استفاده از خود متغیر تحت کنترل )در اینجا T یا دما( برای کنترل کردن
|
|
|
- Διόδοτος Αποστολίδης
- 7 χρόνια πριν
- Προβολές:
Transcript
1 4 فصل : 9 سیستم مدار بسته خطی : عنصر اندازه گیری مثل ترموکوپل - Set point + فرآیند عنصرکنترل نهایی کنترل کننده load بار i proce خطوط انتقال مقدار مطلوب m عنصر اندازه گیری مقدار مقرر تعریف : et point عبارت است از مقدار مطلوب متغیر تحت کنترل و هدف از مدار کنترل رساندن متغیر کنترل شونده به مقدار مطلوب آن است. رساندن به تعریف : Load عبارت است از تغییر در هر متغیری که بتواند متغیر کنترل شونده را تحت تأثیر قرار دهد. Load i است. مثل w و تعریف اصل پس خور : استفاده از خود متغیر تحت کنترل در اینجا یا دما برای کنترل کردن متغیر تحت کنترل را اصل پس خور گویند که بهترین روش کنترل می باشد. پس خور به دو نوع مثبت و منفی می باشد : پس خور منفی : در سیستم پس خور منفی از اختالف بین et point و متغیر اندازه گیری شده q q k c m برای کنترل فرآیند استفاده می شود یعنی : i, m,, q, m برای پس خور مثبت i, m,, q,
2 4 مسئله Servo مسئله egulator اگر در سیستم کنترل بارها Load ثابت باشند و et point تغییر کند یعنی مقدار مطلوب ما مطابق یک برنامه زمانی تغییر کند سیستم کنترل از نوع ervo است. مثال تانک ذخیره همزن ervo است. i دار است. w, ثابت و دمای مطلوب تغییر می کند مسئله در et point egulator ثابت است و بارها loadها تغییر میی کنید. بیرای مثیال در ایین i,w ثابت اما سیستم می تواند تغییر کند. این نوع سیسیتم را از نیوع تنمییم کننیده ییا egulator می نامند. دو مسئله عکس هم دیگرند. i k c wc wc m m ervo G egulator i G اگر بگوید بصورت پله ای یا ایمپالس t 5u 5 S t t?
3 4 خطا در فصل فرآیند عنصر کنترل نهایی کنترل کننده = مقدار مطلوبpoint Set ی مقدار اندازه گیری شده et point مقدار اندازه گیری شده *هر واحدی می تواند داشته باشد به شرطی که et point و مقدار اندازه گیری شده بعدشان یکی باشد. خطا وارد کنترل کننده می شود. کنترل کننده خطا را دریافت می کند و متناسب با این خطا و نوع خطا کننده فرمان نهایی را به عنصر کنترل نهایی می دهد. می تواند بصورت فشار ولتاژ آمپر و... باشد. در صنایع فرآیندی بیشتر عنصر کنترل یک شیر کنترل است. valve control که اگر این شیرکنترل از نوع بادی یا نیوماتیک باشد فرمان صادره از کنترل کننده بصورت فشار هوا می باشد. در مورد عنصر کنترل نهایی که فرمانی که از عنصر کنترل کننده به عنصر نهایی می دهد که عنصر نهایی هم می تواند یک شیر یا valve باشد که این شیر کنترل از نوع بادی است. شیر کنترل بادی از یک دیافراگم که از ورقه فلزی نازکی به قابلیت ارتجاعی و ییک میلیه کیه بیه انتهای آن یک مخروط ناقص متصل شده و به آن پیستون و plag می گویند و یک فلیز تشیکیل شده است. اگر فشار زیاد شود یک نیرو بر دیافراگم اعمال می کند و میله شیر و در نتیجه پیستون به سمت پایین حرکت می کند و شیر را می بندد بنابراین شدت جریان Q کاهش پیدا می کند. رابطه بین P و Q است. چنان چه رابطه بین P و Q خطی باشد شیر را خطی گویند. این شیر که با افزایش فشار می بندد از نوع بسته شدن با هوا یا air to cloe می نامند. چنان چیه مخلیوط ناقص به میله شیر متصل شود شیر را از نوع باز شدن با هوا air to open می نامند. شکل را از کتاب بنویسیم. شکل -
4 4 pig نسبی است. یعنی در pig کامال باز یا کامال بسته اند و در شیرهای صنعتی بین تا 5 pig کامال بسته یا باز می شوند. هوای تغذیه برای سیستم های کنترل شده معموال 5pig است. تابع انتقال عنصر کنترل نهایی یا همان شیر کنترل : P عنصر کنترل نهایی Q Q P هر شیر کنترل دارای تاخیر دینامیکی یا کندی انتقال است. یعنی تغییرات فشار روی دیافراگم آن فورا به تغییرات برای Q منجر نمی شود. چون ثابت زمانی این شیرها کوچک است. Q v P v = بهره یا حساسیت شیر کنترل کننده ا ست. v = ثابت زمانی شیر کنترل v : تغییرات دبی بین دو حالت teady v تعریف به تغییرات فشار بین آن دو حالت است. شیوه های عمل کنترل : در کنترل کننده ها از شیرهای کنترل تناسبیP انتگرالی مشتقیD استفاده می شود.
5 4 فصل P کنترل کننده تناسبی P Proportional : ε کنترل کننده تناسبی c p p = p + c ε اگر این کنترل کننده نیوماتیک یا بادی باشد سیگنال خروجی فشار خواهد بود. در کنترل کننده های الکترونیکی سیگنال خروجی ولتاژ خواهد بود. p فشار در حالت teady یعنی وقتی که = c است. ε حساسیت یا بهره..teady به تغییرات خطا در حالت teady عبارت است از تغییرات فشار بین دو حالت : c c = صفر تغییرات فشار ییییییییییییی تغییرات ε p = p + c ε p p = c ε ε P = c ε P = c ε P ییییی ε c = ییییی Δ p Δ ε = c دامنه تناسبی یا P.B : Proportional Band در صنعت بجای c از P.B استفاده می کنند. عبارت است از درصد خطای الزم برای اینکه عنصر کنترل نهایی بر روی تمام محدوده خود حرکت کند به عنوان مثال شیر کنترل از حالت کامال باز به حالت بسته و یا از حالت کامال بسته به حالت کامال باز تبیدیل شیود. دامنیه تناسیبی بصیورت درصدی از کل محدوده متغیر اندازه گیری شونده بیان می شود.
6 4 کنترل کننده قطع و وصل on-off : هر وقت حساسیت کنترل کننده بسیار زیاد باشد کنترل کننده قطع و وصلی میی گوینید. مثیل ترموستات شیر آب منزل یا تهویه دامنه تناسبی برابر با صفر است. کنترل کننده تناسبی انتگرالی P : ε P p = p + c ε + c ییییی τ : τ ثابت زمانی کنترل کننده انتگرالی p p c t c dt c P c t dt P = c ε [+ یییی τ ] P ییییی ε = c [+ ییییی τ ] ε PD کنترل کننده تناسبی مشتقی PD : p = p + c ε + c τ D d ε ییییی d t p p = c ε ε + c τ D d ε - ε یییییییییی d t P = c ε + c τ D P d ε ییییی d t الپالس = c + τ D ییییی ε P = c ε + τ D
7 44 کنترل کننده تناسبی انتگرالی مشتقی : PD ε P PD =ییییی c [+ ییییی ε τ [S + τ D سه تا را با هم جمع می کنیم + - B -B B B B دالیل افزودن شیوه های مختلف انتگرالی و مشتقی به کنترل کننده تناسبی : فرض می کنیم در یک مدار کنترل ورودی بصورت پله ای افزایش یابد. چنان چه را بطه ی کنترل کننده قطع باشد = c متغیر تحت کنترل افزایش می یابد و به مقدار teady جدییدی میی چنان چه رسد. c یا > c از افزایش متغیر تحت کنترل جلوگیری می کند. اگر کنتیرل کننده فقط تناسبی باشد متغیر تحت کنترل احتماال با نوسان همراه خواهد بیود و در نهاییت بیه مقدار teady جدیدی می رسد که به مقدار مطلوب نزدیک است. اما این کنترل کننده تناسبی قادر نیست متغیر تحت کنترل را به مقدار مطلیوب خیود برسیاند و همیشه با یک خطا خواهد بود که به آن offet یا افت کنترل یا خطای ماندگار می گویند.
8 444 اگر انتگرالی استفاده شود P پاسخ دارای نوسان بیشتر over hoot بزرگتر ولی در هر حال بعد از چند نوسان به مقدار مطلوب می رسد. اگر مشتقی به همراه تناسبی انتگرالی استفاده کنیم PD نوسان را کاهش می دهد. پاسخ زودتر PD به مقدار مطلوب می رسد. اضافه کردن مشتقی به تناسبی باعث می شود که از نوسانات جلوگیری شود اما در هر صورت دارای offet خواهد بود. دو نوع کنترل کننده,PD P دارای خطای ماندگار هستند. فصل فصل : Forward path عالئم استاندارد مدار بسته : پیش رو + ε + M پیش رو G c G G B - D یا U Feedback path پس خور H عناصر داخل هر جعبه توابع انتقال و بقیه عوامل متغیرها هستند. et point مقدار مطلوب : متغیر تحت کنترل متغیر اندازه گیری شده : :B D یاU : load یا بار آشفتگی یا اغتشاش error. : خطا B ε = ε یا e یا E متغیرها بصورت سیگنال در مدار چرخش می کنند. توابع انتقال : : فرآیند G : کنترل کننده G c
9 44 : H عنصر اندازه گیری : کنترل نهایی G تابع انتقال کلی مدار بسته : تابع انتقالی که بتواند را به یا را به u ارتباط دهد تابع انتقال کلی مدار بسته نامیده میشود. load نداریم. در مسئله u =, ervo است یعنی تغییر در load است. در مسئله =, egulator است یعنی تغییر در - تابع انتقال کلی مدار بسته برای مسئله :ervo _ G c G G B H در مسیر Forward یا Feed back اگر بین جعبه ها block ها جمع کننده نداشته باشیم می توان توابع انتقال را در هم ضرب کرد و بجایش یک block قرار داد. + - ε G G = G c G G B H X G Y G B Z Y یییییی X Z یییییی Y = G = G B Y یییییی X Z = G Y ییییی.G B Z یییییی X = G G B X G. G B Z
10 44 ε G - G = G c G G B H یییییییی =? خودش متغیر است = G ε ε = B B = H = G-B = G -GH + GH = G +GH = G G ییییییییییییییی + GH G یییییییییییییی ییییییییییییییی= + GH - تابع انتقال کلی مدار بسته برای مسئله :egulator D یا U + M+U G c G G = ε M + - B H ε = - B, M= ε G G, =M+UG ε = - B = - H = G M + G U = G [G c G ε] + G U = G [G c G - H] + G U ییییییییییییییی یییییییییییی U = + GH G = GH + معادله مشخصه مدار بسته
11 44 بنابراین پاسخ سیستم مدار بسته عالوه بر اینکه بر و u بستگی دارد به ریشه های = GH + = u = = u = = + u G G ییییییییییییییی + GH + = u ییییییییییییییی + GH Super poition بستگی دارد. Y ییییی X = F ± L Y و X حاصلضرب توابع انتقال مدار بسته در مسیر پیش رو بین : F : L حاصلضرب توابع انتقال مدار بسته مثبت : پس خور منفی منفی: پس خور مثبت یییییی = F + L F G G c G G L G c G G H مثال : u u + - ε G G c + + G G B B H H H * H = H G یییییییییییییی ییییییی = + GH یییییی u = G G ییییییییییییییی + GH G c G G G = G B ییییییییییی G H ییییییییییییییییییییییییییییییی = u + G H B ییییییی u = G G H یییییییییییییییییییی + GH
12 44 مثال : u u + - ε G c G c G - + G + G H B H الف + - ε G c ب H + ج تقلیل نخستین ج نمودار تک جعبه ای نهائی شکل 4 تقلیل نمودار جعبه ای الف نمودار اصلی ب Gc G c G GG G G H G G G G G c c c H
13 44 اگر مدارها با یکدیگر تداخل داشته باشند ابتدا باید سعی کنیم که یک مدار در داخل مدار خارجی قرار گیرد سپس از قاعده پس خور استفاده کنیم. برای این منمور باید سعی کنیید ابتیدا جمیع کننده ها را کنار هم قرار دهیم سپس با یک جابجایی مناسب یک مدار را کامال در داخیل میدار دیگر یا در کنار آن قرار دهیم. در صورتی می توان جای دو جمع کننده را عوض نمود که بین دو جمع کننده تابع انتقالی وجود نداشته باشد. X G a + - G b + Y + G c الف X + - G b G c + Y + G a
14 44 ب شکل م..
15 44
16 44 فصل افت کنترل یا خطای ماندگار: t Offet روش محاسبه Offet از نمودار جعبه ای داده شده : > < t - مشخص بودن مساله ervo یا egulator - نوشتن برای ervo و یا برای egulator با توجه به قوانین ساده سازی نمودار جعبه ای و قواعد پس خور و ساده سازی آنها تا حد امکان. - نوشتن t و برای ervo و نوشیتن ut و u بیرای egulator بیا اسیتفاده از توضیحات مساله. 4- جایگزینی در و جایگزینی u در. 5- محاسبه offet از فرمول داده شده
17 4 تلاح : P عون هدننک لرتنک رییغت کی و رد دحاو یا هلپ et point : S t u t S o W offet S S im S l offet lim lim lim wc P wc i
18 44 تلاح P عون هدننک لرتنک و load رد دحاو یا هلپ رییغت کی : t u t i i i i W offet S S im S l offet lim lim wc P wc i
19 4 تلاح : Pعون هدننک لرتنک رد دحاو یا هلپ رییغت کی و etpoint : + k=.6 - ریغتم رییغت : wc k k k k k k t u t c c c c c c c c S k S k S k k S k S k S k k ~ k S S im S l offet lim wc k c wc
20 4 V تلاح عون هدننک لرتنک P Load رد یا هلپ رییغت کی و : t u t i i k i S S S S ~ S S S im S l offet lim wc k wc
21 4 Vتلاح : PD عون لرتنک رد یا هلپ ریغتم کی و etpoint : S S S t u t o o / o o W S S im S l offet lim wc k D wc i
22 4 تلاح V : PD عون هدننک لرتنک load رد یا هلپ رییغت کی و : t u t i i S D i o W S S im S l offet lim wc k D wc i
23 4 تلاح V : PD عون هدننک لرتنک رد یا هلپ رییغت کی و etpoint : t u t o O o o o o o S S im S l offet lim wc k D wc i
24 4 تلاح V : PD عون هدننک لرتنک load رد یا هلپ رییغت کی و : t u t i i D i o D S S im S l offet lim wc k D wc i
25 4 تسبولطم ریز لرتنک رادم هب هجوت اب e overhoot + k=.6 - مود هجرد متسیس درادناتسا مرف x y / / / / e overhoot offet S S im l offet t u t 5 ++
26 4 8 8 c lim c
27 4 در مدار کنترل زیر به.5 = ζ مقدار? = را پیدا کنید به ازای یک تغییر پله ای واحد در یییییییی 6 + یییییییییییییییییییییییی ییییییییییییییییییییییییییییییییییییییییی = = یییییییییییییییییییییییی + offet را محاسبه کنید 6 یییییییییییییییییییییییییییییییییی یییییییی = 6 ییییییییییییییییییییییییییییییییییییییی یییییییییییییییییییییییییییییییییی = t = ut = = یییییی ی یییییییییییییییییییییییییییییییییییییی S [ + +6 τ +6] Offet = c =-= = Lim t t = Lim = = Lim c = 6/6 = τ = τ = ζ τ = =
28 44 فصل 4 تعریف پایداری سیستم های خطی : سیستمی است که به ازای ورودی محدود پاسخ محدود بدهد. هر سیسیتمی کیه بیه ازای ورودی محدود پاسخ نامحدود بدهد. سیستم ناپایدار است از جمله ورودی های محدود ورودی های پله ای f t = e at سینوسی پالسی و نمایی نزولی -at e هستند. ورودی های نامحدود f t = at f t = at + b t +c معیار پایداری روت outh راست این معیار یک روش کامال جبری است که به کمک آن تعداد ریشه های ناپایدار کننده یعنی ریشه هایی که دارای قسمت حقیقی مثبت هستند را معرفی می کنند. در مواردی که معادله مشخصیه e مداربسته آنها بصورت یک چند جمله ای بر حسب باشد. اگر دارای عامیل تیاخیر انتقیالی + GH = a n + a n- + + a n- + a n = نکات مهم : باشد نمی توان استفاده کرد. منفی باشد طرفین معادله را در - ضرب می کنیم. - اگر a - اگر حتی یکی از ضرایب و ریشه ها منفی باشد سیستم ناپایدار می گردد. - اگر همه ضرایب مثبت باشد سیستم ممکن است پایدار یا ناپایدار باشد. برای معیار outh آزمون outh ابتدا باید جدول یا رشته outh را تشکیل دهیم. عناصر دو سطر اول و دوم از ضرایب معادله مشخصه نوشته می شود و بقیه سطرها بیه کمیک دو سیطر ماقبل تکمیل می شود.
