Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής
|
|
|
- Ἰεζάβελ Κρεστενίτης
- 10 χρόνια πριν
- Προβολές:
Transcript

1 ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία ή εξειδικευμένες συσκευές με κατάλληλες μεταβλητά προγραμματιζόμενες κινήσεις που στοχεύουν στη βελτίωση της απόδοσης μιας σειράς εργασιών.

2 Ένα ρομπότ διαθέτει: αισθητήρες για την απόκτηση πληροφορίας από το εξωτερικό περιβάλλον ή σε σχέση με την εσωτερική κατάσταση δυνατότητες επεξεργασίας, αντίληψη, συλλογισμός, λήψη αποφάσεων, σχεδιασμός δράσης ενεργοποιητές (actuators), για την εκτέλεση κάποιας εργασίας στο περιβάλλον
, για την εκτέλεση κάποιας εργασίας στο")
3 ΠΛΕΟΝΕΚΤΗΜΑΤΑ Ακρίβεια Επαναληψιμότητα Η απόδοση των ρομπότ είναι ανεξάρτητη από τον αριθμό των επαναλήψεων εκτέλεσης μιας εργασίας Μείωση κόστους Αύξηση της παραγωγικότητας Απαλλαγή ανθρώπου από επικίνδυνες και ανθυγιεινές εργασίες ΜΕΙΟΝΕΚΤΗΜΑΤΑ Σε εργασίες που απαιτούν νοημοσύνη Σε εργασίες που εκτελούνται σε αβέβαιο περιβάλλον Μείωση θέσεων εργασίας σε ανιδείκευτο και χαμηλά ειδικευόμενο προσωπικό που δεν αντισταθμίζεται από την δημιουργία νέων θέσεων

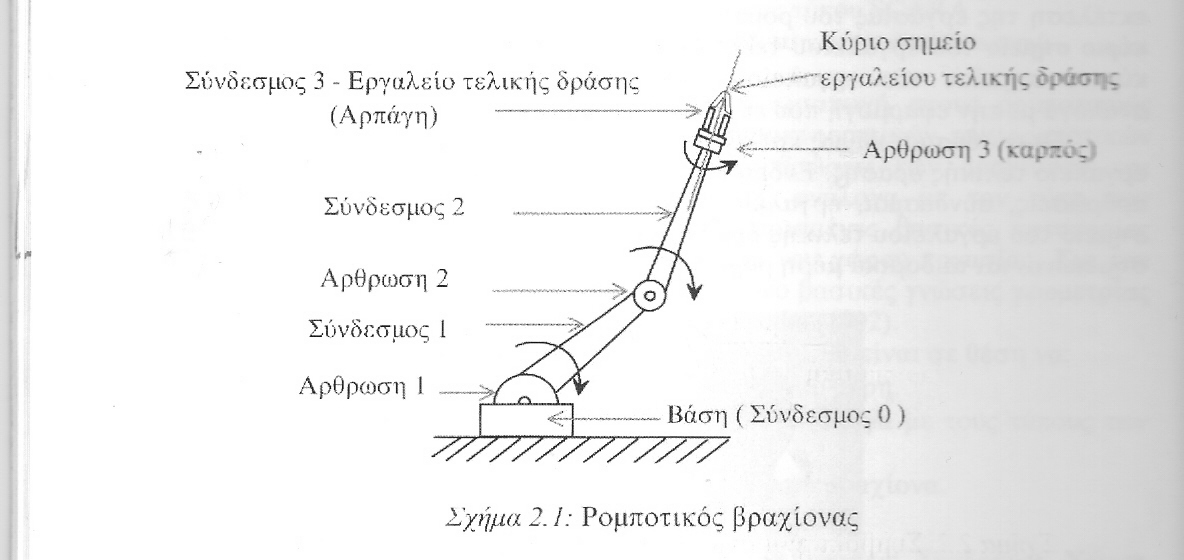
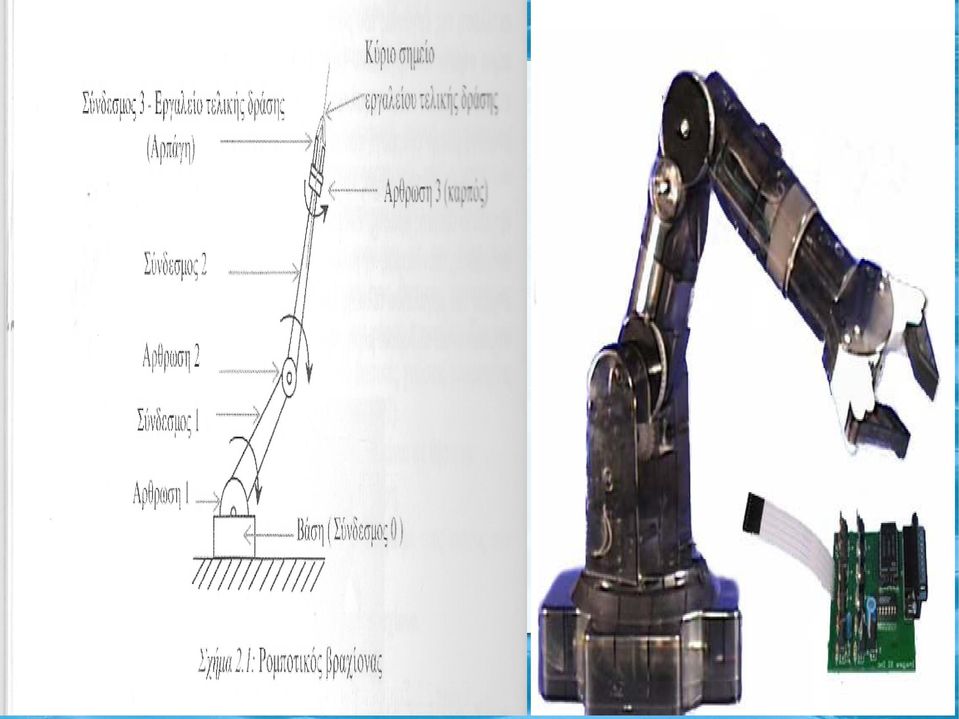
4 Βάση του ρομποτικού βραχίονα ονομάζεται το τμήμα του ρομποτικού βραχίονα που είναι στερεωμένο στο έδαφος ή γενικά στο περιβάλλον εργασίας του ρομπότ. Στη βάση είναι συνδεδεμένη αλυσίδα αρθρώσεων-συνδέσμων που καταλήγει στο εργαλείο τελικής δράσης. Οι σύνδεσμοι είναι στερεά σώματα που αποτελούν το σκελετό του ρομπότ. Οι αρθρώσεις είναι μηχανισμοί που επιτρέπουν τη σχετική κίνηση μεταξύ των συνδέσμων. Εργαλείο τελικής δράσης είναι το εργαλείο με το οποίο ο ρομποτικός βραχίονας εκτελεί εργασίες (ηλεκτροσυγκολλητές, κατσαβίδια, ραντιστές μπογιάς, αρπάγη). Κύριο σημείο του εργαλείου τελικής δράσης ονομάζεται το σημείο του οποίου η θέση είναι σημαντική για την αποτελεσματική εκτέλεση της εργασίας του ρομποτικού βραχίονα (π.χ η μύτη σε ένα κατσαβίδι, το σημείο ένωσης των σημείων μιας αρπάγης). Το σύνολο των ανεξαρτήτων μεταβλητών με βάση τις οποίες περιγράφεται πλήρως η θέση των υλικών σημείων του συστήματος αποτελεί τους βαθμούς ελευθερίας του συστήματος.
.")

5
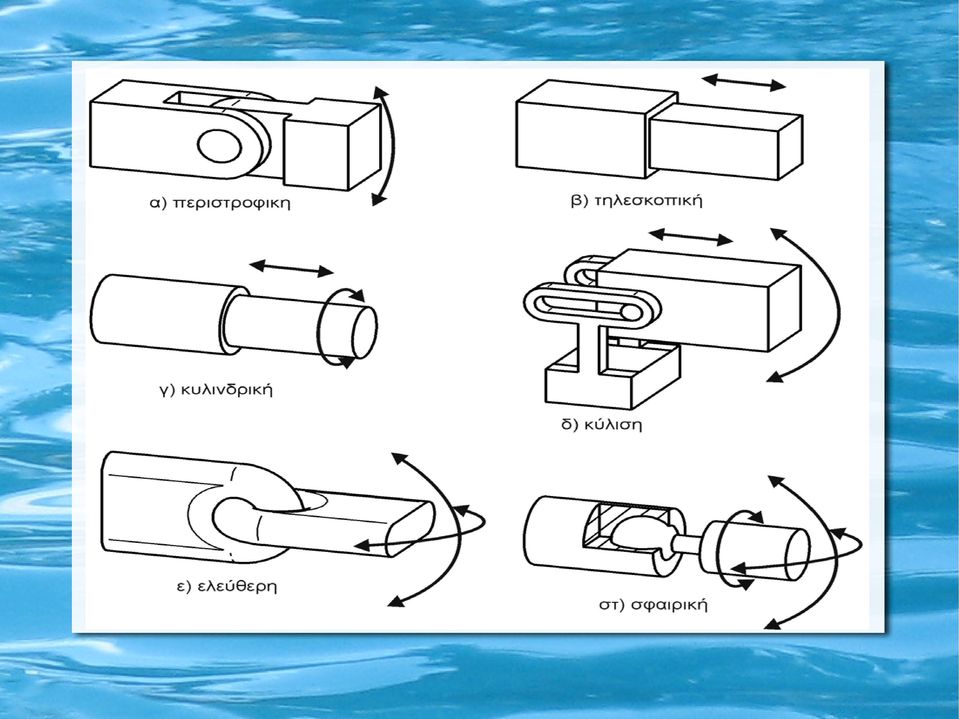
6 ΕΙΔΗ ΑΡΘΡΩΣΕΩΝ: Η περιστροφική άρθρωση είναι άρθρωση που επιτρέπει σχετική στροφή μεταξύ δύο γειτονικών συνδέσμων. Δίνει ένα βαθμό ελευθερίας αφήνοντας το σώμα να περιστραφεί σε ένα επίπεδο και αποκόπτει κάθε άλλη δυνατότητα κίνησης. Η πρισματική (ή τηλεσκοπική) άρθρωση είναι άρθρωση που επιτρέπει σχετική μετατόπιση (σε ευθεία γραμμή) μεταξύ δύο γειτονικών συνδέσμων. Δίνει και αυτή ένα βαθμό ελευθερίας αφήνοντας το σώμα να μετατοπίζεται στη διεύθυνση ενός από τους άξονες, και αποκόπτει κάθε άλλη δυνατότητα κίνησης. Σύνθετες αρθρώσεις είναι αυτές που αναλύονται γεωμετρικά σε υπέρθεση δύο ή περισσότερων από τις βασικές αρθρώσεις (στροφική και πρισματική). ΣΥΝΘΕΤΕΣ ΑΡΘΡΩΣΕΙΣ: Η κυλινδρική άρθρωση δίνει δύο βαθμούς ελευθερίας αφήνοντας μία μεταφορική κίνηση στη διεύθυνση ενός άξονα και μία περιστροφική γύρω από τον άξονα αυτό. Η άρθρωση της κύλισης δίνει και αυτή δύο βαθμούς ελευθερίας, δηλαδή μία μεταφορική και μία περιστροφική κίνηση, άλλα σε αυτή την περίπτωση ο άξονας της περιστροφικής κίνησης είναι κάθετος στη διεύθυνση του άξονα που πραγματοποιείται η μεταφορική κίνηση. Η ελεύθερη άρθρωση δίνει δύο βαθμούς ελευθερίας αφήνοντας δύο περιστροφικές κινήσεις και εμποδίζοντας όλες τις υπόλοιπες Η σφαιρική άρθρωση δίνει τρεις βαθμούς ελευθερίας αφήνοντας και τις τρεις περιστροφικές κινήσεις ελεύθερες και εμποδίζοντας όλες τις μεταφορικές.

