Διδακτορική Διατριβή
|
|
|
- Αθορ Ασπάσιος
- 8 χρόνια πριν
- Προβολές:
Transcript



1 ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ & ΑΕΡΟΝΑΥΠΗΓΩΝ ΜΗΧΑΝΙΚΩΝ Διδακτορική Διατριβή Ανάπτυξη αλγορίθμων ιεραρχικού ευφυούς ελέγχου ρομπότ για τον χειρισμό εύκαμπτων αντικειμένων κατά τη ραφή τους Παναγιώτης Ν. Κουστουμπάρδης ΔΙΠΛΩΜΑΤΟΥΧΟΣ ΜΗΧΑΝΟΛΟΓΟΣ ΜΗΧΑΝΙΚΟΣ ΠΟΛΥΤΕΧΝΙΚΗΣ ΣΧΟΛΗΣ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΠΑΤΡΩΝ ΠΑΤΡΑ 2014
2
3 ΠΡΟΛΟΓΟΣ Η παρούσα διατριβή εκπονήθηκε στο Τμήμα Μηχανολόγων & Αεροναυπηγών Μηχανικών της Πολυτεχνικής Σχολής του Πανεπιστημίου Πατρών. Η διαδρομή για την απόκτηση ενός διδακτορικού διπλώματος επιφυλάσσει ποικιλόμορφες δοκιμασίες, τις οποίες δεν θα είχα αντιπαρέλθει χωρίς τη βοήθεια πολλών ανθρώπων. Είναι πολύ δύσκολο να αποτυπωθούν γραπτά οι εμπειρίες και οι γνώσεις που αποκόμισα από όλους τους, παρ όλα αυτά η βαθύτατη ανάγκη μου να εκφράσω τις ειλικρινείς μου ευχαριστίες, για τη σύμπραξή τους στο παρόν εγχείρημα, το επιτάσσει. Κατά πρώτον θα ήθελα να ευχαριστήσω θερμά, τον επιβλέποντα της διατριβής Καθηγητή κ. Νίκο Ασπράγκαθο, για την πολύπλευρη συμπαράστασή του σε κάθε στάδιο των σπουδών μου, αλλά και για την υπομονή και την επιμονή του στη βελτίωση αυτής της διατριβής, για την ανεξάντλητη διάθεσή του να συζητά μαζί μου, και κυρίως για τη ξεχωριστή επιστημονική καθοδήγησή του, η οποία πολλές φορές ξεδίπλωνε μπροστά μου νέους ερευνητικούς ορίζοντες και τον οποίο θεωρώ πάνω από όλα δάσκαλο με ήθος. Οι ευχαριστίες μου είναι επίσης ξεχωριστές και προς τους δύο έτερους συμβούλους της διατριβής, στον Καθηγητή κ. Αργύρη Δέντσορα και στον Καθηγητή κ. Σπήλιο Φασόη. Η συνεχής επιστημονική και θετική στάση των οποίων συνεισέφερε σημαντικά στη συνεχή ποιοτική αναβάθμιση και περαίωση του ανά χείρας κειμένου. Επιπροσθέτως, θέλω να ευχαριστήσω τον Καθηγητή κ.αργύρη Δέντσορα, για την παράλληλη επιστημονική και ερευνητική συνεργασία μας, στον οποίο οφείλω το πάθος μου προς τον προγραμματισμό υπολογιστών. Οφείλω, επίσης, να εκφράσω εκ των προτέρων τις ευχαριστίες μου στα τέσσερα υπόλοιπα μέλη της εξεταστικής επιτροπής που συμβάλουν στην διαδικασία ολοκλήρωσης της διατριβής, στον Καθηγητή κ. Πέτρο Γρουμπό, στον Καθηγητή κ. Σπυρίδων Λυκοθανάση, στον Αν. Καθηγητή κ. Ευάγγελο Δερματά και στον Αν. Καθηγητή κ. Ιωάννη Χατζηλυγερούδη. Για τη συνεργασία μας και τη βοήθειά τους, ευχαριστώ όλους τους συνεργάτες, μεταπτυχιακούς και προπτυχιακούς φοιτητές της Ομάδας Ρομποτικής του Πανεπιστημίου Πατρών, η συμβολή των οποίων υπήρξε καταλυτική τόσο στη συγκρότηση όσο και στη διεύρυνση του αντικειμένου της διατριβής. Ιδιαίτερα, θέλω να ευχαριστήσω τη σύντροφό μου και γυναίκα μου Νικολέτα Κατσαλά, που ήταν πάντα αμέριστα δίπλα μου σε όλη αυτήν την προσπάθεια. Οι ατελείωτες συζητήσεις μας σε φιλοσοφική, ηθική και επιστημονική βάση προσέγγισης επί των ευρύτερων προκλήσεων/θεμάτων κατά τη διεξαγωγή ενός διδακτορικού, διαμόρφωσαν και καθόρισαν, πέρα από το χαρακτήρα μας, και τη μελλοντική στάση ζωής μας σε καθημερινά και μη ζητήματα. Επίσης, δεν μπορώ να μην ευχαριστώ τα παιδιά μου Νικόλα και Διονύση, που παρόλο το μικρό της ηλικίας τους πολλές φορές προσπαθούσαν να ενστερνιστούν την κατάσταση και μιλούσαν ψιθυριστά, επειδή όπως έλεγαν: ο μπαμπάς έχει δουλειά στον υπολογιστή. I
4
5 Αφιερώνεται στη Νικολέτα, που μ έμαθε να πιστεύω και να προσπαθώ. και στους Νικόλα και Διονύση, που μ έμαθαν να γελάω και να κλαίω.
6
7 ΠΕΡΙΛΗΨΗ Η βιομηχανία παραγωγής ρούχων, ακόμα και σήμερα, αποτελεί ένα βιομηχανικό κλάδο όπου η αυτοματοποίηση είναι εν μέρει σχεδόν ανύπαρκτη και εν γένει σε εμβρυικό στάδιο. Ένα μεγάλο τμήμα της γραμμής παραγωγής αποτελεί το τμήμα κατά το οποίο κομμάτια υφάσματος ράβονται σε μία ραπτομηχανή. Το στάδιο της ραφής, παρόλο που είναι το μεγαλύτερο σε χρονική διάρκεια και το σημαντικότερο στην τελική ποιότητα, παραμένει σχεδόν εξολοκλήρου μία χειρονακτική εργασία. Οι ιδιαιτερότητες των υφασμάτων όπως: η πολύ μικρή αντίστασή τους σε κάμψη, οι μεγάλες παραμορφώσεις τους, η απρόβλεπτη στατική/δυναμική συμπεριφορά τους, η ανισότροπη και μη-γραμμική φύση τους και η ανομοιογένειά τους είναι οι κύριοι παράγοντες των έντονων δυσκολιών κατά τον χειρισμό τους. Η ρομποτική ραφή είναι ένα σχετικά νέο ερευνητικό πεδίο αλλά και εξαιρετικά πολύπλοκο πρόβλημα, όπου ελάχιστοι ερευνητές έχουν προσπαθήσει να προσεγγίσουν. Αυτή τη στιγμή, από όσο είναι δυνατόν να είναι γνωστόν, μόνο τρία ερευνητικά κέντρα ασχολούνται, σε διεθνή επίπεδο, ενώ το ένα από αυτά είναι η Ομάδα Ρομποτικής του Πανεπιστημίου Πατρών. Στόχος της διατριβής είναι η ανάπτυξη ενός ευέλικτου συστήματος το οποίο ενσωματώνει όλα εκείνα τα ευφυή χαρακτηριστικά ώστε να συμβάλει στη ρομποτική αυτοματοποίηση της ραφής υφασμάτων. Η επίτευξη αυτού του στόχου στηρίζεται σε μεθόδους υπολογιστικής νοημοσύνης, σε τακτικές εμπνευσμένες από τον τρόπο εργασίας του ίδιου του ανθρώπου και στην ποιοτική διαχείριση της γνώσης/δεδομένων που εμπεριέχουν ασάφεια. Ταυτόχρονα, επιτυγχάνεται ο έλεγχος της ραφής χωρίς τη χρήση αναλυτικών μοντέλων τόσο των υφασμάτων όσο και της διαδικασίας. Ο συντονισμός όλων των προηγουμένων επιτυγχάνεται από ένα ευέλικτο ευφυές ιεραρχικό σύστημα ελέγχου της διαδικασίας της ραφής. Στην παρούσα διατριβή αναπτύχθηκε ένα σύνολο νέων μεθόδων για την αυτοματοποιημένη ραφή υφασμάτων με ένα βιομηχανικό ρομπότ εφοδιασμένο με έναν αισθητήρα δύναμης και μία κλασσικού τύπου ραπτομηχανή. Η πρωτότυπη προσέγγιση που αποτελεί το πλαίσιο της διατριβής αποτελείται από ένα ιεραρχικό σύστημα εκτιμήσεων, αποφάσεων και ελέγχου της διαδικασίας ραφής. Γίνεται μία συστηματική μελέτη, καταγραφή και αξιολόγηση όλων των χειρισμών του υφάσματος, πριν και κατά τη διάρκεια της ραφής, ως προς τις απαιτήσεις τους σε συστήματα αισθητήρων αλλά και στρατηγικών ελέγχου. Αναπτύσσεται μία πρωτότυπη βάση δεδομένων και ένα έμπειρο σύστημα που ενσωματώνουν όλη αυτή την προγενέστερη γνώση και εμπειρία. Παρουσιάζεται η ιδέα της εφαρμογής μεθόδων υπολογιστικής νοημοσύνης στο επιστημονικό πεδίο της ραφής υφασμάτων και εφαρμογής μεθόδων ευφυούς ελέγχου, για την τάνυση των υφασμάτων, βασισμένες σε νευρωνικά δίκτυα οι οποίες, για πρώτη φορά, χρησιμοποιούν ποιοτικές εκτιμήσεις των ιδιοτήτων και των χαρακτηριστικών των υφασμάτων. Έτσι, εισάγεται η έννοια των λεκτικών μεταβλητών για την ποιοτική περιγραφή των ιδιοτήτων των υφασμάτων. Στο πλαίσιο αυτό, εκφράζεται για πρώτη φορά, ποιοτικά σαν ποσοστό, η έννοια της V
8 εκτατότητας (extensibility) των υφασμάτων, που είναι μία βασική και καθοριστική ιδιότητά τους κατά την εργασία της ραφής τους. Επίσης περιγράφεται η ανάπτυξη μιας νέας μεθόδου αυτοματοποιημένου πειραματικού προσδιορισμού της εκτατότητας των υφασμάτων. Η πρωτότυπη αυτή προσέγγιση εφαρμόστηκε σε μονά και διπλά υφάσματα ενώ τα πειράματα εφελκυσμού ενσωματώθηκαν έξυπνα στην ίδια τη ραπτομηχανή και λίγο πριν τη διαδικασία της ραφής. Παρουσιάζεται ένα ασαφές σύστημα εξαγωγής της επιθυμητής τάνυσης, κατά τη ραφή του κάθε υφάσματος, το οποίο βασίζεται στην ποιοτική εκτίμηση της εκτατότητας του υφάσματος και διαμορφώθηκε από την εμπειρία του έμπειρου χειριστή και την ασαφή συνεπαγωγή που κάνει αυτός ανάμεσα στην εκτατότητα και την επιθυμητή τάνυση. Αναπτύχθηκε μία νέα μέθοδος ελέγχου της τάνυσης του υφάσματος κατά τη ραφή του. Σε αυτή χρησιμοποιήθηκε ένας νευρωνικός ελεγκτής ευθείας τροφοδότησης για τον έλεγχο του ρομποτικού άκρου εργασίας με σκοπό τη διατήρηση της τάνυσης του υφάσματος σύμφωνα με την εκάστοτε επιθυμητή. Επιπροσθέτως, παρουσιάζεται η επέκταση της προτεινόμενης προσέγγισης, του νευρωνικού ελέγχου της τάνυσης, η οποία έδειξε τη δυνατότητα γενίκευσής της και σε άλλες παραπλήσιες εργασίες. Επίσης, καταγράφονται τα νέα ερευνητικά πεδία που ανοίγουν στο χώρο της συνεργασίας ανθρώπου-ρομπότ για τον χειρισμό υπερεύκαμπτων και εύκαμπτων αντικειμένων. Τελικά, παρουσιάζεται μία συστηματική εργαστηριακή εκτέλεση ραφών, σε μία μεγάλη ποικιλία τόσο μονών όσο και διπλών υφασμάτων, με ρομπότ ενώ συγκρίθηκαν αυτές με ραφές από έμπειρους. Μέσα από τις πειραματικές ραφές αναδεικνύεται, η αναζητούμενη ευελιξία του συστήματος και η ικανοποιητική απόκρισή του σε μία μεγάλη ποικιλομορφία υφασμάτων.
9 We can't solve problems by using the same kind of thinking we used when we created them. - A. Einstein -
10
11 ΠΕΡΙΕΧΟΜΕΝΑ Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής Κίνητρα και στόχοι της διατριβής Ανασκόπηση βιβλιογραφίας Αυτοματοποίηση της διαδικασίας της ραφής υφασμάτων Μετρήσεις ιδιοτήτων των υφασμάτων Υπολογιστική νοημοσύνη στην αυτοματοποίηση της ραφής Συμβολή της διατριβής Δομή της διατριβής Αναλυτική και συστηματική μελέτη ραφής- Έμπειρο σύστημα αξιολόγησης εργασιών ραφής Εισαγωγή Τοποθέτηση του προβλήματος της ραφής Ευρύτερο συνολικό πλαίσιο εργασιών για τη ραφή Βάση δεδομένων-έμπειρο σύστημα αξιολόγησης απαιτήσεων κατά τη ραφή Δόμηση γνώσης και κανόνων του έμπειρου συστήματος Συμπεράσματα αναλυτικής μελέτης ανάπτυξης έμπειρου συστήματος Ιεραρχική δομή συστήματος ελέγχου της ραφής Εισαγωγή Συνολική ιεραρχική δομή συστήματος αυτοματοποίησης της ραφής Ιεραρχική δομή συστήματος προκαταρκτικών εργασιών Ιεραρχική δομή συστήματος ελέγχου της ραφής Προκαταρκτικές φάσεις πριν τη διαδικασία της ραφής Εισαγωγή Αναγνώριση-διόρθωση πτυχώσεων Περιγραφή του προβλήματος αναγνώρισης και διόρθωσης των πτυχώσεων Νευρωνικό δίκτυο για την αναγνώριση των πτυχώσεων Εκπαίδευση και δοκιμή του νευρωνικού δικτύου Συμπεράσματα Αρχική τοποθέτηση του ρομπότ πάνω στο ύφασμα Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού Εισαγωγή
12 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Εκτατότητα υφασμάτων και αυτοματοποίηση της εκτίμησής της Πειράματα εφελκυσμού σε μονά υφάσματα Προδιαγραφές πειραμάτων εφελκυσμού Ανάπτυξη πειραμάτων εφελκυσμού Μεθοδολογία πειραμάτων εφελκυσμού Πειράματα εφελκυσμού σε διπλά υφάσματα Νευρωνικό δίκτυο για την εκτίμηση της εκτατότητας Εκπαίδευση νευρωνικού δικτύου για την εκτίμηση της εκτατότητας Διερεύνηση των λειτουργικών ορίων των πειραμάτων εφελκυσμού Πειράματα εφελκυσμού με μεταβλητό πλάτος υφασμάτων Πειράματα εφελκυσμού με μεταβλητό μήκος υφασμάτων Επέκταση της χρήσης της νέας μεθόδου προσέγγισης των πειραμάτων Συμπεράσματα Εκτίμηση των επιθυμητών προδιαγραφών του ελέγχου της ραφής επιθυμητή τάνυση κάθε υφάσματος Εισαγωγή Εξόρυξη γνώσης από έμπειρους χειριστές ραπτικών μηχανών Ασαφές σύστημα εξαγωγής της επιθυμητής τάνυσης Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές Εισαγωγή Προσομοίωση νευρωνικού ελεγκτή Αποτελέσματα προσομοίωσης Συμπεράσματα προσομοίωσης Νευρωνικός ελεγκτής (τμήμα ) Νευρωνικός Ελεγκτής για ραφές μονών υφασμάτων Νευρωνικός Ελεγκτής για ραφές διπλών υφασμάτων Αποθήκευση εμπειρίας και (ανα-)προσαρμογή συστήματος (τμήμα ) Σύγκριση PID με Νευρωνικό Ελεγκτή Σύγκριση υπολογιστικού κόστους Σύγκριση προσαρμοστικού ασαφή ελεγκτή με τον νευρωνικό ελεγκτή Επέκταση χρήσης νευρωνικού ελεγκτή και σε άλλες εφαρμογές Συνεργασία Ανθρώπου-Ρομπότ για τη μετακίνηση και το δίπλωμα υφασμάτων Έλεγχος με ενσωμάτωση μηχανικής όρασης (Machine vision control) Συμπεράσματα της εφαρμογής: συνεργασία Ανθρώπου-Ρομπότ για τον χειρισμό υφάσματος Ρομποτική υποβοήθηση ανθρώπου για την ανύψωση αντικειμένων X
13 Περιεχόμενα 8 Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις Εισαγωγή Πειραματική διάταξη και συσκευές Σχεδιασμός αρπάγης Πειράματα ραφών σε μονά και διπλά υφάσματα Χαρακτηριστικά μονών υφασμάτων Χαρακτηριστικά διπλών υφασμάτων Παρατηρήσεις συμπεράσματα για τα πειράματα ραφής υφασμάτων Συμπεράσματα Προοπτικές Ανακεφαλαίωση και γενικά συμπεράσματα Προοπτικές και προτάσεις για μελλοντική έρευνα Παράρτημα Α Βιβλιογραφία Σύντομο Βιογραφικό Αποτελέσματα Δημοσιεύσεις Ευρετήριο XI
14
15 ΠΙΝΑΚΑΣ ΣΧΗΜΑΤΩΝ Σχ. 1.1 Ραφή υφάσματος μετατρέποντάς το σε άκαμπτο, χρησιμοποιώντας (α) ειδική ρομποτική αρπάγη και (β) ειδικό μηχανισμό πάνω στη ραπτομηχανή Σχ. 1.2 Σερβομηχανισμός για ραφή, τοποθετημένος πάνω στη ραπτομηχανή [10]... 8 Σχ. 1.3 Συνεργαζόμενοι ρομποτικοί βραχίονες για ραφή δερμάτων [13] Σχ. 1.4 Fryma Fabric Extensometer Σχ. 1.5 Kawabata Evaluation System για μετρήσεις εφελκυσμού και διάτμησης (πάνω). Καμπύλη εφελκυσμού (Α - φόρτισης, Β - αποφόρτισης) (κάτω) Σχ. 1.6 Fast-3 σύστημα για μετρήσεις εφελκυσμού Σχ. 1.7 FAMOUS σύστημα για όλη τη γκάμα των πειραμάτων [31] Σχ. 1.8 Instron σύστημα για εφελκυσμό υφασμάτων Σχ. 2.1 Κενά επικοινωνίας κατά τη μεταφορά και χειρισμό των δεδομένων/γνώσης/εμπειρίας μεταξύ των ευρύτερων κλάδων της βιομηχανίας ένδυσης Σχ. 2.2 Μηχανικό μοντέλο υφάσματος [3, 65] Σχ. 2.3 Δύο περιπτώσεις ιδανικού και απλοποιημένου προφίλ της ταχύτητας της ραπτομηχανής. α) για μικρό μήκος γαζιού β) για μεγάλο μήκος γαζιού Σχ. 2.4 Η προσέγγιση της ραφής υφασμάτων χρησιμοποιώντας ραπτομηχανή και ρομπότ Σχ. 2.5 Διάγραμμα ροής συνολικών εργασιών για την αυτοματοποίηση της ραφής.. 34 Σχ. 2.6 Δομή έμπειρου συστήματος για την επιλογή αρπαγών και στρατηγικής ελέγχου Σχ. 2.7 Αποτελέσματα εφαρμογής έμπειρου συστήματος (είσοδος παραμέτρων και γενικό σχήμα ελέγχου) Σχ. 2.8 Αποτελέσματα εφαρμοφγής έμπειρου συστήματος (σχήμα ελέγχου) Σχ. 2.9 Αποτελέσματα εφαρμοφγής έμπειρου συστήματος (επεξήγηση σχήματος ελέγχου) Σχ. 3.1 Ιεραρχική αλληλουχία διαδικασιών κατά τη ραφή Σχ. 3.2 Συνολική ιεραρχική δομή συστήματος αυτοματοποίησης της ραφής με ρομπότ Σχ. 3.3 Ιεραρχικό σχήμα ελέγχου της ραφής υφασμάτων Σχ. 4.1 Προκαταρκτικές εργασίες πριν τη διαδικασία της ραφής Σχ. 4.2 Αναγνώριση πτυχώσεων και εκπαίδευση νευρωνικού δικτύου Σχ. 4.3 Εικόνα ενός τμήματος του υφάσματος: α) χωρίς πτύχωση β) με πτύχωση Σχ. 4.4 Σχήμα ελέγχου αναγνώρισης πτυχώσεων Σχ. 4.5 Πτύχωση υφάσματος α) αρχική εικόνα εικονοστοιχείων, β) ψηφιοποιημένη εικόνα εικονοστοιχείων Σχ. 4.6 Δομή νευρωνικού δικτύου για την αναγνώριση των πτυχώσεων Σχ. 4.7 Περιπτώσεις εμφάνισης πτύχωσης στις Σχ. 4.8 Ασπρόμαυρη εικόνα (της εικόνας 16 με πτύχωση στη μέση) Σχ. 4.9 Δεδομένα εισόδου για την εικόνα 1 με πτύχωση στη μέση της εικόνας Σχ Δεδομένα εισόδου για την εικόνα 1 με πτύχωση στην πάνω πλευρά της εικόνας Σχ Αρχική τοποθέτηση του άκρου εργασίας του ρομπότ Σχ Εμφάνιση πτύχωσης σε μετακινούμενο ύφασμα
16 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ Σχήμα ελέγχου για την αρχική τοποθέτηση του άκρου εργασίας του ρομπότ Σχ Ασαφή σετ για τον καθορισμό του κρίσιμου μήκους L Σχ. 5.1 Ευφυής αυτοματοποίηση της διαδικασία: Πειράματα-ιδιότητες-αξιολόγησηαξιοποίηση (α) πριν και (β) μετά Σχ. 5.2 Πείραμα του εφελκυσμού υφάσματος όπως εκτελείται από τον έμπειρο χειριστή Σχ. 5.3 Διαστάσεις των δειγμάτων υφασμάτων για το πείραμα του εφελκυσμού Σχ. 5.4 Ρομποτικά αυτοματοποιημένο πείραμα εφελκυσμού (για μονό ύφασμα), διαδικασία ανεξάρτητη από τη ραφή Σχ. 5.5 Καμπύλες εφελκυσμού μονών υφασμάτων Σχ. 5.6 Ρομποτικά αυτοματοποιημένο πείραμα εφελκυσμού (για διπλό ύφασμα), διαδικασία ενσωματωμένη στη ραπτική μηχανή Σχ. 5.7 Καμπύλες εφελκυσμού διπλών υφασμάτων Σχ. 5.8 Μέτρηση και ευφυής εκτίμηση της εκτατότητας υφασμάτων Σχ. 5.9 Βελτίωση της λειτουργικότητας του νευρωνικού δικτύου τροφοδοτώντας το με την τρέχουσα και την προηγούμενη μέτρηση Σχ Τοπολογία νευρωνικού δικτύου (4-7-1) για την εκτίμηση της εκτατότητας.. 91 Σχ Μέσο τετραγωνικό σφάλμα (MSE) της διαδικασίας εκπαίδευσης Σχ Οι εκτιμήσεις του νευρωνικού δικτύου για την εκτατότητα των δειγμάτων Σχ Πείραμα εφελκυσμού με μεταβλητό μήκος και πλάτος Σχ Εκτέλεση του πειράματος εφελκυσμού με τρεις διαφορετικούς τρόπους στο ίδιο όμως δείγμα Σχ Καμπύλες εφελκυσμού υφασμάτων με μεταβλητό πλάτος Σχ Μείωση του ενεργού μήκους του υφάσματος καθώς εξελίσσεται η διαδικασία της ραφής Σχ Καμπύλες εφελκυσμού υφασμάτων με μεταβλητό μήκος Σχ. 6.1 Εκτίμηση επιθυμητής τάνυσης από το ασαφές σύστημα Σχ. 6.2 Η ασαφής μεταβλητή εκτατότητα με πέντε λεκτικές τιμές Σχ. 6.3 Η ασαφής μεταβλητή διεύθυνση με τρεις λεκτικές τιμές Σχ. 6.4 Η ασαφής μεταβλητή τάνυση με πέντε λεκτικές τιμές Σχ. 7.1 Γενικό διάγραμμα ελέγχου δύναμης κατά τη ραφή Σχ. 7.2 Νευρωνικό δίκτυο για τις ανάγκες της προσομοίωσης Σχ. 7.3 Καμπύλες εφελκυσμού υφάσματος: α) πειραματική, β) προσεγγιστική Σχ. 7.4 Καμπύλες συμπίεσης υφάσματος: α) πειραματική, β) προσεγγιστική Σχ. 7.5 Απόκριση νευρωνικού ελεγκτή. α) ταχύτητα ρομπότ και ραπτικής μηχανής, β) επιθυμητή και πραγματική δύναμη επί του υφάσματος. (προσομοίωση) Σχ. 7.6 Απόκριση νευρωνικού ελεγκτή με την παρουσία θορύβου. α) ταχύτητες, β) δυνάμεις. (προσομοίωση) Σχ. 7.7 Απόκριση νευρωνικού ελεγκτή με χρήση προγενέστερης εμπειρίας. α) ταχύτητες, β) δυνάμεις. (προσομοίωση) Σχ. 7.8 Τοπολογία νευρωνικού ελεγκτή για ραφή μονών υφασμάτων Σχ. 7.9 Τοπολογία νευρωνικού ελεγκτή για ραφή διπλών υφασμάτων Σχ Η δομή της βάσης δεδομένων για την αποθήκευση της εμπειρίας Σχ Τοπολογία PID ελεγκτή για ραφή υφασμάτων Σχ PID σε σύγκριση με Νευρωνικό (χωρίς αρχική εκπαίδευση) ελεγκτή Σχ PID σε σύγκριση με Νευρωνικό (εκπαιδευμένο) ελεγκτή Σχ Έλεγχος δύναμης κατά τη ραφή (πλεκτό). α) νευρωνικού ελεγκτή β) PID ελεγκτή Σχ Στιγμιότυπα της διαδικασίας ραφής XIV
17 Πίνακας Σχημάτων Σχ Έλεγχος δύναμης κατά τη ραφή (υφαντό). α) νευρωνικού ελεγκτή β) PID ελεγκτή Σχ Αποκρίσεις προσαρμοστικού ασαφή ελεγκτή Σχ Συνεργασία ρομπότ-ανθρώπου για τον χειρισμό υφάσματος Σχ Νευρωνικός Ελεγκτής (a), περίπτωση αποκεντρωτικού ελεγκτή (b) και συγκεντρωτικού (c) Σχ Συνδέσεις πειραματικής διάταξης Σχ Απόκριση αποκεντρωτικού ελέγχου. (a) Δυνάμεις και (b) θέση άκρου εργασίας Σχ Απόκριση συγκεντρωτικού ελέγχου. (a) Δυνάμεις και (b) θέση άκρου εργασίας Σχ Απόκριση εκπαιδευμένων ελεγκτών. (a) αποκεντρωτικού και (b) συγκεντρωτικού Σχ Δυνάμεις που καταγράφηκαν όταν το ρομπότ καθοδηγεί τον άνθρωπο Σχ Δυνάμεις που καταγράφηκαν όταν το ρομπότ καθοδηγεί τον άνθρωπο ο οποίος έχει κλειστά τα μάτια του Σχ Θέση του άκρου εργασίας το ρομπότ καθοδηγεί τον άνθρωπο Σχ Συνεργασία Ανθρώπου-Ρομπότ για το άπλωμα, στρώσιμο και δίπλωμα υφάσματος πάνω σε τραπέζι Σχ Δίπλωμα ή μετακίνηση υφάσματος με συνεργασία Ανθρώπου-Ρομπότ Σχ Σχήμα ελέγχου για τον χειρισμό υφάσματος με συνεργασία Ανθρώπου- Ρομπότ (με αισθητήρα δύναμης και μηχανική όραση) Σχ Ρομποτική υποβοήθηση ανθρώπου για τη μετακίνηση φορτίων Σχ Σχεδιάγραμμα μηχανισμού υποβοήθησης για το ανεβοκατέβασμα φορτίων Σχ. 8.1 Πειραματική διάταξη για τη ραφή (ρομπότ-ραπτομηχανή) Σχ. 8.2 Διάγραμμα πειραματικής διάταξης για τη ραφή Σχ. 8.3 Χρόνοι απόκρισης του βρόχου ελέγχου Σχ. 8.4 Αρπάγη συγκράτησης υφασμάτων βασισμένη στον τρόπο συγκράτησης από τον ανθρώπου Σχ. 8.5 Νέος σχεδιασμός αρπάγης χειρισμού υφασμάτων βασισμένη στον τρόπο λειτουργίας των δαχτύλων του ανθρώπου Σχ. 8.6 καμπύλες εφελκυσμού των 12 μονών υφασμάτων (αποτελούν τμήμα αυτών που παρουσιάζονται στο Σχ. 5.5) Σχ. 8.7 Δυνάμεις κατά την 3 η φάση (προτάνυση) και 4 η φάση (γάζωμα) για τα μονά υφάσματα Νο.1 και Νο Σχ. 8.8 Δυνάμεις κατά την 3 η φάση (προτάνυση) και 4 η φάση (γάζωμα) για τα διπλά υφάσματα Νο.1, Νο.5 και Νο XV
18
19 1 Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής 1.1 Κίνητρα και στόχοι της διατριβής. Η διεθνής έρευνα που διεξάγεται στον χειρισμό υφασμάτων με τη χρήση ρομπότ, έχει αναδείξει νέες και ερευνητικά προκλητικές δυσκολίες οι οποίες απαιτούν μεθόδους ελέγχου και χειρισμού πέρα από τις κλασσικές. Οι ιδιαιτερότητες των υφασμάτων όπως: η πολύ μικρή αντίστασή τους σε κάμψη, οι μεγάλες παραμορφώσεις τους, η απρόβλεπτη στατική/δυναμική συμπεριφορά τους, η ανισότροπη και μη-γραμμική φύση τους και η ανομοιογένειά τους είναι οι κύριοι παράγοντες των έντονων δυσκολιών κατά τον χειρισμό τους. Το πρόβλημα της αυτοματοποίησης του χειρισμού τους γίνεται ακόμα πιο δύσκολο όταν πάρουμε υπόψη μας την πολύ μεγάλη και συνεχώς αυξανόμενη ποικιλία υφασμάτων καθώς και τις δυσκολίες μοντελοποίησής τους σε εφαρμογές πραγματικού χρόνου. Τα προβλήματα αυτά αποτελούν τροχοπέδη ακόμα και για πολύ απλές εργασίες χειρισμού. Ο χειρισμός τους, κατά τη διαδικασία της ραφής τους, γίνεται ακόμα πιο δύσκολος εξαιτίας της περιοδικής μετακίνησης του υφάσματος που προέρχεται από τον μηχανισμό τροφοδοσίας της ραπτομηχανής και θεωρείται ως μία εξωτερική επιπρόσθετη διαταραχή στο σύστημα. Το ύφασμα πρέπει να κρατιέται τεντωμένο κατά τη διάρκεια της ραφής του. Η κατάλληλη εφαρμοζόμενη δύναμη τάνυσης εξαρτάται κάθε φορά από τις ιδιότητες των υφασμάτων, από τη σύνθεσή τους, τον τρόπο κατασκευή τους ακόμα και από τη διεύθυνση της ραφής τους. Η διερεύνηση, της επιρροής που έχουν όλοι οι παραπάνω παράγοντες, κάνει το πρόβλημα υπερβολικά πολύπλοκο. Από την άλλη, ο έλεγχος της ραφής, που αποτελείται από ένα έντονα δυναμικό και μη-γραμμικό σύστημα, είναι μία ανοιχτή, δύσκολη αλλά δελεαστική ερευνητική πρόκληση. Οι προσπάθειες αυτοματοποίησης της ραφής έχουν πολύ μικρή ιστορία που εξελίσσεται τις τρείς τελευταίες δεκαετίες. Οι πρώτες απόπειρες αυτοματοποίησης (με ρομπότ ή/και με απλούς μηχανισμούς) έγιναν στις αρχές της δεκαετίας του ογδόντα. Κατά τις δύο πρώτες δεκαετίες, του 1980 και του 1990, διατέθηκαν διεθνώς σημαντικότατες χρηματοδοτήσεις στην έρευνα για την αυτοματοποίηση της ραφής. Παρόλα αυτά, ο αυτοματισμός σε αυτόν τον βιομηχανικό κλάδο εξακολουθεί ακόμα και σήμερα να είναι σχεδόν ανύπαρκτος. Εξαίρεση αποτελούν κάποια τμήματα των
20 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ ρούχων όπως οι γιακάδες, οι τσέπες (Σχ. 1.1β), οι κουμπότρυπες και οι διακοσμητικές ραφές διαφόρων σχημάτων που υλοποιούνται από κλειστού τύπου και μη-ευέλικτες αυτοματοποιημένες διαδικασίες. Μάλιστα, το μεγαλύτερο μέρος της παραγωγής έχει μεταφερθεί σε χώρες με πολύ χαμηλό κόστος εργασίας μιας και σχεδόν το 80% της παραγωγής ενός ρούχου γίνεται ακόμα χειρονακτικά. Κατά τη διάρκεια της πρώτης δεκαετίας του 21 ου αιώνα, η έρευνα πάνω στο αντικείμενο ατόνησε ενώ με την έναρξη της δεκαετίας του 2010 το ενδιαφέρον έχει αναθερμανθεί και πάλι. Τα τελευταία χρόνια διεθνείς ισχυροί παράγοντες στον ευρύτερο ερευνητικό χώρο έστρεψαν το ενδιαφέρον τους προς την αυτοματοποίηση της ραφής. Ερευνητικά κέντρα, όπως αυτό της DARPA 1 και SINTEF 2, έχουν αρχίσει να διαθέτουν σημαντικά ποσά στη σχετική έρευνα. Θεωρείται πλέον, ότι ο βιομηχανικός κλάδος της παραγωγής υφασμάτων και κυρίως των ρούχων πρέπει να επιστρέψει στις αναπτυγμένες δυτικές χώρες. Για να επιβιώσει δε, ένα τέτοιο εγχείρημα, είναι μονόδρομος η επένδυση στη γενικότερη αυτοματοποίηση του χειρισμού υφασμάτων. Αυτή η στροφή τακτικής, έχει ελπίδες δεδομένου ότι πλέον ενθαρρύνεται και υποστηρίζεται από τη ραγδαία αύξηση της υπολογιστικής δύναμης, τις πολύ υψηλές ταχύτητες στην επεξεργασία της μηχανικής όρασης και των αισθητήρων καθώς επίσης και από την εξέλιξη στην τεχνολογία των ρομπότ. Στόχος της παρούσας διατριβής είναι η ανάπτυξη ενός ευέλικτου συστήματος το οποίο ενσωματώνει όλα εκείνα τα ευφυή χαρακτηριστικά ώστε να συμβάλει στη ρομποτική αυτοματοποίηση της ραφής υφασμάτων. Η επίτευξη αυτού του στόχου στηρίζεται σε μεθόδους υπολογιστικής νοημοσύνης, σε τακτικές εμπνευσμένες από τον τρόπο εργασίας του ίδιου του ανθρώπου και στην ποιοτική διαχείριση της γνώσης/δεδομένων που εμπεριέχουν ασάφεια. Ο συντονισμός όλων των προηγουμένων επιτυγχάνεται από ένα ευέλικτο ευφυές ιεραρχικό σύστημα ελέγχου της διαδικασίας της ραφής. 1.2 Ανασκόπηση βιβλιογραφίας. Η εργασία της ραφής υφασμάτων εντάσσεται μέσα σε ένα γενικότερο πλαίσιο εργασιών που προϋποθέτουν επιδέξιους χειρισμούς των υφασμάτων. Τέτοιες εργασίες είναι: Ο διαχωρισμός ενός υφάσματος από μία στοίβα υφασμάτων. Εναπόθεση υφάσματος σε ένα τραπέζι. Ο χειρισμός του και η μετακίνησή του πάνω στο τραπέζι. Η ραφή του. Απομάκρυνσή του από το τραπέζι. Η ανασκόπηση της βιβλιογραφίας δείχνει ότι οι τακτικές που έχουν ακολουθηθεί στο παρελθόν μπορούν να συνοψιστούν στις παρακάτω κατηγορίες, 1 σε συνεργασία με
21 Κεφ. 1 - Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής σύμφωνα με τον τρόπο χειρισμού των υφασμάτων κατά τη διάρκεια των παραπάνω εργασιών: Το ύφασμα μετατρέπεται σε άκαμπτο αντικείμενο (rigidization). Με διάφορες τεχνικές το ύφασμα εξαναγκάζεται να συμπεριφέρεται σαν στερεό αντικείμενο. Χρησιμοποιούνται ειδικές αρπάγες ή μηχανισμοί όπως η ψύξη επιτυγχάνοντας έτσι σχετική ακινητοποίηση του υφάσματος. Ο χειρισμός του από εκεί και πέρα γίνεται με κλασσικές μεθόδους χειρισμού στερεών αντικειμένων. Η τακτική αυτή περιορίζει την ευελιξία του συστήματος και εφαρμόζεται σε μία μικρή γκάμα απλών εργασιών χειρισμού. Χρήση μαθηματικών μοντέλων των υφασμάτων. Ο έλεγχος του χειρισμού των υφασμάτων βασίζεται σε εκτιμήσεις του μοντέλου τους και των ιδιοτήτων τους. Η τακτική αυτή εφαρμόζεται σε απλούς χειρισμούς του υφάσματος καθώς είναι πολύ δύσκολο να βρεθούν μοντέλα συμπεριφοράς τους σε συνθήκες με έντονα δυναμικά φαινόμενα και μη-γραμμικές ιδιότητες που μεταβάλλονται με τον χρόνο, όπως συμβαίνει στο γάζωμα με ραπτομηχανή. Εφαρμογή κλασικών μεθόδων ελέγχου (PID) με ανατροφοδότηση αισθητήρων. Αυτή η τακτική παρουσιάζει το μεγαλύτερο ενδιαφέρον, επειδή η κατάσταση του υφάσματος ανατροφοδοτείται και έτσι μπορούν να αντιμετωπιστούν συνθήκες δυναμικής συμπεριφοράς. Η χρήση όμως του συγκεκριμένου νόμου ελέγχου είναι ανεπαρκής καθώς περιορίζονται οι δυνατότητες του από τις ιδιότητες των υφασμάτων, ενώ πολλές φορές απαιτούν την γνώση παραμέτρων των ελεγχόμενων συστημάτων. Εφαρμογή μεθόδων προσαρμοστικού ελέγχου με εκτίμηση παραμέτρων. Τακτική που εφαρμόστηκε στις πρώτες προσπάθειες αυτοματοποίησης του χειρισμού υφασμάτων αλλά εγκαταλείφτηκε γρήγορα λόγω του μεγάλου υπολογιστικού κόστους που την κάνει ανεφάρμοστη σε έλεγχο πραγματικού χρόνου. Πέραν αυτού απαιτεί αρχικές εκτιμήσεις των παραμέτρων του συστήματος και ενώ μπορεί να προσαρμόζεται εν μέρει σε νέες καταστάσεις αδυνατεί να παρακολουθήσει μεταβολές του συστήματος (μεγάλη γκάμα υφασμάτων, διαταραχές ραπτομηχανής). Τροποποίηση της ίδιας της ραπτικής μηχανής με επί τούτω (adhoc) αυτοματισμούς 3,4. Πρόκειται για ιδιαίτερους σχεδιαστικά μηχανισμούς που αναπτύσσονται πάνω στην ίδια τη ραπτομηχανή και έχουν περιορισμένη ευελιξία σε σχέση με τα ρομπότ. Η τακτική αυτή δεν ενδιαφέρει την παρούσα διατριβή καθώς ακολουθεί τη λογική της επέμβασης πάνω στη
22 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ ραπτομηχανή και την μετατροπή της σε έναν άλλο μηχανισμό που δεν θυμίζει την κλασσική ραπτομηχανή. Προσαρμογή ραπτικής κεφαλής στο ρομπότ (ακινητοποίηση υφάσματος μέσω μανεκέν 5 κλπ.) Η τακτική αυτή παραπέμπει στην πρώτη περίπτωση με τη διαφορά ότι ολόκληρη η ραπτομηχανή προσαρμόζεται πάνω στο ρομπότ και μετακινείται από αυτό. Χρήση δύο ρομποτικών βραχιόνων. Το ύφασμα εξαναγκάζεται σε σχετική ως προς τα ρομπότ ακινησία (στην διεύθυνση ανάμεσα στα δύο ρομπότ) και έτσι η τακτική ελέγχου του και χειρισμού του παραπέμπει στην πρώτη περίπτωση (rigidization). Οι περισσότερες από τις παραπάνω τακτικές χειρισμού υφασμάτων έχουν εφαρμοστεί σε απλές εργασίες που πρέπει να εκτελεστούν πριν η/και μετά από τη βασική εργασία της ραφής. Βασικό μειονέκτημά τους έγκειται στο ότι δεν είναι ευέλικτες στην ποικιλομορφία των υφασμάτων, λειτουργούν δε ικανοποιητικά όταν χειρίζονται συγκεκριμένους τύπους υφασμάτων καθώς εξαρτώνται από τις ιδιότητές τους Αυτοματοποίηση της διαδικασίας της ραφής υφασμάτων. Όσον αφορά τη ραφή των υφασμάτων με ραπτομηχανή και τις προσπάθειες αυτοματοποίησης της διαδικασίας υπάρχουν λίγες ερευνητικές εργασίες. Τα ρομποτικά συστήματα που έχουν εφαρμοστεί στη βιομηχανία είναι ελάχιστα, ενώ η πλειοψηφία της πραγματικής παραγωγής ρούχων (ραφή) γίνεται ακόμα χειρωνακτικά. Κάποια από αυτά αντιμετωπίζουν το ύφασμα ως στιβαρό αντικείμενο, αφού το ακινητοποιήσουν και το περιορίσουν να κινείται ελεύθερα, όπως φαίνεται στο Σχ Με αυτόν τον τρόπο η ραφή του υφάσματος είναι εύκολη υπόθεση για ένα ρομποτικό σύστημα, στα περιμετρικά ελεύθερα και σχεδόν άκαμπτα τμήματά του. Στην κατηγορία αυτή ανήκουν δύο περιπτώσεις ραφής: α) με κλασσική ραπτική μηχανή, όπου το ύφασμα είναι άκαμπτο αλλά κινείται από έναν μηχανισμό (ή ρομπότ). 6,7,8,9,10,11,
23 Κεφ. 1 - Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής β) με κινητή κεφαλή ραφής από έναν μηχανισμό (ή από ρομπότ), όπου το ύφασμα είναι άκαμπτο και δεν κινείται 13,14,15 και γ) συνδυασμός των δύο περιπτώσεων, δηλαδή και με κινητή κεφαλή ραφής και το ύφασμα είναι άκαμπτο αλλά κινείται από έναν μηχανισμό 16. Τέτοια συστήματα υπάρχουν αρκετά και δεν παρουσιάζουν ιδιαίτερο ερευνητικό ενδιαφέρον, δεδομένου ότι η εφαρμοσιμότητά τους είναι περιορισμένη στην εκάστοτε εφαρμογή, περιορίζοντας έτσι την ευελιξία του συστήματος γι αυτό και δεν υπάρχουν ερευνητικές αναφορές. Η εφαρμογή διαφορετικής κάθε φορά τάνυσης επί του υφάσματος είναι αδύνατη με αυτόν τον τρόπο και απαιτεί επιπλέον αυτοματισμούς. Ως εκ τούτου, η παρούσα διατριβή δεν ασχολείται με αυτόν τον τρόπο χειρισμού υφασμάτων. Το πρόβλημα της αυτόματης τροφοδότησης υφασμάτων με ρομπότ παρουσιάστηκε αρχικά από τους E. Bernardon και T. Kondoleon [1]. Η πρώτη αξιόλογη ερευνητική προσπάθεια παρουσιάστηκε από τον D. Gershon [2], όπου αναπτύχθηκε ένα συνολικό ρομποτικό σύστημα (FIGARO) για ραφή, σε πειραματικό στάδιο. Ο έλεγχος της τάνυσης κατά τη διάρκεια της ραφής γινόταν έμμεσα χρησιμοποιώντας μία εκτίμηση της ταχύτητας της ραπτομηχανής. Ένας κωδικοποιητής (encoder) τοποθετημένος στον μηχανισμό περιστροφής της ραπτομηχανής μέτραγε την ταχύτητά της. Η εκτιμώμενη ταχύτητα ραφής προσαρμοζόταν ούτως ώστε να υπολογιστεί η ταχύτητα του ρομπότ. Ο έλεγχος γινόταν με έναν PI ελεγκτή. Τα κέρδη του ρυθμίζονταν με δοκιμές και θα έπρεπε να αναπροσαρμοστούν πάλι εάν επρόκειτο να ραφτεί ένα νέο ύφασμα [3]. Ο D. Gershon, στη σημαντική για την εποχή εργασία του, ξεκάθαρα αιτιολογεί ότι για να επιτευχθεί η επιθυμητή σταθερή τάνυση επί του υφάσματος πρέπει να γίνει έλεγχος της ραφής με ανατροφοδότηση της δύναμης. Επίσης, προχωρώντας ένα βήμα παρακάτω επισήμανε ότι οι συμβατικές μέθοδοι ελέγχου είναι ανεπαρκείς στο να υποστηρίξουν τον έλεγχο της τάνυσης του υφάσματος κατά τη ραφή
![Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ (α) (β) Σχ. 1.1 Ραφή υφάσματος μετατρέποντάς το σε άκαμπτο, χρησιμοποιώντας (α) ειδική ρομποτική αρπάγη 17 και (β) ειδικό μηχανισμό πάνω στη ραπτομηχανή 18. Οι Makoto Kudo κ.α. [4] παρουσίασαν ένα ρομποτικό σύστημα ραφής το οποίο χρησιμοποιούσε δύο συνεργαζόμενους ρομποτικούς βραχίονες, το οποίο ήταν και η βασική συνεισφορά τους.](/docs-images/61/46142248/images/24-0.png "Οι δύο βραχίονες έπιαναν το ύφασμα σε δύο σημεία πριν την βελόνα της ραπτομηχανής, με αποτέλεσμα η ευθεία ανάμεσα στα δύο σημεία να είναι κάθετη στην ευθεία της ραφής.")

