3.9 SCORBOT-ER III ROBOT HOME... 31
|
|
|
- Εὐκλείδης Ελευθερόπουλος
- 8 χρόνια πριν
- Προβολές:
Transcript

1 : 1/11/2010
2 ... 4 :... 4 : μ μ SCORBOT-ER III SCORBOT ROBOT SCORBOT-ER III SCORBOT-ER III ROBOT HOME SCORBOT-ER III SCORBOT DRIVER SOFTWARE /C AT90CAN128 OLIMEX μ PC μμ SCORBOT
3 4.2 goposition (POSITION) μμ Home SCORBOT gohome ( HOME) μ PWM SOFTWARE PC μ ( μ μ ) ( μ ) Matlab μμ μμ μμ μμ ( ) MATLAB ( ) AT90CAN ( ) SCORBOT ER-III
4 : μ μμ matlab μ μ, μ. μ μ. : SCORBOT-ER III μμ MATLB μμ CodeVisionAVR μμ AVR STUDIO Web camera AT90CAN128 OLIMEX 1 μ μ. 2 μ μ μ. μ μ, μ μ μ μ μ, μ μ μ μ μ μ 3 SCORBOT ER III. μ, μ μ μ μ : μ. μ μ DC, μ encoders 4
5 4 μ μ μ at90can128. μμ SCORBOT ER III, goposition μ μ, μμ gohome μ, μ PWM 5 μμ μ matlab. μ μ μ. μ matlab, μμ, μμ μμ μμ. 5
6 1. μ μ. μ μ μ. μ μ : AGVs (Automatic Guided Vehicles), μ, μ, ROVs (Remotely Operated Vehicles), μ, AUVs (Autonomous Underwater Vehicles) μ :, μ μ μ μ,, μ μ, μ. 1.1 μ μ : μ : μ μ ( μ ) μ μ μ μ. μ μ μ ( ). μ μ μ μ μ, μ. μ μ : μ μ μ μ μ. μ, μ ( ) ( μ ). μ μ μ μ μ μ. μ : AGVs: (Automatic Guided Vehicles), μ μ, μ μ μ μ. μ μ : μ μ μ μ. μ μ μ μ μ μ. μ : μ μ μ μ μ. μ μ μ 6
7 1.2 μ μ μ μ. μ μ μ μ. ROVs: (Remotely Operated Vehicles) μ μ μ. μ μ μ μ, μ μ μ μ μ μ. μ μ μ. AUVs: (Autonomous Underwater Vehicles) μ ROVs μ. μ μ, μ μ μ. AUVs μ μ μ μ. μ : μ μ μ μ,. μ μ μ, μ μ μ μ μ μ. μ μ μ μ. μ μ μ μ : (.. μ μ,, μ ) μ μ μ μ (.., μ ) μ μ μ (.. CNC, injection moulding, laser cutting, ) μ μ μ μ μ μ μ. 7
8 μ μ μ μ, μ, μ μ 2, 4 6 SCARA, μ ( 50 ). μ μ μ μ μ μ μ,. μ μ μ μ (Vision) μ μ. μ μ (blisters). μ μ μ (.. ). & μ μ μ μ, μ. μ μ μ. μ, μ μ 4 6 μ μ μ, μ μ. μ μ, μ μ μ μ, μ μ,. μ μ μ μ, μ. μ μ μ,,,,. μ μ μ, μ, μ,.. μ μ 4 6 μ μ μ μ. μ μ μ μμ. (layer palletiser). μ μ : μ ( 4 ) μ μ μ μ 8
9 μ μ μ μ μ (stretch wrapping) μ μ μ RFID μ μ (μ PLC ) μ (, ), μ μ μ, μ μ μ, μ μ μ. μ μ μ μ μ, μ μ ( μ, ), μ μ μ. μ, μ (.. ). μ ( μ ) ( MIG TIG) μ μ. μ μ (.. μ, μ μ μ μ μ,, ). μ μ μ. μ μ μ μ μ μ μμ μ μ μ μ μ (,..). μ,. μ μ μ μ, μ ( ) μ. μ μ μ μ μ μ. μ μ μ μ, μ, μ μ μ. μ μ.,, μ μ μ ( μ ). μ ( μ ) ( PLASMA, LASER, WATER JET) μ μ μ μ. μ μ (.. μ μ ). μ μ μ μ. μ 9
10 μ μ μ μ μ μμ μ μ μ μ. μ μ, μ. μ μ μ μ, μ, μ μ ( ). μ ( μ ) ( ) μ μ. μ μ (.. - μ, μ..) μ μ μμ, μ μ μ. μ μ μ μ μ, μ μ, μ μ.. μ, μ μ. μ μ μ. μ μ μ, μ μ μ μ. μ μ,, μ, μ. & μ μ μ (.. CNC, injection moulding, laser cutting, CNC ) μ μ μ μ. μ μ μ 3, 4 6 μ μ. μ, μ μμ μ, μ μ. μ μ μ μ μ. μ, μ μ μ μ μ, μ μ μ. μ μ. 10

11 2. - μ μ μ. μ μ, μ μ μ μ μ, μ μ μ μ μ. μ μ μ μ μ μ μ. μ μ μ μ μ. μ μ μ μ μ μ. μ μ μ μ μ μ μ μ. μ μ. μ μ μ μ μ. μ μ. μ μ μ μ. μ μ μ μ μ
 = (8 + 6 ) 1 = 10 μ μ : 2 2 L + L L L cos( 180 2) = cos(180 ) = 2 2 P 2L 2 L 2 p 2 2 2 P 2L cos 2 = 2 L 2 2L P 2 = arccos 2 L 2 2 49 100 =")
12 μ μ TCP μ μ μ μ μ. μ μ A x = 8, A y = 6, L=7 μ. μ μ μ. μ μ , μ TCP μ, μ μ P = ( Ax + Ay ) = (8 + 6 ) 1 = 10 μ μ : 2 2 L + L L L cos( 180 2) = cos(180 ) = 2 2 P 2L 2 L 2 p P 2L cos 2 = 2 L 2 2L P 2 = arccos 2 L = arccos = o 1 μ : = + 1 : Ay = arctan Ax 6 = arctan 37 8 o μ : b c = sin b sin

13 μ μ μ : Lsin 2 sin = P Lsin 2 7 sin92 = arcsin = arcsin P 10 = + = = 81 1 o 44 o μ 2. μ μμ, 1 2. μ, 2. μ, μ TCP μ μ A =8, A y =6, μ : 1 = 81 2 = -92 μ μ μ μ μ 2 3 TCP μ μ μ μ μ = 4, y = 3, A z = 5. μ TCP μ ; 13
14 1.18 μ μ μ μ 1, 2 R. μ μ μ μ μ : μ 1, 2 R μ μ. μ μ μ μ μ μ μ. : A Z = Rsin 2 (1) XY μ μ OP μμ μ : OP = R cos 2 OP : A X = OP cos 1 (2) OP Y : A = OP sin 1 (3) (1), (2), (3) μ A A A X Z = R cos cos = R cos sin = Rsin A Y μ A X, μ : A A Y X = tan 1 1, : = arctan 1 A A X μ, A, A Z, μ R: ( AX + AY AZ R = + ) 1 2 μ R, 2 μ μ A Z : A Z 2 = arcsin R 14
15 M μ μ μ μ, : 3 o 1 = arctan = 37 4 R = (4 + 3 = arcsin ) 1 2 = 45 = 7.07 o μ μ μ μ TCP μ. μ μ μ. 15

16 3.SCORBOT-ER III 16
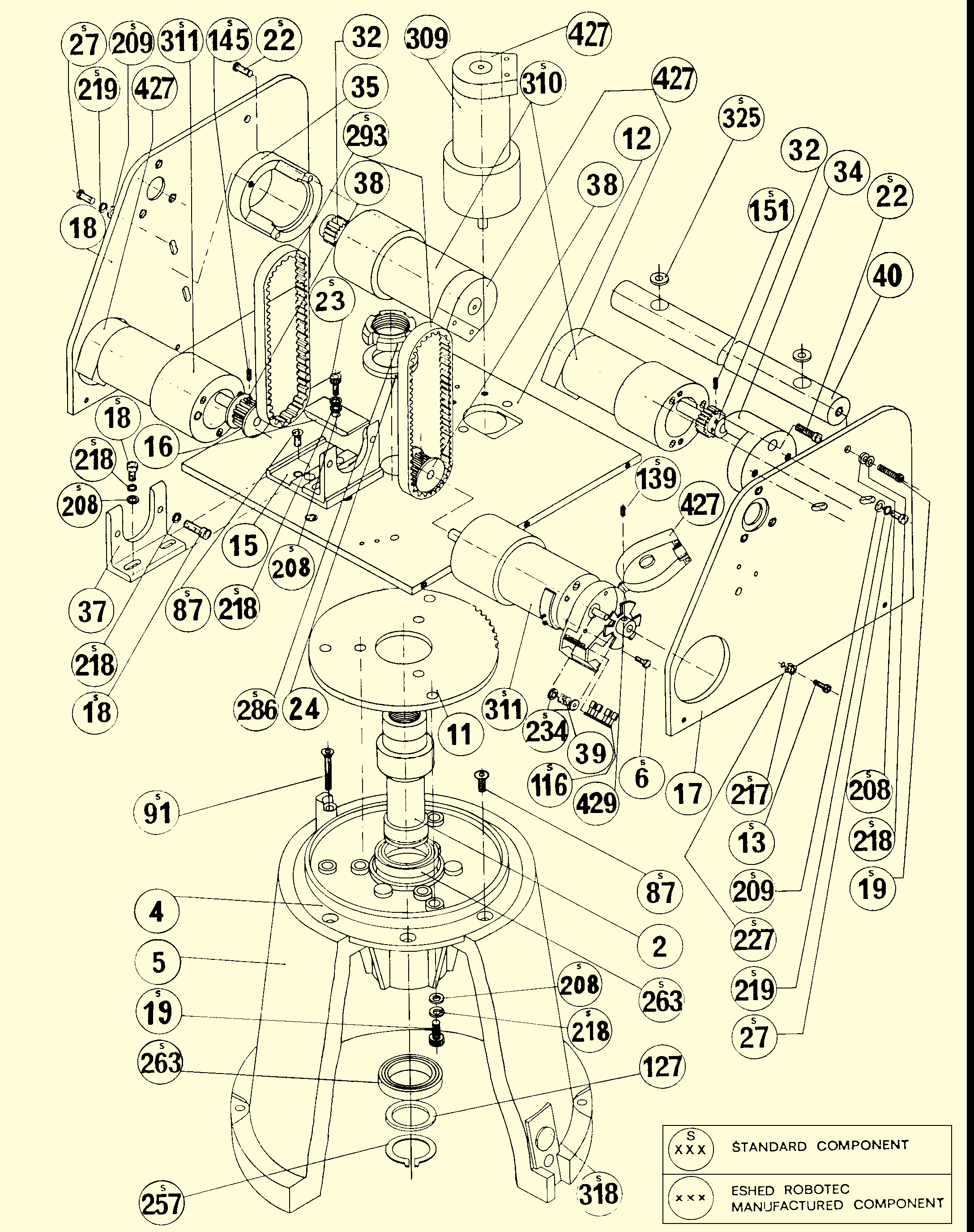
17 SCORBOT ER III. : 1. μ, μ μ μ μ : μ. μ μ DC, μ encoders, SCORBOT ER III μ μ, μ,,. 3. SCORBOT ER III 4. HOME SCORBOT ER III μ μ, SCORBOT ER III, μ μ, drivers. 3.1 SCORBOR-ET III JAR (Joint Arm Revolute) μ μ μ μ. μ μ μ μ, μμ μμ μ μ. μ, μ μ μ μ μ μ. μ μ μ. μ SCORBOT-ER III : μ, 6. μ μ μ 5 6 dc motor μ. μ. μ robot μ ( ) μ μμ. μ. μ μ μ μ. μ μ μ μ leaser. μ μ μ μ μ spray gun μ μ. 17
18 SCORBOT-ER III μ. : : μ μ. μ : μ μ y-. : μ μ μ -. : μ μ μ μ μ.. - μ. μ μ μ. SCORBOT-ER III: 1: 310 μ 2: μ μ +130 / -35 μ îïíáò 3: Óôñïö Áãê íáò ìïéñ í 4: μ 5: 6: μ / μ + μ : 61 (24.4 ") : 75 (3"), μ 65 (2.56 ") μ μ : 1kg (2.2 LB) : 6 DC Servo Motors μ Closed-Loop Servo Control 6 (optical encoders) 5 μ ( home robot ) μ : mm ( ") : 330mm/Sec. (13"/Sec) (13 "/ sec) : 11kg(24Lb) 18

19 3.2 SCORBOT - μ μ μ : μ μ. μ μ. μ μ μ μ. μ μ μ μ DC servo motor ROBOT
 encoder 1 led encoder (Vled) 1 μ μ μ home robot 20")
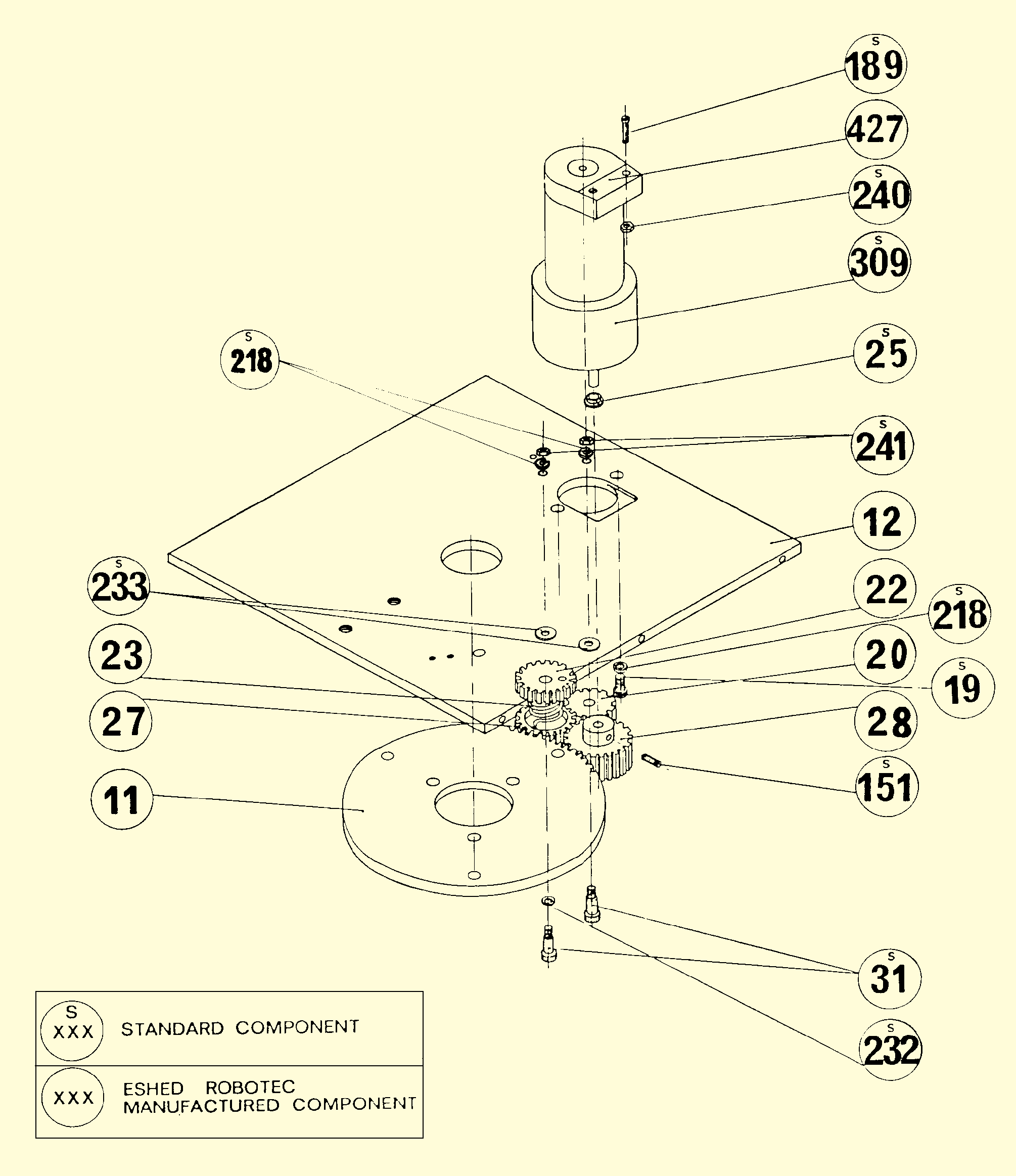
20 3 3 1 μ μ (DC motors). μ : μ μ,. μ μ. o μ μ. μ SCORBOT-ER III, (μ ).,, ( ), μ μ μ. μ μ μ μ μ, μ μ. μ μ, μ μ μ μ μ μ. 3.4 SCORBOT-ER III, DC, μ encoders, : 2 motor 2 μ μ ( μ ) encoder 1 led encoder (Vled) 1 μ μ μ home robot 20
21 1 encoder μ robot μ μ. μ μ μ robotμ D50 ( 50 pins). 21
22 μ SCORBOT-ER III μ μ. μ μ μ, μ μ, μ. SCORBOT-ER III 3 μ, μ. μ μ (T m: μ μ μ μ ):, μ, (motors): m 1,2,3 = 127.7:1 (motor): T m 4,5 = 65.5:1 (motor): T m 8 = 19.5:1, μ μ 127.7:1, μ μ μ. 22

23 3 5 1 μ μ μ 1.4. μ μ μ μ μ. μ μ μ μ μ μ : m a = 24 teeth. M b = 120 teeth. W a = W 1,2,3 = rpm S a = S 1,2,3 = 0.47 o μ μ μ SCORBOT-ER III μ μ μ. μ μ μ μ μ μ μ. μ. μ μ. μ μ μ μ. μ : 23

