Εισαγωγή στη Ροµποτική
|
|
|
- Γάννης Αγγελίδου
- 9 χρόνια πριν
- Προβολές:
Transcript
1 Εισαγωγή στη Ροµποτική Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007

2 Modern Times (1936) 1
3 Modern Times (c. 2000) 2
4 Ροµπότ και αυτοµατισµοί: Ιστορική αναδροµή Ο Αρχύτας ο Ταραντίνος ( π.χ.) λέγεται πως κατασκεύασε µία ιπτάµενη µηχανή ( πετοµηχανή ή περιστερά ) που κινούνταν µε ατµό και µπορούσε να διανύσει απόσταση µέχρι και 200µ. Ο Μηχανισµός των Αντικυθήρων ( π.χ.) είναι ο αρχαιότερος αυτοµατισµός που σώζεται ως σήµερα (Αρχ. Μουσείο Αθηνών). Μπορούσε να προβλέψει τις ϑέσεις των πλανητών. Ο Ηρων ο Αλεξανδρεύς ( µ.χ.) κατασκεύασε το E πρώτο προγραµµατιζόµενο ϱοµπότ: ένα αυτοκινούµενο τρίκυκλο. 3
 είναι ο αρχαιότερος αυτοµατισµός που σώζεται ως σήµερα (Αρχ.")
5 Ροµπότ και αυτοµατισµοί: Ιστορική αναδροµή (2) Ο Αραβας Al-Jazari ( µ.χ.) κατασκεύασε το πρώτο ανθρωποειδές ϱοµπότ: ένα προγραµµατιζόµενο τυµπανιστή. Ο Ιταλός Leonardo da Vinci ( µ.χ.) σχεδίασε (και ίσως κατασκεύασε) ένα ανθρωποειδές ϱοµπότ µε πανοπλία. Το ϱοµπότ µπορούσε να ανασηκώνεται και να κινεί τα χέρια και το κεφάλι του. Είναι το παλαιότερο σχέδιο ανθρωποειδούς ϱοµπότ που σώζεται ως σήµερα. 4
 σχεδίασε (και ίσως κατασκεύασε) ένα ανθρωποειδές ϱοµπότ µε πανοπλία.")
6 Ροµπότ και αυτοµατισµοί: Ιστορική αναδροµή (3) Το 1738 ο Γάλλος Jacques de Vaucanson κατασκεύασε µια ϱοµποτική πάπια που είχε τη δυνατότητα να τρώει σπόρους και να κουνάει τα ϕτερά της. Το 1796 ο Ιάπωνας Hisashige Tanaka κατασκεύασε ϱοµποτικούς µηχανισµούς που µπορούσαν να σερβίρουν τσάι ή να Ϲωγραφίζουν γιαπωνέζικα ιδεογράµµατα. Το 1898 ο Σέρβος Nikola Tesla παρουσίασε το πρώτο τηλεχειριζόµενο πλοίο. 5

7 Ροµπότ και αυτοµατισµοί: Ιστορική αναδροµή (4) Το 1920 ο Τσέχος συγγραφέας Karel Capek εισάγει τη λέξη robot στο ϑεατρικό του έργο R.U.R. (Rossum s Universal Robots). Το 1930 η εταιρία Westinghouse Electric Corporation (Η.Π.Α.) κατασκευάζει το ανθρωποειδές ϱοµπότ Elektro που µπορούσε να µιλά, να περπατά, και να καπνίζει. Το 1942 ο Ρώσο-Αµερικανός Isaac Asimov εισάγει τη λέξη robotics στο χρονογράφηµά του Runaround. 6
 κατασκευάζει το ανθρωποειδές ϱοµπότ Elektro που µπορούσε να µιλά, να περπατά, και να καπνίζει.")
8 Ροµπότ και αυτοµατισµοί: Ιστορική αναδροµή (5) Το 1948 κατασκευάζεται το πρώτο αυτόνοµο ϱοµπότ Elsie στο πανεπιστήµιο του Bristol (Αγγλία), που κινούνταν µε ϐάση ερεθίσµατα που λάµβανε από αισθητήρες ϕωτός. Ο Αµερικάνος George Devol κατασκεύασε το 1954 το πρώτο σύγχρονο, ψηφιακά προγραµµατιζόµενο ϱοµποτικό ϐραχίονα Unimate. Η εταιρία General Motors (Η.Π.Α.) αγοράζει και εγκαθιστά το πρώτο ϱοµπότ Unimate το Το ϱοµπότ χρησιµοποιήθηκε για εκφόρτωση µετάλλου από µια µηχανή χυτηρίου. 7
 αγοράζει και εγκαθιστά το πρώτο ϱοµπότ Unimate το 1961.")
9 Ροµπότ: Ορισµός Ροµπότ είναι ένα προγραµµατιζόµενο σύστηµα αυτοµάτου ελέγχου, του οποίου η εµφάνιση και οι κινήσεις συχνά δίνουν την εντύπωση πως ενεργεί κατά ϐούληση. 8

10 οµικά συστατικά ενός ροµπότ Αισθητήρες (sensors) που παρέχουν στο ϱοµπότ πληροφορίες σχετικά µε το εξωτερικό του περιβάλλον. Στοιχεία δράσης (end-effectors) που ασκούν δυνάµεις σε αντικείµενα και µεταβάλλουν το εξωτερικό περιβάλλον του ϱοµπότ. Ελεγκτής (controller) που επεξεργάζεται την πληροφορία από τους αισθητήρες και οδηγεί τα στοιχεία δράσης. 9

11 Αισθητήρες ροµπότ Οπτικοί: Εκτίµησης απόστασης µε LASER (laser range scanners), µονοφθαλµικής/στερεοσκοπικής όρασης (monocular/binocular vision)), αισθητήρες ϕωτός (light sensors). Ηλεκτροµαγνητικοί: Συνήθως RADAR (Radio Detection and Ranging). Μηχανικοί: Θέσης (π.χ. GPS), επιτάχυνσης, πίεσης, κίνησης (οδόµετρα), προσανατολισµού (γυροσκόπια) κ.α. Ακουστικοί: Συνήθως αισθητήρες υπερήχων για εκτίµηση απόστασης (SONAR; Sound Navigation And Ranging). 10
, επιτάχυνσης, πίεσης, κίνησης (οδόµετρα)")
12 Κινητήρες ροµπότ Ηλεκτρικοί: Σερβοκινητήρες (DC/AC motors, servos), ϐηµατικοί κινητήρες (stepper motors). Οι συνηθέστεροι κινητήρες ϱοµπότ σήµερα. Πνευµατικοί: Αεροσυµπιεστές (air muscles). Υδραυλικοί: Κίνηση µε έµβολα λαδιού ή άλλων υγρών. Πιεζοηλεκτρικοί: Βασίζονται στο αντίστροφο πιεζοηλεκτρικό ϕαινόµενο (παραµόρφωση έως και 0.1% κεραµικών υλικών σε ηλεκτρικό πεδίο). 11

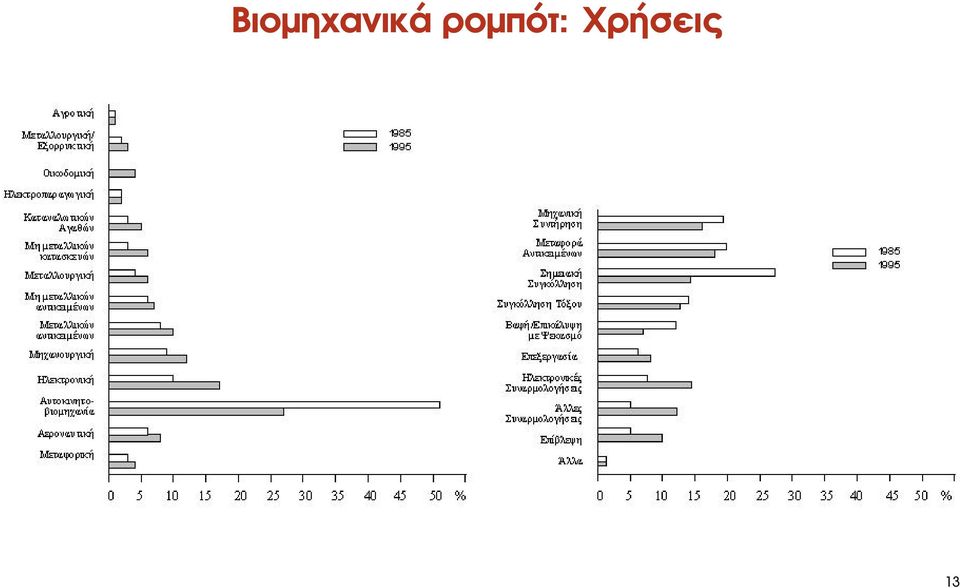
13 Βιοµηχανικά ροµπότ (industrial robots) Τα ϐιοµηχανικά ϱοµπότ χρησιµοποιούνται για εργασίες που απαιτούν ταχύτητα, ακρίβεια, και αξιοπιστία. Σε αυτές τις εργασίες τα ϱοµπότ είναι καλύτερα από τον άνθρωπο. Εφαρµογές: αυτοκινητοβιοµηχανία, ηλεκτρονική, µηχανουργική, µεταφορά ϕορτίων, κ.α. Σήµερα υπάρχουν περίπου 1 εκατοµµύριο εγκατεστηµένα ϱοµπότ στη ϐιοµηχανία (τα περισσότερα στην Ιαπωνία και στην Ε.Ε.). 12

14 Βιοµηχανικά ροµπότ: Χρήσεις 13
15 Βιοµηχανικά ροµπότ: Κριτήρια επιθυµητότητας Πλεονεκτήµατα: Ασφάλεια των εργαζοµένων (ϐαριά ϕορτία, τοξικά αέρια, κ.α.) Παραγωγικότητα (ταχύτητα, ακρίβεια, ευελιξία) Εργασία υπό αντίξοες συνθήκες (υποθαλλάσιες και διαστηµικές έρευνες, σήραγγες, κ.α.) Μειονεκτήµατα: Κυρίως κοινωνικής ϕύσης (ανακατανοµή εργασίας) 14
 Μειονεκτήµατα: Κυρίως κοινωνικής ϕύσης (ανακατανοµή εργασίας) 14")
16 Ροµποτικοί χειριστές (manipulators) 15

17 Γεωµετρία ροµποτικών χειριστών Ανάλογα µε τη γεωµετρία τους, οι ϱοµποτικοί χειριστές χαρακτηρίζονται ως: Ορθογωνικοί (rectangular) Κυλινδρικοί (cylindrical) Σφαιρικοί (spherical) Αρθρωτοί (articulated) 16
 Σφαιρικοί (spherical)")
18 Κινητά ροµπότ (mobile robots) Εντροχα (wheeled): συνήθως µε 3 ή 4 τροχούς, ή ερπυστριοφόρα. υναµικής ευστάθειας (dynamic balance): κίνηση σε 2 τροχούς (Segway) ή πάνω σε µπάλλα (Ballbot, CMU). Αµφικατευθυντικά (omnidirectional): π.χ. µε τροχούς Mecanum. 17
 ή πάνω σε µπάλλα (Ballbot, CMU).")
