هروتورراهچ داپهپ رلرتنک درکلمع يزاسه نيهب رب يراکتبا ارف ياهمتيروگ
|
|
|
- Ιπποκράτης Δράκος
- 7 χρόνια πριν
- Προβολές:
Transcript
1 چهارروتوره پهپاد کنترلر عملکرد بهينهسازي بر ابتکاري فرا الگوريتمهاي عملکرد تحليلي بررسي تيکني وحيد شهبازي حامد اصفهان اصفهان دانشگاه مهندسی و فنی دانشکده استاديار اصفهان اصفهان دانشگاه مهندسی و فنی دانشکده ارشد کارشناسی دانشجوي 394//5 دريافت: تاريخ 395/0/07 پذيرش: تاريخ چکيده PD PD کليدي واژگان مقدمه زمستان و پاييز دوم شمارة پنجم سال



2 بررسي تحليلي عملکرد الگوريتمهاي فرا ابتکاري بر بهينهسازي عملکرد کنترلر پهپاد چهارروتوره Ω Rotor Y Z yaw ψ X Rotor 4 Ω 4 roll φ pitch θ Ω Ω 3 Rotor Rotor 3 شکل. ساختار پهپاد چهارروتوره PD X f ( X, U) X U X U U U U U 3 4 x x y y LQR r T x, y, T,, sθ cos c. c R s. c s cθ c.s.s - s.c s.s.s - c.c c. s R sin c.s.c - s.s s.s.c - c.s c. c PD PD F b i i i i b. نشرية علمي پژوهشي دانش و فناوري هوافضا 56



 K e( t) K K d")




 dτ")
 dt")




")

3 حامد شهبازي وحيد تيکني u b 3 u b 3 4 u d 4 3 d,, p, q, r d 4 4 T F i b i i x 0 y g 0 R R T m i 0 0 M M G u( t) K e( t) K K d K i p t 0 e( t) K PD D d dt e( t) K p M M G M Lb 3 4 M Lb d 3 4 i u x cos sin cos sin sin m u y cos sin sin sin cos m g u cos cos m. P K i e(τ) dτ Plant D K p e(t) K d de(t) dt Output شکل. بلوک دياگرام کنترلر تناسبي - مشتقگير انتگرالگير yy xx yy xx J R y xx yy J r xx J x m r yy d u4 yy d u xx u3 L yy y x R m g k pe Kd( ) Ki E U( ) cos cos u U 4 b 3 4 U 3 U U 57 سال پنجم شمارة دوم پاييز و زمستان 395
4 بررسي تحليلي عملکرد الگوريتمهاي فرا ابتکاري بر بهينهسازي عملکرد کنترلر پهپاد چهارروتوره U ( ) k E K ( ) K pp p U ( 3) k E K ( ) K pt t U ( 4) k E K ( ) K ps K i K d K p s dt dp ds it ip is E p s E t E m. r e u y شکل 3. روند محاسبة بهرههاي کنترلي با الگوريتمهاي فرا ابتکاري نشرية علمي پژوهشي دانش و فناوري هوافضا 58




 dt 0")










5 φ(rad) Best Cost حامد شهبازي وحيد تيکني t s e ss t r M p SE J e i M e e t t pi ssi si ri TSE AE TSE AE SE SE e ( t) dt 0 AE e( t) dt 0 TSE te ( t) dt 0 PD HS Algorithm Genetic Algorithm PSO Algorithm teration شکل 4. تابع هزينة طراحي کنترلر PD با الگوريتمهاي فرا ابتکاري Genetic Algorithm HS Algorithm PSO Algorithm شکل 5. پاسخ کنترلر PD به ورودي پله براي کنترل رول 59 سال پنجم شمارة دوم پاييز و زمستان 395




 t r t s E ss GA")

6 ψ(rad) θ(rad) بررسي تحليلي عملکرد الگوريتمهاي فرا ابتکاري بر بهينهسازي عملکرد کنترلر پهپاد چهارروتوره HS Algorithm PSO Algorithm Genetic Algorithm شکل 6. پاسخ کنترلر PD به ورودي پله براي کنترل پيچ PSO Algorithm HS Algorithm Genetic Algorithm شکل 7. پاسخ کنترلر PD به ورودي پله براي کنترل ياو جدول. مشخصههاي پاسخ کنترلر به ورودي پله براي کنترل رول K p K D K M p (%) t r t s E ss GA PD PSO PD HS PD جدول. مشخصههاي پاسخ کنترلر به ورودي پله براي کنترل پيچ K p K D K M p (%) t r t s E ss GA PD PSO PD HS PD نشرية علمي پژوهشي دانش و فناوري هوافضا 60








")











7 حامد شهبازي وحيد تيکني جدول 3. مشخصههاي پاسخ کنترلر به ورودي پله براي کنترل ياو K p K D K M p (%) t r t s E ss GA PD PSO PD HS PD PWM PWM (ESC) PWM MU GY80 شکل 8. نحوة قرارگيري ربات روي پايه با سه درجه آزادي شکل 9. نحوة قرارگيري ربات روي پايه با يک درجه آزادي DC 6 سال پنجم شمارة دوم پاييز و زمستان 395



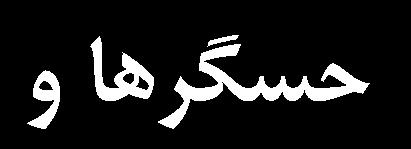
8 بررسي تحليلي عملکرد الگوريتمهاي فرا ابتکاري بر بهينهسازي عملکرد کنترلر پهپاد چهارروتوره Rx est Rx acc Rx weight weight Ry est Ry acc Ry weight weight MU R est R acc R weight weight g ADC R acc R R est weight PD شتابسنج سه محوره x y ESC موتور حسگر GY80 ميکروکنترلر ژيروسکوپ سه محوره x y ESC ESC موتور موتور 3 s φ θ ψ ESC موتور 4 شکل 0. بلوک دياگرام نمونة آزمايشگاهي PD نشرية علمي پژوهشي دانش و فناوري هوافضا 6
 φ(rad) Gyroscope Output")





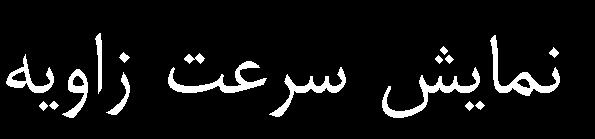
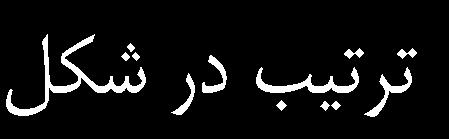
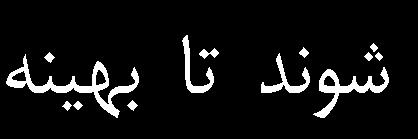
9 حامد شهبازي وحيد تيکني φ(rad) φ(rad) φ(rad) Gyroscope Output Accelerometer Output Kalman Filter شکل. خروجي حسگرها و فيلتر کالمن در حالت موتور خاموش Gyroscope Output Accelerometer Output Kalman Filter شکل. خروجي حسگرها و فيلتر کالمن در حالت موتور روشن Accelerometer Output Kalman Filter شکل 3. نتايج تجربي کنترل زاويه با استفاده از کنترلر PD آزمايش اول PD 63 سال پنجم شمارة دوم پاييز و زمستان 395



")









