A 1. DDRA = 0b ; k = PINB; DDRC = 0xf0; PORTC = 0x0f;
|
|
|
- ÍÊ Μεταξάς
- 9 χρόνια πριν
- Προβολές:
Transcript
1 μ : :
2

3 - - A 1 / μ : : : _ _ : 1. μ μμ μ μ VR μ μ (STK200/CodeVision C) μ μ μμ C. _ _ μ - / μ μ μ STK LED. μ LED LEDn 0 Volt., SWn 5 Volt μ μ. μ ATmega , μ 4 (ports) μ μ A,B,C D. μ 8-bit, bit /. μ 3 : 1. M DDRx ( x=a,b,c,d) μ x ( bit 0) ( bit 1). μ, μ DDRA = 0b ; 4 pin (0..3) (4..7). 2. PINx μ,. μ, μ k = PINB; μ k ( μ unsigned char) μ μ bits ( 1 0) PORTx μ. μ, μ μ PULL UP ( 1 bit ). μ, μ DDRC = 0xf0; PORTC = 0x0f; 4 Pin (0..3) C μ μ PULL UP (4..7) μ
 μ μ bits ( 1 0) 8. 3. PORTx μ. μ, μ μ PULL UP ( 1 bit ).")
4 H Codevision C μ μ bits ( ) 3. μ μ μ : DDRC.2 = 1; PORTC.2 = 0; if (PINB.3 == 0).. O 2 C O 2 C 0 Volt 3 μ μ μ μ μ μ μ, ( 1 0). μ μ,.. μ C 1, μ μ PORTC = 0b ; {, μ PORTC = 255; {, μ PORTC = 0xFF; { μ STK200 (SW0 - SW7) μ D μ, (LED0 LED7) μ B. _ _ CODEVISION C, μ μμ μ AVR μ E : 1. μ μμ CodeVisionAVR. 2. μ μ μ ( File -> New..). 3. μ, μ project μ. 4. μ μ μ μ μ μ μ (CodeWizard) μ Yes. 5. μ. 6. μ μ : Chip (i) Chip μ ATmega16 (ii) Clock μ 4,0 z (iii) Program Type μ Application μ μ - μ μ μ, -, μ STK
 μ Yes. 5. μ. 6.")
5 7. μ μ File «Generate, Save and Exit». μ μ μ «Micro1» μ μ «lab1». 8., CodeVision μ μ μ μ lab1.c μ μ μ CodeWizard. μμ μ μ, μ μ. μ, μ μ μ μ μμ μ. μ, μ μ, μ μ (μ Ctrl-A) μ delete., μ μμ ( ) #include <mega16.h> void main(void) { DDRB = 0b ; PORTB = 0b ; DDRD = 0b ; PORTD = 0b ; #include μ μ μ, μ μ μμ μ μ (0..7) B μ μ 1, LED μ (0..7) D μ pull-up D while(1) μ ( TRUE) { if (PIND.0 == 0) μ SW0 PORTB.0 = 0; - LED0 else (. SW0 μ ) PORTB.0 = 1; - LED0! ( μμ ) 3 1
 B μ μ 1, LED μ (0..7) D μ pull-up D while(1) μ ( TRUE) { if (PIND.0 == 0) μ SW0 PORTB.0 = 0; - LED0 else (.")

6 DOWNLOAD 1. LED μ. 2. Board, μ. 3. μ Project CodeVisionAVR Configure. 4. μ μ μ After Make μ μ Program The Chip OK. 5. μ Project CodeVisionAVR Make., μ - μ compile μμ.,, μ Program., μ μ Make. 6. μ Program μμ μ μ μ. 4 1

 μ μ μ μ μμ / ( μ ). μ Debug, μ, μ. μ Trace into ( F11) μ μ F11 ( μ μ )., resources μ I/O. μ μ μ μ STK200, μ μ μ \"Input Pins\" PORTD.")
7 AVRStudio μ μ μ AVRStudio μ μ μμ. μ μ μ μ, μ compiler. μ μμ ( μ μ / ). Codevision, μ compile μ, μ AVRStudio μ μ μ μμ μ AVR Studio, μ μ. μ μ (, μ Alt+5 μ ). μ μ resources (,, /,.) μ μ μ μ μμ / ( μ ). μ Debug, μ, μ. μ Trace into ( F11) μ μ F11 ( μ μ )., resources μ I/O. μ μ μ μ STK200, μ μ μ "Input Pins" PORTD. μ STK200,, μμ, μ. 5 1
 μ μ F11 ( μ μ )., resources μ I/O.")

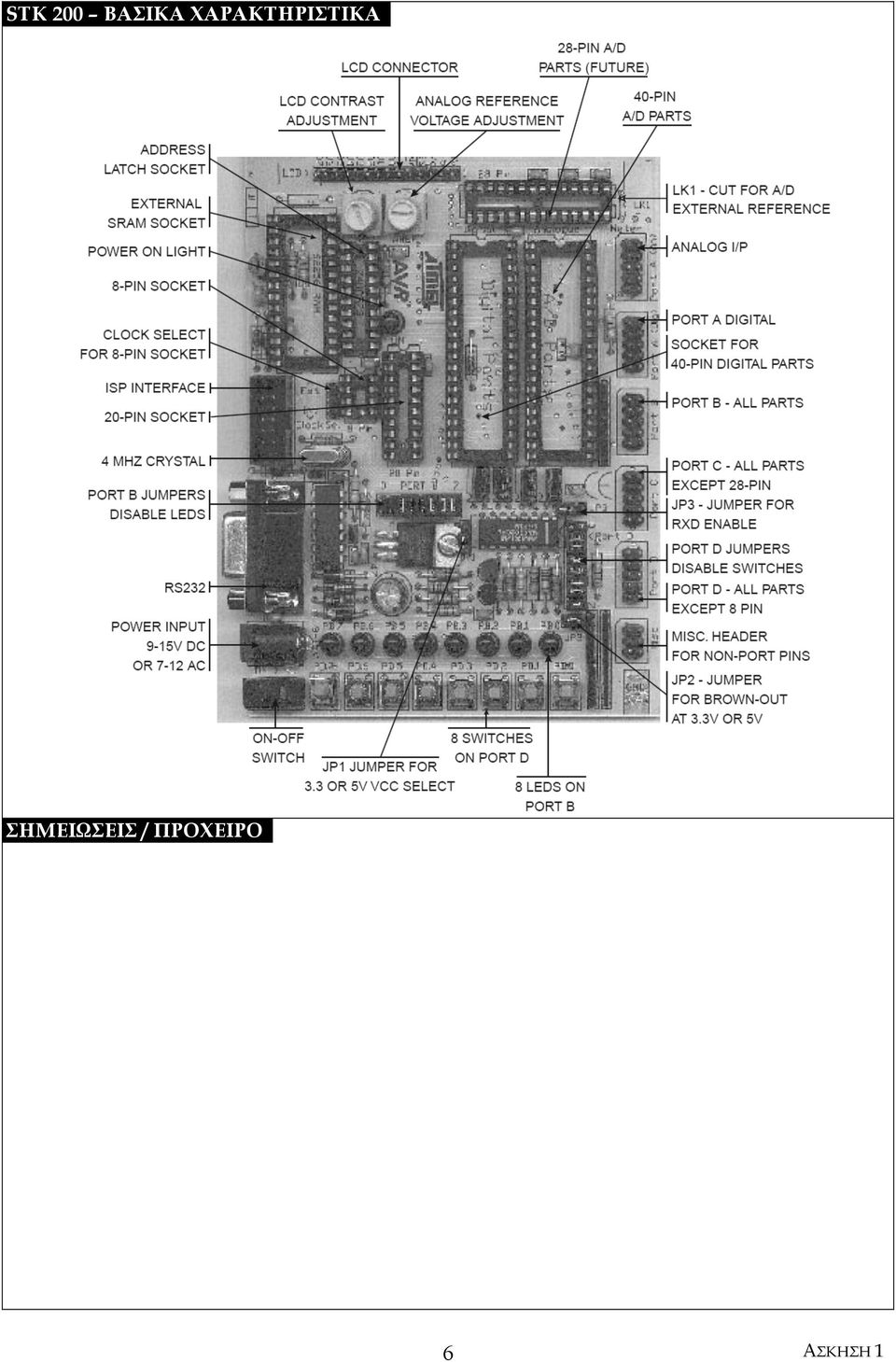
8 _STK 200 / _ 6 1
9 _ - _ μ μ μ. 1 μ LED3 μ SW2. 2 while PORTB = PIND. μμ (μ. 2!). 3 μμ LED0 SW0 SW1. 4 μμ LED SW2 SW3. 5 μμ LED{0,1,2 SW2 LED{5,6,7 SW6. 6 μ μμ μ AVR Studio, μ ( μ μ ) 7 1

10 _ - _ 1 μμ LED3 ( μμ ) μ SW3 ( toggle). μ μ μ if/else. bitwise μ ; #include <mega16.h> #include <delay.h> void main(void) { PORTB = 0xFF; DDRB = 0xFF; PORTD = 0x00; DDRD =0x00; while(1) { if (PIND.3 == 0) { // SW3 PORTB.3 = ~PINB.3; // LED3 delay_ms(50); // μ 50ms, debounce while(pind.3 == 0); // μ μ SW3 delay_ms(50); // μ 50ms, debounce 2 μμ, μ toggle SWn LEDn (n=0..7) #include <mega16.h> #include <delay.h> void main(void) { int keystate; PORTB = 0xFF; DDRB = 0xFF; PORTD = 0x00; DDRD = 0x00; while(1) { keystate = ~PIND; if (keystate) { PORTB = PORTB ^ keystate; delay_ms(50); while(~pind); delay_ms(50); 8 1
 #include <mega16.h> #include <delay.")
11 - - A 2 I/O μ : : : _ μμ interrupts, μ μ interrupts. _ _ 1 μμ μ SW4. μ μ μ ( ) 8-bit μ LED STK200. #include <mega16.h> #include <delay.h> void main(void) { unsigned char count = 0; PORTB = 0xFF; PORTD = 0x00; DDRD = 0x00; while(1) { PORTB = ~count; if (PIND.4 == 0) // SW4 { delay_ms(50); // μ 50ms, debounce while(pind.4 == 0); // μ μ SW4 delay_ms(50); // μ 50ms, debounce count = count ++; 1 2
 // SW4 { delay_ms(50); // μ 50ms, debounce while(pind.")
12 2 μμ, μ μ 10, LED 100ms 60.! μμ, μ μ SW4 LED. #include <mega16.h> #include <delay.h> void main(void) { unsigned char count = 0; unsigned char blink = 0; PORTB = 0xFF; PORTD = 0x00; DDRD = 0x00; while(1) { PORTB = ~count; if (PIND.4 == 0) // SW4 { delay_ms(50); // μ 50ms, debounce while(pind.4 == 0); // μ μ SW4 delay_ms(50); count = count ++; blink = 0; if ((count%10 == 0) && (blink<60)) { delay_ms(100); PORTB = 0xFF; delay_ms(100); blink++; // μ 50ms, debounce 2 2
; // μ μ SW4 delay_ms(50); count = count ++; blink = 0; if ((count%10 == 0) && (blink<60)) { delay_ms(100);")
13 μμ : 3 SW0, μ μ : : LED : LED{0,1,2,3,4,5,6 LED sec μμ μ μ μ flag bit, μ. μμ μ. #include <mega16.h> #include <delay.h> void main(void) { int count = 0; bit flag = 0; PORTB = 0xFF; PORTD = 0x00; DDRD = 0x00; while(1) { if (PIND.4 == 0) // SW3 { delay_ms(50); // μ 50ms, debounce while(pind.4 == 0); // μ μ SW4 delay_ms(50); // μ 50ms, debounce flag = ~flag; if (flag == 1) { PORTB.7 =!PORTB.7; delay_ms(250); else PORTB = PIND; 3 2
 // SW3 { delay_ms(50); // μ 50ms, debounce while(pind.")
14 4 2
15 - - H 3 μ : : : _ : 1. μ, μ μ μ μ μ μ. 2. μ μ CodeVision C compiler. _ μ μ μ, μ μ ( ). μ μ μ, μ μ μ μ μ μ. μ μ - (P1 P2), μ. SAW ON OFF POWER SERVICE P1 P2 RET μ 1 μ μ μ μ ( μ 1). ( ) ( FF). μ μ (POWER). 1 3

16 , μ P1 P2 μ μ. : i) μ μ - (SAW) 7sec, μ μ ( μ 1) μμ. ii) μ μ - (RET) 3.5sec, μ. 1000, μ μ μ μ μ μ (SERVICE). μ μ μ μ μ / μ ATmega16. μ μ μ 2, μ μ μ μ ( μ, pin B7 7 B). PIN PIN ON D0 μ SAW B0 OFF D7 μ RET B1 P1 D3 POWER B7 P2 D4 SERVICE B6 μ 2 μ, μ μ μ ( ' μ LED STK200), 0 μ, 1. μ μμ μ 0 Volt ( 0). μ (SAW RET) μ 0, μ

17 _ A _ 1 μμ μ, - μ. μ LED STK200, μ μ μ CodeVision C ( help files) μ,., ( ): #include <mega16.h> #include <delay.h> #define MAXCYCLES 1000 #define ON 0 #define OFF 1 void main(void) { char pow; unsigned int cyclecount=0; PORTB = 0xFF; DDRB = 0xFF; PORTD = 0xFF; DDRD = 0x00; // LED outputs on STK200 // BUTTON inputs on STK200 while (cyclecount<maxcycles) { if ( PIND.0 == ON ) { pow = ON; PORTB.7 = ON; if ( ) { if ( ) { PORTB.7 = PORTB.6 = pow = while(1); 3 3
 { if ( PIND.0 == ON ) { pow = ON; PORTB.7 = ON; if ( ) { if ( ) { PORTB.7 = PORTB.")
18 2 μμ μ μ μ μ SRAM, μ μ μ μ μ. 3 M μ μ, μ μμ, μ EEPROM, μ μ ( μ manual CodeVision). 4 μ, μ (μ μ / μμ ), μ μ μ. 4 3
, μ μ μ.")