7
8 Ταξινόμηση ρομπότ ανάλογα με το σύστημα συντεταγμένων Καρτεσιανά με τρεις γραμμικούς άξονες Κυλινδρικά με δυο γραμμικούς και ένα στροφικό άξονα Σφαιρικά με ένα γραμμικό και δυο στροφικούς άξονες Αρθρωτά με τρεις στροφικούς άξονες Καρτεσιανός χώρος εργασίας


9 Ταξινόμηση ρομπότ ανάλογα με το σύστημα συντεταγμένων Καρτεσιανά με τρεις γραμμικούς άξονες Κυλινδρικά με δυο γραμμικούς και ένα στροφικό άξονα Σφαιρικά με ένα γραμμικό και δυο στροφικούς άξονες Αρθρωτά με τρεις στροφικούς άξονες Κυλινδρικός χώρος εργασίας

10 Ταξινόμηση ρομπότ ανάλογα με το σύστημα συντεταγμένων Καρτεσιανά με τρεις γραμμικούς άξονες Κυλινδρικά με δυο γραμμικούς και ένα στροφικό άξονα Σφαιρικά με ένα γραμμικό και δυο στροφικούς άξονες Αρθρωτά με τρεις στροφικούς άξονες Σφαιρικός χώρος εργασίας

11 Ταξινόμηση ρομπότ ανάλογα με το σύστημα συντεταγμένων Καρτεσιανά με τρεις γραμμικούς άξονες Κυλινδρικά με δυο γραμμικούς και ένα στροφικό άξονα Σφαιρικά με ένα γραμμικό και δυο στροφικούς άξονες Αρθρωτά με τρεις στροφικούς άξονες Σφαιρικός χώρος εργασίας

12 Οι ρομποτικοί βραχίωνες από την οπτική της θεωρίας συστημάτων διακρίνονται σε δύο κατηγορίες Ανοικτού βρόχου Κλειστού βρόχου που παρουσιάζουν μεγαλύτερο πρακτικό ενδιαφέρον και χαρακτηρίζονται από δύο επιπλέον στοιχεία εκτός από τα στοιχεία που διαχωρίζουν το ρομποτικό βραχίονα από το χωρικό μηχανισμό: αισθητήρες που είναι όργανα μέτρησης της σχετικής ή απόλυτης κίνησης (θέση, ταχύτητα ή επιτάχυνση) των συνδέσμων του βραχίονα. σύστημα αυτόματου ελέγχου (ΣΑΕ) της κίνησης του ρομποτικού βραχίονα, το οποίο είναι εγκατεστημένο στον εγκέφαλο του ρομποτικού βραχίονα. Το σύστημα ελέγχου ή αλλιώς ο ελεγκτης αξιοποιεί την πληροφορία των αισθητήρων και με βάση την πληροφορία αυτή διαμορφώνει τις εντολές προς τους ενεργοποιητές.
 της κίνησης του ρομποτικού βραχίονα, το οποίο είναι εγκατεστημένο στον εγκέφαλο του ρομποτικού βραχίονα.")
13 ΚΙΝΗΣΗ ΒΡΑΧΙΩΝΑ Μελέτη της σχετικής κίνησης ενός στερεού σώματος ως προς το άλλο (κίνηση μεταξύ των συνδέσμων των ρομποτικών βραχιόνων. Η ανάλυση της στροφής μεταξύ δύο στερεών σωμάτων παρουσιάζει περισσότερες δυσκολίες σε σχέση με τη μετατόπιση. Έστω το σώμα P το οποίο είναι προσαρμοσμένο σε ένα σύστημα συντεταγμένων {Ox,Oy,Oz} με ορθοκανονική βάση {i,j,k}. Το διάνυσμα από την αρχή των αξόνων O μέχρι το σημείο Ρ συμβολίζεται με p και αναλύεται στην ορθοκανονική βαση ως εξής: p = p,x i+p,y j+p,z k Όπου p,x, p,y, p,z οι συντεταγμένες του διανύσματος ως προς το σύστημα συντεταγμένων {Ox,Oy,Oz}. To διάνυσμα p γράφεται με τη μορφή πίνακα ως εξής: p = [ p,x p,y p,z ] T Έστω {Ox,Oy,Oz} το αρχικό σύστημα αξόνων με ορθοκανονική βάση {i,j,k}. Το διάνυσμα p αναλύεται στην ορθοκανονική βαση ως εξής: p = p,x i+p,y j+p,z k To διάνυσμα p γράφεται με τη μορφή πίνακα ως εξής: p = [ p,x p,y p,z ] T

14 Οι πίνακες p, p που αποτελούν τις συντεταγμένες του διανύσματος p ως προς τα δύο συστήματα αναφοράς σχετίζονται με τις σχέσεις: [ ][ ][ ][ ][ ( p, x i + p, y j + p, z k ) i p, x i i + p, y j i + p, z k i i i p i p, x p= p, y = p j = ( p, x i + p, y j + p, z k ) j = p, x i j + p, y j j + p, z k j = i j p, z p k ( p, x i + p, y j + p, z k ) k p, x i k + p, y j k + p, z k k i k Ο πίνακας R ονομάζεται πίνακας στροφής. Ο πίνακας R μας δίνει την ανάποδη στροφή και ισχύει R = (R)-. H γωνία περιστροφής του άξονα Oz ονομάζεται yaw. H γωνία περιστροφής του άξονα Oy ονομάζεται pitch. H γωνία περιστροφής του άξονα Ox ονομάζεται roll. ][ ] j i k i p, x j j k j p, y =R p j k k k p, z

15 ΠΙΝΑΚΕΣ ΣΤΡΟΦΗΣ ΓΙΑ ΤΙΣ ΤΡΕΙΣ ΒΑΣΙΚΕΣ ΓΩΝΙΕΣ (roll, pitch, yaw) [ [ [ ][ ][ ][ i i R x, ψ = i j i k j i k i j j k j = συνψ ημψ ημψ συνψ j k k k i i Ry,θ= i j i k j i k i συνθ j j k j = ημθ j k k k i i R z, φ= i j i k j i k i συνφ ημφ j j k j = ημφ συνφ j k k k Περιστρέφοντας ένα σύστημα συντεταγμένων κατά γωνία φ τον άξονα z, στη συνέχεια κατά γωνία θ τον άξονα y και τέλος κατά γωνία ψ τον άξονα x οι συντεταγμένες ενός σημείου p ως προς το αρχικό σύστημα συντεταγμένων θα είναι: ] ] ] [ ημθ συνθ p= Rz, φ R y,θ Rx,ψ p ][ συνφ ημφ συνθ p= ημφ συνφ ημθ ][ ] ημθ συνψ ημψ p συνθ ημψ συνψ Περιστρέφοντας το σύστημα συντεταγμένων με διαφορετική σειρά ως προς τους άξονες ακόμα και με τις ίδιες γωνίες προκύπτει διαφορετικός πίνακας στροφής.
![τέλος κατά γωνία ψ τον άξονα x οι συντεταγμένες ενός σημείου p ως προς το αρχικό σύστημα συντεταγμένων θα είναι: ] ] ] [ ημθ συνθ p= Rz, φ R y,θ Rx,ψ p ][ συνφ ημφ συνθ p= ημφ συνφ ημθ](/docs-images/41/3803050/images/page_15.jpg "][ ] ημθ συνψ ημψ p συνθ ημψ συνψ Περιστρέφοντας το σύστημα συντεταγμένων με διαφορετική σειρά ως προς τους άξονες ακόμα και με τις ίδιες γωνίες προκύπτει διαφορετικός πίνακας στροφής.")
16 ΕΦΑΡΜΟΓΗ Να βρεθούν οι συντεταγμένες του τελικού στοιχείου δράσης ως προς το αρχικό σύστημα συντεταγμένων με κέντρο το Ο αν ο βραχίωνας περιστραφεί πρώτα ως προς τον άξονα z κατά γωνία φ=π/6, στη συνέχεια ως προς τον άξονα x κατά ψ=π/3 και το έμβολο ρυθμιστεί σε απόσταση r=3cm από το κέντρο Ο. ΛΥΣΗ: Ως προς το σύστημα συντεταγμένων {Ox,Oy,Oz} τελικό στοιχείο δράσης θα έχεις πάντοτε τις εξής συνιστώσες: p = (, r, ). Μετά την περιστροφή του άξονα z κατά γωνία φ=π/6 και στη συνέχεια του άξονα x κατά ψ=π/6 οι συντεταγμένες του τελικού σημείου δράσης θα είναι: [ ][ ] [ ][ ] συνφ ημφ συνφ ημφ συνψ ημφ ημψ p= Rz, φ R x, ψ p = ημφ συνφ συνψ ημψ p= ημφ συνφ συνψ συνφ ημψ r ημψ συνψ ημψ συνψ [ ][ ] π π,3,3 ημ συν r ημφ συνψ,75 π π 3 =,3 συν συν =,3 = r συνφ συνψ, r ημψ,26 π 3,3 ημ,3 3 2 [ ] [ ]

17 ΕΦΑΡΜΟΓΗ Πιο ενδιαφέρον πρόβλημα αποτελεί το αντίστροφο. Να βρεθούν οι γωνίες φ, ψ και το μήκος που πρέπει να προεκταθεί το έμβολο του σχήματος ώστε το τελικό στοιχείο δράσης να βρεθεί στη θέση p=(,,). Να θεωρηθεί ότι πρώτα γίνεται η περιστροφή του άξονα z και στη συνέχεια η περιστροφή του άξονα x. ΛΥΣΗ: Σην προηγούμενη εφαρμογή αποδείχθηκε ότι οι συντεταγμένες του τελικού στοιχείου δράσης ικανοποιούν τη σχέση: [ ] [][ ]{ } r ημφ συνψ r ημφ συνψ r ημφ συνψ = () p= r συνφ συνψ = r συνφ συνψ r συνφ συνψ = (2) r ημψ r ημψ r ημψ= (3) Διαιρώντας κατά μέλη τις () και (2) έχουμε: r ημφ συνψ π = εφφ= φ= ή αλλιώς φ= 45ο r συνφ συνψ 4 To σύστημα των εξισώσεων γίνεται: { }{ }{ π 2 r ημ( ) συνψ= () r συνψ = () 4 2 r συνψ = 2 () 2 r συνψ = 2 (2) π r συν ( ) συνψ = (2) r συνψ = ( 2) 4 r ημψ= (3) 2 r ημψ = (3) r ημψ= (3) Διαιρώντας κατά μέλη τις (3) και (2) έχουμε: }
 p= r συνφ συνψ = r συνφ συνψ r")
18 r ημψ 2 = εφψ= ψ 35ο r συνψ 2 2 Αντικαθιστώντας στην (3) και λύνοντας ως προς r προκύπτει: r= r= r= r=,73 ο ημψ,58 ημ35 Επομένως για να βρεθεί το τελικό στοιχείο δράσης στο σημείο με συνταταγμένες (,, ) ως προς το αρχικό σύστημα αναφοράς θα πρέπει να περιστραφεί η άρθρωση που καθορίζει την περιστροφή στον άξονα z κατά γωνία 45ο και στη συνέχεια η άρθρωση που καθορίζει την περιστροφή στον άξονα x κατά 35ο. To έμβολο πρέπει να προεκταθεί σε μήκος,73. Για κάθε σημείο θα πρέπει ο επεξεργαστής του ρομποτικού βραχίωνα (μικροελεγκτής, DSP, PLC, FPGA, υπολογιστής) να υπολογίζει τις γωνίες και να δίνει τις κατάλληλες εντολές στους κινητήρες που ελέγχουν την περιστροφή των αρθρώσεων.