24 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ (α) (β) Σχ. 1.1 Ραφή υφάσματος μετατρέποντάς το σε άκαμπτο, χρησιμοποιώντας (α) ειδική ρομποτική αρπάγη 17 και (β) ειδικό μηχανισμό πάνω στη ραπτομηχανή 18. Οι Makoto Kudo κ.α. [4] παρουσίασαν ένα ρομποτικό σύστημα ραφής το οποίο χρησιμοποιούσε δύο συνεργαζόμενους ρομποτικούς βραχίονες, το οποίο ήταν και η βασική συνεισφορά τους. Οι δύο βραχίονες έπιαναν το ύφασμα σε δύο σημεία πριν την βελόνα της ραπτομηχανής, με αποτέλεσμα η ευθεία ανάμεσα στα δύο σημεία να είναι κάθετη στην ευθεία της ραφής. Στο σύστημά τους είχαν ενσωματώσει έλεγχο τάνυσης του υφάσματος πάνω στη διεύθυνση μεταξύ των δύο σημείων επαφής των ρομπότ με το ύφασμα και όχι στη διεύθυνση της ραφής. Επίσης, είχαν έλεγχο της κάθετης δύναμης για την πίεση των αρπαγών πάνω στο τραπέζι καθώς και οπτικό έλεγχο για την περιστροφή του υφάσματος γύρω από τη βελόνα. Σε μία άλλη, μικρότερου ενδιαφέροντος, εφαρμογή [5] το ύφασμα μετακινείται από μία μεταφορική ταινία κάτω από τη βελόνα της ραπτομηχανής, ενώ το κύριο βάρος δίδεται στη χρήση μηχανικής όρασης για τον χειρισμό του υφάσματος κατά τη ραφή του. Το σημαντικότερο και πιο κρίσιμο σημείο, για την παραγωγή ποιοτικών ραφών, είναι ο έλεγχος της δύναμης τάνυσης του υφάσματος που πρέπει να εφαρμόζεται 17 πηγή: 18 πηγή: 6
25 Κεφ. 1 - Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής πάνω στη διεύθυνση ραφής. Στη διεθνή βιβλιογραφία υπάρχει αρκετό υλικό [6] [7] για τον έλεγχο της δύναμης κατά την αλληλεπίδραση του ρομπότ με στιβαρό περιβάλλον. Λιγότερο αλλά ικανοποιητικό υλικό [8] υπάρχει επίσης και για την αλληλεπίδραση του ρομπότ με εύκαμπτα και μαλακά αντικείμενα. Όμως, ο έλεγχος της δύναμης σε γενικές εργασίες ρομποτικού χειρισμού υπερ-εύκαμπτων αντικειμένων (υφάσματα), δεν έχει διερευνηθεί αρκετά. Πολύ περισσότερο δε, η περίπτωση όπου τα υφάσματα είναι σε δυναμική κίνηση ως αποτέλεσμα εξωτερικών διαταραχών (δηλαδή γάζωμα με ραπτομηχανή), είναι μία πολύ δύσκολη ερευνητική περιοχή που έχει διερευνηθεί από ελάχιστους. Τα σχήματα ελέγχου που έχουν προταθεί στη διεθνή βιβλιογραφία είναι πολύ λίγα και παρουσιάζονται στις επόμενες παραγράφους. Παρόλο που ο έλεγχος δύναμης μπορεί να θεωρηθεί ότι είναι ευκολότερος, στην περίπτωση που το ρομπότ είναι σε επαφή με ένα αντικείμενο που έχει πολύ μεγάλη ενδοτικότητα και εφελκυστικότητα (ύφασμα), αντιθέτως στη συγκεκριμένη περίπτωση δεν είναι. Οι δυσκολίες που παρουσιάζονται είναι πολύ περισσότερες εξαιτίας της μη-γραμμικότητας των ιδιοτήτων του και κυρίως εξαιτίας της αλληλεπίδρασης του υφάσματος με τη ραπτομηχανή. Μία μέθοδος προσαρμοστικού ελέγχου της δύναμης είχε προταθεί από τον R. Patton [9], όπου η παράμετρος που προσαρμοζόταν είναι η σκληρότητα (stiffness) του υφάσματος. Η εκτίμησή της γινόταν πειραματικά χρησιμοποιώντας την μέθοδο ελαχίστου μέσου τετραγωνικού σφάλματος (Least mean squares - LMS). Στην εργασία αυτή το ύφασμα κρατιόταν από τη μία πλευρά από ένα ρομπότ ενώ από την άλλη ήταν σταθερά στερεωμένο πάνω στο τραπέζι. Αρχικά το ύφασμα ήταν τοποθετημένο με διάφορες πτυχώσεις. Η εργασία για το ρομπότ ήταν να τραβήξει το ύφασμα μέχρι να εξαφανιστούν οι πτυχώσεις και τελικά να εφαρμόσει μία τάνυση σε αυτό. Τελικά, οι ερευνητές του άρθρου αναφέρουν ότι ακόμα και τέτοιες απλές εργασίες απαιτούν μεθόδους προσαρμοστικού ελέγχου. Αυτό επειδή η σκληρότητα του υφάσματος παρουσιάζει μεγάλες μεταβολές εξαιτίας των ίδιων των κλωστών, που άλλοτε είναι σφικτές και άλλοτε είναι χαλαρές. Η εργασία αυτή είναι μία υπεραπλουστευμένη περίπτωση, όπου το ύφασμα αφενός μεν είναι ακίνητο και αφετέρου δε δεν εφαρμόζεται κάποια διαταραχή πάνω του όπως στην περίπτωση της ραπτομηχανής. Ένα σύστημα προσαρμοστικού ελέγχου βασισμένο σε μοντέλο (model-reference adaptive system) προτάθηκε από τους E.Fung κ.α. [10], το οποίο συγκρίθηκε με έναν PI ελεγκτή. Στο σύστημα χρησιμοποιήθηκαν δύο βραχίονες απλά για να εφαρμόζουν μία τάνυση σε ένα ύφασμα με σκοπό τον μετέπειτα ποιοτικό του έλεγχο. Ο έλεγχος ενός τέτοιου στατικού προβλήματος, όπου το ύφασμα δεν κινείται, είναι πολύ πιο εύκολος από ότι η περίπτωση της ραφής, όπου η μία άκρη του υφάσματος βρίσκεται υπό δυναμική και περιοδική κίνηση. Μία άλλη, πολλά υποσχόμενη εκδοχή, παρουσιάστηκε από τους R.Winck κ.α. [11, 12], όπου έχουν κάνει παρέμβαση πάνω στη ραπτομηχανή (Σχ. 1.2) με σημαντικές μετατροπές. Ο κλασσικός μηχανισμός τροφοδοσίας του υφάσματος επανασχεδιάστηκε εξ αρχής και αντικαταστάθηκε από έναν ειδικό σερβομηχανισμό. Το πρωτότυπο του σερβομηχανισμού τοποθετήθηκε μετά από ειδική προσαρμογή και μετατροπές πάνω στην κεφαλή της ραπτομηχανής. Το σύστημά τους δοκιμάστηκε σε υψηλές ταχύτητες ραφής, γαζώνοντας διπλά υφάσματα σε ευθείες γραμμές και κύκλους. Ήταν η πρώτη φορά όπου τέθηκε το θέμα του γαζώματος δύο κομματιών υφάσματος. 7
![Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 1.2 Σερβομηχανισμός για ραφή, τοποθετημένος πάνω στη ραπτομηχανή [10]. Πρόσφατα, μία ενδιαφέρουσα προσέγγιση παρουσιάστηκε από τους J. Schrimpf [13].](/docs-images/61/46142248/images/26-0.png "Στην εργασία τους χρησιμοποιούν δύο ρομποτικούς βραχίονες και μία ραπτομηχανή για να ράβουν δύο κομμάτια δερμάτων, όπως φαίνεται στο Σχ. 1.3.")
 και ο άλλος βραχίονας το δεύτερο κομμάτι (το κάτω).")
26 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 1.2 Σερβομηχανισμός για ραφή, τοποθετημένος πάνω στη ραπτομηχανή [10]. Πρόσφατα, μία ενδιαφέρουσα προσέγγιση παρουσιάστηκε από τους J. Schrimpf [13]. Στην εργασία τους χρησιμοποιούν δύο ρομποτικούς βραχίονες και μία ραπτομηχανή για να ράβουν δύο κομμάτια δερμάτων, όπως φαίνεται στο Σχ Στο σύστημα τους συμπεριλαμβάνονται αισθητήρες τόσο για τον έλεγχο της δύναμης όσο και για τον έλεγχο της θέσης της ακμής των δερμάτων κοντά στη βελόνα ( για την περιστροφή γύρω από τη βελόνα). Ο έλεγχος των δύο βραχιόνων είναι ανεξάρτητος δεδομένου ότι ο ένας βραχίονας πιάνει το ένα κομμάτι δέρματος (το πάνω) και ο άλλος βραχίονας το δεύτερο κομμάτι (το κάτω). Πολύ πρόσφατα, γίνεται μία προσπάθεια από την ίδια ερευνητική ομάδα [14] να συντονιστούν οι δύο βραχίονες. Και σε αυτήν την περίπτωση χρησιμοποιείται PI ελεγκτής για τον έλεγχο της δύναμης, η οποία δεν εφαρμόζεται ακριβώς στη διεύθυνση της ραφής αλλά πάνω στην ευθεία από την βελόνα μέχρι το σημείο συγκράτησης των δερμάτων. Η δύναμη που εφαρμόζεται κατά τη διάρκεια της ραφής καθορίζεται αυθαίρετα ενώ δεν γίνεται αναφορά για τη συσχέτισή της με τις ιδιότητες των δερμάτων. Σχ. 1.3 Συνεργαζόμενοι ρομποτικοί βραχίονες για ραφή δερμάτων [13]. 8
27 Κεφ. 1 - Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής Η ίδια ομάδα παρουσίασε [15], επίσης, μία προκαταρκτική μελέτη για να δουν κατά πόσο είναι εφικτό να γαζωθούν δύο κομμάτια δέρματος διαφορετικού σχήματος χρησιμοποιώντας πάλι δύο ρομπότ. Στις στρατηγικές ελέγχου των ρομπότ που ακολουθούνται και στις δύο περιπτώσεις [13] και [15], χρησιμοποιείται ανατροφοδότηση της μετρούμενης ταχύτητας της ραπτομηχανής αλλά γίνεται και έλεγχος αυτής. Σε κανένα από τα παραπάνω συστήματα δεν γίνεται αναφορά στις ιδιότητες των υφασμάτων, αλλά ούτε λαμβάνονται αυτές υπόψη κατά το σχεδιασμό ή/και τη λειτουργία του εκάστοτε ελεγκτή. Η μεγάλη ποικιλομορφία των υφασμάτων ή με άλλα λόγια οι μεγάλες διαφορές των ιδιοτήτων τους είναι ένας παράγοντας που επηρεάζει και καθορίζει τον τρόπο χειρισμού τους κατά τη ραφή, είτε το γάζωμά τους γίνεται από ρομποτικά συστήματα είτε από έμπειρους χειριστές Μετρήσεις ιδιοτήτων των υφασμάτων. Οι ιδιότητες των υφασμάτων καθώς και η απόκριση τους στον εφελκυσμό, κάμψη, διάτμηση κ.α. είναι καθοριστικοί παράγοντες για το πώς συμπεριφέρονται τα υφάσματα. Η γνώση αυτών των ιδιοτήτων είναι απαραίτητη για να προβλεφθεί η συμπεριφορά τους ή όταν αναπτύσσονται μαθηματικά μοντέλα τους. Όλες οι εφαρμογές, από τον απλό χειρισμό τους μέχρι την προσομοίωση και τη γραφική αναπαράσταση της κίνησής τους, βασίζονται στην αξιόπιστη εύρεση των ιδιοτήτων τους. Τα υφάσματα είναι προϊόντα με πάρα πολύ μεγάλη ποικιλομορφία που μάλιστα αυξάνεται ραγδαία καθώς παρουσιάζονται στην αγορά όλο και περισσότερα νέα προϊόντα (με συνδυασμό νέων ινών, σύνθετα κλπ.). Έτσι, έχουν αναπτυχθεί αρκετές συσκευές και όργανα για τη μέτρηση κάποιων ή όλων των μηχανικών ιδιοτήτων των υφασμάτων. Κατά την αυτοματοποίηση του χειρισμού των υφασμάτων, οι μηχανικές ιδιότητές τους είναι μία βασική καταλυτική παράμετρος. Επίσης, ο βαθμός αυτοματοποίησης των μετρήσεών τους είναι καθοριστικός παράγοντας για την αυτονόμηση των συστημάτων χειρισμού. Όσον αφορά αποκλειστικά τη ραφή υφασμάτων, η γνώση της εκτατότητάς τους είναι η κύρια παράμετρος για την παραγωγή ρούχων με ποιοτικές ραφές. Η αντικειμενική μέτρηση, καταγραφή, και αξιολόγηση των μηχανικών ιδιοτήτων των υφασμάτων είχε κεντρίσει το ενδιαφέρον των ερευνητών από τις αρχές του προηγούμενου αιώνα. Το 1930, ο F. Peirce [16] παρουσίασε το γνωστό cantileverbending test. Ήταν ο πρώτος που έθεσε τα θεμέλια για την συστηματική μελέτη και την ανάπτυξη πειραμάτων για την αντικειμενική μέτρηση των ιδιοτήτων. Από τότε, έχει παρουσιαστεί ένα μεγάλο πλήθος από ερευνητικά και εμπορικά αυτόνομα μετρητικά όργανα. Κάποια από αυτά έχουν χρησιμοποιηθεί περιστασιακά από τη βιομηχανία ένδυσης, για τον καθορισμό ιδιοτήτων υφασμάτων όπως: η συμπίεση (compression), η τάνυση (tension), η κάμψη (bending), η διάτμηση (shearing) και η τριβή (frictional). Το Fryma Fabric Extensometer (Σχ. 1.4) από την Shirley Developments [17] είναι ένα αντιπροσωπευτικό παράδειγμα που ανήκει στην πρώτη γενιά των μετρητικών οργάνων [18], όπου οι παραμορφώσεις των δειγμάτων μετριούνταν χειροκίνητα χρησιμοποιώντας χάρακες/μικρόμετρα ενώ η φόρτιση γινόταν με διακριτά βάρη. Όλα αυτά τα όργανα τα χειρίζονταν αποκλειστικά έμπειροι χειριστές, και δεν είχαν ενσωματωμένη καμία αυτοματοποίηση και κανέναν έλεγχο του μηχανήματος ή της διαδικασίας. 9


28 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 1.4 Fryma Fabric Extensometer 19. Πέρα από τις μηχανικές ιδιότητες των υφασμάτων, οι ερευνητές έδειξαν μεγάλο ενδιαφέρον για το hand των υφασμάτων. Μία μετα-ιδιότητα των υφασμάτων, δηλαδή ένα χαρακτηριστικό το οποίο προκύπτει από την ανάλυση των βασικών μηχανικών ιδιοτήτων των υφασμάτων. Το hand είναι η συνολική αίσθηση που αποκομίζουμε όταν ακουμπάμε και επεξεργαζόμαστε με τα χέρια μας ένα ύφασμα. Οι λέξεις όπως softness, crispness, dryness, silkiness είναι όροι που περιγράφουν το hand των υφασμάτων. Τελικά, παρουσιάστηκαν αρκετά όργανα μέτρησης των μηχανικών ιδιοτήτων και επεξεργασίας τους με σκοπό την εύρεση του Hand. Ο S. Kawabata [19], το 1980, παρουσίασε το ευρέως γνωστό Kawabata Evaluation System-KES (Σχ. 1.5), το οποίο διατίθεται από την εταιρεία Kato Tekko [20]. To KES σύστημα θεωρείται το πρώτο ολοκληρωμένο σύστημα για τη μέτρηση ιδιοτήτων υφασμάτων υπό χαμηλές φορτίσεις (low-stress fabric tests). Είναι ένα αξιόλογο ερευνητικό και εμπορικό προϊόν το οποίο θεωρείται πραγματική πρόοδος προς την κατεύθυνση της αντικειμενικής μέτρησης των ιδιοτήτων των υφασμάτων. Στο KES-FB1 σύστημα, τα πειράματα τάνυσης και διάτμησης εκτελούνται με την ίδια συσκευή (Σχ. 1.5), όπου το δείγμα του υφάσματος πιάνεται ανάμεσα σε δύο δαγκάνες και οι μετρήσεις εκτυπώνονται αυτόματα σε ένα x-y διάγραμμα (εκτυπωτή plotter). Από τις δύο καμπύλες τάνυσης (φόρτισης και αποφόρτισης) εξάγονται τέσσερις παράμετροι: η γραμμικότητα LT (linearity), η ενέργεια τάνυσης WT (tensile energy), η ελαστικότητα RT (tensile resilience) και η εκτατότητα EMT (extensibility). Οι παράμετροι αυτοί υπολογίζονται από τους ίδιους τους χειριστές και όχι αυτόματα. Από τις τρείς πρώτες παραμέτρους υπολογίζεται η βασική τιμή της αίσθησης του υφάσματος (primary hand value) και τελικά η συνολική αίσθηση του υφάσματος (total hand value). Παρόλο που το σύστημα KES είναι το πιο συνηθισμένο στο χώρο της παραγωγής υφασμάτων-ρούχων, αφενός μεν απαιτεί πάρα πολύ μεγάλο χρόνο για να μετρηθούν και να καθοριστούν οι ιδιότητες των υφασμάτων αφετέρου δε αποτελείται από πολλά όργανα υψηλού κόστους. 19 πηγή: 10

29 Κεφ. 1 - Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής Σχ. 1.5 Kawabata Evaluation System για μετρήσεις εφελκυσμού και διάτμησης 20 (πάνω). Καμπύλη εφελκυσμού (Α - φόρτισης, Β - αποφόρτισης) (κάτω). Ένα πιο εύχρηστο και με μικρότερο κόστος σύστημα παρουσιάστηκε από την CSIRO Division, Wool Technology το 1988 [21]. Η εμπορική εκδοχή των οργάνων μέτρησης παρουσιάστηκε με το όνομα SiroFAST [22] το 1994 (Σχ. 1.6), με σκοπό να ικανοποιήσει τις βιομηχανικές απαιτήσεις για απλούστερα, φτηνότερα και αξιόπιστα όργανα για τη μέτρηση των ιδιοτήτων των υφασμάτων. Τελικά, το σύστημα αυτό είναι λιγότερο ευέλικτο από το αντίστοιχο KES. Στη συσκευή που χρησιμοποιείται για το πείραμα του εφελκυσμού (extension meter) χρησιμοποιούνται διακριτά βάρη και η αρχή λειτουργίας του είναι ίδια με αυτήν των οργάνων της πρώτης γενιάς. Με τη διαφορά όμως, ότι έχει αυτοματοποιηθεί η διαδικασία της ανάλυσης των μετρήσεων/δεδομένων. 20 πηγή: 11

![Μία ανασκόπηση των απόψεων των ερευνητών καθώς και μία ανάλυση του θέματος παρουσιάζεται από τον G. Stylios [23] το 1991. Αργότερα (1996) ο D.](/docs-images/61/46142248/images/30-1.png "Bishop [24] δημοσίευσε μία συγκριτική μελέτη των διαφόρων μεθόδων που είχαν παρουσιαστεί μέχρι τότε. Μία πιο πρόσφατη και εις βάθος ανασκόπηση των δύο συστημάτων παρουσιάστηκε από τον M.")
30 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 1.6 Fast-3 σύστημα 21 για μετρήσεις εφελκυσμού. Σύμφωνα με τους περισσότερους ερευνητές, τα συστήματα KES και FAST είναι οι πιο αξιόπιστες συσκευές για τη μέτρηση και αξιολόγηση των ιδιοτήτων των υφασμάτων. Μία ανασκόπηση των απόψεων των ερευνητών καθώς και μία ανάλυση του θέματος παρουσιάζεται από τον G. Stylios [23] το Αργότερα (1996) ο D. Bishop [24] δημοσίευσε μία συγκριτική μελέτη των διαφόρων μεθόδων που είχαν παρουσιαστεί μέχρι τότε. Μία πιο πρόσφατη και εις βάθος ανασκόπηση των δύο συστημάτων παρουσιάστηκε από τον M. Matsudaira [25], το Επίσης, μία αναλυτική συγκριτική παρουσίαση των δύο μεθόδων παρουσιάστηκε στο βιβλίο του N.M. Thalmann [26] το Τέλος, μία αποτίμηση της απήχησης, της αποδοτικότητας καθώς και της προοπτικής αυτών των οργάνων δημοσιεύτηκε πολύ πρόσφατα (2012) από τους I.L. Ciesielska και L.V. Langenhove [27]. Και στα δύο συστήματα (KES και FAST), όλοι οι απαραίτητοι χειρισμοί των υφασμάτων (τοποθέτηση, ευθυγράμμιση, ενεργοποίηση δαγκανών κλπ.) γίνονται 21 πηγή: και 12
31 Κεφ. 1 - Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής από ειδικά εκπαιδευμένους χειριστές. Η εμπλοκή του ανθρώπινου παράγοντα κατά τη διαδικασία των πειραμάτων, επηρεάζει την ακρίβεια και την επαναληψιμότητα της πειραματικής διαδικασίας. Είναι γενικά γνωστό ότι η αξιοπιστία μιας αναλυτικής μεθόδου καθορίζεται από την ακρίβεια και την επαναληψιμότητά της. Από την άλλη, οι μηχανισμοί και ο τρόπος λειτουργίας αυτών των οργάνων βασίζονται κυρίως σε μη-ευέλικτους αυτοματισμούς (hard automation). Δηλαδή, δεν έχουν καμία ευελιξία όσον αφορά το μέγεθος των δειγμάτων ή της μεταβολής των παραμέτρων των πειραμάτων όπως το φορτίο, τη διάρκεια κλπ. Η ανάγκη για ευελιξία σε τέτοια συστήματα επισημάνθηκε από τους P. Potluri και I. Porat [18] [28]. Αυτοί παρουσίασαν ένα ευέλικτο ρομποτικό σύστημα το οποίο εκτελεί τα ίδια πειράματα με το KES σύστημα. Με το ρομποτικό τους σύστημα αυτοματοποιήθηκαν πολλές διαδικασίες πριν από την έναρξη των πειραμάτων όπως ο χειρισμός και η συγκράτηση των υφασμάτων. Επίσης, αυτοματοποιήθηκε και η εκτέλεση των πειραμάτων μειώνοντας έτσι σημαντικά την παρέμβαση του ανθρώπινου παράγοντα. Η αυτοματοποίηση όμως δεν προχώρησε και στην αξιολόγηση των μετρήσεων, αλλά τα δεδομένα των πειραμάτων απλά εκτυπώνονταν και δεν αναλύονταν. Όσον αφορά το πείραμα του εφελκυσμού, είναι δυνατόν να εκτυπωθεί αυτόματα ένα διάγραμμα δύναμης-επιμήκυνσης και από αυτό να υπολογιστούν οι ιδιότητες LT, WT, RT και EMT. Από εκεί και πέρα η ανάλυση είναι ίδια με το KES σύστημα ούτως ώστε να προσδιοριστεί τελικά το THV του υφάσματος. Επίσης, και με αυτό το σύστημα τα αποτελέσματα πρέπει να αξιολογηθούν από έναν έμπειρο χειριστή/μηχανικό για να αξιοποιηθούν μέσα σε ένα γενικότερο περιβάλλον αυτοματισμού για την παραγωγή ρούχων. Ως γνωστόν, η διαδικασία των σχετικών πειραμάτων αποτελεί ένα πολύ μικρό ποσοστό εντός της συνολικής διαδικασίας για την παραγωγή ρούχων. Έτσι, το ρομποτικό σύστημα των P. Potluri και I. Porat δεν εφαρμόστηκε στη βιομηχανία παραγωγής ρούχων αφού τελικά είναι πολύ πιο δαπανηρό από τα προηγούμενα. Ο λόγος της αποτυχίας του είναι ότι δεν εντάχθηκε εντός της διαδικασίας της παραγωγής ούτως ώστε να είναι δυνατόν να αξιοποιηθεί ο πολύ ακριβός εξοπλισμός και σε άλλες εργασίες πέρα από τα πειράματα. Η παρουσίαση του FAMOUS 22 συστήματος, το 2001 [29, 30, 31], είναι μία απόδειξη ότι οι αντίστοιχες βιομηχανικές απαιτήσεις και η ζήτηση δεν είχε καλυφθεί. Η βιομηχανία παραγωγής ρούχων εξακολουθούσε να έχει ανάγκη από συστήματα ευέλικτα, χαμηλού κόστους και εύχρηστα. Με το σύστημα FAMOUS παρουσιάστηκε μία νέα προσέγγιση, για την αξιόπιστη μέτρηση των ιδιοτήτων, η οποία βασίζονταν σε μία μόνο συσκευή. Ένα μόνο όργανο εκτελεί όλη τη γκάμα των πειραμάτων με ένα μόνο δείγμα υφάσματος και καθορίζεται το σύνολο των ιδιοτήτων του. Έτσι, καταφέρνει να μειώσει ακόμα περισσότερο τον ανθρώπινο παράγοντα κατά την εκτέλεση των πειραμάτων αλλά το σημαντικότερο είναι ότι καταφέρνει να μειώσει σημαντικά τον συνολικό απαιτούμενο χρόνο σε λιγότερο από πέντε λεπτά. Ο τρόπος ανάλυσης και αξιολόγησης των μετρήσεων είναι ίδιος με τα προηγούμενα συστήματα. Η πολλά υποσχόμενη πρωτότυπη συσκευή φαίνεται ότι έχασε τελικά την αρχική της αίγλη μετά από τη διαδικασία διεθνούς πατεντοποίησής του προϊόντος. 22 Fabric Automated Modular and Optimisation Universal System (FAMOUS) 13
![Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 1.7 FAMOUS 23 σύστημα για όλη τη γκάμα των πειραμάτων [31]. Πέρα από τα παραπάνω, υπάρχουν και κάποια εναλλακτικά συστήματα, αλλά μικρότερης απήχησης, όπως οι μηχανές Instron.](/docs-images/61/46142248/images/32-0.png "Στην πραγματικότητα, πρόκειται για μετατροπές των κλασσικών μηχανών εφελκυσμού Instron (Σχ. 1.")
32 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 1.7 FAMOUS 23 σύστημα για όλη τη γκάμα των πειραμάτων [31]. Πέρα από τα παραπάνω, υπάρχουν και κάποια εναλλακτικά συστήματα, αλλά μικρότερης απήχησης, όπως οι μηχανές Instron. Στην πραγματικότητα, πρόκειται για μετατροπές των κλασσικών μηχανών εφελκυσμού Instron (Σχ. 1.8), ούτως ώστε να μπορούν να εκτελούν πειράματα μικρού φορτίου για την πρόβλεψη των μηχανικών ιδιοτήτων των υφασμάτων. Οι μηχανές όμως αυτές κυρίως χρησιμοποιούνται για πειράματα αντοχής των υφασμάτων και εντάσσονται στην κατηγορία των καταστροφικών ελέγχων με μεγάλα φορτία τα οποία φτάνουν μέχρι και μερικές εκατοντάδες Newton. 23 πηγή: και 14

