Αποθετήριο εκπαιδευτικών σεναρίων LEGO Education WeDo + Scratch
|
|
|
- Δαίδαλος Αλαφούζος
- 6 χρόνια πριν
- Προβολές:
Transcript











1 Επιµέλεια: Θεόδωρος Καρβουνίδης, Απόστολος Αµπαριώτης, Θεόδωρος Κωστούλας, Δηµήτρης Λαδιάς Αποθετήριο εκπαιδευτικών σεναρίων LEGO Education WeDo + Scratch Έκδοση: STEM Education 2018 ISBN: Επιτρέπεται η χρήση σύµφωνα µε την άδεια Creative Commons Attribution - Share Alike 2.0
2 Ευχαριστίες Ευχαριστίες σε όλους τους ακούραστους προπονητές των ομάδων που συμμετείχαν στο διαγωνισμό που καθοδήγησαν και ενέπνευσαν τους εκατοντάδες μαθητές τους και ιδιαίτερα στους Δημήτριο Κωσταγιάννη- Γεώργιο Κωσταγιάννη- Ευάγγελο Γεραλή και Παναγιώτη Μαστοράκη από το 3ο Δημοτικό Σχολείο Νέας Ιωνίας Αττικής Ηλία Νάτσιο της ανεξάρτητης ομάδας M.A.R.S. Μαρία Αναστασίου από το 4ο Δημοτικό Σχολείο Ασπροπύργου Βασιλική Τζιοβάρα από το 4ο Δημοτικό Σχολείο Ιωαννίνων Αγορίτσα Σουλιώτη από το 3ο Δημοτικό Θήβας Ευστράτιο Περουτσέα της ανεξάρτητης ομάδας Pathfinders Φίλιππο Μελά της ανεξάρτητης ομάδας Πεντανοί Αρειανοί Ευαγγελία Σπυράτου από το 1ο Δημοτικό Σχολείο Ηγουμενίτσας Ευαγγελία Κοντοπίδη από το 6/Θέσιο Πειραματικό Δημοτικό Σχολείο Πανεπιστημίου Αθηνών Θεόδωρο Ζώη από το IT-Experts Θεμιστοκλή Γκιών από το NeueSchuleAthen Θεοδούλα Λιάμπα από το 3ο Δημοτικό Σχολείο Γρεβενών που τα έργα των μαθητών τους επιλέχθηκαν ως τα πλέον αντιπροσωπευτικά για να τοποθετηθούν στο αποθετήριο του διαγωνισμού της χρονιάς
3 Μέρος Α Το Πλαίσιο του STEM Περιεχόμενα Α. Η εκπαίδευση STEM ως το πλαίσιο των έργων του αποθετηρίου Α1. Τι είναι το STEM Α2. Η εκπαίδευση STEM ως παγκόσμιο κίνημα Α3. Η διεπιστημονική διάσταση της εκπαίδευσης STEM Α4. Μια παιδαγωγική προσέγγιση της εκπαίδευσης STEM Α5. Η διαδικασία της Μηχανικής Σχεδίασης Α6. Οι δυνατότητες & προτεραιότητες της Ελλάδας στο πλαίσιο του STEM Β. Τα projects των Πανελλήνιων Διαγωνισμών ρομποτικής ως πεδία εφαρμογής της εκπαίδευσης STEM Β1. Η Ρομποτική Β2. Η Εκπαιδευτική Ρομποτική Β3. Η εκπαιδευτική ρομποτική στα πλαίσια του STEM Β4. Εκπαιδευτική Ρομποτική και Μηχανική Σχεδίαση Β5. Προώθηση της εκπαιδευτικής ρομποτικής μέσω των Πανελληνίων και Διεθνών Διαγωνισμών Εκπαιδευτικής Ρομποτικής. Β6. Οι Διαγωνισμοί Εκπαιδευτικής Ρομποτικής του WRO-Hellas Β7. Ο Πανελλήνιος Διαγωνισμός Εκπαιδευτικής Ρομποτικής του WRO-Hellas Β8. Η εξέλιξη του Πανελληνίου Διαγωνισμού Εκπαιδευτικής Ρομποτικής για μαθητές Δημοτικού του WRO-Hellas Γ. Η διττή φύση των έργων ρομποτικής (του Πανελλήνιου Διαγωνισμού Εκπαιδευτικής Ρομποτικής του WRO-Hellas) Γ1. Το Υλικό ως εργαλείο της Εκπαιδευτικής Ρομποτικής Γ2. Το Λογισμικό ως εργαλείο της Εκπαιδευτικής Ρομποτικής Γ2α. Περιβάλλοντα Οπτικού Προγραμματισμού Γ2β. Το Scratch Γ2γ. Το Scratch και η διαχείριση συσκευών του φυσικού κόσμου Δ. Εισηγμένες και σχεδιαζόμενες καινοτομίες στον Πανελλήνιο Διαγωνισμό Εκπαιδευτικής Ρομποτικής για το Δημοτικό Δ1. To κωδικόραμα ως εργαλείο οπτικής αναπαράστασης του κώδικα Δ1α. Η ανάγκη επινόησης του κωδικοράματος Δ1β. Ορισμός και κανόνες σχεδίασης του κωδικοράματος Δ1γ. Η προστιθέμενη αξία του κωδικοράματος Δ2. Ο Πίνακας Ταυτοποίησης Δεδομένων Δ3. Κριτήρια αξιολόγησης του αναπτυσσόμενου λογισμικού Δ4. Κριτήρια αξιολόγησης του κατασκευαστικού μέρους Ε. Τα κριτήρια επιλογής των έργων του αποθετηρίου Ε1. Κανονισμοί συμμετοχής στο διαγωνισμό Ε2. Ρουμπρίκα βαθμολόγησης των έργων Ε3. Πολλαπλά φίλτρα για την επιλογή των έργων του αποθετηρίου του 2018
4 Βιβλιογραφία και Αρθρογραφία Ελληνική Ξενόγλωσση Μελέτες Διαδικτυακοί Τόποι Μέρος Β Σενάρια Σενάριο 01 - Γαιοποίηση του Άρη Σενάριο 02 - Κατοικία ανελκυστήρας Σενάριο 03 - Εργασία στο Άρη Σενάριο 04 - Εργοστάσιο διαλογής τροφίμων και Ρομποτικός βοηθός στον Άρη!! Σενάριο 05 - Σχέδιο διάσωσης Σενάριο 06 - Ανίχνευση κατάλληλων συνθηκών για εποικισμό στον πλανήτη Άρη Σενάριο 07 - Συνεργασία στον Άρη! Σενάριο 08 - Αποικία στον Άρη! Σενάριο 09 - Ας προστατεύσουμε το περιβάλλον του πλανήτη Αρη! Σενάριο 10 - Εξερευνητής διαστήματος Σενάριο 11 - Χτίζουμε αποικία στον Άρη με 3D printer σπιτιών και drone Σενάριο 12 - Robometal
5 Μέρος Α Το Πλαίσιο του STEM
6 Α. Η εκπαίδευση STEM ως το πλαίσιο των έργων του αποθετηρίου Α1. Τι είναι το STEM Ο όρος STEM εμφανίστηκε για πρώτη φορά το 2001 από την βιολόγο Judith A. Ramaley. Αποτελεί το ακρωνύμιο από τα τις λέξεις-επιστημονικά πεδία: Science (Φυσικές Επιστήμες), Technology (Τεχνολογία), Engineering (Μηχανική) και Mathematics (Μαθηματικά). Αντί της διδασκαλίας των τεσσάρων κλάδων ως διακεκριμένα μαθήματα, σύμφωνα με την κυρίαρχη άποψη η εκπαίδευση STEM τους ολοκληρώνει / ενσωματώνει σε ένα συνεκτικό μαθησιακό μοντέλο, μέσω μιας διεπιστημονικής προσέγγισης και βασισμένο σε εφαρμογές του πραγματικού κόσμου. Όμως όσον αφορά τον ορισμό της εκπαίδευσης STEM υπάρχει μια αντίφαση κατά την οποία «ενώ πολλοί αναζητούν τον σαφή ορισμό της STEM εκπαίδευσης λίγοι τελικά συμφωνούν σε κάτι κοινά αποδεκτό» (Bybee, 2010). Έτσι σε πολλές περιπτώσεις ενώ γίνεται αναφορά και στα τέσσερα πεδία του STEM, τελικά δίνεται έμφαση μόνο σε ένα από αυτά. Μια πιο ολοκληρωμένη εκδοχή της εκπαίδευσης STEM είναι αυτή του STEΑM, όπου το Α αντιστοιχεί στις Τέχνες (Arts) που εισάγονται ως ένα πεδίο που προωθεί την ανάπτυξη της δημιουργικότητας και των κινήτρων για μάθηση. Έτσι η εκπαίδευση STEΑM περιλαμβάνει διδακτικές και μαθησιακές προσεγγίσεις που συνδυάζουν τρία ή περισσότερα από τα γνωστικά αντικείμενα STEΑM. Η εκπαίδευση STEM είναι μια προσέγγιση που καταργεί τα σύνορα μεταξύ των ιδιαίτερων αντικειμένων και τα θεωρεί ως ένα όλον (Morrison & Bartlett, 2009) με συνδυασμό διαδικασιών και πρακτικών που υπερβαίνουν τα όρια αυτών των γνωστικών αντικειμένων, με το σκεπτικό ότι τα σύγχρονα προβλήματα είναι αρκετά πολυσύνθετα και πολυδιάστατα και δεν μπορούν να αντιμετωπιστούν αποτελεσματικά από μία μόνο επιστήμη. Έτσι η εκπαίδευση STEM ως "σύνολο" είναι περισσότερο από το "άθροισμα" των επιμέρους επιστημονικών πεδίων συμπεριλαμβάνοντας επιπλέον τουλάχιστον και τις σχέσεις μεταξύ αυτών (Σχήμα 1). Σημαντικότερο από τον ορισμό του STEM είναι να καθοριστούν οι στόχοι της εκπαίδευσης STEM, οι οποίοι σύμφωνα με τον Bybee (2013) είναι: (α) η δημιουργία κοινωνίας με (εγ)γραμματισμό στην προσέγγιση STEM, (β) η ανάπτυξη εργατικού δυναμικού με ικανότητες του 21ου αιώνα (Dede, 2009) και (γ) η ανάπτυξη εξελιγμένης έρευνας και ανάπτυξης με εστίαση στην καινοτομία.

7 Σχήμα 1. Το "σύνολο" είναι περισσότερο από το "άθροισμα" των επιμέρους τμημάτων συμπεριλαμβάνοντας επιπλέον τουλάχιστον και τις σχέσεις μεταξύ αυτών Α2. Η εκπαίδευση STEM ως παγκόσμιο κίνημα Η σύγχρονη παγκόσμια πραγματικότητα με τις διαφοροποιημένες απαιτήσεις μόρφωσης και κατάρτισης και τις ραγδαίες εξελίξεις της αγοράς εργασίας, ανέδειξε την ανάγκη προσαρμογής των υπαρχόντων εκπαιδευτικών συστημάτων και άνοιξε το δρόμο ώστε να υιοθετηθεί το μοντέλο εκπαίδευσης STEM. Στις ΗΠΑ (Betrus, 2015) αναγνωρίστηκε ευρέως το ανταγωνιστικό πλεονεκτήματα της εκπαίδευσης STEM με διάφορες δράσεις όπως οι «Every Child Succeeds Act (ESSA)» και President Obama s «Computer Science for All initiative», και σύμφωνα με αυτό χαράχτηκε η πολιτική των ΗΠΑ για τα επόμενα χρόνια (STEM 2026 Vision). Μέσα στην προσεχή δεκαετία, στα περισσότερα από τα τριάντα νέα επαγγέλματα 1 θα απαιτείται τουλάχιστον κάποιο υπόβαθρο συνδυασμού γνώσεων τεχνολογίας, μηχανικής και μαθηματικών. Όπως αναφέρθηκε η εκπαίδευση STEM αποτελεί πλέον οικονομική επιταγή για τις ΗΠΑ, ενώ σε όλη την Ευρώπη οι χώρες που θέλουν να αναπτύξουν τη βιομηχανία τους προσπαθούν να εντάξουν το STEM σε όλες τις βαθμίδες της εκπαίδευσης. Έτσι το Ευρωπαϊκό Σχολικό Δίκτυο με έδρα τις Βρυξέλλες, έχει αρχίσει από το 2009 μια προσπάθεια, ώστε συγκεκριμένα σχολεία να αναπτύξουν πιλοτικά νέες δραστηριότητες μάθησης και τεχνολογίας στην τάξη, διερευνώντας τη χρήση νέων παιδαγωγικών εργαλείων μέσω της διδασκαλίας με τη βοήθεια του STEM. Έρευνες δείχνουν ότι, μέσα από καλές πρακτικές στην εκπαίδευση STEM, οι μαθητές όλων των τύπων σχολείων μπορούν να εμπλακούν σε υψηλών ποιοτικών προδιαγραφών εκμάθηση των επιστημών, της τεχνολογίας, της μηχανικής και των μαθηματικών (Κατσαβού, 2017). Αυτό είναι εφόδιο απαραίτητο αφού όλα τα επαγγέλματα απαιτούν πλέον εργαζόμενους που να έχουν την ικανότητα να σκέφτονται κριτικά, να δουλεύουν ταυτόχρονα αφενός ως μέλη μιας ομάδας και αφετέρου αυτόνομα και να διαθέτουν δεξιότητες STEM (Fioriello, 2015). Ένα από τα ζητήματα που προκύπτουν κατά τη διαδικασία αυτή είναι η αναζήτηση και η εξασφάλιση των προϋποθέσεων, που θα εμπλέξουν -γνωστικά, συναισθηματικά, συμπεριφορικά- περισσότερους μαθητές σε δραστηριότητες STEM. Αρχικός στόχος 1 νανο-γιατροί, χειρούργοι μνήμης, ειδικοί αντιστροφής της κλιματικής αλλαγής, κατασκευαστές διαστημικών οχημάτων κ.α.
8 παραμένει να προσελκυθεί το ενδιαφέρον των μαθητών, ούτως ώστε να θέλουν να εμπλακούν σε δραστηριότητες STEM και όχι να συμμετάσχουν επειδή πρέπει να το κάνουν ( Successful STEM Education, 2011; National Research Council, Committee on Highly Successful Schools or Programs for K 12 STEM Education, 2011; Hom, 2014). Αν και η εκπαίδευση STEM φαίνεται να δραστηριοποιείται στα πλαίσια της ανάπτυξης τεχνικών και επαγγελματικών δεξιοτήτων στη δευτεροβάθμια και στην επαγγελματική εκπαίδευση και κατάρτιση, πρέπει όμως να ληφθεί σοβαρά η άποψη (Γεωργοπούλου, 2017) ότι η εστίαση στην πρωτοβάθμια εκπαίδευση είναι σημαντική γιατί (α) σε όλες τις χώρες, η πρωτοβάθμια εκπαίδευση είναι η μεγαλύτερη συνιστώσα της υποχρεωτικής εκπαίδευσης, η οποία στοχεύει στην προσωπική ανάπτυξη που θα επιτρέψει στους μαθητές και μελλοντικούς πολίτες την ενεργό συμμετοχή τους στην κοινωνία και (β) οι μαθητές στην πρωτοβάθμια εκπαίδευση είναι στην ηλικία που διαμορφώνεται ο χαρακτήρας και οι γνωστικές τους δεξιότητες και κατά συνέπεια η κατανόηση βασικών εννοιών εκεί μπορεί να αυξήσει την αποτελεσματικότητα σε μεταγενέστερα στάδια. Α3. Η διεπιστημονική διάσταση της εκπαίδευσης STEM Χαρακτηριστικό της εκπαίδευσης STEM είναι ο διεπιστημονικός της χαρακτήρας. Έχει αποδειχθεί πως οι καλύτεροι επαγγελματίες οποιοδήποτε κλάδου είναι «αυτοί που έχουν ικανότητες αποτελεσματικής εργασίας με πολύπλοκα συστήματα, λειτουργούν αποδοτικά και επικοινωνούν δημιουργικά με ειδικούς από διαφορετικούς κλάδους, σχεδιάζουν, παρακολουθούν και αξιολογούν την πρόοδο της δουλειάς τους και προσαρμόζονται γρήγορα στις νέες τεχνολογίες» (Gainsburg, 2006). Αυτά τα χαρακτηριστικά συνδέονται άμεσα με το στοιχείο της διεπιστημονικότητας στη μάθηση, μέσω της οποίας αναμένεται η αφομοίωση γνώσεων από διαφορετικές πηγές και πεδία, και η αξιοποίησή τους με διαφορετικούς, εναλλακτικούς και καινοτόμους τρόπους. Με αυτόν τον τρόπο, η διεπιστημονικότητα στην εκπαιδευτική διαδικασία, παρακινεί τους μαθητές (stimulating) προσφέροντας λιγότερο κατακερματισμένη μάθηση (Furner & Kumar, 2007). Επιπλέον, θεωρείται πως αυξάνει την αποδοτικότητα του ατόμου, διευρύνει την τεχνογνωσία του, βελτιώνει την κατανόηση και τον τρόπο αντιμετώπισης διαφορετικών κλάδων, καθώς και τους επιτρέπει να προσεγγίσουν καταστάσεις που ανταποκρίνονται στην πραγματικότητα (Rennie et al, 2012). Τα άτομα που λαμβάνουν μια διεπιστημονική εκπαίδευση αναμένεται να αναπτύξουν έναν κατάλογο με επιθυμητά χαρακτηριστικά όπως "κριτική σκέψη" (English & Mousoulides, 2015), αγάπη για τη μάθηση, αλληλεγγύη, αυτοπεποίθηση και δέσμευση απέναντι στις δημοκρατικές διαδικασίες (Vars, 2001). Άλλοι εκπαιδευτικοί έχουν επεκτείνει αυτόν τον κατάλογο, προσθέτοντας πως η διεπιστημονική εκπαίδευση καλλιεργεί λειτουργικά εγγράμματους ( functionally literate ) ανθρώπους. Αυτός ο λειτουργικός (εγ)γραμματισμός καλλιεργεί ικανότητες όπως: ευκαμψία, ευελιξία δεξιοτήτων, πρόβλεψη προβλημάτων, λήψη αποφάσεων με ελλιπή δεδομένα, υψηλό επίπεδο αυτό-
9 καθοδήγησης και προσωπικής πειθαρχίας, συνεργασία σε ένα ποικιλόμορφο περιβάλλον, διαλλακτικότητα συνειδητή δημιουργία προσωπικών και συλλογικών οραμάτων για το επιθυμητό μέλλον και την ικανότητα της πραγματοποίησης τους (Rennie et al., 2012). Έτσι τα άτομα που θα ολοκληρώσουν μια εκπαίδευση στο πνεύμα του STEM (Morrison, 2006) πιθανόν θα έχουν αναπτύξει ικανότητες ώστε να είναι: (α) Ικανοί λύτες προβλημάτων (problem solvers) δηλ. θα είναι σε θέση να καθορίσουν τις ερωτήσεις και τα προβλήματα, να σχεδιάσουν έρευνες για τη συλλογή και οργάνωση δεδομένων, την εξαγωγή συμπερασμάτων και στη συνέχεια να εφαρμόσουν τα συμπεράσματα σε νέες καταστάσεις, (β) Καινοτόμοι (innovators) δηλ. θα χρησιμοποιούν δημιουργικά τις έννοιες και αρχές των Μαθηματικών και της Τεχνολογίας, εφαρμόζοντας τες στο μηχανικό σχεδιασμό, (γ) Αυτοδύναμοι (self reliant) δηλ. θα είναι σε θέση να παίρνουν πρωτοβουλίες και να αναπτύσσουν εσωτερικά κίνητρα για να προσδιορίζουν την μία πορεία δράσης τους μέσα σε χρονικά πλαίσια, (δ) Λογικοί στοχαστές (logical thinkers) δηλ. θα είναι σε θέση να εφαρμόζουν λογικές διαδικασίες σκέψης των Επιστημών, των Μαθηματικών και του τεχνολογικού σχεδιασμού για την καινοτομία και την εφεύρεση και (ε) Τεχνολογικά εγγράμματοι (technologically literate) δηλ. θα είναι ικανοί να κατανοήσουν και να εξηγήσουν τη φύση της τεχνολογίας, να αναπτύξουν τις δεξιότητες που απαιτούνται, και να εφαρμόσουν την τεχνολογία κατάλληλα. Α4. Μια παιδαγωγική προσέγγιση της εκπαίδευσης STEM Ένα χαρακτηριστικό της εκπαίδευσης STEM είναι ότι υιοθετείται η ανακαλυπτικήδιερευνητική μάθηση (inquiry-based learning), εγκαταλείποντας τη δασκαλοκεντρική διδασκαλία, με τη δημιουργική εμπλοκή των μαθητών στην επίλυση αυθεντικών προβλημάτων (active learning) (σχήμα 2) μέσω της σχεδίασης, ανάπτυξης και ολοκλήρωσης έργων (project-based learning), όπου λαμβάνονται υπόψη οι συνθήκες, οι παράγοντες και κάθε είδους περιορισμοί (κοινωνικοί, περιβαλλοντικοί, τεχνικοί, κλπ.)

.")
10 Σχήμα 2. Χαρακτηριστικό της εκπαίδευσης STEM είναι η δημιουργική εμπλοκή των μαθητών στην επίλυση αυθεντικών προβλημάτων (Πηγή: Έτσι στο περιβάλλον της εκπαίδευσης STEM οι μαθητές εξερευνούν, ανακαλύπτουν και εφευρίσκουν, με τη χρήση πραγματικών προβλημάτων και καταστάσεων οι οποίες σχετίζονται με τις βιωματικές τους εμπειρίες (PCAST, 2010). Οι Μπέλλου & Μικρόπουλος (2017) προτείνουν ως θεωρητική βάση για την εκπαίδευση STEM, την Τεχνολογική Παιδαγωγική Γνώση του Περιεχομένου (σχήμα 3), Σχήμα 3. Η θεωρητική βάση για την εκπαίδευση STEM προτείνεται να είναι η Τεχνολογική Παιδαγωγική Γνώση του Περιεχομένου.
 βασιζόμενοι σε θεωρίες μάθησης όπως ο κατασκευαστικός εποικοδομισμός (Papert, 1991) και ο κοινωνικός κονστρουκτιβισμός του")
11 που είναι ο κοινός τόπος της Γνώσης του Περιεχομένου με την Τεχνολογική Γνώση και την Παιδαγωγική Γνώση (Koehler & Mishra, 2008; Shulman, 1987). Στο πλαίσιο της Τεχνολογικής Παιδαγωγικής Γνώσης του Περιεχομένου, (α) βασιζόμενοι σε θεωρίες μάθησης όπως ο κατασκευαστικός εποικοδομισμός (Papert, 1991) και ο κοινωνικός κονστρουκτιβισμός του Vygotsky (wikipedia, 2018), (β) θέτοντας μαθησιακούς στόχους προερχόμενους από την αναθεωρημένη ταξινομία του Bloom (Krathwohl, 2002) (σχήμα 4), (γ) υιοθετώντας ένα διερευνητικό και συνεργατικό διδακτικό μοντέλο και (δ) χρησιμοποιώντας ως διδακτικές τεχνικές το πείραμα και την προσομοίωση για την επίλυση προβλήματος, μπορεί να υπάρξει ένα συνεκτικό παιδαγωγικό υπόβαθρο για την εκπαίδευση STEM (σχήμα 5). Σχήμα 4. Αναθεωρημένη ταξινομία Bloom


12 Σχήμα 5. Συνεκτικό παιδαγωγικό υπόβαθρο για την εκπαίδευση STEM Στα πλαίσια του STEM ενθαρρύνεται η παραγωγή καινοτομίας αφενός με την συνεχή εναλλαγή κριτικής και δημιουργικής σκέψης (Λαδιάς, Καρβουνίδης, Λαδιάς, Δουληγέρης, 2017) όπως φαίνεται στο σχήμα 6, Σχήμα 6. Η συνεχής εναλλαγή μεταξύ της συγκλίνουσας (π.χ. αλγοριθμικής) σκέψης και της αποκλίνουσας (δημιουργικής) σκέψης δημιουργεί ευνοϊκές συνθήκες ανάπτυξης καινοτομίας αφετέρου με τη διεπιστημονική προσέγγιση με πεδίο εφαρμογής την επίλυση αυθεντικών προβλημάτων (σχήμα 7), δίνοντας εναύσματα στους μαθητές και μελλοντικούς εργαζομένους να κάνουν νέες νοητικές συνδέσεις μεταξύ των επιστημονικών κλάδων και ενίοτε να εμπνέονται ιδέες για τη δημιουργία εντελώς νέων (Council on Competitiveness, 2005).
 όταν συμμετέχουν σε εργασίες που περιλαμβάνουν στοιχεία του σχεδιασμού")
13 Σχήμα 7. Στα πλαίσια του STEM συνδυάζονται η δημιουργική με την κριτική σκέψη, με διεπιστημονική προσέγγιση και με πεδίο εφαρμογής την επίλυση αυθεντικών προβλημάτων. Α5. Η διαδικασία της Μηχανικής Σχεδίασης Σημαντικό είναι ότι οι μαθητές απολαμβάνουν και χαίρονται (η ικανοποίηση της δημιουργίας) όταν συμμετέχουν σε εργασίες που περιλαμβάνουν στοιχεία του σχεδιασμού και της κατασκευής, καθώς συνδυάζουν τη δημιουργική σκέψη με πιο χειροπιαστές και χειρωνακτικές δραστηριότητες. Με τον τρόπο αυτό, οι μαθητές αφενός έρχονται σε επαφή με τις επιστήμες και εξοικειώνονται με τη μεθοδολογία επίλυσης προβλημάτων, αφετέρου αναπτύσσουν δεξιότητες μέσω της επικοινωνίας και υποστήριξης των ιδεών τους. Έτσι δημιουργείται ένα μαθησιακό περιβάλλον, μέσα στο οποίο οι μαθητές αποκτούν όχι μόνο δεξιότητες του 21ου αιώνα, αλλά και έχουν την ευκαιρία να δημιουργήσουν νέες δεξιότητες στο μέλλον (Narum, 2008). Οι μαθητές μαθαίνοντας πως να μαθαίνουν, αναστοχάζονται για τον τρόπο που σκέφτονται / μαθαίνουν (Papert 1991), αποκτώντας ουσιαστική μάθηση αναβαθμίζοντας τον τρόπο σκέψης τους από πνευματικές δεξιότητες χαμηλού επιπέδου (θυμάμαι, κατανοώ), σε υψηλότερου (εφαρμόζω, αναλύω, αξιολογώ, δημιουργώ). Αυτό σε έναν βαθμό επιτυγχάνεται αποτελεσματικότερα με τη μελέτη πραγματικών και όχι ιδανικών καταστάσεων. Σε αυτό συνεισφέρει το «Ε» (Engineering) του STEM, παραπέμποντας στον όρο Engineering Design / Μηχανική Σχεδίαση (Μπέλλου & Μικρόπουλος 2017). Η διαδικασία της Μηχανικής Σχεδίασης (engineering design process) αποτελεί θεμελιώδες στοιχείο της εκπαίδευσης STEM για την επίτευξη του τεχνολογικού και επιστημονικού (εγ)γραμματισμού των μαθητών, επιτρέποντας αυστηρά ακαδημαϊκές έννοιες να συνδυαστούν με την επίλυση αυθεντικών προβλημάτων (Γεωργοπούλου, 2017). Στο σχήμα 8 παρουσιάζονται τα στάδια που ακολουθούνται κατά τη Μηχανική Σχεδίαση που είναι (α) ο καθορισμός του προβλήματος ή ο εντοπισμός της ανάγκης, (β)
 ο αναστοχασμός και η βελτιστοποίηση της λύσης. Σχήμα 8.")
14 η διερεύνηση των κριτηρίων και των υφιστάμενων περιορισμών, (γ) η αναζήτηση των πιθανών λύσεων, (δ) η επιλογή και η υλοποίηση μιας λύσης από τις πιθανές, (ε) ο έλεγχος και η αξιολόγηση της λύσης που επιλέχθηκε και (στ) ο αναστοχασμός και η βελτιστοποίηση της λύσης. Σχήμα 8. Τα διαδοχικά στάδια της διαδικασία της Μηχανικής Σχεδίασης Οι διαφορές της επιστημονικής προσέγγισης ενός επιστημονικού ερωτήματος από τη διαδικασία της μηχανικής σχεδίασης για την επίλυση ενός πραγματικού προβλήματος, φαίνονται στο σχήμα 9.

15 Σχήμα 9. Συγκριτική παρουσίαση(α) της επιστημονικής προσέγγισης και (Β) της διαδικασίας της μηχανικής σχεδίασης (Πηγή: Α6. Οι δυνατότητες & προτεραιότητες της Ελλάδας στο πλαίσιο του STEM Οι ΗΠΑ είναι μια μεγάλη χώρα έχει αναπτυγμένο κάθε τομέα της επιστήμης και της τεχνολογίας, και αυτή την ολότητα προσπαθεί να προωθήσει με το STEM για να διατηρήσει την τεχνολογική υπεροχή της στα χρόνια που έρχονται. Για τη χώρα μας τα ερωτήματα που τίθενται είναι: Πως μπορούμε να επωφεληθούμε από την εκπαίδευση STEM; Πως μπορούμε -χωρίς να αντιγράψουμε άκριτα ότι έρχεται από την Εσπερία- να την προσαρμόσουμε στα δικά μας δεδομένα και να την εφαρμόσουμε καλύπτοντας τις ανάγκες μας αποτελεσματικά; Ο όρος STEM αναφέρεται στην εκπαίδευση και η εκπαίδευση προετοιμάζει τους εργαζόμενους για την παραγωγή του αύριο. Πως το STEM ακουμπάει την παραγωγή στην Ελλάδα της κρίσης; Τι παράγει σήμερα η Ελλάδα και τι μπορεί να παράγει σε ένα άκρως ανταγωνιστικό και παγκοσμιοποιημένο περιβάλλον; Τι προβλέπει ο σχεδιασμός για το μέλλον; Δεν είμαστε μια μεγάλη χώρα και δεν μπορούμε / συμφέρει να έχουμε μια ολόπλευρη ανάπτυξη όπως αυτή των ΗΠΑ. Τι να κάνουμε; Τι έχουμε; Ποια είναι τα δεδομένα μας; Τι είναι αυτό που θα δώσει το στίγμα μας στον παγκόσμιο παραγωγικό χάρτη; Όταν βρεθεί αυτό τότε προς αυτό θα πρέπει να στραφεί η εκπαίδευσής μας. Ας ψάξουμε για την απάντηση Εύκολα απαντάμε στο ΤΙ πρέπει να κάνουμε. Όμως δυσκολευόμαστε στο ΠΩΣ. Ως παιδιά του Οδυσσέα είμαστε πολυμήχανοι. Έχουμε
16 μάθει να διαχειριζόμαστε το χάος. Ιστορικά έχουμε επιβιώσει από πολλές και χειρότερες κρίσεις. Πρώτα απ όλα ας επιλέξουμε να παίξουμε στο δικό μας γήπεδο, εκεί που είμαστε δυνατοί. Που είμαστε δυνατοί; (α) στη νησιωτική Ελλάδα ο τουρισμός φαίνεται να είναι μια λύση, η βαριά μας βιομηχανία, (β) στην ηπειρωτική χώρα η ποικιλία του κλίματος αλλά και η πολυδιάσπαση των εδαφών ενδείκνυνται για μικρής κλίμακας εξειδικευμένη ποιοτική γεωργοκτηνοτροφική παραγωγή με το να στρεφόμαστε στην ποιότητα μετατρέποντας το μειονέκτημα της μικρής παραγωγής σε πλεονέκτημα με το επώνυμο προϊόν. Όμως έχουμε πρόβλημα με τον αστικό πληθυσμό, ιδιαίτερα αυτόν του λεκανοπεδίου της Αττικής. Εδώ έχουμε ~ ανθρώπους. Ένας πληθυσμός που στην κρίση (ιδιαίτερα οι νέοι) έχει πληγεί από την ανεργία με κύριο χαρακτηριστικό του ότι μεγάλο ποσοστό του έχει σπουδές στην τριτοβάθμια εκπαίδευση, γεγονός που του παρέχει ευελιξία να στραφεί προς την επιχειρηματικότητα. Το μέγεθος αυτού του πληθυσμού παρέχει ένα συγκριτικό πλεονέκτημα (αντίστοιχο με την οικονομία κλίμακος), η καινοτομία σε μια πόλη κατοίκων δεν είναι μόνο 10 φορές μεγαλύτερη από ότι σε μια πόλη κατοίκων, αλλά είναι 17 φορές μεγαλύτερη σύμφωνα με το νόμο του Kleiber (wikipedia, 2018). Πως θα αξιοποιήσουμε αυτό το πλεονέκτημα; Πως θα αναδείξουμε αυτές τις εν δυνάμει ευκαιρίες καινοτομίας; Ποιος τομέας της βιομηχανίας δεν χρειάζεται υψηλή επένδυση σε εγκαταστάσεις και εξοπλισμό; Το λογισμικό! Και τι λογισμικό να παράγουμε; Αυτό που έχουμε ανάγκη να καταναλώνουμε ώστε να μετατρέπουμε το μειονέκτημα σε πλεονέκτημα, αντί να εισάγουμε να το παράγουμε! Πρώτα να καλύψουμε τις υπαρκτές αμυντικές ανάγκες μας («Πόλεμος πατήρ πάντων»). Μετά να βρούμε το στίγμα μας στο παγκοσμιοποιημένο επιχειρηματικό περιβάλλον βάζοντας στόχο να γίνουμε εξαγωγείς υψηλής τεχνολογίας. Τέτοια παραδείγματα είναι οι χώρες (χωρίς φυσικό πλούτο): η κατεστραμμένη μεταπολεμική Ιαπωνία και το περικυκλωμένο σύγχρονο Ισραήλ. Χρειαζόμαστε επιχειρήσεις. Μεγάλες ή μικρές επιχειρήσεις; «Το μικρό (μέσα στο μεγάλο) είναι όμορφο». Χρειαζόμαστε μεγάλα δίκτυα μικρών επιχειρήσεων και ως συντονιστή μια εθνική πρωταθλήτρια εταιρεία (παράδειγμα η Nokia στη Φινλανδία, με όλα τα ρίσκα που υπάρχουν). Έτσι το λεκανοπέδιο της Αττικής μπορεί να γίνει η Silicon Valley της Νοτιοανατολικής Ευρώπης. Έτσι η βιομηχανία του λογισμικού μπορεί να γίνει η ατμομηχανή ολόκληρης της ελληνικής μετά-βιομηχανίας. Είπαμε ότι η βιομηχανία λογισμικού δεν χρειάζεται εγκαταστάσεις και εξοπλισμό. Τότε τι χρειάζεται; Δεν χρειάζεται κεφάλαια, χρειάζεται κεφάλια.

