FACTS Flexible AC Transmission Systems
|
|
|
- Ειδοθεα Αναγνώστου
- 8 χρόνια πριν
- Προβολές:
Transcript

1 انعطافپذير AC انرژي انتقال سيستمهاي FACTS Flexible AC Transmission Systems
2 ادوات FACTS خالصه درس 1- مشکالت خط انتقال شامل موارد زیر است: A( مشکالت بی باری )افزایش ولتاژ انتهای خط - کاهش پایداری( B( مشکالت بار داری )افت ولتاژ کاهش قدرت قابل انتقال( C( فروپاشی ولتاژ و ناپایداری ولتاژ D( نوسانات توان و زاویه بر اثر تغییرات کوچک E( ناپایداری گذرا بر اثر تغییرات کوچک و شدید که این مشکالت با افزایش طول خط شدت می یابند.
3 2- برای حل این مشکالت باید بتوان ولتاژ توان اکتیوو توان راکتیو را بصورت لحظه ای کنترل نمود. 3- اولین وسایلی که به حل این مشکل با اهداف فوق پرداختند جبران کننده های متداول بودند که عبارتند از: a( جبران کننده موازی)خازن ها راکتورها( b( جبران کننده سری)خازن سری( phase shifter فاز متداول c (جابجاگر 4 -چون وسائل فوق قادر به کنترل لحظه ای نبوده و فقط پله ای عمل می کنند الزم است که ادواتی که کنترل های فوق را جداگانه یا همزمان به صورت لحظه ای انجام می دهند معرفی شوند. ادوات FACTS با این هدف ظهور کردند.
4 و اکتیو توان ولتاژ کنترل برای FACTS ادوات 5- شده ذکر مشکالت حل نتیجه در و راکتیو توان شدند: معرفی نسل دو در خطوط تریستوری کنترل بر مبتنی ادوات : اول نسل a( Thyristor Controlled Devices استاتیک کانورترهای بر مبتنی :ادوات دوم نسل b( Static Converter Based Devices عملکرد ساختمان ادوات این انواع درس این 6 -در گیرد. می قرار بحث مورد آنها کاربرد و مدل
5 بارگذاری: یا و توان انتقال های محدودیت حرارتی 1 -محدوديت الکتريک 2 -دي 3- پايداري به facts ادوات در توانند می مبدلها موازي سري يا و موازي سري صورت گيرد. قرار
6 فهرست مطالب FACTS فصل 1- کنترل انتقال توان و نیاز به ادوات فصل 2- کنترل کننده های مبتنی بر کلیدهای تریستوری شامل, TCSC SVC و جابجاگر فاز تریستوری یا کانورتری فصل 3- کنترل کننده های FACTS مبتنی بر کانورترها SVS (synchronous voltage source) STATCOM (static compensator) SSSC (static synchronous series compensator) UPFC (unified power flow controller) IPFC (interline power flow controller)
7
8
9 FACTS ادوات به نیاز و توان انتقال کنترل اول: فصل مقدمه از: عبارتست انتقال سیستم یک در انتقالی قدرت رابطه Vs Vr P Sinδ ZoSinӨ آن: در که Zo (L C) β w. (L C)β.a Ө a = خط طول
10
11 از: عبارتست Natural Load طبیعی بار تلفات بدون خط در Vo² Po= نامی Vo= Vs = Vr ولتاژ Zo فاز هم آن با خط وجریان بوده ثابت خط در ولتاژ اندازه توان این در است. مصرفی قدرت با خط )خازنی( تولیدی راکتیو قدرت توانی چنین در است. مساوی آن )سلفی(. است صفر Q انتقالی راکتیو توان نماید. می عبور خط از راکتیو توان اجبارا دیگر های بار در در بار چون و است طبیعی بار خط از انتقالی توان بهترین این بنابر بار به را عبوری بار لحظه هر در است بهتر است متغیر روز شبانه طول کنیم. تبدیل طبیعی
12 : کوتاه خط در Sinθ=θ=β a=w a (L C) Zo θ=wa (L C) (L C)=wal=WL=Xl=X بود: خواهد زیر بصورت توان انتقال معادله Vs Vr V ² P Sinδ= Sinδ X X Vs V ² Q = ( Vs Vr cosδ) = (1 cosδ) X X است. شده صرفنظر خط خازنی ظرفیت از کوتاه خط در
13
14 2- نیازهای خط انتقال a) بی باری و شرایط کم باری : نیاز به جبران کننده راکتیوی که توان راکتیومصرف کند و ولتاژ را پایین نگه دارد وهمزمان از جریان یافتن توان های راکتیو به سوی ژنراتورها و ایجاد ناپایداری جلوگیری نماید. b (بارداری: نیاز به جبران کننده راکتیوی که توان راکتیو تولید نماید تا ولتاژ و قدرت قابل انتقال خط را باال ببرد. c (اختالالت سیستم)نوسانات توان و زاویه( : نیاز به وسائلی که باعث میرائی نوسانات توان و زاویه گردد یعنی وسائلی که بتوانند توان اکتیو هم تولید وهم جذب کنند تا نوسانات توان مستهلک شود.
15 ے 0 ےδ ےδ متداول های کننده جبران بر مروری 3- آل ایده موازی های کننده جبران 3-1 عمل طوری خط وسط در کننده جبران که است اساس این بر کننده جبران این طرح فرض ثابت اندازه با سینوسی ولتاژ منبع یک بصورت که کند شود: Vm = Vs = Vr =V شکل خط وسط در آل ایده ساز 1 جبران ماشینی( دو )سیستم Vs= Vs ےδ Vr= Vr Vm= Vm 2 = V 2
16 V²V² زاس ناربج بدون P = SinδQ= (1 Cosδ) XX 2V² 2V² زاس جبران Pبا = Sinδ/2 Q= (1 Cosδ/2) XX موازی ساز جبران با و ساز جبران بدون انتقالی توان شکل 2 - یکسان δ در انتقالی توان a (افزایش انتقالی توان حداکثر b (افزایش یکسان δ در انتقالی راکتیو توان c (کاهش ولتاژ پروفیل d (بهبود جریان پروفیل e (بهبود Q کاهش بخاطر پایداری f (بهبود خط طرف دو در
17 و کوچکتر شده تقسیم قطعات ها کننده جبران تعداد افزایش با یابند. می بیشتری بهبود الذکر فوق پارامترهای موازی ساز جبران سه 3 با ماشینی دو سیستم شکل 3 - رفتند بکار فوق های محل در ساز جبران بعنوان که وسائلی اولین بعد مرحله در و اشباع قابل راکتور سپس و سنکرون کندانسورهای اند. بوده ) SVC انواع از ( TCR
18 سری ساز جبران 3-2 جریان افزایش و خط طول کاهش نتیجه در خط راکتانس کاهش انتقالی. توان افزایش نتیجه ودر امپدانس مخالف ولتاژی که است سری خازن وسیله ترین ساده قابل خازن این تر پیشرفته حالت در کند. می ایجاد را خط سری است کنترل Xeff = X Xc= (1 - K )X Xc K= 0 K 1 degree of series x compensation شکل ماشینی دو سیستم در سری ساز 4 -جبران
19
20 ے 0 Vm= Vm Vs = Vs ے δ/2vr = Vr ے-δ/2 VS Vr V(Cosδ/2+jSinδ/2) V(Cos δ/2 -jsinδ/2) I= = j X(1-k) j X(1-k) 2V I = Sinδ/2 X(1-k) Vs + Vr Vm= = V Cosδ/2 2 V² P = Real {Vm I*} = Sinδ X(1-k) 2V Qc=I² Xc = ( Sinδ/2)² k X X(1-k) 2V²k Qc = (1 Cosδ) X (1-k) ² یابد می افزایش K افزایش با انتقالی اکتیو *توان یابد می افزایش K افزایش با )Qc( خازن توسط شده تولید راکتیو توان * Cos 2a = 1- Sin²(a/2) یاداوری:
21 phase angle control فاز زاویه کنترل 3-3 موازی خط دو که شود می استفاده مواردی در فاز جابجاگر از تا داد تغییر خط دو از یکی در را δ باید و هستند مختلف θ دو دارای یا افزایش با که مواردی یا کند عبور خط دو از مساوی طور به قدرت دهیم. تغییر را خط از عبوری توان خواهیم می خط δ کاهش دو )سیستم انتقال خط ابتدای در فاز جابجاگر یک 5 شکل در است. گرفته قرار ماشینی( Vs با کردکه فرض سینوسی ولتاژac منبع یک توان می را وسیله این نظر از که نماید می ایجاد را Vseff و شود می کم آن از یا و جمع کم δ از б اندازه به زاویه است. متفاوت Vs با زاویه و اندازه گردد می اضافه آن به یا شود می
22 phase shifter نصب ماشینی دو سیستم در 5 شکل و ابتدا ولتاژ )بین б δ زاویه توان می Vб ولتاژ دامنه کنترل با زاویهای در را توان ترتیب این به و داد قرار 2/п در را خط( انتهای توان توان می ترتیب این داشت.به نگه آن پیک حد در 2/п از بزرگتر داد. افزایش را انتقالی
23 V² P = Sin(δ-б) X ترانسفورماتور یک از که است شده داده نشان 6 شکل در متداول فاز جابجاگر یک یک و مکانیکی چنجر تپ یک موازی )Exciting Transformer( تحریک است. شده تشکیل (Insertion Transformer ( سری ترانسفورماتور فاز و دامنه در چون که کند می فراهم Vбرا تزریقی ولتاژ سری ترانسفورماتور شوند. می کنترل راکتیو و اکتیو توان دو هر دهد می تغییر را Vs متداول جابجاگر 6 شکل مکانیکی عمل با
24 اضافه V( هب ( آن به باید که را Vб ولتاژ برای 90 زاویه ایجاد چگونگی 7 شکل به توان می گیرد قرار bc بر عمود an بردار دهد. می نشان را شود کم آن از یا شود. کسر آن از یا و اضافه Va به است( Va بر عمود )که Vб=ΔVan اندازه دارند. قرار هسته یک روی موازی های پیچ سیم 7 شکل در آن برداری نمودار و فاز زاویه کنترل 7 شکل
25 4- محدودیت های دینامیکی انتقال توان با توجه به ماشین های سنکرون در سیستم قدرت بر اثر اختالالت دینامیکی مختلف نظیر خطا در خطوط خرابی تجهیزات و عملیات مختلف کلید زنی عدم توازن توان و در نتیجه کاهش و یا افزایش شتاب در بعضی ماشین ها بوجود می آید. توانائی سیستم ها برای غلبه براین اختالالت و بازگشت ماشینها به حالت سنکرونیزم موجب محدودیت ظرفیت انتقال توان می باشد. این توانائی ها با دو مسئله پایداری گذرا و دینامیکی سیستم بیان میشود. اختالالت اساسی پایداری گذرا اختالالت فرعی پایداری دینامیکی
26 اختالالت اثر بر سیستم سازی میرا های مشخصه دهنده نشان دینامیکی پایداری است. کوچک ممکن کوچک اختالل یک که است معنی این به )نوسانی( دینامیکی ناپایداری گردد. سنکرونیزم از خروج نهایتا و توان نوسانات افزایش باعث است و موتوری نوع از بارهای متقابل اثر است. سیستم دیگر مسئله ولتاژ ناپایداری به منجر تواند می چنجر تپ دارای ترانسفورماتورهای نظیر کنندها تنظیم بعضی دقیقه(. چند تا ثانیه چند )در شود ولتاژ سقوط خود که شده قدرت ضریب کاهش و بار جریان افزایش باعث ولتاژ کاهش گردد. ولتاژ بیشتر کاهش باعث میتواند سقوط نتیجه در و دهند تغییر را فرایند این مشخصه نیستند قادر چنجرها تپ آید. می بوجود ولتاژ V و P مشخصه از ای نقطه ولتاژ پایداری حد شود. می ولتاژ سقوط باعث بار افزایش کوچکترین آن در که است
27 گذرا پایداری بهبود 4-1 افزایش به قادر فاز جابجاگر و "سری موازی های کننده جبران 8 شکل مطابق حالت در مربوط سطوح a شکل در هستند. گذرا پایداری بحث در Margin جبران نصب حالت در ترتیب به d,c,b های شکل در و کننده جبران بدون است. شده داده نشان فاز جابجاگر و خط("سری وسط )در موازی های کننده برابر سطوح معیار 8 شکل گذرا پایداری بهبود نمایش برای.
28 دینامیکی( پایداری )بهبود توان نوسانات سازی میرا 4-2 با آن ماندگار کار نقطه اطراف در ماشین نوسان باعث جزئی اختالالت مشکل میرائی فقدان صورت در شوند. می سیستم طبیعی فرکانس قابل توان برای ساز محدود عامل یک امر این و آمده پدید اساسی شود. می انتقال δ یابد افزایش نوسان مورد ژنراتور شتاب اگر شود می زیاد افزایش باید الکتریکی انتقالی توان صورت این در ) dδ/dt 0< ( ژنراتور اگر برعکس باشد. گو پاسخ را ورودی مکانیکی توان تا یابد توان )dδ/dt 0> ( یابد کاهش δ و شود منفی شتاب دارای )توان کند ایجاد تعادل مکانیکی توان با تا یابد کاهش باید الکتریکی الکتریکی توان و شود می فرض ثابت مطالعه مورد فاصله در مکانیکی نماید(. هماهنگ آن با را خود باید
29 وجود و کننده جبران بدون حالت در ژنراتور δ زاویه 9a شکل در 9bتوان شکل ودر فاز جابجاگر یا سری یا موازی کننده جبران است. شده داده نشان شرایط همین برای انتقالی ها کننده جبران حضور با δ)t( 9 تغییرات شکل
30 ولتاژ پایداری حد افزایش 4-3 را ولتاژ و پایداری حد توان می موازی کننده جبران با که دهد می نشان 10 شکل ثابت تقریبا ولتاژ و رفته باال منحنی چون موازی سازی جبران در داد افزایش قدرت افزایش با هم سری سازی جبران در است. کمتر ولتاژ سقوط احتمال است توان ضریب 10cبرای )شکل یابد. می افزایش پایداری حد ماکسیمم انتقالی است( شده رسم یک 10 شکل سری و موازی سازی جبران با ولتاژ پایداری حد افزایش
31 5 ظهور ادوات FACTS با افزایش طول خط مشکالت خط انتقال بیشتر می شوند. جبران کننده های سری موازی و جابجاگر فاز متداول قادر به کنترل لحظه ای و سریع و با ظرفیت زیاد کنترل کننده ها نیستند. در سال های اخیر پس از معرفی کنترل کننده های مبتنی بر الکترونیک قدرت وسائلی برای کنترل های لحظه ای و سریع ساخته و معرفی شدند که نهایتا به ادوات FACTS معرفی شدند. اهداف استفاده از ادوات FACTS : 1 (افزایش توان قابل انتقال سیستم های انتقال 2 (کنترل توان به میزان دلخواه 3 (کنترل بهینه کل سیستم )شامل کنترل ولتاژ توان اکتیو و توان راکتیو(
32 شوند: می تقسیم اصلی دسته دو به FACTS ادوات Thyristor Controlled Devices(a به تریستوری های کلید از که هستند FACTS ادوات اول نسل کنند. می استفاده شده کنترل عناصر عنوان Static Converter Based Devices(b استاتیک ازکانورترهای که هستند FACTS ادوات دوم نسل کنند. می استفاده شده کنترل ولتاژ منابع بعنوان
33 دوم فصل تریستوری- های کلید بر مبتنی FACTS های کننده -کنترل مقدمه 1 a) static var compensator (SVC) b) thyristor cont.series cap (TSSC,TCSC) c) thyristor cont.phase shifter که )تریستورهائی کنند می استفاده متداول تریستورهای از ها کننده کنترل این در نتیجه در دارند. را )Intrinsic turn off( خود به خود شدن خاموش قابلیت ترانسفورماتورهای و شونده کنترل و شونده سوئیچ های راکتور و ها خازن مشابه دارای و تر سریع بسیار پاسخی دارای ولی کنند می عمل مکانیکی چنجر تپ با پارامتر سه از یکی کنترل برای ادوات این از یک هر هستند. تر پیچیده کنترل انتقال زاویه انتقال) TCSC (و ) svc (,امپدانس ولتاژ کنند: می عمل توان انتقال شوند. می دیده 11 شکل در که فاز( )جابجاگر
34 های کننده کنترل متداول تریستوری مدارهای بر مبتنی FACTS 11 شکل
35 ادوات الکترونیک قدرت ديود تريستور SCR کموتاسيون scr به صورت طبيعی است و بايستی به صفر برسد تا موثر شود اين ادوات ولتاژ معکوس را نمی توانند عمل نمايند بنابراين از يک عنصر موازي با آن استفاده کنيم تا ولتاژ معکوس را محدود کند. : تفاوت ترانزيستور سرعت سوئيچگ باال و تلفات کمتر دارند تريستورها: تلفات هدايت مستقيم پايين تر و قابليت توان باالتر دارند)عيب مربوط به کموتاسيون آنها است( تريستور قابليت روشن شدن را دارد :gto
36 تريستور کریستال های سیلیکونی قابلیت توان ولتاژ 200 kv/cm را دارند با تزریق ناخالصی منجر به هدایت بیشتر اما تحمل آن کاهش می یابد.
37 حال در دیود یک مشابه آن رفتار کرد هدایت به شروع تریستور هنگامیکه ادامه خود هدایت به عنصر و ندارد وجود آن روی کنترلی و است هدایت نگهدارنده جریان که جریانی از پایینتر میزانی به آن جریان اگر ولی داد خواهد میگیرد. قرار قطع حالت در تریستور یابد کاهش میشود نامیده IH آن میتوان گیت پایة از استفاده با که است دیودی یا کلید تریستور گونه هیچ اما نمود کنترل شدن روشن یا وصل لحظة کنترل با را ندارد. وجود آن خاموشی روی کنترلی
38 تریستور عملکرد در ديود يک مشابه آن رفتار تريستور هدايت از بعد و ندارد وجود آن روي کنترلی و شود می هدايت حال جريان اگر ولی داد خواهد ادامه خود هدايت به عنصر نگهدارنده جريان که جريانی از پايينتر ميزانی به آن قطع حالت در تريستور يابد کاهش میشود ناميده میگيرد. قرار گيت پاية از استفاده با که است ديودي يا کليد تريستور نمود کنترل شدن روشن يا وصل لحظة کنترل با را آن میتوان ندارد وجود آن خاموشی روي کنترلی گونه هيچ اما
39 تلفات: مستقيم هدايت تلفات قطع تلفات سوئيچينگ تلفات است مهم تريستور شدن خاموش زمان می بيان را تريستور شدن خاموش سرعت di/dt دارد بستگی پارامتر دو به شدن خاموش اين کند. تريستور سلفی خاصيت 1- تريستور فيزيک 2-
40
41
42 اگر منبع dc اگر منبع dc Voltage Sourced Converters& Current Soured Converters در VSC طرف dc از نوع جريان بود CSC از نوع ولتاژ بود VSC منبع ولتاژ و طرف AC بايستی جريانی باشد. در csc طرف dc منبع جريان و طرف AC بايستی منبع ولتاژ قرار گيرد در csc جهت جريان در طرف dc ثابت است و جهت معکوس کردن انتقال توان الزم است پالرتيه منبع ولتاژ AC تغيير يابد. در VSC پالرتيه ولتاژ dc ثابت است و بنابراين جهت معکوس کردن انتقال توان الزم است جهت جريان عوض شود. سوئيچ هاي VSC بايد دو جهته باشد. در ادوات فکس قالباVSC استفاده می شود.
43 در صورتيکه کليدها از نوع تريستوري باشد فقط توان راکتيو مصرف می کنند. اما اگر GTO باشند می توانند هر دو حالت توليد و يا مصرف Q ايجاد نمايند
44 کانورتورهای منبع ولتاژ سه سطحی کانورترسهسطحی منجربهتغییرمقدار ولتاژخروجی AC بدوناجباردرتغییر مقدارولتاژ DC خواهدشد
45 شکل موج ولتاژ به صورت مربعی توليد می کنيم جريان با توجه به نوع بار ايجاد می شود در اين شکل جريان را مرجع در نظر گرفته شده است جريان دريافتی منبع نسبت به ولتاژ پيش فاز است يا به عبارت ديگر منبع معادل يک خازن است که توان راکتيو توليد می کند بنابراين مبدل معادل مصرف کننده توان راکتيو است در صورتيکه I و v همفاز باشند به ديود احتياج نيست زيرا مدتی که ولتاژ مثبت است طبق عالمت شکل جريان عبوري منفی است يعنی تريستور 1 و درجه هدايت می کنند و وقتی ولتاژ منفی است جريان مثبت است )طبق شکل( يعنی تريستور 3 و 4 هدايت می کنند اما در حالتيکه پس فازي و يا پيش فازي داشته باشيم در يک فاصله زمانی از هر نيم سيکل قابليت عبور جريان با توجه به جهت آن از تريستور مربوطه وجود ندارد. بنابراين الزم است ديود آنتی پارالل آن وجود داشته باشد تا مسير عبور جريان را ببندد
46 در شکل اگر تريستور 1 و 2 هدايت می کنند. Iab=Id و اگر تريستور 3 و 4 هدايت کنند Iab=-Id در فاصله اي که ولتاژ مثبت است جريان طرف dc يک قسمت مثبت و يک قسمت منفی است اگر جريان dc کامال مثبت باشد طبق عالمت شکل حالت يکسوکنندگی يا کانوتري داريم و اگر کامال منفی باشد وضعيت اينورتري داريم يعنی در حالت اول p مثبت ودر حالت دوم p منفی است. اما در حالت کلی هر دو حالت را داريم يعنی يک مبدل دو وضعيت اينورتري و رکتيفايري را در يک پريود مشخص دارا می باشد. در صورتيکه θ کوچک شود عملکرد رکتيفايري بيشتر و اينورتري کمتر می گردد. در حالت 90=θ جريان در طرف dc مولفه dc نخواهد داشت و 0=p خواهد شد. اگر تريستوري باشد فقط می تواند q مصرف کند. در 0 = θعملکرد کامال رکتيفايري است و فقط هدايت ديود داريم و تريستورها بی اثر هستند. منبع ac جريان پيش فاز مصرف می کند و يا اينورتر جريان پيش فاز توليد می کند. در اين حالت منبع معادل سلف است و مبدل معادل توليد کننده q ويا خازن می باشد.
