Υλοποίηση μικρού αυτόνομου ρομποτικού οχήματος με μικροελεγκτή Arduino.
|
|
|
- Ἀβειρὼν Καραβίας
- 7 χρόνια πριν
- Προβολές:
Transcript

1 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. Υλοποίηση μικρού αυτόνομου ρομποτικού οχήματος με μικροελεγκτή Arduino. ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ της Μάκρα Αικατερίνης ΑΕΜ 2774 Επιβλέπων: Δρ. Καλόμοιρος Ιωάννης, Αναπληρωτής Καθηγητής Σέρρες, 2016
2 ΥΠΕΥΘΥΝΗ ΔΗΛΩΣΗ Βεβαιώνω ότι είμαι η συγγραφέας αυτής της πτυχιακής εργασίας και ότι κάθε βοήθεια την οποία είχα για την προετοιμασία της, είναι πλήρως αναγνωρισμένη και αναφέρεται στην πτυχιακή εργασία. Επίσης έχω αναφέρει τις όποιες πηγές από τις οποίες έκανα χρήση δεδομένων, ιδεών ή λέξεων είτε αυτές αναφέρονται ακριβώς είτε παραφρασμένες. Επίσης βεβαιώνω ότι αυτή η πτυχιακή εργασία προετοιμάστηκε από εμένα προσωπικά ειδικά για τις απαιτήσεις του προγράμματος σπουδών του τμήματος Μηχανικών Πληροφορικής του Τ.Ε.Ι. Σερρών. Σελίδα 2 από 68
3 ΠΕΡΙΕΧΟΜΕΝΑ Υπεύθυνη δήλωση σελ. 2 Περίληψη σελ. 5 ΚΕΦΑΛΑΙΟ Ρομποτική και Ρομπότ σελ Ιστορική αναδρομή των αυτοκινούμενων Ρομπότ σελ. 7 KEΦΑΛΑΙΟ Τι είναι ο ARDUINO σελ Μικροελεγκτής, η καρδιά του ARDUINO σελ Εκδόσεις ARDUINO σελ Xαρακτηριστικά του Αrduino UNO σελ Παράδειγμα εύρεσης του παλμού λειτουργίας duty cycle (κύκλος) σελ Τροφοδοσία σελ Ενσωματωμένα κουμπιά και LED του Αrduino UNO σελ Εγκατάσταση περιβάλλοντος Αrduino IDE σελ.22 ΚΕΦΑΛΑΙΟ Το ολοκληρωμένο κύκλωμα οδήγησης κινητήρων σελ Ιστορικά στοιχεία των ολοκληρωμένων κυκλωμάτων σελ Διάκριση ολοκληρωμένων κυκλωμάτων σελ Το ολοκληρωμένο κύκλωμα L293D σελ Κινητήρες- εισαγωγή σελ Κινητήρας DC σελ Συνδεσμολογία για τον έλεγχο δύο κινητήρων με το ολοκληρωμένο κύκλωμα σελ.31 Σελίδα 3 από 68
4 3.3 Κίνηση dc μοτέρ με τη χρήση ολοκληρωμένου κυκλώματος σελ H-Bridge σελ Συνδεσμολογία Arduino με το ολοκληρωμένο κύκλωμα L293D σελ.34 ΚΕΦΑΛΑΙΟ Εισαγωγή σελ Ο αισθητήρας υπερήχων HC-SR04 σελ Σύνδεση με το Arduino σελ.40 ΚΕΦΑΛΑΙΟ Ηχείο- Sounder σελ Σύνδεση ηχείου στο Αrduino σελ.41 ΚΕΦΑΛΑΙΟ Αρχικοποίηση Μεταβλητών σελ Κώδικας που εκτελείται μια φορά σελ Κυρίως πρόγραμμα σελ Εντολές εντός κυρίου προγράμματος για την δήλωση του ήχου όταν όχημα πλησιάζει σε εμπόδιο σελ.55 Διάφορες εικόνες που τραβήχτηκαν κατά την διαδικασία υλοποίησης της εργασίας. σελ.54 Προβλήματα που παρουσιάστηκαν κατά την υλοποίηση του αυτόνομου ρομποτικού αυτοκινήτου σελ.62 Σχόλια και συμπεράσματα Παράρτημα Υλικών Βιβλιογραφία Ιστοσελίδες σελ.63 σελ.64 σελ.68 σελ.68 Σελίδα 4 από 68
5 ΠΕΡΙΛΗΨΗ Η παρούσα πτυχιακή εργασία έχει σαν στόχο την ανάπτυξη και την δυνατότητα διδασκαλίας της εκπαιδευτικής ρομποτικής κυρίως με τη χρήση του ARDUINO με αισθητήρες και ήχο πάνω σε ένα αυτοκίνητο που θα είναι αυτόνομο. Στο πλαίσιο αυτής της διπλωματικής εργασίας χρησιμοποιείται ένα ολοκληρωμένο κύκλωμα L293D για την κίνηση των κινητήρων. Με τη βοήθεια του μικροεπεξεργαστή atmega328p (ARDUINO) προγραμματίζουμε την ομαλή λειτουργία του οχήματος. Με τη χρήση των αισθητήρων και των ηχητικών εφέ επιτυγχάνεται η αποφυγή εμποδίων που θα βρίσκονται στο δρόμο του αυτοκινήτου μας. Σελίδα 5 από 68
6 ΚΕΦΑΛΑΙΟ Ρομποτική και Ρομπότ Ρομποτική είναι ο σύγχρονος τεχνολογικός κλάδος της αυτοματοποίησης, που έχει ως αντικείμενο τη μελέτη, το σχεδιασμό και τη λειτουργία των ρομπότ, καθώς και την έρευνα για την περαιτέρω ανάπτυξή τους. Ρομπότ είναι μια μηχανική συσκευή η οποία μπορεί να υποκαθιστά τον άνθρωπο σε διάφορες εργασίες. Ένα ρομπότ μπορεί να δράσει κάτω από τον απευθείας έλεγχο ενός ανθρώπου ή αυτόνομα κάτω από τον έλεγχο ενός προγραμματισμένου υπολογιστή. Η λέξη ρομπότ προέρχεται από το σλαβικό robota που σημαίνει εργασία. Η φιλοδοξία του ανθρώπου να δημιουργήσει μηχανές που θα του μοιάζουν τόσο στη μορφή όσο και στη λειτουργία, πρωτοσυναντάται στην Ελληνική Μυθολογία όπου ο Τάλως, ο μυθικός χάλκινος γίγαντας που κατασκεύασε ο Ήφαιστος για να προστατεύει την Κρήτη από τους εισβολείς, αποτελεί το πρώτο αυτόματο στην ανθρώπινη ιστορία. Στη σύγχρονη εποχή, ο όρος καθιερώθηκε με την σημερινή του έννοια, το 1921 από τον Τσέχο θεατρικό συγγραφέα Karel Capek στο έργο του Rossum s Universal Robots, όπου σατιρίζει την εξάρτηση της κοινωνίας από τους μηχανικούς εργάτες (ρομπότ) της τεχνολογικής εξέλιξης και που τελικά εξοντώνουν τους δημιουργούς τους. Λίγα χρόνια αργότερα, κατά την δεκαετία του 40, ο Ρώσος συγγραφέας επιστημονικής φαντασίας, Isaak Asimov, συνέλαβε το ρομπότ ως ένα αυτόματο με εμφάνιση ανθρώπου, αλλά απαλλαγμένο από συναισθήματα. Ο όρος ρομποτική χρησιμοποιήθηκε από τον Asimov ως το σύμβολο της επιστήμης που είναι αφιερωμένη στη μελέτη των ρομπότ και διέπονται από τους παρακάτω τρείς βασικούς νόμους: 1. Το ρομπότ δε θα κάνει κακό σε άνθρωπο, ούτε με την αδράνεια του θα επιστρέψει να βλάψει κανείς ανθρώπινο ον. 2. Το ρομπότ πρέπει να υπακούει στις διαταγές που του δίνουν οι άνθρωποι, εκτός αν αυτές οι διαταγές έρχονται σε αντίθεση με τον πρώτο νόμο. 3. Το ρομπότ οφείλει να προστατεύει τη ύπαρξή του, εφόσον αυτό δεν συγκρούεται με τον πρώτο ή το δεύτερο νόμο. Σελίδα 6 από 68


7 1.2. Ιστορική αναδρομή των αυτοκινούμενων Ρομπότ Στην παράγραφο αυτή θα κάνουμε μια σύντομη ιστορική αναδρομή στην ιστορία των αυτοκινούμενων ρομπότ, η οποία και έχει στιγματίσει την πορεία της τεχνολογίας και της επιστήμης από τα μέσα του 20 ου αιώνα μέχρι και σήμερα. Η εκτέλεση των κινούμενων ρομπότ προέκυψε με σκοπό την επιτέλεση διάφορων λειτουργιών, από την εκτέλεση απλών καθημερινών εργασιών μέχρι την διενέργεια πολύπλοκων ερευνών, ενώ σήμερα χρησιμοποιούνται και στις πλέον μεγάλης σημασίας διαστημικές αποστολές. Electric Dog (1912) Δημιουργήθηκε από τους ερευνητές John Hammond, Jr και Benjamin Miessner στις ΗΠΑ και αποτέλεσε πρόδρομο όλων των φωτοτροπικών αυτόματων ρομπότ. εικ. 1.1 Electric Dog Maze Machine Learning - Ross Thomas (1933) Πρόκειται για έναν μηχανικό αρουραίο ο οποίος δημιουργήθηκε από τον Dr. Stevenson Smith του πανεπιστημίου Ουάσινγκτον. εικ. 1.2 Maze Machine Learning - Ross Thomas Σελίδα 7 από 68

.")
8 Elmer& Elsie ( ) Δύο ρομπότ που κατασκευάστηκαν από τον William Grey Walter και ονομάστηκαν Machina Speculatrix επειδή τους άρεσε να εξερευνούν το περιβάλλον τους, χαρακτηρίστηκαν ως χελώνες λόγω σχήματος και της αργής κίνησής τους.. εικ. 1.3 Elsie Squee Electric Squirrel (1951) Σχεδιάστηκε και κατασκευάστηκε από τον Edmund C. Berkeley. Ήταν ένα μικρό ηλεκτρονικό ρομπότ που περισυνέλεγε καρύδια (μπάλες τένις ή γκολφ). Ήταν το πρώτο επιδέξιο ρομπότ υπό αυτόματο έλεγχο και το πρώτο αληθινό ρομπότ. εικ. 1.4 Squee Electric Squirrel Σελίδα 8 από 68
 Κατασκευάστηκε αρχικά από τον James L.")

9 Βeast (1960) Το Johns Hopkins University ανέπτυξε το ρομπότ αυτό το οποίο ήταν ένα κινητό αυτόνομο που μπορούσε να επιβιώσει σε ένα φυσικό περιβάλλον χωρίς καμιά ανθρώπινη βοήθεια. εικ.1.5 Beast Stanford Cart (1961) Κατασκευάστηκε αρχικά από τον James L. Adams ως ερευνητικό όχημα για απομακρυσμένες αποστολές στο φεγγάρι. Είχε τέσσερις μικρές ρόδες ποδηλάτου που συνδέονταν με ηλεκτρικούς κινητήρες και τροφοδοτούνταν από μια μπαταρία αυτοκινήτου. Επίσης πραγματοποιούσε λήψεις με μια τηλεοπτική κάμερα με σταθερή θέα προς τα εμπρός.. Σελίδα 9 από 68
10 εικ. 1.6 Stanford Cart (αρχική μορφή) Σελίδα 10 από 68
 να χρησιμοποιήσει και να δοκιμάσει την περιήγηση στο δρόμο υπό τονέλεγχο")
 Shakey (1966-1972) Κατασκευάστηκε μετά από έρευνα που διενεργήθηκε στο ερευνητικό κέντρο του πανεπιστημίου Stanford και ονομάστηκε έτσι εξαιτίας της σπασμωδικής του")
11 Stanford Cart ( ) Μέχρι το 1966 το ρομπότ αυτό ήταν αχρησιμοποίητο σε ένα εργαστήριο, ώσπου ο Les Ernest βρήκε το δημιουργό του και του μίλησε, αφήνοντας το SAIL (Stanford AI Lab- σπίτι για τους ερευνητές στο Στάνφορντ, Τμήμα Επιστήμης Υπολογιστών του οποίου η κύρια εστίαση της έρευνας είναι η Τεχνητή Νοημοσύνη) να χρησιμοποιήσει και να δοκιμάσει την περιήγηση στο δρόμο υπό τονέλεγχο του υπολογιστή χρησιμοποιώντας αναφορές οπτικής επαφής.. εικ 1.7 Stanford Cart (εξελιγμένη μορφή) Shakey ( ) Κατασκευάστηκε μετά από έρευνα που διενεργήθηκε στο ερευνητικό κέντρο του πανεπιστημίου Stanford και ονομάστηκε έτσι εξαιτίας της σπασμωδικής του κίνησης. Ήταν το πρώτο ρομπότ στο οποίο δίνονταν πολύ απλές εντολές (ανοιγόκλεινε πόρτες και διακόπτες) κι εκείνο αντιλαμβανόταν τα απαραίτητα βήματα που έπρεπε να κάνει. εικ. 1.8 Shakey Σελίδα 11 από 68


12 Timbug (1980) Ίσως ο πρώτος σχεδιασμός που δημοσιεύτηκε για ένα ρομποτικό όχημα που χρησιμοποιούσε αισθητήρες υπερήχων για την ανίχνευση εμποδίων, αποφεύγοντάς τα, κάνοντας τυχαία όπισθεν και αλλάζοντας κατεύθυνση. εικ. 1.9 Timbug Sojourner ( ) Η NASA στέλνει στον Άρη το Mars Pathfinder μαζί με το ρόβερ του, το Sojourner, έχοντας ως σκοπό την εξερεύνηση της επιφάνειάς του δεχόμενο εντολές από τη Γη. Ήταν το πρώτο ρόβερ που πάτησε στην επιφάνεια του Άρη, ήταν εξοπλισμένο με κάμερες (μπρος και πίσω) και με σύστημα αποφυγής κινδύνων. εικ.1.10 Sojourner Σελίδα 12 από 68
 Κατασκευαστής του είναι ο έλληνας φοιτητής του Α.Π.Θ.")

13 Roomba (2002) Είναι μια σειρά από αυτόνομα ρομπότ που λειτουργούν σαν ηλεκτρικές σκούπες. Υπό κανονικές συνθήκες στο σπίτι, είναι σε θέση να κινείται αυτόνομα στο πάτωμα αποφεύγοντας τυχόν εμπόδια. εικ Roomba Pandora Robot (2013) Κατασκευαστής του είναι ο έλληνας φοιτητής του Α.Π.Θ., Άρης Θάλας από τη Λαμία, μέλος τη ς ομάδας Pandora που κατέκτησε τη 2 η θέση παγκοσμίως στο διαγωνισμό RobocupRescue2013. Ως αντικείμενό του έχει την εξερεύνηση ενός εκ των προτέρων αγνώστου χώρου με απώτερο σκοπό να εντοπίζει πιθανά θύματα μετά από κάποια φυσική καταστροφή. εικ Pandora Robot Όλα τα παραπάνω ρομπότ που εξετάσαμε ως αναδρομή στο παρελθόν και στην ιστορία της ρομποτικής, βλέπουμε ότι είναι είτε αυτόνομα είτε χειριζόμενα από τρίτους και χρήσιμα στο να συλλέγουν πληροφορίες ή αντικείμενα. Υπάρχει πληθώρα κατασκευών τέτοιου είδους που για ευνόητους λόγους δεν έχουν αναφερθεί παραπάνω, παρά μόνο παρουσιάστηκαν όσα αποτέλεσαν σταθμό στην ιστορία της τεχνολογίας και της επιστήμης. Σελίδα 13 από 68
14 KEΦΑΛΑΙΟ Τι είναι ο ARDUINO Όπως το περιγράφει ο δημιουργός του, ο Arduino είναι μια «ανοικτού κώδικα» πλατφόρμα «πρωτοτυποποίησης» ηλεκτρονικών βασισμένη σε ευέλικτο και εύκολο στη χρήση hardware και software που προορίζεται για οποιονδήποτε έχει λίγη προγραμματιστική εμπειρία, στοιχειώδεις γνώσεις ηλεκτρονικών και ενδιαφέρεται να δημιουργήσει διαδραστικά αντικείμενα ή περιβάλλοντα. Στην ουσία, πρόκειται για ένα ηλεκτρονικό κύκλωμα που βασίζεται στον μικροελεγκτή ATmega της Atmel και του οποίου όλα τα σχέδια, καθώς και το software που χρειάζεται για την λειτουργία του, διανέμονται ελεύθερα και δωρεάν ώστε να μπορεί να κατασκευαστεί από τον καθένα. Αφού κατασκευαστεί, μπορεί να συμπεριφερθεί σαν ένας μικροσκοπικός υπολογιστής, αφού ο χρήστης μπορεί να συνδέσει επάνω του πολλαπλές μονάδες εισόδου/εξόδου και να προγραμματίσει τον μικροελεγκτή να δέχεται δεδομένα από τις μονάδες εισόδου, να τα επεξεργάζεται και να στέλνει κατάλληλες εντολές στις μονάδες εξόδου. Μάλιστα κάποιος θα μπορούσε να ισχυριστεί - και θα ήταν ένας αρκετά πετυχημένος παραλληλισμός - ότι λειτουργικά το Arduino μοιάζει πολύ με το NXT Brick των Lego Mindstorms NXT. Άλλωστε η ρομποτική είναι μια από τις πολλές εφαρμογές στις οποίες ο Arduino διαπρέπει. Ο Arduino βέβαια, δεν είναι ούτε ο μοναδικός, ούτε και ο καλύτερος δυνατός τρόπος για την δημιουργία μιας οποιασδήποτε διαδραστικής ηλεκτρονικής συσκευής. Όμως το κύριο πλεονέκτημά του είναι η τεράστια κοινότητα που το υποστηρίζει και η οποία έχει δημιουργήσει, συντηρεί και επεκτείνει μια ανάλογου μεγέθους online γνωσιακή βάση. Έτσι, παρότι ένας έμπειρος ηλεκτρονικός μπορεί να προτιμήσει διαφορετική πλατφόρμα ή εξαρτήματα ανάλογα με την εφαρμογή που έχει στον νου του, ο Arduino, με το εκτενές documentation, καταφέρνει να κερδίσει όλους αυτούς των οποίων οι γνώσεις στα ηλεκτρονικά περιορίζονται στα όσα λίγα έμαθαν στο σχολείο. Ακριβώς επειδή απευθύνεται κυρίως σε αρχάριους των ηλεκτρονικών και επειδή, παρά τις αναλυτικότατες οδηγίες που υπάρχουν, δεν έχουν όλοι τις γνώσεις και τα μέσα να κατασκευάσουν μια ηλεκτρονική πλακέτα, κυκλοφορούν έτοιμες, προκατασκευασμένες πλακέτες Arduino που μπορείτε να προμηθευτείτε σε πολύ οικονομική τιμή. Με λίγα χρήματα παραπάνω μάλιστα, οι περισσότεροι προμηθευτές διαθέτουν Arduino Starter Kit, τα οποία, εκτός από το ίδιο ο Arduino, περιέχουν διάφορα άλλα εξαρτήματα και εργαλεία που μπορεί να χρειαστείτε για τις πρώτες σας εφαρμογές (όπως το απαραίτητο καλώδιο USB για την σύνδεση με τον υπολογιστή, ράστερ, καλώδια, LED, διακόπτες, ποτενσιόμετρα, αντιστάσεις, διόδους, τρανζίστορ κ.λπ.). Σελίδα 14 από 68
15 Εικ.2.1 Arduino UNO 2.2 Μικροελεγκτής, η καρδιά του ARDUINO Ο Arduino βασίζεται στον ATmega328, έναν 8-bit RISC μικροελεγκτή, τον οποίο χρονίζει στα 16MHz. Ο ATmega328 διαθέτει ενσωματωμένη μνήμη τριών τύπων: a) 2Kb μνήμης SRAM που είναι η ωφέλιμη μνήμη που μπορούν να χρησιμοποιήσουν τα προγράμματά σας για να αποθηκεύουν μεταβλητές, πίνακες κ.λπ. κατά το runtime. Όπως και σε έναν υπολογιστή, αυτή η μνήμη χάνει τα δεδομένα της όταν η παροχή ρεύματος στον Arduino σταματήσει ή αν γίνει reset. b) 1Kb μνήμης EEPROM η οποία μπορεί να χρησιμοποιηθεί για «ωμή» εγγραφή/ανάγνωση δεδομένων (χωρίς datatype) ανά byte από τα προγράμματά σας κατά το runtime. Σε αντίθεση με την SRAM, η EEPROM δεν χάνει τα περιεχόμενά της με απώλεια τροφοδοσίας ή reset οπότε είναι το ανάλογο του σκληρού δίσκου c) 32Kb μνήμης Flash, από τα οποία τα 2Kb χρησιμοποιούνται από το firmware του Arduino που έχει εγκαταστήσει ήδη ο κατασκευαστής του. Το firmware αυτό που στην ορολογία του Arduino ονομάζεται bootloader είναι αναγκαίο Σελίδα 15 από 68
16 για να εγκαταστήσετε τα δικά σας προγράμματα στον μικροελεγκτή μέσω της θύρας USB, χωρίς δηλαδή να χρειάζεται εξωτερικός hardware programmer. Τα υπόλοιπα 30Kb της μνήμης Flash χρησιμοποιούνται για την αποθήκευση αυτών ακριβώς των προγραμμάτων, αφού πρώτα μεταγλωττιστούν στον υπολογιστή σας. Η μνήμη Flash, όπως και η EEPROM δεν χάνει τα περιεχόμενά της με απώλεια τροφοδοσίας ή reset. Επίσης, ενώ η μνήμη Flash υπό κανονικές συνθήκες δεν προορίζεται για χρήση runtime μέσα από τα προγράμματά σας, λόγω της μικρής συνολικής μνήμης που είναι διαθέσιμη σε αυτά (2Kb SRAM + 1Kb EEPROM), έχει σχεδιαστεί μια βιβλιοθήκη που επιτρέπει την χρήση όσου χώρου περισσεύει (30Kb μείον το μέγεθος του προγράμματός σας σε μεταγλωττισμένη μορφή). 2.3 Εκδόσεις ARDUINO Στη συνέχεια μπορείτε να δείτε τα γενικά χαρακτηριστικά από τις πιο διαδεδομένες εκδόσεις Arduino που χρησιμοποιούνται σήμερα. Μικροελεγκτής ΑΤmega328(arduino UNO) ATmega2560(arduino mega 2560) ATmega32u4(arduino lilypad) Τάση λειτουργίας 5v 5v 3.3v Τάση εξωτερικής τροφοδοσίας 7-12v 7-12v 3.8v-5v Όρια τάσης εξωτερικής τροφοδοσίας 6-20v 6-20v Ψηφιακές είσοδοι και έξοδοι (μέσω ακροδεκτών) 14(εκ των οποίων οι 6 υποστηρίζουν PWM) 54(εκ των οποίων οι 15 υποστηρίζουν PWM) 9 (εκ των οποίων υποστηρίζει 4 κανάλια PWM) Αναλογικές είσοδοι(μέσω ακροδεκτών) Μέγιστο συνεχές ρεύμα ανά ακροδέκτη εισόδου/εξόδου mA 40mA 40mA Μέγιστο ρεύμα για τον ακροδέκτη 3,3v 50mA 50mA Flash Memory 32KB(ATmega328)εκ των οποίων τα 0.5 ΚΒ χρησιμοποιούνται από τον bootloader 256KB εκ των οποίων τα 8 kβ χρησιμοποιούνται από τον bootloader 32KB(ATmega328)εκ των οποίων τα 4 ΚΒ χρησιμοποιούνται από τον bootloader SRAM 2KB 8KB 2.5KB EEPROM 1KB 4KB 1KB Ταχύτητα ρολογιού 16MHz 16MHz 8MHz Σελίδα 16 από 68