29 4 ییییییییییییییییییییییییییییییییییییییییییییییییییییییییی n n- n-... n- n n+ a a a 4 a 6... a a a 5 a 7... b b b c c c.. e f g a b = a a a b = یییییییییییییییییییییی a a a 4 a a 5 ییییییییییییییییییییی a b = a a b یییییییییییییییییییییی b b a 5 a b یییییییییییییییییییییی = b تعداد سطرها + n عناصر هر سطر از دو سطر قبلی بوجود می آید. عناصر هر سطر را می توان بر یک عدد ثابت و مثبت تقسیم کرد. اگر n زوج باشد سطر اول یک عنصر بیشتر از سطر دوم دارد. : قضایای تست outh 4 -شرط الزم و کافی برای اینکه تمام ریشه های معادله مشخصه مدار بسته دارای قسمت حقیقی a, a, b باشد تمامی عناصر ستون اول یعنی..., منفی باشد یعنی در واقع سیستم پایدار مثبت و غیر صفر باشد. - اگر تعدادی از عناصر ستون اول منفی باشند در این صورت تعداد ریشه های ناپاییدار کننیده برابر است با تعداد تغییر عالمت ها در ستون اول.
30 4 - اگر یک جفت ریشه موهومی روی محور موهومی و به فاصله مساوی از مبدا قرار گیرد و سیایر ریشه ها سمت چپ محور موهومی قرار گیرند عنصر سطر n ام حذف می شود و محل این ریشه موهومی از معادله ای به نام معادله کمکی بدست می آید. S +D= عناصر سطر -n ام به ترتیب از چپ به راست می باشد.,D مثال ی به کمک معیار روت پایداری سیستمی را که معادله مشخصه یک مدار بسیته زییر را دارد بررسی کنید ییییییییییییییییییییییییییییییییییییییییییییییی = 4 * 5 4 * ییییییییییییییییییییییییی 4 44/ -6 ییییییییییییییییی 6 ییییی= / 5
31 4 مهم c مثال ی با استفاده از معیار روت تعیین کنید به ازای چه مقداری از سیستمی که دارای معادله c = مشخصه مدار بسته زیر است پایدار است. باید کوچکتر از بزرگتر از باشد. یییییییییییییییییییییییییییییییییییییییییی c + c c ییییییییییییییی > c < < c < c > مثال : پایداری سیستم زیر را بررسی کنید = ییییییییییییییییییییییییییییییییی _ این سیستم دو تا ریشه ناپایدار کننده دارد. معیار پایداری روت فقط تعداد ریشه های ناپایدار کننده را مشخص می کند که چند تا ریشه سمت راست محور موهومی داریم اما اینکه با چه فاصله از محور موهومی قرار گرفته با این معیار مشخص
32 4 نمی شود. چون ریشه هایی که سمت چپ هستند و به محور موهومی نزدیک هستند خیلی دیرتر میرا می شوند. اگر فاصله از محور موهومی زیاد باشد خیلی زودتر میرا می شوند. حالت های خاص : - اگر یک عنصر در ستون اول باشد ولی بقیه عناصر یا تنها یکی از آن ها مخالف صفر باشد و یا عنصر باقی مانده دیگری وجود نداشته باشد به جای عنصر صفر یک عدد بسیار کوچک مثبت مانند قرار داده و بقیه جدول را تکمیل می کنیم. اگر عالمت باال و پایین صیفر یکسیان باشید بدون تغییر عالمت یک جفت ریشه موهومی محض بصورت j وجود خواهد داشت. چنانچه عالمت باال و پایین مخالف باشند یک تغییر عالمت محسوب شده و به ازای هر تغییر عالمیت یک ریشه در سمت راست محور موهومی داریم. : = ییییییییییییییییییییییییییییییی ε 4 مثال : = + + = = - + = = ± j : - + = ییییییییییییییییییییییییییییییی - ε -ε-/ ε = + = - ضریب
33 4 - اگر تمامی عناصر یک سطر صفر باشند در اینصورت ریشه ها به صورت زیر می توانند باشند: = δ, δ ± j w ± a ± j w a ± j w, -a ± j w در این حالت ابتدا معادله کمکی را تشکیل می دهیم. معادله کمکی معادله ای است که ضرایب آن از عناصر سطر ماقبل صفر تشکیل می شود. سپس از معادله کمکی مشتق می گییریم و ضیرایب مشتق معادله کمکی را در سطر صفر جایگذاری کرده جدول را تکمیل می کنیم : مثال: = معادله درجه 5 بنابراین 5 ریشه دارد. معادله کمکی را تشکیل می دهیم : = = + = ییییییییییییییییییییییییییییییییییییییییییییییییییییی /4-5 = 5 48Z S =Z, Z + ریشه های معادله کمکی را بدست می آوریم. = = +, = - = - 5 = +5 j 4 = -5 j 4- مجموع ریشه های یک چند جمله ای=
34 = - a /a 5 = - فصل 5 مکان هندسی ریشه ها : τ معیار پایداری روت را تکمیل می کند ولی اگر چند جمله ای عامل e داشته باشد کارایی ندارد. مفهوم مکان هندسی ریشه ها : U + - G c + G G H ییییییییییی G c = c H = τ + ییییی = G ییییییییییییییییی G G G c + GH یییییییییی = G τ + = G یییییییییییییییییی + GH یییییییییی = G τ + c τ +τ +τ + + ییییییییییییییییییییییییییییییییییییییییییییی + = GH + τ +τ +τ + = c τ +τ +τ + یییییییییییییییییییییییییییییییییییییییییییییییییییییی Pole قطب GH تابع انتقال مدار باز c ییییییییییییییییییییییییییییییییییییییییییییی= GH = ییییییییییییییییییییییییییییییییییییییییییییییییییییییی = + τ +τ +τ + / τ + / τ + / τ = ییییییییییییییییییییییییییییییییییییی = ییییییییییییی c P P P τ P = - / τ τ τ قطب های مدار باز : P = - / τ P = - / τ
35 4 +GH= τ + τ + τ + + c = مقادیری از هستند که GH را بی نهایت می کنند. رسم مکان هندسی ریشه ها : اولین کار باید تابع GH را به صورت استاندارد بنویسیم. GH =k z z z z m ییییییییییییییییییییییییییییییییییییییییییییییییییییییییییییییییییی P P P P n k > n m تا را قطب های مدار باز گویند. روی شکل با مشخص می کنیم تا را صفرهای مدار باز گویند. با یک دایره توخالی o نشان می دهیم. P n z m P z به ازای صفرهای مدار باز صفر می شود و به ازای قطب های مدار باز بی نهایت می شود. GH N ییییییییییی GH = D N ییییییییییی +GH = + = D N = - D ییییییییییی N = z z z z m D = p p p p n
36 4 y z = x + j y معیار مقدار و معیار زاویه : z x. z در آرگومان z = مقدار z اندازه Z برابر است با اندازه θ = z = tan - y/x z = z.z z = z. z z = z + z = θ + θ z = z / z اندازه z و آرگومان z بدست آورید z = z / z z = θ - θ = z - z k z z z m - = یییییییییییییییییییییییییییییییییییییییییییییییییییی p p p n. z z z m =ییییییییییییییییییییییییییییییییییییییییییییییییی p p p n - z + - z + + z m } - { p + + p n } = n +
37 4 قواعد رسم مکان هندسی ریشه ها : = یییییییییییییییییییییییییییییییییییییییییییییییییییییییییی j j++j+-j ییییییییییییییییییییییییییییییییییییییییی GH = m = n=5 P = Z = - P =-j Z = - P =j P 4 =--j P 5 =-+j قواعد در پس خور منفی : GH = k z z z m ییییییییییییییییییییییییییییییییییییییییییییییییییییی p p p n 4- تعداد شاخه های مکان هندسی ریشه ها برابر است با تعداد قطب های مدار باز n - شاخه های مکان هندسی ریشه ها به ازای = از قطب های مدار بیاز شیروع میی شیود. چنانچه صفر در مدار باز وجود داشته باشد m تا از شاخه های مکان هندسی ریشه ها به صفرهای مکان باز ختم می شود و n-m تای دیگر به صفرهایی ختم می شود که در بی نهایت قرار گرفته اند و یا به عبارت دیگر n-m تای شاخه ها به مجانب ها در بی نهایت می رسند. اگر یک قطب درجه تا شاخه از آن خارج می شود. اگر یک صفر درجه q باشد q مکان هندسی به آن ختم q باشد q + + می شود. قطب صفرها یییییییییییییییی P, = P = - Z = -
38 44 - مکان هندسی ریشه ها روی محور حقیقی: هر گاه سمت راست نقطه ای از محور حقیقی مجموع تعداد قطب ها و صفرهای مدار باز فرد باشد آن نقطه روی مکان هندسی ریشه ها قرار می گیرد. واضح است که قطب ها یا صیفرهای مخیتلط آثارشان موقع استفاده از این قاعده از بین می رود زیرا همیشه بصورت زوج ظاهر میی شیوند. در نتیجه فقط کافی است قطب ها و صفرهای حقیقی را در این قاعده به حساب آوریم. یک قطب و یا صفر درجه q باید q بار شمرده شود مجانب ها : تعداد مجانب ها برابر است با n-m تا. یعنی n-m تا از مکان هندسی ریشه ها به صفرهایی ختم می شوند که در بی نهایت روی مجانیب هیا واقیع شیده انید. مجانیب هیا خطیوط مستقیمی هستند که یکدیگر را در نقطه ای روی محور حقیقی قطع می کنند. این نقطه مرکز ثقل مجانبها نامیده می شود و با نمایش می دهند. n j = P j - m i= z i یییییییییییییییییییییییییییییییییییییی = γ n m 8 = θ زاویه مجانبها با محور حقیقی مثبت + ییییییییییییییییییی n m =,,,n-m-
39 4 مطلوبست = n m GH = سه قاعده داخل کتاب هست. +++ ییییییییییییییییییییییییییییییییی زاویه مجانب با یکدیگر یییییییییییی مرکز ثقل =,,,n-m- = - θ= k + یییییییییییییییییییییییی / 5 / =ییییییییییییییییییییی= γ ییییییییی =زاویه مجانبها مکان هندسی شاخه ها: از قطب شروع می شود به صفر یا مجانب n-m ختم می شود. 5- نقطه جدایی هر گاه بین دو قطب مجاور واقع بر محور حقیقی مکان هندسی ریشه ها واقع شود شیاخه هیای مکان هندسی که از قطب های مجاور شروع شده اند به هم برخورد کرده و محور حقیقی را ترک می کنند. این نقطه نقطه جدایی نامیده می شود point.break in
40 4 همچنین اگر شاخه های مکان هندسی از دو قطب مختلط شروع شیوند و بخواهنید بیه صیفر ییا صفرهای روی محور حقیقی برسند در نقطه ای وارد محور حقیقی می شوند که به آن نییز نقطیه جدایی می گویند. point Break a way زاویه ترک قطب نقطه جدایی زاویه میل به صفر نقطه جدایی زاویه میل به صفر زاویه ترک قطب نقطه جدایی نقطه جدایی
41 4 +. یییییی + ییییی یییییی + = یییییییی n j= p j = m i= ییییییییی z i ییییییییییییییییییییییییییییییییییییییییییییی = + + ییییییییییییییییییییییی راه دیگری برای پیدا کردن نقطه جدایی : سه تا پرانتز را در هم ضرب و بعد مشتق بگیریم و مساوی صفر قرار دهیم. =-.4 N ییییی +GH = + = = D -D N d k ییییی = d +++=.58 اگر پس خور مثبت بگوید قابل قبول می شود. θ = [k+ + m i= p a z i - n j= p a - p j ] 6- زاویه ترک قطب و میل به صفر. =,,,q- z =- z =-+4j z = --4j P =-+j P=--j P= j - = -+j tan - /- =-6.44 o - +j -+4j = -+j+-4j=-j+ tan - -/= j++4j=+6j tan - 6/=8.5 o -+j+.5=.5+j tan - /.5 = j---j=4j tan - 4/=9o Θ= = -. -+j
42 4 ] i θ = [k+ + n j= z b p j - m i= z b - z زاویه میل به صفر 7- محل تالقی مکان هندسی ریشه ها با محور موهومی حتما یک زوج ریشه است. ریشه های بصورت باید در معادله در مشخصه مداربسته = +GH صدق کند. ± j w =ییییییییییییییییییییییییییییییییی ییییییییییییییییییییییییییییییییییی +++ = ++++ = = دو روش برای پیدا کردنw, k تستی: معادله چند جمله ای به ازای چه مقداری از در آستانه پایداری است. از طریق outh یییییییییییییییییییییییییییییییییییی 6 k+6 6- / / 6 = = حل می کنیم. outh - 6 +k+6= 6 +66= = - = ± j = ±.j - راه دوم بجای = J w را در معادله -jw -6w +jw+6+= +6-6w +j-w +w=+j 6= 6-= غیر قابل قبول -w +w = w= +6-6w = w=.
43 مثال.75+5j- معیار مقدار و معیار زاویه را مقایسه کنیم. - z + - z + + z m } = -i + =, j حدس =8 +].5j j j صورت مسأله وجود نداشت j حدس بعدی j.5+.5j.5+.5j j j j +] =-8 مثال : نمودار جعبه ای یک سیستم بصورت زیر می باشد. مکان هندسی ریشه ها را رسم کنیید نسبت به پایداری بحث کنیم. + - c [+/ +/] ++ +/ + / ییییییییییییییییییییییییییییییییییییییییی z z ییییییییییییییییییییییییییییییییییییییییی S p p p
44 4 G = G = + + ییییییییییییییییییی c [+/]+ یییییییییییییییییییییییییییییییییییییییییییییییی یییییییییییییییییییییییییییییییییییییییییییییییی G = = 5 +/+/+ 5 +/+/+ P = p =. z =.5 P = -.5 p 4 = - z = - + += + / +/ = فصل [+/]+ 8 پاسخ فرکانسی: فاز خروجی دامنه خروجی فاز ورودی دامنه ورودی Xt = in ω t G D in ω t +φ = D/= Gj ω φ = Gj w مشخصات پاسخ فرکانسی سیستم در جه اول : G = G j w = مطلوب است محاسبه و φ = G j ω = ییییییییییی +jτw = یییییییییییییییی = +jτω ییییییییییییییییی φ = } {= +jτ ω = -tan - ωτ =-tan - ω τ ییییییییییییییییییییی = G τ +ζτ + مشخصات پاسخ فرکانسی درجه دوم : = G j ω = ییییییییییییییییییییی τ +ζτ + = یییییییییییییییییییییییییییی τ j ω +ζjωτ + ییییییییییییییییییییییییییییییییی = - τ ω +ζjτω + = یییییییییییییییییییییییییییییییییییییی - τ ω +4ζ ω τ
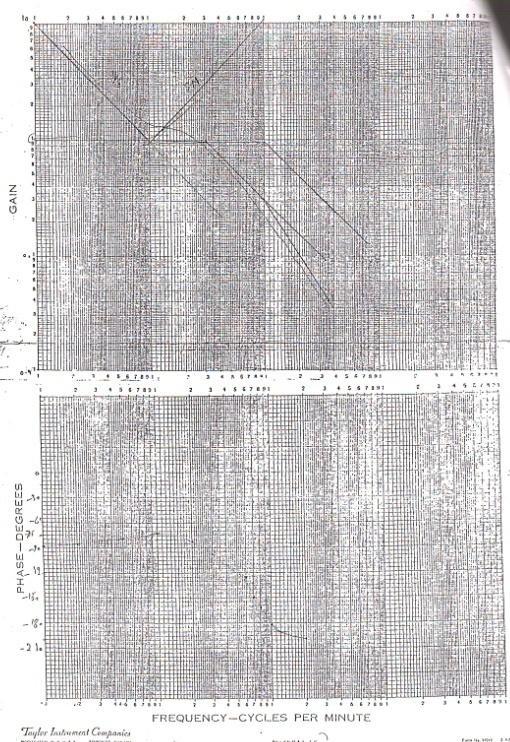
45 4 φ = ζτω یییییییییییییییی - -tan G j ω = τ ω - = tan - -ζτω ییییییییییییییی - τ ω سیستم تاخیر انتقالی : Xt = in ω t G = e τ yt = in ωt -τ = یییییی = = G j ω = e -τ j w = o ω τ j Sin ω τ e ± τ j ω = φ = ω t- τ - ω t = -ω τ برحسب راد یان = φ =- ω τ * 8 رادیان -ω τ x=? نمودارهای ب د : Bode از دو قسمت یکی لگاریتم نسبت دامنه بر حسب لگاریتم فرکانس و دیگری اختالف فاز یا تغییر فاز بر حسب لگاریتم فرکانس تنمیم شده است. نمودار بد نمایش ترسیم لگاریتم log بر حسب log ω و بر حسب log ω می باشد. روی این نمودارها چون عملیات لگاریتم گیری انجام می شود عملیات ضرب بصورت حاصل جمع و عملیات تقسیم بصورت تفاضل می شود. با استفاده از
46 4 خطوط مستقیمی که مجانب کلی نامیده می شود می توان رفتار سیستم را در فرکانس های کم یا زیاد پیش بینی کرده و پایداری سیستم را تشخیص داد. همچنین از روی مجانب کلی و نمودار فاز می توان تابع انتقال تقریبی سیستم را حدس زد. یییییییییییی = G τ + نمودار بد برای سیستم در جه اول : ییییییییییییییییی = Log = log log = - log +ω τ - مجانب فرکانس پایین را باید بدست آوریم. L.F. Low frequency aymptate Lim ω τ Log = Lim ωτ - log +ω τ Log = = یک خط با شیب صفر و مقدار = است. - مجانب فرکانس باال H.F. Log = Lim ωτ - log +ω τ Log = - log ω τ Log = -log ω τ
47 4 = یک خط با شیب - و یییییییی است. ω τ نمودار فاز : φ= -tan - ω τ ییییییییییییییییییییییییییییییییییییییییییییی ω τ φ
48 44 بیشترین انحراف در نمودار بهره در فرکانس گوشه corner اتفاق می افتد که با ω c نشان داده می شود. محل تالقی مجانب فرکانس پایین و باال است. ییییییییییییییییی = = =.77 ییییییی G شیب فرکانس گوشه درجه اول ω c τ = ω c = ω c Φ مجانب کلی : خط شکسته ای است که در فرکانس های پایین تا فرکانس گوشه بر مجانب فرکانس پایین منطبق است و از گوشه تا فرکانس های باال بر مجانب فرکانس باال منطبق است.
49 4 صورت = ω c + tan -ω τ مخرج = ω c - - tan -ω τ صورت مخرج درجه دوم = = ω c ω c + - tan - -tan - صورت e - τ = -ω τ * صورت = ω= +n +n9 S n = مخرج -n -n9 ω= سیستم های در جه اول متوالی : یییییییییییییی *ییییییییییییی = G τ + τ + یییییییییییی *ییییییییییی = G + +5 = G j ω = یییییییییییییییییی *ییییییییییییییییییی وφ?= مثال : G =G *G G n = * n φ = φ + φ + + φ n φ = - tan - ωτ - tan - ωτ = φ + φ φ = G j ω+ G j ω
50 4 ییییییییییی *یییییییییی = G + +5 مثال: ی یییییییییییییییییییییییییییی ω = G j = = + یییییییییییییییییییییییییییییییییییی Log = log log +ω - log [ = log +ω - log [ φ = φ + φ = - tan - ω - tan - ییییییییییییییییی * ییییییییییییییی =
51 4 عدد ثابتی که ایجاد می شود بر حسب می نویسیم. شیب - است. ییییییییییییییییییییییییی / /5 ω. یک عامل درجه یک در صورت +log می شود. فرکانس پایین تا می شود. در صورت G = τ + یک خط با شیب + = خط با شیب صفر = ω τ φ ییییییییییییییییییییییییی ω. φ = - tan - ω - tan -
52 4 نمودار بد برای سیستم درجه دو : یییییییییییییییییییییییی = G τ +ζτ+ ییییییییییییییییییییییییییییییییییییییییییی = ϕ = tan - Log = - log [-ω τ +ζωτ ] L.F. Lim G = = شیب صفر ω τ Log = - log ω τ 4 Log = - log ω τ ω τ در فرکانس باال یک خط با شیب - داریم و مقدارش یییییییییییی = ω τ
53 4 G = e τ = φ = -ω τ * 8 / 6 فرکانسی را که در آن ماکزیمم مقدار تشدید می گویند. بر حسب ω تشکیل می شود فرکانس رزونانسی یا ω τ از بر حسب ω مشتق بگیریم. G = c مطلوب است رسم نمودار فاز و بهره = c φ = = G j ω = c
54 4 کنترل کننده : P G = c [+ ] φ = -tan - عامل مشتقی : n G = n = G j ω = j ω n = ω Log = log w n = -n log w یک خط به شیب n Log = log ω if n = + = ω G j ω= jω n = j ω=tan - = tan - =9 n= 9 n= 8 n= = α ω = tan - - = 8 زاویه n می شود n تا 9 درجه
55 4 φ = n 9 n اگر در مخرج باشد همه راه حل بر عکس می شود. عامل انتگرالی مهم : نمودار بد تابع زیر را رسم کنید G = e.5 سیستم کنترل مدار بسته وقتی ناپایدار است که پاسخ فرکانس مدار باز سیستم در فرکانسی که تا 8 فاز ایجاد می کند دارای نسبت دامنه بزرگتر از باشد. فرکانسی که تاخیر فاز ایجاد 8 می کند فرکانس گذرا نام دارد. برای بررسی پایداری سیستم به روش بد پایه منحنی بهره و فاز بر حسب فرکانس در دسترس باشد. خط 8- درجه را با منحنی فاز قطع می دهیم و فرکانس گذرا را به دست می آوریم. سپس از فرکانس گذرا خطی عمود رسم می کنیم تا منحنی بهر را قطع کند. مقدار بهره را با نشان می دهیم. اگر < باشد سیستم ناپایدار است. اگر > باشد سیستم پایدار است.اگر = سیستم در آستانه ناپایداری است.
56 4 ' G.m بهره -8 فاز Ph.m w w Marjin پایدار ناپایدار Gain حاشیه یا فاز بهره G.M = G.M > G.M <.G M عکس نسبت دامنه بد فرکانسی در تغییر فاز 8 دارد. عبارت است از تفاوت فاز بین 8- درجه و زاویه فازی که در آن نسبت دامنه برابیر ییک اسیت. Margin Ph M. Phae حد با حاشیه فاز در طراحی سعی می شود حد فاز درجه انتخاب شود PH.M معموال بین تیا 6 درجیه قابل قبول است. همچنین =.7 G.M در نمر می گیرند. الپالس معکوس Ph.m =8 + ϕ معیار پایداری کل مکان هندسی نمودار است.
57 4
58 44 تمرین ها یک مسئله نمونه از نمودار ب د : d برای سیستم کنترلی که تابع انتقال آن به صورت زیر داده شده است. الف ی به ازای.. مطلوبست :. رسم منحنی های بهره و فاز نمودار Bode در منحنی بهره عالوه بر مجانب ها رسم مقدار واقعی بهره الزامی است.. از نمودار رسم شده مقادیر مناسب بهره حاشیه بهره و حاشیه فاز را تعیین کنید. GH c e d اگر شیبی با خط - d الف ی. GH. c e. c e GH. c e GH jw jw c jw jw e.wj jw.wj w e c w w w c
59 4 مجانب ها : log w log w log w w w L. F. H. F. log log w. wj e w log log w w w w L. F. log 4 w H. F. log 4 w w w 4 w log log L. F. log 5 w H. F. log 5 5 log 5 w log tan w 8 w 9 tan w w g tan 4 5
60 4 w c تعیین مقادیر مناسب بهره و حواشی بهره و فاز : 8 w c 9. 8 rad فرکانس گداز زمان واحد c. G. M.7 تعیین c با استفاده از. c. c c c اکنون به کمک نمودار ب د Ph.M را تعیین می کنیم. c با در نمر گرفتن حاشیه.7 داریم : G. M.7 PhM. 6 c.8 Ph.M تعیین c با استفاده از Ph.M 8 5 c.. c..


61 4 c. وقتي که5 G. M.57 L. وقتي که8 c c c انتخاب بهره و حواشی فاز و بهره مناسب ی بین مقادیر تعیین شد..8 را انتخاب می کنیم. یک مسئله نمونه دربارة مایکوئیست تابع انتقال مدار باز یک سیستم کنترل زیر وارد شده است.. الف ی نمودار بایکوئیست را رسم کنید ب ی درباره پایداری سیستم بحث نمائید. ج ی مقادیری از را تعیین کنید که سیستم پایدار و ناپایدار می شود. GH. حل : مسیر بسته نایکوئیست را مطابق شکل انتخاب می کنیم.

62 4 الف :.4 نگاشت abc از مسیر بسته نایکوئیست e GH GH j 9 9 j j. e. e j j e e j. j. e e GH w. GH.5 jw w GH GH. jw jw jw jw GH jw GH jw. w jw 7 tan w w w jw

63 4. نگاشت df e GH j j j. e e j e e j قرینه نگاشت cd نسبت به محور حقیقی است زیرا GHjw 4. نگاشت dfa ی نگاشت fa مزدوج کمپلکس GH-jw است. ب- بحث پایداری : قرار گیرد در اینصورت تعداد دورخوردنهای j+- عبارتست. اگر نقطه j+- در محدوده M-N از : N N Z P P a Z Z یعنی هیچ ریشه ای از معادله مشخصه مداربسته در سمت راست محور موهومی قرار نمی گیرد و سیستم پایدار است. سمت چپ نقطه M قرار گیرد در اینصورت :. اگر نقطه -+jo
64 4 N P Z Z N Z P یعنی دو ریشه ناپایدار کننده دو ریشه در سمت راست محور موهومی وجود خواهد داشت و در نتیجه سیستم ناپایدار می گردد. ج- تعیین مقدار. jw. w wj GH jw jw w j GH w. w. w j w w در نقطه M قسمت موهومی jw GH برابر با صفر است.. w w w w شرط پایداری آنست که نقطه M سمت چپ نقطه -+jo واقع شود.. w. w یا. w. 5w بنابراین 5 w 5 سیستم ناپایدار سیستم در آستانه ناپایداری 5 حل مسئله مکان هندسی ریشه ها. مکان هندسی ریشه ها را برای سیستمی که تابع انتقال مدار باز آن بصورت زیر داده شده است رسم کنید و درباره پایداری آن بحث نمایید. GH h
65 4 ی لح 4 m P n P j P j P 4 یاه هشیر h n = 4 اب ربارب اه هشیر یسدنه ناکم یاه هخاش دادعت.دشاب یم.دنوش یم سامم اه بناجم رب تیاهنیب رد و هدش عورش اه بطق زا یسدنه ناکم یاه هخاش n-m=4-=4 اب ربارب اه بناجم دادعت ی اه بناجم.دشاب یم j j m n j Pj m j n j n n m n - = زا یقیقح روحم ی یقیقح روحم یور ناکم ات = -... و اه هشیر یسدنه ناکم زا لیکشت.. m i n j i j j j
66 4 بقیه ریشه های این معادله بر روی مکان قرار نمی گیرند بنابراین نقطه جدایی محسوب نمی گردند. - محل تالقی با محور موهومی GH jw w.95 - زاویه ترک قطب //.. پایداری : توجه به نمودار سیستم پایداری < +b پایدار است. تمرین : مقداری از و تعیین که معادله مشخصه را برای ریشه مضاعف باشد. همچنین به ازای این مقدار تمامی ریشه ها را بدست آورید. تمرین : برای مقدار که... محور...
روش محاسبه ی توان منابع جریان و منابع ولتاژ
 روش محاسبه ی توان منابع جریان و منابع ولتاژ ابتدا شرح کامل محاسبه ی توان منابع جریان: برای محاسبه ی توان منابع جریان نخست باید ولتاژ این عناصر را بدست آوریم و سپس با استفاده از رابطه ی p = v. i توان این
روش محاسبه ی توان منابع جریان و منابع ولتاژ ابتدا شرح کامل محاسبه ی توان منابع جریان: برای محاسبه ی توان منابع جریان نخست باید ولتاژ این عناصر را بدست آوریم و سپس با استفاده از رابطه ی p = v. i توان این
محاسبه ی برآیند بردارها به روش تحلیلی
 محاسبه ی برآیند بردارها به روش تحلیلی برای محاسبه ی برآیند بردارها به روش تحلیلی باید توانایی تجزیه ی یک بردار در دو راستا ( محور x ها و محور y ها ) را داشته باشیم. به بردارهای تجزیه شده در راستای محور
محاسبه ی برآیند بردارها به روش تحلیلی برای محاسبه ی برآیند بردارها به روش تحلیلی باید توانایی تجزیه ی یک بردار در دو راستا ( محور x ها و محور y ها ) را داشته باشیم. به بردارهای تجزیه شده در راستای محور
مثال( مساله الپالس در ناحیه داده شده را حل کنید. u(x,0)=f(x) f(x) حل: به کمک جداسازی متغیرها: ثابت = k. u(x,y)=x(x)y(y) X"Y=-XY" X" X" kx = 0
=f(x) f(x) حل: به کمک جداسازی متغیرها: ثابت = k. u(x,y)=x(x)y(y) XY=-XY X X kx = 0") مثال( مساله الپالس در ناحیه داده شده را حل کنید. (,)=() > > < π () حل: به کمک جداسازی متغیرها: + = (,)=X()Y() X"Y=-XY" X" = Y" ثابت = k X Y X" kx = { Y" + ky = X() =, X(π) = X" kx = { X() = X(π) = معادله
مثال( مساله الپالس در ناحیه داده شده را حل کنید. (,)=() > > < π () حل: به کمک جداسازی متغیرها: + = (,)=X()Y() X"Y=-XY" X" = Y" ثابت = k X Y X" kx = { Y" + ky = X() =, X(π) = X" kx = { X() = X(π) = معادله
فصل چهارم : مولتی ویبراتورهای ترانزیستوری مقدمه: فیدبک مثبت
 فصل چهارم : مولتی ویبراتورهای ترانزیستوری مقدمه: فیدبک مثبت در تقویت کننده ها از فیدبک منفی استفاده می نمودیم تا بهره خیلی باال نرفته و سیستم پایدار بماند ولی در فیدبک مثبت هدف فقط باال بردن بهره است در
فصل چهارم : مولتی ویبراتورهای ترانزیستوری مقدمه: فیدبک مثبت در تقویت کننده ها از فیدبک منفی استفاده می نمودیم تا بهره خیلی باال نرفته و سیستم پایدار بماند ولی در فیدبک مثبت هدف فقط باال بردن بهره است در
تحلیل مدار به روش جریان حلقه
 تحلیل مدار به روش جریان حلقه برای حل مدار به روش جریان حلقه باید مراحل زیر را طی کنیم: مرحله ی 1: مدار را تا حد امکان ساده می کنیم)مراقب باشید شاخه هایی را که ترکیب می کنید مورد سوال مسئله نباشد که در
تحلیل مدار به روش جریان حلقه برای حل مدار به روش جریان حلقه باید مراحل زیر را طی کنیم: مرحله ی 1: مدار را تا حد امکان ساده می کنیم)مراقب باشید شاخه هایی را که ترکیب می کنید مورد سوال مسئله نباشد که در
تصاویر استریوگرافی.
 هب انم خدا تصاویر استریوگرافی تصویر استریوگرافی یک روش ترسیمی است که به وسیله آن ارتباط زاویه ای بین جهات و صفحات بلوری یک کریستال را در یک فضای دو بعدی )صفحه کاغذ( تعیین میکنند. کاربردها بررسی ناهمسانگردی
هب انم خدا تصاویر استریوگرافی تصویر استریوگرافی یک روش ترسیمی است که به وسیله آن ارتباط زاویه ای بین جهات و صفحات بلوری یک کریستال را در یک فضای دو بعدی )صفحه کاغذ( تعیین میکنند. کاربردها بررسی ناهمسانگردی
مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل
 مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل شما باید بعد از مطالعه ی این جزوه با مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل کامال آشنا شوید. VA R VB به نظر شما افت ولتاژ مقاومت R چیست جواب: به مقدار عددی V A
مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل شما باید بعد از مطالعه ی این جزوه با مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل کامال آشنا شوید. VA R VB به نظر شما افت ولتاژ مقاومت R چیست جواب: به مقدار عددی V A
آزمایش 8: تقویت کننده عملیاتی 2
 آزمایش 8: تقویت کننده عملیاتی 2 1-8 -مقدمه 1 تقویت کننده عملیاتی (OpAmp) داراي دو یا چند طبقه تقویت کننده تفاضلی است که خروجی- هاي هر طبقه به وروديهاي طبقه دیگر متصل شده است. در انتهاي این تقویت کننده
آزمایش 8: تقویت کننده عملیاتی 2 1-8 -مقدمه 1 تقویت کننده عملیاتی (OpAmp) داراي دو یا چند طبقه تقویت کننده تفاضلی است که خروجی- هاي هر طبقه به وروديهاي طبقه دیگر متصل شده است. در انتهاي این تقویت کننده
ﯽﺳﻮﻃ ﺮﯿﺼﻧ ﻪﺟاﻮﺧ ﯽﺘﻌﻨﺻ هﺎﮕﺸﻧاد
 دانشگاه صنعتی خواجه نصیر طوسی دانشکده برق - گروه کنترل آزمایشگاه کنترل سیستمهای خطی گزارش کار نمونه تابستان 383 به نام خدا گزارش کار آزمایش اول عنوان آزمایش: آشنایی با نحوه پیاده سازی الکترونیکی فرایندها
دانشگاه صنعتی خواجه نصیر طوسی دانشکده برق - گروه کنترل آزمایشگاه کنترل سیستمهای خطی گزارش کار نمونه تابستان 383 به نام خدا گزارش کار آزمایش اول عنوان آزمایش: آشنایی با نحوه پیاده سازی الکترونیکی فرایندها
سايت ويژه رياضيات درسنامه ها و جزوه هاي دروس رياضيات
 سايت ويژه رياضيات درسنامه ها و جزوه هاي دروس رياضيات دانلود نمونه سوالات امتحانات رياضي نمونه سوالات و پاسخنامه كنكور دانلود نرم افزارهاي رياضيات و... کانال سایت ریاضی سرا در تلگرام: https://telegram.me/riazisara
سايت ويژه رياضيات درسنامه ها و جزوه هاي دروس رياضيات دانلود نمونه سوالات امتحانات رياضي نمونه سوالات و پاسخنامه كنكور دانلود نرم افزارهاي رياضيات و... کانال سایت ریاضی سرا در تلگرام: https://telegram.me/riazisara
مدار معادل تونن و نورتن
 مدار معادل تونن و نورتن در تمامی دستگاه های صوتی و تصویری اگرچه قطعات الکتریکی زیادی استفاده می شود ( مانند مقاومت سلف خازن دیود ترانزیستور IC ترانس و دهها قطعه ی دیگر...( اما هدف از طراحی چنین مداراتی
مدار معادل تونن و نورتن در تمامی دستگاه های صوتی و تصویری اگرچه قطعات الکتریکی زیادی استفاده می شود ( مانند مقاومت سلف خازن دیود ترانزیستور IC ترانس و دهها قطعه ی دیگر...( اما هدف از طراحی چنین مداراتی
1) { } 6) {, } {{, }} 2) {{ }} 7 ) { } 3) { } { } 8) { } 4) {{, }} 9) { } { }
 { } 6) {, } {{, }} 2) {{ }} 7 ) { } 3) { } { } 8) { } 4) {{, }} 9) { } { }") هرگاه دسته اي از اشیاء حروف و اعداد و... که کاملا"مشخص هستند با هم در نظر گرفته شوند یک مجموعه را به وجود می آورند. عناصر تشکیل دهنده ي یک مجموعه باید دو شرط اساسی را داشته باشند. نام گذاري مجموعه : الف
هرگاه دسته اي از اشیاء حروف و اعداد و... که کاملا"مشخص هستند با هم در نظر گرفته شوند یک مجموعه را به وجود می آورند. عناصر تشکیل دهنده ي یک مجموعه باید دو شرط اساسی را داشته باشند. نام گذاري مجموعه : الف
آزمایش 1: پاسخ فرکانسی تقویتکننده امیتر مشترك
 آزمایش : پاسخ فرکانسی تقویتکننده امیتر مشترك -- مقدمه هدف از این آزمایش بدست آوردن فرکانس قطع بالاي تقویتکننده امیتر مشترك بررسی عوامل تاثیرگذار و محدودکننده این پارامتر است. شکل - : مفهوم پهناي باند تقویت
آزمایش : پاسخ فرکانسی تقویتکننده امیتر مشترك -- مقدمه هدف از این آزمایش بدست آوردن فرکانس قطع بالاي تقویتکننده امیتر مشترك بررسی عوامل تاثیرگذار و محدودکننده این پارامتر است. شکل - : مفهوم پهناي باند تقویت
همبستگی و رگرسیون در این مبحث هدف بررسی وجود یک رابطه بین دو یا چند متغیر می باشد لذا هدف اصلی این است که آیا بین
 همبستگی و رگرسیون در این مبحث هدف بررسی وجود یک رابطه بین دو یا چند متغیر می باشد لذا هدف اصلی این است که آیا بین دو صفت متغیر x و y رابطه و همبستگی وجود دارد یا خیر و آیا می توان یک مدل ریاضی و یک رابطه
همبستگی و رگرسیون در این مبحث هدف بررسی وجود یک رابطه بین دو یا چند متغیر می باشد لذا هدف اصلی این است که آیا بین دو صفت متغیر x و y رابطه و همبستگی وجود دارد یا خیر و آیا می توان یک مدل ریاضی و یک رابطه
قاعده زنجیره ای برای مشتقات جزي ی (حالت اول) :
 :") ۱ گرادیان تابع (y :f(x, اگر f یک تابع دومتغیره باشد ا نگاه گرادیان f برداری است که به صورت زیر تعریف می شود f(x, y) = D ۱ f(x, y), D ۲ f(x, y) اگر رویه S نمایش تابع (y Z = f(x, باشد ا نگاه f در هر نقطه
۱ گرادیان تابع (y :f(x, اگر f یک تابع دومتغیره باشد ا نگاه گرادیان f برداری است که به صورت زیر تعریف می شود f(x, y) = D ۱ f(x, y), D ۲ f(x, y) اگر رویه S نمایش تابع (y Z = f(x, باشد ا نگاه f در هر نقطه
تخمین با معیار مربع خطا: حالت صفر: X: مکان هواپیما بدون مشاهده X را تخمین بزنیم. بهترین تخمین مقداری است که متوسط مربع خطا مینیمم باشد:
 تخمین با معیار مربع خطا: هدف: با مشاهده X Y را حدس بزنیم. :y X: مکان هواپیما مثال: مشاهده نقطه ( مجموعه نقاط کنارهم ) روی رادار - فرض کنیم می دانیم توزیع احتمال X به چه صورت است. حالت صفر: بدون مشاهده
تخمین با معیار مربع خطا: هدف: با مشاهده X Y را حدس بزنیم. :y X: مکان هواپیما مثال: مشاهده نقطه ( مجموعه نقاط کنارهم ) روی رادار - فرض کنیم می دانیم توزیع احتمال X به چه صورت است. حالت صفر: بدون مشاهده
بسم هللا الرحمن الرحیم
 بسم هللا الرحمن الرحیم نام سر گروه : نام اعضای گروه : شماره گروه : تاریخ انجام آزمایش : تاریخ تحویل آزمایش : هدف آزمایش : بررسی جریان و ولتاژ در مدارهای RLC و مطالعه پدیده تشدید وسایل آزمایش : منبع تغذیه
بسم هللا الرحمن الرحیم نام سر گروه : نام اعضای گروه : شماره گروه : تاریخ انجام آزمایش : تاریخ تحویل آزمایش : هدف آزمایش : بررسی جریان و ولتاژ در مدارهای RLC و مطالعه پدیده تشدید وسایل آزمایش : منبع تغذیه
تمرینات درس ریاض عموم ٢. r(t) = (a cos t, b sin t), ٠ t ٢π. cos ٢ t sin tdt = ka۴. x = ١ ka ۴. m ٣ = ٢a. κds باشد. حاصل x٢
 = (a cos t, b sin t), ٠ t ٢π. cos ٢ t sin tdt = ka۴. x = ١ ka ۴. m ٣ = ٢a. κds باشد. حاصل x٢") دانش اه صنعت شریف دانش ده ی علوم ریاض تمرینات درس ریاض عموم سری دهم. ١ سیم نازک داریم که روی دایره ی a + y x و در ربع اول نقطه ی,a را به نقطه ی a, وصل م کند. اگر چ ال سیم در نقطه ی y,x برابر kxy باشد جرم
دانش اه صنعت شریف دانش ده ی علوم ریاض تمرینات درس ریاض عموم سری دهم. ١ سیم نازک داریم که روی دایره ی a + y x و در ربع اول نقطه ی,a را به نقطه ی a, وصل م کند. اگر چ ال سیم در نقطه ی y,x برابر kxy باشد جرم
هندسه تحلیلی بردارها در فضای R
 هندسه تحلیلی بردارها در فضای R فصل اول-بردارها دستگاه مختصات سه بعدی از سه محور ozوoyوox عمود بر هم تشکیل شده که در نقطه ای به نام o یکدیگر را قطع می کنند. قرارداد: دستگاه مختصات سه بعدی راستگرد می باشد
هندسه تحلیلی بردارها در فضای R فصل اول-بردارها دستگاه مختصات سه بعدی از سه محور ozوoyوox عمود بر هم تشکیل شده که در نقطه ای به نام o یکدیگر را قطع می کنند. قرارداد: دستگاه مختصات سه بعدی راستگرد می باشد
هدف از این آزمایش آشنایی با رفتار فرکانسی مدارهاي مرتبه اول نحوه تأثیر مقادیر عناصر در این رفتار مشاهده پاسخ دامنه
 آزما ی ش شش م: پا س خ فرکا نس ی مدا رات مرتبه اول هدف از این آزمایش آشنایی با رفتار فرکانسی مدارهاي مرتبه اول نحوه تأثیر مقادیر عناصر در این رفتار مشاهده پاسخ دامنه و پاسخ فاز بررسی رفتار فیلتري آنها بدست
آزما ی ش شش م: پا س خ فرکا نس ی مدا رات مرتبه اول هدف از این آزمایش آشنایی با رفتار فرکانسی مدارهاي مرتبه اول نحوه تأثیر مقادیر عناصر در این رفتار مشاهده پاسخ دامنه و پاسخ فاز بررسی رفتار فیلتري آنها بدست
جلسه 3 ابتدا نکته اي در مورد عمل توابع بر روي ماتریس ها گفته می شود و در ادامه ي این جلسه اصول مکانیک کوانتمی بیان. d 1. i=0. i=0. λ 2 i v i v i.
 محاسبات کوانتمی (671) ترم بهار 1390-1391 مدرس: سلمان ابوالفتح بیگی نویسنده: محمد جواد داوري جلسه 3 می شود. ابتدا نکته اي در مورد عمل توابع بر روي ماتریس ها گفته می شود و در ادامه ي این جلسه اصول مکانیک
محاسبات کوانتمی (671) ترم بهار 1390-1391 مدرس: سلمان ابوالفتح بیگی نویسنده: محمد جواد داوري جلسه 3 می شود. ابتدا نکته اي در مورد عمل توابع بر روي ماتریس ها گفته می شود و در ادامه ي این جلسه اصول مکانیک
Angle Resolved Photoemission Spectroscopy (ARPES)
") Angle Resolved Photoemission Spectroscopy (ARPES) روش ARPES روشی است تجربی که برای تعیین ساختار الکترونی مواد به کار می رود. این روش بر پایه اثر فوتوالکتریک است که توسط هرتز کشف شد: الکترونها می توانند
Angle Resolved Photoemission Spectroscopy (ARPES) روش ARPES روشی است تجربی که برای تعیین ساختار الکترونی مواد به کار می رود. این روش بر پایه اثر فوتوالکتریک است که توسط هرتز کشف شد: الکترونها می توانند
معادلهی مشخصه(کمکی) آن است. در اینجا سه وضعیت متفاوت برای ریشههای معادله مشخصه رخ میدهد:
 آن است. در اینجا سه وضعیت متفاوت برای ریشههای معادله مشخصه رخ میدهد:") شکل کلی معادلات همگن خطی مرتبه دوم با ضرایب ثابت = ٠ cy ay + by + و معادله درجه دوم = ٠ c + br + ar را معادلهی مشخصه(کمکی) آن است. در اینجا سه وضعیت متفاوت برای ریشههای معادله مشخصه رخ میدهد: c ١ e r١x
شکل کلی معادلات همگن خطی مرتبه دوم با ضرایب ثابت = ٠ cy ay + by + و معادله درجه دوم = ٠ c + br + ar را معادلهی مشخصه(کمکی) آن است. در اینجا سه وضعیت متفاوت برای ریشههای معادله مشخصه رخ میدهد: c ١ e r١x
ویرایشسال 95 شیمیمعدنی تقارن رضافالحتی
 ویرایشسال 95 شیمیمعدنی تقارن رضافالحتی از ابتدای مبحث تقارن تا ابتدای مبحث جداول کاراکتر مربوط به کنکور ارشد می باشد افرادی که این قسمت ها را تسلط دارند می توانند از ابتدای مبحث جداول کاراکتر به مطالعه
ویرایشسال 95 شیمیمعدنی تقارن رضافالحتی از ابتدای مبحث تقارن تا ابتدای مبحث جداول کاراکتر مربوط به کنکور ارشد می باشد افرادی که این قسمت ها را تسلط دارند می توانند از ابتدای مبحث جداول کاراکتر به مطالعه
بسم اهلل الرحمن الرحیم آزمایشگاه فیزیک )2( shimiomd
2( shimiomd") بسم اهلل الرحمن الرحیم آزمایشگاه فیزیک )( shimiomd خواندن مقاومت ها. بررسی قانون اهم برای مدارهای متوالی. 3. بررسی قانون اهم برای مدارهای موازی بدست آوردن مقاومت مجهول توسط پل وتسون 4. بدست آوردن مقاومت
بسم اهلل الرحمن الرحیم آزمایشگاه فیزیک )( shimiomd خواندن مقاومت ها. بررسی قانون اهم برای مدارهای متوالی. 3. بررسی قانون اهم برای مدارهای موازی بدست آوردن مقاومت مجهول توسط پل وتسون 4. بدست آوردن مقاومت
دبیرستان غیر دولتی موحد
 دبیرستان غیر دلتی محد هندسه تحلیلی فصل دم معادله های خط صفحه ابتدا باید بدانیم که از یک نقطه به مازات یک بردار تنها یک خط می گذرد. با تجه به این مطلب برای نشتن معادله یک خط احتیاج به داشتن یک نقطه از خط
دبیرستان غیر دلتی محد هندسه تحلیلی فصل دم معادله های خط صفحه ابتدا باید بدانیم که از یک نقطه به مازات یک بردار تنها یک خط می گذرد. با تجه به این مطلب برای نشتن معادله یک خط احتیاج به داشتن یک نقطه از خط
نویسنده: محمدرضا تیموری محمد نصری مدرس: دکتر پرورش خالصۀ موضوع درس سیستم های مینیمم فاز: به نام خدا
 به نام خدا پردازش سیگنالهای دیجیتال نیمسال اول ۹۵-۹۶ هفته یازدهم ۹۵/۰8/2۹ مدرس: دکتر پرورش نویسنده: محمدرضا تیموری محمد نصری خالصۀ موضوع درس یا سیستم های مینیمم فاز تجزیه ی تابع سیستم به یک سیستم مینیمم
به نام خدا پردازش سیگنالهای دیجیتال نیمسال اول ۹۵-۹۶ هفته یازدهم ۹۵/۰8/2۹ مدرس: دکتر پرورش نویسنده: محمدرضا تیموری محمد نصری خالصۀ موضوع درس یا سیستم های مینیمم فاز تجزیه ی تابع سیستم به یک سیستم مینیمم
آزمون مقایسه میانگین های دو جامعه )نمونه های بزرگ(
نمونه های بزرگ(") آزمون مقایسه میانگین های دو جامعه )نمونه های بزرگ( فرض کنید جمعیت یک دارای میانگین و انحراف معیار اندازه µ و انحراف معیار σ باشد و جمعیت 2 دارای میانگین µ2 σ2 باشند نمونه های تصادفی مستقل از این دو جامعه
آزمون مقایسه میانگین های دو جامعه )نمونه های بزرگ( فرض کنید جمعیت یک دارای میانگین و انحراف معیار اندازه µ و انحراف معیار σ باشد و جمعیت 2 دارای میانگین µ2 σ2 باشند نمونه های تصادفی مستقل از این دو جامعه
جلسه ی ۱۰: الگوریتم مرتب سازی سریع
 دانشکده ی علوم ریاضی داده ساختارها و الگوریتم ها ۸ مهر ۹ جلسه ی ۱۰: الگوریتم مرتب سازی سریع مدر س: دکتر شهرام خزاي ی نگارنده: محمد امین ادر یسی و سینا منصور لکورج ۱ شرح الگور یتم الگوریتم مرتب سازی سریع
دانشکده ی علوم ریاضی داده ساختارها و الگوریتم ها ۸ مهر ۹ جلسه ی ۱۰: الگوریتم مرتب سازی سریع مدر س: دکتر شهرام خزاي ی نگارنده: محمد امین ادر یسی و سینا منصور لکورج ۱ شرح الگور یتم الگوریتم مرتب سازی سریع
باشند و c عددی ثابت باشد آنگاه تابع های زیر نیز در a پیوسته اند. به شرطی که g(a) 0 f g
 0 f g") تعریف : 3 فرض کنیم D دامنه تابع f زیر مجموعه ای از R باشد a D تابع f:d R در نقطه a پیوسته است هرگاه به ازای هر دنباله از نقاط D مانند { n a{ که به a همگراست دنبال ه ){ n }f(a به f(a) همگرا باشد. محتوی
تعریف : 3 فرض کنیم D دامنه تابع f زیر مجموعه ای از R باشد a D تابع f:d R در نقطه a پیوسته است هرگاه به ازای هر دنباله از نقاط D مانند { n a{ که به a همگراست دنبال ه ){ n }f(a به f(a) همگرا باشد. محتوی
فصل چهارم : مولتی ویبراتورهای ترانزیستوری مقدمه: فیدبک مثبت
 جزوه تکنیک پالس فصل چهارم: مولتی ویبراتورهای ترانزیستوری فصل چهارم : مولتی ویبراتورهای ترانزیستوری مقدمه: فیدبک مثبت در تقویت کننده ها از فیدبک منفی استفاده می نمودیم تا بهره خیلی باال نرفته و سیستم پایدار
جزوه تکنیک پالس فصل چهارم: مولتی ویبراتورهای ترانزیستوری فصل چهارم : مولتی ویبراتورهای ترانزیستوری مقدمه: فیدبک مثبت در تقویت کننده ها از فیدبک منفی استفاده می نمودیم تا بهره خیلی باال نرفته و سیستم پایدار
فهرست مطالب جزوه ی فصل اول مدارهای الکتریکی مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل تحلیل مدار به روش جریان حلقه... 22
 فهرست مطالب جزوه ی فصل اول مدارهای الکتریکی آنچه باید پیش از شروع کتاب مدار بدانید تا مدار را آسان بیاموزید.............................. 2 مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل................................................
فهرست مطالب جزوه ی فصل اول مدارهای الکتریکی آنچه باید پیش از شروع کتاب مدار بدانید تا مدار را آسان بیاموزید.............................. 2 مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل................................................
جلسه 9 1 مدل جعبه-سیاه یا جستاري. 2 الگوریتم جستجوي Grover 1.2 مسا له 2.2 مقدمات محاسبات کوانتمی (22671) ترم بهار
 ترم بهار") محاسبات کوانتمی (22671) ترم بهار 1390-1391 مدرس: سلمان ابوالفتح بیگی نویسنده: هیربد کمالی نیا جلسه 9 1 مدل جعبه-سیاه یا جستاري مدل هایی که در جلسه ي پیش براي استفاده از توابع در الگوریتم هاي کوانتمی بیان
محاسبات کوانتمی (22671) ترم بهار 1390-1391 مدرس: سلمان ابوالفتح بیگی نویسنده: هیربد کمالی نیا جلسه 9 1 مدل جعبه-سیاه یا جستاري مدل هایی که در جلسه ي پیش براي استفاده از توابع در الگوریتم هاي کوانتمی بیان
فصل دهم: همبستگی و رگرسیون
 فصل دهم: همبستگی و رگرسیون مطالب این فصل: )r ( کوواریانس ضریب همبستگی رگرسیون ضریب تعیین یا ضریب تشخیص خطای معیار برآور ( )S XY انواع ضرایب همبستگی برای بررسی رابطه بین متغیرهای کمی و کیفی 8 در بسیاری
فصل دهم: همبستگی و رگرسیون مطالب این فصل: )r ( کوواریانس ضریب همبستگی رگرسیون ضریب تعیین یا ضریب تشخیص خطای معیار برآور ( )S XY انواع ضرایب همبستگی برای بررسی رابطه بین متغیرهای کمی و کیفی 8 در بسیاری
فهرست جزوه ی فصل دوم مدارهای الکتریکی ( بردارها(
 فهرست جزوه ی فصل دوم مدارهای الکتریکی ( بردارها( رفتار عناصر L, R وC در مدارات جریان متناوب......................................... بردار و کمیت برداری.............................................................
فهرست جزوه ی فصل دوم مدارهای الکتریکی ( بردارها( رفتار عناصر L, R وC در مدارات جریان متناوب......................................... بردار و کمیت برداری.............................................................
تئوری جامع ماشین بخش سوم جهت سادگی بحث یک ماشین سنکرون دو قطبی از نوع قطب برجسته مطالعه میشود.
 مفاهیم اصلی جهت آنالیز ماشین های الکتریکی سه فاز محاسبه اندوکتانس سیمپیچیها و معادالت ولتاژ ماشین الف ) ماشین سنکرون جهت سادگی بحث یک ماشین سنکرون دو قطبی از نوع قطب برجسته مطالعه میشود. در حال حاضر از
مفاهیم اصلی جهت آنالیز ماشین های الکتریکی سه فاز محاسبه اندوکتانس سیمپیچیها و معادالت ولتاژ ماشین الف ) ماشین سنکرون جهت سادگی بحث یک ماشین سنکرون دو قطبی از نوع قطب برجسته مطالعه میشود. در حال حاضر از
بسمه تعالی «تمرین شماره یک»
 بسمه تعالی «تمرین شماره یک» شماره دانشجویی : نام و نام خانوادگی : نام استاد: دکتر آزاده شهیدیان ترمودینامیک 1 نام درس : ردیف 0.15 m 3 میباشد. در این حالت یک فنر یک دستگاه سیلندر-پیستون در ابتدا حاوي 0.17kg
بسمه تعالی «تمرین شماره یک» شماره دانشجویی : نام و نام خانوادگی : نام استاد: دکتر آزاده شهیدیان ترمودینامیک 1 نام درس : ردیف 0.15 m 3 میباشد. در این حالت یک فنر یک دستگاه سیلندر-پیستون در ابتدا حاوي 0.17kg
جلسه ی ۴: تحلیل مجانبی الگوریتم ها
 دانشکده ی علوم ریاضی ساختمان داده ها ۲ مهر ۱۳۹۲ جلسه ی ۴: تحلیل مجانبی الگوریتم ها مدر س: دکتر شهرام خزاي ی نگارنده: شراره عز ت نژاد ا رمیتا ثابتی اشرف ۱ مقدمه الگوریتم ابزاری است که از ا ن برای حل مسا
دانشکده ی علوم ریاضی ساختمان داده ها ۲ مهر ۱۳۹۲ جلسه ی ۴: تحلیل مجانبی الگوریتم ها مدر س: دکتر شهرام خزاي ی نگارنده: شراره عز ت نژاد ا رمیتا ثابتی اشرف ۱ مقدمه الگوریتم ابزاری است که از ا ن برای حل مسا
فصل سوم جریان های الکتریکی و مدارهای جریان مستقیم جریان الکتریکی
 فصل سوم جریان های الکتریکی و مدارهای جریان مستقیم جریان الکتریکی در رساناها مانند یک سیم مسی الکترون های آزاد وجود دارند که با سرعت های متفاوت بطور کاتوره ای)بی نظم(در حال حرکت هستند بطوریکه بار خالص گذرنده
فصل سوم جریان های الکتریکی و مدارهای جریان مستقیم جریان الکتریکی در رساناها مانند یک سیم مسی الکترون های آزاد وجود دارند که با سرعت های متفاوت بطور کاتوره ای)بی نظم(در حال حرکت هستند بطوریکه بار خالص گذرنده
سلسله مزاتب سبان مقدمه فصل : زبان های فارغ از متن زبان های منظم
 1 ماشیه ای توریىگ مقدمه فصل : سلسله مزاتب سبان a n b n c n? ww? زبان های فارغ از متن n b n a ww زبان های منظم a * a*b* 2 زبان ها پذیرفته می شوند بوسیله ی : ماشین های تورینگ a n b n c n ww زبان های فارغ
1 ماشیه ای توریىگ مقدمه فصل : سلسله مزاتب سبان a n b n c n? ww? زبان های فارغ از متن n b n a ww زبان های منظم a * a*b* 2 زبان ها پذیرفته می شوند بوسیله ی : ماشین های تورینگ a n b n c n ww زبان های فارغ
فصل پنجم زبان های فارغ از متن
 فصل پنجم زبان های فارغ از متن خانواده زبان های فارغ از متن: ( free )context تعریف: گرامر G=(V,T,,P) کلیه قوانین آن به فرم زیر باشد : یک گرامر فارغ از متن گفته می شود در صورتی که A x A Є V, x Є (V U T)*
فصل پنجم زبان های فارغ از متن خانواده زبان های فارغ از متن: ( free )context تعریف: گرامر G=(V,T,,P) کلیه قوانین آن به فرم زیر باشد : یک گرامر فارغ از متن گفته می شود در صورتی که A x A Є V, x Є (V U T)*
جلسه ی ۲۴: ماشین تورینگ
 دانشکده ی علوم ریاضی نظریه ی زبان ها و اتوماتا ۲۶ ا ذرماه ۱۳۹۱ جلسه ی ۲۴: ماشین تورینگ مدر س: دکتر شهرام خزاي ی نگارندگان: حمید ملک و امین خسر وشاهی ۱ ماشین تور ینگ تعریف ۱ (تعریف غیررسمی ماشین تورینگ)
دانشکده ی علوم ریاضی نظریه ی زبان ها و اتوماتا ۲۶ ا ذرماه ۱۳۹۱ جلسه ی ۲۴: ماشین تورینگ مدر س: دکتر شهرام خزاي ی نگارندگان: حمید ملک و امین خسر وشاهی ۱ ماشین تور ینگ تعریف ۱ (تعریف غیررسمی ماشین تورینگ)
جلسه ی ۳: نزدیک ترین زوج نقاط
 دانشکده ی علوم ریاضی ا نالیز الگوریتم ها ۴ بهمن ۱۳۹۱ جلسه ی ۳: نزدیک ترین زوج نقاط مدر س: دکتر شهرام خزاي ی نگارنده: امیر سیوانی اصل ۱ پیدا کردن نزدیک ترین زوج نقطه فرض می کنیم n نقطه داریم و می خواهیم
دانشکده ی علوم ریاضی ا نالیز الگوریتم ها ۴ بهمن ۱۳۹۱ جلسه ی ۳: نزدیک ترین زوج نقاط مدر س: دکتر شهرام خزاي ی نگارنده: امیر سیوانی اصل ۱ پیدا کردن نزدیک ترین زوج نقطه فرض می کنیم n نقطه داریم و می خواهیم
آشنایی با پدیده ماره (moiré)
") فلا) ب) آشنایی با پدیده ماره (moiré) توری جذبی- هرگاه روی ورقه شفافی چون طلق تعداد زیادی نوارهای خطی کدر هم پهنا به موازات یکدیگر و به فاصله های مساوی از هم رسم کنیم یک توری خطی جذبی به وجود می آید شکل
فلا) ب) آشنایی با پدیده ماره (moiré) توری جذبی- هرگاه روی ورقه شفافی چون طلق تعداد زیادی نوارهای خطی کدر هم پهنا به موازات یکدیگر و به فاصله های مساوی از هم رسم کنیم یک توری خطی جذبی به وجود می آید شکل
دانشکده ی علوم ریاضی جلسه ی ۵: چند مثال
 دانشکده ی علوم ریاضی احتمال و کاربردا ن ۴ اسفند ۹۲ جلسه ی : چند مثال مدر س: دکتر شهرام خزاي ی نگارنده: مهدی پاک طینت (تصحیح: قره داغی گیوه چی تفاق در این جلسه به بررسی و حل چند مثال از مطالب جلسات گذشته
دانشکده ی علوم ریاضی احتمال و کاربردا ن ۴ اسفند ۹۲ جلسه ی : چند مثال مدر س: دکتر شهرام خزاي ی نگارنده: مهدی پاک طینت (تصحیح: قره داغی گیوه چی تفاق در این جلسه به بررسی و حل چند مثال از مطالب جلسات گذشته
جلسه ی ۵: حل روابط بازگشتی
 دانشکده ی علوم ریاضی ساختمان داده ها ۶ مهر ۲ جلسه ی ۵: حل روابط بازگشتی مدر س: دکتر شهرام خزاي ی نگارنده: ا رمیتا ثابتی اشرف و علی رضا علی ا بادیان ۱ مقدمه پیدا کردن کران مجانبی توابع معمولا با پیچیدگی
دانشکده ی علوم ریاضی ساختمان داده ها ۶ مهر ۲ جلسه ی ۵: حل روابط بازگشتی مدر س: دکتر شهرام خزاي ی نگارنده: ا رمیتا ثابتی اشرف و علی رضا علی ا بادیان ۱ مقدمه پیدا کردن کران مجانبی توابع معمولا با پیچیدگی
جلسه 12 به صورت دنباله اي از,0 1 نمایش داده شده اند در حین محاسبه ممکن است با خطا مواجه شده و یکی از بیت هاي آن. p 1
 محاسبات کوانتمی (67) ترم بهار 390-39 مدرس: سلمان ابوالفتح بیگی نویسنده: سلمان ابوالفتح بیگی جلسه ذخیره پردازش و انتقال اطلاعات در دنیاي واقعی همواره در حضور خطا انجام می شود. مثلا اطلاعات کلاسیکی که به
محاسبات کوانتمی (67) ترم بهار 390-39 مدرس: سلمان ابوالفتح بیگی نویسنده: سلمان ابوالفتح بیگی جلسه ذخیره پردازش و انتقال اطلاعات در دنیاي واقعی همواره در حضور خطا انجام می شود. مثلا اطلاعات کلاسیکی که به
SanatiSharif.ir مقطع مخروطی: دایره: از دوران خط متقاطع d با L حول آن یک مخروط نامحدود بدست میآید که سطح مقطع آن با یک
 مقطع مخروطی: از دوران خط متقاطع d با L حول آن یک مخروط نامحدود بدست میآید که سطح مقطع آن با یک صفحه میتواند دایره بیضی سهمی هذلولی یا نقطه خط و دو خط متقاطع باشد. دایره: مکان هندسی نقاطی است که فاصلهی
مقطع مخروطی: از دوران خط متقاطع d با L حول آن یک مخروط نامحدود بدست میآید که سطح مقطع آن با یک صفحه میتواند دایره بیضی سهمی هذلولی یا نقطه خط و دو خط متقاطع باشد. دایره: مکان هندسی نقاطی است که فاصلهی
فصل 5 :اصل گسترش و اعداد فازی
 فصل 5 :اصل گسترش و اعداد فازی : 1-5 اصل گسترش در ریاضیات معمولی یکی از مهمترین ابزارها تابع می باشد.تابع یک نوع رابطه خاص می باشد رابطه ای که در نمایش زوج مرتبی عنصر اول تکراری نداشته باشد.معموال تابع
فصل 5 :اصل گسترش و اعداد فازی : 1-5 اصل گسترش در ریاضیات معمولی یکی از مهمترین ابزارها تابع می باشد.تابع یک نوع رابطه خاص می باشد رابطه ای که در نمایش زوج مرتبی عنصر اول تکراری نداشته باشد.معموال تابع
جلسه 14 را نیز تعریف کرد. عملگري که به دنبال آن هستیم باید ماتریس چگالی مربوط به یک توزیع را به ماتریس چگالی مربوط به توزیع حاشیه اي آن ببرد.
 تي وري اطلاعات کوانتمی ترم پاییز 39-39 مدرس: ابوالفتح بیگی و امین زاده گوهري نویسنده: کامران کیخسروي جلسه فرض کنید حالت سیستم ترکیبی AB را داشته باشیم. حالت سیستم B به تنهایی چیست در ابتداي درس که حالات
تي وري اطلاعات کوانتمی ترم پاییز 39-39 مدرس: ابوالفتح بیگی و امین زاده گوهري نویسنده: کامران کیخسروي جلسه فرض کنید حالت سیستم ترکیبی AB را داشته باشیم. حالت سیستم B به تنهایی چیست در ابتداي درس که حالات
مسائل. 2 = (20)2 (1.96) 2 (5) 2 = 61.5 بنابراین اندازه ی نمونه الزم باید حداقل 62=n باشد.
2 (1.96) 2 (5) 2 = 61.5 بنابراین اندازه ی نمونه الزم باید حداقل 62=n باشد.") ) مسائل مدیریت کارخانه پوشاک تصمیم دارد مطالعه ای به منظور تعیین میانگین پیشرفت کارگران کارخانه انجام دهد. اگر او در این مطالعه دقت برآورد را 5 نمره در نظر بگیرد و فرض کند مقدار انحراف معیار پیشرفت کاری
) مسائل مدیریت کارخانه پوشاک تصمیم دارد مطالعه ای به منظور تعیین میانگین پیشرفت کارگران کارخانه انجام دهد. اگر او در این مطالعه دقت برآورد را 5 نمره در نظر بگیرد و فرض کند مقدار انحراف معیار پیشرفت کاری
هو الحق دانشکده ي مهندسی کامپیوتر جلسه هفتم
 هو الحق دانشکده ي مهندسی کامپیوتر کدگذاري شبکه Coding) (Network شنبه 2 اسفند 1393 جلسه هفتم استاد: مهدي جعفري نگارنده: سید محمدرضا تاجزاد تعریف 1 بهینه سازي محدب : هدف پیدا کردن مقدار بهینه یک تابع ) min
هو الحق دانشکده ي مهندسی کامپیوتر کدگذاري شبکه Coding) (Network شنبه 2 اسفند 1393 جلسه هفتم استاد: مهدي جعفري نگارنده: سید محمدرضا تاجزاد تعریف 1 بهینه سازي محدب : هدف پیدا کردن مقدار بهینه یک تابع ) min
شاخصهای پراکندگی دامنهی تغییرات:
 شاخصهای پراکندگی شاخصهای پراکندگی بیانگر میزان پراکندگی دادههای آماری میباشند. مهمترین شاخصهای پراکندگی عبارتند از: دامنهی تغییرات واریانس انحراف معیار و ضریب تغییرات. دامنهی تغییرات: اختالف بزرگترین و
شاخصهای پراکندگی شاخصهای پراکندگی بیانگر میزان پراکندگی دادههای آماری میباشند. مهمترین شاخصهای پراکندگی عبارتند از: دامنهی تغییرات واریانس انحراف معیار و ضریب تغییرات. دامنهی تغییرات: اختالف بزرگترین و
فصل سوم : عناصر سوئیچ
 فصل سوم : عناصر سوئیچ رله الکترومکانیکی: یک آهنربای الکتریکی است که اگر به آن ولتاژ بدهیم مدار را قطع و وصل می کند. الف: دیود بعنوان سوئیچ دیود واقعی: V D I D = I S (1 e η V T ) دیود ایده آل: در درس از
فصل سوم : عناصر سوئیچ رله الکترومکانیکی: یک آهنربای الکتریکی است که اگر به آن ولتاژ بدهیم مدار را قطع و وصل می کند. الف: دیود بعنوان سوئیچ دیود واقعی: V D I D = I S (1 e η V T ) دیود ایده آل: در درس از
1 دایره فصل او ل کاربردهای بسیاری داشته است. یک قضیۀ بنیادی در هندسه موسوم با محیط ثابت دایره دارای بیشترین مساحت است. این موضوع در طراحی
 فصل او ل 1 دایره هندسه در ساخت استحکامات دفاعی قلعهها و برج و باروها از دیرباز کاربردهای بسیاری داشته است. یک قضیۀ بنیادی در هندسه موسوم به»قضیۀ همپیرامونی«میگوید در بین همۀ شکلهای هندسی بسته با محیط ثابت
فصل او ل 1 دایره هندسه در ساخت استحکامات دفاعی قلعهها و برج و باروها از دیرباز کاربردهای بسیاری داشته است. یک قضیۀ بنیادی در هندسه موسوم به»قضیۀ همپیرامونی«میگوید در بین همۀ شکلهای هندسی بسته با محیط ثابت
پايداری Stability معيارپايداری. Stability Criteria. Page 1 of 8
 پايداری Stility اطمينان از پايداری سيستم های کنترل در زمان طراحی ا ن بسيار حاي ز اهمييت می باشد. سيستمی پايدار محسوب می شود که: بعد از تغيير ضربه در ورودی خروجی به مقدار اوليه ا ن بازگردد. هر مقدار تغيير
پايداری Stility اطمينان از پايداری سيستم های کنترل در زمان طراحی ا ن بسيار حاي ز اهمييت می باشد. سيستمی پايدار محسوب می شود که: بعد از تغيير ضربه در ورودی خروجی به مقدار اوليه ا ن بازگردد. هر مقدار تغيير
جلسه 2 1 فضاي برداري محاسبات کوانتمی (22671) ترم بهار
 ترم بهار") محاسبات کوانتمی (22671) ترم بهار 1390-1391 مدرس: سلمان ابوالفتح بیگی نویسنده: نادر قاسمی جلسه 2 در این درسنامه به مروري کلی از جبر خطی می پردازیم که هدف اصلی آن آشنایی با نماد گذاري دیراك 1 و مباحثی از
محاسبات کوانتمی (22671) ترم بهار 1390-1391 مدرس: سلمان ابوالفتح بیگی نویسنده: نادر قاسمی جلسه 2 در این درسنامه به مروري کلی از جبر خطی می پردازیم که هدف اصلی آن آشنایی با نماد گذاري دیراك 1 و مباحثی از
فعالیت = ) ( )10 6 ( 8 = )-4( 3 * )-5( 3 = ) ( ) ( )-36( = m n m+ m n. m m m. m n mn
 ( )10 6 ( 8 = )-4( 3 * )-5( 3 = ) ( ) ( )-36( = m n m+ m n. m m m. m n mn") درس»ریشه ام و توان گویا«تاکنون با مفهوم توان های صحیح اعداد و چگونگی کاربرد آنها در ریشه گیری دوم و سوم اعداد آشنا شده اید. فعالیت زیر به شما کمک می کند تا ضمن مرور آنچه تاکنون در خصوص اعداد توان دار و
درس»ریشه ام و توان گویا«تاکنون با مفهوم توان های صحیح اعداد و چگونگی کاربرد آنها در ریشه گیری دوم و سوم اعداد آشنا شده اید. فعالیت زیر به شما کمک می کند تا ضمن مرور آنچه تاکنون در خصوص اعداد توان دار و
فصل چهارم تعیین موقعیت و امتدادهای مبنا
 فصل چهارم تعیین موقعیت و امتدادهای مبنا هدف های رفتاری پس از آموزش و مطالعه این فصل از فراگیرنده انتظار می رود بتواند: 1 راهکار کلی مربوط به ترسیم یک امتداد در یک سیستم مختصات دو بعدی و اندازه گیری ژیزمان
فصل چهارم تعیین موقعیت و امتدادهای مبنا هدف های رفتاری پس از آموزش و مطالعه این فصل از فراگیرنده انتظار می رود بتواند: 1 راهکار کلی مربوط به ترسیم یک امتداد در یک سیستم مختصات دو بعدی و اندازه گیری ژیزمان
تئوری رفتار مصرف کننده : می گیریم. فرض اول: فرض دوم: فرض سوم: فرض چهارم: برای بیان تئوری رفتار مصرف کننده ابتدا چهار فرض زیر را در نظر
 تئوری رفتار مصرف کننده : می گیریم برای بیان تئوری رفتار مصرف کننده ابتدا چهار فرض زیر را در نظر فرض اول: مصرف کننده یک مصرف کننده منطقی است یعنی دارای رفتار عقالیی می باشد به عبارت دیگر از مصرف کاالها
تئوری رفتار مصرف کننده : می گیریم برای بیان تئوری رفتار مصرف کننده ابتدا چهار فرض زیر را در نظر فرض اول: مصرف کننده یک مصرف کننده منطقی است یعنی دارای رفتار عقالیی می باشد به عبارت دیگر از مصرف کاالها
تلفات خط انتقال ابررسی یک شبکة قدرت با 2 به شبکة شکل زیر توجه کنید. ژنراتور فرضیات شبکه: میباشد. تلفات خط انتقال با مربع توان انتقالی متناسب
 تلفات خط انتقال ابررسی یک شبکة قدرت با 2 به شبکة شکل زیر توجه کنید. ژنراتور فرضیات شبکه: این شبکه دارای دو واحد کامال یکسان آنها 400 MW میباشد. است تلفات خط انتقال با مربع توان انتقالی متناسب و حداکثر
تلفات خط انتقال ابررسی یک شبکة قدرت با 2 به شبکة شکل زیر توجه کنید. ژنراتور فرضیات شبکه: این شبکه دارای دو واحد کامال یکسان آنها 400 MW میباشد. است تلفات خط انتقال با مربع توان انتقالی متناسب و حداکثر
جلسه دوم سوم چهارم: مقدمه اي بر نظریه میدان
 هو الحق دانشکده ي مهندسی کامپیوتر کدگذاري شبکه Coding) (Network سه شنبه 21 اسفند 1393 جلسه دوم سوم چهارم: مقدمه اي بر نظریه میدان استاد: مهدي جعفري نگارنده: علیرضا حیدري خزاي ی در این نوشته مقدمه اي بر
هو الحق دانشکده ي مهندسی کامپیوتر کدگذاري شبکه Coding) (Network سه شنبه 21 اسفند 1393 جلسه دوم سوم چهارم: مقدمه اي بر نظریه میدان استاد: مهدي جعفري نگارنده: علیرضا حیدري خزاي ی در این نوشته مقدمه اي بر
راهنمای کاربری موتور بنزینی )سیکل اتو(
سیکل اتو(") راهنمای کاربری موتور بنزینی )سیکل اتو( هدف آزمایش : شناخت و بررسی عملکرد موتور بنزینی تئوری آزمایش: موتورهای احتراق داخلی امروزه به طور وسیع برای ایجاد قدرت بکار می روند. ژنراتورهای کوچک پمپ های مخلوط
راهنمای کاربری موتور بنزینی )سیکل اتو( هدف آزمایش : شناخت و بررسی عملکرد موتور بنزینی تئوری آزمایش: موتورهای احتراق داخلی امروزه به طور وسیع برای ایجاد قدرت بکار می روند. ژنراتورهای کوچک پمپ های مخلوط
جلسه 15 1 اثر و اثر جزي ی نظریه ي اطلاعات کوانتومی 1 ترم پاي یز جدایی پذیر باشد یعنی:
 نظریه ي اطلاعات کوانتومی 1 ترم پاي یز 1391-1391 مدرس: دکتر ابوالفتح بیگی ودکتر امین زاده گوهري نویسنده: محمدرضا صنم زاده جلسه 15 فرض کنیم ماتریس چگالی سیستم ترکیبی شامل زیر سیستم هايB و A را داشته باشیم.
نظریه ي اطلاعات کوانتومی 1 ترم پاي یز 1391-1391 مدرس: دکتر ابوالفتح بیگی ودکتر امین زاده گوهري نویسنده: محمدرضا صنم زاده جلسه 15 فرض کنیم ماتریس چگالی سیستم ترکیبی شامل زیر سیستم هايB و A را داشته باشیم.
تبدیل ها هندسه سوم دبیرستان ( D با یک و تنها یک عضو از مجموعه Rست که در آن هر عضو مجموعه نگاشت از Dبه R تناظری بین مجموعه های D و Rمتناظر باشد.
 تبدیل ها ن گاشت : D با یک و تنها یک عضو از مجموعه نگاشت از Dبه R تناظری بین مجموعه های D و Rمتناظر باشد. Rست که در آن هر عضو مجموعه تبد ی ل : نگاشتی یک به یک از صفحه به روی خودش است یعنی در تبدیل هیچ دو
تبدیل ها ن گاشت : D با یک و تنها یک عضو از مجموعه نگاشت از Dبه R تناظری بین مجموعه های D و Rمتناظر باشد. Rست که در آن هر عضو مجموعه تبد ی ل : نگاشتی یک به یک از صفحه به روی خودش است یعنی در تبدیل هیچ دو
مینامند یا میگویند α یک صفر تابع
 1 1-1 مقدمه حل بسیاری از مسائل اجتماعی اقتصادی علمی منجر به حل معادله ای به شکل ) ( می شد. منظر از حل این معادله یافتن عدد یا اعدادی است که مقدار تابع به ازای آنها صفر شد. اگر (α) آنگاه α را ریشه معادله
1 1-1 مقدمه حل بسیاری از مسائل اجتماعی اقتصادی علمی منجر به حل معادله ای به شکل ) ( می شد. منظر از حل این معادله یافتن عدد یا اعدادی است که مقدار تابع به ازای آنها صفر شد. اگر (α) آنگاه α را ریشه معادله
نکنید... بخوانید خالء علمی خود را پر کنید و دانش خودتان را ارائه دهید.
 گزارش کار آزمایشگاه صنعتی... مکانیک سیاالت ( رینولدز افت فشار ) دانشجویان : فردین احمدی محمد جاللی سعید شادخواطر شاهین غالمی گروه یکشنبه ساعت 2::0 الی رینولدز هدف : بررسی نوع حرکت سیال تئوری : یکی از انواع
گزارش کار آزمایشگاه صنعتی... مکانیک سیاالت ( رینولدز افت فشار ) دانشجویان : فردین احمدی محمد جاللی سعید شادخواطر شاهین غالمی گروه یکشنبه ساعت 2::0 الی رینولدز هدف : بررسی نوع حرکت سیال تئوری : یکی از انواع
آموزش SPSS مقدماتی و پیشرفته مدیریت آمار و فناوری اطالعات -
 آموزش SPSS مقدماتی و پیشرفته تهیه و تنظیم: فرزانه صانعی مدیریت آمار و فناوری اطالعات - مهرماه 96 بخش سوم: مراحل تحلیل آماری تحلیل داده ها به روش پارامتری بررسی نرمال بودن توزیع داده ها قضیه حد مرکزی جدول
آموزش SPSS مقدماتی و پیشرفته تهیه و تنظیم: فرزانه صانعی مدیریت آمار و فناوری اطالعات - مهرماه 96 بخش سوم: مراحل تحلیل آماری تحلیل داده ها به روش پارامتری بررسی نرمال بودن توزیع داده ها قضیه حد مرکزی جدول
هد ف های هفته ششم: 1- اجسام متحرک و ساکن را از هم تشخیص دهد. 2- اندازه مسافت و جا به جایی اجسام متحرک را محاسبه و آن ها را مقایسه کند 3- تندی متوسط
 هد ف های هفته ششم: 1- اجسام متحرک و ساکن را از هم تشخیص دهد. - اندازه مسافت و جا به جایی اجسام متحرک را محاسبه و آن ها را مقایسه کند 3- تندی متوسط اجسام متحرک را محاسبه کند. 4- تندی متوسط و لحظه ای را
هد ف های هفته ششم: 1- اجسام متحرک و ساکن را از هم تشخیص دهد. - اندازه مسافت و جا به جایی اجسام متحرک را محاسبه و آن ها را مقایسه کند 3- تندی متوسط اجسام متحرک را محاسبه کند. 4- تندی متوسط و لحظه ای را
هدف از انجام این آزمایش بررسی رفتار انواع حالتهاي گذراي مدارهاي مرتبه دومRLC اندازهگيري پارامترهاي مختلف معادله
 آزما ی ش پنج م: پا س خ زمانی مدا رات مرتبه دوم هدف از انجام این آزمایش بررسی رفتار انواع حالتهاي گذراي مدارهاي مرتبه دومLC اندازهگيري پارامترهاي مختلف معادله مشخصه بررسی مقاومت بحرانی و آشنایی با پدیده
آزما ی ش پنج م: پا س خ زمانی مدا رات مرتبه دوم هدف از انجام این آزمایش بررسی رفتار انواع حالتهاي گذراي مدارهاي مرتبه دومLC اندازهگيري پارامترهاي مختلف معادله مشخصه بررسی مقاومت بحرانی و آشنایی با پدیده
:موس لصف یسدنه یاه لکش رد یلوط طباور
 فصل سوم: 3 روابط طولی درشکلهای هندسی درس او ل قضیۀ سینوس ها یادآوری منظور از روابط طولی رابطه هایی هستند که در مورد اندازه های پاره خط ها و زاویه ها در شکل های مختلف بحث می کنند. در سال گذشته روابط طولی
فصل سوم: 3 روابط طولی درشکلهای هندسی درس او ل قضیۀ سینوس ها یادآوری منظور از روابط طولی رابطه هایی هستند که در مورد اندازه های پاره خط ها و زاویه ها در شکل های مختلف بحث می کنند. در سال گذشته روابط طولی
تمرین اول درس کامپایلر
 1 تمرین اول درس 1. در زبان مربوط به عبارت منظم زیر چند رشته یکتا وجود دارد (0+1+ϵ)(0+1+ϵ)(0+1+ϵ)(0+1+ϵ) جواب 11 رشته کنند abbbaacc را در نظر بگیرید. کدامیک از عبارتهای منظم زیر توکنهای ab bb a acc را ایجاد
1 تمرین اول درس 1. در زبان مربوط به عبارت منظم زیر چند رشته یکتا وجود دارد (0+1+ϵ)(0+1+ϵ)(0+1+ϵ)(0+1+ϵ) جواب 11 رشته کنند abbbaacc را در نظر بگیرید. کدامیک از عبارتهای منظم زیر توکنهای ab bb a acc را ایجاد
طراحی مدارهای الکترونیکی فرکانس باال دکتر سیدامیر گوهری
 طراحی مدارهای الکترونیکی فرکانس باال دکتر سیدامیر گوهری 1 فهرست فصل اول... مقدمه... 5 کاربرد فرکانس های مایکروویو... 6 انواع خطوط انتقال... 6 سیگنال فصل دوم... محیط انتقال... 21 باندهای فرکانسی... 21 پارامترهای
طراحی مدارهای الکترونیکی فرکانس باال دکتر سیدامیر گوهری 1 فهرست فصل اول... مقدمه... 5 کاربرد فرکانس های مایکروویو... 6 انواع خطوط انتقال... 6 سیگنال فصل دوم... محیط انتقال... 21 باندهای فرکانسی... 21 پارامترهای
به نام خدا. الف( توضیح دهید چرا از این تکنیک استفاده میشود چرا تحلیل را روی کل سیگنال x[n] انجام نمیدهیم
![به نام خدا. الف( توضیح دهید چرا از این تکنیک استفاده میشود چرا تحلیل را روی کل سیگنال x[n] انجام نمیدهیم](/thumbs/86/94326429.jpg "به نام خدا. الف( توضیح دهید چرا از این تکنیک استفاده میشود چرا تحلیل را روی کل سیگنال x[n] انجام نمیدهیم") پردازش گفتار به نام خدا نیمسال اول 59-59 دکتر صامتی تمرین سری سوم پیشبینی خطی و کدینگ شکلموج دانشکده مهندسی کامپیوتر زمان تحویل: 32 آبان 4259 تمرینهای تئوری: سوال 1. می دانیم که قبل از انجام تحلیل پیشبینی
پردازش گفتار به نام خدا نیمسال اول 59-59 دکتر صامتی تمرین سری سوم پیشبینی خطی و کدینگ شکلموج دانشکده مهندسی کامپیوتر زمان تحویل: 32 آبان 4259 تمرینهای تئوری: سوال 1. می دانیم که قبل از انجام تحلیل پیشبینی
ندرک درگ ندرک درگ شور
 ٥ عددهای تقریبی درس او ل: تقریب زدن گردکردن در کالس چهارم شما با تقریب زدن آشنا شده اید. عددهای زیر را با تقریب دهگان به نزدیک ترین عدد مانند نمونه تقریب بزنید. عدد جواب را در خانه مربوطه بنویسید. 780
٥ عددهای تقریبی درس او ل: تقریب زدن گردکردن در کالس چهارم شما با تقریب زدن آشنا شده اید. عددهای زیر را با تقریب دهگان به نزدیک ترین عدد مانند نمونه تقریب بزنید. عدد جواب را در خانه مربوطه بنویسید. 780
تجزیه و تحلیل سیگنال ها و سیستم ها دکتر منصور زینلی
 درس تجزیه و تحلیل سیگنال ها و سیستم ها دکتر منصور زینلی فصل اول سیگنال: نشانه یا عالمت هر کمیت فیزیکی) قابل اندازه گیری ) است. انواع سیگنال : سیگنالپیوستهدرزمانکهبهصورت x(t) نشان داده میشود و t یک متغیر
درس تجزیه و تحلیل سیگنال ها و سیستم ها دکتر منصور زینلی فصل اول سیگنال: نشانه یا عالمت هر کمیت فیزیکی) قابل اندازه گیری ) است. انواع سیگنال : سیگنالپیوستهدرزمانکهبهصورت x(t) نشان داده میشود و t یک متغیر
دانشگاه بیرجند فهرست:
 فهرست: آزمایش 1 :منحنی مشخصه دیود با استفاده از روش نقطه یابی و اسیلوسکوپ... 1 آزمایش 2 : کاربرد دیود )یکسو کننده ها(... 6 آزمایش 3 : کاربردهای دیود در مدار های جهش برش و چند برابر کننده های ولتاژ... 11
فهرست: آزمایش 1 :منحنی مشخصه دیود با استفاده از روش نقطه یابی و اسیلوسکوپ... 1 آزمایش 2 : کاربرد دیود )یکسو کننده ها(... 6 آزمایش 3 : کاربردهای دیود در مدار های جهش برش و چند برابر کننده های ولتاژ... 11
جلسه 22 1 نامساویهایی در مورد اثر ماتریس ها تي وري اطلاعات کوانتومی ترم پاییز
 تي وري اطلاعات کوانتومی ترم پاییز 1391-1392 مدرس: ابوالفتح بیگی و امین زاده گوهري نویسنده: محمد مهدي مجاهدیان جلسه 22 تا اینجا خواص مربوط به آنتروپی را بیان کردیم. جهت اثبات این خواص نیاز به ابزارهایی
تي وري اطلاعات کوانتومی ترم پاییز 1391-1392 مدرس: ابوالفتح بیگی و امین زاده گوهري نویسنده: محمد مهدي مجاهدیان جلسه 22 تا اینجا خواص مربوط به آنتروپی را بیان کردیم. جهت اثبات این خواص نیاز به ابزارهایی
ثابت. Clausius - Clapeyran 1
 جدول 15 فشار بخار چند مایع خالص در دمای 25 C فشار بخار در دمایC (atm) 25 نام مایع 0/7 دیاتیل اتر 0/3 برم 0/08 اتانول 0/03 آب دمای جوش یک مایع برابر است با دمایی که فشار بخار تعادلی آن مایع با فشار اتمسفر
جدول 15 فشار بخار چند مایع خالص در دمای 25 C فشار بخار در دمایC (atm) 25 نام مایع 0/7 دیاتیل اتر 0/3 برم 0/08 اتانول 0/03 آب دمای جوش یک مایع برابر است با دمایی که فشار بخار تعادلی آن مایع با فشار اتمسفر
Spacecraft thermal control handbook. Space mission analysis and design. Cubesat, Thermal control system
 سیستم زیر حرارتی ماهواره سرفصل های مهم 1- منابع مطالعاتی 2- مقدمه ای بر انتقال حرارت و مکانیزم های آن 3- موازنه انرژی 4 -سیستم های کنترل دما در فضا 5- مدل سازی عددی حرارتی ماهواره 6- تست های مورد نیاز
سیستم زیر حرارتی ماهواره سرفصل های مهم 1- منابع مطالعاتی 2- مقدمه ای بر انتقال حرارت و مکانیزم های آن 3- موازنه انرژی 4 -سیستم های کنترل دما در فضا 5- مدل سازی عددی حرارتی ماهواره 6- تست های مورد نیاز
فصل سوم جبر بول هدف های رفتاری: در پایان این فصل از فراگیرنده انتظار می رود که :
 فصل سوم جبر بول هدف کلی: شناخت جبر بول و اتحادهای اساسی آن توابع بولی به شکل مجموع حاصل ضرب ها و حاصل ضرب جمع ها پیاده سازی توابع منطقی توسط دروازه های منطقی پایه و نقشة کارنو هدف های رفتاری: در پایان
فصل سوم جبر بول هدف کلی: شناخت جبر بول و اتحادهای اساسی آن توابع بولی به شکل مجموع حاصل ضرب ها و حاصل ضرب جمع ها پیاده سازی توابع منطقی توسط دروازه های منطقی پایه و نقشة کارنو هدف های رفتاری: در پایان
مقاومت مصالح 2 فصل 9: خيز تيرها. 9. Deflection of Beams
 مقاومت مصالح فصل 9: خيز تيرها 9. Deflection of eams دکتر مح مدرضا نيرومند دااگشنه ايپم نور اصفهان eer Johnston DeWolf ( ) رابطه بين گشتاور خمشی و انحنا: تير طره ای تحت بار متمرکز در انتهای آزاد: P انحنا