47 هارمونیکی وضعیت بررسی شود. می توليد هارمونيکی 2k±1 لحاظ از ندارد. وجود زوج هارمونيک حالت اين در 0.9 برابر ولتاژ اول مولفه شود می قرارداده مبدلها خروجی در سلفی عمل در در هارمونيکی اثرات کاهش بر عالوه سلف اين که طرف يعنی کند می تضمين را v.s.c عملکرد واقع و جريان بايدمنبع ac طرف و داريم ولتاژ منبع dc باشيم. داشته سلفی اثر يا
48 هارمونیک در کانورترهای سه فاز
49
50 در ربع اول وچهارم که توان مثبت است کانورتري است. در ربع دوم و سوم که توان منفی است عملکرد اينورتري است. اگر يکسوکنندگی باشد به تريستورها نيازي نيست
51 Three phase full wave
52
53 باند) PWM ( عرض مدوالسیون کانورتر رویکردتغییرولتاژخروجی AC 1 -داشتنچندینپالسدرهرنیمسیکل 2 -تغییرعرضپالسها نحوهعملکرد برخوردسهسیگنالبافرکانساصلیموجسینوسیبا یکموجدندانهارهایبافرکانسچندبرابرفرکانس اصلی
54
55 تریستور با شده کنترل FACTS ادوات تریستوری کلیدهای از خود مداری ساختار در ادوات این و خازن سلف نظیر مداری ساده اجزاء کنار در معمولی مرسوم ادوات با مقایسه در مینمایند. استفاده ترانسفورماتور سیستم و سریعتر پاسخ دارای ادوات این انتقال سیستمهای میباشند. خبرهتری کنترل پاسخ سرعت کنندهها جبران این مهم مشخصههای از است آنها به پاسخ در بایستی کننده جبران راکتیو توان مثال بهعنوان این ادامة در نماید. تغییر کافی سرعت با ترمینال ولتاژ تغییرات مورد تریستور با شده کنترل FACTS ادوات انواع فصل میگیرند. قرار بررسی
56 ادوات 2 -انواع SVC الزم جبرانسازی جریان تا کند می ایجاد موازی متغیر امپدانس جبران میزان این بر بنا نماید. مبادله شبکه با ) را الزم راکتیو )توان را )ولتاژ دارد بستگی SVC شده نصب نقطه ولتاژ به متناسب سازی خط(. واقع در دهد. می تغییر را خطا طول در سری متغییر امپدانس TCSC می کم آن از یا و شود جمع خط ولتاژ با که کند می ایجاد ولتاژی نماید. می تغییر خط از عبوری توان و خط جریان نتیجه در شود. دارد. بستگی خط جریان به حالت این در سازی جبران میزان این بر بنا فرکانس با رزونانسی موجب تواند می TCSC و سری خازن وجود های رزونانس با آن متقابل اثر نتیجه در که شود اصلی فرکانس زیر زیر رزونانس به منجر تواند می ژنراتور توربین مکانیکی شود. sub-synchronous resonance سنکرون) SSR (
57 static var compensator (SVC) شد. طراحی الکتريکی قوس هاي کوره سازي جبران براي 1970 سال در بار اولين کرد. پيدا استفاده مورد انتقال خط در ها بعد انتخاب ترمينال در انتقال سيستم ولتاژ تنظيم براي معموال ها کننده جبران اين رود می بکار شده خروجی که است موازي اتصال با واراستاتيکی کننده جذب يا کننده توليد SVCيک حفظ منظور به واين شود می تنظيم اندوکتيو يا کاپاسيتيو جريان تبادل با آن ولتاژشين( نمونه طور قدرت)به سيستم از معين پارامترهاي کنترل ويا نمودن شين عنوان به يافته اتصال آن به SVC که بار شينی پخش درمحاسبات باشد.. می شود. می داده PVنمايش نمايند اما بهترين می بار مستقر درمنطقه ويا انتقال خطوط ميانه در را SVC معموال شود. می استفاده Svc از که است خط انتهاي در جبران نقطه : svc کاربرد مزاياي ولتاژ پايداري بهبود 1- توان نوسان ميراسازي 2- گذرا پايداري بهبود 3-

58
59
60 TSC SR TCR انواع: TCR+TSC تر پیشرفته حالت در و TCR+FC استفاده روش svc 2-1 TSC+TCR شامل 12 شکل
61 میانی نقطه در ولتاژ تنظیم
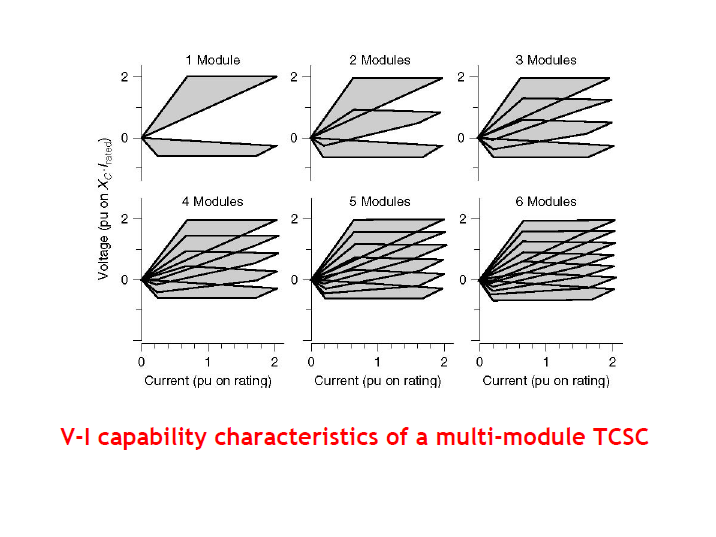
62 . مشخصه V-I مربوط به SVC این جبران کننده ها معموال برای تنظیم ولتاژ سیستم انتقال در ترمینال انتخاب شده بکار می رود تنظیم در شیب حدود ولتاژ نامی مربوط به حداکثر ظرفیت خازنی و سلفی جریان SVC انجام میشود. SVC عالوه بر تنظیم ولتاژ برای بهبود پایداری گذرا و دینامیکی )میرا سازی نوسانات( نیز بکار می رود. در شکل 14 اثر SVC برای افزایش قدرت انتقالی در سیستم دو ماشینی برای حداکثر ظرفیتهای مختلف خازنی Bc,max رسم شده است. تنظيم در شيب حدود ولتاژ نامی مربوط به حداکثر ظرفيت خازنی و سلفی جريان SVC انجام ميشود مقدارشيب مشخصه وابسته به تنظيم ولتاژ خواسته شده می باشد. مقدار اين شيب به طور نمونه )1-5(% می باشد.
63 افزایش قدرت انتقالی در سیستم دو ماشینی
64 پس از آنکه SVC به حداکثر ظرفیت خود Bc,max می رسد )نقطه ماکزیمم(,از این به بعد منحنی قدرت مانند حالتی است که یک خازن ثابت در وسط خط با ادمپتانس Bc,max وصل شده باشد.امپدانس بین a و b در شکل 14 با تبدیل اتصال ستاره به مثلث بین سه نقطه a و b و c )با مقدار خازن )Bc,max بدست می آید که عبارتست از: X[ 1- (X/4)Bc,max] بنابراین از نقطه ماکسیمم به بعد قدرت انتقالی از رابطه زیر بدست می آید: V²/X P = Sinδ 1-(X/4.Bc,max)
65 بهبود پایداری دینامیکی ميرائی نوسانات توان با تغيير دادن خروجی svc بين مقادير خازنی و سلفی براي مخالفت کردن با شتاب زاويه اي ماشين انجام می شود. هنگامی که ماشين شتاب می گيرد با افزايش دادن ولتاژ خط انتقال )از طريق وار خازنی( قدرت انتقالی را افزايش می دهيم و در هنگام شتاب منفی ماشين ولتاژ آنرا )در حالت سلفی( کاهش می دهيم و قدرت الکتريکی انتقالی کاهش می يابد
66 خروجی دادن تغییر با توان( نوسانات )میرائی دینامیکی پایداری بهبود شتاب با کردن مخالفت برای سلفی و خازنی مقادیر بین svc شود. می انجام ماشین منفی( و )مثبت ای زاویه زا ( انتقال خط ولتاژ دادن افزایش با گیرد می شتاب ماشین که هنگامی شتاب هنگام و دهیم می افزایش را انتقالی قدرت خازنی( وار طریق قدرت و دهیم می کاهش سلفی( حالت )در آنرا ولتاژ ماشین منفی یعنی: یابد, می کاهش انتقالی الکتریکی وقتی وقتی Pm Pe > 0 Pm Pe < 0 یابد افزایش Pe باید یابد کاهش Pe باید svc کاربردهای از دیگر یکی است توزیع های شبکه فاز سه جریانهای سازی متعادل در
67 مدلسازيSVC ظرفيت نامی SVC می تواند به لحاظ تووان راکتيوانودوکتيو و کاپاسويتيو متقارن يا نامتقارن باشد. به عنوان نمونه ظرفيت می تواند 200 مگواوار اندوکتيو و 200 مگاوار کاپاسيتيو و يوا 100 مگوا وار انودوکتيو و 200 مگواوار کاپاسيتيو باشد. 67
68 svc مدل گزارش اساس بر [Static var compensator models for power Flow and dynamic performance simulation] IEEE در special stability controls کاری گروه توسط جبران محل در pv شین یک بصورت 15 شکل طبق را svc توان می کننده جبران به )مربوط راکتیو توان حداکثر و حداقل حدود با و کننده که داد PQنمایش شین بصورت باال ولتاژ سمت شین در و )svc است. V-I مشخصه شیب دهنده Xstنشان راکتانس Xst = 1-5 % )slope Reactance( V = Vref + Xst. I
69 این )ماندگار( بار پخش مطالعات در SVC مدل 15 شکل شود. می داده نشان متغییر موازی سوسپتانس یک با گذرا حالت مدل 16(. )شکل نماید می تغییر α یعنی TCR آتش زاویه با سوسپتانس SVC مدل 16 شکل گذرا مطالعات برای
70 سازی شبیه توان درصد ) MW توان خطا از قبل 17 شکل نمونه سیستم در مدل جزئیات( )با تحریک کنترل و ژنراتور شود. می منتقل ژنراتور( نامی خطوط اند. شده مدل Pm ثابت توان بصورت نیز گاورنر و توربین و شده اند. شده مدلسازی )100Km هر )برای π اسمی مدل بصورت داده نشان شکل در ژنراتور ترمینالهای نزدیکی در فاز سه کوتاه اتصال سازی شبیه نتایج است. سیکل( 0.1S)5 خطا استمرار زمان است. شده است. شده داده نشان 19 و 18 شکلهای در شکل گذرا مطالعات برای نمونه سیستم 17-
71 2 شکل SVC نصب بدون سازی شبیه نتایج MW نامی قدرت با SVC نصب با سازی شبیه نتایج شود. می برطرف 0.1S از پس که خطائی اثر بر -19 شکل شین در
72 TCR راکتورهای کنترل شده با تریستور
73
74
75
76 هارمونیکهای TCR
77
78
79
80
81
82
83
84
85
86 مشکالت هارمونیکی اگر در مسير مقاومت وجود داشته باشد هارمونيکها منجر به تلفات در سيستم می شود اگر مقاومت نبود و فقط سلف بود افت ولتاژ آنهم از نوع هارمونيکی ايجاد می شود. بنابراين ولتاژ باس از حالت sin خارج می شود. در حد نهايت منجر به جابجايی زاويه آتش می گردد که مشکالتی را در مدار ايجاد می کند بنابراين بهتر است که هارمونيکها را تا حد امکان از بين برد
87 هارمونیک کاهش روشهای کردن ثابت با توان می کنيم بندي تقسيم را راکتيوها بتوانيم اگر اول: روش کنيم کم را هارمونيک راکتورها است نياز مگاوار 10 تا صفر بين کنيدQ فرض : مثال تغيير 10 MVAR تا صفر رابين Q X راکتانس با راکتور يک توان می 1- داد. که داشت 10x مقدار با راکتانس 10 توان می هارمونيک کاهش براي 2- وفقط شود می استفاده کامل روشن يا و کامل خاموش وضعيت با آنها از تعداي شود کنترل آتش زاويه با )1MVAR( آنها از يکی آن مقطع سطح کمترجريان مصرف بزرگتر راکتانس بيشتر X موازي( حالت کمتر)براي قيمت کوچکتر است متصل شبکه به آن اوليه که ترانسفورماتور از استفاده با : دوم روش و باشيم داشته مثلث و ستاره پيچ سيم آن ثالثه و ثانويه فاز سه شبکه در 12 معادل که نماييم متصل ثالثه و ثانويه به فاز سه حالت در را تريستورها گردد. می پالسه
88 داد کاهش را هارمونيک توان می پالسه چند مدولهاي از استفاده کنيم. حذف مثلث اتصال با راحتی به توان می را سوم هارمونيک است 13 بعد و 11 هارمونيک اولين باشد پالسه اگر 12 بعد به 13 و 11 و پالسه( شش )در بعد به 7 و 5 هارمونيک هم باز روشها اين صورتيکه در کنيم. می استفاده پسيو فيلتر از آنوقت بود مالحظه قابل هم باز آن دامنه پالسه( 12 )در
89 دامنه مولفه های هارمونیکیTCR TCRرا به همراه خازن ثابت در مدار قرار می دهند. خازنها در مدارهارمونيک را کاهش می دهند معموال TCR می تواند به همراه FC ويا MSC مورد استفاده قرار می گيرد.
90 باشد. می سيکل 0.5 تا TCR تاخير سيکلی نيم در دهيم می α زاويه تغيير فرمان که وقتی واقع در شود صفر تا يابد می ادامه جريان هستيم که در و شود می آتش تريستور يافته تغيير α با بعد سيکل نيم داشت خواهيم )گذرا( زوج هارمونيک سيکل يک همين يک و کنيد سازي شبيه فاز سه حالت رابراي مداري 9: تمرين دهيد انجام بار جريان و ولتاژ بر فوريه تحليل کنيد. ترسيم آنرا اصلی هارمونيک مولفه fft با
91 تمرين 10: در demo مطلب در قسمت power svc سيگنالی که B را تعيين می کند با استفاده از کنترل کننده PI با ورودي v-vref )مد کنترلی ولتاژ( بدست می آيد در واقع اين svc به منظور تنظيم ولتاژ )بهبود پايداري ولتاژ( بکار برده شده است. در حالت phasor اي است. با استفاده از بلوکهاي phasor می توان توان عبوري از خط را اندازه گيري نمود.در صورتيکه بجاي منبع ولتاژ ژنراتور قرار گيرد و بخواهيم svc را به منظور ميراسازي نوسان توان به کار بريم می توان آنرا مثال در مد تنظيم زاويه روتور به کار بريم مثال به طور نمونه در حالت فازوري اينکار را انجام دهيم. به اين منظور الزم است يک سيستم کنترلی طراحی کنيم که توان عبوري را که به آن می دهيم شيبش را تعيين کند اگر شيب مثبت و يا منفی شد svc خازنی و يا سلفی شود.
92 TSCخازنهای سوئیچ شده با تریستور می خواهيم خازنی را به شبکه موازي کنيم. کاربرد سلف به کار رفته در مدار : وجود سلف برای محدود کردن جریان عبوری در زمان و همچنین جلوگیری از رزونانس با سیستم ac
93 عدم وجود حالت گذرا موقعی است که ورودي و ولتاژ خازن برابرو مقدار پيک آنراداشته باشد. در اين حالت بدون ايجاد مشکل )گذرا( 90 درجه پيشفازي مطابق شکل زيرخواهيم داشت.
94 TSC سوئيچ زنی ها نيم سيکل نيم سيکل اتفاق می افتد. محدوديت :اگر v2 درپيک مثبت باشد و بخواهيم سوئيچينگ کنيم بايستی تا يک سيکل تاخير داشته باشيم. مثال در شکل قبل مشاهده می شود vc منفی بوده يک سيکل گذشته تا دوباره اين منفی ايجاد شود تا سوئيچ زده شود. چون خازن ايده آل نيست و داراي يک مقاومت است و ممکن است دشارژ شود. -سوئيچ زنی خازن در پيک مستلزم شرايط خاص است هارمونيک جريان با عبور در مسير به هارمونيک ولتاژ تبديل می شود و می تواند باعث مشکل عدم تشخيص دامنه پيک شود که می توان از PLL استفاده کنيم رابطه فازوري در حالتيکه سوئيچ زنی در پيک باشد صحيح می باشد قبل از وارد شدن tsc به مدار جريان مسير خط سينوسی است و افتی دارد
95 TSC فاز پس جريان که حالتی در را خط از عبوري جريان ميزان tsc اثر و شود کمتر ولتاژ افت شود می موجب و دهد می کاهش است باشد داشته است شده متصل آن به tsc که اي نقطه ولتاژ در افزايش کردن وارد از بعد و قبل فازوري روابط کند می تغيير آنها فاز دامنه تنها و است tscبرقرار و ولتاژ: پيک در زنی کليد علت ولتاژبخاطر افت يک بيفتد اتفاق سريع زنی اگرسوئيچ اول لحظه در شود می ايجاد خازن مسير در ديگر شود صفر خازن جريان ولتاژ پيک لحظه در بتوانيم اگر صفر ولتاژ که است حالتی در اين و کند نمی ايجاد ولتاژي افت خط باشد کردن خاموش يا و زنی سوئيچ توان می صفر جريان لحظه در بنابراين داد. انجام را
96 روشن کردنTSC فرض کنيد که در لحظه صفر Vc صفر باشد در اين لحظه سوئيچ زنی انجام گيرد. v=vc+vl بهترين حالت : ولتاژ خازن و ولتاژ شبکه يکسان باشد بدترين حالت : ولتاژ خازن صفر باشد و در اين لحظه سوئيچ زنی انجام شود در اين حالت کمترين امپدانس در مسير و بيشترين حالت گذرا را داريم در اين حالت خازن اتصال کوتاه است و بيشترين مقدار جريان را داريم. در ولتاژ صفر خازن سوئيچ زنی شده است. چون جريان غير سينوسی از مدار عبور می کند بنابراين vرا دچار اعوحاج می کند. حالت دوم Vc: در نيم پريونيت مقدار داشته سپس سوئيچ زنی انجام شده است. بنابراين گذرا کمتر است وبايد يک استراتژي کنترلی اتخاذ شود که گذرا کمترين مقدار داشته باشد و در اين صورت بايد Vc و ولتاژ باس متصل به tsc نزديکترين مقدار را به يکديگر داشته باشد. يک مقايسه گر می گذاريم و آن زمانی که vc و v برابر باشد سوئيچ زنی انجام می دهيم. بدترين حالت آن است که v مثبت و vc صفر يا منفی باشد. ولتاژدوسر تريستور برابر با Vsw=V-Vc است ولتاژ سوئيچ هميشه مثبت است بنابراين در هر لحظه امکان وصل شدن دارد در واقع در پيک ولتاژ سوئيچ زنی انجام می شود و اين لحظه اي است که ولتاژ دو سر سوئيچ ها صفر است
97
98 تلفات بررسی خازن: تلفات 1- است کمی مقدار و ثابت تلفات اين : راکتور 2 -تلفات دارد. مستقيم نسبت جريان عبور با : تريستورها تلفات -3 است صفر مقدار اين بيفتد اتفاق (zcs,zvs) مناسب وضعيت در زنی سوئيچ اگر تغيير جريان با خطی صورت به تقريبا تلفات هدايت مدت در معمول طور به اما کند. می مهم ديناميکی پاسخ و داريم نگه مدار در را خازنها بخواهيم صورتيکه در کنيم می استفاده tcr-fc از نباشد نيز باال هارمونيکهاي براي فيلتري عنوان به راکتيو توان ايجاد بر عالوه خازن کند می عمل گذرا اثر از کاهش به منجر که باشد بيشتر خازنها تعداد است ممکن عمل در شود. می
99 منحنی تلفات در عمل به جاي يک Qc از 5Qc استفاده می کنيم 1- اثرات حالت گذرا کاهش می يابد 2- ولتاژ را به صورت پوسته و مقطعی کنترل کنيم.
100 تلفات راکتیو بجاي FC از MSC استفاده می شود. با توجه به مباحث فوق مشاهده می شود سلف يا خازن متصل به يک باس که توان راکتيو را کنترل می کند جريان آن عمود بر راستاي ولتاژ است
101 Switching Converter Type Var Generator هر دومدار قبلی پسيو هستند يکی از مشکالت اصلی آنها ديناميک نسبتا کند است و مشکل ديگر وابستگی ميزان توليد و يا مصرف Q آن به ولتاژ نقطه اتصال می باشد. اماجبران کننده اکتيو به صورت پيوسته و در دو حالت توليد و مصرف Q عمل می کند که ميزان آن نيز مستقل از ولتاژ نقطه اتصال است. V ثابت E ولتاژ توليدي ژنراتور سنکرونی در نظر گرفته می شود که با اکسياتر قابل کنترل است. اگر بار سلفی باشد توان راکتيو مصرف می کند بنابراين V طبق معمول کاهش می يابد و اگر بار خازنی باشد Q توليد می کند و V افزايش می يابد اما می خواهيم V ثابت بماند. اکسايتر اين وضعيت را تشخيص می دهد. در بار با اثر سلفی افت JXI است و E افزايش می يابد وخاصيت مغناطيسی در ماشين سنکرون بايستی ثابت باشد ماشين سنکرون بايد Q به آن بدهد بنابراين الزم است تحريک ماشين سنکرون بيشتر شود که در اين حالت Q از سيستم dc وارد ماشين سنکرون می شود و از طرف acآن Q خارج می شود و در صورتيکه بار پيشفاز باشد ماشين سنکرون بايد Q بگيرد. بايد تحريک DC کم شود تا ميزان Q ورودي از طريق سيستم DC کاهش يابد.
102 تمرين : يکی از مشکالت )معايب ) SVC پاسخ نده آن بدليل استفاده از سوئيچ هاي با کموتاسيون طبيعی می باشند در صورتيکه از سوئيچ هاي کموتاسيون اجباري در SVC )به طور نمونه TCR ) استفاده شود سرعت پاسخ آن را مورد بررسی قرار دهيد.
103 2-2 تایریستوری کنترل با سری خازن : خطوط در بارپذیری افزایش و پایداری افزایش : هدف خط در ولتاژ افت ایجاد و راکتانس سازی جبران کار: اساس خط. راکتانس کاهش برای خازنی ولتاژ یک کردن وارد با خط جریان با سری خازن توسط شده ایجاد ولتاژ توان خط بار افزایش با است. عمود آن بر و متناسب یابد. می افزایش نیز خازن تولیدی راکتیوی سری خازن وظایف ولتاژ سقوط از جلوگیری و ماندگار حالت ولتاژ تنظیم a( )20 )شکل در Adec سطح 21 شکل مطابق گذرا پایداری افزایش b( پایداری احتمال و شده بیشتر سری خازن نصب حالت شود. می بیشتر گذرا
104 منحنی رفتن باال وبا ماکزیمم انتقالی توان افزایش با توان c (کنترل P(δ) خط ولتاژ پروفیل 20- شکل حاشیه افزایش 21- شکل خازن نصب با گذرا پایداری تریستوری: کنترل با سری های خازن انواع a) Thy. cont. series comp.(tcsc) b) Thy. Switched series cap. (Tssc) 2-2-2
105 :TSSC این وسیله از سوئیچ های تریستوری موازی با بانک های خازنی سری برای ورود وخروج سریع بانک های خازنی در پله های منفصل استفاده می کند. شکل 22- مدار TSSC چون ولتاژ دوسر خازن سری تابعی مستقیم از جریان خط و متناسب با آن است برای جلو گیری از اضافه ولتاژ دو سر خازن ها در جریان های اتصال کوتاه و دیگر شرایط مشابه الزم است از وسیله ای مناسب نظیر Zno یا دیگر by-pass های الزم بصورت موازی با بانک های خازنی سوئیچ شده با تریستور استفاده شود.
106 TCSC 2-3 شکل 23 مدارTCSC را نشان می دهد. حداکثر مقدار جبرانسازی سری در حالتی است که TCR خاموش باشد. TCSC وظایف زیر را انجام می دهد : 1- بهبود و کنترل توان حالت ماندگار )باال رفتن منحنی )P-δ 2- بهبود پایداری گذرا 3- میرا سازی نوسانات توان )افزایش پایداری دینامیکی( 4- ایجاد تعادل توان در خطوط موازی)خط دو مداره( مشخصات مدار: a( بانک خازنی با امپدانس 10-30Ω برای هر فاز و جریان نامی A b( راکتور حدود چند میلی هانری)با هسته هوائی( c( وریستور اکسید فلزی varistor( mov )metal oxide که دو سر خازن قرار می گیرد تا از اضافه ولتاژ دو سر خازن جلوگیری کند.