 του οποίου τα")
17 Eικ. 2.2 Arduino Mega 2560 Στην εικόνα 2.2 και σύμφωνα με τα στοιχεία που προβάλλονται στον παραπάνω πίνακα φαίνεται η έκδοση Μega 2560 στην οποία χρησιμοποιείται διαφορετικός τύπος και φυσική μορφή μικροελεγκτή που διαθέτει μεγαλύτερο πλήθος ακροδεκτών σε σχέση με την έκδοση UNO. Μια ειδική έκδοση Αrduino είναι το Lilypad το οποίο χρησιμοποιείται σε ορισμένες ειδικές εφαρμογές (στον τομέα της υγείας) του οποίου τα χαρακτηριστικά και οι διαφορές από τους άλλους Arduino παρατίθενται στον παραπάνω πίνακα. Εικ. 2.3 Arduino Lilypad Σελίδα 17 από 68

18 2.4 Xαρακτηριστικά του Αrduino UNO Καταρχήν ο Arduino διαθέτει σειριακό interface. Ο μικροελεγκτής ATmega υποστηρίζει σειριακή επικοινωνία, την οποία ο Arduino προωθεί μέσα από έναν ελεγκτή Serial-over-USB ώστε να συνδέεται με τον υπολογιστή μέσω USB. Η σύνδεση αυτή χρησιμοποιείται για την μεταφορά των προγραμμάτων που σχεδιάζονται από τον υπολογιστή στο Arduino αλλά και για αμφίδρομη επικοινωνία του Arduino με τον υπολογιστή μέσα από το πρόγραμμα την ώρα που εκτελείται. εικ.2.4 Ο Arduino Επιπλέον, στην πάνω πλευρά του Arduino βρίσκονται 14 θηλυκά pin, αριθμημένα από 0 ως 13, που μπορούν να λειτουργήσουν ως ψηφιακές είσοδοι και έξοδοι. Λειτουργούν στα 5V και καθένα μπορεί να παρέχει ή να δεχτεί το πολύ 40mA. Ως ψηφιακή έξοδος, ένα από αυτά τα pin μπορεί να τεθεί από το πρόγραμμά σας σε κατάσταση HIGH ή LOW, οπότε ο Arduino θα ξέρει αν πρέπει να διοχετεύσει ή όχι ρεύμα στο συγκεκριμένο pin. Με αυτόν τον τρόπο μπορείτε λόγου χάρη να ανάψετε και να σβήσετε ένα LED που έχετε συνδέσει στο συγκεκριμένο pin. Αν πάλι ρυθμίσετε ένα από αυτά τα pin ως ψηφιακή είσοδο μέσα από το πρόγραμμά σας, μπορείτε με την κατάλληλη εντολή να διαβάσετε την κατάστασή του (HIGH ή LOW) ανάλογα με το αν η εξωτερική συσκευή που έχετε συνδέσει σε αυτό το pin διοχετεύει ή όχι ρεύμα στο pin (με αυτόν τον τρόπο λόγου χάρη μπορείτε να «διαβάζετε» την κατάσταση ενός διακόπτη). Μερικά από αυτά τα 14 pin, εκτός από ψηφιακές είσοδοι/έξοδοι έχουν και δεύτερη λειτουργία. Σελίδα 18 από 68
19 Συγκεκριμένα: Τα pin 0 και 1 λειτουργούν ως RX και TX της σειριακής όταν το πρόγραμμά σας ενεργοποιεί την σειριακή θύρα. Έτσι, όταν λόγου χάρη το πρόγραμμά σας στέλνει δεδομένα στην σειριακή, αυτά προωθούνται και στην θύρα USB μέσω του ελεγκτή Serial-Over-USB αλλά και στο pin 0 για να τα διαβάσει ενδεχομένως μια άλλη συσκευή (π.χ. έναν δεύτερο Arduino στο δικό του pin 1). Αυτό φυσικά σημαίνει ότι αν στο πρόγραμμά σας ενεργοποιήσετε το σειριακό interface, χάνετε 2 ψηφιακές εισόδους/εξόδους. Τα pin 2 και 3 λειτουργούν και ως εξωτερικά interrupt (interrupt 0 και 1 αντίστοιχα). Με άλλα λόγια, μπορείτε να τα ρυθμίσετε μέσα από το πρόγραμμά σας ώστε να λειτουργούν αποκλειστικά ως ψηφιακές είσοδοι στις οποίες όταν συμβαίνουν συγκεκριμένες αλλαγές, η κανονική ροή του προγράμματος σταματάει *άμεσα* και εκτελείται μια συγκεκριμένη συνάρτηση. Τα εξωτερικά interrupt είναι ιδιαίτερα χρήσιμα σε εφαρμογές που απαιτούν συγχρονισμό μεγάλης ακρίβειας. Τα pin 3, 5, 6, 9, 10 και 11 μπορούν να λειτουργήσουν και ως ψευδοαναλογικές έξοδοι με το σύστημα PWM (Pulse Width Modulation), δηλαδή το ίδιο σύστημα που διαθέτουν οι μητρικές των υπολογιστών για να ελέγχουν τις ταχύτητες των ανεμιστήρων. Έτσι, μπορείτε να συνδέσετε λόγου χάρη ένα LED σε κάποιο από αυτά τα pin και να ελέγξετε πλήρως την φωτεινότητά του με ανάλυση 8bit (256 καταστάσεις από 0-σβηστό ως 255-πλήρως αναμμένο) αντί να έχετε απλά την δυνατότητα αναμμένο-σβηστό που παρέχουν οι υπόλοιπές ψηφιακές έξοδοι. Είναι σημαντικό να καταλάβετε ότι το PWM δεν είναι πραγματικά αναλογικό σύστημα και ότι θέτοντας στην έξοδο την τιμή 127, δεν σημαίνει ότι η έξοδος θα δίνει 2.5V αντί της κανονικής τιμής των 5V, αλλά ότι θα δίνει ένα παλμό που θα εναλλάσσεται με μεγάλη συχνότητα και για ίσους χρόνους μεταξύ των τιμών 0 και 5V. Όσον αφορά, τώρα, την συγκεκριμένη εργασία, επιτυγχάνουμε διαφορετική ταχύτητα στον κινητήρα όταν αλλάζουμε το πλάτος (το χρόνο) του παλμού. Υπάρχουν πέντε στάνταρ καταστάσεις 0%, 25%, 50%, 75% και 100% (κύκλοι λειτουργίας). Με απλά λόγια όσο μεγαλύτερο χρόνο θέτουμε στο θετικό μέτωπο του παλμού (πλάτος) τόσο μεγαλύτερη ταχύτητα έχουμε στον κινητήρα. Σελίδα 19 από 68
20 Στο παρακάτω γράφημα οι πράσινες γραμμές αντιπροσωπεύουν μια κανονική χρονική περίοδο. Αυτή η διάρκεια ή η περίοδος είναι το αντίστροφο της συχνότητας PWM. Μέσα από τη βιβλιοθήκη του προγράμματος του Arduino χρησιμοποιούμε το analogwrite που έχει κλίμακα από 0-255, με άλλα λόγια μια συχνότητα PWM περίπου 500Hz. Έτσι αν analogwrite (255) είναι ένας κύκλος εργασίας 100% (πάντα on), αν analogwrite (127) είναι ένας κύκλος 50% (στο μισό χρόνο). Αυτό εξηγείται στο γράφημα, όπως επίσης και για τις υπόλοιπες καταστάσεις. εικ. 2.5 Pulse Width Modulation (PWM) - γράφημα Σελίδα 20 από 68
21 2.4.1 Παράδειγμα εύρεσης του παλμού λειτουργίας duty cycle (κύκλος) Έχουμε : t=ton+toff (χρονος της pwm) ton : είναι ο παλμός στα +v toff: είναι ο παλμός στα 0 v τύπος : [ton /(ton+toff)] * 100 π.χ. v=5v duty cycle =75% τότε vout = (75% / 5 )* 100 = 3,75 v η έξοδος από το Αrduino περίοδος t=1/f =ton+toff duty cycle [ton /(ton+toff)] * 100 =ton / t όταν θετικό παλμός ton = duty cycle * t όταν 0 παλμός toff =t-ton Τροφοδοσία Το Arduino μπορεί να τροφοδοτηθεί με ρεύμα είτε από τον υπολογιστή μέσω της σύνδεσης USB, είτε από εξωτερική τροφοδοσία που παρέχεται μέσω μιας υποδοχής φις των 2.1mm (θετικός πόλος στο κέντρο) και βρίσκεται στην κάτω-αριστερή γωνία του Arduino. Σελίδα 21 από 68

22 εικ.2.6 Τροφοδοσία του Arduino Για να μην υπάρχουν προβλήματα, η εξωτερική τροφοδοσία πρέπει να είναι από 7 ως 12V και μπορεί να προέρχεται από ένα κοινό μετασχηματιστή του εμπορίου, από μπαταρίες ή οποιαδήποτε άλλη πηγή DC Ενσωματωμένα κουμπιά και LED του Αrduino UNO. Πάνω στην πλακέτα του Αrduino υπάρχει ένας διακόπτης micro-switch και τέσσερα μικροσκοπικά LED επιφανειακής στήριξης. Η λειτουργία του διακόπτη (που έχει τη σήμανση reset) και του ενός LED με τη σήμανση power είναι μάλλον προφανής. Τα δύο LED με τις σημάνσεις ΤΧ και RX, χρησιμοποιούνται ως ένδειξη λειτουργίας του σειριακού interface καθώς ανάβουν όταν ο Arduino στέλνει ή λαμβάνει αντίστοιχα δεδομένα μέσω USB. Τέλος, υπάρχει το LED με τη σήμανση L. Η βασική δοκιμή λειτουργίας του Arduino είναι να του αναθέσετε να αναβοσβήνει ένα LED. 2.5 Εγκατάσταση περιβάλλοντος Αrduino IDE Για να γίνει σωστή εγκατάσταση του προγράμματος, πρέπει να ακολουθηθεί μια σειρά από βήματα, ανάλογα με το λειτουργικό σύστημα που διαθέτει. Στην περίπτωσή μας θα εγκατασταθεί σε λειτουργικό σύστημα Windows. Στην παρούσα πτυχιακή εργασία επιλέχθηκε να χρησιμοποιηθεί η πλακέτα Αrduino UNO. Θα χρησιμοποιήσουμε ένα καλώδιο USB για να συνδεθούν πλακέτα και υπολογιστής. Μεταφορτώνουμε δωρεάν την τελευταία έκδοση Arduino-1.6. Από την Σελίδα 22 από 68


23 ιστοσελίδα Συνδέουμε την πλακέτα Arduino UNO στον υπολογιστή χρησιμοποιώντας το καλώδιο USB. Παρατηρούμε ότι το LED της πλακέτας ανάβει. Αρχίζουμε το κατέβασμα από την σελίδα που προαναφέρθηκε και τα βήματα που θα ακολουθηθούν παρατίθενται στις εικόνες που ακολουθούν. εικ. 2.7 Κάνουμε πρώτα την εγκατάσταση του λογισμικού στον υπολογιστή μας. εικ 2.8 Αποδεχόμαστε τους όρους. Σελίδα 23 από 68


24 εικ. 2.9 Επιλέγουμε πού θέλουμε να αποθηκευτεί το πρόγραμμα. εικ.2.10 Επιλέγουμε τα περιεχόμενα που θέλουμε να αποθηκεύσουμε σύμφωνα με αυτά που χρειάζεται ο καθένας. Σελίδα 24 από 68


25 εικ Περιμένουμε να γίνει η εγκατάσταση. εικ Μόλις γίνει η εγκατάσταση, εμφανίζεται στην επιφάνεια εργασίας, όπου εμείς επιλέξαμε να εμφανιστεί εκεί το εικονίδιο της συντόμευσης. Επάνω σε αυτό πατάμε διπλό κλικ ώστε να ανοίξει το πρόγραμμά μας. Σελίδα 25 από 68

26 εικ Αυτός είναι ο εργασιακός μας χώρος όπου θα ασχοληθούμε με την συγγραφή του προγραμματισμού του ρομποτικού μας οχήματος. Το περιβάλλον ανάπτυξης του Arduino περιέχει μια περιοχή επεξεργασίας κειμένου για την συγγραφή κώδικα, μια περιοχή μηνυμάτων, ένα μενού, μια γραμμή εργαλείων και τη βοήθεια. Συνδέεται με το υλικό Arduino UNO για την εργασία μας για τη φόρτωση προγραμμάτων και για να επικοινωνούν μεταξύ τους. Ένα ολοκληρωμένο πρόγραμμα ονομάζεται sketch (όπως αναγράφεται στην εικ.1.13). Έχει δυνατότητες για την αντιγραφή/επικόλληση, αναζήτηση και αντικατάσταση κειμένου. Στην κονσόλα της εικόνας επίσης απεικονίζεται η έξοδος του κειμένου για το περιβάλλον Arduino συμπεριλαμβανομένου τον έλεγχο για τυχόν λάθη που μπορεί να κάνουμε στον κώδικα καθώς τον συγγράφουμε. Τα κουμπιά της γραμμής εργαλείων επιτρέπουν τον έλεγχο και το ανέβασμα των προγραμμάτων, τη δημιουργία νέου sketch και το άνοιγμα ήδη υπαρχόντων sketch. Τελειώνοντας, αποθηκεύουμε τον κώδικά μας. Σελίδα 26 από 68
27 ΚΕΦΑΛΑΙΟ Το ολοκληρωμένο κύκλωμα οδήγησης κινητήρων Τα ψηφιακά κυκλώματα κατασκευάζονται κυρίως με χρήση ολοκληρωμένων κυκλωμάτων (που λέγονται για συντομία ICs- INTEGRATED CIRCUITS). Κάθε IC είναι ένας μικρός κρύσταλλος ημιαγωγού πυριτίου (Si), καλούμενο CHIP. To CHIP περιλαμβάνει ηλεκτρικά στοιχεία όπως τρανζίστορς, διόδους, αντιστάσεις και πυκνωτές. Τα στοιχεία αυτά είναι συνδεδεμένα μέσα στο CHIP, ώστε να σχηματίζουν ένα ηλεκτρονικό κύκλωμα. Το CHIP τοποθετείται πάνω σε μεταλλικό ή πλαστικό στέλεχος και οι συνδέσεις συγκολλούνται σε εξωτερικά ποδαράκια,έτσι σχηματίζεται το IC. Tα ολοκληρωμένα κυκλώματα διαφέρουν από τα συμβατικά κυκλώματα διακριτών στοιχείων στο ότι τα στοιχεία τους δεν μπορούν να διαχωριστούν ή να αποσυνδεθούν από το κύκλωμα του εσωτερικού του ολοκληρωμένου πακέτου. Η σύνδεση του ολοκληρωμένου με το υπόλοιπο εξωτερικό κύκλωμα γίνεται μόνο με τους εξωτερικούς του ακροδέκτες (ποδαράκια). Στη φάση κατασκευής τους τα ολοκληρωμένα κυκλώματα (τα οποία ακόμη δεν έχουν ολοκληρωθεί ώστε να λειτουργήσουν) ονομάζονται κύβοι και φτιάχνονται κατά εκατοντάδες πάνω σε πλακίδια. Οι λογικές πύλες με την παρούσα τεχνολογία υλοποιούνται με παθητικά στοιχεία, οπότε τα ολοκληρωμένα κυκλώματα είναι παθητικά. Ολοκληρωμένα κυκλώματα χρησιμοποιούνται σχεδόν σε κάθε στοιχείο ηλεκτρονικού εξοπλισμού που χρησιμοποιείται σήμερα και θεωρούνται επανάσταση στον τομέα της ηλεκτρονικής. Πλεονεκτήματα των ΙC: 1) Πολύ μικρό μέγεθος 2) Χαμηλή τιμή κόστους μαζικής παραγωγής 3) Μικρή κατανάλωση ισχύος 4) Υψηλή αξιοπιστία λειτουργίας 5) Υψηλή ταχύτητα λειτουργίας 6) Μείωση εξωτερικών καλωδιακών συνδέσεων Ιστορικά στοιχεία των ολοκληρωμένων κυκλωμάτων Το 1950 είχε εμφανιστεί η κρυσταλλοτρίοδος ενώ είχαν κατασκευαστεί οι ηλεκτρονικοί υπολογιστές με λυχνίες κενού και κρυσταλλοτριόδους. Το πρόβλημα των μηχανικών εκείνης της εποχής ήταν ότι δεν υπήρχε αξιόπιστος τρόπος να κατασκευάζονται περίπλοκα και μεγάλα λογικά κυκλώματα, γνωστό και ως τυραννία των αριθμών. Το 1958 ο Τζακ Κίλμπυ, ερευνητής της εταιρίας Texas Σελίδα 27 από 68

28 Instrument, ερευνώντας πυρετωδώς τρόπους για τη σμίκρυνση των ηλεκτρικών κυκλωμάτων εφηύρε το ολοκληρωμένο κύκλωμα, εφεύρεση για την οποία βραβεύτηκε με βραβείο Νόμπελ Φυσικής το Η τεχνολογία για τη μαζική παραγωγή ολοκληρωμένων κυκλωμάτων ήταν ακόμη ελλιπής, υπήρχαν διάφορα πρακτικά προβλήματα, όπως η σύνδεση των στοιχείων του ολοκληρωμένου. Ο Ρόμπερτ Νόις έλυσε αυτά τα προβλήματα, έτσι ξεκίνησε η μαζική παραγωγή των ολοκληρωμένων κυκλωμάτων. Ο Νόις είναι ένας από τους συνιδρυτές της Intel, μια από τις πιο σημαντικές κατασκευάστριες εταιρείες ολοκληρωμένων κυκλωμάτων στον κόσμο. Το ολοκληρωμένο κύκλωμα αποτέλεσε τομή στην ιστορία των ηλεκτρονικών υπολογιστών Διάκριση ολοκληρωμένων κυκλωμάτων Τα ολοκληρωμένα κυκλώματα διακρίνονται σε τέσσερις (4) κατηγορίες: -SSI (μικρής κλίμακας ολοκλήρωσης) -ΜSI (μεσαίας κλίμακας ολοκλήρωσης) -LSI (μεγάλης κλίμακας ολοκλήρωσης) -VLSI (πολύ μεγάλης κλίμακας ολοκλήρωσης) Η διάκρισή τους γίνεται σύμφωνα με τον αριθμό των ολοκληρωμένων κυκλωμάτων από τα οποία αποτελούνται. εικ. 3.1 Ολοκληρωμένα κυκλώματα Σελίδα 28 από 68
29 3.2 Το ολοκληρωμένο κύκλωμα L293D Ένα από τα πολλά ολοκληρωμένα κυκλώματα που υλοποιούν H- Bridge είναι και το L293D το οποίο έχει δύο γέφυρες και επομένων μπορεί να ελέγξει μέχρι και δύο dc κινητήρες που θα αναφερθούμε παρακάτω στο κεφάλαιο(3.2.2). Το συγκεκριμένο ολοκληρωμένο έχει ενσωματωμένες διόδους που προστατεύουν τα εσωτερικά του κυκλώματα από εγκλωβισμένα ρεύματα του πηνίου του κινητήρα. Επίσης, το μέγιστο ρεύμα που μπορεί να δώσει σε κάθε κινητήρα είναι 600Ma και μέγιστη συχνότητα PWM σήματος είναι 5kΗz. Το ολοκληρωμένο προσφέρει δύο κανάλια (δύο ξεχωριστές Η-Bridge) για κάθε κινητήρα αλλά θα μπορούσε να λειτουργήσει και με μόνο ένα κανάλι ενεργό. Επίσης, το L293D είναι λειτουργίας ΤΤL και το CHIP είναι της εταιρείας Τexas Instrument. εικ Κινητήρες- εισαγωγή Οι πιο απλοί και οι πιο συνηθισμένοι μηχανισμοί κίνησης στα ρομπότ είναι οι ηλεκτρονικοί κινητήρες. Ο ηλεκτρονικός κινητήρας είναι μια ηλεκτρομηχανική συσκευή η οποία χρησιμοποιείται για τη μετατροπή της ηλεκτρικής ενέργειας σε κινητική. Η αρχή λειτουργίας του ηλεκτρικού κινητήρα είναι η δύναμη Lorenz η οποία λέει ότι όταν ένας αγωγός διαρρέεται από ηλεκτρικό ρεύμα και βρίσκεται μέσα σε ένα μαγνητικό πεδίο τότε ασκείται πάνω στον αγωγό μια δύναμη (F) η οποία είναι ίση με F= I*λ*Β όπου Ι ισούται με την ένταση του ηλεκτρικού ρεύματος, το λ ισούται με το μήκος του αγωγού και το Β ισούται με την ένταση του μαγνητικού πεδίου. H δύναμη αυτή στέλνει την κατάλληλη συνεχή τάση στον αγωγό του ηλεκτροκινητήρα και αυτός αρχίζει να περιστρέφεται. Ανάλογα με τη διαφορά Σελίδα 29 από 68

30 δυναμικού που θα παρουσιάζεται στους ακροδέκτες των κινητήρων, αυτοί θα έχουν τη δυνατότητα να περιστρέφονται δεξιόστροφα ή αριστερόστροφα, έτσι το όχημα έχει τη δυνατότητα να κινηθεί ως εξής: -Επιτόπου στροφή δεξιά, όταν ο δεξιός ηλεκτροκινητήρας δεξιόστροφα ενώ ο αριστερός περιστρέφεται αριστερόστροφα. περιστρέφεται -Επιτόπου στροφή αριστερά, όταν ο δεξιός ηλεκτροκινητήρας περιστρέφεται αριστερόστροφα ενώ ο αριστερός περιστρέφεται δεξιόστροφα. -Κίνηση προς τα μπρός, όταν και οι δύο κινητήρες περιστρέφονται αριστερόστροφα. - Κίνηση προς τα πίσω, όταν και οι δύο κινητήρες περιστρέφονται δεξιόστροφα Κινητήρας DC Οι ηλεκτροκινητήρες προορίζονται για τη χρήση στα 6V. Σε γενικές γραμμές, αυτά τα είδη των κινητήρων μπορούν να λειτουργήσουν σε τάσεις πάνω και κάτω από αυτή την ονομαστική τάση. Έτσι λειτουργούν άνετα στην περιοχή τάσης 3-9V. Οι χαμηλότερες τάσεις ενδέχεται να μην είναι πρακτικές, όπως και οι υψηλότερες τάσεις θα μπορούσαν να επηρεάσουν αρνητικά τη διάρκεια ζωής του κινητήρα. Όσο αφορά λοιπόν την παρούσα εφαρμογή, οι κινητήρες που είναι υπεύθυνοι για την κίνηση των τροχών πρέπει να πληρούν, για τις ανάγκες της εργασίας, τις βασικές προϋποθέσεις. Χρειαζόμαστε συνεχούς περιστροφής κινητήρες οι οποίοι πρέπει να έχουν τάση λειτουργίας της τάξης των 6V και ροπή ικανή να μεταφέρει το βάρος της κατασκευής χωρίς να υπάρχει μεγάλη επιβάρυνση της μπαταρίας. εικ. 3.3 Κινητήρας DC Οι κινητήρες στη δική μας κατασκευή υπήρχαν ήδη προσαρτημένοι επάνω στο αυτοκίνητό μας που θα αναφερθούν αναλυτικότερα παρακάτω. Σελίδα 30 από 68
31 3.2.3 Συνδεσμολογία για τον έλεγχο δύο κινητήρων με το ολοκληρωμένο κύκλωμα. εικ 3.4 Σχηματική αναπαράσταση ολοκληρωμένου κυκλώματος Στην παραπάνω εικόνα βλέπουμε τη συνδεσμολογία μεταξύ του L293D των κινητήρων (M1 και M2) καθώς και των ακροδεκτών (A, B, C, D, PWM1 και PWM2). Οι ακροδέκτες αυτοί μεταφέρουν σήματα από το μικροελεγκτή προς το ολοκληρωμένο κύκλωμα. Το Vcc είναι η τροφοδοσία που χρειάζεται το ολοκληρωμένο και θα πρέπει να είναι 5V. Η τάση των κινητήρων είναι ανάλογη με το είδος των κινητήρων που θέλουμε να ελέγξουμε, θα πρέπει να προσέξουμε παρόλα αυτά το μέγιστο ρεύμα που μπορεί να δώσει το κάθε κανάλι. Τα σήματα A, B, C, και D καθορίζουν τη λειτουργία των κινητήρων (φρενάρισμα, κίνηση αρνητικής κατεύθυνσης ή θετικής) ενώ τα σήματα PWM1 και PWM2 ρυθμίζουν την ταχύτητα της κίνησης των κινητήρων Μ1 και Μ2 αντίστοιχα με την τεχνική διαμόρφωσης εύρους παλμού. Mέχρι και σε αυτό το σημείο έχουμε αναφερθεί σε δύο πρακτικές. Μία για τον υπολογισμό της ταχύτητας (διαμόρφωση εύρους παλμού) και μία για τον υπολογισμό της φοράς της κίνησης του dc κινητήρα (H-Bridge στο οποίο θα αναφερθούμε στην επόμενη ενότητα). Μπορούμε να χρησιμοποιήσουμε PWM σήματα στις εισόδους ελέγχου του κυκλώματος Η-Bridge και να ελέγξουμε πλήρως κατεύθυνση και ταχύτητα. Τα σήματα PWM για τον έλεγχο προέρχονται από τον μικροελεγκτή και έχουν μέγιστη συχνότητα 5κΗz λόγω περιορισμού από τον κατασκευαστή του L293D. Έλεγχος θέσης Για να ελέγξουμε την ακριβή θέση ενός dc κινητήρα χρειαζόμαστε κάποιο αισθητήρα γιατί ο dc κινητήρας είναι μη ελέγξιμος ως προς την θέση. Για να δώσουμε κάποια επιθυμητή θέση μέσω κάποιου σήματος ελέγχου πρέπει να υπολογίσουμε το κλειστό σύστημα κινητήρας - αισθητήρας και με όλες αυτές τις τεχνικές που αναλύσαμε να εφαρμόσουμε τα θεωρήματα της θεωρίας ελέγχου. Σελίδα 31 από 68

32 3.3 Κίνηση dc μοτέρ με τη χρήση ολοκληρωμένου κυκλώματος. Το τηλεκατευθυνόμενο που θα φτιάξουμε έχει δύο dc μοτέρ, ένα για την κίνηση πίσω κι ένα για την αλλαγή κατεύθυνσης μπροστά. Πριν συνεχίσουμε θα πρέπει να αποσυνδέσουμε το υπάρχον κύκλωμα του τηλεκατευθυνόμενου αφήνοντας αρκετό καλώδιο πίσω για να επιτύχουμε κολλήσεις οι οποίες θα γίνουν σε επόμενη φάση. Δείτε την εικόνα παρακάτω. εικ. 3.5 Αποσύνδεση συστήματος τηλεχειρισμού και πλαστικών τμημάτων του αυτοκινήτου Ενώνουμε τους πόλους μιας μπαταρίας 1.5V AA με τα καλώδια του πίσω μοτέρ (κίνησης) για να βρούμε με ποια πολικότητα το όχημά μας κινείται μπροστά. Βάζουμε ένα αυτοκόλλητο σε αυτό το καλώδιο (που ενώνεται με το + της μπαταρίας) για να το ξεχωρίσουμε. Κάνουμε το ίδιο με το μοτέρ κατεύθυνσης για να δούμε με ποια πολικότητα οι ρόδες στρίβουν αριστερά και δεξιά. Βάζουμε αυτοκόλλητο στο καλώδιο (που ενώνεται με το + της μπαταρίας) που έκανε τις ρόδες να στρίψουν αριστερά. Το ολοκληρωμένο κύκλωμα L293D το χρησιμοποιούμε για να οδηγήσουμε σωστά το μοτέρ μας. Αυτό σημαίνει ότι τα pin του Aduino UNO δεν μπορούν να δώσουν το ρεύμα που χρειάζεται για να κινηθούν τα μοτέρ γι αυτό το λόγο πρέπει να χρησιμοποιήσουμε transistor. To L293D κάνει ακριβώς αυτή τη δουλειά κρύβοντας στο εσωτερικό του τέσσερα transistor. Σελίδα 32 από 68

33 εικ.3.6 L293 Το L293D εκτός του ότι μπορεί να παρέχει το απαιτούμενο ρεύμα στα μοτέρ για να οδηγηθούν σωστά μπορεί να δώσει και τάση μέχρι 35V, αυξάνοντας έτσι την ισχύ P=V*I. Όμως, αυτό δε σημαίνει ότι τα μοτέρ θα μπορέσουν να αποδώσουν σε τέτοιες τιμές. Πιθανόν να καούν ή να καεί και το ίδιο το ολοκληρωμένο. Γι αυτό στο pin8 του L293 Motor Power μπορούμε να δώσουμε από 5 μέχρι το πολύ 12V. Το L293D δεν είναι και ό,τι καλύτερο που υπάρχει για την οδήγηση κινητήρων dc καθώς θερμαίνεται όσο ανεβαίνει η ισχύς και μειώνεται η απόδοσή του και δεν μπορεί να δώσει ρεύμα πάνω από 0,5Α σε κάθε κανάλι. Ωστόσο είναι φθηνό και έχει εύκολη συνδεσμολογία και το ρεύμα του επαρκεί για την κατασκευή μας H-Bridge εικ. 3.7 H-Bridge Το H-Bridge ονομάζεται και Full-Bridge. Το H-Bridge ονομάζεται έτσι επειδή έχει τέσσερις διακόπτες σε κάθε άκρη του γράμματος H και τον κινητήρα που ελέγχεται Σελίδα 33 από 68

34 στην οριζόντια γραμμή του όπως στο σχήμα. Βέβαια δεν είναι ακριβώς το γράμμα H αλλά η ομοιότητα είναι εμφανής. Τα σήματα ελέγχου Α, Β, Γ και Δ στο συγκεκριμένο σχήμα δίνονται από χειροκίνητους διακόπτες. Το κύκλωμα αυτό χρησιμοποιείται για να ελέγχουμε την πορεία του ρεύματος μέσα στον κινητήρα. Όταν κλείσουμε τους διακόπτες Α και Δ τότε ρεύμα περνάει από το θετικό στο αρνητικό ακροδέκτη του κινητήρα κάνοντας τον να κινείται προς μια κατεύθυνση. Όταν κλείσουμε τους διακόπτες Β και Γ τότε ρεύμα περνάει από τον αρνητικό στο θετικό ακροδέκτη κάνοντας τον να κινείται προς την αντίθετη κατεύθυνση. Στις περιπτώσεις όπου κλείσουμε τους διακόπτες Α και Β ή Γ και Δ προκαλούμε φρενάρισμα του κινητήρα. Στις περιπτώσεις όπου κλείσουμε τους διακόπτες Α και Γ ή Β και Δ προκαλούμε βραχυκύκλωμα της πηγής τάσεως και είναι ζημιογόνο Συνδεσμολογία Arduino με το ολοκληρωμένο κύκλωμα L293D Τα υλικά που θα χρειαστούμε: 1. Arduino UNO 2. L293D 3. Καλώδια (για την ένωση) εικ. 3.8 Προσομοίωση της σύνδεσης Arduino με το ολοκληρωμένο κύκλωμα Σταθεροποιούμε αρχικά την πλακέτα Arduino στο Raster( Breadboard) έτσι ώστε να γίνει εύχρηστη και να μη φεύγει από τη θέση της. Στη συνέχεια σταθεροποιούμε το ολοκληρωμένο κύκλωμα L293D έτσι ώστε να συνδέσουμε το Arduino με το ολοκληρωμένο κύκλωμα. Σελίδα 34 από 68

35 εικ. 3.9 L293D Όπως βλέπουμε στην εικόνα 3.7, συνδέουμε με καλώδιο τον Arduino με το ολοκληρωμένο κύκλωμα - το Enable 1,2 με τον υποδοχέα του Arduino ~11 Digital -το Input 1 με τον υποδοχέα 8 -το Output 1 το αφήνουμε κενό -το GND 4 στη γείωση του Raster -το GND 5 επίσης στη γείωση Raster -το Οutput 2 το αφήνουμε κενό -το Input 2 με τον υποδοχέα 7, ο οποίος είναι Digital -το Vcc 2 στη γείωση του Raster -το Vcc 1 στη γείωση του Raster -το Input 4 με τον υποδοχέα 2, ο οποίος είναι Digital - το Output 4 το αφήνουμε κενό -το GND 13 στη γείωση του Raster -το GND 12 στη γείωση του Raster -το Output 3 το αφήνουμε κενό -το Input 3 με τον υποδοχέα 4, ο οποίος είναι Digital PWM -το Enable 3,4 με τον υποδοχέα του Arduino ~10 Digital Σελίδα 35 από 68
 του πυκνωτή μπαίνει στο Enable 1,2 και το άλλο σκέλος στη γείωση.")
36 Συνδέουμε τα GND του Arduino με τα GND του Raster (γειώσεις). Βάζουμε πυκνωτές και διόδους στα Enable 1,2 και Enable 3,4. Το ένα σκέλος (ποδαράκια) του πυκνωτή μπαίνει στο Enable 1,2 και το άλλο σκέλος στη γείωση. Το ίδιο αντιστοίχως γίνεται και με τη δίοδο, όπου το ένα σκέλος μπαίνει στο Enable 3,4 και το άλλο στη γείωση. Στην περίπτωση του πυκνωτή το σκέλος που μπαίνει στη γείωση, μπαίνει στον αρνητικό ημισφαίριο και στην περίπτωση της διόδου το σκέλος που μπαίνει στη γείωση, στο θετικό ημισφαίριο της γείωσης του Raster. εικ Η σύνδεση στο δικό μας ρομποτικό αυτοκίνητο Σελίδα 36 από 68

37 ΚΕΦΑΛΑΙΟ Εισαγωγή Υπέρηχος ονομάζεται το μηχανικό κύμα με συχνότητα μεγαλύτερη από αυτήν που μπορεί να ακούσει ο άνθρωπος (περίπου Hz). Αυτό συμβαίνει καθώς το ανθρώπινο αυτί έχει κάποια όρια και δεν μπορεί να ακούσει πολύ υψηλούς ή χαμηλούς ήχους. Η φυσική του υπέρηχου είναι ίδια με του ήχου ( δηλαδή η ταχύτητά του στον αέρα είναι 331,5 m/sec). εικ. 4.1 Υπέρηχος Παρόλο πάντως που οι άνθρωποι δεν τους ακούνε, κάποια ζώα μπορούν να τους ακούσουν αλλά και τους χρησιμοποιούν. Χαρακτηριστικά παραδείγματα που μας το δείχνουν αυτό είναι η κίνηση των νυχτερίδων και η σφυρίχτρα που χρησιμοποιείται για τους σκύλους. Οι νυχτερίδες μάλιστα μπορούν να αντιληφθούν το στόχο που κυνηγούν χάρη στο φαινόμενο Doppler. εικ. 4.2 Το φαινόμενο Doppler Το φαινόμενο Doppler είναι η παρατηρούμενη αλλαγή στη συχνότητα και το μήκος ενός κύματος από παρατηρητή που βρίσκεται σε σχετική κίνηση με την πηγή των κυμάτων. Για κύματα όπως τα ηχητικά, όπως διαδίδονται μέσα σε κάποιο υλικό μέσο, η ταχύτητα τόσο του παρατηρητή όσο και της πηγής, πρέπει να προσδιορίζεται σε σχέση με το μέσο διάδοσης. Το τελικό φαινόμενο Doppler μπορεί επομένως να προκύψει είτε από την κίνηση του παρατηρητή είτε από την κίνηση της πηγής, είτε και των δύο, ως προς το μέσο διάδοσης. Κάθε μια από αυτές τις δύο επιδράσεις Σελίδα 37 από 68

38 αναλύεται ξεχωριστά. Τέλος ο υπέρηχος χρησιμοποιείται σε συσκευές απεικόνισης του εσωτερικού ενός ανθρώπου, του γήινου φλοιού και άλλων αντικειμένων. Ακόμη σε συσκευές που χρησιμοποιούνται για την ανίχνευση αόρατων ραγισμάτων και αποστάσεων. Μια σημαντική εφαρμογή είναι η απεικόνιση του εμβρύου στις έγκυες γυναίκες. εικ. 4.3 Απεικόνιση εμβρύου μέσω υπερήχου 4.2 Ο αισθητήρας υπερήχων HC-SR04 Για τη διαδικασία εντοπισμού και αποφυγής των εμποδίων χρησιμοποιήθηκαν αισθητήρες υπερήχων. Οι αισθητήρες υπερήχων είναι μια φθηνή και αξιόπιστη λύση χωρίς να απαιτούν πολύπλοκα κυκλώματα υποστήριξης. Είναι αρκετά δημοφιλή στην κατηγορία των ρομποτικών οχημάτων. Οι αισθητήρες υπερήχων λειτουργούν με την ίδια αρχή που λειτουργούν τα ραντάρ και τα σόναρ. Απαρτίζονται από έναν πομπό, ο οποίο δημιουργεί το σήμα και από ένα δέκτη ο οποίος το λαμβάνει. Εκτιμούν την απόσταση ενός στόχου ή ακόμα και την ταχύτητα του στόχου, λαμβάνοντας υπ όψιν τους την αντανάκλαση ενός ραδιοκύματος ή ενός ηχητικού σήματος επάνω στο στόχο, υπολογίζοντας το χρόνο που έκανε το σήμα για να καλύψει την απόσταση από τον αισθητήρα εώς το αντικείμενο και πίσω. Έτσι ο αισθητήρας στέλνει ριπές παλμών υψηλής συχνότητας (40 khz περίπου), ενώ η κάθε ριπή ταξιδεύει στον αέρα με ταχύτητα 344 m/sec. Τα ηλεκτρονικά του αισθητήρα μετρούν το χρόνο λήψης του σήματος και το μετατρέπουν σε μονάδα μήκους, δεδομένου ότι η ταχύτητα του ήχου επηρεάζεται από τη θερμοκρασία αέρα, οι αισθητήρες υπερήχων περιλαμβάνουν ένα ενσωματωμένο αισθητήρα θερμοκρασίας. εικ. 4.4 Αισθητήρας HC- SR04 Σελίδα 38 από 68