33 Κεφ. 1 - Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής Σχ. 1.8 Instron σύστημα 24 για εφελκυσμό υφασμάτων. Η πλειοψηφία των βιομηχανιών που παράγουν υφάσματα, ρούχα κλπ. έχουν ένα ξεχωριστό εργαστηριακό τμήμα για εκτέλεση των πειραμάτων. Ένα ολοκληρωμένο εργαστήριο δοκιμών και πειραμάτων είναι εξοπλισμένο με ένα πλήθος διαφορετικών οργάνων και συσκευών και είναι επίσης στελεχωμένο με εξειδικευμένο προσωπικό [32]. Όλη αυτή η δομή προσθέτει ένα σημαντικό επιπλέον κόστος στο τελικό κόστος του προϊόντος. Η πληροφορία που παράγεται από όλη αυτή τη διαδικασία χρησιμοποιείται κατά κύριο λόγο για να τη βελτίωση της ποιότητας των υφασμάτων. Αλλά, δεν χρησιμοποιείται και δεν μπορεί να χρησιμοποιηθεί απευθείας από συστήματα ελέγχου για τον χειρισμό υφασμάτων στη βιομηχανία ενδυμάτων. Ειδικότερα κατά τη διαδικασία της ραφής, είτε αυτή γίνεται από τον άνθρωπο είτε γίνεται από ένα αυτοματοποιημένο σύστημα όπως το ρομπότ, η γνώση της εκτατότητας των υφασμάτων είναι απαραίτητη. Αυτή η ιδιότητα των υφασμάτων εκφράζει την ικανότητα του υφάσματος να εκτείνεται υπό πολύ μικρές φορτίσεις. Οι πληροφορίες που δίνονται από τα παραπάνω συστήματα και συγκεκριμένα από το πείραμα του εφελκυσμού (LT, WT, RT και EMT) πρέπει να διερμηνευτούν από κάποιον έμπειρο για να μπορέσουν να χρησιμοποιηθούν. Η εκτατότητα (EMT) που εξάγεται ως ένα χαρακτηριστικό από την καμπύλη εφελκυσμού είναι η επιμήκυνση του υφάσματος στο μέγιστο φορτίο και εκφραζόμενη ως ποσοστό. Άρα είναι μία συγκεκριμένη τιμή και δεν μπορεί σε καμία περίπτωση να αντιπροσωπεύει την συνολική εικόνα της εκτατότητας του υφάσματος. Η εκτατότητα των υφασμάτων είναι μία μη-γραμμική ιδιότητα και δεν μπορεί να εκφραστεί ως μία τελική τιμή του πειράματος εφελκυσμού. Για αυτό, θα ήταν χρήσιμο να γίνει ένας συνδυασμός του EMT (εκτατότητα) με τα LT (γραμμικότητα) και WT (ενέργεια τάνυσης) για να μπορέσει να εκτιμηθεί η εκτατότητα ενός υφάσματος. Μία άλλη εκδοχή είναι να 24 πηγή: 15
34 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ αναπτυχθεί μία άλλη προσέγγιση για την αξιολόγηση του πειράματος εφελκυσμού και της αντίστοιχης καμπύλης Υπολογιστική νοημοσύνη στην αυτοματοποίηση της ραφής. Οι μέθοδοι της υπολογιστικής νοημοσύνης έχουν χρησιμοποιηθεί σε αρκετές εργασίες, για τον έλεγχο δύναμης όταν το ρομπότ χειρίζεται στιβαρά και σχετικά μαλακά αντικείμενα [33] [34]. Επίσης, έχουν χρησιμοποιηθεί στον ευρύτερο βιομηχανικό κλάδο της παραγωγής υφασμάτων, σε ερευνητικό πάντα επίπεδο. Μία αναλυτική ανασκόπηση παρουσιάζεται στο [35]. Όμως, από τη διερεύνηση της διεθνούς βιβλιογραφίας φαίνεται ότι δεν έχουν χρησιμοποιηθεί μέθοδοι υπολογιστικής νοημοσύνης στον έλεγχο της δύναμης κατά τη ραφή υφασμάτων με ρομπότ. Η διεπιστημονική προσέγγιση του προβλήματος, μπορεί να οδηγήσει σε ένα πολλά υποσχόμενο αποτέλεσμα. Η συνεργασία επιστημονικών περιοχών, αφενός μεν από τον ευοίωνο χώρο της υπολογιστικής νοημοσύνης και αφετέρου δε της ρομποτικής και η έξυπνη προσαρμογή τους στο χώρο της ραφής υφασμάτων μπορεί να λύσει πολλά προβλήματα κατά την αυτοματοποίηση της παραγωγής υφασμάτων. Σε παρόμοιο συμπέρασμα είχε καταλήξει αρκετά νωρίτερα και ο G. Stylios, όπου στην εισαγωγή της ειδικής έκδοσης [36], έθιγε το θέμα της ανάγκης για εισαγωγή ευφυών μεθόδων στο χώρο του βιομηχανικού κλάδου της παραγωγής υφασμάτων. Ο ίδιος έγραφε τότε την εύστοχη παρατήρηση, ότι ο άνθρωπος εκφράζει και εκτελεί τις εργασίες του με όρους αίσθησης-επεξεργασίας-δράσης-μάθησης-προσαρμογής χωρίς να έχει κάποια προγενέστερη γνώση των ιδιοτήτων των αντικειμένων που χειρίζεται. Παρόλη όμως τη διορατικότητα του ο G. Stylios, ο οποίος παρουσίαζε σε αρκετά άρθρα ότι το μέλλον στη βιομηχανία ρούχων είναι η υπολογιστική νοημοσύνη, τελικά εγκατέλειψε την προσπάθεια και έτσι δεν κατάφερε να παρουσιάσει στη διεθνή βιβλιογραφία κάποιο αυτοματοποιημένο σύστημα ραφής υφασμάτων. Φυσικά, ακόμα και τα σημερινά ευφυή συστήματα απέχουν μακράν της συμπεριφοράς του ανθρώπου, καθώς δεν έχουμε κατανοήσει ακόμα τον τρόπο λειτουργίας του εγκεφάλου του ανθρώπου ούτως ώστε να μπορούμε να τον αντιγράψουμε. Όμως, οι μέθοδοι της υπολογιστικής νοημοσύνης είναι μαθηματικά εργαλεία που μπορούν να χρησιμοποιηθούν για να λύσουν πολύπλοκα και δύσκολα προβλήματα που δεν μπορούν να λυθούν ή που λύνονται εν μέρει από τις κλασσικές μεθόδους ελέγχου. Συγκεκριμένα, τα νευρωνικά δίκτυα έχουν κάποια γενικά χαρακτηριστικά που τα κάνουν ιδανικά για κάποιες προβλημάτων όπως η αναγνώριση προτύπων (pattern recognition), η κατηγοριοποίηση (classification) και ο έλεγχος (control): Ικανά να μαθαίνουν πολύπλοκες μη-γραμμικές συναρτήσεις. Είναι συστήματα με ικανότητα μάθησης μέσω παραδειγμάτων. Χαρακτηρίζονται από προσαρμοστικότητα. Μπορούν και προσαρμόζονται σε νέα γνώση και εμπειρία, δηλαδή, αναπροσαρμόζονται σε νέες και απρόβλεπτες για αυτά συνθήκες. Μπορούν να λειτουργήσουν σε συνθήκες με έντονη ασάφεια και αβεβαιότητα. Δεν εξαρτώνται από εκτιμητή παραμέτρων του συστήματος που πρόκειται να ελέγξουν. 16
35 Κεφ. 1 - Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής Έχουν χαρακτηριστικά παραλληλισμού (massively parallel), κατανεμημένης μνήμης (distributed memory) και μνήμης συσχέτισης (associative memory). Δηλαδή, η πληροφορία που κωδικοποιούν είναι κατανεμημένη σε όλα τα βάρη των συνδέσμων τους. Επίσης, αποθηκεύουν την πληροφορία συσχετίζοντας τα αποθηκευμένα δεδομένα μεταξύ τους (με τα βάρη των συνδέσεων). Ενώ ανάκληση της πληροφορίας γίνεται με βάση το περιεχόμενο και όχι τη διεύθυνση, όπως συμβαίνει και με τον ανθρώπινο εγκέφαλο. Σθεναρότητα (robustness). Ανοχή σε βλάβες (fault tolerance). Έχουν δηλαδή, μεγάλη ανοχή σε δομικά σφάλματα. Αυτό σημαίνει ότι η καταστροφή ενός νευρώνα ή κάποιων συνδέσεων, από κακή λειτουργία, δεν είναι ικανή να διαταράξει σημαντικά τη λειτουργία τους, καθώς η πληροφορία που εσωκλείουν δεν είναι συγκεντρωμένη σε συγκεκριμένα σημεία αλλά διάχυτη σε όλο το δίκτυο. Το μέγεθος του σφάλματος λόγω των δομικών αστοχιών είναι ανάλογο του ποσοστού των κατεστραμμένων νευρώνωνσυνδέσεων. Για αυτό, η υλοποίησή τους σε κυκλώματα τα κάνει ιδανικά για λειτουργία σε αντίξοες συνθήκες. Ικανότητα γενίκευσης αποφάσεων. Μαθαίνουν από την εμπειρία και όχι από προτυποποίηση. Δεν επηρεάζονται από δεδομένα που εμπεριέχουν θόρυβο ή/και ελλιπή δεδομένα, για αυτό είναι ιδανικά για αναγνώριση προτύπων. Μπορούν να χρησιμοποιηθούν με μικρό πλήθος πειραματικών δεδομένων. Μπορούν να υπολογίσουν την απόκρισή τους πολύ γρήγορα (μικρό υπολογιστικό κόστος). Δεν χρειάζονται μαθηματικό μοντέλο του ελεγχόμενου συστήματος. Είναι κάτι παραπάνω από ένα μαύρο-κουτί μοντελοποίησης (black-box modeling), καθώς μπορούν να ενσωματώσουν και να χρησιμοποιήσουν αποτελεσματικά προγενέστερη γνώση. Χαρακτηριστικό που είναι γνωστό ως ημι-φυσική μοντελοποίηση (semi-physical modeling) ή μοντελοποίηση γκρί-κουτιού (gray-box modeling). Από την άλλη τα συστήματα που είναι βασισμένα στην ασαφή λογική [37] έχουν κάποια αντίστοιχα χαρακτηριστικά όπως: Μπορούν να λειτουργήσουν σε προβλήματα με έντονη ασάφεια και αβεβαιότητα. Είναι χρήσιμα σε προβλήματα λήψης αποφάσεων. Οι κανόνες εκφράζονται, σχεδόν σε φυσική γλώσσα. Μπορούν να δώσουν αποτελέσματα που να είναι εξηγήσιμα και να έχουν νόημα για τον άνθρωπο, προσεγγίζουν δηλαδή την ανθρώπινη λογική και συλλογιστική. 17
36 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Μπορούν να εμπεριέχουν τις ειδικές γνώσεις ενός έμπειρου και να τις κωδικοποιούν μέσα στη δομή τους. Μπορούν να δίνουν ικανοποιητική λύση στο πρόβλημα της αρχής του ασυμβίβαστου 25. Με άλλα λόγια μπορούν να αναλύσουν και να λειτουργήσουν συστήματα με μεγάλη πολυπλοκότητα. Επιτρέπουν την ανάπτυξη συστημάτων που ενσωματώνουν τη γνώση και την εμπειρία από πολλούς ειδικούς. Μπορούν να συνδυαστούν εύκολα με άλλες μεθόδους υπολογιστικής νοημοσύνης. Για τους παραπάνω λόγους η υπολογιστική νοημοσύνη είναι ένα πολύ καλό εργαλείο το οποίο μπορεί να είναι πολύ χρήσιμο στη ρομποτική αυτοματοποίηση της ραφής υφασμάτων. Εξάλλου, η συμβολή και η αποτελεσματικότητα της υπολογιστικής νοημοσύνης στον χειρισμό υφασμάτων από ρομπότ έχει αποδειχθεί και στο πρόσφατο παρελθόν από αντίστοιχες ερευνητικές εργασίες [38], [39] συνεργατών, που προέρχονται από την ίδια ερευνητική ομάδα με αυτήν της παρούσας διατριβής. Στον ευρύτερο χώρο του χειρισμού υφασμάτων, δηλαδή σε εργασίες περιφερειακές/επικουρικές της εργασίας της ραφής, υπάρχουν κάποιες ερευνητικές αναφορές που χρησιμοποιούν μεθόδους υπολογιστικής νοημοσύνης. Τα νευρωνικά δίκτυα και η ασαφής λογική έχουν χρησιμοποιηθεί από τον G. Stylios [40] στην βιομηχανία υφασμάτων και συγκεκριμένα στην εύρεση των κατάλληλων παραμέτρων της ραπτομηχανής (πίεση που πρέπει να ασκεί το ποδαράκι της κλπ.) για να επιτευχθούν ποιοτικές ραφές. Επίσης, έχουν χρησιμοποιηθεί επιτυχώς στον σχεδιασμό και στον έλεγχο αρπαγών για τον χειρισμό υφασμάτων [41]. Η απόθεση υφάσματος πάνω σε ένα τραπέζι, μία εργασία που απαιτείται να γίνει πριν τη ραφή, έχει αντιμετωπιστεί αποτελεσματικά με τη χρήση ασαφούς λογικής [42]. Παρόμοια σε απαιτήσεις εργασία είναι και το δίπλωμα υφασμάτων, όπου έχει ομοίως εφαρμοστεί η ασαφής λογική [43]. Η ασαφής λογική και οι γενετικοί αλγόριθμοι έχουν χρησιμοποιηθεί επίσης, για τη μετακίνηση/περιστροφή των υφασμάτων γύρω από τη βελόνα της ραπτομηχανής [44] [45]. Η υπολογιστική νοημοσύνη έχει χρησιμοποιηθεί και στον ευρύτερο χώρο της μελέτης των ιδιοτήτων των υφασμάτων. Οι R. Gong και Y. Chen [46] χρησιμοποίησαν νευρωνικά δίκτυα για να προβλέψουν τα χαρακτηριστικά των υφασμάτων έχοντας ως δεδομένα τις μετρήσεις των ιδιοτήτων των υφασμάτων από το KES σύστημα. Οι S. Park κ.α. [47] [48] έδειξαν ότι τα νευρωνικά δίκτυα είναι πιο αποτελεσματικά, από ότι το KES σύστημα, για τον καθορισμό της συνολικής αίσθησης του υφάσματος (total hand value). Η προσέγγισή τους βασίζεται στην μετα-επεξεργασία των δεδομένων από τα πειράματα με τις KES συσκευές και όχι στα ίδια τα πειράματα. Οι είσοδοι στο νευρωνικό δίκτυο ήταν κάποιες επιλεγμένες ιδιότητες που προέκυψαν από το KES σύστημα ενώ η έξοδος ήταν συνολική αίσθηση του υφάσματος. Η 25 Συστήματα όπου καθώς η πολυπλοκότητα τους αυξάνει, η ικανότητα να κάνουμε ακριβείς και σημαντικές δηλώσεις για τη συμπεριφορά τους μειώνεται. (L. Zadeh) 18
37 Κεφ. 1 - Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής εκπαίδευση με επίβλεψη του δικτύου βασίστηκε σε εκτιμήσεις ειδικών για την συνολική αίσθηση των υφασμάτων. Σε μία εμπεριστατωμένη σχετική μελέτη, ο M. Matsudaira [25] κατέληξε στο συμπέρασμα ότι η ακρίβεια που προσφέρουν τα νευρωνικά δίκτυα είναι καλύτερη, έναντι των κλασσικών μεθόδων που χρησιμοποιούνται από το KES σύστημα. Οι T. Amano κ.α. [49], υπολόγιζαν την τιμή της συνολικής αίσθησης των υφασμάτων χρησιμοποιώντας ποιοτικά δεδομένα όπως μεγάλο/μικρό, υψηλό/χαμηλό κλπ., τα οποία προέκυψαν από την μετατροπή των μηχανικών ιδιοτήτων που μετρήθηκαν από το KES σύστημα. Τελικά, κατέληξαν στο συμπέρασμα ότι η αντικειμενική εκτίμηση της συνολικής αίσθησης των υφασμάτων, με τη χρήση ποιοτικών δεδομένων, μπορεί να είναι το ίδιο πρακτική όπως και με τη μέθοδο του KES συστήματος. Τελικά, η υπολογιστική νοημοσύνη επιλέχθηκε για τον έλεγχο της ραφής υφασμάτων επειδή μπορεί να λειτουργήσει με συστήματα που εμπεριέχουν ασάφεια όπως αυτό που εξετάζεται στη παρούσα διατριβή. Επιπλέον, μπορεί να ελέγχει συστήματα χωρίς να χρειάζεται τα μαθηματικά τους μοντέλα, ενώ μπορούν να παίρνουν σωστές αποφάσεις έχοντας ανακριβή δεδομένα. Μπορούν όμως να χειριστούν ποιοτικές εκτιμήσεις των δεδομένων του συστήματος που ελέγχουν. Για να επιτευχθεί ο στόχος της δημιουργίας πραγματικών ραφών σε μία μεγάλη ποικιλία υφασμάτων, χρησιμοποιούνται δύο από τους τρεις βασικούς πυλώνες της υπολογιστικής νοημοσύνης. Τα νευρωνικά δίκτυα και η ασαφής λογική. 1.3 Συμβολή της διατριβής. Στην παρούσα διατριβή αναπτύχθηκε ένα σύνολο νέων μεθόδων για την αυτοματοποιημένη ραφή υφασμάτων με ένα ρομπότ και μία βιομηχανικού τύπου κλασσική ραπτική μηχανή. Η πρωτότυπη προσέγγιση που αποτελεί το πλαίσιο της διατριβής αποτελείται από ένα ιεραρχικό σύστημα εκτιμήσεων, αποφάσεων και ελέγχου της διαδικασίας ραφής χρησιμοποιώντας τη θεωρία της υπολογιστικής νοημοσύνης. Επίκεντρο της όλης ερευνητικής δραστηριότητας είναι η ραφή μονών και διπλών υφασμάτων με ραφές σε ευθείες γραμμές και σε μία μεγάλη ποικιλία όσον αφορά τις ιδιότητές τους και τη δομή τους. Η επιστημονική και ερευνητική συμβολή καθώς και τα πρωτότυπα στοιχεία της διατριβής συνοψίζονται στα παρακάτω: Αναλύθηκαν, μελετήθηκαν και αξιολογήθηκαν όλες οι φάσεις αυτοματοποιημένου χειρισμού του υφάσματος πριν και κατά τη διάρκεια της ραφής, όπως ο διαχωρισμός από μία στοίβα, η μεταφορά του υφάσματος σε άλλο στάδιο, η τοποθέτηση σε τράπεζα εργασίας, η μετακίνηση του υφάσματος κατά τη ραφή καθώς και η περιστροφή του γύρω από τη βελόνα. Οι εργασίες αυτές μελετήθηκαν εξονυχιστικά και ως προς τις απαιτήσεις τους σε συστήματα αισθητηρίων και στρατηγικών ελέγχου. Αναπτύχθηκε μία πρωτότυπη βάση δεδομένων και ένα έμπειρο σύστημα για τους απαιτούμενους αισθητήρες και στρατηγικές ελέγχου κατά τα διάφορα στάδια χειρισμού υφασμάτων από ρομποτικά συστήματα και ανάλογα με το είδος του υφάσματος, τον τρόπο χειρισμού του καθώς και ανάλογα με τη φάση της επεξεργασίας του. Τα αποτελέσματα αυτής της ανάλυσης χρησιμοποιήθηκαν για να καθορίσουν τις απαιτήσεις και προδιαγραφές για τη ραφή και τον έλεγχο της τάνυσης των υφασμάτων. 19
38 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Εισήχθηκε μία ιεραρχική δομή εργασιών και ροής πληροφοριών για τη ραφή ως εξής: α) προκαταρκτικές εργασίες πριν την έναρξη της ραφής β) ποιοτική εκτίμηση (από τον άνθρωπο ή/και αυτόματα) των χαρακτηριστικών-ιδιοτήτων του υφάσματος υπό τη μορφή λεκτικών μεταβλητών. γ) είσοδος αυτών σε έναν μηχανισμό λήψης αποφάσεων βασισμένο σε Ασαφή Λογική ο οποίος υπολογίζει την επιθυμητή τάνυση του υφάσματος. δ) χρήση του νευρωνικού ελεγκτή με σκοπό τη διατήρηση της επιθυμητής τάνυσης υπολογίζοντας την ταχύτητα του άκρου εργασίας του ρομπότ. ε) αποθήκευση και αξιοποίηση της αποκτούμενης εμπειρίας του συστήματος ραφής. Η αποτελεσματικότητα αυτής της καινοτόμας προσέγγισης ελέγχθηκε και αξιολογήθηκε κάτω από συνθήκες προσομοίωσης και πριν την πειραματική εφαρμογή της. Εισήχθη η ιδέα της εφαρμογής μεθόδων υπολογιστικής νοημοσύνης στο επιστημονικό πεδίο της ραφής υφασμάτων και εφαρμογής μεθόδων ευφυούς ελέγχου, για την τάνυση των υφασμάτων, βασισμένες σε νευρωνικά δίκτυα οι οποίες, για πρώτη φορά, χρησιμοποιούν ποιοτικές εκτιμήσεις των ιδιοτήτων και των χαρακτηριστικών των υφασμάτων. Οι προτεινόμενες αυτές μέθοδοι ελέγχου που δεν χρησιμοποιούν ποσοτικοποιημένα μοντέλα του υφάσματος αποδεικνύεται ότι υπερισχύουν των υπαρχόντων μεθόδων κλασικού ελέγχου, που περιόριζαν την ευελιξία του συστήματος ελέγχου καθώς ήταν αυστηρά εξαρτώμενες από τα χαρακτηριστικά και τις ποσοτικές εκτιμήσεις των ιδιοτήτων του κάθε υφάσματος. Παρουσιάστηκε μία πρωτότυπη μελέτη για την κατάλληλη αρχική τοποθέτηση του άκρου εργασίας του ρομπότ πάνω στο ύφασμα ούτως ώστε να αποφεύγεται η δημιουργία πτυχώσεων κατά τη μετακίνησή του πάνω στο τραπέζι. Αυτή, βασίστηκε σε ένα μηχανισμό λήψης αποφάσεων βασισμένο σε ασαφή λογική και ποιοτικές εκτιμήσεις των ιδιοτήτων και των χαρακτηριστικών του υφάσματος όπως η ευκαμπτότητα και ο τύπος του. Εισάγεται μία νέα μέθοδος για την αναγνώριση της διεύθυνσης των πτυχώσεων ενός υφάσματος, το οποίο βρίσκεται πάνω σε μία τράπεζα εργασίας και έτοιμο για να αρχίσει η ραφή του, με σκοπό τη διόρθωσή τους από τον ρομποτικό βραχίονα. Για το σκοπό αυτό εκπαιδεύεται και χρησιμοποιείται ένα νευρωνικό δίκτυο ευθείας τροφοδότησης το οποίο χρησιμοποιεί δεδομένα από ένα σύστημα μηχανικής όρασης για την καταγραφή των πτυχώσεων. Εισάγεται για πρώτη φορά στη διεθνή βιβλιογραφία η έννοια των λεκτικών μεταβλητών για την ποιοτική περιγραφή των ιδιοτήτων των υφασμάτων. Η προσέγγιση αυτή εξυπηρέτησε τον πρωταρχικό σκοπό της ανάπτυξης ενός ευέλικτου, ευφυή και όσο το δυνατόν λιγότερο εξαρτώμενου από το ίδιο το ύφασμα συστήματος ραφής. Με αυτόν τον τρόπο παρακάμφθηκαν οι δυσκολίες και οι περιορισμοί που συνεπάγονταν από την χρησιμοποίηση απαραίτητων ιδιοτήτων των υφασμάτων σε προγενέστερες εργασίες που εφάρμοζαν κλασικές μεθόδους ελέγχου κατά τη ραφή. Στο πλαίσιο αυτό, εκφράζεται για πρώτη φορά, ποιοτικά σαν ποσοστό, η έννοια της εκτατότητας (extensibility) των υφασμάτων, που είναι μία βασική και καθοριστική ιδιότητά τους κατά την εργασία της ραφής τους. Αναπτύχθηκε μια νέα μέθοδος αυτοματοποιημένου πειραματικού προσδιορισμού της εκτατότητας των υφασμάτων και με αυτό τον τρόπο ανεξαρτητοποιήθηκε το σύστημα από την υποκειμενική κρίση του ανθρώπινου παράγοντα. Η πρωτότυπη αυτή προσέγγιση εφαρμόστηκε σε μονά και διπλά υφάσματα ενώ τα πειράματα εφελκυσμού τους αναπτύχθηκαν αυτόνομα αλλά και ενσωματωμένα έξυπνα στην ίδια τη ραπτομηχανή και λίγο πριν τη διαδικασία της ραφής. 20