 να υπολογίζει τις γωνίες και να δίνει τις κατάλληλες εντολές")
ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - ΣΥΝΟΨΗ
 ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - Π. ΑΣΒΕΣΤΑΣ E MAIL: pasv@uniwa.gr Εφαρμογές ρομποτικής στην Ιατρική Κλασσική χειρουργική Ορθοπεδικές επεμβάσεις Νευροχειρουργική Ακτινοθεραπεία Αποκατάσταση φυσιοθεραπεία 2 Βασικοί
ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - Π. ΑΣΒΕΣΤΑΣ E MAIL: pasv@uniwa.gr Εφαρμογές ρομποτικής στην Ιατρική Κλασσική χειρουργική Ορθοπεδικές επεμβάσεις Νευροχειρουργική Ακτινοθεραπεία Αποκατάσταση φυσιοθεραπεία 2 Βασικοί
Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα.
 ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ ΣΤΕΡΕΟΎ ΣΏΜΑΤΟΣ Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα. Ένα υλικό σημείο μπορεί να κάνει μόνο μεταφορική
ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ ΣΤΕΡΕΟΎ ΣΏΜΑΤΟΣ Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα. Ένα υλικό σημείο μπορεί να κάνει μόνο μεταφορική
Εισαγωγή στην Ρομποτική
 Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
Κεφάλαιο 2: Διανυσματικός λογισμός συστήματα αναφοράς
 Κεφάλαιο 2: Διανυσματικός λογισμός συστήματα αναφοράς 2.1 Η έννοια του διανύσματος Ο τρόπος που παριστάνομε τα διανυσματικά μεγέθη είναι με τη μαθηματική έννοια του διανύσματος. Διάνυσμα δεν είναι τίποτε
Κεφάλαιο 2: Διανυσματικός λογισμός συστήματα αναφοράς 2.1 Η έννοια του διανύσματος Ο τρόπος που παριστάνομε τα διανυσματικά μεγέθη είναι με τη μαθηματική έννοια του διανύσματος. Διάνυσμα δεν είναι τίποτε
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Βασικές Έννοιες Μέχρι στιγμής αντιμετωπίζαμε κάθε σώμα που μελετούσαμε την κίνηση του ως υλικό
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Βασικές Έννοιες Μέχρι στιγμής αντιμετωπίζαμε κάθε σώμα που μελετούσαμε την κίνηση του ως υλικό
Χωρικές Περιγραφές και Μετασχηµατισµοί
 Χωρικές Περιγραφές και Μετασχηµατισµοί Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007 Ροµπότ SCR 1 Περιεχόµενα Στοιχεία γραµµικής άλγεβρας Χωρικές
Χωρικές Περιγραφές και Μετασχηµατισµοί Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007 Ροµπότ SCR 1 Περιεχόµενα Στοιχεία γραµµικής άλγεβρας Χωρικές
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ
 ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ 12. Ένας οριζόντιος ομογενής δίσκος ακτίνας μπορεί να περιστρέφεται χωρίς τριβές, γύρω από κατακόρυφο
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ 12. Ένας οριζόντιος ομογενής δίσκος ακτίνας μπορεί να περιστρέφεται χωρίς τριβές, γύρω από κατακόρυφο
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Γ ΛΥΚΕΙΟΥ ΗΜΕΡΟΜΗΝΙΑ: 05/01/2016 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ
 ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Γ ΛΥΚΕΙΟΥ ΗΜΕΡΟΜΗΝΙΑ: 05/01/2016 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1-Α4
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Γ ΛΥΚΕΙΟΥ ΗΜΕΡΟΜΗΝΙΑ: 05/01/2016 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1-Α4
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Γ ΛΥΚΕΙΟΥ ΑΠΑΝΤΗΣΕΙΣ ΗΜΕΡΟΜΗΝΙΑ: 05/01/2016 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ
 ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Γ ΛΥΚΕΙΟΥ ΑΠΑΝΤΗΣΕΙΣ ΗΜΕΡΟΜΗΝΙΑ: 05/01/2016 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Γ ΛΥΚΕΙΟΥ ΑΠΑΝΤΗΣΕΙΣ ΗΜΕΡΟΜΗΝΙΑ: 05/01/2016 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω
Σφαίρα σε ράγες: Η συνάρτηση Lagrange. Ν. Παναγιωτίδης
 Σφαίρα σε ράγες: Η συνάρτηση Lagrange Ν. Παναγιωτίδης Έστω σύστημα δυο συγκλινόντων ραγών σε σχήμα Χ που πάνω τους κυλίεται σφαίρα ακτίνας. Θεωρούμε σύστημα συντεταγμένων με οριζόντιους τους άξονες και.
Σφαίρα σε ράγες: Η συνάρτηση Lagrange Ν. Παναγιωτίδης Έστω σύστημα δυο συγκλινόντων ραγών σε σχήμα Χ που πάνω τους κυλίεται σφαίρα ακτίνας. Θεωρούμε σύστημα συντεταγμένων με οριζόντιους τους άξονες και.
το άκρο Β έχει γραμμική ταχύτητα μέτρου.
 ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ 1. Μια ράβδος ΑΒ περιστρέφεται με σταθερή γωνιακή ταχύτητα γύρω από έναν σταθερό οριζόντιο άξονα που περνάει από ένα σημείο πάνω
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ 1. Μια ράβδος ΑΒ περιστρέφεται με σταθερή γωνιακή ταχύτητα γύρω από έναν σταθερό οριζόντιο άξονα που περνάει από ένα σημείο πάνω
ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΘΕΜΑ Β
 ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ : ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΘΕΜΑ Β Ερώτηση. Tο γιο-γιο του σχήματος έχει ακτίνα R και αρχικά είναι ακίνητο. Την t=0 αφήνουμε ελεύθερο το δίσκο
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ : ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΘΕΜΑ Β Ερώτηση. Tο γιο-γιο του σχήματος έχει ακτίνα R και αρχικά είναι ακίνητο. Την t=0 αφήνουμε ελεύθερο το δίσκο
Φυσική Θετικών Σπουδών Γ τάξη Ενιαίου Λυκείου 2 0 Κεφάλαιο
 Φυσική Θετικών Σπουδών Γ τάξη Ενιαίου Λυκείου 0 Κεφάλαιο Περιέχει: Αναλυτική Θεωρία Ερωτήσεις Θεωρίας Ερωτήσεις Πολλαπλής Επιλογής Ερωτήσεις Σωστού - λάθους Ασκήσεις ΘΕΩΡΙΑ 4- ΕΙΣΑΓΩΓΗ Στην μέχρι τώρα
Φυσική Θετικών Σπουδών Γ τάξη Ενιαίου Λυκείου 0 Κεφάλαιο Περιέχει: Αναλυτική Θεωρία Ερωτήσεις Θεωρίας Ερωτήσεις Πολλαπλής Επιλογής Ερωτήσεις Σωστού - λάθους Ασκήσεις ΘΕΩΡΙΑ 4- ΕΙΣΑΓΩΓΗ Στην μέχρι τώρα
Ομογενής δίσκος ροπής αδράνειας, με μάζα και ακτίνας θα χρησιμοποιηθεί σε 3 διαφορετικά πειράματα.
 Δίσκος Σύνθετη Τρίτη 01 Μαϊου 2012 ΑΣΚΗΣΗ 5 Ομογενής δίσκος ροπής αδράνειας, με μάζα και ακτίνας θα χρησιμοποιηθεί σε 3 διαφορετικά πειράματα. ΠΕΙΡΑΜΑ Α Θα εκτοξευθεί με ταχύτητα από τη βάση του κεκλιμένου
Δίσκος Σύνθετη Τρίτη 01 Μαϊου 2012 ΑΣΚΗΣΗ 5 Ομογενής δίσκος ροπής αδράνειας, με μάζα και ακτίνας θα χρησιμοποιηθεί σε 3 διαφορετικά πειράματα. ΠΕΙΡΑΜΑ Α Θα εκτοξευθεί με ταχύτητα από τη βάση του κεκλιμένου
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3A: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3A: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ Συστήματα αξόνων του αεροσκάφους Κίνηση αεροσκάφους στην ατμόσφαιρα Απαιτούνται κατάλληλα συστήματα αξόνων για την περιγραφή
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3A: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ Συστήματα αξόνων του αεροσκάφους Κίνηση αεροσκάφους στην ατμόσφαιρα Απαιτούνται κατάλληλα συστήματα αξόνων για την περιγραφή
Αυτόματη προσγείωση τετρακόπτερου με χρήση κάμερας
 Διπλωματική εργασία Αυτόματη προσγείωση τετρακόπτερου με χρήση κάμερας Τζιβάρας Βασίλης Επιβλέπων: Κ. Κωνσταντίνος Βλάχος Τμήμα Μηχανικών Η/Υ και Πληροφορικής Ιωάννινα Φεβρουάριος 2018 Περιεχόμενα Εισαγωγή
Διπλωματική εργασία Αυτόματη προσγείωση τετρακόπτερου με χρήση κάμερας Τζιβάρας Βασίλης Επιβλέπων: Κ. Κωνσταντίνος Βλάχος Τμήμα Μηχανικών Η/Υ και Πληροφορικής Ιωάννινα Φεβρουάριος 2018 Περιεχόμενα Εισαγωγή
ΕΡΠΥΣΤΡΙΕΣ: ΕΡΕΥΝΑ ΑΓΟΡΑΣ ΕΡΠΥΣΤΡΙΕΣ ΘΕΩΡΙΑ
 ΕΡΠΥΣΤΡΙΕΣ ΕΡΠΥΣΤΡΙΕΣ: ΕΡΕΥΝΑ ΑΓΟΡΑΣ ΕΡΠΥΣΤΡΙΕΣ ΘΕΩΡΙΑ ΘΕΩΡΙΑ Τι είναι οι ερπύστριες Ιστορία τους Πλεονεκτήματα Μειονεκτήματα ROVER 5 CHASSIS MULTI CHASSIS (RESCUE PLATFORM BIG) ΕΡΕΥΝΑ ΑΓΟΡΑΣ KIT TRACKED
ΕΡΠΥΣΤΡΙΕΣ ΕΡΠΥΣΤΡΙΕΣ: ΕΡΕΥΝΑ ΑΓΟΡΑΣ ΕΡΠΥΣΤΡΙΕΣ ΘΕΩΡΙΑ ΘΕΩΡΙΑ Τι είναι οι ερπύστριες Ιστορία τους Πλεονεκτήματα Μειονεκτήματα ROVER 5 CHASSIS MULTI CHASSIS (RESCUE PLATFORM BIG) ΕΡΕΥΝΑ ΑΓΟΡΑΣ KIT TRACKED
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ. Άσκηση 1. (Ροπή αδράνειας - Θεμελιώδης νόμος στροφικής κίνησης)
") ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση. (Ροπή αδράνειας - Θεμελιώδης νόμος στροφικής κίνησης) Ένας ομογενής οριζόντιος δίσκος, μάζας Μ και ακτίνας R, περιστρέφεται γύρω από κατακόρυφο ακλόνητο άξονα z, ο οποίος διέρχεται
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση. (Ροπή αδράνειας - Θεμελιώδης νόμος στροφικής κίνησης) Ένας ομογενής οριζόντιος δίσκος, μάζας Μ και ακτίνας R, περιστρέφεται γύρω από κατακόρυφο ακλόνητο άξονα z, ο οποίος διέρχεται
Κεφάλαιο 10 Περιστροφική Κίνηση. Copyright 2009 Pearson Education, Inc.
 Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόμενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσματικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναμική της Περιστροφικής Κίνησης, Ροπή και
Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόμενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσματικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναμική της Περιστροφικής Κίνησης, Ροπή και
ΚΕΦΑΛΑΙΟ ΟΡΙΖΟΝΤΙΑ ΒΟΛΗ ΘΕΩΡΙΑ
 ΚΕΦΑΛΑΙΟ o ΟΡΙΖΟΝΤΙΑ ΒΟΛΗ ΘΕΩΡΙΑ.) Τ ι γνωρίζετε για την αρχή της ανεξαρτησίας των κινήσεων; Σε πολλές περιπτώσεις ένα σώμα εκτελεί σύνθετη κίνηση, δηλαδή συμμετέχει σε περισσότερες από μία κινήσεις. Για
ΚΕΦΑΛΑΙΟ o ΟΡΙΖΟΝΤΙΑ ΒΟΛΗ ΘΕΩΡΙΑ.) Τ ι γνωρίζετε για την αρχή της ανεξαρτησίας των κινήσεων; Σε πολλές περιπτώσεις ένα σώμα εκτελεί σύνθετη κίνηση, δηλαδή συμμετέχει σε περισσότερες από μία κινήσεις. Για
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ. (Θέμα Δ) Άσκηση 2. (Κύλιση χωρίς ολίσθηση, σχέση υ cm και ω, σχέση α cm και a γων )
 Άσκηση 2. (Κύλιση χωρίς ολίσθηση, σχέση υ cm και ω, σχέση α cm και a γων )") ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση 1. (Γωνιακή ταχύτητα, γωνιακή επιτάχυνση, σύνθετη κίνηση, κέντρο μάζας) Δύο δίσκοι οριζόντιοι Δ 1 και Δ εκτελούν περιστροφική κίνηση γύρω από κατακόρυφο άξονα που περνά από το
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση 1. (Γωνιακή ταχύτητα, γωνιακή επιτάχυνση, σύνθετη κίνηση, κέντρο μάζας) Δύο δίσκοι οριζόντιοι Δ 1 και Δ εκτελούν περιστροφική κίνηση γύρω από κατακόρυφο άξονα που περνά από το
Μηχανικό Στερεό. Μια εργασία για την Επανάληψη
 Μηχανικό Στερεό. Μια εργασία για την Επανάληψη Απλές προτάσεις Για τον έλεγχο της κατανόησης και εφαρμογής των εννοιών Δογραματζάκης Γιάννης 9/5/2013 Απλές προτάσεις για τον έλεγχο της κατανόησης και εφαρμογής
Μηχανικό Στερεό. Μια εργασία για την Επανάληψη Απλές προτάσεις Για τον έλεγχο της κατανόησης και εφαρμογής των εννοιών Δογραματζάκης Γιάννης 9/5/2013 Απλές προτάσεις για τον έλεγχο της κατανόησης και εφαρμογής
ΕΜΒΙΟΜΗΧΑΝΙΚΟΙ ΠΑΡΑΓΟΝΤΕΣ. Σοφία Α. Ξεργιά PT, MSc, PhD
 ΕΜΒΙΟΜΗΧΑΝΙΚΟΙ ΠΑΡΑΓΟΝΤΕΣ Σοφία Α. Ξεργιά PT, MSc, PhD Ανάλυση της Ανθρώπινης Κίνησης Εμβιομηχανική Κινησιολογία Κινηματική Κινητική Λειτουργική Ανατομική Γραμμική Γωνιακή Γραμμική Γωνιακή Θέση Ταχύτητα
ΕΜΒΙΟΜΗΧΑΝΙΚΟΙ ΠΑΡΑΓΟΝΤΕΣ Σοφία Α. Ξεργιά PT, MSc, PhD Ανάλυση της Ανθρώπινης Κίνησης Εμβιομηχανική Κινησιολογία Κινηματική Κινητική Λειτουργική Ανατομική Γραμμική Γωνιακή Γραμμική Γωνιακή Θέση Ταχύτητα
ΟΡΟΣΗΜΟ α. =α. γων. R γ. Όλα τα σημεία του τροχού που είναι σε ύψος R από τον δρόμο έχουν ταχύτητα υ=υ cm
 ÊéíÞóåéò óôåñåïý óþìáôïò ÊÅÖÁËÁÉÏ 4 21 Ένα σώμα εκτελεί μεταφορική κίνηση Τότε: α Όλα τα σημεία του στερεού έχουν την ίδια στιγμιαία γωνιακή επιτάχυνση β Όλα τα σημεία του στερεού έχουν την ίδια στιγμιαία
ÊéíÞóåéò óôåñåïý óþìáôïò ÊÅÖÁËÁÉÏ 4 21 Ένα σώμα εκτελεί μεταφορική κίνηση Τότε: α Όλα τα σημεία του στερεού έχουν την ίδια στιγμιαία γωνιακή επιτάχυνση β Όλα τα σημεία του στερεού έχουν την ίδια στιγμιαία
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΑΥΕΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΑΠΑΝΤΗΣΕΙΣ Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014
 ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014") ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΑΥΕΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΑΠΑΝΤΗΣΕΙΣ Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/04 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΑΥΕΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΑΠΑΝΤΗΣΕΙΣ Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/04 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ [Υποκεφάλαιο 4.2 Οι κινήσεις των στερεών σωμάτων του σχολικού βιβλίου]
![ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ [Υποκεφάλαιο 4.2 Οι κινήσεις των στερεών σωμάτων του σχολικού βιβλίου]](/thumbs/52/29790189.jpg "ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ [Υποκεφάλαιο 4.2 Οι κινήσεις των στερεών σωμάτων του σχολικού βιβλίου]") ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
1 f. d F D x m a D x m D x dt. 2 t. Όλες οι αποδείξεις στην Φυσική Κατεύθυνσης Γ Λυκείου. Αποδείξεις. d t dt dt dt. 1. Απόδειξη της σχέσης.
 Αποδείξεις. Απόδειξη της σχέσης N t T N t T. Απόδειξη της σχέσης t t T T 3. Απόδειξη της σχέσης t Ικανή και αναγκαία συνθήκη για την Α.Α.Τ. είναι : d F D ma D m D Η εξίσωση αυτή είναι μια Ομογενής Διαφορική
Αποδείξεις. Απόδειξη της σχέσης N t T N t T. Απόδειξη της σχέσης t t T T 3. Απόδειξη της σχέσης t Ικανή και αναγκαία συνθήκη για την Α.Α.Τ. είναι : d F D ma D m D Η εξίσωση αυτή είναι μια Ομογενής Διαφορική
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ. Άσκηση 1. (Κινητική ενέργεια λόγω περιστροφής. Έργο και ισχύς σταθερής ροπής)
") ΕΚΦΩΝΗΣΕΣ ΑΣΚΗΣΕΩΝ Άσκηση 1 (Κινητική ενέργεια λόγω περιστροφής Έργο και ισχύς σταθερής ροπής) Ένας κύβος και ένας δίσκος έχουν ίδια μάζα και αφήνονται από το ίδιο ύψος να κινηθούν κατά μήκος δύο κεκλιμένων
ΕΚΦΩΝΗΣΕΣ ΑΣΚΗΣΕΩΝ Άσκηση 1 (Κινητική ενέργεια λόγω περιστροφής Έργο και ισχύς σταθερής ροπής) Ένας κύβος και ένας δίσκος έχουν ίδια μάζα και αφήνονται από το ίδιο ύψος να κινηθούν κατά μήκος δύο κεκλιμένων
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013
 ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013 ΘΕΜΑ Α Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1- Α4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013 ΘΕΜΑ Α Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1- Α4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή
3. ΥΝΑΜΙΚΗ ΡΟΜΠΟΤΙΚΩΝ ΒΡΑΧΙΟΝΩΝ
 3. ΥΝΑΜΙΚΗ ΡΟΜΠΟΤΙΚΩΝ ΒΡΑΧΙΟΝΩΝ Η δυναµική ασχολείται µε την εξαγωγή και τη µελέτη του δυναµικού µοντέλου ενός ροµποτικού βραχίονα. Το δυναµικό µοντέλο συνίσταται στις διαφορικές εξισώσεις που περιγράφουν
3. ΥΝΑΜΙΚΗ ΡΟΜΠΟΤΙΚΩΝ ΒΡΑΧΙΟΝΩΝ Η δυναµική ασχολείται µε την εξαγωγή και τη µελέτη του δυναµικού µοντέλου ενός ροµποτικού βραχίονα. Το δυναµικό µοντέλο συνίσταται στις διαφορικές εξισώσεις που περιγράφουν
ΦΥΣΙΚΗ Β Λ ΠΡΟΕΤ. Γ Λ
 ΦΥΣΙΚΗ Β Λ ΠΡΟΕΤ. Γ Λ 04-01 - 018 Άρχων Μάρκος ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1-Α4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση. Α1.
ΦΥΣΙΚΗ Β Λ ΠΡΟΕΤ. Γ Λ 04-01 - 018 Άρχων Μάρκος ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1-Α4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή απάντηση. Α1.
τα βιβλία των επιτυχιών
 Τα βιβλία των Εκδόσεων Πουκαμισάς συμπυκνώνουν την πολύχρονη διδακτική εμπειρία των συγγραφέων μας και αποτελούν το βασικό εκπαιδευτικό υλικό που χρησιμοποιούν οι μαθητές των φροντιστηρίων μας. Μέσα από
Τα βιβλία των Εκδόσεων Πουκαμισάς συμπυκνώνουν την πολύχρονη διδακτική εμπειρία των συγγραφέων μας και αποτελούν το βασικό εκπαιδευτικό υλικό που χρησιμοποιούν οι μαθητές των φροντιστηρίων μας. Μέσα από
Κεφάλαιο 6α. Περιστροφή στερεού σώματος γύρω από σταθερό άξονα
 Κεφάλαιο 6α Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Στερεό (ή άκαμπτο) σώμα Τα μοντέλα ανάλυσης που παρουσιάσαμε μέχρι τώρα δεν μπορούν να χρησιμοποιηθούν για την ανάλυση όλων των κινήσεων. Μπορούμε
Κεφάλαιο 6α Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Στερεό (ή άκαμπτο) σώμα Τα μοντέλα ανάλυσης που παρουσιάσαμε μέχρι τώρα δεν μπορούν να χρησιμοποιηθούν για την ανάλυση όλων των κινήσεων. Μπορούμε
Κεφάλαιο 6β. Περιστροφή στερεού σώματος γύρω από σταθερό άξονα
 Κεφάλαιο 6β Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Ροπή Ροπή ( ) είναι η τάση που έχει μια δύναμη να περιστρέψει ένα σώμα γύρω από κάποιον άξονα. d είναι η κάθετη απόσταση του άξονα περιστροφής
Κεφάλαιο 6β Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Ροπή Ροπή ( ) είναι η τάση που έχει μια δύναμη να περιστρέψει ένα σώμα γύρω από κάποιον άξονα. d είναι η κάθετη απόσταση του άξονα περιστροφής
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ. Μηχανική Στερεού Σώματος. Ροπή Δυνάμεων & Ισορροπία Στερεού Σώματος. Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος Ροπή Δυνάμεων & Ισορροπία Στερεού Σώματος Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Εισαγωγή Στην Α Λυκείου είχαμε μελετήσει τη δύναμη προκειμένου
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος Ροπή Δυνάμεων & Ισορροπία Στερεού Σώματος Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Εισαγωγή Στην Α Λυκείου είχαμε μελετήσει τη δύναμη προκειμένου
3.3. Δυναμική στερεού.