39 Εφαρμογές τους θα βρούμε σε ένα μεγάλο εύρος τεχνολογιών όπως την ανίχνευση προσέγγισης, την παρουσία ή την απουσία αντικειμένων, την ανίχνευση εμποδίων αυτοματοποιημένα οχήματα, τη μέτρηση απόστασης, τη μέτρηση στάθμης, τη μέτρηση της διεύθυνσης και της ταχύτητας του ανέμου. Η κατανάλωση ισχύος του αισθητήρα είναι της τάξης των 30m A εώς 35m A το πολύ, ενώ η τάση λειτουργίας του είναι στα 5V. εικ 4.5 Χρονοδιάγραμμα του αισθητήρα Στον Arduino η διαδικασία αυτή (αντιστοίχηση χρόνου σε απόσταση) είναι αρκετά απλή διότι υπάρχει συγκεκριμένη βιβλιοθήκη για τον αισθητήρα HC-SR04 που κάνει την "δύσκολη" δουλειά. Εμείς στον κώδικά μας αρκεί να κάνουμε χρήση μόνο εντολής. Η εντολή αυτή θα μας επιστρέψει την απόσταση σε εκατοστά (cm). εικ. 4.6 Πομπός και δέκτης (αντανάκλαση κύματος) Σελίδα 39 από 68
 pin.")
 και τον υποδοχέα 12 του Arduino -το")
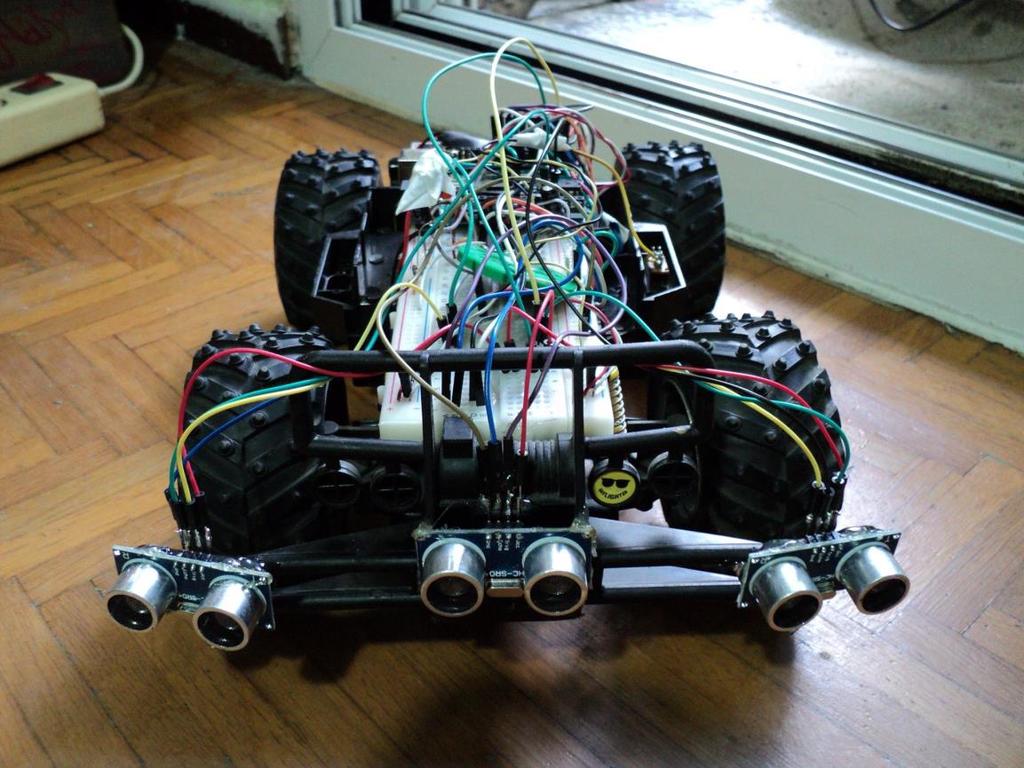
40 4.3 Σύνδεση με τον Arduino Για τη σύνδεση των αισθητήρων με την πλακέτα Arduino χρησιμοποιήθηκαν τέσσερα καλώδια. Η σύνδεση των αισθητήρων με την πλακέτα του Arduino παρατίθεται παρακάτω. Ο αισθητήρας HC-SR04 διαθέτει τέσσερα (4) pin. -το Vcc που το συνδέουμε στον υποδοχέα των 5V του Arduino -το Trigger, το οποίο είναι έξοδος από την οποία γίνεται αποστολή σήματος αφού δοθεί τάση και το συνδέουμε με το 3Β της πλακέτας (Raster) και τον υποδοχέα 9 του Arduino -το Echo, που είναι η είσοδος η οποία λαμβάνει το σήμα, το οποίο έχει σταλεί από πριν και το συνδέουμε με το 2C της πλακέτας (Raster) και τον υποδοχέα 12 του Arduino -το GND που το συνδέουμε από τη γείωση της πλακέτας (Raster) στη γείωση (-) του Arduino. Στις εικόνες παρακάτω φαίνεται ακριβώς η σύνδεση την οποία αναλύουμε παραπάνω. εικ 4.7 Σύνδεση των αισθητήρων εικ 4.8 Ομοίως με εικ.4.7 με την πλακέτα Arduino Σελίδα 40 από 68
 κι ένα για τη γείωση (GND). Αν του δώσουμε σταθερή τάση (π.χ.")
41 ΚΕΦΑΛΑΙΟ Ηχείο- Sounder Ένα επίσης απλό εξάρτημα που μπορούμε να συνδέσουμε με τον Arduino μας είναι ένα ηχείο. Δουλεύει ακριβώς όπως ένα LED, με δύο καλώδια, ένα για την πηγή (5V) κι ένα για τη γείωση (GND). Αν του δώσουμε σταθερή τάση (π.χ. 5V) θα μας δώσει σταθερό ήχο, ενώ μεταβλητή τάση (π.χ. αντί στην πηγή (5V), σύνδεσή του με ένα PWM pin στον Arduino και αυξομείωση της τάσης που του παρέχεται θα μας δώσει μεταβλητό ήχο, δηλαδή ηχητικό εφέ. Εκτός από τα απλά ηχεία υπάρχουν και διατάξεις ηχείων που αλλάζουν τις ιδιότητές τους ανάλογα με την πίεση που τους ασκείται. Η συνδεσμολογία τους είναι ίδια και μπορούμε να τα χρησιμοποιήσουμε για να ανιχνεύσουμε ασκούμενη δύναμη πάνω τους. Στο δικό μας κύκλωμα χρησιμεύει για την ηχητική ενημέρωση κάποιου εμποδίου που συναντά. εικ. 5.1 Ηχείο 5.2 Σύνδεση ηχείου στον Αrduino Στο ηχείο μας εξέχουν δυο καλώδια (+/-). Το καλώδιο (+) το συνδέουμε στη γείωση του Raster που είναι στο αρνητικό ημισφαίριο και το καλώδιο (-) το συνδέουμε στο Α21 της πλακέτας Raster το οποίο με τη σειρά του με τη χρήση καλωδίου, συνδέεται στον υποδοχέα 6 του Arduino. Σελίδα 41 από 68
42 ΚΕΦΑΛΑΙΟ Αρχικοποίηση Μεταβλητών int Enable1FB = 11; // PWM για κίνηση μπροστά πίσω int Enable2LR = 10; // PWM για κίνηση δεξιά αριστερά int Input1FB = 8; // int Input2FB = 7; // LOW + HIGH κινήτε πίσω HIGH + LOW κινήτε μπροστά int Input3LR = 4; // int Input4LR = 2; // HIGH + LOW κινήτε δεξιά LOW + HIGH κινήτε αριστερά int echopin1 = 12; int trigpin1 = 9; int echopin2 = A1; int trigpin2 = 3; int echopin3 = A0; int trigpin3 = 5; // Echo Pin για το μέσω // Trigger Pin για το μέσω // Echo Pin για το αριστερα // Trigger Pin για το μέσω // Echo Pin για το δεξιό // Trigger Pin για το δεξιο int LEDPin = 13; // Onboard LED int Altop = 6; // altop int maximumrange = 50; // Maximum range needed int minimumrange = 0; // Minimum range needed long duration1, distance1; // Duration used to calculate distance long duration2, distance2; Σελίδα 42 από 68
43 long duration3, distance3; Όπως βλέπουμε στο παραπάνω πρόγραμμα, πρώτα αρχίζουμε με τη δήλωση των μεταβλητών των διαφόρων περιφερειακών συσκευών που έχουμε συνδέσει επάνω στον Arduino. Πιο συγκεκριμένα, δηλώνουμε τους ακροδέκτες και τα Enable των κινητήρων όπου Enable 1FB και Enable 2LR τους οποίους συνδέσαμε στους υποδοχείς 11 και 10 αντίστοιχα από τους οποίους τροφοδοτείται με ρεύμα το ολοκληρωμένο κύκλωμα. Το 1FB ενεργοποιεί τον κινητήρα μπρος-πίσω και το 2LR ενεργοποιεί τον κινητήρα δεξιά-αριστερά. Τα Input 1FB και Input 2FB τα συνδέουμε στους υποδοχείς 8 και 7 αντίστοιχα και ενεργοποιούν την κίνηση μπρος-πίσω. Τα Input3LR και Input4LR τα συνδέουμε στους υποδοχείς 4 και 2 αντίστοιχα και ενεργοποιούν την κίνηση δεξιά-αριστερά. Για τους αισθητήρες που συνδέσαμε στον Arduino αρχικοποιούμε το echopin στον υποδοχέα 12,Α1,Α0 και το trigpin στον υποδοχέα 9,3,5. Αυτά στέλνουν και λαμβάνουν το σήμα. Το Altop (ηχείο) το οποίο συνδέουμε στον υποδοχέα 6, αρχικοποιεί το ηχείο. Σελίδα 43 από 68
44 6.2 Κώδικας που εκτελείται μια φορά void setup() { // put your setup code here, to run once: pinmode(enable1fb, OUTPUT); // Θέτουμε το PIN έξοδο pinmode(enable2lr, OUTPUT); // Θέτουμε το PIN έξοδο pinmode(input1fb, OUTPUT); // Θέτουμε το PIN έξοδο pinmode(input2fb, OUTPUT); // Θέτουμε το PIN έξοδο pinmode(input3lr, OUTPUT); // Θέτουμε το PIN έξοδο pinmode(input4lr, OUTPUT); // Θέτουμε το PIN έξοδο pinmode(trigpin1, OUTPUT); // Θέτουμε το PIN έξοδο pinmode(echopin1, INPUT); // Θέτουμε το PIN είσοδο pinmode(trigpin2, OUTPUT); // Θέτουμε το PIN έξοδο pinmode(echopin2, INPUT); // Θέτουμε το PIN είσοδο pinmode(trigpin3, OUTPUT); // Θέτουμε το PIN έξοδο pinmode(echopin3, INPUT); // Θέτουμε το PIN είσοδο pinmode(ledpin pinmode(altop, OUTPUT); // Use LED indicator (if required), OUTPUT); // Θέτουμε το PIN έξοδο } Όπως εξηγείται στα σχόλια δίπλα από κάθε εντολή, κάποια τα θέτουμε ως εξόδους και κάποια ως εισόδους. Σελίδα 44 από 68
45 6.3 Κυρίως πρόγραμμα void loop() { // Μέτρηση της διαδικασίας για να εκπέμψουμε ένα σήμα (μια ριπή) για να μετρήσουμε την απόσταση digitalwrite(trigpin1, LOW); delaymicroseconds(2); digitalwrite(trigpin1, HIGH); delaymicroseconds(10); digitalwrite(trigpin1, LOW); duration1 = pulsein(echopin1, HIGH); //Calculate the distance (in cm) based on the speed of sound. distance1 = duration1/58.2; // Μέτρηση digitalwrite(trigpin2, LOW); delaymicroseconds(2); digitalwrite(trigpin2, HIGH); delaymicroseconds(10); digitalwrite(trigpin2, LOW); duration2 = pulsein(echopin2, HIGH); Σελίδα 45 από 68
46 //Calculate the distance (in cm) based on the speed of sound. distance2 = duration2/58.2; // Μέτρηση digitalwrite(trigpin3, LOW); delaymicroseconds(2); digitalwrite(trigpin3, HIGH); delaymicroseconds(10); digitalwrite(trigpin3, LOW); duration3 = pulsein(echopin3, HIGH); //Calculate the distance (in cm) based on the speed of sound. distance3 = duration3/58.2; if (distance1 >= maximumrange distance1 <= minimumrange){ // Συγκρίνει την απόσταση για μια χρονική στιγμή και αν το εμπόδιο είναι μακριά δεν παράγει ήχο digitalwrite(ledpin, HIGH); // Σύγκριση της απόστασης για τον ήχο από το ηχείο αν η απόσταση είναι μικρότερη από μια σταθερά (δηλ. το όχημα πλησιάζει το εμπόδιο) if (distance1 < 60){ analogwrite(altop, 125); delay(distance1*10); Σελίδα 46 από 68
47 analogwrite(altop, 0); } if (distance1 <= 3){ analogwrite(altop, 125); } // Μεγάλη απόστασης digitalwrite(ledpin, LOW); // Κίνηση μπροστά digitalwrite(input1fb, HIGH); // HIGH + LOW τοτε θα κινηθεί μπροστά digitalwrite(input2fb, LOW); analogwrite(enable1fb, 200); // Ταχύτητα του μοτόρ } else { //Κίνηση μπροστά πίσω (πίσω) digitalwrite(input1fb, LOW); // LOW + HIGH τοτε θα κινηθεί πίσω digitalwrite(input2fb, HIGH); analogwrite(enable1fb, 180); // Ταχύτητα του μοτόρ delay(80); digitalwrite(enable1fb, LOW); // Σταματάω το μοτόρ delay(500); digitalwrite(input3lr, LOW); // HIGH + LOW τοτε θα κινηθεί δεξια digitalwrite(input4lr, HIGH); analogwrite(enable2lr, 255); // Κίνηση του μοτόρ delay(2000); Σελίδα 47 από 68
48 digitalwrite(enable1fb, LOW); // Σταματάω το μοτορ delay(500); digitalwrite(input1fb, LOW); // LOW + HIGH τοτε θα κινηθεί πίσω digitalwrite(input2fb, HIGH); analogwrite(enable1fb, 180); // Ταχύτητα του μοτόρ delay(1000); digitalwrite(enable1fb, LOW); // Σταματάω το μοτόρ delay(500); digitalwrite(input3lr, HIGH); // HIGH + LOW τοτε θα κινηθεί αριστερά digitalwrite(input4lr, LOW); digitalwrite(enable2lr, HIGH); // Επαναφορά του μοτόρ delay(200); digitalwrite(enable2lr, LOW); delay (1000); // Συγκρίνει την απόσταση για μια χρονική στιγμή και αν το εμπόδιο είναι μακριά δεν παράγει ήχο digitalwrite(ledpin, HIGH); // Σύγκριση της απόστασης για τον ήχο από το ηχείο αν η απόσταση είναι μικρότερη από μια σταθερά (δηλ. το όχημα πλησιάζει το εμπόδιο) if (distance1 < 60){ analogwrite(altop, 125); Σελίδα 48 από 68
49 delay(distance1*10); analogwrite(altop, 0); } if (distance1 <= 3){ analogwrite(altop, 125); } } if (distance2 >= maximumrange distance2 <= minimumrange){ // Συγκρίνει την απόσταση για μια χρονική στιγμή και αν το εμπόδιο είναι μακριά δεν παράγει ήχο digitalwrite(ledpin, HIGH); // Σύγκριση της απόστασης για τον ήχο από το ηχείο αν η απόσταση είναι μικρότερη από μια σταθερά (δηλ. το όχημα πλησιάζει το εμπόδιο) if (distance2 < 60){ analogwrite(altop, 125); delay(distance2*10); analogwrite(altop, 0); } if (distance2 <= 3){ analogwrite(altop, 125); } // Μεγάλη απόστασης Σελίδα 49 από 68
50 digitalwrite(ledpin, LOW); // Κίνηση μπροστά // Μεγάλη απόστασης digitalwrite(ledpin, LOW); // Κίνηση μπροστά digitalwrite(input1fb, HIGH); // HIGH + LOW τοτε θα κινηθεί μπροστά digitalwrite(input2fb, LOW); analogwrite(enable1fb, 200); // Ταχύτητα του μοτόρ } else { //Κίνηση μπροστά πίσω (πίσω) digitalwrite(input1fb, LOW); // LOW + HIGH τοτε θα κινηθεί πίσω digitalwrite(input2fb, HIGH); analogwrite(enable1fb, 180); // Ταχύτητα του μοτόρ delay(80); digitalwrite(enable1fb, LOW); // Σταματάω το μοτόρ delay(500); digitalwrite(input3lr, LOW); // HIGH + LOW τοτε θα κινηθεί δεξια digitalwrite(input4lr, HIGH); analogwrite(enable2lr, 255); // Κίνηση του μοτόρ delay(2000); digitalwrite(enable1fb, LOW); // Σταματάω το μοτορ Σελίδα 50 από 68
51 delay(500); digitalwrite(input1fb, LOW); // LOW + HIGH τοτε θα κινηθεί πίσω digitalwrite(input2fb, HIGH); analogwrite(enable1fb, 180); // Ταχύτητα του μοτόρ delay(1000); digitalwrite(enable1fb, LOW); // Σταματάω το μοτόρ delay(500); digitalwrite(input3lr, HIGH); // HIGH + LOW τοτε θα κινηθεί αριστερά digitalwrite(input4lr, LOW); digitalwrite(enable2lr, HIGH); // Επαναφορά του μοτόρ delay(200); digitalwrite(enable2lr, LOW); delay (1000); // Συγκρίνει την απόσταση για μια χρονική στιγμή και αν το εμπόδιο είναι μακριά δεν παράγει ήχο digitalwrite(ledpin, HIGH); // Σύγκριση της απόστασης για τον ήχο από το ηχείο αν η απόσταση είναι μικρότερη από μια σταθερά (δηλ. το όχημα πλησιάζει το εμπόδιο) if (distance2 < 60){ analogwrite(altop, 125); delay(distance2*10); analogwrite(altop, 0); Σελίδα 51 από 68
52 } if (distance2 <= 3){ analogwrite(altop, 125); } } if (distance3 >= maximumrange distance3 <= minimumrange){ // Σύγκριση της απόστασης για τον ήχο από το ηχείο αν η απόσταση είναι μικρότερη από μια σταθερά (δηλ. το όχημα πλησιάζει το εμπόδιο) digitalwrite(ledpin, HIGH); // Συγκρίνει την απόσταση για μια χρονική στιγμή και αν το εμπόδιο είναι μακριά δεν παράγει ήχο if (distance3 < 60){ analogwrite(altop, 125); delay(distance3*10); analogwrite(altop, 0); } if (distance3 <= 3){ analogwrite(altop, 125); } // Μεγάλη απόστασης digitalwrite(ledpin, LOW); // Κίνηση μπροστά digitalwrite(input1fb, HIGH); // HIGH + LOW τοτε θα κινηθεί μπροστά Σελίδα 52 από 68
53 digitalwrite(input2fb, LOW); analogwrite(enable1fb, 200); // Ταχύτητα του μοτόρ } else { //Κίνηση μπροστά πίσω (πίσω) digitalwrite(input1fb, LOW); // LOW + HIGH τοτε θα κινηθεί πίσω digitalwrite(input2fb, HIGH); analogwrite(enable1fb, 180); // Ταχύτητα του μοτόρ delay(80); digitalwrite(enable1fb, LOW); // Σταματάω το μοτόρ delay(500); digitalwrite(input3lr, LOW); // HIGH + LOW τοτε θα κινηθεί δεξια digitalwrite(input4lr, HIGH); analogwrite(enable2lr, 255); // Κίνηση του μοτόρ delay(2000); digitalwrite(enable1fb, LOW); // Σταματάω το μοτορ delay(500); digitalwrite(input1fb, LOW); // LOW + HIGH τοτε θα κινηθεί πίσω digitalwrite(input2fb, HIGH); analogwrite(enable1fb, 180); // Ταχύτητα του μοτόρ delay(1000); digitalwrite(enable1fb, LOW); // Σταματάω το μοτόρ Σελίδα 53 από 68
54 delay(500); digitalwrite(input3lr, HIGH); // HIGH + LOW τοτε θα κινηθεί αριστερά digitalwrite(input4lr, LOW); digitalwrite(enable2lr, HIGH); // Επαναφορά του μοτόρ delay(200); digitalwrite(enable2lr, LOW); delay (1000); Ο κώδικας παραπάνω χρησιμοποιεί την digitalwrite η οποία γράφει μια υψηλή (ΗΙGH) και μια χαμηλή (LOW) τιμή σε μια ψηφιακή ακίδα. Αν η ακίδα έχει ρυθμιστεί ως έξοδος με τη συνάρτηση PinMode( ), τότε η τάση της θα καθορίσει στην αντίστοιχη τιμή: 5V για HIGΗ και 0V για LOW. Επίσης χρησιμοποιεί και την analogwrite η οποία γράφει μια αναλογική τιμή (PWM κύμα) σε μια ακίδα. Μπορεί να χρησιμοποιηθεί για παράδειγμα να ανάψει ένα LED σε διάφορες φωτεινότητες ή να οδηγήσει έναν κινητήρα σε διάφορες ταχύτητες. Μετά από μια κλήση της analogwrite ( ), η ακίδα θα δημιουργήσει ένα σταθερό τετραγωνικό κύμα του καθορισμένου κύκλου λειτουργίας μέχρι την επόμενη κλήση της analogwrite ( ) (ή μια κλήση της digitalwrite( ) ή digitalread( ) για την ίδια την ακίδα). Η συχνότητα του σήματος PWM είναι περίπου 490 Hz. Το delay που χρησιμοποιούμε στο πρόγραμμά μας είναι για την παύση/αναμονή για όσο χρόνο προβλέπεται από την κάθε εντολή. Σελίδα 54 από 68
55 6.3.1 Εντολές εντός κυρίου προγράμματος για την δήλωση του ήχου όταν όχημα πλησιάζει σε εμπόδιο // Σύγκριση της απόστασης για τον ήχο από το ηχείο αν η απόσταση είναι μικρότερη από μια σταθερά (δηλ. το όχημα πλησιάζει το εμπόδιο) digitalwrite(ledpin, HIGH); // Ανάβει το LED // Συγκρίνει την απόσταση για μια χρονική στιγμή και αν το εμπόδιο είναι μακριά δεν παράγει ήχο if (distance < 60){ analogwrite(altop, 125); delay(distance*10); analogwrite(altop, 0); } // Συγκρίνει την απόσταση για μια χρονική στιγμή και αν το εμπόδιο είναι κοντά τότε παράγει ήχο if (distance <= 3){ analogwrite(altop, 125); } } // Καθυστέρηση για την επόμενη σύγκριση delay(100); } Σελίδα 55 από 68


