ΡΟΜΠΟΤΙΚΗ ΟΡΑΣΗ. Όταν ένα ρομπότ κινείται σε άγνωστο χώρο ή σε χώρο που μπορεί να αλλάξει η διάταξή του τότε εμφανίζεται η ανάγκη της όρασης μηχανής.
|
|
|
- Νομική Αποστόλου
- 9 χρόνια πριν
- Προβολές:
Transcript
 Διατάξεις")
1 ΡΟΜΠΟΤΙΚΗ ΟΡΑΣΗ Όταν ένα ρομπότ κινείται σε άγνωστο χώρο ή σε χώρο που μπορεί να αλλάξει η διάταξή του τότε εμφανίζεται η ανάγκη της όρασης μηχανής. Αισθητήρες που χρησιμοποιούνται για να αντιλαμβάνεται ένα ρομπότ τη διάταξη του χώρου που βρίσκεται: Αισθητήρες αφής Διατάξεις πομποδεκτών υπερύθρων Διατάξεις πομποδεκτών υπερήχων (σόναρ) Διατάξεις με κάμερες Ερευνητικό αντικείμενο με έντονο ενδιαφέρον αποτελεί η χαρτογράφηση χώρου με βάση τη στερεοσκοπική όραση. Ως Στερεοσκοπική Όραση ονομάζουμε τη διαδικασία ανάκτησης πληροφοριών που αφορούν την τρισδιάστατη δομή και το βάθος μιας σκηνής από δύο ή περισσότερες εικόνες που έχουν ληφθεί από διαφορετικές οπτικές γωνίες. Για την απλούστευση των υπολογισμών χρησιμοποιούνται συνήθως κάμερες που βρίσκονται ακριβώς στο ίδιο ύψος παράλληλες μεταξύ τους με μικρή εστιακή απόσταση.

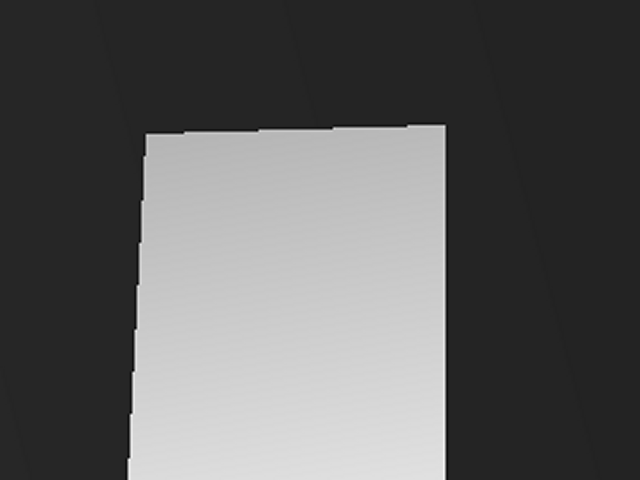
2 ΧΑΡΤΗΣ ΒΑΘΟΥΣ Ένας χάρτης βάθους είναι μια εικόνα που αναπαριστά μια σκηνή για την οποία κάθε εικονοστοιχείο παίρνει μια χρωματική τιμή από τις διαβαθμίσεις του γκρι. Η χρωματική τιμή υποδηλώνει την απόσταση του σημείου της σκηνής από τον οπτικό αισθητήρα στον τρισδιάστατο χώρο. Κατά σύμβαση, όσο πιο μικρή είναι η απόσταση τόσο πιο φωτεινή γίνεται η απόχρωση του γκρι. Έτσι μπορεί να γίνει διάκριση πόσο κοντά βρίσκονται στον οπτικό αισθητήρα τα διάφορα αντικείμενα της σκηνής. Πραγματική εικόνα Χάρτης βάθους Για την εξαγωγή χαρτών βάθους γενικά ακολουθείται η παρακάτω διαδικασία: Συλλογή και προεπεξεργασία εικόνων Εύρεση αντιστοιχιών και υπολογισμός παραλλάξεων με βάση τους περιορισμούς Κατασκευή χάρτη βάθους

3 ΣΤΕΡΕΟΣΚΟΠΙΚΗ ΑΝΤΙΣΤΟΙΧΗΣΗ Η εύρεση αντιστοιχιών ανάμεσα στις στερεοσκοπικές εικόνες συνοψίζεται στην ταυτοποίηση των σημείων των δύο εικόνων που αναφέρονται στο ίδιο σημείο της σκηνής στον τρισδιάστατο χώρο. Η εύρεση αντιστοιχιών αποτελεί το δυσκολότερο στάδιο της διαδιακασίας της στερεοσκοπικής όρασης και ερευνητικά έχουν προταθεί διάφορες μέθοδοι και τεχνικές για την επίλυση του συγκεκριμένου προβλήματος. Με τον υπολογισμό των αντιστοιχιών ουσιαστικά υπολογίζεται ο πίνακας παραλλάξεων. Ως παράλλαξη ονομάζουμε τη διαφορά στη θέση της προβολής ενός σημείου της σκηνής πάνω στις δύο στερεοσκοπικές εικόνες. Οπότε υπολογίζεται μια τιμή παράλλαξης για κάθε εικονοστοιχείο της εικόνας που αναπαριστά τη σκηνή. Όσο μεγαλύτερη είναι η τιμή της παράλλαξης τόσο πιο κοντά βρίσκεται το σημείο στο ρομπότ. Όσο μικρότερη είναι η τιμή της παράλλαξης τόσο πιο μακρυά βρίσκεται το σημείο στο ρομπότ. Η απόσταση ενός σημείου της σκηνής από το ρομπότ είναι αντιστρόφως ανάλογη της παράλλαξης.

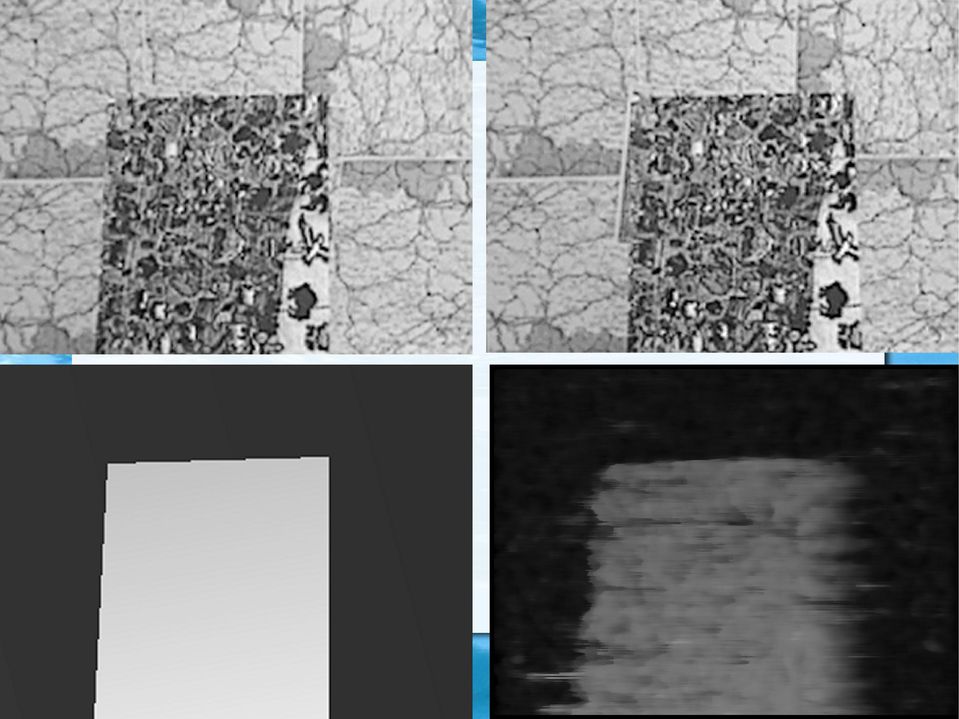
4 Πάνω αριστερά είναι η εικόνα που δείχνει η αριστερή κάμερα και κάτω αριστερά η εικόνα που δείχνει η δεξιά κάμερα. Ο χάρτης βάθους φαίνεται κάτω δεξιά.

5
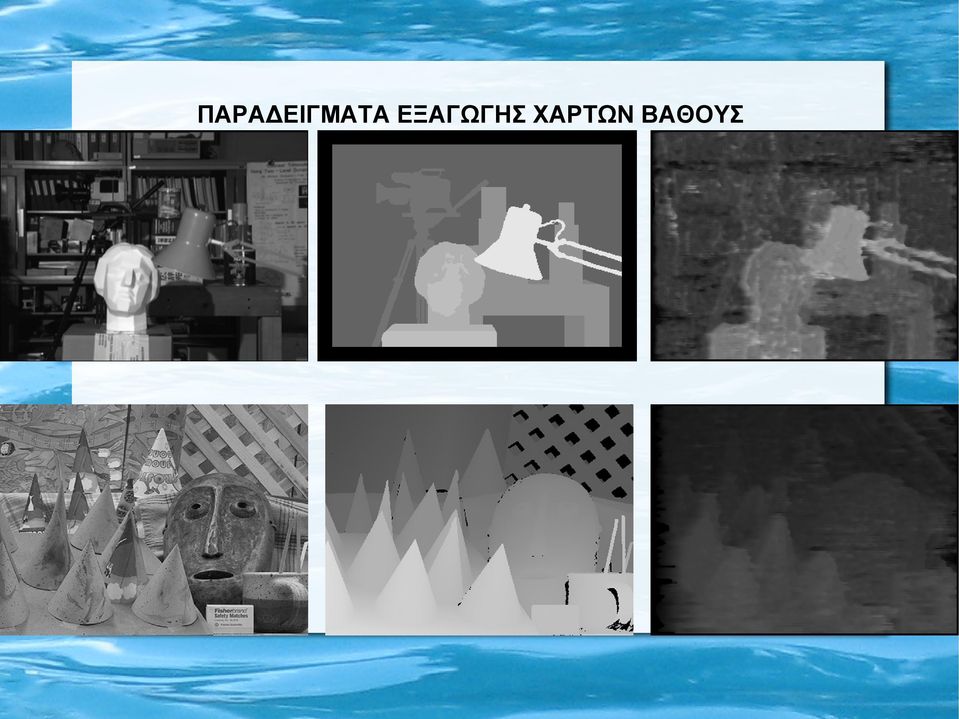
6 ΠΑΡΑΔΕΙΓΜΑΤΑ ΕΞΑΓΩΓΗΣ ΧΑΡΤΩΝ ΒΑΘΟΥΣ


7 Φωτογραφία από Δώρα Παπαγιάννη

8 ΡΟΜΠΟΤΙΚΗ ΟΡΑΣΗ Έχοντας στη διάθεσή του το ρομπότ κάθε στιγμή το χάρτη βάθους στη μνήμη του ξέρει εάν υπάρχει κάποιο αντικείμενο προς τα εμπρός του από την χρωματική τιμή των pixel της εικόνας. Όταν ανακαλύπτει πως η εικόνα έχει περιοχές με υψηλή φωτεινότητα αυτό σημαίνει ότι υπάρχει κάποιο εμπόδιο πολύ κοντά του και θα πρέπει να αλλάξει πορεία για να το αποφύγει. Σε εφαρμογές πραγματικού χρόνου (Real Time Applications) το ρομπότ απαιτεί να έχει στη διάθεσή του πολλά frame το δευτερόλεπτο ειδικά όταν κινείται με μεγάλη ταχύτητα. Η χρήση υπολογιστή αποτυγχάνει και συνήθως χρησιμοποιούνται διατάξεις hardware για τους υπολογισμούς. Συνήθως χρησιμοποιούνται επαναδιαμορφούμενες (reconfigurable) διατάξεις από ολοκληρωμένα κυκλώματα προγραμματιζόμενης ψηφίδας (FPGA Field Programmable Gate Array).

9 ΠΡΟΑΙΡΕΤΙΚΗ ΕΡΓΑΣΙΑ Να εφευρεθεί υποθετικό και αληθοφανές πρόβλημα αυτοματισμού. Να διατυπωθεί με λεπτομέρεια και να τονιστούν τα λεπτά σημεία του προβλήματος καθώς και πού πρέπει να εστιάσει κανείς για την επίλυσή του. Να παρουσιαστεί η λύση του προβλήματος. Θα αξιολογηθεί όχι μόνο η λύση αλλά και το κατά πόσο το πρόβλημα που θα παρουσιαστεί παρουσιάζει επιστημονική ή πρακτική σημασία. Αξιολόγηση: 2 μονάδες bonus ανεξαρτήτως τελικής βαθμολογίας στις εξετάσεις.