39 Κεφ. 1 - Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής Αναπτύχθηκε ένα ολοκληρωμένο σύστημα πειραμάτων και επεξεργασίας δεδομένων για την αυτοματοποιημένη εξαγωγή των χαρακτηριστικών των υφασμάτων υπό τη μορφή λεκτικών μεταβλητών ούτως ώστε να είναι δυνατή η άμεση χρησιμοποίησή τους στο ιεραρχικό σύστημα ελέγχου της ραφή. Η αυτοματοποιημένη εκτίμηση της εκτατότητας ανήκει στα αρχικά στάδια του ιεραρχικού συστήματος ελέγχου κατά την εκτίμηση των ποιοτικών ιδιοτήτων των υφασμάτων. Σχεδιάστηκαν και αναπτύχθηκαν αυτοματοποιημένα πειράματα εφελκυσμού υφασμάτων με χρήση του ρομπότ και του αισθητήρα δύναμης με σκοπό την εξαγωγή της ιδιότητας εκτατότητα των δοκιμίων. Από αυτά εκπαιδεύτηκε με επίβλεψη και με βάση την εμπειρία του ανθρώπου ένα νευρωνικό δίκτυο το οποίο εν συνεχεία χρησιμοποιήθηκε για την εκτίμηση της εκτατότητας άγνωστων για το σύστημα υφασμάτων. Χαρακτηριστικό και βασικό πλεονέκτημα του συστήματος είναι ότι μπορεί να γενικεύσει και να εκτιμήσει με ικανοποιητική ακρίβεια την εκτατότητα υφασμάτων από τα πρώτα δευτερόλεπτα του πειράματος του εφελκυσμού. Αυτή η εκτατότητα εκφρασμένη υπό τη μορφή λεκτικών μεταβλητών μπορεί πλέον να χρησιμοποιηθεί από το ασαφές σύστημα για την εξαγωγή της επιθυμητής τάνυσης κατά τη ραφή του εκάστοτε υφάσματος. Η παραπάνω εργασία επεκτάθηκε, ενσωματώθηκε και παρουσιάστηκε η χρήση νευρωνικών δικτύων για την εξαγωγή των ιδιοτήτων εύκαμπτων αλλά και στιβαρών αντικειμένων. Καταγράφτηκε και αναλύθηκε η γνώση και η εμπειρία χειριστριών/στών ραπτικών μηχανών, κατά τον χειρισμό υφασμάτων για τη ραφή τους, με σκοπό την ενσωμάτωσή τους στον υπό συνεχή εξέλιξη τρόπο αντιμετώπισης του προβλήματος. Παρουσιάζεται ένα ασαφές σύστημα εξαγωγής της επιθυμητής τάνυσης του κάθε υφάσματος το οποίο βασίζεται στην ποιοτική εκτίμηση της εκτατότητας του υφάσματος και διαμορφώθηκε από την εμπειρία του έμπειρου χειριστή και την ασαφή συνεπαγωγή που κάνει αυτός ανάμεσα στην εκτατότητα και την επιθυμητή τάνυση. Παρουσιάζεται μία νέα μέθοδος κατά την οποία χρησιμοποιήθηκε ένας νευρωνικός ελεγκτής ευθείας τροφοδότησης για τον έλεγχο της ταχύτητας του ρομποτικού άκρου εργασίας με σκοπό τη διατήρηση της τάνυσης του υφάσματος σύμφωνα με μία επιθυμητή κάθε φορά τιμή σε συνθήκες προσομοίωσης. Για τις ανάγκες της προσομοίωσης αναπτύχθηκε ένα απλουστευμένο μοντέλο ενός συγκεκριμένου υφάσματος μετά από πειράματα τάνυσης και συμπίεσής του. Παρουσιάστηκαν πειραματικά αποτελέσματα του προτεινόμενου συστήματος όπου το ιεραρχικό σύστημα ελέγχου και ο νευρωνικός ελεγκτής συγκρίθηκαν με έναν PID ελεγκτή κατά τη διαδικασία της ραφής που συμπεριλάμβανε ρομποτικό βραχίονα, αισθητήρα δύναμης και μία βιομηχανικού τύπου ραπτική μηχανή. Οι πρώτες ραφές σε μονά ορθογώνια παραλληλόγραμμα κομμάτια υφάσματος απέδειξαν την αποτελεσματικότητα του συστήματος. Για κάθε ύφασμα το αυτοματοποιημένο πείραμα του εφελκυσμού δίνει την εκτατότητα του υφάσματος. Αυτή χρησιμοποιείται από το ασαφές σύστημα αποφάσεων με σκοπό την εξαγωγή της επιθυμητής τάνυσης του υφάσματος κατά τη διάρκεια της ραφής. Ο προτεινόμενος νευρωνικός ελεγκτής είναι υπεύθυνος για τη διατήρηση αυτής της τάνυσης καθ όλη τη διάρκεια της ραφής. Επίσης, ο νευρωνικός ελεγκτής βελτιώθηκε και μία εξελιγμένη παραλλαγή του χρησιμοποιήθηκε για τη ραφή διπλών υφασμάτων. 21
40 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Παρουσιάστηκαν για πρώτη φορά στη διεθνή βιβλιογραφία πλήθος ραφών σε ευθεία γραμμή για μία μεγάλη ποικιλία μονών και διπλών υφασμάτων. Οι ραφές έγιναν με τη χρήση ενός ρομπότ και μιας βιομηχανικού τύπου ραπτικής μηχανής. Οι παραγόμενες από το ρομπότ ραφές συγκρίθηκαν με αντίστοιχες, που παρήγαγε ο χειριστής όπου σε κάποιες περιπτώσεις οι ραφές που παρήγαγε το ρομπότ ήταν καλύτερες από αυτές του χειριστή. Παρουσιάζεται μία πρωτότυπη ευρετική λύση για την αποθήκευση της αποκτώμενης μετά από κάθε ραφή εμπειρίας, για την επέκτασή της σε ραφές για πρωτοεμφανιζόμενα για το σύστημα υφάσματα καθώς και για τον τρόπο αξιοποίησης της γνώσης του συστήματος. Επίσης, για πρώτη φορά χρησιμοποιήθηκε ένας προσαρμοστικός ασαφής ελεγκτής σε αντικατάσταση του νευρωνικού ελεγκτή και υλοποιήθηκαν πειράματα με τη διαδικασία της ραφής. Όπως φάνηκε από τα αποτελέσματα ο ασαφής ελεγκτής υστερεί σε απόδοση σε σχέση με τον αντίστοιχο νευρωνικό. Ο προτεινόμενος νευρωνικός ελεγκτής ελέγχθηκε και αξιολογήθηκε με την επέκταση της χρήσης του και σε άλλα παραδείγματα χειρισμού υφασμάτων όπως η μετακίνηση ενός υφάσματος σε μία διάσταση από τον άνθρωπο και το ρομπότ ταυτόχρονα. Ο ίδιος νευρωνικός ελεγκτής διευρύνθηκε με σκοπό τον έλεγχο και των τριών δυνάμεων (F x, F y, F z ) που καταγράφονται από τον αισθητήρα δύναμης ούτως ώστε να γίνει δυνατή η μετακίνηση και στις τρεις διαστάσεις του καρτεσιανού συστήματος. Εφαρμογή αυτού ήταν η συνεργασία ανθρώπουρομπότ για τον χειρισμό ενός υφάσματος, ένα νέο αντικείμενο έρευνας που παρουσιάστηκε για πρώτη φορά στη διεθνή βιβλιογραφία και από ότι διαφαίνεται ανέδειξε ένα νέο ερευνητικό πεδίο στο χώρο της συνεργασίας ανθρώπου-ρομπότ για το χειρισμό εύκαμπτων αντικειμένων. Επίσης, ενσωματώθηκε και μηχανική όραση για την παρακολούθηση του χεριού του ανθρώπου και επεκτάθηκε αποτελεσματικότερα η συνεργασία ανθρώπου-ρομπότ στη μετακίνηση και το δίπλωμα υφασμάτων. Επιπλέον, ο ίδιος τύπος νευρωνικού ελεγκτή και με την ίδια δομή χρησιμοποιήθηκε για τη ρομποτική υποβοήθηση ενός ανθρώπου με σκοπό τη μετακίνηση αντικειμένων όπου το βάρος τους φέρει αποκλειστικά το ρομπότ ενώ ο άνθρωπος καθοδηγεί το ρομπότ μέσω του αισθητήρα δύναμης και του συστήματος ελέγχου των δυνάμεων. Εφαρμόστηκε ο ίδιος νευρωνικός ελεγκτής σε ένα σύστημα ανύψωσης φορτίων και έγινε σύγκρισή του με άλλη μέθοδο. Αυτές οι δύο τελευταίες παράλληλες εφαρμογές της προτεινόμενης προσέγγισης δείχνουν τη δυνατότητα γενίκευσης της και σε άλλες παραπλήσιες εργασίες. Ταυτόχρονα, τα τελικά επιτεύγματα της διατριβής εντάχθηκαν και ενσωματώθηκαν μέσα σε ένα γενικότερο πλαίσιο αντιμετώπισης του προβλήματος του χειρισμού υφασμάτων. Αυτό έγινε μέσω της παρουσίασής της μαζί με άλλες δύο σχετικές διατριβές, απόθεσης υφασμάτων σε τράπεζα εργασίας και περιστροφής των υφασμάτων γύρω από τη βελόνα. Για τις εξειδικευμένες και αυξημένες απαιτήσεις του πειραματικού τμήματος της διατριβής για την παραγωγή των ραφών σε μονά και διπλά υφάσματα σχεδιάστηκε και υλοποιήθηκε ολοκληρωμένη πειραματική διάταξη αποτελούμενη από τα παρακάτω τμήματα: 22
41 Κεφ. 1 - Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής Εγκαταστάθηκε στον υπάρχοντα ρομποτικό βραχίονα και ελέγχθηκε σύστημα μηχανικής όρασης καθώς και σύστημα αισθητήρα δύναμης. Το σύστημα μηχανικής όρασης χρησιμοποιήθηκε για την αναγνώριση της διεύθυνσης των πτυχώσεων του υφάσματος ενώ ο αισθητήρας δύναμης για τη μέτρηση των αναπτυσσόμενων δυνάμεων επί του υφάσματος. Κατά τα πρώτα στάδια της διατριβής σχεδιάστηκε και χρησιμοποιήθηκε πρότυπος μηχανισμός προσομοίωσης της ραπτικής μηχανής ο οποίος βοήθησε στα πρώτα πειράματα για την αξιολόγηση της εφικτότητας της ρομποτικής ραφής και τα οποία οδήγησαν στο συμπέρασμα της επιτευξιμότητάς της. Μεταγενέστερα, όλα τα πειράματα υλοποιήθηκαν σε μία βιομηχανικού τύπου ραπτική μηχανή. Στον κινητήρα της ραπτικής μηχανής προσαρμόστηκε ένα σύστημα ρύθμισης στροφών (inverter) ούτως ώστε να είναι δυνατόν να ρυθμίζεται η ταχύτητα ραφής και έτσι να δοκιμαστεί η προτεινόμενη προσέγγιση κάτω από διαφορετικές συνθήκες αλλά και να βρεθούν τα όρια απόδοσης του συστήματος. Σχεδιάστηκε και υλοποιήθηκε μία ολοκληρωμένη πειραματική διάταξη για την εκτέλεση των πειραμάτων εφελκυσμού υφασμάτων. Τα υφάσματα δένονται χειροκίνητα σε μία ειδικού σκοπού αρπάγη τοποθετημένη στο άκρο του ρομπότ ενώ το άλλο άκρο τους δένεται και συγκρατείται από σταθερή δαγκάνα. Σχεδιάστηκε και κατασκευάστηκε μια αρπάγη συγκράτησης και χειρισμού των υφασμάτων για την υλοποίηση των πειραμάτων σε ρεαλιστικές συνθήκες ραφής. Ο σχεδιασμός της αρπάγης ήταν αποτέλεσμα μιας εκτεταμένης έρευνας και ανάλυσης με αντικείμενο την επισκόπηση και τη συστηματική καταγραφή των αρπαγών για τον χειρισμό υφασμάτων. Η ίδια αρπάγη χρησιμοποιήθηκε(-είται) αποτελεσματικά σε όλα τα πειραματικά στάδια της διατριβής. Παρουσιάστηκε μία έξυπνη λύση για την ενσωμάτωση και την απευθείας εκτέλεση των πειραμάτων εφελκυσμού εντός της όλης διαδικασίας και λίγο πριν αρχίσει η ραφή. Σε αυτήν την προσέγγιση η ίδια αρπάγη που χρησιμοποιείται για τη ραφή χρησιμοποιείται και για το πείραμα του εφελκυσμού ενώ το ύφασμα κρατιέται από την άλλη του πλευρά από το ποδαράκι της ραπτικής μηχανής καθώς αυτό είχε τοποθετηθεί εκεί για να γίνει η ραφή. Κατά αυτόν τον τρόπο το πείραμα του εφελκυσμού και η ραφή μπορούν να γίνουν με τις ίδιες διατάξεις και η μία διαδικασία να ακολουθεί την άλλη χωρίς τη μεσολάβηση ανθρώπου ή μηχανισμού. Όλοι οι αλγόριθμοι και το απαραίτητο λογισμικό αναπτύχθηκε, εγκαταστάθηκε και λειτουργεί στον εσωτερικό ελεγκτή του ρομπότ για να επιτευχθούν όσον το δυνατόν μεγαλύτερες ταχύτητες υπολογισμών, αλλά και να επαλειφθούν οι καθυστερήσεις που θα προέκυπταν από την επικοινωνία του ρομπότ με τον ηλεκτρονικό υπολογιστή που θα έτρεχε τους αλγορίθμους. Τα αποτελέσματα της διατριβής ανακοινώθηκαν σε συνέδρια και δημοσιεύθηκαν σε επιστημονικά περιοδικά ανάλογα με το αντικείμενό τους ως εξής: Η δυνατότητα των νευρωνικών δικτύων να ελέγχουν τη δύναμη τάνυσης κατά τη ραφή μονών κομματιών υφασμάτων παρουσιάζεται στις εργασίες [50] [51]. Στις εργασίες αυτές έγινε μία θεωρητική προσέγγιση και παρουσιάστηκε μία μελέτη εφικτότητας του προβλήματος της ραφής υφασμάτων με ρομπότ. Το σύστημα δοκιμάστηκε σε συνθήκες προσομοίωσης όπου μοντελοποιήθηκε η συμπεριφορά ενός συγκεκριμένου υφάσματος, ενώ η ταχύτητα της ραπτομηχανής θεωρήθηκε ότι είχε μία σταθερή ιδανική τιμή. Η αυτοματοποίηση πειραμάτων για εκτίμηση των ιδιοτήτων των υφασμάτων και η ποιοτική έκφρασή τους με χρήση λεκτικών μεταβλητών παρουσιάστηκαν στην [52]. Τα πρώτα προκαταρκτικά πειράματα παρουσιάστηκαν στην [53] ενώ οι πρώτες πραγματικές ραφές παρουσιάστηκαν στην 23
42 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ εργασία [54], όπου γαζώθηκαν μονά υφάσματα. Το ολοκληρωμένο ιεραρχικό σύστημα ελέγχου και οι πραγματικές ραφές διπλών υφασμάτων (ένωση δύο κομματιών υφάσματος με μία ραφή) παρουσιάστηκαν στην εργασία [55]. Πέρα από τα παραπάνω, που αποτελούν το βασικό κορμό του θέματος που πραγματεύεται η διατριβή, υπάρχουν και κάποια επικουρικά τμήματά της που συνθέτουν το συνολικό ιεραρχικό σύστημα. Οι προδιαγραφές και οι απαιτήσεις της αυτοματοποίησης της ραφής μέσω ρομποτικών συστημάτων παρουσιάστηκαν στην εργασία [56]. Η αναγνώριση των πτυχώσεων κατά τη μετακίνηση ενός υφάσματος (ή όταν είναι ακίνητο) και η διόρθωσή τους παρουσιάστηκαν στην [57]. Μία συστηματική καταγραφή, μελέτη και κατηγοριοποίηση των αρπαγών που έχουν χρησιμοποιηθεί στον χειρισμό υφασμάτων παρουσιάστηκε στην [58]. Στην εργασία [53], ο νευρωνικός ελεγκτής τάνυσης συγκρίθηκε με έναν PID, ενώ στην [59] συγκρίθηκε με έναν προσαρμοστικό ασαφή ελεγκτή. Ο νευρωνικός ελεγκτής εφαρμόστηκε και αξιολογήθηκε και σε άλλα βιομηχανικά προβλήματα που έχουν παρόμοιες απαιτήσεις, όπως η συνεργασία ρομπότ ανθρώπου για τη μετακίνηση [60] και δίπλωμα [61] υφασμάτων καθώς και η ρομποτική υποβοήθηση ενός ανθρώπου για τη μεταφορά και ανύψωση αντικειμένων [62] [63]. 1.4 Δομή της διατριβής. Το αντικείμενο της διατριβής αποτελείται από οχτώ κεφάλαια/ενότητες ενιαίες και αλληλένδετες που συνθέτουν το συνολικό σύστημα αλλά που μπορούν κάποιες από αυτές να εφαρμοστούν αυτόνομα και σε άλλες εφαρμογές, όπως και έγινε στην παρούσα διατριβή. Αρχικά, στο Κεφ.1, παρουσιάζεται η βιβλιογραφική έρευνα και παρουσιάζονται όλες οι προσεγγίσεις για τη λύση του προβλήματος της αυτοματοποίησης της ραφής. Επιπλέον, παρουσιάζεται η μεθοδολογία και η προτεινόμενη προσέγγιση. Στο Κεφ. 2, παρουσιάζεται η αναλυτική και συστηματική μελέτη του προβλήματος της ραφής, η καταγραφή των προδιαγραφών και απαιτήσεων της αυτοματοποίησή της και περιγράφεται το έμπειρο σύστημα που αναπτύχθηκε για να βοηθάει τον χρήστη/ερευνητή προς αυτήν την κατεύθυνση. Στο Κεφ.3, γίνεται η συνολική περιγραφή της δομής του πρωτότυπου ιεραρχικού συστήματος ελέγχου της ραφής. Παρουσιάζονται τα τμήματα από τα οποία αποτελείται και ο τρόπος με τον οποίο συμβάλει κάθε ένα από αυτά στο συνολικό σύστημα. Η ενότητα αυτή αποτελεί το βασικό κορμό της διατριβής και το βασικό πλαίσιο πάνω στο οποίο χτίστηκε ολόκληρο το σύστημα αυτοματοποίησης της ραφής. Τα τμήματα είναι: i) Η εκτίμηση των αρχικών παραμέτρων βέλτιστης θέσης του ρομπότ για την τοποθέτηση του υφάσματος στη ραπτική μηχανή. ii) Η αναγνώριση και διόρθωση των πτυχώσεων του υφάσματος πριν την έναρξη της διαδικασίας της ραφής. iii) η ποιοτική εκτίμηση (αυτοματοποιημένη και μη) των ιδιοτήτων των υφασμάτων. iv) η εκτίμηση των επιθυμητών προδιαγραφών του ελέγχου της ραφής (επιθυμητή τάνυση κάθε υφάσματος). 24
43 Κεφ. 1 - Ανασκόπηση βιβλιογραφίας & Συμβολή διατριβής v) ο ευφυής έλεγχος της διαδικασίας της ραφής με γαζί σε ευθείες γραμμές. vi) η αποθήκευση, η επέκταση και η αξιοποίηση της γνώσης του συστήματος. Στο Κεφ.4, γίνεται αναλυτική περιγραφή των δύο αρχικών φάσεων πριν την έναρξη της ραφής. Πρώτον, της εκτίμησης της αρχικής θέσης του ρομπότ πάνω στο ύφασμα ούτως ώστε αυτό να οδηγηθεί από το ρομπότ μπροστά από τη βελόνα της ραπτικής μηχανής χωρίς να διπλώσει κατά τη μετακίνησή του, όπου χρησιμοποιείται ένα ασαφές σύστημα για την εκτίμηση της θέσης. Δεύτερον, της αναγνώρισης πιθανών πτυχώσεων επί του υφάσματος με σκοπό τη διόρθωσή τους από το ρομπότ πριν αρχίσει η ραφή, όπου χρησιμοποιείται ένα νευρωνικό δίκτυο για την αναγνώριση της διεύθυνσης των πτυχώσεων. Στο Κεφ.5, παρουσιάζεται η αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων που απαιτούνται για τις επόμενες φάσεις. Εισάγεται μία νέα προσέγγιση στην διατύπωση και χρήση των ιδιοτήτων των υφασμάτων με λεκτικές μεταβλητές και ποιοτική εκτίμηση της εκτατότητας των υφασμάτων. Επίσης, παρουσιάζεται μία νέα τεχνική πειραμάτων εφελκυσμού και ενσωμάτωσή τους στη ραπτική μηχανή. Τέλος, εκπαιδεύονται νευρωνικά δίκτυα τα οποία μπορούν να αναγνωρίσουν και να εκτιμήσουν ποιοτικά την εκτατότητα των υφασμάτων, μία ιδιότητα απαραίτητη και για την επόμενη φάση του προσδιορισμού της επιθυμητής τάνυσης ανάλογα με το ύφασμα. Έχουν εκπαιδευτεί δύο νευρωνικά δίκτυα ένα για μονά υφάσματα για την περίπτωση όπου πρέπει να γίνει ένα γαζί πάνω σε μονό ύφασμα και ένα για διπλά υφάσματα, που καλύπτει την πλειοψηφία των εμφανιζόμενων περιπτώσεων ραφής ρούχων, όπου δύο κομμάτια υφάσματος ενώνονται με μία ραφή. Στο Κεφ.6, καταγράφεται και αναλύεται η προσέγγιση που ακολουθήθηκε για την εξόρυξη της γνώσης και της εμπειρίας από χειρίστριες/στές ραπτικών μηχανών, σχετικά με τον χειρισμό των υφασμάτων κατά τη ραφή τους. Επίσης, περιγράφεται αναλυτικά το ασαφές σύστημα που χτίστηκε με βάση αυτή τη γνώση και το οποίο χρησιμοποιεί ποιοτικές εκτιμήσεις των ιδιοτήτων των υφασμάτων και συνάγει την επιθυμητή δύναμη (τάνυση) που θα πρέπει να εφαρμοστεί πάνω στο ύφασμα κατά τη διάρκεια της ραφής. Στο Κεφ.7, παρουσιάζεται ο έλεγχος της τάνυσης κατά τη ραφή. Αυτό το κατώτερο ιεραρχικά επίπεδο αποτελείται από έναν νευρωνικό ελεγκτή που προσπαθεί να κρατήσει σταθερή την τάνυση στο ύφασμα σύμφωνα με την επιθυμητή ενώ δίνει εντολές θέσης στο άκρο εργασίας του ρομπότ. Παρουσιάζεται η αποθήκευση της εμπειρίας, η επέκτασή της και ο τρόπος αξιοποίησης της γνώσης του συστήματος. Επίσης, σχεδιάστηκε και υλοποιήθηκε ένας PID ελεγκτής και ένας προσαρμοστικός ασαφής ελεγκτής και συγκρίνονται με τον νευρωνικό ελεγκτή. Τέλος, ο προτεινόμενος νευρωνικός ελεγκτής αξιολογήθηκε και σε άλλες εφαρμογές πέραν της ραφής. Δύο τέτοιες εφαρμογές είναι η συνεργασία ανθρώπουρομπότ για τον χειρισμό εύκαμπτων αντικειμένων και η ρομποτική υποβοήθηση ενός ανθρώπου για τη μετακίνηση αντικειμένων. Στο Κεφ.8 παρουσιάζονται και σχολιάζονται οι πειραματικές διατάξεις που αναπτύχθηκαν καθώς και όλα τα αποτελέσματα ραφών σε μονά και διπλά υφάσματα πάνω σε ευθείες γραμμές και γίνονται συγκρίσεις με αντίστοιχες ραφές που έγιναν από τον άνθρωπο. 25
44 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Τέλος, στο Κεφ.9 παρουσιάζονται τα συμπεράσματα και οι προοπτικές εξέλιξης της εργασίας καθώς και τα σχετικά παραρτήματα, βιβλιογραφία, σύντομο βιογραφικό και ευρετήριο. 26
45 2 Αναλυτική και συστηματική μελέτη ραφής- Έμπειρο σύστημα αξιολόγησης εργασιών ραφής Παρουσιάζεται μία αναλυτική μελέτη και αξιολόγηση όλων των φάσεων αυτοματοποιημένου χειρισμού του υφάσματος πριν και κατά τη διάρκεια της ραφής, όπως ο διαχωρισμός από μία στοίβα, η μεταφορά του υφάσματος σε άλλο στάδιο, η τοποθέτηση σε τράπεζα εργασίας, η μετακίνηση του υφάσματος κατά τη ραφή καθώς και η περιστροφή του γύρω από τη βελόνα. Οι παραπάνω φάσεις χειρισμού υφασμάτων μελετήθηκαν εξονυχιστικά και ως προς τις απαιτήσεις τους σε συστήματα αισθητηρίων και στρατηγικών ελέγχου. Αναπτύχθηκε μία πρωτότυπη βάση δεδομένων και ένα έμπειρο σύστημα [C1] για τους απαιτούμενους αισθητήρες και στρατηγικές ελέγχου κατά τα διάφορα στάδια χειρισμού υφασμάτων από ρομποτικά συστήματα και ανάλογα με το είδος του υφάσματος, τον τρόπο χειρισμού του καθώς και ανάλογα με τη φάση της επεξεργασίας του. Τα αποτελέσματα αυτής της ανάλυσης χρησιμοποιήθηκαν για να καθορίσουν τις απαιτήσεις και προδιαγραφές για τη ραφή και τον έλεγχο της τάνυσης των υφασμάτων. 2.1 Εισαγωγή Η αυτοματοποίηση στον κλάδο των υφασμάτων και της ένδυσης και ιδιαίτερα στο ράψιμο των υφασμάτων, ρούχων κ.λπ. είναι περισσότερο αναγκαία στις μέρες μας από ποτέ. Αυτός ο τομέας της βιομηχανίας είναι ένα από τα τελευταία οχυρά της βιομηχανίας που ανυπομονεί να κατακτηθεί από τη ρομποτική αυτοματοποίηση. Οι προσπάθειες για τον επαναπατρισμό της βιομηχανίας παραγωγής ενδυμάτων πίσω στις ανεπτυγμένες χώρες έχουν ήδη ξεκινήσει [64] και τα προηγμένα ευφυή ρομποτικά συστήματα είναι ο βασικός παράγοντας που μπορεί να βοηθήσει προς αυτή τη κατεύθυνση. Το ρομποτικά εκείνα σύστημα που θα έχουν τις πιθανότητες να πετύχουν, σε αυτήν την υψηλού οικονομικού αντίκτυπου βιομηχανία, θα πρέπει να είναι σε θέση να ανταποκριθούν στην τεράστια γκάμα υφασμάτων τα οποία μεταξύ τους έχουν πολύ διαφορετικές ιδιότητες. Αυτά τα ρομποτικά συστήματα θα πρέπει να είναι όσο το δυνατόν πιο αυτόνομα με τη χαμηλότερη δυνατή ανθρώπινη παρέμβαση και θα πρέπει να είναι ικανά να χειριστούν τόσο την ποιοτική όσο και την ποσοτική γνώση στον χώρο. Η δομή ελέγχου τους, θα πρέπει να έχει την δυνατότητα να