24 n a = 18 teeth. N b = 72 teeth W a = W 1,2,3 = rpm S a = S 1,2,3 = 0.47 o μ, μ μ μ μ. μ., μ μ 1.5. O μ μ ( μ ) μ. μ μ μ,. C μ μ B μ μ. C D μ μ. μ : n a = 18 teeth. n b = 72 teeth n c = 17 teeth n d = 17 teeth W a = W 1,2,3 = rpm S a = S 1,2,3 = 0.47 o 24
: i. 1 2 μ, μ 3. pitch. ii. 1 2 μ, μ 3. roll.")
25 3 5 4 μ SCOREBOT-ER III, μ up/down (pitch) μ (roll). SCORBOT-ER III, , 3 μ. μ 1 2 μ 4 5,. μ μ 1 2 μ 3, μ μ, μ ( 1.10): i. 1 2 μ, μ 3. pitch. ii. 1 2 μ, μ 3. roll. 32 (teeth)
26 μ pitch roll, μ μ 4 5. (μ μ.) μ μ 4 5, μ 1.6. μ μ 4 ( μ 5) : A μ μ μ. B A μ μ 1. C μ B ( ). D C μ μ 2. E μ D ( ). F E μ μ 3. μ μ F μ μ. μ : n a = 12 teeth. n b = n c = 24 teeth n d = n e = 24 teeth n f = 24 teeth W a = W 4,5 = rpm S a = S 4,5 = o SCOREBOT-ER III μ μ μ μ. μ μ μ μ μ. μ μ,. μ μ μ μ,

27 3 5 6,. μ μ μ μ, 1.9., μ μ μ, μ μ μ μ μ SCORBOT-ER III μ. μ μ. 27
. μ encoder μ μ μ μ 5V. 4 5 motors 6 motor 3.")
28 3.6, μ, μ, ( ). μ, μ μ., μ μ, μ μ μ. SCORBOT-ER III μ : (encoder). (encoder wheel). μ encoder μ μ μ μ 5V. 4 5 motors 6 motor

29 μ μ μ μ., μ, μ., μ μ μ - μ μ μ μ, μ μ μ μ μ, μ μ μ μ μ. 3.7 SCORBOT-ER III μ SCORBOT-ER III μ. μ SCORBOT-ER III 3 4 μ μ μ μ μ. μ. LED, μ., μ. μ, μ LED-., μ μμ μ μ. LED-. 29
, 6. μ, μ μ ( ) : S = 360 o /6 = 60 o μ, μ μ... μ μ μ μ - μ. μ μ 127.7:1. μ, μ μ : S = 60 o /127.7 = 0.")
30 Led s ( μ ) μ μ, μ μ 5, ' μ. μ μ μ. μμ μ μ led,,, μ., μ μ 1.13, μ (0V) (4V), μ μ μ SCORBOT-ER III 6. μ, μ ( ), 6. μ, μ μ ( ) : S = 360 o /6 = 60 o μ, μ μ... μ μ μ μ - μ. μ μ 127.7:1. μ, μ μ : S = 60 o /127.7 = 0.47 o μ ( F) : 30

31 S joint = S * (n a /n b ) * (n c /n d ) = 0.47 o * (18/72) * (17/17) = 0.12 o μ 0.1 μ, μ μ ROBOT HOME robot home, μ μ μ. μ, μ home. μ μ μ μ μμ. μ μ home μμ μ. μ home μ μ. μ. μ,, home μ. 31
 μμ. SCORBOT-ER III.")
32 SCORBOT-ER III μ μ μ μ μ μ μ, μ μ μ. μ μ μ μ μ μ μ μ. μ μ μ μ - μ,, μ μ ( μμ ) μμ. SCORBOT-ER III. μ ER iii 110/220 VAC 60/50 Hz 5 1Kg 0.5mm 32
33 μ 330 mms per sec 6 DC servo motor μ μ 340 μ +/- 85 +/ /- 150 roll 610mm 75mm μ 65mm μ μ, μ, 3.10 SCORBOT μ μ μ μ 150 VA μ μ 9 V μ 24 V. 9V μ μ 5V μ. μ μ 15 V SCORBOT-ER III. μ μ : 0-15 V encoders 0-5 V 33
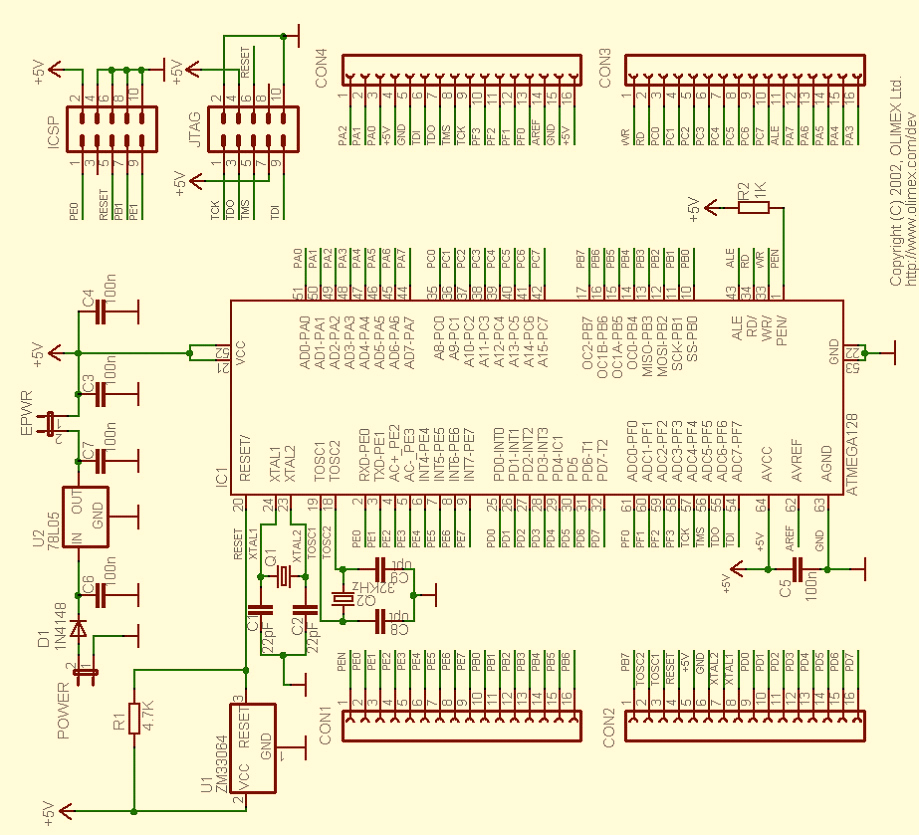
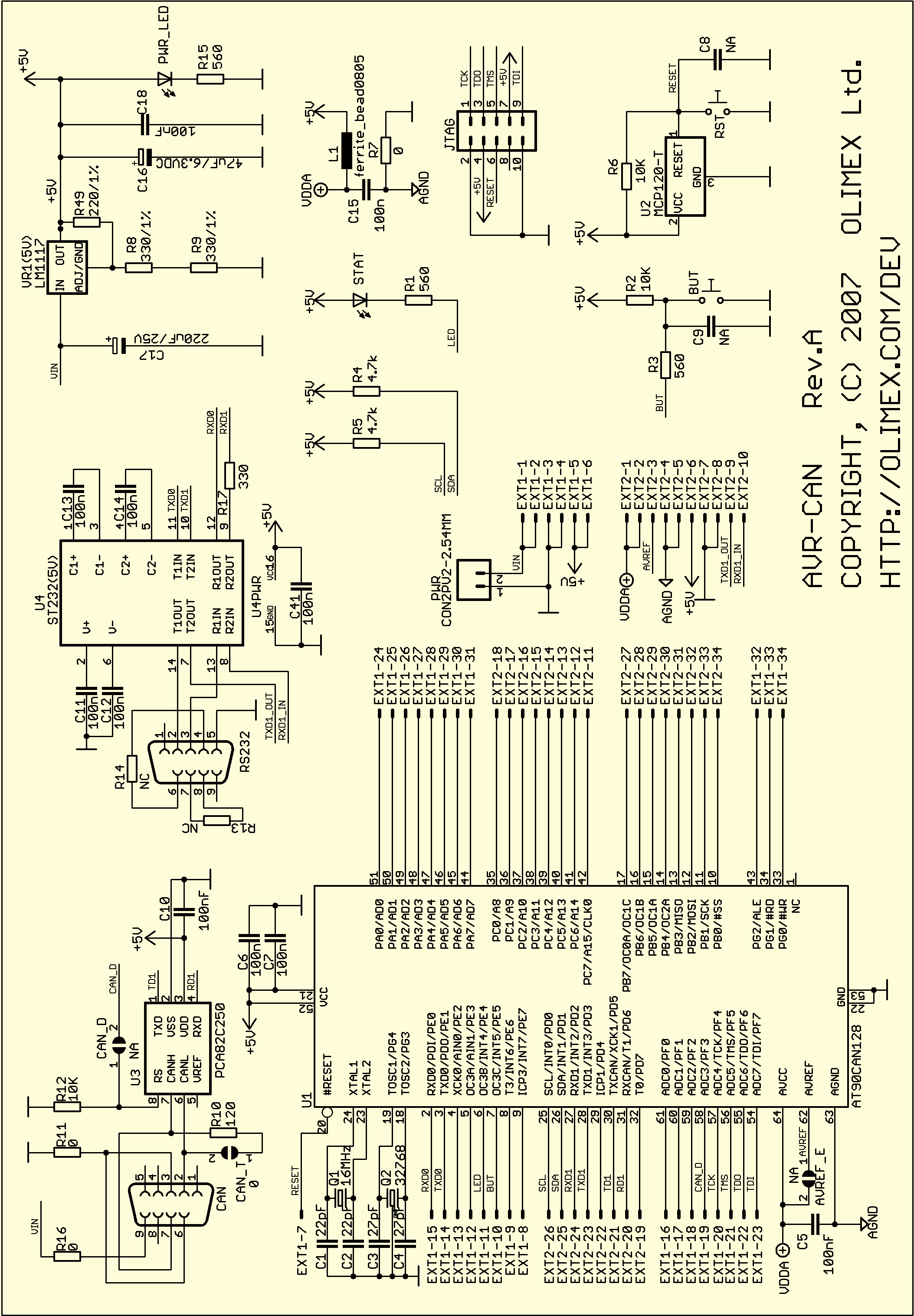
34 μ 5V 3.11 μ μ AT90CAN128 OLIMEX. AT90CAN128 : 5 V 7 PORTS μ μ 16 MHz 4 timers 1 watchdog 2 usart μ SCORBOT-ER III. PORTA( ): SCORBOT PORTB( ): μ SCORBOT home. PORTC( ): motors μ PWM. interrupt μ μ μ. interrupt falling edge. TIMER0 μ 250 KHz (16MHz/64, μ 64) overflow interrupt. TIMER0 μ μ PWM μ PWM μ. interrupt μ μ matlab DRIVER driver μ μ L298. μ Vs 15V DC. pins input μ 34

35 , μ 0V 5V input ( pins input, 0V, 5V, ). pin enable μ PWM, μ, μ 0 V μ o Vs, μ 15 V. 35
36 SCORBOT ER III. μ, μ μ μ μ : μ, μ,,, μ home,, SCORBOT ER III, μ μ, drivers. 36

37 4.SOFTWARE /C AT90CAN128 OLIMEX 37

38 μ μ μ at90can128. μμ SCORBOT ER III, goposition μ μ, μμ gohome μ, μ PWM. 4.1 μ PC μμ μ μ at90can128 CodeVisionAVR. -μ μ J-tag μ μμ CodeVisionAVR J-tag μ μμ AVRstudio μ μ. μ CodeWizardAVR μμ μ μ SCORBOT : Chip: μ μ AT90CAN128 μ 16 MHz
39 : PORTA( ): SCORBOT pin_7:base moves: 1:left, 0:right pin_6:shoulder moves: 1:up, 0:down pin_5:elbow moves: 1:down, 0:up pin_4:left wrist moves: 1:out, 0:in pin_3:right wrist moves: 1:in, 0:out pin_2:gripper moves: 1:open, 0:close pin_0:home SCORBOT PORTB( ): μ SCORBOT home. pin: 2-6 PORTC( ): motors μ PWM. pin_0:base pin_1:shoulder pin_2:elbow pin_3:left wrist pin_4:right wrist pin_5:grippe r 39

40 4 1 2 interrupt μ μ. μ (, μ,,, ). interrupt falling edge. INT0: elbow INT1: shoulder INT2: base INT4: gripper INT5: left wrist INT6: right wrist 40

41 4 1 3 TIMER0 μ 250 KHz (16MHz/64, μ 64) overflow interrupt. TIMER0 μ μ PWM μ PWM μ

42 interrupt μ μ matlab. interrupt μ Matlab

43 μμ SCORBOT. 43
44 4.2 goposition (POSITION). μ 1: interrupt usart0_rx_isr μ μ matlab μ μ 2: μ interrupt usart0_rx_isr μ rx_buffer0[] μ. rx_buffer0[0]-rx_buffer0[2] μ μ μ μ. : 0: μ, 1: μ, 2: bit_0: Home bit_2-7, 3:,4: MSBs, 5: LSBs, 6: MSBs μ, 7: LSBs μ, 8: MSBs, 9: LSBs, 10: MSBs,11: LSBs, 12: MSBs, 13: LSBs, 14: MSBs, 15: LSBs μ 3: μ main godir ( ) rx_buffer0[2], μ μ rx_buffer0[4:15] μ. μ μ (position). μ 4: μ (PWM) PORTA. μ μ encoders interrupts, μ μ μ μ. μ μ μ μ, interrupts μ. μ μ,,. μ μ μ lastdir μ Home. μ 5:. 44
45 μμ Home SCORBOT. 45
46 4.3 gohome ( HOME). μ 1 μ 2 μ μ μ 3: μ main μ (sethome = (rx_buffer0[2] & 0b ) == 0b ;) bit home, 1 home (gohome). μ 4: μ home μ (PWM) (PORTA) μ μ lastdir μμ (position). μ μ μ μ, interrupts μ. μ μ μ μμ. μ μ,. μ 5: home. 46
47 4.4 μ PWM μ (, μ,, ) μμ μ μ μ PWM. μ μ μ μ μ. μ μμ μ TIMER0 μ 64 (TCCR0A=0x03). μ μ PWM (0: μ 100%, 255: 0%). μ interrupt TIMER0 μ TCNT0 μ PWM. if (pwm<tcnt0) PORTC.2 = 1; else PORTC.2 = 0; μ μ μ at90can128. μμ. 47
48 5. SOFTWARE PC μμ μ matlab. μ μ. μμ, μμ μμ μμ. 5.1 μ ( μ μ ) μμ μ ( μ x,y. μ, μ, μ μ scorbot. μ μ μ matlab scorbot home μ μ. 5.2 ( μ ) Matlab MATLAB μ μ μ μ μ μ μ μ μ μ μ μ (scientific computing). μ MATtrix LABoratory ( ). MATLAB (interactive) μμ μ μ μ (data visualization) μ μμ μ μ. μμ μ MATLAB μ μμ. MATLAB μ μ μ μ μ, μ μ. μ μ μ Maple Mathematica. μ ( μ ) μ MATLAB μ μ. μ μ μ μ μ. μ MATLAB help( ). μ MATLAB: μ μ. 48
49 μμ. 49
50 50

51 5.3 μμ μμ matlab μ μ μ : μ 1:. μ μ μ scorbot μ 2: μ μ μ μ. μ (x,y). 51

52
 (z: μ ) ( ( 1), μ ( 2), ( 3)). μ μ μ μ.")
53 5 3 6 μ 3: μ (x,y) μ. μ 4: (x,y,z) (z: μ ) ( ( 1), μ ( 2), ( 3)). μ μ μ μ. μ 5: matlab matlab μ μ. μ 7: μ μ
. μ μμ (box_ pulses), μ.")
54 μ 8: matlab matlab μ μ. μ 9: μ scorbot μ μ. μ μ μ μ ( μ μ ),. μ 10: matlab matlab μ μ. μ 11: μ scorbot ( ). μ μμ (box_ pulses), μ μ 12: μ μ μ matlab. 54