 3.3.. 3.3.1. Ροπή και γωνιακή επιτάχυνση Μια οριζόντια τετράγωνη πλάκα ΑΒΓΔ, πλευράς 1m και μάζας 20kg μπορεί να στρέφεται γύρω από σταθερό άξονα z που περνά από το κέντρο της. Η πλάκα αποκτά γωνιακή ταχύτητα
3.3.. 3.3.1. Ροπή και γωνιακή επιτάχυνση Μια οριζόντια τετράγωνη πλάκα ΑΒΓΔ, πλευράς 1m και μάζας 20kg μπορεί να στρέφεται γύρω από σταθερό άξονα z που περνά από το κέντρο της. Η πλάκα αποκτά γωνιακή ταχύτητα
ΚΑΡΤΕΣΙΑΝΟ ΣΥΣΤΗΜΑ ΣΕ ΔΥΟ ΔΙΑΣΤΑΣΕΙΣ
 ΚΑΡΤΕΣΙΑΝΟ ΣΥΣΤΗΜΑ ΣΕ ΔΥΟ ΔΙΑΣΤΑΣΕΙΣ Δυο κάθετοι μεταξύ τους προσανατολισμένοι και βαθμονομημένοι άξονες A Α Έστω σημείο Α στο επίπεδο Η θέση του προσδιορίζεται από τις προβολές στους άξονες A, A 0 A Η
ΚΑΡΤΕΣΙΑΝΟ ΣΥΣΤΗΜΑ ΣΕ ΔΥΟ ΔΙΑΣΤΑΣΕΙΣ Δυο κάθετοι μεταξύ τους προσανατολισμένοι και βαθμονομημένοι άξονες A Α Έστω σημείο Α στο επίπεδο Η θέση του προσδιορίζεται από τις προβολές στους άξονες A, A 0 A Η
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ. Ενότητα 2 η Βαθµοί Ελευθερίας Στερεού Σώµατος & Κινηµατικοί Περιορισµοί
 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ Ενότητα 2 η Βαθµοί Ελευθερίας Στερεού Σώµατος & Κινηµατικοί Περιορισµοί Αναπαράσταση µηχανισµού Η µονογραµµική απεικόνιση χρησιµοποιείται για την απλοποιηµένη
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ Ενότητα 2 η Βαθµοί Ελευθερίας Στερεού Σώµατος & Κινηµατικοί Περιορισµοί Αναπαράσταση µηχανισµού Η µονογραµµική απεικόνιση χρησιµοποιείται για την απλοποιηµένη
ΦΥΣΙΚΗ Ο.Π. ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ ΑΠΑΝΤΗΣΕΙΣ. ΘΕΜΑ Β Β1. Σωστή η γ) Σύμφωνα με τον ορισμό της ροπής αδράνειας στερεού σώματος ως προς άξονα
 Σύμφωνα με τον ορισμό της ροπής αδράνειας στερεού σώματος ως προς άξονα") Κανάρη 36, Δάφνη Τηλ 0 973934 & 0 9769376 ΦΥΣΙΚΗ ΟΠ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Ι Δ Α 3 Γ 4 Γ ΙΙ Σ Λ 3 Λ 4 Σ 5 Σ ΘΕΜΑ Β Β Σωστή η γ) Σύμφωνα με τον ορισμό της ροπής αδράνειας στερεού σώματος ως προς
Κανάρη 36, Δάφνη Τηλ 0 973934 & 0 9769376 ΦΥΣΙΚΗ ΟΠ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Ι Δ Α 3 Γ 4 Γ ΙΙ Σ Λ 3 Λ 4 Σ 5 Σ ΘΕΜΑ Β Β Σωστή η γ) Σύμφωνα με τον ορισμό της ροπής αδράνειας στερεού σώματος ως προς
Διαγώνισμα Γ Λυκείου Θετικού προσανατολισμού. Διαγώνισμα Μηχανική Στερεού Σώματος. Τετάρτη 12 Απριλίου Θέμα 1ο
 Διαγώνισμα Μηχανική Στερεού Σώματος Τετάρτη 12 Απριλίου 2017 Θέμα 1ο Στις παρακάτω προτάσεις 1.1 1.4 να επιλέξτε την σωστή απάντηση (4 5 = 20 μονάδες ) 1.1. Η γωνιακή επιτάχυνση ενός ομογενούς δίσκου που
Διαγώνισμα Μηχανική Στερεού Σώματος Τετάρτη 12 Απριλίου 2017 Θέμα 1ο Στις παρακάτω προτάσεις 1.1 1.4 να επιλέξτε την σωστή απάντηση (4 5 = 20 μονάδες ) 1.1. Η γωνιακή επιτάχυνση ενός ομογενούς δίσκου που
Μηχανική Στερεού Ασκήσεις Εμπέδωσης
 Μηχανική Στερεού Ασκήσεις Εμπέδωσης Όπου χρειάζεται, θεωρείστε δεδομένο ότι g = 10m/s 2. 1. Μία ράβδος ΟΑ, μήκους L = 0,5m, περιστρέφεται γύρω από σταθερό άξονα που περνάει από το ένα άκρο της Ο, με σταθερή
Μηχανική Στερεού Ασκήσεις Εμπέδωσης Όπου χρειάζεται, θεωρείστε δεδομένο ότι g = 10m/s 2. 1. Μία ράβδος ΟΑ, μήκους L = 0,5m, περιστρέφεται γύρω από σταθερό άξονα που περνάει από το ένα άκρο της Ο, με σταθερή
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
 Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 04-05 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 5. - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 04-05 opyight ΕΜΠ - Σχολή
Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 04-05 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 5. - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 04-05 opyight ΕΜΠ - Σχολή
BIOMHXANIKOI AYTOMATIΣMOΙ. Προγραμματιζόμενοι Λογικοί Ελεγκτές (PLC) Μικροελεγκτές Συλλογή Δεδομένων LabView
 Μικροελεγκτές Συλλογή Δεδομένων LabView") BIOMHXANIKOI AYTOMATIΣMOΙ Προγραμματιζόμενοι Λογικοί Ελεγκτές (PLC) Μικροελεγκτές Συλλογή Δεδομένων LabView BIOMHXANIKOI AYTOMATIΣMOΙ Ηλεκτρικοί Κινητήρες Κυκλώματα οδήγησης και ελέγχου Ρομποτικές διατάξεις
BIOMHXANIKOI AYTOMATIΣMOΙ Προγραμματιζόμενοι Λογικοί Ελεγκτές (PLC) Μικροελεγκτές Συλλογή Δεδομένων LabView BIOMHXANIKOI AYTOMATIΣMOΙ Ηλεκτρικοί Κινητήρες Κυκλώματα οδήγησης και ελέγχου Ρομποτικές διατάξεις
ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - ΑΣΚΗΣΕΙΣ. Π. Ασβεστάς Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Βιοϊατρικής Πανεπιστήμιο Δυτικής Αττικής
 ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - ΑΣΚΗΣΕΙΣ Π. Ασβεστάς Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Βιοϊατρικής Πανεπιστήμιο Δυτικής Αττικής E-mail: pasv@uniwa.gr ΑΣΚΗΣΗ 1 1. Έστω δύο 3Δ καρτεσιανά συστήματα συντεταγμένων,
ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - ΑΣΚΗΣΕΙΣ Π. Ασβεστάς Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Βιοϊατρικής Πανεπιστήμιο Δυτικής Αττικής E-mail: pasv@uniwa.gr ΑΣΚΗΣΗ 1 1. Έστω δύο 3Δ καρτεσιανά συστήματα συντεταγμένων,
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Β ΛΥΚΕΙΟΥ Καμπυλόγραμμες Κινήσεις Επιμέλεια: Αγκανάκης Α. Παναγιώτης, Φυσικός http://phyiccore.wordpre.com/ Βασικές Έννοιες Μέχρι στιγμής έχουμε μάθει να μελετάμε απλές κινήσεις,
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Β ΛΥΚΕΙΟΥ Καμπυλόγραμμες Κινήσεις Επιμέλεια: Αγκανάκης Α. Παναγιώτης, Φυσικός http://phyiccore.wordpre.com/ Βασικές Έννοιες Μέχρι στιγμής έχουμε μάθει να μελετάμε απλές κινήσεις,
ΟΡΟΣΗΜΟ >Ι 3. δ. Ι Οι τροχοί (1) και (2) του σχήματος είναι ίδιοι. Τότε: και Ι 2
 και (2) του σχήματος είναι ίδιοι. Τότε: και Ι 2") ΚΕΦΑΛΑΙΟ 4 Ροπή αδράνειας - Θεμελιώδης νόμος της στροφικής κίνησης 4.1 Η ροπή αδράνειας ενός σώματος εξαρτάται: α. μόνο από τη μάζα του σώματος β. μόνο τη θέση του άξονα γύρω από τον οποίο μπορεί να περιστρέφεται
ΚΕΦΑΛΑΙΟ 4 Ροπή αδράνειας - Θεμελιώδης νόμος της στροφικής κίνησης 4.1 Η ροπή αδράνειας ενός σώματος εξαρτάται: α. μόνο από τη μάζα του σώματος β. μόνο τη θέση του άξονα γύρω από τον οποίο μπορεί να περιστρέφεται
ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ
 Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
Τίτλος Μαθήματος ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ - ΡΟΜΠΟΤΙΚΗ Καθηγητής Δρ.Δ.Σαγρής ΣΕΡΡΕΣ, ΣΕΠΤΕΜΒΡΙΟΣ
α. 2 β. 4 γ. δ. 4 2 Μονάδες 5
 ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΟΠ Β Λ (ΠΡΟΕΤΟΙΜΑΣΙΑ) - ΑΠΑΝΤΗΣΕΙΣ ΗΜΕΡΟΜΗΝΙΑ: 04/01/017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΟΠ Β Λ (ΠΡΟΕΤΟΙΜΑΣΙΑ) - ΑΠΑΝΤΗΣΕΙΣ ΗΜΕΡΟΜΗΝΙΑ: 04/01/017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις
w w w.k z a c h a r i a d i s.g r
 Πως εφαρμόζουμε την αρχή διατήρησης της μηχανικής ενέργειας στα στερεά σώματα Πριν δούμε την μεθοδολογία, ας θυμηθούμε ότι : Για να εφαρμόσουμε την αρχή διατήρησης της μηχανικής ενέργειας (Α.Δ.Μ.Ε.) για
Πως εφαρμόζουμε την αρχή διατήρησης της μηχανικής ενέργειας στα στερεά σώματα Πριν δούμε την μεθοδολογία, ας θυμηθούμε ότι : Για να εφαρμόσουμε την αρχή διατήρησης της μηχανικής ενέργειας (Α.Δ.Μ.Ε.) για
mg ηµφ Σφαίρα, I = 52
 Μελέτη της κίνησης ενός σώµατος που µπορεί να κυλάει σε κεκλιµένο επίπεδο (π.χ. σφόνδυλος, κύλινδρος, σφαίρα, κλπ.) Τ mg συνφ Κ Ν mg ηµφ Το σώµα του σχήµατος έχει µάζα m, ακτίνα και µπορεί να είναι: Σφόνδυλος
Μελέτη της κίνησης ενός σώµατος που µπορεί να κυλάει σε κεκλιµένο επίπεδο (π.χ. σφόνδυλος, κύλινδρος, σφαίρα, κλπ.) Τ mg συνφ Κ Ν mg ηµφ Το σώµα του σχήµατος έχει µάζα m, ακτίνα και µπορεί να είναι: Σφόνδυλος
[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]
![[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]](/thumbs/61/46095927.jpg "[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]") ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 5: ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΕΡΓΟ ΔΥΝΑΜΗΣ ΣΤΗ ΣΤΡΟΦΙΚΗ ΚΙΝΗΣΗ 34. Μία κατακόρυφη ράβδος μάζας μήκους, μπορεί να περιστρέφεται στο κατακόρυφο επίπεδο γύρω από
