Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Ακριβοπούλου Μαριάννα. Μαθήτρια Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
|
|
|
- Θαΐς Λιακόπουλος
- 9 χρόνια πριν
- Προβολές:
Transcript
1 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Ακριβοπούλου Μαριάννα Μαθήτρια Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής Ελληνικού Κολλεγίου Θεσσαλονίκης Περίληψη Σκοπός αυτής της εργασίας ήταν η μελέτη, ανάπτυξη, ανάλυση και η καταγραφή των χαρακτηριστικών των ρομπότ, της εξέλιξης τους ανάμεσα στα χρόνια, την παρουσίαση των μελών, των λειτουργιών, της αιτίες που δημιουργήθηκαν και οδήγησαν τον άνθρωπο στην δημιουργία και την συνεχή εξέλιξη των ρομπότ, στη χρήση τους, την ανάλυση και την περιγραφή της γενικής τεχνολογικής ενότητας στην οποία ανήκουν τα ρομπότ. Λέξεις κλειδιά Ρομπότ, εξέλιξη, περιγραφή Γενικά χαρακτηριστικά Ένα ρομπότ είναι ένας μηχανικός ή εικονικός παράγοντας, συνήθως μια ηλεκτρομηχανική μηχανή που οδηγείται από ένα πρόγραμμα υπολογιστή ή ηλεκτρονικά κυκλώματα. Ρομπότ μπορεί να είναι αυτόνομη ή ημιαυτόνομες και κυμαίνονται από ανθρωποειδή σε καινοτόμες κινητικότητες και σε βιομηχανικά ρομπότ, συλλογικά προγραμματισμένα ρομπότ, ακόμα και μικροσκοπικά νανο-ρομπότ. Με μίμηση μια ρεαλιστική εμφάνιση ή την αυτοματοποίηση των κινήσεων, ένα ρομπότ μπορεί να μεταφέρει την αίσθηση της νοημοσύνης ή δικών του σκέψεων.

2 Ρομποτική είναι ο κλάδος της τεχνολογίας που ασχολείται με το σχεδιασμό, την κατασκευή, τη λειτουργία και την εφαρμογή των ρομπότ, καθώς και τα συστήματα πληροφορικής για τον έλεγχό τους, την αισθητήρια ανατροφοδότηση, και την επεξεργασία πληροφοριών. Οι τεχνολογίες αυτές ασχολούνται με αυτοματοποιημένες μηχανές που μπορούν να πάρουν τη θέση των ανθρώπων σε επικίνδυνα περιβάλλοντα ή διαδικασίες κατασκευής, ή να μοιάζουν με τους ανθρώπους στην εμφάνιση, τη συμπεριφορά, ή τη γνωστική λειτουργία. Πολλές από τις σημερινά ρομπότ είναι εμπνευσμένα από τη φύση συμβάλλοντας στον τομέα της βιοεμπνευσμένης ρομποτικής. Αυτά τα ρομπότ έχουν επίσης δημιουργήσει ένα νεότερο υποκατάστημα της ρομποτικής : Soft robotics. Όπως μηχανικές τεχνικές που αναπτύχθηκαν μέσα από τη βιομηχανική εποχή, πιο πρακτικές εφαρμογές προτάθηκαν από τον Nikola Tesla, ο οποίος το 1898 σχεδίασε ένα τηλεκατευθυνόμενο σκάφος. Η ηλεκτρονική εξελίχθηκε σε κινητήρια δύναμη της ανάπτυξης, με την έλευση των πρώτων ηλεκτρονικών αυτόνομων ρομπότ που δημιουργήθηκαν από τον William Grey Walter στο Μπρίστολ της Αγγλίας το Το πρώτο ψηφιακό και προγραμματιζόμενο ρομπότ εφευρέθηκε από τον George Devol το 1954 και ονομάστηκε Unimate. Πουλήθηκε στην General Motors το Διάφορες χρήσεις ρομπότ Επί του παρόντος, υπάρχουν δύο κύριοι τύποι των ρομπότ, με βάση τη χρήση τους : γενικής χρήσης αυτόνομων ρομπότ και ειδικά ρομπότ. Τα ρομπότ μπορούν να ταξινομηθούν με βάση την εξειδίκευση του σκοπού τους. Ένα ρομπότ μπορεί να σχεδιαστεί για να εκτελεί μια συγκεκριμένη εργασία εξαιρετικά καλά, ή μια σειρά από καθήκοντα λιγότερο καλά. Φυσικά, όλα τα ρομπότ από τη φύση τους μπορεί να επαναπρογραμματιστεί να συμπεριφέρεται διαφορετικά, αλλά μερικά περιορίζονται από τη φυσική τους μορφή. Για παράδειγμα, ένας βραχίονας ρομπότ εργοστάσιο μπορεί να εκτελέσει εργασίες όπως την κοπή, συγκόλληση, κόλληση, ή να ενεργεί ως ένα εκθεσιακό χώρο βόλτα, ενώ ένα ρομπότ pick-and-place μπορεί να κατοικηθεί μόνο πλακέτες τυπωμένων κυκλωμάτων.

3 Αιτίες για τη χρήση ρομπότ Ρομπότ έχουν αντικαταστήσει τους ανθρώπους βοηθώντας στην εκτέλεση επαναλαμβανόμενων και επικίνδυνων εργασιών που οι άνθρωποι προτιμούν να μην κάνουν, ή δεν είναι σε θέση να κάνει λόγω των περιορισμών μεγέθους, ή ακόμη και εκείνες, όπως στο διάστημα ή στο βυθό της θάλασσας, όπου οι άνθρωποι δεν θα μπορούσαν να επιβιώσουν τα ακραία περιβάλλοντα.. Υπάρχουν ανησυχίες σχετικά με την αυξανόμενη χρήση των ρομπότ και το ρόλο τους στην κοινωνία. Τα ρομπότ που ευθύνονται για την αύξηση της ανεργίας καθώς αντικαθιστούν τους εργαζόμενους σε κάποιες λειτουργίες. Η χρήση των ρομπότ σε στρατιωτικές μάχες εγείρει ηθικές ανησυχίες. Η δυνατότητα του ρομπότ αυτονομία και πιθανές επιπτώσεις έχει αντιμετωπιστεί στη μυθοπλασία και μπορεί να είναι μια ρεαλιστική ανησυχία για το μέλλον. Κατά τη γνώμη μου δεν υπάρχουν αρνητικές επιπτώσεις, οπότε δεν χρειάζεται να επέμβουμε ή να βελτιώσουμε οτιδήποτε. Τα βασικά μέρη ενός ρομπότ Μηχανικό μέρος (Σασί) Το μηχανικό μέρος ενός ρομπότ εκτός από την στήριξη όλων των υπόλοιπων μερών, ενσωματώνει και τους κινητήρες που του επιτρέπουν να μετακινηθεί στον χώρο. Οι κινητήρες μπορούν να περιστρέφουν: Ρόδες (τροχοφόρα ρομπότ) Έλικες - Προπέλες (ελικοφόρa ρομπότ) Αρθρώσεις (βραχίονες, πόδια κτλ) Με την κατάλληλη επιλογή αρθρώσεων και κινητήρων, μπορούμε να

4 κάνουμε ένα ρομπότ να μιμείται την κίνηση πλασμάτων του ζωικού βασιλείου (βιομιμητική). Αισθητήρες και μονάδες εξόδου Οι αισθητήρες και οι μονάδες εξόδου είναι τα εξαρτήματα που επιτρέπουν στο ρομπότ να επικοινωνεί και να αλληλεπιδρά με το περιβάλλον. Οι Αισθητήρες ενός ρομπότ Είδη αισθητήρων: Επαφής Υπερύθρων Υπερήχων Φωτός - Χρωμάτων Θερμοκρασίας Ήχου (μικρόφωνα) Άλλοι αισθητήρες: πίεσης, επιταχυνσιόμετρα,

5 γυροσκόπια, πυξίδες κτλ. Είδη μονάδων εξόδου: Φωτεινές λυχνίες - οθόνες. Βομβητές. Μεγάφωνα. Μονάδα Επεξεργασίας (Εγκέφαλος) Η μονάδα επεξεργασίας ενός ρομπότ, αποτελεί τον ηλεκτρονικό του εγκέφαλο και μπορεί να είναι μικρής ή μεγάλης υπολογιστικής ισχύος. Είναι αυτή που λαμβάνει όλες τις αποφάσεις με βάση τα δεδομένα που παίρνει από τους αισθητήρες. Στέλνει τα αποτελέσματα στους κινητήρες και στις άλλες μονάδες εξόδου. H δημιουργία πλατφορμών (πλακετών) ανάπτυξης αυτοματισμών και ρομπότ, έκανε τη ρομποτική περισσότερο προσιτή στον αρχάριο χρήστη. Η μονάδα επεξεργασίας ενός ρομπότ Arduino: Η πιο διαδεδομένη ανοιχτή (ελεύθερη) πλατφόρμα ανάπτυξης

6 ηλεκτρονικών, ανοιχτού (ελεύθερου) κώδικα. Arduino Shields: Εξωτερικά ηλεκτρονικά κυκλώματα (πλακέτες) που συνδέονται πάνω στο Arduino επεκτείνοντας τις δυνατοτητές του Πηγή ενέργειας (συνήθως μπαταρίες) Περιγραφή των ρομπότ Κάθε είδος ρομπότ αποτελείται εκτός από τα βασικά μέρη, και από άλλα μέρη και συνεπώς έχει κάποια διαφορετικά χαρακτηριστικά ώστε να μπορεί να εκτελεί διάφορες λειτουργίες. Κάποια είδη ρομπότ είναι τα:

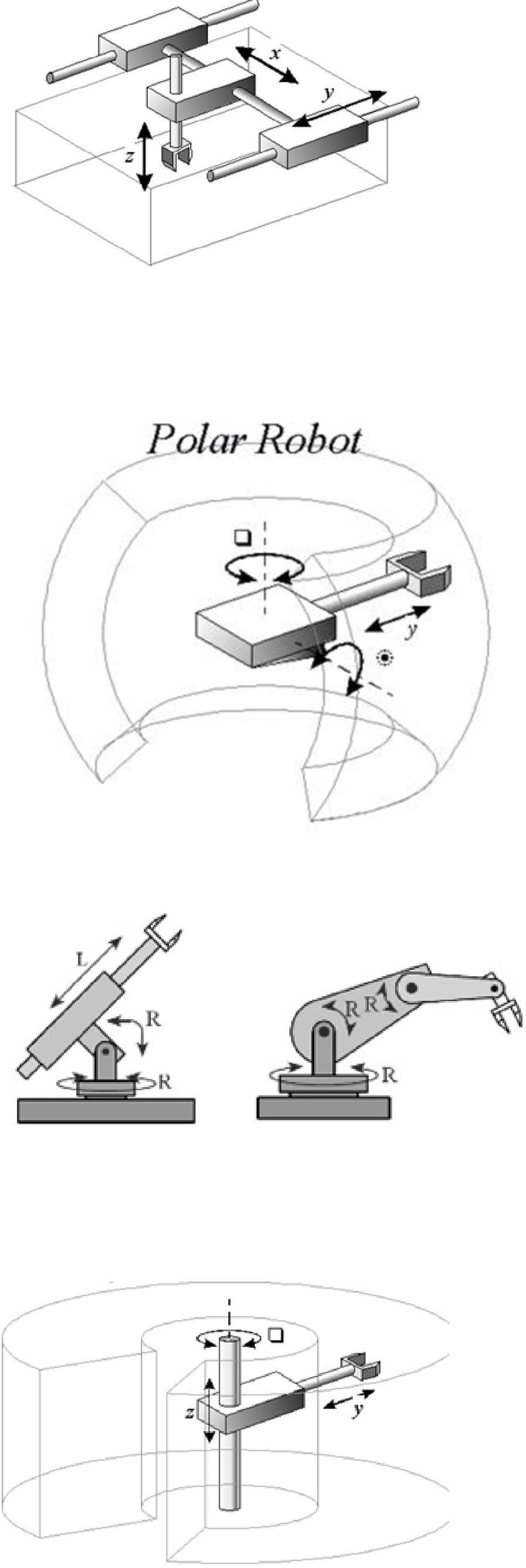
7 Καρτεσιανά ρομπότ: Το κυρίως σώμα ενός ρομπότ του τύπου αυτού αποτελείται από τρεις γραμμικούς άξονες. Η δομή μπορεί να είναι όμοια με τις εργαλειομηχανές αλλά τότε ο λόγος μεταξύ του χώρου εργασίας του ρομπότ και του χώρου που καταλαμβάνει είναι μικρότερος. Γενικά, τα χαρακτηριστικά ενός καρτεσιανού ρομπότ είναι όμοια με εκείνα των εργαλειομηχανών υπολογιστικού αριθμητικού ελέγχου (CNC). Έτσι η διακριτική ικανότητα και η επαναληψιμότητα ενός καρτεσιανού ρομπότ μπορεί να είναι πολύ καλή όπως και στις εργαλειομηχανές. Σε πολλά καρτεσιανά ρομπότ η βάση δεν είναι σταθερή αλλά μπορεί να κινείται μέσα σε ορισμένα όρια. Ο καρπός ενός καρτεσιανού ρομπότ μπορεί να ακολουθήσει μια ευθύγραμμη τροχιά, αν κάθε άξονας κινηθεί με σταθερή ταχύτητα. Στα άλλα είδη ρομπότ οι σχέσεις που δίνουν τις ταχύτητες των αξόνων για τη λήψη ευθύγραμμων τροχιών δεν είναι τόσο απλές. Στα ρομπότ αυτά πρέπει να γίνει μετασχηματισμούς των καρτεσιανών συντεταγμένων των αρθρώσεων του ρομπότ. Άλλο πλεονέκτημα των καρτεσιανών ρομπότ είναι η σταθερότητα της διακριτικής ικανότητας θέσης. Δηλαδή η ΒΜΔΙ είναι ορισμένη για κάθε άξονα και παραμένει σταθερή σε όλα τα σημεία του χώρου εργασίας του ρομπότ. Αυτό δεν συμβαίνει στα μη καρτεσιανά ρομπότ. Παρά τα πλεονεκτήματα αυτά, τα καρτεσιανά ρομπότ δεν είναι προτιμητέα στη βιομηχανία. Τούτο συμβαίνει γιατί δεν έχουν μηχανική ευελιξία (δεν μπορούν λ.χ. να φθάσουν αντικείμενα που βρίσκονται στο πάτωμα ή δεν είναι ορατά από τη βάση τους). Επίσης η ταχύτητα λειτουργίας στο οριζόντιο επίπεδο είναι συνήθως μικρότερη από την αντίστοιχη ταχύτητα των ρομπότ που έχουν περιστρεφόμενη βάση. Κυλινδρικά ρομπότ: Το κυρίως σώμα ενός ρομπότ του τύπου αυτού αποτελείται από ένα οριζόντιο βραχίονα στερεωμένο σε μια κατακόρυφη κολώνα. Η κολώνα είμαι με τη σειρά της στερεωμένη πάνω σε μια περιστρεφόμενη βάση. Ο οριζόντιος βραχίονας κινείται προς τα εμπρός και προς τα πίσω κατά τη διεύθυνση του διαμήκους άξονά του και επίσης ανεβοκατεβαίνει στην κολώνα. Κολώνα και βραχίονας στρέφονται σαν ένα σώμα πάνω στη βάση γύρω από τον κατακόρυφο άξονα. H διακριτή ικανότητα ενός κυλινδρικού ρομπότ δεν είναι σταθερή αλλά εξαρτάται από την απόσταση r μεταξύ της κολώνας και του εργαλείου κατά μήκος του οριζοντίου βραχίονα. Παρατηρούμε ότι η διακριτική ικανότητα θέσης του θεωρούμενου κυλινδρικού ρομπότ γύρω από τον άξονα είναι κατά δύο τάξεις χειρότερη από την αντίστοιχη των καρτεσιανών ρομπότ ή των εργαλειομηχανών Τούτο είναι ένα από τα