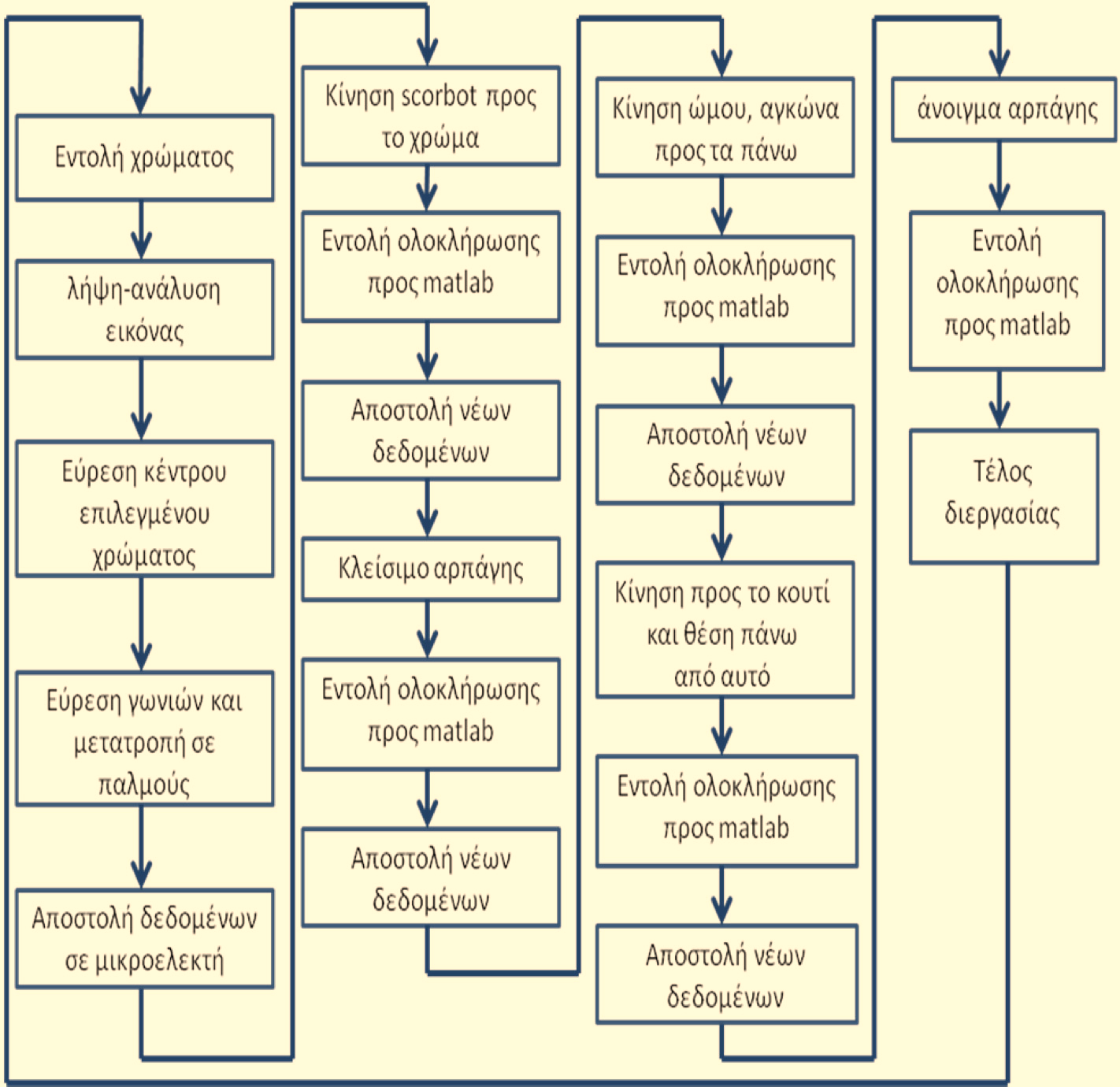
55 5 3 9 μ 13:. μ μ. 5.4 μμ μ μμ Matlab μ μ μ μ... blue μ μ. ( μ ) 1 μμ find-picture μ Matlab μ μ SCORBOT ER-III μ μ. μ μ μ fabric SCORBOT ER-III μ μ μ. 2 μμ find-colors 3 μ. Matlab μ μ μ 380X640. μ μμ 3, μ μ. 3 μμ clean-colors μμ μ μ μ. μ μ μμ μ μ μ μ (0) μ (1) μ μ. μ μ (x,y). x, y μ 55
56 μ μ μμ - μ. 4 μμ find-pulses μμ μ. μ μ μ μ μ μμ μ μ μ SCORBOT ER-III. μ Pixel cm, μ μ μ Pixel μ cm. μ X zero Y zero μ μ pixel. μμ μ μ SCORBOT μ μ. μ μ μ μ μ μ μ μ encoders SCORBOT ER-III. 5 o μμ up-robot SCORBOT ER-III μ. μ μ μ μμ. 6 μμ box-pulses. μ μ SCORBOT ER-III μ x, y home μ μ μμ 4,. 7 μμ ser-data μμ Matlab μμ μ μ. μμ μ μ μ SCORBOT ER-III. μμ μ matlab. μ μ μ matlab, μμ, μμ μμ μμ SCORBOT ER III. 56
57 1 μ μ. 2 μ μ μ. μ μ, μ μ μ μ μ, μ μ μ μ μ μ 3 SCORBOT ER III. μ, μ μ μ μ : μ. μ μ DC, μ encoders 4 μ μ μ at90can128. μμ SCORBOT ER III, goposition μ μ, μμ gohome μ, μ PWM 5 μμ μ matlab. μ μ μ. μ matlab, μμ, μμ μμ μμ. SCORBOT μ μ. PWM encoders (interrupts), μ μ μ μ μ μ. μ μ robot μ μ ( μ ), / μ (crosstalk) μ μμ. μ SCORBOT μ, μ. μ μ μ μ. 57
58 μ. μ μ cm μ pixels. μ pixels μ.. 5 cm. μ μ μ. μ μ ( y ). 3 μ μ μ software ( μ / MATLAB) μ μ (, μ.). 58
59 ( ) MATLAB 59
60 ( ) AT90CAN128 60
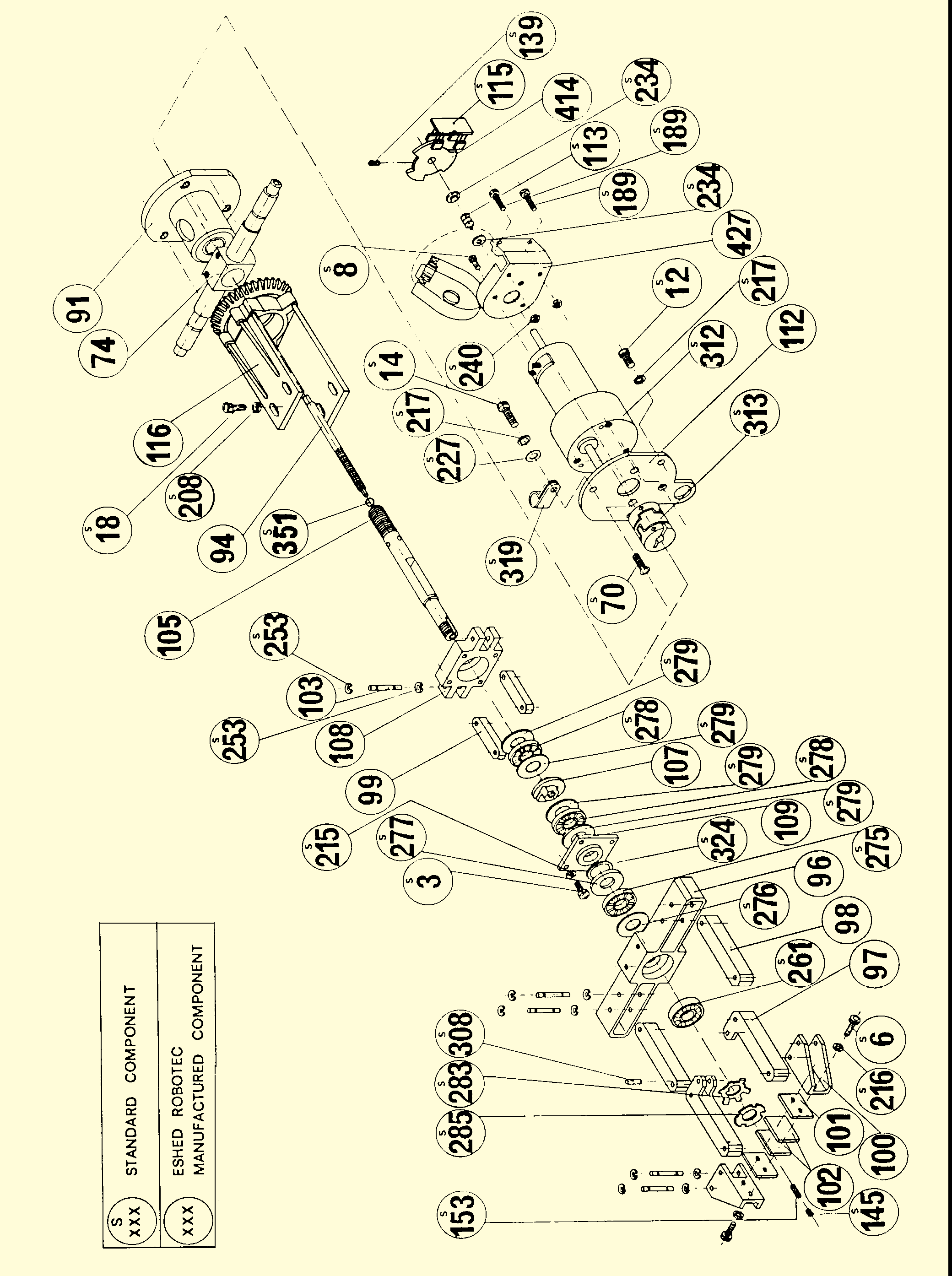
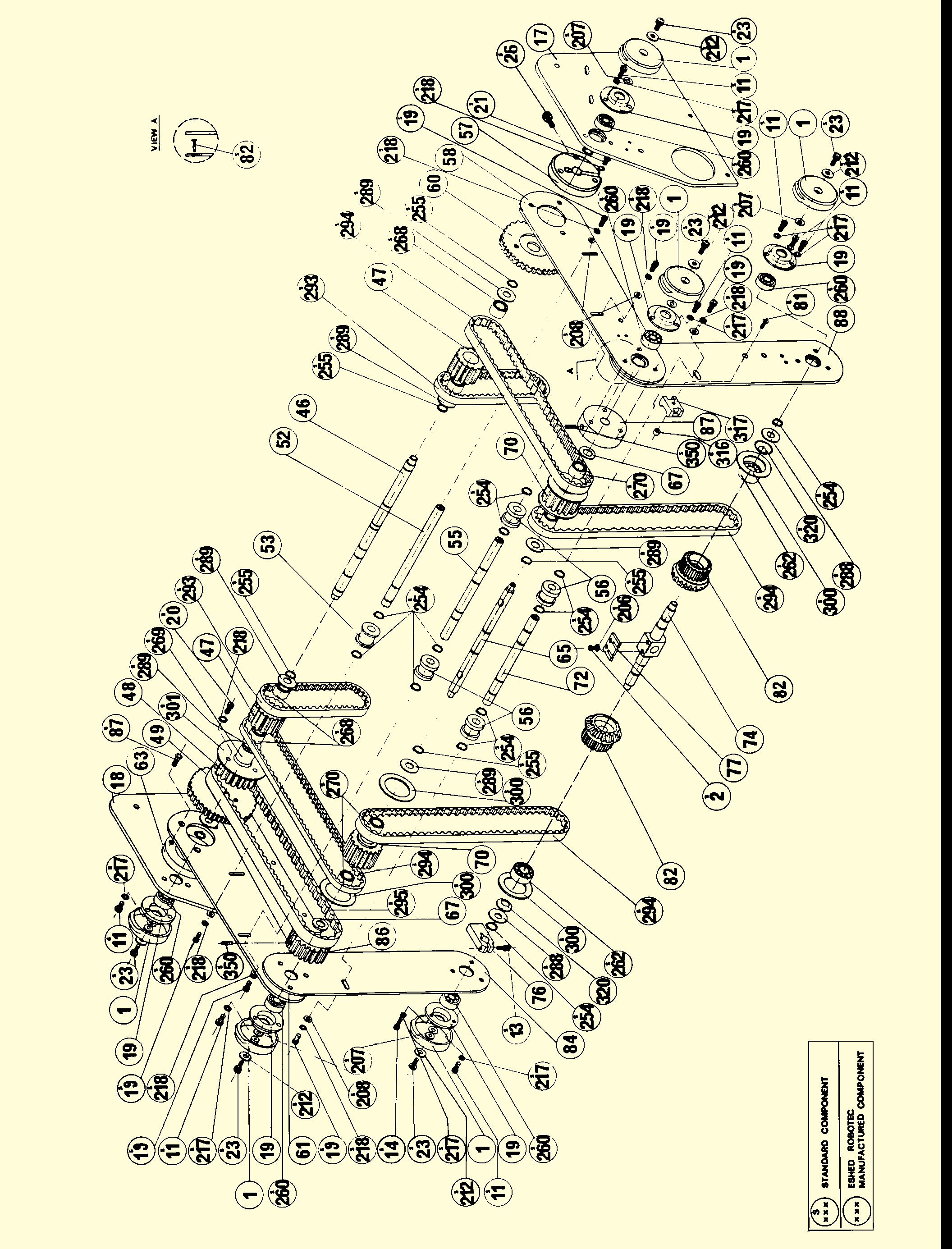
61 ( ) SCORBOT ER-III 61
62 62
63 63
64 64
65 65
66 66

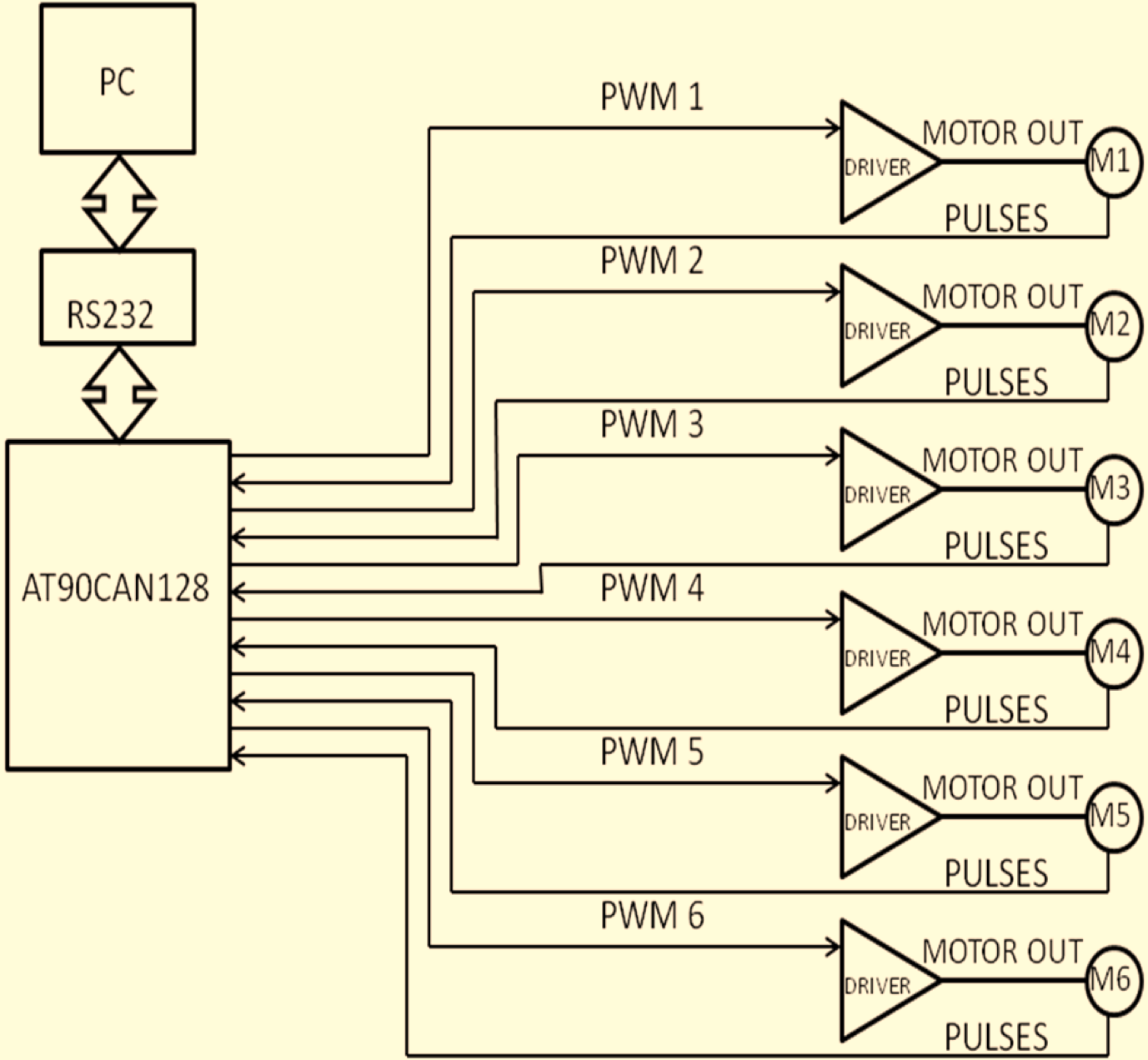
67 BLOCK DIAGRAM: 67
68 SCHEMATIC: 68

69 drivers μ 15V dc PC μ μ dc 5V / : 9V, 24V 69
70 SCORBOT ER-3 USER S MANUAL TEXT BOOK 1 TEXT BOOK 2 TEXT BOOK 3 TEXT BOOK

