10. ΗΛΕΚΤΡΟΛΟΓΙΚΟ ΚΑΙ ΗΛΕΚΤΡΟΝΙΚΟ ΥΠΟΣΥΣΤΗΜΑ
|
|
|
- Εύφημη Βουγιουκλάκης
- 9 χρόνια πριν
- Προβολές:
Transcript
1 10. ΗΛΕΚΤΡΟΛΟΓΙΚΟ ΚΑΙ ΗΛΕΚΤΡΟΝΙΚΟ ΥΠΟΣΥΣΤΗΜΑ 10.0 Εισαγωγή Μετά τη µελέτη του κινηµατικού και του δυναµικού µοντέλου ενός ροµποτικού βραχίονα, τα οποία ουσιαστικά αναφέρονται στο µηχανολογικό υποσύστηµα, περνάµε στην ανάλυση του ηλεκτρολογικού και ηλεκτρονικού υποσυστήµατος. Όπως έχουµε ήδη σηµειώσει στο µηχανολογικό υποσύστηµα ανήκουν εκτός των άλλων οι κινητήρες του βραχίονα, οι οποίοι µελετώνται στα πλαίσια ολόκληρου του υποσυστήµατος µαζί µε τους συνδέσµους και τις αρθρώσεις. Στην περίπτωση όµως που οι κινητήρες είναι ηλεκτρικοί, η οποία είναι από τις πλέον συνήθεις, µπορεί να θεωρηθεί ότι αποτελούν ένα ξεχωριστό υποσύστηµα, το ηλεκτρολογικό υποσύστηµα. Όσον αφορά στο ηλεκτρονικό υποσύστηµα, σ αυτό ανήκουν οι αισθητήρες και οι επιµέρους συνιστώσες του συστήµατος ελέγχου (π.χ. ηλεκτρονικά ισχύος, αναλογικο-ψηφιακοί µετατροπείς, ψηφιακο-αναλογικοί µετατροπείς κτλ.). Με όλες αυτές τις συνιστώσες πρόκειται να ασχοληθούµε στη συνέχεια Σερβοκινητήρες Για την πραγµατοποίηση της επιθυµητής κίνησης ενός ροµποτικού µηχανισµού απαιτείται η συνδυασµένη κίνηση των αρθρώσεών του. Η τελευταία επιτυγχάνεται µε χρήση κινητήρων, οι οποίοι και κινούν συνολικά το µηχανικό σύστηµα. Οι κινητήρες που χρησιµοποιούνται στις συνήθεις ροµποτικές εφαρµογές αποτελούν εξέλιξη των κινητήρων που επί σειρά ετών χρησιµοποιούνταν σε εφαρµογές βιοµηχανικού αυτοµατισµού. Ωστόσο για τις ειδικές εφαρµογές που εξετάζουµε οι κινητήρες χρειάζεται να πληρούν ορισµένες επιπλέον απαιτήσεις, σε σχέση πάντα µε τις συµβατικές βιοµηχανικές εφαρµογές. Παραδειγµατικά αναφέρουµε την απαίτηση για χαµηλή αδράνεια και µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης υψηλών επιταχύνσεων, δυνατότητα λειτουργίας σε ένα µεγάλο εύρος ταχυτήτων και συνεχή περιστροφή ακόµα και σε χαµηλές ταχύτητες λειτουργίας. Στα παραπάνω θα πρέπει να προσθέσουµε την απαιτήσεις για ακρίβεια και παρακολούθηση της επιβαλλόµενης τροχιάς. Όλα αυτά τα χαρακτηριστικά οδηγούν τελικά στη χρήση µιας ειδικής κλάσης κινητήρων που ονοµάζονται σερβοκινητήρες. Περισσότερες λεπτοµέρειες για την υλοποίηση του σέρβο θα δώσουµε πιο κάτω. Οι σερβοκινητήρες που χρησιµοποιούνται στις ροµποτικές εφαρµογές µπορεί να είναι τριών ειδών. Έχουµε λοιπόν: Πνευµατικοί: κάνουν χρήση της πνευµατικής ενέργειας που παρέχεται από ένα συµπιεστή και τη µετασχηµατίζουν σε µηχανική ενέργεια µε τη βοήθεια πιστονιών ή στροβίλων. Οι κινητήρες αυτοί παρουσιάζουν ιδιαίτερες δυσκολίες στον έλεγχο, εξαιτίας της αναπόφευκτης συµπιεστότητας του χρησιµοποιούµενου ρευστού. Για το λόγο αυτό και δεν χρησιµοποιούνται συχνά, εκτός από εφαρµογές που δεν απαιτούν υψηλή ακρίβεια, όπως το άνοιγµα και το κλείσιµο της αρπάγης του εργαλείου. Υδραυλικοί: µετασχηµατίζουν την υδραυλική ενέργεια µίας δεξαµενής σε µηχανική, µε χρήση κατάλληλων αντλιών. Οι κινητήρες αυτοί µπορούν να υλοποιήσουν τόσο µεταφορική (χρήση ενός εµβόλου) όσο και περιστροφική κίνηση (χρήση αξονικών ή ακτινικών εµβόλων). Ηλεκτρικοί: µετασχηµατίζουν την ηλεκτρική ενέργεια του δικτύου διανοµής ηλεκτρισµού σε µηχανική. Τα πιο συνηθισµένα είδη τέτοιων κινητήρων είναι οι κινητήρες συνεχούς ρεύµατος µόνιµων µαγνητών (permanent-magnet dc servomotors) και 1

2 κινητήρες συνεχούς ρεύµατος χωρίς ψήκτρες (brushless dc servomotors). Απαραίτητα συνοδευτικά εξαρτήµατα αυτών των κινητήρων είναι ένας µετασχηµατιστής, ένας ανορθωτής τάσης και ένας πυκνωτής. Τα εξαρτήµατα αυτά µετασχηµατίζουν την εναλλασσόµενη τάση του δικτύου σε συνεχή κατάλληλου µεγέθους και στη συνέχεια την αποθηκεύουν. Οι υδραυλικοί και ηλεκτρικοί σερβοκινητήρες παρουσιάζουν ποικίλα πλεονεκτήµατα και µειονεκτήµατα, τα οποία αποτελούν καθοριστικό παράγοντα για τη χρήση τους στις διάφορες εφαρµογές. Σε επίπεδο εγκατάστασης οι ηλεκτρικοί κινητήρες εµφανίζουν τα εξής πλεονεκτήµατα: ευρεία διάθεση της χρησιµοποιούµενης ηλεκτρικής ενέργειας, χαµηλό κόστος και µεγάλη ποικιλία προϊόντων, υψηλός συντελεστής µετατροπής ισχύος, εύκολη συντήρηση, δεν ρυπαίνουν το περιβάλλον εργασίας. Ταυτόχρονα όµως παρουσιάζουν τους παρακάτω περιορισµούς: εξαιτίας της επίδρασης της βαρύτητας στο βραχίονα µπορεί να προκληθεί βραχυκύκλωµα. Στις περιπτώσεις αυτές απαιτείται η χρήση ειδικών φρένων, χρειάζονται ειδική προστασία όταν λειτουργούν σε εύφλεκτο περιβάλλον. Από την άλλη πλευρά οι υδραυλικοί κινητήρες παρουσιάζουν αρκετά αξιοσηµείωτα µειονεκτήµατα. Τα πιο σπουδαία είναι: ανάγκη ύπαρξης πηγής υδραυλικής ισχύος, υψηλό κόστος, µικρή ποικιλία προϊόντων µε ιδιαίτερες δυσκολίες κατασκευής τους σε µικρές διαστάσεις, χαµηλός συντελεστής µετατροπής ισχύος, αυξηµένες ανάγκες συντήρησης, ρύπανση του περιβάλλοντος εργασίας εξαιτίας διαρροών υδραυλικού ρευστού. Παρόλα αυτά οφείλουµε να σηµειώσουµε ότι οι υδραυλικοί κινητήρες: δεν παρουσιάζουν προβλήµατα βραχυκυκλώσεων, είναι αυτολυπαινόµενοι, µε το υδραυλικό ρευστό να εκτελεί εκτός των άλλων χρέη ψυκτικού µέσου, είναι ιδιαιτέρως ασφαλείς σε επικίνδυνα περιβάλλοντα, παρουσιάζουν πολύ υψηλές σχέσεις ισχύος-βάρους. Αν εξετάσουµε τις δύο παραπάνω κλάσεις κινητήρων από πλευράς λειτουργίας θα διαπιστώσουµε ότι: και οι δύο τύποι σερβοκινητήρων παρουσιάζουν καλή δυναµική συµπεριφορά, αν και οι ηλεκτρικοί σερβοκινητήρες εµφανίζουν µεγαλύτερη ευκολία ελέγχου. Η παρατήρηση αυτή σχετίζεται µε την άµεση εξάρτηση της δυναµικής συµπεριφοράς των υδραυλικών σερβοκινητήρων από τη θερµοκρασία στην οποία βρίσκεται το χρησιµοποιούµενο ρευστό. οι ηλεκτρικοί σερβοκινητήρες δίνουν χαµηλές ροπές σε υψηλές ταχύτητες. Επειδή στις συνήθεις ροµποτικές εφαρµογές απαιτούνται υψηλές ροπές σε χαµηλές ταχύτητες είναι αναγκαία η χρήση µειωτήρων. Οι τελευταίοι µεσολαβούν ανάµεσα στον κινητήρα και την άρθρωση δηµιουργώντας ελαστικότητα και χάρη. Απ την άλλη οι υδραυλικοί 2

3 σερβοκινητήρες είναι σε θέση να δηµιουργήσουν µεγάλες ροπές σε µικρές ταχύτητες, µε αποτέλεσµα να µην απαιτείται η ενδιάµεση χρήση µειωτήρων. Όπως προκύπτει από τις παραπάνω παρατηρήσεις η χρήση υδραυλικών σερβοκινητήρων κρίνεται απαραίτητη κυρίως στους βραχίονες που είναι επιφορτισµένοι µε τη διακίνηση µεγάλων ωφέλιµων φορτίων. Στην περίπτωση αυτή οι υδραυλικοί κινητήρες όχι µόνο είναι πιο κατάλληλοι από τους αντίστοιχους ηλεκτρικούς, αλλά επιπλέον το κόστος της υδραυλικής εγκατάστασης αποτελεί ένα σχετικά µικρό ποσοστό της συνολικής επένδυσης του ροµποτικού συστήµατος. Πάντως σε όλες εκείνες τις εφαρµογές που δεν έχουµε µεγάλα ωφέλιµα φορτία, προτιµάται η χρήση ηλεκτρικών σερβοκινητήρων. Οι τελευταίοι µπορεί να θεωρηθεί ότι ανήκουν στο µηχανολογικό υποσύστηµα του ροµπότ, είναι όµως εύλογο να θεωρηθεί ότι αποτελούν ένα ξεχωριστό υποσύστηµα Ηλεκτρονικό Υποσύστηµα Σε ένα ροµποτικό βραχίονα το ηλεκτρονικό υποσύστηµα είναι υπεύθυνο για τη συνολική λειτουργία και την επικοινωνία µε το περιβάλλον και το χρήστη. Το υποσύστηµα αυτό αποτελείται από διάφορες ηλεκτρονικές συνιστώσες, οι οποίες θα µπορούσαν να οµαδοποιηθούν σε τρεις βασικές κατηγορίες. Οι κατηγορίες αυτές φαίνονται στο σχήµα 10.1 και είναι οι ακόλουθες: Αισθητήρες: µαζί µε διάφορες άλλες συνιστώσες χαµηλής ισχύος αποτελούν το υποσύστηµα αίσθησης, το οποίο παρέχει στον κεντρικό ελεγκτή του ροµπότ πληροφορίες για την κατάσταση του ροµπότ και του περιβάλλοντος εργασίας. Ηλεκτρονικά Ισχύος: πρόκειται ουσιαστικά για τους ενισχυτές, σκοπός των οποίων είναι η ενίσχυση ενός κατάλληλου σήµατος ελέγχου και η τροφοδοσία των κινητήρων που θέτουν σε κίνηση τις αρθρώσεις. Ηλεκτρονικά Συστήµατα Μετατροπής Σηµάτων: οι συνιστώσες αυτές έχουν ως σκοπό τη µεταφορά σηµάτων µεταξύ των διαφόρων υποσυστηµάτων του ροµπότ και τη µετατροπή τους σε κατάλληλη µορφή (π.χ. αναλογική, ψηφιακή). Στην κατηγορία αυτή ανήκουν οι αναλογικο-ψηφιακοί µετατροπείς (A/D Converters), οι ψηφιο-αναλογικοί µετατροπείς (D/A Converters) και οι συγκριτές. ΗΛΕΚΤΡΟΝΙΚΟ ΥΠΟΣΥΣΤΗΜΑ ΑΙΣΘΗΤΗΡΕΣ ΚΑΙ ΗΛΕΚΤΡΟΝΙΚΑ ΧΑΜΗΛΗΣ ΙΣΧΥΟΣ ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ (ΕΝΙΣΧΥΤΕΣ) ΜΕΤΑΤΡΟΠΕΙΣ ΣΗΜΑΤΩΝ (A/D Converters, D/A Converters) Σχήµα 10.1 Συνιστώσες του Ηλεκτρονικού Υποσυστήµατος Η αρχή λειτουργίας και η σπουδαιότητα κάθε µίας από τις παραπάνω οµάδες ηλεκτρονικών θα περιγραφούν αναλυτικά παρακάτω Αισθητήρες Για την επίτευξη της επιθυµητής απόδοσης και συµπεριφοράς ενός ροµποτικού συστήµατος απαιτείται η σε τακτά χρονικά διαστήµατα µέτρηση διαφόρων µεγεθών που αναπαριστούν τόσο την εσωτερική κατάσταση του ροµπότ όσο και την αλληλεπίδρασή του µε το 3