19 - - A 4 E INTERRUPTS μ : : : _ : 1. μ μ μ μ AVR μ μμ μ CodeVision C compiler. 2. μ μ μμ ATmega16. _ O (interrupts) μ μμ μ - μ. O μ μ μ, μ μ. M μ interrupt ( μ μ ), CPU μμ. K μ (interrupt service routine - ISR), μμ μ μ interrupt. (, interrupts.) μ ISR. M ISR, μμ μ interrupt. E μ, μ. μμ μ μ μ μ μ. H interrupts μ : 1. μ μ μ μ μ μ μ μ bits μ. 2. μ μ μ, μ μ μ. Status Register SREG Bit I T H S V N Z C Read/Write R/W R/W R/W R/W R/W R/W R/W R/W Initial Value O SREG (Status register) (μ 1) (μ 0) μ μ, bit 7. M (SEI CLI) μ μ μ μ Global Interrupt Enable bit ( 1 SREG 1 4


20 0 ). A μ μ Assembly, μμ μ μ #asm. O ATmega16 μμ (INT0, INT1 INT2) 16, 17, 3 ( μ ). μ, (μ DDR). μ, STK200 B μ LED, INT2 μ, μμ μ μ μ interrupts INT0 INT1. A mega16 interrupts μ : General Interrupt Control Register GICR Bit INT1 INT0 INT IVSEL IVCE Read/Write R/W R/W R/W R R R R/W R/W Initial Value GICR μ μ μ μμ A mega16 1 μ 0. O, μ μ μ interrupt, μ bits MCUCSR MCUCR. MCU Control Register MCUCR Bit SM2 SE SM1 SM0 ISC11 ISC10 ISC01 ISC00 MCUCR Read/Write R/W R/W R/W R/W R/W R/W R/W R/W Initial Value T bits 0-3 μ interrupts INT0 INT1, μ μ, : Interrupt 0 Sense Control ISC01 ISC μ μ pin INT0 μ 0 1 pin INT0 μ 1 0 μ ( μ μ ) pin INT0 μ 1 1 μ ( μ μ ) pin INT0 μ Interrupt 1 Sense Control ISC11 ISC μ μ Pin INT1 μ 0 1 Pin INT1 μ 1 0 μ ( μ μ ) Pin INT1 μ 1 1 μ ( μ μ ) pin INT1 μ GICR 2 4

21 - I_ 1 μμ project. μμ μ, μ SW2. μ μμ, μ μ. #include <mega16.h> unsigned char count=0; interrupt [EXT_INT0] void ext_int0_isr(void) { count++; PORTB = ~count; void main(void) { PORTB = 0xFF; DDRB = 0xFF; PORTD = 0xFF; DDRD = 0x00; GICR = 0b ; MCUCR = 0b ; #asm("sei") while (1); 2 μ μμ AVR Studio, μ μ μ. MCUCR=0x02; 3 μμ LED μ μ. μ MCUCR=0x03; μ : MCUCR=0x02; 4 μμ LED μ μ 1 ( SW3). μ MCUCR=0x03; μ : MCUCR=0x02; 3 4
22 μμ μ interrupt INT1 : 5 μ INT1, μ μ : : LED{0,1,2,3 μμ LED{4,5,6,7 : LED{0,1,2,3,4,5,6 LED sec μμ μ μ μ flag bit, μ. #include <mega16.h> #include <delay.h> bit flag; interrupt [EXT_INT1] void ext_int1_isr(void) { flag =!flag; if (flag) PORTB = 0xFF; // toggle state flag void main(void) { PORTB = 0xFF; // PORTB is output DDRB = 0xFF; // LEDS switched off DDRD = 0x00; // enable INT1 GICR = 0x80; // PORTD is input MCUCR = 0x08; // INT1 request 1->0 #asm("sei") while (1) { if (flag) { PORTB.7 =!PINB.7; delay_ms(250); Else { PORTB = 0xF0; 4 4
23 - II_ 6 N μμ, interrupt 0 1: A μ μ μμ LED, μ μ INT0 INT1, μ :, μμ LED LED0 ( LED ). μ μ μ μ INT0, μμ LED μ μ. μμ LED LED7, LED0. μ μ μ μ INT1, μμ LED μ μ ( ) LED2. #include <mega16.h> unsigned char LEDpos=0x01; interrupt [EXT_INT0] void ext_int0_isr(void) { if (LEDpos == 0x80) LEDpos = 0x01; else LEDpos = LEDpos<<1; PORT = ~LEDpos; interrupt [EXT_INT1] void ext_int1_isr(void) { LEDpos = 0x04; PORT = ~LEDpos; void main(void) { PORTD=0xFF; DDRD=0x00; DDRB = 0xFF; PORT = ~LEDpos; MCUCR = 0b ; GICR = 0b ; #asm("sei") // Global enable interrupts while (1); 7 N μμ, μ μ μμ LED 0 μ μ. MCUCR = 0b ; 5 4
24 8 N / μμ, μ, μ INT0, : μ μ μ μ INT1, μμ LED μ μ. μμ LED LED0, LED7. SW0, μμ LED μ μ ( ) LED2. #include <mega16.h> unsigned char LEDpos = 0x01; interrupt [EXT_INT0] void ext_int0_isr(void) { if (LEDpos == 0x80) LEDpos = 0x01; else LEDpos = LEDpos<<1; PORT = ~LEDpos; interrupt [EXT_INT1] void ext_int1_isr(void) { if (LEDpos == 0x01) LEDpos = 0x80; else LEDpos = LEDpos>>1; PORT = ~LEDpos; void main(void) { PORTD=0xFF; DDRD=0x00; PORT = ~LEDpos; DDRB=0xFF; MCUCR = 0b ; GICR = 0b ; #asm("sei") // Global enable interrupts while (1) { if (!PIND.0) { LEDpos = 0x04; PORTB = ~LEDpos; 6 4
25 - - H 5 TIMER0 μ : : : _ : 1. Timer0 μ Tmega16 2. A μ μμ μ μ (ISRs). _ TIMER0 O ATmega16 3 / μ, μ μ Timer0, Timer1 Timer2. Timer0 μ 8-bit ( 0x00 0xFF). H μ μ - μ, μ ( ) μ TCNT0. O Timer0, μ μ : Timer/Counter0 Control Register TCCR0 Bit FOC0 WGM00 COM01 COM00 WGM01 CS02 CS01 CS00 Read/Write W R/W R/W R/W R/W R/W R/W R/W Initial Value T bits 3 6 (mode), : TCCR0 Waveform generation mode bits WGM01 WGM μ E μ (Phase Correct PWM) 1 0 M μ T (CTC - Clear Timer on Compare) 1 1 μ E μ (PWM) (fast PWM) T bits 0:2 μ μ μ Timer0, μ : Clock Selection Bits CS02 CS01 CS00 μ A M System Clock (CK) System Clock, prescaler N = 8 (CK/8) System Clock, prescaler N = 64 (CK/64) System Clock, prescaler N = 256 (CK/256) System Clock, prescaler N = 1024 (CK/1024) E μ ( μ μ ) E μ ( μ μ ) 1 5
26 TIMER0 μ TCCR0, μ μ μ f 0 = F CK/N μ 0 μ 1 μ 0xFF. μ μ 0xFF, μ μ, μ TOV0 TIFR 1 μ μ 0 ( ). E interrupt μ, ISR Timer0, μ TOV0 μ 0. H μ μ μ μ, μ TCNT0. μ μ μ μ μ CS00:CS20 = 0 TCCR0. Timer0 μ TIMSK TIFR. Timer/Counter Interrupt Mask Register TIMSK Bit OCIE2 TOIE2 TICIE1 OCIE1A OCIE1B TOIE1 OCIE0 TOIE0 Read/Write R/W R/W R/W R/W R/W R/W R/W R/W Initial Value TIMSK Timer/Counter Interrupt Flag Register TIFR Bit OCF2 TOV2 ICF1 OCF1A OCF1B TOV1 OCF0 TOV0 Read/Write R/W R/W R/W R/W R/W R/W R/W R/W Initial Value bits 0 1 TIMS (μ 1) Y M (Timer0 Overflow 0) T (Timer0 Output Compare Match OCIE0). μ μ (μ 1) flag bits TOV0 OCF0 TIFR. TIFR M (Timer0 Overflow) μ 0xFF 0x00 μ TOV0 1. E bits TOIE0 ( Timer0 Overflow) GIE ( ) 1, ISR, μ μ TOV0 0 μ. _ 1 μ μ μ, STK200, μ F CK = 4,00 MHz, μ, μ μ μ. CS02 CS01 CS00 Prescaler Timer0 μ μ Timer0 μ Timer0 N f0 = FCK/N t0 = 1/F0 T0 = 256/F ,00 MHz 0.25 μsec 64 μsec khz 2 μsec 512 μsec ,5 khz 16 μsec 4,096 msec ,625 khz 64 μsec 16,384 msec ,9063 khz 256 μsec 65,536 msec 2 μ, μ : ; μ F CK = 4 MHz Timer0 μ prescaler = 8 f 0 = F CK /8 μ μ TCNT0 t 0 = 1/F 0 μ 250 TCNT0 T = 250t 0 = 500μsec 2 5
27 3 μμ project ( CodeWizard). μμ μ, μ μμ, μ μ. #include <mega16.h> unsigned char count = 0; unsigned int ovf_count = 0; interrupt [TIM0_OVF] void timer0_ovf_isr(void) { TCNT0=0x06; ovf_count++; if (ovf_count == 2000) { ovf_count = 0; count++; PORTB = ~count; void main(void) { PORTB = 0xFF; DDRB = 0xFF; PORTD = 0xFF; DDRD = 0x00; TCNT0 = 0x06; TIMSK = 0x01; TCCR0 = 0x02; #asm("sei") while (1); 4 μμ μ LED 1. μ... if (++ovf_count == 250)... TCCR0 = 0x03;... 5 μμ (3) μ, μ prescaler = 64. μ CPU ; μ... unsigned long int ovf_count = 0;... if (++ovf_count == 2000*60)
28 6 μμ Timer0 INT0, : 1. μ μμ : : LED, Timer0 μ. : LED7 2 sec, μ Timer0. 2. μ INT0, μ μ ( ) ( ). μμ μ ( ). μμ μ μ μ flag bit, μ. #include <mega16.h> unsigned int ovf_count; bit flag; interrupt [TIM0_OVF] void timer0_ovf_isr(void) { TCNT0 = 0x06; if (++ovf_count==250*2) { PORT.7 = ~P.7; ovf_count = 0; interrupt [EXT_INT0] void ext_int0_isr(void) { flag = ~flag; if (flag) { PORT.7 = ~P.7; TCNT0 = 0x06; TCCR0 = 0x03; ovf_count = 0; else { TCCR0 = 0x00; PORT.7 = 1; void main(void) { // Port initializations PORT = 0xFF; DDR = 0xFF; PORTD = 0xFF; DDRC = 0x00; GICR = 0x40; MCUCR = 0x02; MCUCSR = 0x00; GIFR = 0x40; TCCR0 = 0x00; TCNT0 = 0x00; TIMSK = 0x01; flag = 0; #asm("sei") while (1); 4 5
29 - - A H 6 O TIMER1 μ : : : _ : 1. Timer1 μ Tmega A μ μμ μ μ (ISRs). _ TIMER1 O ATmega16 3 / μ, μ μ Timer0, Timer1 Timer2. Timer1 μ 16-bit ( 0x00 0xFFFF) μ - μ, μ ( ) μ TCNT1. O Timer1, μ μ : Timer/Counter1 Control Register B TCCR1B Bit ICNC1 ICES1 -- WGM13 WGM12 CS12 CS11 CS10 Read/Write W R/W R R/W R/W R/W R/W R/W Initial Value T bits 3 4 (mode), : TCCR1B Waveform generation mode bits WGM13 WGM CTC-OCR1A: M μ T ( μ OCR1A) 1 0 PWM & 1 1 CTC-ICR1: M μ T ( μ ICR1) T bits 0:2 μ μ Timer1, μ : Clock Selection Bits CS12 CS11 CS10 μ A M System Clock (CK) System Clock, prescaler N = 8 (CK/8) System Clock, prescaler N = 64 (CK/64) System Clock, prescaler N = 256 (CK/256) System Clock, prescaler N = 1024 (CK/1024) E μ ( μ μ ) E μ ( μ μ ) 1 6
30 TOY TIMER1 μ TCCR1, μ μ μ f 1 = F CK/N μ 0 μ 1 μ 0xFFFF (65535). H μ μ μ μ μ 16-bit TCNT1. μ μ, μ μ μ μ 0x0000 ( ) interrupt μ, ISR Timer1. CTC-OCR1A TOY TIMER1 CTC-OCR1A μ μ 0 μ μ 16-bit OCR1A. μ, μ 0x0000 interrupt μ, ISR μ OCR1A Timer1. Timer1 μ TIMSK. Timer/Counter Interrupt Mask Register TIMSK Bit OCIE2 TOIE2 TICIE1 OCIE1A OCIE1B TOIE1 OCIE0 TOIE0 Read/Write R/W R/W R/W R/W R/W R/W R/W R/W Initial Value TIMSK bits 2 4 TIMS (μ 1) Y M (Timer1 Overflow 1), T A (Timer1 Output Compare Match OCIE1A) T B (OCIE1B). Y M (Timer1 Overflow) M Timer1 0xFFFF 0x0000 bit 1 TIMSK 1, μ, ISR μ μ μ. A (Timer1 Output Compare) TCNT1 μ OCR1A bit OCIE1A TIMSK 1, μ, ISR μ μ μ. _ 1 μ, μ : ( μ μ!) ; μ F CK = 4 MHz Timer1 μ prescaler = 8 f 1 = F CK/ = 500 khz μ 1 TCNT1 t 1 = 1/f 1 = 2 μsec μ Timer1 T 1 = * t 1= 0,1311 sec 2 μ μ μ, 0,1 sec, μ prescaler N = 8. Q = 0.1/t 1=