46 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ αντιμετωπίσει την υψηλή πολυπλοκότητα του συστήματος που οφείλεται τόσο στη φύση των ίδιων των υφασμάτων όσο και στις ιδιαιτερότητες της διαδικασίας της ραφής και των ραπτομηχανών. Ένα τέτοιο ρομποτικό σύστημα θα πρέπει να είναι προσαρμόσιμο και ευέλικτο, ώστε να μπορεί να συνεργάζεται με διαφορετικούς τύπους ραπτομηχανών αλλά και να ανταποκρίνεται ικανοποιητικά στις διαφορετικές ρυθμίσεις των παραμέτρων της κάθε ραπτομηχανής. Στην ευρύτερη συναφή βιομηχανία, του χώρου των υφασμάτων και του ενδύματος, υπάρχει η ανάγκη για μια κοινή γλώσσα μεταξύ των διαφόρων κλάδων και τμημάτων. Στο Σχ. 2.1, φαίνονται τα κενά όσον αφορά την ορολογία στη ροή των δεδομένων/γνώσεων/εμπειρίας που υπάρχουν μεταξύ των κλάδων που ασχολούνται με την παραγωγή/διάθεση των υφασμάτων και ενδυμάτων. Στην αλληλουχία αυτή η σύνδεση μεταξύ των κλάδων, τόσο στην επικοινωνία του προσωπικού όσο και των συστημάτων, διακόπτεται λόγω της ασυμβατότητας που υπάρχει στην ορολογία της ροής δεδομένων. Από αριστερά προς τα δεξιά το προσωπικό χρησιμοποιεί ως επί το πλείστον ποσοτικά δεδομένα (προς τα αριστερά) και ποιοτικά καθώς προχωράμε προς τα δεξιά. Τελικά, οι τελικοί πελάτες/καταναλωτές εκφράζουν τις ανάγκες και τις γνώσεις τους κατά την επικοινωνία τους κυρίως ποιοτικά με χρήση γλωσσικών μεταβλητών. Κλάδος: Ινών, Κλωστών Κλάδος: Υφασμάτων Κλάδος: Ένδυσης Πελάτες Καταναλωτές Αυξανόμενος βαθμός ασυμφωνίας στην επικοινωνία (ορολογία) Σχ. 2.1 Κενά επικοινωνίας κατά τη μεταφορά και χειρισμό των δεδομένων/γνώσης/εμπειρίας μεταξύ των ευρύτερων κλάδων της βιομηχανίας ένδυσης. Στον χώρο της ραφής (εντός του κλάδου ένδυσης) ένας ελεγκτής θα πρέπει να είναι σε θέση να αξιοποιήσει τις γνώσεις (ποιοτικές και ποσοτικές) των έμπειρων χειριστών, να τις ενσωματώσει στο λογισμικό του και να τις διαχειρίζεται με μεθόδους υπολογιστικής νοημοσύνης. Ταυτόχρονα, θα πρέπει να χειρίζεται τις αβεβαιότητες του περιβάλλοντος, του και του ελεγχόμενου συστήματος επειδή συνήθως είναι πολύ δύσκολο να μοντελοποιηθούν. Η παρούσα διατριβή συμβάλλει επίσης (Κεφ. 5), στην ενεργοποίηση και καθιέρωση μιας κοινής γλώσσας μεταξύ του προσωπικού στην σχετική βιομηχανία ένδυσης. Από την άλλη, προωθεί την αξιοποίηση αυτής της γλώσσας σε ρομποτικά συστήματα ραφής χρησιμοποιώντας μεθόδους νευρωνικών δικτύων, ασαφούς λογικής και έμπειρων συστημάτων. Η ίδια τακτική θα μπορούσε να επεκταθεί και σε άλλους χώρους που χρειάζονται ευέλικτα συστήματα αυτοματοποίησης. Η διατριβή 28
47 Κεφ. 2 - Αναλυτική και συστηματική μελέτη ραφής- Έμπειρο σύστημα αξιολόγησης εργασιών ραφής εισάγει στο χώρο της βιομηχανίας ένδυσης και ιδιαίτερα της ραφής τη χρήση των λεκτικών μεταβλητών (ποιοτικά δεδομένα) για την έκφραση των ιδιοτήτων των υφασμάτων. Αυτές οι λεκτικές μεταβλητές χρησιμοποιούνται ήδη από τους έμπειρους χειριστές κατά τη διάρκεια των ραπτικών εργασιών, καθώς επίσης και κατά τις γενικότερες εργασίες χειρισμού υφασμάτων σε όλους τους κλάδους. Αυτός ο υποκειμενικός τρόπος εκτίμησης των ιδιοτήτων των υφασμάτων είναι μια σημαντικότατη εμπειρία, η οποία κατά παράδοση περνάει από τον έμπειρο χειριστή στον εκπαιδευόμενο. Κατά την ανάλυση και το σχεδιασμό του προτεινόμενου ιεραρχικού συστήματος ελέγχου αυτή η εμπειρία λήφθηκε σημαντικά υπόψη. 2.2 Τοποθέτηση του προβλήματος της ραφής Το βασικό ερώτημα το οποίο αντιμετώπισε η παρούσα διατριβή είναι το: Τα υπο-ερωτήματα στα οποία καλείται να δώσει απάντηση για να ικανοποιηθεί έμμεσα το βασικό ερώτημα συνοψίζονται στα παρακάτω: Τι αισθητήρες θα πρέπει να χρησιμοποιηθούν και σε ποιες εργασίες αντίστοιχα; Ποια είναι η βέλτιστη αρχική θέση του ρομπότ πάνω στο ύφασμα; Ποια είναι η επιθυμητή τάνυση στο κάθε ύφασμα και από τι εξαρτάται; Ποιος θα είναι ο αλγόριθμος ελέγχου; Πως θα ελαχιστοποιηθεί η ανθρώπινη παρέμβαση στην όλη διαδικασία; Μία κοινή προσέγγιση κατά τον έλεγχο συστημάτων είναι να προσπαθήσει κάποιος να μοντελοποιήσει τη μηχανική και δυναμική συμπεριφορά του υπό ελέγχου συστήματος. Ένα απλοποιημένο μηχανικό μοντέλο [3, 65] που περιγράφει τη βισκοελαστική συμπεριφορά του υφάσματος μόνο όμως κατά τον εφελκυσμό του φαίνεται στο Σχ
48 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ ταχύτητα ραπτικής μηχανής Ταχύτητα ρομπότ k(x) b(x) f(x) Σχ. 2.2 Μηχανικό μοντέλο υφάσματος [3, 65]. Το μοντέλο αυτό είναι μία υπεραπλουστευμένη προσέγγιση μοντέλου συγκεντρωμένων παραμέτρων σε αντίθεση με το πραγματικό ύφασμα. Οι παράμετροι του μοντέλου αυτού, οι οποίες αντιπροσωπεύουν τις ιδιότητες των υφασμάτων είναι: το ελατήριο με σταθερά k(x), η απόσβεση με σταθερά b(x) και η τριβή f(x) ανάμεσα στο ύφασμα και το τραπέζι, που είναι αφενός μεν μη-γραμμικές παράμετροι και αφετέρου δε εξαρτώνται από το ενεργό μήκος του υφάσματος (x) ανάμεσα στην αρπάγη και τη βελόνα της ραπτικής μηχανής. Το μήκος μειώνεται συνεχώς καθώς εξελίσσεται το φαινόμενο το ραφής. Οι παραπάνω ιδιότητες εξαρτώνται από τον τύπο του υφάσματος, από το είδος πλέξης του, από το μέγεθος του υφάσματος, από τον πλήθος των κομματιών που θα ενωθούν με το γαζί, από τη σύνθεση των ινών του αλλά ακόμα και από το εάν είναι χαλαρή ή σφιχτή η κάθε κλωστή (thread-yarn) και η κάθε ίνα (fiber) από τις οποίες αποτελείται το ύφασμα. Για παράδειγμα, ένα πολύ εκτατό ύφασμα έχει πολύ διαφορετικές ιδιότητες από ένα ύφασμα με πολύ μικρή εκτατότητα, όπου το δεύτερο πλησιάζει τη συμπεριφορά ενός στιβαρού αντικειμένου, μόνο όμως κατά τον εφελκυσμό του. Πέρα από αυτό, ακόμη και για την περίπτωση του ίδιου υφάσματος, κατά την εξέλιξη της ραφής το ενεργό μήκος του μειώνεται συνεχώς και κατά συνέπεια η εκτατότητα και οι υπόλοιπες ιδιότητες του υφάσματος αλλάζουν. Επιπλέον, το παραπάνω μοντέλο ισχύει μόνο στην περίπτωση του εφελκυσμού επειδή το ύφασμα δεν μπορεί να φέρει θλιπτικές δυνάμεις σε αντίθεση με το απλό μηχανικό μοντέλο που φαίνεται στο Σχ Για μια σωστή μοντελοποίηση της συμπεριφοράς του υφάσματος είναι απαραίτητες [66] προσεγγίσεις όπως πεπερασμένα στοιχεία (ή ενεργειακές μέθοδοι, ή θεωρία ελαστικότητας), γεγονός που καθιστά την επεξεργασία σε πραγματικό χρόνο σχεδόν αδύνατη. Όλες αυτές οι δυσκολίες στη μοντελοποίηση της συμπεριφοράς του υφάσματος είναι ένας ανασταλτικός παράγοντας για να χρησιμοποιηθεί έστω και ένα απλοποιημένο μηχανικό μοντέλο σε ένα σύστημα ελέγχου. Ως εκ τούτου, στο σχεδιασμό του προτεινόμενου ιεραρχικού συστήματος ελέγχου το μοντέλο του υφάσματος και του συστήματος θεωρούνται ότι είναι άγνωστα. Από την άλλη μεριά, το προφίλ της ταχύτητας της ραπτομηχανής έχει μία περιοδική μορφή, η οποία μεταφέρεται μέσω του υφάσματος σαν εξωτερική διαταραχή στον ρομποτικό βραχίονα και στον αισθητήρα δύναμης. Δύο περιπτώσεις για το προφίλ της ταχύτητας των ραπτομηχανών, που είναι όμως ιδανικές και 30
49 Κεφ. 2 - Αναλυτική και συστηματική μελέτη ραφής- Έμπειρο σύστημα αξιολόγησης εργασιών ραφής απλοποιημένες εκδοχές φαίνονται στο Σχ Τα δύο προφίλ αφενός μεν αντιστοιχούν στην ίδια ταχύτητα της ραπτομηχανής αλλά αφετέρου δε σχετίζονται με διαφορετικά μήκη γαζιού. Ο μηχανισμός της ραπτομηχανής (feed dog mechanism) τραβάει περιοδικά το ύφασμα για ένα χρονικό διάστημα Τ κάθε φορά. Ανάμεσα σε δύο διαδοχικά διαστήματα Τ, όπου η ταχύτητα του υφάσματος είναι μηδέν, η βελόνα εισχωρεί στο ύφασμα. Αρχίζει να εισέρχεται στο ύφασμα στο σημείο ΙΝ, στο σημείο Ν έχει τη μέγιστη εισχώρηση και εξέρχεται τελικά από το ύφασμα στο σημείο OUT. Εάν το T είναι μικρό (μικρό μήκος γαζιού) τότε η συνολική μετακίνηση του υφάσματος είναι μικρή και ο χρόνος που το ύφασμα παραμένει ακίνητο είναι μεγάλος. Το αντίθετο συμβαίνει όταν το Τ είναι μεγάλο, Σχ. 2.3 (β). Παρόλο που η ταχύτητα της ραπτομηχανής είναι η ίδια (ίδια περίοδος), στην πρώτη περίπτωση η ταχύτητα μετακίνησης του υφάσματος είναι μικρότερη από ότι στη δεύτερη περίπτωση. ταχύτητα T IN OUT N T N T t μικρό μήκος γαζιού (α) ταχύτητα μεγάλο μήκος γαζιού T N T N T t (β) Σχ. 2.3 Δύο περιπτώσεις ιδανικού και απλοποιημένου προφίλ της ταχύτητας της ραπτομηχανής. α) για μικρό μήκος γαζιού β) για μεγάλο μήκος γαζιού. Η διακοπτόμενη κίνηση του υφάσματος, που εξαρτάται από το μήκος του γαζιού, προκαλεί την εμφάνιση διαφορετικών τύπων ταλαντωτικών διαταραχών οι οποίες πρέπει να αντισταθμιστούν από τον ελεγκτή του συστήματος. Ο ελεγκτής θα πρέπει να έχει τη σθεναρότητα ούτως ώστε να απορρίψει και να ξεπεράσει αυτήν την περιοδική διαταραχή και ταυτόχρονα πρέπει να μπορεί να συγχρονίσει το ρομπότ με τη ραπτομηχανή και να διατηρήσει το ύφασμα τεντωμένο σύμφωνα με την επιθυμητή δύναμη εφελκυσμού. Επιπροσθέτως, η περίοδος ενός πλήρους κύκλου, του μηχανισμού τροφοδοσίας της ραπτομηχανής, δεν είναι σταθερή καθ όλη τη διάρκεια της ραφής. Όταν η ραπτομηχανή αρχίζει να δουλεύει (φάση επιτάχυνσης), η περίοδος αυτή είναι μεγάλη και μειώνεται συνεχώς καθώς εξελίσσεται η ραφή. Καθώς η ραπτομηχανή πλησιάζει την τελική σταθερή ταχύτητα ραφής (σταθερή κατάσταση) η περίοδος φθάνει σε μια τελική σταθερή τιμή. Το αντίθετο συμβαίνει όταν η ραπτομηχανή σταματά (φάση επιβράδυνσης) και μάλιστα ο ρυθμός μεταβολής της περιόδου είναι διαφορετικός από πριν και συγκεκριμένα πολύ μεγαλύτερος. Όλες αυτές οι ιδιάζουσες συνθήκες απαιτούν εξελιγμένη και 31