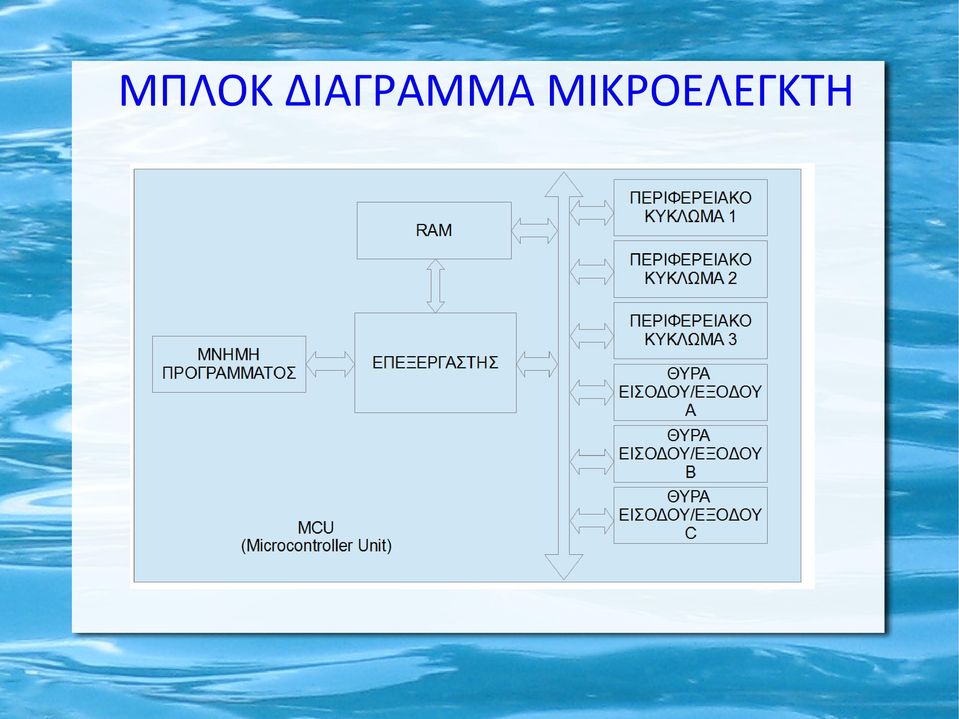
10 ΜΙΚΡΟΕΛΕΓΚΤΕΣ Έναν ορισμό που θα μπορούσαμε να δώσουμε για τους μικροελεγκτές είναι ο εξής: Μικροελεγκτής είναι ένα προγραμματιζόμενο ολοκληρωμένο κύκλωμα το οποίο διαθέτει επεξεργαστή, μνήμη, διάφορα περιφερειακά κυκλώματα καθώς επίσης και θύρες εισόδου/εξόδου για επικοινωνία με εξωτερικές συσκευές. Θα μπορούσε να παρομοιαστεί με έναν μικροϋπολογιστή. Όπως ακριβώς ένας μικροϋπολογιστής έχει επεξεργαστή, μνήμη, περιφερειακές συσκευές και εκτελεί προγράμματα έτσι κι ένας μικροελεγκτής διαθέτει τα παραπάνω χαρακτηριστικά και μάλιστα ολοκληρωμένα σε ένα μόνο chip. Το πρόγραμμα που εκτελεί ο μικροελεγκτής αποθηκεύεται μόνιμα στη μνήμη προγράμματος.

11 ΧΡΗΣΗ ΜΙΚΡΟΕΛΕΓΚΤΩΝ Οι μικροελεγκτές χρησιμοποιούνται γενικότερα όπου απαιτείται ψηφιακός έλεγχος. Ειδικότερα βρίσκουν εφαρμογή: Στη βιομηχανία σε αυτοματισμούς Σε κυκλώματα τηλεπικοινωνιών Σε συστήματα αυτομάτου ελέγχου Στη ρομποτική Στις ηλεκτρονικές συσκευές Στις ηλεκτρικές συσκευές Σε εφαρμογές ηλεκτρονικών ισχύος Σε συστήματα τηλεματικής Σε συστήματα συλλογής δεδομένων

12 ΔΙΑΔΙΚΑΣΙΑ ANAΠTYΞΗΣ ΕΦΑΡΜΟΓΩΝ Η ανάπτυξη του λογισμικού (firmware) του μικροελεγκτή γίνεται στον υπολογιστή. Με τη χρήση ειδικών συσκευών προγραμματισμού όταν το πρόγραμμα του μικροελεγκτή είναι έτοιμο γίνεται download στο ολοκληρωμένο και εγγράφεται στη μνήμη προγράμματος. Η πιο συνήθης μέθοδος προγραμματισμού είναι εντός του κυκλώματος (In Circuit System Programming). Όταν το πρόγραμμα είναι έτοιμο και απαλλαγμένο από λογικά σφάλματα τότε για τη μείωση του κόστους ο προγραμματισμός του μικροελεγκτή μπορεί να πραγματοποιηθεί εργοστασιακά κατά την παραγωγή του σε συνεργασία με την κατασκευάστρια εταιρεία.

13 ΕΡΓΑΛΕΙΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΚΑΙ ΑΠΟΣΦΑΛΜΑΤΩΣΗΣ Προσομοίωση στον υπολογιστή (simulation) Εξομοίωση με τη χρήση in circuit debugger εργαλείων όπου γίνεται δοκιμαστική εκτέλεση της εφαρμογής στο πραγματικό κύκλωμα Εξομοίωση με χρήση emulator στο πραγματικό κύκλωμα Με τη χρήση debugger γίνεται χρήση πόρων του ολοκληρωμένου για τη διαδικασία αποσφαλμάτωσης. Με τη χρήση emulator δε χρησιμοποιείται καθόλου το ολοκληρωμένο αλλά η συσκευή του emulator την εξομοιώνει πλήρως. Οι debuggers κοστίζουν από μερικές δεκάδες έως λίγες εκατοντάδες ευρώ. Οι emulators κοστίζουν από μερικές εκατοντάδες έως λίγες χιλιάδες ευρώ. Η χρήση debugger για την ανάπτυξη κρίνεται γενικά ικανοποιητική ως προς το κόστος.


14 ΜΠΛΟΚ ΔΙΑΓΡΑΜΜΑ ΜΙΚΡΟΕΛΕΓΚΤΗ
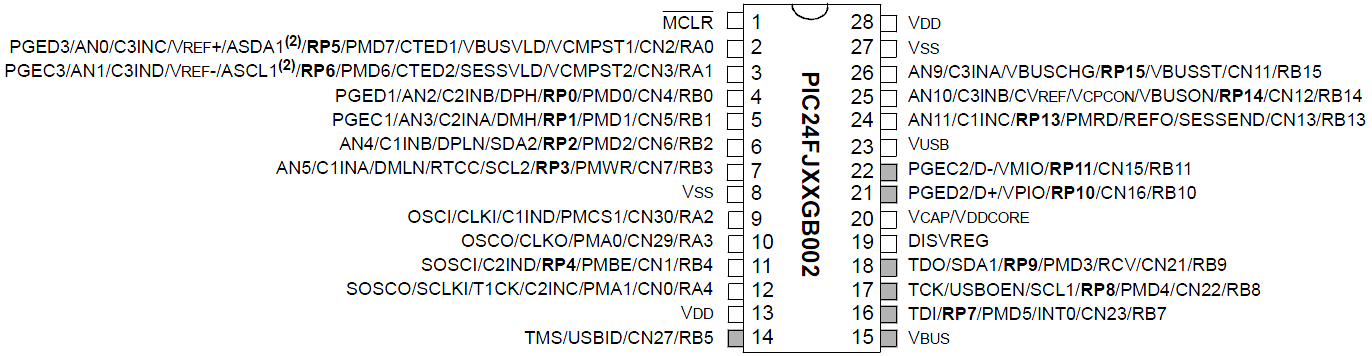
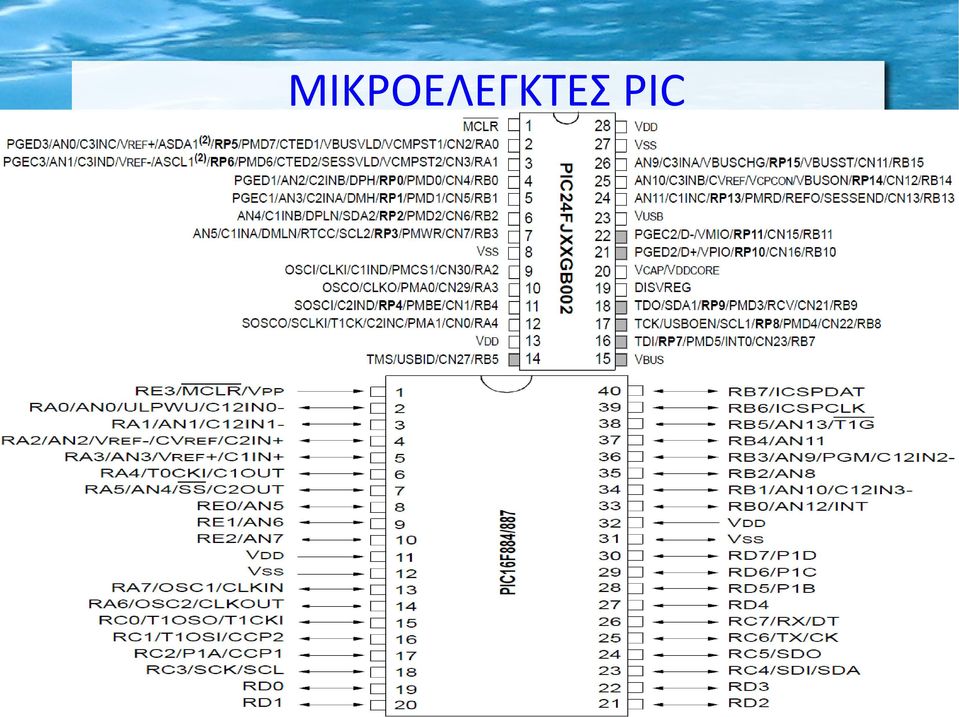
15 ΜΙΚΡΟΕΛΕΓΚΤΕΣ PIC
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΑΥΤΟΜΑΤΙΣΜΟΣ
 ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΑΥΤΟΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΗ Η Ρομποτική είναι ο κλάδος της επιστήμης που κατασκευάζει και μελετά μηχανές που μπορούν να αντικαταστήσουν τον άνθρωπο στην εκτέλεση μιας εργασίας. Tι είναι το ΡΟΜΠΟΤ
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΑΥΤΟΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΗ Η Ρομποτική είναι ο κλάδος της επιστήμης που κατασκευάζει και μελετά μηχανές που μπορούν να αντικαταστήσουν τον άνθρωπο στην εκτέλεση μιας εργασίας. Tι είναι το ΡΟΜΠΟΤ
Εφαρμογές μικροελεγκτών
 Μικροελεγκτές Έναν ορισμό που θα μπορούσαμε να δώσουμε για τους μικροελεγκτές είναι ο εξής: Μικροελεγκτής είναι ένα προγραμματιζόμενο ολοκληρωμένο κύκλωμα το οποίο διαθέτει επεξεργαστή, μνήμη, διάφορα
Μικροελεγκτές Έναν ορισμό που θα μπορούσαμε να δώσουμε για τους μικροελεγκτές είναι ο εξής: Μικροελεγκτής είναι ένα προγραμματιζόμενο ολοκληρωμένο κύκλωμα το οποίο διαθέτει επεξεργαστή, μνήμη, διάφορα
RobotArmy Περίληψη έργου
 RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
Πτυχιακή Εργασία Σχεδίαση κυκλωμάτων επικοινωνίας με απλές οθόνες, με τη γλώσσα VHDL και υλοποίηση στις αναπτυξιακές πλακέτες LP-2900 και DE2.
