ΕΝΟΤΗΤΑ 2: Αυτόνομα Ευφυή Κινούμενα Ρομποτικά Συστήματα
|
|
|
- Γοργοφόνη Μπότσαρης
- 8 χρόνια πριν
- Προβολές:
Transcript
1 Ε.Μ.Π., ΣΗΜΜΥ, Ακαδημαϊκό Έτος 00-, ο Εξάμηνο Μάθημα: Ρομποτική ΙΙ. Διδάσκων: Κ.Τζαφέστας ΕΝΟΤΗΤΑ : Αυτόνομα Ευφυή Κινούμενα Ρομποτικά Συστήματα Σχεδιασμός Δρόμου Πλοήγηση (path-planning, navigation) Αυτόνομα Ευφυή Κινούμενα Ρομπότ Περιεχόμενα Ενότητας Μηχανισμοί Κίνησης στο χώρο (locomotion) Αισθητήριες Διατάξεις (sensing) Proprioception (internal state ) / Exteroception etc. Σύνθεση αισθητηρίων πληροφοριών (sensor fusion) Αρχιτεκτονικές ελέγχου (mobile robot control architectures) Αυτοεντοπισμός θέσης / Χαρτογράφηση (self-localisation / map-building) Σχεδιασμός Δρόμου - Πλοήγηση (path planning / navigation) perception action motion control sensing reasoning
2 Βασικό Σχήμα Αρχιτεκτονικής Ελέγχου Αντίληψη (Perception) Μοντελοποίηση (Model) Σχεδιασμός Δράσης (Plan) Εκτέλεση εργασίας (Execute) Έλεγχος (Motor Control) Αίσθηση (sensing) Περιβάλλον (environment) Δράση (action) Σχεδιασμός Κίνησης / Δρόμου (motion / path planning) Motion / Path Planner Ενδιάμεσοι στόχοι Trajectory Generator Ομαλή τροχιά Controller Σήματα ελέγχου (to joint controllers/drivers) Motors / sensors / hardware
3 Σχεδιασμός Κίνησης: Το βασικό πρόβλημα Πρόβλημα: Αρχική θέση (διάταξη) C 0 Τελική θέση C f Σχεδιασμός δρόμου: εύρεση «βέλτιστης» ακολουθίας ενδιάμεσων θέσεων C i Σχεδιασμός τροχιάς: υπολογισμός «ομαλής» τροχιάς... C f C 0 Αλγόριθμοι Σχεδιασμού Δρόμου Αλγόρθμοι σχεδιασμού δρόμου: υποθέσεις / απαιτήσεις Παράσταση/μοντελοποίηση περιβάλλοντος & ρομπότ Εγκυρότητα λύσεων (soundness) Πληρότητα αλγορίθμων (completeness) «Βέλτιστες» λύσεις (optimality) Πολυπλοκότητα αλγορίθμων (space/time complexity)
 Sample environment Uniform decomposition Παράσταση Χώρου Κίνησης ().")
4 Παράσταση Χώρου Κίνησης () Mobile Robot Workspace Obstacles Free-space. Spatial Decomposition Grid-based representations (occupancy grids) Sample environment Uniform decomposition Παράσταση Χώρου Κίνησης (). Spatial Decomposition (occupancy grids) (συνέχεια) Quadtree (or octree) representations
 D maps: points, lines, line segments, polynomials etc. (π.χ. παράσταση κάτοψης χώρου κίνησης: τοίχοι, πόρτες, διάδρομοι κλπ.")
5 Παράσταση Χώρου Κίνησης (). Spatial Decomposition (occupancy grids) (συνέχεια) Binary Space Partitioning trees (BSP) Exact Decomposition 9 Παράσταση Χώρου Κίνησης (). Geometric Representations (Γεωμετρικά μοντέλα χώρου κίνησης) D maps: points, lines, line segments, polynomials etc. (π.χ. παράσταση κάτοψης χώρου κίνησης: τοίχοι, πόρτες, διάδρομοι κλπ.) D maps: points, planar surfaces, polyhedra, ellipsoids etc. Μετρικοί χάρτες (metric maps) 0
 regions [] [] [] [] Metric representation [] [] [] [] Topological")
6 Παράσταση Χώρου Κίνησης (). Topological Representations (Τοπολογικά μοντέλα χώρου κίνησης) Metric vs. Topological representations Metric: exact, analytical representations Topological: graph representations approximate (global) regions [] [] [] [] Metric representation [] [] [] [] Topological representation Παράσταση του κινούμενου ρομπότ () Configuration Space (C-space) (Χώρος Διάταξης του Ρομπότ)
")
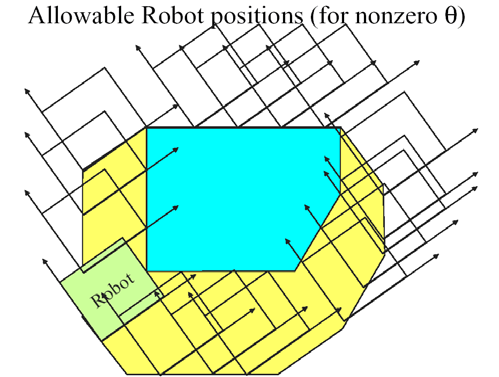
7 Παράσταση του κινούμενου ρομπότ () Configuration Space (C-space) (συνέχεια) Παράσταση του κινούμενου ρομπότ () Configuration Space (C-space) (συνέχεια)

")
")
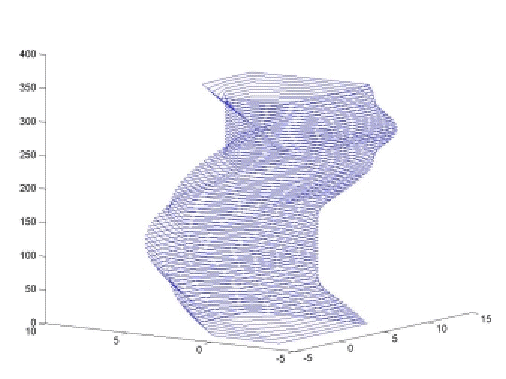
8 Παράσταση του κινούμενου ρομπότ () Configuration Space (C-space) (συνέχεια) Παράσταση του κινούμενου ρομπότ () Configuration Space (C-space) (συνέχεια)
9 Μεθοδολογίες Σχεδιασμού Δρόμου Σχεδιασμός δρόμου κινούμενων ρομπότ (robot path planning) Μέθοδοι «οδικού χάρτη» (roadmap methods) Visibility graph, Voronoi diagrams, silhouettes, probabilistic roadmaps, etc. Γράφοι συννεκτικότητας (connectivity graphs) Exact or Approximate cell decomposition Μέθοδος Δυναμικών πεδίων (potential fields) Local collision avoidance / Global navigation functions Σχεδιασμός Δρόμου σε Διακριτό Χώρο Γενική Ρουτίνα Αναζήτησης σε Γράφο (graph search). Procedure GraphSearch(s, goal). OPEN = {s}; CLOSED = {};. found=false;. while (OPEN ) and (not found). Select a node n from OPEN;. OPEN = OPEN {n}; CLOSED = CLOSED {n} «Επισκέψιμοι κόμβοι» Εαν OPEN: ουρά (queue) breadth-first Εαν OPEN: στοίβα (stack) depth-first Εαν OPEN: ordered using an evaluation function f (n) best-first. if n goal then. found = true; 9. else 0. Let M the set of all nodes accessible from n and not in CLOSED. OPEN = OPEN M ;. end-if. end-while
 and (not found). Select a node: u Extract_Min(OPEN);.")
;. end-if. end-while Weights(G) (Υπόθεση: w 0) Initialize_Single_Source(G, s).")
![For each node v V(G). d[v] = ;. π[v] = NULL;. d[s] = 0; Relax(u, v, w). if d[u] + w(u, v) < d[v]. d[v] = d[u] + w(u, v);.](/docs-images/60/44974169/images/10-2.png "π[v] = u; Start with upper bound (d[u]: shortest-path distance to u) (π[v]: predecessor of v, in shortest-path tree) Relax")
10 Αλγόριθμος Dijkstra (Single-Source Shortest Path) Procedure Dijkstra(G, s). Initialize_Single_Source(G, s). OPEN = {s}; CLOSED = {};. found=false;. while (OPEN ) and (not found). Select a node: u Extract_Min(OPEN);. OPEN = OPEN {u}; CLOSED = CLOSED {u}. if u goal then found = true;. else 9. for each node v Adjacency(u) and v CLOSED 0. OPEN = OPEN v;. Relax(u, v, w);. end-if. end-while Weights(G) (Υπόθεση: w 0) Initialize_Single_Source(G, s). For each node v V(G). d[v] = ;. π[v] = NULL;. d[s] = 0; Relax(u, v, w). if d[u] + w(u, v) < d[v]. d[v] = d[u] + w(u, v);. π[v] = u; Start with upper bound (d[u]: shortest-path distance to u) (π[v]: predecessor of v, in shortest-path tree) Relax bounds at each step 9 Αλγόριθμος Dijkstra Παράδειγμα Εφαρμογής () 0
. Initialization: d[s]=0; f[s]=d[s]+h(s); π[s]=null;. OPEN = {s}; CLOSED = {};. while (OPEN ). Select a node: u Get_Best_Node(OPEN); /* min f[u] */. if (u == goal) then return true;.")
![for each node v Adjacency(u). new_f = d[u] + w(u, v) + h(v) ;. if (new_f < f[v]) then 9. d[v] = d[u] + w(u, v); f[v] = new_f; π[v] = u; 0. Add v to OPEN;. end-if. end-for.](/docs-images/60/44974169/images/11-1.png "Remove u from OPEN ; Add u to CLOSED;. end-while f[.]: cost associated with each node d[.]: distance from start node s h(.): heuristic estimated distance to goal Heuristic function h[.")