50 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ πρωτοπόρα σχεδίαση ενός ευφυούς ελεγκτή, ο οποίος θα πρέπει να είναι σε θέση να ξεπεράσει όλες αυτές τις δυσκολίες που προκαλούνται από την ιδιόμορφη κίνηση του μηχανισμού της ραπτομηχανής. Ταυτόχρονα, θα πρέπει να επιτυγχάνει και ποιοτικές ραφές, αφενός μεν χωρίς σουρώματα των υφασμάτων και αφετέρου δε εξασφαλίζοντας την ακρίβεια της θέσης των ραφών πάνω στα υφάσματα. Η κεντρική ιδέα της προσέγγισης που ακολουθήθηκε έχει αρκετές ομοιότητες με τον τρόπο που ράβει ο άνθρωπος σε μία ραπτομηχανή, μόνο που τώρα ο έμπειρος χειριστής αντικαθίσταται από το ρομπότ. Αυτό φαίνεται στο Σχ. 2.4, όπου η ραφή υφασμάτων γίνεται χρησιμοποιώντας μία συμβατική ραπτομηχανή και έναν ρομποτικό βραχίονα με μία αρπάγη και έναν αισθητήρα δύναμης. Ένα ή δύο ορθογώνια παραλληλόγραμμα κομμάτια υφάσματος πιάνονται από το δεξί τους άκρο από την αρπάγη του ρομπότ, ενώ το άλλο άκρο τους κινείται με άγνωστη ταχύτητα από το μηχανισμό της ραπτομηχανής. Επίσης δεν χρησιμοποιείται κανένας επιπλέον αισθητήρας για τη μέτρηση ή εκτίμηση της ταχύτητας της ραπτομηχανής. Ραπτομηχανή ρομπότ πνευματική αρπάγη αισθητήρας δύναμης ύφασμα x Σχ. 2.4 Η προσέγγιση της ραφής υφασμάτων χρησιμοποιώντας ραπτομηχανή και ρομπότ. Κατά τη διάρκεια του γαζώματος το ύφασμα θα πρέπει να είναι τεντωμένο για να αποφεύγεται η πτύχωσή του (buckling) και να εξασφαλίζεται η υψηλή ποιότητα της ραφής. Η επιθυμητή δύναμη τάνυσης για κάθε ύφασμα εξαρτάται από τον τύπο του υφάσματος και τις ιδιότητές του και περιγράφεται αναλυτικά στο Κεφ. 5 και 6. Σε αυτή τη φάση θα πρέπει να γίνει σαφές ότι δεν εξετάζονται στην παρούσα διατριβή ο προσανατολισμός του υφάσματος και η περιστροφή του γύρω από τη βελόνα ώστε για να γίνουν καμπύλες ραφές. Επιπλέον, υποτίθεται ότι το/τα ύφασμα/τα έχουν 32
51 Κεφ. 2 - Αναλυτική και συστηματική μελέτη ραφής- Έμπειρο σύστημα αξιολόγησης εργασιών ραφής ήδη τοποθετηθεί 26 πάνω στο τραπέζι [42] [61]. Στη συνέχεια, η διαδικασία της ραφής χωρίζεται σε τέσσερις φάσεις, όπως αυτές περιγράφονται αναλυτικά στο Κεφ. 8. Στην 1η φάση (πιάσιμο υφασμάτων), το ρομπότ πλησιάζει κάθετα προς το τραπέζι και πιάνει (τσιμπάει) το ύφασμα. Στην 2η φάση (πείραμα εφελκυσμού με ρομπότ), το ρομπότ εκτελεί το πείραμα εφελκυσμού, προκειμένου να καθορίσει την επιθυμητή τάνυση (Κεφ. 5) που θα πρέπει να εφαρμόζεται κατά τη φάση του γαζώματος. Στο 3η (εφαρμογή προτάνυσης), η ιεραρχικός νευρωνικός ελεγκτής του ρομπότ εφαρμόζει την επιθυμητή τάνυση πάνω στο ύφασμα. Τέλος, στην 4η φάση (ραφή), η ραπτομηχανή ξεκινά και το ρομπότ καθοδηγεί το ύφασμα. Στόχος είναι η ανάπτυξη ενός ευέλικτου ιεραρχικού συστήματος ελέγχου που θα είναι σε θέση να εκτελεί τις προαναφερόμενες εργασίες ραφής. Θα πρέπει να είναι σε θέση να ανταποκρίνεται σε ένα ευρύ φάσμα διαφορετικών τύπων υφασμάτων χωρίς καμία προηγούμενη γνώση σχετικά με τις ιδιότητές τους, ή το μοντέλο τους ή τη δυναμική συμπεριφορά του κάθε υφάσματος. Ως εκ τούτου, χρησιμοποιήθηκαν μέθοδοι υπολογιστικής νοημοσύνης και εργαλεία τα οποία είναι σε θέση να μοντελοποιούν τη συμπεριφορά και να ελέγχουν συστήματα που είναι μη-γραμμικά και δυναμικά μεταβαλλόμενα. Η νέα προσέγγιση της χρήσης ποιοτικών ιδιοτήτων των υφασμάτων με λεκτικές μεταβλητές ακολουθείται σε όλη την δομή του ιεραρχικού ελεγκτή. Η προσέγγιση αυτή εξυπηρετεί τους ευρύτερους στόχους της διατριβής που είναι η κατανόηση των ιδιοτήτων των υφασμάτων από το προσωπικό και η καθιέρωση μιας κοινής γλώσσας μεταξύ τους. Επίσης, εξυπηρετεί το στόχο της ενσωμάτωσης της εμπειρίας του προσωπικού στο προτεινόμενο σύστημα ελέγχου. Οι νέες μέθοδοι που αναπτύχθηκαν και παρουσιάζονται αναλυτικά στα παρακάτω, βοηθούν στην ελαχιστοποίηση των πολλαπλών διατάξεων καθώς και στον περιορισμό και ενσωμάτωση των διεργασιών. Έτσι, η προτεινόμενη νέα μέθοδος για την ενσωμάτωση του πειράματος του εφελκυσμού, εντός της συνολικής διάταξης ρομπότ-ραπτομηχανή, βοηθά στο να αποφευχθεί η χρήση ειδικών πειραματικών συσκευών, περιορίζει τους επιπρόσθετους σταθμούς εργασίας και αυξάνει την αυτονομία του συστήματος. Δεδομένου ότι δεν γίνεται κάποια μηχανική ή ηλεκτρονική σύζευξη του ρομπότ και της ραπτομηχανής, το προτεινόμενο ρομποτικό σύστημα μπορεί απλά να τοποθετηθεί μπροστά από οποιαδήποτε ραπτομηχανή και να συνεργαστεί μαζί της χωρίς να χρειάζεται ειδικές τροποποιήσεις/ρυθμίσεις. 2.3 Ευρύτερο συνολικό πλαίσιο εργασιών για τη ραφή. Η αυτοματοποίηση της ραφής υφασμάτων είναι ένα πολύπλοκο και περίπλοκο πρόβλημα το οποίο απαιτεί διεπιστημονικές προσεγγίσεις και ολοκληρωμένες λύσεις. Για να ολοκληρωθεί η διαδικασία της ραφής που περιγράφτηκε στα προηγούμενα απαιτείται μία σειρά προεργασιών και ενεργειών που όλες μαζί εντάσσονται σε ένα γενικότερο ολοκληρωμένο πλαίσιο. Στο Σχ. 2.5 φαίνεται ένα συνολικό διάγραμμα ροής όλων των απαραίτητων εργασιών για την αυτοματοποίηση της ραφής