10 بررسي تحليلي عملکرد الگوريتمهاي فرا ابتکاري بر بهينهسازي عملکرد کنترلر پهپاد چهارروتوره φ (degree) φ(rad) PD Accelerometer Output Kalman Filter شکل 4. نتايج تجربي کنترل زاويه با استفاده از کنترلر PD آزمايش دوم Accelerometer Output Kalman Filter Disturbance Disturbance شکل 5. نتايج تجربي کنترل زاويه با استفاده از کنترلر PD با اعمال اغتشاش خارجي نشرية علمي پژوهشي دانش و فناوري هوافضا 64
![حامد شهبازي وحيد تيکني شکل 6. دنبالة تصاوير عملکرد کنترلر PD در پاسخ به ورودي پله براي زاوية 0- [] S. Bouabdallah, R. Siegwart, G.](/docs-images/74/71300885/images/11-0.jpg "Caprari, Design and control of an indoor coaxial helicopter, Proceedings of the nternational Conference on ntelligent Robots and Systems, pp. 930-935, 006. [] P. Castillo, A. Dul, R.")
![Loano, Real-time stabiliation and tracking of a four-rotor mini rotorcraft, Transactions on Control Systems Technology, Vol., No. 4, pp. 50-56, 004. [3] J. Li, Y.](/docs-images/74/71300885/images/11-1.jpg "Li, Dynamic analysis and PD control for a quadrotor, Proceedings of the nternational Conference on Mechatronics and Automation, pp. 573-578, 0. [4] B. Erginer, E.")
11 حامد شهبازي وحيد تيکني شکل 6. دنبالة تصاوير عملکرد کنترلر PD در پاسخ به ورودي پله براي زاوية 0- [] S. Bouabdallah, R. Siegwart, G. Caprari, Design and control of an indoor coaxial helicopter, Proceedings of the nternational Conference on ntelligent Robots and Systems, pp , 006. [] P. Castillo, A. Dul, R. Loano, Real-time stabiliation and tracking of a four-rotor mini rotorcraft, Transactions on Control Systems Technology, Vol., No. 4, pp , 004. [3] J. Li, Y. Li, Dynamic analysis and PD control for a quadrotor, Proceedings of the nternational Conference on Mechatronics and Automation, pp , 0. [4] B. Erginer, E. Altug, Modeling and PD control of a quadrotor VTOL vehicle, Proceedings of the ntelligent Vehicles Symposium, pp , 007. [5] B. Erginer, E. Altug, Design and implementation of a hybrid fuy logic controller for a quadrotor VTOL vehicle, nternational Journal of Control, Automation and Systems, Vol. 0, No., pp.6-70, 0. [6] T. Sangyam, P. Laohapiengsak, W. Chongcharoen,. Nilkhamhang, Path tracking of UAV using self-tuning PD controller based on fuy logic, Proceedings of the SCE Annual Conference, pp , 00. [7] M. O. Efe, Neural network assisted computationally simple P-D control of a quadrotor UAV, EEE Transactions on ndustrial nformatics, Vol. 7, No., pp , 0. [8] E. Altuğ, J. P. Ostrowski, C. J. Taylor, Control of a quadrotor helicopter using dual camera visual feedback, The nternational Journal of Robotics Research, Vol. 4, No. 5, pp , 005. [9] D. Suter, T. Hamel, R. Mahony, Visual servo control using homography estimation for the stabiliation of an x4-flyer, Proceedings of the 4st EEE Conference on decision and control, Vol. 3, pp , 00. [0] J. Dunfied, M. Tarbouchi, G. Labonte, Neural network based control of a four rotor helicopter, Proceedings of the nternational Conference on ndustrial Technology, Vol. 3, pp , 004. [] M. G. Earl, R. D. Andrea, Real-time attitude estimation techniques applied to a four rotor helicopter, Proceedings of the 43rd EEE Conference on Decision and Control, 004. [] D. Lee, H. J. Kim, S. Sastry, Feedback lineariation vs. adaptive sliding mode control for a quadrotor helicopter, nternational Journal of Control, Automation and Systems, Vol. 7, No. 3, pp , 009. [3] B. Erginer, E. Altuğ, Design and implementation of a hybrid fuy logic controller for a quadrotor VTOL vehicle, nternational 65 سال پنجم شمارة دوم پاييز و زمستان 395
12 بررسي تحليلي عملکرد الگوريتمهاي فرا ابتکاري بر بهينهسازي عملکرد کنترلر پهپاد چهارروتوره Journal of Control, Automation and Systems, Vol.0, No., pp. 6-70, 0. [4] A. Sharma, P. A. Barve, Controlling of quadrotor uav using P-D controller and fuy logic controller, nternational Journal of Electrical, Electronics and Computer Engineering, Vol., No., pp. 38-4, 0. [5] L. X. Wang, A course in fuy systems and control: Desing of Fuy Systems from nput- Output Data, 997. [6] C. C. Lee, Fuy logic in control systems: fuy logic controller., EEE Transactions on systems, man, and cybernetics, Vol. 0, No., pp , 990. [7] L. Renik, Fuy controllers handbook, first Edittion, Newnes, 997. [8] E. H. Kwun Fung, Y. Kwong Wong, Y. Ma, C. W. Marcus Yuen, W. Keung Wong, Smart hanger dynamic modeling and fuy controller design, nternational Journal of Control, Automation and Systems, Vol. 9, No. 4, pp , 0. [9] A. Hafaifa, F. Laaouad, K. Laroussi, A numerical structural approach to surge detection and isolation in compression systems using fuy logic controller, nternational Journal of Control, Automation and Systems, Vol. 9, No., pp , 0. [0] M. Sugeno, Development of an intelligent unmanned helicopter, at the Fuy modeling and control, CRC Press, Boca Raton, 999. [] B. Kadmiry, D. Driankov, Fuy control of an autonomous helicopter, Proceedings of the FSA World Congress and 0th NAFPS nternational Conference, pp , 00. [] C. Cavalcante, J. Cardoso, J. J. Ramos, O. R. Neves, Design and tuning of a helicopter fuy controller, Proceedings of the nternational Joint Conference of the Fourth EEE nternational Conference on Fuy Systems and The Second nternational Fuy Engineering Symposium, Vol. 3, pp , 995. [3] N.. Vitilaios, N. C. Tsourveloudis, An experimental test bed for small unmanned helicopters, Journal of ntelligent and Robotic Systems, Vol. 54, No. 5, pp , 009. [4] R. D. Garcia, K. P. Valavanis, The implementation of an autonomous helicopter testbed, n Unmanned Aircraft Systems, pp , Springer Netherlands, 008. [5]. D. Cowling, J. F. Whidborne, A. K. Cooke, Optimal trajectory planning and LQR control for a quadrotor UAV, Proceedings of the nternational Conference on Control, Glasgow, UK, 006. پينوشت نشرية علمي پژوهشي دانش و فناوري هوافضا 66
Trajectory tracking of quadrotor based on disturbance rejection control
 33 11 216 11 DOI: 1.7641/CTA.216.6117 Control Theory & Applications Vol. 33 No. 11 Nov. 216, (,, 224) :,,,.,,, ;,... : ; ; ; ; ; : TP273 : A Trajectory tracking of quadrotor based on disturbance rejection
33 11 216 11 DOI: 1.7641/CTA.216.6117 Control Theory & Applications Vol. 33 No. 11 Nov. 216, (,, 224) :,,,.,,, ;,... : ; ; ; ; ; : TP273 : A Trajectory tracking of quadrotor based on disturbance rejection
3: A convolution-pooling layer in PS-CNN 1: Partially Shared Deep Neural Network 2.2 Partially Shared Convolutional Neural Network 2: A hidden layer o
 Sound Source Identification based on Deep Learning with Partially-Shared Architecture 1 2 1 1,3 Takayuki MORITO 1, Osamu SUGIYAMA 2, Ryosuke KOJIMA 1, Kazuhiro NAKADAI 1,3 1 2 ( ) 3 Tokyo Institute of
Sound Source Identification based on Deep Learning with Partially-Shared Architecture 1 2 1 1,3 Takayuki MORITO 1, Osamu SUGIYAMA 2, Ryosuke KOJIMA 1, Kazuhiro NAKADAI 1,3 1 2 ( ) 3 Tokyo Institute of
Optimization, PSO) DE [1, 2, 3, 4] PSO [5, 6, 7, 8, 9, 10, 11] (P)
![Optimization, PSO) DE [1, 2, 3, 4] PSO [5, 6, 7, 8, 9, 10, 11] (P)](/thumbs/85/92153760.jpg "Optimization, PSO) DE [1, 2, 3, 4] PSO [5, 6, 7, 8, 9, 10, 11] (P)") ( ) 1 ( ) : : (Differential Evolution, DE) (Particle Swarm Optimization, PSO) DE [1, 2, 3, 4] PSO [5, 6, 7, 8, 9, 10, 11] 2 2.1 (P) (P ) minimize f(x) subject to g j (x) 0, j = 1,..., q h j (x) = 0, j
( ) 1 ( ) : : (Differential Evolution, DE) (Particle Swarm Optimization, PSO) DE [1, 2, 3, 4] PSO [5, 6, 7, 8, 9, 10, 11] 2 2.1 (P) (P ) minimize f(x) subject to g j (x) 0, j = 1,..., q h j (x) = 0, j
Motion analysis and simulation of a stratospheric airship
 32 11 Vol 32 11 2011 11 Journal of Harbin Engineering University Nov 2011 doi 10 3969 /j issn 1006-7043 2011 11 019 410073 3 2 V274 A 1006-7043 2011 11-1501-08 Motion analysis and simulation of a stratospheric
32 11 Vol 32 11 2011 11 Journal of Harbin Engineering University Nov 2011 doi 10 3969 /j issn 1006-7043 2011 11 019 410073 3 2 V274 A 1006-7043 2011 11-1501-08 Motion analysis and simulation of a stratospheric
ΑΥΤΟΝΟΜΗ ΠΛΟΗΓΗΣΗ ΜΗ ΕΠΑΝΔΡΩΜΕΝΩΝ ΕΛΙΚΟΠΤΕΡΩΝ
 ΑΥΤΟΝΟΜΗ ΠΛΟΗΓΗΣΗ ΜΗ ΕΠΑΝΔΡΩΜΕΝΩΝ ΕΛΙΚΟΠΤΕΡΩΝ Νίκος Ι. Βιτζηλαίος, Νίκος Χρ. Τσουρβελούδης Εργαστήριο Ευφυών Συστημάτων & Ρομποτικής Τμήμα Μηχανικών Παραγωγής & Διοίκησης Πολυτεχνείο Κρήτης, 731, Χανιά,