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 5: ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΕΡΓΟ ΔΥΝΑΜΗΣ ΣΤΗ ΣΤΡΟΦΙΚΗ ΚΙΝΗΣΗ 34. Μία κατακόρυφη ράβδος μάζας μήκους, μπορεί να περιστρέφεται στο κατακόρυφο επίπεδο γύρω από
ΦΥΣΙΚΗ Ι. ΤΜΗΜΑ Α Ευστάθιος Στυλιάρης ΠΑΝΕΠΙΣΤΗΜΙΟN ΑΘΗΝΩΝ,, ΠΕΡΙΣΤΡΟΦΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ. ΚΥΛΙΣΗ, ΡΟΠΗ και ΣΤΡΟΦΟΡΜΗ
 ΠΕΡΙΣΤΡΟΦΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ Γωνιακή Μετατόπιση & Ταχύτητα Περιστροφική Κινητική Ενέργεια & Ροπή Αδράνειας Υπολογισμός Ροπής Αδράνειας Στερεών Σωμάτων Θεώρημα Παραλλήλων Αξόνων (Steine) ΚΥΛΙΣΗ, ΡΟΠΗ και
ΠΕΡΙΣΤΡΟΦΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ Γωνιακή Μετατόπιση & Ταχύτητα Περιστροφική Κινητική Ενέργεια & Ροπή Αδράνειας Υπολογισμός Ροπής Αδράνειας Στερεών Σωμάτων Θεώρημα Παραλλήλων Αξόνων (Steine) ΚΥΛΙΣΗ, ΡΟΠΗ και
ΚΡΙΤΗΡΙΟ ΑΞΙΟΛΟΓΗΣΗΣ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ
 ΚΡΙΤΗΡΙΟ ΑΞΙΟΛΟΓΗΣΗΣ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ Αντικείμενο: Κεφάλαιο 4 Θέμα 1ο Α. Να επιλέξετε τη σωστή απάντηση που ακολουθεί κάθε μια από τις πιο κάτω προτάσεις α. Ένα σώμα ηρεμεί εκτός πεδίου βαρύτητας. Ασκούμε
ΚΡΙΤΗΡΙΟ ΑΞΙΟΛΟΓΗΣΗΣ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ Αντικείμενο: Κεφάλαιο 4 Θέμα 1ο Α. Να επιλέξετε τη σωστή απάντηση που ακολουθεί κάθε μια από τις πιο κάτω προτάσεις α. Ένα σώμα ηρεμεί εκτός πεδίου βαρύτητας. Ασκούμε
ΦΥΣΙΚΗ Ι. ΤΜΗΜΑ Α Ευστάθιος. Στυλιάρης ΠΑΝΕΠΙΣΤΗΜΙΟN ΑΘΗΝΩΝ,,
 ΦΥΣΙΚΗ Ι ΤΜΗΜΑ Α Ευστάθιος Στυλιάρης ΠΑΝΕΠΙΣΤΗΜΙΟN ΑΘΗΝΩΝ,, 06 0 07 ΣΥΣΤΗΜΑΤΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ Πολικές Συντεταγμένες Κυλινδρικές Συντεταγμένες Σφαιρικές Συντεταγμένες Στοιχειώδεις Όγκοι ΠΑΡΑΓΩΓΙΣΗ Ιδιότητες
ΦΥΣΙΚΗ Ι ΤΜΗΜΑ Α Ευστάθιος Στυλιάρης ΠΑΝΕΠΙΣΤΗΜΙΟN ΑΘΗΝΩΝ,, 06 0 07 ΣΥΣΤΗΜΑΤΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ Πολικές Συντεταγμένες Κυλινδρικές Συντεταγμένες Σφαιρικές Συντεταγμένες Στοιχειώδεις Όγκοι ΠΑΡΑΓΩΓΙΣΗ Ιδιότητες
Γενικά Μαθηματικά ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 3 η : Εισαγωγικές Ένvοιες ΙI Λουκάς Βλάχος Καθηγητής Αστροφυσικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 3 η : Εισαγωγικές Ένvοιες ΙI Λουκάς Βλάχος Καθηγητής Αστροφυσικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες
ΠΕΙΡΑΜΑ 8. Μελέτη Ροπής Αδρανείας Στερεών Σωµάτων
 ΠΕΙΡΑΜΑ 8 Μελέτη Ροπής Αδρανείας Στερεών Σωµάτων Σκοπός του πειράµατος Σκοπός του πειράµατος είναι η µελέτη της ροπής αδρανείας διαφόρων στερεών σωµάτων και των στροφικών ταλαντώσεων που εκτελούν γύρω
ΠΕΙΡΑΜΑ 8 Μελέτη Ροπής Αδρανείας Στερεών Σωµάτων Σκοπός του πειράµατος Σκοπός του πειράµατος είναι η µελέτη της ροπής αδρανείας διαφόρων στερεών σωµάτων και των στροφικών ταλαντώσεων που εκτελούν γύρω
φυσική κατεύθυνσης γ λυκείου ΕΡΩΤΗΣΕΙΣ ΣΩΣΤΟΥ ΛΑΘΟΥΣ ΕΠΙΛΟΓΗΣ (κεφ.4) Γκότσης Θανάσης - Τερζής Πέτρος
 Γκότσης Θανάσης - Τερζής Πέτρος") 1 Ένα στερεό εκτελεί μεταφορική κίνηση όταν: α) η τροχιά κάθε σημείου είναι ευθεία γραμμή β) όλα τα σημεία του έχουν ταχύτητα που μεταβάλλεται με το χρόνο γ) μόνο το κέντρο μάζας του διαγράφει ευθύγραμμη
1 Ένα στερεό εκτελεί μεταφορική κίνηση όταν: α) η τροχιά κάθε σημείου είναι ευθεία γραμμή β) όλα τα σημεία του έχουν ταχύτητα που μεταβάλλεται με το χρόνο γ) μόνο το κέντρο μάζας του διαγράφει ευθύγραμμη
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Θέματα Εξετάσεων Ασκήσεις στο Mάθημα: "ΡΟΜΠΟΤΙΚΗ Ι: ΑΝΑΛΥΣΗ, ΕΛΕΓΧΟΣ, ΕΡΓΑΣΤΗΡΙΟ" 1 η Σειρά Θεμάτων Θέμα 1-1 Έστω ρομποτικός
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Θέματα Εξετάσεων Ασκήσεις στο Mάθημα: "ΡΟΜΠΟΤΙΚΗ Ι: ΑΝΑΛΥΣΗ, ΕΛΕΓΧΟΣ, ΕΡΓΑΣΤΗΡΙΟ" 1 η Σειρά Θεμάτων Θέμα 1-1 Έστω ρομποτικός
ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ. Α5. α. Λάθος β. Λάθος γ. Σωστό δ. Λάθος ε. Σωστό
 ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ. Α. δ. Α3. γ. Α4. γ. Α5. α. Λάθος β. Λάθος γ. Σωστό δ. Λάθος ε. Σωστό ΘΕΜΑ B B1. Σωστή απάντηση είναι η
ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ. Α. δ. Α3. γ. Α4. γ. Α5. α. Λάθος β. Λάθος γ. Σωστό δ. Λάθος ε. Σωστό ΘΕΜΑ B B1. Σωστή απάντηση είναι η
Η Επιτάχυνση. η τα- χύτητά του ( Σχήμα 1 ). Από τον ορισμό της ταχύτητας θα ισχύει (3)
. Από τον ορισμό της ταχύτητας θα ισχύει (3)") Η Επιτάχυνση η τα- Έστω r ( t ) ( t ) i ( t ) j z ( t ) k το διάνυσμα θέσης του κινητού Μ και ( t ) χύτητά του ( Σχήμα 1 ). Από τον ορισμό της ταχύτητας θα ισχύει r ( t ) r ( t ) ή πιο απλά (1) t t Άρα
Η Επιτάχυνση η τα- Έστω r ( t ) ( t ) i ( t ) j z ( t ) k το διάνυσμα θέσης του κινητού Μ και ( t ) χύτητά του ( Σχήμα 1 ). Από τον ορισμό της ταχύτητας θα ισχύει r ( t ) r ( t ) ή πιο απλά (1) t t Άρα
ΠΡΟΩΘΗΣΗ ΠΥΡΑΥΛΩΝ. Η προώθηση των πυραύλων στηρίζεται στην αρχή διατήρησης της ορμής.
 ΠΡΟΩΘΗΣΗ ΠΥΡΑΥΛΩΝ Η προώθηση των πυραύλων στηρίζεται στην αρχή διατήρησης της ορμής. Ο πύραυλος καίει τα καύσιμα που αρχικά βρίσκονται μέσα του και εκτοξεύει τα καυσαέρια προς τα πίσω. Τα καυσαέρια δέχονται
ΠΡΟΩΘΗΣΗ ΠΥΡΑΥΛΩΝ Η προώθηση των πυραύλων στηρίζεται στην αρχή διατήρησης της ορμής. Ο πύραυλος καίει τα καύσιμα που αρχικά βρίσκονται μέσα του και εκτοξεύει τα καυσαέρια προς τα πίσω. Τα καυσαέρια δέχονται
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ. Ενότητα 5 η : Παραδείγµατα 3 µηχανισµών. χώρο (3 )
") ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ Ενότητα 5 η Παραδείγµατα µηχανισµών στο χώρο (3 ) Παράδειγµα 1 ο : Ροµποτικός βραχίονας RPPRR R: revolute pair P: prismatic pair Βραχίονας Τηλεσκοπικός βραχίονας
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ Ενότητα 5 η Παραδείγµατα µηχανισµών στο χώρο (3 ) Παράδειγµα 1 ο : Ροµποτικός βραχίονας RPPRR R: revolute pair P: prismatic pair Βραχίονας Τηλεσκοπικός βραχίονας
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔ ΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ Μεθοδολογία Κλεομένης Γ. Τσιγάνης Λέκτορας ΑΠΘ Πρόχειρες
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔ ΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ Μεθοδολογία Κλεομένης Γ. Τσιγάνης Λέκτορας ΑΠΘ Πρόχειρες
% ] Βαγγέλης Δημητριάδης 4 ο ΓΕΛ Ζωγράφου
![% ] Βαγγέλης Δημητριάδης 4 ο ΓΕΛ Ζωγράφου](/thumbs/53/30956495.jpg "% ] Βαγγέλης Δημητριάδης 4 ο ΓΕΛ Ζωγράφου") 1. Ομογενής και ισοπαχής ράβδος μήκους L= 4 m και μάζας M= 2 kg ισορροπεί οριζόντια. Το άκρο Α της ράβδου συνδέεται με άρθρωση σε κατακόρυφο τοίχο. Σε σημείο Κ της ράβδου έχει προσδεθεί το ένα άκρο κατακόρυφου
1. Ομογενής και ισοπαχής ράβδος μήκους L= 4 m και μάζας M= 2 kg ισορροπεί οριζόντια. Το άκρο Α της ράβδου συνδέεται με άρθρωση σε κατακόρυφο τοίχο. Σε σημείο Κ της ράβδου έχει προσδεθεί το ένα άκρο κατακόρυφου
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014
 ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014") ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/014 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α1 Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/014 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α1 Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα που αντιστοιχεί
Για να μην χάσουμε τα συμπεράσματα.
 Για να μην χάσουμε τα συμπεράσματα. Η τομή ενός ομογενούς στερεού s είναι ορθογώνιο ΑΒΓΔ με πλευρές (ΑΒ)=2α και (ΑΔ)=6α. Αφήνουμε το στερεό σε κεκλιμένο επίπεδο κλίσεως θ, όπου ημθ=0,6 και συνθ=0,8. Να
Για να μην χάσουμε τα συμπεράσματα. Η τομή ενός ομογενούς στερεού s είναι ορθογώνιο ΑΒΓΔ με πλευρές (ΑΒ)=2α και (ΑΔ)=6α. Αφήνουμε το στερεό σε κεκλιμένο επίπεδο κλίσεως θ, όπου ημθ=0,6 και συνθ=0,8. Να
Ασκήσεις (διάφορες, στροφορμής και δυναμικής συστήματος σωματιδίων)
") Προσπαθείστε να λύσετε τις: Ασκήσεις (διάφορες, στροφορμής και δυναμικής συστήματος σωματιδίων Διάφορες: l. inn: : 7.6, 7.76, 7.78 Serwy: Κεφ.. 9:, 55, 65, 8, 85 Στροφορμή: : : 7.5, 7.8, 7., 7.6 Δυν. Συστ.