52 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 2.5 Διάγραμμα ροής συνολικών εργασιών για την αυτοματοποίηση της ραφής. Ως αρχικό στάδιο θεωρείται η εργασία κατά την οποία ένα κομμάτι υφάσματος πρέπει να διαχωριστεί από μία στοίβα υφασμάτων η οποία έχει προέλθει από την κοπή πολλαπλών στρώσεων ρεταλιών και σύμφωνα με το εκάστοτε πατρόν. Τα διαφορετικά κομμάτια τα οποία αποτελούν ένα ρούχο προέρχονται από διαφορετικές στοίβες. Για αυτό κατά το στάδιο αυτό χρειάζεται ένα σύστημα ποιοτικού ελέγχου των χρωματικών αποκλίσεων [67], ούτως ώστε να παραχθεί ένα ρούχο με ενιαίο και ομοιόμορφο χρωματισμό. Κάθε κομμάτι υφάσματος, το οποίο διαχωρίζεται επιτυχώς από τη στοίβα, πρέπει να τοποθετηθεί σωστά πάνω στην τράπεζα εργασίας [38]. Η σωστή τοποθέτησή του, χωρίς πτυχώσεις και διπλώματα, είναι σημαντική για τη διευκόλυνση των εργασιών της ραφής που έπονται. Στην περίπτωση όμως που το ύφασμα τοποθετηθεί λάθος, τότε αυτοματοποιημένα συστήματα θα πρέπει να αναγνωρίσουν [68] και να διορθώσουν το πρόβλημα και να στρώσουν σωστά το ύφασμα. Όταν το ύφασμα βρίσκεται πλέον πάνω στο τραπέζι τότε θα πρέπει να μετακινηθεί με κατάλληλους χειρισμούς για να τοποθετηθεί κάτω από τη βελόνα της ραπτομηχανής. Κατά τους χειρισμούς της μετακίνησής του το ύφασμα θα πρέπει να παρακολουθείται για την πιθανή εμφάνιση πτυχώσεων. Όταν τελικά το/τα κομμάτι/α υφάσματος βρίσκονται κάτω από τη βελόνα αρχίζει η εργασία της ραφής. Κατά τη ραφή πρέπει και πάλι να εκτελούνται εργασίες χειρισμού και περιστροφής του υφάσματος [39] και ταυτόχρονα να ελέγχεται η τάνυσή του για να εξασφαλιστεί η ποιοτική ραφή του. Σε ένα ολοκληρωμένο σύστημα η ποιότητα της ραφής του μπορεί να αναγνωρισθεί και από αυτοματοποιημένα συστήματα ποιοτικού ελέγχου [69]. Τέλος, μετά την ολοκλήρωση της ραφής το συραμμένο κομμάτι ρούχου θα πρέπει να απομακρυνθεί από την τράπεζα εργασίας. Επίσης, ένα καθοριστικό κομμάτι της όλης διαδικασίας είναι η ίδια η ραπτομηχανή και οι απαραίτητες ρυθμίσεις της. Η αυτοματοποίηση των ρυθμίσεων της ραπτομηχανής έχει διεθνώς μελετηθεί διεξοδικά και μπορεί να θεωρηθεί και ως ανεξάρτητη διαδικασία και απαιτείται, είτε η ραφή είναι αυτοματοποιημένη είτε όχι. Στο συνολικό διάγραμμα εργασιών του Σχ. 2.5 κάποιες από τις εργασίες που περιγράφτηκαν έχουν προσεγγιστεί από ανεξάρτητες αλλά και δυνητικά συνεργαζόμενες διδακτορικές διατριβές, γεγονός που καταδεικνύει τη δυσκολία και τη διεπιστημονικότητα του προβλήματος. Η τρέχουσα διατριβή ασχολείται αποκλείστηκα με τις εργασίες που φαίνονται μέσα σε κύκλους στο Σχ. 2.5 και μπορεί να συνεργαστεί άψογα με όλες τις υπόλοιπες διατριβές με σκοπό την ολοκλήρωση 34
53 Κεφ. 2 - Αναλυτική και συστηματική μελέτη ραφής- Έμπειρο σύστημα αξιολόγησης εργασιών ραφής της όλης διαδικασίας της αυτοματοποίησης της ραφής [70] [71] [72]. Επίκεντρο, λοιπόν, της διατριβής είναι η ίδια η ραφή του υφάσματος και κυρίως ο έλεγχος της τάνυσης κατά τη ραφή του. Αρχικά το πρόβλημα μελετήθηκε συνολικά με σκοπό να βρεθούν όλα εκείνα τα αδύνατα σημεία και τα χαρακτηριστικά τους τα οποία είναι απαραίτητα για τη σωστή αντιμετώπιση του προβλήματος. Έτσι εξετάστηκαν συστηματικά και εξονυχιστικά όλες οι περιπτώσεις της διεθνούς βιβλιογραφίας σε σχέση με τις αρπάγες που έχουν χρησιμοποιηθεί [56] [58] καθώς και τις στρατηγικές ελέγχου [56] των διαδικασιών που εφαρμόστηκαν. Στόχος ήταν να βρεθούν εκείνα τα λειτουργικά χαρακτηριστικά και οι απαιτήσεις, η εκπλήρωση των οποίων θα κάνει την αυτοματοποίηση της ραφής εφικτή αλλά και θα θέσει τις προδιαγραφές για την αυτοματοποίηση της ραφής. 2.4 Βάση δεδομένων-έμπειρο σύστημα αξιολόγησης απαιτήσεων κατά τη ραφή. Όλες οι φάσεις χειρισμού υφασμάτων για τη ραφή, μελετήθηκαν εξονυχιστικά ως προς τις απαιτήσεις τους σε συστήματα αισθητηρίων και στρατηγικών ελέγχου. Η εις βάθος αναλυτική και μεθοδική αυτή μελέτη οδήγησε στην ανάπτυξη μίας πρωτότυπης βάσης δεδομένων και ενός έμπειρου συστήματος για τον καθορισμό των αισθητήρων και των στρατηγικών ελέγχου κατά τα διάφορα στάδια χειρισμού υφασμάτων από ρομποτικά συστήματα. Οι είσοδοι του έμπειρου συστήματος είναι ο τρόπος χειρισμού του (ο τρόπος με τον οποίο η αρπάγη πιάνει το ύφασμα operating principles) καθώς και η εργασία για τον χειρισμό του (fabric handling task). Στα παρακάτω περιγράφεται η διαδικασία που ακολουθήθηκε καθώς και τα χαρακτηριστικά/δομή του έμπειρου συστήματος. Οι πιο κλασσικοί τρόποι για την εξόρυξη της απαραίτητης γνώσης για να δομηθεί ένα έμπειρο σύστημα είναι δύο. Ο πρώτος είναι μέσα από συνεντεύξεις έμπειρων στο συγκεκριμένο πρόβλημα και ο δεύτερος είναι μέσα από την σχετική διεθνή βιβλιογραφία. Στην περίπτωση μας και δεδομένης της ιδιαιτερότητας του προβλήματος ακολουθήθηκε ο δεύτερος τρόπος για να καλυφθούν όλες οι σχετικές προσεγγίσεις. Η ρομποτική αρπάγη είναι εκείνη η συσκευή η οποία έρχεται σε επαφή και αλληλεπιδρά με το αντικείμενο το οποίο χειρίζεται το ρομπότ. Για αυτό, ο μηχανικός ο οποίος καλείται να σχεδιάσει μία αρπάγη οδηγείται στη χρήση αισθητήρων και κατάλληλων στρατηγικών ελέγχου. Αυτά είτε θα ενσωματωθούν είτε θα συνεργαστούν με το μηχανικό μέρος του συστήματος με σκοπό να ξεπεράσουν τα μειονεκτήματα του ρομποτικού βραχίονα αλλά και τις αβεβαιότητες του περιβάλλοντος-αντικειμένου. Βασικός, λοιπόν, στόχος κατά την εξόρυξη της γνώσης για τη δόμηση του έμπειρου συστήματος ήταν να βρεθούν όλες εκείνες οι καλές πρακτικές και οι δημοσιευμένες εργασίες, οι οποίες εμπεριείχαν αισθητήρες και αντίστοιχες στρατηγικές ελέγχου στα προτεινόμενα συστήματά τους. Περισσότερες από 50 διεθνείς δημοσιεύσεις εξετάστηκαν όσον αφορά τα συστήματα αρπάγης και ελέγχου για τον χειρισμό εύκαμπτων αντικειμένων. Ενδεικτικά αναφέρονται οι παρακάτω. Ο Monkman [73] παρουσίασε έναν αρκετά ενδιαφέροντα τρόπο για την ταυτόχρονη προσέγγιση των εργασιών χειρισμού στα υφάσματα και των απαιτήσεων σε αισθητήρες. Η εργασία που εξέτασε είναι ο διαχωρισμός ενός υφάσματος από μία στοίβα (ply separation from a stack). Η εργασία αυτή χωρίστηκε σε εργασίες που 35
54 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ απαιτούν τη χρήση αισθητήρων, όπως προσέγγιση της κορυφής της στοίβας, εύρεση του πλήθους υφασμάτων που έχει πιάσει η αρπάγη κλπ. Κατά αυτόν τον τρόπο, ενσωματώθηκαν οι αισθητήρες και τα απαραίτητα ηλεκτρονικά στα μηχανικά μέρη της αρπάγης ούτως ώστε να φτιαχτεί μία αρπάγη που θα μπορεί να εκτελέσει την συγκεκριμένη εργασία χειρισμού. Οι Paraschidis κ.α. [74], παρουσίασαν μία αρπάγη δύο δακτύλων για διάφορες εργασίες χειρισμού υφασμάτων. Αρχικά καθόρισαν τις εργασίες χειρισμού, όπως απόθεση υφάσματος, δίπλωμα κλπ. και χρησιμοποίησαν αισθητήρες δύναμης και μηχανικής όρασης Δόμηση γνώσης και κανόνων του έμπειρου συστήματος Η γνώσης που εξορύχτηκε, από το σύνολο της διεθνούς βιβλιογραφίας, κατηγοριοποιήθηκε με τέτοιον τρόπο ούτως ώστε να είναι εύκολη η χρήση της κατά τη δόμηση των κανόνων. Επίσης, η γνώση αυτή πέρασε από την κατάλληλη επεξεργασία για να εξαλειφθούν οι αντιφάσεις που βρέθηκαν στην βιβλιογραφία. Δεδομένου ότι κάθε διαδικασία σχεδιασμού ξεκινά με τον καθορισμό της εκτελούμενης εργασίας, είναι καλύτερο να διαιρεθεί η συνολική εργασία σε δευτερεύουσες υπο-εργασίες και σε αντίστοιχες εργασίες αισθητήρων. Έτσι είναι ευκολότερο για το ρομπότ να ολοκληρώσει μία ευρύτερη περίπλοκη εργασία. Στη συνέχεια, προσδιορίζονται οι κατάλληλοι τύποι αισθητήρων και οι στρατηγικές ελέγχου για τις αντίστοιχες εργασίες αισθητήρων και την αρχή λειτουργίας της αρπάγης. Η διαδικασία αυτή παρουσιάζεται στους Πιν. 2.1 και Πιν Εδώ πρέπει να σημειωθεί ότι στον όρο αρχή λειτουργίας της αρπάγης (operating principle of gripper) μερικές φορές συμπεριλαμβάνεται μια σειρά από ειδικές αρπάγες οι οποίες όμως έχουν τον ίδιο τρόπο χειρισμού επί του υφάσματος. Για παράδειγμα, η περίπτωση επιφανειακή μόνο επαφή (surface only contact) περιλαμβάνει τις αρπάγες που λειτουργούν με κενό αέρος (vacuum), με ηλεκτροστατικές δυνάμεις (electroadhesive), με κόλλες (adhesive) ή με κατάψυξη (freezing). 36

55 Κεφ. 2 - Αναλυτική και συστηματική μελέτη ραφής- Έμπειρο σύστημα αξιολόγησης εργασιών ραφής Πιν. 2.1 Ταξινόμηση γνώσης σχετική με τις αρπάγες. 37
 and op. princ.")
56 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Πιν. 2.2 Ταξινόμηση γνώσης σχετική με τις στρατηγικές ελέγχου. Οι παραπάνω πίνακες χρησιμοποιούνται για την εξαγωγή των κανόνων του έμπειρου συστήματος. Η γενική μορφή των κανόνων έχει ως εξής: Εάν Τότε handling task(i) and op. princ. of gripper(j) sensing device = sensor1 or sensor2 control strategy = control1 or control2 To Εάν μέρος ασχολείται με τις εισόδους στο έμπειρο σύστημα όπως η εργασία (task) και η αρχή λειτουργίας της αρπάγης. Το Τότε μέρος ασχολείται με τις εξόδους 38
 του έμπειρου συστήματος [75], με σκοπό την εύρεση των κατάλληλων")

57 Κεφ. 2 - Αναλυτική και συστηματική μελέτη ραφής- Έμπειρο σύστημα αξιολόγησης εργασιών ραφής συστήματος που είναι ο τύπος των αισθητήρων και η στρατηγική ελέγχου. Το σύνολο των κανόνων σαρώνεται από τον μηχανισμό συμπερασμού (ορθή αλυσίδα συλλογισμού - forward chaining) του έμπειρου συστήματος [75], με σκοπό την εύρεση των κατάλληλων αισθητήρων και του αντίστοιχου ελέγχου. Η διαδικασία αυτή απεικονίζεται στο Σχ Επιπλέον, το Τότε μέρος ενεργοποιεί ένα μηχανισμό, ο οποίος δείχνει γραφικά σε ένα παράθυρο τα αποτελέσματα του έμπειρου συστήματος. Η είσοδος των παραμέτρων και το αρχικό σχήμα ελέγχου φαίνεται στο Σχ Σχ. 2.6 Δομή έμπειρου συστήματος για την επιλογή αρπαγών και στρατηγικής ελέγχου. 39
. Οι τύποι των αισθητήρων έχουν κατηγοριοποιηθεί σε τρεις κατηγορίες (Σχ. 2.")
58 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 2.7 Αποτελέσματα εφαρμογής έμπειρου συστήματος (είσοδος παραμέτρων και γενικό σχήμα ελέγχου). Οι τύποι των αισθητήρων έχουν κατηγοριοποιηθεί σε τρεις κατηγορίες (Σχ. 2.6): 1) αισθητήρες πάνω στην αρπάγη ( ) 2) αισθητήρες στο ευρύτερο περιβάλλον της εργασίας χειρισμού ( )και 3) αισθητήρες μηχανικής όρασης ( ) Η ίδια κατηγοριοποίηση ακολουθήθηκε και κατά τη δόμηση των κανόνων. Όταν ένας κανόνας ενεργοποιείται, ένας εσωτερικός μηχανισμός ελέγχει ποιος από τους τρείς τύπους αισθητήρων ενεργοποιείται. Τότε η αντίστοιχη γκρι περιοχή (, ή του Σχ. 2.6) απεικονίζεται στην οθόνη και όταν το ποντίκι μετακινείται πάνω στην αντίστοιχη περιοχή εμφανίζονται επιπλέον πληροφορίες για τους αισθητήρες και τη στρατηγική ελέγχου. Το συνολικό έμπειρο σύστημα υλοποιήθηκε στο λογισμικό Kappa PC. Ένα παράδειγμα λειτουργίας του έμπειρου συστήματος παρουσιάζεται στα παρακάτω και φαίνεται στο Σχ Είσοδος στο έμπειρο σύστημα: Αρχή λειτουργίας της αρπάγης: Adhesive Εργασία χειρισμού: Separation Εργασία αισθητήρων: find the top of the stack 40

59 Κεφ. 2 - Αναλυτική και συστηματική μελέτη ραφής- Έμπειρο σύστημα αξιολόγησης εργασιών ραφής Οι κανόνες που ενεργοποιούνται φαίνεται με πράσινη σκίαση στους Πιν. 2.1 και Πιν Το αποτέλεσμα της λειτουργίας του έμπειρου συστήματος φαίνεται στο Σχ. 2.8, που υποδεικνύει ότι πρέπει να χρησιμοποιηθούν αισθητήρες πάνω στην αρπάγη. Όταν ο χρήστης μετακινηθεί πάνω στο προτεινόμενο αισθητήρα τότε εμφανίζονται επιπλέον πληροφορίες για τους αισθητήρες και τη στρατηγική ελέγχου που φαίνονται στο Σχ Όπως φαίνεται στις λεπτομέρειες του Σχ. 2.9, οι τελικές λύσεις είναι δύο. Έτσι ο χρήστης μπορεί να επιλέξει μία από αυτές για να εκτελέσει τη συγκεκριμένη εργασία χειρισμού. Σχ. 2.8 Αποτελέσματα εφαρμοφγής έμπειρου συστήματος (σχήμα ελέγχου). 41