17 Δηλαδή μυαλό που να επιλύει προβλήματα, να ανακαλύπτει και να εφευρίσκει, να δημιουργεί ιδέες, να τις μετασχηματίζει σε καινοτομία και εφαρμόζοντάς τες να παράγει κέρδος. Έχουμε ένα τέτοιο ανθρώπινο δυναμικό που να μπορεί να τα κάνει αυτά και ΠΩΣ; Εδώ έρχεται το STEM ή καλύτερα η εξειδίκευση και προσαρμογή του STEM στην ελληνική πραγματικότητα & ιδιαιτερότητα. Αυτή η προσαρμογή γίνεται (αυθόρμητα-δεν ξέρω πως) και στην εκπαίδευση: Αγοράζουμε (εκπαιδευτικό) εξοπλισμό και αναπτύσσουμε εφαρμογές που τον κάνουν να δουλεύει έξυπνα επιλύοντας προβλήματα, βάζοντάς του ελληνική νοητική προστιθέμενη αξία. Παράδειγμα: Οι διαγωνισμοί εκπαιδευτικής ρομποτικής όπου αγοράζουμε εισαγόμενο εξοπλισμό (hardware) και τον χρησιμοποιούμε συνδυάζοντάς το με πρωτότυπο τρόπο και προγραμματίζοντάς τον (να η νοητική προστιθέμενη αξία), ώστε να επιλύουμε πραγματικά προβλήματα και (όσο και αν ακούγεται παράδοξο) να έχουμε τελικά προϊόντα υψηλής τεχνολογίας made in Greece.
18 Β. Τα projects των Πανελλήνιων Διαγωνισμών Εκπαιδευτικής Ρομποτικής ως πεδία εφαρμογής της εκπαίδευσης STEM Β1. Η Ρομποτική Βρισκόμαστε ήδη στην αρχή μιας επανάστασης που θα αλλάξει ριζικά τον τρόπο που ζούμε, τον τρόπο που μετακινούμαστε, εργαζόμαστε, μαθαίνουμε και σχετιζόμαστε ο ένας με τον άλλον. Η τεχνολογική πρόοδος εξελίσσεται με εκθετικό ρυθμό συγχρόνως σε πολλά τεχνολογικά πεδία, που ο συνδυασμός αυτών των τεχνολογικών πεδίων αλλάζει το φυσικό, ψηφιακό και βιολογικό κόσμο μας. Σύμφωνα με μελέτη της McKinsey (2013), μεταξύ εκατό τεχνολογιών αυτές που διαθέτουν τέσσερα κοινά βασικά χαρακτηριστικά (α) τον υψηλό βαθμό τεχνολογικής αλλαγής, (β) το διευρυμένο πεδίο επιρροής, (γ) το μεγάλο οικονομικό αντίκτυπο και (δ) τις «ανατρεπτικές» ιδιότητες, είναι μόλις δώδεκα: το mobile internet, η αυτοματοποίηση της εργασίας γνώσης, το Internet των πραγμάτων, η τεχνολογία cloud, η εξελιγμένη ρομποτική, τα αυτόνομα οχήματα, η γονιδιωματική νέας γενιάς, η αποθήκευση ενέργειας, η 3D εκτύπωση, τα προηγμένα υλικά, οι εξελιγμένες τεχνικές εξόρυξης πετρελαίου και αερίου και η ανανεώσιμη ενέργεια. Η ρομποτική είναι μια απόληξη της εξέλιξης της αυτοματοποίησης, που έχει ως αντικείμενο τη μελέτη, το σχεδιασμό και τη λειτουργία των ρομπότ. Το δυνάμενο να προγραμματιστεί ρομπότ, είναι μια οντότητα ικανή μέσω του προγραμματισμού να αντιλαμβάνεται το μεταβαλλόμενο περιβάλλον της και να εκπληρώνει συγκεκριμένες εκ των προτέρων ενέργειες και έργα και ως εκ τούτου θεωρείται ότι είναι προικισμένη με αυτονομία. Ο συνδυασμός ρομποτικής και τεχνητής νοημοσύνης μπορεί να ξεπεράσει τα προαναφερθέντα όρια των "συγκεκριμένων εκ των προτέρων ενεργειών και έργων" με ανεξερεύνητες ακόμα δυνατότητες (Harari, 2017). Β2. Η Εκπαιδευτική Ρομποτική Η εκπαιδευτική ρομποτική (educational robotics) είναι μια διασκεδαστική και ενδιαφέρουσα δραστηριότητα η οποία περιλαμβάνει ένα υπολογιστικό περιβάλλον που αποτελείται από ένα ή περισσότερα ρομπότ (είτε αυτόνομα είτε συνοδευόμενα από υπολογιστή). Θεωρείται ως ένα παιδαγωγικό εργαλείο ικανό να οδηγήσει στην ανάπτυξη γνωστικών ικανοτήτων υψηλού επιπέδου βασισμένο στη θεωρία μάθησης του εποικοδομισμού (Piaget, 1974) και στις αρχές του κατασκευαστικού εποικοδομισμού* (*μάθηση μέσα από τις κατασκευές και το χειρισμό πραγματικών και ιδεατών αντικειμένων) του Papert (1991) που αναφέρει ότι "για να οδηγήσεις τον υπολογιστή (το ρομπότ) να κάνει κάτι, πρέπει να περιγράψεις τη σχετική διεργασία, με αρκετή ακρίβεια ώστε να εκτελεστεί από τη μηχανή". Επιπλέον, με τη φυσική υπόσταση των ρομπότ ο μαθητής ξεπερνά τα στενά όρια της οθόνης και ασχολείται με τον
19 πραγματικό κόσμο εξελίσσοντας τη μαθηματική σκέψη από την επίλυση προβλήματος υπό ιδανικές συνθήκες σε σκέψη μηχανικού που έχει να αντιμετωπίσει τη δύστροπη φυσική πραγματικότητα. Σε αυτό το πλαίσιο το ρομπότ μπορεί να χρησιμοποιηθεί στην τυπική (αλλά και στην άτυπη) εκπαίδευση ως ένα αποτελεσματικό εργαλείο για την ανάπτυξη γνωστικών δομών από τους μαθητές (Παπαχριστοδούλου, 2012; Κόμης, 2004). Το εκπαιδευτικό ρομπότ, ως φυσικό αντικείμενο, καλύπτει την κατασκευαστική - εποικοδομητική οπτική της μάθησης και δίνει τη δυνατότητα στους μαθητές να εργαστούν σε ένα ενεργό περιβάλλον, αφενός χτίζοντας φυσικά αντικείμενα και αφετέρου βιώνοντας αφηρημένες έννοιες (Αβραμίδου, 2016). Η ενσωμάτωση της τεχνολογίας ως εργαλείο στην εκπαιδευτική διαδικασία βασίζεται στο ότι τα διάφορα τεχνολογικά μέσα θεωρούνται ως νοητικά εργαλεία (cognitive tools), που ενισχύουν και εμπλουτίζουν την εκπαιδευτική διαδικασία (Carbonaro et al., 2003). Συγκεκριμένα η εκπαιδευτική ρομποτική (α) ενισχύει την ανάπτυξη υψηλότερων νοητικών δεξιοτήτων και ικανοτήτων επίλυσης προβλήματος (Blanchard et al., 2010), (β) αξιοποιεί την έρευνα στην τάξη (Williams et al., 2007), αναπτύσσοντας δεξιότητες κριτικής σκέψης (Petre & Price, 2004) αφού χρησιμοποιείται ως εργαλείο για τη διδασκαλία της πληροφορικής κυρίως για να μυηθούν τα παιδιά στον προγραμματισμό (Nourbakhsh et al., 2005), (γ) δίνει κίνητρα βελτίωσης των δεξιοτήτων της συνεργασίας, αναπτύσσοντας την αυτοπεποίθηση και τη δημιουργικότητα (Wagner, 1998) καθώς χρησιμοποιείται ως ενισχυτής της ενεργούς συμμετοχής των μαθητών κατά τη διαδικασία της μάθησης εμπλέκοντάς τους σε ομαδοσυνεργατικά projects, (δ) λειτουργεί συμπληρωματικά στην εκπαιδευτική διαδικασία δίνοντας τη δυνατότητα στους μαθητές να ασχοληθούν με κάτι αυθεντικό, νοηματοδοτούμενο και χειροπιαστό (tangible), το οποίο μπορούν να τροποποιήσουν όπως αυτοί θέλουν, υλοποιώντας αφηρημένες σχεδιαστικές ιδέες που έχουν στο μυαλό τους και βλέποντας άμεσα τα αποτελέσματα αυτής τους της προσπάθειας (Druin & Hendler, 2000), και (ε) αναπτύσσει γνώσεις και ικανότητες του 21ου αιώνα που χρειάζονται οι μαθητές για να επιβιώσουν στη συνεχώς μεταβαλλόμενη κοινωνία της ΤΠΕ (Talaiver & Bowen, 2010). Β3. Η εκπαιδευτική ρομποτική στα πλαίσια του STEM Η εκπαιδευτική ρομποτική στην πράξη μπορεί να χρησιμοποιηθεί με δύο τρόπους (α) ως αντικείμενο μελέτης και (β) ως εργαλείο μάθησης. Στην πρώτη περίπτωση, η ρομποτική μελετάται ως ένα ξεχωριστό πεδίο. Περιλαμβάνει εκπαιδευτικές δραστηριότητες που σκοπό έχουν να εμπλέξουν τους μαθητές στη μελέτη και επίλυση προβλημάτων που εστιάζουν στην κατασκευή ρομπότ, στον προγραμματισμό τους και στη τεχνητή νοημοσύνη. Συνήθως, υπό αυτή τη μορφή διδάσκεται στη τριτοβάθμια εκπαίδευση. Στη δεύτερη περίπτωση η εκπαιδευτική ρομποτική ως εργαλείο μάθησης χρησιμοποιείται σε αρχικά εκπαιδευτικά επίπεδα και αυτό οφείλεται στο ότι είναι πλέον διαθέσιμες αρκετές -όχι ακριβές- ρομποτικές αρχιτεκτονικές.
20 Η διεθνής κοινότητα εξετάζει εκπαιδευτικά προγράμματα σπουδών που ενισχύονται με δραστηριότητες ρομποτικής και καλύπτουν τις διάφορες εκπαιδευτικές βαθμίδες: το πληρέστερο από αυτά αρχίζει από τον παιδικό σταθμό και ολοκληρώνεται στην τριτοβάθμια εκπαίδευση. Σε αυτά τα προγράμματα σπουδών (Τζιμογιάννης κ.α, 2014) στη μεν πρωτοβάθμια και στην κατώτερη δευτεροβάθμια εκπαίδευση η ρομποτική συνήθως παρουσιάζεται ως ένα γενικό εργαλείο μάθησης, ενώ θεωρείται ως αυτόνομος επιστημονικός κλάδος τόσο στην ανώτερη δευτεροβάθμια εκπαίδευση όσο και στο πανεπιστημιακό επίπεδο. Στη χρήση των ρομπότ ως εργαλεία μάθησης, η εκπαιδευτική ρομποτική θεωρείται ένα εξαιρετικό όργανο για την εισαγωγή των μαθητών στο εκπαιδευτικό μοντέλο της εκπαίδευσης STEM. Σύμφωνα με την Γεωργοπούλου (2017) με το σχεδιασμό κατάλληλων δραστηριοτήτων, η εκπαιδευτική ρομποτική δύναται να ικανοποιήσει όλους τους στόχους που ορίζει το πνεύμα STEM, ως εξής: (α) Διεπιστημονικότητα, η ρομποτική από τη φύση της περιλαμβάνει αρχές από πολλούς διαφορετικούς κλάδους, όπως η Φυσική, τα Μαθηματικά, η Πληροφορική και η Μηχανική (Chung et al., 2014). Οι δραστηριότητες της εκπαιδευτικής ρομποτικής καλλιεργούν στα παιδιά γνώσεις από τους παραπάνω κλάδους, αλλά αναπτύσσουν και δεξιότητες που αναδύονται από τη συνδυαστική διδασκαλία τους. (β) Επίλυση προβλημάτων, σε μια δραστηριότητα που περιλαμβάνει τη χρήση εκπαιδευτικών ρομπότ, οι μαθητές καλούνται να αντιμετωπίσουν πολυάριθμα προβλήματα, τα οποία πηγάζουν από τα εμπόδια που πρέπει να ξεπεράσουν για την επίτευξη των στόχων της δραστηριότητας. Το γεγονός ότι αυτά τα προβλήματα έχουν φυσική και πραγματική υπόσταση, διαφοροποιεί την ποιότητα μάθησης από τα εικονικά και θεωρητικά προβλήματα που προσεγγίζονται στις σχολικές τάξεις. Πράγματι, αυτά τα αληθινά και πρακτικά προβλήματα δύναται να είναι δύσκολο ή αδύνατο να επιλυθούν, απαιτούν την εφαρμογή άλλων τεχνικών για την επίλυση τους, όπως διαδικασίες δοκιμής και σφάλματος (trial and error procedures) και μερικές φορές η λύση που προκύπτει δεν είναι η τέλεια, αλλά η καλύτερη προσπάθεια. (γ) Φαντασία και δημιουργικότητα, η ιδέα της «καινοτομίας» συνδέεται άμεσα με τη φαντασία, η οποία σχετίζεται με τη διαδικασία επίλυσης ενός προβλήματος. Η κατασκευή και ο προγραμματισμός ενός εκπαιδευτικού ρομπότ διεγείρουν τη φαντασία των μαθητών, βοηθώντας τους να καινοτομήσουν κατά τη διαδικασία επίλυσης προβλημάτων. (δ) Λογικός και αόριστος συλλογισμός (logical and abstract reasoning), η διαδικασία κατασκευής ενός εκπαιδευτικού ρομπότ προϋποθέτει τον σχεδιασμό και την συναρμολόγηση του με τέτοιο τρόπο ώστε να είναι ικανό να λειτουργήσει σε ένα συγκεκριμένο περιβάλλον και να εκτελέσει συγκεκριμένες ενέργειες. Αυτό προϋποθέτει από τον μαθητή τη μοντελοποίηση του ρομπότ και του περιβάλλοντος του κατά έναν αόριστο τρόπο, προκειμένου να προβλέψει τη συμπεριφορά του. Επιπλέον, η παρατήρηση των σφαλμάτων βοηθά τον μαθητή στη διερεύνηση εναλλακτικών λύσεων. Τέλος, ο προγραμματισμός των ρομπότ επιτυγχάνεται μέσω της χρήσης μιας συμβολικής οπτικής γλώσσας προγραμματισμού, όπου ο μαθητής οφείλει να κάνει σύνδεση μεταξύ μιας λίστας συμβόλων και εννοιών με τη φυσική συμπεριφορά του
21 ρομπότ, και να περιγράψει τη συμπεριφορά του ρομπότ βάσει μιας σειράς εντολών στον υπολογιστή. Β4. Εκπαιδευτική Ρομποτική και Μηχανική Σχεδίαση Η Μηχανική Σχεδίαση -όπως αναφέρθηκε στα πλαίσια του STEM- βοηθάει τους μαθητές: (α) στην αναγνώριση και διατύπωση μιας περιοχής στην οποία εμφανίζεται κάποιο πρόβλημα, (β) στη σχεδίαση της κατάλληλης λύσης, (γ) στην υλοποίηση και εφαρμογή αυτής της λύσης, (δ) στη βελτίωση και επανασχεδίαση της λύσης και (ε) στην επικοινωνία και διάδοση της τελικής λύσης (Rodgers & Portsmore, 2004). Συγκεκριμένα τα βήματα που ακολουθούνται στη διαδικασία της Μηχανικής Σχεδίασης είναι αυτά που φαίνονται στο σχήμα 10 στο οποίο τα βήματα Σχεδίασε, Δημιούργησε, Δοκίμασε και Βελτίωσε επαναλαμβάνονται παράγοντας έτσι κάθε φορά βελτιωμένο προϊόν. Σχήμα 10. Διαδικασία μηχανικής σχεδίασης Ένα παράδειγμα της διαδικασίας μηχανικής σχεδίασης στο πεδίο της εκπαιδευτικής ρομποτικής φαίνεται στο σχήμα 11.
22 Σχήμα 11. Παράδειγμα διαδικασίας μηχανικής σχεδίασης στο πεδίο της εκπαιδευτικής ρομποτικής Β5. Προώθηση της εκπαιδευτικής ρομποτικής μέσω των Πανελληνίων και Διεθνών Διαγωνισμών Εκπαιδευτικής Ρομποτικής. Οι διαγωνισμοί ρομποτικής έχουν μια ιστορία τριών δεκαετιών στην Αμερική και μόλις δέκα χρόνων στην Ελλάδα, με διαφαινόμενη μια συνεχώς αυξανόμενη δυναμική. Οι διαγωνισμοί ρομποτικής είναι ένας πολύ αποτελεσματικός τρόπος για να προσελκύσουν την προσοχή των μαθητών στο χώρο της ρομποτικής. Σε αυτούς τους διαγωνισμούς οι μαθητές καλούνται να υλοποιήσουν αυθεντικές δραστηριότητες από τον πραγματικό κόσμο, γεγονός που τους αναγκάζει να εφαρμόσουν στην πράξη τις γνώσεις και δεξιότητες που αποκόμισαν στη θεωρία ή και να αποκτήσουν εμπειρίες με τις οποίες στη συνέχεια θα χτίσουν τη δικιά τους προσωπική επιστημονική θεωρία (Papert, 1991). Επιπλέον, όλα αυτά πρέπει να επιτευχθούν σε προκαθορισμένο χρόνο, χωρίς την παρέμβαση του εκπαιδευτικού και ανταγωνιζόμενοι άλλες ομάδες. Έτσι σύμφωνα με το Mueller (2005) και το Πανεπιστήμιο του Βορείου Τέξας (2008) οι μαθητές στους διαγωνισμούς ρομποτικής -όπως και στην εκπαίδευση STEMαξιολογούνται όχι σε θεωρητικές γνώσεις αλλά στο βαθμό που τις έχουν αφομοιώσει και μπορούν να τις εφαρμόσουν για να επιλύσουν υπαρκτά προβλήματα (Κατσαβού, 2017).
23 Τα τελευταία χρόνια στην Ελλάδα έχουν γίνει θεσμοί οι εκδηλώσεις που προβάλλουν και προωθούν τη ρομποτική, όπως οι πανελλήνιοι και διεθνείς διαγωνισμοί ρομποτικής, μέχρι και τα πανελλήνια Φεστιβάλ και τις τοπικές εκθέσεις έργων ρομποτικής. Β6. Οι Διαγωνισμοί Εκπαιδευτικής Ρομποτικής του WRO-Hellas Ο Παγκόσμιος Διαγωνισμός Ρομποτικής (World Robot Olympiad) είναι ένα παγκόσμιο γεγονός για την επιστήμη, την τεχνολογία και την εκπαίδευση. Ο WRO ( συγκεντρώνει παιδιά και νέους από όλον τον κόσμο με σκοπό να αναπτύξουν τη δημιουργικότητά τους και την ικανότητά τους για επίλυση προβλημάτων, μέσα από τη συμμετοχή τους σε δύσκολους, αλλά δημιουργικούς διαγωνισμούς εκπαιδευτικής ρομποτικής. Για τη συμμετοχή στο διαγωνισμό, οι ενδιαφερόμενοι καλούνται να συγκροτήσουν ομάδες των δύο ή τριών παιδιών. Οι ομάδες που συμμετέχουν καλούνται να σχεδιάσουν, να κατασκευάσουν και να προγραμματίσουν ένα ρομπότ που είτε θα χρησιμοποιείται σε δοκιμασίες πίστας (Regular κατηγορία), είτε θα προσομοιώνει ένα επιστημονικό, σχετικό με τη θεματολογία του διαγωνισμού, θέμα (Open κατηγορία). Η Ολυμπιάδα εκπαιδευτικής ρομποτικής έχει τέσσερις κατηγορίες/επίπεδα: (α) Κανονική (Regular) κατηγορία, (β) Ανοικτή (Open) κατηγορία, (γ) Ποδόσφαιρο WRO (WRO Football) και (δ) Ανώτερη κατηγορία (Advanced Robotics Challenge). Ο παγκόσμιος διαγωνισμός ρομποτικής (WRO) πραγματοποιείται χωριστά για τα τρία βασικά ηλικιακά επίπεδα (δημοτικό, γυμνάσιο, λύκειο) στις κατηγορίες Regular & Open. Η κάθε κατηγορία/ηλικιακό επίπεδο διαγωνίζεται σε δικό της πρόβλημα και πίστα διαγωνισμού με διαφορετικό επίπεδο δυσκολίας, ανάλογο με την ηλικία συμμετοχής. Το 2008 η Ελλάδα έγινε ένα από τα κράτη-μέλη του διεθνούς οργανισμού WRO (World Robot Olympiad) με κύριο φορέα διοργάνωσης για την Ολυμπιάδα Εκπαιδευτικής Ρομποτικής το μη κερδοσκοπικό Οργανισμό Εκπαιδευτικής Ρομποτικής & Επιστήμης με το διακριτικό τίτλο WRO Hellas. Στην ιστοσελίδα του wrohellas.gr οι διαγωνισμοί αυτοί αναφέρονται ως «το όχημα με το οποίο επιδιώκεται η εισαγωγή της εκπαιδευτικής ρομποτικής, καθώς και η ευρύτερη μεθοδολογία STEM (Science - Technology - Engineering - Mathematics), στο επίσημο εκπαιδευτικό σύστημα της Ελλάδας». Όλα αυτά τα χρόνια οι διαγωνισμοί τελούν υπό την αιγίδα είτε του Υπουργείου Παιδείας είτε της Προεδρίας της Δημοκρατίας. Ο WRO Hellas διοργανώνει ετησίως δύο ξεχωριστούς διαγωνισμούς (σχήμα 12) για όλες τις εκπαιδευτικές βαθμίδες: (α) τον Πανελλήνιο Διαγωνισμό Εκπαιδευτικής Ρομποτικής (Οκτώβριος Μάρτιος) και (β) τον Εθνικό Διαγωνισμό WRO (Μάρτιος-Ιούλιος) από τον οποίο προκρίνονται οι ομάδες που θα συμμετέχουν στον διεθνή διαγωνισμό. Οι δύο διαγωνισμοί, που απευθύνονται στην εκπαιδευτική κοινότητα στο σύνολό της, στην πρωτοβάθμια και δευτεροβάθμια εκπαίδευση, ξεκινούν από τις Περιφέρειες και καταλήγουν στην Αθήνα για τη διεξαγωγή του τελικού.
24 Σχήμα 12. Οι διαγωνισμοί εκπαιδευτικής ρομποτικής του WRO-Hellas Στο πλαίσιο των διαγωνισμών, αναζητούνται υποστηρικτές-χορηγοί ώστε να προσφέρουν δωρεάν εξοπλισμό εκπαιδευτικής ρομποτικής σε σχολεία που δεν έχουν τη δυνατότητα αγοράς. Το 2016 το ίδρυμα Σταύρος Νιάρχος (όπως έχει αναρτηθεί στην ιστοσελίδα του) διέθεσε μία δωρεά του στηρίζει τον οργανισμό WRO Hellas. Συγκεκριμένα, η δωρεά περιλάμβανε την παροχή κιτ Ρομποτικής EV3 σε πλέον των 100 δημόσιων σχολείων δευτεροβάθμιας εκπαίδευσης σε όλη την Ελλάδα, καθώς και την κατάρτιση των εκπαιδευτικών. Το ίδιο έτος η εταιρεία COSMOTE χορήγησε 100 εκπαιδευτικά πακέτα LEGO WeDo με οδηγίες και υλικά (όπως επεξεργαστή, αισθητήρες και δομικά στοιχεία για την ολοκλήρωση της κατασκευής), τα οποία διανεμήθηκαν σε συγκεκριμένα σχολεία της περιφέρειας, ακολουθώντας αντικειμενικά κριτήρια επιλογής. Ο εξοπλισμός είναι απαραίτητος στα σχολεία, τόσο για τη συμμετοχή τους στους διαγωνισμούς, όσο και για την ευρύτερη ένταξη της εκπαιδευτικής ρομποτικής στη διδακτική πράξη 2. Ένας από τους στόχους του WRO-Hellas είναι η προσπάθεια εξοπλισμού με ρομποτικά κιτ τουλάχιστον 100 σχολεία κάθε χρόνο. Έως και το σχολικό έτος έχουν εφοδιαστεί περισσότερα από 550 σχολεία με εξοπλισμό εκπαιδευτικής ρομποτικής. Λαμβάνοντας υπόψη μόνο τα παραπάνω δεδομένα γίνεται κατανοητή η αύξηση της συμμετοχής των ομάδων στους διαγωνισμούς που εμφανίζεται στο παρακάτω γράφημα (Σχήμα 13). 2 (
25 Σχήμα 13. Συμμετοχές ομάδων στους διαγωνισμούς WRO Η πανελλαδική φύση των διαγωνισμών απαιτεί και τη σχετική με αυτούς επιμόρφωση των εκπαιδευτικών ολόκληρης της χώρας. Στο πλαίσιο της προετοιμασίας των ομάδων σε περιφερειακό επίπεδο, διοργανώνονται τοπικά εργαστήρια / workshops σχετικά με τους εκπαιδευτικούς στόχους και τα διαγωνιστικά κριτήρια των διαγωνισμών εκπαιδευτικής ρομποτικής του WRO Hellas. Κατά το σχολικό έτος έχουν επιμορφωθεί δωρεάν περισσότεροι από 1500 εκπαιδευτικοί είτε με εντατικά σεμινάρια δια ζώσης ή με εξ αποστάσεως σεμινάρια (webinars). Η γενική φιλοσοφία των σεμιναρίων και των webinars είναι αυτή της πρακτικής εξάσκησης (Hands on Training). Κάθε εκπαιδευτικό αντικείμενο διδάσκεται μέσω παραδειγματικών κατασκευών, σύμφωνα με το θέμα του εκάστοτε τρέχοντα διαγωνισμού εκπαιδευτικής ρομποτικής. Κάθε κατηγορία / ηλικιακό επίπεδο διαγωνίζεται σε δικό της πρόβλημα και πίστα διαγωνισμού με διαφορετικό επίπεδο δυσκολίας. Οι διαγωνισμοί του WRO-Hellas: Διευκολύνουν τους μαθητές να επεκτείνουν τους ορίζοντες της γνώσης τους, εξερευνώντας τα ρομπότ και τα ρομποτικά συστήματα στο σχολείο τους και στις καθημερινές τους δραστηριότητες. Εισάγουν την έννοια της σύγχρονης επιστήμης στις εκπαιδευτικές δραστηριότητες των μαθητών στις φυσικές επιστήμες, τα μαθηματικά και την τεχνολογία τόσο μέσα στο σχολείο, όσο και έξω από αυτό. Προωθούν τη δημιουργική σκέψη, να αναπτύξει τις δεξιότητες επικοινωνίας και συνεργασίας, να ενδυναμώσει τις δυνατότητες των παιδιών για απόκτηση νέων δεξιοτήτων, απαραίτητων σε ένα σύστημα σύγχρονης εκπαίδευσης. Διευκολύνουν τις συναντήσεις παιδιών και νέων από όλο τον κόσμο με στόχο την ανάπτυξη της δημιουργικότητας, της ικανότητας επίλυσης προβλημάτων, της ικανότητας για καινοτομικές προσεγγίσεις στην επίλυση καθημερινών και
26 ανθρώπινων αναγκών, αξιοποιώντας τις ευκαιρίες συμμετοχής σε ιδιαίτερα απαιτητικούς διαγωνισμούς εκπαιδευτικής ρομποτικής. Διευρύνουν την κατανόηση των παιδιών και των νέων για τις δυνατότητες αξιοποίησης εφαρμογών της επιστήμης και της τεχνολογίας. Σκοπός η αναβάθμιση της ποιότητας της καθημερινής ζωής των πολιτών. Δημιουργούν κατάλληλες συνθήκες για την αυτομόρφωση και τη δια βίου μάθηση, αξιοποιώντας ελκυστικά μαθησιακά περιβάλλοντα και ευχάριστες ενασχολήσεις. Ενθαρρύνουν την έρευνα και την καινοτομία και να υποβοηθήσει τη δημιουργία ή την αύξηση της παραγωγικής βάσης μιας χώρας, αξιοποιώντας τεχνολογίες αιχμής μικρότερης κλίμακας, ώστε να είναι οικονομικά βιώσιμες και υποσχόμενες. Αναπτύσσουν τις ψηφιακές δεξιότητες των μελλοντικών πολιτών, βοηθώντας στην αύξηση της οικονομικής εμβέλειας μιας χώρας, στο σημερινό παγκόσμιο ανταγωνιστικό γίγνεσθαι. Β7. Ο Πανελλήνιος Διαγωνισμός Εκπαιδευτικής Ρομποτικής του WRO-Hellas Ο Πανελλήνιος Διαγωνισμός Εκπαιδευτικής Ρομποτικής για μαθητές Δημοτικού, Γυμνασίου και Λυκείου διοργανώνεται από το 2015 από τον WRO-Hellas. Ο διαγωνισμός αποτελεί για την εκπαιδευτική κοινότητα όλης της χώρας ένα έντονο ταξίδι διάρκειας 6 μηνών, από την ανακοίνωση των θεμάτων τον Οκτώβριο έως τη διεξαγωγή του τελικού τον Μάρτιο. Ο Πανελλήνιος Διαγωνισμός έχει τρεις κατηγορίες για μαθητές Δημοτικού, Γυμνασίου και Λυκείου. Για κάθε βαθμίδα τίθενται διαφορετικοί εκπαιδευτικοί στόχοι και ως εκ τούτου διαφορετικά διαγωνιστικά κριτήρια. Συγκεκριμένα (α) οι μαθητές του δημοτικού χρησιμοποιούν το πακέτο εκπαιδευτικής ρομποτικής LEGO Education WeDo και λογισμικό το Scratch, (β) οι μαθητές του Γυμνασίου χρησιμοποιούν το LEGO Mindstorms EV3 και καλούνται να εκτελέσουν δοκιμασία σε πίστα. Η πίστα είναι κάθε χρόνο σε σημαντικά γεγονότα της ελληνικής ιστορίας και (γ) οι μαθητές του Λυκείου χρησιμοποιούν το LEGO Mindstorms EV3 και καλούνται να υλοποιήσουν ένα project το οποίο θα συνδυάζει την αειφόρο ανάπτυξη με την επιχειρηματικότητα. Για να γίνει πλήρως κατανοητή η φιλοσοφία των διαγωνισμών ρομποτικής της WRO θα γίνει ειδική αναφορά στη δομή και τη θεματολογία του πανελλήνιου διαγωνισμού για τα δημοτικά του Ο τίτλος του διαγωνισμού ήταν «Οχήματα και μεταφορές του αύριο». Οι μαθητές που διαγωνίζονται πρέπει να παρουσιάσουν μια κατασκευή με αυτοματισμούς, η οποία θα έχει σχέση με το θέμα του διαγωνισμού: «Οχήματα και μεταφορές του αύριο». Υπάρχουν συγκεκριμένοι κανόνες και τεχνικές προδιαγραφές που πρέπει να ακολουθήσουν οι ομάδες και η αξιολόγηση γίνεται με κριτήρια που βασίζονται σε τέσσερις άξονες: (α) τη σύλληψη ιδέας / project, (β) τους αυτοματισμούς, (γ) τον εικονικό κόσμο, δηλαδή την ορθότητα λογικής, την πολυπλοκότητα λογισμικού και αυτοματισμών, την αναπαράσταση αυτοματισμού με animation, interface, και την

.")
27 αισθητική, και (δ) την παρουσίαση της εργασίας, οι επικοινωνιακές δεξιότητες των μαθητών και τη μεταξύ τους συνεργασία. Β8. Η εξέλιξη του Πανελληνίου Διαγωνισμού Εκπαιδευτικής Ρομποτικής για μαθητές Δημοτικού του WRO-Hellas Τα στοιχεία των μέχρι τώρα Πανελλήνιων Διαγωνισμών Εκπαιδευτικής Ρομποτικής για μαθητές Δημοτικού της κατηγορίας open είναι: 2015, Θέμα: Η δική μου πόλη. Πανελλαδικές συμμετοχές: 508 ομάδες (Αττική: 214). Συμμετοχές στον τελικό διαγωνισμό: 50 ομάδες, 25 κριτές. 2016, Θέμα: Ο Γαλαξίας μας. Πανελλαδικές συμμετοχές: 350 ομάδες (Αττική: 105). Συμμετοχές στον τελικό διαγωνισμό: 50 ομάδες, 8 κριτές.

.")

28 Πανελλαδικές συμμετοχές: 350 ομάδες (Αττική: 105). Συμμετοχές στον τελικό διαγωνισμό: 50 ομάδες, 8 κριτές. 2017, Θέμα: Οχήματα και μεταφορές. Πανελλαδικές συμμετοχές: 371 ομάδες (Αττική: 130). Συμμετοχές στον τελικό διαγωνισμό: 80 ομάδες, 25 κριτές. 2018, Θέμα: Ο Αποικισμός του Άρη. Πανελλαδικές συμμετοχές: 386 ομάδες (Αττική: 150). Συμμετοχές στον τελικό διαγωνισμό: 84 ομάδες, 25 Κριτές. 2019, Θέμα: Αρχιπέλαγος Αιγαίο: Η τεχνολογία βοηθά στην ανάπτυξη των νησιών.
29 Γ. Η διττή φύση των έργων ρομποτικής (του Πανελλήνιου Διαγωνισμού Εκπαιδευτικής Ρομποτικής του WRO-Hellas) Σύμφωνα με τον Κόμη (Κόμης κ.ά. 2017), κεντρικές έννοιες της εκπαιδευτικής ρομποτικής αποτελούν η «κατασκευή» και ο «προγραμματισμός» των ρομπότ. Οι έννοιες αυτές εντάσσονται στο παιδαγωγικό ρεύμα του Εποικοδομισμού (Constructivism), το οποίο υποστηρίζει ότι η μάθηση συνίσταται στην οργάνωση των εσωτερικών αναπαραστάσεων και εμπειριών του ατόμου (Piaget, 1974). Οι ιδέες «Μαθαίνω κατασκευάζοντας» και «Μαθαίνω για την κατασκευή» έδωσαν το έναυσμα για τη θεμελίωση της προσέγγισης του «Κατασκευαστικού Εποικοδομισμού» (Constructionism) του Papert (Papert, 2000), η οποία αποσκοπεί στη διαμόρφωση ενός πλαισίου αξιοποίησης των ΤΠΕ στην εκπαιδευτική διαδικασία, ικανού να προκαλέσει ουσιαστικές αλλαγές στον τρόπο με τον οποίο διδάσκουν οι εκπαιδευτικοί και μαθαίνουν οι μαθητές (Ackermann, 2001), καθώς ο μαθητής από παθητικός δέκτης πληροφοριών γίνεται ένα ενεργό υποκείμενο, το οποίο διερευνά και επεξεργάζεται ό,τι αντιλαμβάνεται με τις αισθήσεις του και δημιουργεί τη γνώση (Φράγκου, 2005). Η τεχνητή κατασκευή που δημιουργείται από τους μαθητές αξιοποιεί ένα σύνολο δομικών υλικών, διαθέτοντας αισθητήρες για να συλλαμβάνει συμβάντα, μηχανισμό κίνησης που να θέτει σε κίνηση ολόκληρη την κατασκευή ή ένα τμήμα της. Όμως η λειτουργία της κατασκευής βασίζεται στο λογισμικό που καθορίζει τις συμπεριφορές της κατασκευής όπως είναι η ανίχνευση ενός ερεθίσματος και η αντίδραση με την ενεργοποίηση ενός κινητήρα. Έτσι κατά τη διαδικασία ανάπτυξης της φυσικής κατασκευής και του προγράμματος ελέγχου αυτής, υπάρχει μια αμφίδρομη σχέση. Η σχεδίαση μιας φυσικής κατασκευής (υλικό) αλλά και του τρόπου λειτουργίας της (λογισμικό) προϋποθέτει την αλληλοσύζευξη αυτών των διαδικασιών. Κρίνεται ιδιαίτερα αποτελεσματικό αφενός οι μαθητές με ρόλο προγραμματιστών να έχουν κατανοήσει το μοντέλο ανάπτυξης της κατασκευής και αφετέρου οι μαθητές με ρόλο κατασκευαστών να εμπλέκονται να έχουν οικοδομήσει το νοητικό μοντέλο λειτουργίας της κατασκευής. Αυτή η διαλεκτική σχέση μεταξύ της ανάπτυξης της κατασκευής και του προγραμματισμού της λειτουργίας της θα οδηγήσει σε κατασκευές (τουλάχιστον στο αρχικό στάδιο) που θα είναι εφικτό να προγραμματιστούν αποτελεσματικά λαμβάνοντας υπόψη ότι ο προγραμματισμός ρομποτικών κατασκευών έχει μια ιδιαιτερότητα σε σχέση με τον προγραμματισμό σε άλλες συνθήκες ή καταστάσεις. Ταυτίζεται με την απόδοση συμπεριφοράς σε μια τεχνητή κατασκευή (Τσοβόλας & Κόμης, 2008). Γ1. Το Υλικό ως εργαλείο της Εκπαιδευτικής Ρομποτικής Το LEGO Education WeDo 2.0 αποτελεί την πιο πρόσφατη σε κυκλοφορία (2016) εκπαιδευτική πρόταση της LEGO Education που σχετίζεται με το STEM, τα πρώτα
30 βήματα στον προγραμματισμό και την εκπαιδευτική ρομποτική. Κυκλοφόρησε το 2016 αντικαθιστώντας το προηγούμενο LEGO Education WeDo και αποτελεί το αποτέλεσμα συνεργασίας μεταξύ του ομίλου LEGO και του Media Lab του MIT με επικεφαλής τον Mitchel Resnick (Resnick et al., 2009). Στόχος της πλατφόρμας αυτής είναι η ανάπτυξη της υπολογιστής σκέψης. Η εκπαιδευτική αξία αυτού του WeDo είναι εξαιρετικά σημαντική, γιατί επιτρέπει στους μαθητές να σχεδιάσουν, να κατασκευάσουν, να συνεργαστούν, να έρθουν σε επαφή με τις φυσικές επιστήμες, να αποκτήσουν βασικές δεξιότητες προγραμματισμού και να καλλιεργήσουν την κριτική σου σκέψη γύρω από την επίλυση προβλημάτων. Για την πρωτοβάθμια εκπαίδευση η LEGO Education προτείνει WeDo 2.0 Core Set. Αυτό το σετ αποτελεί την πιο πρόσφατη εκπαιδευτική πρόταση της LEGO Education, η οποία βασίζεται στα πιο σύγχρονα επιστημονικά πρότυπα και δημιουργήθηκε με σκοπό να ενισχύσει τη δημιουργικότητα τη φαντασία και την περιέργεια των μαθητών. Το πακέτο LEGO Education WeDo 2.0 περιλαμβάνει: Υλικό: 280 δομικά υλικά για τη δημιουργία κατασκευών και μοντέλων, συγκεκριμένα: Εγκέφαλο (Smarthub): Ο εγκέφαλος είναι ένα ηλεκτρονικό σύστημα που αποτελεί μέρος της σειράς LEGO Power Functions (LPF) 2.0. Έχει ενσωματωμένο Bluetooth τεχνολογίας Low Energy, που εξυπηρετεί τη σύνδεση με το λογισμικό. Τροφοδοτείται με 2 μπαταρίες ΑΑ, ή με την επαναφορτιζόμενη μπαταρία. Έχει δύο θύρες εισόδου / εξόδου για τη σύνδεση κινητήρων ή αισθητήρων καθώς και ένα λαμπάκι LED το οποίο μπορεί να αναπαράγει 10 διαφορετικά χρώματα. Κινητήρα (Medium Motor): Ο κινητήρας προγραμματίζεται ώστε να περιστρέφεται δεξιόστροφα ή αριστερόστροφα με ισχύ που επιλέγει ο χρήστης. Αισθητήρες Αισθητήρας κίνησης (Motion Sensor): Ο αισθητήρας κίνησης μπορεί να ανιχνεύσει αντικείμενα εντός εύρους 15 εκατοστών ανάλογα με το σχέδιο του αντικειμένου. Ο αισθητήρας κίνησης μπορεί επίσης να χρησιμοποιηθεί ως ανιχνευτής εμβέλειας και μπορεί να ανιχνεύσει αν ένα αντικείμενο είναι κοντά ή μακριά (μέχρι 15 εκατ.). Αισθητήρας Κλίσης (Tilt Sensor): Ο αισθητήρας κλίσης ανιχνεύει αλλαγές μέσα σε έξι διαφορετικές θέσεις: κλίση προς τα δεξιά, κλίση προς τα αριστερά, κλίση προς τα πάνω, κλίση προς τα κάτω, χωρίς κλίση, οποιαδήποτε κλίση (κούνημα). Αυτοκόλλητα: Αυτοκόλλητα ετικέτες που διευκολύνουν την ταξινόμηση. Στον κανονισμό του Πανελλήνιου διαγωνισμού Εκπαιδευτικής Ρομποτικής μπορεί να χρησιμοποιηθεί ο παρακάτω εξοπλισμός: PowerFunctions XL Motor
31 LEGO WeDo Αισθητήρας Κλίσης PowerFunctionsBatteryBox PowerFunctionsExtensionWire Καλώδιο Επέκτασης PowerFunctions LEGO WeDo Αισθητήρας Κίνησης E-Motor LEGO WeDo USB Hub PowerFunctionsLight


32 PowerFunctions M-Motor Επίσης επιτρέπονται τα παρακάτω υλικά του WeDo 2.0: Smarthub 2 Διασύνδεση WeDo 2 Με PC Ή Tablet Medium Motor LEGO Education WeDo ΑισθητήραςΚλίσηςLEGO Education WeDo Αισθητήρας Κίνησης LEGO EducationWeDo 2.0

. Σχήμα 14.")
 Συνήθως, οι γλώσσες οπτικού προγραμματισμού είναι ενσωματωμένες σε ειδικά περιβάλλοντα")
33 LEGO Education WeDo 2.0 Add-On Power Pack Γ2. Το Λογισμικό ως εργαλείο της Εκπαιδευτικής Ρομποτικής Γ2α. Περιβάλλοντα Οπτικού Προγραμματισμού Έχουν αναπτυχθεί διάφορα εργαλεία λογισμικού για την προσομοίωση εφαρμογών ρομποτικής. Ένα από αυτά τα εργαλεία είναι οι Γλώσσες Οπτικού Προγραμματισμού (Visual Programming Languages VPL), που επιτρέπουν στους χρήστες να προγραμματίζουν μέσω γραφικών στοιχείων αντί κειμένου (σχήμα 14). Σχήμα 14. Στις Γλώσσες Οπτικού Προγραμματισμού οι χρήστες προγραμματίζουν μέσω γραφικών στοιχείων αντί κειμένου (κώδικες από τις Γλώσσες Οπτικού Προγραμματισμού Turtle Art, StarLogo TNG και BYOB) Συνήθως, οι γλώσσες οπτικού προγραμματισμού είναι ενσωματωμένες σε ειδικά περιβάλλοντα προγραμματισμού με πολυμεσικές δυνατότητες (Visual Programming Environment VPE) (Παπαδόπουλος, 2017) όπως στο σχήμα 15.

 με ενιαία φιλοσοφία αλλά και με")
34 Σχήμα 15. Το πολυμεσικό περιβάλλον προγραμματισμού της StarLogo TNG Κυρίαρχος σε αυτό το χώρο είναι η γλώσσα logo (Μικρόπουλος & Λαδιάς, 1997) και οι επίγονοί της τα logo-like προγραμματιστικά περιβάλλοντα, μια ομάδα εκατοντάδων διαλέκτων (σχήμα 16) με ενιαία φιλοσοφία αλλά και με ιδιαίτερες δυνατότητες το καθένα (Boytchev, 2014). Σχήμα 16. Το δένδρο των επιγόνων της logo

35 Μια περαιτέρω εξειδικευμένη επιλογή είναι η χρήση περιβαλλόντων οπτικού προγραμματισμού με πλακίδια έναντι μιας κειμενικής (text-based) logo-like γλώσσας προγραμματισμού όπως οι msw logo, microworld pro κλπ. Η δυνατότητα των οπτικών περιβαλλόντων προγραμματισμού αφενός να μπορεί ο προγραμματιστής να δει τα αποτελέσματα της εκτέλεσης ενός προγράμματος άμεσα και με γραφικό τρόπο (σχήμα 17) και αφετέρου ο περιορισμός των δυσκολιών όσον αφορα το συντακτικό του προγράμματος σε σχέση με τις παραδοσιακές γλώσσες προγραμματισμού, τα καθιστά ιδανικά για την εκμάθησή τους από αρχάριους. Σχήμα 17. Στο προγραμματιστικό περιβάλλον της EasyLogo ο προγραμματιστής μπορεί να δει τα αποτελέσματα της εκτέλεσης ενός προγράμματος άμεσα και με γραφικό τρόπο Γ2β. Το Scratch Ένα από τα περιβάλλοντα προγραμματισμού είναι το Scratch (1 ( (σχήμα 18) που αναπτύχθηκε στο MIT (Massachusetts Institute of Technology) από το Lifelong Kindergarten Group (Resnick κ.α., 2009). Δόθηκε προς χρήση στο γενικό κοινό το 2007 και χρησιμοποιείται κυρίως για τη δημιουργία εκπαιδευτικών παιγνίων και διαδραστικών αφηγήσεων.

, ενώ ένα χρόνο πριν ήταν 24 εκατομμύρια. Σχήμα 19.")
36 Σχήμα 18. Το οπτικό περιβάλλον προγραμματισμού Scratch 2 Θεωρείται ένα ιδιαίτερα δημοφιλές και αποτελεσματικό μέσο εκμάθησης προγραμματισμού και χρησιμοποιείται πλέον παγκοσμίως σε διαφόρων τύπων σχολεία και εκπαιδευτικούς οργανισμούς. Το Scratch διαθέτει μια μεγάλη κοινότητα δημιουργικής μάθησης και στο αποθετήριό του υπάρχουν εκατομμύρια διαμοιράσιμα project. Το μέγεθος και η δυναμική αυτού του αποθετηρίου φαίνεται όταν αυτά τα projects τον Αύγουστο του 2018 ξεπερνούσαν τα 38 εκατομμύρια (σχήμα 19), ενώ ένα χρόνο πριν ήταν 24 εκατομμύρια. Σχήμα 19. Η ιστοσελίδα του Scratch την 27η Σεπτεμβρίου 2018 Ο προγραμματισμός στο Scratch καθοδηγείται από γεγονότα και υλοποιείται συνδυάζοντας blocks-εντολές που εφαρμόζουν μεταξύ τους όπως τα τουβλάκια της Lego (σχήμα 20),
 που «ζουν» σε ένα συγκεκριμένο χώρο (stage) (σχήμα 21).")
 στα δεξιά του σχήματος. Γ2γ.")
37 Σχήμα 20. Τα πλακίδια στο logo-like περιβάλλον οπτικού προγραμματισμού Scratch 1.4 συνδυάζονται μεταξύ τους ως κομμάτια παζλ για να καθορίσουν τη συμπεριφορά διδιάστατων αντικειμένων (sprites) που «ζουν» σε ένα συγκεκριμένο χώρο (stage) (σχήμα 21). Ένα block-εντολή στο Scratch ακολουθεί μια χρωματική κωδικοποίηση που παραπέμπει στην κατηγορία των εντολών που ανήκει. Σχήμα 21. Στο περιβάλλον του Scratch 3, φαίνεται αριστερά η ενδυμασία ενός διδιάστατου αντικειμένου, που «ζει» ως sprite στο χώρο της σκηνής (stage) στα δεξιά του σχήματος. Γ2γ. Το Scratch και η διαχείριση συσκευών του φυσικού κόσμου To Scratch παρέχει τη δυνατότητα ελέγχου της διασύνδεσης του υπολογιστή με το φυσικό κόσμο μέσω περιφερειακών συσκευών. Αυτό επιτυγχάνεται με την ενσωμάτωση στο Scratch επεκτάσεων (συνήθως) τρίτων κατασκευαστών. Μια από τις περιφερειακές συσκευές είναι και το LEGO WeDo 2.0, ο έλεγχος του οποίου γίνεται μέσω του Scratch, προϋποθέτει τη συμβατότητα μεταξύ των δύο και επιτυγχάνεται με τις πρόσθετες εντολές που ενσωματώνονται στο Scratch (σχήμα 22).