ΑΥΤΟΝΟΜΗ ΠΛΟΗΓΗΣΗ ΜΗ ΕΠΑΝΔΡΩΜΕΝΩΝ ΕΛΙΚΟΠΤΕΡΩΝ Νίκος Ι. Βιτζηλαίος, Νίκος Χρ. Τσουρβελούδης Εργαστήριο Ευφυών Συστημάτων & Ρομποτικής Τμήμα Μηχανικών Παραγωγής & Διοίκησης Πολυτεχνείο Κρήτης, 731, Χανιά,
بررسي اثر صدمه بر مشخصات ائروديناميکي بال با در نظر گرفتن آثار جريان سهبعدي
 1 2 2 1 سهيال عبدالهيپور محمود ماني کارشناس ارشد مهندسي هوافضا پژوهشگاه هوافضا وزارت علوم تحقيقات و فناوري تهران sabdolahi@ari.ac.ir استاد دانشکدة مهندسي هوافضا دانشگاه صنعتي اميرکبير تهران تاريخ دريافت:
1 2 2 1 سهيال عبدالهيپور محمود ماني کارشناس ارشد مهندسي هوافضا پژوهشگاه هوافضا وزارت علوم تحقيقات و فناوري تهران sabdolahi@ari.ac.ir استاد دانشکدة مهندسي هوافضا دانشگاه صنعتي اميرکبير تهران تاريخ دريافت:
AR.Drone, ( ), [1]. [2-4], - [5-8] [9, 10] - . :, [6], - [9], [7], [11, 12]
![AR.Drone, ( ), [1]. [2-4], - [5-8] [9, 10] - . :, [6], - [9], [7], [11, 12]](/thumbs/61/45886070.jpg "AR.Drone, ( ), [1]. [2-4], - [5-8] [9, 10] - . :, [6], - [9], [7], [11, 12]") 56 ARDRONE 639 oto@idissiaenssu : +7 (383) 333-6-5 : ARDrone Abstract In this paper we discuss a trajector tracing probem of quadrocopter where the trajector is defined as impicit function of coordinates
56 ARDRONE 639 oto@idissiaenssu : +7 (383) 333-6-5 : ARDrone Abstract In this paper we discuss a trajector tracing probem of quadrocopter where the trajector is defined as impicit function of coordinates
Buried Markov Model Pairwise
 Buried Markov Model 1 2 2 HMM Buried Markov Model J. Bilmes Buried Markov Model Pairwise 0.6 0.6 1.3 Structuring Model for Speech Recognition using Buried Markov Model Takayuki Yamamoto, 1 Tetsuya Takiguchi
Buried Markov Model 1 2 2 HMM Buried Markov Model J. Bilmes Buried Markov Model Pairwise 0.6 0.6 1.3 Structuring Model for Speech Recognition using Buried Markov Model Takayuki Yamamoto, 1 Tetsuya Takiguchi
Δημήτριος Θ. Τόμτσης, Ph.D. Αναλυτικό Βιογραφικό Σημείωμα
 Δημήτριος Θ. Τόμτσης, Ph.D. Αναλυτικό Βιογραφικό Σημείωμα Τίτλοι σπουδών Πτυχίο: Μηχανικός Πληροφοριακών Συστημάτων, Πανεπιστήμιο Coventry, U.K,, 1991. Μεταπτυχιακό: Μηχανικός Τηλεπικοινωνιακών Συστημάτων
Δημήτριος Θ. Τόμτσης, Ph.D. Αναλυτικό Βιογραφικό Σημείωμα Τίτλοι σπουδών Πτυχίο: Μηχανικός Πληροφοριακών Συστημάτων, Πανεπιστήμιο Coventry, U.K,, 1991. Μεταπτυχιακό: Μηχανικός Τηλεπικοινωνιακών Συστημάτων
Research on real-time inverse kinematics algorithms for 6R robots
 25 6 2008 2 Control Theory & Applications Vol. 25 No. 6 Dec. 2008 : 000 852(2008)06 037 05 6R,,, (, 30027) : 6R. 6 6R6.., -, 6R., 2.03 ms, 6R. : 6R; ; ; : TP242.2 : A Research on real-time inverse kinematics
25 6 2008 2 Control Theory & Applications Vol. 25 No. 6 Dec. 2008 : 000 852(2008)06 037 05 6R,,, (, 30027) : 6R. 6 6R6.., -, 6R., 2.03 ms, 6R. : 6R; ; ; : TP242.2 : A Research on real-time inverse kinematics
ΕΥΡΕΣΗ ΤΟΥ ΔΙΑΝΥΣΜΑΤΟΣ ΘΕΣΗΣ ΚΙΝΟΥΜΕΝΟΥ ΡΟΜΠΟΤ ΜΕ ΜΟΝΟΦΘΑΛΜΟ ΣΥΣΤΗΜΑ ΟΡΑΣΗΣ
 ΕΥΡΕΣΗ ΤΟΥ ΔΙΑΝΥΣΜΑΤΟΣ ΘΕΣΗΣ ΚΙΝΟΥΜΕΝΟΥ ΡΟΜΠΟΤ ΜΕ ΜΟΝΟΦΘΑΛΜΟ ΣΥΣΤΗΜΑ ΟΡΑΣΗΣ Νικόλαος Κυριακούλης *, Ευάγγελος Καρακάσης, Αντώνιος Γαστεράτος, Δημήτριος Κουλουριώτης, Σπυρίδων Γ. Μουρούτσος Δημοκρίτειο
ΕΥΡΕΣΗ ΤΟΥ ΔΙΑΝΥΣΜΑΤΟΣ ΘΕΣΗΣ ΚΙΝΟΥΜΕΝΟΥ ΡΟΜΠΟΤ ΜΕ ΜΟΝΟΦΘΑΛΜΟ ΣΥΣΤΗΜΑ ΟΡΑΣΗΣ Νικόλαος Κυριακούλης *, Ευάγγελος Καρακάσης, Αντώνιος Γαστεράτος, Δημήτριος Κουλουριώτης, Σπυρίδων Γ. Μουρούτσος Δημοκρίτειο
Adaptive grouping difference variation wolf pack algorithm
 3 2017 5 ( ) Journal of East China Normal University (Natural Science) No. 3 May 2017 : 1000-5641(2017)03-0078-09, (, 163318) :,,.,,,,.,,. : ; ; ; : TP301.6 : A DOI: 10.3969/j.issn.1000-5641.2017.03.008
3 2017 5 ( ) Journal of East China Normal University (Natural Science) No. 3 May 2017 : 1000-5641(2017)03-0078-09, (, 163318) :,,.,,,,.,,. : ; ; ; : TP301.6 : A DOI: 10.3969/j.issn.1000-5641.2017.03.008
A Method of Trajectory Tracking Control for Nonminimum Phase Continuous Time Systems
 IIC-11-8 A Method of Trajectory Tracking Control for Nonminimum Phase Continuous Time Systems Takayuki Shiraishi, iroshi Fujimoto (The University of Tokyo) Abstract The purpose of this paper is achievement
IIC-11-8 A Method of Trajectory Tracking Control for Nonminimum Phase Continuous Time Systems Takayuki Shiraishi, iroshi Fujimoto (The University of Tokyo) Abstract The purpose of this paper is achievement
ΒΙΟΓΡΑΦΙΚΟ ΣΗΜΕΙΩΜΑ ΛΕΩΝΙΔΑΣ Α. ΣΠΥΡΟΥ. 2004 2009 Διδακτορικό σε Υπολογιστική Εμβιομηχανική, Τμήμα Μηχανολόγων Μηχανικών, Πανεπιστήμιο Θεσσαλίας.
 ΒΙΟΓΡΑΦΙΚΟ ΣΗΜΕΙΩΜΑ ΛΕΩΝΙΔΑΣ Α. ΣΠΥΡΟΥ ΔΙΕΥΘΥΝΣΗ Ινστιτούτο Έρευνας και Τεχνολογίας Θεσσαλίας (ΙΕΤΕΘ) Εθνικό Κέντρο Έρευνας και Τεχνολογικής Ανάπτυξης (ΕΚΕΤΑ) Δημητριάδος 95 και Παύλου Μελά 38333 Βόλος
ΒΙΟΓΡΑΦΙΚΟ ΣΗΜΕΙΩΜΑ ΛΕΩΝΙΔΑΣ Α. ΣΠΥΡΟΥ ΔΙΕΥΘΥΝΣΗ Ινστιτούτο Έρευνας και Τεχνολογίας Θεσσαλίας (ΙΕΤΕΘ) Εθνικό Κέντρο Έρευνας και Τεχνολογικής Ανάπτυξης (ΕΚΕΤΑ) Δημητριάδος 95 και Παύλου Μελά 38333 Βόλος
Στοιχεία εισηγητή Ημερομηνία: 10/10/2017
 Θέμα μεταπτυχιακής διατριβής: Λογισμικά μελέτης και σχεδίασης ρομποτικών συστημάτων - συγκρτική μελέτη και εφαρμογές. 1) Μελέτη των δημοφιλών λογισμικών σχεδίασης ρομποτικών συστημάτων VREP και ROS. 2)
Θέμα μεταπτυχιακής διατριβής: Λογισμικά μελέτης και σχεδίασης ρομποτικών συστημάτων - συγκρτική μελέτη και εφαρμογές. 1) Μελέτη των δημοφιλών λογισμικών σχεδίασης ρομποτικών συστημάτων VREP και ROS. 2)
در اين آزمايش ابتدا راهاندازي موتور القايي روتور سيمپيچي شده سه فاز با مقاومتهاي روتور مختلف صورت گرفته و س سپ مشخصه گشتاور سرعت آن رسم ميشود.
 ك ي آزمايش 7 : راهاندازي و مشخصه خروجي موتور القايي روتور سيمپيچيشده آزمايش 7: راهاندازي و مشخصه خروجي موتور القايي با روتور سيمپيچي شده 1-7 هدف آزمايش در اين آزمايش ابتدا راهاندازي موتور القايي روتور
ك ي آزمايش 7 : راهاندازي و مشخصه خروجي موتور القايي روتور سيمپيچيشده آزمايش 7: راهاندازي و مشخصه خروجي موتور القايي با روتور سيمپيچي شده 1-7 هدف آزمايش در اين آزمايش ابتدا راهاندازي موتور القايي روتور
An Automatic Modulation Classifier using a Frequency Discriminator for Intelligent Software Defined Radio
 C IEEJ Transactions on Electronics, Information and Systems Vol.133 No.5 pp.910 915 DOI: 10.1541/ieejeiss.133.910 a) An Automatic Modulation Classifier using a Frequency Discriminator for Intelligent Software
C IEEJ Transactions on Electronics, Information and Systems Vol.133 No.5 pp.910 915 DOI: 10.1541/ieejeiss.133.910 a) An Automatic Modulation Classifier using a Frequency Discriminator for Intelligent Software
Control Theory & Applications PID (, )
") 26 12 2009 12 : 1000 8152(2009)12 1317 08 Control Theory & Applications Vol. 26 No. 12 Dec. 2009 PID,, (, 200240) : PID (PIDNN), PID,, (BP).,, PIDNN PIDNN (MPIDNN), (CPSO) BP, MPIDNN CPSO MPIDNN CRPSO
26 12 2009 12 : 1000 8152(2009)12 1317 08 Control Theory & Applications Vol. 26 No. 12 Dec. 2009 PID,, (, 200240) : PID (PIDNN), PID,, (BP).,, PIDNN PIDNN (MPIDNN), (CPSO) BP, MPIDNN CPSO MPIDNN CRPSO
2.153 Adaptive Control Lecture 7 Adaptive PID Control
 2.153 Adaptive Control Lecture 7 Adaptive PID Control Anuradha Annaswamy aanna@mit.edu ( aanna@mit.edu 1 / 17 Pset #1 out: Thu 19-Feb, due: Fri 27-Feb Pset #2 out: Wed 25-Feb, due: Fri 6-Mar Pset #3 out:
2.153 Adaptive Control Lecture 7 Adaptive PID Control Anuradha Annaswamy aanna@mit.edu ( aanna@mit.edu 1 / 17 Pset #1 out: Thu 19-Feb, due: Fri 27-Feb Pset #2 out: Wed 25-Feb, due: Fri 6-Mar Pset #3 out:
Relative dynamic modeling and formation control of multiple unmanned helicopters
 28 1 2011 1 : 1000 8152(2011)01 0108 05 Control Theory & Applications Vol. 28 No. 1 Jan. 2011 1, 2, 2 (1., 110016; 2., 110016) :,. 6..,. : ; ; : TP273 : A Relative dynamic modeling and ormation control
28 1 2011 1 : 1000 8152(2011)01 0108 05 Control Theory & Applications Vol. 28 No. 1 Jan. 2011 1, 2, 2 (1., 110016; 2., 110016) :,. 6..,. : ; ; : TP273 : A Relative dynamic modeling and ormation control
Real time mobile robot control with a multiresolution map representation
 IIC 06 21 Real time mobile robot control with a multiresolution map representation Katsuya Iwata, Shinkichi Inagaki, Yusuke Nara, Tatsuya Suzuki (Nagoya University) Abstract In this paper a real-time path
IIC 06 21 Real time mobile robot control with a multiresolution map representation Katsuya Iwata, Shinkichi Inagaki, Yusuke Nara, Tatsuya Suzuki (Nagoya University) Abstract In this paper a real-time path
Security in the Cloud Era
 Security in the Cloud Era Dimitris Gritzalis October 2011 Ασφάλεια στην εποχή του Cloud: Παράδοξο ή απλώς διαφορετικό; Δημήτρης Γκρίτζαλης Καθηγητής Ασφάλειας στις ΤΠΕ Οικονομικό Πανεπιστήμιο Αθηνών Πρόεδρος
Security in the Cloud Era Dimitris Gritzalis October 2011 Ασφάλεια στην εποχή του Cloud: Παράδοξο ή απλώς διαφορετικό; Δημήτρης Γκρίτζαλης Καθηγητής Ασφάλειας στις ΤΠΕ Οικονομικό Πανεπιστήμιο Αθηνών Πρόεδρος
ΜΟΝΤΕΛΟΠΟΙΗΣΗ ΚΑΙ ΕΛΕΓΧΟΣ ΥΠΕΡ- ΕΠΕΝΕΡΓΟΥΜΕΝΗΣ ΤΡΙΓΩΝΙΚΗΣ ΠΛΩΤΗΣ ΠΛΑΤΦΟΡΜΑΣ
 ΜΟΝΤΕΛΟΠΟΙΗΣΗ ΚΑΙ ΕΛΕΓΧΟΣ ΥΠΕΡ- ΕΠΕΝΕΡΓΟΥΜΕΝΗΣ ΤΡΙΓΩΝΙΚΗΣ ΠΛΩΤΗΣ ΠΛΑΤΦΟΡΜΑΣ Κώστας Βλάχος, και Ευάγγελος Παπαδόπουλος Σχολή Μηχ. Μηχ. Ε.Μ.Π., Εργαστήριο Αυτομάτου Ελέγχου ΠΕΡΙΛΗΨΗ Στην παρούσα εργασία
ΜΟΝΤΕΛΟΠΟΙΗΣΗ ΚΑΙ ΕΛΕΓΧΟΣ ΥΠΕΡ- ΕΠΕΝΕΡΓΟΥΜΕΝΗΣ ΤΡΙΓΩΝΙΚΗΣ ΠΛΩΤΗΣ ΠΛΑΤΦΟΡΜΑΣ Κώστας Βλάχος, και Ευάγγελος Παπαδόπουλος Σχολή Μηχ. Μηχ. Ε.Μ.Π., Εργαστήριο Αυτομάτου Ελέγχου ΠΕΡΙΛΗΨΗ Στην παρούσα εργασία
ΔΙΠΛΩΜΑΤΙΚΕΣ ΕΡΓΑΣΙΕΣ
 ΔΙΠΛΩΜΑΤΙΚΕΣ ΕΡΓΑΣΙΕΣ ΤΜ. ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΤΗΛΕΠΙΚΟΙΝΩΝΙΩΝ 2018-2019 Επιβλέπουσα: Μπίμπη Ματίνα Ανάλυση της πλατφόρμας ανοιχτού κώδικα Home Assistant Το Home Assistant είναι μία πλατφόρμα ανοιχτού
ΔΙΠΛΩΜΑΤΙΚΕΣ ΕΡΓΑΣΙΕΣ ΤΜ. ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΤΗΛΕΠΙΚΟΙΝΩΝΙΩΝ 2018-2019 Επιβλέπουσα: Μπίμπη Ματίνα Ανάλυση της πλατφόρμας ανοιχτού κώδικα Home Assistant Το Home Assistant είναι μία πλατφόρμα ανοιχτού
Δρ. Ηλίας Ξυδιάς E-mail: xidias@aegean.gr Τηλ.: 22810-97134, 694-9191282
 Η. Ξυδιάς: Βιογραφικό Σημείωμα (Μάιος 12) i Δρ. Ηλίας Ξυδιάς E-mail: xidias@aegean.gr Τηλ.: 22810-97134, 694-9191282 Πανεπιστήμιο Αιγαίου Τμήμα Μηχανικών Σχεδίασης Προϊόντων & Συστημάτων 84100 Ερμούπολη,
Η. Ξυδιάς: Βιογραφικό Σημείωμα (Μάιος 12) i Δρ. Ηλίας Ξυδιάς E-mail: xidias@aegean.gr Τηλ.: 22810-97134, 694-9191282 Πανεπιστήμιο Αιγαίου Τμήμα Μηχανικών Σχεδίασης Προϊόντων & Συστημάτων 84100 Ερμούπολη,
Lifting Entry (continued)
") ifting Entry (continued) Basic planar dynamics of motion, again Yet another equilibrium glide Hypersonic phugoid motion Planar state equations MARYAN 1 01 avid. Akin - All rights reserved http://spacecraft.ssl.umd.edu
ifting Entry (continued) Basic planar dynamics of motion, again Yet another equilibrium glide Hypersonic phugoid motion Planar state equations MARYAN 1 01 avid. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Simplex Crossover for Real-coded Genetic Algolithms
 Technical Papers GA Simplex Crossover for Real-coded Genetic Algolithms 47 Takahide Higuchi Shigeyoshi Tsutsui Masayuki Yamamura Interdisciplinary Graduate school of Science and Engineering, Tokyo Institute
Technical Papers GA Simplex Crossover for Real-coded Genetic Algolithms 47 Takahide Higuchi Shigeyoshi Tsutsui Masayuki Yamamura Interdisciplinary Graduate school of Science and Engineering, Tokyo Institute
UAV. UAV Unmanned Aerial Vehicle LED Light Emitting Diodes LQR Linear Quadratic Regulator
 2013 11 39 11 November 2013 Journal of Beijing University of Aeronautics and Astronautics Vol 39 No 11 UAV 100191 110035 100191 UAV Unmanned Aerial Vehicle LED Light Emitting Diodes LQR Linear Quadratic
2013 11 39 11 November 2013 Journal of Beijing University of Aeronautics and Astronautics Vol 39 No 11 UAV 100191 110035 100191 UAV Unmanned Aerial Vehicle LED Light Emitting Diodes LQR Linear Quadratic
Traversing Assist System for Tracked Vehicles on Rough Terrain Based on Continuous Three-Dimensional Terrain-Scanning
 ,, Traversing Assist System for Tracked Vehicles on Rough Terrain Based on Continuous Three-Dimensional Terrain-Scanning Yoshito OKADA, Keiji NAGATANI and Kazuya YOSHIDA Department of Aerospace Engineering,
,, Traversing Assist System for Tracked Vehicles on Rough Terrain Based on Continuous Three-Dimensional Terrain-Scanning Yoshito OKADA, Keiji NAGATANI and Kazuya YOSHIDA Department of Aerospace Engineering,
CAP A CAP
 2012 4 30 2 Journal of Northwestern Polytechnical University Apr. Vol. 30 2012 No. 2 Neal-Smith 710072 CAP Neal-Smith PIO Neal-Smith V249 A 1000-2758 2012 02-0279-07 Neal-Smith CAP Neal-Smith Neal-Smith
2012 4 30 2 Journal of Northwestern Polytechnical University Apr. Vol. 30 2012 No. 2 Neal-Smith 710072 CAP Neal-Smith PIO Neal-Smith V249 A 1000-2758 2012 02-0279-07 Neal-Smith CAP Neal-Smith Neal-Smith
Speeding up the Detection of Scale-Space Extrema in SIFT Based on the Complex First Order System
 (MIRU2008) 2008 7 SIFT 572-8572 26-12 599-8531 1-1 E-mail: umemoto@ipc.osaka-pct.ac.jp, kise@cs.osakafu-u.ac.jp SIFT 1 ANN 3 1 SIFT 1 Speeding up the Detection of Scale-Space Extrema in SIFT Based on the
(MIRU2008) 2008 7 SIFT 572-8572 26-12 599-8531 1-1 E-mail: umemoto@ipc.osaka-pct.ac.jp, kise@cs.osakafu-u.ac.jp SIFT 1 ANN 3 1 SIFT 1 Speeding up the Detection of Scale-Space Extrema in SIFT Based on the
Schedulability Analysis Algorithm for Timing Constraint Workflow Models
 CIMS Vol.8No.72002pp.527-532 ( 100084) Petri Petri F270.7 A Schedulability Analysis Algorithm for Timing Constraint Workflow Models Li Huifang and Fan Yushun (Department of Automation, Tsinghua University,
CIMS Vol.8No.72002pp.527-532 ( 100084) Petri Petri F270.7 A Schedulability Analysis Algorithm for Timing Constraint Workflow Models Li Huifang and Fan Yushun (Department of Automation, Tsinghua University,
Autonomous navigation control for mobile robots based on emotion and environment cognition
 25 6 2008 12 : 1000 8152(2008)06 0995 06 Control Theory & Applications Vol. 25 No. 6 Dec. 2008 1,2, 2 (1., 200237; 2., 310018) :,., ART2,.,.,,. : ; ; ; ART2 ; ; : TP242 : A Autonomous navigation control
25 6 2008 12 : 1000 8152(2008)06 0995 06 Control Theory & Applications Vol. 25 No. 6 Dec. 2008 1,2, 2 (1., 200237; 2., 310018) :,., ART2,.,.,,. : ; ; ; ART2 ; ; : TP242 : A Autonomous navigation control
Toward a SPARQL Query Execution Mechanism using Dynamic Mapping Adaptation -A Preliminary Report- Takuya Adachi 1 Naoki Fukuta 2.
 SIG-SWO-041-05 SPAIDA: SPARQL Toward a SPARQL Query Execution Mechanism using Dynamic Mapping Adaptation -A Preliminary Report- 1 2 Takuya Adachi 1 Naoki Fukuta 2 1 1 Faculty of Informatics, Shizuoka University
SIG-SWO-041-05 SPAIDA: SPARQL Toward a SPARQL Query Execution Mechanism using Dynamic Mapping Adaptation -A Preliminary Report- 1 2 Takuya Adachi 1 Naoki Fukuta 2 1 1 Faculty of Informatics, Shizuoka University
Dynamic Torque Control Strategy of Engine Clutch in Hybrid Electric Vehicle
 49 4 2013 2 JOURNAL OF MECHANICAL ENGINEERING Vol.49 No.4 Feb. 2013 DOI10.3901/JME.2013.04.114 * 1 1 2 BOUKEHILI Adel 1 (1. 100081 2. 065000) (Proportional-integral-differential, PID) PID U467 Dynamic
49 4 2013 2 JOURNAL OF MECHANICAL ENGINEERING Vol.49 No.4 Feb. 2013 DOI10.3901/JME.2013.04.114 * 1 1 2 BOUKEHILI Adel 1 (1. 100081 2. 065000) (Proportional-integral-differential, PID) PID U467 Dynamic
No. 7 Modular Machine Tool & Automatic Manufacturing Technique. Jul TH166 TG659 A
 7 2016 7 No. 7 Modular Machine Tool & Automatic Manufacturing Technique Jul. 2016 1001-2265 2016 07-0122 - 05 DOI 10. 13462 /j. cnki. mmtamt. 2016. 07. 035 * 100124 TH166 TG659 A Precision Modeling and
7 2016 7 No. 7 Modular Machine Tool & Automatic Manufacturing Technique Jul. 2016 1001-2265 2016 07-0122 - 05 DOI 10. 13462 /j. cnki. mmtamt. 2016. 07. 035 * 100124 TH166 TG659 A Precision Modeling and
VSC STEADY2STATE MOD EL AND ITS NONL INEAR CONTROL OF VSC2HVDC SYSTEM VSC (1. , ; 2. , )
") 22 1 2002 1 Vol. 22 No. 1 Jan. 2002 Proceedings of the CSEE ν 2002 Chin. Soc. for Elec. Eng. :025828013 (2002) 0120017206 VSC 1, 1 2, (1., 310027 ; 2., 250061) STEADY2STATE MOD EL AND ITS NONL INEAR CONTROL
22 1 2002 1 Vol. 22 No. 1 Jan. 2002 Proceedings of the CSEE ν 2002 Chin. Soc. for Elec. Eng. :025828013 (2002) 0120017206 VSC 1, 1 2, (1., 310027 ; 2., 250061) STEADY2STATE MOD EL AND ITS NONL INEAR CONTROL
2 ~ 8 Hz Hz. Blondet 1 Trombetti 2-4 Symans 5. = - M p. M p. s 2 x p. s 2 x t x t. + C p. sx p. + K p. x p. C p. s 2. x tp x t.
 36 2010 8 8 Vol 36 No 8 JOURNAL OF BEIJING UNIVERSITY OF TECHNOLOGY Aug 2010 Ⅰ 100124 TB 534 + 2TP 273 A 0254-0037201008 - 1091-08 20 Hz 2 ~ 8 Hz 1988 Blondet 1 Trombetti 2-4 Symans 5 2 2 1 1 1b 6 M p