4 περιβάλλον εργασίας. Η µέτρηση των µεγεθών αυτών πραγµατοποιείται µε τη βοήθεια ειδικών αισθητήρων που µπορεί να είναι εσωγενείς (proprioceptive sensors) ή εξωγενείς (heteroceptive sensors). Στην πρώτη κατηγορία (proprioceptive) ανήκουν αισθητήρες που µετρούν: τη θέση των αρθρώσεων (απόσταση για πρισµατική ή γωνία για περιστροφική άρθρωση), την ταχύτητα κίνησης των αρθρώσεων, τις δυνάµεις και ροπές που ασκούνται στη µηχανική κατασκευή από το περιβάλλον. Οι σπουδαιότεροι τέτοιοι αισθητήρες είναι αντίστοιχα: τα ποτενσιόµετρα (potentiometers), οι optical encoders (absolute και incremental) και οι resolvers, τα ταχύµετρα (tachometers), οι αισθητήρες δύναµης-ροπής (force-torque sensors). Στη δεύτερη κατηγορία (heteroceptive) ανήκουν οι: αισθητήρες αφής (tactile sensors), αισθητήρες προσέγγισης (proximity sensors), αισθητήρες εύρους (range sensors), υπερηχητικοί αισθητήρες (ultrasonic sensors), υπέρυθροι αισθητήρες (infrared sensors), κάµερες. Στα πλαίσια της παρούσας ανάλυσης θα παρουσιάσουµε την αρχή λειτουργίας των absolute και incremental encoders, οι οποίοι είναι οι πλέον συνήθεις σε ροµποτικές εφαρµογές. Οι αισθητήρες αυτοί δίνουν τη γωνιακή θέση της εκάστοτε άρθρωσης και χρησιµοποιούνται τόσο στην περίπτωση πρισµατικών όσο και την περίπτωση περιστροφικών αρθρώσεων, µιας και οι χρησιµοποιούµενοι κινητήρες είναι συνήθως περιστροφικού τύπου (π.χ. ηλεκτρικοί κινητήρες). Επιπλέον σηµειώνουµε ότι οι µετρήσεις θέσης των encoders µπορούν να αξιοποιηθούν για τον έµµεσο υπολογισµό της ταχύτητας της άρθρωσης Absolute Encoders Ένας absolute encoder αποτελείται από έναν γυάλινο οπτικό δίσκο, ο οποίος φέρει οµόκεντρους κύκλους που ονοµάζονται ίχνη (tracks). Κάθε ίχνος φέρει ένα σύνολο από διαδοχικούς διαφανείς και αδιαφανείς τοµείς (sectors), οι οποίοι έχουν προκύψει µε απόθεση µεταλλικού φιλµ. Σε κάθε ίχνος εκπέµπεται δέσµη φωτός, η οποία κατευθύνεται σε µία φωτοδίοδο ή ένα φωτοτρανζίστορ που βρίσκεται τοποθετηµένο στην πίσω πλευρά του οπτικού δίσκου. Με κατάλληλη διαρρύθµιση των διαφανών και αδιαφανών τοµέων του δίσκου είναι δυνατός ο µετασχηµατισµός ενός πεπερασµένου πλήθους γωνιακών θέσεων σε ψηφιακά δεδοµένα. Ο αριθµός των ιχνών καθορίζει το µήκος της προκύπτουσας ψηφιολέξης και κατά συνέπεια την ανάλυση του encoder. Κατά τη χρήση της κλασικής ψηφιακής κωδικοποίησης και αρίθµησης για τις γωνιακές θέσεις είναι δυνατό να δηµιουργηθεί ένα πρόβληµα, το οποίο σχετίζεται µε την ταυτόχρονη µετάβαση πολλών ιχνών από διαφανείς σε αδιαφανείς τοµείς και αντίστροφα. Στην περίπτωση αυτή είναι πιθανό να υπάρξει ασάφεια στις µετρήσεις µε αποτέλεσµα να πάρουµε λανθασµένα αποτελέσµατα. Για την αποφυγή αυτού του προβλήµατος συχνά γίνεται χρήση του κώδικα Gray µε βάση τον οποίο σε κάθε διακεκριµένη µετάβαση έχουµε µία µόνο αλλαγή στην αντίθεση (contrast) του οπτικού δίσκου. 4
, οι optical encoders (absolute και incremental) και οι resolvers, τα ταχύµετρα (tachometers), οι αισθητήρες")
5 Στα παρακάτω σχήµατα 10.2,3 δίνονται οι σχηµατικές αναπαραστάσεις δύο absolute encoders µε 4 ίχνη, οι οποίοι µπορούν να ορίσουν 2 4 =16 διαφορετικές γωνιακές θέσεις. Από αυτούς ο πρώτος χρησιµοποιεί κλασική ψηφιακή κωδικοποίηση ενώ ο δεύτερος χρησιµοποιεί κωδικοποίηση Gray. Από απλή παρατήρηση των δύο σχηµάτων µπορεί κανείς να διακρίνει τις υφιστάµενες διαφορές και τη φιλοσοφία στην οποία στηρίζεται ο κώδικας Gray. Σχήµα 10.2 Αναπαράσταση ενός 4-bit Absolute Encoder Σχήµα 10.3 Αναπαράσταση ενός 4-bit Absolute Encoder µε κωδικοποίηση Gray Τελειώνοντας κρίνεται σκόπιµο να σηµειώσουµε ότι σύµφωνα µε τις συνήθεις ανάγκες ελέγχου µία τυπική ανάλυση για absolute encoder είναι 12 τουλάχιστον bits (ίχνη). Στην περίπτωση αυτή µπορούν να κωδικοποιηθούν 2 12 =4096 διαφορετικές γωνιακές θέσεις, όµως η πολυπλοκότητα και το κόστος του αισθητήρα αυξάνονται σηµαντικά. Στο σχήµα 31 φαίνεται ένας absolute encoder µε ανάλυση 10 bits. Ο αισθητήρας αυτός είναι σε θέση να κωδικοποιήσει 2 10 =1024 διακεκριµένες γωνίες της άρθρωσης στην οποία και τοποθετείται Incremental Encoders Σχήµα 10.4 Absolute Encoder µε ανάλυση 10-bits Στις περισσότερες ροµποτικές εφαρµογές προτιµάται η χρήση incremental encoders και όχι τόσο η χρήση absolute encoders. Αυτό συµβαίνει διότι από κατασκευαστικής απόψεως οι incremental encoders είναι πιο απλοί και κατά συνέπεια πιο φθηνοί. Όπως οι absolute encoders έτσι και ένας incremental encoder αποτελείται από έναν οπτικό δίσκο µε διαδοχικούς διαφανείς και αδιαφανείς τοµείς (sectors). Στην περίπτωση που εξετάζουµε υπάρχουν µόλις 2 ίχνη (tracks) µε ίσο πλήθος διαφανών και αδιαφανών τοµέων. Μάλιστα η διαδοχή των περιοχών διαφορετικής αντίθεσης (contrast) παρουσιάζει διαφορά 5

6 φάσης 90 στα δύο ίχνη, κάτι που φαίνεται καθαρά και στο σχήµα Είναι φανερό λοιπόν ότι η παρουσία των δύο ιχνών επιτρέπει τον προσδιορισµό όχι µόνο του πλήθους των µεταβάσεων που σχετίζεται µε τη γωνιακή περιστροφή, αλλά ακόµα και του πρόσηµού τους, δηλαδή της φοράς περιστροφής. Για τον ορισµό της απόλυτης γωνιακής θέσης αναφοράς (απόλυτο µηδέν) οι encoders αυτού του τύπου φέρουν συνήθως και ένα τρίτο ίχνος, το οποίο αποτελείται από ένα µόνο αδιαφανή τοµέα. Σε παλαιότερες εφαρµογές για τον ορισµό της γωνίας αναφοράς γινόταν συνδυασµένη χρήση encoder και ποτενσιοµέτρου (potentiometer). Σχήµα 10.5 Αναπαράσταση ενός Incremental Encoder Παρά την απλούστερη κατασκευαστική διαµόρφωση σε σχέση µε τους absolute encoders, η χρήση incremental encoders σε ένα σύστηµα κίνησης και ελέγχου αρθρώσεων απαιτεί την ύπαρξη και λειτουργία ορισµένων συνοδευτικών ηλεκτρονικών κυκλωµάτων. Πιο συγκεκριµένα κάθε encoder διαθέτει τα δικά του ηλεκτρονικά επεξεργασίας σήµατος, τα οποία και παρέχουν απ ευθείας στον κεντρικό ελεγκτή ψηφιακές µετρήσεις γωνιών. Για το σκοπό αυτό χρησιµοποιούνται εκτός των άλλων κατάλληλες ηλεκτρονικές διατάξεις µέτρησης και αποθήκευσης. Επειδή όµως οι πληροφορίες και τα δεδοµένα των µετρήσεων αποθηκεύονται σε µη-στατικές µνήµες είναι πιθανό να σηµειωθεί αλλοίωσή τους εξαιτίας διαταραχών που δρουν στο ηλεκτρονικό κύκλωµα ή ακόµα και διακυµάνσεων στην τάση τροφοδοσίας. Τα µειονεκτήµατα αυτά προφανώς δεν εµφανίζονται στους absolute encoders όπου η πληροφορία κωδικοποιείται απ ευθείας στον οπτικό δίσκο. Με τη χρήση κατάλληλου εξωτερικού κυκλώµατος είναι δυνατός ο υπολογισµός των γωνιακών ταχυτήτων της άρθρωσης από τις µετρήσεις γωνίας. Εάν σε κάθε µετάβαση του encoder από διαφανή σε αδιαφανή τοµέα και αντίστροφα παράγεται ένας παλµός, τότε η ταχύτητα µπορεί να προκύψει µε τους εξής τρεις τρόπους: κάνοντας χρήση ενός µετατροπέα τάσης-προς-συχνότητα (voltage-to-frequency converter) µε αναλογική έξοδο, µετρώντας ψηφιακά τη συχνότητα των παλµών που παράγονται, µετρώντας ψηφιακά το χρονικό διάστηµα που διαρκούν οι παραγόµενοι παλµοί. Ειδικά για τις δύο τελευταίες µεθόδους σηµειώνουµε ότι η πρώτη είναι κατάλληλη για µετρήσεις σε υψηλές ταχύτητες περιστροφής, ενώ η δεύτερη είναι κατάλληλη για µετρήσεις σε χαµηλές ταχύτητες περιστροφής Ενισχυτές Ισχύος Ένας ενισχυτής ισχύος είναι επιφορτισµένος µε τη ρύθµιση της ροής ισχύος που παρέχεται από την κύρια τροφοδοσία του συστήµατος κα πρέπει να διοχετευθεί στους επενεργητέςκινητήρες για την εκτέλεση της επιθυµητής κίνησης των αρθρώσεων. Η ρύθµιση αυτή 6
. Σχήµα 10.")
7 υλοποιείται µε τη βοήθεια κατάλληλου σήµατος ελέγχου. Με λίγα λόγια ο ενισχυτής κρατάει ένα κλάσµα της συνολικής ισχύος που διατίθεται από την πηγή τροφοδοσίας, και είναι ανάλογο του σήµατος ελέγχου, και το διοχετεύει στον κινητήρα που κινεί την άρθρωση. Στις συνήθεις ροµποτικές εφαρµογές για την κίνηση της κάθε άρθρωσης χρησιµοποιείται ξεχωριστός κινητήρας, ο οποίος και διαθέτει τον δικό του ενισχυτή ισχύος. Προφανώς κατά τη λειτουργία του ενισχυτή ένα µέρος της ισχύος εισόδου απορρίπτεται προς το περιβάλλον (π.χ. θερµότητα). Όλα αυτά αναπαρίστανται σχηµατικά στο σχήµα ΙΣΧΥΣ ΕΛΕΓΧΟΥ ΙΣΧΥΣ ΚΥΡΙΑΣ ΤΡΟΦΟ ΟΣΙΑΣ ΕΝΙΣΧΥΤΗΣ ΙΣΧΥΟΣ ΙΣΧΥΣ ΚΙΝΗΤΗΡΑ ΑΠΟΡΡΙΠΤΟΜΕΝΗ ΙΣΧΥΣ Σχήµα 10.6 Ροή Ισχύος σε έναν Ενισχυτή Ισχύος Η λειτουργία που περιγράψαµε πιο πάνω είναι γενική και ισχύει ανεξάρτητα από το είδος των χρησιµοποιούµενων σερβοκινητήρων (ηλεκτρικών, υδραυλικών, πνευµατικών). Σε κάθε περίπτωση πάντως η ισχύς που σχετίζεται µε το σήµα ελέγχου είναι συνήθως ηλεκτρική. Ειδικά για την περίπτωση ελέγχου ηλεκτρικών κινητήρων είναι απαραίτητη η τροφοδοσία τους µε τάση ή ρεύµα κατάλληλης µορφής, ανάλογα µε το είδος του χρησιµοποιούµενου σερβοκινητήρα. Η τάση αυτή (ή το ρεύµα) είναι συνεχής για τους σερβοκινητήρες συνεχούς ρεύµατος µόνιµων µαγνητών και εναλλασσόµενο για τους κινητήρες συνεχούς ρεύµατος χωρίς ψήκτρες. Η τιµή της τάσης για τους κινητήρες της πρώτης κατηγορίας και οι τιµές της τάσης και της συχνότητας για τους κινητήρες της δεύτερης κατηγορίας καθορίζονται από το σήµα ελέγχου του ενισχυτή, έτσι ώστε να είναι δυνατή η επιθυµητή κίνηση της άρθρωσης. Για τα εύρη ισχύος που απαιτούνται στην κίνηση αρθρώσεων, τα οποία είναι τάξης µεγέθους µερικών kw, χρησιµοποιούνται συνήθως ενισχυτές τρανζίστορ (transistor amplifiers) που εφαρµόζουν τεχνικές διαµόρφωσης εύρους παλµού (pulse-width modulation, PWM). Πιο συγκεκριµένα οι ενισχυτές που χρησιµοποιούνται για τον έλεγχο κινητήρων συνεχούς ρεύµατος µόνιµων µαγνητών είναι µετατροπείς συνεχούς ρεύµατος-σε-συνεχές ρεύµα (dc-todc converters choppers), ενώ οι αντίστοιχοι ενισχυτές για τη δεύτερη κατηγορία ηλεκτρικών σερβοκινητήρων είναι µετατροπείς συνεχούς ρεύµατος-σε-εναλλασσόµενο (dcto-ac- converters inverters). Με αυτού του είδους τους ενισχυτές επιτυγχάνονται συντελεστές µετατροπής ισχύος της τάξεως του 0.9, ενώ το κέρδος ενίσχυσης φτάνει µία τάξη µεγέθους Σύστηµα Ελέγχου Σε µία ροµποτική εφαρµογή το σύστηµα ελέγχου αποτελεί την κύρια συνιστώσα του ηλεκτρικού και ηλεκτρονικού υποσυστήµατος και µπορεί να θεωρηθεί η «καρδιά» ή το «µυαλό» του ροµπότ. Είναι το σύστηµα εκείνο που παρακολουθεί, συντονίζει, ελέγχει, παίρνει τις αποφάσεις και δίνει εντολές σε ολόκληρο το υπόλοιπο σύστηµα. Όλες αυτές οι 7
. Όλα αυτά αναπαρίστανται σχηµατικά στο σχήµα 10.6.")