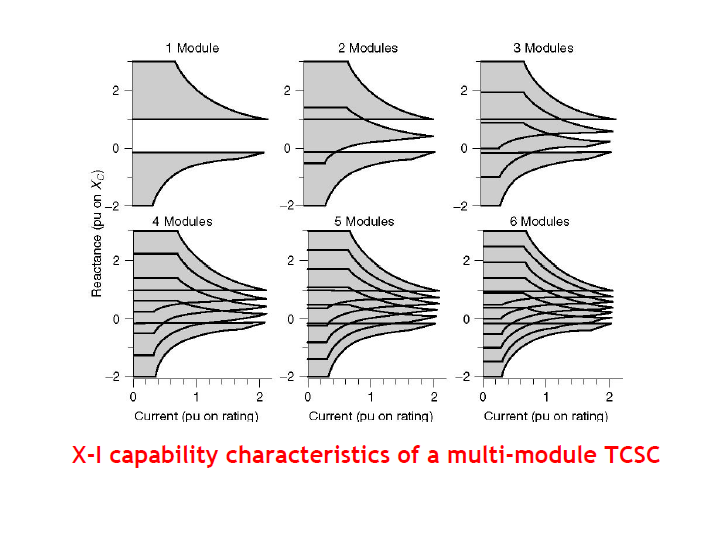
107 TCSC ساختمان اساس 23- شکل خازنی بانک راکتانس از کمتر خیلی )XL )یعنی L به مربوط راکتانس است. )Xc( Vc1 Xapp = Im{ } IL1 TCSC جریان و ولتاژ اول( )هارمونیک اصلی موج IL1 و Vc1 است. Xapp KB = Xc است. Booster factor تقویت ضریب KB
108 2-3-1 TCSC کاری مودهای 1)Blocking Mode 2)By-pass Mode 3)Capacitive boost Mode Blocking Mode از فقط جریان اند نشده روشن تریستوری کلیدهای که هنگامی میکند کار ثابت خازن یک بمنزله TCSC و کرده عبور خازن Vc = jxc.il جلوتر 90 º ولتاژ از TCSC جریان 24 شکل مطابق یعنی است یک برابر KB تقویت ضریب همچنین و است
109 Blocking Mode در ولتاژ و جریان 24 شکل By-pass mode قرار کامل هدایت در و کنند عمل مداوم طور به تریستوری کلیدهای اگر به TCSC شوند( روشن 270 درجه و 90=α در )تریستورها گیرند مقدار به بسته که میکند عمل راکتور و خازنی بانک موازی اتصال صورت کند کار ثابت خازنی یا سلفی حالت دو از یکی در میتواند راکتور و خازن در اندوکتانس مقدار کمترین یعنی است L همان راکتور اندوکتانس واقع )در داریم: حالت این در )TCR
110 Vc K B X X app c jxappi l XvXc Xv Xc Xc jkbx 1 vblocking x 1 c I l c Xv Xv Xc xc j x 1 x c v I l 1 Xc 1 Xv < 2 نسبت معموال xc x است. xv v (Bloking mode) بود خازنی کامال حالت به KBمربوط 1= kb اخیر رابطه به توجه با By-pass mode در که حالی در است. یک از کوچکتر xc شود می یک از کوچکتر بیشتر kb باشد 2 از بزرگتر x نسبت چه هر v جریان که است این مثل و شده خارج بیشتر خازنی حالت از و میکند. عبور کمتر خازن از و شده By-pass از کمتر خیلی By-pass حالت در Vc که میدهد نشان زیر رابطه است. Blocking حالت در Vc
111 1 Vc,Bypass = Vc,blocking 1 + Xc/Xv از اتوماتیک طور به و میگیرد قرار خازن سر دو در کمتری ولتاژ لذا میشود. جلوگیری خطا هنگام ولتاژ اضافه استفاده خطا وقوع هنگام در By pass mode از بنابراین میشود. Capcitive boost mode و کرده غلبه موازی سلفی بر خازنی حالت α آتش 90 < زاویههای در است آن مانند بتاشد 90 بزرگتراز α چه هر. است خازنی حاصل مدار در حالت این. اس گرفته قرار مدار در بزرگتری خازنی ظرفیت که بین مقداری KB حالت این در است. TCSC عادی کاری رژیم واقع یک به یعنی است Blocking حالت و By حالتpass میشود. نزدیکتر
112 TCSC مدل است: شده داده نشان 25 شکل در TCSC مدل سری ادمتیانس( )یا امپدانس یک با مدل این میشود دیده که همانطور بلوك وسیله به امپدانس این اندازه است. شده داده نشان کنترل قابل میشود. تعیین FACTS CONTROL
113 TCSC ودینامیکی گذرا مطالعات گذرا حالت برای سازی شبیه به خطای همان و مشخصات همان با 17 شکل قدرت سیستم در خطا حین در و شود نصب خطوط TCSCدر چنانچه آمده وجود است. 26 شکل مطابق سازی شبیه نتایج نشود خارج مدار از نیز شکل TCSC نصب با سازی شبیه نتایج 26 با سازی جبران %15
114 نوسانات( میراسازی در TCSC )نقش دینامیکی مطالعات در الکترومکانیکی نوسانات میراسازی برای که عناصری اولین خطوط طول افزایش با بودند. ها PSS کاررفتند به قدرت سیستمهای TCSC نبودند. کافی نوسانات میراسازی در ها PSS کارآئی انتقال بنابراین دهد. انجام انتقال خط در را اکتیو توان سریع کنترل میتواند الکترومکانیکی نوسانات میراسازی برای وسیلهای عنوان به میتواند رود. بکار است. مهم بسیار میراسازی برای TCSC برای مناسب فیدبک انتخاب ماشینی تک سیستم در میراسازی برای مطالعه مورد سیستم 27 شکل VE داریم: فوق شکل P X d XL Sin
115 d dt 2 d P P P M داریم: حالت فضای صورت به خطی معادالت آوردن دست به برای VE X VE X dt k T s 12 synchronising Coefficient 1 و 2 مقایسه با 2 Sin Cos P max M 2 d dt 2 P x P Cos M xd Ks Ks x l 1 2
116 M K s 1 k s ناسون هلداعم.تسا یناسون لاماک متسیس خساپ هک دهد یم ناشن هلداعم نیا ننیا یزاساریم یارب.دور راک هب یدیلوت ناوت یزاس لداعتم یارب یلمکم ناوت دیاب تاناسون هلودم ناوت یزاس (Modulating Power).دوش یم باختنا ریز تروص هب k k P s k k k P ) ( s k k k
117 1 هطبار اب هطبار نیا هسیاقم : بسانم ریداقم باختنا اب و ناوت یم و یئاریم هب ور ار.درب تیاهن یب نیش و نیشام تعرس فلاتخا بسانم کبدیف لانگیس ( ).تسا M k k k s ) ( M k k M k s 1 M k ks M k k k k
118 دینامیکی مطالعات سازی شبیه 1 موردی مطالعه 5-7 خط در TCSC بگیرید. نظر در را 28 شکل قدرت سیستم نزدیک 7-8 انتقال خط در فازی سه کوتاه اتصال است. شده نصب و شده برطرف سیکل سه از پس که است شده گرفته درنظر شین 8 بازبست(. )کلید میآید مدار به خط سیکل 6 از پس مجددا برای TCSC نصب بدون و با سازی شبیه نتایج 29 شکل در است. شده داده نشان 2 1 و ماشینهای مطالعه مورد سیستم 28 شکل دینامیکی سازی شبیه برای
119 TCSC از استفاده با توان زاویه نوسانات میرائی 29 شکل 2 موردي مطالعه SVC است. شده گرفته نظر در TCSC محل دو در 30 شکل شبیه 4 سیستم در خازن عنوان به TCSC دو هر 1 حالت در است. شده نصب ولتاژ کنترل برای نیز است. Blacking mode به مربوط 2 حالت در میکنند. عمل ثابت Tcsc2 و ثابت Tcsc1 3 حالت در میشود. کنترل Tcsc1 و ثابت Tcsc2 31 شکل مطالعات میشوند. کنترل TCSC دو هر 4 حالت در میشود. کنترل است. مناسب و کافی Tcsc2 فقط نصب که میدهد نشان
120 3 و شکل 30 سیستم 4 TCSC اثر مطالعه برای شینه نوسانات میرائی در TCSC عملکرد و نصب مختلف حالتهای در پاسخ 31 شکل درنقطه فاز سه خطای شدهاند. رسم اول 20s در برحسب میشود. برطرف بعد S و 2 زاویههای افتاده اتفاق c
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140 2-4- جابجا گر فاز با کنترل تریستوری Thy.Comt phase shifter مقصود از phase shifter مجموعهای از ترانسفورماتور یا ترانسفورماتورها است که هم اندازه ولتاژ و هم زاویه فاز ولتاژ را دربارداری یا بیباری تنظیم میکنند. جابجا گر فاز متعارف دو وظیفه زیر را انجام میدهد: 1 (تنظیم توان در حالت ماندگار 2( تنظیم ولتاژ کاربرد این وسائل با استفاده از ادوات کنترل شده تریستوری و همچنین متعاقب آن با کارنورترها وسعت وظائف را زیادتر نموده است. این وسائل عالوه بر دو وظیفه فوق وظائف زیر را انجام میدهند: 3 (بهبود کیفیت توان 4( کنترل ولتاژ در حالت دینامیکی 5 (بهبود پایداری دینامیکی سیگنال کوچک 6 (بهبود پایداری گذرا
141 اساس جابجاگر فاز جابجاگر فاز در خط انتقال وصل میشود و از قسمتهای زیرتشکیل میشود: (Exciting Transformer) ET ترانسفورتر تحریک (a (Boosting Transformer) ترانسفورماتور تقویتی )کمکی( (b c) مدار تریستوری یا کانورتری ترانسفورتور ET ولتاژ ورودی مورد نیاز را برای جابجاگر فاز تامین میکند و ترانسفورماتور BT ولتاژ کنترل شده سری را ایجاد میکند. اندازه و زاویه این ولتاژ توسط مدار تریستوری یا کانورتری کنترل میشود و در نتیجه ولتاژ کنترل شدهای از نظر اندازه و زاویه فاز برای Vp )ولتاژ خروجی سیستم که قرار است کنترل شود( تهیه میشود. جابجاگر فاز در حقیقت بین دو نقطه B, E قرار گرفته است که امپدانس بین این نقاط با ابتدا و انتهای خط ( s Vو ) V R برابر X s و X R است.
142 32 شکل ولتاژ فازوری ودیاگرام فاز جابجاگر یک نمایش V P و V B انتهای که است ناحیهای شده داده نشان دایره فوق شکل در کنترل تریستوری مدار یا کانورتر توسط و V B گیرند. قرار درآن میتواند کنترل خط از انتقالی توان همچنین و B شین ولتاژ حالت این در میشوند. با: است برابر توان این میشوند. اصلی مشخصه و بوده توان کنترل X eq بین راکتانس V s و V R است. P V s X V eq R sin( ) p S R p
143 قسمت کانورتر درشکل صفحه قبل با سوئیچهای مکانیکی )در سیستمهای متعارف( جایگزین میشود که در داخل ترانسفورماتور تحریک ET بوده و قسمت مجزائی نیستند. جابجاگر فاز متعارف میتواند p را درمحدوده 30 درجه در پلههای تقریبا یک تا دو درجهای تغییر دهند )شکل زیر(. اندازه فاز و اندازه ولتاژ تزریقی VB بوسیله کلیدهای مکانیکی SW1 وSW2 تنظیم میشوند. با انتخاب V1 و V2 های مختلف توسط تغییر دادن تپ میتوان VBهای مختلف و لذا VP های با اندازه و زاویه فازهای مختلف به دست آورد. در این وسائل: سرعت پاسخ کند است )به خاطر سوئیچهای مکانیکی( عمر مفید وسائل کم است )به خاطر تعمیرات مداوم سیستم مکانیکی و فاسدشدن روغن(
144 کاربرد ماندگار حالت در فقط که است آن فاز جابجاگر محدودیت یک حالت در ولتاژ تریستوری تنظیم شده کنترل فاز جابجاگر از استفاده با دارد. مکانیکی های سوئیچ جایگزینی با میشود. انجام نیز دینامیکی یا گذرا Static Converters استاتیک) کانورترهای توسط است( ولتاژ منبع کانورترهای یا تریستوری مدارهای شامل که میشود. حل متداول جابجاگر مشکالت 33 شکل آن برداری دیاگرام و متداول فاز جابجاگر یک مدار
145 میشوند. نامبرده SPS با وسائل این بعد به این از SPS Static Phase Shifter معرفی TCPST نام به تریستوری فاز جابجاگر یک IEEE است. کرده Thyristor Controlled Phase Shifting Transformer وسیله به فاز جابجاگر ترانسفورماتور یک آن در که سریعی متغیر فاز زاویه تا میشود تنظیم تریستوری سوئیچهای محسوب SPS انواع از یکی TCPST بنابراین بدهد. را باکلیدهای مکانیکی کلیدهای مستقیم جایگزینی میشود. نیستند. مناسب عملی و اقتصادی نظر از تریستوری
146 SPS ماندگار حالت مدل میشوند. فرض ایدهآل ترانسفورماتورها زیر شکل در میشود. صرفنظر آنها به مربوط Z B و Z E است. و بین فاز Φزاویه V E V B 34 شکل SPS فاز یک مدار و فاز سه مدار از لذا V B k k VE V V B E
147 S E S V E B I V I E E V B I B شود: نمی وبدل رد شبکه با توانی هیچ فوق شکل در E k P E P B وابسته منبع دو بمنزله SPS یک که میدهند نشان باال روابط است: هم( به )وابسته هم با متقابل I E I k I B E ki B V E, V kv B E, I Q B E Q B :SPS مدل 35 شکل
148 SPS کانورتری مدارهای قدرت الکترونیک کلیدهای با مکانیکی جابجاگر تپ a )جایگزینی مکانیکی سوئیچهای آن در که است شده داده نشان متداول فاز جابجاگر یک هر شدهاند. جایگزین S EN تا S E1 قدرت الکترونیک کلیدهای با مستقیما تعدادی کلید هر وصل است. معکوس موازی کنترل تریستور مدار یک کلید میآورد. مدار به را پیچها سیم از شکل قدرت الکترونیک کلیدهای جایگزینی با استاتیکی فاز جابجاگر 36
149 کلید میکنند هدایت S En تا S E1 کلیدهای از یک هر که هنگامی S B کلید نکنند هدایت فوق کلیدهای از هیچیک اگر است. باز S B کوتاه اتصال ها CT مانند BT ترانسفورماتور ثانویه تا میشود بسته شود. S En هدایت هنگام آن وحداقل S E1 هدایت هنگام ولتاژ حداکثر دارد. بستگی تریستوری کلیدهای تعداد به پلهها تعداد. است V E بر عمود شده تزریق ولتاژ باشد مثلث ET اولیه اتصال اگر تزریقی ولتاژ باشد ستاره ET اولیه اتصال که درصورتی و بوده میباشد. V E سیستم فازی ولتاژ با همفاز برای مثلث حالت و ولتاژ دامنه کنترل برای ستاره حالت بنابراین میرود. کار به فاز زاویه کنترل حالت در توان نتیجه در و زاویه تنظیم برای ترانسفورماتورها این میروند. کار به ماندگار
150 مکانیکی چنجر تپ جایگزینی با میتوان را توان دینامیکی کنترل با: مکانیکی( کلیدهای فقط )نه تریستوریها( آتش زاویه کنترل )با کنترل قابل تریستوری کلیدهای نوع در میشود اشاره آنها به بعدی مدارهای در که نمود عملی کنترل. نه دارند وصل و قطع وظیفه فقط کلیدها (a) ها AC Controller از b )استفاده مؤلفه یک ET برای میتوان آتش زاویه کنترل با 37 شکل در اصلی ولتاژ به نسبت V2- + V2 فاز( پس یا فاز )پیش عمود مثلث(. اولیه اتصال )با ایجادکرد سیستم S( E2 ( یا S E1 آتش زاویه توسط V B شده تزریق ولتاژ اندازه میشود. تعیین Sهدایت E2 و S E1 سیکل هر از زمانی فاصله هر در که هنگامی میشود. بسته S B کلید هستند( صفر که جاهائی )در نکنند
151 میشود. کنترل ولتاژ اندازه فقط باشد ستاره ET اولیه اگر ac Controller بر مبتنی SPS دیاگرام 37 شکل است. هارمونیکها وجود روش این اشکال ac-ac فاز تک پل کانورتر c) ولتاژ تزریق برای ac-ac فاز تک کانورتر یک از حالت این در دو سوئیچ یک شامل کانورتر بازوی هر میشود. استفاده عمودی است. معکوس( موازی تایریستوری سوئیچ )دو طرفه
152 ac-ac فاز یک پل کانورتر بر مبتنی SPS دیاگرام 38 شکل میشود. کنترل تریستورها آتش زاویه وسیله به تزریقی ولتاژ اندازه است. ها هارمونیک وجود آن عمده اشکال به میتوان آن مطالعه برای که دارد وجود SPS از دیگری انواع نمود. مراجعه مرجع کتب
153 SPS کاربردهای ماندگار حالت a) به راکتیو و اکتیو توانهای کنترل توان- تنظیم ولتاژ تنظیم موازی خطوط بین توان سازی متعادل و تقسیم مستقل- طور کوچک: سیگنال دینامیک b) و کند تزریق سیستم به ولتاژ دینامیکی طور به میتواند SPS قدرت سیستم الکترومکانیکی نوسانات به پاسخ در را توان عبور طور به میتواند SPS توسط ولتاژ سریع تزریق نماید. کنترل نماید. کنترل نوسانات این میرسازی برای را توان عبور دینامیکی گ:ر بز سیگنال دینامیک c) با و... خطاها نظیر میشوند ناپایداری باعث که سیگنالهائی در میروند. پایداری سوی به phase shifting سریع عمل کرد. استفاده SPS خطی غیر مدل از باید اینجا
154 سوم فصل FACTS کنندههای لرتنک کانورترها بر مبتنی Converter-based FACTS Controllers مقدمه استفاده ولتاژ منبع سوئیچینگ ازکانورترهای کنندهها کنترل این و استاتیک کنترل قابل سریع جریان یا ولتاژ منابع تا میکنند کنند. ایجاد سنکرون ولتاژ برای ویکنواختتر بهتر مشخصهای معموال وسائل این میکنند ایجاد زاویه کنترل و خط موثر امپدانس انتقال
155 FACTS كنندههاي كنترل كانورترها بر مبتني و کنترل استاتیک قابل سریع جریان یا ولتاژ منابع تا کنند. ایجاد سنکرون برای ویکنواختتر بهتر مشخصهای معموال وسائل این ایجاد زاویه کنترل و خط موثر امپدانس انتقال ولتاژ میکنند. سیستم با اکتیو توان تبادل برای الزم پتانسیل همچنین کرده ایجاد راکتیو توان کنترل قابل جبرانسازی ونیز ac بار پخش کنترل برای جدیدی انتخاب بنابراین و میآورند. وجود به (Power Flow)
156 منبع ولتاژ سنکرون (Synchronous Voltage Source) SVS در اینجا متناظر با ماشین سنکرون ایدهآل است که میتواند دامنه وزاویه فاز ولتاژ را کنترل نماید با این تفاوت که دارای اینرسی نیست پاسخ آن لحظهای است و میتواند توان راکتیو )در هر دو جهت( تولید نموده و با سیستم تبادل توان اکتیو نیز داشته باشد )چنانچه با منبع انرژی مناسبی که بتواند توان برای سیستم تولید یا از آن جذب نماید کوپل شود(.
157 SVS سنکرون ولتاژ منبع 39 شکل Pref و Qref 39 شکل در شده( تولید ولتاژ V )دامنه کننده: تعیین و تولیدی( ولتاژ )فاز ψ و هستند هایی Q و P نتیجه در شوند. تبادل شبکه با باید که مانند SVS باشد اگرPref=0 Q فقط کندانسورسنکرون یک حالت این در و میکند کنترل را نبوده DC انرژی منبع به نیازی میشود. حذف و خازن یک از باید آن بجای ولی نمود. استفاده
158 شده کنترل موازی ادمیتانس با کنندههای جبران برخالف پارامترهای از مستقل SVS توسط سازی جبران ها (SVC) است. فاز( زاویه و ولتاژ خط )جریان شبکه را خود کار شبکه در اختالالت ایجاد درصورت بنابراین میکند. حفظ را خود وظیفه و میدهد انجام که )سینوسی( است متناوب ولتاژ منبع یک SVS صفر آن خروجی امپدانس دارد. ثابتی کنترلی ورودیهای ترانسفورماتور پراکندگی اثر بر راکتیو امپدانس )فقط است دارد(. را شده کوپل نمیآورد. وجود به تشدید مدار بنابراین
159 بین اکتیو توان طرفه دو تبادل قابلیت همچنین SVS دارد. را خود dc, ac ترمینالهای به را ها SVS از بیشتر یا دو dc ترمینالهای میتوان بنابراین بین اکتیو توان انتقال برای مسیرهائی لذا و نمود کوپل هم کرد. ایجاد انتقال خطوط و/یا نظر مورد شینهای در راکتیو و اکتیو توانهای میتوان SVSها ترکیب با بین را راکتیو و اکتیو توانهای و نمود کنترل جداگانه را خطوط کرد. متعادل خطوط
160 FACTS کنندههای کنترل از: عبارتند میکنند استفاده سنکرون ولتاژ منابع از که (Static Synchronous Compensator) STATCOM به را انتقال ولتاژ و شده نصب موازی صورت به SVS نظیر وسیله این مینماید. کنترل سازی جبران وسیله (Static Synchronous Series Compensator) SSSC انتقال خط امپدانس سر دو ولتاژ کنترل با را سری سازی جبران وسیله این مینماید. کنترل را خط موثر امپدانس وبنابراین کرده کنترل (Unified Power Flow Controller) UPFC انتقال پاراتر سه هر ترکیبی صورت به یا جداگانه طور به میتواند وسیله این خط در عبوری راکتیو و اکتیو توان مستقیما یا فاز( زاویه و امپدانس )ولتاژ نماید. کنترل را
161 (Interline Power Flow Controller) IPFC آن بر عالوه دهد. انتقال خطوط بین را اکتیو توان است قادر چند خط یک در بنابراین و نموده فراهم را سری راکتیو جبرانسازی دهد. انجام را راکتیو و اکتیو توانهای کنترل مدیریت است قادر مداره است. شده داده نشان انتقال درخط کنندهها کنترل این اثر زیر شکل در 40 شکل FACTS کنندههای کنترل اثر کانورتری
162 اثر کنترل کنندههای گروه الف, ب و ج را بر پارامترهای خط انتقال نشان می دهد
163 ) (VSC ولتاژ منبع مبدل اصول و مبانی قابلیت با نیمههادی کلیدهای از ولتاژ منبع مبدلهای آرایش در میشود. استفاده GTO نظیر شدن خاموش اجباری شود پرداخته مبدلها این مشخصات شود. بیان دارد وجود ( توسط AC ولتاژ منبع یک مدار این در مقاومتی بار به معکوس موازی تریستور دو عنصر هیچ و است شده متصل هم انرژی کننده ذخیره ندارد. وجود سیستم در بررسی به اینکه از قبل جریان قطع شده( کنترل بگیرید. نظر در را شکل ساده مدار منظور این.برای آن جریان و ولتاژ موج شکل و تریستوری ساده مدار
164 با روشن کردن تریستور در زاویه آتش 180> < 0 ولتاژ منبع دو سر مقاومت قرار گرفته و شکل موج جریان I را به وجود میآورد. با رسیدن ولتاژ به صفر جریان هم صفر شده و با شروع نیم سیکل ولتاژ منفی, تریستور خاموش میشود و در نیم سیکل بعدی تریستور موازی در زاویه روشن شده و همین روند تکرار میشود با بسط شکل موج جریان به سری فوریه مالحظه میگردد که مولفه اول آن یک موج سینوسی خواهد بود که نسبت به شکل موج ولتاژ منبع بهاندازة β درجه تاخیر فاز خواهد داشت.
165 بهصورت همیشه زاویه آتش زاویه تغییرات محدوده بهازای منبع ولتاژ به نسبت مصرفی جریان منبع نظر از و بود خواهد فاز پس است. فاز پس همیشه که حالی در میکند جذب راکتیو توان منبع از همیشه ترکیب این لذا ندارد. وجود سیستم در راکتیوی عنصر هیچ مبدلهایی کلید شدن خاموش که میشود نتیجهگیری اساس این بر شده استفاده معمولی تریستوری کلیدهای از آنها ساختمان در که همیشه مبدلها این و شده تعیین شبکه جریان و ولتاژ توسط است هستند سیستم در راکتیو توان کننده مصرف
166 از آن در که بگیرید نظر در را )زیر( شکل ساده مدار اکنون شده استفاده اجباری( شدن خاموش قابلیت با )تریستور GTO خاموش t 180 زمان در و روشن 0=t زمان در کلیدها کنید فرض است. بود خواهد شکل مطابق جریان و ولتاژ موج شکل صورت این در شوند
167 مولفه دهیم بسط فوریه سری از استفاده با را جریان این اگر منبع ولتاژ موج با که بود خواهد سینوسی موج یک آن اول پیش خاص حالت این در که دارد فاز اختالف بهاندازه است. فاز مصرف یا و تولید راکتیو توان میتواند ترکیب این لذا نظیر انرژی کننده ذخیره عنصر هیچ از اینکه بدون نماید کند. استفاده خازن و سلف منبع مبدلهای مشخصه که گفت میتوان نتیجه یک بهعنوان انرژی کننده ذخیره عناصر به نیاز بدون که است این ولتاژ الگو طرح با را شبکه خازنی یا سلفی راکتیو توان میتوانند نمایند. جبران زنی کلید
168 است شده داده نشان ولتاژ منبع مبدل يك مداري نمودار شكل در هر شود. می مشاهده کلید دو فاز سه مبدل این )شاخه( بازو هر روی بر ترکیب این با است. شده تشکیل معکوس - موازی دیود یک و GTO میگردد. پذیر امکان کلید از جریان یک از کلید طرفه دو عبور خروجی ولتاژهای موج شکل و پالسی شش ولتاژ منبع مبدل
169 ب- Va=Vdc Ta1 پتانسیل کلید شدن فعال بار هر با کلید طریق از جریان مسیر بودن قطع صورت در و گردد می Va=0 است. پتانسیل Ta2 و Da2 گیت )فرمان کنترل استراتژی یک انتخاب با بنابراین و Vb, Va های موج شکل راحتی به توان می GTOها( نمود. ایجاد ) )5-3 شکل با مطابق را Vc شده ارائه ولتاژ های موج شکل اول مولفه گرفتن نظر در با را ولتاژ مبدل میتوان AC طرف ولتاژ و )5-3( شکل در آن خروجی ولتاژ فاز و دامنه که کرد مدل ولتاژ منبع یک با است. کنترل قابل زنی کلید الگوهای توسط
170 فرض کنید یک مبدل منبع ولتاژ به شبکة قدرت متصل شود. در این صورت می توان تونن شبکه را بهصورت مدار معادل مولفه اول ولتاژ مبدل و مدل ارائه شده در شکل زیر نشان داد. مدل معادل مولفه اول مبدل منبع ولتاژ و مدل تونن شبكه در این شکل Vc ولتاژ خروجی مبدل میباشد که دامنه و فاز آن توسط شاخصهای دامنه و فاز الگنوی کلیند زننی قابل کنترل میباشد.