31 3 μμ μ μ μ μμ LED, μ, :, μμ LED LED0 ( LED ) 0,1 sec μμ LED μ μ. μμ LED LED7, LED0. μ μ μ Timer1 μ prescaler N = 8 μ M μ T μ μ OCR1A (CTC-OCR1A). μ : interrupt CTC-OCR1A : interrupt [TIM1_COMPA] void timer1_compa_isr(void) #include <mega16.h> unsigned char count = 1; interrupt [TIM1_COMPA] void timer1_compa_isr(void) { if (count==128) count = 1; else count = count<<1; PORTB = ~count; void main(void) { PORTB = ~count; // initially LED0 is on DDRB = 0xFF; TCCR1B = 0x0A; // prescaler = 8, CTC-OCR1A mode OCR1A = 50000; // load OCR1A value for 0.1 sec TCNT1 = 0; // initialize TCNT1 TIMSK = 0x10; // enable Timer1 overflow interrupt #asm("sei") while (1); 4 μ μμ μ o μ μ μ μ LED μ, 0 6 sec, μ μ 0.1 sec. μ μ interrupt 0 1 ( μ ). μ μ 0 sec, μ LED μ, μ μ μ. 3 6
32 #include <mega16.h> unsigned char count = 1; unsigned char N = 1; unsigned ovf_count = 0; interrupt [EXT_INT0] void ext_int0_isr(void) { if (N<60) N++; if (N==1) TCCR1B = TCCR1B 0x02; ovf_count = 0; TCNT1 = 0; interrupt [EXT_INT1] void ext_int1_isr(void) { if (N>0) N--; if (N==0) TCCR1B = TCCR1B & 0b ; ovf_count = 0; TCNT1 = 0; interrupt [TIM1_COMPA] void timer1_compa_isr(void) { if (++ovf_count == N) { if (count==128) count = 1; else count = count<<1; PORTB = ~count; ovf_count = 0; void main(void) { PORTB = ~count; // initially LED0 is on DDRB = 0xFF; TCCR1B = 0x0A; // prescaler = 8, CTC-OCR1A mode OCR1A = 50000; // load OCR1A value for 0.1 sec TCNT1 = 0; // initialize TCNT1 TIMSK = 0x10; // enable Timer1 overflow interrupt GICR = 0xC0; MCUCR = 0x0F; #asm("sei") while (1); 4 6
33 - - A H 7 μ : : : _ : 1. μ μ μ. 2. μ analog to digital (ADC) μ Tmega16. _ ANALOG TO DIGITAL (ADC) H μ ADC ATmega16 μ 10-bit. M μ μ 8 μ μ - (single-ended) μ. A - A μ μ μ GND. O ADC AVR μ μ (successive approximation ADC) μ μ. μ μ μ 10-bit ADC, μ μ 50 khz < F ADC < 200 khz prescaler μ μ ADC μ. μ μ μ ADC, μ : (i) μ μ F CK 200 khz, (ii) μ μ μ μ μ (iii) μ bits ADPS2:0 ADCSRA. ADC bit DEN ADCSRA ADC μ 1. H μ - μ 1 bit ADSC ADCSRA, 0 μ μ μ., bit ADATE ADCSRA 1, μ μ μ μ μ μ, bits ADTS2:0 SFIOR. M μ 13 μ ADC μ μ μ 1 bit ADIF ADCSRA. interrupt ( 1 bit ADIE ADCSRA), ISR μ. T μ μ μ μ ADCW CodeVision C ADCW = 2 10 VIN /VREF V IN μ V REF. T ADCW=0x000 μ (GND) ADCW=0x3FF V REF μ 1 LSB. 1 7
34 ADC Multiplexer Selection Register ADMUX Bit REFS1 REFS0 ADLAR MUX4 MUX3 MUX2 MUX1 MUX0 Read/Write W R/W R R/W R/W R/W R/W R/W Initial Value ADMUX μ n (0 <= n <= 7) bits MUX0:2 μ ( n ). bits REFS1 REFS0 V REF : REFS1 REFS0 0 0 μ AREF 0 1 μ AVCC μ AREF 1 0 ( μ ) 1 1 E 2.56 V μ AREF ADC Control and Status Register ADCSRA Bit ADEN ADSC ADATE ADIF ADIE ADPS2 ADPS1 ADPS0 Read/Write R/W R/W R/W R/W R/W R/W R/W R/W Initial Value ADCSRA bit 7 ( DEN) ADC μ 1. H μ 1 bit 6 (ADSC). interrupt μ μ 1 bit 3 (ADIE) μ - bit 4 (ADIF). μ μ ( 10-bit) μ CodeVision C μ ADCW. μ μ μ μ 0 bit 5 (ADATE). bits 0 2 μ prescaler μ ADC, : ADPS2 ADPS1 ADPS0 Prescaler N _ 1 μ μ, μ : μ μ prescaler ADC μ 10-bit μ ADC μ μ F CK = 4.00 MHz = 32 (4000/200 = 20.0) F ADC = F CK/N = 125 khz T ADC = 13/F CK = 104 μsec 10-bit μ V REF=5Volt V 0= V REF/1024 = 5/1024 = 4.88 mvolt 2 7
35 2 N μμ, μ μ (0-5 Volt). #include <mega16.h> interrupt [ADC_INT] void adc_isr(void) { unsigned char i, outb=0; unsigned int lim, adc_data; adc_data = ADCW; ADCSRA = 0x40; // Read ADC Word // ADC Start conversion lim = 64; for (i=7; i>=0; i--) { if (adc_data>lim) outb = outb (1<<i); else break; lim = lim+128; PORTB = ~outb; void main(void) { PORTB = 0xFF; DDRB = 0xFF; PORTD = 0xFF; DDRD = 0x00; ACSR = 0x80; SFIOR = 0x00; ADMUX = 0x47; ADCSRA = 0x8D; ADCSRA = 0x40; // Analog comparator disable // ADC Voltage Reference: AVCC pin // select channel 7 (PORTA.7) // ADC Start conversion #asm("sei") // Global interrupt enable while (1); 3 VCC 5Volt, μ μ 8- μ μ ; μ 5/8 Volt = 0.625Volt 4 N o μ μ μ μμ. μ μ μ ADC μ μ μ, μ μ μμ Fs = 1/T ADC= ksps (kilo samples per sec) 3 7
36 5 μμ μ μ μ ADC μ 8 LED STK200. μ μ μ 10-bit, 8 μ bits. // ADC interrupt service routine interrupt [ADC_INT] void adc_isr(void) { unsigned char adc_data8; ADCSRA = 0x40; adc_data8 = (ADCW >> 2); PORTB = ~adc_data8; // μ // μ 8 μ 6 μ ; 5/2 8 = mvolt 7 μμ LEDs 10 μ -μ ADC, μ μ 10 μ ( μ 10-bit μ μ ). #include <mega16.h> #define MAXN 10 unsigned char n = 0; unsigned int sumadc = 0; // index variable // 1023*10 fits in 16 bits! // ADC interrupt service routine interrupt [ADC_INT] void adc_isr(void) { unsigned char adc_data8; sumadc += ADCW; ADCSRA = 0x40; // start new conversion if (++n == MAXN) { adc_data8 = ((unsigned int)(sumadc/maxn)) >> 2; PORTB = ~adc_data8; n = 0; sumadc = 0; 4 7
12. Διακοπές Interrupts (IRQ)
") 2. Διακοπές Interrupts (IRQ) Πίνακας Ι. Χειρισμός διακοπών στον ATmega6. A/A Program address Source Vector Interrupt definition External Pin, Power-on Reset, Brown-outReset, Watchdog Reset, and JTAG AVR
2. Διακοπές Interrupts (IRQ) Πίνακας Ι. Χειρισμός διακοπών στον ATmega6. A/A Program address Source Vector Interrupt definition External Pin, Power-on Reset, Brown-outReset, Watchdog Reset, and JTAG AVR
14. Timers/Counters prescaler Timer/Counter0 2 Timer/Counter0 Timer/Counter2 Timer/Counter1 Timer/Counter0 Timer/Counter1 Timer/Counter2
 14. Timers/Counters Οι AVR διαθέτουν μετρητές (Timers) με δυνατότητα σύγκρισης και διακοπής. Ο χρονισμός τους μπορεί να είναι σύγχρονος ή ασύγχρονος, από το ρολόι συστήματος ή από εξωτερική πηγή και υπάρχει
14. Timers/Counters Οι AVR διαθέτουν μετρητές (Timers) με δυνατότητα σύγκρισης και διακοπής. Ο χρονισμός τους μπορεί να είναι σύγχρονος ή ασύγχρονος, από το ρολόι συστήματος ή από εξωτερική πηγή και υπάρχει
15. Seven Segment Display. Πολυπλεγμένη λειτουργία
 15. Seven Segment Display. Πολυπλεγμένη λειτουργία Τα Seven Segment Display με LED είναι ίσως η πιο συνηθισμένη μέθοδος απεικόνισης αριθμών. Η διακριτική τους ικανότητα, η υψηλή φωτεινότητα σε συνάρτηση
15. Seven Segment Display. Πολυπλεγμένη λειτουργία Τα Seven Segment Display με LED είναι ίσως η πιο συνηθισμένη μέθοδος απεικόνισης αριθμών. Η διακριτική τους ικανότητα, η υψηλή φωτεινότητα σε συνάρτηση
Υλοποίηση συσκευής ανάγνωσης παλμογράφου για άτομα με αναπηρία όρασης με μικροελεγκτή AVR
 Υλοποίηση συσκευής ανάγνωσης παλμογράφου για άτομα με αναπηρία όρασης με μικροελεγκτή AVR ΔΗΜΗΤΡΗΣ ΚΑΜΠΕΛΟΠΟΥΛΟΣ Επιβλέπων καθηγητής: ΝΙΚΟΛΑΙΔΗΣ ΣΠΥΡΙΔΩΝ Τμήμα Φυσικής Σχολή Θετικών Επιστημών Αριστοτέλειο
Υλοποίηση συσκευής ανάγνωσης παλμογράφου για άτομα με αναπηρία όρασης με μικροελεγκτή AVR ΔΗΜΗΤΡΗΣ ΚΑΜΠΕΛΟΠΟΥΛΟΣ Επιβλέπων καθηγητής: ΝΙΚΟΛΑΙΔΗΣ ΣΠΥΡΙΔΩΝ Τμήμα Φυσικής Σχολή Θετικών Επιστημών Αριστοτέλειο
1. Περιβάλλον εργασίας παραδείγματα σύνταξης
 1. Περιβάλλον εργασίας παραδείγματα σύνταξης Θα χρειαστούμε τα προγράμματα Atmel Studio 7.0 (http://www.atmel.com/) και khazama AVR Programmer (http://khazama.com/project/programmer/). Τα προγράμματα διατίθενται
1. Περιβάλλον εργασίας παραδείγματα σύνταξης Θα χρειαστούμε τα προγράμματα Atmel Studio 7.0 (http://www.atmel.com/) και khazama AVR Programmer (http://khazama.com/project/programmer/). Τα προγράμματα διατίθενται
ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΕΛΕΓΚΤΩΝ
 ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΕΛΕΓΚΤΩΝ ATMEL AVR8 ΠΟΡΛΙΔΑΣ ΔΗΜΗΤΡΙΟΣ ATMEL AVR Atmega16 Χαρακτηριστικά Μικροελεγκτής 8-bit υψηλής απόδοσης και χαμηλής κατανάλωσης Προοδευμένη αρχιτεκτονική RISC (Reduced instruction
ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΕΛΕΓΚΤΩΝ ATMEL AVR8 ΠΟΡΛΙΔΑΣ ΔΗΜΗΤΡΙΟΣ ATMEL AVR Atmega16 Χαρακτηριστικά Μικροελεγκτής 8-bit υψηλής απόδοσης και χαμηλής κατανάλωσης Προοδευμένη αρχιτεκτονική RISC (Reduced instruction
ROBOARM II. β I f,/)! ο (^ U U- Πτυχιακή TEI ΚΑΒΑΛΑΣ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ. Λογισμικό Εφαρμογής. Γαβαλάς Φώτιος Χαραλαμττίδης Νικόλαος
! ο (^ U U- Πτυχιακή TEI ΚΑΒΑΛΑΣ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ. Λογισμικό Εφαρμογής. Γαβαλάς Φώτιος Χαραλαμττίδης Νικόλαος") β I f,/)! ο (^ U U- TEI ΚΑΒΑΛΑΣ Πτυχιακή ROBOARM II Λογισμικό Εφαρμογής Γαβαλάς Φώτιος Χαραλαμττίδης Νικόλαος Επιβλέττίΐ'ν Καθηγητής Δρ. Καμπουρλάζος RoboArm II Ευχαριστούμε Θερμά Τον Δρ. Καμπουρλάζο και
β I f,/)! ο (^ U U- TEI ΚΑΒΑΛΑΣ Πτυχιακή ROBOARM II Λογισμικό Εφαρμογής Γαβαλάς Φώτιος Χαραλαμττίδης Νικόλαος Επιβλέττίΐ'ν Καθηγητής Δρ. Καμπουρλάζος RoboArm II Ευχαριστούμε Θερμά Τον Δρ. Καμπουρλάζο και
ΣΧΕΔΙΑΣΗ ΚΑΙ ΥΛΟΠΟΙΗΣΗ ΣΥΣΤΗΜΑΤΟΣ ΣΗΜΑΤΩΝ ΔΙΑΣΤΑΥΡΩΣΗΣ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΕΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΗΛΕΚΤΡΟΝΙΚΗΣ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΣΧΕΔΙΑΣΗ ΚΑΙ ΥΛΟΠΟΙΗΣΗ ΣΥΣΤΗΜΑΤΟΣ ΣΗΜΑΤΩΝ ΔΙΑΣΤΑΥΡΩΣΗΣ
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΕΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΗΛΕΚΤΡΟΝΙΚΗΣ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΣΧΕΔΙΑΣΗ ΚΑΙ ΥΛΟΠΟΙΗΣΗ ΣΥΣΤΗΜΑΤΟΣ ΣΗΜΑΤΩΝ ΔΙΑΣΤΑΥΡΩΣΗΣ
2. Δήλωση μεταβλητών. #include <avr/io.h> #include <util/delay.h> unsigned char i=0xa0; register unsigned char i asm("r3");
