ΠΕΡΙΦΕΡΕΙΑΚΑ ΤΟΥ PIC16F887
|
|
|
- Λευί Τρικούπη
- 8 χρόνια πριν
- Προβολές:
Transcript

1 ΠΕΡΙΦΕΡΕΙΑΚΑ ΤΟΥ PIC16F887 EEPROM: H μνήμη EEPROM (Εlactrically Erasable Programmable Read Only Memory) είναι μία μνήμη η οποία εγγράφεται ηλεκτρικά και διατηρεί τα δεδομένα της ακόμα και μετά την απομάκρυνση της τροφοδοσίας. Επιπλέον η EEPROM μπορεί να επανεγγραφεί χωρίς να είναι απαραίτητο να γίνει πρώτα η διαγραφή της. Μπορεί να χρησιμοποιηθεί σε μια εφαρμογή για την αποθήκευση κάποιου κωδικού ή κάποιου serial number συσκευής. Επίσης εκεί μπορούν να αποθηκευτούν κρίσιμα δεδομένα για μια εφαρμογή ή το status κάποιων λειτουργιών ώστε σε περίπτωση διακοπής τροφοδοσίας ο μικροελεγκτής μετά την επανασύνδεσή της να επαναφέρει την κατάσταση που υπήρχε πριν τη διακοπή.

2 ΠΕΡΙΦΕΡΕΙΑΚΑ ΤΟΥ PIC16F887 SPI: Serial Peripheral Interface Το SPI είναι ένα σειριακό interface επικοινωνίας με το οποίο επιτρέπεται ταυτόχρονα η αμφίδρομη (full duplex) επικοινωνία ανάμεσα σε μία master συσκευή και σε μία ή περισσότερες slave συσκευές. Τοπολογία:

3 ΠΕΡΙΦΕΡΕΙΑΚΑ ΤΟΥ PIC16F887 SPI Χρησιμοποιεί 3 ή 4 ακροδέκτες: SLAVE: MASTER: SCK (RC3): serial clock (είσοδος)sck: serial clock (έξοδος) SDI (RC4): serial data in (είσοδος) SDI: serial data in (είσοδος) SDO (RC5): serial data out (έξοδος) SDO: serial data out (έξοδος) SS (RA5): slave select (είσοδος) Η είσοδος SS είναι προαιρετική και χρησιμοποιείται όταν ο master πρέπει να επικοινωνεί με περισσότερες από μία slave συσκευές και στην περίπτωση αυτή ακούει η συσκευή για την οποία ο master ορίζει το SS στο λογικό '0'. Η επικοινωνία ξεκινάει όταν ο master στείλει 8 παλμούς ρολογιού. Με κάθε παλμό στέλνεται και διαβάζεται ένα bit από κάθε συσκευή που μετέχει στην επικοινωνία. Όταν για μία συσκευή δεν απαιτείται να στείλει δεδομένα τότε απλώς στέλνει dummy data. Oι καταχωρητές ειδικής χρήσης που χρησιμοποιούνται για τη ρύθμιση του SPI είναι: SSPSTAT, SSPCON.


4 ΠΕΡΙΦΕΡΕΙΑΚΑ ΤΟΥ PIC16F887 I 2 C: Inter-Integrated Circuit To I 2 C είναι ένα interface επικοινωνίας με το οποίο επιτρέπεται αμφίδρομη (half duplex) επικοινωνία ανάμεσα σε μία master και μία slave συσκευή οι οποίες είναι συνδεδεμένες πάνω στο bus. Oι καταχωρητές ειδικής χρήσης που χρησιμοποιούνται για τη ρύθμιση του SPI είναι: SSPSTAT, SSPCON, SSPCON2. Τοπολογία:

5 ΠΕΡΙΦΕΡΕΙΑΚΑ ΤΟΥ PIC16F887 I 2 C Χρησιμοποιεί 2 ακροδέκτες: SLAVE: SCL (RC3): serial clock (είσοδος) SDA (RC4): serial data (είσοδος/έξοδος) MASTER: SCK: serial clock (έξοδος) SDΑ: serial data(είσοδος/έξοδος) Η επικοινωνία ξεκινάει και σταματάει με συγκεκριμένα συμβάντα (events) τα οποία πρέπει αναγνωρίζονται από τις συμβατές με το I 2 C συσκευές. S : Start To Start ή αλλιώς Start bit έχει μέγεθος 1 bit και καθορίζει την έναρξη μιας I 2 C επικοινωνίας. Ως start bit αναγνωρίζεται εκείνο το bit κατά το οποίο παρατηρείται κατερχόμενο μέτωπο στο σήμα SDA ενώ το SCL βρίσκεται σε λογικό '1'. P : Stop To Stop ή αλλιώς Stop bit έχει μέγεθος 1 bit και καθορίζει τον τερματισμό μιας I 2 C επικοινωνίας. Ως stop bit αναγνωρίζεται εκείνο το bit κατά το οποίο παρατηρείται ανερχόμενο μέτωπο στο σήμα SDA ενώ το SCL βρίσκεται σε λογικό '1'.

6 ΠΕΡΙΦΕΡΕΙΑΚΑ ΤΟΥ PIC16F887 I 2 C R :Repeated Start To Repeated Start έχει μέγεθος 1 bit και καθορίζει την έναρξη μιας I 2 C επικοινωνίας. Ως Repeated start bit αναγνωρίζεται εκείνο το bit κατά το οποίο παρατηρείται κατερχόμενο μέτωπο στο σήμα SDA ενώ το SCL βρίσκεται σε λογικό '1'. Η διαφορά με το S bit είναι ότι με R bit αρχίζει μια νέα επικοινωνία χωρίς να έχει τερματιστεί με P bit η προηγούμενη. Τα δεδομένα στο SDA αλλάζουν πάντοτε κατά τη χρονική στιγμή που το SCL βρίσκεται στο λογικό '0'. Μία τυπική επικοινωνία με I 2 C γίνεται με την εξής διαδικασία: 1. Start bit 2. Aποστολή ενός byte (7-bit διεύθυνση και το 8ο bit R/W) 3. Απελευθέρωση του SDA για acknowleadgement (λογικό '0' από το δέκτη σημαίνει επιβεβαίωση) 4. Αποστολή byte δεδομένων 5. Απελευθέρωση του SDA για acknowleadgement (λογικό '0' από το δέκτη σημαίνει επιβεβαίωση) (Τα βήματα 3 και 4 επαναλαμβάνονται για όσες φορές χρειάζεται) 6. Ρ bit

7 ΔΙΑΓΡΑΜΜΑ ΧΡΟΝΙΣΜΟΥ ΕΠΙΚΟΙΝΩΝΙΑΣ I 2 C α. Slave reception, β. Slave transmission, γ. Master reception, δ. Master transmission α β γ δ

8 ΠΕΡΙΦΕΡΕΙΑΚΑ ΤΟΥ PIC16F887 USART : Universal Synchronous Asynchronous Receiver Transmitter Η USART αποτελεί ένα σειριακό interface επικοινωνίας με το οποίο μπορούμε να έχουμε είτε σύγχρονη επικοινωνία ανάμεσα σε μία master συσκευή και σε μία slave ή ασύγχρονη επικοινωνία ανάμεσα σε δύο συσκευές. Οι καταχωρητές ειδικής χρήσης που χρησιμοποιούνται για τη ρύθμιση της USART είναι οι TXSTA, RCSTA, BAUDCTL, SPBRG, SPBRGH, TXREG και RCREG. Σύγχρονη επικοινωνία: Χρησιμοποιούνται δύο ακροδέκτες με τη συσκευή master να ελέγχει το ρολόι CK ενώ ο ακροδέκτης δεδομένων είναι ο ακροδέκτης DT. Ασύγχρονη επικοινωνία: Το συγκεκριμένο κύκλωμα χρησιμοποιείται κυρίως για ασύγχρονη επικοινωνία και συνήθως για επικοινωνία με τις UART των υπολογιστών με τη χρήση του interface RS232. Τοπολογία: ΣΥΣΚΕΥΗ 1 ΣΥΣΚΕΥΗ 2 GND RΧ ΤΧ ΤΧ RΧ GND

9 ΠΕΡΙΦΕΡΕΙΑΚΑ ΤΟΥ PIC16F887 USART Χρησιμοποιούνται 2 ακροδέκτες ΤΧ (transmit) και RX (receive). Μία τυπική επικοινωνία με I 2 C γίνεται με την εξής διαδικασία: 1. Start bit (λογικό '0') 2. Αποστολή ενός byte στέλνοντας πρώτα το LSB 3. Αποστολή 1 ή 2 Stop bit (λογικό '1') Στο διπλανό διάγραμμα παρουσιάζεται η αποστολή του byte h'55' (85). Επίσης για τη διασύνδεση στη σειριακή θύρα του υπολογιστή απαιτείται μετατροπέας για τη μετατροπή των TTL λογικών σταθμών σε RS232 και το αντίστροφο όπως το MAX232. TTL levels RS232 levels 5V 10V idle bit0 bit2 bit4 bit6 stop start bit bit bit1 bit3 bit5 bit7 idle -10V

10 PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη τιμή της και το τμήμα OFF στο οποίο έχει την τιμή μηδέν. To ΟΝ τμήμα ονομάζεται Duty Cycle και μετριέται είτε σε μονάδες χρόνου (ms, us κλπ) είτε σε ποσοστό (%) επί της περιόδου. Εφαρμόζοντας μία PWM κυματομορφή στην τροφοδοσία ενός φορτίου επιτυγχάνουμε να ελέγξουμε την το ποσοστό της ισχύος που πέφτει πάνω στο φορτίο. Για την περίπτωση που το φορτίο είναι ένας κινητήρας αυτό συνεπάγεται έλεγχος στροφών του κινητήρα.


11 ΠΕΡΙΦΕΡΕΙΑΚΑ ΤΟΥ PIC16F887 PWM CCP: Capture/Compare/PWM Όταν το CCP λειτουργεί σε PWM mode τότε παράγει μία PWM κυματομορφή σε κάποιον ακροδέκτη του μικροελεγκτή. Οι PWM κυματομορφές χρησιμοποιούνται ιδιαίτερα στις τηλεπικοινωνίες αλλά και στην οδήγηση κινητήρων.

12 ΠΕΡΙΦΕΡΕΙΑΚΑ ΤΟΥ PIC16F887 CCP CCP: Capture/Compare/PWM O PIC16F887 διαθέτει ένα βελτιωμένο PWM module (ΕCCP Enhanced CCP) με το οποίο υπάρχει η δυνατότητα να παλμοδοτηθούν MOSFET σε συνδεσμολογία ημιγέφυρας (half bridge) ή πλήρους γέφυρας (full bridge) όπως φαίνεται στο παρακάτω σχήμα. Oι καταχωρητές που χρησιμοποιούνται για τη ρύθμιση του CCP είναι: CCPxCON, CCPRxL, PR2, T2CON, x=1 ή 2.

13 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ/CONFIGURATION BITS O PIC16F887 προγραμματίζεται με τη χρήση των παρακάτω ακροδεκτών: MCLR (Master Clear): Ακροδέκτης στον οποίο εφαρμόζονται οι υψηλές (12V) τάσεις προγραμματισμού. RB7: Data RB6: Clock Ο προγραμματισμός επίσης περιλαμβάνει τη ρύθμιση των configuration bits. Αυτά είναι υπεύθυνα για την επιλογή του ταλαντωτή χρονισμού, για την ενεργοποίηση/απενεργοποίηση κάποιων χρονιστών (WDT, Power up Timer), για την προστασία του κώδικα κλπ.