8 μειονεκτήματα των κυλινδρικών ρομπότ απέναντι στα καρτεσιανά ρομπότ. Τα κυλινδρικά όμως ρομπότ λόγω του περιστρεφόμενου άξονα προσφέρουν μεγαλύτερη ταχύτητα στο άκρο του βραχίονα. Βέβαια η ταχύτητα αυτή περιορίζεται από το φορτίο που σηκώνει το εργαλείο του ρομπότ και από τη θέση του βραχίονα. Επίσης η δυναμική συμπεριφορά των ρομπότ που έχουν στρεφόμενους άξονες εξαρτάται από τη ροπή αδράνειας του όλου συστήματος ως προς τη βάση, που εξαρτάται από το βάρος που σηκώνει το ρομπότ και από την απόσταση του βάρους αυτού από τον άξονα της βάσης. Επειδή δε η ενεργός αυτή ροπή αδράνειας μεταβάλλεται με το χρόνο και με τη θέση, η δυναμική συμπεριφορά του κυλινδρικού (σφαιρικού και αρθρωτού) ρομπότ είναι χειρότερη από εκείνη του καρτεσιανού ρομπότ που δεν έχει στρεφόμενο άξονα. Σφαιρικά ρομπότ: Τα ρομπότ του τύπου αυτού αποτελούνται από μια στρεφόμενη βάση, ένα ανυψούμενο στέλεχος στους άξονες. Το βασικό μειονέκτημα των σφαιρικών ρομπότ είναι και πάλι η μικρή διακριτική ικανότητα θέσης των δύο στροφικών αξόνων που μεταβάλλεται με το μήκος του βραχίονα. Τα σφαιρικά ρομπότ, εκτός από το πλεονέκτημα της αυξημένης ταχύτητας κίνησης των στροφικών αξόνων, έχουν και το πλεονέκτημα της αυξημένης ευελιξίας σε σχέση τόσο με τα καρτεσιανά όσο και με τα κυλινδρικά ρομπότ. Αρθρωτά ρομπότ: Τα αρθρωτά ρομπότ αποτελούνται από τρία σταθερά μέλη (συνδέσμους) που ενώνονται με στροφικές αρθρώσεις και είναι τοποθετημένα πάνω σε μια στρεφόμενη βάση. Η κινηματική διάταξη μοιάζει με εκείνη του ανθρώπινου χεριού. Το εργαλείο (αρπάγη) είναι ανάλογο της παλάμης και προσαρμόζεται στον κάτω βραχίονα μέσω του καρπού. Ο "αγκώνας" συνδέει τον κάτω με τον άνω βραχίονα και ο "ώμος" συνδέει τον άνω βραχίονα με τη βάση. Πολλές φορές στην άρθρωση του ώμου διατίθεται και μια περιστροφική κίνηση σε οριζόντιο επίπεδο.-επειδή το αρθρωτό ρομπότ έχει και τους τρεις άξονες στροφικούς η διακριτική ικανότητα θέσης εξαρτάται τελείως από τη θέση του βραχίονα. Η ολική ακρίβεια

9 ενός αρθρωτού ρομπότ είναι μικρή γιατί τα σφάλματα των αρθρώσεων συσσωρεύονται στο άκρο του βραχίονα δηλαδή στη θέση του καρπού. Τα πλεονεκτήματα των αρθρωτών ρομπότ είναι ότι έχουν την πιο μεγάλη μηχανική ευελιξία και μπορούν να κινηθούν ταχύτατα ως προς τους τρεις βαθμούς ελευθερίας. Παράλληλα ρομπότ: Τα παράλληλα ρομπότ αποτελούνται από κλειστές κινηματικές αλυσίδες κατά τις οποίες οι αρθρωτοί σύνδεσμοι ενώνονται παράλληλα μεταξύ μιας σταθερής βάσης και μιας κινούμενης πλατφόρμας εννοώντας την πλατφόρμα. Τα παράλληλα ρομπότ έχουν κάποια πλεονεκτήματα έναντι των σειριακών όπως: στιβαρότητα, καλή ικανότητα χειρισμού, ικανότητα χειρισμού μεγάλων φορτίων και καλό λόγο φορτίου προς βάρος. Γενικά, τα κύρια μειονεκτήματά τους είναι ο μικρότερος χώρος εργασίας, το σχετικά περιορισμένο εύρος κινήσεων, καθώς και το σχετικά μεγάλο οικονομικό κόστος. Τα παράλληλα ρομπότ είναι κινητές πλατφόρμες εξομοιωτές πτήσης με πιλοτήριο. Δίτροχα ρομπότ: Τα τελευταία χρόνια τα δίτροχα ρομπότ γίνονται όλο και περισσότερο διαδεδομένα. Όπως είναι αναμενόμενο, τα δίτροχα ρομπότ για να μην πέσουν χρησιμοποιούν δυναμική σταθερότητα. Συγκεκριμένα, ελέγχουν την ισορροπία τους κάνοντας συνεχείς μετακινήσεις μπρος-πίσω. Πλέον τα δίτροχα ρομπότ μπορούν να μένουνε ακίνητα, ακόμη και σε απότομη κλίση εδάφους. Ανθρωπόμορφα ρομπότ: Μια εταιρεία η Hanson Robotics αποφάσισε να φτιάξει λοιπόν όχι ανδροειδές αλλά το ανδρογυνοειδές. Του έδωσαν λοιπόν την εμφάνιση του στατιστικά τέλειου σε χαρακτηριστικά ανδρόγυνου προσώπου, που πραγματικά είναι όμορφο (ένα μείγμα ανδρικών και γυναικείων χαρακτηριστικών). Για την κατασκευή του προσώπου η εταιρεία δεν χρησιμοποιεί το συνηθισμένο ελαστικό που προσομοιάζει την ανθρώπινη επιδερμίδα αλλά ένα νέο υλικό που ονομάζεται Frubber, το οποίο είναι πολύ πιο ελαφρύ, πιο ελαστικό, και μπορεί με ελάχιστη δύναμη να κινηθεί από ειδικούς μηχανισμούς και να αναπαραστήσει πιο πειστικά εκφράσεις του προσώπου. Και πραγματικά κάνει τέλεια δουλειά. Το πρόσωπο δουλεύεται πρώτα σε πηλό και αφότου τελειώσει παίρνουν το αποτύπωμα του με το Frubber και το φοράνε στο τεχνητό κρανίο του ρομπότ(αφού το συνδέσουν με όλους τους μηχανισμούς έκφρασης). Το ρομπότ διαθέτει επεξεργαστή, και αναγνώριση φωνής. Μπορεί να σας ακούσει, να σας δει (έχει κάμερες στα μάτια και μάλιστα να σας αναγνωρίζει), να επεξεργαστεί τις εκφράσεις του προσώπου σας, και να συνομιλήσει μαζί σας, χάρη σε μία μεγάλη βάση δεδομένων που έχει με φράσεις και λέξεις.

10 Εξέλιξη των ρομπότ Η ιδέα των αυτομάτων μηχανημάτων προέρχεται από τις μυθολογίες πολλών πολιτισμών σε όλο τον κόσμο. Μηχανικοί και εφευρέτες από τους αρχαίους πολιτισμούς, συμπεριλαμβανομένου αρχαία Κίνα, Αρχαία Ελλάδα, και των Πτολεμαίων της Αιγύπτου, προσπάθησαν να οικοδομήσουν ιδιολειτουργούμενα μηχανήματα, τα οποία έμοιαζαν με ζώα και ανθρώπους. Πρόωρη περιγραφές των αυτομάτων περιλαμβάνουν τα τεχνητά περιστέρια της Αρχύτας, τα τεχνητά τα πουλιά της Mozi και Lu Ban, ένα "μιλώντας " αυτόματο με Ήρωας της Αλεξάνδρειας, ένα αυτόματο πλυντήριο με Φίλωνα του Βυζαντίου, και ένα ανθρώπινο αυτόματο περιγράφεται στο το Lie Zi. Πρόωρο ξεκίνημα Πολλές αρχαίες μυθολογίες, και πιο σύγχρονες θρησκείες περιλαμβάνουν τεχνητά άτομα, όπως των μηχανικών υπαλλήλων που χτίστηκε από τον Έλληνα θεό Ήφαιστο, Vulcan στους Ρωμαίους,, τα Γκόλεμ πήλινα, εβραϊκός μύθος και οι πήλοινοι γίγαντες των Νορβηγικού μύθος, και στη Γαλάτεια, το μυθικό άγαλμα του Πυγμαλίων που ήρθε στη ζωή. Δεδομένου ότι περίπου το 400 π.χ., τους μύθους της Κρήτης περιλαμβάνουν τον Τάλως, ένας άνθρωπος χαλκού που φρουρούσε το Κρητικό νησί της Europa από τους πειρατές. Στην αρχαία Ελλάδα, ο Έλληνας μηχανικός του Κτησίβιου ( περ. 270 π.χ. ) εφαρμόζει τις γνώσεις του στα πνευματικά και υδραυλικά συστήματα στην παραγωγή των πρώτων οργάνων και νερό ρολόγια με κινούμενα σχήματα. Τον 4ο αιώνα π.χ., ο Έλληνας μαθηματικός Αρχύτας ο Ταραντίνος αξιωματικός δημιουργεί μια μηχανική ατμοκίνητων πουλί που ονομάζεται " The Pigeon ". Ήρωας της Αλεξάνδρειας, ένας Έλληνας μαθηματικός και εφευρέτης, δημιούργησε πολλές ρύθμισεις από το χρήστη αυτοματοποιημένες συσκευές, και περιγράφονται μηχανήματα που κινούνται με την πίεση του αέρα, ατμού και νερού. Το 11ο αιώνα ο Lokapannatti λέει πως τα λείψανα του Φο προστατεύονται με μηχανικά ρομπότ, από το βασίλειο των Ρομά Visaya που πιστεύεται ότι είναι η Ρώμη Στην αρχαία Κίνα, το κείμενο του 3ου αιώνα του Lie Zi περιγράφει το λογαριασμό των ανθρωποειδών αυτόματα, με τη συμμετοχή πολύ νωρίτερα τη συνάντηση μεταξύ του κινεζικού αυτοκράτορα βασιλιά Mu του Zhou και μηχανολόγου μηχανικού γνωστό ως Yan Shi, έναν τεχνίτη. Ο Yan Shi παρουσίασε με υπερηφάνεια στο βασιλιά με μια ζωή - το μέγεθος, το σχήμα ανθρώπου εικόνα των μηχανικών «εργόχειρο» του είναι κατασκευασμένα από δέρμα, ξύλο και τεχνητών οργάνων. Υπάρχουν επίσης οι λογαριασμοί του αναφέρουν αυτόματα το Χαν Φέι Zi και άλλα κείμενα, το οποίο αποδίδει τον 5ο αιώνα π.χ. Mohist φιλόσοφος Mozi και σύγχρονη Lu Ban του με την εφεύρεση του τεχνητού ξύλινα πουλιά που θα μπορούσε να πετάξουν με επιτυχία. Το 1066, η κινεζική εφευρέτης Su

11 Song έχτισε ένα ρολόι του νερού με τη μορφή της ενός πύργοςυ που χαρακτήρισε μηχανικά ειδώλια που έλεγαν τις ώρες. Στην Αναγέννηση στην Ιταλία, Leonardo da Vinci ( ) σχεδίασε τα σχέδια για ένα ανθρωποειδές ρομπότ γύρω από Σημειωματάρια του Ντα Βίντσι, ανακαλύφθηκε στη δεκαετία του 1950, περιείχε λεπτομερή σχέδια ενός μηχανικού ιππότη τώρα γνωστού ως ρομπότ Λεονάρντο,που είναι σε θέση να καθίσει επάνω, κύμα τα χέρια της και να μετακινήσει το κεφάλι και το σαγόνι του. Δεν είναι γνωστό αν προσπάθησε να το χτίσει. Στη Γαλλία, μεταξύ 1738 και 1739, ο Jacques de Vaucanson παρουσίασαν αρκετές ζωή μεγέθους αυτομάτων : φλάουτο παίκτη, ένας παίκτης σωλήνα και μια πάπια. Η μηχανική πάπια μπορεί να κουνήσει τα φτερά της, και να καταπίνετε το φαγητό από το χέρι του εκθέτη, και έδωσε την ψευδαίσθηση της πέψης της τροφής του αποβάλλοντας το θέμα να αποθηκεύονται σε ένα κρυφό διαμέρισμα. Η τορπίλη Brennan, ένα από τα πρώτα «κατευθυνόμενα βλήματα». Τηλεχειριζόμενα οχήματα αποδείχθηκε στα τέλη του 19ου αιώνα με τη μορφή των διαφόρων τύπων των τηλεχειριζόμενων τορπίλες. Οι αρχές της δεκαετίας του 1870 είδε τηλεχειριζόμενο τορπίλες από τον John Ericsson ( με πεπιεσμένο αέρα ), John Louis Lay ( ηλεκτρικό καλώδιο καθοδηγείται ) και Victor von Scheliha ( ηλεκτρικό καλώδιο καθοδηγείται ). [ 25 ] Η τορπίλη Brennan, που εφευρέθηκε από τον Louis Brennan το 1877 τροφοδοτείται από δύο αντίθετα περιστρεφόμενες προπέλες που περιστρέφεται με την ταχεία τραβώντας τα καλώδια από τα τύμπανα πληγή στο εσωτερικό της τορπίλης. Η διαφορική ταχύτητα για τα καλώδια που συνδέονται με το σταθμό ακτή επίτρεπε στη τορπίλη να οδηγηθεί στο στόχο του, καθιστώντας το " πρώτο πρακτικό κατευθυνόμενο βλήμα του κόσμου» Ο Archibald Low, γνωστός ως ο «πατέρας των συστημάτων καθοδήγησης radio "για την πρωτοποριακή εργασία του στην καθοδηγούμενη πυραύλους και αεροπλάνα κατά τη διάρκεια του Πρώτου Παγκοσμίου Πολέμου το 1917, επέδειξε ένα τηλεκατευθυνόμενο αεροσκάφος στο Βασιλικό σώμα πετάγματος και την ίδια χρονιά κατασκεύασε την πρώτη καλωδιακή καθοδήγηση πυραύλων. Ανθρωποειδές ρομπότ Ο όρος «ρομπότ» για πρώτη φορά χρησιμοποιείται για να υποδηλώσει φανταστικό αυτόματα σε ένα παιχνίδι το 1921, Rossum Universal Robots του από τον Τσέχο συγγραφέα, Karel Čapek.