11 Αλγόριθμος Dijkstra Παράδειγμα Εφαρμογής () «Μέτωπο εξερεύνησης» αλγορίθμου Dijkstra Αποτέλεσμα αλγορίθμου Dijkstra σε πρόβλημα με «παγίδα» Αλγόριθμος Α* (Single-Pair Shortest Path) Procedure A*(G, s, goal). Initialization: d[s]=0; f[s]=d[s]+h(s); π[s]=null;. OPEN = {s}; CLOSED = {};. while (OPEN ). Select a node: u Get_Best_Node(OPEN); /* min f[u] */. if (u == goal) then return true;. for each node v Adjacency(u). new_f = d[u] + w(u, v) + h(v) ;. if (new_f < f[v]) then 9. d[v] = d[u] + w(u, v); f[v] = new_f; π[v] = u; 0. Add v to OPEN;. end-if. end-for. Remove u from OPEN ; Add u to CLOSED;. end-while f[.]: cost associated with each node d[.]: distance from start node s h(.): heuristic estimated distance to goal Heuristic function h[.]: estimated distance to target π[v]: predecessor of v, in shortest-path tree

: G = (V,E), V: κορυφές εμποδίων")
12 Αλγόριθμος Α* Παράδειγμα Εφαρμογής «Μέτωπο εξερεύνησης» αλγορίθμου αναζήτησης Α* Αποτέλεσμα αλγορίθμου Α* σε πρόβλημα με «παγίδα» Μεθοδολογίες «Οδικού Χάρτη» (roadmap path-planning methods) (). Γράφος «ορατότητας» (visibility graph planning): G = (V,E), V: κορυφές εμποδίων (vertices), Ε: ακμές που συνδέουν «ορατές» μεταξύ τους κορυφές (edges) start s goal
13 Μεθοδολογίες «Οδικού Χάρτη» (roadmap path-planning methods) (). Διάγραμμα Voronoi (Voronoi diagrams): γεωμετρικός τόπος σημείων που απέχουν εξίσου (equidistant) από τα πλησιέστερα δύο εμπόδια του χώρου V E V E E E V E V V E E V V Vor(C free ): maximizes clearance straight-lines: {configurations} closest to a pair of edges, or vertices, i.e. (edge,edge) or (vertex,vertex) (διχοτόμος) (μεσοκάθετος) parabolic arc: {configurations} closest to a pair (edge, vertex) Μεθοδολογίες «Οδικού Χάρτη» (): Πιθανοτικές Μέθοδοι Πιθανοτικές Μέθοδοι Μέθοδοι «δειγματοληψίας» Πιθανοτικοί Οδικοί Χάρτες (Probabilistic Roadmaps PRM) Rapidly exploring Random Trees (RRT)
 (Probabilistic Roadmaps")




")
14 Πιθανοτικοί «Οδικοί Χάρτες» () (Probabilistic Roadmaps PRM). «Πιθανοτικοί» οδικοί χάρτες δειγματοληψία χώρου Αρχική θέση Στόχος Δειγματοληψία χώρου κίνησης Α* αναζήτηση Έλεγχος συμβατότητας Κατασκευή Γράφου Βέλτιστη Διαδρομή Πιθανοτικοί «Οδικοί Χάρτες» () (Probabilistic Roadmaps) Δειγματοληψία Χώρου (χώρος διατάξεων - configuration space)
 (Probabilistic Roadmaps) Έλεγχος Συμβατότητας ( free configurations) Διατήρηση τυχαίων σημείων στον «ελεύθερο» χώρο διατάξεων")
15 Πιθανοτικοί «Οδικοί Χάρτες» () (Probabilistic Roadmaps) Δειγματοληψία Χώρου (Sampling_strategy) Δημιουργία τυχαίων σημείων στο χώρο ρομποτικών διατάξεων 9 Πιθανοτικοί «Οδικοί Χάρτες» () (Probabilistic Roadmaps) Έλεγχος Συμβατότητας ( free configurations) Διατήρηση τυχαίων σημείων στον «ελεύθερο» χώρο διατάξεων 0
16 Πιθανοτικοί «Οδικοί Χάρτες» () (Probabilistic Roadmaps) Διασύνδεση «γειτονικών» κόμβων (neighbour_strategy + verify_path) Πιθανοτικοί «Οδικοί Χάρτες» () (Probabilistic Roadmaps) Αλγόριθμος κατασκευής πιθανοτικού γράφου PRM {V, E}
17 Πιθανοτικοί «Οδικοί Χάρτες» () (Probabilistic Roadmaps) Γράφος στον «ελεύθερο» χώρο διατάξεων Πιθανοτικοί «Οδικοί Χάρτες» () (Probabilistic Roadmaps) Αναζήτηση βέλτιστης διαδρομής στο γράφο
18 Σχεδιασμός Δρόμου με «Γράφους Συννεκτικότητας» (connectivity graphs) (). Exact cell decomposition: Διάσπαση του χώρου C free σε ένα υποσύνολο από μη-επικαλυπτόμενες υποπεριοχές (cells), και δημιουργία του «γράφου συννεκτικότητας» (connectivity graph) start s 9 goal 0 Σχεδιασμός Δρόμου με «Γράφους Συννεκτικότητας» (connectivity graphs) (). Exact cell decomposition (συνέχεια) start s 9 goal 0
19 Μεθοδολογίες «Δυναμικών Πεδίων» (potential fields methods) () «Τεχνητά δυναμικά πεδία» (artificial potential fields) Εμπόδια: repulsive potential field U rep (q) Στόχος: attractive potential field U att (q) Ένα τεχνητό δυναμικό πεδίο πλοήγησης μπορεί: να αντανακλά την τοπική πληροφορία ύπαρξης εμποδίων στο χώρο κίνησης «τοπική αποφυγή εμποδίων» (Πρόβλημα: ύπαρξη τοπικών ελαχίστων local minima) να αντανακλά τη συνολική εικόνα του ελεύθερου χώρου διατάξεων C free, μέσω μιας ιδανικής συνάρτησης πλοήγησης (navigation function) με ένα μόνο ολικό ελάχιστο στο στόχο. Μεθοδολογίες «Δυναμικών Πεδίων» (potential fields methods) () Γενική δομή μεθοδολογίας δυναμικών πεδίων: F(q) = U(q), και U(q) = U att (q) + U rep (q) και Στόχος: attractive potential field U att (q) Uatt ( q) = Katt ρgoal ( q) όπου ρ ( q) = q qgoal F ( q) = U ( q) = K ρ ( q) ρ ( q) = K q q ( ) att att att goal goal att goal
 () Εμπόδια: repulsive potential")
 ρ0 = 0, óταν ρk ( q) > ρ0")
 = U ( q) obstk F obst ( q ) = K")
 () (a)")

20 Μεθοδολογίες «Δυναμικών Πεδίων» (potential fields methods) () Εμπόδια: repulsive potential field U n rep = obst k k= ( q) U ( q) όπου και U ρ k K, óταν ρk ( q) ρ0 = 0, óταν ρk ( q) > ρ0 rep obst ( q) k ρk ( q) ρ0 ( q) = min q q obstk q obstk F ( q) = U ( q) obstk F obst ( q ) = K ( ), ( ) k rep ρ k ρk ρ0 ρk( ) ρ 0 ρk( ) q óταν q q q F rep U rep q q 9 Μεθοδολογίες «Δυναμικών Πεδίων» (potential fields methods) () (a) (b) (c) U att (q) U rep (q) (d) U(q) = U att +U rep 0
 = U(q) on-line path generation a.")
21 Ρομποτικός Σχεδιασμός Δρόμου οδηγούμενος από «Δυναμικά Πεδία» () Potential-guided path planning: local collision avoidance Το ρομπότ μοντελοποιείται ως μια σημειακή μάζα στο χώρο κατάστασης, κινούμενη υπό την επίδραση του πεδίου δυνάμεων: F(q) = U(q) on-line path generation a. Depth-First, without backtracking (σε κάθε βήμα i: q i q i+ ) a(q i ) = F(q i )/ F(q i ) και U qi+ = qi + δi ai qi = qi + δi qi i ( increment δ i : no collision in q the segment q i q i+ ) (i) Steepest-descent of the potential function (ii) Problem of local-minima ( ) ( ) local goal Ρομποτικός Σχεδιασμός Δρόμου οδηγούμενος από «Δυναμικά Πεδία» () Reactive collision avoidance based on artificial potential fields Παράδειγμα: Τοπική («ανακλαστική») αποφυγή εμποδίων Σύγκλιση σε στόχο με παράλληλη τοπική αποφυγή εμποδίων Πρόβλημα: πιθανή ύπαρξη τοπικών ελαχίστων Σύγκλιση στο στόχο Αποφυγή εμποδίου Τοπικό ελάχιστο στόχος
22 Ρομποτικός Σχεδιασμός Δρόμου οδηγούμενος από «Δυναμικά Πεδία» () b. (Greedy) Best-First με backtracking (GC: grid of configurations q i ) Αναδρομική κατασκευή ενός δέντρου T, με κόμβους στο GC και το q start ως «ρίζα». Σε κάθε βήμα, ο αλγόριθμος «επισκέπτεται» όλους τους p-γείτονες (p-connectivity, συνήθως p= ή p=) του φύλλου του Τ με τη μικρότερη τιμή δυναμικού (best-first), και προσθέτει ως παιδιά τους κόμβους του GC που δεν ανήκουν ήδη στο Τ, και που το δυναμικό τους δεν ξεπερνά κάποιο ανώτατο κατώφλι ( εμπόδιο). Για κάθε κόμβο του Τ διατηρούμε και ένα δείκτη προς τον «πατέρα», με στόχο την ανακατασκευή της βέλτιστης διαδρομής, όταν φτάσουμε στο q goal. Best-First με backtracking (επανιχνηλάτηση): Διακριτή προσέγγιση του steepestdecent (πλέον απότομης κατάβασης ή μέγιστης κλίσης), αλλά όταν φτάσουμε σε κάποιο τοπικό ελάχιστο ο αλγόριθμος «οπισθοδρομεί»(«πλημμυρίζοντας το πηγάδι» του τοπικού ελαχίστου) μέχρις ότου «ξεφύγει», συνεχίζοντας την αναζήτηση της βέλτιστης διαδρομής προς το στόχο. Ρομποτικός Σχεδιασμός Δρόμου οδηγούμενος από «Δυναμικά Πεδία» () b. Αλγόριθμος Best-First-Planning (συνέχεια). Procedure BFP;. Install q init in T; INSERT(q init in OPEN); Mark q init as visited;. success=false;. while (OPEN ) and (not success). (Select a node q from OPEN) q = BEST(OPEN);. For every neighbor q of q in GC do. if U( q ) < Max and q not visited, then. Install q in T; INSERT(q, OPEN); Mark q as visited; 9. if q = q goal then success = true; 0. end-if. end-while. if (success) then return the constructed path by tracing back the pointers in T from q goal to q init
 με βάση αλγορίθμους wavefront expansion α.")
 Κατασκευή")
 0 0 0 0 0 0 0 β.")
23 Ρομποτικός Σχεδιασμός Δρόμου με «Συνάρτηση Πλοήγησης» () Κατασκευή Γενικής Συνάρτησης Πλοήγησης (global navigation function) με βάση αλγορίθμους wavefront expansion α. Κατασκευή «χάρτη απόστασης» (distance map) από το στόχο Global Distance Map: Global vs. Local Path Planning Ρομποτικός Σχεδιασμός Δρόμου με «Συνάρτηση Πλοήγησης» () Κατασκευή Συνάρτησης Πλοήγησης (global navigation function) με βάση αλγορίθμους wavefront expansion (συνέχεια) β. Κατασκευή «χάρτη απόστασης» (distance map) από εμπόδια Δημιουργία skeletons as roadmaps


24 Ρομποτικός Σχεδιασμός Δρόμου με «Συνάρτηση Πλοήγησης» Εφαρμογή «Human-Demonstration» of Desired Mobile Robot Trajectory (Tele-planning) Active Assistance Functions: collision avoidance / motion guides Pre-Viewing / Playback Automatic Waypoint Computation / Editing Animation Video Clip Βιβλιογραφία J-C. Latombe, Robot Motion Planning, Kluwer, 99. G. Dudek, M.Jenkin, Computational Principles of Mobile Robotics, Cambridge University Press, 000. H. Choset, K. M. Lynch, S. Hutchinson, G. Kantor, W. Burgard, L. E. Kavraki and S. Thrun, Principles of Robot Motion Theory, Algorithms and Implementations, The MIT Press, Cambridge, Massachusetts, 00
ΕΝΟΤΗΤΑ 2: Αυτόνομα Ευφυή Κινούμενα Ρομποτικά Συστήματα
 Ε.Μ.Π., ΣΗΜΜΥ, Ακαδημαϊκό Έτος 009-0, ο Εξάμηνο Μάθημα: Ρομποτική ΙΙ. Διδάσκων: Κ.Τζαφέστας ΕΝΟΤΗΤΑ : Αυτόνομα Ευφυή Κινούμενα Ρομποτικά Συστήματα Σχεδιασμός Δρόμου Πλοήγηση (path-planning, navigation)
Ε.Μ.Π., ΣΗΜΜΥ, Ακαδημαϊκό Έτος 009-0, ο Εξάμηνο Μάθημα: Ρομποτική ΙΙ. Διδάσκων: Κ.Τζαφέστας ΕΝΟΤΗΤΑ : Αυτόνομα Ευφυή Κινούμενα Ρομποτικά Συστήματα Σχεδιασμός Δρόμου Πλοήγηση (path-planning, navigation)
ΕΝΤΟΠΙΣΜΟΣ ΘΕΣΗΣ ΚΑΙ ΧΑΡΤΗΓΡΑΦΗΣΗ
 ΕΝΤΟΠΙΣΜΟΣ ΘΕΣΗΣ ΚΑΙ ΧΑΡΤΗΓΡΑΦΗΣΗ Δρ Γιώργος Α. Δημητρίου Ευφυή Κινούμενα Ρομπότ 139 Ρομποτικός Εντοπισμός Θέσης Δεδομένα Χάρτης του περιβάλλοντος Ακολουθία παρατηρήσεων Ζητούμενο Εκτίμηση της θέσης του
ΕΝΤΟΠΙΣΜΟΣ ΘΕΣΗΣ ΚΑΙ ΧΑΡΤΗΓΡΑΦΗΣΗ Δρ Γιώργος Α. Δημητρίου Ευφυή Κινούμενα Ρομπότ 139 Ρομποτικός Εντοπισμός Θέσης Δεδομένα Χάρτης του περιβάλλοντος Ακολουθία παρατηρήσεων Ζητούμενο Εκτίμηση της θέσης του
ΕΝΟΤΗΤΑ 2: Αυτόνομα Ευφυή Κινούμενα Ρομποτικά Συστήματα
 Ε.Μ.Π., ΣΗΜΜΥ, Ακαδημαϊκό Έτος 2010-11, 8ο Εξάμηνο Μάθημα: Ρομποτική ΙΙ. Διδάσκων: Κ.Τζαφέστας ΕΝΟΤΗΤΑ 2: Αυτόνομα Ευφυή Κινούμενα Ρομποτικά Συστήματα Αρχιτεκτονικές Ελέγχου (mobile robot control architectures)
Ε.Μ.Π., ΣΗΜΜΥ, Ακαδημαϊκό Έτος 2010-11, 8ο Εξάμηνο Μάθημα: Ρομποτική ΙΙ. Διδάσκων: Κ.Τζαφέστας ΕΝΟΤΗΤΑ 2: Αυτόνομα Ευφυή Κινούμενα Ρομποτικά Συστήματα Αρχιτεκτονικές Ελέγχου (mobile robot control architectures)
Μέθοδοι Σχεδίασης κίνησης
 Μέθοδοι Σχεδίασης κίνησης Τασούδης Σταύρος Ο προγραμματισμός τροχιάς(trajectory planning) είναι η κίνηση από το σημείο Α προς το σημείο Β αποφεύγοντας τις συγκρούσεις με την πάροδο του χρόνου. Αυτό μπορεί
Μέθοδοι Σχεδίασης κίνησης Τασούδης Σταύρος Ο προγραμματισμός τροχιάς(trajectory planning) είναι η κίνηση από το σημείο Α προς το σημείο Β αποφεύγοντας τις συγκρούσεις με την πάροδο του χρόνου. Αυτό μπορεί
Αναζήτηση σε Γράφους. Μανόλης Κουμπαράκης. ΥΣ02 Τεχνητή Νοημοσύνη 1
 Αναζήτηση σε Γράφους Μανόλης Κουμπαράκης ΥΣ02 Τεχνητή Νοημοσύνη 1 Πρόλογος Μέχρι τώρα έχουμε δει αλγόριθμους αναζήτησης για την περίπτωση που ο χώρος καταστάσεων είναι δένδρο (υπάρχει μία μόνο διαδρομή
Αναζήτηση σε Γράφους Μανόλης Κουμπαράκης ΥΣ02 Τεχνητή Νοημοσύνη 1 Πρόλογος Μέχρι τώρα έχουμε δει αλγόριθμους αναζήτησης για την περίπτωση που ο χώρος καταστάσεων είναι δένδρο (υπάρχει μία μόνο διαδρομή
ΤΜΗΜΑ ΔΙΟΙΚΗΣΗΣ ΕΠΙΧΕΙΡΗΣΕΩΝ
 ΤΕΙ Δυτικής Μακεδονίας ΤΜΗΜΑ ΔΙΟΙΚΗΣΗΣ ΕΠΙΧΕΙΡΗΣΕΩΝ 2015-2016 Τεχνητή Νοημοσύνη Επίλυση προβλημάτων με αναζήτηση Διδάσκων: Τσίπουρας Μάρκος Εκπαιδευτικό Υλικό: Τσίπουρας Μάρκος http://ai.uom.gr/aima/ 2
ΤΕΙ Δυτικής Μακεδονίας ΤΜΗΜΑ ΔΙΟΙΚΗΣΗΣ ΕΠΙΧΕΙΡΗΣΕΩΝ 2015-2016 Τεχνητή Νοημοσύνη Επίλυση προβλημάτων με αναζήτηση Διδάσκων: Τσίπουρας Μάρκος Εκπαιδευτικό Υλικό: Τσίπουρας Μάρκος http://ai.uom.gr/aima/ 2
ΑΛΓΟΡΙΘΜΙΚΕΣ ΜΕΘΟΔΟΙ ΒΕΛΤΙΣΤΟΠΟΙΗΣΗΣ
 ΑΛΓΟΡΙΘΜΙΚΕΣ ΜΕΘΟΔΟΙ ΒΕΛΤΙΣΤΟΠΟΙΗΣΗΣ ΚΟΥΛΙΝΑΣ ΓΕΩΡΓΙΟΣ Δρ. Μηχανικός Παραγωγής & Διοίκησης ΔΠΘ ΑΛΓΟΡΙΘΜΙΚΕΣ ΜΕΘΟΔΟΙ ΒΕΛΤΙΣΤΟΠΟΙΗΣΗΣ o ΔΙΑΛΕΞΕΙΣ ΜΑΘΗΜΑΤΟΣ ΔΕΥΤΕΡΑ 16.00-19.00 (Εργ. Υπ. Μαθ. Τμ. ΜΠΔ) oτρόπος
ΑΛΓΟΡΙΘΜΙΚΕΣ ΜΕΘΟΔΟΙ ΒΕΛΤΙΣΤΟΠΟΙΗΣΗΣ ΚΟΥΛΙΝΑΣ ΓΕΩΡΓΙΟΣ Δρ. Μηχανικός Παραγωγής & Διοίκησης ΔΠΘ ΑΛΓΟΡΙΘΜΙΚΕΣ ΜΕΘΟΔΟΙ ΒΕΛΤΙΣΤΟΠΟΙΗΣΗΣ o ΔΙΑΛΕΞΕΙΣ ΜΑΘΗΜΑΤΟΣ ΔΕΥΤΕΡΑ 16.00-19.00 (Εργ. Υπ. Μαθ. Τμ. ΜΠΔ) oτρόπος
Ε ανάληψη. Ορισµοί της Τεχνητής Νοηµοσύνης (ΤΝ) Καταβολές. Ιστορική αναδροµή. Πράκτορες. Περιβάλλοντα. κριτήρια νοηµοσύνης
 Καταβολές. Ιστορική αναδροµή. Πράκτορες. Περιβάλλοντα. κριτήρια νοηµοσύνης") ΠΛΗ 405 Τεχνητή Νοηµοσύνη Αναζήτηση Search Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Ορισµοί της Τεχνητής Νοηµοσύνης (ΤΝ) κριτήρια νοηµοσύνης Καταβολές συνεισφορά
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Αναζήτηση Search Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Ορισµοί της Τεχνητής Νοηµοσύνης (ΤΝ) κριτήρια νοηµοσύνης Καταβολές συνεισφορά
Αλγόριθμοι και Δομές Δεδομένων (IΙ) (γράφοι και δένδρα)
 (γράφοι και δένδρα)") Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής Εισαγωγή στην Επιστήμη των Υπολογιστών 2016-17 Αλγόριθμοι και Δομές Δεδομένων (IΙ) (γράφοι και δένδρα) http://mixstef.github.io/courses/csintro/ Μ.Στεφανιδάκης Αφηρημένες
Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής Εισαγωγή στην Επιστήμη των Υπολογιστών 2016-17 Αλγόριθμοι και Δομές Δεδομένων (IΙ) (γράφοι και δένδρα) http://mixstef.github.io/courses/csintro/ Μ.Στεφανιδάκης Αφηρημένες
Επίλυση Προβληµάτων µε Greedy Αλγόριθµους
 Επίλυση Προβληµάτων µε Greedy Αλγόριθµους Περίληψη Επίλυση προβληµάτων χρησιµοποιώντας Greedy Αλγόριθµους Ελάχιστα Δέντρα Επικάλυψης Αλγόριθµος του Prim Αλγόριθµος του Kruskal Πρόβληµα Ελάχιστης Απόστασης
Επίλυση Προβληµάτων µε Greedy Αλγόριθµους Περίληψη Επίλυση προβληµάτων χρησιµοποιώντας Greedy Αλγόριθµους Ελάχιστα Δέντρα Επικάλυψης Αλγόριθµος του Prim Αλγόριθµος του Kruskal Πρόβληµα Ελάχιστης Απόστασης
Ε ανάληψη. Καταβολές. Ιστορική αναδροµή. Πράκτορες. Περιβάλλοντα. συνεισφορά άλλων επιστηµών στην ΤΝ. 1956 σήµερα
 ΠΛΗ 405 Τεχνητή Νοηµοσύνη Α ληροφόρητη Αναζήτηση Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Καταβολές συνεισφορά άλλων επιστηµών στην ΤΝ Ιστορική αναδροµή 1956
ΠΛΗ 405 Τεχνητή Νοηµοσύνη Α ληροφόρητη Αναζήτηση Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιστών Πολυτεχνείο Κρήτης Ε ανάληψη Καταβολές συνεισφορά άλλων επιστηµών στην ΤΝ Ιστορική αναδροµή 1956
In I t n r t o r d o u d c u ti t on o n to t o Rob o o b t o i t c M ot o i t on o n Planning 1
 Introduction to Robotic Motion Planning 1 Robot Planning & Control Architecture Trajectory Generator Trajectory (i.e. geometry +time) d d ( t) ( ) Control: Trajectory / Interaction u Robot, & h t, f µ
Introduction to Robotic Motion Planning 1 Robot Planning & Control Architecture Trajectory Generator Trajectory (i.e. geometry +time) d d ( t) ( ) Control: Trajectory / Interaction u Robot, & h t, f µ
Αλγόριθμοι Γραφημάτων
 Αλγόριθμοι Γραφημάτων 1. Συντομότατα μονοπάτια 2. Αλγόριθμος Bellman-Ford 3. Αλγόριθμος Dijkstra 4. Floyd-Warshall Εισαγωγή στην Ανάλυση Αλγορίθμων Μάγια Σατρατζέμη Single-Source Shortest Path Πρόβλημα:
Αλγόριθμοι Γραφημάτων 1. Συντομότατα μονοπάτια 2. Αλγόριθμος Bellman-Ford 3. Αλγόριθμος Dijkstra 4. Floyd-Warshall Εισαγωγή στην Ανάλυση Αλγορίθμων Μάγια Σατρατζέμη Single-Source Shortest Path Πρόβλημα:
Πανεπιστήμιο Δυτικής Μακεδονίας. Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών. Τεχνητή Νοημοσύνη. Ενότητα 2: Αναζήτηση (Search)
") Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Τεχνητή Νοημοσύνη Ενότητα 2: Αναζήτηση (Search) Αν. καθηγητής Στεργίου Κωνσταντίνος kstergiou@uowm.gr Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Άδειες
Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Τεχνητή Νοημοσύνη Ενότητα 2: Αναζήτηση (Search) Αν. καθηγητής Στεργίου Κωνσταντίνος kstergiou@uowm.gr Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Άδειες
Real time mobile robot control with a multiresolution map representation
 IIC 06 21 Real time mobile robot control with a multiresolution map representation Katsuya Iwata, Shinkichi Inagaki, Yusuke Nara, Tatsuya Suzuki (Nagoya University) Abstract In this paper a real-time path
IIC 06 21 Real time mobile robot control with a multiresolution map representation Katsuya Iwata, Shinkichi Inagaki, Yusuke Nara, Tatsuya Suzuki (Nagoya University) Abstract In this paper a real-time path
Σχεδιασμός Κίνησης σε Δισδιάστατα Περιβάλλοντα που Περιλαμβάνουν Εμπόδια Άγνωστης Τροχιάς
 Σχεδιασμός Κίνησης σε Δισδιάστατα Περιβάλλοντα που Περιλαμβάνουν Εμπόδια Άγνωστης Τροχιάς Ηλίας Κ. Ξυδιάς, Φίλιππος Ν. Αζαριάδης Τμήμα Μηχανικών Σχεδίασης Προϊόντων & Συστημάτων, Πανεπιστήμιο Αιγαίου,