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. Πτυχιακή Εργασία Σχεδίαση κυκλωμάτων επικοινωνίας με απλές οθόνες, με τη γλώσσα VHDL και υλοποίηση στις αναπτυξιακές
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. Πτυχιακή Εργασία Σχεδίαση κυκλωμάτων επικοινωνίας με απλές οθόνες, με τη γλώσσα VHDL και υλοποίηση στις αναπτυξιακές
ΘΕΜΑ : ΗΛΕΚΤΡΟΝΙΚΗ ΜΝΗΜΗ ΚΑΙ ΜΙΚΡΟΕΛΕΓΚΤΕΣ. ΔΙΑΡΚΕΙΑ: 1 περίοδος
 ΘΕΜΑ : ΗΛΕΚΤΡΟΝΙΚΗ ΜΝΗΜΗ ΚΑΙ ΜΙΚΡΟΕΛΕΓΚΤΕΣ ΔΙΑΡΚΕΙΑ: 1 περίοδος Σε αυτό το μάθημα θα μάθετε να: 1. Αναφέρετε τα διάφορα είδη μνήμης και συσκευές που τις περιέχουν. 2. Περιγράφετε τα σημαντικά χαρακτηριστικά
ΘΕΜΑ : ΗΛΕΚΤΡΟΝΙΚΗ ΜΝΗΜΗ ΚΑΙ ΜΙΚΡΟΕΛΕΓΚΤΕΣ ΔΙΑΡΚΕΙΑ: 1 περίοδος Σε αυτό το μάθημα θα μάθετε να: 1. Αναφέρετε τα διάφορα είδη μνήμης και συσκευές που τις περιέχουν. 2. Περιγράφετε τα σημαντικά χαρακτηριστικά
Γενικά Στοιχεία Ηλεκτρονικού Υπολογιστή
 Γενικά Στοιχεία Ηλεκτρονικού Υπολογιστή 1. Ηλεκτρονικός Υπολογιστής Ο Ηλεκτρονικός Υπολογιστής είναι μια συσκευή, μεγάλη ή μικρή, που επεξεργάζεται δεδομένα και εκτελεί την εργασία του σύμφωνα με τα παρακάτω
Γενικά Στοιχεία Ηλεκτρονικού Υπολογιστή 1. Ηλεκτρονικός Υπολογιστής Ο Ηλεκτρονικός Υπολογιστής είναι μια συσκευή, μεγάλη ή μικρή, που επεξεργάζεται δεδομένα και εκτελεί την εργασία του σύμφωνα με τα παρακάτω
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 4 ο Πρόκληση με αισθητήρες αφής Όνομα Ημερομηνία Έξοδος από σπηλιά Θα επιδιώξουμε να προγραμματίσουμε το
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 4 ο Πρόκληση με αισθητήρες αφής Όνομα Ημερομηνία Έξοδος από σπηλιά Θα επιδιώξουμε να προγραμματίσουμε το
Πτυχιακή Εργασία Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Η Ασύρματη Επικοινωνία, χρησιμοποιώντας
 Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
ΣΧΕΔΙΑΣΗ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ - VHDL ΑΝΤΩΝΗΣ ΠΑΣΧΑΛΗΣ
 ΕΘΝΙΚΟΝ ΚΑΙ ΚΑΠΟΔΙΣΤΡΙΑΚΟΝ ΠΑΝΕΠΙΣΤΗΜΙΟΝ ΑΘΗΝΩΝ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΤΗΛΕΠΙΚΟΙΝΩΝΙΩΝ ΣΧΕΔΙΑΣΗ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ - VHDL ΥΛΙΚΟ ΚΑΙ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΥΠΟΛΟΓΙΣΤΩΝ ΠΠΣ Πληροφορικής και Τηλεπικοινωνιών, E Εξάμηνο
ΕΘΝΙΚΟΝ ΚΑΙ ΚΑΠΟΔΙΣΤΡΙΑΚΟΝ ΠΑΝΕΠΙΣΤΗΜΙΟΝ ΑΘΗΝΩΝ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΤΗΛΕΠΙΚΟΙΝΩΝΙΩΝ ΣΧΕΔΙΑΣΗ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ - VHDL ΥΛΙΚΟ ΚΑΙ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΥΠΟΛΟΓΙΣΤΩΝ ΠΠΣ Πληροφορικής και Τηλεπικοινωνιών, E Εξάμηνο
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 8. Μετρώντας Επιτάχυνση με το Accelerόμετρο (ADXL 335) Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων") Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 8 Μετρώντας Επιτάχυνση με το Accelerόμετρο (ADXL 335). Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 8 Μετρώντας Επιτάχυνση με το Accelerόμετρο (ADXL 335). Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο
ΠΕΡΙΕΧΟΜΕΝΟ. ΜΑΘΗΜΑ: ΡΟΜΠΟΤΙΚΗ (3Ε) Γ τάξη Ημερήσιου ΕΠΑ.Λ. και Γ τάξη Εσπερινού ΕΠΑ.Λ.
 Γ τάξη Ημερήσιου ΕΠΑ.Λ. και Γ τάξη Εσπερινού ΕΠΑ.Λ.") ΑΣΚΗΣΗ 25 - ΤΗΛΕΜΑΤΙΚΗ ΣΥΣΚΕΥΗ Μαθησιακά αποτελέσματα Ο μαθητής/μαθήτρια να μπορεί να: ΓΝΩΣΕΙΣ - Περιγράφει τη λειτουργία της τηλεματικής συσκευής. ΔΕΞΙΟΤΗΤΕΣ - Κατασκευάζει τηλεματική συσκευή. - Εγκαθιστά
ΑΣΚΗΣΗ 25 - ΤΗΛΕΜΑΤΙΚΗ ΣΥΣΚΕΥΗ Μαθησιακά αποτελέσματα Ο μαθητής/μαθήτρια να μπορεί να: ΓΝΩΣΕΙΣ - Περιγράφει τη λειτουργία της τηλεματικής συσκευής. ΔΕΞΙΟΤΗΤΕΣ - Κατασκευάζει τηλεματική συσκευή. - Εγκαθιστά
Εισαγωγή στα Συστήματα Ψηφιακής Επεξεργασίας Σήματος
 ΕΣ 08 Επεξεργαστές Ψηφιακών Σημάτων Εισαγωγή στα Συστήματα Ψηφιακής Επεξεργασίας Σήματος Κλήμης Νταλιάνης Λέκτορας Π.Δ.407/80 Τμήμα Επιστήμη και Τεχνολογίας Τηλεπικοινωνιών Πανεπιστήμιο Πελοποννήσου Αρχιτεκτονική
ΕΣ 08 Επεξεργαστές Ψηφιακών Σημάτων Εισαγωγή στα Συστήματα Ψηφιακής Επεξεργασίας Σήματος Κλήμης Νταλιάνης Λέκτορας Π.Δ.407/80 Τμήμα Επιστήμη και Τεχνολογίας Τηλεπικοινωνιών Πανεπιστήμιο Πελοποννήσου Αρχιτεκτονική
Μια πρόταση διδασκαλίας για το μάθημα του προγραμματισμού Η/Υ στο Λύκειο με τη μεθοδολογία STEM
 Μια πρόταση διδασκαλίας για το μάθημα του προγραμματισμού Η/Υ στο Λύκειο με τη μεθοδολογία STEM Οδηγίες για την υλοποίηση της διδακτικής παρέμβασης 1η διδακτική ώρα: Υλοποίηση του φύλλου εργασίας 1 με
Μια πρόταση διδασκαλίας για το μάθημα του προγραμματισμού Η/Υ στο Λύκειο με τη μεθοδολογία STEM Οδηγίες για την υλοποίηση της διδακτικής παρέμβασης 1η διδακτική ώρα: Υλοποίηση του φύλλου εργασίας 1 με
Πακέτο Lego Mindstorms
 Πακέτο Lego Mindstorms Τούβλο NXT και Κινητήρες, Αισθητήρες Α. Κινητήρες Οι κινητήρες είναι αυτοί που κινούν το ρομπότ μας. Οι κινητήρες συνδέονται με καλώδια στις θύρες εξόδου A,B ή C του NXT. Αν μάλιστα
Πακέτο Lego Mindstorms Τούβλο NXT και Κινητήρες, Αισθητήρες Α. Κινητήρες Οι κινητήρες είναι αυτοί που κινούν το ρομπότ μας. Οι κινητήρες συνδέονται με καλώδια στις θύρες εξόδου A,B ή C του NXT. Αν μάλιστα
Μεταπτυχιακό Πρόγραμμα «Γεωχωρικές Τεχνολογίες» Ψηφιακή Επεξεργασία Εικόνας. Εισηγητής Αναστάσιος Κεσίδης
 Μεταπτυχιακό Πρόγραμμα «Γεωχωρικές Τεχνολογίες» Ψηφιακή Επεξεργασία Εικόνας Εισηγητής Αναστάσιος Κεσίδης Εισαγωγή Τι είναι η εικόνα; Μια οπτική αναπαράσταση με την μορφή μιας συνάρτησης f(x, y) όπου η
Μεταπτυχιακό Πρόγραμμα «Γεωχωρικές Τεχνολογίες» Ψηφιακή Επεξεργασία Εικόνας Εισηγητής Αναστάσιος Κεσίδης Εισαγωγή Τι είναι η εικόνα; Μια οπτική αναπαράσταση με την μορφή μιας συνάρτησης f(x, y) όπου η
Προηγµένη ιασύνδεση µε τοπεριβάλλον
 Προηγµένη ιασύνδεση µε τοπεριβάλλον! Επεξεργασία φυσικής γλώσσας # Κατανόηση φυσικής γλώσσας # Παραγωγή φυσικής γλώσσας! Τεχνητή όραση! Ροµποτική Κατανόηση Φυσικής Γλώσσας! Αναγνώριση οµιλίας (Speech recognition)!
Προηγµένη ιασύνδεση µε τοπεριβάλλον! Επεξεργασία φυσικής γλώσσας # Κατανόηση φυσικής γλώσσας # Παραγωγή φυσικής γλώσσας! Τεχνητή όραση! Ροµποτική Κατανόηση Φυσικής Γλώσσας! Αναγνώριση οµιλίας (Speech recognition)!
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 4 ο Πρόκληση με αισθητήρες αφής Σημειώσεις Καθηγητή Έξοδος από σπηλιά Φύλλο Εργασιών 4 : Πρόκληση με αισθητήρες
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 4 ο Πρόκληση με αισθητήρες αφής Σημειώσεις Καθηγητή Έξοδος από σπηλιά Φύλλο Εργασιών 4 : Πρόκληση με αισθητήρες
Σχολή Ηλεκτρολόγων Μηχανικών & Μηχανικών Υπολογιστών
 Σχολή Ηλεκτρολόγων Μηχανικών & Μηχανικών Υπολογιστών ίδα, 7 Ιουνίο ου 2012 Ημερ ΣχολήΗλεκτρολόγων Μηχ. & Μηχ. Υπολογιστών Προπτυχιακά μαθήματα ανά θεματική περιοχή: Ενεργειακή Διαχείριση Περιβάλλον Ποιότητα
Σχολή Ηλεκτρολόγων Μηχανικών & Μηχανικών Υπολογιστών ίδα, 7 Ιουνίο ου 2012 Ημερ ΣχολήΗλεκτρολόγων Μηχ. & Μηχ. Υπολογιστών Προπτυχιακά μαθήματα ανά θεματική περιοχή: Ενεργειακή Διαχείριση Περιβάλλον Ποιότητα
Κυκλωμάτων» Χειμερινό εξάμηνο
 «Σχεδιασμός Ολοκληρωμένων Κυκλωμάτων» Χειμερινό εξάμηνο 2016-2017 Εισαγωγή στα Συστήματα Ολοκληρωμένων Κυκλωμάτων Δρ. Παρασκευάς Κίτσος Επίκουρος Καθηγητής http://diceslab.cied.teiwest.gr E-mail: pkitsos@teimes.gr
«Σχεδιασμός Ολοκληρωμένων Κυκλωμάτων» Χειμερινό εξάμηνο 2016-2017 Εισαγωγή στα Συστήματα Ολοκληρωμένων Κυκλωμάτων Δρ. Παρασκευάς Κίτσος Επίκουρος Καθηγητής http://diceslab.cied.teiwest.gr E-mail: pkitsos@teimes.gr
Φύλλο εργασίας 1 Εισαγωγή στη Ρομποτική
 Φύλλο εργασίας 1 Εισαγωγή στη Ρομποτική Χωριστείτε σε ομάδες 2-3 ατόμων και απαντήστε στις ερωτήσεις του φύλλου εργασίας. Δραστηριότητα 1 Συζητήστε με τα μέλη της ομάδας σας και γράψτε μια λίστα με ρομποτικές
Φύλλο εργασίας 1 Εισαγωγή στη Ρομποτική Χωριστείτε σε ομάδες 2-3 ατόμων και απαντήστε στις ερωτήσεις του φύλλου εργασίας. Δραστηριότητα 1 Συζητήστε με τα μέλη της ομάδας σας και γράψτε μια λίστα με ρομποτικές
Αυτόματος κλιμακοστασίου με τη χρήση PLC. 1 Θεωρητικό μέρος
 Αυτόματος κλιμακοστασίου με τη χρήση PLC Σε αυτή την άσκηση θα δούμε τη λειτουργία αυτοματοποίησης φωτισμού, ενός κλιμακοστασίου τεσσάρων επιπέδων οικοδομής. Θα δούμε τι περιλαμβάνει και τα πλεονεκτήματα
Αυτόματος κλιμακοστασίου με τη χρήση PLC Σε αυτή την άσκηση θα δούμε τη λειτουργία αυτοματοποίησης φωτισμού, ενός κλιμακοστασίου τεσσάρων επιπέδων οικοδομής. Θα δούμε τι περιλαμβάνει και τα πλεονεκτήματα
Φουκαράκη Χρυσούλα - ΓΕΛ Γαζίου
 ΚΕΦΑΛΑΙΟ 1 Φουκαράκη Χρυσούλα - ΓΕΛ Γαζίου Υπολογιστικά συστήματα σχεδιάστηκαν για να καλύψουν συγκεκριμένες ανάγκες σε συγκεκριμένη χρονική στιγμή και βοηθούν στη συνολική πρόοδο της τεχνολογίας Φουκαράκη
ΚΕΦΑΛΑΙΟ 1 Φουκαράκη Χρυσούλα - ΓΕΛ Γαζίου Υπολογιστικά συστήματα σχεδιάστηκαν για να καλύψουν συγκεκριμένες ανάγκες σε συγκεκριμένη χρονική στιγμή και βοηθούν στη συνολική πρόοδο της τεχνολογίας Φουκαράκη
Α.Τ.Ε.Ι. Ηρακλείου Ψηφιακή Επεξεργασία Εικόνας ιδάσκων: Βασίλειος Γαργανουράκης. Ανθρώπινη Όραση - Χρωµατικά Μοντέλα
 Ανθρώπινη Όραση - Χρωµατικά Μοντέλα 1 Τι απαιτείται για την όραση Φωτισµός: κάποια πηγή φωτός Αντικείµενα: που θα ανακλούν (ή διαθλούν) το φως Μάτι: σύλληψη του φωτός σαν εικόνα Τρόποι µετάδοσης φωτός