71 71
A 1. DDRA = 0b11110000; k = PINB; DDRC = 0xf0; PORTC = 0x0f;
 μ : : - - A 1 / μ : : : _ _ : 1. μ μμ μ μ VR μ μ (STK200/CodeVision C). 2. - μ μ μμ C. _ _ μ - / μ μ μ STK200 8 8 LED. μ LED LEDn 0 Volt., SWn 5 Volt μ μ. μ ATmega16 32 -, μ 4 (ports) μ μ A,B,C D. μ 8-bit,
μ : : - - A 1 / μ : : : _ _ : 1. μ μμ μ μ VR μ μ (STK200/CodeVision C). 2. - μ μ μμ C. _ _ μ - / μ μ μ STK200 8 8 LED. μ LED LEDn 0 Volt., SWn 5 Volt μ μ. μ ATmega16 32 -, μ 4 (ports) μ μ A,B,C D. μ 8-bit,
ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ. Σχεδίαση και ανάπτυξη οχήματος που ακολουθεί μια γραμμή
 ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΚΑΙ ΘΡΑΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Σχεδίαση και ανάπτυξη οχήματος που ακολουθεί μια γραμμή Σπουδαστές: Ταβλάκης Γεώργιος ΑΕΜ:
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΚΑΙ ΘΡΑΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Σχεδίαση και ανάπτυξη οχήματος που ακολουθεί μια γραμμή Σπουδαστές: Ταβλάκης Γεώργιος ΑΕΜ:
Ενσωµατωµένα Συστήµατα
 Ενσωµατωµένα Συστήµατα για εφαρµογές πραγµατικού χρόνου Μικροελεγκτής Arduino Ιωάννης Καλόµοιρος Αναπληρωτής Καθηγητής Τµήµα Μηχανικών Πληροφορικής Μάθηµα 7ο Τι είναι το Arduino... Ένα open-hardware σύστηµα
Ενσωµατωµένα Συστήµατα για εφαρµογές πραγµατικού χρόνου Μικροελεγκτής Arduino Ιωάννης Καλόµοιρος Αναπληρωτής Καθηγητής Τµήµα Μηχανικών Πληροφορικής Μάθηµα 7ο Τι είναι το Arduino... Ένα open-hardware σύστηµα
12. Διακοπές Interrupts (IRQ)
") 2. Διακοπές Interrupts (IRQ) Πίνακας Ι. Χειρισμός διακοπών στον ATmega6. A/A Program address Source Vector Interrupt definition External Pin, Power-on Reset, Brown-outReset, Watchdog Reset, and JTAG AVR
2. Διακοπές Interrupts (IRQ) Πίνακας Ι. Χειρισμός διακοπών στον ATmega6. A/A Program address Source Vector Interrupt definition External Pin, Power-on Reset, Brown-outReset, Watchdog Reset, and JTAG AVR
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΣΧΕ ΙΑΣΗΣ ΠΡΟΪΟΝΤΩΝ ΚΑΙ ΣΥΣΤΗΜΑΤΩΝ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΣΧΕ ΙΑΣΗΣ ΠΡΟΪΟΝΤΩΝ ΚΑΙ ΣΥΣΤΗΜΑΤΩΝ & ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΤΟΥ ΑΛΕΞΑΝ ΡΕΙΟΥ ΤΕΧΝΟΛΟΓΙΚΟΥ ΕΚΠΑΙ ΕΥΤΙΚΟΥ Ι ΡΥΜΑΤΟΣ ΘΕΣΣΑΛΟΝΙΚΗΣ ΠΡΟΓΡΑΜΜΑ ΜΕΤΑΠΤΥΧΙΑΚΩΝ ΣΠΟΥ ΩΝ «Σχεδίαση
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΣΧΕ ΙΑΣΗΣ ΠΡΟΪΟΝΤΩΝ ΚΑΙ ΣΥΣΤΗΜΑΤΩΝ & ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΤΟΥ ΑΛΕΞΑΝ ΡΕΙΟΥ ΤΕΧΝΟΛΟΓΙΚΟΥ ΕΚΠΑΙ ΕΥΤΙΚΟΥ Ι ΡΥΜΑΤΟΣ ΘΕΣΣΑΛΟΝΙΚΗΣ ΠΡΟΓΡΑΜΜΑ ΜΕΤΑΠΤΥΧΙΑΚΩΝ ΣΠΟΥ ΩΝ «Σχεδίαση
Ο προσφερόμενος εξοπλισμός θα πρέπει να καλύπτεται από εγγύηση του κατασκευαστή τουλάχιστον 1 έτους. ΝΑΙ 13.1
 L.1 Φορητοί Σταθμοί Εργασίας (Laptops) 15,6'' (High end) Full HD 1. Φορητοί Σταθμοί Εργασίας 2.2. Ανακοίνωση τους τελευταίους 12 μήνες 3.1. Να περιγραφεί η αρχιτεκτονική της CPU και να δοθούν: Τύπος CPU:
L.1 Φορητοί Σταθμοί Εργασίας (Laptops) 15,6'' (High end) Full HD 1. Φορητοί Σταθμοί Εργασίας 2.2. Ανακοίνωση τους τελευταίους 12 μήνες 3.1. Να περιγραφεί η αρχιτεκτονική της CPU και να δοθούν: Τύπος CPU:
ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΕΛΕΓΚΤΩΝ
 ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΕΛΕΓΚΤΩΝ ATMEL AVR8 ΠΟΡΛΙΔΑΣ ΔΗΜΗΤΡΙΟΣ ATMEL AVR Atmega16 Χαρακτηριστικά Μικροελεγκτής 8-bit υψηλής απόδοσης και χαμηλής κατανάλωσης Προοδευμένη αρχιτεκτονική RISC (Reduced instruction
ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΕΛΕΓΚΤΩΝ ATMEL AVR8 ΠΟΡΛΙΔΑΣ ΔΗΜΗΤΡΙΟΣ ATMEL AVR Atmega16 Χαρακτηριστικά Μικροελεγκτής 8-bit υψηλής απόδοσης και χαμηλής κατανάλωσης Προοδευμένη αρχιτεκτονική RISC (Reduced instruction
Περιεχόμενα. 1 Οδηγίες ασφαλείας. 4 Εγκατάσταση προϊόντος. 8 CE Δήλωση συμμόρφωσης. Σελ. 1. Σελ. 2 2.1. Εισαγωγή στο προϊόν. Σελ. 2 2.
 Εγχειρίδιο εγκατάστασης και χρήσης 4A Αρθρωτή μονάδα ελέγχου για ή μοτέρ 4Vdc Management System ISO 9:8 www.tuv.com ID 9543769 EL Περιεχόμενα Οδηγίες ασφαλείας Σελ. Εισαγωγή στο προϊόν Σελ.. Περιγραφή
Εγχειρίδιο εγκατάστασης και χρήσης 4A Αρθρωτή μονάδα ελέγχου για ή μοτέρ 4Vdc Management System ISO 9:8 www.tuv.com ID 9543769 EL Περιεχόμενα Οδηγίες ασφαλείας Σελ. Εισαγωγή στο προϊόν Σελ.. Περιγραφή
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ ΠΡΥΤΑΝΕΙΑ Ρέθυμνο 01/11/2010 Διεύθυνση :Οικονομικής Διαχείρισης Αριθ. Πρωτ.: 12183
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ ΠΡΥΤΑΝΕΙΑ Ρέθυμνο 0//200 Διεύθυνση :Οικονομικής Διαχείρισης Αριθ Πρωτ: 283 Τμήμα :Προμηθειών Ταχ Δ/νση :Παν/πολη Ρεθύμνου Πληροφορίες :Σ ΧΑΤΖΗΔΑΚΗΣ Τηλέφωνο :283077929
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ ΠΡΥΤΑΝΕΙΑ Ρέθυμνο 0//200 Διεύθυνση :Οικονομικής Διαχείρισης Αριθ Πρωτ: 283 Τμήμα :Προμηθειών Ταχ Δ/νση :Παν/πολη Ρεθύμνου Πληροφορίες :Σ ΧΑΤΖΗΔΑΚΗΣ Τηλέφωνο :283077929
ΤΥΠΟΣ ΤΕΧΝΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ TIMH Crystal Line Crystal 35
 Crystal Line Crystal 35 1/1/2014 Home Cinema Video/Data Projector DLP, 1 chip DMD 1080p, Φωτεινότητα: 2500 ANSI Lumens, Contrast >30.000:1, Ανάλυση 1920x1080 pixels, Aspect Ratio 16:9 (4 aspect ratio selectable),
Crystal Line Crystal 35 1/1/2014 Home Cinema Video/Data Projector DLP, 1 chip DMD 1080p, Φωτεινότητα: 2500 ANSI Lumens, Contrast >30.000:1, Ανάλυση 1920x1080 pixels, Aspect Ratio 16:9 (4 aspect ratio selectable),
Προηγμένοι Μικροεπεξεργαστές. Φροντιστήριο 4 Real Mode Interrupts
 Προηγμένοι Μικροεπεξεργαστές Φροντιστήριο 4 Real Mode Interrupts Επισκόπηση Μορφές control tranfer Γενικά μη προγραμματισμένες Ασυγχρονα προς την εκτέλεση του προγράμματος Hardware interrupts Σύγχρονα
Προηγμένοι Μικροεπεξεργαστές Φροντιστήριο 4 Real Mode Interrupts Επισκόπηση Μορφές control tranfer Γενικά μη προγραμματισμένες Ασυγχρονα προς την εκτέλεση του προγράμματος Hardware interrupts Σύγχρονα
TRC ELECTRONICS, INC LED Driver Constant Voltage 45W MEAN WELL IDLV-45 Series
 LED Driver Constant Voltage 5W MEAN WELL IDLV5 Series ~ A File Name:IDLV5SPEC 0707 TRC ELECTRONICS, INC..888.6.95 LED Driver Constant Voltage 5W MEAN WELL IDLV5 Series TRC ELECTRONICS, INC. SPECIFICATION
LED Driver Constant Voltage 5W MEAN WELL IDLV5 Series ~ A File Name:IDLV5SPEC 0707 TRC ELECTRONICS, INC..888.6.95 LED Driver Constant Voltage 5W MEAN WELL IDLV5 Series TRC ELECTRONICS, INC. SPECIFICATION
ΟΓΖΓΖΖ ΒΖΜΑΣΗΚΟΤ ΚΗΝΖΣΖΡΑ ΜΔ ΜΗΚΡΟΔΛΔΓΚΣΖ
 ΣΔΥΝΟΛΟΓΙΚΟ ΔΚΠΑΙΓΔΤΣΙΚΟ ΙΓΡΤΜΑ ΚΑΒΑΛΑ ΥΟΛΗ ΣΔΥΝΟΛΟΓΙΚΩΝ ΔΦΑΡΜΟΓΩΝ ΣΜΗΜΑ ΗΛΔΚΣΡΟΛΟΓΙΑ ΠΣΤΥΙΑΚΗ ΔΡΓΑΙΑ ΘΔΜΑ: ΟΓΖΓΖΖ ΒΖΜΑΣΗΚΟΤ ΚΗΝΖΣΖΡΑ ΜΔ ΜΗΚΡΟΔΛΔΓΚΣΖ πνπδαζηέο: ηαζφπνπινο Αλαζηάζηνο (Α.Δ.Μ: 4410) ηαζφπνπινο
ΣΔΥΝΟΛΟΓΙΚΟ ΔΚΠΑΙΓΔΤΣΙΚΟ ΙΓΡΤΜΑ ΚΑΒΑΛΑ ΥΟΛΗ ΣΔΥΝΟΛΟΓΙΚΩΝ ΔΦΑΡΜΟΓΩΝ ΣΜΗΜΑ ΗΛΔΚΣΡΟΛΟΓΙΑ ΠΣΤΥΙΑΚΗ ΔΡΓΑΙΑ ΘΔΜΑ: ΟΓΖΓΖΖ ΒΖΜΑΣΗΚΟΤ ΚΗΝΖΣΖΡΑ ΜΔ ΜΗΚΡΟΔΛΔΓΚΣΖ πνπδαζηέο: ηαζφπνπινο Αλαζηάζηνο (Α.Δ.Μ: 4410) ηαζφπνπινο
Ενσωµατωµένα Υπολογιστικά Συστήµατα (Embedded Computer Systems)
") Ενσωµατωµένα Υπολογιστικά Συστήµατα (Embedded Computer Systems) Μαθηµα 2 ηµήτρης Λιούπης 1 Intel SA-1110 µc StrongARM core. System-on-Chip. Εξέλιξη των SA-110 και SA-1100. 2 ARM cores ARM: IP (intellectual
Ενσωµατωµένα Υπολογιστικά Συστήµατα (Embedded Computer Systems) Μαθηµα 2 ηµήτρης Λιούπης 1 Intel SA-1110 µc StrongARM core. System-on-Chip. Εξέλιξη των SA-110 και SA-1100. 2 ARM cores ARM: IP (intellectual
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino UNO Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino UNO Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O
IDPV-45 series. 45W PWM Output LED Driver. File Name:IDPV-45-SPEC S&E
 IDPV5 series S&E ~ A File Name:IDPV5SPEC 0805 IDPV5 series SPECIFICATION MODEL OUTPUT INPUT OTHERS NOTE DC VOLTAGE RATED CURRENT RATED POWER DIMMING RANGE VOLTAGE TOLERANCE PWM FREQUENCY (Typ.) SETUP TIME
IDPV5 series S&E ~ A File Name:IDPV5SPEC 0805 IDPV5 series SPECIFICATION MODEL OUTPUT INPUT OTHERS NOTE DC VOLTAGE RATED CURRENT RATED POWER DIMMING RANGE VOLTAGE TOLERANCE PWM FREQUENCY (Typ.) SETUP TIME
Ενσωματωμένα Συστήματα
 Ενσωματωμένα Συστήματα για εφαρμογές πραγματικού χρόνου Εφαρμογές με τον Arduino Ιωάννης Καλόμοιρος Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Πληροφορικής Μάθημα 10 1 Συναρτήσεις αναλογικής εξόδου: PWM Το
Ενσωματωμένα Συστήματα για εφαρμογές πραγματικού χρόνου Εφαρμογές με τον Arduino Ιωάννης Καλόμοιρος Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Πληροφορικής Μάθημα 10 1 Συναρτήσεις αναλογικής εξόδου: PWM Το
OWA-60E series IP67. 60W Single Output Moistureproof Adaptor. moistureproof. File Name:OWA-60E-SPEC
 Single Output Moistureproof Adaptor OWA-60E series IP67 Ⅱ Ⅱ moistureproof I File Name:OWA-60E-SPEC 0-04- Single Output Moistureproof Adaptor OWA-60E series SPECIFICATION MODEL OWA-60E- OWA-60E- OWA-60E-0
Single Output Moistureproof Adaptor OWA-60E series IP67 Ⅱ Ⅱ moistureproof I File Name:OWA-60E-SPEC 0-04- Single Output Moistureproof Adaptor OWA-60E series SPECIFICATION MODEL OWA-60E- OWA-60E- OWA-60E-0
ROBOARM II. β I f,/)! ο (^ U U- Πτυχιακή TEI ΚΑΒΑΛΑΣ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ. Λογισμικό Εφαρμογής. Γαβαλάς Φώτιος Χαραλαμττίδης Νικόλαος
! ο (^ U U- Πτυχιακή TEI ΚΑΒΑΛΑΣ ΤΜΗΜΑ ΒΙΟΜΗΧΑΝΙΚΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ. Λογισμικό Εφαρμογής. Γαβαλάς Φώτιος Χαραλαμττίδης Νικόλαος") β I f,/)! ο (^ U U- TEI ΚΑΒΑΛΑΣ Πτυχιακή ROBOARM II Λογισμικό Εφαρμογής Γαβαλάς Φώτιος Χαραλαμττίδης Νικόλαος Επιβλέττίΐ'ν Καθηγητής Δρ. Καμπουρλάζος RoboArm II Ευχαριστούμε Θερμά Τον Δρ. Καμπουρλάζο και
β I f,/)! ο (^ U U- TEI ΚΑΒΑΛΑΣ Πτυχιακή ROBOARM II Λογισμικό Εφαρμογής Γαβαλάς Φώτιος Χαραλαμττίδης Νικόλαος Επιβλέττίΐ'ν Καθηγητής Δρ. Καμπουρλάζος RoboArm II Ευχαριστούμε Θερμά Τον Δρ. Καμπουρλάζο και
ΗΜΥ Εργαστήριο Οργάνωσης Υπολογιστών και Μικροεπεξεργαστών
 ΗΜΥ 213 - Εργαστήριο Οργάνωσης Υπολογιστών και Μικροεπεξεργαστών ΗΜΥ 213 Εργαστήριο Οργάνωσης Υπολογιστών και Μικροεπεξεργαστών Διάλεξη 4 Περίληψη Συναρτήσεις Χρονόμετρο Χρήση Διακοπτών Coprocessor Διαχείριση