19 Βαδίζοντα ροµπότ (walking/legged robots) Κυρίως δίποδα, τετράποδα, και εξάποδα. E Βασικές τεχνικές ϐαδίσµατος: Zero Moment Point (ZMP), dynamic balance, κ.α. Τελευταία έχουν αναπτυχθεί αλγόριθµοι µάθησης για ϐάδισµα (reinforcement/imitation learning). 18

20 Ιπτάµενα ροµπότ (flying robots) Ενα από τα ϱοµποτικά ελικόπτερα του εργαστηρίου µας. 19

21 Οικιακά ροµπότ (home robots) Μία ϱοµποτική ηλεκτρική σκούπα. 20
22 Και πολλά άλλα... Τηλεκατευθυνόµενα ϱοµπότ (teleoperated robots). Υποβρύχια ϱοµπότ (underwater robots). Ροµποτικά σµήνη (robot swarms). Πολυµορφικά ϱοµπότ (reconfigurable robots). Νανοροµπότ (nanorobot, 10 9 m)
Ρομποτική Σύντομη Εισαγωγή
 Ρομποτική Σύντομη Εισαγωγή Ευτύχιος Χριστοφόρου Τι είναι ένα Ρομπότ; 1 Ιστορία Τάλος: Κατασκευή του Ήφαιστου που δόθηκε δώρο στο βασιλιά τηςκρήτης Μίνωα για να προστατεύει το νησί. Πρώτη χρήση της λέξης
Ρομποτική Σύντομη Εισαγωγή Ευτύχιος Χριστοφόρου Τι είναι ένα Ρομπότ; 1 Ιστορία Τάλος: Κατασκευή του Ήφαιστου που δόθηκε δώρο στο βασιλιά τηςκρήτης Μίνωα για να προστατεύει το νησί. Πρώτη χρήση της λέξης
ΑΡΧΑΙΑ ΕΛΛΑΔΑ. Η αυτόματη υπηρέτρια του Φίλωνος
 ΝΑΝΟΡΟΜΠΟΣ ΟΡΙΜΟ Η λέξη ρομπότ έγινε για πρώτη φορά γνωστή στο ευρύ κοινό από τον Σσέχο συγγραφέα Karel Capek στο έργο του, Rossum s Universal Robots, το 1920. Σο έργο ξεκινά σε ένα εργοστάσιο που κατασκευάζει
ΝΑΝΟΡΟΜΠΟΣ ΟΡΙΜΟ Η λέξη ρομπότ έγινε για πρώτη φορά γνωστή στο ευρύ κοινό από τον Σσέχο συγγραφέα Karel Capek στο έργο του, Rossum s Universal Robots, το 1920. Σο έργο ξεκινά σε ένα εργοστάσιο που κατασκευάζει
Ευφυή Κινούμενα Ρομπότ
 Ευφυή Κινούμενα Ρομπότ Δρ Γιώργος Α. Δημητρίου Ακαδημία Ρομποτικής Τμήμα Πληροφορικής και Μηχανικών Υπολογιστών Σχολή Μηχανικής και Εφαρμοσμένων Επιστημών Πανεπιστήμιο Frederick, Λεμεσός, Κύπρος http://akrob.frederick.ac.cy
Ευφυή Κινούμενα Ρομπότ Δρ Γιώργος Α. Δημητρίου Ακαδημία Ρομποτικής Τμήμα Πληροφορικής και Μηχανικών Υπολογιστών Σχολή Μηχανικής και Εφαρμοσμένων Επιστημών Πανεπιστήμιο Frederick, Λεμεσός, Κύπρος http://akrob.frederick.ac.cy
Η ΙΣΤΟΡΙΑ ΤΩΝ ΡΟΜΠΟΤ
 Η ΙΣΤΟΡΙΑ ΤΩΝ ΡΟΜΠΟΤ ΠΡΙΝ ΤΙΣ ΜΗΧΑΝΕΣ Ο άνθρωπος πριν ανακάλυψη των μηχανών για την βοήθεια του χρησιμοποιούσε άλλους τρόπους όπως η χρήση των ζώων και άλλων ανθρώπων καταργώντας την ελεύθερη βούληση τους
Η ΙΣΤΟΡΙΑ ΤΩΝ ΡΟΜΠΟΤ ΠΡΙΝ ΤΙΣ ΜΗΧΑΝΕΣ Ο άνθρωπος πριν ανακάλυψη των μηχανών για την βοήθεια του χρησιμοποιούσε άλλους τρόπους όπως η χρήση των ζώων και άλλων ανθρώπων καταργώντας την ελεύθερη βούληση τους
Τι είναι ρομπότ. Εκπαιδευτική ρομποτική Lego
 Εκπαιδευτική ρομποτική Lego Τι είναι ρομπότ Πανεπιστήμιο Αιγαίου / Τμήμα Μηχανικών Πληροφοριακών και Επικοινωνιακών Συστημάτων ΠΜΣ Διδακτική Πληροφορικής & Επικοινωνιών / Φιλίππου Σ. - Μαυρόπουλος Ν. icsdweb.aegean.gr/edurobots
Εκπαιδευτική ρομποτική Lego Τι είναι ρομπότ Πανεπιστήμιο Αιγαίου / Τμήμα Μηχανικών Πληροφοριακών και Επικοινωνιακών Συστημάτων ΠΜΣ Διδακτική Πληροφορικής & Επικοινωνιών / Φιλίππου Σ. - Μαυρόπουλος Ν. icsdweb.aegean.gr/edurobots
«Robot από τον Τάλω στα σύγχρονα προγραμματισμένα Robot» Βασίλης Κυρβασίλης Γ3, Ελληνικό Κολλέγιο Θεσσαλονίκης
 «Robot από τον Τάλω στα σύγχρονα προγραμματισμένα Robot» Βασίλης Κυρβασίλης Γ3, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κος Παρασκευόπουλος Κωνσταντίνος Περίληψη Η ρομποτική αποτελεί ένα σύγχρονο
«Robot από τον Τάλω στα σύγχρονα προγραμματισμένα Robot» Βασίλης Κυρβασίλης Γ3, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κος Παρασκευόπουλος Κωνσταντίνος Περίληψη Η ρομποτική αποτελεί ένα σύγχρονο
«Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot»
 «Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot» Γιώργος Λαζαρίδης, Γ3 Ελληνικό Κολλέγιο Θεσσαλονίκης Καθηγητής : Κωνσταντίνος Παρασκευόπουλος Λέξεις κλειδιά: Προγραμματισμός, αυτονομία Ένα ρομπότ
«Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot» Γιώργος Λαζαρίδης, Γ3 Ελληνικό Κολλέγιο Θεσσαλονίκης Καθηγητής : Κωνσταντίνος Παρασκευόπουλος Λέξεις κλειδιά: Προγραμματισμός, αυτονομία Ένα ρομπότ
ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ
 Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ
 ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ 1 ΕΙΣΑΓΩΓΗ 1.1 Ορισµοί και Ιστορικά Στοιχεία Η Ροµποτική είναι εκείνος ο κλάδος της επιστήµης του µηχανικού που ασχολείται µε τη σύλληψη, το σχεδιασµό, την κατασκευή και
ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ 1 ΕΙΣΑΓΩΓΗ 1.1 Ορισµοί και Ιστορικά Στοιχεία Η Ροµποτική είναι εκείνος ο κλάδος της επιστήµης του µηχανικού που ασχολείται µε τη σύλληψη, το σχεδιασµό, την κατασκευή και
ΕΚΠ 413 / ΕΚΠ 606 Υ ολογισµός µε Πράκτορες στο ιαδίκτυο
 ΕΚΠ 413 / ΕΚΠ 606 Υ ολογισµός µε Πράκτορες στο ιαδίκτυο ιδάσκων Μιχαήλ Γ. Λαγουδάκης Ε ίκουρος Καθηγητής Τοµέας Πληροφορικής Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης ΕΚΠ
ΕΚΠ 413 / ΕΚΠ 606 Υ ολογισµός µε Πράκτορες στο ιαδίκτυο ιδάσκων Μιχαήλ Γ. Λαγουδάκης Ε ίκουρος Καθηγητής Τοµέας Πληροφορικής Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης ΕΚΠ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΡΟΤΥΠΟΣ ΡΟΜΠΟΤΙΚΟΣ ΚΕΙΜΕΝΟΓΡΑΦΟΣ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΡΟΤΥΠΟΣ ΡΟΜΠΟΤΙΚΟΣ ΚΕΙΜΕΝΟΓΡΑΦΟΣ Πτυχιακή Εργασία των Καρακωνσταντίνου Χρίστου Τερζή Ιωάννας Επιβλέπων:
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΡΟΤΥΠΟΣ ΡΟΜΠΟΤΙΚΟΣ ΚΕΙΜΕΝΟΓΡΑΦΟΣ Πτυχιακή Εργασία των Καρακωνσταντίνου Χρίστου Τερζή Ιωάννας Επιβλέπων:
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ. Επενεργητές Αισθητήρες Σύστηµα Ελέγχου
 Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Robot και καθημερινή ζωή
 Robot και καθημερινή ζωή Καθηγήτρια: Σπυριδούλα Καραγιάννη Νίκος Κάνιστρας Νίκος Ηλιόπουλος Θεόδωρος Θεοδωρόπουλος Διονύσης Γιαχαλής Ροµπότ και ανεργία Ροµποτική Η ροµποτική είναι µια «διεπιστηµονική περιοχή»
Robot και καθημερινή ζωή Καθηγήτρια: Σπυριδούλα Καραγιάννη Νίκος Κάνιστρας Νίκος Ηλιόπουλος Θεόδωρος Θεοδωρόπουλος Διονύσης Γιαχαλής Ροµπότ και ανεργία Ροµποτική Η ροµποτική είναι µια «διεπιστηµονική περιοχή»
Ροµποτικοί Επενεργητές Σερβοκινητήρες Πνευµατικοί Υδραυλικοί Ηλεκτρικοί
 Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
ΣΕΡΒΟΜΗΧΑΝΙΣΜΟΙ RC. Καταπόδης Στέφανος
 ΣΕΡΒΟΜΗΧΑΝΙΣΜΟΙ RC Καταπόδης Στέφανος 14-1-2014 1.Γενικά για τους Σερβομηχανισμούς Είναι αυτόματες συσκευές που χρησιμοποιούνται για να: - ελέγχουν αν η λειτουργία ενός μηχανισμού γίνεται σωστά - διατηρούν
ΣΕΡΒΟΜΗΧΑΝΙΣΜΟΙ RC Καταπόδης Στέφανος 14-1-2014 1.Γενικά για τους Σερβομηχανισμούς Είναι αυτόματες συσκευές που χρησιμοποιούνται για να: - ελέγχουν αν η λειτουργία ενός μηχανισμού γίνεται σωστά - διατηρούν
«ΜΕΛΕΤΗ ΚΑΙ ΑΝΑΠΤΥΞΗ ΛΟί ΙΣΜΙΚΟΥ ΠΡΟΣΤΑΣΙΑΣ Κ ΑΙ ΑΣΦΑΛΕΙΑΣ ΜΕ ΤΗ ΒΟΗ0ΕΙΛ ΕΝΟΣ Σ \ ΣΤΗΜΑΤΟΣ ΟΡΑΣΗΣ ΣΤΟ ΡΟΜΠΟΤΙΚΟ ΧΩΡΟ ΕΝΟΣ ΡΟΜΠΟΤΙΚΟΊ ΒΡΑΧΙΟΝΑ»
 Βιομηχανική Πληροφορική ΤΕ1 ΚΑΒΑΛΑΣ «ΜΕΛΕΤΗ ΚΑΙ ΑΝΑΠΤΥΞΗ ΛΟί ΙΣΜΙΚΟΥ ΠΡΟΣΤΑΣΙΑΣ Κ ΑΙ ΑΣΦΑΛΕΙΑΣ ΜΕ ΤΗ ΒΟΗ0ΕΙΛ ΕΝΟΣ Σ \ ΣΤΗΜΑΤΟΣ ΟΡΑΣΗΣ ΣΤΟ ΡΟΜΠΟΤΙΚΟ ΧΩΡΟ ΕΝΟΣ ΡΟΜΠΟΤΙΚΟΊ ΒΡΑΧΙΟΝΑ» Πτυχιακή Εργασία TALOS
Βιομηχανική Πληροφορική ΤΕ1 ΚΑΒΑΛΑΣ «ΜΕΛΕΤΗ ΚΑΙ ΑΝΑΠΤΥΞΗ ΛΟί ΙΣΜΙΚΟΥ ΠΡΟΣΤΑΣΙΑΣ Κ ΑΙ ΑΣΦΑΛΕΙΑΣ ΜΕ ΤΗ ΒΟΗ0ΕΙΛ ΕΝΟΣ Σ \ ΣΤΗΜΑΤΟΣ ΟΡΑΣΗΣ ΣΤΟ ΡΟΜΠΟΤΙΚΟ ΧΩΡΟ ΕΝΟΣ ΡΟΜΠΟΤΙΚΟΊ ΒΡΑΧΙΟΝΑ» Πτυχιακή Εργασία TALOS
Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Ακριβοπούλου Μαριάννα. Μαθήτρια Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Ακριβοπούλου Μαριάννα Μαθήτρια Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Ακριβοπούλου Μαριάννα Μαθήτρια Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Ρομποτική. Τι είναι ένα ρομπότ ; Τι είναι ο αλγόριθμος ; Τι είναι το πρόγραμμα ; Επιμέλεια παρουσίασης : Κυριακού Γεώργιος
 Ρομποτική Τι είναι ένα ρομπότ ; Τι είναι ο αλγόριθμος ; Τι είναι το πρόγραμμα ; Που έχετε δει κάποιο ρομπότ ; Να απαριθμήσετε τα ρομπότ που έχετε δει σε ταινίες. Κάντε μία αντιπαράθεση με τα πραγματικά
Ρομποτική Τι είναι ένα ρομπότ ; Τι είναι ο αλγόριθμος ; Τι είναι το πρόγραμμα ; Που έχετε δει κάποιο ρομπότ ; Να απαριθμήσετε τα ρομπότ που έχετε δει σε ταινίες. Κάντε μία αντιπαράθεση με τα πραγματικά
ΛΥΚΕΙΟ ΝΕΑΠΟΛΗΣ ΛΑΚΩΝΙΑΣ
 Τι είναι το «Ροµπότ» ΛΥΚΕΙΟ ΝΕΑΠΟΛΗΣ ΛΑΚΩΝΙΑΣ Ένα ροµπότ είναι µια µηχανική συσκευή η οποία µπορεί να αντικαθιστά τον άνθρωπο σε διάφορες εργασίες. Ένα ροµπότ µπορεί να ενεργήσει κάτω από τον άµεσο έλεγχο
Τι είναι το «Ροµπότ» ΛΥΚΕΙΟ ΝΕΑΠΟΛΗΣ ΛΑΚΩΝΙΑΣ Ένα ροµπότ είναι µια µηχανική συσκευή η οποία µπορεί να αντικαθιστά τον άνθρωπο σε διάφορες εργασίες. Ένα ροµπότ µπορεί να ενεργήσει κάτω από τον άµεσο έλεγχο
ROBOT: ΑΠΟ ΤΟΝ ΤΑΛΩ ΣΤΑ ΣΤΑ ΣΥΓΧΡΟΝΑ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΑ ROBOT
 ROBOT: ΑΠΟ ΤΟΝ ΤΑΛΩ ΣΤΑ ΣΤΑ ΣΥΓΧΡΟΝΑ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΑ ROBOT Κακαρέλης Θωμάς Μαθητής Γ2 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
ROBOT: ΑΠΟ ΤΟΝ ΤΑΛΩ ΣΤΑ ΣΤΑ ΣΥΓΧΡΟΝΑ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΑ ROBOT Κακαρέλης Θωμάς Μαθητής Γ2 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου
 Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου") Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Υδρομπότ (Hydrobot) Κατασκευή & Προτάσεις Αξιοποίησης Ενός Τηλεκατευθυνόμενου Υποβρύχιου Ρομπότ
 Κατασκευή & Προτάσεις Αξιοποίησης Ενός Τηλεκατευθυνόμενου Υποβρύχιου Ρομπότ") Υδρομπότ (Hydrobot) Κατασκευή & Προτάσεις Αξιοποίησης Ενός Τηλεκατευθυνόμενου Υποβρύχιου Ρομπότ Οι μαθητές της Β τάξης Πληροφορικής του ΕΠΑ.Λ. Αξιούπολης 2013-2014 με τη συνδρομή του καθηγητή Πληροφορικής
Υδρομπότ (Hydrobot) Κατασκευή & Προτάσεις Αξιοποίησης Ενός Τηλεκατευθυνόμενου Υποβρύχιου Ρομπότ Οι μαθητές της Β τάξης Πληροφορικής του ΕΠΑ.Λ. Αξιούπολης 2013-2014 με τη συνδρομή του καθηγητή Πληροφορικής
Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Γεωργιάδου Κατερίνα. Μαθήτρια Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Γεωργιάδου Κατερίνα Μαθήτρια Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Γεωργιάδου Κατερίνα Μαθήτρια Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Προηγµένη ιασύνδεση µε τοπεριβάλλον
 Προηγµένη ιασύνδεση µε τοπεριβάλλον! Επεξεργασία φυσικής γλώσσας # Κατανόηση φυσικής γλώσσας # Παραγωγή φυσικής γλώσσας! Τεχνητή όραση! Ροµποτική Κατανόηση Φυσικής Γλώσσας! Αναγνώριση οµιλίας (Speech recognition)!
Προηγµένη ιασύνδεση µε τοπεριβάλλον! Επεξεργασία φυσικής γλώσσας # Κατανόηση φυσικής γλώσσας # Παραγωγή φυσικής γλώσσας! Τεχνητή όραση! Ροµποτική Κατανόηση Φυσικής Γλώσσας! Αναγνώριση οµιλίας (Speech recognition)!
Παράρτημα 3: Παράλληλη συγκριτική παρουσίαση του προηγούμενου και του νέου Πρoγράμματος Σπουδών. 5 Περίγραμμα Υ Ηλεκτρονικά Στοιχεία
 ΤΛ1001 ΤΛ1101 ΤΛ1002 ΤΛ1102 Προηγούμενο ΠΣ - Α' Εξάμηνο Ηλεκτρονικά Στοιχεία 3 1 2 7 4 14 1002 1012 Ηλεκτρικά Κυκλώματα Ι 2 0 2 7 2 14 1004 1014 Νέο ΠΣ - Α' Εξάμηνο Υ Ηλεκτρονικά Στοιχεία 2 1 1 7 3 7 Υ
ΤΛ1001 ΤΛ1101 ΤΛ1002 ΤΛ1102 Προηγούμενο ΠΣ - Α' Εξάμηνο Ηλεκτρονικά Στοιχεία 3 1 2 7 4 14 1002 1012 Ηλεκτρικά Κυκλώματα Ι 2 0 2 7 2 14 1004 1014 Νέο ΠΣ - Α' Εξάμηνο Υ Ηλεκτρονικά Στοιχεία 2 1 1 7 3 7 Υ
ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ
 Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης
 Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης Αντώνιος Γαστεράτος, Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Παραγωγής και Διοίκησης, Δημοκρίτειο Πανεπιστήμιο Θράκης μηχανοτρονική διαδικασία σχεδιασμού
Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης Αντώνιος Γαστεράτος, Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Παραγωγής και Διοίκησης, Δημοκρίτειο Πανεπιστήμιο Θράκης μηχανοτρονική διαδικασία σχεδιασμού
Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Ονοματεπώνυμο :Κάρκας Αλέξιος. Μαθητής του τμήματος Γ2
 Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Ονοματεπώνυμο :Κάρκας Αλέξιος Μαθητής του τμήματος Γ2 Καθηγητής : Κωνσταντίνος Παρασκευόπουλος 1.Περίληψη Το ρομπότ είναι μια μηχανική συσκευή η
Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Ονοματεπώνυμο :Κάρκας Αλέξιος Μαθητής του τμήματος Γ2 Καθηγητής : Κωνσταντίνος Παρασκευόπουλος 1.Περίληψη Το ρομπότ είναι μια μηχανική συσκευή η
Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Μπογδάνη Κωνσταντία. Μαθητής Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Μπογδάνη Κωνσταντία Μαθητής Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Μπογδάνη Κωνσταντία Μαθητής Γ4 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
«Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot».
 ΕΛΛΗΝΙΚΟ ΚΟΛΛΕΓΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ «Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot». Χρυσοπούλου Τσεβά Κλειώ Γ 3 Υπεύθυνος καθηγητής: Κ. Κωνσταντίνος Παρασκευόπουλος. 8/12/2013 ΠΕΡΙΛΗΨΗ Η χρήση και
ΕΛΛΗΝΙΚΟ ΚΟΛΛΕΓΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ «Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot». Χρυσοπούλου Τσεβά Κλειώ Γ 3 Υπεύθυνος καθηγητής: Κ. Κωνσταντίνος Παρασκευόπουλος. 8/12/2013 ΠΕΡΙΛΗΨΗ Η χρήση και
εν υπάρχει συµφωνία ως προς τον ορισµό. 1949 Μηχανή Αριθµητικού Ελέγχου (MIT Servo Lab) Βραχίονες για χειρισµό πυρηνικού υλικού (Master Slave, 1948)
 Βραχίονες για χειρισµό πυρηνικού υλικού (Master Slave, 1948)") Κεφάλαιο 1 Εισαγωγή 1-1 Τι είναι Ροµπότ; εν υπάρχει συµφωνία ως προς τον ορισµό. Σύµφωνα µε το Αµερικανικό Ινστιτούτο Ροµποτικής (Rbt Institute f America, RIA) είναι ένας επαναπρογραµµατιζόµενος βραχίονας
Κεφάλαιο 1 Εισαγωγή 1-1 Τι είναι Ροµπότ; εν υπάρχει συµφωνία ως προς τον ορισµό. Σύµφωνα µε το Αµερικανικό Ινστιτούτο Ροµποτικής (Rbt Institute f America, RIA) είναι ένας επαναπρογραµµατιζόµενος βραχίονας
Πτυχιακή Εργασία Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Η Ασύρματη Επικοινωνία, χρησιμοποιώντας
 Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Κούρογλου Αλέξανδρος. Μαθητής Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Κούρογλου Αλέξανδρος Μαθητής Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Κούρογλου Αλέξανδρος Μαθητής Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης
 www.robolab.tuc.gr 1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας R/C σέρβο βηματικός κινητήρας 2 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας
www.robolab.tuc.gr 1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας R/C σέρβο βηματικός κινητήρας 2 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας
ROBOT ΑΠΟ ΤΟΝ ΤΑΛΩ ΣΤΑ ΣΥΓΧΡΟΝΑ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΑ ROBOT
 ROBOT ΑΠΟ ΤΟΝ ΤΑΛΩ ΣΤΑ ΣΥΓΧΡΟΝΑ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΑ ROBOT Ομάρ Εζάτ Αλέξανδρος Μαθητής Γ2 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
ROBOT ΑΠΟ ΤΟΝ ΤΑΛΩ ΣΤΑ ΣΥΓΧΡΟΝΑ ΠΡΟΓΡΑΜΜΑΤΙΖΟΜΕΝΑ ROBOT Ομάρ Εζάτ Αλέξανδρος Μαθητής Γ2 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
ΩΡΟΛΟΓΙΟ ΠΡΟΓΡΑΜΜΑ ΧΕΙΜΕΡΙΝΟΥ ΕΞΑΜΗΝΟΥ ΕΤΟΥΣ 2015/16 1 ο ΕΞΑΜΗΝΟ ΩΡΑ ΔΕΥΤΕΡΑ ΤΡΙΤΗ ΤΕΤΑΡΤΗ ΠΕΜΠΤΗ ΠΑΡΑΣΚΕΥΗ. Λογισμός Ι.
 1 ο ΕΞΑΜΗΝΟ Γραμμική Άλγεβρα (Τμ. I) & (Τμ. ΙI) (Θ) Γραμμική Άλγεβρα (Τμ. I) & (Τμ. ΙI) (Θ) Τεχ. Σχεδ. με Τεχ. Σχεδ. με Γραμμική Άλγεβρα (Τμ. IΙ) (Α) Γραμμική Άλγεβρα (Τμ. IΙ) (Α) Τεχ. Σχεδ. Α9 (Εργ. Ομ.
1 ο ΕΞΑΜΗΝΟ Γραμμική Άλγεβρα (Τμ. I) & (Τμ. ΙI) (Θ) Γραμμική Άλγεβρα (Τμ. I) & (Τμ. ΙI) (Θ) Τεχ. Σχεδ. με Τεχ. Σχεδ. με Γραμμική Άλγεβρα (Τμ. IΙ) (Α) Γραμμική Άλγεβρα (Τμ. IΙ) (Α) Τεχ. Σχεδ. Α9 (Εργ. Ομ.
Α.2 Μαθησιακά Αποτελέσματα Έχοντας ολοκληρώσει επιτυχώς το μάθημα οι εκπαιδευόμενοι θα είναι σε θέση να:
 ΒΑΣΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ Τίτλος Μαθήματος Μεθοδολογίες και Συστήματα Βιομηχανικής Αυτοματοποίησης Κωδικός Μαθήματος Μ3 Θεωρία / Εργαστήριο Θεωρία + Εργαστήριο Πιστωτικές μονάδες 4 Ώρες Διδασκαλίας 2Θ+1Ε Τρόπος/Μέθοδοι
ΒΑΣΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ Τίτλος Μαθήματος Μεθοδολογίες και Συστήματα Βιομηχανικής Αυτοματοποίησης Κωδικός Μαθήματος Μ3 Θεωρία / Εργαστήριο Θεωρία + Εργαστήριο Πιστωτικές μονάδες 4 Ώρες Διδασκαλίας 2Θ+1Ε Τρόπος/Μέθοδοι
ΩΡΟΛΟΓΙΟ ΠΡΟΓΡΑΜΜΑ ΧΕΙΜΕΡΙΝΟΥ ΕΞΑΜΗΝΟΥ ΕΤΟΥΣ 2014/15 1 ο ΕΞΑΜΗΝΟ ΩΡΑ ΕΥΤΕΡΑ ΤΡΙΤΗ ΤΕΤΑΡΤΗ ΠΕΜΠΤΗ ΠΑΡΑΣΚΕΥΗ. (Τμ. Ι) Α1 & (Τμ.
 Α1 & (Τμ.") 1 ο ΕΞΑΜΗΝΟ Γραμμική Άλγεβρα (Τμ. I) & (Τμ. ΙI) (Θ) Γραμμική Άλγεβρα (Τμ. I) & (Τμ. ΙI) (Θ) Λογισμός Ι Λογισμός Ι Φυσική Ι Λογισμός Ι Λογισμός Ι (Τμ. ΙΙ) (Τμ. ΙΙ) (Τμ. ΙΙ) (Εργ. Ομ. 2) (Εργ. Ομ. 2) Τεχνικές
1 ο ΕΞΑΜΗΝΟ Γραμμική Άλγεβρα (Τμ. I) & (Τμ. ΙI) (Θ) Γραμμική Άλγεβρα (Τμ. I) & (Τμ. ΙI) (Θ) Λογισμός Ι Λογισμός Ι Φυσική Ι Λογισμός Ι Λογισμός Ι (Τμ. ΙΙ) (Τμ. ΙΙ) (Τμ. ΙΙ) (Εργ. Ομ. 2) (Εργ. Ομ. 2) Τεχνικές
Ισχύει μόνο για φοιτητές που εισήχθησαν στο Τμήμα από το ακαδ. έτος και πριν
 Ισχύει μόνο για φοιτητές που εισήχθησαν στο Τμήμα από το ακαδ. έτος 2003-04 και πριν Βασικός Κύκλος ΕΞΑΜΗΝΟ 1 Λογισμός Ι 11 4 Φυσική Ι 13 5 Γραμμική Αλγεβρα 15 4 Προγραμματισμός 17 4+2 Τεχνικό Σχέδιο 19
Ισχύει μόνο για φοιτητές που εισήχθησαν στο Τμήμα από το ακαδ. έτος 2003-04 και πριν Βασικός Κύκλος ΕΞΑΜΗΝΟ 1 Λογισμός Ι 11 4 Φυσική Ι 13 5 Γραμμική Αλγεβρα 15 4 Προγραμματισμός 17 4+2 Τεχνικό Σχέδιο 19
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΒΙΟΜΗΧΑΝΙΑ. Η επανάσταση μόλις αρχίζει
 ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΒΙΟΜΗΧΑΝΙΑ Η επανάσταση μόλις αρχίζει Η ΒΙΟΜΗΧΑΝΙΑ ΧΡΕΙΑΖΕΤΑΙ: Πρώτες ύλες Μηχανήματα και τεχνική υποστήριξη Εργασία Από ανθρώπους Από μηχανές (ρομπότ) Πολλές εργασίες που γίνονται από ανθρώπους
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΒΙΟΜΗΧΑΝΙΑ Η επανάσταση μόλις αρχίζει Η ΒΙΟΜΗΧΑΝΙΑ ΧΡΕΙΑΖΕΤΑΙ: Πρώτες ύλες Μηχανήματα και τεχνική υποστήριξη Εργασία Από ανθρώπους Από μηχανές (ρομπότ) Πολλές εργασίες που γίνονται από ανθρώπους
y 1 Output Input y 2 Σχήµα 1.1 Βασική δοµή ενός συστήµατος ελέγχου κλειστού βρόγχου
 Τ.Ε.Ι. ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜHΜΑ ΗΛΕΚΤΡΟΛΟΓIΑΣ Σηµειώσεις για το εργαστήριο του µαθήµατος ΣΥΣΤΗΜΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ I ΓΑΥΡΟΣ ΚΩΝ/ΝΟΣ ΚΟΖΑΝΗ 2008 Κεφάλαιο 1 ο Ορισµός Συστηµάτων
Τ.Ε.Ι. ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜHΜΑ ΗΛΕΚΤΡΟΛΟΓIΑΣ Σηµειώσεις για το εργαστήριο του µαθήµατος ΣΥΣΤΗΜΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ I ΓΑΥΡΟΣ ΚΩΝ/ΝΟΣ ΚΟΖΑΝΗ 2008 Κεφάλαιο 1 ο Ορισµός Συστηµάτων
Έλεγχος οπτικής οδήγησης ρομποτικού βραχίονα με χρήση φίλτρου Kalman και φίλτρου σωματιδίων για παρακολούθηση κινούμενου στόχου ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΗΜΑΤΩΝ, ΕΛΕΓΧΟΥ & ΡΟΜΠΟΤΙΚΗΣ Έλεγχος οπτικής οδήγησης ρομποτικού βραχίονα με χρήση φίλτρου Kalman και φίλτρου
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΗΜΑΤΩΝ, ΕΛΕΓΧΟΥ & ΡΟΜΠΟΤΙΚΗΣ Έλεγχος οπτικής οδήγησης ρομποτικού βραχίονα με χρήση φίλτρου Kalman και φίλτρου
Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Ντουντούδη Ιωάννα. Μαθήτρια Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Ντουντούδη Ιωάννα Μαθήτρια Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Ντουντούδη Ιωάννα Μαθήτρια Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Επιμέλεια παρουσίασης: Αριστείδης Παλιούρας ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)?
?") 1 ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)? Τι είναι το ρομπότ (robot)? 1. Περιγράψτε με μια πρόταση την έννοια της λέξης ρομπότ (robot) Το ρομπότ είναι μια μηχανή που συλλέγει δεδομένα από το περιβάλλον του (αισθάνεται),
1 ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)? Τι είναι το ρομπότ (robot)? 1. Περιγράψτε με μια πρόταση την έννοια της λέξης ρομπότ (robot) Το ρομπότ είναι μια μηχανή που συλλέγει δεδομένα από το περιβάλλον του (αισθάνεται),
Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Χαρδαλή Ευτυχία. Μαθήτρια Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Χαρδαλή Ευτυχία Μαθήτρια Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Χαρδαλή Ευτυχία Μαθήτρια Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ
 ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΝΑΣΤΑΣΙΑΔΗΣ ΕΛΕΥΘΕΡΙΟΣ ΥΛΟΠΟΙΗΣΗ ΣΥΣΤΗΜΑΤΟΣ ΣΥΝΑΓΕΡΜΟΥ ΜΕ ΤΗΝ ΧΡΗΣΗ ΜΙΚΡΟΕΛΕΓΚΤΗ ARDUINO ΒΑΡΔΟΥΛΑΚΗΣ ΕΥΤΥΧΙΟΣ-ΔΗΜΗΤΡΙΟΣ ΑΥΤΟΜΑΤΟΣ ΑΠΟΜΑΚΡΥΣΜΕΝΟΣ ΕΛΕΓΧΟΣ ΘΕΡΜΟΚΗΠΙΟΥ ΒΑΣΙΛΕΙΟΥ
ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΝΑΣΤΑΣΙΑΔΗΣ ΕΛΕΥΘΕΡΙΟΣ ΥΛΟΠΟΙΗΣΗ ΣΥΣΤΗΜΑΤΟΣ ΣΥΝΑΓΕΡΜΟΥ ΜΕ ΤΗΝ ΧΡΗΣΗ ΜΙΚΡΟΕΛΕΓΚΤΗ ARDUINO ΒΑΡΔΟΥΛΑΚΗΣ ΕΥΤΥΧΙΟΣ-ΔΗΜΗΤΡΙΟΣ ΑΥΤΟΜΑΤΟΣ ΑΠΟΜΑΚΡΥΣΜΕΝΟΣ ΕΛΕΓΧΟΣ ΘΕΡΜΟΚΗΠΙΟΥ ΒΑΣΙΛΕΙΟΥ
Η Ελληνική Πύλη Ρομποτικής στην 77η ΔΕΘ
 Η Ελληνική Πύλη Ρομποτικής στην 77η ΔΕΘ Για δεύτερη συνεχόμενη χρονιά η Διεθνής Έκθεση Θεσσαλονίκης φιλοξένησε την Ελληνική Πύλη Ρομποτικής σε εκθεσιακό περίπτερο στο οποίο παρουσιάστηκαν ρομποτικές εφαρμογές
Η Ελληνική Πύλη Ρομποτικής στην 77η ΔΕΘ Για δεύτερη συνεχόμενη χρονιά η Διεθνής Έκθεση Θεσσαλονίκης φιλοξένησε την Ελληνική Πύλη Ρομποτικής σε εκθεσιακό περίπτερο στο οποίο παρουσιάστηκαν ρομποτικές εφαρμογές
Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής
 ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ ΘΕΜΑ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ. "Ρομποτικός Βραχίονας 4 Βαθμών Ελευθερίας"
 ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ ΘΕΜΑ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ "Ρομποτικός Βραχίονας 4 Βαθμών Ελευθερίας" ΟΝΟΜΑ ΦΟΙΤΗΤΗ: ΠΡΟΚΟΠΗΣ ΚΙΟΥΣΗΣ AM:41896 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΜΙΧΑΛΗΣ ΠΑΠΟΥΤΣΙΔΑΚΗΣ
ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ ΘΕΜΑ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ "Ρομποτικός Βραχίονας 4 Βαθμών Ελευθερίας" ΟΝΟΜΑ ΦΟΙΤΗΤΗ: ΠΡΟΚΟΠΗΣ ΚΙΟΥΣΗΣ AM:41896 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΜΙΧΑΛΗΣ ΠΑΠΟΥΤΣΙΔΑΚΗΣ
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εφαρμοσμένος & Υπολογιστικός Ηλεκτρομαγνητισμός Ηλ. Αιθ. 012, 013. Στοχαστικά Συστήματα & Επικοινωνίες Ηλ. Αμφ.
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εφαρμοσμένος & Υπολογιστικός Ηλεκτρομαγνητισμός Ηλ. Αιθ. 012, 013. Εργαστήριο Ψηφιακών Συστημάτων Ηλ. Εργ.
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
Βηµατίζοντα Ροµπότ. Τµήµα Μηχανολογίας Τ.Ε.Ι. Κρήτης
 Βηµατίζοντα Ροµπότ I. ΕΙΣΑΓΩΓΗ Στην φύση παρατηρείται ποικιλία κινήσεων. Για παράδειγµα τα καγκουρό πηδάνε, τα πουλιά πετάνε, ο άνθρωπος περπατάει κ.τ.λ. Για να περπατήσουν όµως τα ζώα χρειάζεται ένας
Βηµατίζοντα Ροµπότ I. ΕΙΣΑΓΩΓΗ Στην φύση παρατηρείται ποικιλία κινήσεων. Για παράδειγµα τα καγκουρό πηδάνε, τα πουλιά πετάνε, ο άνθρωπος περπατάει κ.τ.λ. Για να περπατήσουν όµως τα ζώα χρειάζεται ένας
ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤ ΓΙΑ ΑΥΤΟΝΟΜΗ ΠΕΡΙΗΓΗΣΗ ΣΤΟ ΧΩΡΟ
 ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤ ΓΙΑ ΑΥΤΟΝΟΜΗ ΠΕΡΙΗΓΗΣΗ ΣΤΟ ΧΩΡΟ Της φοιτήτριας Κωνσταντίνας Χριστοφορίδου Επιβλέπων καθηγητής κ. Κωνσταντίνος Διαμαντάρας Αρ. Μητρώου: 06/2990 Θεσσαλονίκη 2012 ΠΡΟΛΟΓΟΣ
ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤ ΓΙΑ ΑΥΤΟΝΟΜΗ ΠΕΡΙΗΓΗΣΗ ΣΤΟ ΧΩΡΟ Της φοιτήτριας Κωνσταντίνας Χριστοφορίδου Επιβλέπων καθηγητής κ. Κωνσταντίνος Διαμαντάρας Αρ. Μητρώου: 06/2990 Θεσσαλονίκη 2012 ΠΡΟΛΟΓΟΣ
«ΠΡΟΣΟΜΟΙΩΣΗ ΡΟΜΠΟΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΣΤΗ ΓΕΩΡΓΙΑ.»
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΠΡΟΓΡΑΜΜΑ ΜΕΤΑΠΤΥΧΙΑΚΩΝ ΣΠΟΥΔΩΝ «ΠΡΟΣΟΜΟΙΩΣΗ ΡΟΜΠΟΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΣΤΗ ΓΕΩΡΓΙΑ.» «ΑΥΤΟΜΑΤΙΣΜΟΙ ΣΤΙΣ ΑΡΔΕΥΣΕΙΣ, ΤΙΣ ΓΕΩΡΓΙΚΕΣ ΚΑΤΑΣΚΕΥΕΣ ΚΑΙ ΣΤΗΝ ΕΚΜΗΧΑΝΙΣΗ ΤΗΣ ΓΕΩΡΓΙΑΣ» ΤΜΗΜΑΤΟΣ
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΠΡΟΓΡΑΜΜΑ ΜΕΤΑΠΤΥΧΙΑΚΩΝ ΣΠΟΥΔΩΝ «ΠΡΟΣΟΜΟΙΩΣΗ ΡΟΜΠΟΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΣΤΗ ΓΕΩΡΓΙΑ.» «ΑΥΤΟΜΑΤΙΣΜΟΙ ΣΤΙΣ ΑΡΔΕΥΣΕΙΣ, ΤΙΣ ΓΕΩΡΓΙΚΕΣ ΚΑΤΑΣΚΕΥΕΣ ΚΑΙ ΣΤΗΝ ΕΚΜΗΧΑΝΙΣΗ ΤΗΣ ΓΕΩΡΓΙΑΣ» ΤΜΗΜΑΤΟΣ
Εισαγωγή στην Ρομποτική
 Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
ΕΙΔΙΚΗ ΘΕΜΑΤΙΚΗ ΔΡΑΣΤΗΡΙΟΤΗΤΑ Β ΗΝ - Β ΟΧ. Αισθητήρες και συλλογή δεδομένων από τα τμήματα ενός αυτοκινήτου και το περιβάλλον του
 ΕΙΔΙΚΗ ΘΕΜΑΤΙΚΗ ΔΡΑΣΤΗΡΙΟΤΗΤΑ Β ΗΝ - Β ΟΧ Αισθητήρες και συλλογή δεδομένων από τα τμήματα ενός αυτοκινήτου και το περιβάλλον του Τι είναι αισθητήρας; Αισθητήρας ονομάζεται μία συσκευή που ανιχνεύει ένα
ΕΙΔΙΚΗ ΘΕΜΑΤΙΚΗ ΔΡΑΣΤΗΡΙΟΤΗΤΑ Β ΗΝ - Β ΟΧ Αισθητήρες και συλλογή δεδομένων από τα τμήματα ενός αυτοκινήτου και το περιβάλλον του Τι είναι αισθητήρας; Αισθητήρας ονομάζεται μία συσκευή που ανιχνεύει ένα
ΚΑΤΑΣΚΕΥΗ ΜΕ ΧΡΗΣΗ Η/Υ Computer Aided Manufacturing - CAM) Οφέλη
 Οφέλη") ΚΑΤΑΣΚΕΥΗ ΜΕ ΧΡΗΣΗ Η/Υ Computer Aided Manufacturing - CAM) Οφέλη 1. Ο άµεσος και εύκολα µεταβαλλόµενος έλεγχος µέσω Η/Υ των διαφόρων οµάδων αυτόµατων µηχανών. 2. Αυξηµένη παραγωγικότητα λόγω καλύτερης
ΚΑΤΑΣΚΕΥΗ ΜΕ ΧΡΗΣΗ Η/Υ Computer Aided Manufacturing - CAM) Οφέλη 1. Ο άµεσος και εύκολα µεταβαλλόµενος έλεγχος µέσω Η/Υ των διαφόρων οµάδων αυτόµατων µηχανών. 2. Αυξηµένη παραγωγικότητα λόγω καλύτερης
ΩΡΟΛΟΓΙΟ ΠΡΟΓΡΑΜΜΑ ΧΕΙΜΕΡΙΝΟΥ ΕΞΑΜΗΝΟΥ ΕΤΟΥΣ 2016/17 1 ο ΕΞΑΜΗΝΟ ΩΡΑ ΕΥΤΕΡΑ ΤΡΙΤΗ ΤΕΤΑΡΤΗ ΠΕΜΠΤΗ ΠΑΡΑΣΚΕΥΗ. (Τμ. ΙΙ) Α3. (Τμ. Ι) Α1 & (Τμ.
 Α3. (Τμ. Ι) Α1 & (Τμ.") 1 ο ΕΞΑΜΗΝΟ 08-09 Γραμμική Άλγεβρα (Τμ. I) & (Τμ. ΙI) (Θ) Γραμμική Άλγεβρα (Τμ. I) & (Τμ. ΙI) (Θ) Λογική Σχεδίαση Λογική Σχεδίαση Η/Υ (Α) Η/Υ (Α) Γραμμική Άλγεβρα (Τμ. IΙ) (Α) Γραμμική Άλγεβρα (Τμ. IΙ)
1 ο ΕΞΑΜΗΝΟ 08-09 Γραμμική Άλγεβρα (Τμ. I) & (Τμ. ΙI) (Θ) Γραμμική Άλγεβρα (Τμ. I) & (Τμ. ΙI) (Θ) Λογική Σχεδίαση Λογική Σχεδίαση Η/Υ (Α) Η/Υ (Α) Γραμμική Άλγεβρα (Τμ. IΙ) (Α) Γραμμική Άλγεβρα (Τμ. IΙ)
ΕΡΕΥΝΗΤΙΚΗ ΕΡΓΑΣΙΑ Α ΤΕΤΡΑΜΗΝΟΥ ΣΧ. ΕΤΟΥΣ ΤΜΗΜΑ Α1-Α2 ΘΕΜΑ: ΡΟΜΠΟΤΙΚΗ ΣΤΗΝ ΕΚΠΑΙΔΕΥΣΗ
 ΕΡΕΥΝΗΤΙΚΗ ΕΡΓΑΣΙΑ Α ΤΕΤΡΑΜΗΝΟΥ ΣΧ. ΕΤΟΥΣ 2017-2018 ΤΜΗΜΑ Α1-Α2 ΘΕΜΑ: ΡΟΜΠΟΤΙΚΗ ΣΤΗΝ ΕΚΠΑΙΔΕΥΣΗ Υπεύθυνος καθηγητής Παραστατίδης Παναγιώτης 20 ΓΕΛ Λευκαδας Περιεχόμενα ΙΣΤΟΡΙΚΗ ΑΝΑΔΡΟΜΗ... 3 Χρήσεις- εφαρμογές...
ΕΡΕΥΝΗΤΙΚΗ ΕΡΓΑΣΙΑ Α ΤΕΤΡΑΜΗΝΟΥ ΣΧ. ΕΤΟΥΣ 2017-2018 ΤΜΗΜΑ Α1-Α2 ΘΕΜΑ: ΡΟΜΠΟΤΙΚΗ ΣΤΗΝ ΕΚΠΑΙΔΕΥΣΗ Υπεύθυνος καθηγητής Παραστατίδης Παναγιώτης 20 ΓΕΛ Λευκαδας Περιεχόμενα ΙΣΤΟΡΙΚΗ ΑΝΑΔΡΟΜΗ... 3 Χρήσεις- εφαρμογές...
ΠΡΟΓΡΑΜΜΑ ΤΕΛΙΚΩΝ ΕΞΕΤΑΣΕΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδηµαϊκό Έτος 2008-2009 Περίοδος Ιουνίου 2009 ΠΡΟΓΡΑΜΜΑ ΤΕΛΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 2ο ΕΞΑΜΗΝΟ ΩΡΑ 4ο ΕΞΑΜΗΝΟ ΩΡΑ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδηµαϊκό Έτος 2008-2009 Περίοδος Ιουνίου 2009 ΠΡΟΓΡΑΜΜΑ ΤΕΛΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 2ο ΕΞΑΜΗΝΟ ΩΡΑ 4ο ΕΞΑΜΗΝΟ ΩΡΑ
Project 2 Ρομποτική. 'Β Τάξη Γενικού Λυκείου Σητείας Σχολικό 'Ετος 2012-2013. Υπεύθυνος Καθηγητής: Πουλακάκης Ιωάννης
 Project 2 Ρομποτική 'Β Τάξη Γενικού Λυκείου Σητείας Σχολικό 'Ετος 2012-2013 Υπεύθυνος Καθηγητής: Πουλακάκης Ιωάννης Η Ιστορία της Ρομποτικής Ένα ρομπότ είναι μια μηχανική συσκευή η οποία μπορεί να υποκαθιστά
Project 2 Ρομποτική 'Β Τάξη Γενικού Λυκείου Σητείας Σχολικό 'Ετος 2012-2013 Υπεύθυνος Καθηγητής: Πουλακάκης Ιωάννης Η Ιστορία της Ρομποτικής Ένα ρομπότ είναι μια μηχανική συσκευή η οποία μπορεί να υποκαθιστά
101. ΑΡΧΕΣ ΑΕΡΟΔΙΑΣΤΗΜΙΚΗΣ ΕΠΙΣΤΗΜΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ 102. ΜΗΧΑΝΙΚΗ ΑΝΑΛΥΣΗ Ι ΚΑΙ ΕΦΑΡΜΟΓΕΣ 7
 Α ΕΤΟΣ 1 ο Εξάμηνο Σπουδών 101. ΑΡΧΕΣ ΑΕΡΟΔΙΑΣΤΗΜΙΚΗΣ ΕΠΙΣΤΗΜΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ 10. ΜΗΧΑΝΙΚΗ 7 103. ΑΝΑΛΥΣΗ Ι ΚΑΙ ΕΦΑΡΜΟΓΕΣ 7 104. ΑΛΓΟΡΙΘΜΟΙ, ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΚΑΙ ΔΟΜΕΣ ΔΕΔΟΜΕΝΩΝ 7 10. ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ
Α ΕΤΟΣ 1 ο Εξάμηνο Σπουδών 101. ΑΡΧΕΣ ΑΕΡΟΔΙΑΣΤΗΜΙΚΗΣ ΕΠΙΣΤΗΜΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ 10. ΜΗΧΑΝΙΚΗ 7 103. ΑΝΑΛΥΣΗ Ι ΚΑΙ ΕΦΑΡΜΟΓΕΣ 7 104. ΑΛΓΟΡΙΘΜΟΙ, ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΚΑΙ ΔΟΜΕΣ ΔΕΔΟΜΕΝΩΝ 7 10. ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εργαστηριακή και Βιομηχανική Ηλεκτρονική Ηλ. Αμφ. 2, 3. Γλώσσες Προγραμματισμού Ι. Ηλ. Αμφ. 1, 2, 3, 4, 5
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Ιουνίου 2017 Έκδοση 08.06.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Ιουνίου 2017 Έκδοση 08.06.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Αρχιτεκτονική Υπολογιστών Ηλ. Αιθ. 001, 002. Ηλ. Αιθ. 003, 004 Ηλεκτρονική ΙΙΙ Ηλ. αιθ. 003, 004. Θεωρία Δικτύων & Κυκλωμάτων
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 v20180517 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 v20180517 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2011
 ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2011 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2011 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Διατάξεις Ημιαγωγών. Ηλ. Αιθ. 013. Αριθμητικές Μέθοδοι Διαφορικών Εξισώσεων Ηλ. Αιθ. 013
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Φεβρουαρίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Φεβρουαρίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Ηλ. Αιθ. 003, 004 Ηλεκτρονική ΙΙΙ Ηλ. αιθ. 003, 004
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
219 Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Θεσσαλονίκης
 219 Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Θεσσαλονίκης Το Τμήμα Ηλεκτρολόγων Μηχανικών ιδρύθηκε με το ΒΔ.400/72 και άρχισε να λειτουργεί το 1972-73. Το ΑΠΘ είχε τότε ήδη 28.000 φοιτητές. Η ακριβής
219 Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Θεσσαλονίκης Το Τμήμα Ηλεκτρολόγων Μηχανικών ιδρύθηκε με το ΒΔ.400/72 και άρχισε να λειτουργεί το 1972-73. Το ΑΠΘ είχε τότε ήδη 28.000 φοιτητές. Η ακριβής
ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Σεπεμβρίου 2017 ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ Έκδοση 05.07.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 3-4ο
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Σεπεμβρίου 2017 ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ Έκδοση 05.07.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 3-4ο
Γ015. ΜΗΧ 707. Αυτοµατισµοί Βιοµηχανικών κ Κτηριακών Εγκαταστάσεων. Εγκαταστάσεων ΠΡΟΣΟΧΗ! ΑΙΘΟΥΣΑ ΕΡΓΑΣΤΗΡΙΟΥ: Αιτιατότητα
 ΜΗΧ 707. Αυτοµατισµοί Βιοµηχανικών κ Κτηριακών Εγκαταστάσεων ΠΡΟΣΟΧΗ! ΑΙΘΟΥΣΑ ΕΡΓΑΣΤΗΡΙΟΥ: Γ015 Καθηγητής Γ. Ε. Χαµηλοθώρης ΜΗΧ707. ΑΥΤΟΜΑΤΙΣΜΟΙ ΒΙΟΜΗΧΑΝΙΚΩΝ κ ΚΤΗΡΙΑΚΩΝ ΕΓΚΑΤΑΣΤΑΣΕΩΝ 1 ΜΗΧ 707. Αυτοµατισµοί
ΜΗΧ 707. Αυτοµατισµοί Βιοµηχανικών κ Κτηριακών Εγκαταστάσεων ΠΡΟΣΟΧΗ! ΑΙΘΟΥΣΑ ΕΡΓΑΣΤΗΡΙΟΥ: Γ015 Καθηγητής Γ. Ε. Χαµηλοθώρης ΜΗΧ707. ΑΥΤΟΜΑΤΙΣΜΟΙ ΒΙΟΜΗΧΑΝΙΚΩΝ κ ΚΤΗΡΙΑΚΩΝ ΕΓΚΑΤΑΣΤΑΣΕΩΝ 1 ΜΗΧ 707. Αυτοµατισµοί
ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΟΡΘΗ ΕΠΑΝΑΛΗΨΗ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΟΡΘΗ ΕΠΑΝΑΛΗΨΗ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Σεπτεμβρίου 2018 Έκδοση 17/07/2018 ΗΜΕΡΟΜΗΝΙΑ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΟΡΘΗ ΕΠΑΝΑΛΗΨΗ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Σεπτεμβρίου 2018 Έκδοση 17/07/2018 ΗΜΕΡΟΜΗΝΙΑ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΤΟΜΕΑΣ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΤΟΜΕΑΣ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΔΙΑΜΟΡΦΩΣΗ ΤΗΣ ΣΥΜΠΕΡΙΦΟΡΑΣ ΡΟΜΠΟΤΙΚΟΥ ΣΥΣΤΗΜΑΤΟΣ ΑΠΟ ΤΗΝ ΑΝΙΧΝΕΥΣΗ ΤΗΣ ΔΙΑΘΕΣΗΣ ΑΝΘΡΩΠΟΥ ΜΕ ΤΗ ΒΟΗΘΕΙΑ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΤΟΜΕΑΣ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΔΙΑΜΟΡΦΩΣΗ ΤΗΣ ΣΥΜΠΕΡΙΦΟΡΑΣ ΡΟΜΠΟΤΙΚΟΥ ΣΥΣΤΗΜΑΤΟΣ ΑΠΟ ΤΗΝ ΑΝΙΧΝΕΥΣΗ ΤΗΣ ΔΙΑΘΕΣΗΣ ΑΝΘΡΩΠΟΥ ΜΕ ΤΗ ΒΟΗΘΕΙΑ
Η Καινοτομία συναντά την Αμυντική Βιομηχανία
 Η Καινοτομία συναντά την Αμυντική Βιομηχανία Διημερίδα Καινοτομίας 8 & 9 Μαρτίου 2018 Β ΠΑΠΑΝΤΩΝΙΟΥ Από το 1992 η είναι μια εταιρεία εξειδικευμένη στην ρομποτική και τον αυτοματισμό. Μέχρι σήμερα έχει
Η Καινοτομία συναντά την Αμυντική Βιομηχανία Διημερίδα Καινοτομίας 8 & 9 Μαρτίου 2018 Β ΠΑΠΑΝΤΩΝΙΟΥ Από το 1992 η είναι μια εταιρεία εξειδικευμένη στην ρομποτική και τον αυτοματισμό. Μέχρι σήμερα έχει
Έλεγχος Κίνησης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Αυτόματος Έλεγχος Συστημάτων Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Αυτόματος Έλεγχος Συστημάτων Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
ΑΙΘΟΥΣΑ 1 ΠΡΟΓΡΑΜΜΑ ΧΕΙΜΕΡΙΝΟΥ ΕΞΑΜΗΝΟΥ ΑΚΑΔΗΜΑΙΚΟΥ ΕΤΟΥΣ 2017/2018
 ΑΙΘΟΥΣΑ 1 08-09 09-10 10-11 11-12 Μικροκύματα ΙΙ 12-13 Μικροκύματα ΙΙ Διάδοση Η/Μ κύματος Ι Διάδοση Η/Μ κύματος Ι Τεχνολογία Ηλεκτροτεχνικών Υλικών Τεχνολογία Ηλεκτροτεχνικών Υλικών Εισαγωγή στην Ενεργειακή
ΑΙΘΟΥΣΑ 1 08-09 09-10 10-11 11-12 Μικροκύματα ΙΙ 12-13 Μικροκύματα ΙΙ Διάδοση Η/Μ κύματος Ι Διάδοση Η/Μ κύματος Ι Τεχνολογία Ηλεκτροτεχνικών Υλικών Τεχνολογία Ηλεκτροτεχνικών Υλικών Εισαγωγή στην Ενεργειακή
Π.Π.Σ.Π.Α Εργασία τεχνολογίας: ΡΟΜΠΟΤ
 Π.Π.Σ.Π.Α Εργασία τεχνολογίας: ΡΟΜΠΟΤ Κωνσταντίνα Τομαρά Α2 2013-2014 Επιβλέπων Καθηγητής: Δημήτριος Μανωλάς Περιεχόμενα Εξώφυλλο Περιεχόμενα Πρόλογος Εισαγωγή Ευχαριστίες Τι είναι ρομπότ; Από που προέρχεται
Π.Π.Σ.Π.Α Εργασία τεχνολογίας: ΡΟΜΠΟΤ Κωνσταντίνα Τομαρά Α2 2013-2014 Επιβλέπων Καθηγητής: Δημήτριος Μανωλάς Περιεχόμενα Εξώφυλλο Περιεχόμενα Πρόλογος Εισαγωγή Ευχαριστίες Τι είναι ρομπότ; Από που προέρχεται
Πανεπιστήμιο Κύπρου. Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών (ΗΜΜΥ)
") Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών (ΗΜΜΥ) 26/01/2014 Συνεισφορά του κλάδους ΗΜΜΥ Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Ευρύ φάσμα γνώσεων και επιστημονικών
Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών (ΗΜΜΥ) 26/01/2014 Συνεισφορά του κλάδους ΗΜΜΥ Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Ευρύ φάσμα γνώσεων και επιστημονικών
Δραστηριότητες Έρευνας και Ανάπτυξης του Εργαστηρίου Αυτοματικής Ρομποτικής του Τμήματος Μηχανολογίας του ΤΕΙ Κρήτης
 Δραστηριότητες Έρευνας και Ανάπτυξης του Εργαστηρίου Αυτοματικής Ρομποτικής του Τμήματος Μηχανολογίας του ΤΕΙ Κρήτης των Δρ. Μανόλη Καββουσανού και Δρ. Γιάννη Φασουλά Το Εργαστήριο Αυτοματικής Ρομποτικής
Δραστηριότητες Έρευνας και Ανάπτυξης του Εργαστηρίου Αυτοματικής Ρομποτικής του Τμήματος Μηχανολογίας του ΤΕΙ Κρήτης των Δρ. Μανόλη Καββουσανού και Δρ. Γιάννη Φασουλά Το Εργαστήριο Αυτοματικής Ρομποτικής
ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ
 Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2009
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 29 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και Ηλεκτρονικός
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 29 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και Ηλεκτρονικός
ΑΙΘΟΥΣΑ 1 ΠΡΟΓΡΑΜΜΑ ΧΕΙΜΕΡΙΝΟΥ ΕΞΑΜΗΝΟΥ ΑΚΑΔΗΜΑΙΚΟΥ ΕΤΟΥΣ 2015/16
 ΑΙΘΟΥΣΑ 1 09-10 10-11 11-12 12-13 Γραμμικών Συστημάτων Γραμμικών Συστημάτων Μικροκύματα ΙΙ Μικροκύματα ΙΙ Διάδοση Η/Μ κύματος Ι Διάδοση Η/Μ κύματος Ι Ηλεκτρικά Κυκλώματα ΙΙ (Α) Ηλεκτρικά Κυκλώματα ΙΙ (Α)
ΑΙΘΟΥΣΑ 1 09-10 10-11 11-12 12-13 Γραμμικών Συστημάτων Γραμμικών Συστημάτων Μικροκύματα ΙΙ Μικροκύματα ΙΙ Διάδοση Η/Μ κύματος Ι Διάδοση Η/Μ κύματος Ι Ηλεκτρικά Κυκλώματα ΙΙ (Α) Ηλεκτρικά Κυκλώματα ΙΙ (Α)
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
Εισαγωγή στους Ηλεκτρονικούς Υπολογιστές. Τμήμα Λογιστικής. 1 Στέργιος Παλαμάς
 ΤΕΙ Ηπείρου Παράρτημα Πρέβεζας Τμήμα Λογιστικής 1 Θεματικές Ενότητες Ιστορική Αναδρομή - Εφαρμογές Αρχιτεκτονική ενός Η/Υ - Υλικό Σύνθεση ενός Προσωπικού Υπολογιστή Λογισμικό Η/Υ - Λειτουργικά Συστήματα
ΤΕΙ Ηπείρου Παράρτημα Πρέβεζας Τμήμα Λογιστικής 1 Θεματικές Ενότητες Ιστορική Αναδρομή - Εφαρμογές Αρχιτεκτονική ενός Η/Υ - Υλικό Σύνθεση ενός Προσωπικού Υπολογιστή Λογισμικό Η/Υ - Λειτουργικά Συστήματα
ΣΥΓΧΡΟΝΗ ΤΕΧΝΟΛΟΓΙΑ ΣΤΗ ΜΗΧΑΝΟΛΟΓΙΑ. ΕΚΠΑΙΔΕΥΤΗΣ: Ανδρέας Ιωάννου
 ΣΥΓΧΡΟΝΗ ΤΕΧΝΟΛΟΓΙΑ ΣΤΗ ΜΗΧΑΝΟΛΟΓΙΑ 1 ΑΥΤΟΜΑΤΗ ΓΕΜΙΣΤΙΚΗ 2 3 ΒΑΣΙΚΕΣ ΑΡΧΕΣ ΡΥΘΜΙΣΗΣ ΚΑΙ ΕΛΕΓΧΟΥ ΑΥΤΟΜΑΤΩΝ ΛΕΙΤΟΥΡΓΕΙΩΝ Ο αυτοματισμός περιλαμβάνει σχεδόν κάθε μηχανισμό ή συσκευή που ελαττώνει το ποσό
ΣΥΓΧΡΟΝΗ ΤΕΧΝΟΛΟΓΙΑ ΣΤΗ ΜΗΧΑΝΟΛΟΓΙΑ 1 ΑΥΤΟΜΑΤΗ ΓΕΜΙΣΤΙΚΗ 2 3 ΒΑΣΙΚΕΣ ΑΡΧΕΣ ΡΥΘΜΙΣΗΣ ΚΑΙ ΕΛΕΓΧΟΥ ΑΥΤΟΜΑΤΩΝ ΛΕΙΤΟΥΡΓΕΙΩΝ Ο αυτοματισμός περιλαμβάνει σχεδόν κάθε μηχανισμό ή συσκευή που ελαττώνει το ποσό
1. Σέρβο (R/C Servo) 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης
 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης") www.robolab.tuc.gr 1. Σέρβο (R/C Servo) 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σέρβο (R/C servo) (1) Το σέρβο είναι συσκευή που αποτελείται
www.robolab.tuc.gr 1. Σέρβο (R/C Servo) 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σέρβο (R/C servo) (1) Το σέρβο είναι συσκευή που αποτελείται
Πρόγραµµα τελικών εξετάσεων Ηµεροµηνία 2ο 4ο 6ο 8ο ευτέρα 28/8/2006
 ΕΘΝΙΚΟ Μ. ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδηµαϊκό έτος 2005-2006 Ιούνιος 2006 Πρόγραµµα τελικών εξετάσεων Ηµεροµηνία 2ο 4ο 6ο 8ο 28/8/2006 Μιγαδικές Συναρτ. ιαφορ. Εξισώσεις
ΕΘΝΙΚΟ Μ. ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδηµαϊκό έτος 2005-2006 Ιούνιος 2006 Πρόγραµµα τελικών εξετάσεων Ηµεροµηνία 2ο 4ο 6ο 8ο 28/8/2006 Μιγαδικές Συναρτ. ιαφορ. Εξισώσεις
ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2018-2019 Περίοδος Σεπεμβρίου 2019 Έκδοση 17/07/2019 26/08/2019 27/08/2019
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2018-2019 Περίοδος Σεπεμβρίου 2019 Έκδοση 17/07/2019 26/08/2019 27/08/2019
Αργύρης Δέντσορας Επίκουρος Καθηγητής ΔΟΜΙΚΕΣ ΜΗΧΑΝΕΣ. Πανεπιστημιακές Παραδόσεις
 Αργύρης Δέντσορας Επίκουρος Καθηγητής ΔΟΜΙΚΕΣ ΜΗΧΑΝΕΣ Πανεπιστημιακές Παραδόσεις ΠΑΤΡΑ 2003 ΟΜΙΚΕΣ ΜΗΧΑΝΕΣ i ΠΕΡΙΕΧΟΜΕΝΑ ΕΙΣΑΓΩΓΗ 1 ΓΕΝΙΚΑ ΠΕΡΙ ΟΜΙΚΩΝ ΜΗΧΑΝΩΝ 5 Εισαγωγή 5 Κατηγορίες δοµικών µηχανών 6
Αργύρης Δέντσορας Επίκουρος Καθηγητής ΔΟΜΙΚΕΣ ΜΗΧΑΝΕΣ Πανεπιστημιακές Παραδόσεις ΠΑΤΡΑ 2003 ΟΜΙΚΕΣ ΜΗΧΑΝΕΣ i ΠΕΡΙΕΧΟΜΕΝΑ ΕΙΣΑΓΩΓΗ 1 ΓΕΝΙΚΑ ΠΕΡΙ ΟΜΙΚΩΝ ΜΗΧΑΝΩΝ 5 Εισαγωγή 5 Κατηγορίες δοµικών µηχανών 6
ΕΡΓΑΣΤΗΡΙΑΚΗ ΕΦΑΡΜΟΓΗ 1 ΤO ΡΟΜΠΟΤ INTELLITEK ER-2u
 Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Στοχαστικά Συστήματα & Επικοινωνίες Ηλ. Αμφ. 1, 2 Ηλ. Αιθ. 001, 002. Γλώσσες Προγραμματισμού Ι Ηλ. Αμφ.
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2015-2016 Περίοδος Ιουνίου 2016 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2015-2016 Περίοδος Ιουνίου 2016 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2015-2016 Περίοδος Σεπτεμβρίου 2016 ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1-2o ΕΞΑΜΗΝΟ 3-4ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2015-2016 Περίοδος Σεπτεμβρίου 2016 ΠΡΟΓΡΑΜΜΑ ΕΠΑΝΑΛΗΠΤΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1-2o ΕΞΑΜΗΝΟ 3-4ο ΕΞΑΜΗΝΟ
3 Διακριτοποίηση Συστημάτων Συνεχούς Χρόνου... 65
 ΠΕΡΙΕΧΟΜΕΝΑ \ Πρόλογος 15 1 Εισαγωγικά Στοιχεία Βιομηχανικού Ελέγχου 19 1.1 Μοντέλα Περιγραφής Βιομηχανικών Συστημάτων... 19 1.2 Βιομηχανικοί Ελεγκτές 23 1.2.1 Σύστημα 23 1.2.2 Σύνδεση Συστημάτων 26 1.2.3
ΠΕΡΙΕΧΟΜΕΝΑ \ Πρόλογος 15 1 Εισαγωγικά Στοιχεία Βιομηχανικού Ελέγχου 19 1.1 Μοντέλα Περιγραφής Βιομηχανικών Συστημάτων... 19 1.2 Βιομηχανικοί Ελεγκτές 23 1.2.1 Σύστημα 23 1.2.2 Σύνδεση Συστημάτων 26 1.2.3
Έλεγχος Κίνησης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Εισαγωγή στον Έλεγχο Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Εισαγωγή στον Έλεγχο Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το παρόν εκπαιδευτικό
Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot
 Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Εργασία στο μάθημα της πληροφορικής Ονοματεπώνυμο μαθήτριας: Αναστασία Τσαρχοπούλου Τάξη: Γ 4 γυμνασίου Ονοματεπώνυμο καθηγητή: Κωνσταντίνος Παρασκευόπουλος
Robot από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Εργασία στο μάθημα της πληροφορικής Ονοματεπώνυμο μαθήτριας: Αναστασία Τσαρχοπούλου Τάξη: Γ 4 γυμνασίου Ονοματεπώνυμο καθηγητή: Κωνσταντίνος Παρασκευόπουλος
ΟΔΗΓΟΣ ΕΠΑΓΓΕΛΜΑΤΟΣ ΤΟΥ ΤΜΗΜΑΤΟΣ ΑΥΤΟΜΑΤΙΣΜΟΥ. Γρηγόρης Νικολάου
 ΟΔΗΓΟΣ ΕΠΑΓΓΕΛΜΑΤΟΣ ΤΟΥ ΤΜΗΜΑΤΟΣ ΑΥΤΟΜΑΤΙΣΜΟΥ Γρηγόρης Νικολάου Σημερινή επισκόπηση 1 Τι είναι ο Αυτοματισμός 2 Αντικείμενο Σπουδών 3 Επαγγελματικά πεδία απασχόλησης ΤΙ ΕΊΝΑΙ Ο ΑΥΤΟΜΑΤΙΣΜΟΣ Ήρων ο Αλεξανδρινός
ΟΔΗΓΟΣ ΕΠΑΓΓΕΛΜΑΤΟΣ ΤΟΥ ΤΜΗΜΑΤΟΣ ΑΥΤΟΜΑΤΙΣΜΟΥ Γρηγόρης Νικολάου Σημερινή επισκόπηση 1 Τι είναι ο Αυτοματισμός 2 Αντικείμενο Σπουδών 3 Επαγγελματικά πεδία απασχόλησης ΤΙ ΕΊΝΑΙ Ο ΑΥΤΟΜΑΤΙΣΜΟΣ Ήρων ο Αλεξανδρινός
Κατασκευή Ρομπότ. Από τη θεωρία στην πράξη. Μάκης Χατζόπουλος
 Κατασκευή Ρομπότ Από τη θεωρία στην πράξη Μάκης Χατζόπουλος Λέκτορας Εφαρμογών Τμήμα Μηχανικών Βιομηχανικής Σχεδίασης και Παραγωγής Σχολή Μηχανικών - Πανεπιστήμιο Δυτικής Αττικής Τι κοινό έχουν αυτές οι
Κατασκευή Ρομπότ Από τη θεωρία στην πράξη Μάκης Χατζόπουλος Λέκτορας Εφαρμογών Τμήμα Μηχανικών Βιομηχανικής Σχεδίασης και Παραγωγής Σχολή Μηχανικών - Πανεπιστήμιο Δυτικής Αττικής Τι κοινό έχουν αυτές οι
Η ΤΕΧΝΟΛΟΓΙΑ ΤΗΣ ΡΟΜΠΟΤΙΚΗΣ: ΕΦΑΡΜΟΓΕΣ, ΕΞΕΛΙΞΗ ΚΑΙ ΣΗΜΕΡΙΝΕΣ ΤΑΣΕΙΣ
 ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΙΟΙΚΗΣΗΣ ΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ Η ΤΕΧΝΟΛΟΓΙΑ ΤΗΣ ΡΟΜΠΟΤΙΚΗΣ: ΕΦΑΡΜΟΓΕΣ, ΕΞΕΛΙΞΗ ΚΑΙ ΣΗΜΕΡΙΝΕΣ ΤΑΣΕΙΣ ιπλωµατική Εργασία που παρουσιάστηκε στο Πολυτεχνείο Κρήτης
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΑΡΑΓΩΓΗΣ & ΙΟΙΚΗΣΗΣ ΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ Η ΤΕΧΝΟΛΟΓΙΑ ΤΗΣ ΡΟΜΠΟΤΙΚΗΣ: ΕΦΑΡΜΟΓΕΣ, ΕΞΕΛΙΞΗ ΚΑΙ ΣΗΜΕΡΙΝΕΣ ΤΑΣΕΙΣ ιπλωµατική Εργασία που παρουσιάστηκε στο Πολυτεχνείο Κρήτης
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες
 Πράκτορες") ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Πράκτορες και Περιβάλλοντα Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Σήµερα Πράκτορες χαρακτηριστικά στοιχεία είδη πρακτόρων
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Πράκτορες και Περιβάλλοντα Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Σήµερα Πράκτορες χαρακτηριστικά στοιχεία είδη πρακτόρων
ΑΙΣΘΗΤΗΡΙΑ ΣΤΑΘΜΗΣ. Σχήμα 1: Ηλεκτρικός μετρητής με πλωτήρα
 1) Ηλεκτρικός μετρητής με πλωτήρα ΑΙΣΘΗΤΗΡΙΑ ΣΤΑΘΜΗΣ Ένας ηλεκτρικός μετρητής με πλωτήρα είναι έτσι σχεδιασμένος ώστε να ακολουθεί την μεταβαλλόμενη στάθμη ενός υγρού. Όταν αυτή αλλάζει η κίνηση του πλωτήρα
1) Ηλεκτρικός μετρητής με πλωτήρα ΑΙΣΘΗΤΗΡΙΑ ΣΤΑΘΜΗΣ Ένας ηλεκτρικός μετρητής με πλωτήρα είναι έτσι σχεδιασμένος ώστε να ακολουθεί την μεταβαλλόμενη στάθμη ενός υγρού. Όταν αυτή αλλάζει η κίνηση του πλωτήρα
Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping).
.") Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής Δεδομένων, Μονάδα Επεξεργασίας
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής Δεδομένων, Μονάδα Επεξεργασίας