Ανθρώπινη Όραση - Χρωµατικά Μοντέλα 1 Τι απαιτείται για την όραση Φωτισµός: κάποια πηγή φωτός Αντικείµενα: που θα ανακλούν (ή διαθλούν) το φως Μάτι: σύλληψη του φωτός σαν εικόνα Τρόποι µετάδοσης φωτός
ΗΥ220 Εργαστήριο Ψηφιακών Κυκλωμάτων
 ΗΥ220 Εργαστήριο Ψηφιακών Κυκλωμάτων Χειμερινό Εξάμηνο 2018-2019 Ροή Σχεδίασης Κυκλωμάτων και Εργαλεία CAD ΗΥ220 - Βασίλης Παπαευσταθίου 1 Transistor: Δομική μονάδα κυκλωμάτων Τα ολοκληρωμένα κυκλώματα
ΗΥ220 Εργαστήριο Ψηφιακών Κυκλωμάτων Χειμερινό Εξάμηνο 2018-2019 Ροή Σχεδίασης Κυκλωμάτων και Εργαλεία CAD ΗΥ220 - Βασίλης Παπαευσταθίου 1 Transistor: Δομική μονάδα κυκλωμάτων Τα ολοκληρωμένα κυκλώματα
ΗΥ220 Εργαστήριο Ψηφιακών Κυκλωμάτων
 ΗΥ220 Εργαστήριο Ψηφιακών Κυκλωμάτων Χειμερινό Εξάμηνο 2017-2018 Ροή Σχεδίασης Κυκλωμάτων και Εργαλεία CAD ΗΥ220 - Γιώργος Καλοκαιρινός & Βασίλης Παπαευσταθίου 1 Transistor: Δομική μονάδα κυκλωμάτων Τα
ΗΥ220 Εργαστήριο Ψηφιακών Κυκλωμάτων Χειμερινό Εξάμηνο 2017-2018 Ροή Σχεδίασης Κυκλωμάτων και Εργαλεία CAD ΗΥ220 - Γιώργος Καλοκαιρινός & Βασίλης Παπαευσταθίου 1 Transistor: Δομική μονάδα κυκλωμάτων Τα
Ρομποτική. Τι είναι ένα ρομπότ ; Τι είναι ο αλγόριθμος ; Τι είναι το πρόγραμμα ; Επιμέλεια παρουσίασης : Κυριακού Γεώργιος
 Ρομποτική Τι είναι ένα ρομπότ ; Τι είναι ο αλγόριθμος ; Τι είναι το πρόγραμμα ; Που έχετε δει κάποιο ρομπότ ; Να απαριθμήσετε τα ρομπότ που έχετε δει σε ταινίες. Κάντε μία αντιπαράθεση με τα πραγματικά
Ρομποτική Τι είναι ένα ρομπότ ; Τι είναι ο αλγόριθμος ; Τι είναι το πρόγραμμα ; Που έχετε δει κάποιο ρομπότ ; Να απαριθμήσετε τα ρομπότ που έχετε δει σε ταινίες. Κάντε μία αντιπαράθεση με τα πραγματικά
Μάθημα 3.8 Τεχνικές μεταφοράς δεδομένων Λειτουργία τακτικής σάρωσης (Polling) Λειτουργία Διακοπών DMA (Direct Memory Access)
 Λειτουργία Διακοπών DMA (Direct Memory Access)") Μάθημα 3.8 Τεχνικές μεταφοράς δεδομένων Λειτουργία τακτικής σάρωσης (Polling) Λειτουργία Διακοπών DMA (Direct Memory Access) Μελετώντας το μάθημα θα μπορείς να ξέρεις τη λειτουργία του Polling να ξέρεις
Μάθημα 3.8 Τεχνικές μεταφοράς δεδομένων Λειτουργία τακτικής σάρωσης (Polling) Λειτουργία Διακοπών DMA (Direct Memory Access) Μελετώντας το μάθημα θα μπορείς να ξέρεις τη λειτουργία του Polling να ξέρεις
Ψηφιακή Επεξεργασία και Ανάλυση Εικόνας. Παρουσίαση 12 η. Θεωρία Χρώματος και Επεξεργασία Έγχρωμων Εικόνων
 Ψηφιακή Επεξεργασία και Ανάλυση Εικόνας Παρουσίαση 12 η Θεωρία Χρώματος και Επεξεργασία Έγχρωμων Εικόνων Εισαγωγή (1) Το χρώμα είναι ένας πολύ σημαντικός παράγοντας περιγραφής, που συχνά απλουστεύει κατά
Ψηφιακή Επεξεργασία και Ανάλυση Εικόνας Παρουσίαση 12 η Θεωρία Χρώματος και Επεξεργασία Έγχρωμων Εικόνων Εισαγωγή (1) Το χρώμα είναι ένας πολύ σημαντικός παράγοντας περιγραφής, που συχνά απλουστεύει κατά
Φύλλο εργασίας 6. Αποφυγή εμποδίων. Χωριστείτε σε ομάδες 2-3 ατόμων και απαντήστε στις ερωτήσεις του φύλλου εργασίας.
 Φύλλο εργασίας 6 Αποφυγή εμποδίων Ο στόχος του φύλλου εργασίας είναι η κατασκευή και ο προγραμματισμός ρομπότ το οποίο θα διασχίζει ένα διάδρομο με πολλά εμπόδια, θα τα αποφεύγει και θα τερματίζει με ασφάλεια
Φύλλο εργασίας 6 Αποφυγή εμποδίων Ο στόχος του φύλλου εργασίας είναι η κατασκευή και ο προγραμματισμός ρομπότ το οποίο θα διασχίζει ένα διάδρομο με πολλά εμπόδια, θα τα αποφεύγει και θα τερματίζει με ασφάλεια
Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2. Προγραμματισμός Φυσικών Συστημάτων. Συστήματα Πραγματικών Εφαρμογών. Νέα Ψηφιακά Αντικείμενα
 Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Φύλλο εργασίας 9 - Αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων
 Φύλλο εργασίας 9 - Αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων Σε αυτήν τη δραστηριότητα θα κατασκευάσουμε ένα αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων. Εκτός από τον μικροελεγκτή Arduino, το breadboard,
Φύλλο εργασίας 9 - Αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων Σε αυτήν τη δραστηριότητα θα κατασκευάσουμε ένα αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων. Εκτός από τον μικροελεγκτή Arduino, το breadboard,
Μνήμη και Προγραμματίσιμη Λογική
 Μνήμη και Προγραμματίσιμη Λογική Η μονάδα μνήμης είναι ένα στοιχείο κυκλώματος στο οποίο μεταφέρονται ψηφιακές πληροφορίες προς αποθήκευση και από το οποίο μπορούμε να εξάγουμε αποθηκευμένες πληροφορίες
Μνήμη και Προγραμματίσιμη Λογική Η μονάδα μνήμης είναι ένα στοιχείο κυκλώματος στο οποίο μεταφέρονται ψηφιακές πληροφορίες προς αποθήκευση και από το οποίο μπορούμε να εξάγουμε αποθηκευμένες πληροφορίες
Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου. Ενότητα 2
 Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου Ενότητα 2 Τι είναι το PLC ΠΕΡΙΕΧΟΜΕΝΑ 2 Τι είναι το PLC. 2.1 Πλεονεκτήματα των PLC. 2.2 Η δομή ενός PLC. 2.3 Τα PLC της αγοράς. 2.4 Αρχή λειτουργίας ενός PLC.
Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου Ενότητα 2 Τι είναι το PLC ΠΕΡΙΕΧΟΜΕΝΑ 2 Τι είναι το PLC. 2.1 Πλεονεκτήματα των PLC. 2.2 Η δομή ενός PLC. 2.3 Τα PLC της αγοράς. 2.4 Αρχή λειτουργίας ενός PLC.
Α1. Προγραμματισμός Συστοιχίας Επιτόπια Προγραμματιζόμενων Πυλών - Field Programmable Gate Arrays (FPGAs).
.") ΣΧΟΛΗ ΝΑΥΤΙΚΩΝ ΔΟΚΙΜΩΝ Τομέας Συστημάτων Μάχης, Ναυτικών Επιχειρήσεων, Θαλασσίων Επιστημών, Ναυτιλίας, Ηλεκτρονικών & Τηλεπικοινωνιών Επίκ. Καθηγητής Ανδρέας Τσιγκόπουλος Εργαστήριο Ηλεκτρονικής Τέρμα
ΣΧΟΛΗ ΝΑΥΤΙΚΩΝ ΔΟΚΙΜΩΝ Τομέας Συστημάτων Μάχης, Ναυτικών Επιχειρήσεων, Θαλασσίων Επιστημών, Ναυτιλίας, Ηλεκτρονικών & Τηλεπικοινωνιών Επίκ. Καθηγητής Ανδρέας Τσιγκόπουλος Εργαστήριο Ηλεκτρονικής Τέρμα
Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές. Εισαγωγή στο Arduino. Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών
 με μικροελεγκτές. Εισαγωγή στο Arduino. Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών") Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές Εισαγωγή στο Arduino Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών Τι είναι Μικροελεγκτής; Ηλεκτρονική συσκευή που διαχειρίζεται ηλεκτρονικά
Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές Εισαγωγή στο Arduino Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών Τι είναι Μικροελεγκτής; Ηλεκτρονική συσκευή που διαχειρίζεται ηλεκτρονικά
Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 1. Προγραμματισμός Φυσικών Συστημάτων. Νέα Ψηφιακά Αντικείμενα
 Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 1 ΜΕΤΡΩΝΤΑΣ ΑΠΟΣΤΑΣΗ ΜΕ ΤΟΝ ΑΙΣΘΗΤΗΡΑ ΥΠΕΡΗΧΩΝ (SR04). Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Νέα Ψηφιακά Αντικείμενα Αισθητήρες
Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 1 ΜΕΤΡΩΝΤΑΣ ΑΠΟΣΤΑΣΗ ΜΕ ΤΟΝ ΑΙΣΘΗΤΗΡΑ ΥΠΕΡΗΧΩΝ (SR04). Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Νέα Ψηφιακά Αντικείμενα Αισθητήρες
ΘΕΜΑ : ΨΗΦΙΑΚΑ ΗΛΕΚΤΡΟΝΙΚΑ DIGITAL ELECTRONICS
 ΘΕΜΑ : ΨΗΦΙΑΚΑ ΗΛΕΚΤΡΟΝΙΚΑ DIGITAL ELECTRONICS ΔΙΑΡΚΕΙΑ: 1 περιόδους 16/11/2011 10:31 (31) καθ. Τεχνολογίας ΚΑΤΗΓΟΡΙΕΣ ΜΕΓΕΘΩΝ ΑΝΑΛΟΓΙΚΟ (ANALOGUE) ΨΗΦΙΑΚΟ (DIGITAL) 16/11/2011 10:38 (38) ΕΙΣΑΓΩΓΗ ΣΤΑ
ΘΕΜΑ : ΨΗΦΙΑΚΑ ΗΛΕΚΤΡΟΝΙΚΑ DIGITAL ELECTRONICS ΔΙΑΡΚΕΙΑ: 1 περιόδους 16/11/2011 10:31 (31) καθ. Τεχνολογίας ΚΑΤΗΓΟΡΙΕΣ ΜΕΓΕΘΩΝ ΑΝΑΛΟΓΙΚΟ (ANALOGUE) ΨΗΦΙΑΚΟ (DIGITAL) 16/11/2011 10:38 (38) ΕΙΣΑΓΩΓΗ ΣΤΑ
Σχεδιασμός και κατασκευή εφαρμογής ταξινόμησης αντικειμένων σε γραμμή μεταφοράς προϊόντων με χρήση όρασης μηχανής
 Πανεπιστήμιο Δυτικής Μακεδονίας Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Σχεδιασμός και κατασκευή εφαρμογής ταξινόμησης αντικειμένων σε γραμμή μεταφοράς προϊόντων με χρήση όρασης μηχανής Λοΐζου
Πανεπιστήμιο Δυτικής Μακεδονίας Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Σχεδιασμός και κατασκευή εφαρμογής ταξινόμησης αντικειμένων σε γραμμή μεταφοράς προϊόντων με χρήση όρασης μηχανής Λοΐζου
ΕΡΓΑΣΤΗΡΙΟ ΤΕΧΝΟΛΟΓΙΑΣ ΟΠΤΙΚΩΝ ΟΡΓΑΝΩΝ
 ΕΡΓΑΣΤΗΡΙΟ ΤΕΧΝΟΛΟΓΙΑΣ ΟΠΤΙΚΩΝ ΟΡΓΑΝΩΝ Άσκηση 4. Διαφράγματα. Θεωρία Στο σχεδιασμό οπτικών οργάνων πρέπει να λάβει κανείς υπόψη και άλλες παραμέτρους πέρα από το πού και πώς σχηματίζεται το είδωλο ενός
ΕΡΓΑΣΤΗΡΙΟ ΤΕΧΝΟΛΟΓΙΑΣ ΟΠΤΙΚΩΝ ΟΡΓΑΝΩΝ Άσκηση 4. Διαφράγματα. Θεωρία Στο σχεδιασμό οπτικών οργάνων πρέπει να λάβει κανείς υπόψη και άλλες παραμέτρους πέρα από το πού και πώς σχηματίζεται το είδωλο ενός
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT. ΚΕΦΑΛΑΙΟ 7ο. Δραστηριότητες για το ΝΧΤ-G και το Robolab
 ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 7ο Δραστηριότητες για το ΝΧΤ-G και το Robolab Α. Αποφυγή εμποδίων Θα επιδιώξουμε να προγραμματίσουμε το όχημα-ρομπότ μας ώστε να είναι σε θέση
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 7ο Δραστηριότητες για το ΝΧΤ-G και το Robolab Α. Αποφυγή εμποδίων Θα επιδιώξουμε να προγραμματίσουμε το όχημα-ρομπότ μας ώστε να είναι σε θέση
Πρόγραμμα όρασης. Στη συνέχεια θα περιγράψουμε πώς δουλεύει το ρομπότ.
 Πρόγραμμα όρασης Υλοποιείτε ένα πρόγραμμα όρασης για ένα ρομπότ. Κάθε φορά που η κάμερα του ρομπότ βγάζει μία φωτογραφία, αυτή αποθηκεύεται στη μνήμη του ρομπότ ως μία ασπρόμαυρη εικόνα. Κάθε εικόνα είναι
Πρόγραμμα όρασης Υλοποιείτε ένα πρόγραμμα όρασης για ένα ρομπότ. Κάθε φορά που η κάμερα του ρομπότ βγάζει μία φωτογραφία, αυτή αποθηκεύεται στη μνήμη του ρομπότ ως μία ασπρόμαυρη εικόνα. Κάθε εικόνα είναι
Εργαστήριο Προγραμματισμού και τεχνολογίας Ευφυών συστημάτων (intelligence)
") Εργαστήριο Προγραμματισμού και τεχνολογίας Ευφυών συστημάτων (intelligence) http://www.intelligence.tuc.gr Τμήμα Ηλεκτρονικών Μηχανικών και Μηχανικών Υπολογιστών Το εργαστήριο Ένα από τα 3 εργαστήρια του
Εργαστήριο Προγραμματισμού και τεχνολογίας Ευφυών συστημάτων (intelligence) http://www.intelligence.tuc.gr Τμήμα Ηλεκτρονικών Μηχανικών και Μηχανικών Υπολογιστών Το εργαστήριο Ένα από τα 3 εργαστήρια του
Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία ΡομποΚαθαριστής Μέρος Β : Το Πρόγραμμα. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping).
.") Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής Μέρος Β : Το Πρόγραμμα. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής Μέρος Β : Το Πρόγραμμα. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής
Επιμέλεια παρουσίασης: Αριστείδης Παλιούρας ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)?
?") 1 ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)? Τι είναι το ρομπότ (robot)? 1. Περιγράψτε με μια πρόταση την έννοια της λέξης ρομπότ (robot) Το ρομπότ είναι μια μηχανή που συλλέγει δεδομένα από το περιβάλλον του (αισθάνεται),
1 ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)? Τι είναι το ρομπότ (robot)? 1. Περιγράψτε με μια πρόταση την έννοια της λέξης ρομπότ (robot) Το ρομπότ είναι μια μηχανή που συλλέγει δεδομένα από το περιβάλλον του (αισθάνεται),
Ειδικά Θέµατα Υπολογιστικής Όρασης & Γραφικής. Εµµανουήλ Ζ. Ψαράκης & Αθανάσιος Τσακαλίδης Πολυτεχνική Σχολή Τµήµα Μηχανικών Η/Υ & Πληροφορικής
 Ειδικά Θέµατα Υπολογιστικής Όρασης & Γραφικής Εµµανουήλ Ζ. Ψαράκης & Αθανάσιος Τσακαλίδης Πολυτεχνική Σχολή Τµήµα Μηχανικών Η/Υ & Πληροφορικής Εκτίµηση Κίνησης Εµµανουήλ Ζ. Ψαράκης Πολυτεχνική Σχολή Τµήµα
Ειδικά Θέµατα Υπολογιστικής Όρασης & Γραφικής Εµµανουήλ Ζ. Ψαράκης & Αθανάσιος Τσακαλίδης Πολυτεχνική Σχολή Τµήµα Μηχανικών Η/Υ & Πληροφορικής Εκτίµηση Κίνησης Εµµανουήλ Ζ. Ψαράκης Πολυτεχνική Σχολή Τµήµα
Σχεδιασμός και υλοποίηση κυκλώματος μέτρησης κατανάλωσης ισχύος
 Σχεδιασμός και υλοποίηση κυκλώματος μέτρησης κατανάλωσης ισχύος Φοιτητής Φετινίδης Αναστάσιος Επιβλέπων Δασυγένης Μηνάς Μάρτιος 2014 1 Περιεχόμενα παρουσίασης Εισαγωγή Θεωρητικό υπόβαθρο Υλικό μέρος του
Σχεδιασμός και υλοποίηση κυκλώματος μέτρησης κατανάλωσης ισχύος Φοιτητής Φετινίδης Αναστάσιος Επιβλέπων Δασυγένης Μηνάς Μάρτιος 2014 1 Περιεχόμενα παρουσίασης Εισαγωγή Θεωρητικό υπόβαθρο Υλικό μέρος του
ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΑΥΤΟΜΑΤΙΣΜΟ ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΜΑΘΗΜΑΤΟΣ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΤΑ ΤΕΧΝΟΛΟΓΙΚΑ ΕΠΑΓΓΕΛΜΑΤΙΚΑ ΕΚΠΑΙΔΕΥΤΗΡΙΑ-ΤΕΕ
 Αφιέρωμα στο Γ Συνέδριο «Τεχνολογία & Αυτοματισμός» ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΑΥΤΟΜΑΤΙΣΜΟ ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΜΑΘΗΜΑΤΟΣ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΤΑ ΤΕΧΝΟΛΟΓΙΚΑ ΕΠΑΓΓΕΛΜΑΤΙΚΑ ΕΚΠΑΙΔΕΥΤΗΡΙΑ-ΤΕΕ Νίκος Γλώσσας Καθηγητής Δευτεροβάθμιας
Αφιέρωμα στο Γ Συνέδριο «Τεχνολογία & Αυτοματισμός» ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΑΥΤΟΜΑΤΙΣΜΟ ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΜΑΘΗΜΑΤΟΣ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΤΑ ΤΕΧΝΟΛΟΓΙΚΑ ΕΠΑΓΓΕΛΜΑΤΙΚΑ ΕΚΠΑΙΔΕΥΤΗΡΙΑ-ΤΕΕ Νίκος Γλώσσας Καθηγητής Δευτεροβάθμιας
ΕΝ ΕΙΚΤΙΚΑ ΠΑΡΑ ΕΙΓΜΑΤΑ ΚΡΙΤΗΡΙΩΝ ΑΞΙΟΛΟΓΗΣΗΣ. Κεφάλαιο 17
 ΕΝ ΕΙΚΤΙΚΑ ΠΑΡΑ ΕΙΓΜΑΤΑ ΚΡΙΤΗΡΙΩΝ ΑΞΙΟΛΟΓΗΣΗΣ 1 ο Παράδειγµα (διάρκεια: 15 λεπτά) Κεφάλαιο 17 Α. ΣΤΟΙΧΕΙΑ ΤΟΥ ΜΑΘΗΤΗ ΟΝΟΜΑΤΕΠΩΝΥΜΟ ΜΑΘΗΤΗ:... ΤΑΞΗ:... ΤΜΗΜΑ:... ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ:... ΗΜΕΡΟΜΗΝΙΑ:... Β.
ΕΝ ΕΙΚΤΙΚΑ ΠΑΡΑ ΕΙΓΜΑΤΑ ΚΡΙΤΗΡΙΩΝ ΑΞΙΟΛΟΓΗΣΗΣ 1 ο Παράδειγµα (διάρκεια: 15 λεπτά) Κεφάλαιο 17 Α. ΣΤΟΙΧΕΙΑ ΤΟΥ ΜΑΘΗΤΗ ΟΝΟΜΑΤΕΠΩΝΥΜΟ ΜΑΘΗΤΗ:... ΤΑΞΗ:... ΤΜΗΜΑ:... ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ:... ΗΜΕΡΟΜΗΝΙΑ:... Β.
Εγκατάσταση του LabVIEW
 Συλλογή και Επεξεργασία Δεδομένων ΠΕΡΙΕΧΟΜΕΝΑ: Πώς να κατεβάσετε και να εγκαταστήσετε την ακαδημαϊκή έκδοση του LabVIEW. Εισαγωγή στο LabVIEW. Εγκατάσταση του LabVIEW Γιατί το LabVIEW? Το LabVIEW είναι
Συλλογή και Επεξεργασία Δεδομένων ΠΕΡΙΕΧΟΜΕΝΑ: Πώς να κατεβάσετε και να εγκαταστήσετε την ακαδημαϊκή έκδοση του LabVIEW. Εισαγωγή στο LabVIEW. Εγκατάσταση του LabVIEW Γιατί το LabVIEW? Το LabVIEW είναι
Μοντελοποίηση τρισδιάστατου κόσμου σε πραγματικό κόσμο: το παράδειγμα του Kinect. ιδάσκων: Φ. Αζαριάδης Φοιτήτρια: Άρτεμις-Αγγελική Σφύρη
 Μοντελοποίηση τρισδιάστατου κόσμου σε πραγματικό κόσμο: το παράδειγμα του Kinect ιδάσκων: Φ. Αζαριάδης Φοιτήτρια: Άρτεμις-Αγγελική Σφύρη Computer graphics Μοντελοποίηση τρισδιάστατου κόσμου 2d/3d computer
Μοντελοποίηση τρισδιάστατου κόσμου σε πραγματικό κόσμο: το παράδειγμα του Kinect ιδάσκων: Φ. Αζαριάδης Φοιτήτρια: Άρτεμις-Αγγελική Σφύρη Computer graphics Μοντελοποίηση τρισδιάστατου κόσμου 2d/3d computer
Εξαμηνιαία Εργασία 2013 Προγραμματίζοντας τον Arduino στη C Μέρος Α : Υλικά
 Σκοπός Εξαμηνιαία Εργασία 2013 Προγραμματίζοντας τον Arduino στη C Μέρος Α : Υλικά Μικροελεγκτές Πλακέτα Arduino Προσομοίωση Μικροελεγκτών Προγραμματισμός Μικροελεγκτών στη C. 7.1 ΕΠΙΔΙΩΞΗ ΤΗΣ ΕΡΓΑΣΙΑΣ
Σκοπός Εξαμηνιαία Εργασία 2013 Προγραμματίζοντας τον Arduino στη C Μέρος Α : Υλικά Μικροελεγκτές Πλακέτα Arduino Προσομοίωση Μικροελεγκτών Προγραμματισμός Μικροελεγκτών στη C. 7.1 ΕΠΙΔΙΩΞΗ ΤΗΣ ΕΡΓΑΣΙΑΣ
«Προγραµµατισµός του LEGO Mindstorm NXT για το διαγωνισµό "Move the Ball!"»
 ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΚΠ 413 / ΕΚΠ 606 ΑΥΤΟΝΟΜΟΙ ΠΡΑΚΤΟΡΕΣ Εργασία Εξαµήνου Προγραµµατισµός του LEGO Mindstorm NXT για το διαγωνισµό "Move the Ball!"
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΚΠ 413 / ΕΚΠ 606 ΑΥΤΟΝΟΜΟΙ ΠΡΑΚΤΟΡΕΣ Εργασία Εξαµήνου Προγραµµατισµός του LEGO Mindstorm NXT για το διαγωνισµό "Move the Ball!"
Παρουσίαση Νο. 4 Ψηφιακή Καταγραφή Εικόνας
 Ψηφιακή Επεξεργασία και Ανάλυση Εικόνας Παρουσίαση Νο. 4 Ψηφιακή Καταγραφή Εικόνας Εισαγωγή (1/2) Για την καταγραφή εικόνας απαιτούνται «Φωτεινή» πηγή Αντικείμενο Σύστημα καταγραφής «Φωτεινή» πηγή Πηγή
Ψηφιακή Επεξεργασία και Ανάλυση Εικόνας Παρουσίαση Νο. 4 Ψηφιακή Καταγραφή Εικόνας Εισαγωγή (1/2) Για την καταγραφή εικόνας απαιτούνται «Φωτεινή» πηγή Αντικείμενο Σύστημα καταγραφής «Φωτεινή» πηγή Πηγή
DIP_04 Σημειακή επεξεργασία. ΤΕΙ Κρήτης
 DIP_04 Σημειακή επεξεργασία ΤΕΙ Κρήτης ΒΕΛΤΙΣΤΟΠΟΙΗΣΗ ΕΙΚΟΝΑΣ Σκοπός μιας τέτοιας τεχνικής μπορεί να είναι: η βελτιστοποίηση της οπτικής εμφάνισης μιας εικόνας όπως την αντιλαμβάνεται ο άνθρωπος, η τροποποίηση
DIP_04 Σημειακή επεξεργασία ΤΕΙ Κρήτης ΒΕΛΤΙΣΤΟΠΟΙΗΣΗ ΕΙΚΟΝΑΣ Σκοπός μιας τέτοιας τεχνικής μπορεί να είναι: η βελτιστοποίηση της οπτικής εμφάνισης μιας εικόνας όπως την αντιλαμβάνεται ο άνθρωπος, η τροποποίηση
1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης
 www.robolab.tuc.gr 1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας R/C σέρβο βηματικός κινητήρας 2 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας
www.robolab.tuc.gr 1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας R/C σέρβο βηματικός κινητήρας 2 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας
Τηλεπισκόπηση. Ψηφιακή Ανάλυση Εικόνας Η ΒΕΛΤΙΩΣΗ εικόνας
 Τηλεπισκόπηση Ψηφιακή Ανάλυση Εικόνας Η ΒΕΛΤΙΩΣΗ εικόνας Η βελτίωση εικόνας ασχολείται με την τροποποίηση των εικόνων ώστε να είναι πιο κατάλληλες για την ανθρώπινη όραση. Ανεξάρτητα από το βαθμό της ψηφιακής
Τηλεπισκόπηση Ψηφιακή Ανάλυση Εικόνας Η ΒΕΛΤΙΩΣΗ εικόνας Η βελτίωση εικόνας ασχολείται με την τροποποίηση των εικόνων ώστε να είναι πιο κατάλληλες για την ανθρώπινη όραση. Ανεξάρτητα από το βαθμό της ψηφιακής
ΕΡΓΑΣΤΗΡΙΑΚΗ ΕΦΑΡΜΟΓΗ 4 TΟ ΡΟΜΠΟΤΙΚΟ ΟΧΗΜΑ ROGUE BLUE
 Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr, kyralakis@dpem.tuc.gr ΕΡΓΑΣΤΗΡΙΑΚΗ
Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr, kyralakis@dpem.tuc.gr ΕΡΓΑΣΤΗΡΙΑΚΗ
Συστήματα πολυμέσων. Εισαγωγή Υλικό συστημάτων πολυμέσων Λογισμικό συστημάτων πολυμέσων Συστήματα πραγματικού χρόνου Χρονοπρογραμματισμός
 Συστήματα πολυμέσων Εισαγωγή Υλικό συστημάτων πολυμέσων Λογισμικό συστημάτων πολυμέσων Συστήματα πραγματικού χρόνου Χρονοπρογραμματισμός Τεχνολογία Πολυμέσων και Πολυμεσικές Επικοινωνίες 03-1 Εισαγωγή
Συστήματα πολυμέσων Εισαγωγή Υλικό συστημάτων πολυμέσων Λογισμικό συστημάτων πολυμέσων Συστήματα πραγματικού χρόνου Χρονοπρογραμματισμός Τεχνολογία Πολυμέσων και Πολυμεσικές Επικοινωνίες 03-1 Εισαγωγή
ΡΟΜΠΟΤΙΚΗ. ΕΡΓΑΣΙΑ ΠΑΝΩ ΣΤΗΝ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΝΧΤ ΚΑΙ ΤΑ ΠΡΩΤΟΚΟΛΛΑ ΕΠΙΚΟΙΝΩΝΙΑΣ BLUETOOTH, I2C και serial communication
 ΡΟΜΠΟΤΙΚΗ ΕΡΓΑΣΙΑ ΠΑΝΩ ΣΤΗΝ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΝΧΤ ΚΑΙ ΤΑ ΠΡΩΤΟΚΟΛΛΑ ΕΠΙΚΟΙΝΩΝΙΑΣ BLUETOOTH, I2C και serial communication ΜΠΑΝΤΗΣ ΑΝΤΩΝΙΟΣ 533 ΤΣΙΚΤΣΙΡΗΣ ΔΗΜΗΤΡΙΟΣ 551 ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΤΟΥ ΡΟΜΠΟΤ LEGO NXT Το ρομπότ
ΡΟΜΠΟΤΙΚΗ ΕΡΓΑΣΙΑ ΠΑΝΩ ΣΤΗΝ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΝΧΤ ΚΑΙ ΤΑ ΠΡΩΤΟΚΟΛΛΑ ΕΠΙΚΟΙΝΩΝΙΑΣ BLUETOOTH, I2C και serial communication ΜΠΑΝΤΗΣ ΑΝΤΩΝΙΟΣ 533 ΤΣΙΚΤΣΙΡΗΣ ΔΗΜΗΤΡΙΟΣ 551 ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΤΟΥ ΡΟΜΠΟΤ LEGO NXT Το ρομπότ
Υλοποίηση Τεχνολογιών έξυπνων σπιτιών
 Πανεπιστήμιο Μακεδονίας Μεταπτυχιακό Εφ. Πληροφορικής Ειδικευση Συστήματα Υπολογιστών Μεταπτυχιακή Εργασία Υλοποίηση Τεχνολογιών έξυπνων σπιτιών Εκπόνηση: Απόστολος Πλαστήρας Επιβλέπων Καθηγητής: Αλέξανδρος
Πανεπιστήμιο Μακεδονίας Μεταπτυχιακό Εφ. Πληροφορικής Ειδικευση Συστήματα Υπολογιστών Μεταπτυχιακή Εργασία Υλοποίηση Τεχνολογιών έξυπνων σπιτιών Εκπόνηση: Απόστολος Πλαστήρας Επιβλέπων Καθηγητής: Αλέξανδρος
ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΑΕ ΙΙ. Εισαγωγή στους Προγραμματιζόμενους Λογικούς Ελεγκτές
 ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Εργαστηριακή Άσκηση 3 ΣΑΕ ΙΙ Εισαγωγή στους Προγραμματιζόμενους Λογικούς Ελεγκτές Εκτός από τα κλασσικά ή μοντέρνα συστήματα αυτομάτου ελέγχου, στην παραγωγική διαδικασία,
ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Εργαστηριακή Άσκηση 3 ΣΑΕ ΙΙ Εισαγωγή στους Προγραμματιζόμενους Λογικούς Ελεγκτές Εκτός από τα κλασσικά ή μοντέρνα συστήματα αυτομάτου ελέγχου, στην παραγωγική διαδικασία,
Κεφάλαιο 1 Εισαγωγή.
 Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
Β1.1 Δημιουργία Εφαρμογής στο Περιβάλλον Προγραμματισμού EdScratch του Edison ρομπότ
 Β1.1 Δημιουργία Εφαρμογής στο Περιβάλλον Προγραμματισμού EdScratch του Edison ρομπότ Τι θα μάθουμε σήμερα: Να γνωρίσουμε την Ρομποτική Να προετοιμάσουμε και να γνωρίσουμε το Edison ρομπότ Να μεταφερόμαστε
Β1.1 Δημιουργία Εφαρμογής στο Περιβάλλον Προγραμματισμού EdScratch του Edison ρομπότ Τι θα μάθουμε σήμερα: Να γνωρίσουμε την Ρομποτική Να προετοιμάσουμε και να γνωρίσουμε το Edison ρομπότ Να μεταφερόμαστε
Πανεπιστήμιο Κύπρου. Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών (ΗΜΜΥ)
") Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών (ΗΜΜΥ) 26/01/2014 Συνεισφορά του κλάδους ΗΜΜΥ Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Ευρύ φάσμα γνώσεων και επιστημονικών
Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών (ΗΜΜΥ) 26/01/2014 Συνεισφορά του κλάδους ΗΜΜΥ Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Ευρύ φάσμα γνώσεων και επιστημονικών
Σχεδιασμός και κατασκευή ενός υβριδικού αμυντικού αυτοματοποιημένου ρομποτικού συστήματος
 Σχεδιασμός και κατασκευή ενός υβριδικού αμυντικού αυτοματοποιημένου ρομποτικού συστήματος Τσούρμα Μαρία Επιβλέπων καθηγητής: Δρ. Μηνάς Δασυγένης Πανεπιστήμιο Δυτικής Μακεδονίας Τμήμα Μηχανικών Πληροφορικής
Σχεδιασμός και κατασκευή ενός υβριδικού αμυντικού αυτοματοποιημένου ρομποτικού συστήματος Τσούρμα Μαρία Επιβλέπων καθηγητής: Δρ. Μηνάς Δασυγένης Πανεπιστήμιο Δυτικής Μακεδονίας Τμήμα Μηχανικών Πληροφορικής
ΧΡΩΜΑΤΙΚΟΣ ΤΑΞΙΝΟΜΗΤΗΣ ΜΕ ΡΟΜΠΟΤΙΚΟ ΒΡΑΧΙΟΝΑ ΚΑΙ ΧΡΗΣΗ ΤΟΥ ΜΙΚΡΟΕΛΕΓΚΤΗ BASIC STAMP ΤΗΣ PARALLAX
 ΧΡΩΜΑΤΙΚΟΣ ΤΑΞΙΝΟΜΗΤΗΣ ΜΕ ΡΟΜΠΟΤΙΚΟ ΒΡΑΧΙΟΝΑ ΚΑΙ ΧΡΗΣΗ ΤΟΥ ΜΙΚΡΟΕΛΕΓΚΤΗ BASIC STAMP ΤΗΣ PARALLAX Γιαννακόπουλος Νίκος Εκπαιδευτικός ΠΕ19- ΜΔΕ σπουδές στην εκπαίδευση ΕΑΠ, 3ο ΓΕΛ Πάτρας gianakop@gmail.com
ΧΡΩΜΑΤΙΚΟΣ ΤΑΞΙΝΟΜΗΤΗΣ ΜΕ ΡΟΜΠΟΤΙΚΟ ΒΡΑΧΙΟΝΑ ΚΑΙ ΧΡΗΣΗ ΤΟΥ ΜΙΚΡΟΕΛΕΓΚΤΗ BASIC STAMP ΤΗΣ PARALLAX Γιαννακόπουλος Νίκος Εκπαιδευτικός ΠΕ19- ΜΔΕ σπουδές στην εκπαίδευση ΕΑΠ, 3ο ΓΕΛ Πάτρας gianakop@gmail.com
ΤΜΗΜΑ ΜΗΧ/ΚΩΝ ΗΛ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ
 ΤΜΗΜΑ ΜΗΧ/ΚΩΝ ΗΛ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ Το Τμήμα Μηχανικών Ηλεκτρονικών Υπολογιστικών Συστημάτων ιδρύθηκε και λειτουργεί από το 1984 στη Σχολή Τεχνολογικών Εφαρμογών του Α.Ε.Ι. Πειραιά Τ.Τ., με σκοπό
ΤΜΗΜΑ ΜΗΧ/ΚΩΝ ΗΛ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ Το Τμήμα Μηχανικών Ηλεκτρονικών Υπολογιστικών Συστημάτων ιδρύθηκε και λειτουργεί από το 1984 στη Σχολή Τεχνολογικών Εφαρμογών του Α.Ε.Ι. Πειραιά Τ.Τ., με σκοπό
ΑΥΤΟΝΟΜΟΙ ΠΡΑΚΤΟΡΕΣ ΠΛΗ 513
 ΑΥΤΟΝΟΜΟΙ ΠΡΑΚΤΟΡΕΣ ΠΛΗ 513 Αναφορά Εργασίας Εξαμήνου Χειμερινό Εξάμηνο 2011-2012 Γεωργάκης Γεώργιος 2006030111 RobotStadium 2012 Εισαγωγή Το Robostadium είναι ένας διαγωνισμός στο διαδίκτυο κατά τα πρότυπα
ΑΥΤΟΝΟΜΟΙ ΠΡΑΚΤΟΡΕΣ ΠΛΗ 513 Αναφορά Εργασίας Εξαμήνου Χειμερινό Εξάμηνο 2011-2012 Γεωργάκης Γεώργιος 2006030111 RobotStadium 2012 Εισαγωγή Το Robostadium είναι ένας διαγωνισμός στο διαδίκτυο κατά τα πρότυπα
ΛΥΚΕΙΟ ΣΟΛΕΑΣ Σχολική χρονιά
 ΛΥΚΕΙΟ ΣΟΛΕΑΣ Σχολική χρονιά 2008 2009 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ IOYNIΟΥ 2009 ΤΑΞΗ: Β ΜΑΘΗΜΑ: ΤΕΧΝΟΛΟΓΙΑ ΗΜΕΡΟΜΗΝΙΑ: Παρασκευή, 5 Ιουνίου 2009 ΧΡΟΝΟΣ: 07:45-10:15 ΒΑΘΜΟΣ Αριθμητικώς:... Ολογράφως:...