ΗΜΥ 213 - Εργαστήριο Οργάνωσης Υπολογιστών και Μικροεπεξεργαστών ΗΜΥ 213 Εργαστήριο Οργάνωσης Υπολογιστών και Μικροεπεξεργαστών Διάλεξη 4 Περίληψη Συναρτήσεις Χρονόμετρο Χρήση Διακοπτών Coprocessor Διαχείριση
ΠΕΡΙΓΡΑΦΗ ΥΛΙΚΟΥ AVR 1. ΕΙΣΑΓΩΓΗ 1.1 ΓΕΝΙΚΗ ΔΟΜΗ 1.2 ΟΙΚΟΓΕΝΕΙΕΣ 1.3 ΤΥΠΟΙ 1.4 ΕΡΓΑΛΕΙΑ
 ΠΕΡΙΓΡΑΦΗ ΥΛΙΚΟΥ AVR 1. ΕΙΣΑΓΩΓΗ 1.1 ΓΕΝΙΚΗ ΔΟΜΗ 1.2 ΟΙΚΟΓΕΝΕΙΕΣ 1.3 ΤΥΠΟΙ 1.4 ΕΡΓΑΛΕΙΑ Oι βασικές αρχές λειτουργίας των RISC είναι : Εντολές ενός κ.μ. με κατάλληλη σχεδίαση της μονάδας διοχέτευσης Μεγάλος
ΠΕΡΙΓΡΑΦΗ ΥΛΙΚΟΥ AVR 1. ΕΙΣΑΓΩΓΗ 1.1 ΓΕΝΙΚΗ ΔΟΜΗ 1.2 ΟΙΚΟΓΕΝΕΙΕΣ 1.3 ΤΥΠΟΙ 1.4 ΕΡΓΑΛΕΙΑ Oι βασικές αρχές λειτουργίας των RISC είναι : Εντολές ενός κ.μ. με κατάλληλη σχεδίαση της μονάδας διοχέτευσης Μεγάλος
Παραμετροποίηση Inverter L1000A. Lift Inverter. Συμβατές μόνον με πίνακα ISL_V4
 Page 1 Παραμετροποίηση Inverter. Lift Inverter Συμβατές μόνον με πίνακα ISL_V4 Page 2 Αρχικές Συνδέσεις Εκκίνησης Σε εφαρμογές κλειστού βρόγχου με incremental encoder πρέπει να συνδέσουμε την κάρτα του
Page 1 Παραμετροποίηση Inverter. Lift Inverter Συμβατές μόνον με πίνακα ISL_V4 Page 2 Αρχικές Συνδέσεις Εκκίνησης Σε εφαρμογές κλειστού βρόγχου με incremental encoder πρέπει να συνδέσουμε την κάρτα του
ΗΛΕΚΤΡΟΣΥΓΚΟΛΛΗΣΗ ΙΝVERTER MMA - DC LIFT TIG
 Ηλεκτροσυγκολλήσεις ΗΛΕΚΤΡΟΣΥΓΚΟΛΛΗΣΗ ΙΝVERTER MMA - DC LIFT TIG Η νέα σειρά ηλεκτροσυγκολλήσεων inverter IMPERIA είναι επαγγελματικών προδιαγραφών με κορυφαία ηλεκτρονικά νέας γενιάς, κατάλληλες για συγκόλληση
Ηλεκτροσυγκολλήσεις ΗΛΕΚΤΡΟΣΥΓΚΟΛΛΗΣΗ ΙΝVERTER MMA - DC LIFT TIG Η νέα σειρά ηλεκτροσυγκολλήσεων inverter IMPERIA είναι επαγγελματικών προδιαγραφών με κορυφαία ηλεκτρονικά νέας γενιάς, κατάλληλες για συγκόλληση
o o o o o o o o o o o o o o o o o o o
 1. Σύστηµα ΗΥ Τύπου Α Τεµ. 40 - Κουτί Midi Twer µε τουλάχιστον 3 θέσεις συσκευών 5,25 και 2 θέσεις συσκευών 3,5, τουλάχιστον 2 ενεργές θύρες USB από την µπροστινή πλευρά, τουλάχιστον 1 ανεµιστήρα πλαισίου
1. Σύστηµα ΗΥ Τύπου Α Τεµ. 40 - Κουτί Midi Twer µε τουλάχιστον 3 θέσεις συσκευών 5,25 και 2 θέσεις συσκευών 3,5, τουλάχιστον 2 ενεργές θύρες USB από την µπροστινή πλευρά, τουλάχιστον 1 ανεµιστήρα πλαισίου
π H-4710 ELECTRIC PALLET TRUCK LB uline.com
 -00-9-0 Steering arm DIAGRAM 0 0 7 7 0 7 9 9 0 9 PAGE OF 0 0 PH-70 -00-9-0 Steering arm parts list Control Head Assembly ---------- 0-0000-00 Steering Arm H-70STEER 0-0000-0A Gas Spring Assembly H-00 0-0000-00
-00-9-0 Steering arm DIAGRAM 0 0 7 7 0 7 9 9 0 9 PAGE OF 0 0 PH-70 -00-9-0 Steering arm parts list Control Head Assembly ---------- 0-0000-00 Steering Arm H-70STEER 0-0000-0A Gas Spring Assembly H-00 0-0000-00
IDPV-25 series. 25W PWM Output LED Driver. File Name:IDPV-25-SPEC S&E
 5W PWM Output LED Driver IDPV5 series S&E ~ A File Name:IDPV5SPEC 0805 5W PWM Output LED Driver IDPV5 series SPECIFICATION MODEL IDPV5 IDPV5 4 IDPV5 6 IDPV5 48 IDPV5 60 DC VOLTAGE V 4V 6V 48V 60V CONSTANT
5W PWM Output LED Driver IDPV5 series S&E ~ A File Name:IDPV5SPEC 0805 5W PWM Output LED Driver IDPV5 series SPECIFICATION MODEL IDPV5 IDPV5 4 IDPV5 6 IDPV5 48 IDPV5 60 DC VOLTAGE V 4V 6V 48V 60V CONSTANT
15W DIN Rail Type DC-DC Converter. DDR-15 s e r i e s. File Name:DDR-15-SPEC
 DIN Rail Type DC-DC Converter ± : DIN Rail Type DC-DC Converter SPECIFICATION MODEL OUTPUT INPUT PROTECTION ENVIRONMENT SAFETY & EMC (Note 5) OTHERS NOTE DC VOLTAGE RATED CURRENT CURRENT RANGE RATED POWER
DIN Rail Type DC-DC Converter ± : DIN Rail Type DC-DC Converter SPECIFICATION MODEL OUTPUT INPUT PROTECTION ENVIRONMENT SAFETY & EMC (Note 5) OTHERS NOTE DC VOLTAGE RATED CURRENT CURRENT RANGE RATED POWER
d dx x 2 = 2x d dx x 3 = 3x 2 d dx x n = nx n 1
 d dx x 2 = 2x d dx x 3 = 3x 2 d dx x n = nx n1 x dx = 1 2 b2 1 2 a2 a b b x 2 dx = 1 a 3 b3 1 3 a3 b x n dx = 1 a n +1 bn +1 1 n +1 an +1 d dx d dx f (x) = 0 f (ax) = a f (ax) lim d dx f (ax) = lim 0 =
d dx x 2 = 2x d dx x 3 = 3x 2 d dx x n = nx n1 x dx = 1 2 b2 1 2 a2 a b b x 2 dx = 1 a 3 b3 1 3 a3 b x n dx = 1 a n +1 bn +1 1 n +1 an +1 d dx d dx f (x) = 0 f (ax) = a f (ax) lim d dx f (ax) = lim 0 =
65W PWM Output LED Driver. IDLV-65 series. File Name:IDLV-65-SPEC
 ~ A File Name:IDLV65SPEC 07050 SPECIFICATION MODEL OUTPUT OTHERS NOTE DC VOLTAGE RATED CURRENT RATED POWER DIMMING RANGE VOLTAGE TOLERANCE PWM FREQUENCY (Typ.) SETUP TIME Note. AUXILIARY DC OUTPUT Note.
~ A File Name:IDLV65SPEC 07050 SPECIFICATION MODEL OUTPUT OTHERS NOTE DC VOLTAGE RATED CURRENT RATED POWER DIMMING RANGE VOLTAGE TOLERANCE PWM FREQUENCY (Typ.) SETUP TIME Note. AUXILIARY DC OUTPUT Note.
15W DIN Rail Type DC-DC Converter. DDR-15 series. File Name:DDR-15-SPEC
 DIN Rail Type DC-DC Converter ± : DIN Rail Type DC-DC Converter SPECIFICATION MODEL OUTPUT INPUT PROTECTION ENVIRONMENT SAFETY & EMC (Note 5) OTHERS DC VOLTAGE RATED CURRENT CURRENT RANGE RATED POWER RIPPLE
DIN Rail Type DC-DC Converter ± : DIN Rail Type DC-DC Converter SPECIFICATION MODEL OUTPUT INPUT PROTECTION ENVIRONMENT SAFETY & EMC (Note 5) OTHERS DC VOLTAGE RATED CURRENT CURRENT RANGE RATED POWER RIPPLE
, μ μ. μ ALPINE TR800- R1200-3
 TR800 / TR1200 μ μ μ μ, μ, μ,. 3 5 5 μ μ 7 8 μ ( μ ), 9 μ μ 9 μ 11 μ 12 13 μ / μ 13 μ ; 13 13 μ μ 14 15 μ " " 15 / 16 17 μ μμ 17 19 μμ 20 μ μ 21 μ 1: μ 21 μ 2: μ 21 μ 3: μ μ μ 22 μ 4: μ - 22 μ 5: μ μμ
TR800 / TR1200 μ μ μ μ, μ, μ,. 3 5 5 μ μ 7 8 μ ( μ ), 9 μ μ 9 μ 11 μ 12 13 μ / μ 13 μ ; 13 13 μ μ 14 15 μ " " 15 / 16 17 μ μμ 17 19 μμ 20 μ μ 21 μ 1: μ 21 μ 2: μ 21 μ 3: μ μ μ 22 μ 4: μ - 22 μ 5: μ μμ
1200 mm 50 mm 1600 Χ 1600 mm mm/min 2000 mm/min 1000 mm/min 200 mm/min mm/min mm/min MAX Fiber laser watt
 Μηχανή κοπής και χάραξης µε 1200χ1200mm CNC FIBER LASER 1000 WATT Πρόκειται για Ελληνική κατασκευή. Ο σκελετός είναι κατασκευασµένος από χαλύβδινους δοκούς µεγάλης διατοµής, συγκολληµένους. Οι γραµµικοί
Μηχανή κοπής και χάραξης µε 1200χ1200mm CNC FIBER LASER 1000 WATT Πρόκειται για Ελληνική κατασκευή. Ο σκελετός είναι κατασκευασµένος από χαλύβδινους δοκούς µεγάλης διατοµής, συγκολληµένους. Οι γραµµικοί
Προβολές και Μετασχηματισμοί Παρατήρησης
 Γραφικά & Οπτικοποίηση Κεφάλαιο 4 Προβολές και Μετασχηματισμοί Παρατήρησης Εισαγωγή Στα γραφικά υπάρχουν: 3Δ μοντέλα 2Δ συσκευές επισκόπησης (οθόνες & εκτυπωτές) Προοπτική απεικόνιση (προβολή): Λαμβάνει
Γραφικά & Οπτικοποίηση Κεφάλαιο 4 Προβολές και Μετασχηματισμοί Παρατήρησης Εισαγωγή Στα γραφικά υπάρχουν: 3Δ μοντέλα 2Δ συσκευές επισκόπησης (οθόνες & εκτυπωτές) Προοπτική απεικόνιση (προβολή): Λαμβάνει
ΠΟΡΤΕΣ ΑΝΑΚΑΙΝΙΣΗΣ DOORS FOR MODERNIZATION
 ΠΟΡΤΕΣ ΑΝΑΚΑΙΝΙΣΗΣ DOORS FOR MODERNIZATION ΠΟΡΤΑ ΟΡΟΦΟΥ ΚΕΝΤΡΙΚΗ 2ΦΥΛΛΗ 2 PANELS CENTRE PARTING LANDING DOOR.1. Πόρτα ορόφου χωρίς κάσωμα, για ανακαινίσεις Landing door without frames, for modernization
ΠΟΡΤΕΣ ΑΝΑΚΑΙΝΙΣΗΣ DOORS FOR MODERNIZATION ΠΟΡΤΑ ΟΡΟΦΟΥ ΚΕΝΤΡΙΚΗ 2ΦΥΛΛΗ 2 PANELS CENTRE PARTING LANDING DOOR.1. Πόρτα ορόφου χωρίς κάσωμα, για ανακαινίσεις Landing door without frames, for modernization
ΑΣΚΗΣΗ ΜHΧΑΤΡΟΝΙΚΗΣ. Τέλος όταν εισάγετε ένας σωστός συνδυασμός η ένδειξη του display να μηδενίζετε.
 ΑΣΚΗΣΗ ΜHΧΑΤΡΟΝΙΚΗΣ Να σχεδιάσετε ένα σύστημα το οποίο ελέγχει την κατάσταση τριών διακοπτών on/off, όταν πατηθεί ένας διακόπτης επαναφοράς (push buron), και εξετάζει αν ο συνδυασμός των παραπάνω διακοπτών
ΑΣΚΗΣΗ ΜHΧΑΤΡΟΝΙΚΗΣ Να σχεδιάσετε ένα σύστημα το οποίο ελέγχει την κατάσταση τριών διακοπτών on/off, όταν πατηθεί ένας διακόπτης επαναφοράς (push buron), και εξετάζει αν ο συνδυασμός των παραπάνω διακοπτών
ΑΤΕΙ ΘΕΣΣΑΛΟΝΙΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ. Σηµειώσεις στο µάθηµα ΜΙΚΡΟΕΛΕΓΚΤΕΣ
 ΑΤΕΙ ΘΕΣΣΑΛΟΝΙΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Σηµειώσεις στο µάθηµα ΜΙΚΡΟΕΛΕΓΚΤΕΣ ΝΙΚΟΛΑΪ ΗΣ ΝΙΚ. ΘΕΣΣΑΛΟΝΙΚΗ ΜΑΡΤΙΟΣ 2011 Σημειώσεις ΜΕ 1011Ε.doc Νικολαΐδης Νικ. Σηµειώσεις Μικροελεγκτών
ΑΤΕΙ ΘΕΣΣΑΛΟΝΙΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Σηµειώσεις στο µάθηµα ΜΙΚΡΟΕΛΕΓΚΤΕΣ ΝΙΚΟΛΑΪ ΗΣ ΝΙΚ. ΘΕΣΣΑΛΟΝΙΚΗ ΜΑΡΤΙΟΣ 2011 Σημειώσεις ΜΕ 1011Ε.doc Νικολαΐδης Νικ. Σηµειώσεις Μικροελεγκτών
ΤΥΠΟΣ ΤΕΧΝΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ TIMH Impact Series. Διαστάσεις (H/W/D):35cm x 33cm x 37cm, Βάρος 13.6kgr
:35cm x 33cm x 37cm, Βάρος 13.6kgr") Impact Series Impact Mini 1/3/2015 Impact 10 Impact 12 Ενεργό Subwoofer 6.5 με ενισχυτή ισχύος 180WRMS/300WPeak, με κώνο ανωδιωμένου αλουμίνιου & μεγάφωνο παθητικού ακτινοβολητή, πηνίο 2, Ρύθμιση έντασης,
Impact Series Impact Mini 1/3/2015 Impact 10 Impact 12 Ενεργό Subwoofer 6.5 με ενισχυτή ισχύος 180WRMS/300WPeak, με κώνο ανωδιωμένου αλουμίνιου & μεγάφωνο παθητικού ακτινοβολητή, πηνίο 2, Ρύθμιση έντασης,
OIKONOMIKO ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ ΠΑΤΗΣΙΩΝ 76-104 34 ΑΘΗΝΑ - ΤΗΛ. 010-8203911 - FAX: 010-8226204 - http://www.aueb.gr
 Ε Λ Λ Η Ν Ι Κ Η Δ Η Μ Ο Κ Ρ Α Τ Ι Α OIKONOMIKO ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ ΠΑΤΗΣΙΩΝ 76-104 34 ΑΘΗΝΑ - ΤΗΛ. 010-8203911 - FAX: 010-8226204 - http://www.aueb.gr 14PROC001936787 2014-03-20 ΔΙΑΚΗΡΥΞΗ Ν ο 121/2014
Ε Λ Λ Η Ν Ι Κ Η Δ Η Μ Ο Κ Ρ Α Τ Ι Α OIKONOMIKO ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ ΠΑΤΗΣΙΩΝ 76-104 34 ΑΘΗΝΑ - ΤΗΛ. 010-8203911 - FAX: 010-8226204 - http://www.aueb.gr 14PROC001936787 2014-03-20 ΔΙΑΚΗΡΥΞΗ Ν ο 121/2014
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ν. Φιλ/φεια: 27 /11/2015 ΠΕΡΙΦΕΡΕΙΑ ΑΤΤΙΚΗΣ Αριθμ. Πρωτ: 24142 ΔΗΜΟΣ ΦΙΛΑΔΕΛΦΕΙΑΣ-ΧΑΛΚΗΔΟΝΟΣ Α Ν Α Κ Ο Ι Ν Ω Σ Η
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ν. Φιλ/φεια: 27 /11/2015 ΠΕΡΙΦΕΡΕΙΑ ΑΤΤΙΚΗΣ Αριθμ. Πρωτ: 24142 ΔΗΜΟΣ ΦΙΛΑΔΕΛΦΕΙΑΣ-ΧΑΛΚΗΔΟΝΟΣ Α Ν Α Κ Ο Ι Ν Ω Σ Η Διενέργειας για την εκτέλεση προμήθειας < ΕΞΟΠΛΙΣΜΟΥ ΕΙΚΑΣΤΙΚΟΥ ΕΡΓΑΣΤΗΡΙΟΥ>
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ν. Φιλ/φεια: 27 /11/2015 ΠΕΡΙΦΕΡΕΙΑ ΑΤΤΙΚΗΣ Αριθμ. Πρωτ: 24142 ΔΗΜΟΣ ΦΙΛΑΔΕΛΦΕΙΑΣ-ΧΑΛΚΗΔΟΝΟΣ Α Ν Α Κ Ο Ι Ν Ω Σ Η Διενέργειας για την εκτέλεση προμήθειας < ΕΞΟΠΛΙΣΜΟΥ ΕΙΚΑΣΤΙΚΟΥ ΕΡΓΑΣΤΗΡΙΟΥ>
13SYMV
 Α Η Η υ πα α φ α π υ ( ) 13SYMV001809529 2013-12-27 Θ 24 /12 /2013..:2977 Η Η Η Α Α Φ Α Η Η Η Α Θ Θ 1 ου Γ Δ Θ Γ Φ Θ Ε π Δ Η Ω Η Η Γ Η Η Ω Φ Θ Ε Ποσού 822.220,56 Ευρώ με ΦΠΑ α 1 Χ... 4 Θ... 4 Γ... 8 Χ