Σχεδιασμός Κίνησης σε Δισδιάστατα Περιβάλλοντα που Περιλαμβάνουν Εμπόδια Άγνωστης Τροχιάς Ηλίας Κ. Ξυδιάς, Φίλιππος Ν. Αζαριάδης Τμήμα Μηχανικών Σχεδίασης Προϊόντων & Συστημάτων, Πανεπιστήμιο Αιγαίου,
Δομές Δεδομένων και Αλγόριθμοι
 Δομές Δεδομένων και Αλγόριθμοι Χρήστος Γκόγκος ΤΕΙ Ηπείρου Χειμερινό Εξάμηνο 2014-2015 Παρουσίαση 18 Dijkstra s Shortest Path Algorithm 1 / 12 Ο αλγόριθμος εύρεσης της συντομότερης διαδρομής του Dijkstra
Δομές Δεδομένων και Αλγόριθμοι Χρήστος Γκόγκος ΤΕΙ Ηπείρου Χειμερινό Εξάμηνο 2014-2015 Παρουσίαση 18 Dijkstra s Shortest Path Algorithm 1 / 12 Ο αλγόριθμος εύρεσης της συντομότερης διαδρομής του Dijkstra
Δομές Δεδομένων και Αλγόριθμοι
 Δομές Δεδομένων και Αλγόριθμοι Χρήστος Γκόγκος ΤΕΙ Ηπείρου Χειμερινό Εξάμηνο 2014-2015 Παρουσίαση 1 Εισαγωγή 1 / 14 Δομές Δεδομένων και Αλγόριθμοι Δομή Δεδομένων Δομή δεδομένων είναι ένα σύνολο αποθηκευμένων
Δομές Δεδομένων και Αλγόριθμοι Χρήστος Γκόγκος ΤΕΙ Ηπείρου Χειμερινό Εξάμηνο 2014-2015 Παρουσίαση 1 Εισαγωγή 1 / 14 Δομές Δεδομένων και Αλγόριθμοι Δομή Δεδομένων Δομή δεδομένων είναι ένα σύνολο αποθηκευμένων
Τεχνητή Νοημοσύνη (ΥΠ23) 6 ο εξάμηνο Τμήμα Πληροφορικής και Τηλεματικής Χαροκόπειο Πανεπιστήμιο Ουρανία Χατζή
 6 ο εξάμηνο Τμήμα Πληροφορικής και Τηλεματικής Χαροκόπειο Πανεπιστήμιο Ουρανία Χατζή") Τεχνητή Νοημοσύνη (ΥΠ23) 6 ο εξάμηνο Τμήμα Πληροφορικής και Τηλεματικής Χαροκόπειο Πανεπιστήμιο Ουρανία Χατζή raniah@hua.gr 1 Αναζήτηση Δοθέντος ενός προβλήματος με περιγραφή είτε στον χώρο καταστάσεων
Τεχνητή Νοημοσύνη (ΥΠ23) 6 ο εξάμηνο Τμήμα Πληροφορικής και Τηλεματικής Χαροκόπειο Πανεπιστήμιο Ουρανία Χατζή raniah@hua.gr 1 Αναζήτηση Δοθέντος ενός προβλήματος με περιγραφή είτε στον χώρο καταστάσεων
Επίλυση προβλημάτων με αναζήτηση
 Επίλυση προβλημάτων με αναζήτηση Περιεχόμενα Μέθοδοι (πράκτορες) επίλυσης προβλημάτων Προβλήματα και Λύσεις Προβλήματα παιχνίδια Προβλήματα του πραγματικού κόσμου Αναζήτηση λύσεων Δέντρο αναζήτησης Στρατηγικές
Επίλυση προβλημάτων με αναζήτηση Περιεχόμενα Μέθοδοι (πράκτορες) επίλυσης προβλημάτων Προβλήματα και Λύσεις Προβλήματα παιχνίδια Προβλήματα του πραγματικού κόσμου Αναζήτηση λύσεων Δέντρο αναζήτησης Στρατηγικές
ΥΣ02 Τεχνητή Νοημοσύνη Χειμερινό Εξάμηνο
 ΥΣ02 Τεχνητή Νοημοσύνη Χειμερινό Εξάμηνο 2010-2011 Πρώτη Σειρά Ασκήσεων (20% του συνολικού βαθμού στο μάθημα, Άριστα = 390 μονάδες) Ημερομηνία Ανακοίνωσης: 6/10/2010 Ημερομηνία Παράδοσης: 15/11/2010 σύμφωνα
ΥΣ02 Τεχνητή Νοημοσύνη Χειμερινό Εξάμηνο 2010-2011 Πρώτη Σειρά Ασκήσεων (20% του συνολικού βαθμού στο μάθημα, Άριστα = 390 μονάδες) Ημερομηνία Ανακοίνωσης: 6/10/2010 Ημερομηνία Παράδοσης: 15/11/2010 σύμφωνα
HY380 Αλγόριθμοι και πολυπλοκότητα Hard Problems
 HY380 Αλγόριθμοι και πολυπλοκότητα Hard Problems Ημερομηνία Παράδοσης: 0/1/017 την ώρα του μαθήματος ή με email: mkarabin@csd.uoc.gr Γενικές Οδηγίες α) Επιτρέπεται η αναζήτηση στο Internet και στην βιβλιοθήκη
HY380 Αλγόριθμοι και πολυπλοκότητα Hard Problems Ημερομηνία Παράδοσης: 0/1/017 την ώρα του μαθήματος ή με email: mkarabin@csd.uoc.gr Γενικές Οδηγίες α) Επιτρέπεται η αναζήτηση στο Internet και στην βιβλιοθήκη
Network Algorithms and Complexity Παραλληλοποίηση του αλγορίθμου του Prim. Αικατερίνη Κούκιου
 Network Algorithms and Complexity Παραλληλοποίηση του αλγορίθμου του Prim Αικατερίνη Κούκιου Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό,
Network Algorithms and Complexity Παραλληλοποίηση του αλγορίθμου του Prim Αικατερίνη Κούκιου Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό,
Αλγόριθµοι Τύπου Μείωσης Προβλήµατος
 Αλγόριθµοι Τύπου Μείωσης Προβλήµατος Περίληψη Αλγόριθµοι Τύπου Μείωσης Προβλήµατος ( Decrease and Conquer ) Μείωση κατά µια σταθερά (decrease by a constant) Μείωση κατά ένα ποσοστό (decrease by a constant
Αλγόριθµοι Τύπου Μείωσης Προβλήµατος Περίληψη Αλγόριθµοι Τύπου Μείωσης Προβλήµατος ( Decrease and Conquer ) Μείωση κατά µια σταθερά (decrease by a constant) Μείωση κατά ένα ποσοστό (decrease by a constant
ΑΣΚΗΣΕΙΣ ΓΙΑ ΤΟ ΕΡΓΑΣΤΗΡΙΟ 1
 Version 1.5.1 (24/03/2017) Σχολή Τεχνολογικών Εφαρμογών (ΣΤΕΦ) Τμήμα Μηχανικών Πληροφορικής Τ.Ε. Διδάσκων: Γκόγκος Χρήστος Μάθημα: Τεχνητή Νοημοσύνη (εργαστήριο Δ εξαμήνου) Ακαδημαϊκό έτος 2016-2017 εαρινό
Version 1.5.1 (24/03/2017) Σχολή Τεχνολογικών Εφαρμογών (ΣΤΕΦ) Τμήμα Μηχανικών Πληροφορικής Τ.Ε. Διδάσκων: Γκόγκος Χρήστος Μάθημα: Τεχνητή Νοημοσύνη (εργαστήριο Δ εξαμήνου) Ακαδημαϊκό έτος 2016-2017 εαρινό
ΑΛΓΟΡΙΘΜΟΙ Άνοιξη I. ΜΗΛΗΣ
 ΑΛΓΟΡΙΘΜΟΙ http://eclass.aueb.gr/courses/inf161/ Άνοιξη 2017 - I. ΜΗΛΗΣ AΛΓΟΡΙΘΜΟΙ ΓΡΑΦΩΝ Ι ΕΞΕΡΕΥΝΗΣΗ 1 Graphs Ανά ζεύγη (pairwise) σχέσεις μεταξύ των στοιχείων ενός συνόλου 2 Graphs Εφαρμογές Χάρτες,
ΑΛΓΟΡΙΘΜΟΙ http://eclass.aueb.gr/courses/inf161/ Άνοιξη 2017 - I. ΜΗΛΗΣ AΛΓΟΡΙΘΜΟΙ ΓΡΑΦΩΝ Ι ΕΞΕΡΕΥΝΗΣΗ 1 Graphs Ανά ζεύγη (pairwise) σχέσεις μεταξύ των στοιχείων ενός συνόλου 2 Graphs Εφαρμογές Χάρτες,
ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΑΝΑΛΥΣΗ ΑΛΓΟΡΙΘΜΩΝ
 ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΑΝΑΛΥΣΗ ΑΛΓΟΡΙΘΜΩΝ Ενότητα 12: Αλγόριθμοι Γραφημάτων/Συντομότατα μονοπάτια/αλγόριθμος Bellman-Ford/Αλγόριθμος Dijkstra/Floyd-Warshall Μαρία Σατρατζέμη Τμήμα Εφαρμοσμένης Πληροφορικής Άδειες
ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΑΝΑΛΥΣΗ ΑΛΓΟΡΙΘΜΩΝ Ενότητα 12: Αλγόριθμοι Γραφημάτων/Συντομότατα μονοπάτια/αλγόριθμος Bellman-Ford/Αλγόριθμος Dijkstra/Floyd-Warshall Μαρία Σατρατζέμη Τμήμα Εφαρμοσμένης Πληροφορικής Άδειες
ΑΛΓΟΡΙΘΜΙΚΕΣ ΜΕΘΟΔΟΙ ΒΕΛΤΙΣΤΟΠΟΙΗΣΗΣ
 ΑΛΓΟΡΙΘΜΙΚΕΣ ΜΕΘΟΔΟΙ ΒΕΛΤΙΣΤΟΠΟΙΗΣΗΣ ΚΟΥΛΙΝΑΣ ΓΕΩΡΓΙΟΣ Δρ. Μηχανικός Παραγωγής & Διοίκησης ΔΠΘ ΠΛΕΟΝΕΚΤΙΚΟΙ ΚΑΤΑΣΚΕΥΑΣΤΙΚΟΙ ΑΛΓΟΡΙΘΜΟΙ GREEDY CONSTRUCTIVE HEURISTICS Βασικό μειονέκτημα: οι αποφάσεις που
ΑΛΓΟΡΙΘΜΙΚΕΣ ΜΕΘΟΔΟΙ ΒΕΛΤΙΣΤΟΠΟΙΗΣΗΣ ΚΟΥΛΙΝΑΣ ΓΕΩΡΓΙΟΣ Δρ. Μηχανικός Παραγωγής & Διοίκησης ΔΠΘ ΠΛΕΟΝΕΚΤΙΚΟΙ ΚΑΤΑΣΚΕΥΑΣΤΙΚΟΙ ΑΛΓΟΡΙΘΜΟΙ GREEDY CONSTRUCTIVE HEURISTICS Βασικό μειονέκτημα: οι αποφάσεις που
Αλγόριθμοι και πολυπλοκότητα Depth-First Search
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Αλγόριθμοι και πολυπλοκότητα Depth-First Search Ιωάννης Τόλλης Τμήμα Επιστήμης Υπολογιστών Depth-First Search A B D E C Depth-First Search 1 Outline and Reading
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Αλγόριθμοι και πολυπλοκότητα Depth-First Search Ιωάννης Τόλλης Τμήμα Επιστήμης Υπολογιστών Depth-First Search A B D E C Depth-First Search 1 Outline and Reading
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ. Δομές Δεδομένων. Ιωάννης Γ. Τόλλης Τμήμα Επιστήμης Υπολογιστών Πανεπιστήμιο Κρήτης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Δομές Δεδομένων Ιωάννης Γ. Τόλλης Τμήμα Επιστήμης Υπολογιστών Πανεπιστήμιο Κρήτης Χρηματοδότηση Το παρόν εκπαιδευτικό υλικό έχει αναπτυχθεί στα πλαίσια του εκπαιδευτικού
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Δομές Δεδομένων Ιωάννης Γ. Τόλλης Τμήμα Επιστήμης Υπολογιστών Πανεπιστήμιο Κρήτης Χρηματοδότηση Το παρόν εκπαιδευτικό υλικό έχει αναπτυχθεί στα πλαίσια του εκπαιδευτικού
ΣΤΟΧΑΣΤΙΚΕΣ ΔΙΕΡΓΑΣΙΕΣ & ΒΕΛΤΙΣΤΟΠΟΙΗΣΗ Αίθουσα Νέα Κτίρια ΣΗΜΜΥ Ε.Μ.Π.
 ΣΤΟΧΑΣΤΙΚΕΣ ΔΙΕΡΓΑΣΙΕΣ & ΒΕΛΤΙΣΤΟΠΟΙΗΣΗ Αίθουσα 005 - Νέα Κτίρια ΣΗΜΜΥ Ε.Μ.Π. Αλγόριθμος Bellman-Ford, Δρομολόγηση BGP στο Internet καθ. Βασίλης Μάγκλαρης maglaris@netmode.ntua.gr www.netmode.ntua.gr Πέμπτη
ΣΤΟΧΑΣΤΙΚΕΣ ΔΙΕΡΓΑΣΙΕΣ & ΒΕΛΤΙΣΤΟΠΟΙΗΣΗ Αίθουσα 005 - Νέα Κτίρια ΣΗΜΜΥ Ε.Μ.Π. Αλγόριθμος Bellman-Ford, Δρομολόγηση BGP στο Internet καθ. Βασίλης Μάγκλαρης maglaris@netmode.ntua.gr www.netmode.ntua.gr Πέμπτη
3 Degree Centrality. 4 Closeness Centrality. Degree: (out-degree). In-Degree: Out-Degree: c D (v) = deg(v) c Din (v) = deg (v) c Dout (v) = deg + (v)
. In-Degree: Out-Degree: c D (v) = deg(v) c Din (v) = deg (v) c Dout (v) = deg + (v)") Centrality Measures Θεωρία Γράφων Πίσκας Γεώργιος - ΑΕΜ 2087 4 Ιουνίου 2013 1 Γενικά Τα Centrality Measures είναι ενα σύνολο από μετρικές που διευκολύνουν την εξαγωγή στατιστικών για γράφους. Ουσιαστικά,
Centrality Measures Θεωρία Γράφων Πίσκας Γεώργιος - ΑΕΜ 2087 4 Ιουνίου 2013 1 Γενικά Τα Centrality Measures είναι ενα σύνολο από μετρικές που διευκολύνουν την εξαγωγή στατιστικών για γράφους. Ουσιαστικά,
Κεφάλαιο 3. Αλγόριθµοι Τυφλής Αναζήτησης. Τεχνητή Νοηµοσύνη - Β' Έκδοση. Ι. Βλαχάβας, Π. Κεφαλάς, Ν. Βασιλειάδης, Φ. Κόκκορας, Η.
 Κεφάλαιο 3 Αλγόριθµοι Τυφλής Αναζήτησης Τεχνητή Νοηµοσύνη - Β' Έκδοση Ι. Βλαχάβας, Π. Κεφαλάς, Ν. Βασιλειάδης, Φ. Κόκκορας, Η. Σακελλαρίου Αλγόριθµοι Τυφλής Αναζήτησης Οι αλγόριθµοι τυφλής αναζήτησης (blind
Κεφάλαιο 3 Αλγόριθµοι Τυφλής Αναζήτησης Τεχνητή Νοηµοσύνη - Β' Έκδοση Ι. Βλαχάβας, Π. Κεφαλάς, Ν. Βασιλειάδης, Φ. Κόκκορας, Η. Σακελλαρίου Αλγόριθµοι Τυφλής Αναζήτησης Οι αλγόριθµοι τυφλής αναζήτησης (blind
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ. Δομές Δεδομένων. Ιωάννης Γ. Τόλλης Τμήμα Επιστήμης Υπολογιστών Πανεπιστήμιο Κρήτης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Δομές Δεδομένων Ιωάννης Γ. Τόλλης Τμήμα Επιστήμης Υπολογιστών Πανεπιστήμιο Κρήτης Χρηματοδότηση Το παρόν εκπαιδευτικό υλικό έχει αναπτυχθεί στα πλαίσια του εκπαιδευτικού
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Δομές Δεδομένων Ιωάννης Γ. Τόλλης Τμήμα Επιστήμης Υπολογιστών Πανεπιστήμιο Κρήτης Χρηματοδότηση Το παρόν εκπαιδευτικό υλικό έχει αναπτυχθεί στα πλαίσια του εκπαιδευτικού
Αλγόριθμοι Γραφημάτων
 Αλγόριθμοι Γραφημάτων 1. Διερεύνηση Πρώτα σε Βάθος (DFS) 2. Τοπολογική Ταξινόμηση Εισαγωγή στην Ανάλυση Αλγορίθμων Μάγια Σατρατζέμη Depth-First Search Πρώτα σε Βάθος διερεύνηση (Depth-First Search) είναι
Αλγόριθμοι Γραφημάτων 1. Διερεύνηση Πρώτα σε Βάθος (DFS) 2. Τοπολογική Ταξινόμηση Εισαγωγή στην Ανάλυση Αλγορίθμων Μάγια Σατρατζέμη Depth-First Search Πρώτα σε Βάθος διερεύνηση (Depth-First Search) είναι
6η Διάλεξη Διάσχιση Γράφων και Δέντρων
 ΘΕΩΡΙΑ ΓΡΑΦΩΝ 6 η Διάλεξη Διάσχιση Γράφων και Δέντρων Αλγόριθμος αναζήτησης σε Βαθος Αλγόριθμος αναζήτησης κατά Πλάτος Αλγόριθμοι για Δένδρα Εύρεση ελαχίστων Γεννητορικών (Επικαλύπτοντα) Δένδρων Διάσχιση
ΘΕΩΡΙΑ ΓΡΑΦΩΝ 6 η Διάλεξη Διάσχιση Γράφων και Δέντρων Αλγόριθμος αναζήτησης σε Βαθος Αλγόριθμος αναζήτησης κατά Πλάτος Αλγόριθμοι για Δένδρα Εύρεση ελαχίστων Γεννητορικών (Επικαλύπτοντα) Δένδρων Διάσχιση
ΔΙΑΧΕΙΡΙΣΗ ΔΙΚΤΥΩΝ Δρομολόγηση στο Internet (II) Αλγόριθμοι Distance Vector (Bellman) Αλγόριθμοι Link State (Dijkstra)
 Αλγόριθμοι Distance Vector (Bellman) Αλγόριθμοι Link State (Dijkstra)") ΔΙΑΧΕΙΡΙΣΗ ΔΙΚΤΥΩΝ Δρομολόγηση στο Internet (II) Αλγόριθμοι Distance Vector (Bellman) Αλγόριθμοι Link State (Dijkstra) Β. Μάγκλαρης maglaris@netmode.ntua.gr www.netmode.ntua.gr 2/11/2015 Άδεια Χρήσης Το
ΔΙΑΧΕΙΡΙΣΗ ΔΙΚΤΥΩΝ Δρομολόγηση στο Internet (II) Αλγόριθμοι Distance Vector (Bellman) Αλγόριθμοι Link State (Dijkstra) Β. Μάγκλαρης maglaris@netmode.ntua.gr www.netmode.ntua.gr 2/11/2015 Άδεια Χρήσης Το
Διδάσκων: Παναγιώτης Ανδρέου
 Διάλεξη 3: Βραχύτερα Μονοπάτια σε Γράφους Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: - Βραχύτερα Μονοπάτια σε γράφους -Ο αλγόριθμος ijkstraγια εύρεση της βραχύτερης απόστασης -Ο αλγόριθμος
Διάλεξη 3: Βραχύτερα Μονοπάτια σε Γράφους Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: - Βραχύτερα Μονοπάτια σε γράφους -Ο αλγόριθμος ijkstraγια εύρεση της βραχύτερης απόστασης -Ο αλγόριθμος
ΑΣΚΗΣΕΙΣ ΓΙΑ ΤΟ ΕΡΓΑΣΤΗΡΙΟ 2
 Version 1.5 (16/03/2017) Σχολή Τεχνολογικών Εφαρμογών (ΣΤΕΦ) Τμήμα Μηχανικών Πληροφορικής Τ.Ε. Διδάσκων: Γκόγκος Χρήστος Μάθημα: Τεχνητή Νοημοσύνη (εργαστήριο Δ εξαμήνου) Ακαδημαϊκό έτος 2016-2017 εαρινό
Version 1.5 (16/03/2017) Σχολή Τεχνολογικών Εφαρμογών (ΣΤΕΦ) Τμήμα Μηχανικών Πληροφορικής Τ.Ε. Διδάσκων: Γκόγκος Χρήστος Μάθημα: Τεχνητή Νοημοσύνη (εργαστήριο Δ εξαμήνου) Ακαδημαϊκό έτος 2016-2017 εαρινό
ΑΛΓΟΡΙΘΜΟΙ Άνοιξη I. ΜΗΛΗΣ
 ΑΛΓΟΡΙΘΜΟΙ http://eclass.aueb.gr/courses/inf161/ Άνοιξη 016 - I. ΜΗΛΗΣ AΛΓΟΡΙΘΜΟΙ ΓΡΑΦΩΝ ΙΙΙ Minimum Spanning Trees ΑΛΓΟΡΙΘΜΟΙ - ΑΝΟΙΞΗ 016 - Ι. ΜΗΛΗΣ 14 - GRAPHS III - MSTs 1 Trees Ένας γράφος T = (V,
ΑΛΓΟΡΙΘΜΟΙ http://eclass.aueb.gr/courses/inf161/ Άνοιξη 016 - I. ΜΗΛΗΣ AΛΓΟΡΙΘΜΟΙ ΓΡΑΦΩΝ ΙΙΙ Minimum Spanning Trees ΑΛΓΟΡΙΘΜΟΙ - ΑΝΟΙΞΗ 016 - Ι. ΜΗΛΗΣ 14 - GRAPHS III - MSTs 1 Trees Ένας γράφος T = (V,
Επίλυση Προβλημάτων. Αποτελεί ένα από τα βασικά χαρακτηριστικά γνωρίσματα της νοημοσύνης.
 Επίλυση Προβλημάτων Αποτελεί ένα από τα βασικά χαρακτηριστικά γνωρίσματα της νοημοσύνης. Τεχνητή Νοημοσύνη = Αναπαράσταση Γνώσης + Αλγόριθμοι Αναζήτησης Κατηγορίες Προβλημάτων Aναζήτησης Πραγματικά και
Επίλυση Προβλημάτων Αποτελεί ένα από τα βασικά χαρακτηριστικά γνωρίσματα της νοημοσύνης. Τεχνητή Νοημοσύνη = Αναπαράσταση Γνώσης + Αλγόριθμοι Αναζήτησης Κατηγορίες Προβλημάτων Aναζήτησης Πραγματικά και
Minimum Spanning Tree: Prim's Algorithm
 Minimum Spanning Tree: Prim's Algorithm 1. Initialize a tree with a single vertex, chosen arbitrarily from the graph. 2. Grow the tree by one edge: of the edges that connect the tree to vertices not yet
Minimum Spanning Tree: Prim's Algorithm 1. Initialize a tree with a single vertex, chosen arbitrarily from the graph. 2. Grow the tree by one edge: of the edges that connect the tree to vertices not yet
Γράφηµα (Graph) Εργαστήριο 10. Εισαγωγή
 Εργαστήριο 10. Εισαγωγή") Εργαστήριο 10 Γράφηµα (Graph) Εισαγωγή Στην πληροφορική γράφηµα ονοµάζεται µια δοµή δεδοµένων, που αποτελείται από ένα σύνολο κορυφών ( vertices) (ή κόµβων ( nodes» και ένα σύνολο ακµών ( edges). Ενας
Εργαστήριο 10 Γράφηµα (Graph) Εισαγωγή Στην πληροφορική γράφηµα ονοµάζεται µια δοµή δεδοµένων, που αποτελείται από ένα σύνολο κορυφών ( vertices) (ή κόµβων ( nodes» και ένα σύνολο ακµών ( edges). Ενας
ΤΕΧΝΗΤΗ ΝΟΗΜΟΣΥΝΗ. Ενότητα 2: Δένδρο αναζήτησης. Ρεφανίδης Ιωάννης Τμήμα Εφαρμοσμένης Πληροφορικής
 Ενότητα 2: Δένδρο αναζήτησης Ρεφανίδης Ιωάννης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε άλλου τύπου
Ενότητα 2: Δένδρο αναζήτησης Ρεφανίδης Ιωάννης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε άλλου τύπου
Δέντρα Απόφασης (Decision(
 Δέντρα Απόφασης (Decision( Trees) Το μοντέλο που δημιουργείται είναι ένα δέντρο Χρήση της τεχνικής «διαίρει και βασίλευε» για διαίρεση του χώρου αναζήτησης σε υποσύνολα (ορθογώνιες περιοχές) Ένα παράδειγμα
Δέντρα Απόφασης (Decision( Trees) Το μοντέλο που δημιουργείται είναι ένα δέντρο Χρήση της τεχνικής «διαίρει και βασίλευε» για διαίρεση του χώρου αναζήτησης σε υποσύνολα (ορθογώνιες περιοχές) Ένα παράδειγμα
ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΑΝΑΛΥΣΗ ΑΛΓΟΡΙΘΜΩΝ
 ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΑΝΑΛΥΣΗ ΑΛΓΟΡΙΘΜΩΝ Ενότητα 10γ: Αλγόριθμοι Γραφημάτων- Διερεύνηση Πρώτα σε Βάθος (DFS)- Τοπολογική Ταξινόμηση Μαρία Σατρατζέμη Τμήμα Εφαρμοσμένης Πληροφορικής Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΑΝΑΛΥΣΗ ΑΛΓΟΡΙΘΜΩΝ Ενότητα 10γ: Αλγόριθμοι Γραφημάτων- Διερεύνηση Πρώτα σε Βάθος (DFS)- Τοπολογική Ταξινόμηση Μαρία Σατρατζέμη Τμήμα Εφαρμοσμένης Πληροφορικής Άδειες Χρήσης Το παρόν εκπαιδευτικό
Διδάσκων: Κωνσταντίνος Κώστα Διαφάνειες: Δημήτρης Ζεϊναλιπούρ
 Διάλεξη 23: Βραχύτερα Μονοπάτια σε Γράφους Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: Βραχύτερα Μονοπάτια σε γράφους Ο αλγόριθμος Dijkstra για εύρεση της βραχύτερης απόστασης Ο αλγόριθμος
Διάλεξη 23: Βραχύτερα Μονοπάτια σε Γράφους Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: Βραχύτερα Μονοπάτια σε γράφους Ο αλγόριθμος Dijkstra για εύρεση της βραχύτερης απόστασης Ο αλγόριθμος
ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ EPL035: ΔΟΜΕΣ ΔΕΔΟΜΕΝΩΝ ΚΑΙ ΑΛΓΟΡΙΘΜΟΙ
 ΠΝΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΤΜΗΜ ΠΛΗΡΟΦΟΡΙΚΗΣ EPL035: ΔΟΜΣ ΔΔΟΜΝΩΝ ΚΙ ΛΓΟΡΙΘΜΟΙ ΗΜΡΟΜΗΝΙ: 14/11/2018 ΔΙΓΝΩΣΤΙΚΟ ΠΝΩ Σ ΔΝΔΡΙΚΣ ΔΟΜΣ ΚΙ ΓΡΦΟΥΣ Διάρκεια: 45 λεπτά Ονοματεπώνυμο:. ρ. Ταυτότητας:. ΒΘΜΟΛΟΓΙ ΣΚΗΣΗ ΒΘΜΟΣ
ΠΝΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΤΜΗΜ ΠΛΗΡΟΦΟΡΙΚΗΣ EPL035: ΔΟΜΣ ΔΔΟΜΝΩΝ ΚΙ ΛΓΟΡΙΘΜΟΙ ΗΜΡΟΜΗΝΙ: 14/11/2018 ΔΙΓΝΩΣΤΙΚΟ ΠΝΩ Σ ΔΝΔΡΙΚΣ ΔΟΜΣ ΚΙ ΓΡΦΟΥΣ Διάρκεια: 45 λεπτά Ονοματεπώνυμο:. ρ. Ταυτότητας:. ΒΘΜΟΛΟΓΙ ΣΚΗΣΗ ΒΘΜΟΣ
Alternative to Balanced Trees, Comms of the ACM, 33(6), June 1990,
, June 1990,") ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Πληροφορικής & Τηλεπικοινωνιών Μια σημείωση από τον Α. Δελή για το άρθρο: W. Pugh, Skip Lists: A Probabilistic Alternative to Balanced Trees, Comms of the ACM, 33(), June 10,
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Πληροφορικής & Τηλεπικοινωνιών Μια σημείωση από τον Α. Δελή για το άρθρο: W. Pugh, Skip Lists: A Probabilistic Alternative to Balanced Trees, Comms of the ACM, 33(), June 10,
ΗΜΥ 325: Επαναληπτικές Μέθοδοι. Διδάσκων: Χρίστος Παναγιώτου
 ΗΜΥ 325: Επαναληπτικές Μέθοδοι Διδάσκων: Χρίστος Παναγιώτου ΗΜΥ 325: Επαναληπτικές Μέθοδοι. A. Levitin, Introduction to the Design and Analysis of Algorithms, 2 nd Ed. Περίληψη µαθήµατος Επιπρόσθετες Πληροφορίες
ΗΜΥ 325: Επαναληπτικές Μέθοδοι Διδάσκων: Χρίστος Παναγιώτου ΗΜΥ 325: Επαναληπτικές Μέθοδοι. A. Levitin, Introduction to the Design and Analysis of Algorithms, 2 nd Ed. Περίληψη µαθήµατος Επιπρόσθετες Πληροφορίες
Αλγόριθµοι και Πολυπλοκότητα
 Αλγόριθµοι και Πολυπλοκότητα Ν. Μ. Μισυρλής Τµήµα Πληροφορικής και Τηλεπικοινωνιών, Πανεπιστήµιο Αθηνών Καθηγητής: Ν. Μ. Μισυρλής () Αλγόριθµοι και Πολυπλοκότητα 6 Μαΐου 2015 1 / 42 Εύρεση Ελάχιστου Μονοπατιού
Αλγόριθµοι και Πολυπλοκότητα Ν. Μ. Μισυρλής Τµήµα Πληροφορικής και Τηλεπικοινωνιών, Πανεπιστήµιο Αθηνών Καθηγητής: Ν. Μ. Μισυρλής () Αλγόριθµοι και Πολυπλοκότητα 6 Μαΐου 2015 1 / 42 Εύρεση Ελάχιστου Μονοπατιού
Αφηρημένες Δομές Δεδομένων. Στοίβα (Stack) Υλοποίηση στοίβας
 Υλοποίηση στοίβας") Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής ισαγωγή στην πιστήμη των Υπολογιστών 2015-16 λγόριθμοι και ομές εδομένων (IΙ) (γράφοι και δένδρα) http://di.ionio.gr/~mistral/tp/csintro/ Μ.Στεφανιδάκης φηρημένες
Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής ισαγωγή στην πιστήμη των Υπολογιστών 2015-16 λγόριθμοι και ομές εδομένων (IΙ) (γράφοι και δένδρα) http://di.ionio.gr/~mistral/tp/csintro/ Μ.Στεφανιδάκης φηρημένες
Διδάσκων: Κωνσταντίνος Κώστα Διαφάνειες: Δημήτρης Ζεϊναλιπούρ
 Διάλεξη 9: Εισαγωγή στους Γράφους Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: Γράφοι - ορισμοί και υλοποίηση Διάσχιση Γράφων Διδάσκων: Κωνσταντίνος Κώστα Διαφάνειες: Δημήτρης Ζεϊναλιπούρ
Διάλεξη 9: Εισαγωγή στους Γράφους Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: Γράφοι - ορισμοί και υλοποίηση Διάσχιση Γράφων Διδάσκων: Κωνσταντίνος Κώστα Διαφάνειες: Δημήτρης Ζεϊναλιπούρ
General Models & Inapproximability Overview. Influence Maximization σε Social Networks
 Συνοπτικά: Αν θέλω να πετύχω υιοθέτηση μιας άποψης/προϊόντος από πολλούς, πως διαλέγω το αρχικό target group (free samples) Συνοπτικά: Αν θέλω να πετύχω υιοθέτηση μιας άποψης/προϊόντος από πολλούς, πως
Συνοπτικά: Αν θέλω να πετύχω υιοθέτηση μιας άποψης/προϊόντος από πολλούς, πως διαλέγω το αρχικό target group (free samples) Συνοπτικά: Αν θέλω να πετύχω υιοθέτηση μιας άποψης/προϊόντος από πολλούς, πως
Σχέσεις, Ιδιότητες, Κλειστότητες
 Σχέσεις, Ιδιότητες, Κλειστότητες Ορέστης Τελέλης telelis@unipi.gr Τµήµα Ψηφιακών Συστηµάτων, Πανεπιστήµιο Πειραιώς Ο. Τελέλης Πανεπιστήµιο Πειραιώς Σχέσεις 1 / 26 Εισαγωγή & Ορισµοί ιµελής Σχέση R από
Σχέσεις, Ιδιότητες, Κλειστότητες Ορέστης Τελέλης telelis@unipi.gr Τµήµα Ψηφιακών Συστηµάτων, Πανεπιστήµιο Πειραιώς Ο. Τελέλης Πανεπιστήµιο Πειραιώς Σχέσεις 1 / 26 Εισαγωγή & Ορισµοί ιµελής Σχέση R από
Fractional Colorings and Zykov Products of graphs
 Fractional Colorings and Zykov Products of graphs Who? Nichole Schimanski When? July 27, 2011 Graphs A graph, G, consists of a vertex set, V (G), and an edge set, E(G). V (G) is any finite set E(G) is
Fractional Colorings and Zykov Products of graphs Who? Nichole Schimanski When? July 27, 2011 Graphs A graph, G, consists of a vertex set, V (G), and an edge set, E(G). V (G) is any finite set E(G) is
HY118-Διακριτά Μαθηματικά
 HY118-Διακριτά Μαθηματικά Παρασκευή, 16/03/2018 Αντώνης Α. Αργυρός e-mail: argyros@csd.uoc.gr Το υλικό των διαφανειών έχει βασιστεί σε διαφάνειες του Kees van Deemter, από το University of Aberdeen 17-Mar-18
HY118-Διακριτά Μαθηματικά Παρασκευή, 16/03/2018 Αντώνης Α. Αργυρός e-mail: argyros@csd.uoc.gr Το υλικό των διαφανειών έχει βασιστεί σε διαφάνειες του Kees van Deemter, από το University of Aberdeen 17-Mar-18
Στοιχεία Θεωρίας Γράφων (Graph Theory)
") Στοιχεία Θεωρίας Γράφων (Graph Theory) Ε Εξάμηνο, Τμήμα Πληροφορικής & Τεχνολογίας Υπολογιστών ΤΕΙ Λαμίας plam@inf.teilam.gr, Οι διαφάνειες βασίζονται στα βιβλία:. Αλγόριθμοι, Σχεδιασμός & Ανάλυση, η έκδοση,
Στοιχεία Θεωρίας Γράφων (Graph Theory) Ε Εξάμηνο, Τμήμα Πληροφορικής & Τεχνολογίας Υπολογιστών ΤΕΙ Λαμίας plam@inf.teilam.gr, Οι διαφάνειες βασίζονται στα βιβλία:. Αλγόριθμοι, Σχεδιασμός & Ανάλυση, η έκδοση,
Αλγόριθµοι και Πολυπλοκότητα
 Αλγόριθµοι και Πολυπλοκότητα Ν. Μ. Μισυρλής Τµήµα Πληροφορικής και Τηλεπικοινωνιών, Πανεπιστήµιο Αθηνών Καθηγητής: Ν. Μ. Μισυρλής () Αλγόριθµοι και Πολυπλοκότητα 26 Ιουνίου 201 1 / Απληστοι (Greedy) Αλγόριθµοι
Αλγόριθµοι και Πολυπλοκότητα Ν. Μ. Μισυρλής Τµήµα Πληροφορικής και Τηλεπικοινωνιών, Πανεπιστήµιο Αθηνών Καθηγητής: Ν. Μ. Μισυρλής () Αλγόριθµοι και Πολυπλοκότητα 26 Ιουνίου 201 1 / Απληστοι (Greedy) Αλγόριθµοι
ΤΥΦΛΗ ΑΝΑΖΗΤΗΣΗ (1) ΣΤΡΑΤΗΓΙΚΗ Ή ΑΛΓΟΡΙΘΜΟΣ ΑΝΑΖΗΤΗΣΗΣ
 ΣΤΡΑΤΗΓΙΚΗ Ή ΑΛΓΟΡΙΘΜΟΣ ΑΝΑΖΗΤΗΣΗΣ") ΤΥΦΛΗ ΑΝΑΖΗΤΗΣΗ (1) ΣΤΡΑΤΗΓΙΚΗ Ή ΑΛΓΟΡΙΘΜΟΣ ΑΝΑΖΗΤΗΣΗΣ Μια αυστηρά καθορισµένη ακολουθία ενεργειών µε σκοπό τη λύση ενός προβλήµατος. Χαρακτηριστικά οθέν πρόβληµα: P= Επιλυθέν πρόβληµα: P s
ΤΥΦΛΗ ΑΝΑΖΗΤΗΣΗ (1) ΣΤΡΑΤΗΓΙΚΗ Ή ΑΛΓΟΡΙΘΜΟΣ ΑΝΑΖΗΤΗΣΗΣ Μια αυστηρά καθορισµένη ακολουθία ενεργειών µε σκοπό τη λύση ενός προβλήµατος. Χαρακτηριστικά οθέν πρόβληµα: P= Επιλυθέν πρόβληµα: P s
Αλγόριθµοι και Πολυπλοκότητα
 Αλγόριθµοι και Πολυπλοκότητα Ν. Μ. Μισυρλής Τµήµα Πληροφορικής και Τηλεπικοινωνιών, Πανεπιστήµιο Αθηνών Καθηγητής: Ν. Μ. Μισυρλής () Αλγόριθµοι και Πολυπλοκότητα Μαΐου 201 1 / Απληστοι (Greedy) Αλγόριθµοι
Αλγόριθµοι και Πολυπλοκότητα Ν. Μ. Μισυρλής Τµήµα Πληροφορικής και Τηλεπικοινωνιών, Πανεπιστήµιο Αθηνών Καθηγητής: Ν. Μ. Μισυρλής () Αλγόριθµοι και Πολυπλοκότητα Μαΐου 201 1 / Απληστοι (Greedy) Αλγόριθµοι
HY335Α Δίκτυα Υπολογιστών Xειμερινό Εξάμηνο Πανεπιστήμιο Κρήτης, Τμήμα Επιστήμης Υπολογιστών. Routing Algorithms. Network Layer.
 HY335Α Δίκτυα Υπολογιστών Xειμερινό Εξάμηνο 2016-2017 Πανεπιστήμιο Κρήτης, Τμήμα Επιστήμης Υπολογιστών Routing Algorithms Network Layer Nena Basina Υποδίκτυα (subnets) 200.23.18.0/23 11001000 00010111
HY335Α Δίκτυα Υπολογιστών Xειμερινό Εξάμηνο 2016-2017 Πανεπιστήμιο Κρήτης, Τμήμα Επιστήμης Υπολογιστών Routing Algorithms Network Layer Nena Basina Υποδίκτυα (subnets) 200.23.18.0/23 11001000 00010111
Ενότητα 10 Γράφοι (ή Γραφήµατα)
") Ενότητα 10 Γράφοι (ή γραφήµατα) ΗΥ240 - Παναγιώτα Φατούρου 1 Γράφοι (ή Γραφήµατα) Ένας γράφος αποτελείται από ένα σύνολο από σηµεία (που λέγονται κόµβοι) και ένα σύνολο από γραµµές (που λέγονται ακµές)
Ενότητα 10 Γράφοι (ή γραφήµατα) ΗΥ240 - Παναγιώτα Φατούρου 1 Γράφοι (ή Γραφήµατα) Ένας γράφος αποτελείται από ένα σύνολο από σηµεία (που λέγονται κόµβοι) και ένα σύνολο από γραµµές (που λέγονται ακµές)
Κεφάλαιο 3. Γραφήματα. ver. 21/12/2014. Χρησιμοποιήθηκε υλικό από τις αγγλικές διαφάνειες του Kevin Wayne.
 Κεφάλαιο 3 Γραφήματα ver. 21/12/2014 Χρησιμοποιήθηκε υλικό από τις αγγλικές διαφάνειες του Kevin Wayne. 1 3.1 Βασικοί Ορισμοί και Εφαρμογές γραφήματα γράφημα G: ένας τρόπος κωδικοποίησης των σχέσεων ανά
Κεφάλαιο 3 Γραφήματα ver. 21/12/2014 Χρησιμοποιήθηκε υλικό από τις αγγλικές διαφάνειες του Kevin Wayne. 1 3.1 Βασικοί Ορισμοί και Εφαρμογές γραφήματα γράφημα G: ένας τρόπος κωδικοποίησης των σχέσεων ανά
Αλγόριθμοι Eλάχιστα μονοπάτια
 Αλγόριθμοι Eλάχιστα μονοπάτια Μάρθα Σιδέρη Προτεινόμενη βιβλιογραφία: S. Dasgupta, C.H. Papadimitriou, and U.V. Vazirani «Αλγόριθμοι» Κλειδάριθμος 009 Κεφάλαιο. http://www.cs.berkeley.edu/~vazirani/algorithms/chap.pdf
Αλγόριθμοι Eλάχιστα μονοπάτια Μάρθα Σιδέρη Προτεινόμενη βιβλιογραφία: S. Dasgupta, C.H. Papadimitriou, and U.V. Vazirani «Αλγόριθμοι» Κλειδάριθμος 009 Κεφάλαιο. http://www.cs.berkeley.edu/~vazirani/algorithms/chap.pdf
Αλγόριθμοι και Πολυπλοκότητα
 Αλγόριθμοι και Πολυπλοκότητα Άπληστοι Αλγόριθμοι Δημήτρης Μιχαήλ Τμήμα Πληροφορικής και Τηλεματικής Χαροκόπειο Πανεπιστήμιο Άπληστοι Αλγόριθμοι Είναι δύσκολο να ορίσουμε ακριβώς την έννοια του άπληστου
Αλγόριθμοι και Πολυπλοκότητα Άπληστοι Αλγόριθμοι Δημήτρης Μιχαήλ Τμήμα Πληροφορικής και Τηλεματικής Χαροκόπειο Πανεπιστήμιο Άπληστοι Αλγόριθμοι Είναι δύσκολο να ορίσουμε ακριβώς την έννοια του άπληστου
Δομές Δεδομένων (Data Structures)
") Δομές Δεδομένων (Data Structures) Στοίβες Ουρές Στοίβες: Βασικές Έννοιες. Ουρές: Βασικές Έννοιες. Βασικές Λειτουργίες. Παραδείγματα. Στοίβες Δομή τύπου LIFO: Last In - First Out (τελευταία εισαγωγή πρώτη
Δομές Δεδομένων (Data Structures) Στοίβες Ουρές Στοίβες: Βασικές Έννοιες. Ουρές: Βασικές Έννοιες. Βασικές Λειτουργίες. Παραδείγματα. Στοίβες Δομή τύπου LIFO: Last In - First Out (τελευταία εισαγωγή πρώτη
Διδάσκων: Κωνσταντίνος Κώστα Διαφάνειες: Δημήτρης Ζεϊναλιπούρ
 ιάλεξη : λάχιστα εννητορικά ένδρα Αλγόριθμος Prim Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: λάχιστα εννητορικά ένδρα () Minimum Spanning Trees Ο αλγόριθμος του Prim για εύρεση σε γράφους
ιάλεξη : λάχιστα εννητορικά ένδρα Αλγόριθμος Prim Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: λάχιστα εννητορικά ένδρα () Minimum Spanning Trees Ο αλγόριθμος του Prim για εύρεση σε γράφους
HY437 Αλγόριθμοι CAD
 HY437 Αλγόριθμοι CAD Διδϊςκων: Χ. Σωτηρύου http://inf-server.inf.uth.gr/courses/ce437/ 1 Περιεχόμενα Πολυπλοκότθτα Είδθ Προβλθμάτων Τφποι Αλγορίκμων Κατθγοριοποίθςθ Γραμμικόσ Προγραμματιςμόσ (Σχεδιαςμόσ)
HY437 Αλγόριθμοι CAD Διδϊςκων: Χ. Σωτηρύου http://inf-server.inf.uth.gr/courses/ce437/ 1 Περιεχόμενα Πολυπλοκότθτα Είδθ Προβλθμάτων Τφποι Αλγορίκμων Κατθγοριοποίθςθ Γραμμικόσ Προγραμματιςμόσ (Σχεδιαςμόσ)
Ενότητα 4. Πρωτόκολλα ροµολόγησης: Αρχές Λειτουργίας του OSPF (Open Shortest Path First)
") Ενότητα 4 Πρωτόκολλα ροµολόγησης: Αρχές Λειτουργίας του OSPF (Open Shortest Path First) Πρωτόκολλα ροµολόγησης Πρωτόκολλα ιανύσµατος Απόστασης Πρωτόκολλα Κατάστασης Ζεύξης Πρωτόκολλα ιανύσµατος Απόστασης
Ενότητα 4 Πρωτόκολλα ροµολόγησης: Αρχές Λειτουργίας του OSPF (Open Shortest Path First) Πρωτόκολλα ροµολόγησης Πρωτόκολλα ιανύσµατος Απόστασης Πρωτόκολλα Κατάστασης Ζεύξης Πρωτόκολλα ιανύσµατος Απόστασης
ΚΥΠΡΙΑΚΗ ΕΤΑΙΡΕΙΑ ΠΛΗΡΟΦΟΡΙΚΗΣ CYPRUS COMPUTER SOCIETY ΠΑΓΚΥΠΡΙΟΣ ΜΑΘΗΤΙΚΟΣ ΔΙΑΓΩΝΙΣΜΟΣ ΠΛΗΡΟΦΟΡΙΚΗΣ 19/5/2007
 Οδηγίες: Να απαντηθούν όλες οι ερωτήσεις. Αν κάπου κάνετε κάποιες υποθέσεις να αναφερθούν στη σχετική ερώτηση. Όλα τα αρχεία που αναφέρονται στα προβλήματα βρίσκονται στον ίδιο φάκελο με το εκτελέσιμο
Οδηγίες: Να απαντηθούν όλες οι ερωτήσεις. Αν κάπου κάνετε κάποιες υποθέσεις να αναφερθούν στη σχετική ερώτηση. Όλα τα αρχεία που αναφέρονται στα προβλήματα βρίσκονται στον ίδιο φάκελο με το εκτελέσιμο
Διάλεξη 21: Γράφοι II - Τοπολογική Ταξινόμηση
 ΕΠΛ231 Δομές Δεδομένων και Αλγόριθμοι 1 Διάλεξη 21: Γράφοι II - Τοπολογική Ταξινόμηση Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: - Τοπολογική Ταξινόμηση - Εφαρμογές, Παραδείγματα, Αλγόριθμοι
ΕΠΛ231 Δομές Δεδομένων και Αλγόριθμοι 1 Διάλεξη 21: Γράφοι II - Τοπολογική Ταξινόμηση Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: - Τοπολογική Ταξινόμηση - Εφαρμογές, Παραδείγματα, Αλγόριθμοι
Αλγόριθμοι και Πολυπλοκότητα
 7ο εξάμηνο Σ.Η.Μ.Μ.Υ. & Σ.Ε.Μ.Φ.Ε. http://www.corelab.ece.ntua.gr/courses/ 4η εβδομάδα: Εύρεση k-οστού Μικρότερου Στοιχείου, Master Theorem, Τεχνική Greedy: Knapsack, Minimum Spanning Tree, Shortest Paths
7ο εξάμηνο Σ.Η.Μ.Μ.Υ. & Σ.Ε.Μ.Φ.Ε. http://www.corelab.ece.ntua.gr/courses/ 4η εβδομάδα: Εύρεση k-οστού Μικρότερου Στοιχείου, Master Theorem, Τεχνική Greedy: Knapsack, Minimum Spanning Tree, Shortest Paths
ιαφάνειες παρουσίασης #11
 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ http://www.corelab.ece.ntua.gr/courses/programming/ ιδάσκοντες: Στάθης Ζάχος (zachos@cs.ntua.gr) Νίκος Παπασπύρου (nickie@softlab.ntua.gr) ιαφάνειες παρουσίασης
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ http://www.corelab.ece.ntua.gr/courses/programming/ ιδάσκοντες: Στάθης Ζάχος (zachos@cs.ntua.gr) Νίκος Παπασπύρου (nickie@softlab.ntua.gr) ιαφάνειες παρουσίασης
Εισαγωγή στους Αλγορίθμους Ενότητα 10η
 Εισαγωγή στους Αλγορίθμους Ενότητα 10η Διδάσκων Χρήστος Ζαρολιάγκης Καθηγητής Τμήμα Μηχανικών Η/Υ & Πληροφορικής Πανεπιστήμιο Πατρών Email: zaro@ceid.upatras.gr Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
Εισαγωγή στους Αλγορίθμους Ενότητα 10η Διδάσκων Χρήστος Ζαρολιάγκης Καθηγητής Τμήμα Μηχανικών Η/Υ & Πληροφορικής Πανεπιστήμιο Πατρών Email: zaro@ceid.upatras.gr Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
Διάλεξη 22: Δυαδικά Δέντρα. Διδάσκων: Παναγιώτης Ανδρέου
 Διάλεξη 22: Δυαδικά Δέντρα Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: - Δυαδικά Δένδρα - Δυαδικά Δένδρα Αναζήτησης - Πράξεις Εισαγωγής, Εύρεσης Στοιχείου, Διαγραφής Μικρότερου Στοιχείου
Διάλεξη 22: Δυαδικά Δέντρα Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: - Δυαδικά Δένδρα - Δυαδικά Δένδρα Αναζήτησης - Πράξεις Εισαγωγής, Εύρεσης Στοιχείου, Διαγραφής Μικρότερου Στοιχείου
ΕΡΓΑΣΙΑ ΣΤΟ ΜΑΘΗΜΑ Λ03Β ΑΛΓΟΡΙΘΜΟΙ ΔΙΚΤΥΩΝ & ΠΟΛΥΠΛΟΚΟΤΗΤΑ ΦΛΕΒΑΡΗΣ 2004
 ΕΡΓΑΣΙΑ ΣΤΟ ΜΑΘΗΜΑ Λ03Β ΑΛΓΟΡΙΘΜΟΙ ΔΙΚΤΥΩΝ & ΠΟΛΥΠΛΟΚΟΤΗΤΑ ΦΛΕΒΑΡΗΣ 2004 Παρουσίαση του paper: Increasing the Weight of Minimum Spanning Trees Greg N. Frederickson and Roberto Solis- Oba Journal of Algorithms
ΕΡΓΑΣΙΑ ΣΤΟ ΜΑΘΗΜΑ Λ03Β ΑΛΓΟΡΙΘΜΟΙ ΔΙΚΤΥΩΝ & ΠΟΛΥΠΛΟΚΟΤΗΤΑ ΦΛΕΒΑΡΗΣ 2004 Παρουσίαση του paper: Increasing the Weight of Minimum Spanning Trees Greg N. Frederickson and Roberto Solis- Oba Journal of Algorithms
Σχεδίαση Αλγορίθμων - Τμήμα Πληροφορικής ΑΠΘ -4ο εξάμηνο 1
 Σχεδίαση Αλγορίθμων Μείωσε και Βασίλευε http://delab.csd.auth.gr/~gounaris/courses/ad auth gounaris/courses/ad Σχεδίαση Αλγορίθμων - Τμήμα Πληροφορικής ΑΠΘ -4ο εξάμηνο 1 Μείωσε και Βασίλευε 1. Μειώνουμε
Σχεδίαση Αλγορίθμων Μείωσε και Βασίλευε http://delab.csd.auth.gr/~gounaris/courses/ad auth gounaris/courses/ad Σχεδίαση Αλγορίθμων - Τμήμα Πληροφορικής ΑΠΘ -4ο εξάμηνο 1 Μείωσε και Βασίλευε 1. Μειώνουμε
Ασκηση 1 [ ] Παράδοση : Τετάρτη , 13:00
![Ασκηση 1 [ ] Παράδοση : Τετάρτη , 13:00](/thumbs/52/30327863.jpg "Ασκηση 1 [ ] Παράδοση : Τετάρτη , 13:00") Χρήστος. Ζαρολιάγκης Τεχνολογίες Υλοποίησης Αλγορίθµων : Άσκηση 1 1 Ασκηση 1 [16.03.2016] Παράδοση : Τετάρτη 13.04.2016, 13:00 Η παρούσα άσκηση αφορά στον έλεγχο διµερότητας ενός γραφήµατος. Σκοπός της
Χρήστος. Ζαρολιάγκης Τεχνολογίες Υλοποίησης Αλγορίθµων : Άσκηση 1 1 Ασκηση 1 [16.03.2016] Παράδοση : Τετάρτη 13.04.2016, 13:00 Η παρούσα άσκηση αφορά στον έλεγχο διµερότητας ενός γραφήµατος. Σκοπός της
Εξερεύνηση χώρου από κινούμενα ρομπότ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΣΧΟΛΗ ΘΕΤΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ Εξερεύνηση χώρου από κινούμενα ρομπότ Συγγραφέας: Παναγιώτου Λεωνίδας Ευθύμιος Επιβλέπων Καθηγητής: Αντώνιος Τζες Υποβάλλεται
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΣΧΟΛΗ ΘΕΤΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ Εξερεύνηση χώρου από κινούμενα ρομπότ Συγγραφέας: Παναγιώτου Λεωνίδας Ευθύμιος Επιβλέπων Καθηγητής: Αντώνιος Τζες Υποβάλλεται
ΠΛΗ111. Ανοιξη 2005. Μάθηµα 10 ο. Γράφοι. Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υπολογιστών Πολυτεχνείο Κρήτης
 ΠΛΗ111 οµηµένος Προγραµµατισµός Ανοιξη 2005 Μάθηµα 10 ο Γράφοι Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υπολογιστών Πολυτεχνείο Κρήτης Γράφοι Ορισµός Αφηρηµένος τύπος δεδοµένων Υλοποίηση Αναζήτηση έντρο
ΠΛΗ111 οµηµένος Προγραµµατισµός Ανοιξη 2005 Μάθηµα 10 ο Γράφοι Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υπολογιστών Πολυτεχνείο Κρήτης Γράφοι Ορισµός Αφηρηµένος τύπος δεδοµένων Υλοποίηση Αναζήτηση έντρο
Κατ οίκον Εργασία 5 Σκελετοί Λύσεων
 Κατ οίκον Εργασία 5 Σκελετοί Λύσεων Άσκηση 1 (α) Ο αλγόριθµος χρησιµοποιεί τη διαδικασία DFS(v) η οποία, ως γνωστό, επισκέπτεται όλους τους κόµβους που είναι συνδεδεµένοι µε τον κόµβο v. Για να µετρήσουµε
Κατ οίκον Εργασία 5 Σκελετοί Λύσεων Άσκηση 1 (α) Ο αλγόριθµος χρησιµοποιεί τη διαδικασία DFS(v) η οποία, ως γνωστό, επισκέπτεται όλους τους κόµβους που είναι συνδεδεµένοι µε τον κόµβο v. Για να µετρήσουµε
Δυαδικά Δένδρα Αναζήτησης, Δένδρα AVL
 Δυαδικά Δένδρα Αναζήτησης, Δένδρα AVL Υλικό από τις σηµειώσεις Ν. Παπασπύρου, 2006 Δέντρα δυαδικής αναζήτησης Δενδρικές δοµές δεδοµένων στις οποίες Όλα τα στοιχεία στο αριστερό υποδέντρο της ρίζας είναι
Δυαδικά Δένδρα Αναζήτησης, Δένδρα AVL Υλικό από τις σηµειώσεις Ν. Παπασπύρου, 2006 Δέντρα δυαδικής αναζήτησης Δενδρικές δοµές δεδοµένων στις οποίες Όλα τα στοιχεία στο αριστερό υποδέντρο της ρίζας είναι
Αλγόριθμοι Τυφλής Αναζήτησης
 Τεχνητή Νοημοσύνη 04 Αλγόριθμοι Τυφλής Αναζήτησης Αλγόριθμοι Τυφλής Αναζήτησης (Blind Search Algorithms) Εφαρμόζονται σε προβλήματα στα οποία δεν υπάρχει πληροφορία που να επιτρέπει αξιολόγηση των καταστάσεων.
Τεχνητή Νοημοσύνη 04 Αλγόριθμοι Τυφλής Αναζήτησης Αλγόριθμοι Τυφλής Αναζήτησης (Blind Search Algorithms) Εφαρμόζονται σε προβλήματα στα οποία δεν υπάρχει πληροφορία που να επιτρέπει αξιολόγηση των καταστάσεων.
Ρομποτικά Συστήματα Ελέγχου: Διαφορική Κινηματική Ανάλυση
 Διατμηματικό Πρόγραμμα Μεταπτυχιακών Σπουδών «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» Ρομποτικά Συστήματα Ελέγχου: Διαφορική Κινηματική Ανάλυση Κων/νος Τζαφέστας Τομέας Σημάτων, Ελέγχου & Ρομποτικής Σχολή Ηλεκτρ. Μηχ/κών
Διατμηματικό Πρόγραμμα Μεταπτυχιακών Σπουδών «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» Ρομποτικά Συστήματα Ελέγχου: Διαφορική Κινηματική Ανάλυση Κων/νος Τζαφέστας Τομέας Σημάτων, Ελέγχου & Ρομποτικής Σχολή Ηλεκτρ. Μηχ/κών
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες
 Πράκτορες") ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Ροµ οτική Χαρτογράφηη Robotic Mapping Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιτών Πολυτεχνείο Κρήτης Ε ανάληψη Στρατηγικές MaxiMin παιχνίδια
ΕΚΠ 413 / ΕΚΠ 606 Αυτόνοµοι (Ροµ οτικοί) Πράκτορες Ροµ οτική Χαρτογράφηη Robotic Mapping Τµήµα Ηλεκτρονικών Μηχανικών και Μηχανικών Υ ολογιτών Πολυτεχνείο Κρήτης Ε ανάληψη Στρατηγικές MaxiMin παιχνίδια
Εφαρμογές σε Χωρικά Δίκτυα
 Εφαρμογές σε Χωρικά Δίκτυα Ελευθέριος Τιάκας Δεκέμβριος 2013 Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης Εργαστήριο Τεχνολογίας και Επεξεργασίας Δεδομένων Τμήμα Πληροφορικής Α.Π.Θ. Σύνοψη Παρουσίασης Σημαντικά
Εφαρμογές σε Χωρικά Δίκτυα Ελευθέριος Τιάκας Δεκέμβριος 2013 Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης Εργαστήριο Τεχνολογίας και Επεξεργασίας Δεδομένων Τμήμα Πληροφορικής Α.Π.Θ. Σύνοψη Παρουσίασης Σημαντικά
Map Generation of Mobile Robot by Probabilistic Observation Model Considering Occlusion
 Map Generation of Mobile Robot by Probabilistic Observation Model Considering Occlusion *, **, **, * Kazuma HARAGUCHI Nobutaka SHIMADA Yoshiaki SHIRAI Jun MIURA *,{haraguti,jun}@cv.mech.eng.osaka-u.ac.jp
Map Generation of Mobile Robot by Probabilistic Observation Model Considering Occlusion *, **, **, * Kazuma HARAGUCHI Nobutaka SHIMADA Yoshiaki SHIRAI Jun MIURA *,{haraguti,jun}@cv.mech.eng.osaka-u.ac.jp
ΒΕΛΤΙΣΤΕΣ ΙΑ ΡΟΜΕΣ ΣΕ ΙΚΤΥΑ ΜΕΤΑΒΛΗΤΟΥ ΚΟΣΤΟΥΣ
 ΒΕΛΤΙΣΤΕΣ ΙΑ ΡΟΜΕΣ ΣΕ ΙΚΤΥΑ ΜΕΤΑΒΛΗΤΟΥ ΚΟΣΤΟΥΣ Μωυσιάδης Πολυχρόνης, Ανδρεάδης Ιωάννης Τμήμα Μαθηματικών Α.Π.Θ. ΠΕΡΙΛΗΨΗ Στην εργασία αυτή παρουσιάζεται μία μελέτη για την ελάχιστη διαδρομή σε δίκτυα μεταβλητού
ΒΕΛΤΙΣΤΕΣ ΙΑ ΡΟΜΕΣ ΣΕ ΙΚΤΥΑ ΜΕΤΑΒΛΗΤΟΥ ΚΟΣΤΟΥΣ Μωυσιάδης Πολυχρόνης, Ανδρεάδης Ιωάννης Τμήμα Μαθηματικών Α.Π.Θ. ΠΕΡΙΛΗΨΗ Στην εργασία αυτή παρουσιάζεται μία μελέτη για την ελάχιστη διαδρομή σε δίκτυα μεταβλητού
Λυσεις προβλημάτων τελικής φάσης Παγκύπριου Μαθητικού Διαγωνισμού Πληροφορικής 2007
 Λυσεις προβλημάτων τελικής φάσης Παγκύπριου Μαθητικού Διαγωνισμού Πληροφορικής 2007 Πρόβλημα 1 Το πρώτο πρόβλημα λύνεται με τη μέθοδο του Δυναμικού Προγραμματισμού. Για να το λύσουμε με Δυναμικό Προγραμματισμό
Λυσεις προβλημάτων τελικής φάσης Παγκύπριου Μαθητικού Διαγωνισμού Πληροφορικής 2007 Πρόβλημα 1 Το πρώτο πρόβλημα λύνεται με τη μέθοδο του Δυναμικού Προγραμματισμού. Για να το λύσουμε με Δυναμικό Προγραμματισμό
Εισαγωγή στους Αλγορίθμους Φροντιστήριο 10
 Εισαγωγή στους Αλγορίθμους Φροντιστήριο 10 Διδάσκων Χρήστος Ζαρολιάγκης Καθηγητής Τμήμα Μηχανικών Η/Υ & Πληροφορικής Πανεπιστήμιο Πατρών Email: zaro@ceid.upatras.gr Άδειες Χρήσης Το παρόν εκπαιδευτικό
Εισαγωγή στους Αλγορίθμους Φροντιστήριο 10 Διδάσκων Χρήστος Ζαρολιάγκης Καθηγητής Τμήμα Μηχανικών Η/Υ & Πληροφορικής Πανεπιστήμιο Πατρών Email: zaro@ceid.upatras.gr Άδειες Χρήσης Το παρόν εκπαιδευτικό
Πανεπιστήμιο Πειραιώς Σχολή Τεχνολογιών Πληροφορικής και Επικοινωνιών Τμήμα Ψηφιακών Συστημάτων ομές εδομένων
 Πανεπιστήμιο Πειραιώς Σχολή Τεχνολογιών Πληροφορικής και Επικοινωνιών Τμήμα Ψηφιακών Συστημάτων 3. Στοίβες & Ουρές 2 ομές εδομένων 4 5 Χρήστος ουλκερίδης Τμήμα Ψηφιακών Συστημάτων 19/10/2017 Ανακεφαλαίωση:
Πανεπιστήμιο Πειραιώς Σχολή Τεχνολογιών Πληροφορικής και Επικοινωνιών Τμήμα Ψηφιακών Συστημάτων 3. Στοίβες & Ουρές 2 ομές εδομένων 4 5 Χρήστος ουλκερίδης Τμήμα Ψηφιακών Συστημάτων 19/10/2017 Ανακεφαλαίωση:
Πανεπιστήμιο Πειραιώς Σχολή Τεχνολογιών Πληροφορικής και Επικοινωνιών Τμήμα Ψηφιακών Συστημάτων ομές εδομένων
 Πανεπιστήμιο Πειραιώς Σχολή Τεχνολογιών Πληροφορικής και Επικοινωνιών Τμήμα Ψηφιακών Συστημάτων 3. Στοίβες & Ουρές 2 ομές εδομένων 4 5 Χρήστος ουλκερίδης Τμήμα Ψηφιακών Συστημάτων 4/11/2016 Ανακεφαλαίωση:
Πανεπιστήμιο Πειραιώς Σχολή Τεχνολογιών Πληροφορικής και Επικοινωνιών Τμήμα Ψηφιακών Συστημάτων 3. Στοίβες & Ουρές 2 ομές εδομένων 4 5 Χρήστος ουλκερίδης Τμήμα Ψηφιακών Συστημάτων 4/11/2016 Ανακεφαλαίωση:
Γράφοι: κατευθυνόμενοι και μη
 Γράφοι: κατευθυνόμενοι και μη (V,E ) (V,E ) Γράφος (ή γράφημα): ζεύγος (V,E), V ένα μη κενό σύνολο, Ε διμελής σχέση πάνω στο V Μη κατευθυνόμενος γράφος: σχέση Ε συμμετρική V: κορυφές (vertices), κόμβοι
Γράφοι: κατευθυνόμενοι και μη (V,E ) (V,E ) Γράφος (ή γράφημα): ζεύγος (V,E), V ένα μη κενό σύνολο, Ε διμελής σχέση πάνω στο V Μη κατευθυνόμενος γράφος: σχέση Ε συμμετρική V: κορυφές (vertices), κόμβοι
Διδάσκων: Παναγιώτης Ανδρέου
 Διάλεξη 3: Ελάχιστα Γεννητορικά Δέντρα Ο λγόριθμος Prim Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: - Ελάχιστα Γεννητορικά Δένδρα (ΕΓΔ) Minimum Spanning Trees -Ο αλγόριθμος του Primγια εύρεση
Διάλεξη 3: Ελάχιστα Γεννητορικά Δέντρα Ο λγόριθμος Prim Στην ενότητα αυτή θα μελετηθούν τα εξής επιμέρους θέματα: - Ελάχιστα Γεννητορικά Δένδρα (ΕΓΔ) Minimum Spanning Trees -Ο αλγόριθμος του Primγια εύρεση
Επίλυση προβληµάτων µε αναζήτηση
 Επίλυση προβληµάτων µε αναζήτηση Πράκτορες επίλυσης προβληµάτων (1/2) ιατύπωση στόχου: Σύνολο καταστάσεων του κόσµου ιατύπωση προβλήµατος Επιλογή επιπέδου λεπτοµέρειας (αφαίρεση) 3-2 Πράκτορες επίλυσης
Επίλυση προβληµάτων µε αναζήτηση Πράκτορες επίλυσης προβληµάτων (1/2) ιατύπωση στόχου: Σύνολο καταστάσεων του κόσµου ιατύπωση προβλήµατος Επιλογή επιπέδου λεπτοµέρειας (αφαίρεση) 3-2 Πράκτορες επίλυσης
Αναζήτηση στους γράφους. - Αναζήτηση η κατά βάθος Συνεκτικές Συνιστώσες - Αλγόριθμος εύρεσης συνεκτικών συνιστωσών
 Αναζήτηση στους γράφους Βασικός αλγόριθμος λό - Αναζήτηση κατά πλάτος - Αναζήτηση η κατά βάθος Συνεκτικές Συνιστώσες - Αλγόριθμος εύρεσης συνεκτικών συνιστωσών Διάσχιση (αναζήτηση ) στους γράφους Φεύγοντας
Αναζήτηση στους γράφους Βασικός αλγόριθμος λό - Αναζήτηση κατά πλάτος - Αναζήτηση η κατά βάθος Συνεκτικές Συνιστώσες - Αλγόριθμος εύρεσης συνεκτικών συνιστωσών Διάσχιση (αναζήτηση ) στους γράφους Φεύγοντας
Κεφάλαιο 3. Γραφήµατα v1.0 ( ) Χρησιµοποιήθηκε υλικό από τις αγγλικές διαφάνειες του Kevin Wayne.
 Χρησιµοποιήθηκε υλικό από τις αγγλικές διαφάνειες του Kevin Wayne.") Κεφάλαιο 3 Γραφήµατα v1.0 (2010-05-25) Χρησιµοποιήθηκε υλικό από τις αγγλικές διαφάνειες του Kevin Wayne. 1 3.1 Βασικοί Ορισµοί και Εφαρµογές γραφήµατα γράφηµα G: ένας τρόπος κωδικοποίησης των σχέσεων
Κεφάλαιο 3 Γραφήµατα v1.0 (2010-05-25) Χρησιµοποιήθηκε υλικό από τις αγγλικές διαφάνειες του Kevin Wayne. 1 3.1 Βασικοί Ορισµοί και Εφαρµογές γραφήµατα γράφηµα G: ένας τρόπος κωδικοποίησης των σχέσεων
ΣΥΝΔΥΑΣΤΙΚΗ ΒΕΛΤΙΣΤΟΠΟΙΗΣΗ
 Ενότητα 10 Τμήμα Εφαρμοσμένης Πληροφορικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε άλλου τύπου άδειας
Ενότητα 10 Τμήμα Εφαρμοσμένης Πληροφορικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε άλλου τύπου άδειας
[ΠΛΗ 417] Τεχνητή Νοημοσύνη. Project Εξαμήνου ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ
![[ΠΛΗ 417] Τεχνητή Νοημοσύνη. Project Εξαμήνου ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ](/thumbs/92/109254821.jpg "[ΠΛΗ 417] Τεχνητή Νοημοσύνη. Project Εξαμήνου ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ") [ΠΛΗ 417] Τεχνητή Νοημοσύνη Project Εξαμήνου Γεωργαρά Αθηνά (A.M. 2011030065) ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΑΡΙΝΟ ΕΞΑΜΗΝΟ 2015-2016 Στη εργασία εξαμήνου αυτή
[ΠΛΗ 417] Τεχνητή Νοημοσύνη Project Εξαμήνου Γεωργαρά Αθηνά (A.M. 2011030065) ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΑΡΙΝΟ ΕΞΑΜΗΝΟ 2015-2016 Στη εργασία εξαμήνου αυτή