 μπορεί να συνεργάζεται και να προγραμματίζει διάφορες εξωτερικές συσκευές και λειτουργίες")
38 Σχήμα 22. Το ρεπερτόριο των πρόσθετων εντολών που διαχειρίζονται το υλικό WeDo 2.0 στο προγραμματιστικό περιβάλλον του Scratch 2 Από τον Αύγουστο του 2018, η δοκιμαστική έκδοση του Scratch-3 ( μπορεί να συνεργάζεται και να προγραμματίζει διάφορες εξωτερικές συσκευές και λειτουργίες όπως φαίνεται στο σχήμα 23. Σχήμα 23. Το μενού επιλογής επεκτάσεων στο Scratch 3
39 Δ. Εισηγμένες και σχεδιαζόμενες καινοτομίες στον Πανελλήνιο Διαγωνισμό Εκπαιδευτικής Ρομποτικής για το Δημοτικό Δ1. To κωδικόραμα ως εργαλείο οπτικής αναπαράστασης του κώδικα Δ1α. Η ανάγκη επινόησης του κωδικοράματος Το κωδικόραμα εισήχθη πιλοτικά το 2018 και βαίνει προς καθιέρωση το Η ανάγκη τα τελευταία χρόνια για εκπαιδευτική χρήση περισσότερο σύνθετων προβλημάτων, με μακροσκελή σενάρια, με πολλά αντικείμενα, σε διαφορετικές καταστάσεις οδήγησε σε πιο πολύπλοκους αλγορίθμους και κώδικες, δημιουργώντας όμως προβλήματα κατανόησης στους μαθητές όπως «ποιός κώδικας αντιστοιχεί σε ποιά συμπεριφορά, ποιού αντικειμένου και σε ποιά κατάσταση;». Η προσπάθεια όσων διδάσκουν προγραμματισμό θα πρέπει να είναι μεγαλύτερη γιατί η ανάπτυξη κώδικα καλύπτει όλα τα επίπεδα της αναθεωρημένης ταξινομίας του Bloom φτάνοντας στο ανώτερο που είναι η «δημιουργία», ενώ θα πρέπει να διδαχθεί σε μαθητές μικρής ηλικίας (Βασιλοπούλου, κ.ά., 2016). Η αποτελεσματική διαχείριση πολύπλοκων κωδίκων στον οπτικό προγραμματισμό συνίσταται στην ανάγκη για ταυτόχρονη αντίληψη αφενός του συνόλου του κώδικα - με δεδομένο ότι το σύνολο είναι μεγαλύτερο από το άθροισμα των μερών του- που μπορεί να καλύπτει μια μεγάλη έκταση π.χ. περισσότερο από 4 m2 (με ανάλυση εικόνας 72 dpi) όπως η απεικόνιση του κώδικα της άσκησης του Δρομολογητή στο βιβλίο «Special programming topics in Scratch» (Papadopoulos, et al., 2015) που έχει διαστάσεις 237,81cm x 191,31cm ( αφετέρου των επιμέρους τμημάτων του κώδικα στα οποία κρύβονται σημαντικές λεπτομέρειες, που μπορεί να βρίσκονται σε λιγότερα από 20 cm2, δηλαδή πρέπει ταυτόχρονα να είναι εφικτή η διαχείριση καταστάσεων που έχουν διαφορές οπτικού μεγέθους της τάξης του 103. Αυτή η ανάγκη οδήγησε στην επινόηση του κωδικοράματος που απεικονίζει το σύνολο της δομής του κώδικα ενός συστήματος. Σημειωτέον ότι τα κωδικοράματα ως εργαλεία μετά τη δημιουργία τους βρήκαν εφαρμογές και σε άλλα πεδία πέραν της πρώτης ανάγκης που τα δημιούργησε και έτσι βρίσκονται σε μια διαδικασία συνεχούς εξέλιξης. Δ1β. Ορισμός και κανόνες σχεδίασης του κωδικοράματος Το κωδικόραμα (Σχήμα 24) είναι ένας οπτικοποιημένος διδιάστατος πίνακας που απεικονίζει το σύνολο του κώδικα. Στην οριζόντια διάσταση του πίνακα παρατίθενται τα αντικείμενα που εμπλέκονται σε ένα προγραμματιστικό πρόβλημα και στην κατακόρυφη διάσταση παρατίθενται οι καταστάσεις στις οποίες βρίσκονται τα αντικείμενα κατά την εκτέλεση του προγράμματος. Στην επιφάνεια που ορίζεται
. Σχήμα 24.")
40 δημιουργούνται κελιά στα οποία αναπτύσσονται τμήματα του οπτικοποιημένου κώδικα που καθορίζει την εκάστοτε συμπεριφορά του αντικειμένου. Σημειωτέον ότι συνήθως υπάρχουν κενά κελιά κάτι που παρέχει σημαντικές πληροφορίες για τα χαρακτηριστικά του κώδικα (Λαδιάς, κ.ά. 2016). Σχήμα 24. Το κωδικόραμα είναι ένας οπτικοποιημένος διδιάστατος πίνακας που απεικονίζει το σύνολο του κώδικα. Οι διάφορες διασυνδέσεις που συμβολίζουν την επικοινωνία μεταξύ των τμημάτων του κώδικα αναπαριστώνται με βέλη που δείχνουν τη ροή της πληροφορίας. Οι διασυνδέσεις αφορούν το χειρισμό του κώδικα με διαδικασίες, μεταβλητές, μηνύματα και κλώνους. Είναι αυτονόητο ότι οι διασυνδέσεις γίνονται μεταξύ ομοίων π.χ. μεταξύ της κλήσης μιας διαδικασίας και του ορισμού της, μεταξύ της αλλαγής της τιμής μιας μεταβλητής και της εντολής ελέγχου της τιμής της μεταβλητής, μεταξύ της μετάδοσης

41 ενός μηνύματος και του κώδικα που αντιστοιχεί στη λήψη του μηνύματος και μεταξύ της εντολής δημιουργίας ενός κλώνου και του κώδικα που προσδιορίζει τα χαρακτηριστικά του κλώνου μετά τη δημιουργία του. Στο κωδικόραμα η αντιστοίχιση των χρωμάτων των διαφόρων διασυνδέσεων βασίστηκε στη χρωματική κωδικοποίηση που έχει υιοθετηθεί από το Scratch: μωβ χρώμα για τη διαχείριση των διαδικασιών, πορτοκαλί χρώμα για τη διαχείριση των μεταβλητών, καφέ χρώμα για τη διαχείριση των μηνυμάτων και μουσταρδί χρώμα για τη διαχείριση των κλώνων. Σε απλά κωδικοράματα τα μωβ βέλη / διασυνδέσεις συνδέουν τα πλακίδια κλήσης μιας διαδικασίας με τον κώδικα που ορίζει τη διαδικασία (σχήμα 25 αριστερά). Σε πολύπλοκα όμως κωδικοράματα, για να μειωθεί ο οπτικός θόρυβος, αυτές οι συνδέσεις έχουν αντικατασταθεί με μια τοπολογία επιπέδων όπου οι κώδικες που ορίζουν τις διαδικασίες τοποθετούνται στο ίδιο ύψος (εάν είναι εφικτό) και δεξιότερα από το πλακίδιο που καλεί τη διαδικασία, όπως στο σχήμα 25 δεξιά (Λαδιάς, 2016). Σχήμα 25. Σε απλά κωδικοράματα οι μωβ διασυνδέσεις απεικονίζουν την κλήση μιας διαδικασίας με τον ορισμό της (αριστερό τμήμα του σχήματος) Το στίγμα (οι συντεταγμένες) των κωδίκων ενός κελιού δίνεται αφενός από την επικεφαλίδα του (τετμημένη) και αφετέρου από το εικονίδιο δίπλα στη επικεφαλίδα (τεταγμένη), εξασφαλίζοντας έτσι ότι ο χρήστης δεν θα έχει απώλεια προσανατολισμού κατά την εμβύθιση σε λεπτομέρειες (σχήμα 26).
 δεν περιορίζεται μόνο στη βασική ενδυμασία του αλλά -στο")
42 Σχήμα 26. Το κελί στο οποίο ανήκει κάθε τμήμα κώδικα ταυτοποιείται από τις συντεταγμένες του Η απεικόνιση του κάθε αντικειμένου (στον οριζόντιο άξονα) δεν περιορίζεται μόνο στη βασική ενδυμασία του αλλά -στο μέτρο του δυνατού- εμφανίζονται όσο το δυνατόν περισσότερες από το σύνολο των ενδυμασιών του. Αυτό έχει ως αποτέλεσμα να γίνεται εμφανής στο χρήστη η δυνατότητα του αντικειμένου για την παραγωγή cel animation (σχήμα 24, γραμμή με αντικείμενα). Σε μια γραμμή πάνω από κάθε αντικείμενο εμφανίζονται τα δεδομένα και οι δομές δεδομένων που ως «τοπικές» μεταβλητές (είναι αφενός οι εξ ορισμού από το Scratch όπως θέση Χ, θέση Υ, κατεύθυνση... και αφετέρου αυτές που ορίζονται από τον προγραμματιστή) χρησιμοποιούνται από το πρόγραμμα, ενώ το σύνολο των κοινών για όλα τα αντικείμενα (καθολικών) μεταβλητών (όπως π.χ. ο timer του συστήματος) και δομών δεδομένων εμφανίζεται στο πάνω αριστερά κελί του κωδικοράματος (σχήμα 24). Επιπλέον προτείνεται να αξιοποιηθεί η δυνατότητα κάποια υποσύνολα των δεδομένων που αντιστοιχούν σε συγκεκριμένες λογικές δομές να «ομαδοποιούνται οπτικά» σε μορφή «λογικών εγγραφών». Η ευαναγνωσιμότητα των κωδικοραμάτων (σχήμα 27) βελτιώνεται αν ο κώδικας ακολουθεί τις συμβάσεις του ευανάγνωστου προγραμματισμού με εννοιολογική ονοματολογία των μεταβλητών και των διαδικασιών (προτεινόμενη η «τυποποίηση της καμήλας»), ώστε να περιορίζεται η ανάγκη για προσθήκη επεξηγηματικών σχολίων τεκμηρίωσης και έτσι το κωδικόραμα που παράγεται να διαβάζεται ως κείμενο (Βασιλοπούλου, κ.ά., 2016).

43 Σχήμα 27. Τα ονόματα των μεταβλητών και των διαδικασιών ακολουθούν τις συμβάσεις του ευαναγνωστου προγραμματισμού Η κατάλληλη χωρική τοποθέτηση/γειτνίαση των αντικειμένων (που αντιστοιχεί στη χωροθέτηση των κατακόρυφων στηλών) αποσκοπεί αφενός στο να μην επικαλύπτονται / τέμνονται οι γραμμές διασύνδεσης μεταξύ των επιμέρους τμημάτων του κώδικα με αποτέλεσμα τη μείωση του οπτικού θορύβου και αφετέρου να αναδεικνύονται στοιχεία συμμετρίας/ομοιότητας που προκύπτουν από τη φύση του προβλήματος (σχήμα 28).
 του κώδικα που προκύπτει από την ίδια τη φύση του")
44 Σχήμα 28. ΚωδικΌραμα στο οποίο η κατάλληλη χωρική τοποθέτηση των αντικειμένων ανέδειξε τα στοιχεία συμμετρίας (με άξονα συμμετρίας την κόκκινη γραμμή) του κώδικα που προκύπτει από την ίδια τη φύση του προβλήματος Επίσης η κατάλληλη χωρική τοποθέτηση/γειτνίαση των καταστάσεων (που αντιστοιχεί στην τοποθέτηση των οριζόντιων γραμμών) αποσκοπεί στο να αναδεικνύεται η χρονική εξέλιξη του συστήματος. Οι διακριτές χρονικές καταστάσεις αναπαρίστανται στην κατακόρυφη διάσταση του ΚωδικΟράματος με αποτέλεσμα η χρονική εξέλιξη του συστήματος να αναπαρίσταται με μεταπτώσεις στον κατακόρυφο άξονα (συνήθως από πάνω προς τα κάτω). Περιορισμοί σε αυτό τίθενται από τη φύση των εκάστοτε προβλημάτων π.χ. όταν έχουμε επαναληπτικές ή αναδρομικής φύσεως διαδικασίες υλοποιημένες με τη χρήση μηνυμάτων. Δ1γ. Η προστιθέμενη αξία του κωδικοράματος Το κωδικόραμα ως εργαλείο μπορεί να χρησιμοποιηθεί αφενός για την ανάπτυξη του προγραμματιστικού υλικού και αφετέρου για τη διδακτική και παιδαγωγική αξιοποίηση αυτού του υλικού. Το κωδικόραμα ως εργαλείο μπορεί να χρησιμοποιηθεί αφενός για την ανάπτυξη του προγραμματιστικού υλικού και αφετέρου για τη διδακτική και παιδαγωγική αξιοποίηση αυτού του υλικού. Σύμφωνα με μελέτη των Λαδιά Α.& Λαδιά
45 Δ. (2016) η παιδαγωγική προστιθέμενη αξία εμφανίζεται στο 37% των χαρακτηριστικών της εφαρμογής της οπτικής αναπαράστασης του κώδικα, κάτι που είναι αναμενόμενο γιατί ο προγραμματισμός Η/Υ δεν είναι προνομιακό πεδίο της παιδαγωγικής, η διδακτική προστιθέμενη αξία εμφανίζεται στο 97% των χαρακτηριστικών, γεγονός που επιβεβαιώνει το σημαντικό ρόλο που παίζει η οπτική αναπαράσταση του κώδικα κατά τη διδασκαλία του προγραμματισμού και τέλος η προγραμματιστική προστιθέμενη αξία προσεγγίζει στο 87% των χαρακτηριστικών και φαίνεται ότι αυτή κυριαρχεί στα επίπεδα της αντίληψη & κατανόησης, της εφαρμογής και της ανάλυσης & οργάνωσης (αναθεωρημένη ταξινομία του Bloom). Τα ισχυρά σημεία της χρήσης οπτικής αναπαράστασης του κώδικα είναι αφενός ότι διευκολύνει τη σύγκριση μεταξύ διαφορετικών προγραμμάτων όσον αφορά το μέγεθος και την «πυκνότητα» του κώδικα, μεταξύ σειριακού και παράλληλου προγραμματισμού και μεταξύ των τμημάτων του κώδικα που λειτουργούν παράλληλα εντός ενός αντικειμένου και των τμημάτων του κώδικα που λειτουργούν παράλληλα σε περισσότερα του ενός αντικείμενα και αφετέρου να βοηθήσει στο να γίνει κατανοητό το ποιος κώδικας αντιστοιχεί σε ποια συμπεριφορά, ποιου αντικειμένου και σε ποια κατάσταση, να εστιάσει ταυτόχρονα αφενός το σύνολο του κώδικα και αφετέρου η εστίαση σε επιμέρους μικρά τμήματα του κώδικα, ενός πολύπλοκου έργου και να βοηθήσει ώστε να γίνει ευκολότερα ο διαχωρισμός αρμοδιοτήτων στα τμήματα του κώδικα. Δ2. Ο Πίνακας Ταυτοποίησης Δεδομένων Ο Πίνακας Ταυτοποίησης Δεδομένων σχεδιάζεται να εισαχθεί ως πιλοτική εφαρμογή το 2020 στον Πανελλήνιο Διαγωνισμό του Δημοτικού.Σύμφωνα με το Wirth, το πρόγραμμα είναι αλγόριθμος συν δεδομένα που συνεπάγεται ότι "Δεδομένα = Πρόγραμμα - Αλγόριθμος". Το πώς θα αναπαρασταθούν τα δεδομένα είναι μια επιλογή που επηρεάζει σημαντικά το ποιός αλγόριθμος θα υιοθετηθεί για τη λύση ενός προβλήματος. Έτσι αν και η αναπαράσταση των δεδομένων θεωρείται σε ένα πρόγραμμα σχεδόν εξίσου σημαντική με τον αλγόριθμο, στην πραγματικότητα ο ρόλος των δεδομένων είναι υποβαθμισμένος (Λαδιάς, Σαριδάκη & Λαδιάς, 2017). Αυτή την ετεροβαρή αντιμετώπιση των δεδομένων στην αναπαράσταση του κώδικα (και στο κωδικόραμα) έρχεται να ισορροπήσει ο προτεινόμενος Πίνακας Ταυτοποίησης των Δεδομένων, η χρήση του οποίου θα απεικονίσει πληρέστερα ένα πρόγραμμα. Η ευαναγνωσιμότητα του προγράμματος (και των κωδικοραμάτων) υποβοηθείται από την υιοθέτηση των συμβάσεων του ευανάγνωστου προγραμματισμού με τη χρήση σταθερών αντί τιμών, τη χρήση αντικειμένων αντί χρωμάτων, την εννοιολογική ονοματολογία των δεδομένων (προτεινόμενη η «τυποποίηση της καμήλας»). Επιπλέον επειδή στα προγραμματιστικά περιβάλλοντα οπτικού προγραμματισμού εμπλέκονται και αντικείμενα με διάφορες ενδυμασίες που συμπεριφέρονται ως φορείς δεδομένων συνιστάται να εφαρμόζεται και σε αυτά εννοιολογική ονοματολογία.
46 Ένα από τα ερωτήματα που τίθενται είναι το "Τι τύπου είναι τα δεδομένα ή ως τι τύπου χρησιμοποιούνται;" Το Scratch υποστηρίζει δύο τύπους δεδομένων, τις μεταβλητές (απλά - μεμονωμένα δεδομένα) και τις λίστες (ως δομές δεδομένων). Τα απλά δεδομένα μπορεί να είναι τιμές (αριθμητικές, λογικές, "ορμαθοί χαρακτήρων") ή μεταβλητές αντίστοιχων τύπων. Στο Scratch που τα απλά δεδομένα ορίζονται όλα ως μεταβλητές θα πρέπει να γίνει η διάκριση μεταξύ αυτών που δεν μεταβάλλεται η τιμή τους κατά τη διάρκεια της εκτέλεσης του προγράμματος (να θεωρούνται ως σταθερά δεδομένα) και εκείνων που δύναται να μεταβάλλεται η τιμή τους κατά τη διάρκεια της εκτέλεσης του προγράμματος. Ειδικά για τις αριθμητικού τύπου μεταβλητές αυτές μπορεί να παίζουν ρόλους "μετρητών", "αθροιστών", "σημαιών πολλαπλών θέσεων" ή προσωρινών αποθηκευτικών χώρων μνήμης. Αν και η χρησιμοποίηση απλών τιμών ως δεδομένων εκ πρώτης όψεως φαίνεται ότι κάνει απλούστερο το πρόγραμμα έναντι εκείνου με τις μεταβλητές, όμως η χρήση μεταβλητών κάνει το πρόγραμμα πιο ευέλικτο, προσαρμόσιμο και ευανάγνωστο. Συνεπώς συνιστάται η χρήση μεταβλητών έναντι απλών τιμών. Εκτός των αντικειμένων και οι κλώνοι τους είναι φορείς δεδομένων. Οι κλώνοι που δημιουργούνται μπορούν να διαφοροποιούνται ως προς την ενδυμασία, το μέγεθος, τη φωτεινότητα αλλά και τις καρτεσιανές συντεταγμένες των θέσεών τους. Τα στοιχεία μιας λίστας στο Scratch μπορεί να είναι τιμές (και κάθε θέση της λίστας να λειτουργεί όπως μια μεταβλητή) ή να είναι άλλες λίστες. Όμως σημασία έχει τι αναπαριστά αυτή η δόμηση των δεδομένων. Για παράδειγμα μια λίστα με αριθμητικές τιμές θα μπορούσε να αναπαριστά τις τιμές της εξέλιξης ενός φαινομένου που να αποθηκεύονται στη λίστα από κάποιον αισθητήρα, να αποθηκεύει τις νότες ενός τραγουδιού που θα μπορούσαν ως δεδομένα να διαμοιράζονται και να επαναχρησιμοποιούνται όταν εκτελείται από πολλά διαφορετικά μουσικά όργανα ταυτόχρονα ή να είναι μια σειρά μετρητών ή αθροιστών. Αυτά όμως θα μπορούσαν να αναπαρασταθούν και ως look-up tables που να υλοποιούνται με μια λίστα που στοιχεία της να είναι άλλες λίστες. Η δόμηση ανόμοιου τύπου δεδομένων ως στοιχείων σε μια λίστα μπορεί να παρέχει στον προγραμματιστή τη δυνατότητα της "λογικής εγγραφής". Χρησιμοποιώντας τις λίστες με ανόμοιου τύπου δεδομένα μπορεί να υλοποιηθούν δομές δεδομένων με ποικίλους τρόπους πρόσβασης στα δεδομένα τους όπως οι ουρές/fifo, οι στοίβες/lifo, τα δένδρα και οι γράφοι. Ένας άλλος παράγοντας που πρέπει να εξεταστεί είναι η "εμβέλεια των δεδομένων". Στο Scratch κατά τη δήλωση μιας μεταβλητής καθορίζεται αν η ύπαρξή της θα περιορίζεται ως τοπική μεταβλητή στο εσωτερικό του αντικειμένου ή θα είναι μια καθολική μεταβλητή στην οποία θα μπορούν να έχουν πρόσβαση οι κώδικες από όλα τα αντικείμενα του προγράμματος.
47 Ένα θέμα που τίθεται είναι η πατρότητα των δεδομένων που ορίζονται από τον προγραμματιστή. Ενώ δεν τίθεται θέμα για την πατρότητα των τοπικών μεταβλητών, οι καθολικές μεταβλητές μετά τη δημιουργία τους (η δημιουργία τους γίνεται στο περιβάλλον ενός αντικειμένου ή του υποβάθρου) αποτελούν κοινό κτήμα όλων των αντικειμένων. Η άγνοια της πατρότητας ενός αντικειμένου από προγραμματιστική σκοπιά ίσως να μην παρουσιάζει πρόβλημα όμως καλό θα ήταν να γνωρίζουμε ποιά ανάγκη (και ποιού αντικειμένου) το δημιούργησε για λόγους κατανόησης του προβλήματος που επιλύει το πρόγραμμα. Επιπλέον μια μεταβλητή μπορεί να "ζει" ως παράμετρος τιμής αποκλειστικά στο εσωτερικό μιας διαδικασίας χωρίς να υπάρχει άλλος τρόπος προσπέλασης σε αυτή από κώδικες που είναι εκτός της διαδικασίας. Τέλος εκτός από τα δεδομένα που ορίζει ο προγραμματιστής υπάρχουν και τα δεδομένα του συστήματος. Τα δεδομένα του συστήματος έχουν να κάνουν με τις συντεταγμένες του πλέγματος της σκηνής, με τις ενδυμασίες και τις ιδιότητες των όψεων των αντικειμένων (χρώμα, φωτεινότητα, εξαφάνιση, κυρτότητα, περιστροφή, εικονοστοιχειοποίηση, ψηφιδωτό), τους ήχους (ένταση, ρυθμός, μουσικό όργανο), την πένα (χρώμα, μέγεθος, σκιά), τους αισθητήρες (ύπαρξη συμβάντων αλληλεπίδρασης με όρια, ποντίκι, πληκτρολόγιο, άλλα αντικείμενα, χρώματα, την ένταση του μικροφώνου και οποιαδήποτε σήματα από περιφερειακές συσκευές π.χ. arduino), τη γεννήτρια τυχαίων αριθμών κ.λπ.). Στο Scratch στην κίνηση των αντικειμένων (η θέση και ο προσανατολισμός τους) μπορεί να είναι τα χρησιμοποιούμενα δεδομένα "σχετικά" ή "απόλυτα". Μπορεί δηλαδή η στροφή ενός αντικειμένου να είναι σχετική π.χ. με την εντολή "turn 90 degrees" ή απόλυτη "point in direction 90 (right)". Για λόγους πληρότητας θα πρέπει να γίνει η διάκριση των δεδομένων όσον αφορά το χώρο της μνήμης που καταλαμβάνουν τα δεδομένα σε στατικής φύσεως (σταθερός χώρος μνήμης για όλη τη διάρκεια της εκτέλεσης του προγράμματος) και σε δυναμικής φύσεως όπως οι λίστες που το μέγεθός τους αυξομειώνεται κατά τη διάρκεια της εκτέλεσης του προγράμματος. Ολοκληρώνοντας όλα τα προηγούμενα σχετικά με το προφίλ ενός δεδομένου κάποιου προγράμματος και κωδικοποιώντας τα σε ένα πίνακα είναι πλέον δυνατόν να αποτυπωθεί η αναπαράσταση και ο ρόλος ενός εκάστου δεδομένου (Σχήμα 29).


48 Σχήμα 29. Ενδεικτικός Πίνακας Ταυτοποίησης Δεδομένων Δ3. Κριτήρια αξιολόγησης του αναπτυσσόμενου λογισμικού Το παρόν είναι υπό ανάπτυξη και σχεδιάζεται η εισαγωγή του μετά το Σχεδιάζεται να προταθεί ένα μοντέλο αξιολόγησης του κώδικα που χρησιμοποιείται στις ρομποτικές κατασκευές και στους αυτοματισμούς των έργων του διαγωνισμού που θα βασίζεται στην ταξινομία SOLO (Structure of the Observed Learning Outcomes) των Biggs και
, αφετέρου στην τμηματοποίηση του κώδικα, στην εσωτερική επικοινωνία μεταξύ")
.")

49 Collis (1982) όπως αυτή θα εφαρμοστεί αφενός στην αναπαράσταση των δεδομένων και των προγραμματιστικών δομών (ακολουθία - επιλογή - επανάληψη), αφετέρου στην τμηματοποίηση του κώδικα, στην εσωτερική επικοινωνία μεταξύ των οντοτήτων του προγράμματος για το συγχρονισμό και την παραλληλία και στην αλληλεπιδραστικότητά του με το περιβάλλον και το χρήστη. (Karvounidis et al., 2017). Ενδεικτική εφαρμογή του προαναφερθέντος φαίνεται στο σχήματα 30 και 31 (Λαδιάς, κ.α, 2018). Σχήμα 30. Κατάταξη των προγραμματιστικών δομών υλοποίησης βρόχων στη γνωστική ταξινομία μαθησιακών αποτελεσμάτων SOLO. Η δεξιά γκρίζα περιοχή αντιστοιχεί στην εικόνα του σχήματος 31

50 Σχήμα 31. Τα δώδεκα εμφωλευμένα μη ομοειδή σχήματα προγραμματιστικών βρόχων (που δημιουργούνται ως συνδυασμοί όταν στη θέση της κενής εντολής καθενός αρθρώματος της πρώτης γραμμής εμφυτευτεί άρθρωμα από τη δεύτερη γραμμή αλλά διαφορετικής στήλης) αποτελούν το ανώτερο επίπεδο (της εκτεταμένης αφαίρεσης) της γνωστικής ταξινομίας μαθησιακών αποτελεσμάτων SOLO (γκρίζα περιοχή στο σχήμα 12) όσον αφορά τη χρήση των προγραμματιστικών δομών υλοποίησης βρόχων Δ4. Κριτήρια αξιολόγησης του κατασκευαστικού μέρους Παράλληλα με την αξιολόγηση του λογισμικού που ήδη εξελίσσεται, θα επιχειρηθεί να αναπτυχθεί αντίστοιχο μοντέλο αξιολόγησης της κατασκευής του υλικού.
51 Ε. Τα κριτήρια επιλογής των έργων του αποθετηρίου Ε1. Κανονισμοί συμμετοχής στο διαγωνισμό Για την κατασκευή θα χρησιμοποιηθεί το ρομποτικό κιτ LEGO WeDo (1.0 ή 2.0). Ως λογισμικό θα χρησιμοποιηθεί μόνο το Scratch (οποιαδήποτε έκδοση). Η χρήση άλλων υλικών (επιπλέον των LEGO) επιτρέπεται μόνο για το σκηνικό του project. Στο project θα πρέπει να υπάρχουν τουλάχιστον δύο αυτοματισμοί. Ως αυτοματισμός θεωρείται η διαδικασία κατά την οποία ερέθισμα του πραγματικού κόσμου γίνεται αντιληπτό από αισθητήρα*, το πρόγραμμα αφού ενημερωθεί από τον αισθητήρα, επεξεργάζεται τα δεδομένα και δίνει εντολή που μεταβάλει την κατάσταση του ενεργοποιητή**. * Τα είδη των αισθητήρων που επιτρέπεται να χρησιμοποιηθούν είναι οι αισθητήρες κλίσης, απόστασης και το μικρόφωνο του υπολογιστή. ** Τα είδη των ενεργοποιητών που επιτρέπεται να χρησιμοποιηθούν είναι οι κινητήρες, τα leds, τα μεγάφωνα του υπολογιστή. Στο project μπορούν να χρησιμοποιηθούν μέχρι δύο Η/Υ. Κατά την παρουσίαση στο διαγωνισμό οι κατασκευές (το ρομποτικό κομμάτι τους) μπορούν να είναι προκατασκευασμένες και προσυναρμολογημένες. Στο διαγωνισμό κατά τη διάρκεια της εκτέλεσης του ενός από τους αυτοματισμούς πρέπει να παρουσιάζεται στην οθόνη του υπολογιστή αναπαράστασή του αυτοματισμού υλοποιημένη με animation στο περιβάλλον του Scratch. Ο κώδικας (σε Scratch) του αυτοματισμού και της αναπαράστασής του πρέπει να παρουσιαστούν με χρήση αφίσας (ζωγραφική, κολάζ...) ή ψηφιακής εικόνας που θα προβάλλεται με projector. Κάθε ομάδα μπορεί να έχει από τρεις έως και έξι μαθητές. Ο προπονητής πρέπει να είναι τουλάχιστον 20 ετών. Project που δεν είναι συναφή με το θέμα του διαγωνισμού δεν θα αξιολογηθούν. Για τη συμμετοχή τους στο διαγωνισμό, οι ομάδες θα πρέπει να έχουν πρώτα αναρτήσει ένα portfolio στον ιστότοπο του WRO Hellas.

52 Ε2. Ρουμπρίκα βαθμολόγησης των έργων Ε3. Πολλαπλά φίλτρα για την επιλογή των έργων του αποθετηρίου του Στο διαγωνισμό του 2018, πανελλαδικά υποβλήθηκαν 382 έργα. 2. Από αυτά τα 29 δεν κατέθεσαν φάκελο υποψηφιότητας ή δεν υπήρχε η δυνατότητα πρόσβασης στο φάκελο και συνεπώς απέμειναν προς εξέταση 353 έργα. 3. Επειδή υπήρξε στόχευση στην πληρότητα των έργων, έγινε εστίαση στην νεοεισαχθείσα καινοτομία που ήταν η αναπαράσταση του κώδικα με το κωδικόραμα και έτσι απορρίφθηκαν 135 έργα που δεν διέθεταν καμία αναπαράσταση του κώδικα και έμειναν προς εξέταση 218 έργα. 4. Από αυτά απορρίφθηκαν 28 έργα που έχουν μόνο κάποιο στοιχειώδες κωδικόραμα (σε μορφή πίνακα) και έτσι έμειναν προς εξέταση 190 έργα. 5. Στη συνέχεια αυτά περιορίστηκαν σε 145 γιατί αυτά διέθεταν ΚωδικΌραμα με σωστές γραμμές καταστάσεων. 6. Τέλος με ποσοτικό κριτήριο την ύπαρξη τουλάχιστον 5 στηλών και 5 καταστάσεων ανά κωδκόραμα επιλέχθηκαν 52 έργα. 7. Στη συνέχεια τα κριτήρια έχουν ποιοτική προοπτική και τα έργα διευρύνθηκαν όσον αφορά το κατασκευαστικό μέρος, την πρωτοτυπία, την αντιπροσωπευτικότητα και κατά πόσο μπορούσαν να υποστηρίξουν το διδακτικό και παιδαγωγικό μέρος. Με αυτό τον τρόπο επιλέχθηκαν 18 έργα. 8. Τελικά επιλέχθηκαν τα καλύτερα (κατά την υποκειμενική κρίση των μελών της ομάδας) 12 έργα που αποφασίστηκε να υποστούν επεξεργασία και να αναρτηθούν στο αποθετήριο.
53 Βιβλιογραφία Αρθρογραφία Eλληνική Αβραμίδου Μ., (2016), Εκπαιδευτική ρομποτική και ανάπτυξη υπολογιστικής σκέψης: ο ρόλος του φύλου στη σύνθεση των ομάδων, Μεταπτυχιακή Διατριβή, ΑΠΘ, URL: Τελευταία Πρόσβαση: 20 Ιουνίου 2018 Βασιλοπούλου Σπ., Φωτιάδης Δ., Λαδιάς Αν., (2016). Παρουσίαση του εθελοντικού προγράμματος διδασκαλίας προγραμματισμού Marathon Project σε μαθητές της υποχρεωτικής εκπαίδευσης. Πρακτικά Εργασιών 10ου Πανελλήνιου Συνεδρίου Καθηγητών Πληροφορικής, Ναύπλιο Απριλίου Γεωργοπούλου, Σ., Μ., (2017), Σχεδίαση και Υλοποίηση Εργαστηρίου Εκπαιδευτικής Ρομποτικής για Μαθητές 9-12 Ετών στο Πνεύμα της Εκπαίδευσης STEM, Πτυχιακή/Διπλωματική Εργασία, Πανεπιστήμιο Αιγαίου,URL: Τελευταία Πρόσβαση: 25 Μαΐου 2018 Κατσαβού, Ν. (2017), Η Προώθηση της STEM Εκπαίδευσης και των δεξιοτήτων του 21ου Αιώνα μέσα από τους διαγωνισμούς τα Φεστιβάλ και τις Εκθέσεις Ρομποτικής, URL: pdf. Τελευταία Πρόσβαση: 20 Ιουνίου Κόμης, Β. (2004), Εισαγωγή στις εκπαιδευτικές εφαρμογές των ΤΠΕ, Αθήνα: Εκδόσεις Νέων Τεχνολογιών. Κόμης Βασίλης, Δημοπούλου Αθανασία, Θεοδωροπούλου Ιωάννα, Ζιάτα Χριστίνα, Μισιρλή Αναστασία, Τσοβόλας Σπύρος, Δαπόντες Νίκος, (2017), Εισαγωγή στη Ρομποτική και τον Προγραμματισμό με τη χρήση του ρομπότ Thymio & του λογισμικού Aseba, Πρακτικά Εργασιών 5ου Πανελλήνιου Συνεδρίου«Ένταξη και Χρήση των ΤΠΕ στην Εκπαιδευτική Διαδικασία», Ανώτατη Σχολή ΠΑΙδαγωγικής & Τεχνολογικής Εκπαίδευσης, Μαρούσι. Λαδιάς Αν., (2016). Διδακτικές και παιδαγωγικές διαστάσεις του προγραμματισμού στην υποχρεωτική εκπαίδευση, Περιοδικό Έρκυνα, τεύχος 10ο ISSN: Λαδιάς Αν., Καρβουνίδης Θ., Λαδιάς Δ., Δουληγέρης Χρ., «Μια πρόταση ταξινόμησης των προγραμματιστικών βρόχων στο Scratch». Πρακτικά Εργασιών συνεδρίου «Η Πληροφορική στην Εκπαίδευση» (10th CIE 2018) που έγινε στο Πανεπιστήμιο Μακεδονίας, στις 11 Νοεμβρίου 2018 Λαδιάς Αν., Καρβουνίδης Θ., Λαδιάς Δ., Δουληγέρης Χρ., «Προγραμματιστικός μικρόκοσμος στο Scratch ως εκπαιδευτικό υλικό για τις Δημιουργικές Εργασίες». Πρακτικά Εργασιών 9th CIE, Πειραιάς, Οκτωβρίου 2017 Λαδιάς Αν., Παπαδόπουλος Γ., Φωτιάδης Δ., (2016). ΚωδικΌραμα: Εργαλείο για την ανάπτυξη οπτικού προγραμματισμού σε Scratch, Πανελλήνιο Συνέδριο Ψηφιακό Εκπαιδευτικό Υλικό και Ηλεκτρονική Μάθηση 2.0. Κόρινθος, Μαρτίου Λαδιάς Αν., Σαριδάκη Α., Λαδιάς Δημ. «Η αναπαράσταση των δεδομένων στον οπτικό προγραμματισμό ως επιπλέον διάσταση του ΚωδικΟράματος» Επιστημονικό περιοδικό
54 «Έρκυνα» Τεύχος 12 (σελ ) /2017, ISSN της Πανελλήνιας Παιδαγωγικής Εταιρείας Δευτεροβάθμιας Εκπαίδευσης (ΠΑ.Π.Ε.Δ.Ε.) URL: Τελευταία πρόσβαση: 30 Σεπτεμβρίου 2018 Λαδιάς Α. & Λαδιάς Δ. (2016), Αναπαράσταση αλγορίθμων με τη βοήθεια του κωδικοράματος σε περιβάλλοντα οπτικού προγραμματισμού. URL: Τελευταία πρόσβαση: 29 Σεπτεμβρίου Μικρόπουλος, Α. & Λαδιάς, Α. (1997). Η Logo στην εκπαιδευτική διαδικασία. Ιωάννινα: Πανεπιστήμιο Ιωαννίνων. Μπέλλου Ι. & Μικρόπουλος Α. (2017), Εκπαίδευση STEM: Μιά Παιδαγωγική Προσέγγιση, 4ο Συνέδριο ΠΕΣΣ, Ιωάννινα 10 Δεκεμβρίου Παπαδόπουλος Β. (2017). Εκπαιδευτικά προγραμματιστικά περιβάλλοντα στην πρωτοβάθμια εκπαίδευση. Μια συγκριτική εμπειρική μελέτη. Ιωάννινα: Πανεπιστήμιο Ιωαννίνων. Παπαχριστοδούλου Μ., (2012), Η Εκπαιδευτική Ρομποτικής ως Όχημα Ανάπτυξης Δεξιοτήτων Υπολογιστικής Σκέψης με Ανάθεση Ρόλων Μαθητών κατά τη Συνεργασία, Πτυχιακή/Διπλωματική Εργασία, ΑΠΘ, Διαθέσιμη από: %B9%CE%B1%CE%BA%CE%AE%20%CE%B5%CF%81%CE%B3%CE%B1%CF%83 %CE%AF%CE%B1_%CE%A0%CE%B1%CF%80%CE%B1%CF%87%CF%81%CE%B9 %CF%83%CF%84%CE%BF%CE%B4%CE%BF%CF%8D%CE%BB%CE%BF%CF%85% 20%CE%9C%CE%AC%CF%81%CE%B8%CE%B1_draft.pdf. Τελευταία Πρόσβαση: 20 Ιουνίου 2018 Τσοβόλας Σ. & Κόμης Β. (2008), Προγραμματισμός ρομποτικών κατασκευών:μελέτη περίπτωσης με μαθητές δημοτικού, 4ο Πανελλήνιο Συνέδριο Διδακτική της Πληροφορικής, Πάτρα. Φράγκου, Σ., Πανανικολάου, Κ. (2005). Εκπαιδευτική αξιοποίηση συστημάτων ρομποτικής, 5ο Πανελλήνιο Συνέδριο «Διδακτική της Πληροφορικής» (Εργαστηριακή συνεδρία), Αθήνα, 9-11 Απριλίου σσ Ανακτήθηκε στις 22 Δεκεμβρίου 2016 από Ξενόγλωσση Ackermann, E. (2001). Piaget's constructivism, Papert's constructionism: What's the difference?. Retrieved 22 September 2008 from Arts-and-Sciences/MAS-962Spring-2003/Readings/index.htm, URL: Τελευταία Πρόσβαση: 21 Ιουνίου Betrus, A. (2015). Through STEM education our future is bright. URL: h-stem-education-ourfuture-is-bright/242.html?m=false, Τελευταία Πρόσβαση: 21 Ιουνίου Biggs, J. B. and Collis, K. F. (1982), Evaluating the quality of learning. The SOLO taxonomy, Academic Press, NY
55 Blanchard, S., Freiman, V. and Lirrete-Pitre, N. (2010). Strategies used by elementary school children solving robotics-based complex tasks: innovative potential of technology, Procedia - Social and Behavioral Sciences, 2(2), Boytchev P., Logo tree project (2014) Τελευταία Πρόσβαση: 28/9/2018. Bybee, R. W. (2010). Advancing STEM education: A 2020 vision. Technology and Engineering Teacher, 70(1), Bybee, R. W. (2013). The case of STEM education. Challenges and Opportunities, NTA press, Arlington Virginia, USA. Carbonaro, M., Rex, M. and Chambers, J. (2003). "Using LEGO Robotics in a Project-Based Learning Environment", The Interactive Multimedia Electronic Journal of Computer Enhanced Learning, 6(1). Chung, C. J., Cartwright, C., Cole, M. (2014). Assessing the Impact of an Autonomous Robotics Competition for STEM Education. Journal of STEM Education: Innovations and Research, 15(2), Dede C., (2009). Comparing Frameworks for 21st Century Skills, Harvard Graduate School of Education, URL: %2021st%20Century%20Skills.pdf. Τελευταία Πρόσβαση: 30 Σεπτεμβρίου Druin, A. and Hendler, J. A. (Eds.). (2000). Robots for kids: exploring new technologies for learning, Morgan Kaufmann. Fisher, R. (2008), Teaching Thinking: Philosophical Enquiry in the Classroom, Continuum. English, L. D., and Mousoulides, N. (2015). Bridging STEM in a real-world problem. Mathematics, Teaching in the Middle School, 20, Fioriello, P. (2015). Understanding the Basics of STEM Education, URL: ΤελευταίαΠρόσβαση: 21 Ιουνίου Furner, J. M. & Kumar, D. D. (2007) The Mathematics and Science Integration Argument: A Stand for Teacher Education. Eurasia Journal of Mathematics, Science & Technology Education, 3, Harari Noah Yuval, Homo Deus - Μια σύντομη ιστορία του μέλλοντος, Αλεξάνδρεια, 2017, ISBN: Ηom, E. J. (2014). What is STEM Education? URL: what-is-stem-education.html, Τελευταία Πρόσβαση: 21 Ιουνίου Karvounidis T., Argiriou I., Ladias A. & Douligeris C., (2017). A Design and Evaluation Framework for Visual Programming Codes, IEEE Global Engineering Education Conference 2017 (EDUCON 2017), April 2017, Athens, Greece. Proceedings pp Διαθέσιμο διαδικτυακά από: DOI: /EDUCON
56 Koehler, M.J., & Mishra, P. (2008). Introducing TPCK. AACTE Committee on Innovation and Technology (Ed.), The handbook of technological pedagogical content knowledge (TPCK) for educators (pp. 3-29). Mahwah, NJ: Lawrence Erlbaum Associates. Krathwohl, D. R. (2002). A revision of Bloom's taxonomy: An overview. Theory Into Practice 41 (4) Morrison, J. S. (2006). Attributes of STEM Education,TIES STEM Education Monograph Series, URL: d_technical_education/attributes%20of%20stem%20education%20with%20cover %202%20.pdf, ΤελευταίαΠρόσβαση: 21 Ιουνίου Morrison, J., & Raymond Bartlett, V. (2009). STEM as curriculum. Education Week, 23, Mueller, J. (2005). Authentic Assessment in the Classroom and the Library Media Center. Library Media Connection. Narum J. (2008). Promising Practices in Undergraduate STEM Education; Commissioned paper presented at NRC workshop on Evidence on Selected Promising Practices in Undergraduate Science, Technology, Engineering, and Mathematics (STEM) Education; Washington, DC. Nourbakhsh, I. R., Crowley, K., Bhave, A., Hsium, T., Hammer, E. and Perez Bergquist, A. (2005). The robotic autonomy mobile robotics course: Robot design, curriculum design and educational assessment, Autonomous Robots, 18(1), Papadopoulos, G., Fotiadis, D., Ladias A. ((2015) Special programming topics in Scratch, ISBN: , URL: Τελευταία πρόσβαση: 18 Ιουνίου Papert, S. (1991). Νοητικές θύελλες. Παιδιά, Ηλεκτρονικοί Υπολογιστές και Δυναμικές Ιδέες.Τα πάντα γύρω από τη Logo. Αθήνα: Οδυσσέας. Papert, S. (2000). What s the big idea: Towards a pedagogy of idea power. IBM Systems Journal, pp. 39 (3 4), Retrieved 20 December 2016 from Papert, S. and Harel, I. (1991). Constructionism: research reports and essays by the Epistemology and Learning Research Group, the Media Lab, Massachusetts Institute of Technology, Ablex Pub. Corp, Norwood, NJ. Petre, M. and Price, B. (2004). Using robotics to motivate "back door" learning, Education and Information Technologies, 9(2), Piaget, J. (1974). To understand is to invent, New York: Basic Books. Rennie, L., Venville, G., & Wallace, J. (2012). Knowledge that counts in a global community: exploring the contribution of integrated curriculum. New York, NY: Routledge. Resnick M., Maloney J., Monroy-Hernández A., Rusk N., Eastmond E., Brennan K., Millner A., Rosenbaum E., Silver J., Silverman B. & Kafai Y., (2009). Communications of the ACM, November 2009, Vol. 52 No. 11, Pages 60-67, doi: /
57 Rogers, C., & Portsmore, M. (2004). Bringing engineering to elementary School. Journal of STEM Education: Innovations & Research, 5(3/4), Shulman, L. S. (1987). Knowledge and teaching: Foundations of the new reform. Harvard Educational Review, 57(1), Talaiver, M. & Bowen, R. (2010). Developing 21st-Century Skills: Game Design and Robotics Exploration. In D. Gibson & B. Dodge (Eds.), Proceedings of Society for Information Technology & Teacher Education International Conference 2010 (pp ). Chesapeake, VA: AACE. Vars, G. F., (2001). Can curriculum integration survive in an era of high-stakes testing? Middle School Journal, 33(2), Wagner, S. P. (1998). Robotics and children: Science achievement and problem solving, Journal of Computing in Childhood Education, 9(2), Wikipedia.org, (2018), Λήμμα: Vygotsky Lev, Τελευταία Πρόσβαση: 29 Σεπτεμβρίου 2018 Wikipedia.org, (2018), Λήμμα: Kleiber's law, Τελευταία Πρόσβαση: 29 Σεπτεμβρίου 2018 Williams, D. C., Ma, Y., Prejean, L. and Ford, M. J. (2007). Acquisition of physics content knowledge and scientific inquiry skills in a robotics summer camp, Journal of Research on Technology in Education, 40(2), Μελέτες Τζιμογιάννης, A., Κόμης, Β., Φεσάκης, Γ., Λαδιάς, Α., Γουμενάκης, Ι., Λιακοπούλου, Ε., Σαρίδου, Χ., Σιμωτάς, Κ., Σταματοπούλου, Ε., Τσάκαλης, Π., Τσιωτάκης, Π. (2014α) Πρόγραμμα Σπουδών: Επιστημονικό Πεδίο: Πληροφορική και νέες τεχνολογίες: Διδακτικό Μαθησιακό Αντικείμενο/Τάξη/επίπεδο εκπαίδευσης: Τεχνολογίες Πληροφορίας και Επικοινωνιών Α -ΣΤ Δημοτικού. Υπουργείο Παιδείας & Θρησκευμάτων. Ινστιτούτο Εκπαιδευτικής Πολιτικής. Ανακτήθηκε την 30/5/2017 από McKinsey, (2013), Disruptive technologies: Advances that will transform life, business and the global economy, URL: Τελευταία πρόσβαση: 29 Σεπτεμβρίου National Innovation Initiative Summit and Report. Council On Competitiveness, URL: merica.pdf, Τελευταίαπρόσβαση: 21 Ιουνίου National Research Council, Committee on Highly Successful Schools or Programs for K 12 STEM Education. (2011). Successful K 12 STEM Education: Identifying Effective 145 Approaches in Science, Technology, Engineering, and Mathematics. Washington, DC: The National Academies Press. Report to the president prepare and inspire: K-12 education in Science, Technology, Engineering and Math (STEM) for America s future, (2017). URL:
58 πρόσβαση: 21 Ιουνίου Τελευταία Successful STEM Education, (2011). Improving STEM Curriculum and Instruction: Engaging Students and Raising Standards. Retrieved November 10, 2014, from URL: 0Curriculum%20Instruction_FINAL.pdf, Τελευταία πρόσβαση: 21 Ιουνίου 2018.
59 Μέρος Β Σενάρια
60 1 ο σενάριο
61 Σενάριο 01 Γαιοποίηση του Άρη Ιστορία - Σενάριο έργου Το Rover μας βρίσκεται στη βάση εκτόξευσης που είναι στημένη πάνω σε υδραυλικό ανελκυστήρα που βασίζεται στη λειτουργία των συγκοινωνούντων δοχείων. Όταν δοθεί η εκκίνηση, μαθητής ανοίγει το μπουκάλι με το νερό και το σηκώνει ψηλά για να αρχίσει η ροή νερού και το Rover ν αρχίσει να ανυψώνεται έως ότου φτάσει στην προγραμματισμένη θέση. Ο αισθητήρας απόστασης πιάνει το Rover το ενεργοποιεί και αρχίζει να κινείται. Όταν το Rover φτάσει στο φεγγάρι, σταματά για λίγο, για ανεφοδιασμό. Σταματά με χρόνο, και ξανά-ξεκινά. Όταν φτάσει στην επιφάνεια του Άρη σταματά με αισθητήρα απόστασης. Εκεί είναι τοποθετημένος ξηρός πάγος, που το Rover τον ρίχνει σε δοχείο με νερό και γίνεται έκρηξη προσομοιάζοντας τον βομβαρδισμό του πλανήτη με μετεωρίτες, που στόχο έχουν την άνοδο της θερμοκρασίας και το λιώσιμο των πάγων. Έπειτα το Rover μετακινείται προς τα πίσω, όπου τον πιάνει ο αισθητήρας απόστασης του γερανού που περιέχει βαρούλκο για ανύψωση νερού από υπόγειο ταμιευτήρα. Αμέσως ο κουβάς ανεβαίνει και με λειτουργία των συγκοινωνούντων δοχείων ρέει νερό στην επιφάνεια του πλανήτη ποτίζοντας τα φυτά. Το νερό που περισσεύει αποστραγγίζεται σε υπόγειο ταμιευτήρα νερού. Στο διάστημα αυτό ο κουβάς κατεβαίνει στην αρχική του θέση και το Rover κινείται προς τα πίσω. Εκεί υπάρχει η ρομποτική κατασκευή της ασπίδας που προφυλάσσει από ηλιακές καταιγίδες ή άλλους κινδύνους. Ο αισθητήρας απόστασης αντιλαμβάνεται το Rover, σημαίνει συναγερμός και η ασπίδα κατεβαίνει προφυλάσσοντας το Rover. Με χρονισμό η ασπίδα σηκώνεται και το Rover κινείται προς τα πίσω με τελικό προορισμό την επιστροφή του στη βάση εκτόξευσης. Αν όλα πάνε καλά το Rover θα ακινητοποιηθεί στην πλατφόρμα εκτόξευσης, το υδραυλικό ασανσέρ θα κατέβει και το project θα ολοκληρωθεί.
62 Πρόβλημα που επιλύει το project Το όχημα κινείται με αυτόματο τρόπο και με τον αισθητήρα απόστασης καταλαβαίνει κάθε φορά που βρίσκεται και συμπεριφέρεται ανάλογα. Ένας γερανός χρησιμοποιεί συστήματα τροχαλιών και ένα σύστημα με μεγάλο γρανάζι και μειωτήρα για την ανύψωση μεγάλων φορτίων, απαιτώντας μικρότερη δύναμη από το μοτέρ. Λόγω του μεγάλου βάρους της ασπίδας χρειάστηκε να υλοποιηθεί ένας μηχανισμός με ισχυρό μοτέρ με μειωτήρα πάνω σε μια στιβαρή κατασκευή. Σκοπός Να κατασκευαστεί ένα όχημα το οποίο θα κινείται με αυτοματοποιημένοτρόπο για την μετάβαση στον Άρη. Να κατασκευαστεί έναςγερανός με τέτοιο τρόποώστε να μπορεί ανυψώνει ένα κουβά με νερό για το πότισμα της καλλιέργειας. Να κατασκευαστεί μια ασπίδα προστασίας για το όχημα που είναι στον Άρη. Εκπαιδευτικοί στόχοι Το παρόν project ενδείκνυται ως παράδειγμα: εφαρμογής του τμηματικού προγραμματισμού στο οποίο υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων, με χρήση κώδικα-μενού (σε ρόλο κυρίου προγράμματος με φιλοσοφία δομημένου προγραμματισμού) που δημιουργεί δενδροειδή δομή προγράμματος δύο επιπέδων. Η τμηματοποίηση του κώδικα στο εσωτερικό των κωδίκων στα κλαδιά-κελιά αποτελείται κατά κανόνα από την κλήση μιας διαδικασίας. χρήσης εκτεταμένης επικοινωνίας μεταξύ των διαφόρων τμημάτων του κώδικα κυρίως με τη χρησιμοποίηση αποστολής μηνυμάτων η ανίχνευση των οποίων γίνεται με την τεχνική polling και δευτερευόντως με τη χρήση μεταβλητών σε ρόλο σημαιών.
63 σειριακού προγραμματισμού με αποστολή μηνυμάτων που επιβάλλουν σειριακή εκτέλεση (μετάδωσε και περίμενε), αν και η κατάσταση της αρχικοποίησης θα μπορούσε να είναι παράδειγμα παράλληλου προγραμματισμού. αρχικοποίησης του προγράμματος επειδή τα τμήματα του κώδικα της κατάστασης της πρώτης γραμμής ασχολούνται κατά κανόνα με την αρχικοποίηση των μεταβλητών και την χωροθέτηση και καθορισμό εμφάνισης των αντικειμένων. χρήσης των μεταβλητών σε ρόλο σημαίας όσον αφορά την αναπαράσταση των δεδομένων. αναγνωσιμότητας του προγράμματος στο οποίο οι μεταβλητές, τα αντικείμενα και οι διαδικασίες έχουν κατάλληλες ονομασίες. χρήσης απλών και εμφωλευμένων δομών επιλογής (Εάν Τότε & Εάν Τότε Αλλιώς) και με χρήση του λογικού τελεστή NOT. χρήσης δομών προκαθορισμένου πλήθους επαναλήψεων και δομών επανάληψης υπό συνθήκη. Χαρακτηριστικά του έργου Διάρκεια (σεδιδακτικές ώρες) 10 Δυσκολία (υλοποίησης κατασκευαστικά) (1-5) 5 Δυσκολία (υλοποίησης προγραμματιστικά) (1-5) 2 Όνομα ομάδας : Gemma Robot NeasIonias Σχολείο Υλοποίησης : 3ο Δημοτικό Σχολείο Νέας Ιωνίας Αττικής Προπονητής/τες : Δημήτριος Κωσταγιάννης- Γεώργιος Κωσταγιάννης- Ευάγγελος Γεραλής Παναγιώτης Μαστοράκης