12 Ο Karel Čapek - πρώτος χρήστης του όρου «ρομπότ». Συνήθιζε αυτή τη λέξη σε ένα παιχνίδι 1921 R.U.R. Rossum Universal Robots του. «Ρομπότ» είναι μια καθαρά τσεχική λέξη. Το 1928, ένα από τα πρώτα ανθρωποειδή ρομπότ παρουσιάστηκε στην ετήσια έκθεση του μοντέλου Μηχανικοί Society στο Λονδίνο. Εφευρέθηκε από τον WH Richards, το πλαίσιο του ρομπότ Eric αποτελούνταν από ένα σώμα από αλουμίνιο της πανοπλίας με έντεκα ηλεκτρομαγνήτες και ένας κινητήρας τροφοδοτείται από μια πηγή ισχύος δώδεκα βολτ. Το ρομπότ θα μπορούσε να κινηθεί είναι τα χέρια και το κεφάλι και θα μπορούσε να ελεγχθεί μέσω του τηλεχειριστηρίου ή το φωνητικό έλεγχο. Σύγχρονη αυτόνομων ρομπότ Ο William Grey Walter, εφευρέτης του πρώτου ηλεκτρονικού αυτόνομου ρομπότ. Οι πρώτες ηλεκτρονικές αυτόνομων ρομπότ με πολύπλοκη συμπεριφορά δημιουργήθηκαν από τον William Grey Walter από το βάρος Νευρολογικό Ινστιτούτο στο Μπρίστολ της Αγγλίας το 1948 και το Ήθελε να αποδείξει ότι οι πλούσιοι συνδέσεις ανάμεσα σε ένα μικρό αριθμό των κυττάρων του εγκεφάλου θα μπορούσε να οδηγήσει σε πολύ περίπλοκες συμπεριφορές - κατ 'ουσίαν, ότι το μυστικό για το πώς ο εγκέφαλος εργάστηκε θέσει στο πώς ήταν συνδεδεμένος. Πρώτο ρομπότ του, το όνομά του Elmer και Elsie, κατασκευάστηκαν μεταξύ 1948 και 1949 και ήταν συχνά περιγράφεται ως χελώνες, λόγω του σχήματος τους και ένας αργός ρυθμός της κίνησης. Το τρίκυκλο ρομπότ χελώνα μπορούσαν να βρουν το δρόμο τους σε ένα σταθμό επαναφόρτισης όταν έτρεξαν χαμηλή ισχύ της μπαταρίας. Ο Walter τόνισε τη σημασία της χρήσης καθαρά αναλογικά ηλεκτρονικά για την προσομοίωση διεργασιών του εγκεφάλου σε μια εποχή που οι σύγχρονοί του, όπως ο Alan Turing και John Von Neumann ήταν όλοι στραφόμενοι προς την κατεύθυνση σχετικά με τις ψυχικές διεργασίες όσον αφορά τις ψηφιακές υπολογισμού. Το έργο του ενέπνευσε τις επόμενες γενιές της ρομποτικής ερευνητές όπως τον Rodney Brooks, Hans Moravec και Mark Tilden. Σύγχρονη ενσαρκώσεις των χελωνών Walter μπορεί να βρεθεί με τη μορφή της ρομποτικής BEAM. Δίπλωμα Ευρεσιτεχνίας εκδόθηκε το 1961

13 Το πρώτο λειτουργεί ψηφιακά, και προγραμματιζόμενα ρομπότ εφευρέθηκε από τον George Devol το 1954 και τελικά ονομάζεται Unimate. Αυτό που τελικά τα θεμέλια της σύγχρονης βιομηχανίας της ρομποτικής. Ο Devol πούλησε το πρώτο Unimate για την General Motors το 1960, και εγκαταστάθηκε το 1961 σε ένα εργοστάσιο στο Trenton, New Jersey να άρει καυτά κομμάτια μετάλλου από ένα μηχάνημα χύτευσης. Ο Devol πήρε δίπλωμα ευρεσιτεχνίας για το πρώτο ψηφιακά προγραμματιζόμενα ρομποτικό βραχίονα ο οποίος αποτελεί το θεμέλιο της σύγχρονης βιομηχανίας της ρομποτικής. Το πρώτο ρομπότ παλετοποίησης εισήχθη το 1963 από την Fuji Yusoki Kogyo Company. Το 1973, ένα ρομπότ με έξι ηλεκτρομηχανικά οδηγούμενους άξονες κατοχυρώθηκε με δίπλωμα ευρεσιτεχνίας από KUKA ρομποτικής στη Γερμανία, και η προγραμματιζόμενη βραχίονα καθολική χειραγώγηση εφευρέθηκε από τον Victor Scheinman το 1976, καθώς και ο σχεδιασμός πωλήθηκε στην Unimation. Εμπορικά και βιομηχανικά ρομπότ είναι σήμερα σε ευρεία χρήση εκτέλεση θέσεων εργασίας φθηνότερα ή με μεγαλύτερη ακρίβεια και αξιοπιστία από τους ανθρώπους. Αυτά χρησιμοποιούνται επίσης για τις θέσεις εργασίας οι οποίες είναι πάρα πολύ βρώμικες, επικίνδυνες ή θαμπές για να είναι κατάλληλες για τους ανθρώπους. Ρομπότ χρησιμοποιούνται ευρέως στην κατασκευή, συναρμολόγηση και συσκευασία, τη μεταφορά, τη γη και την εξερεύνηση του διαστήματος, η χειρουργική επέμβαση, όπλα, εργαστηριακή έρευνα, και η μαζική παραγωγή καταναλωτικών και βιομηχανικών προϊόντων. Φωτογραφικό υλικό Διάφορα είδη

14
15 (Ελλάδε 3 ος αιώνας π.χ). Πηγές

Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου
 Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου") Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Γεωργιάδου Κατερίνα. Μαθήτρια Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Γεωργιάδου Κατερίνα Μαθήτρια Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Γεωργιάδου Κατερίνα Μαθήτρια Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Π.Π.Σ.Π.Α Εργασία τεχνολογίας: ΡΟΜΠΟΤ
 Π.Π.Σ.Π.Α Εργασία τεχνολογίας: ΡΟΜΠΟΤ Κωνσταντίνα Τομαρά Α2 2013-2014 Επιβλέπων Καθηγητής: Δημήτριος Μανωλάς Περιεχόμενα Εξώφυλλο Περιεχόμενα Πρόλογος Εισαγωγή Ευχαριστίες Τι είναι ρομπότ; Από που προέρχεται
Π.Π.Σ.Π.Α Εργασία τεχνολογίας: ΡΟΜΠΟΤ Κωνσταντίνα Τομαρά Α2 2013-2014 Επιβλέπων Καθηγητής: Δημήτριος Μανωλάς Περιεχόμενα Εξώφυλλο Περιεχόμενα Πρόλογος Εισαγωγή Ευχαριστίες Τι είναι ρομπότ; Από που προέρχεται
Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Ντουντούδη Ιωάννα. Μαθήτρια Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Ντουντούδη Ιωάννα Μαθήτρια Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Ντουντούδη Ιωάννα Μαθήτρια Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Κούρογλου Αλέξανδρος. Μαθητής Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Κούρογλου Αλέξανδρος Μαθητής Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Κούρογλου Αλέξανδρος Μαθητής Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Χαρδαλή Ευτυχία. Μαθήτρια Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Χαρδαλή Ευτυχία Μαθήτρια Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Χαρδαλή Ευτυχία Μαθήτρια Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Η ΙΣΤΟΡΙΑ ΤΩΝ ΡΟΜΠΟΤ
 Η ΙΣΤΟΡΙΑ ΤΩΝ ΡΟΜΠΟΤ ΠΡΙΝ ΤΙΣ ΜΗΧΑΝΕΣ Ο άνθρωπος πριν ανακάλυψη των μηχανών για την βοήθεια του χρησιμοποιούσε άλλους τρόπους όπως η χρήση των ζώων και άλλων ανθρώπων καταργώντας την ελεύθερη βούληση τους
Η ΙΣΤΟΡΙΑ ΤΩΝ ΡΟΜΠΟΤ ΠΡΙΝ ΤΙΣ ΜΗΧΑΝΕΣ Ο άνθρωπος πριν ανακάλυψη των μηχανών για την βοήθεια του χρησιμοποιούσε άλλους τρόπους όπως η χρήση των ζώων και άλλων ανθρώπων καταργώντας την ελεύθερη βούληση τους
«Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot»
 «Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot» Γιώργος Λαζαρίδης, Γ3 Ελληνικό Κολλέγιο Θεσσαλονίκης Καθηγητής : Κωνσταντίνος Παρασκευόπουλος Λέξεις κλειδιά: Προγραμματισμός, αυτονομία Ένα ρομπότ
«Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot» Γιώργος Λαζαρίδης, Γ3 Ελληνικό Κολλέγιο Θεσσαλονίκης Καθηγητής : Κωνσταντίνος Παρασκευόπουλος Λέξεις κλειδιά: Προγραμματισμός, αυτονομία Ένα ρομπότ
Ρομποτική Σύντομη Εισαγωγή
 Ρομποτική Σύντομη Εισαγωγή Ευτύχιος Χριστοφόρου Τι είναι ένα Ρομπότ; 1 Ιστορία Τάλος: Κατασκευή του Ήφαιστου που δόθηκε δώρο στο βασιλιά τηςκρήτης Μίνωα για να προστατεύει το νησί. Πρώτη χρήση της λέξης
Ρομποτική Σύντομη Εισαγωγή Ευτύχιος Χριστοφόρου Τι είναι ένα Ρομπότ; 1 Ιστορία Τάλος: Κατασκευή του Ήφαιστου που δόθηκε δώρο στο βασιλιά τηςκρήτης Μίνωα για να προστατεύει το νησί. Πρώτη χρήση της λέξης
ΑΡΧΑΙΑ ΕΛΛΑΔΑ. Η αυτόματη υπηρέτρια του Φίλωνος
 ΝΑΝΟΡΟΜΠΟΣ ΟΡΙΜΟ Η λέξη ρομπότ έγινε για πρώτη φορά γνωστή στο ευρύ κοινό από τον Σσέχο συγγραφέα Karel Capek στο έργο του, Rossum s Universal Robots, το 1920. Σο έργο ξεκινά σε ένα εργοστάσιο που κατασκευάζει
ΝΑΝΟΡΟΜΠΟΣ ΟΡΙΜΟ Η λέξη ρομπότ έγινε για πρώτη φορά γνωστή στο ευρύ κοινό από τον Σσέχο συγγραφέα Karel Capek στο έργο του, Rossum s Universal Robots, το 1920. Σο έργο ξεκινά σε ένα εργοστάσιο που κατασκευάζει
ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ
 ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ 1 ΕΙΣΑΓΩΓΗ 1.1 Ορισµοί και Ιστορικά Στοιχεία Η Ροµποτική είναι εκείνος ο κλάδος της επιστήµης του µηχανικού που ασχολείται µε τη σύλληψη, το σχεδιασµό, την κατασκευή και
ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ 1 ΕΙΣΑΓΩΓΗ 1.1 Ορισµοί και Ιστορικά Στοιχεία Η Ροµποτική είναι εκείνος ο κλάδος της επιστήµης του µηχανικού που ασχολείται µε τη σύλληψη, το σχεδιασµό, την κατασκευή και
Εισαγωγή στη Ροµποτική
 Εισαγωγή στη Ροµποτική Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007 Modern Times (1936) 1 Modern Times (c. 2000) 2 Ροµπότ και αυτοµατισµοί: Ιστορική
Εισαγωγή στη Ροµποτική Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007 Modern Times (1936) 1 Modern Times (c. 2000) 2 Ροµπότ και αυτοµατισµοί: Ιστορική
Ρομποτική. Τι είναι ένα ρομπότ ; Τι είναι ο αλγόριθμος ; Τι είναι το πρόγραμμα ; Επιμέλεια παρουσίασης : Κυριακού Γεώργιος
 Ρομποτική Τι είναι ένα ρομπότ ; Τι είναι ο αλγόριθμος ; Τι είναι το πρόγραμμα ; Που έχετε δει κάποιο ρομπότ ; Να απαριθμήσετε τα ρομπότ που έχετε δει σε ταινίες. Κάντε μία αντιπαράθεση με τα πραγματικά
Ρομποτική Τι είναι ένα ρομπότ ; Τι είναι ο αλγόριθμος ; Τι είναι το πρόγραμμα ; Που έχετε δει κάποιο ρομπότ ; Να απαριθμήσετε τα ρομπότ που έχετε δει σε ταινίες. Κάντε μία αντιπαράθεση με τα πραγματικά
Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής
 ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
ROBOT: ΑΠΟ ΤΟΝ ΤΑΛΩ ΣΤΑ ΣΤΑ ΣΥΓΧΡΟΝΑ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΑ ROBOT
 ROBOT: ΑΠΟ ΤΟΝ ΤΑΛΩ ΣΤΑ ΣΤΑ ΣΥΓΧΡΟΝΑ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΑ ROBOT Κακαρέλης Θωμάς Μαθητής Γ2 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
ROBOT: ΑΠΟ ΤΟΝ ΤΑΛΩ ΣΤΑ ΣΤΑ ΣΥΓΧΡΟΝΑ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΑ ROBOT Κακαρέλης Θωμάς Μαθητής Γ2 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
ΑΡΧΕΣ & ΕΦΑΡΜΟΓΕΣ ΡΟΜΠΟΤΙΚΗΣ. Άνθρωποι και Μηχανές
 ΑΡΧΕΣ & ΕΦΑΡΜΟΓΕΣ ΡΟΜΠΟΤΙΚΗΣ ΠΑΠΑΪΩΑΝΝΟΥ ΣΑΨΑΝΗΣ ΣΤΑΣΙΝΟΠΟΥΛΟΣ ΤΣΑΜΗΣ ΚΩΝΣΤΑΝΤΙΝΟΣ ΒΑΣΙΛΕΙΟΣ ΚΩΝΣΤΑΝΤΙΝΟΣ ΘΕΜΙΣΤΟΚΛΗΣ Άνθρωποι και Μηχανές Ορισμός ρομπότ Ρομπότ είναι μια μηχανική συσκευή η οποία μπορεί
ΑΡΧΕΣ & ΕΦΑΡΜΟΓΕΣ ΡΟΜΠΟΤΙΚΗΣ ΠΑΠΑΪΩΑΝΝΟΥ ΣΑΨΑΝΗΣ ΣΤΑΣΙΝΟΠΟΥΛΟΣ ΤΣΑΜΗΣ ΚΩΝΣΤΑΝΤΙΝΟΣ ΒΑΣΙΛΕΙΟΣ ΚΩΝΣΤΑΝΤΙΝΟΣ ΘΕΜΙΣΤΟΚΛΗΣ Άνθρωποι και Μηχανές Ορισμός ρομπότ Ρομπότ είναι μια μηχανική συσκευή η οποία μπορεί
ταχύτητα μέτρου. Με την άσκηση κατάλληλης σταθερής ροπής, επιτυγχάνεται
 ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 4: ΣΤΡΟΦΟΡΜΗ 26. Δύο σημειακές σφαίρες που η καθεμιά έχει μάζα συνδέονται μεταξύ τους με οριζόντια αβαρή ράβδο. Το σύστημα περιστρέφεται γύρω από κατακόρυφο
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 4: ΣΤΡΟΦΟΡΜΗ 26. Δύο σημειακές σφαίρες που η καθεμιά έχει μάζα συνδέονται μεταξύ τους με οριζόντια αβαρή ράβδο. Το σύστημα περιστρέφεται γύρω από κατακόρυφο
Μηχανολόγος Μηχανικός στο Α.Π.Θ.
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Μηχανολόγος Μηχανικός στο Α.Π.Θ. Παναγιώτης Σεφερλής Αναπληρωτής Καθηγητής Έχεις το «μικρόβιο» του Μηχανικού; Dilbert 2 Επιστήμη του Μηχανολόγου
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Μηχανολόγος Μηχανικός στο Α.Π.Θ. Παναγιώτης Σεφερλής Αναπληρωτής Καθηγητής Έχεις το «μικρόβιο» του Μηχανικού; Dilbert 2 Επιστήμη του Μηχανολόγου
ROBOT ΑΠΟ ΤΟΝ ΤΑΛΩ ΣΤΑ ΣΥΓΧΡΟΝΑ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΑ ROBOT
 ROBOT ΑΠΟ ΤΟΝ ΤΑΛΩ ΣΤΑ ΣΥΓΧΡΟΝΑ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΑ ROBOT Ομάρ Εζάτ Αλέξανδρος Μαθητής Γ2 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
ROBOT ΑΠΟ ΤΟΝ ΤΑΛΩ ΣΤΑ ΣΥΓΧΡΟΝΑ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΑ ROBOT Ομάρ Εζάτ Αλέξανδρος Μαθητής Γ2 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
ΣΕΡΒΟΜΗΧΑΝΙΣΜΟΙ RC. Καταπόδης Στέφανος
 ΣΕΡΒΟΜΗΧΑΝΙΣΜΟΙ RC Καταπόδης Στέφανος 14-1-2014 1.Γενικά για τους Σερβομηχανισμούς Είναι αυτόματες συσκευές που χρησιμοποιούνται για να: - ελέγχουν αν η λειτουργία ενός μηχανισμού γίνεται σωστά - διατηρούν
ΣΕΡΒΟΜΗΧΑΝΙΣΜΟΙ RC Καταπόδης Στέφανος 14-1-2014 1.Γενικά για τους Σερβομηχανισμούς Είναι αυτόματες συσκευές που χρησιμοποιούνται για να: - ελέγχουν αν η λειτουργία ενός μηχανισμού γίνεται σωστά - διατηρούν
Εισαγωγή στην Ρομποτική
 Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
Επιμέλεια παρουσίασης: Αριστείδης Παλιούρας ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)?
?") 1 ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)? Τι είναι το ρομπότ (robot)? 1. Περιγράψτε με μια πρόταση την έννοια της λέξης ρομπότ (robot) Το ρομπότ είναι μια μηχανή που συλλέγει δεδομένα από το περιβάλλον του (αισθάνεται),
1 ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)? Τι είναι το ρομπότ (robot)? 1. Περιγράψτε με μια πρόταση την έννοια της λέξης ρομπότ (robot) Το ρομπότ είναι μια μηχανή που συλλέγει δεδομένα από το περιβάλλον του (αισθάνεται),
Υδρομπότ (Hydrobot) Κατασκευή & Προτάσεις Αξιοποίησης Ενός Τηλεκατευθυνόμενου Υποβρύχιου Ρομπότ
 Κατασκευή & Προτάσεις Αξιοποίησης Ενός Τηλεκατευθυνόμενου Υποβρύχιου Ρομπότ") Υδρομπότ (Hydrobot) Κατασκευή & Προτάσεις Αξιοποίησης Ενός Τηλεκατευθυνόμενου Υποβρύχιου Ρομπότ Οι μαθητές της Β τάξης Πληροφορικής του ΕΠΑ.Λ. Αξιούπολης 2013-2014 με τη συνδρομή του καθηγητή Πληροφορικής
Υδρομπότ (Hydrobot) Κατασκευή & Προτάσεις Αξιοποίησης Ενός Τηλεκατευθυνόμενου Υποβρύχιου Ρομπότ Οι μαθητές της Β τάξης Πληροφορικής του ΕΠΑ.Λ. Αξιούπολης 2013-2014 με τη συνδρομή του καθηγητή Πληροφορικής
ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΪΟΥ-ΙΟΥΝΙΟΥ 2013
 ΛΥΚΕΙΟ ΑΓΙΑΣ ΦΥΛΑΞΕΩΣ ΣΧΟΛΙΚΗ ΧΡΟΝΙΑ 2012-13 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΪΟΥ-ΙΟΥΝΙΟΥ 2013 Φυσική Τάξη Α Ημερομηνία: 27 Μαΐου 2013 Βαθμός:. Ώρα: 7 : 30 Ολογράφως:. Χρόνος: 2 ώρες Υπογραφή: Ονοματεπώνυμο
ΛΥΚΕΙΟ ΑΓΙΑΣ ΦΥΛΑΞΕΩΣ ΣΧΟΛΙΚΗ ΧΡΟΝΙΑ 2012-13 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΪΟΥ-ΙΟΥΝΙΟΥ 2013 Φυσική Τάξη Α Ημερομηνία: 27 Μαΐου 2013 Βαθμός:. Ώρα: 7 : 30 Ολογράφως:. Χρόνος: 2 ώρες Υπογραφή: Ονοματεπώνυμο
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΒΙΟΜΗΧΑΝΙΑ. Η επανάσταση μόλις αρχίζει
 ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΒΙΟΜΗΧΑΝΙΑ Η επανάσταση μόλις αρχίζει Η ΒΙΟΜΗΧΑΝΙΑ ΧΡΕΙΑΖΕΤΑΙ: Πρώτες ύλες Μηχανήματα και τεχνική υποστήριξη Εργασία Από ανθρώπους Από μηχανές (ρομπότ) Πολλές εργασίες που γίνονται από ανθρώπους
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΒΙΟΜΗΧΑΝΙΑ Η επανάσταση μόλις αρχίζει Η ΒΙΟΜΗΧΑΝΙΑ ΧΡΕΙΑΖΕΤΑΙ: Πρώτες ύλες Μηχανήματα και τεχνική υποστήριξη Εργασία Από ανθρώπους Από μηχανές (ρομπότ) Πολλές εργασίες που γίνονται από ανθρώπους
Project 2 Ρομποτική. 'Β Τάξη Γενικού Λυκείου Σητείας Σχολικό 'Ετος 2012-2013. Υπεύθυνος Καθηγητής: Πουλακάκης Ιωάννης
 Project 2 Ρομποτική 'Β Τάξη Γενικού Λυκείου Σητείας Σχολικό 'Ετος 2012-2013 Υπεύθυνος Καθηγητής: Πουλακάκης Ιωάννης Η Ιστορία της Ρομποτικής Ένα ρομπότ είναι μια μηχανική συσκευή η οποία μπορεί να υποκαθιστά
Project 2 Ρομποτική 'Β Τάξη Γενικού Λυκείου Σητείας Σχολικό 'Ετος 2012-2013 Υπεύθυνος Καθηγητής: Πουλακάκης Ιωάννης Η Ιστορία της Ρομποτικής Ένα ρομπότ είναι μια μηχανική συσκευή η οποία μπορεί να υποκαθιστά
ΕΡΠΥΣΤΡΙΕΣ: ΕΡΕΥΝΑ ΑΓΟΡΑΣ ΕΡΠΥΣΤΡΙΕΣ ΘΕΩΡΙΑ
 ΕΡΠΥΣΤΡΙΕΣ ΕΡΠΥΣΤΡΙΕΣ: ΕΡΕΥΝΑ ΑΓΟΡΑΣ ΕΡΠΥΣΤΡΙΕΣ ΘΕΩΡΙΑ ΘΕΩΡΙΑ Τι είναι οι ερπύστριες Ιστορία τους Πλεονεκτήματα Μειονεκτήματα ROVER 5 CHASSIS MULTI CHASSIS (RESCUE PLATFORM BIG) ΕΡΕΥΝΑ ΑΓΟΡΑΣ KIT TRACKED
ΕΡΠΥΣΤΡΙΕΣ ΕΡΠΥΣΤΡΙΕΣ: ΕΡΕΥΝΑ ΑΓΟΡΑΣ ΕΡΠΥΣΤΡΙΕΣ ΘΕΩΡΙΑ ΘΕΩΡΙΑ Τι είναι οι ερπύστριες Ιστορία τους Πλεονεκτήματα Μειονεκτήματα ROVER 5 CHASSIS MULTI CHASSIS (RESCUE PLATFORM BIG) ΕΡΕΥΝΑ ΑΓΟΡΑΣ KIT TRACKED
Ένας ψηφιακός κατάλογος για την Κοινωνία της Πληροφορίας. ΤΕΕ Ειδικής Αγωγής 1 Β Βαθμίδας
 Ένας ψηφιακός κατάλογος για την Κοινωνία της Πληροφορίας ΤΕΕ Ειδικής Αγωγής 1 Β Βαθμίδας Ο υπολογιστής στους αθλητικούς αγώνες Οι αθλητικοί αγώνες απαιτούν άμεση πληροφόρηση και ενημέρωση τόσο αυτών που
Ένας ψηφιακός κατάλογος για την Κοινωνία της Πληροφορίας ΤΕΕ Ειδικής Αγωγής 1 Β Βαθμίδας Ο υπολογιστής στους αθλητικούς αγώνες Οι αθλητικοί αγώνες απαιτούν άμεση πληροφόρηση και ενημέρωση τόσο αυτών που
ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ
 Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
«Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot».
 ΕΛΛΗΝΙΚΟ ΚΟΛΛΕΓΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ «Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot». Χρυσοπούλου Τσεβά Κλειώ Γ 3 Υπεύθυνος καθηγητής: Κ. Κωνσταντίνος Παρασκευόπουλος. 8/12/2013 ΠΕΡΙΛΗΨΗ Η χρήση και
ΕΛΛΗΝΙΚΟ ΚΟΛΛΕΓΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ «Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot». Χρυσοπούλου Τσεβά Κλειώ Γ 3 Υπεύθυνος καθηγητής: Κ. Κωνσταντίνος Παρασκευόπουλος. 8/12/2013 ΠΕΡΙΛΗΨΗ Η χρήση και
ΥΠΕΥΘΥΝΟΣ ΚΑΘΗΓΗΤΗΣ:Δ.ΜΑΝΩΛΑΣ
 ΘΕΡΜΙΚΗ ΚΑΜΕΡΑ ΔΗΜΗΤΡΑ ΠΑΠΑΔΟΠΟΥΛΟΥ ΥΠΕΥΘΥΝΟΣ ΚΑΘΗΓΗΤΗΣ:Δ.ΜΑΝΩΛΑΣ 2013-2014 ΠΡΟΛΟΓΟΣ-ΕΥΧΑΡΙΣΤΙΕΣ ΕΙΣΑΓΩΓΗ -Ετυμολογία -Τεχνολογική ενότητα ΘΕΩΡΙΤΙΚΟ ΜΕΡΟΣ -Τα μέρη του -Πως λειτουργεί -Μορφή ενέργειας
ΘΕΡΜΙΚΗ ΚΑΜΕΡΑ ΔΗΜΗΤΡΑ ΠΑΠΑΔΟΠΟΥΛΟΥ ΥΠΕΥΘΥΝΟΣ ΚΑΘΗΓΗΤΗΣ:Δ.ΜΑΝΩΛΑΣ 2013-2014 ΠΡΟΛΟΓΟΣ-ΕΥΧΑΡΙΣΤΙΕΣ ΕΙΣΑΓΩΓΗ -Ετυμολογία -Τεχνολογική ενότητα ΘΕΩΡΙΤΙΚΟ ΜΕΡΟΣ -Τα μέρη του -Πως λειτουργεί -Μορφή ενέργειας
Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Ονοματεπώνυμο :Κάρκας Αλέξιος. Μαθητής του τμήματος Γ2
 Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Ονοματεπώνυμο :Κάρκας Αλέξιος Μαθητής του τμήματος Γ2 Καθηγητής : Κωνσταντίνος Παρασκευόπουλος 1.Περίληψη Το ρομπότ είναι μια μηχανική συσκευή η
Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Ονοματεπώνυμο :Κάρκας Αλέξιος Μαθητής του τμήματος Γ2 Καθηγητής : Κωνσταντίνος Παρασκευόπουλος 1.Περίληψη Το ρομπότ είναι μια μηχανική συσκευή η
Πτυχιακή Εργασία Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Η Ασύρματη Επικοινωνία, χρησιμοποιώντας
 Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Δραστηριότητες Έρευνας και Ανάπτυξης του Εργαστηρίου Αυτοματικής Ρομποτικής του Τμήματος Μηχανολογίας του ΤΕΙ Κρήτης
 Δραστηριότητες Έρευνας και Ανάπτυξης του Εργαστηρίου Αυτοματικής Ρομποτικής του Τμήματος Μηχανολογίας του ΤΕΙ Κρήτης των Δρ. Μανόλη Καββουσανού και Δρ. Γιάννη Φασουλά Το Εργαστήριο Αυτοματικής Ρομποτικής
Δραστηριότητες Έρευνας και Ανάπτυξης του Εργαστηρίου Αυτοματικής Ρομποτικής του Τμήματος Μηχανολογίας του ΤΕΙ Κρήτης των Δρ. Μανόλη Καββουσανού και Δρ. Γιάννη Φασουλά Το Εργαστήριο Αυτοματικής Ρομποτικής
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ. = 2r, τότε:
 ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση 1. (Διατήρηση της στροφορμής) Η Γη στρέφεται σε ελλειπτική τροχιά γύρω από τον Ήλιο. Το κοντινότερο σημείο στον Ήλιο ονομάζεται Περιήλιο (π) και το πιο απομακρυσμένο Αφήλιο (α).
