι ΧΡΗΣΗΣ ΚΑΝΟΝΩΝ KIRCHOFF ΘΕΟΔΩΡΟΣ ΓΚΑΝΕΤΣΟΣ Τμήμα Μηχ.
Σχολή Τεχνολογικών Εφαρμογών. Τμήμα Αυτοματισμού. Σημειώσεις Εργαστηρίου Ψηφιακού Ελέγχου. Σχεδίαση Συστημάτων Ελέγχου με χρήση MATLAB
 Σχολή Τεχνολογικών Εφαρμογών Τμήμα Αυτοματισμού Σημειώσεις Εργαστηρίου Ψηφιακού Ελέγχου Σχεδίαση Συστημάτων Ελέγχου με χρήση MATLAB Επιμέλεια: Ξανθή Παπαγεωργίου E-mail: xanthi.papageorgiou@gmail.com Τμήματα:
Σχολή Τεχνολογικών Εφαρμογών Τμήμα Αυτοματισμού Σημειώσεις Εργαστηρίου Ψηφιακού Ελέγχου Σχεδίαση Συστημάτων Ελέγχου με χρήση MATLAB Επιμέλεια: Ξανθή Παπαγεωργίου E-mail: xanthi.papageorgiou@gmail.com Τμήματα: