ORGANE DE MAŞINI, MECANISME ŞI TRIBOLOGIE STUDII DE CAZ
|
|
|
- Αιγιδιος Παπάζογλου
- 8 χρόνια πριν
- Προβολές:
Transcript
1 ORGANE DE MAŞINI, MECANISME ŞI TRIBOLOGIE STUDII DE CAZ
2
3 Felicia SUCALĂ Ovidiu BELCIN Ştefan BOJAN Simion HARAGÂŞ Gheorghe KEREKES Dumitru POP Marius PUSTAN Lucian TUDOSE Adalbert ANTAL Corina BÎRLEANU Aurica CĂZILĂ Dorina JICHIŞAN-MATIEŞAN Iacob OLTEAN Claudiu POPA Ovidiu TĂTARU Ioan TURCU ORGANE DE MAŞINI, MECANISME ŞI TRIBOLOGIE STUDII DE CAZ Editura Todesco 008
4
5 CUPRINS PREFAŢĂ...9 ORGANE DE MAŞINI.... DETERMINAREA COEFICIENŢILOR DE FRECARE LA ASAMBLĂRILE CU ŞURUBURI...3. DETERMINĂRI EXPERMENTALE ASUPRA UNEI ASAMBLĂRI CU ŞURUBURI PRESTRÂNSE RANDAMENTUL FILETELOR DE MIŞCARE ASAMBLĂRI CU PENE PARALELE ASAMBLĂRI PRIN CANELURI DETERMINAREA EXPERIMENTALĂ A MOMENTULUI DE TORSIUNE TRANSMISIBIL PRINTR-O ÎMBINARE CU PENE INELARE STUDIUL ASAMBLĂRILOR CU BRĂŢĂRI ELASTICE STUDIUL EXPERIMENTAL AL ASAMBLĂRILOR PRIN STRÂNGERE PROPRIE (SERAJE) DETERMINAREA EXPERIMENTALĂ A CARACTERISTICII ŞI RIGIDITĂŢII ARCURILOR DETERMINAREA RANDAMENTULUI ŞURUBURILOR CU BILE DETERMINAREA DISTRIBUŢIEI PRESIUNII ÎN PELICULA DE LUBRIFIANT LA LAGĂRELE CU ALUNECARE CU UNGERE HIDRODINAMICĂ...8. ARBORI ELASTICI. VIBRAŢII FLEXIONALE, TURAŢIA CRITICĂ ŞI FENOMENUL DE REZONANŢĂ SIMULAREA PREZENŢEI UNEI FISURI ÎNTR UN ARBORE AFLAT ÎN MIŞCARE DE ROTAŢIE PIERDERILE PRIN FRECARE ÎN LAGĂRELE CU RULMENŢI COMPORTAREA ÎN FUNCŢIONARE A RULMENŢILOR CU DETERIORĂRI ÎNCERCAREA AMBREIAJELOR CU DISCURI DE FRICŢIUNE CARACTERISTICA STATICĂ A CUPLAJELOR ELASTICE...37
6 6 8. RESTABILIREA PARAMETRILOR DIMENSIONALI AI ANGRENAJELOR CU ROŢI DINŢATE CILINDRICE CU DINŢI DREPŢI RESTABILIREA PARAMETRILOR DIMENSIONALI AI ANGRENAJELOR CU ROŢI DINŢATE CILINDRICE CU DINŢI ÎNCLINAŢI RESTABILIREA PARAMETRILOR DIMENSIONALI AI ANGRENAJELOR CU ROŢI DINŢATE CONICE CU DINŢI DREPŢI RESTABILIREA PARAMETRILOR DIMENSIONALI AI ANGRENAJELOR MELCATE CILINDRICE MONTAREA ŞI DEMONTAREA REDUCTOARELOR STUDIUL FACTORILOR DE INFLUENŢĂ ASUPRA FUNCŢIONĂRII TRANSMISIILOR PRIN CURELE...97 MECANISME CUPLE CINEMATICE ŞI REPREZENTAREA STRUCTURALǍ A MECANISMELOR CU BARE STUDIUL STRUCTURAL AL MECANISMELOR PLANE ANALIZA CINEMATICĂ A MECANISMELOR PLANE CU AJUTORUL FUNCŢIILOR DE TRANSMITERE ANALIZA CINEMATICĂ A MECANISMELOR PLANE PE CALE GRAFO- ANALITICĂ ECHILIBRAREA DINAMICĂ (ÎN DOUĂ PLANE) DETERMINAREA CARACTERISTICILOR MASICE ŞI INERŢIALE PENTRU ELEMENTELE MECANISMULUI PATRULATER PLAN STUDIUL CINEMATICII ŞI DINAMICII MECANISMULUI PATRULATER PLAN FOLOSIND METODE MODERNE DE SIMULARE GENERAREA CU CREMALIERA A DINŢILOR ROŢILOR DINŢATE CILINDRICE CU DINŢI DREPŢI...93 TRIBOLOGIE DETERMINAREA FORŢELOR DE FRECARE ŞI A COEFICIENŢILOR DE FRECARE ÎN CAZUL FRECĂRII USCATE DETERMINAREA FORŢELOR DE FRECARE ŞI A COEFICIENŢILOR DE FRECARE ÎN FUNCŢIE DE VITEZA DE ALUNECARE PENTRU DIFERITE CUPLURI DE MATERIALE, ÎN CAZUL FRECĂRII USCATE...3
7 34. STUDIUL ALUNECĂRII CU INTERMITENŢE (STICK-SLIP) ÎN FUNCŢIE DE CUPLUL DE MATERIALE ŞI DE SARCINA NORMALĂ DE ÎNCĂRCARE STUDIUL ALUNECĂRII CU INTERMITENŢE (STICK-SLIP) ÎN FUNCŢIE DE LUBRIFIANT ŞI DE RUGOZITATEA SUPRAFEŢELOR DE ALUNECARE DETERMINAREA PE CALE GRAVIMETRICĂ A UZURII ELEMENTELOR CUPLELOR DE FRECARE CU CONTACT LINIAR ÎN FUNCŢIE DE CALITATEA MATERIALELOR, ÎN REGIM DE FRECARE MIXTĂ DETERMINAREA PE CALE GRAVIMETRICĂ A UZURII ELEMENTELOR CUPLELOR DE FRECARE CU CONTACT LINIAR ÎN FUNCŢIE DE TIPUL LUBRIFIANTULUI, ÎN REGIM DE FRECARE MIXTĂ DETERMINAREA VARIAŢIEI FORŢELOR DE FRECARE ŞI A COEFICIENŢILOR DE FRECARE ÎN FUNCŢIE DE SARCINA DE ÎNCĂRCARE PENTRU DIFERITE CUPLURI DE MATERIALE DIN MASE PLASTICE ELEMENTE METALICE, ÎN CAZUL FRECĂRII USCATE DETERMINAREA UZURII DE ABRAZIUNE PE DISC ROTATIV CU HÂRTIE DE ŞLEFUIT DETERMINAREA REZISTENŢEI PELICULEI DE LUBRIFIANT LA PRESIUNI RIDICATE PE MAŞINA CU PATRU BILE ANALIZA, PRIN METODE OPTICE, A UNGERII ELASTOHIDRODINAMICE INFLUENŢA PARAMETRILOR CONSTRUCTIVI ŞI FUNCŢIONALI ASUPRA DISTRIBUŢIEI PRESIUNII ÎN PELICULA DE LUBRIFIANT LA LAGĂRELE CU ALUNECARE CU UNGERE HIDRODINAMICĂ STUDIUL EXPERIMENTAL AL FRECĂRII DE ALUNECARE CU AJUTORUL MODULULUI EXPERIMENTAL ŞTIFT PE DISC (PIN ON DISC) STUDIUL EFECTULUI STICK-SLIP ÎN PROCESUL DE FRECARE BIBLIOGRAFIE
8
9 PREFAŢĂ Lucrarea de faţă, urmăreşte ca prin structura şi conţinutul său să pună la dispoziţia studenţilor un material suplimentar important pentru însuşirea metodologiei utilizate în cadrul unor cercetări experimentale, ajutând în acelaşi timp la înţelegerea şi însuşirea cunoştinţelor predate la disciplinele Organe de maşini, Mecanisme şi organe de maşini, Tribologie. Studenţii fac cunoştinţă cu o serie de metode şi tehnici noi de evaluare experimentală a unor mărimi mecanice specifice organelor de maşini, mecanismelor şi maşinilor în general. Sunt utilizate atât metode precise de măsurare a unor mărimi mecanice, cât şi tehnica modernă de calcul. Lucrarea conţine un număr de 3 studii de caz în domeniul organelor de maşini, 8 în domeniul mecanismelor şi 3 de tribologie.
10
11 ORGANE DE MAŞINI
12
13 . DETERMINAREA COEFICIENŢILOR DE FRECARE LA ASAMBLĂRILE CU ŞURUBURI.. Scopul lucrării În cadrul lucrării de laborator se va proceda la determinarea ' coeficienţilor de frecare μ i între şurub şi piuliţă şi μ i între piuliţă şi piesa de reazem la o îmbinare cu şuruburi... Consideraţii teoretice La strângerea unei asamblări cu şuruburi trebuie învinsă frecarea ce apare între şurub şi piuliţă şi între piuliţă şi piesa de reazem. Mărimea coeficienţilor de frecare variază în limite destul de largi în funcţie de următorii parametri: natura materialelor folosite la execuţia elementelor cuplei elicoidale şurub-piuliţă, precizia şi calitatea prelucrării elementelor îmbinării filetate, prezenţa şi tipul lubrifiantului, presiunea de contact între spirele şurubului şi piuliţei, respectiv între piuliţă şi piesa de reazem etc. Momentul de torsiune total T toti care se aplică la strângerea asamblării filetate este egal cu suma momentelor de înşurubare a piuliţei pe spirele şurubului T i şi a momentului de frecare pe suprafaţa de reazem a piuliţei T i, corespunzătoare forţei axiale F i : Ttoti T + i Ti = () T i ' ( β + ϕ ) d = Fi tan i () T i D D = Fi μi (3) 3 D D S-au folosit notaţiile: β unghiul de înclinare a elicei filetului pe cilindrul cu diametrul d :
14 4 p tanβ = (4) π d p pasul filetului; φ' i unghiul de frecare corespunzător deplasării piuliţei pe şurub la strângerea sa cu momentul T i ; μ' i coeficientul de frecare între spirele şurubului şi a piuliţei; μ i coeficientul de frecare dintre piuliţă şi piesa de reazem; D 4 diametrul exterior al suprafeţei inelare de sprijin a piuliţei pe piesa de reazem; D 3 diametrul găurii de trecere din piesa Fig. pe care se sprijină piuliţa. Utilizând datele experimentale pentru T i şi T i din relaţiile () şi (3) se determină coeficienţii de frecare: i μ i = i ; = arctan β Fi d tan ϕ T ϕ i (5) 3 T D D i 4 3 μ i = (6) 3 3 Fi D4 D3.3. Utilajul şi aparatura utilizată Lucrarea se va executa folosind dispozitivul de încercat şuruburi (fig.) care constă din următoarele părţi principale: suportul dispozitivului, care are ca parte principală o placă de lemn pe care se fixează elementele 9 şi 4 ale dispozitivului; arcul lamelar dublu 5; şurubul de încercat 7; piuliţa 8; rondela 9; rondela sferică 3 care asigură centrarea capului şurubului pe arcul lamelar dublu; rulmentul axial 0; bucşa ;
15 elementul de blocare a capului şurubului contra rotirii 6; tija 0 pe care se montează elementul de blocare 6; comparatorul 7 pentru măsurarea deformaţiilor arcului lamelar dublu (varianta a) (varianta b) Fig.
16 6 Strângerea controlată a piuliţei se realizează cu o cheie dinamometrică clasică sau cu o cheie dinamometrică digitală. Construcţia cheii dinamometrice clasice este prezentată în figura 3. În componenţa cheii dinamometrice intră braţul care are montat, la un capăt, un cap schimbabil 4 funcţie de dimensiunea piuliţei iar la celălalt capăt un mâner prin care se aplică forţa exterioară A A-A Fig. 3 A Sub acţiunea sarcinii aplicate la capătul braţului, acesta va fi solicitat la încovoiere ca o bară încastrată la un capăt. Deformaţia braţului este măsurată cu ajutorul comparatorului montat pe suportul 3, astfel încât palpatorul său este menţinut în contact permanent cu tija. Cheia dinamometrică a fost etalonată astfel încât pe baza diagramei de etalonare se pot determina valorile momentului de torsiune aplicat. Cheia dinamometrică digitală este prezentată în figura 4. La aceasta citirea momentului aplicat se face digital. Fig. 4
17 .4. Desfăşurarea lucrării În cadrul lucrării se vor încerca şuruburi şi piuliţe standardizate cu dimensiunile corespunzătoare pentru M8 şi M0 executate din diferite materiale realizându-se cuplurile de materiale oţel/oţel, oţel/bronz, oţel/fontă. Procedeul de lucru cuprinde următoarele operaţii:. Măsurarea caracteristicilor geometrice ale şuruburilor şi piuliţelor supuse încercării, conform cerinţelor cuprinse în tabelul. 7 Caracteristicile şurubului şi piuliţei Diametrul exterior al filetului [mm] Diametrul mediu al filetului [mm] Diametrul interior al filetului [mm] Pasul [mm] Notaţie d d d p Şurub: oţel Piuliţă: oţel Şurub: oţel Piuliţă: bronz Tabelul Şurub: oţel Piuliţă: fontă Înălţimea piuliţei [mm] Diametrul exterior al suprafeţei de reazem [mm] Diametrul găurii de trecere pentru şurub [mm] m D 4 D 3. Determinarea forţei axiale maxime admisibile ce poate fi preluată de tija şurubului de încercare pentru a evita deformaţiile remanente în timpul experimentării: F π d 4 max. a = σat (7) unde: σ at = N/mm pentru OL 37; σ at = N/mm pentru OL 50. În timpul măsurătorilor forţa F max.a se va aplica treptat în fracţiuni egale cu: Fmax. a Fmax. a 3 Fmax. a F = ; F = ; F3 = ; F 4 = Fmax. a 4 4
18 8 3. Utilizând diagrama de etalonare a arcului lamelar dublu (poz.5, fig.) se determină săgeţile f, f, f 3 şi f 4 corespunzătoare forţelor F, F, F 3, F Se execută montajul şurubului din oţel şi al piuliţei din oţel în dispozitiv după cum urmează: Etapa I în dispozitiv se introduce sub rondela 9 rulmentul axial 0 pentru a elimina frecarea dintre piuliţă şi piesa de reazem. În această etapă momentul de torsiune citit la cheia dinamometrică va reprezenta T i ; Etapa a II-a se va monta în dispozitivul de încercare, în locul rulmentului, bucşa prin care trece şurubul de încercat. În acest montaj se măsoară la cheia dinamometrică, momentul de torsiune T toti necesar învingerii frecării dintre piuliţă şi piesa de reazem, precum şi pentru deplasarea piuliţei pe şurub. Momentul de torsiune T i (de frecare între piuliţă şi piesa de reazem) se va determina cu relaţia: Ti Ttoti T i = (8) 5. După montarea şurubului, corespunzător etapei I, punctul 4 se procedează astfel: Se fixează la zero comparatorul arcului lamelar dublu şi cel al cheii dinamometrice, după ce în prealabil s-au eliminat jocurile din îmbinare prin strângerea piuliţei cu mâna; Se aplică pe piuliţă, capul cheii dinamometrice şi se roteşte braţul cheii până ce comparatorul arcului lamelar dublu indică valoarea deformaţiei egală cu f, corespunzătoare forţei F. În acest moment se citeşte pe ceasul comparator al cheii, deformaţia braţului cheii y ; Se strânge piuliţa în continuare cu cheia dinamometrică până ce comparatorul de la arcul lamelar dublu indică deformaţia f, corespunzătoare forţei F din şurub; Se notează deformaţia y a braţului cheii; Se procedează analog şi pentru valorile forţelor F 3 şi F 4 înscriinduse deformaţiile braţului cheii dinamometrice y 3 şi y 4 în tabelul ; Se deşurubează piuliţa complet; Se repetă operaţiile de la punctul 5 de 3 ori notând valorile măsurate în tabelul. Se va face apoi convertirea valorilor medii ale cifrelor citite la măsurarea experimentală y med, y med, y 3med, y 4med în unităţi de moment, cu ajutorul diagramei de etalonare a cheii dinamometrice.
19 9 Oţel/oţel Săgeata Forţa axială f i Deformaţia braţului cheii dinamometrice etapa I T i φ' i μ' i braţului cheii dinamometrice Deformaţia etapa a II-a Tabelul T toti T i μ i F f y y med = T x x med = F f y y med = T x x med = F 3 f 3 y 3 y 3med = T 3 x 3 x 3med = F 4 f 4 y 4 y 4med = T 4 x 4 x 4med = 6. Pentru etapa a II-a (punctul 4) se procedează în felul următor: Se elimină jocul din îmbinare prin strângerea piuliţei cu mâna; Se fixează la zero comparatoarele de la arcul lamelar şi de la cheia dinamometrică; Se strânge piuliţa cu cheia dinamometrică până ce comparatorul arcului indică valoarea f, corespunzătoare forţei F. Se notează în acest moment indicaţia comparatorului de la braţul cheii dinamometrice x, care, convertită în unităţi de moment, va reprezenta o valoare pentru T toti ; Se procedează analog pentru forţele F, F 3, F 4 notând deformaţiile braţului cheii x, x 3, x 4 ; Se repetă operaţiile de la punctul 6 de 3 ori, valorile citite introducându-se în tabel, iar pentru valorile medii x med, x med, x 3med, x 4med se determină T tot, T tot, T tot3 şi T tot4 din diagrama de etalonare a cheii dinamometrice..5. Prelucrarea datelor. Datele experimentale se înscriu în tabelele, 3 şi 4.. Cu relaţiile 5 şi 6 se determină coeficienţii de frecare μ' i şi μ i. 3. Se trasează diagramele μ' i = f(f i ) şi μ i = f(f i ) pe baza datelor din tabele pentru cuplurile de materiale încercate.
20 0 Oţel/bronz Săgeata Forţa axială f i Deformaţia braţului cheii dinamometrice etapa I T i φ' i μ' i braţului cheii dinamometrice Deformaţia etapa a II-a Tabelul 3 T toti T i μ i F f y y med = T x x med = F f y y med = T x x med = F 3 f 3 y 3 y 3med = T 3 x 3 x 3med = F 4 f 4 y 4 y 4med = T 4 x 4 x 4med = Oţel/fontă Săgeata Forţa axială f i Deformaţia braţului cheii dinamometrice etapa I T i φ' i μ' i braţului cheii dinamometrice Deformaţia etapa a II-a Tabelul 4 T toti T i μ i F f y y med = T x x med = F f y y med = T x x med = F 3 f 3 y 3 y 3med = T 3 x 3 x 3med = F 4 f 4 y 4 y 4med = T 4 x 4 x 4med =.6. Concluzii Se compară valorile determinate experimental pentru coeficienţii de frecare cu cele date în literatura de specialitate şi se explică alura diagramelor.
21 . DETERMINĂRI EXPERMENTALE ASUPRA UNEI ASAMBLĂRI CU ŞURUBURI PRESTRÂNSE.. Scopul lucrării Şuruburile montate cu prestrângere şi asupra cărora acţionează şi forţe exterioare se întâlnesc în practicǎ la îmbinarea capacelor în mecanismele bielă-manivelă, la chiulasele motoarelor cu ardere internă, la capacele recipienţilor de înaltǎ presiune, la flanşele conductelor cu presiune înaltǎ etc. Pentru determinarea forţei totale care lucrează asupra tijei şurubului este necesarǎ cunoaşterea rigidităţii pieselor care formează asamblarea respectivǎ. Problema se poate rezolva în trei moduri: analitic, grafic şi experimental. Lucrarea are drept scop determinarea experimentală a rigidităţii pieselor care formează asamblarea şi compararea rezultatelor experimentale cu cele analitice. Grafic sau cu programe de optimizare se pot face studii privind influenţa forţei de prestrângere şi a rigidităţilor asupra rezistenţei la oboseală a unei astfel de asamblări. ls ls ls.. Consideraţii teoretice F t F t d D 4 D d D 3 Fig. F r F r F lp lp Calculul asamblărilor cu prestrângere are la bazǎ ipoteza că solicitările se produc în domeniul elastic, adică se respectă legea lui Hooke pentru toate materialele care formează asamblarea. Se consideră îmbinarea de forma şi dimensiunile din figura, prestrânsă la montaj de forţa F 0 şi asupra căreia acţionează ulterior şi forţa de serviciu F. Dacǎ sub acţiunea forţei de prestrângere se stabileşte o stare de echilibru a forţelor şi deformaţiilor în piesele care formează
22 asamblarea, la apariţia forţei de serviciu acest echilibru se modifică. Astfel în şurub acţionează forţa F t numită forţă totalǎ, iar în piesele strânse forţa de compresiune F r va scădea la o valoare inferioarǎ forţei de prestrângere. Forţe φ Fv φ Fo ψ ψ Fr F Ft Fcr Δl so Δ l so Deformaţii Δl s Δl p Δl po Fig. Fenomenul se poate urmări pe diagrama forţelor şi a deformaţiilor prezentată în figura unde notaţiile au următoarea semnificaţie: Δ l so deformaţia şurubului sub acţiunea forţei de prestrângere F 0 ; Δ l s deformaţia suplimentară a şurubului (sub acţiunea forţei de serviciu F) identică cu relaxarea pieselor datorată alungirii suplimentare a şurubului; Δ ls = Δlso + Δ ls deformaţia totală a şurubului sub acţiunea forţei totale F t ; Δ l po deformaţia pieselor strânse sub acţiunea forţei de prestrângere F 0 ; Δ l p = Δl po Δ ls deformaţia remanentă a pieselor strânse sub acţiunea forţei F r. Se remarcă uşor că forţa totală F t care solicită şurubul la întindere este mai mică decât suma F 0 + F, datorită elasticităţii elementelor care formează
23 asamblarea. Mărimea deformaţiilor prezentate mai sus precum şi a forţelor F t şi F r depinde de rigiditatea elementelor îmbinării. Dacă forţa de serviciu F variază ciclic se poate pune în evidenţă o componentă variabilǎ a forţei care solicită la întindere şurubul. Această forţă, notatǎ cu F v, rezultă din diferenţa F t -F 0 şi dă naştere unei solicitări la oboseală în şurub. Din diagrama forţelor şi a deformaţiilor şi ţinând seama de relaţiile dintre forţe şi deformaţii, respectiv de legea lui Hooke se poate scrie următoarea relaţie de calcul a forţei variabile: unde: C C F tan rigiditatea şurubului; 0 s = ϕ = Δlso 0 p = ψ = Δl po F C 3 s v = F () Cs + C p F tan rigiditatea pieselor strânse. Ţinând seama de dimensiunile pieselor prezentate în figura, de faptul cǎ deformaţia totală este suma deformaţiilor parţiale a porţiunilor cu secţiune constantă putem scrie: unde: C C s = + şi C C s s C p = + () C C C s, C s rigidităţile celor două tronsoane deformate ale şurubului; C p, C p rigidităţile celor două piese strânse. A E s s s = ; ls C A E s s s = ; ls A s C π d = ; 4 A p E p p p = ; l p A s p C A E p p p = (3) l p π d = (4) 4 Relaţiile pentru A p, sunt scrise în condiţiile în care materialul deformat al celor douǎ piese strânse formează la exterior două mantale tronconice cu generatoarele înclinate la 45º faţă de axa şurubului şi care se aproximează la exterior, ca formă, cu un cilindru. Aria secţiunii pieselor deformate se poate calcula cu relaţia:
24 4 A π = D 4 + l p 4 p D3 ; π Ap = D4 + l p D3 (5) 4 E s modulul de elasticitate al materialului şurubului, în N/mm ; E p, modulele de elasticitate pentru materialele pieselor strânse, în N/mm. Pentru oţel E =, 0 5 N/mm Observaţie Pentru piuliţa hexagonală şi şurubul cu cap hexagonal D 4 =S (S este deschiderea cheii) iar D 3 este diametrul găurii de trecere. Dacă materialul celor două piese strânse este acelaşi se poate utiliza relaţia: π l p + l p Ap = S + D3 (6) 4.3. Utilajul şi aparatura utilizată Fig Pentru realizarea încercărilor se foloseşte un montaj conform figurii 3. Şurubul cu cap hexagonal strânge piesele cilindrice şi 3 filetate la exterior pentru a putea fi montate în bacurile 4 şi 5 adaptate la maşina universală de încercat la tracţiune. Ştiftul 7 împiedicǎ rotirea relativǎ a pieselor şi 3 la strângerea piuliţei, iar pana de blocare 6 împiedicǎ rotirea relativǎ a şurubului faţǎ de bacul 5 în cazul în care strângerea se face cu bacul 5 montat. Pe porţiunea nefiletată a şurubului se fixează traductori cu ajutorul cărora se poate măsura forţa care solicită şurubul la întindere. Între piesele şi 3 se aşează folia de staniol sau hârtie 8 cu ajutorul căreia se poate determina momentul în care forţa de serviciu ajunge la valoarea aşa numitei forţe critice (F cr, fig.), în asamblare
25 neexistând strângere, asamblarea fiind compromisă Desfăşurarea lucrării. Se măsoară dimensiunile tuturor elementelor asamblării.. Se calculează rigidităţile teoretice C s şi C p. 3. Se calculează forţa maximǎ pe care o poate suporta şurubul pe baza solicitării de întindere a tijei filetate cu relaţia π d Fs max = σat [N] (7) 4 d diametrul interior al filetului şurubului (se ia din STAS); σ at rezistenţa admisibilǎ la tracţiune. Pentru OL50, materialul din care este confecţionat şurubul, σ at = 50 N/mm. 4. Se adoptă mărimea forţei de serviciu F = 0,3 F smax şi a forţei de prestrângere F 0 = 0,5 F smax. 5. Se calculează forţa variabilă (teoretică) F v cu relaţia. 6. Se calculează forţa totalǎ (teoreticǎ) F t cu relaţia F t = F 0 + F v. 7. Se realizează montajul conform figurii 3 fără a monta bacurile 4 şi Se realizează strângerea cu forţa F 0 utilizând pentru aceasta o cheie dinamometrică sau puntea tensometrică legată la traductorii de forţă de pe şurub. 9. Se înşurubează bacurile 4 şi 5 pe piesele, respectiv 3, iar ansamblul se instalează pe maşina de încercat la tracţiune. 0. Se încarcă cu sarcina de serviciu F (mărimea forţei F se citeşte la sistemul indicator al maşinii) după care se citeşte din indicaţia punţii tensometrice sau a cheii forţa totalǎ F te (experimentalǎ).. Se încarcă progresiv cu o sarcina suplimentară (astfel încât să nu se depăşească valoarea forţei F smax, rel.7) trăgând uşor cu mâna de foiţa de staniol sau hârtie 8 până când aceasta iese dintre piesele şi 3 fără a se deteriora. Se citeşte, la sistemul indicator al maşinii, mărimea forţei critice F cr (forţa la care asamblarea este compromisǎ). Atenţie! Dacă se ajunge la valoarea lui F smax şi foiţa 8 nu poate fi extrasă, experimentul se opreşte. Se repetă experimentul începând de la punctul 4 cu valori mai mici adoptate pentru F 0 (F 0 = 0, F smax şi F 0 = 0,4 F smax ).
26 6.5. Prelucrarea datelor. Se alege o scară pentru forţe şi pentru deformaţii.. Se trasează la scară diagrama forţelor şi a deformaţiilor pe baza calculelor teoretice prezentate. 3. Din diagrama astfel trasatǎ se determină F cr (forţa la care asamblarea este compromisă). 4. Cu ajutorul forţei totale dedusă experimental F te se recalculează rigiditatea efectivă a pieselor strânse cu relaţia: C F C s pe = Cs (8) Fte Fo 5. Se trag concluzii privind diferenţele dintre valorile teoretice şi cele experimentale (rigiditatea pieselor strânse respectiv forţa critică la care nu mai există strângere în asamblare). 6. Se face o verificare la oboseală a şurubului cu o metodǎ prezentată sau studiată la disciplina Rezistenţa materialelor.
27 3. RANDAMENTUL FILETELOR DE MIŞCARE 3.. Scopul lucrării Scopul direct al lucrării este acela de a permite determinarea experimentală a randamentului filetelor de mişcare. Lucrarea face posibil, de asemenea, să se obţină informaţii utile de altă natură, referitoare la: măsurarea unui moment de torsiune cu ajutorul unui arc dinamometric; soluţii pentru limitarea cursei şurubului testat; izolarea electrică, realizată cu un cuplaj elastic cu elemente din cauciuc. unde: unde: 3.. Consideraţii teoretice O formă a relaţiei care exprimă randamentul unui filet este: tanβ η = tan ( β + ϕ ) β unghiul de înclinare a elicei pe cilindrul de diametru mediu d ; φ unghiul de frecare (corespunzător cazului unui filet cu unghiul de vârf al profilului filetului diferit de zero). Pe de altă parte, randamentul se mai poate exprima, succesiv, astfel: () Lu F p F p η = = = () 3 Lc H π d 0 π T L u lucrul mecanic util; L c lucrul mecanic consumat; F forţa axială [N]; ea reprezintă suma dintre sarcina instalată şi greutatea echipamentului mobil axial. p pasul filetului [mm]; d diametrul mediu al filetului [mm]; H forţa tangenţială având punctul de aplicaţie la raza d / [N]; T momentul de înşurubare [N m].
28 8 Fig. În cadrul lucrării, momentul de înşurubare T se determină experimental cu ajutorul arcului dinamometric (aşa cum se va arăta la 3.3.3),
29 9 F este sarcina aleasă pentru experiment, iar p este pasul filetului. Cunoscând aceste mărimi, din relaţia () se calculează randamentul, iar din relaţia () se poate deduce φ, deoarece β se cunoaşte ( tanβ = p / π d ). Cunoscând unghiul φ se poate calcula coeficientul de frecare redus: μ = tan ϕ (3) 3.3. Descrierea aparaturii Construcţia şi funcţionarea ştandului reies din figura. Cupla cinematică de încercat este constituită din şurubul 8 şi piuliţa 5. Ştandul asigură următoarele funcţii: a. antrenarea şurubului, precum şi ridicarea-coborârea echipamentului mobil în care este încorporată piuliţa; b. încărcarea axială a cuplei cinematice şurub-piuliţă; c. măsurarea momentului de înşurubare. Aceste funcţii sunt explicitate mai jos Antrenarea şurubului şi ridicarea-coborârea piuliţei Elementele care concură la antrenarea şurubului în mişcarea de rotaţie sunt: motorul electric, cuplajul elastic cu bolţuri 3, suportul al motorului - fixat rigid pe carcasa 6 a reductorului, arborele cu pinion 5 montat pe rulmenţii 4 şi 5, angrenajul cilindric, arborele cu pinion 3 montat pe rulmenţii poziţionaţi prin capacele 4, angrenajul cilindric cu roata condusă 7, arborele montat pe rulmenţii 8. Se observă că reductorul este coaxial (arborele de ieşire este coaxial cu arborele de intrare 5). Carcasa lui este montată, prin intermediul axului tubular 9, pe rulmenţii din lagărul 0. Pe arborele este montat capul de antrenare 4. Şurubul este sferic la extremitatea sa inferioară şi se reazemă în lagărul 0. După cum se observă, şurubul este poziţionat la cele două capete. Piuliţa 5 este montată în corpul 7 şi poate efectua doar o mişcare de translaţie. Cursa este limitată sus-jos prin două limitatoare de cursă cu poziţie reglabilă Încărcarea axială a cuplei cinematice şurub-piuliţă Se realizează cu sarcina legată de traversa, care, prin tiranţii 9 şi corpul 7 încarcă piuliţa, respectiv şurubul Măsurarea momentului de înşurubare Deoarece statorul motorului electric este solidarizat, prin suportul, de carcasa pivotantă a reductorului, la ridicarea sarcinii prin rotirea rotorului
30 30 într-un sens, statorul împreună cu carcasa reductorului tind să se rotească în sens contrar. Această rotire este limitată cu ajutorul unui montaj cu arc lamelar dinamometric etalonat (fig.). Pe tamburul 3 (fig.) sunt fixate fălcile 6. La rotirea acestuia una din fălci (în funcţie de sensul de rotaţie) deformează arcul lamelar etalonat 7. Săgeata acestuia se citeşte la comparatorul cu cadran 8. Din diagrama de etalonare a arcului se poate determina valoarea lui T în funcţie de săgeata arcului lamelar. Fig Desfăşurarea lucrării Pentru efectuarea lucrării se parcurg secvenţele de mai jos, în succesiunea indicată: a. Se montează pe ştand cupla şurub-piuliţă de încercat; b. Se fixează sarcina. Aceasta, adunată cu greutatea echipamentului mobil axial, constituie forţa axială F din şurub. c. Se apasă pe butonul care comandă coborârea a sarcinii, pentru a o aduce în poziţia de pornire; d. Se apasă pe butonul care comandă urcarea sarcinii; e. În timp ce sarcina urcă, se citeşte săgeata f a arcului; f. Se coboară sarcina şi se repetă aceste operaţii de câteva ori; se face media valorilor săgeţilor arcului pentru cele n măsurători; Cu informaţiile de mai sus, se procedează la procesarea datelor, astfel: Se identifică filetul, prin constatarea formei profilului şi prin măsurarea diametrului exterior d şi a pasului p; din standarde se determină diametrul d ; Se calculează unghiul de înclinare a elicei β ( tanβ = p / π d );
31 Se parcurg secvenţele a - f de mai sus şi se determină, din diagrama de etalonare a arcului, valoarea momentului de înşurubare T, corespunzător valorii medii a săgeţilor arcului; Se calculează randamentul, din relaţia (); Se determină φ, din relaţia (); Se calculează coeficientul de frecare real µ, din relaţia (3). Datele şi rezultatele se introduc într-un tabel de tipul tabelului. 3 Tabelul Nr. crt Mărimea Simbol Unitatea de măsură Valori numerice Diametrul exterior al filetului d mm Pasul p mm 3 Diametrul mediu al filetului d mm 4 Unghiul de înclinare a elicei β grade 5 Forţa axială F N 6 Săgeata arcului f f f 3 f 4 f 5 Săgeata medie f mm 7 Momentul de înşurubare T N m 8 Randamentul η 9 Unghiul de frecare φ grade 0 Coeficientul de frecare µ Valoarea medie
32 4. ASAMBLĂRI CU PENE PARALELE 4.. Scopul lucrării Lucrarea urmăreşte dimensionarea sau verificarea unei asamblări prin pene paralele. 4.. Consideraţii teoretice Penele paralele sunt pene longitudinale cu joc radial. Fac parte din categoria asamblărilor prin formă. Transmit mişcarea de rotaţie şi momentele de torsiune prin intermediul suprafeţelor de contact dintre feţele laterale ale penei şi canalele din arbore şi butuc. Limitarea momentului de torsiune transmis este impusă de tensiunile de contact dintre aceste suprafeţe. Datorită modului de realizare a îmbinării, pe lângă solicitarea de contact pe feţele laterale, apare şi o solicitare de forfecare a penei în secţiune longitudinală, la suprafaţa de separaţie arbore butuc. Penele sunt ajustate în canalele din arbore şi butuc, cu ajustaj: normal, presat sau liber, iar jocul radial apare între faţa superioară a penei şi fundul canalului de pană din butuc. Câmpul de toleranţă la lăţimea penei b este h9. Penele paralele sunt de următoarele tipuri: subţiri (STAS 950), obişnuite (STAS 004), înalte (STAS 933) şi cu găuri de fixare (STAS 006). Se execută în trei forme: A (fig.,a), B (fig.,b) şi C (fig.,c). Penele paralele obişnuite, de uz general, sunt destinate, în principal, pentru îmbinări pe capete de arbore cilindrice sau conice, cât şi pentru îmbinări pe arbori cu diametrul de la 6 la 500 mm. Se folosesc în asamblări fixe sau mobile. Penele paralele subţiri se folosesc la îmbinări pe capete de arbore cilindrice şi îmbinări pe arbori cu diametrul de la la 50 mm. Se recomandă la îmbinări în pereţi subţiri. Se utilizează în general în asamblări fixe. Penele paralele înalte se recomandă în îmbinări la care butucii sunt executaţi din fontă sau alte materiale de rezistenţă mai mică decât a arborelui. Se folosesc pentru diametre de arbori de la 30 la 500 mm.
33 Penele paralele cu găuri de fixare se montează pe arbori cu diametrul de la la 00 mm prin intermediul a două şuruburi de fixare. Se folosesc frecvent în asamblări mobile. Nu se recomandă pentru arbori tubulari sau bucşe cu pereţi subţiri. Forma şi dimensiunile penelor paralele obişnuite (STAS 004) şi ale canalelor corespunzătoare din arbore şi butuc sunt indicate în figurile şi, respectiv în tabelul. 33 x x x h x l b/ h x l x l c 45º sau r b b b h b/ a b c Fig. Tabelul Adâncimea Raze de Diametrul Interval de Secţiunea penei canalelor de racordare r arborelui lungimi pană şi teşituri c d b h t t l sau r > ,5,8 0,6... 0, > , > ,5,8 0,5... 0, > , > , > , > ,5 3,8 0,4... 0, > , > , > ,5 4, > , > ,4 0,6... 0, > , > ,
34 34 A b A-A h B t t d d-t d+t A r B r Fig. Tipul asamblării şi schema de solicitare σ s h τ f d l c T T σ s F b Tabelul Relaţiile de calcul - pentru asamblări fixe: 4 T 4 T σs = σas ; lc d h lc d h σ T τ f = τaf d b lc d h lc σas Tp 4 - pentru asamblări mobile: T p = 4 pa d h l c 4 T lc d h p d h l Tp 4 a c p a as
35 Relaţiile de calcul şi schema de solicitare a unei asamblări cu pene paralele sunt indicate în tabelul. În acest tabel l şi l c sunt lungimea standardizată respectiv lungimea de calcul a penei (l c l) (l c = l b pentru forma A; l c = l pentru forma B; l c = l b/ pentru forma C). Tensiunile admisibile la cele două solicitări se pot lua din tabelele 3 şi Tabelul 3 σ as, MPa R m R p0 Material Caracterul solicitării MPa MPa Alternant Statică Pulsatorie simetrică OL OLC 45 N OLC 45 CR Oţel călit Oţel de mică rezistenţă Fontă prelucrată R m R p0 τ af, MPa Tabelul 4 Material pană Caracterul solicitării MPa MPa Alternant Statică Pulsatorie simetrică OL OLC Oţel de mică rezistenţă Fontă prelucrată Tensiunile admisibile în asamblările fixe se pot calcula cu relaţiile: σ as = ( 0,3... 0,5) Rp 0 conform caracterului solicitării; R p0 limita de curgere a materialului celui mai slab din cuplele pană arbore şi pană butuc;
36 36 af ( 0,... 0,3) Rp 0 τ = conform caracterului solicitării; R p0 limita de curgere a materialului penei. În asamblările mobile tensiunile admisibile de contact pot fi: = p =,... 0, R p MPa sau: ( ) 0 a a 0 p Lungimile standardizate ale penelor paralele sunt indicate în tabelul 5. l mm Tabelul Notarea penelor paralele se face indicând: Pană simbolul formei dimensiunile bxhxl şi numărul standardului. Pentru o pană paralelă obişnuită de forma A cu dimensiunile b = 8 mm, h = 7 mm şi l = 8 mm notarea este: Pană A 8x7x8 STAS Utilajul şi aparatura necesară Pentru efectuarea lucrării sunt necesare: un set de pene paralele de diferite tipuri şi instrumente de măsură (şublere, micrometre) Desfăşurarea lucrării Lucrarea se poate desfăşura în două feluri şi anume:. Se dă o pană paralelă. Se cere: desenul de execuţie al penei (schiţă de mână cotată); identificarea şi notarea penei conform STAS; stabilirea materialului penei; stabilirea materialului arborelui şi butucului; alegerea diametrului arborelui (d) în funcţie de secţiunea penei (bxh); stabilirea tensiunii admisibile σ as funcţie de cuplul de materiale pană arbore, respectiv pană butuc; calculul momentului capabil al penei (T p ); calculul momentului capabil al arborelui T a, alegând în prealabil τ at ; compararea critică a celor două momente de torsiune; verificarea penei la forfecare.. Se dau: momentul de torsiune de transmis (T), tipul penei şi tipul asamblării. Se cere:
37 predimensionarea arborelui la torsiune (d), alegând în prealabil materialul acestuia; alegerea secţiunii penei (bxh) în funcţie de diametrul arborelui;.. Lăţimea butucului impusă: alegerea unei lungimi standardizate a penei funcţie de tipul penei şi de lăţimea butucului; notarea penei conform STAS; calculul momentului capabil al penei (T p ), stabilind în prealabil σ as ; compararea celor două momente de torsiune (T p şi T) şi prescrierea măsurilor adecvate; verificarea penei la forfecare... Lăţimea butucului nu este impusă: se calculează lungimea necesară a penei (l c ) şi se alege o lungime standardizată (l l c ); notarea penei conform STAS; calculul momentului capabil al penei (T p ), stabilind în prealabil σ as ; compararea celor două momente de torsiune şi prescrierea măsurilor adecvate; verificarea penei la forfecare Prelucrarea datelor Datele alese şi cele calculate se vor nota în tabelul Tabelul 6 Nr. crt. Notare Material σ as MPa Pană T N m τ af MPa τ f MPa l c mm d mm Arbore Material τ at MPa T N m T pană T arbore Obs.
38 5. ASAMBLĂRI PRIN CANELURI 5.. Scopul lucrării Lucrarea urmăreşte dimensionarea şi verificarea unei asamblări prin caneluri. 5.. Consideraţii teoretice Asamblările prin caneluri sunt asamblări directe, prin formă. Se caracterizează prin prezenţa pe periferia arborelui a unor proeminenţe prismatice care alternează cu canale (goluri), iar îmbinarea se realizează astfel încât proeminenţele arborelui intră în canalele butucului şi invers. Se aseamănă cu o asamblare cu pene paralele multiple amplasate uniform pe periferia arborelui şi butucului, făcând corp comun cu acestea. Clasificarea asamblărilor canelate (fig.) se face după criteriile menţionate în tabelul. Fig. Forma, dimensiunile şi toleranţele canelurile dreptunghiulare, triunghiulare şi în evolventă sunt standardizate (tabelul ). Standardele stabilesc de asemenea şi modul de centrare a asamblărilor canelate respective.
39 39 Fig. Clasificarea asamblărilor canelate Tabelul După profilul canelurii După felul centrării După mobilitatea pieselor asamblate Dreptunghiular (fig.,a) Interioară (fig.,a) Fixe Triunghiular (fig.,b) Exterioară (fig.,b) Mobile În evolventă (fig.,c) Laterală (pe flancuri) (fig.,c) Tabelul Caneluri dreptunghiulare Caneluri triunghiulare Caneluri în evolventă Denumire STAS Denumire STAS Denumire STAS Calculul îmbinărilor Profilul de 767 Dimensiuni canelate referinţă Serie uşoară 768 Toleranţe 8489 Dimensiuni 6858 dimensiuni Serie mijlocie- 769 Toleranţe şi 7338 dimensiuni ajustaje Serie grea 770 dimensiuni Toleranţe şi ajustaje 6565 Cele mai utilizate în prezent sunt canelurile dreptunghiulare. Se utilizează în asamblări fixe sau mobile, caracterul fix sau mobil reflectându-se asupra dimensiunilor profilului precum şi asupra modului de centrare. În
40 40 funcţie de mărimea momentului de torsiune pe care îl pot transmite, condiţiile de lucru şi felul asamblării, canelurile dreptunghiulare se execută în trei serii: uşoară, mijlocie şi grea (tabelul 3). Seria Uşoară STAS 768 Mijlocie STAS 769 Grea STAS 770 Domeniul de utilizare T caneluri /T arbore Tipul asamblării Tabelul 3 Lungimea L recomandată pentru butuc inferior fixă L =, 5 d egal egal fixă sau mobilă, cuplare în gol mobilă, cuplare în sarcină (,5..., ) d L = 5 (,5..., ) d L = 5 Asamblările canelate cu profil dreptunghiular se caracterizează prin următoarele dimensiuni nominale: numărul de caneluri z, diametrul interior d, diametrul exterior D, lăţimea canelurii b. Fig. 3 Dimensiunile nominale şi dimensiunile de execuţie ale arborilor şi butucilor canelaţi cu profil dreptunghiular sunt indicate în figura 4, tabelul 4 serie uşoară, tabelul 5 serie mijlocie şi tabelul 6 serie grea.
41 4 Fig. 4 Dimensiuni zxdxdxb z Centrare Tip Simbol d D b d min 6x3x6x6 Inte , 3,54 d 6x6x30x6 6 rioară ,6 3,85 6x8x3x ,7 4,03 8x3x36x ,4,7 8x36x40x ,5 3,46 8x4x46x ,4 5,03 8x46x50x ,6 5,75 Inte- 8x5x58x0 d ,7 4,89 rioară 8x56x6x0 sau ,6 6,38 sau pe 8x6x68x b ,8 7,3 flancuri 0x7x78x ,6 5,45 0x8x88x ,3 8,6 0x9x98x ,4 0,08 0x0x08x ,9,49 0xx0x ,8 0,7 Tabelul 4 f c r min nominal abateri max 0,3 0, 0,4 0,5 +0, 0 +0,3 0 0,3 0,5
42 4 Dimensiuni zxdxdxb z Centrare Tip Simbol d D b d min 6xx4x3 4 3,0 9,9 6x3x6x3,5 Exte ,5,0 D 6x6x0x4 rioară 6 0 4,0 4,5-6x8xx5 8 5,0 6,7 6 6xx5x5 5 5,0 9,5,95 6x3x8x6 Inte ,0,3,84 d 6x6x3x6 rioară 6 3 6,0 3,4,65 6x8x34x ,0 5,9,70 8x3x38x ,0 9,4-8x36x4x ,0 33,5,0 8x4x48x ,0 39,5,57 8x46x54x ,0 4,7 - Inte- 8x5x60x ,0 48,7,44 rioară d 8x56x65x ,0 5,,50 sau sau 8x6x7x 6 7,0 57,8,40 pe b 0x7x8x flancuri 7 8,0 67,4-0x8x9x 8 9,0 77, 3,00 0x9x0x ,0 87,3 4,50 0x0xx6 0 6,0 97,7 6,30 0xx5x8 5 8,0 06,3 4,40 Tabelul 5 f c r min nominal abateri max 0,3 0, 0,4 0,5 +0, 0 +0,3 0 Calculul asamblărilor canelate cu profil dreptunghiular se face la solicitarea de contact. Solicitarea de forfecare ce apare la toate tipurile de centrări este periculoasă la caneluri netratate termic (HRC 0). Solicitarea la încovoiere a canelurii apare la centrarea interioară şi exterioară nefiind periculoasă. Schema de solicitare şi relaţiile de calcul sunt indicate în tabelul 8, iar tensiunile de contact admisibile în tabelul 7. Prin condiţii de lucru grele se înţeleg: şocuri în ambele sensuri, vibraţii, condiţii nefavorabile de ungere, toleranţe largi, cuplare în sarcină, suprasarcini mai mari de 5 %. Prin condiţii de lucru mijlocii se înţeleg: suprasarcini până la % din sarcina constantă, cuplare în gol, ungere săracă, execuţie şi toleranţe strânse. Prin condiţii de lucru uşoare se înţeleg: sarcină variabilă de până la 5 % din sarcina statică. 0,3 0,5
43 Dimensiuni zxdxdxb z Centrare Tip Simbol d D b d min 0x6x0x,5 6 0,5 4, 0x8x3x ,0 5,6 0xx6x3 6 3,0 8,5 Inte- 0x3x9x ,0 0,3 rioară d 0x6x3x ,0 3,0 0 sau sau 0x8x35x ,0 4,4 pe b 0x3x40x5 flancuri ,0 8,0 0x36x45x ,0 3,3 0x4x5x ,0 36,9 0x46x56x ,0 40,9 6x5x60x ,0 47,0 6x56x65x ,0 50,6 6 6x6x7x ,0 56,9 6x7x8x7 Pe 7 8 7,0 65,0 b 0x8x9x6 flancuri 8 9 6,0 75,6 0x9x0x ,0 85,5 0 0x0x5x ,0 94,0 0xx5x9 5 9,0 04,0 c nominal abateri 43 Tabelul 6 r max 0,3 0, 0,4 0,5 +0, 0 +0,3 0 0,3 0,5 Funcţionarea asamblării canelate σ as, MPa Condiţii de lucru Tabelul 7 uşoare mijlocii grele Butucul fix pe arbore Butucul cuplare în gol alunecător pe arbore cuplare în sarcină Valorile din tabelul 7 sunt valabile pentru oţeluri cu R m = 000 MPa; pentru materiale cu R m 000 MPa tensiunea de contact admisibilă se va calcula cu relaţia: σ as real Rm real = σ 000 as tabel ()
44 44 Schema de solicitare T Relaţiile de calcul Tabelul 8 asamblări fixe şi mobile: T σs = σas D d kσ dm z L c D d Tcap. kσ dm z L σas c T Lmin D d kσ dm z L σas c ( d D) d m = + σ as tabelul 7 k σ coeficient de repartizare neuniformă a sarcinii la solicitarea de contact k = 0,8 caneluri obţinute prin rulare σ k σ = 0,7 caneluri obţinute prin divizare c teşitura canelurii (vezi STAS) T τ f = τaf k b L z d τ m k τ = 0,5 coeficient de repartizare neuniformă a sarcinii la solicitarea de forfecare τ =,... 0,3 R valoarea minimă af ( 0 ) p 0 la asamblări mobile iar valoarea maximă la asamblări fixe R p0 limita de curgere a materialului celui mai slab din cupla arbore butuc canelat Diametrul arborelui canelat poate fi stabilit prin predimensionare la torsiune cu relaţia: d min π τ 6 M t 3 ; dmin at d STAS ()
45 unde: τ at = MPa valori mici pentru arbori lungi şi valori mari pentru arbori scurţi rigizi. Diametrul d se poate stabili şi constructiv proiectând arborele de la capătul de arbore. Notarea arborilor şi butucilor canelaţi trebuie să cuprindă: simbolul suprafeţei de centrare (d, D sau b); numărul de caneluri z, dimensiunea nominală d, dimensiunea nominală D şi dimensiunea nominală b, despărţite prin semnul x, conform standardului dimensional respectiv; simbolurile câmpurilor de toleranţă al diametrului de centrare şi al dimensiunii b, dispuse lângă dimensiunile respective (STAS 6565). Exemple de notare: H 7 F8 centrare interioară: d 8x46 x54x9 g 6 h 7 H 7 D9 centrare exterioară: D 8x46x54 x9 f 7 e 8 F0 centrare pe flancuri: b 8x46x54x9 d Desfăşurarea lucrării Lucrarea se poate desfăşura în două moduri distincte şi anume:. Se indică: locul de utilizare al asamblării canelate, momentul de torsiune care trebuie transmis, modul de cuplare, condiţiile de lucru, materialele arborelui şi al butucului canelat. Se cere: alegerea capătului de arbore conform STAS 874, impunând, în funcţie de condiţiile iniţiale date în temă, coloana a, b sau c; proiectarea constructivă a arborelui plecând de la capătul de arbore; verificarea diametrului d min în zona canelată prin calculul la torsiune (relaţia ); stabilirea seriei de execuţie şi alegerea asamblării canelate adecvate zxdxdxb (tabelele 4...6); stabilirea modului de centrare şi alegerea ajustajului asamblării canelate (STAS 6565); notarea asamblării canelate conform STAS 6565; alegerea tensiunii admisibile de contact σ as (tabelul 7); calculul lungimii minime necesare a butucului canelat, ţinând seama de teşituri; 45
46 46 definitivarea lungimii butucului canelat L funcţie de condiţiile constructive impuse; verificarea asamblării canelate la solicitarea de contact σ s (tabelul 8). desenul asamblării canelate proiectate sub forma unei schiţe de mână cotate.. Se dă: o asamblare canelată, momentul de torsiune de transmis T, materialele arborelui şi butucului, condiţiile de lucru. Se cere: identificarea seriei de execuţie, centrării şi notarea asamblării conform STAS 6565; prescrierea ajustajului adecvat conform STAS 6565; desenul asamblării canelate sub forma unei schiţe cotate; alegerea tensiunii admisibile de contact (tabelul 7); calculul momentului de torsiune transmisibil prin asamblare T cap ; compararea celor două momente de torsiune (T cap T); verificarea asamblării canelate la solicitarea de tensiune de contact; verificarea asamblării canelate la solicitarea de forfecare, dacă este cazul Prelucrarea datelor Datele măsurate şi calculate se vor înscrie în tabelele 9 şi 0. Arbore canelat Butuc canelat Tabelul 9 Nr. crt. Material τ at T d min Notare Material L t Notare Nr. crt. Condiţii de lucru Asamblare canelată Tabelul 0 Tip Notare T T cap L σ s τ f
47 6. DETERMINAREA EXPERIMENTALĂ A MOMENTULUI DE TORSIUNE TRANSMISIBIL PRINTR-O ÎMBINARE CU PENE INELARE 6.. Scopul lucrării Lucrarea urmăreşte determinarea experimentală a mărimii momentului de torsiune transmisibil cu una, respectiv cu două perechi de pene inelare şi compararea acestor valori cu cele ale momentelor de torsiune calculate cu relaţiile existente în literatura de specialitate. 6.. Consideraţii teoretice Asamblările cu pene inelare transmit momentele de torsiune prin intermediul forţelor de frecare de pe suprafaţa de contact a arborelui şi butucului cu inelele elastice. În figura,a s-a reprezentat o îmbinare cu o singură pereche de pene inelare. Pentru a fi posibil montajul, iniţial penele sunt introduse cu joc. 3 F R P β R P β F d 4 R P R P a b Fig. Sub acţiunea forţei axiale F, inelele tronconice 3 şi 4 se deformează elastic şi solidarizează butucul de arborele.
48 48 Între pene şi arbore, respectiv butuc, apar forţe de apăsare P şi de frecare R, figura,b. Mărimea forţei P se poate calcula cu relaţia: F P = () tanβ + μ Momentul teoretic transmis prin intermediul unei perechi de pene este: d μ d T = μ P = F () (tanβ + μ) unde: μ coeficientul de frecare; d diametrul arborelui; β unghiul la vârf al penelor. În realitate, momentul de torsiune transmisibil este mai mic, apăsarea P nefiind creată de forţa F ci de o forţă mai mică F-F 0, unde forţa F 0 este necesară deformării radiale a inelelor până la anularea jocului. Momentul real T r este: ( ) μ d T r = F F0 (3) (tanβ + μ) Mărimea forţei axiale F 0 se poate determina cu ajutorul relaţiilor din teoria elasticităţii: unde: A j F = d 0 E m tanβ + μ μ tanβ A aria secţiunii radiale a unui inel; j jocul diametral dintre inelul exterior şi butuc; d m diametrul mediu al perechii de pene inelare, adică: D + d d m = D diametrul alezajului butucului; d diametrul arborelui; E modulul de elasticitate; μ coeficientul de frecare; β unghiul la vârf al penelor. (4)
49 În cazul montării a două perechi de pene, figura, momentul transmisibil T t va fi mai mare decât în cazul unei singure perechi de pene, dar nu va fi dublul acestuia. d d T t = T + T = μ P + μ P (5) 49 F F R P R P F F F R R P P d a Fig. b Din echilibrul forţelor care lucrează asupra celor două perechi de pene se poate scrie: F tanβ F = F + R rezultând că: F = (6) tanβ + μ F F tanβ iar: P = sau P = (7) tanβ + μ (tanβ + μ) Înlocuind în relaţia 5 valoarea lui P din relaţia şi a lui P din relaţia 7 rezultă: μ d tanβ tanβ T t = F ( + ) = T ( + ) (8) (tanβ + μ) tanβ + μ tanβ + μ O valoare mai apropiată de realitate se obţine dacă se va înlocui T cu T r. T tr = ( F F ) μ d tanβ tanβ + = T + ( tanβ + μ) tanβ + μ tanβ + μ 0 r Practica a arătat că mărimea momentului de torsiune T t este mai mică decât cea calculată cu relaţia (9) datorită faptului că presiunea de contact dintre pene şi arbore, respectiv butuc nu se repartizează uniform, ci după o hiperbolă. (9)
50 50 Uzual se calculează: T tr =,5 T (0) 6.3. Utilajul şi aparatura utilizată Ca epruvetă se utilizează cuplul bucşă arbore, (fig.3) asamblate între ele cu penele de încercat 3, respectiv 3 şi4, adaptate la standul de încercat seraje. F 3 F 3 4 a b Fig. 3 Construcţia standului se descrie în lucrarea 8. Pe partea superioară a arborelui (fig.3) se montează un rulment axial pentru a permite rotirea arborelui faţă de şurubul de forţă. Arborele este executat din OLC 45 călit la HRC 45 50, iar bucşa din OLC 45 în stare normalizată. Penele inelare se confecţionează din oţel de arc. Unghiul la vârf al penelor β =. Între arbore şi pene există ajustaj H 7 H 7 alunecător iar între bucşă şi pene un ajustaj cu joc. h7 f 7 Pentru determinarea jocului efectiv se utilizează un micrometru de interior şi unul de exterior.
51 Desfăşurarea lucrării. Se măsoară dimensiunile elementelor asamblării cu precizia de 0 - mm şi se stabilesc ajustajele efective cu care se asamblează ele.. Se montează asamblarea conform figurii 3,a în stare unsă pentru a evita griparea. 3. Ansamblul montat se introduce în standul de încercat seraje. 4. Se aşează rulmentul axial pe partea superioară a arborelui. 5. Prin intermediul şurubului de forţă se creează forţa de apăsare axială F, mărimea adoptându-se între 0000 şi N, iar evaluarea făcându-se cu ajutorul manometrului de forţă şi a diagramei de etalonare. 6. Se roteşte arborele canelat prin intermediul subansamblului de rotire până patinează iar cu ajutorul manometrului de rotire şi a diagramei de etalonare se determină momentul efectiv transmisibil printr-o singură pereche de pene T e. 7. Se scoate asamblarea din stand şi se montează şi a doua pereche de pene inelare conform figurii 3,b. 8. Se repetă operaţiile de la punctele 3 6, mărimea forţei de apăsare menţinându-se, ca în cazul unei singure perechi de pene inelare, determinând astfel pe T te. 9. Se repetă operaţiile de la punctele 8 de trei ori, rezultatele trecându-se în tabelul. Tabelul T te N m Nr. exp. d mm D mm j µm F N T e N m Observaţii: j este jocul diametral efectiv între bucşă şi pene. În calcule se va utiliza media măsurătorilor Prelucrarea datelor În funcţie de starea suprafeţelor se adoptă valoarea minimă (µ min ) şi (µ max ) pentru coeficientul de frecare dintre arbore şi pene. Se calculează mărimea forţei F 0 cu relaţia (4) adoptând pentru coeficientul de frecare o valoare medie.
52 5 Se calculează momentul teoretic transmisibil T cu relaţia () şi T r cu expresia (3), atât pentru µ min cât şi pentru µ max, obţinând patru valori T min, T max respectiv T rmin şi T rmax. Cu relaţiile (8) şi (9) pentru µ min şi µ max se determină momentele T tmin, T tmax respectiv T trmin şi T trmax. Se calculează şi momentul T tr cu relaţia (0). Rezultatele se trec în tabelul. µ min µ max Tabelul T T r T e T t T tr T tr T te Rezultatele se vor interpreta şi se vor trage concluzii asupra aproximaţiilor pe care le introduc calculele teoretice având în vedere starea suprafeţelor, abaterile de formă ale arborelui, bucşei şi penelor etc.
53 7. STUDIUL ASAMBLĂRILOR CU BRĂŢĂRI ELASTICE 7.. Scopul lucrării Lucrarea are drept scop verificarea experimentală a relaţiilor teoretice de calcul a momentelor de torsiune maxime care pot fi transmise de asamblările cu brăţară elasticǎ. 7.. Consideraţii teoretice Relaţiile teoretice de calcul ale momentelor de torsiune maxime (capabile) care pot fi transmise de asamblările cu brăţară elastică au la bază anumite legi de repartizare a presiunilor de contact dintre brăţară şi arbore, care depind de rigiditatea brăţării şi de tipul ajustajului de montaj al acesteia pe arbore. F s F p max F s F p max D d d F s a F a. Fig. F s a F b. Rigiditatea unei brăţări elastice este funcţie de raportul d D şi creşte D astfel: d pentru valori mai mici considerăm cazul brăţării elastice (nerigidă); pentru valori mai mari considerăm cazul brăţării rigide. împreună cu acesta. O rigiditate medie avem pentru (,5...,8 )
54 54 Relaţiile teoretice de calcul ale momentelor de torsiune capabile sunt diferite de la caz la caz, depind de soluţia constructivă şi de modul de repartizare a presiunilor de contact pe suprafaţa cilindrică a arborelui. Se pot avea în vedere următoarele situaţii: I. În cazul unei brăţări rigide cu joc iniţial, presiunea de contact se repartizează pe o suprafaţă redusă (fig.,a). Momentul transmisibil T I se determină astfel: ( a d ) TI = 0 3 Fs μ + [N m] () unde: F s forţa de strângere din şurub, [N]; μ coeficientul de frecare dintre brăţară şi arbore; d diametrul arborelui, [mm]; a distanţa dintre axa şurubului şi axa brăţării, [mm]. II. În cazul unei brăţări elastice cu joc iniţial sau al unei brăţări rigide fără joc iniţial, presiunea de contact se repartizează după o lege cosinusoidală (situaţie mai favorabilă) (fig.,b). Relaţia teoretică de calcul a momentului este: 4 3 ( a d ) TII = 0 Fs μ + π [N m] () III. În cazul unei brăţări montată cu strângere iniţială cunoscută (seraj), presiunea de contact se repartizează uniform pe suprafaţa arborelui, iar momentul transmisibil se determină ca sumă a douǎ momente: l Il T = T + T (3) III unde: l T III momentul transmisibil în cazul unei simple asamblări prin strângere proprie (seraj); ll T III momentul transmisibil dacǎ s-ar lua în considerare doar strângerea realizată prin strângerea şuruburilor, fără a lua în considerare serajul (vezi cazul II). Dacă ţinem seama de relaţiile aplicate în cazul asamblărilor prin strângere proprie şi de cele prezentate în cazul II, relaţiile teoretice vor fi de forma: T l III = 0 3 III III μ π d l p d [N m] (4)
55 p presiunea de contact se determină cu relaţia: s p = [N/mm ] (5) K K d + E E s strângerea realizată la montaj, rezultată ca diferenţa dintre diametrul efectiv al arborelui d a şi diametrul efectiv al alezajului brăţării d b : s = d a d b [µm] (6) K, K coeficienţi care se calculează cu relaţiile: K = ν (7) unde: D + d K = + ν (8) D d d diametrul nominal al arborelui, [mm]; D diametrul exterior al brăţării, [mm]; ν,ν coeficienţii lui Poisson pentru cele două materiale (arbore şi brăţară). Pentru oţel ν = 0, 3; E, E modulele de elasticitate pentru cele două materiale (arbore şi 5 brăţară). Pentru oţel E =, 0 [N/mm ]. Momentul ll T III se determină cu relaţia prezentată la cazul II: 4 3 ( a d ) ll TIII = 0 Fs μ + π [N m] (9) 7.3. Utilajul şi aparatura utilizată Pentru determinarea experimentǎ a momentului de torsiune transmis de asamblarea cu brăţara elastică se utilizează un dispozitiv de strângere a brăţării reprezentat în figura montat pe un stand reprezentat schematic în figura 3. Arborele 8 asigură transmitere momentului de torsiune de la arborele motor la arborele condus al standului pe care se fac măsurătorile. Prin intermediul arborilor şi 8 dispozitivul se montează între capetele de prindere 9 şi 0 ale standului. Capul de prindere 0, legat solidar de arborele motor, este antrenat în mişcare de rotaţie manual cu ajutorul unui reductor melcat. Capul de prindere 9, legat solidar de arborele condus, este legat de arcul
56 56 dinamometric 5 printr-un sistem de pârghii. Deformaţia (săgeata) arcului se măsoară cu ajutorul ceasului comparator 6 fixat pe batiul standului. Sania permite deplasarea axială a întregului ansamblu legat de arborele condus. Aceastǎ deplasare este realizată prin acţionarea manuală a roţii 4 montată pe şurubul l d D Fig Fig.3
57 7.4. Desfăşurarea lucrării Se parcurg următoarele etape: Calculul momentului de torsiune transmisibil. Se măsoară cu micrometrul diametrul efectiv al arborelui şi al alezajului brăţării. Se stabileşte tipul (cu joc sau cu strângere).. Se identifică, prin măsurarea diametrului exterior, mărimea filetului şurubului 3 şi se ia din STAS diametrul d al acestuia. 3. Se calculează forţa de strângere admisibilă. F sa π d = σat [N] (0) β 4 unde: β=,3 coeficientul care ţine seama de răsucirea şurubului în momentul strângerii; d diametrul interior al filetului şurubului; σ at =50 N/mm rezistenţa admisibilǎ la tracţiune pentru OL50, materialul din care este confecţionat şurubul. 4. Se calculează forţele efective F si la care facem încercările experimentale i =...4: F = 4 F = F 3 = F 4 s F sa ; s sa ; s3 sa ; s sa 5. Se calculează valoarea medie a presiunii de contact. a) Dacă brăţara se montează fără strângere iniţială p mi F F 4 = F () Fi = [N/mm ] () l d unde, F i se calculează astfel: pentru o brăţară rigidă montată cu joc (vezi cazul I) Fsi F = i ( a + d ) d [N] (3) pentru o brăţară cu repartizare cosinusoidală a presiunii(vezi cazul II) π Fsi Fi = 4 ( a + d ) b) Dacă brăţara se montează cu strângere iniţială d [N] (4)
58 58 p = p + [N/mm ] (5) i p mi unde p se determinǎ cu relaţia (5) iar p mi cu relaţia() 6. Se stabileşte valoarea μ 0,6 0, 0,8 0,4 0,0 0, p P[N/mm ] Fig. 4 coeficientului de frecare μ în funcţie de presiunea de contact şi de rugozitatea suprafeţei pe baza figurii 4 (curba se referǎ la suprafeţe prelucrate prin alezare, curba la suprafeţe rectificate). Pentru p se ia valoarea determinată cu relaţia (5). 7. Se calculează momentul de torsiune transmisibil cu una din relaţiile, sau 3 în funcţie de cazul în care se încadrează brăţara (vezi cazul I, II sau III) Determinarea experimentală a momentului de torsiune capabil. Se face montajul din figura.. Se montează asamblarea pe stand. 3. Se fixează acul indicator al comparatorului 6 la zero. 4. Se strânge piuliţa 4 până la realizarea forţei F si Se utilizează în acest scop o diagramă de etalonare a arcului dinamometric Se fixează acul indicator al comparatorului 6 la zero. 6. Se roteşte lent dar continuu manivela reductorului până când brăţara patinează pe arbore. În acest moment se notează indicaţia acului comparatorului Din diagrama de etalonare a arcului dinamometric 5 se determină momentul de torsiune capabil la care s-a produs patinarea. 8. Se repetă operaţiile pentru toate forţele F si Prelucrarea datelor. Se completează tabelul cu datele teoretice şi experimentale.. Se trasează pe acelaşi grafic curba de variaţie a momentului de torsiune în funcţie de forţa de strângere F si. (o curbă pentru determinări experimentale şi una pentru calcule teoretice). 3.Concluzii şi comentarii.
59 Nr. crt. Denumire Simbol U.M. Val. calc. Diametrul efectiv al arborelui d a mm - Diametrul efectiv al alezajului d b mm - 59 Tabelul Val. măs. 3 Jocul sau strângerea iniţială d b -d a μm - 4 Diametrul exterior al brăţării D mm - 5 Diametrul nominal al arborelui d mm - 6 Raportul diametrelor D/d Lăţimea brăţării l mm - 8 Diametrul exterior al filetului d s mm - 9 Diametrul interior al filetului d mm - 0 Forţa de strângere admisibilă F sa N - Coeficientul de frecare μ - Presiunea datorată ajustajului p N/mm - Presiunea medie 4 Momentul de torsiune transmis p m N/mm - p m N/mm - p m3 N/mm - p m4 N/mm - T T T 3 T 4 N m N m N m N m
60 8. STUDIUL EXPERIMENTAL AL ASAMBLĂRILOR PRIN STRÂNGERE PROPRIE (SERAJE) 8.. Scopul lucrării Lucrarea urmăreşte trasarea diagramei de variaţie a forţei de presare şi a forţei de depresare, precum şi determinarea experimentală a coeficienţilor de frecare la presare, depresare şi rotire, pentru asamblările tip arbore bucşă. 8.. Consideraţii teoretice Serajele sunt asamblări realizate prin apăsarea reciprocă a pieselor pe suprafeţe cilindrice folosind numai diferenţa de dimensiuni corespunzătoare ajustajelor presate, fără nici un alt organ suplimentar. Menţinerea asamblării se face numai prin forţele de frecare ce iau naştere pe suprafeţele de contact ale pieselor asamblate. O asemenea asamblare tip arbore bucşă este prezentată în figura. înainte de presare de De de după presare d A p De A - A d d d l A Fig. Aceste asamblări sunt frecvent întâlnite în construcţia de maşini la montarea rulmenţilor pe arbori şi în carcase, a bandajelor roţilor de vagon, a coroanelor roţilor dinţate, a elementelor arborilor cotiţi etc. Ca avantaje ale folosirii serajelor se pot menţiona: capacitatea portantă foarte mare, economisirea de materiale deficitare, asamblarea nu necesită elemente suplimentare. Ca dezavantaje, se constată practic că nu se pot face montări şi demontări repetate, iar la un lot aparent identic de seraje rezultă strângeri
61 diferite, datorită caracterului probabilistic al formării ajustajelor, ceea ce implică o precizie de execuţie relativ ridicată a suprafeţelor cilindrice de contact. La aceste asamblări apar solicitări de diferite naturi: solicitarea de strivire pe suprafeţele de contact a arborelui şi bucşei, precum şi tensiuni radiale şi tangenţiale în cele două piese. Mărimea care caracterizează în mod deosebit asamblarea este strângerea teoretică S: 6 S = d e D e [μm] () unde: d e este diametrul efectiv al arborelui înainte de presare; D e diametrul efectiv al alezajului înainte de presare. Strângerea S determină mărimea presiunii p între suprafeţele în contact, care influenţează direct asupra capacităţii asamblării de a transmite forţe şi momente, precum şi asupra condiţiilor tehnologice de realizare a serajului. Strângerea este influenţată de o serie de factori: înălţimea asperităţilor suprafeţelor în contact, diferenţa dintre temperatura de montaj şi cea de lucru, deformaţiile cauzate de forţele exterioare. Deoarece în cadrul lucrării, experimentările se fac la temperatura ambiantă, fără a avea influenţă forţele exterioare, doar primul factor se ia în considerare la calculul strângerii efective S e S = S, ( R + R ) [μm] () unde: e z z R z, R z înălţimile medii a rugozităţii suprafeţelor în contact, tabelul. Tabelul Felul prelucrării R z [μm] Felul prelucrării R z [μm] Lustruire 0, 0,4 Alezare 4,0 0,0 Lepuire fină 0,6,0 Strujire fină cu diamant,0,5 Lepuire 0,6 4,0 Strunjire fină cu metal dur,5 0,0 Honuire 0,,0 Netezire prin strunjire 0,0 40,0 Rectificare foarte fină 0,,0 Strunjire grosolană 40,0 00,0 Rectificare fină,0 4,0 Frezare fină 4,0 0,0 Rectificare 4,0 0,0 Netezire prin frecare 0,0 40,0 Broşare,5 0,0 Netezire prin rabotare 0,0 40,0 Alezare fină,0 4,0 Rabotare grosolană 40,0 00,0
62 6 Între înălţimea medie a rugozităţii R z şi abaterea medie aritmetică a rugozităţii R a, care se indică pe desenele de execuţie, se poate scrie relaţia: unde: unde: R = k [μm] (3) z R a k=5 dacă 0,05 μm R a,6 μm k=4 dacă,6 μm R a 00 μm Presiunea de contact p se calculează cu formula: 3 Se 0 p = [N/mm ] (4) K K d + E E S e strângerea efectivă, în μm; d diametrul mediu al asamblării, în mm; E, E modulul de elasticitate longitudinal al materialelor arborelui, respectiv bucşei, în N/mm ; K, K coeficienţii adimensionali, care au valorile: d + d d + d K ; K = + ν (5) d d = ν d d Unde d, d, d corespund notaţiilor din figura iar ν şi ν sunt coeficienţii lui Poisson pentru materialul arborelui, respectiv al bucşei, din tabelul. Materialul E [N/mm ] ν Oţel (,0,) 0 5 0,3 Fontă cenuşie (,5,6) 0 5 0,3 0,7 Bronz, ,3 0,35 Alamă laminată la rece 0, ,3 0,4 Aliaje de aluminiu (0,67 0,7) 0 5 0,3 0,36 Forţa necesară presării este: F p p Tabelul = π d l p μ [N] (6) unde: l lungimea de presare (fig.), în mm;
63 unde: unde: µ p coeficientul de frecare la presare. Forţa de depresare este: F µ d coeficientul de frecare la depresare. Momentul de torsiune transmisibil este: T d 0 = d 63 = π d l p μ [N] (7) 3 π d l p μ μ r coeficientul de frecare la rotire. Experimental coeficienţii de frecare r μ p, μ d, [N m] (8) μ r nu sunt egali. În tabelul 3 se dau valorile recomandate pentru µ p şi µ d iar în tabelul 4 se dau valorile recomandate în cazul proiectării asamblărilor prin strângere. Materialul pieselor Arbore Oţel Oţel Oţel Bucşă Oţel Fontă Aliaje uşoare Stare de ungere Cu ungere la montare Cu ungere la montare μ p Presare la rece μ d Tabelul 3 μ (proiectare) 0,06 0, 0, ,09 0,7 0,06 0,4 0,09 0,7 0,07 0, Fără ungere 0,0 0,08 0,03 0,09 0,0 0,06 Cuplul de materiale Oţel pe oţel Starea suprafeţelor în contact Uscată, fără oxizi Bine unsă Calitatea suprafeţelor în contact Arbore rectificat butuc alezat Arbore rectificat fin butuc rectificat Arbore rectificat butuc alezat Arbore rectificat fin butuc rectificat Tabelul 4 μ (proiectare) 0, 0,3 0,5 0,4 0,07 0,6 0,05 0,3
64 64 Cuplul de materiale Oţel pe fontă sau fontă pe fontă Oţel pe bronz Oţel pe aliaj de aluminiu Oţel pe materiale plastice Starea suprafeţelor în contact Uscată, fără oxizi Bine unsă Calitatea suprafeţelor în contact Arbore rectificat butuc alezat Arbore rectificat fin butuc alezat Arbore rectificat butuc alezat Arbore rectificat fin butuc rectificat Arbore rectificat μ (proiectare) 0,5 0,5 0,7 0,33 0,06 0,3 0,0 0, Uscată fără oxizi 0,3 0,5 Bine unsă butuc alezat 0,0 0, Uscată fără oxizi Arbore rectificat 0,03 0,08 Uscată fără oxizi butuc alezat 0, Utilajul şi aparatura necesară Epruveta se compune dintr-un arbore (canelat la un capăt) şi o bucşă (fig.), adaptate la standul de încercat. Standul de încercat din figura 3 se compune din două subansamble principale: subansamblul de presare-depresare şi subansamblul de rotire. Elementul principal al subansamblului de presare este şurubul de forţă, antrenat de piuliţa prin intermediul roţii melcate 3, a melcului 4 şi a manivelei 5. Şurubul este blocat împotriva rotirii cu două pene paralele 6. Subansamblul de rotire se compune din butucul canelat 9 antrenat de roata melcată 0, Fig. melcul şi manivela. Forţa de presare se transmite de la şurubul de forţă la sistemul cilindru piston 5 prin intermediul epruvetei 7-8 a piesei 3 şi a rulmentului axial 4. Sistemul cilindru piston 5 are în interior un arc de formă specială 6 şi este umplut cu ulei. Sub influenţa forţei de presare arcul 6 se deformează, spaţiul din interiorul cilindrului 5 se micşorează iar uleiul este transmis prin conducta 7 în indicatorul de forţă 8.
65 A A A-A Fig. 3 Forţa de presare se evaluează cu ajutorul unei diagrame de etalonare a indicatorului de forţă 8. Rotind manivela şi odată cu ea butucul canelat 9, acesta din urmă va roti arborele-epruvetă 7. Momentul de torsiune se transmite prin asamblarea cu strângere la bucşa-epruvetă 8 care este prevăzută cu două proeminenţe ce permit rotirea piesei 3. Piesa 3 este legată prin articulaţiile sferice 9 de două sisteme cilindru piston 0, în interiorul cărora se găseşte câte un arc elicoidal. Sistemele 0 se reazemă în partea opusă de masa standului. În urma rotirii, volumul din sistemul 0 se micşorează iar uleiul ce se găseşte în interior va face să crească nivelul lichidului din indicatorul de rotire. Indicatorul de rotire permite determinarea momentului transmis, utilizându-se diagrama de etalonare. Lungimea de presare se determină cu formula: n l = p [mm] (9) i i i 34
66 66 unde: l i deplasarea arborelui în raport cu bucşa ; p pasul şurubului, în mm; n i numărul de rotaţii ale manivelei 5; i 34 raportul de transmitere a angrenajului melcat Desfăşurarea lucrării Se măsoară dimensiunile efective ale arborelui şi bucşei, se apreciază rugozităţile suprafeţelor de contact şi se determină strângerea efectivă S e cu formulele () şi (). Se determină numărul de rotaţii n, n, n 3, n 4 ale manivelei 5, necesare deplasărilor l = 5 mm, l = 0 mm, l 3 = 5 mm şi l = 4 0 mm. Se introduc bucşa şi arborele în standul de încercat seraje. Rotind manivela 5 se presează arborele în bucşă pe lungimea l. Se citeşte nivelul indicatorului de forţă înainte şi după presare. Aceleaşi operaţii se execută pentru lungimile l, l 3 şi l 4. Apoi se determină momentul de torsiune transmisibil. Pentru aceasta se ridică şurubul de forţă de pe arbore, se roteşte de manivela până când arborele patinează şi se citeşte la indicatorul de rotire nivelul acestuia înainte şi după rotire. Pentru depresare se inversează ansamblul arbore-bucşă şi se repetă aceleaşi operaţii ca la presare. Cu ajutorul diagramelor de etalonare se determină forţele de presare şi depresare corespunzătoare lungimilor l, l, l 3 şi l 4 şi momentul maxim transmis de îmbinare Prelucrarea datelor Din relaţiile (6), (7) şi (8) se calculează µ p, µ d şi µ r : Fpi μ pi = (0) π d l p i Fdi μ di = () π d l p μ r 3 T 0 = π d l p i 4 () unde presiunea p se calculează cu relaţia (4) iar µ pi şi µ di sunt coeficienţii de frecare corespunzători lungimilor de presare sau depresare l i ( i = 4 ) respectiv forţelor de presare sau depresare F i.
67 67 F p Piesa cuprinsă Butucul Operaţia de depresare F d F p F d F d cursa cursa a. b. Fig. 4 Cu valorile µ pi şi µ di se calculează µ pmediu şi µ dmediu. Toate valorile măsurate, determinate experimental sau calculate se trec în tabelul 5. Având mărimea forţelor de presare F pi şi de depresare F di în funcţie de lungimea l i se trasează diagramele: F pi = f (l) şi F di = f (l) care teoretic au aspectul din figura 4. Coeficienţii de frecare obţinuţi se vor compara cu valorile recomandate în tabelele 3 şi 4. Tabelul 5 Denumire Simbol U.M. Observaţii şi formule Valori Diametrul nominal d mm Măsurare cu şublerul Diametrul efectiv al Măsurare cu micrometrul d arborelui e mm de exterior Diametrul efectiv al Măsurare cu micrometrul D alezajului e mm de interior Diametrul alezajului din arbore d mm Măsurare cu şublerul Diametrul exterior al bucşei d mm Măsurare cu şublerul Modulele de elasticitate longitudinale pentru E N/mm Tabelul materialele arborelui, respectiv bucşei E N/mm Tabelul Coeficienţii lui Poisson pentru materialele ν - Tabelul arborelui, respectiv bucşei ν - Tabelul Rugozitatea arborelui R z µm Rugozitatea alezajului R z µm Se determină din tabelul sau cu formula 3
68 68 Denumire Simbol U.M. Observaţii şi formule Valori Strângerea efectivă S e µm S e = de De, ( RZ + RZ ) d + d Coeficienţii K - K = ν d d adimensionali pentru arbore, respectiv bucşă d + d K - K = + ν d d 3 Se 0 p = Presiunea de contact p N/mm K K d + E E Nivelul n i l i indicatorului de F pi F n pi μ pi = μ pmed = rotaţii [mm] μ [N] π d li p n i= forţă n = l =5 Presare Depresare Rotire n = l =0 n 3 = l 3 =5 n 4 = l 4 =0 n i rotaţii l i [mm] n = l =0 n = l =5 n 3 = l 3 =0 n 4 = l 4 =5 Nivelul indicatorului de rotire Nivelul indicatorului de forţă T [N m] F pi [N] μ di μ Fdi = π d l p r i μ 3 T 0 = π d l p 4 dmed = n n i= μ pi di
69 9. DETERMINAREA EXPERIMENTALĂ A CARACTERISTICII ŞI RIGIDITĂŢII ARCURILOR 9.. Scopul lucrării Lucrarea are drept scop determinarea experimentală a caracteristicii şi rigidităţii arcurilor elicoidale şi compararea acestora cu rezultatele calculate pe baze teoretice. 9.. Consideraţii teoretice Caracteristica unui arc este curba ce defineşte variaţia forţei F care solicită arcul, în funcţie de săgeata sa, f (fig.): α F = ϕ( f ) () Pentru arcurile fără frecare interioară (arcuri lamelare simple, arcuri elicoidale etc.) caracteristica este o dreaptă (fig.). Rigiditatea arcului C, fiind raportul dintre forţă şi deformaţia corespunzătoare, la aceste arcuri este constantă: Fi C = = tan α = constant () f Cunoaşterea rigidităţii şi a caracteristicii arcurilor permite determinarea energia potenţială acumulată, precum şi a forţei de Fig. apăsare a arcurilor la diferite săgeţi. La arcurile elicoidale, caracteristica şi rigiditatea este aceeaşi la încărcare şi descărcare. La aceste arcuri relaţia dintre săgeata f şi forţa F este: i
70 70 iar rigiditatea C se calculează cu relaţia: unde: G d R n 3 64 n R F f =, (3) 4 G d 4 G d C = (4) 3 64 n R modulul de elasticitate transversal al arcului; diametrul sârmei; raza medie de înfăşurare a arcului; numărul de spire active ale arcului Descrierea aparaturii Determinarea caracteristicii şi a rigidităţii arcurilor elicoidale se efectuează pe ştandul prezentat în figura. Ca epruvetă se foloseşte un arc elicoidal, iar pentru măsurarea dimensiunilor principale un şubler. Forţa F care solicită arcul este exercitată de către şurubul de forţă prin rotirea unei manivele corp comun cu un melc 3, care angrenează cu roata melcată. Roata melcată este montată pe piuliţa 0 care antrenează şurubul de forţă într-o mişcare de translaţie. Rotirea şurubului este anulată datorită unei pene montate în coloana 4. Subansamblul inferior al standului cuprinde sistemul de măsurare a forţei, care se compune din: arcul elicoidal etalon 4, piesele 3, 5, 7, 8 şi ceasul comparator 9, fixat pe piesa de sprijin 7. Forţa ce solicită arcul experimental deformează şi arcul etalon, deformaţie sesizată de ceasul comparator 9. Mărimea forţei F se determină cu ajutorul unei diagrame de etalonare în funcţie de indicaţiile ceasului comparator, săgeata f. Determinarea săgeţii pentru arcul experimental se face prin măsurarea deplasării şurubului de forţă şi a piesei de sprijin 7. Deplasarea şurubului de forţă se citeşte pe rigla gradată 5 cu vernierul 6. Săgeata arcului elicoidal experimental este egală cu diferenţa dintre deplasarea şurubului şi a piesei de sprijin Desfăşurarea lucrării Se execută schiţa arcului de încercat. Se măsoară dimensiunile arcului de încercat cu un şubler şi se completează tabelul, apoi se aşează arcul pe standul de încercat arcuri (pe masa 8 a standului de încercat arcuri).
71 Fig.
72 7 Rotind de manivelă se încarcă arcul cu sarcini progresive: F, F, F 3, F 4. Diferenţa dintre două sarcini consecutive depinde de sensibilitatea arcului. Pentru fiecare sarcină se notează săgeata corespunzătoare f im. La determinarea forţei se utilizează o diagrama de etalonare, iar pentru stabilirea săgeţii se efectuează diferenţa dintre deplasarea şurubului de forţă şi deplasarea piesei de sprijin 7 (v. fig.). Fiecare experienţă se repetă de trei ori făcându-se apoi media măsurătorilor Prelucrarea datelor Cu relaţia (3) se calculează săgeţile teoretice f it corespunzătoare forţelor F i care le-au produs, măsurate pe ştand; Cu relaţia (4) se calculează rigiditatea teoretică C t ; Cu relaţia () se determină rigiditatea măsurată C t utilizându-se pentru aceasta săgeata măsurată f im. Rezultatele experimentale se trec în tabelul. Se compară rezultatele calculelor cu cele experimentale. Se trasează graficul F = ϕ( f ). Tabelul Arcul nr.: d = mm R = mm G = N/mm n = Nr. crt. Sarcina F, N.. 3. Nr. încercări 3 M 3 M 3 Valori măsurate f im, mm M Observaţii: * M media măsurătorilor C m, N/mm Valori calculate f it, mm C, t N/mm
73 9.6. Concluzii Determinarea valorilor rigidităţii arcurilor elicoidale şi cunoaşterea caracteristicii acestora are importanţă pentru cunoaşterea comportării arcurilor elicoidale în funcţionare. Efectuarea determinărilor experimentale oferă, de asemenea, posibilitatea comparării valorilor teoretice cu valorile determinate pe ştand. 73

, care după ce ies din zona de lucru a piuliţei sunt reintroduse în circuit printr-un canal de recirculare.")
74 0. DETERMINAREA RANDAMENTULUI ŞURUBURILOR CU BILE 0.. Scopul lucrării În cadrul lucrării se urmăreşte determinarea randamentului şi unghiului de frecare într-o cuplă şurub piuliţă cu bile. 0.. Consideraţii teoretice Pentru obţinerea unei mişcări de rostogolire între elementele transmisiei, atât în şurub cât şi în piuliţă se prevăd canale elicoidale între care circulă un convoi continuu de bile (fig.), care după ce ies din zona de lucru a piuliţei sunt reintroduse în circuit printr-un canal de recirculare. Sistemele de recirculare cele mai utilizate sunt: printr-o pană exterioară fixată în piuliţă (fig.,a), printr-o ţeavă exterioară fixată în piuliţă (fig.,b) şi sisteme combinate (fig.,c). Fig.
75 75 Fig. Bilele utilizate pot fi de acelaşi diametru (fig.3,a) sau se pot utiliza şi bile intermediare executate din bronz sau materiale plastice de diametru mai mic cu 0, , mm (fig.3,b) decât bilele portante. Bilele intermediare au rolul de a reduce frecarea şi uzarea şi de a creşte astfel randamentul. Scad însă capacitatea portantă a transmisiei prin reducerea numărului bilelor principale. Indiferent de soluţia constructivă adoptată piuliţele sunt prevăzute la capete cu sisteme de etanşare care să împiedice pătrunderea impurităţilor în zona de lucru. Performanţele şuruburilor cu bile depind în mod hotărâtor de geometria contactului bile căi de rulare. Profilul căilor de rulare poate fi: semicircular (fig.4,a,b), Fig. 3
76 76 ogival (fig.4,c), triunghiular (fig.4,d), trapezoidal(fig.4,e), dreptunghiular (fig.4,f) sau combinat (fig.4,g). La profilele circulare raza de curbură a profilului este: r c = (,03...,05) r b. Fig. 4 Unghiul de contact γ este unghiul format de linia de contact, care uneşte punctele de contact ale bilei cu căile de rulare şi trece prin centrul bilei, şi o perpendiculară pe axa şurubului. Acest unghi are un rol hotărâtor asupra performanţelor transmisiei. Dependenţa randamentului, a forţei axiale maxime şi a rigidităţii şurubului funcţie de unghiul de contact γ sunt indicate în figura 5. Din γ figură rezultă că un unghi de contact γ = 90º ar fi ideal din toate punctele de vedere dar problemele tehnologice deosebite ce apar au Fig. 5 făcut ca majoritatea firmelor producătoare de şuruburi cu bile să adopte un unghi γ = 45º... 50º. Calculul randamentului transmisiei pe baza momentului de înşurubare din cupla şurub piuliţă cu bile se face cu relaţia: Fa va 0 3 η = () π T f
77 unde: F a încărcarea axială a piuliţei, N; v a viteza de avans, mm/rot; T f momentul de înşurubare, N m. Şuruburile cu bile pot transforma mişcarea de rotaţie în mişcare de translaţie sau invers (fig.6). 77 Fig. 6 În cazul antrenării prin rotaţie (şurub sau piuliţă) randamentul teoretic se poate calcula cu relaţia: unde: tanβ η = tan ( β + ϕ ) β m unghiul de pantă al elicei medii; m m r m () P βm = arctan (3) π d P pasul şurubului; d m diametrul nominal al şurubului. În cazul antrenării prin translaţie (şurub sau piuliţă) randamentul teoretic se calculează cu relaţia: ( β ϕ ) tan m η = tanβ Deoarece unghiul de frecare redus are valori extrem de mici (φ r = 0,º firma A.Mannesmann; φ r = 0,3º... 0,34º firma Warner, φ r = 0,3º... 0,6º m r (4)
78 78 firma Eichenberger etc.) şuruburile cu bile sunt în general fără autofrânare (β m > φ r ). Randamentul acestor transmisii este de ordinul η = 0, , Descrierea standului Standul prezentat schematic în figura 7 este astfel conceput încât să permită realizarea următoarelor funcţii: antrenarea şurubului într-o mişcare de rotaţie, translaţia piuliţei (ridicare coborâre), încărcarea axială a cuplei şurub piuliţă, măsurarea momentului de înşurubare din cupla şurub piuliţă cu bile. Fig. 7
79 Principalele subansamble şi repere ale standului sunt: motorul electric de antrenare, tabloul electric de comandă, batiul 3, coloanele 5, suportul de încărcare axială 6, şurubul cu bile 7, piuliţa 8, cuplajul 9 şi reductorul planetar 0. Sistemul de măsurare 4 a momentului de înşurubare este prezentat în figura 8 şi se compune din: arcul lamelar etalonat, suportul ceasului comparator, ceasul comparator 3 şi rola de ghidare Desfăşurarea lucrării Fig. 8 Lucrarea se desfăşoară în următoarea succesiune: se cuplează standul la sursa de tensiune; se apasă pe butonul jos al tabloului electric pentru a aduce piuliţa 8, suportul de încărcare 6 şi sistemul de măsurare a momentului de înşurubare 4 în poziţia minimă; se încarcă pe suportul taler 6 sarcina F ; se roteşte suportul de încărcare 6 în sens trigonometric până când se întrerupe contactul dintre rola de ghidare4 şi coloana din stânga batiului; în această poziţie se pune la zero ceasul comparator 3; se lasă uşor suportul 6 care va avea tendinţa de autodeşurubare şi prin rotire liberă în sens orar va aduce din nou în contact direct rola de ghidare 4 cu coloana din stânga a standului; ceasul comparator 3 va indica o săgeată iniţială f 0 ; se apasă pe butonul sus pentru ridicarea sarcinii F ; la ceasul comparator 3 se va citi o săgeată f a arcului lamelar etalonat ; se repetă operaţiile de cel puţin trei ori şi se face media măsurătorilor f med ; se repetă operaţiile pentru alte sarcini axiale F i şi se stabilesc săgeţile f i med.
80 80 Se precizează că masa întregului subansamblu de încărcare 6 (fig.7) este m = 46,5 kg, iar greutatea sa va fi G=m g=456,6 N. Sarcina efectivă axială va fi F ie =F i +G Prelucrarea datelor La prelucrarea datelor se procedează astfel: se măsoară diametrul d al şurubului şi pe baza datelor din catalogul firmei producătoare se stabileşte tipul şi dimensiunile şurubului cu bile; cu ajutorul relaţiei 3 se calculează unghiul β m ; pe diagrama de etalonare se marchează valorile săgeţilor f 0 şi f i med şi se determină valoarea momentului de înşurubare T f ca diferenţă între momentele corespunzătoare săgeţilor respective; cu ajutorul relaţiei se calculează randamentul transmisiei η i pentru valorile F ie ale forţei axiale; din relaţia se calculează valoarea unghiului de frecare redus φ ri ; se compară valorile obţinute pentru φ ri şi η i cu valorile recomandate în literatura de specialitate; mărimile măsurate şi calculate se trec în tabelul. Nr. crt. Denumirea mărimii Simbol U. M.. Diametrul nominal al asamblării d 0 mm Valori numerice Tabelul Obs.. Pasul şurubului P mm 3. Diametrul nominal al şurubului d mm 4. Unghiul elicei şurubului β m grade 5. Forţa axială efectivă F ie N 6. Săgeata iniţială f 0 mm 7. Săgeata arcului lamelar etalonat f i med mm 8. Momentul de înşurubare T fi N m 9. Randamentul η i 0. Unghiul de frecare φ ri grade
81 . DETERMINAREA DISTRIBUŢIEI PRESIUNII ÎN PELICULA DE LUBRIFIANT LA LAGĂRELE CU ALUNECARE CU UNGERE HIDRODINAMICĂ.. Scopul lucrării Lucrarea urmăreşte determinarea experimentală a variaţiei presiunii în pelicula de lubrifiant la un lagăr cu ungere hidrodinamică... Consideraţii teoretice Analiza regimurilor de ungere existente în lagărele cu alunecare arată că pentru asigurarea unei frecări fluide este necesară îndeplinirea următoarelor condiţii: viteză relativă suficient de mare a fusului în raport cu cuzinetul, existenţa unui joc în formă de pană între fus şi cuzinet în care să existe lubrifiant în exces, lubrifiantul utilizat să aibă o vâscozitate corespunzătoare, paralelismul axelor fusului şi cuzinetului. În regimul de frecare fluidă, în pelicula continuă de lubrifiant ce separă fusul de cuzinet se înmagazinează o presiune hidrodinamică suficient de mare pentru a echilibra acţiunea sarcinii exterioare aplicate pe fus. Ecuaţia diferenţială a presiunii în cazul curgerii fluidului între două suprafeţe plane este: h x 3 p x + p h z 3 p z + h 6 η = 0 x iar după integrare şi adaptare la condiţiile de funcţionare a lagărelor cu alunecare cu ungere hidrodinamică, primeşte forma: () unde: p ϕ ϕ (+ε cosϕ) (+ε cosϕ ) d 3 (+ε cosϕ) ϕ 6 η ω m pϕ = ϕ. () ψ presiunea hidrodinamică într-un punct oarecare situat pe periferia cuzinetului la unghiul ϕ faţă de linia centrelor;
82 8 η vâscozitatea dinamică a lubrifiantului; ω viteza unghiulară a fusului; ψ jocul relativ din lagăr; ε excentricitatea relativa (ε = e/δ); ϕ m unghiul ce poziţionează punctul în care presiunea hidrodinamică este maximă; h grosimea filmului de lubrifiant. Curba de distribuţie a presiunii hidrodinamice p ϕ pe periferia cuzinetului este prezentată în figura,a iar distribuţia presiunii p ϕ pe lungimea fusului în figura,b. Ieşire ulei h min p max A h m F ϕ ϕ ϕ ϕ m linia centrelor Intrare ulei a. b. R O e O D r γ B C A A Fig. F l / l / r ϕ dϕ p ϕ sin(ϕ - ϕ ) p ϕ -z +z p ϕ cos(ϕ - ϕ ) Aşa cum rezultă din relaţia () mărimea p ϕ este funcţie de calitatea lubrifiantului, de mărimea jocului relativ din lagăr, de viteza relativă dintre fus şi cuzinet, de poziţia fusului în cuzinet prin valoarea excentricităţii relative..3. Utilajul şi aparatura utilizată Încercările experimentale se fac pe standul pentru studiul lagărelor cu alunecare cu ungere hidrodinamică prezentat în figura. Schema cinematică a standului care asigură domeniul de turaţii n = rot./min, este prezentată în figura,d, în care: este motorul electric de antrenare a standului; o transmisie prin curele trapezoidale înguste, 3 suportul transmisiei, 4 arborele transmisiei; 5 variator PIV cu curele II ϕ I y




83 a. b M c. 6 F 7 d. 5 Ieşire ulei d. Fig. ulei 4 3 e. 0 Fig. 9 G 7 8 F
84 84 trapezoidale; 6 arborele principal al standului; 7 cuzinetul lagărului cu alunecare de încercat. Standul are un sistem centralizat de urmărire a parametrilor (temperatură, turaţie şi presiune) format din: Indicatorul de parametri 8, tip MICROTEMP, care indică temperatura în două puncte de măsură, presiunea în patru puncte, turaţia şi momentul forţei de frecare; traductori de măsură a temperaturii tip TRANSTEMP 0KTY montaţi pe stand pentru determinarea temperaturii în lagăr şi respectiv în bazinul de alimentare cu ulei; 4 traductori de presiune; traductor optic de turaţie; traductor de moment; program soft de comunicare între indicatorul de parametri şi calculator. În figurile,b şi,c sunt prezentate: indicatorul de parametri 8, precum şi conexiunile de la traductori şi cele la calculator. Lagărul de încercat este în consolă, pe arborele 6 (fig.,d) şi este format din cuzinetul 7 (fig.,d şi e) montat rigid cu pană în traversa 6, iar fusul este de tipul unei bucşe schimbabile care se asamblează prin pană pe capătul arborelui 6. Încărcarea lagărului se realizează prin sistemul de pârghii de tip paralelogram 4, 5,6 respectiv tiranţii şi traversele 3, 0,, şi talerul de greutăţi 9. Raportul de amplificare este 00: astfel încât o sarcină de N pe taler asigură încărcarea lagărului cu forţa F = 00 N. Standul permite determinarea forţei de frecare dintre fus şi cuzinet în timpul funcţionării, prin balanţa de frecare formată din pârghiile şi, respectiv greutăţile 3 şi 9. Pârghia este scoasă din poziţia de echilibru de către momentul de frecare care caută să antreneze în mişcare de rotaţie cuzinetul montat în traversa 6, ceea ce determină ridicarea pârghiei şi totodată dezechilibrarea pârghiei balanţei. Prin deplasarea greutăţii deplasabile 3 se echilibrează balanţa. Pe pârghia 6 este montat traductorul de moment care va determina deplasarea pârghiei determinată de momentul de frecare din lagăr, în momentul echilibrării balanţei, deplasare transmisă aparatului indicator şi în funcţie de care softul va calcula coeficientul de frecare corespunzător. Ungerea lagărului cu alunecare se realizează prin presiune (presiunea are o valoare mică) de către o pompă cu roţi dinţate montată în baia de ulei a standului şi care este antrenată de motorul electric prin intermediul unei transmisii cu curea trapezoidală. Reglarea debitului de ulei care intră în lagăr şi a presiunii acestuia se poate face printr-un distribuitor montat în circuitul de alimentare cu lubrifiant, mărimea presiunii de alimentare se citeşte pe
85 manometrul aflat în circuit înaintea intrării uleiului în lagăr, respectiv pe aparatul indicator 8. Intrarea uleiului în lagăr se face în plan orizontal, la 90º faţă de punctul de aplicare a forţei ce încarcă lagărul. Măsurarea presiunii în filmul de ulei se face cu ajutorul a 4 manometre şi respectiv a 4 traductori de presiune, montaţi pe periferia cuzinetului (fig.3). Manometrul este în legătură Ieşire ulei Intrare ulei Fig.3 cu un canal înfundat, ceea ce face ca repartiţia presiunii în filmul de lubrifiant să nu fie modificată. Uleiul care asigură ungerea lagărului se scurge pe la capetele lagărului şi este reintrodus în baia de ulei..4. Desfăşurarea lucrării. Se verifică respectarea măsurilor de protecţia muncii înainte de începerea lucrării (montajul corect al curelelor pe roţi, strângerea manometrelor în locaşurile lor, standul să nu fie încărcat);. Se porneşte standul în gol la turaţia minimă a fusului de 50 rot/min şi se lasă să funcţioneze până când între fus şi cuzinet se asigură un film continuu de ulei, moment marcat de scurgerea acestuia pe la partea frontală a lagărului; 3. Se echilibrează balanţa aducând la zero cursorul (greutatea) 3 prin modificarea poziţiei contragreutăţii 9; 4. Prin manevrarea distribuitorului se reglează presiunea de alimentare la o valoare p a ; 5. Se încarcă lagărul prin aşezarea greutăţilor pe talerul 9, realizând astfel forţa F pe cuzinet;
86 86 6. Se echilibrează balanţa pentru măsurarea forţei de frecare, se aşteaptă stabilirea echilibrului termic în lagăr şi respectiv stabilizarea valorilor deplasării traductorului de moment pe indicatorul de parametri 8, apoi se notează în tabelul cu date, respectiv se salvează într-un fişier valorile corespunzătoare pentru presiunile din filmul de lubrifiant, deplasarea traductorului pentru măsurarea momentului de frecare, coeficientul de frecare corespunzător, temperaturile din lagăr şi baia de ulei (t, t ); 7. Se încarcă lagărul cu alte sarcini F, F 3,, F n şi se repetă operaţia 6; 8. Se descarcă lagărul; 9. Se echilibrează la zero balanţa; 0. Se modifică presiunea de alimentare cu ulei la valoarea p a pentru a urmări efectul acesteia asupra distribuţiei presiunii în filmul de ulei;. Se repetă operaţiile 5 9;. Pentru a urmări efectul vitezei periferice a fusului asupra distribuţiei presiunii în filmul de lubrifiant, după descărcarea lagărului se acţionează asupra sistemului de reglare a variatorului de turaţie 5 şi se modifică turaţia fusului la o valoare n (500, 750 sau 000 rot/min); 3. Se repetă operaţiile ; 4. După încheierea setului de încercări se opreşte standul având grijă ca mai întâi să se descarce de greutăţi talerul Prelucrarea datelor. Datele experimentale se înscriu în tabelul. Tabelul Ulei tip: Dimensiunile fusului: - nominale: d = mm; l = mm; Vâscozitate: - efective: d e = mm; l e = mm; p m = F/l d; μ = F f /F G [N] F Presiuni [N/mm ] F f [N] p a p p p 3 p 4 [N] t [ 0 C] t [ 0 C] p m [N/mm ] n [rot/min] μ. Pe baza datelor din tabel se trasează distribuţia presiunii în filmul de ulei (fig.4) comparându-se apoi cu distribuţiile trasate pe calculator.
87 Diagramele de distribuţie se trasează pentru două presiuni de alimentare şi pentru două turaţii ale fusului. Pentru trasarea acestor diagrame se adoptă o scară convenabilă pentru presiuni iar apoi presiunile p, p, p 3 şi p 4 se reprezintă pe razele vectoare,, 3, 4 de la periferia cercului cu diametrul egal cu diametrul fusului (fig.4). 87 n 4 3 F F μ n = ct. p a = ct. Ieşire ulei Intrare ulei μ a. n = ct. p a = ct. p m Fig. 4 Fig. 5 b. p m 4. Se compară diagramele obţinute experimental cu distribuţiile teoretice prezentate la curs. 5. Se trasează diagrama de variaţie a coeficientului de frecare în funcţie de presiunea medie (fig.5).
88 . ARBORI ELASTICI. VIBRAŢII FLEXIONALE, TURAŢIA CRITICĂ ŞI FENOMENUL DE REZONANŢĂ.. Scopul lucrării Lucrarea are drept scop familiarizarea cu termenii turaţie critică şi fenomen de rezonanţă... Consideraţii teoretice O tendinţă a tehnicii moderne este creşterea vitezei de funcţionare a maşinilor. Aceasta se justifică prin: reducerea gabaritului maşinilor la aceeaşi putere de transmis. Din relaţia puterii P = F v, rezultă că, la aceeaşi putere, forţa scade o dată cu creşterea vitezei şi în consecinţă organele de maşini pot avea dimensiuni mai mici; creşterea vitezei de funcţionare a maşinii are, de regulă, ca o consecinţă importantă creşterea capacităţii ei de producţie. Creşterea vitezei este însă limitată de forţele de inerţie care apar în timpul funcţionării şi care provoacă vibraţii şi solicitări suplimentare în organele de maşini. Se ştie că orice corp elastic scos din starea de echilibru oscilează cu o frecvenţă proprie, până la amortizarea energiei de deformaţie. Efectul forţelor centrifuge şi al vibraţiilor constituie un factor important, de care trebuie să se ţină seama la proiectarea arborilor. Forţele de inerţie variază periodic, rezultând astfel vibraţii atât în maşină cât şi în fundaţie. Dacă la un moment dat, frecvenţa oscilaţiilor forţate cauzate de forţele de inerţie (forţa perturbatoare) coincid cu frecvenţa oscilaţiilor proprii ale unui element, mecanism sau maşină, apare fenomenul de rezonanţă mecanică, ceea ce poate duce la ruperea elementului sau distrugerea legăturilor dintre elementele mecanismului. În consecinţă, în practică trebuie folosite mecanisme şi maşini echilibrate.... Cazul unui arbore de masă neglijabilă pe care este montat un disc de masă m, la jumătatea arborelui Cauzele apariţiei vibraţiilor sunt:
89 arborele se deplasează în raport cu poziţia lui de echilibru (deformaţie statică); l Fig. discul este executat cu anumite toleranţe (imprecizie de execuţie); imprecizie de montaj; neomogenitatea materialului discului. Aceste cauze fac ca centrul de greutate al discului să se găsească la o anumită distanţă e faţă de axa lui şi a arborelui. În timpul funcţionării apare forţa centrifugă: = F c m v r = m ω forţă care creşte o dată cu creşterea lui ω şi deci săgeata va creşte şi mai mult, până când forţa elastică din arbore va echilibra această forţă: unde: a l F S c e G = m ω r = m ω r ( e+ f ) r raza centrului de greutate în raport cu axa de rotaţie; f din săgeata provocată de forţa F c : f din 3 Fc l = 48 E I Verificarea la vibraţii flexionale constă în determinarea frecvenţei proprii a arborelui şi deci a turaţiei corespunzătoare care poartă denumirea de turaţie critică. Scopul este ca turaţia de regim să nu coincidă cu turaţia critică sau să nu fie prea apropiată de ea. Coincidenţa turaţiei critice cu cea de regim este însoţită de apariţia fenomenului de rezonanţă, situaţie în care amplitudinea vibraţiei proprii poate creşte până la ruperea arborelui. Relaţiile de calcul sunt: 3 3 m ω ( f +e) l G l ( f +e) din ω din f din = = 48 E I 48 E I g e fdin F c din b 89
90 90 în care: deci: = f st 3 G l 48 E I () e f din = () g f ω În cadrul fenomenului de rezonanţă f din tinde spre ; pentru aceasta este necesar ca: g -= 0 f. rezultă: ω cr = g f st ω st ; st n cr 30 =. π Pentru o bună funcţionare este necesar ca turaţia la care funcţionează arborele să nu fie egală cu turaţia critică. Pentru evitarea fenomenului de rezonanţă se recomandă respectarea următoarelor condiţii: n < 0,7 n cr = n lim pentru arbori rigizi; n >,3 n cr = n lim pentru arbori elastici. Pentru cazurile în care turaţia de regim este mai mare decât cea critică, arborii se numesc elastici şi se recomandă ca trecerea prin zona critică să se facă într-un timp cât mai scurt pentru ca efectul de rezonanţă să nu ducă la ruperea arborilor. Se consideră că arborii utilizaţi în zona subcritică sunt arbori rigizi. Există turaţii critice flexionale cauzate de forţe transversale variabile (forţe centrifuge), turaţii critice torsionale determinate de momente de torsiune variabile şi turaţii critice provocate de forţe axiale variabile care însă nu prezintă importanţă pentru practică deoarece pulsaţia proprie a arborilor este foarte mare şi nu există pericolul apariţiei fenomenului de rezonanţă..3. Descrierea aparaturii În vederea realizării lucrării se va utiliza Sistemul de diagnoză al organelor de maşini PT 500 pe care se montează modulul pentru arbori elastici PT (fig.). g f st (3) (4)
91 9 Fig. Montajul prezentat în figura se utilizează la determinarea vibraţiilor în lagăr la un arbore elastic cu ajutorul senzorilor de acceleraţie, la pornire şi oprire precum şi turaţia critică a arborelui. Montajul prezentat în figura este format din: unitate de comandă şi motor electric, cuplaj, 3 lagăr oscilant monobloc cu rulment cu bile, 4 senzor de acceleraţie, 5 arbore elastic, 6 lagăr de siguranţă (necesar pentru a evita deformarea prea mare respectiv ruperea arborelui la trecerea prin zona critică), 7 alezaje pentru senzorii de poziţie, 8 disc, 9 set de fixare, 0 reper de reflexie pentru senzorul de referinţă, senzor de acceleraţie, portmagnet, 3 senzor de referinţă. În tabelul sunt date setările pentru senzorul de acceleraţie AS-0 iar în tabelul setările de referinţă. Tabelul Setările senzorului AS-0 pentru vibraţiile rulmentului (Vibroport 4) Setare Setare Intrare Activă Activă Tipul senzorului De acceleraţie De acceleraţie Sensibilitatea 00mV/g 00mV/g Unitatea de măsură m/s eff m/s eff Domeniu de măsurare 0 (variabile) 0 (variabile) Filtru cu trecere înaltă 0 Hz ISO 0 Hz ISO Filtru cu trecere joasă khz ISO khz ISO
92 9 Setări de referinţă (P-84) Setare Referinţe exterioare Activă Nivelul mecanismului de declanşare 50 % Rigla mecanismului de declanşare Pozitivă Unitate de măsură pentru turaţie rpm Viteza/referinţă /.4. Desfăşurarea lucrării Tabelul Montajul necesar (fig.) precum şi realizarea lucrării necesită parcurgerea următoarelor etape: se fixează motorul electric pe placa de bază; se conectează unitatea ; se montează mai întâi rulmentul cu bile liber 3 de lângă cuplaj; se introduce arborele elastic cu lagărul de siguranţă 6 montat pe el, direct prin rulmentul din lagărul monobloc 3 în cuplaj şi se aşează pe placa de bază; se pune discul de greutate pe arborele elastic cu ajutorul setului de fixare; se reazemă arborele elastic pe al doilea rulment şi se aşează liber lagărul pe placa de bază; se aliniază şi se fixează lagărele; se fixează discul 8 pe arborele elastic, pe cât posibil la mijlocul acestuia; se aplică reperul pentru senzorul de referinţă de pe arbore; se fixează senzorul de referinţă pe marcaj; se înşurubează senzorul de acceleraţie pe rulment şi se conectează senzorii la aparatul de măsură al vibraţiilor; se porneşte calculatorul care conţine softul utilizat pentru măsurarea şi înregistrarea mărimilor ce urmează să fie studiate în cadrul lucrării; se deschide aplicaţia PT 500 (din desktop); din meniul Kind of test se alege varianta Traking Analyses ; se setează unul din cele două canale şi modul Continuous de înregistrare a datelor; din opţiunile centrale se înlocuieşte acceleraţia cu viteza (apare pe axa verticală de coordonate a diagramei);

93 se închide ecranul de protecţie; se porneşte unitatea de acţionare pentru motorul electric; se setează sensul de rotire; se porneşte motorul electric; se începe măsurarea reglând încet viteza, prin accelerare de la 0 la 3000 rot/min; se salvează imaginea cu diagrama înregistrată pe ecranul calculatorului cu Print Screen şi în continuare într-un fişier în calculator; se continuă măsurarea reglând încet viteza prin frânare, de la 3000 la 0 rot/min; se salvează imaginea cu diagrama înregistrată pe ecranul calculatorului cu Print Screen şi într-un fişier în calculator; pe diagramele obţinute se va identifica domeniul în care arborele elastic atinge lagărul de siguranţă 6 trasându-se cele două linii verticale scurte de delimitare (reprezentate cu portocaliu în figura 3) şi se determină valoarea turaţiei critice; se calculează cu relaţiile (4) valorile turaţiei care delimitează domeniul (zona) critic şi se trasează pe diagramă liniile verticale care delimitează zona critică. 93 Domeniul maxim de rezonanţă fără lagăr de siguranţă Viteză [mm/s] Domeniul subcritic Turaţie critică Domeniul supracritic Domeniul critic Turaţie [rot/min] Fig. 3 n lim n n cr n n lim Se trece la evaluarea rezultatelor încercării experimentale: din figura 3 rezultă clar domeniul de rezonanţă (domeniul critic) cu contact pe lagărul 6. La aproximativ 400 rot/min amplitudinea vibraţiilor începe să crească (începe domeniul de rezonanţă). La aproximativ 00 rot/min arborele atinge lagărul de siguranţă 6. Peste 600 rot/min arborele se detaşează de lagărul 6, amplitudinea vibraţiilor scade în continuare, domeniul de rezonanţă este
 este turaţia la care curba de rezonanţă atinge valoarea maximă fără a fi influenţată de prezenţa lagărului de siguranţă.")
94 94 depăşit (domeniul supracritic). Domeniul sub cel critic se numeşte domeniu subcritic. Turaţia critică (în cazul de faţă aproximativ 400 rot/min) este turaţia la care curba de rezonanţă atinge valoarea maximă fără a fi influenţată de prezenţa lagărului de siguranţă. Domeniul maxim de rezonanţă cu contact pe lagărul de siguranţă Viteză [mm/s] Domeniul subcritic Turaţie critică Domeniul supracritic Domeniul critic Turaţie [rot/min] Fig. 4 n lim n n cr n n lim Figura 4 arată vibraţiile existente ale lagărului când turaţia scade de la 3000 rot/min la 0. Curba rezonanţei începe la aproximativ 600 rot/min şi la 00 rot/min arborele se desprinde de lagărul 6. Lagărul protejează arborele prin limitarea vibraţiilor, şi previne ruperea arborelui. La aproximativ 000 rot/min arborele părăseşte domeniul critic..5. Prelucrarea datelor Datele obţinute în cadrul încercărilor efectuate şi stabilite prin analiza acestora (trasarea pe cele două grafice a dreptelor care marchează domeniile) se vor trece în tabelul 3 în coloanele corespunzătoare. Pentru a compara aceste date cu cele obţinute prin calcul cu relaţiile stabilite teoretic, se va determina pentru început greutatea G a discului (cântărire) iar apoi cu relaţia () se determină săgeata statică produsă de această greutate, cu relaţia (3) turaţia critică şi cu relaţiile 4 limitele domeniul critic. Rezultatele obţinute se vor trece în tabelul 3 în coloanele corespunzătoare şi se vor reprezenta pe cele două grafice cu o culoare diferită de cea cu care s-au trasat liniile rezultate din analiză. Prin compararea acestor rezultate se va constata în ce măsură datele obţinute prin calcul corespund celor obţinute pe cale experimentală. Se va încerca explicarea eventualelor abateri.
95 95 Tabelul 3 Nr. Date experimentale Date calculate crt. Încercarea n cr n n n lim n lim G f st n cr n lim n lim [rot/min] [Kg] [mm] [rot/min] rot/min rot/min unde: n cr turaţia critică; n turaţia corespunzătoare momentului în care arborele atinge lagărul de siguranţă; n turaţia corespunzătoare momentului în care arborele se desprinde de pe lagărul de siguranţă; n lim =0,7 n cr ; n lim =,3 n cr.
96 3. SIMULAREA PREZENŢEI UNEI FISURI ÎNTR UN ARBORE AFLAT ÎN MIŞCARE DE ROTAŢIE 3.. Scopul lucrării Lucrarea are ca scop studiul influenţei unei fisuri existente în interiorul unui arbore aflat în mişcare de rotaţie, asupra funcţionării acestuia. Fisurile datorate oboselii materialului prezintă pericol în cazul elementelor aflate în mişcare de rotaţie întrucât pot duce la distrugerea prin oboseală a piesei, cu consecinţe posibil catastrofale. Fisura situată în interiorul arborelui se dezvoltă în timpul funcţionării ca urmare a acţiunii sarcinilor ciclice, până ce ajunge la o dimensiune critică, putând pune în pericol funcţionarea pe mai departe, în condiţii de siguranţă, a acestui organ de maşină. Unitatea PT 500. Echipament pentru detectarea fisurii într-un arbore aflat în mişcare de rotaţie permite simularea comportamentului unui arbore având o fisură, de diferite lungimi, în interiorul lui. Fisura din interiorul arborelui influenţează vibraţiile acestuia datorită modificării rigidităţii. Aceste modificări pot fi detectate prin măsurarea vibraţiilor arborelui, utilizând un program de analiză corespunzător. Metoda experimentală descrisă mai jos implică şi utilizarea echipamentului PT.500.0, Setul de aparatură Brüel & Kjaer Vibro. Oricum, ca alternativă, pot fi utilizate echipamente de măsurare a vibraţiilor realizate de alţi producători. Rezultatele măsurătorilor vor reflecta caracteristicile procesului, dar depind calitativ de montajul provizoriu experimental. 3.. Simularea prezenţei fisurii în arbore Comportamentul caracteristic al unui arbore cu o fisură în interior este simulat printr-o îmbinare cu flanşe asimetrice (fig.). Îmbinarea flanşelor este realizată prin şase şuruburi distribuite de-a lungul circumferinţei.
97 Prin strângerea ansamblului flanşelor cu distanţiere se realizează o legătură care, în funcţie de direcţia de montare a bucşelor, asamblează flanşele cu sau fără joc. Prin imprimarea mişcării de rotaţie, sub acţiunea unei sarcini de încovoiere, această legătură între flanşe va prezenta o discontinuitate temporară. Acest efect este similar cu cel produs de o fisură din arbore. 97 a) b) c) Fig. Figura,a corespunde cazului unui arbore fără fisură, cele două flanşe fiind unite prin toate cele şase şuruburi. Figura,b corespunde unui arbore cu o fisură mică (flanşele sunt unite cu cinci din cele şase bolţuri) iar figura,c corespunde unui arbore având fisura de dimensiune maximă (flanşele sunt prinse doar cu două şuruburi din cele şase). Pentru a crea efectul dat de fisură, această îmbinare a flanşelor trebuie supusă încărcării sub un moment încovoietor (de exemplu transmisia prin curea Pt sau prin dezechilibrarea ansamblului cu discul de masă).! Atenţionare: În cazul asamblării fără joc, asamblarea flanşelor se face cu cel puţin două şuruburi strânse Descrierea echipamentului de simulare În figura se prezintă asamblarea dintre cele două flanşe, deci şi a arborilor, corespunzător cazului în care nu există fisură în interiorul vreunui arbore (toate cele şase şuruburi sunt strânse). Centrarea arborelui se face prin intermediul unui dorn de centrare 3, care intră în alezajul prevăzut în arborele lung cu flanşă 7 cu ieşire la un disc de masă mare. Setul de strângere este montat pe discul de prindere 4, iar şuruburile cu cap hexagonal 5 se montează cu distanţiere în locaşurile prevăzute în
98 98 flanşe, poziţionarea distanţierelor făcându-se astfel încât să se obţină fie o conexiune fixă, fie un joc între flanşe. L= 85 mm L = 0 mm Fig. arbore conducător, set pentru strângere, 3 dorn de centrare, 4 disc de prindere, 5 şuruburi cu cap hexagonal, 6 distanţier, 7 arbore lung (ieşire pentru discul de masă), 8 flanşă cu arbore scurt (ieşire pentru transmisia prin curea) 3... Montarea flanşelor pentru simularea fisurii se aliniază flanşa cu arborele (fig., poz.7 sau 8) şi discul de prindere 4 folosind dornul de centrare 3; se introduc distanţierele 6 în concordanţă cu funcţiile acestora şi se strâng cu şuruburile cu cap hexagonal 5: - utilizarea distanţierului pentru o conexiune liberă este prezentată în figura 3.a; când se utilizează un distanţier, flanşa şi discul de prindere sunt ţinute împreună cu joc prin intermediul şuruburilor; - când se foloseşte distanţierul pentru o conexiune fixă se inversează poziţia acestuia, aşa cum este prezentat în figura 3.b);
99 99 joc a b Fig. 3 - utilizarea distanţierului pentru o conexiune fixă între flanşa şi discul de prindere este prezentată în figura 3,b; în acest caz flanşa şi discul de prindere sunt asamblate fără joc datorită forţelor din şuruburi. se introduce setul de strângere în discul de prindere 4; se montează unitatea arbore cu fisură în montajul provizoriu cu setul pentru strângere la un capăt al arborelui Asigurarea îmbinării flanşei cu setul de strângere pe arbore Pentru a asigura discul de prindere cu setul de strângere pe arbore (fig.4) se procedează astfel: cu setul de strângere slăbit, se împinge discul de prindere pe arbore; se verifică dacă setul de strângere este introdus la acelaşi nivel cu discul de prindere; se strânge şurubul cu cap hexagonal exterior (A), în timp ce este ţinut nemişcat şurubul hexagonal interior (B); filetul şurubului hexagonal exterior se înşurubează pe conul (C) în bucşa hexagonului interior. Acesta deformează arborele cu discul de masă. La slăbirea setului de strângere se ţine fix hexagonul interior (B) şi se deşurubează hexagonul exterior. După depăşirea momentului de torsiune iniţial de separare, se continuă rotirea până când rezistenţa creşte din nou. Prin continuarea rotirii, setul de strângere este scos afară din montaj şi poate fi detaşat cu mâna.
100 00 Disc de prindere A B C Arbore Fig. 4! Atenţionări: - există riscul de rănire datorat componentelor aflate în mişcare de rotaţie; se va lucra numai cu capacul standului închis; - există riscuri pentru echipamentul de lucru şi anume: - nu este voie să se depăşească valorile maxime permise ale turaţiei, încărcării transmisiei prin curele etc. (conform datelor tehnice); - cel puţin două şuruburi hexagonale de pe circumferinţă trebuie să fie strânse cu distanţiere în cazul conexiunilor fixe fără joc. - la încercarea arbore cu fisură cu capăt de arbore încărcarea maximă din curea este de 70 N Simularea fisurii în arbore în cazul unui arbore în consolă Standul utilizat O fisură într-un arbore în consolă este simulată folosind arborele scurt cu flanşă, conform montajului prezentat în figura 5.
101 Fig întinzător de curea, curea, 3 roată de curea mică, 4 arbore scurt cu flanşă, 5 disc de prindere, 6 set pentru strângerea arborelui, 7 senzor de acceleraţie, 8 lagăr cu rulmenţi, 9 arbore scurt, 0 senzor de referinţă, lagăr cu rulmenţi, cuplaj, 3 mecanism de acţionare, 4 placă metalică pentru cadrul magnetic, 5 suport magnetic, 6 element de reflexie, 7 roată de curea mare cu lagăr cu rulmenţi Încărcarea radială constantă este realizată de transmisia prin curea. Se fac următoarele precizări: în experimentul fără fisură în arbore, toate cele şase şuruburi cu distanţiere sunt asamblate ca în cazul conexiunilor fixe fără joc (fig.3,b). în experimentul cu fisură în arbore, sunt slăbite patru şuruburi consecutive şi sunt asamblate cu distanţiere pentru conexiuni libere (fig.3,a). Se procedează în felul următor: se montează mecanismul de acţionare 3 în cadrul de bază; se conectează mecanismul de acţionare;
102 0 se asamblează arborele scurt 9 în lagărele cu rulmenţi şi 8 astfel încât acesta să poată fi conectat, prin intermediul cuplajului la mecanismul de acţionare; se asigură întreaga asamblare conţinând discul de prindere 5 şi arborele scurt cu flanşă 4 (secţiunea 3..) cu setul de strângere 6 la capătul arborelui 9. Pentru încercările arbore cu fisură flanşa trebuie să fie montată aşa cum s a arătat în secţiunea 3..3: - 4 şuruburi hexagonale cu distanţier pentru conexiuni libere; - şuruburi hexagonale cu distanţier pentru conexiuni fixe; se asigură roata de curea mică 3 cu setul de strângere la capătul arborelui cu flanşă; se completează transmisia prin curea cu lagărul cu rulmenţi şi întinzătorul de curea din PT 500.4, se aliniază şi se tensionează transmisia prin curea; se înşurubează un senzor de acceleraţie în alezajul orizontal din lagărul cu rulmenţi; se poziţionează şi se aliniază un senzor de referinţă pentru a înregistra turaţia; se aplică pe arbore o banda adezivă de reflectare pentru senzorul de referinţă (unghiul de reflexie pe arbore trebuie să fie diferit de 90 pentru că poate interfera cu înregistrarea turaţiei). Reglarea tensiunii din curea la arborele cu o fisură în interior se face conform figurii 6. Cureaua se tensionează până când un calibru de grosime de 0.4 mm intră între cele două flanşe. Măsurătorile vor fi efectuate pe partea lagărului depărtată faţă de transmisia prin curele, pe faţa unde acţionează tensiuni de întindere asupra arborelui Înregistrarea spectrului de frecvenţă Senzorul de frecvenţă este AS 00. Reglajele se fac conform tabelului. Etapele de lucru sunt următoarele: se închide capacul de protecţie; se acţionează dispozitivul de comandă a motorului electric; se alege sensul de rotaţie; se porneşte motorul electric; se reglează turaţia la valoarea dorită, rot/min;
103 03 Set pentru întinderea curelei 0,4 mm Fig. 6 Reglarea spectrului de frecvenţă Intrare Activ Tip senzor Acceleraţie Sensibilitate 00 mv/g Unitate de măsură m/s Gama de măsurare 0 (variabil) Gama de frecvenţă 0 00 Hz Tabelul setarea datelor pe calculator se face în succesiunea următoare: Desktop PT 500 Kind of Test Frequency Spectrum Velocity Channel Maxim; se înregistrează spectrul pentru arbore cu fisură ; se reduce turaţia până la 0; se opreşte motorul;
104 04 se modifică poziţia arbore cu fisură în cea fără fisură şi se strâng toate cele şase şuruburi cu manşon de strângere, ca pentru o conexiune fixă; se porneşte motorul electric păstrând acelaşi sens de rotaţie; se reglează turaţia la aceeaşi valoare ca mai sus, rot/min; se înregistrează spectrul pentru arbore fără fisură ; se readuce turaţia la 0; se opreşte motorul electric Evaluarea rezultatelor Caracteristic pentru arborele cu fisură în interior sunt vibraţiile secundare (de ordinul al doilea) în spectrul de frecvenţe. Acestea sunt cauzate de rigiditatea anizotropică a arborelui. Arborele trece de două ori prin gama de rigidităţi scăzute şi tot de două ori prin gama de rigidităţi mari, la fiecare rotaţie. Acestea au ca rezultat apariţia vibraţiilor la dublul valorii turaţiei. La început se prezintă spectrul de frecvenţă pentru arborele fără fisură. În figura 7 se prezintă spectrul de frecvenţă al arborelui cu capăt de arbore fără fisură (6 şuruburi strânse), corespunzător unei turaţii de 400 rot/min., respectiv ν = 40 Hz. Aici este prezentată oscilaţia fundamentală la 40 Hz. Fig. 7 În figura 8 se prezintă spectrul de frecvenţă al arborelui cu capăt de arbore cu fisură ( şuruburi strânse), pentru turaţia de 400 rot/min., respectiv ν = 40 Hz. De asemenea, este prezentată oscilaţia fundamentală a arborelui cu fisură. Amplitudinea oscilaţiilor fundamentale, cu sau fără fisuri, este aproape aceeaşi (0,4/0,5 mm/s).
105 05 Fig. 8 La arborele cu fisură se constată o creştere caracteristică a oscilaţiilor secundare, aceasta fiind un indicator al prezenţei fisurii Simularea fisurii în arbore la un rotor elastic Simularea unei fisuri în arbore în cazul unui rotor elastic se realizează cu ajutorul arborelui lung cu flanşă şi a discului de masă. Se vor determina curbele de ordinul unu şi doi precum şi curbele orbitale Montajul utilizat Determinările se vor face pe stand, conform montajului din figura 9. Accesoriile necesare sunt: PT 500 Machinery Fault Trainer, PT 500. Instrumentation Set from Brüel & Kjaer Vibro, PT Elastic Shaft Kit. Modul de lucru este următorul: se introduce unitatea de acţionare în cadrul suport; se conectează unitatea de acţionare; se montează arborele scurt 8 în lagărul cu rulmenţi 0, apoi inelul pentru prindere 5, discul de masă 6 şi lagărul de siguranţă 7, astfel încât să se realizeze conectarea arborelui scurt la unitatea de acţionare, prin cuplajul ; se montează întreaga asamblare (arbore cu fisură) conţinând discul de prindere 4, arborele lung cu flanşă 3, cu setul de strângere 7 pe celălalt capăt al arborelui scurt 8; pentru o mai bună manevrare, cel de-al doilea lagăr cu rulmenţi,, se va fixa pe capătul liber al arborelui cu flanşă ; se montează inelul 5 pentru fixarea axială a arborelui; se înşurubează senzorul de acceleraţie în orificiul orizontal din lagărul cu rulmenţi ;
106 Fig. 9 senzor de acceleraţie orizontal, lagăr cu rulmenţi, 3 arbore lung cu flanşă, 4 disc de prindere, 5 senzor de proximitate, vertical, 6 senzor de distanţă, orizontal, 7 lagăr de siguranţă, 8 arbore scurt, 9 senzor de referinţă, 0 lagăr cu rulmenţi, cuplaj, unitate de acţionare, 3 placă metalică pentru cadrul magnetic, 4 suport magnetic pentru senzorul de referinţă, 5 inel pentru fixare axială, 6 disc cu set de strângere, 7 set de strângere, 8 distanţier, 9 şuruburi cu cap hexagonal se poziţionează şi se aliniază senzorul de referinţă 9 pentru înregistrarea turaţiei; se aplică pe arbore o bandă adezivă de reflectare pentru senzorul de referinţă (unghiul de reflexie pe arbore trebuie să fie diferit de 90 pentru că poate interfera cu înregistrarea turaţiei); se montează senzorii de distanţă în lagărul de siguranţă: - Senzor canal X (orizontal), - Senzor canal Y (vertical).
107 Montarea şi ajustarea senzorilor Pentru a efectua acest lucru se procedează în felul următor: se înşurubează senzorii de distanţă în lagărul de siguranţă astfel încât aceştia să nu poată intra în contact cu arborele; se conectează senzorii de distanţă la Vibroport şi se ajustează distanţa (distanţă zero) folosind ecranul Vibroport DC; din meniu (Task Characteristics Axial Position Numeric Measure) se pot stabili valorile tensiunii curentului continuu pentru senzorii de distanţă. Reglajul pentru măsurarea poziţiei axiale, numeric Intrare Tipul senzorului Sensibilitate Unitate de măsură Reglaj Activ Distanţă 8 mv/μm mm Afişaj zero -4V Tabelul Pentru experimentul următor senzorii de distanţă trebuie să fie deconectaţi de la Vibroport iar senzorii de acceleraţie conectaţi pentru analiza traseelor Analiza traseelor de ordinul şi Reglajele se fac conform tabelului 3. Reglaj pentru analiza traseelor Intrare Activ Tip senzor Acceleraţie Sensibilitate 00 mv/g Unitate de măsură mm/s Gama de măsurare 0 (variabil) Tabelul 3 Se procedează după cum urmează: se închide capacul de protecţie;
108 08 se acţionează dispozitivul de comandă a motorului electric; se alege sensul de rotaţie; se porneşte motorul electric; se creşte încet turaţia de la 0 la turaţia dorită rot/min; setarea datelor pe calculator se face în succesiunea următoare: Desktop PT 500 Kind of Test Tracking Analysis Channel Graph Order se vizualizează pe monitor curbele obţinute, se salvează în calculator sau se tipăresc Înregistrarea curbelor orbitale Tipul senzorului de distanţă este IN 085. Parametrii de reglare pentru curbele orbitale sunt conform tabelului 4. Reglarea pentru trasee Reglaj Reglaj Intrare Activ Activ Tip senzor Distanţă Distanţă Sensibilitate 8 mv/μm 8 mv/μm Unitate de măsură mm μm Gama de măsurare 00 (variabil) 00 (variabil) Filtru de înaltă frecvenţă 0 Hz 0 Hz Filtru de joasă frecvenţă khz khz Tabelul 4 Operaţiunile de lucru se desfăşoară după următoarea metodologie: se conectează senzori de distanţă la lagărul de siguranţă, senzor canal X, senzor canal Y; se închide capacul de protecţie; se acţionează dispozitivul de comandă a motorului electric; se stabileşte sensul de rotaţie; se porneşte motorul electric; se reglează turaţia şi se vizualizează pe monitor traseele; se salvează sau se tipăreşte rezultatul.
109 Evaluarea rezultatelor 09 În cazul arborilor elastici apariţia oscilaţiilor de ordinul doi depinde de încărcarea pe arbore. Aceasta se modifică cu turaţia datorită oscilaţiilor de rezonanţă. În consecinţă, o măsurătoare la o valoare fixă a turaţiei s-ar putea să nu fie utilă. Este necesară o analiză a traseelor de-a lungul unei game largi de frecvenţă pentru determinarea oscilaţiilor de ordinul doi. Analizele traseelor de ordinul şi pentru un rotor elastic fără fisură sunt prezentate în figurile 0, respectiv. Fig. 0 Fig. Analizele traseelor de ordinul şi pentru un rotor elastic cu fisură sunt prezentate în figurile, respectiv 3.
110 0 Fig. Fig. 3 Se observă o creştere semnificativă în amplitudine a oscilaţiilor de ordinul, la aproximativ 850 rot/min. Analize de acest gen ale traseelor se pot efectua pentru rotoarele existente (de exemplu în cazul turbinele centralelor electrice) la verificările programate (scadente). Un rol important în acest caz îl au datele de referinţă pentru un rotor iniţial, în stare nedefectată. Pentru a arăta creşterea oscilaţiilor de ordinul, funcţie de existenţa fisurii, se suprapun mai multe trasee pe aceeaşi imagine. Aici se constată, chiar şi pentru o fisură mică (cinci bolţuri ajustate), deviaţii semnificative faţă de arborele fără fisură. Înregistrarea traseelor de ordinul şi pentru fisuri de dimensiuni diferite se prezintă în figurile 4 respectiv 5. Caracteristic pentru arborele cu fisură sunt următoarele aspecte: amplitudinea oscilaţiior de ordinul este, în anumite game, mai mare decât cele de ordinul ;
111 Analiza traseelor de ordinul Amplitudinea vibraţiei 3 şuruburi strânse 4 şuruburi strânse 5 şuruburi strânse 6 şuruburi strânse Turaţie, rot/min Fig. 4 Analiza traseelor de ordinul Amplitudinea vibraţiei 3 şuruburi strânse 4 şuruburi strânse 5 şuruburi strânse 6 şuruburi strânse Turaţie, rot/min Fig. 5 amplitudinea oscilaţiior de ordinul creşte cu creşterea fisurii. Oscilaţiile de ordinul sunt, de asemenea, vizibile în curbele orbitale. Setarea se face după cum urmează: Desktop Kind of Test Orbit Analysis Velocity Prima dată se prezintă curbele orbitale pentru un arbore fără fisură la diferite turaţii.
112 n = 468 rot/min Fig. 6 n = 75 rot/min Se poate observa o formă mai mult sau mai puţin apropiată de un cerc. În cazul existenţei fisurii, oscilaţiile de ordinul apar ca o buclă în curba orbitală. În figura 7 se prezintă, în funcţie de turaţie, diferite curbe orbitale caracteristice, cu oscilaţii majore de ordinul. n = 468 rot/min n = 63 rot/min n = 70 rot/min n = 780 rot/min Fig Date tehnice ale dispozitivului Lungime maximă: 50 mm; Diametrul flanşelor: 90 mm; Greutate aproximativă: 5 kg; Şuruburile cu cap hexagonal pentru flanşe: DIN , M8x0 mm;
113 3 Momentul încovoietor maxim admisibil al arborelui scurt pentru roata de transmisie este 5,9 Nm sau forţa maximă perpendiculară pe arbore (pentru un braţ de pârghie de l=06 mm) este 50 N; Momentul încovoietor maxim admisibil al arborelui scurt pentru discul de masă este 3,9 Nm respectiv forţa maximă perpendiculară pe arbore (pentru un braţ de pârghie de l=0 mm) este 5,5 N; Se va evita funcţionarea continuă în cazul încovoierii la turaţia critică. Aceasta depinde de valorile fiecărui experiment individual.
114 4. PIERDERILE PRIN FRECARE ÎN LAGĂRELE CU RULMENŢI 4.. Scopul lucrării Lucrarea are, în mod direct, un dublu scop: a. determinarea experimentală a pierderilor prin frecare în rulmenţii cu bile seria 60; b. calculul coeficientului de frecare global (echivalent). Ea permite şi obţinerea unor informaţii inginereşti suplimentare privind: utilizarea unui arc dinamometric pentru măsurarea forţelor; modalitatea antrenării unui arbore astfel încât turaţia sa să varieze în trepte; măsurarea turaţiei arborelui cu ajutorul unui tahometru; metodica de măsurare a unui moment al forţelor de frecare cu ajutorul unui pendul. 4.. Consideraţii teoretice Pierderile de energie în rulmenţi sunt relativ mici şi ele rezultă, mai ales, din pierderile prin frecare. Acestea iau naştere pe suprafeţele de contact dintre corpurile de rulare şi căile de rulare, dintre corpurile de rulare şi colivie, precum şi din rezistenţa opusă de lubrifiant la deplasarea relativă a corpurilor de rulare şi coliviei faţă de acesta. Tipurile de frecări mai sus menţionate şi, ca urmare, frecarea totală din rulment, depind de o serie de factori care nu pot fi cuprinşi cu exactitate într-o relaţie teoretică. Uzual, coeficienţii de frecare pentru diferitele tipuri constructive de rulmenţi, precum şi legile de variaţie a lor în funcţie de sarcină şi de turaţie, se stabilesc pe cale experimentală. Astfel, de exemplu, s-a stabilit că frecarea dintre corpurile de rulare şi căile de rulare creşte cu creşterea sarcinii, în timp ce frecarea între corpurile de rulare şi colivie este aproape independentă de sarcină şi turaţie, mărimea sa fiind condiţionată de precizia formei geometrice a elementelor rulmentului. Pierderile de energie cauzate de frecarea între corpurile de rulare, colivie şi lubrifiant depind de vâscozitatea (sau consistenţa) lubrifiantului, precum şi de cantitatea de lubrifiant introdus în lagăr. Pe măsura creşterii sarcinii şi a creşterii temperaturii de funcţionare, aceste pierderi se micşorează datorită micşorării vâscozităţii lubrifiantului.
115 5 În cazul turaţiilor mari ale arborelui, pierderile prin frecarea părţilor mobile ale rulmentului cu lubrifiantul cresc datorită turbioanelor din lubrifiant. Datorită complexităţii fenomenelor privind pierderile prin frecare în rulmenţi, se poate lua în considerare, pentru turaţii mici sau medii, un coeficient de frecare global (echivalent) µ 0, care depinde de tipul rulmentului. În acest caz, momentul de frecare poate fi exprimat cu următoarea relaţie aproximativă: T f F d = μ0 [Nmm] () unde: F sarcina radială din rulment (este vorba de rulmenţi radiali cu bile seria 60) [N]; d diametrul fusului [mm]; Observaţie: Datorită faptului că etanşarea a rulmenţilor (fig.) este cu contact, pierderile prin frecare care vor fi constatate în cursul desfăşurării lucrării includ şi frecările din etanşare. Lucrarea urmăreşte să se determine pierderile prin frecare doar în rulmenţi, nu şi cele din etanşare. De aceea, se va determina, mai întâi, momentul de frecare în gol (T f0 ), care va fi scăzut din valoarea momentului de frecare în sarcină T f. Calculele se vor efectua cu diferenţa acestor momente (T fnet ): T fnet = T T () f f Descrierea aparaturii Experimentul se realizează pe instalaţia din figura. Părţile componente principale ale acesteia sunt următoarele: lagărul oscilant, care este montat în consolă la o extremitate a arborelui. El conţine rulmenţii pentru care se studiază pierderile prin frecare. Pe corpul lagărului oscilant este montat un ac indicator care evoluează în faţa unei scale unghiulare. lagărul fix 8, în care se sprijină arborele. modulul de antrenare, care conţine motorul electric şi cele două roţi de curea. Roţile au câte trei canale, la diferite diametre, pentru cureaua trapezoidală. În felul acesta arborele poate avea trei turaţii. pendulul 3 cu greutăţile 3. Cei patru rulmenţi de studiat 4, sunt montaţi pe bucşa 7, asamblată cu pană paralelă cu arborele. Inelele exterioare ale rulmenţilor marginali sunt
116 6 ajustate în corpul 3, respectiv în capacul 5. Inelele exterioare ale rulmenţilor centrali sunt ajustate în bucşa, care este liberă faţă de corpul 3. Fig. Rulmenţii se încarcă de la şurubul 7. Strângând şurubul, el va avansa în jos, încărcând direct cei doi rulmenţi centrali. Forţa generată de şurub poate fi stabilită cu arcul dinamometric 9, pe care şurubul îl deformează. Săgeata arcului se citeşte pe cadranul ceasului comparator ataşat arcului. Din diagrama de etalonare a arcului se poate citi mărimea forţei, F arc, care a produs săgeata respectivă. Fiecare rulment central este încărcat cu F arc /. Forţa elastică a arcului, F e = F arc, acţionează în sus asupra şurubului, deci şi asupra pieselor 6, 0, 3. Rulmenţii marginali vor fi încărcaţi în mod direct de corpul 3, fiecare rulment preluând o forţă F arc /. Momentul de frecare T f4, corespunzător celor 4 rulmenţi, tinde să antreneze, în sensul rotaţiei arborelui, corpul 3 al lagărului oscilant, deci şi pendulul. Acesta va devia (fig.) de la poziţia de repaus cu un unghi α, a cărui mărime se citeşte pe scala unghiulară. În poziţia deviată, momentul de frecare este echilibrat de momentul de revenire, generat de greutatea G a celor două mase 3 fixate pe tija pendulului. Conform figurii se poate scrie: T f = G sin α (3) 4 r
117 T f4 7 unde: r distanţa de la axa arborelui la centrul de greutate al maselor 3 [mm]. Considerând că rulmenţii contribuie în mod egal la acest moment total de frecare, se poate scrie relaţia de calcul a momentului corespunzător unui singur rulment: Tf 4 Tf = = G r sin α (4) 4 4 Fig Desfăşurarea lucrării Premisele lucrării sunt următoarele: Turaţiile la care se fac încercările sunt n, n, n 3. Valorile acestora se vor determina cu ajutorul tahomentrului. Atenţie la regulile de protecţia muncii. După măsurarea turaţiei, capacul transmisiei trebuie închis. Forţa din arc, F arc, va avea următoarele valori (în N): 800, 00, 600, 000. În consecinţă, forţa radială F care încarcă un rulment va avea valorile: 400, 00, 600, 000 N. Lucrarea se desfăşoară în următoarea succesiune: a. Din diagrama de etalonare a arcului dinamometric se iau valorile săgeţilor, corespunzătoare celor patru forţe F arc,i. b. Se porneşte instalaţia la o turaţie n, care se măsoară cu tahometrul. După o funcţionare în gol de câteva minute, se notează unghiul de deviaţie a pendulului, α 0, în vederea determinării momentului de frecare în gol T f0. c. Cu instalaţia în funcţiune, se încarcă rulmenţii cu o forţă F arc =800N. Se notează deviaţia α a pendulului. Se repetă operaţia pentru celelalte valori ale forţei din arc, F arc,i de 00, 600, 000 N, notând deviaţiile α i ale pendulului. d. Se repetă operaţiile b şi c pentru turaţiile n, respectiv n 3 ale arborelui. Observaţie importantă: din motive de protecţia muncii, înainte de schimbarea turaţiei prin mutarea curelei trapezoidale de pe un canal pe altul, standul trebuie scos din priză. Se procedează la prelucrarea datelor, astfel:
118 8 Cunoscând forţele din arc, F arc,i, se calculează forţele F i care încarcă fiecare rulment: F i = F arc,i /. Având valorile deviaţiilor pendulului, atât la mersul în gol α 0i, cât şi în sarcină α i, din diagrama de etalonare se determină valorile momentelor de frecare în gol, T f0i, respectiv în sarcină T fi. Pentru fiecare turaţie şi sarcină se calculează momentul de frecare net T fnet,i din relaţia (). Pentru fiecare caz se calculează coeficientul de frecare echivalent µ 0i dintr-o relaţie de tipul (): μ 0i Tfnet, i = F d Datele şi rezultatele se trec în tabele de tipul tabelului, câte un tabel pentru fiecare turaţie n i. n i =... rot/min i Tabelul Forţa din arc, F arc [N] Forţa radială pe rulment, F [N] Săgeata arcului, f arc [0 - mm] Deviaţia pendulului în gol, α 0 [grade] Momentul de frecare în gol, T f0 [N mm] Deviaţia pendulului în sarcină, α [grade] Momentul de frecare în sarcină, T f [N mm] Momentul de frecare net, T fnet [N mm] Coeficientul de frecare global, µ 0
119 5. COMPORTAREA ÎN FUNCŢIONARE A RULMENŢILOR CU DETERIORĂRI 5.. Scopul lucrării Lucrarea are drept scop detectarea deteriorărilor rulmenţilor prin compararea frecvenţei vibraţiilor care apar datorită acestora cu frecveţele teoretice ale defecţiunilor respective şi permite simularea a cinci tipuri de deteriorări diferite ale rulmenţilor. 5.. Consideraţii teoretice Scoaterea din uz a rulmenţilor exploataţi corect poate fi determinată de următoarele cauze: - oboseala superficială a corpurilor şi căilor de rulare apare la rulmenţii care se rotesc sub sarcină cu o turaţie n > 0 rot/min şi se manifestă prin apariţia unor gropiţe (pitting) pe suprafaţa corpurilor de rostogolire sau a căilor de rulare. Are drept consecinţe pierderea preciziei de rotire a rulmentului, creşterea bruscă a zgomotului şi a vibraţiilor; - deformaţii plastice locale (amprente) ale suprafeţelor de lucru apar în special la rulmenţii care nu se rotesc, la cei care au mişcări de oscilaţie sau turaţie foarte mică ( n 0 rot/min), când sarcina depăşeşte o anumită limită, dar pot să apară şi la rulmenţii care se rotesc sub sarcină, la încărcări cu şocuri mari, aplicate în fracţiuni de rotaţie. Consecinţele apariţiei acestei forme de distrugere asupra funcţionării rulmentului sunt aceleaşi ca şi în cazul precedent. - uzare abrazivă care este cauzată de impurităţile dure care pătrund in interiorul rulmentului datorită unor etanşări necorespunzătoare, a unui lubrifiant cu impurităţi sau a mediului cu impurităţi; - ruperea unei piese din componenţa rulmentului reprezintă cea mai periculoasă formă de distrugere a rulmenţilor, apare în general brusc (la colivie, unul dintre inele sau corpuri de rulare)
120 0 şi poare fi datorată, de exemplu, unei defecţiuni de material sau tratament termic. Ieşirea din uz a rulmenţilor, în cazul unei exploatări corecte a lor, se datorează solicitărilor variabile (la oboseală) produse de trecerile repetate ale corpurilor de rostogolire încărcate peste acelaşi punct al căilor de rulare. În continuare se va analiza ce influenţă are asupra solicitării la oboseală faptul că se roteşte inelul interior al rulmentului sau cel exterior. Pentru început se consideră cazul general, când se rotesc ambele inele ale rulmentului (fig.). Se consideră rulmentul radial cu bile prezentat în figura. În cazul rostogolirii A C B v B v C v A D i n e Dc n i D e Fig. fără alunecare, viteza punctului A de pe corpul de rostogolire va fi egală cu viteza periferică a unui punct de pe calea de rulare a inelului interior cu diametrul D i, respectiv: unde: unde: π Di ni vi =, () 60 D i diametrul căii de rulare a inelului interior; n i turaţia inelului interior. Viteza punctului B, în mod analog, este: D e diametrul căii de rulare a inelului exterior; n e turaţia inelului exterior. v e π De ne =, () 60
121 Deoarece bila este rigidă, vitezele punctelor sale cuprinse între A şi B variază liniar, deci viteza centrului corpului de rostogolire va fi egală cu media aritmetică a vitezelor. Deoarece centrul corpului de rostogolire execută numai o mişcare în jurul axei rulmentului, viteza sa liniară va fi egală cu viteza coliviei. Se poate scrie: ve + vi π Dc vc = = nc, (3) 60 în care: Di + De Dc = = Di + d = De d,, (4) iar: D c diametrul cercului centrelor rolelor; d diametrul rolelor. Înlocuind relaţiile () şi () în (3), se obţine: ni Di ne De nc = +. (5) D D c c Cazul în care ambele inele se rotesc este întâlnit mai rar. În practică se pot întâlni frecvent unul din următoarele cazuri: I. Cazul când inelul interior este rotitor, iar cel exterior este fix, respectiv pentru n i = n, n e = 0, relaţia (5) devine: n d. n = ci (6) D c II. Când inelul interior este fix şi cel exterior se roteşte, respectiv pentru n i = 0 şi n e = n, se obţine: n d. n = cii + (7) D c Comparând relaţiile (6) şi (7) se observă că turaţia coliviei este mai mare când inelul exterior este rotitor. Pentru aprecierea durabilităţii rulmentului, este important numărul de treceri ale corpurilor de rulare peste un anumit punct din zona încărcată de pe calea de rulare interioară sau exterioară. La o rotaţie completă a coliviei faţă de inel, toate cele z corpuri de rulare trec peste un anumit punct al inelului,
122 deci z treceri. Dacă forţa radială F r are direcţie constantă şi inelul exterior este fix, turaţia relativă a coliviei faţă de inelul exterior este n ci. Numărul de treceri în unitatea de timp peste punctul B al inelului exterior este: f ci = n ci z (8) Turaţia relativă a coliviei faţă de inelul interior este (n-n ci ), iar numărul de treceri peste punctul A al inelului interior este: f cii = (n n ci ) z (9) Deoarece inelul interior se roteşte, iar forţa are direcţie constantă, jumătate din contacte se fac în zona neîncărcată, deci numărul de treceri care trebuie luat în considerare este: n nci fi = z. (0) Când se roteşte inelul exterior, iar inelul interior este fix, numărul trecerilor în unitatea de timp peste punctul A al inelului interior fix, este: f II = n cii z () iar numărul de treceri peste punctul B al inelului exterior, analog cu () este: n ncii fi = z. () Comparând relaţiile (8), (0), () şi (), se observă că numărul cel mai mare de treceri sub sarcină se realizează în cazul rotirii inelului exterior, iar încărcarea cea mai defavorabilă este cea a inelului interior (punctul A, relaţia ()). Inelul interior este deci partea cea mai solicitată a rulmentului şi ca urmare, el determină în final capacitatea de încărcare a rulmentului. Uzarea rulmenţilor se manifestă în mod normal printr-o înrăutăţire graduală a performanţelor în funcţionare. Uzările rulmenţilor pot fi detectate prin măsurarea vibraţiilor provocate de acestea. Fiecare bilă va produce un impact/şoc atunci când se rostogoleşte peste punctul în care există o deteriorare (uzare). Acest impact şi viteza de repetare a acestuia se numeşte în continuare frecvenţă a deteriorării. Datele tehnice pentru încercările efectuate în acest studiu de caz sunt: - Tipul rulmenţilor studiaţi: , rulment radial cu bile, în diferite stări provocate de uzare şi fără; - Dimensiunile rulmentului: d = 0 mm, D = 4 mm, B = mm, - Diametrul coliviei: D c = 3 mm,
123 3 - Diametrul bilelor: d = 6,35 mm, - Numărul de bile: z = 9. Ţinând seama de relaţiile stabilite anterior pentru cazul în care inelul interior este rotitor şi cel exterior fix (fig.), frecvenţele elementelor componente ale rulmentului 6004 (în Hz) produse de turaţia n în rot/min, a arborelui pe care este montat se pot calcula cu relaţiile: - Frecvenţa/Viteza de rotaţie a inelului interior: f =,0 n/60 [Hz], - Frecvenţa deteriorării inelului interior: f i = 5,4 n/60 [Hz], - Frecvenţa deteriorării inelului exterior: f e = 3,58 n/60 [Hz], - Frecvenţa deteriorării bilei: f b = 4,68 n/60 [Hz], - Frecvenţa/Viteza de rotaţie a coliviei: f c = 0,398 n/60 [Hz], - Frecvenţa/Viteza de rotaţie a bilei: f b = 0,398 n/60 [Hz]. În tabelul sunt date valorile calculate (teoretice) ale acestor frecvenţe pentru diferite turaţii ale arborelui, în cazul rulmentului Descrierea aparaturii În vederea realizării lucrării se va utiliza Sistemul de diagnoză al organelor de maşini PT 500 pe care se montează modulul pentru detectarea deteriorărilor rulmenţilor PT 500., fiind necesar pentru simulare şi modulul transmisii prin curele PT (fig. a şi b). Modulul PT 500. este format dintr-un lagăr 4 cu rulment fără deteriorări (fig.,a) şi lagărul 7 (fig.,a) care va conţine unul din rulmenţii cu deteriorări. Modulul este dotat şase rulmenţi cu diferite tipuri de defecţiuni. Pentru identificarea tipului de defecţiune a rulmentului, acesta este marcat pe inelul exterior cu litere, care au următoarele semnificaţii: - A - rulment fără deteriorări; - B - rulment cu deteriorări pe inelul exterior; - C - rulment cu deteriorări pe inelul interior;


124 4 - D - rulment cu deteriorări la unul din corpurile de rulare; - E - rulment cu deteriorări pe inelul exterior, interior si pe unul din corpurile de rulare; - F - rulment cu uzare severă. Montajul prezentat în figura,a este format din: - unitate de comandă şi motor electric, cuplaj, 3 placă din oţel cu suport magnetic, 4 lagăr cu rulment fără defecţiuni, 5 senzor de referinţă, 6 arbore scurt cu reper de reflexie pentru senzorul de referinţă, 7 lagărul cu unul din rulmenţii cu defecţiuni, 8 transmisie prin curea, 9 senzor de acceleraţie (orizontal). a. b. Fig.
125 n [rot/min] 5 Tabelul Inel exterior Inel interior Bilă Colivie f e f i f b f c [Hz] [rot/min] [Hz] [rot/min] [Hz] [rot/min] [Hz] [rot/min] 00,9 76 8, 084 5,6 935, , , 67 3,4 403, , , 69 3, 87, , , 7 39, , , , , , , , , , , , , , ,7 30 8, , 409 6, , , , , , , , , , , ,5 56 8, , , , , , , , , , , , , , , , , , ,6 97 3,5 795, , , ,3 849, , , , 8886, , , , , , , ,7 98 3, , ,8 98 7, , , , , , , , , 5 5, , , , , , , ,7 60 7, , , ,5 68 7, , , ,4 86 8, , ,0 58 8, , , , 573 6, , , , , , , , , , , , ,4 4967, , , , 5434, , , ,0 590, , , , , , , , , , , , , , , , , 55

126 6 Lagărul prezentat în figura 3, pe lângă rulmentul care urmează să fie montat în el prezintă următoarele elemente:,5 - găuri filetate M8x8 pentru ataşarea/montarea senzorilor;,4 - inele elastice 4x,75; rulment cu bile cu caneluri/nervuri; 6 corpul lagărului; 7 şuruburile de fixare M8x5; 8 şaibe plate. Fig. 3 Se va avea grijă ca rulmenţii să fie unşi în mod corespunzător cu ulei curat. Dacă sunt expuşi unui mediu cu praf, atunci rulmenţii se vor spăla în benzină din timp în timp şi suflaţi cu aer comprimat. În continuare rulmentul se va unge imediat cu ulei curat pentru a preveni coroziunea. Tabelul Setările senzorului AS-0 pentru vibraţiile rulmentului (Vibroport 4) Setare Setare Intrare Activă Activă Tipul senzorului De acceleraţie De acceleraţie Sensibilitatea 00mV/g 00mV/g Unitatea de măsură m/s eff m/s eff Domeniu de măsurare 0 (variabile) 0 (variabile) Filtru cu trecere înaltă 0 Hz ISO 0 Hz ISO Filtru cu trecere joasă khz ISO khz ISO
127 Setări de referinţă (P-84) Setare Referinţe Ext. Activă Nivelul mecanismului de declanşare 50 % Rigla mecanismului de declanşare Pozitivă Unitate de măsură pentru turaţie rpm Viteza/referinţă / 7 Tabelul 3 În tabelul sunt date setările pentru senzorul de acceleraţie AS-0 iar în tabelul 3 setările de referinţă. Atenţie! Ştandul va fi pus în funcţiune numai după ce s-a verificat dacă rulmenţii sunt unşi în mod corespunzător, montajul a fost făcut corect şi după ce s-a închis capacul de protecţie. Există riscul de accidentare/rănire cu piesele aflate în mişcare de rotaţie Desfăşurarea lucrării Pentru realizarea montajului (fig.), necesar încercărilor efectuate cu primul rulment, cu defecţiuni la inelul exterior, notat cu B, se parcurg următoarele etape: - se fixează motorul electric pe placa de bază; - se conectează unitatea ; - se montează pe arborele scurt 6 cele două lagăre, 3 şi cel experimental 7 (având montat în el rulmentul B), şi prin intermediul cuplajului se realizează legătura cu motorul electric; - se deplasează lagărul experimental 7 astfel încât roata de curea mică să poată fi montată pe capătul arborelui; - se fixează roata mică de curea cu ajutorul setului de fixare; - se completează transmisia prin curea cu lagărul pentru roata mare de curea şi mecanismul de tensionare a curelei (vezi lucrarea nr. 3); - se montează senzorii de acceleraţie pe lagărul 7; - se aplică reperul pentru senzorul de referinţă de pe arbore; - se fixează senzorul de referinţă pe marcaj; - se aliniază senzorul de referinţă cu arborele, cu ajutorul suportului magnetic şi al plăcii din oţel pe placa de bază şi se fixează pe marcaj; - se tensionează cureaua (vezi lucrarea nr. 3);
128 8 - se porneşte calculatorul care conţine softul utilizat pentru măsurarea şi înregistrarea mărimilor ce urmează să fie studiate în cadrul lucrării; - se deschide aplicaţia PT 500 (din desktop); - din meniul Kind of test se alege varianta Frequency Spectrum ; - se setează canalul şi modul Continuous de înregistrare a datelor; - se setează senzorul de acceleraţie AS-0 conform datelor din tabelul având în vedere setările de referinţă date în tabelul şi se trece la efectuarea încercărilor; - se închide ecranul de protecţie; - se porneşte unitatea de acţionare pentru motorul electric; - se setează sensul de rotire; - se porneşte motorul electric; - se setează turaţia la 500 rot/min; - se salvează imaginea (fig.4) cu diagrama înregistrată pe ecranul calculatorului cu Print Screen şi în continuare într-un fişier în calculator; - pe diagrama obţinută se va identifica frecvenţa cu care se produce impactul. Valoarea citită pe diagramă se va trece în tabelul 4. Pentru a efectua încercări cu un alt rulment deteriorat, pentru schimbarea rulmentului din lagărul 7 (fig.,a) prezentat în figura 5, se procedează în felul următor: - se opreşte unitatea de antrenare; - se ridică apărătoarea de protecţie de pe montajul utilizat la încercarea anterioară; - se demontează senzorii de pe corpul lagărului; - se detensionează cureaua de la transmisia prin curele; - se demontează roata mică de curea (se reţine roata cu cureaua şi se deşurubează setul de fixare cu cheia); - se desfac şuruburile de prindere ale corpului 6 a lagărului 7 (fig.5) de pe placa de bază şi se scoate din montaj; - se demontează inelul elastic cu ajutorul cleştelui pentru inele elastice; - se depresează rulmentul 3 utilizat anterior; - se montează rulmentul care urmează a fi încercat;

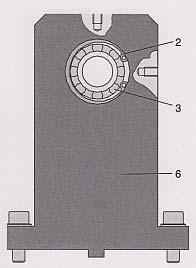
129 9 Fig. 4 Fig. 5
130 30 - se fixează cu inelul elastic cu ajutorul cleştelui; - se introduce şi se fixează lagărul 7 în montajul prezentat în figura,a. Se repetă încercările, respectând etapele prezentate în cazul rulmentului B, şi pentru ceilalţi rulmenţii cu defecţiuni şi anume cei notaţi pe inelul exterior cu C, D, E, F şi respectiv pentru rulmentul fără defecţiuni A Evaluarea rezultatelor încercării experimentale Diagramele obţinute vor avea forma celei prezentate în figura 4. Din analiza acestor diagrame rezultă frecvenţa deteriorării pentru fiecare caz în parte, valori care vor fi trecute în tabelul 4 cu rezultatele obţinute în cadrul încercărilor efectuate, tabel în care se vor trece şi valorile teoretice scoase din tabelul pentru turaţia utilizată, explicând diferenţele între cele două valori. Nr. crt. Rulmentul încercat B - cu deteriorări pe inelul exterior C - cu deteriorări pe inelul interior 3 D - cu deteriorări pe corpurile de rulare 4 E - cu deteriorări de tipul A, B şi C 5 F - cu deteriorări severe 6 A - fără deteriorări Tabelul 4 Lagărul Lagărul Teoretic [Hz] Practic [Hz] [Hz]
131 6. ÎNCERCAREA AMBREIAJELOR CU DISCURI DE FRICŢIUNE 6.. Scopul lucrării Ambreiajele cu discuri de fricţiune (multidisc) se utilizează pentru cuplarea unui arbore conducător cu un arbore condus şi fac posibilă ambreierea şi debreierea lină în funcţionare. Momentul de torsiune se transmite prin forţele de frecare dintre discurile de oţel călit, care sunt asamblate prin caneluri cu arborele conducător şi arborele condus şi sunt montate alternativ. Discurile pot realiza mici deplasări axiale în raport cu arborii, cuplarea realizându-se prin apăsarea axială a discurilor. În cadrul lucrării se determină experimental dependenţa dintre momentul de frecare şi forţa de apăsare a discurilor. Din această dependenţă se poate calcula coeficientul de frecare mediu al discurilor la diferite valori ale forţei de apăsare. De asemenea se va urmări variaţia coeficientului de frecare în funcţie de presiunea de contact dintre discuri. 6.. Consideraţii teoretice D D Fig. Forma discurilor este reprezentată în figura. Unul din discuri are caneluri interioare şi se numeşte disc interior, iar celălalt are nişte proeminenţe exterioare numindu-se disc exterior. Canelurile pot avea profil dreptunghiular sau evolventic. Suprafaţa de frecare a discurilor are o formă inelară. Relaţia de dependenţă dintre momentul de frecare T f şi forţa de apăsare axială F a este: T f 3 D μ Fa 3 D D D 3 = z ()
132 3 unde: µ coeficientul de frecare; z numărul suprafeţelor de frecare; D diametrul minim al suprafeţei de frecare; D diametrul maxim al suprafeţei de frecare. D Pentru cazul când raportul 0, 5 se poate utiliza şi relaţia D aproximativă: T f = μ F D a m z () unde: D + D D m = diametrul mediu al suprafeţei de frecare. Presiunea medie pe suprafaţa de frecare este dată de relaţia: p m Fa 4 F = = (3) A π a ( D D ) Presiunile maxime admise pentru discurile din oţel sunt de 0,4 0,6 N/mm. Coeficientul de frecare este diferit pentru starea de repaus relativ a discurilor (când discurile nu alunecă unul faţă de altul), faţă de starea de mişcare (când discurile alunecă), fapt pus în evidenţă prin observarea pe dispozitivul de înregistrare a valorii momentului de frecare. Momentul de frecare va avea valoarea maximă la începutul alunecării discurilor şi o valoare mai mică în timpul alunecării discurilor. Se face deci distincţie între coeficientul de frecare static sau de repaus şi coeficientul de frecare cinematic sau de mişcare. Coeficientul de frecare mai depinde de prezenţa şi felul lubrifiantului, de materialul discurilor, rugozitatea suprafeţelor de frecare, presiunea dintre discuri, viteza de alunecare şi temperatura de lucru Utilajul şi aparatura utilizată Standul utilizat este prezentat în figura. Arborele motor poate fi pus în mişcare de rotaţie fie manual cu ajutorul unei manivele, fie de la un motor electric prin intermediul unei transmisii cu curele. Ambreiajul cu discuri multiple este rigidizat de arborele motor prin intermediul discului, iar de arborele condus prin cuplajul cu gheare 3 şi arborele canelat 6. Discurile
133 33 exterioare 4 sunt antrenate de arborele motor prin intermediul manşonului 3, iar discurile interioare 5 montate pe arborele intermediar 6 transmit momentul de frecare la arborele condus prin cuplajul cu gheare. Forţa de apăsare axială b este realizată printr-o pârghie (poziţia 7) având raportul de amplificare = 0, a pe talerul căreia se aşează greutăţi. Pentru eliminarea forţei de frecare dintre capătul pârghiei şi manşonul de presiune este montat un rulment axial cu două rânduri de bile (poziţia 4) b l c a G G F t 5 Fig. arbore motor, disc, 3 manşon, 4 disc exterior, 5 disc interior, 6 arbore canelat, 7 pârghie, 8 opritor, 9 ceas comparator, 0 frână cu saboţi, arc, arbore condus, 3 cuplaj cu gheare, 4 rulment axial, 5 arc lamelar Mărimea forţei axiale se determină cu relaţia:
134 34 F a b ( G + G ) a = 0 (4) unde: G 0 greutatea proprie a talerului şi greutatea redusă a pârghiei la nivelul talerului G 0 =8 N; G mărimea greutăţilor care se aşează pe taler; b = 0 raportul de amplificare al pârghiei. a Determinarea momentului de frecare transmis de cuplaj se poate face prin blocarea arborelui condus cu ajutorul unui arc lamelar (poziţia 5). Deformaţia arcului f va fi proporţională cu forţa tangenţială. unde: 3 Ft l f = 3 E I l lungimea în consolă a arcului lamelar până la punctul de aplicaţie al forţei F t ; E modulul de elasticitate al materialului arcului; I momentul de inerţie al secţiunii arcului. Momentul de torsiune (frecare) transmis de cuplaj va fi T f F t (5) = c (6) unde: c braţul forţei F t faţă de axa de rotaţie. Pentru operativitate se poate determina momentul cu ajutorul unei diagrame de etalonare în funcţie de săgeata f citită la ceasul comparator. Standul poate fi acţionat şi electric. În acest caz, momentul rezistent este generat de frâna cu saboţi 0, acţionată de arcul dinamometric. Acţionând electric arborele şi realizând cuplarea cu ajutorul ambreiajului, este posibilă determinarea duratei de ambreiere t a şi a lucrului mecanic pierdut prin frecare L p. Pentru determinarea acestor mărimi este necesară montarea unui tahogenerator sau stroboscop care să marcheze sincronizarea turaţiilor Desfăşurarea lucrării se execută schiţa discurilor şi a cuplajului; se măsoară dimensiunile limită (D şi D ) pentru suprafaţa de frecare şi se află numărul suprafeţelor de frecare z;
135 35 se calculează aria de contact A şi necesarul de greutăţi G, G, G, 3 G 4, G 5, G 6 ce trebuie să fie aşezate pe taler pentru a se realiza presiuni de contact p =0,05, p =0,0, p 3 =0,5, p 4 =0,0, p 5 =0,5, p 6 =0,30 [N/mm ]; cu greutăţile existente în laborator se formează seturi de greutăţi G... G 6 cât mai apropiate de valorile G'... G' 6 antecalculate; cu valorile G... G 6 se determină forţele axiale F a... F a6 cu relaţia (4); cu relaţia (3) se determină presiunile medii pe suprafaţa de frecare p... p 6 ; se pune ceasul comparator la zero, în stare debreiată (pârghia fiind ridicată cu ajutorul opritorului 8); se aşează greutatea G pe talerul pârghiei şi se pune în mişcare arborele motor cu ajutorul manivelei; se va citi la ceasul comparator săgeata f a arcului lamelar în momentul de început al alunecării (repaus) şi în timpul alunecării uniforme (mişcare). Observaţie: Manivela se va roti în sensul indicat de săgeata înscrisă pe stand, fără bruscări, iar după ce ambreiajul începe să alunece se va roti cât mai uniform. se repetă operaţiile pentru toate greutăţile G, G 3, G 4, G 5, G 6 ; din diagrama de etalonare se determină momentul corespunzător indicaţiilor citite la ceasul comparator pentru săgeata arcului lamelar; din relaţia () se va calcula µ mediu iar cu relaţia () µ aprox ; se va reprezenta grafic dependenţa dintre momentul de frecare T f şi forţa axială, precum şi dependenţa dintre coeficientul de frecare şi presiunea de contact (fig.3). Observaţie: Existenţa unor puncte izolate pe diagramă, arată abateri prea mari ale măsurătorilor şi conduc la necesitatea de a repeta măsurătorile respective Prelucrarea datelor Se completează datele cerute în tabelele şi şi se trasează diagramele de dependenţă T f = f(f a ) şi µ med = f (p) respectiv µ aprox = f (p). Se vor analiza şi explica dependenţele trasate grafic.
136 36 T f µ med µ aprox F a p Fig. 3 Diametrul exterior D mm Diametrul interior D mm Diametrul mediu D m mm Aria de contact A mm Numărul suprafeţelor de frecare z Tabelul Tabelul p, N/mm 0,05 0,0 0,5 0,0 0,5 0,30 G, N G, N F a, N p, N/mm f, mm T f, N mm µ med µ aprox repaus mişcare repaus mişcare repaus mişcare repaus mişcare
137 7. CARACTERISTICA STATICĂ A CUPLAJELOR ELASTICE 7.. Scopul lucrării Scopul declarat al lucrării îl constituie ridicarea, pe cale experimentală, a caracteristicii statice a unui cuplaj elastic cu elemente din cauciuc. În afara acestui scop lucrarea dă posibilitatea de a cunoaşte şi alte aspecte tehnice utile cum ar fi, de exemplu, utilizarea arcurilor dinamometrice pentru măsurarea unui moment de torsiune. 7.. Consideraţii teoretice Cuplajele elastice se utilizează în următoarele scopuri: atenuarea şi amortizarea şocurilor la transmiterea momentelor de torsiune; compensarea abaterilor de la coaxialitate a arborilor; modificarea frecvenţei proprii a lanţului cinematic pentru evitarea rezonanţei. Cuplajele elastice sunt caracterizate prin: rigiditate, care se defineşte prin momentul de torsiune necesar pentru a produce o rotire relativă unitară a semicuplajelor; amortizare, care reprezintă capacitatea cuplajului de a disipa energia mecanică. La cuplajele elastice cu elemente din cauciuc, această proprietate se datorează frecărilor interne din elementele respective. La cuplajele elastice cu elemente metalice, amortizarea se datorează frecărilor dintre elementele elastice metalice care intră în componenţa cuplajului (de exemplu, la cuplajele cu arcuri lamelare multiple). Caracteristica unui cuplaj elastic se defineşte ca fiind curba de dependenţă dintre momentul de torsiune T transmis prin cuplaj şi unghiul de rotire relativă φ a semicuplajelor. Dacă momentul de torsiune este aplicat lent, caracteristica este statică. Cuplajele pot avea o caracteristică liniară sau una neliniară (fig.,a). Cele cu caracteristică liniară au rigiditatea k constantă:
138 38 Fig. a tipuri de caracteristici, b caracteristică având buclă de histerezis ( caracteristica la încărcare; la descărcare). k = T [Nm/rad] () ϕ Cuplajele cu caracteristică neliniară au rigiditatea variabilă. Pentru figura,a rigiditatea este crescătoare, de la încărcarea cu un moment de torsiune iniţial, la unul final. La un asemenea cuplaj rigiditatea se defineşte astfel: k ϕ = T& ϕ () ( ) ( ) De pildă, pentru punctul de coordonate T 0, φ 0, rigiditatea este ( ϕ0 ) = 0 k 0 = T& tan α (3) La un cuplaj la care există frecările amintite mai sus, caracteristica la încărcare (curba, figura,b) diferă de cea la descărcare (curba ), între acestea închizându-se o buclă de histerezis. Aria acestei bucle reprezintă energia consumată pentru învingerea frecărilor interne şi este o măsură a capacităţii de amortizare a cuplajului Descrierea aparaturii Ştandul utilizat este prezentat schematic în figura. Semicuplajele se montează în capetele de prindere 3 şi 4. Pentru aceasta se acţionează roata de mână 8 şi, printr-un mecanism şurub 7 piuliţă 6, se asigură deplasarea saniei 5 împreună cu elementele montate pe ea, realizându-se distanţa între capetele de prindere, necesară montării semicuplajelor. Încărcarea cuplajului cu un anumit moment de torsiune se realizează astfel:

139 39 se antrenează semicuplajul motor, montat în capul de prindere 3, de la manivela a reductorului melcat ; Fig. levierul 9, asamblat pe arborele condus, tinde să se rotească şi deplasează tija furcată 0 al cărei capăt este fixat, printr-o asamblare sferică, în arcul dinamometric ; forţa elastică a acestuia generează momentul de torsiune rezistent. săgeata arcului se citeşte la comparatorul ; cu ajutorul ei se determină, din diagrama de etalonare a arcului, momentul de torsiune. La încărcarea cuplajului elastic cu momentul de torsiune T, elementele elastice din cauciuc se deformează, iar semicuplajele se rotesc relativ cu un anumit unghi φ. Acest unghi se determină cu ajutorul montajului din figura 3. Fig. 3
140 40 Pe arborele motor se montează, printr-un colier, tija care acţionează palpatorul comparatorului 5. Comparatorul este fixat pe un element 4, care este asamblat cu arborele condus 6. Legătura elastică între cei doi arbori este realizată prin cuplajul elastic 3. Cunoscând raza r (fig.4) la care se măsoară deplasarea s a palpatorului, se poate determina unghiul φ de rotire relativă a semicuplajelor: Fig. 4 0 s 80 ϕ = [grade] (4) r π unde r se exprimă în mm, iar s în sutimi de milimetru (indicaţia comparatorului). Dacă comparatorul are diviziuni de 0-3 mm, atunci în relaţia (4), în loc de 0 - se va scrie Desfăşurarea lucrării Lucrarea se va derula în următoarea succesiune:. Se montează cuplajul între capetele de prindere ale ştandului şi se fixează indicatoarele comparatoarelor la zero.. Se aleg câteva valori ale momentului de torsiune cu care va fi încărcat cuplajul. Un număr mai mare de valori (de exemplu 0) permite trasarea unei caracteristici statice a cuplajului mai aproape de realitate. Fie momentul de torsiune curent T i (i =...0). Din diagrama de etalonare se scot valorile corespunzătoare ale săgeţilor arcului (fig.) care vor fi citite la comparatorul în cursul experimentului. 3. Se acţionează lent manivela reductorului, încărcându-se cuplajul, succesiv, cu momentele de torsiune T...T 0. Pentru fiecare valoare T i a momentului se notează deplasarea s îi (fig.4) a palpatorului, citită pe cadranul comparatorului 5 (fig.3). 4. De la valoarea T 0 a momentului de torsiune, la care s-a ajuns prin manevrele anterioare, se descarcă treptat cuplajul, trecând prin aceleaşi valori ale momentelor de torsiune T 9, T 8,... T din etapa de încărcare. Se notează, pentru fiecare moment de torsiune, indicaţia comparatorului (deci valoarea curentă s di, în care indicele d indică faptul că s corespunde etapei de descărcare).
141 4 5. Se calculează, cu relaţia (4), pentru ambele etape (încărcaredescărcare) şi pentru fiecare valoare a momentului de torsiune, unghiul φ de rotire relativă a semicuplajelor. Datele se trec în tabele de tipul (pentru încărcare) şi (pentru descărcare). Se reprezintă grafic caracteristica statică experimentală T = f(φ) şi se constată existenţa histerezisului. Prezenţa histerezisului indică faptul că acest cuplaj are o capacitate de amortizare. Momentul de torsiune T i N m Săgeata arcului f i mm 0 - T = f = s î = T = f = s î = T 3 = f 3 = s î3 = T 4 = f 4 = s î4 = T 5 = f 5 = s î5 = T 6 = f 6 = s î6 = T 7 = f 7 = s î7 = T 8 = f 8 = s î8 = T 9 = f 9 = s î9 = T 0 = f 0 = s î0 = Momentul de torsiune T i N m Săgeata arcului f i mm 0 - T 0 = f 0 = s d0 = T 9 = f 9 = s d9 = T 8 = f 8 = s d8 = T 7 = f 7 = s d7 = T 6 = f 6 = s d6 = T 5 = f 5 = s d5 = T 4 = f 4 = s d4 = T 3 = f 3 = s d3 = T = f = s d = T = f = s d = Tabelul Rotirea relativă a semicuplajelor Indicaţia s îi a comparatorului mm 0 - Unghiul de rotire relativă, φ grade Tabelul Rotirea relativă a semicuplajelor Indicaţia s di a comparatorului mm 0 - Unghiul de rotire relativă, φ grade


142 8. RESTABILIREA PARAMETRILOR DIMENSIONALI AI ANGRENAJELOR CU ROŢI DINŢATE CILINDRICE CU DINŢI DREPŢI 8.. Scopul lucrării Restabilirea parametrilor dimensionali ai unui angrenaj uzat sau deteriorat are o importanţă deosebită, mai ales dacă este necesară înlocuirea acestuia cu unul nou, care să păstreze parametrii geometrici şi cinematici iniţiali, în cazurile în care lipseşte documentaţia tehnologică a angrenajului iniţial. Lucrarea prezintă o metodă pentru restabilirea parametrilor dimensionali ai angrenajelor cilindrice cu dinţi drepţi, deteriorate. 8.. Consideraţii teoretice La roţile dinţate care trebuie înlocuite pot constata, în general, următoarele deteriorări: ruperea dinţilor datorită suprasolicitărilor, uzării pronunţate sau din cauza unui defect de material (fig.,a); deteriorarea flancurilor dinţilor prin pitting, exfoliere etc. (fig.,b). a. b. Fig.
143 43 Fig. În situaţiile de mai sus, se recomandă înlocuirea întregului angrenaj, cu excepţia angrenajelor de dimensiuni mari, respectiv în cazul roţilor dinţate executate din materiale scumpe, caz în care se acceptă înlocuirea doar a roţii defecte. Dacă se impune înlocuirea angrenajului, trebuie examinaţi arborii şi lagărele deoarece, dacă acestea sunt uzate, ele pot fi cauze ale scoaterii din uz a noului angrenajului. Se consideră cazul unui angrenaj cilindric de uz general (fig.) cu profilul flancurilor dinţilor în evolventă, executat cu o sculă standardizată având profilul de referinţă conform STAS 8. Profilul cremalierei generatoare se defineşte prin următorii parametri: unghiul de angrenare de referinţă, α=0º; coeficientul înălţimii capului de referinţă, h a *=; coeficientul jocului de referinţă la piciorul dintelui, c*=0,5. Elementele geometrice ale angrenajului, necesare acestei lucrări de laborator, sunt date de următoarele relaţii: distanţa axială de referinţă, mm:
144 44 unde: ( + ) m z z a = () m modulul cremalierei de referinţă, mm. Valorile modulilor sunt standardizate conform STAS 8 (tabelul ); z, numerele de dinţi ai roţilor. Tabelul Gama modulilor pentru angrenajele cilindrice şi conice (extras din STAS 8), mm I II I II I II I II 0,,5 0,,5 0,4, ,5,5 6 0,8,75 8 0, 0 0,,5 0,5,5 5 0,8,75 8 0, ,35 3,5 36 0, ,45 4,5 45 0,05 0, ,055 0,55 5,5 55 0,06 0, ,07 0, ,08 0, ,09 0, , 0 00 Observaţii:. Se admite folosirea modulilor 3,5 mm, 3,75 mm şi 4,5 mm pentru construcţia de automobile şi a modulului 6,5 mm pentru construcţia de tractoare.. Valorile din şirul I sunt preferenţiale. relaţia dintre distanţa axială de referinţă şi cea reală (adeseori standardizată sau impusă) a angrenajului: aw cosαw = a cosα ()
145 45 unde: a w distanţa axială (reală), mm; α w unghiul de angrenare real,. Valorile nominale, în mm, ale distanţei între axe la reductoarele de turaţie, conform STAS 6055, se prezintă în tabelul. Tabelul Valorile nominale ale distanţei dintre axe (extras din STAS 6055), mm I II I II I II I II Observaţii:. Se admite folosirea valorii 30 mm în locul valorii 35 mm şi a valorii 360 mm în locul valorii 355 mm.. Valorile din şirul I sunt preferenţiale. pasul pe cercul de bază, mm: ecuaţia fundamentală a angrenajului: p b = π m cosα (3) x tan inv inv s α α w = α + (4) z + z x s suma coeficienţilor deplasărilor de profil, x şi x : x s = x + x (5) astfel: Reamintim că funcţia inv x (a unui unghi x dat în grade) este definită
146 46 π x inv x = tanx (6) 80 coeficientul de variaţie a distanţei axiale: z z + cosα aw a y = = (7) cosαw m scurtarea specifică a înălţimii dinţilor: Δ y = x y (8) s diametrele cercurilor de bază, mm: d b = m cosα (9), z, diametrele cercurilor de divizare, mm: d, m z, diametrele cercurilor de rostogolire, mm: d cosα = (0) cosα a w, w, = d, = m z, = () cosαw cosαw z + z distanţa axială (reală): diametrele cercurilor de cap, mm: a w z d w + d w = () * [ z + ( h + x Δy) ] da, = m, a, (3) diametrele cercurilor de picior, mm: înălţimea dintelui, mm: d * * [ z ( h + c )] f, m, a x, cotele peste N dinţi, mm (fig.3): = (4) * ( h + c y) h = m a Δ (5) [ π ( N,5) cosα + z invα cosα + α] W N = m sin (6), 0, x,,

147 8.3. Metodologia determinării modulului angrenajului 47 Pentru stabilirea elementelor dimensionale ale angrenajului ieşit din funcţiune, primul element geometric ce trebuie determinat este modulul. În funcţie de gradul de uzare a flancurilor dinţilor, pot apărea două cazuri: Determinarea modulului în cazul în care flancurile dinţilor nu sunt uzate Dacă flancurile dinţilor nu sunt uzate, se va utiliza metoda cea mai precisă de determinare a modulului, prin calcularea lui din relaţia pasului pe cercul de bază: p m = b (7) π cosα Fig. 3 Pasul de bază se determină prin măsurarea cotei peste N dinţi (fig.3), respectiv peste N+ dinţi, pentru pinion, respectiv roată, cote care pot fi exprimate prin relaţiile: [ π ( N, 0,5) cosα + z, invα cosα +, α] [ π ( N +,5) cosα + z invα cosα + α] W N = m sin (8) x, W N + = m, 0,, sin (9) x, Scăzând membru cu membru relaţiile de mai sus, se obţine:
148 48 W = N + WN = π m cos α p,, b (0) Astfel, modulul se poate determina practic, cu relaţia: ~ ~, + N, m = W W N () π cosα ~ ~ unde W N, +, W N sunt valorile măsurate ale cotelor peste N, respectiv N+, dinţi, corespunzătoare angrenajului care trebuie înlocuit (fig.3). Din raţiuni care ţin de posibilitatea măsurării cotelor ~ ~ W N,, + WN,, numerele de dinţi, N, se determină cu relaţia:, N, = z + 0,5 () 9 Valoarea obţinută din relaţia () se va rotunji la cea mai apropiată valoare întreagă. Valoarea modulului, obţinută din relaţia (), se rotunjeşte la cea mai apropiată valoare din STAS 8, tabelul Determinarea modulului în cazul în care flancurile dinţilor sunt foarte uzate Dacă roţile care se înlocuiesc au flancurile dinţilor distruse, măsurarea cotei peste N dinţi poate duce la obţinerea unor rezultate eronate în determinarea modulului. În acest caz se consideră că angrenajul este executat fără deplasări de profil (x =x =0) şi având profilul de referinţă conform STAS 8. Modulul angrenajului se determină cu una din relaţiile: ~ sau m = z d a,, + ~ d f, m = z,5, (3) (4) De menţionat faptul că relaţiile de mai sus vor fi folosite în funcţie de elementele geometrice care pot fi măsurate, iar semnul ~ se referă la faptul că acele valori se obţin prin măsurare. Măsurarea valorilor reale ale diametrelor de cap, respectiv de picior trebuie să ţină cont de numerele de dinţi ale roţilor.
149 49 În cazul în care numărul de dinţi este impar, unui dinte îi corespunde diametral opus un gol, deci măsurarea în mod direct a diametrelor produce abateri faţă de valoarea reală a acestora (fig.4 şi fig. 5). Pentru a înlătura acest neajuns, măsurarea diametrelor de cap, respectiv de picior se va face conform figurilor 5 a şi b. Pe baza figurilor 5 a şi b se poate scrie: ~ d a, D =, + e, (5) ~ d f, D =, + f, (6) unde D, sunt diametrele alezajelor roţilor, măsurate cu şublerul, mm. d f d a Fig. 4 D,/ e, d a,/ D,/ f, d f,/ a. b. Fig. 5

150 50 Valoarea obţinută pentru modul cu relaţiile (3) sau (4) se standardizează la cea mai apropiată valoare din STAS 8, tabelul Utilajul şi aparatura utilizată Roţile dinţate ai căror parametri geometrici trebuie restabiliţi sunt montate conform figurii 6. Pentru măsurarea cotelor peste dinţi se va folosi micrometrul, restul dimensiunilor fiind măsurate cu şublerul Desfăşurarea lucrării Pentru început se vor controla instrumentele de măsură şi, dacă este necesar, se vor pune la zero. Fig. 6. Se numără dinţii roţilor dinţate z, z şi se măsoară următoarele elemente: distanţa dintre axe a ~ w, mm (fig.6); D D = A (7) a ~ w diametrele cercurilor de cap şi de picior ale pinionului, respectiv ~ ~ roţii, d a,, d f, ; ~ ~ ~ ~ cotele peste N şi N+ dinţi, W N, W N +, WN, W N + ; lăţimea roţilor, b; Valorile măsurate se trec în tabelul 3.. În continuare se determină modulul prin una din metodele prezentate mai sus şi se standardizează. 3. Se calculează distanţa axială de referinţă a, cu relaţia ().
151 5 4. Se stabilesc valorile coeficienţilor deplasărilor de profil x, x şi a scurtării specifice a înălţimii dinţilor Δ y : a) dacă a~ w = a atunci: x s = x + x 0şi Δy = 0 (8) = Pentru a stabili concret valorile coeficienţilor x, x se disting două situaţii: i) dacă: ~ * ~ * * d m z + d = m z h c = ( ) sau [ ( )] a,, h a f,, a + atunci: x = x 0 (9) = ii) în caz contrar x = x şi se determină din relaţiile: ~ ~ da, z, * d f, z, * * x, = ha sau x, = + ha + c (30) m m De menţionat faptul că relaţiile de mai sus vor fi folosite în funcţie de posibilităţile de măsurare şi semnul ~ se referă la valori măsurate. b) dacă a~ w a atunci x s = x + x 0, x x şi Δy 0. Pentru calculul acestor valori se procedează succesiv: unghiul de angrenare real: involutele unghiurilor de angrenare: α w a cosα = arccos a~ (3) w α π inv α = tan α (3) 80 αw π invαw = tan αw (33) 80 Observaţie: valorile involutelor se vor determina cu cel puţin şase zecimale. suma coeficienţilor deplasărilor de profil: x invα invα = ( z z ) (34) tan α w S + modificarea specifică a distanţei axiale:
152 5 scurtarea specifică a înălţimii dinţilor: sau: Δy = h aw a y = ~ (35) m Δ y = x y (36) * a + c * s ~ d a, ~ d m f, (37) coeficienţii deplasărilor de profil ai roţilor dinţate se pot determina ~ ~ în funcţie de diametrele cercurilor de cap, d a, sau de picior, d f, măsurate: ~ da, z, * x, = ha + Δy (38) m sau: x ~ d f,, * *, = + ha + c (39) m z De menţionat faptul că relaţiile de mai sus vor fi folosite în funcţie de posibilităţile de măsurare şi semnul ~ se referă la valori măsurate. Se face observaţia că dacă se doreşte modificarea repartizării existente a valorilor coeficienţilor deplasării de profil atunci aceştia pot fi determinaţi din x sn pe baza relaţiilor existente în literatura de specialitate sau a conturelor de blocare. 5. Cu valorile coeficienţilor deplasărilor de profil x, x şi a scurtării specifice a înălţimii dinţilor Δ y se calculează elementele geometrice ale angrenajului cu ajutorul relaţiilor (9)...(6). 6. Valorile obţinute se trec în tabelul Prelucrarea datelor Rezultatele obţinute în urma măsurătorilor şi calculelor făcute se trec în tabelul 3. Unitatea de măsură utilizată pentru lungimi va fi milimetrul iar valorile unghiurilor vor fi notate în grade ( ).
153 Coeficienţii cremalierei generatoare = ; c * 0,5 h * = a Nr. crt. Elemente măsurate a ~ ~ ~ w = d a = W N = ~ ~ z = d a = W N = ~ ~ z = d f = W N = ~ ~ + k, b = d = W = Denumirea mărimii Numerele de dinţi peste care se măsoară cota f Elemente calculate Simbol N N Modulul standardizat m Relaţia de calcul () N + () sau (3) sau (4) 3 Distanţa axială de referinţă a () 4 Unghiul de angrenare real α w (3) Suma coeficienţilor 5 x s (8) sau (34) deplasărilor de profil Coeficientul de variaţie a 6 y (35) distanţei axiale Scurtarea specifică a înălţimii dinţilor Coeficienţii deplasărilor de profil Diametrele cercurilor de bază Diametrele cercurilor de divizare Diametrele cercurilor de rostogolire Distanţa axială reală, calculată, (pentru control) Δ y x x d b d b d d d w d w (8) sau (36) sau (37) (9) sau (30) sau (38) sau (39) (9) (0) () a w () 53 Tabelul 3 Rezultat
154 Diametrele cercurilor de cap calculate Diametrele cercurilor de picior calculate d a d a d f d f (3) (4) 5 Înălţimea dintelui, calculată h (5) 6 Cotele peste N dinţi, calculate W N W N (6) 8.7. Concluzii Se vor constata gradul de uzură a flancurilor, principalele particularităţi ale angrenajului, existenţa sau nu a unor diferenţe între valorile măsurate şi cele calculate, precum şi cauzele care pot fi responsabile de acest lucru.
155 9. RESTABILIREA PARAMETRILOR DIMENSIONALI AI ANGRENAJELOR CU ROŢI DINŢATE CILINDRICE CU DINŢI ÎNCLINAŢI 9.. Scopul lucrării Lucrarea prezintă o metodă pentru restabilirea parametrilor dimensionali ai angrenajelor cilindrice cu dinţi înclinaţi (elicoidal evolventice), deteriorate în procesul de funcţionare. 9.. Consideraţii teoretice Angrenajele cilindrice cu dinţi înclinaţi, în comparaţie cu cele cu dinţi drepţi prezintă câteva avantaje şi anume: zgomot mai mic şi funcţionare mai lină; grad de acoperire şi capacitate portantă mai mari. Ca dezavantaje se poate menţiona apariţia forţelor axiale şi, deci, necesitatea utilizării unor lagăre radial axiale. Modul de angrenare pentru acest tip de roţi dinţate exclude poziţiile de angrenare singulare deoarece dinţii intră, respectiv ies din angrenare progresiv, astfel încât pe toată durata de funcţionare există, simultan, mai multe perechi de dinţi în contact, cu diferite lungimi de contact. Dinţii roţilor cilindrice cu dinţi înclinaţi pot avea înclinarea spre dreapta sau spre stânga, după cum elicele au înfăşurarea înspre dreapta sau înspre stânga. Specific acestor angrenaje este definirea mai multor plane: planul normal: plan perpendicular pe direcţia dintelui, definită pe cilindrul de divizare (sau rostogolire); - cremaliera cu dinţi înclinaţi are elementele standardizate în secţiunea normală pe dinte, secţiune care coincide cu cremaliera de referinţă (STAS 8); - toate elementele angrenajului aferente acestui plan au indicele n (de exemplu m n, x n etc.); - modulul este standardizat în plan normal, m n ;
; planul axial: plan care cuprinde axele angrenajului; - toate elementele angrenajului aferente acestui plan au indicele x (de exemplu m x ).")
156 56 planul frontal: plan perpendicular pe axa roţii; - profilul dintelui în acest plan este evolventic; - toate elementele angrenajului aferente acestui plan au indicele t (de exemplu m t, x t etc.); planul axial: plan care cuprinde axele angrenajului; - toate elementele angrenajului aferente acestui plan au indicele x (de exemplu m x ). Pentru profilul cremalierei generatoare se cunosc: unghiul de angrenare de referinţă în plan normal, αn = 0 ; coeficientul înălţimii capului de referinţă, în secţiune normală, h * an = ; coeficientul jocului de referinţă la capul dintelui, în secţiune normală, c * = 0, 5. n Fig. Elementele geometrice ale angrenajului, necesare acestei lucrări de laborator (fig.), sunt date de următoarele relaţii: distanţa axială de referinţă, mm: unde: ( ) mt z + z a = () m t modulul cremalierei de referinţă, în plan frontal, mm:
157 unde: unde: 57 mn m t = () cos β m n modulul cremalierei deci şi a roţilor dinţate în plan normal, mm; valorile modulilor în plan normal sunt standardizate conform STAS 8 (tabelul, lucrarea 8); β unghiul de înclinare al cremalierei, numit şi înclinaţie nominală; - coincide cu unghiul de înclinare a danturii pe cilindrii de divizare, ; - cu cât valoarea acestui unghi este mai mare, cu atât gradul de acoperire total al angrenajului este mai mare dar, totodată, cresc şi valorile forţelor axiale; - în proiectare se recomandă adoptarea unei valori β = ; z, numerele de dinţi ale roţilor. unghiul de angrenare de referinţă în plan frontal: tan αn tan αt = (3) cosβ relaţia dintre distanţa axială de referinţă şi cea reală (adeseori standardizată sau impusă, tabelul din lucrarea 8) a angrenajului: a w cos α = a cosα (4) a w distanţa axială (reală), mm; α wt unghiul de angrenare real, în plan frontal,. ecuaţia fundamentală a angrenajului: wt t xts tan αt invα wt = invαt + (5) z + z x st suma coeficienţilor deplasărilor de profil în plan frontal x t şi x t : x = x + x (6) ts t t x = x cosβ (7) t, n, unde: x n, x n coeficienţii deplasărilor de profil în plan normal;
158 58 astfel: Reamintim că funcţia inv x (a unui unghi x dat în grade) este definită π x inv x = tan x (8) 80 coeficientul de modificare a distanţei axiale, în plan frontal: y t z + z cosα a a = = cosαwt mt t w (9) coeficientul de modificare a distanţei axiale, în plan normal: y a a w n = (0) mn scurtarea specifică a înălţimii dinţilor, în plan frontal: Δyt = xt + xt yt = xts yt () scurtarea specifică a înălţimii dinţilor, în plan normal: Δyn = xn + xn yn = xns yn () diametrele cercurilor de divizare, mm: diametrele cercurilor de bază, mm: d, mn z, = mt z, = (3) cosβ d b, = d, cosαt (4) diametrele cercurilor de rostogolire, mm: d = cosα cosα t t n t w, d, = mt z, z, (5) cosαwt cosαwt cosβ cosαwt distanţa axială (reală): diametrele cercurilor de cap calculate, mm: a w = m cosα d w + d w = (6)
159 * [ z + ( h + x Δy ) β] 59 = mn d cosβ cos a,, an n, n (7) diametrele cercurilor de picior calculate, mm: * * ( h + c x ) z, d f, = mn an n n, (8) cosβ înălţimea dintelui calculată, mm: n * * ( h + c Δy ) h = m (9) cotele peste N dinţi calculate, mm: ( n) = m [ π ( N,5) + z invα ] an sinαn W N 0 cosα +, n,, t n xt, (0) cosβ unde notaţia ( n) arată faptul că acele elemente sunt aferente planului normal, figura. n n Fig.
160 60 Pentru stabilirea elementelor dimensionale ale angrenajului ieşit din funcţiune, primul element geometric ce trebuie determinat este modulul în plan normal. În funcţie de gradul de uzare a flancurilor dinţilor, pot apărea două cazuri: 9... Determinarea modulului normal în cazul în care flancurile dinţilor nu sunt uzate Dacă flancurile dinţilor nu sunt uzate, se va utiliza metoda cea mai precisă de determinare a modulului normal prin calcularea lui cu ajutorul lungimilor măsurate în plan normal ale cotelor peste N, respectiv N+ dinţi la pinion şi roată (similar lucrării 8) pe baza relaţiei: ~ ( n) ~ ( n) WN W, + N, mn = () π cosα unde: ~ ( n) N W, ~ ( n) WN, n cotele peste N dinţi pentru pinion, respectiv roată, măsurate în plan normal, mm; + cotele peste N+ dinţi pentru pinion, respectiv roată, măsurate în plan normal, mm. Din punct de vedere al notaţiilor se face precizarea că semnul ~ se referă la faptul că acele valori se obţin prin măsurare iar ( n) acele elemente au fost măsurate în plan normal. Din raţiuni care ţin de posibilitatea măsurării cotelor (similar lucrării 8), numerele de dinţi, N, se determină cu relaţia: arată faptul că ~ ( n) WN,, ~ ( n) N + W, z, αn N, = + 0,5 () cos 3 β 80 unde β a este unghiul de înclinare a dinţilor pe cilindrul exterior,. Acest unghi se determină prin rostogolirea roţii pe o coală de hârtie albă, aşezată pe o masă plată (fig.3). În scopul obţinerii unor urme clare ale dinţilor, vârfurile acestora se ung cu un strat foarte subţire de ulei. Din figura 3 rezultă că: tan b a a (3) β = a a deci b β = arctan a
161 6 Fig. 3 Valorile numerelor de dinţi obţinute din relaţia () se vor rotunji la cele mai apropiate valori întregi. Valoarea modulului normal obţinută din relaţia () se standardizează la cea mai apropiată valoare din STAS 8, tabelul din lucrarea Determinarea modulului în cazul în care flancurile dinţilor sunt foarte uzate sau lăţimea roţii este prea mică pentru a măsura cotele peste dinţi În cazul în care lăţimea roţii este prea mică, făcând imposibilă măsurarea cotelor peste N dinţi, respectiv N+ dinţi sau în cazul în care flancurile dinţilor sunt distruse, stabilirea modulului normal se poate face prin determinarea directă a valorii unghiului de înclinare a danturii pe cilindrul de divizare β ~, folosind dispozitivul din figura 5 care funcţionează pe principiul angrenării roţii de măsurat cu cremaliera generatoare. Metodologia de măsurare este prezentată în detaliu în paragraful 9.4. În urma determinării valorii unghiului β ~ şi a măsurării diametrelor de ~ cap d a,, modulul normal se poate obţine din relaţia: ~ da sin β ~, mn = (4) z tanβ, a
162 6 Valoarea modulului, obţinută din relaţia (4), se standardizează la cea mai apropiată valoare din STAS 8, tabelul din lucrarea Utilajul şi aparatura utilizată Roţile dinţate ai căror parametri geometrici trebuie restabiliţi sunt montate conform figurii 4. Dacă aceste roţi permit măsurarea cotelor peste N, respectiv N+ dinţi, măsurarea elementelor geometrice necesare se va face ţinând cont de precizările făcute în lucrarea 8 privind numerele de dinţi ale roţilor. Pentru măsurarea cotelor peste dinţi se va folosi micrometrul, restul dimensiunilor fiind măsurate cu şublerul. Fig. 4 În cazul în care nu este posibilă măsurarea cotelor peste dinţi, în vederea determinării modulului normal se va proceda la măsurarea unghiului de înclinare a danturii pe cilindrul de divizare β ~, cu ajutorul dispozitivului prezentat în figura 5. Acesta funcţionează pe principiul angrenării roţii de măsurat cu cremaliera generatoare. Materializarea cremalierei se realizează prin vârful de măsurare care are parametrii constructivi identici cu ai cremalierei de referinţă, STAS 8. Simularea angrenării dintre roată şi cremalieră duce la rotirea vârfului cu un unghi necesar aşezării lui în golul dintre doi dinţi ai roţii. Această rotire se transmite arborelui cu care vârful este cuplat, care la rândul său roteşte rola 4 pe care se înfăşoară două fire 5. Rotindu-se, rola va antrena firele 5 (fie unul, fie celălalt, funcţie de sens) care, la rândul lor vor trage pe ghidaje traversa 6. Aceasta va acţiona palpatorul comparatorului cu cadran 7 care va înregistra mărimea deplasării.
163 Fig. 5 vârf palpator, arbore, 3 capac, 4 rolă, 5 fir, 6 pârghie, 7 comparator cu cadran, 8 suport metalic, 9 roată de mână, 0 carcasă, roată dinţată, axul păpuşii fixe, 3 păpuşă fixă, 4 dorn elastic, 5 mecanism de blocare Roata cilindrică de măsurat se prinde pe un dorn elastic 4, între vârfurile ale păpuşilor fixe 3, care au posibilitatea de reglare a poziţiei roţii faţă de palpatorul. Acesta se poate deplasa pe ghidaje în direcţia perpendiculară pe axa roţii de măsurat astfel încât să poată fi utilizată o gamă variată de diametre ale roţilor. Diametrul maxim al roţii care se poate măsura pe acest dispozitiv este de 60 mm. Vârful de măsurare este schimbabil.
164 64 Dispozitivul este dotat cu un set de vârfuri de măsură şi cu un set de dornuri elastice pentru fixarea şi centrarea roţii de măsurat. Pentru determinarea unghiului β ~ se procedează în felul următor (fig.6): se verifică dacă indicaţia de pe arborele coincide cu cea de pe capacul 3; se montează comparatorul cu cadran 7 în locaşul din carcasa 0, astfel încât, după atingerea pârghiei 6 acul să execute aproximativ o rotaţie pe cadran pentru eliminarea jocurilor; se fixează comparatorul în această poziţie şi se aduce la zero; se alege din setul de dornuri un dorn potrivit cu alezajul roţii şi se montează roata pe dorn; se fixează dornul între vârfurile, după care vârfurile se blochează cu manetele de blocare 5; cu ajutorul roţii de mână 9 se aduce capul de măsură lângă roată; se aşează cu mâna vârful de măsură, apropiind în continuare capul de măsură până se aşează vârful în golul dintre doi dinţi; se citeşte indicaţia s a comparatorului şi, conform notaţiilor din figura 5, se determină unghiul β ~ cu relaţia: unde: ~ lungimea arcului AB s β = = r r s r 80 π [ rad] = [] r raza rolei pe care se înfăşoară firul, mm; s lungimea arcului AB citită pe comparatorul 6, mm. (5) Fig. 6
165 9.4. Desfăşurarea lucrării 65 Pentru început se vor controla instrumentele de măsură şi, dacă este necesar, se vor pune la zero.. Se numără dinţii roţilor dinţate z, z şi se măsoară următoarele elemente: distanţa dintre axe a ~ w, mm (fig.4); D D = B (6) a ~ w diametrele cercurilor de cap şi de picior ale pinionului, respectiv ~ ~ roţii, d a,, d f, ţinând cont de precizările făcute în lucrarea 8 paragraful 8.3.; unghiul de înclinare a danturii pe cilindrul de cap β a din relaţia (3); lăţimea roţilor b ~ ;. Se determină modulul normal, funcţie de posibilităţile de măsurare: în cazul în care dinţii nu sunt uzaţi iar lăţimea roţii permite, se determină numerele de dinţi peste care se măsoară cotele (relaţia ) apoi se măsoară cotele peste N respectiv N+ dinţi în plan ~ ~ ~ ~ normal, W N, W N +, WN, W N + şi apoi se calculează modulul normal cu relaţia (); Se reia precizarea că, din punct de vedere al notaţiilor, semnul ~ se referă la faptul că acele valori se obţin prin măsurare iar ( n) arată faptul că acele elemente au fost măsurate în plan normal; în caz contrar, se măsoară unghiul β ~ cu dispozitivul prezentat în figurile 5 respectiv 6 şi apoi se determină modulul normal cu relaţia (4); se standardizează valoarea obţinută prin una din cele două metode la cea mai apropiată valoare a modulului normal din STAS 8 8 şi se trece în tabelul ; în relaţiile de calcul ale dimensiunilor roţilor dinţate se va utiliza valoarea standardizată a modulului normal; 3. Valorile măsurate se trec în tabelul ; 4. Se calculează valoarea unghiului de înclinare pe cilindrul de divizare β cu relaţia:
166 66 m n z β = arcsin ~ da,, tanβ a (7) Se rotunjeşte la o valoare convenabilă la care minutele să fie un număr întreg (de exemplu 0 30') 5. Se calculează distanţa axială de referinţă a, mm: ( + ) mn z = z a (8) cosβ 4. Se stabilesc valorile coeficienţilor deplasărilor de profil în plan normal x n, x n şi a scurtării specifice a înălţimii dinţilor în plan normal Δ yn : a) dacă a~ w = a atunci x x = x + x 0 şi y = 0. t + t n n = Pentru a stabili concret valorile coeficienţilor x n, x n se disting două situaţii: i) dacă: Δ n * [ z ( h + c ) β] = mn cos β cos, an d ~ * f, n atunci: x x = x = x 0, x x = 0, y = 0 (9) t = t n n = ii) în caz contrar: x t t ; n n ts = ns Δ n = x x = x, x x = 0, y = 0 (30) ts = ns Δ n iar valorile coeficienţilor deplasărilor de profil în plan normal se determină cu relaţia: ~ d f, z, * * x n, = + han + cn (3) mn cos β b) dacă a~ w a atunci x x + x ; x = x + x 0 x x x x şi Δy 0; Δy 0. t t ; n n t ts = t t 0 ns n n Pentru calculul acestor valori se procedează succesiv: unghiul de angrenare de referinţă în plan frontal, : n tan αn αt = arctan (3) cosβ
167 unghiul de angrenare real în plan frontal, : α wt 67 a cos α t = arccos (33) a w involutele unghiurilor de angrenare în plan frontal: αt π invαt = tan αt (34) 80 αwt π invαwt = tan αwt (35) 80 Observaţie: valorile involutelor se vor determina cu cel puţin şase zecimale; suma coeficienţilor deplasărilor de profil în plan normal: x invα invα = (36) ( z z ) wt t ns + tan αn modificarea specifică a distanţei axiale în plan normal y n, relaţia (0); scurtarea specifică a înălţimii dinţilor; se constată existenţa a două cazuri: i) dacă a w are valoare standardizată conform STAS 6055: n sn n Δ y = x y (37) ii) dacă a w nu are valoare standardizată, atunci: ~ ~ * * da, d f, Δyn = han + cn m n (38) coeficienţii deplasărilor de profil ai roţilor, în plan normal, se determină în funcţie de diametrele cercurilor de picior măsurate: ~ d f, z, * * x n, = + han + cn (39) mn cos β 5. Cu valorile coeficienţilor deplasărilor de profil x n, x n şi a scurtării specifice a înălţimii dinţilor în plan normal Δ se calculează elementele geometrice ale angrenajului cu ajutorul relaţiilor (3)...(0). y n
168 68 6. Valorile obţinute se trec în tabelul Prelucrarea datelor Rezultatele obţinute în urma măsurătorilor şi calculelor făcute se trec în tabelul. Unitatea de măsură utilizată pentru lungimi va fi milimetrul iar valorile unghiurilor vor fi notate în grade ( ). Coeficienţii cremalierei generatoare ; c * 0,5 h * = = an n Nr. crt. Elemente măsurate a ~ ~ w = d a = ~ z = d a = ~ z = d f = b ~ ~ = d = f β a = β ~ = Elemente calculate ~ W N ~ W N ~ ( n ) = ( n ) = ( n) WN+ ~ ( n) WN + = = Tabelul Denumirea mărimii Simbol Relaţia de calcul Rezultat Numerele de dinţi peste care N se măsoară cota în plan normal N () Modul normal STAS 8 m n () sau (4) 3 Unghiul de înclinare (calculat) a dinţilor pe β (7) cilindrul de divizare 4 Distanţa axială de referinţă a (8) Unghiul de angrenare de referinţă în plan frontal Unghiul de angrenare real în plan frontal Suma coeficienţilor deplasărilor de profil în plan normal Coeficientul de modificare a distanţei dintre axe α t (3) α wt (33) x ns (36) y n (0)
169 Scurtarea specifică a înălţimii dinţilor Coeficienţii deplasărilor de profil în plan normal Coeficienţii deplasărilor de profil în plan frontal Diametrele cercurilor de divizare Diametrele cercurilor de bază Diametrele cercurilor de rostogolire Distanţa axială reală (pentru control) Diametrele cercurilor de cap calculate Diametrele cercurilor de picior calculate (pentru Δ y n (37) sau (38) x n x n x t x t d d d b d b d w d w (9) sau (30) sau (39) (7) (3) (4) (5) a w (6) d a d a d f control) d f (7) (8) 8 Înălţimea dintelui h (9) ( n) W N 9 Cotele peste N dinţi ( n) W N (0) Concluzii Se vor identifica, respectiv se vor constata planele definite ale angrenajului, sensul de înclinare a dinţilor pinionului, respectiv roţii, gradul de uzură a flancurilor, principalele particularităţi ale angrenajului, existenţa sau nu a unor diferenţe între valorile măsurate şi cele calculate, precum şi cauzele care pot fi responsabile de acest lucru.
170 0. RESTABILIREA PARAMETRILOR DIMENSIONALI AI ANGRENAJELOR CU ROŢI DINŢATE CONICE CU DINŢI DREPŢI 0.. Scopul lucrării În lucrarea de faţă se prezintă o metodă de restabilire a parametrilor dimensionali la un angrenaj conic ortogonal cu dinţi drepţi, care în procesul de funcţionare s a defectat şi trebuie să fie înlocuit. 0.. Consideraţii teoretice Angrenajele conice au axele roţilor două drepte coplanare concurente, iar axoidele mişcării (suprafeţele lor de rostogolire) sunt două conuri tangente care se rostogolesc unul peste altul fără alunecare având vârfurile situate în punctul de intersecţie al axelor celor două roţi. Dacă într-un angrenaj conic una din roţi se distruge, trebuie înlocuit întregul angrenaj din două motive: determinarea unghiului de angrenare dintre roată şi sculă este dificilă; nu se poate stabili dacă maşina de danturat a executat roţile după o roată plană imaginară aproximativă sau precisă. Roţile executate după cele două roţi plane nu angrenează corect între ele. După forma liniei dinţilor angrenajele conice pot fi: cu dantură dreaptă; cu dantură înclinată; cu dantură curbă: în arc de cerc (Gleason); în arc de epicicloidă alungită (dantură eloidă, procedeul Oerlikon Spiromatic); în arc de evolventă (dantură paloidă, procedeul Klingelnberg). Lucrarea de faţă studiază doar angrenajele conice cu dantură dreaptă. Două roţi dinţate conice care angrenează între ele admit o generatoare comună definită prin unghiurile δ şi δ, unghiul dintre axele roţilor fiind: δ = δ + () δ

171 7 unde: δ unghiul dintre axele angrenajului; δ, δ unghiurile conurilor de divizare (unghiurile dintre axele roţilor şi generatoarele conurilor de divizare), în grade, ( ). Lucrarea de faţă are în vedere angrenajele conice ortogonale, cel mai des utilizate, pentru care δ = 90 ; Geometria unui astfel de angrenaj este prezentată în figura. Fig. Elementele geometrice ale roţilor conice variază în lungul dinţilor, având valorile maxime pe conul frontal exterior. Conurile frontale (exterior, median, interior) sunt definite conform STAS 95/4 ca fiind conurile ale căror generatoare sunt perpendiculare pe cele ale conului de divizare (la extremitatea exterioară, la mijlocul respectiv la extremitatea interioară) a danturii.
172 7 Lăţimea danturii este limitată de conul frontal exterior şi conul frontal interior. Profilul de referinţă standardizat (STAS 6844) este raportat la linia pe care grosimea dinţilor este egală cu golul dintre dinţi (linia de referinţă). La roţile dinţate cu dinţi drepţi, secţiunea în care este definit corespunde conului frontal exterior. Se presupune că angrenajul a fost executat conform STAS 6844 cu: unghiul de presiune, α = 0 ; coeficientul înălţimii capului de referinţă, h * = ; coeficientul jocului radial de referinţă, c * = 0, 0. Modulul m este standardizat pe conul frontal exterior conform STAS 8. Ţinând cont de faptul că în practică angrenajele conice nu sunt riguros evolventice, aceste tipuri de angrenaje sunt realizate numai ca angrenaje nedeplasate sau zero deplasate, întrucât angrenajele deplasate reprezintă o particularitate specifică angrenajelor evolventice. Datorită acestui fapt conurile de rostogolire sunt şi conuri de divizare, iar cercul cu diametrul d, (fig.) se numeşte cerc de divizare. Astfel, se consideră că, în cazul general, coeficienţii deplasărilor radiale normale de profil sunt compensaţi: x r r a = x () Elementele geometrice ale angrenajului, necesare acestei lucrări de laborator, sunt date de următoarele relaţii: unghiul conului de divizare al pinionului, : tan z δ = (3) z unde z, z sunt numerele de dinţi ai pinionului, respectiv roţii; unghiul conului de divizare al roţii, : diametrele cercurilor de divizare, mm: δ = 90 δ (4) d, m z, = (5) lungimea (exterioară) a generatoarei conului de divizare, mm: d,, R = = (6) sin δ sin δ, m z,
173 diametrele cercurilor de cap (la exterior), mm: * [ z + ( h + x ) δ ] a, = m, a r, cos, 73 d (7) diametrele cercurilor de picior (la exterior), mm: * * [ z ( h + c x ) δ ] d (8) f, = m, a r, cos înălţimea capului dintelui (la exterior), mm: * ( h x ) h = m + (9) a, a r, înălţimea piciorului dintelui (la exterior), mm: h * * ( h + c x ) = m (0) f, a r, înălţimea dintelui (la exterior), mm: * * ( h c ) h = m a + () unghiul capului dintelui la pinion, respectiv roată, : h a, θa, = arctan () R unghiul piciorului dintelui la pinion, respectiv roată, : h f, θ f, = arctan (3) R unghiurile conurilor de cap la pinion, respectiv roată, : δ = δ + θ (4) a,, a, unghiurile conurilor de picior la pinion, respectiv roată, : δ = δ θ (5) f,, f,, 0.3. Metodologia determinării modulului angrenajului Pentru stabilirea elementelor dimensionale ale angrenajului ieşit din funcţiune, primul element geometric ce trebuie determinat este modulul, corespunzător cercului de divizare. În funcţie de posibilitatea măsurării lungimii (exterioare) R a generatoarei conului de divizare pot să apară două cazuri:
174 Determinarea modulului pe baza lungimii generatoarei conului de divizare la exteriorul danturii Modalitatea cea mai precisă de determinare a modulului este cea rezultată prin măsurarea dublului lungimii exterioare a generatoarei conului de divizare, R ~, cotă măsurată conform figurii : ~ R sin δ, m = (6) z unde R ~ este lungimea exterioară măsurată a generatoarei conului de divizare, mm; Valoarea modulului preliminar obţinut cu relaţia (6) se standardizează la cea mai apropiată valoare din STAS 8 8, tabelul lucrarea Determinarea modulului pe baza înălţimii dintelui la exteriorul danturii Dacă valoarea R ~ este prea mare pentru a putea fi măsurată, o altă modalitate de determinare a modulului este cea dată de măsurarea înălţimii dintelui pe conul frontal exterior, h ~., În acest caz modulul se determină cu relaţia: ~ h m = (7) * * h c După determinarea modulului preliminar, valoarea acestuia se standardizează la valoarea cea mai apropiată din STAS 8. Indiferent de modalitatea de stabilire a modulului, în calculele elementelor geometrice ale angrenajului se va lucra cu valoarea standardizată a acestuia. a Utilajul şi aparatura utilizată Roţile dinţate ai căror parametri dimensionali urmează a fi restabiliţi sunt montate conform figurii. Pentru măsurarea dublului lungimii generatoarei conului de divizare, a diametrelor şi a înălţimii dintelui pe conul frontal exterior se va utiliza un şubler.
175 75 Fig Desfăşurarea lucrării. Se numără dinţii roţilor dinţate z, z şi se măsoară următoarele elemente: dublul lungimii generatoarei conului de divizare, R ~, mm; înălţimea dinţilor la exterior, h ~, mm; lăţimea roţilor, b, mm; diametrele cercurilor de cap şi de picior ale pinionului, respectiv ~ ~ roţii, la exterior, d a,, d f,, mm; Se face observaţia că semnul ~ se referă la faptul că valorile respective se obţin prin măsurare.. Datele obţinute se trec în tabelul. 3. Se calculează unghiul conului de divizare δ cu relaţia: iar δ cu relaţia (4); z δ = arctan z (8)
176 76 3. În continuare se determină modulul prin una din metodele prezentate mai sus şi se standardizează conform STAS 8 8; 4. Se stabilesc valorile coeficienţilor deplasărilor radiale normale de profil x r, x r funcţie de cazurile de mai jos: a) în cazul în care se constată că este satisfăcută una din egalităţile: ~ * * d f, = m [ z, ( ha + c ) cosδ, ] (9) sau * ( z + h δ ) ~ d (0) a, = m, a cos atunci se consideră că valorile coeficienţilor deplasărilor radiale normale de profil sunt: b) în caz contrar:, x x 0 () r = r = x = x () r r iar valorile acestora se determină, în funcţie de posibilităţile de măsurare a diametrelor, cu una din relaţiile: - corespunzător diametrelor cercurilor de picior (la exterior) ~ d, măsurate: f, x ~ d z = f,, * * r, + ha + c m cosδ, cosδ (3), ~ - corespunzător diametrelor cercurilor de cap (la exterior) d a,, măsurate: ~ da, z, * x = r, ha m cosδ cos δ (4), 5. Cu valorile coeficienţilor deplasărilor de profil x r, x r se calculează elementele geometrice ale angrenajului cu ajutorul relaţiilor (5)...(5). 6. Valorile obţinute se trec în tabelul.,
177 0.6. Prelucrarea datelor 77 Rezultatele obţinute în urma măsurătorilor şi calculelor făcute se trec în tabelul. Unitatea de măsură utilizată pentru lungimi va fi milimetrul iar valorile unghiurilor vor fi notate în grade ( ). Elementele profilului de referinţă * = ; c * = 0,0 Nr. crt. h a Elemente măsurate R ~ ~ = d a = ~ z = d a = ~ z = d f = ~ h = d = b = Elemente calculate f Tabelul Denumirea mărimii Simbol Relaţia de calcul Rezultat Modulul standardizat m (6) sau (7) Unghiurile conurilor de divizare Diametrele cercurilor de divizare Lungimea generatoarei conului de divizare (la exterior) Coeficienţii deplasărilor radiale normale de profil Diametrele cercurilor de cap (la exterior) Diametrele cercurilor de picior (la exterior) δ (8) δ (4) d d (5) R (6) x r x r d a d a d f d f () sau (3) sau (4) (7) (8)
178 Înălţimea capului dintelui (la exterior) Înălţimea piciorului dintelui (la exterior) Înălţimea dintelui, calculată, (la exterior) Unghiurile capului dintelui la pinion, respectiv roată Unghiurile piciorului dintelui la pinion, respectiv h a h a h f h f (9) (0) h () θ a θ a θ f roată θ f Unghiurile conurilor de cap la pinion, respectiv roată Unghiurile conurilor de picior la pinion, respectiv δ a δ a δ f roată δ f () (3) (4) (5) 0.7. Concluzii Se vor constata principalele particularităţi ale angrenajului, conurile frontale, existenţa sau nu a unor diferenţe între valorile măsurate şi cele calculate, precum şi cauzele care pot fi responsabile de acest lucru.
179 . RESTABILIREA PARAMETRILOR DIMENSIONALI AI ANGRENAJELOR MELCATE CILINDRICE.. Scopul lucrării Lucrarea prezintă o metodă de restabilire a parametrilor dimensionali la un angrenaj melcat cilindric, deteriorat în procesul de funcţionare şi care trebuie înlocuit... Consideraţii teoretice Angrenajele melcate servesc la transmiterea unor puteri mici şi mijlocii între două axe, care se încrucişează în spaţiu sub un unghi de 90. Angrenajele melcate, faţă de celelalte angrenaje, prezintă avantajul că realizează rapoarte mari de transmitere pe o singură treaptă, funcţionează fără zgomot şi, de asemenea, pot asigura autofrânarea în cazul maşinilor de ridicat. Angrenajele melcate au un randament mai mic decât al celorlalte tipuri de angrenaje, necesită folosirea unor materiale cu proprietăţi antifricţiune deosebite, mai scumpe în comparaţie cu materialele celorlalte roţi dinţate. De asemenea implică o tehnologie de execuţie şi montaj mai complexă. Angrenajul melcat este format dintr-o roată dinţată cilindrică cu dinţi înclinaţi numită roată melcată aflată în angrenare cu o roată dinţată cu un număr mic de dinţi ( z =... 4 ) numită melc. Melcul are diametrul mult mai mic faţă de roata melcată şi un unghi mare de înclinare a dinţilor. În consecinţă dintele înfăşoară melcul după o elice, de-a lungul a mai multor paşi, ca în cazul spirei filetului. În funcţie de forma melcului şi a roţii melcate există două tipuri de angrenaje şi anume (fig.): angrenaj melcat cilindric (fig.,a) la care melcul este cilindric iar roata are o formă globoidală (dintele roţii melcate înfăşoară melcul); angrenaj melcat globoidal (fig.,b) la care atât melcul cât şi roata melcată sunt globoidale.
180 80 a. b. Fig. Lucrarea de faţă are în vedere doar angrenajele melcate cilindrice. În funcţie de tehnologia de realizare, angrenajele melcate cilindrice cuprinse în STAS 6845 pot fi: cu melc de tip ZA (arhimedic), având profil rectiliniu în secţiune axială; cu melc de tip ZN (convolut), melc cilindric cu flancurile generate geometric de două drepte cuprinse într un plan perpendicular pe elicea mediană (de referinţă) a melcului; cu melc de tip ZN (convolut), având profil rectiliniu în secţiunea normală pe elicea medie a golului; cu melc de tip ZE (evolventic), melc cilindric cu flancurile generate geometric de două drepte tangente la un cilindru director (de bază); cu melc de tip ZK, melc cilindric cu flancurile înfăşurate de o sculă cilindrică biconică, cu profil axial rectiliniu şi de tip ZK, melc prelucrat cu o sculă conică, freză deget sau piatră deget de rectificat şi având forma profilului o curbă oarecare în secţiune axială şi frontală. Din punct de vedere geometric, un angrenaj melcat cilindric este definit de: melcul de referinţă, numerele de începuturi ale melcului z, respectiv numărul de dinţi ai roţii melcate z, distanţa dintre axe şi deplasarea de profil a roţii. Parametrii danturii melcului de referinţă sunt standardizaţi conform STAS 6845: coeficientul înălţimii capului dintelui, h * = ; a
181 8 coeficientul jocului radial: - c * = 0, pentru melci prelucraţi pe strung şi pentru roţi melcate prelucrate cu freze melc; - c * = 0,...0, 3 pentru melci prelucraţi cu freze deget sau freze disc; * * coeficientul înălţimii piciorului dintelui, h f = + c ; coeficientul înălţimii dintelui, h + * * = c. Melcul angrenajului are forma şi dimensiunile identice cu melcul de referinţă, cu excepţia grosimii dintelui, micşorată pentru a obţine jocul în angrenaj. Melcul generator al roţii melcate diferă de melcul de referinţă prin aceea că are diametrul mărit în scopul realizării jocului radial la baza dinţilor roţii melcate. Conform STAS 95/5 se defineşte un angrenaj echivalent. Este angrenajul care corespunde planului median al roţii, în care se află şi axa melcului. Geometria angrenajului melcat este definită pentru acest angrenaj echivalent. La angrenajul melcat deplasat, la care corijarea danturii se face numai la roata melcată (scula materializând melcul), cercul de rostogolire al roţii melcate coincide cu cercul de divizare al acesteia, în secţiune mediană, rezultând un cilindru de divizare al melcului echivalent liniei de divizare a cremalierei. Deplasările de profil se fac, cel mai frecvent, în scopul realizării unei distanţe dintre axe impuse precum şi pentru îmbunătăţirea condiţiilor de funcţionare. Valorile deplasărilor de profil trebuie alese astfel încât să se evite subtăierea sau ascuţirea dinţilor roţii melcate. Deplasarea specifică de profil se recomandă a avea valori x [ 0, ,5]. Având în vedere faptul că atât melcul cât şi roata melcată sunt roţi dinţate cu dinţi înclinaţi iar angrenajul are axele încrucişate în spaţiu, pe lângă modulul normal m n şi cel frontal m t, apare şi modulul axial m x. În cazul angrenajelor melcate cilindrice modulul este standardizat în plan axial m x, conform STAS 8 (tabelul ). Elementele geometrice ale angrenajului, necesare acestei lucrări de laborator, sunt date de următoarele relaţii: modulul axial, m, mm: x p m = x x () π
182 8 unde p x este valoarea măsurată a pasului melcului în secţiune axială (fig.), mm. coeficientul diametral q, standardizat conform STAS (tabelul ); pentru fiecare domeniu de moduli sunt indicate trei valori ale lui q, prin aceasta limitându-se numărul de scule freze melc necesare prelucrării roţilor; Tabelul Gama modulilor pentru angrenaje cu melc cilindric m x, mm 0, 0,5 0,6 0, 0,5 0,35 0,4 0,5 0,63 0,8,5,6.5 3, ,3 8 0, Observaţie: Se admite şi folosirea modulilor 0,; 0,5; 0,30; 0,60;,5; 3; 3,5; 6; 7 şi mm. Fig. plan median Valorile coeficientului diametral q, STAS 6845 Tabelul m x,6 şi, , şi q Observaţie: Coeficienţii diametrali tipăriţi cu caractere aldine sunt de preferat.
183 unghiul elicei de referinţă γ, ( ): 83 z tan γ = () q diametrul cilindrului de referinţă al melcului, mm: d = mx q (3) diametrul cercului de divizare (rostogolire) al roţii melcate, mm: d = (4) mx z distanţa axială de referinţă, mm: ( q ) mx + z a = (5) relaţia dintre distanţa axială reală a w (adeseori standardizată, STAS 6055, sau impusă) şi cea de referinţă a: a = a + x (6) w m x diametrul cilindrului de divizare al melcului, mm: ( q + x) dw = mx (7) diametrul cercului de rostogolire (de divizare) al roţii melcate, mm: d = = (8) w d mx z distanţa axială reală (pentru control), mm: a w dw + dw = (9) diametrul de cap al melcului, respectiv al roţii melcate, mm: d * x ( q + h ) * [ z + ( h x) ] = m (0) a a da = mx a + () diametrul de picior al melcului, respectiv al roţii melcate, mm: * * [ q ( h )] d = m c () f x a + * * [ z ( h + c x) ] d = m (3) f x a
184 84 înălţimea dintelui, mm: * * ( h c ) h = m (4) x a + diametrul de strunjire al roţii, mm: 6 mx de = da + (5) z + lăţimea roţii melcate (valori recomandate), mm: 0,75 da b pentru z 3 (6) 0,67 da b pentru z 4 (7) = lungimea melcului (valori recomandate), mm: L L ( + 0,06 z ) mx = pentru z = sau (8) (,5 + 0,09 z ) mx = pentru z = 3 sau 4 (9).3. Utilajul şi aparatura utilizată Pentru determinarea pasului axial p~ x şi a distanţei axiale reale a ~ w a angrenajului se va folosi dispozitivul de măsurare prezentat în figura 3, iar ~ ~ ~ ~ pentru măsurarea diametrelor d a, d f, da, de precum şi a cotelor b şi L se va utiliza şublerul. Se face precizarea că semnul ~ se referă la faptul că acele valori se obţin prin măsurare. Dispozitivul de măsurare este format din suportul 6, păpuşile fixe 8 între ale căror vârfuri 4 se fixează dornul schimbabil 7, pe care s a montat melcul de măsurat 9. Pe dornul schimbabil se montează roata melcată 3 care, prin intermediul mecanismului şurub piuliţă 7 8, se aduce în angrenare cu melcul. Pentru această poziţie se determină distanţa axială a ~ w prin citirea valorii pe rigla gradată cu vernier. Pasul axial al melcului se măsoară cu ajutorul capului de măsurare, prin intermediul vârfului 6. Acesta se poate deplasa în direcţie perpendiculară pe axa melcului cu ajutorul mecanismului şurub piuliţă 3 5, respectiv în direcţie paralelă cu axa melcului cu ajutorul mecanismului şurub piuliţă 4, deplasând vârful de măsură 6 în două goluri succesive ale melcului.
185 a w 5 4 Fig. 3 riglă gradată cu vernier,,4 mecanism şurub piuliţă, 3,5 mecanism şurub piuliţă, 6 vârful capului de măsurare, 7,8 mecanism şurub piuliţă, 9 melc, 0 suportul roţii melcate, riglă gradată cu vernier, dorn schimbabil pentru roata melcată, 3 roată melcată de măsurat, 4 vârful păpuşii fixe, 5 comparator cu cadran, 6 placă suport, 7 dorn schimbabil pentru melc, 8 păpuşă fixă
186 86 Pasul axial p~ x pentru valori până la 0 mm se măsoară cu ajutorul comparatorului cu cadran 5, iar pentru valori mai mari se va folosi rigla gradată cu vernier. Pentru determinarea valorilor a ~ w şi p~ x se procedează astfel: se alege din setul de dornuri două dornuri corespunzătoare alezajelor melcului şi roţii melcate şi se montează pe ele roţile; se fixează dornul cu melcul între vârfurile păpuşilor fixe; se montează dornul cu roata melcată în suportul 0 şi, prin intermediul mecanismului şurub-piuliţă 7 8, se aduce în angrenare cu melcul; se citeşte distanţa axială reală a angrenajului a ~ w pe rigla cu vernier ; se apropie vârful de măsurare 6 de melc până când acesta pătrunde în golul dintre spire şi se notează poziţia de pe rigla gradată cu vernier ; se scoate vârful de măsurare din golul dintre spire şi se deplasează în direcţie paralelă cu axa melcului până intră în golul următor şi se citeşte din nou poziţia. Diferenţa dintre cele două citiri reprezintă pasul axial al melcului p~ ; x această operaţiune se va repeta în diferite secţiuni axiale, valoarea pasului axial adoptându se ca fiind media aritmetică a valorilor măsurate; pentru paşi mai mici de 0 mm, la prima citire se fixează acul comparatorului 5 la zero urmând ca a doua citire să se facă pe ceasul comparator..4. Desfăşurarea lucrării ~ ~ ~ ~. Se măsoară cu şublerul diametrele d a, d f, da, de precum şi cotele b ~ şi L ~ ale angrenajul melcat care urmează a fi înlocuit, iar p~ x şi a ~ w se determină cu dispozitivul prezentat în figura 3. Se reaminteşte observaţia conform căreia semnul ~ se referă la faptul că acele valori se obţin prin măsurare.. Se determină modulul axial cu relaţia () în funcţie de valoarea pasului axial măsurat; pentru mărirea siguranţei asupra obţinerii unei valori corecte a modulului se recomandă şi o verificare cu relaţia:
187 m x 87 ~ ~ ~ ~ d a d f da d f = = (0) * * ( h + c ) 4, 4 a Modulul axial se standardizează la cea mai apropiată valoare din STAS 8 (tabelul ); în calculele pentru determinarea elementelor geometrice ale angrenajului melcat restabilit se va folosi valoarea standardizată a modulului axial; 3. Se calculează diametrul de referinţă (preliminar) al melcului, mm: ~ d prel. = da mx () 4. Se determină coeficientul diametral cu relaţia: d prel. q = () m Se standardizează valoarea coeficientului diametral conform STAS 6845, tabelul. Observaţie: Dacă modulul a fost corect stabilit şi d a bine măsurat, iar valoarea coeficientului diametral nu se încadrează în valorile indicate în tabelul, atunci înseamnă că melcul are dimensiunile nestandardizate şi dimensiunile geometrice se vor calcula cu valoarea lui q nestandardizată. 4. Se calculează unghiul elicei de referinţă γ, : x z γ = arctan (3) q 5. Se calculează distanţa axială de referinţă cu relaţia (5); 6. Se calculează valoarea coeficientului deplasării de profil al roţii melcate astfel: a) dacă a~ w = a atunci x = 0 (4) b) în caz contrar x 0 iar valoarea coeficientului se obţine cu relaţia: a x = m w x q + z a a = m w (5) 7. Cu valorile stabilite mai sus se calculează parametrii dimensionali ai angrenajului care va înlocui angrenajul uzat, cu relaţiile (7)...(5). 8. Valorile calculate se trec în tabelul 3. x
188 88.5. Prelucrarea datelor Rezultatele obţinute în urma măsurătorilor şi calculelor făcute se trec în tabelul 3. Unitatea de măsură utilizată pentru lungimi este milimetrul iar valorile unghiurilor vor fi notate în grade ( ). Parametrii melcului de referinţă * = ; c * = 0, h a Elemente măsurate ~ z = d a = b ~ = ~ z = d f = L ~ = a ~ ~ w = d a = ~ p~ = d = x e Elemente calculate Nr. Relaţia de Denumirea mărimii Simbol crt. calcul Modulul axial m x () sau (0) Diametrul de referinţă preliminar al melcului d prel. () 3 Coeficientul diametral q () 4 Unghiul elicei de referinţă γ (3) 5 Diametrul cilindrului de d referinţă al melcului (3) 6 Diametrul cercului de divizare d al roţii melcate (4) 7 Distanţa axială elementară a (5) 8 Coeficientul deplasării de profil al roţii melcate x (4) sau (5) 9 Diametrul cilindrului de d w divizare al melcului (7) 0 Diametrul cercului de d w rostogolire al roţii melcate (8) Distanţa axială reală, calculată a w (9) Diametrele cercurilor de cap, calculate d a (0) d a () Tabelul 3 Rezultat
189 89 3 Diametrele cercurilor de picior, calculate d f () d f (3) 4 Înălţimea dintelui h (4) 5 Diametrul de strunjire al roţii melcate d e (5).6. Concluzii Se vor constata elementele geometrice ale melcului şi ale roţii melcate, principalele particularităţi ale angrenajului, existenţa sau nu a unor diferenţe între valorile măsurate şi cele calculate, precum şi cauzele care pot fi responsabile de acest lucru.
190 . MONTAREA ŞI DEMONTAREA REDUCTOARELOR.. Scopul lucrării În cadrul lucrării se vor studia următoarele aspecte esenţiale: cunoaşterea construcţiei şi elementelor componente din ansamblul unui reductor, în corelaţie cu rolul lor funcţional; stabilirea caracteristicilor principale geometrice, cinematice şi tehnologice ale reductorului analizat... Consideraţii teoretice Reductoarele fac parte din marea categorie a transmisiilor mecanice. Servesc la reducerea numărului de turaţii la arborele de ieşire şi creşterea corespunzătoare a momentului de torsiune. Sunt transmisii prin angrenare cu raport de transmitere constant, montate de regulă în carcase închise. După tipul angrenajelor componente reductoarele pot fi: cu roţi cilindrice, conice, pseudoconice, elicoidale, melcate şi combinate. Elementele principale ale unui reductor, indiferent de tip, sunt următoarele: angrenajele, arborii, lagărele, carcasa, elementele de etanşare, elementele de asamblare (fig.). Angrenajele constituie partea funcţională principală a unui reductor. Cele mai frecvent utilizate angrenaje în construcţia de reductoare de uz general sunt: cilindrice (cu dinţi drepţi, înclinaţi şi în V), conice (cu dinţi drepţi, înclinaţi şi curbi) şi melc roată melcată. În funcţie de cerinţele locului de utilizare se va alege angrenajul sau combinaţia de angrenaje care să întrunească cele mai multe avantaje. La reductoarele cu mai multe trepte se impune împărţirea raţională a raportului de transmitere pe fiecare treaptă pentru obţinerea unor construcţii cu gabarite care să răspundă cât mai bine scopului, ungerea corespunzătoare a tuturor treptelor etc. Arborii pe care sunt montate roţile dinţate sunt arbori drepţi. Ei sunt proiectaţi cât mai scurţi pentru a avea o rigiditate cât mai mare (importantă în funcţionare) şi pentru a asigura o construcţie compactă reductorului.
191 , Fig. roată condusă cilindrică; pană paralelă; 3 arbore condus; 4 capac lateral + plăcuţe reglare; 5 manşetă de rotaţie; 6 arbore motor; 7 rulment radial axial; 8 dop de golire + garnitură; 9 jojă; 0 inel de ridicare; - şurub; capac de vizitare; 3 aerisitor + garnitură; 4 şurub; 5 capac reductor; 6 şurub; 7 piuliţă; 8 ştift de centrare; 9 corp reductor; 0 rulment radial axial; manşetă de rotaţie; şurub+şaibă Grower; 3 capac lateral+plăcuţe de reglare.
192 9 Orice reductor are un arbore de intrare şi un arbore de ieşire prevăzuţi cu capete de cuplare. La reductoarele cu mai multe trepte există şi arbori intermediari. Există construcţii de reductoare cu două capete de cuplare la ieşire sau cu ieşiri pe arborii intermediari. Arborii pot fi amplasaţi în plan orizontal sau vertical în funcţie de tipul şi de poziţia relativă a angrenajelor, soluţia constructivă aleasă, locul de utilizare a reductorului etc. Lagărele sunt în marea majoritate a cazurilor lagăre de rostogolire. Tipul şi mărimea rulmenţilor vor fi funcţie de valoarea şi de sensul forţelor ce solicită arborii, tipul construcţiei alese etc. Se menţionează faptul că la construcţii speciale de reductoare de mare turaţie, care lucrează cu sarcini importante, lagărele cu rulmenţi sunt înlocuite total sau parţial prin lagăre cu alunecare. Carcasa reductoarelor de uz general este formată în general din corp şi capac. Se execută în general din fontă, prin turnare. Carcasa trebuie să asigure poziţia relativă corectă a arborilor (prin intermediul lagărelor) şi roţilor dinţate, servind şi ca baie de ulei. Este prevăzută cu nervuri care au rolul de a mări rigiditatea ansamblului, de a reduce zgomotul şi vibraţiile şi de a mări suprafaţa efectivă de răcire a reductorului. La nivelul planului de separaţie corpul şi capacul reductorului se prelucrează fin pentru a sigura etanşeitatea la montare şi în funcţionare. Pentru etanşare se folosesc lacuri sau vopsele de etanşare cu care se acoperă planul de separaţie înainte de asamblarea carcasei. Există soluţii constructive în care la nivelul planului de separaţie sunt prevăzute canale de ungere care au rolul de a ghida un debit suplimentar de ulei spre lagăre. Carcasa reductorului se asamblează prin şuruburi, iar cele două părţi componente se centrează cu ştifturi de centrare. Corpul reductorului (semicarterul inferior) este prevăzut cu un dop de golire a uleiului uzat, după rodaj sau după timpul normat de utilizare. Pe corp se montează vizorul de nivel de ulei sau joja, pentru indicarea nivelului de ulei din baia reductorului. La unele construcţii corpul reductorului este prevăzut cu umeri de ridicare. Capacul reductorului (semicarterul superior) este prevăzut cu un orificiu de vizitare acoperit cu un capac metalic sau transparent prin care se poate urmări periodic starea angrenajelor şi se introduce lubrifiantul în reductor. În partea superioară a capacului este montat un aerisitor. Capacul reductorului are montate, în general, două inele de ridicare care să permită manevrarea mecanizată a reductorului. În dreptul lagărelor carcasa reductorului are prevăzute capace care se montează cu şuruburi pe carcasă, sau în locaşuri prevăzute anume în pereţii carcasei.
193 93 Trebuie menţionate şi elementele de etanşare de la capacele arborilor de intrare şi ieşire, respectiv de la capacele arborilor intermediari. De asemenea, elementele de fixare şi poziţionare a rulmenţilor şi roţilor dinţate pe arbori şi în carcasă: piuliţe şi şaibe de siguranţă pentru rulmenţi, plăcuţe de reglare, bucşe şi inele distanţiere, pene etc. Ungerea reductoarelor de uz general se face cu ulei. Metodele de ungere se aleg funcţie de viteza periferică a roţilor dinţate. Pentru viteze periferice până la m/s ungerea se realizează prin barbotare. La angrenajele cilindrice roata mare se scufundă în ulei pe cel puţin două înălţimi de dinte, dar nu mai puţin de 0 mm. Roţile de turaţie mică de pe treptele a doua sau a treia se pot scufunda până la /3 din diametrul lor exterior. La angrenajele conice roata mare se scufundă în ulei cel puţin pe toată înălţimea dintelui, iar ca limită maximă până la /3 din diametrul ei exterior. Melcul angrenajului melcat se scufundă în ulei pe o înălţime de (,5...4) m x. Dacă roata melcată este în ulei iar melcul se află deasupra ei, se vor aplica recomandările de la angrenajele cilindrice sau se va opta pentru soluţia ungerii prin presiune de ulei. Rulmenţii se ung în general cu uleiul barbotat de către roţile dinţate. La viteze sub m/s rulmenţii se pot unge cu unsori consistente, prevăzânduse în astfel de cazuri elemente de protecţie care să împiedice pătrunderea produselor de uzură în rulmenţi sau amestecarea unsorii cu uleiul din baie..3. Utilajul şi aparatura necesară Pentru efectuarea lucrării se vor utiliza reductoarele existente în cadrul laboratorului de organe de maşini, reprezentate schematic în figura. Ca accesorii se vor folosi: trusă de chei fixe sau inelare, şublere, micrometre, şurubelniţe, dornuri etc. funcţie de particularităţile constructive ale fiecărui reductor..4. Desfăşurarea lucrării Obiectivele urmărite în cadrul lucrării sunt: demontarea şi montarea unui reductor dat într-o anumită ordine bine stabilită; cunoaşterea construcţiei şi rolului funcţional al fiecărui subansamblu şi reper component; determinarea principalelor caracteristici geometrice, cinematice şi tehnologice; identificarea şi notarea rulmenţilor conform STAS 679;
194 94 Fig.
195 95 notarea reductorului conform STAS Demontarea reductorului se va face pe subansamble şi repere în următoarea ordine: se deşurubează dopul de golire pentru scurgerea lubrifiantului din baia de ulei; se demontează şuruburile capacelor laterale şi se scot aceste capace împreună cu garniturile de etanşare sau plăcuţele de reglare; se demontează şuruburile de asamblare a carcasei şi se separă capacul reductorului; se scot subansamblele arbori roţi dinţate rulmenţi, fără a demonta roţile dinţate şi rulmenţii de pe arbori; se demontează capacul de vizitare, aerisitorul, inelele de ridicare, joja sau vizorul de nivel de ulei; se vor analiza rolul funcţional şi particularităţile constructive pentru fiecare reper component al reductorului. La reductorul astfel demontat se vor stabili următoarele: tipul angrenajelor componente şi numărul de trepte; numerele de dinţi ale roţilor; rapoartele parţiale de transmitere şi raportul total; distanţele axiale; modulele roţilor dinţate; principalele elemente geometrice. Măsurătorile se fac cu reductorul demontat conform aliniatului trei de mai sus, cu capacul înlăturat. Montarea reductorului se face în ordine inversă demontării, având grijă să nu fie omise anumite repere. Efectuarea operaţiunilor de demontare şi montare se va face cu ajutorul SDV-urilor menţionate la punctul Prelucrarea datelor Pentru reductorul studiat se va întocmi un desen de ansamblu în două proiecţii (schiţă de mână cotată) şi alăturat schema cinematică conform STAS 543 sau figurii. Cele două proiecţii sunt: vedere din faţă şi vedere de sus cu secţiune în planul de separaţie a carcasei. Pe desenul de ansamblu se vor indica elementele componente după modelul prezentat în figura. Datele măsurate şi calculate se vor înscrie în tabelele şi. Se vor formula observaţii privind soluţiile constructive şi rolul funcţional al elementelor componente ale reductorului.
196 96 Simbol reductor STAS 6848 Poz. Tip z Roată dinţată m (m n, m x ) mm d (d w ) mm Angrenaj β (γ) Poz. a mm Tabelul a w mm i Simbol reductor STAS 6848 Tabelul Reductor Rulmenţi Obs. a t i t Poz. Tip Simbol STAS 679
197 3. STUDIUL FACTORILOR DE INFLUENŢĂ ASUPRA FUNCŢIONĂRII TRANSMISIILOR PRIN CURELE 3.. Scopul lucrării Transmisiile prin curele corect proiectate, montate şi reglate asigură o funcţionare silenţioasă, durabilă şi întreţinere minime. Existenţa acestor caracteristici impune evitarea vibraţiilor şi alunecării curelei în funcţionare. Lucrarea permite studiul comparativ al vibraţiilor în diferite tipuri de montaje (cu fulie excentrică, curea deteriorată) la transmisiile prin curele POLY V. Este posibil, de asemenea, studiul influenţei diferitelor valori ale întinderii (pretensionării) curelei, în diferite montaje, asupra vibraţiilor şi alunecării curelei POLY V. 3.. Consideraţii teoretice Transmisia prin curea este o transmisie cu element intermediar flexibil şi elastic fără sfârşit, înfăşurat pe roţile de curea montate pe arborii între care se realizează transmiterea puterii. Acest tip de transmisie funcţionează prin frecarea dintre roţile de curea şi curea sau prin efectul de angrenare dintre cureaua dinţată sau banda perforată ori profilată şi roţile de curea profilate corespunzător. Frecarea dintre roţile de curea şi curea se obţine în urma întinderii (pretensionării) curelei, respectiv apăsării ei pe roţi pentru transmisiile prin curea lată, bandă metalică netedă, curea trapezoidală, POLY V şi curea cu profil rotund. Aceste transmisii au aplicaţii numeroase în transmisiile de putere, transmisii de mişcare (putere redusă), benzi transportoare, transmisii cu bandă-sculă etc. Transmisiile prin curele sunt foarte diverse, în funcţie de forma curelei, regimul de funcţionare, materialele utilizate pentru construcţia curelei, lungimea curelei, dispunerea axelor, modul de acţionare şi sistemele de întindere. Forma curelei de transmisie influenţează în măsura cea mai mare performanţele transmisiei, metoda de proiectare a acesteia şi comportarea în funcţionare.
198 98 Deoarece lucrarea de laborator îşi propune studiul experimental al vibraţiilor la transmisiile prin curele POLY V elementele geometrice, cinematice şi dinamice ale transmisiei se vor referi în special la acest tip de transmisie. În figura se prezintă elementele geometrice ale curelei POLY V (fig.,a) şi dimensiunile roţilor de curea (fig.,b). h m h înălţimea, mm b lăţimea, mm t pasul de profil, mm Clasice Înguste b / h =,6 b / h =,5 Profil ISO Profil DIN Y Z A B C D E 484 b T SPZ SPA SPB SPC b 9,7,7 8,3,0 b r d, diametrul primitiv, mm; de, diametrul exterior, mm; h m =(d, de, )/, mm; f distanţa faţă de margine, mm; e pasul canalelor, mm; b r lăţimea roţii de curea, mm Fig. Geometria transmisiei este prezentată în figura, unde d, este diametrul caracteristic (primitiv) pentru roata de curea, (v. fig.,b). În general diametrul d poate fi corelat, pentru gabarit redus şi rezistenţă acceptabilă, cu grosimea curelei h. Astfel, pentru curele POLY V, dmin 9h. Distanţa dintre axe, a, se află în intervalul: Unghiul a a ( d + d ), [mm]. () min α = 80 + γ, iar unghiul γ este dat de relaţia: [( d d ) ( )] γ = arcsin, [grade]. () a
199 99 Fig. roată motoare (fulie mică); roată condusă (fulie mare); 3 curea de transmisie. Lungimea curelei la nivelul diametrelor d, este: L = acos( γ ) + πd (80 γ) πd (80 + γ) 360, [mm]. (3) Elementele cinematice principale ale transmisiei sunt: raportul geometric al transmisiei: u = d d (4) raportul real de transmitere i, pentru curele late, trapezoidale şi POLY V, considerând efectele de alunecare elastică: ξ fiind coeficientul de alunecare; viteza periferică a roţii : i = u ( ), (5), ξ v = π n d , [m/s] (6) n fiind turaţia roţii, în rot/min, iar d diametrul roţii, în mm; frecvenţa îndoirilor, la înfăşurarea pe două roţi, cu viteza periferică v, în m/s şi lungimea curelei L, în mm, este: sau, în general 3 f = v 0 L, [/s] x fiind numărul de roţi pe care se îndoaie cureaua. f = x v 000 L, [/s] (7)
200 00 Funcţionarea transmisiei prin curea presupune apăsarea curelei pe roţi, obţinută prin întinderea curelei. Cureaua se montează pe roţi astfel încât să existe o forţă de întindere iniţială F 0. Între F 0 şi forţele din ramurile de curea F, (fig.3) există relaţia: F + =, [N]. (8) F F0 Fig. 3 Frecarea dintre roată şi curea, datorată apăsării curelei pe roţi asigură transmiterea unei forţe periferice F u forţă utilă de transmis: sau F u F u = F F, [N] (9) T 000 P = =, [N] (0) d v T fiind momentul de torsiune de transmis, N/m; P puterea de transmis, kw; d diametrul roţii motoare, m; v viteza periferică, în m/s. Aceste forţe provoacă tensiuni în curea, de forma: σ tu = σt σt şi σ t 0 = F 0 Ac, () sau μα ( e + ) σt0 = σtu + σ, () μα e ( ) tc în care A c este aria secţiunii transversale a curelei, mm ; iar σ tc tensiunea provocată de forţele centrifuge.
201 0 În baza relaţiilor de calcul a forţelor şi tensiunilor principale prezentate rezultă unele aspecte practice privind montarea, funcţionarea şi reglarea transmisiilor prin curele. Astfel: dependenţa dintre forţa respectiv tensiunea de întindere şi forţa utilă de transmis impune realizarea unei întinderi controlate a curelei, precum şi a unor verificări şi reglaje (datorită caracteristicilor mecanice reale de tip elasto/plastic al materialelor pentru curele; creşterea vitezei periferice are ca rezultat creşterea forţelor şi tensiunilor de întindere (prin forţele şi tensiunile centrifuge σ ); pentru un anumit material, în condiţii de funcţionare date, există un domeniu de întindere optimă, în baza următoarelor restricţii: μα μα - apare patinarea dacă σt0 < σtu ( e + ) ( e ) + σtc şi - apare ruperea dacă σ t0 > σt lim σtu, pentru σ t lim care se consideră caracteristicile limită ale curelei în structură compactă sau complexă. Pretensionarea transmisiei prin curele (întinderea curelei), realizează condiţia obligatorie pentru asigurarea funcţionării transmisiei prin curele care presupune apăsarea curelei pe roţi. Forţa de întindere iniţială F 0, este corelată cu forţele din ramurile de curea şi în funcţie de tipul curelei are relaţii specifice de calcul. Astfel pentru μα transmisiile prin curele POLY-V (cele de pe stand), unde e >> valoarea forţei de întindere iniţială F 0 este:,5 F Fc + m v K cu valori pentru coeficientul K date de relaţia: 0 =, [N] (3) α π [ ( 5 )] K =,5, (4) şi masa unitară m = ρ s b / 000, în kg/m; ρ densitatea materialului curelei, în kg/m 3 ; b lăţimea curelei, în m; s mărime caracteristică structurii curelei, în m; v viteza periferică, în m/s. Măsurarea forţei de pretensionare se poate realiza direct sau indirect, în funcţie de instalaţia experimentală. tc
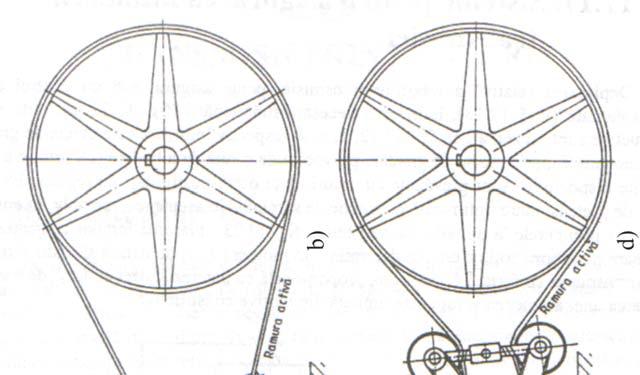
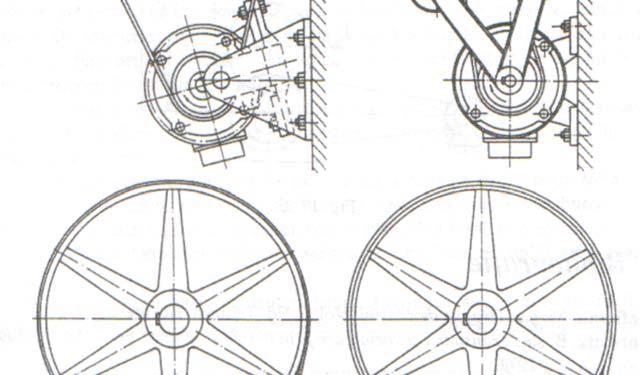
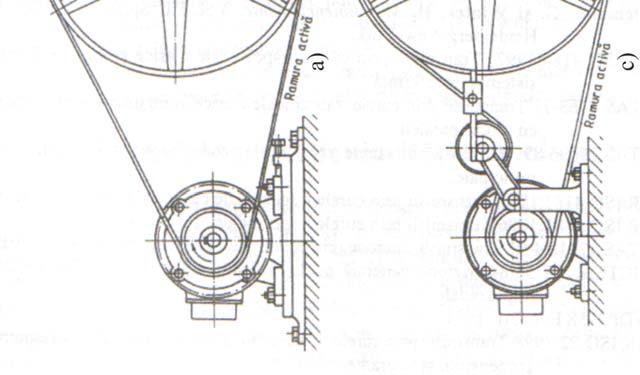
202 0 Fig. 4
203 03 Deoarece deformaţia elastică a curelei se transformă, în timp, în deformaţie remanentă, este necesară întinderea periodică a curelei pentru a fi tensionată la parametrii iniţiali. Întinderea curelei, necesară funcţionării, se realizează prin deplasarea relativă a arborilor transmisiei, sub un control deformaţie-solicitare. Soluţiile constructive în acest sens sunt multiple, unele dintre acestea fiind prezentate în figura 4: deplasarea unei dintre roţi odată cu motorul, pe patine, cu ajutorul şuruburilor (fig.4,a); întinderea prin greutate (fig.4,b); printr-o rolă de întindere (fig.4,c); prin role duble (fig.4,d), sau prin role de întindere acţionate de o greutate (fig.5,a) sau de un arc (fig.5,b) care oferă posibilităţi de reglare. Fig Descrierea aparaturii (standului experimental) Încercările experimentale se efectuează pe un montaj cu o transmisie prin curele POLY V, care, echipat cu o unitate de frânare şi încărcare PT500 şi setul PT500.0 Brüel & Kjaer Vibro, face posibilă studierea condiţiilor care duc la apariţia vibraţiilor şi a nivelului acestora. În figura 6 este prezentat montajul cu o curea POLY V dublă (de pe standul experimental), având role pentru reglarea întinderii curelei 9 pe fiecare curea. Roata conducătoare 5 (fulia mică) se montează pe arborele unităţii de bază. Roata condusă (fulia mare) este asamblată pe un lagăr cu rulmenţi. Reglarea forţei de întindere din curea se realizează prin rolele 9 şi şuruburile de reglaj 8, fixate în dispozitivul 0. Cureaua de transmisie POLY V, 3, poate fi înlocuită cu o curea de acelaşi tip deteriorată, iar roata motoare a transmisiei 5 poate fi înlocuită cu o fulie excentrică (B), în funcţie de tipul încercărilor experimentale. Realizarea încercărilor experimentale este posibilă prin includerea montajului în construcţia unui stand experimental prezentat în figura 7, dotat cu unitate de forţă, unitatea de încărcare/frânare şi setul PT500.0 Brüel & Kjaer Vibro cu senzorii de măsură. Legătura la unitatea de forţă se

204 04 realizează prin montarea fuliei mici 8 pe arborele scurt 7 al unităţii de forţă, iar prin cureaua (sau curelele) 4 şi fulia mare 3 se face cu dispozitivul de frânare/încărcare. Fig. 6. lagăr cu rulmenţi; fulie condusă; 3 curea POLY V; 4 întinzător; 5 fulie motoare; 6 şurub de fixare; 7 bucşă elastică; 8 şurub de reglaj al întinzătorului; 9 rola întinzătorului; 0 dispozitiv de fixare al întinzătorului; fulie mică, excentrică (B) Desfăşurarea lucrării Vibraţiile în transmisia prin curea se măsoară pe standul experimental prezentat în figura 7, în care este înglobat montajul cu curele POLY V (fig.6), parcurgând următoarele etape: se fixează unitatea de forţă, a standului experimental, pe placa de bază; se conectează motorul electric; se montează arborele scurt 7 pe cele două lagăre cu rulmenţi 9 şi se realizează legătura cu motorul electric prin intermediul cuplajului ;

205 05 a b Fig. 7 unitatea de forţă; cuplaj; 3 suport metalic; 4 suport magnetic; 5 senzor de reper; 6 marcaj de reflecţie; 7 arbore scurt; 8 fulie mică; 9 lagăre cu rulmenţi; 0 senzor de acceleraţie ; senzor de acceleraţie ; dispozitiv de frânare/încărcare; 3 fulie mare; 4 curea de transmisie; 5 dispozitiv de reglare a întinderii curelei. c
206 06 se fixează fulia mică 8 pe capătul liber al arborelui scurt, cu o bucşă elastică; se fixează fulia mare 3 pe arborele de intrare în unitatea de încărcare/frânare ; se montează cureaua POLY V, 4; se pretensionează (întinde) cureaua, prin poziţionarea rolelor 9 de reglare a tensiunii din curea (v. fig.6); reglarea tensiunii din curea se execută cu şurubul de reglaj al dispozitivului de reglare 5 a întinderii curelei; se măsoară forţa de întindere (pretensionare) a curelei, cu un dispozitiv din trusa de măsurare; se verifică apoi montajul executat prin acţionarea motorului la turaţie joasă; dacă curelele sar de pe rolele de (întindere) reglaj a tensiunii din curea, se corectează alinierea acestora şi întinderea curelei; se conectează frâna la unitatea de reglaj; se fixează senzorii de acceleraţie 0 şi pe lagărul cu rulmenţi şi respectiv pe frână; se ataşează discul 3 al suportului magnetic 4 pe placa de bază; se aliniază senzorul de referinţă 5 împreună cu suportul magnetic 4, la marcajul de pe curea; se aplică marcajul de reflexie 6 de pe arbore pentru senzorul de reper; se conectează senzorii la dispozitivul de măsurare a vibraţiilor. Următoarea fază este setarea senzorului de acceleraţie AS 00 conform datelor din tabelul, pe baza setărilor de referinţă din tabelul. Apoi se pot efectua măsurătorile. Setări pentru senzorul AS-00 la vibraţii Setare Setare Intrare Activ Activ Tipul senzorului De acceleraţie De acceleraţie Sensibilitate,0 mv/g,0 mv/g Unitate de măsură mm/s/eff mm/s/eff Domeniu de măsurare (0) variabilă (0) variabilă Domeniu de frecvenţă 0 00 Hz 0 00 Hz Numărul de linii Fereastra Hanning Hanning Tabelul
207 Tabelul Condiţii iniţiale de referinţă la senzorul AS-00 Referinţa externă Activă Nivelul de declanşare 50% Limita de declanşare Pozitivă Turaţia (frecvenţa) Hz Turaţia/referinţa / 07 Înainte de începerea măsurătorilor se închide capacul de protecţie. Apoi, etapele sunt următoarele: se porneşte unitatea de acţionare şi reglare a motorului electric; se verifică sensul de rotaţie; se reglează turaţia la valori care să producă valori întregi şi pare ale frecvenţei, evitându-se frecvenţele de rezonanţă; se porneşte unitatea de reglare a frânei; se reglează cuplul de frânare, cu ajutorul potenţiometrului; se acţionează frâna; se reglează cuplul de frânare; se înregistrează spectrul de frecvenţă cu ajutorul dispozitivului de măsurare, pentru montajul A. Înregistrarea spectrului frecvenţelor se efectuează pentru trei tipuri de montaje cu o curea POLY V, şi anume: A montaj cu o curea cu fulie centrică; B montaj cu o curea cu fulie excentrică; C montaj cu o curea POLY V deteriorată. Pentru montajul B, cu fulia mică excentrică, standul experimental este acelaşi, dar în acest caz senzorul de referinţă este aliniat la semnul de pe dosul curelei de transmisie POLY V (la fel ca pentru montajul A), iar parametrii regimului de măsurare sunt cei din tabelul 4 (nu se utilizează unitatea de frânare). Spectrul de frecvenţe (fig.8) se înregistrează pentru fiecare tip de montaj şi fiecare regim de măsurare (turaţie, încărcare, forţă de pretensionare a curelei) şi se pot compara. Pe spectrul de frecvenţă obţinut la fiecare măsurătoare, se pot determina valorile vitezei de oscilaţie (amplitudinii, A) pentru oscilaţiile fundamentale, f R (30 Hz) şi pentru armonica de ordinul, D f (60,3 Hz). Aceste date se înregistrează în tabelul 5 şi pot fi analizate.
208 08 Fig. 8 Tabelul 3 Nr. Montaj Date iniţiale Simbol UM crt. A B C. Tipul curelei POLY V SP. Distanţa axială a mm Diametrul fuliei mici d mm Diametrul fuliei mari d mm 5 5. Diametrul clemei de fixare D c mm 4 6. Lungimea curelei L mm 9 Tabelul 4 Nr. Montaj Parametrul Simbol UM crt. A B C. Tipul curelei POLY V SP Bună Bună Deteriorată. Turaţia (constantă) n rot/min Încărcarea (constantă) F A 0, Pretensionarea curelei F o N Frecvenţa îndoirilor curelei f Hz 6,5 6,5 6,5 Observaţie: Frecvenţa curelei f a fost calculată pentru dimensiunile montajului realizat.
209 09 La montajul C, cu o curea POLY V deteriorată, se parcurg etapele prezentate pentru montajul A, pe standul experimental prezentat, dar senzorul de referinţă se aliniază cu semnul de pe arbore (nu se utilizează unitatea de frânare). Dimensiunile principale ale transmisiei prin curele sunt date în tabelul 3, parametrii regimului de măsurare-în tabelul 4, iar datele măsurătorilor se înregistrează în tabelul 5. Tipul montajului Montaj cu o curea cu fulie centrică Montaj cu o curea cu fulie excentrică Montaj cu o curea POLY V deteriorată Oscilaţia fundamentală, Hz f, A, Hz mm Tabelul 5 Armonica de ordinul f, Hz A, mm 3.5. Concluzii Pe baza spectrelor de vibraţii şi a valorii amplitudinilor înregistrate, prin comparare se poate face o apreciere asupra influenţei diferiţilor factori (pretensionare, încărcare, turaţie, stare de uzare) asupra intensităţii vibraţiilor şi a funcţionării transmisiei prin curele, deci o apreciere calitativă a funcţionării transmisiei prin curele.
210
211 MECANISME
212
213 4. CUPLE CINEMATICE ŞI REPREZENTAREA STRUCTURALǍ A MECANISMELOR CU BARE 4.. Scopul lucrării Lucrarea are drept scop determinarea clasei unor cuple cinematice, reprezentarea schematică a acestora precum şi întocmirea schemelor cinematice şi structurale ale mecanismelor. 4.. Consideraţii teoretice Un solid rigid care intră în componenţa unui mecanism poartă numele de element cinematic. Două elemente cinematice, aflate în contact permanent printr-o legătură care să permită mobilitate pentru cel puţin unul dintre elemente, formează o cuplă cinematică. Cuplele cinematice reprezintă cea mai simplă combinaţie structurală care intră în construcţia mecanismelor şi care introduce anumite restricţii în mişcarea relativă a elementelor care o compun. Aceste restricţii poartă numele de condiţii de legătură şi se notează cu S. Un corp solid rigid liber în spaţiu are şase grade de libertate, respectiv poate să execute şase mişcări simple şi anume: trei mişcări de translaţie de-a lungul celor trei axe de coordonate (v x, v y, v z ) şi trei mişcări de rotaţie în jurul aceloraşi axe (ω x, ω y, ω z ). Dacă se notează cu L numărul mişcărilor simple care pot fi efectuate de către elementele cuplei cinematice şi cu S numărul condiţiilor de legătură introduse de cuplă, respectiv a mişcărilor suprimate, atunci se poate scrie: S = 6 L () Cuplele cinematice se împart în clase, clasa cuplei fiind dată de numărul S ( S 5) a mişcărilor suprimate de legătura realizată prin cuplă. În direcţia mişcării blocate cu ajutorul cuplelor, se pot transmite forţe F, dacă mişcarea blocată este de translaţie sau cupluri M dacă mişcarea blocată este de rotaţie. În tabelul sunt prezentate variantele reprezentative ale cuplelor cinematice din cele cinci clase. Mişcările permise de cuple sunt indicate prin săgeţi în raport cu un sistem de referinţă Oxyz legat de unul din elemente. De
214 4 Nr. crt. Numărul mişcărilor Exemple de cuple cinematice Tabelul Denumirea S L Clasa Schema constructivă Simbol cuplei Cuplă cinematică superioară ω y y ω x 5 I plană: o sferă ω z x v x pe un plan v z 4 II Cuplă cinematică superioară plană: un cilindru pe un plan z ω z z y v z ω y v x x III 4 4 IV 5 5 V Cuplă cinematică sferică Cuplă cinematică cilindrică Cuplă cinematică de rotaţie Cuplă cinematică de translaţie Cuplă cinematică elicoidală y z y ω y ω x ω z v x z ω x y z y v z x x ω x x x z y ω x x v x z
215 5 regulă mişcările permise de cuple sunt în ambele sensuri, dar prin convenţie, în reprezentările grafice se va indica un singur sens. Cupla cinematică elicoidală, formată dintr-un şurub şi o piuliţă (tabelul ), deşi permite efectuarea a două mişcări şi anume: translaţia şurubului de-a lungul axei sale şi rotaţia sa în jurul aceleiaşi axe, este de clasa a V-a, întrucât cele două mişcări nu sunt independente. Filetul, având pasul p şi unghiul de înclinare β al elicei pe cilindrul mediu de rază r, realizează o legătură impusă între viteza de translaţie v z şi viteza unghiulară de rotaţie ω z. Pentru a evidenţia legătura dintre cele două mişcări se desfăşoară elicea în plan, obţinându-se planul înclinat prezentat în figura. Unei rotaţii complete (π) îi corespunde o deplasare p, iar pentru o rotaţie cu unghiul φ, o deplasare z. Se poate scrie (fig.): p z β φr πr Fig. z p tanβ = = () ϕ r π r de unde: = p z ϕ = h ϕ (3) π z Derivând în raport cu timpul, rezultă: p v = z ωz = hz ω z π (4) Constanta h z reprezintă parametrul mişcării elicoidale sau deplasarea axială corespunzătoare unui unghi de rotaţie egal cu un radian. Relaţia (4) exprimă dependenţa celor două mişcări, rotaţie şi translaţie, în consecinţă cupla elicoidală este o cuplă de clasa a V-a. În cadrul schemelor structurale şi cinematice ale mecanismelor, cuplele cinematice sunt reprezentate prin simbolizări convenţionale (STAS ). În tabelul sunt reprezentate simbolurile celor mai utilizate cuple cinematice.
216 6 În componenţa maşinilor şi a mecanismelor, în foarte multe cazuri elementele cinematice sunt legate între ele prin cuple speciale compuse. În acest caz cele două elemente principale ale cuplei nu fac contact direct, ci între ele sunt intercalate elemente intermediare. Aceste cuple sunt subansamble sau organe de maşini complexe. Clasa cuplelor compuse se stabileşte prin echivalare, apreciind mişcările permise sau blocate ale elementelor cinematice principale. O mare diversitate de cuple compuse se întâlneşte la rulmenţi. Corpurile de rostogolire având forme geometrice de sferă, cilindru, trunchi de con sau butoi pot să se rostogolească pe căile de rulare prevăzute pe cele două elemente cinematice sau pe elemente intermediare fixate rigid de elementele cinematice. La stabilirea clasei unei cuple formată din rulmenţi nu se iau în considerare mişcările relative ale corpurilor de rulare faţă de suprafeţele de rulare şi colivie (convenţional), ci numai mişcările dintre elementele cinematice în care sunt montate inelul interior respectiv inelul exterior al rulmentului. y z zy 3 ω z ω y ω y ω x ω x ω y ω z x O x y O x y z x z x a. b. Fig. De exemplu, în figura,a este reprezentată o cuplă compusă, unde între elementele principale, arborele şi carcasa, sunt intercalate două rânduri de bile. Această cuplă reprezintă un rulment oscilant. Cupla echivalentă permite trei rotaţii şi blochează toate translaţiile, prin urmare este o cuplă de clasa a III-a.
217 7 În figura,b este reprezentată o cuplă compusă, la care între elementele principale, arborele şi carcasa, este intercalat un rând de role conice. Cupla reprezintă un rulment radial-axial cu role conice. Cupla echivalentă permite o mişcare de rotaţie (ω x ) şi blochează celelalte mişcări. Prin urmare, această cuplă este o cuplă de clasa a V-a. Uneori cuplele montate în mecanisme îşi schimbă clasa. Cauza schimbării clasei este faptul că elementele cinematice intră de obicei în componenţa diferitelor cuple cinematice. Dacă o cuplă analizată izolat permite anumite mişcări, atunci este posibil ca o parte dintre aceste mişcări să nu poată fi realizate datorită restricţiilor impuse de celelalte cuple din care face parte elementul. De exemplu, în figura 3, cupla cinematică formată de pistonul 3 şi batiul 4, considerată izolat este de clasa a IV-a, având blocate următoarele mişcări: v y, v z, ω y, ω z. Elementul 3, însă, face parte şi din cupla de rotaţie formată de biela şi pistonul 3, care blochează rotaţia pinionului în jurul axei Ox, prin urmare cupla de rototranslaţie devine în mecanism o cuplă de translaţie de clasa a V-a, având blocate cinci mişcări (v y, v z, ω z, ω x, ω y ). A ω y x B z 3 Fig Reprezentarea structurală a mecanismelor cu bare O reuniune de elemente cinematice legate între ele prin cuple cinematice formează un lanţ cinematic. Mecanismul se defineşte ca fiind lanţul cinematic închis care are un element fix sau considerat fix şi care se bucură de proprietatea că la o mişcare dată a elementului conducător sau elementelor conducătoare, pentru toate celelalte elemente rezultă mişcări univoc determinate. Pentru reprezentarea structurală a mecanismelor este necesar ca pe lângă cuple să fie cunoscută şi reprezentarea elementelor cinematice.
218 8 Elementele cinematice se reprezintă (STAS ) printr-un segment de dreaptă sau o figură geometrică poligonală nedeformabilă (fig.4). a. b. c. d. Fig. 4 De exemplu, în figura 4,a este reprezentat simbolizat un tachet cu talpă, în figura 4,b o bielă iar în figura 4,c o manivelă cu element triunghiular. Elementele fixe sau considerate fixe (batiurile) se marchează în reprezentări convenţionale prin câteva linii de haşură (fig.4,d). Schema structurală a mecanismelor constă din reprezentarea convenţională plană a elementelor cinematice componente şi a cuplelor cinematice echivalente. Pe baza schemelor structurale pot fi stabilite numărul de elemente cinematice, numărul şi clasa cuplelor cinematice precum şi gradul de mobilitate al mecanismului Desfăşurarea lucrării În vederea realizării lucrării vor fi utilizate machetele cu cuple cinematice şi mecanisme existente în laborator. Etapele de desfăşurare a lucrării sunt: se vor forma grupuri de studenţi în funcţie de numărul machetelor existente; se va distribui fiecărui grup câte o machetă de cuplă cinematică; se vor schiţa cuplele cinematice indicând prin săgeţi mişcările permise; se stabileşte clasa cuplelor cinematice; se va realiza reprezentarea simbolică a cuplelor cinematice; se vor schimba machetele de cuple cinematice între grupurile de studenţi astfel încât fiecare grup să analizeze toate machetele existente şi se vor urma aceleaşi etape ca la prima machetă; grupurilor de studenţi li se vor repartiza câte o machetă de mecanism; studenţii vor întocmi schema structurală convenţională, stabilind numărul elementelor, numărul şi clasa cuplelor cinematice.
219 5. STUDIUL STRUCTURAL AL MECANISMELOR PLANE 5.. Scopul lucrării Lucrarea are drept scop analiza structurală a unor mecanisme plane. 5.. Consideraţii teoretice Mecanismul este un lanţ cinematic închis la care un element este fix sau considerat fix şi care se bucură de proprietatea că, la o mişcare dată a elementului conducător sau a elementelor conducătoare, pentru toate celelalte elemente rezultă mişcări univoc determinate (se spune că este desmodrom). Un mecanism are elemente conducătoare, ale căror legi de mişcare în raport cu un batiu sau cu un alt element sunt cunoscute şi elemente conduse, ale căror legi de mişcare sunt determinate de legile de mişcare ale elementelor conducătoare. Gradul de mobilitate M al unui mecanism se defineşte ca fiind egal cu numărul mişcărilor independente pe care le poate primi din afară. Deoarece mecanismele provin din lanţuri cinematice la care s-a fixat un element, lanţul cinematic fiind o reuniune de elemente cinematice legate între ele prin cuple cinematice, atunci, gradul de mobilitate al mecanismului se va determina scăzând din numărul gradelor de libertate L ale lanţului cinematic cele şase mişcări blocate de batiu, deci: adică: unde: M = L 6 M = 6 n 5 C C C () 5 4 C4 3 C3 n numărul de elemente cinematice mobile ale mecanismului; C 5 numărul de cuple cinematice de clasa a V-a; C 4 numărul de cuple cinematice de clasa a IV-a; C 3 numărul de cuple cinematice de clasa a III-a; C numărul de cuple cinematice de clasa a II-a;
220 0 C numărul de cuple cinematice de clasa I. Relaţia () este cunoscută sub denumirea de formula structurală sau formula mobilităţii mecanismelor. Gradul de mobilitate al mecanismelor de diferite familii se poate determina astfel: Familia 0: unde: Familia : Familia : Familia 3: Familia 4: M 0 n 5 C5 4 C4 3 C3 = 6 C C () M n 4 C5 3 C4 = 5 C C (3) M n 3 C5 4 3 = 4 C C (4) M 3 n Mecanismele de familia m au formula: m M m = = 3 C C (5) M 4 = n C 5 (6) ( 6 m) n ( 5 m) C5 ( 4 m) C4 ( 3 m) C3 ( m) C ( m) C numărul mişcărilor simple suprimate simultan, prin construcţie, tuturor elementelor cinematice mobile din mecanism, adică familia sa: m = 0,,, 3, 4; n numărul de elemente cinematice mobile din mecanism. Relaţiile de mai sus, de calcul a gradului de mobilitate sunt valabile pentru mecanisme de familie întreagă, respectiv când m=0,,, 3, 4. Există însă, mecanisme a căror familie nu este întreagă. Un astfel de mecanism este compus din mai multe lanţuri cinematice independente, de familii diferite. Uneori, în structura unor mecanisme, pe lângă elementele cinematice şi cuplele cinematice care determină caracterul mişcărilor elementelor, mai pot interveni şi alte elemente, respectiv cuple cinematice care n-au nici o influenţă asupra mişcărilor celorlalte elemente. Asemenea elemente şi cuple cinematice (7)
221 se numesc pasive. Elementele şi cuplele cinematice pasive apar în construcţia mecanismelor şi maşinilor din motive constructive fiind necesare din punct de vedere dinamic, pentru îmbunătăţirea transmiterii forţelor, evitarea uzării premature etc. Prezenţa lor poate atrage după sine şi apariţia unor grade de libertate pasive. La determinarea gradului de mobilitate nu se vor lua în considerare legăturile pasive existente în mecanism. De exemplu, la mecanismul paralelogram (fig.), elementul cinematic CD şi cuplele cinematice C respectiv D sunt pasive, deoarece nu influenţează cu nimic mişcările celorlalte elemente cinematice. Introducerea lor în construcţia mecanismului se face cu scopul de a-i mări rigiditatea şi de a facilita transmiterea forţelor în condiţii mai bune. Pentru determinarea corectă a gradului de mobilitate al mecanismului din figura este necesar să se înlăture elementul pasiv precum şi cuplele cinematice pasive, deci: M = n C C = = Dacă, din neatenţie, nu s-ar elimina elementul pasiv, gradul de mobilitate ar fi M = = 0, ceea ce nu concordă realitatea, deoarece se vede că şi în prezenţa constructivă a elementului CD, mecanismul este desmodrom şi are un grad de libertate. A B C 4 3 D ω O A=O B O AB=O O =CD O Fig. Deci, pentru determinarea corectă a gradului de mobilitate al unui mecanism, este necesar să se determine corect familia din care face parte şi să se înlăture elementele cinematice şi cuplele cinematice pasive, precum şi gradele de mobilitate pasive.
222 Sesizarea elementelor, a cuplelor şi a gradelor de mobilitate pasive presupune cunoaşterea temeinică a funcţionării mecanismelor. Majoritatea mecanismelor plane sunt de familia 3. În structura acestor mecanisme pot intra cuple cinematice de clasa a V- a, de rotaţie şi translaţie, precum şi cuple cinematice superioare de clasa a IV- a, cu contact punctiform în plan. În vederea uşurării analizei cinematice şi dinamice a mecanismelor plane, cuplele cinematice superioare se înlocuiesc cu lanţuri cinematice ce conţin numai cuple cinematice de clasa a V- a. Mecanismul astfel obţinut poartă denumirea de mecanism înlocuitor sau echivalent. Înlocuirea cuplelor cinematice de clasa a IV- a trebuie făcută astfel încât să fie îndeplinite următoarele condiţii: a. Gradul de mobilitate al mecanismului înlocuitor să fie identic cu gradul de mobilitate al mecanismului iniţial (fără elemente pasive); b. Mişcările relative instantanee ale mecanismului înlocuitor să rămână aceleaşi ca şi la mecanismul iniţial. De exemplu, pentru mecanismul din figura, înlocuirea se va face în felul următor: în punctul de contact C al celor două profile ce formează cupla cinematică superioară ce urmează a fi înlocuită (fig.,a) se duce normala n-n la cele două profile; pe normala n-n se determină centrele de curbură C şi C ale profilelor (centrele cercurilor osculatoare), în care se pune câte o cuplă de rotaţie C şi C ; 3 n 3 C n C ω C A C B A C a. b. ω B Fig. se unesc cele două cuple printr-un element cinematic (elementul 3);
223 3 se unesc cuplele C şi C cu restul mecanismului (adică C cu A şi C cu B) obţinându-se mecanismul înlocuitor (fig.,b) al mecanismului dat. Deoarece, razele de curbură CC şi CC ale celor două curbe (fig.), deci şi C C, se modifică de la o poziţie la alta, mecanismul înlocuitor este valabil doar pentru o poziţie instantanee. Când curbele ce formează cupla cinematică superioară de clasa a IV-a sunt cercuri, atunci C C =const. şi mecanismul înlocuitor rămâne acelaşi pentru orice poziţie. Dacă unul din profilele care formează cupla superioară este o dreaptă, cum este cazul mecanismului cu camă cu tachet talpă (fig.3), se procedează analog, cu precizarea că în locul cuplei de rotaţie C, care ar trebui plasată la pe direcţia n-n, se va pune o cuplă de translaţie cu direcţia de mişcare perpendiculară pe n-n. În acest mod, mişcările relative dintre elementele cinematice ale mecanismului înainte (fig.3,a) şi după înlocuire (fig.3,b) rămân aceleaşi. n C C ω A 3 ω A n a. b. C 3 Fig. 3 Uneori, unul din cele două profile se reduce la un punct cum este cazul mecanismului cu camă cu tachet oscilant (fig.4,a). Procedeul de înlocuire al cuplei de clasa a IV-a rămâne acelaşi, cu sublinierea că centrul de curbură C al vârfului tachetului este chiar în punctul de contact.
224 4 3 n 3 C n C ω C A C B A C a. b. ω B Fig Clasificarea mecanismelor plane după criteriul grupelor cinematice. După înlocuirea cuplelor cinematice superioare, în structura mecanismelor plane de familia 3 se găsesc numai cuple cinematice de clasa a V-a, de rotaţie şi de translaţie. Formula gradului de libertate al acestor mecanisme poate fi pusă sub forma: M = 3 n C (8) Un mecanism poate fi descompus în grupe cinematice şi elemente motoare legate de batiu (adică elemente care introduc mişcarea în mecanism). La descompunerea unui mecanism în grupe cinematice, care este unică pentru un element motor precizat, trebuie avut în vedere faptul că un element sau o cuplă cinematică nu poate aparţine concomitent la două grupe. Prin definiţie, grupa cinematică este cel mai simplu lanţ cinematic cu gradul de mobilitate zero, respectiv dacă se leagă de batiu prin toate cuplele sale marginale se transformă într-o construcţie rigidă. Pe baza acestei definiţii (M = 0) din ecuaţia (8) rezultă relaţia de legătură între numărul de elemente cinematice şi numărul de cuple cinematice de clasa a V-a ce compun grupele cinematice, astfel: 3 n C5 = 0 5
225 Rezolvând în mulţimea numerelor întregi, această relaţie, se obţine: 5 n C Tabelul Clasa unei grupe cinematice este dată de numărul laturilor conturului închis cu cel mai mare număr de laturi din grupă. Ordinul grupei cinematice este dat de numărul cuplelor libere (marginale), cu care aceasta se leagă de batiu, de elementul conducător (motor) sau de alte grupe. Nr. crt. Aspectul grupei ( RRR) Grupe structurale de clasa a doua ordinul doi Schema C A B O A Tabelul Exemple de mecanism C A mecanismul patrulater ω B C B O ω ω O mecanismul pentagonal (RRT) A C O A ω C mecanismul bielă -manivelă 3 3 (RTR) A B O A ω B mecanismul cu patină oscilantă 4 4 (TRT) C C mecanismul tangentă O ω 5 5 (RTT) A O A ω mecanismul cosinus
226 6 Cele mai simple grupe cinematice au în structura lor două elemente cinematice şi trei cuple de clasa a V-a. Aceste grupe cinematice sunt de clasa a II-a şi de ordinul doi. După numărul şi poziţia cuplelor de rotaţie şi translaţie existente în structura grupelor cinematice, acestea pot fi de cinci aspecte (tabelul ). Grupele cinematice care au în structura lor patru elemente şi şase cuple cinematice de clasa a V-a sunt de clasa a III-a, ordinul 3 (fig.5,a). În structura acestor grupe pot intra cuple de clasa a V-a de rotaţie şi de translaţie, dar numai cu cuple de translaţie nu se pot forma asemenea grupe. În mod analog se pot forma grupe cinematice ce au în structura lor şase elemente şi nouă cuple cinematice (fig.5,b), opt elemente şi douăsprezece cuple cinematice (fig.5,c) etc. Fig Desfăşurarea lucrării În vederea desfăşurării lucrării se vor folosi machetele unor mecanisme simple existente în laborator. Etapele de lucru sunt: Se constituie grupe de studenţi în funcţie de numărul machetelor supuse spre analiză: a. Fiecărui grup i se atribuie spre analiză câte o machetă; b. Se studiază modul de alcătuire a fiecărui mecanism şi se notează numărul de elemente cinematice respectiv numărul de cuple cinematice;
227 7 c. Se identifică elementul motor; d. Se stabileşte şi se descrie modul de funcţionare al mecanismului; e. Se identifică gradele de libertate pasive precum şi legăturile pasive din structura mecanismului; f. Se întocmeşte schema cinematică a mecanismului; g. Se stabileşte familia mecanismului, se reprezintă mecanismul înlocuitor (dacă este cazul) şi apoi se determină gradul de mobilitate al mecanismului; h. Se descompune mecanismul în grupe cinematice, specificându-se clasa şi ordinul fiecărei grupe şi apoi clasa întregului mecanism.
228 6. ANALIZA CINEMATICĂ A MECANISMELOR PLANE CU AJUTORUL FUNCŢIILOR DE TRANSMITERE 6.. Scopul lucrării Lucrarea urmăreşte determinarea pe cale analitică, cu ajutorul funcţiilor de transmitere, a parametrilor cinematici pentru mecanismele plane, cu gradul de mobilitate. 6.. Consideraţii teoretice Analiza cinematică a mecanismelor constă în studierea mişcării elementelor din punct de vedere geometric fără a lua în considerare forţele care determină mişcarea. În cadrul analizei cinematice se urmăreşte rezolvarea următoarelor probleme: determinarea poziţiilor elementelor şi a traiectoriilor pe care le descriu punctele elementelor; determinarea vitezelor unghiulare ale elementelor şi a vitezelor liniare ale punctelor elementelor; determinarea acceleraţiilor unghiulare ale elementelor şi a acceleraţiilor liniare ale punctelor elementelor. Metodele de analiză cinematică pot fi: grafice, grafo-analitice şi analitice, ele utilizându-se în funcţie de precizia necesară. Metodele analitice sunt mai precise. O astfel de metodă este cea a funcţiilor de transmitere. Funcţiile de transmitere (de transfer) reprezintă acele funcţii care stabilesc o legătură între starea cinematică a unui element condus şi starea cinematică a elementului conducător (sau a elementelor conducătoare). Funcţia de transmitere de ordinul zero (funcţia de poziţie) R k ( q, q k ) se defineşte ca fiind funcţia care stabileşte legătura între parametrul q k care fixează poziţia elementului condus k şi parametrul q (coordonată independentă) care fixează poziţia elementului conducător. Această funcţie poate fi pusă sub forma: k ( q, q ) R 0 R () k k =
229 9 în care q, qk pot fi deplasări unghiulare (ϕ,ϕ κ ) sau deplasări liniare (s,s k ), după cum elementele şi k execută mişcări de rotaţie sau de translaţie. Funcţia R k ( q, q k ) = 0 este specifică unui anumit mecanism şi în ea intră ca nişte constante lungimile elementelor mecanismului. Derivând relaţia () în raport cu timpul se obţine: unde: Expresia q& k dqk q& k = ; dt = R & () k q dq q& = (3) dt Rk q R k = Rk (4) q k R k este funcţia de transmitere de ordinul întâi, ea stabileşte q& a elementului legătura între viteza q& k a elementului condus k şi viteza conducător. Derivând relaţia () de două ori în raport cu timpul se obţine: unde: R R = k k q q& k = R q& + & (5) k Rk q d qk q& k = ; dt d q q & = dt Rk + R k q q Rk q k k + ( R ) k R q R k este funcţia de transmitere de ordinul doi şi alături de Expresia funcţia de transmitere de ordinul întâi k k (6) (7) R k, stabileşte legătura între acceleraţia
230 30 q& & k a elementului condus k şi viteza q&, respectiv acceleraţia q& & ale elementului conducător. Determinarea vitezelor şi acceleraţiilor unui element condus este condiţionată de cunoaşterea funcţiilor de transmitere de ordinul întâi şi doi. Aceste funcţii se pot obţine prin efectuarea unor derivate parţiale ale funcţiei de transmitere de ordinul zero scrisă sub formă implicită. Funcţiile de transmitere de diferite ordine (zero, întâi, doi etc.) sunt caracteristici geometrice ale mecanismelor, ele putând fi determinate independent de starea cinematică a elementului sau a elementelor conducătoare. Funcţiile de transmitere de ordinul zero, în formă implicită, se pot obţine prin diferite metode. O posibilitate de determinare a acestora este scrierea ecuaţiei de închidere a fiecărui contur independent al mecanismului Analiza cinematică a mecanismului patrulater La mecanismul patrulater prezentat în figura, se consideră cunoscute viteza unghiulară ω şi acceleraţia ε ale elementului conducător. Se determină vitezele şi acceleraţiile unghiulare ale elementelor şi 3 ale mecanismului patrulater cu ajutorul funcţiilor de transmitere. y l A l ε ψ ω 3 ψ φ ψ O l O 4 4 φ δ δ Fig. Proiectând conturul poligonal O ABO pe cele două axe ale sistemului de coordonate Oxy se obţine: φ 3 l cosϕ + l cosϕ + l 3 cosϕ3 l 4 = 0 B l sin ϕ + l sin ϕ + l 3 sin ϕ3 l 3 = 0 x (8)
231 3 Eliminând din relaţia (8) pe ϕ 3 şi apoi pe ϕ se obţin funcţiile de transmitere de ordinul zero: R R ( ϕ ϕ ) = l + l l + l + l l cos( ϕ ϕ ) l l cos ϕ l l cos ϕ 0, = ( ϕ ϕ ) = l l + l + l + l l cos( ϕ ϕ ) l l cos ϕ l l cos ϕ 0 3, = Funcţiile de transmitere de ordinul întâi şi doi vor fi: R ϕ R = 3 R ϕ R = ; R R ϕ R = 3 ϕ R + R ϕ ϕ R ϕ R3 + R 3 ϕ ϕ R3 ϕ R ϕ 3 R 3 = (0) R ϕ 3 ( R ) ( R ) 3 R ϕ R ϕ 3 3 Derivând parţial relaţiile (9) în raport cu ϕ, ϕ şi ϕ 3 succesiv de două ori se determină valorile: R = l l sin sin ϕ ϕ ( ϕ ϕ ) + l l 4 R = l l sin sin ϕ ϕ ( ϕ ϕ ) + l l 4 (9) () R ϕ R ϕ ( ϕ ϕ ) + l l 4 cos = l l cos ϕ ( ϕ ϕ ) + l l 4 cos = l l cos ϕ
232 3 R ϕ ϕ ( ϕ ) = l l cos ϕ () R3 = l l 3 sin sin ϕ ϕ 3 ( ϕ ϕ3) + l l 4 R3 = l l 3 sin sin ϕ ϕ ( ϕ ϕ3 ) + l 3 l 4 3 R ϕ 3 R ϕ ( ϕ ϕ3) + l l 4 cos = l l cos ϕ 3 ( ϕ ϕ3) + l 3 l 4 cos 3 = l l cos ϕ R3 ϕ ϕ 3 3 ( ϕ ) = l l cos ϕ Înlocuind valorile acestor derivate parţiale în relaţiile (0) şi () se obţin funcţiile de transmitere: R R ( ϕ ) 3 ( ϕ ) l = l = R R ' ' 3 ( ϕ ) ( ϕ ) l = l l = l 3 l l l l 3 sin sin sin sin ( ϕ ϕ ) ( ϕ ϕ ) ( ϕ ϕ3) ( ϕ ϕ ) 3 l + l l + l sin ϕ sin ϕ sin ϕ sin ϕ 3 ; ; (3) [ l cos( ϕ ϕ ) l 4 cos ϕ] + l [ R ( ϕ) ] [ l cos( ϕ ϕ ) l 4 cos ϕ] l [ l sin( ϕ ϕ ) + l 4 sin ϕ] (4) [ l 3 cos( ϕ ϕ 3 ) l 4 cos ϕ] + l 3 [ R 3 ( ϕ )] [ l cos( ϕ ϕ3 ) l 4 cos ϕ3 ] l [ l sin( ϕ ϕ ) + l sin ϕ ] Unghiurile ϕ şi ϕ 3 se determină din figura : ϕ = δ δ ; ϕ 3 = 360 ψ = 360 ( ψ + ψ ). (5) Din triunghiurile ACO, ABO şi O AO se pot scrie relaţiile: 4 3
233 ψ = arctan l l sin ϕ ; l cosϕ 4 33 ψ l 3 + ΑΟ l = arccos l ΑΟ 3 ; (6) δ l + ΑΟ l = arccos l ΑΟ 3 ; ΑΟ = + l 4 l l cos l ϕ. Pe baza relaţiilor (6) şi a faptului că δ = ψ ecuaţiile (5) vor avea forma: l + l l 3 + l 4 l l 4 cosϕ l sin ϕ ϕ = arccos arctan ; l l + l 4 l l 4 cosϕ l 4 l cosϕ (7) o l l + l 3 + l 4 l l 4 cosϕ l sin ϕ ϕ3 = 360 arccos arctan l l + l l l cosϕ l 4 l cosϕ 3 4 Se poate determina viteza unghiulară şi acceleraţia unghiulară a elementului respectiv a elementului 3: ω = ω R 4 ε R = ω + ε R ω 3 = ω R 3 (8) ε R + ε 3 = ω 3 R3 Cunoscând ω, ε, ω3 şi ε 3 se poate determina viteza şi acceleraţia oricărui punct al elementului condus sau a elementului condus 3. De exemplu viteza şi acceleraţia punctului B va fi: v = ω Ο Β ; Β 3 a ; (9) ν τ Β = aβο + a ΒΟ ν τ a = ω Β O ; a = ε Β O. ΒΟ 3 ΒΟ 3
234 Analiza cinematică a mecanismului manivelă-piston Se consideră că elementul conducător este manivela O A iar elementul condus este pistonul 3 (fig.). y φ A O ω ε l φ 4 ψ l a B v B 3 l 4 B x Fig. zero. Proiectând conturul poligonal OAB pe cele două axe se obţine: l cosϕ + l cosϕ l 4 = 0 l sin ϕ + l sin ϕ = 0 După eliminarea lui ϕ se obţine funcţia de transmitere de ordinul ( ϕ l ) = l l + l l l cosϕ 0 R () 4, = Funcţiile de transmitere de ordinul întâi şi doi sunt: R4 ϕ R 4 = ; () R4 l 4 (0)
235 R R R 4 + ( R 4 ) ϕ ϕ l 4 l 4 R 4 =. (3) R4 l Derivatele parţiale ale funcţiei () vor fi: R4 = l l 4 sin ϕ ϕ 4 R4 = l 4 l cosϕ l R R ϕ 4 = l l cosϕ 4 (4) R 4 l 4 = R4 ϕ l 4 = l sin ϕ Înlocuind valorile acestor derivate parţiale în relaţiile () şi (3) se obţine: ( ϕ ) l l sin ϕ 4 R 4 = (5) l 4 l cosϕ [ R ( ϕ )] l sin ϕ + [ R ( ϕ )] l l 4 cosϕ R 4( ϕ ) = (6) l 4 l cosϕ Cursa s = l 4 rezultă din relaţia (): Viteza v Β şi acceleraţia relaţiilor () şi (5) cu formulele: = ϕ + l l 4 l cos l sin (7) ϕ a Β ale pistonului se determină, conform v = R (8) Β 4 ω
236 36 a = R (9) Β 4 ω + R4 ε 6.5. Desfăşurarea lucrării În cadrul lucrării studentul va primi un mecanism pentru care va face analiza cinematică prin metoda funcţiilor de transmitere, respectând următoarele etape: se întocmeşte schema cinematică a mecanismului pentru care urmează să se facă analiza cinematică; se determină dimensiunile elementelor mecanismului; se stabileşte legea de mişcare a elementului conducător; se calculează funcţiile de transmitere de ordinul unu şi doi pentru mecanismul considerat; se determină vitezele unghiulare ale elementelor mecanismului şi respectiv vitezele liniare ale punctelor mecanismului pentru poziţiile stabilite ale mecanismului, utilizând programul de calcul MathCAD; rezultatele obţinute se trec în tabelul. Tabelul Schema cinematică a mecanismului: Date iniţiale: ω = s - ; ϕ = º; l = mm; l = mm; l 3 = mm; l = mm. Nr. crt Caracteristica cinematică Relaţia de calcul 4 Rezultat
237 7. ANALIZA CINEMATICĂ A MECANISMELOR PLANE PE CALE GRAFO-ANALITICĂ 7.. Scopul lucrării Lucrarea urmăreşte determinarea pe cale grafo-analitică a parametrilor cinematici pentru mecanismele plane, cu gradul de mobilitate. 7.. Consideraţii teoretice Metodele grafo-analitice de analiză cinematică a mecanismelor plane asigură în general o precizie suficientă pentru necesităţile practice şi prezintă avantajul că dau o imagine clară şi generală despre mişcarea analizată. În vederea efectuării analizei cinematice este necesar să se cunoască schema structurală a mecanismului şi legea de mişcare a elementului sau elementelor conducătoare. Analiza cinematică a unui mecanism se va face pentru elementul conducător (mecanismul fundamental de clasa I) şi pentru grupele cinematice care îl compun. Cele mai expeditive şi mai intuitive metode de analiză cinematică sunt cele grafice, iar dintre acestea cea mai utilizată este metoda planelor de viteze şi a planelor de acceleraţii. Planele vitezelor şi acceleraţiilor se construiesc pentru o poziţie a mecanismului; schimbând poziţia elementului conducător, deci şi a mecanismului, se va schimba configuraţia planului vitezelor şi al acceleraţiilor. În vederea efectuării analizei cinematice este necesar să se întocmească schema structurală a mecanismului şi să se cunoască legea de mişcare a elementului conducător. Schema structurală scoate în evidenţă clasa cuplelor cinematice cu care se leagă elementele între ele şi de batiu, precum şi dimensiunile elementelor, care influenţează caracterul mişcării mecanismului. Legea de mişcare, în general, se dă sub forma unei relaţii, care exprimă deplasarea unghiulară sau liniară a elementului conducător în funcţie de timp. La început, este necesar să se facă analiza structurală prin care se stabileşte felul grupelor din care este format mecanismul şi ordinea în care acestea sunt legate între ele. În continuare, se face analiza cinematică pentru fiecare grupă în parte, începând cu grupa legată direct de elementul
238 38 conducător. O astfel de ordine în efectuarea analizei cinematice este impusă de faptul că este necesar să se cunoască poziţiile, vitezele şi acceleraţiile cuplelor cinematice prin intermediul cărora grupele se leagă unele de altele sau de batiu (grupele marginale). La reprezentarea grafică a schemei structurale se adoptă scara Scara k. l k reprezintă raportul dintre lungimea din natură a unui element l cinematic, exprimată în metri şi lungimea de pe desen a aceluiaşi element, exprimată în milimetri, adică k [m, din natură/mm, din desen]. l La reprezentarea grafică a vitezei unui punct de pe mecanism se adoptă scara k v. Scara k reprezintă raportul dintre viteza din natură a unui punct v exprimată în [m/s] şi lungimea de pe desen a aceleiaşi viteze, exprimată în [mm], adică k [m/s, din natură/mm, din desen]. Pentru reprezentarea grafică a v acceleraţiei unui punct de pe mecanism se adoptă scara k a. Scara k a reprezintă raportul dintre acceleraţia din natură a unui punct exprimată în [m/s ] şi lungimea de pe desen a aceleiaşi acceleraţii exprimată în [mm], adică k [m/s, din natură/mm, din desen]. a 7.3. Determinarea grafo-analitică a caracteristicilor cinematice ale elementelor şi punctelor elementelor pentru grupele de clasa II de diferite aspecte Se determină în prealabil, viteza şi acceleraţia unui punct notat cu C. În cazul grupelor cinematice de clasa II aspectele, şi 4 (tabelul ) un asemenea punct C este centrul cuplei de rotaţie interioară, iar în cazul grupelor de aspect 3 şi 5 punctul C este rigid legat de elementele care execută mişcarea de transport şi la momentul dat se suprapune cu una din cuplele de rotaţie. Pentru fiecare grupă se pot scrie câte două ecuaţii, care exprimă vitezele şi acceleraţiile punctului C în raport cu vitezele şi acceleraţiile punctelor B şi D aparţinând elementelor grupelor respective (tabelul ). În cazul în care punctele aparţin aceluiaşi element, pentru determinarea vitezelor şi acceleraţiilor se utilizează formulele lui Euler, iar când punctele aparţin la elemente diferite, dar la momentul dat se suprapun, se pot folosi ecuaţiile pentru viteze şi acceleraţii corespunzătoare mişcării relative. Astfel de relaţii se scriu pentru punctul C în raport cu punctele B şi D 4 (tab., coloana I, rândul 3) care aparţin elementelor, respectiv 4, la momentul dat punctele C şi D 4 suprapunându-se. La determinarea caracteristicilor cinematice ale grupelor se consideră cunoscute vitezele şi acceleraţiile tuturor punctelor rigid legate de elementele şi 4 (de care se leagă grupa respectivă), inclusiv ale punctelor B şi D.
239 Nr. crt. v = v + v C C B v = v + v a a C C D = a = a B D 39 Tabelul I II III IV V VI VII CB + a + a CD ν sau c CB ν sau c CD + a + a τ sau r CB τ sau r CD v CB v CD ω ω 3 sau a τ CB r a τ sau CD r a ν sau CB c ε a ν sau c ε 3 CD Aspectul B C 3 D 4 CB CD v CB l CB CB v CD l CD CD v l CB CB a τ CB l CB v l CD CD a τ CD l CD 3 Aspectul B C, D 4 x 3 x 4 CB xx v CB l CB CB ω4 vcd4 xx v l CB CB a τ CB l CB ω 4 ε 4 4 Aspectul 3 x B C 3 x 3 4 D xx BD ω 3 xx vc 3 v C3D l BD BD ω 3 ε 3 v l C3D C3D a l τ C D C D Aspectul 4 x B, D 4 C x y Aspectul 5 C 3 x 3 B, D 4 y x 3 y 4 y 4 xx xx yy yy ω v CB xx ω xx vc 3 ω4 vcd 4 yy ω4 v C 3D4 yy ω ε ω ε 3 3 ω 4 ε 4 ω ε 4 4
240 40 În tabelul, în coloana I, rândul, se dau în forma generală, ecuaţiile vectoriale cu care se pot determina vitezele şi acceleraţiile punctului C. Se menţionează că vectorii subliniaţi cu două linii sunt definiţi complet iar cei subliniaţi cu una singură se cunosc numai ca direcţie. În coloana I, rândurile, 3, 4, 5 şi 6 sunt reprezentate schemele cinematice ale grupelor de clasa II de ordinul de cele cinci aspecte. Dacă se utilizează ecuaţiile incluse în coloana I, rândul, pentru determinarea vitezelor şi acceleraţiilor punctului C 3 în cazul grupei de clasa, aspectul 5 (tab., coloana I, rândul 6) care la momentul dat se suprapune cu punctele B şi D 4, ale căror caracteristici cinematice sunt cunoscute, se pot scrie relaţiile: v = + ; v C = v 3 D + v 4 C3D ; 4 C vb v 3 C3B a = a + a + a ; a c r C3 B C3B C3B C 3 = a + a + a. Având în vedere că mişcările de transport ale elementelor şi 4 sunt plan paralele, respectiv de rotaţie apare acceleraţia Coriolis. Rezolvarea ecuaţiilor din coloana I, rândul (tab.) se face grafic prin construirea planelor vitezelor şi acceleraţiilor. Direcţiile vitezelor şi acceleraţiilor liniare pentru fiecare grupă sunt date în coloanele II şi III, iar formulele pentru determinarea valorilor numerice ale acceleraţiilor normale şi Coriolis sunt prezentate în coloanele IV şi V. Vitezele şi acceleraţiile unghiulare respective se obţin din coloanele VI şi VII. Tabelul, în care sunt prezentate toate cele cinci grupe cinematice de clasa a II-a şi diferite aspecte, dă toate formulele necesare la construirea planelor vitezelor şi acceleraţiilor, indicând totodată fazele şi succesiunea de utilizare a formulelor respective Exemplu Să se determine viteza şi acceleraţia punctului M a mecanismului bielă manivelă cu patină oscilantă (fig.), fiind date: viteza unghiulară a elementului conducător ω =constant, lungimile elementelor l, l AB, l BM, l MA şi unghiul ϕ. Mecanismul este reprezentat la scara k l [m/mm]; el este format dintr-o grupă de clasa II, aspectul 3. Planul vitezelor (fig.,b) şi planul acceleraţiilor (fig.,c) sunt construite la scara k v [ms - /m], respectiv k a [ms - /m]. Pentru construirea planului vitezelor se alege un pol p, iar la construirea planului acceleraţiilor se alege un pol p`. D 4 c C D 3 4 A O r C D 3 4 ()
241 4 Viteza punctului A este va = l O ω A. Segmentul pa din planul vitezelor se obţine astfel: v k A pa = [mm] () Pentru rezolvarea grupei de aspectul 3 din punct de vedere cinematic se scriu ecuaţiile: v vc = va + v C A v = v + v C O CO Rezolvând grafic aceste ecuaţii vectoriale se determină mărimea, direcţia şi sensul vitezei v C şi modulele şi sensurile vitezelor vc A şi v C O. =0, deoarece elementul se leagă prin articulaţie la batiu. Vitezele v O punctelor B şi M se determină prin metoda asemănării: (3) M B A C 3 O O ω φ a. p,o AB m b c AB b` m` c` nc A a` c C O O p`,o` c aco a b. c. d. v C O ω Fig.
242 4 ( ca) ( ba) ( ) ( ) ( BA) = ba = ca, (4) ( CA) ( BA) ( CA) şi deoarece ΔABM Δabm, rezultă: ( ab) ( AB) = ( am) ( AM ) = ( bm) ( BM ) şi ( ) ( ) ( AM am = ab ) ( AB) Valorile reale ale acestor viteze vor fi; v v ( pc ) kv C = ; C A = ( c a) kv ; CO ( co ) kv vc ( ) ( ) ( BM bm = ab ) ( AB) (5) v = = ; (6) v v B M ( pb) kv = ; ( pm) kv =. Acceleraţia punctului A este acceleraţiilor se obţine astfel: a p = k a a l ω. Segmentul p a din planul A = O A A a [mm] şi AO a A (7) Acceleraţia punctului C se determină prin rezolvarea grafică a următoarelor ecuaţii vectoriale: a r A C a C ν τ = aa + ac A + a C A a c r C = ao + ac O + a CO τ În ecuaţiile de mai sus a O = 0. Se cunosc sensurile lui a C A AB şi AB. Acceleraţia normală ( ac ) ( ) v ν C A ac k A = = a AC AC planul acceleraţiilor aceasta e reprezentată prin segmentul orientat şi ν a C A AB. În. a n C A (8)
243 43 v c C A Acceleraţia Coriolis ac O = ω 3 vc O = v CO. Direcţia şi AC sensul acceleraţiei Coriolis se determină prin rotirea vitezei relative v C O cu 90º (fig.,d) în sensul vitezei unghiulare de transport ω. În planul acceleraţiilor acceleraţia Coriolis e reprezentată de segmentul p c C O. Acceleraţiile punctelor B şi M se determină prin metoda asemănării: de unde: ( a c ) ( AC ) = ( a b ) ( AB) ( a b ) = ( a c ) ( a b ) ( AB) ( a m ) ( AM ) ( AB) ( AC ) ( b m ) ( BM ) Δ ABM Δa b m = =, ( ) ( ) ( BM b m = a b ) şi ( ) ( ) ( AM a m = a b ) ( AB) ( AB) (9). (0) Mărimile scalare ale acceleraţiilor se determină cu relaţiile: a p c k a a ( ) a C = ; ( nc Ac ) k a ( cc O c ) ka τ C A = ; r C O = ; () a a B M ( p b ) ka = ; ( p m ) ka = Desfăşurarea lucrării În cadrul lucrării studentul va primi un mecanism pentru care va face analiza cinematică prin metoda grafo-analitică, respectând următoarele etape: se adoptă scara lungimilor k l şi se întocmesc la scară, schema cinematică şi cea structurală a mecanismului pentru care urmează să se facă analiza cinematică; se face analiza structurală a mecanismului, determinându-se clasa şi aspectul grupelor care formează mecanismul, ordinea în care
244 44 acestea sunt legate între ele, stabilindu-se în acelaşi timp ordinea în care trebuie să se facă analiza cinematică; se stabileşte legea de mişcare a elementului conducător; se calculează viteza periferică a butonului manivelei A, care reprezintă viteza cuplei cinematice de legătură cu manivela a primei grupe cinematice din mecanismul considerat; se adoptă polul vitezelor p, scara vitezelor k v şi se reprezintă la această scară viteza punctului A, prin segmentul pa; se scriu ecuaţiile vectoriale ale vitezelor punctelor grupei pentru care se face analiza cinematică; se rezolvă grafic ecuaţiile vitezelor punctelor, construind planul vitezelor, determinându-se astfel vitezele liniare ale punctelor mecanismului pentru poziţia stabilită a mecanismului şi se calculează vitezele unghiulare ale elementelor mecanismului; rezultatele obţinute se trec în tabelul. se calculează acceleraţia normală a butonului manivelei A, care reprezintă acceleraţia cuplei cinematice de legătură cu manivela a primei grupe cinematice din mecanismul considerat; se adoptă polul acceleraţiilor p, scara acceleraţiilor şi se reprezintă la această scară acceleraţia punctului A prin segmentul p a ; se scriu ecuaţiile vectoriale ale acceleraţiilor punctelor grupei pentru care se face analiza cinematică; se rezolvă grafic ecuaţiile acceleraţiilor punctelor, construind planul acceleraţiilor, determinându-se astfel acceleraţiile liniare ale punctelor mecanismului pentru poziţia stabilită a mecanismului şi se calculează acceleraţiile unghiulare ale elementelor mecanismului; rezultatele obţinute se trec în tabelul.
245 45 Tabelul Schema cinematică a mecanismului: Date iniţiale: ω = s - ; ϕ = º; l = mm; Nr. crt Caracteristica cinematică Relaţia de calcul l l l 3 4 = = = mm; mm; mm. Rezultat
246 8. ECHILIBRAREA DINAMICĂ (ÎN DOUĂ PLANE) 8.. Scopul lucrării Lucrarea are drept scop prezentarea unei metode de echilibrare dinamică (în două plane) a organelor de maşini în mişcare de rotaţie, prin măsurarea vibraţiilor produse de dezechilibrul pieselor. 8.. Consideraţii teoretice Echilibrarea mecanismelor şi a maşinilor are ca scop anularea sau micşorarea acţiunii dăunătoare a forţelor de inerţie. Forţele de inerţie au mărimi şi direcţii variabile. În consecinţă, în cuplele cinematice (lagăre), în elementele mecanismului, în fundaţia maşinii, apar solicitări dinamice. Deci pe lângă solicitările statice, la dimensionare trebuie să se ţină seama şi de cele dinamice, fapt care ar conduce la dimensiuni mai mari, la materiale speciale şi mai scumpe. Forţele de inerţie variază periodic, rezultând astfel vibraţii atât în maşină cât şi în fundaţie. În cazul când, la un moment dat, frecvenţa oscilaţiilor forţate cauzate de forţele de inerţie (forţa perturbatoare) coincide cu frecvenţa oscilaţiilor proprii ale unui element, mecanism sau maşină, apare fenomenul de rezonanţă mecanică, ceea ce poate duce la ruperea elementului sau distrugerea legăturilor dintre elementele mecanismului. În consecinţă, în practică trebuie folosite mecanisme şi maşini echilibrate Echilibrarea organelor de maşini în mişcare de rotaţie În diferite maşini sau mecanisme există o serie de organe de maşini (manivele, came, roţi dinţate etc.) care execută mişcări de rotaţie în jurul unor axe fixe. Datorită neomogenităţii materialului, a impreciziei de prelucrare a toleranţelor de montaj, este posibil ca axa principală de inerţie să nu coincidă cu axa de rotaţie. Dezechilibrul pieselor duce la apariţia forţelor de inerţie şi a momentelor forţelor de inerţie care produc vibraţii şi încarcă suplimentar lagărele şi arborii. Toate aceste fenomene trebuie eliminate în cazul mecanismelor şi a maşinilor, în special a celor cu turaţie ridicată, prin echilibrarea pieselor ce se rotesc. Echilibrarea este o problemă inginerească
247 47 foarte importantă, care trebuie avută în vedere de la proiectare până la asamblarea finală şi apoi în exploatare. Se presupune că un corp (fig.), la care centrul de greutate situat pe axa principală nu se află şi pe axa de rotaţie (axa fusurilor şi a lagărelor). La mişcarea de rotaţie a corpului apare o forţă de inerţie radială (centrifugală) dată de relaţia: = e ω F e m () unde: m e ω masa corpului, excentricitatea (distanţa radială de la axa de rotaţie la centrul de greutate a piesei); viteza unghiulară. C e Fig. Această forţă este echilibrată de reacţiunile care apar în lagăre. Suma algebrică a reacţiunilor este egală cu forţa centrifugală, sensul acestora fiind opus ei. Pentru anularea acestor reacţiuni este necesar ca centrul de greutate să fie adus pe axa de rotaţie (axa fusurilor), ceea ce s-ar putea realiza în mai multe moduri: a) se modifică fusurile în aşa fel încât axa lor să coincidă cu axa ce trece prin centrul de greutate, lucru dificil de realizat practic; b) este mai simplu să se deplaseze centrul de greutate pe axa de rotaţie, adăugând mase suplimentare la masa corpului. În acest scop, ţinând seama de relaţia () rezultă: m s r = m e () unde: m s masa suplimentară (adăugată); r distanţa la care se găseşte această masă faţă de axa de rotaţie. Echilibrarea prin care se realizează coincidenţa dintre centrul de greutate al corpului şi axa de rotaţie se numeşte echilibrare statică sau într-un singur plan. Un corp echilibrat static nu se va roti dacă se află numai sub
248 48 influenţa gravitaţiei. El poate fi rotit în orice poziţie şi, lăsat liber, va rămâne nemişcat în această nouă poziţie. Dacă corpul nu este echilibrat static, atunci din orice poziţie, el va tinde să se rotească astfel încât centrul de greutate va ocupa poziţia cea mai de jos posibilă (fig.). În practică se poate utiliza echilibrarea statică, în cazul când mişcarea de rotaţie se produce cu n < rot/min şi B/D <,5, unde D este diametrul piesei iar B este lăţimea ei. Fig. Dacă pe arborele care se roteşte se montează diferite piese (pinioane, şaibe, manivele, etc.) este necesar să se facă o echilibrare dinamică (în două plane). Pentru a obţine o echilibrare perfectă în cazul unui corp echilibrat static, axa principală de inerţie trebuie rotită în jurul centrului de greutate până când se suprapune peste axa de rotaţie. Această rotire se poate realiza îndepărtând sau adăugând două mase suplimentare, de mărime egală la masa iniţială a corpului. În acest scop se aleg două plane radiale în aşa fel încât să se producă un cuplu. Planele se aleg la distanţă cât mai mare unul de altul, pentru a reduce cât mai mult mărimea maselor aplicate. Dacă un corp este echilibrat dinamic, prin definiţie, el este echilibrat şi static; reciproca însă nu este adevărată. Echilibrarea dinamică a diferitelor organe de maşini care execută mişcări de rotaţie, se face pe maşini speciale. Cu ajutorul acestora se pot determina masele care trebuie plasate în planele I şi II pentru echilibrarea piesei Descrierea aparaturii În vederea realizării lucrării se va utiliza Sistemul de diagnoză al organelor de maşini modulul de bază PT 500 cu montajul prezentat în figura (fig.3). Montajul experimental pentru echilibrarea dinamică (în două plane) este prezentat în figura 3 şi este format din:, 5 greutăţi,, 6 senzori de acceleraţie montaţi pe lagărele cu rulmenţi pe care este rezemat arborele lung utilizat la această echilibrare, 7 cuplaj elastic, 8 motorul de antrenare. Acest montaj se realizează în felul următor:

249 Se fixează motorul de antrenare 8 pe masa standului; Se conectează motorul de antrenare; 49 a. b. Fig. 3
; Se cuplează motorul de antrenare 8 cu arborele lung prin intermediul cuplajului elastic; Se verifică alinierea şi se fixează lagărele cu rulmenţi astfel încât să se lase aproximativ 0 mm faţă de")
250 50 Fig. 4 Se montează liber arborele lung din modulul de bază, coaxial (aliniat) cu motorul de antrenare, cele două lagăre cu rulmenţi şi între ele cele două greutăţi gradate şi 5 (fig.4); Se cuplează motorul de antrenare 8 cu arborele lung prin intermediul cuplajului elastic; Se verifică alinierea şi se fixează lagărele cu rulmenţi astfel încât să se lase aproximativ 0 mm faţă de umărul arborelui şi faţă de greutăţi. Se aliniază lagărele cu rulmenţi astfel încât găurile filetate orizontale pentru senzorii de vibraţii să fie toate înspre utilizator; Se montează senzorii de acceleraţie (fig.5) (de preferinţă în găurile filetate din partea superioară a lagărelor cu rulmenţi) şi se conectează prin intermediul unui amplificator la calculatorul pe care în prealabil s-a instalat placa de achiziţii de date şi softul necesar prelucrării acestor date; Se aplică timbrul argintiu 9 de referinţă pe greutate astfel încât să fie plasat la 0º faţă de senzorul optic utilizat pentru măsurarea turaţiei;

251 5 9 Fig. 5 Se conectează senzorul de referinţă la calculator şi se ataşează cu suportul magnetic la stand folosind placa metalică; Se aliniază senzorul de referinţă la timbrul Desfăşurarea lucrării Vibraţiile produse de dezechilibru se măsoară la lagăre cu ajutorul senzorilor de acceleraţie şi 5. Atenţie! Întotdeauna trebuie închis capacul de protecţie înainte de pornirea instalaţiei. Echilibrarea dinamică, cu montajul prezentat anterior, se realizează parcurgând următoarele operaţii:. Funcţionare iniţială Se porneşte motorul de antrenare şi se reglează turaţia între limitele rot/min;


252 5 se deschide aplicaţia PT 500 (din desktop); din meniul Kind of test se alege varianta Plane Balancing ; După înregistrarea măsurătorilor pe ecranul calculatorului se obţine imaginea prezentată în figura 8, cu detaliile din figurile 6, 7, 9, 0 şi ; Fig. 6 Fig. 7
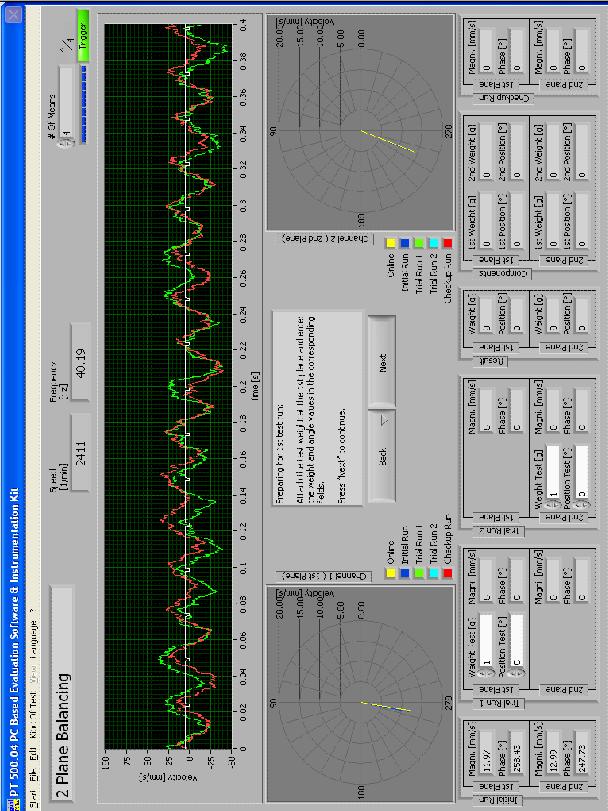
253 53 Fig. 8

 şi în vederea aplicării lui (etapa a doua) se aduce turaţia la zero şi se opreşte")

254 54 Fig. 9 Fig. 0 Fig. se porneşte calculatorul care conţine softul utilizat pentru măsurarea şi înregistrarea mărimilor ce urmează să fie studiate în cadrul lucrării, se citeşte mesajul care apare (fig.) şi în vederea aplicării lui (etapa a doua) se aduce turaţia la zero şi se opreşte motorul de antrenare;. Funcţionare de testare Se montează în primul plan o greutate de dezechilibrare de testare (,6 g, 35º), înregistrându-se automat în căsuţele corespunzătoare valoarea acesteia şi unghiul la care a fost montată (fig. şi 5);
255 55 Fig.


256 56 Fig. 3 Fig. 4 Fig. 5

257 57 Fig. 6 Fig.7 Se porneşte motorul de antrenare şi se reglează turaţia între limitele rot/min; După înregistrarea măsurătorilor pe ecranul calculatorului se obţine imaginea prezentată în figura, cu detaliile din figurile 3, 4, 5, 6 şi 7; Se citeşte mesajul care apare (fig.7) şi în vederea aplicării lui (etapa a treia) se aduce turaţia la zero şi se opreşte motorul de antrenare. 3. Funcţionare de testare Se montează în al doilea plan greutatea de dezechilibrare de testare (,4 g, 80º), înregistrându-se automat în căsuţele corespunzătoare valoarea acesteia şi unghiul la care a fost montată (fig.8 şi ); Se porneşte motorul de antrenare şi se reglează turaţia de la zero la 400 rot/min; După înregistrarea măsurătorilor pe ecranul calculatorului se obţine imaginea prezentată în figura 8, cu detaliile din figurile 9, 0,, şi 3; Se citeşte mesajul care apare (fig.3) şi pentru aplicarea lui (etapa a treia) se aduce turaţia la zero şi se opreşte motorul de antrenare.
258 58 Fig. 8


259 59 Fig. 9 Fig. 0 Fig.
 iar în planul 0,9 g la 66,3º (cu componentele 0,54 g la 60º şi")

260 60 Fig. 4. Funcţionare de verificare Fig. 3 Se montează greutăţile calculate în cele două plane şi anume: în planul 3,4 g la 95,7º (cu componentele, g la 85º şi,33 g la 300º) iar în planul 0,9 g la 66,3º (cu componentele 0,54 g la 60º şi 0,39 g la 75º) şi se îndepărtează greutatea de dezechilibrare de testare din planul II; Se porneşte motorul de antrenare şi se reglează turaţia între limitele rot/min; După înregistrarea măsurătorilor pe ecranul calculatorului se obţine imaginea prezentată în figura 4, cu detaliile din figurile 5, 6, 7, 8 şi 9; Se citeşte mesajul care apare (fig.9) de unde rezultă dezechilibrul rezidual şi se compară cu cel iniţial. Se poate constata uşor că în planul I acesta a scăzut de ~ 4 ori iar în planul II de ~ 3 ori; Se vor trece datele înregistrate pe ecran în tabelul şi se vor trasa diagramele cu vectorii vibraţie corespunzători fiecărei etape de lucru pentru cele două plane, după exemplul din figurile 5 şi 6. Se vor face aprecieri legate de gradul de realizare al echilibrării.
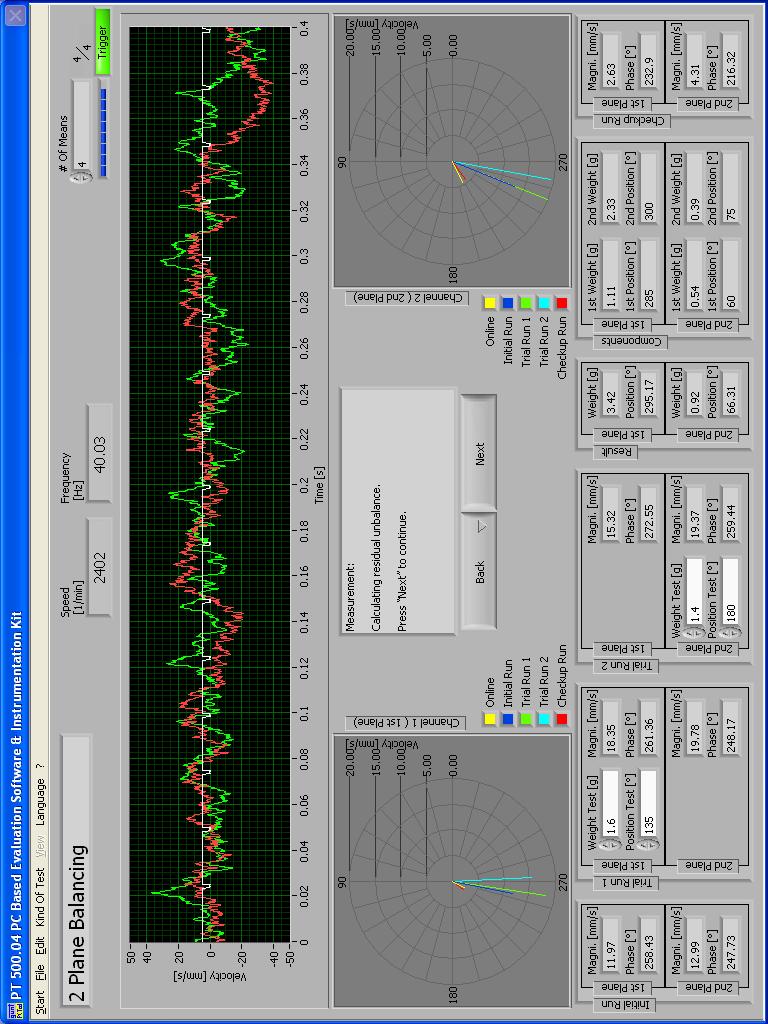
261 6 Fig. 4

262 6 Fig. 5 Fig.6 Fig. 7


263 63 Fig. 8 Fig. 9 Nr. crt Etapa Funcţionare iniţială Funcţionare de testare Funcţionare de testare Funcţionare de verificare Plan I II I II I II I II Tabelul Dezechilibru Iniţial De testare Rezidual Mărime Faza Mărime Faza Mărime Faza [mm/s] [ 0 ] [mm/s] [ 0 ] [mm/s] [ 0 ]
264 9. DETERMINAREA CARACTERISTICILOR MASICE ŞI INERŢIALE PENTRU ELEMENTELE MECANISMULUI PATRULATER PLAN 9.. Scopul lucrării Studiul dinamicii mecanismelor implică cunoaşterea forţelor şi momentelor care acţionează asupra mecanismului, precum şi a valorilor caracteristicilor masice şi inerţiale pentru fiecare element al mecanismului. În cadrul acestei lucrări se vor determina valorile caracteristicilor masice şi inerţiale pentru fiecare element al unui mecanism patrulater plan. Pentru determinarea valorilor menţionate se vor utiliza aplicaţii moderne pe calculator în domeniul CAD 3D. 9.. Consideraţii teoretice 9... Ecuaţia de mişcare a mecanismului Pentru stabilirea ecuaţiei de mişcare a mecanismului se vor utiliza noţiunile: forţa redusă, respectiv momentul redus este o forţă, respectiv un moment fictiv, care acţionând asupra unui element al mecanismului, numit element de reducere, dezvoltă aceeaşi putere ca şi întregul sistem de forţe şi momente ce acţionează asupra mecanismului. masa redusă într-un punct oarecare al unui mecanism este o masă fictivă considerată concentrată în acel punct, care în timpul mişcării punctului de reducere dezvoltă o energie cinetică Ec egală cu suma energiilor cinetice ale tuturor elementelor mecanismului. Momentul de inerţie redus al unui mecanism este un moment de inerţie fictiv, care în timpul mişcării elementului de reducere dezvoltă o energie cinetică Ec egală cu suma energiilor cinetice ale tuturor elementelor mecanismului. Notaţii utilizate (fig.):
265 65 F r, M r forţa, respectiv momentul redus; m r, I r masa redusă, respectiv momentul de inerţie redus; v A, ω viteza punctului A de aplicaţie a forţei reduse, respectiv viteza unghiulară al elementului de reducere; v Gk viteza centrului de greutate G k a elementului k care execută o mişcare generală plană; ω k viteza unghiulară a elementului k în mişcare generală plană; F i, M j forţa, respectiv momentul care acţionează asupra elementului i, respectiv j; α i unghiul dintre vectorii Fi respectiv v i ; m k, I Gk masa, respectiv momentul de inerţie mecanic în raport cu o axă ce trece prin centrul de greutate al elementului k; n numărul de forţe care acţionează asupra elementelor mecanismului; v A F r v i α i F i A k ω M r ω j G k O O M j j Fig. n n 3 n 4 n 5 numărul de momente care acţionează asupra elementelor mecanismului; numărul de elemente ale mecanismului care execută mişcare de translaţie; numărul de elemente ale mecanismului care execută mişcare de rotaţie; numărul de elemente ale mecanismului care execută mişcare generală plană.
266 66 Ţinând seama de notaţiile utilizate, relaţiile de calcul pentru forţa redusă, momentul redus, masa redusă şi momentul de inerţie redus sunt: = = ω + α = cos n j A j j n i A i i i r v M v v F F () = = ω ω + ω α = cos n j j j n i i i i r M v F M ; () = = = ω + + ω + = n k A k G k A Gk k n j A j Oj n i A i i r v I v v m v J v v m m ; (3) = = = ω ω + ω + ω ω + ω = 3 n k k G k Gk k n j j Oj n i i i r I v m J v m J. (4) Pentru a obţine ecuaţia diferenţială de mişcare al mecanismului se aplică teorema energiei cinetice pentru elementul redus: de C =dl (5) În relaţia (5) C de reprezintă variaţia elementară a energiei cinetice a elementului de reducere la o deplasare elementară a acestuia, energia cinetică calculându-se cu relaţia: A r C v m E =, (6) în cazul în care elementul de reducere execută mişcare de translaţie. În cazul în care elementul de reducere execută mişcare de rotaţie, energia cinetică se va calcula cu formula: ω = r C I E. (7) Lucrul mecanic elementar efectuat de forţa sau momentul redus (în timpul deplasării elementare) se calculează cu următoarele relaţii: F ds dl r =, (8) dacă elementul de reducere execută mişcare de translaţie, = dϕ M dl r, (9)
267 67 dacă elementul de reducere execută mişcare de rotaţie. Dacă elementul de reducere efectuează mişcare de rotaţie atunci în baza relaţiilor (5) şi (7) se poate scrie: Integrând relaţia (0) se obţine: d Ir ( ϕ ) ω = M r ( ϕ ) dϕ. (0) ϕ ϕ Ir ( ϕ ) ω Ir ( ϕ0 ) ω0 = M r ( ϕ ) dϕ. () În relaţia () ω 0,ϕ0 reprezintă viteza unghiulară iniţială, respectiv poziţia iniţială a elementului de reducere iar ω are următoarea semnificaţie: ω dϕ dt & = = ϕ Integrând ecuaţia diferenţială () se obţine: t = ϕ ϕ 0 I r ( ξ) I r ( ϕ ) 0 dξ ω 0 + ξ ϕ 0 0 M r () ς dς () (3) După integrare, din relaţia (3) se obţine o ecuaţie algebrică transcendentă, care exprimă poziţia în funcţie de timp a mecanismului: ϕ = ϕ ). (4) ( t 9... Determinarea caracteristicilor masice ale elementelor mecanismului Pentru calculul masei reduse m r sau a momentului de inerţie redus I r, aşa cum rezultă din relaţiile de definiţie ale acestora (3) şi (4), este necesar să se determine masele elementelor în mişcare de translaţie, precum şi momentele de inerţie ale elementelor în mişcare de rotaţie sau în mişcare generală plană. În continuare se prezintă modul de calcul al momentelor de inerţie. În figura este reprezentat un element oarecare al unui mecanism. Poziţia centrului de greutate G (fig.), de coordonate x G, y G în raport cu sistemul de referinţă Axy legat de element, se calculează cu următoarele formule:
268 68 y Axa principală de inerţie Y y α x G x y G x G Axa principală de inerţie A Elementul O X Fig. x y G G xdm = D m ; (5) ydm = D m (6) În relaţiile (5), (6) m reprezintă masa elementului, iar dm este elementul infinitezimal de masă. Momentele de inerţie axiale I x, I y şi momentul centrifugal I xy, faţă de sistemul de referinţă Gxy (fig.) legat de element se calculează cu următoarele formule: I x = y dm ; (7) D I y = x dm ; (8) D I = yxdm. (9) xy D
269 69 Unghiul α dintre axa principală de inerţie (fig.) Δ şi axa Gx are următoarea expresie: I xy tan α =. (0) I y I x În sistemul de referinţă G Δ Δ (fig.) momentul de inerţie centrifugal se anulează, iar energia cinetică al elementului se va calcula cu formula: E = I ω + m () C 3 v G În relaţia () v G reprezintă viteza centrului de greutate, ω viteza unghiulară a elementului, iar I 3 este momentul de inerţie principal în raport cu axa ce trece prin G, perpendicular pe planul de mişcare şi se calculează cu următoarea formulă: I 3 = I x + I y. () Dinamica mecanismului patrulater Pentru conturul închis (fig.3) O ABO se poate scrie următoarea relaţie vectorială: O A + AB + BO + O O 0. (3) = Explicitând relaţia (3) după cele două axe se obţin relaţiile: l cosϕ + l l sin ϕ + l cosϕ sin ϕ + l + l 3 3 cosϕ sin ϕ 3 3 l = 0. 4 = 0; (4) Din relaţia (4) se obţin următoarele relaţii de calcul a unghiurilor ϕ, ϕ 3 de poziţionare a bielei, respectiv a balansierului mecanismului patrulater (fig.3) în funcţie de unghiul de poziţionare a ϕ bielei: ϕ l + l l 3 + l = arccos l l + l 4 4 l l l l 4 4 cosϕ cosϕ arctan l l sin ϕ ; l cosϕ 4 (5) o l l + l 3 + l 4 l l 4 cosϕ ϕ3 = 360 arccos l l + l l l cosϕ arctan l 4 l sin ϕ l cosϕ
270 70 y Y Bielă ϕ 3 x G(X G,Y G ) B l Manivelă A ϕ l 3 Balansier l O ϕ l 4 ψ O X Fig. 3 Expresia energiei cinetice a manivelei este: E = ( ϕ& ) Cmaniv I maniv. (6) Poziţia centrului de greutate a bielei în raport cu reperul fix se exprimă cu relaţia matricială: X Y G G X A cosϕ sin ϕ xg = +. (7) Y sin ϕ cosϕ y A Ţinând cont de notaţiile din figura 3 relaţia (7) devine: X Y G G l cosϕ = l sin ϕ cosϕ + sin ϕ sin ϕ cosϕ Derivând relaţia (8) în raport cu timpul se obţine relaţia: X& Y& G G = ϕ l sin ϕ l cosϕ + ϕ sin ϕ cosϕ G x y cosϕ G G sin ϕ. x y G G. (8) (9) Expresia modulului vitezei centrului de greutate se determină cu relaţia:
271 v Gbiela G G 7 = X& + Y& (30) Utilizând relaţiile (8), (9) şi (30) expresia modulului vitezei centrului de greutate al bielei este: este: E Cbiela v Gbiela = X& + Y& = l ϕ& + ϕ& ( x + y ) G G G G + ϕ& ϕ& G + [(sin ϕ + cosϕ ) x + (cosϕ sin ϕ ) y ] G (3) În baza relaţiilor (), (30) şi (3) expresia energiei cinetice a bielei [ l ϕ& + ϕ& ( x + y ) + ϕ& ϕ& [ (sin ϕ + cosϕ ) x + (cosϕ sin ϕ ) y ] = M biela G G + I ϕ& biela. Energia cinetică a balansierului se calculează cu relaţia: G E = ( ϕ& ) Cbalansier I balansier (33) Energia cinetică totală a mecanismului patrulater se compune din suma energiilor cinetice ale manivelei a bielei şi a balansierului. E = E + E + E (34) Ctot Cmaniv Cbiela Cbalansier Dacă elementul de reducere este manivela atunci în baza relaţiilor (4), (6), (3) şi (33) expresia momentului de inerţie redus este: I r = I + M + I maniv biela biela + l ϕ& ϕ& ϕ& ( x + y ) + [ (sinϕ + cosϕ ) x + (cosϕ sinϕ y ] ϕ& + G G G ) ϕ& ϕ& + I Expresiile: balans ϕ& ϕ& 3 ϕ& ϕ& ϕ = ϕ ; & ϕ& ϕ 3 3 sunt funcţiile de transmitere de ordinul ale mecanismului. G G + (3) + (35) ϕ = ; (36) ϕ

272 Desfăşurarea lucrării În cadrul lucrării studentul va primi un mecanism patrulater pentru care va determina valorile caracteristicilor masice şi inerţiale ale fiecărui element, respectând următoarele etape: Se porneşte aplicaţia SolidWorks prin dublu click pe icoana aflată pe desktop. După pornirea aplicaţiei, se apasă butonul din meniul principal şi se va deschide caseta de dialog Open (fig.4). În caseta de dialog Open (fig.4) la caseta derulantă Look in se alege calea către fişierul care conţine modelul CAD 3D al manivelei unui mecanism patrulater. Modelul CAD 3D pentru toate elementele mecanismului au fost efectuate în prealabil şi sunt stocate pe Harddisk în Folderul C:\STUDENTI. Fig. 4 După deschiderea fişierului C:\STUDENTI \MANIVELA. SLDPRT, se apasă click dreapta pe Annotation şi se selectează Show Feature Dimensions (fig.5). În funcţie de valorile primite se vor modifica cotele modelului. Cotele modelului se modică în felul următor: a. Se poziţionează mouseul pe valoarea cotei de modificat (fig.6). În acel moment va apărea un chenar roşu în jurul cotei. b. Se apasă dublu click pe casetă, iar în caseta de dialog Modify se scrie valoarea impusă (fig.7). Pentru a valida data introdusă se apasă


273 73 c. Se observă că aceste modificări nu s-au produs în modelul CAD 3D al manivelei. Pentru ca modificările să se producă este necesar să se apese butonul Rebuild de pe meniul principal. Fig. 5 Fig. 6 Pentru a determina caracteristicile masice şi inerţiale a unei piese cu ajutorul aplicaţiei SolidWorks este necesar utilizarea barei de instrumente Tools. Activarea ei se face prin click dreapta pe o bară activă a aplicaţiei şi din meniul scurt se va alege Tools.
.")
274 74 Fig. 7 În cazul manivelei pentru a determina caracteristicile masice şi inerţiale se va selecta piesa, iar apoi se apasă click stânga pe butonul Mass Properties. Aplicaţia SolidWorks calculează toţi parametrii masici şi inerţiali, iar rezultatele sunt afişate în caseta de dialog Mass Properties (fig.8). Pentru determinarea caracteristicilor masice şi inerţiale ale manivelei (fig.9) şi a balansierului (fig.0) se vor parcurge etapele - 7. Se închid cele trei fişiere. Se apasă butonul New de pe bara principală, iar apoi Assambly. Se salvează fişierul de ansamblu în directorul propriu al studentului sub denumirea de MECANISM_PATRULATER.ALDASM. Se va asambla mecanismul prin asamblarea manivelei de batiu urmată de asamblarea manivelei de bielă, a bielei de balansier şi a balansierului de batiu. Pentru a se asambla manivela de batiu se parcurg următoarele etape: a. Insert -> Component -> From File (fig.) b. Se selectează piesa Suport (fig.). c. În mod analog se procedează şi la inserarea în ansamblu a manivelei. d. Se selectează faţa interioară a alezajului suportului şi faţa cilindrică a capătului manivelei (fig.4). e. Se apasă butonul Mate de pe bara de unelte Assembly.

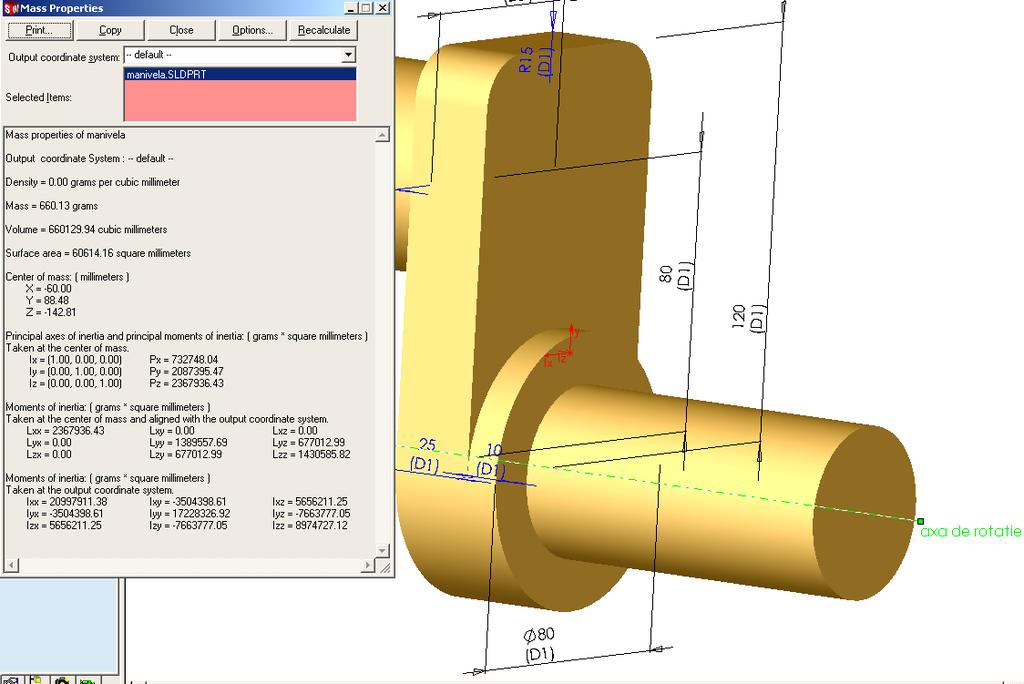
275 75 Fig. 8 Fig. 9


276 76 Fig. 0 Fig. f. Din caseta de dialog Mate se alege opţiunea Concentric (fig.3) şi se apasă Ok. g. Pentru finalizarea montajului manivelei în alezajul suportului mai este necesar un Coincident Mate între suprafeţele frontale. Se selectează cele două feţe se apasă butonul Mate se selectează opţiunea Coincident (fig.3), iar apoi Ok. Rezultatul obţinut este vizibil în figura 5. Se va parcurge etapa 9 în vederea finalizării asamblării componentelor mecanismului patrulater (fig.6). Rezultatele obţinute se trec în tabelul.


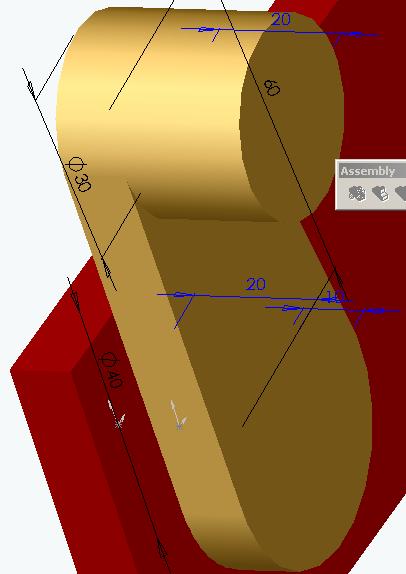

277 77 Fig. Fig. 3 Fig. 4 Fig. 6 Fig.5
278 78 Tabelul Schema cinematică a mecanismului: Date iniţiale: ω = s - ; ϕ = 0 ; l = mm; l l l 3 4 = mm; = mm; = mm. Nr. crt.. Caracteristica masică sau inerţială Relaţia de calcul Rezultat
279 30. STUDIUL CINEMATICII ŞI DINAMICII MECANISMULUI PATRULATER PLAN FOLOSIND METODE MODERNE DE SIMULARE 30.. Scopul lucrării Studiul dinamicii mecanismelor implică cunoaşterea forţelor şi momentelor care acţionează asupra lui, precum şi a valorilor caracteristicilor masice şi inerţiale pentru fiecare element. În cadrul acestei lucrări, utilizând aplicaţii moderne în domeniul CAD 3D, se va efectua pe calculator studiul cinematic şi dinamic al unui mecanism patrulater plan. Rezultatele obţinute prin simulare se vor compara cu rezultatele obţinute pe standul existent în laborator, pe care se măsoară viteza unghiulară a elementului conducător şi, respectiv, condus la diferite valori ale momentului rezistent şi diferite valori ale turaţiei motorului de antrenare Consideraţii teoretice Consideraţiile teoretice ale acestei lucrări coincid cu ale lucrării anterioare intitulate Determinarea caracteristicilor masice şi inerţiale pentru elementele mecanismului patrulater plan Desfăşurarea lucrării Se porneşte aplicaţia Visual Nastran prin dublu click pe icoana de pe Desktop. Pentru a se realiza simularea pe calculator a cinematicii şi dinamicii mecanismului plan patrulater este necesar ca modelul CAD 3D, realizat în SolidWorks, să fie importat în softul Visual Nastran Desktop. Pentru aceasta se apasă click pe butonul Open al meniului principal (fig.) şi în caseta de dialog, care se deschide, se indică calea către fişierul în care este stocat modelul CAD 3D al mecanismului.

. Fig. Biela Balansier Cupla motoare Fig.")
280 80 Aplicaţia Visual Nastran va recunoaşte automat, pe baza mateurilor definite în Solid Works, cuplele dintre elementele mecanismului (fig.). Fig. Biela Balansier Cupla motoare Fig. Manivelă
. Fig.")

281 8 Se stabileşte cupla motoare prin click stânga pe cuplă urmat de click dreapta şi se alege Properties -> Revolute Motor -> Close (fig.3). Fig. 3 Primul pas în simularea cinematicii constă în impunerea vitezei unghiulare a cuplei motoare. Pentru aceasta se aplică click dreapta pe cuplă şi în caseta de dialog Properties se introduce valoarea turaţiei primite (fig.4). În acest caz se activează căsuţa Angular Velocity. Fig. 4
 centrului de greutate al bielei mecanismului. Fig.")
282 8 Al doilea pas în simularea cinematicii constă în definirea instrumentelor de măsură, care ataşate elementelor mecanismului ne vor furniza informaţii despre poziţia, viteza şi acceleraţia elementului considerat. În figura 5 este exemplificat modul în care se ataşează un instrument de măsurare a poziţiei (Meter) centrului de greutate al bielei mecanismului. Fig. 5 Se ataşează un instrument de măsură a poziţiei centrului de greutate al bielei. În figura 6 este reprezentată variaţia în timp a coordonatelor centrului de greutate al bielei. Se ataşează un instrument de măsură a vitezei centrului de greutate al bielei. Variaţia în timp ale vitezei centrului de greutate a bielei este reprezentată în figura 7. Se ataşează un instrument de măsură a acceleraţiei centrului de greutate al bielei. Variaţia în timp a acceleraţiei centrului de greutate al bielei este reprezentată în figura 8.

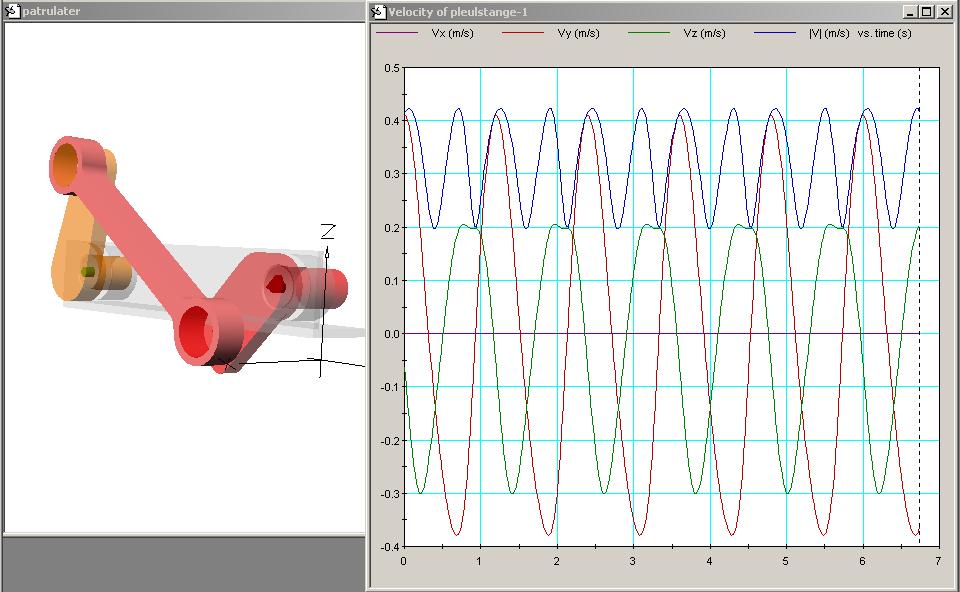
283 83 Fig.6 Fig. 7


284 84 Se ataşează bielei un instrument de măsurare a vitezei şi unul de măsurare a acceleraţiei unghiulare. În figura 9 sunt reprezentate variaţiile în timp ale acceleraţiei şi vitezei unghiulare a bielei. Fig. 8 Fig. 9


285 85 Pentru simularea cinematicii bielei şi a balansierului se vor urma paşii 6-0. Rezultatele obţinute sunt prezentate în figurile 0 3. Fig. 0 Fig.


286 86 Fig. Fig. 3 Primul pas în simularea dinamicii constă în impunerea mărimii cuplului motor. Pentru aceasta se aplică click dreapta pe cupla motoare şi în caseta de dialog Proprties se introduce valoarea

287 87 cuplului motor primit (fig.4). În acest caz căsuţa Torque trebuie să fie activă. Fig. 4 Al doilea pas în simularea dinamicii îl constituie definirea cuplurilor, respectiv a forţelor rezistente. Cuplul rezistent care acţionează asupra balansierului se defineşte conform figurii 5. Se apasă click pe butonul de pe bara de unelte Sketch, iar apoi click stânga pe elementul dorit, care în cazul nostru este balansierul. După click dreapta pe pictograma momentului rezistent se completează valoarea momentului rezistent conform figurii 6. Pentru fiecare element al mecanismului se vor ataşa diferite instrumente de măsură conform etapelor 6 0. Rezultatele obţinute sunt prezentate în figurile 7 9.


288 88 Click dreapta Fig. 5 Fig. 6

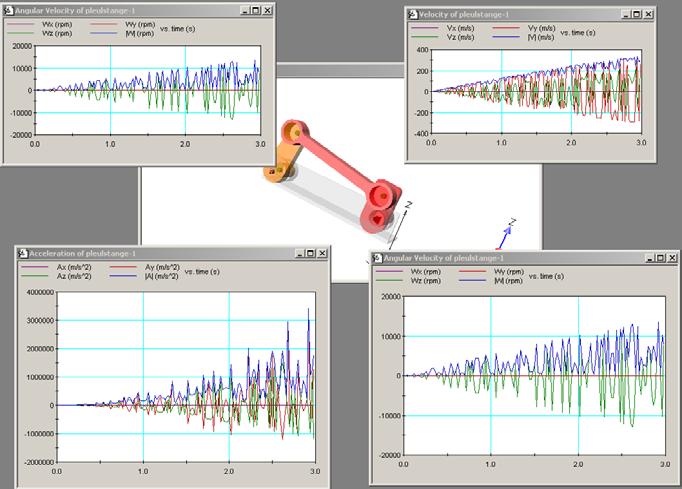
289 89 Fig. 7 Fig.8

290 90 Fig. 9 Rezultatele obţinute, parcurgând etapele anterioare se vor compara cu cele determinate pe cale experimentală pentru un mecanism manivelă-balansier, utilizând standul prezentat în figurile 0, şi. Standul este format dintr-un motor electric de curent continuu 5 care antrenează un mecanism patrulater plan manivelă-balansier, acestea fiind montate pe batiul 6. Manivela mecanismului este materializată prin piesa 3 montată pe arborele motorului electric. Biela 9 este articulată pe balansierul 0, fixat pe arborele 5, pe al cărui capăt este montat un cuplaj unisens şi o frână cu saboţi prin intermediul căreia se realizează momentul rezistent. Construcţia mecanismului permite reglarea lungimii manivelei. În acest scop, cu ajutorul şurubului special 6 (cu două porţiuni filetate în sensuri opuse) se deplasează piuliţele 4 şi 8, asigurându-se prin aceasta reglarea lungimii manivelei şi în acelaşi timp şi echilibrarea acesteia. Forma balansierului a fost astfel determinată încât să se realizeze echilibrarea sarcinilor excentrice cauzate de grupul bielă-balansier. Cuplajul unisens este montat în consolă şi este încărcat cu ajutorul frânei cu saboţi. Reglarea turaţiei motorului electric de curent continuu 5 se face cu ajutorul unui reostat, turaţia lui măsurându-se prin intermediul unui traductor optic şi al unui tahometru digital TED 439.

291 9 5 6 Fig Fig.
 şi se va compara cu cea obţinută prin studiul efectuat anterior pe calculator.")
292 9 Fig. Viteza unghiulară a arborelui condus, deci a balansierului, se va înregistra grafic cu ajutorul unui aparat X-Y (fig.) şi se va compara cu cea obţinută prin studiul efectuat anterior pe calculator. Etapele care trebuie să fie parcurse pentru realizarea părţii experimentale vor fi: cu ajutorul şurubului special 6, ţinând seama de gradaţiile existente pe manivela 3, se reglează lungimea manivelei la valoarea dată şi utilizată la studiul efectuat pe calculator; se elimină cu mâna jocul din şurubul 7 de încărcare al frânei; se conectează aparatul X-Z la arborele pe care este montat balansierul; se verifică corectitudinea montajului din stand; se porneşte motorul electric de antrenare; se reglează turaţia motorului cu ajutorul reostatului; se lasă standul să meargă în gol timp de 5 minute; se strânge şurubul de încărcare al frânei până la forţa axială necesară realizării momentului rezistent considerat; se porneşte aparatul X-Y şi se înregistrează viteza unghiulară a acestuia; se compară legea de variaţie a vitezei unghiulare obţinută grafic cu cea obţinută la etapa 4 din cadrul studiului efectuat pe calculator şi se analizează cauzele eventualelor diferenţe.
293 3. GENERAREA CU CREMALIERA A DINŢILOR ROŢILOR DINŢATE CILINDRICE CU DINŢI DREPŢI 3.. Scopul lucrării Lucrarea are ca scop prezentarea metodei de danturare cu o sculă care materializează cremaliera generatoare, precum şi influenţa pe care o au deplasările de profil asupra formei dinţilor. 3.. Consideraţii teoretice Evolventa cercului, curba Γ, este descrisă în planul P fix al cercului C b de punctul M de pe dreapta D aparţinând planului mobil Π, prin mişcare relativă astfel încât dreapta D să se rostogolească fără alunecare pe cercul C b de rază r b (fig.). Γ t I t t M t T O r b D (P) C b (Π) Fig. Evolventa astfel obţinută este generată ca ruletă (traiectorie a unui punct). Aceeaşi evolventă poate fi generată şi prin mişcarea tangentei t t legată rigid de raza de curbură TM (fig.).
294 94 În acest caz evolventa este generată ca înfăşurătoare a poziţiilor succesive ale tangentei t t. Cercul de bază C b reprezintă locul geometric al centrelor de curbură pentru evolventa Γ. t M t v r b (C b ) Γ I ω O T r b D Fig. Alegând puncte echidistante pe dreapta D, ele, respectiv perpendicularele pe dreapta D în aceste puncte vor genera, evolvente echidistante ca rulete, respectiv ca înfăşurătoare. Metoda de generare prezentată are valoare pur teoretică datorită dificultăţii de realizare practică (mişcările necesare generării sunt făcute numai de punctul M) precum şi faptului că numai acelaşi punct M fie că aparţine dreptei D sau dreptei t t va profila evolventa, ceea ce duce la uzură exagerată şi neuniformă a sculei. Generarea aceleiaşi evolvente de către punctul M de pe dreapta D (fig.) care se deplasează după o direcţie fixă poate fi concepută şi prin mişcarea tangentei t t legată rigid de raza de curbură TM. În acest caz sunt necesare două mişcări: una de rotaţie a planului C b (semifabricatului) în jurul punctului O cu viteza unghiulară ω şi una de translaţie a tangentei t t (muchia aşchietoare a sculei) cu viteza v b astfel ca (fig.): v b = ω r b () În acest caz centroidele mişcării relative sunt dreapta D şi cercul de rază r b astfel că:
295 95 TM = s ) () La generarea după această schemă, tot acelaşi punct M al profilului generator al sculei va profila evolventa, cu aceleaşi consecinţe ca la schema de generare anterioară. Pentru a se evita aceste fenomene soluţia utilizată în majoritatea cazurilor este cea prezentată în figura 3, centroidele mişcării relative fiind dreapta D şi cercul C d. α t M t ω I r b t t C α T r v d s ) C d D D Fig. 3 Tangenta t t la evolventă, normală pe dreapta D este rigid legată de centroida D care se deplasează cu viteza v d după o direcţie fixă dar în acelaşi timp centroida C se roteşte cu viteza unghiulară ω astfel încât v d = ω r. Datorită mişcării dreptei generatoare t t simultan cu dreapta D metoda de generare se numeşte generarea cu dreapta mobilă. Unghiul făcut de dreptele D şi D se numeşte unghi de angrenare. Dacă de dreapta D se leagă rigid mai multe drepte paralele şi echidistante cu tangenta t t, această dreaptă devine dreaptă de divizare şi centroidă a conturului generator, rostogolindu-se pe un cerc mai mare decât rb cel de bază numit cerc de divizare de rază: r =. cos α În mod obişnuit unghiul α se ia egal cu 0º, dar mai rar poate avea valorile 4,5º, 5º, 7º,,5º şi 30º. O altă posibilitate de generare este cea cu dreaptă fixă, când cercul de divizare se roteşte cu viteza unghiulară ω în jurul centrului său O şi simultan se deplasează cu viteza v d = ω r. Dreapta generatoare t t este fixă.
296 96 Pentru a obţine două ramuri de evolventă, pe dreapta şi pe stânga necesare flancurilor antiomologe ale tuturor dinţilor roţii, se consideră două familii de profile generatoare rectilinii, cu sensuri opuse de înclinare, care unite între ele dau conturul standardizat al cremalierei generatoare. Pe linia de referinţă a cremalierei grosimea dintelui este egală cu grosimea golului. Linia de referinţă a cremalierei generatoare poate coincide cu dreapta D când se obţine o roată dinţată zero (fig.3) sau poate fi paralelă cu aceasta (fig.4) când se obţine o roată dinţată deplasată. Dacă linia de referinţă a cremalierei se îndepărtează de centrul cercului de divizare deplasarea de profil este pozitivă iar dacă se apropie, deplasarea de profil este negativă. t D C C (D ) t ω α α v d r b O O r b r ω r Fig. 4 p=π m α c α=0º α=0º c h π m/ π m/ h a linie de referinţă linie de divizare h f m x ρ h a c Fig. 5
297 97 Două roţi dinţate generate cu aceeaşi cremalieră se pot împerechea formând un angrenaj a) zero, b) zero deplasat sau c) deplasat după cum ambele roţi s-au generat a) fără deplasări de profil, b) cu deplasare pozitivă, respectiv negativă, egale în valoare absolută, sau c) cu deplasări de profil ce nu se încadrează în nici unul din cele două cazuri de mai sus Descrierea aparaturii Dispozitivul de trasare a profilului evolventic al dintelui (fig.6) este format din stativul, pe care se montează discul, care se poate roti în jurul bolţului 3, fixat de stativ. 0 3 D 4 ω 5 6 D C C d m x v m x F 5 Fig. 6 La partea inferioară a discului există două caneluri circulare, pe care sunt înfăşurate două benzi flexibile de oţel 4.
298 98 Acestea materializează dreapta D iar canelurile materializează cercul de divizare C d. Diametrul exterior al discului este mai mare decât diametrul de cap al roţii de prelucrat. Cremaliera 5 este fixată prin şuruburile 6 de sania 7 care este ghidată pe stativ prin două role metalice 8 şi una de cauciuc 9. Rostogolirea fără alunecare a discului pe sania 7 este asigurată de cele două benzi metalice legate la un capăt de sanie iar la celălalt capăt de disc, prin intermediul unui sistem de pretensionare realizat cu arcul elicoidal 0 şurubul şi piuliţa. Benzile sunt înfăşurate pe canelurile discului în sensuri opuse permiţând deplasarea saniei în ambele sensuri. Translatând cremaliera împreună cu sania, o ramură a benzii se înfăşoară pe cercul de divizare, iar alta se desfăşoară realizându-se astfel o rostogolire pură. Translaţia cremalierei împreună cu sania se realizează prin intermediul unui mecanism cu clichet ce acţionează asupra rolei de cauciuc 3, care prin fricţiune antrenează sania 7. Pârghia 4 a clichetului se apasă manual în sensul săgeţii, iar revenirea sa face prin arc. Pentru schimbarea sensului de deplasare, se trage uşor de şaiba striată 5 legată de axa clichetului şi se roteşte cu 80º. La o singură apăsare a pârghiei, cremaliera se va translata cu 4-5 mm. Dacă se urmăreşte o translaţie rapidă, se eliberează clichetul rotind şaiba 5 doar cu 90º. Cremaliera 5 poate avea diferite poziţii pe sania 7, adică poate fi mai apropiată sau mai îndepărtată de axa de rotaţie a discului. Apropiind sau îndepărtând cremaliera de centrul roţii de prelucrat, pe cercul de divizare al discului se va rostogoli o altă linie a cremalierei decât linia de referinţă, numită linie de divizare. Distanţa între această linie de divizare şi linia de referinţă este chiar deplasarea de profil m x, care se reglează cu ajutorul celor două gradaţii. Profilele evolventelor înfăşurate de cremalieră se trasează pe un carton care se fixează de discul prin intermediul a trei ştifturi. Pentru efectuarea lucrării laboratorul este utilat cu dispozitive, cu ajutorul cărora se pot realiza roţi cu modul 6 şi cu numerele de dinţi cuprinse în tabelul. Tabelul mai cuprinde şi diametrele D ale discurilor corespunzătoare celor 6 numere de dinţi.
299 Nr. crt z D [mm] Tabelul 3.4. Desfăşurarea lucrării Lucrarea se va desfăşura după următoarele etape: se vor repartiza câte doi studenţi pe dispozitivele existente în laborator; se efectuează calculele elementelor geometrice ale roţilor dinţate date în tabelul, cu o precizie de cel puţin patru zecimale. Deplasările de profil se adoptă după criteriul evitării interferenţei iar în cazul z=7, se adoptă relaţia aproximativă prin care interferenţa nu este complet evitată, în schimb se evită ascuţirea dinţilor; în continuare cu ajutorul unui carton duplex, de diametru D, fiecare din cei doi studenţi va genera, controla şi decupa individual, profilul roţii calculate după cum urmează: pe discul din carton se vor trasa cercurile de cap, de picior, de divizare şi de rostogolire; în continuare discul de carton se fixează în cele trei ştifturi pe discul al dispozitivului, astfel ca centrele lor să se suprapună; se reglează în continuare poziţia cremalierei astfel încât linia sa de referinţă să fie situată la distanţa m x de cercul de divizare, realizându-se astfel deplasarea de profil calculată, poziţia corectă fiind realizată atunci când dreapta de cap a cremalierei este tangentă la cercul de picior al roţii; se trage butonul 5, cremaliera 5 se eliberează de mecanismul cu clichet şi se aduce în poziţia extremă din dreapta. În această poziţie vârful unui creion se conduce pe conturul cremalierei astfel ca pe carton să se reproducă cât mai exact muchiile cremalierei; se apasă pârghia 4, cremaliera se translatează spre stânga cu 4-5 mm după care se trasează din nou conturul cremalierei pe carton cu ajutorul creionului;
300 300 se repetă aceste operaţii până când cremaliera ocupă poziţia extremă din stânga, obţinându-se astfel profilele a doi sau trei dinţi; se realizează înfăşurarea prin rostogolire şi pentru poziţia zero a cremalierei (linia de referinţă a cremalierei tangentă la cercul de divizare); se măsoară arcul de divizare s şi de cap s a al dintelui obţinut prin înfăşurare şi se compară cu valoarea calculată; se compară profilele înfăşurate şi efectele deplasărilor de profil; rezultatele obţinute se trec în tabelul. Tabelul Date iniţiale: - modulul cremalierei generatoare m = 6 mm - unghiul de presiune de referinţă α = 0º - coeficientul de înălţime a capului de referinţă h = Nr. crt. - coeficientul jocului de referinţa la cap c * = 0,5 - numărul de dinţi z = Elementul geometric Relaţia de calcul Rezultat Pasul de divizare p = π m Pasul de bază p b = p cosα 3 Raza de divizare r = m z/ 4 Raza de bază r b = r cosα 5 Coeficientul deplasării de c z profil x =, c=7, dacă z > 7 7 c=4, dacă z = 7 6 Raza de picior r f = r - m ( + c * x 7 Raza de cap de referinţă (cu dinţi nescurtaţi) 8 Unghiul de presiune la capul dintelui 9 Arcul de divizare al dintelui: 0 Arcul de cap al dintelui: h * ) a * r a = r + m ( h a + x) r α a = arccos( cosα) r a π s = ( + x tan α ) m s s a = r a ( +invα invα a ) r * a
301 TRIBOLOGIE
302
303 3. DETERMINAREA FORŢELOR DE FRECARE ŞI A COEFICIENŢILOR DE FRECARE ÎN CAZUL FRECĂRII USCATE 3.. Scopul lucrării Lucrarea are ca scop determinarea pe cale experimentală a forţelor de frecare şi a coeficienţilor de frecare pentru diferite cuple de frecare, în cazul frecării uscate. Măsurătorile efectuate corespund frecării de alunecare. 3.. Consideraţii teoretice Frecarea uscată presupune absenţa lubrifiantului între suprafeţele de contact aflate în mişcare relativă. La nivel microgeometric frecarea uscată se realizează prin contactul direct dintre neregularităţile suprafeţelor, având ca rezultat obţinerea unor valori mai mari ale coeficienţilor de frecare şi un grad ridicat de uzură a cuplei de frecare Teorii ale frecării uscate. Teoria mecanică (Amontons) În cazul acestei teorii, forţei de frecare îi corespunde energia necesară pentru a depăşi (escalada) microasperităţile celor două suprafeţe aflate în mişcare relativă.. Teoria adeziunii moleculare (Dezaguillet, Ewing, Tomlinson, Dereaghin) Această teorie arată că fenomenul de frecare este un rezultat al învingerii forţelor de interacţiune moleculare (forţelor de aderenţă) dintre vârfurile asperităţilor suprafeţelor aflate în mişcare relativă, forţele de aderenţă fiind datorate energiei libere de suprafaţă care participă la formarea joncţiunilor de la interfaţă. 3. Teoria molecular mecanică (Coulomb) Conform acestei teorii se consideră că frecarea apare atât ca rezultat al învingerii forţelor de aderenţă dintre suprafeţe cât şi ca rezultat al învingerii forţei necesare escaladării rugozităţilor.
304 Teoria punţilor de sudură (Bowden, Tabor) Se consideră că forţa de frecare este forţa necesară ruperii punţilor de sudură create între vârfurile asperităţilor, punţi datorate interacţiunilor moleculare la temperaturi locale mari. 5. Teoria deformării Această teorie consideră că frecarea se datorează energiei consumate pentru deformarea elastică, plastică sau elasto-plastică a neregularităţilor suprafeţelor în contact Forţa de frecare, coeficientul de frecare În condiţii industriale, la scurt timp după prelucrare, datorită mediului ambiant suprafeţele cuplei se acoperă cu straturi de oxizi sau cu molecule adsorbite (H O, N etc.). Totodată, în condiţii de exploatare sau prin manipulare, pe suprafeţele pieselor se depun straturi moleculare de lubrifianţi (de origine animală sau vegetală) existând astfel condiţiile pentru realizarea unui alt tip de frecare şi anume frecarea limită ( boundary friction ), având ca rezultat obţinerea unor valori mai reduse ale forţelor de frecare precum şi ale coeficienţilor de frecare. Ţinând seama de cele arătate mai sus, se va admite o frecare uscată tehnică şi nu o frecare teoretică (sau pură) care se poate obţine numai în condiţii speciale de laborator. Pe baza unor cercetări experimentale întreprinse asupra frecării uscate, Amontons (699) a formulat următoarele legi ale frecării uscate:. Forţa de frecare este direct proporţională cu sarcina normală de contact.. Forţa de frecare este independentă de aria aparentă de contact. Ulterior, Coulomb (785) a formulat cea de a treia lege, dar având o arie de aplicabilitate mai restrânsă: 3. Forţa de frecare este independentă de viteza de alunecare. În conformitate cu teoriile de mai sus, literatura de specialitate prezintă diferite relaţii între forţele de frecare şi coeficienţii de frecare. Astfel, după vechiul concept al forţei de frecare, relaţia dintre forţa de frecare la alunecare şi sarcina de încărcare normală este dată de legea Amontons Coulomb: F f = μ F () a n unde: F f forţa de frecare [N]; F n sarcina normală care încarcă cupla de frecare [N];
305 305 μ a coeficient de proporţionalitate sau coeficient de frecare la alunecare; Se deosebesc două tipuri de coeficienţi de frecare şi anume: μ coeficient de frecare static; as μ ak coeficient de frecare cinetic. Ţinând seama de cele două tipuri ale coeficienţilor de frecare, relaţia () poate fi scrisă sub formele: forţa de frecare statică: F forţa de frecare cinetică: F fs fk = μ F () as ak n = μ F (3) Pe baza teoriei punţilor de sudură (Bowden, Tabor), coeficientul de frecare de aderenţă se consideră ca fiind efectul combinat al tensiunilor normale şi tangenţiale în cazul frecării de natură moleculară (adezivă sau coezivă). Această frecare poate fi apreciată prin energia disipată sau lucrul mecanic efectuat la formarea şi ruperea legăturilor formate la punctele de contact dintre cele două suprafeţe aflate în mişcare relativă. Astfel: în cazul suprafeţelor rugoase din metale (aliaje) elasto-plastice, aria reală Ar datorată forţei normale F n se formează la tranziţia de la regimul de deformare elastic la cel plastic: unde: n F A σ (4) n = r A r aria reală de contact [mm ]; F n forţa normală de apăsare [N]; σ tensiunea de curgere a materialului mai moale [MPa]. suprafaţa reală A r, a corpului mai moale aderă la suprafaţa conjugată formând microjoncţiuni, forţa de frecare fiind forţa necesară ruperii acestora în timpul procesului de alunecare. Astfel: Din relaţiile (), (4), (5) rezultă: F A τ (5) f = r τ μ = (6) σ
306 306 unde: unde: τ tensiunea de forfecare a stratului aderent (la limită fiind tensiunea de forfecare a stratului mai moale [MPa]. Coeficientul de frecare molecular μ mol are expresia: τ mol = + β (7) σ μ 0 τ 0 tensiunea tangenţială de forfecare [MPa]; β piezocoeficientul componentei moleculare a frecării. În tabelul sunt redate valorile τ 0 şi β pentru câteva materiale. Tabelul Material τ 0, MPa β Material τ 0, MPa β Vanadiu 8 0,50 Argint 6,50 0,090 Crom 50 0,40 Aluminiu 3,00 0,043 Beriliu 4,5 0,50 Zinc 8,00 0,00 Platină 95 0,00 Cositor,5 0,0 Alamă 0 0,0 Plumb 0,90 0, Aparatura utilizată Construcţia şi funcţionarea tribometrului Pentru măsurarea forţei de frecare precum şi a coeficienţilor de frecare se utilizează în principal metoda cu traductor tensometric rezistiv. Aceasta se bazează pe faptul că forţa de frecare produce deplasarea sau tendinţa de deplasare a uneia din piesele cuplei de frecare, având ca rezultat deformarea unei lamele elastice pe care se află montat un traductor tensometric de o anumită rezistenţă electrică (R Ω ), producându-se o variaţie ΔR a rezistenţei electrice care poate fi măsurată. Tribometrul (fig.) este alcătuit din următoarele elemente principale: un cadru metalic 4 pe care se află montat dispozitivul de încercare şi motorul electric de antrenare al acestuia; cupla de frecare constituită din două elemente: un disc montat pe discul principal care execută mişcarea de rotaţie şi epruvetele 3 de formă cilindrică, în număr de 3, montate în 3 dispozitive de fixare.
307 Fig. motor electric de antrenare, disc, 3 epruvetă cilindrică, 4 corp (disc fix), 5 greutăţi, 6 piesă de centrare, 7 ştift cilindric, 8 tensometru electronic, 9 arc lamelar, 0 traductor tensometric rezistiv, disc rotitor, arbore, 3 lagăre, 4 cadru metalic vertical Discul principal pe care se montează discul este fixat rigid de arborele principal care la rândul lui este montat pe două lagăre cu rulmenţi radial-axiali 3. Arborele principal primeşte mişcarea de rotaţie de la un motor electric de antrenare prin intermediul unei transmisii prin curele trapezoidale. Turaţia arborelui principal, respectiv a discului este n = 350 rot/min. Corpul 4 se sprijină pe discul prin intermediul celor trei epruvete cilindrice 3 şi este oprit în tendinţa lui de rotire de către arcul lamelar 9 prin intermediul ştiftului 7, presat în discul 4.
308 308 Încărcarea cu sarcină normală a cuplei de frecare se face ataşând greutăţi 5 de diferite valori pe corpul 4 (vezi fig. şi fig.4) Măsurarea forţelor de frecare Aşa cum s-a arătat anterior, pentru măsurarea forţelor de frecare se utilizează traductori tensometrici rezistivi. A A A F f D F s F f3 F f A R s Fig. şurub, şaibă, 3 bucşă de fixare, 4 şurub de fixare, 5 epruvetă cilindrică După cum rezultă din figura, datorită forţei de frecare ce apare între elementele şi 3 ale cuplei de frecare, corpul 4 are tendinţa de a se roti, însă este oprit de arcul lamelar 9 pe care sunt fixate două traductoare tensometrice rezistive 0. Pentru măsurarea deformaţiei arcului lamelar, traductoarele sunt legate la un tensometru electronic 8. Din figura rezultă că momentul total al forţelor de frecare este dat de relaţia: unde: T tf ( F + F + F ) D D = f f f 3 = Ff (8) T tf momentul total de frecare [N mm]; F f,,3 forţele de frecare date de cele 3 epruvete cilindrice 3 în contact cu discul [N]; D diametrul cercului pe care se află epruvetele 3 [mm]. Din relaţia (8) rezultă:
309 F 309 Ttf Ttf = (9) D R f = F s [N] 0 Fig. 3 F s = k nr. div. nr. div. Valoarea forţei de frecare F s se stabileşte din caracteristica arcului lamelar în funcţie de numărul de diviziuni citite la tensometrul electronic (fig.3), unde k este o constantă de proporţionalitate obţinută prin etalonarea timbrului tensometric. Având în vedere că D poate fi modificată prin deplasarea radială a epruvetelor 3 în cazul general forţa de frecare se poate determina cu relaţia (0). unde: F f Fs Rs = (0) R F s reacţiunea arcului lamelar asupra ştiftului cilindric [N]; R s distanţa fixă de la centrul ştiftului 7 la centrul discului 4; R s = 50 mm Desfăşurarea lucrării Se parcurg următoarele etape: se montează primele trei epruvete cilindrice 3 în dispozitivele de fixare; se cuplează la reţea tensometrul electronic şi se apasă pe butonul de pornire poziţia STATIC ; se face verificarea reglării tensometrului electronic. Se verifică sensibilitatea traductorului tensometric prin apăsarea capătului arcului lamelar 9. La cea mai uşoară apăsare a acestuia, trebuie să apară devieri ale acului indicator al tensometrului electronic; se degresează cu o cârpă curată impregnată cu diluant suprafeţele celor două elemente ale cuplei de frecare ce urmează să vină în contact;
310 30 se montează corpul 4 pe discul mobil ; acestea se rotesc împreună până când ştiftul 7 ajunge în contact cu arcul lamelar 9; se cuplează la reţea motorul electric de antrenare a tribometrului; F F, (fig.4); se încarcă cupla de frecare cu sarcinile normale ( )... n n5 G 6 G 5 G 4 G G 3 F n = G +G 3 = 0+,8 =,8 N F n = F n +G =,8+3, = 6 N F n3 = F n +G 4 = 6+, = 8, N F n4 = F n3 +G 5 = 8,+,45 = 9,65 N F n5 = F n4 +G 6 = 9,65+0,8 = 0,45 G Fig. 4 se reglează la zero tensometrul electronic; se porneşte instalaţia şi se fac măsurătorile pentru cupla de frecare numărul cu cele cinci sarcini normale. Durata unei încercări nu trebuie să depăşească 4 0 secunde; după aplicarea fiecărei sarcini, pentru aceeaşi cuplă de frecare, se modifică valorile diametrului D şi se notează în tabelul ; rezultatele măsurătorilor se trec în tabelul ; se schimbă ştiftul obţinându-se astfel o altă cuplă de frecare şi se reiau măsurătorile conform punctelor de mai sus; după încercarea fiecărei cuple de frecare, discul şi epruvetele cilindrice 3 se şlefuiesc cu hârtie abrazivă, se curăţă de impurităţi şi se degresează Prelucrarea datelor se aleg elementele cuplei de frecare, raza R şi sarcina F n ; se citeşte numărul de diviziuni la tensometrul electronic; se determină F s din diagrama prezentată în figura 3; se calculează forţa de frecare F f ; se calculează coeficienţii de frecare μi, i = 5; se calculează coeficientul de frecare mediu cu relaţia:
311 3 μ + μ + μ3 + μ4 + μ5 μ m = () 5 valorile medii obţinute se compară cu valorile coeficienţilor de frecare redaţi în literatura de specialitate, prezentate în tabelul 3; μ = f şi cu valorile din tabelul se trasează diagramele iak ( F n ) F = f ( ). f F n Nr. crt. Cupla de frecare R [mm] F n [N] Nr. div. F s [N] F f [N] Tabelul μ i μ m Obs. 3 Tabelul 3 Cuplul de materiale Uscată μ ak Tipul frecării Limită, Mixtă Observaţii Alamă-oţel 0,60-0,80 0,0-0,6 Funcţie de compoziţia chimică; Oţel-oţel 0,35-0,40 0,0-0,5 Funcţie de HB şi starea suprafeţei Fontă-fontă 0,3-0,8 0,0-0,5 Funcţie de compoziţia chimică; Fontă-oţel 0,8-0,0 0,0-0,5 Valorile pot fi mai mari; Oţel-Cu cu strat Se poate reduce la straturi mai 0,5-0,8 0,08-0,0 de Sn subţiri; Oţel-bronz fosf. 0,67-0,74 0,09-0,9 Funcţie de compoziţia chimică; Oţel-aliaj de Al 0,79-0,8 0,09-0, Valorile pot fi mai mari; Al-oţel 0,70-0,90 0,098 Valorile pot fi mai mari; Cu-oţel 0,30-0,40 0,093 Valorile pot fi mai mari;
312 33. DETERMINAREA FORŢELOR DE FRECARE ŞI A COEFICIENŢILOR DE FRECARE ÎN FUNCŢIE DE VITEZA DE ALUNECARE PENTRU DIFERITE CUPLURI DE MATERIALE, ÎN CAZUL FRECĂRII USCATE 33.. Scopul lucrării Scopul lucrării este determinarea pe cale experimentală a modului de variaţie a forţelor de frecare şi a coeficienţilor de frecare în funcţie de viteza relativă de alunecare, pentru diferite cupluri de materiale. Importanţa cunoaşterii acestui mod de variaţie se regăseşte în cazul funcţionării cuplelor de frecare reale (frâne, ambreiaje etc.) Consideraţii teoretice Una din legile frecării uscate enunţate de către Coulomb arată faptul că forţa de frecare este invariabilă cu viteza de alunecare. Cercetările ulterioare au dovedit însă că forţa de frecare şi, implicit, coeficientul de frecare variază în anumite limite în funcţie de viteza de alunecare. În cazul frecării uscate, variaţia forţei de frecare şi a coeficientului de frecare în funcţie de viteza de alunecare nu a putut fi cuprinsă într-o relaţie matematică, datorită complexităţii fenomenului. Astfel, pentru diferitele cupluri de materiale este necesară determinarea pe cale experimentală a modului de variaţie a forţelor si a coeficienţilor de frecare Desfăşurarea lucrării Aparatura utilizată este aceeaşi cu cea folosită în lucrarea nr.3. Măsurarea forţei de frecare, respectiv determinarea coeficienţilor de frecare, se vor face în conformitate cu relaţiile de calcul şi cu diagramele prezentate în lucrarea anterioară. Se parcurg următoarele etape (standul de la lucrarea nr.3, figura ): se montează epruvetele cilindrice 3 în dispozitivele de fixare;
313 33 se cuplează la reţea tensometrul electronic şi se apasă pe butonul de pornire poziţia STATIC ; se verifică funcţionarea corectă a tensometrului electronic; se şlefuiesc cu hârtie abrazivă suprafeţele celor două elemente care urmează să vină în contact, apoi se degresează cu o lavetă impregnată cu diluant; se montează corpul 4 peste discul mobil şi se aduce în contact ştiftul 7 cu arcul lamelar 9; se cuplează la reţea motorul electric de antrenare a tribometrului ; se încarcă cupla de frecare (pentru toate încercările) cu sarcina: F const. = F =,8 N () n = n se face punerea la zero a tensometrului electronic; se porneşte instalaţia şi se fac măsurătorile pentru cupla de frecare nr., păstrând sarcina normală constantă şi dând diferite valori razei R (notate în tabelul ) prin deplasarea radială a dispozitivelor de fixare a epruvetelor 3; se citeşte numărul de diviziuni pe scala tensometrului; după fiecare încercare (respectiv pentru fiecare valoare R ), epruvetele 3 se şlefuiesc cu hârtie abrazivă, se degresează şi se şterg cu o lavetă curată; rezultatele măsurătorilor se trec în tabelul şi se trasează pe hârtie milimetrică graficele din figura ; se schimbă materialele elementelor cuplei de frecare şi se reiau măsurătorile, respectând succesiunea etapelor de mai sus. unde: Prelucrarea datelor se consideră sarcina normală F n =,8 N şi valorile R = 40; 45; 50; 55; 60 mm; se calculează viteza periferică de alunecare v [m/s] cu relaţia: π D n v = () D diametrul cercului pe care sunt aşezate epruvetele cilindrice, D = R [mm]; n turaţia discului (n = 350 rot/min). se citeşte numărul de diviziuni la tensometrul electronic;
314 34 se determină F s din figura 3, lucrarea nr.3; se calculează forţa de frecare F f cu relaţia: F f Fs Rs = (3) R considerând că R s = 45 mm; se calculează coeficientul de frecare cu relaţia: F f μ ak = (4) Fn rezultatele obţinute se trec în tabelul şi se trasează diagramele: μ = f v ; F f v. () ( ) ak f = Tabelul Nr. crt. Cupla de frecare R [mm] F n [N] nr. div. F s [N] F f [N] μ ak v [m/s] Obs , , ,
315 34. STUDIUL ALUNECĂRII CU INTERMITENŢE (STICK-SLIP) ÎN FUNCŢIE DE CUPLUL DE MATERIALE ŞI DE SARCINA NORMALĂ DE ÎNCĂRCARE 34.. Scopul lucrării Scopul lucrării constă în determinarea pe cale experimentală a forţelor de frecare precum şi a coeficienţilor de frecare în cazul alunecării cu intermitenţe a două elemente ale cuplei de frecare sub acţiunea sarcinilor normale pe suprafaţa de contact Consideraţii teoretice Funcţionarea cuplelor de frecare cu viteze de alunecare foarte mici (0,8..80 mm/min.), în regim de frecare uscată sau limită, duce la apariţia unei mişcări cu intermitenţe între elementele cuplei. Această situaţie poartă denumirea de stick slip. Ea poate apărea atât în cazul mişcării de rotaţie (ambreiaje, lagăre, procese de roluirea tablelor etc.) cât şi al mişcării de translaţie (ghidaje, cilindri hidraulici, filiere de trefilare, ascensoare etc.) şi are o influenţă nefavorabilă asupra funcţionării unor cuple de frecare reale, deci implicit a utilajului din care acestea fac parte (ghidajele maşinilor unelte, ghidajele preselor etc.). Fenomenul de alunecare cu intermitenţe poate fi modelat cu ajutorul elementelor tribometrului din figura. Acesta cuprinde cupla de frecare formată din elementele 3, respectiv 4 (contact pe suprafeţe plane) arcul elicoidal cu ajutorul căruia elementul 3 este legat de un punct fix şi amortizorul de vibraţii. Variaţia forţei de frecare în raport cu timpul este prezentată în figura. Trecerea de la un tip de mişcare la altul depinde de viteza de antrenare precum şi de caracteristicile sistemului mecanic (masă, rigiditate, cuplul de materiale etc.). Se pot deduce teoretic amplitudinea liniară (sau unghiulară) a mişcării sacadate (A, θ) şi viteza maximă de antrenare la care poate să apară mişcarea sacadată (v max, ω max ).
316 F n v a μ a F n x Fig. amortizor de vibraţii, arc elicoidal, 3,4 elementele cuplei de frecare F f [N] F f max F f min t 0 t t t 3 t 4 t 5 t 6 t 7 t 8 t t 0 -t,t -t 3,t 4 -t 5,t 6 -t 7 perioada de STICK: μ as t -t,t 3 -t 4,t 5 -t 6,t 7 -t 8 perioada de SLIP: μ ak Fig. Considerând că mişcarea este de translaţie iar regimul de frecare este uscat (fără lubrifiant lichid, deci fără amortizare), amplitudinea liniară a mişcării A [m] are expresia: u 4 F n D v A. + u = () 0 k hm v ω
317 37 unde: F n sarcina normală [N]; k rigiditatea sistemului în direcţia vitezei de antrenare [N/m]; h m adâncimea de interacţiune mecanică a rugozităţilor celor două suprafeţe ca urmare a acţiunii sarcinii F n [m]; D parametrul de difuzie (pentru cuple din aliaje Fe-C, D m /s); ω 0 pulsaţia proprie a sistemului în direcţia de antrenare [rad/s]; v viteza de antrenare [m/s]. Viteza optimă de antrenare v 0 [m/s] (viteza la care amplitudinea mişcării este minimă) este: v = Fn D () 0 ω 0 k hm În cazul mişcării de rotaţie (în condiţiile frecării uscate tehnice), amplitudinea unghiulară a mişcării θ u [rad] este: unde: θ u T = kt h m 4 D ωa ω + ω a 0t T momentul de torsiune transmis [Nm]; k t rigiditatea torsională a sistemului [Nm/rad]; ω a viteza unghiulară de antrenare [rad/s]; ω 0t pulsaţia proprie a sistemului în sensul de rotire [rad/s]: (3) k t ω 0 t = (4) I în care: I momentul masic de inerţie al sistemului antrenat [kg m ]. Viteza unghiulară optimă de antrenare (la care amplitudinea mişcării este minimă) este: T ω = D (5) 0 pa ω 0 t kt hm Conform figurii, epruveta 4 este acţionată de un sistem mecanic exterior, cu o viteză de alunecare constantă, v a. Iniţial elementele 3 şi 4 se mişcă împreună, lipite. În acest timp forţa de frecare variază de la 0 la F. f max
318 38 Pentru această perioadă de timp (t 0 t, conform figurii, perioada de stick ) forţa de frecare statică poate fi determinată cu relaţia: F fs = μ F (6) unde: F fs forţa de frecare statică [N]; μ as coeficient de frecare static; F n sarcina normală [N]. În momentul când forţa elastică din arc ( F e = k x, unde k este constanta arcului [N/mm], iar x este săgeata arcului [mm]) depăşeşte forţa de frecare statică ( F > F ) apare dezlipirea şi alunecarea relativă dintre e fs elementele cuplei de frecare 3, respectiv 4, cu viteza relativă v s (perioada de slip, aferentă curbei din figura ). Viteza relativă de deplasare v s este mult mai mare decât viteza de alunecare v a, (v s >>v a ). În timpul alunecării relative dintre elementele cuplei de frecare cu viteza v s, se manifestă forţa de frecare cinetică: F fk as ak n = μ F (7) n unde: F fk forţa de frecare cinetică [N]; μ ak coeficient de frecare cinetic; F sarcina normală [N]. n Practic, coeficientul de frecare μ ak se va determina cu relaţia: μ ak F = f max + F F n f min Variaţia forţelor de frecare în funcţie de timp, în cadrul fenomenului de alunecare cu intermitenţe este prezentată în figura Construcţia şi funcţionarea tribometrului Tribometrul pentru studiul alunecării cu intermitenţe este prezentat în figura 3. Cupla de frecare este formată din elementul de formă cilindrică şi elementul de formă prismatică. Piesa 3 în care se fixează elementul al cuplei are forma unui cărucior, se deplasează pe două ghidaje 4 şi este (8)
319 39 antrenată în mişcare de translaţie de către un fir de oţel 5 trecut peste două role de ghidare cu rulmenţi 6 şi. Firul din oţel 5 este legat de capătul tijei 7 a unui piston 9 care se deplasează în interiorul cilindrului hidraulic Fig. 3 epruvetă cilindrică, epruvetă prismatică, 3 cărucior, 4 ghidaje, 5 fir din oţel (Φ 0,3 mm), 6, role de sprijin, 7 tijă piston, 8 cilindru hidraulic, 9 piston, 0 taler şi greutăţi pentru deplasarea căruciorului, taler şi greutăţi pentru echilibrare, 3 arc lamelar, 4 braţ suport, 5 traductoare tensometrice rezistive, 6 comparator cu cadran, 7 braţ oscilant, 8 greutăţi pentru încărcarea cuplei de frecare. Prin montarea greutăţilor 0 se produce deplasarea spre dreapta a căruciorului. Pistonul se va deplasa în jos obligând lichidul hidraulic să treacă
320 30 printr-o fantă a pistonului în partea de deasupra pistonului 9. În acest mod se obţine o viteză mică de deplasare a căruciorului. F f [N] F f = 0,0357 f f este numărul de diviziuni citite la ceasul comparator Fig. 4 f x 0,0 [mm] Pentru menţinerea firului din oţel 5 întins, în partea stângă a căruciorului 3 este ataşat un taler pe care se aşează greutăţile. Forţa de frecare se determină din diagrama de etalonare a arcului lamelar (fig.4) în funcţie de mărimea săgeţii arcului lamelar 3 citită cu ajutorul comparatorului cu cadran 6. Sarcinile normale care acţionează asupra cuplei sunt realizate prin montarea diferitelor greutăţi 8 pe braţul suport Desfăşurarea lucrării Se parcurg următoare etape: se aduce căruciorul 3 în poziţie de lucru (cu pistonul în partea superioară a cilindrului). Pentru aceasta, se montează 3 greutăţi în valoare totală de 65 N pe talerul din stânga; rigla gradată pentru măsurarea spaţiului parcurs de cărucior se aduce cu reperul zero în dreptul reperului de măsurare a căruciorului; se montează elementele cuplei de frecare. Epruveta prismatică se fixează prin intermediul a două cleme, iar epruveta cilindrică se montează în locaşul din braţul oscilant 7; se unge cu un strat subţire de lubrifiant (ulei) epruveta prismatică; se montează greutăţile G = 65 N de pe talerul pe talerul 0 iar pe talerul se montează o greutate de 0 N; se efectuează o cursă cu căruciorul pe spaţiul s = 00 mm. Aceasta se consideră că este o cursă de rodaj şi nu se fac măsurători; se readuce căruciorul în dreptul reperului zero de pe riglă prin mutarea greutăţilor 0 pe talerul ;
321 3 se montează comparatorul cu cadran 6 în braţul suport 4 şi se reglează la poziţia zero (punând între cele două elemente ale cuplei de frecare o bilă sau o rolă cilindrică pentru ca forţele de frecare să fie minime); se încarcă cupla de frecare prin montarea greutăţilor 8 corespunzătoare sarcinii normale; se repetă operaţiile de la etapa a 5-a pentru punerea în mişcare a căruciorului; simultan cu punerea în mişcare a căruciorului, se porneşte cronometrul şi se măsoară timpul în care căruciorul se deplasează pe o distanţă de 50 mm; în perioada cât căruciorul 3 este în mişcare, se urmăresc indicaţiile comparatorului cu cadran (valorile minime şi maxime). În funcţie de aceste valori se vor determina (din figura 4) valorile forţelor de frecare (minimă şi maximă); se efectuează câte două măsurători pentru fiecare valoare a sarcinii normale ( F n = 0 N, F n = 40 N); se repetă măsurătorile pentru diferite materiale ale epruvetei : CuSn4, Fc00, OLC45 etc. Epruveta prismatică este confecţionată din OLC Prelucrarea datelor se notează timpul t (în secunde) în care căruciorul parcurge distanţa s = 50 mm; se calculează viteza de deplasare a căruciorului v a cu relaţia: s v a = (9) t se notează valorile maxime şi minime înregistrate de comparatorul cu cadran şi se trec în tabelul ; funcţie de numărul de diviziuni citite la comparatorul cu cadran, se determină din figura 4 forţa maximă de frecare ( F minimă ( F ); f min f max cu datele din tabelul se calculează coeficienţii de frecare: - static, cu relaţia Ff max n ) şi cea μ as = (0) F
322 3 - cinetic, cu relaţia μ ak = F f max + F F n f min () Cupla de frecare Nr. diviz. F f [N] μ μ as / [N] max min F fmax F fmin μ as μ ak F n, μ ak v a [mm/ min] Tabelul s [mm] media media media media 50 t [s]
323 35. STUDIUL ALUNECĂRII CU INTERMITENŢE (STICK-SLIP) ÎN FUNCŢIE DE LUBRIFIANT ŞI DE RUGOZITATEA SUPRAFEŢELOR DE ALUNECARE 35.. Scopul lucrării Scopul lucrării este studiul fenomenului de alunecare cu intermitenţe (amplitudinea fenomenului, forţele de frecare şi coeficienţii de frecare) în funcţie de tipul lubrifiantului, orientarea asperităţilor şi rugozitatea suprafeţelor Consideraţii teoretice Atât din punct de vedere teoretic, cât şi experimental s-a demonstrat că scăderea vâscozităţii lubrifiantului duce la creşterea amplitudinii fenomenului stick-slip, precum şi la creşterea forţelor de frecare, respectiv a coeficienţilor de frecare. De asemenea, creşterea rugozităţii suprafeţelor şi modul de orientare a asperităţilor duc la modificarea forţelor de frecare şi a amplitudinii fenomenului stick slip. În cazul frecării limită şi mixtă, amplitudinea mişcării de translaţie (A -m ) poate fi stabilită cu relaţia:, ω ω δ + ω + ω δ = ω ω δ m m v D h k F m h k F D v v D h k F e A m () unde: δ parametrul de amortizare vâscoasă: m γ δ = ()
324 34 γ coeficientul de amortizare a fluidului [Ns/m]; m masa sistemului antrenat [kg]; 0 δ ω = ω (3) Viteza maximă de antrenare până la care mişcarea sacadată poate apărea este dată de relaţia: 3 max a a a a a v + = (4) în care: ( ) ω = ϕ α π+ ω δ 4 3 e a (5) ω ω δ = D h k F a m (6) ω ω = D h k F a m (7) δ ω = α arctg (8) ( ) [ ] π π ω ω δ = ϕ, 3 / / / arctg D h k F v m (9) În cazul mişcării de rotaţie, amplitudinea unghiulară a mişcării este:, ω ω δ + ω ω + ω ω δ = θ ω ω ω δ m t t t t t a a m t t t D h k T m h k T D D h k T e a t m t t t (0) unde: t δ parametrul de amortizare vâscoasă [rad/s] m t t γ = δ ()
325 35 t γ coeficientul de amortizare la torsiunea fluidului; 0 t t t δ ω = ω () Viteza unghiulară maximă de antrenare până la care poate să apară mişcarea sacadată este: 3 max t t t t t a a a a a a + = ω (3) unde: ( ) ω = ϕ α π+ ω δ t t t t e a t t 4 3 (4) t m t t t t D h k T a ω ω δ = (5) t t m t t D h k T a ω ω = (6) t t t δ ω = α arctg (7) ( ) [ ] π π ω ω ω δ = ϕ, 3 / / / arctg t m t a t t t D h k T (8) Din analiza teoretică a mişcării sacadate se poate aprecia durata fazei de stick precum şi a celei de slip, raportul lor dând o indicaţie asupra intensităţii de uzare în absenţa mişcării şi în prezenţa ei. Se poate aprecia, pe baze experimentale, că viteza sau intensitatea de uzare este mai mică în prezenţa mişcării sacadate decât în absenţa ei. Acest aspect poate fi explicat prin reducerea drumului de frecare parcurs de epruveta mobilă. Astfel: pentru mişcarea de translaţie: v A t stick = (9) 0 ω ϕ π + = slip t (0)
326 36 pentru mişcarea de rotaţie: t stick θ = () ω a t slip π + ϕ t = () ω 0t Construcţia şi funcţionarea tribometrului Aceste elemente au fost descrise în detaliu în lucrarea nr Desfăşurarea lucrării elementele care rămân nemodificate în timpul desfăşurării lucrării sunt: - cuplul de materiale; - sarcina normală de încărcare a cuplei; - viteza de alunecare relativă, v a. parametrii care se modifică sunt: - tipul lubrifiantului; - rugozitatea suprafeţelor cuplei de frecare. Pentru desfăşurarea lucrării se vor parcurge următoarele etape: se montează elementele şi ale cuplei de frecare şi se aduce căruciorul 3 în poziţie de lucru, montând pe talerul din stânga trei greutăţi în valoare totală de 65 N; se montează comparatorul cu cadran în braţul suport 4 şi se reglează la poziţia zero punând între cele două suprafeţe în contact ale cuplei o bilă sau un mic cilindru; se unge suprafaţa de frecare a epruvetei prismatice cu lubrifiantul de încercat, într-un strat cât mai uniform; se face punerea la zero a riglei cu care se măsoară spaţiul parcurs prin aducerea reperului zero în dreptul reperului de pe cărucior; se transferă greutăţile G = 65 N de pe talerul din stânga pe talerul din dreapta 0, pe talerul din stânga ataşându-se o greutate G = 0 N pentru menţinerea firului din oţel 5 întins. se porneşte cronometrul simultan cu începerea deplasării căruciorului; se execută o cursă de rodaj (s r = 00 mm), fără să se facă măsurători;
327 37 se readuce căruciorul în poziţie de lucru; se reglează rigla de măsurare pe poziţia zero ; se încarcă cupla de frecare prin montarea greutăţilor 8 corespunzătoare sarcinii normale; se efectuează operaţiile necesare punerii în mişcare a căruciorului şi se porneşte cronometrul simultan cu începerea deplasării căruciorului; se citeşte la comparator săgeata minimă şi maximă a arcului lamelar (numărul minim şi maxim de diviziuni) înregistrate pe spaţiul s=50 mm; se fac câte două măsurători pentru fiecare lubrifiant încercat; se şterge şi se spală cu diluant elementele cuplei de frecare, se înlocuieşte lubrifiantul şi se reiau măsurătorile. Observaţie: Pentru încercările în funcţie de rugozitate se montează epruvete cu diferite rugozităţi ale suprafeţelor ce vin în contact şi diferite orientări ale asperităţilor. Se păstrează acelaşi lubrifiant şi se efectuează măsurătorile în succesiunea de mai sus Prelucrarea datelor se notează timpul t [s] necesar parcurgerii de către cărucior a spaţiului prevăzut (s = 50 mm); se calculează viteza de deplasare a căruciorului v a [mm/s]: s v a = (3) t se notează valorile maxime şi minime indicate de comparatorul cu cadran 6 şi se trec în tabelul ; în funcţie de numărul de diviziuni indicate de comparatorul cu cadran, din diagrama de etalonare a arcului lamelar (fig.4 din lucrarea nr.34, F f = 0,0357 nr. diviziuni), se determină valoarea forţei maxime (F fmax ) şi a celei minime de frecare (F fmin ); cu datele din tabelul se calculează coeficienţii de frecare: - static, cu relaţia - cinetic, cu relaţia μ ak Ff max μ as = (0) F = F f max n + F F n f min ()
328 38 datele pentru încercările în funcţie de rugozitate, de direcţia de orientare a asperităţilor, se completează în tabelul ; se comentează rezultatele obţinute. Tip Nr. div. F f [N] μ μ as / lubrifiant max min F fmax F fmin μ as μ ak μ ak v a [mm/ min] s [mm] Tabelul t [s] Orientarea Nr. div. F f [N] μ μ as / asperităţilor max min F fmax F fmin μ as μ ak μ ak v a [mm/s] Tabelul s [mm] t [s] v a v a
329 36. DETERMINAREA PE CALE GRAVIMETRICĂ A UZURII ELEMENTELOR CUPLELOR DE FRECARE CU CONTACT LINIAR ÎN FUNCŢIE DE CALITATEA MATERIALELOR, ÎN REGIM DE FRECARE MIXTĂ 36.. Scopul lucrării Scopul lucrării îl constituie determinarea pe cale gravimetrică a uzurii diferitelor cupluri de materiale ale unei cuple de frecare în condiţii de ungere mixte cu acelaşi lubrifiant astfel încât să poată fi stabilită alegerea corectă a cuplului de materiale din punct de vedere al uzurii materialelor Consideraţii teoretice Uzarea cuplelor de frecare este un fenomen complex, cu evoluţie la nivelul ariei reale de contact, deci a contactului şi a deformaţiilor dintre microasperităţi. Definiţie: Uzarea reprezintă un proces prin care are loc pierderea de material şi modificarea stării iniţiale a suprafeţelor corpurilor, având ca rezultat uzura. Procesele de uzare sunt, în esenţă, influenţate de următoarele grupe de caracteristici mecanice: ansamblul condiţiilor de solicitare, compus din: - caracteristicile solicitării (sarcină, viteză, temperatură, durata solicitării); - tipul mişcării (alunecare, rostogolire, pivotare, ciocnire); - evoluţia în timp a mişcării (continuă, discontinuă, intermitentă); structura sistemului tribologic, specificându-se: - componentele participante la procesul de uzare (semicuplele şi, lubrifiantul, mediul de lucru); - proprietăţile elementelor componente (material, caracteristici macro şi microgeometrice ale suprafeţelor de frecare). Câteva dintre efectele uzării, care pot fi observate, sunt:
330 330 vibraţiile (longitudinale sau transversale); fenomene termice (temperatura medie, temperatura instantanee); modificări geometrice; transformări mecanice şi tribochimice (oxidări, ecruisare, distrugerea grăunţilor etc.); modificarea masei, care poate fi determinată prin cântărire, evidenţierea gradului de contaminare a lubrifiantului etc.; evoluţia în timp a forţei de frecare sau a momentului de frecare (evoluţie constantă, aleatoare, sacadată, oferind informaţii asupra fenomenului de uzare a suprafeţelor cuplei de frecare) Regimul de frecare mixt în cuplele superioare În cazul regimului de frecare mixt valoarea grosimii filmului de lubrifiant este comparabilă cu valoarea rugozităţii compuse a suprafeţelor. Parametrul filmului de lubrifiant este: h λ = =...,5 σ unde: h grosimea filmului de lubrifiant; σ abaterea medie pătratică a înălţimilor asperităţilor. Experimentele au evidenţiat faptul că forţa de frecare (F f ), momentul de frecare(m f ) sau coeficientul de frecare (μ) sunt dependente de raportul η vr η ω (pentru cuple superioare) sau (pentru cuple inferioare) unde: F p n η vâscozitatea lubrifiantului; v r viteza de rostogolire; F n sarcina de contact; ω viteza unghiulară; p presiunea medie de contact. Graficul obţinut în coordonate F f, M f, μ = f (η v r /F n ) sau F f, M f, μ = f (η ω/ p ) oferă informaţii cu privire la localizarea atât a regimului de frecare mixt cât şi a regimurilor adiacente acestuia (fig. ). În cazul cuplelor superioare, curba Stribeck poate fi explicată prin acţiunea combinată a celor două componente ale frecării (fluidă şi uscată) în funcţie de valorile parametrului λ. Valorile acestui parametru corespunzătoare regimului mixt determină ca raportul dintre forţa de frecare corespunzătoare ()
331 33 frecării fluide (F l ) şi forţa de frecare corespunzătoare frecării uscate (F a ) să aibă valori apropiate de unitate. F f M f μ F f μ μ = (F l +F a )/F n I II III IV F f = F l +F a F l L M (limită) (mixt) EHD a HD (hidrodinamic) η ω log p b F a λ Fig. Din figura,b se observă că: la valori scăzute ale lui λ, dominantă este frecarea uscată; la valori mari ale lui λ, dominantă este frecarea fluidă. Pentru λ =,5 cele două componente au valori apropiate. Frecarea mixtă apare la viteze mici şi încărcări mari, când regimul EHD nu se poate menţine. În funcţie de valorile parametrului λ, regimurile de frecare (ungere) din cuplele superioare se pot defini după cum urmează (fig.,a): zona I, dacă λ < regim limită (L); zona II, dacă < λ <,5 regim mixt (M); zona III, dacă,5 < λ < 3 regim elastohidrodinamic (EHD); zona IV, dacă λ 3 regim hidrodinamic (HD) Tipuri de uzare Principalele tipuri de uzare sunt:. Uzarea de adeziune Aceasta este des întâlnită în cuplele de frecare cu mişcare de alunecare şi se produce prin sudarea şi ruperea punţilor de sudură între microzonele de contact.
332 33 Pentru două corpuri metalice contactul se realizează, în zone distincte, prin intermediul asperităţilor. Dacă presiunea de contact depăşeşte duritatea unuia dintre corpuri, se produc atât deformări elastice cât şi plastice, iar apropierea dintre atomii fiecărui corp poate da naştere unor joncţiuni metalice care la temperaturi reduse formează suduri reci, iar la temperaturi apropiate de cele de topire ale materialelor formează suduri calde. Forma cea mai severă a uzurii de adeziune este gripajul ( scuffing ) şi apare în condiţii extreme de utilizare (presiune ridicată, viteze de alunecare mari, ungere insuficientă), atunci când între suprafeţele de frecare se formează joncţiuni prin sudarea la cald a vârfurilor asperităţilor, care nu mai pot fi forfecate, având ca efect blocarea cuplei de frecare (conform teoriei Bowden - Tabor).. Uzarea de abraziune Reprezintă un proces de deteriorare a cuplelor de frecare printr-o microaşchiere realizată de către un alt corp (provenit dintr-o sursă exterioară sau generat de o uzare adezivă). Rezistenţa la uzarea abrazivă (ε w ) este raportul dintre uzura liniară a unui eşantion standard şi cea a eşantionului studiat şi creşte liniar cu duritatea suprafeţei. Forma blândă a uzării de abraziune se numeşte zgâriere şi se manifestă prin rizuri liniare, paralele, care apar fie prin interpunerea între suprafeţele de frecare a unor particule mai dure, fie prin acţiunea directă a asperităţilor. Forma severă a abraziunii se numeşte brăzdare şi se manifestă prin rizuri late şi adânci (fiind produsă de particule interpuse, mai dure, de dimensiuni mai mari sau de contrapiesă). 3. Uzarea de oboseală Uzarea de oboseală se produce în urma unor solicitări ciclice ale suprafeţelor în contact. Acest fenomen poate apărea atât în cazul contactelor directe (metal/metal), cât şi în cazul în care suprafeţele sunt separate printr-un film de lubrifiant. El poate fi explicat prin asocierea tensiunilor de contact cu existenţa unor microdefecte în materialul solicitat (microfisuri provenite din procesul de prelucrare, defecte de turnare, goluri, incluziuni etc.). Acest tip de uzare poate fi recunoscut prin: deformaţii plastice (la materiale ductile); fisuri, crestături (la materiale fragile); ciupituri, exfolieri şi microexfolieri (în contacte EHD, de exemplu la rulmenţi). Tot aici poate fi amintită uzarea de tip pitting care reprezintă o formă de deteriorare prin oboseală de contact a elementelor unei cuple de frecare,
333 333 care au contact liniar sau punctiform, greu încărcate şi care funcţionează în regim de lubrifiere EHD (specific rulmenţilor, angrenajelor, mecanismelor cu came etc.). 4. Uzarea de coroziune Uzarea de coroziune reprezintă un proces de deteriorare cu pierderi de material datorită acţiunii agenţilor chimici agresivi existenţi în mediul de lucru (apă, oxigen, medii chimice acide etc.). Câteva exemple de asemenea tipuri de uzare sunt: ruginirea, coroziune chimică datorată mediului ambiant; electrocoroziunea sau coroziunea electrochimică, care poate fi întâlnită în medii de lubrifiere care pot favoriza formarea de microcelule electrolitice; tribocoroziunea sau coroziunea tribochimică, în care factorii de natură chimică se asociază cu cei de natură mecanică; coroziunea de contact (fretting), coroziune tribochimică caracteristică contactelor puternic solicitate ale căror suprafeţe execută mişcări relative, oscilatorii, de mică amplitudine. Aceste tipuri de uzări pot apărea atât în cazul frecării uscate cât şi în prezenţa lubrifianţilor. În practică aceste patru forme de uzare pot fi întâlnite separat numai în cazuri speciale. Principalii indicatori ai procesului de uzare sunt: Uzura (U) În funcţie de metoda de măsurare a uzurii se disting: - uzura liniară (U h ), reprezintă grosimea stratului uzat [mm] sau [μm]; - uzura volumetrică (U v ), reprezintă volumul stratului uzat [mm 3 ]; - uzura gravimetrică (U g ), reprezintă masa stratului uzat [g] sau [mg]. Viteza de uzare (v u ) Viteza de uzare se defineşte ca fiind raportul dintre uzură şi timp: v u = du / dt () În funcţie de modul de exprimare a uzurii, viteza de uzare poate fi: - liniară, (v uh ) [mm/h] sau [μm/h]; - volumetrică, (v uv ) [mm 3 /h]; - gravimetrică, (v ug ) [g/h] sau [mg/h]. Intensitatea de uzare (I u )
334 334 Reprezintă raportarea uzurii la una dintre cauzele principale şi anume, frecarea (lungimea de frecare, lucrul mecanic consumat prin frecare); din acest punct de vedere, intensitatea de uzare poate fi: - intensitatea liniară, adimensională, de uzare: unde: I uh h f h f h ( v f t) = ΔU h /( v f Δt) vuh / v f = du / dl ΔU / ΔL = ΔU / Δ = (3) L f lungimea de frecare în cursul căreia s a mărit grosimea stratului uzat cu U h ; v f viteza de frecare, reprezentând viteza de alunecare sau de rostogolire dintre cele două elemente ale cuplei de frecare. - intensitatea volumetrică de uzare: I uv v f v f ( AnU h ) ΔLf = du / dl ΔU / ΔL = Δ / (4) în care A n este aria nominală de contact; dacă configuraţia geometrică a cuplei de frecare permite ca în timpul uzării A n să rămână constantă, atunci (4) devine: I uv = A n I uh ; - intensitatea gravimetrică de uzare: unde: ρ I ug g f g f ( U v ) ΔL f = du / dl ΔU / ΔL = Δ ρ / (5) este densitatea materialului elementului cuplei de frecare care se analizează; pentru majoritatea materialelor densitatea este constantă, deci: I ug = ρ I uv. - intensitatea energetică de uzare: I ue v mf v ( F L ) ΔU Δ( F L ) = du / dl = du / d / (6) unde: L mf lucrul mecanic consumat prin frecare care a condus la uzura U v ; F f forţa de frecare. În funcţie de specificul geometric şi cinematic al cuplei de frecare se definesc, suplimentar, aria de frecare A f, coeficientul de acoperire reciprocă a suprafeţelor λ = A n /A f şi lungimea specifică de frecare L 0f. În tabelul se explicitează mărimile A n, A f, L 0f şi λ pentru câteva cazuri particulare. f f v f f
335 335 Datorită complexităţii fenomenului de uzare în care o serie de parametri se modifică în timpul procesului de frecare uzare, relaţiile teoretice de calcul nu satisfac pe deplin. În aceste cazuri se recurge la determinarea uzurii pe cale experimentală. Tabel Lungimea şi aria de frecare Schema cuplei de frecare Ciclul de mişcare Parametrii principali Aplicaţii Obs. O L d O l x Din O în O A n = l L A f =(d+l) L A f = l L L 0f =x pt. x [0,l] =l pt. x [l, d] =d+l x pt. x [d, d+l] L 0f =d λ =[l/(d+l)]; λ = Ghidaje, mecanisme cu culise, sisteme de copiat, piston cilindru. L lung. de contact l lăţime de contact R e R i α O rotaţie a elementului A n =[α z (R e R i )]/ A f =[α z (R e R i )]/ A f =π (R e R i ) L 0f =πr pt. R i r R e L 0f =αzr pt. R i r R e λ = λ =(αz)/(π) Cuplaje, ambreiaje, etanşări frontale, frâne disc z nr. segmentelor R R ϕ 0 O rotaţie a elementului A n = ϕ 0 R L A f = π R L A f = ϕ 0 R L L 0f = ϕ 0 R L 0f = π R λ =ϕ 0 /π λ = Lagăre cu alunecare, frâne cu tambur L lung. de cont. în direcţie axială, R R R ϕ 0 unghiul de contact R ω ϕ ϕ ω R O rotaţie a fiecărui element A n = ϕ R L= ϕ R L A f = π R L A f = π R L L 0f =ϕ R [ (ω R /ω R ] L 0f =ϕ R [(ω R /ω R ) ] λ =ϕ /π λ =ϕ /π Came, transmisii cu fricţiune, variatoare ϕ, ϕ depind de sarcină, material şi dimensiuni; L lung. de cont.
336 Construcţia şi funcţionarea tribometrului Schema cinematică a tribometrului pe care se determină uzura gravimetrică pentru o cuplă de frecare de tip Timken (cuplă de frecare cu contact liniar, de clasa a II a, fig.3), este prezentată în figura F c F 5 4 b a d 3 F n F n 3 Fig. disc,, epruvete, 3, 0 pârghii, 4 motor electric, 5, pârghii, 6, 8 roţi de curea, 7 lagăre, 9 arbore vertical, 3 vas cu ulei a = 85 mm, b = 35 mm, c = 470 mm, d = 5 mm Cupla de frecare este alcătuită din discul având diametrul de 6 mm, montat pe capătul de arbore conic al arborelui vertical 9 şi epruvetele cilindrice, respectiv având diametrul Φ 6 mm. Arborele vertical este antrenat în mişcarea de rotaţie de către un motor electric 4 prin intermediul unei transmisii prin curele trapezoidale 6, 8. Turaţiile obţinute la arborele vertical sunt: n = 980 rot/min, n = 05 rot/min. Încărcarea cuplei cu sarcina normală se face printr-un sistem de pârghii 3, respectiv 0 prin ataşarea diferitelor greutăţi pe talerele pârghiilor 5 şi.
337 337 Φ 6 Fig. 3 disc, epruvetă Determinarea uzurii Determinarea uzurii se face pe cale gravimetrică. Epruvetele şi ale cuplei de frecare sunt cântărite la o balanţă analitică atât înainte cât şi după încercarea la uzare. Înainte de cântărire, epruvetele se spală în diluant şi se şterg cu o lavetă curată sau se usucă în curent de aer. Uzura se determină ca diferenţa dintre masele epruvetelor înainte şi după uzare Desfăşurarea lucrării Se parcurg următoarele etape: epruvetele se spală în diluant, se usucă şi se cântăresc la balanţa analitică cu precizia de 0, mg; se montează epruvetele, respectiv, în braţele 3, respectiv 0; se montează pe talerele pârghiilor 5 şi greutăţile care realizează sarcina F = 30 N; se fixează cureaua de transmisie pe treapta corespunzătoare turaţiei: n = 980 rot/min; cupla de frecare se scufundă într-un vas cu lubrifiant 3. Nivelul lubrifiantului trebuie să depăşească cu 5 mm discul ; se montează paravanul de protecţie împotriva stropirii cu ulei; se porneşte instalaţia simultan cu pornirea cronometrului prin care se măsoară timpul de încercare. Timpul de încercare se va alege în funcţie de cuplul de materiale şi de lubrifiant, astfel încât să poată fi obţinută o uzură măsurabilă (t 40 minute); după efectuarea încercării pe durata t prestabilită se opreşte instalaţia, se demontează epruvetele, se spală în diluant, se usucă şi se cântăresc; se modifică turaţia arborelui 9 la valoarea n = 05 rot/min, se montează epruvetele a căror masă iniţială este cunoscută şi se reiau operaţiile de la etapele 6, 7 şi 8. Φ 6
338 338 unde: Prelucrarea datelor masa iniţială m 0i şi cea finală m i a epruvetelor şi se trec în tabelul ; se determină sarcina normală totală F n [N] care încarcă cupla de frecare: F = F + F (7) n n n F n cota parte din sarcina normală totală datorată greutăţilor montate pe pârghiile 5, respectiv ; Fn = 0 N cota parte din sarcina normală totală datorată greutăţilor proprii ale pârghiilor 5, respectiv. F n ( a + b) = F a c d (8) c a F n = F (9) d a + b unde: a=85 mm; b=35 mm; c=470 mm; d=5 mm. se calculează viteza periferică v [m/s] cu relaţia: π D n v = (0) se calculează diferenţa (m 0i m i ) care reprezintă masa materialului pierdut prin uzare; se completează tabelul cu datele obţinute; se discută rezultatele obţinute. Tabelul Cupla de frecare m 0i [g] m i [g] m 0i m i [g] t [min] Lubrif. n [rot/min] v [m/s]
339 37. DETERMINAREA PE CALE GRAVIMETRICĂ A UZURII ELEMENTELOR CUPLELOR DE FRECARE CU CONTACT LINIAR ÎN FUNCŢIE DE TIPUL LUBRIFIANTULUI, ÎN REGIM DE FRECARE MIXTĂ 37.. Scopul lucrării Lucrarea are ca scop determinarea pe cale gravimetrică a uzurii elementelor cuplelor de frecare cu contact liniar în condiţiile utilizării diferitelor tipuri de lubrifianţi lichizi Consideraţii teoretice Utilizarea lubrifianţilor lichizi în cuplele de frecare se face cu scopul reducerii frecării şi uzării suprafeţelor în contact, a protejării anticorozive a suprafeţelor cuplelor de frecare precum şi a răcirii elementelor cuplei prin transportul energiei termice (rezultată în urma procesului de frecare) din zona de contact. Într-o cuplă de frecare, tipul lubrifiantului (considerat a fi cel de-al treilea corp) poate fi stabilit încă din faza de proiectare a cuplei. După starea de agregare şi după consistenţă, lubrifianţii pot fi: gazoşi, lichizi, semisolizi, solizi. Pe baza experienţelor practice, tipurile lubrifianţilor utilizaţi pentru ungere pot fi recomandate în funcţie de tipul cuplei de frecare, regimul de lucru, condiţiile de funcţionare etc. În multe situaţii, mai ales în cazul unor cuple de frecare speciale, în literatura de specialitate nu se regăsesc recomandări privind utilizarea lubrifianţilor optimi pentru ungerea acestor cuple. În aceste cazuri se recurge la modele experimentale la scară, care să funcţioneze în regimuri şi din materiale identice cu cupla reală.
340 Construcţia şi funcţionarea tribometrului Tribometrul pe care se efectuează lucrarea practică utilizează o cuplă de frecare de tip Timken (cuplă de frecare cu contact liniar, fig.). Discul este confecţionat din OLC 45, durificat superficial prin CIF, la o duritate 48 HRC. Φ 6 Fig. disc, epruvetă. Schema cinematică a tribometrului este prezentată în lucrarea nr.36, figura. Conform acesteia, cupla de frecare este alcătuită din discul montat pe capătul de arbore conic al arborelui vertical 9 şi epruvetele, respectiv. Arborele vertical este antrenat în mişcare de rotaţie de către un motor electric 4 prin intermediul unei transmisii prin curele trapezoidale 6, 8. Turaţiile care pot fi obţinute la acest arbore sunt: n = 980 rot/min, respectiv n = 05 rot/min. Încărcarea cuplei de frecare se face printr-un sistem de pârghii, prin montarea de greutăţi pe talerele celor două braţe 5 şi Determinarea uzurii Principalele tipuri de uzare care apar în cupla de frecare sunt: uzarea adezivă şi uzarea abrazivă. Determinarea uzurii se face pe cale gravimetrică. Epruvetele şi sunt cântărite (înainte şi după uzare) cu o balanţă analitică cu precizia de măsurare de 0, mg. Uzura se determină prin diferenţa dintre masele epruvetelor înainte şi după uzare (m 0 m ) [g] Desfăşurarea lucrării Se parcurg următoarele etape: epruvetele se spală în diluant, se usucă şi se cântăresc la balanţa analitică cu precizia de 0, mg; sarcina care se aşează pe talerele 5 şi este F = 30 N; Φ 6
341 se determină sarcina normală totală frecare, scriind ecuaţia de echilibru: 34 F n [N] care încarcă cupla de c a F n = F () d a + b în care F n este cota parte din sarcina normală totală datorată sarcinii F, iar ceilalţi termeni sunt: a=85 mm, b=35 mm, c=470 mm, d=5 mm; în afară de sarcina normală F n, se va ţine seama de greutatea proprie a braţelor 5 şi precum şi a talerelor care, împreună, produc o încărcare suplimentară Fn = 0 N. Sarcina normală totală este: F = F + F () n n n se montează epruvetele şi în pârghiile 3 şi 0; se montează cureaua trapezoidală pe treapta corespunzătoare turaţiei n = 980 rot/min.; se alege o anumită cuplă de frecare (epruvetele fiind din aceeaşi şarjă de material, prelucrate la aceeaşi rugozitate, duritate etc.) şi unul dintre diferitele tipuri de lubrifianţi lichizi (M30, T90EP, L00, Te); se scufundă cupla de frecare în vasul cu ulei 3. Nivelul lubrifiantului trebuie să depăşească cu 4 5 mm discul ; se montează paravanul de protecţie împotriva stropirii cu ulei; se porneşte instalaţia, simultan cu pornirea cronometrului care trebuie să înregistreze timpul de încercare. Acest timp se stabileşte în funcţie de materialele cuplei de frecare şi de lubrifiant, astfel încât să poată fi obţinută o uzură măsurabilă. Informativ t = 40 minute; se opreşte instalaţia, se scot epruvetele şi, se spală de resturile de lubrifiant, se usucă şi se cântăresc; se alege un alt tip de ulei şi se reiau operaţiunile precedente; după fiecare încercare, discul este şlefuit cu hârtie abrazivă fină (cu granulaţie 30) pentru a menţine aceeaşi rugozitate (R a =,6).
342 Prelucrarea datelor în tabelul se notează valoarea maselor iniţiale (m 0 ) şi după uzare (m ) ale epruvetelor, cântărite cu balanţa analitică; se calculează viteza periferică şi se notează în tabelul ; se calculează masa pierdută prin uzare (m 0 m ); se analizează rezultatele obţinute. Tabelul Tip lubrifiant Masa iniţială m 0 [g] Masa după uzare m [g] Masa pierdută prin uzare m 0 m [g] Timpul de încercare t [s] Viteza de alunecare [m/s]
343 38. DETERMINAREA VARIAŢIEI FORŢELOR DE FRECARE ŞI A COEFICIENŢILOR DE FRECARE ÎN FUNCŢIE DE SARCINA DE ÎNCĂRCARE PENTRU DIFERITE CUPLURI DE MATERIALE DIN MASE PLASTICE ELEMENTE METALICE, ÎN CAZUL FRECĂRII USCATE 38.. Scopul lucrării Lucrarea are ca scop determinarea variaţiei coeficienţilor de frecare în funcţie de încărcare a diferitelor cuple de frecare formate din materiale plastice şi metale Consideraţii teoretice Cuplele de frecare utilizate în construcţia de maşini folosesc o gamă largă de materiale printre care şi masele plastice. Acestea sunt folosite din ce în ce mai mult fie ca lubrifianţi (sub forma unor straturi subţiri din nylon, teflon etc. depuse pe suprafeţele de frecare ale unor organe de maşini), fie ca lianţi ai unor lubrifianţi solizi. Deşi caracteristicile mecanice ale maselor plastice sunt în general inferioare celor ale aliajelor feroase şi neferoase, totuşi aceste materiale sunt utilizate pe scară largă ca materiale antifricţiune (sau autolubrifiante) chiar şi în medii abrazive sau corozive, fiind mult mai puţin sensibile decât metalele la absenţa ungerii. Particularităţile tribologice ale maselor plastice sunt determinate de proprietăţile vâscoelastice ale acestora. Forţa de frecare are în expresia sa şi o componentă de histerezis. Această componentă variază cu viteza de alunecare şi cu temperatura din cupla de frecare Construcţia şi funcţionarea tribometrului Schema cinematică a tribometrului pe care se efectuează lucrarea este prezentată în figura. Cupla de frecare este formată din elementul cilindric (diametrul d = 6 mm, înălţimea h = 6 mm) şi elementul prismatic
344 344 (50x30x8 mm). Contactul dintre elementele cuplei se realizează pe o suprafaţă plană (cuple de clasa a III a). Căruciorul 3 pe care se fixează epruveta se poate deplasa pe două ghidaje prismatice 4 şi este antrenat de un fir de oţel care este trecut peste două role de ghidare 6 alcătuite din doi rulmenţi radiali. Firul din oţel 5 este legat de cărucior şi de capătul unei tije 7 a pistonului 9 care se deplasează în cilindrul hidraulic Fig. epruvetă cilindrică, epruvetă prismatică, 3 cărucior, 4 ghidaje, 5 fir din oţel (Φ 0,3 mm), 6, role de sprijin, 7 tijă piston, 8 cilindru hidraulic, 9 piston, 0 taler şi greutăţi pentru deplasarea căruciorului, taler şi greutăţi pentru echilibrare, 3 arc lamelar, 4 braţ suport, 5 traductoare tensometrice rezistive, 6 comparator cu cadran, 7 braţ oscilant, 8 greutăţi pentru încărcarea cuplei de frecare.
345 F f [N] F f = 0,0357 f f este numărul de diviziuni citite la ceasul comparator Fig. f x 0,0 [mm] 345 La deplasarea spre dreapta a căruciorului (ca urmare a montării greutăţilor 0), pistonul 9 se va deplasa în jos obligând lichidul hidraulic să treacă, printr-o fantă practicată pe piston, din partea de jos a cilindrului hidraulic deasupra pistonului. În acest mod se obţine o viteză redusă şi constantă a căruciorului. Încărcarea cuplei de frecare se face cu greutăţile 8 aşezate pe un braţ oscilant 7 care, la rândul lui este legat de un arc lamelar 3. La deplasarea spre dreapta a căruciorului 3, forţa de frecare din cuplă deplasează braţul oscilant 7 spre dreapta şi produce o deformaţie a arcului lamelar care poate fi măsurată cu ajutorul unui comparator cu cadran 6 sau al unor traductoare tensometrice rezistive 5. Din diagrama de etalonare a arcului lamelar 3 (fig.), se determină valoarea forţei de frecare F f, în funcţie de deformaţia arcului. Viteza medie de alunecare v [mm/s] a elementului faţă de elementul se determină prin cronometrarea timpului t de parcurgere a unui spaţiu s cunoscut (de exemplu s = 50 mm) care este măsurat cu ajutorul unei rigle gradate montată pe batiul dispozitivului şi a unui reper de pe cărucior. Astfel: s v = () t unde: s spaţiul parcurs de cărucior [mm]; t timpul în care s-a parcurs spaţiul s [s]. Epruvetele cilindrice sunt confecţionate din PTFE, POLIAMIDĂ, FERODO, TEXTOLIT, iar epruveta prismatică din OLC Desfăşurarea lucrării Se parcurg următoare etape: se aduce căruciorul 3 în poziţie de lucru (cu pistonul în partea superioară a cilindrului). Pentru aceasta, se montează 3 greutăţi în valoare totală de 65 N pe talerul din stânga;
346 346 rigla gradată pentru măsurarea spaţiului parcurs de cărucior se aduce cu reperul zero în dreptul reperului de măsurare a căruciorului; se montează elementele cuplei de frecare. Epruveta prismatică se fixează prin intermediul a două cleme, iar epruveta cilindrică se montează în locaşul din braţul oscilant 7; se montează greutăţile G = 65 N de pe talerul pe talerul 0 iar pe talerul se montează o greutate de 0 N pentru menţinerea firului de oţel 5 întins; se efectuează o cursă cu căruciorul pe spaţiul s = 00 mm. Aceasta se consideră că este o cursă de rodaj şi nu se fac măsurători; se readuce căruciorul în dreptul reperului zero de pe riglă prin mutarea greutăţilor pe talerul ; se montează comparatorul cu cadran 6 în braţul suport 4 şi se reglează la poziţia zero (punând între cele două elemente ale cuplei de frecare o bilă sau o rolă cilindrică pentru ca forţele de frecare să fie minime); se încarcă cupla de frecare prin montarea greutăţilor 8 corespunzătoare sarcinii normale F n, conform tabelului ; se repetă operaţiile pentru punerea în mişcare a căruciorului; simultan cu punerea în mişcare a căruciorului, se porneşte cronometrul şi se măsoară timpul în care căruciorul se deplasează pe o distanţă de 50 mm; în perioada cât căruciorul 3 este în mişcare, se urmăresc indicaţiile comparatorului cu cadran (valorile minime şi maxime). În funcţie de aceste valori se vor determina (din figura ) valorile forţelor medii de frecare; se efectuează măsurători pentru diferitele încărcări normale şi pentru diferitele cupluri de materiale; Prelucrarea datelor se notează în tabelul valorile minime şi maxime ale deformaţiilor arcului lamelar 3, n i şi n i, corespunzătoare cuplurilor de materiale studiate; se calculează valoarea medie a deformaţiilor; în funcţie de valoarea medie calculată, din figura se determină valorile medii ale forţelor de frecare, F fi ; se calculează coeficienţii de frecare μ i cu relaţia:
347 F 347 fi μ i = () Fni cu valorile coeficienţilor de frecare notaţi în tabelul se trasează diagrama de variaţie a acestora în funcţie de sarcina normală şi cuplurile de materiale utilizate, μ i = f ( F ni ), figura 3. Cupla de frecare F ni [N] Nr. de diviziuni Media (n n n i +n i )/ F fi [N] μ i Tabelul v [mm/s] μ i Fig. 3 F ni [N]
348 39. DETERMINAREA UZURII DE ABRAZIUNE PE DISC ROTATIV CU HÂRTIE DE ŞLEFUIT 39.. Scopul lucrării Scopul lucrării este determinarea rezistenţei la uzarea de abraziune (pe disc rotativ cu hârtie de şlefuit) pentru diferite tipuri de materiale în comparaţie cu un material considerat etalon. Pentru anumite tipuri de cuple de frecare care funcţionează într-un mediu abraziv se poate determina uzura relativă Consideraţii teoretice Uzarea de abraziune reprezintă un proces de deteriorare a cuplelor de frecare prin microaşchiere, datorită prezenţei în interiorul cuplei de frecare a unor particule de duritate mai mare decât ale materialelor cuplei, sau datorită unor asperităţi mai dure ale uneia dintre suprafeţele de contact faţă de cele ale suprafeţei conjugate. Particulele dure pot proveni fie din exteriorul cuplei ca urmare, de exemplu, a unor etanşări necorespunzătoare (particule de nisip, praf etc.), fie din interiorul cuplei, ca urmare a uzurii de adeziune (forfecarea joncţiunilor). În acest caz procesul este denumit, în general, abraziune cu trei corpuri (fig. a şi b). 3 3 a b Fig., 3 elementele cuplei, particule abrazive.
349 349 În cazul în care corpul abraziv este o asperitate mai dură a suprafeţei conjugate, sau este porţiunea activă a unei scule de prelucrare, procesul este denumit abraziune cu două corpuri (fig. a şi b). a b Fig. scula aşchietoare; piesă. În funcţie de valoarea durităţii abrazivului (H a ) şi cea a durităţii materialului cuplei (H m ) se disting trei regimuri de uzare: regim de uzare blândă, dacă: H a < H m () Forma blândă a uzării de abraziune se numeşte zgâriere şi se manifestă prin rizuri liniare, paralele, care apar prin interpunerea între suprafeţele de frecare a unor particule mai dure sau prin acţiunea directă a unor asperităţi; regim de tranziţie, dacă: regim de uzare severă, dacă: H a H m () H a > H m (3) Forma severă a abraziunii se numeşte brăzdare ; se manifestă prin rizuri late şi adânci şi este produsă de particule interpuse, mai dure, de dimensiuni mai mari (sau poate fi produsă direct de suprafaţa conjugată). Rezistenţa relativă la uzare abrazivă este definită ca fiind raportul dintre uzura liniară a unui eşantion standard şi cea a eşantionului studiat: U h(standard) ε w = (4) U h(epruvetă )
350 350 În figura 3 este reprezentată variaţia rezistenţei relative la uzare în funcţie de duritatea materialului, iar în figura 4 condiţia apariţiei particulelor de uzură din punctul de vedere al raportului dintre duritatea abrazivului (H a ) şi duritatea materialului cercetat (H m ) (sau duritatea minimă a materialelor celor două suprafeţe de frecare). Rezistenţa relativă la uzare Cr W Mo Oţeluri tratate termic 0 Co Fe Sn Al 0 Cd Pb Duritatea HB [MPa] Fig. 3 Oţel aliat,,9 % Cr Oţel carbon,, % C Oţel carbon, 0,83 % C Oţel carbon, 0,4 % C Metale pure Oţeluri tratate termic Rezistenţa la uzare (Ru) I II III R u 0,7,,3,7 Fig. 4 H / H a m În zona I nu apare uzarea de tip abraziv, însă în zona III ea apare sigur şi nu mai depinde de raportul durităţilor. Rezistenţa la uzare abrazivă este influenţată şi de structura materialului.
351 35 În tabelul este prezentată rezistenţa la uzare (R u ) a unor tipuri de oţeluri, considerând ca etalon rezistenţa oţelului T05Mn0, STAS 378, pentru diferite variante de tratament termic (conform tabelului ). Duritatea este exprimată în MPa. Tabelul Variantă Tipuri de oţeluri tratam. termic OSC 0 OSC 65M0 0C08 OLC 35 5C0 OLC 55 HB I Ru 0,99 0,40 0,49 0,5 0,69 II III IV V VI VII VIII IX HB Ru,78,95,39,08,08,65,55 HB Ru,6,75,7 0,99 0,94,5,3 HB Ru,43,60, 0,97 0,75,37,04 HB Ru,8,49, 0,8 0,59, 0,89 HB Ru 0,6 0,50 0,85 0,74 HB Ru,65,3,8 HB Ru,63,3,7 HB Ru,60,30,66 Uzarea de abraziune este un proces complex, care depinde de o serie de factori care acţionează în cele mai multe cazuri simultan. S-au stabilit relaţii teoretice de calcul pentru acest tip de uzare, care se bazează pe determinarea practică a coeficienţilor de uzare, cu care se poate calcula apoi volumul de material pierdut prin uzarea de abraziune (sau înălţimea stratului uzat).
352 35 Varianta I II III IV V VI VII VIII IX Regimul tratamentului termic Tabelul Încălzit cu 50 peste Ac3 sau Ac timp de 30 de minute şi răcit în cuptor. Încălzit la o temperatură cu 50 peste Ac3 sau Ac, călit şi menţinut la 70 C. Călit şi menţinut la 300 C. Călit şi menţinut la 400 C. Călit şi menţinut la 500 C. Călit şi menţinut la 600 C. Tratat izoterm la o temperatură cu70 C peste Ac sau Ac3 în baie cu temperatura C. Tratament izoterm în baie cu temperatura C. Tratament izoterm în baie cu temperatura C. Un model simplificat al procesului de desprindere a particulei de uzură pune în corespondenţă intensitatea liniară de uzare (I uh ) cu condiţiile de lucru: I Δh p n uh = = k (5) L f pc unde: p n presiunea nominală de contact; p c presiunea de curgere minimă a celor două elemente aflate în contact; k constantă de proporţionalitate dependentă de natura materialelor; k = (,8...4) 0 pentru materiale metalice. Dependenţa intensităţii liniare de uzare de principalele caracteristici ale materialului (modulul de elasticitate, duritatea Vickers, energia moleculară) este de forma: pentru metale pure:,3 I uh = 09 E, (6) în care E este modulul de elasticitate longitudinal [MPa] sau: 3 0,79 I uh = 8,4 0 HV, (7) în care HV este duritatea Vickers [MPa] sau:
353 ,7 uh = e subl 353 I (8) în care e subl este energia moleculară de sublimare [kj/kmol]; pentru polimeri: I,4 0 8,6 0 (9) 3 0,7 4 / uh = HV = ecoez în care e coez este energia moleculară de coeziune [kj/kmol]. Pentru oţelurile carbon (OL şi OLC) netratate termic se pot aplica relaţiile (6) (8); pentru oţelurile tratate termic se modifică atât exponenţii, cât şi coeficienţii de proporţionalitate. În cazul în care în zona de contact pătrund particule abrazive, fie ca urmare a lubrifiantului incorect filtrat, fie ca urmare a suspensiilor abrazive din mediul ambiant, de obicei praf, intensitatea liniară de uzare poate fi determinată cu relaţia: 0 I uh = 3,5 0 A K / M (0) în care: A grupa factorilor dependenţi de caracteristicile geometrice şi mecanice ale abrazivului; M grupa factorilor materialelor celor două elemente ale cuplei; K grupa factorilor cinematici ai cuplei. Din punctul de vedere al acestei intensităţi se definesc clase de uzare (tabelul 3), punându-se în evidenţă natura interacţiunii de contact. Clase de Intensitatea de uzare I uh uzare de la până la Natura interacţiunii de contact Elastică Elasto plastică Plastică Microaşchiere Tabelul 3
354 Condiţii de încercare Lucrarea destinată determinării rezistenţei la uzarea pe disc cu hârtie abrazivă s-a conceput cu respectarea condiţiilor din STAS viteza tangenţială de alunecare a epruvetei are valoarea medie v a = 0,09 m/s; lungimea parcursului în spirală asigură o uzură masică măsurabilă la o balanţă analitică cu precizia de 0,000 g; aplicarea epruvetei asigură o poziţie perpendiculară pe suprafaţa discului rotativ cu o abatere sub. Ca material abraziv se utilizează hârtie de şlefuit cu carbură de siliciu, HCn6 livrată în suluri de benzi cu lăţimea minimă de 30 mm. Epruvetele sunt de formă cilindrică, se execută prin strunjire şi au dimensiunile din figura 6. Se vor avea în vedere şi prescripţiile din STAS Epruvetele din metalul de comparaţie se confecţionează din oţel carbon de calitate în stare normalizată, conform STAS Materialul epruvetei este OLC 60, STAS , normalizat Construcţia şi funcţionarea uzurometrului Uzurometrul pe care se determină rezistenţa la uzarea de abraziune pe disc rotativ cu hârtie de şlefuit este prezentat în figura 5 şi cuprinde următoarele elemente principale: un disc 3 antrenat într-o mişcare de rotaţie de arborele vertical 5; pe discul 3 este fixată hârtia de şlefuit cu diametrul exterior Φ 305 mm; turaţia discului este n d = 5 rot/min; un dispozitiv de apăsare a epruvetei pe suprafaţa discului rotativ; un mecanism 0 de deplasare a epruvetei în sens radial pe disc pentru obţinerea parcursului în spirală. Avansul radial este S r = 0,5 mm/rot; un numărător de ture 4 pentru indicarea parcursului de uzare al epruvetei Desfăşurarea lucrării se montează epruveta în braţul şi se încarcă cu o sarcină F n = 0 N. se efectuează o trecere de rodaj. Operaţiunea se repetă până când suprafaţa abrazată se extinde la întreaga suprafaţă circulară a epruvetei. Rodajului îi sunt supuse toate epruvetele, inclusiv epruveta de comparaţie;
355 355 F n Fig. 5 epruveta de încercat, hârtie de şlefuit, 3 disc rotativ, 4 numărător de ture, 5 arbore principal, 6 reductor melcat, 7 angrenaj conic, 8 angrenaj cilindric, 9 motor electric de antrenare, 0 culisă, braţ mobil, traductor tensometric rezistiv 6,3 3, 3, 30 ± 0,5 φ0±0,05 Fig. 6
356 356 după rodaj, epruvetele sunt curăţate în neofalină sau diluant şi se usucă în curent de aer sau prin ştergere cu o lavetă moale; epruvetele curăţate şi uscate sunt cântărite cu o balanţă analitică având precizia de măsurare de 0,000 g. Aceste date se trec în tabelul 4. se remontează epruveta în braţul ; înainte de încercare, pentru măsurarea forţelor de frecare se face punerea la zero a tensometrului electronic. Sub epruveta de încercat se aşează o bilă metalică cu diametrul de 0 mm. Se cuplează tensometrul la reţea, se împinge braţul (în sensul forţelor de frecare din cupla de încercat) şi se verifică revenirea de fiecare dată la zero, a acului tensometrului electronic; se stabilesc dimensiunile fâşiei utile de contact dintre epruvetă şi discul din hârtie abrazivă (D max, D min, fig.7) şi diametrul epruvetei d. Se cunoaşte avansul radial S r. Se stabileşte lungimea drumului ce trebuie parcurs cu frecare L f ; se stabileşte numărul de treceri N necesar şi numărul de rotaţii necesar la o trecere, n, pentru realizarea lungimii drumului parcurs cu frecare L f ; se încarcă cupla cu sarcina F n = 30 N şi se efectuează n rotaţii pentru fiecare din cele N treceri. la sfârşitul fiecărei treceri se inversează sensul de rotaţie; în timpul funcţionării uzurometrului se notează numărul de diviziuni indicate de tensometrul electronic în funcţie de care, din diagrama de etalonare a traductorului (fig.8), se determină forţa de frecare; după terminarea parcursului de uzare se demontează epruvetele, se spală în neofalină sau diluant, se usucă şi se cântăresc cu aceeaşi balanţă analitică; rezultatele încercărilor se trec în tabelul Prelucrarea datelor lungimea epruvetei L =... mm; diametrul epruvetei d =... mm; parcursul de uzare L f =... mm; diametrele fâşiei utile D... mm; D... mm; max = avansul radial S =... mm/rot. r min =
357 357 d D min D n D k D Fig. 7 D max Forţa de frecare [N] F f =,5 Nr. diviz Nr. diviziuni Fig. 8 se determină: - numărul de rotaţii capabile la o trecere: n cap D max Dmin d = () Sr unde prin [] s-a notat partea întreagă a n cap ; - lungimea drumului capabil de a fi parcurs la o trecere: L cap D + D = π ncap n cap ()
358 358 în care: D = D max d [mm]; Dncap = D ( ncap ) Sr [mm]; - numărul de treceri necesar pentru a se acoperi întregul drum L : f L f N = + (3) Lcap unde prin [ ] s-a notat partea întreagă a numărului; - lungimea drumului parcurs cu frecare la o trecere: - numărul de rotaţii necesar la o trecere: D n = max d + S r Lf L = (4) N ( D d + S ) max S r r 4 L S π unde prin[ ] s-a notat partea întreagă a numărului. Exemplu de calcul: D = mm, D = 0 mm, S = 0,5 mm / rot, max d = 0 mm, L 00 min f = 70 m = mm; n cap = = 60 rotaţii; 0.5 D = 00 0 = 90 mm; D = ,5 mm; ( ) 3 60 = L cap = π 60 = 3053,3 mm; N = + = [,3] + = 3 treceri; 30.53, L = = 3.333,3 mm; 3 r r (5)
359 ,5 n = ( ,5) 0, ,3 0,5 π = [ 44,09] n = 44 rotaţii. viteza tangenţială de alunecare (viteza medie) [m/s]: D + Dn π nd v = m (6) masa iniţială a epruvetei din materialul examinat, masa iniţială a epruvetei de comparaţie, m c0 [g]; masa epruvetei din metalul de încercat după uzare, m 0 i [g]; m ui [g]; masa epruvetei de comparaţie după uzare, m cu [g]; uzura masică a epruvetei din materialul examinat U [g]: U = m 0 i m ui (7) uzura masică a metalului de comparaţie U c [g]: uzura relativă: presiunea de apăsare a epruvetei p [MPa]: turaţia discului abraziv: n = 5 rot/min; diametrul discului: D = 30 mm; coeficientul de frecare: U c = m 0 m (8) c cu U u = (9) U c 4 Fn p = (0) π d d F f μ a = () Fn
360 360 Valorile măsurate şi cele calculate se trec în tabelul 4 (pentru epruvetele încercate şi pentru cea de comparaţie). Material Masa iniţială m 0i, m c0 [g] Masa după uzare m ui,m cu [g] Uzura masică U, U c [g] Uzura relativă u=u/u c Nr. diviz. la tens. electr. N div Forţa de frecare F f [N] Tabelul 4 Coef. de frecare μ a
361 40. DETERMINAREA REZISTENŢEI PELICULEI DE LUBRIFIANT LA PRESIUNI RIDICATE PE MAŞINA CU PATRU BILE 40.. Scopul lucrării Prezenta lucrare stabileşte metodele de determinare a rezistenţei la presiune a peliculei de lubrifiant la ungerea cuplelor de frecare superioare (rulmenţi cu bile, rulmenţi cu role, roţi dinţate etc.). Metodele de încercare sunt cuprinse în STAS 868 iar încercările se efectuează pe maşina (tribometrul) cu patru bile prezentată în figura Consideraţii teoretice Funcţionarea corectă a unor cuple de frecare cu contact punctiform şi liniar (rulmenţi, roţi dinţate etc.) în regimul de ungere EHD depinde de menţinerea în zona de contact a unor pelicule subţiri de lubrifiant. Regimul de ungere elastohidrodinamic (EHD) se bazează pe: deformaţiile din zona de contact a suprafeţelor: sub acţiunea unei forţe exterioare de compresiune, suprafeţele corpurilor se deformează şi rezultă o suprafaţă de contact eliptică (la contacte punctuale) sau dreptunghiulară (la contacte liniare); calculul geometriei, a tensiunilor şi a deformaţiilor din zona de contact se face cu ajutorul teoriei lui Hertz; modificarea vâscozităţii lubrifiantului sub acţiunea presiunilor ridicate: în ipoteza că lubrifiantul este incompresibil şi regimul de funcţionare este izoterm, dependenţa presiune vâscozitate se exprimă prin relaţia exponenţială a lui Barus şi anume: p η = η e α 0 () unde: 0 η vâscozitatea dinamică în condiţii normale; p presiunea de lucru; α coeficientul de piezo vâscozitate.
362 36 Astfel, specific regimului de ungere EHD (la contactele hertziene supuse unor încărcări mari) este faptul că, datorită deformării suprafeţelor în contact şi a creşterii la valori mari a vâscozităţii lubrifiantului, acesta se comportă ca un corp elastic pe parcursul unui interval de timp foarte scurt, numit timp de relaxare. Valorile orientative ale acestuia sunt: t relaxare = secunde pentru uleiuri aditivate; t relaxare = secunde pentru uleiuri neaditivate. În prezenta lucrare cele patru bile ale cuplei de frecare fac contact în trei puncte şi sunt separate de pelicule foarte subţiri de lubrifiant (sub μm). La sarcini mari, pelicula de lubrifiant poate fi străpunsă, apărând în acest mod contactul metalic direct între bile şi, totodată, creşterea forţelor de frecare. În această situaţie suprafeţele de contact se deteriorează prin forme specifice de uzare (adezivă, abrazivă, sau chiar gripare). Caracteristicile de rezistenţă la presiune ale unui lubrifiant sunt: sarcina maximă fără gripaj; reprezintă sarcina la care în decurs de 60 secunde coeficientul de frecare nu prezintă oscilaţii şi nu apar pete pe suprafeţele cuplei; sarcina minimă cu gripaj instantaneu; reprezintă sarcina la care în mai puţin de 0,5 secunde de la pornirea motorului se produc oscilaţii şi o creştere bruscă a coeficientului de frecare, cu dezvoltarea gripajului; încărcarea calculată pentru o întârziere a gripajului de,5 secunde; reprezintă sarcina minimă la care maximul coeficientului de frecare apare după,5 secunde de la pornire; valoarea minimă a sarcinii la care se produce sudarea bilelor într-un interval de 60 secunde; reprezintă sarcina minimă la care se produce sudarea bilelor în decurs de 60 secunde. În figura s-a reprezentat în coordonate logaritmice dependenţa dintre diametrul mediu al petelor de uzură (de pe bilele staţionare) obţinute în decurs de 60 secunde de funcţionare şi sarcina aplicată. Zona A B (fig.) corespunde unei uzuri minime, fără a exista riscul de gripare a cuplei de frecare. Dacă se depăşeşte sarcina corespunzătoare punctului B, uzura creşte puternic (zona B C a curbei). Pe porţiunea C D, uzura continuă să crească cu creşterea sarcinii, dar într-o măsură mai mică decât pe porţiunea B C datorită creşterii vâscozităţii lubrifiantului. Creşterea în continuare a sarcinii produce intensificarea efectelor termice care conduc la sudarea (griparea) celor 4 bile (punctul D).
363 363 lg. uzura diametrul petei, (mm) A B gripare C D lg. sarcina (N) Fig Construcţia şi funcţionarea tribometrului Maşina cu patru bile Maşina cu patru bile, în comparaţie cu celelalte maşini pentru încercarea lubrifianţilor (Timken, FZG), permite obţinerea unor presiuni specifice mai mari pe suprafeţele de frecare. Din acest motiv maşina (tribometrul) cu 4 bile are răspândirea cea mai mare ca mijloc de apreciere (pe cale de laborator) a influenţei lubrifianţilor asupra uzurii cuplelor de frecare. Principiul de funcţionare constă în rotirea cu turaţie constantă, sub sarcină, a unei bile de oţel în contact cu alte trei bile de oţel fixe, scufundate în lubrifiantul de încercat. În funcţie de sarcina aplicată, se măsoară forţa de frecare, uzura mecanică, sau sarcina la care apare străpungerea filmului de lubrifiant şi, dacă este cazul, sarcina la care se produce sudarea bilelor Funcţionarea tribometrului (figura ) Arborele principal se roteşte cu o turaţie constantă n = 45±50 rot/min, primită de la un motor electric prin intermediul unei transmisii prin curele trapezoidale. Bila rotitoare este fixată într-o bucşă elastică 3. Cele trei bile fixe sunt aşezate în cuva 6 şi sunt fixate prin intermediul bucşei conice 5 şi a piuliţei 4. Cuva este aşezată pe discul 0 rezemat pe un rulment axial cu bile. Forţa de frecare dintre bile este transmisă discului 0 care are tendinţa de rotire, dar este oprit de un arc lamelar pe care sunt lipite traductoare tensometrice rezistive pentru măsurarea forţelor de frecare.
364 Fig. arbore principal, rulmenţi, 3 bucşă elastică, 4 piuliţă, 5 bucşă conică, 6 cuvă, 7 braţ de încărcare cu greutăţi, 8 pivot conic, 9 dispozitiv de blocare, 0 disc, bile de încercare,
365 F [N] Fig. 3 0 Nr. diviziuni 365 În funcţionare, în condiţiile străpungerii stratului de lubrifiant şi a apariţiei contactelor dintre materialele metalice ale bilelor, coeficientul de frecare creşte, fapt constatat pe baza valorilor citite la tensometrul electronic Desfăşurarea lucrării bilele, cuva şi bucşa elastică se spală cu diluant, se şterg cu o bucată de pânză, apoi se usucă cu un jet de aer uscat; se introduce o bilă în bucşa elastică 3, după care aceasta se montează pe arborele de antrenare; celelalte trei bile se aşează în cuva 6, apoi se introduce bucşa 5 de fixare a bilelor şi după aceea se strânge piuliţa 4; se toarnă în cuvă, peste cele trei bile, cca. 0 cm 3 din uleiul de încercat, astfel încât nivelul acestuia să depăşească suprafaţa superioară a bilelor cu cca. 3 mm; cuva 6 se montează în tribometru, apoi se conectează şi se reglează tensometrul electronic. Diagrama de etalonare a arcului lamelar în vederea măsurării forţelor de frecare este prezentată în figura 3; se pune în funcţiune motorul de acţionare timp de 60 secunde şi se aplică diferite sarcini (conform tabelului ) până la stabilirea sarcinii maxime la care coeficientul de frecare rămâne constant determinând astfel sarcină maximă fără gripaj [N]. Ea se caracterizată prin aceea că, după încercare, pe bile nu se observă pete de uzură. Variaţia coeficientului de frecare la sarcina maximă fără gripaj este reprezentată în figura 4,a. Vârful care apare pe diagramă este cauzat de inerţia ansamblului şi nu se ia în considerare. se aplică diferite sarcini (conform tabelului ), până la stabilirea sarcinii maxime la care apare o creştere bruscă (vârf) a coeficientului de frecare în mai puţin de 0,5 secunde de la pornirea motorului, după care în decurs de 60 secunde coeficientul de frecare rămâne practic constant. Aceasta reprezintă sarcina minimă cu gripaj instantaneu [N]. Pe bilele scoase din cuvă apar pete de uzură. Variaţia coeficientului de frecare la sarcina minimă cu gripaj instantaneu este prezentată în figura 4,b;
366 366 μ μ Coeficient de frecare 60 t (s) Coeficient de frecare < 0,5 60 t (s) a Fig. 4 b Sarcina aplicată [N] Sarcina aplicată [N] Sarcina aplicată [N] Sarcina aplicată [N] Sarcina aplicată [N] Tabelul Sarcina aplicată [N] Prelucrarea datelor experimentale Pe parcursul desfăşurării lucrării se vor analiza trei tipuri de uleiuri şi anume: H4, M0W-40 şi T90EP. Pentru fiecare tip de ulei se determină: sarcina maximă fără gripaj [N], (conform 40.4); sarcina minimă cu gripaj instantaneu [N], (conform 40.4). se analizează rezultatele obţinute.
367 4. ANALIZA, PRIN METODE OPTICE, A UNGERII ELASTOHIDRODINAMICE 4.. Scopul lucrării Lucrarea are drept scop analiza, prin metode optice, a ungerii elastohidrodinamice. Se determină grosimea filmului de lubrifiant în funcţie de turaţie şi de încărcare. Lucrarea analizează următoarele aspecte: a. Determinarea grosimii filmului de lubrifiant în punctul de contact şi compararea cu valorile teoretice; b. Analiza influenţei încărcării şi turaţiei asupra grosimii filmului de lubrifiant. Grosimea filmului de lubrifiant este evaluată vizual pe baza culorii din interfaţă. O sferă dură din oţel (finisată) este apăsată pe un disc din sticlă semireflectiv cu suprafeţele paralele. În punctul de contact dintre sferă şi disc există un film de ulei. Fascicolul de lumină de la microscop trece prin discul din sticlă şi prin filmul de ulei iar apoi este reflectat de suprafaţa sferei. Unda de lumină reflectată este modificată de către filmul de ulei ducând la obţinerea unei interfeţe colorate. 4.. Descrierea aparaturii 4... Modulul experimental de bază Modulul experimental de bază este prezentat în figura. Conceptul general al instalaţiei experimentale este acela al unei construcţii modulare. Toate echipamentele sunt montate pe suportul modular de bază. Acestea sunt bine fixate şi foarte uşor de asamblat şi poziţionat. Elementele principale ale modulului experimental de bază sunt: 4 picioare din cauciuc care asigură poziţionarea ştandului pe masa de lucru; Un cadru de bază fabricat din elemente din aluminiu; O placa modulară de bază 3 cu două pârghii de strângere 4;


368 368 Un motor în consolă 5 cu opritor 6 pentru poziţionarea orizontală şi verticală a arborelui de transmitere 9; Un motor de curent alternativ cu senzor de viteză şi angrenaj melcat 7; O unitate de comandă 8 pentru reglarea vitezei. Fig. Fig. Atât modulul de bază cât şi celelalte accesorii experimentale pot fi acţionate utilizând unitatea de control prezentată în figura. Două display-uri digitale şi comutatoare sunt montate pe panoul frontal. Accesoriile destinate diferitelor încercări experimentale sunt conectate la partea din spate a unităţii de control. Turaţia poate fi continuu reglată între 0 şi 00 rot/min utilizând potenţiometrul şi poate fi citită pe display-ul. Motorul poate fi pornit şi oprit utilizând comutatorul 3. Modulul experimental de bază descris în acest subcapitol se utilizează atât pentru analiza lubrifierii elastohidrodinamice prin metode optice, cât şi pentru analiza diferitelor tipuri de frecări (lucrările 43 şi 44). Pentru măsurarea forţei de frecare, un amplificator de control a deformaţiei este încorporat în unitatea de control. Valoarea măsurată este indicată pe display-ul 5. Acurateţea măsurării forţei de frecare este ajustată utilizând potenţiometrul 4 de sub display-ul 5. Limita de reglare este N.


369 369 Sursa de lumină pe un accesoriu poate fi pornită şi oprită utilizând comutatorul 6. Conexiunile 7 pentru motor, 8 pentru traductorul de forţă, 9 pentru sursa de lumină şi conectorul principal 0 sunt poziţionate pe spatele unităţii de control. Unitatea de comandă este poziţionată pe un suport de bază modular care este fixat cu două pârghii. Strângerea pârghiilor de fixare permite ajustarea continuă a suportului de bază modular Construcţia modulului experimental elastohidrodinamic optic Modulul experimental elastohidrodinamic optic este compus dintr-o placă modulară de bază, un disc de sticlă şi o sferă din oţel. Discul de sticlă este fixat pe arborele principal de pe modulul de bază. Mecanismul de încărcare şi microscopul de lumină reflectată sunt fixate pe placa de bază modulară. Fig. 3 Părţile principale ale modulului experimental (fig.3) sunt următoarele: Discul de sticlă cu suprafeţe paralele cu 30% reflecţie; Sfera dură şi finisată ; Microscopul 3 care reflectă lumină către filmul de ulei; Mecanismul de reglare 4 al microscopului 3; Sistemul de încărcare 5;
 realizează o mărire de 40 de ori ceea ce face ca punctul de contact să fie vizualizat cu precizie. Undele de lumină de la un bec cu halogen de 0W (poz.")

370 370 Mecanismul de fixare şi centrare 8 care serveşte la instalarea precisă şi uşoară a discului de sticlă. Microscopul de lumină reflectată (fig.4) realizează o mărire de 40 de ori ceea ce face ca punctul de contact să fie vizualizat cu precizie. Undele de lumină de la un bec cu halogen de 0W (poz.) sunt proiectate incident vertical pe discul de sticlă şi reflectate de către sfera din oţel. Un detector din ocularul este folosit pentru focalizarea imaginii. Dacă domeniul de reglare al ocularului este insuficient atunci înălţimea microscopului poate fi modificată. Pentru aceasta se desface pârghia de blocare 3 iar microscopul se deplasează în poziţia dorită. Pe urmă, pârghia de fixare se strânge. Înălţimea poate fi reglată şi cu ajutorul a două bolţuri (poz.4). Microscopul este conectat la o tensiune de V. Alimentarea este realizată de la unitatea de comandă a modulului de bază. Fig. 4 Fig. 5 Fig. 6 Mecanismul de încărcare (fig.5) cuprinde pârghia şi mecanismul cu arc care poate regla continuu forţa de încărcare. O extremitate a arcului este fixată pe axul principal la mecanismul de reglare 3 iar cealaltă extremitate 4 este fixată la pârghia de încărcare. Punctul de lăgăruire 5 al sferei din oţel este cu frecare mică datorită utilizării rulmenţilor cu bile 6. Sfera din oţel poate fi încărcată cu maxim 75N utilizând mecanismul de încărcare. Mecanismul de încărcare realizează o amplificare de 3: ceea ce înseamnă că, o reglare a încărcării mecanismului cu
371 37 arc de N duce la obţinerea unei forţe de 3 N cu care sfera apasă asupra discului din sticlă. Mecanismul cu arc este marcat cu diviziuni de 0,5 N. Mecanismul de fixare şi centrare (fig.6) conţine un inel de fixare canelat, un suport pentru discul din sticlă, o placă de strângere 3 şi un bolţ de strângere 4. Mecanismul de centrare şi fixare este poziţionat pe axul principal al modulului de bază utilizând un inel de fixare. Atunci când se montează, bolţul 5 trebuie să fie complet ridicat Pregătirea experimentului Pentru realizarea experimentului se montează suportul de bază modular TM60.0 şi suportul principal al modulului de bază pe postamentul din aluminiu. Se ataşează cele două suporturi modulare şi se strâng utilizând cleme de fixare. Se răsuceşte motorul pe modulul de bază, astfel încât axul principal să fie vertical în sus. Se montează discul de sticlă şi mecanismul de fixare la capătul axului. Sfera din oţel se aşează pe rulmenţii cu bile în braţul de încărcare. Se leagă braţul de încărcare la mecanismul cu arc. Înainte de încărcarea sferei din oţel trebuie puse una sau două picături de ulei pe sferă pentru a forma filmul lubrifiant. Apoi, prin intermediul mecanismului cu arc, se reglează forţa de încărcare a sferei. Se conectează cablul de la microscop la unitatea de comandă. Se introduce fişa de conectare în mufa aflată în spatele carcasei aparatului şi marcată cu un simbol. Se porneşte comutatorul principal pentru lumină. Lumina microscopului trebuie sa fie acum aprinsă. Înainte de începerea experimentului trebuie reglat microscopul. Microscopul este reglat corect iar modulul este gata de lucru când interfaţa poate fi clar observată Desfăşurarea lucrării Etapele de măsurare Sfera de oţel cu diametrul de 5,4 mm este apăsată pe un disc de sticlă acoperit cu un strat dielectric care reflectă peste 30% din lumină. Punctul de contact este vizualizat din partea de jos a discului, fascicolul de lumină fiind de asemenea proiectat din această parte. Razele de lumină care nu sunt reflectate trec prin stratul de ulei. Pe durata acestui proces lungimea de undă este schimbată de către indicele de refracţie diferit. Aceste raze sunt reflectate pe suprafaţa sferei şi astfel
372 37 formează interfaţa colorată. Prin urmare, grosimea filmului lubrifiant poate fi determinată pe baza culorii interfeţei Determinarea grosimii filmului de lubrifiant funcţie de turaţie Un exemplu privind măsurarea grosimii filmului de lubrifiant este prezentat în tabelul. Pentru aceste măsurători a fost utilizat un lubrifiant ISO VG 00. Măsurătorile realizate au arătat că turaţia are o influenţa mult mai mare asupra grosimii filmului fluid decât sarcina. Cu creşterea turaţiei creşte grosimea filmului de lubrifiant dintre sferă şi discul din sticlă. Încărcarea [N] Tabelul Turaţia [rot/min] Violet nr. Verde nr.7 Galben nr.3 Violet nr.9 5 Violet nr. Galben nr.8 Galben nr.4 Galben nr.0 0 Verde nr.3 Violet nr.9 30 Galben nr.4 Verde nr.0 45 Violet nr.5 Galben nr. 70 Galben nr.6 Violet nr. 80rot/min Violet nr.5 5rot/min Verde nr.6 35rot/min Galben nr.7 5 rot/min Violet nr.8 78 rot/min Violet nr. 5 rot/min Verde nr. 40 rot/min Galben nr.3 53rot/min Violet nr.4 Pentru realizarea încercărilor experimentale se procedează astfel: a. Se setează sarcina de încărcare. b. Se observă şi se notează culoarea filmului în situaţia statică. c. Se măreşte încet turaţia şi în acelaşi timp se monitorizează punctul de contact. d. Când culoarea se schimbă atunci se notează turaţia şi se realizează o schiţă cu distribuirea culorilor. e. Se compară culorile schiţate cu cele prezentate în tabelul. f. Se evaluează rezultatele. Pe durata măsurătorilor turaţia poate varia uşor. Valoarea corectă este cea corespunzătoare încărcării din domeniul respectiv.

 ceea ce se poate observa în figurile 7,b, 7,c şi 7,d.")


373 373 verde galben violet galben violet verde portocaliu galben a. b. c. d. Fig. 7 În figura 7 se prezintă exemple de imagini obţinute în urma încercărilor experimentale. În figura 7,a care reprezintă cazul static, poate fi clar observat modelul Newtonian al fluidului din interfaţă. Creşterea turaţiei duce la creşterea grosimii filmului de lubrifiant (zona centrală) ceea ce se poate observa în figurile 7,b, 7,c şi 7,d. În figura 8 se prezintă domeniile de culoare şi corespondenţa lor pentru grosimea aparentă a filmului de lubrifiant. Pentru obţinerea unei grosimi prestabilite a filmului de lubrifiant, trebuie să se ţină seama de indicele de refracţie al lubrifiantului. Indicele de refracţie la cei mai utilizaţi lubrifianţi este în jur de,5. grosimea aparentă a filmului de fluid h[µm],4,,0 0,8 0,6 0,4 0,,5 verde,4 violet 0,98 verde 0,9 violet 0,7 verde 0,5 galben 0,34 violet 0,9 alb Lumina liniilor din interfaţă Fig. 8 0,84 galben 0.64 violet 0,49 verde 0,40 albastru 0,9 portocaliu 0,4 galben Culorile complementare Calculul grosimii filmului de lubrifiant Grosimea filmului de lubrifiant în punctul de contact poate fi calculată utilizând următoarea formulă: unde: h R 0,67 0,05 ' ( η ) 0, 6 η0 u F =,84 E ' ' E R E R h grosimea filmului de lubrifiant, μm;
374 374 R raza sferei, mm; η 0 vâscozitatea dinamică efectivă a uleiului în condiţii normale, Pa s; u numărul de rulări ale sferei; ' E E E = - modulul de elasticitate efectiv, MPa; E + E E modulul de elasticitate al discului, MPa; E modulul de elasticitate al sferei, MPa; F încărcarea, N; η vâscozitatea dinamică efectivă a uleiului, Pa s Prelucrarea datelor Se realizează încercări experimentale pentru diferite sarcini de încărcare. Datele se trec în tabele de tipul tabelului. Sarcina, F i =... N Tabelul Turaţia, n [rot/min] Culoarea Grosimea filmului de lubrifiant, h [μm] Grosimea calculată a filmului de lubrifiant, h [μm]
375 4. INFLUENŢA PARAMETRILOR CONSTRUCTIVI ŞI FUNCŢIONALI ASUPRA DISTRIBUŢIEI PRESIUNII ÎN PELICULA DE LUBRIFIANT LA LAGĂRELE CU ALUNECARE CU UNGERE HIDRODINAMICĂ 4.. Scopul lucrării Se urmăreşte distribuţia presiunii în pelicula de lubrifiant la lagărele cu alunecare cu ungere hidrodinamică în funcţie de variaţia parametrilor constructivi şi funcţionali. Pot fi experimentate următoarele aspecte: Distribuţia presiunii în funcţie de viteză; Distribuţia presiunii în funcţie de mărimea jocului; Limita stabilităţii în funcţie de mărimea jocului; 4.. Consideraţii teoretice În timpul funcţionării, fusul radial se roteşte, iar cuzinetul este fix (în cazuri speciale este invers), asigurându-se astfel o viteză relativă de alunecare suficient de mare pentru formarea peliculei de lubrifiant. a. d D O O D d h min b. ' O O O h min c. " O O O d. Fig. O O '" O
376 376 Jocul existent între fus şi cuzinet permite realizarea spaţiului în formă de pană. Executarea cuzinetului cu un diametru mai mare decât al fusului permite obţinerea jocului cerut pentru asigurarea continuităţii filmului de lubrifiant. În stare de repaus poziţia fusului în cuzinet este arătată în figura,a. Centrul fusului se găseşte pe aceeaşi verticală cu al cuzinetului, distanţat cu (D-d)/, unde D este diametrul cuzinetului şi d diametrul fusului. În momentul punerii în funcţiune a fusului, la început, el tinde să se rotească în sens orar pe cuzinet datorită frecării uscate. Uleiul care a aderat pe fus este antrenat în sensul mişcării şi, datorită vâscozităţii, formează filmul portant (fig.,b). Deoarece presiunea este mai mare în zona de intrare decât în cea de ieşire a uleiului, uleiul, fiind şi antrenat de fus, trece din partea dreaptă în partea stângă. Datorită acestei diferenţe de presiune, fusul va fi ridicat şi deplasat în sensul mişcării astfel încât poziţia centrului său se schimbă, ocupând o poziţie ' unghiulară O faţă de vechea linie a centrelor. Odată cu schimbarea poziţiei centrului fusului se va modifica şi grosimea filmului de lubrifiant. Pe măsură ce turaţia fusului creşte, se va mări cantitatea de lubrifiant ce trece prin interstiţiul dintre fus şi cuzinet, ceea ce determină ridicarea fusului, dar în acelaşi timp, din cauza diferenţei de presiune între cele două pene de ulei din dreapta şi stânga, fusul va fi împins înapoi în sensul săgeţii din figura,c. La o turaţie foarte mare (teoretic n= ), centrul fusului va coincide cu al cuzinetului - apare fenomenul de autocentrare şi drept consecinţă, filmul de lubrifiant fiind de grosime uniformă, nu are portanţă, deci nu va putea prelua nici o sarcină exterioară (fig.,d), fusul se găseşte într-o poziţie instabilă şi cade pe cuzinet iar procesul se reia de la început. Din figura se poate observa că locul geometric descris de centrul fusului în timpul variaţiei turaţiei de la n = 0 la n = este aproximativ un semicerc cu raza 0,5 e (e-excentricitatea absolută; e = O O ). Curba de distribuţie a presiunii hidrodinamice pe periferia cuzinetului este prezentată în figura,a iar pe lungimea fusului în figura,b Construcţia şi funcţionarea ştandului Construcţia ştandului Modulul experimental Lagăr de alunecare (fig.3 şi 4) face parte dintr-un grup de module şi poate fi uşor montat pe o ramă de bază. Se conectează la arborele de transmisie printr-un cuplaj. Arborele de transmisie trebuie sa fie plasat într-o poziţie orizontală. Modulul trebuie, mai întâi, să fie montat pe rama de bază.

 I ϕ II a. b. Fig. y Fig.")
377 377 linia centrelor F F Intrare ulei l / l / R ϕ ϕ A O e O ϕ D r Ieşire ulei ϕ r γ A p ϕ sin(ϕ - ϕ ) h min B C dϕ p ϕ ϕ m -z +z h m A p max p ϕ cos(ϕ - ϕ ) I ϕ II a. b. Fig. y Fig. 3 Fig.4

378 378 Carcasa deschisă de susţinere 4 înconjoară numai jumătate din arborele de transmisie 3 şi este proiectată să suporte cuzinetul. Carcasa este realizată din Plexiglas pentru a permite să se urmărească distribuţia presiunii. Grosimea filmului de lubrifiant poate fi reglat cu ajutorul şurubului micrometric 9. Carcasa lagărului 4 este ataşată modulului cu ajutorul a două arcuri de oţel 8. Arcurile sunt pretensionate astfel încât carcasa lagărului4 este în permanent contact cu şurubul micrometric 9. Lubrifiantul se găseşte în colectorul de ulei 5. Poate fi uşor golit şi umplut prin îndepărtarea, mai întâi, a blocului 6 iar apoi a colectorului de ulei 5. Colierele 0 sunt folosite ca să fixeze modulul de rama de bază Conectarea modulului la unitatea de bază Componentele şi se montează pe rama de bază 3 aşa cum apare în figura 5. Arborele de transmisie al unităţii de bază trebuie să fie plasat în poziţie orizontală. Se apropie componentele modulului până când jumătăţile cuplajului cu gheare 4 se interferează. Se strâng colierele 5 pentru a fixa componentele modulului. Fig Reglarea jocului (diametrului interior) Şurubul micrometric este folosit pentru a regla jocul (cuzinetul are un diametru interior variabil). Intervalul de reglare este de la 0 la,5 mm şi poate fi realizat cu o precizie de /00mm.
. Se citeşte valoarea gradaţiei şurubului micrometric şi se reţine. 4.")
379 379 Fig. 6 Carcasa lagărului este montată pe două arcuri de oţel, pretensionate Trebuie ca şurubul micrometric să fie întotdeauna în contact cu carcasa lagărului. La reglarea jocului se roteşte şurubul micrometric până când carcasa lagărului vine în contact cu arborele de transmisie (fig.6,b). Se citeşte valoarea gradaţiei şurubului micrometric şi se reţine Citirea coloanei de lichid Sunt 3 puncte de măsurare pe carcasa lagărului dispuse pe perimetrul care formează lagărul (figura 7). Punctele de măsurare de la la 5 sunt amplasate la intervale de 0 de grade iar punctele de măsurare de la 5 la 3 sunt amplasate la intervale de 0 grade. Primul punct de măsurare este dispus la 0 grade faţă de orizontală. Intervalul de afişare a coloanei lichidului este de la 0 la 360 mm. Intervalul măsurabil poate fi insuficient pentru unele reglări sau când se

. 4.3.5.")
380 380 folosesc lubrifianţi cu vâscozitate ridicată. Uleiul care se scurge este colectat prin scurgere de către alte tuburi. În această situaţie reglările trebuie modificate. Fig. 7 Carcasa lagărului este montată astfel încât baza ei este localizată la aceeaşi înălţime ca şi axa arborelui. Acest lucru simplifică măsurarea nivelului lichidului. Pentru a măsura nivelul lichidului pentru fiecare punct de măsurare se foloseşte o riglă gradată. În cazul punctelor de măsură care sunt deasupra axului, măsurările sunt realizate începând de sus şi calculate corespunzător. Înălţimea carcasei lagărului este 00mm (fig.7) Umplerea colectorului de ulei Colectorul de ulei trebuie demontat la umplere şi golire. Mai întâi se demontează blocul iar apoi se demontează colectorul de ulei (fig.8). Înainte de a se face experimente se umple colectorul de ulei şi se montează sub arbore. Fig. 8
381 Pregătiri pentru desfăşurarea lucrării 38 Pentru a începe acest experiment modulul trebuie montat ca în figura 5 Se roteşte motorul unităţii de transmisie până când arborele de transmisie este orizontal; Se apropie componentele modulului până când jumătăţile cuplajului cu gheare interferează; Se umple colectorul de ulei; Se reglează jocul; Se conectează butonul principal din unitatea de bază. Modulul este în funcţiune. Viteza poate fi reglată cu ajutorul potenţiometrului de viteză Desfăşurarea lucrării Distribuţia presiunii in funcţie de jocul lagărului şi turaţie În acest experiment distribuţia presiunii şi formarea filmului portant de ulei pot fi vizualizate datorită carcasei transparente şi a diametrului interior care e mai mare. Următoarele aspecte trebuie avute în vedere: Reglarea jocului (excentricităţii) şi notarea valorii de pe şurubul micrometric; Adăugarea lubrifiantului în carcasa de ulei; Pornirea motorului; Reglarea vitezei cu ajutorul vitezometrului; Distribuţia presiunii poate fi măsurată numai după ce presiunea încetează să crească. Se reţin aceste valori; Se repetă procedura la diferite viteze; Se modifică jocul şi se reface din nou experimentul. Observaţii: O stare instabilă de funcţionare poate apărea la anumite reglări. În această situaţie volumul lichidului va fluctua sau unele tuburi vor fi goale Prelucrarea datelor. Datele experimentale se înscriu în tabelul.. Se desenează semiperimetrul carcasei, după care se duc razele corespunzătoare punctelor de măsurare la unghiurile precizate la paragraful Pe baza datelor din tabel se trasează distribuţia presiunii în filmul de lubrifiant
382 38 4. Se compară diagramele obţinute experimental cu cele prezentate în literatura de specialitate. Turaţia [rot/min] Tabelul Jocul Nivelul lichidului la punctele de măsurare [mm]: [mm]
383 43. STUDIUL EXPERIMENTAL AL FRECĂRII DE ALUNECARE CU AJUTORUL MODULULUI EXPERIMENTAL ŞTIFT PE DISC (PIN ON DISC) 43.. Introducere Modulul experimental TM ştift pe disc (pin on disc) al firmei G.U.N.T. este proiectat pentru a examina forţele de frecare dintre un ştift vertical şi un disc aflat în mişcare de rotaţie. Această unitate este destinată a fi utilizată împreună cu modulul de bază TM 60. Lucrarea are ca scop determinarea pe cale experimentală a: frecării în diferite condiţii de încărcare; frecării în diferite condiţii de ungere; frecării în diferite condiţii de viteze; frecării pentru diferite cuple de frecare; precum şi examinarea uzării pentru diferite cuple de frecare. Forţele sunt măsurate cu un traductor de forţă localizat în punctul de lăgăruire al mecanismului de încărcare Proiectare şi funcţionare Unitatea principală Modulul experimental Ştift pe disc (pin on disc) este realizat pe o masă modulară şi poate fi uşor montat pe unitatea de bază. Discul şi cupa sunt montate pe arborele motor al unităţii de bază. Când se pregăteşte acest experiment unitatea trebuie să fie fixată în poziţie verticală astfel încât arborele motor să fie în poziţie verticală. Se montează masa modulară 9 cu experimentul ştift / disc (pin on disc) pregătit în cadrul de bază a unităţii principale. Se fixează discul şi cupa 3 pe arborele motor al unităţii de mişcare. Lubrifiantul poate fi adăugat în cupă mai târziu.
 de încărcare 5. Frecarea este măsurată cu ajutorul traductorului de forţă 8.")

384 384 Ştiftul 4, împreună cu port ştiftul sunt deplasate pe braţul de încărcare 5 până când se obţine un raport al pârghiei de :. Apoi ştiftul se fixează în această poziţie. Pentru a încărca sistemul se folosesc diferite greutăţi 6. Contragreutatea 7 compensează greutatea braţului (pârghiei) de încărcare 5. Frecarea este măsurată cu ajutorul traductorului de forţă 8. Fig Conectarea masei modulare la unitatea de bază Se montează masele modulare ( şi ) pe cadrul de bază 3 aşa cum se vede în figura. Pentru început se împinge port ştiftul 4 spre mijlocul braţului de încărcare şi se fixează în această poziţie. Apoi se împinge masa modulară până când port ştiftul este poziţionat în centrul discului 5. Se fixează mesele modulare în această poziţie cu ajutorul bridelor 6. Fig.
.")
385 Mecanismul de încărcare Fig Mecanismul de încărcare este folosit pentru a încărca cuplele de frecare în diverse moduri. Setul de greutăţi corespunde unei greutăţi totale de 40 N. Raportul pârghiei este de : rezultând o încărcare maximă de 80N. Forţa de încărcare poate fi modificată gradual (0 N). Trebuie să ne asigurăm că port ştiftul este plasat în centrul braţului de încărcare astfel încât să se asigure un raport al pârghiei de :. Port ştiftul poate fi poziţionat (fixat) cu un şurub. Pentru a compensa greutatea braţului se aşează la capătul pârghiei o contragreutate. Setul de greutăţi este format din: o greutate de 0N; o greutate de 0N; o greutate de 5N; o greutate de 5N (greutatea talerului gol) Înlocuirea ştiftului Înlocuirea ştiftului se face foarte simplu. Mai întâi se îndepărtează greutăţile de pe taler. Se ridică braţul pârghiei şi se scoate ştiftul din port ştift. Se introduce ştiftul dorit şi se aşează la loc pârghia. Lucrarea include ştifturi din trei categorii de materiale (oţel, alamă, aluminiu). Diametrul ştifturilor este de 4 mm Desfăşurarea lucrării Pentru a porni acest experiment mesele modulare trebuie, în primul rând, să fie aranjate ca în paragraful Se roteşte motorul unităţii principale până când arborele motor ajunge în poziţie verticală; Se fixează cupa şi discul pe arborele motor; Se pune contragreutatea pe braţul de încărcare. Ştiftul trebuie să fie deja în port ştift iar talerul nu trebuie să fie agăţat de braţul pârghiei;
386 386 Se conectează traductorul de forţă la unitatea principală. Se cuplează traductorul de forţă la priza aflată în spate; Se adaugă lubrifiant în cupă până când discul este complet umed; Se încarcă cu greutăţile dorite braţul pârghiei; Se acţionează butonul de pornire al unităţii de bază. Unitatea este gata de funcţionare. Observaţie: viteza poate fi reglată fin folosind potenţiometrul de viteză Încercări experimentale Determinarea forţei de frecare în funcţie de viteză Frecarea (forţa de frecare) este determinată pentru diferite valori ale vitezelor. Experimentul permite examinarea comportamentului mai multor tipuri de cuple de frecare. De asemenea în această lucrare poate fi examinată comportarea tipului de lubrifiant precum şi efectul lui asupra frecării. Când se doreşte examinarea frecării în prezenţa lubrifiantului se umple cupa cu tipul de lubrifiant dorit. În vederea executării încercărilor se folosesc ştifturi din diferite materiale (de exemplu: oţel, alamă, aluminiu). Discul este din oţel de duritate ridicată. Pentru a asigura o rugozitate scăzută, suprafeţele plane se rectifică sau se lustruiesc. Încercările se desfăşoară astfel: Se determină tipul frecării - dacă este vorba de frecare uscată sau în prezenţa lubrifiantului; Se adaugă lubrifiant în cupă; Se determină materialele cuplei de frecare (respectiv tipul ştifturilor) şi se fixează ştifturile în port ştift; Se încarcă foarte uşor braţul până când ştiftul ajunge în contact cu discul; Se reglează la zero balanţa din camera de control a unităţii de bază; Se adaugă greutăţi pe talerul de la braţul pârghiei; Se reglează viteza din camera de control; Se citeşte şi se înregistrează forţa de frecare Determinarea forţei de frecare în funcţie de încărcare În cadrul acestui experiment viteza se păstrează constantă iar încărcarea este crescută în mod gradat. În acest experiment sunt folosite diferite cuple de frecare precum şi diferite tipuri de lubrifiant.
387 unde: Determinarea coeficientului de frecare Coeficientul de frecare se calculează astfel: Ff μ = F n 387 F f forţa de frecare măsurată; F n forţa normală (încărcarea). Observaţii: Rezultatele anterioare vor fi folosite pentru evaluările propuse. Influenţa vitezei este clar definită, recunoscută. Coeficientul de frecare descreşte odată cu creşterea vitezei. Influenţa încărcării asupra coeficientul de frecare este variabilă. Nu este posibilă o evaluare unică, precisă în acest caz Prelucrarea datelor Determinările experimentale se pot face în condiţiile frecării uscate sau în prezenţa unui lubrifiant. Valorile măsurate şi cele calculate se trec în tabelul. Nr. crt. 3 Cupla de frecare Oţel / oţel Oţel / alamă Oţel / aluminiu Încărcarea [N] F n [N] Viteza discului [m/s] F f [N] μ Tabelul Obs.
388 44. STUDIUL EFECTULUI STICK-SLIP ÎN PROCESUL DE FRECARE 44.. Introducere Modulul experimental TM Vibraţii în procesul stick-slip şi de frecare al firmei G.U.N.T poate fi utilizat pentru a pune în evidenţă efectele stick-slipului. Funcţionarea cuplelor de frecare cu viteze de alunecare foarte mici (0,8..80 mm/min.), în regim de frecare uscată sau limită, duce la apariţia unei mişcări cu intermitenţe între elementele cuplei. Această mişcare poartă denumirea de stick-slip. Ea poate apărea atât în cazul mişcării de rotaţie (ambreiaje, lagăre, procese de roluire a tablelor etc.) cât şi al mişcării de translaţie (ghidaje, cilindri hidraulici, filiere de trefilare, ascensoare etc.) şi are o influenţă nefavorabilă asupra funcţionării unor cuple de frecare reale, deci implicit a utilajului din care acestea fac parte (ghidajele maşinilor unelte, ghidajele preselor etc.). Această unitate este destinată a fi utilizată împreună cu modulul de bază TM 60. Diferenţele dintre aspectele frecării statice şi de alunecare sunt evidenţiate foarte clar. În această lucrare sunt examinate următoarele aspecte: Trecerea de la frecarea statică la cea de alunecare. Influenţa ungerii asupra efectelor stick-slipului. Influenţa forţei normale asupra efectelor stick-slipului. Influenţa vitezei asupra efectelor stick-slipului Construcţia standului Unitatea principală Modulul experimental Oscilaţiile frecării este realizat pe o masă modulară şi poate fi uşor montat pe unitatea de bază.

 este măsurată utilizând traductorul de forţă.")
389 389 Pentru a pregăti experimentul elementul de mişcare este instalat pe arborele motor al unităţii de bază, care trebuie să fie fixat într-o poziţie verticală. Se montează masa modulară 5 împreună cu experimentul pregătit în cadrul de bază a unităţii principale. Între masele modulare ar trebui să rămână un spaţiu de aproximativ 30 mm. 6 Fig. Fig. Elementul de mişcare 3 este montat pe arborele motor al unităţii de antrenare. Pe elementul de mişcare 3 vor fi poziţionate diferite greutăţi 4. Traductorul de forţă 7 este fixat de suportul 6 de pe masa modulară 5. Forţa de frecare (statică) este măsurată utilizând traductorul de forţă. Elementul de mişcare 3 este legat la traductorul de forţă 7 cu ajutorul cablului 9 şi a arcului 8. Cablul este fixat în canalul 0 al roţii de curea Conectarea mesei modulare la unitatea de baza Se vor monta mesele modulare ( şi ) în cadrul de bază 3 aşa cum se vede în figura 3. Între mesele modulare ar trebui să rămână un spaţiu de aproximativ 30 mm. Fixarea meselor modulare se face cu ajutorul unei bride 4. Se va conecta cablul 5 cu arcul 6. Se va fixa capătul cablului cu un nod în canalul roţii de curea 7. Apoi se va fixa arcul 6 în cârligul 8 al traductorului de forţă 9.

390 Fig. 3 Fig Elementul conducător Elementul conducător este montat pe arborele motor cu ajutorul unei flanşe. Momentul motor este aplicat inelului de frecare 4 prin aderenţă pe discul 3. Inelul de frecare este ataşat scripetelui 5 şi este centrat cu un lagăr de alunecare 6. În acelaşi timp rola de transmisie este folosită şi ca susţinător pentru greutăţi auxiliare 7. Cele două ştifturi 8 sunt folosite pentru a centra si a transmite forţă. Rola de transmisie 5 este legată cu un cablu iar arcul este legat la traductorul de forţă. Valoarea care apare pe monitor în camera de control este pentru forţa de frecare (statică) dintre inelul de frecare 4 şi discul 3. Coeficientul de frecare poate fi modificat dacă se va realiza un film de lubrifiant (ulei) între cele două părţi Pornirea Pentru a porni acest experiment mesele modulare trebuie în primul rând să fie aranjate ca în paragraful Se roteşte motorul unităţii principale până când arborele motor ajunge în poziţie verticală; Se montează elementul de mişcare pe arborele motor; Se determină tipul de ungere. Se va unge inelul de frecare sau se va înlătura filmul de ulei dacă este necesar;
Capitolul 14. Asamblari prin pene
 Capitolul 14 Asamblari prin pene T.14.1. Momentul de torsiune este transmis de la arbore la butuc prin intermediul unei pene paralele (figura 14.1). De care din cotele indicate depinde tensiunea superficiala
Capitolul 14 Asamblari prin pene T.14.1. Momentul de torsiune este transmis de la arbore la butuc prin intermediul unei pene paralele (figura 14.1). De care din cotele indicate depinde tensiunea superficiala
Capitolul 15. Asamblari prin caneluri, arbori profilati
 Capitolul 15 Asamblari prin caneluri, arbori profilati T.15.1. Care dintre asamblarile arbore-butuc prin caneluri are portanta mai mare? a) cele din seria usoara; b) cele din seria mijlocie; c) cele din
Capitolul 15 Asamblari prin caneluri, arbori profilati T.15.1. Care dintre asamblarile arbore-butuc prin caneluri are portanta mai mare? a) cele din seria usoara; b) cele din seria mijlocie; c) cele din
RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii transversale, scrisă faţă de una dintre axele de inerţie principale:,
 REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25
 Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25 LAGĂRELE CU ALUNECARE!" 25.1.Caracteristici.Părţi componente.materiale.!" 25.2.Funcţionarea lagărelor cu alunecare.! 25.1.Caracteristici.Părţi componente.materiale.
Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25 LAGĂRELE CU ALUNECARE!" 25.1.Caracteristici.Părţi componente.materiale.!" 25.2.Funcţionarea lagărelor cu alunecare.! 25.1.Caracteristici.Părţi componente.materiale.
Capitolul 30. Transmisii prin lant
 Capitolul 30 Transmisii prin lant T.30.1. Sa se precizeze domeniile de utilizare a transmisiilor prin lant. T.30.2. Sa se precizeze avantajele si dezavantajele transmisiilor prin lant. T.30.3. Realizati
Capitolul 30 Transmisii prin lant T.30.1. Sa se precizeze domeniile de utilizare a transmisiilor prin lant. T.30.2. Sa se precizeze avantajele si dezavantajele transmisiilor prin lant. T.30.3. Realizati
Tabele ORGANE DE MAȘINI 1 Îndrumar de proiectare 2014
 Tabele ORGANE DE MAȘINI 1 Îndruar de roiectare 01 Caracteristicile ecanice entru ateriale etalice utilizate în construcţia organelor de aşini sunt rezentate în tabelele 1.1... 1.. Marca oţelului Tabelul
Tabele ORGANE DE MAȘINI 1 Îndruar de roiectare 01 Caracteristicile ecanice entru ateriale etalice utilizate în construcţia organelor de aşini sunt rezentate în tabelele 1.1... 1.. Marca oţelului Tabelul
5.5. REZOLVAREA CIRCUITELOR CU TRANZISTOARE BIPOLARE
 5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
Componente şi Circuite Electronice Pasive. Laborator 3. Divizorul de tensiune. Divizorul de curent
 Laborator 3 Divizorul de tensiune. Divizorul de curent Obiective: o Conexiuni serie şi paralel, o Legea lui Ohm, o Divizorul de tensiune, o Divizorul de curent, o Implementarea experimentală a divizorului
Laborator 3 Divizorul de tensiune. Divizorul de curent Obiective: o Conexiuni serie şi paralel, o Legea lui Ohm, o Divizorul de tensiune, o Divizorul de curent, o Implementarea experimentală a divizorului
LUCRAREA DE LABORATOR Nr. 2 MÃSURAREA DIAMETRULUI MEDIU AL FILETULUI PRIN METODA SÂRMELOR CALIBRATE
 LUCRAREA DE LABORATOR Nr. 2 MÃSURAREA DIAMETRULUI MEDIU AL FILETULUI PRIN METODA SÂRMELOR CALIBRATE 1. Scopul lucrãrii Lucrarea urmãreşte cunoaşterea unei metode de mãsurare a diametrului mediu al filetelor
LUCRAREA DE LABORATOR Nr. 2 MÃSURAREA DIAMETRULUI MEDIU AL FILETULUI PRIN METODA SÂRMELOR CALIBRATE 1. Scopul lucrãrii Lucrarea urmãreşte cunoaşterea unei metode de mãsurare a diametrului mediu al filetelor
1. PROPRIETĂȚILE FLUIDELOR
 1. PROPRIETĂȚILE FLUIDELOR a) Să se exprime densitatea apei ρ = 1000 kg/m 3 în g/cm 3. g/cm 3. b) tiind că densitatea glicerinei la 20 C este 1258 kg/m 3 să se exprime în c) Să se exprime în kg/m 3 densitatea
1. PROPRIETĂȚILE FLUIDELOR a) Să se exprime densitatea apei ρ = 1000 kg/m 3 în g/cm 3. g/cm 3. b) tiind că densitatea glicerinei la 20 C este 1258 kg/m 3 să se exprime în c) Să se exprime în kg/m 3 densitatea
a. 11 % b. 12 % c. 13 % d. 14 %
 1. Un motor termic funcţionează după ciclul termodinamic reprezentat în sistemul de coordonate V-T în figura alăturată. Motorul termic utilizează ca substanţă de lucru un mol de gaz ideal având exponentul
1. Un motor termic funcţionează după ciclul termodinamic reprezentat în sistemul de coordonate V-T în figura alăturată. Motorul termic utilizează ca substanţă de lucru un mol de gaz ideal având exponentul
Aplicaţii ale principiului I al termodinamicii la gazul ideal
 Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Metode iterative pentru probleme neliniare - contractii
 Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM 1 electronica.geniu.ro
 Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Fig Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36].
![Fig Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36].](/thumbs/72/67648751.jpg "Fig Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36].") Componente şi circuite pasive Fig.3.85. Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36]. Fig.3.86. Rezistenţa serie echivalentă pierderilor în funcţie
Componente şi circuite pasive Fig.3.85. Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36]. Fig.3.86. Rezistenţa serie echivalentă pierderilor în funcţie
2. Sisteme de forţe concurente...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
MARCAREA REZISTOARELOR
 1.2. MARCAREA REZISTOARELOR 1.2.1 MARCARE DIRECTĂ PRIN COD ALFANUMERIC. Acest cod este format din una sau mai multe cifre şi o literă. Litera poate fi plasată după grupul de cifre (situaţie în care valoarea
1.2. MARCAREA REZISTOARELOR 1.2.1 MARCARE DIRECTĂ PRIN COD ALFANUMERIC. Acest cod este format din una sau mai multe cifre şi o literă. Litera poate fi plasată după grupul de cifre (situaţie în care valoarea
5.4. MULTIPLEXOARE A 0 A 1 A 2
 5.4. MULTIPLEXOARE Multiplexoarele (MUX) sunt circuite logice combinaţionale cu m intrări şi o singură ieşire, care permit transferul datelor de la una din intrări spre ieşirea unică. Selecţia intrării
5.4. MULTIPLEXOARE Multiplexoarele (MUX) sunt circuite logice combinaţionale cu m intrări şi o singură ieşire, care permit transferul datelor de la una din intrări spre ieşirea unică. Selecţia intrării
Problema a II - a (10 puncte) Diferite circuite electrice
 Diferite circuite electrice") Olimpiada de Fizică - Etapa pe judeţ 15 ianuarie 211 XI Problema a II - a (1 puncte) Diferite circuite electrice A. Un elev utilizează o sursă de tensiune (1), o cutie cu rezistenţe (2), un întrerupător
Olimpiada de Fizică - Etapa pe judeţ 15 ianuarie 211 XI Problema a II - a (1 puncte) Diferite circuite electrice A. Un elev utilizează o sursă de tensiune (1), o cutie cu rezistenţe (2), un întrerupător
Componente şi Circuite Electronice Pasive. Laborator 4. Măsurarea parametrilor mărimilor electrice
 Laborator 4 Măsurarea parametrilor mărimilor electrice Obiective: o Semnalul sinusoidal, o Semnalul dreptunghiular, o Semnalul triunghiular, o Generarea diferitelor semnale folosind placa multifuncţională
Laborator 4 Măsurarea parametrilor mărimilor electrice Obiective: o Semnalul sinusoidal, o Semnalul dreptunghiular, o Semnalul triunghiular, o Generarea diferitelor semnale folosind placa multifuncţională
Determinarea momentului de inerţie prin metoda oscilaţiei şi cu ajutorul pendulului de torsiune. Huţanu Radu, Axinte Constantin Irimescu Luminita
 Determinarea momentului de inerţie prin metoda oscilaţiei şi cu ajutorul pendulului de torsiune Huţanu Radu, Axinte Constantin Irimescu Luminita 1. Generalităţi Există mai multe metode pentru a determina
Determinarea momentului de inerţie prin metoda oscilaţiei şi cu ajutorul pendulului de torsiune Huţanu Radu, Axinte Constantin Irimescu Luminita 1. Generalităţi Există mai multe metode pentru a determina
V O. = v I v stabilizator
 Stabilizatoare de tensiune continuă Un stabilizator de tensiune este un circuit electronic care păstrează (aproape) constantă tensiunea de ieșire la variaţia între anumite limite a tensiunii de intrare,
Stabilizatoare de tensiune continuă Un stabilizator de tensiune este un circuit electronic care păstrează (aproape) constantă tensiunea de ieșire la variaţia între anumite limite a tensiunii de intrare,
Metode de interpolare bazate pe diferenţe divizate
 Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
(a) se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.
 se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.") Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
 10. STABILIZATOAE DE TENSIUNE 10.1 STABILIZATOAE DE TENSIUNE CU TANZISTOAE BIPOLAE Stabilizatorul de tensiune cu tranzistor compară în permanenţă valoare tensiunii de ieşire (stabilizate) cu tensiunea
10. STABILIZATOAE DE TENSIUNE 10.1 STABILIZATOAE DE TENSIUNE CU TANZISTOAE BIPOLAE Stabilizatorul de tensiune cu tranzistor compară în permanenţă valoare tensiunii de ieşire (stabilizate) cu tensiunea
TERMOCUPLURI TEHNICE
 TERMOCUPLURI TEHNICE Termocuplurile (în comandă se poate folosi prescurtarea TC") sunt traductoare de temperatură care transformă variaţia de temperatură a mediului măsurat, în variaţie de tensiune termoelectromotoare
TERMOCUPLURI TEHNICE Termocuplurile (în comandă se poate folosi prescurtarea TC") sunt traductoare de temperatură care transformă variaţia de temperatură a mediului măsurat, în variaţie de tensiune termoelectromotoare
Stabilizator cu diodă Zener
 LABAT 3 Stabilizator cu diodă Zener Se studiază stabilizatorul parametric cu diodă Zener si apoi cel cu diodă Zener şi tranzistor. Se determină întâi tensiunea Zener a diodei şi se calculează apoi un stabilizator
LABAT 3 Stabilizator cu diodă Zener Se studiază stabilizatorul parametric cu diodă Zener si apoi cel cu diodă Zener şi tranzistor. Se determină întâi tensiunea Zener a diodei şi se calculează apoi un stabilizator
MECANIC CU ŞURUBURI DE MIŞCARE
 1. TEMA DE PROIECTARE Să se proiecteze un SISTEM MECANIC CU ŞURUBURI DE MIŞCARE pentru ridicarea unei sarcini axiale F, cu acţionare manuală cu clichet vertical, ce realizează o cursă H, cu raportul K
1. TEMA DE PROIECTARE Să se proiecteze un SISTEM MECANIC CU ŞURUBURI DE MIŞCARE pentru ridicarea unei sarcini axiale F, cu acţionare manuală cu clichet vertical, ce realizează o cursă H, cu raportul K
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate.
 Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Analiza funcționării și proiectarea unui stabilizator de tensiune continuă realizat cu o diodă Zener
 Analiza funcționării și proiectarea unui stabilizator de tensiune continuă realizat cu o diodă Zener 1 Caracteristica statică a unei diode Zener În cadranul, dioda Zener (DZ) se comportă ca o diodă redresoare
Analiza funcționării și proiectarea unui stabilizator de tensiune continuă realizat cu o diodă Zener 1 Caracteristica statică a unei diode Zener În cadranul, dioda Zener (DZ) se comportă ca o diodă redresoare
Esalonul Redus pe Linii (ERL). Subspatii.
. Subspatii.") Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
2. STATICA FLUIDELOR. 2.A. Presa hidraulică. Legea lui Arhimede
 2. STATICA FLUIDELOR 2.A. Presa hidraulică. Legea lui Arhimede Aplicația 2.1 Să se determine ce masă M poate fi ridicată cu o presă hidraulică având raportul razelor pistoanelor r 1 /r 2 = 1/20, ştiind
2. STATICA FLUIDELOR 2.A. Presa hidraulică. Legea lui Arhimede Aplicația 2.1 Să se determine ce masă M poate fi ridicată cu o presă hidraulică având raportul razelor pistoanelor r 1 /r 2 = 1/20, ştiind
Planul determinat de normală şi un punct Ecuaţia generală Plane paralele Unghi diedru Planul determinat de 3 puncte necoliniare
 1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
a. Caracteristicile mecanice a motorului de c.c. cu excitaţie independentă (sau derivaţie)
") Caracteristica mecanică defineşte dependenţa n=f(m) în condiţiile I e =ct., U=ct. Pentru determinarea ei vom defini, mai întâi caracteristicile: 1. de sarcină, numită şi caracteristica externă a motorului
Caracteristica mecanică defineşte dependenţa n=f(m) în condiţiile I e =ct., U=ct. Pentru determinarea ei vom defini, mai întâi caracteristicile: 1. de sarcină, numită şi caracteristica externă a motorului
Organe de mașini I. Tiberiu Laurian
 Tiberiu Laurian 2014 2 Capitolul 1 Noțiuni introductive 1.1 Elemente definitorii Pentru o mai bună înțelegere a contextului în care se face studiul organelor de mașini, este necesară definirea entităților
Tiberiu Laurian 2014 2 Capitolul 1 Noțiuni introductive 1.1 Elemente definitorii Pentru o mai bună înțelegere a contextului în care se face studiul organelor de mașini, este necesară definirea entităților
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE
 DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
2. ASAMBLĂRI [1, 2, 4, 6]
![2. ASAMBLĂRI [1, 2, 4, 6]](/thumbs/75/72417168.jpg "2. ASAMBLĂRI [1, 2, 4, 6]") . ASAMBLĂRI [1,, 4, 6] Asamblările se folosesc pentru legarea ansamblelor şi subansamblelor maşinilor şi utilajelor, pentru legarea elementelor componente ale ansamblelor şi subansamblelor, a pieselor
. ASAMBLĂRI [1,, 4, 6] Asamblările se folosesc pentru legarea ansamblelor şi subansamblelor maşinilor şi utilajelor, pentru legarea elementelor componente ale ansamblelor şi subansamblelor, a pieselor
III. Serii absolut convergente. Serii semiconvergente. ii) semiconvergentă dacă este convergentă iar seria modulelor divergentă.
 semiconvergentă dacă este convergentă iar seria modulelor divergentă.") III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
Clasa a IX-a, Lucrul mecanic. Energia
 1. LUCRUL MECANIC 1.1. Un resort având constanta elastică k = 50Nm -1 este întins cu x = 0,1m de o forță exterioară. Ce lucru mecanic produce forța pentru deformarea resortului? 1.2. De un resort având
1. LUCRUL MECANIC 1.1. Un resort având constanta elastică k = 50Nm -1 este întins cu x = 0,1m de o forță exterioară. Ce lucru mecanic produce forța pentru deformarea resortului? 1.2. De un resort având
3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...4
 SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
2. ASAMBLĂRI [1, 2, 4, 6, 8, 10, 12, 14]
![2. ASAMBLĂRI [1, 2, 4, 6, 8, 10, 12, 14]](/thumbs/64/52133105.jpg "2. ASAMBLĂRI [1, 2, 4, 6, 8, 10, 12, 14]") . ASAMBLĂRI [1,, 4, 6, 8, 10, 1, 14] Asamblările se folosesc pentru legarea ansamblelor şi subansamblelor maşinilor şi utilajelor, pentru legarea elementelor componente ale ansamblelor şi subansamblelor,
. ASAMBLĂRI [1,, 4, 6, 8, 10, 1, 14] Asamblările se folosesc pentru legarea ansamblelor şi subansamblelor maşinilor şi utilajelor, pentru legarea elementelor componente ale ansamblelor şi subansamblelor,
1.7. AMPLIFICATOARE DE PUTERE ÎN CLASA A ŞI AB
 1.7. AMLFCATOARE DE UTERE ÎN CLASA A Ş AB 1.7.1 Amplificatoare în clasa A La amplificatoarele din clasa A, forma de undă a tensiunii de ieşire este aceeaşi ca a tensiunii de intrare, deci întreg semnalul
1.7. AMLFCATOARE DE UTERE ÎN CLASA A Ş AB 1.7.1 Amplificatoare în clasa A La amplificatoarele din clasa A, forma de undă a tensiunii de ieşire este aceeaşi ca a tensiunii de intrare, deci întreg semnalul
STUDIUL CONVERTORULUI ELECTRO - PNEUMATIC
 STUDIUL CONVERTORULUI ELECTRO - PNEUMATIC - - 3. OBIECTUL LUCRĂRII Studiul principiuluonstructiv şi funcţional al convertorului electro pneumatic ELA 04. Caracteristica statică : p = f( ), şi reglaje de
STUDIUL CONVERTORULUI ELECTRO - PNEUMATIC - - 3. OBIECTUL LUCRĂRII Studiul principiuluonstructiv şi funcţional al convertorului electro pneumatic ELA 04. Caracteristica statică : p = f( ), şi reglaje de
SOLICITAREA DE TRACŢIUNE COMPRESIUNE
 CPITOLUL 4 SOLICITRE DE TRCŢIUE COMPRESIUE 4.1. Forţe axiale Dacă asupra unei bare drepte se aplică forţe dirijate în lungul axei longitudinale bara este solicitată la tracţiune (Fig.4.1.a) sau la compresiune
CPITOLUL 4 SOLICITRE DE TRCŢIUE COMPRESIUE 4.1. Forţe axiale Dacă asupra unei bare drepte se aplică forţe dirijate în lungul axei longitudinale bara este solicitată la tracţiune (Fig.4.1.a) sau la compresiune
Capitolul COTAREA DESENELOR TEHNICE LECŢIA 21
 Capitolul COTAREA DESENELOR TEHNICE LECŢIA 21! 21.1. Generalităţi.! 21.2. Elementele cotării.! 21.3. Aplicaţii.! 21.1. Generalităţi! Dimensiunea este o caracteristică geometrică liniară sau unghiulară,care
Capitolul COTAREA DESENELOR TEHNICE LECŢIA 21! 21.1. Generalităţi.! 21.2. Elementele cotării.! 21.3. Aplicaţii.! 21.1. Generalităţi! Dimensiunea este o caracteristică geometrică liniară sau unghiulară,care
Curs 4 Serii de numere reale
 Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
4. Măsurarea tensiunilor şi a curenţilor electrici. Voltmetre electronice analogice
 4. Măsurarea tensiunilor şi a curenţilor electrici oltmetre electronice analogice oltmetre de curent continuu Ampl.c.c. x FTJ Protectie Atenuator calibrat Atenuatorul calibrat divizor rezistiv R in const.
4. Măsurarea tensiunilor şi a curenţilor electrici oltmetre electronice analogice oltmetre de curent continuu Ampl.c.c. x FTJ Protectie Atenuator calibrat Atenuatorul calibrat divizor rezistiv R in const.
2. NOŢIUNI SUMARE ASUPRA DEPLASĂRII AUTOMOBILULUI
 2. NOŢIUNI SUMARE ASUPRA DEPLASĂRII AUTOMOBILULUI 2.1. Consideraţii generale Utilizarea automobilului constă în transportul pe drumuri al pasagerilor, încărcăturilor sau al utilajului special montat pe
2. NOŢIUNI SUMARE ASUPRA DEPLASĂRII AUTOMOBILULUI 2.1. Consideraţii generale Utilizarea automobilului constă în transportul pe drumuri al pasagerilor, încărcăturilor sau al utilajului special montat pe
 4. CIRCUITE LOGICE ELEMENTRE 4.. CIRCUITE LOGICE CU COMPONENTE DISCRETE 4.. PORŢI LOGICE ELEMENTRE CU COMPONENTE PSIVE Componente electronice pasive sunt componente care nu au capacitatea de a amplifica
4. CIRCUITE LOGICE ELEMENTRE 4.. CIRCUITE LOGICE CU COMPONENTE DISCRETE 4.. PORŢI LOGICE ELEMENTRE CU COMPONENTE PSIVE Componente electronice pasive sunt componente care nu au capacitatea de a amplifica
Integrala nedefinită (primitive)
") nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
Curs 1 REZISTENTA SI STABILITATEA ELEMENTELOR STRUCTURILOR DIN OTEL
 Curs 1 REZISTENTA SI STABILITATEA ELEMENTELOR STRUCTURILOR DIN OTEL Rezistenta elementelor structurale din otel o Calcul la nivelul secţiunii elementelor structurale (rezistenta secţiunilor) Stabilitatea
Curs 1 REZISTENTA SI STABILITATEA ELEMENTELOR STRUCTURILOR DIN OTEL Rezistenta elementelor structurale din otel o Calcul la nivelul secţiunii elementelor structurale (rezistenta secţiunilor) Stabilitatea
5. FUNCŢII IMPLICITE. EXTREME CONDIŢIONATE.
 5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
1. ESTIMAREA UNUI SCHIMBĂTOR DE CĂLDURĂ CU PLĂCI
 1. ESTIMAREA UNUI SCHIMBĂTOR DE CĂLDURĂ CU PLĂCI a. Fluidul cald b. Fluidul rece c. Debitul masic total de fluid cald m 1 kg/s d. Temperatura de intrare a fluidului cald t 1i C e. Temperatura de ieşire
1. ESTIMAREA UNUI SCHIMBĂTOR DE CĂLDURĂ CU PLĂCI a. Fluidul cald b. Fluidul rece c. Debitul masic total de fluid cald m 1 kg/s d. Temperatura de intrare a fluidului cald t 1i C e. Temperatura de ieşire
Măsurări în Electronică şi Telecomunicaţii 4. Măsurarea impedanţelor
 4. Măsurarea impedanţelor 4.2. Măsurarea rezistenţelor în curent continuu Metoda comparaţiei ceastă metodă: se utilizează pentru măsurarea rezistenţelor ~ 0 montaj serie sau paralel. Montajul serie (metoda
4. Măsurarea impedanţelor 4.2. Măsurarea rezistenţelor în curent continuu Metoda comparaţiei ceastă metodă: se utilizează pentru măsurarea rezistenţelor ~ 0 montaj serie sau paralel. Montajul serie (metoda
Subiecte Clasa a VIII-a
 Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor X) functia f 1
 functia f 1") Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
13. Grinzi cu zăbrele Metoda izolării nodurilor...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...
 SEMINAR GRINZI CU ZĂBRELE METODA IZOLĂRII NODURILOR CUPRINS. Grinzi cu zăbrele Metoda izolării nodurilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele
SEMINAR GRINZI CU ZĂBRELE METODA IZOLĂRII NODURILOR CUPRINS. Grinzi cu zăbrele Metoda izolării nodurilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele
SEMINAR 14. Funcţii de mai multe variabile (continuare) ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0
 ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0") Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Seminariile Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reziduurilor
 Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Fig. 1 A L. (1) U unde: - I S este curentul invers de saturaţie al joncţiunii 'p-n';
 U unde: - I S este curentul invers de saturaţie al joncţiunii 'p-n';") ELECTRONIC Lucrarea nr.3 DISPOZITIVE OPTOELECTRONICE 1. Scopurile lucrării: - ridicarea caracteristicilor statice ale unor dispozitive optoelectronice uzuale (dioda electroluminiscentă, fotodiodă, fototranzistorul);
ELECTRONIC Lucrarea nr.3 DISPOZITIVE OPTOELECTRONICE 1. Scopurile lucrării: - ridicarea caracteristicilor statice ale unor dispozitive optoelectronice uzuale (dioda electroluminiscentă, fotodiodă, fototranzistorul);
Seminar 5 Analiza stabilității sistemelor liniare
 Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
i R i Z D 1 Fig. 1 T 1 Fig. 2
 TABILIZATOAE DE TENINE ELECTONICĂ Lucrarea nr. 5 TABILIZATOAE DE TENINE 1. copurile lucrării: - studiul dependenţei dintre tensiunea stabilizată şi cea de intrare sau curentul de sarcină pentru stabilizatoare
TABILIZATOAE DE TENINE ELECTONICĂ Lucrarea nr. 5 TABILIZATOAE DE TENINE 1. copurile lucrării: - studiul dependenţei dintre tensiunea stabilizată şi cea de intrare sau curentul de sarcină pentru stabilizatoare
Valori limită privind SO2, NOx şi emisiile de praf rezultate din operarea LPC în funcţie de diferite tipuri de combustibili
 Anexa 2.6.2-1 SO2, NOx şi de praf rezultate din operarea LPC în funcţie de diferite tipuri de combustibili de bioxid de sulf combustibil solid (mg/nm 3 ), conţinut de O 2 de 6% în gazele de ardere, pentru
Anexa 2.6.2-1 SO2, NOx şi de praf rezultate din operarea LPC în funcţie de diferite tipuri de combustibili de bioxid de sulf combustibil solid (mg/nm 3 ), conţinut de O 2 de 6% în gazele de ardere, pentru
L.2. Verificarea metrologică a aparatelor de măsurare analogice
 L.2. Verificarea metrologică a aparatelor de măsurare analogice 1. Obiectul lucrării Prin verificarea metrologică a unui aparat de măsurat se stabileşte: Dacă acesta se încadrează în limitele erorilor
L.2. Verificarea metrologică a aparatelor de măsurare analogice 1. Obiectul lucrării Prin verificarea metrologică a unui aparat de măsurat se stabileşte: Dacă acesta se încadrează în limitele erorilor
Lucrul si energia mecanica
 Lucrul si energia mecanica 1 Lucrul si energia mecanica I. Lucrul mecanic este produsul dintre forta si deplasare: Daca forta este constanta, atunci dl = F dr. L 1 = F r 1 cos α, unde r 1 este modulul
Lucrul si energia mecanica 1 Lucrul si energia mecanica I. Lucrul mecanic este produsul dintre forta si deplasare: Daca forta este constanta, atunci dl = F dr. L 1 = F r 1 cos α, unde r 1 este modulul
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor
 Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
SIGURANŢE CILINDRICE
 SIGURANŢE CILINDRICE SIGURANŢE CILINDRICE CH Curent nominal Caracteristici de declanşare 1-100A gg, am Aplicaţie: Siguranţele cilindrice reprezintă cea mai sigură protecţie a circuitelor electrice de control
SIGURANŢE CILINDRICE SIGURANŢE CILINDRICE CH Curent nominal Caracteristici de declanşare 1-100A gg, am Aplicaţie: Siguranţele cilindrice reprezintă cea mai sigură protecţie a circuitelor electrice de control
Ovidiu Gabriel Avădănei, Florin Mihai Tufescu,
 vidiu Gabriel Avădănei, Florin Mihai Tufescu, Capitolul 6 Amplificatoare operaţionale 58. Să se calculeze coeficientul de amplificare în tensiune pentru amplficatorul inversor din fig.58, pentru care se
vidiu Gabriel Avădănei, Florin Mihai Tufescu, Capitolul 6 Amplificatoare operaţionale 58. Să se calculeze coeficientul de amplificare în tensiune pentru amplficatorul inversor din fig.58, pentru care se
2CP Electropompe centrifugale cu turbina dubla
 2CP Electropompe centrifugale cu turbina dubla DOMENIUL DE UTILIZARE Capacitate de până la 450 l/min (27 m³/h) Inaltimea de pompare până la 112 m LIMITELE DE UTILIZARE Inaltimea de aspiratie manometrică
2CP Electropompe centrifugale cu turbina dubla DOMENIUL DE UTILIZARE Capacitate de până la 450 l/min (27 m³/h) Inaltimea de pompare până la 112 m LIMITELE DE UTILIZARE Inaltimea de aspiratie manometrică
 11.2 CIRCUITE PENTRU FORMAREA IMPULSURILOR Metoda formării impulsurilor se bazează pe obţinerea unei succesiuni periodice de impulsuri, plecând de la semnale periodice de altă formă, de obicei sinusoidale.
11.2 CIRCUITE PENTRU FORMAREA IMPULSURILOR Metoda formării impulsurilor se bazează pe obţinerea unei succesiuni periodice de impulsuri, plecând de la semnale periodice de altă formă, de obicei sinusoidale.
Aparate de măsurat. Măsurări electronice Rezumatul cursului 2. MEE - prof. dr. ing. Ioan D. Oltean 1
 Aparate de măsurat Măsurări electronice Rezumatul cursului 2 MEE - prof. dr. ing. Ioan D. Oltean 1 1. Aparate cu instrument magnetoelectric 2. Ampermetre şi voltmetre 3. Ohmetre cu instrument magnetoelectric
Aparate de măsurat Măsurări electronice Rezumatul cursului 2 MEE - prof. dr. ing. Ioan D. Oltean 1 1. Aparate cu instrument magnetoelectric 2. Ampermetre şi voltmetre 3. Ohmetre cu instrument magnetoelectric
4. ARBORI ŞI OSII [1, 2, 4, 6, 10]
![4. ARBORI ŞI OSII [1, 2, 4, 6, 10]](/thumbs/78/77149340.jpg "4. ARBORI ŞI OSII [1, 2, 4, 6, 10]") 4. ARBORI ŞI OSII [1, 2, 4, 6, 10] 4.1. CARACTERIZARE, DOMENII DE FOLOSIRE, CLASIFICARE Arborii sunt organe de maşini cu mişcare de rotaţie, destinate să transmită un moment de torsiune în lungul axei
4. ARBORI ŞI OSII [1, 2, 4, 6, 10] 4.1. CARACTERIZARE, DOMENII DE FOLOSIRE, CLASIFICARE Arborii sunt organe de maşini cu mişcare de rotaţie, destinate să transmită un moment de torsiune în lungul axei
PROIECTAREA TRANSMISIEI PRIN CURELE TRAPEZOIDALE
 - 1-2. PROIECTAREA TRANSMISIEI PRIN CURELE TRAPEZOIDALE Acest tip de transmisie se realizează între arbori paraleli, are în construcţie cel puţin două roţi pe care se înfăşoară elementul intermediar elastic
- 1-2. PROIECTAREA TRANSMISIEI PRIN CURELE TRAPEZOIDALE Acest tip de transmisie se realizează între arbori paraleli, are în construcţie cel puţin două roţi pe care se înfăşoară elementul intermediar elastic
14. Grinzi cu zăbrele Metoda secţiunilor...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR GRINZI CU ZĂBRELE METODA SECŢIUNILOR CUPRINS. Grinzi cu zăbrele Metoda secţiunilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele Metoda secţiunilor
SEMINAR GRINZI CU ZĂBRELE METODA SECŢIUNILOR CUPRINS. Grinzi cu zăbrele Metoda secţiunilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele Metoda secţiunilor
Curs 14 Funcţii implicite. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi"
 Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
3. ARCURI [1, 2, 4, 6]
![3. ARCURI [1, 2, 4, 6]](/thumbs/63/50313938.jpg "3. ARCURI [1, 2, 4, 6]") 3. ARCURI [1, 2, 4, 6] 3.1. CARACTERIZARE. DOMENII DE FOLOSIRE. CLASIFICARE. Arcurile sunt organe de maşini care, prin forma lor şi prin proprietăţile elastice deosebite ale materialelor din care sunt
3. ARCURI [1, 2, 4, 6] 3.1. CARACTERIZARE. DOMENII DE FOLOSIRE. CLASIFICARE. Arcurile sunt organe de maşini care, prin forma lor şi prin proprietăţile elastice deosebite ale materialelor din care sunt
V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile
 Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
PROPRIETATI ELASTICE ALE CORPURILOR
 PROPRIETATI ELASTICE ALE CORPURILOR Determinarea modulului de elasticitate a cauciucului. Determinarea constantei elastice a unui resort. Determinarea modulelor de torsiune şi de forfecare ale unei bare
PROPRIETATI ELASTICE ALE CORPURILOR Determinarea modulului de elasticitate a cauciucului. Determinarea constantei elastice a unui resort. Determinarea modulelor de torsiune şi de forfecare ale unei bare
BARDAJE - Panouri sandwich
 Panourile sunt montate vertical: De jos în sus, îmbinarea este de tip nut-feder. Sensul de montaj al panourilor trebuie să fie contrar sensului dominant al vântului. Montaj panouri GAMA ALLIANCE Montaj
Panourile sunt montate vertical: De jos în sus, îmbinarea este de tip nut-feder. Sensul de montaj al panourilor trebuie să fie contrar sensului dominant al vântului. Montaj panouri GAMA ALLIANCE Montaj
ASAMBLARI FILETATE. I. Definitii, elemente geometrice, clasificarea filetelor
 ASAMBLARI FILETATE I. Definitii, elemente geometrice, clasificarea filetelor Filetul totalitatea spirelor dispuse pe o suprafata cilindrica sau conica, exterioara sau interioara si uneori pe o suprafata
ASAMBLARI FILETATE I. Definitii, elemente geometrice, clasificarea filetelor Filetul totalitatea spirelor dispuse pe o suprafata cilindrica sau conica, exterioara sau interioara si uneori pe o suprafata
Lucrarea Nr. 5 Circuite simple cu diode (Aplicaţii)
") ucrarea Nr. 5 Circuite simple cu diode (Aplicaţii) A.Scopul lucrării - Verificarea experimentală a rezultatelor obţinute prin analiza circuitelor cu diode modelate liniar pe porţiuni ;.Scurt breviar teoretic
ucrarea Nr. 5 Circuite simple cu diode (Aplicaţii) A.Scopul lucrării - Verificarea experimentală a rezultatelor obţinute prin analiza circuitelor cu diode modelate liniar pe porţiuni ;.Scurt breviar teoretic
MOTOARE DE CURENT CONTINUU
 MOTOARE DE CURENT CONTINUU În ultimul timp motoarele de curent continuu au revenit în actualitate, deşi motorul asincron este folosit în circa 95% din sistemele de acţionare electromecanică. Această revenire
MOTOARE DE CURENT CONTINUU În ultimul timp motoarele de curent continuu au revenit în actualitate, deşi motorul asincron este folosit în circa 95% din sistemele de acţionare electromecanică. Această revenire
15. Se dă bara O 1 AB, îndoită în unghi drept care se roteşte faţă de O 1 cu viteza unghiulară ω=const, axa se rotaţie fiind perpendiculară pe planul
 INEMTI 1. Se consideră mecanismul plan din figură, compus din manivelele 1 şi 2, respectiv biela legate intre ele prin articulaţiile cilindrice şi. Manivela 1 se roteşte cu viteza unghiulară constantă
INEMTI 1. Se consideră mecanismul plan din figură, compus din manivelele 1 şi 2, respectiv biela legate intre ele prin articulaţiile cilindrice şi. Manivela 1 se roteşte cu viteza unghiulară constantă
Curs 2 DIODE. CIRCUITE DR
 Curs 2 OE. CRCUTE R E CUPRN tructură. imbol Relația curent-tensiune Regimuri de funcționare Punct static de funcționare Parametrii diodei Modelul cu cădere de tensiune constantă Analiza circuitelor cu
Curs 2 OE. CRCUTE R E CUPRN tructură. imbol Relația curent-tensiune Regimuri de funcționare Punct static de funcționare Parametrii diodei Modelul cu cădere de tensiune constantă Analiza circuitelor cu
L1. DIODE SEMICONDUCTOARE
 L1. DIODE SEMICONDUCTOARE L1. DIODE SEMICONDUCTOARE În lucrare sunt măsurate caracteristicile statice ale unor diode semiconductoare. Rezultatele fiind comparate cu relaţiile analitice teoretice. Este
L1. DIODE SEMICONDUCTOARE L1. DIODE SEMICONDUCTOARE În lucrare sunt măsurate caracteristicile statice ale unor diode semiconductoare. Rezultatele fiind comparate cu relaţiile analitice teoretice. Este
REDRESOARE MONOFAZATE CU FILTRU CAPACITIV
 REDRESOARE MONOFAZATE CU FILTRU CAPACITIV I. OBIECTIVE a) Stabilirea dependenţei dintre tipul redresorului (monoalternanţă, bialternanţă) şi forma tensiunii redresate. b) Determinarea efectelor modificării
REDRESOARE MONOFAZATE CU FILTRU CAPACITIV I. OBIECTIVE a) Stabilirea dependenţei dintre tipul redresorului (monoalternanţă, bialternanţă) şi forma tensiunii redresate. b) Determinarea efectelor modificării
Curs 1 Şiruri de numere reale
 Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
Laborator 1: INTRODUCERE ÎN ALGORITMI. Întocmit de: Claudia Pârloagă. Îndrumător: Asist. Drd. Gabriel Danciu
 INTRODUCERE Laborator 1: ÎN ALGORITMI Întocmit de: Claudia Pârloagă Îndrumător: Asist. Drd. Gabriel Danciu I. NOŢIUNI TEORETICE A. Sortarea prin selecţie Date de intrare: un şir A, de date Date de ieşire:
INTRODUCERE Laborator 1: ÎN ALGORITMI Întocmit de: Claudia Pârloagă Îndrumător: Asist. Drd. Gabriel Danciu I. NOŢIUNI TEORETICE A. Sortarea prin selecţie Date de intrare: un şir A, de date Date de ieşire:
IV. CUADRIPOLI SI FILTRE ELECTRICE CAP. 13. CUADRIPOLI ELECTRICI
 V. POL S FLTE ELETE P. 3. POL ELET reviar a) Forma fundamentala a ecuatiilor cuadripolilor si parametrii fundamentali: Prima forma fundamentala: doua forma fundamentala: b) Parametrii fundamentali au urmatoarele
V. POL S FLTE ELETE P. 3. POL ELET reviar a) Forma fundamentala a ecuatiilor cuadripolilor si parametrii fundamentali: Prima forma fundamentala: doua forma fundamentala: b) Parametrii fundamentali au urmatoarele
L2. REGIMUL DINAMIC AL TRANZISTORULUI BIPOLAR
 L2. REGMUL DNAMC AL TRANZSTRULU BPLAR Se studiază regimul dinamic, la semnale mici, al tranzistorului bipolar la o frecvenţă joasă, fixă. Se determină principalii parametrii ai circuitului echivalent natural
L2. REGMUL DNAMC AL TRANZSTRULU BPLAR Se studiază regimul dinamic, la semnale mici, al tranzistorului bipolar la o frecvenţă joasă, fixă. Se determină principalii parametrii ai circuitului echivalent natural
Erori si incertitudini de măsurare. Modele matematice Instrument: proiectare, fabricaţie, Interacţiune măsurand instrument:
 Erori i incertitudini de măurare Sure: Modele matematice Intrument: proiectare, fabricaţie, Interacţiune măurandintrument: (tranfer informaţie tranfer energie) Influente externe: temperatura, preiune,
Erori i incertitudini de măurare Sure: Modele matematice Intrument: proiectare, fabricaţie, Interacţiune măurandintrument: (tranfer informaţie tranfer energie) Influente externe: temperatura, preiune,
Sisteme diferenţiale liniare de ordinul 1
 1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
Exemple de probleme rezolvate pentru cursurile DEEA Tranzistoare bipolare cu joncţiuni
 Problema 1. Se dă circuitul de mai jos pentru care se cunosc: VCC10[V], 470[kΩ], RC2,7[kΩ]. Tranzistorul bipolar cu joncţiuni (TBJ) este de tipul BC170 şi are parametrii β100 şi VBE0,6[V]. 1. să se determine
Problema 1. Se dă circuitul de mai jos pentru care se cunosc: VCC10[V], 470[kΩ], RC2,7[kΩ]. Tranzistorul bipolar cu joncţiuni (TBJ) este de tipul BC170 şi are parametrii β100 şi VBE0,6[V]. 1. să se determine
Lucrul mecanic. Puterea mecanică.
 1 Lucrul mecanic. Puterea mecanică. In acestă prezentare sunt discutate următoarele subiecte: Definitia lucrului mecanic al unei forţe constante Definiţia lucrului mecanic al unei forţe variabile Intepretarea
1 Lucrul mecanic. Puterea mecanică. In acestă prezentare sunt discutate următoarele subiecte: Definitia lucrului mecanic al unei forţe constante Definiţia lucrului mecanic al unei forţe variabile Intepretarea
Difractia de electroni
 Difractia de electroni 1 Principiul lucrari Verificarea experimentala a difractiei electronilor rapizi pe straturi de grafit policristalin: observarea inelelor de interferenta ce apar pe ecranul fluorescent.
Difractia de electroni 1 Principiul lucrari Verificarea experimentala a difractiei electronilor rapizi pe straturi de grafit policristalin: observarea inelelor de interferenta ce apar pe ecranul fluorescent.
LUCRAREA A4 REGIMUL TERMIC AL BOBINEI DE EXCITAŢIE A UNUI CONTACTOR DE CURENT CONTINUU
 LUCRAREA A4 REGIMUL TERMIC AL BOBINEI DE EXCITAŢIE A UNUI CONTACTOR DE CURENT CONTINUU. Tematica lucrării.. Regimul termic tranzitoriu într-un anumit punct din bobină... Determinarea repartiţiei experimentale
LUCRAREA A4 REGIMUL TERMIC AL BOBINEI DE EXCITAŢIE A UNUI CONTACTOR DE CURENT CONTINUU. Tematica lucrării.. Regimul termic tranzitoriu într-un anumit punct din bobină... Determinarea repartiţiei experimentale
CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1
... 1 Cuprins..1") CURS 3 SISTEME DE FORŢE (continuare) CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 3.1. Momentul forţei în raport cu un punct...2 Test de autoevaluare
CURS 3 SISTEME DE FORŢE (continuare) CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 3.1. Momentul forţei în raport cu un punct...2 Test de autoevaluare
Subiecte Clasa a VII-a
 lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
Lucrarea nr. 5 STABILIZATOARE DE TENSIUNE. 1. Scopurile lucrării: 2. Consideraţii teoretice. 2.1 Stabilizatorul derivaţie
 Lucrarea nr. 5 STABILIZATOARE DE TENSIUNE 1. Scopurile lucrării: - studiul dependenţei dintre tensiunea stabilizată şi cea de intrare sau curentul de sarcină pentru stabilizatoare serie şi derivaţie; -
Lucrarea nr. 5 STABILIZATOARE DE TENSIUNE 1. Scopurile lucrării: - studiul dependenţei dintre tensiunea stabilizată şi cea de intrare sau curentul de sarcină pentru stabilizatoare serie şi derivaţie; -
a n (ζ z 0 ) n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea
 n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea") Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,