Α Η Η υ πα α φ α π υ ( ) 13SYMV001809529 2013-12-27 Θ 24 /12 /2013..:2977 Η Η Η Α Α Φ Α Η Η Η Α Θ Θ 1 ου Γ Δ Θ Γ Φ Θ Ε π Δ Η Ω Η Η Γ Η Η Ω Φ Θ Ε Ποσού 822.220,56 Ευρώ με ΦΠΑ α 1 Χ... 4 Θ... 4 Γ... 8 Χ
MICROMASTER Vector MIDIMASTER Vector
 s MICROMASTER Vector MIDIMASTER Vector... 2 1.... 4 2. -MICROMASTER VECTOR... 5 3. -MIDIMASTER VECTOR... 16 4.... 24 5.... 28 6.... 32 7.... 54 8.... 56 9.... 61 Siemens plc 1998 G85139-H1751-U553B 1.
s MICROMASTER Vector MIDIMASTER Vector... 2 1.... 4 2. -MICROMASTER VECTOR... 5 3. -MIDIMASTER VECTOR... 16 4.... 24 5.... 28 6.... 32 7.... 54 8.... 56 9.... 61 Siemens plc 1998 G85139-H1751-U553B 1.
ELWOOD HIGH PERFORMANCE MOTORS H-SERIES MOTOR DATA
 H-SERIES MOTOR DATA MOTOR MODEL H-3007 H-3016 H-4030-P H-4030-M H-4040 H-4050 H-4075 H-6100 H-6200 H-6300 MECHANICAL DATA (1) Rated Torque, Cont (Stall) 0.8 2.3 3.4 3.4 5.0 6.8 10.2 11.3 22.6 36.7 lb-in
H-SERIES MOTOR DATA MOTOR MODEL H-3007 H-3016 H-4030-P H-4030-M H-4040 H-4050 H-4075 H-6100 H-6200 H-6300 MECHANICAL DATA (1) Rated Torque, Cont (Stall) 0.8 2.3 3.4 3.4 5.0 6.8 10.2 11.3 22.6 36.7 lb-in
Ι ΑΣΚΩΝ ΚΑΘΗΓΗΤΗΣ: ΚΑΘΗΓΗΤΗΣ ΕΦΑΡΜΟΓΩΝ ΠΑΡΑΡΤΗΜΑ ΚΑΣΤΟΡΙΑΣ ΤΕΙ ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ
 Ι ΑΣΚΩΝ ΚΑΘΗΓΗΤΗΣ: ΦΩΤΙΑ ΗΣ Α. ΗΜΗΤΡΗΣ M.Sc. ΚΑΘΗΓΗΤΗΣ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. ΠΑΡΑΡΤΗΜΑ ΚΑΣΤΟΡΙΑΣ ΤΕΙ ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΙΑΚΟΠΕΣ (INTERRUPTS) ΟΙ ΙΑΚΟΠΕΣ ΕΙΝΑΙ «ΣΥΜΒΑΝΤΑ», ΕΣΩΤΕΡΙΚΑ
Ι ΑΣΚΩΝ ΚΑΘΗΓΗΤΗΣ: ΦΩΤΙΑ ΗΣ Α. ΗΜΗΤΡΗΣ M.Sc. ΚΑΘΗΓΗΤΗΣ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. ΠΑΡΑΡΤΗΜΑ ΚΑΣΤΟΡΙΑΣ ΤΕΙ ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΙΑΚΟΠΕΣ (INTERRUPTS) ΟΙ ΙΑΚΟΠΕΣ ΕΙΝΑΙ «ΣΥΜΒΑΝΤΑ», ΕΣΩΤΕΡΙΚΑ
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 1: Εισαγωγή στα ενσωματωμένα συστήματα (embedded systems) Εργαστήριο Αυτομάτου Ελέγχου Ενσωματωμένα συστήματα (Embedded Systems) Ενσωματωμένα συστήματα (Embedded
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 1: Εισαγωγή στα ενσωματωμένα συστήματα (embedded systems) Εργαστήριο Αυτομάτου Ελέγχου Ενσωματωμένα συστήματα (Embedded Systems) Ενσωματωμένα συστήματα (Embedded
ΤΥΠΟΣ ΤΕΧΝΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ TIMH 1-Series
 1-Series 1/9/2015 101 Ηχείο βάσεως 2 δρόμων Ισχύος 150 WRMS, μαγνητικά θωρακισμένο Απόκριση συχνότητας 48Hz - 32KHz (+/- 3dB) Αντίσταση 8Ω Ευαισθησία 87dB Mid/Bass Drivers 110mm με κώνους από ανοδυομένο
1-Series 1/9/2015 101 Ηχείο βάσεως 2 δρόμων Ισχύος 150 WRMS, μαγνητικά θωρακισμένο Απόκριση συχνότητας 48Hz - 32KHz (+/- 3dB) Αντίσταση 8Ω Ευαισθησία 87dB Mid/Bass Drivers 110mm με κώνους από ανοδυομένο
Εισαγωγή στη Γεώργιος Γεωργίου & Χρίστος Ξενοφώντος
 Εισαγωγή στη Γεώργιος Γεωργίου & Χρίστος Ξενοφώντος Τμήμα Μαθηματικών και Στατιστικής Πανεπιστήμιο Κύπρου Μάϊος 7 . ΕΙΣΑΓΩΓΗ Το MATLAB είναι ένα σύγχρονο ολοκληρωμένο μαθηματικό λογισμικό πακέτο που χρησιμοποιείται
Εισαγωγή στη Γεώργιος Γεωργίου & Χρίστος Ξενοφώντος Τμήμα Μαθηματικών και Στατιστικής Πανεπιστήμιο Κύπρου Μάϊος 7 . ΕΙΣΑΓΩΓΗ Το MATLAB είναι ένα σύγχρονο ολοκληρωμένο μαθηματικό λογισμικό πακέτο που χρησιμοποιείται
65W PWM Output LED Driver. IDPV-65 series. File Name:IDPV-65-SPEC
 IDPV65 series ~ A File Name:IDPV65SPEC 07060 IDPV65 series SPECIFICATION MODEL OUTPUT OTHERS NOTE DC VOLTAGE RATED CURRENT RATED POWER DIMMING RANGE VOLTAGE TOLERANCE PWM FREQUENCY (Typ.) SETUP TIME Note.
IDPV65 series ~ A File Name:IDPV65SPEC 07060 IDPV65 series SPECIFICATION MODEL OUTPUT OTHERS NOTE DC VOLTAGE RATED CURRENT RATED POWER DIMMING RANGE VOLTAGE TOLERANCE PWM FREQUENCY (Typ.) SETUP TIME Note.
Έλεγχος θέσης μπάλας σε μία ράβδο χρησιμοποιώντας την πλατφόρμα της QUANSER. Πτυχιακή Εργασία
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ Έλεγχος θέσης μπάλας σε μία ράβδο χρησιμοποιώντας την πλατφόρμα της QUANSER Πτυχιακή Εργασία Κύρκος Αντώνης
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ Έλεγχος θέσης μπάλας σε μία ράβδο χρησιμοποιώντας την πλατφόρμα της QUANSER Πτυχιακή Εργασία Κύρκος Αντώνης
ΕΛΕΓΧΟΣ ΑΝΤΛΙΟΣΤΑΣΙΟΥ ΜΕ ΔΕΞΑΜΕΝΗ ΜΕΣΩ GSM CHECK IN TANK PUMPING THROUGH GSM
 ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΏΝ ΕΦΑΡΜΟΓΏΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ CHECK IN TANK PUMPING THROUGH GSM Επιβλέπων Καθηγητής: Κόγιας Παναγιώτης Επιβλέπουσα Καθηγήτρια: Κόγια Φωτεινή ΚΑΒΑΛΑ, ΦΕΒΡΟΥΑΡΙΟΣ
ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΏΝ ΕΦΑΡΜΟΓΏΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ CHECK IN TANK PUMPING THROUGH GSM Επιβλέπων Καθηγητής: Κόγιας Παναγιώτης Επιβλέπουσα Καθηγήτρια: Κόγια Φωτεινή ΚΑΒΑΛΑ, ΦΕΒΡΟΥΑΡΙΟΣ
13PROC
 : & : &, 13/06/2013.: 213-2143327,317 FAX : 213-2143256 E-mail: gr.promitheion@ekab.gr URL: www.ekab.gr. / :!" & "!#$.%.: 11527 - &$ 13PROC001546644 2013-07-19 I I. 1/2012/2! "#$%& 167 "&$'#$ %!$#$ KAI
: & : &, 13/06/2013.: 213-2143327,317 FAX : 213-2143256 E-mail: gr.promitheion@ekab.gr URL: www.ekab.gr. / :!" & "!#$.%.: 11527 - &$ 13PROC001546644 2013-07-19 I I. 1/2012/2! "#$%& 167 "&$'#$ %!$#$ KAI
[ ] ΝΕΟ / NEW. Linea ROSH-el Linea SUAW-el
![[ ] ΝΕΟ / NEW. Linea ROSH-el Linea SUAW-el](/thumbs/26/8847206.jpg "[ ] ΝΕΟ / NEW. Linea ROSH-el Linea SUAW-el") Linea ROSH-el Linea SUAW-el ΝΕΟ Σωληνωτά µοτέρ µε ενσωµατωµένη ηλεκτρονική ανίχνευση εµποδίου NEW tubular motors with integrated electronic Προηγµένη τεχνολογία για ρολά (ROSH-el) και τέντες (SUAW-el)
Linea ROSH-el Linea SUAW-el ΝΕΟ Σωληνωτά µοτέρ µε ενσωµατωµένη ηλεκτρονική ανίχνευση εµποδίου NEW tubular motors with integrated electronic Προηγµένη τεχνολογία για ρολά (ROSH-el) και τέντες (SUAW-el)
ΤΕΧΝΙΚΕΣ ΠΡΟ ΙΑΓΡΑΦΕΣ ΕΞΟΠΛΙΣΜΟΥ
 ΤΕΧΝΙΚΕΣ ΠΡΟ ΙΑΓΡΑΦΕΣ ΕΞΟΠΛΙΣΜΟΥ Α. κεντρικός εξυπηρετητής τεµάχια : 5 (πέντε) Ολα τα µέρη του προσφερόµενου εξοπλισµού να είναι του ιδίου κατασκευαστή. Αριθµός µονάδων. 5 Τα τµήµατα που συνθέτουν το σύστηµα
ΤΕΧΝΙΚΕΣ ΠΡΟ ΙΑΓΡΑΦΕΣ ΕΞΟΠΛΙΣΜΟΥ Α. κεντρικός εξυπηρετητής τεµάχια : 5 (πέντε) Ολα τα µέρη του προσφερόµενου εξοπλισµού να είναι του ιδίου κατασκευαστή. Αριθµός µονάδων. 5 Τα τµήµατα που συνθέτουν το σύστηµα
PWM και SWITCHING τεχνολογίες
 PWM και SWITCHING τεχνολογίες Βεζέρης ημήτριος Λευκίππου 6, 67100 Ξάνθη, Τηλ.-Fax 2541 084 084, e-mail: leader@cosmos4u.com www.vezeris.gr Προσέγγιση θέματος υπό το πλαίσιο εργασίας με θέμα τεχνολογίες
PWM και SWITCHING τεχνολογίες Βεζέρης ημήτριος Λευκίππου 6, 67100 Ξάνθη, Τηλ.-Fax 2541 084 084, e-mail: leader@cosmos4u.com www.vezeris.gr Προσέγγιση θέματος υπό το πλαίσιο εργασίας με θέμα τεχνολογίες
3. Προσωπικός Ηλεκτρονικός Υπολογιστής (Personal Computer - PC)
") Έχουμε δει την δύναμη του PC και έχουμε δει ότι είναι απεριόριστη. Eckhard Pfeiffer (1947 - ) Γερμανός Επιχειρηματίας 3. Προσωπικός Ηλεκτρονικός Υπολογιστής (Personal Computer - PC) Ο προσωπικός υπολογιστής
Έχουμε δει την δύναμη του PC και έχουμε δει ότι είναι απεριόριστη. Eckhard Pfeiffer (1947 - ) Γερμανός Επιχειρηματίας 3. Προσωπικός Ηλεκτρονικός Υπολογιστής (Personal Computer - PC) Ο προσωπικός υπολογιστής
Dimensions in inches (mm)
") SGMH Dimensions in inches (mm) () 3-Bit Incremental Encoder, without Brake 30 (0.04hp), 50 (0.07hp), 00 (0.3hp) ENCODER CBE, Φ0.24 (Φ6) U20276.8 (300) ±.8 (30) MOTOR CBE, Φ0.28 (Φ7) U88 or U3535.38 (35)
SGMH Dimensions in inches (mm) () 3-Bit Incremental Encoder, without Brake 30 (0.04hp), 50 (0.07hp), 00 (0.3hp) ENCODER CBE, Φ0.24 (Φ6) U20276.8 (300) ±.8 (30) MOTOR CBE, Φ0.28 (Φ7) U88 or U3535.38 (35)
ΑΝΑΡΤΗΤΕΑ ΣΤΟ ΔΙΑΔΙΚΤΥΟ
 ΔΙΚΤΥΟ ΚΟΙΝΩΝΙΚΗΣ ΑΛΛΗΛΕΓΓΥΗΣ ΝΟΜΑΡΧΙΑΣ ΞΑΝΘΗΣ 'Η ΣΤΗΡΙΞΗ' Πληροφ. κ Αλατζά Κυριακή Τηλ. 2542350120 ΕΥΡΩΠΑΪΚΗ ΕΝΩΣΗ ΕΥΡΩΠΑΪΚΗ ΕΠΙΤΡΟΠΗ ΑΝΑΡΤΗΤΕΑ ΣΤΟ ΔΙΑΔΙΚΤΥΟ The Programme is co-funded by the European
ΔΙΚΤΥΟ ΚΟΙΝΩΝΙΚΗΣ ΑΛΛΗΛΕΓΓΥΗΣ ΝΟΜΑΡΧΙΑΣ ΞΑΝΘΗΣ 'Η ΣΤΗΡΙΞΗ' Πληροφ. κ Αλατζά Κυριακή Τηλ. 2542350120 ΕΥΡΩΠΑΪΚΗ ΕΝΩΣΗ ΕΥΡΩΠΑΪΚΗ ΕΠΙΤΡΟΠΗ ΑΝΑΡΤΗΤΕΑ ΣΤΟ ΔΙΑΔΙΚΤΥΟ The Programme is co-funded by the European
Αναφορά εργασίας. Χατζητζάνος Ευάγγελος 2006030128
 Αναφορά εργασίας Χατζητζάνος Ευάγγελος 2006030128 Η εργασία εξαμήνου είναι στο περιβάλλον του Webots και περιλαμβάνει το Nao, καθώς και σκαλοπάτια που πρέπει να ανεβαίνει. Αρχικά έχουμε τον έτοιμο κώδικα
Αναφορά εργασίας Χατζητζάνος Ευάγγελος 2006030128 Η εργασία εξαμήνου είναι στο περιβάλλον του Webots και περιλαμβάνει το Nao, καθώς και σκαλοπάτια που πρέπει να ανεβαίνει. Αρχικά έχουμε τον έτοιμο κώδικα
ιακήρυξη ιαγωνισµού για το Έργο «Προµήθεια Συστήµατος Park & Ride ήµου Λουτρακίου Αγ. Θεοδώρων»
 ΗΜΟΣ Λουτρακίου-Περαχώρας-Αγίων Θεοδώρων ΙΕΥΘΥΝΣΗ ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ & ΠΟΛΕΟ ΟΜΙΑΣ ΤΜΗΜΑ ΤΕΧΝΙΚΩΝ ΕΡΓΩΝ Ταχ. ιεύθυνση : Ιάσονος 1 & Εθν. Αντιστάσεως, Λουτράκι Ταχ. Κώδικας : 20 300 Τηλέφωνο : 00302744069000-00302744360169
ΗΜΟΣ Λουτρακίου-Περαχώρας-Αγίων Θεοδώρων ΙΕΥΘΥΝΣΗ ΤΕΧΝΙΚΩΝ ΥΠΗΡΕΣΙΩΝ & ΠΟΛΕΟ ΟΜΙΑΣ ΤΜΗΜΑ ΤΕΧΝΙΚΩΝ ΕΡΓΩΝ Ταχ. ιεύθυνση : Ιάσονος 1 & Εθν. Αντιστάσεως, Λουτράκι Ταχ. Κώδικας : 20 300 Τηλέφωνο : 00302744069000-00302744360169
!!! )!)(!,!! )!! )! (!!)!
!)(!,!! )!! )! (!!)!") ! # %&!!!!! # %& (!!! # %&! ( ) # %&!! )! )!!!!! (! )! +!!! )!)(!,!! )!! )! (!!)!!!!,!!!!! + (!!)! ).!!!)( / ) 0!!!!!!! + (!!!,! + ( ( 5 % 6! & ) & 7 8!+ 9 ## 78 ## # #5! 7! /, #:6 ;! 7 )! & 9 ) 5< 7 )
! # %&!!!!! # %& (!!! # %&! ( ) # %&!! )! )!!!!! (! )! +!!! )!)(!,!! )!! )! (!!)!!!!,!!!!! + (!!)! ).!!!)( / ) 0!!!!!!! + (!!!,! + ( ( 5 % 6! & ) & 7 8!+ 9 ## 78 ## # #5! 7! /, #:6 ;! 7 )! & 9 ) 5< 7 )
ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ
 ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ 1 ΕΙΣΑΓΩΓΗ 1.1 Ορισµοί και Ιστορικά Στοιχεία Η Ροµποτική είναι εκείνος ο κλάδος της επιστήµης του µηχανικού που ασχολείται µε τη σύλληψη, το σχεδιασµό, την κατασκευή και
ΕΙΣΑΓΩΓΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΡΟΜΠΟΤΙΚΗΣ 1 ΕΙΣΑΓΩΓΗ 1.1 Ορισµοί και Ιστορικά Στοιχεία Η Ροµποτική είναι εκείνος ο κλάδος της επιστήµης του µηχανικού που ασχολείται µε τη σύλληψη, το σχεδιασµό, την κατασκευή και