8 λειτουργίες πραγµατοποιούνται από ένα µοναδικό µικροεπεξεργαστή, ο οποίος σε συνεργασία µε ορισµένα άλλα chips και προσαρµοστικά ηλεκτρονικά (π.χ. ηλεκτρονικά σήµατος και ισχύος) αναλύει και εκτελεί το πρόγραµµα του ροµπότ. Περισσότερες λεπτοµέρειες για την υλοποίηση του ελέγχου πρόκειται να δώσουµε στη συνέχεια. Μία από τις βασικότερες λειτουργίες του ελεγκτή ενός ροµπότ είναι η επικοινωνία µε όλα τα επιµέρους υποσυστήµατα του ροµπότ, η συγκέντρωση πληροφοριών για την κατάστασή τους, η ανάλυση των πληροφοριών αυτών και τελικά η λήψη αποφάσεων και η διαβίβαση εντολών. Η λειτουργία αυτή παριστάνεται σχηµατικά στο σχήµα 10.7, στο οποίο δίνεται η βασική αρχιτεκτονική ενός ροµποτικού συστήµατος. Σύστηµ α Ελέγχου Επεξεργασία Σήµ ατος Επεξεργασία Σήµ ατος Ενίσχυση Επενεργητές Αισθητήρες Μετάδοση Κίνησης Μηχανισµ ός Αισθητήρες Μηχανολογικό Υποσύστηµ α Περιβάλλον Ηλεκτρονικό Υποσύστηµ α Σχήµα 10.7 Βασική Αρχιτεκτονική ενός Ροµποτικού Συστήµατος Στο παραπάνω σχήµα έχει τηρηθεί η σύµβαση που έχουµε χρησιµοποιήσει µέχρι τώρα για τα βασικά υποσυστήµατα και τις βασικές συνιστώσες ενός ροµπότ. Ωστόσο είναι φανερό ότι οι επενεργητές, στην περίπτωση που είναι ηλεκτρικοί κινητήρες, θα µπορούσε να θεωρηθεί ότι αποτελούν ένα ξεχωριστό υποσύστηµα (ηλεκτρολογικό υποσύστηµα ή ακόµα και ηλεκτρο- µηχανολογικό υποσύστηµα). Επιπλέον πρέπει να σηµειώσουµε ότι στο σύστηµα ελέγχου ανήκουν διάφορες συνιστώσες του ηλεκτρονικού υποσυστήµατος, οι οποίες θα µπορούσαν να εξεταστούν και µεµονωµένα. Παραδειγµατικά αναφέρουµε τους ενισχυτές ισχύος, ενώ δεν θα πρέπει να ξεχνάµε και τη συνεισφορά που έχουν οι αισθητήρες στην όλη λειτουργία του ελέγχου. Η βασική αρχιτεκτονική σχεδιασµού που δίνεται στο σχήµα 10.7 ακολουθείται σε όλες τις ροµποτικές εφαρµογές, µε διάφορες µικρότερες ή µεγαλύτερες τροποποιήσεις που σχετίζονται µε τη φύση της εκάστοτε εφαρµογής. Για παράδειγµα στην περίπτωση ενός 8

9 τροχοφόρου ροµπότ (Mobile Robot - MR) η αντίστοιχη αρχιτεκτονική θα είναι αυτή που φαίνεται στο σχήµα PC µε πρόγραµµα ελέγχου OFF BOARD Η/Υ Κεντρικός Ελεγκτής ON BOARD ΗΛΕΚΤΡΟΝΙΚΟ ΥΠΟΣΥΣΤΗΜΑ ΕΛΕΓΧΟΥ Έλεγχος Αισθητήρων Έλεγχος Κίνησης Έλεγχος Υπερήχων Οδοµετρία Έλεγχος Κινητήρων Υπέρηχοι Προφυλακτήρες Optical Encoders Κινητήρες ΗΛΕΚΤΡΟΛΟΓΙΚΟ ΥΠΟΣΥΣΤΗΜΑ ΑΙΣΘΗΤΗΡΕΣ ΜΗΧΑΝΟΛΟΓΙΚΟ ΥΠΟΣΥΣΤΗΜΑ Μετάδοση Κίνησης + Σύστηµα ιεύθυνσης Σχήµα 10.8 Αρχιτεκτονική ενός Αυτόνοµου Τροχοφόρου Ροµπότ Παραπάνω σηµειώσαµε ότι µία από τις λειτουργίες του συστήµατος ελέγχου είναι, όπως υποδηλώνει άλλωστε και το όνοµά του, ο έλεγχος. Υπάρχουν δύο βασικά είδη ελέγχου και συνακόλουθα συστηµάτων ελέγχου: ανοικτού βρόχου και κλειστού βρόχου (σχήµατα 10.9 α & β). ΡΟΜΠΟΤΙΚΟΣ ΒΡΑΧΙΟΝΑΣ ΠΑΡΑΓΩΓΗ ΚΙΝΗΣΗΣ ΡΟΜΠΟΤΙΚΟΣ ΒΡΑΧΙΟΝΑΣ ΠΑΡΑΓΩΓΗ ΚΙΝΗΣΗΣ ΕΠΕΝΕΡΓΗΤΕΣ ΑΡΘΡΩΣΕΩΝ ΑΙΣΘΗΤΗΡΕΣ ΘΕΣΗΣ ΑΡΘΡΩΣΕΩΝ ΕΠΕΝΕΡΓΗΤΕΣ ΑΡΘΡΩΣΕΩΝ ΕΛΕΓΚΤΗΣ ΣΗΜΑΤΑ ΕΝΤΟΛΩΝ ΕΛΕΓΚΤΗΣ ΣΗΜΑΤΑ ΕΝΤΟΛΩΝ (α) Σχήµα 10.9 Σύστηµα Ελέγχου: (α) Ανοικτού Βρόχου (β) Κλειστού Βρόχου Σε ένα σύστηµα ανοικτού βρόχου δεν υπάρχουν αισθητήρες και έτσι ο ελεγκτής αγνοεί την κατάσταση στην οποία βρίσκεται ο µηχανισµός. Πιο συγκεκριµένα δεν γνωρίζει αν το ροµπότ κινήθηκε, ως αποτέλεσµα της εντολής που έδωσε, και πόσο. Το γεγονός αυτό προφανώς περιορίζει τις δυνατότητες του συστήµατος. Οι κινητήρες των ροµπότ αυτού του τύπου είναι απλοί και όχι σερβοκινητήρες, η δε κίνησή τους είναι µάλλον απότοµη και πολλές φορές ανακριβής. Ωστόσο στα πλεονεκτήµατά τους θα πρέπει να συµπεριλάβουµε το χαµηλό (β) 9

10 κόστος και την εύκολη συντήρηση. Μία αρκετά συνηθισµένη εφαρµογή είναι η φορτοεκφόρτωση. Από την άλλη πλευρά τα συστήµατα κλειστού βρόχου ενσωµατώνουν ανάδραση θέσης ή/και ταχύτητας, µε τη βοήθεια κατάλληλων αισθητήρων. Στην περίπτωση αυτή ο ελεγκτής συγκρίνει την πραγµατική κατάσταση (π.χ. θέση, ταχύτητα) του ροµπότ, όπως αυτή προκύπτει από την ανάγνωση των αισθητήρων, µε την προγραµµατισθείσα και παράγει ανάλογες διορθωτικές εντολές προκειµένου να µηδενίσει το µεταξύ τους σφάλµα. Οι κινητήρες ενός τέτοιου ροµπότ ενσωµατώνουν τη λειτουργία σέρβο (είναι δηλαδή σερβοκινητήρες), η δε προκύπτουσα κίνηση είναι αρκετά οµαλή και ακριβής. Η έννοια του «σέρβο» είναι άµεσα συνυφασµένη, όπως φαίνεται και από τις παραπάνω παρατηρήσεις, µε τον έλεγχο κλειστού βρόχου. Στην περίπτωση ροµπότ µε σερβοµηχανισµούς κάθε άξονας του ροµπότ ελέγχεται και κινείται από ένα ξεχωριστό σύστηµα σέρβο. Αυτό αυτοµάτως σηµαίνει ότι ο πραγµατοποιούµενος έλεγχος γίνεται σε δύο επίπεδα: Το πρώτο αφορά στον κεντρικό ελεγκτή του όλου συστήµατος (µερικές φορές καταχρηστικά θεωρείται ότι από µόνος του αποτελεί το σύστηµα ελέγχου) και το δεύτερο στους ελεγκτές κίνησης των µεµονωµένων αρθρώσεων και συνακόλουθα κινητήρων. Ο ελεγκτής κίνησης είναι ουσιαστικά ένας µικροεπεξεργαστής που έχει ως αποστολή τον µεµονωµένο έλεγχο της λειτουργίας του αντίστοιχου κινητήρα και της κίνησης της αντίστοιχης άρθρωσης. Ο ελεγκτής αυτός λαµβάνει τις εντολές από το κεντρικό σύστηµα ελέγχου και τις διαβιβάζει στον κινητήρα που κινεί την άρθρωση, αφού προηγουµένως προηγηθεί η µετατροπή του σήµατος ελέγχου από ψηφιακό σε αναλογικό και η ενίσχυσή του στα σωστά επίπεδα τάσης ή ρεύµατος. Στο σηµείο αυτό καταδεικνύεται η χρησιµότητα των ηλεκτρονικών ισχύος (ενισχυτές), αλλά και των προσαρµοστικών ηλεκτρονικών που παρεµβάλλονται µεταξύ του ελεγκτή και του ενισχυτή. Η παρουσία του ψηφιο-αναλογικού µετατροπέα (D/A Converter) είναι απαραίτητη από τη στιγµή που οι µικροεπεξεργαστές λειτουργούν ψηφιακά και ο φυσικός κόσµος (ενισχυτής, κινητήρας, άρθρωση) λειτουργεί αναλογικά. Προφανώς για το κλείσιµο του βρόχου στον έλεγχο είναι αναγκαία η λήψη µετρήσεων θέσης ή/και ταχύτητας των αρθρώσεων, οι οποίες λαµβάνονται συνήθως από incremental encoders. Το κλείσιµο του βρόχου ελέγχου στον ελεγκτή κίνησης πραγµατοποιείται συνήθως µε αρκετά µεγαλύτερη συχνότητα από τη συχνότητα διαβίβασης των εντολών του κεντρικού ελεγκτή. Στο σχήµα δίνεται ένα τυπικό δοµικό διάγραµµα ελεγκτού κίνησης ενός ροµποτικού βραχίονα, ενώ στο σχήµα δίνεται ένα πιο λεπτοµερειακό δοµικό διάγραµµα όπου φαίνεται η αλληλεπίδραση του ελεγκτή κίνησης µε τον κεντρικό ελεγκτή στη συγκεκριµένη περίπτωση έχει γίνει η θεώρηση ότι ο ελεγκτής κίνησης υλοποιεί αλγόριθµο ελέγχου θέσης PID. Εντολή Εισόδου + Σ - Ελεγκτής και Επενεργητές Άρθρωση Βραχίονα (Εγκατάσταση) Θέση (Ταχύτητα) Στοιχεία Ανάδρασης Σχήµα Τυπικό οµικό ιάγραµµα Ελέγχου Άρθρωσης Βραχίονα 10
, η δε προκύπτουσα κίνηση είναι αρκετά οµαλή και ακριβής.")
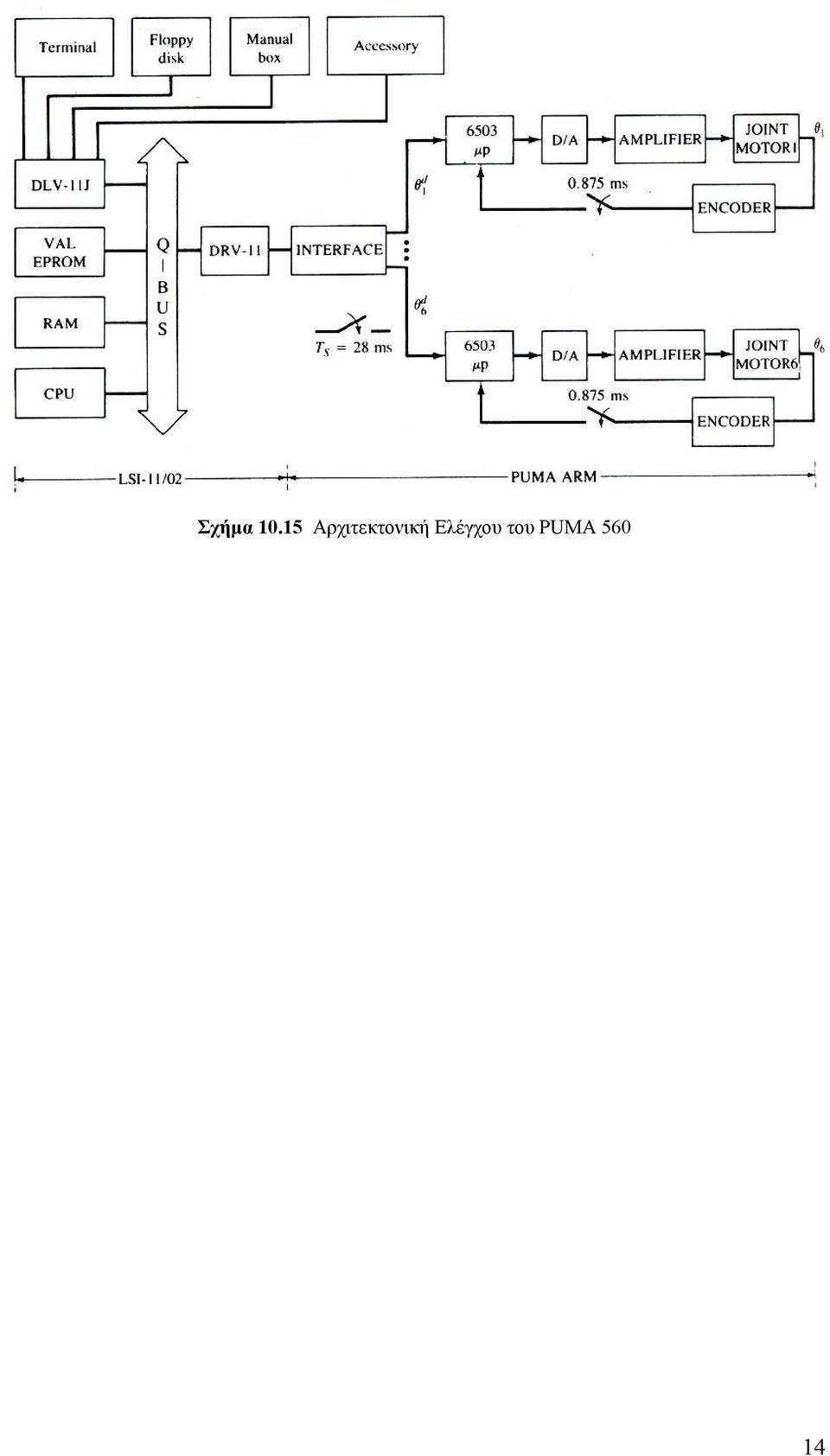
11 Είσοδος / Έξόδος Γένεση Προφίλ Κίνησης Κεντρικό Σύστηµα Ελέγχου Ελεγκτής Κίνησης R E x PID DAC C Αποκωδικοποιητής Κίνησης Ενίσχυση Incremental Εncoder Κινητήρας Σχήµα οµικό ιάγραµµα Ελέγχου µε Έλεγχο Θέσης PID 10.6 Μελέτη Περιπτώσεως: Ο Βραχίονας PUMA 560 Στο σηµείο αυτό θα δούµε πως υλοποιούνται όλα όσα περιγράψαµε παραπάνω στην περίπτωση ενός πραγµατικού ροµπότ, ενός PUMA 560. Ο ροµποτικός βραχίονας PUMA 560 της εταιρείας Unimation Inc. (βλ. σχήµα 1.1) είναι ένας ανθρωποµορφικός βραχίονας µε σφαιρικό καρπό. Κατά συνέπεια διαθέτει 6 περιστροφικές αρθρώσεις, κάθε µία από τις οποίες προσδίδει ένα βαθµό κινητικότητας στην κατασκευή. Κάθε άρθρωση του βραχίονα κινείται από ξεχωριστό σερβοκινητήρα, στην άτρακτο του οποίου βρίσκεται τοποθετηµένος ένας incremental encoder. Ο αισθητήρας αυτός συνεργάζεται µε ένα ποτενσιόµετρο, το οποίο ορίζει την απόλυτη µηδενική γωνία, και παρέχει στο σύστηµα ελέγχου µετρήσεις θέσης. Από τις µετρήσεις αυτές είναι δυνατός ο υπολογισµός και των ταχυτήτων των αρθρώσεων από τον ελεγκτή του βραχίονα. Προφανώς κάθε σερβοκινητήρα συνοδεύουν όλες οι απαραίτητες ηλεκτρονικές συνιστώσες (π.χ. ηλεκτρονικά ισχύος). Τα υποσυστήµατα ενός PUMA 560 µε ελεγκτή Mark II, καθώς και ο τρόπος διασύνδεσης και επικοινωνίας τους, δίνονται στο σχήµα Στο τελευταίο φαίνεται ότι για τον έλεγχο του βραχίονα υπάρχει ένας κεντρικός ελεγκτής (LSI-11), ενώ για τον έλεγχο κίνησης της κάθε άρθρωσης υπάρχει από µία ξεχωριστή κάρτα ελέγχου (Digital Servo Board). Πάνω στις κάρτες αυτές υλοποιείται ο έλεγχος κλειστού βρόχου των αρθρώσεων, ο οποίος είναι PID. Στα σχήµατα 10.13, 14 δίνεται η εσωτερική διαρρύθµιση του ελεγκτή Mark II µέσα από δύο φωτογραφίες (άνοψη-κάτοψη). Στις φωτογραφίες αυτές φαίνονται οι διάφορες ηλεκτρολογικές και ηλεκτρονικές συνιστώσες του συστήµατος ελέγχου, καθώς επίσης και οι πλακέτες που τις υλοποιούν. Ο LSI-11 είναι ο βασικός επεξεργαστής του συστήµατος ελέγχου του βραχίονα και είναι υπεύθυνος για την όλη λειτουργία του PUMA. 11
 είναι ένας ανθρωποµορφικός βραχίονας µε σφαιρικό καρπό.")