;") 2. Δήλωση μεταβλητών Οι μεταβλητές είναι τα βασικά στοιχεία που διαπραγματεύεται ένα πρόγραμμα. Περιέχουν τιμές ή δεδομένα και μπορεί να έχουν μια σταθερή τιμή ή το περιεχόμενό τους να εξαρτάται από τις
2. Δήλωση μεταβλητών Οι μεταβλητές είναι τα βασικά στοιχεία που διαπραγματεύεται ένα πρόγραμμα. Περιέχουν τιμές ή δεδομένα και μπορεί να έχουν μια σταθερή τιμή ή το περιεχόμενό τους να εξαρτάται από τις
Ένα απλό πρόγραμμα C
 Δομή Προγράμματος C pre-processor directives global declarations function prototypes main() local variables to function main ; statements associated with function main ; f1() local variables to function
Δομή Προγράμματος C pre-processor directives global declarations function prototypes main() local variables to function main ; statements associated with function main ; f1() local variables to function
3.9 SCORBOT-ER III ROBOT HOME... 31
 : 1/11/2010 ... 4 :... 4 :... 4... 4 1.... 6... 6 1.1 μ... 6 1.2 μ... 7... 10 2. -... 11... 11... 15 3.SCORBOT-ER III... 16... 17 3.1... 17 3.2 SCORBOT -... 19 3.3 ROBOT... 19 3.4 SCORBOT-ER III... 20
: 1/11/2010 ... 4 :... 4 :... 4... 4 1.... 6... 6 1.1 μ... 6 1.2 μ... 7... 10 2. -... 11... 11... 15 3.SCORBOT-ER III... 16... 17 3.1... 17 3.2 SCORBOT -... 19 3.3 ROBOT... 19 3.4 SCORBOT-ER III... 20
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΤΜΗΜΑ ΒΙΟΜΗΧΑ ΝΙΚΗΣ ΠΛ ΗΡΟΦΟΡΙΚΗΣ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΤΜΗΜΑ ΒΙΟΜΗΧΑ ΝΙΚΗΣ ΠΛ ΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΣΥΝΑΓΕΡΜΟΣ ΑΥΤΟΚΙΝΗΤΟΥ ΜΕ ΧΡΗΣΗ ΤΩΝ ΤΕΧΝΟΛΟΓΙΩΝ GSM KAIGPS ΕΙΣΗΓΗΤΗΣ: Καθηγητής ΠΟΓΑΡΙΔΗΣ ΔΗΜΗΤΡΙΟΣ ΣΠΟΥΔΑΣΤΕΣ:
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΤΜΗΜΑ ΒΙΟΜΗΧΑ ΝΙΚΗΣ ΠΛ ΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΣΥΝΑΓΕΡΜΟΣ ΑΥΤΟΚΙΝΗΤΟΥ ΜΕ ΧΡΗΣΗ ΤΩΝ ΤΕΧΝΟΛΟΓΙΩΝ GSM KAIGPS ΕΙΣΗΓΗΤΗΣ: Καθηγητής ΠΟΓΑΡΙΔΗΣ ΔΗΜΗΤΡΙΟΣ ΣΠΟΥΔΑΣΤΕΣ:
ΠΕΡΙΓΡΑΦΗ ΥΛΙΚΟΥ AVR 1. ΕΙΣΑΓΩΓΗ 1.1 ΓΕΝΙΚΗ ΔΟΜΗ 1.2 ΟΙΚΟΓΕΝΕΙΕΣ 1.3 ΤΥΠΟΙ 1.4 ΕΡΓΑΛΕΙΑ
 ΠΕΡΙΓΡΑΦΗ ΥΛΙΚΟΥ AVR 1. ΕΙΣΑΓΩΓΗ 1.1 ΓΕΝΙΚΗ ΔΟΜΗ 1.2 ΟΙΚΟΓΕΝΕΙΕΣ 1.3 ΤΥΠΟΙ 1.4 ΕΡΓΑΛΕΙΑ Oι βασικές αρχές λειτουργίας των RISC είναι : Εντολές ενός κ.μ. με κατάλληλη σχεδίαση της μονάδας διοχέτευσης Μεγάλος
ΠΕΡΙΓΡΑΦΗ ΥΛΙΚΟΥ AVR 1. ΕΙΣΑΓΩΓΗ 1.1 ΓΕΝΙΚΗ ΔΟΜΗ 1.2 ΟΙΚΟΓΕΝΕΙΕΣ 1.3 ΤΥΠΟΙ 1.4 ΕΡΓΑΛΕΙΑ Oι βασικές αρχές λειτουργίας των RISC είναι : Εντολές ενός κ.μ. με κατάλληλη σχεδίαση της μονάδας διοχέτευσης Μεγάλος
FOSSCOMM 2013 6ο Συνέδριο Κοινοτήτων Ανοιχτού Λογισμικού Σάββατο 20 Απριλίου 2013. Ομάδα Σχολής Ικάρων Εργαστήριο Arduino
 FOSSCOMM 2013 6ο Συνέδριο Κοινοτήτων Ανοιχτού Λογισμικού Σάββατο 20 Απριλίου 2013 Ομάδα Σχολής Ικάρων Εργαστήριο Arduino Arduino Workshop LAB 1 : Παιχνίδι με έναν αισθητήρα φωτός Τι θα χρειαστούμε: 1 LED
FOSSCOMM 2013 6ο Συνέδριο Κοινοτήτων Ανοιχτού Λογισμικού Σάββατο 20 Απριλίου 2013 Ομάδα Σχολής Ικάρων Εργαστήριο Arduino Arduino Workshop LAB 1 : Παιχνίδι με έναν αισθητήρα φωτός Τι θα χρειαστούμε: 1 LED
ΗΜΥ 213. Εργαστήριο Οργάνωσης Η.Y. και Μικροεπεξεργαστών week 5. Διδάσκων: Δρ. Γιώργος Ζάγγουλος
 ΗΜΥ 213 Εργαστήριο Οργάνωσης Η.Y. και Μικροεπεξεργαστών week 5 Διδάσκων: Δρ. Γιώργος Ζάγγουλος Email: zaggoulos.george@ucy.ac.cy www.ece.ucy.ac.cy/courses/ece213 Περίληψη Κλήση Συνάρτησης και επιστροφή
ΗΜΥ 213 Εργαστήριο Οργάνωσης Η.Y. και Μικροεπεξεργαστών week 5 Διδάσκων: Δρ. Γιώργος Ζάγγουλος Email: zaggoulos.george@ucy.ac.cy www.ece.ucy.ac.cy/courses/ece213 Περίληψη Κλήση Συνάρτησης και επιστροφή
ΕΥΧΑΡΙΣΤΙΕΣ. 2 Καρβουνά Αθηνά
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ «Βοηθητικό Σύστημα Παρκαρίσματος Αυτοκινήτου» Κοτίτσα Κωνσταντία ΕΠΙΒΛΕΠΩΝ Καθηγητής
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΑΒΑΛΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ «Βοηθητικό Σύστημα Παρκαρίσματος Αυτοκινήτου» Κοτίτσα Κωνσταντία ΕΠΙΒΛΕΠΩΝ Καθηγητής
Ανάπτυξη ενός Μονοφασικού Αναλυτή Ενεργείας με το ΑΤmega 328 με δυνατότητα επικοινωνίας με το Labview μέσω Ethernet.
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΔΥΤΙΚΗΣ ΕΛΛΑΔΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Αριθμός 1496 ΤΙΤΛΟΣ ΤΗΣ ΠΤΥΧΙΑΚΗΣ Ανάπτυξη ενός Μονοφασικού Αναλυτή Ενεργείας
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΔΥΤΙΚΗΣ ΕΛΛΑΔΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Αριθμός 1496 ΤΙΤΛΟΣ ΤΗΣ ΠΤΥΧΙΑΚΗΣ Ανάπτυξη ενός Μονοφασικού Αναλυτή Ενεργείας
Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα
 Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα 1ο ΕΠΑΛ Περάματος 7ο ΕΚ Πειραιά Πλακέτα Arduino Το 2005 oι Massimo Banzi και David Cueartielles στο Ivrea Δημιουργούν την υπολογιστική πλατφόρμα Arduino.
Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα 1ο ΕΠΑΛ Περάματος 7ο ΕΚ Πειραιά Πλακέτα Arduino Το 2005 oι Massimo Banzi και David Cueartielles στο Ivrea Δημιουργούν την υπολογιστική πλατφόρμα Arduino.
10. Πληκτρολόγιο matrix 4x4
 10. Πληκτρολόγιο matrix 4x4 Το πληκτρολόγιο matrix 4x4 αποτελείται από 16 πλήκτρα διακόπτες τα οποία είναι συνδεδεμένα μεταξύ τους ανά 4 σε τέτοια διάταξη ώστε, με το ένα άκρο τους να σχηματίζουν 4 σειρές
10. Πληκτρολόγιο matrix 4x4 Το πληκτρολόγιο matrix 4x4 αποτελείται από 16 πλήκτρα διακόπτες τα οποία είναι συνδεδεμένα μεταξύ τους ανά 4 σε τέτοια διάταξη ώστε, με το ένα άκρο τους να σχηματίζουν 4 σειρές
Είναι το πρωτόκολλο RS232 που χρησιμοποιείται στις σειριακές θύρες COM με τη διαφορά ότι εκτελείται σε επίπεδο τάσεων TTL. 2
 16. USART Οι AVR διαθέτουν ενσωματωμένη διάταξη για υποστήριξη σειριακής επικοινωνίας USART 1 (Universal Synchronous and Asynchronous serial Receiver and Transmitter). Η ενσωματωμένη διάταξη μας εξυπηρετεί
16. USART Οι AVR διαθέτουν ενσωματωμένη διάταξη για υποστήριξη σειριακής επικοινωνίας USART 1 (Universal Synchronous and Asynchronous serial Receiver and Transmitter). Η ενσωματωμένη διάταξη μας εξυπηρετεί
Έλεγχος με μικροϋπολογιστές
 Έλεγχος με μικροϋπολογιστές μυ και Ψηφιακός Έλεγχος Παρουσίαση 1: Εισαγωγή στα ενσωματωμένα συστήματα (embedded systems hardware) Εργαστήριο Αυτομάτου Ελέγχου Ενσωματωμένα Συστήματα Embedded Systems Ενσωματωμένα
Έλεγχος με μικροϋπολογιστές μυ και Ψηφιακός Έλεγχος Παρουσίαση 1: Εισαγωγή στα ενσωματωμένα συστήματα (embedded systems hardware) Εργαστήριο Αυτομάτου Ελέγχου Ενσωματωμένα Συστήματα Embedded Systems Ενσωματωμένα
Πλακέτα Arduino. 1ο ΕΠΑΛ Περάματος - 7ο ΕΚ Πειραιά
 Πλακέτα Arduino Το 2005 oι Massimo Banzi και David Cueartielles στο Ivrea Δημιουργούν την υπολογιστική πλατφόρμα Arduino. Το Arduino είναι βασισμένο σε μια απλή μητρική πλακέτα ανοικτού κώδικα, με ενσωματωμένο
Πλακέτα Arduino Το 2005 oι Massimo Banzi και David Cueartielles στο Ivrea Δημιουργούν την υπολογιστική πλατφόρμα Arduino. Το Arduino είναι βασισμένο σε μια απλή μητρική πλακέτα ανοικτού κώδικα, με ενσωματωμένο
Καβάλα, / /2010. Εγκρίνεται η Πτυχιακή Εργασία. Ο επιβλέπων Καθηγητής. οϊλεμές Ανδρέας
 Καβάλα, / /2010 Εγκρίνεται η Πτυχιακή Εργασία Ο επιβλέπων Καθηγητής οϊλεμές Ανδρέας Η Εξεταστική Επιτροπή 1. οϊλεμές Ανδρέας 2. Ναλμπάντης τέφανος 3. Σ.Ε.Ι. Καβάλας. χολή Σεχνολογικών Εφαρμογών. Σμήμα
Καβάλα, / /2010 Εγκρίνεται η Πτυχιακή Εργασία Ο επιβλέπων Καθηγητής οϊλεμές Ανδρέας Η Εξεταστική Επιτροπή 1. οϊλεμές Ανδρέας 2. Ναλμπάντης τέφανος 3. Σ.Ε.Ι. Καβάλας. χολή Σεχνολογικών Εφαρμογών. Σμήμα
ΜΕΡΟΣ 1. Διακοπές (Interrupts)
") Εργαστήριο Μικροελεγκτών 6η ΑΣΚΗΣΗ ΗΜΕΡΟΜΗΝΙΑ ΟΝΟΜΑ ΕΠΩΝΥΜΟ ΑΜ ΕΞΑΜΗΝΟ ΣΚΟΠΟΣ ΕΡΓΑΣΤΗΡΙΟΥ Διακοπές (Interrupts) Τρόπο Λειτουργίας (Operating Modes) ΜΕΡΟΣ 1. Διακοπές (Interrupts) 1. Εισαγωγή 1. Μια διακοπή
Εργαστήριο Μικροελεγκτών 6η ΑΣΚΗΣΗ ΗΜΕΡΟΜΗΝΙΑ ΟΝΟΜΑ ΕΠΩΝΥΜΟ ΑΜ ΕΞΑΜΗΝΟ ΣΚΟΠΟΣ ΕΡΓΑΣΤΗΡΙΟΥ Διακοπές (Interrupts) Τρόπο Λειτουργίας (Operating Modes) ΜΕΡΟΣ 1. Διακοπές (Interrupts) 1. Εισαγωγή 1. Μια διακοπή
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino UNO Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino UNO Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O
Ενσωµατωµένα Συστήµατα
 Ενσωµατωµένα Συστήµατα για εφαρµογές πραγµατικού χρόνου Μικροελεγκτής Arduino Ιωάννης Καλόµοιρος Αναπληρωτής Καθηγητής Τµήµα Μηχανικών Πληροφορικής Μάθηµα 7ο Τι είναι το Arduino... Ένα open-hardware σύστηµα
Ενσωµατωµένα Συστήµατα για εφαρµογές πραγµατικού χρόνου Μικροελεγκτής Arduino Ιωάννης Καλόµοιρος Αναπληρωτής Καθηγητής Τµήµα Μηχανικών Πληροφορικής Μάθηµα 7ο Τι είναι το Arduino... Ένα open-hardware σύστηµα
Προηγμένοι Μικροεπεξεργαστές. Φροντιστήριο 4 Real Mode Interrupts
 Προηγμένοι Μικροεπεξεργαστές Φροντιστήριο 4 Real Mode Interrupts Επισκόπηση Μορφές control tranfer Γενικά μη προγραμματισμένες Ασυγχρονα προς την εκτέλεση του προγράμματος Hardware interrupts Σύγχρονα
Προηγμένοι Μικροεπεξεργαστές Φροντιστήριο 4 Real Mode Interrupts Επισκόπηση Μορφές control tranfer Γενικά μη προγραμματισμένες Ασυγχρονα προς την εκτέλεση του προγράμματος Hardware interrupts Σύγχρονα
Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης. Σχολή Θετικών Επιστημών. Τμήμα Φυσικής. Τομέας Ηλεκτρονικής και Ηλεκτρονικών Υπολογιστών
 Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης Σχολή Θετικών Επιστημών Τμήμα Φυσικής Τομέας Ηλεκτρονικής και Ηλεκτρονικών Υπολογιστών Πτυχιακή Εργασία Ανάπτυξη συστήματος καταγραφής σημάτων ήχου Παπασταύρου Γεώργιος-Ναπολέων
Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης Σχολή Θετικών Επιστημών Τμήμα Φυσικής Τομέας Ηλεκτρονικής και Ηλεκτρονικών Υπολογιστών Πτυχιακή Εργασία Ανάπτυξη συστήματος καταγραφής σημάτων ήχου Παπασταύρου Γεώργιος-Ναπολέων
Όταν το πρόγραμμα φτάσει σε αυτή την εντολή και ο καταχωρητής PINA έχει την τιμή
 5. Εντολή while() Η εντολή while() είναι ίσως η πιο πολυχρησιμοποιούμενη εντολή κατά τη σύνταξη κώδικα σε γλώσσα προγραμματισμού C για μικροελεγκτές. Το κυρίως μέρος του προγράμματος κλείνεται σχεδόν πάντα
5. Εντολή while() Η εντολή while() είναι ίσως η πιο πολυχρησιμοποιούμενη εντολή κατά τη σύνταξη κώδικα σε γλώσσα προγραμματισμού C για μικροελεγκτές. Το κυρίως μέρος του προγράμματος κλείνεται σχεδόν πάντα
ΕΡΓΑΣΤΗΡΙΟ 4 ΕΙΣΑΓΩΓΗ ΣΤΟN ARDUINO: ΨΗΦΙΑΚΗ ΕΙΣΟΔΟΣ/ΕΞΟΔΟΣ
 ΕΡΓΑΣΤΗΡΙΟ 4 ΕΙΣΑΓΩΓΗ ΣΤΟN ARDUINO: ΨΗΦΙΑΚΗ ΕΙΣΟΔΟΣ/ΕΞΟΔΟΣ Σκοπός της άσκησης Οι φοιτητές θα εξοικειωθούν με την πλακέτα του μικροελεγκτή και θα αναγνωρίσουν τα βασικά της στοιχεία. Επίσης θα εξοικειωθούν
ΕΡΓΑΣΤΗΡΙΟ 4 ΕΙΣΑΓΩΓΗ ΣΤΟN ARDUINO: ΨΗΦΙΑΚΗ ΕΙΣΟΔΟΣ/ΕΞΟΔΟΣ Σκοπός της άσκησης Οι φοιτητές θα εξοικειωθούν με την πλακέτα του μικροελεγκτή και θα αναγνωρίσουν τα βασικά της στοιχεία. Επίσης θα εξοικειωθούν
Ενσωµατωµένα Υπολογιστικά Συστήµατα (Embedded Computer Systems)
") Ενσωµατωµένα Υπολογιστικά Συστήµατα (Embedded Computer Systems) Μαθηµα 2 ηµήτρης Λιούπης 1 Intel SA-1110 µc StrongARM core. System-on-Chip. Εξέλιξη των SA-110 και SA-1100. 2 ARM cores ARM: IP (intellectual
Ενσωµατωµένα Υπολογιστικά Συστήµατα (Embedded Computer Systems) Μαθηµα 2 ηµήτρης Λιούπης 1 Intel SA-1110 µc StrongARM core. System-on-Chip. Εξέλιξη των SA-110 και SA-1100. 2 ARM cores ARM: IP (intellectual
Ι. Έλληνας. Σεπτέμβριος 2016
 Ι. Έλληνας Σεπτέμβριος 2016 Αναφορές 1. Παναγιώτης Παπάζογλου, Σπύρος Λιωνής, Ανάπτυξη εφαρμογών με το Arduino, Εκδόσεις Τζιόλα, 2016 2. Michael Margolis, Arduino Cookbook, O Reilly, 2012 3. Arduino cheatsheet
Ι. Έλληνας Σεπτέμβριος 2016 Αναφορές 1. Παναγιώτης Παπάζογλου, Σπύρος Λιωνής, Ανάπτυξη εφαρμογών με το Arduino, Εκδόσεις Τζιόλα, 2016 2. Michael Margolis, Arduino Cookbook, O Reilly, 2012 3. Arduino cheatsheet
2. ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΤΩΝ ΘΥΡΩΝ ΕΙΣΟ ΟΥ/ΕΞΟ ΟΥ ΤΟΥ PIC16F877-ΑΡΙΘΜΗΤΙΚΕΣ ΕΝΤΟΛΕΣ
 1 2. ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΤΩΝ ΘΥΡΩΝ ΕΙΣΟ ΟΥ/ΕΞΟ ΟΥ ΤΟΥ PIC16F877-ΑΡΙΘΜΗΤΙΚΕΣ ΕΝΤΟΛΕΣ Σκοπός της άσκησης: εξοικείωση µε τις θύρες εισόδου/εξόδου ενός µικροελεγκτή 2. Θεωρητικό Μέρος 2.1.1 Θύρες εισόδου / εξόδου
1 2. ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΤΩΝ ΘΥΡΩΝ ΕΙΣΟ ΟΥ/ΕΞΟ ΟΥ ΤΟΥ PIC16F877-ΑΡΙΘΜΗΤΙΚΕΣ ΕΝΤΟΛΕΣ Σκοπός της άσκησης: εξοικείωση µε τις θύρες εισόδου/εξόδου ενός µικροελεγκτή 2. Θεωρητικό Μέρος 2.1.1 Θύρες εισόδου / εξόδου
Breadboard PIC Μέρος 1 1 Σταύρος Σ. Φώτογλου. BreadBoard PIC
 Breadboard PIC Μέρος 1 1 Σταύρος Σ. Φώτογλου BreadBoard PIC Στο άρθρο αυτό θα δούμε αναλυτικά την κατασκευή ενός συστήματος μικροϋπολογιστή κατασκευασμένο πάνω σε breadboard. Το σύστημα διαθέτει κοινούς
Breadboard PIC Μέρος 1 1 Σταύρος Σ. Φώτογλου BreadBoard PIC Στο άρθρο αυτό θα δούμε αναλυτικά την κατασκευή ενός συστήματος μικροϋπολογιστή κατασκευασμένο πάνω σε breadboard. Το σύστημα διαθέτει κοινούς
10. Πληκτρολόγιο matrix 4x4
 10. Πληκτρολόγιο matrix 4x4 Το πληκτρολόγιο matrix 4x4 αποτελείται από 16 πλήκτρα διακόπτες τα οποία είναι συνδεδεμένα μεταξύ τους ανά 4 σε τέτοια διάταξη ώστε, με το ένα άκρο τους να σχηματίζουν 4 σειρές
10. Πληκτρολόγιο matrix 4x4 Το πληκτρολόγιο matrix 4x4 αποτελείται από 16 πλήκτρα διακόπτες τα οποία είναι συνδεδεμένα μεταξύ τους ανά 4 σε τέτοια διάταξη ώστε, με το ένα άκρο τους να σχηματίζουν 4 σειρές
Μικροελεγκτές AVR. 1η ΕΝΟΤΗΤΑ: Η ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΤΩΝ ΜΙΚΡΟΕΛΕΓΚΤΩΝ AVR. Υπεύθυνος Μαθήματος: K. ΠΕΚΜΕΣΤΖΗ
 Μικροελεγκτές AVR 1η ΕΝΟΤΗΤΑ: Η ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΤΩΝ ΜΙΚΡΟΕΛΕΓΚΤΩΝ AVR Υπεύθυνος Μαθήματος: K. ΠΕΚΜΕΣΤΖΗ Ε.Μ.Π. Εργ. Μικροϋπολογιστών & Ψηφιακών Συστημάτων Υπεύθυνος: Κ. ΠΕΚΜΕΣΤΖΗ Καθ. Άδεια Χρήσης Το παρόν
Μικροελεγκτές AVR 1η ΕΝΟΤΗΤΑ: Η ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΤΩΝ ΜΙΚΡΟΕΛΕΓΚΤΩΝ AVR Υπεύθυνος Μαθήματος: K. ΠΕΚΜΕΣΤΖΗ Ε.Μ.Π. Εργ. Μικροϋπολογιστών & Ψηφιακών Συστημάτων Υπεύθυνος: Κ. ΠΕΚΜΕΣΤΖΗ Καθ. Άδεια Χρήσης Το παρόν
Conversion time: 8 µs. Maximum Input Over voltage: ±30 V Common Mode Rejection Ratio (CMRR) Maximum data throughput:
 Maximum data throughput:") Περιεχόµενα Εισαγωγή... 2 Γενικά... 2 PCI-bus Plug and Play (τοποθέτηση και άµεση λειτουργία)... 2 Ευέλικτη επιλογή εισόδου και ranges setting... 3 On-board FIFO (First In First Out) Memory... 3 On-board
Περιεχόµενα Εισαγωγή... 2 Γενικά... 2 PCI-bus Plug and Play (τοποθέτηση και άµεση λειτουργία)... 2 Ευέλικτη επιλογή εισόδου και ranges setting... 3 On-board FIFO (First In First Out) Memory... 3 On-board
Εργαστηριακές ασκήσεις λογικών κυκλωμάτων 11 A/D-D/A
 11.1 Θεωρητικό μέρος 11 A/D-D/A 11.1.1 Μετατροπέας αναλογικού σε ψηφιακό σήμα (A/D converter) με δυαδικό μετρητή Σχ.1 Μετατροπέας A/D με δυαδικό μετρητή Στο σχήμα 1 απεικονίζεται σε block diagram ένας
11.1 Θεωρητικό μέρος 11 A/D-D/A 11.1.1 Μετατροπέας αναλογικού σε ψηφιακό σήμα (A/D converter) με δυαδικό μετρητή Σχ.1 Μετατροπέας A/D με δυαδικό μετρητή Στο σχήμα 1 απεικονίζεται σε block diagram ένας
Συστήματα Μικροεπεξεργαστών
 Εργαστήριο 1 ο Εισαγωγή στον AVR Περίγραμμα Εργαστηριακής Άσκησης Εισαγωγή... 2 Κατηγορίες μικροελεγκτών AVR... 2 Εξοικείωση με το περιβάλλον AVR Studio 4... 3 Βήμα 1ο: Δημιουργία νέου έργου (project)...
Εργαστήριο 1 ο Εισαγωγή στον AVR Περίγραμμα Εργαστηριακής Άσκησης Εισαγωγή... 2 Κατηγορίες μικροελεγκτών AVR... 2 Εξοικείωση με το περιβάλλον AVR Studio 4... 3 Βήμα 1ο: Δημιουργία νέου έργου (project)...
Ενεργοποίηση και ιαχείριση σηµάτων διακοπής
 ΗΜΥ 213 Εργαστήριο Οργάνωσης Υπολογιστών και Μικροεπεξεργαστών Παρουσίαση Εργαστηρίου 6 ιδάσκων: Γιώργος Ζάγγουλος Email: zaggoulos.george@ucy.ac.cy www.ece.ucy.ac.cy/courses/ece213 Περίληψη 1 ο Πρότζεκτ
ΗΜΥ 213 Εργαστήριο Οργάνωσης Υπολογιστών και Μικροεπεξεργαστών Παρουσίαση Εργαστηρίου 6 ιδάσκων: Γιώργος Ζάγγουλος Email: zaggoulos.george@ucy.ac.cy www.ece.ucy.ac.cy/courses/ece213 Περίληψη 1 ο Πρότζεκτ
ΕΙΣΑΓΩΓΗ. Αρχιτεκτονική Η/Υ ΗΜΟΣ ΜΠΟΛΑΝΑΚΗΣ
 ΕΙΣΑΓΩΓΗ Θέµατα ❸Συστήµατα Η/Υ (αναφορά) ❸Γλώσσα υπολογιστών ❸Γλώσσες προγραµµατισµού (low-high level) ❸Low level VS high level programming ❸Βασικά µέρη Η/Υ ❸Μικροϋπολογιστές (µc µp) ❸Αρχιτεκτονική µικροελεγκτών
ΕΙΣΑΓΩΓΗ Θέµατα ❸Συστήµατα Η/Υ (αναφορά) ❸Γλώσσα υπολογιστών ❸Γλώσσες προγραµµατισµού (low-high level) ❸Low level VS high level programming ❸Βασικά µέρη Η/Υ ❸Μικροϋπολογιστές (µc µp) ❸Αρχιτεκτονική µικροελεγκτών
Εισαγωγή στη Verilog με το ISE
 Εισαγωγή στη Verilog με το ISE Πατάμε new project Δίνουμε όνομα και κατάλογο όπου θα αποθηκευτεί το project. Next όπου επιλέγουμε chip και preferred language βάζουμε Verilog Next και στο Create new source
Εισαγωγή στη Verilog με το ISE Πατάμε new project Δίνουμε όνομα και κατάλογο όπου θα αποθηκευτεί το project. Next όπου επιλέγουμε chip και preferred language βάζουμε Verilog Next και στο Create new source
Εισαγωγή στις παράλληλες θύρες
 Εισαγωγή στις παράλληλες θύρες Η παράλληλη θύρα είναι η συνηθέστερα χρησιμοποιημένη θύρα για τι διασύνδεση απλών εφαρμογών. Αυτή η θύρα θα επιτρέπει την εισαγωγή μέχρι 9 μπιτ ή την εξαγωγή 12 μπιτ σε οποιοδήποτε
Εισαγωγή στις παράλληλες θύρες Η παράλληλη θύρα είναι η συνηθέστερα χρησιμοποιημένη θύρα για τι διασύνδεση απλών εφαρμογών. Αυτή η θύρα θα επιτρέπει την εισαγωγή μέχρι 9 μπιτ ή την εξαγωγή 12 μπιτ σε οποιοδήποτε
Γνωριμία με το Arduino
 Γνωριμία με το Arduino Τι είναι το Arduino; Το arduino είναι ένας μικρός υπολογιστής σε μέγεθος παλάμης που περιλαμβάνει ένα μικροελεγκτή (για εκτέλεση εντολών) και ένα σύνολο εισόδων/εξόδων για επικοινωνία
Γνωριμία με το Arduino Τι είναι το Arduino; Το arduino είναι ένας μικρός υπολογιστής σε μέγεθος παλάμης που περιλαμβάνει ένα μικροελεγκτή (για εκτέλεση εντολών) και ένα σύνολο εισόδων/εξόδων για επικοινωνία
Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα
 Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα 1ο ΕΠΑΛ Περάματος 7ο ΕΚ Πειραιά Πλακέτα Arduino Το 2005 oι Massimo Banzi και David Cueartielles στο Ivrea Δημιουργούν την υπολογιστική πλατφόρμα Arduino.
Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα 1ο ΕΠΑΛ Περάματος 7ο ΕΚ Πειραιά Πλακέτα Arduino Το 2005 oι Massimo Banzi και David Cueartielles στο Ivrea Δημιουργούν την υπολογιστική πλατφόρμα Arduino.
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 1: Εισαγωγή στα ενσωματωμένα συστήματα (embedded systems) Εργαστήριο Αυτομάτου Ελέγχου Ενσωματωμένα συστήματα (Embedded Systems) Ενσωματωμένα συστήματα (Embedded
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 1: Εισαγωγή στα ενσωματωμένα συστήματα (embedded systems) Εργαστήριο Αυτομάτου Ελέγχου Ενσωματωμένα συστήματα (Embedded Systems) Ενσωματωμένα συστήματα (Embedded
Ανώτατο Τεχνολογικό Εκπαιδευτικό Ίδρυμα Κρήτης. Σχολή Τεχνολογικών Εφαρμογών. Τμήμα Ηλεκτρολογίας
 Ανώτατο Τεχνολογικό Εκπαιδευτικό Ίδρυμα Κρήτης Σχολή Τεχνολογικών Εφαρμογών Τμήμα Ηλεκτρολογίας Θέμα: Έλεγχος και προγραμματισμός Μικροϋπολογιστών Atmel Σπουδαστές: Αλεβυζάκης Αριστοτέλης Μαράκης Γιάννης
Ανώτατο Τεχνολογικό Εκπαιδευτικό Ίδρυμα Κρήτης Σχολή Τεχνολογικών Εφαρμογών Τμήμα Ηλεκτρολογίας Θέμα: Έλεγχος και προγραμματισμός Μικροϋπολογιστών Atmel Σπουδαστές: Αλεβυζάκης Αριστοτέλης Μαράκης Γιάννης
Μηχανοτρονική. Τμήμα Μηχανικών Παραγωγής και Διοίκησης 7 ο Εξάμηνο,
 Τμήμα Μηχανικών Παραγωγής και Διοίκησης 7 ο Εξάμηνο, 2016-2017 Mηχανοτρονική Το Arduino είναι μια «ανοικτού κώδικα» πλατφόρμα «πρωτοτυποποιημένων» ηλεκτρονικών βασισμένη σε ευέλικτο και εύκολο στη χρήση
Τμήμα Μηχανικών Παραγωγής και Διοίκησης 7 ο Εξάμηνο, 2016-2017 Mηχανοτρονική Το Arduino είναι μια «ανοικτού κώδικα» πλατφόρμα «πρωτοτυποποιημένων» ηλεκτρονικών βασισμένη σε ευέλικτο και εύκολο στη χρήση
ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε., ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ, ΤΕΙ ΔΥΤΙΚΗΣ ΕΛΛΑΔΑΣ ΜΙΚΡΟΫΠΟΛΟΓΙΣΤΕΣ ΙΙ
 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε., ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ, ΤΕΙ ΔΥΤΙΚΗΣ ΕΛΛΑΔΑΣ ΜΙΚΡΟΫΠΟΛΟΓΙΣΤΕΣ ΙΙ Μικροεπεξεργαστής AVR, Εργαστηριακές Ασκήσεις Δρ. Τοπάλης Ευάγγελος (Δρ. Ηλεκτρολόγος Μηχανικός
ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε., ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ, ΤΕΙ ΔΥΤΙΚΗΣ ΕΛΛΑΔΑΣ ΜΙΚΡΟΫΠΟΛΟΓΙΣΤΕΣ ΙΙ Μικροεπεξεργαστής AVR, Εργαστηριακές Ασκήσεις Δρ. Τοπάλης Ευάγγελος (Δρ. Ηλεκτρολόγος Μηχανικός
ΕΙΣΑΓΩΓΗ ΣΤΟ ΕΡΓΑΣΤΗΡΙΟ ΥΛΙΚΟΥ ΨΗΦΙΑΚΗΣ ΣΧΕΔΙΑΣΗΣ. Στόχοι
 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡOY ΗΜΥ 211-2007 ΕΙΣΑΓΩΓΗ ΣΤΟ ΕΡΓΑΣΤΗΡΙΟ ΥΛΙΚΟΥ ΨΗΦΙΑΚΗΣ ΣΧΕΔΙΑΣΗΣ Στόχοι Αυτό το εργαστήριο θα σας παρουσιάσει τα χαρακτηριστικά
ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡOY ΗΜΥ 211-2007 ΕΙΣΑΓΩΓΗ ΣΤΟ ΕΡΓΑΣΤΗΡΙΟ ΥΛΙΚΟΥ ΨΗΦΙΑΚΗΣ ΣΧΕΔΙΑΣΗΣ Στόχοι Αυτό το εργαστήριο θα σας παρουσιάσει τα χαρακτηριστικά
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΘΕΜΑ: ΠΑΠΑΣΤΑΜΟΠΟΥΛΟΣ ΓΕΩΡΓΙΟΣ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΘΕΜΑ: Ανάπτυξη και υλοποίηση ηλεκτρονικού και ηλεκτρικού συστήματος αισθητήρων και διεπαφών
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΘΕΜΑ: Ανάπτυξη και υλοποίηση ηλεκτρονικού και ηλεκτρικού συστήματος αισθητήρων και διεπαφών
Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε
 Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε Βιβλιογραφία B. Evans, Beginning Arduino Programming, 2011. J. Purdum, Beginning C for Arduino,Apress,2012. M. Margolis,
Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε Βιβλιογραφία B. Evans, Beginning Arduino Programming, 2011. J. Purdum, Beginning C for Arduino,Apress,2012. M. Margolis,
BM1385. Bitcoin Hash ASIC Datasheet. Bitmain Technologies Limited
 BM1385 Bitcoin Hash ASIC Datasheet Bitmain Technologies Limited Page 1 of 14 Contents Contents... 1 Revision History... 2 1 Overview... 3 1.1 Features... 3 1.2 Applications... 3 2 Pin Description... 4
BM1385 Bitcoin Hash ASIC Datasheet Bitmain Technologies Limited Page 1 of 14 Contents Contents... 1 Revision History... 2 1 Overview... 3 1.1 Features... 3 1.2 Applications... 3 2 Pin Description... 4
Ενσωματωμένα Συστήματα
 Ενσωματωμένα Συστήματα Ενότητα: ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ARDUINO Δρ. Μηνάς Δασυγένης mdasyg@ieee.org Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών
Ενσωματωμένα Συστήματα Ενότητα: ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ARDUINO Δρ. Μηνάς Δασυγένης mdasyg@ieee.org Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών
ΑΤΕΙ ΘΕΣΣΑΛΟΝΙΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ. Σηµειώσεις στο µάθηµα ΜΙΚΡΟΕΛΕΓΚΤΕΣ
 ΑΤΕΙ ΘΕΣΣΑΛΟΝΙΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Σηµειώσεις στο µάθηµα ΜΙΚΡΟΕΛΕΓΚΤΕΣ ΝΙΚΟΛΑΪ ΗΣ ΝΙΚ. ΘΕΣΣΑΛΟΝΙΚΗ ΜΑΡΤΙΟΣ 2011 Σημειώσεις ΜΕ 1011Ε.doc Νικολαΐδης Νικ. Σηµειώσεις Μικροελεγκτών
ΑΤΕΙ ΘΕΣΣΑΛΟΝΙΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Σηµειώσεις στο µάθηµα ΜΙΚΡΟΕΛΕΓΚΤΕΣ ΝΙΚΟΛΑΪ ΗΣ ΝΙΚ. ΘΕΣΣΑΛΟΝΙΚΗ ΜΑΡΤΙΟΣ 2011 Σημειώσεις ΜΕ 1011Ε.doc Νικολαΐδης Νικ. Σηµειώσεις Μικροελεγκτών
ΗΜΥ 213 Εργαστήριο Οργάνωσης Υπολογιστών και Μικροεπεξεργαστών
 ΗΜΥ 213 Εργαστήριο Οργάνωσης Υπολογιστών και Μικροεπεξεργαστών Παρουσίαση Εργαστηρίου 6 Διδάσκων: Γιώργος Ζάγγουλος Email: zaggoulos.george@ucy.ac.cy www.ece.ucy.ac.cy/courses/ece213 Περίληψη Ελάχιστες
ΗΜΥ 213 Εργαστήριο Οργάνωσης Υπολογιστών και Μικροεπεξεργαστών Παρουσίαση Εργαστηρίου 6 Διδάσκων: Γιώργος Ζάγγουλος Email: zaggoulos.george@ucy.ac.cy www.ece.ucy.ac.cy/courses/ece213 Περίληψη Ελάχιστες
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΘΕΜΑ: ΔΑΤΣΟΓΙΑΝΝΗΣ ΔΗΜΗΤΡΙΟΣ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΘΕΜΑ: Ανάπτυξη και υλοποίηση ηλεκτρονικού και ηλεκτρικού συστήματος αισθητήρων και διεπαφών
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΘΕΜΑ: Ανάπτυξη και υλοποίηση ηλεκτρονικού και ηλεκτρικού συστήματος αισθητήρων και διεπαφών
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO. Υποψήφιος Διδάκτωρ
 ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO Δημιουργός: Επιβλέπων: Μπακάλη Ιωάννα Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ 1 ΤΙ ΕΙΝΑΙ ΤΟ ARDUINO; Είναι ένας συνδυασμός Υλικού (πλακέτας, μικροελεγκτή, αντιστάσεων κτλ) και Λογισμικού
ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO Δημιουργός: Επιβλέπων: Μπακάλη Ιωάννα Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ 1 ΤΙ ΕΙΝΑΙ ΤΟ ARDUINO; Είναι ένας συνδυασμός Υλικού (πλακέτας, μικροελεγκτή, αντιστάσεων κτλ) και Λογισμικού
Εργαστήριο Εφαρµογών Μικροϋπολογιστών
 1. Εισαγωγή Ο Infotech CodeVisionAVR είναι ένας C cross compiler, µε δοµηµένο περιβάλλον ανάπτυξης και αυτοµατοποιηµένης παραγωγής κώδικα σχεδιασµένος για την οικογένεια των µικροελεγκτών AVR της Atmel.
1. Εισαγωγή Ο Infotech CodeVisionAVR είναι ένας C cross compiler, µε δοµηµένο περιβάλλον ανάπτυξης και αυτοµατοποιηµένης παραγωγής κώδικα σχεδιασµένος για την οικογένεια των µικροελεγκτών AVR της Atmel.
ΤΕΙ ΚΡΗΤΗΣ ΠΑΡΑΡΤΗΜΑ ΡΕΘΥΜΝΟΥ ΤΜΗΜΑ ΜΟΥΣΙΚΗΣ ΤΕΧΝΟΛΟΓΙΑΣ ΚΑΙ ΑΚΟΥΣΤΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ
 ΤΕΙ ΚΡΗΤΗΣ ΠΑΡΑΡΤΗΜΑ ΡΕΘΥΜΝΟΥ ΤΜΗΜΑ ΜΟΥΣΙΚΗΣ ΤΕΧΝΟΛΟΓΙΑΣ ΚΑΙ ΑΚΟΥΣΤΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΘΕΜΑ:ΚΑΤΑΣΚΕΥΗ ΣΥΣΚΕΥΗΣ ΕΛΕΓΧΟΥ ΦΩΤΙΣΜΟΥ ΜΕΣΩ ΠΡΩΤΟΚΟΛΛΟΥ DMX 512 ONOMA : NTOKOΣ ΚΩΝ/ΝΟΣ ΑΜ:327 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ:ΧΟΥΣΙΔΗΣ
ΤΕΙ ΚΡΗΤΗΣ ΠΑΡΑΡΤΗΜΑ ΡΕΘΥΜΝΟΥ ΤΜΗΜΑ ΜΟΥΣΙΚΗΣ ΤΕΧΝΟΛΟΓΙΑΣ ΚΑΙ ΑΚΟΥΣΤΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΘΕΜΑ:ΚΑΤΑΣΚΕΥΗ ΣΥΣΚΕΥΗΣ ΕΛΕΓΧΟΥ ΦΩΤΙΣΜΟΥ ΜΕΣΩ ΠΡΩΤΟΚΟΛΛΟΥ DMX 512 ONOMA : NTOKOΣ ΚΩΝ/ΝΟΣ ΑΜ:327 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ:ΧΟΥΣΙΔΗΣ
Η πρωτεύουσα διάταξη Α, για την αποστολή θερμοκρασιακών δεδομένων μέσω υπέρυθρης ζεύξης.