EUROPEAN TERRITORIAL COOPERATION PROGRAMME GREECE ITALY 2007-2013
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΣΙΑ ΠΑΝΕΠΙΣΗΜΙΟ ΠΑΣΡΩΝ ΕΙΔΙΚΟ ΛΟΓΑΡΙΑΜΟ ΚΟΝΔΤΛΙΩΝ ΕΡΕΤΝΑ Π.Δ. 432/81 ΣΗΛ: 2610/996660 FAX: 2610/996677 E-mail: rescom@upatras.gr http://research.upatras.gr Πάτρα,.26/06/2012 EUROPEAN TERRITORIAL
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΣΙΑ ΠΑΝΕΠΙΣΗΜΙΟ ΠΑΣΡΩΝ ΕΙΔΙΚΟ ΛΟΓΑΡΙΑΜΟ ΚΟΝΔΤΛΙΩΝ ΕΡΕΤΝΑ Π.Δ. 432/81 ΣΗΛ: 2610/996660 FAX: 2610/996677 E-mail: rescom@upatras.gr http://research.upatras.gr Πάτρα,.26/06/2012 EUROPEAN TERRITORIAL
Drive Partner for your Safety. All-in-one video recorder with GPS Reader
 Drive Partner for your Safety All-in-one video recorder with GPS Reader 2011 1. Καταγραφικό οχημάτων (In-car μαύρο κουτί, in-car καταγραφέας ατυχημάτων) ΚΑΣΑΓΡΑΥΕΑ ΤΜΒΑΝΣΩΝ; Προσαρμόστε το στο όχημα και
Drive Partner for your Safety All-in-one video recorder with GPS Reader 2011 1. Καταγραφικό οχημάτων (In-car μαύρο κουτί, in-car καταγραφέας ατυχημάτων) ΚΑΣΑΓΡΑΥΕΑ ΤΜΒΑΝΣΩΝ; Προσαρμόστε το στο όχημα και
P Î,.. Š ²³Ò±μ, Œ.. Œ ϱ,.. ʳ ˆ ˆ ˆ ˆŸ ˆŠ Š Š ˆ Ÿ -200
 P9-2011-62. Î,.. Š ²³Ò±μ, Œ.. Œ ϱ,.. ʳ ˆ ˆ ˆ ˆŸ ˆŠ Š Š ˆ Ÿ -200 Î.. P9-2011-62 É μ É μ μ Í μ μ Ö μ ±μ Êα Ê ±μ É ²Ö -200 É ² μ μ Ê É μ É μ Í μ μ Ö Ò ÒÌ μ - ±μ, ±μéμ μ Ö ²Ö É Ö Î ÉÓÕ É ³Ò μ É ± Êα ²
P9-2011-62. Î,.. Š ²³Ò±μ, Œ.. Œ ϱ,.. ʳ ˆ ˆ ˆ ˆŸ ˆŠ Š Š ˆ Ÿ -200 Î.. P9-2011-62 É μ É μ μ Í μ μ Ö μ ±μ Êα Ê ±μ É ²Ö -200 É ² μ μ Ê É μ É μ Í μ μ Ö Ò ÒÌ μ - ±μ, ±μéμ μ Ö ²Ö É Ö Î ÉÓÕ É ³Ò μ É ± Êα ²
...απόλαυση High Definition παντού!
 HDMI Modulator single DVB-T...απόλαυση High Definition παντού! Οδηγίες Χρήσης HDMI to DVB T Modulator Οδηγίες Χρήσης ΠΕΡΙΕΧΟΜΕΝΑ Σελ. 1. ΟΠΙΣΘΙΑ ΟΨΗ 3 2. ΣΥΝΔΕΣΗ 4 3. ΠΡΟΣΘΙΑ ΟΨΗ 4 4. ΛΕΙΤΟΥΡΓΙΑ 5 4.1
HDMI Modulator single DVB-T...απόλαυση High Definition παντού! Οδηγίες Χρήσης HDMI to DVB T Modulator Οδηγίες Χρήσης ΠΕΡΙΕΧΟΜΕΝΑ Σελ. 1. ΟΠΙΣΘΙΑ ΟΨΗ 3 2. ΣΥΝΔΕΣΗ 4 3. ΠΡΟΣΘΙΑ ΟΨΗ 4 4. ΛΕΙΤΟΥΡΓΙΑ 5 4.1
π H-2302 ELECTRIC PALLET TRUCK uline.com FORK FRAME
 FORK FRAME 1 1 3 4 5 6 16 19 1 18 0 3 6 4 13 14 5 7 8 7 9 10 PAGE 1 OF 10 FORK FRAME PARTS LIST 1 Fork Frame 1 ----------- 1000501004 Rock - Arm 1 ----------- 1000501014 3 Bushing ----------- 000007006
FORK FRAME 1 1 3 4 5 6 16 19 1 18 0 3 6 4 13 14 5 7 8 7 9 10 PAGE 1 OF 10 FORK FRAME PARTS LIST 1 Fork Frame 1 ----------- 1000501004 Rock - Arm 1 ----------- 1000501014 3 Bushing ----------- 000007006
8bit demo coding horror
 8bit demo coding horror Μιχάλης Κάργας (Optimus) 0x375 0x08 18 Ιουλίου 2012 Γιατί; Νοσταλγία Περιέργεια Πρόκληση Μαγικά Κόλπα! ZX Spectrum 48k/128k/+2/+3 CPU: Z80 @ 3.5Mhz Memory: 48k / 128k Graphics 256
8bit demo coding horror Μιχάλης Κάργας (Optimus) 0x375 0x08 18 Ιουλίου 2012 Γιατί; Νοσταλγία Περιέργεια Πρόκληση Μαγικά Κόλπα! ZX Spectrum 48k/128k/+2/+3 CPU: Z80 @ 3.5Mhz Memory: 48k / 128k Graphics 256
NEC Silicon RFIC Amplifiers Low Power, Wideband & SiGe/SiGeC
 NEC Silicon RFIC Amplifiers Low Power, Wideband & SiGe/SiGeC Low Power Amplifiers ELECTRICAL CHARACTERISTICS (TA = 25 C) Range VCC ICC NF Gain RLIN RLOUT PdB ISOL @ 3dB (V) (ma) (dbm) Part down Package
NEC Silicon RFIC Amplifiers Low Power, Wideband & SiGe/SiGeC Low Power Amplifiers ELECTRICAL CHARACTERISTICS (TA = 25 C) Range VCC ICC NF Gain RLIN RLOUT PdB ISOL @ 3dB (V) (ma) (dbm) Part down Package
Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα
 Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα 1ο ΕΠΑΛ Περάματος 7ο ΕΚ Πειραιά Πλακέτα Arduino Το 2005 oι Massimo Banzi και David Cueartielles στο Ivrea Δημιουργούν την υπολογιστική πλατφόρμα Arduino.
Εφαρμογές Arduino Σεμινάριο Ηλεκτρονικού Τομέα 1ο ΕΠΑΛ Περάματος 7ο ΕΚ Πειραιά Πλακέτα Arduino Το 2005 oι Massimo Banzi και David Cueartielles στο Ivrea Δημιουργούν την υπολογιστική πλατφόρμα Arduino.
ΘΕΜΑ : Πρόσκληση εκδήλωσης ενδιαφέροντος για την «Προμήθεια Λογισμικού και ηλεκτρονικού εξοπλισμού ΔΕ Φιλιατρών». ΑΝΑΚΟΙΝΩΣΗ
 Ελληνική ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΝΟΜΟΣ ΜΕΣΣΗΝΙΑΣ KΥΠΑΡΙΣΣΙΑ 5/0/204 Αρ. Πρωτ: 25073 ΑΥΤΟΤΕΛΕΣ ΓΡΑΦΕΙΟ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΟΡΓΑΝΩΣΗΣ & ΠΛΗΡΟΦΟΡΙΚΗΣ ΘΕΜΑ : Πρόσκληση εκδήλωσης ενδιαφέροντος για την «Προμήθεια Λογισμικού
Ελληνική ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΝΟΜΟΣ ΜΕΣΣΗΝΙΑΣ KΥΠΑΡΙΣΣΙΑ 5/0/204 Αρ. Πρωτ: 25073 ΑΥΤΟΤΕΛΕΣ ΓΡΑΦΕΙΟ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΟΡΓΑΝΩΣΗΣ & ΠΛΗΡΟΦΟΡΙΚΗΣ ΘΕΜΑ : Πρόσκληση εκδήλωσης ενδιαφέροντος για την «Προμήθεια Λογισμικού
Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές. Εισαγωγή στο Arduino. Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών
 με μικροελεγκτές. Εισαγωγή στο Arduino. Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών") Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές Εισαγωγή στο Arduino Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών Τι είναι Μικροελεγκτής; Ηλεκτρονική συσκευή που διαχειρίζεται ηλεκτρονικά
Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές Εισαγωγή στο Arduino Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών Τι είναι Μικροελεγκτής; Ηλεκτρονική συσκευή που διαχειρίζεται ηλεκτρονικά
SPIN DUO. ΓΡΗΓΟΡΟΣ ΟΔΗΓΟΣ ΕΚΚΙΝΗΣΗΣ : compact radio wind control for 2 motors (90.421.111) www.mastermotion.eu. 433,42 MHz ΜΗΧΑΝΙΚΟ ΜΟΤΕΡ 1
 www.mastermotion.eu. 433,42 MHz ΜΗΧΑΝΙΚΟ ΜΟΤΕΡ 1") R 4,42 MHz ΓΡΗΓΟΡΟΣ ΟΔΗΓΟΣ ΕΚΚΙΝΗΣΗΣ : compact radio wind control for 2 motors SPIN DUO (0.421.111) ΜΗΧΑΝΙΚΟ ΜΟΤΕΡ 1 ΜΗΧΑΝΙΚΟ ΜΟΤΕΡ 2 ΧΕΙΡΟΚΊΝΗΤΟ 1 ( προαιρετικά) ΧΕΙΡΟΚΊΝΗΤΟ 2 ( προαιρετικά) ΧΕΙΡΙΣΤΉΡΙΟ
R 4,42 MHz ΓΡΗΓΟΡΟΣ ΟΔΗΓΟΣ ΕΚΚΙΝΗΣΗΣ : compact radio wind control for 2 motors SPIN DUO (0.421.111) ΜΗΧΑΝΙΚΟ ΜΟΤΕΡ 1 ΜΗΧΑΝΙΚΟ ΜΟΤΕΡ 2 ΧΕΙΡΟΚΊΝΗΤΟ 1 ( προαιρετικά) ΧΕΙΡΟΚΊΝΗΤΟ 2 ( προαιρετικά) ΧΕΙΡΙΣΤΉΡΙΟ
Προκήρυξη Πρόχειρου Μειοδοτικού ιαγωνισμού
 Γραφείο: Πληροφορίες: Τηλ.: Φαξ: e-mail: Αρ. Φακέλου: Μ.Προμηθειών Ε.Ε. Α.Π.Θ. Θεοδοσιάδης Ε. 2310-996754 2310-200392 Procur@rc.auth.gr 85829,85830 Θεσσαλονίκη, 08/02/2012 Αρ.Πρωτ.: 13445/2012 ΑΝΑΡΤΗΤΕΑ
Γραφείο: Πληροφορίες: Τηλ.: Φαξ: e-mail: Αρ. Φακέλου: Μ.Προμηθειών Ε.Ε. Α.Π.Θ. Θεοδοσιάδης Ε. 2310-996754 2310-200392 Procur@rc.auth.gr 85829,85830 Θεσσαλονίκη, 08/02/2012 Αρ.Πρωτ.: 13445/2012 ΑΝΑΡΤΗΤΕΑ
ΤΕΧΝΙΚΟ ΕΓΧΕΙΡΙΔΙΟ ΟΔΗΓΙΕΣ ΕΓΚΑΤΑΣΤΑΣΗΣ
 ΤΕΧΝΙΚΟ ΕΓΧΕΙΡΙΔΙΟ ΟΔΗΓΙΕΣ ΕΓΚΑΤΑΣΤΑΣΗΣ 1 Πίνακας 1. Μοντέλα Inverters IP20 380-480V ±10% - 3 Phase Input Αριθμός Μοντέλου με φίλτρο KW Έξοδος Ρεύματος (Α) Frame Size ODL-2-24400-3KF42 4 9.5 2 ODL-2-34055-3KF42
ΤΕΧΝΙΚΟ ΕΓΧΕΙΡΙΔΙΟ ΟΔΗΓΙΕΣ ΕΓΚΑΤΑΣΤΑΣΗΣ 1 Πίνακας 1. Μοντέλα Inverters IP20 380-480V ±10% - 3 Phase Input Αριθμός Μοντέλου με φίλτρο KW Έξοδος Ρεύματος (Α) Frame Size ODL-2-24400-3KF42 4 9.5 2 ODL-2-34055-3KF42
Rectangular Polar Parametric
 Harold s Precalculus Rectangular Polar Parametric Cheat Sheet 15 October 2017 Point Line Rectangular Polar Parametric f(x) = y (x, y) (a, b) Slope-Intercept Form: y = mx + b Point-Slope Form: y y 0 = m
Harold s Precalculus Rectangular Polar Parametric Cheat Sheet 15 October 2017 Point Line Rectangular Polar Parametric f(x) = y (x, y) (a, b) Slope-Intercept Form: y = mx + b Point-Slope Form: y y 0 = m
Review Exercises for Chapter 7
 8 Chapter 7 Integration Techniques, L Hôpital s Rule, and Improper Integrals 8. For n, I d b For n >, I n n u n, du n n d, dv (a) d b 6 b 6 (b) (c) n d 5 d b n n b n n n d, v d 6 5 5 6 d 5 5 b d 6. b 6
8 Chapter 7 Integration Techniques, L Hôpital s Rule, and Improper Integrals 8. For n, I d b For n >, I n n u n, du n n d, dv (a) d b 6 b 6 (b) (c) n d 5 d b n n b n n n d, v d 6 5 5 6 d 5 5 b d 6. b 6
Studio Transmitter Link
 UHF STL TRANSMITTER BPT-V/UHF TRANSMITTER SPECIFICATIONS TYPE solid state direct FM frequency synthesised crystal referenced thermal compensated FREQUENCY STABILITY better than 4 ppm0 -------------------------------------------+40
UHF STL TRANSMITTER BPT-V/UHF TRANSMITTER SPECIFICATIONS TYPE solid state direct FM frequency synthesised crystal referenced thermal compensated FREQUENCY STABILITY better than 4 ppm0 -------------------------------------------+40
Προηγμένοι Μικροεπεξεργαστές. Εργαστήριο 5 - Editor
 Προηγμένοι Μικροεπεξεργαστές Εργαστήριο 5 - Editor Περιγραφή Υλοποίηση ενός υποτυπώδους editor που θα: Διαβάζει ένα προκαθορισμένο αρχείο Θα το απεικονίζει στην οθόνη Θα κάνει highlight με έναν ελεγχόμενο
Προηγμένοι Μικροεπεξεργαστές Εργαστήριο 5 - Editor Περιγραφή Υλοποίηση ενός υποτυπώδους editor που θα: Διαβάζει ένα προκαθορισμένο αρχείο Θα το απεικονίζει στην οθόνη Θα κάνει highlight με έναν ελεγχόμενο
Αρχιτεκτονική Υπολογιστών
 Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Αρχιτεκτονική Υπολογιστών Ενότητα 11: Γραφικά VGA Δρ. Μηνάς Δασυγένης mdasyg@ieee.org Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών http://arch.icte.uowm.gr/mdasyg
Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Αρχιτεκτονική Υπολογιστών Ενότητα 11: Γραφικά VGA Δρ. Μηνάς Δασυγένης mdasyg@ieee.org Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών http://arch.icte.uowm.gr/mdasyg
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
ΕΙΣΑΓΩΓΗ. Αρχιτεκτονική Η/Υ ΗΜΟΣ ΜΠΟΛΑΝΑΚΗΣ
 ΕΙΣΑΓΩΓΗ Θέµατα ❸Συστήµατα Η/Υ (αναφορά) ❸Γλώσσα υπολογιστών ❸Γλώσσες προγραµµατισµού (low-high level) ❸Low level VS high level programming ❸Βασικά µέρη Η/Υ ❸Μικροϋπολογιστές (µc µp) ❸Αρχιτεκτονική µικροελεγκτών
ΕΙΣΑΓΩΓΗ Θέµατα ❸Συστήµατα Η/Υ (αναφορά) ❸Γλώσσα υπολογιστών ❸Γλώσσες προγραµµατισµού (low-high level) ❸Low level VS high level programming ❸Βασικά µέρη Η/Υ ❸Μικροϋπολογιστές (µc µp) ❸Αρχιτεκτονική µικροελεγκτών
GENEVA Sound System. Model M - L - XL GENEVA. www.apopsissound.gr 1
 GENEVA Sound System Model M - L - XL GENEVA www.apopsissound.gr 1 . : μ, μ, μ μ. μ μ. μ 1). 2). 3). 4). 5) μ. 6) μ μ μ. 7) μ. μ μ. 8) μ μ μ, μ, μ, ( μ μ μ ) μ. 9) μ μ μ μ. 10) μ μ. 11) μ μ μ μ. 12) μ,