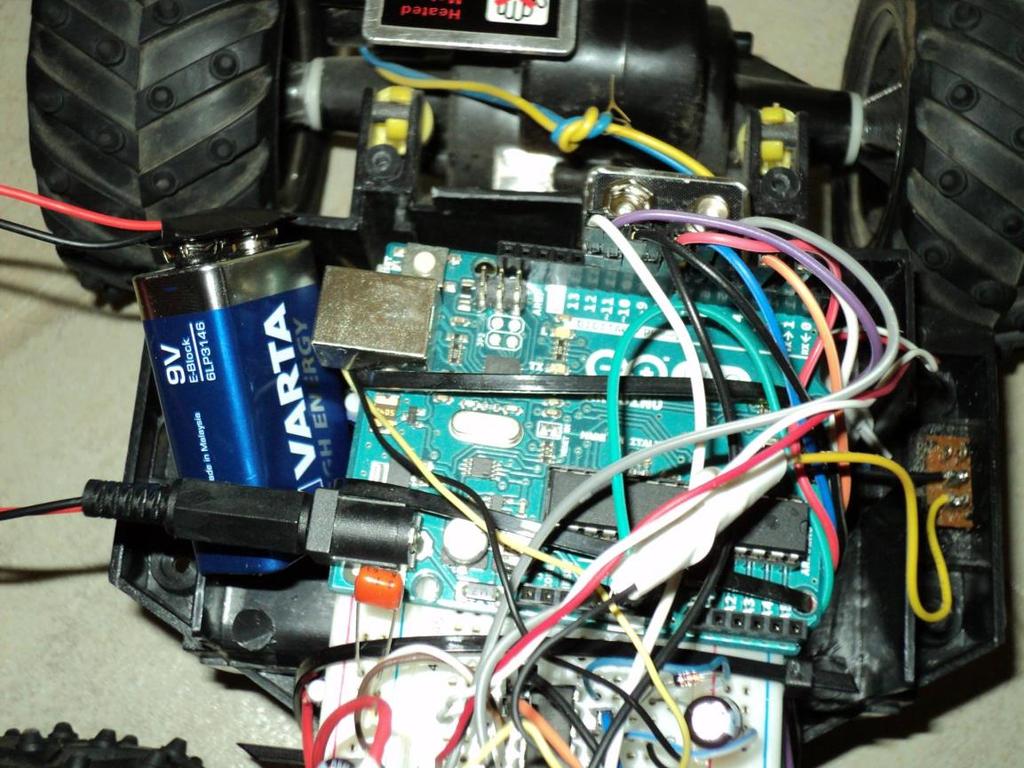
56 Διάφορες εικόνες που τραβήχτηκαν κατά την διαδικασία υλοποίησης της εργασίας. εικ.1 Arduino UNO L293D Ηχείο - Αισθητήρας εικ.2 Σύνδεση πρώτης φάσης Αrduino με ολοκληρωμένο κύκλωμα Σελίδα 56 από 68


57 εικ.3 Ομοίως με την εικ.2 εικ.4 Όλα τα υλικά που αφαιρέσαμε και προσθέσαμε στον Αrduino Σελίδα 57 από 68

58 εικ.5 Σελίδα 58 από 68

59 Σελίδα 59 από 68


60 Σελίδα 60 από 68


61 Σελίδα 61 από 68
62 Προβλήματα που παρουσιάστηκαν κατά την υλοποίηση του αυτόνομου ρομποτικού αυτοκινήτου Κατά τη διαδικασία της υλοποίησης του αυτόνομου ρομποτικού αυτοκινήτου παρουσιάστηκαν κάποια προβλήματα τα οποία και στη συνέχεια αντιμετωπίστηκαν με επιτυχία. Αρχικά κάηκε ο ένας κινητήρας και συγκεκριμένα ο πίσω, λόγω υπερφόρτωσης, που υπήρχε ήδη προσαρτημένος στο τηλεκατευθυνόμενο αυτοκίνητο που χρησιμοποιήθηκε ως βάση του αυτόνομου. Έτσι, αναγκαστικά έπρεπε να αλλαχτεί, όπως κι έγινε. Στην συνέχεια έγινε αντιληπτό ότι το πρώτο αμαξίδιο δεν άντεχε το βάρος για την κίνηση προς τα πίσω, το βοηθούσε το καλώδιο της τροφοδοσίας για να κινηθεί ενώ με την μπαταρία δεν μπορούσε και αντικαταστάθηκε ο βραχίονας του αμαξιδίου. Η αλλαγή φαίνεται στις εικόνες τις εργασίας. Άλλο ένα πρόβλημα παρουσιάστηκε στον τρόπο της σύνταξης του προγράμματος. Ειδικότερα, στο πόσο ταχύτητα θα δοθεί στους κινητήρες (τάση), ώστε να μπορεί να κινηθεί το όχημα και να μην καούν οι κινητήρες, όπως συνέβη αρχικά. Το πρόβλημα αντιμετωπίστηκε επίσης με επιτυχία. Επιπρόσθετα, μετά από πολλές δοκιμές διαπιστώθηκε ότι η μπαταρία δε διαρκεί πολύ και πρέπει κάθε φορά να αλλάζουν οι ταχύτητες του προγράμματος.λόγω του ότι πέφτει η τάση γρήγορα και το αμαξίδιο δεν εκπληρώνει σωστά τις εντολές που του δίνονται. Αυτό μπορεί να επιλυθεί με μια επαναφορτιζόμενη μπαταρία ή αλλιώς με εξωτερική τροφοδοσία η οποία θα έχει μακρύ καλώδιο για να κινείται εύκολα στο χώρο. Σελίδα 62 από 68
63 Σχόλια και συμπεράσματα Η πτυχιακή αυτή, η οποία ασχολήθηκε με την υλοποίηση ενός αυτόνομου ρομποτικού αυτοκινήτου με αισθητήρες και ήχο, δεν είχε μόνο ως στόχο την καθαυτού υλοποίηση του αυτοκινούμενου ρομπότ αλλά και την περιήγηση του αναγνώστη της στον θαυμαστό κόσμο της Ρομποτικής Τεχνολογίας. Επιχειρήθηκε αρχικά, μέσα από μια ιστορική αναδρομή στο παρελθόν της τεχνολογίας και της επιστήμης, ο αναγνώστης να γνωρίσει την χρήση και τη λειτουργία της Ρομποτικής. Στη συνέχεια, έγινε παράθεση της πλατφόρμας Arduino και μια πρώτη γνωριμία με αυτήν, αναφέρθηκαν οι διάφοροι τύποι που υπάρχουν και αναλύθηκε ενδελεχώς η πλατφόρμα Arduino UNO, η οποία χρησιμοποιήθηκε στη συγκεκριμένη κατασκευή. Το ολοκληρωμένο κύκλωμα, ο αισθητήρας, ο κινητήρας και το ηχείο ήταν τα περιφερειακά συστήματα τα οποία χρησίμευσαν στην υλοποίηση της κατασκευής, επίσης. Σαν συμπέρασμα λοιπόν, μπορούμε να πούμε πως το πλεονέκτημα της εν λόγω πλατφόρμας, είναι ότι κάποιος μπορεί να κατασκευάσει ένα ρομπότ, ενώ το κόστος της κατασκευής είναι κατά πολλές φορές χαμηλότερο, σε σχέση με τα συναρμολογούμενα ρομποτικά κιτ της αγοράς. Για να φτιάξει κάποιος ένα ρομπότ με τον Αrduino δεν χρειάζεται εξειδικευμένες γνώσεις ηλεκτρονικής, ωστόσο απαιτεί και λίγες γνώσεις προγραμματισμού, οι οποίες καθίστανται σαφείς στην εν λόγω πτυχιακή εργασία. Σελίδα 63 από 68

 2.")

64 Παράρτημα Υλικών 1. Arduino UNO (με το μικροεπεξεργαστή atmega328p) 2. Καλώδια -USB -Για τις συνδέσεις υλικών πάνω στο breadboard (πλακέτα) -Μπαταριών Σελίδα 64 από 68
 4.")


65 3.BreadBoard (πλακέτα) 4. Πυκνωτές - πλαστικοί 2x0.1 μf - πολικότητας 2x100μF 5. Δίοδοι 2x1N4148 Σελίδα 65 από 68
 6.")
")

66 5.Ηχείο (για την παραγωγή ήχου) 6. Ολοκληρωμένο κύκλωμα L293D (για την οδήγηση κινητήρων) Σταθεροποιητής 5V 8. HC-SR04 αισθητήρας υπερήχων Σελίδα 66 από 68