Προσπαθείστε να λύσετε τις: Ασκήσεις (διάφορες, στροφορμής και δυναμικής συστήματος σωματιδίων Διάφορες: l. inn: : 7.6, 7.76, 7.78 Serwy: Κεφ.. 9:, 55, 65, 8, 85 Στροφορμή: : : 7.5, 7.8, 7., 7.6 Δυν. Συστ.
Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα. ΔΙΑΛΕΞΗ 09 Ροπή Αδρανείας Στροφορμή
 Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα ΔΙΑΛΕΞΗ 09 Ροπή Αδρανείας Στροφορμή ΦΥΣ102 1 Υπολογισμός Ροπών Αδράνειας Η Ροπή αδράνειας
Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα ΔΙΑΛΕΞΗ 09 Ροπή Αδρανείας Στροφορμή ΦΥΣ102 1 Υπολογισμός Ροπών Αδράνειας Η Ροπή αδράνειας
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός https://phsicscourses.wordpress.com/ Θεωρία Υπάρχουν κάποιες περιπτώσεις μελέτης τις οποίες
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός https://phsicscourses.wordpress.com/ Θεωρία Υπάρχουν κάποιες περιπτώσεις μελέτης τις οποίες
Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα
 Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα ΔΙΑΛΕΞΗ 08 Δυναμική περιστροφικής κίνησης Ροπή Ροπή Αδρανείας ΦΥΣ102 1 Περιστροφική κίνηση
Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα ΔΙΑΛΕΞΗ 08 Δυναμική περιστροφικής κίνησης Ροπή Ροπή Αδρανείας ΦΥΣ102 1 Περιστροφική κίνηση
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ ( Μεθοδολογία- Παραδείγματα ) Κλεομένης Γ. Τσιγάνης
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ ( Μεθοδολογία- Παραδείγματα ) Κλεομένης Γ. Τσιγάνης
Μην χάσουμε τον σύνδεσμο ή τον κινηματικό περιορισμό!!!
 Μην χάσουμε τον σύνδεσμο ή τον κινηματικό περιορισμό!!! Σε πάρα πολλές περιπτώσεις κατά τη μελέτη του στερεού, το πρόβλημα επιλύεται με εφαρμογή του ου νόμου του Νεύτωνα, τόσο για την περιστροφική κίνηση
Μην χάσουμε τον σύνδεσμο ή τον κινηματικό περιορισμό!!! Σε πάρα πολλές περιπτώσεις κατά τη μελέτη του στερεού, το πρόβλημα επιλύεται με εφαρμογή του ου νόμου του Νεύτωνα, τόσο για την περιστροφική κίνηση
ΚΕΦΑΛΑΙΟ 9 ΠΕΡΙΣΤΡΟΦΗ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ 18/11/2011 ΚΕΦ. 9
 ΚΕΦΑΛΑΙΟ 9 ΠΕΡΙΣΤΡΟΦΗ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ 18/11/011 ΚΕΦ. 9 1 ΓΩΝΙΑΚΗ ΚΙΝΗΣΗ: ΟΡΙΣΜΟΙ Περιστροφική κινηματική: περιγράφει την περιστροφική κίνηση. Στερεό Σώμα: Ιδανικό μοντέλο σώματος που έχει τελείως ορισμένα
ΚΕΦΑΛΑΙΟ 9 ΠΕΡΙΣΤΡΟΦΗ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ 18/11/011 ΚΕΦ. 9 1 ΓΩΝΙΑΚΗ ΚΙΝΗΣΗ: ΟΡΙΣΜΟΙ Περιστροφική κινηματική: περιγράφει την περιστροφική κίνηση. Στερεό Σώμα: Ιδανικό μοντέλο σώματος που έχει τελείως ορισμένα
Γιάννης Γιάκας. Συστήματα αναφοράς και μονάδες μέτρησης Γραμμικά κινηματικά χαρακτηριστικά Γωνιακά κινηματικά χαρακτηριστικά Βλητική 2/12/2013
 Γιάννης Γιάκας Ύλη προόδου Συστήματα αναφοράς και μονάδες μέτρησης Γραμμικά κινηματικά χαρακτηριστικά Γωνιακά κινηματικά χαρακτηριστικά Βλητική 1 Συστήματα Αναφοράς M.K.S. ( m, Kg, sec ) C.G.S. ( cm, gr,
Γιάννης Γιάκας Ύλη προόδου Συστήματα αναφοράς και μονάδες μέτρησης Γραμμικά κινηματικά χαρακτηριστικά Γωνιακά κινηματικά χαρακτηριστικά Βλητική 1 Συστήματα Αναφοράς M.K.S. ( m, Kg, sec ) C.G.S. ( cm, gr,
Χωρικές Περιγραφές και Ομογενείς Μετασχηματισμοί
 Χωρικές Περιγραφές και Ομογενείς Μετασχηματισμοί ΚΕΦΑΛΑΙΟ.. Εισαγωγή Η λειτουργία των ρομποτικών χειριστών είναι συνυφασμένη με τη μετακίνηση υλικών και εργαλείων μέσα στο χώρο με τη βοήθεια κάποιου μηχανισμού
Χωρικές Περιγραφές και Ομογενείς Μετασχηματισμοί ΚΕΦΑΛΑΙΟ.. Εισαγωγή Η λειτουργία των ρομποτικών χειριστών είναι συνυφασμένη με τη μετακίνηση υλικών και εργαλείων μέσα στο χώρο με τη βοήθεια κάποιου μηχανισμού
 Ασκήσεις Κεφ. 2, Δυναμική υλικού σημείου Κλασική Μηχανική, Τμήμα Μαθηματικών Διδάσκων: Μιχάλης Ξένος, email : mxenos@cc.uoi.gr 29 Μαΐου 2012 1. Στο υλικό σημείο A ασκούνται οι δυνάμεις F 1 και F2 των οποίων
Ασκήσεις Κεφ. 2, Δυναμική υλικού σημείου Κλασική Μηχανική, Τμήμα Μαθηματικών Διδάσκων: Μιχάλης Ξένος, email : mxenos@cc.uoi.gr 29 Μαΐου 2012 1. Στο υλικό σημείο A ασκούνται οι δυνάμεις F 1 και F2 των οποίων
2. Επίδραση των δυνάμεων στην περιστροφική κίνηση Ισοδύναμα συστήματα δυνάμεων
 2. Επίδραση των δυνάμεων στην περιστροφική κίνηση Ισοδύναμα συστήματα δυνάμεων 2.1 Όπως είναι γνωστό, όταν σε κάποιο σώμα ενεργούν δυνάμεις, ένα από τα αποτελέσματά τους μπορεί να είναι να αλλάξει η κατάσταση
2. Επίδραση των δυνάμεων στην περιστροφική κίνηση Ισοδύναμα συστήματα δυνάμεων 2.1 Όπως είναι γνωστό, όταν σε κάποιο σώμα ενεργούν δυνάμεις, ένα από τα αποτελέσματά τους μπορεί να είναι να αλλάξει η κατάσταση
ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ ΠΡΟΣΠΑΘΕΙΑ ΣΑΣ ΚΙ 2014
 ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΨΗΦΙΑΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΒΟΗΘΗΜΑ «ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ» 5 o ΔΙΑΓΩΝΙΣΜΑ ΑΠΡΙΛΙΟΣ 2017: ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ
 5 o ΔΙΑΓΩΝΙΣΜΑ ΑΠΡΙΛΙΟΣ 017: ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ. Α. δ. Α3. γ. Α4. γ. Α5. α. Λάθος β. Λάθος γ. Σωστό
5 o ΔΙΑΓΩΝΙΣΜΑ ΑΠΡΙΛΙΟΣ 017: ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ. Α. δ. Α3. γ. Α4. γ. Α5. α. Λάθος β. Λάθος γ. Σωστό
Μην ξεχνάμε τον άξονα περιστροφής.
 Μην ξεχνάμε τον άξονα περιστροφής. Έχουμε πάρα πολλά προβλήματα, όπου ένα στερεό, όπως μια ράβδος, στρέφεται γύρω από έναν σταθερό άξονα. Συνήθως στις περιπτώσεις αυτές επιλύουμε το πρόβλημα, «αφήνοντας
Μην ξεχνάμε τον άξονα περιστροφής. Έχουμε πάρα πολλά προβλήματα, όπου ένα στερεό, όπως μια ράβδος, στρέφεται γύρω από έναν σταθερό άξονα. Συνήθως στις περιπτώσεις αυτές επιλύουμε το πρόβλημα, «αφήνοντας
Θέση και Προσανατολισμός
 Κεφάλαιο 2 Θέση και Προσανατολισμός 2-1 Εισαγωγή Προκειμένου να μπορεί ένα ρομπότ να εκτελέσει κάποιο έργο, πρέπει να διαθέτει τρόπο να περιγράφει τα εξής: Τη θέση και προσανατολισμό του τελικού στοιχείου
Κεφάλαιο 2 Θέση και Προσανατολισμός 2-1 Εισαγωγή Προκειμένου να μπορεί ένα ρομπότ να εκτελέσει κάποιο έργο, πρέπει να διαθέτει τρόπο να περιγράφει τα εξής: Τη θέση και προσανατολισμό του τελικού στοιχείου
Και τα στερεά συγκρούονται
 Και τα στερεά συγκρούονται Εξετάζοντας την ελαστική κρούση υλικών σημείων, ουσιαστικά εξετάζουμε την κρούση μεταξύ δύο στερεών σωμάτων, δύο μικρών σφαιρών, τα οποία εκτελούν μόνο μεταφορική κίνηση. Τι
Και τα στερεά συγκρούονται Εξετάζοντας την ελαστική κρούση υλικών σημείων, ουσιαστικά εξετάζουμε την κρούση μεταξύ δύο στερεών σωμάτων, δύο μικρών σφαιρών, τα οποία εκτελούν μόνο μεταφορική κίνηση. Τι
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΑΠΑΝΤΗΣΕΙΣ ΣΤΑ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ 2015
 ΘΕΜΑ Α Α. α Α.2 β Α.3 α Α.4 δ Α.5 α Λ β Σ γ Σ δ Λ ε Σ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΑΠΑΝΤΗΣΕΙΣ ΣΤΑ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ 205 ΘΕΜΑ Β Β. Σωστή η απάντηση ( iii ) Αιτιολόγηση: Από το θεμελιώδη νόμο
ΘΕΜΑ Α Α. α Α.2 β Α.3 α Α.4 δ Α.5 α Λ β Σ γ Σ δ Λ ε Σ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΑΠΑΝΤΗΣΕΙΣ ΣΤΑ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ 205 ΘΕΜΑ Β Β. Σωστή η απάντηση ( iii ) Αιτιολόγηση: Από το θεμελιώδη νόμο
2 Η ΠΡΟΟΔΟΣ. Ενδεικτικές λύσεις κάποιων προβλημάτων. Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση
 2 Η ΠΡΟΟΔΟΣ Ενδεικτικές λύσεις κάποιων προβλημάτων Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση Ένας τροχός εκκινεί από την ηρεμία και επιταχύνει με γωνιακή ταχύτητα που δίνεται από την,
2 Η ΠΡΟΟΔΟΣ Ενδεικτικές λύσεις κάποιων προβλημάτων Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση Ένας τροχός εκκινεί από την ηρεμία και επιταχύνει με γωνιακή ταχύτητα που δίνεται από την,