36 2010 8 8 Vol 36 No 8 JOURNAL OF BEIJING UNIVERSITY OF TECHNOLOGY Aug 2010 Ⅰ 100124 TB 534 + 2TP 273 A 0254-0037201008 - 1091-08 20 Hz 2 ~ 8 Hz 1988 Blondet 1 Trombetti 2-4 Symans 5 2 2 1 1 1b 6 M p
ΒΙΟΓΡΑΦΙΚΟ ΣΗΜΕΙΩΜΑ ΣΤΥΛΙΑΝΗΣ Κ. ΣΟΦΙΑΝΟΠΟΥΛΟΥ Αναπληρώτρια Καθηγήτρια. Τµήµα Τεχνολογίας & Συστηµάτων Παραγωγής.
 ΒΙΟΓΡΑΦΙΚΟ ΣΗΜΕΙΩΜΑ ΣΤΥΛΙΑΝΗΣ Κ. ΣΟΦΙΑΝΟΠΟΥΛΟΥ Αναπληρώτρια Καθηγήτρια Τµήµα Τεχνολογίας & Συστηµάτων Παραγωγής Πανεπιστήµιο Πειραιώς, Καραολή ηµητρίου 80, 18534 Πειραιάς Τηλ. 210 414-2147, e-mail: sofianop@unipi.gr
ΒΙΟΓΡΑΦΙΚΟ ΣΗΜΕΙΩΜΑ ΣΤΥΛΙΑΝΗΣ Κ. ΣΟΦΙΑΝΟΠΟΥΛΟΥ Αναπληρώτρια Καθηγήτρια Τµήµα Τεχνολογίας & Συστηµάτων Παραγωγής Πανεπιστήµιο Πειραιώς, Καραολή ηµητρίου 80, 18534 Πειραιάς Τηλ. 210 414-2147, e-mail: sofianop@unipi.gr
ER-Tree (Extended R*-Tree)
") 1-9825/22/13(4)768-6 22 Journal of Software Vol13, No4 1, 1, 2, 1 1, 1 (, 2327) 2 (, 3127) E-mail xhzhou@ustceducn,,,,,,, 1, TP311 A,,,, Elias s Rivest,Cleary Arya Mount [1] O(2 d ) Arya Mount [1] Friedman,Bentley
1-9825/22/13(4)768-6 22 Journal of Software Vol13, No4 1, 1, 2, 1 1, 1 (, 2327) 2 (, 3127) E-mail xhzhou@ustceducn,,,,,,, 1, TP311 A,,,, Elias s Rivest,Cleary Arya Mount [1] O(2 d ) Arya Mount [1] Friedman,Bentley
مطالعة رفتار الکتروترمومکانيکي پوستههاي پيزوالکتريک با استفاده از تحليل همهندسه
 مطالعة رفتار الکتروترمومکانيکي پوستههاي پيزوالکتريک با استفاده از تحليل همهندسه زهرا قديمي بهروز حسني دانشجوي دکتري دانشکده مهندسي مکانيک دانشگاه فردوسي مشهد استاد دانشکدة مهندسي مکانيک دانشگاه فردوسي
مطالعة رفتار الکتروترمومکانيکي پوستههاي پيزوالکتريک با استفاده از تحليل همهندسه زهرا قديمي بهروز حسني دانشجوي دکتري دانشکده مهندسي مکانيک دانشگاه فردوسي مشهد استاد دانشکدة مهندسي مکانيک دانشگاه فردوسي
Scrub Nurse Robot: SNR. C++ SNR Uppaal TA SNR SNR. Vain SNR. Uppaal TA. TA state Uppaal TA location. Uppaal
 Scrub Nurse Robot: SNR SNR SNR SNR Uppaal Uppaal timed automatonta SNR C++ Uppaal TA SNR SNR 1 1SNR3 SNR SNR C++ SNR Uppaal TA Vain Uppaal TA TA state Uppaal TA location TRON (Testing Realtime Systems
Scrub Nurse Robot: SNR SNR SNR SNR Uppaal Uppaal timed automatonta SNR C++ Uppaal TA SNR SNR 1 1SNR3 SNR SNR C++ SNR Uppaal TA Vain Uppaal TA TA state Uppaal TA location TRON (Testing Realtime Systems
ΒΕΛΤΙΣΤΟΣ ΓΕΩΜΕΤΡΙΚΟΣ ΣΧΕΔΙΑΣΜΟΣ ΧΩΡΙΚΟΥ ΒΡΑΧΙΟΝΑ RRR ΜΕ ΧΡΗΣΗ ΥΒΡΙΔΙΚΟΥ ΑΛΓΟΡΙΘΜΟΥ
 ΒΕΛΤΙΣΤΟΣ ΓΕΩΜΕΤΡΙΚΟΣ ΣΧΕΔΙΑΣΜΟΣ ΧΩΡΙΚΟΥ ΒΡΑΧΙΟΝΑ RRR ΜΕ ΧΡΗΣΗ ΥΒΡΙΔΙΚΟΥ ΑΛΓΟΡΙΘΜΟΥ Δ. Σαγρής, Σ. Μήτση, Κ.-Δ. Μπουζάκης, Γκ. Μανσούρ Εργαστήριο Εργαλειομηχανών και Διαμορφωτικής Μηχανολογίας, Τμήμα Μηχανολόγων
ΒΕΛΤΙΣΤΟΣ ΓΕΩΜΕΤΡΙΚΟΣ ΣΧΕΔΙΑΣΜΟΣ ΧΩΡΙΚΟΥ ΒΡΑΧΙΟΝΑ RRR ΜΕ ΧΡΗΣΗ ΥΒΡΙΔΙΚΟΥ ΑΛΓΟΡΙΘΜΟΥ Δ. Σαγρής, Σ. Μήτση, Κ.-Δ. Μπουζάκης, Γκ. Μανσούρ Εργαστήριο Εργαλειομηχανών και Διαμορφωτικής Μηχανολογίας, Τμήμα Μηχανολόγων
Περισσότερα+για+τις+στροφές+
 ΤεχνολογικόEκπαιδευτικόΊδρυμαKρήτης Ρομποτική «Τοπικήπαραμετροποίησηπινάκωνστροφής,γωνίεςEuler, πίνακαςστροφήςγύρωαπόισοδύναμοάξονα» Δρ.ΦασουλάςΓιάννης 1 Περισσότεραγιατιςστροφές ΗστροφήενόςΣΣμπορείνααντιστοιχηθείσεένα
ΤεχνολογικόEκπαιδευτικόΊδρυμαKρήτης Ρομποτική «Τοπικήπαραμετροποίησηπινάκωνστροφής,γωνίεςEuler, πίνακαςστροφήςγύρωαπόισοδύναμοάξονα» Δρ.ΦασουλάςΓιάννης 1 Περισσότεραγιατιςστροφές ΗστροφήενόςΣΣμπορείνααντιστοιχηθείσεένα
Applying Markov Decision Processes to Role-playing Game
 1,a) 1 1 1 1 2011 8 25, 2012 3 2 MDPRPG RPG MDP RPG MDP RPG MDP RPG MDP RPG Applying Markov Decision Processes to Role-playing Game Yasunari Maeda 1,a) Fumitaro Goto 1 Hiroshi Masui 1 Fumito Masui 1 Masakiyo
1,a) 1 1 1 1 2011 8 25, 2012 3 2 MDPRPG RPG MDP RPG MDP RPG MDP RPG MDP RPG Applying Markov Decision Processes to Role-playing Game Yasunari Maeda 1,a) Fumitaro Goto 1 Hiroshi Masui 1 Fumito Masui 1 Masakiyo
Gain self-tuning of PI controller and parameter optimum for PMSM drives
 14 1 1 1 ELECTRI C MACHINES AND CONTROL Vol. 14 No. 1 Dec. 1 1 1 1 1 1. 151. 154 PI PI E E 1% 4r /min TM 359 A 17-449X 1 1-9- 6 Gain self-tuning of PI controller and parameter optimum for PMSM drives YANG
14 1 1 1 ELECTRI C MACHINES AND CONTROL Vol. 14 No. 1 Dec. 1 1 1 1 1 1. 151. 154 PI PI E E 1% 4r /min TM 359 A 17-449X 1 1-9- 6 Gain self-tuning of PI controller and parameter optimum for PMSM drives YANG
ΑΝΑΣΤΑΣΙΟΣ Ι. ΝΤΟΥΝΗΣ ΒΙΟΓΡΑΦΙΚΟ
 ΑΝΑΣΤΑΣΙΟΣ Ι. ΝΤΟΥΝΗΣ ΒΙΟΓΡΑΦΙΚΟ http://auto.teipir.gr/el/prosopiko/anastasios-ntoynis/297 ΠΑΝΕΠΙΣΤΗΜΙΑΚΕΣ ΣΠΟΥΔΕΣ Πτυχίο Φυσικής, Φυσικό Τμήμα, Πανεπιστήμιο Πάτρας (1983). Μεταπτυχιακό Δίπλωμα Ηλεκτρονικού
ΑΝΑΣΤΑΣΙΟΣ Ι. ΝΤΟΥΝΗΣ ΒΙΟΓΡΑΦΙΚΟ http://auto.teipir.gr/el/prosopiko/anastasios-ntoynis/297 ΠΑΝΕΠΙΣΤΗΜΙΑΚΕΣ ΣΠΟΥΔΕΣ Πτυχίο Φυσικής, Φυσικό Τμήμα, Πανεπιστήμιο Πάτρας (1983). Μεταπτυχιακό Δίπλωμα Ηλεκτρονικού
ROBOT. Design and Realization of a Control System for Laparoscopic Robot
 30 4 2008 7 ROBOT Vol.30, No.4 July, 2008 1002-0446(2008)04-0340-06 150080 TP241.3 B Design and Realization of a Control System for Laparoscopic Robot FU Yi-li, PAN Bo, YANG Zong-peng, WANG Shu-guo (State
30 4 2008 7 ROBOT Vol.30, No.4 July, 2008 1002-0446(2008)04-0340-06 150080 TP241.3 B Design and Realization of a Control System for Laparoscopic Robot FU Yi-li, PAN Bo, YANG Zong-peng, WANG Shu-guo (State
Ταξινόμηση και διαχρονική παρακολούθηση των βοσκόμενων δασικών εκτάσεων στη λεκάνη απορροής του χειμάρρου Μπογδάνα Ν. Θεσσαλονίκης
 Ταξινόμηση και διαχρονική παρακολούθηση των βοσκόμενων δασικών εκτάσεων στη λεκάνη απορροής του χειμάρρου Μπογδάνα Ν. Θεσσαλονίκης Α. Αϊναλής 1, Ι. Μελιάδης 2, Π. Πλατής 3 και Κ. Τσιουβάρας 4 1 Διεύθυνση
Ταξινόμηση και διαχρονική παρακολούθηση των βοσκόμενων δασικών εκτάσεων στη λεκάνη απορροής του χειμάρρου Μπογδάνα Ν. Θεσσαλονίκης Α. Αϊναλής 1, Ι. Μελιάδης 2, Π. Πλατής 3 και Κ. Τσιουβάρας 4 1 Διεύθυνση
Evolution of Novel Studies on Thermofluid Dynamics with Combustion
 MEMOIRS OF SHONAN INSTITUTE OF TECHNOLOGY Vol. 42, No. 1, 2008 * Evolution of Novel Studies on Thermofluid Dynamics with Combustion Hiroyuki SATO* This paper mentions the recent development of combustion
MEMOIRS OF SHONAN INSTITUTE OF TECHNOLOGY Vol. 42, No. 1, 2008 * Evolution of Novel Studies on Thermofluid Dynamics with Combustion Hiroyuki SATO* This paper mentions the recent development of combustion
ΚΛΙΜΑΤΟΛΟΓΙΑ CLIMATOLOGY
 10 ο COMECAP 2010, Πρακτικά Συνεδρίου, Πάτρα 10 th COMECAP 2010, Proceedings, Patras, Greece ΚΛΙΜΑΤΟΛΟΓΙΑ CLIMATOLOGY ΥΧΡΟΥΡΟΝΗΚΖ ΓΗΑΚΤΜΑΝΖ ΣΧΝ ΖΛΔΚΣΡΗΚΧΝ ΔΚΚΔΝΧΔΧΝ ΣΖΝ ΔΛΛΑΓΑ ΓΗΑ ΣΖΝ ΥΡΟΝΗΚΖ ΠΔΡΗΟΓΟ 1998-2007
10 ο COMECAP 2010, Πρακτικά Συνεδρίου, Πάτρα 10 th COMECAP 2010, Proceedings, Patras, Greece ΚΛΙΜΑΤΟΛΟΓΙΑ CLIMATOLOGY ΥΧΡΟΥΡΟΝΗΚΖ ΓΗΑΚΤΜΑΝΖ ΣΧΝ ΖΛΔΚΣΡΗΚΧΝ ΔΚΚΔΝΧΔΧΝ ΣΖΝ ΔΛΛΑΓΑ ΓΗΑ ΣΖΝ ΥΡΟΝΗΚΖ ΠΔΡΗΟΓΟ 1998-2007
Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής"
 Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής" Βιομηχανική Ρομποτική «Τοπική παραμετροποίηση πινάκων στροφής, γωνίες
Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής" Βιομηχανική Ρομποτική «Τοπική παραμετροποίηση πινάκων στροφής, γωνίες
The straight-line navigation control of an agricultural tractor subject to input saturation
 30 10 013 10 DOI: 10.7641/CTA.013.30034 Control Theory & Applications Vol. 30 No. 10 Oct. 013 1,, 1, 1, 3 (1., 1013;., 10096; 3., 10031 ) :,,,,,,,, :,, : ; ; ; : TP73 : A The straight-line navigation control
30 10 013 10 DOI: 10.7641/CTA.013.30034 Control Theory & Applications Vol. 30 No. 10 Oct. 013 1,, 1, 1, 3 (1., 1013;., 10096; 3., 10031 ) :,,,,,,,, :,, : ; ; ; : TP73 : A The straight-line navigation control
Development and Verification of Multi-Level Sub- Meshing Techniques of PEEC to Model High- Speed Power and Ground Plane-Pairs of PFBS
 Rose-Hulman Institute of Technology Rose-Hulman Scholar Graduate Theses - Electrical and Computer Engineering Graduate Theses Spring 5-2015 Development and Verification of Multi-Level Sub- Meshing Techniques
Rose-Hulman Institute of Technology Rose-Hulman Scholar Graduate Theses - Electrical and Computer Engineering Graduate Theses Spring 5-2015 Development and Verification of Multi-Level Sub- Meshing Techniques
توربين گازي 150 مگاواتي حين تغييرات بار توسط کيم و همکاران 1 مورد
 امیرکبیر مکانیک مهندسی نشریه 370 تا 363 صفحات 1396 سال 2 شماره 49 دوره امیرکبیر مکانیک مهندسی نشریه DOI: 10.22060/mej.2016.621 MGT-70 گازي توربين راهاندازي شبيهسازي و مدلسازي 2 عباسي اسحاق 1* اخگري رسول
امیرکبیر مکانیک مهندسی نشریه 370 تا 363 صفحات 1396 سال 2 شماره 49 دوره امیرکبیر مکانیک مهندسی نشریه DOI: 10.22060/mej.2016.621 MGT-70 گازي توربين راهاندازي شبيهسازي و مدلسازي 2 عباسي اسحاق 1* اخگري رسول
Supplementary Materials for Evolutionary Multiobjective Optimization Based Multimodal Optimization: Fitness Landscape Approximation and Peak Detection
 IEEE TRANSACTIONS ON EVOLUTIONARY COMPUTATION, VOL. XX, NO. X, XXXX XXXX Supplementary Materials for Evolutionary Multiobjective Optimization Based Multimodal Optimization: Fitness Landscape Approximation
IEEE TRANSACTIONS ON EVOLUTIONARY COMPUTATION, VOL. XX, NO. X, XXXX XXXX Supplementary Materials for Evolutionary Multiobjective Optimization Based Multimodal Optimization: Fitness Landscape Approximation
Solving an Air Conditioning System Problem in an Embodiment Design Context Using Constraint Satisfaction Techniques
 Solving an Air Conditioning System Problem in an Embodiment Design Context Using Constraint Satisfaction Techniques Raphael Chenouard, Patrick Sébastian, Laurent Granvilliers To cite this version: Raphael
Solving an Air Conditioning System Problem in an Embodiment Design Context Using Constraint Satisfaction Techniques Raphael Chenouard, Patrick Sébastian, Laurent Granvilliers To cite this version: Raphael
CorV CVAC. CorV TU317. 1
 30 8 JOURNAL OF VIBRATION AND SHOCK Vol. 30 No. 8 2011 1 2 1 2 2 1. 100044 2. 361005 TU317. 1 A Structural damage detection method based on correlation function analysis of vibration measurement data LEI
30 8 JOURNAL OF VIBRATION AND SHOCK Vol. 30 No. 8 2011 1 2 1 2 2 1. 100044 2. 361005 TU317. 1 A Structural damage detection method based on correlation function analysis of vibration measurement data LEI
ROBOT. Mater-slave Control Technology for Abdominal Minimally Invasive Surgery Robot and Its Experiments
 34 6 12 11 ROBOT Vol.34, No.6 Nov., 12 DOI.3724/SP.J.1218.12.646 1,2 1 1 1 2 1. 158 2. 151 TP241 A 2-446(12)-6-646-6 Mater-slave Control Technology for Abdominal Minimally Invasive Surgery Robot and Its
34 6 12 11 ROBOT Vol.34, No.6 Nov., 12 DOI.3724/SP.J.1218.12.646 1,2 1 1 1 2 1. 158 2. 151 TP241 A 2-446(12)-6-646-6 Mater-slave Control Technology for Abdominal Minimally Invasive Surgery Robot and Its
Secure Cyberspace: New Defense Capabilities
 Secure Cyberspace: New Defense Capabilities Dimitris Gritzalis November 1999 Υπουργείο Εθνικής Αμυνας Διημερίδα Πληροφορικής και Επιχειρησιακής Ερευνας Αθήνα, 2-3 Νοέμβρη 1999 Ασφάλεια στον Κυβερνοχώρο:
Secure Cyberspace: New Defense Capabilities Dimitris Gritzalis November 1999 Υπουργείο Εθνικής Αμυνας Διημερίδα Πληροφορικής και Επιχειρησιακής Ερευνας Αθήνα, 2-3 Νοέμβρη 1999 Ασφάλεια στον Κυβερνοχώρο:
Stabilization of stock price prediction by cross entropy optimization
 ,,,,,,,, Stabilization of stock prediction by cross entropy optimization Kazuki Miura, Hideitsu Hino and Noboru Murata Prediction of series data is a long standing important problem Especially, prediction
,,,,,,,, Stabilization of stock prediction by cross entropy optimization Kazuki Miura, Hideitsu Hino and Noboru Murata Prediction of series data is a long standing important problem Especially, prediction
ΒΙΟΓΡΑΦΙΚΟ ΣΗΜΕΙΩΜΑ 1. ΠΡΟΣΩΠΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ
 ΒΙΟΓΡΑΦΙΚΟ ΣΗΜΕΙΩΜΑ 1. ΠΡΟΣΩΠΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ Επώνυμο : Δρ. ΓΚΡΙΤΖΑΠΗΣ Όνομα : ΔΗΜΗΤΡΙΟΣ Όνομα Πατέρα : Νικόλαος Όνομα Μητέρας : Άννα Ημερομηνία Γέννησης : 16 Σεπτεμβρίου 1973 (16/09/1973) Τόπος Γέννησης
ΒΙΟΓΡΑΦΙΚΟ ΣΗΜΕΙΩΜΑ 1. ΠΡΟΣΩΠΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ Επώνυμο : Δρ. ΓΚΡΙΤΖΑΠΗΣ Όνομα : ΔΗΜΗΤΡΙΟΣ Όνομα Πατέρα : Νικόλαος Όνομα Μητέρας : Άννα Ημερομηνία Γέννησης : 16 Σεπτεμβρίου 1973 (16/09/1973) Τόπος Γέννησης
ΣΧΕ ΙΑΣΜΟΣ ΚΑΙ ΑΝΑΠΤΥΞΗ ΟΛΟΚΛΗΡΩΜΕΝΟΥ ΡΟΜΠΟΤΙΚΟΥ ΣΥΣΤΗΜΑΤΟΣ ΧΑΜΗΛΟΥ ΚΟΣΤΟΥΣ ΓΙΑ ΤΗ Ι ΑΣΚΑΛΙΑ ΤΗΣ ΡΟΜΠΟΤΙΚΗΣ
 ΣΧΕ ΙΑΣΜΟΣ ΚΑΙ ΑΝΑΠΤΥΞΗ ΟΛΟΚΛΗΡΩΜΕΝΟΥ ΡΟΜΠΟΤΙΚΟΥ ΣΥΣΤΗΜΑΤΟΣ ΧΑΜΗΛΟΥ ΚΟΣΤΟΥΣ ΓΙΑ ΤΗ Ι ΑΣΚΑΛΙΑ ΤΗΣ ΡΟΜΠΟΤΙΚΗΣ Θωµ. Σακάρος,. Τσόντος, ρ. Γ. Φουσκιτάκης, ρ. Λ. οϊτσίδης Τµήµα Ηλεκτρονικής, Τεχνολογικό Εκπαιδευτικό
ΣΧΕ ΙΑΣΜΟΣ ΚΑΙ ΑΝΑΠΤΥΞΗ ΟΛΟΚΛΗΡΩΜΕΝΟΥ ΡΟΜΠΟΤΙΚΟΥ ΣΥΣΤΗΜΑΤΟΣ ΧΑΜΗΛΟΥ ΚΟΣΤΟΥΣ ΓΙΑ ΤΗ Ι ΑΣΚΑΛΙΑ ΤΗΣ ΡΟΜΠΟΤΙΚΗΣ Θωµ. Σακάρος,. Τσόντος, ρ. Γ. Φουσκιτάκης, ρ. Λ. οϊτσίδης Τµήµα Ηλεκτρονικής, Τεχνολογικό Εκπαιδευτικό
Βιογραφικό σημείωμα Δρ. Ψύχας Ηρακλής - Δημήτριος
 Βιογραφικό σημείωμα Δρ. Ψύχας Ηρακλής - Δημήτριος Βιογραφικό Σημείωμα Δρ. Ψύχας Ηρακλής - Δημήτριος Σελίδα 1 Προσωπικές Πληροφορίες Επώνυμο: Ψύχας Όνομα: Ηρακλής - Δημήτριος Έτος γεννήσεως: 1987 Διεύθυνση:
Βιογραφικό σημείωμα Δρ. Ψύχας Ηρακλής - Δημήτριος Βιογραφικό Σημείωμα Δρ. Ψύχας Ηρακλής - Δημήτριος Σελίδα 1 Προσωπικές Πληροφορίες Επώνυμο: Ψύχας Όνομα: Ηρακλής - Δημήτριος Έτος γεννήσεως: 1987 Διεύθυνση:
2013 Aymeric Bethencourt et al., licensee Versita Sp. z o. o.
 1 1 2013 Aymeric Bethencourt et al., licensee Versita Sp. z o. o. This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivs license, which means that the text may be used for
1 1 2013 Aymeric Bethencourt et al., licensee Versita Sp. z o. o. This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivs license, which means that the text may be used for
ΠΡΟΤΕΙΝΟΜΕΝΑ ΘΕΜΑΤΑ ΔΙΠΛΩΜΑΤΙΚΩΝ ΕΡΓΑΣΙΩΝ ΓΙΑ ΤΟ ΕΑΡΙΝΟ ΕΞΑΜΗΝΟ Εισηγητής: Νίκος Πλόσκας Επίκουρος Καθηγητής ΤΜΠΤ
 ΠΡΟΤΕΙΝΟΜΕΝΑ ΘΕΜΑΤΑ ΔΙΠΛΩΜΑΤΙΚΩΝ ΕΡΓΑΣΙΩΝ ΓΙΑ ΤΟ ΕΑΡΙΝΟ ΕΞΑΜΗΝΟ 2018-2019 Εισηγητής: Νίκος Πλόσκας (nploskas@uowm.gr), Επίκουρος Καθηγητής ΤΜΠΤ 1. Τεχνικές μηχανικής μάθησης για τον εντοπισμό προβλημάτων
ΠΡΟΤΕΙΝΟΜΕΝΑ ΘΕΜΑΤΑ ΔΙΠΛΩΜΑΤΙΚΩΝ ΕΡΓΑΣΙΩΝ ΓΙΑ ΤΟ ΕΑΡΙΝΟ ΕΞΑΜΗΝΟ 2018-2019 Εισηγητής: Νίκος Πλόσκας (nploskas@uowm.gr), Επίκουρος Καθηγητής ΤΜΠΤ 1. Τεχνικές μηχανικής μάθησης για τον εντοπισμό προβλημάτων
supporting phase aerial phase supporting phase z 2 z T z 1 p G quardic curve curve f 2, n 2 f 1, n 1 lift-off touch-down p Z
 Enhancement of Boundary Condition Relaxation Method for D Hopping Motion Planning of Biped Robots University oftokyo Tomomichi Sugihara and Yoshihiko Nakamura Abstract Boundary Condition Relaxation method[],
Enhancement of Boundary Condition Relaxation Method for D Hopping Motion Planning of Biped Robots University oftokyo Tomomichi Sugihara and Yoshihiko Nakamura Abstract Boundary Condition Relaxation method[],
Μάθημα: Ειδικά Συστήματα Ελέγχου Πλοίου(8.3.45.8) Κεφάλαιο: Συστήματα Ελέγχου Πλοίου
 Κεφάλαιο: Συστήματα Ελέγχου Πλοίου") Μάθημα: Ειδικά Συστήματα Ελέγχου Πλοίου(8.3.45.8) Κεφάλαιο: Συστήματα Ελέγχου Πλοίου Δρ.ΓεώργιοςΠαπαλάμπρου 1 Εισαγωγή Στο παρόν κεφάλαιο παρουσιάζονται συστήματα ελέγχου πλοίων, όπως αυτόματοι πιλότοι
Μάθημα: Ειδικά Συστήματα Ελέγχου Πλοίου(8.3.45.8) Κεφάλαιο: Συστήματα Ελέγχου Πλοίου Δρ.ΓεώργιοςΠαπαλάμπρου 1 Εισαγωγή Στο παρόν κεφάλαιο παρουσιάζονται συστήματα ελέγχου πλοίων, όπως αυτόματοι πιλότοι
ΟΠΤΙΚΗ ΑΝΑΓΝΩΡΙΣΗ ΓΙΑ ΥΠΟΣΤΗΡΙΞΗ ΑΥΤΟΝΟΜΗΣ ΠΤΗΣΗΣ ΕΛΙΚΟΠΤΕΡΟΥ
 ΟΠΤΙΚΗ ΑΝΑΓΝΩΡΙΣΗ ΓΙΑ ΥΠΟΣΤΗΡΙΞΗ ΑΥΤΟΝΟΜΗΣ ΠΤΗΣΗΣ ΕΛΙΚΟΠΤΕΡΟΥ ιοµήδης Κατζουράκης 1, Νίκος Βιτζηλαίος 2, Νίκος Τσουρβελούδης 2 1 Biomechanical Engineering Group, Mechanical, Maritime and Materials Engineering,
ΟΠΤΙΚΗ ΑΝΑΓΝΩΡΙΣΗ ΓΙΑ ΥΠΟΣΤΗΡΙΞΗ ΑΥΤΟΝΟΜΗΣ ΠΤΗΣΗΣ ΕΛΙΚΟΠΤΕΡΟΥ ιοµήδης Κατζουράκης 1, Νίκος Βιτζηλαίος 2, Νίκος Τσουρβελούδης 2 1 Biomechanical Engineering Group, Mechanical, Maritime and Materials Engineering,
Εφαρμογή Υπολογιστικών Τεχνικών στην Γεωργία
 Ελληνική ημοκρατία Τεχνολογικό Εκπαιδευτικό Ίδρυμα Ηπείρου Εφαρμογή Υπολογιστικών Τεχνικών στην Γεωργία Ενότητα 4 : Εφαρμογές της Τεχνητής Νοημοσύνης στη Γεωργία(3/3) Μελετίου Γεράσιμος 1 Ανοιχτά Ακαδημαϊκά
Ελληνική ημοκρατία Τεχνολογικό Εκπαιδευτικό Ίδρυμα Ηπείρου Εφαρμογή Υπολογιστικών Τεχνικών στην Γεωργία Ενότητα 4 : Εφαρμογές της Τεχνητής Νοημοσύνης στη Γεωργία(3/3) Μελετίου Γεράσιμος 1 Ανοιχτά Ακαδημαϊκά
Ηλεκτρική Παραγωγή Και Ελεγχος Ηχητικών Σηµάτων Με Χρήση Μορφοµεταβλητών Κραµάτων Μνήµης
 Ηλεκτρική Παραγωγή Και Ελεγχος Ηχητικών Σηµάτων Με Χρήση Μορφοµεταβλητών Κραµάτων Μνήµης Σήµατα, Έλεγχος & Ροµποτική Έξυπνα Υλικά ΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΤΟΥ: ΚΟΥΤΣΙΚΟΥ ΑΠΟΣΤΟΛΟΥ του ΙΩΑΝΝΗ ΕΠΙΒΛΕΠΩΝ: ΜΑΝΕΣΗΣ
Ηλεκτρική Παραγωγή Και Ελεγχος Ηχητικών Σηµάτων Με Χρήση Μορφοµεταβλητών Κραµάτων Μνήµης Σήµατα, Έλεγχος & Ροµποτική Έξυπνα Υλικά ΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΤΟΥ: ΚΟΥΤΣΙΚΟΥ ΑΠΟΣΤΟΛΟΥ του ΙΩΑΝΝΗ ΕΠΙΒΛΕΠΩΝ: ΜΑΝΕΣΗΣ
2016 IEEE/ACM International Conference on Mobile Software Engineering and Systems
 2016 IEEE/ACM International Conference on Mobile Software Engineering and Systems Multiple User Interfaces MobileSoft'16, Multi-User Experience (MUX) S1: Insourcing S2: Outsourcing S3: Responsive design
2016 IEEE/ACM International Conference on Mobile Software Engineering and Systems Multiple User Interfaces MobileSoft'16, Multi-User Experience (MUX) S1: Insourcing S2: Outsourcing S3: Responsive design
ΚΑΤΑΣΚΕΥΑΣΤΙΚΟΣ ΤΟΜΕΑΣ
 ΚΑΤΑΡΤΙΣΗ ΜΗΤΡΩΟΥ ΕΣΩΤΕΡΙΚΩΝ & ΕΞΩΤΕΡΙΚΩΝ ΜΕΛΩΝ ΤΟΥ ΤΜΗΜΑΤΟΣ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε., ΣΤΕΦ/ΤΕΙ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΚΑΤΑΣΚΕΥΑΣΤΙΚΟΣ ΤΟΜΕΑΣ Γνωστικό Αντικείμενο: Computer Aided Design (CAD) Computer
ΚΑΤΑΡΤΙΣΗ ΜΗΤΡΩΟΥ ΕΣΩΤΕΡΙΚΩΝ & ΕΞΩΤΕΡΙΚΩΝ ΜΕΛΩΝ ΤΟΥ ΤΜΗΜΑΤΟΣ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε., ΣΤΕΦ/ΤΕΙ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΚΑΤΑΣΚΕΥΑΣΤΙΚΟΣ ΤΟΜΕΑΣ Γνωστικό Αντικείμενο: Computer Aided Design (CAD) Computer
آزمایش 8: تقویت کننده عملیاتی 2
 آزمایش 8: تقویت کننده عملیاتی 2 1-8 -مقدمه 1 تقویت کننده عملیاتی (OpAmp) داراي دو یا چند طبقه تقویت کننده تفاضلی است که خروجی- هاي هر طبقه به وروديهاي طبقه دیگر متصل شده است. در انتهاي این تقویت کننده
آزمایش 8: تقویت کننده عملیاتی 2 1-8 -مقدمه 1 تقویت کننده عملیاتی (OpAmp) داراي دو یا چند طبقه تقویت کننده تفاضلی است که خروجی- هاي هر طبقه به وروديهاي طبقه دیگر متصل شده است. در انتهاي این تقویت کننده
A research on the influence of dummy activity on float in an AOA network and its amendments
 2008 6 6 :100026788 (2008) 0620106209,, (, 102206) : NP2hard,,..,.,,.,.,. :,,,, : TB11411 : A A research on the influence of dummy activity on float in an AOA network and its amendments WANG Qiang, LI
2008 6 6 :100026788 (2008) 0620106209,, (, 102206) : NP2hard,,..,.,,.,.,. :,,,, : TB11411 : A A research on the influence of dummy activity on float in an AOA network and its amendments WANG Qiang, LI
Η Διαδραστική Τηλεδιάσκεψη στο Σύγχρονο Σχολείο: Πλαίσιο Διδακτικού Σχεδιασμού
 Η Διαδραστική Τηλεδιάσκεψη στο Σύγχρονο Σχολείο: Πλαίσιο Διδακτικού Σχεδιασμού Παναγιώτης Αναστασιάδης Πανεπιστήμιο Κρήτης panas@ edc.uoc.gr ΠΕΡΙΛΗΨΗ Οι προηγμένες τεχνολογίες σύγχρονης μετάδοσης και ιδιαίτερα
Η Διαδραστική Τηλεδιάσκεψη στο Σύγχρονο Σχολείο: Πλαίσιο Διδακτικού Σχεδιασμού Παναγιώτης Αναστασιάδης Πανεπιστήμιο Κρήτης panas@ edc.uoc.gr ΠΕΡΙΛΗΨΗ Οι προηγμένες τεχνολογίες σύγχρονης μετάδοσης και ιδιαίτερα
Re-Pair n. Re-Pair. Re-Pair. Re-Pair. Re-Pair. (Re-Merge) Re-Merge. Sekine [4, 5, 8] (highly repetitive text) [2] Re-Pair. Blocked-Repair-VF [7]
![Re-Pair n. Re-Pair. Re-Pair. Re-Pair. Re-Pair. (Re-Merge) Re-Merge. Sekine [4, 5, 8] (highly repetitive text) [2] Re-Pair. Blocked-Repair-VF [7]](/thumbs/78/77313882.jpg "Re-Pair n. Re-Pair. Re-Pair. Re-Pair. Re-Pair. (Re-Merge) Re-Merge. Sekine [4, 5, 8] (highly repetitive text) [2] Re-Pair. Blocked-Repair-VF [7]") Re-Pair 1 1 Re-Pair Re-Pair Re-Pair Re-Pair 1. Larsson Moffat [1] Re-Pair Re-Pair (Re-Pair) ( ) (highly repetitive text) [2] Re-Pair [7] Re-Pair Re-Pair n O(n) O(n) 1 Hokkaido University, Graduate School
Re-Pair 1 1 Re-Pair Re-Pair Re-Pair Re-Pair 1. Larsson Moffat [1] Re-Pair Re-Pair (Re-Pair) ( ) (highly repetitive text) [2] Re-Pair [7] Re-Pair Re-Pair n O(n) O(n) 1 Hokkaido University, Graduate School
Fragility analysis for control systems
 3 1 213 1 DOI: 1.7641/CTA.213.2294 Control Theory & Applications Vol. 3 No. 1 Jan. 213 1, 1, 2, 1, 1 (1., 151; 2., 158) :. ( 1, j), ( 1, j)., Bode...,,,, Bode. : ; Bode ; ; ; : TP273 : A Fragility analysis
3 1 213 1 DOI: 1.7641/CTA.213.2294 Control Theory & Applications Vol. 3 No. 1 Jan. 213 1, 1, 2, 1, 1 (1., 151; 2., 158) :. ( 1, j), ( 1, j)., Bode...,,,, Bode. : ; Bode ; ; ; : TP273 : A Fragility analysis
)7( 4- Viscose 5- Receptance 6- Response Model. 1- Noise, Vibration, Harshness 2- Multi-Mass Model 3- Laser
7( 4- Viscose 5- Receptance 6- Response Model. 1- Noise, Vibration, Harshness 2- Multi-Mass Model 3- Laser") و طيار چرخ ميللنگ مجموعة تجربي و نظري ارتعاش تحليل تسمه چرخ * استهري مهدي صنعت و علم دانشگاه کارشناسي دانشجوي estahrimahdi@yahoo.com رمضاني اصغر صنعت و علم دانشگاه استاديار aramezani@iust.ac.ir سخايي بابک
و طيار چرخ ميللنگ مجموعة تجربي و نظري ارتعاش تحليل تسمه چرخ * استهري مهدي صنعت و علم دانشگاه کارشناسي دانشجوي estahrimahdi@yahoo.com رمضاني اصغر صنعت و علم دانشگاه استاديار aramezani@iust.ac.ir سخايي بابک
ΒΙΟΓΡΑΦΙΚΟ ΣΗΜΕΙΩΜΑ 1. ΠΡΟΣΩΠΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ
 ΒΙΟΓΡΑΦΙΚΟ ΣΗΜΕΙΩΜΑ 1. ΠΡΟΣΩΠΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ Επώνυμο : Δρ. ΓΚΡΙΤΖΑΠΗΣ Όνομα : ΔΗΜΗΤΡΙΟΣ Όνομα Πατέρα : Νικόλαος Όνομα Μητέρας : Άννα Ημερομηνία Γέννησης : 16 Σεπτεμβρίου 1973 (16/09/1973) Τόπος Γέννησης
ΒΙΟΓΡΑΦΙΚΟ ΣΗΜΕΙΩΜΑ 1. ΠΡΟΣΩΠΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ Επώνυμο : Δρ. ΓΚΡΙΤΖΑΠΗΣ Όνομα : ΔΗΜΗΤΡΙΟΣ Όνομα Πατέρα : Νικόλαος Όνομα Μητέρας : Άννα Ημερομηνία Γέννησης : 16 Σεπτεμβρίου 1973 (16/09/1973) Τόπος Γέννησης
Development of the Nursing Program for Rehabilitation of Woman Diagnosed with Breast Cancer
 Development of the Nursing Program for Rehabilitation of Woman Diagnosed with Breast Cancer Naomi Morota Newman M Key Words woman diagnosed with breast cancer, rehabilitation nursing care program, the
Development of the Nursing Program for Rehabilitation of Woman Diagnosed with Breast Cancer Naomi Morota Newman M Key Words woman diagnosed with breast cancer, rehabilitation nursing care program, the
Κλασσική Θεωρία Ελέγχου
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 6: Αντίστροφος μετασχηματισμός Laplace Νίκος Καραμπετάκης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 6: Αντίστροφος μετασχηματισμός Laplace Νίκος Καραμπετάκης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης
ΜΕΘΟΔΟΙ ΥΠΟΛΟΓΙΣΜΟΥ ΤΗΣ ΖΕΝΙΘΕΙΑΣ ΤΡΟΠΟΣΦΑΙΡΙΚΗΣ ΥΣΤΕΡΗΣΗΣ ΣΕ ΜΟΝΙΜΟΥΣ ΣΤΑΘΜΟΥΣ GNSS
 ΤΟΜΕΑΣ ΓΕΩΔΑΙΣΙΑΣ ΚΑΙ ΤΟΠΟΓΡΑΦΙΑΣ ΤΕΙ ΣΕΡΡΩΝ, ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ Τμήμα Γεωπληροφορικής & Τοπογραφίας ΜΕΘΟΔΟΙ ΥΠΟΛΟΓΙΣΜΟΥ ΤΗΣ ΖΕΝΙΘΕΙΑΣ ΤΡΟΠΟΣΦΑΙΡΙΚΗΣ ΥΣΤΕΡΗΣΗΣ ΣΕ ΜΟΝΙΜΟΥΣ ΣΤΑΘΜΟΥΣ GNSS ΣΥΜΕΩΝ
ΤΟΜΕΑΣ ΓΕΩΔΑΙΣΙΑΣ ΚΑΙ ΤΟΠΟΓΡΑΦΙΑΣ ΤΕΙ ΣΕΡΡΩΝ, ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ Τμήμα Γεωπληροφορικής & Τοπογραφίας ΜΕΘΟΔΟΙ ΥΠΟΛΟΓΙΣΜΟΥ ΤΗΣ ΖΕΝΙΘΕΙΑΣ ΤΡΟΠΟΣΦΑΙΡΙΚΗΣ ΥΣΤΕΡΗΣΗΣ ΣΕ ΜΟΝΙΜΟΥΣ ΣΤΑΘΜΟΥΣ GNSS ΣΥΜΕΩΝ
Maude 6. Maude [1] UIUC J. Meseguer. Maude. Maude SRI SRI. Maude. AC (Associative-Commutative) Maude. Maude Meseguer OBJ LTL SPIN
![Maude 6. Maude [1] UIUC J. Meseguer. Maude. Maude SRI SRI. Maude. AC (Associative-Commutative) Maude. Maude Meseguer OBJ LTL SPIN](/thumbs/84/90701332.jpg "Maude 6. Maude [1] UIUC J. Meseguer. Maude. Maude SRI SRI. Maude. AC (Associative-Commutative) Maude. Maude Meseguer OBJ LTL SPIN") 78 Maude 1 Maude [1] UIUC J. Meseguer ( 1 ) ( ) Maude Maude SRI 90 UIUC SRI Maude SRI S. Eker C++ Maude 2 Maude Meseguer OBJ 1983-84 OBJ2[3] OBJ Maude OBJ 1 CafeOBJ 3 Maude 4 Maude CafeOBJ Maude: A Computer
78 Maude 1 Maude [1] UIUC J. Meseguer ( 1 ) ( ) Maude Maude SRI 90 UIUC SRI Maude SRI S. Eker C++ Maude 2 Maude Meseguer OBJ 1983-84 OBJ2[3] OBJ Maude OBJ 1 CafeOBJ 3 Maude 4 Maude CafeOBJ Maude: A Computer
ﻞﻜﺷ V لﺎﺼﺗا ﺎﻳ زﺎﺑ ﺚﻠﺜﻣ لﺎﺼﺗا هﺎﮕﺸﻧاد نﺎﺷﺎﻛ / دﻮﺷ
 1 مبحث بيست و چهارم: اتصال مثلث باز (- اتصال اسكات آرايش هاي خاص ترانسفورماتورهاي سه فاز دانشگاه كاشان / دانشكده مهندسي/ گروه مهندسي برق / درس ماشين هاي الكتريكي / 3 اتصال مثلث باز يا اتصال شكل فرض كنيد
1 مبحث بيست و چهارم: اتصال مثلث باز (- اتصال اسكات آرايش هاي خاص ترانسفورماتورهاي سه فاز دانشگاه كاشان / دانشكده مهندسي/ گروه مهندسي برق / درس ماشين هاي الكتريكي / 3 اتصال مثلث باز يا اتصال شكل فرض كنيد
Utkin Walcott & Zak ¼
 uk j Shft-Senorle Speed Control of the Permnent Mgnet Synchronou Motor under Periodiclly Time-Vrying od ƒf NSC 87--E-009-07 86 8 87 7 knping @cc.nctu.edu.tw o uk j ¼v kƒ Utkin ¼ j uk j ¼ j j¼ uk j j ukj¼
uk j Shft-Senorle Speed Control of the Permnent Mgnet Synchronou Motor under Periodiclly Time-Vrying od ƒf NSC 87--E-009-07 86 8 87 7 knping @cc.nctu.edu.tw o uk j ¼v kƒ Utkin ¼ j uk j ¼ j j¼ uk j j ukj¼
ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ. του φοιτητή του Τμήματος Ηλεκτρολόγων Μηχανικών και. Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του. Πανεπιστημίου Πατρών
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΟΜΗΧΑΝΙΚΗΣ ΜΕΤΑΤΡΟΠΗΣ ΕΝΕΡΓΕΙΑΣ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ του φοιτητή του
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΥΣΤΗΜΑΤΩΝ ΗΛΕΚΤΡΙΚΗΣ ΕΝΕΡΓΕΙΑΣ ΕΡΓΑΣΤΗΡΙΟ ΗΛΕΚΤΡΟΜΗΧΑΝΙΚΗΣ ΜΕΤΑΤΡΟΠΗΣ ΕΝΕΡΓΕΙΑΣ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ του φοιτητή του
ΕΚΘΕΣΗ ΠΡΟΟ ΟΥ Υποψήφιος ιδάκτορας: Ιωάννης Κυριαζής
 ΕΚΘΕΣΗ ΠΡΟΟ ΟΥ Υποψήφιος ιδάκτορας: Ιωάννης Κυριαζής Το πρόβληµα Το πρόβληµα που καλείται ο υποψήφιος διδάκτορας να επιλύσει είναι η εξαγωγή χαρακτηριστικών (feature extraction) από ένα 3 αντικείµενο,
ΕΚΘΕΣΗ ΠΡΟΟ ΟΥ Υποψήφιος ιδάκτορας: Ιωάννης Κυριαζής Το πρόβληµα Το πρόβληµα που καλείται ο υποψήφιος διδάκτορας να επιλύσει είναι η εξαγωγή χαρακτηριστικών (feature extraction) από ένα 3 αντικείµενο,
From Secure e-computing to Trusted u-computing. Dimitris Gritzalis
 From Secure e-computing to Trusted u-computing Dimitris Gritzalis November 2009 11 ο ICT Forum Αθήνα, 4-5 Νοέμβρη 2009 Από το Secure e-computing στο Trusted u-computing Καθηγητής Δημήτρης Γκρίτζαλης (dgrit@aueb.gr,
From Secure e-computing to Trusted u-computing Dimitris Gritzalis November 2009 11 ο ICT Forum Αθήνα, 4-5 Νοέμβρη 2009 Από το Secure e-computing στο Trusted u-computing Καθηγητής Δημήτρης Γκρίτζαλης (dgrit@aueb.gr,
Based Modeling: Applications of Genetic Programming and Self-Organizing Maps.
 Δρ Καμπουρίδης Μιχαήλ, PhD, MSc, BSc Πανεπιστήμιου του Κεντ E-mail: M.Kampouridis@kent.ac.uk Τμήμα Πληροφορικής Ιστοσελίδα http://kampouridis.net Μέντγουεϊ Τηλ: (0) 1634 88 8837 T.K.: ME4 4AG ΠΡΟΦΙΛ Είμαι
Δρ Καμπουρίδης Μιχαήλ, PhD, MSc, BSc Πανεπιστήμιου του Κεντ E-mail: M.Kampouridis@kent.ac.uk Τμήμα Πληροφορικής Ιστοσελίδα http://kampouridis.net Μέντγουεϊ Τηλ: (0) 1634 88 8837 T.K.: ME4 4AG ΠΡΟΦΙΛ Είμαι
P P Ó P. r r t r r r s 1. r r ó t t ó rr r rr r rí st s t s. Pr s t P r s rr. r t r s s s é 3 ñ
 P P Ó P r r t r r r s 1 r r ó t t ó rr r rr r rí st s t s Pr s t P r s rr r t r s s s é 3 ñ í sé 3 ñ 3 é1 r P P Ó P str r r r t é t r r r s 1 t r P r s rr 1 1 s t r r ó s r s st rr t s r t s rr s r q s
P P Ó P r r t r r r s 1 r r ó t t ó rr r rr r rí st s t s Pr s t P r s rr r t r s s s é 3 ñ í sé 3 ñ 3 é1 r P P Ó P str r r r t é t r r r s 1 t r P r s rr 1 1 s t r r ó s r s st rr t s r t s rr s r q s
ΗΜΟΣΙΕΥΣΕΣ ΣΕ ΙΕΘΝΗ ΠΕΡΙΟ ΙΚΑ [1] C. Bouras, A. Gkamas, G. Kioumourtzis, Adaptive smooth multicast protocol for multimedia transmission:
![ΗΜΟΣΙΕΥΣΕΣ ΣΕ ΙΕΘΝΗ ΠΕΡΙΟ ΙΚΑ [1] C. Bouras, A. Gkamas, G. Kioumourtzis, Adaptive smooth multicast protocol for multimedia transmission:](/thumbs/33/16178878.jpg "ΗΜΟΣΙΕΥΣΕΣ ΣΕ ΙΕΘΝΗ ΠΕΡΙΟ ΙΚΑ [1] C. Bouras, A. Gkamas, G. Kioumourtzis, Adaptive smooth multicast protocol for multimedia transmission:") ΗΜΟΣΙΕΥΣΕΣ ΣΕ ΙΕΘΝΗ ΠΕΡΙΟ ΙΚΑ [1] C. Bouras, A. Gkamas, G. Kioumourtzis, Adaptive smooth multicast protocol for multimedia transmission: Implementation details and performance evaluation, International
ΗΜΟΣΙΕΥΣΕΣ ΣΕ ΙΕΘΝΗ ΠΕΡΙΟ ΙΚΑ [1] C. Bouras, A. Gkamas, G. Kioumourtzis, Adaptive smooth multicast protocol for multimedia transmission: Implementation details and performance evaluation, International
Εφαρμογή Υπολογιστικών Τεχνικών στην Γεωργία
 Ελληνική ημοκρατία Τεχνολογικό Εκπαιδευτικό Ίδρυμα Ηπείρου Εφαρμογή Υπολογιστικών Τεχνικών στην Γεωργία Ενότητα 3 : Εφαρμογές της Τεχνητής Νοημοσύνης στη Γεωργία (2/3) Μελετίου Γεράσιμος 1 Ανοιχτά Ακαδημαϊκά
Ελληνική ημοκρατία Τεχνολογικό Εκπαιδευτικό Ίδρυμα Ηπείρου Εφαρμογή Υπολογιστικών Τεχνικών στην Γεωργία Ενότητα 3 : Εφαρμογές της Τεχνητής Νοημοσύνης στη Γεωργία (2/3) Μελετίου Γεράσιμος 1 Ανοιχτά Ακαδημαϊκά
ΔΙΠΛΩΜΑΤΙΚΕΣ ΕΡΓΑΣΙΕΣ ΠΜΣ «ΠΛΗΡΟΦΟΡΙΚΗ & ΕΠΙΚΟΙΝΩΝΙΕς» OSWINDS RESEARCH GROUP
 ΔΙΠΛΩΜΑΤΙΚΕΣ ΕΡΓΑΣΙΕΣ ΠΜΣ «ΠΛΗΡΟΦΟΡΙΚΗ & ΕΠΙΚΟΙΝΩΝΙΕς» OSWINDS RESEARCH GROUP 2015-2016 http://oswinds.csd.auth.gr/pms-theses201516 Ανάλυση επιπέδου προστασίας και ανωνυμοποίησηπροσωπικών δεδομένων κίνησης
ΔΙΠΛΩΜΑΤΙΚΕΣ ΕΡΓΑΣΙΕΣ ΠΜΣ «ΠΛΗΡΟΦΟΡΙΚΗ & ΕΠΙΚΟΙΝΩΝΙΕς» OSWINDS RESEARCH GROUP 2015-2016 http://oswinds.csd.auth.gr/pms-theses201516 Ανάλυση επιπέδου προστασίας και ανωνυμοποίησηπροσωπικών δεδομένων κίνησης
Journal of South China University of Technology Natural Science Edition. ADAMS-Matlab /Simulink . 1. f θ = v fsin γ + l rγ
 44 12 2016 12 Journal of South China University of Technology Natural Science Edition Vol 44 No 12 December 2016 1000-565X201612-0074-07 * 100083 ADAMS ADAMS-Matlab /Simulink 10% 90% U461 1 doi10 3969
44 12 2016 12 Journal of South China University of Technology Natural Science Edition Vol 44 No 12 December 2016 1000-565X201612-0074-07 * 100083 ADAMS ADAMS-Matlab /Simulink 10% 90% U461 1 doi10 3969
[2] T.S.G. Peiris and R.O. Thattil, An Alternative Model to Estimate Solar Radiation
![[2] T.S.G. Peiris and R.O. Thattil, An Alternative Model to Estimate Solar Radiation](/thumbs/74/71129035.jpg "[2] T.S.G. Peiris and R.O. Thattil, An Alternative Model to Estimate Solar Radiation") References [1] B.V.R. Punyawardena and Don Kulasiri, Stochastic Simulation of Solar Radiation from Sunshine Duration in Srilanka [2] T.S.G. Peiris and R.O. Thattil, An Alternative Model to Estimate Solar
References [1] B.V.R. Punyawardena and Don Kulasiri, Stochastic Simulation of Solar Radiation from Sunshine Duration in Srilanka [2] T.S.G. Peiris and R.O. Thattil, An Alternative Model to Estimate Solar
Το άτομο του Υδρογόνου
 Το άτομο του Υδρογόνου Δυναμικό Coulomb Εξίσωση Schrödinger h e (, r, ) (, r, ) E (, r, ) m ψ θφ r ψ θφ = ψ θφ Συνθήκες ψ(, r θφ, ) = πεπερασμένη ψ( r ) = 0 ψ(, r θφ, ) =ψ(, r θφ+, ) π Επιτρεπτές ενέργειες
Το άτομο του Υδρογόνου Δυναμικό Coulomb Εξίσωση Schrödinger h e (, r, ) (, r, ) E (, r, ) m ψ θφ r ψ θφ = ψ θφ Συνθήκες ψ(, r θφ, ) = πεπερασμένη ψ( r ) = 0 ψ(, r θφ, ) =ψ(, r θφ+, ) π Επιτρεπτές ενέργειες
AC Servo Motor Based Position Sensorless Control System Making Use of Springs
 Extended Summary pp.987 992 AC Servo Motor Based Position Sensorless Control System Making Use of Springs Akira Shimada Senior Member (Dept. of Electrical System Engineering, Polytechnic University) Yu
Extended Summary pp.987 992 AC Servo Motor Based Position Sensorless Control System Making Use of Springs Akira Shimada Senior Member (Dept. of Electrical System Engineering, Polytechnic University) Yu
1 (forward modeling) 2 (data-driven modeling) e- Quest EnergyPlus DeST 1.1. {X t } ARMA. S.Sp. Pappas [4]
![1 (forward modeling) 2 (data-driven modeling) e- Quest EnergyPlus DeST 1.1. {X t } ARMA. S.Sp. Pappas [4]](/thumbs/91/106768733.jpg "1 (forward modeling) 2 (data-driven modeling) e- Quest EnergyPlus DeST 1.1. {X t } ARMA. S.Sp. Pappas [4]") 212 2 ( 4 252 ) No.2 in 212 (Total No.252 Vol.4) doi 1.3969/j.issn.1673-7237.212.2.16 STANDARD & TESTING 1 2 2 (1. 2184 2. 2184) CensusX12 ARMA ARMA TU111.19 A 1673-7237(212)2-55-5 Time Series Analysis
212 2 ( 4 252 ) No.2 in 212 (Total No.252 Vol.4) doi 1.3969/j.issn.1673-7237.212.2.16 STANDARD & TESTING 1 2 2 (1. 2184 2. 2184) CensusX12 ARMA ARMA TU111.19 A 1673-7237(212)2-55-5 Time Series Analysis
MIDI [8] MIDI. [9] Hsu [1], [2] [10] Salamon [11] [5] Song [6] Sony, Minato, Tokyo , Japan a) b)
![MIDI [8] MIDI. [9] Hsu [1], [2] [10] Salamon [11] [5] Song [6] Sony, Minato, Tokyo , Japan a) b)](/thumbs/93/113459486.jpg "MIDI [8] MIDI. [9] Hsu [1], [2] [10] Salamon [11] [5] Song [6] Sony, Minato, Tokyo , Japan a) b)") 1,a) 1,b) 1,c) 1. MIDI [1], [2] U/D/S 3 [3], [4] 1 [5] Song [6] 1 Sony, Minato, Tokyo 108 0075, Japan a) Emiru.Tsunoo@jp.sony.com b) AkiraB.Inoue@jp.sony.com c) Masayuki.Nishiguchi@jp.sony.com MIDI [7]
1,a) 1,b) 1,c) 1. MIDI [1], [2] U/D/S 3 [3], [4] 1 [5] Song [6] 1 Sony, Minato, Tokyo 108 0075, Japan a) Emiru.Tsunoo@jp.sony.com b) AkiraB.Inoue@jp.sony.com c) Masayuki.Nishiguchi@jp.sony.com MIDI [7]