67 9. Μπαταρίες 2x9V Τα υλικά τα οποία χρησιμοποιήσαμε δεν ήταν ιδιαίτερα μεγάλου κόστους κι όπως προαναφέραμε στην ενότητα των σχολίων και συμπερασμάτων το κόστος της κατασκευής ενός ρομπότ δεν είναι πλέον υψηλό. Συγκεκριμένα το ρομπότ μας κόστισε ~80. Σελίδα 67 από 68
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5. Ρυθμίζοντας τη Φορά Περιστροφής. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 1. Προγραμματισμός Φυσικών Συστημάτων. Νέα Ψηφιακά Αντικείμενα
 Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 1 ΜΕΤΡΩΝΤΑΣ ΑΠΟΣΤΑΣΗ ΜΕ ΤΟΝ ΑΙΣΘΗΤΗΡΑ ΥΠΕΡΗΧΩΝ (SR04). Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Νέα Ψηφιακά Αντικείμενα Αισθητήρες
Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 1 ΜΕΤΡΩΝΤΑΣ ΑΠΟΣΤΑΣΗ ΜΕ ΤΟΝ ΑΙΣΘΗΤΗΡΑ ΥΠΕΡΗΧΩΝ (SR04). Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Νέα Ψηφιακά Αντικείμενα Αισθητήρες
Γνωριμία με το Arduino
 Γνωριμία με το Arduino Τι είναι το Arduino; Το arduino είναι ένας μικρός υπολογιστής σε μέγεθος παλάμης που περιλαμβάνει ένα μικροελεγκτή (για εκτέλεση εντολών) και ένα σύνολο εισόδων/εξόδων για επικοινωνία
Γνωριμία με το Arduino Τι είναι το Arduino; Το arduino είναι ένας μικρός υπολογιστής σε μέγεθος παλάμης που περιλαμβάνει ένα μικροελεγκτή (για εκτέλεση εντολών) και ένα σύνολο εισόδων/εξόδων για επικοινωνία
Φύλλο εργασίας 9 - Αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων
 Φύλλο εργασίας 9 - Αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων Σε αυτήν τη δραστηριότητα θα κατασκευάσουμε ένα αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων. Εκτός από τον μικροελεγκτή Arduino, το breadboard,
Φύλλο εργασίας 9 - Αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων Σε αυτήν τη δραστηριότητα θα κατασκευάσουμε ένα αυτόνομο ρομποτικό όχημα αποφυγής εμποδίων. Εκτός από τον μικροελεγκτή Arduino, το breadboard,
Ενσωματωμένα Συστήματα
 Ενσωματωμένα Συστήματα για εφαρμογές πραγματικού χρόνου Εφαρμογές με τον Arduino Ιωάννης Καλόμοιρος Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Πληροφορικής Μάθημα 10 1 Συναρτήσεις αναλογικής εξόδου: PWM Το
Ενσωματωμένα Συστήματα για εφαρμογές πραγματικού χρόνου Εφαρμογές με τον Arduino Ιωάννης Καλόμοιρος Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Πληροφορικής Μάθημα 10 1 Συναρτήσεις αναλογικής εξόδου: PWM Το
Εφαρμογές Σειριακής Επικοινωνίας
 Εφαρμογές Σειριακής Επικοινωνίας Εισαγωγή Στο μάθημα αυτό θα μάθουμε πώς να χρησιμοποιούμε την βιβλιοθήκη serial για την επικοινωνία από την πλατφόρμα Arduino πίσω στον υπολογιστή μέσω της θύρας usb. Τι
Εφαρμογές Σειριακής Επικοινωνίας Εισαγωγή Στο μάθημα αυτό θα μάθουμε πώς να χρησιμοποιούμε την βιβλιοθήκη serial για την επικοινωνία από την πλατφόρμα Arduino πίσω στον υπολογιστή μέσω της θύρας usb. Τι
ΕΦΑΡΜΟΓΕΣ ΤΗΛΕΠIΚΟΙΝΩΝΙΑΚΩΝ ΔΙΑΤΑΞΕΩΝ
 ΕΦΑΡΜΟΓΕΣ ΤΗΛΕΠIΚΟΙΝΩΝΙΑΚΩΝ ΔΙΑΤΑΞΕΩΝ ΟΙΚΟΝOΜΟΥ ΧΑΡΗΣ (6424) ΦΩΚΟΣ ΝΙΚΟΛΑΟΣ(6592) ΚΑΜΒΥΣΗΣ ΝΙΚΟΛΑΟΣ(7178) 2013-2014 ΠΕΡΙΕΧΟΜΕΝΑ Σκοπός της εργασίας Ανάλυση Arduino Uno Δημιουργία πληροφορίας Αποστολή και
ΕΦΑΡΜΟΓΕΣ ΤΗΛΕΠIΚΟΙΝΩΝΙΑΚΩΝ ΔΙΑΤΑΞΕΩΝ ΟΙΚΟΝOΜΟΥ ΧΑΡΗΣ (6424) ΦΩΚΟΣ ΝΙΚΟΛΑΟΣ(6592) ΚΑΜΒΥΣΗΣ ΝΙΚΟΛΑΟΣ(7178) 2013-2014 ΠΕΡΙΕΧΟΜΕΝΑ Σκοπός της εργασίας Ανάλυση Arduino Uno Δημιουργία πληροφορίας Αποστολή και
ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO. Υποψήφιος Διδάκτωρ
 ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO Δημιουργός: Επιβλέπων: Μπακάλη Ιωάννα Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ 1 ΤΙ ΕΙΝΑΙ ΤΟ ARDUINO; Είναι ένας συνδυασμός Υλικού (πλακέτας, μικροελεγκτή, αντιστάσεων κτλ) και Λογισμικού
ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO Δημιουργός: Επιβλέπων: Μπακάλη Ιωάννα Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ 1 ΤΙ ΕΙΝΑΙ ΤΟ ARDUINO; Είναι ένας συνδυασμός Υλικού (πλακέτας, μικροελεγκτή, αντιστάσεων κτλ) και Λογισμικού
ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017)
") ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017) Περιγραφή της Άσκησης Ο σκοπός της πρώτης άσκησης είναι κυρίως η εξοικείωση με το περιβάλλον προγραμματισμού του Arduino, γι αυτό και δεν είναι ιδιαίτερα σύνθετη. Αρχικά, θα
ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017) Περιγραφή της Άσκησης Ο σκοπός της πρώτης άσκησης είναι κυρίως η εξοικείωση με το περιβάλλον προγραμματισμού του Arduino, γι αυτό και δεν είναι ιδιαίτερα σύνθετη. Αρχικά, θα
Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία ΡομποΚαθαριστής Μέρος Β : Το Πρόγραμμα. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping).
.") Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής Μέρος Β : Το Πρόγραμμα. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής Μέρος Β : Το Πρόγραμμα. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής
ΜΙΚΡΟΕΛΕΓΚΤΗΣ PICAXE 18M2
 ΘΕΜΑ : ΜΙΚΡΟΕΛΕΓΚΤΗΣ PICAXE 18M2 ΔΙΑΡΚΕΙΑ:? περίοδος Οι μικροελεγκτές είναι υπολογιστές χωρίς περιφερειακά, σε ολοκληρωμένα κυκλώματα. Μπορούν να συνδυάσουν αρκετές από τις βασικές λειτουργίες άλλων ειδικών
ΘΕΜΑ : ΜΙΚΡΟΕΛΕΓΚΤΗΣ PICAXE 18M2 ΔΙΑΡΚΕΙΑ:? περίοδος Οι μικροελεγκτές είναι υπολογιστές χωρίς περιφερειακά, σε ολοκληρωμένα κυκλώματα. Μπορούν να συνδυάσουν αρκετές από τις βασικές λειτουργίες άλλων ειδικών
Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές. Εισαγωγή στο Arduino. Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών
 με μικροελεγκτές. Εισαγωγή στο Arduino. Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών") Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές Εισαγωγή στο Arduino Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών Τι είναι Μικροελεγκτής; Ηλεκτρονική συσκευή που διαχειρίζεται ηλεκτρονικά
Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές Εισαγωγή στο Arduino Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών Τι είναι Μικροελεγκτής; Ηλεκτρονική συσκευή που διαχειρίζεται ηλεκτρονικά
Το κύκλωμα σε breadboard
 Φύλλο εργασίας 8 - Ανιχνευτής απόστασης Σε αυτήν τη δραστηριότητα θα κατασκευάσουμε έναν ανιχνευτή απόστασης. Θα χρησιμοποιήσουμε τον αισθητήρα υπερήχων (ή απόστασης) HC-SR04 για τον υπολογισμό της απόστασης.
Φύλλο εργασίας 8 - Ανιχνευτής απόστασης Σε αυτήν τη δραστηριότητα θα κατασκευάσουμε έναν ανιχνευτή απόστασης. Θα χρησιμοποιήσουμε τον αισθητήρα υπερήχων (ή απόστασης) HC-SR04 για τον υπολογισμό της απόστασης.
Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2. Προγραμματισμός Φυσικών Συστημάτων. Συστήματα Πραγματικών Εφαρμογών. Νέα Ψηφιακά Αντικείμενα
 Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Μάθημα 4.1 Βασικές μονάδες προσωπικού υπολογιστή
 Μάθημα 4.1 Βασικές μονάδες προσωπικού υπολογιστή - Εισαγωγή - Αρχιτεκτονική προσωπικού υπολογιστή - Βασικά τμήματα ενός προσωπικού υπολογιστή - Η κεντρική μονάδα Όταν ολοκληρώσεις το μάθημα αυτό θα μπορείς:
Μάθημα 4.1 Βασικές μονάδες προσωπικού υπολογιστή - Εισαγωγή - Αρχιτεκτονική προσωπικού υπολογιστή - Βασικά τμήματα ενός προσωπικού υπολογιστή - Η κεντρική μονάδα Όταν ολοκληρώσεις το μάθημα αυτό θα μπορείς:
Ενσωματωμένα Συστήματα
 Ενσωματωμένα Συστήματα Ενότητα: ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ARDUINO Δρ. Μηνάς Δασυγένης mdasyg@ieee.org Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών
Ενσωματωμένα Συστήματα Ενότητα: ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ARDUINO Δρ. Μηνάς Δασυγένης mdasyg@ieee.org Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών
Εγκατάσταση του Arduino IDE
 ΑΣΠΑΙΤΕ Συλλογή και Επεξεργασία Δεδομένων Εργαστήριο ΠΕΡΙΕΧΟΜΕΝΑ: Πώς να κατεβάσετε και να εγκαταστήσετε το Ολοκληρωμένο Περιβάλλον Ανάπτυξης (IDE), για το προγραμματισμό του Arduino. Χρησιμοποιώντας το
ΑΣΠΑΙΤΕ Συλλογή και Επεξεργασία Δεδομένων Εργαστήριο ΠΕΡΙΕΧΟΜΕΝΑ: Πώς να κατεβάσετε και να εγκαταστήσετε το Ολοκληρωμένο Περιβάλλον Ανάπτυξης (IDE), για το προγραμματισμό του Arduino. Χρησιμοποιώντας το
Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου. Ενότητα 2
 Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου Ενότητα 2 Τι είναι το PLC ΠΕΡΙΕΧΟΜΕΝΑ 2 Τι είναι το PLC. 2.1 Πλεονεκτήματα των PLC. 2.2 Η δομή ενός PLC. 2.3 Τα PLC της αγοράς. 2.4 Αρχή λειτουργίας ενός PLC.
Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου Ενότητα 2 Τι είναι το PLC ΠΕΡΙΕΧΟΜΕΝΑ 2 Τι είναι το PLC. 2.1 Πλεονεκτήματα των PLC. 2.2 Η δομή ενός PLC. 2.3 Τα PLC της αγοράς. 2.4 Αρχή λειτουργίας ενός PLC.
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 2 USB και Σειριακή Επικοι- νωνία Σ Σειριακή Επικοινωνία
 Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 2 USB και Σειριακή Επικοινωνία. Σειριακή Επικοινωνία USB Σύνδεση / Πρωτόκολλο Σκοπός Εντολή επιλογής (if) Εντολή Επανάληψης (while) Πίνακες 1 Μέρος Α : Σκοπός
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 2 USB και Σειριακή Επικοινωνία. Σειριακή Επικοινωνία USB Σύνδεση / Πρωτόκολλο Σκοπός Εντολή επιλογής (if) Εντολή Επανάληψης (while) Πίνακες 1 Μέρος Α : Σκοπός
Προγραμματισμο ς σε Arduino
 Προγραμματισμο ς σε Arduino Arduino UNO & Innoesys Educational Shield www.devobox.com Ηλεκτρονικά Εξαρτήματα & Υλικά Κατασκευής Πρωτοτύπων Λέανδρου 79, 10443, Κολωνός +30 210 51 55 513, info@devobox.com
Προγραμματισμο ς σε Arduino Arduino UNO & Innoesys Educational Shield www.devobox.com Ηλεκτρονικά Εξαρτήματα & Υλικά Κατασκευής Πρωτοτύπων Λέανδρου 79, 10443, Κολωνός +30 210 51 55 513, info@devobox.com
Κωνσταντίνος Γκαλονάκης. Arduino: Προγραμματισμός στην πράξη
 Κωνσταντίνος Γκαλονάκης Arduino: Προγραμματισμός στην πράξη 1 Σύνδεση του Arduino με τον Η/Υ και προγραμματισμός αυτού. 1. Εγκατάσταση περιβάλλοντος Arduino IDE Για να προγραμματίσετε τη μονάδα σας θα
Κωνσταντίνος Γκαλονάκης Arduino: Προγραμματισμός στην πράξη 1 Σύνδεση του Arduino με τον Η/Υ και προγραμματισμός αυτού. 1. Εγκατάσταση περιβάλλοντος Arduino IDE Για να προγραμματίσετε τη μονάδα σας θα
ΕΝΟΤΗΤΑ 10: ΟΔΗΓΗΣΗ ΚΙΝΗΤΗΡΩΝ
 ΕΝΟΤΗΤΑ 10: ΟΔΗΓΗΣΗ ΚΙΝΗΤΗΡΩΝ Στόχος και Περίγραμμα της Ενότητας 10 Στόχος της παρουσίασης Παρουσίαση της βασικής ιδέα και απλών παραδειγμάτων για την οδήγηση DC και βηματικών κινητήρων με το Arduino.
ΕΝΟΤΗΤΑ 10: ΟΔΗΓΗΣΗ ΚΙΝΗΤΗΡΩΝ Στόχος και Περίγραμμα της Ενότητας 10 Στόχος της παρουσίασης Παρουσίαση της βασικής ιδέα και απλών παραδειγμάτων για την οδήγηση DC και βηματικών κινητήρων με το Arduino.
Εφαρμογές αναλογικών / Ψηφιακών
 Εφαρμογές αναλογικών / Ψηφιακών 1 ΕΙΣΑΓΩΓΗ Σε αυτήν την ενότητα θα δούμε μερικές ακόμα εφαρμογές ψηφιακών / αναλογικών εισόδων/ εξόδων που μπορούμε να φτιάξουμε με την βοήθεια του Arduino, χρησιμοποιώντας
Εφαρμογές αναλογικών / Ψηφιακών 1 ΕΙΣΑΓΩΓΗ Σε αυτήν την ενότητα θα δούμε μερικές ακόμα εφαρμογές ψηφιακών / αναλογικών εισόδων/ εξόδων που μπορούμε να φτιάξουμε με την βοήθεια του Arduino, χρησιμοποιώντας
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 4. Οδηγώντας έναν DC Κινητήρα. Το κύκλωμα της Λειτουργίας DC Κινητήρα
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 4 Οδηγώντας έναν DC Κινητήρα. Το κύκλωμα της Λειτουργίας DC Κινητήρα Τρανζίστορ στη Λειτουργία ενός DC Κινητήρα. Η Χρήση της Διόδου. Το Πρόγραμμα που Οδηγεί
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 4 Οδηγώντας έναν DC Κινητήρα. Το κύκλωμα της Λειτουργίας DC Κινητήρα Τρανζίστορ στη Λειτουργία ενός DC Κινητήρα. Η Χρήση της Διόδου. Το Πρόγραμμα που Οδηγεί
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 3 Μέτρηση Θερμοκρασίας Σύστημα Ελέγχου Θερμοκρασίας. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 3 Μέτρηση Θερμοκρασίας Σύστημα Ελέγχου Θερμοκρασίας με Θερμοστάτη. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Σκοπός Βασική δομή ενός προγράμματος στο LabVIEW.
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 3 Μέτρηση Θερμοκρασίας Σύστημα Ελέγχου Θερμοκρασίας με Θερμοστάτη. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Σκοπός Βασική δομή ενός προγράμματος στο LabVIEW.
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου
 Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου") Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Εισαγωγή στη Ρομποτική (για αρχάριους) Δημήτρης Πιπερίδης Διαδραστική Έκθεση Επιστήμης & Τεχνολογίας Ίδρυμα Ευγενίδου Τι είναι ένα ρομπότ; Δεν υπάρχει σαφής ορισμός. Ορισμός: Μια μηχανική κατασκευή που
Ενσωµατωµένα Συστήµατα
 Ενσωµατωµένα Συστήµατα για εφαρµογές πραγµατικού χρόνου Μικροελεγκτής Arduino Ιωάννης Καλόµοιρος Αναπληρωτής Καθηγητής Τµήµα Μηχανικών Πληροφορικής Μάθηµα 7ο Τι είναι το Arduino... Ένα open-hardware σύστηµα
Ενσωµατωµένα Συστήµατα για εφαρµογές πραγµατικού χρόνου Μικροελεγκτής Arduino Ιωάννης Καλόµοιρος Αναπληρωτής Καθηγητής Τµήµα Μηχανικών Πληροφορικής Μάθηµα 7ο Τι είναι το Arduino... Ένα open-hardware σύστηµα
Lab 1: Experimenting on Arduino & AI Sense
 Lab 1: Experimenting on Arduino & AI Sense 1. Εισαγωγή A. Arduino Robokit Το Robokit, όπως και όλες οι πλακέτες τύπου Arduino, λειτουργεί χάρη σε έναν μικροελεγκτή. Ως μικροελεγκτή μπορούμε να φανταστούμε
Lab 1: Experimenting on Arduino & AI Sense 1. Εισαγωγή A. Arduino Robokit Το Robokit, όπως και όλες οι πλακέτες τύπου Arduino, λειτουργεί χάρη σε έναν μικροελεγκτή. Ως μικροελεγκτή μπορούμε να φανταστούμε
ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ
 Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
Πτυχιακή Εργασία Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Η Ασύρματη Επικοινωνία, χρησιμοποιώντας
 Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Μηχανοτρονική. Τμήμα Μηχανικών Παραγωγής και Διοίκησης 7 ο Εξάμηνο,
 Τμήμα Μηχανικών Παραγωγής και Διοίκησης 7 ο Εξάμηνο, 2016-2017 Mηχανοτρονική Το Arduino είναι μια «ανοικτού κώδικα» πλατφόρμα «πρωτοτυποποιημένων» ηλεκτρονικών βασισμένη σε ευέλικτο και εύκολο στη χρήση
Τμήμα Μηχανικών Παραγωγής και Διοίκησης 7 ο Εξάμηνο, 2016-2017 Mηχανοτρονική Το Arduino είναι μια «ανοικτού κώδικα» πλατφόρμα «πρωτοτυποποιημένων» ηλεκτρονικών βασισμένη σε ευέλικτο και εύκολο στη χρήση
ΕΡΓΑΣΤΗΡΙΟ 4 ΕΙΣΑΓΩΓΗ ΣΤΟN ARDUINO: ΨΗΦΙΑΚΗ ΕΙΣΟΔΟΣ/ΕΞΟΔΟΣ
 ΕΡΓΑΣΤΗΡΙΟ 4 ΕΙΣΑΓΩΓΗ ΣΤΟN ARDUINO: ΨΗΦΙΑΚΗ ΕΙΣΟΔΟΣ/ΕΞΟΔΟΣ Σκοπός της άσκησης Οι φοιτητές θα εξοικειωθούν με την πλακέτα του μικροελεγκτή και θα αναγνωρίσουν τα βασικά της στοιχεία. Επίσης θα εξοικειωθούν
ΕΡΓΑΣΤΗΡΙΟ 4 ΕΙΣΑΓΩΓΗ ΣΤΟN ARDUINO: ΨΗΦΙΑΚΗ ΕΙΣΟΔΟΣ/ΕΞΟΔΟΣ Σκοπός της άσκησης Οι φοιτητές θα εξοικειωθούν με την πλακέτα του μικροελεγκτή και θα αναγνωρίσουν τα βασικά της στοιχεία. Επίσης θα εξοικειωθούν
Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping).
.") Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής Δεδομένων, Μονάδα Επεξεργασίας
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής Δεδομένων, Μονάδα Επεξεργασίας
Εφαρμογές Αναλογικών Ε/Ε PWM (pulse Width Modulation)
") Εφαρμογές Αναλογικών Ε/Ε PWM (pulse Width Modulation) Εισαγωγή Σε αυτή την ενότητα θα δούμε εφαρμογές που χρησιμοποιούν τις αναλογικές Εισόδους/Εξόδους του Arduino ή την τεχνική PWM. Ψηφιακό vs Αναλογικό
Εφαρμογές Αναλογικών Ε/Ε PWM (pulse Width Modulation) Εισαγωγή Σε αυτή την ενότητα θα δούμε εφαρμογές που χρησιμοποιούν τις αναλογικές Εισόδους/Εξόδους του Arduino ή την τεχνική PWM. Ψηφιακό vs Αναλογικό
ΕΝΟΤΗΤΑ ΤΗΛΕΦΩΝΙΑ ΕΙΣΑΓΩΓΗ
 ΕΝΟΤΗΤΑ 4 4.0 ΤΗΛΕΦΩΝΙΑ ΕΙΣΑΓΩΓΗ Η τηλεφωνία είναι ένα βασικό και πολύ διαδεδομένο ηλεκτρολογικό επικοινωνιακό σύστημα. Η τηλεφωνία είναι από τα παλαιότερα ηλεκτρολογικά επικοινωνιακά συστήματα. Το τηλέφωνο