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση 1. (Διατήρηση της στροφορμής) Η Γη στρέφεται σε ελλειπτική τροχιά γύρω από τον Ήλιο. Το κοντινότερο σημείο στον Ήλιο ονομάζεται Περιήλιο (π) και το πιο απομακρυσμένο Αφήλιο (α).
website:
 Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση και Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 29 Μαρτίου 2017 1 Συναρτήσεις μεταφοράς σε
Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση και Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 29 Μαρτίου 2017 1 Συναρτήσεις μεταφοράς σε
ΤΕΧΝΟΛΟΓΙΑ ΠΑΡΑΓΩΓΗΣ Ι 155 7.6 ΦΡΕΖΕΣ
 ΤΕΧΝΟΛΟΓΙΑ ΠΑΡΑΓΩΓΗΣ Ι 155 7.6 ΦΡΕΖΕΣ Η φρέζα όπως και ο τόρνος αποτελεί μία από τις βασικότερες εργαλειομηχανές ενός μηχανουργείου. Κατά την κοπή στην φρέζα, το κοπτικό εργαλείο αποκόπτει από το αντικείμενο
ΤΕΧΝΟΛΟΓΙΑ ΠΑΡΑΓΩΓΗΣ Ι 155 7.6 ΦΡΕΖΕΣ Η φρέζα όπως και ο τόρνος αποτελεί μία από τις βασικότερες εργαλειομηχανές ενός μηχανουργείου. Κατά την κοπή στην φρέζα, το κοπτικό εργαλείο αποκόπτει από το αντικείμενο
ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ
 Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
ΑΣΚΗΣΗ 5 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ. 1. Η μελέτη της δομής και της αρχής λειτουργίας ενός ασύγχρονου τριφασικού κινητήρα.
 Σκοπός της άσκησης: ΑΣΚΗΣΗ 5 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ Σκοπός της εργαστηριακής άσκησης είναι: 1. Η μελέτη της δομής και της αρχής λειτουργίας ενός ασύγχρονου τριφασικού κινητήρα. 1. Γενικά Οι
Σκοπός της άσκησης: ΑΣΚΗΣΗ 5 η ΑΣΥΓΧΡΟΝΟΣ ΤΡΙΦΑΣΙΚΟΣ ΚΙΝΗΤΗΡΑΣ Σκοπός της εργαστηριακής άσκησης είναι: 1. Η μελέτη της δομής και της αρχής λειτουργίας ενός ασύγχρονου τριφασικού κινητήρα. 1. Γενικά Οι
Εργαλειομηχανές CNC. Εισαγωγή στις κατεργασίες
 Εισαγωγή Εισαγωγή στις κατεργασίες Κατεργασία H διαδικασία κατά την οποία εφαρμόζονται φορτίσεις μέσω συσκευών, μηχανών και εργαλείων, ώστε μία αρχική άμορφη μάζα υλικού να παραμορφωθεί πλαστικά και να
Εισαγωγή Εισαγωγή στις κατεργασίες Κατεργασία H διαδικασία κατά την οποία εφαρμόζονται φορτίσεις μέσω συσκευών, μηχανών και εργαλείων, ώστε μία αρχική άμορφη μάζα υλικού να παραμορφωθεί πλαστικά και να
Γκύζη 14-Αθήνα Τηλ :
 Γκύζη 14-Αθήνα Τηλ : 10.64.5.777 ΘΕΜΑ Α ΠΑΝΕΛΛΑΔΙΚΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΚΑΙ ΕΠΑΛ (ΟΜΑΔΑ Β ) ΤΡΙΤΗ 10 ΙΟΥΝΙΟΥ 014 ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΔΥΟ ΚΥΚΛΩΝ)
Γκύζη 14-Αθήνα Τηλ : 10.64.5.777 ΘΕΜΑ Α ΠΑΝΕΛΛΑΔΙΚΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΚΑΙ ΕΠΑΛ (ΟΜΑΔΑ Β ) ΤΡΙΤΗ 10 ΙΟΥΝΙΟΥ 014 ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΔΥΟ ΚΥΚΛΩΝ)
ΘΕΜΑ ΈΡΕΥΝΑΣ: Η ΣΧΕΣΗ ΑΝΑΜΕΣΑ ΣΤΗ
 Μαθήτρια: Αίγλη Θ. Μπορονικόλα Καθηγητής : Ιωάννης Αντ. Παπατσώρης ΜΑΘΗΜΑ: ΈΡΕΥΝΑ & ΤΕΧΝΟΛΟΓΙΑ ΘΕΜΑ ΈΡΕΥΝΑΣ: Η ΣΧΕΣΗ ΑΝΑΜΕΣΑ ΣΤΗ ΓΩΝΙΑ ΚΕΚΛΙΜΕΝΟΥ ΕΠΙΠΕΔΟΥ ΚΑΙ ΤΗ ΔΥΝΑΜΗ ΕΛΞΗΣ ΓΙΑ ΝΑ ΙΣΟΡΡΟΠΗΣΕΙ ΕΝΑ ΣΩΜΑ
Μαθήτρια: Αίγλη Θ. Μπορονικόλα Καθηγητής : Ιωάννης Αντ. Παπατσώρης ΜΑΘΗΜΑ: ΈΡΕΥΝΑ & ΤΕΧΝΟΛΟΓΙΑ ΘΕΜΑ ΈΡΕΥΝΑΣ: Η ΣΧΕΣΗ ΑΝΑΜΕΣΑ ΣΤΗ ΓΩΝΙΑ ΚΕΚΛΙΜΕΝΟΥ ΕΠΙΠΕΔΟΥ ΚΑΙ ΤΗ ΔΥΝΑΜΗ ΕΛΞΗΣ ΓΙΑ ΝΑ ΙΣΟΡΡΟΠΗΣΕΙ ΕΝΑ ΣΩΜΑ
Β ΛΥΚΕΙΟΥ - ΓΕΝΙΚΕΣ ΑΣΚΗΣΕΙΣ
 Β ΛΥΚΕΙΟΥ - ΓΕΝΙΚΕΣ ΑΣΚΗΣΕΙΣ 1. Ποια η σημασία των παρακάτω μεγεθών; Αναφερόμαστε στην κυκλική κίνηση. Α. Επιτρόχια επιτάχυνση: Β. Κεντρομόλος επιτάχυνση: Γ. Συχνότητα: Δ. Περίοδος: 2. Ένας τροχός περιστρέφεται
Β ΛΥΚΕΙΟΥ - ΓΕΝΙΚΕΣ ΑΣΚΗΣΕΙΣ 1. Ποια η σημασία των παρακάτω μεγεθών; Αναφερόμαστε στην κυκλική κίνηση. Α. Επιτρόχια επιτάχυνση: Β. Κεντρομόλος επιτάχυνση: Γ. Συχνότητα: Δ. Περίοδος: 2. Ένας τροχός περιστρέφεται
Robot και καθημερινή ζωή
 Robot και καθημερινή ζωή Καθηγήτρια: Σπυριδούλα Καραγιάννη Νίκος Κάνιστρας Νίκος Ηλιόπουλος Θεόδωρος Θεοδωρόπουλος Διονύσης Γιαχαλής Ροµπότ και ανεργία Ροµποτική Η ροµποτική είναι µια «διεπιστηµονική περιοχή»
Robot και καθημερινή ζωή Καθηγήτρια: Σπυριδούλα Καραγιάννη Νίκος Κάνιστρας Νίκος Ηλιόπουλος Θεόδωρος Θεοδωρόπουλος Διονύσης Γιαχαλής Ροµπότ και ανεργία Ροµποτική Η ροµποτική είναι µια «διεπιστηµονική περιοχή»
Η Καινοτομία συναντά την Αμυντική Βιομηχανία
 Η Καινοτομία συναντά την Αμυντική Βιομηχανία Διημερίδα Καινοτομίας 8 & 9 Μαρτίου 2018 Β ΠΑΠΑΝΤΩΝΙΟΥ Από το 1992 η είναι μια εταιρεία εξειδικευμένη στην ρομποτική και τον αυτοματισμό. Μέχρι σήμερα έχει
Η Καινοτομία συναντά την Αμυντική Βιομηχανία Διημερίδα Καινοτομίας 8 & 9 Μαρτίου 2018 Β ΠΑΠΑΝΤΩΝΙΟΥ Από το 1992 η είναι μια εταιρεία εξειδικευμένη στην ρομποτική και τον αυτοματισμό. Μέχρι σήμερα έχει
ΕΡΓΑΛΕΙΟΜΗΧΑΝΕΣ CNC 1
 ΕΡΓΑΛΕΙΟΜΗΧΑΝΕΣ 1 ΟΡΙΣΜΟΣ Οι εργαλειομηχανές με αριθμητικό προγραμματισμό εργασίας, γνωστές ως, (Computer Numerically Controlled), είναι μηχανήματα που ελέγχονται από ηλεκτρονικούς υπολογιστές. Τα μηχανήματα
ΕΡΓΑΛΕΙΟΜΗΧΑΝΕΣ 1 ΟΡΙΣΜΟΣ Οι εργαλειομηχανές με αριθμητικό προγραμματισμό εργασίας, γνωστές ως, (Computer Numerically Controlled), είναι μηχανήματα που ελέγχονται από ηλεκτρονικούς υπολογιστές. Τα μηχανήματα
11o ΓΥΜΝΑΣΙΟ ΛΑΡΙΣΑΣ ΤΕΧΝΟΛΟΓΙΑ Α ΤΑΞΗ
 11o ΓΥΜΝΑΣΙΟ ΛΑΡΙΣΑΣ ΤΕΧΝΟΛΟΓΙΑ Α ΤΑΞΗ ΑΕΡΟΠΛΑΝΟ ΠΕΡΙΓΡΑΦΗ Το αεροπλάνο αποτελείται βασικά από 3 μέρη που διαφέρουν στη μορφή και στον προορισμό τους. Αυτά είναι: το κύριο σώμα του αεροπλάνου που λέγεται
11o ΓΥΜΝΑΣΙΟ ΛΑΡΙΣΑΣ ΤΕΧΝΟΛΟΓΙΑ Α ΤΑΞΗ ΑΕΡΟΠΛΑΝΟ ΠΕΡΙΓΡΑΦΗ Το αεροπλάνο αποτελείται βασικά από 3 μέρη που διαφέρουν στη μορφή και στον προορισμό τους. Αυτά είναι: το κύριο σώμα του αεροπλάνου που λέγεται
Τι είναι ρομπότ. Εκπαιδευτική ρομποτική Lego
 Εκπαιδευτική ρομποτική Lego Τι είναι ρομπότ Πανεπιστήμιο Αιγαίου / Τμήμα Μηχανικών Πληροφοριακών και Επικοινωνιακών Συστημάτων ΠΜΣ Διδακτική Πληροφορικής & Επικοινωνιών / Φιλίππου Σ. - Μαυρόπουλος Ν. icsdweb.aegean.gr/edurobots
Εκπαιδευτική ρομποτική Lego Τι είναι ρομπότ Πανεπιστήμιο Αιγαίου / Τμήμα Μηχανικών Πληροφοριακών και Επικοινωνιακών Συστημάτων ΠΜΣ Διδακτική Πληροφορικής & Επικοινωνιών / Φιλίππου Σ. - Μαυρόπουλος Ν. icsdweb.aegean.gr/edurobots
ΟΜΑΔΑ: Replete. ΕΡΕΥΝΗΤΙΚΟ ΕΡΩΤΗΜΑ: Ποιά η επίδραση της ρομποτικής στην ιατρική; ΜΕΛΟΣ ΤΗΣ ΟΜΑΔΑΣ ΠΟΥ ΑΣΧΟΛΗΘΗΚΕ ΜΕ ΑΥΤΟ: Σιούτης Δημήτρης
 ΟΜΑΔΑ: Replete ΕΡΕΥΝΗΤΙΚΟ ΕΡΩΤΗΜΑ: Ποιά η επίδραση της ρομποτικής στην ιατρική; ΜΕΛΟΣ ΤΗΣ ΟΜΑΔΑΣ ΠΟΥ ΑΣΧΟΛΗΘΗΚΕ ΜΕ ΑΥΤΟ: Σιούτης Δημήτρης ΡΟΜΠΟΤΙΚΗ & ΙΑΤΡΙΚΗ Στον τομέα της ιατρική η ρομποτική παίζει ένα
ΟΜΑΔΑ: Replete ΕΡΕΥΝΗΤΙΚΟ ΕΡΩΤΗΜΑ: Ποιά η επίδραση της ρομποτικής στην ιατρική; ΜΕΛΟΣ ΤΗΣ ΟΜΑΔΑΣ ΠΟΥ ΑΣΧΟΛΗΘΗΚΕ ΜΕ ΑΥΤΟ: Σιούτης Δημήτρης ΡΟΜΠΟΤΙΚΗ & ΙΑΤΡΙΚΗ Στον τομέα της ιατρική η ρομποτική παίζει ένα
Η Ελληνική Πύλη Ρομποτικής στην 77η ΔΕΘ
 Η Ελληνική Πύλη Ρομποτικής στην 77η ΔΕΘ Για δεύτερη συνεχόμενη χρονιά η Διεθνής Έκθεση Θεσσαλονίκης φιλοξένησε την Ελληνική Πύλη Ρομποτικής σε εκθεσιακό περίπτερο στο οποίο παρουσιάστηκαν ρομποτικές εφαρμογές
Η Ελληνική Πύλη Ρομποτικής στην 77η ΔΕΘ Για δεύτερη συνεχόμενη χρονιά η Διεθνής Έκθεση Θεσσαλονίκης φιλοξένησε την Ελληνική Πύλη Ρομποτικής σε εκθεσιακό περίπτερο στο οποίο παρουσιάστηκαν ρομποτικές εφαρμογές
Μηχανική των κινήσεων σε ξηρά, νερό και αέρα
 Σκοπός Μηχανική των κινήσεων σε ξηρά, νερό και αέρα Σκοπός αυτής της διάλεξης είναι η εξοικείωση με τιςβασικέςέννοιεςκαιτιςεφαρμογέςτης μηχανικής για τις κινήσεις σε ξηρά, νερό και αέρα. Νίκος Αγγελούσης
Σκοπός Μηχανική των κινήσεων σε ξηρά, νερό και αέρα Σκοπός αυτής της διάλεξης είναι η εξοικείωση με τιςβασικέςέννοιεςκαιτιςεφαρμογέςτης μηχανικής για τις κινήσεις σε ξηρά, νερό και αέρα. Νίκος Αγγελούσης
RobotArmy Περίληψη έργου
 RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
ΣΗΜΕΙΩΣΕΙΣ ΣΧΟΛΗΣ-----ΛΕΣΒΙΑΚΟΣ ΟΜΙΛΟΣ ΙΣΤΙΟΠΛΟΪΑΣ ΑΝΟΙΧΤΗΣ ΘΑΛΑΣΣΗΣ-----ΣΗΜΕΙΩΣΕΙΣ ΣΧΟΛΗΣ
 ΣΚΑΦΟΣ Η μορφή των ιστιοφόρων σκαφών όπως εξελίχθηκε από τα αρχαία ξύλινα εμπορικά και πολεμικά πλοία έως τα σύγχρονα αγωνιστικά επηρεάζονταν από τους ίδιους παράγοντες. Είναι συνάρτηση της χρήσης τους,
ΣΚΑΦΟΣ Η μορφή των ιστιοφόρων σκαφών όπως εξελίχθηκε από τα αρχαία ξύλινα εμπορικά και πολεμικά πλοία έως τα σύγχρονα αγωνιστικά επηρεάζονταν από τους ίδιους παράγοντες. Είναι συνάρτηση της χρήσης τους,
ΓΑΛΑΝΑΚΗΣ ΓΙΩΡΓΟΣ ΔΗΜΗΤΡΑΚΟΠΟΥΛΟΣ ΜΙΧΑΛΗΣ
 ΘΕΜΑ Α Στις ερωτήσεις -4 να γράψετε στο τετράδιό σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί η σωστή απάντηση. Ένας ακίνητος τρoχός δέχεται σταθερή συνιστάμενη ροπή ως προς άξονα διερχόμενο
ΘΕΜΑ Α Στις ερωτήσεις -4 να γράψετε στο τετράδιό σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί η σωστή απάντηση. Ένας ακίνητος τρoχός δέχεται σταθερή συνιστάμενη ροπή ως προς άξονα διερχόμενο
ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ
 Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ ΠΡΟΣΠΑΘΕΙΑ ΣΑΣ ΚΙ 2014
 ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΕΠΑΝΑΛΗΠΤΙΚΟ ΔΙΑΓΩΝΙΣΜΑ. (εξεταστέα ύλη: κρούσεις, ελατήρια, μηχανική ρευστών, κινηματική στερεού, φαινόμενο Doppler)
") ΜΑΡΤΙΟΣ 07 ΕΠΑΝΑΛΗΠΤΙΚΟ ΔΙΑΓΩΝΙΣΜΑ (εξεταστέα ύλη: κρούσεις, ελατήρια, μηχανική ρευστών, κινηματική στερεού, φαινόμενο Doppler) ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ Διάρκεια εξέτασης: 0.800sec (& κάθε ένα μετράει ) ΟΝΟΜΑΤΕΠΩΝΥΜΟ:
ΜΑΡΤΙΟΣ 07 ΕΠΑΝΑΛΗΠΤΙΚΟ ΔΙΑΓΩΝΙΣΜΑ (εξεταστέα ύλη: κρούσεις, ελατήρια, μηχανική ρευστών, κινηματική στερεού, φαινόμενο Doppler) ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ Διάρκεια εξέτασης: 0.800sec (& κάθε ένα μετράει ) ΟΝΟΜΑΤΕΠΩΝΥΜΟ:
Απλά ευέλικτα προσιτά
 Ρομποτικά σύστημα, τόσο απλά, όσο θα έπρεπε να είναι! Απλά ευέλικτα προσιτά TEXNIKEΣ ΠΡΟΔΙΑΓΡΑΦΕΣ: www.universal-robots.com/products Επιτέλους, ρομποτικά συστήματα, Η Universal Robots προσφέρει σημαντική
Ρομποτικά σύστημα, τόσο απλά, όσο θα έπρεπε να είναι! Απλά ευέλικτα προσιτά TEXNIKEΣ ΠΡΟΔΙΑΓΡΑΦΕΣ: www.universal-robots.com/products Επιτέλους, ρομποτικά συστήματα, Η Universal Robots προσφέρει σημαντική
Εργασία Τεχνολογίας Α Γυμνασίου: ΕΠΙΚΟΙΝΩΝΙΑ. Αβανίδης Βασίλης
 Εργασία Τεχνολογίας Α Γυμνασίου: ΕΠΙΚΟΙΝΩΝΙΑ Αβανίδης Βασίλης Η ΕΝΝΟΙΑ ΤΗΣ ΕΠΙΚΟΙΝΩΝΙΑΣ Premium ΙΣΤΟΡΙΚΑ ΣΤΟΙΧΕΙΑ Επικοινωνία είναι η διαδικασία της ανταλλαγής πληροφορίας μεταξύ δύο ή περισσοτέρων μερών
Εργασία Τεχνολογίας Α Γυμνασίου: ΕΠΙΚΟΙΝΩΝΙΑ Αβανίδης Βασίλης Η ΕΝΝΟΙΑ ΤΗΣ ΕΠΙΚΟΙΝΩΝΙΑΣ Premium ΙΣΤΟΡΙΚΑ ΣΤΟΙΧΕΙΑ Επικοινωνία είναι η διαδικασία της ανταλλαγής πληροφορίας μεταξύ δύο ή περισσοτέρων μερών
Θέματα Παγκύπριων Εξετάσεων
 Θέματα Παγκύπριων Εξετάσεων 2009-2015 Σελίδα 1 από 13 Μηχανική Στερεού Σώματος 1. Στο πιο κάτω σχήμα φαίνονται δύο όμοιες πλατφόρμες οι οποίες μπορούν να περιστρέφονται χωρίς τριβές, γύρω από κατακόρυφο
Θέματα Παγκύπριων Εξετάσεων 2009-2015 Σελίδα 1 από 13 Μηχανική Στερεού Σώματος 1. Στο πιο κάτω σχήμα φαίνονται δύο όμοιες πλατφόρμες οι οποίες μπορούν να περιστρέφονται χωρίς τριβές, γύρω από κατακόρυφο
8 η ΕΝΟΤΗΤΑ Ανυψωτικά μηχανήματα
 ΣΧΟΛΗ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΜΠ ΔΟΜΙΚΕΣ ΜΗΧΑΝΕΣ & ΚΑΤΑΣΚΕΥΑΣΤΙΚΕΣ ΜΕΘΟΔΟΙ 8 η ΕΝΟΤΗΤΑ Ανυψωτικά μηχανήματα Διδάσκων: Σ. Λαμπρόπουλος Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες Χρήσης Creative
ΣΧΟΛΗ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΜΠ ΔΟΜΙΚΕΣ ΜΗΧΑΝΕΣ & ΚΑΤΑΣΚΕΥΑΣΤΙΚΕΣ ΜΕΘΟΔΟΙ 8 η ΕΝΟΤΗΤΑ Ανυψωτικά μηχανήματα Διδάσκων: Σ. Λαμπρόπουλος Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες Χρήσης Creative
ηλεκτρικό ρεύμα ampere
 Ηλεκτρικό ρεύμα Το ηλεκτρικό ρεύμα είναι ο ρυθμός με τον οποίο διέρχεται ηλεκτρικό φορτίο από μια περιοχή του χώρου. Η μονάδα μέτρησης του ηλεκτρικού ρεύματος στο σύστημα SI είναι το ampere (A). 1 A =
Ηλεκτρικό ρεύμα Το ηλεκτρικό ρεύμα είναι ο ρυθμός με τον οποίο διέρχεται ηλεκτρικό φορτίο από μια περιοχή του χώρου. Η μονάδα μέτρησης του ηλεκτρικού ρεύματος στο σύστημα SI είναι το ampere (A). 1 A =
A4. Η δύναμη επαναφοράς που ασκείται σε ένα σώμα μάζας m που εκτελεί
 ΠΑΝΕΛΛΑΔΙΚΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΚΑΙ ΕΠΑΛ (ΟΜΑΔΑ Β ) ΤΡΙΤΗ 0 ΙΟΥΝΙΟΥ 04 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΔΥΟ ΚΥΚΛΩΝ) ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ΕΞΙ
ΠΑΝΕΛΛΑΔΙΚΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΚΑΙ ΕΠΑΛ (ΟΜΑΔΑ Β ) ΤΡΙΤΗ 0 ΙΟΥΝΙΟΥ 04 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΔΥΟ ΚΥΚΛΩΝ) ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ΕΞΙ
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΑΥΤΟΜΑΤΙΣΜΟΣ
 ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΑΥΤΟΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΗ Η Ρομποτική είναι ο κλάδος της επιστήμης που κατασκευάζει και μελετά μηχανές που μπορούν να αντικαταστήσουν τον άνθρωπο στην εκτέλεση μιας εργασίας. Tι είναι το ΡΟΜΠΟΤ
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΑΥΤΟΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΗ Η Ρομποτική είναι ο κλάδος της επιστήμης που κατασκευάζει και μελετά μηχανές που μπορούν να αντικαταστήσουν τον άνθρωπο στην εκτέλεση μιας εργασίας. Tι είναι το ΡΟΜΠΟΤ
ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΪΟΥ-ΙΟΥΝΙΟΥ 2014
 ΛΥΚΕΙΟ ΑΓΙΑΣ ΦΥΛΑΞΕΩΣ ΣΧΟΛΙΚΗ ΧΡΟΝΙΑ 2013-14 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΪΟΥ-ΙΟΥΝΙΟΥ 2014 Φυσική Τάξη Α Ημερομηνία: 03 Ιουνίου 2014 Βαθμός:. Ώρα: 7 : 30 Ολογράφως:. Χρόνος: 2 ώρες Υπογραφή: Ονοματεπώνυμο
ΛΥΚΕΙΟ ΑΓΙΑΣ ΦΥΛΑΞΕΩΣ ΣΧΟΛΙΚΗ ΧΡΟΝΙΑ 2013-14 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΜΑΪΟΥ-ΙΟΥΝΙΟΥ 2014 Φυσική Τάξη Α Ημερομηνία: 03 Ιουνίου 2014 Βαθμός:. Ώρα: 7 : 30 Ολογράφως:. Χρόνος: 2 ώρες Υπογραφή: Ονοματεπώνυμο
Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου. Ενότητα 2
 Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου Ενότητα 2 Τι είναι το PLC ΠΕΡΙΕΧΟΜΕΝΑ 2 Τι είναι το PLC. 2.1 Πλεονεκτήματα των PLC. 2.2 Η δομή ενός PLC. 2.3 Τα PLC της αγοράς. 2.4 Αρχή λειτουργίας ενός PLC.
Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου Ενότητα 2 Τι είναι το PLC ΠΕΡΙΕΧΟΜΕΝΑ 2 Τι είναι το PLC. 2.1 Πλεονεκτήματα των PLC. 2.2 Η δομή ενός PLC. 2.3 Τα PLC της αγοράς. 2.4 Αρχή λειτουργίας ενός PLC.
ΕΝΩΣΗ ΚΥΠΡΙΩΝ ΦΥΣΙΚΩΝ
 28 Η ΠΑΓΚΥΠΡΙΑ ΟΛΥΜΠΙΑΔΑ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ (Πρώτη Φάση) Κυριακή, 15 Δεκεμβρίου, 2013 Ώρα: 10:00-13:00 Οδηγίες: 1) Το δοκίμιο αποτελείται από πέντε (5) σελίδες και πέντε (5) θέματα. 2) Να απαντήσετε σε
28 Η ΠΑΓΚΥΠΡΙΑ ΟΛΥΜΠΙΑΔΑ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ (Πρώτη Φάση) Κυριακή, 15 Δεκεμβρίου, 2013 Ώρα: 10:00-13:00 Οδηγίες: 1) Το δοκίμιο αποτελείται από πέντε (5) σελίδες και πέντε (5) θέματα. 2) Να απαντήσετε σε
ΣΧΕΔΙΑΣΜΟΣ, ΚΑΤΑΣΚΕΥΗ ΚΑΙ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΟΥ ΒΡΑΧΙΟΝΑ
 ΣΧΕΔΙΑΣΜΟΣ, ΚΑΤΑΣΚΕΥΗ ΚΑΙ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΟΥ ΒΡΑΧΙΟΝΑ Καθ. Αριστομένης Αντωνιάδης Καθ. Νικόλαος Μπιλάλης Καθ. Γεώργιος Σταυρουλάκης Δεληκωνσταντίνου Βασίλης Πολυτεχνείο Κρήτης Χανιά 2016 3 ΔΟΜΗ
ΣΧΕΔΙΑΣΜΟΣ, ΚΑΤΑΣΚΕΥΗ ΚΑΙ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΟΥ ΒΡΑΧΙΟΝΑ Καθ. Αριστομένης Αντωνιάδης Καθ. Νικόλαος Μπιλάλης Καθ. Γεώργιος Σταυρουλάκης Δεληκωνσταντίνου Βασίλης Πολυτεχνείο Κρήτης Χανιά 2016 3 ΔΟΜΗ
ΦΥΣΙΚΗ Ο.Π Γ ΛΥΚΕΙΟΥ 22 / 04 / 2018
 Γ ΛΥΚΕΙΟΥ 22 / 04 / 2018 ΦΥΣΙΚΗ Ο.Π ΘΕΜΑ Α Α1. Μία ηχητική πηγή που εκπέμπει ήχο συχνότητας κινείται με σταθερή ταχύτητα πλησιάζοντας ακίνητο παρατηρητή, ενώ απομακρύνεται από άλλο ακίνητο παρατηρητή.
Γ ΛΥΚΕΙΟΥ 22 / 04 / 2018 ΦΥΣΙΚΗ Ο.Π ΘΕΜΑ Α Α1. Μία ηχητική πηγή που εκπέμπει ήχο συχνότητας κινείται με σταθερή ταχύτητα πλησιάζοντας ακίνητο παρατηρητή, ενώ απομακρύνεται από άλλο ακίνητο παρατηρητή.
δ. έχουν πάντα την ίδια διεύθυνση.
 Διαγώνισμα ΦΥΣΙΚΗ Κ.Τ Γ ΛΥΚΕΙΟΥ ΖΗΤΗΜΑ 1 ον 1.. Σφαίρα, μάζας m 1, κινούμενη με ταχύτητα υ1, συγκρούεται μετωπικά και ελαστικά με ακίνητη σφαίρα μάζας m. Οι ταχύτητες των σφαιρών μετά την κρούση α. έχουν
Διαγώνισμα ΦΥΣΙΚΗ Κ.Τ Γ ΛΥΚΕΙΟΥ ΖΗΤΗΜΑ 1 ον 1.. Σφαίρα, μάζας m 1, κινούμενη με ταχύτητα υ1, συγκρούεται μετωπικά και ελαστικά με ακίνητη σφαίρα μάζας m. Οι ταχύτητες των σφαιρών μετά την κρούση α. έχουν
ΔΙΟΙΚΗΣΗ ΒΙΟΜΗΧΑΝΙΚΩΝ ΕΠΙΧΕΙΡΗΣΕΩΝ III ΤΥΠΟΙ ΔΙΑΔΙΚΑΣΙΩΝ ΠΑΡΑΓΩΓΗΣ
 ΔΙΟΙΚΗΣΗ ΒΙΟΜΗΧΑΝΙΚΩΝ ΕΠΙΧΕΙΡΗΣΕΩΝ III ΤΥΠΟΙ ΔΙΑΔΙΚΑΣΙΩΝ ΠΑΡΑΓΩΓΗΣ Ι. Γιαννατσής ΒΑΣΙΚΟΙ ΠΑΡΑΓΟΝΤΕΣ ΚΑΘΟΡΙΣΜΟΥ ΣΥΣΤΗΜΑΤΟΣ ΠΑΡΑΓΩΓΗΣ Φύση Προϊόντος/Υπηρεσίας και Αγορά Απαιτούμενος βαθμός διαφοροποίησης
ΔΙΟΙΚΗΣΗ ΒΙΟΜΗΧΑΝΙΚΩΝ ΕΠΙΧΕΙΡΗΣΕΩΝ III ΤΥΠΟΙ ΔΙΑΔΙΚΑΣΙΩΝ ΠΑΡΑΓΩΓΗΣ Ι. Γιαννατσής ΒΑΣΙΚΟΙ ΠΑΡΑΓΟΝΤΕΣ ΚΑΘΟΡΙΣΜΟΥ ΣΥΣΤΗΜΑΤΟΣ ΠΑΡΑΓΩΓΗΣ Φύση Προϊόντος/Υπηρεσίας και Αγορά Απαιτούμενος βαθμός διαφοροποίησης
Σχεδιαστικά Προγράμματα Επίπλου
 Σχεδιαστικά Προγράμματα Επίπλου Καθηγήτρια ΦΕΡΦΥΡΗ ΣΩΤΗΡΙΑ Τμήμα ΣΧΕΔΙΑΣΜΟΥ & ΤΕΧΝΟΛΟΓΙΑΣ ΞΥΛΟΥ - ΕΠΙΠΛΟΥ Σχεδιαστικά Προγράμματα Επίπλου Η σχεδίαση με τον παραδοσιακό τρόπο απαιτεί αυξημένο χρόνο, ενώ
Σχεδιαστικά Προγράμματα Επίπλου Καθηγήτρια ΦΕΡΦΥΡΗ ΣΩΤΗΡΙΑ Τμήμα ΣΧΕΔΙΑΣΜΟΥ & ΤΕΧΝΟΛΟΓΙΑΣ ΞΥΛΟΥ - ΕΠΙΠΛΟΥ Σχεδιαστικά Προγράμματα Επίπλου Η σχεδίαση με τον παραδοσιακό τρόπο απαιτεί αυξημένο χρόνο, ενώ
ΤΑΛΑΝΤΩΣΗ ΚΑΙ ΚΡΟΥΣΗ
 ΤΑΛΑΝΤΩΣΗ ΚΑΙ ΚΡΟΥΣΗ 1. Κατακόρυφο ελατήριο σταθεράς k=1000 N /m έχει το κάτω άκρο του στερεωμένο σε ακίνητο σημείο. Στο πάνω άκρο του ελατηρίου έχει προσδεθεί σώμα Σ 1 μάζας m 1 =8 kg, ενώ ένα δεύτερο
ΤΑΛΑΝΤΩΣΗ ΚΑΙ ΚΡΟΥΣΗ 1. Κατακόρυφο ελατήριο σταθεράς k=1000 N /m έχει το κάτω άκρο του στερεωμένο σε ακίνητο σημείο. Στο πάνω άκρο του ελατηρίου έχει προσδεθεί σώμα Σ 1 μάζας m 1 =8 kg, ενώ ένα δεύτερο
ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ (8 ΠΕΡΙΟΔΟΙ)
") ΚΕΦΑΛΑΙΟ : Κατηγορία Α ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ (8 ΠΕΡΙΟΔΟΙ) 1. Ποια στάση και ποιο άξονα θα επιλέγατε για να δώσετε στο σώμα σας τη μικρότερη ροπή αδρανείας; Τη μεγαλύτερη;. Οι κύλινδροι του σχήματος
ΚΕΦΑΛΑΙΟ : Κατηγορία Α ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ (8 ΠΕΡΙΟΔΟΙ) 1. Ποια στάση και ποιο άξονα θα επιλέγατε για να δώσετε στο σώμα σας τη μικρότερη ροπή αδρανείας; Τη μεγαλύτερη;. Οι κύλινδροι του σχήματος
ΕΝΟΤΗΤΑ ΤΗΛΕΦΩΝΙΑ ΕΙΣΑΓΩΓΗ
 ΕΝΟΤΗΤΑ 4 4.0 ΤΗΛΕΦΩΝΙΑ ΕΙΣΑΓΩΓΗ Η τηλεφωνία είναι ένα βασικό και πολύ διαδεδομένο ηλεκτρολογικό επικοινωνιακό σύστημα. Η τηλεφωνία είναι από τα παλαιότερα ηλεκτρολογικά επικοινωνιακά συστήματα. Το τηλέφωνο
ΕΝΟΤΗΤΑ 4 4.0 ΤΗΛΕΦΩΝΙΑ ΕΙΣΑΓΩΓΗ Η τηλεφωνία είναι ένα βασικό και πολύ διαδεδομένο ηλεκτρολογικό επικοινωνιακό σύστημα. Η τηλεφωνία είναι από τα παλαιότερα ηλεκτρολογικά επικοινωνιακά συστήματα. Το τηλέφωνο
ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ
 ΤΕΙ ΙΟΝΙΩΝ ΝΗΣΩΝ ΤΜΗΜΑ ΕΦΑΡΜΟΓΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΣΤΗ ΔΙΟΙΚΗΣΗ ΚΑΙ ΣΤΗΝ ΟΙΚΟΝΟΜΙΑ 1 Ο ΜΑΘΗΜΑ ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΑΠΟΣΤΟΛΙΑ ΠΑΓΓΕ Πληροφορική Η επιστήμη που ασχολείται με: τη συλλογή την αποθήκευση την
ΤΕΙ ΙΟΝΙΩΝ ΝΗΣΩΝ ΤΜΗΜΑ ΕΦΑΡΜΟΓΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΣΤΗ ΔΙΟΙΚΗΣΗ ΚΑΙ ΣΤΗΝ ΟΙΚΟΝΟΜΙΑ 1 Ο ΜΑΘΗΜΑ ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΑΠΟΣΤΟΛΙΑ ΠΑΓΓΕ Πληροφορική Η επιστήμη που ασχολείται με: τη συλλογή την αποθήκευση την
ΔΙΑΓΩΝΙΣΜΑ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ ΚΥΜΑΤΑ-ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΝΙΚΟΣ ΣΑΜΑΡΑΣ ΝΙΚΟΣ ΚΟΥΝΕΛΗΣ ΘΕΜΑ Α
 ΔΙΑΓΩΝΙΣΜΑ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ ΚΥΜΑΤΑ-ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ 28-2-2015 ΕΙΣΗΓΗΤΕΣ ΝΙΚΟΣ ΣΑΜΑΡΑΣ ΝΙΚΟΣ ΚΟΥΝΕΛΗΣ ΘΕΜΑ Α Στις ερωτήσεις 1-4 να γράψετε στο τετράδιό σας τον αριθµό της ερώτησης και δίπλα το
ΔΙΑΓΩΝΙΣΜΑ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ ΚΥΜΑΤΑ-ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ 28-2-2015 ΕΙΣΗΓΗΤΕΣ ΝΙΚΟΣ ΣΑΜΑΡΑΣ ΝΙΚΟΣ ΚΟΥΝΕΛΗΣ ΘΕΜΑ Α Στις ερωτήσεις 1-4 να γράψετε στο τετράδιό σας τον αριθµό της ερώτησης και δίπλα το
Α.2 Μαθησιακά Αποτελέσματα Έχοντας ολοκληρώσει επιτυχώς το μάθημα οι εκπαιδευόμενοι θα είναι σε θέση να:
 ΒΑΣΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ Τίτλος Μαθήματος Μεθοδολογίες και Συστήματα Βιομηχανικής Αυτοματοποίησης Κωδικός Μαθήματος Μ3 Θεωρία / Εργαστήριο Θεωρία + Εργαστήριο Πιστωτικές μονάδες 4 Ώρες Διδασκαλίας 2Θ+1Ε Τρόπος/Μέθοδοι
ΒΑΣΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ Τίτλος Μαθήματος Μεθοδολογίες και Συστήματα Βιομηχανικής Αυτοματοποίησης Κωδικός Μαθήματος Μ3 Θεωρία / Εργαστήριο Θεωρία + Εργαστήριο Πιστωτικές μονάδες 4 Ώρες Διδασκαλίας 2Θ+1Ε Τρόπος/Μέθοδοι
ΑΡΧΗ 1ης ΣΕΛΙΔΑΣ ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : ΦΕΒΡΟΥΑΡΙΟΣ 2016 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 6
 ΑΡΧΗ 1ης ΣΕΛΙΔΑΣ ΘΕΜΑ 1 Ο : ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : ΦΕΒΡΟΥΑΡΙΟΣ 016 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 6 Στις παρακάτω ερωτήσεις 1 έως 3 να γράψετε στο τετράδιό
ΑΡΧΗ 1ης ΣΕΛΙΔΑΣ ΘΕΜΑ 1 Ο : ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : ΦΕΒΡΟΥΑΡΙΟΣ 016 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 6 Στις παρακάτω ερωτήσεις 1 έως 3 να γράψετε στο τετράδιό
Τμήμα Ηλεκτρολόγων Μηχανικών ΧΑΡΑΚΤΗΡΙΣΤΙΚΕΣ ΡΟΠΗΣ ΤΑΧΥΤΗΤΑΣ ΕΠΑΓΩΓΙΚΩΝ ΚΙΝΗΤΗΡΩΝ
 Ένας που κατασκευάζεται ώστε να παρουσιάζει μεγάλη αντίσταση δρομέα η ροπή εκκίνησης του είναι αρκετά υψηλή αλλά το ίδιο υψηλή είναι και η ολίσθηση του στις κανονικές συνθήκες λειτουργίας Όμως επειδή Pconv=(1-s)PAG,
Ένας που κατασκευάζεται ώστε να παρουσιάζει μεγάλη αντίσταση δρομέα η ροπή εκκίνησης του είναι αρκετά υψηλή αλλά το ίδιο υψηλή είναι και η ολίσθηση του στις κανονικές συνθήκες λειτουργίας Όμως επειδή Pconv=(1-s)PAG,
Τεχνολογία Λογισμικού & Πνευματική Ιδιοκτησία. ΜΥΥ-106 Εισαγωγή στους Η/Υ και στην Πληροφορική
 Τεχνολογία Λογισμικού & Πνευματική Ιδιοκτησία ΜΥΥ-106 Εισαγωγή στους Η/Υ και στην Πληροφορική Κύκλος ζωής λογισμικού source: Forouzan, Mosharraf Τροποποιήσεις διόρθωση σφαλμάτων, αλλαγή απαιτήσεων χρήστη,...
Τεχνολογία Λογισμικού & Πνευματική Ιδιοκτησία ΜΥΥ-106 Εισαγωγή στους Η/Υ και στην Πληροφορική Κύκλος ζωής λογισμικού source: Forouzan, Mosharraf Τροποποιήσεις διόρθωση σφαλμάτων, αλλαγή απαιτήσεων χρήστη,...
Απλά ευέλικτα προσιτά
 Ρομποτικά σύστημα, τόσο απλά, όσο θα έπρεπε να είναι! Απλά ευέλικτα προσιτά TEXNIKEΣ ΠΡΟΔΙΑΓΡΑΦΕΣ: www.universal-robots.com/products 195 ΗΜΕΡΕΣ ΜΕΣΗ ΔΙΑΡΚΕΙΑ ΑΠΟΣΒΕΣΗΣ Επιτέλους, ρομποτικά συστήματα, προσιτά
Ρομποτικά σύστημα, τόσο απλά, όσο θα έπρεπε να είναι! Απλά ευέλικτα προσιτά TEXNIKEΣ ΠΡΟΔΙΑΓΡΑΦΕΣ: www.universal-robots.com/products 195 ΗΜΕΡΕΣ ΜΕΣΗ ΔΙΑΡΚΕΙΑ ΑΠΟΣΒΕΣΗΣ Επιτέλους, ρομποτικά συστήματα, προσιτά
Έλεγχος Κίνησης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Αυτόματος Έλεγχος Συστημάτων Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Αυτόματος Έλεγχος Συστημάτων Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
Ερωτήσεις του τύπου Σωστό /Λάθος
 Ερωτήσεις του τύπου Σωστό /Λάθος Οδηγία: Για να απαντήσετε στις παρακάτω ερωτήσεις, αρκεί να γράψετε στο φύλλο απαντήσεων τον αριθμό της ερώτησης και δεξιά απ αυτόν το γράμμα Σ αν την κρίνετε σωστή ή το
Ερωτήσεις του τύπου Σωστό /Λάθος Οδηγία: Για να απαντήσετε στις παρακάτω ερωτήσεις, αρκεί να γράψετε στο φύλλο απαντήσεων τον αριθμό της ερώτησης και δεξιά απ αυτόν το γράμμα Σ αν την κρίνετε σωστή ή το
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ
 ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΘΕΜΑ ο Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις -4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση.. Τα δύο
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΘΕΜΑ ο Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις -4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση.. Τα δύο
1.Η δύναμη μεταξύ δύο φορτίων έχει μέτρο 120 N. Αν η απόσταση των φορτίων διπλασιαστεί, το μέτρο της δύναμης θα γίνει:
 ΗΛΕΚΤΡΟΜΑΓΝΗΤΙΣΜΟΣ ΕΡΩΤΗΣΕΙΣ ΠΟΛΛΑΠΛΩΝ ΕΠΙΛΟΓΩΝ Ηλεκτρικό φορτίο Ηλεκτρικό πεδίο 1.Η δύναμη μεταξύ δύο φορτίων έχει μέτρο 10 N. Αν η απόσταση των φορτίων διπλασιαστεί, το μέτρο της δύναμης θα γίνει: (α)
ΗΛΕΚΤΡΟΜΑΓΝΗΤΙΣΜΟΣ ΕΡΩΤΗΣΕΙΣ ΠΟΛΛΑΠΛΩΝ ΕΠΙΛΟΓΩΝ Ηλεκτρικό φορτίο Ηλεκτρικό πεδίο 1.Η δύναμη μεταξύ δύο φορτίων έχει μέτρο 10 N. Αν η απόσταση των φορτίων διπλασιαστεί, το μέτρο της δύναμης θα γίνει: (α)
H Εξέλιξη των υπολογιστών
 H Εξέλιξη των υπολογιστών January 2014 Γιάννης Συρίγος Κοντογιάννη Μαρία Κωνσταντίνα Μαυροείδη Ανδριάνα Τζανίδου Γιώργος Παπαδάκος 1. Ο Μηχανισμός των Αντικυθήρων 2. Ανακαλύφθηκε σε ναυάγιο ανοιχτά του
H Εξέλιξη των υπολογιστών January 2014 Γιάννης Συρίγος Κοντογιάννη Μαρία Κωνσταντίνα Μαυροείδη Ανδριάνα Τζανίδου Γιώργος Παπαδάκος 1. Ο Μηχανισμός των Αντικυθήρων 2. Ανακαλύφθηκε σε ναυάγιο ανοιχτά του
ΜΑΘΗΜΑ /ΤΑΞΗ: ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ ΟΝΟΜΑΤΕΠΩΝΥMΟ: ΗΜΕΡΟΜΗΝΙΑ: 28/2/2016
 ΜΑΘΗΜΑ /ΤΑΞΗ: ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ ΟΝΟΜΑΤΕΠΩΝΥMΟ: ΗΜΕΡΟΜΗΝΙΑ: 8//06 ΕΞΕΤΑΣΤΕΑ ΥΛΗ: ΣΤΕΡΕΟ ΚΑΙ Doppler ΘΕΜΑ Α Α Μικρότερη συχνότητα ακούει ένας παρατηρητής σε σχέση με την πραγματική συχνότητα
ΜΑΘΗΜΑ /ΤΑΞΗ: ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ ΟΝΟΜΑΤΕΠΩΝΥMΟ: ΗΜΕΡΟΜΗΝΙΑ: 8//06 ΕΞΕΤΑΣΤΕΑ ΥΛΗ: ΣΤΕΡΕΟ ΚΑΙ Doppler ΘΕΜΑ Α Α Μικρότερη συχνότητα ακούει ένας παρατηρητής σε σχέση με την πραγματική συχνότητα
ΚΙΝΗΜΑΤΙΚΗ ΥΛΙΚΟΥ ΣΗΜΕΙΟΥ ΣΕ ΜΙΑ ΔΙΑΣΤΑΣΗ
 ΚΙΝΗΜΑΤΙΚΗ ΥΛΙΚΟΥ ΣΗΜΕΙΟΥ ΣΕ ΜΙΑ ΔΙΑΣΤΑΣΗ ΘΕΣΗ ΤΡΟΧΙΑ ΜΕΤΑΤΟΠΙΣΗ ΚΑΙ ΔΙΑΣΤΗΜΑ. Παρατηρώντας τις εικόνες προσπαθήστε να ορίσετε τις θέσεις των διαφόρων ηρώων των κινουμένων σχεδίων. Ερώτηση: Πότε ένα σώμα
ΚΙΝΗΜΑΤΙΚΗ ΥΛΙΚΟΥ ΣΗΜΕΙΟΥ ΣΕ ΜΙΑ ΔΙΑΣΤΑΣΗ ΘΕΣΗ ΤΡΟΧΙΑ ΜΕΤΑΤΟΠΙΣΗ ΚΑΙ ΔΙΑΣΤΗΜΑ. Παρατηρώντας τις εικόνες προσπαθήστε να ορίσετε τις θέσεις των διαφόρων ηρώων των κινουμένων σχεδίων. Ερώτηση: Πότε ένα σώμα
Γ ΛΥΚΕΙΟΥ ΟΙ ΚΙΝΗΣΕΙΣ ΤΩΝ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ
 Όποτε χρησιμοποιείτε το σταυρό ή το κλειδί της εργαλειοθήκης σας για να ξεσφίξετε τα μπουλόνια ενώ αντικαθιστάτε ένα σκασμένο λάστιχο αυτοκινήτου, ολόκληρος ο τροχός αρχίζει να στρέφεται και θα πρέπει
Όποτε χρησιμοποιείτε το σταυρό ή το κλειδί της εργαλειοθήκης σας για να ξεσφίξετε τα μπουλόνια ενώ αντικαθιστάτε ένα σκασμένο λάστιχο αυτοκινήτου, ολόκληρος ο τροχός αρχίζει να στρέφεται και θα πρέπει
[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]
![[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]](/thumbs/61/46095927.jpg "[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]") ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 5: ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΕΡΓΟ ΔΥΝΑΜΗΣ ΣΤΗ ΣΤΡΟΦΙΚΗ ΚΙΝΗΣΗ 34. Μία κατακόρυφη ράβδος μάζας μήκους, μπορεί να περιστρέφεται στο κατακόρυφο επίπεδο γύρω από
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 5: ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΕΡΓΟ ΔΥΝΑΜΗΣ ΣΤΗ ΣΤΡΟΦΙΚΗ ΚΙΝΗΣΗ 34. Μία κατακόρυφη ράβδος μάζας μήκους, μπορεί να περιστρέφεται στο κατακόρυφο επίπεδο γύρω από
Ερευνα με τίτλο: ΣΕ ΠΟΙΟΝ ΒΑΘΜΟ ΤΟ ΠΛΑΤΟΣ ΤΩΝ ΕΛΙΚΩΝ ΕΠΗΡΕΑΖΕΙ ΤΗΝ ΚΙΝΗΣΗ ΤΟΥ ΕΛΙΚΟΠΤΕΡΟΥ
 Ερευνα με τίτλο: ΣΕ ΠΟΙΟΝ ΒΑΘΜΟ ΤΟ ΠΛΑΤΟΣ ΤΩΝ ΕΛΙΚΩΝ ΕΠΗΡΕΑΖΕΙ ΤΗΝ ΚΙΝΗΣΗ ΤΟΥ ΕΛΙΚΟΠΤΕΡΟΥ Νάγια Βαλάκου-Μυρτώ Βόβολη 2 ο Γυμνάσιο Μεταμόρφωσης Γ 1-2016/2017 Π Ε Ρ Ι Ε Χ Ο Μ Ε Ν Α Προϊστορία σελίδα 3 1.
Ερευνα με τίτλο: ΣΕ ΠΟΙΟΝ ΒΑΘΜΟ ΤΟ ΠΛΑΤΟΣ ΤΩΝ ΕΛΙΚΩΝ ΕΠΗΡΕΑΖΕΙ ΤΗΝ ΚΙΝΗΣΗ ΤΟΥ ΕΛΙΚΟΠΤΕΡΟΥ Νάγια Βαλάκου-Μυρτώ Βόβολη 2 ο Γυμνάσιο Μεταμόρφωσης Γ 1-2016/2017 Π Ε Ρ Ι Ε Χ Ο Μ Ε Ν Α Προϊστορία σελίδα 3 1.
ΨΗΦΙΑΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΒΟΗΘΗΜΑ «ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ» ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ
 ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 4o ΔΙΑΓΩΝΙΣΜΑ ΘΕΜΑΤΑ ΘΕΜΑ Α Στις ημιτελείς προτάσεις 1-4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση, η
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 4o ΔΙΑΓΩΝΙΣΜΑ ΘΕΜΑΤΑ ΘΕΜΑ Α Στις ημιτελείς προτάσεις 1-4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση, η
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 2008 ΕΚΦΩΝΗΣΕΙΣ
 ΘΕΜΑ ο ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 00 ΕΚΦΩΝΗΣΕΙΣ Να γράψετε στο τετράδιό σας τον αριθµό καθεµιάς από τις παρακάτω ερωτήσεις -4 και δίπλα το γράµµα που αντιστοιχεί στη σωστή απάντηση.. Τα
ΘΕΜΑ ο ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 00 ΕΚΦΩΝΗΣΕΙΣ Να γράψετε στο τετράδιό σας τον αριθµό καθεµιάς από τις παρακάτω ερωτήσεις -4 και δίπλα το γράµµα που αντιστοιχεί στη σωστή απάντηση.. Τα
ΡΟΜΠΟΤΟΤΙΚΗ ΚΑΙ ΔΙΑΣΤΗΜΑ
 ΡΟΜΠΟΤΟΤΙΚΗ ΚΑΙ ΔΙΑΣΤΗΜΑ Μπουρνελάς Θάνος Νικητάκης Θάνος Ραφτόπουλος Στέφανος Τσίρος Δημήτρης Ψυχάρης Ιωάννης Τμήμα Β3,Β4 ΕΙΣΑΓΩΓΗ ΚΡΙΤΗΡΙΟ ΕΠΙΛΟΓΗΣ ΘΕΜΑΤΟΣ Η καθοριστική σημασία που έχει στη σύγχρονη
ΡΟΜΠΟΤΟΤΙΚΗ ΚΑΙ ΔΙΑΣΤΗΜΑ Μπουρνελάς Θάνος Νικητάκης Θάνος Ραφτόπουλος Στέφανος Τσίρος Δημήτρης Ψυχάρης Ιωάννης Τμήμα Β3,Β4 ΕΙΣΑΓΩΓΗ ΚΡΙΤΗΡΙΟ ΕΠΙΛΟΓΗΣ ΘΕΜΑΤΟΣ Η καθοριστική σημασία που έχει στη σύγχρονη
ΣΥΓΧΡΟΝΗ ΤΕΧΝΟΛΟΓΙΑ ΣΤΗ ΜΗΧΑΝΟΛΟΓΙΑ. ΕΚΠΑΙΔΕΥΤΗΣ: Ανδρέας Ιωάννου
 ΣΥΓΧΡΟΝΗ ΤΕΧΝΟΛΟΓΙΑ ΣΤΗ ΜΗΧΑΝΟΛΟΓΙΑ 1 ΑΥΤΟΜΑΤΗ ΓΕΜΙΣΤΙΚΗ 2 3 ΒΑΣΙΚΕΣ ΑΡΧΕΣ ΡΥΘΜΙΣΗΣ ΚΑΙ ΕΛΕΓΧΟΥ ΑΥΤΟΜΑΤΩΝ ΛΕΙΤΟΥΡΓΕΙΩΝ Ο αυτοματισμός περιλαμβάνει σχεδόν κάθε μηχανισμό ή συσκευή που ελαττώνει το ποσό
ΣΥΓΧΡΟΝΗ ΤΕΧΝΟΛΟΓΙΑ ΣΤΗ ΜΗΧΑΝΟΛΟΓΙΑ 1 ΑΥΤΟΜΑΤΗ ΓΕΜΙΣΤΙΚΗ 2 3 ΒΑΣΙΚΕΣ ΑΡΧΕΣ ΡΥΘΜΙΣΗΣ ΚΑΙ ΕΛΕΓΧΟΥ ΑΥΤΟΜΑΤΩΝ ΛΕΙΤΟΥΡΓΕΙΩΝ Ο αυτοματισμός περιλαμβάνει σχεδόν κάθε μηχανισμό ή συσκευή που ελαττώνει το ποσό
Μονάδες 5 1.3 β. Μονάδες 5 1.4 Μονάδες 5
 ΘΕΜΑ 1 ο ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΑΠΟΛΥΤΗΡΙΕΣ ΕΞΕΤΑΣΕΙΣ ΤΑΞΗΣ ΕΣΠΕΡΙΝΟΥ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ ΕΥΤΕΡΑ 29 ΜΑΪΟΥ 2006 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ: ΦΥΣΙΚΗ ΣΥΝΟΛΟ ΣΕΛΙ ΩΝ: ΕΠΤΑ (7) Για τις ημιτελείς
ΘΕΜΑ 1 ο ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΑΠΟΛΥΤΗΡΙΕΣ ΕΞΕΤΑΣΕΙΣ ΤΑΞΗΣ ΕΣΠΕΡΙΝΟΥ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ ΕΥΤΕΡΑ 29 ΜΑΪΟΥ 2006 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ: ΦΥΣΙΚΗ ΣΥΝΟΛΟ ΣΕΛΙ ΩΝ: ΕΠΤΑ (7) Για τις ημιτελείς
ΓΡΑΠΤΗ ΕΡΓΑΣΙΑ ΣΤΗΝ ΤΕΧΝΟΛΟΓΙΑ ΕΛΙΚΟΠΤΕΡΟ
 2 ο Γ/σιο Μεταμόρφωσης ΓΡΑΠΤΗ ΕΡΓΑΣΙΑ ΣΤΗΝ ΤΕΧΝΟΛΟΓΙΑ ΜΕΤΑΦΟΡΕΣ- ΕΠΙΚΟΙΝΩΝΙΕΣ ΕΛΙΚΟΠΤΕΡΟ ΑΛΕΞΑΝΔΡΟΣ ΜΟΥΧΑΣΙΡΗΣ Α2 ΜΑΙΟΣ 2017 1. Ανάλυση της γενικής τεχνολογικής ενότητας στην οποία ανήκει το έργο. Τα μέσα
2 ο Γ/σιο Μεταμόρφωσης ΓΡΑΠΤΗ ΕΡΓΑΣΙΑ ΣΤΗΝ ΤΕΧΝΟΛΟΓΙΑ ΜΕΤΑΦΟΡΕΣ- ΕΠΙΚΟΙΝΩΝΙΕΣ ΕΛΙΚΟΠΤΕΡΟ ΑΛΕΞΑΝΔΡΟΣ ΜΟΥΧΑΣΙΡΗΣ Α2 ΜΑΙΟΣ 2017 1. Ανάλυση της γενικής τεχνολογικής ενότητας στην οποία ανήκει το έργο. Τα μέσα
Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2. Προγραμματισμός Φυσικών Συστημάτων. Συστήματα Πραγματικών Εφαρμογών. Νέα Ψηφιακά Αντικείμενα
 Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά