ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΥΣΤΗΜΑΤΩΝ ΚΑΙ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ. Διπλωματική Εργασία
|
|
|
- Ἀκρίσιος Λύκος
- 2 χρόνια πριν
- Προβολές:
Transcript
1 1 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΥΣΤΗΜΑΤΩΝ ΚΑΙ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Διπλωματική Εργασία του/της φοιτητή του τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών, της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών: Σαλούστρος Άρης Αριθμός Μητρώου: Θέμα: Προσαρμοστικός έλεγχος συντελεστή ισχύος AC/DC διάταξης Επιβλέπων/Επιβλέπουσα: Δημοσθένης Καζάκος Επίκουρος Καθηγητής Πάτρα, 2021
2 2 Πανεπιστήμιο Πατρών, Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σαλούστρος Άρης 2018 Με την επιφύλαξη παντός δικαιώματος Το σύνολο της εργασίας αποτελεί πρωτότυπο έργο, παραχθέν από τον/την... (Ονοματεπώνυμο), και δεν παραβιάζει δικαιώματα τρίτων καθ οιονδήποτε τρόπο. Αν η εργασία περιέχει υλικό, το οποίο δεν έχει παραχθεί από την ίδιο/α, αυτό είναι ευδιάκριτο και αναφέρεται ρητώς εντός του κειμένου της εργασίας ως προϊόν εργασίας τρίτου, σημειώνοντας με παρομοίως σαφή τρόπο τα στοιχεία ταυτοποίησής του, ενώ παράλληλα βεβαιώνει πως στην περίπτωση χρήσης αυτούσιων γραφικών αναπαραστάσεων, εικόνων, γραφημάτων κλπ., έχει λάβει τη χωρίς περιορισμούς άδεια του κατόχου των πνευματικών δικαιωμάτων για την συμπερίληψη και επακόλουθη δημοσίευση του υλικού αυτού. ΠΙΣΤΟΠΟΙΗΣΗ Πιστοποιείται ότι η διπλωματική εργασία με θέμα:
3 3 «Προσαρμοστικός έλεγχος συντελεστή ισχύος AC/DC διάταξης»
4 4 Του/της φοιτητή/τριας του τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών, της Πολυτεχνικής Σχολής ου Πανεπιστημίου Πατρών: Σαλούστρος Άρης με Αριθμό Μητρώου παρουσιάστηκε δημοσίως στο Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών του Πανεπιστημίου Πατρών στις... (ημερομηνία εξέτασης) και εξετάστηκε και εγκρίθηκε από την ακόλουθη Εξεταστική Επιτροπή: Δημοσθένης Καζάκος Επίκουρος Καθηγητής Πανεπιστημίου Πατρών, Επιβλέπων Νικόλαος Κούσουλας, Επίκουρος Καθηγητής Πανεπιστημίου Πατρών, Μέλος τριμελούς εξεταστικής επιτροπής.. (Ονοματεπώνυμο), (Βαθμίδα) Πανεπιστημίου Πατρών, Μέλος τριμελούς εξεταστικής επιτροπής ΥΠΟΓΡΑΦΕΣ Πάτρα,
5 5
6 6 ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ...6 ΚΕΦΑΛΑΙΟ ΑΥΤΟΜΑΤΟΣ ΕΛΕΓΧΟΣ 1.1 ΕΙΣΑΓΩΓΗ ΑΝΑΛΥΣΗ ΧΩΡΟΥ ΚΑΤΑΣΤΑΣΕΩΝ ΣΧΕΔΙΑΣΗ ΧΩΡΟΥ ΚΑΤΑΣΤΑΣΕΩΝ ΜΗ ΓΡΑΜΜΙΚΟΣ ΕΛΕΓΧΟΣ ΕΥΣΤΑΘΕΙΑ ΚΕΦΑΛΑΙΟ ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΠΡΟΣΑΡΜΟΣΤΙΚΟ ΕΛΕΓΧΟ ΠΑΡΑΜΕΤΡΙΚΑ ΜΟΝΤΕΛΑ ΕΚΤΙΜΗΣΗ ΠΑΡΑΜΕΤΡΩΝ ΚΕΦΑΛΑΙΟ ΗΛΕΚΤΡΙΚΑ ΚΥΚΛΩΜΑΤΑ ΙΣΧΥΟΣ ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΑΝΑΛΥΣΗ ΚΥΚΛΩΜΑΤΩΝ ΙΣΧΥΟΣ ΕΝΕΡΓΟΣ ΚΑΙ ΑΕΡΓΟΣ ΙΣΧΥΣ ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΚΕΦΑΛΑΙΟ H AC/DC ΔΙΑΤΑΞΗ TO ΚΥΚΛΩΜΑ ΕΛΕΓΧΟΣ ΜΕ ΓΝΩΣΕΣ ΠΑΡΑΜΕΤΡΟΥΣ ΕΛΕΓΧΟΣ ΜΕ AΓΝΩΣΕΣ ΠΑΡΑΜΕΤΡΟΥΣ ΣΥΜΠΕΡΑΣΜΑ ΒΙΒΛΙΟΓΡΑΦΙΑ... 65
7 7
8 8 Τίτλος Διπλωματικής: Προσαρμοστικός έλεγχος συντελεστή ισχύος AC/DC διάταξης Αριθμός Διπλωματικής Εργασίας: Φοιτητής: Άρης Σαλούστρος
9 9 ΚΕΦΑΛΑΙΟ 1 ΑΥΤΟΜΑΤΟΣ ΕΛΕΓΧΟΣ 1.1 ΕΙΣΑΓΩΓΗ Η πρώτη χρήση του ελέγχου με ανατροφοδότηση ενός φυσικού συστήματος από την ανθρωπότητα έγινε από την προϊστορία. Ήταν το σύστημα υπερχείλισης ενός δικτύου άρδευσης, όπου τα πλεονάζοντα ύδατα στραγγίζονταν αυτόματα. Η ανάπτυξη ενός μαθηματικού πλαισίου για την περιγραφή, την ανάλυση και τη σχεδίαση συστημάτων αυτόματου ελέγχου ανάγεται χρονικά στην εισαγωγή του φυγοκεντρικού υδραυλικού ελεγκτή (flyball governor) στην ατμομηχανή αρχικά από τον James Watt(1769) και στη συνέχεια από τους James Clerk Maxwell κ.α. (περίπου 1868), που βελτίωσαν τον σχεδιασμό και τις δυνατότητες εφαρμογής του συστήματος. Από την εποχή εκείνη η θεωρία και η εφαρμογή των συστημάτων αυτόματου ελέγχου εξελίχθηκε ταχύτατα. Σημαντικές νέες έννοιες και εργαλεία αναπτύχθηκαν παράλληλα με την ανάπτυξη του τηλεφώνου και των ραδιοεπικοινωνιών στις δεκαετίες του 1920 και Ηλεκτρονικές συσκευές όπως ενισχυτές και διαμορφωτές, με πολύ φτωχές αρχικά επιδόσεις, βελτιώθηκαν δραματικά με τη βοήθεια της ανατροφοδότησης. Ο δεύτερος παγκόσμιος πόλεμος επιτάχυνε ακόμη περισσότερο την ανάπτυξη της κλασικής θεωρίας συστημάτων αυτόματου ελέγχου. Βαριά όπλα έπρεπε να στοχεύουν γρήγορα και με ακρίβεια. Η ακριβής αεροπλοήγηση και ο εντοπισμός στόχων ήταν ένας κρίσιμος παράγοντας για την έκβαση του πολέμου, ενώ η αποτελεσματικότητα των αεροσκαφών βελτιώθηκε πάρα πολύ με την ενσωμάτωση σύνθετων συστημάτων ελέγχου. Αργότερα ο αυτοματισμός έγινε μια καθημερινή λέξη καθώς η βιομηχανία άρχισε να εξαρτάται σε ολοένα μεγαλύτερο βαθμό από αυτοματοποιημένες μηχανές. Σήμερα τα συστήματα ελέγχου με ανατροφοδότηση είναι πολύ διαδεδομένα στη βιομηχανία και στην καθημερινή ζωή. Βρίσκουν εφαρμογές κάθε κλίμακας, από μικρές οικιακές συσκευές μέχρι και τα φρένα των αυτοκινήτων, τον ποιοτικό έλεγχο της βιομηχανίας παραγωγής ή ακόμη τη νομισματική πολιτική μιας κυβέρνησης. Η ανάπτυξη συστημάτων αυτόματου ελέγχου μπορεί να χωριστεί σε τρεις ιστορικές περιόδους. Η πρώτη περίοδος χαρακτηρίζεται από την κλασική θεωρία αυτόματου ελέγχου που χρησιμοποιεί μεθόδους οι οποίες αναπτύχθηκαν πριν το 1950, όπως η μέθοδος Routh-Hurwitz, ο γεωμετρικός τόπος των ριζών και τα διαγράμματα Bode και Nyquist. Η δεύτερη περίοδος χαρακτηρίζεται από την λεγόμενη σύγχρονη θεωρία αυτομάτου ελέγχου, που αναπτύχθηκε στα τέλη της δεκαετίας του 1950 και τις αρχές της δεκαετίας του 1960 και αναφέρεται στον χώρο καταστάσεων. Η Τρίτη περίοδος, στην διάρκεια των δεκαετιών του 1970 και 1980 οδήγησε στον συνδυασμό των δυο θεωριών και στην ανάπτυξη μεθόδων που απαντούν στο πρόβλημα της αβεβαιότητας της παραγωγικής μονάδας και είναι γνωστές με την ονομασία «συστήματα εύρωστου (robust) ελέγχου».στις επόμενες παραγράφους θα γίνει μια εισαγωγή, αρχικά στη θεωρία ελέγχου για γραμμικά κι έπειτα για μη γραμμικά, συστήματα αυτομάτου ελέγχου. Η οποία και είναι απαραίτητη για την επίλυση του τελικού προβλήματος αυτής της εργασίας.
10 ΑΝΑΛΥΣΗ ΧΩΡΟΥ ΚΑΤΑΣΤΑΣΕΩΝ ΠΡΕΟΠΙΣΚΟΠΗΣΗ Ένα πολύ σημαντικό εργαλείο για την παράσταση ενός γραμμικού συστήματος ελέγχου μέσα από διαφορικές εξισώσεις, είναι οι μεταβλητές κατάστασης (state variable). Γενικά ένα σύστημα που περιγράφεται από μία διαφορική εξίσωση τάξης n, μπορεί ισοδύναμα να περιγραφεί από τουλάχιστον n μεταβλητές κατάστασης και ισάριθμες διαφορικές εξισώσεις πρώτης τάξης. Οι εξισώσεις κατάστασης (state equation), που περιγράφουν το σύστημα είναι της μορφής: ẋ=ax + Bu y= Cx + Du Όπου x οι καταστάσεις του συστήματος, u οι είσοδοι και y οι έξοδοι. Ο πίνακας Α ονομάζεται πίνακας κατάστασης, ο πίνακας Β πίνακας εισόδου, ο πίνακας С πίνακας εξόδου και ο πίνακας D πίνακας άμεσης μετάβασης. Κάθε γνήσια ρητή συνάρτηση μετάδοσης, αλλά και κάθε γραμμική διαφορική εξίσωση, μπορεί να γραφτεί στη μορφή αυτή. Αν η συνάρτηση μετάδοσης μεταβάλλεται με τον χρόνο, οι πίνακες δεν θα περιέχουν σταθερούς αριθμούς αλλά και συναρτήσεις ως προς τη μεταβλητή t. Επίσης οι διαστάσεις των πινάκων εξαρτώνται από τον αριθμό των καταστάσεων και τον αριθμό των εισόδων του συστήματος ΣΥΝΑΡΤΗΣΕΙΣ ΜΕΤΑΔΟΣΗΣ Αν έχουμε τις εξισώσεις κατάστασης ενός συστήματος, μπορούμε να υπολογίσουμε την συνάρτηση ή τις συναρτήσεις μετάδοσης, από τον παρακάτω πίνακα: T(s)= C[sI A] 1 B Ο οποίος έχει διαστάσεις m x i και μας δίνει όλες τις συναρτήσεις μετάδοσης ενός συστήματος, όπου m ο αριθμός των εξόδων και i αυτός των εισόδων. To πολυώνυμο si A ονομάζεται χαρακτηριστικό πολυώνυμο, με τις ρίζες του οποίου να μας δίνουν τις ρίζες του ανοιχτού συστήματος.
11 ΣΧΕΔΙΑΣΗ ΧΩΡΟΥ ΚΑΤΑΣΤΑΣΕΩΝ ΠΡΕΟΠΙΣΚΟΠΗΣΗ Η βασική ιδέα που κάνει δυνατή τη δημιουργία συστημάτων αυτόματου ελέγχου είναι η ανατροφοδότηση (feedback). Στην κλασική θεωρία, το τρέχον σήμα εξόδου, το ολοκλήρωμα του, αλλά και η παράγωγος του ανατροφοδοτείται στην είσοδο του συστήματος, όπου συγκρίνεται με το επιθυμητό σήμα εξόδου και ανάλογα με το αποτέλεσμα της σύγκρισης αυξομειώνεται η λειτουργία της παραγωγικής μονάδας. Στη σύγχρονη θεωρία το σύστημα περιγράφεται από ένα σύνολο μεταβλητών κατάστασης, έτσι η ιδέα της ανατροφοδότησης επεκτείνεται και αντί για ένα μοναδικό σήμα εξόδου, μπορούμε τώρα να ανατροφοδοτήσουμε μερικά ή όλα τα σήματα των μεταβλητών κατάστασης, αποκτώντας έτσι πλήρη πληροφόρηση για την παρούσα κατάσταση του συστήματος κάθε στιγμή ΑΝΑΤΡΟΦΟΔΟΤΗΣΗ ΚΑΤΑΣΤΑΣΗΣ ΚΑΙ ΘΕΣΗ ΤΩΝ ΠΟΛΩΝ Έστω ότι έχουμε ένα σύστημα τάξης n: ẋ=ax + Bu ανατροφοδοτούμε το διάνυσμα κατάστασης x, η εξίσωση γίνεται: ẋ=(a-βκ)x + Bu Όπου Κ το διάνυσμα των συντελεστών k1, k2,, kn, με τους οποίους ενισχύονται τα σήματα των μεταβλητών κατάστασης. Έτσι έχουμε νέο πίνακα κατάστασης του κλειστού συστήματος Α-ΒΚ και χαρακτηριστικό πολυώνυμο το : Δc(S)= si-(a-bk)
12 12 Οι πόλοι κλειστού βρόχου, ή αλλιώς οι ιδιοτιμές του συστήματος, είναι οι ρίζες αυτού του πολυωνύμου. Έτσι, είναι εφικτό να επιλεγούν οι συντελεστές k1, k2,, kn, για την τοποθέτηση των πόλων σε οποιοδήποτε επιθυμητό σημείο του μιγαδικού επιπέδου θέλουμε. Εικόνα 1.1 Τυπικό σύστημα με ανατροφοδότηση κατάστασης Ενώ η συνάρτηση μετάδοσης του κλειστού βρόχου είναι: T(s)= C[sI A + ΒΚ] 1 B ΣΥΣΤΗΜΑΤΑ ΕΝΤΟΠΙΣΜΟΥ ΘΕΣΗΣ Ένα σύστημα αυτομάτου ελέγχου αποτελεί συνήθως μέρος μιας μεγαλύτερης συσκευής, που περιλαμβάνει ένα σύστημα καθοδήγησης, το οποίο παράγει τις εντολές εισόδου για το σύστημα ελέγχου, όπως φαίνεται στην εικόνα 1.2. Αν αυτό που σχεδιάζουμε είναι ένα σύστημα εντοπισμού θέσης (tracking system) είναι σταθερό να πετύχουμε μηδενισμό του σφάλματος σταθερής κατάστασης.
13 13 Εικόνα 1.2 Πρέπει λοιπόν η συνάρτηση εξόδου y(t) να ισούται με την συνάρτηση εισόδου u(t). Έστω λοιπόν ότι έχω το σύστημα που περιγράφεται από τις εξισώσεις: ) ẋ=ax + Bu και x * (t) η επιθυμητή τιμή της κατάστασης x. Επιλέγοντας νόμο ελέγχου: u= 1 B (-Ax + K x + ẋ* ) όπου x =(x * - x) το σφάλμα επιθυμητής κατάστασης, ενώ Κ κέρδος της επιλογής μου. Καταλήγουμε στην εξίσωση: Το οποίο αποτελεί διαφορική πρώτης τάξης με λύση: x(t)= x * (t) x(0) e -K t Όπου γίνεται εύκολα αντιληπτό ότι για κατάλληλο Κ>0 η κατάσταση x(t) συγκλίνει στην επιθυμητή τιμή
14 ΜΗ ΓΡΑΜΜΙΚΟΣ ΕΛΕΓΧΟΣ ΠΡΕΟΠΙΣΚΟΠΗΣΗ Αντικείμενο του μη γραμμικού ελέγχου είναι η ανάλυση και ο σχεδιασμός συστημάτων με τουλάχιστον ένα μη γραμμικό συντελεστή (π.χ. ẋ=x 2 + xu ). Αποτελεί ένα ισχυρό αντικείμενο με μεγάλη ιστορία σε πολλές εφαρμογές. Μερικά από τα χαρακτηριστικά που έκαναν τον μη γραμμικό έλεγχο τόσο διαδεδομένο είναι: η βελτίωση των είδη υπαρχόντων συστημάτων ελέγχου, δυνατότητα ανάλυσης συστημάτων τα οποία δεν μπορούν να γραμμικοποιηθούν, επίσης δίνει την δυνατότητα να γίνει αποτελεσματικός έλεγχος όταν υπάρχουν αβεβαιότητες (π.χ. προσαρμοστικός μη γραμμικός έλεγχος), τέλος μπορεί να είναι πιο απλός στην σχεδίαση. Μπορεί να υπάρξουν βέβαια κι άλλοι λόγοι, για τους οποίους θα προτιμήσουμε τεχνικές ελέγχου μη γραμμικού ελέγχου, όπως το κόστος και η απόδοση. Σε βιομηχανικές συνθήκες, γραμμικές τεχνικές για έλεγχο προχωρημένων μηχανών με συγκεκριμένα μη γραμμικά χαρακτηριστικά, έχουν μεγάλο κόστος και ανάγκη για χρονοβόρα ειδικευμένη δουλειά. Η δουλεία αυτή δύσκολα θα εξασφαλίσει παρόμοια αποτελέσματα, όσον αφορά την ευστάθεια και τον έλεγχο, σε άλλες εφαρμογές παρόμοιας φύσης. Επίσης ο γραμμικός έλεγχος μπορεί να απαιτήσει ενεργοποιητές και αισθητήρες υψηλής ποιότητας και κόστους για να μην αποκτήσει το σύστημα μη γραμμικά χαρακτηριστικά, ενώ μπορεί να υπάρξει ικανοποιητικό αποτέλεσμα με πιο οικονομικά όργανα και χρήση τεχνικών μη γραμμικού ελέγχου. Έτσι το αντικείμενο αυτό είναι αρκετά σημαντικό όσον αφορά τον έλεγχο συστημάτων. Η μάθηση των τεχνικών αυτών μπορεί να αποτελέσουν ένα χρήσιμο εργαλείο, σε έναν μηχανικό στην αποτελεσματική λύση προβλημάτων, που μπορεί να αντιμετωπίσει. Επίσης βοηθάει στην καλύτερη κατανόηση του κάθε συστήματος, καθώς είναι γνωστό πως τίποτα στην φύση δεν είναι γραμμικό, παρόλο που πολλές φορές οι γραμμικές εξισώσεις μας προσφέρουν μία πολύ καλή προσέγγιση της πραγματικότητας. Με την ραγδαία εξέλιξη της τεχνολογίας γίνεται πιο αποτελεσματική και οικονομική η χρήση μη γραμμικών μεθόδων.
15 ΓΡΑΜΜΙΚΟΠΟΙΗΣΗ ΜΕ ΑΝΑΤΡΟΦΟΔΟΤΗΣΗ Η γραμμικοποίηση με ανατροφοδότηση (feedback linearization) αποτελεί μια πολύ σημαντική προσέγγιση στο αντικείμενο του μη γραμμικού ελέγχου. Η κεντρική του ιδέα είναι ο αλγεβρικός μετασχηματισμός των μη γραμμικών δυναμικών του συστήματος σε γραμμικές, έτσι ώστε να συνεχίσουμε τον έλεγχο με γραμμικές μεθόδους. Διαφέρει από μεθόδους συμβατικής γραμμικοποίησης (π.χ. Jacobian linearization) καθώς δεν κάνουμε γραμμικές εκτιμήσεις των δυναμικών καταστάσεων, αλλά μετασχηματίζουμε τις ίδιες τις καταστάσεις. Η ιδέα των απλοποιημένων δυναμικών του συστήματος, χρησιμοποιώντας διαφορετικές αναπαραστάσεις καταστάσεων, δεν εμφανίστηκε πρώτη φορά εδώ. Είναι γνωστό ότι στην μηχανική, η μορφή και η πολυπλοκότητα του μοντέλου ενός συστήματος, εξαρτάται και από το πλαίσιο αναφοράς και τα υποσυστήματα που περιέχει. Μπορεί αυτή η μέθοδος λοιπόν να θεωρηθεί ως ένας μετασχηματισμός του αρχικού συστήματος, σε ισότιμα συστήματα πιο απλής μορφής. Η γραμμικοποίηση με ανατροφοδότηση χρησιμοποιείται επιτυχημένα στην επίλυση πολλών πρακτικών προβλημάτων. Αυτά είναι ο έλεγχος ελικοπτέρων, αεροσκάφη υψηλών επιδόσεων, στην ρομποτική, σε συσκευές βιοϊατρικής αλλά και στην βιομηχανία γενικότερα. Από την άλλη βέβαια το αντικείμενο αυτό έχει και ελλείψεις αλλά και περιορισμούς. Στην πιο απλή της μορφή, η γραμμικοποίηση με ανατροφοδότηση ανέρχεται να ακυρώσει τα μη γραμμικά στοιχεία, ενός μη γραμμικού συστήματος το κλειστό σύστημα να είναι γραμμικό στον χώρο κατάστασης του. Αυτή η απλή ιδέα θα γίνει εύκολα κατανοητή με το παρακάτω απλό παράδειγμα: Έστω η σύστημα με εξισώσεις καταστάσεων С0ẋ=x 2 + u Επιλέγοντας είσοδο: u=1/ С0(-x 2 +v) Με v επιπλέον είσοδο της επιλογής μας, έχουμε το νέο σύστημα ż = v Μετέπειτα μπορούμε να μεταχειριστούμε το νέο σύστημα όπως θέλουμε. Για παράδειγμα αν θέλουμε η κατάσταση μας να συγκλίνει σε μία τιμή C1 επιλέγω νόμο εισόδου: v=-k(z-c1) (όπου Κ τυχαίο κέρδος ανάλογα με τις ανάγκες-δυνατότητες μας). Η διαφορική εξίσωση του συστήματος λοιπόν, είναι η παρακάτω: ż=-κ(z-c1) Kαι λύση όπως εύκολα γίνεται αντιληπτό την εξίσωση x(t)= C1 x(0) e -K t
16 16 Εικόνα 1.3 Feedback Linearization System ΓΡΑΜΜΙΚΟΠΟΙΗΣΗ ΕΙΣΟΔΟΥ-ΚΑΤΑΣΤΑΣΗΣ Για σύστημα της μορφής: ẋ=f(x,u) Η τεχνική είσοδος-κατάσταση λύνει το πρόβλημα της γραμμικοποίησης σε δύο βήματα. Αρχικά υλοποιούμε έναν μετασχηματισμό κατάστασης ż =z(x) και μία είσοδο u=u(x,v), έτσι ώστε το μη γραμμικό σύστημα να μετασχηματιστεί σε ένα νέο γραμμικό της μορφής ż = Az + Bv. Έπειτα χρησιμοποιούμε τις συμβατικές τεχνικές ελέγχου. Για παράδειγμα έστω οι παρακάτω εξισώσεις ενός μη γραμμικού συστήματος ẋ1=-2x1+x2+sinx1 ẋ2=-x2 cosx1+u cos(2x1) Επιλέγω ένα νέο σετ από καταστάσεις: Z1=x1 Z2=x2+sinx1 Όπου μου έχω τις νέες εξισώσεις κατάστασης: Ż1=-2Z1+Z2 Ż2=-2Ζ1 cosz1+cosz1sinz1+u cos(2z2)
17 17 Βάζοντας την παρακάτω είσοδο καταλήγουμε σε γραμμικό σύστημα: u= 1 cos(2z1) (v-cos Z1 sin Z1 +2Z1 csosz1) Με: Ż1=-2Z1+Z2 Ż2=v Έπειτα το μεταχειριζόμαστε όπως επιθυμούμε ΓΡΑΜΜΙΚΟΠΟΙΗΣΗ ΕΙΣΟΔΟΥ-ΕΞΟΔΟΥ Έστω τώρα το πρόβλημα: ẋ=f(x,u) y=h(x) Στόχος μας είναι ο έλεγχος της εξόδου y, με επιθυμητή τροχιά να δίνεται από την συνάρτηση ο(t), με o(t) γνωστή και μη άπειρη. Η δυσκολία του προβλήματος είναι στο γεγονός ότι η έξοδος y συνδέεται μόνο έμμεσα με την είσοδο u, μέσω των καταστάσεων x και τις μη γραμμικές εξισώσεις τους. Έτσι δεν είναι εύκολο να βρούμε ποια είσοδος u θα ελέγξει την τροχιά της εξόδου. Έτσι θα προσπαθήσουμε να βρούμε μια συσχέτιση της εξόδου του συστήματος με την είσοδο u. Αυτή η ιδέα είναι και η γραμμικοποίηση είσοδος-έξοδος. Ως παράδειγμα ας πάρουμε το σύστημα: ẋ1= x1 u x2 ẋ2 = x2 + u x1 y = x1 Για να συσχετίσουμε άμεσα την είσοδο με την έξοδο αρχικά παραγωγίζουμε την έξοδο : ẏ = ẋ1 = x1 u x2 Όπου γίνεται καθαρή η σχέση εισόδου-εξόδου
18 18 Με είσοδο: u= 1 x2 (x1 - v ) Έχουμε: ẏ = v Όπου πολύ εύκολα ελέγχουμε με νόμο εισόδου v = ȯ(t) + K( o(t) y(t) ) (Κ: επιθυμητό κέρδος) Να σημειωθεί ότι οι μετρήσεις των καταστάσεων x είναι απαραίτητες για τον έλεγχο, καθώς χρησιμοποιήθηκαν στην είσοδο u.
19 ΕΥΣΤΑΘΕΙΑ ΕΥΣΤΑΘΕΙΑ ΣΥΣΤΗΜΑΤΩΝ Στον έλεγχο συστημάτων η πρώτη και πιο σημαντική ερώτηση είναι αν το σύστημα είναι ευσταθές. Ένα μη ευσταθές σύστημα τις περισσότερες φορές είναι άχρηστο ή ακόμα και επικίνδυνο. Ένα σύστημα θεωρείται ευσταθές όταν δουλεύοντας το σε ένα σημείο λειτουργίας, αυτό θα συνεχίσει να δουλεύει εκεί. Η πιο χρήσιμη προσέγγιση στη μελέτη της ευστάθειας μη-γραμμικών συστημάτων έρχεται από τα τέλη του 19 ου αιώνα από τον Ρώσο μαθηματικό Alexandr Mikhailovich Lyapunov. H μεθοδολογία του είναι αναλυτική (όχι γραφική) και βασίζεται στη διαφορική εξίσωση που περιγράφει το σύστημα δίνοντας πληροφορίες για την ευστάθεια του, χωρίς να απαιτείται λύση της διαφορικής εξίσωσης. Τα αποτελέσματα του Lyapunov μπορούν να διακριθούν σε δύο τεχνικές (μεθόδους): Η πρώτη μέθοδος Lyapunov (ή η μέθοδος της πρώτης προσέγγισης) και η δεύτερη μέθοδος του Lyapunov (ή απευθείας μέθοδος) ΔΕΥΤΕΡΗ ΜΕΘΟΔΟΣ LYAPUNOV Έστω ότι έχουμε ένα σύστημα ẋ=f(t,x) Η δεύτερη μέθοδος Lyapunov ή η απευθείας μέθοδος, βασίζεται στην εξής ιδέα: Αν ένα σύστημα έχει μία ευσταθή κατάσταση ισορροπίας xe, τότε η αποθηκευμένη ενέργεια του συστήματος εξασθενεί, καθώς ο χρόνος t αυξάνει, μέχρις ότου η αποθηκευμένη ενέργεια φθάσει στην ελάχιστή της τιμή στην κατάσταση ισορροπίας xe. Ο προσδιορισμός της ευστάθειας ενός συστήματος γραμμικού ή μη, με τη δεύτερη μέθοδο του Lyapunov απαιτεί τον προσδιορισμό μιας ειδικής βαθμωτής συνάρτησης που την ονομάζουμε συνάρτηση Lyapunov. Δίνονται ο παρακάτω ορισμος i)η συνάρτηση V(x) V:Rn R λέγεται θετικά ορισμένη στην γειτονιά Ν του σημείου x=0 αν V(0)=0 και V(x)>0 για κάθε x Ν-{0} ii)αντίστοιχα η συνάρτηση V(x) λέγεται αρνητικά ορισμένη αν η V(x) είναι θετικά ορισμένη iii) Η συνάρτηση V(t,x), v:txrn R δέχεται ένα απείρως μικρό άνω φράγμα αν υπάρχει μια συνεχής και αυστηρά μονοτόνως αύξουσα συνάρτηση φ(r),φ: R+ R+,φ(0)=0 τέτοια ώστε V(t,x) φ( x ) για κάθε t T και x N όπου N μια γειτονιά του x=0. Σύμφωνα με τον ορισμό αυτό, αν μια θετικά ορισμένη συνάρτηση V(t,x) δέχεται ένα απείρως μικρό άνω φράγμα τότε από την ανισότητα
20 20 V(t,x) ε για κάθε t T έπεται ότι x φ-1(ε). Προφανώς αν η V δεν εξαρτάται από το t και είναι συνεχής τότε δέχεται ένα απείρως μικρό άνω φράγμα. Θεώρημα 1) Aν υπάρχει μία συνεχής και παραγωγίσιμη θετικά ορισμένη συνάρτηση V(t,x),v:TxRn R+ σε μία γειτονιά της ισορροπίας xe=0 τέτοια ώστε η συνάρτηση V(x(t)) t + [gradxv(t,x)] T f(t,x) Να είναι αρνητικά ημιορισμένη σε μία γειτονιά του xe=0, τότε η κατάσταση ισορροπίας xe=0 του συστήματος Σ είναι ευσταθής κατά Lyapunov. Θεώρημα 2) Αν υπάρχει μια συνεχής και παραγωγίσιμη θετικά ορισμένη συνάρτηση V(t,x),v:TxRn R+ που δέχεται ένα απείρως μικρό άνω φράγμα και της οποίας η ολική παράγωγος ως προς το Σ είναι αρνητικά ορισμένη, τότε η ισορροπία x=0 του συστήματος Σ είναι ασυμπτωτικά ευσταθής. Σύμφωνα με το θεώρημα 1 οι υποθέσεις του θεωρήματος 7.4 συνεπάγονται κατ' αρχήν την ευστάθεια κατά Lyapunov της ισορροπίας x=0 Εξ' άλλου επειδή η V (t,x) είναι αρνητικά ορισμένη, συμπεραίνου με ότι η V[t,x(t)]είναι μονοτόνως φθίνουσα. Επί πλέον V(t,x)) 0. Αρα καθώς το t τείνει στο άπειρο η V[t,x(t)] συγκλίνει σε κάποιο μη αρνητικό αριθμό vo: Για να είναι vo=0 οπότε και limt x(t)=0, θα πρέπει επίπλέον να θεωρήσουμε ότι η V(t,x), δέχεται ένα απείρως μικρό άνω φράγμα. Στην περίπτωση αυτή V[t,x)] vo t T
21 21 V[t,x(t)]<0 Πράγμα άτοπο. Άρα δεν μπορεί παρά να είναι vo=0. Να γιατί είναι απαραίτητο να υποθέσουμε ότι η V(t,x) δέχεται ένα απείρως μικρό άνω φράγμα!
22 22 Παράδειγμα το σύστημα ẋ1=-2x1+2x1x2 2 +tx1 3 ẋ2=-2x2+5x1 2 x2+2x2 3 και έστω V(x)=5χ1 2 +2χ 2 2 Τότε Η θετικά ορισμένη συνάρτηση V(x) είναι συνεχής, άρα δέχεται ένα απείρως άνω φράγμα. Εξ' άλλου η V είναι αρνητικά ορισμένη στην γειτονιά {x R2: 5x+2<2}. Άρα η ισορροπία x=0 του συστήματος είναι ασυμπτωτικά ευσταθής.
23 23 ΚΕΦΑΛΑΙΟ 2 ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ 2.1 ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΠΡΟΣΑΡΜΟΣΤΙΚΟ ΕΛΕΓΧΟ ΕΙΣΑΓΩΓΗ Μία γενική θεώρηση του προσαρμοστικού ελέγχου μπορεί να δοθεί με βάση με βάση το σχήμα 2.1 ως εξής: Το υπό έλεγχο σύστημα θεωρούμε ότι είναι ένα σύστημα που οι παράμετροί του υπόκεινται σε μεταβολές ή ότι οι παράμετροί του είναι άγνωστοι. Καθορίζουμε ένα δείκτη καλής (επιθυμητής) απόδοσης (index of performance) του συστήματος. Επίσης, ορίζουμε και έναν άλλο δείκτη, που ονομάζουμε μετρούμενο δείκτη απόδοσης του συστήματος. Ο δείκτης αυτός υπολογίζεται με βάση τις μετρήσεις των σημάτων εισόδου, καταστάσεων, εξόδου και γνωστών διαταραχών. Ο μετρούμενος δείκτης απόδοσης συγκρίνεται με τον επιθυμητό δείκτη. Αν το σφάλμα e ξεπερνά κάποια προκαθορισμένα όρια, τότε τίθεται σε λειτουργία ο μηχανισμός προσαρμογής. Ο μηχανισμός αυτός είναι κατάλληλα σχεδιασμένος έτσι ώστε να μεταβάλλει τις παραμέτρους του ρυθμιστή προκειμένου το σφάλμα e να περιορίζεται σε ανεκτά επίπεδα.
24 24 Εικόνα 2.1 Κατά τον προσαρμοστικό έλεγχο εκτελούνται τρεις βασικές λειτουργίες: i)υπολογισμός του μετρούμενου δείκτη απόδοσης με βάση τα μετρούμενα σήματα ii)σύγκριση μεταξύ του μετρούμενου και του επιθυμητού δείκτη απόδοσης και λήψη απόφασης, και iii)ενεργοποίηση του προσαρμοστικού μηχανισμού Οι τρεις αυτές λειτουργίες είναι περίπλοκες και συχνά δεν είναι εύκολο να αναλυθούν και να πραγματοποιηθούν χωριστά. Ο προσαρμοστικός έλεγχος έχει αποτελέσει θέμα μελέτης για πολλά χρόνια. Αναπτύχθηκε όμως κύρια τις δύο τελευταίες δεκαετίες. Μέχρι σήμερα έχουν προταθεί πολλές τεχνικές προσαρμοστικού ελέγχου. Κάθε μια από αυτές τις τεχνικές παρουσιάζει πλεονεκτήματα και μειονεκτήματα έναντι των άλλων. Στο σύγγραμμα αυτό θα γίνει αναφορά στις βασικές τεχνικές που χρησιμοποιήθηκαν για την υλοποίηση του προβλήματος προσαρμοστικού ελέγχου στον συντελεστή ισχύος του AC/DC μετατροπέα.
25 ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ ΒΑΣΙΣΜΕΝΟΣ ΣΕ ΑΝΑΓΝΩΡΙΣΗ Ο προσαρμοστικός έλεγχος συστημάτων βασίζεται στον συνδυασμό της εκτίμησης των άγνωστων παραμέτρων του, την κάθε χρονική στιγμή, με κάποιον νόμο έλεγχου, ο οποίος βασίζεται στους γνωστούς παραμέτρους του συστήματος. Ο νόμος ελέγχου βασίζεται σε δύο προσεγγίσεις, την έμμεση και την άμεση. Η βασική δομή της έμμεσης προσέγγισης φαίνεται στην εικόνα 2.2. Το σύστημα G(θ*) παραμετροποιείται με βάση με βάση κάποιους άγνωστες παραμέτρους θ*. Για παράδειγμα σε ένα ΓΧΑ σύστημα μίας εισόδου-μίας εξόδου (SISO), το θ* είναι ένα διάνυσμα από συντελεστές του αριθμητή ή του παρανομαστή της συνάρτησης μεταφοράς του. Ο εκτιμητής μέσω επεξεργασίας της εισόδου u και της εξόδου y, δημιουργεί μία εκτίμηση θ(t) του θ*, κάθε χρονική στιγμή. Εικόνα 2.2. Προσαρμοστικός έλεγχος με έμμεση εκτίμηση παραμέτρων
26 26 Στην εικόνα 2.3 φαίνεται η δομή του προσαρμοστικού ελέγχου με άμεση εκτίμηση παραμέτρων. Σε αυτήν τη περίπτωση το σύστημα G(θ*) παραμετροποιείται με βάση τον ελεγκτή C(θc), όπου παράλληλα εκτιμάμε ένα εικονικό σύστημα Gc() με τα ίδια χαρακτηριστικά εισόδων-εξόδων του G(). Εδώ η εκτίμηση θc(t) του θc* γίνεται με την επεξεργασία των εισόδων-εξόδων του συστήματος. Εικόνα 2.3. Προσαρμοστικός έλεγχος με άμεση εκτίμηση παραμέτρων Οι αρχές πίσω από την σχεδίαση συστημάτων προσαρμοστικού ελέγχου (είτε άμεσου είτε έμμεσου), είναι εννοιολογικά παρόμοιες και απλές. Η μορφή του νόμου ελέγχου είναι ίδια με αυτή που θα χρησιμοποιούσαμε στην περίπτωση που δεν είχαμε άγνωστους παραμέτρους, με της τιμές των εκτιμήσεων του να τις αντικαθιστούν σε κάθε χρονική στιγμή. Η ιδέα πίσω από αυτό είναι ότι η εκτίμηση θ(t) συγκλίνει στην πραγματική τιμή της θ* σε βάθος χρόνου. Αυτό είναι κάτι που πρέπει να το εξασφαλίσουμε, ώστε να ελέγξουμε αποτελεσματικά το σύστημα μας.
27 ΠΑΡΑΜΕΤΡΙΚΑ ΜΟΝΤΕΛΑ SPM & DPM Έστω ότι έχουμε το σύστημα ẋ = ax + u Με x οι καταστάσεις του συστήματος, u η είσοδος, a άγνωστη σταθερά όπου θέλουμε να αναγνωρίσουμε μέσα από τις μετρήσεις των x,u. Το πρώτο βήμα για την σχεδίαση ενός αλγόριθμου εκτίμησης των παραμέτρων είναι να ξεχωρίσουμε τους άγνωστους παραμέτρους από τους γνωστούς, σε διανύσματα (πίνακες). Οπότε για το παραπάνω παράδειγμα θα εκφράσουμε το σύστημα ως x = 1 s+1 (ax+u) x - u s+1 = x s+1 a και σε αλγεβρική μορφή με: z = θ* Τ φ z= [x - θ* Τ = [a] T u s+1 ] φ = [ x s+1 ] Αναφερόμαστε λοιπόν στο z = θ* Τ φ ως το γραμμικό στατικό παραμετρικό μοντέλο (linear static parametric model SPM). To SPM μπορεί να παριστάνει ένα δυναμικό, στατικό, γραμμικό ή μη-γραμμικό σύστημα. Κάθε δυναμική του συστήματος βρίσκεται στα σήματα z,φ όπου συνήθως είναι είσοδοι έξοδοι του συστήματος και φιλτραρισμένες τιμές τους. Επίσης μία άλλη αναπαράσταση του παραπάνω μοντέλου είναι η εξής:
28 28 x - u s+1 = 1 s+1 θ*τ φ Και στη γενική μορφή: z = W(s) θ* Τ φ Με το W(s) να αποτελεί γνωστή ευσταθής συνάρτηση μεταφοράς. Αναφερόμαστε στο παραπάνω ως το γραμμικό δυναμικό παραμετρικό μοντέλο (linear dynamic parametric model DPM) SSPM και άλλες απεικονίσεις Υπάρχουν περιπτώσεις που οι άγνωστες παράμετροι δεν μπορούν να εκφραστούν σε γραμμική μορφή στο παραμετρικό μοντέλο, όπως αναλύθηκε παραπάνω. Σε τέτοιες περιπτώσεις εκφράζουμε το σύστημα σε μορφή B-SPM όπως φαίνεται παρακάτω: ή z=ρ* (θ*φ+z1) z=w(q) ρ* (θ*φ+z1) Όπου φ,z,z1, μετρήσιμα σήματα και ρ*, θ* οι άγνωστες παράμετροι. Μία άλλη χρήσιμη απεικόνιση, όταν έχουμε σύστημα σε μορφή καταστατικών εξισώσεων ẋ = Αx + Βu Με το διάνυσμα κατάστασης x να είναι μετρήσιμο, μπορεί να χρησιμοποιηθεί το ακόλουθο παραμετρικό μοντέλο: ẋ = Amx + (A-Am)x + Βu
29 29 Το Αm εκφράζει ευσταθές μετρήσιμο πίνακα, Α και Β άγνωστους (προς εκτίμηση) πίνακες του συστήματος και τα σήματα x, u διαθέσιμα για μέτρηση. Το μοντέλο μπορεί να εκφραστεί λοιπόν καλύτερα: ẋ = Amx + θ* Τ φ 2.3 ΕΚΤΙΜΗΣΗ ΠΑΡΑΜΕΤΡΩΝ Εισαγωγή Επόμενο και τελευταίο βήμα είναι ο σχεδιασμός, η ανάλυση και η προσομοίωση αλγορίθμων οι οποίοι μπορούν να χρησιμοποιηθούν για την εκτίμηση των παραμέτρων του συστήματος Εκτίμηση Παραμέτρων Η διαδικασία της εκτίμησης των άγνωστων παραμέτρων αποτελείται από τα παρακάτω βήματα: i) Δημιουργία της μαθηματικής έκφρασης του συστήματος σε μορφή παραμετρικού μοντέλου με το αντίστοιχο διάνυσμα θ* που εκφράζει τους άγνωστους παραμέτρους. ii) Χρήση του θ(t) ως εκτίμηση του θ* και δημιουργία ενός προσαρμοστικού νόμου, ο οποίος θα είναι με διαφορική εξίσωση της μορφής: iii) Όπου ε σφάλμα εκτίμησης ανάμεσα στο θ(t) και θ*, ενώ Η(t) είναι μια χρονικώς μεταβαλλόμενη συνάρτηση, η οποία εξαρτάται από τα μετρήσιμα σήματα. Έλεγχος συνθηκών ότι το θ(t) τείνει στο θ* με την πάροδο του χρόνου Προσαρμοστικός Νόμος Υπάρχει μία σειρά από νόμους για την εκτίμηση των παραμέτρων θ(t) του διανύσματος θ*. Ο πιο απλός, παίρνοντας το SPM μοντέλο, δίνεται από τον τύπο: θ(t) = z(t) φ(t)
30 30 Στην πράξη βέβαια, λόγω του θορύβου στις μετρήσεις του φ(t), μπορεί να έχουμε μεγάλα σφάλματα κατά την διαδικασία, ειδικά σε πεδίο τιμών κοντά στο μηδέν. Μια άλλη προσέγγιση λοιπόν, έχει ως στόχο την προσαρμογή του θ(t) έτσι ώστε να μειωθεί το σφάλμα εκτίμησης ε. Καταλήγουμε σε νόμο της μορφής: θ(0) = θ0 Χρειάζεται λοιπόν να αποδειχτει ότι με τον παρακάτω νόμο το θ(t) είναι ευσταθές και ότι το ε μειώνεται σε συνάρτηση με τον χρόνο. Κάτι τέτοιο εξαρτάται από τα χαρακτηριστικά του συστήματος, δηλαδή το φ Εκτίμηση Παραμέτρων για Μη-Γραμμικά Συστήματα Στις προηγούμενες παραγράφους παρουσιάστηκαν μέθοδοι προσαρμοστικού ελέγχου γραμμικών, χρονικά αμετάβλητων συστημάτων. Παρόμοιες τεχνικές χρησιμοποιούνται και σε περιπτώσεις μη γραμμικών συστημάτων. Αρχικά σχεδιάζουμε νόμο ελέγχου για μία επιθυμητή έξοδο, αφού γίνει χρήση τεχνικών γραμμικοποίησης ανατροφοδότησης. Αφού γίνουν τα παραπάνω, επιλέγονται οι εκτιμητές με βάση την θεωρία που ακολουθείται στα γραμμικά συστήματα, και έπειτα ελέγχεται η ευστάθεια με τεχνικές Lyapunov.