12 Σχήµα ιασύνδεση των Υποσυστηµάτων ενός Ελεγκτή Mark II Σχήµα Εσωτερικό του Ελεγκτή του PUMA 560 (Άνοψη) 12

13 Σχήµα Εσωτερικό του Ελεγκτή του PUMA 560 (Κάτοψη) Συγκεκριµένα, ο LSI-11 : Πραγµατοποιεί σε πραγµατικό χρόνο τους αναγκαίους υπολογισµούς για την κίνηση του βραχίονα, επιβλέπει την ανταλλαγή πληροφοριών ανάµεσα στους αισθητήρες του βραχίονα και το σύστηµα ελέγχου, επικοινωνεί µε το χρήστη, και ελέγχει τις διάφορες περιφερειακές συσκευές. Ο κύκλος λειτουργίας (συνολικό διάστηµα δειγµατοληψίας) του LSI-11 είναι τα 28ms. Αντίθετα από τον LSI-11, που επιβλέπει και ελέγχει καθολικά τη λειτουργία του βραχίονα, οι κάρτες ελέγχου των σερβοκινητήρων έχουν ως αποστολή να υλοποιήσουν σε επίπεδο άρθρωσης τις εντολές θέσης που έχει δώσει ο επεξεργαστής. Σε κάθε κάρτα ελέγχου περιέχεται ένας µικροεπεξεργαστής (Rockwell 6503), ο οποίος πραγµατοποιεί τον έλεγχο της κίνησης της αντίστοιχης άρθρωσης σε τοπικό επίπεδο και µε συχνότητα πολύ µεγαλύτερη από τη συχνότητα λειτουργίας του LSI-11. Περίπου 32 φορές κατά τη διάρκεια του κύκλου των 28 ms (δηλαδή κάθε ms) τα σήµατα από τους incremental encoders συγκρίνονται µε τις γωνιακές θέσεις που έχει υπολογίσει ο LSI-11. Στη συνέχεια παράγονται κατάλληλα διορθωτικά σήµατα που διοχετεύονται στους ενισχυτές ισχύος και καταλήγουν στους κινητήρες κινώντας τις αρθρώσεις. Η αρχιτεκτονική του συστήµατος ελέγχου του PUMA 560 δίνεται στο σχήµα όπου εκτός των άλλων φαίνεται και πάλι η αλληλεπίδραση του ελεγκτή του βραχίονα µε τις ποικίλες περιφερειακές συσκευές. 13
 του LSI-11 είναι τα 28ms.")
14 Σχήµα Αρχιτεκτονική Ελέγχου του PUMA
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ. Επενεργητές Αισθητήρες Σύστηµα Ελέγχου
 Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Ροµποτικοί Επενεργητές Σερβοκινητήρες Πνευµατικοί Υδραυλικοί Ηλεκτρικοί
 Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης
 Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης Αντώνιος Γαστεράτος, Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Παραγωγής και Διοίκησης, Δημοκρίτειο Πανεπιστήμιο Θράκης μηχανοτρονική διαδικασία σχεδιασμού
Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης Αντώνιος Γαστεράτος, Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Παραγωγής και Διοίκησης, Δημοκρίτειο Πανεπιστήμιο Θράκης μηχανοτρονική διαδικασία σχεδιασμού
1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης
 www.robolab.tuc.gr 1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας R/C σέρβο βηματικός κινητήρας 2 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας
www.robolab.tuc.gr 1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας R/C σέρβο βηματικός κινητήρας 2 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας
εν υπάρχει συµφωνία ως προς τον ορισµό. 1949 Μηχανή Αριθµητικού Ελέγχου (MIT Servo Lab) Βραχίονες για χειρισµό πυρηνικού υλικού (Master Slave, 1948)
 Βραχίονες για χειρισµό πυρηνικού υλικού (Master Slave, 1948)") Κεφάλαιο 1 Εισαγωγή 1-1 Τι είναι Ροµπότ; εν υπάρχει συµφωνία ως προς τον ορισµό. Σύµφωνα µε το Αµερικανικό Ινστιτούτο Ροµποτικής (Rbt Institute f America, RIA) είναι ένας επαναπρογραµµατιζόµενος βραχίονας
Κεφάλαιο 1 Εισαγωγή 1-1 Τι είναι Ροµπότ; εν υπάρχει συµφωνία ως προς τον ορισµό. Σύµφωνα µε το Αµερικανικό Ινστιτούτο Ροµποτικής (Rbt Institute f America, RIA) είναι ένας επαναπρογραµµατιζόµενος βραχίονας
ΕΡΓΑΣΤΗΡΙΑΚΗ ΕΦΑΡΜΟΓΗ 1 ΤO ΡΟΜΠΟΤ INTELLITEK ER-2u
 Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Κεφάλαιο 1 Εισαγωγή.
 Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
y 1 Output Input y 2 Σχήµα 1.1 Βασική δοµή ενός συστήµατος ελέγχου κλειστού βρόγχου
 Τ.Ε.Ι. ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜHΜΑ ΗΛΕΚΤΡΟΛΟΓIΑΣ Σηµειώσεις για το εργαστήριο του µαθήµατος ΣΥΣΤΗΜΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ I ΓΑΥΡΟΣ ΚΩΝ/ΝΟΣ ΚΟΖΑΝΗ 2008 Κεφάλαιο 1 ο Ορισµός Συστηµάτων
Τ.Ε.Ι. ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜHΜΑ ΗΛΕΚΤΡΟΛΟΓIΑΣ Σηµειώσεις για το εργαστήριο του µαθήµατος ΣΥΣΤΗΜΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ I ΓΑΥΡΟΣ ΚΩΝ/ΝΟΣ ΚΟΖΑΝΗ 2008 Κεφάλαιο 1 ο Ορισµός Συστηµάτων
3.6 Ευθεία και Αντίστροφη υναµική
 3.6 Ευθεία και Αντίστροφη υναµική Στη δυναµική µας απασχολούν δύο ειδών προβλήµατα, το ευθύ δυναµικό πρόβληµα και το αντίστροφο δυναµικό πρόβληµα. Το αντίστροφο πρόβληµα αφορά στον προσδιορισµό των ροπών
3.6 Ευθεία και Αντίστροφη υναµική Στη δυναµική µας απασχολούν δύο ειδών προβλήµατα, το ευθύ δυναµικό πρόβληµα και το αντίστροφο δυναµικό πρόβληµα. Το αντίστροφο πρόβληµα αφορά στον προσδιορισµό των ροπών
Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2. Προγραμματισμός Φυσικών Συστημάτων. Συστήματα Πραγματικών Εφαρμογών. Νέα Ψηφιακά Αντικείμενα
 Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ
 Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
Εισαγωγή στα ψηφιακά Συστήµατα Μετρήσεων
 1 Εισαγωγή στα ψηφιακά Συστήµατα Μετρήσεων 1.1 Ηλεκτρικά και Ηλεκτρονικά Συστήµατα Μετρήσεων Στο παρελθόν χρησιµοποιήθηκαν µέθοδοι µετρήσεων που στηριζόταν στις αρχές της µηχανικής, της οπτικής ή της θερµοδυναµικής.
1 Εισαγωγή στα ψηφιακά Συστήµατα Μετρήσεων 1.1 Ηλεκτρικά και Ηλεκτρονικά Συστήµατα Μετρήσεων Στο παρελθόν χρησιµοποιήθηκαν µέθοδοι µετρήσεων που στηριζόταν στις αρχές της µηχανικής, της οπτικής ή της θερµοδυναµικής.
Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής.
 ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής. Α) Σκοπός: Σκοπός της παρούσας άσκησης είναι να επιδειχθεί ο έλεγχος των στροφών
ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής. Α) Σκοπός: Σκοπός της παρούσας άσκησης είναι να επιδειχθεί ο έλεγχος των στροφών
Συστήµατα DAQ. 6.1 Εισαγωγή
 6 Συστήµατα DAQ 6.1 Εισαγωγή Με τον όρο Acquisition (Απόκτηση) περιγράφουµε τον τρόπο µε τον οποίο µεγέθη όπως η πίεση, η θερµοκρασία, το ρεύµα µετατρέπονται σε ψηφιακά δεδοµένα και απεικονίζονται στην
6 Συστήµατα DAQ 6.1 Εισαγωγή Με τον όρο Acquisition (Απόκτηση) περιγράφουµε τον τρόπο µε τον οποίο µεγέθη όπως η πίεση, η θερµοκρασία, το ρεύµα µετατρέπονται σε ψηφιακά δεδοµένα και απεικονίζονται στην
Κεφάλαιο 5 Διασύνδεση Αναλογικών & Ψηφιακών Συστηµάτων
 Κεφάλαιο 5 Διασύνδεση Αναλογικών & Ψηφιακών Συστηµάτων Αναλογικές & Ψηφιακές Διατάξεις Control Systems Laboratory Τα διάφορα μεγέθη των φυσικών διεργασιών τα μετράμε με αισθητήρες που ουσιαστικά παρέχουν
Κεφάλαιο 5 Διασύνδεση Αναλογικών & Ψηφιακών Συστηµάτων Αναλογικές & Ψηφιακές Διατάξεις Control Systems Laboratory Τα διάφορα μεγέθη των φυσικών διεργασιών τα μετράμε με αισθητήρες που ουσιαστικά παρέχουν
Εισαγωγή στην Ρομποτική
 Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
ΜΕΤΑΤΡΟΠΕΙΣ D/A & A/D
 ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΚΕΦΑΛΑΙΟ 5ο ΜΕΤΑΤΡΟΠΕΙΣ D/A & A/D Μετατροπή αναλογικών σημάτων σε ψηφιακά & αντιστρόφως ADC (Analog to Digital Converter) Μετατρέπει τα αναλογικά σήματα σε ψηφιακά για να μπορούμε να
ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΚΕΦΑΛΑΙΟ 5ο ΜΕΤΑΤΡΟΠΕΙΣ D/A & A/D Μετατροπή αναλογικών σημάτων σε ψηφιακά & αντιστρόφως ADC (Analog to Digital Converter) Μετατρέπει τα αναλογικά σήματα σε ψηφιακά για να μπορούμε να
p& i m p mi i m Με τη ίδια λογική όπως αυτή που αναπτύχθηκε προηγουµένως καταλήγουµε στην έκφραση της κινητικής ενέργειας του ρότορα i,
 Κινητική Ενέργεια Κινητήρων Περνάµε τώρα στη συνεισφορά κινητικής ενέργειας λόγω της κίνησης & ϑ m του κινητήρα που κινεί την άρθρωση µε q& και, προφανώς όπως φαίνεται στο παρακάτω σχήµα, ευρίσκεται στον
Κινητική Ενέργεια Κινητήρων Περνάµε τώρα στη συνεισφορά κινητικής ενέργειας λόγω της κίνησης & ϑ m του κινητήρα που κινεί την άρθρωση µε q& και, προφανώς όπως φαίνεται στο παρακάτω σχήµα, ευρίσκεται στον
Προστασία Σ.Η.Ε. Ενότητα 4: Στατικοί ηλεκτρονόμοι. Νικόλαος Βοβός Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών
 Προστασία Σ.Η.Ε Ενότητα 4: Στατικοί ηλεκτρονόμοι Νικόλαος Βοβός Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών 1 Σημείωμα Αδειοδότησης Το παρόν υλικό διατίθεται με τους όρους
Προστασία Σ.Η.Ε Ενότητα 4: Στατικοί ηλεκτρονόμοι Νικόλαος Βοβός Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών 1 Σημείωμα Αδειοδότησης Το παρόν υλικό διατίθεται με τους όρους
ΑΙΣΘΗΤΗΡΑΣ ΣΧΕΤΙΚΗΣ ΥΓΡΑΣΙΑΣ. Η πιο συνηθισμένη έκφραση για την υγρασία του αέρα είναι η σχετική υγρασία (Relative Ηumidity, RH).
.") ΑΙΣΘΗΤΗΡΑΣ ΣΧΕΤΙΚΗΣ ΥΓΡΑΣΙΑΣ Η πιο συνηθισμένη έκφραση για την υγρασία του αέρα είναι η σχετική υγρασία (Relative Ηumidity, RH). Η σχετική υγρασία είναι ο λόγος επί τοις εκατό (%) της μάζας των υδρατμών
ΑΙΣΘΗΤΗΡΑΣ ΣΧΕΤΙΚΗΣ ΥΓΡΑΣΙΑΣ Η πιο συνηθισμένη έκφραση για την υγρασία του αέρα είναι η σχετική υγρασία (Relative Ηumidity, RH). Η σχετική υγρασία είναι ο λόγος επί τοις εκατό (%) της μάζας των υδρατμών
ΣΥΝΘΕΤΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ. Μετά την ολοκλήρωση της ενότητας αυτής θα μπορείτε:
 Ενότητα 2.6 Κεφάλαιο 2 ΣΥΝΘΕΤΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΤΟΧΟΙ Μετά την ολοκλήρωση της ενότητας αυτής θα μπορείτε: Να αιτιολογείτε την αναγκαιότητα χρησιμοποίησης κάθε είδους αυτοματισμού. Να διακρίνετε
Ενότητα 2.6 Κεφάλαιο 2 ΣΥΝΘΕΤΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΤΟΧΟΙ Μετά την ολοκλήρωση της ενότητας αυτής θα μπορείτε: Να αιτιολογείτε την αναγκαιότητα χρησιμοποίησης κάθε είδους αυτοματισμού. Να διακρίνετε
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
Κεφάλαιο 5 Διασύνδεση Αναλογικών & Ψηφιακών Συστημάτων
 Κεφάλαιο 5 Διασύνδεση Αναλογικών & Ψηφιακών Συστημάτων Αναλογικές & Ψηφιακές Διατάξεις Τα διάφορα μεγέθη των φυσικών διεργασιών τα μετράμε με αισθητήρες που ουσιαστικά παρέχουν ηλεκτρικά σήματα χαμηλής
Κεφάλαιο 5 Διασύνδεση Αναλογικών & Ψηφιακών Συστημάτων Αναλογικές & Ψηφιακές Διατάξεις Τα διάφορα μεγέθη των φυσικών διεργασιών τα μετράμε με αισθητήρες που ουσιαστικά παρέχουν ηλεκτρικά σήματα χαμηλής
ΣΥΣΚΕΥΕΣ ΑΠΟΘΗΚΕΥΣΗΣ (ΜΝΗΜΗ)
") ΣΥΣΚΕΥΕΣ ΑΠΟΘΗΚΕΥΣΗΣ (ΜΝΗΜΗ) Συσκευές αποθήκευσης Ένας υπολογιστής προκειµένου να αποθηκεύσει δεδοµένα χρησιµοποιεί δύο τρόπους αποθήκευσης: Την Κύρια Μνήµη Τις συσκευές µόνιµης αποθήκευσης (δευτερεύουσα
ΣΥΣΚΕΥΕΣ ΑΠΟΘΗΚΕΥΣΗΣ (ΜΝΗΜΗ) Συσκευές αποθήκευσης Ένας υπολογιστής προκειµένου να αποθηκεύσει δεδοµένα χρησιµοποιεί δύο τρόπους αποθήκευσης: Την Κύρια Μνήµη Τις συσκευές µόνιµης αποθήκευσης (δευτερεύουσα
Ψηφιακά Ηλεκτρονικά Γ ΕΠΑΛ ιδάσκων: Γεώργιος Μακεδών, Φυσικός M.Sc. Μάθηµα 47ο. Ερωτήσεις κατανόησης 1. Τι είναι οι µετατροπείς A/D
 Μάθηµα 47ο Θέµα Εισαγωγή Συστήµατα λήψης, επεξεργασίας και διανοµής δεδοµένων. 1. Τι είναι οι µετατροπείς A/D και D/A; Εξηγήστε τη λειτουργία του σχήµατος 11.2.1. 1. Να εξηγήσετε το παράδειγµα αναλογικοψηφιακής
Μάθηµα 47ο Θέµα Εισαγωγή Συστήµατα λήψης, επεξεργασίας και διανοµής δεδοµένων. 1. Τι είναι οι µετατροπείς A/D και D/A; Εξηγήστε τη λειτουργία του σχήµατος 11.2.1. 1. Να εξηγήσετε το παράδειγµα αναλογικοψηφιακής
ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ
 Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
3η Α Σ Κ Η Σ Η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ ΚΛΕΙΣΤΟ ΣΥΣΤΗΜΑ Α. ΤΕΛΕΣΤΙΚΟΣ ΕΝΙΣΧΥΤΗΣ ΩΣ ΣΤΟΙΧΕΙΟ ΣΥΓΚΡΙΣΗΣ
 η Α Σ Κ Η Σ Η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ ΚΛΕΙΣΤΟ ΣΥΣΤΗΜΑ Α. ΤΕΛΕΣΤΙΚΟΣ ΕΝΙΣΧΥΤΗΣ ΩΣ ΣΤΟΙΧΕΙΟ ΣΥΓΚΡΙΣΗΣ ΣΚΟΠΟΣ : Σκοπός της άσκησης είναι η μελέτη του βασικού στοιχείου ενός κλειστού συστήματος του
η Α Σ Κ Η Σ Η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ ΚΛΕΙΣΤΟ ΣΥΣΤΗΜΑ Α. ΤΕΛΕΣΤΙΚΟΣ ΕΝΙΣΧΥΤΗΣ ΩΣ ΣΤΟΙΧΕΙΟ ΣΥΓΚΡΙΣΗΣ ΣΚΟΠΟΣ : Σκοπός της άσκησης είναι η μελέτη του βασικού στοιχείου ενός κλειστού συστήματος του
Ανάκτηση θερμοκρασιακού πεδίου σε περιστρεφόμενο (εν κινήσει)
") Κεφάλαιο 6 Ανάκτηση θερμοκρασιακού πεδίου σε περιστρεφόμενο (εν κινήσει) ρότορα Η σύνδεση του στρεφόμενου τμήματος της μηχανής με την μετρολογική διάταξη (αναλογικά όργανα μέτρησης ή υπολογιστή) παρουσιάζει
Κεφάλαιο 6 Ανάκτηση θερμοκρασιακού πεδίου σε περιστρεφόμενο (εν κινήσει) ρότορα Η σύνδεση του στρεφόμενου τμήματος της μηχανής με την μετρολογική διάταξη (αναλογικά όργανα μέτρησης ή υπολογιστή) παρουσιάζει
Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής
 ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
Αυτά τα πειράµατα έγιναν από τους Michael Faraday και Joseph Henry.
 Επαγόµενα πεδία Ένα µαγνητικό πεδίο µπορεί να µην είναι σταθερό, αλλά χρονικά µεταβαλλόµενο. Πειράµατα που πραγµατοποιήθηκαν το 1831 έδειξαν ότι ένα µεταβαλλόµενο µαγνητικό πεδίο µπορεί να επάγει ΗΕΔ σε
Επαγόµενα πεδία Ένα µαγνητικό πεδίο µπορεί να µην είναι σταθερό, αλλά χρονικά µεταβαλλόµενο. Πειράµατα που πραγµατοποιήθηκαν το 1831 έδειξαν ότι ένα µεταβαλλόµενο µαγνητικό πεδίο µπορεί να επάγει ΗΕΔ σε
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Θέματα Εξετάσεων Ασκήσεις στο Mάθημα: "ΡΟΜΠΟΤΙΚΗ Ι: ΑΝΑΛΥΣΗ, ΕΛΕΓΧΟΣ, ΕΡΓΑΣΤΗΡΙΟ" 1 η Σειρά Θεμάτων Θέμα 1-1 Έστω ρομποτικός
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Θέματα Εξετάσεων Ασκήσεις στο Mάθημα: "ΡΟΜΠΟΤΙΚΗ Ι: ΑΝΑΛΥΣΗ, ΕΛΕΓΧΟΣ, ΕΡΓΑΣΤΗΡΙΟ" 1 η Σειρά Θεμάτων Θέμα 1-1 Έστω ρομποτικός
ΗΜΥ 100 Εισαγωγή στην Τεχνολογία ιάλεξη 18
 ΗΜΥ 100 Εισαγωγή στην Τεχνολογία ιάλεξη 18 14 Νοεµβρίου, 2006 Γεώργιος Έλληνας Επίκουρος Καθηγητής ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΤΑ ΘΕΜΑΤΑ
ΗΜΥ 100 Εισαγωγή στην Τεχνολογία ιάλεξη 18 14 Νοεµβρίου, 2006 Γεώργιος Έλληνας Επίκουρος Καθηγητής ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΤΑ ΘΕΜΑΤΑ
Το υποσύστηµα "αίσθησης" απαιτήσεις και επιδόσεις φυσικά µεγέθη γενική δοµή και συγκρότηση
 Το υποσύστηµα "αίσθησης" απαιτήσεις και επιδόσεις φυσικά µεγέθη γενική δοµή και συγκρότηση Το υποσύστηµα "αίσθησης" είσοδοι της διάταξης αντίληψη του "περιβάλλοντος" τροφοδοσία του µε καθορίζει τις επιδόσεις
Το υποσύστηµα "αίσθησης" απαιτήσεις και επιδόσεις φυσικά µεγέθη γενική δοµή και συγκρότηση Το υποσύστηµα "αίσθησης" είσοδοι της διάταξης αντίληψη του "περιβάλλοντος" τροφοδοσία του µε καθορίζει τις επιδόσεις
«Επικοινωνίες δεδομένων»
 Εργασία στο μάθημα «Διδακτική της Πληροφορικής» με θέμα «Επικοινωνίες δεδομένων» Αθήνα, Φεβρουάριος 2011 Χρονολογική απεικόνιση της εξέλιξης των Τηλεπικοινωνιών Χρονολογική απεικόνιση της εξέλιξης των
Εργασία στο μάθημα «Διδακτική της Πληροφορικής» με θέμα «Επικοινωνίες δεδομένων» Αθήνα, Φεβρουάριος 2011 Χρονολογική απεικόνιση της εξέλιξης των Τηλεπικοινωνιών Χρονολογική απεικόνιση της εξέλιξης των
ΚΕΦΑΛΑΙΟ 7 ΕΠΕΞΕΡΓΑΣΙΑ ΚΑΙ ΜΕΤΑΔΟΣΗ ΨΗΦΙΑΚΩΝ ΔΕΔΟΜΕΝΩΝ
 ΚΕΦΑΛΑΙΟ 7 ΕΠΕΞΕΡΓΑΣΙΑ ΚΑΙ ΜΕΤΑΔΟΣΗ ΨΗΦΙΑΚΩΝ ΔΕΔΟΜΕΝΩΝ 1 ΕΙΣΑΓΩΓΗ Ο πραγματικός κόσμος είναι ένας αναλογικός κόσμος. Όλα τα μεγέθη παίρνουν τιμές με άπειρη ακρίβεια. Π.χ. το ηλεκτρικό σήμα τάσης όπου κάθε
ΚΕΦΑΛΑΙΟ 7 ΕΠΕΞΕΡΓΑΣΙΑ ΚΑΙ ΜΕΤΑΔΟΣΗ ΨΗΦΙΑΚΩΝ ΔΕΔΟΜΕΝΩΝ 1 ΕΙΣΑΓΩΓΗ Ο πραγματικός κόσμος είναι ένας αναλογικός κόσμος. Όλα τα μεγέθη παίρνουν τιμές με άπειρη ακρίβεια. Π.χ. το ηλεκτρικό σήμα τάσης όπου κάθε
ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
Ιατρικά Ηλεκτρονικά. Χρήσιμοι Σύνδεσμοι. ΙΑΤΡΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ - ΔΙΑΛΕΞΗ 2η. Σημειώσεις μαθήματος: E mail:
 Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/courses/tio127/ E mail: pasv@teiath.gr 2 1 Όπως
Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/courses/tio127/ E mail: pasv@teiath.gr 2 1 Όπως
Ηλεκτρική Ενέργεια. Ηλεκτρικό Ρεύμα
 Ηλεκτρική Ενέργεια Σημαντικές ιδιότητες: Μετατροπή από/προς προς άλλες μορφές ενέργειας Μεταφορά σε μεγάλες αποστάσεις με μικρές απώλειες Σημαντικότερες εφαρμογές: Θέρμανση μέσου διάδοσης Μαγνητικό πεδίο
Ηλεκτρική Ενέργεια Σημαντικές ιδιότητες: Μετατροπή από/προς προς άλλες μορφές ενέργειας Μεταφορά σε μεγάλες αποστάσεις με μικρές απώλειες Σημαντικότερες εφαρμογές: Θέρμανση μέσου διάδοσης Μαγνητικό πεδίο
1. Σέρβο (R/C Servo) 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης
 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης") www.robolab.tuc.gr 1. Σέρβο (R/C Servo) 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σέρβο (R/C servo) (1) Το σέρβο είναι συσκευή που αποτελείται
www.robolab.tuc.gr 1. Σέρβο (R/C Servo) 2. Βηματικοί κινητήρες 3. Χαρακτηριστικά κινητήρων ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σέρβο (R/C servo) (1) Το σέρβο είναι συσκευή που αποτελείται
Τα Robot. Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot. Κούρογλου Αλέξανδρος. Μαθητής Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης
 Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Κούρογλου Αλέξανδρος Μαθητής Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
Τα Robot Από τον Τάλω στα σύγχρονα προγραμματιζόμενα Robot Κούρογλου Αλέξανδρος Μαθητής Γ3 Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Επιβλέπων Καθηγητής: Κωνσταντίνος Παρασκευόπουλος Καθηγητής Πληροφορικής
ΠΕΡΙΛΗΨΗ 1. ΕΙΣΑΓΩΓΗ 2. ΚΑΤΑΣΚΕΥΗ
 ΜΕΛΕΤΗ ΕΝΑΛΛΑΚΤΗ ΘΕΡΜΟΤΗΤΑΣ ΕΜΒΑΠΤΙΣΜΕΝΟΥ ΣΕ ΟΧΕΙΟ ΑΠΟΘΗΚΕΥΣΗΣ ΗΛΙΑΚΟΥ ΘΕΡΜΟΣΙΦΩΝΑ. Ν. Χασιώτης, Ι. Γ. Καούρης, Ν. Συρίµπεης. Τµήµα Μηχανολόγων & Αεροναυπηγών Μηχανικών, Πανεπιστήµιο Πατρών 65 (Ρίο) Πάτρα.
ΜΕΛΕΤΗ ΕΝΑΛΛΑΚΤΗ ΘΕΡΜΟΤΗΤΑΣ ΕΜΒΑΠΤΙΣΜΕΝΟΥ ΣΕ ΟΧΕΙΟ ΑΠΟΘΗΚΕΥΣΗΣ ΗΛΙΑΚΟΥ ΘΕΡΜΟΣΙΦΩΝΑ. Ν. Χασιώτης, Ι. Γ. Καούρης, Ν. Συρίµπεης. Τµήµα Μηχανολόγων & Αεροναυπηγών Μηχανικών, Πανεπιστήµιο Πατρών 65 (Ρίο) Πάτρα.
ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499
 ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499 ΟΜΗ ΙΑΚΟΠΤΙΚΩΝ ΜΕΤΑΤΡΟΠΕΩΝ ρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέµατα Επιλογή διακοπτών
ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499 ΟΜΗ ΙΑΚΟΠΤΙΚΩΝ ΜΕΤΑΤΡΟΠΕΩΝ ρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέµατα Επιλογή διακοπτών
Τεχνολογία μνημών Ημιαγωγικές μνήμες Μνήμες που προσπελαύνονται με διευθύνσεις:
 Σύστημα μνήμης Ο κύριος σκοπός στο σχεδιασμό ενός συστήματος μνήμης είναι να προσφέρουμε επαρκή χωρητικότητα αποθήκευσης διατηρώντας ένα αποδεκτό επίπεδο μέσης απόδοσης και επίσης χαμηλό μέσο κόστος ανά
Σύστημα μνήμης Ο κύριος σκοπός στο σχεδιασμό ενός συστήματος μνήμης είναι να προσφέρουμε επαρκή χωρητικότητα αποθήκευσης διατηρώντας ένα αποδεκτό επίπεδο μέσης απόδοσης και επίσης χαμηλό μέσο κόστος ανά
Κεφάλαιο 10 Περιστροφική Κίνηση. Copyright 2009 Pearson Education, Inc.
 Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόµενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσµατικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναµική της Περιστροφικής Κίνησης, Ροπή και
Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόµενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσµατικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναµική της Περιστροφικής Κίνησης, Ροπή και
ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ
 ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ 1 ΕΙΣΑΓΩΓΗ 1.1 Ορισµοί και Ιστορικά Στοιχεία Η Ροµποτική είναι εκείνος ο κλάδος της επιστήµης του µηχανικού που ασχολείται µε τη σύλληψη, το σχεδιασµό, την κατασκευή και
ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ 1 ΕΙΣΑΓΩΓΗ 1.1 Ορισµοί και Ιστορικά Στοιχεία Η Ροµποτική είναι εκείνος ο κλάδος της επιστήµης του µηχανικού που ασχολείται µε τη σύλληψη, το σχεδιασµό, την κατασκευή και
ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΧΕΙΜ17-18 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 2 ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΧΕΙΜ17-18 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 2 ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ
Περιεχόμενο: Δομή υπολογιστή Συστήματα αρίθμησης
 Περιεχόμενο: Δομή υπολογιστή Συστήματα αρίθμησης ΟΜΗ ΤΟΥ ΥΠΟΛΟΓΙΣΤΗ Ένας υπολογιστής αποτελείται από την Κεντρική Μονάδα Επεξεργασίας (ΚΜΕ), τη µνήµη, τις µονάδες εισόδου/εξόδου και το σύστηµα διασύνδεσης
Περιεχόμενο: Δομή υπολογιστή Συστήματα αρίθμησης ΟΜΗ ΤΟΥ ΥΠΟΛΟΓΙΣΤΗ Ένας υπολογιστής αποτελείται από την Κεντρική Μονάδα Επεξεργασίας (ΚΜΕ), τη µνήµη, τις µονάδες εισόδου/εξόδου και το σύστηµα διασύνδεσης
Σεµινάριο Αυτοµάτου Ελέγχου
 ΤΕΙ ΠΕΙΡΑΙΑ Τµήµα Αυτοµατισµού Σεµινάριο Αυτοµάτου Ελέγχου Ειδικά θέµατα Ανάλυσης συστηµάτων Σύνθεσης συστηµάτων ελέγχου Μελέτης στοχαστικών συστηµάτων. Καλλιγερόπουλος Σεµινάριο Αυτοµάτου Ελέγχου Ανάλυση
ΤΕΙ ΠΕΙΡΑΙΑ Τµήµα Αυτοµατισµού Σεµινάριο Αυτοµάτου Ελέγχου Ειδικά θέµατα Ανάλυσης συστηµάτων Σύνθεσης συστηµάτων ελέγχου Μελέτης στοχαστικών συστηµάτων. Καλλιγερόπουλος Σεµινάριο Αυτοµάτου Ελέγχου Ανάλυση
10 - ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ
 10 - ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Ηλεκτρική μηχανή ονομάζεται κάθε διάταξη η οποία μετατρέπει τη μηχανική ενεργεια σε ηλεκτρική ή αντίστροφα ή μετατρεπει τα χαρακτηριστικά του ηλεκτρικού ρεύματος. Οι ηλεκτρικες
10 - ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ Ηλεκτρική μηχανή ονομάζεται κάθε διάταξη η οποία μετατρέπει τη μηχανική ενεργεια σε ηλεκτρική ή αντίστροφα ή μετατρεπει τα χαρακτηριστικά του ηλεκτρικού ρεύματος. Οι ηλεκτρικες
ΙΑΤΑΞΗ ΜΕΤΡΗΣΗΣ ΤΩΝ ΥΝΑΜΕΩΝ ΚΟΠΗΣ ΜΕ ΧΡΗΣΗ ΤΟΥ ΛΟΓΙΣΜΙΚΟΥ LABVIEW
 ΙΑΤΑΞΗ ΜΕΤΡΗΣΗΣ ΤΩΝ ΥΝΑΜΕΩΝ ΚΟΠΗΣ ΜΕ ΧΡΗΣΗ ΤΟΥ ΛΟΓΙΣΜΙΚΟΥ LABVIEW Η έννοια της µέτρησης καθώς και η µέτρηση καθαυτή είναι άρρηκτα συνδεδεµένη µε την επιστηµονική µεθοδολογία. Επίσης ο κάθε άνθρωπος αντιµετωπίζει
ΙΑΤΑΞΗ ΜΕΤΡΗΣΗΣ ΤΩΝ ΥΝΑΜΕΩΝ ΚΟΠΗΣ ΜΕ ΧΡΗΣΗ ΤΟΥ ΛΟΓΙΣΜΙΚΟΥ LABVIEW Η έννοια της µέτρησης καθώς και η µέτρηση καθαυτή είναι άρρηκτα συνδεδεµένη µε την επιστηµονική µεθοδολογία. Επίσης ο κάθε άνθρωπος αντιµετωπίζει
ΗΜΥ 100 Εισαγωγή στην Τεχνολογία
 ΗΜΥ 100 Εισαγωγή στην Τεχνολογία Δρ. Στέλιος Τιμοθέου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΤΑ ΘΕΜΑΤΑ ΜΑΣ ΣΗΜΕΡΑ Αναλογικά και ψηφιακά συστήματα Μετατροπή
ΗΜΥ 100 Εισαγωγή στην Τεχνολογία Δρ. Στέλιος Τιμοθέου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΤΑ ΘΕΜΑΤΑ ΜΑΣ ΣΗΜΕΡΑ Αναλογικά και ψηφιακά συστήματα Μετατροπή
5.1 Θεωρητική εισαγωγή
 ΨΗΦΙΑΚΑ ΚΥΚΛΩΜΑΤΑ - ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 5 ΚΩ ΙΚΟΠΟΙΗΣΗ BCD Σκοπός: Η κατανόηση της µετατροπής ενός τύπου δυαδικής πληροφορίας σε άλλον (κωδικοποίηση/αποκωδικοποίηση) µε τη µελέτη της κωδικοποίησης BCD
ΨΗΦΙΑΚΑ ΚΥΚΛΩΜΑΤΑ - ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 5 ΚΩ ΙΚΟΠΟΙΗΣΗ BCD Σκοπός: Η κατανόηση της µετατροπής ενός τύπου δυαδικής πληροφορίας σε άλλον (κωδικοποίηση/αποκωδικοποίηση) µε τη µελέτη της κωδικοποίησης BCD
Γεφυρώνοντας τις ανάγκες των πελατών
 Γεφυρώνοντας τις ανάγκες των πελατών Οι κινούμενες γέφυρες έχουν πολλές κοινές απαιτήσεις ελέγχου με τις εφαρμογές διαχείρισης υλικών, όπως είναι οι γερανοί και τα βαρούλκα. Έχοντας αυτό ως δεδομένο, το
Γεφυρώνοντας τις ανάγκες των πελατών Οι κινούμενες γέφυρες έχουν πολλές κοινές απαιτήσεις ελέγχου με τις εφαρμογές διαχείρισης υλικών, όπως είναι οι γερανοί και τα βαρούλκα. Έχοντας αυτό ως δεδομένο, το
ΗΛΕΚΤΡΙΚΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Α. ΑΣΚΗΣΕΙΣ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ
 ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ. ΓΕΝΙΚΑ ΗΛΕΚΤΡΙΚΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Α. ΑΣΚΗΣΕΙΣ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ Σε ένα ανοιχτό σύστημα με συνάρτηση μεταφοράς G η έξοδος Υ και είσοδος Χ συνδέονται με τη σχέση: Y=G*Χ
ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ. ΓΕΝΙΚΑ ΗΛΕΚΤΡΙΚΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Α. ΑΣΚΗΣΕΙΣ ΕΛΕΓΧΟΥ ΤΑΧΥΤΗΤΑΣ D.C. ΚΙΝΗΤΗΡΑ Σε ένα ανοιχτό σύστημα με συνάρτηση μεταφοράς G η έξοδος Υ και είσοδος Χ συνδέονται με τη σχέση: Y=G*Χ
Δυναμική Μηχανών I. Μοντελοποίηση Ηλεκτρικών και Υδραυλικών Συστημάτων
 Δυναμική Μηχανών I Μοντελοποίηση Ηλεκτρικών και Υδραυλικών Συστημάτων Χειμερινό Εξάμηνο 2014 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Δημήτριος Τζεράνης, Ph.D. Περιεχόμενα Μοντελοποίηση Ηλεκτρικών Συστημάτων Μεταβλητές
Δυναμική Μηχανών I Μοντελοποίηση Ηλεκτρικών και Υδραυλικών Συστημάτων Χειμερινό Εξάμηνο 2014 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Δημήτριος Τζεράνης, Ph.D. Περιεχόμενα Μοντελοποίηση Ηλεκτρικών Συστημάτων Μεταβλητές
Άσκηση 2: Τελεστικός Ενισχυτής. Αντικείμενο. Απαιτούμενες Θεωρητικές Γνώσεις. 2.1 Συγκριτές
 Εργαστήριο Συστημάτων Αυτομάτου Ελέγχου Άσκηση Τελεστικός Ενισχυτής Άσκηση : Τελεστικός Ενισχυτής Αντικείμενο ) Άθροιση με τελεστικό ενισχυτή ) Έλεγχος κέρδους τελεστικού ενισχυτή Απαιτούμενες Θεωρητικές
Εργαστήριο Συστημάτων Αυτομάτου Ελέγχου Άσκηση Τελεστικός Ενισχυτής Άσκηση : Τελεστικός Ενισχυτής Αντικείμενο ) Άθροιση με τελεστικό ενισχυτή ) Έλεγχος κέρδους τελεστικού ενισχυτή Απαιτούμενες Θεωρητικές
3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
 Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
ηλεκτρικό ρεύµα ampere
 Ηλεκτρικό ρεύµα Το ηλεκτρικό ρεύµα είναι ο ρυθµός µε τον οποίο διέρχεται ηλεκτρικό φορτίο από µια περιοχή του χώρου. Η µονάδα µέτρησης του ηλεκτρικού ρεύµατος στο σύστηµα SI είναι το ampere (A). 1 A =
Ηλεκτρικό ρεύµα Το ηλεκτρικό ρεύµα είναι ο ρυθµός µε τον οποίο διέρχεται ηλεκτρικό φορτίο από µια περιοχή του χώρου. Η µονάδα µέτρησης του ηλεκτρικού ρεύµατος στο σύστηµα SI είναι το ampere (A). 1 A =
3. ΥΝΑΜΙΚΗ ΡΟΜΠΟΤΙΚΩΝ ΒΡΑΧΙΟΝΩΝ
 3. ΥΝΑΜΙΚΗ ΡΟΜΠΟΤΙΚΩΝ ΒΡΑΧΙΟΝΩΝ Η δυναµική ασχολείται µε την εξαγωγή και τη µελέτη του δυναµικού µοντέλου ενός ροµποτικού βραχίονα. Το δυναµικό µοντέλο συνίσταται στις διαφορικές εξισώσεις που περιγράφουν
3. ΥΝΑΜΙΚΗ ΡΟΜΠΟΤΙΚΩΝ ΒΡΑΧΙΟΝΩΝ Η δυναµική ασχολείται µε την εξαγωγή και τη µελέτη του δυναµικού µοντέλου ενός ροµποτικού βραχίονα. Το δυναµικό µοντέλο συνίσταται στις διαφορικές εξισώσεις που περιγράφουν
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ) Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 2002 ÈÅÌÅËÉÏ
 Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 2002 ÈÅÌÅËÉÏ") ΘΕΜΑ 1ο ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ) Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 00 Στις ερωτήσεις 1-4 να γράψετε στο τετράδιό σας τον αριθµό της ερώτησης και δίπλα το γράµµα που αντιστοιχεί