ΛΥΚΕΙΟ ΣΟΛΕΑΣ Σχολική χρονιά 2008 2009 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ IOYNIΟΥ 2009 ΤΑΞΗ: Β ΜΑΘΗΜΑ: ΤΕΧΝΟΛΟΓΙΑ ΗΜΕΡΟΜΗΝΙΑ: Παρασκευή, 5 Ιουνίου 2009 ΧΡΟΝΟΣ: 07:45-10:15 ΒΑΘΜΟΣ Αριθμητικώς:... Ολογράφως:...
Παράρτημα 3: Παράλληλη συγκριτική παρουσίαση του προηγούμενου και του νέου Πρoγράμματος Σπουδών. 5 Περίγραμμα Υ Ηλεκτρονικά Στοιχεία
 ΤΛ1001 ΤΛ1101 ΤΛ1002 ΤΛ1102 Προηγούμενο ΠΣ - Α' Εξάμηνο Ηλεκτρονικά Στοιχεία 3 1 2 7 4 14 1002 1012 Ηλεκτρικά Κυκλώματα Ι 2 0 2 7 2 14 1004 1014 Νέο ΠΣ - Α' Εξάμηνο Υ Ηλεκτρονικά Στοιχεία 2 1 1 7 3 7 Υ
ΤΛ1001 ΤΛ1101 ΤΛ1002 ΤΛ1102 Προηγούμενο ΠΣ - Α' Εξάμηνο Ηλεκτρονικά Στοιχεία 3 1 2 7 4 14 1002 1012 Ηλεκτρικά Κυκλώματα Ι 2 0 2 7 2 14 1004 1014 Νέο ΠΣ - Α' Εξάμηνο Υ Ηλεκτρονικά Στοιχεία 2 1 1 7 3 7 Υ
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 3 Μέτρηση Θερμοκρασίας Σύστημα Ελέγχου Θερμοκρασίας. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 3 Μέτρηση Θερμοκρασίας Σύστημα Ελέγχου Θερμοκρασίας με Θερμοστάτη. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Σκοπός Βασική δομή ενός προγράμματος στο LabVIEW.
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 3 Μέτρηση Θερμοκρασίας Σύστημα Ελέγχου Θερμοκρασίας με Θερμοστάτη. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Σκοπός Βασική δομή ενός προγράμματος στο LabVIEW.
ΠΛΗΡΟΦΟΡΙΚH ΓΙΑ ΤΗΝ ΤEΧΝΗ Η ΕΞAΜΗΝΟ
 ΠΛΗΡΟΦΟΡΙΚH ΓΙΑ ΤΗΝ ΤEΧΝΗ Η ΕΞAΜΗΝΟ ΑΜΑΛIΑ ΦΩΚA ΕΠIΚΟΥΡΗ ΚΑΘΗΓHΤΡΙΑ Περιεχόμενο Μαθήματος 2 Αλληλεπίδραση Ζωντανές Εικόνες Living Images 3 Μια εικόνα αλλάζει ανάλογα με τις ενέργειες του θεατή. Αναπαριστά
ΠΛΗΡΟΦΟΡΙΚH ΓΙΑ ΤΗΝ ΤEΧΝΗ Η ΕΞAΜΗΝΟ ΑΜΑΛIΑ ΦΩΚA ΕΠIΚΟΥΡΗ ΚΑΘΗΓHΤΡΙΑ Περιεχόμενο Μαθήματος 2 Αλληλεπίδραση Ζωντανές Εικόνες Living Images 3 Μια εικόνα αλλάζει ανάλογα με τις ενέργειες του θεατή. Αναπαριστά
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου
 Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου") Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Η ΑΞΙΟΠΟΙΗΣΗ ΤΟΥ ΕΚΠΑΙΔΕΥΤΙΚΟΥ ΛΟΓΙΣΜΙΚΟΥ COACH 5 ΣΤΗΝ ΔΙΔΑΣΚΑΛΙΑ ΜΑΘΗΜΑΤΩΝ ΕΙΔΙΚΟΤΗΤΑΣ ΤΟΥ ΗΛΕΚΤΡΟΝΙΚΟΥ ΤΟΜΕΑ ΤΩΝ Τ.Ε.Ε.
 2 Ο ΣΥΝΕΔΡΙΟ ΣΤΗ ΣΥΡΟ ΤΠΕ ΣΤΗΝ ΕΚΠΑΙΔΕΥΣΗ 485 Η ΑΞΙΟΠΟΙΗΣΗ ΤΟΥ ΕΚΠΑΙΔΕΥΤΙΚΟΥ ΛΟΓΙΣΜΙΚΟΥ COACH 5 ΣΤΗΝ ΔΙΔΑΣΚΑΛΙΑ ΜΑΘΗΜΑΤΩΝ ΕΙΔΙΚΟΤΗΤΑΣ ΤΟΥ ΗΛΕΚΤΡΟΝΙΚΟΥ ΤΟΜΕΑ ΤΩΝ Τ.Ε.Ε. Μπουλταδάκης Στέλιος Εκπαιδευτικός
2 Ο ΣΥΝΕΔΡΙΟ ΣΤΗ ΣΥΡΟ ΤΠΕ ΣΤΗΝ ΕΚΠΑΙΔΕΥΣΗ 485 Η ΑΞΙΟΠΟΙΗΣΗ ΤΟΥ ΕΚΠΑΙΔΕΥΤΙΚΟΥ ΛΟΓΙΣΜΙΚΟΥ COACH 5 ΣΤΗΝ ΔΙΔΑΣΚΑΛΙΑ ΜΑΘΗΜΑΤΩΝ ΕΙΔΙΚΟΤΗΤΑΣ ΤΟΥ ΗΛΕΚΤΡΟΝΙΚΟΥ ΤΟΜΕΑ ΤΩΝ Τ.Ε.Ε. Μπουλταδάκης Στέλιος Εκπαιδευτικός
ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ. ΚΕΦΑΛΑΙΟ 4ο ΜΝΗΜΕΣ. (c) Αμπατζόγλου Γιάννης, Ηλεκτρονικός Μηχανικός, καθηγητής ΠΕ17
 Αμπατζόγλου Γιάννης, Ηλεκτρονικός Μηχανικός, καθηγητής ΠΕ17") ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΚΕΦΑΛΑΙΟ 4ο ΜΝΗΜΕΣ Μνήμες (Memory) - Είναι ημιαγώγιμα κυκλώματα που μπορούν να αποθηκεύσουν ένα σύνολο από δυαδικά ψηφία (bit). - Μια μνήμη αποθηκεύει λέξεις (σειρές από bit). - Σε κάθε
ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΚΕΦΑΛΑΙΟ 4ο ΜΝΗΜΕΣ Μνήμες (Memory) - Είναι ημιαγώγιμα κυκλώματα που μπορούν να αποθηκεύσουν ένα σύνολο από δυαδικά ψηφία (bit). - Μια μνήμη αποθηκεύει λέξεις (σειρές από bit). - Σε κάθε
Περιγραφή της 3 ης εργαστηριακής εφαρμογής: ρομποτικό σύστημα LEGO NXT
 www.robolab.tuc.gr Περιγραφή της 3 ης εργαστηριακής εφαρμογής: ρομποτικό σύστημα LEGO NXT ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Το ρομποτικό σύστημα LEGO NXT περισσότερες πληροφορίες: http://mindstorms.lego.com/
www.robolab.tuc.gr Περιγραφή της 3 ης εργαστηριακής εφαρμογής: ρομποτικό σύστημα LEGO NXT ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Το ρομποτικό σύστημα LEGO NXT περισσότερες πληροφορίες: http://mindstorms.lego.com/
Στόχος της εργασίας και ιδιαιτερότητες του προβλήματος
 ΑΝΑΠΤΥΞΗ ΟΠΤΙΚΟΥ ΣΥΣΤΗΜΑΤΟΣ ΠΡΟΣΑΡΜΟΣΤΙΚΟΥ ΕΛΕΓΧΟΥ ΚΑΤΕΡΓΑΣΙΑΣ ΥΛΙΚΩΝ Κουλουμέντας Παναγιώτης Σχολή Ηλεκτρονικών Μηχανικών και Μηχανικών Υπολογιστών Χανιά,Νοέμβριος 2014 Επιτροπή: Ζερβάκης Μιχάλης (επιβλέπων)
ΑΝΑΠΤΥΞΗ ΟΠΤΙΚΟΥ ΣΥΣΤΗΜΑΤΟΣ ΠΡΟΣΑΡΜΟΣΤΙΚΟΥ ΕΛΕΓΧΟΥ ΚΑΤΕΡΓΑΣΙΑΣ ΥΛΙΚΩΝ Κουλουμέντας Παναγιώτης Σχολή Ηλεκτρονικών Μηχανικών και Μηχανικών Υπολογιστών Χανιά,Νοέμβριος 2014 Επιτροπή: Ζερβάκης Μιχάλης (επιβλέπων)
Μάθημα 1 ΑΙΣΘΗΤΗΡΕΣ Ο Αισθητήρας Δύναμης. Επανεξέταση των βασικών εννοιών της C και του προγραμματισμού.
 Σκοπός Σχεδίαση Συστημάτων με τον Arduino Μάθημα 1 ΑΙΣΘΗΤΗΡΕΣ Ο Αισθητήρας Δύναμης. Επανεξέταση των βασικών εννοιών της C και του προγραμματισμού. Κατανόηση των βημάτων στη συστηματική ανάπτυξη ενός προγράμματος.
Σκοπός Σχεδίαση Συστημάτων με τον Arduino Μάθημα 1 ΑΙΣΘΗΤΗΡΕΣ Ο Αισθητήρας Δύναμης. Επανεξέταση των βασικών εννοιών της C και του προγραμματισμού. Κατανόηση των βημάτων στη συστηματική ανάπτυξη ενός προγράμματος.
Φύλλο εργασίας 4. Η γάτα και τα ποντίκια
 Φύλλο εργασίας 4 Η γάτα και τα ποντίκια Οι επόμενες δραστηριότητες αφορούν την κατασκευή ρομποτικής κατασκευής που θα προσομοιώνει μια γάτα που προσπαθεί να πιάσει ποντίκια. Για την υλοποίηση του φύλλου
Φύλλο εργασίας 4 Η γάτα και τα ποντίκια Οι επόμενες δραστηριότητες αφορούν την κατασκευή ρομποτικής κατασκευής που θα προσομοιώνει μια γάτα που προσπαθεί να πιάσει ποντίκια. Για την υλοποίηση του φύλλου
ΑΙΣΘΗΤΗΡΑΣ ΣΧΕΤΙΚΗΣ ΥΓΡΑΣΙΑΣ. Η πιο συνηθισμένη έκφραση για την υγρασία του αέρα είναι η σχετική υγρασία (Relative Ηumidity, RH).
.") ΑΙΣΘΗΤΗΡΑΣ ΣΧΕΤΙΚΗΣ ΥΓΡΑΣΙΑΣ Η πιο συνηθισμένη έκφραση για την υγρασία του αέρα είναι η σχετική υγρασία (Relative Ηumidity, RH). Η σχετική υγρασία είναι ο λόγος επί τοις εκατό (%) της μάζας των υδρατμών
ΑΙΣΘΗΤΗΡΑΣ ΣΧΕΤΙΚΗΣ ΥΓΡΑΣΙΑΣ Η πιο συνηθισμένη έκφραση για την υγρασία του αέρα είναι η σχετική υγρασία (Relative Ηumidity, RH). Η σχετική υγρασία είναι ο λόγος επί τοις εκατό (%) της μάζας των υδρατμών
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εφαρμοσμένος & Υπολογιστικός Ηλεκτρομαγνητισμός Ηλ. Αιθ. 012, 013. Στοχαστικά Συστήματα & Επικοινωνίες Ηλ. Αμφ.
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εφαρμοσμένος & Υπολογιστικός Ηλεκτρομαγνητισμός Ηλ. Αιθ. 012, 013. Εργαστήριο Ψηφιακών Συστημάτων Ηλ. Εργ.
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΝΟΤΗΤΑ Ο ΗΛΕΚΤΡΟΝΙΚΟΣ ΥΠΟΛΟΓΙΣΤΗΣ ΕΙΣΑΓΩΓΗ
 ΕΝΟΤΗΤΑ 8 8.0 Ο ΗΛΕΚΤΡΟΝΙΚΟΣ ΥΠΟΛΟΓΙΣΤΗΣ ΕΙΣΑΓΩΓΗ Ο Ηλεκτρονικός Υπολογιστής (Η/Υ) είναι σήμερα η κυριότερη επικοινωνιακή συσκευή. Είναι το κατ εξοχή επικοινωνιακό υποσύστημα. Είναι μια πολυσύνθετη συσκευή.