171 مدار در I جریان باال شکل میشود: تعیین زیر رابطه از I V n V jx th c j V C X V th n ( Vc )از مبدل خروجی ولتاژ دامنه اگر اخیر رابطة طبق به نسبت I جریان باشد ( Vn )بزرگتر شبکه ولتاژ دامنه شبکه به راکتیو توان مبدل و بود خواهد فاز پیش شبکه ولتاژ نمود خواهد تزریق دامنه از کوچکتر مبدل خروجی ولتاژ دامنه که حالتی در و بوده فاز پس شبکه به نسبت I جریان باشد شبکه ولتاژ میدارد. دریافت راکتیو توان شبکه از مبدل
172 با استفاده از یک منبع ولتاژ DCیک مبدل میتواند یک شکل موج از ولتاژهای سه فاز متعادل مطابق شکل زیر ایجاد کند. این شکل موج یک شکل موج سه سطحی است Vdc( +, صفر و ) Vdc شکل موج ولتاژهای خروجی مبدل سه سطحی )شش پالسه(
173 وصل DCمشترك باس یک به میتوانند مبدل چندین فاز سه موج شکل یک توانند می یک هر و شوند ایجادکنند. شروع لحظه جابجایی و موجها شکل این تولید با شکل یک موجها شکل کردن جمع سپس و آنها )فازهای( میآید بدست سطحی چند موج موج شکل یک به تقریبا میتوان مبدل این مناسب تعداد با n از استفاده با ترکیب یک 42 شکل یافت. دست سینوسی توان می سطحی سه مبدل n این با میدهد. نشان را مبدل در کرد. ایجاد سطح 1+2n با سینوس ولتاژ یک شد. خواهد بحث بیشتر مورد این در آتی های بخش
174 هر (SVS) سنکرون ولتاژ منابع 2- نیمه 6 از که است. شده داده نشان زیر شکل در پالسی 6 ولتاژ منبع کانورتر یک هادیSelf-Commutated است. شده تشکیل Gate-turn off thyristors = GTO کلیدهای )معموال است. معکوس موازی دیود یک با ها GTO از یک آن خروجی های ولتاژ موج شکل و پالسی 6 کانورتر 41 شکل
175 کانورتر باشد( شده شارژ خازن یک است ممکن )که dc ولتاژ منبع یک از استفاده با کند. ایجاد 41b شکل مطابق متعادل فاز سه ولتاژهای از موج شکل یک میتواند شکل یک هر که شوند وصل مشترك dc ولتاژ منبع یک به میتوانند کارنورتر چندین میکنند. ایجاد را فاز سه موج پالسی 48 6 n 42 شکل کانورتر کانوتر یک موج شکل و پالسی
176 فازهای هم سر پشت جابجائی و جها مو شکل این تولید با چند موج شکل یک آنها موجهای شکل کردن جمع و آنها این مناسب تعداد با میآید. دست به (Multipulse) پالسی یافت. دست سینوسی موج شکل یک به تقریبا توان کانورترها استفاده )با را پالسی 48 ترکیب یک قبل( )صفحه 42 شکل متداول ترکیب یک این میدهد. نشان پالسی( 6 کانورتر 8 از به سینوسی ولتاژ منبع کانورتر یک عنوان به عمل در و است میرود. کار است ولتاژ از جلوتر درجه 90 خروجی جریان 42 شکل در میکند. تولید کاپاسیتیو جریان کانورتر اینحالت در یعنی با میتوان را ac سیستم و کانورتر بین تبادلی راکتیو توان توان کار این با و نمود کنترل فاز سه خروجی ولتاژ دامنه تغییر مینماید. تغییر تبادلی راکتیو
177 را ac سیستم و کانورتر بین تبادلی اکتیو توان ترتیب همین به نسبت کانورتر خروجی ولتاژ Phase shifting عمل با میتوان نمود. کنترل ac سیستم ولتاژ به ولتاژ فاز زاویه از بیشتر کانورتر خروجی ولتاژ فاز زاویه اگر شده( ذخیره انرژی منبع )یا dc ولتاژ منبع از کانورتر باشد ac میدهد. سیستم به اکتیو توان اکتیو توان کند کنترل را راکتیو توان فقط کانورتر باشد قرار اگر صورت این در باشد. صفر باید dc انرژی منبع توسط تولیدی است. نیاز کانورتر با موازی کوچک dc خازن یک به فقط
178 استاتیک) STATCOM ( جبرانساز از است. سنکرون کندانسور مشابه STATCOM عملکرد اساس استفاده قدرت الکترونیک ادوات از وسیله این ساخت در که آنجا میگویند. استاتیک جبرانساز آن به میشود را نیاز مورد راکتیو توان جبرانساز این در کاررفته به مبدلهای تأمین شبکه( به STATCOM اتصال محل )در محلی بطور میباشد تنظیم قابل پیوسته بطور آن خروجی و کرده وسیعی تغییرات قدرت شبکه ولتاژ که مواردی در دلیل همین به این از خطا( رفع از پس یا اغتشاش بروز حالت )در باشد داشته میشود. استفاده جبرانساز
179 STATCOM STATCOM در است ولتاژ مبدل نوع از مبدل است. الزامی STATCOM خروجی در سلف وجود کنيم. می استفاده خازن از کنيم تزريق راکتيو توان فقط بخواهيم اگر آنجا از است. سنکرون کندانسور مشابه STATCOM عملکرد اساس میشود استفاده قدرت الکترونيک ادوات از وسيله اين ساخت در که میگويند. استاتيک جبرانساز آن به بطور را نياز مورد راکتيو توان جبرانساز اين در کاررفته به مبدلهاي و کرده تأمين شبکه( به STATCOM اتصال محل )در محلی میباشد تنظيم قابل پيوسته بطور آن خروجی داشته وسيعی تغييرات قدرت شبکه ولتاژ که مواردي در دليل همين به جبرانساز اين از خطا( رفع از پس يا اغتشاش بروز حالت )در باشد میشود. استفاده
180 مدلسازی SVC و STATCOM براي مدلسازي SVC الزم است در حالت استاتيکی در يک زاويه آتش معين مقدار راکتانس معادل را بدست آورده و معادل باسوئيچ و سلف سري با آن قرار دهيم و با تغيير نقطه کار اندازه آن و در نتيجه مدل آن تغيير می يابد. اما در حالت ديناميکی با استفاده از يک سيستم closeloop قابليت تغيير مد عملکردي را داريم. در مد امپدانس ثابت سيگنال زاويه آتش ثابت است. در مد ولتاژ ثابت الزم است ولتاژ مرجع با مقداراندازه گيري شده در آن باس مقايسه شود و اين سيستم حلقه بسته زاويه آتش را طوري تغيير می دهد که ولتاژ تقريبا ثابت بماند اين موضوع اوال ايده آل نيست ثانيا پاسخ آن تا حدودي کند است ثالثا عملکرد آن در حدود ولتاژهاي نامی است
181
182 SVC و STATCOM مقايسه شبيه هم به بسيار جبرانسازي عملکرد قابليت لحاظ از STATCOM SVCو است. متفاوت اساسا آنها عملکرد اصول اما هستند به SVC حاليکه در کند می عمل سنکرون ولتاژ منبع يک عنوان به STATCOM کند. می عمل شده کنترل راکتيو ادميتانس عنوان پذيري انعطاف و بهتر عملکرد مشخصات از STATCOM شود می باعث تفاوت اين باشد. برخوردار SVC به نسبت بيشتري قابليت )V-I( مشخصه خطی عملکرد محدوده در پيداست شکل از که همانطور است مشابه STATCOM و SVC جبرانسازي عملکرد خروجی جريان است قادر STATCOM غيرخطی عملکرد محدوده درنظرگرفتن با ولتاژ از مستقل صورت به سلفی و خازنی جبرانسازي حداکثر محدوده در را اش کند. کنترل سيستم AC SVCبه از استفاده با حصول قابل جبرانسازي جريان حداکثر حاليکه در يابد. می کاهش سيستم ولتاژ با خطی صورت ولتاژ آنها طی در که سيستم بزرگ اغتشاشات تحت ولتاژ تامين در بنابراين می عمل SVC از موثرتر بسيار STATCOM است خطی محدوده از خارج سيستم کند
183 مقایسه مشخصه V-I SVC و STATCOM
184 قابلیت STATCOM قابليت STATCOM در حفظ کامل جريان خروجی خازنی در شرايط ولتاژ پايين سيستم باعث می شود STATCOM در حفظ پايداري گذراي سيستم بسيار موثرتر از SVC عمل کند. در مواقعی که نياز به جبرانسازي توان اکتيو است DC قادر است با استفاده از پايانه STATCOM خود توان را از يک منبع ذخيره انرژي )باطري بانک خازنی و غيره( بگيرد و از پايانه AC خود آنرا به شبکه تزريق کند. در حاليکه SVC اين قابليت را ندارد.
185 خالصهاي از مهمترين تفاوت STATCOM SVC امپدانسي با عملكرد مناسب در شرايط ولتاژ باال هاي بين STATCOM SVCو منبع جريان با عملكرد مناسب در شرايط ولتاژ پايين ويژگي V-I مشخصه قابل تنظيم در هر محدوده اي با شاخه هاي مختلف متقارن محدوده كنترل CR/TSR/TSC سيكل تا سيكل تا زمان پاسخ
186 STATCOM اي از خالصه مهمترين تفاوت هاي بين SVCو STATCOM ويژگي SVC در مقايسه با فضاي مورد نياز 40-50% 100% SVC 96-98% بيش از 99% دسترس پذيري % هزينه سرمايه گذاري 100%
187 مدلسازی: STATCOM داراي سرعت باالتر از svc بوده ودر بهبود پايداري ديناميکی و گذرا از svc موثر تر است قابليت کنترل اکتيو و راکتيو دارد. سوئيچ ها از نوع IGBT يا GTO می باشد عدم وابستگی به ولتاژ در توليد توان راکتيو می باشد که اين کار منجر به بهبود پايداري گذرا و ديناميکی می گردد و مدلسازي آن می تواند به صورت مدل امپدانسی براي حالت استاتيکی و براي حالت ديناميکی با z متغير مدلسازي شود. چون statcom از نوع svc است می تواند به عنوان منبع ولتاژ متصل شده به شبکه از طريق امپدانس مدلسازي شود. اگر 0=R در بحث انتقال راکتيوVvsc=Vt هر دو همفاز و جريان 90 درجه با هر دو اختالف دارند. با توجه به اينکه ولتاژ Vvsc به شبکه متصل می شود و جريانی را تزريق و يا دريافت می کند می توان مدل منبع جريان براي statcomدر نظر گرفت و مدل آن در صفحه v-i فوق خطوط عمودي می باشد) خطوط عمودي معادل منبع جريان است( به عبارت ديگر در Vvscهاي مختلف i می تواند ثابت باشد.
188 در واقع مد کنترل جريان مستقل از ولتاژ شبکه می باشد يکی از مزاياي statcom :با تغيير حدود 15 درصد در ولتاژ مبدل) Vvsc ( جريان راکتيو خروجی تا 100 درصد تغيير می کند. منحنی فوق وضعيت ايده آل را نشان می دهد اما در عمل يک مشخصه افقی براي statcom در نظر گرفته می شد. اين مشخصه افقی موجب تنظيم ولتاژ بهتر براي حالتهايی می شود که چندين کنترل کننده به يک نقطه از شبکه متصل شده باشد و با داشتن شيبهاي مختلف با توجه به ميزان شيب يا drop آن ميزان راکتيو هر جبران کننده تنظيم می گردد. در ولتاژهاي بسيار پايين توانايی ايجاد جريان ثابت را ندارد و معادل يک راکتانس عمل می کند. در حالت معمولی هر چه بار پس فازتر شود بايستی افت بيشتر شود.
189 مشخصه V-I توليد يا جذب توان راکتيو توسط مبدل منبع ولتاژ (VSC) با تنظيم ولتاژ Vref صورت میگيرد
190 اگر ولتاژ توليد STATCOM کمتر ولتاژ سيستم باشد STATCOM به عنوان يک بار سلفی عمل میکند وMVAR از سيستم جذب میکند. اگر STATCOM بخواهد به عنوان خازن موازي عمل کند و MVAR به سيستم تزريق کند ولتاژ آن بايد بيشتر از ولتاژ سيستم باشد. کانورتر در STATCOM يک اينورتر که dc را به ac تبديل میکند و در اين حالت موج مربعی براي ولتاژ بر اثر سوئيچينگ منبع ولتاژ dc ايجاد میکند )در طرف )ac که مؤلفه اصلی آن يک ولتاژ ac قابل کنترل است.
191 به و موازي هم با باشند می آل ايده که را statcom :دو تمرين مشخصه داريم را آنها تکی مشخصه کنيم می متصل باس يک است. چگونه حاصل افقی مشخصه و باشند ولتاژ کنترل مد در دو هر صورتيکه در نيست ممکن آنها موازي عملکرد باشند نداشته منبع دو که است آن مثل باشند داشته V=1pu فرمان دو هر اگر است شده متصل شبکه از نقطه يک به آل ايده موازي شود اتصال محل ولتاژ تغيير موجب گذرا حالت عمل جريان کنترل مد در بايد موازي statcom دو بنابراين باشند. داشته را کنندگی کنترل برابر دو نيز آن خازنی محدوده برابر دو آن سلفی محدوده يعنی شوند. می نباشد يکسان و داشته وجود آنها افقی مشخصه صورتيکه در اما دارند. نيز ولتاژ کنترل مد در عملکرد قابليت
192 دو با برابر statcom دو افقی مشخصه که کنيم می فرض : مثال statcom دو هر اگر است ولتاژ کنترل ناحيه در درصد 10 و درصد افزايش درصد 10 ولتاژ باشد داشته قرار سلفی مصرف وضعيت در طور به کند می تغيير چقدر و بوده چقدر کدام هر راکتيو جريان يابد تغيير اين از قبل راکتيو جريان مقدار دو مجموع که کنيد فرض نمونه است. بوده درصد 0.8pu statcom به شوند وارد iq جريان بوده يکسان شيب دو هر اگر بوده 0.8pu Iq1=-j0.4 Iq2=-j0.4 جمعا باشد Vt=1pu ازاي به مقدار اين صورتيکه در کردند. می دريافت راکتيو توان برابر Vvsc2 و Vvsc1 بايد شوند واقع موثر دو هر آنکه براي نقطه به متفاوت شيب يا و متفاوت امپدانس با کدام هر اما باشند داريم حالت اين در شوند متصل مشترک
193 در بهبودي توان می svc با statcom يک ترکيب از استفاده با نمود ايجاد هزينه متغير راکتيوي مصرف خواهيم می کنيم می فرض نمونه طور به پله 10 توان می حالت اين در باشيم داشته var 1pu تا صفر بين Rating که گذاشت statcom يک يا کرد موازي هم با TCR باشد متغير 1pu تا 0 از آن مصرف قابليت يعنی باشد pu1 آن 0.5Pu با اي statcom و TCR 0..5Pu توان می بعد طرح در کنيم می موازي آن با باشد Q توليد حداکثر 0.8 بخواهيم صورتيکه در و 0.1pu Rating با کدام هر TSC پله 8 داشتن 1: روش tsc يکجا 0.8 :2 روش 0.2 تا 4 :3 روش 0.4 Rating با statcom و 0.4 پريونيت با ثابت خازن يا Tsc
194 مثال: خازنی با شيب 0.5 موازي با statcom می گردد و هدف داشتن عملکرد کامل در وضعيت خازنی است.پريونيت statcom چقدر بايد باشد Q=2pu IL1+IL2=2 تمرين : 13 دو statcom را به يک نقطه شبکه موازي کرده و در دو حالت زير آنرا بررسی و شبيه سازي نماييد. الف: مشخصه افقی با شيب صفر مشخصه افقی با شيبهاي متفاوت
195 نکات در صورتيکه بخواهيم پيوسته باشند می توانيم ترکيب tcr و خازن ثابت ويا کندانسور سنکرون استفاده کرد اما بايد توجه داشت که پاسخ حلقه بسته به پهناي باند آن در statcom بهتر از svc است در واقع تاثير statcom در حدود 300 ميکروثانيه اما svc تا حدود 5ms است. جبران موازي اگر چه در توان انتقالی خط موثر است اما در واقع قابليت کنترل مناسب در انتقال توان ندارد و بنابراين جبران سري می تواند در کنترل فلوي توان موثر باشد. جبران کننده هاي موازي قادرند پروفيل ولتاژ را در يک خط در حد مطلوب قرار دهند براي بار هاي بزرگترمی توانند به عنوان پشتيبانی براي خطوط شعاعی باشند و در نهايت با افزايش تعداد اين جبران کنند ها می توان انتقال توان را تا حد حرارتی افزايش داد. Msr و msc ديناميک آهسته دارند sr مشخصه ديناميکی سريع نسبت به تغييرات ولتاژ دارند. svc در ولتاژهاي تا 33mw به صورت مستقيم به شبکه متصل شده و در ولتاژهاي باالتر از طريق ترانس مثلث ستاره و يا مثلث /)ستاره /مثلث() 12 پالسه( به شبکه متصل شوند. پاسخ svc در کنترل ولتاژ يک تا 3 سيکل است
196 svc وstatcom براي فيليکر بکار برده می شود. )قابليت حذف و با کاهش فيليکر را دارند( :tsc معموال يک راکتور کوچک يا tsc سري می شود براي کاهش جريان هجومی و ديگري اثر فيلترينگ خازن معموال به صورت ثلث در مدار قرار می گيرند. Tsc+tcr نسبت به tcr+fc ارجحيت دارند IGBT, IGCT,MCT به انرژي کمتري براي سوئينگ احتياج دارند بنابراين براي statcom نسب به gto مناسبتر است. در statcom در شرايط خطا يا بار غير باالنس کنترل فازها می توانند از هم مستقل باشند. در هر سيستم سه فاز بانول ايزوله)ويا اتصال مثلث( هارمونيکهاي مضرب 3 فقط در توالی صفر وجود دارند و از خط عبور نمی کنند اما در صورتيکه ولتاژ تغذيه و يا مبدل باالنس نباشند هارمونيک مضارب 3 داراي تواليهاي مثبت و منفی است و از خط سيستم عبور می کند.
197 شكل زير طرحي از STATCOM و مشخصه V-I آنرا نشان ميدهد. توليد يا جذب توان راكتيو توسط مبدل منبع ولتاژ (VSC) با تنظيم ولتاژ Vref صورت ميگيرد.
198 مهمترين كاربردهاي STATCOM به شرح زير است کنترل دینامیکی ولتاژ بهبود پایداری گذرا حذف نوسانات توان در شبکه انتقال کنترل توان حقیقی و راکتیو.
199 STATCOM -3 انرژی منبع رود کار به راکتیو توان جبرانسازی برای فقط svs اگر صورت در شود جایگزین کوچک dc خازن یک با میتواند DC میباشد. راکتیو فقط DC و AC سیستم بین تبادلی توان.svs از استفاده با STATCOM ساختمان 43 شکل
200 در کرده شارژ را خازن کانورتر حالت این در میدارد نگه نیاز مورد ولتاژ سطح و جذب اکتیو توان کمی ac سیستم از کانورتر تأمین را خود داخلی تلفات بتواند تا میکند مصرف دارد. نگه نظر مورد ولتاژ سطح در را خازن و کرده خروجی ولتاژهای فاز زاویه انداختن عقب با کار این کار به کنترل نوع همین میشود انجام کمی مقدار به کانورتر اندازه بنابراین و ببرد پایین و باال را خازن ولتاژ تا میرود کند کنترل را کانورتر خروجی ولتاژ
201 )برای هدف کنترل کردن تولید یا جذب وار( v-i آن مطابق زیر است. مشخصه شکل 44 )شیب 2 مشخصه V-I مربوط به STATCOM تا 5 درصد است(.
202 یک و آمریکا در STATCOM مورد دو حاضر حال در است. شده نصب ژاپن در مدل باشد سیستم ولتاژ کمتر STATCOM تولید ولتاژ اگر میکند عمل سلفی بار یک عنوان به STATCOM میکند. جذب سیستم از وMVAR عمل موازی خازن عنوان به بخواهد STATCOM اگر از بیشتر باید آن ولتاژ کند تزریق سیستم به MVAR و کند. باشد سیستم ولتاژ ac به را dc که اینورتر یک STATCOM در کانورتر اثر بر ولتاژ برای مربعی موج حالت این در و میکند تبدیل که )ac طرف )در میکند ایجاد dc ولتاژ منبع سوئیچینگ زاویه )با است. کنترل قابل ac ولتاژ یک آن اصلی مؤلفه زیر. شکل مطابق آتش(
203 سطحی دو ولتاژ منبع کانورتر 45 شکل است. متقارن غیر خروجی ولتاژ فوق دوسطحی کانورتر در دست به شکلی آن کردن سطحی سه و ظرفیت کردن برابر 2 با است. متقارن آن خروجی که آید می باشند. متقارن باید نیز آتش زوایای دهد. می نشان را سطحی 3 ولتاژ منبع کانورتر 46 شکل
204 DC ولتاژ كه است اينورتر STATCOMيك در مبدل AC به را ميكند. تبديل خروجی ولتاژ, B یا کند می هدایت A کلید اینکه به توجه با موج حالت این در کرد. خواهد تغییر صفر Vdcیا سطح به این اصلی مولفه است. شده ایجاد کلیدزنی اثر بر ولتاژ مربعی صفر Vdc +و سطح دو دارای که ACاست. ولتاژ یک ولتاژ است. دو با است. متقارن غیر خروجی ولتاژ سطحی دو مبدل این در در شده ارائه مبدل از استفاده و خازنی ظرفیت کردن برابر آید. می بدست متقارن سطحی سه ولتاژ 46 شکل
205 مبدل شکل 46 منبع ولتاژ سه سطحی
206 میشوند. بهتر بعدی هارمونیک و اصلی مؤلفه کانورتر سطوح کردن اضافه با میدهد. نشان را سطحی 5 کانورتر زیر شکل سطحی 5 کانورتر 47 شکل موج شکل آن در که است زیر شکل مطابق ولتاژ منبع کانورتر فاز 3 مدار سطحی( 2 یا پالسی 6 )برای است. شده داده نشان نیز فاز 3 ولتاژهای
207 3 شکل 48 پل کانورتر فاز و ولتاژهای خروجی آن
208 و مقایسه STATCOM SVC عملکرد قابلیت لحاظ از STATCOM SVCو عملکرد اصول اما هستند شبیه هم به بسیار جبرانسازی است. متفاوت اساسا آنها عمل سنکرون ولتاژ منبع یک عنوان به STATCOM راکتیو ادمیتانس عنوان به SVC حالیکه در کند می کند. می عمل شده کنترل مشخصات از STATCOM شود می باعث تفاوت این SVC به نسبت بیشتری پذیری انعطاف و بهتر عملکرد باشد. برخوردار
209 مقايسه مشخصه V-I SVC و STATCOM
210 مشخصه خطی عملکرد محدوده در پیداست شکل از که همانطور مشابه STATCOM و SVC جبرانسازی عملکرد قابلیت )V-I( است قادر STATCOM غیرخطی عملکرد محدوده درنظرگرفتن با خازنی جبرانسازی حداکثر محدوده در را اش خروجی جریان است کند. کنترل سیستم AC ولتاژ از مستقل صورت به سلفی و از استفاده با حصول قابل جبرانسازی جریان حداکثر حالیکه در یابد. می کاهش سیستم ولتاژ با خطی صورت SVCبه طی در که سیستم بزرگ اغتشاشات تحت ولتاژ تامین در بنابراین STATCOM است خطی محدوده از خارج سیستم ولتاژ آنها کند. می عمل SVC از موثرتر بسیار
211 قابليت STATCOM قابلیت STATCOM در حفظ کامل جریان خروجی خازنی در شرایط ولتاژ پایین سیستم باعث می شود STATCOM در حفظ پایداری گذرای سیستم بسیار موثرتر از SVC عمل کند. در مواقعی که نیاز به جبرانسازی توان اکتیو است STATCOM قادر است با استفاده از پایانه DC خود توان را از یک منبع ذخیره انرژی )باطری بانک خازنی و غیره( بگیرد و از پایانه AC خود آنرا به شبکه تزریق کند. در حالیکه SVC این قابلیت را ندارد.
212 STATCOM خالصهای از مهمترین تفاوت های بین SVCو ويژگي STATCOM SVC V-I امپدانسي با عملكرد مناسب در شرايط ولتاژ باال منبع جريان با عملكرد مناسب در شرايط ولتاژ پايين مشخصه قابل تنظيم در هر محدوده اي با شاخه هاي مختلف متقارن محدوده کنترل CR/TSR/TSC سيكل تا سيكل تا زمان پاسخ
213 STATCOM ای از خالصه مهمترین تفاوت های بین SVCو STATCOM ويژگي SVC در مقايسه با فضای مورد نیاز 40-50% 100% SVC 96-98% بيش از 99% دسترس پذیری % هزینه سرمایه گذاری 100%
214 چند شرح به که V 4 = n n V dc STATCOM در هارمونیکها کاهش 3-1 دارد وجود هارمونیکها کاهش برای مختلفی روشهای میپردازیم. آن مورد کانورترها مثلث اتصال a) که میشود ایجاد مربعی موج سطحی دو کانورتر در 4 دامنه: دارای آن اصلی مولفه V1 = V dc داشت. خواهد را دامنه آن هارمونیک هر و سطحی دو ولتاژ منبع کانورتر 45 شکل
215 سه ضریب و سه های هارمونیک کانورترها مثلث اتصال با شوند. می حذف باشند متقارن مبدلها به اعمالی آتش زوایای اگر خروجی موج شکل از خود به خود نیز زوج هارمونیکهای میشوند. حذف بدست 49 شکل مطابق حاصل هارمونیکی طیف نتیجه در 13 و 11 و 7 و 5 هارمونیکهای تنها آن در که آمد خواهد میباشند. موجود... و 19 و 17 و اصلی مولفه به نسبت ها هارمونیک دامنه نمایش این در باشد. می درصد ازای به عمودی محور و است شده سنجیده
216 شکل 49 طیف هارمونیکی با اتصال مثلث )درصد هارمونیکها نسبت به مولفه اصلی(
217 b) تغییر در تاخیر فاز سوئیچینگ در کانورتر سه سطحی چنانچه زاویه کلید زنی قبل و بعد از قطع ولتاژ صفر را تعریف کنیم Point) (Zero Voltage Crossing در این صورت V = 4 مولفهها عبارتند از: V dc Cos 4 Cosn 1 Vn = Vdc n بنابراین هر هارمونیک دلخواهی را میتوان با انتخاب مناسب صفر نمود. مثال برای حذف هارمونیک سوم باید 30 قرار گیرد )که در شکل زیر نشان داده شده است( 18 قرار گیرد. یا برای حذف هارمونیک پنجم باید درشکل زیر تغییرات مولفههای هارمونیکی بر حسب زاویه نشان داده شده است.