ΘΕΜΑ 1ο ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ) Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 00 Στις ερωτήσεις 1-4 να γράψετε στο τετράδιό σας τον αριθµό της ερώτησης και δίπλα το γράµµα που αντιστοιχεί
ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΧΕΙΜ5-6 ΗΜΕΡΟΜΗΝΙΑ: ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 3 ΕΛΕΓΧΟΣ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΧΕΙΜ5-6 ΗΜΕΡΟΜΗΝΙΑ: ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 3 ΕΛΕΓΧΟΣ
«Επικοινωνίες δεδομένων»
 Εργασία στο μάθημα «Διδακτική της Πληροφορικής» με θέμα «Επικοινωνίες δεδομένων» Αθήνα, Φεβρουάριος 2011 Χρονολογική απεικόνιση της εξέλιξης των Τηλεπικοινωνιών Χρονολογική απεικόνιση της εξέλιξης των
Εργασία στο μάθημα «Διδακτική της Πληροφορικής» με θέμα «Επικοινωνίες δεδομένων» Αθήνα, Φεβρουάριος 2011 Χρονολογική απεικόνιση της εξέλιξης των Τηλεπικοινωνιών Χρονολογική απεικόνιση της εξέλιξης των
5. ΜΟΝΟΦΑΣΙΚΟΙ ΚΑΙ ΑΛΛΟΙ ΚΙΝΗΤΗΡΕΣ
 73 5. ΜΟΝΟΦΑΣΙΚΟΙ ΚΑΙ ΑΛΛΟΙ ΚΙΝΗΤΗΡΕΣ Στην συνέχεια εξετάζονται οι µονοφασικοί επαγωγικοί κινητήρες αλλά και ορισµένοι άλλοι όπως οι τριφασικοί σύγχρονοι κινητήρες που υπάρχουν σε µικρό ποσοστό σε βιοµηχανικές
73 5. ΜΟΝΟΦΑΣΙΚΟΙ ΚΑΙ ΑΛΛΟΙ ΚΙΝΗΤΗΡΕΣ Στην συνέχεια εξετάζονται οι µονοφασικοί επαγωγικοί κινητήρες αλλά και ορισµένοι άλλοι όπως οι τριφασικοί σύγχρονοι κινητήρες που υπάρχουν σε µικρό ποσοστό σε βιοµηχανικές
Γ ΛΥΚΕΙΟΥ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ & ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ
 ε π α ν α λ η π τ ι κ ά θ έ µ α τ α 0 0 5 Γ ΛΥΚΕΙΟΥ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ & ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 1 ΘΕΜΑ 1 o Για τις ερωτήσεις 1 4, να γράψετε στο τετράδιο σας τον αριθµό της ερώτησης και δίπλα το γράµµα που
ε π α ν α λ η π τ ι κ ά θ έ µ α τ α 0 0 5 Γ ΛΥΚΕΙΟΥ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ & ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 1 ΘΕΜΑ 1 o Για τις ερωτήσεις 1 4, να γράψετε στο τετράδιο σας τον αριθµό της ερώτησης και δίπλα το γράµµα που
2 Η ΠΡΟΟΔΟΣ. Ενδεικτικές λύσεις κάποιων προβλημάτων. Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση
 2 Η ΠΡΟΟΔΟΣ Ενδεικτικές λύσεις κάποιων προβλημάτων Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση Ένας τροχός εκκινεί από την ηρεμία και επιταχύνει με γωνιακή ταχύτητα που δίνεται από την,
2 Η ΠΡΟΟΔΟΣ Ενδεικτικές λύσεις κάποιων προβλημάτων Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση Ένας τροχός εκκινεί από την ηρεμία και επιταχύνει με γωνιακή ταχύτητα που δίνεται από την,
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2008 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : ΑΥΤΟΜΑΤΙΣΜΟΙ ΚΑΙ
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2008 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : ΑΥΤΟΜΑΤΙΣΜΟΙ ΚΑΙ
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ) Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 2002
 Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 2002") ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ) Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 00 ΕΚΦΩΝΗΣΕΙΣ ΘΕΜΑ 1ο Στις ερωτήσεις 1-4 να γράψετε στο τετράδιό σας τον αριθµό της ερώτησης και δίπλα το γράµµα
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ) Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 00 ΕΚΦΩΝΗΣΕΙΣ ΘΕΜΑ 1ο Στις ερωτήσεις 1-4 να γράψετε στο τετράδιό σας τον αριθµό της ερώτησης και δίπλα το γράµµα
Τα ηλεκτρονικά σήματα πληροφορίας διακρίνονται ανάλογα με τη μορφή τους σε δύο κατηγορίες : Αναλογικά σήματα Ψηφιακά σήματα
 ΕΝΟΤΗΤΑ 2 2.0 ΗΛΕΚΤΡΙΚΑ ΣΗΜΑΤΑ ΚΑΙ ΑΡΧΕΣ ΕΠΙΚΟΙΝΩΝΙΑΣ ΕΙΣΑΓΩΓΗ Ηλεκτρικό σήμα ονομάζεται η τάση ή το ρεύμα που μεταβάλλεται ως συνάρτηση του χρόνου. Στα ηλεκτρονικά συστήματα επικοινωνίας, οι πληροφορίες
ΕΝΟΤΗΤΑ 2 2.0 ΗΛΕΚΤΡΙΚΑ ΣΗΜΑΤΑ ΚΑΙ ΑΡΧΕΣ ΕΠΙΚΟΙΝΩΝΙΑΣ ΕΙΣΑΓΩΓΗ Ηλεκτρικό σήμα ονομάζεται η τάση ή το ρεύμα που μεταβάλλεται ως συνάρτηση του χρόνου. Στα ηλεκτρονικά συστήματα επικοινωνίας, οι πληροφορίες
Ενισχυτές Μετρήσεων. 3.1 Ο διαφορικός Ενισχυτής
 3 Ενισχυτές Μετρήσεων 3.1 Ο διαφορικός Ενισχυτής Πολλές φορές ένας ενισχυτής σχεδιάζεται ώστε να αποκρίνεται στη διαφορά µεταξύ δύο σηµάτων εισόδου. Ένας τέτοιος ενισχυτής ονοµάζεται ενισχυτής διαφοράς
3 Ενισχυτές Μετρήσεων 3.1 Ο διαφορικός Ενισχυτής Πολλές φορές ένας ενισχυτής σχεδιάζεται ώστε να αποκρίνεται στη διαφορά µεταξύ δύο σηµάτων εισόδου. Ένας τέτοιος ενισχυτής ονοµάζεται ενισχυτής διαφοράς
Στην περίπτωση που έχουμε δυο εισόδους (V 1 και V 2 ) στην είσοδο του τελεστικού ενισχυτή, όπως το παρακάτω σχήμα :
 στην είσοδο του τελεστικού ενισχυτή, όπως το παρακάτω σχήμα :") ΑΣΚΗΣΗ η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ ΣΕΡΒΟΚΙΝΗΤΗΡΑ DC ΜΕ ΜΟΝΙΜΟ ΜΑΓΝΗΤΗ ΕΠΙΔΡΑΣΗ ΤΟΥ ΚΕΡΔΟΥΣ ΣΤΟΝ ΕΛΕΓΧΟ ΤΑΧΥΤΗΤΑΣ Α. ΕΝΑΛΛΑΚΤΙΚΗ ΥΛΟΠΟΙΗΣΗ ΤΕΛΕΣΤΙΚΟΥ ΕΝΙΣΧΥΤΗ Σε προηγούμενη άσκηση εξετάσαμε την λειτουργία του
ΑΣΚΗΣΗ η ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ ΣΕΡΒΟΚΙΝΗΤΗΡΑ DC ΜΕ ΜΟΝΙΜΟ ΜΑΓΝΗΤΗ ΕΠΙΔΡΑΣΗ ΤΟΥ ΚΕΡΔΟΥΣ ΣΤΟΝ ΕΛΕΓΧΟ ΤΑΧΥΤΗΤΑΣ Α. ΕΝΑΛΛΑΚΤΙΚΗ ΥΛΟΠΟΙΗΣΗ ΤΕΛΕΣΤΙΚΟΥ ΕΝΙΣΧΥΤΗ Σε προηγούμενη άσκηση εξετάσαμε την λειτουργία του
υναµ α ι µ κή τ ων Ρ οµ ο π µ ο π τ ο ικών Βραχιόνων
 υναµική των Ροµποτικών Βραχιόνων Ροµποτική Αρχιτεκτονική: η υναµική u Ροµποτική υναµική q, q& Ροµποτική Κινηµατική Περιβάλλον Θέση, Προσανατολισµός & και αλληλε ίδραση Η δυναµική ασχολείται µε την εξαγωγή
υναµική των Ροµποτικών Βραχιόνων Ροµποτική Αρχιτεκτονική: η υναµική u Ροµποτική υναµική q, q& Ροµποτική Κινηµατική Περιβάλλον Θέση, Προσανατολισµός & και αλληλε ίδραση Η δυναµική ασχολείται µε την εξαγωγή
3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
 Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Ονοµατεπώνυµο: Αριθµός Μητρώου: Εξάµηνο: Υπογραφή Εργαστήριο Ηλεκτροµηχανικών Συστηµάτων Μετατροπής Ενέργειας 3η Εργαστηριακή Άσκηση: Εύρεση χαρακτηριστικής και συντελεστή απόδοσης κινητήρα συνεχούς ρεύµατος
Κινητήρες μιας νέας εποχής
 Κινητήρες μιας νέας εποχής H ABB παρουσιάζει μια νέα γενιά κινητήρων υψηλής απόδοσης βασισμένη στην τεχνολογία σύγχρονης μαγνητικής αντίστασης. Η ΑΒΒ στρέφεται στην τεχνολογία κινητήρων σύγχρονης μαγνητικής
Κινητήρες μιας νέας εποχής H ABB παρουσιάζει μια νέα γενιά κινητήρων υψηλής απόδοσης βασισμένη στην τεχνολογία σύγχρονης μαγνητικής αντίστασης. Η ΑΒΒ στρέφεται στην τεχνολογία κινητήρων σύγχρονης μαγνητικής
ΟΜΟΣΠΟΝ ΙΑ ΕΚΠΑΙ ΕΥΤΙΚΩΝ ΦΡΟΝΤΙΣΤΩΝ ΕΛΛΑ ΟΣ (Ο.Ε.Φ.Ε.) ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 2012. Ηµεροµηνία: Τετάρτη 18 Απριλίου 2012 ΕΚΦΩΝΗΣΕΙΣ
 ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 2012. Ηµεροµηνία: Τετάρτη 18 Απριλίου 2012 ΕΚΦΩΝΗΣΕΙΣ") ΤΑΞΗ: ΚΑΤΕΥΘΥΝΣΗ: ΜΑΘΗΜΑ: ΘΕΜΑ Α Γ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΘΕΤΙΚΗ & ΤΕΧΝΟΛΟΓΙΚΗ ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Ηµεροµηνία: Τετάρτη 18 Απριλίου 2012 ΕΚΦΩΝΗΣΕΙΣ Στις ερωτήσεις 1 έως 4 να γράψετε στο τετράδιο σας τον αριθµό
ΤΑΞΗ: ΚΑΤΕΥΘΥΝΣΗ: ΜΑΘΗΜΑ: ΘΕΜΑ Α Γ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΘΕΤΙΚΗ & ΤΕΧΝΟΛΟΓΙΚΗ ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Ηµεροµηνία: Τετάρτη 18 Απριλίου 2012 ΕΚΦΩΝΗΣΕΙΣ Στις ερωτήσεις 1 έως 4 να γράψετε στο τετράδιο σας τον αριθµό
Εργαστήριο Συστημάτων Αυτομάτου Ελέγχου Άσκηση 1 Το Σερβοσύστημα MS150 1
 Εργαστήριο Συστημάτων Αυτομάτου Ελέγχου Άσκηση 1 Το Σερβοσύστημα MS150 1 Άσκηση 1: Το Σερβοσύστημα MS150 1) Εξοικείωση με τη διασύνδεση των βαθμίδων του DC σερβοσυστήματος MS150 2) Μέτρηση της σταθεράς
Εργαστήριο Συστημάτων Αυτομάτου Ελέγχου Άσκηση 1 Το Σερβοσύστημα MS150 1 Άσκηση 1: Το Σερβοσύστημα MS150 1) Εξοικείωση με τη διασύνδεση των βαθμίδων του DC σερβοσυστήματος MS150 2) Μέτρηση της σταθεράς
Εξεταστέα Ύλη. Λύκειο Αγίου Γεωργίου Λάρνακας Τεχνολογία Γ' Λυκείου. Σχολική χρονιά:
 Λύκειο Αγίου Γεωργίου Λάρνακας Τεχνολογία Γ' Λυκείου Σχολική χρονιά: 2014-2015 Εξεταστέα Ύλη Εργονομία Ορισμός εργονομίας Προσαρμοστικότητα (σελ. 3) και συνέπειες μη προσαρμογής Τομείς που λαμβάνει υπόψη
Λύκειο Αγίου Γεωργίου Λάρνακας Τεχνολογία Γ' Λυκείου Σχολική χρονιά: 2014-2015 Εξεταστέα Ύλη Εργονομία Ορισμός εργονομίας Προσαρμοστικότητα (σελ. 3) και συνέπειες μη προσαρμογής Τομείς που λαμβάνει υπόψη
ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - ΣΥΝΟΨΗ
 ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - Π. ΑΣΒΕΣΤΑΣ E MAIL: pasv@uniwa.gr Εφαρμογές ρομποτικής στην Ιατρική Κλασσική χειρουργική Ορθοπεδικές επεμβάσεις Νευροχειρουργική Ακτινοθεραπεία Αποκατάσταση φυσιοθεραπεία 2 Βασικοί
ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - Π. ΑΣΒΕΣΤΑΣ E MAIL: pasv@uniwa.gr Εφαρμογές ρομποτικής στην Ιατρική Κλασσική χειρουργική Ορθοπεδικές επεμβάσεις Νευροχειρουργική Ακτινοθεραπεία Αποκατάσταση φυσιοθεραπεία 2 Βασικοί
Συλλογή μεταφορά και έλεγχος Δεδομένων. 1.4 Απλά και σύνθετα συστήματα αυτοματισμού.