31 31 ΚΕΦΑΛΑΙΟ 3 ΗΛΕΚΤΡΙΚΑ ΚΥΚΛΩΜΑΤΑ ΙΣΧΥΟΣ 3.1 ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΑΝΑΛΥΣΗ ΚΥΚΛΩΜΑΤΩΝ ΙΣΧΥΟΣ Αυτό που ιστορικά ονομάστηκε η «μάχη» μεταξύ συστημάτων εναλλασσόμενου ρεύματος και συστημάτων συνεχούς ρεύματος, ήταν στην ουσία μια αντιπαράθεση επιστημονική αλλά και επιχειρηματική δύο πρωτοπόρων εφευρετών στα τέλη του 19 ου αιώνα, του Thomas Edison και του Nikola Tesla. Εν τέλει η άποψη του Tesla επικράτησε και το εναλλασσόμενο ρεύμα προτιμήθηκε έναντι του συνεχούς, καθώς για τα δεδομένα της εποχής ήταν η βέλτιστη λύση σε οικονομικό επίπεδο. Στην Ελλάδα, όπως και στις περισσότερες περιοχές του πλανήτη, έχουμε εναλλασσόμενο ρεύμα, ημιτονοειδούς συνάρτησης, με τάση 230V ενεργό τιμή και συχνότητα 50hz. Παρόλα αυτά με την εξέλιξη της τεχνολογίας, η ανάγκη του dc ρεύματος παράλληλα με το ac ολοένα και αυξάνεται(π.χ. φόρτιση μπαταριών ηλεκτρικού αυτοκινήτου). Όλα αυτά σε συνδυασμό με το γεγονός ότι οι δυνατότητες είναι αρκετά μεγάλες, αν σκεφτεί κανείς τις γρήγορες υπολογιστικές δυνατότητες για έλεγχο, αλλά και τις προσιτές τιμές στα ηλεκτρονικά ισχύος, καθιστούν την σύνδεση του εναλλασσόμενου με το συνεχές ρεύμα πολύ απλή. Στη συνέχεια του κεφαλαίου θα παρουσιαστούν βασικές αρχές των κυκλωμάτων ισχύος, των ηλεκτρονικών στοιχείων ισχύος τα οποία θα χρησιμοποιηθούν σε αυτή την εργασία.
32 ΕΝΕΡΓΟΣ ΚΑΙ ΑΕΡΓΟΣ ΙΣΧΥΣ ΙΣΧΥΣ-ΕΝΕΡΓΕΙΑ ΗΛΕΚΤΡΙΚΟΥ ΦΟΡΤΙΟΥ Πολύ σημαντικό πρόβλημα του ηλεκτρολόγου μηχανικού αποτελεί η εξοικονόμηση όσο το δυνατόν περισσότερης ενέργειας γίνεται, είτε πρόκειται σε επίπεδο παραγωγής, μεταφοράς, κατανάλωσης. Ένα μέρος της ηλεκτρικής ενέργειας που καταναλώνεται είναι το έργο, το οποίο είναι ενέργεια που δεν μπορεί να αφαιρεθεί. Σημαντικό ποσό ενέργειας όμως έγκειται στις απώλειες των κυκλωμάτων. Οι απώλειες αυτές βρίσκονται σε όλα τα επίπεδα (μεταφοράς, διανομής, κατανάλωσης) και η ελαχιστοποίηση τους αποτελεί πάγιο στόχο κάθε μηχανικού που σχεδιάζει ένα σύστημα (π.χ. εγκατάσταση σταθμών παραγωγής ηλεκτρικής ενέργειας κοντά στα κέντρα κατανάλωσης, χρήση ανανεώσιμων πηγών ενέργειας, πιστοποιήσεις ενεργειακής κλάσης σε συσκευές κτλ.). Έστω ένα φορτίο που τραβάει ρεύμα i(t) υπό τάση v(t), η στιγμιαία ισχύς του κυκλώματος δίνεται από τον τύπο: p(t)=v(t) i(t) Επίσης η σχέση της ενέργειας w(t) με την ισχύ δίνεται από τον παρακάτω τύπο: p(t)= dw(t) dt w(t)= t t0 p(t)dt Γίνεται σαφές η σχέση της ισχύος με την ενέργεια, το γεγονός όμως ότι η ενέργεια w(t) εξαρτάται από την αυθαίρετη σταθερά t0, σε αντίθεση με την ισχύ p(t), μας οδηγεί στην προτίμηση της χρήσης της ισχύς σε αντίθεση με την ενέργεια. Αποδοτικό κύκλωμα λοιπόν είναι αυτό που έχει την συνάρτηση p(t) στην ελάχιστη τιμή της.
33 33 Εικόνα ΕΝΕΡΓΟΣ- ΑΕΡΓΟΣ ΙΣΧΥΣ Θεωρούμε την περίπτωση φορτίου, όπου έχουμε τάση v(t) και ρεύμα i(t) με ημιτονοειδές συναρτήσεις όπως περιγράφονται παρακάτω v(t)= V cos(ωt+φv) i(t)= I cos(ωt+φi) Η στιγμιαία ισχύς p(t) που απορροφάται από το φορτίο προκύπτει ως εξείς p(t) = v(t) i(t) = V I [cos(φv- φi)+ cos(2ωt+φv+φi)]
34 34 Εικόνα 3.2. Ισχύς, τάση και ρεύμα ενός φορτίου Παρατηρείται λοιπόν ότι η στιγμιαία ισχύς συντίθεται από δύο όρους, έναν που είναι σταθερός και έναν που είναι ημιτονοειδής με διπλάσια συχνότητα. Σε ένα πλήρως παθητικό φορτίου (όπου δεν παράγει δηλαδή ενέργεια), αρνητική ισχύς σημαίνει ότι η ενέργεια που είναι αποθηκευμένη στα πηνία και στους πυκνωτές εξάγεται τώρα από το φορτίο. Η μέση τιμή της ισχύος δίνεται παρακάτω, δεδομένου ότι οι ημιτονοειδείς συναρτήσεις έχουν μηδενική μέση τιμή P = V I cosφ : Πραγματική ή ενεργός ισχύς (φ = φv φi γωνία συντελεστή ισχύος) Η ποσότητα Ρ έχει σπουδαία φυσική σημασία διότι δίνει την μέση τιμή του ρυθμού με τον οποίο ρέει η ενέργεια από τη πηγή προς το φορτίο. Το πρόσημο της καθορίζεται από τη μέση τιμή της γωνίας φ. Επειδή σε ένα καθαρά παθητικό κύκλωμα, η γωνία φ βρίσκεται πάντα στο διάστημα [-90 ο,+90 ο ], η ποσότητα cosφ είναι πάντα θετική και επομένως το Ρ είναι πάντα θετικό.
35 35 Αν θεωρηθεί ότι το ρεύμα i(t) αποτελείται από δύο συνιστώσες, μία ir(t) σε φάση με την τάση (δηλαδή της μορφής cos(ωt+φv) και μια ix(t) με διαφορά φάσης 90 ο ως προς την τάση (δηλαδή της μορφής sin(ωt+φv), έτσι ώστε: i(t) = ir(t) + ix(t) Η ισχύς του φορτίου δίνεται από τον τύπο: p(t) = v(t) (ir(t) + ix(t)) = v(t) ir(t) + v(t) ix(t) = pr(t) + px(t) pr(t) = V I cosφ [1 + cos2(ωt +φv)] px(t)= V I sinφ sin2(ωt + φv) Η μέση τιμή του πρώτου όρου πάλλεται γύρω από την προηγούμενη τιμή ( V I cosφ ) αλλά ποτέ δεν γίνεται αρνητική και η δεύτερη έχει μηδενική μέση τιμή. Εισάγουμε λοιπόν την ποσότητα Q = V I sinφ : Άεργος ισχύς Η πραγματική ισχύς Ρ είναι ίση με την μέση τιμή της ισχύς p(t) και υποδηλώνει από φυσική άποψη τη χρήσιμη μεταφερόμενη ισχύ. Η άεργος ισχύς Q είναι εξ ορισμού ίση με τη μέγιστη τιμή της συνιστώσας της ισχύος που ταξιδεύει εμπρός-πίσω στη γραμμή, έχει μηδενική μέση τιμή και συνεπώς είναι ανίκανη για παραγωγή χρήσιμου έργου ΣΥΝΤΕΛΕΣΤΗΣ ΙΣΧΥΟΣ ΚΑΙ ΑΝΤΙΣΤΑΘΜΙΣΗ Ως συντελεστή ισχύος λοιπόν ορίζουμε το cosφ, ο οποίος είναι ένας καθαρός αριθμός με πεδίο τιμών το [0,1]. Η μεγαλύτερη κατανάλωση πραγματικής ισχύος σε σχέση με την άεργο, μας δίνει τιμές κοντά στο 1, ενώ αντίθετα μεγαλύτερη κατανάλωση άεργου ισχύος, κοντά στο 0. Ιδανικά θέλουμε συντελεστή ισχύος κοντά στο 1, για λόγους που θα αναλυθούν παρακάτω.
36 36 Ενώ δεν μπορούμε να επηρεάσουμε την πραγματική ισχύ, μπορούμε να ελέγξουμε την άεργο. Αυτό είναι κάτι πολύ συνηθισμένο σε ηλεκτρικές εγκαταστάσεις όπου υπάρχει ανάγκη για μεγάλα ποσά ηλεκτρικής ενέργειας, σε φορτία που είναι συνήθως επαγωγικά (π.χ. επαγωγικοί κινητήρες σε βιομηχανίες), δηλαδή Q>0. Ο έλεγχος αυτός γίνεται με διατάξεις αντιστάθμισης, με χρήση δηλαδή πυκνωτών, οι οποίοι είναι χωρητικά φορτία (Q<0). Μείωση της κατανάλωσης άεργου ισχύος, συνεπάγεται μείωση του ρεύματος i(t) και παρουσιάζει θετικά χαρακτηριστικά. Αρχικά οι διατάξεις των ηλεκτρικών εγκαταστάσεων (καλώδια, διακόπτες, ασφάλειες κ.τ.λ.) έχουν συγκεκριμένο όριο στο ρεύμα που μπορούν να μεταφέρουν. Αυξημένη ζήτηση σε ρεύμα, το οποίο δεν προσφέρει ενέργεια, περιορίζει το ρεύμα που παράγει ισχύ και είναι ωφέλιμο. Επίσης η αύξηση του ρεύματος συνεπάγεται μεγαλύτερες πραγματικές απώλειες στις γραμμές. Οι απώλειες σε μία γραμμή μεταφοράς δύνονται από τον τύπο Ρ= I 2 R, όπου Ι το ρεύμα που την διαπερνά και R η ισοδύναμη αντίσταση της γραμμής, γίνεται σαφής η σχέση των απωλειών με το ρεύμα. Για την μεταφορά ηλεκτρικής ενέργειας χρησιμοποιούμε κάποιο μέταλλο (συνήθως χαλκό), του οποίου η θερμοκρασία αυξάνεται με την αύξηση του ρεύματος που το διαπερνά. Αυξημένη θερμοκρασία δημιουργεί μεγαλύτερη ισοδύναμη ωμική αντίσταση στο κύκλωμα. Εκτός από τα παραπάνω, με την αντιστάθμιση του συντελεστή ισχύος, εξασφαλίζουμε την καλύτερη δυνατή μακροζωία του ηλεκτρικού συστήματος. Τέλος αξίζει να αναφερθεί ότι με συντελεστή ισχύος κοντά στη μονάδα, περιορίζονται οι αρμονικές συνιστώσες, που παρεμβαίνουν από και προς τις άλλες συσκευές, οι οποίες δουλεύουν από την ίδια πηγή. 3.3 ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ Από την εμφάνιση των ημιαγωγικών διακοπτών ισχύος, ο έλεγχος τάσης, του ρεύματος, της ισχύος και της συχνότητας έχει γίνει οικονομικά αποδοτικός. Η ακρίβεια στον έλεγχο βελτιώθηκε με την
37 37 χρήση των υπολογιστών στα κυκλώματα ελέγχου. Παρακάτω θα περιγραφτούν μερικοί από τους διαδεδομένους διακόπτες ισχύος, τους συμβολισμούς τους και τις δυνατότητες τους. i)δίοδος ισχύος Είναι ένα στοιχείο ΡΝ. Όταν το δυναμικό της ανόδου είναι μεγαλύτερο από το δυναμικό της καθόδου του κατά την πτώση τάσης που αντιστοιχεί σε κατάσταση αγωγής, τότε έχουμε έναυση του στοιχείου και αγωγή ρεύματος. Η πτώση τάσης που αντιστοιχεί στην κατάσταση αγωγής είναι συνήθως 0.7V. Όταν το στοιχείο είναι ανάστροφα πολωμένο, δηλαδή η άνοδος είναι λιγότερο θετική από την κάθοδο, τότε έχουμε σβέση του στοιχείου και μετάβαση σε κατάσταση αποκοπής. Η δίοδος δεν διαθέτει δυνατότητα αποκοπής ορθής τάσης πέραν της πτώσης τάσης της αγωγής της. Διαθέτει μεγέθη της τάξης των ka και kv, ενώ η διακοπτική συχνότητα της συνήθως περιορίζεται στην τιμή της συχνότητας της γραμμής τροφοδοσίας. Για ταχείς διακοπτικές εφαρμογές υπάρχουν δίοδοι ταχείας αποκατάστασης με χρόνους ανάστροφης αποκατάστασης της τάξης δεκάδων νανοδευτερολέπτων και ονομαστικά μεγέθη αρκετών εκατοντάδων Α, σε αρκετές εκατοντάδες V, αλλά με μεγαλύτερη πτώση τάσης αγωγής 2 μέχρι 3 V. Σε περιπτώσεις διακοπτικών εφαρμογών χαμηλής τάσης, μικρότερης από 60 μέχρι 100V χρησιμοποιούνται δίοδοι τύπου Schottky. Αυτές έχουν πτώση τάσης αγωγής 0.3V και επιτρέπουν μεγαλύτερη απόδοση κατά τη μετατροπή ισχύος συγκριτικά με τις διόδους ταχείας αποκατάστασης και τις διόδους ισχύος Εικόνα 3.3. Κυκλωματικό σύμβολο διόδου ii)τρανζίστορ ισχύος
38 38 Πρόκειται για ένα στοιχείο τριών τμημάτων, με τον πιο συνηθισμένο συνδυασμό ΝΡΝ. Μέσω του ρεύματος βάσης γίνεται έλεγχος της αγωγής του στοιχείου. Στα κυκλώματα ισχύος ο ενδεδειγμένος τρόπος λειτουργίας είναι αυτός κατά τον οποίο το τρανζίστορ βρίσκεται σε ημικορεσμό, δηλαδή στο σημείο λειτουργίας σε κατάσταση αγωγής που αντιστοιχεί στο «γόνατο» της χαρακτηριστικής του παρακάτω σχήματος. Έτσι μπορεί να επανέρχεται και σε κατάσταση αποκοπής σε μικρότερο χρονικό διάστημα. Αυτό το στοιχείο δεν έχει δυνατότητα αποκοπής ανάστροφης τάσης. Στις μέρες μας, τα διαθέσιμα μέγιστα ονομαστικά μεγέθη των τρανζίστορ είναι 1000 Α, 1400 V με πτώση τάσης στην κατάσταση αγωγής 2V. Η συχνότητα διακοπτικής λειτουργίας είναι πολύ υψηλή για τα διπολικά τρανζίστορ ισχύος, με κατώτερο συντελεστή ενίσχυσης ρεύματος(κέρδος ρεύματος) από 4 έως 10, και στην περίπτωση των τρανζίστορ ισχύος τύπου Darlington η συχνότητα κυμαίνεται από 2 μέχρι 6kHz με κέρδος ρεύματος από 100 έως 200. Αυτά τα στοιχεία δεν χρησιμοποιούνται πολύ στα νεώτερα προϊόντα. Εικόνα 3.3. Συμβολισμός τρανζίστορ και χαρακτηριστική λειτουργίας iii)ελεγχόμενος ανορθωτής πυριτίου(scr) ή θυρίστορ Είναι ένα στοιχείο τεσσάρων τμημάτων(pnpn) με τρεις ενώσεις. Η επανάσταση στα ηλεκτρονικά ισχύος άρχισε με την εφεύρεση αυτού του στοιχείου το Το σύμβολο του και οι χαρακτηριστικές του παρουσιάζονται στο Σχήμα 3.4. Η έναυση του στοιχείου γίνεται με την εφαρμογή ενός σήματος ρεύματος στην πύλη σε συνδυασμό με την ορθή πόλωση του στοιχείου, δηλαδή το δυναμικό της ανόδου είναι μεγαλύτερο από αυτό της καθόδού του κατά την πτώση τάσης αγωγής της τάξης του 1 έως 3 V. Η σβέση του στοιχείου μπορεί να γίνει μόνο με την ανάστροφη πόλωση του. Κατά τη διάρκεια της ανάστροφης πόλωσης, γνωστής ως μετάβασης, το στοιχείο συμπεριφέρεται σαν δίοδος. Για να αποκατασταθεί η δυνατότητα ανάστροφης τάσης αποκοπής στοιχείου, πρέπει να διατηρείται μια αρνητική τάση στα άκρα του για μια περίοδο μεγαλύτερη του χρόνου ανάστροφης αποκατάστασης. Το στοιχείο μπορεί επίσης να
39 39 εμποδίσει και αρνητικές τάσεις, ενώ πέραν μιας συγκεκριμένης τιμής, το στοιχείο θα οδηγηθεί στην αποκοπή και θα άγει στην αντίθετη φορά. Αυτό το στοιχείο μοιάζει πολύ με τη δίοδο ισχύος, αλλά έχει τη δυνατότητα να καθυστερήσει την αγωγή του σε κατάσταση ορθής πόλωσης μέχρι την εφαρμογή του σήματος στην πύλη. Τα μέγιστα ονομαστικά του μεγέθη κυμαίνονται από 6 έως 8 ka, 12 kv, με πτώση τάσης κατά την αγωγή από 1 έως 3 V. H διάταξη χρησιμοποιείται μόνο σε ανορθωτές και αντιστροφείς Η περιορισμένη συχνότητα λειτουργίας του, η οποία κυμαίνεται από 300 μέχρι 400 Hz, αλλά και το βοηθητικό κύκλωμα σβέσης του αποτέλεσε την αφορμή για την αντικατάστασή του με άλλα στοιχεία ισχύος σε όλες τις εφαρμογές εκτός από πολύ συγκεκριμένες. Εικόνα 3.4. Συμβολισμός θυρίστορ και χαρακτηριστική λειτουργίας Στη συνέχεια θα παρουσιαστούν μερικές παραλλαγές του που ανήκουν στην ίδια οικογένεια.