Υπολογισμός ροπής αδράνειας. Για συνεχή κατανομή μάζας έχουμε:
 Υπολογισμός ροπής αδράνειας Για συνεχή κατανομή μάζας έχουμε: I = r dm Υπολογισμός ροπής αδράνειας Θεώρημα παράλληλων αξόνων Icm I p Ροπή αδράνειας ως προς άξονα που περνά από το κέντρο μάζας Ροπή αδράνειας
Υπολογισμός ροπής αδράνειας Για συνεχή κατανομή μάζας έχουμε: I = r dm Υπολογισμός ροπής αδράνειας Θεώρημα παράλληλων αξόνων Icm I p Ροπή αδράνειας ως προς άξονα που περνά από το κέντρο μάζας Ροπή αδράνειας
ΕΡΓΑΣΤΗΡΙΑΚΗ ΕΦΑΡΜΟΓΗ 1 ΤO ΡΟΜΠΟΤ INTELLITEK ER-2u
 Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
ιαγώνισµα Γ Τάξης Ενιαίου Λυκείου Μηχανική Στερεού - µέρος Ι Ενδεικτικές Λύσεις Θέµα Α
 ιαγώνισµα Γ Τάξης Ενιαίου Λυκείου Μηχανική Στερεού - µέρος Ι Ενδεικτικές Λύσεις Θέµα Α Α.1. Η γωνιακή επιτάχυνση ενός οµογενούς δίσκου που στρέφεται γύρω από σταθερό άξονα, που διέρχεται από το κέντρο
ιαγώνισµα Γ Τάξης Ενιαίου Λυκείου Μηχανική Στερεού - µέρος Ι Ενδεικτικές Λύσεις Θέµα Α Α.1. Η γωνιακή επιτάχυνση ενός οµογενούς δίσκου που στρέφεται γύρω από σταθερό άξονα, που διέρχεται από το κέντρο
ΦΥΛΛΟ ΕΡΓΑΣΙΑΣ: ΔΥΝΑΜΕΙΣ ΚΑΙ ΡΟΠΕΣ
 ΦΥΛΛΟ ΕΡΓΑΣΙΑΣ: ΔΥΝΑΜΕΙΣ ΚΑΙ ΡΟΠΕΣ Σ ένα στερεό ασκούνται ομοεπίπεδες δυνάμεις. Όταν το στερεό ισορροπεί, δηλαδή ισχύει ότι F 0 και δεν περιστρέφεται τότε το αλγεβρικό άθροισμα των ροπών είναι μηδέν Στ=0,
ΦΥΛΛΟ ΕΡΓΑΣΙΑΣ: ΔΥΝΑΜΕΙΣ ΚΑΙ ΡΟΠΕΣ Σ ένα στερεό ασκούνται ομοεπίπεδες δυνάμεις. Όταν το στερεό ισορροπεί, δηλαδή ισχύει ότι F 0 και δεν περιστρέφεται τότε το αλγεβρικό άθροισμα των ροπών είναι μηδέν Στ=0,
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - Β. - Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών - 06. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - Β. - Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών - 06. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
Διαγώνισμα Γ Λυκείου Θετικού προσανατολισμού. Διαγώνισμα Μηχανική Στερεού Σώματος. Σάββατο 24 Φεβρουαρίου Θέμα 1ο
 Διαγώνισμα Μηχανική Στερεού Σώματος Σάββατο 24 Φεβρουαρίου 2018 Θέμα 1ο Στις παρακάτω προτάσεις 1.1 1.4 να επιλέξτε την σωστή απάντηση (4 5 = 20 μονάδες ) 1.1. Ένας δίσκος στρέφεται γύρω από άξονα που
Διαγώνισμα Μηχανική Στερεού Σώματος Σάββατο 24 Φεβρουαρίου 2018 Θέμα 1ο Στις παρακάτω προτάσεις 1.1 1.4 να επιλέξτε την σωστή απάντηση (4 5 = 20 μονάδες ) 1.1. Ένας δίσκος στρέφεται γύρω από άξονα που
Προτεινόμενα θέματα για τις εξετάσεις 2011
 Προτεινόμενα θέματα για τις εξετάσεις 011 Τάξη: Γ Γενικού Λυκείου Μάθημα: Φυσική Θετικής και Τεχνολογικής Κατεύθυνσης ΘΕΜΑ Α Α1-A4 Να επιλέξετε τη σωστή από τις απαντήσεις Α1. Ένα σώμα μάζας είναι στερεωμένο
Προτεινόμενα θέματα για τις εξετάσεις 011 Τάξη: Γ Γενικού Λυκείου Μάθημα: Φυσική Θετικής και Τεχνολογικής Κατεύθυνσης ΘΕΜΑ Α Α1-A4 Να επιλέξετε τη σωστή από τις απαντήσεις Α1. Ένα σώμα μάζας είναι στερεωμένο
Ερωτήσεις. 2. Η ροπή αδράνειας μιας σφαίρας μάζας Μ και ακτίνας R ως προς άξονα που διέρχεται
 - Μηχανική στερεού σώματος Ερωτήσεις 1. Στερεό στρέφεται γύρω από σταθερό άξονα. Η γωνιακή ταχύτητα του στερεού μεταβάλλεται με το χρόνο όπως στο διπλανό διάγραμμα ω -. Να χαρακτηρίσετε τις παρακάτω προτάσεις
- Μηχανική στερεού σώματος Ερωτήσεις 1. Στερεό στρέφεται γύρω από σταθερό άξονα. Η γωνιακή ταχύτητα του στερεού μεταβάλλεται με το χρόνο όπως στο διπλανό διάγραμμα ω -. Να χαρακτηρίσετε τις παρακάτω προτάσεις
Παίζοντας με ένα γιο γιο
 Παίζοντας με ένα γιο γιο Ένα γιο γιο είναι κατασκευασμένο από ένα λεπτό σωλήνα μάζας m Σ και ακτίνας =π/4 και δύο ομογενείς δίσκους με μάζα m και ακτίνα 0 = ο καθένας. Τα κέντρα των τριών σωμάτων είναι
Παίζοντας με ένα γιο γιο Ένα γιο γιο είναι κατασκευασμένο από ένα λεπτό σωλήνα μάζας m Σ και ακτίνας =π/4 και δύο ομογενείς δίσκους με μάζα m και ακτίνα 0 = ο καθένας. Τα κέντρα των τριών σωμάτων είναι
ΦΥΕ 14 5η ΕΡΓΑΣΙΑ Παράδοση ( Οι ασκήσεις είναι βαθμολογικά ισοδύναμες) Άσκηση 1 : Aσκηση 2 :
 Άσκηση 1 : Aσκηση 2 :") ΦΥΕ 14 5 η ΕΡΓΑΣΙΑ Παράδοση 19-5-8 ( Οι ασκήσεις είναι βαθμολογικά ισοδύναμες) Άσκηση 1 : Συμπαγής κύλινδρος μάζας Μ συνδεδεμένος σε ελατήριο σταθεράς k = 3. N / και αμελητέας μάζας, κυλίεται, χωρίς να
ΦΥΕ 14 5 η ΕΡΓΑΣΙΑ Παράδοση 19-5-8 ( Οι ασκήσεις είναι βαθμολογικά ισοδύναμες) Άσκηση 1 : Συμπαγής κύλινδρος μάζας Μ συνδεδεμένος σε ελατήριο σταθεράς k = 3. N / και αμελητέας μάζας, κυλίεται, χωρίς να
ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 4 ΚΕΦΑΛΑΙΟ
 ΠΡΟΒΛΗΜΑ 1 ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 4 ΚΕΦΑΛΑΙΟ Η λεπτή, ομογενής ράβδος ΟΑ του σχήματος έχει μήκος, μάζα και μπορεί να περιστρέφεται σε κατακόρυφο επίπεδο γύρω από οριζόντιο ακλόνητο άξονα (άρθρωση) που διέρχεται
ΠΡΟΒΛΗΜΑ 1 ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 4 ΚΕΦΑΛΑΙΟ Η λεπτή, ομογενής ράβδος ΟΑ του σχήματος έχει μήκος, μάζα και μπορεί να περιστρέφεται σε κατακόρυφο επίπεδο γύρω από οριζόντιο ακλόνητο άξονα (άρθρωση) που διέρχεται
Ομαλή Κυκλική Κίνηση 1. Γίνεται με σταθερή ακτίνα (Το διάνυσμα θέσης έχει σταθερό μέτρο και περιστρέφεται γύρω από σταθερό σημείο.
 Ομαλή Κυκλική Κίνηση 1. Γίνεται με σταθερή ακτίνα (Το διάνυσμα θέσης έχει σταθερό μέτρο και περιστρέφεται γύρω από σταθερό σημείο. 1 3 υ υ 1 1. Το μέτρο της ταχύτητας του υλικού σημείου είναι σταθερό.
Ομαλή Κυκλική Κίνηση 1. Γίνεται με σταθερή ακτίνα (Το διάνυσμα θέσης έχει σταθερό μέτρο και περιστρέφεται γύρω από σταθερό σημείο. 1 3 υ υ 1 1. Το μέτρο της ταχύτητας του υλικού σημείου είναι σταθερό.
Α. Ροπή δύναµης ως προς άξονα περιστροφής
 Μηχανική στερεού σώµατος, Ροπή ΡΟΠΗ ΔΥΝΑΜΗΣ Α. Ροπή δύναµης ως προς άξονα περιστροφής Έστω ένα στερεό που δέχεται στο άκρο F Α δύναµη F όπως στο σχήµα. Στο Ο διέρχεται άξονας περιστροφής κάθετος στο στερεό
Μηχανική στερεού σώµατος, Ροπή ΡΟΠΗ ΔΥΝΑΜΗΣ Α. Ροπή δύναµης ως προς άξονα περιστροφής Έστω ένα στερεό που δέχεται στο άκρο F Α δύναµη F όπως στο σχήµα. Στο Ο διέρχεται άξονας περιστροφής κάθετος στο στερεό
S συνφ (3.27), =± F h (3.28)
, =± F h (3.28)") Στη συγκεκριμένη ενότητα, θα ασχηθούμε με το έργο και την μηχανική ενέργεια στην περιστροφική κίνηση, όπως επίσης και με την ορθή διτύπωση των ενεργειακών θεωρημάτων και αρχών (ΘΜΚΕ, ΘΔΜΕ, ΑΔΕ, κλπ) που
Στη συγκεκριμένη ενότητα, θα ασχηθούμε με το έργο και την μηχανική ενέργεια στην περιστροφική κίνηση, όπως επίσης και με την ορθή διτύπωση των ενεργειακών θεωρημάτων και αρχών (ΘΜΚΕ, ΘΔΜΕ, ΑΔΕ, κλπ) που
Δυναμική Μηχανών I. Επανάληψη: Κινηματική και Δυναμική
 Δυναμική Μηχανών I 2 2 Επανάληψη: Κινηματική και Δυναμική 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε αναπαραγωγή χωρίς άδεια Περιεχόμενα
Δυναμική Μηχανών I 2 2 Επανάληψη: Κινηματική και Δυναμική 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε αναπαραγωγή χωρίς άδεια Περιεχόμενα
ΦΥΣΙΚΗ ΘΕΤΙΚΟΥ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΕΡΓΑΣΙΑ 2 ΑΣΚΗΣΕΙΣ ΣΤΗΝ ΟΜΑΛΗ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ
 ΦΥΣΙΚΗ ΘΕΤΙΚΟΥ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΕΡΓΑΣΙΑ 2 ΑΣΚΗΣΕΙΣ ΣΤΗΝ ΟΜΑΛΗ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ 1. Σώμα μάζας m=15/π Kg εκτελεί ομαλή κυκλική κίνηση ακτίνας R=20/π m με φορά αντίθετη απ τους δείκτες του ρολογιού. Αν το σώμα
ΦΥΣΙΚΗ ΘΕΤΙΚΟΥ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΕΡΓΑΣΙΑ 2 ΑΣΚΗΣΕΙΣ ΣΤΗΝ ΟΜΑΛΗ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ 1. Σώμα μάζας m=15/π Kg εκτελεί ομαλή κυκλική κίνηση ακτίνας R=20/π m με φορά αντίθετη απ τους δείκτες του ρολογιού. Αν το σώμα