 Κεφάλαιο 7 Η πρωτεύουσα διάταξη Α, για την αποστολή θερμοκρασιακών δεδομένων μέσω υπέρυθρης ζεύξης Εναλλακτική λύση στο πρόβλημα της μετάδοσης της πληροφορίας από το ρότορα είναι η χρήση υπέρυθρης ζεύξης
Κεφάλαιο 7 Η πρωτεύουσα διάταξη Α, για την αποστολή θερμοκρασιακών δεδομένων μέσω υπέρυθρης ζεύξης Εναλλακτική λύση στο πρόβλημα της μετάδοσης της πληροφορίας από το ρότορα είναι η χρήση υπέρυθρης ζεύξης
ΨΗΦΙΑΚΟ ΠΕ ΙΟΜΕΤΡΟ TRIMAX SM 2500
 ΨΗΦΙΑΚΟ ΠΕ ΙΟΜΕΤΡΟ TRIMAX SM 2500 ΤΕΧΝΙΚΟ ΕΓΧΕΙΡΙ ΙΟ www.trimaxmeters.com Παρακαλούµε διαβάστε το εγχειρίδιο αυτό προσεκτικά πριν χρησιµοποιήσετε το πεδιόµετρο για πρώτη φορά. Τα τεχνικά χαρακτηριστικά
ΨΗΦΙΑΚΟ ΠΕ ΙΟΜΕΤΡΟ TRIMAX SM 2500 ΤΕΧΝΙΚΟ ΕΓΧΕΙΡΙ ΙΟ www.trimaxmeters.com Παρακαλούµε διαβάστε το εγχειρίδιο αυτό προσεκτικά πριν χρησιµοποιήσετε το πεδιόµετρο για πρώτη φορά. Τα τεχνικά χαρακτηριστικά
Writing kernels for fun and profit
 Writing kernels for fun and profit Γιάννης Τσιομπίκας nuclear@memberfsforg 23 Μαρτίου 2011 Γιατί; It s FUN! Εξοικείωση με το hardware Εμβάθυνση στον θαυμαστό κόσμο των λειτουργικών συστημάτων Μια καλή
Writing kernels for fun and profit Γιάννης Τσιομπίκας nuclear@memberfsforg 23 Μαρτίου 2011 Γιατί; It s FUN! Εξοικείωση με το hardware Εμβάθυνση στον θαυμαστό κόσμο των λειτουργικών συστημάτων Μια καλή
070-A
 764 070-A543-50 www.tektronix.com Copyright Tektronix Japan, Ltd. All rights reserved. 141 0001 5 9 31 TektronixTek Tektronix, Inc. i v ix xi 1 11 12 12 12 13 19 110 110 2 21 21 22 23 24 24 26 211
764 070-A543-50 www.tektronix.com Copyright Tektronix Japan, Ltd. All rights reserved. 141 0001 5 9 31 TektronixTek Tektronix, Inc. i v ix xi 1 11 12 12 12 13 19 110 110 2 21 21 22 23 24 24 26 211
1ο ΕΠΑΛ Περάματος -7ο ΕΚ Πειραιά. Εφαρμογές Arduino. Σεμινάριο Ηλεκτρονικού Τομέα. Φεβρουάριος 2014
 1 1ο ΕΠΑΛ Περάματος -7ο ΕΚ Πειραιά Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα Φεβρουάριος 2014 2 Εισαγωγή Με αυτό το σεμιναρίο φιλοδοξούμε να μάθουμε ο ένας στον άλλο βασικές αρχές και εφαρμογές που
1 1ο ΕΠΑΛ Περάματος -7ο ΕΚ Πειραιά Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα Φεβρουάριος 2014 2 Εισαγωγή Με αυτό το σεμιναρίο φιλοδοξούμε να μάθουμε ο ένας στον άλλο βασικές αρχές και εφαρμογές που
Μαθαίνοντας το hardware του αναπτυξιακού
 1. ΑΣΚΗΣΗ 1 Μαθαίνοντας το hardware του αναπτυξιακού Προϋποθέσεις Το εργαστήριο αυτό προϋποθέτει το διάβασμα και χρήση των εξής: Αρχείο mcbstr9.chm HTML, που δίδεται με τα υπόλοιπα αρχεία του εργαστηρίου.
1. ΑΣΚΗΣΗ 1 Μαθαίνοντας το hardware του αναπτυξιακού Προϋποθέσεις Το εργαστήριο αυτό προϋποθέτει το διάβασμα και χρήση των εξής: Αρχείο mcbstr9.chm HTML, που δίδεται με τα υπόλοιπα αρχεία του εργαστηρίου.
Οδηγίες εγκατάστασης και χρήσης του Quartus
 Εγκατάσταση του Quartus Οδηγίες εγκατάστασης και χρήσης του Quartus Δημήτρης Μαγγίρας, Γιώργος Δημητρακόπουλος 1. Κατεβάζουμε την έκδοση 13.0SP1 από εδώ ακολουθώντας τις οδηγίες που φαίνονται στην εικόνα.
Εγκατάσταση του Quartus Οδηγίες εγκατάστασης και χρήσης του Quartus Δημήτρης Μαγγίρας, Γιώργος Δημητρακόπουλος 1. Κατεβάζουμε την έκδοση 13.0SP1 από εδώ ακολουθώντας τις οδηγίες που φαίνονται στην εικόνα.
ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΠΡΟΣΟΜΟΙΩΣΗ ΤΗΣ ΛΕΙΤΟΥΡΓΙΑΣ ΤΟΥ ΣΥΣΤΗΜΑΤΟΣ ΑΣΦΑΛΕΙΑΣ ΜΟΥΣΕΙΟΥ ΜΥΛΩΝΑΣ ΠΑΝΑΓΙΩΤΗΣ Α.Ε.Μ 227
 ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΠΡΟΣΟΜΟΙΩΣΗ ΤΗΣ ΛΕΙΤΟΥΡΓΙΑΣ ΤΟΥ ΣΥΣΤΗΜΑΤΟΣ ΑΣΦΑΛΕΙΑΣ ΜΟΥΣΕΙΟΥ ΜΥΛΩΝΑΣ ΠΑΝΑΓΙΩΤΗΣ Α.Ε.Μ 227 ΕΠΙΒΛΕΠΟΝΤΕΣ ΝΙΚΟΛΑΡΟΠΟΥΛΟΣ ΕΥΑΓΓΕΛΟΣ (ΕΠΙΣΤΗΜΟΝΙΚΟΣ ΣΥΝΕΡΓΑΤΗΣ) ΜΗΤΣΑ ΚΑΤΕΡΙΝΑ (ΚΑΘΗΓΗΤΡΙΑ ΕΦΑΡΜΟΓΩΝ)
ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΠΡΟΣΟΜΟΙΩΣΗ ΤΗΣ ΛΕΙΤΟΥΡΓΙΑΣ ΤΟΥ ΣΥΣΤΗΜΑΤΟΣ ΑΣΦΑΛΕΙΑΣ ΜΟΥΣΕΙΟΥ ΜΥΛΩΝΑΣ ΠΑΝΑΓΙΩΤΗΣ Α.Ε.Μ 227 ΕΠΙΒΛΕΠΟΝΤΕΣ ΝΙΚΟΛΑΡΟΠΟΥΛΟΣ ΕΥΑΓΓΕΛΟΣ (ΕΠΙΣΤΗΜΟΝΙΚΟΣ ΣΥΝΕΡΓΑΤΗΣ) ΜΗΤΣΑ ΚΑΤΕΡΙΝΑ (ΚΑΘΗΓΗΤΡΙΑ ΕΦΑΡΜΟΓΩΝ)
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΗΛΕΚΤΡΟΝΙΚΗΣ ΚΑΙ ΥΠΟΛΟΓΙΣΤΩΝ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΗΛΕΚΤΡΟΝΙΚΗΣ ΚΑΙ ΥΠΟΛΟΓΙΣΤΩΝ ΤΗΛΕΧΕΙΡΙΣΜΟΣ ΚΑΙ ΤΗΛΕΕΛΕΓΧΟΣ ΜΕΣΩ INTERNET ΚΑΙ ΜΕΣΩ ΓΡΑΠΤΩΝ ΜΗΝΥΜΑΤΩΝ SMS ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΗΛΕΚΤΡΟΝΙΚΗΣ ΚΑΙ ΥΠΟΛΟΓΙΣΤΩΝ ΤΗΛΕΧΕΙΡΙΣΜΟΣ ΚΑΙ ΤΗΛΕΕΛΕΓΧΟΣ ΜΕΣΩ INTERNET ΚΑΙ ΜΕΣΩ ΓΡΑΠΤΩΝ ΜΗΝΥΜΑΤΩΝ SMS ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ
Εισαγωγή στις παράλληλες θύρες
 Εισαγωγή στις παράλληλες θύρες Η παράλληλη θύρα είναι η συνηθέστερα χρησιμοποιημένη θύρα για τι διασύνδεση απλών εφαρμογών. Αυτή η θύρα θα επιτρέπει την εισαγωγή μέχρι 9 μπιτ ή την εξαγωγή 12 μπιτ σε οποιοδήποτε
Εισαγωγή στις παράλληλες θύρες Η παράλληλη θύρα είναι η συνηθέστερα χρησιμοποιημένη θύρα για τι διασύνδεση απλών εφαρμογών. Αυτή η θύρα θα επιτρέπει την εισαγωγή μέχρι 9 μπιτ ή την εξαγωγή 12 μπιτ σε οποιοδήποτε
Modbus basic setup notes for IO-Link AL1xxx Master Block
 n Modbus has four tables/registers where data is stored along with their associated addresses. We will be using the holding registers from address 40001 to 49999 that are R/W 16 bit/word. Two tables that
n Modbus has four tables/registers where data is stored along with their associated addresses. We will be using the holding registers from address 40001 to 49999 that are R/W 16 bit/word. Two tables that

ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017)
") ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017) Περιγραφή της Άσκησης Ο σκοπός της πρώτης άσκησης είναι κυρίως η εξοικείωση με το περιβάλλον προγραμματισμού του Arduino, γι αυτό και δεν είναι ιδιαίτερα σύνθετη. Αρχικά, θα
ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017) Περιγραφή της Άσκησης Ο σκοπός της πρώτης άσκησης είναι κυρίως η εξοικείωση με το περιβάλλον προγραμματισμού του Arduino, γι αυτό και δεν είναι ιδιαίτερα σύνθετη. Αρχικά, θα
ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ. Σχεδίαση και ανάπτυξη οχήματος που ακολουθεί μια γραμμή
 ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΚΑΙ ΘΡΑΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Σχεδίαση και ανάπτυξη οχήματος που ακολουθεί μια γραμμή Σπουδαστές: Ταβλάκης Γεώργιος ΑΕΜ:
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΚΑΙ ΘΡΑΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Σχεδίαση και ανάπτυξη οχήματος που ακολουθεί μια γραμμή Σπουδαστές: Ταβλάκης Γεώργιος ΑΕΜ:
Δομημένος Προγραμματισμός
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Δομημένος Προγραμματισμός Ενότητα: Εισαγωγή στη C θεωρία Δ. Ε. Μετάφας Τμ. Ηλεκτρονικών Μηχ. Τ.Ε. Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Δομημένος Προγραμματισμός Ενότητα: Εισαγωγή στη C θεωρία Δ. Ε. Μετάφας Τμ. Ηλεκτρονικών Μηχ. Τ.Ε. Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΑΣΚΗΣΗ 2: Σχεδίαση και προσομοίωση κυκλωμάτων καταχωρητών και μετρητών
 ΑΣΚΗΣΗ 2: Σχεδίαση και προσομοίωση κυκλωμάτων καταχωρητών και μετρητών Θέμα Β.1: Απλός καταχωρητής 1 bit (D Flip-Flop) preset D D Q Q clk clear Σχήμα 2.1: D Flip-Flop με εισόδους preset και clear Με τη
ΑΣΚΗΣΗ 2: Σχεδίαση και προσομοίωση κυκλωμάτων καταχωρητών και μετρητών Θέμα Β.1: Απλός καταχωρητής 1 bit (D Flip-Flop) preset D D Q Q clk clear Σχήμα 2.1: D Flip-Flop με εισόδους preset και clear Με τη
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
Προγραμματισμός σε C και προγραμματισμός Μακροεντολών με τον ΕΖ430
 Προγραμματισμός σε C και προγραμματισμός Μακροεντολών με τον ΕΖ430 Άσκηση 1. Πολλαπλασιασμός και διαίρεση με ολίσθηση bits. Οι πολλαπλασιασμοί και οι διαιρέσεις είναι περίπλοκες διαδικασίες για υλοποίηση
Προγραμματισμός σε C και προγραμματισμός Μακροεντολών με τον ΕΖ430 Άσκηση 1. Πολλαπλασιασμός και διαίρεση με ολίσθηση bits. Οι πολλαπλασιασμοί και οι διαιρέσεις είναι περίπλοκες διαδικασίες για υλοποίηση
G&K ELECTRONICS AVR ATMEGA DEVELOPMENT BOARD
 ΕΓΧΕΙΡΙΔΙΟ ΧΡΗΣΗΣ G&K ELECTRONICS Αυτή η αναπτυξιακή μονάδα (AVR-ATMEGA 28 PIN) είναι σχεδιασμένη να χρησιμοποιηθεί για την εκμάθηση βασικών και προηγμένων δεξιοτήτων που απαιτούνται για τον έλεγχο ενός
ΕΓΧΕΙΡΙΔΙΟ ΧΡΗΣΗΣ G&K ELECTRONICS Αυτή η αναπτυξιακή μονάδα (AVR-ATMEGA 28 PIN) είναι σχεδιασμένη να χρησιμοποιηθεί για την εκμάθηση βασικών και προηγμένων δεξιοτήτων που απαιτούνται για τον έλεγχο ενός
3. Προσωπικός Ηλεκτρονικός Υπολογιστής (Personal Computer - PC)
") Έχουμε δει την δύναμη του PC και έχουμε δει ότι είναι απεριόριστη. Eckhard Pfeiffer (1947 - ) Γερμανός Επιχειρηματίας 3. Προσωπικός Ηλεκτρονικός Υπολογιστής (Personal Computer - PC) Ο προσωπικός υπολογιστής
Έχουμε δει την δύναμη του PC και έχουμε δει ότι είναι απεριόριστη. Eckhard Pfeiffer (1947 - ) Γερμανός Επιχειρηματίας 3. Προσωπικός Ηλεκτρονικός Υπολογιστής (Personal Computer - PC) Ο προσωπικός υπολογιστής
Hancock. Ζωγραφάκης Ιωάννης Εξαρχάκος Νικόλαος. ΕΠΛ 428 Προγραμματισμός Συστημάτων
 Hancock Ζωγραφάκης Ιωάννης Εξαρχάκος Νικόλαος Χ346339 Τ911778 ΕΠΛ 428 Προγραμματισμός Συστημάτων Ιστορική Αναδρομή Δημιουργήθηκε από την εταιρεία ΑΤ&Τ LAB Αφορμή δημιουργίας: Η ανάγκη για καθαρό και αποδοτικό
Hancock Ζωγραφάκης Ιωάννης Εξαρχάκος Νικόλαος Χ346339 Τ911778 ΕΠΛ 428 Προγραμματισμός Συστημάτων Ιστορική Αναδρομή Δημιουργήθηκε από την εταιρεία ΑΤ&Τ LAB Αφορμή δημιουργίας: Η ανάγκη για καθαρό και αποδοτικό
ΔΙΑΚΟΠΕΣ PΙC16F887(INTERRUPTS) Όταν σηματοδοτηθεί μια διακοπή στον PIC16F887, ο έλεγχος του προγράμματος μεταφέρεται στο τμήμα κώδικα που βρίσκεται
 Όταν σηματοδοτηθεί μια διακοπή στον PIC16F887, ο έλεγχος του προγράμματος μεταφέρεται στο τμήμα κώδικα που βρίσκεται") ΔΙΑΚΟΠΕΣ PΙC16F887(INTERRUPTS) Όταν σηματοδοτηθεί μια διακοπή στον PIC16F887, ο έλεγχος του προγράμματος μεταφέρεται στο τμήμα κώδικα που βρίσκεται στη διεύθυνση μνήμης h 0004 η οποία ονομάζεται και διάνυσμα
ΔΙΑΚΟΠΕΣ PΙC16F887(INTERRUPTS) Όταν σηματοδοτηθεί μια διακοπή στον PIC16F887, ο έλεγχος του προγράμματος μεταφέρεται στο τμήμα κώδικα που βρίσκεται στη διεύθυνση μνήμης h 0004 η οποία ονομάζεται και διάνυσμα
Τέτοιες λειτουργίες γίνονται διαμέσου του
 Για κάθε εντολή υπάρχουν δυο βήματα που πρέπει να γίνουν: Προσκόμιση της εντολής (fetch) από τη θέση που δείχνει ο PC Ανάγνωση των περιεχομένων ενός ή δύο καταχωρητών Τέτοιες λειτουργίες γίνονται διαμέσου
Για κάθε εντολή υπάρχουν δυο βήματα που πρέπει να γίνουν: Προσκόμιση της εντολής (fetch) από τη θέση που δείχνει ο PC Ανάγνωση των περιεχομένων ενός ή δύο καταχωρητών Τέτοιες λειτουργίες γίνονται διαμέσου
ΑΣΚΗΣΗ 3 ΑΣΚΗΣΗ 3. Μηχανικοί ιακόπτες. Αρχιτεκτονική Η/Υ ΗΜΟΣ ΜΠΟΛΑΝΑΚΗΣ
 ΑΣΚΗΣΗ 3 Μηχανικοί ιακόπτες Σκοπός της άσκησης Εισαγωγή δεδοµένων στο µc από το περιβάλλον µέσω SW (Switch) Είδη SW στο εµπόριο ιασύνδεση SW (κατάσταση ηλ. σήµα) Έλεγχος κατάστασης SW Το πρόβληµα των αναπηδήσεων
ΑΣΚΗΣΗ 3 Μηχανικοί ιακόπτες Σκοπός της άσκησης Εισαγωγή δεδοµένων στο µc από το περιβάλλον µέσω SW (Switch) Είδη SW στο εµπόριο ιασύνδεση SW (κατάσταση ηλ. σήµα) Έλεγχος κατάστασης SW Το πρόβληµα των αναπηδήσεων
ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΑΥΤΟΜΑΤΟΣ ΠΛΟΗΓΟΣ V2 ΓΙΑ ΑΤΟΜΑ ΜΕ ΠΡΟΒΛΗΜΑ ΟΡΑΣΗΣ ( ΑΝΤΙΚΑΤΑΣΤΑΣΗ ΛΕΥΚΟΥ ΜΠΑΣΤΟΥΝΙΟΥ ).