40 40 iv)θυρίστορ με σβέση από τη πύλη(gto) Εικόνα 3.5. Συμβολισμός SCR και GTO θυρίστορ Είναι ένα στοιχείο θυρίστορ με δυνατότητα σβέσης και έναυσης από την πύλη. Το σύμβολο του παρουσιάζεται παρακάτω. Τα μέγιστα ονομαστικά μεγέθη του στοιχείου είναι 6kA, 6kV, με πτώση τάσης κατά την αγωγή από 2 έως 3V. Η μέγιστη διακοπτική συχνότητα είναι 1kHz και χρησιμοποιείται κυρίως σε αντιστροφείς μεγάλης ισχύος. v)mosfet Αυτό το στοιχείο είναι ένα είδος τρανζίστορ με επίδραση πεδίου που απαιτεί χαμηλότερες τάσεις στην πύλη για την έναυση και σβέση του, ενώ διακθέτει μεγαλύτερη διακοπτική συχνότητα, η οποία κυμαίνεται μεταξύ 30kHz και 1MHz.Το στοιχείο αυτό διαθέτεται στα 100 Α με 100 έως 200V, και στα 10 Α με 1000V. Το στοιχείο αυτό συμπεριφέρεται σαν μια ωμική αντίσταση κατά την αγωγή και συνεπώς μπορεί να χρησιμοποιηθεί ως αισθητήρας ρεύματος. Το στοιχείο αυτό δεν έχει δυνατότητα αποκοπής ανάστροφης τάσης. Ο συμβολισμός και η χαρακτηριστική λειτουργίας παρουσιάζονται στην εικόνα 3.6.
41 41 Εικόνα 3.6. MOSFET vi)διπολικό Τρανζίστορ Μονωμένης Πύλης Πρόκειται για ένα στοιχείο τριών τμημάτων με τα επιθυμητά χαρακτηριστικά ενός MOSFET (όσον αφορά την πύλη), ενός τρανζίστορ σε αγωγή, και ενός SCR/GTO (όσον αφορά τη δυνατότητα αποκοπής ανάστροφης τάσης). Το σύμβολό του φαίνεται στην Εικόνα 3.7. Είναι διαθέσιμο σε ονομαστικά μεγέθη 1.2kA στα 3.3kV, και 0.6kA στα 6.6kV, με πτώση τάσης κατά την αγωγή, 5V. Είναι επίσης διαθέσιμο με υψηλότερες τιμές ρευμάτων σε χαμηλότερες τιμές τάσης, με πολύ χαμηλότερες πτώσεις τάσης κατά την αγωγή. Επιπλέον, αναμένεται αύξηση στις μέγιστες ονομαστικές τιμές ρεύματος και τάσης του στο μέλλον. Η διακοπτική συχνότητά του είναι συνήθως περίπου 20kHz. Εικόνα 3.7. IGBT
42 42 ΚΕΦΑΛΑΙΟ 4 H AC/DC ΔΙΑΤΑΞΗ 4.1 TO ΚΥΚΛΩΜΑ ΕΙΣΑΓΩΓΗ Όπως αναλύθηκε και στο 3 ο Κεφάλαιο η αντιστάθμιση του συντελεστή ισχύος (power factor precompesator PFP) είναι πολύ σημαντική σε AC/DC διατάξεις. Όπως φαίνεται και από το όνομα του, η κύρια λειτουργία του μετατροπέα είναι η επίτευξη μονάδας συντελεστή ισχύος, ελέγχοντας το ρεύμα εισόδου να έχει την ίδια φάση με αυτή της ημιτονοειδής τάσης, της πηγής. Έτσι η διάταξη λειτουργεί στις βέλτιστες συνθήκες. Πιο συγκεκριμένα ο έλεγχος έχει διπλό στόχο. Αρχικά πρέπει να παράγει μία τάση, η οποία θα είναι συνεχής στις επιθυμητές τιμές που εμείς του ορίζουμε. Αφού έχουμε εξασφαλίσει την κατάλληλη τάση, θέλουμε το ημιτονοειδές ρεύμα εισόδου του κυκλώματος μας να είναι συμφασικό με την τάση εισόδου (συντελεστής ισχύος μονάδα). Επιπλέον θέλουμε τα παραπάνω να επιτυγχάνονται ακόμα και σε αλλαγές των χαρακτηριστικών του κυκλώματος, λόγω του φορτίου που μεταβάλλεται (π.χ. όταν βάζουμε στην πρίζα κάτι να δουλέψει) και είναι και άγνωστο.
43 43 Για την διάταξη θα γίνει χρήση διακοπτών στερεάς κατάστασης, τα οποία παρουσιάστηκαν στο 3 ο κεφάλαιο. Η διακοπτική συχνότητας θα είναι της τάξεως των μερικών δεκάδων khz και ο έλεγχος γίνεται με τη μέθοδο διαμόρφωσης πλάτους με παλμούς (pulse-width modulation PWM). Tο κύκλωμα φαίνεται παρακάτω. Εικόνα 4.1. AC/DC διάταξη ΔΙΑΜΟΡΦΩΣΗ ΤΟΥ ΠΡΟΒΛΗΜΑΤΟΣ Έχουμε λοιπόν το κύκλωμα της εικόνας 4.1, το οποίο αποτελείται από δύο ζευγάρια διακοπτών από τρανζίστορ-διόδους τα οποία έχουν συμπληρωματική λειτουργία, όταν ο ένας διακόπτης είναι ανοικτός, ο άλλος είναι κλειστός. Το σήμα δ προέρχεται από ένα κύκλωμα PWM και παίρνει τις σταθερές τιμές {-1,1}. Για 1 κλείνουν οι διακόπτες δ, ενώ για -1 οι δ ~. Οι διαφορικές εξισώσεις του κυκλώματος δίνονται παρακάτω, κάνοντας χρήση των νόμων Kirchoff Lẋ1 = -r x1 ux2 + vi(t) C ẋ2 = -Gx2 + ux1 Όπου μετατρέπονται:
44 44 ẋ1 = - r L x1 u vi(t) x2 + L L (1) ẋ2 = - G C x2 + u C x1 Με vi(t)=e sin(ωt) η τάση εισόδου, x1 το ρεύμα εισόδου, x2 η DC τάση εξόδου στο φορτίο, L, C, r και G θετικές σταθερές, επαγωγή, χωρητικότητα, αντίσταση γραμμής και αγωγιμότητα φορτίου, το u [-1,1] είναι το σήμα των PWM, το οποίο είναι και η είσοδος ελέγχου μας. Θεωρούμε ότι οι παλμοί εκφράζουν έναν αριθμό στο διάστημα αυτό. Το επιθυμητό ρεύμα εισόδου είναι x1*(t) = Id sin(ωt) Με Id >0 το οποίο θα καθοριστεί παρακάτω. Αντικαθιστώντας το επιθυμητό ρεύμα στην εξίσωση (1) έχουμε: Lẋ1* = -r x1* u*x2* + vi(t) Και βάζοντας τις δύο παραπάνω εξισώσεις στην (1) έχουμε την διαφορική εξίσωση για το x2* C ẋ2*x2* = -Gx2 2 * + (E rid) 2 Η οποία δίνει λύση : x2* 2 (t) = (E rid) 2G + A sin(ωt + φ) Id - (E rid) 2 Id cos(ωt) - Lω 2 Id2 sin(ωt)
45 45 Όπου Έτσι λοιπόν το x2* αποτελείται από έναν DC όρο και μία αρμονική. Στην πράξη η αρμονική μπορεί να παραλειφθεί καθώς είναι περίπου 2 τάξης μεγέθους μικρότερη από την σταθερή συνιστώσα. Έτσι το x2* μπορεί να δοθεί από την RMS τιμή της εξίσωσης Vd = (E rid) 2G Γνωρίζοντας την επιθυμητή τάση βρίσκουμε το Id To οποίο είναι πραγματικός αριθμός για Ε Vd > 8rG Επιλέγοντας την μικρότερη λύση, η οποία συνεπάγεται την μικρότερη ισχύ (άρα και λιγότερες απώλειες) καταλήγουμε στη λύση Φαίνεται λοιπόν ότι έχοντας το επιθυμητό ρεύμα x1*(t) = Id sin(ωt) επιτυγχάνουμε και τους δύο στόχους του προβλήματος, μοναδιαίο συντελεστή ισχύος και επιθυμητή τάση εξόδου. Ένα σημαντικό πρόβλημα γεννιέται από το γεγονός ότι το Id εξαρτάται άμεσα από τα r και G, τα οποία δεν είναι γνωστά και σταθερά. Το πρόβλημα αυτό θα λυθεί με χρήση προσαρμοστικού ελέγχου και εκτιμητών για τις άγνωστες παραμέτρους.
46 ΕΛΕΓΧΟΣ ΜΕ ΓΝΩΣΕΣ ΠΑΡΑΜΕΤΡΟΥΣ ΚΑΤΑΣΤΑΤΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΑΙ ΕΥΣΤΑΘΕΙΑ Σε αυτή τη παράγραφο θα παρουσιαστεί ο κατάλληλος νόμος ελέγχου του συστήματος, έτσι ώστε οι έξοδοι να ακολουθούν την επιθυμητή τροχιά. Όλες οι παράμετροι θεωρούνται γνωστοί, ενώ στα επόμενα κεφάλαια τα r, G θα είναι άγνωστα και με τους κατάλληλους εκτιμητές θα εφαρμοστούν οι ίδιοι νόμοι ελέγχου, που θα χρησιμοποιηθούν εδώ. Από τις εξισώσεις (1) βρίσκουμε τις καταστατικές εξισώσεις του συστήματος ẋ = f(x,u) ẋ = [ r L G C u L u C ] x + [ vi(t) L 0 ] Έστω η θετικά ορισμένη συνάρτηση V(x1,x2) = 1 2 Lx Cx22 Η οποία εκφράζει την αποθηκευμένη ενέργεια του συστήματος. Έχουμε V =-rx1 2 + vix1 Gx2 2 Αθροίζοντας τον θετικό όρο (x1 r 2 - vi 2r)2 στο δεξί μέλος έχουμε την ανισότητα V - rx1 2 + r 2 x r vi2 Gx2 2 Και V - r 2 x12 Gx r vi2 Με vi Ε V - r 2 x12 Gx r E2 Έτσι η περιοχή Ω = {(x1,x2)ϵ R x R r 2 x12 + Gx2 2 > 2r E2 } είναι περιοχή ασυμπτωτικής ευστάθειας. 1
47 ΓΡΑΜΜΙΚΟΠΟΙΗΣΗ ΚΑΙ ΝΟΜΟΣ ΕΛΕΓΧΟΥ Όπως είδαμε λοιπόν από τις εξισώσεις (1), έχουμε ένα μη-γραμμικό σύστημα. Θα γραμμικοποιήσουμε την κατάσταση x1 μέσω γραμμικοποίησης με ανατροφοδότηση. Από την εξίσωση παρακάτω θα βρεθεί η κατάλληλη είσοδος. ẋ1 = - r L x1 u vi(t) x2 + L L Επιλέγεται η είσοδος: u vi(t) x2 + L L = v και έχουμε u = 1 x2 (vi(t) Lv) Καταλήγουμε στην παρακάτω διαφορική εξίσωση της κατάστασης x1 ẋ1 = - r L x1 + v Ορίζεται το σφάλμα τροχιάς e = x1 - x1*, με x1*(t) = Id sin(ωt), όπου οδηγεί στο γραμμικοποιημένο σύστημα ė = -am e με είσοδο v= - ame + r x1 + ẋ1* L έχουμε την είσοδο u = 1 x2 (L ame + rx1 - L ẋ1* vi) Έτσι η λύση για το x1(t) δίνεται από την εξίσωση x1 (t) = x1(0) exp(-amt) + Id sin(ωt)
48 48 Θεωρώντας ότι το x1 βρίσκεται στην σταθερή κατάσταση του, x1 = Id sin(ωt) οι εξισώσεις του x2 δίνονται από το (1): ẋ2 = - G (E rid)id x2 + - (E rid)id cos(2ωt) - Lω C 2Cx2 2Cx2 2Cx2 Id2 sin(2ωt) και μετατρέποντας το σε εξίσωση ως προς το x2 2 : ẋ2 2 = - 2G C x22 + (E rid)id C - (E rid)id C cos(2ωt) - Lω C Id2 sin(2ωt) Φαίνεται ότι τείνει εκθετικά στην επιθυμητή τιμή x2* 2 (t) = (E rid) + A sin(ωt + φ) με σταθερά χρόνου - 2G 2G C Συνεπώς η μέση τιμή της τάσης x2 συγκλίνει στην επιθυμητή Vd = (E rid) 2G Εικόνα 4.2. Το Σύστημα
49 ΠΡΟΣΟΜΟΙΩΣΗ Για να κριθεί η αποτελεσματικότητα του ελέγχου, θα γίνει προσομοίωση σε περιβάλλον Matlab (έκδοση 2015). Οι παράμετροι του συστήματος που επιλέχθηκαν είναι E=150 V, ω= 100π rad/s, r= 2.2 Ω, L=2.13 mh, C=1100 μf. Ο κώδικας για την δήλωση των μεταβλητών: E=150; w=100*pi; r=2.2; L= ; C=0.0011; G=1/87; Vd=200; Id=E/(2*r)-(E^2/(4*r^2)-2*G*Vd^2/r)^(1/2); Πρέπει να σημειωθεί ότι από την στιγμή που έχουμε να κάνουμε με μη γραμμικό σύστημα, το πρόβλημα του ελέγχου (με γνωστές παραμέτρους) δεν μπορεί να λυθεί με τις συμβατικές μεθόδους που διαθέτει η matlab, (ορισμού πινάκων, εισόδου κτλ.). Για τη διαφορική εξίσωση του συστήματος χρησιμοποιήθηκε η συνάρτηση ode45. Επιλέχθηκαν οι τιμές x1(0)=2 A, x2(0)=100 V, am=10 x10=2; x20=100; t0=0; tf=0.5; am=10; tspan= [t0, tf]; IC=[x10, x20]; sdot [ (-r*s(1)-script_u(s(1),s(2),t)*s(2)+e*sin(w*t))/l; (-script_g(t)*s(2)+script_u(s(1),s(2),t)*s(1))/c]; [time, state_values] = ode45(sdot,tspan,ic); x=state_values(:,1); y=state_values(:,2);
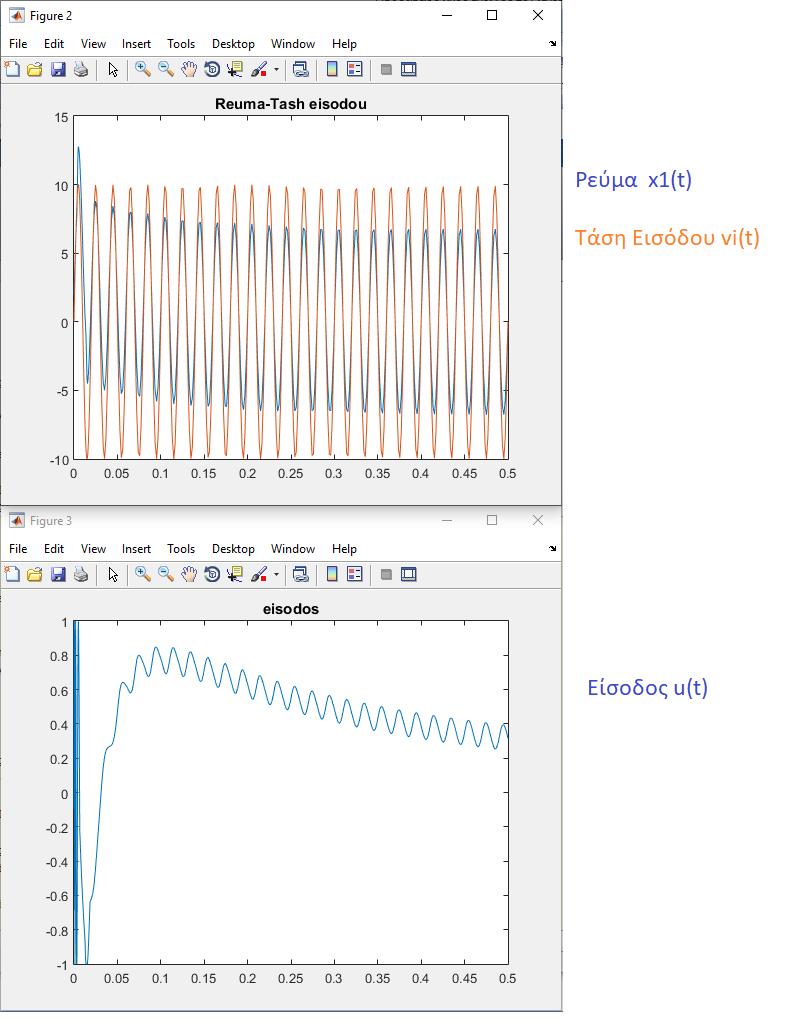
50 Ο πίνακας x μας δίνει τις τιμές του x1(t) και ο y τις αντίστοιχες του x2(t). Η συνάρτηση script_u δίνει την είσοδο και η script_g το φορτίο (σε Ω -1 ). 50 Τα περιεχόμενα των αρχείων.m από τις επιλεγείσες συναρτήσεις δίνονται παρακάτω: script_u.m function script_u = script_u(x,y,t) Vd=200; E=150; w=100*pi; r=2.2; L= ; C=0.0011; am=10; if t<0.3 G = 1/87; else G = 1/50; end Id=E/(2*r)-(E^2/(4*r^2)-2*G*Vd^2/r)^(1/2); u=(e*sin(w*t)-r*x-l*w*id*cos(w*t)-am*l*(id*sin(w*t)-x))/y; if u>1 script_u = 1; elseif u<-1 script_u = -1; else script_u = u; end end και script_g.m function script_g = script_g(t) if t<0.3 script_g = 1/87; else script_g = 1/50; end end Επιλέχθηκε λοιπόν φορτίο 1/87 Ω -1 μέχρι τα t=0.3 s, το οποίο θα αλλάζει στα 1/50 Ω -1 για t>0.3s.

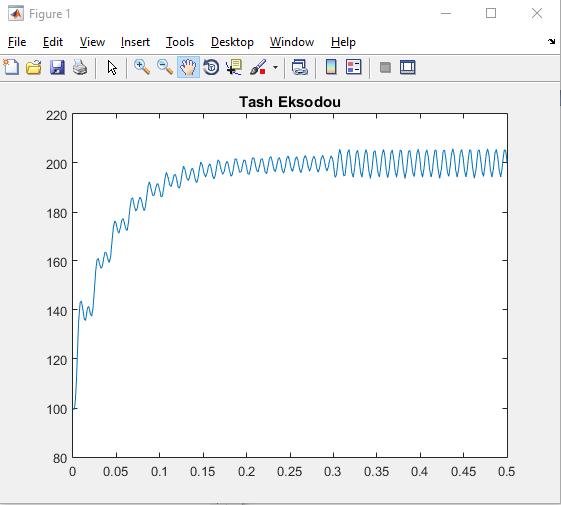
51 Τα αποτελέσματα δίνονται στις γραφικές παραστάσεις της επόμενης σελίδας. Αρχικά για φορτίο μόνο 87Ω. Όπου βγαίνουν με την χρήση των κατάλληλων συναρτήσεων plot. 51
52 52
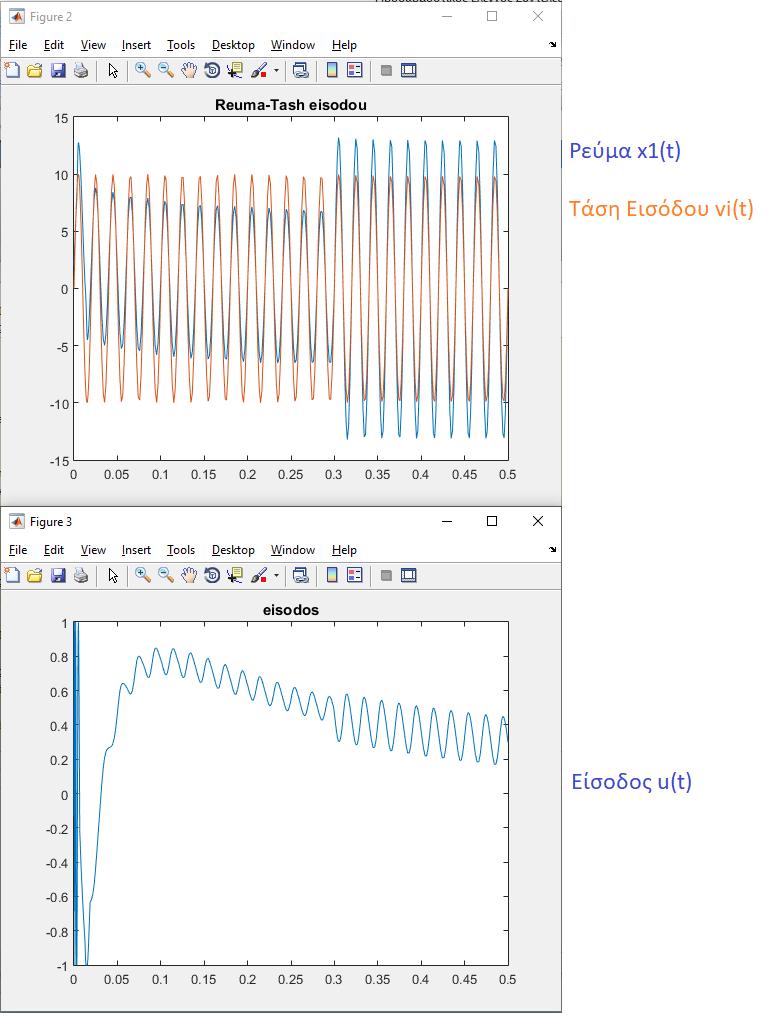
53 Και για μεταβαλλόμενο φορτίο (στο t=0.3 s). 53
54 54
55 55
56 ΕΛΕΓΧΟΣ ΜΕ AΓΝΩΣΕΣ ΠΑΡΑΜΕΤΡΟΥΣ ΠΑΡΑΜΕΤΡΙΚΟ ΜΟΝΤΕΛΟ Στον νόμο ελέγχου που υπολογίστηκε προηγουμένως, το φορτίο G και το r θεωρήθηκαν γνωστά. Κάτι τέτοιο είναι εφικτό μεν, δεν είναι ιδανικό δε. Αν σκεφτεί κανείς πώς για κάθε παράμετρο που έχει το σύστημα, η οποία δεν είναι σταθερή κατά τη λειτουργία της, χρειαζόμαστε μια επιπλέον συσκευή μέτρησης. Όσο λιγότερα όργανα χρησιμοποιηθούν, τόσο μειώνεται η ανάγκη για συντήρηση της. και επίσης τόσο αυξάνεται η ζωή της. Θα εφαρμοστεί λοιπόν προσαρμοστικός έλεγχος στο σύστημα (1) με τα r, G άγνωστα. Έχουμε τις παρακάτω διαφορικές εξισώσεις του συστήματος, με κόκκινες τις παραμέτρους προς αναγνώριση. ẋ1 = - r L x1 u vi(t) x2 + L L (1) ẋ2 = - G C x2 + u C x1 Το σύστημα είναι της μορφής: ẋ = θ* f(x) + g(x) u ή z = θ* f(x) (σε μορφή SPM) Με θ* T = [ r 0 + ] τις άγνωστες παραμέτρους προς εκτίμηση, z = [ẋ 0 G u L x2 vi(t) L ẋ u C x1 ], f(x) = [ x1 L x2 C ]
57 ΔΗΜΙΟΥΡΓΙΑ ΕΚΤΙΜΗΤΩΝ O νόμος ελέγχου της εισόδου λοιπόν, είναι της μορφής : u = 1 x2 (vi Lv) Ενώ το x = Î sin(ωt) Με Λαμβάνοντας υπόψη τη θεωρία του κεφαλαίου 2.3, δημιουργούμε τις εξισώσεις των εκτιμητών της μορφής : Με γ1, γ2 σταθερά κέρδη, ε(x) εξίσωση σφάλματος και f(x) οι συναρτήσεις που βρίσκουμε από τις καταστατικές εξισώσεις του συστήματος.
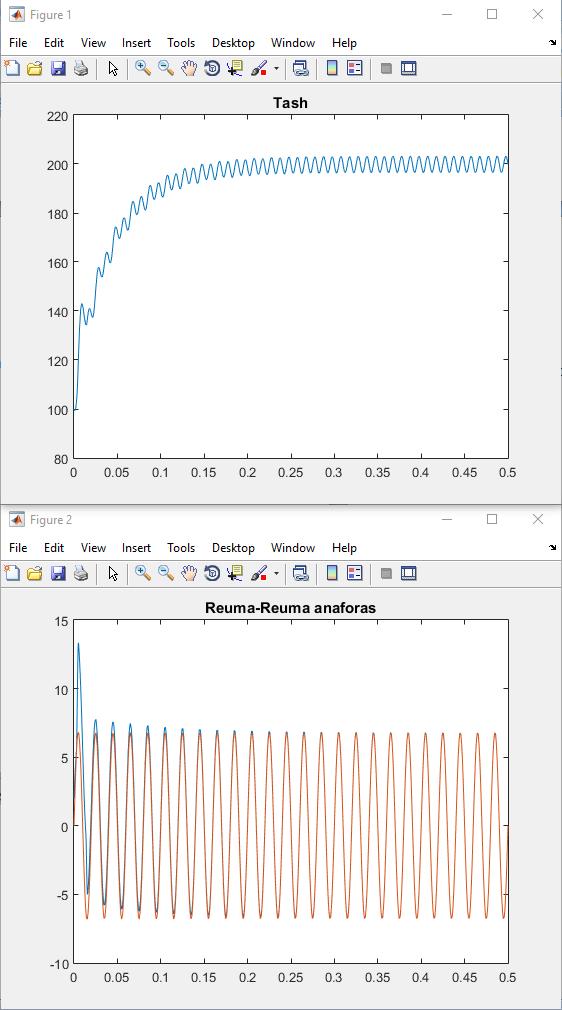
58 Έχουμε λοιπόν τις παρακάτω εξισώσεις του συστήματος (καταστάσεων και εκτιμητών) 58 ẋ1 = - r L x1 u vi(t) x2 + L L ẋ2 = - G C x2 + u C x ΑΠΟΚΡΙΣΗ Στην προσομοίωση του προσαρμοστικού ελέγχου μέσω Matlab επιλέχθηκαν οι ίδιες παράμετροι της προηγούμενης προσομοίωσης. Ο κώδικας φαίνεται παρακάτω αρχικά για φορτίο G=1/87 Ω -1 %% 1st version %% clear clc E=150; w=100*pi; r=2.2; L= ; C=0.0011; G=1/87; Vd=200; t0=0; tf=0.5; tspan= [t0, tf]; x10=2; x20=100; er0=2; eg0=1/100; IC=[x10, x20, er0, eg0]; g1=0.005; g2= ; am=10; sdot [ (-r*s(1)-script_a1(s(1),s(2),t,am,s(3),s(4))*s(2)+e*sin(w*t))/l; (-G*s(2)+script_a1(s(1),s(2),t,am,s(3),s(4))*s(1))/C; -g1*s(1)*(-r*s(1)/l+s(3)*s(1)/l); -g2*s(2)*(-g*s(2)/c+s(4)*s(2)/c) ]; [time, state_values] = ode23s(sdot,tspan,ic); x=state_values(:,1); y=state_values(:,2);
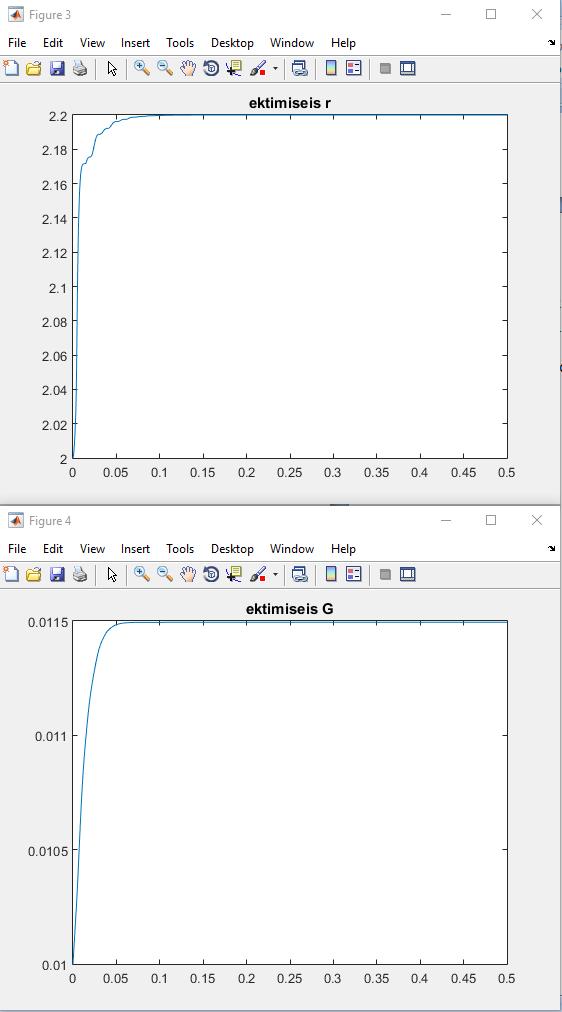
59 er=state_values(:,3); eg=state_values(:,4); figure(1) clf plot(time,y),title('tash') figure(2) clf Id=E/(2*r)-(E^2/(4*r^2)-2*G*Vd^2/r)^(1/2); x1r=id*sin(w*time); plot(time,x,time,x1r);title('reuma-reuma anaforas'); figure(3) clf plot(time,er),title('ektimiseis r') figure(4) clf plot(time,eg),title('ektimiseis G') 59 και το αρχείο script_a1.m με την παρακάτω συνάρτηση, η οποία υπολογίζει την είσοδο u. function script_a1 = script_a1(x,y,t,am,er,eg) Vd=200; E=150; w=100*pi; L= ; C=0.0011; eid=e/(2*er)-(e^2/(4*er^2)-2*eg*vd^2/er)^(1/2); u=(e*sin(w*t)-l*(-am*(x-eid*sin(w*t))+eid*w*cos(w*t)+er/l*x))/y; if u>1 script_a1 = 1; elseif u<-1 script_a1 = -1; else script_a1 = u; end end Σημειώνεται ότι επιλέχθηκε η συνάρτηση ode23s για την επίλυση της διαφορικής σε αντίθεση με το προηγούμενο παράδειγμα, όπου είχε επιλεχθεί η ode45, καθώς η τελευταία αν και πιο ακριβής, δεν μπορεί να λύσει ένα τόσο πολύπλοκο σύστημα. Επιλέχθηκε λοιπόν stiff ode solver, όπου έχει χειρότερη ακρίβεια, με σταθερό βήμα. Επίσης στους εκτιμητές παραλείφτηκαν τα 1/C και 1/L καθώς είναι σταθερά και μπορούν να συμπεριληφθούν στα κέρδη γ1, γ2. Επιλέχθηκαν κέρδη γ1=0.005 και γ2= , πολύ χαμηλά, τα οποία όμως όπως θα φανεί και παρακάτω, δίνουν ικανοποιητικές αποκρίσεις. Τα αποτελέσματα δίνονται στις γραφικές, αρχικά τάση εξόδου και ρεύμα στην είσοδο και έπειτα τα αποτελέσματα των εκτιμητών για r, G.
60 60
61 61
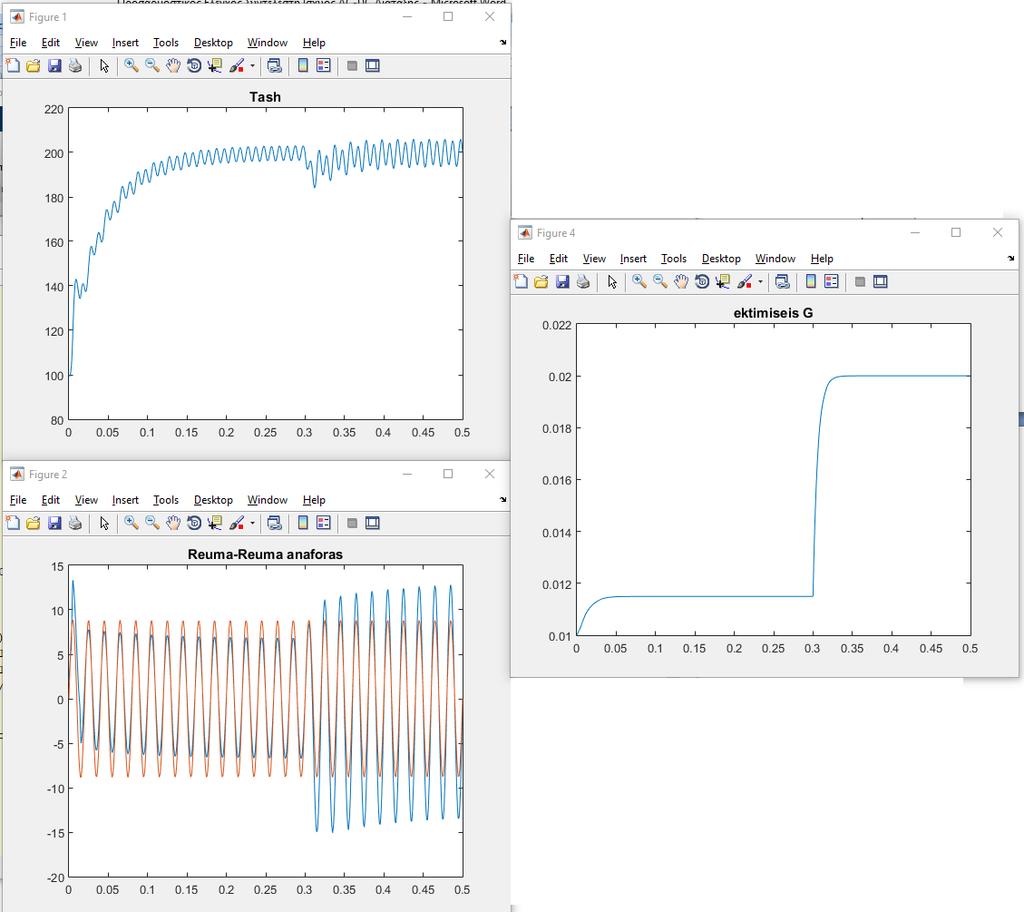
62 62 Έπειτα θα παρουσιαστούν τα αποτελέσματα για μεταβαλλόμενο φορτίο. Αρχικά για G=1/87 Ω -1 το οποίο για t=0.3s γίνεται G=1/50 Ω -1 μέσω του αρχείου script_g.m. Ο κώδικας στην διαφορική εξίσωση γίνεται : sdot [ (-r*s(1)-script_a1(s(1),s(2),t,am,s(3),s(4))*s(2)+e*sin(w*t))/l; (-script_g(t)*s(2)+script_a1(s(1),s(2),t,am,s(3),s(4))*s(1))/c; -g1*s(1)*(-r*s(1)/l+s(3)*s(1)/l); -g2*s(2)*(-script_g(t)*s(2)/c+s(4)*s(2)/c) ]; Και η συνάρτηση script_g είναι: function script_g = script_g(t) if t<0.3 script_g = 1/87; else script_g = 1/50; end end Με τα αποτελέσματα να παρουσιάζονται στην επόμενη σελίδα.
63 63
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER
 4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
Περιεχόμενα. Πρόλογος...13
 Περιεχόμενα Πρόλογος...3 Κεφάλαιο : Στοιχεία ηλεκτρικών κυκλωμάτων...5. Βασικά ηλεκτρικά μεγέθη...5.. Ηλεκτρικό φορτίο...5.. Ηλεκτρικό ρεύμα...5..3 Τάση...6..4 Ενέργεια...6..5 Ισχύς...6..6 Σύνοψη...7.
Περιεχόμενα Πρόλογος...3 Κεφάλαιο : Στοιχεία ηλεκτρικών κυκλωμάτων...5. Βασικά ηλεκτρικά μεγέθη...5.. Ηλεκτρικό φορτίο...5.. Ηλεκτρικό ρεύμα...5..3 Τάση...6..4 Ενέργεια...6..5 Ισχύς...6..6 Σύνοψη...7.
Περιεχόμενα. Πρόλογος...13
 Περιεχόμενα Πρόλογος...3 Κεφάλαιο : Στοιχεία ηλεκτρικών κυκλωμάτων...5. Βασικά ηλεκτρικά μεγέθη...5.. Ηλεκτρικό φορτίο...5.. Ηλεκτρικό ρεύμα...5..3 Τάση...6..4 Ενέργεια...6..5 Ισχύς...6..6 Σύνοψη...7.
Περιεχόμενα Πρόλογος...3 Κεφάλαιο : Στοιχεία ηλεκτρικών κυκλωμάτων...5. Βασικά ηλεκτρικά μεγέθη...5.. Ηλεκτρικό φορτίο...5.. Ηλεκτρικό ρεύμα...5..3 Τάση...6..4 Ενέργεια...6..5 Ισχύς...6..6 Σύνοψη...7.
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
Άσκηση 10 Στοιχεία ηλεκτρονικής τεχνολογίας
 Άσκηση 10 Στοιχεία ηλεκτρονικής τεχνολογίας ΔΙΟΔΟΣ Οι περισσότερες ηλεκτρονικές συσκευές όπως οι τηλεοράσεις, τα στερεοφωνικά συγκροτήματα και οι υπολογιστές χρειάζονται τάση dc για να λειτουργήσουν σωστά.
Άσκηση 10 Στοιχεία ηλεκτρονικής τεχνολογίας ΔΙΟΔΟΣ Οι περισσότερες ηλεκτρονικές συσκευές όπως οι τηλεοράσεις, τα στερεοφωνικά συγκροτήματα και οι υπολογιστές χρειάζονται τάση dc για να λειτουργήσουν σωστά.
( ) = ( ) Ηλεκτρική Ισχύς. p t V I t t. cos cos 1 cos cos 2. p t V I t. το στιγμιαίο ρεύμα: όμως: Άρα θα είναι: Επειδή όμως: θα είναι τελικά:
 = ( ) Ηλεκτρική Ισχύς. p t V I t t. cos cos 1 cos cos 2. p t V I t. το στιγμιαίο ρεύμα: όμως: Άρα θα είναι: Επειδή όμως: θα είναι τελικά:") Η στιγμιαία ηλεκτρική ισχύς σε οποιοδήποτε σημείο ενός κυκλώματος υπολογίζεται ως το γινόμενο της στιγμιαίας τάσης επί το στιγμιαίο ρεύμα: Σε ένα εναλλασσόμενο σύστημα τάσεων και ρευμάτων θα έχουμε όμως:
Η στιγμιαία ηλεκτρική ισχύς σε οποιοδήποτε σημείο ενός κυκλώματος υπολογίζεται ως το γινόμενο της στιγμιαίας τάσης επί το στιγμιαίο ρεύμα: Σε ένα εναλλασσόμενο σύστημα τάσεων και ρευμάτων θα έχουμε όμως:
Ανάλυση Ηλεκτρικών Κυκλωμάτων
 Ανάλυση Ηλεκτρικών Κυκλωμάτων Κεφάλαιο 13: Ισχύς σε κυκλώματα ημιτονοειδούς διέγερσης Οι διαφάνειες ακολουθούν το βιβλίο του Κων/νου Παπαδόπουλου «Ανάλυση Ηλεκτρικών Κυκλωμάτων» ISBN: 9789609371100 κωδ.
Ανάλυση Ηλεκτρικών Κυκλωμάτων Κεφάλαιο 13: Ισχύς σε κυκλώματα ημιτονοειδούς διέγερσης Οι διαφάνειες ακολουθούν το βιβλίο του Κων/νου Παπαδόπουλου «Ανάλυση Ηλεκτρικών Κυκλωμάτων» ISBN: 9789609371100 κωδ.
ΚΕΦΑΛΑΙΟ 3 Ο : ΙΣΧΥΣ ΚΥΚΛΩΜΑΤΩΝ ΣΤΟ ΕΝΑΛΛΑΣΣΟΜΕΝΟ ΡΕΥΜΑ
 ΚΕΦΑΛΑΙΟ 3 Ο : ΙΣΧΥΣ ΚΥΚΛΩΜΑΤΩΝ ΣΤΟ ΕΝΑΛΛΑΣΣΟΜΕΝΟ ΡΕΥΜΑ 1 Ως ισχύς ορίζεται ο ρυθμός παροχής ή κατανάλωσης ενέργειας. Η ηλεκτρική ισχύς ορίζεται ως το γινόμενο της τάσης επί το ρεύμα: p u i Ιδανικό πηνίο
ΚΕΦΑΛΑΙΟ 3 Ο : ΙΣΧΥΣ ΚΥΚΛΩΜΑΤΩΝ ΣΤΟ ΕΝΑΛΛΑΣΣΟΜΕΝΟ ΡΕΥΜΑ 1 Ως ισχύς ορίζεται ο ρυθμός παροχής ή κατανάλωσης ενέργειας. Η ηλεκτρική ισχύς ορίζεται ως το γινόμενο της τάσης επί το ρεύμα: p u i Ιδανικό πηνίο
Να σχεδιαστεί ένας ενισχυτής κοινού εκπομπού (σχ.1) με τα εξής χαρακτηριστικά: R 2.3 k,
 με τα εξής χαρακτηριστικά: R 2.3 k,") Να σχεδιαστεί ένας ενισχυτής κοινού εκπομπού (σχ) με τα εξής χαρακτηριστικά: 3 k, 50, k, S k και V 5 α) Nα υπολογιστούν οι τιμές των αντιστάσεων β) Να επιλεγούν οι χωρητικότητες C, CC έτσι ώστε ο ενισχυτής
Να σχεδιαστεί ένας ενισχυτής κοινού εκπομπού (σχ) με τα εξής χαρακτηριστικά: 3 k, 50, k, S k και V 5 α) Nα υπολογιστούν οι τιμές των αντιστάσεων β) Να επιλεγούν οι χωρητικότητες C, CC έτσι ώστε ο ενισχυτής
Μεταβατική Ανάλυση - Φάσορες. Κατάστρωση διαφορικών εξισώσεων. Μεταβατική απόκριση. Γενικό μοντέλο. ,, ( ) είναι γνωστές ποσότητες (σταθερές)
 είναι γνωστές ποσότητες (σταθερές)") Μεταβατική Ανάλυση - Φάσορες Πρόσθετες διαφάνειες διαλέξεων Αλέξανδρος Πίνο Δεκέμβριος 2017 Γενικό μοντέλο Απόκριση κυκλώματος πρώτης τάξης, δηλαδή με ένα μόνο στοιχείο C ή L 3 Μεταβατική απόκριση Ξαφνική
Μεταβατική Ανάλυση - Φάσορες Πρόσθετες διαφάνειες διαλέξεων Αλέξανδρος Πίνο Δεκέμβριος 2017 Γενικό μοντέλο Απόκριση κυκλώματος πρώτης τάξης, δηλαδή με ένα μόνο στοιχείο C ή L 3 Μεταβατική απόκριση Ξαφνική
website:
 Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 6 Μαρτίου 2017 1 Εισαγωγή Κάθε φυσικό σύστημα
Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 6 Μαρτίου 2017 1 Εισαγωγή Κάθε φυσικό σύστημα
ΤΕΧΝΟΛΟΓΙΑ ΜΕΤΡΗΣΕΩΝ. 3 η ενότητα ΡΥΘΜΙΣΗ ΣΗΜΑΤΩΝ ΚΑΙ ΠΡΟΣΑΡΜΟΓΗ ΜΕ ΤΕΧΝΙΚΕΣ ΠΑΘΗΤΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ. ρ. Λάμπρος Μπισδούνης.
 ΤΕΧΝΟΛΟΓΙΑ ΜΕΤΡΗΣΕΩΝ ρ. Λάμπρος Μπισδούνης Καθηγητής η ενότητα ΡΥΘΜΙΣΗ ΣΗΜΑΤΩΝ ΚΑΙ ΠΡΟΣΑΡΜΟΓΗ ΜΕ ΤΕΧΝΙΚΕΣ ΠΑΘΗΤΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ T... ΥΤΙΚΗΣ ΕΛΛΑ ΑΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. Περιεχόμενα ης ενότητας
ΤΕΧΝΟΛΟΓΙΑ ΜΕΤΡΗΣΕΩΝ ρ. Λάμπρος Μπισδούνης Καθηγητής η ενότητα ΡΥΘΜΙΣΗ ΣΗΜΑΤΩΝ ΚΑΙ ΠΡΟΣΑΡΜΟΓΗ ΜΕ ΤΕΧΝΙΚΕΣ ΠΑΘΗΤΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ T... ΥΤΙΚΗΣ ΕΛΛΑ ΑΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. Περιεχόμενα ης ενότητας
ΤΡΙΦΑΣΙΚΑ ΚΥΚΛΩΜΑΤΑ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ
 Εργαστήριο Ηλεκτρικών Μηχανών Τμήμα Ηλεκτρολόγων Μηχανικών & Μηχανικών Υπολογιστών Πανεπιστήμιο Θεσσαλίας ΤΡΙΦΑΣΙΚΑ ΚΥΚΛΩΜΑΤΑ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Εισαγωγή Τα τριφασικά κυκλώματα Ε.Ρ. αποτελούν τη σπουδαιότερη
Εργαστήριο Ηλεκτρικών Μηχανών Τμήμα Ηλεκτρολόγων Μηχανικών & Μηχανικών Υπολογιστών Πανεπιστήμιο Θεσσαλίας ΤΡΙΦΑΣΙΚΑ ΚΥΚΛΩΜΑΤΑ ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΡΕΥΜΑΤΟΣ Εισαγωγή Τα τριφασικά κυκλώματα Ε.Ρ. αποτελούν τη σπουδαιότερη
Κυκλώματα με ημιτονοειδή διέγερση
 Κυκλώματα με ημιτονοειδή διέγερση Κυκλώματα με ημιτονοειδή διέγερση ονομάζονται εκείνα στα οποία επιβάλλεται τάση της μορφής: = ( ω ϕ ) vt V sin t όπου: V το πλάτος (στιγμιαία μέγιστη τιμή) της τάσης ω
Κυκλώματα με ημιτονοειδή διέγερση Κυκλώματα με ημιτονοειδή διέγερση ονομάζονται εκείνα στα οποία επιβάλλεται τάση της μορφής: = ( ω ϕ ) vt V sin t όπου: V το πλάτος (στιγμιαία μέγιστη τιμή) της τάσης ω
Τελεστικοί Ενισχυτές
 Τελεστικοί Ενισχυτές Ενισχυτές-Γενικά: Οι ενισχυτές είναι δίθυρα δίκτυα στα οποία η τάση ή το ρεύμα εξόδου είναι ευθέως ανάλογη της τάσεως ή του ρεύματος εισόδου. Υπάρχουν τέσσερα διαφορετικά είδη ενισχυτών:
Τελεστικοί Ενισχυτές Ενισχυτές-Γενικά: Οι ενισχυτές είναι δίθυρα δίκτυα στα οποία η τάση ή το ρεύμα εξόδου είναι ευθέως ανάλογη της τάσεως ή του ρεύματος εισόδου. Υπάρχουν τέσσερα διαφορετικά είδη ενισχυτών:
ΚΕΦΑΛΑΙΟ 4 Ο : ΔΙΟΡΘΩΣΗ ΤΟΥ ΣΥΝΤΕΛΕΣΤΗ ΙΣΧΥΟΣ
 ΚΕΦΑΛΑΙΟ 4 Ο : ΔΙΟΡΘΩΣΗ ΤΟΥ ΣΥΝΤΕΛΕΣΤΗ ΙΣΧΥΟΣ 1 Ο όρος διόρθωση του συντελεστή ισχύος σημάνει στην ουσία αύξηση του cosφ έτσι ώστε να τείνει στο 1, δηλαδή η γωνία φ, η οποία ως γνωστό είναι η γωνία φάσης
ΚΕΦΑΛΑΙΟ 4 Ο : ΔΙΟΡΘΩΣΗ ΤΟΥ ΣΥΝΤΕΛΕΣΤΗ ΙΣΧΥΟΣ 1 Ο όρος διόρθωση του συντελεστή ισχύος σημάνει στην ουσία αύξηση του cosφ έτσι ώστε να τείνει στο 1, δηλαδή η γωνία φ, η οποία ως γνωστό είναι η γωνία φάσης
ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
2. Όλες οι απαντήσεις να δοθούν στο εξεταστικό δοκίμιο το οποίο θα επιστραφεί.
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΑΣΚΗΣΕΙΣ ΣΤΑ ΚΥΚΛΩΜΑΤΑ 1 ης ΤΑΞΗΣ (Κεφ. 18)
") ΑΣΚΗΣΕΙΣ ΣΤΑ ΚΥΚΛΩΜΑΤΑ 1 ης ΤΑΞΗΣ (Κεφ. 18) Άσκηση 1. Α) Στο κύκλωμα του παρακάτω σχήματος την χρονική στιγμή t=0 sec ο διακόπτης κλείνει. Βρείτε τα v c και i c. Οι πυκνωτές είναι αρχικά αφόρτιστοι. Β)
ΑΣΚΗΣΕΙΣ ΣΤΑ ΚΥΚΛΩΜΑΤΑ 1 ης ΤΑΞΗΣ (Κεφ. 18) Άσκηση 1. Α) Στο κύκλωμα του παρακάτω σχήματος την χρονική στιγμή t=0 sec ο διακόπτης κλείνει. Βρείτε τα v c και i c. Οι πυκνωτές είναι αρχικά αφόρτιστοι. Β)
ΤΕΧΝΟΛΟΓΙΑ ΜΕΤΡΗΣΕΩΝ. 3 η ενότητα ΡΥΘΜΙΣΗ ΣΗΜΑΤΩΝ ΚΑΙ ΠΡΟΣΑΡΜΟΓΗ ΜΕ ΤΕΧΝΙΚΕΣ ΠΑΘΗΤΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ. ρ. Λάμπρος Μπισδούνης.
 ΤΕΧΝΟΛΟΓΙΑ ΜΕΤΡΗΣΕΩΝ ρ. Λάμπρος Μπισδούνης Καθηγητής 3 η ενότητα ΡΥΘΜΙΣΗ ΣΗΜΑΤΩΝ ΚΑΙ ΠΡΟΣΑΡΜΟΓΗ ΜΕ ΤΕΧΝΙΚΕΣ ΠΑΘΗΤΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ T.E.I. ΥΤΙΚΗΣ ΕΛΛΑ ΑΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. Περιεχόμενα 3 ης
ΤΕΧΝΟΛΟΓΙΑ ΜΕΤΡΗΣΕΩΝ ρ. Λάμπρος Μπισδούνης Καθηγητής 3 η ενότητα ΡΥΘΜΙΣΗ ΣΗΜΑΤΩΝ ΚΑΙ ΠΡΟΣΑΡΜΟΓΗ ΜΕ ΤΕΧΝΙΚΕΣ ΠΑΘΗΤΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ T.E.I. ΥΤΙΚΗΣ ΕΛΛΑ ΑΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. Περιεχόμενα 3 ης
Ηλεκτρονικά Ισχύος. ίοδος
 Ηλεκτρονικά Ισχύος Πρόκειται για στοιχεία κατασκευασμένα από υλικά με συγκεκριμένες μη γραμμικές ηλεκτρικές ιδιότητες (ημιαγωγά στοιχεία) Τα κυριότερα από τα στοιχεία αυτά είναι: Η δίοδος Το thyristor
Ηλεκτρονικά Ισχύος Πρόκειται για στοιχεία κατασκευασμένα από υλικά με συγκεκριμένες μη γραμμικές ηλεκτρικές ιδιότητες (ημιαγωγά στοιχεία) Τα κυριότερα από τα στοιχεία αυτά είναι: Η δίοδος Το thyristor
 ΑΝΑΛΥΣΗ ΚΥΚΛΩΜΑΤΟΣ ΚΟΙΝΟΥ ΕΚΠΟΜΠΟΥ ΜΕΛΕΤΗ DC ΣΥΜΠΕΡΙΦΟΡΑΣ Στο σχήμα φαίνεται ένα κύκλωμα κοινού εκπομπού από το βρόχο εισόδου Β-Ε ο νόμος του Kirchhoff δίνει: Τελικά έχουμε: I I BB B B E E BE B BB E IE
ΑΝΑΛΥΣΗ ΚΥΚΛΩΜΑΤΟΣ ΚΟΙΝΟΥ ΕΚΠΟΜΠΟΥ ΜΕΛΕΤΗ DC ΣΥΜΠΕΡΙΦΟΡΑΣ Στο σχήμα φαίνεται ένα κύκλωμα κοινού εκπομπού από το βρόχο εισόδου Β-Ε ο νόμος του Kirchhoff δίνει: Τελικά έχουμε: I I BB B B E E BE B BB E IE
Άσκηση: Ένα σύστηµα µε είσοδο u(t), έξοδο y(t) και διάνυσµα κατάστασης x(t) = (x 1 (t) x 2 (t)) T περιγράφεται από το ακόλουθο διάγραµµα:
, έξοδο y(t) και διάνυσµα κατάστασης x(t) = (x 1 (t) x 2 (t)) T περιγράφεται από το ακόλουθο διάγραµµα:") 1 Άσκηση: Ένα σύστηµα µε είσοδο u(t), έξοδο y(t) και διάνυσµα κατάστασης x(t) = (x 1 (t) x 2 (t)) T περιγράφεται από το ακόλουθο διάγραµµα: Όπου Κ R α) Να βρεθεί η περιγραφή στο χώρο κατάστασης και η συνάρτηση
1 Άσκηση: Ένα σύστηµα µε είσοδο u(t), έξοδο y(t) και διάνυσµα κατάστασης x(t) = (x 1 (t) x 2 (t)) T περιγράφεται από το ακόλουθο διάγραµµα: Όπου Κ R α) Να βρεθεί η περιγραφή στο χώρο κατάστασης και η συνάρτηση
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 2015
 Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 205 ΘΕΜΑ Ο (2,0 μονάδες) Ο ηλεκτρικός θερμοσίφωνας χρησιμοποιείται για τη θέρμανση νερού σε μια προκαθορισμένη επιθυμητή θερμοκρασία (θερμοκρασία
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 205 ΘΕΜΑ Ο (2,0 μονάδες) Ο ηλεκτρικός θερμοσίφωνας χρησιμοποιείται για τη θέρμανση νερού σε μια προκαθορισμένη επιθυμητή θερμοκρασία (θερμοκρασία
4 η ενότητα ΕΝΙΣΧΥΤΕΣ ΠΟΛΛΩΝ ΒΑΘΜΙΔΩΝ
 ρ. Λάμπρος Μπισδούνης Καθηγητής 4 η ενότητα ΕΝΙΣΧΥΤΕΣ ΠΟΛΛΩΝ ΒΑΘΜΙΔΩΝ T..I. ΥΤΙΚΗΣ ΕΛΛΑ ΑΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. Περιεχόμενα 4 ης ενότητας Στην τέταρτη ενότητα θα μελετήσουμε τους ενισχυτές
ρ. Λάμπρος Μπισδούνης Καθηγητής 4 η ενότητα ΕΝΙΣΧΥΤΕΣ ΠΟΛΛΩΝ ΒΑΘΜΙΔΩΝ T..I. ΥΤΙΚΗΣ ΕΛΛΑ ΑΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. Περιεχόμενα 4 ης ενότητας Στην τέταρτη ενότητα θα μελετήσουμε τους ενισχυτές
ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499
 ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499 ΟΜΗ ΙΑΚΟΠΤΙΚΩΝ ΜΕΤΑΤΡΟΠΕΩΝ ρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέµατα Επιλογή διακοπτών
ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499 ΟΜΗ ΙΑΚΟΠΤΙΚΩΝ ΜΕΤΑΤΡΟΠΕΩΝ ρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέµατα Επιλογή διακοπτών
Βέλτιστος Έλεγχος Συστημάτων
 Βέλτιστος Έλεγχος Συστημάτων Ενότητα 6: Το γραμμικό τετραγωνικό πρόβλημα βέλτιστης Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σημείωμα Αδειοδότησης
Βέλτιστος Έλεγχος Συστημάτων Ενότητα 6: Το γραμμικό τετραγωνικό πρόβλημα βέλτιστης Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σημείωμα Αδειοδότησης
2. Όλες οι απαντήσεις να δοθούν στο εξεταστικό δοκίμιο το οποίο θα επιστραφεί.
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
N 1 :N 2. i i 1 v 1 L 1 - L 2 -
 ΕΝΟΤΗΤΑ V ΙΣΧΥΣ - ΤΡΙΦΑΣΙΚΑ ΣΥΣΤΗΜΑΤΑ 34 Μετασχηµατιστής Ο µετασχηµατιστής είναι µια διάταξη που αποτελείται από δύο πηνία τυλιγµένα σε έναν κοινό πυρήνα από σιδηροµαγνητικό υλικό. Το πηνίο εισόδου λέγεται
ΕΝΟΤΗΤΑ V ΙΣΧΥΣ - ΤΡΙΦΑΣΙΚΑ ΣΥΣΤΗΜΑΤΑ 34 Μετασχηµατιστής Ο µετασχηµατιστής είναι µια διάταξη που αποτελείται από δύο πηνία τυλιγµένα σε έναν κοινό πυρήνα από σιδηροµαγνητικό υλικό. Το πηνίο εισόδου λέγεται
Ανάλυση Ηλεκτρικών Κυκλωμάτων
 Ανάλυση Ηλεκτρικών Κυκλωμάτων Κεφάλαιο 16: Απόκριση συχνότητας Οι διαφάνειες ακολουθούν το βιβλίο του Κων/νου Παπαδόπουλου «Ανάλυση Ηλεκτρικών Κυκλωμάτων» ISBN: 978-960-93-7110-0 κωδ. ΕΥΔΟΞΟΣ: 50657177
Ανάλυση Ηλεκτρικών Κυκλωμάτων Κεφάλαιο 16: Απόκριση συχνότητας Οι διαφάνειες ακολουθούν το βιβλίο του Κων/νου Παπαδόπουλου «Ανάλυση Ηλεκτρικών Κυκλωμάτων» ISBN: 978-960-93-7110-0 κωδ. ΕΥΔΟΞΟΣ: 50657177
ΑΣΚΗΣΗ 6 Μέτρηση πραγματικής ηλεκτρικής ισχύος
 Απαραίτητα όργανα και υλικά ΑΣΚΗΣΗ 6 Μέτρηση πραγματικής ηλεκτρικής ισχύος 61 Απαραίτητα όργανα και υλικά 1 Βολτόμετρο 2 Αμπερόμετρο 3 Τροφοδοτικό συνεχόμενου και εναλλασσόμενου ηλεκτρικού σήματος 4 Πλακέτα
Απαραίτητα όργανα και υλικά ΑΣΚΗΣΗ 6 Μέτρηση πραγματικής ηλεκτρικής ισχύος 61 Απαραίτητα όργανα και υλικά 1 Βολτόμετρο 2 Αμπερόμετρο 3 Τροφοδοτικό συνεχόμενου και εναλλασσόμενου ηλεκτρικού σήματος 4 Πλακέτα
Πόλωση των Τρανζίστορ
 Πόλωση των Τρανζίστορ Πόλωση λέμε την κατάλληλη συνεχή τάση που πρέπει να εφαρμόσουμε στο κύκλωμα που περιλαμβάνει κάποιο ηλεκτρονικό στοιχείο (π.χ τρανζίστορ), έτσι ώστε να εξασφαλίσουμε την ομαλή λειτουργία
Πόλωση των Τρανζίστορ Πόλωση λέμε την κατάλληλη συνεχή τάση που πρέπει να εφαρμόσουμε στο κύκλωμα που περιλαμβάνει κάποιο ηλεκτρονικό στοιχείο (π.χ τρανζίστορ), έτσι ώστε να εξασφαλίσουμε την ομαλή λειτουργία
ΣΥΝΟΠΤΙΚΗ ΠΑΡΟΥΣΙΑΣΗ
 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΗΛΕΚΤΡΙΚΑ ΚΥΚΛΩΜΑΤΑ Ι ΣΥΝΟΠΤΙΚΗ ΠΑΡΟΥΣΙΑΣΗ ΕΙΣΑΓΩΓΙΚΑ Ι Από το πραγματικό κύκλωμα στο μοντέλο Μαθηματική μοντελοποίηση Η θεωρία κυκλωμάτων είναι
ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΗΛΕΚΤΡΙΚΑ ΚΥΚΛΩΜΑΤΑ Ι ΣΥΝΟΠΤΙΚΗ ΠΑΡΟΥΣΙΑΣΗ ΕΙΣΑΓΩΓΙΚΑ Ι Από το πραγματικό κύκλωμα στο μοντέλο Μαθηματική μοντελοποίηση Η θεωρία κυκλωμάτων είναι
Σύστημα και Μαθηματικά μοντέλα συστημάτων
 Σύστημα και Μαθηματικά μοντέλα συστημάτων Όταν μελετούμε έναν συγκεκριμένο μηχανισμό η μια φυσική διεργασία επικεντρώνουμε το ενδιαφέρον μας στα φυσικά μεγέθη του μηχανισμού τα οποία μας ενδιαφέρει να
Σύστημα και Μαθηματικά μοντέλα συστημάτων Όταν μελετούμε έναν συγκεκριμένο μηχανισμό η μια φυσική διεργασία επικεντρώνουμε το ενδιαφέρον μας στα φυσικά μεγέθη του μηχανισμού τα οποία μας ενδιαφέρει να
Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας
 Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας Ενότητα: Άσκηση 6: Αντιστάθμιση γραμμών μεταφοράς με σύγχρονους αντισταθμιστές Νικόλαος Βοβός, Γαβριήλ Γιαννακόπουλος, Παναγής Βοβός Τμήμα Ηλεκτρολόγων
Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας Ενότητα: Άσκηση 6: Αντιστάθμιση γραμμών μεταφοράς με σύγχρονους αντισταθμιστές Νικόλαος Βοβός, Γαβριήλ Γιαννακόπουλος, Παναγής Βοβός Τμήμα Ηλεκτρολόγων
() { ( ) ( )} ( ) () ( )
 { ( ) ( )} ( ) () ( )") Ηλεκτρική Ισχύς σε Μονοφασικά και Τριφασικά Συστήματα. Μονοφασικά Συστήματα Έστω ότι σε ένα μονοφασικό καταναλωτή η τάση και το ρεύμα περιγράφονται από τις παρακάτω δύο χρονικές συναρτήσεις: ( t cos( ω
Ηλεκτρική Ισχύς σε Μονοφασικά και Τριφασικά Συστήματα. Μονοφασικά Συστήματα Έστω ότι σε ένα μονοφασικό καταναλωτή η τάση και το ρεύμα περιγράφονται από τις παρακάτω δύο χρονικές συναρτήσεις: ( t cos( ω
ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΟΝΙΚΗΣ
 ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΟΝΙΚΗΣ ΔΙΟΔΟΣ (Μάθημα 4 ο 5 ο 6 ο 7 ο ) 1/12 4 o εργαστήριο Ιδανική δίοδος n Συμβολισμός της διόδου n 2/12 4 o εργαστήριο Στατική χαρακτηριστική διόδου Άνοδος (+) Κάθοδος () Αν στην ιδανική
ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΟΝΙΚΗΣ ΔΙΟΔΟΣ (Μάθημα 4 ο 5 ο 6 ο 7 ο ) 1/12 4 o εργαστήριο Ιδανική δίοδος n Συμβολισμός της διόδου n 2/12 4 o εργαστήριο Στατική χαρακτηριστική διόδου Άνοδος (+) Κάθοδος () Αν στην ιδανική
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΗΛΕΚΤΡΟΝΙΚΑ ΚΥΚΛΩΜΑΤΑ θεωρία και ασκήσεις. Σπύρος Νικολαΐδης Αναπληρωτής Καθηγητής Τομέας Ηλεκτρονικής & ΗΥ Τμήμα Φυσικής
 ΗΛΕΚΤΡΟΝΙΚΑ ΚΥΚΛΩΜΑΤΑ θεωρία και ασκήσεις Σπύρος Νικολαΐδης Αναπληρωτής Καθηγητής Τομέας Ηλεκτρονικής & ΗΥ Τμήμα Φυσικής ΗΛΕΚΤΡΙΚΑ ΣΤΟΙΧΕΙΑ ΚΑΙ ΚΥΚΛΩΜΑΤΑ Ένα ηλεκτρικό κύκλωμα αποτελείται από ένα σύνολο
ΗΛΕΚΤΡΟΝΙΚΑ ΚΥΚΛΩΜΑΤΑ θεωρία και ασκήσεις Σπύρος Νικολαΐδης Αναπληρωτής Καθηγητής Τομέας Ηλεκτρονικής & ΗΥ Τμήμα Φυσικής ΗΛΕΚΤΡΙΚΑ ΣΤΟΙΧΕΙΑ ΚΑΙ ΚΥΚΛΩΜΑΤΑ Ένα ηλεκτρικό κύκλωμα αποτελείται από ένα σύνολο
Ανάλυση Ηλεκτρικών Κυκλωμάτων
 Ανάλυση Ηλεκτρικών Κυκλωμάτων Κεφάλαιο 11: Η ημιτονοειδής διέγερση Οι διαφάνειες ακολουθούν το βιβλίο του Κων/νου Παπαδόπουλου «Ανάλυση Ηλεκτρικών Κυκλωμάτων» ISBN: 978-960-93-7110-0 κωδ. ΕΥΔΟΞΟΣ: 50657177
Ανάλυση Ηλεκτρικών Κυκλωμάτων Κεφάλαιο 11: Η ημιτονοειδής διέγερση Οι διαφάνειες ακολουθούν το βιβλίο του Κων/νου Παπαδόπουλου «Ανάλυση Ηλεκτρικών Κυκλωμάτων» ISBN: 978-960-93-7110-0 κωδ. ΕΥΔΟΞΟΣ: 50657177
6 Εισαγωγή στα Συστήματα Ηλεκτρικής Ενέργειας
 Πρόλογος Σ το βιβλίο αυτό περιλαμβάνεται η ύλη του μαθήματος «Εισαγωγή στα Συστήματα Ηλεκτρικής Ενέργειας» που διδάσκεται στους φοιτητές του Γ έτους σπουδών του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Πρόλογος Σ το βιβλίο αυτό περιλαμβάνεται η ύλη του μαθήματος «Εισαγωγή στα Συστήματα Ηλεκτρικής Ενέργειας» που διδάσκεται στους φοιτητές του Γ έτους σπουδών του Τμήματος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2009
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 9 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 9 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
2. Όλες οι απαντήσεις να δοθούν στο εξεταστικό δοκίμιο το οποίο θα επιστραφεί.
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2014 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2014 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2014
 ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 014 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 014 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΘΕΩΡΗΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΗΥ-121: Ηλεκτρονικά Κυκλώματα Γιώργος Δημητρακόπουλος. Βασικές Αρχές Ηλεκτρικών Κυκλωμάτων
 Πανεπιστήμιο Κρήτης Τμήμα Επιστήμης Υπολογιστών ΗΥ-121: Ηλεκτρονικά Κυκλώματα Γιώργος Δημητρακόπουλος Άνοιξη 2008 Βασικές Αρχές Ηλεκτρικών Κυκλωμάτων Ηλεκτρικό ρεύμα Το ρεύμα είναι αποτέλεσμα της κίνησης
Πανεπιστήμιο Κρήτης Τμήμα Επιστήμης Υπολογιστών ΗΥ-121: Ηλεκτρονικά Κυκλώματα Γιώργος Δημητρακόπουλος Άνοιξη 2008 Βασικές Αρχές Ηλεκτρικών Κυκλωμάτων Ηλεκτρικό ρεύμα Το ρεύμα είναι αποτέλεσμα της κίνησης
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Ενότητα : ΣΥΝΑΡΤΗΣΗ ΜΕΤΑΦΟΡΑΣ (Transfer function) ΜΑΘΗΜΑΤΙΚΑ ΜΟΝΤΕΛΑ ΣΥΣΤΗΜΑΤΩΝ Aναστασία Βελώνη Τμήμα Η.Υ.Σ
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Ενότητα : ΣΥΝΑΡΤΗΣΗ ΜΕΤΑΦΟΡΑΣ (Transfer function) ΜΑΘΗΜΑΤΙΚΑ ΜΟΝΤΕΛΑ ΣΥΣΤΗΜΑΤΩΝ Aναστασία Βελώνη Τμήμα Η.Υ.Σ
Τµήµα Βιοµηχανικής Πληροφορικής Σηµειώσεις Ηλεκτρονικών Ισχύος Παράρτηµα
 ΠΑΡΑΡΤΗΜΑ Ηµιτονοειδές Ρεύµα και Τάση Τριφασικά Εναλλασσόµενα ρεύµατα Ισχύς και Ενέργεια Ενεργός τιµή περιοδικών µη ηµιτονικών κυµατοµορφών 1. Ηµιτονοειδές Ρεύµα και Τάση Οταν οι νόµοι του Kirchoff εφαρµόζονται
ΠΑΡΑΡΤΗΜΑ Ηµιτονοειδές Ρεύµα και Τάση Τριφασικά Εναλλασσόµενα ρεύµατα Ισχύς και Ενέργεια Ενεργός τιµή περιοδικών µη ηµιτονικών κυµατοµορφών 1. Ηµιτονοειδές Ρεύµα και Τάση Οταν οι νόµοι του Kirchoff εφαρµόζονται
Άσκηση 5. Τρανζίστορ Διπολικής Επαφής σε συνδεσμολογία Κοινής Βάσης
 ΤΕΙ ΔΥΤΙΚΗΣ ΕΛΛΑΔΑΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. ΗΛΕΚΤΡΟΝΙΚΑ Ι (ΕΡ) Άσκηση 5 Τρανζίστορ Διπολικής Επαφής σε συνδεσμολογία Κοινής Βάσης Στόχος Ο στόχος της εργαστηριακής άσκησης είναι η μελέτη των
ΤΕΙ ΔΥΤΙΚΗΣ ΕΛΛΑΔΑΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. ΗΛΕΚΤΡΟΝΙΚΑ Ι (ΕΡ) Άσκηση 5 Τρανζίστορ Διπολικής Επαφής σε συνδεσμολογία Κοινής Βάσης Στόχος Ο στόχος της εργαστηριακής άσκησης είναι η μελέτη των
Φυσική για Μηχανικούς
 Φυσική για Μηχανικούς Ρεύμα και Αντίσταση Εικόνα: Οι γραμμές ρεύματος μεταφέρουν ενέργεια από την ηλεκτρική εταιρία στα σπίτια και τις επιχειρήσεις μας. Η ενέργεια μεταφέρεται σε πολύ υψηλές τάσεις, πιθανότατα
Φυσική για Μηχανικούς Ρεύμα και Αντίσταση Εικόνα: Οι γραμμές ρεύματος μεταφέρουν ενέργεια από την ηλεκτρική εταιρία στα σπίτια και τις επιχειρήσεις μας. Η ενέργεια μεταφέρεται σε πολύ υψηλές τάσεις, πιθανότατα
,..., xn) Οι συναρτήσεις που ορίζουν αυτό το σύστημα υποτίθενται παραγωγίσιμες με συνεχείς παραγώγους:
 Οι συναρτήσεις που ορίζουν αυτό το σύστημα υποτίθενται παραγωγίσιμες με συνεχείς παραγώγους:") ΜΑΘΗΜΑ 6 ο : ΕΥΣΤΑΘΕΙΑ ΤΩΝ ΚΑΤΑΣΤΑΣΕΩΝ ΙΣΟΡΡΟΠΙΑΣ (ΣΥΝΑΡΤΗΣΕΙΣ LYAPUNOV) O Aleksadr Lyapuv (857-98) έθεσε τις βάσεις της μαθηματικής θεωρίας της ευστάθειας που φέρει το όνομά του εμπνευσμένος από μια απλή
ΜΑΘΗΜΑ 6 ο : ΕΥΣΤΑΘΕΙΑ ΤΩΝ ΚΑΤΑΣΤΑΣΕΩΝ ΙΣΟΡΡΟΠΙΑΣ (ΣΥΝΑΡΤΗΣΕΙΣ LYAPUNOV) O Aleksadr Lyapuv (857-98) έθεσε τις βάσεις της μαθηματικής θεωρίας της ευστάθειας που φέρει το όνομά του εμπνευσμένος από μια απλή
Ιατρικά Ηλεκτρονικά. Χρήσιμοι Σύνδεσμοι. ΙΑΤΡΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ - ΔΙΑΛΕΞΗ 2η. Σημειώσεις μαθήματος: E mail:
 Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/courses/tio127/ E mail: pasv@teiath.gr 2 1 Όπως
Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/courses/tio127/ E mail: pasv@teiath.gr 2 1 Όπως
ΚΕΦΑΛΑΙΟ 7 Τελεστικός ενισχυτής
 ΚΕΦΑΛΑΙΟ 7 Τελεστικός ενισχυτής Ο τελεστικός ενισχυτής, TE (operational ampliier, op-amp) είναι ένα από τα πιο χρήσιμα αναλογικά κυκλώματα. Κατασκευάζεται ως ολοκληρωμένο κύκλωμα (integrated circuit) και
ΚΕΦΑΛΑΙΟ 7 Τελεστικός ενισχυτής Ο τελεστικός ενισχυτής, TE (operational ampliier, op-amp) είναι ένα από τα πιο χρήσιμα αναλογικά κυκλώματα. Κατασκευάζεται ως ολοκληρωμένο κύκλωμα (integrated circuit) και
Ανάλυση Ηλεκτρικών Κυκλωμάτων
 Ανάλυση Ηλεκτρικών Κυκλωμάτων Κεφάλαιο 7: Μεταβατική απόκριση κυκλωμάτων RL και RC Οι διαφάνειες ακολουθούν το βιβλίο του Κων/νου Παπαδόπουλου «Ανάλυση Ηλεκτρικών Κυκλωμάτων» ISBN: 9789609371100 κωδ. ΕΥΔΟΞΟΣ:
Ανάλυση Ηλεκτρικών Κυκλωμάτων Κεφάλαιο 7: Μεταβατική απόκριση κυκλωμάτων RL και RC Οι διαφάνειες ακολουθούν το βιβλίο του Κων/νου Παπαδόπουλου «Ανάλυση Ηλεκτρικών Κυκλωμάτων» ISBN: 9789609371100 κωδ. ΕΥΔΟΞΟΣ:
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444
 ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444.οργανωτικά Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Το βιβλίο Ned Mohan First course on Power Electronics
ΗΛΕΚΤΡΟΝΙΚΑ ΙΣΧΥΟΣ ΗΜΥ 444.οργανωτικά Δρ Ανδρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Το βιβλίο Ned Mohan First course on Power Electronics
ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ ΠΡΟΣΠΑΘΕΙΑ ΣΑΣ ΚΙ 2014
 ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://wwwstudy4examsgr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://wwwstudy4examsgr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
Εξαρτημένες Πηγές και Τελεστικός Ενισχυτής
 Ανάλυση Κυκλωμάτων Εξαρτημένες Πηγές και Τελεστικός Ενισχυτής Φώτης Πλέσσας fplessas@inf.uth.gr Εισαγωγή Οι εξαρτημένες πηγές είναι πολύ ενδιαφέροντα ηλεκτρικά στοιχεία, αφού αποτελούν αναπόσπαστα στοιχεία
Ανάλυση Κυκλωμάτων Εξαρτημένες Πηγές και Τελεστικός Ενισχυτής Φώτης Πλέσσας fplessas@inf.uth.gr Εισαγωγή Οι εξαρτημένες πηγές είναι πολύ ενδιαφέροντα ηλεκτρικά στοιχεία, αφού αποτελούν αναπόσπαστα στοιχεία
ΗΛΕΚΤΡΟΝΙΚΑ Ι. ΚΕΦΑΛΑΙΟ 4 Ο : FET (Τρανζίστορ επίδρασης πεδίου)
") ΗΛΕΚΤΡΟΝΙΚΑ Ι ΚΕΦΑΛΑΙΟ 4 Ο : FET (Τρανζίστορ επίδρασης πεδίου) 1 FET Δομή και λειτουργία Τα τρανζίστορ επίδρασης πεδίου είναι ηλεκτρονικά στοιχεία στα οποία οι φορείς του ηλεκτρικού ρεύματος είναι ενός
ΗΛΕΚΤΡΟΝΙΚΑ Ι ΚΕΦΑΛΑΙΟ 4 Ο : FET (Τρανζίστορ επίδρασης πεδίου) 1 FET Δομή και λειτουργία Τα τρανζίστορ επίδρασης πεδίου είναι ηλεκτρονικά στοιχεία στα οποία οι φορείς του ηλεκτρικού ρεύματος είναι ενός
ΑΣΚΗΣΗ 1 η ΜΕΤΑΣΧΗΜΑΤΙΣΤΕΣ ΙΣΧΥΟΣ ΕΙΣΑΓΩΓΗ. Στόχοι της εργαστηριακής άσκησης είναι η εξοικείωση των σπουδαστών με την:
 Σκοπός της Άσκησης: ΑΣΚΗΣΗ η ΜΕΤΑΣΧΗΜΑΤΙΣΤΕΣ ΙΣΧΥΟΣ ΕΙΣΑΓΩΓΗ Στόχοι της εργαστηριακής άσκησης είναι η εξοικείωση των σπουδαστών με την: α. Κατασκευή μετασχηματιστών. β. Αρχή λειτουργίας μετασχηματιστών.
Σκοπός της Άσκησης: ΑΣΚΗΣΗ η ΜΕΤΑΣΧΗΜΑΤΙΣΤΕΣ ΙΣΧΥΟΣ ΕΙΣΑΓΩΓΗ Στόχοι της εργαστηριακής άσκησης είναι η εξοικείωση των σπουδαστών με την: α. Κατασκευή μετασχηματιστών. β. Αρχή λειτουργίας μετασχηματιστών.
Ορισμοί (Σημείο ισορροπίας - Ευστάθεια κατά Lyapunov)
") Ορισμοί (ημείο ισορροπίας - Ευστάθεια κατά Lyapuo) Έστω ότι στη γενική περίπτωση το σύστημα περιγράφεται στο χώρο κατάστασης με το μαθηματικό πρότυπο: = f(, t), (t 0 ) = 0 () όπου είναι ένα διάστατο διάνυσμα
Ορισμοί (ημείο ισορροπίας - Ευστάθεια κατά Lyapuo) Έστω ότι στη γενική περίπτωση το σύστημα περιγράφεται στο χώρο κατάστασης με το μαθηματικό πρότυπο: = f(, t), (t 0 ) = 0 () όπου είναι ένα διάστατο διάνυσμα
Ταλαντωτές. Ηλεκτρονική Γ Τάξη Β εξάμηνο Μάρτιος 2011 Επ. Καθ. Ε. Καραγιάννη
 Ταλαντωτές Ηλεκτρονική Γ Τάξη Β εξάμηνο Μάρτιος Επ. Καθ. Ε. Καραγιάννη Ταλαντωτές ΑΝΑΔΡΑΣΗ Στοιχεία Ταλάντωσης Ενισχυτής OUT Ταλαντωτής είναι ένα κύκλωμα που παράγει ηλεκτρικό σήμα σταθερής συχνότητας
Ταλαντωτές Ηλεκτρονική Γ Τάξη Β εξάμηνο Μάρτιος Επ. Καθ. Ε. Καραγιάννη Ταλαντωτές ΑΝΑΔΡΑΣΗ Στοιχεία Ταλάντωσης Ενισχυτής OUT Ταλαντωτής είναι ένα κύκλωμα που παράγει ηλεκτρικό σήμα σταθερής συχνότητας
Ψηφιακός Έλεγχος. 6 η διάλεξη Σχεδίαση στο χώρο κατάστασης. Ψηφιακός Έλεγχος 1
 Ψηφιακός Έλεγχος 6 η διάλεξη Σχεδίαση στο χώρο κατάστασης Ψηφιακός Έλεγχος Μέθοδος μετατόπισης ιδιοτιμών Έστω γραμμικό χρονικά αμετάβλητο σύστημα διακριτού χρόνου: ( + ) = + x k Ax k Bu k Εφαρμόζουμε γραμμικό
Ψηφιακός Έλεγχος 6 η διάλεξη Σχεδίαση στο χώρο κατάστασης Ψηφιακός Έλεγχος Μέθοδος μετατόπισης ιδιοτιμών Έστω γραμμικό χρονικά αμετάβλητο σύστημα διακριτού χρόνου: ( + ) = + x k Ax k Bu k Εφαρμόζουμε γραμμικό
Μαθηματικά μοντέλα συστημάτων
 Μαθηματικά μοντέλα συστημάτων 1. Γενικά Για να κατανοήσουμε και να ελέγξουμε διάφορα πολύπλοκα συστήματα πρέπει να καταφύγουμε σε κάποιο ποσοτικό μοντέλο των συστημάτων αυτών. Έτσι, είναι απαραίτητο να
Μαθηματικά μοντέλα συστημάτων 1. Γενικά Για να κατανοήσουμε και να ελέγξουμε διάφορα πολύπλοκα συστήματα πρέπει να καταφύγουμε σε κάποιο ποσοτικό μοντέλο των συστημάτων αυτών. Έτσι, είναι απαραίτητο να
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: 1η (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 21/10/12
 ΗΜΕΡΟΜΗΝΙΑ: 21/10/12") ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: 1η (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 21/10/12 ΘΕΜΑ 1 ο Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράμμα
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: 1η (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 21/10/12 ΘΕΜΑ 1 ο Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράμμα
Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών. Διάλεξη 13
 Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Τομέας Συστημάτων και Αυτομάτου Ελέγχου ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ Διάλεξη 13 Πάτρα 28 Προσαρμοστικός έλεγχος με μοντέλο αναφοράς
Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Τομέας Συστημάτων και Αυτομάτου Ελέγχου ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ Διάλεξη 13 Πάτρα 28 Προσαρμοστικός έλεγχος με μοντέλο αναφοράς
Η Βασική Δομή Συστημάτων Ελέγχου Κίνησης
 Η Βασική Δομή Συστημάτων Ελέγχου Κίνησης Σύστημα ονομάζουμε ένα σύνολο στοιχείων κατάλληλα συνδεδεμένων μεταξύ τους για να επιτελέσουν κάποιο έργο Είσοδο ονομάζουμε τη διέγερση, εντολή ή αιτία η οποία
Η Βασική Δομή Συστημάτων Ελέγχου Κίνησης Σύστημα ονομάζουμε ένα σύνολο στοιχείων κατάλληλα συνδεδεμένων μεταξύ τους για να επιτελέσουν κάποιο έργο Είσοδο ονομάζουμε τη διέγερση, εντολή ή αιτία η οποία
Εισαγωγή στην Τεχνολογία Αυτοματισμού
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ Εισαγωγή στην Τεχνολογία Αυτοματισμού Ενότητα # 3: Μετασχηματισμός Laplace: Συνάρτηση μεταφοράς
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ Εισαγωγή στην Τεχνολογία Αυτοματισμού Ενότητα # 3: Μετασχηματισμός Laplace: Συνάρτηση μεταφοράς
Φυσική για Μηχανικούς
 Φυσική για Μηχανικούς Χωρητικότητα Εικόνα: Όλες οι παραπάνω συσκευές είναι πυκνωτές, οι οποίοι αποθηκεύουν ηλεκτρικό φορτίο και ενέργεια. Ο πυκνωτής είναι ένα είδος κυκλώματος που μπορούμε να συνδυάσουμε
Φυσική για Μηχανικούς Χωρητικότητα Εικόνα: Όλες οι παραπάνω συσκευές είναι πυκνωτές, οι οποίοι αποθηκεύουν ηλεκτρικό φορτίο και ενέργεια. Ο πυκνωτής είναι ένα είδος κυκλώματος που μπορούμε να συνδυάσουμε
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2009
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 009 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 009 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρμοσμένη Ηλεκτρολογία
1) Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι
 Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι") 1) Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι επιπτώσεις της 4) Μαθηματικό υπόβαθρο για την μελέτη των
1) Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι επιπτώσεις της 4) Μαθηματικό υπόβαθρο για την μελέτη των
ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ & ΣΥΣΤΗΜΑΤΩΝ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΥΣΤΗΜΑΤΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ & ΣΥΣΤΗΜΑΤΩΝ Διδάσκων : Δημήτρης Τσιπιανίτης Γεώργιος Μανδέλλος
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΥΣΤΗΜΑΤΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ & ΣΥΣΤΗΜΑΤΩΝ Διδάσκων : Δημήτρης Τσιπιανίτης Γεώργιος Μανδέλλος
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ. Το ιδανικό κύκλωμα LC του σχήματος εκτελεί αμείωτες ηλεκτρικές ταλαντώσεις, με περίοδο
 ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση 1. Ιδανικό κύκλωμα LC εκτελεί αμείωτες ηλεκτρικές ταλαντώσεις. Να αποδείξετε ότι η στιγμιαία τιμή i της έντασης του ρεύματος στο κύκλωμα δίνεται σε συνάρτηση με το στιγμιαίο
ΕΚΦΩΝΗΣΕΙΣ ΑΣΚΗΣΕΩΝ Άσκηση 1. Ιδανικό κύκλωμα LC εκτελεί αμείωτες ηλεκτρικές ταλαντώσεις. Να αποδείξετε ότι η στιγμιαία τιμή i της έντασης του ρεύματος στο κύκλωμα δίνεται σε συνάρτηση με το στιγμιαίο
ΚΕΦΑΛΑΙΟ 8 Ο : ΤΡΙΦΑΣΙΚΑ ΔΙΚΤΥΑ
 ΚΕΦΑΛΑΙΟ 8 Ο : ΤΡΙΦΑΣΙΚΑ ΔΙΚΤΥΑ 1 Τα τριφασικά δίκτυα χρησιμοποιούνται στην παραγωγή και μεταφορά ηλεκτρικής ενέργειας για τους εξής λόγους: 1. Οικονομία στο αγώγιμο υλικό (25% λιγότερος χαλκός). 2. Η
ΚΕΦΑΛΑΙΟ 8 Ο : ΤΡΙΦΑΣΙΚΑ ΔΙΚΤΥΑ 1 Τα τριφασικά δίκτυα χρησιμοποιούνται στην παραγωγή και μεταφορά ηλεκτρικής ενέργειας για τους εξής λόγους: 1. Οικονομία στο αγώγιμο υλικό (25% λιγότερος χαλκός). 2. Η
ΚΕΦΑΛΑΙΟ 5 Ο : ΣΥΝΤΟΝΙΣΜΟΣ ΑΠΛΩΝ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ
 ΚΕΦΑΛΑΙΟ 5 Ο : ΣΥΝΤΟΝΙΣΜΟΣ ΑΠΛΩΝ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ 1 Ο συντονισμός είναι μια κατάσταση κατά την οποία το φανταστικό μέρος της σύνθετης αντίστασης ενός κυκλώματος RCL μηδενίζεται. Αυτό συμβαίνει γιατί
ΚΕΦΑΛΑΙΟ 5 Ο : ΣΥΝΤΟΝΙΣΜΟΣ ΑΠΛΩΝ ΗΛΕΚΤΡΙΚΩΝ ΚΥΚΛΩΜΑΤΩΝ 1 Ο συντονισμός είναι μια κατάσταση κατά την οποία το φανταστικό μέρος της σύνθετης αντίστασης ενός κυκλώματος RCL μηδενίζεται. Αυτό συμβαίνει γιατί
Εισαγωγή Φώτης Πλέσσας
 Ανάλυση Κυκλωμάτων Εισαγωγή Φώτης Πλέσσας fplessas@inf.uth.gr Τμήμα Ηλεκτρολόγων Μηχανικών & Μηχανικών Υπολογιστών Δομή Παρουσίασης Εισαγωγικές Κυκλωμάτων Έννοιες Ανάλυσης Φυσικά και μαθηματικά μοντέλα
Ανάλυση Κυκλωμάτων Εισαγωγή Φώτης Πλέσσας fplessas@inf.uth.gr Τμήμα Ηλεκτρολόγων Μηχανικών & Μηχανικών Υπολογιστών Δομή Παρουσίασης Εισαγωγικές Κυκλωμάτων Έννοιες Ανάλυσης Φυσικά και μαθηματικά μοντέλα
Ηλεκτροτεχνία Ηλ. Μηχανές & Εγκαταστάσεις πλοίου (Θ)
") Ανοικτά Ακαδημαϊκά Μαθήματα στο ΤΕΙ Αθήνας Ηλεκτροτεχνία Ηλ. Μηχανές & Εγκαταστάσεις πλοίου (Θ) Ενότητα 5: Εναλλασσόμενα κυκλώματα μόνιμης κατάστασης Δ.Ν. Παγώνης Τμήμα Ναυπηγών Μηχανικών ΤΕ Το περιεχόμενο
Ανοικτά Ακαδημαϊκά Μαθήματα στο ΤΕΙ Αθήνας Ηλεκτροτεχνία Ηλ. Μηχανές & Εγκαταστάσεις πλοίου (Θ) Ενότητα 5: Εναλλασσόμενα κυκλώματα μόνιμης κατάστασης Δ.Ν. Παγώνης Τμήμα Ναυπηγών Μηχανικών ΤΕ Το περιεχόμενο
ΕΚΠΑΙΔΕΥΤΙΚΟ ΕΠΟΠΤΙΚΟ ΥΛΙΚΟ
 ΤΕΙ ΣΤΕΡΕΑΣ ΕΛΛΑΔΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΕΚΠΑΙΔΕΥΤΙΚΟ ΕΠΟΠΤΙΚΟ ΥΛΙΚΟ ΗΛΕΚΤΡΟΝΙΚΕΣ ΗΛΕΚΤΡΙΚΕΣ ΜΕΤΡΗΣΕΙΣ Χ. ΤΣΩΝΟΣ ΛΑΜΙΑ 2013 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
ΤΕΙ ΣΤΕΡΕΑΣ ΕΛΛΑΔΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΕΚΠΑΙΔΕΥΤΙΚΟ ΕΠΟΠΤΙΚΟ ΥΛΙΚΟ ΗΛΕΚΤΡΟΝΙΚΕΣ ΗΛΕΚΤΡΙΚΕΣ ΜΕΤΡΗΣΕΙΣ Χ. ΤΣΩΝΟΣ ΛΑΜΙΑ 2013 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Τεχνολογίες Ελέγχου στα Αιολικά Συστήματα
 Τεχνολογίες Ελέγχου στα Αιολικά Συστήματα Ενότητα 4: Έλεγχος ισχύος που συνδέεται στο δίκτυο Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σημείωμα
Τεχνολογίες Ελέγχου στα Αιολικά Συστήματα Ενότητα 4: Έλεγχος ισχύος που συνδέεται στο δίκτυο Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Σημείωμα
2012 : (307) : , 29 2012 : 11.00 13.30
 : , 29 2012 : 11.00 13.30") ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2012 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρµοσµένη Ηλεκτρολογία
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2012 ΤΕΧΝΟΛΟΓΙΑ (ΙΙ) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : Εφαρµοσµένη Ηλεκτρολογία
3. Κεφάλαιο Μετασχηματισμός Fourier
 3 Κεφάλαιο 3 Ορισμοί Ο μετασχηματισμός Fourir αποτελεί την επέκταση των σειρών Fourir στη γενική κατηγορία των συναρτήσεων (περιοδικών και μη) Όπως και στις σειρές οι συναρτήσεις θα εκφράζονται με τη βοήθεια
3 Κεφάλαιο 3 Ορισμοί Ο μετασχηματισμός Fourir αποτελεί την επέκταση των σειρών Fourir στη γενική κατηγορία των συναρτήσεων (περιοδικών και μη) Όπως και στις σειρές οι συναρτήσεις θα εκφράζονται με τη βοήθεια
Προηγμένος έλεγχος ηλεκτρικών μηχανών
 Προηγμένος έλεγχος ηλεκτρικών μηχανών Ενότητα 3: Βαθμωτός Έλεγχος Ασύχρονων Μηχανών Επαμεινώνδας Μητρονίκας - Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών & Τεχνολογίας Υπολογιστών
Προηγμένος έλεγχος ηλεκτρικών μηχανών Ενότητα 3: Βαθμωτός Έλεγχος Ασύχρονων Μηχανών Επαμεινώνδας Μητρονίκας - Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών & Τεχνολογίας Υπολογιστών
ΔΙΑΓΩΝΙΣΜΑ 1 ο ΕΚΦΩΝΗΣΕΙΣ
 ΔΙΑΓΩΝΙΣΜΑ ο ΕΚΦΩΝΗΣΕΙΣ ΘΕΜΑ Α. Στις ημιτελείς προτάσεις - 4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση, η οποία τη συμπληρώνει σωστά.. Το μέτρο της
ΔΙΑΓΩΝΙΣΜΑ ο ΕΚΦΩΝΗΣΕΙΣ ΘΕΜΑ Α. Στις ημιτελείς προτάσεις - 4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση, η οποία τη συμπληρώνει σωστά.. Το μέτρο της
ΑΝΑΛΟΓΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ
 ΑΝΑΛΟΓΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ ΚΕΦΑΛΑΙΟ 3ο ΚΡΥΣΤΑΛΛΟΔΙΟΔΟΙ Επαφή ΡΝ Σε ένα κομμάτι κρύσταλλο πυριτίου προσθέτουμε θετικά ιόντα 5σθενούς στοιχείου για τη δημιουργία τμήματος τύπου Ν από τη μια μεριά, ενώ από την
ΑΝΑΛΟΓΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ ΚΕΦΑΛΑΙΟ 3ο ΚΡΥΣΤΑΛΛΟΔΙΟΔΟΙ Επαφή ΡΝ Σε ένα κομμάτι κρύσταλλο πυριτίου προσθέτουμε θετικά ιόντα 5σθενούς στοιχείου για τη δημιουργία τμήματος τύπου Ν από τη μια μεριά, ενώ από την
Το εξεταστικό δοκίµιο µαζί µε το τυπολόγιο αποτελείται από εννιά (9) σελίδες. Τα µέρη του εξεταστικού δοκιµίου είναι τρία (Α, Β και Γ ).
 σελίδες. Τα µέρη του εξεταστικού δοκιµίου είναι τρία (Α, Β και Γ ).") ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2012 ΤΕΧΝΟΛΟΓΙΑ (ΙI) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : ΕΦΑΡΜΟΣΜΕΝΗ ΗΛΕΚΤΡΟΛΟΓΙΑ
ΥΠΟΥΡΓΕΙΟ ΠΑΙ ΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙ ΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2012 ΤΕΧΝΟΛΟΓΙΑ (ΙI) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΜΑΘΗΜΑ : ΕΦΑΡΜΟΣΜΕΝΗ ΗΛΕΚΤΡΟΛΟΓΙΑ
Ανάδραση. Ηλεκτρονική Γ τάξη Επ. Καθηγ. Ε. Καραγιάννη
 Ανάδραση Ηλεκτρονική Γ τάξη Επ. Καθηγ. Ε. Καραγιάννη 3 Συστήματα Ελέγχου Σύστημα Ελέγχου Ανοικτού Βρόχου Α Σύστημα Ελέγχου Κλειστού Βρόχου με Ανάδραση Ε =β Α β Μάρτιος 2 Μάθημα 3, Ηλεκτρονική Γ' Έτος 2
Ανάδραση Ηλεκτρονική Γ τάξη Επ. Καθηγ. Ε. Καραγιάννη 3 Συστήματα Ελέγχου Σύστημα Ελέγχου Ανοικτού Βρόχου Α Σύστημα Ελέγχου Κλειστού Βρόχου με Ανάδραση Ε =β Α β Μάρτιος 2 Μάθημα 3, Ηλεκτρονική Γ' Έτος 2
Συστήματα Αυτομάτου Ελέγχου ΙΙ. Άσκηση. γραμμάτων του επιθέτου σας (π.χ. για το επίθετο Κοσματόπουλος, οι αριθμοί α ι θα είναι a
 Συστήματα Αυτομάτου Ελέγχου ΙΙ Άσκηση Θεωρείστε το σύστημα με συνάρτηση μεταφοράς: Y ( s) a s 4 3 a3s a U ( s) s a όπου οι αριθμοί α ι αντιστοιχούν στους αντίστοιχους αριθμούς των 4 πρώτων γραμμάτων του
Συστήματα Αυτομάτου Ελέγχου ΙΙ Άσκηση Θεωρείστε το σύστημα με συνάρτηση μεταφοράς: Y ( s) a s 4 3 a3s a U ( s) s a όπου οι αριθμοί α ι αντιστοιχούν στους αντίστοιχους αριθμούς των 4 πρώτων γραμμάτων του
Εργαστήριο Ηλεκτροτεχνικών Εφαρμογών
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Εργαστήριο Ηλεκτροτεχνικών Εφαρμογών Ενότητα: Χωρητική Αντιστάθμιση Ισχύος Γεώργιος Χ. Ιωαννίδης Τμήμα Ηλεκτρολογίας Άδειες Χρήσης
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Εργαστήριο Ηλεκτροτεχνικών Εφαρμογών Ενότητα: Χωρητική Αντιστάθμιση Ισχύος Γεώργιος Χ. Ιωαννίδης Τμήμα Ηλεκτρολογίας Άδειες Χρήσης
ΣΥΣΤΗΜΑΤΑ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ ΣΥΣΤΗΜΑΤΑ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΙΙ Μάθημα ασκήσεων 7: Γραμμή μεταφοράς Διανεμημένα χαρακτηριστικά Λαμπρίδης Δημήτρης Ανδρέου Γεώργιος Δούκας
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ ΣΥΣΤΗΜΑΤΑ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΙΙ Μάθημα ασκήσεων 7: Γραμμή μεταφοράς Διανεμημένα χαρακτηριστικά Λαμπρίδης Δημήτρης Ανδρέου Γεώργιος Δούκας
ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499
 ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499 ΣΤΑΤΑ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ ΑΕΡΓΟΥ ΙΣΧΥΟΣ (S) ρ Ανρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέµατα Βαθµίες
ΕΥΕΛΙΚΤΑ ΣΥΣΤΗΜΑΤΑ ΜΕΤΑΦΟΡΑΣ ΗΜΥ 499 ΣΤΑΤΑ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ ΑΕΡΓΟΥ ΙΣΧΥΟΣ (S) ρ Ανρέας Σταύρου ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ Τα Θέµατα Βαθµίες
ΗΛΕΚΤΡΟΝΙΚΗ Ι ΔΙΑΓΡΑΜΜΑΤΑ BODE ΣΥΜΠΛΗΡΩΜΑΤΙΚΟ ΤΕΥΧΟΣ ΣΗΜΕΙΩΣΕΩΝ
 Ε. Μ. Πολυτεχνείο Εργαστήριο Ηλεκτρονικής ΗΛΕΚΤΡΟΝΙΚΗ Ι ΔΙΑΓΡΑΜΜΑΤΑ BODE ΣΥΜΠΛΗΡΩΜΑΤΙΚΟ ΤΕΥΧΟΣ ΣΗΜΕΙΩΣΕΩΝ Γ. ΠΑΠΑΝΑΝΟΣ ΠΑΡΑΡΤΗΜΑ : Συναρτήσεις Δικτύων Βασικοί ορισμοί Ας θεωρήσουμε ένα γραμμικό, χρονικά
Ε. Μ. Πολυτεχνείο Εργαστήριο Ηλεκτρονικής ΗΛΕΚΤΡΟΝΙΚΗ Ι ΔΙΑΓΡΑΜΜΑΤΑ BODE ΣΥΜΠΛΗΡΩΜΑΤΙΚΟ ΤΕΥΧΟΣ ΣΗΜΕΙΩΣΕΩΝ Γ. ΠΑΠΑΝΑΝΟΣ ΠΑΡΑΡΤΗΜΑ : Συναρτήσεις Δικτύων Βασικοί ορισμοί Ας θεωρήσουμε ένα γραμμικό, χρονικά
Ανάλυση Ηλεκτρικών Κυκλωμάτων
 Ανάλυση Ηλεκτρικών Κυκλωμάτων Κεφάλαιο 13: Ισχύς σε κυκλώματα ημιτονοειδούς διέγερσης Οι διαφάνειες ακολουθούν το βιβλίο του Κων/νου Παπαδόπουλου «Ανάλυση Ηλεκτρικών Κυκλωμάτων» ISBN: 9789609371100 κωδ.
Ανάλυση Ηλεκτρικών Κυκλωμάτων Κεφάλαιο 13: Ισχύς σε κυκλώματα ημιτονοειδούς διέγερσης Οι διαφάνειες ακολουθούν το βιβλίο του Κων/νου Παπαδόπουλου «Ανάλυση Ηλεκτρικών Κυκλωμάτων» ISBN: 9789609371100 κωδ.
1 Αριθμητική κινητής υποδιαστολής και σφάλματα στρογγύλευσης
 1 Αριθμητική κινητής υποδιαστολής και σφάλματα στρογγύλευσης Στη συγκεκριμένη ενότητα εξετάζουμε θέματα σχετικά με την αριθμητική πεπερασμένης ακρίβειας που χρησιμοποιούν οι σημερινοί υπολογιστές και τα
1 Αριθμητική κινητής υποδιαστολής και σφάλματα στρογγύλευσης Στη συγκεκριμένη ενότητα εξετάζουμε θέματα σχετικά με την αριθμητική πεπερασμένης ακρίβειας που χρησιμοποιούν οι σημερινοί υπολογιστές και τα
Παράδειγμα 1. Δίνεται ο κάτωθι κλειστός βρόχος αρνητικής ανάδρασης με. Σχήμα 1. στο οποίο εφαρμόζουμε αρνητική ανάδραση κέρδους
 Παράδειγμα 1 Δίνεται ο κάτωθι κλειστός βρόχος αρνητικής ανάδρασης με _ + Σχήμα 1 στο οποίο εφαρμόζουμε αρνητική ανάδραση κέρδους Α) Γράψτε το σύστημα ευθέως κλάδου σε κανονική παρατηρήσιμη μορφή στο χώρο
Παράδειγμα 1 Δίνεται ο κάτωθι κλειστός βρόχος αρνητικής ανάδρασης με _ + Σχήμα 1 στο οποίο εφαρμόζουμε αρνητική ανάδραση κέρδους Α) Γράψτε το σύστημα ευθέως κλάδου σε κανονική παρατηρήσιμη μορφή στο χώρο
Φυσική για Μηχανικούς
 Φυσική για Μηχανικούς Ρεύμα και Αντίσταση Εικόνα: Οι γραμμές ρεύματος μεταφέρουν ενέργεια από την ηλεκτρική εταιρία στα σπίτια και τις επιχειρήσεις μας. Η ενέργεια μεταφέρεται σε πολύ υψηλές τάσεις, πιθανότατα
Φυσική για Μηχανικούς Ρεύμα και Αντίσταση Εικόνα: Οι γραμμές ρεύματος μεταφέρουν ενέργεια από την ηλεκτρική εταιρία στα σπίτια και τις επιχειρήσεις μας. Η ενέργεια μεταφέρεται σε πολύ υψηλές τάσεις, πιθανότατα
PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών
 Διαμόρφωση εύρους παλμών") PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη
PWM (Pulse Width Modulation) Διαμόρφωση εύρους παλμών Μία PWM κυματομορφή στην πραγματικότητα αποτελεί μία περιοδική κυματομορφή η οποία έχει δύο τμήματα. Το τμήμα ΟΝ στο οποίο η κυματομορφή έχει την μέγιστη
Μελέτη προβλημάτων ΠΗΙ λόγω λειτουργίας βοηθητικών προωστήριων μηχανισμών
 «ΔιερΕΥνηση Και Aντιμετώπιση προβλημάτων ποιότητας ηλεκτρικής Ισχύος σε Συστήματα Ηλεκτρικής Ενέργειας (ΣΗΕ) πλοίων» (ΔΕΥ.Κ.Α.Λ.Ι.ΩΝ) πράξη ΘΑΛΗΣ-ΕΜΠ, πράξη ένταξης 11012/9.7.2012, MIS: 380164, Κωδ.ΕΔΕΙΛ/ΕΜΠ:
«ΔιερΕΥνηση Και Aντιμετώπιση προβλημάτων ποιότητας ηλεκτρικής Ισχύος σε Συστήματα Ηλεκτρικής Ενέργειας (ΣΗΕ) πλοίων» (ΔΕΥ.Κ.Α.Λ.Ι.ΩΝ) πράξη ΘΑΛΗΣ-ΕΜΠ, πράξη ένταξης 11012/9.7.2012, MIS: 380164, Κωδ.ΕΔΕΙΛ/ΕΜΠ:
Ηλεκτρική και Μηχανική ταλάντωση στο ίδιο φαινόμενο
 Ηλεκτρική και Μηχανική ταλάντωση στο ίδιο φαινόμενο Στο σχήμα φαίνεται μια γνώριμη διάταξη δύο παράλληλων αγωγών σε απόσταση, που ορίζουν οριζόντιο επίπεδο, κάθετο σε ομογενές μαγνητικό πεδίο έντασης.
Ηλεκτρική και Μηχανική ταλάντωση στο ίδιο φαινόμενο Στο σχήμα φαίνεται μια γνώριμη διάταξη δύο παράλληλων αγωγών σε απόσταση, που ορίζουν οριζόντιο επίπεδο, κάθετο σε ομογενές μαγνητικό πεδίο έντασης.
Έλεγχος Κίνησης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Αυτόματος Έλεγχος Συστημάτων Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Αυτόματος Έλεγχος Συστημάτων Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
Αριθμητική Ανάλυση και Εφαρμογές
 Αριθμητική Ανάλυση και Εφαρμογές Διδάσκων: Δημήτριος Ι. Φωτιάδης Τμήμα Μηχανικών Επιστήμης Υλικών Ιωάννινα 07-08 Πεπερασμένες και Διαιρεμένες Διαφορές Εισαγωγή Θα εισάγουμε την έννοια των διαφορών με ένα
Αριθμητική Ανάλυση και Εφαρμογές Διδάσκων: Δημήτριος Ι. Φωτιάδης Τμήμα Μηχανικών Επιστήμης Υλικών Ιωάννινα 07-08 Πεπερασμένες και Διαιρεμένες Διαφορές Εισαγωγή Θα εισάγουμε την έννοια των διαφορών με ένα
M m l B r mglsin mlcos x ml 2 1) Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br
 Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br") ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΑΣΚΗΣΗ 1 ΜΟΝΟΦΑΣΙΚΟΣ ΜΕΤΑΣΧΗΜΑΤΙΣΤΗΣ
 ΑΣΚΗΣΗ 1 ΜΟΝΟΦΑΣΙΚΟΣ ΜΕΤΑΣΧΗΜΑΤΙΣΤΗΣ Α.1 ΘΕΩΡΗΤΙΚΗ ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΜΟΝΟΦΑΣΙΚΟ ΜΕΤΑΣΧΗΜΑΤΙΣΤΗ Ο μετασχηματιστής είναι μια ηλεκτρική διάταξη που μετατρέπει εναλλασσόμενη ηλεκτρική ενέργεια ενός επιπέδου τάσης
ΑΣΚΗΣΗ 1 ΜΟΝΟΦΑΣΙΚΟΣ ΜΕΤΑΣΧΗΜΑΤΙΣΤΗΣ Α.1 ΘΕΩΡΗΤΙΚΗ ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΜΟΝΟΦΑΣΙΚΟ ΜΕΤΑΣΧΗΜΑΤΙΣΤΗ Ο μετασχηματιστής είναι μια ηλεκτρική διάταξη που μετατρέπει εναλλασσόμενη ηλεκτρική ενέργεια ενός επιπέδου τάσης