218 50 شکل زاویه حسب بر ها هارمونیک تغییرات
219 )Pulse Width modulation) PWM (C پالس پهنای مدوالسیون هارمونیک کنترل برای مناسبی روش روش این درهر ترتیب به حالت این در GTOها است ها کلید ولحظات شده وخاموش روشن سیکل نیم که میشود انتخاب طوری هم سر پشت زنی کنند تامین را نظر مورد نیازهای کنند. حذف را نظر مورد های هارمونیک یعنی
220 )شاخه( بازو دو دارای که مبدل یک برای را روش این کنیم. می مطرح است زیر شکل در شده مطرح انواع از
221 دو مبدل یک شاخه دو از یک هر مناسب کلیدزنی باید چگونه که میدهد نشان 51 شکل هارمونیکهای حذف به منجر سیکل هر در کلیدزنی بار 5 با آنها جمع تا شود کنترل سطحی گردد. 7 و 5 کاهش نیز اصلی هارمونیک ها, کلیدزنی تعداد افزایش با که است آن روش این اشکال مییابد زنی GTOها کلید با واقع در که است این روش این گذاری نام علت که است ذکر قابل است. تنظیم قابل پالس پهنای عبارتی به یا و پالس تداوم زمان مدت 7 5 PWM روش 51 شکل هارمونیکهای حذف برای و
222 (d مدار زنجیره یا هر چه سطوح شود(. )آرایش چند سطحی( (Level) کانورترها بیشتر شود )یعنی تعداد پالسها بیشتر شکل موج منحنی خروجی ولتاژ به سینوسی نزدیکتر بوده هارمونیک ها کمتر میشوند. قبال کانورترهای سه سطحی )4 پالسی( و پنج سطحی )8 پالسی( نشان داده شد. در شکل زیر نیز یک کانورتر 12 پالسی با منحنی خروجی مشخص شده است. 52 شکل زنجیره یا کانورتر مدار پالسی 12
223 ) ترانسفورماتور از استفاده با فاز پالسها)جابجایی فاز جابجائی e) و ترانسفورماتور ثانویه در مثلث اتصال به مبدل یک حالت این در میشود وصل ترانسفورماتور همان ثالثیه در ستاره اتصال به مبدل یک شوند. حذف 7 و 5 هامورنیکهای اولیه در تا 30 زاویه اختالف است. شده داده نشان وضعیت این زیر شکل در حذف این باعث ستاره-مثلث ترانسفورماتور ثانویه و اولیه بین درجه میشود. 7 5 شکل های هارمونیک حذف برای پالسها فاز جابجائی 53 و
224 3-2 تلفات STATCOM شکل زیر نشان میدهد که با افزایش جریان به حالتهای پیش فاز و پس فاز تلفات افزایش مییابد. بنابراین هر چه STATCOM بخواهد حالت خازنی بیشتر یا سلفی بیشتر برود تلفات آن افزایش مییابد. شکل 54 تلفات STATCOM تابعی از جریانهای پیش و پس فاز
225 STATCOM مدل 3-3 است. SVC مانند بار( پخش محاسبات )برای ماندگار حالت مدل امپدانس R+JX آن در که زیراست شکل مطابق گذرا مطالعات مدل شبیه مطالعات است. PWM شاخص ضریب K و است ترانسفورماتور است. SVC مشابه آن نتایج و STATCOM سازی 55 شکل STATCOM گذرای مطالعات مدل
226 استفاده حال در و شده نصب ادوات 3-4 ژاپن کشور در 1991 سال در 80MVAR توان با STATCOM یک a) 8 با که 10MVAR هرکدام کانورتر 8 دارای که است شده نصب به )نسبت میکنند ایجاد زاویه اختالف درجه 5/7 یک هر که ترانسفورماتور میکنند ایجاد را پالسی 48 عمل جمعا و هستند متصل آنها ثالثیه در یکدیگر( زیر( )شکل ±80mvAr STATCOM 56 شکل ژاپن در شده نصب
227 قدرتهای با ترتیب به انگلستان و درآمریکا نیز مورد دو C( وB سال )در 75MvAr )R.5 MvAr کانورتر 8( 100MVAR شدهاند. نصب شکل )1996 وانگلستان آمریکا در شده نصب های STATCOM 57
228 P SSSC -4 که است ac سیستم اصلی فرکانس در مناسب ولتاژ تولید سری خازن نقش میشود. کم خط( ابتدای )ولتاژ Vs ولتاژ از یعنی کل راکتانس واقع در باشد, انتقال خط سلفی راکتانس X اگر مییابد. Xnew=Xکاهش - Xc زیر رابطه طبق V S V= T V= فرض با انتقال قابل توان حداکثر بنابراین مییابد. افزایش 2 V Sin x x c متداول سری سازی جبران 58 شکل
229 آن دامنه که اصلی فرکانس در ولتاژ منبع یک اگر بنابراین تزریق خط به سری صورت به باشد خط جریان با متناسب سری خازن حالت به نسبت یکسانی سازی جبران یک شود منبع این ریاضی ازنظر میآید. وجود به اصلی فرکانس در میشود. تعریف زیر صورت به ولتاژ V jkxi c I شده تزریق سازی جبران ولتاژ فازور Vc آن در که جبران درجه K و خط سری راکتانس خط X جریان فازور است. سری سازی که است مجازی سری خازن دهنده نشان KX بنابراین میسازد. فراهم را الزم سازی جبران ولتاژ همان
230 با نیز و سری خازن با )SVS( سنکرون ولتاژ منبع تفاوت خط به شده تزریق ولتاژ وسائل این در که است آن TCSC است متناسب خط جریان با جریان هر در را دلخواهی ولتاژ است قادر SVS حالیکه در رامستقل ای شده تزریق ولتاژ دامنه یعنی کند ایجاد خط نماید. کنترل جریان ازدامنه SSSC یک عنوان به ولتاژسنکرون شکل 59 :منبع
231 2 Vq فازور با SSSC توسط تزریقی ولتاژ )59( شکل در است. شده داده نمایش انتقالی قدرت برای V=V s V= r فرض با حالت این در داشت: خواهیم P V X 2 Sin V X V q Cos P تغييرات )59( شكل در فوق رابطه به توجه با حسب بر است شده رسم
232 شده رسم حسب بر P تغییرات رابطه این مبنای زیر شکل در داده نشان سری خازن به مربوط منحنی با مقایسه در که است دست به توان افزایش برای بهتری کنترل محدوده که میشود میآید. سری )خازن شکل ( Vq=0 SSSC در Vq پارامتر از تابعی P() تغییرات 60
233 دارای مالحظهای قابل بهطور SSSC ماندگار حالت در همان در سری خازن به نسبت تری وسیع کنترل محدوده است. MVAr صورت به 160MVAr ظرفیت به SSSC یک است. شده کامل آمریکا در آزمایشگاهی ولتاژ منبع مبدل یک شامل SSSC )61( شکل با مطابق قرار خط در سری صورت به آن ترانسفورماتور که است میگیرد. سر دو در DC ولتاژ تولید برای DC انرژی منبع یک است. الزم اینورتر تلفات تامین و خازن
234 به که است اینورتر صورت به ولتاژ منبع کانورتر یک شامل SSSC یک میگیرد. قرار خط در ترانسفورماتور یک توسط سری صورت تلفات وتامین خازن سر دو در dc ولتاژ تولید برای انرژی منبع است. الزم اینورتر 61 شکل SSSC یک ساختمان
235 ولتاژ باشد, داشته کافی تولید بتواند DC انرژی منبع اگر کنترل فاز زاویه و اندازه نظر از میتوان را V c شده تزریق نمود. راکتیو و اکتیو توانهای تبادل است قادر SSSC بنابراین باشد. داشته سیستم با منبع اندازه باشد مطرح راکتیو توان جبرانسازی تنها اگر جهت خازن یک وجود و میشود کوچک کامال انرژی است. کافی مبدل عملکرد اندازه تنها راکتیو( توان سازی جبران )در حالت این در عمود شده تزریق ولتاژ بردار زیرا است کنترل قابل ولتاژ است. خط جریان بر
236 جریان از میتواند شده تزریق سری ولتاژ حالت این در باشد. عقبتر یا جلوتر درجه 90 خط یا سری خازن یک شبیه کامال SSSC رفتار بنابراین است. کنترل قابل سری راکتور شده تزریق ولتاژ که است آن سری خازن با آن فرق میتواند و نبوده مربوط خط جریان به SSSC توسط شود کنترل مستقل بهطور گردد. واقع موثر باری پر و باری کم در بنابراین و
237 برای (TCSC) تریستور با شده کنترل سری خازن کاربردهای است. معتبر هم SSSC شامل: کاربردها این است. گذرا پایداری و ولتاژ توان کنترل خط در سلفی و خازنی سری ولتاژ SSSCمیتواند اینکه میدهد. توسعه را وسیله این کاری وسعت کند تولید کاهش یا افزایش را خط توان SSSCمیتواند توان کنترل در میدهد. نوسانات میراسازی برای بهتری امکان پایداری در و دهد عیب TCSCیک با مقایسه در سری ترانسفورماتور وجود مورد این در با هزینه افزایش بر عالوه ترانسفورماتور این وجود میشود. محسوب میکند. کم را SSSC کارآیی اضافی راکتانس یک کردن اضافه
238 SSSC مدل -4-1 الف( ماندگار مطالعات مدل (Load Flow) سری راکتانس و V s ایدهآل ولتاژ منبع یک با ولتاژ منبع کانورتر اگر سری راکتانس پشت مجازی ولتاژ دهنده نشان و V شود Xمدل i s داریم: باشد شکل ولتاژ منبع کانورتر نمایش 62 Vs یعنی: است کنترل قابل فاز و اندازه نظر از V i V s V rv s i V i
239 b است آن در که جریان منبع یک توسط یعنی: آید می دست به خط با موازی صورت به s 1 X s 2, r r max Vs کردن جایگزین با تزریق مدل Is = -jbsvs موازی مدل با کانورتر جایگزینی 63 شکل
240 S is Vi ( Is)* S js Vj ( Is)* Sis Vi jb rv * s i ij i j b s rv i 2 Sin jb rv Cos s i 2 Sjs Vj jb rv * s i b rv V Sin( ) s i j ij jb s rv i V j Cos ( ij )
241 بنابراین مدل منبع ولتاژ سری به صورت دو بار وابسنته مطنابق زینر است. P si Q si rb s rb s V i V i 2 2 Sin Cos P Q sj sj rb rb s s V V i i V V j j Sin( ij ) Cos( ij ) Load Flow شکل 64 مدل sssc برای
242 S V I )SSSC( سری ولتاژ منبع توسط شده تولید توان با: است برابر s * ij rv جدا زیر صورت به P rb s Q rb s V i V i V V j j VV i j i jx SSSC تولیدی راکتیو و اکتیو های توان آن در که میشود: Sin( ) rb i Cos( ) rb i j j گذرا مطالعات مدل ب( میدهد. نشان سیستم گذرای مطالعات برای را SSSC مدل 65 شکل ومقایسه همچنین و خط جریان اندازهگیری با V dc * s s V V i i 2 2 Sin 2 Cos r b V s i 2
243 , مقادیر میتواند کنترلر VdcrefوIref مرجع مقادیر با آنها راانتخاب را( قبل صفحات در شده ذکر مقادیرr, )همان K نماید. تزریق سیستم به را ولتاژ و نمود kv dc SSSC مدل 65 شکل گذرا مطالعات برای
244 سازی شبیه 4-2- و مشخصات همان با 40( )صفحه 17 شکل قدرت سیستم در خطوط در SSSC چنانچه آمده وجود به خطای همان خواهد 66 شکل مطابق سازی شبیه نتایج 2( )شین شود نصب TCSC با درمقایسه بهتری بسیار میرائی دهنده نشان که بود میباشد. 49( صفحه 26 )شکل 0.1 خطا SSSC نصب با سازی شبیه نتایج 66 شکل دارد. دوام ثانیه
245 4-3- کاربردها کاربرد خازن سری قابل کنترل (TCSC) برای SSSC هم معتبر است. این کاربردها شامل کنترل توان ولتاژ و پایداری زاویه است. اینکه SSSC میتواند ولتاژ سری اندوکتیو وکاپاسیتیو در خط تولید کند رژیم کاری این وسیله را توسعه میدهد. در کنترل توان SSSC میتواند توان خطا را افزایش یا کاهش دهد. در پایداری امکان بهتری برای میراسازی نوسانات میدهد.
246 محسوب عیب یک سری ترانسفورماتور وجود اینجا در.)TCSC با مقایسه )در میشود اضافه با هزینه بر عالوه ترانسفورماتور این وجود کم را SSSC یی کارا اضافی راکتانس یک کردن میکند. ترانسفورماتور بدون های SSSC معرفی با آینده در شد. خواهد رفع احتماال مشکل این
247 نمیتواند ولی UPFC -5 دهد راتغییر انتقال خط دوسر ولتاژ است قادر SSSC دهد. راتغییر انتقال امپدانس ولتاژ منبع دو از که (UPFC) بار پخش یکنواخت کننده کنترل میکند استفاده back to back پشت به پشت (SVS) سنکرون پخش بر گذار تاثیر پارامترهای همه انتخابی یا همزمان قادراست کند راکنترل باردرخط هر مستقل کنترل قابلیت دیگر عبارت به فاز( زاویه و امپدانس )ولتاژ دارد. را خط در راکتیو و اکتیو توان دو
248 UPFC اساسی مفهوم 67 شکل آن: کنترل قابل اندازه که است ولتاژ کانورترمنبع سر دو Vولتاژ pq V min pq Vpq max است. P 2 آن کنترل قابل زاویه و میشود. سری انتقال خط با ولتاژ منبع این V pq
249 ولتاژ وزاویه اندازه مقدار هردو چون آرایش این در است کنترل قابل و اکتیو میتوان هم است قادر V pq ولتاژ منبع لذا کند. تبادل خط با راکتیو توان هم داشته تولیدی راکتیو توان میتواند فقط SVS چون مناسب توان منبع یک توسط باید اکتیو توان لذا باشد شود. جذب یا تولید است. خط ابتدای ولتاژ منبع همان منبع این
250 کند. تولید اکتیو توان میتواند طریق این از کانورترموازی back to back کانورتر دو از استفاده با UPFC ساختمان 68 شکل
251 متصل مشترك dc لینک یک به ولتاژ منبع کانورتر دو کند. می استفاده dc ذخیره خازن یک از لینک این و هستند با راکتیو توان تبادل مستقل طور به میتواند کانورتر هر باشد. داشته خود ترمینال را زاویه و اندازه با ولتاژ تزریق وظیفه )سری( 2 کانورتر دارد. خط در سری صورت به و نموده عبور کانورتر این از خط جریان با متناسب جریان ac وسیستم آن بین راکتیو و اکتیو توان تبادل به منجر شود. می
252 سری( های ترمینال )یعنی ترمینال هر در راکتیو توان تبادل سری(. )جبرانسازی شود می تولید کانورتر توسط در توان جذب یا تولید با ac ترمینال در اکتیو توان تبادل شود. می انجام dc لینک مورد اکتیو توان جذب یا تولید )موازی( 1 کانورتر وظیفه است. 2 کانورتر نیاز راکتیو توان لزوم صورت در میتواند همچنین 1 کانورتر جبرانسازی یک بنابراین و کرده تولید یا جذب کنترل قابل کند. ایجاد خط برای راکتیو موازی
253 با V pq کردن اضافه با را توانها کنترل وظیفه UPFC انجام V s ولتاژ فازور به p زاویه و Vمناسب pq دامنه میدهد. انجام قبلی نظر مورد کنترل نوع سه V pq مناسب انتخاب با فاز(. زاویه کنترل موازی کنترل سری )کنترل میشود. چنجر تیپ دارای ترانسفورماتور یک مشابه ترمینال ولتاژ کوچک بسیار پله هر و زیاد بینهایت پلههای تعداد با ولی میشود. انجام 69 a شکل مطابق
254 69 شکل UPFC قابلیتهای آن در که میدهد نشان را سری )راکتیو( جبرانسازی 69 b شکل و میشود کم آن از یا اضافه (V) خط ولتاژ به خطا جریان بر عمود است. شده سری خط با خازنی که است آن مانند درست لذا V c
255 69c شکل در انتقال زاویه تنظیم (Phase shifting) میشود انجام و شده اضافه خطا ولتاژ به V بر عمود V آن در که یا اندازه به را آن زاویه ولتاژ دامنه تغییردر بدون میدهد. تغییر بار پخش هدفه چند کنترل 69d شکل در Multi_function power flow control آن: در که میشود انجام V = V + V + pq C V
256 V S V r V pq در تولیدی راکتیو توان و P انتقالی توان جهت به باتوجه V داریم: خطا انتهای s Vpq Vr * P jq Vr ( ) jx * V V V V s r * r pq Vr ( ) jx jx = V < V 2 = V 2 V ( Cos ( Cos jsin 2 jsin ) 2 ( ) VPq ( Cos( ) jsin ( )) )
257 P-jQ سه این جایگزینی با رابطه در بردار داریم: 2 V VV pq P P0 ( ) Ppq( ) Sin Sin( ) X X 2 V VV pq Q Qor( ) Qpq( ) (1Cos ) Cos( X X V P ( ) = Sin o X 2 V Q0 ( ) (1 Cos ) X 2 P pq ( ) بنابراین است کنترل قابل 2 است: کنترل قابل از مستقل تا صفر بین چون و VV pq بین VV pq X X )
258 P o VV pq ( ) P P ( ) 0 X VV X pq بین مقادیر زیر قابل کنترل است. VV pq Q ( ) Q Q ( 0 0 ) X VV X pq همچنین Q دو رابطه اخير مشخص كننده اين موضوعاند كه UPFC ميتواند به ازاي هاي گوناگون و بطور مستقل از هم, توان اكتيو و راكتيو را كنترل نمايد.
259 UPFC مدل -5-1 گذرا مطالعات مدل الف- 70 شکل گذرا مطالعات برای دیده 70 شکل در که همانطور میشود مشابه UPFC STATCOM یک دارای که SSSC یک و هستند مشترك dc شین میشود. مدل
260 ب( دینامیکی مدل بلوك آن در که UPFC حضور با سیستم دینامیکی مدل شده گرفته نظر در نیز میراسازی جهت نوسان معادله دیاگرام است. به مربوط قسمت واقع در است. شده داده نشان شکل در 71 شکل راست سمت ودر بوده 70 شکل مشابه کانورترها است. شده مشخص نوسان معادله دیاگرام بلوك طریق از زمین به فاز )یک شده داده نشان نقطه در خطائی میکند. ایجاد دینامیکی شرایط خطا( زیاد امپدانس میشود. برطرف سیکل چند از پس خطا این
261 شکل UPFC مدل 71 دینامیکی مطالعات برای UPFC دارای خط از 0.75 pu عادی درشرایط فوق شکل در مییابد. انتقال آن موازی ازخط باقیمانده 0.25pu و میکند عبور خط از توان 1pu کل که میکند عمل طوری UPFC خطا از پس نکند. عبور توانی دیگر دارد خطا خط از و کند عبور آن به متعلق
262 سازی شبیه 5-2- گذرا مطالعات الف( UPFC است. شده داده نشان 72 شکل در مطالعه مورد نمونه سیستم 8 و 4 شینهای ولتاژ کنترل همچنین و ازخط عبوری توان کنترل برای لحظه در 6 شین در متقارن فاز سه کوتاه اتصال است. شده نصب بین شکل در شده داده نشان است.کلید شده گرفته نظر در 45=t کرده عمل سیکل( 9 از )پس لحظه در 4, 5 شینهای میکند. حذف را 7 شین بار و کوتاه اتصال ودرنتیجه نمونه سیستم 72 شکل گذرا مطالعات بررسی برای
263 گذرا مطالعات سازی شبیه نتایج 73 شکل 3 شین در موجود ژنراتور فوق( )شکل آمده دست به نتایج اساس بر خود 1pu در تغییرات کمی از پس را خود ولتاژ )AVR داشتن )با میرسد. پایدار حالت به نیز آن میکندوزاویه حفظ مدل با UPFC برای چنین خط و UPFC ساده مدل برای پر خط است. دقیقتر جزئیات
264 از پس نیز UPFC دارای ازخط عبوری توان و بار تقاضای میشود دیده که همانطور میشود کنترل بخوبی تغییرات کمی کنترل نظر مورد نیزدرمقادیر انتقال خط انتهای و ابتدا ولتاژ اند. شده دینامیکی مطالعات ب( )صفحه مربوط صفحه در شده ذکر شرایط با 71 شکل برای ولتاژ خط زاویه تغییرات خط انتهای به تحویلی توان 120( است داده نشان خطا جریان و سری ترانسفورماتور دوسر 125( و 124 صفحه های شکل )در و توان نوسانات چگونه که میدهند نشان ها شکل این سری ترانسفورماتور سر دو ولتاژ نوسانات همچنین و زاویه میشوند. میرا و کنترل خط وجریان

265 است آمده دست به حالتی برای مطالعات نتایج 74 شکل در )بخش شده حذف میراسازی به مربوط قسمت آن در که حالت این در لذا و )UPFC مدل در نوسان معادله به مربوط بار پخش اتوماتیک کنترل خاصیت دارای فقط UPFC است. شکل که حالتی در دینامیکی مطالعات سازی شبیه نتایج است. شده حذف میراسازی قسمت 74

266 قسمت گرفتن نظر در با مربوط دینامیکی مطالعات نتایج 75 شکل در است. شده مشخص شده داده نشان مدل در UPFC میراسازی به ولتاژ همچنین و زاویه و میشودتوان مالحظه که همانطور میگیرند. قرار دلخواه مقدارهای سطح در و شده میرا سرعت شکل که حالتی در دینامیکی مطالعات سازی شبیه نتایج مینماید. عمل میراسازی 75 قسمت
روش محاسبه ی توان منابع جریان و منابع ولتاژ
 روش محاسبه ی توان منابع جریان و منابع ولتاژ ابتدا شرح کامل محاسبه ی توان منابع جریان: برای محاسبه ی توان منابع جریان نخست باید ولتاژ این عناصر را بدست آوریم و سپس با استفاده از رابطه ی p = v. i توان این
روش محاسبه ی توان منابع جریان و منابع ولتاژ ابتدا شرح کامل محاسبه ی توان منابع جریان: برای محاسبه ی توان منابع جریان نخست باید ولتاژ این عناصر را بدست آوریم و سپس با استفاده از رابطه ی p = v. i توان این
محاسبه ی برآیند بردارها به روش تحلیلی
 محاسبه ی برآیند بردارها به روش تحلیلی برای محاسبه ی برآیند بردارها به روش تحلیلی باید توانایی تجزیه ی یک بردار در دو راستا ( محور x ها و محور y ها ) را داشته باشیم. به بردارهای تجزیه شده در راستای محور
محاسبه ی برآیند بردارها به روش تحلیلی برای محاسبه ی برآیند بردارها به روش تحلیلی باید توانایی تجزیه ی یک بردار در دو راستا ( محور x ها و محور y ها ) را داشته باشیم. به بردارهای تجزیه شده در راستای محور
آزمایش 8: تقویت کننده عملیاتی 2
 آزمایش 8: تقویت کننده عملیاتی 2 1-8 -مقدمه 1 تقویت کننده عملیاتی (OpAmp) داراي دو یا چند طبقه تقویت کننده تفاضلی است که خروجی- هاي هر طبقه به وروديهاي طبقه دیگر متصل شده است. در انتهاي این تقویت کننده
آزمایش 8: تقویت کننده عملیاتی 2 1-8 -مقدمه 1 تقویت کننده عملیاتی (OpAmp) داراي دو یا چند طبقه تقویت کننده تفاضلی است که خروجی- هاي هر طبقه به وروديهاي طبقه دیگر متصل شده است. در انتهاي این تقویت کننده
آزمایش 1: پاسخ فرکانسی تقویتکننده امیتر مشترك
 آزمایش : پاسخ فرکانسی تقویتکننده امیتر مشترك -- مقدمه هدف از این آزمایش بدست آوردن فرکانس قطع بالاي تقویتکننده امیتر مشترك بررسی عوامل تاثیرگذار و محدودکننده این پارامتر است. شکل - : مفهوم پهناي باند تقویت
آزمایش : پاسخ فرکانسی تقویتکننده امیتر مشترك -- مقدمه هدف از این آزمایش بدست آوردن فرکانس قطع بالاي تقویتکننده امیتر مشترك بررسی عوامل تاثیرگذار و محدودکننده این پارامتر است. شکل - : مفهوم پهناي باند تقویت
فصل چهارم : مولتی ویبراتورهای ترانزیستوری مقدمه: فیدبک مثبت
 فصل چهارم : مولتی ویبراتورهای ترانزیستوری مقدمه: فیدبک مثبت در تقویت کننده ها از فیدبک منفی استفاده می نمودیم تا بهره خیلی باال نرفته و سیستم پایدار بماند ولی در فیدبک مثبت هدف فقط باال بردن بهره است در
فصل چهارم : مولتی ویبراتورهای ترانزیستوری مقدمه: فیدبک مثبت در تقویت کننده ها از فیدبک منفی استفاده می نمودیم تا بهره خیلی باال نرفته و سیستم پایدار بماند ولی در فیدبک مثبت هدف فقط باال بردن بهره است در
مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل
 مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل شما باید بعد از مطالعه ی این جزوه با مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل کامال آشنا شوید. VA R VB به نظر شما افت ولتاژ مقاومت R چیست جواب: به مقدار عددی V A
مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل شما باید بعد از مطالعه ی این جزوه با مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل کامال آشنا شوید. VA R VB به نظر شما افت ولتاژ مقاومت R چیست جواب: به مقدار عددی V A
تصاویر استریوگرافی.