GENEVA Sound System Model M - L - XL GENEVA www.apopsissound.gr 1 . : μ, μ, μ μ. μ μ. μ 1). 2). 3). 4). 5) μ. 6) μ μ μ. 7) μ. μ μ. 8) μ μ μ, μ, μ, ( μ μ μ ) μ. 9) μ μ μ μ. 10) μ μ. 11) μ μ μ μ. 12) μ,
Μετατροπή Μηχανικήσ Πεταλούδασ Γκαζιού Σε Ηλεκτρονικά Ελεγχόμενη Με Χρήςη Η/Υ Στεργίου Γεώργιοσ Πέμπτη
 ΑΛΕΞΑΝΔΡΕΙΟ ΤΕΧΝΟΛΟΓΙΚΟ ΙΔΡΥΜΑ ΘΕΣΣΑΛΟΝΙΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΟΧΗΜΑΤΩΝ Μετατροπή Μηχανικήσ Πεταλούδασ Γκαζιού Σε Ηλεκτρονικά Ελεγχόμενη Με Χρήςη Η/Υ Στεργίου Γεώργιοσ Πέμπτη 03-11-2011
ΑΛΕΞΑΝΔΡΕΙΟ ΤΕΧΝΟΛΟΓΙΚΟ ΙΔΡΥΜΑ ΘΕΣΣΑΛΟΝΙΚΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΟΧΗΜΑΤΩΝ Μετατροπή Μηχανικήσ Πεταλούδασ Γκαζιού Σε Ηλεκτρονικά Ελεγχόμενη Με Χρήςη Η/Υ Στεργίου Γεώργιοσ Πέμπτη 03-11-2011
UPS ΑΔΙΑΛΛΕΙΠΤΗ ΠΑΡΟΧΗ ΕΝΕΡΓΕΙΑΣ & ΠΡΟΣΤΑΣΙΑ ΓΙΑ ΚΑΤΟΙΚΙΑ & ΜΙΚΡΟ ΕΠΑΓΓΕΛΜΑΤΙΚΟ ΧΩΡΟ ΜΟΝΟΦΑΣΙΚΑ UPS ΕΩΣ 3000 VA
 ΑΔΙΑΛΛΕΙΠΤΗ ΠΑΡΟΧΗ ΕΝΕΡΓΕΙΑΣ & ΠΡΟΣΤΑΣΙΑ ΜΟΝΟΦΑΣΙΚΑ ΕΩΣ 3000 VA ΓΙΑ ΚΑΤΟΙΚΙΑ & ΜΙΚΡΟ ΕΠΑΓΓΕΛΜΑΤΙΚΟ ΧΩΡΟ ΠΑΓΚΟΣΜΙΟΣ ΕΙΔΙΚΟΣ ΣΤΙΣ ΗΛΕΚΤΡΙΚΕΣ ΚΑΙ ΨΗΦΙΑΚΕΣ ΚΤΙΡΙΑΚΕΣ ΥΠΟΔΟΜΕΣ KEOR Multiplug πολλαπλών εξόδων
ΑΔΙΑΛΛΕΙΠΤΗ ΠΑΡΟΧΗ ΕΝΕΡΓΕΙΑΣ & ΠΡΟΣΤΑΣΙΑ ΜΟΝΟΦΑΣΙΚΑ ΕΩΣ 3000 VA ΓΙΑ ΚΑΤΟΙΚΙΑ & ΜΙΚΡΟ ΕΠΑΓΓΕΛΜΑΤΙΚΟ ΧΩΡΟ ΠΑΓΚΟΣΜΙΟΣ ΕΙΔΙΚΟΣ ΣΤΙΣ ΗΛΕΚΤΡΙΚΕΣ ΚΑΙ ΨΗΦΙΑΚΕΣ ΚΤΙΡΙΑΚΕΣ ΥΠΟΔΟΜΕΣ KEOR Multiplug πολλαπλών εξόδων
υπάρχει στην ΣΑΕ του Υπουργείου Περιβάλλοντος και Ενέργειας 2016ΣΕ (τρεις χιλιάδες τετρακόσια ευρώ) μη συμπεριλαμβανομένου ΦΠΑ
 μη συμπεριλαμβανομένου ΦΠΑ") ΑΝΤΙΚΕΙΜΕΝΟ ΚΑΙ ΕΙΔΟΣ ΔΙΑΓΩΝΙΣΜΟΥ ΧΡΗΜΑΤΟΔΟΤΗΣΗ ΕΡΓΟΥ ΠΡΟΥΠΟΛΟΓΙΣΜΟΣ ΧΡΟΝΟΣ ΥΛΟΠΟΙΗΣΗΣ/ΔΙΑΡΚΕΙΑ ΕΡΓΟΥ ΗΜΕΡΟΜΗΝΙΑ ΔΗΜΟΣΙΕΥΣΗΣ ΑΝΑΚΟΙΝΩΣΗΣ ΚΑΤΑΛΗΚΤΙΚΗ ΗΜΕΡΟΜΗΝΙΑ ΚΑΙ ΩΡΑ ΥΠΟΒΟΛΗΣ ΠΡΟΣΦΟΡΩΝ ΠΡΟΜΗΘΕΙΑ ΕΙΔΩΝ-ΗΛΕΚΤΡΟΝΙΚΟΣ
ΑΝΤΙΚΕΙΜΕΝΟ ΚΑΙ ΕΙΔΟΣ ΔΙΑΓΩΝΙΣΜΟΥ ΧΡΗΜΑΤΟΔΟΤΗΣΗ ΕΡΓΟΥ ΠΡΟΥΠΟΛΟΓΙΣΜΟΣ ΧΡΟΝΟΣ ΥΛΟΠΟΙΗΣΗΣ/ΔΙΑΡΚΕΙΑ ΕΡΓΟΥ ΗΜΕΡΟΜΗΝΙΑ ΔΗΜΟΣΙΕΥΣΗΣ ΑΝΑΚΟΙΝΩΣΗΣ ΚΑΤΑΛΗΚΤΙΚΗ ΗΜΕΡΟΜΗΝΙΑ ΚΑΙ ΩΡΑ ΥΠΟΒΟΛΗΣ ΠΡΟΣΦΟΡΩΝ ΠΡΟΜΗΘΕΙΑ ΕΙΔΩΝ-ΗΛΕΚΤΡΟΝΙΚΟΣ
Δθαξκνγέο αζύξκαηεο ηειεκεηξίαο ζηελ αλαπηπμηαθή πιαηθόξκα Arduino
 Σερλνινγηθό Δθπαηδεπηηθό Ίδξπκα Κξήηεο ρνιή Σερλνινγηθώλ Δθαξκνγώλ Σκήκα Δθαξκνζκέλεο Πιεξνθνξηθήο & Πνιπκέζσλ Πηπρηαθή εξγαζία Δθαξκνγέο αζύξκαηεο ηειεκεηξίαο ζηελ αλαπηπμηαθή πιαηθόξκα Arduino Διεπζεξηάδεο
Σερλνινγηθό Δθπαηδεπηηθό Ίδξπκα Κξήηεο ρνιή Σερλνινγηθώλ Δθαξκνγώλ Σκήκα Δθαξκνζκέλεο Πιεξνθνξηθήο & Πνιπκέζσλ Πηπρηαθή εξγαζία Δθαξκνγέο αζύξκαηεο ηειεκεηξίαο ζηελ αλαπηπμηαθή πιαηθόξκα Arduino Διεπζεξηάδεο
ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO. Υποψήφιος Διδάκτωρ
 ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO Δημιουργός: Επιβλέπων: Μπακάλη Ιωάννα Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ 1 ΤΙ ΕΙΝΑΙ ΤΟ ARDUINO; Είναι ένας συνδυασμός Υλικού (πλακέτας, μικροελεγκτή, αντιστάσεων κτλ) και Λογισμικού
ΕΙΣΑΓΩΓΗ ΣΤΟ ARDUINO Δημιουργός: Επιβλέπων: Μπακάλη Ιωάννα Πετεινάτος Ηλίας Υποψήφιος Διδάκτωρ 1 ΤΙ ΕΙΝΑΙ ΤΟ ARDUINO; Είναι ένας συνδυασμός Υλικού (πλακέτας, μικροελεγκτή, αντιστάσεων κτλ) και Λογισμικού
CNC ROUTER ATC 1300 X 2600 X 400 ( ΑΥΤΟΜΑΤΗ ΕΝΑΛΛΑΓΗ ΕΡΓΑΛΕΙΩΝ)
") ΚΡΙΤΕΛΑΣ ΑΘΑΝΑΣΙΟΣ ΠΩΛΗΣΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ CNC ROBOTIC CUTTER ΜΗΤΡΟΠΟΛΕΩΣ 86-88 - 52100 ΚΑΣΤΟΡΙΑ ΤΗΛ: 2467023619 Fax: 2467023886 www.servo.gr - email: krit01@otenet.gr CNC ROUTER ATC 1300 X 2600 X 400 ( ΑΥΤΟΜΑΤΗ
ΚΡΙΤΕΛΑΣ ΑΘΑΝΑΣΙΟΣ ΠΩΛΗΣΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ CNC ROBOTIC CUTTER ΜΗΤΡΟΠΟΛΕΩΣ 86-88 - 52100 ΚΑΣΤΟΡΙΑ ΤΗΛ: 2467023619 Fax: 2467023886 www.servo.gr - email: krit01@otenet.gr CNC ROUTER ATC 1300 X 2600 X 400 ( ΑΥΤΟΜΑΤΗ
Ολοκληρωμένο Σύστημα (Σουΐτα)Τρισδιάστατης Ψηφιοποίησης.
Τρισδιάστατης Ψηφιοποίησης.") Ανωτάτη Σχολή Καλών Τεχνών Μεταπτυχιακό Ψηφιακές Μορφές Τέχνης Ολοκληρωμένο Σύστημα (Σουΐτα)Τρισδιάστατης Ψηφιοποίησης. Ολοκληρωμένο Σύστημα (Σουΐτα) Τρισδιάστατης Ψηφιοποίησης επαγγελματικών προδιαγραφών
Ανωτάτη Σχολή Καλών Τεχνών Μεταπτυχιακό Ψηφιακές Μορφές Τέχνης Ολοκληρωμένο Σύστημα (Σουΐτα)Τρισδιάστατης Ψηφιοποίησης. Ολοκληρωμένο Σύστημα (Σουΐτα) Τρισδιάστατης Ψηφιοποίησης επαγγελματικών προδιαγραφών
Answers to practice exercises
 Answers to practice exercises Chapter Exercise (Page 5). 9 kg 2. 479 mm. 66 4. 565 5. 225 6. 26 7. 07,70 8. 4 9. 487 0. 70872. $5, Exercise 2 (Page 6). (a) 468 (b) 868 2. (a) 827 (b) 458. (a) 86 kg (b)
Answers to practice exercises Chapter Exercise (Page 5). 9 kg 2. 479 mm. 66 4. 565 5. 225 6. 26 7. 07,70 8. 4 9. 487 0. 70872. $5, Exercise 2 (Page 6). (a) 468 (b) 868 2. (a) 827 (b) 458. (a) 86 kg (b)
μ ALPINE TR3000- R4000-2
 TR3000 / TR4000 μ μ μ μ, μ, μ,. ...4...6...9...13...19 /...25...28...40...44 -...47...4...6...6 μ μ...7...9 μ ( μ ),...9 μ μ...10 μ...10 μ...11...13 μ / μ...13 μ ;...13...13 μ μ...14...14 μ " "...14 /...15...16
TR3000 / TR4000 μ μ μ μ, μ, μ,. ...4...6...9...13...19 /...25...28...40...44 -...47...4...6...6 μ μ...7...9 μ ( μ ),...9 μ μ...10 μ...10 μ...11...13 μ / μ...13 μ ;...13...13 μ μ...14...14 μ " "...14 /...15...16
Κωνσταντίνος Γκαλονάκης. Arduino: Προγραμματισμός στην πράξη
 Κωνσταντίνος Γκαλονάκης Arduino: Προγραμματισμός στην πράξη 1 Σύνδεση του Arduino με τον Η/Υ και προγραμματισμός αυτού. 1. Εγκατάσταση περιβάλλοντος Arduino IDE Για να προγραμματίσετε τη μονάδα σας θα
Κωνσταντίνος Γκαλονάκης Arduino: Προγραμματισμός στην πράξη 1 Σύνδεση του Arduino με τον Η/Υ και προγραμματισμός αυτού. 1. Εγκατάσταση περιβάλλοντος Arduino IDE Για να προγραμματίσετε τη μονάδα σας θα
: 1/8
 & Y 9, 157 80 NATIONAL TECHNICAL UNIVERSITY OF ATHENS DEPARTMENT OF MECHANICAL ENGINEERING MECHANICAL DESIGN & CONTROL SYSTEMS SECTION 9 HEROON POLYTECHNIOU ST., 157 80 ZOGRAFOU μ μ, μ. T 3 μ, 1, 1, 3,
& Y 9, 157 80 NATIONAL TECHNICAL UNIVERSITY OF ATHENS DEPARTMENT OF MECHANICAL ENGINEERING MECHANICAL DESIGN & CONTROL SYSTEMS SECTION 9 HEROON POLYTECHNIOU ST., 157 80 ZOGRAFOU μ μ, μ. T 3 μ, 1, 1, 3,
LED Pool Lighting 10W
 3 Year Warranty On All Products Email Enquiries: sales@azoogi.com Contact Us Today: (02) 9337 2062 LED Pool Lighting 10W Features 3 years warranty IP68 suitable for underwater meter double insulated cable
3 Year Warranty On All Products Email Enquiries: sales@azoogi.com Contact Us Today: (02) 9337 2062 LED Pool Lighting 10W Features 3 years warranty IP68 suitable for underwater meter double insulated cable
(REV:01) RYOBI 48 Volt Lawn Mower Model No. RY14110 Replacement Parts List
 RYOBI 48 Volt Lawn Mower Model No. RY14110 Replacement Parts List") 9800-86 2-0-0 (REV:0) RYOBI 48 Volt Lawn Mower Model No. RY0 Replacement Parts List RYOBI RY0 48 volt lawn mower 3 38 39 44 39 36 34 36 42 38 39 3 4 37 34 3 43 2 32 0 8 9 2 4 33 8 7 6 3 6 7 22 8 20 3 30
9800-86 2-0-0 (REV:0) RYOBI 48 Volt Lawn Mower Model No. RY0 Replacement Parts List RYOBI RY0 48 volt lawn mower 3 38 39 44 39 36 34 36 42 38 39 3 4 37 34 3 43 2 32 0 8 9 2 4 33 8 7 6 3 6 7 22 8 20 3 30
Είναι το πρωτόκολλο RS232 που χρησιμοποιείται στις σειριακές θύρες COM με τη διαφορά ότι εκτελείται σε επίπεδο τάσεων TTL. 2
 16. USART Οι AVR διαθέτουν ενσωματωμένη διάταξη για υποστήριξη σειριακής επικοινωνίας USART 1 (Universal Synchronous and Asynchronous serial Receiver and Transmitter). Η ενσωματωμένη διάταξη μας εξυπηρετεί
16. USART Οι AVR διαθέτουν ενσωματωμένη διάταξη για υποστήριξη σειριακής επικοινωνίας USART 1 (Universal Synchronous and Asynchronous serial Receiver and Transmitter). Η ενσωματωμένη διάταξη μας εξυπηρετεί
Ι ΑΣΚΩΝ ΚΑΘΗΓΗΤΗΣ: ΚΑΘΗΓΗΤΗΣ ΕΦΑΡΜΟΓΩΝ. ΤΕΙ ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ d.fotiadis@kastoria.teikoz.gr
 Ι ΑΣΚΩΝ ΚΑΘΗΓΗΤΗΣ: ΦΩΤΙΑ ΗΣ Α. ΗΜΗΤΡΗΣ M.Sc. ΚΑΘΗΓΗΤΗΣ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ (Σ.Τ.ΕΦ.) ΤΕΙ ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ d.fotiadis@kastoria.teikoz.gr ΛΕΙΤΟΥΡΓΙΕΣ
Ι ΑΣΚΩΝ ΚΑΘΗΓΗΤΗΣ: ΦΩΤΙΑ ΗΣ Α. ΗΜΗΤΡΗΣ M.Sc. ΚΑΘΗΓΗΤΗΣ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ (Σ.Τ.ΕΦ.) ΤΕΙ ΥΤΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ d.fotiadis@kastoria.teikoz.gr ΛΕΙΤΟΥΡΓΙΕΣ
π H-3405 ELECTRIC PALLET TRUCK uline.com FORK FRAME
 FORK FRAME 17 18 1 4 24 25 26 22 26 3 23 5 19 23 6 20 21 2 9 4 27 28 7 8 4 5 15 8 16 6 7 14 10 12 11 13 11 PAGE 1 OF 12 FORK FRAME PARTS LIST 1 Fork Frame 1 ----------- 1060501011 2 Rock Arm 1 -----------
FORK FRAME 17 18 1 4 24 25 26 22 26 3 23 5 19 23 6 20 21 2 9 4 27 28 7 8 4 5 15 8 16 6 7 14 10 12 11 13 11 PAGE 1 OF 12 FORK FRAME PARTS LIST 1 Fork Frame 1 ----------- 1060501011 2 Rock Arm 1 -----------
(REV:01) RYOBI 48 Volt Lawn Mower Model No. RY14110A Replacement Parts List
 RYOBI 48 Volt Lawn Mower Model No. RY14110A Replacement Parts List") 9000-7 9-- (REV:0) RYOBI 4 Volt Lawn Mower Model No. RY0A Replacement Parts List RYOBI RY0A 4 VOLT LAWN MOWER 3 3 39 44 39 3 34 3 42 3 39 3 4 37 34 3 43 2 0 37 2 33 32 3 9 7 22 30 4 7 3 20 9 3 2 2 27 2
9000-7 9-- (REV:0) RYOBI 4 Volt Lawn Mower Model No. RY0A Replacement Parts List RYOBI RY0A 4 VOLT LAWN MOWER 3 3 39 44 39 3 34 3 42 3 39 3 4 37 34 3 43 2 0 37 2 33 32 3 9 7 22 30 4 7 3 20 9 3 2 2 27 2
ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ- ΦΥΛΛΑΔΙΟ 1(ΑΝΑΛΥΣΗ)
") ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ- ΦΥΛΛΑΔΙΟ (ΑΝΑΛΥΣΗ) Ι. Οι τριγωνομετρικές συναρτήσεις και οι αντίστροφές τους. Η συνάρτηση = sin. Η συνάρτηση sin : -, [,], = sin είναι, αφού (sin ) = cos >, για κάθε -,. Άρα
ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ- ΦΥΛΛΑΔΙΟ (ΑΝΑΛΥΣΗ) Ι. Οι τριγωνομετρικές συναρτήσεις και οι αντίστροφές τους. Η συνάρτηση = sin. Η συνάρτηση sin : -, [,], = sin είναι, αφού (sin ) = cos >, για κάθε -,. Άρα
ΠΡΟΔΙΑΓΡΑΦΕ ΕΞΟΠΛΙΜΟΥ ΠΡΟ ΠΡΟΜΗΘΕΙΑ ΠΙΝΑΚΑ ΠΡΟΥΠΟΛΟΓΙΜΟΥ
 ΠΡΟΔΙΑΓΡΑΦΕ ΕΞΟΠΛΙΜΟΥ ΠΡΟ ΠΡΟΜΗΘΕΙΑ ΠΙΝΑΚΑ ΠΡΟΥΠΟΛΟΓΙΜΟΥ 1 ΡΟΔΙΑΓΑΦΕΣ ΕΞΟΡΛΙΣΜΟΥ ΤΠΟΛΟΓΙΣΕ (ΕΠΙΣΡΑΠΕΖΙΟΙ ΚΑΙ ΥΟΡΗΣΟΙ) ΜΗΦΑΝΕ ΓΡΑΥΕΙΟΤ/ ΤΚΕΤΕ ΗΦΟΤ ΚΑΙ ΕΙΚΟΝΑ Κωδικός 1: PC INTEL ΚΟΥΤΙ ΥΡΟΛΟΓΙΣΤΘ Θα είναι
ΠΡΟΔΙΑΓΡΑΦΕ ΕΞΟΠΛΙΜΟΥ ΠΡΟ ΠΡΟΜΗΘΕΙΑ ΠΙΝΑΚΑ ΠΡΟΥΠΟΛΟΓΙΜΟΥ 1 ΡΟΔΙΑΓΑΦΕΣ ΕΞΟΡΛΙΣΜΟΥ ΤΠΟΛΟΓΙΣΕ (ΕΠΙΣΡΑΠΕΖΙΟΙ ΚΑΙ ΥΟΡΗΣΟΙ) ΜΗΦΑΝΕ ΓΡΑΥΕΙΟΤ/ ΤΚΕΤΕ ΗΦΟΤ ΚΑΙ ΕΙΚΟΝΑ Κωδικός 1: PC INTEL ΚΟΥΤΙ ΥΡΟΛΟΓΙΣΤΘ Θα είναι