ΕΝΟΤΗΤΑ 4 4.0 ΤΗΛΕΦΩΝΙΑ ΕΙΣΑΓΩΓΗ Η τηλεφωνία είναι ένα βασικό και πολύ διαδεδομένο ηλεκτρολογικό επικοινωνιακό σύστημα. Η τηλεφωνία είναι από τα παλαιότερα ηλεκτρολογικά επικοινωνιακά συστήματα. Το τηλέφωνο
Εξαμηνιαία Εργασία 2013 Προγραμματίζοντας τον Arduino στη C Μέρος Α : Υλικά
 Σκοπός Εξαμηνιαία Εργασία 2013 Προγραμματίζοντας τον Arduino στη C Μέρος Α : Υλικά Μικροελεγκτές Πλακέτα Arduino Προσομοίωση Μικροελεγκτών Προγραμματισμός Μικροελεγκτών στη C. 7.1 ΕΠΙΔΙΩΞΗ ΤΗΣ ΕΡΓΑΣΙΑΣ
Σκοπός Εξαμηνιαία Εργασία 2013 Προγραμματίζοντας τον Arduino στη C Μέρος Α : Υλικά Μικροελεγκτές Πλακέτα Arduino Προσομοίωση Μικροελεγκτών Προγραμματισμός Μικροελεγκτών στη C. 7.1 ΕΠΙΔΙΩΞΗ ΤΗΣ ΕΡΓΑΣΙΑΣ
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 1. Arduino + LabVIEW: Μέτρηση Έντασης Φωτός με Φωτοαντίσταση. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 1 Arduino + LabVIEW: Μέτρηση Έντασης Φωτός με Φωτοαντίσταση. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 1 Arduino + LabVIEW: Μέτρηση Έντασης Φωτός με Φωτοαντίσταση. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο
Π.Π.Σ.Π.Α Εργασία τεχνολογίας: ΡΟΜΠΟΤ
 Π.Π.Σ.Π.Α Εργασία τεχνολογίας: ΡΟΜΠΟΤ Κωνσταντίνα Τομαρά Α2 2013-2014 Επιβλέπων Καθηγητής: Δημήτριος Μανωλάς Περιεχόμενα Εξώφυλλο Περιεχόμενα Πρόλογος Εισαγωγή Ευχαριστίες Τι είναι ρομπότ; Από που προέρχεται
Π.Π.Σ.Π.Α Εργασία τεχνολογίας: ΡΟΜΠΟΤ Κωνσταντίνα Τομαρά Α2 2013-2014 Επιβλέπων Καθηγητής: Δημήτριος Μανωλάς Περιεχόμενα Εξώφυλλο Περιεχόμενα Πρόλογος Εισαγωγή Ευχαριστίες Τι είναι ρομπότ; Από που προέρχεται
ΠΛΗΡΟΦΟΡΙΚH ΓΙΑ ΤΗΝ ΤEΧΝΗ Η ΕΞAΜΗΝΟ
 ΠΛΗΡΟΦΟΡΙΚH ΓΙΑ ΤΗΝ ΤEΧΝΗ Η ΕΞAΜΗΝΟ ΑΜΑΛIΑ ΦΩΚA ΕΠIΚΟΥΡΗ ΚΑΘΗΓHΤΡΙΑ Περιεχόμενο Μαθήματος 2 Arduino Τι είναι το Arduino; 3 μικρή συσκευή (μικροεπεξεργαστής) που συνδέεται με USB στον υπολογιστή μια πλατφόρμα
ΠΛΗΡΟΦΟΡΙΚH ΓΙΑ ΤΗΝ ΤEΧΝΗ Η ΕΞAΜΗΝΟ ΑΜΑΛIΑ ΦΩΚA ΕΠIΚΟΥΡΗ ΚΑΘΗΓHΤΡΙΑ Περιεχόμενο Μαθήματος 2 Arduino Τι είναι το Arduino; 3 μικρή συσκευή (μικροεπεξεργαστής) που συνδέεται με USB στον υπολογιστή μια πλατφόρμα
Project 5: Συνθέτοντας μουσική
 Project 5: Συνθέτοντας μουσική Επίπεδο: Μέτριο Κατηγορία: Προγραμματισμός Σύντομη Περιγραφή: Πράγματι το Arduino είναι ικανό να παίξει μουσική! Το μόνο επιπλέον εξάρτημα που απαιτείται είναι Buzzer ή πιεζοηλεκτρικό
Project 5: Συνθέτοντας μουσική Επίπεδο: Μέτριο Κατηγορία: Προγραμματισμός Σύντομη Περιγραφή: Πράγματι το Arduino είναι ικανό να παίξει μουσική! Το μόνο επιπλέον εξάρτημα που απαιτείται είναι Buzzer ή πιεζοηλεκτρικό
PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών
 Διαμόρφωση εύρους παλμών") PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη
PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT. ΚΕΦΑΛΑΙΟ 7ο. Δραστηριότητες για το ΝΧΤ-G και το Robolab
 ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 7ο Δραστηριότητες για το ΝΧΤ-G και το Robolab Α. Αποφυγή εμποδίων Θα επιδιώξουμε να προγραμματίσουμε το όχημα-ρομπότ μας ώστε να είναι σε θέση
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 7ο Δραστηριότητες για το ΝΧΤ-G και το Robolab Α. Αποφυγή εμποδίων Θα επιδιώξουμε να προγραμματίσουμε το όχημα-ρομπότ μας ώστε να είναι σε θέση
Arduino Teachers Workshop
 Arduino Teachers Workshop Εισαγωγή στο Arduino Προγραμματισμός στο Arduino IDE Επικοινωνία με τον υπολογιστή μέσω USB Πλακέτα εύκολων συνδέσεων Breadboard Projects Led Blink Αναλογική ανάγνωση Ποτενσιόμετρου
Arduino Teachers Workshop Εισαγωγή στο Arduino Προγραμματισμός στο Arduino IDE Επικοινωνία με τον υπολογιστή μέσω USB Πλακέτα εύκολων συνδέσεων Breadboard Projects Led Blink Αναλογική ανάγνωση Ποτενσιόμετρου
Η δυναμική του Arduino στο μάθημα της Τεχνολογίας. Φάσουρας Δημήτριος Ηλεκτρολόγος ΠΕ 17,03
 Η δυναμική του Arduino στο μάθημα της Τεχνολογίας Φάσουρας Δημήτριος Ηλεκτρολόγος ΠΕ 17,03 dfasouras@gmail.com Τι είναι το Arduino ; Το Arduino είναι μια απλή μητρική πλακέτα ανοικτού κώδικα. Διαθέτει
Η δυναμική του Arduino στο μάθημα της Τεχνολογίας Φάσουρας Δημήτριος Ηλεκτρολόγος ΠΕ 17,03 dfasouras@gmail.com Τι είναι το Arduino ; Το Arduino είναι μια απλή μητρική πλακέτα ανοικτού κώδικα. Διαθέτει
Εκπαιδευτική Ρομποτική με ARDUINO. για εκπαιδευτικούς και μαθητές. 1o Μέρος: Απλά Κυκλώματα
 ... 1o Μέρος: Απλά Κυκλώματα Εισαγωγή - Αναγνώριση του κυκλώματος Μελετήστε τα κυκλώματα που ακολουθούν και συζητήστε με την ομάδα σας ποιες από τις παρακάτω προτάσεις είναι σωστές και ποιες λάθος. Α Β
... 1o Μέρος: Απλά Κυκλώματα Εισαγωγή - Αναγνώριση του κυκλώματος Μελετήστε τα κυκλώματα που ακολουθούν και συζητήστε με την ομάδα σας ποιες από τις παρακάτω προτάσεις είναι σωστές και ποιες λάθος. Α Β
2017 Κατασκευάζω και Προγραμματίζω με τον μικροελεγκτή Arduino
 2017 Κατασκευάζω και Προγραμματίζω με τον μικροελεγκτή Arduino Αριστείδης Παλιούρας e-mail: arispaliouras@gmail.com ISBN: 978-960-93-8945-7 Κατασκευάζω και Προγραμματίζω με τον μικροελεγκτή Arduino Copyright
2017 Κατασκευάζω και Προγραμματίζω με τον μικροελεγκτή Arduino Αριστείδης Παλιούρας e-mail: arispaliouras@gmail.com ISBN: 978-960-93-8945-7 Κατασκευάζω και Προγραμματίζω με τον μικροελεγκτή Arduino Copyright
Πακέτο Lego Mindstorms
 Πακέτο Lego Mindstorms Τούβλο NXT και Κινητήρες, Αισθητήρες Α. Κινητήρες Οι κινητήρες είναι αυτοί που κινούν το ρομπότ μας. Οι κινητήρες συνδέονται με καλώδια στις θύρες εξόδου A,B ή C του NXT. Αν μάλιστα
Πακέτο Lego Mindstorms Τούβλο NXT και Κινητήρες, Αισθητήρες Α. Κινητήρες Οι κινητήρες είναι αυτοί που κινούν το ρομπότ μας. Οι κινητήρες συνδέονται με καλώδια στις θύρες εξόδου A,B ή C του NXT. Αν μάλιστα
Σχεδιασμός και Υλοποίηση οχήματος ελεγχόμενου μέσω Bluetooth
 ΕΚΘΕΣΗ ΑΝΑΦΟΡΑΣ ΕΡΓΑΣΙΑΣ ΕΞΑΜΗΝΟΥ ΜΕ ΘΕΜΑ: Σχεδιασμός και Υλοποίηση οχήματος ελεγχόμενου μέσω Bluetooth Design and Implementation of a remote control vehicle using Bluetooth ΑΝΑΣΤΑΣΙΟΥ ΚΩΝΣΤΑΝΤΙΝΟΣ Επιβλέπων:
ΕΚΘΕΣΗ ΑΝΑΦΟΡΑΣ ΕΡΓΑΣΙΑΣ ΕΞΑΜΗΝΟΥ ΜΕ ΘΕΜΑ: Σχεδιασμός και Υλοποίηση οχήματος ελεγχόμενου μέσω Bluetooth Design and Implementation of a remote control vehicle using Bluetooth ΑΝΑΣΤΑΣΙΟΥ ΚΩΝΣΤΑΝΤΙΝΟΣ Επιβλέπων:
ΑΣΚΗΣΗ 8 Tutorial by TeSLa Συνδεσμολογία κυκλώματος Διαδικασία Προγραμματισμού
 Α.Τ.Ε.Ι. ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΫΠΟΛΟΓΙΣΤΩΝ ΑΣΚΗΣΗ 8 Tutorial by TeSLa Συνδεσμολογία κυκλώματος Διαδικασία Προγραμματισμού Θεσσαλονίκη, Ιανουάριος 2007 Η Άσκηση 8 του εργαστηρίου
Α.Τ.Ε.Ι. ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΫΠΟΛΟΓΙΣΤΩΝ ΑΣΚΗΣΗ 8 Tutorial by TeSLa Συνδεσμολογία κυκλώματος Διαδικασία Προγραμματισμού Θεσσαλονίκη, Ιανουάριος 2007 Η Άσκηση 8 του εργαστηρίου
ΔΡΑΣΤΗΡΙΟΤΗΤΑ ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO- 01a
 ΔΡΑΣΤΗΡΙΟΤΗΤΑ ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO- 01a Βασικό κύκλωμα προγραμματισμός μικροελεγκτή Πλακέτα Arduino, 1 Να δημιουργήσετε και να προγραμματίσετε ένα πολύ απλό σύστημα που να αναβοσβήνει ένα λαμπάκι (έξοδος)
ΔΡΑΣΤΗΡΙΟΤΗΤΑ ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO- 01a Βασικό κύκλωμα προγραμματισμός μικροελεγκτή Πλακέτα Arduino, 1 Να δημιουργήσετε και να προγραμματίσετε ένα πολύ απλό σύστημα που να αναβοσβήνει ένα λαμπάκι (έξοδος)
Arduhand. Μπασάκη Λυδία, Λιάμπας Παναγιώτης, Άγγου Σωτηρία, Βασιλειάδου Αμαζόνα, Κύρμος Θεόδωρος, Τσακάλη Έλλη
 Arduhand Μπασάκη Λυδία, Λιάμπας Παναγιώτης, Άγγου Σωτηρία, Βασιλειάδου Αμαζόνα, Κύρμος Θεόδωρος, Τσακάλη Έλλη Μαθητές A Τάξης Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Λιαρής Ιωάννης -ΠΕ 19 jliaris@yahoo.gr
Arduhand Μπασάκη Λυδία, Λιάμπας Παναγιώτης, Άγγου Σωτηρία, Βασιλειάδου Αμαζόνα, Κύρμος Θεόδωρος, Τσακάλη Έλλη Μαθητές A Τάξης Γυμνασίου, Ελληνικό Κολλέγιο Θεσσαλονίκης Λιαρής Ιωάννης -ΠΕ 19 jliaris@yahoo.gr
ΦΥΛΛΟ ΠΛΗΡΟΦΟΡΙΩΝ. Μονάδες μέτρησης χωρητικότητας μνήμης - Η περιφερειακή μνήμη
 Τ.Π.Ε. - Φ.ΠΛΗΡ.Ε-001 ΜΟΝΑΔΕΣ ΜΕΤΡΗΣΗΣ ΧΩΡΗΤΙΚΟΤΗΤΑΣ ΜΝΗΜΗΣ 1 Όνομα Σχολείου 5ο Ολοήμερο Δημοτικό Σχολείο Μεταμόρφωσης Τάξη Ε Τίτλος μαθήματος Τ.Π.Ε. Τίτλος ενότητας Μονάδες μέτρησης χωρητικότητας μνήμης
Τ.Π.Ε. - Φ.ΠΛΗΡ.Ε-001 ΜΟΝΑΔΕΣ ΜΕΤΡΗΣΗΣ ΧΩΡΗΤΙΚΟΤΗΤΑΣ ΜΝΗΜΗΣ 1 Όνομα Σχολείου 5ο Ολοήμερο Δημοτικό Σχολείο Μεταμόρφωσης Τάξη Ε Τίτλος μαθήματος Τ.Π.Ε. Τίτλος ενότητας Μονάδες μέτρησης χωρητικότητας μνήμης
LFT169 - LFR169 ΠΟΜΠΟΣ ΚΑΙ ΔΕΚΤΗΣ ΨΗΦΙΑΚΩΝ ΚΑΙ ΑΝΑΛΟΓΙΚΩΝ ΣΗΜΑΤΩΝ
 LFT169 - LFR169 ΠΟΜΠΟΣ ΚΑΙ ΔΕΚΤΗΣ ΨΗΦΙΑΚΩΝ ΚΑΙ ΑΝΑΛΟΓΙΚΩΝ ΣΗΜΑΤΩΝ Οδηγίες Παραμετροποίησης Power Electronics Control Ε.Π.Ε. Τύποι Συσκευών: LFT169 - LFR169 Περιγραφή: Πομπός και Δέκτης Τηλεχειρισμού 169MHz
LFT169 - LFR169 ΠΟΜΠΟΣ ΚΑΙ ΔΕΚΤΗΣ ΨΗΦΙΑΚΩΝ ΚΑΙ ΑΝΑΛΟΓΙΚΩΝ ΣΗΜΑΤΩΝ Οδηγίες Παραμετροποίησης Power Electronics Control Ε.Π.Ε. Τύποι Συσκευών: LFT169 - LFR169 Περιγραφή: Πομπός και Δέκτης Τηλεχειρισμού 169MHz
ΚΕΦΑΛΑΙΟ 5 ΠΡΟΣΟΜΟΙΩΤΗΣ PLC SIMATIC S7-300
 ΚΕΦΑΛΑΙΟ 5 ΠΡΟΣΟΜΟΙΩΤΗΣ PLC SIATIC S7-300 5. Σκοπός του προσομοιωτή. Χωρίς τον προσομοιωτή ο έλεγχος της ορθότητας ενός προγράμματος μπορεί να γίνει μόνο offline με τη χρήση του λογισμικού STEP 7 της Siemens
ΚΕΦΑΛΑΙΟ 5 ΠΡΟΣΟΜΟΙΩΤΗΣ PLC SIATIC S7-300 5. Σκοπός του προσομοιωτή. Χωρίς τον προσομοιωτή ο έλεγχος της ορθότητας ενός προγράμματος μπορεί να γίνει μόνο offline με τη χρήση του λογισμικού STEP 7 της Siemens
ΑΣΚΗΣΗ 8 η : ΣΥΣΤΗΜΑΤΑ ΕΙΔΟΠΟΙΗΣΗΣ
 Εργαστήριο ΜΕΚ και Τεχνολογίας Αυτοκινήτου Καθηγητής: Χριστολουκάς Δημήτριος ΑΣΚΗΣΗ 8 η : ΣΥΣΤΗΜΑΤΑ ΕΙΔΟΠΟΙΗΣΗΣ Ηχητική ειδοποίηση (κόρνες) Σύμφωνα με τον κανονισμό, ένα όχημα με κινητήρα πρέπει να χρησιμοποιεί
Εργαστήριο ΜΕΚ και Τεχνολογίας Αυτοκινήτου Καθηγητής: Χριστολουκάς Δημήτριος ΑΣΚΗΣΗ 8 η : ΣΥΣΤΗΜΑΤΑ ΕΙΔΟΠΟΙΗΣΗΣ Ηχητική ειδοποίηση (κόρνες) Σύμφωνα με τον κανονισμό, ένα όχημα με κινητήρα πρέπει να χρησιμοποιεί
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 1: Εισαγωγή στα ενσωματωμένα συστήματα (embedded systems) Εργαστήριο Αυτομάτου Ελέγχου Ενσωματωμένα συστήματα (Embedded Systems) Ενσωματωμένα συστήματα (Embedded
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 1: Εισαγωγή στα ενσωματωμένα συστήματα (embedded systems) Εργαστήριο Αυτομάτου Ελέγχου Ενσωματωμένα συστήματα (Embedded Systems) Ενσωματωμένα συστήματα (Embedded
- Εισαγωγή - Επίπεδα μνήμης - Ολοκληρωμένα κυκλώματα μνήμης - Συσκευασίες μνήμης προσωπικών υπολογιστών
 Μάθημα 4.5 Η Μνήμη - Εισαγωγή - Επίπεδα μνήμης - Ολοκληρωμένα κυκλώματα μνήμης - Συσκευασίες μνήμης προσωπικών υπολογιστών Όταν ολοκληρώσεις το μάθημα αυτό θα μπορείς: Να αναφέρεις τα κυριότερα είδη μνήμης
Μάθημα 4.5 Η Μνήμη - Εισαγωγή - Επίπεδα μνήμης - Ολοκληρωμένα κυκλώματα μνήμης - Συσκευασίες μνήμης προσωπικών υπολογιστών Όταν ολοκληρώσεις το μάθημα αυτό θα μπορείς: Να αναφέρεις τα κυριότερα είδη μνήμης
Β1.1 Δημιουργία Εφαρμογής στο Περιβάλλον Προγραμματισμού EdScratch του Edison ρομπότ
 Β1.1 Δημιουργία Εφαρμογής στο Περιβάλλον Προγραμματισμού EdScratch του Edison ρομπότ Τι θα μάθουμε σήμερα: Να γνωρίσουμε την Ρομποτική Να προετοιμάσουμε και να γνωρίσουμε το Edison ρομπότ Να μεταφερόμαστε
Β1.1 Δημιουργία Εφαρμογής στο Περιβάλλον Προγραμματισμού EdScratch του Edison ρομπότ Τι θα μάθουμε σήμερα: Να γνωρίσουμε την Ρομποτική Να προετοιμάσουμε και να γνωρίσουμε το Edison ρομπότ Να μεταφερόμαστε
ΣΥΣΚΕΥΗ ΜΕ ΦΩΤΟΒΟΛΤΑΪΚΗ ΚΥΨΕΛΗ ΜΕΤΑΤΡΟΠΕΑ DC σε AC ΚΑΙ ΤΡΟΦΟΔΟΤΙΚΟ UPS
 ΣΥΣΚΕΥΗ ΜΕ ΦΩΤΟΒΟΛΤΑΪΚΗ ΚΥΨΕΛΗ ΜΕΤΑΤΡΟΠΕΑ DC σε AC ΚΑΙ ΤΡΟΦΟΔΟΤΙΚΟ UPS SIU 150 ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ ΣΗΜΑΝΤΙΚΕΣ ΠΡΟΕΙΔΟΠΟΙΗΣΕΙΣ Παρακαλούμε διαβάστε προσεκτικά τις οδηγίες που ακολουθούν προκειμένου να αποφύγετε
ΣΥΣΚΕΥΗ ΜΕ ΦΩΤΟΒΟΛΤΑΪΚΗ ΚΥΨΕΛΗ ΜΕΤΑΤΡΟΠΕΑ DC σε AC ΚΑΙ ΤΡΟΦΟΔΟΤΙΚΟ UPS SIU 150 ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ ΣΗΜΑΝΤΙΚΕΣ ΠΡΟΕΙΔΟΠΟΙΗΣΕΙΣ Παρακαλούμε διαβάστε προσεκτικά τις οδηγίες που ακολουθούν προκειμένου να αποφύγετε
Σχεδιασμός και υλοποίηση κυκλώματος μέτρησης κατανάλωσης ισχύος
 Σχεδιασμός και υλοποίηση κυκλώματος μέτρησης κατανάλωσης ισχύος Φοιτητής Φετινίδης Αναστάσιος Επιβλέπων Δασυγένης Μηνάς Μάρτιος 2014 1 Περιεχόμενα παρουσίασης Εισαγωγή Θεωρητικό υπόβαθρο Υλικό μέρος του
Σχεδιασμός και υλοποίηση κυκλώματος μέτρησης κατανάλωσης ισχύος Φοιτητής Φετινίδης Αναστάσιος Επιβλέπων Δασυγένης Μηνάς Μάρτιος 2014 1 Περιεχόμενα παρουσίασης Εισαγωγή Θεωρητικό υπόβαθρο Υλικό μέρος του
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino UNO Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino UNO Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O
ΒΑΣΙΚΑ ΜΑΘΗΜΑΤΑ ΝΤΟΥΛΑΚΗΣ - ΜΕΝΙΟΥΔΑΚΗΣ ΕΠΑ.Λ ΕΛ. ΒΕΝΙΖΕΛΟΥ
 ΒΑΣΙΚΑ ΜΑΘΗΜΑΤΑ ΠΕΡΙΕΧΟΜΕΝΑ ΠΕΡΙΕΧΟΜΕΝΑ... 2 ΠΡΟΛΟΓΟΣ... 3 ΕΙΣΑΓΩΓΗ... 4 Η ΑΝΑΠΤΥΞΗ ΤΗΣ ΟΘΟΝΗΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ... 4 Ο ΕΚΠΑΙΔΕΥΤΗΣ ΡΟΜΠΟΤ... 5 ΤΟ ΠΑΡΑΘΥΡΟ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ... 5 ΤΑ ΚΟΥΜΠΙΑ ΚΑΙ ΤΑ ΜΠΛΟΚ...
ΒΑΣΙΚΑ ΜΑΘΗΜΑΤΑ ΠΕΡΙΕΧΟΜΕΝΑ ΠΕΡΙΕΧΟΜΕΝΑ... 2 ΠΡΟΛΟΓΟΣ... 3 ΕΙΣΑΓΩΓΗ... 4 Η ΑΝΑΠΤΥΞΗ ΤΗΣ ΟΘΟΝΗΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ... 4 Ο ΕΚΠΑΙΔΕΥΤΗΣ ΡΟΜΠΟΤ... 5 ΤΟ ΠΑΡΑΘΥΡΟ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ... 5 ΤΑ ΚΟΥΜΠΙΑ ΚΑΙ ΤΑ ΜΠΛΟΚ...
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 8. Μετρώντας Επιτάχυνση με το Accelerόμετρο (ADXL 335) Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων") Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 8 Μετρώντας Επιτάχυνση με το Accelerόμετρο (ADXL 335). Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 8 Μετρώντας Επιτάχυνση με το Accelerόμετρο (ADXL 335). Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο
ΡΟΜΠΟΤΙΚΗ. ΕΡΓΑΣΙΑ ΠΑΝΩ ΣΤΗΝ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΝΧΤ ΚΑΙ ΤΑ ΠΡΩΤΟΚΟΛΛΑ ΕΠΙΚΟΙΝΩΝΙΑΣ BLUETOOTH, I2C και serial communication
 ΡΟΜΠΟΤΙΚΗ ΕΡΓΑΣΙΑ ΠΑΝΩ ΣΤΗΝ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΝΧΤ ΚΑΙ ΤΑ ΠΡΩΤΟΚΟΛΛΑ ΕΠΙΚΟΙΝΩΝΙΑΣ BLUETOOTH, I2C και serial communication ΜΠΑΝΤΗΣ ΑΝΤΩΝΙΟΣ 533 ΤΣΙΚΤΣΙΡΗΣ ΔΗΜΗΤΡΙΟΣ 551 ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΤΟΥ ΡΟΜΠΟΤ LEGO NXT Το ρομπότ
ΡΟΜΠΟΤΙΚΗ ΕΡΓΑΣΙΑ ΠΑΝΩ ΣΤΗΝ ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΝΧΤ ΚΑΙ ΤΑ ΠΡΩΤΟΚΟΛΛΑ ΕΠΙΚΟΙΝΩΝΙΑΣ BLUETOOTH, I2C και serial communication ΜΠΑΝΤΗΣ ΑΝΤΩΝΙΟΣ 533 ΤΣΙΚΤΣΙΡΗΣ ΔΗΜΗΤΡΙΟΣ 551 ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΤΟΥ ΡΟΜΠΟΤ LEGO NXT Το ρομπότ
Κεφάλαιο 1.6: Συσκευές αποθήκευσης
 Κεφάλαιο 1.6: Συσκευές αποθήκευσης 1.6.1 Συσκευές αποθήκευσης Μνήμη τυχαίας προσπέλασης - RAM Η μνήμη RAM (Random Access Memory Μνήμη Τυχαίας Προσπέλασης), κρατεί όλη την πληροφορία (δεδομένα και εντολές)
Κεφάλαιο 1.6: Συσκευές αποθήκευσης 1.6.1 Συσκευές αποθήκευσης Μνήμη τυχαίας προσπέλασης - RAM Η μνήμη RAM (Random Access Memory Μνήμη Τυχαίας Προσπέλασης), κρατεί όλη την πληροφορία (δεδομένα και εντολές)
Σημειώσεις κεφαλαίου 16 Αρχές επικοινωνίας με ήχο και εικόνα
 Σημειώσεις κεφαλαίου 16 Αρχές επικοινωνίας με ήχο και εικόνα ΠΩΣ ΛΕΙΤΟΥΡΓΟΥΝ ΟΙ ΗΛΕΚΤΡΟΝΙΚΕΣ ΕΠΙΚΟΙΝΩΝΙΕΣ Ένα σύστημα ηλεκτρονικής επικοινωνίας αποτελείται από τον πομπό, το δίαυλο (κανάλι) μετάδοσης και
Σημειώσεις κεφαλαίου 16 Αρχές επικοινωνίας με ήχο και εικόνα ΠΩΣ ΛΕΙΤΟΥΡΓΟΥΝ ΟΙ ΗΛΕΚΤΡΟΝΙΚΕΣ ΕΠΙΚΟΙΝΩΝΙΕΣ Ένα σύστημα ηλεκτρονικής επικοινωνίας αποτελείται από τον πομπό, το δίαυλο (κανάλι) μετάδοσης και
Σημειώσεις Ηλεκτρολογείου ΣΤ εξαμήνου