مقاومت مصالح فصل 9: خيز تيرها 9. Deflection of eams دکتر مح مدرضا نيرومند دااگشنه ايپم نور اصفهان eer Johnston DeWolf ( ) رابطه بين گشتاور خمشی و انحنا: تير طره ای تحت بار متمرکز در انتهای آزاد: P انحنا
Beta Coefficient نویسنده : محمد حق وردی
 مفهوم ضریب سهام بتای Beta Coefficient نویسنده : محمد حق وردی مقدمه : شاید بارها در مقاالت یا گروهای های اجتماعی مربوط به بازار سرمایه نام ضریب بتا رو دیده باشیم یا جایی شنیده باشیم اما برایمان مبهم باشد
مفهوم ضریب سهام بتای Beta Coefficient نویسنده : محمد حق وردی مقدمه : شاید بارها در مقاالت یا گروهای های اجتماعی مربوط به بازار سرمایه نام ضریب بتا رو دیده باشیم یا جایی شنیده باشیم اما برایمان مبهم باشد
شبکه های عصبی در کنترل
 شبکه های عصبی در کنترل دانشگاه نجف آباد درس: کنترل هوشمند در فضای سایبرنتیک مدرس: حمید محمودیان مدل ریاضی نرون مدل ریاضی یک نرون ساده به صورت روبرو است P: مقدار کمیت ورودی b: مقدار بایاس )عرض از مبدا تابع
شبکه های عصبی در کنترل دانشگاه نجف آباد درس: کنترل هوشمند در فضای سایبرنتیک مدرس: حمید محمودیان مدل ریاضی نرون مدل ریاضی یک نرون ساده به صورت روبرو است P: مقدار کمیت ورودی b: مقدار بایاس )عرض از مبدا تابع
مود لصف یسدنه یاه لیدبت
 فصل دوم 2 تبدیلهای هندسی 1 درس او ل تبدیل های هندسی در بسیاری از مناظر زندگی روزمره نظیر طراحی پارچه نقش فرش کاشی کاری گچ بری و... شکل های مختلف طبق الگویی خاص تکرار می شوند. در این فصل وضعیت های مختلفی
فصل دوم 2 تبدیلهای هندسی 1 درس او ل تبدیل های هندسی در بسیاری از مناظر زندگی روزمره نظیر طراحی پارچه نقش فرش کاشی کاری گچ بری و... شکل های مختلف طبق الگویی خاص تکرار می شوند. در این فصل وضعیت های مختلفی
جلسه 16 نظریه اطلاعات کوانتمی 1 ترم پاییز
 نظریه اطلاعات کوانتمی ترم پاییز 39-39 مدرسین: ابوالفتح بیگی و امین زاده گوهري نویسنده: محم دحسن آرام جلسه 6 تا اینجا با دو دیدگاه مختلف و دو عامل اصلی براي تعریف و استفاده از ماتریس چگالی جهت معرفی حالت
نظریه اطلاعات کوانتمی ترم پاییز 39-39 مدرسین: ابوالفتح بیگی و امین زاده گوهري نویسنده: محم دحسن آرام جلسه 6 تا اینجا با دو دیدگاه مختلف و دو عامل اصلی براي تعریف و استفاده از ماتریس چگالی جهت معرفی حالت
جلسه 2 جهت تعریف یک فضاي برداري نیازمند یک میدان 2 هستیم. یک میدان مجموعه اي از اعداد یا اسکالر ها به همراه اعمال
 نظریه اطلاعات کوانتمی 1 ترم پاییز 1391-1392 مدرسین: ابوالفتح بیگی و امین زاده گوهري جلسه 2 فراگیري نظریه ي اطلاعات کوانتمی نیازمند داشتن پیش زمینه در جبرخطی می باشد این نظریه ترکیب زیبایی از جبرخطی و نظریه
نظریه اطلاعات کوانتمی 1 ترم پاییز 1391-1392 مدرسین: ابوالفتح بیگی و امین زاده گوهري جلسه 2 فراگیري نظریه ي اطلاعات کوانتمی نیازمند داشتن پیش زمینه در جبرخطی می باشد این نظریه ترکیب زیبایی از جبرخطی و نظریه
الکتریسیته ساکن مدرس:مسعود رهنمون سال تحصیلى 95-96
 الکتریسیته ساکن سال تحصیلى 95-96 مقدمه: همانطور که می دانیم بارهای الکتریکی بر هم نیرو وارد می کنند. بارهای الکتریکی هم نام یکدیگر را می رانند و بارهای الکتریکی نا هم نام یکدیگر را می ربایند. بار نقطه
الکتریسیته ساکن سال تحصیلى 95-96 مقدمه: همانطور که می دانیم بارهای الکتریکی بر هم نیرو وارد می کنند. بارهای الکتریکی هم نام یکدیگر را می رانند و بارهای الکتریکی نا هم نام یکدیگر را می ربایند. بار نقطه
تعیین محل قرار گیری رله ها در شبکه های سلولی چندگانه تقسیم کد
 تعیین محل قرار گیری رله ها در شبکه های سلولی چندگانه تقسیم کد مبتنی بر روش دسترسی زلیخا سپهوند دانشکده مهندسى برق واحد نجف آباد دانشگاه آزاد اسلامى نجف آباد ایر ان zolekhasepahvand@yahoo.com روح االله
تعیین محل قرار گیری رله ها در شبکه های سلولی چندگانه تقسیم کد مبتنی بر روش دسترسی زلیخا سپهوند دانشکده مهندسى برق واحد نجف آباد دانشگاه آزاد اسلامى نجف آباد ایر ان zolekhasepahvand@yahoo.com روح االله
هدف از این آزمایش آشنایی با برخی قضایاي ساده و در عین حال مهم مدار از قبیل قانون اهم جمع آثار مدار تونن و نورتن
 آزما ی ش سوم: ربرسی اقنون ا ه م و قوانین ولتاژ و جریان اهی کیرشهف قوانین میسقت ولتاژ و میسقت جریان ربرسی مدا ر تونن و نورتن قضیه ااقتنل حدا کثر توان و ربرسی مدا ر پ ل و تس ون هدف از این آزمایش آشنایی با
آزما ی ش سوم: ربرسی اقنون ا ه م و قوانین ولتاژ و جریان اهی کیرشهف قوانین میسقت ولتاژ و میسقت جریان ربرسی مدا ر تونن و نورتن قضیه ااقتنل حدا کثر توان و ربرسی مدا ر پ ل و تس ون هدف از این آزمایش آشنایی با
فصل سوم .)MAC( و الگوریتم کنترل مدل )کنترل کننده مدل الگوریتمی-پاسخ ضربه-( )DMC(
MAC( و الگوریتم کنترل مدل )کنترل کننده مدل الگوریتمی-پاسخ ضربه-( )DMC(") فصل سوم مدل های تجاری طرح های کنترل پیش بینیکنترل کننده های پیش بین مبتنی بر مدل پرکاربرد در صنعت مانند آنچه همانگونه که در فصل های گذشته اشاره شددر فصل های گذشته نشان داده شده یک خانواده گسترده از کنترل
فصل سوم مدل های تجاری طرح های کنترل پیش بینیکنترل کننده های پیش بین مبتنی بر مدل پرکاربرد در صنعت مانند آنچه همانگونه که در فصل های گذشته اشاره شددر فصل های گذشته نشان داده شده یک خانواده گسترده از کنترل
فصل دوم مثلثات نسبت های مثلثاتی دایره مثلثاتی روابط بین نسبتهای مثلثاتی
 37 فصل دوم مثلثات نسبت های مثلثاتی دایره مثلثاتی روابط بین نسبتهای مثلثاتی 38 آخر این درس با چی آشنا میشی نسبت های مثلثاتی آشنایی با نسبت های مثلثاتی سینوس کسینوس تانژانت کتانژانت 39 به شکل مقابل نگاه
37 فصل دوم مثلثات نسبت های مثلثاتی دایره مثلثاتی روابط بین نسبتهای مثلثاتی 38 آخر این درس با چی آشنا میشی نسبت های مثلثاتی آشنایی با نسبت های مثلثاتی سینوس کسینوس تانژانت کتانژانت 39 به شکل مقابل نگاه
زمین شناسی ساختاری.فصل پنجم.محاسبه ضخامت و عمق الیه
 پن ج م فص ل محاسبه ضخامت و عم ق الهی زمین شناسی ساختاری.کارشناسی زمین شناسی.بخش زمین شناسی دانشکده علوم.دانشگاه شهید باهنر کرمان.استاد درس:دکتر شهرام شفیعی بافتی 1 تعاریف ضخامت - فاصله عمودی بین دو صفحه
پن ج م فص ل محاسبه ضخامت و عم ق الهی زمین شناسی ساختاری.کارشناسی زمین شناسی.بخش زمین شناسی دانشکده علوم.دانشگاه شهید باهنر کرمان.استاد درس:دکتر شهرام شفیعی بافتی 1 تعاریف ضخامت - فاصله عمودی بین دو صفحه
اصول انتخاب موتور با مفاهیم بسیار ساده شروع و با نکات کاربردی به پایان می رسد که این خود به درک و همراهی خواننده کمک بسیاری می کند.
 اصول انتخاب موتور اصول انتخاب موتور انتخاب یک موتور به در نظر گرفتن موارد بسیار زیادی از استانداردها عوامل محیطی و مشخصه های بار راندمان موتور و... وابسته است در این مقاله کوتاه به تاثیر و چرایی توان و
اصول انتخاب موتور اصول انتخاب موتور انتخاب یک موتور به در نظر گرفتن موارد بسیار زیادی از استانداردها عوامل محیطی و مشخصه های بار راندمان موتور و... وابسته است در این مقاله کوتاه به تاثیر و چرایی توان و
جلسه ی ۱۸: درهم سازی سرتاسری - درخت جست و جوی دودویی
 دانشکده ی علوم ریاضی ساختمان داده ۱۰ ا ذر ۹۲ جلسه ی ۱۸: درهم سازی سرتاسری - درخت جست و جوی دودویی مدر س: دکتر شهرام خزاي ی نگارنده: معین زمانی و ا رمیتا اردشیری ۱ یادا وری همان طور که درجلسات پیش مطرح
دانشکده ی علوم ریاضی ساختمان داده ۱۰ ا ذر ۹۲ جلسه ی ۱۸: درهم سازی سرتاسری - درخت جست و جوی دودویی مدر س: دکتر شهرام خزاي ی نگارنده: معین زمانی و ا رمیتا اردشیری ۱ یادا وری همان طور که درجلسات پیش مطرح
3 لصف یربج یاه ترابع و ایوگ یاه ناوت
 فصل توان های گویا و عبارت های جبری 8 نگاه کلی به فصل هدفهای این فصل را میتوان به اختصار چنین بیان کرد: همانگونه که توان اعداد را در آغاز برای توانهای طبیعی عددهای ٢ و ٣ تعریف میکنیم و سپس این مفهوم را
فصل توان های گویا و عبارت های جبری 8 نگاه کلی به فصل هدفهای این فصل را میتوان به اختصار چنین بیان کرد: همانگونه که توان اعداد را در آغاز برای توانهای طبیعی عددهای ٢ و ٣ تعریف میکنیم و سپس این مفهوم را
ˆ ˆ ˆ. r A. Axyz ( ) ( Axyz. r r r ( )
 ( Axyz. r r r ( )") دینامیک و ارتعاشات ad ad ω x, ω y 6, ω z s s ωω ˆ ˆ ˆ ˆ y j+ω z k 6j+ k A xx x ˆ yy y ˆ zz z ˆ H I ω i+ I ω j+ I ω k, ω x HA Iyyω y ˆ i+ Izz ωz k ˆ Ωω y ĵ پاسخ تشریحی توسط: استاد مسیح لقمانی A گزینه درست
دینامیک و ارتعاشات ad ad ω x, ω y 6, ω z s s ωω ˆ ˆ ˆ ˆ y j+ω z k 6j+ k A xx x ˆ yy y ˆ zz z ˆ H I ω i+ I ω j+ I ω k, ω x HA Iyyω y ˆ i+ Izz ωz k ˆ Ωω y ĵ پاسخ تشریحی توسط: استاد مسیح لقمانی A گزینه درست
کنترل تطبیقی غیر مستقیم مبتنی بر تخصیص قطب با مرتبه کسری
 چکیده : کنترل تطبیقی غیر مستقیم مبتنی بر تخصیص قطب با مرتبه کسری روش طراحی قوانین کنترل چندجمله ای با استفاده از جایابی قطب راه کار مناسبی برای بسیاری از کاربردهای صنعتی می باشد. این دسته از کنترل کننده
چکیده : کنترل تطبیقی غیر مستقیم مبتنی بر تخصیص قطب با مرتبه کسری روش طراحی قوانین کنترل چندجمله ای با استفاده از جایابی قطب راه کار مناسبی برای بسیاری از کاربردهای صنعتی می باشد. این دسته از کنترل کننده
طراحی و تعیین استراتژی بهره برداری از سیستم ترکیبی توربین بادی-فتوولتاییک بر مبنای کنترل اولیه و ثانویه به منظور بهبود مشخصههای پایداری ریزشبکه
 طراحی و تعیین استراتژی بهره برداری از سیستم ترکیبی توربین بادی-فتوولتاییک بر مبنای کنترل اولیه و ثانویه به منظور بهبود مشخصههای پایداری ریزشبکه 2 1* فرانک معتمدی فرید شیخ االسالم 1 -دانشجوی دانشکده برق
طراحی و تعیین استراتژی بهره برداری از سیستم ترکیبی توربین بادی-فتوولتاییک بر مبنای کنترل اولیه و ثانویه به منظور بهبود مشخصههای پایداری ریزشبکه 2 1* فرانک معتمدی فرید شیخ االسالم 1 -دانشجوی دانشکده برق
که روي سطح افقی قرار دارد متصل شده است. تمام سطوح بدون اصطکاك می باشند. نیروي F به صورت افقی به روي سطح شیبداري با زاویه شیب
 فصل : 5 نیرو ها 40- شخصی به جرم جرم به وسیله طنابی که از روي قرقره بدون اصطکاکی عبور کرده و به یک کیسه شن به متصل است از ارتفاع h پایین می آید. اگر شخص از حال سکون شروع به حرکت کرده باشد با چه سرعتی به
فصل : 5 نیرو ها 40- شخصی به جرم جرم به وسیله طنابی که از روي قرقره بدون اصطکاکی عبور کرده و به یک کیسه شن به متصل است از ارتفاع h پایین می آید. اگر شخص از حال سکون شروع به حرکت کرده باشد با چه سرعتی به