14 CONFIGURATION BITS α) Oscillator: Καθορισμός ταλαντωτή χρονισμού του μικροελεγκτή. External RC Clockout: Επιλογή ταλαντωτή χρονισμού βασισμένου σε εξωτερικό δίκτυο RC: Το ρολόι είναι διαθέσιμο εξωτερικά στον ακροδέκτη 14 του PIC16F887. External RC No Clockout: Επιλογή ταλαντωτή χρονισμού βασισμένου σε εξωτερικό δίκτυο RC. Το ρολόι είναι δεν διαθέσιμο εξωτερικά του μικροελεγκτή. Internal RC Clockout: Επιλογή ταλαντωτή χρονισμού βασισμένου στον εσωτερικό ταλαντωτή του μικροελεγκτή. Το ρολόι είναι διαθέσιμο εξωτερικά στον ακροδέκτη 14 του PIC16F887. Internal RC Νο Clockout: Επιλογή ταλαντωτή χρονισμού βασισμένου στον εσωτερικό ταλαντωτή του μικροελεγκτή. Το ρολόι είναι δεν διαθέσιμο εξωτερικά στο μικροελεγκτή. EC: Επιλογή ταλαντωτή χρονισμού από εξωτερικό ρολόι (External Clock) HS: Επιλογή κρυσταλικού ταλαντωτή υψηλής ταχύτητας (High Speed) >= 8ΜΗz ΧΤ: Επιλογή κρυσταλικού ταλαντωτή συχνότητας < 8MHz LP: Επιλογή κεραμικού ταλαντωτή χαμηλής ισχύος (Low Power) β) WatchDog Timer: Ο WatchDog timer αποτελεί ένα κύκλωμα χρονισμού επιτήρησης. Σε κάθε υπερχείλιση προκαλεί RESET και χρησιμοποιείται για αποφυγή «κολλημάτων» του προγράμματος του μικροελεγκτή. On: Ενεργοποίηση Off: Απενεργοποίηση γ) Power Up Timer: Ο Power Up Timer αποτελεί ένα κύκλωμα που διατηρεί σε RESET το μικροελεγκτή για μερικά msec κατά την εφαρμογή της τροφοδοσίας μέχρι να σταθεροποιηθεί. On: Ενεργοποίηση Off: Απενεργοποίηση δ) Master Clear Enable: Καθορισμός του ακροδέκτη 1 του PIC16F887 (MCLR) ως Master Clear ή ως ψηφιακή είσοδος. RE3 is digital input: Ο ακροδέκτης 1 του PIC16F887 αποτελεί ψηφιακή είσοδο Master Clear is external: Ο ακροδέκτης 1 του PIC16F887 αποτελεί το Master Clear. ε) Code Protect: Με το bit αυτό καθορίζεται αν θα υπάρχει προστασία της μνήμης προγράμματος από ανάγνωση. Off: Δεν υπάρχει προστασία από ανάγνωση On: Υπάρχει προστασία από ανάνγωση στ) Data EE Read Protect: Με το bit αυτό καθορίζεται αν θα υπάρχει προστασία της μνήμης δεδομένων EEPROM από ανάγνωση. Off: Δεν υπάρχει προστασία από ανάγνωση On: Υπάρχει προστασία από ανάνγωση ζ) Brown Out Detect: Με το χαρακτηριστικό Brown out Detect προκαλείται RESET στο μικροελεγκτή όταν η τροφοδοσία πέσει κάτω από κάποια τάση αναφοράς. Με την παραπάνω επιλογή καθορίζεται η ενεργοποίηση/απενεργοποίηση αυτού του χαρακτηριστικού του PIC16F887 BOD and SBOREN disabled: Απενεργοποίηση SBOREN controls BOR function: Το bit SBOREN του καταχωρητή PCON ελέγχει την ενεργοποίηση/απενεργοποίηση BOD enabled in run, disabled in sleep, SBOREN disabled: Εδώ το χαρακτηριστικό αυτό είναι ενεργοποιημένο κατά την κανονική λειτουργία και απενεργοποιημένο κατά τη λειτουργία χαμηλής κατανάλωσης ισχύος BOD enabled, SBOREN disabled: Ενεργοποίηση η) Internal External Switch Over Mode: Με το bit αυτό ο ενεργοποιείται/ απενεργοποιείται η αλλαγή του ταλαντωτή χρονισμού από τον εσωτερικό σε εξωτερικό και το αντίστροφο. Enabled: Ενεργοποίηση Disabled: Απενεργοποίηση θ) Monitor Clock fail-safe: Με το bit αυτό ενεργοποιείται/απενεργοποιείται το χαρακτηριστικό του μικροελεγκτή να μπορεί να μεταβεί στον εσωτερικό ταλαντωτή χρονισμού σε περίπτωση αποτυχίας του εξωτερικού ταλαντωτή. Enabled: Ενεργοποίηση Disabled: Απενεργοποίηση ι) Low Voltage Program: Με το bit αυτό ενεργοποιείται/απενεργοποιείται η δυνατότητα για προγραμματισμό εντός του κυκλώματος με χαμηλή τάση. Όταν είναι ενεργοποιημένη η δυνατότητα αυτή τότε ο ακροδέκτης RB3/PGMπαύει να είναι διαθέσιμος στον προγραμματιστή και χρησιμοποιείται μόνο για τον προγραμματισμό του μικροελεγκτή. Enabled: Ενεργοποίηση Disabled: Απενεργοποίηση ια) Brown Out Reset Sel Bit: Με το bit συτό επιλέγεται η τάση αναφοράς για το Brown-out Reset. Brown out at 2.1V: Θα πραγματοποιηθεί RESET όταν η τάση γίνει 2.1V. Brown out at 4.0V: Θα πραγματοποιηθεί RESET όταν η τάση γίνει 4.0V. ιβ) Self Write Enable: Με την επιλογή αυτή καθορίζουμε αν η μνήμη προγράμματος θα έχει προστασία εγγραφής από το firmware το μικροελεγκτή fff prot. Προστασία εγγραφής στις διευθύνσεις μνήμης από h 0000 έως h 0FFF fff prot. Προστασία εγγραφής στις διευθύνσεις μνήμης από h 0000 έως h 7FFF ff prot. Προστασία εγγραφής στις διευθύνσεις μνήμης από h 0000 έως h 00FF. No protection. Προστασία εγγραφής απενεργοποιημένη.

15 bit 7 Δεν είναι υλοποιημένο Καταχωρητής Τ2CON (Bank0) bit 6-3 TOUTPS<3:0>: Bit επιλογής κλίμακας επόμενης βαθμίδας μέτρησης (Postscaler) 0000 = 1:1 Postscaler 0001 = 1:2 Postscaler 0010 = 1:3 Postscaler 0011 = 1:4 Postscaler 0100 = 1:5 Postscaler 0101 = 1:6 Postscaler 0110 = 1:7 Postscaler 0111 = 1:8 Postscaler 1000 = 1:9 Postscaler 1001 = 1:10 Postscaler 1010 = 1:11 Postscaler 1011 = 1:12 Postscaler 1100 = 1:13 Postscaler 1101 = 1:14 Postscaler 1110 = 1:15 Postscaler 1111 = 1:16 Postscaler bit 2 TMR2ON: Bit ενεργοποίησης Timer2 1 = Eνεργοποίηση Timer2 0 = Απενεργοποίηση Timer2 bit 1-0 T2CKPS<1:0>: Bit επιλογής κλίμακας προηγούμενης βαθμίδας μέτρησης (Prescaler) 00 = 1:1 Prescaler 01 = 1:4 Prescaler 1x = 1:16 Prescaler
 00 = 1:1 Prescaler 01 = 1:4 Prescaler 1x = 1:16")
16 bit 7-6 Καταχωρητής CCP1CON (Bank0) P1M<1:0>: Bit ρυθμίσεων της PWM εξόδου Εάν CCP1M<3:2> = 00, 01, 10: xx = Ο ακροδέκτης P1A ορίζεται ως είσοδος Capture/Compare. Οι ακροδέκτες P1B, P1C και P1D ορίζονται ως είσοδοι/έξοδοι των θυρών στις οποίες ανήκουν Εάν CCP1M<3:2> = 11: 00 = Ο ακροδέκτης P1A ορίζεται ως απλή έξοδος PWM. Οι ακροδέκτες P1B, P1C και P1D ορίζονται ως είσοδοι/έξοδοι των θυρών στις οποίες ανήκουν 01 = Οδήγηση εμπρόσθιας κατεύθυνσης κινητήρα συνδεσμολογίας πλήρους γέφυρας. Έξοδος P1D διαμορφωμένη κατά εύρος. Έξοδος P1A ενεργός. Έξοδος P1B ανενεργός. Έξοδος P1C ανενεργός 10 = Οδήγηση κινητήρα συνδεσμολογίας μισής γέφυρας. Έξοδοι P1A και P1B διαμορφωμένοι κατά εύρος. Έξοδοι P1C και P1D ορίζονται ως είσοδοι/έξοδοι των θυρών στις οποίες ανήκουν 11 = Οδήγηση αντίστροφης κατεύθυνσης κινητήρα συνδεσμολογίας πλήρους γέφυρας. Έξοδος P1Β διαμορφωμένη κατά εύρος. Έξοδος P1C ενεργός. Έξοδος P1A ανενεργός. Έξοδος P1D ανενεργός bit 5-4 DC1B<1:0>: Τα λιγότερο σημαντικά bit του Duty Cycle της PWM κυματομορφής Capture mode: Δεν χρησιμοποιείται σε αυτό το mode λειτουργίας Compare mode: Δεν χρησιμοποιείται σε αυτό το mode λειτουργίας PWM mode: Τα δύο λιγότερο σημαντικά bits του Duty Cycle της PWM κυματομορφής bit 3-0 CCP1M<3:0>: Bit επιλογής mode λειτουργίας 0000 = Απενεργοποίηση μονάδας CCP 0001 = Δε χρησιμοποιείται (δεσμευμένη) 0010 = Compare mode, αντιστροφή εξόδου σε κάθε ταύτιση 0011 = Δε χρησιμοποιείται (δεσμευμένη) 0100 = Capture mode, σύλληψη σε κάθε κατερχόμενο μέτωπο 0101 = Capture mode, σύλληψη σε κάθε ανερχόμενο μέτωπο 0110 = Capture mode, σύλληψη σε κάθε 4ο ανερχόμενο μέτωπο 0111 = Capture mode, σύλληψη σε κάθε 16ο ανερχόμενο μέτωπο 1000 = Compare mode, έξοδος στο λογικό 1 σε κάθε ταύτιση 1001 = Compare mode, έξοδος στο λογικό 0 σε κάθε ταύτιση 1010 = Compare mode, έξοδος ανεπηρέαστη, σηματοδότηση διακοπής σε κάθε ταύτιση 1011 = Compare mode, σκανδαλισμός ειδικού συμβάντος προκαλώντας RESET στον Timer1 και κάνοντας εκκίνηση μιας A/D μετατροπής 1100 = PWM mode, για τα P1A, P1C η ενεργός κατάσταση περιγράφεται με υψηλό επίπεδο, για τα P1Β, P1D η ενεργός κατάσταση περιγράφεται με υψηλό επίπεδο = PWM mode, για τα P1A, P1C η ενεργός κατάσταση περιγράφεται με υψηλό επίπεδο, για τα P1Β, P1D η ενεργός κατάσταση περιγράφεται με χαμηλό επίπεδο = PWM mode, για τα P1A, P1C η ενεργός κατάσταση περιγράφεται με χαμηλό επίπεδο, για τα P1Β, P1D η ενεργός κατάσταση περιγράφεται με υψηλό επίπεδο = PWM mode,για τα P1A, P1C η ενεργός κατάσταση περιγράφεται με χαμηλό επίπεδο, για τα P1Β, P1D η ενεργός κατάσταση περιγράφεται με χαμηλό επίπεδο.

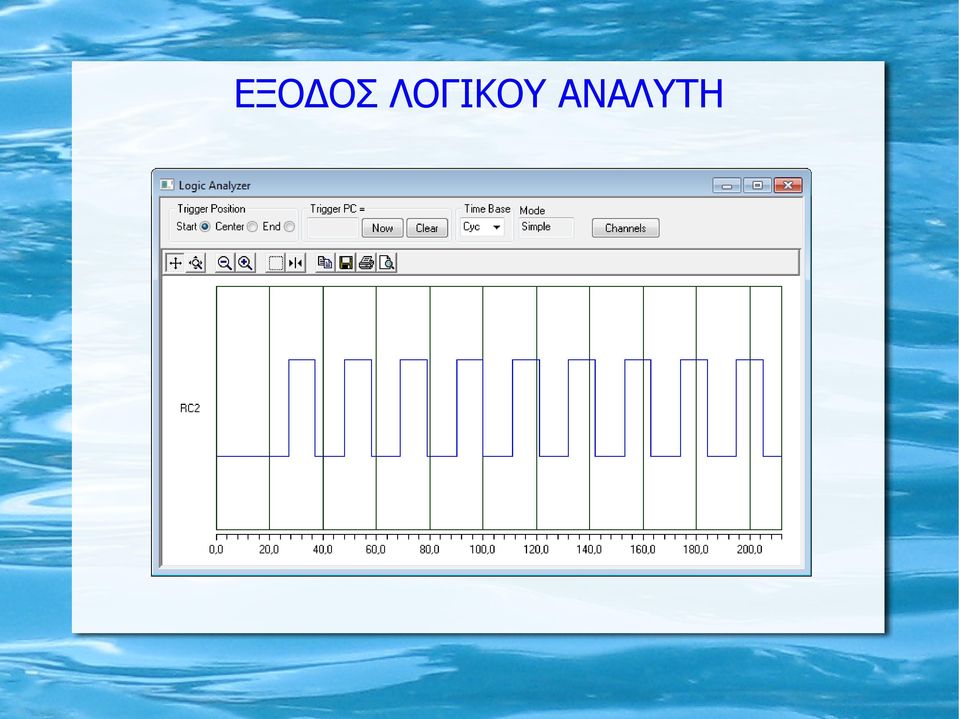
17 ΠΑΡΑΔΕΙΓΜΑ ΧΡΗΣΗΣ PWM include <p16f887.inc> org h'0000' bsf STATUS,RP0 ; Bank1 bcf TRISC,2 ; Το RC2 καθορίζεται ως έξοδος movlw d'20' movwf PR2 ; Φόρτωση στον PR2 το 20 bcf STATUS,RP0 ; Bank0 bsf T2CON,TMR2ON ; Ενεργοποίηση Timer2 movlw d'10' movwf CCPR1L ; Καθορισμός του Duty Cycle στο RC2 movlw b' ' movwf CCP1CON ; Ρύθμιση CCP1 για PWM goto $ end


18 ΕΞΟΔΟΣ ΛΟΓΙΚΟΥ ΑΝΑΛΥΤΗ
WDT και Power Up timer
 Ο ΜΙΚΡΟΕΛΕΓΚΤΗΣ PIC O μικροελεγκτής PIC κατασκευάζεται από την εταιρεία Microchip. Περιλαμβάνει τις τρεις βασικές κατηγορίες ως προς το εύρος του δίαυλου δεδομένων (Data Bus): 8 bit (σειρές PIC10, PIC12,
Ο ΜΙΚΡΟΕΛΕΓΚΤΗΣ PIC O μικροελεγκτής PIC κατασκευάζεται από την εταιρεία Microchip. Περιλαμβάνει τις τρεις βασικές κατηγορίες ως προς το εύρος του δίαυλου δεδομένων (Data Bus): 8 bit (σειρές PIC10, PIC12,
Σπύρος Καζαρλής, Χειμώνας 2014-2015 1
 Κάθε ενσωματωμένο σύστημα έχει ένα σύνολο θυρών εισόδου / εξόδου, ψηφιακές ή και αναλογικές. Οι ψηφιακές θύρες μπορεί να είναι: Παράλληλες θύρες Σειριακές θύρες Θύρες επικοινωνίας άλλων πρωτοκόλλων όπως
Κάθε ενσωματωμένο σύστημα έχει ένα σύνολο θυρών εισόδου / εξόδου, ψηφιακές ή και αναλογικές. Οι ψηφιακές θύρες μπορεί να είναι: Παράλληλες θύρες Σειριακές θύρες Θύρες επικοινωνίας άλλων πρωτοκόλλων όπως
ΑΝΑLOG TO DIGITAL CONVERTER (ADC)
") ΑΝΑLOG TO DIGITAL CONVERTER (ADC) O ADC αναλαμβάνει να μετατρέψει αναλογικές τάσεις σε ψηφιακές ώστε να είναι διαθέσιμες εσωτερικά στο μικροελεγκτή για επεξεργασία. Η αναλογική τάση που θέλουμε να ψηφιοποιηθεί
ΑΝΑLOG TO DIGITAL CONVERTER (ADC) O ADC αναλαμβάνει να μετατρέψει αναλογικές τάσεις σε ψηφιακές ώστε να είναι διαθέσιμες εσωτερικά στο μικροελεγκτή για επεξεργασία. Η αναλογική τάση που θέλουμε να ψηφιοποιηθεί
Καταχωρητής STATUS. IRP: Bit επιλογής περιοχής μνήμης (Bank) για την έμμεση διευθυνσιοδότηση 1= Bank2, Bank3 0= Bank0, Bank1
 για την έμμεση διευθυνσιοδότηση 1= Bank2, Bank3 0= Bank0, Bank1") Καταχωρητής STATUS bit 7 IRP: Bit επιλογής περιοχής μνήμης (Bank) για την έμμεση διευθυνσιοδότηση 1= Bank2, Bank3 0= Bank0, Bank1 bit 6-5 RP1:RP0: Bit επιλογής περιοχής μνήμης (Bank) για την άμεση διευθυνσιοδότηση
Καταχωρητής STATUS bit 7 IRP: Bit επιλογής περιοχής μνήμης (Bank) για την έμμεση διευθυνσιοδότηση 1= Bank2, Bank3 0= Bank0, Bank1 bit 6-5 RP1:RP0: Bit επιλογής περιοχής μνήμης (Bank) για την άμεση διευθυνσιοδότηση
PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών
 Διαμόρφωση εύρους παλμών") PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη
PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη
ΠΑΡΟΥΣΙΑΣΗ ΤΟΥ ΕΡΓΑΣΤΗΡΙΑΚΟΥ ΜΑΘΗΜΑΤΟΣ «ΣΥΣΤΗΜΑΤΑ ΨΗΦΙΑΚΩΝ ΗΛΕΚΤΡΟΝΙΚΩΝ» ή ΠΡΟΓΡΑΜΜΑΤΙΖΟΝΤΑΣ ΤΟΝ ΜΙΚΡΟΕΛΕΓΚΤΉ PIC16F877 ΤΗΣ MICROCHIP TECHNOLOGY INC
 ΠΑΡΟΥΣΙΑΣΗ ΤΟΥ ΕΡΓΑΣΤΗΡΙΑΚΟΥ ΜΑΘΗΜΑΤΟΣ «ΣΥΣΤΗΜΑΤΑ ΨΗΦΙΑΚΩΝ ΗΛΕΚΤΡΟΝΙΚΩΝ» ή ΠΡΟΓΡΑΜΜΑΤΙΖΟΝΤΑΣ ΤΟΝ ΜΙΚΡΟΕΛΕΓΚΤΉ PIC16F877 ΤΗΣ MICROCHIP TECHNOLOGY INC ΗΛΕΚΤΡΟΝΙΚΟΣ ΤΟΜΕΑΣ ΕΠΑΛ ΣΕΙΡΑ ΠΑΡΑΓΩΓΗΣ MICROCONTROLLERS
ΠΑΡΟΥΣΙΑΣΗ ΤΟΥ ΕΡΓΑΣΤΗΡΙΑΚΟΥ ΜΑΘΗΜΑΤΟΣ «ΣΥΣΤΗΜΑΤΑ ΨΗΦΙΑΚΩΝ ΗΛΕΚΤΡΟΝΙΚΩΝ» ή ΠΡΟΓΡΑΜΜΑΤΙΖΟΝΤΑΣ ΤΟΝ ΜΙΚΡΟΕΛΕΓΚΤΉ PIC16F877 ΤΗΣ MICROCHIP TECHNOLOGY INC ΗΛΕΚΤΡΟΝΙΚΟΣ ΤΟΜΕΑΣ ΕΠΑΛ ΣΕΙΡΑ ΠΑΡΑΓΩΓΗΣ MICROCONTROLLERS
Ι ΑΣΚΩΝ ΚΑΘΗΓΗΤΗΣ: ΚΑΘΗΓΗΤΗΣ ΕΦΑΡΜΟΓΩΝ. ΤΕΙ ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ d.fotiadis@kastoria.teikoz.gr
 Ι ΑΣΚΩΝ ΚΑΘΗΓΗΤΗΣ: ΦΩΤΙΑ ΗΣ Α. ΗΜΗΤΡΗΣ M.Sc. ΚΑΘΗΓΗΤΗΣ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ (Σ.Τ.ΕΦ.) ΤΕΙ ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ d.fotiadis@kastoria.teikoz.gr Ασύγχρονη σειριακή
Ι ΑΣΚΩΝ ΚΑΘΗΓΗΤΗΣ: ΦΩΤΙΑ ΗΣ Α. ΗΜΗΤΡΗΣ M.Sc. ΚΑΘΗΓΗΤΗΣ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ (Σ.Τ.ΕΦ.) ΤΕΙ ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ d.fotiadis@kastoria.teikoz.gr Ασύγχρονη σειριακή
ΔΙΑΚΟΠΕΣ PΙC16F887(INTERRUPTS) Όταν σηματοδοτηθεί μια διακοπή στον PIC16F887, ο έλεγχος του προγράμματος μεταφέρεται στο τμήμα κώδικα που βρίσκεται
 Όταν σηματοδοτηθεί μια διακοπή στον PIC16F887, ο έλεγχος του προγράμματος μεταφέρεται στο τμήμα κώδικα που βρίσκεται") ΔΙΑΚΟΠΕΣ PΙC16F887(INTERRUPTS) Όταν σηματοδοτηθεί μια διακοπή στον PIC16F887, ο έλεγχος του προγράμματος μεταφέρεται στο τμήμα κώδικα που βρίσκεται στη διεύθυνση μνήμης h 0004 η οποία ονομάζεται και διάνυσμα
ΔΙΑΚΟΠΕΣ PΙC16F887(INTERRUPTS) Όταν σηματοδοτηθεί μια διακοπή στον PIC16F887, ο έλεγχος του προγράμματος μεταφέρεται στο τμήμα κώδικα που βρίσκεται στη διεύθυνση μνήμης h 0004 η οποία ονομάζεται και διάνυσμα
ΡΟΜΠΟΤΙΚΗ. ΕΡΓΑΣΙΑ ΠΑΝΩ ΣΤΗΝ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΝΧΤ ΚΑΙ ΤΑ ΠΡΩΤΟΚΟΛΛΑ ΕΠΙΚΟΙΝΩΝΙΑΣ BLUETOOTH, I2C και serial communication
 ΡΟΜΠΟΤΙΚΗ ΕΡΓΑΣΙΑ ΠΑΝΩ ΣΤΗΝ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΝΧΤ ΚΑΙ ΤΑ ΠΡΩΤΟΚΟΛΛΑ ΕΠΙΚΟΙΝΩΝΙΑΣ BLUETOOTH, I2C και serial communication ΜΠΑΝΤΗΣ ΑΝΤΩΝΙΟΣ 533 ΤΣΙΚΤΣΙΡΗΣ ΔΗΜΗΤΡΙΟΣ 551 ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΤΟΥ ΡΟΜΠΟΤ LEGO NXT Το ρομπότ
ΡΟΜΠΟΤΙΚΗ ΕΡΓΑΣΙΑ ΠΑΝΩ ΣΤΗΝ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΝΧΤ ΚΑΙ ΤΑ ΠΡΩΤΟΚΟΛΛΑ ΕΠΙΚΟΙΝΩΝΙΑΣ BLUETOOTH, I2C και serial communication ΜΠΑΝΤΗΣ ΑΝΤΩΝΙΟΣ 533 ΤΣΙΚΤΣΙΡΗΣ ΔΗΜΗΤΡΙΟΣ 551 ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΤΟΥ ΡΟΜΠΟΤ LEGO NXT Το ρομπότ
ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 1
 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 1 Σε αυτή την εργαστηριακή άσκηση θα σχεδιάσετε ένα σύστημα που θα υλοποιεί έναν ενιαίο ασύγχρονο πομποδέκτη UART (Universal Asynchronous Receiver Transmitter). Το UART θα υλοποιηθεί
ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 1 Σε αυτή την εργαστηριακή άσκηση θα σχεδιάσετε ένα σύστημα που θα υλοποιεί έναν ενιαίο ασύγχρονο πομποδέκτη UART (Universal Asynchronous Receiver Transmitter). Το UART θα υλοποιηθεί
Εφαρμογές μικροελεγκτών
 Μικροελεγκτές Έναν ορισμό που θα μπορούσαμε να δώσουμε για τους μικροελεγκτές είναι ο εξής: Μικροελεγκτής είναι ένα προγραμματιζόμενο ολοκληρωμένο κύκλωμα το οποίο διαθέτει επεξεργαστή, μνήμη, διάφορα
Μικροελεγκτές Έναν ορισμό που θα μπορούσαμε να δώσουμε για τους μικροελεγκτές είναι ο εξής: Μικροελεγκτής είναι ένα προγραμματιζόμενο ολοκληρωμένο κύκλωμα το οποίο διαθέτει επεξεργαστή, μνήμη, διάφορα
ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ. ΚΕΦΑΛΑΙΟ 4ο ΜΝΗΜΕΣ. (c) Αμπατζόγλου Γιάννης, Ηλεκτρονικός Μηχανικός, καθηγητής ΠΕ17
 Αμπατζόγλου Γιάννης, Ηλεκτρονικός Μηχανικός, καθηγητής ΠΕ17") ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΚΕΦΑΛΑΙΟ 4ο ΜΝΗΜΕΣ Μνήμες (Memory) - Είναι ημιαγώγιμα κυκλώματα που μπορούν να αποθηκεύσουν ένα σύνολο από δυαδικά ψηφία (bit). - Μια μνήμη αποθηκεύει λέξεις (σειρές από bit). - Σε κάθε
ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΚΕΦΑΛΑΙΟ 4ο ΜΝΗΜΕΣ Μνήμες (Memory) - Είναι ημιαγώγιμα κυκλώματα που μπορούν να αποθηκεύσουν ένα σύνολο από δυαδικά ψηφία (bit). - Μια μνήμη αποθηκεύει λέξεις (σειρές από bit). - Σε κάθε
Καθολική Σειριακή Διεπιφάνεια (Universal Serial Interface)
") Καθολική Σειριακή Διεπιφάνεια (Universal Serial Interface) Εισαγωγή Η καθολική σειριακή διεπιφάνεια (universal serial interface, USI) παρέχει SPI (Serial peripheral interface) και I 2 C (Inter integrated
Καθολική Σειριακή Διεπιφάνεια (Universal Serial Interface) Εισαγωγή Η καθολική σειριακή διεπιφάνεια (universal serial interface, USI) παρέχει SPI (Serial peripheral interface) και I 2 C (Inter integrated
ΕΙΣΑΓΩΓΗ. 1. Το λογισμικό MPLAB. 2. Υλικό προγραμματισμού και αποσφαλμάτωσης
 ΕΙΣΑΓΩΓΗ 1. Το λογισμικό MPLAB Στις εργαστηριακές ασκήσεις που θα ακολουθήσουν για την ανάπτυξη των προγραμμάτων του μικροελεγκτή χρησιμοποιείται το περιβάλλον προγραμματισμού και αποσφαλμάτωσης MPLAB,
ΕΙΣΑΓΩΓΗ 1. Το λογισμικό MPLAB Στις εργαστηριακές ασκήσεις που θα ακολουθήσουν για την ανάπτυξη των προγραμμάτων του μικροελεγκτή χρησιμοποιείται το περιβάλλον προγραμματισμού και αποσφαλμάτωσης MPLAB,
ΡΟΜΠΟΤΙΚΗ ΜΕ ARDUINO - ARDUINO ΚΑΙ ΗΧΟΣ I. Δημιουργός: Δρ.Αθανάσιος Μπαλαφούτης Επιβλέπων: Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ
 ΡΟΜΠΟΤΙΚΗ ΜΕ ARDUINO - ARDUINO ΚΑΙ ΗΧΟΣ I Δημιουργός: Δρ.Αθανάσιος Μπαλαφούτης Επιβλέπων: Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ 1 ARDUINO ΚΑΙ ΗΧΟΣ ΠΕΡΙΕΧΟΜΕΝΑ Εισαγωγή, μηχανές παραγωγής ήχου Χρήση του πιεζοηλεκτρικού
ΡΟΜΠΟΤΙΚΗ ΜΕ ARDUINO - ARDUINO ΚΑΙ ΗΧΟΣ I Δημιουργός: Δρ.Αθανάσιος Μπαλαφούτης Επιβλέπων: Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ 1 ARDUINO ΚΑΙ ΗΧΟΣ ΠΕΡΙΕΧΟΜΕΝΑ Εισαγωγή, μηχανές παραγωγής ήχου Χρήση του πιεζοηλεκτρικού
ΕΝΟΤΗΤΑ 10: ΟΔΗΓΗΣΗ ΚΙΝΗΤΗΡΩΝ
 ΕΝΟΤΗΤΑ 10: ΟΔΗΓΗΣΗ ΚΙΝΗΤΗΡΩΝ Στόχος και Περίγραμμα της Ενότητας 10 Στόχος της παρουσίασης Παρουσίαση της βασικής ιδέα και απλών παραδειγμάτων για την οδήγηση DC και βηματικών κινητήρων με το Arduino.
ΕΝΟΤΗΤΑ 10: ΟΔΗΓΗΣΗ ΚΙΝΗΤΗΡΩΝ Στόχος και Περίγραμμα της Ενότητας 10 Στόχος της παρουσίασης Παρουσίαση της βασικής ιδέα και απλών παραδειγμάτων για την οδήγηση DC και βηματικών κινητήρων με το Arduino.
ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΑΣΥΓΧΡΟΝΟΙ ΜΕΤΡΗΤΕΣ
 ΣΧΟΛΗ ΑΣΠΑΙΤΕ ΤΜΗΜΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΑΣΥΓΧΡΟΝΟΙ ΜΕΤΡΗΤΕΣ 1) Οι απαριθμητές ή μετρητές (counters) είναι κυκλώματα που
ΣΧΟΛΗ ΑΣΠΑΙΤΕ ΤΜΗΜΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΑΣΥΓΧΡΟΝΟΙ ΜΕΤΡΗΤΕΣ 1) Οι απαριθμητές ή μετρητές (counters) είναι κυκλώματα που
Είναι το πρωτόκολλο RS232 που χρησιμοποιείται στις σειριακές θύρες COM με τη διαφορά ότι εκτελείται σε επίπεδο τάσεων TTL. 2
 16. USART Οι AVR διαθέτουν ενσωματωμένη διάταξη για υποστήριξη σειριακής επικοινωνίας USART 1 (Universal Synchronous and Asynchronous serial Receiver and Transmitter). Η ενσωματωμένη διάταξη μας εξυπηρετεί
16. USART Οι AVR διαθέτουν ενσωματωμένη διάταξη για υποστήριξη σειριακής επικοινωνίας USART 1 (Universal Synchronous and Asynchronous serial Receiver and Transmitter). Η ενσωματωμένη διάταξη μας εξυπηρετεί
Εντολές PIC16F rrf <όνομα καταχωρητή>,a a=f ή a=w H εντολή πραγματοποιεί ολίσθηση προς τα δεξιά του καταχωρητή που ακολουθεί μέσω κρατουμένου
 Εντολές PIC16F887 20. rrf ,a a=f ή a=w H εντολή πραγματοποιεί ολίσθηση προς τα δεξιά του καταχωρητή που ακολουθεί μέσω κρατουμένου (Carry) και αν a=f αποθηκεύει το αποτέλεσμα στον καταχωρητή
Εντολές PIC16F887 20. rrf ,a a=f ή a=w H εντολή πραγματοποιεί ολίσθηση προς τα δεξιά του καταχωρητή που ακολουθεί μέσω κρατουμένου (Carry) και αν a=f αποθηκεύει το αποτέλεσμα στον καταχωρητή
Ενσωµατωµένα Υπολογιστικά Συστήµατα (Embedded Computer Systems)
") Ενσωµατωµένα Υπολογιστικά Συστήµατα (Embedded Computer Systems) Μαθηµα 2 ηµήτρης Λιούπης 1 Intel SA-1110 µc StrongARM core. System-on-Chip. Εξέλιξη των SA-110 και SA-1100. 2 ARM cores ARM: IP (intellectual
Ενσωµατωµένα Υπολογιστικά Συστήµατα (Embedded Computer Systems) Μαθηµα 2 ηµήτρης Λιούπης 1 Intel SA-1110 µc StrongARM core. System-on-Chip. Εξέλιξη των SA-110 και SA-1100. 2 ARM cores ARM: IP (intellectual
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5. Ρυθμίζοντας τη Φορά Περιστροφής. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Η συχνότητα f των παλµών 0 και 1 στην έξοδο Q n είναι. f Qn = 1/(T cl x 2 n+1 )
") ΨΗΦΙΑΚΑ ΚΥΚΛΩΜΑΤΑ - ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 9 ΥΑ ΙΚΟΙ ΑΠΑΡΙΘΜΗΤΕΣ Σκοπός: Η µελέτη της λειτουργίας των απαριθµητών. Υλοποίηση ασύγχρονου απαριθµητή 4-bit µε χρήση JK Flip-Flop. Κατανόηση της αλλαγής του υπολοίπου
ΨΗΦΙΑΚΑ ΚΥΚΛΩΜΑΤΑ - ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 9 ΥΑ ΙΚΟΙ ΑΠΑΡΙΘΜΗΤΕΣ Σκοπός: Η µελέτη της λειτουργίας των απαριθµητών. Υλοποίηση ασύγχρονου απαριθµητή 4-bit µε χρήση JK Flip-Flop. Κατανόηση της αλλαγής του υπολοίπου
Flip-Flop: D Control Systems Laboratory
 Flip-Flop: Control Systems Laboratory Είναι ένας τύπος συγχρονιζόμενου flip- flop, δηλαδή ενός flip- flop όπου οι έξοδοί του δεν αλλάζουν μόνο με αλλαγή των εισόδων R, S αλλά χρειάζεται ένας ωρολογιακός
Flip-Flop: Control Systems Laboratory Είναι ένας τύπος συγχρονιζόμενου flip- flop, δηλαδή ενός flip- flop όπου οι έξοδοί του δεν αλλάζουν μόνο με αλλαγή των εισόδων R, S αλλά χρειάζεται ένας ωρολογιακός
ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΕΦΑΡΜΟΓΕΣ ΚΑΤΑΧΩΡΗΤΩΝ ΟΛΙΣΘΗΣΗΣ
 ΣΧΟΛΗ ΑΣΠΑΙΤΕ ΤΜΗΜΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΕΦΑΡΜΟΓΕΣ ΚΑΤΑΧΩΡΗΤΩΝ ΟΛΙΣΘΗΣΗΣ ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ Στο διπλανό σχήμα φαίνεται το διάγραμμα ακροδεκτών
ΣΧΟΛΗ ΑΣΠΑΙΤΕ ΤΜΗΜΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΕΦΑΡΜΟΓΕΣ ΚΑΤΑΧΩΡΗΤΩΝ ΟΛΙΣΘΗΣΗΣ ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ Στο διπλανό σχήμα φαίνεται το διάγραμμα ακροδεκτών
12. Διακοπές Interrupts (IRQ)
") 2. Διακοπές Interrupts (IRQ) Πίνακας Ι. Χειρισμός διακοπών στον ATmega6. A/A Program address Source Vector Interrupt definition External Pin, Power-on Reset, Brown-outReset, Watchdog Reset, and JTAG AVR
2. Διακοπές Interrupts (IRQ) Πίνακας Ι. Χειρισμός διακοπών στον ATmega6. A/A Program address Source Vector Interrupt definition External Pin, Power-on Reset, Brown-outReset, Watchdog Reset, and JTAG AVR
Λογικά σύμβολα των CPU, RAM, ROM και I/O module
 Μικροϋπολογιστές Λογικά σύμβολα των CPU, RAM, ROM και I/O module Data CPU Data Data Address RAM Control Address Control External Data Data Address Control I/O module External Data External Control ROM
Μικροϋπολογιστές Λογικά σύμβολα των CPU, RAM, ROM και I/O module Data CPU Data Data Address RAM Control Address Control External Data Data Address Control I/O module External Data External Control ROM
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
Ψηφιακή Λογική Σχεδίαση
 Ψηφιακή Λογική Σχεδίαση Επιμέλεια: Γεώργιος Θεοδωρίδης, Επίκουρος Καθηγητής Ανδρέας Εμερετλής, Υποψήφιος Διδάκτορας Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σημείωμα Αδειοδότησης Το παρόν
Ψηφιακή Λογική Σχεδίαση Επιμέλεια: Γεώργιος Θεοδωρίδης, Επίκουρος Καθηγητής Ανδρέας Εμερετλής, Υποψήφιος Διδάκτορας Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σημείωμα Αδειοδότησης Το παρόν
ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΟΙ ΚΑΤΑΧΩΡΗΤΕΣ ΚΑΙ Η ΥΛΟΠΟΙΗΣΗ ΤΟΥΣ ΜΕ FLIP-FLOP ΚΑΙ ΠΥΛΕΣ
 ΑΣΠΑΙΤΕ ΤΜΗΜΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΗΛΕΚΤΡΟΝΙΚΗΣ & ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ & μ-υπολογιστων ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΟΙ ΚΑΤΑΧΩΡΗΤΕΣ ΚΑΙ Η ΥΛΟΠΟΙΗΣΗ ΤΟΥΣ ΜΕ FLIP-FLOP ΚΑΙ ΠΥΛΕΣ Θεωρητικό
ΑΣΠΑΙΤΕ ΤΜΗΜΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΗΛΕΚΤΡΟΝΙΚΗΣ & ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ & μ-υπολογιστων ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΟΙ ΚΑΤΑΧΩΡΗΤΕΣ ΚΑΙ Η ΥΛΟΠΟΙΗΣΗ ΤΟΥΣ ΜΕ FLIP-FLOP ΚΑΙ ΠΥΛΕΣ Θεωρητικό
Ακολουθιακό κύκλωμα Η έξοδος του κυκλώματος εξαρτάται από τις τιμές εισόδου ΚΑΙ από την προηγούμενη κατάσταση του κυκλώματος
 1 Συνδυαστικό κύκλωμα Η έξοδος του κυκλώματος εξαρτάται ΜΟΝΟ από τις εισόδους του Εάν γνωρίζουμε τις τιμές των εισόδων του κυκλώματος, τότε μπορούμε να προβλέψουμε ακριβώς τις εξόδους του Ακολουθιακό κύκλωμα
1 Συνδυαστικό κύκλωμα Η έξοδος του κυκλώματος εξαρτάται ΜΟΝΟ από τις εισόδους του Εάν γνωρίζουμε τις τιμές των εισόδων του κυκλώματος, τότε μπορούμε να προβλέψουμε ακριβώς τις εξόδους του Ακολουθιακό κύκλωμα
Οδηγώντας μια οθόνη υγρών κρυστάλλων Liquid Crystal Display
 Οδηγώντας μια οθόνη υγρών κρυστάλλων Liquid Crystal Display Σχηματικό Διάγραμμα μιας Οθόνης Υγρών Κρυστάλλων To Lcd εσωτερικά έχει έναν controller που είναι υπεύθυνος για την επεξεργασία τον δεδομένων
Οδηγώντας μια οθόνη υγρών κρυστάλλων Liquid Crystal Display Σχηματικό Διάγραμμα μιας Οθόνης Υγρών Κρυστάλλων To Lcd εσωτερικά έχει έναν controller που είναι υπεύθυνος για την επεξεργασία τον δεδομένων
ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΣΥΓΧΡΟΝΟΙ ΜΕΤΡΗΤΕΣ
 ΣΧΟΛΗ ΑΣΠΑΙΤΕ ΤΜΗΜΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΣΥΓΧΡΟΝΟΙ ΜΕΤΡΗΤΕΣ 1) Οι σύγχρονοι μετρητές υλοποιούνται με Flip-Flop τύπου T
ΣΧΟΛΗ ΑΣΠΑΙΤΕ ΤΜΗΜΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΣΥΓΧΡΟΝΟΙ ΜΕΤΡΗΤΕΣ 1) Οι σύγχρονοι μετρητές υλοποιούνται με Flip-Flop τύπου T
; Έλεγχος σημαίας λήψης (RCIF=0: άδειος buffer)
") **************************************************************************** *Πρόγραμμα μέτρησης θερμοκρασίας με το LM335 και απεικόνιση σtην οθόνη * *ενός υπολογιστή, με τον οποίο συνδέεται μέσω σειριακής
**************************************************************************** *Πρόγραμμα μέτρησης θερμοκρασίας με το LM335 και απεικόνιση σtην οθόνη * *ενός υπολογιστή, με τον οποίο συνδέεται μέσω σειριακής
Μηχανοτρονική. Τμήμα Μηχανικών Παραγωγής και Διοίκησης 7 ο Εξάμηνο,
 Τμήμα Μηχανικών Παραγωγής και Διοίκησης 7 ο Εξάμηνο, 2016-2017 ΜΙΚΡΟΕΠΕΞΕΡΓΑΣΤΕΣ Μικροϋπολογιστής Υπολογιστής που χρησιμοποιείται για την είσοδο, επεξεργασία και έξοδο πληροφοριών. Είδη μικροϋπολογιστών:
Τμήμα Μηχανικών Παραγωγής και Διοίκησης 7 ο Εξάμηνο, 2016-2017 ΜΙΚΡΟΕΠΕΞΕΡΓΑΣΤΕΣ Μικροϋπολογιστής Υπολογιστής που χρησιμοποιείται για την είσοδο, επεξεργασία και έξοδο πληροφοριών. Είδη μικροϋπολογιστών:
; Οι HL δείχνουν την επόµενη θέση µνήµης MVI A, 38H CMP H JNZ DO_FLMEM ; POP B. ; Ανάκτηση καταχωρητών απο το σωρό.
 ΑΣΚΗΣΗ 1 η 1. Να γραφεί πρόγραµµα σε µνηµονική γλώσσα assembly 8085, υπό µορφή υπορουτίνας, (µε τις απαραίτητες αρχικοποιήσεις), που να γεµίζει τις θέσεις µνήµης RAM από 3400-37FF Hex, µε περιεχόµενα αυξηµένα
ΑΣΚΗΣΗ 1 η 1. Να γραφεί πρόγραµµα σε µνηµονική γλώσσα assembly 8085, υπό µορφή υπορουτίνας, (µε τις απαραίτητες αρχικοποιήσεις), που να γεµίζει τις θέσεις µνήµης RAM από 3400-37FF Hex, µε περιεχόµενα αυξηµένα
Ακολουθιακό κύκλωμα Η έξοδος του κυκλώματος εξαρτάται από τις τιμές εισόδου ΚΑΙ από την προηγούμενη κατάσταση του κυκλώματος
 1 Συνδυαστικό κύκλωμα Η έξοδος του κυκλώματος εξαρτάται ΜΟΝΟ από τις εισόδους του Εάν γνωρίζουμε τις τιμές των εισόδων του κυκλώματος, τότε μπορούμε να προβλέψουμε ακριβώς τις εξόδους του Ακολουθιακό κύκλωμα
1 Συνδυαστικό κύκλωμα Η έξοδος του κυκλώματος εξαρτάται ΜΟΝΟ από τις εισόδους του Εάν γνωρίζουμε τις τιμές των εισόδων του κυκλώματος, τότε μπορούμε να προβλέψουμε ακριβώς τις εξόδους του Ακολουθιακό κύκλωμα
Μαθαίνοντας το hardware του αναπτυξιακού
 1. ΑΣΚΗΣΗ 1 Μαθαίνοντας το hardware του αναπτυξιακού Προϋποθέσεις Το εργαστήριο αυτό προϋποθέτει το διάβασμα και χρήση των εξής: Αρχείο mcbstr9.chm HTML, που δίδεται με τα υπόλοιπα αρχεία του εργαστηρίου.
1. ΑΣΚΗΣΗ 1 Μαθαίνοντας το hardware του αναπτυξιακού Προϋποθέσεις Το εργαστήριο αυτό προϋποθέτει το διάβασμα και χρήση των εξής: Αρχείο mcbstr9.chm HTML, που δίδεται με τα υπόλοιπα αρχεία του εργαστηρίου.
Χρ. Καβουσιανός Επίκουρος Καθηγητής
 Είσοδος - Έξοδος Χρ. Καβουσιανός Επίκουρος Καθηγητής Συσκευές Εισόδου/Εξόδου Θερµοκρασία Τα ψηφιακά συστήµατα επικοινωνούν µε το περιβάλλον µε µορφοτροπείς (transducers-sensors). Πίεση Φως Ηχος Κίνηση
Είσοδος - Έξοδος Χρ. Καβουσιανός Επίκουρος Καθηγητής Συσκευές Εισόδου/Εξόδου Θερµοκρασία Τα ψηφιακά συστήµατα επικοινωνούν µε το περιβάλλον µε µορφοτροπείς (transducers-sensors). Πίεση Φως Ηχος Κίνηση
Μικροεπεξεργαστές - Μικροελεγκτές Ψηφιακά Συστήματα
 Μικροεπεξεργαστές - Μικροελεγκτές Ψηφιακά Συστήματα 1. Ποια είναι η σχέση της έννοιας του μικροεπεξεργαστή με αυτή του μικροελεγκτή; Α. Ο μικροεπεξεργαστής εμπεριέχει τουλάχιστο έναν μικροελεγκτή. Β. Ο
Μικροεπεξεργαστές - Μικροελεγκτές Ψηφιακά Συστήματα 1. Ποια είναι η σχέση της έννοιας του μικροεπεξεργαστή με αυτή του μικροελεγκτή; Α. Ο μικροεπεξεργαστής εμπεριέχει τουλάχιστο έναν μικροελεγκτή. Β. Ο
ΔΙΑΧΥΤΑ ΚΑΙ ΕΝΣΩΜΑΤΩΜΕΝΑ ΣΥΣΤΗΜΑΤΑ
 ΔΙΑΧΥΤΑ ΚΑΙ ΕΝΣΩΜΑΤΩΜΕΝΑ ΣΥΣΤΗΜΑΤΑ Πλατφόρμες ενσωματωμένων συστημάτων Διδάσκων: Παναγιώτης Καρκαζής Περίγραμμα - Δίαυλοι επικοινωνίας - Μνήμες -Συσκευές Ι/Ο Timers Counters keyboards Leds 7 segment display
ΔΙΑΧΥΤΑ ΚΑΙ ΕΝΣΩΜΑΤΩΜΕΝΑ ΣΥΣΤΗΜΑΤΑ Πλατφόρμες ενσωματωμένων συστημάτων Διδάσκων: Παναγιώτης Καρκαζής Περίγραμμα - Δίαυλοι επικοινωνίας - Μνήμες -Συσκευές Ι/Ο Timers Counters keyboards Leds 7 segment display
«Σχεδιασμός Ψηφιακών Συστημάτων σε FPGA» Εαρινό εξάμηνο
 ΤΕΙ Δυτικής Ελλάδας Τμήμα Μηχανικών Πληροφορικής ΤΕ Εργαστήριο Σχεδίασης Ψηφιακών Ολοκληρωμένων Κυκλωμάτων και Συστημάτων «Σχεδιασμός Ψηφιακών Συστημάτων σε FPGA» Εαρινό εξάμηνο 2016-2017 Διάλεξη 4 η :
ΤΕΙ Δυτικής Ελλάδας Τμήμα Μηχανικών Πληροφορικής ΤΕ Εργαστήριο Σχεδίασης Ψηφιακών Ολοκληρωμένων Κυκλωμάτων και Συστημάτων «Σχεδιασμός Ψηφιακών Συστημάτων σε FPGA» Εαρινό εξάμηνο 2016-2017 Διάλεξη 4 η :
Ανάπτυξη Μικρής Αυτόνομης Ρομποτικής Πλατφόρμας Οδηγούμενης μέσω Ασύρματης Σειριακής ιασύνδεσης ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙ ΕΥΤΙΚΟ Ι ΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Ανάπτυξη Μικρής Αυτόνομης Ρομποτικής Πλατφόρμας Οδηγούμενης μέσω Ασύρματης Σειριακής ιασύνδεσης ΠΤΥΧΙΑΚΗ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙ ΕΥΤΙΚΟ Ι ΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Ανάπτυξη Μικρής Αυτόνομης Ρομποτικής Πλατφόρμας Οδηγούμενης μέσω Ασύρματης Σειριακής ιασύνδεσης ΠΤΥΧΙΑΚΗ
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 2 USB και Σειριακή Επικοι- νωνία Σ Σειριακή Επικοινωνία
 Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 2 USB και Σειριακή Επικοινωνία. Σειριακή Επικοινωνία USB Σύνδεση / Πρωτόκολλο Σκοπός Εντολή επιλογής (if) Εντολή Επανάληψης (while) Πίνακες 1 Μέρος Α : Σκοπός
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 2 USB και Σειριακή Επικοινωνία. Σειριακή Επικοινωνία USB Σύνδεση / Πρωτόκολλο Σκοπός Εντολή επιλογής (if) Εντολή Επανάληψης (while) Πίνακες 1 Μέρος Α : Σκοπός
ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ Γ ΕΠΑΛ 14 / 04 / 2019
 Γ ΕΠΑΛ 14 / 04 / 2019 ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΘΕΜΑ 1 ο 1. Να γράψετε στο τετράδιό σας το γράμμα καθεμιάς από τις παρακάτω προτάσεις και δίπλα τη λέξη ΣΩΣΤΟ, αν είναι σωστή ή τη λέξη ΛΑΘΟΣ, αν είναι λανθασμένη.
Γ ΕΠΑΛ 14 / 04 / 2019 ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΘΕΜΑ 1 ο 1. Να γράψετε στο τετράδιό σας το γράμμα καθεμιάς από τις παρακάτω προτάσεις και δίπλα τη λέξη ΣΩΣΤΟ, αν είναι σωστή ή τη λέξη ΛΑΘΟΣ, αν είναι λανθασμένη.
Σύγχρονη και Ασύγχρονη Σειριακή Επικοινωνία
 Σύγχρονη και Ασύγχρονη Σειριακή Επικοινωνία Δρ. Κλειώ Σγουροπούλου Μετάδοση Δεδομένων Οργάνωση καναλιού μετάδοσης Τρόποι επικοινωνίας Τρόποι μετάδοσης Οργάνωση καναλιού μετάδοσης Τα δεδομένα μπορούν να
Σύγχρονη και Ασύγχρονη Σειριακή Επικοινωνία Δρ. Κλειώ Σγουροπούλου Μετάδοση Δεδομένων Οργάνωση καναλιού μετάδοσης Τρόποι επικοινωνίας Τρόποι μετάδοσης Οργάνωση καναλιού μετάδοσης Τα δεδομένα μπορούν να
2. ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΤΩΝ ΘΥΡΩΝ ΕΙΣΟ ΟΥ/ΕΞΟ ΟΥ ΤΟΥ PIC16F877-ΑΡΙΘΜΗΤΙΚΕΣ ΕΝΤΟΛΕΣ
 1 2. ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΤΩΝ ΘΥΡΩΝ ΕΙΣΟ ΟΥ/ΕΞΟ ΟΥ ΤΟΥ PIC16F877-ΑΡΙΘΜΗΤΙΚΕΣ ΕΝΤΟΛΕΣ Σκοπός της άσκησης: εξοικείωση µε τις θύρες εισόδου/εξόδου ενός µικροελεγκτή 2. Θεωρητικό Μέρος 2.1.1 Θύρες εισόδου / εξόδου
1 2. ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΤΩΝ ΘΥΡΩΝ ΕΙΣΟ ΟΥ/ΕΞΟ ΟΥ ΤΟΥ PIC16F877-ΑΡΙΘΜΗΤΙΚΕΣ ΕΝΤΟΛΕΣ Σκοπός της άσκησης: εξοικείωση µε τις θύρες εισόδου/εξόδου ενός µικροελεγκτή 2. Θεωρητικό Μέρος 2.1.1 Θύρες εισόδου / εξόδου
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 1: Εισαγωγή στα ενσωματωμένα συστήματα (embedded systems) Εργαστήριο Αυτομάτου Ελέγχου Ενσωματωμένα συστήματα (Embedded Systems) Ενσωματωμένα συστήματα (Embedded
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 1: Εισαγωγή στα ενσωματωμένα συστήματα (embedded systems) Εργαστήριο Αυτομάτου Ελέγχου Ενσωματωμένα συστήματα (Embedded Systems) Ενσωματωμένα συστήματα (Embedded
ΒΑΣΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ. Τίτλος Μαθήματος. Διαλέξεις - Θεωρητική Διδασκαλία, Εποπτευόμενο Εργαστήριο Επίδειξη, Μελέτες (Projects)
") ΒΑΣΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ Τίτλος Μαθήματος Μικροελεγκτές και Ενσωματωμένα συστήματα Ανάπτυξη και Εφαρμογές Κωδικός Μαθήματος Μ2 Θεωρία / Εργαστήριο Θεωρία + Εργαστήριο Πιστωτικές μονάδες 4 Ώρες Διδασκαλίας 2Θ+1Ε
ΒΑΣΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ Τίτλος Μαθήματος Μικροελεγκτές και Ενσωματωμένα συστήματα Ανάπτυξη και Εφαρμογές Κωδικός Μαθήματος Μ2 Θεωρία / Εργαστήριο Θεωρία + Εργαστήριο Πιστωτικές μονάδες 4 Ώρες Διδασκαλίας 2Θ+1Ε
ΑΣΚΗΣΗ 8 ΚΑΤΑΧΩΡΗΤΕΣ - REGISTERS
 ΑΣΚΗΣΗ 8 ΚΑΤΑΧΩΡΗΤΕΣ - REGISTERS Αντικείμενο της άσκησης: Η σχεδίαση και λειτουργία συστημάτων προσωρινής αποθήκευσης (Kαταχωρητές- Registers). Για την αποθήκευση μιας πληροφορίας του ενός ψηφίου (bit)
ΑΣΚΗΣΗ 8 ΚΑΤΑΧΩΡΗΤΕΣ - REGISTERS Αντικείμενο της άσκησης: Η σχεδίαση και λειτουργία συστημάτων προσωρινής αποθήκευσης (Kαταχωρητές- Registers). Για την αποθήκευση μιας πληροφορίας του ενός ψηφίου (bit)
Ψηφιακά Συστήματα. 7. Κυκλώματα Μνήμης
 Ψηφιακά Συστήματα 7. Κυκλώματα Μνήμης Βιβλιογραφία 1. Φανουράκης Κ., Πάτσης Γ., Τσακιρίδης Ο., Θεωρία και Ασκήσεις Ψηφιακών Ηλεκτρονικών, ΜΑΡΙΑ ΠΑΡΙΚΟΥ & ΣΙΑ ΕΠΕ, 2016. [59382199] 2. Floyd Thomas L., Ψηφιακά
Ψηφιακά Συστήματα 7. Κυκλώματα Μνήμης Βιβλιογραφία 1. Φανουράκης Κ., Πάτσης Γ., Τσακιρίδης Ο., Θεωρία και Ασκήσεις Ψηφιακών Ηλεκτρονικών, ΜΑΡΙΑ ΠΑΡΙΚΟΥ & ΣΙΑ ΕΠΕ, 2016. [59382199] 2. Floyd Thomas L., Ψηφιακά
10. Πληκτρολόγιο matrix 4x4
 10. Πληκτρολόγιο matrix 4x4 Το πληκτρολόγιο matrix 4x4 αποτελείται από 16 πλήκτρα διακόπτες τα οποία είναι συνδεδεμένα μεταξύ τους ανά 4 σε τέτοια διάταξη ώστε, με το ένα άκρο τους να σχηματίζουν 4 σειρές
10. Πληκτρολόγιο matrix 4x4 Το πληκτρολόγιο matrix 4x4 αποτελείται από 16 πλήκτρα διακόπτες τα οποία είναι συνδεδεμένα μεταξύ τους ανά 4 σε τέτοια διάταξη ώστε, με το ένα άκρο τους να σχηματίζουν 4 σειρές
Ενότητα ΑΡΧΕΣ ΑΚΟΛΟΥΘΙΑΚΗΣ ΛΟΓΙΚΗΣ LATCHES & FLIP-FLOPS
 Ενότητα ΑΡΧΕΣ ΑΚΟΛΟΥΘΙΑΚΗΣ ΛΟΓΙΚΗΣ LATCHES & FLIP-FLOPS Γενικές Γραμμές Ακολουθιακή Λογική Μεταστάθεια S-R RLatch h( (active high h&l low) S-R Latch with Enable Latch Flip-Flop Ασύγχρονοι είσοδοι PRESET
Ενότητα ΑΡΧΕΣ ΑΚΟΛΟΥΘΙΑΚΗΣ ΛΟΓΙΚΗΣ LATCHES & FLIP-FLOPS Γενικές Γραμμές Ακολουθιακή Λογική Μεταστάθεια S-R RLatch h( (active high h&l low) S-R Latch with Enable Latch Flip-Flop Ασύγχρονοι είσοδοι PRESET
Συστήματα Μικροϋπολογιστών
 Συστήματα Μικροϋπολογιστών Είσοδος / Έξοδος Δεδομένων Υπεύθυνος Μαθήματος: K. ΠΕΚΜΕΣΤΖΗ Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως
Συστήματα Μικροϋπολογιστών Είσοδος / Έξοδος Δεδομένων Υπεύθυνος Μαθήματος: K. ΠΕΚΜΕΣΤΖΗ Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως
ΕΙΣΑΓΩΓΗ. Αρχιτεκτονική Η/Υ ΗΜΟΣ ΜΠΟΛΑΝΑΚΗΣ
 ΕΙΣΑΓΩΓΗ Θέµατα ❸Συστήµατα Η/Υ (αναφορά) ❸Γλώσσα υπολογιστών ❸Γλώσσες προγραµµατισµού (low-high level) ❸Low level VS high level programming ❸Βασικά µέρη Η/Υ ❸Μικροϋπολογιστές (µc µp) ❸Αρχιτεκτονική µικροελεγκτών
ΕΙΣΑΓΩΓΗ Θέµατα ❸Συστήµατα Η/Υ (αναφορά) ❸Γλώσσα υπολογιστών ❸Γλώσσες προγραµµατισµού (low-high level) ❸Low level VS high level programming ❸Βασικά µέρη Η/Υ ❸Μικροϋπολογιστές (µc µp) ❸Αρχιτεκτονική µικροελεγκτών
CTMU. => C = 50pF 10pF = 40 pf. C stray. d (C V ) I= I = C V. C= I t. Ι = dq dt
 I= I = C V. C= I t. Ι = dq dt") CTMU Με τη μονάδα CTMU (Charge Time Measurement Unit) μπορούμε να μετρήσουμε απόλυτη χωρητικότητα, σχετική μεταβολή χωρητικότητας καθώς επίσης και χρονικό διάστημα ανάμεσα σε δύο παλμούς. Βασίζεται στην
CTMU Με τη μονάδα CTMU (Charge Time Measurement Unit) μπορούμε να μετρήσουμε απόλυτη χωρητικότητα, σχετική μεταβολή χωρητικότητας καθώς επίσης και χρονικό διάστημα ανάμεσα σε δύο παλμούς. Βασίζεται στην
ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΕΛΕΓΚΤΩΝ
 ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΕΛΕΓΚΤΩΝ ATMEL AVR8 ΠΟΡΛΙΔΑΣ ΔΗΜΗΤΡΙΟΣ ATMEL AVR Atmega16 Χαρακτηριστικά Μικροελεγκτής 8-bit υψηλής απόδοσης και χαμηλής κατανάλωσης Προοδευμένη αρχιτεκτονική RISC (Reduced instruction
ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΕΛΕΓΚΤΩΝ ATMEL AVR8 ΠΟΡΛΙΔΑΣ ΔΗΜΗΤΡΙΟΣ ATMEL AVR Atmega16 Χαρακτηριστικά Μικροελεγκτής 8-bit υψηλής απόδοσης και χαμηλής κατανάλωσης Προοδευμένη αρχιτεκτονική RISC (Reduced instruction
8051 Interrupt Ports. Name Alternate Function
 Σκοπόςτης Διάλεξης Εισαγωγήστις πηγές διακοπών (interrupts) και στον τρόπο που αυτές είναι διαχειρίσιμες από την αρχιτεκτονική 8051 Πώς συνδέονται οι διακόπτες και τα πληκτρολόγια σε ένα μικροϋπολογιστή
Σκοπόςτης Διάλεξης Εισαγωγήστις πηγές διακοπών (interrupts) και στον τρόπο που αυτές είναι διαχειρίσιμες από την αρχιτεκτονική 8051 Πώς συνδέονται οι διακόπτες και τα πληκτρολόγια σε ένα μικροϋπολογιστή
Πανεπιστήμιο Πατρών Τμήμα Φυσικής Εργαστήριο Ηλεκτρονικής. Ψηφιακά Ηλεκτρονικά. Μονάδες Μνήμης και Διατάξεις Προγραμματιζόμενης Λογικής
 Πανεπιστήμιο Πατρών Τμήμα Φυσικής Ψηφιακά Ηλεκτρονικά Μονάδες Μνήμης και Επιμέλεια Διαφανειών: Δ. Μπακάλης Πάτρα, Φεβρουάριος 2009 Μονάδες Μνήμης - Προγραμματιζόμενη Λογική Μια μονάδα μνήμης είναι ένα
Πανεπιστήμιο Πατρών Τμήμα Φυσικής Ψηφιακά Ηλεκτρονικά Μονάδες Μνήμης και Επιμέλεια Διαφανειών: Δ. Μπακάλης Πάτρα, Φεβρουάριος 2009 Μονάδες Μνήμης - Προγραμματιζόμενη Λογική Μια μονάδα μνήμης είναι ένα
Ψηφιακά Ηλεκτρονικά. Προαιρετική εργασία
 Τ.Ε.Ι. ΑΘΗΝΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΒΙΟΙΑΤΡΙΚΗΣ ΤΕΧΝΟΛΟΓΙΑΣ Ψηφιακά Ηλεκτρονικά Προαιρετική εργασία «Κατασκευή δυαδικού απαριθμητή με δεκαδική απεικόνιση δεκάδων και μονάδων» Συνυπεύθυνος
Τ.Ε.Ι. ΑΘΗΝΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΒΙΟΙΑΤΡΙΚΗΣ ΤΕΧΝΟΛΟΓΙΑΣ Ψηφιακά Ηλεκτρονικά Προαιρετική εργασία «Κατασκευή δυαδικού απαριθμητή με δεκαδική απεικόνιση δεκάδων και μονάδων» Συνυπεύθυνος
ΜΙΚΡΟΕΛΕΓΚΤΗΣ PICAXE 18M2
 ΘΕΜΑ : ΜΙΚΡΟΕΛΕΓΚΤΗΣ PICAXE 18M2 ΔΙΑΡΚΕΙΑ:? περίοδος Οι μικροελεγκτές είναι υπολογιστές χωρίς περιφερειακά, σε ολοκληρωμένα κυκλώματα. Μπορούν να συνδυάσουν αρκετές από τις βασικές λειτουργίες άλλων ειδικών
ΘΕΜΑ : ΜΙΚΡΟΕΛΕΓΚΤΗΣ PICAXE 18M2 ΔΙΑΡΚΕΙΑ:? περίοδος Οι μικροελεγκτές είναι υπολογιστές χωρίς περιφερειακά, σε ολοκληρωμένα κυκλώματα. Μπορούν να συνδυάσουν αρκετές από τις βασικές λειτουργίες άλλων ειδικών
ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ ΕΠΛ 121 ΕΡΓΑΣΤΗΡΙΑ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΜΝΗΜΗ ΚΑΙ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΗ ΛΟΓΙΚΗ ΥΠΕΥΘΥΝΟΣ ΕΡΓΑΣΤΗΡΙΩΝ: ΧΡΥΣΟΣΤΟΜΟΣ ΧΡΥΣΟΣΤΟΜΟΥ ΕΑΡΙΝΟ ΕΞΑΜΗΝΟ 2001 ΕΠΛ 121 ΕΡΓΑΣΤΗΡΙΑ ΨΗΦΙΑΚΩΝ
ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ ΕΠΛ 121 ΕΡΓΑΣΤΗΡΙΑ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΜΝΗΜΗ ΚΑΙ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΗ ΛΟΓΙΚΗ ΥΠΕΥΘΥΝΟΣ ΕΡΓΑΣΤΗΡΙΩΝ: ΧΡΥΣΟΣΤΟΜΟΣ ΧΡΥΣΟΣΤΟΜΟΥ ΕΑΡΙΝΟ ΕΞΑΜΗΝΟ 2001 ΕΠΛ 121 ΕΡΓΑΣΤΗΡΙΑ ΨΗΦΙΑΚΩΝ
Η πρωτεύουσα διάταξη Α, για την αποστολή θερμοκρασιακών δεδομένων μέσω υπέρυθρης ζεύξης.
 Κεφάλαιο 7 Η πρωτεύουσα διάταξη Α, για την αποστολή θερμοκρασιακών δεδομένων μέσω υπέρυθρης ζεύξης Εναλλακτική λύση στο πρόβλημα της μετάδοσης της πληροφορίας από το ρότορα είναι η χρήση υπέρυθρης ζεύξης
Κεφάλαιο 7 Η πρωτεύουσα διάταξη Α, για την αποστολή θερμοκρασιακών δεδομένων μέσω υπέρυθρης ζεύξης Εναλλακτική λύση στο πρόβλημα της μετάδοσης της πληροφορίας από το ρότορα είναι η χρήση υπέρυθρης ζεύξης
Μικροεπεξεργαστές. Σημειώσεις Μαθήματος Υπεύθυνος: Δρ Άρης Παπακώστας,
 Μικροεπεξεργαστές Σημειώσεις Μαθήματος 2013-14 Υπεύθυνος: Δρ Άρης Παπακώστας, Interrupts - Διακοπές Είναι ένας τρόπος για να διακοπεί η ροή ενός προγράμματος έτσι ώστε να εξυπηρετηθεί ένα έκτακτο γενογός
Μικροεπεξεργαστές Σημειώσεις Μαθήματος 2013-14 Υπεύθυνος: Δρ Άρης Παπακώστας, Interrupts - Διακοπές Είναι ένας τρόπος για να διακοπεί η ροή ενός προγράμματος έτσι ώστε να εξυπηρετηθεί ένα έκτακτο γενογός
8. Στοιχεία μνήμης. Οι δυο έξοδοι του FF είναι συμπληρωματικές σημειώνονται δε σαν. Όταν αναφερόμαστε στο FF εννοούμε πάντα την κανονική έξοδο Q.
 8. ΣΟΙΧΕΙΑ ΜΝΗΜΗΣ 8. Εισαγωγή Στα συνδυαστικά κυκλώματα, που μελετήσαμε έως τώρα, δεν υπήρχε κάποια διαδικασία ανάδρασης (Feed Back) -δηλαδή οδήγηση της εξόδου των στοιχείων στην είσοδό τους- επομένως
8. ΣΟΙΧΕΙΑ ΜΝΗΜΗΣ 8. Εισαγωγή Στα συνδυαστικά κυκλώματα, που μελετήσαμε έως τώρα, δεν υπήρχε κάποια διαδικασία ανάδρασης (Feed Back) -δηλαδή οδήγηση της εξόδου των στοιχείων στην είσοδό τους- επομένως
ΕΦΑΡΜΟΓΕΣ ΤΗΛΕΠIΚΟΙΝΩΝΙΑΚΩΝ ΔΙΑΤΑΞΕΩΝ
 ΕΦΑΡΜΟΓΕΣ ΤΗΛΕΠIΚΟΙΝΩΝΙΑΚΩΝ ΔΙΑΤΑΞΕΩΝ ΟΙΚΟΝOΜΟΥ ΧΑΡΗΣ (6424) ΦΩΚΟΣ ΝΙΚΟΛΑΟΣ(6592) ΚΑΜΒΥΣΗΣ ΝΙΚΟΛΑΟΣ(7178) 2013-2014 ΠΕΡΙΕΧΟΜΕΝΑ Σκοπός της εργασίας Ανάλυση Arduino Uno Δημιουργία πληροφορίας Αποστολή και
ΕΦΑΡΜΟΓΕΣ ΤΗΛΕΠIΚΟΙΝΩΝΙΑΚΩΝ ΔΙΑΤΑΞΕΩΝ ΟΙΚΟΝOΜΟΥ ΧΑΡΗΣ (6424) ΦΩΚΟΣ ΝΙΚΟΛΑΟΣ(6592) ΚΑΜΒΥΣΗΣ ΝΙΚΟΛΑΟΣ(7178) 2013-2014 ΠΕΡΙΕΧΟΜΕΝΑ Σκοπός της εργασίας Ανάλυση Arduino Uno Δημιουργία πληροφορίας Αποστολή και
ΑΣΚΗΣΗ 9 ΑΣΥΓΧΡΟΝΟΙ ΜΕΤΡΗΤΕΣ (COUNTERS)
") ΑΣΚΗΣΗ 9 ΑΣΥΓΧΡΟΝΟΙ ΜΕΤΡΗΤΕΣ (COUNTERS) Αντικείμενο της άσκησης: H σχεδίαση και η χρήση ασύγχρονων απαριθμητών γεγονότων. Με τον όρο απαριθμητές ή μετρητές εννοούμε ένα ακολουθιακό κύκλωμα με FF, οι καταστάσεις
ΑΣΚΗΣΗ 9 ΑΣΥΓΧΡΟΝΟΙ ΜΕΤΡΗΤΕΣ (COUNTERS) Αντικείμενο της άσκησης: H σχεδίαση και η χρήση ασύγχρονων απαριθμητών γεγονότων. Με τον όρο απαριθμητές ή μετρητές εννοούμε ένα ακολουθιακό κύκλωμα με FF, οι καταστάσεις
Εφαρµογές Πληροφορικής Υπολογιστών. Κεφάλαιο 3 Το υλικό του υπολογιστή
 Κεφάλαιο 3 Το υλικό του υπολογιστή Εισαγωγή Τµήµατα του Η/Υ καιοργάνωση Μονάδα Κεντρικής Μνήµης Κεντρική Μονάδα Επεξεργασίας (CPU) Μονάδα Εισόδου Εξόδου ίαυλοι Επικοινωνίας Εναλλακτικές αρχιτεκτονικές
Κεφάλαιο 3 Το υλικό του υπολογιστή Εισαγωγή Τµήµατα του Η/Υ καιοργάνωση Μονάδα Κεντρικής Μνήµης Κεντρική Μονάδα Επεξεργασίας (CPU) Μονάδα Εισόδου Εξόδου ίαυλοι Επικοινωνίας Εναλλακτικές αρχιτεκτονικές
Κεφάλαιο 4 Σύνδεση Μικροεπεξεργαστών και Μικροελεγκτών ΕΡΩΤΗΣΕΙΣ ΑΣΚΗΣΕΙΣ
 Κεφάλαιο 4 Σύνδεση Μικροεπεξεργαστών και Μικροελεγκτών ΕΡΩΤΗΣΕΙΣ ΑΣΚΗΣΕΙΣ 1. Παρακάτω δίνονται μερικοί από τους ακροδέκτες που συναντάμε στην πλειοψηφία των μικροεπεξεργαστών. Φτιάξτε έναν πίνακα που να
Κεφάλαιο 4 Σύνδεση Μικροεπεξεργαστών και Μικροελεγκτών ΕΡΩΤΗΣΕΙΣ ΑΣΚΗΣΕΙΣ 1. Παρακάτω δίνονται μερικοί από τους ακροδέκτες που συναντάμε στην πλειοψηφία των μικροεπεξεργαστών. Φτιάξτε έναν πίνακα που να
ΚΕΦΑΛΑΙΟ 6 ΒΑΣΙΚΑ ΑΚΟΛΟΥΘΙΑΚΑ ΚΥΚΛΩΜΑΤΑ. 6.1 Εισαγωγή
 ΚΕΦΑΛΑΙΟ 6 ΒΑΣΙΚΑ ΑΚΟΛΟΥΘΙΑΚΑ ΚΥΚΛΩΜΑΤΑ 6. Εισαγωγή Τα ψηφιακά κυκλώματα διακρίνονται σε συνδυαστικά και ακολουθιακά. Τα κυκλώματα που εξετάσαμε στα προηγούμενα κεφάλαια ήταν συνδυαστικά. Οι τιμές των
ΚΕΦΑΛΑΙΟ 6 ΒΑΣΙΚΑ ΑΚΟΛΟΥΘΙΑΚΑ ΚΥΚΛΩΜΑΤΑ 6. Εισαγωγή Τα ψηφιακά κυκλώματα διακρίνονται σε συνδυαστικά και ακολουθιακά. Τα κυκλώματα που εξετάσαμε στα προηγούμενα κεφάλαια ήταν συνδυαστικά. Οι τιμές των
ΗΜΥ 210 ΣΧΕΔΙΑΣΜΟΣ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ. Χειµερινό Εξάµηνο 2016 ΔΙΑΛΕΞΗ 15: Καταχωρητές (Registers)
") ΗΜΥ 210 ΣΧΕΔΙΑΣΜΟΣ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ Χειµερινό Εξάµηνο 2016 ΔΙΑΛΕΞΗ 15: Καταχωρητές (Registers) ΧΑΡΗΣ ΘΕΟΧΑΡΙΔΗΣ Επίκουρος Καθηγητής, ΗΜΜΥ (ttheocharides@ucy.ac.cy) Περίληψη q Καταχωρητές Παράλληλης
ΗΜΥ 210 ΣΧΕΔΙΑΣΜΟΣ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ Χειµερινό Εξάµηνο 2016 ΔΙΑΛΕΞΗ 15: Καταχωρητές (Registers) ΧΑΡΗΣ ΘΕΟΧΑΡΙΔΗΣ Επίκουρος Καθηγητής, ΗΜΜΥ (ttheocharides@ucy.ac.cy) Περίληψη q Καταχωρητές Παράλληλης
Διασύνδεση Εισόδου-Εξόδου
 Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής Αρχιτεκτονική Υπολογιστών 2016-17 Διασύνδεση Εισόδου-Εξόδου (συσκευές και ) http://mixstef.github.io/courses/comparch/ Μ.Στεφανιδάκης Διασυνδετικοί : Αναλαμβάνουν
Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής Αρχιτεκτονική Υπολογιστών 2016-17 Διασύνδεση Εισόδου-Εξόδου (συσκευές και ) http://mixstef.github.io/courses/comparch/ Μ.Στεφανιδάκης Διασυνδετικοί : Αναλαμβάνουν
Διασυνδετικοί Δίαυλοι. Τι διασυνδέει ένας δίαυλος; Μεταφορά δεδομένων. Διασύνδεση Εισόδου-Εξόδου. Μ.Στεφανιδάκης
 Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής Αρχιτεκτονική Υπολογιστών 2014-15 Διασύνδεση Εισόδου-Εξόδου (συσκευές και ) http://www.ionio.gr/~mistral/tp/comparch/ Μ.Στεφανιδάκης Διασυνδετικοί : Αναλαμβάνουν την
Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής Αρχιτεκτονική Υπολογιστών 2014-15 Διασύνδεση Εισόδου-Εξόδου (συσκευές και ) http://www.ionio.gr/~mistral/tp/comparch/ Μ.Στεφανιδάκης Διασυνδετικοί : Αναλαμβάνουν την
Πανεπιστήμιο Πειραιώς Τμήμα Πληροφορικής
 Πανεπιστήμιο Πειραιώς Τμήμα Πληροφορικής Πρόγραμμα Μεταπτυχιακών Σπουδών «Πληροφορική» Μεταπτυχιακή Διατριβή Τίτλος Διατριβής Τα πρωτόκολλα επικοινωνίας I2C και SPI και η υλοποίησή τους σε σύστημα τηλεχειρισμού,
Πανεπιστήμιο Πειραιώς Τμήμα Πληροφορικής Πρόγραμμα Μεταπτυχιακών Σπουδών «Πληροφορική» Μεταπτυχιακή Διατριβή Τίτλος Διατριβής Τα πρωτόκολλα επικοινωνίας I2C και SPI και η υλοποίησή τους σε σύστημα τηλεχειρισμού,
ΑΣΚΗΣΗ 7 FLIP - FLOP
 ΑΣΚΗΣΗ 7 FLIP - FLOP Αντικείμενο της άσκησης: Η κατανόηση της δομής και λειτουργίας των Flip Flop. Flip - Flop Τα Flip Flop είναι δισταθή λογικά κυκλώματα με χαρακτηριστικά μνήμης και είναι τα πλέον βασικά
ΑΣΚΗΣΗ 7 FLIP - FLOP Αντικείμενο της άσκησης: Η κατανόηση της δομής και λειτουργίας των Flip Flop. Flip - Flop Τα Flip Flop είναι δισταθή λογικά κυκλώματα με χαρακτηριστικά μνήμης και είναι τα πλέον βασικά
ΕΡΓΑΣΤΗΡΙΟ 4 ΕΙΣΑΓΩΓΗ ΣΤΟN ARDUINO: ΨΗΦΙΑΚΗ ΕΙΣΟΔΟΣ/ΕΞΟΔΟΣ
 ΕΡΓΑΣΤΗΡΙΟ 4 ΕΙΣΑΓΩΓΗ ΣΤΟN ARDUINO: ΨΗΦΙΑΚΗ ΕΙΣΟΔΟΣ/ΕΞΟΔΟΣ Σκοπός της άσκησης Οι φοιτητές θα εξοικειωθούν με την πλακέτα του μικροελεγκτή και θα αναγνωρίσουν τα βασικά της στοιχεία. Επίσης θα εξοικειωθούν
ΕΡΓΑΣΤΗΡΙΟ 4 ΕΙΣΑΓΩΓΗ ΣΤΟN ARDUINO: ΨΗΦΙΑΚΗ ΕΙΣΟΔΟΣ/ΕΞΟΔΟΣ Σκοπός της άσκησης Οι φοιτητές θα εξοικειωθούν με την πλακέτα του μικροελεγκτή και θα αναγνωρίσουν τα βασικά της στοιχεία. Επίσης θα εξοικειωθούν
ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017)
") ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017) Περιγραφή της Άσκησης Ο σκοπός της πρώτης άσκησης είναι κυρίως η εξοικείωση με το περιβάλλον προγραμματισμού του Arduino, γι αυτό και δεν είναι ιδιαίτερα σύνθετη. Αρχικά, θα
ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017) Περιγραφή της Άσκησης Ο σκοπός της πρώτης άσκησης είναι κυρίως η εξοικείωση με το περιβάλλον προγραμματισμού του Arduino, γι αυτό και δεν είναι ιδιαίτερα σύνθετη. Αρχικά, θα
Ψηφιακά Συστήματα. 8. Καταχωρητές
 Ψηφιακά Συστήματα 8. Καταχωρητές Βιβλιογραφία 1. Φανουράκης Κ., Πάτσης Γ., Τσακιρίδης Ο., Θεωρία και Ασκήσεις Ψηφιακών Ηλεκτρονικών, ΜΑΡΙΑ ΠΑΡΙΚΟΥ & ΣΙΑ ΕΠΕ, 2016. [59382199] 2. Floyd Thomas L., Ψηφιακά
Ψηφιακά Συστήματα 8. Καταχωρητές Βιβλιογραφία 1. Φανουράκης Κ., Πάτσης Γ., Τσακιρίδης Ο., Θεωρία και Ασκήσεις Ψηφιακών Ηλεκτρονικών, ΜΑΡΙΑ ΠΑΡΙΚΟΥ & ΣΙΑ ΕΠΕ, 2016. [59382199] 2. Floyd Thomas L., Ψηφιακά
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ, ΤΕ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ, ΤΕ Τίτλος: Υλοποίηση ασύρματου δικτύου αισθητήρων με μικροελεγκτή ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Παππά
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ, ΤΕ Τίτλος: Υλοποίηση ασύρματου δικτύου αισθητήρων με μικροελεγκτή ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Παππά
7.1 Θεωρητική εισαγωγή
 ΨΗΦΙΑΚΑ ΚΥΚΛΩΜΑΤΑ - ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 7 ΑΚΟΛΟΥΘΙΑΚΑ ΚΥΚΛΩΜΑΤΑ ΜΑΝ ΑΛΩΤΕΣ FLIP FLOP Σκοπός: Η κατανόηση της λειτουργίας των βασικών ακολουθιακών κυκλωµάτων. Θα µελετηθούν συγκεκριµένα: ο µανδαλωτής (latch)
ΨΗΦΙΑΚΑ ΚΥΚΛΩΜΑΤΑ - ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 7 ΑΚΟΛΟΥΘΙΑΚΑ ΚΥΚΛΩΜΑΤΑ ΜΑΝ ΑΛΩΤΕΣ FLIP FLOP Σκοπός: Η κατανόηση της λειτουργίας των βασικών ακολουθιακών κυκλωµάτων. Θα µελετηθούν συγκεκριµένα: ο µανδαλωτής (latch)
K24 Ψηφιακά Ηλεκτρονικά 9: Flip-Flops
 K24 Ψηφιακά Ηλεκτρονικά 9: TEI Πελοποννήσου Σχολή Τεχνολογικών Εφαρμογών Τμήμα Μηχανικών Πληροφορικής ΤΕ ΤΕΧΝΟΛΟΓΙΚΟ Περιεχόμενα 1 2 3 Γενικά Ύστερα από τη μελέτη συνδυαστικών ψηφιακών κυκλωμάτων, θα μελετήσουμε
K24 Ψηφιακά Ηλεκτρονικά 9: TEI Πελοποννήσου Σχολή Τεχνολογικών Εφαρμογών Τμήμα Μηχανικών Πληροφορικής ΤΕ ΤΕΧΝΟΛΟΓΙΚΟ Περιεχόμενα 1 2 3 Γενικά Ύστερα από τη μελέτη συνδυαστικών ψηφιακών κυκλωμάτων, θα μελετήσουμε
3 ΤΕΛΟΣ 1ΗΣ ΑΠΟ 6 ΣΕΛΙ ΕΣ
 ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΠΑΝΕΛΛΑ ΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΗMEΡΗΣΙΩΝ ΚΑΙ ΕΣΠΕΡΙΝΩΝ ΕΠΑΓΓΕΛΜΑΤΙΚΩΝ ΛΥΚΕΙΩΝ (ΟΜΑ Α A ) ΚΑΙ ΜΑΘΗΜΑΤΩΝ ΕΙ ΙΚΟΤΗΤΑΣ ΕΠΑΓΓΕΛΜΑΤΙΚΩΝ ΛΥΚΕΙΩΝ (ΟΜΑ Α Β ) ΕΥΤΕΡΑ 8 ΙΟΥΝΙΟΥ 215 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΣΥΣΤΗΜΑΤΑ
ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΠΑΝΕΛΛΑ ΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΗMEΡΗΣΙΩΝ ΚΑΙ ΕΣΠΕΡΙΝΩΝ ΕΠΑΓΓΕΛΜΑΤΙΚΩΝ ΛΥΚΕΙΩΝ (ΟΜΑ Α A ) ΚΑΙ ΜΑΘΗΜΑΤΩΝ ΕΙ ΙΚΟΤΗΤΑΣ ΕΠΑΓΓΕΛΜΑΤΙΚΩΝ ΛΥΚΕΙΩΝ (ΟΜΑ Α Β ) ΕΥΤΕΡΑ 8 ΙΟΥΝΙΟΥ 215 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΣΥΣΤΗΜΑΤΑ
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino UNO Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino UNO Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O
9. ΚΑΤΑΧΩΡΗΤΕΣ (REGISTERS)
") 9. ΚΑΤΑΧΩΡΗΤΕΣ (REGISTERS) 9.. ΕΙΣΑΓΩΓΗ Όπως έχουμε ήδη αναφέρει για την αποθήκευση μιας πληροφορίας ενός ψηφίου ( bit) απαιτείται ένα στοιχείο μνήμης δηλαδή ένα FF. Επομένως για περισσότερα του ενός ψηφία
9. ΚΑΤΑΧΩΡΗΤΕΣ (REGISTERS) 9.. ΕΙΣΑΓΩΓΗ Όπως έχουμε ήδη αναφέρει για την αποθήκευση μιας πληροφορίας ενός ψηφίου ( bit) απαιτείται ένα στοιχείο μνήμης δηλαδή ένα FF. Επομένως για περισσότερα του ενός ψηφία
Περίληψη. ΗΜΥ-210: Λογικός Σχεδιασµός Εαρινό Εξάµηνο Παράδειγµα: Καταχωρητής 2-bit. Καταχωρητής 4-bit. Μνήµη Καταχωρητών
 ΗΜΥ-210: Λογικός Σχεδιασµός Εαρινό Κεφάλαιο 7 i: Καταχωρητές Περίληψη Καταχωρητές Παράλληλης Φόρτωσης Καταχωρητές Ολίσθησης Σειριακή Φόρτωση Σειριακή Ολίσθηση Καταχωρητές Ολίσθησης Παράλληλης Φόρτωσης