ΕΝΟΤΗΤΑ 8 8.0 Ο ΗΛΕΚΤΡΟΝΙΚΟΣ ΥΠΟΛΟΓΙΣΤΗΣ ΕΙΣΑΓΩΓΗ Ο Ηλεκτρονικός Υπολογιστής (Η/Υ) είναι σήμερα η κυριότερη επικοινωνιακή συσκευή. Είναι το κατ εξοχή επικοινωνιακό υποσύστημα. Είναι μια πολυσύνθετη συσκευή.
Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC.
 Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC. Ονόματα μαθητών Γεωργίου Χρίστος Η1β, Γεωργίου Αντώνης Η1β Ονόματα καθηγητών: Αγγελίδης Λουκής, Πετρίδης Πέτρος Περίληψη Σκοπός της
Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC. Ονόματα μαθητών Γεωργίου Χρίστος Η1β, Γεωργίου Αντώνης Η1β Ονόματα καθηγητών: Αγγελίδης Λουκής, Πετρίδης Πέτρος Περίληψη Σκοπός της
Συλλογή μεταφορά και έλεγχος Δεδομένων. 1.4 Απλά και σύνθετα συστήματα αυτοματισμού.
 Συλλογή μεταφορά και έλεγχος Δεδομένων 1.4 Απλά και σύνθετα συστήματα αυτοματισμού. Το είδαμε μέχρι τώρα Δομή συστήματος αυτοματισμού Ο ελεγκτής προϋποθέτει την ύπαρξη κάποιων στοιχείων, στα οποία θα επιδράσει
Συλλογή μεταφορά και έλεγχος Δεδομένων 1.4 Απλά και σύνθετα συστήματα αυτοματισμού. Το είδαμε μέχρι τώρα Δομή συστήματος αυτοματισμού Ο ελεγκτής προϋποθέτει την ύπαρξη κάποιων στοιχείων, στα οποία θα επιδράσει
Παρατηρησιακή Αστρονομία
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Παρατηρησιακή Αστρονομία Ενότητα 8: Φωτομετρία με ψηφιακές φωτογραφικές μηχανές Ιωάννης Χ. Σειραδάκης Τμήμα Φυσικής Άδειες Χρήσης Το παρόν
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Παρατηρησιακή Αστρονομία Ενότητα 8: Φωτομετρία με ψηφιακές φωτογραφικές μηχανές Ιωάννης Χ. Σειραδάκης Τμήμα Φυσικής Άδειες Χρήσης Το παρόν
ΧΡΗΣΗ ΝΕΩΝ ΟΠΤΙΚΩΝ ΚΑΙ ΨΗΦΙΑΚΩΝ ΜΕΘΟΔΩΝ ΓΙΑ ΤΗΝ ΑΝΤΙΓΡΑΦΗ ΤΡΙΣΔΙΑΣΤΑΤΩΝ ΑΝΤΙΚΕΙΜΕΝΩΝ ΣΤΕΦΑΝΙΑ ΧΛΟΥΒΕΡΑΚΗ 2014
 ΧΡΗΣΗ ΝΕΩΝ ΟΠΤΙΚΩΝ ΚΑΙ ΨΗΦΙΑΚΩΝ ΜΕΘΟΔΩΝ ΓΙΑ ΤΗΝ ΑΝΤΙΓΡΑΦΗ ΤΡΙΣΔΙΑΣΤΑΤΩΝ ΑΝΤΙΚΕΙΜΕΝΩΝ ΣΤΕΦΑΝΙΑ ΧΛΟΥΒΕΡΑΚΗ 2014 ΧΡΗΣΗ ΝΕΩΝ ΟΠΤΙΚΩΝ ΚΑΙ ΨΗΦΙΑΚΩΝ ΜΕΘΟΔΩΝ ΓΙΑ ΤΗΝ ΑΝΤΙΓΡΑΦΗ ΤΡΙΣΔΙΑΣΤΑΤΩΝ ΑΝΤΙΚΕΙΜΕΝΩΝ Η χρήση
ΧΡΗΣΗ ΝΕΩΝ ΟΠΤΙΚΩΝ ΚΑΙ ΨΗΦΙΑΚΩΝ ΜΕΘΟΔΩΝ ΓΙΑ ΤΗΝ ΑΝΤΙΓΡΑΦΗ ΤΡΙΣΔΙΑΣΤΑΤΩΝ ΑΝΤΙΚΕΙΜΕΝΩΝ ΣΤΕΦΑΝΙΑ ΧΛΟΥΒΕΡΑΚΗ 2014 ΧΡΗΣΗ ΝΕΩΝ ΟΠΤΙΚΩΝ ΚΑΙ ΨΗΦΙΑΚΩΝ ΜΕΘΟΔΩΝ ΓΙΑ ΤΗΝ ΑΝΤΙΓΡΑΦΗ ΤΡΙΣΔΙΑΣΤΑΤΩΝ ΑΝΤΙΚΕΙΜΕΝΩΝ Η χρήση
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εργαστηριακή και Βιομηχανική Ηλεκτρονική Ηλ. Αμφ. 2, 3. Γλώσσες Προγραμματισμού Ι. Ηλ. Αμφ. 1, 2, 3, 4, 5
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Ιουνίου 2017 Έκδοση 08.06.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Ιουνίου 2017 Έκδοση 08.06.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο
Κεφάλαιο 8. Οπτικοποίηση Απαλοιφή
 Κεφάλαιο 8. Οπτικοποίηση Απαλοιφή Oι οπτικές επιδράσεις, που μπορεί να προκαλέσει μια εικόνα στους χρήστες, αποτελούν ένα από τα σπουδαιότερα αποτελέσματα των λειτουργιών γραφικών με Η/Υ. Τον όρο της οπτικοποίησης
Κεφάλαιο 8. Οπτικοποίηση Απαλοιφή Oι οπτικές επιδράσεις, που μπορεί να προκαλέσει μια εικόνα στους χρήστες, αποτελούν ένα από τα σπουδαιότερα αποτελέσματα των λειτουργιών γραφικών με Η/Υ. Τον όρο της οπτικοποίησης
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5. Ρυθμίζοντας τη Φορά Περιστροφής. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΥΠΟΥΡΓΕΙΟ ΟΙΚΟΝΟΜΙΑΣ ΥΠΟΔΟΜΩΝ, ΝΑΥΤΙΛΙΑΣ & ΤΟΥΡΙΣΜΟΥ ΑΠΟΦΑΣΗ ΕΠΙ ΔΗΛΩΣΗΣ ΣΗΜΑΤΟΣ ΑΠΟΦΑΣΗ ΕΞ 4288 /11.08.2015
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΥΠΟΥΡΓΕΙΟ ΟΙΚΟΝΟΜΙΑΣ ΥΠΟΔΟΜΩΝ, ΝΑΥΤΙΛΙΑΣ & ΤΟΥΡΙΣΜΟΥ ΑΠΟΦΑΣΗ ΕΠΙ ΔΗΛΩΣΗΣ ΣΗΜΑΤΟΣ ΑΠΟΦΑΣΗ ΕΞ 4288 /11.08.2015 Σύμφωνα με: α) τις διατάξεις των άρθρων 123, 124, 135 και 136 του Ν. 4072/2012
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΥΠΟΥΡΓΕΙΟ ΟΙΚΟΝΟΜΙΑΣ ΥΠΟΔΟΜΩΝ, ΝΑΥΤΙΛΙΑΣ & ΤΟΥΡΙΣΜΟΥ ΑΠΟΦΑΣΗ ΕΠΙ ΔΗΛΩΣΗΣ ΣΗΜΑΤΟΣ ΑΠΟΦΑΣΗ ΕΞ 4288 /11.08.2015 Σύμφωνα με: α) τις διατάξεις των άρθρων 123, 124, 135 και 136 του Ν. 4072/2012
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Αρχιτεκτονική Υπολογιστών Ηλ. Αιθ. 001, 002. Ηλ. Αιθ. 003, 004 Ηλεκτρονική ΙΙΙ Ηλ. αιθ. 003, 004. Θεωρία Δικτύων & Κυκλωμάτων
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 v20180517 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 v20180517 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ
Μικροεπεξεργαστές - Μικροελεγκτές Ψηφιακά Συστήματα
 Μικροεπεξεργαστές - Μικροελεγκτές Ψηφιακά Συστήματα 1. Ποια είναι η σχέση της έννοιας του μικροεπεξεργαστή με αυτή του μικροελεγκτή; Α. Ο μικροεπεξεργαστής εμπεριέχει τουλάχιστο έναν μικροελεγκτή. Β. Ο
Μικροεπεξεργαστές - Μικροελεγκτές Ψηφιακά Συστήματα 1. Ποια είναι η σχέση της έννοιας του μικροεπεξεργαστή με αυτή του μικροελεγκτή; Α. Ο μικροεπεξεργαστής εμπεριέχει τουλάχιστο έναν μικροελεγκτή. Β. Ο
Υπάρχουν δύο τύποι μνήμης, η μνήμη τυχαίας προσπέλασης (Random Access Memory RAM) και η μνήμη ανάγνωσης-μόνο (Read-Only Memory ROM).
 και η μνήμη ανάγνωσης-μόνο (Read-Only Memory ROM).") Μνήμες Ένα από τα βασικά πλεονεκτήματα των ψηφιακών συστημάτων σε σχέση με τα αναλογικά, είναι η ευκολία αποθήκευσης μεγάλων ποσοτήτων πληροφοριών, είτε προσωρινά είτε μόνιμα Οι πληροφορίες αποθηκεύονται
Μνήμες Ένα από τα βασικά πλεονεκτήματα των ψηφιακών συστημάτων σε σχέση με τα αναλογικά, είναι η ευκολία αποθήκευσης μεγάλων ποσοτήτων πληροφοριών, είτε προσωρινά είτε μόνιμα Οι πληροφορίες αποθηκεύονται
Προσφερόμενα Διπλώματα (Προσφερόμενοι Τίτλοι)
") Εισαγωγή Το Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών του Πανεπιστημίου Κύπρου προσφέρει ολοκληρωμένα προπτυχιακά και μεταπτυχιακά προγράμματα σπουδών στους κλάδους του Ηλεκτρολόγου Μηχανικού
Εισαγωγή Το Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών του Πανεπιστημίου Κύπρου προσφέρει ολοκληρωμένα προπτυχιακά και μεταπτυχιακά προγράμματα σπουδών στους κλάδους του Ηλεκτρολόγου Μηχανικού
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Ηλ. Αιθ. 003, 004 Ηλεκτρονική ΙΙΙ Ηλ. αιθ. 003, 004
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
Εικόνα. Τεχνολογία Πολυμέσων και Πολυμεσικές Επικοινωνίες 05-1
 Εικόνα Εισαγωγή Ψηφιακή αναπαράσταση Κωδικοποίηση των χρωμάτων Συσκευές εισόδου και εξόδου Βάθος χρώματος και ανάλυση Συμβολική αναπαράσταση Μετάδοση εικόνας Σύνθεση εικόνας Ανάλυση εικόνας Τεχνολογία
Εικόνα Εισαγωγή Ψηφιακή αναπαράσταση Κωδικοποίηση των χρωμάτων Συσκευές εισόδου και εξόδου Βάθος χρώματος και ανάλυση Συμβολική αναπαράσταση Μετάδοση εικόνας Σύνθεση εικόνας Ανάλυση εικόνας Τεχνολογία
ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Σεπεμβρίου 2017 ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ Έκδοση 05.07.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 3-4ο
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Σεπεμβρίου 2017 ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ Έκδοση 05.07.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 3-4ο
Επεξεργασία Χαρτογραφικής Εικόνας
 Επεξεργασία Χαρτογραφικής Εικόνας ιδάσκων: Αναγνωστόπουλος Χρήστος Βασικά στοιχεία εικονοστοιχείου (pixel) Φυσική λειτουργία όρασης Χηµική και ψηφιακή σύλληψη (Κλασσικές και ψηφιακές φωτογραφικές µηχανές)
Επεξεργασία Χαρτογραφικής Εικόνας ιδάσκων: Αναγνωστόπουλος Χρήστος Βασικά στοιχεία εικονοστοιχείου (pixel) Φυσική λειτουργία όρασης Χηµική και ψηφιακή σύλληψη (Κλασσικές και ψηφιακές φωτογραφικές µηχανές)
ΠΑΝΕΠΙΤΗΜΙΟ ΔΥΤΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΤΗΛΕΠΙΚΟΙΝΩΝΙΩΝ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ
 ΠΑΝΕΠΙΤΗΜΙΟ ΔΥΤΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΤΗΛΕΠΙΚΟΙΝΩΝΙΩΝ 1 ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ Κατασκευή εφαρμογής ανίχνευσης κινούμενων αντικειμένων ή αντικειμένων που εναποτέθηκαν με χρήση όρασης
ΠΑΝΕΠΙΤΗΜΙΟ ΔΥΤΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΤΗΛΕΠΙΚΟΙΝΩΝΙΩΝ 1 ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ Κατασκευή εφαρμογής ανίχνευσης κινούμενων αντικειμένων ή αντικειμένων που εναποτέθηκαν με χρήση όρασης