 Συλλογή μεταφορά και έλεγχος Δεδομένων 1.4 Απλά και σύνθετα συστήματα αυτοματισμού. Το είδαμε μέχρι τώρα Δομή συστήματος αυτοματισμού Ο ελεγκτής προϋποθέτει την ύπαρξη κάποιων στοιχείων, στα οποία θα επιδράσει
Συλλογή μεταφορά και έλεγχος Δεδομένων 1.4 Απλά και σύνθετα συστήματα αυτοματισμού. Το είδαμε μέχρι τώρα Δομή συστήματος αυτοματισμού Ο ελεγκτής προϋποθέτει την ύπαρξη κάποιων στοιχείων, στα οποία θα επιδράσει
Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης TMHMA MHXANOΛOΓIAΣ. Δρ. Φασουλάς Γιάννης
 Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης TMHMA MHXANOΛOΓIAΣ Δρ. Φασουλάς Γιάννης jfasoulas@staff.teicrete.gr Θα μάθετε: Έννοιες που σχετίζονται με την μετατροπή μεταξύ αναλογικών και ψηφιακών σημάτων Πώς
Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης TMHMA MHXANOΛOΓIAΣ Δρ. Φασουλάς Γιάννης jfasoulas@staff.teicrete.gr Θα μάθετε: Έννοιες που σχετίζονται με την μετατροπή μεταξύ αναλογικών και ψηφιακών σημάτων Πώς
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ & ΕΠΑ.Λ. Β 22 ΜΑΪΟΥ 2013 ΕΚΦΩΝΗΣΕΙΣ ÓÕÃ ÑÏÍÏ
 Θέµα Α ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ & ΕΠΑ.Λ. Β ΜΑΪΟΥ 03 ΕΚΦΩΝΗΣΕΙΣ Στις ερωτήσεις Α-Α να γράψετε στο τετράδιό σας τον αριθµό της ερώτησης και δίπλα το γράµµα που αντιστοιχεί στη φράση, η οποία συµπληρώνει
Θέµα Α ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ & ΕΠΑ.Λ. Β ΜΑΪΟΥ 03 ΕΚΦΩΝΗΣΕΙΣ Στις ερωτήσεις Α-Α να γράψετε στο τετράδιό σας τον αριθµό της ερώτησης και δίπλα το γράµµα που αντιστοιχεί στη φράση, η οποία συµπληρώνει
ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ ΠΑΝΕΛΛΗΝΙΕΣ ΘΕΜΑΤΑ
 ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ ΠΑΝΕΛΛΗΝΙΕΣ 2002 ΘΕΜΑΤΑ ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΑΠΟΛΥΤΗΡΙΕΣ ΕΞΕΤΑΣΕΙΣ Σ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ ΠΕΜΠΤΗ 6 ΙΟΥΝΙΟΥ 2002 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ): ΦΥΣΙΚΗ
ΦΥΣΙΚΗ Γ ΛΥΚΕΙΟΥ ΠΑΝΕΛΛΗΝΙΕΣ 2002 ΘΕΜΑΤΑ ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΑΠΟΛΥΤΗΡΙΕΣ ΕΞΕΤΑΣΕΙΣ Σ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ ΠΕΜΠΤΗ 6 ΙΟΥΝΙΟΥ 2002 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ): ΦΥΣΙΚΗ
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ
 ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΘΕΜΑ ο Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις -4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση.. Τα δύο
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΘΕΜΑ ο Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις -4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση.. Τα δύο
ΑΡΧΗ 2ΗΣ ΣΕΛΙ ΑΣ ΤΑΞΗ
 ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΑΠΟΛΥΤΗΡΙΕΣ ΕΞΕΤΑΣΕΙΣ Σ ΕΣΠΕΡΙΝΟΥ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ ΕΥΤΕΡΑ 5 ΙΟΥΛΙΟΥ 2004 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΣΥΝΟΛΟ ΣΕΛΙ ΩΝ: ΕΞΙ (6) ΘΕΜΑ 1ο Στις
ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΑΠΟΛΥΤΗΡΙΕΣ ΕΞΕΤΑΣΕΙΣ Σ ΕΣΠΕΡΙΝΟΥ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ ΕΥΤΕΡΑ 5 ΙΟΥΛΙΟΥ 2004 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΣΥΝΟΛΟ ΣΕΛΙ ΩΝ: ΕΞΙ (6) ΘΕΜΑ 1ο Στις
Συντελεστής ισχύος C p σαν συνάρτηση της ποσοστιαίας μείωσης της ταχύτητας του ανέμου (v 0 -v 1 )/v 0
/v 0") Συντελεστής ισχύος C p σαν συνάρτηση της ποσοστιαίας μείωσης της ταχύτητας του ανέμου (v 0 -v 1 )/v 0 19 ΠΑΡΑΓΩΓΗ ΕΝΕΡΓΕΙΑΣ ΑΠΟ ΑΝΕΜΟΓΕΝΝΗΤΡΙΕΣ Ταχύτητα έναρξης λειτουργίας: Παραγόμενη ισχύς = 0 Ταχύτητα
Συντελεστής ισχύος C p σαν συνάρτηση της ποσοστιαίας μείωσης της ταχύτητας του ανέμου (v 0 -v 1 )/v 0 19 ΠΑΡΑΓΩΓΗ ΕΝΕΡΓΕΙΑΣ ΑΠΟ ΑΝΕΜΟΓΕΝΝΗΤΡΙΕΣ Ταχύτητα έναρξης λειτουργίας: Παραγόμενη ισχύς = 0 Ταχύτητα
Ιατρικά Ηλεκτρονικά. Δρ. Π. Ασβεστάς Εργαστήριο Επεξεργασίας Ιατρικού Σήματος & Εικόνας Τμήμα Τεχνολογίας Ιατρικών Οργάνων
 Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Εργαστήριο Επεξεργασίας Ιατρικού Σήματος & Εικόνας Τμήμα Τεχνολογίας Ιατρικών Οργάνων Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/courses/tio127/
Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Εργαστήριο Επεξεργασίας Ιατρικού Σήματος & Εικόνας Τμήμα Τεχνολογίας Ιατρικών Οργάνων Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/courses/tio127/
Ιατρικά Ηλεκτρονικά. Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε
 Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/courses/tio127/ https://eclass.teiath.gr/courses/tio101/
Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/courses/tio127/ https://eclass.teiath.gr/courses/tio101/
ΔΙΔΑΣΚΩΝ: Λ. ΜΠΙΣΔΟΥΝΗΣ ΛΥΣΕΙΣ ΕΞΕΤΑΣΗΣ ΣΤΟ ΜΑΘΗΜΑ «ΤΕΧΝΟΛΟΓΙΑ ΜΕΤΡΗΣΕΩΝ» ΗΜΕΡΟΜΗΝΙΑ: 28/01/2015
 ΛΥΣΕΙΣ ΕΞΕΤΑΣΗΣ ΣΤΟ ΜΑΘΗΜΑ «ΤΕΧΝΟΛΟΓΙΑ ΜΕΤΡΗΣΕΩΝ» ΗΜΕΡΟΜΗΝΙΑ: 8//5 ΘΕΜΑ ο (.5 μονάδες) Η έξοδος του αισθητήρα του παρακάτω σχήματος είναι γραμμικό σήμα τάσης, το οποίο εφαρμόζεται για χρονικό διάστημα
ΛΥΣΕΙΣ ΕΞΕΤΑΣΗΣ ΣΤΟ ΜΑΘΗΜΑ «ΤΕΧΝΟΛΟΓΙΑ ΜΕΤΡΗΣΕΩΝ» ΗΜΕΡΟΜΗΝΙΑ: 8//5 ΘΕΜΑ ο (.5 μονάδες) Η έξοδος του αισθητήρα του παρακάτω σχήματος είναι γραμμικό σήμα τάσης, το οποίο εφαρμόζεται για χρονικό διάστημα
ΣΕΡΒΟΜΗΧΑΝΙΣΜΟΙ RC. Καταπόδης Στέφανος
 ΣΕΡΒΟΜΗΧΑΝΙΣΜΟΙ RC Καταπόδης Στέφανος 14-1-2014 1.Γενικά για τους Σερβομηχανισμούς Είναι αυτόματες συσκευές που χρησιμοποιούνται για να: - ελέγχουν αν η λειτουργία ενός μηχανισμού γίνεται σωστά - διατηρούν
ΣΕΡΒΟΜΗΧΑΝΙΣΜΟΙ RC Καταπόδης Στέφανος 14-1-2014 1.Γενικά για τους Σερβομηχανισμούς Είναι αυτόματες συσκευές που χρησιμοποιούνται για να: - ελέγχουν αν η λειτουργία ενός μηχανισμού γίνεται σωστά - διατηρούν
3 Διακριτοποίηση Συστημάτων Συνεχούς Χρόνου... 65
 ΠΕΡΙΕΧΟΜΕΝΑ \ Πρόλογος 15 1 Εισαγωγικά Στοιχεία Βιομηχανικού Ελέγχου 19 1.1 Μοντέλα Περιγραφής Βιομηχανικών Συστημάτων... 19 1.2 Βιομηχανικοί Ελεγκτές 23 1.2.1 Σύστημα 23 1.2.2 Σύνδεση Συστημάτων 26 1.2.3
ΠΕΡΙΕΧΟΜΕΝΑ \ Πρόλογος 15 1 Εισαγωγικά Στοιχεία Βιομηχανικού Ελέγχου 19 1.1 Μοντέλα Περιγραφής Βιομηχανικών Συστημάτων... 19 1.2 Βιομηχανικοί Ελεγκτές 23 1.2.1 Σύστημα 23 1.2.2 Σύνδεση Συστημάτων 26 1.2.3
ΔΠΜΣ «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» «ΕΡΓΑΣΤΗΡΙΟ ΡΟΜΠΟΤΙΚΗΣ» Άσκηση 2. Έλεγχος Pendubot
 Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Ηλεκτρ. Μηχ/κών και Μηχ/κών Υπολογιστών Τομέας Σημάτων, Ελέγχου και Ρομποτικής ΔΠΜΣ «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» «ΕΡΓΑΣΤΗΡΙΟ ΡΟΜΠΟΤΙΚΗΣ» Άσκηση 2. Έλεγχος Pendubot Υπεύθυνος
Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Ηλεκτρ. Μηχ/κών και Μηχ/κών Υπολογιστών Τομέας Σημάτων, Ελέγχου και Ρομποτικής ΔΠΜΣ «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» «ΕΡΓΑΣΤΗΡΙΟ ΡΟΜΠΟΤΙΚΗΣ» Άσκηση 2. Έλεγχος Pendubot Υπεύθυνος
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2014
 ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2014 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2014 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
Τµήµα Βιοµηχανικής Πληροφορικής Σηµειώσεις Ηλεκτρονικών Ισχύος Παράρτηµα
 ΠΑΡΑΡΤΗΜΑ Ηµιτονοειδές Ρεύµα και Τάση Τριφασικά Εναλλασσόµενα ρεύµατα Ισχύς και Ενέργεια Ενεργός τιµή περιοδικών µη ηµιτονικών κυµατοµορφών 1. Ηµιτονοειδές Ρεύµα και Τάση Οταν οι νόµοι του Kirchoff εφαρµόζονται
ΠΑΡΑΡΤΗΜΑ Ηµιτονοειδές Ρεύµα και Τάση Τριφασικά Εναλλασσόµενα ρεύµατα Ισχύς και Ενέργεια Ενεργός τιµή περιοδικών µη ηµιτονικών κυµατοµορφών 1. Ηµιτονοειδές Ρεύµα και Τάση Οταν οι νόµοι του Kirchoff εφαρµόζονται
website:
 Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση και Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 29 Μαρτίου 2017 1 Συναρτήσεις μεταφοράς σε
Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση και Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 29 Μαρτίου 2017 1 Συναρτήσεις μεταφοράς σε
Θέµα 1 ο Nα γράψετε στο τετράδιο σας τον αριθµό καθεµιάς από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράµµα που αντιστοιχεί στη σωστή απάντηση.
 50 Χρόνια ΦΡΟΝΤΙΣΤΗΡΙΑ ΜΕΣΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΣΑΒΒΑΪ Η-ΜΑΝΩΛΑΡΑΚΗ ΠΑΓΚΡΑΤΙ : Φιλολάου & Εκφαντίδου 26 : Τηλ.: 210760170 ΙΑΓΩΝΙΣΜΑ : ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ 2010 Θέµα 1 ο Nα γράψετε στο τετράδιο σας τον
50 Χρόνια ΦΡΟΝΤΙΣΤΗΡΙΑ ΜΕΣΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΣΑΒΒΑΪ Η-ΜΑΝΩΛΑΡΑΚΗ ΠΑΓΚΡΑΤΙ : Φιλολάου & Εκφαντίδου 26 : Τηλ.: 210760170 ΙΑΓΩΝΙΣΜΑ : ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ 2010 Θέµα 1 ο Nα γράψετε στο τετράδιο σας τον
Προηγμένος έλεγχος ηλεκτρικών μηχανών
 Προηγμένος έλεγχος ηλεκτρικών μηχανών Ενότητα 8: Άμεσος Διανυσματικός Έλεγχος Ασύγχρονων Μηχανών με προσανατολισμό στην μαγνητική ροή του στάτη Επαμεινώνδας Μητρονίκας - Αντώνιος Αλεξανδρίδης Πολυτεχνική
Προηγμένος έλεγχος ηλεκτρικών μηχανών Ενότητα 8: Άμεσος Διανυσματικός Έλεγχος Ασύγχρονων Μηχανών με προσανατολισμό στην μαγνητική ροή του στάτη Επαμεινώνδας Μητρονίκας - Αντώνιος Αλεξανδρίδης Πολυτεχνική
Εισαγωγή στους Ηλεκτρονικούς Υπολογιστές
 στους Ηλεκτρονικούς Υπολογιστές http://courseware.mech.ntua.gr/ml23021/ 6 ο Μάθημα Λεωνίδας Αλεξόπουλος Λέκτορας ΕΜΠ E-mail: leo@mail.ntua.gr URL: http://users.ntua.gr/leo 1 Στα προηγούμενα μaθήματα Συστήματα
στους Ηλεκτρονικούς Υπολογιστές http://courseware.mech.ntua.gr/ml23021/ 6 ο Μάθημα Λεωνίδας Αλεξόπουλος Λέκτορας ΕΜΠ E-mail: leo@mail.ntua.gr URL: http://users.ntua.gr/leo 1 Στα προηγούμενα μaθήματα Συστήματα
ΟΜΟΣΠΟΝ ΙΑ ΕΚΠΑΙ ΕΥΤΙΚΩΝ ΦΡΟΝΤΙΣΤΩΝ ΕΛΛΑ ΟΣ (Ο.Ε.Φ.Ε.) ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 2012
 ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 2012") ΤΑΞΗ: Β ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ / ΘΕΤΙΚΗΣ & ΤΕΧΝΟΛΟΓΙΚΗΣ ΘΕΜΑ Α Ηµεροµηνία: Κυριακή Απριλίου 01 ΕΚΦΩΝΗΣΕΙΣ Στις ερωτήσεις από 1-4 να γράψετε στο τετράδιο σας τον αριθµό της ερώτησης και το γράµµα
ΤΑΞΗ: Β ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ / ΘΕΤΙΚΗΣ & ΤΕΧΝΟΛΟΓΙΚΗΣ ΘΕΜΑ Α Ηµεροµηνία: Κυριακή Απριλίου 01 ΕΚΦΩΝΗΣΕΙΣ Στις ερωτήσεις από 1-4 να γράψετε στο τετράδιο σας τον αριθµό της ερώτησης και το γράµµα
PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών
 Διαμόρφωση εύρους παλμών") PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη
PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη
Ψηφιακός Έλεγχος. 12 η διάλεξη Ψηφιακός έλεγχος τεχνητού χεριού. Ψηφιακός Έλεγχος 1
 Ψηφιακός Έλεγχος 1 η διάλεξη Ψηφιακός έλεγχος τεχνητού χεριού Ψηφιακός Έλεγχος 1 Θέλουμε να κάνουμε έλεγχο τεχντητού χεριού που πιάνει και μεταφέρει εύθραστα γυάλινα δοχεία διαφόρων μεγεθών. Ο στόχος είναι
Ψηφιακός Έλεγχος 1 η διάλεξη Ψηφιακός έλεγχος τεχνητού χεριού Ψηφιακός Έλεγχος 1 Θέλουμε να κάνουμε έλεγχο τεχντητού χεριού που πιάνει και μεταφέρει εύθραστα γυάλινα δοχεία διαφόρων μεγεθών. Ο στόχος είναι