.") 2014 ΚΑΘΗΓΗΤΕΣ: ΚΩΝΣΤΑΝΤΑΡΑΣ ΑΝΤ. ΡΗΓΑΚΗΣ Η. ΑΤΕΙ ΚΡΗΤΗΣ ΣΧΟΛΗ ΕΦΑΡΜΟΣΜΕΝΩΝ ΕΠΙΣΤΗΜΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. ΓΑΡΥΦΑΛΙΑ ΜΙΝΟΥ ΑΜ:4728 ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΑΥΤΟΜΑΤΟΣ ΠΛΟΗΓΟΣ V2 ΓΙΑ ΑΤΟΜΑ ΜΕ ΠΡΟΒΛΗΜΑ
2014 ΚΑΘΗΓΗΤΕΣ: ΚΩΝΣΤΑΝΤΑΡΑΣ ΑΝΤ. ΡΗΓΑΚΗΣ Η. ΑΤΕΙ ΚΡΗΤΗΣ ΣΧΟΛΗ ΕΦΑΡΜΟΣΜΕΝΩΝ ΕΠΙΣΤΗΜΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. ΓΑΡΥΦΑΛΙΑ ΜΙΝΟΥ ΑΜ:4728 ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΑΥΤΟΜΑΤΟΣ ΠΛΟΗΓΟΣ V2 ΓΙΑ ΑΤΟΜΑ ΜΕ ΠΡΟΒΛΗΜΑ
ΔΙΑΧΥΤΑ ΚΑΙ ΕΝΣΩΜΑΤΩΜΕΝΑ ΣΥΣΤΗΜΑΤΑ
 ΔΙΑΧΥΤΑ ΚΑΙ ΕΝΣΩΜΑΤΩΜΕΝΑ ΣΥΣΤΗΜΑΤΑ Πλατφόρμες ενσωματωμένων συστημάτων Διδάσκων: Παναγιώτης Καρκαζής Περίγραμμα - Δίαυλοι επικοινωνίας - Μνήμες -Συσκευές Ι/Ο Timers Counters keyboards Leds 7 segment display
ΔΙΑΧΥΤΑ ΚΑΙ ΕΝΣΩΜΑΤΩΜΕΝΑ ΣΥΣΤΗΜΑΤΑ Πλατφόρμες ενσωματωμένων συστημάτων Διδάσκων: Παναγιώτης Καρκαζής Περίγραμμα - Δίαυλοι επικοινωνίας - Μνήμες -Συσκευές Ι/Ο Timers Counters keyboards Leds 7 segment display
Εργαστήριο Λειτουργικών Συστημάτων 8o εξάμηνο, Ροή Υ, ΗΜΜΥ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ Σχολή Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Εργαστήριο Λειτουργικών Συστημάτων 8o εξάμηνο, Ροή Υ, ΗΜΜΥ Σχεδιασμός και υλοποίηση υποδομής σημείωσης διεργασιών στον
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ Σχολή Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Εργαστήριο Λειτουργικών Συστημάτων 8o εξάμηνο, Ροή Υ, ΗΜΜΥ Σχεδιασμός και υλοποίηση υποδομής σημείωσης διεργασιών στον
Καταχωρητες (Registers) Μετρητες (Counters)
 Μετρητες (Counters)") Καταχωρητες (Registers) Μετρητες (Counters) Καταχωρητής (register) Ομαδα από flip-flops μαζί με συνδυαστικο κυκλωμα για εκτελεση διαφορων λειτουργιων όπως μεταφορα, αποθηκευση και επεξεργασια πληροφοριων.
Καταχωρητες (Registers) Μετρητες (Counters) Καταχωρητής (register) Ομαδα από flip-flops μαζί με συνδυαστικο κυκλωμα για εκτελεση διαφορων λειτουργιων όπως μεταφορα, αποθηκευση και επεξεργασια πληροφοριων.
ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΙ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ: ΜΙΚΡΟΕΛΕΓΚΤΕΣ
 ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΙ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ: ΜΙΚΡΟΕΛΕΓΚΤΕΣ Ι. Έλληνας Δεκέμβριος 2018 Άσκηση 1 Να συνδεθεί ο Arduino Uno με το LED matrix 8X8 μέσω SPI. Να γραφτεί πρόγραμμα το οποίο θα δημιουργεί
ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΙ ΥΠΟΛΟΓΙΣΤΩΝ ΕΡΓΑΣΤΗΡΙΟ: ΜΙΚΡΟΕΛΕΓΚΤΕΣ Ι. Έλληνας Δεκέμβριος 2018 Άσκηση 1 Να συνδεθεί ο Arduino Uno με το LED matrix 8X8 μέσω SPI. Να γραφτεί πρόγραμμα το οποίο θα δημιουργεί
ΔΙΑΧΥΤΑ ΚΑΙ ΕΝΣΩΜΑΤΩΜΕΝΑ ΣΥΣΤΗΜΑΤΑ
 ΔΙΑΧΥΤΑ ΚΑΙ ΕΝΣΩΜΑΤΩΜΕΝΑ ΣΥΣΤΗΜΑΤΑ CPUs Διδάσκων: Παναγιώτης Καρκαζής Περίγραμμα -Συσκευές Ι/Ο - Διακοπές, Εξαιρέσεις, Παγίδες -Καταστάσεις λειτουργίας -Συνεπαξεργαστές mechanism Συσκευές Ι/Ο Οι συσκευές
ΔΙΑΧΥΤΑ ΚΑΙ ΕΝΣΩΜΑΤΩΜΕΝΑ ΣΥΣΤΗΜΑΤΑ CPUs Διδάσκων: Παναγιώτης Καρκαζής Περίγραμμα -Συσκευές Ι/Ο - Διακοπές, Εξαιρέσεις, Παγίδες -Καταστάσεις λειτουργίας -Συνεπαξεργαστές mechanism Συσκευές Ι/Ο Οι συσκευές
Πανεπιστήμιο Δυτικής Μακεδονίας. Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών. Ψηφιακή Σχεδίαση
 Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Ψηφιακή Σχεδίαση Ενότητα 7: κωδικοποιητές, κωδικοποιητές προτεραιότητας, πολυπλέκτες, υλοποίηση συνάρτησης με πολυπλέκτη, αποπλέκτες, πύλη 3ιών καταστάσεων,
Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Ψηφιακή Σχεδίαση Ενότητα 7: κωδικοποιητές, κωδικοποιητές προτεραιότητας, πολυπλέκτες, υλοποίηση συνάρτησης με πολυπλέκτη, αποπλέκτες, πύλη 3ιών καταστάσεων,
HY16F3981 HYCON IP User s Manual
 . Page1 Table of Contents 1. DOCUMENT DESCRIPTION... 7 2. IC DESCRIPTION... 7 3. DIGITAL IP (TIMER)... 9 3.1. Example Name... 9 3.2. Example Description... 9 3.3. Software Flowchart... 9 3.4. Program Description...
. Page1 Table of Contents 1. DOCUMENT DESCRIPTION... 7 2. IC DESCRIPTION... 7 3. DIGITAL IP (TIMER)... 9 3.1. Example Name... 9 3.2. Example Description... 9 3.3. Software Flowchart... 9 3.4. Program Description...
Σε γενικές γραμμές, είναι καλή πρακτική να γράϕουμε προγράμματα C που αποτελούνται από πολλές και μικρές συναρτήσεις, παρά από λίγες και μεγάλες.
 58 Δομή ενός προγράμματος C Συναρτήσεις Μία συνάρτηση C είναι ένα αυτόνομο, πακεταρισμένο τμήμα προγράμματος που ϕέρει σε πέρας μία διαδικασία η οποία έχει σαϕείς προδιαγραϕές εισόδου και εξόδου και συγκεκριμένο
58 Δομή ενός προγράμματος C Συναρτήσεις Μία συνάρτηση C είναι ένα αυτόνομο, πακεταρισμένο τμήμα προγράμματος που ϕέρει σε πέρας μία διαδικασία η οποία έχει σαϕείς προδιαγραϕές εισόδου και εξόδου και συγκεκριμένο
ΑΣΚΗΣΗ 2 (29 Νοεμβρίου 2016)
") ΑΣΚΗΣΗ 2 (29 Νοεμβρίου 2016) Περιγραφή της Άσκησης Στόχος της άσκησης είναι η δημιουργία ενός συστήματος διαχείρισης φωτισμού. Μία φωτομεταβαλλόμενη αντίσταση (LDR) θα διαπιστώνει την ποσότητα του φωτός
ΑΣΚΗΣΗ 2 (29 Νοεμβρίου 2016) Περιγραφή της Άσκησης Στόχος της άσκησης είναι η δημιουργία ενός συστήματος διαχείρισης φωτισμού. Μία φωτομεταβαλλόμενη αντίσταση (LDR) θα διαπιστώνει την ποσότητα του φωτός
 PEI %β(βλβλ
PEI %β(βλβλ SPEEDO AQUABEAT. Specially Designed for Aquatic Athletes and Active People
 SPEEDO AQUABEAT TM Specially Designed for Aquatic Athletes and Active People 1 2 Decrease Volume Increase Volume Reset EarphonesUSBJack Power Off / Rewind Power On / Fast Forward Goggle clip LED Status
SPEEDO AQUABEAT TM Specially Designed for Aquatic Athletes and Active People 1 2 Decrease Volume Increase Volume Reset EarphonesUSBJack Power Off / Rewind Power On / Fast Forward Goggle clip LED Status
ΤΕΙ ΚΑΒΑΛΛΣ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ
 ΤΕΙ ΚΑΒΑΛΛΣ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ «Σχεδίαση και ανάπτνξη ενός συστήματος! τηφιακού μετατροπέα κατανάλωσης σε ευρώ και παροχή ειδικής προστασίας» ΤΕΙ ϊζαβαλασ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ
ΤΕΙ ΚΑΒΑΛΛΣ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ «Σχεδίαση και ανάπτνξη ενός συστήματος! τηφιακού μετατροπέα κατανάλωσης σε ευρώ και παροχή ειδικής προστασίας» ΤΕΙ ϊζαβαλασ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 3: Βασικός Προγραμματισμός Arduino (AVR) (Συνέχεια) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 3: Βασικός Προγραμματισμός Arduino (AVR) (Συνέχεια) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital
Ι ΑΣΚΩΝ ΚΑΘΗΓΗΤΗΣ: ΚΑΘΗΓΗΤΗΣ ΕΦΑΡΜΟΓΩΝ. ΤΕΙ ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ d.fotiadis@kastoria.teikoz.gr
 Ι ΑΣΚΩΝ ΚΑΘΗΓΗΤΗΣ: ΦΩΤΙΑ ΗΣ Α. ΗΜΗΤΡΗΣ M.Sc. ΚΑΘΗΓΗΤΗΣ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ (Σ.Τ.ΕΦ.) ΤΕΙ ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ d.fotiadis@kastoria.teikoz.gr ΛΕΙΤΟΥΡΓΙΕΣ
Ι ΑΣΚΩΝ ΚΑΘΗΓΗΤΗΣ: ΦΩΤΙΑ ΗΣ Α. ΗΜΗΤΡΗΣ M.Sc. ΚΑΘΗΓΗΤΗΣ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ (Σ.Τ.ΕΦ.) ΤΕΙ ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ d.fotiadis@kastoria.teikoz.gr ΛΕΙΤΟΥΡΓΙΕΣ