ΗΜΥ-210: Λογικός Σχεδιασµός Εαρινό Κεφάλαιο 7 i: Καταχωρητές Περίληψη Καταχωρητές Παράλληλης Φόρτωσης Καταχωρητές Ολίσθησης Σειριακή Φόρτωση Σειριακή Ολίσθηση Καταχωρητές Ολίσθησης Παράλληλης Φόρτωσης
ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ. ΚΕΦΑΛΑΙΟ 2ο ΚΑΤΑΧΩΡΗΤΕΣ. (c) Αμπατζόγλου Γιάννης, Ηλεκτρονικός Μηχανικός, καθηγητής ΠΕ17
 Αμπατζόγλου Γιάννης, Ηλεκτρονικός Μηχανικός, καθηγητής ΠΕ17") ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΚΕΦΑΛΑΙΟ 2ο ΚΑΤΑΧΩΡΗΤΕΣ Καταχωρητές (ολίσθησης) Είναι κυκλώματα με D FF που χρησιμοποιούνται για την αποθήκευση πληροφοριών. Ανάλογα με τον τρόπο εισόδου και εξόδου των δεδομένων, οι
ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΚΕΦΑΛΑΙΟ 2ο ΚΑΤΑΧΩΡΗΤΕΣ Καταχωρητές (ολίσθησης) Είναι κυκλώματα με D FF που χρησιμοποιούνται για την αποθήκευση πληροφοριών. Ανάλογα με τον τρόπο εισόδου και εξόδου των δεδομένων, οι
ΗΜΥ 210: Σχεδιασμός Ψηφιακών Συστημάτων. Καταχωρητές 1
 ΗΜΥ-210: Σχεδιασμός Ψηφιακών Συστημάτων Καταχωρητές Διδάσκουσα: Μαρία Κ. Μιχαήλ Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Περίληψη Καταχωρητές Παράλληλης Φόρτωσης Καταχωρητές
ΗΜΥ-210: Σχεδιασμός Ψηφιακών Συστημάτων Καταχωρητές Διδάσκουσα: Μαρία Κ. Μιχαήλ Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Περίληψη Καταχωρητές Παράλληλης Φόρτωσης Καταχωρητές
Εργασία στα πλαίσια του εργαστηρίου των Ευφυών Συστηµάτων Ελέγχου. Μελέτη και κατασκευή διάταξης ελέγχου ταχύτητας αυτοκινούµενου οχήµατος.
 Εργασία στα πλαίσια του εργαστηρίου των Ευφυών Συστηµάτων Ελέγχου. 12-11-2015 05-12-2015 12-12-2015 28-12-2015 04-01-2016 10-01-2016 Φάση 1. Μελέτη και κατασκευή διάταξης ελέγχου ταχύτητας αυτοκινούµενου
Εργασία στα πλαίσια του εργαστηρίου των Ευφυών Συστηµάτων Ελέγχου. 12-11-2015 05-12-2015 12-12-2015 28-12-2015 04-01-2016 10-01-2016 Φάση 1. Μελέτη και κατασκευή διάταξης ελέγχου ταχύτητας αυτοκινούµενου
26-Nov-09. ΗΜΥ 210: Λογικός Σχεδιασμός, Χειμερινό Εξάμηνο Καταχωρητές 1. Διδάσκουσα: Μαρία Κ. Μιχαήλ
 ΗΜΥ-210: Σχεδιασμός Ψηφιακών Συστημάτων Χειμερινό Εξάμηνο 2009 Καταχωρητές Διδάσκουσα: Μαρία Κ. Μιχαήλ Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Περίληψη Καταχωρητές Παράλληλης
ΗΜΥ-210: Σχεδιασμός Ψηφιακών Συστημάτων Χειμερινό Εξάμηνο 2009 Καταχωρητές Διδάσκουσα: Μαρία Κ. Μιχαήλ Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Περίληψη Καταχωρητές Παράλληλης
Κ. ΕΥΣΤΑΘΙΟΥ, Γ. ΠΑΠΑΔΟΠΟΥΛΟΣ ΠΑΤΡΑ
 ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΗΛΕΚΤΡΟΝΙΚΗΣ & ΥΠΟΛΟΓΙΣΤΩΝ ΨΗΦΙΑΚΑ ΟΛΟΚΛΗΡΩΜΕΝΑ ΚΥΚΛΩΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ ΣΗΜΕΙΩΣΕΙΣ ΑΠΑΡΙΘΜΗΤΕΣ Κ. ΕΥΣΤΑΘΙΟΥ, Γ. ΠΑΠΑΔΟΠΟΥΛΟΣ
ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΗΛΕΚΤΡΟΝΙΚΗΣ & ΥΠΟΛΟΓΙΣΤΩΝ ΨΗΦΙΑΚΑ ΟΛΟΚΛΗΡΩΜΕΝΑ ΚΥΚΛΩΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ ΣΗΜΕΙΩΣΕΙΣ ΑΠΑΡΙΘΜΗΤΕΣ Κ. ΕΥΣΤΑΘΙΟΥ, Γ. ΠΑΠΑΔΟΠΟΥΛΟΣ
1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης
 www.robolab.tuc.gr 1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας R/C σέρβο βηματικός κινητήρας 2 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας
www.robolab.tuc.gr 1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας R/C σέρβο βηματικός κινητήρας 2 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ Μάθημα: ΤΕΧΝΟΛΟΓΙΑ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ Ημερομηνία και ώρα εξέτασης: Τετάρτη, 6 Μαΐου 1 7:3 1:3 ΘΕΜΑ Α1 ΛΥΣΕΙΣ
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ Μάθημα: ΤΕΧΝΟΛΟΓΙΑ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ Ημερομηνία και ώρα εξέτασης: Τετάρτη, 6 Μαΐου 1 7:3 1:3 ΘΕΜΑ Α1 ΛΥΣΕΙΣ
Μνήμη και Προγραμματίσιμη Λογική
 Μνήμη και Προγραμματίσιμη Λογική Η μονάδα μνήμης είναι ένα στοιχείο κυκλώματος στο οποίο μεταφέρονται ψηφιακές πληροφορίες προς αποθήκευση και από το οποίο μπορούμε να εξάγουμε αποθηκευμένες πληροφορίες
Μνήμη και Προγραμματίσιμη Λογική Η μονάδα μνήμης είναι ένα στοιχείο κυκλώματος στο οποίο μεταφέρονται ψηφιακές πληροφορίες προς αποθήκευση και από το οποίο μπορούμε να εξάγουμε αποθηκευμένες πληροφορίες
Α. ΣΚΟΔΡΑΣ ΠΛΗ21 ΟΣΣ#2. 14 Δεκ 2008 ΠΑΤΡΑ ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ 2008 Α. ΣΚΟΔΡΑΣ ΧΡΟΝΟΔΙΑΓΡΑΜΜΑ ΜΕΛΕΤΗΣ
 ΠΛΗ21 ΟΣΣ#2 14 Δεκ 2008 ΠΑΤΡΑ ΧΡΟΝΟΔΙΑΓΡΑΜΜΑ ΜΕΛΕΤΗΣ 7-segment display 7-segment display 7-segment display Αποκωδικοποιητής των 7 στοιχείων (τμημάτων) (7-segment decoder) Κύκλωμα αποκωδικοποίησης του στοιχείου
ΠΛΗ21 ΟΣΣ#2 14 Δεκ 2008 ΠΑΤΡΑ ΧΡΟΝΟΔΙΑΓΡΑΜΜΑ ΜΕΛΕΤΗΣ 7-segment display 7-segment display 7-segment display Αποκωδικοποιητής των 7 στοιχείων (τμημάτων) (7-segment decoder) Κύκλωμα αποκωδικοποίησης του στοιχείου
Ανάκτηση θερμοκρασιακού πεδίου σε περιστρεφόμενο (εν κινήσει)
") Κεφάλαιο 6 Ανάκτηση θερμοκρασιακού πεδίου σε περιστρεφόμενο (εν κινήσει) ρότορα Η σύνδεση του στρεφόμενου τμήματος της μηχανής με την μετρολογική διάταξη (αναλογικά όργανα μέτρησης ή υπολογιστή) παρουσιάζει
Κεφάλαιο 6 Ανάκτηση θερμοκρασιακού πεδίου σε περιστρεφόμενο (εν κινήσει) ρότορα Η σύνδεση του στρεφόμενου τμήματος της μηχανής με την μετρολογική διάταξη (αναλογικά όργανα μέτρησης ή υπολογιστή) παρουσιάζει
ΠΕΡΙΕΧΟΜΕΝΑ ΠΕΡΙΕΧΟΜΕΝΑ.3 ΑΣΥΓΧΡΟΝΟΣ ΔYΑΔΙΚΟΣ ΑΠΑΡΙΘΜΗΤΗΣ.5 ΑΣΥΓΧΡΟΝΟΣ ΔΕΚΑΔΙΚΟΣ ΑΠΑΡΙΘΜΗΤΗΣ.7 ΑΣΥΓΧΡΟΝΟΣ ΔΕΚΑΔΙΚΟΣ ΑΠΑΡΙΘΜΗΤΗΣ ΜΕ LATCH.
 ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΗΛΕΚΤΡΟΝΙΚΗΣ & ΥΠΟΛΟΓΙΣΤΩΝ ΨΗΦΙΑΚΑ ΟΛΟΚΛΗΡΩΜΕΝΑ ΚΥΚΛΩΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ ΣΗΜΕΙΩΣΕΙΣ ΑΠΑΡΙΘΜΗΤΕΣ Κ. ΕΥΣΤΑΘΙΟΥ, Γ. ΠΑΠΑΔΟΠΟΥΛΟΣ
ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΗΛΕΚΤΡΟΝΙΚΗΣ & ΥΠΟΛΟΓΙΣΤΩΝ ΨΗΦΙΑΚΑ ΟΛΟΚΛΗΡΩΜΕΝΑ ΚΥΚΛΩΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ ΣΗΜΕΙΩΣΕΙΣ ΑΠΑΡΙΘΜΗΤΕΣ Κ. ΕΥΣΤΑΘΙΟΥ, Γ. ΠΑΠΑΔΟΠΟΥΛΟΣ
ΑΣΚΗΣΗ 9. Tα Flip-Flop
 ΑΣΚΗΣΗ 9 Tα Flip-Flop 9.1. ΣΚΟΠΟΣ Η κατανόηση της λειτουργίας των στοιχείων μνήμης των ψηφιακών κυκλωμάτων. Τα δομικά στοιχεία μνήμης είναι οι μανδαλωτές (latches) και τα Flip-Flop. 9.2. ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ
ΑΣΚΗΣΗ 9 Tα Flip-Flop 9.1. ΣΚΟΠΟΣ Η κατανόηση της λειτουργίας των στοιχείων μνήμης των ψηφιακών κυκλωμάτων. Τα δομικά στοιχεία μνήμης είναι οι μανδαλωτές (latches) και τα Flip-Flop. 9.2. ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ
ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΚΑΤΑΧΩΡΗΤΕΣ ΟΛΙΣΘΗΤΕΣ
 ΣΧΟΛΗ ΑΣΠΑΙΤΕ ΤΜΗΜΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΚΑΤΑΧΩΡΗΤΕΣ ΟΛΙΣΘΗΤΕΣ 1) Το παρακάτω κύκλωμα του σχήματος 1 είναι ένας καταχωρητής-ολισθητής
ΣΧΟΛΗ ΑΣΠΑΙΤΕ ΤΜΗΜΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ ΤΙΤΛΟΣ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΑΣΚΗΣΗΣ ΚΑΤΑΧΩΡΗΤΕΣ ΟΛΙΣΘΗΤΕΣ 1) Το παρακάτω κύκλωμα του σχήματος 1 είναι ένας καταχωρητής-ολισθητής
ΒΑΣΙΚΑ ΑΚΟΛΟΥΘΙΑΚΑ ΚΥΚΛΩΜΑΤΑ
 ΒΑΣΙΚΑ ΑΚΟΛΟΥΘΙΑΚΑ ΚΥΚΛΩΜΑΤΑ FLIP-FLOP ΤΟ ΒΑΣΙΚΟ FLIP-FLOP ΧΡΟΝΙΖΟΜΕΝΑ FF ΤΥΠΟΥ FF ΤΥΠΟΥ D FLIP-FLOP Τ FLIP-FLOP ΠΥΡΟΔΟΤΗΣΗ ΤΩΝ FLIP-FLOP ΚΥΡΙΟ - ΕΞΑΡΤΗΜΕΝΟ FLIP-FLOP ΑΚΜΟΠΥΡΟΔΟΤΟΥΜΕΝΑ FLIP-FLOP ΚΥΚΛΩΜΑΤΑ
ΒΑΣΙΚΑ ΑΚΟΛΟΥΘΙΑΚΑ ΚΥΚΛΩΜΑΤΑ FLIP-FLOP ΤΟ ΒΑΣΙΚΟ FLIP-FLOP ΧΡΟΝΙΖΟΜΕΝΑ FF ΤΥΠΟΥ FF ΤΥΠΟΥ D FLIP-FLOP Τ FLIP-FLOP ΠΥΡΟΔΟΤΗΣΗ ΤΩΝ FLIP-FLOP ΚΥΡΙΟ - ΕΞΑΡΤΗΜΕΝΟ FLIP-FLOP ΑΚΜΟΠΥΡΟΔΟΤΟΥΜΕΝΑ FLIP-FLOP ΚΥΚΛΩΜΑΤΑ
ΣΤΑΤΙΚΕΣ ΚΑΙ ΔΥΝΑΜΙΚΕΣ ΜΝΗΜΕΣ ΤΥΧΑΙΑΣ ΠΡΟΣΠΕΛΑΣΗΣ (Static and Dynamic RAMs). ΔΙΑΡΘΡΩΣΗ ΤΟΥ ΜΑΘΗΜΑΤΟΣ ΘΕΜΑΤΙΚΕΣ ΕΝΟΤΗΤΕΣ
. ΔΙΑΡΘΡΩΣΗ ΤΟΥ ΜΑΘΗΜΑΤΟΣ ΘΕΜΑΤΙΚΕΣ ΕΝΟΤΗΤΕΣ") ΣΤΑΤΙΚΕΣ ΚΑΙ ΔΥΝΑΜΙΚΕΣ ΜΝΗΜΕΣ ΤΥΧΑΙΑΣ ΠΡΟΣΠΕΛΑΣΗΣ (Static and Dynamic RAMs). ΔΙΑΡΘΡΩΣΗ ΤΟΥ ΜΑΘΗΜΑΤΟΣ ΘΕΜΑΤΙΚΕΣ ΕΝΟΤΗΤΕΣ ΒΑΣΙΚΑ ΣΤΟΙΧΕΙΑ ΗΜΙΑΓΩΓΙΚΩΝ ΜΝΗΜΩΝ. ΒΑΣΙΚΗ ΛΕΙΤΟΥΡΓΙΑ RAM CMOS. ΤΥΠΟΙ ΚΥΤΤΑΡΩΝ ΑΡΧΕΣ
ΣΤΑΤΙΚΕΣ ΚΑΙ ΔΥΝΑΜΙΚΕΣ ΜΝΗΜΕΣ ΤΥΧΑΙΑΣ ΠΡΟΣΠΕΛΑΣΗΣ (Static and Dynamic RAMs). ΔΙΑΡΘΡΩΣΗ ΤΟΥ ΜΑΘΗΜΑΤΟΣ ΘΕΜΑΤΙΚΕΣ ΕΝΟΤΗΤΕΣ ΒΑΣΙΚΑ ΣΤΟΙΧΕΙΑ ΗΜΙΑΓΩΓΙΚΩΝ ΜΝΗΜΩΝ. ΒΑΣΙΚΗ ΛΕΙΤΟΥΡΓΙΑ RAM CMOS. ΤΥΠΟΙ ΚΥΤΤΑΡΩΝ ΑΡΧΕΣ
Εργαστηριακές ασκήσεις λογικών κυκλωμάτων 11 A/D-D/A
 11.1 Θεωρητικό μέρος 11 A/D-D/A 11.1.1 Μετατροπέας αναλογικού σε ψηφιακό σήμα (A/D converter) με δυαδικό μετρητή Σχ.1 Μετατροπέας A/D με δυαδικό μετρητή Στο σχήμα 1 απεικονίζεται σε block diagram ένας
11.1 Θεωρητικό μέρος 11 A/D-D/A 11.1.1 Μετατροπέας αναλογικού σε ψηφιακό σήμα (A/D converter) με δυαδικό μετρητή Σχ.1 Μετατροπέας A/D με δυαδικό μετρητή Στο σχήμα 1 απεικονίζεται σε block diagram ένας