 Ακαδημία Εμπορικού Ναυτικού Κρήτης Σημειώσεις Ηλεκτρολογείου ΣΤ εξαμήνου ΚΙΝΗΤΗΡΕΣ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Γεώργιος Μεσαρχάκης Ηλεκτρονικός Μηχανικός Τ.Ε. Διακρίνονται σε μονοφασικούς και τριφασικούς.
Ακαδημία Εμπορικού Ναυτικού Κρήτης Σημειώσεις Ηλεκτρολογείου ΣΤ εξαμήνου ΚΙΝΗΤΗΡΕΣ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Γεώργιος Μεσαρχάκης Ηλεκτρονικός Μηχανικός Τ.Ε. Διακρίνονται σε μονοφασικούς και τριφασικούς.
Ηλεκτρικό κύκλωµα. Βασική θεωρία
 8 Ηλεκτρικό κύκλωµα Ηλεκτρικό κύκλωµα Βασική θεωρία Ηλεκτρικό κύκλωμα ονομάζεται κάθε διάταξη που αποτελείται από κλειστούς αγώγιμους «δρόμους», μέσω των οποίων μπορεί να διέλθει ηλεκτρικό ρεύμα. Κλειστό
8 Ηλεκτρικό κύκλωµα Ηλεκτρικό κύκλωµα Βασική θεωρία Ηλεκτρικό κύκλωμα ονομάζεται κάθε διάταξη που αποτελείται από κλειστούς αγώγιμους «δρόμους», μέσω των οποίων μπορεί να διέλθει ηλεκτρικό ρεύμα. Κλειστό
Έλεγχος κινητήρα συνεχούς ρεύματος με τρανζίστορ και Arduino
 Έλεγχος κινητήρα συνεχούς ρεύματος με τρανζίστορ και Arduino Στην κατασκευή αυτή ο σκοπός ήταν να ελέγξουμε την ταχύτητα ενός κινητήρα συνεχούς ρεύματος με τη χρήση ενός τρανζίστορ που θα χρησιμοποιηθεί
Έλεγχος κινητήρα συνεχούς ρεύματος με τρανζίστορ και Arduino Στην κατασκευή αυτή ο σκοπός ήταν να ελέγξουμε την ταχύτητα ενός κινητήρα συνεχούς ρεύματος με τη χρήση ενός τρανζίστορ που θα χρησιμοποιηθεί
ΠΕΡΙΕΧΟΜΕΝΑ ΚΕΦΑΛΑΙΟ I: ΕΙΣΑΓΩΓΗ ΣΤΑ ΗΛΕΚΤΡΟΝΙΚΑ
 ΠΕΡΙΕΧΟΜΕΝΑ ΚΕΦΑΛΑΙΟ I: ΕΙΣΑΓΩΓΗ ΣΤΑ ΗΛΕΚΤΡΟΝΙΚΑ 1.1 ΕΙΣΑΓΩΓΗ ΣΤΑ ΑΝΑΛΟΓΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ 1 1.1.1 Αναλογικά σήματα 1 1.1.2 Οι αντιστάσεις 3 1.1.3 Οι πυκνωτές 7 1.1.4 Τα πηνία 11 1.1.5 Οι δίοδοι 13 1.1.6
ΠΕΡΙΕΧΟΜΕΝΑ ΚΕΦΑΛΑΙΟ I: ΕΙΣΑΓΩΓΗ ΣΤΑ ΗΛΕΚΤΡΟΝΙΚΑ 1.1 ΕΙΣΑΓΩΓΗ ΣΤΑ ΑΝΑΛΟΓΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ 1 1.1.1 Αναλογικά σήματα 1 1.1.2 Οι αντιστάσεις 3 1.1.3 Οι πυκνωτές 7 1.1.4 Τα πηνία 11 1.1.5 Οι δίοδοι 13 1.1.6
Σειριακό Τερματικό Serial Terminal (Dumb Terminal)
") Σειριακό Τερματικό Serial Terminal (Dumb Terminal) Ένα σειριακό τερματικό είναι ο απλούστερος τρόπος για να συνδέσουμε πολλαπλές μονάδες εξόδου (οθόνες) και εισόδου (πληκτρολόγια) σε ένα μηχάνημα UNIX
Σειριακό Τερματικό Serial Terminal (Dumb Terminal) Ένα σειριακό τερματικό είναι ο απλούστερος τρόπος για να συνδέσουμε πολλαπλές μονάδες εξόδου (οθόνες) και εισόδου (πληκτρολόγια) σε ένα μηχάνημα UNIX
Μέτρηση Θερμοκρασίας με τον αισθητήρα TMP36. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων. Βασική δομή ενός προγράμματος στο LabVIEW.
 Σκοπός Μάθημα 2 Δραστηριότητα 1 Μέτρηση Θερμοκρασίας με τον αισθητήρα TMP36. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front panel). Σχεδίαση
Σκοπός Μάθημα 2 Δραστηριότητα 1 Μέτρηση Θερμοκρασίας με τον αισθητήρα TMP36. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front panel). Σχεδίαση
Η φυσική με πειράματα Α Γυμνασίου
 Εργαστήριο Φυσικών Επιστημών Γυμνασίου Δρεπάνου Η φυσική με πειράματα Α Γυμνασίου Φύλλο Εργασίας 10 Το Ηλεκτρικό Βραχύ-Κύκλωμα Κίνδυνοι και Ασφάλεια Επεξεργασία-Απαντήσεις δραστηριοτήτων και ερωτημάτων
Εργαστήριο Φυσικών Επιστημών Γυμνασίου Δρεπάνου Η φυσική με πειράματα Α Γυμνασίου Φύλλο Εργασίας 10 Το Ηλεκτρικό Βραχύ-Κύκλωμα Κίνδυνοι και Ασφάλεια Επεξεργασία-Απαντήσεις δραστηριοτήτων και ερωτημάτων
ΑΣΚΗΣΗ 0. Κύκλωμα - Όργανα
 ΑΣΚΗΣΗ 0 Κύκλωμα Όργανα ΤΙ ΧΡΕΙΑΖΟΜΑΣΤΕ: Ένα τροφοδοτικό GP 4303D, δύο πολύμετρα FLUKE 179 ένα λαμπάκι πυρακτώσεως, ένα πυκνωτή και καλώδια. ΣΚΟΠΟΣ: α) Να μάθουμε να φτιάχνουμε ένα κύκλωμα στον πάγκο β)
ΑΣΚΗΣΗ 0 Κύκλωμα Όργανα ΤΙ ΧΡΕΙΑΖΟΜΑΣΤΕ: Ένα τροφοδοτικό GP 4303D, δύο πολύμετρα FLUKE 179 ένα λαμπάκι πυρακτώσεως, ένα πυκνωτή και καλώδια. ΣΚΟΠΟΣ: α) Να μάθουμε να φτιάχνουμε ένα κύκλωμα στον πάγκο β)
Μάθημα 4.2 Η μητρική πλακέτα
 Μάθημα 4.2 Η μητρική πλακέτα - Εισαγωγή - Οι βάσεις του επεξεργαστή και της μνήμης - Οι υποδοχές της μητρικής πλακέτας - Άλλα μέρη της μητρική πλακέτας - Τυποποιήσεις στην κατασκευή μητρικών πλακετών Όταν
Μάθημα 4.2 Η μητρική πλακέτα - Εισαγωγή - Οι βάσεις του επεξεργαστή και της μνήμης - Οι υποδοχές της μητρικής πλακέτας - Άλλα μέρη της μητρική πλακέτας - Τυποποιήσεις στην κατασκευή μητρικών πλακετών Όταν
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΑΥΤΟΜΑΤΙΣΜΟΣ
 ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΑΥΤΟΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΗ Η Ρομποτική είναι ο κλάδος της επιστήμης που κατασκευάζει και μελετά μηχανές που μπορούν να αντικαταστήσουν τον άνθρωπο στην εκτέλεση μιας εργασίας. Tι είναι το ΡΟΜΠΟΤ
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΑΥΤΟΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΗ Η Ρομποτική είναι ο κλάδος της επιστήμης που κατασκευάζει και μελετά μηχανές που μπορούν να αντικαταστήσουν τον άνθρωπο στην εκτέλεση μιας εργασίας. Tι είναι το ΡΟΜΠΟΤ
ΘΕΜΑ : ΨΗΦΙΑΚΑ ΗΛΕΚΤΡΟΝΙΚΑ DIGITAL ELECTRONICS
 ΘΕΜΑ : ΨΗΦΙΑΚΑ ΗΛΕΚΤΡΟΝΙΚΑ DIGITAL ELECTRONICS ΔΙΑΡΚΕΙΑ: 1 περιόδους 16/11/2011 10:31 (31) καθ. Τεχνολογίας ΚΑΤΗΓΟΡΙΕΣ ΜΕΓΕΘΩΝ ΑΝΑΛΟΓΙΚΟ (ANALOGUE) ΨΗΦΙΑΚΟ (DIGITAL) 16/11/2011 10:38 (38) ΕΙΣΑΓΩΓΗ ΣΤΑ
ΘΕΜΑ : ΨΗΦΙΑΚΑ ΗΛΕΚΤΡΟΝΙΚΑ DIGITAL ELECTRONICS ΔΙΑΡΚΕΙΑ: 1 περιόδους 16/11/2011 10:31 (31) καθ. Τεχνολογίας ΚΑΤΗΓΟΡΙΕΣ ΜΕΓΕΘΩΝ ΑΝΑΛΟΓΙΚΟ (ANALOGUE) ΨΗΦΙΑΚΟ (DIGITAL) 16/11/2011 10:38 (38) ΕΙΣΑΓΩΓΗ ΣΤΑ
Σκοπός. Προγραμματίζοντας τον Arduino ΙΙ Εντολή Εκχώρησης & Εντολές. Συλλογή & Επεξεργασία Δεδομένων. Πρόγραμμα. Εντολές Επεξεργασίας Δεδομένων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Προγραμματίζοντας τον Arduino ΙΙ Εντολή Εκχώρησης & Εντολές Ελέγχου. Πρόγραμμα Εντολές Επεξεργασίας Δεδομένων Εντολή Εκχώρησης Εντολές Ελέγχου Λογική συνθήκη Εντολή
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Προγραμματίζοντας τον Arduino ΙΙ Εντολή Εκχώρησης & Εντολές Ελέγχου. Πρόγραμμα Εντολές Επεξεργασίας Δεδομένων Εντολή Εκχώρησης Εντολές Ελέγχου Λογική συνθήκη Εντολή
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
ΠΑΝΑΓΙΩΤΗΣ ΚΟΥΤΣΙΩΡΑΣ Α.Μ.: ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ. Αναφορά Πρακτικής Εργασίας: Μετατροπέας Κώδικα BCD Σε Κώδικα GRAY
 ΤΜΗΜΑ ΕΠΙΣΤΗΜΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΛΟΠΟΝΝΗΣΟΥ ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ Αναφορά Πρακτικής Εργασίας: Μετατροπέας Κώδικα BCD Σε Κώδικα GRAY ΠΑΝΑΓΙΩΤΗΣ ΚΟΥΤΣΙΩΡΑΣ Α.Μ.: 2025201100037 Χειμερινό
ΤΜΗΜΑ ΕΠΙΣΤΗΜΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΛΟΠΟΝΝΗΣΟΥ ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ Αναφορά Πρακτικής Εργασίας: Μετατροπέας Κώδικα BCD Σε Κώδικα GRAY ΠΑΝΑΓΙΩΤΗΣ ΚΟΥΤΣΙΩΡΑΣ Α.Μ.: 2025201100037 Χειμερινό
Αρχές επικοινωνίας με ήχο και εικόνα Συστήματα επικοινωνίας με ήχο και εικόνα
 Αρχές επικοινωνίας με ήχο και εικόνα Συστήματα επικοινωνίας με ήχο και εικόνα Παραδείγματα: 1. Τηλέγραφος 2. Τηλέφωνο 3. Τηλεόραση 4. Ραδιόφωνο 5. Cd/dvd-player 1 Αρχές επικοινωνίας με ήχο και εικόνα Μετατροπή
Αρχές επικοινωνίας με ήχο και εικόνα Συστήματα επικοινωνίας με ήχο και εικόνα Παραδείγματα: 1. Τηλέγραφος 2. Τηλέφωνο 3. Τηλεόραση 4. Ραδιόφωνο 5. Cd/dvd-player 1 Αρχές επικοινωνίας με ήχο και εικόνα Μετατροπή
Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα
 Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα 1ο ΕΠΑΛ Περάματος 7ο ΕΚ Πειραιά Πλακέτα Arduino Το 2005 oι Massimo Banzi και David Cueartielles στο Ivrea Δημιουργούν την υπολογιστική πλατφόρμα Arduino.
Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα 1ο ΕΠΑΛ Περάματος 7ο ΕΚ Πειραιά Πλακέτα Arduino Το 2005 oι Massimo Banzi και David Cueartielles στο Ivrea Δημιουργούν την υπολογιστική πλατφόρμα Arduino.
Model: ED-CS5000. Ηλεκτρονικός πίνακας ελέγχου για συρόμενες και ανοιγόμενες μονόφυλλες πόρτες.
 Model: ED-CS5000 Ηλεκτρονικός πίνακας ελέγχου για συρόμενες και ανοιγόμενες μονόφυλλες πόρτες. Ο πίνακας είναι συμβατός με χειριστήρια σταθερού (11 32bit) η κυλιόμενου κωδικού στην συχνότητα των 433,92Mhz
Model: ED-CS5000 Ηλεκτρονικός πίνακας ελέγχου για συρόμενες και ανοιγόμενες μονόφυλλες πόρτες. Ο πίνακας είναι συμβατός με χειριστήρια σταθερού (11 32bit) η κυλιόμενου κωδικού στην συχνότητα των 433,92Mhz
Φαινόμενο Doppler (Γ. Μ.) Φαινόμενο Doppler. Φαινόμενο Doppler είναι η διαφορά των συχνοτήτων που μετρούν οι παρατηρητές
 Φαινόμενο Doppler. Φαινόμενο Doppler είναι η διαφορά των συχνοτήτων που μετρούν οι παρατηρητές") Φαινόμενο Doppler Για την κατανόηση του φαινομένου αυτού εισάγουμε τα παρακάτω σύμβολα και πρέπει να εξηγήσουμε τη σημασία τους. : πηγή ηχητικών κυμάτων : ανιχνευτής ηχητικών κυμάτων : συχνότητα ηχητικών
Φαινόμενο Doppler Για την κατανόηση του φαινομένου αυτού εισάγουμε τα παρακάτω σύμβολα και πρέπει να εξηγήσουμε τη σημασία τους. : πηγή ηχητικών κυμάτων : ανιχνευτής ηχητικών κυμάτων : συχνότητα ηχητικών
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
Μάθημα 1 ΑΙΣΘΗΤΗΡΕΣ Ο Αισθητήρας Δύναμης. Επανεξέταση των βασικών εννοιών της C και του προγραμματισμού.
 Σκοπός Σχεδίαση Συστημάτων με τον Arduino Μάθημα 1 ΑΙΣΘΗΤΗΡΕΣ Ο Αισθητήρας Δύναμης. Επανεξέταση των βασικών εννοιών της C και του προγραμματισμού. Κατανόηση των βημάτων στη συστηματική ανάπτυξη ενός προγράμματος.
Σκοπός Σχεδίαση Συστημάτων με τον Arduino Μάθημα 1 ΑΙΣΘΗΤΗΡΕΣ Ο Αισθητήρας Δύναμης. Επανεξέταση των βασικών εννοιών της C και του προγραμματισμού. Κατανόηση των βημάτων στη συστηματική ανάπτυξη ενός προγράμματος.
Σχεδίαση του αλγορίθμου για το παιχνίδι Rat s Life
 H παρουσίαση περιλαμβάνει: Λίγα λόγια για την Τεχνητή Νοημοσύνη Λίγα λόγια για το πρόγραμμα Webots Τεχνικά χαρακτηριστικά του αυτόνομου E-puckmobile-robot Σχεδίαση του αλγορίθμου για το παιχνίδι Rat s
H παρουσίαση περιλαμβάνει: Λίγα λόγια για την Τεχνητή Νοημοσύνη Λίγα λόγια για το πρόγραμμα Webots Τεχνικά χαρακτηριστικά του αυτόνομου E-puckmobile-robot Σχεδίαση του αλγορίθμου για το παιχνίδι Rat s
Μέρος Α Γνωριμία με το περιβάλλον προγραμματισμού του ρομπότ OTTO
 OTTO ROBOT Εκπαιδευτικές Δραστηριότητες Μέρος Α Γνωριμία με το περιβάλλον προγραμματισμού του ρομπότ OTTO Δραστηριότητα 1 - Γνωριμία, περιγραφή Otto Τι είναι το ρομπότ Otto; Είναι ένα αλληλεπιδραστικό
OTTO ROBOT Εκπαιδευτικές Δραστηριότητες Μέρος Α Γνωριμία με το περιβάλλον προγραμματισμού του ρομπότ OTTO Δραστηριότητα 1 - Γνωριμία, περιγραφή Otto Τι είναι το ρομπότ Otto; Είναι ένα αλληλεπιδραστικό
ARDUINO ΟΔΗΓΟΣ ΓΙΑ ΑΡΧΑΡΙΟΥΣ
 ARDUINO ΟΔΗΓΟΣ ΓΙΑ ΑΡΧΑΡΙΟΥΣ ΤΙ ΕIΝΑΙ ΤΟ ARDUINO; Το Arduino είναι μια «ανοικτού κώδικα» πλατφόρμα βασισμένη σε ευέλικτο και εύκολο στη χρήση hardware και software. Αυτό σημαίνει ότι ο καθένας μπορεί να
ARDUINO ΟΔΗΓΟΣ ΓΙΑ ΑΡΧΑΡΙΟΥΣ ΤΙ ΕIΝΑΙ ΤΟ ARDUINO; Το Arduino είναι μια «ανοικτού κώδικα» πλατφόρμα βασισμένη σε ευέλικτο και εύκολο στη χρήση hardware και software. Αυτό σημαίνει ότι ο καθένας μπορεί να
Παράρτημα. Πραγματοποίηση μέτρησης τάσης, ρεύματος, ωμικής αντίστασης με χρήση του εργαστηριακού εξοπλισμού Άσκηση εξοικείωσης
 Παράρτημα Πραγματοποίηση μέτρησης τάσης, ρεύματος, ωμικής αντίστασης με χρήση του εργαστηριακού εξοπλισμού Άσκηση εξοικείωσης Σκοπός του παραρτήματος είναι η εξοικείωση των φοιτητών με τη χρήση και τη
Παράρτημα Πραγματοποίηση μέτρησης τάσης, ρεύματος, ωμικής αντίστασης με χρήση του εργαστηριακού εξοπλισμού Άσκηση εξοικείωσης Σκοπός του παραρτήματος είναι η εξοικείωση των φοιτητών με τη χρήση και τη
Αρχές επικοινωνίας με ήχο και εικόνα
 Αρχές επικοινωνίας με ήχο και εικόνα Εισαγωγή Πως λειτουργούν οι ηλεκτρονικές επικοινωνίες: Ένα βασικό μοντέλο ηλεκτρονικής επικοινωνίας αποτελείται απλά από ένα πόμπο, το δίαυλο μεταδόσεως, και το δέκτη.
Αρχές επικοινωνίας με ήχο και εικόνα Εισαγωγή Πως λειτουργούν οι ηλεκτρονικές επικοινωνίες: Ένα βασικό μοντέλο ηλεκτρονικής επικοινωνίας αποτελείται απλά από ένα πόμπο, το δίαυλο μεταδόσεως, και το δέκτη.
Παιδιά κάτω των 13 ετών δε θα πρέπει να χρησιμοποιούν το κιτ χωρίς επίβλεψη. Μη συνδέετε την κύρια πλακέτα σε εξωτερική τροφοδοσία μεγάλης ισχύος.
 2 ΠΕΡΙΕΧΟΜΕΝΑ 01. Robotale (Arduino-Compatible) 02. Ράστερ 830 οπών 03. Κουτί αποθήκευσης 04. Κόκκινα leds (τεμ. 5) 05. Κίτρινα leds (τεμ. 5) 06. Πράσινα leds (τεμ. 5) 07. Αντιστάτες 220 Ohm (τεμ. 8) 08.
2 ΠΕΡΙΕΧΟΜΕΝΑ 01. Robotale (Arduino-Compatible) 02. Ράστερ 830 οπών 03. Κουτί αποθήκευσης 04. Κόκκινα leds (τεμ. 5) 05. Κίτρινα leds (τεμ. 5) 06. Πράσινα leds (τεμ. 5) 07. Αντιστάτες 220 Ohm (τεμ. 8) 08.
για τις ρυθμίσεις LabView μέσα από το κανάλι και του καλωδίου USB.
 1o ΕΠΑΛ- Ε.Κ. Συκεών -Τομέας: Ηλεκτρονικής, Ηλεκτρολογίας και Αυτοματισμού Εκπαιδευτικοί: Μπουλταδάκης Στέλιος Μαυρίδης Κώστας Δραστηριότητα: 11 Μάθημα: Εργαστήριο Δικτύων Υπολογιστών Αντικείμενο : Μέτρηση
1o ΕΠΑΛ- Ε.Κ. Συκεών -Τομέας: Ηλεκτρονικής, Ηλεκτρολογίας και Αυτοματισμού Εκπαιδευτικοί: Μπουλταδάκης Στέλιος Μαυρίδης Κώστας Δραστηριότητα: 11 Μάθημα: Εργαστήριο Δικτύων Υπολογιστών Αντικείμενο : Μέτρηση
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
ΠΑΡΑΡΤΗΜΑ IV. ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΑΡΑΡΤΗΜΑ IV Ασκήσεις για το Robolab
 ΠΑΡΑΡΤΗΜΑ IV Παρακάτω παραθέτουμε μία σειρά ασκήσεων για το Robolab ομαδοποιημένων σε κατηγορίες : Επιμέλεια : Κυριακού Γεώργιος 1 Φύλλο Ασκήσεων (πρόκληση με κινητήρες) ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΑΡΑΡΤΗΜΑ
ΠΑΡΑΡΤΗΜΑ IV Παρακάτω παραθέτουμε μία σειρά ασκήσεων για το Robolab ομαδοποιημένων σε κατηγορίες : Επιμέλεια : Κυριακού Γεώργιος 1 Φύλλο Ασκήσεων (πρόκληση με κινητήρες) ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΑΡΑΡΤΗΜΑ
ΘΕΜΑ : ΟΛΟΚΛΗΡΩΜΕΝΑ ΚΥΚΛΩΜΑΤΑ ΔΙΑΡΚΕΙΑ: 1 περιόδος. 24/11/2011 12:09 Όνομα: Λεκάκης Κωνσταντίνος καθ. Τεχνολογίας
 ΘΕΜΑ : ΟΛΟΚΛΗΡΩΜΕΝΑ ΚΥΚΛΩΜΑΤΑ ΔΙΑΡΚΕΙΑ: 1 περιόδος 24/11/2011 12:09 καθ. Τεχνολογίας ΜΙΚΡΟΕΠΕΞΕΡΓΑΣΤΗΣ Ένας μικροεπεξεργαστής είναι ένα ολοκληρωμένο κύκλωμα που επεξεργάζεται όλες τις πληροφορίες σε ένα
ΘΕΜΑ : ΟΛΟΚΛΗΡΩΜΕΝΑ ΚΥΚΛΩΜΑΤΑ ΔΙΑΡΚΕΙΑ: 1 περιόδος 24/11/2011 12:09 καθ. Τεχνολογίας ΜΙΚΡΟΕΠΕΞΕΡΓΑΣΤΗΣ Ένας μικροεπεξεργαστής είναι ένα ολοκληρωμένο κύκλωμα που επεξεργάζεται όλες τις πληροφορίες σε ένα
Ηλεκτροκινητήρας Εναλλασσόμενου Ρεύματος τύπου κλωβού. Άσκηση 9. Ηλεκτροκινητήρας εναλλασσόμενου ρεύματος τύπου κλωβού
 ANTIKEIMENO: Άσκηση 9 Ηλεκτροκινητήρας εναλλασσόμενου ρεύματος τύπου κλωβού ΣΤΟΧΟΙ ΑΥΤΟΥ ΤΟΥ ΠΕΙΡΑΜΑΤΟΣ: Κατανόηση της λειτουργίας του ηλεκτροκινητήρα εναλλασσόμενου ρεύματος τύπου κλωβού Υπολογισμός μηχανικών
ANTIKEIMENO: Άσκηση 9 Ηλεκτροκινητήρας εναλλασσόμενου ρεύματος τύπου κλωβού ΣΤΟΧΟΙ ΑΥΤΟΥ ΤΟΥ ΠΕΙΡΑΜΑΤΟΣ: Κατανόηση της λειτουργίας του ηλεκτροκινητήρα εναλλασσόμενου ρεύματος τύπου κλωβού Υπολογισμός μηχανικών
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 2 ο Κινητήρες και Δομή Επανάληψης Σημειώσεις Καθηγητή Τώρα θα δούμε πως μπορούν να τροποποιηθούν τα προγράμματα
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 2 ο Κινητήρες και Δομή Επανάληψης Σημειώσεις Καθηγητή Τώρα θα δούμε πως μπορούν να τροποποιηθούν τα προγράμματα
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
Πολύμετρο Βασικές Μετρήσεις
 Πολύμετρο Βασικές Μετρήσεις 1. Σκοπός Σκοπός της εισαγωγικής άσκησης είναι η εξοικείωση του σπουδαστή με τη χρήση του πολύμετρου για τη μέτρηση βασικών μεγεθών ηλεκτρικού κυκλώματος, όπως μέτρηση της έντασης
Πολύμετρο Βασικές Μετρήσεις 1. Σκοπός Σκοπός της εισαγωγικής άσκησης είναι η εξοικείωση του σπουδαστή με τη χρήση του πολύμετρου για τη μέτρηση βασικών μεγεθών ηλεκτρικού κυκλώματος, όπως μέτρηση της έντασης