 هب انم خدا تصاویر استریوگرافی تصویر استریوگرافی یک روش ترسیمی است که به وسیله آن ارتباط زاویه ای بین جهات و صفحات بلوری یک کریستال را در یک فضای دو بعدی )صفحه کاغذ( تعیین میکنند. کاربردها بررسی ناهمسانگردی
هب انم خدا تصاویر استریوگرافی تصویر استریوگرافی یک روش ترسیمی است که به وسیله آن ارتباط زاویه ای بین جهات و صفحات بلوری یک کریستال را در یک فضای دو بعدی )صفحه کاغذ( تعیین میکنند. کاربردها بررسی ناهمسانگردی
ﯽﺳﻮﻃ ﺮﯿﺼﻧ ﻪﺟاﻮﺧ ﯽﺘﻌﻨﺻ هﺎﮕﺸﻧاد
 دانشگاه صنعتی خواجه نصیر طوسی دانشکده برق - گروه کنترل آزمایشگاه کنترل سیستمهای خطی گزارش کار نمونه تابستان 383 به نام خدا گزارش کار آزمایش اول عنوان آزمایش: آشنایی با نحوه پیاده سازی الکترونیکی فرایندها
دانشگاه صنعتی خواجه نصیر طوسی دانشکده برق - گروه کنترل آزمایشگاه کنترل سیستمهای خطی گزارش کار نمونه تابستان 383 به نام خدا گزارش کار آزمایش اول عنوان آزمایش: آشنایی با نحوه پیاده سازی الکترونیکی فرایندها
دانشگاه ا زاد اسلامی واحد خمينی شهر
 دانشگاه ا زاد اسلامی واحد خمينی شهر fact svc موضوع پروژه: شبيه سازی حالات داي می وگذرای وادوات ارشادی مهندس اقای جناب پروژه: استاد نام کشکوليان سعيد کننده تهيه : قدرت برق مهندسی رشته : 874174015 شماره
دانشگاه ا زاد اسلامی واحد خمينی شهر fact svc موضوع پروژه: شبيه سازی حالات داي می وگذرای وادوات ارشادی مهندس اقای جناب پروژه: استاد نام کشکوليان سعيد کننده تهيه : قدرت برق مهندسی رشته : 874174015 شماره
مدار معادل تونن و نورتن
 مدار معادل تونن و نورتن در تمامی دستگاه های صوتی و تصویری اگرچه قطعات الکتریکی زیادی استفاده می شود ( مانند مقاومت سلف خازن دیود ترانزیستور IC ترانس و دهها قطعه ی دیگر...( اما هدف از طراحی چنین مداراتی
مدار معادل تونن و نورتن در تمامی دستگاه های صوتی و تصویری اگرچه قطعات الکتریکی زیادی استفاده می شود ( مانند مقاومت سلف خازن دیود ترانزیستور IC ترانس و دهها قطعه ی دیگر...( اما هدف از طراحی چنین مداراتی
تئوری جامع ماشین بخش سوم جهت سادگی بحث یک ماشین سنکرون دو قطبی از نوع قطب برجسته مطالعه میشود.
 مفاهیم اصلی جهت آنالیز ماشین های الکتریکی سه فاز محاسبه اندوکتانس سیمپیچیها و معادالت ولتاژ ماشین الف ) ماشین سنکرون جهت سادگی بحث یک ماشین سنکرون دو قطبی از نوع قطب برجسته مطالعه میشود. در حال حاضر از
مفاهیم اصلی جهت آنالیز ماشین های الکتریکی سه فاز محاسبه اندوکتانس سیمپیچیها و معادالت ولتاژ ماشین الف ) ماشین سنکرون جهت سادگی بحث یک ماشین سنکرون دو قطبی از نوع قطب برجسته مطالعه میشود. در حال حاضر از
طراحی و تعیین استراتژی بهره برداری از سیستم ترکیبی توربین بادی-فتوولتاییک بر مبنای کنترل اولیه و ثانویه به منظور بهبود مشخصههای پایداری ریزشبکه
 طراحی و تعیین استراتژی بهره برداری از سیستم ترکیبی توربین بادی-فتوولتاییک بر مبنای کنترل اولیه و ثانویه به منظور بهبود مشخصههای پایداری ریزشبکه 2 1* فرانک معتمدی فرید شیخ االسالم 1 -دانشجوی دانشکده برق
طراحی و تعیین استراتژی بهره برداری از سیستم ترکیبی توربین بادی-فتوولتاییک بر مبنای کنترل اولیه و ثانویه به منظور بهبود مشخصههای پایداری ریزشبکه 2 1* فرانک معتمدی فرید شیخ االسالم 1 -دانشجوی دانشکده برق
هدف از این آزمایش آشنایی با رفتار فرکانسی مدارهاي مرتبه اول نحوه تأثیر مقادیر عناصر در این رفتار مشاهده پاسخ دامنه
 آزما ی ش شش م: پا س خ فرکا نس ی مدا رات مرتبه اول هدف از این آزمایش آشنایی با رفتار فرکانسی مدارهاي مرتبه اول نحوه تأثیر مقادیر عناصر در این رفتار مشاهده پاسخ دامنه و پاسخ فاز بررسی رفتار فیلتري آنها بدست
آزما ی ش شش م: پا س خ فرکا نس ی مدا رات مرتبه اول هدف از این آزمایش آشنایی با رفتار فرکانسی مدارهاي مرتبه اول نحوه تأثیر مقادیر عناصر در این رفتار مشاهده پاسخ دامنه و پاسخ فاز بررسی رفتار فیلتري آنها بدست
تحلیل مدار به روش جریان حلقه
 تحلیل مدار به روش جریان حلقه برای حل مدار به روش جریان حلقه باید مراحل زیر را طی کنیم: مرحله ی 1: مدار را تا حد امکان ساده می کنیم)مراقب باشید شاخه هایی را که ترکیب می کنید مورد سوال مسئله نباشد که در
تحلیل مدار به روش جریان حلقه برای حل مدار به روش جریان حلقه باید مراحل زیر را طی کنیم: مرحله ی 1: مدار را تا حد امکان ساده می کنیم)مراقب باشید شاخه هایی را که ترکیب می کنید مورد سوال مسئله نباشد که در
هدف از انجام این آزمایش بررسی رفتار انواع حالتهاي گذراي مدارهاي مرتبه دومRLC اندازهگيري پارامترهاي مختلف معادله
 آزما ی ش پنج م: پا س خ زمانی مدا رات مرتبه دوم هدف از انجام این آزمایش بررسی رفتار انواع حالتهاي گذراي مدارهاي مرتبه دومLC اندازهگيري پارامترهاي مختلف معادله مشخصه بررسی مقاومت بحرانی و آشنایی با پدیده
آزما ی ش پنج م: پا س خ زمانی مدا رات مرتبه دوم هدف از انجام این آزمایش بررسی رفتار انواع حالتهاي گذراي مدارهاي مرتبه دومLC اندازهگيري پارامترهاي مختلف معادله مشخصه بررسی مقاومت بحرانی و آشنایی با پدیده
ﻞﻜﺷ V لﺎﺼﺗا ﺎﻳ زﺎﺑ ﺚﻠﺜﻣ لﺎﺼﺗا هﺎﮕﺸﻧاد نﺎﺷﺎﻛ / دﻮﺷ
 1 مبحث بيست و چهارم: اتصال مثلث باز (- اتصال اسكات آرايش هاي خاص ترانسفورماتورهاي سه فاز دانشگاه كاشان / دانشكده مهندسي/ گروه مهندسي برق / درس ماشين هاي الكتريكي / 3 اتصال مثلث باز يا اتصال شكل فرض كنيد
1 مبحث بيست و چهارم: اتصال مثلث باز (- اتصال اسكات آرايش هاي خاص ترانسفورماتورهاي سه فاز دانشگاه كاشان / دانشكده مهندسي/ گروه مهندسي برق / درس ماشين هاي الكتريكي / 3 اتصال مثلث باز يا اتصال شكل فرض كنيد
بررسی پایداری نیروگاه بادی در بازه های متفاوت زمانی وقوع خطا
 بررسی پایداری نیروگاه بادی در بازه های متفاوت زمانی وقوع خطا رضا شریفی شرکت توزیع نیروی برق استان خوزستان r.e.sharifi@gmail.com نازنین صباغ شرکت توزیع نیروی برق استان خوزستان sabbaghnazanin@gmail.com سیاوش
بررسی پایداری نیروگاه بادی در بازه های متفاوت زمانی وقوع خطا رضا شریفی شرکت توزیع نیروی برق استان خوزستان r.e.sharifi@gmail.com نازنین صباغ شرکت توزیع نیروی برق استان خوزستان sabbaghnazanin@gmail.com سیاوش
سپس بردار بردار حاال ابتدای بردار U 1 ولتاژ ورودی است.
 33 زیر ميباشد: U = U + U + U 1 R X رابطه )1-6( نشان مي دهد با جمع برداری سه بدست می آید. U' بردار و U x بردار U1= ReI1+ XeI1+ U UR = ReI1 )1-7( )1-8( Ux = XeI1 )1-9( را افت ولتاژ که در رابطه )1-8( و )1-9(
33 زیر ميباشد: U = U + U + U 1 R X رابطه )1-6( نشان مي دهد با جمع برداری سه بدست می آید. U' بردار و U x بردار U1= ReI1+ XeI1+ U UR = ReI1 )1-7( )1-8( Ux = XeI1 )1-9( را افت ولتاژ که در رابطه )1-8( و )1-9(
فصل چهارم : مولتی ویبراتورهای ترانزیستوری مقدمه: فیدبک مثبت
 جزوه تکنیک پالس فصل چهارم: مولتی ویبراتورهای ترانزیستوری فصل چهارم : مولتی ویبراتورهای ترانزیستوری مقدمه: فیدبک مثبت در تقویت کننده ها از فیدبک منفی استفاده می نمودیم تا بهره خیلی باال نرفته و سیستم پایدار
جزوه تکنیک پالس فصل چهارم: مولتی ویبراتورهای ترانزیستوری فصل چهارم : مولتی ویبراتورهای ترانزیستوری مقدمه: فیدبک مثبت در تقویت کننده ها از فیدبک منفی استفاده می نمودیم تا بهره خیلی باال نرفته و سیستم پایدار
بدست میآيد وصل شدهاست. سیمپیچ ثانويه با N 2 دور تا زمانی که کلید
 آزمايش 9 ترانسفورماتور بررسی تجربی ترانسفورماتور و مقايسه با يك ترانسفورماتور ايدهآل تئوری آزمايش توان متوسط در مدار جريان متناوب برابر است با: P av = ε rms i rms cos φ که ε rms جذر میانگین مربعی ε و i
آزمايش 9 ترانسفورماتور بررسی تجربی ترانسفورماتور و مقايسه با يك ترانسفورماتور ايدهآل تئوری آزمايش توان متوسط در مدار جريان متناوب برابر است با: P av = ε rms i rms cos φ که ε rms جذر میانگین مربعی ε و i
بسم هللا الرحمن الرحیم
 بسم هللا الرحمن الرحیم نام سر گروه : نام اعضای گروه : شماره گروه : تاریخ انجام آزمایش : تاریخ تحویل آزمایش : هدف آزمایش : بررسی جریان و ولتاژ در مدارهای RLC و مطالعه پدیده تشدید وسایل آزمایش : منبع تغذیه
بسم هللا الرحمن الرحیم نام سر گروه : نام اعضای گروه : شماره گروه : تاریخ انجام آزمایش : تاریخ تحویل آزمایش : هدف آزمایش : بررسی جریان و ولتاژ در مدارهای RLC و مطالعه پدیده تشدید وسایل آزمایش : منبع تغذیه
تلفات خط انتقال ابررسی یک شبکة قدرت با 2 به شبکة شکل زیر توجه کنید. ژنراتور فرضیات شبکه: میباشد. تلفات خط انتقال با مربع توان انتقالی متناسب
 تلفات خط انتقال ابررسی یک شبکة قدرت با 2 به شبکة شکل زیر توجه کنید. ژنراتور فرضیات شبکه: این شبکه دارای دو واحد کامال یکسان آنها 400 MW میباشد. است تلفات خط انتقال با مربع توان انتقالی متناسب و حداکثر
تلفات خط انتقال ابررسی یک شبکة قدرت با 2 به شبکة شکل زیر توجه کنید. ژنراتور فرضیات شبکه: این شبکه دارای دو واحد کامال یکسان آنها 400 MW میباشد. است تلفات خط انتقال با مربع توان انتقالی متناسب و حداکثر
در اين آزمايش ابتدا راهاندازي موتور القايي روتور سيمپيچي شده سه فاز با مقاومتهاي روتور مختلف صورت گرفته و س سپ مشخصه گشتاور سرعت آن رسم ميشود.
 ك ي آزمايش 7 : راهاندازي و مشخصه خروجي موتور القايي روتور سيمپيچيشده آزمايش 7: راهاندازي و مشخصه خروجي موتور القايي با روتور سيمپيچي شده 1-7 هدف آزمايش در اين آزمايش ابتدا راهاندازي موتور القايي روتور
ك ي آزمايش 7 : راهاندازي و مشخصه خروجي موتور القايي روتور سيمپيچيشده آزمايش 7: راهاندازي و مشخصه خروجي موتور القايي با روتور سيمپيچي شده 1-7 هدف آزمايش در اين آزمايش ابتدا راهاندازي موتور القايي روتور
بسم اهلل الرحمن الرحیم آزمایشگاه فیزیک )2( shimiomd
2( shimiomd") بسم اهلل الرحمن الرحیم آزمایشگاه فیزیک )( shimiomd خواندن مقاومت ها. بررسی قانون اهم برای مدارهای متوالی. 3. بررسی قانون اهم برای مدارهای موازی بدست آوردن مقاومت مجهول توسط پل وتسون 4. بدست آوردن مقاومت
بسم اهلل الرحمن الرحیم آزمایشگاه فیزیک )( shimiomd خواندن مقاومت ها. بررسی قانون اهم برای مدارهای متوالی. 3. بررسی قانون اهم برای مدارهای موازی بدست آوردن مقاومت مجهول توسط پل وتسون 4. بدست آوردن مقاومت
فصل سوم : عناصر سوئیچ
 فصل سوم : عناصر سوئیچ رله الکترومکانیکی: یک آهنربای الکتریکی است که اگر به آن ولتاژ بدهیم مدار را قطع و وصل می کند. الف: دیود بعنوان سوئیچ دیود واقعی: V D I D = I S (1 e η V T ) دیود ایده آل: در درس از
فصل سوم : عناصر سوئیچ رله الکترومکانیکی: یک آهنربای الکتریکی است که اگر به آن ولتاژ بدهیم مدار را قطع و وصل می کند. الف: دیود بعنوان سوئیچ دیود واقعی: V D I D = I S (1 e η V T ) دیود ایده آل: در درس از
آزمایش ۱ اندازه گیری مقاومت سیم پیچ های ترانسفورماتور تک فاز
 گزارش آزمایشگاه ماشینهای الکتریکی ۲ آزمایش ۱ اندازه گیری مقاومت سیم پیچ های ترانسفورماتور تک فاز شرح آزمایش ماژول تغذیه را با قرار دادن Breaker Circuit بر روی on روشن کنید با تغییر دستگیره ماژول منبع تغذیه
گزارش آزمایشگاه ماشینهای الکتریکی ۲ آزمایش ۱ اندازه گیری مقاومت سیم پیچ های ترانسفورماتور تک فاز شرح آزمایش ماژول تغذیه را با قرار دادن Breaker Circuit بر روی on روشن کنید با تغییر دستگیره ماژول منبع تغذیه
مقدمه الف) مبدلهای AC/DC ب) مبدلهای DC/AC ج) مبدلهای AC/AC د) چاپرها. (Rectifiers) (Inverters) (Converters) (Choppers) Version 1.0
 مبدلهای AC/DC ب) مبدلهای DC/AC ج) مبدلهای AC/AC د) چاپرها. (Rectifiers) (Inverters) (Converters) (Choppers) Version 1.0") چرا خازن مقدمه اغلب دستگاهها و مصرفکنندگان الکتریکی برای انجام کار مفید نیازمند مقداری توان راکتیو برای مهیا کردن شرایط لازم برای انجام کار میباشند. به عنوان مثال موتورهای الکتریکی AC برای تبدیل انرژی
چرا خازن مقدمه اغلب دستگاهها و مصرفکنندگان الکتریکی برای انجام کار مفید نیازمند مقداری توان راکتیو برای مهیا کردن شرایط لازم برای انجام کار میباشند. به عنوان مثال موتورهای الکتریکی AC برای تبدیل انرژی
مثال( مساله الپالس در ناحیه داده شده را حل کنید. u(x,0)=f(x) f(x) حل: به کمک جداسازی متغیرها: ثابت = k. u(x,y)=x(x)y(y) X"Y=-XY" X" X" kx = 0
=f(x) f(x) حل: به کمک جداسازی متغیرها: ثابت = k. u(x,y)=x(x)y(y) XY=-XY X X kx = 0") مثال( مساله الپالس در ناحیه داده شده را حل کنید. (,)=() > > < π () حل: به کمک جداسازی متغیرها: + = (,)=X()Y() X"Y=-XY" X" = Y" ثابت = k X Y X" kx = { Y" + ky = X() =, X(π) = X" kx = { X() = X(π) = معادله
مثال( مساله الپالس در ناحیه داده شده را حل کنید. (,)=() > > < π () حل: به کمک جداسازی متغیرها: + = (,)=X()Y() X"Y=-XY" X" = Y" ثابت = k X Y X" kx = { Y" + ky = X() =, X(π) = X" kx = { X() = X(π) = معادله
جلسه 3 ابتدا نکته اي در مورد عمل توابع بر روي ماتریس ها گفته می شود و در ادامه ي این جلسه اصول مکانیک کوانتمی بیان. d 1. i=0. i=0. λ 2 i v i v i.
 محاسبات کوانتمی (671) ترم بهار 1390-1391 مدرس: سلمان ابوالفتح بیگی نویسنده: محمد جواد داوري جلسه 3 می شود. ابتدا نکته اي در مورد عمل توابع بر روي ماتریس ها گفته می شود و در ادامه ي این جلسه اصول مکانیک
محاسبات کوانتمی (671) ترم بهار 1390-1391 مدرس: سلمان ابوالفتح بیگی نویسنده: محمد جواد داوري جلسه 3 می شود. ابتدا نکته اي در مورد عمل توابع بر روي ماتریس ها گفته می شود و در ادامه ي این جلسه اصول مکانیک
Angle Resolved Photoemission Spectroscopy (ARPES)
") Angle Resolved Photoemission Spectroscopy (ARPES) روش ARPES روشی است تجربی که برای تعیین ساختار الکترونی مواد به کار می رود. این روش بر پایه اثر فوتوالکتریک است که توسط هرتز کشف شد: الکترونها می توانند
Angle Resolved Photoemission Spectroscopy (ARPES) روش ARPES روشی است تجربی که برای تعیین ساختار الکترونی مواد به کار می رود. این روش بر پایه اثر فوتوالکتریک است که توسط هرتز کشف شد: الکترونها می توانند
مقدمه -1-4 تحليلولتاژگرهمدارهاييبامنابعجريان 4-4- تحليلجريانمشبامنابعولتاژنابسته
 مقدمه -1-4 تحليلولتاژگرهمدارهاييبامنابعجريان -2-4 بامنابعجريانوولتاژ تحليلولتاژگرهمدارهايي 3-4- تحليلولتاژگرهبامنابعوابسته 4-4- تحليلجريانمشبامنابعولتاژنابسته 5-4- ژاتلو و 6-4 -تحليلجريانمشبامنابعجريان
مقدمه -1-4 تحليلولتاژگرهمدارهاييبامنابعجريان -2-4 بامنابعجريانوولتاژ تحليلولتاژگرهمدارهايي 3-4- تحليلولتاژگرهبامنابعوابسته 4-4- تحليلجريانمشبامنابعولتاژنابسته 5-4- ژاتلو و 6-4 -تحليلجريانمشبامنابعجريان
تخمین با معیار مربع خطا: حالت صفر: X: مکان هواپیما بدون مشاهده X را تخمین بزنیم. بهترین تخمین مقداری است که متوسط مربع خطا مینیمم باشد:
 تخمین با معیار مربع خطا: هدف: با مشاهده X Y را حدس بزنیم. :y X: مکان هواپیما مثال: مشاهده نقطه ( مجموعه نقاط کنارهم ) روی رادار - فرض کنیم می دانیم توزیع احتمال X به چه صورت است. حالت صفر: بدون مشاهده
تخمین با معیار مربع خطا: هدف: با مشاهده X Y را حدس بزنیم. :y X: مکان هواپیما مثال: مشاهده نقطه ( مجموعه نقاط کنارهم ) روی رادار - فرض کنیم می دانیم توزیع احتمال X به چه صورت است. حالت صفر: بدون مشاهده
جلسه ی ۱۰: الگوریتم مرتب سازی سریع
 دانشکده ی علوم ریاضی داده ساختارها و الگوریتم ها ۸ مهر ۹ جلسه ی ۱۰: الگوریتم مرتب سازی سریع مدر س: دکتر شهرام خزاي ی نگارنده: محمد امین ادر یسی و سینا منصور لکورج ۱ شرح الگور یتم الگوریتم مرتب سازی سریع
دانشکده ی علوم ریاضی داده ساختارها و الگوریتم ها ۸ مهر ۹ جلسه ی ۱۰: الگوریتم مرتب سازی سریع مدر س: دکتر شهرام خزاي ی نگارنده: محمد امین ادر یسی و سینا منصور لکورج ۱ شرح الگور یتم الگوریتم مرتب سازی سریع
تاثیر مدهاي کاري جبرانساز خازن سري در خطوط انتقال بر عملکرد رلهدیستانس
 و 3 تاثیر مدهاي کاري جبرانساز خازن سري در خطوط انتقال بر رلهدیستانس مظاهرساغري 3 2 1 مهدي فرزینفر و الهام وزیري 1 2 دانشگاه آزاد اسلامی واحد علوم تحقیقات سمنان ایران 1 saghari.mazaher@yahoo.com 2 Farzinfar.mehdi@gmail.com
و 3 تاثیر مدهاي کاري جبرانساز خازن سري در خطوط انتقال بر رلهدیستانس مظاهرساغري 3 2 1 مهدي فرزینفر و الهام وزیري 1 2 دانشگاه آزاد اسلامی واحد علوم تحقیقات سمنان ایران 1 saghari.mazaher@yahoo.com 2 Farzinfar.mehdi@gmail.com
باسمه تعالی مادی و معنوی این اثر متعلق به دانشگاه تربیت دبیر شهید رجایی میباشد.