64 Σενάριο 1: GEMMA Robots 3ο Δημοτικό Σχολείο Νέας Ιωνίας Όχημα Γερανός Σύνολο κατασκευής
65 Σχολιασμός του κώδικα Στο παρόν έργο το πρόγραμμα αναπαριστάνεται με τα δύο επόμενα κωδικοράματα.
66
67

68 Το πρόγραμμα του έργου αυτού αποτελείται από δύο κώδικες. Σύμφωνα με τα δύο κωδικοράματα: Ο πρώτος κώδικας εμπλέκει 9 αντικείμενα σε 13 καταστάσεις, σχηματίζοντας 117 κελιά, εκ των οποίων στα 24 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων αφενός υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων και αφετέρου δεν φαίνεται να υπάρχει αλληλεπίδραση με το χρήστη του προγράμματος.

69 Το κύριο βάρος του προγράμματος πέφτει αφενός στον κώδικα του κελιού Η1 ο οποίος (κώδικας) φαίνεται να ρυθμίζει τα περισσότερα τμήματα του κώδικα που υπάρχει στις υπόλοιπες καταστάσεις κάνοντας χρήση τεχνικής polling με αποστολή μηνυμάτων που επιβάλλουν σειριακή εκτέλεση (μετάδωσε και περίμενε),
 και έχοντας ως κλαδιά πρώτου επιπέδου τους κώδικες σχεδόν όλων των υπολοίπων κελιών, αφετέρου στον κώδικα του κελιού Α2 ο")

70 με αποτέλεσμα να δημιουργείται μια δενδροειδής δομή προγράμματος, με ρίζα το κελί Η1 (σε ρόλο κυρίου προγράμματος με φιλοσοφία δομημένου προγραμματισμού) και έχοντας ως κλαδιά πρώτου επιπέδου τους κώδικες σχεδόν όλων των υπολοίπων κελιών, αφετέρου στον κώδικα του κελιού Α2 ο οποίος (κώδικας) ανήκοντας σε κλαδί πρώτου επιπέδου λειτουργεί ως υπομενού ρυθμίζει τμήματα κώδικα σε κλαδιά δευτέρου επιπέδου με όμοιο τρόπο όπως προαναφέρθηκε για τον κώδικα Η1. με εξαίρεση τους κώδικες δύο αντικείμενων (Θ και Ι), που δεν φαίνεται να παίζουν ενεργό ρόλο κατά τη ροή του προγράμματος.

71 Ο δεύτερος κώδικας εμπλέκει 6 αντικείμενα σε 11 καταστάσεις. σχηματίζοντας 66 κελιά, εκ των οποίων στα 16 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων αφενός υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων και αφετέρου δεν φαίνεται να υπάρχει αλληλεπίδραση με το χρήστη του προγράμματος.

72 Το κύριο βάρος του προγράμματος πέφτει στον κώδικα του κελιού Α1 ο οποίος (κώδικας) φαίνεται να ρυθμίζει τα περισσότερα τμήματα του κώδικα που υπάρχει στις υπόλοιπες καταστάσεις κάνοντας χρήση τεχνικής polling με αποστολή μηνυμάτων που επιβάλλουν σειριακή εκτέλεση (μετάδωσε και περίμενε),
, που δεν φαίνεται να παίζουν ενεργό ρόλο κατά τη ροή του")
73 με αποτέλεσμα να δημιουργείται μια δενδροειδής δομή προγράμματος, με ρίζα το κελί Α1 (σε ρόλο κυρίου προγράμματος με φιλοσοφία δομημένου προγραμματισμού) και έχοντας ως κλαδιά πρώτου επιπέδου τους κώδικες σχεδόν όλων των υπολοίπων κελιών, με εξαίρεση τους κώδικες δύο αντικείμενων (Ε και Ζ), που δεν φαίνεται να παίζουν ενεργό ρόλο κατά τη ροή του προγράμματος.

74 Και στους δύο κώδικες (α) Τα τμήματα του κώδικα της κατάστασης της πρώτης γραμμής ασχολούνται κατά κανόνα με την αρχικοποίηση των μεταβλητών και την χωροθέτηση και καθορισμό εμφάνισης των αντικειμένων. (β) Η δόμηση στο εσωτερικό των κωδίκων στα κλαδιά-κελιά αποτελείται κατά κανόνα από την κλήση μιας διαδικασίας στο εσωτερικό της οποίας το πρώτο τμήμα ασχολείται με τη ρύθμιση του ενεργοποιητή του αυτοματισμού ενώ το δεύτερο με τις ρυθμίσεις της προσομοίωσης στον υπολογιστή, κάνοντας χρήση δομών επανάληψης κυρίως προκαθορισμένου πλήθους.
75 Τα δεδομένα που χρησιμοποιούνται είναι απλές μεταβλητές είτε του συστήματος είτε οριζόμενες από τον προγραμματιστή, πολλές από αυτές σε ρόλο σημαίας.
76 2 ο σενάριο
77 Σενάριο 02 Κατοικία - ανελκυστήρας Ιστορία - Σενάριο έργου Βρισκόμαστε στο 2040, δέκα χρόνια μετά το πρώτο ταξίδι του ανθρώπου στον Άρη. Οι πρώτες κατοικίες στην επιφάνεια του Κόκκινου Πλανήτη έχουν ήδη κατασκευαστεί αλλά πολλές από αυτές παθαίνουν συχνά σοβαρές ζημιές ή καταστρέφονται ολοσχερώς από τα επικίνδυνα καιρικά φαινόμενα που επικρατούν εκεί. Αναμφίβολα, το πιο επικίνδυνο από όλα τα καιρικά φαινόμενα στον Άρη, είναι οι σφοδρές ανεμοθύελλες που ξεκινούν από διάμετρο 2.000χλμ και μπορούν να καλύψουν μέχρι και ολόκληρο τον πλανήτη. Η διάρκεια τους κυμαίνεται από λίγες μέρες μέχρι και δύο μήνες. Συνεπώς, η ανάγκη να προστατευτούν οι άνθρωποι, ο εξοπλισμός και οι κατοικίες είναι επιτακτική! Η παραδειγματική κατασκευή είναι μια ρομποτική κατοικία/θόλος που όταν ανιχνεύει την έλευση ανεμοθύελλας (ισχυρού ανέμου) ενεργοποιεί ηχητικό και οπτικό συναγερμό και στη συνέχεια βυθίζεται στο έδαφος για να προστατευτεί. Μετά τη λήξη του καιρικού φαινομένου η κατοικία επανέρχεται στην αρχική της θέση. Πρόβλημα που επιλύει το project Με την συγκεκριμένη ιδέα είναι ότι επιτρέπεται στους έποικους να μην ζουν μόνιμα σε υπόγειες σπηλιές για να προστατευτούν - όπως προτείνουν σήμερα κάποιοι επιστήμονες - αλλά να μπορούν να ζήσουν για μεγάλα διαστήματα και στην επιφάνεια του Άρη. Σκοπός Να κατασκευαστεί μία κατοικία η οποία να μπορεί να βυθίζεται κάτω από την επιφάνεια του πλανήτη όταν το ανεμόμετρο ανιχνεύσει αέρα από οποιαδήποτε κατεύθυνση.
78 Εκπαιδευτικοί στόχοι Το παρόν project ενδείκνυται ως παράδειγμα: εισαγωγικής χρήσης επικοινωνίας μεταξύ ενός κυρίου προγράμματος και δύο επιμέρους καταστάσεων. διαχωρισμού των αρμοδιοτήτων αφού σε άλλες καταστάσεις βρίσκονται οι κώδικες που ασχολούνται με τους αυτοματισμούς σε άλλες καταστάσεις οι κώδικες που ασχολούνται με τις προσομοιώσεις στον υπολογιστή. παράλληλου προγραμματισμού των κωδίκων που εξυπηρετούν τις προσομοιώσεις των αυτοματισμών. χρήσης απλών και εμφωλευμένων δομών επιλογής (Εάν Τότε) και με χρήση του λογικού τελεστή AND. χρήσης δομών προκαθορισμένου πλήθους επαναλήψεων και δομών επανάληψης υπό συνθήκη. Χαρακτηριστικά του έργου Διάρκεια (σε διδακτικές ώρες) 6 Δυσκολία (υλοποίησης κατασκευαστικά) (1-5) 3 Δυσκολία (υλοποίησης προγραμματιστικά) (1-5) 2 Όνομα ομάδας : M.A.R.S. Σχολείο Υλοποίησης : Ανεξάρτητη Ομάδα Προπονητής/τες : Ηλίας Νάτσιος



79 Σενάριο 2: M.A.R.S Ανεξάρτητη ομάδα Ανελκυστήρας Μηχανισμός ανελκυστήρα Κεραία Σύνολο κατασκευής
80 Σχολιασμός του κώδικα Στο παρόν έργο το πρόγραμμα αναπαριστάνεται με το επόμενο κωδικόραμα.




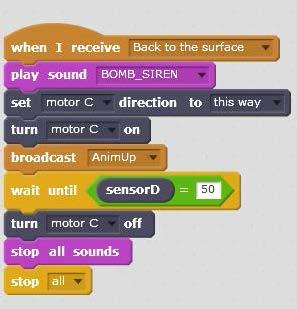
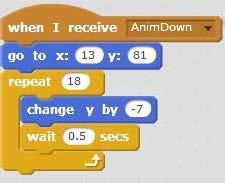
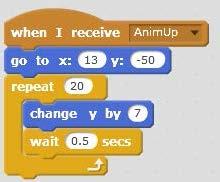
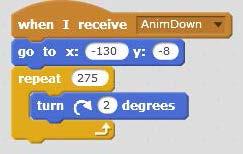

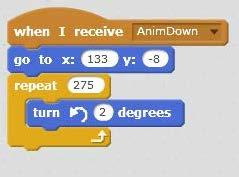
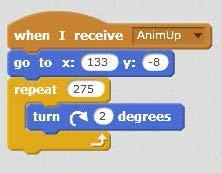



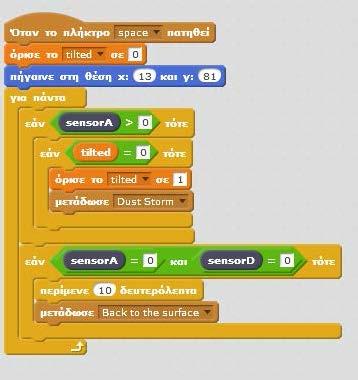
81 Ομάδα M.A.R.S. κατοικία-ανελκυστήρας A Β Marsian House Gear2 Γ Gear1 Δ HidingGround Ε Message


82 Σύμφωνα με το κωδικόραμα: Ο κώδικας εμπλέκει 5 αντικείμενα σε 5 καταστάσεις, σχηματίζοντας 25 κελιά, εκ των οποίων στα 11 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων αφενός υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων και αφετέρου η αλληλεπίδραση με το χρήστη του προγράμματος φαίνεται να περιορίζεται στο ξεκίνημα του προγράμματος που γίνεται με το πάτημα του πλήκτρου space.
, με αποτέλεσμα να δημιουργείται μια μικρή δενδροειδής δομή προγράμματος με ρίζα το κελί Α1.")
83 Το κύριο βάρος του προγράμματος πέφτει στον κώδικα του κελιού A1 ο οποίος με μια απλή τεχνική polling οδηγεί ανάλογα σε μια από δύο καταστάσεις (Α2 και Α4), κάθε μία από τις οποίες οδηγεί αντίστοιχα σειριακά σε μια άλλη κατάσταση (γραμμή 3 και 4), με αποτέλεσμα να δημιουργείται μια μικρή δενδροειδής δομή προγράμματος με ρίζα το κελί Α1. Οι κώδικες στα κελιά Α2 και Α4 ασχολούνται με τον κινητήρα του αυτοματισμού



84 Είναι χαρακτηριστικό ότι οι κώδικες της κατάστασης στη γραμμή 3 που εκτελούνται ταυτόχρονα (παράλληλος προγραμματισμός), υλοποιούν την προσομοίωση του αυτοματισμού στον υπολογιστή. ενώ το αυτό συμβαίνει και για τους κώδικες της κατάστασης στη γραμμή 4. Ο κώδικας του αντικείμενου Δ δεν φαίνεται να παίζει ενεργό ρόλο κατά τη ροή του προγράμματος.

85 Η τμηματοποίηση του κώδικα περιορίζεται σε αυτή των κελιών του κωδικοράματος. Χρησιμοποιούνται απλές και εμφωλευμένες δομές επιλογής (Εάν Τότε) και με χρήση λογικού τελεστή AND. Χρησιμοποιούνται δομές επανάληψης προκαθορισμένου πλήθους επαναλήψεων και η εντολή "περίμενε ώσπου". Τα δεδομένα που χρησιμοποιούνται είναι μία απλή μεταβλητή που ορίζεται από τον προγραμματιστή και οι τιμές από τους αισθητήρες του WeDo.
86 3 ο σενάριο
87 Σενάριο 03 Εργασία στο Άρη Ιστορία - Σενάριο έργου Βρισκόμαστε στον πλανήτη Άρη στα μέσα της δεκαετίας του Οι πρώτοι έποικοι στον Άρη έχουν ήδη εγκατασταθεί. Η καθημερινότητα τους στον πλανήτη έχει πολλές ιδιαιτερότητες. Οι έποικοι εργάζονται καθημερινά σκληρά για να αντεπεξέλθουν στις δυσκολίες. Θα παρακολουθήσουμε το ξεκίνημα μίας εργάσιμης ημέρας των εποίκων. Το αυτόματο όχημα που θα τους οδηγήσει στις θέσεις εργασίας τους είναι έτοιμο να ξεκινήσει μαζί τους από τον οικισμό τους. Πρώτος σταθμός εργασίας είναι η υπό-κατασκευή γειτονιά. Νέοι έποικοι από τη γη αναμένεται να φτάσουν σύντομα και οι εργαζόμενοι εδώ με την βοήθεια ειδικών ρομπότ ετοιμάζουν νέες κατοικίες. Στον επόμενο σταθμό βρίσκεται ένα θερμοκήπιο υψηλής τεχνολογίας όπου καλλιεργούνται σπανάκι, λάχανα, φράουλες, πατάτες κα. Τελευταία στάση είναι το MOXIE, το εργοστάσιο παραγωγής οξυγόνου. Το ΜΟΧΙΕ εκμεταλλεύεται το άφθονο διοξειδίου του άνθρακα που υπάρχει στην ατμόσφαιρα του Άρη και με κατάλληλες επεξεργασίες το μετατρέπει σε οξυγόνο. Πρόβλημα που επιλύει το project Η συγκεκριμένη ιδέα υλοποιεί ένα διαστημικό λεωφορείο το οποίο μεταφέρει μόνο του και αυτόματα τους εποίκους στις διαφορετικές εργασίες τους στον Άρη και κάνει στάση σε κάθε σημείο που επιτρέπεται. Η δεξαμενή παραγωγής οξυγόνου που είναι πολύ σημαντική για την επιβίωση των ανθρώπων στον Άρη ελέγχει με αυτόματο τρόπο τα επίπεδα παραγωγής οξυγόνου και όταν αυτά πέσουν κάτω από τα επιθυμητά επίπεδα ειδοποιεί τους εποίκους για να αναλάβουν δράση.
88 Σκοπός Να κατασκευαστεί ένα διαστημικό λεωφορείο το οποίο θα μεταφέρει τους εποίκους του Άρη στην εργασία τους πάνω στον πλανήτη με αυτόματο τρόπο και χωρίς οδηγό. Να κατασκευαστεί μία δεξαμενή παραγωγής οξυγόνου η οποία θα ειδοποιεί στην περίπτωση που το οξυγόνο πέσει κάτω από τα επιθυμητά επίπεδα. Εκπαιδευτικοί στόχοι Το παρόν project ενδείκνυται ως παράδειγμα: απλού τμηματικού προγραμματισμού στο οποίο υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων, με χρήση κώδικα-μενού (σε ρόλο κυρίου προγράμματος με φιλοσοφία δομημένου προγραμματισμού) που δημιουργεί δενδροειδή δομή προγράμματος ενός επιπέδου. εισαγωγικής χρήσης επικοινωνίας μεταξύ ενός κυρίου προγράμματος και τριών επιμέρους καταστάσεων κάνοντας χρήση τεχνικής polling. ενός απλοϊκού μοντέλου καταρράκτη (στο δεύτερο κώδικα). παράλληλου προγραμματισμού των κωδίκων που εξυπηρετούν τις προσομοιώσεις των αυτοματισμών. χρήσης απλών δομών επιλογής (Εάν Τότε Αλλιώς). χρήσης δομών επανάληψης υπό συνθήκη και "περίμενε ώσπου". Χαρακτηριστικά του έργου Διάρκεια (σε διδακτικές ώρες) 6 Δυσκολία (υλοποίησης κατασκευαστικά) (1-5) 3 Δυσκολία (υλοποίησης προγραμματιστικά) (1-5) 2 Όνομαομάδας : The 4th on Mars Σχολείο Υλοποίησης : 4ο Δημοτικό Σχολείο Ασπροπύργου Προπονητής/τες : Μαρία Αναστασίου



89 Σενάριο 3: The 4th on Mars 4ο Δημοτικό Σχολείο Ασπροπύργου Όχημα Αυτοματισμοί Τελική μορφή οχήματος
90 Σχολιασμός του κώδικα Στο παρόν έργο το πρόγραμμα αναπαριστάνεται με τα δύο επόμενα κωδικοράματα.




91 The 4th on Mars Το 4ο στον Άρη OLC Δεξαμενή Γεμάτη Δεξαμενή άδειασμα 1 Δεξαμενή άδειασμα 12 Δεξαμενή Άδειασμα 123 Δεξαμενή Άδειασμα 1234 Δεξαμενή Άδειασμα Μήνυμα Οξυγόνο





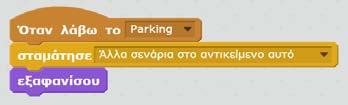

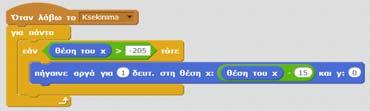
92 The 4th on Mars Το 4ο στον Άρη 1ος Αυτοματισμός Λεωφορείο ρομποτικό Διαστημικό Λεωφορείο Διαδρομή 1 Διαδρομή 2

93 Το πρόγραμμα του έργου αυτού αποτελείται από δύο κώδικες. Σύμφωνα με τα δύο κωδικοράματα: Ο πρώτος κώδικας εμπλέκει 4 αντικείμενα σε 4 καταστάσεις, σχηματίζοντας 16 κελιά, εκ των οποίων στα 13 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων αφενός υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων, περιορίζοντάς το όμως μόνο στο animation των αντικειμένων και αφετέρου δεν φαίνεται να υπάρχει ισχυρή αλληλεπίδραση με το χρήστη του προγράμματος. Το κύριο βάρος του προγράμματος πέφτει στον κώδικα του κελιού Α1 ο οποίος (κώδικας) φαίνεται αφενός να ρυθμίζει εσωτερικά τον χειρισμό του κινητήρα στο πλαίσιο του αυτοματισμού και αφετέρου να χρησιμοποιεί τρεις καταστάσεις κάνοντας χρήση τεχνικής polling με αποστολή μηνυμάτων που αντιστοιχούν στις προσομοιώσεις του αυτοματισμού που γίνονται στον υπολογιστή.
94 Αποτέλεσμα είναι να δημιουργείται μια δενδροειδής δομή προγράμματος, με ρίζα το κελί Α1 (σε ρόλο κυρίου προγράμματος με φιλοσοφία δομημένου προγραμματισμού) και έχοντας ως κλαδιά πρώτου επιπέδου τους κώδικες σχεδόν όλων των υπολοίπων κελιών. Είναι χαρακτηριστικό ότι οι κώδικες της κατάστασης στη γραμμή 2 που εκτελούνται ταυτόχρονα (παράλληλος προγραμματισμός) και υλοποιούν την προσομοίωση του αυτοματισμού στον υπολογιστή. ενώ το αυτό συμβαίνει και για τους κώδικες της κατάστασης στη γραμμή 3, όμοια επαναλαμβάνεται και για τους κώδικες της κατάστασης στη γραμμή 4.


95 Ο δεύτερος κώδικας εμπλέκει 3 αντικείμενα σε 3 καταστάσεις. σχηματίζοντας 9 κελιά, εκ των οποίων στα 6 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων αφενός υιοθετείται το μοντέλο καταρράκτη και αφετέρου δεν φαίνεται να υπάρχει αλληλεπίδραση με το χρήστη του προγράμματος. Το κύριο βάρος του προγράμματος πέφτει στον κώδικα του κελιού Α1 που φαίνεται αφενός να ρυθμίζει εσωτερικά το χρώμα του led στο WeDo στο πλαίσιο του αυτοματισμού και αφετέρου να χρησιμοποιεί διαδοχικά δύο καταστάσεις, με αποστολή μηνυμάτων που αντιστοιχούν στα αντίστοιχα χρώματα που παίρνει το led προσομοιώνοντάς το στον υπολογιστή.
, και η εντολή \"επανάλαβε ώσπου\", κάνοντας χρήση του λογικού τελεστή της διάζευξης και η εντολή \"περίμενε ώσπου\", Τα δεδομένα που χρησιμοποιούνται")
96 Η τμηματοποίηση του κώδικα περιορίζεται σε αυτή των κελιών του κωδικοράματος. Χρησιμοποιείται η δομή επιλογής (Εάν Τότε Αλλιώς), και η εντολή "επανάλαβε ώσπου", κάνοντας χρήση του λογικού τελεστή της διάζευξης και η εντολή "περίμενε ώσπου", Τα δεδομένα που χρησιμοποιούνται είναι μία απλή μεταβλητή που ορίζεται από τον προγραμματιστή και οι τιμές από τους αισθητήρες του WeDo. Τα δεδομένα που χρησιμοποιούνται είναι μόνο οι τιμές από τους αισθητήρες του WeDo και οι μεταβλητές-συντεταγμένες των αντικειμένων που διαθέτει το σύστημα. Δεν χρησιμοποιούνται μεταβλητές που έχουν οριστεί από τον προγραμματιστή.
97 4 ο σενάριο
98 Σενάριο 04 Εργοστάσιο διαλογής τροφίμων και Ρομποτικός βοηθός στον Άρη!! Ιστορία - Σενάριο έργου Βρισκόμαστε στο έτος 2070 στον πλανήτη Άρη, όπου οι άνθρωποι έχουν δημιουργήσει αποικία. Για να τραφούν έχουν αναπτύξει εκτεταμένες καλλιέργειες. Διαθέτουν θερμοκήπια, όπου παράγονται ανθεκτικά φυτά που μπορούν να παράσχουν στον ανθρώπινο οργανισμό όλες τις απαραίτητες θρεπτικές πρώτες ύλες. Η κατασκευή επιλύει το πρόβλημα της διαλογής των τροφίμων ανάλογα με την ποιότητά τους. Ο συγκεκριμένος αυτοματισμός μπορεί να διαχωρίσει αντικείμενα, ανάλογα με το χρώμα τους (λευκό χρώμα σημαίνει τρόφιμο καλής ποιότητας κατάλληλο για φάγωμα, ενώ μαύρο χρώμα σημαίνει ακατάλληλο τρόφιμο που οδηγείται προς Κάδο ανακύκλωσης). Το εργοστάσιο έχει μία είσοδο και δύο εξόδους. Στην είσοδο τοποθετούνται τα τρόφιμα προς διαλογή πάνω σε μια ταινία μεταφοράς. Το τρόφιμο αυτό περνάει μπροστά από έναν αισθητήρα απόστασης και ανάλογα με το χρώμα του ανιχνεύεται η ποιότητα του τροφίμου. Ανάλογα με το είδος που θα ανιχνευτεί οι ταινίες μεταφοράς το οδηγούν στην κατάλληλη έξοδο. Το δεύτερο τμήμα του έργου περιλαμβάνει ένα ανθρωποειδές Ρομπότ που το όνομα του είναι XFour και χρησιμοποιείται για να μεταφέρει τρόφιμα από το εργοστάσιο διαλογής στο διαστημικό εστιατόριο, στο οποίο παρασκευάζεται το φαγητό των αποίκων. Το ρομπότ περπατά με βηματισμό όπως ο άνθρωπος. Εμπνευστήκαμε το ρομποτικό βοηθό από τα ανθρωποειδή ρομπότ με όνομα Valkyrie που η NASA πρόκειται να χρησιμοποιήσει ως εξερευνητές για να προετοιμάσουν την άφιξη του ανθρώπου στον Άρη, αλλά και ως βοηθούς των πρώτων αποίκων του Άρη. Πρόβλημα που επιλύει το project Στον Άρη αφού έχουν κατασκευαστεί τα κατάλληλα θερμοκήπια για την παραγωγή τροφών θα πρέπει με κάποιο τρόπο να ελέγχουμε αυτές τις στροφές πριν την κατανάλωση
99 τους από τον άνθρωπο ώστε να είναι ποιοτικές και ασφαλείς. Ακόμα για τις τυποποιημένες εργασίες μεταφοράς αντικειμένων και τροφών μπορούμε να χρησιμοποιήσουμε ρομπότ που θα κάνουν αυτήν την εργασία έτσι ώστε οι έποικοι να ασχολούνται με σημαντικότερες αποστολές. Σκοπός Να κατασκευαστεί κατάλληλος μηχανισμός- εργοστάσιο διαλογής, ο οποίος θα μπορεί να διαχωρίζει τα τρόφιμα σε ποιοτικά και ακατάλληλα ανάλογα με το χρώμα τους. Να κατασκευαστεί βοηθός ρομπότ με μορφή δίποδου για να μεταφέρει τα ποιοτικά τρόφιμα στο εστιατόριο των εποίκων. Εκπαιδευτικοί στόχοι Το παρόν project ενδείκνυται ως παράδειγμα: παράλληλου προγραμματισμού των κωδίκων που εξυπηρετούν τις προσομοιώσεις των αυτοματισμών. χρήσης απλών δομών επιλογής (Εάν Τότε) δημιουργίας δομής επανάληψης με τη χρήση μετάδοσης μηνύματος που λαμβάνεται από το σενάριο που το μετάδωσε. προς αποφυγή με τη χρήση δύο τεμνόμενων βρόχων (ενός "για πάντα" και της δομής επανάληψης με μήνυμα). Χαρακτηριστικά του έργου Διάρκεια (σε διδακτικές ώρες) 8 Δυσκολία (υλοποίησης κατασκευαστικά) (1-5) 3 Δυσκολία (υλοποίησης προγραμματιστικά) (1-5) 2 Όνομαομάδας : Fantastic Four Σχολείο Υλοποίησης : 4ο Δημοτικό Σχολείο Ιωαννίνων Προπονητής/τες : Βασιλική Τζιοβάρα



100 Σενάριο 4: Fantastic Four 4ο Δημοτικό Σχολείο Ιωαννίνων Δίποδο ρομπότ Ταινιόδρομος Σύνολο κατασκευής
101 Σχολιασμός του κώδικα Στο παρόν έργο το πρόγραμμα αναπαριστάνεται με το επόμενο κωδικόραμα.
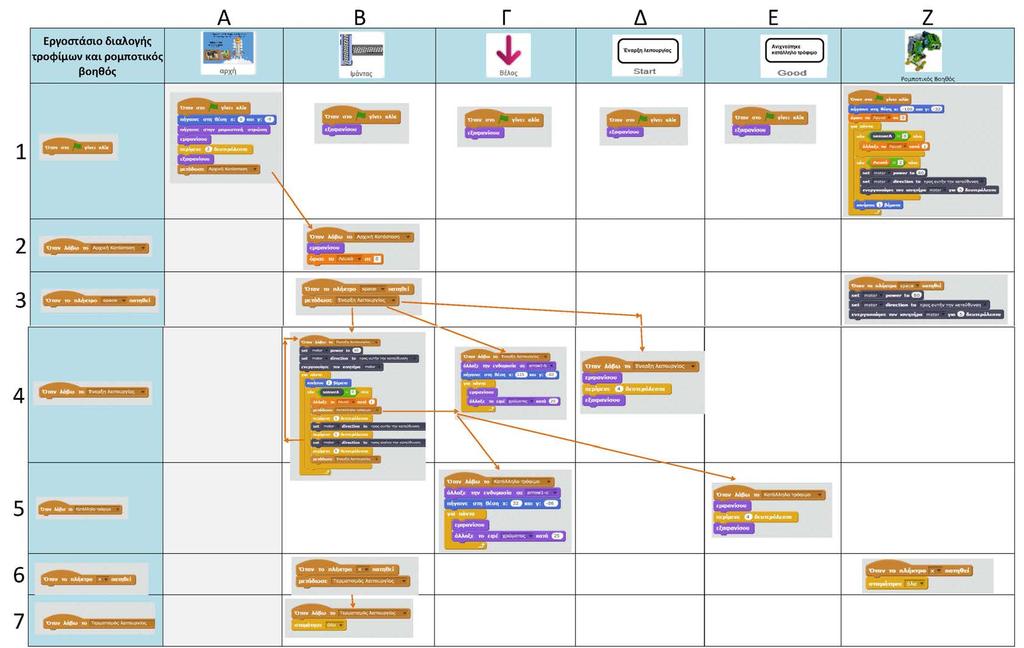
102


103 Σύμφωνα με το κωδικόραμα: Ο κώδικας εμπλέκει 6 αντικείμενα σε 7 καταστάσεις, σχηματίζοντας 42 κελιά, εκ των οποίων στα 17 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων αφενός υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων και αφετέρου η αλληλεπίδραση με το χρήστη του προγράμματος έγκειται στο ξεκίνημα του προγράμματος, στην έναρξη λειτουργίας του αυτοματισμού που γίνεται με το πάτημα του πλήκτρου space και στον τερματισμό του προγράμματος που γίνεται με το πλήκτρο x. Το κύριο βάρος του προγράμματος πέφτει στον κώδικα του κελιού Β4 ο οποίος με μια απλή τεχνική polling οδηγεί στην κατάσταση "Κατάλληλο τρόφιμο" ( γραμμή 5).
,")

104 Ο κώδικας στο κελί Α2 Β4 ασχολούνται με τον κινητήρα του αυτοματισμού Είναι χαρακτηριστικό ότι οι κώδικες της κατάστασης στη γραμμή 5 που εκτελούνται ταυτόχρονα (παράλληλος προγραμματισμός), υλοποιούν την προσομοίωση του αυτοματισμού στον υπολογιστή για την κατάσταση που βρέθηκε κατάλληλο τρόφιμο. ενώ το αυτό συμβαίνει και για τους κώδικες της κατάστασης στη γραμμή 4 (ακατάλληλο τρόφιμο).

105 Ο κώδικας του αντικείμενου Ζ (ρομποτικός βοηθός) δεν φαίνεται να παίζει ενεργό ρόλο κατά τη ροή του προγράμματος.
.")


106 Η τμηματοποίηση του κώδικα περιορίζεται σε αυτή των κελιών του κωδικοράματος. Χρησιμοποιούνται απλές δομές επιλογής (Εάν Τότε). Χρησιμοποιείται μόνο η δομή επανάληψης "για πάντα". Αξίζει να σχολιαστεί από τον αναγνώστη η επικάλυψη της προγραμματιστικής δομής επανάληψης "για πάντα" (γαλάζια βέλη) με το βρόχο που δημιουργείται με τη μετάδοση και λήψη του μηνύματος "Έναρξη λειτουργίας" από το ίδιο σενάριο (Όταν λάβω το "Έναρξη λειτουργίας").
107 Τα δεδομένα που χρησιμοποιούνται είναι μία απλή μεταβλητή που ορίζεται από τον προγραμματιστή και οι τιμές από τους αισθητήρες του WeDo.
108 5 ο σενάριο
109 Σενάριο 05 Σχέδιο διάσωσης Ιστορία - Σενάριο έργου Βρισκόμαστε στο Πρόκειται για την πρώτη επανδρωμένη αποστολή στον Άρη. Μία σειρά επιστημόνων συνεχίζουν τη διεξαγωγή των ερευνών για τη γαιοποίηση του πλανήτη. Οι συνθήκες εκεί παραμένουν θανάσιμες για τον άνθρωπο, παρότι έχει μπει σε εφαρμογή το σχέδιο της μαγνητικής ασπίδας. Για το λόγο αυτό, ζουν σε κλειστές θολωτές αποικίες που τους εξασφαλίζει, βασικές συνθήκες επιβίωσης κατάλληλη θερμοκρασία, πίεση και οξυγόνο. Ενώ, συνεχίζει να υφίσταται ακόμη το πρόβλημα πτώσης μετεωριτών λόγω της ασθενής ατμόσφαιρας.η πτώση των μετεωριτών αποτελεί ένα μεγάλο πρόβλημα που συχνά θέτει σε κίνδυνο τη ζωή των ανθρώπων της ομάδας. Ένα μέτρο προστασίας αποτελεί ο δορυφόρος (αισθητήρας κίνησης) που βρίσκεται σε τροχιά γύρω από τη μαγνητική ασπίδα και ανιχνεύει σε μακρινή απόσταση την ύπαρξη μετεωριτών. Όταν ένας μετεωρίτης πλησιάζει, ενεργοποιείται ο συναγερμός, ενώ, ταυτόχρονα ανοίγει η πύλη- έξοδος κινδύνου για 20, ύστερα κλείνει μαζί με τον συναγερμό.σε αυτό το χρόνο, οι άνθρωποι θα πρέπει να πάρουν τον κατάλληλο εξοπλισμό και να μεταβούν στο καταφύγιο σε βάθος αρκετά μέτρα μέσα στο έδαφος. O θόλος αποτελεί μέρος ζωτικής σημασίας για την επιβίωση τον αστροναυτών στον Άρη, όμως, ελλοχεύει συνεχώς ο κίνδυνος της αποσταθεροποίησης των πιέσεων εσωτερικά και εξωτερικά του θόλου που μπορεί να οδηγήσει σε έκρηξη και καταστροφή του. Η ομάδα των Space X ειδικεύεται στη διατήρηση των κατάλληλων ισορροπιών μέσω της ρύθμισης των τιμών της πίεσης. Έτσι, όταν υπάρξουν αλλαγές στους δείκτες ελέγχου, ενεργοποιείται ένας δεύτερος συναγερμός. Για ασφάλεια οι αστροναύτες μεταβαίνουν για άλλη μία φορά στο καταφύγιο, έτσι η πύλη ανοίγει για άλλη μία φορά. Μία ομάδα, όμως, ειδικών κατευθύνεται προς το κέντρο ελέγχου. Η μετάβασή τους εκεί γίνεται με ανελκυστήρα και με τη χρήση ενός ανιχνευτή απόστασης σταματά στο σημείο πρόσβασης στο κέντρο ελέγχου, με το «κάτω βέλος» κατεβαίνει στην αρχική του θέση. Στο σταθμό ελέγχου, οι ειδικοί ανιχνεύουν το πρόβλημα σταθεροποιώντας με τα κατάλληλα όργανα τις τιμές πίεσης και
110 θερμοκρασίας. Όταν ο δείκτης ελέγχου σταθεροποιηθεί, ο κίνδυνος έχει απομακρυνθεί και ο συναγερμός σταματά. Πρόβλημα που επιλύει το project Ο εποικισμός στον Άρη έχει πολλά προβλήματα που πρέπει να αντιμετωπιστούν. Ένα από αυτά είναι η πτώση μετεωριτών στον πλανήτη λόγω έλλειψης της ατμόσφαιρας. Έτσι ο δορυφόρος επιτήρησης προειδοποιεί τους εποίκους στον πλανήτη ώστε να προφυλαχθούν. Ένα άλλο σύστημα ελέγχου προειδοποιεί τους εποίκους για να αναλάβουν δράση όταν η πίεση μέσα στο θολό κατοικιών διαταραχθεί. Σκοπός Να κατασκευαστεί δορυφόρος επιτήρησης που θα προειδοποιεί τους εποίκους την επιφάνεια του πλανήτη για αντικείμενα ή μετεωρίτες που κατευθύνονται προς τον πλανήτη. Να υλοποιηθεί ένα σύστημα συναγερμού για την περίπτωση αλλαγής πίεσης μέσα στο θολό κατοικιών. Να κατασκευαστεί Αυτόματος ανελκυστήρας που οδηγεί στο κέντρο ελέγχου.. Εκπαιδευτικοί στόχοι Το παρόν project ενδείκνυται ως παράδειγμα: προς αποφυγή για την κατασκευή πλεονάσματος καταστάσεων με τη σύγχυση της ενέργειας που πρέπει να εκτελεστεί με το αντικείμενο που πρέπει να το εκτελέσει (στις διαδοχικές εντολές "μετάδωσε ΠΟΡΤΑ" και "μετάδωσε ΜΕΤΕΩΡΙΤΗΣ". διαχωρισμού των αρμοδιοτήτων αφού στο ίδιο κελί (Η4) άλλο σενάριο ασχολείται με τον αυτοματισμό και άλλο με την προσομοίωση στον υπολογιστή. παράλληλου προγραμματισμού των κωδίκων που εξυπηρετούν τις προσομοιώσεις των αυτοματισμών.
111 προσπάθειας βελτιστοποίησης του προγράμματος όταν εμφανίζονται σενάρια που ο κώδικας επαναλαμβάνεται (κελιά Θ3 και Ι3). χρήσης δομών επανάληψης "για πάντα". ενός ιδιότυπου τρόπου ανίχνευσης των τιμών των αισθητήρων με τεχνική polling αλλά με χρήση της εντολής "περίμενε ώσπου". Χαρακτηριστικά του έργου Διάρκεια (σε διδακτικές ώρες) 6 Δυσκολία (υλοποίησης κατασκευαστικά) (1-5) 3 Δυσκολία (υλοποίησης προγραμματιστικά) (1-5) 3 Όνομαομάδας : SpaceX Σχολείο Υλοποίησης : 3ο Δημοτικό Θήβας Προπονητής/τες : Αγορίτσα Σουλιώτη




112 Σενάριο 5: SpaceX 3ο Δημοτικό Θήβας Πνευματικός σωλήνας Ανυψωτικός μηχανισμός Ανελκυστήρας Θόλος
113 Σχολιασμός του κώδικα Στο παρόν έργο το πρόγραμμα αναπαριστάνεται με το επόμενο κωδικόραμα.
















114 Α Β Γ Δ Ε Ζ Η Θ Ι Κ ΣΧΕΔΙΟ ΔΙΑΣΩΣΗΣ ALARM 1 ΔΟΡΥΦΟΡΟΣ ΑΣΤΡΟΝΑΥΤΕΣ ΚΑΤΑΦΥΓΙΟ ΚΛΕΙΣΤΟ ΚΑΤΑΦΥΓΙΟ ΑΝΟΙΧΤΟ ΚΟΜΗΤΗΣ ΠΟΡΤΑ ALARM 2 ΔΕΙΚΤΗΣ ΠΙΕΣΗΣ ΑΝΕΛΚΥΣΤΗΡΑΣ

115 Σύμφωνα με το κωδικόραμα: Ο κώδικας εμπλέκει 10 αντικείμενα (+2 αστροναύτες) σε 7 καταστάσεις, σχηματίζοντας 70 κελιά, εκ των οποίων στα 12 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων αφενός υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων (να σχολιαστεί από τον αναγνώστη η διαδοχική μετάδοση των μηνυμάτων "ΠΟΡΤΑ" και "ΜΕΤΕΩΡΙΤΗΣ" και να προταθεί εναλλακτική λύση). Η αλληλεπίδραση με το χρήστη του προγράμματος φαίνεται να γίνεται με το πάτημα διαφόρων πλήκτρων.


 και να")
116 Το κύριο βάρος του προγράμματος πέφτει στον κώδικα του κελιού Β1... και Ι3 αντίστοιχα Όσον αφορά τη ροή εκτέλεσης του προγράμματος να σχολιαστεί από τον αναγνώστη η ταυτόχρονη εκτέλεση των κωδίκων στα κελιά Α1 και Β1) και να προταθεί εναλλακτική λύση.



117 Ανάλογα για την ταυτόχρονη εκτέλεση των κωδίκων στα κελιά Θ3 και Ι3 και να προταθεί εναλλακτική λύση. Ο κώδικας στο κελί Η4 (που εξυπηρετεί και τους δύο αυτοματισμούς) ασχολείται με τον κινητήρα των αυτοματισμών αλλά και με το animation του αντικειμένου "Πόρτα". Οι υπόλοιποι κώδικες της κατάστασης στη γραμμή 4 που εκτελούνται ταυτόχρονα (παράλληλος προγραμματισμός), υλοποιούν την προσομοίωση του αυτοματισμού στον υπολογιστή.

118 Ο κώδικας του αντικείμενου Κ δεν φαίνεται να παίζει ενεργό ρόλο κατά τη ροή του προγράμματος.

119 Η τμηματοποίηση του κώδικα περιορίζεται σε αυτή των κελιών του κωδικοράματος. Η ανίχνευση των τιμών των αισθητήρων γίνεται με χρήση της εντολής "περίμενε ώσπου..." Χρησιμοποιείται η δομή επανάληψης "για πάντα". Τα δεδομένα που χρησιμοποιούνται είναι μόνο οι τιμές από τους αισθητήρες του WeDo.
120 6 ο σενάριο
121 Σενάριο 06 Ανίχνευση κατάλληλων συνθηκών για εποικισμό στον πλανήτη Άρη Ιστορία - Σενάριο έργου Ως γνωστόν υπάρχει ως προοπτική ο εποικισμός στον πλανήτη Άρη και έχουν γίνει πολλές μελέτες πάνω στο θέμα αυτό παρόλο που οι δυσκολίες είναι αρκετές. Θεωρούμε ότι στο κοντινό μέλλον θα πραγματοποιηθούν ποικίλες παρεμβάσεις από τον άνθρωπο όπως είναι η μαγνητική ασπίδα, η αύξηση της μάζας του πλανήτη κ.α. ώστε οι συνθήκες στον πλανήτη να γίνουν φιλικές προς τον άνθρωπο. Το πρόβλημα που προκύπτει σ αυτήν την περίπτωση είναι η διερεύνηση της αποτελεσματικότητας των παρεμβάσεων. Δημιουργήθηκε ατμόσφαιρα στον πλανήτη; Υπάρχει νερό σε στερεά ή υγρή μορφή; Αυξήθηκε η βαρύτητα; Βελτιώθηκαν οι καιρικές συνθήκες; Το project έχει ως στόχο την επίλυση του παραπάνω προβλήματος με την ανίχνευση κατάλληλων για εποικισμό συνθηκών ως αποτέλεσμα των ανθρώπινων παρεμβάσεων και χρονικά τοποθετείται στο ξημέρωμα μίας μέρας του έτους Το project μας αποτελείται από ένα διαστημικό όχημα (το MER που το σχέδιό του είναι εμπνευσμένο από τα MERsSpirit και Opportunity) και μία μη επανδρωμένη διαστημική βάση (την Chalkis ). Το MER ακολουθεί μία συγκεκριμένη διαδρομή που αποτελείται από μία μαύρη γραμμή χρησιμοποιώντας την τεχνική linefollow. Ξεκινάει από ένα σημείο του πλανήτη και καταλήγει στην Chalkis. Κατά τη διάρκεια της διαδρομής έχει ως στόχο την εύρεση ενδείξεων ύπαρξης παγωμένου νερού καθώς και τον εντοπισμό των συντεταγμένων του συγκεκριμένου σημείου εφόσον αυτό βρεθεί. Στην κατάληξη της διαδρομής το MER αντιλαμβάνεται την προσέγγιση στη Chalkis και διενεργεί ένα πείραμα όπου μετριέται η επιτάχυνση βαρύτητας του Άρη, συγκρίνεται με αυτήν της Γης και αναλόγως προκύπτει αν είναι στα επιθυμητά επίπεδα ή όχι. Επιπλέον η Chalkis είναι εξοπλισμένη με ανεμόμετρο και εφόσον ανιχνευτεί ανεμοθύελλα το MER ακινητοποιείται και παραμένει σε στάση μέχρι τη λήξη της ανεμοθύελλας με σκοπό την προστασία του από αυτές τις δυσμενείς καιρικές συνθήκες. Τέλος η Chalkis είναι εφοδιασμένη με κινούμενους φωτοβολταϊκούς συλλέκτες που ακολουθούν την πορεία του ήλιου και τα
122 οποία οριζοντιώνονται κατά την διάρκεια της νύχτας αλλά και μίας ενδεχόμενης ανεμοθύελλας. Πρόβλημα που επιλύει το project Το πρόβλημα που επιλύουμε με το συγκεκριμένο έργο είναι η διερεύνηση της αποτελεσματικότητας των παρεμβάσεων. Συγκεκριμένα ελέγχει αν δημιουργήθηκε ατμόσφαιρα στον πλανήτη, αν υπάρχει νερό, σε στερεά ή σε υγρή μορφή αν αυξήθηκε η βαρύτητα και αν βελτιώθηκαν οι καιρικές συνθήκες. Σκοπός Να κατασκευαστεί κατάλληλο όχημα που σε ακολουθεί μία προκαθορισμένη διαδρομή και θα ανιχνεύει εάν στην πορεία αυτή υπάρχει νερό και θα στέλνει συντεταγμένες στο κέντρο ελέγχου. Επίσης να κατασκευαστεί το κέντρο ελέγχου όπου θα ελέγχει για ακραία καιρικά φαινόμενα και θα προστατεύει αυτόματα τους ηλιακούς συλλέκτες καθώς και το όχημα ανίχνευσης με την ακινητοποίηση του. Στο τέλος στο κέντρο ελέγχου αξιολογεί τα δεδομένα που έχουν συλλεχθεί θα αποφασίζει και θα ενημερώνει για το αν πληρούνται οι κατάλληλες συνθήκες για τον εποικισμό. Εκπαιδευτικοί στόχοι Το παρόν project ενδείκνυται ως παράδειγμα: συγχρονισμού των σεναρίων σε διαφορετικές καταστάσεις του πρώτου αντικειμένου με τη βοήθεια της μεταβλητής "Σήμα Τέλους". διαχωρισμού των αρμοδιοτήτων αφού σε ένα αντικείμενο βρίσκονται οι κώδικες που υλοποιούν τους αυτοματισμούς ενώ τα υπόλοιπα αντικείμενα και οι κώδικές τους χρησιμοποιούνται στην προσομοίωση του αυτοματισμού στον υπολογιστή.
123 σειριακού προγραμματισμού των κωδίκων (με τη χρήση της "μετάδωσε και περίμενε") που αναφέρονται στο ίδιο αντικείμενο. παράλληλου προγραμματισμού των κωδίκων που βρίσκονται στην ίδια κατάσταση και εξυπηρετούν τις προσομοιώσεις των αυτοματισμών. χρήσης πληθώρας μεταβλητών, σωστά ονοματοδοτούμενων (με τεχνική camelcase), και χρησιμοποιούμενων με κατάλληλο τρόπο. χρήσης των μεταβλητών σε ρόλο μετρητή σημαίας όσον αφορά την αναπαράσταση των δεδομένων συνδυασμών τιμών και μεταβλητών στη σύνθεση ενημερώσεων προς το χρήστη (πες...). τρόπου χειρισμού αλφαριθμητικού τύπου μεταβλητών (η τιμή "απόσταση") σε συνδυασμό με αριθμητικού τύπου μεταβλητές (ΤετμημένεςΧ) για την παραγωγή τιμής που θα φυλαχτεί στην αλφαριθμητικού τύπου μεταβλητή "ΌνομαΉχουΑπόστασης". αναγνωσιμότητας του προγράμματος στο οποίο οι μεταβλητές, τα αντικείμενα και τα μηνύματα έχουν κατάλληλες ονομασίες. χρήσης απλών και πολλαπλώς εμφωλευμένων δομών επιλογής (Εάν Τότε & Εάν Τότε Αλλιώς) και συνδυασμό αυτών. Χρήση των λογικών τελεστών NOT και AND. χρήσης δομών επανάληψης "για πάντα", δομών προκαθορισμένου πλήθους επαναλήψεων και δομών επανάληψης υπό συνθήκη, καθώς και δομών (επανάληψης) "περίμενε ώσπου". Χαρακτηριστικά του έργου Διάρκεια (σε διδακτικές ώρες) 10 Δυσκολία (υλοποίησης κατασκευαστικά) (1-5) 5 Δυσκολία (υλοποίησης προγραμματιστικά) (1-5) 5 Όνομα ομάδας : Pathfinders Σχολείο Υλοποίησης : Ανεξάρτητη Ομάδα Προπονητής/τες : Ευστράτιος Περουτσέας



124 Σενάριο 6: Pathfinders Ανεξάρτητη Ομάδα Όχημα Διαστημική βάση Σύνολο κατασκευής
125 Σχολιασμός του κώδικα Στο παρόν έργο το πρόγραμμα αναπαριστάνεται με το επόμενο κωδικόραμα.
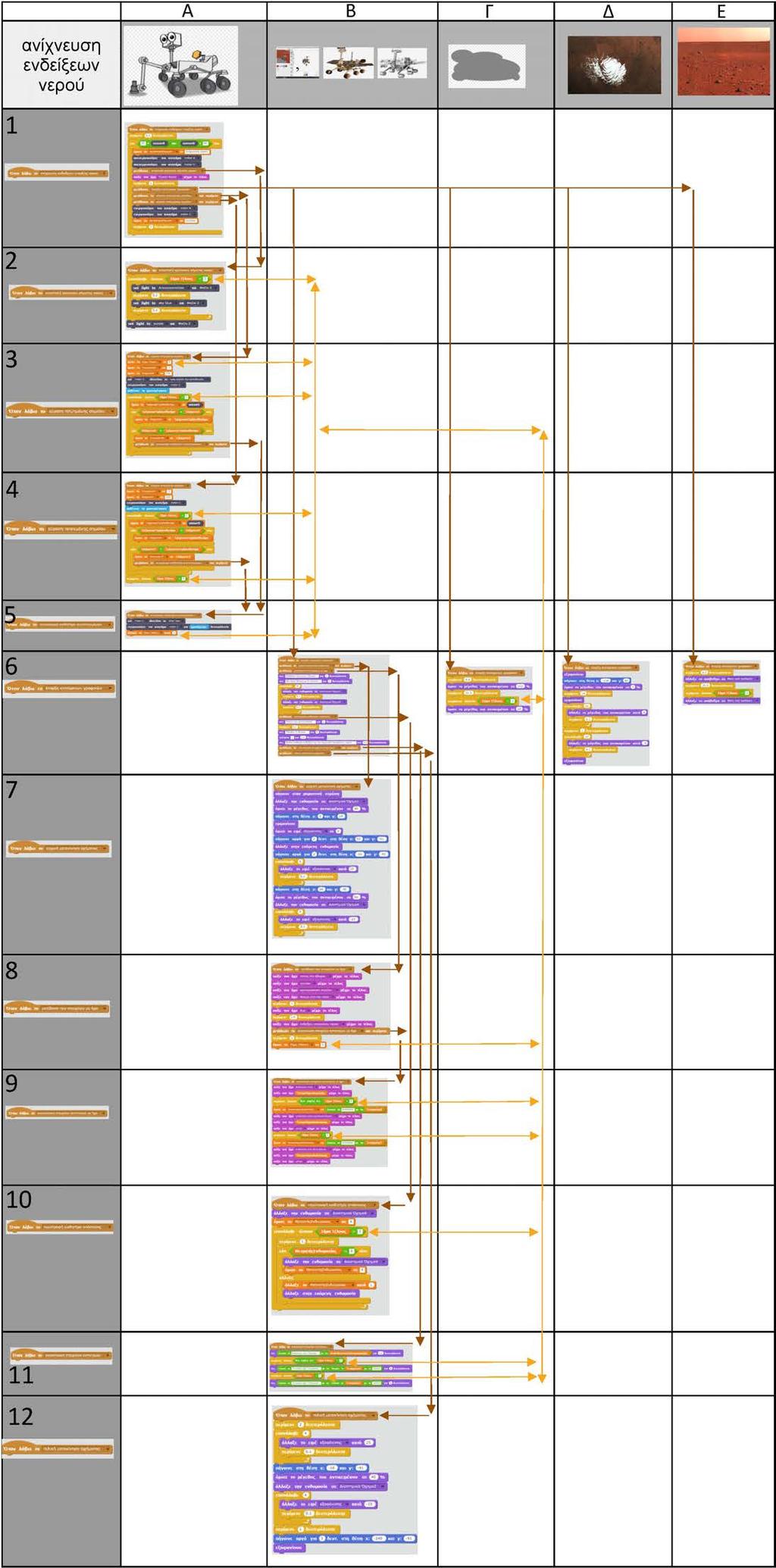
126
 βρίσκονται όλες στο αντικείμενο Α και μάλιστα στις πέντε πρώτες καταστάσεις, ενώ οι καταστάσεις 6 έως 12 αφενός αφορούν τα")
127 Σύμφωνα με το κωδικόραμα: Ο κώδικας εμπλέκει 5 αντικείμενα σε 12 καταστάσεις, σχηματίζοντας 60 κελιά, εκ των οποίων στα 15 υπάρχει τμήμα κώδικα. Παρατηρούμε ότι οι εντολές που διαχειρίζονται το WeDo (μαύρες εντολές) βρίσκονται όλες στο αντικείμενο Α και μάλιστα στις πέντε πρώτες καταστάσεις, ενώ οι καταστάσεις 6 έως 12 αφενός αφορούν τα υπόλοιπα αντικείμενα (Β,Γ,Δ καιε), αφετέρου περιέχουν εντολές καθορισμού θέσης (μπλε), διαχείρισης της όψης (μωβ), παιξίματος ήχων (βιολετί) που σημαίνει ότι ασχολούνται με το interface, την επικοινωνία με το χρήστη και την προσομοίωση του αυτοματισμού στον υπολογιστή.

128 Από τη φύση των περιγραφομένων καταστάσεων φαίνεται να υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων. Το συγκεκριμένο κωδικόραμα απεικονίζει ένα τμήμα του κώδικα με αφετηρία την κατάσταση 1 όπου έχει συμβεί "ανίχνευση ενδείξεων ύπαρξης νερού". Με ακολουθιακό / σειριακό τρόπο γίνεται (με τη χρήση μηνύματος) η "αποστολή φωτεινού σήματος νερού" (μετάβαση στην κατάσταση 2), ενώ μετά και με παράλληλο τρόπο γίνεται η "έναρξη κινούμενων γραφικών" (μετάβαση στην κατάσταση 6), που συνεχίζει παράλληλα με τις προηγούμενες διεργασίες στην "εύρεση τετμημένης σημείου" (μετάβαση στην κατάσταση 3). Όταν ολοκληρωθεί η εύρεση τετμημένης σημείου (και όλων των νημάτων που έχει πυροδοτήσει) τότε προχωράει στην "εύρεση τεταγμένης σημείου" (μετάβαση στην κατάσταση 4). Όταν ολοκληρωθεί η εύρεση τεταγμένης σημείου (και όλων των νημάτων που έχει πυροδοτήσει) τότε προχωράει στην ενεργοποίηση των κινητήρων.



.")
129 Στον κώδικα του κελιού Α2, αξίζει να σημειωθεί η χρήση της μεταβλητής "Σήμα Τέλους" σε ρόλο μετρητή......που αυξάνεται κάθε φορά που ολοκληρώνεται ένα νήμα που ξεκινάει με την εύρεση των συντεταγμένων. Επίσης η ίδια τεχνική χρησιμοποιείται κατά την "εύρεση τετμημένης σημείου" (κελί Α3) και κατά την "εύρεση τεταγμένης σημείου" (κελί Α4)


 απλές")
130 Στο παρόν τμήμα του κώδικα που περιλαμβάνεται στο κωδικόραμα δεν περιλαμβάνεται αλληλεπίδραση με το χρήστη του προγράμματος πέραν κάποιων ενημερώσεων προς το χρήστη με χρήση της εντολής "πες...", π.χ. στο κελί Β11. Η τμηματοποίηση του κώδικα περιορίζεται σε αυτή των κελιών του κωδικοράματος. Από τις προγραμματιστικές δομές επιλογής χρησιμοποιούνται: (α) απλές δομές επιλογής "Εάν Τότε" (β) απλές δομές επιλογής "Εάν Τότε Αλλιώς"
")


131 (γ) εμφωλευμένες δομές επιλογής "Εάν Τότε" (δ) συνδυασμοί εμφωλευμένων δομών επιλογής Από τις προγραμματιστικές δομές επανάληψης χρησιμοποιούνται: (α) δομές επανάληψης "για πάντα"

 δομές επανάληψης")
 δομές")
132 (β) δομές επανάληψης προκαθορισμένου πλήθους επαναλήψεων (γ) δομές επανάληψης "επανάλαβε ώσπου..." (δ) δομές "περίμενε ώσπου..."

133 Επίσης στις λογικές συνθήκες των δομών επιλογής και επανάληψης χρησιμοποιούνται λογικοί τελεστές: Προτείνεται οι παρακάτω δύο εντολές "Εάν Τότε" να αντικατασταθούν με μία που να έχει συνθετότερη λογική συνθήκη.
 σε συνδυασμό με αριθμητικού τύπου μεταβλητές ( παραγωγή τιμής που θα φυλαχτεί στην αλφαριθμητικού τύπου")
134 Τα δεδομένα που χρησιμοποιούνται είναι μια σειρά μεταβλητών που ορίζεται από τον προγραμματιστή... και οι τιμές από τους αισθητήρες του WeDo. Είναι αξιοσημείωτος ο τρόπος χειρισμού αλφαριθμητικού τύπου μεταβλητών (η τιμή "απόσταση") σε συνδυασμό με αριθμητικού τύπου μεταβλητές ( παραγωγή τιμής που θα φυλαχτεί στην αλφαριθμητικού τύπου μεταβλητή ) για την όπως φαίνεται στην παρακάτω εντολή:
135 Αξίζει επίσης να παρατηρηθούν οι δύο εναλλακτικοί τρόποι χρήσης του πεδίου τιμών της εντολής "παίξε τον ήχο...":
136 7 ο σενάριο
137 Σενάριο 07 Συνεργασία στον Αρη! Ιστορία - Σενάριο έργου Ο άνθρωπος προκειμένου να εποικίσει στο άγνωστο και αφιλόξενο κόσμο του Άρη, χρειάζεται να προσαρμοστεί όσο γίνεται περισσότερο στο περιβάλλον του και να μπορέσει να διαβιώσει με όσο το δυνατόν μεγαλύτερη αυτονομία. Σημαντικό στοιχεία για την υποστήριξη της ζωής είναι η κάλυψη των ενεργειακών αναγκών του με τους πόρους που υπάρχουν στον ίδιο τον πλανήτη. Το όχημα χρειάζεται να προστατεύεται μέσα στη βάση, να ανιχνεύει για πετρώματα στον κόκκινο πλανήτη (που θα μπορούσαν να αποδώσουν ενέργεια) και να ενημερώνουν τη Γη. Στο έργο μας το όχημα περνά την πόρτα για να βγει στην επιφάνεια του Άρη. Το όχημα είναι φτιαγμένο να ανιχνεύει και να προσπαθεί να αποφεύγει εμπόδια και να ανιχνεύει πετρώματα στο υπέδαφος. Οι ρομποτικές κατασκευές ενημερώνουν το δορυφόρο για τις ενέργειες τους, ο οποίος με τη σειρά του ενημερώνει στη Γη το Houston. Πρόβλημα που επιλύει το project Η επικοινωνία των Φυσικών αντικειμένων στον Άρη. Στο project έχουμε τρία αντικείμενα: το δορυφόρο, το όχημα και την πόρτα. Για να επικοινωνήσουν τα φυσικά αντικείμενα μεταξύ τους χρησιμοποιούν ένα κανάλι επικοινωνίας το οποίο εμείς το προσομοιώνουμε με τη χρήση ήχου. Αυτό γίνεται μέσω της χρήσης του αισθητήρα του μικροφώνου και του ενεργοποιητή των ηχείων. Ο δέκτης του κάθε αντικειμένου «ακούει» συνεχώς το κανάλι και αποκωδικοποιεί τα μηνύματα ήχου που λαμβάνει. Έπειτα προωθεί - μεταδίδει στα υπόλοιπα αντικείμενα scratch (εντός του ίδιου φυσικού αντικειμένου) κατάλληλα μηνύματα για να τους ενημερώσει. Η επικοινωνία μεταξύ των αντικειμένων scratch του ίδιου φυσικού αντικειμένου θεωρούμε ότι γίνεται με λογισμικό πρόγραμμα. Στο βασικό αντικείμενο scratch λαμβάνονται ο αποφάσεις για τις ενέργειες που θα κάνει το φυσικό αντικείμενο. Αν χρειάζεται να γίνει
138 επικοινωνία με τα υπόλοιπα αντικείμενα χρησιμοποιείται ο πομπός του φυσικού αντικειμένου. Στο κανάλι επικοινωνίας δε μπορούν να μεταδίδουν περισσότεροι από ένας πομπός κάθε φορά. Γι αυτό το λόγο υπάρχει αμοιβαίος αποκλεισμός στη χρήση του καναλιού, μεταξύ των φυσικών αντικειμένων. Το κάθε φυσικό αντικείμενο «ακούει» αν υπάρχει μετάδοση δεδομένων στο κανάλι. Όταν θέλει να μεταδώσει, περιμένει να βρει το κανάλι επικοινωνίας ελεύθερο για να το δεσμεύσει, όμως με μη επίμονο τρόπο. Για την επικοινωνία μεταξύ δορυφόρου και Houston, χρησιμοποιούμε το Led του Hub. Σκοπός Στο project βρίσκονται στον Άρη τρεις ρομποτικές κατασκευές: ένα όχημα, μία βάση (που έχει μία πόρτα) και ένας δορυφόρος. Στο έργο το όχημα περνά την πόρτα για να βγει στην επιφάνεια του Άρη. Το όχημα είναι φτιαγμένο να ανιχνεύει και να προσπαθεί να αποφεύγει εμπόδια και να ανιχνεύει πετρώματα στο υπέδαφος. Οι ρομποτικές κατασκευές ενημερώνουν το δορυφόρο για τις ενέργειες τους, ο οποίος με τη σειρά του ενημερώνει στη Γη το Houston. Για να τα καταφέρουν στην αποστολή τους οι τρεις κατασκευές επικοινωνούν μεταξύ τους, σε ένα δικό τους δίκτυο επικοινωνίας, για να μπορέσουν να συνεργαστούν και να στηρίξουν την αυτόνομη λειτουργία τους. Στο κανάλι επικοινωνίας του Άρη μεταδίδονται μηνύματα ήχου των 9 bits. Τα 2 πρώτα αφορούν τη διεύθυνση του αποστολέα, τα 2 επόμενα τη διεύθυνση του παραλήπτη, τα επόμενα 4 την ενέργεια περιεχόμενο του μηνύματος, ενώ το 9ο bit είναι το bit ισοτιμίας. Εκπαιδευτικοί στόχοι Το παρόν project ενδείκνυται ως παράδειγμα: καταχρηστικής δημιουργίας καταστάσεων (όπως π.χ. οι καταστάσεις 2 έως 6). εφαρμογής τμηματικού προγραμματισμού στο οποίο υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων. Η τμηματοποίηση του κώδικα στο εσωτερικό των κωδίκων στα κλαδιά-κελιά αποτελείται από τις κλήσεις διαφόρων διαδικασιών.
139 συνδυασμού σειριακού προγραμματισμού των κωδίκων (με τη χρήση της "μετάδωσε και περίμενε") και παράλληλου προγραμματισμού (με τη χρήση της "μετάδωσε") που αναφέρονται στο ίδιο αντικείμενο. παράλληλου προγραμματισμού των κωδίκων που βρίσκονται στην ίδια κατάσταση χρήσης πληθώρας μεταβλητών, σωστά ονοματοδοτούμενων (με τεχνική camelcase), και χρησιμοποιούμενων με κατάλληλο τρόπο. χρήσης απλών δομών δεδομένων (λιστών). αναγνωσιμότητας του προγράμματος στο οποίο οι μεταβλητές, τα αντικείμενα οι διαδικασίες και τα μηνύματα έχουν κατάλληλες ονομασίες. ανάγκης παραμετροποίησης μερικών διαδικασιών (κελιά G23, G24, G25 και G26) για τη βελτιστοποίησή του κώδικα. χρήσης απλών και πολλαπλώς εμφωλευμένων δομών επιλογής (Εάν Τότε Αλλιώς) και συνδυασμό αυτών. Χρήση των λογικών τελεστών AND. χρήσης δομών επανάληψης "για πάντα" και δομών επανάληψης υπό συνθήκη Χαρακτηριστικά του έργου Διάρκεια (σε διδακτικές ώρες) 12 Δυσκολία (υλοποίησης κατασκευαστικά) (1-5) 4 Δυσκολία (υλοποίησης προγραμματιστικά) (1-5) 4 Όνομαομάδας : Πεντανοί Αρειανοί Σχολείο Υλοποίησης : Ανεξάρτητη Ομάδα Προπονητής/τες : Φίλιππος Μελάς



140 Σενάριο 7: Πεντανοί Αρειανοί Ανεξάρτητη Ομάδα Μοχλός ανύψωσης Διπλό όχημα Μακέτα
141 Σχολιασμός του κώδικα Στο παρόν έργο το πρόγραμμα αναπαριστάνεται με το επόμενο κωδικόραμα.



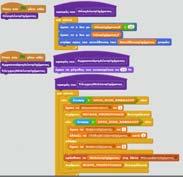
















142 A B C D E F G H I J K L Συμβάντα ΔέκτηςΔορυφόρου Δορυφόρος ΠομπόςΔορυφόρου ΚεραίαHouston ΔέκτηςΟχήματος Όχημα ΠομπόςΟχήματος ΔέκτηςΠόρτας Πόρτα ΠομπόςΠόρτας ΚανάλιΕπικοινωνίας Σκηνικό

143 Σύμφωνα με το κωδικόραμα: Ο κώδικας εμπλέκει 12 αντικείμενα σε 37 καταστάσεις, σχηματίζοντας 444 κελιά, εκ των οποίων στα 48 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων αφενός υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων με την παρατήρηση ότι ίσως γίνεται μια καταχρηστική δημιουργία καταστάσεων όπως οι καταστάσεις των γραμμών 2 έως 6, των 8 έως 10, των 33 έως 35 και ενδεχομένως των 12 έως 21. H αλληλεπίδραση με το χρήστη του προγράμματος έγκειται στο ξεκίνημα του προγράμματος με το πάτημα της πράσινης σημαίας.



, ΔέκτηςΟχήματος")
144 Το κύριο βάρος του προγράμματος πέφτει στον κώδικα του κελιού F11. Αξίζει να παρατηρηθεί η ομοιότητα των κωδίκων ΔέκτηςΔορυφόρου (κελί Α1), ΔέκτηςΟχήματος (κελί Ε1) και ΔέκτηςΠόρτας (κελί Η1)

.")


145 Στους κώδικες των κελιών D1, F1 και Ι1 γίνεται η αρχικοποίηση του υλικού (αντίστοιχα της ΚεραίαςHuston, του Οχήματος και της Πόρτας). Η δραστηριοποίηση των ενεργοποιητών των αυτοματισμών γίνεται στο κελί D7 (για την ΚεραίαHuston), στο κελί F11 (για το Όχημα) και συγκεκριμένα στις διαδικασίες "ΈναρξηΟχήματος", "ΣταμάτημαΟχήματος" και "ΜικρήΟπισθοδρόμησηΟχήματος"


146 και στα κελιά I27 και I30 (για την Πόρτα). Είναι χαρακτηριστικό ότι τα 23 σενάρια με το πράσινο σημαιάκι που κατανέμονται και στα 12 κελιά της πρώτης γραμμής εκτελούνται ταυτόχρονα (παράλληλος προγραμματισμός).

147 Η τμηματοποίηση του κώδικα δεν περιορίζεται σε αυτή των κελιών του κωδικοράματος αλλά χρησιμοποιεί εντός των κελιών διαδικασίες όπως π.χ. στο κελί C1


148 Οι αναγνώστες θα μπορούσαν να διερευνήσουν την δυνατότητα οι κώδικες των κελιών G23, G24, G25 και G26 να συντμηθούν σε έναν παραμετροποιώντας τις διαδικασίες που καλούν.
 είτε σειριακά είτε πολλαπλώς")
149 Χρησιμοποιούνται δομές επιλογής (Εάν Τότε Αλλιώς) είτε σειριακά είτε πολλαπλώς εμφωλευμένες.



150 με σύνθετες λογικές συνθήκες Χρησιμοποιείται η δομή επανάληψης "για πάντα", και η δομή "επανάλαβε ώσπου..."


151 Πέραν των τιμών των αισθητήρων του WeDo, τα δεδομένα που Χρησιμοποιούνται μια πληθώρα δεδομένων που ορίζονται από το χρήστη. Επιπλέον η επικοινωνία μεταξύ των διαφόρων modules του προγράμματος γίνεται εκτός από την εκπομπή και λήψη μηνυμάτων και με τη χρήση μεταβλητών σε ρόλους σημαιών.

152 Εκτός των απλών δεδομένων γίνεται και χρήση μιας λίστας.
153 8 ο σενάριο
154 Σενάριο 08 Αποικία στον Αρη! Ιστορία - Σενάριο έργου Μετά από 30 χρόνια ο άνθρωπος θα έχει καταφέρει να αποικήσει στον Άρη. Ωστόσο η ατμόσφαιρα του πλανήτη δημιουργεί δυσκολίες στην ανθρώπινη επιβίωση. Ο άνθρωπος δεν μπορεί να αναπνεύσει στον Άρη γιατί περιέχει μόνο 0,14% οξυγόνο, οπότε η αποικία μας θα πρέπει να τροφοδοτείται συνεχώς από οξυγόνο. Η διαδικασία της βακτηριοσύνθεσης, δηλαδή της καλλιέργειας βακτηριδίων στο έδαφος του πλανήτη, αναμένεται να δώσει λύση στο πρόβλημα έλλειψης οξυγόνου. Επιπλέον, η πτώση μετεωριτών στον Άρη είναι συχνή και ικανή να καταστρέψει την αποικία μας. Η κατασκευή μας αντιμετωπίζει αυτά τα δύο προβλήματα. Στο «εργαστήριο» παραγωγής οξυγόνου ένας σωλήνας μεταφέρει διαρκώς οξυγόνο που παράγεται από το έδαφος στον θόλο διαβίωσης της αποικίας μας. Επιπλέον, ένας δορυφόρος σαρώνει διαρκώς τον ορίζοντα. Όταν ο αισθητήρας απόστασης πάνω στο δορυφόρο λάβει τιμή μικρότερη από 60, γεγονός που συμβαίνει όταν πλησιάσει την αποικία μας ένας φλεγόμενος μετεωρίτης, ένα πυροβόλο κι ένα μαχητικό αεροσκάφος ενεργοποιούνται. Αντίθετα, τα «φιλικά» στον πλανήτη μας οχήματα, χρώματος μαύρου, δεν ενεργοποιούν τα μέσα αντιμετώπισης. Μετά από συναγερμό που σημαίνει σε περίπτωση μετεωρίτη, το πυροβόλο μας ενεργοποιείται και μέσω κινητήρα ανυψώνεται ώστε να τον στοχεύσει. Η ανύψωσή του ρυθμίζεται από έναν αισθητήρα κλίσης. Όταν ο αισθητήρας φτάσει σε οριζόντια θέση, δηλαδή όταν το πυροβόλο έχει την επιθυμητή ανύψωση, ένας ακόμη κινητήρας ενεργοποιείται και το πυροβόλο μας τελικά στέλνει τα πυρά του και καταστρέφει τον μετεωρίτη. Μετά την καταστροφή του η ζωή στην αποικία συνεχίζεται κανονικά μέχρις ότου υπάρξει παρόμοια απειλή. Πρόβλημα που επιλύει το project Επειδή η ατμόσφαιρα του Άρη είναι πολύ μικρή οι διερχόμενοι μετεωρίτες πέφτουνε συχνά στην επιφάνεια του πλανήτη δημιουργώντας καταστροφές. η κατασκευή μας είναι ένα
155 σύστημα που ανιχνεύει και καταστρέφει αυτούς τους μετεωρίτες πριν δημιουργήσουν πρόβλημα στην αποικία που έχει κατασκευαστεί στην επιφάνεια του πλανήτη. Σκοπός Να κατασκευαστεί ένα σύστημα προστασίας του πλανήτη από τους διερχόμενους μετεωρίτες. Συγκεκριμένα να κατασκευαστεί δορυφόρος με ραντάρ ανίχνευσης μετεωριτών όποιος θα ειδοποιεί και θα ενεργοποιείται αυτόματα ένα όπλο καταστροφής των μετεωριτών. Εκπαιδευτικοί στόχοι Το παρόν project ενδείκνυται ως παράδειγμα: συντονισμού διαφόρων σεναρίων (μέχρι να ολοκληρωθεί η εκτέλεση όλων) με τη χρήση της εντολής "μετάδωσε και περίμενε" και πως αυτό επιτυγχάνεται με τη χρήση μεταβλητή. παράλληλου προγραμματισμού των κωδίκων που βρίσκονται στην ίδια κατάσταση. χρήσης δομών επανάληψης "για πάντα", προκαθορισμένου πλήθους επαναλήψεων, δομών επανάληψης υπό συνθήκη και δομών "περίμενε ώσπου". Χαρακτηριστικά του έργου Διάρκεια (σε διδακτικές ώρες) 8 Δυσκολία (υλοποίησης κατασκευαστικά) (1-5) 4 Δυσκολία (υλοποίησης προγραμματιστικά) (1-5) 3 Όνομαομάδας : Μικροί Επιστήμονες Σχολείο Υλοποίησης : 1ο Δημοτικό Σχολείο Ηγουμενίτσας Προπονητής/τες : Ευαγγελία Σπυράτου




156 Σενάριο 8: Μικροί Επιστήμονες 1ο Δημοτικό Σχολείο Ηγουμενίτσας Δορυφόρος Περιστρεφόμενος μηχανισμός Κανόνι Σύνολο κατασκευής
157 Σχολιασμός του κώδικα Στο παρόν έργο το πρόγραμμα αναπαριστάνεται με το επόμενο κωδικόραμα.




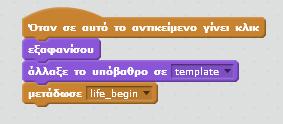
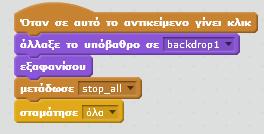
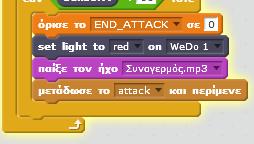
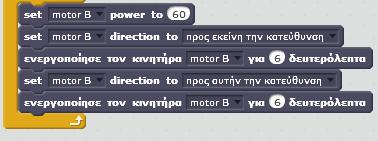
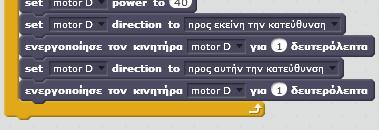
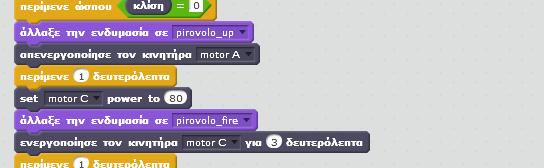
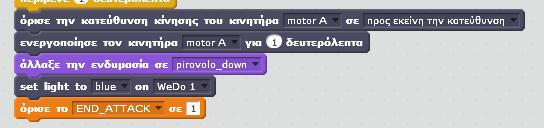
158 Α Β Γ Δ Ε Ζ Η ΑΠΟΙΚΙΑ ΣΤΟΝ ΑΡΗ ΣΚΗΝΙΚΟ


159 Σύμφωνα με το κωδικόραμα: Ο κώδικας εμπλέκει 7 αντικείμενα σε 5 καταστάσεις, σχηματίζοντας 35 κελιά, εκ των οποίων στα 18 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων αφενός υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων και αφετέρου η αλληλεπίδραση με το χρήστη του προγράμματος φαίνεται να περιορίζεται στη χρήση των πλήκτρων-αντικειμένων Α (GO) και Β (STOP). Ο κώδικας στο κελί Δ4 αρχικοποιεί την κατάσταση του κινητήρα, ενώ ο κώδικας στο κελί Γ4 ελέγχοντας την τιμή του αισθητήρα του WeDo αρχικοποιεί τον ενεργοποιητή led του WeDo και αποφασίζει την επίθεση μεταδίδοντας το αντίστοιχο μήνυμα.



160 Να παρατηρηθεί ότι η χρήση της εντολής "Μετάδωσε... και περίμενε" εξασφαλίζει ότι θα πρέπει να ολοκληρωθεί η εκτέλεση του κώδικα και στα τρία κελιά (Ε5, Ζ5 και Η5) που λαμβάνουν το μήνυμα. Επίσης αξίζει να παρατηρηθεί ο τρόπος που χρησιμοποιείται η μεταβλητή "" για να συγχρονίσει τους κώδικες στα κελιά Ε5, Ζ5 και Η5. Είναι χαρακτηριστικό ότι οι κώδικες της κατάστασης στη γραμμή 4 που εκτελούνται ταυτόχρονα (παράλληλος προγραμματισμός). ενώ το αυτό συμβαίνει και για τους κώδικες της κατάστασης στη γραμμή 5.


 με χρήση των")


161 Η τμηματοποίηση του κώδικα περιορίζεται σε αυτή των κελιών του κωδικοράματος χωρίς να υπάρχει η ανάγκη χρήσης διαδικασιών. Χρησιμοποιούνται απλές δομές επιλογής (Εάν Τότε) με χρήση των τιμών των αισθητήρων από το WeDo. Χρησιμοποιούνται δομές επανάληψης "για πάντα". "επανάλαβε ώσπου..." και προκαθορισμένου πλήθους επαναλήψεων και η εντολή "περίμενε ώσπου".
162 Τα δεδομένα που χρησιμοποιούνται είναι η απλή μεταβλητή από τον προγραμματιστή και... που ορίζεται οι τιμές από τους αισθητήρες του WeDo και.
163 9 ο σενάριο
164 Σενάριο 09 Ας προστατεύσουμε το περιβάλλον του πλανήτη Αρη! Ιστορία - Σενάριο έργου Ένα ταξίδι στον Άρη και ο εποικισμός του κόκκινου πλανήτη είναι μια πολύ μεγάλη τεχνολογική πρόκληση, η οποία αν επιτευχθεί θα σημαίνει πολλά για το ανθρώπινο είδος. Τα πρώτα δείγματα ανθρώπινης ζωής εμφανίστηκαν πάνω στη γη εδώ και 2,5 εκατομμύρια χρόνια. Μέσα σε αυτό το μεγάλο χρονικό διάστημα ο άνθρωπος εξελίχθηκε και πραγματοποίησε τεράστια επιτεύγματα που άλλαξαν τον ίδιο αλλά και τον πλανήτη μας. Φθάνοντας οι άνθρωποι στον Άρη θα πρέπει πάνω από όλα να σεβαστούν τον πλανήτη και το περιβάλλον του. Δεν θα πρέπει να επαναληφθούν τα λάθη που οδήγησαν στην καταστροφή του φυσικού περιβάλλοντος της γης.. Με το ειδικό όχημα που μεταφέραμε μαζί μας από την γη, οδηγούμε στην επιφάνεια του πλανήτη ψάχνοντας να βρούμε Αρειανούς και να τους προειδοποιήσουμε για τα πιθανά προβλήματα που μπορεί να δημιουργήσουν οι άνθρωποι. O άνθρωπος που επιβαίνει στο όχημα ξεκινά μια συνομιλία με τον Αρειανό η οποία ενεργοποιεί τα μεγάφωνα του υπολογιστή. Καθώς δεν γνωρίζουμε αν υπάρχουν νοήμονα όντα επάνω στον πλανήτη Άρη η επικοινωνία έχει συμβολικό νόημα. Θέλει να τονίσει την σημασία της περιβαλλοντικής εκπαίδευσης και συνείδησης που πρέπει να αποκτήσουν οι άνθρωποι όχι μόνο ως κάτοικοι του πλανήτη γη αλλά και ως μελλοντικοί κάτοικοι άλλων πλανητών. Πρόβλημα που επιλύει το project Φτάνοντας ο άνθρωπος στον πλανήτη Αρη θα πρέπει να αναζητήσει τους ιθαγενείς και να ζητήσει να ενημερωθεί για τον τρόπο με τον οποίο θα πρέπει να συμπεριφερθεί στον πλανήτη ώστε να μην καταστραφεί ο πλανήτης και να μην αλλοιωθεί η ζωή σε αυτόν.
165 Σκοπός Να κατασκευαστεί όχημα το οποίο να ανιχνεύει την εξωγήινη ζωή και να ακινητοποιεί το όχημα ώστε να ξεκινήσει η επικοινωνία του ανθρώπου με τον εξωγήινο. Εκπαιδευτικοί στόχοι Το παρόν project ενδείκνυται ως παράδειγμα: ενός απλοϊκού μοντέλου καταρράκτη. τεχνικής interrupt στην ανίχνευση σημάτων (κελί Α4). σειριακού προγραμματισμού των κωδίκων σε διαφορετικά αντικείμενα. χρήσης δομών επανάληψης "για πάντα" και δομών "περίμενε ώσπου". μη χρήσης δομών επιλογής (Εάν) αλλά αντί για αυτές χρησιμοποιούνται η εντολή "Όταν..." και η εντολή επανάληψης "επανάλαβε ώσπου...".. Χαρακτηριστικά του έργου Διάρκεια (σε διδακτικές ώρες) 4 Δυσκολία (υλοποίησης κατασκευαστικά) (1-5) 1 Δυσκολία (υλοποίησης προγραμματιστικά) (1-5) 1 Όνομαομάδας : ΠΣΠΑ-All-Day Σχολείο Υλοποίησης : 6/Θέσιο Πειραματικό Δημοτικό Σχολείο Πανεπιστημίου Αθηνών Προπονητής/τες : Ευαγγελία Κοντοπίδη



166 Σενάριο 9: ΠΣΠΑ-All-Day Εξαθέσιο Πειραματικό Δημοτικό Σχολείο Πανεπιστημίου Αθηνών Όχημα Διαστημικός σταθμός Σύνολο κατασκευής
167 Σχολιασμός του κώδικα Στο παρόν έργο το πρόγραμμα αναπαριστάνεται με το επόμενο κωδικόραμα.
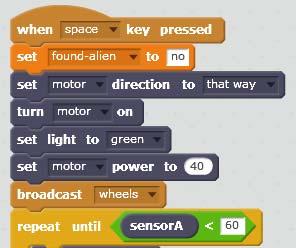
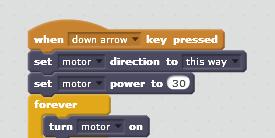



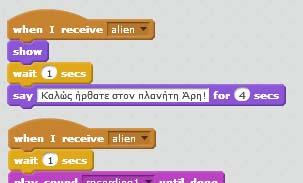

168 Α Β Γ Δ Ε Διαστημικά Οχήματα

169 Σύμφωνα με το κωδικόραμα: Ο κώδικας εμπλέκει 5 αντικείμενα σε 8 καταστάσεις, σχηματίζοντας 40 κελιά, εκ των οποίων στα 9 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων αφενός υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων και αφετέρου η αλληλεπίδραση με το χρήστη του προγράμματος φαίνεται να περιορίζεται στο ξεκίνημα των δύο αυτοματισμών προγράμματος που γίνεται με το πάτημα των πλήκτρων space και "κάτω βέλος". Ο πρώτος αυτοματισμός περιλαμβάνει τις καταστάσεις 2, 5, 6 και 7, ενώ ο δεύτερος τις καταστάσεις 3, 4 και 8.



170 Στον πρώτο αυτοματισμό το κύριο βάρος του προγράμματος πέφτει στον κώδικα του κελιού A2... ο οποίος αφού αρχικά ενεργοποιήσει τον κινητήρα ώστε να κινείται και το animation-περιστροφή των εικονικών τροχών (κελί Β5) με το μήνυμα "wheels"... "παγιδεύεται" σε ένα βρόχο κινώντας το όχημα μέχρι ο αισθητήρας απόστασης του WeDo εντοπίσει εμπόδιο σε απόσταση μικρότερη του 60. Εντοπίζοντάς το σταματά τον κινητήρα και εκπέμποντας το μήνυμα "alien" διεξάγει έναν ακολουθιακό διάλογο μεταξύ του αντικειμένου Γ (Αρειανός) και του αντικειμένου Δ (Γήινος) στα αντίστοιχα κελιά Γ6 και Δ7.

171 Στο δεύτερο αυτοματισμό η αρχικοποίηση γίνεται στον κώδικα Α3, ο έλεγχος του συμβάντος γίνεται με τον κώδικα του κελιού Α4 που στη συνέχεια με χρήση μηνύματος ενεργοποιεί τον κώδικα στο κελί Ε8. Είναι χαρακτηριστικό ότι στο κελί Α4 η ανίχνευση του συμβάντος δεν γίνεται με τεχνική polling αλλά με τεχνική interrupt χρησιμοποιώντας την εντολή "Όταν..."




172 Η τμηματοποίηση του κώδικα περιορίζεται σε αυτή των κελιών του κωδικοράματος. Δεν χρησιμοποιούνται δομές επιλογής (Εάν Τότε) αλλά αντί για αυτές χρησιμοποιούνται αφενός η εντολή "Όταν..." και η εντολή επανάληψης "επανάλαβε ώσπου..." Χρησιμοποιούνται δομές επανάληψης όπως η εντολή "περίμενε ώσπου".
173 Τα δεδομένα που χρησιμοποιούνται είναι μία απλή μεταβλητή που ορίζεται από τον προγραμματιστή και η τιμή από τον αισθητήρα του WeDo.
174 10 ο σενάριο
175 Σενάριο 10 Εξερευνητής διαστήματος Ιστορία - Σενάριο έργου Στα δύσβατα σημεία του πλανήτη Άρη όπου υπάρχουν μόνο ατελείωτες οροσειρές και ηφαίστεια, ορισμένοι εξερευνητές ταξιδεύουν με σκοπό να τα εξερευνήσουν! Το διαστημόπλοιο ανεβάζει ένα διαστημικό ασανσέρ που μεταφέρει εξερευνητές στην κορυφή, οι οποίοι μεταφέρονται μέσα σε μια κάψουλα. Η κάψουλα εκτοξεύεται αυτόματα ώστε να πάει στην περιοχή προς εξερεύνηση. Η κάψουλα επίσης μεταφέρει και ένα ρομπότ συλλέκτη. Όταν φτάσουν στο έδαφος, το ρομπότ συλλέγει δείγματα πετρωμάτων, τα οποία θα πάρουν μαζί τους οι εξερευνητές στην κάψουλα. Στην συνέχεια η κάψουλα επιστρέφει πίσω στη βάση της για να αποβιβάσει τους εξερευνητές στο ασανσέρ. Πρόβλημα που επιλύει το project Η εξερεύνηση του Αρη ακόμα και με μία εγκατεστημένη βάση στην επιφάνεια του πλανήτη είναι εξαιρετικά δύσκολη για αυτό έχουν κατασκευαστεί ειδικές κάψουλες οι οποίες μεταφέρουν τους ανθρώπους σε δύσβατες περιοχές για να συλλέξουν πετρώματα και διάφορες πληροφορίες που θα βοηθήσουν στην κατανόηση του κόκκινου πλανήτη. Η μετακίνηση των ανθρώπων από τη βάση μέχρι την κάψουλα γίνεται με ένα ειδικά διαμορφωμένο ασανσέρ το οποίο τους μεταφέρει με ασφάλεια στην κάψουλα. Σκοπός Να κατασκευαστεί ένα ειδικά διαμορφωμένο ασανσέρ το οποίο θα μπορεί να μεταφέρει τους ανθρώπους από τη βάση του πλανήτη στην βάση εκτόξευσης της κάψουλας με ασφάλεια. Να κατασκευαστεί μία κάψουλα μεταφοράς προσωπικού. Η κάψουλα αυτή θα πετάει και θα προσγειώνεται μόνη της στην περιοχή που θέλουμε να εξερευνήσουμε και θα μπορεί να μεταφέρει προσωπικό και οχήματα.
176 Εκπαιδευτικοί στόχοι Το παρόν project ενδείκνυται ως παράδειγμα: ενός μοντέλου καταρράκτη στο οποίο το σύστημα μεταπίπτει στις διάφορες καταστάσεις που διαδέχονται η μία την άλλη σειριακά αφού ολοκληρωθεί η εκτέλεση της προηγούμενης (με τη χρήση της εντολής μετάδωσε... και περίμενε). διαχωρισμού των αρμοδιοτήτων αφού στο ίδιο κελί άλλο σενάριο ασχολείται με τον αυτοματισμό και άλλο με την προσομοίωση στον υπολογιστή. μη χρήσης δομών επιλογής (Εάν Τότε) αλλά αντί για αυτές για τους ελέγχους χρησιμοποιείται η εντολή "περίμενε ώσπου". χρήσης δομών επανάληψης υπό συνθήκη. Χαρακτηριστικά του έργου Διάρκεια (σε διδακτικές ώρες) 8 Δυσκολία (υλοποίησης κατασκευαστικά) (1-5) 4 Δυσκολία (υλοποίησης προγραμματιστικά) (1-5) 3 Όνομαομάδας : IT-Robotics 1 Σχολείο Υλοποίησης : IT-Experts Προπονητής/τες : Θοδωρής Ζώης



177 Σενάριο 10: IT- Robotics 1 IT-Experts Αναβατόριο Μηχανισμός οχήματος Διάδρομος μεταφοράς
178 Σχολιασμός του κώδικα Στο παρόν έργο το πρόγραμμα αναπαριστάνεται με το επόμενο κωδικόραμα.


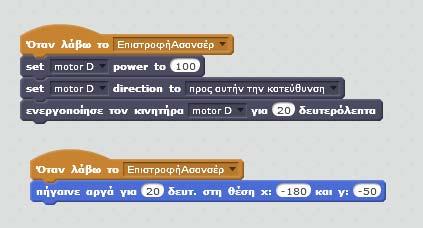



179 Εξερευνητής διαστήματος A Β Γ Δ


180 Σύμφωνα με το κωδικόραμα: Ο κώδικας εμπλέκει 4 αντικείμενα σε 6 καταστάσεις, σχηματίζοντας 24 κελιά, εκ των οποίων στα 6 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων. Η αλληλεπίδραση με το χρήστη του προγράμματος περιορίζεται στο ξεκίνημα του προγράμματος που γίνεται με το πάτημα του πλήκτρου space.



181 Το κύριο βάρος του προγράμματος πέφτει στον κώδικα του κελιού A1, στο οποίο με μοντέλο καταρράκτη το σύστημα μεταπίπτει στις διάφορες καταστάσεις που διαδέχονται η μία την άλλη αφού ολοκληρωθεί η εκτέλεση της προηγούμενης (με τη χρήση της εντολής μετάδωσε... και περίμενε). Οι κώδικες των κελιών που αντιστοιχούν στα αντικείμενα σε αυτές τις καταστάσεις περιέχουν δύο σενάρια που εκτελούνται ταυτόχρονα (παράλληλος προγραμματισμός), με το ένα να διαχειρίζεται τους ενεργοποιητές του WeDo, ενώ το άλλο να δημιουργεί την αντίστοιχη προσομοίωση στον υπολογιστή, όπως φαίνεται: στα κελιά Β2 και Β6:



182 στα κελιά Γ3 και Γ5: και στο κελί Δ4:



183 Η τμηματοποίηση του κώδικα περιορίζεται σε αυτή των κελιών του κωδικοράματος. Δεν χρησιμοποιούνται δομές επιλογής (Εάν Τότε) αλλά οι αποφάσεις λαμβάνονται με έλεγχο των τιμών των διαφόρων αισθητήρων του WeDo με χρήση της εντολής "περίμενε ώσπου". Χρησιμοποιείται η δομή επανάληψης "επανάλαβε ώσπου..."
184 Τα δεδομένα που χρησιμοποιούνται είναι αφενός απλές αριθμητικές τιμές και αφετέρου η απλή μεταβλητή αισθητήρες του WeDo. που ορίζεται από τον προγραμματιστή και οι τιμές από τους
185 11 ο σενάριο
186 Σενάριο 11 Χτίζουμε αποικία στον Άρη με 3D printer σπιτιών και drone Ιστορία - Σενάριο έργου Όταν δημιουργήσουμε αποικίες στον Άρη θα χτίζουμε σπίτια με οικοδομικά υλικά που θα παράγονται εκεί. Τα σπίτια δεν θα χτίζονται με τους παραδοσιακούς τρόπους, όπως στη Γη. Θα τυπώνονται σε εργοστάσια με μεγάλους 3D printers και θα μεταφέρονται έτοιμα με drones για εγκατάσταση στις νέες πόλεις. Κατασκευάσαμε έναν 3D printer που τυπώνει σπίτια. Μόλις ένα σπίτι χτιστεί μέσα στον 3D printer, τo παίρνει ένα drone και τo μεταφέρει για να τo τοποθετήσει στη νέα πόλη που κατασκευάζουμε. Πρόβλημα που επιλύει το project Τα σπίτια στον πλανήτη άρη δεν θα χτίζονται με τον παραδοσιακό τρόπο που χτίζονται στη γη. Θα κατασκευάζονται με μεγάλους 3d εκτυπωτές και θα μεταφέρονται στις αποικίες με αυτοματοποιημένο τρόπο με ειδικά μηχανήματα. Το πρόβλημα που επιλύει το συγκεκριμένο έργο είναι η αυτόματη ανύψωση του σπιτιού μόλις αυτό ολοκληρωθεί από τον 3d εκτυπωτή η παραλαβή του από το ειδικά διαμορφωμένο ιπτάμενο όχημα drone και η τοποθέτησή του στην αποικία. Επίσης το drone έχει ένα σύστημα ελέγχου ώστε να επαναφέρει τους κινητήρες του σε οριζόντια θέση όταν αυτό πάρει κλήση. Σκοπός Να κατασκευαστεί ένας ανελκυστήρας ο οποίος θα φέρνει το τελειωμένο τρισδιάστατο σπίτι στην επιφάνεια. Να κατασκευαστεί ιπτάμενο όχημα (drone) με ειδικό μηχανισμό (δαγκάνα) το οποίο θα μπορεί να αρπάζει και να μεταφέρει το σπίτι και να το αφήνει στην αποικία.
187 Να κατασκευαστεί το σύστημα ελέγχου που θα επαναφέρει τους κινητήρες του drone πάντα σε οριζόντια θέση. Εκπαιδευτικοί στόχοι Το παρόν project ενδείκνυται ως παράδειγμα: προγραμματισμού βασισμένου σε συμβάντα (που προκαλούνται από τον χρήστη του προγράμματος). διαχωρισμού των αρμοδιοτήτων αφού σε ένα αντικείμενο βρίσκονται οι κώδικες που υλοποιούν τους αυτοματισμούς ενώ τα υπόλοιπα αντικείμενα και οι κώδικές τους χρησιμοποιούνται στην προσομοίωση του αυτοματισμού στον υπολογιστή. παράλληλου προγραμματισμού των κωδίκων που βρίσκονται στην ίδια κατάσταση. χρήσης απλών και εμφωλευμένων δομών επιλογής (Εάν Τότε). χρήσης δομών επανάληψης "για πάντα" και προκαθορισμένου πλήθους επαναλήψεων. Χαρακτηριστικά του έργου Διάρκεια (σε διδακτικές ώρες) 8 Δυσκολία (υλοποίησης κατασκευαστικά) (1-5) 4 Δυσκολία (υλοποίησης προγραμματιστικά) (1-5) 3 Όνομαομάδας : Flow Σχολείο Υλοποίησης : NeueSchuleAthen Προπονητής/τες : Θεμιστοκλής Γκιών



188 Σενάριο 11: Flow Neue Schule Athen Μηχανισμός δαγκάνας Μηχανισμός ελίκων Αναβατόριο
189 Σχολιασμός του κώδικα Στο παρόν έργο το πρόγραμμα αναπαριστάνεται με το επόμενο κωδικόραμα.




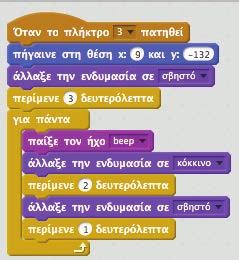
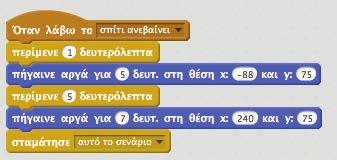
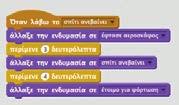
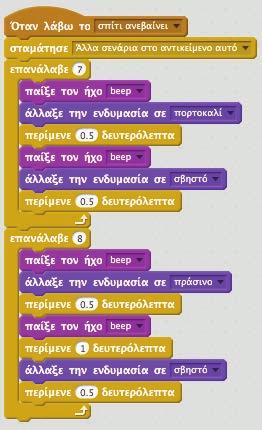

190 ! Ε Δ Γ Β Α Ζ Η!!! 1!!!!!!!!!!!!!!!!!!!!!!!!!!!!!! 2 2!! 3!! 4 4!! 5!!!!!!!!!!!!!!! 6 6!!!!!!!! 7! 8! 9 9!!!!!!!!!!!!!!!!!!!!!!!


191 Σύμφωνα με το κωδικόραμα: Ο κώδικας εμπλέκει 7 αντικείμενα σε 9 καταστάσεις, σχηματίζοντας 63 κελιά, εκ των οποίων στα 19 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων φαίνεται να υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων σε μια απλοϊκή του μορφή. Η αλληλεπίδραση με το χρήστη του προγράμματος φαίνεται να κυριαρχεί στο παρόν project αφού οι οκτώ από τις εννέα καταστάσεις προέρχονται από πατήματα σε πλήκτρα του πληκτρολογίου.

192 Από το κωδικόραμα φαίνεται ότι το αντικείμενο που φέρει το βάρος ελέγχου του WeDo είναι το Α. Από τους κώδικες του αντικειμένου Α αυτός που διαχειρίζεται και την προσομοίωση του φυσικού κόσμου στον υπολογιστή είναι αυτός του κελιού Α5, ο οποίος κατευθύνει τη ροή του προγράμματος με χρήση μηνύματος ανάλογα με την τιμή του αισθητήρα από την κατάσταση 5 στην κατάσταση 6.
 στις δύο καταστάσεις (5 και 6).")
, υλοποιούν την προσομοίωση του")

193 Για το animation της προσομοίωσης χρησιμοποιούνται όλα τα υπόλοιπα αντικείμενα (Β έως Η) στις δύο καταστάσεις (5 και 6). Είναι χαρακτηριστικό ότι οι κώδικες της κατάστασης στη γραμμή 5 που εκτελούνται ταυτόχρονα (παράλληλος προγραμματισμός), υλοποιούν την προσομοίωση του αυτοματισμού στον υπολογιστή. Το αυτό συμβαίνει και με τους κώδικες της κατάστασης 6. Προτείνεται ο αναγνώστης να τροποποιήσει τους κώδικες των κελιών Ε6 και Η6 χρησιμοποιώντας την εντολή επιλογής "Εάν-τότε-αλλιώς".



194 Η τμηματοποίηση του κώδικα περιορίζεται σε αυτή των κελιών του κωδικοράματος. Χρησιμοποιούνται απλές δομές επιλογής (Εάν Τότε). Χρησιμοποιούνται δομές επανάληψης "για πάντα" και δομές επανάληψης προκαθορισμένου πλήθους επαναλήψεων.

")



195 Όσον αφορά τα δεδομένα αν και έχουν οριστεί δύο μεταβλητές από τον προγραμματιστή ( ) αυτές δεν χρησιμοποιούνται στο πρόγραμμα: Τα δεδομένα που χρησιμοποιούνται είναι σταθερές αριθμητικές τιμές: και οι τιμές από τους αισθητήρες του WeDo:
196 12 ο σενάριο
197 Σενάριο 12 Robometal Ιστορία - Σενάριο έργου Το διαστημικό ρομπότ των legomaster είναι έτοιμο για την αποστολή του στον Aρη με σκοπό να προετοιμάσει το έδαφος, καθαρίζοντας το από πέτρες προκειμένου να δημιουργηθούν αποικίες. Πρόβλημα που επιλύει το project Το έδαφος του πλανήτη Aρη είναι ανώμαλο και πετρώδες, για να μπορέσουν να φτιαχτούν οι αποικίες και οι κατοικίες επάνω στην επιφάνεια του πλανήτη θα πρέπει η περιοχή να καθαριστεί από τις πέτρες και άλλα υλικά. Το όχημα αυτό έχει αναλάβει την αποστολή της αναζήτησης και μετακίνησης των βράχων αλλά και άλλων εμποδίων από την επιφάνεια του πλανήτη. Σκοπός Να κατασκευαστεί κατάλληλο όχημα το οποίο θα μπορεί να μετακινείται στην επιφάνεια του άρη να ανιχνεύει πέτρες, να τις αρπάζει και να τις μετακινεί σε συγκεκριμένους χώρους. Εκπαιδευτικοί στόχοι Το παρόν project ενδείκνυται ως παράδειγμα: προγραμματισμού βασισμένου σε συμβάντα (που προκαλούνται από τον χρήστη του προγράμματος). τεχνικής interrupt στην ανίχνευση των συμβάντων.
198 διαχωρισμού των αρμοδιοτήτων αφού σε ένα αντικείμενο βρίσκονται οι κώδικες που υλοποιούν τους αυτοματισμούς ενώ τα υπόλοιπα αντικείμενα και οι κώδικές τους χρησιμοποιούνται στην προσομοίωση του αυτοματισμού στον υπολογιστή. παράλληλου προγραμματισμού των κωδίκων που βρίσκονται στην ίδια κατάσταση αλλά σε διαφορετικά αντικείμενα. Χαρακτηριστικά του έργου Διάρκεια (σεδιδακτικές ώρες) 4 Δυσκολία (υλοποίησης κατασκευαστικά) (1-5) 2 Δυσκολία (υλοποίησης προγραμματιστικά) (1-5) 1 Όνομαομάδας : LegoMasters Σχολείο Υλοποίησης : 3ο Δημοτικό Σχολείο Γρεβενών Προπονητής/τες : Θεοδούλα Λιάμπα



199 Σενάριο 12: LegoMasters 3ο Δημοτικό Σχολείο Γρεβενών Μηχανισμός δαγκάνας Μηχανισμός οχήματος Σύνολο οχήματος
200 Σχολιασμός του κώδικα Στο παρόν έργο το πρόγραμμα αναπαριστάνεται με το επόμενο κωδικόραμα.
201


202 Σύμφωνα με το κωδικόραμα: Ο κώδικας εμπλέκει 6 αντικείμενα σε 7 καταστάσεις, σχηματίζοντας 42 κελιά, εκ των οποίων στα 28 υπάρχει τμήμα κώδικα. Από τη φύση των περιγραφομένων καταστάσεων αφενός υιοθετείται το μοντέλο των πεπερασμένων καταστάσεων και αφετέρου η αλληλεπίδραση με το χρήστη του προγράμματος φαίνεται να κυριαρχεί αφού οι 6 από τις 7 καταστάσεις αντιστοιχούν σε πατήματα πλήκτρων από το χρήστη (με εξαίρεση την κατάσταση της γραμμής 5 που προκύπτει από μήνυμα).

203 Η διαχείριση του κινητήρα του WeDo γίνεται αποκλειστικά από το αντικείμενο Α, στις καταστάσεις 2,3,4, και6. (οι εντολές με έντονο μπλε χρώμα στα κελιά Α2, Α3, Α4 και Α6)
, υλοποιούν την προσομοίωση του αυτοματισμού στον υπολογιστή.")

204 Είναι χαρακτηριστικό ότι οι κώδικες (εκτός του αντικειμένου Α) της κατάστασης στη γραμμή 4 που εκτελούνται ταυτόχρονα (παράλληλος προγραμματισμός), υλοποιούν την προσομοίωση του αυτοματισμού στον υπολογιστή. ενώ το αυτό συμβαίνει και για όλους τους υπόλοιπους κώδικες (εκτός των Α2, Α3, Α4 και Α6). Είναι χαρακτηριστικό ότι τα χρώματα των εντολών (δηλ. των κατηγοριών εντολών) σε αυτούς τους κώδικες είναι αυτά της τοποθέτησης στο χώρο (μπλε), της εμφάνισης (μωβ) και των ήχων (ιώδες).



205 Όσον αφορά την τμηματοποίηση του κώδικα (και επειδή χρησιμοποιείται η έκδοση 1.4 του Scratch που δεν έχει τη δυνατότητα διαδικασιών) περιορίζεται σε αυτή των κελιών του κωδικοράματος. Χρησιμοποιούνται μόνο απλές δομές επιλογής (Εάν Τότε). Χρησιμοποιούνται δομές επανάληψης "για πάντα" και δομές επανάληψης "περίμενε ώσπου"

206 Τα δεδομένα που χρησιμοποιούνται είναι δύο απλές καθολικές μεταβλητές που ορίζεται από τον προγραμματιστή οι οποίες αντιστοιχούν στις συντεταγμένες του αντικειμένου Β και οι τιμές από τους αισθητήρες του WeDo, όπως π.χ. η
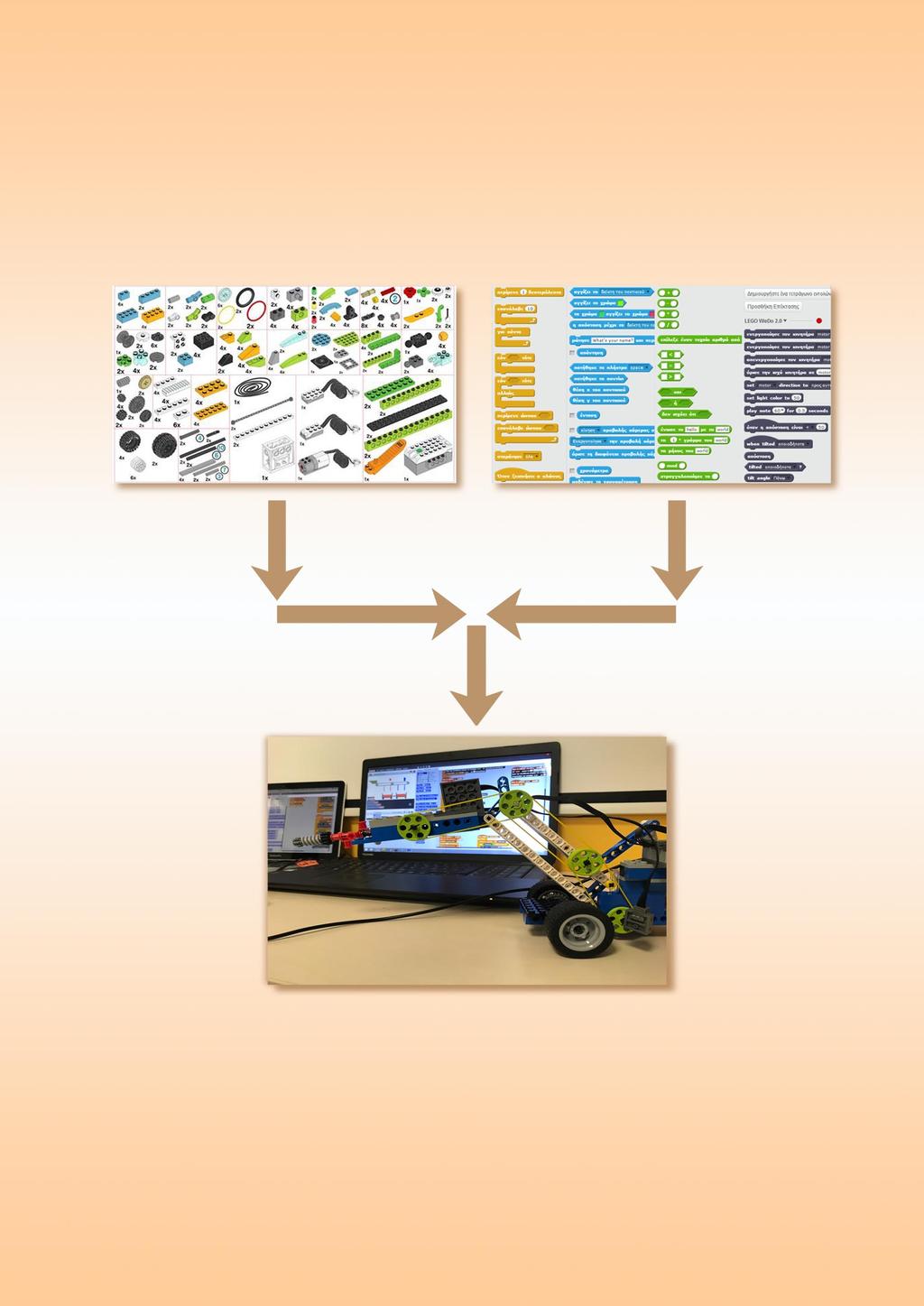
207
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΕΚΠΑΙΔΕΥΣΗ
 ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΕΚΠΑΙΔΕΥΣΗ Γιατί η Ρομποτική στην Εκπαίδευση; A) Τα παιδιά όταν σχεδιάζουν, κατασκευάζουν και προγραμματίζουν ρομπότ έχουν την ευκαιρία να μάθουν παίζοντας και να αναπτύξουν δεξιότητες Η
ΡΟΜΠΟΤΙΚΗ ΚΑΙ ΕΚΠΑΙΔΕΥΣΗ Γιατί η Ρομποτική στην Εκπαίδευση; A) Τα παιδιά όταν σχεδιάζουν, κατασκευάζουν και προγραμματίζουν ρομπότ έχουν την ευκαιρία να μάθουν παίζοντας και να αναπτύξουν δεξιότητες Η
Ανουσάκη Γεωργία 1, Αναγνωστάκης Σίμος 2
 Πανελλήνιο Συνέδριο Scientix για την εκπαίδευση STEM 3 & 4 Σεπτεμβρίου 2018 Ε.Μ.Π., Πολυτεχνειούπολη Ζωγράφου Διερεύνηση δυνατοτήτων χρήσης 3D εκτύπωσης και υλικών χαμηλού κόστος για την δημιουργία διδακτικών
Πανελλήνιο Συνέδριο Scientix για την εκπαίδευση STEM 3 & 4 Σεπτεμβρίου 2018 Ε.Μ.Π., Πολυτεχνειούπολη Ζωγράφου Διερεύνηση δυνατοτήτων χρήσης 3D εκτύπωσης και υλικών χαμηλού κόστος για την δημιουργία διδακτικών
ΕΝΙΑΙΟ ΠΛΑΙΣΙΟ ΠΡΟΓΡΑΜΜΑΤΟΣ ΣΠΟΥΔΩΝ
 ΥΠΟΥΡΓΕΙΟ ΕΘΝΙΚΗΣ ΠΑΙΔΕΙΑΣ ΚΑΙ ΘΡΗΣΚΕΥΜΑΤΩΝ ΠΑΙΔΑΓΩΓΙΚΟ ΙΝΣΤΙΤΟΥΤΟ ΕΝΙΑΙΟ ΠΛΑΙΣΙΟ ΠΡΟΓΡΑΜΜΑΤΟΣ ΣΠΟΥΔΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΙΣΧΥΕΙ ΚΑΤΑ ΤΟ ΜΕΡΟΣ ΠΟΥ ΑΦΟΡΑ ΤΟ ΛΥΚΕΙΟ ΓΙΑ ΤΗΝ ΥΠΟΧΡΕΩΤΙΚΗ ΕΚΠΑΙΔΕΥΣΗ ΙΣΧΥΟΥΝ ΤΟ ΔΕΠΠΣ
ΥΠΟΥΡΓΕΙΟ ΕΘΝΙΚΗΣ ΠΑΙΔΕΙΑΣ ΚΑΙ ΘΡΗΣΚΕΥΜΑΤΩΝ ΠΑΙΔΑΓΩΓΙΚΟ ΙΝΣΤΙΤΟΥΤΟ ΕΝΙΑΙΟ ΠΛΑΙΣΙΟ ΠΡΟΓΡΑΜΜΑΤΟΣ ΣΠΟΥΔΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΙΣΧΥΕΙ ΚΑΤΑ ΤΟ ΜΕΡΟΣ ΠΟΥ ΑΦΟΡΑ ΤΟ ΛΥΚΕΙΟ ΓΙΑ ΤΗΝ ΥΠΟΧΡΕΩΤΙΚΗ ΕΚΠΑΙΔΕΥΣΗ ΙΣΧΥΟΥΝ ΤΟ ΔΕΠΠΣ
Διδακτική της Πληροφορικής
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 3: Η Πληροφορική στην Ελληνική Δευτεροβάθμια Εκπαίδευση - Γυμνάσιο Σταύρος Δημητριάδης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 3: Η Πληροφορική στην Ελληνική Δευτεροβάθμια Εκπαίδευση - Γυμνάσιο Σταύρος Δημητριάδης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
ΦΟΡΜΑ ΥΠΟΒΟΛΗΣ ΠΡΟΤΑΣΗΣ ΓΙΑ ΤΗ ΔΗΜΙΟΥΡΓΙΑ ΟΜΙΛΟΥ ΣΧΟΛΙΚΟΥ ΕΤΟΥΣ ΝΙΚΟΛΑΟΣ ΑΜΑΝΑΤΙΔΗΣ 1 Ο ΠΡΟΤΥΠΟ ΠΕΙΡΑΜΑΤΙΚΟ ΔΗΜΟΤΙΚΟ ΣΧΟΛΕΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ
 ΦΟΡΜΑ ΥΠΟΒΟΛΗΣ ΠΡΟΤΑΣΗΣ ΓΙΑ ΤΗ ΔΗΜΙΟΥΡΓΙΑ ΟΜΙΛΟΥ ΣΧΟΛΙΚΟΥ ΕΤΟΥΣ 2016-2017 ΝΙΚΟΛΑΟΣ ΑΜΑΝΑΤΙΔΗΣ 1 Ο ΠΡΟΤΥΠΟ ΠΕΙΡΑΜΑΤΙΚΟ ΔΗΜΟΤΙΚΟ ΣΧΟΛΕΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΟΜΙΛΟΣ ΡΟΜΠΟΤΙΚΗΣ ΟΝΟΜΑΤΕΠΩΝΥΜΟ ΕΚΠ/ΚΟΥ ΝΙΚΟΛΑΟΣ ΑΜΑΝΑΤΙΔΗΣ
ΦΟΡΜΑ ΥΠΟΒΟΛΗΣ ΠΡΟΤΑΣΗΣ ΓΙΑ ΤΗ ΔΗΜΙΟΥΡΓΙΑ ΟΜΙΛΟΥ ΣΧΟΛΙΚΟΥ ΕΤΟΥΣ 2016-2017 ΝΙΚΟΛΑΟΣ ΑΜΑΝΑΤΙΔΗΣ 1 Ο ΠΡΟΤΥΠΟ ΠΕΙΡΑΜΑΤΙΚΟ ΔΗΜΟΤΙΚΟ ΣΧΟΛΕΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΟΜΙΛΟΣ ΡΟΜΠΟΤΙΚΗΣ ΟΝΟΜΑΤΕΠΩΝΥΜΟ ΕΚΠ/ΚΟΥ ΝΙΚΟΛΑΟΣ ΑΜΑΝΑΤΙΔΗΣ
Τα Διδακτικά Σενάρια και οι Προδιαγραφές τους. του Σταύρου Κοκκαλίδη. Μαθηματικού
 Τα Διδακτικά Σενάρια και οι Προδιαγραφές τους του Σταύρου Κοκκαλίδη Μαθηματικού Διευθυντή του Γυμνασίου Αρχαγγέλου Ρόδου-Εκπαιδευτή Στα προγράμματα Β Επιπέδου στις ΤΠΕ Ορισμός της έννοιας του σεναρίου.
Τα Διδακτικά Σενάρια και οι Προδιαγραφές τους του Σταύρου Κοκκαλίδη Μαθηματικού Διευθυντή του Γυμνασίου Αρχαγγέλου Ρόδου-Εκπαιδευτή Στα προγράμματα Β Επιπέδου στις ΤΠΕ Ορισμός της έννοιας του σεναρίου.
Εκστρατεία για τον εξοπλισμό των σχολείων όλων των βαθμίδων. Με εξοπλισμό STEM & εκπαιδευτικής ρομποτικής
 Εκστρατεία για τον εξοπλισμό των σχολείων όλων των βαθμίδων Με εξοπλισμό STEM & εκπαιδευτικής ρομποτικής H προσέγγισή μας 1. Δημιουργούμε κίνητρα & ευκαιρίες ώστε τα σχολεία να αποκτήσουν τον απαραίτητο
Εκστρατεία για τον εξοπλισμό των σχολείων όλων των βαθμίδων Με εξοπλισμό STEM & εκπαιδευτικής ρομποτικής H προσέγγισή μας 1. Δημιουργούμε κίνητρα & ευκαιρίες ώστε τα σχολεία να αποκτήσουν τον απαραίτητο
Η ΠΛΗΡΟΦΟΡΙΚΗ ΣΤΟ ΔΗΜΟΤΙΚΟ ΣΧΟΛΕΙΟ
 Η ΠΛΗΡΟΦΟΡΙΚΗ ΣΤΟ ΔΗΜΟΤΙΚΟ ΣΧΟΛΕΙΟ Η θέση της Πανελλήνιας Ένωσης Καθηγητών Πληροφορικής Επιμέλεια κειμένου: Δ.Σ. ΠΕΚαΠ κατόπιν δημόσιας διαβούλευσης των μελών της Ένωσης από 20/07/2010. Τελική έκδοση κειμένου:
Η ΠΛΗΡΟΦΟΡΙΚΗ ΣΤΟ ΔΗΜΟΤΙΚΟ ΣΧΟΛΕΙΟ Η θέση της Πανελλήνιας Ένωσης Καθηγητών Πληροφορικής Επιμέλεια κειμένου: Δ.Σ. ΠΕΚαΠ κατόπιν δημόσιας διαβούλευσης των μελών της Ένωσης από 20/07/2010. Τελική έκδοση κειμένου:
Κανονιστικά πλαίσια σε διαγωνισμούς ρομποτικής
 Πανελλήνιοι Διαγωνισμοί Εκπαιδευτικής Ρομποτικής Ραλλείος 20 Δεκεμβρίου 2017 Κανονιστικά πλαίσια σε διαγωνισμούς ρομποτικής Αμπαριώτης Απόστολος abariotis@gmail.com Αμπαριώτης Απόστολος 2 Προπονητής σε
Πανελλήνιοι Διαγωνισμοί Εκπαιδευτικής Ρομποτικής Ραλλείος 20 Δεκεμβρίου 2017 Κανονιστικά πλαίσια σε διαγωνισμούς ρομποτικής Αμπαριώτης Απόστολος abariotis@gmail.com Αμπαριώτης Απόστολος 2 Προπονητής σε
Η διάρκεια πραγματοποίησης της ανοιχτής εκπαιδευτικής πρακτικής ήταν 2 διδακτικές ώρες
 ΣΧΟΛΕΙΟ Η εκπαιδευτική πρακτική αφορούσε τη διδασκαλία των μεταβλητών στον προγραμματισμό και εφαρμόστηκε σε μαθητές της τελευταίας τάξης ΕΠΑΛ του τομέα Πληροφορικής στα πλαίσια του μαθήματος του Δομημένου
ΣΧΟΛΕΙΟ Η εκπαιδευτική πρακτική αφορούσε τη διδασκαλία των μεταβλητών στον προγραμματισμό και εφαρμόστηκε σε μαθητές της τελευταίας τάξης ΕΠΑΛ του τομέα Πληροφορικής στα πλαίσια του μαθήματος του Δομημένου
Η ΕΚΠΑΙΔΕΥΤΙΚΗ ΡΟΜΠΟΤΙΚΗ ΣΤΟ ΔΗΜΟΤΙΚΟ ΣΧΟΛΕΙΟ
 Η ΕΚΠΑΙΔΕΥΤΙΚΗ ΡΟΜΠΟΤΙΚΗ ΣΤΟ ΔΗΜΟΤΙΚΟ ΣΧΟΛΕΙΟ Συμπληρωματικό κείμενο στη θέση του Δ.Σ. της ΠΕΚαΠ για την Πληροφορική στην Πρωτοβάθμια Εκπαίδευση. Τελική έκδοση κειμένου: Η ΕΚΠΑΙΔΕΥΤΙΚΗ ΡΟΜΠΟΤΙΚΗ ΣΤΟ ΔΗΜΟΤΙΚΟ
Η ΕΚΠΑΙΔΕΥΤΙΚΗ ΡΟΜΠΟΤΙΚΗ ΣΤΟ ΔΗΜΟΤΙΚΟ ΣΧΟΛΕΙΟ Συμπληρωματικό κείμενο στη θέση του Δ.Σ. της ΠΕΚαΠ για την Πληροφορική στην Πρωτοβάθμια Εκπαίδευση. Τελική έκδοση κειμένου: Η ΕΚΠΑΙΔΕΥΤΙΚΗ ΡΟΜΠΟΤΙΚΗ ΣΤΟ ΔΗΜΟΤΙΚΟ
Πληροφορική και Τεχνολογίες Πληροφορίας & Επικοινωνιών: Συνύπαρξη και παιδαγωγική πρακτική. Τάσος Μικρόπουλος Ιωάννα Μπέλλου Πανεπιστήμιο Ιωαννίνων
 Πληροφορική και Τεχνολογίες Πληροφορίας & Επικοινωνιών: Συνύπαρξη και παιδαγωγική πρακτική Τάσος Μικρόπουλος Ιωάννα Μπέλλου Πανεπιστήμιο Ιωαννίνων Πληροφορική και ΤΠΕ Η Πληροφορική και οι Τεχνολογίες της
Πληροφορική και Τεχνολογίες Πληροφορίας & Επικοινωνιών: Συνύπαρξη και παιδαγωγική πρακτική Τάσος Μικρόπουλος Ιωάννα Μπέλλου Πανεπιστήμιο Ιωαννίνων Πληροφορική και ΤΠΕ Η Πληροφορική και οι Τεχνολογίες της
Τεχνολογία στην Εκπαίδευση Εισαγωγή. Χαρίκλεια Τσαλαπάτα 24/9/2012
 Τεχνολογία στην Εκπαίδευση Εισαγωγή Χαρίκλεια Τσαλαπάτα 24/9/2012 Μάθηση Γενικότερος όρος από την «εκπαίδευση» Την εκπαίδευση την αντιλαμβανόμαστε σαν διαδικασία μέσα στην τάξη «Μάθηση» παντού και συνεχώς
Τεχνολογία στην Εκπαίδευση Εισαγωγή Χαρίκλεια Τσαλαπάτα 24/9/2012 Μάθηση Γενικότερος όρος από την «εκπαίδευση» Την εκπαίδευση την αντιλαμβανόμαστε σαν διαδικασία μέσα στην τάξη «Μάθηση» παντού και συνεχώς
Μαθησιακές δραστηριότητες με υπολογιστή
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Μαθησιακές δραστηριότητες με υπολογιστή Εργαλεία κατασκευής γνώσης Διδάσκων: Καθηγητής Αναστάσιος Α. Μικρόπουλος Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Μαθησιακές δραστηριότητες με υπολογιστή Εργαλεία κατασκευής γνώσης Διδάσκων: Καθηγητής Αναστάσιος Α. Μικρόπουλος Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
Ανοικτή Κατηγορία Δημοτικού: Εποικισμός του Άρη
 Πανελλήνιος Διαγωνισμός Εκπαιδευτικής Ρομποτικής Ανοικτή Κατηγορία Δημοτικού: Εποικισμός του Άρη Κανονισμοί και Βαθμολογία Σελίδα 1 Κανονισμοί Για την κατασκευή θα χρησιμοποιηθεί το ρομποτικό κιτ LEGO
Πανελλήνιος Διαγωνισμός Εκπαιδευτικής Ρομποτικής Ανοικτή Κατηγορία Δημοτικού: Εποικισμός του Άρη Κανονισμοί και Βαθμολογία Σελίδα 1 Κανονισμοί Για την κατασκευή θα χρησιμοποιηθεί το ρομποτικό κιτ LEGO
ΕΚΠΑΙΔΕΥΤΙΚΉ ΡΟΜΠΟΤΙΚΉ & STEM. Δημήτριος Κράββαρης Καθηγητής Πληροφορικής Α/θμιας Εκπ/σης MSc. BSc. Πληροφορικής
 ΕΚΠΑΙΔΕΥΤΙΚΉ ΡΟΜΠΟΤΙΚΉ & STEM Δημήτριος Κράββαρης Καθηγητής Πληροφορικής Α/θμιας Εκπ/σης MSc. BSc. Πληροφορικής ΤΙ ΕΊΝΑΙ STEM; Ο όρος STEM [Science, Technology, Engineering and Mathematics] είναι το ακρωνύμιο
ΕΚΠΑΙΔΕΥΤΙΚΉ ΡΟΜΠΟΤΙΚΉ & STEM Δημήτριος Κράββαρης Καθηγητής Πληροφορικής Α/θμιας Εκπ/σης MSc. BSc. Πληροφορικής ΤΙ ΕΊΝΑΙ STEM; Ο όρος STEM [Science, Technology, Engineering and Mathematics] είναι το ακρωνύμιο
Παιδαγωγικές δραστηριότητες μοντελοποίησης με χρήση ανοικτών υπολογιστικών περιβαλλόντων
 Παιδαγωγικές δραστηριότητες μοντελοποίησης με χρήση ανοικτών υπολογιστικών περιβαλλόντων Βασίλης Κόμης, Επίκουρος Καθηγητής Ερευνητική Ομάδα «ΤΠΕ στην Εκπαίδευση» Τμήμα Επιστημών της Εκπαίδευσης και της
Παιδαγωγικές δραστηριότητες μοντελοποίησης με χρήση ανοικτών υπολογιστικών περιβαλλόντων Βασίλης Κόμης, Επίκουρος Καθηγητής Ερευνητική Ομάδα «ΤΠΕ στην Εκπαίδευση» Τμήμα Επιστημών της Εκπαίδευσης και της
H Συμβολή της Υπολογιστικής Σκέψης στην Προετοιμασία του Αυριανού Πολίτη
 H Συμβολή της Υπολογιστικής Σκέψης στην Προετοιμασία του Αυριανού Πολίτη Κοτίνη Ι., Τζελέπη Σ. Σχ. Σύμβουλοι Κ. Μακεδονίας στην οικονομία, στη τέχνη, στην επιστήμη, στις ανθρωπιστικές και κοινωνικές επιστήμες.
H Συμβολή της Υπολογιστικής Σκέψης στην Προετοιμασία του Αυριανού Πολίτη Κοτίνη Ι., Τζελέπη Σ. Σχ. Σύμβουλοι Κ. Μακεδονίας στην οικονομία, στη τέχνη, στην επιστήμη, στις ανθρωπιστικές και κοινωνικές επιστήμες.
Εξωσχολικά προγράμματα STEM και Εκπαιδευτικής Ρομποτικής στο Κολλέγιο Ανατόλια σε συνεργασία με τον STEM Education
 Εξωσχολικά προγράμματα STEM και Εκπαιδευτικής Ρομποτικής στο Κολλέγιο Ανατόλια σε συνεργασία με τον STEM Education ΑΝΟΙΧΤΑ ΣΕ ΜΑΘΗΤΕΣ ΤΗΣ ΠΟΛΗΣ Λιλιπούτειοι Μηχανικοί Για μαθητές Νηπιαγωγείου, Σάββατο
Εξωσχολικά προγράμματα STEM και Εκπαιδευτικής Ρομποτικής στο Κολλέγιο Ανατόλια σε συνεργασία με τον STEM Education ΑΝΟΙΧΤΑ ΣΕ ΜΑΘΗΤΕΣ ΤΗΣ ΠΟΛΗΣ Λιλιπούτειοι Μηχανικοί Για μαθητές Νηπιαγωγείου, Σάββατο
ΔΙΔΑΚΤΙΚΉ ΤΩΝ ΜΑΘΗΜΑΤΙΚΏΝ
 ΔΙΔΑΚΤΙΚΉ ΤΩΝ ΜΑΘΗΜΑΤΙΚΏΝ 2. Εκπαιδευτικό Λογισμικό για τα Μαθηματικά 2.1 Κύρια χαρακτηριστικά του εκπαιδευτικού λογισμικού για την Διδακτική των Μαθηματικών 2.2 Κατηγορίες εκπαιδευτικού λογισμικού για
ΔΙΔΑΚΤΙΚΉ ΤΩΝ ΜΑΘΗΜΑΤΙΚΏΝ 2. Εκπαιδευτικό Λογισμικό για τα Μαθηματικά 2.1 Κύρια χαρακτηριστικά του εκπαιδευτικού λογισμικού για την Διδακτική των Μαθηματικών 2.2 Κατηγορίες εκπαιδευτικού λογισμικού για
Παρουσίαση Δραστηριότητας Ρομποτικής
 Τι είναι ρομποτική; Παρουσίαση Δραστηριότητας Ρομποτικής Η Ρομποτική είναι ο κλάδος της επιστήμης που μελετά τις μηχανές εκείνες που μπορούν να αντικαταστήσουν τον άνθρωπο στην εκτέλεση μιας εργασίας,
Τι είναι ρομποτική; Παρουσίαση Δραστηριότητας Ρομποτικής Η Ρομποτική είναι ο κλάδος της επιστήμης που μελετά τις μηχανές εκείνες που μπορούν να αντικαταστήσουν τον άνθρωπο στην εκτέλεση μιας εργασίας,
ΑΝΑΠΤΥΞΗ ΕΦΑΡΜΟΓΩΝ ΣΕ Π ΡΟΓΡΑΜΜΑΤΙΣΤΙΚΟ Π ΕΡΙΒΑΛΛΟΝ
 ΥΠΟΥΡΓΕΙΟ ΕΘΝΙΚΗΣ ΠΑΙΔΕΙΑΣ ΚΑΙ ΘΡΗΣΚΕΥΜΑΤΩΝ ΠΑΙΔΑΓΩΓΙΚΟ ΙΝΣΤΙΤΟΥΤΟ ΑΝΑΠΤΥΞΗ ΕΦΑΡΜΟΓΩΝ ΣΕ Π ΡΟΓΡΑΜΜΑΤΙΣΤΙΚΟ Π ΕΡΙΒΑΛΛΟΝ Κ Υ Κ Λ Ο Υ Π Λ Η Ρ Ο Φ Ο Ρ Ι Κ Η Σ Κ Α Ι Υ Π Η Ρ Ε Σ Ι Ω Ν Τ Ε Χ Ν Ο Λ Ο Γ Ι Κ Η
ΥΠΟΥΡΓΕΙΟ ΕΘΝΙΚΗΣ ΠΑΙΔΕΙΑΣ ΚΑΙ ΘΡΗΣΚΕΥΜΑΤΩΝ ΠΑΙΔΑΓΩΓΙΚΟ ΙΝΣΤΙΤΟΥΤΟ ΑΝΑΠΤΥΞΗ ΕΦΑΡΜΟΓΩΝ ΣΕ Π ΡΟΓΡΑΜΜΑΤΙΣΤΙΚΟ Π ΕΡΙΒΑΛΛΟΝ Κ Υ Κ Λ Ο Υ Π Λ Η Ρ Ο Φ Ο Ρ Ι Κ Η Σ Κ Α Ι Υ Π Η Ρ Ε Σ Ι Ω Ν Τ Ε Χ Ν Ο Λ Ο Γ Ι Κ Η
Μαθησιακά Αντικείμενα για το μάθημα ΤΠΕ-Πληροφορική: Παιδαγωγική αξιοποίηση στην πρωτοβάθμια εκπαίδευση
 Μαθησιακά Αντικείμενα για το μάθημα ΤΠΕ-Πληροφορική: Παιδαγωγική αξιοποίηση στην πρωτοβάθμια εκπαίδευση Καθηγητής Αθανάσιος Τζιμογιάννης Πανεπιστήμιο Πελοποννήσου ΙΤΥΕ «Διόφαντος» ΗΜΕΡΙΔΑ ΕΠΙΜΟΡΦΩΣΗΣ ΣΧΟΛΙΚΩΝ
Μαθησιακά Αντικείμενα για το μάθημα ΤΠΕ-Πληροφορική: Παιδαγωγική αξιοποίηση στην πρωτοβάθμια εκπαίδευση Καθηγητής Αθανάσιος Τζιμογιάννης Πανεπιστήμιο Πελοποννήσου ΙΤΥΕ «Διόφαντος» ΗΜΕΡΙΔΑ ΕΠΙΜΟΡΦΩΣΗΣ ΣΧΟΛΙΚΩΝ
ΘΕΜΑΤΙΚΗ ΕΝΟΤΗΤΑ Ι «Η Θεωρητική έννοια της Μεθόδου Project» Αγγελική ρίβα ΠΕ 06
 ΘΕΜΑΤΙΚΗ ΕΝΟΤΗΤΑ Ι «Η Θεωρητική έννοια της Μεθόδου Project» Αγγελική ρίβα ΠΕ 06 1590 1765 η Μέθοδος Project σε σχολές Αρχιτεκτονικής στην Ευρώπη 1765 1880 συνήθης µέθοδος διδασκαλίας - διάδοσή της στην
ΘΕΜΑΤΙΚΗ ΕΝΟΤΗΤΑ Ι «Η Θεωρητική έννοια της Μεθόδου Project» Αγγελική ρίβα ΠΕ 06 1590 1765 η Μέθοδος Project σε σχολές Αρχιτεκτονικής στην Ευρώπη 1765 1880 συνήθης µέθοδος διδασκαλίας - διάδοσή της στην
Μάθηση & Εξερεύνηση στο περιβάλλον του Μουσείου
 Βασίλειος Κωτούλας vaskotoulas@sch.gr h=p://dipe.kar.sch.gr/grss Αρχαιολογικό Μουσείο Καρδίτσας Μάθηση & Εξερεύνηση στο περιβάλλον του Μουσείου Η Δομή της εισήγησης 1 2 3 Δυο λόγια για Στόχοι των Ερευνητική
Βασίλειος Κωτούλας vaskotoulas@sch.gr h=p://dipe.kar.sch.gr/grss Αρχαιολογικό Μουσείο Καρδίτσας Μάθηση & Εξερεύνηση στο περιβάλλον του Μουσείου Η Δομή της εισήγησης 1 2 3 Δυο λόγια για Στόχοι των Ερευνητική
Προσφερόμενα Διπλώματα (Προσφερόμενοι Τίτλοι)
") Εισαγωγή Το Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών του Πανεπιστημίου Κύπρου προσφέρει ολοκληρωμένα προπτυχιακά και μεταπτυχιακά προγράμματα σπουδών στους κλάδους του Ηλεκτρολόγου Μηχανικού
Εισαγωγή Το Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών του Πανεπιστημίου Κύπρου προσφέρει ολοκληρωμένα προπτυχιακά και μεταπτυχιακά προγράμματα σπουδών στους κλάδους του Ηλεκτρολόγου Μηχανικού
Κοινωνικοπολιτισμικές. Θεωρίες Μάθησης. & Εκπαιδευτικό Λογισμικό
 Κοινωνικοπολιτισμικές Θεωρίες Μάθησης & Εκπαιδευτικό Λογισμικό Κοινωνικοπολιτισμικές προσεγγίσεις Η σκέψη αναπτύσσεται (προϊόν οικοδόμησης και αναδόμησης γνώσεων) στα πλαίσια συνεργατικών δραστηριοτήτων
Κοινωνικοπολιτισμικές Θεωρίες Μάθησης & Εκπαιδευτικό Λογισμικό Κοινωνικοπολιτισμικές προσεγγίσεις Η σκέψη αναπτύσσεται (προϊόν οικοδόμησης και αναδόμησης γνώσεων) στα πλαίσια συνεργατικών δραστηριοτήτων
"Η ΕΚΠΑΙΔΕΥΤΙΚΗ ΡΟΜΠΟΤΙΚΗ ΣΑΝ ΠΡΟΠΤΥΧΙΑΚΟ ΜΑΘΗΜΑ ΣΕ ΦΟΙΤΗΤΕΣ ΤΟΥ Π.Τ.Δ.Ε ΣΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ".
 "Η ΕΚΠΑΙΔΕΥΤΙΚΗ ΡΟΜΠΟΤΙΚΗ ΣΑΝ ΠΡΟΠΤΥΧΙΑΚΟ ΜΑΘΗΜΑ ΣΕ ΦΟΙΤΗΤΕΣ ΤΟΥ Π.Τ.Δ.Ε ΣΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ". Σίμος Αναγνωστάκης, Ε.Ε.Δι.Π., sanagn@edc.uoc.gr Παιδαγωγικό Τμήμα Δημοτικής Εκπαίδευσης, Πανεπιστήμιο
"Η ΕΚΠΑΙΔΕΥΤΙΚΗ ΡΟΜΠΟΤΙΚΗ ΣΑΝ ΠΡΟΠΤΥΧΙΑΚΟ ΜΑΘΗΜΑ ΣΕ ΦΟΙΤΗΤΕΣ ΤΟΥ Π.Τ.Δ.Ε ΣΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ". Σίμος Αναγνωστάκης, Ε.Ε.Δι.Π., sanagn@edc.uoc.gr Παιδαγωγικό Τμήμα Δημοτικής Εκπαίδευσης, Πανεπιστήμιο
Πληροφορική Γυμνασίου. Δρ. Κοτίνη Ισαβέλλα Σχ. Σύμβουλος Πληροφορικής Πέλλας, Ημαθίας και Πιερίας
 Πληροφορική Γυμνασίου Δρ. Κοτίνη Ισαβέλλα Σχ. Σύμβουλος Πληροφορικής Πέλλας, Ημαθίας και Πιερίας Εκπαιδευτικό υλικό Ο εκπαιδευτικός μπορεί να σχεδιάσει τις δικές του δραστηριότητες, να αξιοποιήσει αξιόλογο
Πληροφορική Γυμνασίου Δρ. Κοτίνη Ισαβέλλα Σχ. Σύμβουλος Πληροφορικής Πέλλας, Ημαθίας και Πιερίας Εκπαιδευτικό υλικό Ο εκπαιδευτικός μπορεί να σχεδιάσει τις δικές του δραστηριότητες, να αξιοποιήσει αξιόλογο
08/07/2015. Ονοματεπώνυμο: ΣΤΕΦΑΝΟΣ ΚΟΥΤΡΑΣ. Ιδιότητα: ΣΥΜΒΟΥΛΟΣ Β ΙΕΠ. (Υπογραφή)
") Πράξη: «Ανάπτυξη μεθοδολογίας και ψηφιακών διδακτικών σεναρίων για τα γνωστικά αντικείμενα της Πρωτοβάθμιας και Δευτεροβάθμιας Γενικής και Επαγγελματικής Εκπαίδευσης» Άξονες Προτεραιότητας 1-2-3 Οριζόντια
Πράξη: «Ανάπτυξη μεθοδολογίας και ψηφιακών διδακτικών σεναρίων για τα γνωστικά αντικείμενα της Πρωτοβάθμιας και Δευτεροβάθμιας Γενικής και Επαγγελματικής Εκπαίδευσης» Άξονες Προτεραιότητας 1-2-3 Οριζόντια
Εμπλουτισμός σχολικών εγχειριδίων με μαθησιακά αντικείμενα: το μεθοδολογικό πλαίσιο των ομάδων σχεδιασμού ανάπτυξης
 ΕΠΙΜΟΡΦΩΤΙΚΗ ΗΜΕΡΙΔΑ Αξιοποίηση Ψηφιακού Εκπαιδευτικού Περιεχομένου για τη Διδασκαλία Γνωστικών Αντικειμένων Κέρκυρα, 18.06.15 Εμπλουτισμός σχολικών εγχειριδίων με μαθησιακά αντικείμενα: το μεθοδολογικό
ΕΠΙΜΟΡΦΩΤΙΚΗ ΗΜΕΡΙΔΑ Αξιοποίηση Ψηφιακού Εκπαιδευτικού Περιεχομένου για τη Διδασκαλία Γνωστικών Αντικειμένων Κέρκυρα, 18.06.15 Εμπλουτισμός σχολικών εγχειριδίων με μαθησιακά αντικείμενα: το μεθοδολογικό
Εξ αποστάσεως υποστήριξη του έργου των Εκπαιδευτικών μέσω των δικτύων και εργαλείων της Πληροφορικής
 Εξ αποστάσεως υποστήριξη του έργου των Εκπαιδευτικών μέσω των δικτύων και εργαλείων της Πληροφορικής Ε. Κολέζα, Γ. Βρέταρος, θ. Δρίγκας, Κ. Σκορδούλης Εισαγωγή Ο εκπαιδευτικός κατά τη διάρκεια της σχολικής
Εξ αποστάσεως υποστήριξη του έργου των Εκπαιδευτικών μέσω των δικτύων και εργαλείων της Πληροφορικής Ε. Κολέζα, Γ. Βρέταρος, θ. Δρίγκας, Κ. Σκορδούλης Εισαγωγή Ο εκπαιδευτικός κατά τη διάρκεια της σχολικής
ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΧΗΜΕΙΑΣ
 ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΧΗΜΕΙΑΣ Κατερίνα Σάλτα ΔιΧηΝΕΤ 2017-2018 Θέματα Διδακτικής Φυσικών Επιστήμων 1. ΟΙ ΙΔΕΕΣ ΤΩΝ ΜΑΘΗΤΩΝ 2. ΤΑ ΜΟΝΤΕΛΑ ΚΑΙ Η ΜΟΝΤΕΛΟΠΟΙΗΣΗ 3. ΤΟ ΕΡΓΑΣΤΗΡΙΟ & ΤΟ ΠΕΙΡΑΜΑ 4. ΔΙΔΑΚΤΙΚΕΣ ΠΡΟΣΕΓΓΙΣΕΙΣ
ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΧΗΜΕΙΑΣ Κατερίνα Σάλτα ΔιΧηΝΕΤ 2017-2018 Θέματα Διδακτικής Φυσικών Επιστήμων 1. ΟΙ ΙΔΕΕΣ ΤΩΝ ΜΑΘΗΤΩΝ 2. ΤΑ ΜΟΝΤΕΛΑ ΚΑΙ Η ΜΟΝΤΕΛΟΠΟΙΗΣΗ 3. ΤΟ ΕΡΓΑΣΤΗΡΙΟ & ΤΟ ΠΕΙΡΑΜΑ 4. ΔΙΔΑΚΤΙΚΕΣ ΠΡΟΣΕΓΓΙΣΕΙΣ
Μέθοδος : έρευνα και πειραματισμός
 1 Ο ΓΥΜΝΑΣΙΟ ΠΕΥΚΩΝ Γ ΓΥΜΝΑΣΙΟΥ ΜΑΘΗΜΑ : ΤΕΧΝΟΛΟΓΙΑ ΕΚΠΑΙΔΕΥΤΙΚΟΣ : Τρασανίδης Γεώργιος, διπλ. Ηλεκ/γος Μηχανικός Μsc ΠΕ12 05 Μέθοδος : έρευνα και πειραματισμός Στόχος της Τεχνολογίας στην Γ Γυμνασίου
1 Ο ΓΥΜΝΑΣΙΟ ΠΕΥΚΩΝ Γ ΓΥΜΝΑΣΙΟΥ ΜΑΘΗΜΑ : ΤΕΧΝΟΛΟΓΙΑ ΕΚΠΑΙΔΕΥΤΙΚΟΣ : Τρασανίδης Γεώργιος, διπλ. Ηλεκ/γος Μηχανικός Μsc ΠΕ12 05 Μέθοδος : έρευνα και πειραματισμός Στόχος της Τεχνολογίας στην Γ Γυμνασίου
Αναγκαιότητα - Χρησιμότητα
 Διδακτικά Σενάρια Σενάρια Ως διδακτικό σενάριο θεωρείται η περιγραφή μιας διδασκαλίας- παρέμβασης με εστιασμένο γνωστικό αντικείμενο, συγκεκριμένους εκπαιδευτικούς στόχους, διδακτικές αρχές και πρακτικές.
Διδακτικά Σενάρια Σενάρια Ως διδακτικό σενάριο θεωρείται η περιγραφή μιας διδασκαλίας- παρέμβασης με εστιασμένο γνωστικό αντικείμενο, συγκεκριμένους εκπαιδευτικούς στόχους, διδακτικές αρχές και πρακτικές.
ΔΙΔΑΚΤΙΚΗ ΜΕΘΟΔΟΛΟΓΙΑ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ ΔΙΔΑΚΤΙΚΗ ΜΕΘΟΔΟΛΟΓΙΑ Ενότητα: Μέθοδος Project Διδάσκων: Κατσαρού Ελένη ΤΜΗΜΑ ΦΙΛΟΣΟΦΙΚΩΝ ΚΑΙ ΚΟΙΝΩΝΙΚΩΝ ΣΠΟΥΔΩΝ ΦΙΛΟΣΟΦΙΚΗ ΣΧΟΛΗ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ ΔΙΔΑΚΤΙΚΗ ΜΕΘΟΔΟΛΟΓΙΑ Ενότητα: Μέθοδος Project Διδάσκων: Κατσαρού Ελένη ΤΜΗΜΑ ΦΙΛΟΣΟΦΙΚΩΝ ΚΑΙ ΚΟΙΝΩΝΙΚΩΝ ΣΠΟΥΔΩΝ ΦΙΛΟΣΟΦΙΚΗ ΣΧΟΛΗ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Γεωργία Ε. Αντωνέλου Επιστημονικό Προσωπικό ΕΕΥΕΜ Μαθηματικός, Msc. antonelou@ecomet.eap.gr
 Γεωργία Ε. Αντωνέλου Επιστημονικό Προσωπικό ΕΕΥΕΜ Μαθηματικός, Msc. antonelou@ecomet.eap.gr Θεμελίωση μιας λύσης ενός προβλήματος από μια πολύπλευρη (multi-faceted) και διαθεματική (multi-disciplinary)
Γεωργία Ε. Αντωνέλου Επιστημονικό Προσωπικό ΕΕΥΕΜ Μαθηματικός, Msc. antonelou@ecomet.eap.gr Θεμελίωση μιας λύσης ενός προβλήματος από μια πολύπλευρη (multi-faceted) και διαθεματική (multi-disciplinary)
Από τη σχολική συμβατική τάξη στο νέο υβριδικό μαθησιακό περιβάλλον: εκπαίδευση από απόσταση για συνεργασία και μάθηση
 Από τη σχολική συμβατική τάξη στο νέο υβριδικό μαθησιακό περιβάλλον: εκπαίδευση από απόσταση για συνεργασία και μάθηση Δρ Κώστας Χαμπιαούρης Επιθεωρητής Δημοτικής Εκπαίδευσης Συντονιστής Άξονα Αναλυτικών
Από τη σχολική συμβατική τάξη στο νέο υβριδικό μαθησιακό περιβάλλον: εκπαίδευση από απόσταση για συνεργασία και μάθηση Δρ Κώστας Χαμπιαούρης Επιθεωρητής Δημοτικής Εκπαίδευσης Συντονιστής Άξονα Αναλυτικών
6.5 Ανάπτυξη, εφαρμογή και αξιολόγηση εκπαιδευτικών σεναρίων και δραστηριοτήτων ανά γνωστικό αντικείμενο
 6.5 Ανάπτυξη, εφαρμογή και αξιολόγηση εκπαιδευτικών σεναρίων και δραστηριοτήτων ανά γνωστικό αντικείμενο Το εκπαιδευτικό σενάριο Η χρήση των Τ.Π.Ε. στην πρωτοβάθμια εκπαίδευση θα πρέπει να γίνεται με οργανωμένο
6.5 Ανάπτυξη, εφαρμογή και αξιολόγηση εκπαιδευτικών σεναρίων και δραστηριοτήτων ανά γνωστικό αντικείμενο Το εκπαιδευτικό σενάριο Η χρήση των Τ.Π.Ε. στην πρωτοβάθμια εκπαίδευση θα πρέπει να γίνεται με οργανωμένο
ΠΑΙ ΑΓΩΓΙΚΟ ΙΝΣΤΙΤΟΥΤΟ ΙΑΤΜΗΜΑΤΙΚΗ ΕΠΙΤΡΟΠΗ ΓΙΑ ΤΗ ΜΟΡΦΩΤΙΚΗ ΑΥΤΟΤΕΛΕΙΑ ΤΟΥ ΛΥΚΕΙΟΥ
 ΠΑΙ ΑΓΩΓΙΚΟ ΙΝΣΤΙΤΟΥΤΟ ΙΑΤΜΗΜΑΤΙΚΗ ΕΠΙΤΡΟΠΗ ΓΙΑ ΤΗ ΜΟΡΦΩΤΙΚΗ ΑΥΤΟΤΕΛΕΙΑ ΤΟΥ ΛΥΚΕΙΟΥ ΚΑΙ ΤΟΝ ΙΑΛΟΓΟ ΓΙΑ ΤΗΝ ΠΑΙ ΕΙΑ ΑΞΙΟΛΟΓΗΣΗ ΜΑΘΗΤΩΝ ΠΡΟΤΑΣΗ ΣΤΟ ΠΛΑΙΣΙΟ ΤΗΣ ΑΝΑΜΟΡΦΩΣΗΣ ΤΟΥ ΛΥΚΕΙΟΥ Ι. ΓΕΝΙΚΟ ΠΛΑΙΣΙΟ Η
ΠΑΙ ΑΓΩΓΙΚΟ ΙΝΣΤΙΤΟΥΤΟ ΙΑΤΜΗΜΑΤΙΚΗ ΕΠΙΤΡΟΠΗ ΓΙΑ ΤΗ ΜΟΡΦΩΤΙΚΗ ΑΥΤΟΤΕΛΕΙΑ ΤΟΥ ΛΥΚΕΙΟΥ ΚΑΙ ΤΟΝ ΙΑΛΟΓΟ ΓΙΑ ΤΗΝ ΠΑΙ ΕΙΑ ΑΞΙΟΛΟΓΗΣΗ ΜΑΘΗΤΩΝ ΠΡΟΤΑΣΗ ΣΤΟ ΠΛΑΙΣΙΟ ΤΗΣ ΑΝΑΜΟΡΦΩΣΗΣ ΤΟΥ ΛΥΚΕΙΟΥ Ι. ΓΕΝΙΚΟ ΠΛΑΙΣΙΟ Η
1. Η σκοπιμότητα της ένταξης εργαλείων ψηφιακής τεχνολογίας στη Μαθηματική Εκπαίδευση
 1. Η σκοπιμότητα της ένταξης εργαλείων ψηφιακής τεχνολογίας στη Μαθηματική Εκπαίδευση Στη βασική παιδεία, τα μαθηματικά διδάσκονται με στατικά μέσα α) πίνακα/χαρτιού β) κιμωλίας/στυλού γ) χάρτινου βιβλίου.
1. Η σκοπιμότητα της ένταξης εργαλείων ψηφιακής τεχνολογίας στη Μαθηματική Εκπαίδευση Στη βασική παιδεία, τα μαθηματικά διδάσκονται με στατικά μέσα α) πίνακα/χαρτιού β) κιμωλίας/στυλού γ) χάρτινου βιβλίου.
Ενότητα 1: Πώς να διδάξεις ηλικιωμένους για να χρησιμοποιήσουν τη ψηφιακή τεχνολογία. Ημερομηνία: 15/09/2017. Intellectual Output:
 Τίτλος: Εταίρος: Ενότητα 1: Πώς να διδάξεις ηλικιωμένους για να χρησιμοποιήσουν τη ψηφιακή τεχνολογία SOSU Oestjylland Ημερομηνία: 15/09/2017 Intellectual Output: IO3 ΠΕΡΙΕΧΟΜΕΝΑ Ψυχολογικές Πτυχές...2
Τίτλος: Εταίρος: Ενότητα 1: Πώς να διδάξεις ηλικιωμένους για να χρησιμοποιήσουν τη ψηφιακή τεχνολογία SOSU Oestjylland Ημερομηνία: 15/09/2017 Intellectual Output: IO3 ΠΕΡΙΕΧΟΜΕΝΑ Ψυχολογικές Πτυχές...2
Διερευνητική μάθηση We are researchers, let us do research! (Elbers and Streefland, 2000)
") Διερευνητική μάθηση We are researchers, let us do research! (Elbers and Streefland, 2000) Πρόκειται για την έρευνα που διεξάγουν οι επιστήμονες. Είναι μια πολύπλοκη δραστηριότητα που απαιτεί ειδικό ακριβό
Διερευνητική μάθηση We are researchers, let us do research! (Elbers and Streefland, 2000) Πρόκειται για την έρευνα που διεξάγουν οι επιστήμονες. Είναι μια πολύπλοκη δραστηριότητα που απαιτεί ειδικό ακριβό
Σας αποστέλλω το παρακάτω κείμενο για την ενημέρωσή σας.
 Αγαπητέ(ή) κύριε/κυρία: Σας αποστέλλω το παρακάτω κείμενο για την ενημέρωσή σας. Εργαστήριο Διδακτικής Θετικών Επιστημών 1 (ΕΔΘΕ) του Παιδαγωγικού Τμήματος Δημοτικής Εκπαίδευσης (ΠΤΔΕ) του Πανεπιστημίου
Αγαπητέ(ή) κύριε/κυρία: Σας αποστέλλω το παρακάτω κείμενο για την ενημέρωσή σας. Εργαστήριο Διδακτικής Θετικών Επιστημών 1 (ΕΔΘΕ) του Παιδαγωγικού Τμήματος Δημοτικής Εκπαίδευσης (ΠΤΔΕ) του Πανεπιστημίου
Ψηφιακός εμπλουτισμός σχολικών εγχειριδίων: Ένα βήμα για τη νοηματοδοτημένη παιδαγωγική αξιοποίηση των ΤΠΕ
 Ψηφιακός εμπλουτισμός σχολικών εγχειριδίων: Ένα βήμα για τη νοηματοδοτημένη παιδαγωγική αξιοποίηση των ΤΠΕ Τάσος Μικρόπουλος Συντονιστής ψηφιακού εμπλουτισμού βιβλίων Φυσικής H ψηφιακή στρατηγική για την
Ψηφιακός εμπλουτισμός σχολικών εγχειριδίων: Ένα βήμα για τη νοηματοδοτημένη παιδαγωγική αξιοποίηση των ΤΠΕ Τάσος Μικρόπουλος Συντονιστής ψηφιακού εμπλουτισμού βιβλίων Φυσικής H ψηφιακή στρατηγική για την
ΘΕΡΙΝΑ ΣΧΟΛΕΙΑ Αξιοποιώντας Ψηφιακά Μαθησιακά Αντικείμενα στη Διδασκαλία
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ ΣΧΟΛΗ ΕΠΙΣΤΗΜΩΝ ΑΓΩΓΗΣ ΘΕΡΙΝΑ ΣΧΟΛΕΙΑ 2016 1. Αξιοποιώντας Ψηφιακά Μαθησιακά Αντικείμενα στη Διδασκαλία 2. Στατιστική ανάλυση δεδομένων και Μεθοδολογία επιστημονικής Έρευνας ΚΟΝΙΤΣΑ
ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ ΣΧΟΛΗ ΕΠΙΣΤΗΜΩΝ ΑΓΩΓΗΣ ΘΕΡΙΝΑ ΣΧΟΛΕΙΑ 2016 1. Αξιοποιώντας Ψηφιακά Μαθησιακά Αντικείμενα στη Διδασκαλία 2. Στατιστική ανάλυση δεδομένων και Μεθοδολογία επιστημονικής Έρευνας ΚΟΝΙΤΣΑ
1. Οι Τεχνολογίες της Πληροφορίας και των Επικοινωνιών στην εκπαιδευτική διαδικασία
 1. Οι Τεχνολογίες της Πληροφορίας και των Επικοινωνιών στην εκπαιδευτική διαδικασία Ο διδακτικός σχεδιασμός (instructional design) εμφανίσθηκε στην εκπαιδευτική διαδικασία και στην κατάρτιση την περίοδο
1. Οι Τεχνολογίες της Πληροφορίας και των Επικοινωνιών στην εκπαιδευτική διαδικασία Ο διδακτικός σχεδιασμός (instructional design) εμφανίσθηκε στην εκπαιδευτική διαδικασία και στην κατάρτιση την περίοδο
ΠΡΟΣΚΛΗΣΗ ΣΥΜΜΕΤΟΧΗΣ
 ΠΡΟΣΚΛΗΣΗ ΣΥΜΜΕΤΟΧΗΣ Το ευρωπαϊκό ερευνητικό πρόγραμμα PROFILES ανακοινώνει τη δυνατότητα δήλωσης ενδιαφέροντος για συμμετοχή στο δεύτερο κύκλο βιωματικών εργαστηρίων (2012-2013) με θέμα το σχεδιασμό και
ΠΡΟΣΚΛΗΣΗ ΣΥΜΜΕΤΟΧΗΣ Το ευρωπαϊκό ερευνητικό πρόγραμμα PROFILES ανακοινώνει τη δυνατότητα δήλωσης ενδιαφέροντος για συμμετοχή στο δεύτερο κύκλο βιωματικών εργαστηρίων (2012-2013) με θέμα το σχεδιασμό και
ΠΛΑΙΣΙΟ ΠΡΟΓΡΑΜΜΑΤΩΝ ΣΠΟΥΔΩΝ (ΠΣ) Χρίστος Δούκας Αντιπρόεδρος του ΠΙ
 Χρίστος Δούκας Αντιπρόεδρος του ΠΙ") ΠΛΑΙΣΙΟ ΠΡΟΓΡΑΜΜΑΤΩΝ ΣΠΟΥΔΩΝ (ΠΣ) Χρίστος Δούκας Αντιπρόεδρος του ΠΙ Οι Δ/τές ως προωθητές αλλαγών με κέντρο τη μάθηση Χαράσσουν τις κατευθύνσεις Σχεδιάσουν την εφαρμογή στη σχολική πραγματικότητα Αναπτύσσουν
ΠΛΑΙΣΙΟ ΠΡΟΓΡΑΜΜΑΤΩΝ ΣΠΟΥΔΩΝ (ΠΣ) Χρίστος Δούκας Αντιπρόεδρος του ΠΙ Οι Δ/τές ως προωθητές αλλαγών με κέντρο τη μάθηση Χαράσσουν τις κατευθύνσεις Σχεδιάσουν την εφαρμογή στη σχολική πραγματικότητα Αναπτύσσουν
Σενάριο 5. Μετασχηµατισµοί στο επίπεδο. Γνωστική περιοχή: Γεωµετρία Α' Λυκείου. Συµµετρία ως προς άξονα. Σύστηµα συντεταγµένων.
 Σενάριο 5. Μετασχηµατισµοί στο επίπεδο Γνωστική περιοχή: Γεωµετρία Α' Λυκείου. Συµµετρία ως προς άξονα. Σύστηµα συντεταγµένων. Απόλυτη τιµή πραγµατικών αριθµών. Συµµεταβολή σηµείων. Θέµα: Στο περιβάλλον
Σενάριο 5. Μετασχηµατισµοί στο επίπεδο Γνωστική περιοχή: Γεωµετρία Α' Λυκείου. Συµµετρία ως προς άξονα. Σύστηµα συντεταγµένων. Απόλυτη τιµή πραγµατικών αριθµών. Συµµεταβολή σηµείων. Θέµα: Στο περιβάλλον
Μάθηση & διδασκαλία στην προσχολική εκπαίδευση: βασικές αρχές
 Μάθηση & διδασκαλία στην προσχολική εκπαίδευση: βασικές αρχές Σκοποί ενότητας Να συζητηθούν βασικές παιδαγωγικές αρχές της προσχολικής εκπαίδευσης Να προβληματιστούμε για τους τρόπους με τους οποίους μπορεί
Μάθηση & διδασκαλία στην προσχολική εκπαίδευση: βασικές αρχές Σκοποί ενότητας Να συζητηθούν βασικές παιδαγωγικές αρχές της προσχολικής εκπαίδευσης Να προβληματιστούμε για τους τρόπους με τους οποίους μπορεί
Σε ποιους απευθύνεται: Χρόνος υλοποίησης: Χώρος υλοποίησης: Κοινωνική ενορχήστρωση της τάξης Στόχοι:... 4
 Περιεχόμενα Νικόλαος Μανάρας... 2 Σενάριο για διδασκαλία/ εκμάθηση σε μια σύνθεση μεικτής μάθησης (Blended Learning) με τη χρήση του δυναμικού μαθηματικού λογισμικού Geogebra σε διαδραστικό πίνακα και
Περιεχόμενα Νικόλαος Μανάρας... 2 Σενάριο για διδασκαλία/ εκμάθηση σε μια σύνθεση μεικτής μάθησης (Blended Learning) με τη χρήση του δυναμικού μαθηματικού λογισμικού Geogebra σε διαδραστικό πίνακα και
Μαθησιακές δραστηριότητες με υπολογιστή
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Μαθησιακές δραστηριότητες με υπολογιστή Κατευθυντήριες γραμμές σχεδίασης μαθησιακών δραστηριοτήτων Διδάσκων: Καθηγητής Αναστάσιος Α. Μικρόπουλος Άδειες
ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Μαθησιακές δραστηριότητες με υπολογιστή Κατευθυντήριες γραμμές σχεδίασης μαθησιακών δραστηριοτήτων Διδάσκων: Καθηγητής Αναστάσιος Α. Μικρόπουλος Άδειες
2018 / 19 ΜΕΤΑΠΤΥΧΙΑΚΑ ΠΡΟΓΡΑΜΜΑΤΑ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΑΚΩΝ & ΕΠΙΚΟΙΝΩΝΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ
 2018 / 19 ΜΕΤΑΠΤΥΧΙΑΚΑ ΠΡΟΓΡΑΜΜΑΤΑ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΑΚΩΝ & ΕΠΙΚΟΙΝΩΝΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ 2 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΜΕΤΑΠΤΥΧΙΑΚΟ ΠΡΟΓΡΑΜΜΑ: ΑΣΦΑΛΕΙΑ ΠΛΗΡΟΦΟΡΙΑΚΩΝ & ΕΠΙΚΟΙΝΩΝΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ
2018 / 19 ΜΕΤΑΠΤΥΧΙΑΚΑ ΠΡΟΓΡΑΜΜΑΤΑ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΑΚΩΝ & ΕΠΙΚΟΙΝΩΝΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ 2 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΜΕΤΑΠΤΥΧΙΑΚΟ ΠΡΟΓΡΑΜΜΑ: ΑΣΦΑΛΕΙΑ ΠΛΗΡΟΦΟΡΙΑΚΩΝ & ΕΠΙΚΟΙΝΩΝΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ
ΒΑΣΙΚΕΣ ΑΡΧΕΣ ΓΙΑ ΤΗ ΜΑΘΗΣΗ ΚΑΙ ΤΗ ΔΙΔΑΣΚΑΛΙΑ ΣΤΗΝ ΠΡΟΣΧΟΛΙΚΗ ΕΚΠΑΙΔΕΥΣΗ
 ΒΑΣΙΚΕΣ ΑΡΧΕΣ ΓΙΑ ΤΗ ΜΑΘΗΣΗ ΚΑΙ ΤΗ ΔΙΔΑΣΚΑΛΙΑ ΣΤΗΝ ΠΡΟΣΧΟΛΙΚΗ ΕΚΠΑΙΔΕΥΣΗ ΑΝΑΓΝΩΡΙΖΟΝΤΑΣ ΤΗ ΔΙΑΦΟΡΕΤΙΚΟΤΗΤΑ & ΑΝΑΠΤΥΣΣΟΝΤΑΣ ΔΙΑΦΟΡΟΠΟΙΗΜΕΝΕΣ ΠΡΟΣΕΓΓΙΣΕΙΣ Διαστάσεις της διαφορετικότητας Τα παιδιά προέρχονται
ΒΑΣΙΚΕΣ ΑΡΧΕΣ ΓΙΑ ΤΗ ΜΑΘΗΣΗ ΚΑΙ ΤΗ ΔΙΔΑΣΚΑΛΙΑ ΣΤΗΝ ΠΡΟΣΧΟΛΙΚΗ ΕΚΠΑΙΔΕΥΣΗ ΑΝΑΓΝΩΡΙΖΟΝΤΑΣ ΤΗ ΔΙΑΦΟΡΕΤΙΚΟΤΗΤΑ & ΑΝΑΠΤΥΣΣΟΝΤΑΣ ΔΙΑΦΟΡΟΠΟΙΗΜΕΝΕΣ ΠΡΟΣΕΓΓΙΣΕΙΣ Διαστάσεις της διαφορετικότητας Τα παιδιά προέρχονται
Εκπαιδευτικά προγραμματιστικά περιβάλλοντα ως εργαλεία ανάπτυξης υπολογιστικής σκέψης
 Ημερίδα της Ευαγγελικής Σχολής Σμύρνης για τις Νέες Εξελίξεις στην Πληροφορική 21 Ιανουαρίου 2018, Ίδρυμα Ευγενίδου Εκπαιδευτικά προγραμματιστικά περιβάλλοντα ως εργαλεία ανάπτυξης υπολογιστικής σκέψης
Ημερίδα της Ευαγγελικής Σχολής Σμύρνης για τις Νέες Εξελίξεις στην Πληροφορική 21 Ιανουαρίου 2018, Ίδρυμα Ευγενίδου Εκπαιδευτικά προγραμματιστικά περιβάλλοντα ως εργαλεία ανάπτυξης υπολογιστικής σκέψης
ΕΚΠΑΙΔΕΥΤΙΚΗ ΔΡΑΣΤΗΡΙΟΤΗΤΑ Ανακαλύψτε νέες επιχειρήσεις
 ΕΚΠΑΙΔΕΥΤΙΚΗ ΔΡΑΣΤΗΡΙΟΤΗΤΑ Ανακαλύψτε νέες επιχειρήσεις Ent-teach Κεφάλαιο 2 Αναγνώριση ευκαιριών Περιγραφή της εκπαιδευτικής δραστηριότητας Αυτή η εκπαιδευτική δραστηριότητα στοχεύει να βοηθήσει τους
ΕΚΠΑΙΔΕΥΤΙΚΗ ΔΡΑΣΤΗΡΙΟΤΗΤΑ Ανακαλύψτε νέες επιχειρήσεις Ent-teach Κεφάλαιο 2 Αναγνώριση ευκαιριών Περιγραφή της εκπαιδευτικής δραστηριότητας Αυτή η εκπαιδευτική δραστηριότητα στοχεύει να βοηθήσει τους
Ελένη Μοσχοβάκη Σχολική Σύμβουλος 47ης Περιφέρειας Π.Α.
 Ελένη Μοσχοβάκη Σχολική Σύμβουλος 47ης Περιφέρειας Π.Α. Τι θα Δούμε. Γιατί αλλάζει το Αναλυτικό Πρόγραμμα Σπουδών. Παιδαγωγικό πλαίσιο του νέου Α.Π.Σ. Αρχές του νέου Α.Π.Σ. Μαθησιακές περιοχές του νέου
Ελένη Μοσχοβάκη Σχολική Σύμβουλος 47ης Περιφέρειας Π.Α. Τι θα Δούμε. Γιατί αλλάζει το Αναλυτικό Πρόγραμμα Σπουδών. Παιδαγωγικό πλαίσιο του νέου Α.Π.Σ. Αρχές του νέου Α.Π.Σ. Μαθησιακές περιοχές του νέου
Δημήτρης Ρώσσης, Φάνη Στυλιανίδου Ελληνογερμανική Αγωγή. http://www.creative-little-scientists.eu
 Τι έχουμε μάθει για την προώθηση της Δημιουργικότητας μέσα από τις Φυσικές Επιστήμες και τα Μαθηματικά στην Ελληνική Προσχολική και Πρώτη Σχολική Ηλικία; Ευρήματα για την εκπαίδευση στην Ελλάδα από το
Τι έχουμε μάθει για την προώθηση της Δημιουργικότητας μέσα από τις Φυσικές Επιστήμες και τα Μαθηματικά στην Ελληνική Προσχολική και Πρώτη Σχολική Ηλικία; Ευρήματα για την εκπαίδευση στην Ελλάδα από το
Τρίτη 24 και Τετάρτη 25 Οκτωβρίου 2017
 Τρίτη 24 και Τετάρτη 25 Οκτωβρίου 2017 Παιδαγωγικές προσεγγίσεις και διδακτικές πρακτικές - η σχέση τους με τις θεωρίες μάθησης Παρατηρώντας τη μαθησιακή διαδικασία Τι είδους δραστηριότητες παρατηρήσατε
Τρίτη 24 και Τετάρτη 25 Οκτωβρίου 2017 Παιδαγωγικές προσεγγίσεις και διδακτικές πρακτικές - η σχέση τους με τις θεωρίες μάθησης Παρατηρώντας τη μαθησιακή διαδικασία Τι είδους δραστηριότητες παρατηρήσατε
Προσχολική Παιδαγωγική Ενότητα 8: Σχεδιασμός Ημερησίων Προγραμμάτων
 Προσχολική Παιδαγωγική Ενότητα 8: Σχεδιασμός Ημερησίων Προγραμμάτων Διδάσκουσα: Μαρία Καμπεζά Τμήμα Επιστημών της Εκπαίδευσης και της Αγωγής στην Προσχολική Ηλικία Σκοποί ενότητας Να συζητήσουν και να
Προσχολική Παιδαγωγική Ενότητα 8: Σχεδιασμός Ημερησίων Προγραμμάτων Διδάσκουσα: Μαρία Καμπεζά Τμήμα Επιστημών της Εκπαίδευσης και της Αγωγής στην Προσχολική Ηλικία Σκοποί ενότητας Να συζητήσουν και να
ΑΝΑΦΟΡΑ ΚΑΙΝΟΤΟΜΙΑΣ (STATE OF THE ART) ΤΟΥ ENTELIS ΕΚΔΟΣΗ EΥΚΟΛΗΣ ΑΝΑΓΝΩΣΗΣ
 ΤΟΥ ENTELIS ΕΚΔΟΣΗ EΥΚΟΛΗΣ ΑΝΑΓΝΩΣΗΣ") ΑΝΑΦΟΡΑ ΚΑΙΝΟΤΟΜΙΑΣ (STATE OF THE ART) ΤΟΥ ENTELIS ΕΚΔΟΣΗ EΥΚΟΛΗΣ ΑΝΑΓΝΩΣΗΣ Εισαγωγή Η έρευνα στην Ευρώπη δείχνει ότι οι άνθρωποι με αναπηρίες όλων των ηλικιών έχουν προσωπική εμπειρία με την τεχνολογία.
ΑΝΑΦΟΡΑ ΚΑΙΝΟΤΟΜΙΑΣ (STATE OF THE ART) ΤΟΥ ENTELIS ΕΚΔΟΣΗ EΥΚΟΛΗΣ ΑΝΑΓΝΩΣΗΣ Εισαγωγή Η έρευνα στην Ευρώπη δείχνει ότι οι άνθρωποι με αναπηρίες όλων των ηλικιών έχουν προσωπική εμπειρία με την τεχνολογία.
Αναλυτικό Πρόγραμμα Μαθηματικών
 Αναλυτικό Πρόγραμμα Μαθηματικών Σχεδιασμός... αντιμετωπίζει ενιαία το πλαίσιο σπουδών (Προδημοτική, Δημοτικό, Γυμνάσιο και Λύκειο), είναι συνέχεια υπό διαμόρφωση και αλλαγή, για να αντιμετωπίζει την εξέλιξη,
Αναλυτικό Πρόγραμμα Μαθηματικών Σχεδιασμός... αντιμετωπίζει ενιαία το πλαίσιο σπουδών (Προδημοτική, Δημοτικό, Γυμνάσιο και Λύκειο), είναι συνέχεια υπό διαμόρφωση και αλλαγή, για να αντιμετωπίζει την εξέλιξη,
Παίζουμε μπάσκετ; Εκπαιδευτική δραστηριότητα ρομποτικής στο προγραμματιστικό περιβάλλον Lego Mindstorms
 Παίζουμε μπάσκετ; Εκπαιδευτική δραστηριότητα ρομποτικής στο προγραμματιστικό περιβάλλον Lego Mindstorms Γεώργιος Βουνάτσος Εκπαιδευτικός ΠΕ12 gvounatsos@freemail.gr Ανδριανή Μέγα Εκπαιδευτικός ΠΕ19 adrianim@hotmail.com
Παίζουμε μπάσκετ; Εκπαιδευτική δραστηριότητα ρομποτικής στο προγραμματιστικό περιβάλλον Lego Mindstorms Γεώργιος Βουνάτσος Εκπαιδευτικός ΠΕ12 gvounatsos@freemail.gr Ανδριανή Μέγα Εκπαιδευτικός ΠΕ19 adrianim@hotmail.com
Τμήμα: Προσχολικής & Πρωτοβάθμιας Φωκίδας. Φορέας ιεξαγωγής: ΠΕΚ Λαμίας Συντονιστής: ημητρακάκης Κωνσταντίνος Τηλέφωνο:
 Τμήμα: Προσχολικής & Πρωτοβάθμιας Φωκίδας Φορέας ιεξαγωγής: ΠΕΚ Λαμίας Συντονιστής: ημητρακάκης Κωνσταντίνος Τηλέφωνο: 2231081842 Χώρος υλοποίησης: ΕΚΦΕ Φωκίδας Υπεύθυνος: Μπεμπή Ευαγγελία Τηλέφωνο επικοινωνίας:
Τμήμα: Προσχολικής & Πρωτοβάθμιας Φωκίδας Φορέας ιεξαγωγής: ΠΕΚ Λαμίας Συντονιστής: ημητρακάκης Κωνσταντίνος Τηλέφωνο: 2231081842 Χώρος υλοποίησης: ΕΚΦΕ Φωκίδας Υπεύθυνος: Μπεμπή Ευαγγελία Τηλέφωνο επικοινωνίας:
Θεωρητικές αρχές σχεδιασµού µιας ενότητας στα Μαθηµατικά. Ε. Κολέζα
 Θεωρητικές αρχές σχεδιασµού µιας ενότητας στα Μαθηµατικά Ε. Κολέζα Α. Θεωρητικές αρχές σχεδιασµού µιας µαθηµατικής ενότητας: Βήµατα για τη συγγραφή του σχεδίου Β. Θεωρητικό υπόβαθρο της διδακτικής πρότασης
Θεωρητικές αρχές σχεδιασµού µιας ενότητας στα Μαθηµατικά Ε. Κολέζα Α. Θεωρητικές αρχές σχεδιασµού µιας µαθηµατικής ενότητας: Βήµατα για τη συγγραφή του σχεδίου Β. Θεωρητικό υπόβαθρο της διδακτικής πρότασης
5.34 Αξιοποίηση κοινοτήτων μάθησης στο πλαίσιο προγράμματος προπτυχιακής εκπαίδευσης εν δυνάμει εκπαιδευτικών
 5.34 Αξιοποίηση κοινοτήτων μάθησης στο πλαίσιο προγράμματος προπτυχιακής εκπαίδευσης εν δυνάμει εκπαιδευτικών συντελεστές Σπυρίδων Δουκάκης sdoukakis@rhodes.aegean.gr ΠΤΔΕ Πανεπιστημίου Αιγαίου Μαρία Μοσκοφόγλου-
5.34 Αξιοποίηση κοινοτήτων μάθησης στο πλαίσιο προγράμματος προπτυχιακής εκπαίδευσης εν δυνάμει εκπαιδευτικών συντελεστές Σπυρίδων Δουκάκης sdoukakis@rhodes.aegean.gr ΠΤΔΕ Πανεπιστημίου Αιγαίου Μαρία Μοσκοφόγλου-
Α ΕΙΔΙΚΕΥΣΗ ΣΤΗ ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΓΛΩΣΣΑΣ (ΕΛΛΗΝΙΚΗ ΓΛΩΣΣΑ)
") Ειδίκευση Α ΕΙΔΙΚΕΥΣΗ ΣΤΗ ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΓΛΩΣΣΑΣ (ΕΛΛΗΝΙΚΗ ΓΛΩΣΣΑ) Η ειδίκευση προσφέρει στις φοιτήτριες και στους φοιτητές σε βάθος θεωρητική κατάρτιση σε ζητήματα διδακτικής της ελληνικής γλώσσας, εξετάζοντας
Ειδίκευση Α ΕΙΔΙΚΕΥΣΗ ΣΤΗ ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΓΛΩΣΣΑΣ (ΕΛΛΗΝΙΚΗ ΓΛΩΣΣΑ) Η ειδίκευση προσφέρει στις φοιτήτριες και στους φοιτητές σε βάθος θεωρητική κατάρτιση σε ζητήματα διδακτικής της ελληνικής γλώσσας, εξετάζοντας
ΤΕΧΝΟΛΟΓΙΕΣ ΚΟΙΝΩΝΙΚΗΣ ΔΙΚΤΥΩΣΗΣ ΣΤΗΝ ΕΚΠΑΙΔΕΥΣΗ
 ΤΕΧΝΟΛΟΓΙΕΣ ΚΟΙΝΩΝΙΚΗΣ ΔΙΚΤΥΩΣΗΣ ΣΤΗΝ ΕΚΠΑΙΔΕΥΣΗ Κιουτσιούκη Δήμητρα, 485 Τελική δραστηριότητα Φάση 1 :Ατομική μελέτη 1. Πώς θα περιγράφατε το ρόλο της τεχνολογίας στην εκπαιδευτική καινοτομία; Οι Web
ΤΕΧΝΟΛΟΓΙΕΣ ΚΟΙΝΩΝΙΚΗΣ ΔΙΚΤΥΩΣΗΣ ΣΤΗΝ ΕΚΠΑΙΔΕΥΣΗ Κιουτσιούκη Δήμητρα, 485 Τελική δραστηριότητα Φάση 1 :Ατομική μελέτη 1. Πώς θα περιγράφατε το ρόλο της τεχνολογίας στην εκπαιδευτική καινοτομία; Οι Web
«Ψηφιακά δομήματα στα μαθηματικά ως εργαλεία μάθησης για το δάσκαλο και το μαθητή»
 Ψηφιακό σχολείο: Το γνωστικό πεδίο των Μαθηματικών «Ψηφιακά δομήματα στα μαθηματικά ως εργαλεία μάθησης για το δάσκαλο και το μαθητή» ΕΛΕΝΗ ΚΑΛΑΪΤΖΙΔΟΥ Πληροφορικός ΠΕ19 (1 ο Πρότυπο Πειραματικό Γυμνάσιο
Ψηφιακό σχολείο: Το γνωστικό πεδίο των Μαθηματικών «Ψηφιακά δομήματα στα μαθηματικά ως εργαλεία μάθησης για το δάσκαλο και το μαθητή» ΕΛΕΝΗ ΚΑΛΑΪΤΖΙΔΟΥ Πληροφορικός ΠΕ19 (1 ο Πρότυπο Πειραματικό Γυμνάσιο
ΠΑΝΕΠΙΣΤΗΜΙΑΚΑ ΦΡΟΝΤΙΣΤΗΡΙΑ ΚΟΛΛΙΝΤΖΑ
 ΕΠΙΜΕΛΕΙΑ: Νάκου Αλεξάνδρα Εισαγωγή στις Επιστήμες της Αγωγής Ο όρος ΕΠΙΣΤΗΜΕΣ ΤΗΣ ΑΓΩΓΗΣ δημιουργεί μία αίσθηση ασάφειας αφού επιδέχεται πολλές εξηγήσεις. Υπάρχει συνεχής διάλογος και προβληματισμός ακόμα
ΕΠΙΜΕΛΕΙΑ: Νάκου Αλεξάνδρα Εισαγωγή στις Επιστήμες της Αγωγής Ο όρος ΕΠΙΣΤΗΜΕΣ ΤΗΣ ΑΓΩΓΗΣ δημιουργεί μία αίσθηση ασάφειας αφού επιδέχεται πολλές εξηγήσεις. Υπάρχει συνεχής διάλογος και προβληματισμός ακόμα
Ο υπολογιστής ως γνωστικό εργαλείο. Καθηγητής Τ. Α. Μικρόπουλος
 Ο υπολογιστής ως γνωστικό εργαλείο Καθηγητής Τ. Α. Μικρόπουλος Τεχνολογίες Πληροφορίας & Επικοινωνιών ΟιΤΠΕχαρακτηρίζουνόλαταμέσαπουείναιφορείς άυλων μηνυμάτων (χαρακτήρες, εικόνες, ήχοι). Η αξιοποίησή
Ο υπολογιστής ως γνωστικό εργαλείο Καθηγητής Τ. Α. Μικρόπουλος Τεχνολογίες Πληροφορίας & Επικοινωνιών ΟιΤΠΕχαρακτηρίζουνόλαταμέσαπουείναιφορείς άυλων μηνυμάτων (χαρακτήρες, εικόνες, ήχοι). Η αξιοποίησή
«Η μέθοδος Project ορίζεται ως μια σκόπιμη πράξη ολόψυχου ενδιαφέροντος που συντελείται σε ένα κοινωνικό περιβάλλον» (Kilpatrick, 1918)
") «Η μέθοδος Project ορίζεται ως μια σκόπιμη πράξη ολόψυχου ενδιαφέροντος που συντελείται σε ένα κοινωνικό περιβάλλον» (Kilpatrick, 1918) Κάθε οργανωμένη μαθησιακή δραστηριότητα που λαμβάνει χώρα στην εκπαιδευτική
«Η μέθοδος Project ορίζεται ως μια σκόπιμη πράξη ολόψυχου ενδιαφέροντος που συντελείται σε ένα κοινωνικό περιβάλλον» (Kilpatrick, 1918) Κάθε οργανωμένη μαθησιακή δραστηριότητα που λαμβάνει χώρα στην εκπαιδευτική
Τα Νέα Προγράμματα Σπουδών για τις ΤΠΕ στην υποχρεωτική εκπαίδευση
 «ΝΕΟ ΣΧΟΛΕΙΟ (Σχολείο 21ου αιώνα) Πιλοτική Εφαρμογή, στους Άξονες Προτεραιότητας 1,2,3 -Οριζόντια Πράξη» Τα Νέα Προγράμματα Σπουδών για τις ΤΠΕ στην υποχρεωτική εκπαίδευση Αθανάσιος Τζιμογιάννης Αναπληρωτής
«ΝΕΟ ΣΧΟΛΕΙΟ (Σχολείο 21ου αιώνα) Πιλοτική Εφαρμογή, στους Άξονες Προτεραιότητας 1,2,3 -Οριζόντια Πράξη» Τα Νέα Προγράμματα Σπουδών για τις ΤΠΕ στην υποχρεωτική εκπαίδευση Αθανάσιος Τζιμογιάννης Αναπληρωτής
Ξεκινώντας τον Προγραµµατισµό στις τάξεις του ηµοτικού Παίζοντας µε το Scratch
 Ξεκινώντας τον Προγραµµατισµό στις τάξεις του ηµοτικού Παίζοντας µε το Scratch Κωνσταντίνος Χαρατσής ρ. Ηλεκτρολόγος Μηχανικός ΠΕ 19 Εκπαιδευτικός Πληροφορικής Ενότητα Προγραµµατισµός στο ηµοτικό (Ε και
Ξεκινώντας τον Προγραµµατισµό στις τάξεις του ηµοτικού Παίζοντας µε το Scratch Κωνσταντίνος Χαρατσής ρ. Ηλεκτρολόγος Μηχανικός ΠΕ 19 Εκπαιδευτικός Πληροφορικής Ενότητα Προγραµµατισµός στο ηµοτικό (Ε και
Σωτηρίου Σοφία. Εκπαιδευτικός ΠΕ0401, Πειραματικό Γενικό Λύκειο Μυτιλήνης
 «Αξιοποίηση των Τ.Π.Ε. στη Διδακτική Πράξη» «Ανάκλαση-Διάθλαση, Ηλεκτρομαγνητική επαγωγή, Κίνηση-Ταχύτητα: τρία υποδειγματικά ψηφιακά διδακτικά σενάρια για τη Φυσική Γενικού Λυκείου στην πλατφόρμα "Αίσωπος"»
«Αξιοποίηση των Τ.Π.Ε. στη Διδακτική Πράξη» «Ανάκλαση-Διάθλαση, Ηλεκτρομαγνητική επαγωγή, Κίνηση-Ταχύτητα: τρία υποδειγματικά ψηφιακά διδακτικά σενάρια για τη Φυσική Γενικού Λυκείου στην πλατφόρμα "Αίσωπος"»
Αξιολόγηση του Εκπαιδευτικού Προγράμματος. Εκπαίδευση μέσα από την Τέχνη. [Αξιολόγηση των 5 πιλοτικών τμημάτων]
![Αξιολόγηση του Εκπαιδευτικού Προγράμματος. Εκπαίδευση μέσα από την Τέχνη. [Αξιολόγηση των 5 πιλοτικών τμημάτων]](/thumbs/25/6784763.jpg "Αξιολόγηση του Εκπαιδευτικού Προγράμματος. Εκπαίδευση μέσα από την Τέχνη. [Αξιολόγηση των 5 πιλοτικών τμημάτων]") Αξιολόγηση του Εκπαιδευτικού Προγράμματος Εκπαίδευση μέσα από την Τέχνη [Αξιολόγηση των 5 πιλοτικών τμημάτων] 1. Είστε ικανοποιημένος/η από το Πρόγραμμα; Μ. Ο. απαντήσεων: 4,7 Ικανοποιήθηκαν σε απόλυτο
Αξιολόγηση του Εκπαιδευτικού Προγράμματος Εκπαίδευση μέσα από την Τέχνη [Αξιολόγηση των 5 πιλοτικών τμημάτων] 1. Είστε ικανοποιημένος/η από το Πρόγραμμα; Μ. Ο. απαντήσεων: 4,7 Ικανοποιήθηκαν σε απόλυτο
Το μάθημα Διδακτική Μαθημάτων Ειδικότητας φέρνει τους φοιτητές σε επαφή με τα επιστημονικά, επιστημολογικά και διδακτικά χαρακτηριστικά της κάθε
 Το μάθημα Διδακτική Μαθημάτων Ειδικότητας φέρνει τους φοιτητές σε επαφή με τα επιστημονικά, επιστημολογικά και διδακτικά χαρακτηριστικά της κάθε επιστήμης που πρόκειται να διδάξουν Πώς ένα επιστημονικό
Το μάθημα Διδακτική Μαθημάτων Ειδικότητας φέρνει τους φοιτητές σε επαφή με τα επιστημονικά, επιστημολογικά και διδακτικά χαρακτηριστικά της κάθε επιστήμης που πρόκειται να διδάξουν Πώς ένα επιστημονικό
ΔΙΔΑΣΚΑΛΙΑ ΤΗΣ ΕΝΝΟΙΑΣ ΤΟΥ ΟΡΙΟΥ ΣΥΝΑΡΤΗΣΗΣ
 ΕΠΙΜΟΡΦΩΣΗ ΤΩΝ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΓΙΑ ΤΗΝ ΑΞΙΟΠΟΙΗΣΗ ΚΑΙ ΕΦΑΡΜΟΓΗ ΤΩΝ ΤΠΕ ΣΤΗ ΔΙΔΑΚΤΙΚΗ ΠΡΑΞΗ ΔΙΔΑΣΚΑΛΙΑ ΤΗΣ ΕΝΝΟΙΑΣ ΤΟΥ ΟΡΙΟΥ ΣΥΝΑΡΤΗΣΗΣ ΟΡΙΟ ΣΥΝΑΡΤΗΣΗΣ ΕΞ ΑΡΙΣΤΕΡΩΝ ΚΑΙ ΕΚ ΔΕΞΙΩΝ ΣΥΓΓΡΑΦΕΑΣ: ΚΟΥΤΙΔΗΣ ΙΩΑΝΝΗΣ
ΕΠΙΜΟΡΦΩΣΗ ΤΩΝ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΓΙΑ ΤΗΝ ΑΞΙΟΠΟΙΗΣΗ ΚΑΙ ΕΦΑΡΜΟΓΗ ΤΩΝ ΤΠΕ ΣΤΗ ΔΙΔΑΚΤΙΚΗ ΠΡΑΞΗ ΔΙΔΑΣΚΑΛΙΑ ΤΗΣ ΕΝΝΟΙΑΣ ΤΟΥ ΟΡΙΟΥ ΣΥΝΑΡΤΗΣΗΣ ΟΡΙΟ ΣΥΝΑΡΤΗΣΗΣ ΕΞ ΑΡΙΣΤΕΡΩΝ ΚΑΙ ΕΚ ΔΕΞΙΩΝ ΣΥΓΓΡΑΦΕΑΣ: ΚΟΥΤΙΔΗΣ ΙΩΑΝΝΗΣ
SAME WORLD Μοιραζόμαστε σχολικές πρακτικές για την αειφορία
 SAME WORLD Μοιραζόμαστε σχολικές πρακτικές για την αειφορία Κλιματική Αλλαγή Περιβαλλοντική Δικαιοσύνη Περιβαλλοντική Μετανάστευση Φεβρουάριος - Ιούλιος 2017 1ος Ευρωπαϊκός Διαγωνισμός Καλών Εκπαιδευτικών
SAME WORLD Μοιραζόμαστε σχολικές πρακτικές για την αειφορία Κλιματική Αλλαγή Περιβαλλοντική Δικαιοσύνη Περιβαλλοντική Μετανάστευση Φεβρουάριος - Ιούλιος 2017 1ος Ευρωπαϊκός Διαγωνισμός Καλών Εκπαιδευτικών
ΠΑΙΔΑΓΩΓΙΚΕΣ ΕΦΑΡΜΟΓΕΣ Η/Υ
 ΕΘΝΙΚΟ ΚΑΙ ΚΑΠΟΔΙΣΤΡΙΑΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ ΑΝΩΤΑΤΗ ΣΧΟΛΗ ΠΑΙΔΑΓΩΓΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΠΑΙΔΑΓΩΓΙΚΕΣ ΕΦΑΡΜΟΓΕΣ Η/Υ ΘΕΜΑΤΑ ΕΝΟΤΗΤΑΣ ΣΙΑΣΙΑΚΟΣ ΚΩΝΣΤΑΝΤΙΝΟΣ ΕΠΙΣΤΗΜΟΝΙΚΟΣ ΥΠΕΥΘΥΝΟΣ ΕΝΟΤΗΤΑΣ «ΠΑΙΔΑΓΩΓΙΚΗ
ΕΘΝΙΚΟ ΚΑΙ ΚΑΠΟΔΙΣΤΡΙΑΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ ΑΝΩΤΑΤΗ ΣΧΟΛΗ ΠΑΙΔΑΓΩΓΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΠΑΙΔΑΓΩΓΙΚΕΣ ΕΦΑΡΜΟΓΕΣ Η/Υ ΘΕΜΑΤΑ ΕΝΟΤΗΤΑΣ ΣΙΑΣΙΑΚΟΣ ΚΩΝΣΤΑΝΤΙΝΟΣ ΕΠΙΣΤΗΜΟΝΙΚΟΣ ΥΠΕΥΘΥΝΟΣ ΕΝΟΤΗΤΑΣ «ΠΑΙΔΑΓΩΓΙΚΗ
ΚΕΝΤΡΟ ΣΥΝΕΧΙΖΟΜΕΝΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΚΑΙ ΕΠΙΜΟΡΦΩΣΗΣ
 ΚΕΝΤΡΟ ΣΥΝΕΧΙΖΟΜΕΝΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΚΑΙ ΕΠΙΜΟΡΦΩΣΗΣ ΕΚΠΑΙΔΕΥΤΙΚΟ ΠΡΟΓΡΑΜΜΑ «ΑΞΙΟΛΟΓΗΣΗ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΔΡΑΣΤΗΡΙΟΤΗΤΩΝ ΚΑΙΝΩΤΟΜΙΑΣ ΚΑΙ ΕΠΙΧΕΙΡΗΜΑΤΙΚΟΤΗΤΑΣ» (INOV) Ζ ΚΥΚΛΟΣ To Κέντρο Συνεχιζόμενης Εκπαίδευσης
ΚΕΝΤΡΟ ΣΥΝΕΧΙΖΟΜΕΝΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΚΑΙ ΕΠΙΜΟΡΦΩΣΗΣ ΕΚΠΑΙΔΕΥΤΙΚΟ ΠΡΟΓΡΑΜΜΑ «ΑΞΙΟΛΟΓΗΣΗ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΔΡΑΣΤΗΡΙΟΤΗΤΩΝ ΚΑΙΝΩΤΟΜΙΑΣ ΚΑΙ ΕΠΙΧΕΙΡΗΜΑΤΙΚΟΤΗΤΑΣ» (INOV) Ζ ΚΥΚΛΟΣ To Κέντρο Συνεχιζόμενης Εκπαίδευσης
3 βήματα για την ένταξη των ΤΠΕ: 1. Εμπλουτισμός 2. Δραστηριότητα 3. Σενάριο Πέτρος Κλιάπης-Όλγα Κασσώτη Επιμόρφωση εκπαιδευτικών
 3 βήματα για την ένταξη των ΤΠΕ: 1. Εμπλουτισμός 2. Δραστηριότητα 3. Σενάριο Πέτρος Κλιάπης-Όλγα Κασσώτη Επιμόρφωση εκπαιδευτικών Παρουσίαση βασισμένη στο κείμενο: «Προδιαγραφές ψηφιακής διαμόρφωσης των
3 βήματα για την ένταξη των ΤΠΕ: 1. Εμπλουτισμός 2. Δραστηριότητα 3. Σενάριο Πέτρος Κλιάπης-Όλγα Κασσώτη Επιμόρφωση εκπαιδευτικών Παρουσίαση βασισμένη στο κείμενο: «Προδιαγραφές ψηφιακής διαμόρφωσης των
Ενότητα 1: Παρουσίαση μαθήματος. Διδάσκων: Βασίλης Κόμης, Καθηγητής
 Διδακτική της Πληροφορικής: Ερευνητικές προσεγγίσεις στη μάθηση και τη διδασκαλία Μάθημα επιλογής B εξάμηνο, Πρόγραμμα Μεταπτυχιακών Σπουδών Τμήμα Επιστημών της Εκπαίδευσης και της Αγωγής στην Προσχολική
Διδακτική της Πληροφορικής: Ερευνητικές προσεγγίσεις στη μάθηση και τη διδασκαλία Μάθημα επιλογής B εξάμηνο, Πρόγραμμα Μεταπτυχιακών Σπουδών Τμήμα Επιστημών της Εκπαίδευσης και της Αγωγής στην Προσχολική
Η εκπαίδευση καθηγητών για την αξιοποίηση των ΤΠΕ στη διδακτική πράξη
 Η εκπαίδευση καθηγητών για την αξιοποίηση των ΤΠΕ στη διδακτική πράξη ΕΠΙΜΟΡΦΩΣΗ Β ΕΠΙΠΕΔΟΥ http://b-epipedo2.cti.gr/ ΕΠΙΜΟΡΦΩΣΗ Β ΕΠΙΠΕΔΟΥ Το έργο Το Έργο Το έργο «επιμόρφωση των εκπαιδευτικών για την
Η εκπαίδευση καθηγητών για την αξιοποίηση των ΤΠΕ στη διδακτική πράξη ΕΠΙΜΟΡΦΩΣΗ Β ΕΠΙΠΕΔΟΥ http://b-epipedo2.cti.gr/ ΕΠΙΜΟΡΦΩΣΗ Β ΕΠΙΠΕΔΟΥ Το έργο Το Έργο Το έργο «επιμόρφωση των εκπαιδευτικών για την
Εκπαίδευση Ενηλίκων: Εμπειρίες και Δράσεις ΑΘΗΝΑ, Δευτέρα 12 Οκτωβρίου 2015
 Εκπαίδευση Ενηλίκων: Εμπειρίες και Δράσεις ΑΘΗΝΑ, Δευτέρα 12 Οκτωβρίου 2015 Μάθηση και γνώση: μια συνεχής και καθοριστική αλληλοεπίδραση Αντώνης Λιοναράκης Στην παρουσίαση που θα ακολουθήσει θα μιλήσουμε
Εκπαίδευση Ενηλίκων: Εμπειρίες και Δράσεις ΑΘΗΝΑ, Δευτέρα 12 Οκτωβρίου 2015 Μάθηση και γνώση: μια συνεχής και καθοριστική αλληλοεπίδραση Αντώνης Λιοναράκης Στην παρουσίαση που θα ακολουθήσει θα μιλήσουμε
Διδακτική της Πληροφορικής
 3 η Ατομική Εργασία Καταληκτική Ημερομηνία Παράδοσης της Εργασίας: 5/3/2012 Σκοπός της εργασίας είναι ο σχεδιασμός ενός σεναρίου διδασκαλίας για έννοια/ες του γνωστικού αντικειμένου της Πληροφορικής με
3 η Ατομική Εργασία Καταληκτική Ημερομηνία Παράδοσης της Εργασίας: 5/3/2012 Σκοπός της εργασίας είναι ο σχεδιασμός ενός σεναρίου διδασκαλίας για έννοια/ες του γνωστικού αντικειμένου της Πληροφορικής με
ΑΠΑΝΤΗΣΗ ΕΛΕΥΘΕΡΟΥ ΘΕΜΑΤΟΣ 1. Τίτλος ΟΙ ΣΥΓΚΟΙΝΩΝΙΕΣ 2. Εµπλεκόµενες γνωστικές περιοχές Γεωγραφία, Γλώσσα 3. Γνώσεις και πρότερες ιδέες ή αντιλήψεις τ
 ΕΚΦΩΝΗΣΗ ΕΛΕΥΘΕΡΟΥ ΘΕΜΑΤΟΣ (µεγάλες τάξεις ηµοτικού) Σχεδιασµός σεναρίου µε θέµα «Οι συγκοινωνίες» µε τη χρήση λογισµικών γενικής χρήσης, οπτικοποίησης, διαδικτύου και λογισµικών εννοιολογικής χαρτογράφησης.
ΕΚΦΩΝΗΣΗ ΕΛΕΥΘΕΡΟΥ ΘΕΜΑΤΟΣ (µεγάλες τάξεις ηµοτικού) Σχεδιασµός σεναρίου µε θέµα «Οι συγκοινωνίες» µε τη χρήση λογισµικών γενικής χρήσης, οπτικοποίησης, διαδικτύου και λογισµικών εννοιολογικής χαρτογράφησης.
Εκπαιδευτική Τεχνολογία - Πολυμέσα. Ελένη Περιστέρη, Msc, PhD
 Εκπαιδευτική Τεχνολογία - Πολυμέσα Ελένη Περιστέρη, Msc, PhD Τι είναι η «Εκπαιδευτική Τεχνολογία» (1) Εκπαιδευτική Τεχνολογία είναι «η εφαρμογή τεχνολογικών διαδικασιών και εργαλείων που μπορούν να χρησιμοποιηθούν
Εκπαιδευτική Τεχνολογία - Πολυμέσα Ελένη Περιστέρη, Msc, PhD Τι είναι η «Εκπαιδευτική Τεχνολογία» (1) Εκπαιδευτική Τεχνολογία είναι «η εφαρμογή τεχνολογικών διαδικασιών και εργαλείων που μπορούν να χρησιμοποιηθούν
 Πρόγραμμα Μεταπτυχιακών Σπουδών MA in Education (Education Sciences) ΑΣΠΑΙΤΕ-Roehampton ΠΜΣ MA in Education (Education Sciences) Το Μεταπτυχιακό Πρόγραμμα Σπουδών στην Εκπαίδευση (Επιστήμες της Αγωγής),
Πρόγραμμα Μεταπτυχιακών Σπουδών MA in Education (Education Sciences) ΑΣΠΑΙΤΕ-Roehampton ΠΜΣ MA in Education (Education Sciences) Το Μεταπτυχιακό Πρόγραμμα Σπουδών στην Εκπαίδευση (Επιστήμες της Αγωγής),
Εκπαιδευτική Αξιοποίηση Λογισμικού Γενικής Χρήσης
 Εκπαιδευτική Αξιοποίηση Λογισμικού Γενικής Χρήσης Δρ. Χαράλαμπος Μουζάκης Διδάσκων Π.Δ.407/80 Παιδαγωγικό Τμήμα Δημοτικής Εκπαίδευσης Εθνικό και Καποδιστριακό Πανεπιστήμιο Αθηνών Στόχοι ενότητας Το λογισμικό
Εκπαιδευτική Αξιοποίηση Λογισμικού Γενικής Χρήσης Δρ. Χαράλαμπος Μουζάκης Διδάσκων Π.Δ.407/80 Παιδαγωγικό Τμήμα Δημοτικής Εκπαίδευσης Εθνικό και Καποδιστριακό Πανεπιστήμιο Αθηνών Στόχοι ενότητας Το λογισμικό
Στρατηγικές συμπράξεις στους τομείς της εκπαίδευσης, της κατάρτισης και της νεολαίας
 KA2 Συνεργασία για Καινοτομία και Ανταλλαγή Καλών Πρακτικών Αναμενόμενα αποτελέσματα Τα σχέδια που υποστηρίζονται στο πλαίσιο αυτής της Δράσης αναμένονται να επιφέρουν τα παρακάτω αποτελέσματα: Καινοτόμες
KA2 Συνεργασία για Καινοτομία και Ανταλλαγή Καλών Πρακτικών Αναμενόμενα αποτελέσματα Τα σχέδια που υποστηρίζονται στο πλαίσιο αυτής της Δράσης αναμένονται να επιφέρουν τα παρακάτω αποτελέσματα: Καινοτόμες
ΣΧΕΔΙΟ ΥΠΟΒΟΛΗΣ ΕΡΕΥΝΗΤΙΚΗΣ ΕΡΓΑΣΙΑΣ
 ΣΧΕΔΙΟ ΥΠΟΒΟΛΗΣ ΕΡΕΥΝΗΤΙΚΗΣ ΕΡΓΑΣΙΑΣ Σχολικό Έτος: 2014-2015 Σχολική Μονάδα: ΓΕΛ ΚΡΑΝΙΔΙΟΥ Τίτλος Ερευνητικής Εργασίας: Εργαλεία Web 2.0 για την τάξη ΟΝΟΜΑΤΕΠΩΝΥΜΟ ΣΤΟΙΧΕΙΑ ΥΠΕΥΘΥΝΟΥ ΕΚΠΑΙΔΕΥΤΙΚΟΥ ΥΛΟΠΟΙΗΣΗ
ΣΧΕΔΙΟ ΥΠΟΒΟΛΗΣ ΕΡΕΥΝΗΤΙΚΗΣ ΕΡΓΑΣΙΑΣ Σχολικό Έτος: 2014-2015 Σχολική Μονάδα: ΓΕΛ ΚΡΑΝΙΔΙΟΥ Τίτλος Ερευνητικής Εργασίας: Εργαλεία Web 2.0 για την τάξη ΟΝΟΜΑΤΕΠΩΝΥΜΟ ΣΤΟΙΧΕΙΑ ΥΠΕΥΘΥΝΟΥ ΕΚΠΑΙΔΕΥΤΙΚΟΥ ΥΛΟΠΟΙΗΣΗ
ΓΕΝΙΚΕΣ ΠΡΟΔΙΑΓΡΑΦΕΣ ΔΙΔΑΚΤΙΚΟΥ ΥΛΙΚΟΥ
 ΓΕΝΙΚΕΣ ΠΡΟΔΙΑΓΡΑΦΕΣ ΔΙΔΑΚΤΙΚΟΥ ΥΛΙΚΟΥ 1 «Στο πλαίσιο των ενεργειών των εκπαιδευτικών που έχουν ενταχθεί στο Μητρώο του Ι.Ε.Π. για την Τεχνική και Επαγγελματική Εκπαίδευση περιλαμβάνεται και η συμβολή
ΓΕΝΙΚΕΣ ΠΡΟΔΙΑΓΡΑΦΕΣ ΔΙΔΑΚΤΙΚΟΥ ΥΛΙΚΟΥ 1 «Στο πλαίσιο των ενεργειών των εκπαιδευτικών που έχουν ενταχθεί στο Μητρώο του Ι.Ε.Π. για την Τεχνική και Επαγγελματική Εκπαίδευση περιλαμβάνεται και η συμβολή
Εισαγωγή. ΘΕΜΑΤΙΚΗ ΕΝΟΤΗΤΑ: Κουλτούρα και Διδασκαλία
 The project Εισαγωγή ΘΕΜΑΤΙΚΗ ΕΝΟΤΗΤΑ: Κουλτούρα και Διδασκαλία ΘΕΜΑΤΙΚΗ ΕΝΟΤΗΤΑ: Κουλτούρα και διδασκαλία Στόχοι Να κατανοήσετε τις έννοιες της κοινωνικοπολιτισμικής ετερότητας και ένταξης στο χώρο της
The project Εισαγωγή ΘΕΜΑΤΙΚΗ ΕΝΟΤΗΤΑ: Κουλτούρα και Διδασκαλία ΘΕΜΑΤΙΚΗ ΕΝΟΤΗΤΑ: Κουλτούρα και διδασκαλία Στόχοι Να κατανοήσετε τις έννοιες της κοινωνικοπολιτισμικής ετερότητας και ένταξης στο χώρο της
Πρότυπα-πειραματικά σχολεία
 Πρότυπα-πειραματικά σχολεία 1. Τα πρότυπα-πειραματικά: ένα ιστορικό Τα πειραματικά σχολεία (στα οποία εντάχθηκαν με το Ν. 1566/85 και τα ιστορικά πρότυπα σχολεία) έχουν μακρά ιστορία στον τόπο μας. Τα
Πρότυπα-πειραματικά σχολεία 1. Τα πρότυπα-πειραματικά: ένα ιστορικό Τα πειραματικά σχολεία (στα οποία εντάχθηκαν με το Ν. 1566/85 και τα ιστορικά πρότυπα σχολεία) έχουν μακρά ιστορία στον τόπο μας. Τα
ΣΤΡΑΤΗΓΙΚΗ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΠΕΙΡΑΙΩΣ
 ΣΤΡΑΤΗΓΙΚΗ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΠΕΙΡΑΙΩΣ Το Όραμα του Πανεπιστημίου Πειραιώς είναι: να είναι ένα Ίδρυμα διεθνούς κύρους στο σύγχρονο Ακαδημαϊκό Χάρτη και να αναγνωρίζεται για: την αριστεία στην εκπαίδευση και
ΣΤΡΑΤΗΓΙΚΗ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΠΕΙΡΑΙΩΣ Το Όραμα του Πανεπιστημίου Πειραιώς είναι: να είναι ένα Ίδρυμα διεθνούς κύρους στο σύγχρονο Ακαδημαϊκό Χάρτη και να αναγνωρίζεται για: την αριστεία στην εκπαίδευση και
ΔΟΜΕΣ ΕΠΑΝΑΛΗΨΗΣ ΟΣΟ ΣΥΝΘΗΚΗ ΕΠΑΝΑΛΑΒΕ.ΤΕΛΟΣ_ΕΠΑΝΑΛΗΨΗΣ. Κοκκαλάρα Μαρία ΠΕ19
 ΔΟΜΕΣ ΕΠΑΝΑΛΗΨΗΣ ΟΣΟ ΣΥΝΘΗΚΗ ΕΠΑΝΑΛΑΒΕ.ΤΕΛΟΣ_ΕΠΑΝΑΛΗΨΗΣ Κοκκαλάρα Μαρία ΠΕ19 ΠΕΡΙΓΡΑΜΜΑ ΤΗΣ ΠΑΡΟΥΣΙΑΣΗΣ 1. Εισαγωγικά στοιχεία 2. Ένταξη του διδακτικού σεναρίου στο πρόγραμμα σπουδών 3. Οργάνωση της τάξης
ΔΟΜΕΣ ΕΠΑΝΑΛΗΨΗΣ ΟΣΟ ΣΥΝΘΗΚΗ ΕΠΑΝΑΛΑΒΕ.ΤΕΛΟΣ_ΕΠΑΝΑΛΗΨΗΣ Κοκκαλάρα Μαρία ΠΕ19 ΠΕΡΙΓΡΑΜΜΑ ΤΗΣ ΠΑΡΟΥΣΙΑΣΗΣ 1. Εισαγωγικά στοιχεία 2. Ένταξη του διδακτικού σεναρίου στο πρόγραμμα σπουδών 3. Οργάνωση της τάξης
Η Θεωρία του Piaget για την εξέλιξη της νοημοσύνης
 Η Θεωρία του Piaget για την εξέλιξη της νοημοσύνης Σύμφωνα με τον Piaget, η νοημοσύνη είναι ένας δυναμικός παράγοντας ο οποίος οικοδομείται προοδευτικά, έχοντας σαν βάση την κληρονομικότητα, αλλά συγχρόνως
Η Θεωρία του Piaget για την εξέλιξη της νοημοσύνης Σύμφωνα με τον Piaget, η νοημοσύνη είναι ένας δυναμικός παράγοντας ο οποίος οικοδομείται προοδευτικά, έχοντας σαν βάση την κληρονομικότητα, αλλά συγχρόνως
Τι ακριβώς είναι η Java η C++, η PASCAL και η PYTHON;
 ΦΟΡΜΑ ΥΠΟΒΟΛΗΣ ΠΡΟΤΑΣΗΣ ΓΙΑ ΤΗ ΔΗΜΙΟΥΡΓΙΑ ΟΜΙΛΟΥ ΣΤΟ ΠΕΙΡΑΜΑΤΙΚΟ ΓΕΝΙΚΟ ΛΥΚΕΙΟ ΠΑΤΡΩΝ ΟΝΟΜΑΤΕΠΩΝΥΜΟ ΕΚΠ/ΚΟΥ ΚΟΥΝΑΒΗ ΕΥΑΓΓΕΛΙΑ ΕΙΔΙΚΟΤΗΤΑ ΠΕ19.03 ΠΛΗΡΟΦΟΡΙΚΗΣ ΘΕΜΑΤΙΚΗ ΟΜΙΛΟΥ ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟ
ΦΟΡΜΑ ΥΠΟΒΟΛΗΣ ΠΡΟΤΑΣΗΣ ΓΙΑ ΤΗ ΔΗΜΙΟΥΡΓΙΑ ΟΜΙΛΟΥ ΣΤΟ ΠΕΙΡΑΜΑΤΙΚΟ ΓΕΝΙΚΟ ΛΥΚΕΙΟ ΠΑΤΡΩΝ ΟΝΟΜΑΤΕΠΩΝΥΜΟ ΕΚΠ/ΚΟΥ ΚΟΥΝΑΒΗ ΕΥΑΓΓΕΛΙΑ ΕΙΔΙΚΟΤΗΤΑ ΠΕ19.03 ΠΛΗΡΟΦΟΡΙΚΗΣ ΘΕΜΑΤΙΚΗ ΟΜΙΛΟΥ ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