 باسمه تعالی مدیریت تحصیالت تکمیلی تعهدنامه اینجانب محمد چشفر متعهد میشوم که مطالب مندرج در این پایاننامه حاصل کار پژوهشی اینجانب است و دستاوردهای پژوهشی دیگران که در این پژوهش از آن استفاده شده است مطابق
باسمه تعالی مدیریت تحصیالت تکمیلی تعهدنامه اینجانب محمد چشفر متعهد میشوم که مطالب مندرج در این پایاننامه حاصل کار پژوهشی اینجانب است و دستاوردهای پژوهشی دیگران که در این پژوهش از آن استفاده شده است مطابق
کنترل فرکانس- بار سیستم قدرت چند ناحیه شامل نیروگاههای حرارتی بادی و آبی
 راهنماي تدوين مقاله کامل همايش م ی "ل برق مخابرات و توسعه پايدار " کنترل فرکانس- بار سیستم قدرت چند ناحیه شامل نیروگاههای حرارتی بادی و آبی سیاوش محمدپور محمدرضا علیزاده پهلوانی 1- کارشناس ارشد دانشگاه
راهنماي تدوين مقاله کامل همايش م ی "ل برق مخابرات و توسعه پايدار " کنترل فرکانس- بار سیستم قدرت چند ناحیه شامل نیروگاههای حرارتی بادی و آبی سیاوش محمدپور محمدرضا علیزاده پهلوانی 1- کارشناس ارشد دانشگاه
Continuos 8 V DC Intermittent 10A for 10 Sec ±% % / c. AVR Responsez 20 ms
 ولتاژ رگولاتور ژنراتور مدل AVR8 توضیحات دستگاه ولتاژ رگولاتور DATAKOM AVR8 باعث ثابت ماندن ولتاژ خروجی ژنراتور می گردد. طراحی دستگاه بصورت روباز و رزین ریخته شده می باشد که قابلیت نصب در جعبه ترمینال ژنراتور
ولتاژ رگولاتور ژنراتور مدل AVR8 توضیحات دستگاه ولتاژ رگولاتور DATAKOM AVR8 باعث ثابت ماندن ولتاژ خروجی ژنراتور می گردد. طراحی دستگاه بصورت روباز و رزین ریخته شده می باشد که قابلیت نصب در جعبه ترمینال ژنراتور
آزمون مقایسه میانگین های دو جامعه )نمونه های بزرگ(
نمونه های بزرگ(") آزمون مقایسه میانگین های دو جامعه )نمونه های بزرگ( فرض کنید جمعیت یک دارای میانگین و انحراف معیار اندازه µ و انحراف معیار σ باشد و جمعیت 2 دارای میانگین µ2 σ2 باشند نمونه های تصادفی مستقل از این دو جامعه
آزمون مقایسه میانگین های دو جامعه )نمونه های بزرگ( فرض کنید جمعیت یک دارای میانگین و انحراف معیار اندازه µ و انحراف معیار σ باشد و جمعیت 2 دارای میانگین µ2 σ2 باشند نمونه های تصادفی مستقل از این دو جامعه
13 86 ﺰﯿﺋﺎﭘ / مود هرﺎﻤﺷ /ل وا لﺎﺳ / ﯽﺴﻠﺠﻣ قﺮﺑ ﯽﺳﺪﻨﻬﻣ ﯽﺼﺼﺨﺗ - ﯽﻤﻠﻋ ﻪﻣﺎﻨﻠﺼﻓ
 به کار گیري مانع هاي مقاومتی جهت بهبود پایداري گذرا سعید اباذري - هیات علمی دانشگاه شهرکرد saeedabazar@yah.cm چکیده میباشد. یکی از مساي ل مهم در سیستم هاي قدرت افزایش میرایی دامنه نوسانات و افزایش زمان
به کار گیري مانع هاي مقاومتی جهت بهبود پایداري گذرا سعید اباذري - هیات علمی دانشگاه شهرکرد saeedabazar@yah.cm چکیده میباشد. یکی از مساي ل مهم در سیستم هاي قدرت افزایش میرایی دامنه نوسانات و افزایش زمان
جریان نامی...
 مقاومت نقطه نوترال (NGR) مشخصات فنی فهرست مطالب 5 5... معرفی کلی... مشخصات... 1-2- ولتاژ سیستم... 2-2- ولتاژ نامی... -2- جریان نامی... -2- مقدار مقاومت -5-2 زمان... -2- جریان پیوسته... 7-2- ضریب دماي مقاومت...
مقاومت نقطه نوترال (NGR) مشخصات فنی فهرست مطالب 5 5... معرفی کلی... مشخصات... 1-2- ولتاژ سیستم... 2-2- ولتاژ نامی... -2- جریان نامی... -2- مقدار مقاومت -5-2 زمان... -2- جریان پیوسته... 7-2- ضریب دماي مقاومت...
فصل سوم جریان های الکتریکی و مدارهای جریان مستقیم جریان الکتریکی
 فصل سوم جریان های الکتریکی و مدارهای جریان مستقیم جریان الکتریکی در رساناها مانند یک سیم مسی الکترون های آزاد وجود دارند که با سرعت های متفاوت بطور کاتوره ای)بی نظم(در حال حرکت هستند بطوریکه بار خالص گذرنده
فصل سوم جریان های الکتریکی و مدارهای جریان مستقیم جریان الکتریکی در رساناها مانند یک سیم مسی الکترون های آزاد وجود دارند که با سرعت های متفاوت بطور کاتوره ای)بی نظم(در حال حرکت هستند بطوریکه بار خالص گذرنده
عنوان فهرست مطالب صفحه فصل اول : ترانسفورماتور مقدمه اصول پایه اتوترانسفورماتور ساختمان ترانسفورماتور
 واحد خمینی شهر عنوان پروژه: تست و راه اندازيPT,CT و رله ها مهندس آقاي نام استاد: امیررضا رضاي ی اراي ه دهنده: یحیی پوراسفندیار شماره دانشجویی: 88415740086 بهار 91 عنوان فهرست مطالب صفحه فصل اول : ترانسفورماتور...
واحد خمینی شهر عنوان پروژه: تست و راه اندازيPT,CT و رله ها مهندس آقاي نام استاد: امیررضا رضاي ی اراي ه دهنده: یحیی پوراسفندیار شماره دانشجویی: 88415740086 بهار 91 عنوان فهرست مطالب صفحه فصل اول : ترانسفورماتور...
فهرست مطالب جزوه ی فصل اول مدارهای الکتریکی مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل تحلیل مدار به روش جریان حلقه... 22
 فهرست مطالب جزوه ی فصل اول مدارهای الکتریکی آنچه باید پیش از شروع کتاب مدار بدانید تا مدار را آسان بیاموزید.............................. 2 مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل................................................
فهرست مطالب جزوه ی فصل اول مدارهای الکتریکی آنچه باید پیش از شروع کتاب مدار بدانید تا مدار را آسان بیاموزید.............................. 2 مفاهیم ولتاژ افت ولتاژ و اختالف پتانسیل................................................
روش ابداعی کنترل بهینه غیرخطی در توربین بادی با حداقل سازی نوسانات توان و گشتاور
 روش ابداعی کنترل بهینه غیرخطی در توربین بادی با حداقل سازی نوسانات توان و گشتاور فرانک معتمدی * دکترفرید شیخ االسالم 2 -دانشجوی رشته برق دانشگاه آزاد واحد نجفآباد Fa_motamedi@yahoo.com 2 -استاد گروه برق
روش ابداعی کنترل بهینه غیرخطی در توربین بادی با حداقل سازی نوسانات توان و گشتاور فرانک معتمدی * دکترفرید شیخ االسالم 2 -دانشجوی رشته برق دانشگاه آزاد واحد نجفآباد Fa_motamedi@yahoo.com 2 -استاد گروه برق
حفاظت مقایسه فاز خطوط انتقال جبرانشده سري.
 حفاظت مقایسه فاز در خطوط انتقال جبران شده سري همراه با MOV 2 1 محمد رضا پویان فر جواد ساده 1 دانشگاه آزاد اسلامی واحد گناباد reza.pooyanfar@gmail.com 2 دانشکده فنی مهندسی دانشگاه فردوسی مشهد sadeh@um.ac.ir
حفاظت مقایسه فاز در خطوط انتقال جبران شده سري همراه با MOV 2 1 محمد رضا پویان فر جواد ساده 1 دانشگاه آزاد اسلامی واحد گناباد reza.pooyanfar@gmail.com 2 دانشکده فنی مهندسی دانشگاه فردوسی مشهد sadeh@um.ac.ir
همبستگی و رگرسیون در این مبحث هدف بررسی وجود یک رابطه بین دو یا چند متغیر می باشد لذا هدف اصلی این است که آیا بین
 همبستگی و رگرسیون در این مبحث هدف بررسی وجود یک رابطه بین دو یا چند متغیر می باشد لذا هدف اصلی این است که آیا بین دو صفت متغیر x و y رابطه و همبستگی وجود دارد یا خیر و آیا می توان یک مدل ریاضی و یک رابطه
همبستگی و رگرسیون در این مبحث هدف بررسی وجود یک رابطه بین دو یا چند متغیر می باشد لذا هدف اصلی این است که آیا بین دو صفت متغیر x و y رابطه و همبستگی وجود دارد یا خیر و آیا می توان یک مدل ریاضی و یک رابطه
بررسی تاثیر ادوات مختلف FACTS بر پایداري ولتاژ
 بررسی تاثیر ادوات مختلف FACTS بر پایداري ولتاژ 3 2 1 حمید فتاحی حمدي عبدي و آرش زرینی تبار 1 دانشجوي کارشناسی ارشد علوم تحقیقات کرمانشاه en.hamidfattahi@gmail.com 2 گروه برق دانشکده فنی و مهندسی دانشگاه
بررسی تاثیر ادوات مختلف FACTS بر پایداري ولتاژ 3 2 1 حمید فتاحی حمدي عبدي و آرش زرینی تبار 1 دانشجوي کارشناسی ارشد علوم تحقیقات کرمانشاه en.hamidfattahi@gmail.com 2 گروه برق دانشکده فنی و مهندسی دانشگاه
فصل پنجم : سینکروها جاوید سید رنجبر میالد سیفی علی آسگون
 فصل پنجم : سینکروها جاوید سید رنجبر میالد سیفی علی آسگون مقدمه دراغلب شاخه های صنایع حالتی پدید می آید که دو نقطه دور از هم بایستی دارای سرعت یکسانی باشند. پل های متحرک دهانه سد ها تسمه ی نقاله ها جرثقیل
فصل پنجم : سینکروها جاوید سید رنجبر میالد سیفی علی آسگون مقدمه دراغلب شاخه های صنایع حالتی پدید می آید که دو نقطه دور از هم بایستی دارای سرعت یکسانی باشند. پل های متحرک دهانه سد ها تسمه ی نقاله ها جرثقیل
فهرست جزوه ی فصل دوم مدارهای الکتریکی ( بردارها(
 فهرست جزوه ی فصل دوم مدارهای الکتریکی ( بردارها( رفتار عناصر L, R وC در مدارات جریان متناوب......................................... بردار و کمیت برداری.............................................................
فهرست جزوه ی فصل دوم مدارهای الکتریکی ( بردارها( رفتار عناصر L, R وC در مدارات جریان متناوب......................................... بردار و کمیت برداری.............................................................
اراي ه روشی جدید جهت تشخیص فاز خطا در خطوط جبرانشده با STATCOM
 اراي ه روشی جدید جهت تشخیص فاز خطا در خطوط جبرانشده با STATCOM 1 2 1 و 2 احمد شریعتی جواد ساده شرکت نفت و گاز پارس (POGC) ahmad@shariati.ir 2 دانشگاه فردوسی مشهد sadeh@um.ac.ir چکیده - عملکرد نابجا و ناخواسته
اراي ه روشی جدید جهت تشخیص فاز خطا در خطوط جبرانشده با STATCOM 1 2 1 و 2 احمد شریعتی جواد ساده شرکت نفت و گاز پارس (POGC) ahmad@shariati.ir 2 دانشگاه فردوسی مشهد sadeh@um.ac.ir چکیده - عملکرد نابجا و ناخواسته
Spacecraft thermal control handbook. Space mission analysis and design. Cubesat, Thermal control system
 سیستم زیر حرارتی ماهواره سرفصل های مهم 1- منابع مطالعاتی 2- مقدمه ای بر انتقال حرارت و مکانیزم های آن 3- موازنه انرژی 4 -سیستم های کنترل دما در فضا 5- مدل سازی عددی حرارتی ماهواره 6- تست های مورد نیاز
سیستم زیر حرارتی ماهواره سرفصل های مهم 1- منابع مطالعاتی 2- مقدمه ای بر انتقال حرارت و مکانیزم های آن 3- موازنه انرژی 4 -سیستم های کنترل دما در فضا 5- مدل سازی عددی حرارتی ماهواره 6- تست های مورد نیاز
مقاومت مصالح 2 فصل 9: خيز تيرها. 9. Deflection of Beams
 مقاومت مصالح فصل 9: خيز تيرها 9. Deflection of eams دکتر مح مدرضا نيرومند دااگشنه ايپم نور اصفهان eer Johnston DeWolf ( ) رابطه بين گشتاور خمشی و انحنا: تير طره ای تحت بار متمرکز در انتهای آزاد: P انحنا
مقاومت مصالح فصل 9: خيز تيرها 9. Deflection of eams دکتر مح مدرضا نيرومند دااگشنه ايپم نور اصفهان eer Johnston DeWolf ( ) رابطه بين گشتاور خمشی و انحنا: تير طره ای تحت بار متمرکز در انتهای آزاد: P انحنا
آزمایش 2: تعيين مشخصات دیود پيوندي PN
 آزمایش 2: تعيين مشخصات دیود پيوندي PN هدف در اين آزمايش مشخصات ديود پيوندي PN را بدست آورده و مورد بررسي قرار مي دهيم. وسايل و اجزاي مورد نياز ديودهاي 1N4002 1N4001 1N4148 و يا 1N4004 مقاومتهاي.100KΩ,10KΩ,1KΩ,560Ω,100Ω,10Ω
آزمایش 2: تعيين مشخصات دیود پيوندي PN هدف در اين آزمايش مشخصات ديود پيوندي PN را بدست آورده و مورد بررسي قرار مي دهيم. وسايل و اجزاي مورد نياز ديودهاي 1N4002 1N4001 1N4148 و يا 1N4004 مقاومتهاي.100KΩ,10KΩ,1KΩ,560Ω,100Ω,10Ω
طراحی وبهینه سازی رگوالتورهای ولتاژ با افت کم) LDO (
 LDO (") پایان نامه دوره کارشناسی ارشد مهندسی برق گرایش الکترونیک طراحی وبهینه سازی رگوالتورهای ولتاژ با افت کم) LDO ( نجمه خانیان استاد راهنما: دکتر عباس گلمکانی تابستان 9 I II شکر شایان نثار ایزدمنان که توقیق
پایان نامه دوره کارشناسی ارشد مهندسی برق گرایش الکترونیک طراحی وبهینه سازی رگوالتورهای ولتاژ با افت کم) LDO ( نجمه خانیان استاد راهنما: دکتر عباس گلمکانی تابستان 9 I II شکر شایان نثار ایزدمنان که توقیق
جلسه 12 به صورت دنباله اي از,0 1 نمایش داده شده اند در حین محاسبه ممکن است با خطا مواجه شده و یکی از بیت هاي آن. p 1
 محاسبات کوانتمی (67) ترم بهار 390-39 مدرس: سلمان ابوالفتح بیگی نویسنده: سلمان ابوالفتح بیگی جلسه ذخیره پردازش و انتقال اطلاعات در دنیاي واقعی همواره در حضور خطا انجام می شود. مثلا اطلاعات کلاسیکی که به
محاسبات کوانتمی (67) ترم بهار 390-39 مدرس: سلمان ابوالفتح بیگی نویسنده: سلمان ابوالفتح بیگی جلسه ذخیره پردازش و انتقال اطلاعات در دنیاي واقعی همواره در حضور خطا انجام می شود. مثلا اطلاعات کلاسیکی که به
و STATCOM بر روی پارامتر های مختلف سیستم و مطالعات پخش بار
 و STATCOM بر روی پارامتر های مختلف سیستم و مطالعات پخش بار مقایسه تاثیرUPFC جواد ابراهیمی محمد هادی کریمی تفتی 1 1 مربی وهئیت علمی دانشگاه آزاداسالمی واحدمهریز دانشجوی کارشناسی ارشد دانشگاه آزاداسالمی
و STATCOM بر روی پارامتر های مختلف سیستم و مطالعات پخش بار مقایسه تاثیرUPFC جواد ابراهیمی محمد هادی کریمی تفتی 1 1 مربی وهئیت علمی دانشگاه آزاداسالمی واحدمهریز دانشجوی کارشناسی ارشد دانشگاه آزاداسالمی
تمرینات درس ریاض عموم ٢. r(t) = (a cos t, b sin t), ٠ t ٢π. cos ٢ t sin tdt = ka۴. x = ١ ka ۴. m ٣ = ٢a. κds باشد. حاصل x٢
 = (a cos t, b sin t), ٠ t ٢π. cos ٢ t sin tdt = ka۴. x = ١ ka ۴. m ٣ = ٢a. κds باشد. حاصل x٢") دانش اه صنعت شریف دانش ده ی علوم ریاض تمرینات درس ریاض عموم سری دهم. ١ سیم نازک داریم که روی دایره ی a + y x و در ربع اول نقطه ی,a را به نقطه ی a, وصل م کند. اگر چ ال سیم در نقطه ی y,x برابر kxy باشد جرم
دانش اه صنعت شریف دانش ده ی علوم ریاض تمرینات درس ریاض عموم سری دهم. ١ سیم نازک داریم که روی دایره ی a + y x و در ربع اول نقطه ی,a را به نقطه ی a, وصل م کند. اگر چ ال سیم در نقطه ی y,x برابر kxy باشد جرم
ویرایشسال 95 شیمیمعدنی تقارن رضافالحتی
 ویرایشسال 95 شیمیمعدنی تقارن رضافالحتی از ابتدای مبحث تقارن تا ابتدای مبحث جداول کاراکتر مربوط به کنکور ارشد می باشد افرادی که این قسمت ها را تسلط دارند می توانند از ابتدای مبحث جداول کاراکتر به مطالعه
ویرایشسال 95 شیمیمعدنی تقارن رضافالحتی از ابتدای مبحث تقارن تا ابتدای مبحث جداول کاراکتر مربوط به کنکور ارشد می باشد افرادی که این قسمت ها را تسلط دارند می توانند از ابتدای مبحث جداول کاراکتر به مطالعه
جلسه 9 1 مدل جعبه-سیاه یا جستاري. 2 الگوریتم جستجوي Grover 1.2 مسا له 2.2 مقدمات محاسبات کوانتمی (22671) ترم بهار
 ترم بهار") محاسبات کوانتمی (22671) ترم بهار 1390-1391 مدرس: سلمان ابوالفتح بیگی نویسنده: هیربد کمالی نیا جلسه 9 1 مدل جعبه-سیاه یا جستاري مدل هایی که در جلسه ي پیش براي استفاده از توابع در الگوریتم هاي کوانتمی بیان
محاسبات کوانتمی (22671) ترم بهار 1390-1391 مدرس: سلمان ابوالفتح بیگی نویسنده: هیربد کمالی نیا جلسه 9 1 مدل جعبه-سیاه یا جستاري مدل هایی که در جلسه ي پیش براي استفاده از توابع در الگوریتم هاي کوانتمی بیان
اصول انتخاب موتور با مفاهیم بسیار ساده شروع و با نکات کاربردی به پایان می رسد که این خود به درک و همراهی خواننده کمک بسیاری می کند.
 اصول انتخاب موتور اصول انتخاب موتور انتخاب یک موتور به در نظر گرفتن موارد بسیار زیادی از استانداردها عوامل محیطی و مشخصه های بار راندمان موتور و... وابسته است در این مقاله کوتاه به تاثیر و چرایی توان و
اصول انتخاب موتور اصول انتخاب موتور انتخاب یک موتور به در نظر گرفتن موارد بسیار زیادی از استانداردها عوامل محیطی و مشخصه های بار راندمان موتور و... وابسته است در این مقاله کوتاه به تاثیر و چرایی توان و
طرح یافتن مکان خطا در خطوط انتقال چندترمینالی با استفاده از اندازه گیریهای ناهمگام )آسنکرون(
آسنکرون(") طرح یافتن مکان خطا در خطوط انتقال چندترمینالی با استفاده از اندازه گیریهای ناهمگام )آسنکرون( چکیده در این مقاله یک روش ساده با استفاده از اندازه گیری ناهمگام برای تعیین مکان خطا در خطوط انتقال چند-ترمینالی
طرح یافتن مکان خطا در خطوط انتقال چندترمینالی با استفاده از اندازه گیریهای ناهمگام )آسنکرون( چکیده در این مقاله یک روش ساده با استفاده از اندازه گیری ناهمگام برای تعیین مکان خطا در خطوط انتقال چند-ترمینالی
هدف:.100 مقاومت: خازن: ترانزيستور: پتانسيومتر:
 آزمايش شماره (10) تقويت كننده اميتر مشترك هدف: هدف از اين آزمايش مونتاژ مدار طراحي شده و اندازهگيري مشخصات اين تقويت كننده جهت مقايسه نتايج اندازهگيري با مقادير مطلوب و در ادامه طراحي يك تقويت كننده اميترمشترك
آزمايش شماره (10) تقويت كننده اميتر مشترك هدف: هدف از اين آزمايش مونتاژ مدار طراحي شده و اندازهگيري مشخصات اين تقويت كننده جهت مقايسه نتايج اندازهگيري با مقادير مطلوب و در ادامه طراحي يك تقويت كننده اميترمشترك
ترانسفورماتور مولف : جواد خشت زر قابل استفاده برای هنرجویان دانشجویان مدرسان و مهندسان رشته برق
 ترانسفورماتور قابل استفاده برای هنرجویان دانشجویان مدرسان و مهندسان رشته برق ترانسفورماتور ترانسفورماتور وسیله ای است که انرژی الکتریکی را از یک سطح به سطح دیگری انتقال میدهد بدون اینکه در کمیت های نامی
ترانسفورماتور قابل استفاده برای هنرجویان دانشجویان مدرسان و مهندسان رشته برق ترانسفورماتور ترانسفورماتور وسیله ای است که انرژی الکتریکی را از یک سطح به سطح دیگری انتقال میدهد بدون اینکه در کمیت های نامی
فهرست مطالب جزوه ی الکترونیک 1 فصل اول مدار الکتریکی و نقشه ی فنی... 2 خواص مدارات سری... 3 خواص مدارات موازی...
 فهرست مطالب جزوه ی الکترونیک 1 فصل اول مدار الکتریکی و نقشه ی فنی................................................. 2 خواص مدارات سری....................................................... 3 3...................................................
فهرست مطالب جزوه ی الکترونیک 1 فصل اول مدار الکتریکی و نقشه ی فنی................................................. 2 خواص مدارات سری....................................................... 3 3...................................................
دانشگاه صنعتی کرمانشاه آموزش نرم افزار SIMPOWER MATLAB. SimPowerSystems MATLAB آموزش مقدماتی دانشگاه صنعتی کرمانشاه دکتر وحید عباسی
 آموزش مقدماتی SimPowerSystems MATLAB دکتر وحید عباسی مقدمه بسته نرمافزاری SimPowerSystems یک مجموعه کتابخانهای و تحلیلی مناسب را برای مهندسین برق فراهم میکند که با استفاده از آن میتوان سیستمهای قدرت را
آموزش مقدماتی SimPowerSystems MATLAB دکتر وحید عباسی مقدمه بسته نرمافزاری SimPowerSystems یک مجموعه کتابخانهای و تحلیلی مناسب را برای مهندسین برق فراهم میکند که با استفاده از آن میتوان سیستمهای قدرت را
1. یک مولد 5000 هرتز می توان بصورت نیروی محرکه الکتریکی ثابت با مقدار 200 ولت مؤثر باا امدادان
 تمرین های سری سری یک درس ماشین 2 )رضاییان( 1. یک مولد 5000 هرتز می توان بصورت نیروی محرکه الکتریکی ثابت با مقدار 200 ولت مؤثر باا امدادان 31 اهم در نظر گرفت این مولد برای تغذیه بار مقاومتی به مقدار 0.65
تمرین های سری سری یک درس ماشین 2 )رضاییان( 1. یک مولد 5000 هرتز می توان بصورت نیروی محرکه الکتریکی ثابت با مقدار 200 ولت مؤثر باا امدادان 31 اهم در نظر گرفت این مولد برای تغذیه بار مقاومتی به مقدار 0.65
موتورهای تکفاز ساختمان موتورهای تک فاز دوخازنی را توضیح دهد. منحنی مشخصه گشتاور سرعت موتور تک فاز با خازن راه انداز را تشریح کند.
 5 موتورهای تک فاز 183 موتورهای تکفاز هدف های رفتاری: نحوه تولید میدان مغناطیسی در یک استاتور با یک و دو سیم پیچ را بررسی نماید. لزوم استفاده از سیم پیچ کمکی در موتورهای تک فاز را توضیح دهد. ساختمان داخلی
5 موتورهای تک فاز 183 موتورهای تکفاز هدف های رفتاری: نحوه تولید میدان مغناطیسی در یک استاتور با یک و دو سیم پیچ را بررسی نماید. لزوم استفاده از سیم پیچ کمکی در موتورهای تک فاز را توضیح دهد. ساختمان داخلی
طراحی و شبیه سازی اینورتره یا
 دانشکده برق و رباتیک گروه قدرت طراحی و شبیه سازی اینورتره یا سه فاز و تکفاز گرد آورنده: جواد برسالنی زمستان 95 چکیده با توجه به مزایای استفاده از وسایل الکترونیک قدرت تعداد این وسایل روز به روز در حال
دانشکده برق و رباتیک گروه قدرت طراحی و شبیه سازی اینورتره یا سه فاز و تکفاز گرد آورنده: جواد برسالنی زمستان 95 چکیده با توجه به مزایای استفاده از وسایل الکترونیک قدرت تعداد این وسایل روز به روز در حال
هدف از این آزمایش آشنایی با برخی قضایاي ساده و در عین حال مهم مدار از قبیل قانون اهم جمع آثار مدار تونن و نورتن
 آزما ی ش سوم: ربرسی اقنون ا ه م و قوانین ولتاژ و جریان اهی کیرشهف قوانین میسقت ولتاژ و میسقت جریان ربرسی مدا ر تونن و نورتن قضیه ااقتنل حدا کثر توان و ربرسی مدا ر پ ل و تس ون هدف از این آزمایش آشنایی با
آزما ی ش سوم: ربرسی اقنون ا ه م و قوانین ولتاژ و جریان اهی کیرشهف قوانین میسقت ولتاژ و میسقت جریان ربرسی مدا ر تونن و نورتن قضیه ااقتنل حدا کثر توان و ربرسی مدا ر پ ل و تس ون هدف از این آزمایش آشنایی با
دبیرستان غیر دولتی موحد
 دبیرستان غیر دلتی محد هندسه تحلیلی فصل دم معادله های خط صفحه ابتدا باید بدانیم که از یک نقطه به مازات یک بردار تنها یک خط می گذرد. با تجه به این مطلب برای نشتن معادله یک خط احتیاج به داشتن یک نقطه از خط
دبیرستان غیر دلتی محد هندسه تحلیلی فصل دم معادله های خط صفحه ابتدا باید بدانیم که از یک نقطه به مازات یک بردار تنها یک خط می گذرد. با تجه به این مطلب برای نشتن معادله یک خط احتیاج به داشتن یک نقطه از خط
طراحی و تجزیه و تحلیل کنترل کننده منطق فازي براي کنترل فرکانس بار در سیستم هاي قدرت
 طراحی و تجزیه و تحلیل کنترل کننده منطق فازي براي کنترل فرکانس بار در سیستم هاي قدرت 2 1 مهرداد احمدي کمرپشتی هدي کاظمی موسسه آموزش عالی روزبهان ساري گروه برق ساري ایران Mehrdad.ahmadi.k@gmail.com hoda.kazemi.aski@gmail.com
طراحی و تجزیه و تحلیل کنترل کننده منطق فازي براي کنترل فرکانس بار در سیستم هاي قدرت 2 1 مهرداد احمدي کمرپشتی هدي کاظمی موسسه آموزش عالی روزبهان ساري گروه برق ساري ایران Mehrdad.ahmadi.k@gmail.com hoda.kazemi.aski@gmail.com
یونیزاسیون اشعهX مقدار مو ثر یونی را = تعریف میکنیم و ظرفیت مو ثر یونی نسبت مقدار مو ثر یونی به زمان تابش هدف آزمایش: مقدمه:
 ر 1 یونیزاسیون اشعهX هدف آزمایش: تعیین مقدار ظرفیت مو ثر یونی هوا تحقیق بستگی جریان یونیزاسیون به جریان فیلامان و ولتاژ آند لامپ اشعه x مقدمه: اشعه x موج الکترومغناطیسی پر قدرت با محدوده انرژي چند تا چند
ر 1 یونیزاسیون اشعهX هدف آزمایش: تعیین مقدار ظرفیت مو ثر یونی هوا تحقیق بستگی جریان یونیزاسیون به جریان فیلامان و ولتاژ آند لامپ اشعه x مقدمه: اشعه x موج الکترومغناطیسی پر قدرت با محدوده انرژي چند تا چند
هر عملگرجبر رابطه ای روی يک يا دو رابطه به عنوان ورودی عمل کرده و يک رابطه جديد را به عنوان نتيجه توليد می کنند.
 8-1 جبررابطه ای يک زبان پرس و جو است که عمليات روی پايگاه داده را توسط نمادهايی به صورت فرمولی بيان می کند. election Projection Cartesian Product et Union et Difference Cartesian Product et Intersection
8-1 جبررابطه ای يک زبان پرس و جو است که عمليات روی پايگاه داده را توسط نمادهايی به صورت فرمولی بيان می کند. election Projection Cartesian Product et Union et Difference Cartesian Product et Intersection
گزارش کار آزمایشگاه مبانی مهندسی برق گزارش کار آزمایشگاه مبانی مهندسی برق آزمایش مدارهای
 گزارش کار آزمایشگاه مبانی مهندسی برق خدا نام به 00 گزارش کار آزمایشگاه مبانی مهندسی برق آزمایش مدارهای RC www.ie uni.ir هدف آزمایش: می خواهیم شارژ ودشارژ خازن را در مدار ببینیم که به چه نحوی وبا چه روابطی
گزارش کار آزمایشگاه مبانی مهندسی برق خدا نام به 00 گزارش کار آزمایشگاه مبانی مهندسی برق آزمایش مدارهای RC www.ie uni.ir هدف آزمایش: می خواهیم شارژ ودشارژ خازن را در مدار ببینیم که به چه نحوی وبا چه روابطی
راهنمای کاربری موتور بنزینی )سیکل اتو(
سیکل اتو(") راهنمای کاربری موتور بنزینی )سیکل اتو( هدف آزمایش : شناخت و بررسی عملکرد موتور بنزینی تئوری آزمایش: موتورهای احتراق داخلی امروزه به طور وسیع برای ایجاد قدرت بکار می روند. ژنراتورهای کوچک پمپ های مخلوط
راهنمای کاربری موتور بنزینی )سیکل اتو( هدف آزمایش : شناخت و بررسی عملکرد موتور بنزینی تئوری آزمایش: موتورهای احتراق داخلی امروزه به طور وسیع برای ایجاد قدرت بکار می روند. ژنراتورهای کوچک پمپ های مخلوط
سپیده محمدی مهدی دولتشاهی گروه الکترونیک موسسه آموزش عالی جهاد دانشگاهی استان اصفهان استاد یار دانشکده مهندسی برق دانشگاه آزاد اسالمی واحد نجف آباد
 طراحی یک گیرنده مخابرات نوری CMOS داده 2.5Gb/s برای نرخ سپیده محمدی مهدی دولتشاهی گروه الکترونیک موسسه آموزش عالی جهاد دانشگاهی استان اصفهان استاد یار دانشکده مهندسی برق دانشگاه آزاد اسالمی واحد نجف آباد
طراحی یک گیرنده مخابرات نوری CMOS داده 2.5Gb/s برای نرخ سپیده محمدی مهدی دولتشاهی گروه الکترونیک موسسه آموزش عالی جهاد دانشگاهی استان اصفهان استاد یار دانشکده مهندسی برق دانشگاه آزاد اسالمی واحد نجف آباد
بررسی یک روش حذف پسیو خازن پارازیتی جهت کاهش نویز مود مشترك در مبدل سوي یچینگ فلاي بک
 بررسی یک روش حذف پسیو خازن پارازیتی جهت کاهش نویز مود مشترك در مبدل سوي یچینگ فلاي بک محمد روح اله یزدانی 1 مریم فاضل 1 استادیار گروه برق دانشگاه آزاد اسلامی واحد خوراسگان m.yazdani@khuisf.ac.ir دانش آموخته
بررسی یک روش حذف پسیو خازن پارازیتی جهت کاهش نویز مود مشترك در مبدل سوي یچینگ فلاي بک محمد روح اله یزدانی 1 مریم فاضل 1 استادیار گروه برق دانشگاه آزاد اسلامی واحد خوراسگان m.yazdani@khuisf.ac.ir دانش آموخته
بهبود پایداري شبکه قدرت با استفاده از TCSC در خط انتقال
 و بهبود پایداري شبکه قدرت با استفاده از در خط انتقال 3 علی شاهمرادي غضنفر شاهقلیان بهادر فانی محمد آبادي دانشگاه آزاد اسلامی واحد نجف آبادalishahmorai365@gmail.com دانشگاه آزاد اسلامی واحد نجف آباد shahgholian@iaun.ac.ir
و بهبود پایداري شبکه قدرت با استفاده از در خط انتقال 3 علی شاهمرادي غضنفر شاهقلیان بهادر فانی محمد آبادي دانشگاه آزاد اسلامی واحد نجف آبادalishahmorai365@gmail.com دانشگاه آزاد اسلامی واحد نجف آباد shahgholian@iaun.ac.ir
دانشگاه بیرجند فهرست:
 فهرست: آزمایش 1 :منحنی مشخصه دیود با استفاده از روش نقطه یابی و اسیلوسکوپ... 1 آزمایش 2 : کاربرد دیود )یکسو کننده ها(... 6 آزمایش 3 : کاربردهای دیود در مدار های جهش برش و چند برابر کننده های ولتاژ... 11
فهرست: آزمایش 1 :منحنی مشخصه دیود با استفاده از روش نقطه یابی و اسیلوسکوپ... 1 آزمایش 2 : کاربرد دیود )یکسو کننده ها(... 6 آزمایش 3 : کاربردهای دیود در مدار های جهش برش و چند برابر کننده های ولتاژ... 11
بسمه تعالی «تمرین شماره یک»
 بسمه تعالی «تمرین شماره یک» شماره دانشجویی : نام و نام خانوادگی : نام استاد: دکتر آزاده شهیدیان ترمودینامیک 1 نام درس : ردیف 0.15 m 3 میباشد. در این حالت یک فنر یک دستگاه سیلندر-پیستون در ابتدا حاوي 0.17kg
بسمه تعالی «تمرین شماره یک» شماره دانشجویی : نام و نام خانوادگی : نام استاد: دکتر آزاده شهیدیان ترمودینامیک 1 نام درس : ردیف 0.15 m 3 میباشد. در این حالت یک فنر یک دستگاه سیلندر-پیستون در ابتدا حاوي 0.17kg
آشنایی با پدیده ماره (moiré)
") فلا) ب) آشنایی با پدیده ماره (moiré) توری جذبی- هرگاه روی ورقه شفافی چون طلق تعداد زیادی نوارهای خطی کدر هم پهنا به موازات یکدیگر و به فاصله های مساوی از هم رسم کنیم یک توری خطی جذبی به وجود می آید شکل
فلا) ب) آشنایی با پدیده ماره (moiré) توری جذبی- هرگاه روی ورقه شفافی چون طلق تعداد زیادی نوارهای خطی کدر هم پهنا به موازات یکدیگر و به فاصله های مساوی از هم رسم کنیم یک توری خطی جذبی به وجود می آید شکل
t a a a = = f f e a a
 ا زمايشگاه ماشينه يا ۱ الکتريکي ا زمايش شمارهي ۴-۱ گزارش کار راهاندازي و تنظيم سرعت موتورهايي DC (شنت) استاد درياباد نگارش: اشکان نيوشا ۱۶ ا ذر ۱۳۸۷ ي م به نام خدا تي وري ا زمايش شنت است. در اين ا زمايش
ا زمايشگاه ماشينه يا ۱ الکتريکي ا زمايش شمارهي ۴-۱ گزارش کار راهاندازي و تنظيم سرعت موتورهايي DC (شنت) استاد درياباد نگارش: اشکان نيوشا ۱۶ ا ذر ۱۳۸۷ ي م به نام خدا تي وري ا زمايش شنت است. در اين ا زمايش
تلفات کل سيستم کاهش مي يابد. يکي ديگر از مزاياي اين روش بهبود پروفيل ولتاژ ضريب توان و پايداري سيستم مي باشد [-]. يکي ديگر از روش هاي کاهش تلفات سيستم
![تلفات کل سيستم کاهش مي يابد. يکي ديگر از مزاياي اين روش بهبود پروفيل ولتاژ ضريب توان و پايداري سيستم مي باشد [-]. يکي ديگر از روش هاي کاهش تلفات سيستم](/thumbs/87/95865628.jpg "تلفات کل سيستم کاهش مي يابد. يکي ديگر از مزاياي اين روش بهبود پروفيل ولتاژ ضريب توان و پايداري سيستم مي باشد [-]. يکي ديگر از روش هاي کاهش تلفات سيستم") اراي ه روشي براي کاهش تلفات در سيستم هاي توزيع بر مبناي تغيير محل تغذيه سيستم هاي توزيع احد کاظمي حيدر علي شايانفر حسن فشکي فراهاني سيد مهدي حسيني دانشگاه علم و صنعت ايران- دانشکده مهندسي برق چکيده براي
اراي ه روشي براي کاهش تلفات در سيستم هاي توزيع بر مبناي تغيير محل تغذيه سيستم هاي توزيع احد کاظمي حيدر علي شايانفر حسن فشکي فراهاني سيد مهدي حسيني دانشگاه علم و صنعت ايران- دانشکده مهندسي برق چکيده براي
سلسله مزاتب سبان مقدمه فصل : زبان های فارغ از متن زبان های منظم
 1 ماشیه ای توریىگ مقدمه فصل : سلسله مزاتب سبان a n b n c n? ww? زبان های فارغ از متن n b n a ww زبان های منظم a * a*b* 2 زبان ها پذیرفته می شوند بوسیله ی : ماشین های تورینگ a n b n c n ww زبان های فارغ
1 ماشیه ای توریىگ مقدمه فصل : سلسله مزاتب سبان a n b n c n? ww? زبان های فارغ از متن n b n a ww زبان های منظم a * a*b* 2 زبان ها پذیرفته می شوند بوسیله ی : ماشین های تورینگ a n b n c n ww زبان های فارغ
قاعده زنجیره ای برای مشتقات جزي ی (حالت اول) :
 :") ۱ گرادیان تابع (y :f(x, اگر f یک تابع دومتغیره باشد ا نگاه گرادیان f برداری است که به صورت زیر تعریف می شود f(x, y) = D ۱ f(x, y), D ۲ f(x, y) اگر رویه S نمایش تابع (y Z = f(x, باشد ا نگاه f در هر نقطه
۱ گرادیان تابع (y :f(x, اگر f یک تابع دومتغیره باشد ا نگاه گرادیان f برداری است که به صورت زیر تعریف می شود f(x, y) = D ۱ f(x, y), D ۲ f(x, y) اگر رویه S نمایش تابع (y Z = f(x, باشد ا نگاه f در هر نقطه
هو الحق دانشکده ي مهندسی کامپیوتر جلسه هفتم
 هو الحق دانشکده ي مهندسی کامپیوتر کدگذاري شبکه Coding) (Network شنبه 2 اسفند 1393 جلسه هفتم استاد: مهدي جعفري نگارنده: سید محمدرضا تاجزاد تعریف 1 بهینه سازي محدب : هدف پیدا کردن مقدار بهینه یک تابع ) min
هو الحق دانشکده ي مهندسی کامپیوتر کدگذاري شبکه Coding) (Network شنبه 2 اسفند 1393 جلسه هفتم استاد: مهدي جعفري نگارنده: سید محمدرضا تاجزاد تعریف 1 بهینه سازي محدب : هدف پیدا کردن مقدار بهینه یک تابع ) min
شبکه های عصبی در کنترل
 شبکه های عصبی در کنترل دانشگاه نجف آباد درس: کنترل هوشمند در فضای سایبرنتیک مدرس: حمید محمودیان مدل ریاضی نرون مدل ریاضی یک نرون ساده به صورت روبرو است P: مقدار کمیت ورودی b: مقدار بایاس )عرض از مبدا تابع
شبکه های عصبی در کنترل دانشگاه نجف آباد درس: کنترل هوشمند در فضای سایبرنتیک مدرس: حمید محمودیان مدل ریاضی نرون مدل ریاضی یک نرون ساده به صورت روبرو است P: مقدار کمیت ورودی b: مقدار بایاس )عرض از مبدا تابع
زا هدﺎﻔﺘﺳا هزو. ﺖﺳا هﺪﺷ ﻪﯾارا قﻮﻓ فاﺪﻫا ﻪﺑ ﯽﺑﺎﯿﺘﺳد ياﺮﺑ ﺮﺛﻮﻣ ﯽﺷور. دﻮﺷ ﯽﻣ هدﺎﻔﺘﺳا ﯽﻟﺎﺘﯿﺠﯾد ﻢﺘﺴﯿﺳ ﮏﯾ
 طراحی و شبیه سازي یک فیلتر اکتیو تکفاز جهت حذف هار مونیک هاي جریان شرکت برق منطقه اي زنجان پژوهشگران: مهندس آرام کنعانی ودکتر محسن کلانتر دانشکده برق -دانشگاه علم و صنعت ایران کلمات کلیدي : هارمونیک ها
طراحی و شبیه سازي یک فیلتر اکتیو تکفاز جهت حذف هار مونیک هاي جریان شرکت برق منطقه اي زنجان پژوهشگران: مهندس آرام کنعانی ودکتر محسن کلانتر دانشکده برق -دانشگاه علم و صنعت ایران کلمات کلیدي : هارمونیک ها
فصل یازدهم تجزیه و تحلیل مدارهای دیودی هدف کلی : تحلیل نظری و عملی یکسوسازها هدف های رفتاری: پس از پایان این فصل از فراگیرنده انتظار می رود که:
 تجزیه و تحلیل مدارهای دیودی هدف کلی : تحلیل نظری و عملی یکسوسازها هدف های رفتاری: پس از پایان این فصل از فراگیرنده انتظار می رود که: - مدار یکسوساز نیمموج را رسم کند و طرز کار مدار را شرح دهد. - مقدار
تجزیه و تحلیل مدارهای دیودی هدف کلی : تحلیل نظری و عملی یکسوسازها هدف های رفتاری: پس از پایان این فصل از فراگیرنده انتظار می رود که: - مدار یکسوساز نیمموج را رسم کند و طرز کار مدار را شرح دهد. - مقدار
در اين ا زمايش ابتدا راهاندازي موتور القايي رتور سيمپيچي شده سه فاز با مقاومت مختلف بررسي و س سپ مشخصه گشتاور سرعت ا ن رسم ميشود.
 ا زمايش 4: راهاندازي و مشخصه خروجي موتور القايي با رتور سيمپيچي شده 1-4 هدف ا زمايش در اين ا زمايش ابتدا راهاندازي موتور القايي رتور سيمپيچي شده سه فاز با مقاومت مختلف بررسي و س سپ مشخصه گشتاور سرعت ا
ا زمايش 4: راهاندازي و مشخصه خروجي موتور القايي با رتور سيمپيچي شده 1-4 هدف ا زمايش در اين ا زمايش ابتدا راهاندازي موتور القايي رتور سيمپيچي شده سه فاز با مقاومت مختلف بررسي و س سپ مشخصه گشتاور سرعت ا
ماشینهای مخصوص سیم پیچي و میدانهای مغناطیسي
 ماشینهای مخصوص سیم پیچي و میدانهای مغناطیسي استاد: مرتضي خردمندی تهیهکننده: سجاد شمس ویراستار : مینا قنادی یاد آوری مدار های مغناطیسی: L g L g مطابق شکل فرض کنید سیمپیچ N دوری حامل جریان i به دور هستهای
ماشینهای مخصوص سیم پیچي و میدانهای مغناطیسي استاد: مرتضي خردمندی تهیهکننده: سجاد شمس ویراستار : مینا قنادی یاد آوری مدار های مغناطیسی: L g L g مطابق شکل فرض کنید سیمپیچ N دوری حامل جریان i به دور هستهای
مسائل. 2 = (20)2 (1.96) 2 (5) 2 = 61.5 بنابراین اندازه ی نمونه الزم باید حداقل 62=n باشد.
2 (1.96) 2 (5) 2 = 61.5 بنابراین اندازه ی نمونه الزم باید حداقل 62=n باشد.") ) مسائل مدیریت کارخانه پوشاک تصمیم دارد مطالعه ای به منظور تعیین میانگین پیشرفت کارگران کارخانه انجام دهد. اگر او در این مطالعه دقت برآورد را 5 نمره در نظر بگیرد و فرض کند مقدار انحراف معیار پیشرفت کاری
) مسائل مدیریت کارخانه پوشاک تصمیم دارد مطالعه ای به منظور تعیین میانگین پیشرفت کارگران کارخانه انجام دهد. اگر او در این مطالعه دقت برآورد را 5 نمره در نظر بگیرد و فرض کند مقدار انحراف معیار پیشرفت کاری
تمرین اول درس کامپایلر
 1 تمرین اول درس 1. در زبان مربوط به عبارت منظم زیر چند رشته یکتا وجود دارد (0+1+ϵ)(0+1+ϵ)(0+1+ϵ)(0+1+ϵ) جواب 11 رشته کنند abbbaacc را در نظر بگیرید. کدامیک از عبارتهای منظم زیر توکنهای ab bb a acc را ایجاد
1 تمرین اول درس 1. در زبان مربوط به عبارت منظم زیر چند رشته یکتا وجود دارد (0+1+ϵ)(0+1+ϵ)(0+1+ϵ)(0+1+ϵ) جواب 11 رشته کنند abbbaacc را در نظر بگیرید. کدامیک از عبارتهای منظم زیر توکنهای ab bb a acc را ایجاد
کیوان بهزادپور محدرضا امینی
 1000 / 1004 کنترل فیلترهاي توان اکتیو (APF) تکفاز و سه فاز با استفاده از یک سنسور جریان کیوان بهزادپور محدرضا امینی keivan_bp@yahoo.com دانشجوي کارشناسی ارشد دانشگاه آزاد اسلامی واحد اصفهان چکیده عضو هیي
1000 / 1004 کنترل فیلترهاي توان اکتیو (APF) تکفاز و سه فاز با استفاده از یک سنسور جریان کیوان بهزادپور محدرضا امینی keivan_bp@yahoo.com دانشجوي کارشناسی ارشد دانشگاه آزاد اسلامی واحد اصفهان چکیده عضو هیي
اثرات درایو مبدل AC/DC تکفاز بر روي مشخصه گشتاور سرعت موتور DC
 اثرات درایو مبدل AC/DC تکفاز بر روي مشخصه گشتاور سرعت موتور DC 1 حمید کریمی 2 میثم ایوبی 3 مصطفی میرزاده 4 علی امیري زانیانی شرکت پالایش گاز پارسیان- hkfars@yahoo.com 1- شرکت پالایش گاز پارسیان- maysam_ayubi@yahoo.com
اثرات درایو مبدل AC/DC تکفاز بر روي مشخصه گشتاور سرعت موتور DC 1 حمید کریمی 2 میثم ایوبی 3 مصطفی میرزاده 4 علی امیري زانیانی شرکت پالایش گاز پارسیان- hkfars@yahoo.com 1- شرکت پالایش گاز پارسیان- maysam_ayubi@yahoo.com
رسوب سختی آلیاژهای آلومینیوم: تاريخچه : فرآیند رسوب سختی )پیرسختی( در سال 6091 بوسیله آلمانی کشف گردید.
پیرسختی( در سال 6091 بوسیله آلمانی کشف گردید.") رسوب سختی آلیاژهای آلومینیوم تاريخچه فرآیند رسوب سختی )پیرسختی( در سال 6091 بوسیله Dr.A.Wilm آلمانی کشف گردید. دکتر Wilm یک آلیاژ 4 درصد مس و 9/5 درصد منیزیم را حرارت داده و پس از آن به سرعت سرد نمود و
رسوب سختی آلیاژهای آلومینیوم تاريخچه فرآیند رسوب سختی )پیرسختی( در سال 6091 بوسیله Dr.A.Wilm آلمانی کشف گردید. دکتر Wilm یک آلیاژ 4 درصد مس و 9/5 درصد منیزیم را حرارت داده و پس از آن به سرعت سرد نمود و
هندسه تحلیلی بردارها در فضای R
 هندسه تحلیلی بردارها در فضای R فصل اول-بردارها دستگاه مختصات سه بعدی از سه محور ozوoyوox عمود بر هم تشکیل شده که در نقطه ای به نام o یکدیگر را قطع می کنند. قرارداد: دستگاه مختصات سه بعدی راستگرد می باشد
هندسه تحلیلی بردارها در فضای R فصل اول-بردارها دستگاه مختصات سه بعدی از سه محور ozوoyوox عمود بر هم تشکیل شده که در نقطه ای به نام o یکدیگر را قطع می کنند. قرارداد: دستگاه مختصات سه بعدی راستگرد می باشد
1-2-1 تعیین منحنی مشخصه ولتاژ - جریان دیود قدرت...17 مقدمه فهرست مقدمه... 6 الف( پیش گزارش... 6
 1 مقدمه فهرست مقدمه... 6 الف( پیش گزارش... 6 ب( گزارش و پرسش ه یا متن... 6 پ( حفاظت و مسائل مربوطه...7 ت( معرفی اجمالی اجزای دستگاه آموزنده الکترونیک صنعتی... 9 ت- 1 بلوکهای اتصاالت... 9 بلوک اتصاالت پل
1 مقدمه فهرست مقدمه... 6 الف( پیش گزارش... 6 ب( گزارش و پرسش ه یا متن... 6 پ( حفاظت و مسائل مربوطه...7 ت( معرفی اجمالی اجزای دستگاه آموزنده الکترونیک صنعتی... 9 ت- 1 بلوکهای اتصاالت... 9 بلوک اتصاالت پل
جلسه 14 را نیز تعریف کرد. عملگري که به دنبال آن هستیم باید ماتریس چگالی مربوط به یک توزیع را به ماتریس چگالی مربوط به توزیع حاشیه اي آن ببرد.
 تي وري اطلاعات کوانتمی ترم پاییز 39-39 مدرس: ابوالفتح بیگی و امین زاده گوهري نویسنده: کامران کیخسروي جلسه فرض کنید حالت سیستم ترکیبی AB را داشته باشیم. حالت سیستم B به تنهایی چیست در ابتداي درس که حالات
تي وري اطلاعات کوانتمی ترم پاییز 39-39 مدرس: ابوالفتح بیگی و امین زاده گوهري نویسنده: کامران کیخسروي جلسه فرض کنید حالت سیستم ترکیبی AB را داشته باشیم. حالت سیستم B به تنهایی چیست در ابتداي درس که حالات
زمین شناسی ساختاری.فصل پنجم.محاسبه ضخامت و عمق الیه
 پن ج م فص ل محاسبه ضخامت و عم ق الهی زمین شناسی ساختاری.کارشناسی زمین شناسی.بخش زمین شناسی دانشکده علوم.دانشگاه شهید باهنر کرمان.استاد درس:دکتر شهرام شفیعی بافتی 1 تعاریف ضخامت - فاصله عمودی بین دو صفحه
پن ج م فص ل محاسبه ضخامت و عم ق الهی زمین شناسی ساختاری.کارشناسی زمین شناسی.بخش زمین شناسی دانشکده علوم.دانشگاه شهید باهنر کرمان.استاد درس:دکتر شهرام شفیعی بافتی 1 تعاریف ضخامت - فاصله عمودی بین دو صفحه