60 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 2.9 Αποτελέσματα εφαρμοφγής έμπειρου συστήματος (επεξήγηση σχήματος ελέγχου). 2.5 Συμπεράσματα αναλυτικής μελέτης ανάπτυξης έμπειρου συστήματος. Μία πολύ σημαντική συγκέντρωση και οργάνωση της γνώσης σχετικά με τις αρπάγες και τις στρατηγικές ελέγχου πραγματοποιήθηκε στο αρχικό αυτό στάδιο της διατριβής [56] [58]. Η ενσωμάτωση της γνώσης σε ένα έμπειρο σύστημα που ασχολείται με τον θεμελιώδη σχεδιασμό αρπαγών για χειρισμό εύκαμπτων υλικών μπορεί να οδηγήσει σε πιο ευφυείς αρπάγες. Η ενσωμάτωση των ηλεκτρονικών τμημάτων (αισθητήρων και ελέγχου) κατά τη φάση του σχεδιασμού της αρπάγης καθώς και του σχεδιασμού της αυτοματοποίησης της εργασίας χειρισμού του υφάσματος, οδηγεί σε μία ολοκληρωμένη μηχανοτρονική μελέτη [58] που βοηθάει στην αυτοματοποίηση της εργασίας. Το προτεινόμενο εργαλείο που αναπτύχθηκε μπορεί να είναι ένα ισχυρό δυναμικό εργαλείο στα χέρια του μηχανικού που καλείται να σχεδιάσει ρομποτικά συστήματα για τον χειρισμό υπερ-εύκαμπτων αντικειμένων. Από την δική μας οπτική γωνία το εργαλείο αυτό αποτέλεσε το μεταφορικό μέσο για την κατανόηση του προβλήματος της αυτοματοποίησης της ραφής, του εντοπισμού των ανεξιχνίαστων ερευνητικών σημείων, του καθορισμού των απαιτήσεών της διεργασίας και την ανάπτυξη σχεδιαστικών λύσεων. Από τη άλλη, η μελέτη αυτή ήταν καταλυτική στο σχεδιασμό της αρπάγης που χρησιμοποιήθηκε τελικά κατά τη διάρκεια των πειραμάτων και παρουσιάζεται στο κεφάλαιο 8. 42
61 3 Ιεραρχική δομή συστήματος ελέγχου της ραφής Εισαγωγή μίας νέας μεθόδου ευφυούς, ευέλικτου και εκπαιδεύσιμου ιεραρχικού συστήματος ελέγχου [J1] για την αντιμετώπιση του προβλήματος της αυτοματοποίησης της ραφής. Αυτή η μέθοδος αποτελεί και το βασικό πλαίσιο πάνω στο οποίο στηρίζεται η διατριβή. Εισήχθηκε μία ιεραρχική δομή εργασιών και ροής πληροφοριών για τη ραφή ως εξής: α) προκαταρκτικές εργασίες πριν την έναρξη της ραφής β) ποιοτική εκτίμηση (από τον άνθρωπο ή/και αυτόματα) των χαρακτηριστικών-ιδιοτήτων του υφάσματος υπό τη μορφή λεκτικών μεταβλητών. γ) είσοδος αυτών σε έναν μηχανισμό λήψης αποφάσεων βασισμένο σε Ασαφή Λογική ο οποίος υπολογίζει την επιθυμητή τάνυση του υφάσματος. δ) χρήση του νευρωνικού ελεγκτή με σκοπό τη διατήρηση της επιθυμητής τάνυσης υπολογίζοντας την ταχύτητα του άκρου εργασίας του ρομπότ. ε) αποθήκευση και αξιοποίηση της αποκτούμενης εμπειρίας του συστήματος ραφής. Πριν την πειραματική εφαρμογή αυτής της μεθόδου η αποτελεσματικότητα της ελέγχθηκε και αξιολογήθηκε κάτω από συνθήκες προσομοίωσης με ενθαρρυντικά αποτέλεσμα. Εισήχθη η ιδέα της εφαρμογής μεθόδων υπολογιστικής νοημοσύνης στη ραφή υφασμάτων και εφαρμογής μεθόδων ευφυούς ελέγχου, για την τάνυση των υφασμάτων, βασισμένες σε νευρωνικά δίκτυα οι οποίες, για πρώτη φορά, χρησιμοποιούν ποιοτικές εκτιμήσεις των ιδιοτήτων και των χαρακτηριστικών των υφασμάτων. Οι προτεινόμενες αυτές μέθοδοι ελέγχου που δεν χρησιμοποιούν ποσοτικοποιημένα μοντέλα του υφάσματος αποδεικνύεται ότι υπερισχύουν των υπαρχόντων μεθόδων κλασικού ελέγχου, που περιόριζαν την ευελιξία του συστήματος ελέγχου καθώς ήταν αυστηρά εξαρτώμενες από τα χαρακτηριστικά και τις ποσοτικές εκτιμήσεις των ιδιοτήτων του κάθε υφάσματος. 3.1 Εισαγωγή. Μέσα από την παρούσα διατριβή, είναι η πρώτη φορά που παρουσιάζεται μία συνολική προσέγγιση του προβλήματος της αυτοματοποίησης της ραφής υφασμάτων. Αυτό επιτυγχάνεται με τη χρήση μεθόδων υπολογιστικής νοημοσύνης, μέσα σε μία ιεραρχική δομή ελέγχου, για τη διαχείριση των διαδικασιών και των ποιοτικών χαρακτηριστικών/ιδιοτήτων των υφασμάτων.

62 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ 3.2 Συνολική ιεραρχική δομή συστήματος αυτοματοποίησης της ραφής. Το προτεινόμενο ιεραρχικό σύστημα ρυθμίσεων, εκτιμήσεων, αποφάσεων και ελέγχου βασίζεται στην ιδέα της ιεραρχικής αλληλουχίας διαδικασιών που φαίνεται στο Σχ Οι βασικές εργασίες/στόχοι που υλοποιούνται μέσα από αυτήν την προσέγγιση είναι: η διόρθωση των πτυχώσεων, η αρχική θέση του ρομπότ και η ραφή. 1 2 Α Β Γ Δ Σχ. 3.1 Ιεραρχική αλληλουχία διαδικασιών κατά τη ραφή. Η ιεραρχική δομή των διαδικασιών χωρίζεται σε δύο φάσεις: 1) στις προκαταρκτικές εργασίες για τη ραφή και 2) στις εργασίες για τον έλεγχο της ραφής. Η γνώση και η εμπειρία των ειδικών επαγγελματιών, στο χώρο της ραφής υφασμάτων, συγκεντρώνεται στα πρώτα ιεραρχικά επίπεδα στις προκαταρκτικές εργασίες, στην εκτίμηση των ιδιοτήτων και στον καθορισμό της επιθυμητής τάνυσης. Το προτεινόμενο σχήμα ελέγχου διαχειρίζεται και επεξεργάζεται ποσοτική αλλά και ποιοτική γνώση στα διάφορα ιεραρχικά επίπεδα ούτως ώστε να ράψει μονά ή και διπλά υφάσματα. Ο στόχος της προτεινόμενης μεθόδου είναι ένα αυτόνομο και ευέλικτο σύστημα και ως εκ τούτου χρησιμοποιήθηκαν ευφυείς μέθοδοι για τον χειρισμό της ποιοτικής γνώσης και της εμπειρίας των ειδικών επαγγελματιών (ράπτριες). Μέθοδοι όπως τα νευρωνικά δίκτυα και η ασαφής λογική χρησιμοποιήθηκαν σε όλα τα επίπεδα του ιεραρχικού συστήματος για να επιτευχθεί η επιθυμητή ευελιξία και προσαρμοστικότητα του συστήματος. Η συνολική ιεραρχική δομή του συστήματος με την ανάλυση των επί μέρους τμημάτων φαίνεται στο Σχ Οι τρεις βασικές εργασίες/στόχοι φαίνονται μέσα στα μπλε πλαίσια στα δεξιά του σχήματος. Το έμπειρο σύστημα που περιγράφηκε στο Κεφ. 2.4 καθορίζει τις αρχικές προδιαγραφές για κάθε μία από αυτές τις εργασίες, δηλαδή τις απαιτήσεις σε αισθητήρες και σε σχήμα ελέγχου. Όπου, για παράδειγμα για την εργασία Ραφή και στην περίπτωση που αυτή είναι ευθύγραμμη είναι: 44

63 Κεφ. 3 - Ιεραρχική δομή συστήματος ελέγχου της ραφής δηλαδή, ο αισθητήρας μηχανικής όρασης απενεργοποιημένος, ο αισθητήρας δύναμης ενεργοποιημένος και το σχήμα ελέγχου που απαιτείται είναι έλεγχος δύναμης. Όπως προαναφέρθηκε, το συνολικό ιεραρχικό σύστημα χωρίζεται σε δύο φάσεις, αυτή των προκαταρκτικών εργασιών και αυτή του ελέγχου της ραφής, οι οποίες και περιγράφονται στα παρακάτω Ιεραρχική δομή συστήματος προκαταρκτικών εργασιών. Στην πρώτη φάση των προκαταρκτικών εργασιών γίνεται η διόρθωση των πτυχώσεων και η εύρεση της αρχικής θέσης του ρομπότ πάνω στο ύφασμα, όπως φαίνεται στο Σχ Στην πρώτη προκαταρκτική εργασία, κατά την τοποθέτηση του υφάσματος πάνω στην τράπεζα εργασίας μπορεί να εμφανιστούν πτυχώσεις οι οποίες πρέπει να διορθωθούν πριν αρχίσει η διαδικασία της ραφής. Αυτό γίνεται εκπαιδεύοντας ένα νευρωνικό δίκτυο που αναπτύχθηκε για να αναγνωρίζει την πτύχωση χρησιμοποιώντας μηχανική όραση. Η έξοδος του νευρωνικού δικτύου είναι η διεύθυνση της πτύχωσης πάνω στο ύφασμα. Από αυτήν παράγεται η διεύθυνση κίνησης του ρομπότ για να διορθωθεί η πτύχωση. Στη δεύτερη προκαταρκτική εργασία, αναπτύχθηκε ένα σύστημα απόφασης βασισμένο σε ασαφή λογική το οποίο καθορίζει την αρχική θέση του ρομπότ πάνω στο ύφασμα σύμφωνα με τον τύπο και την ευκαμπτότητα του κάθε υφάσματος. Τα απαραίτητα δεδομένα, τύπος και ευκαμπτότητα, εισάγονται από τον άνθρωπο ή δυνητικά από μία αυτοματοποιημένη κλασική διαδικασία καταγραφής των χαρακτηριστικών του υφάσματος. Η εκτέλεση αυτής της εργασίας βοηθάει στην εξάλειψη του φαινομένου της εμφάνισης πτυχώσεων κατά τη μετακίνηση του υφάσματος πάνω στο τραπέζι. Η έξοδος της εργασίας μπορεί να είναι προς την επόμενη φάση της ραφής (εάν έχει ολοκληρωθεί η διαδικασία της μετακίνησης) ή μπορεί να γυρίζει πάλι πίσω στην εργασία για να ελέγχεται σε πραγματικό χρόνο η εμφάνιση πτυχώσεων κατά τη διάρκεια της μετακίνησης του υφάσματος. Και οι δύο αυτές προκαταρκτικές εργασίες αναλύονται διεξοδικά στο Κεφ. 4. Μετά από αυτήν την πρώτη φάση, των προκαταρκτικών εργασιών, ακολουθεί το ιεραρχικό σύστημα ελέγχου της διαδικασία της ραφής που είναι και το κύριο αντικείμενο της διατριβής. 45


64 1 2 Α Β Δ Γ Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 3.2 Συνολική ιεραρχική δομή συστήματος αυτοματοποίησης της ραφής με ρομπότ. 46
65 Κεφ. 3 - Ιεραρχική δομή συστήματος ελέγχου της ραφής Ιεραρχική δομή συστήματος ελέγχου της ραφής. Στη δεύτερη φάση γίνεται ο έλεγχος της ραφής μονών ή διπλών υφασμάτων. Στόχος αυτής της φάσης είναι να υλοποιηθεί η ραφή μέσω του ελέγχου τάνυσης του υφάσματος που με τη σειρά του απαιτεί την εύρεση της κατάλληλης επιθυμητής τάνυσης. Το ιεραρχικό σύστημα ελέγχου της ραφής, το οποίο φαίνεται αναλυτικά στο Σχ. 3.3, αποτελείται από τα παρακάτω τέσσερα τμήματα: Α. Εκπαιδευμένο νευρωνικό δίκτυο για την εκτίμηση της εκτατότητας των υφασμάτων. Σε αυτό το υψηλότερο ιεραρχικά επίπεδο εκτιμάται η εκτατότητα του κάθε υφάσματος μέσω του πειράματος εφελκυσμού που εκτελείται από το ρομπότ. Εναλλακτικά, εάν είναι διαθέσιμη αυτή η πληροφορία μπορεί να δύνεται από τον άνθρωπο ή από ένα αυτοματοποιημένο σύστημα εφόσον το υπό ραφή ύφασμα είναι ήδη γνωστό στο ιεραρχικό σύστημα ελέγχου. Β. Ασαφές σύστημα για τον καθορισμό της επιθυμητής τάνυσης του υφάσματος. Αυτό το ενδιάμεσο ιεραρχικά επίπεδο είναι υπεύθυνο για τον καθορισμό της επιθυμητής τάνυσης που πρέπει να εφαρμοστεί κατά τη διάρκεια της ραφής. Τα δεδομένα της εκτατότητας και της διεύθυνσης της ραφής είναι απαραίτητα για αυτό το επίπεδο. Γ. Νευρωνικός ελεγκτής δύναμης. Το κατώτερο ιεραρχικά αυτό επίπεδο ελέγχει τη δύναμη τάνυσης κατά τη διάρκεια της ραφής. Δ. Αποθηκευμένη εμπειρία. Σε αυτό το τμήμα, γίνεται η (ανα-)προσαρμογή του συστήματος, δηλαδή η κεκτημένη εμπειρία του συστήματος αποθηκεύεται κατάλληλα ούτως ώστε να χρησιμοποιηθεί στο μέλλον για τη ραφή ενός ίδιου ή παραπλήσιων ιδιοτήτων υφάσματος. Οι διαδικασίες σε αυτή τη δεύτερη φάση ξεκινάνε με το πείραμα του εφελκυσμού στο υποψήφιο για ραφή μονό ή διπλό ύφασμα. Στόχος αυτής της διαδικασίας (τμήμα ) είναι η εύρεση της εκτατότητας του υφάσματος που είναι η βασική και σημαντικότερη ιδιότητα η οποία μαζί με την διεύθυνση ραφής θα καθορίσει (τμήμα ) την επιθυμητή τάνυση που θα εφαρμοστεί κατά τη ραφή (τμήμα ). Εναλλακτικά, η εκτατότητα του κάθε υφάσματος μπορεί να δοθεί ως πληροφορία στο τμήμα είτε από τον άνθρωπο είτε από κάποια άλλη πηγή δεδομένων. Ομοίως, η επιθυμητή τάνυση θα μπορούσε να δοθεί ως πληροφορία στο τμήμα μέσω μίας άλλη πηγής δεδομένων αντί μέσω των προηγούμενων τμημάτων. Κατά αυτή την έννοια, φαίνεται η ανεξαρτητοποίηση του κάθε τμήματος της ιεραρχικής δομής του συστήματος και η δυνατότητα να λειτουργήσει αυτόνομα ή σε συνεργασία με τα προηγούμενα τμήματα. 47



66 Κατώτερο επίπεδο: έλεγχος Επίπεδο αποφάσεων: επιθυμητή τάνυση Υψηλό επίπεδο: ποιοτική εκτίμηση ιδιοτήτων Γραμμική τροχιά ρομπότ Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Πείραμα εφελκυσμού με ρομπότ Αισθητήρας Δύναμης (δύναμη, επιμήκυνση) Α Εκπαιδευμένο νευρωνικό δίκτυο για την εκτίμηση της εκτατότητας Διεύθυνση ραφής Εκτατότητα υφάσματος Β Ασαφές σύστημα για τον καθορισμό της επιθυμητής τάνυσης Επιθυμητή δύναμη τάνυσης (Fd) προσαρμογή Δ αποθηκευμένη εμπειρία + - Γ Νευρωνικός ελεγκτής δύναμης βήμα μετακίνησης ρομπότ Ένα ή δύο κομμάτια υφάσματος ελεγχόμενο σύστημα Αισθητήρας Δύναμης Σχ. 3.3 Ιεραρχικό σχήμα ελέγχου της ραφής υφασμάτων. 48
67 Κεφ. 3 - Ιεραρχική δομή συστήματος ελέγχου της ραφής Όπως φαίνεται και στο Σχ. 3.3, η πληροφορία της επιθυμητής τάνυσης διοχετεύεται στο τμήμα αλλά και στο τμήμα. Αυτό γίνεται για να χρησιμοποιηθεί η αποθηκευμένη εμπειρία του συστήματος, που υπάρχει στο τμήμα κατάλληλης αρχικοποίησης του νευρωνικού ελεγκτή., μέσω της Όλα τα παραπάνω τμήματα, αυτής της ιεραρχικής φάσης, αναλύονται διεξοδικά στα επόμενα Κεφάλαια 5, 6 και 7. 49
68
69 4 Προκαταρκτικές φάσεις πριν τη διαδικασία της ραφής Εισάγεται μία εναλλακτική μέθοδος για την αναγνώριση της διεύθυνσης των πτυχώσεων ενός υφάσματος [C3], το οποίο βρίσκεται πάνω σε μία τράπεζα εργασίας και έτοιμο για να αρχίσει η ραφή του, με σκοπό τη διόρθωσή τους από τον ρομποτικό βραχίονα. Για το σκοπό αυτό εκπαιδεύεται και χρησιμοποιείται ένα νευρωνικό δίκτυο ευθείας τροφοδότησης το οποίο χρησιμοποιεί δεδομένα από ένα σύστημα μηχανικής όρασης για την καταγραφή των πτυχώσεων. Παρουσιάζεται μία πρωτότυπη μελέτη για την κατάλληλη αρχική τοποθέτηση του άκρου εργασίας του ρομπότ πάνω στο ύφασμα [J1] ούτως ώστε να αποφεύγεται η δημιουργία πτυχώσεων κατά τη μετακίνησή του πάνω στο τραπέζι. Αυτή, βασίστηκε σε ένα μηχανισμό λήψης αποφάσεων βασισμένο σε ασαφή λογική και ποιοτικές εκτιμήσεις των ιδιοτήτων και των χαρακτηριστικών του υφάσματος όπως η ευκαμπτότητα και ο τύπος του. 4.1 Εισαγωγή Στο κεφάλαιο αυτό παρουσιάζονται οι δύο προκαταρκτικές εργασίες πριν τη διαδικασία της ραφής, όπως φαίνεται στο Σχ Οι εργασίες αυτές ανήκουν στην πρώτη φάση του συνολικού ιεραρχικού συστήματος όπως αυτό παρουσιάζεται στο Σχ. 3.1 και Σχ Οι εργασίες είναι η διόρθωση των πτυχώσεων Σχ. 4.1(1) και η αρχική θέση του ρομπότ Σχ. 4.1(2). Στην πρώτη [57], γίνονται οι διορθώσεις των πιθανών πτυχώσεων των υφασμάτων που βρίσκονται πάνω σε ένα τραπέζι πριν αυτά οδηγηθούν στη βελόνα της ραπτικής μηχανής αλλά και όταν αυτά βρίσκονται ήδη στη βελόνα και πριν αρχίσει η ραφή. Στη δεύτερη [51], εργασία αναζητείται η καλύτερη θέση της αρπάγης του ρομπότ επί του υφάσματος με σκοπό να μετακινηθεί αυτό μπροστά από τη βελόνα χωρίς να προκληθούν πτυχώσεις κατά τη μετακίνησή του ή να μειωθεί κατά το δυνατόν η πιθανότητα εμφάνισης της πτύχωσης.

70 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ 1 2 : κόμβος Or Σχ. 4.1 Προκαταρκτικές εργασίες πριν τη διαδικασία της ραφής. 4.2 Αναγνώριση-διόρθωση πτυχώσεων. Τα υφάσματα τα οποία πρόκειται να ραφτούν και βρίσκονται ήδη πάνω στο τραπέζι εργασίας μπορεί να εμφανίζουν πτυχώσεις όπως φαίνεται και στη φωτογραφία του Σχ Επίσης, μπορεί να εμφανίσουν πτυχώσεις κατά τη διάρκεια του χειρισμού τους (μετακίνηση ή/και περιστροφή) από το ρομπότ πάνω στο τραπέζι εργασίας ή ακόμα και κατά τη περιστροφή τους γύρω από τη βελόνα της ραπτικής μηχανής για να ραφτεί μία άλλη πλευρά του υφάσματος. Στην πρώτη περίπτωση της απλής μετακίνησης του υφάσματος, η πτύχωση μπορεί να εμφανιστεί σε μία ευθεία κάθετη προς αυτήν της μετακίνησης ενώ στις περιπτώσεις περιστροφής η πτύχωση μπορεί να εμφανιστεί οπουδήποτε πάνω στο ύφασμα. Γενικά η εμφάνιση των πτυχώσεων στα υφάσματα είναι ένα ανεπιθύμητο φαινόμενο για την πλειοψηφία των εργασιών χειρισμού υφασμάτων. Μία ενδεχόμενη προσέγγιση στο πρόβλημα της εξάλειψης των πτυχώσεων βασίζεται σε έμμεσες λύσεις [9]. Σε αυτές τα υφάσματα, κατά τη διαδικασία του χειρισμού τους, βρίσκονται υπό τάνυση με διάφορους τρόπους και πρακτικές. Έτσι το πρόβλημα μετατοπίζεται στον έλεγχο της εφαρμοζόμενης δύναμης και έμμεσα αποφεύγεται η πρόκληση πτυχώσεων. Από την άλλη, η μηχανική όραση έχει χρησιμοποιηθεί αρκετά στον ρομποτικό χειρισμό υφασμάτων όπως: στην αναγνώρισή/εύρεση της θέσης τους [76], στην εύρεση του προσανατολισμού τους και την περιστροφή τους [39] αλλά και στον ποιοτικό έλεγχο των υφασμάτων και των ραφών τους [69]. Είναι λοιπόν, εύκολο και πλεονεκτικό να χρησιμοποιηθεί η ήδη υπάρχουσα σε ένα σύστημα μηχανική όραση και για την εύρεση των πτυχώσεων. Η αναγνώριση των πτυχώσεων είναι ένα 3-διάστατο πρόβλημα, δεδομένου ότι η πτύχωση εμφανίζεται στην τρίτη διάσταση, το οποίο πρέπει να αντιμετωπιστεί μέσω δισδιάστατων εικόνων. Οι πτυχώσεις γίνονται δε αντιληπτές από την αλλαγή της φωτεινότητας του χρώματος του υφάσματος και κυρίως από την εμφάνιση της σκιάς. Οι μέθοδοι για την αναγνώριση των 3-δ χαρακτηριστικών των εικόνων περιλαμβάνουν πολύπλοκους αλγορίθμους και στερεοσκοπική όραση [68] τα οποία απαιτούν μεγάλους υπολογιστικούς χρόνους και πόρους. Για παράδειγμα, η μέθοδος shape from shading [77] βασίζεται σε μαθηματικές φόρμες οι οποίες πρέπει να τροποποιούνται ή να αλλάζουν όταν οι ιδιότητες και τα χαρακτηριστικά του 52
71 Κεφ.4 - Προκαταρκτικές φάσεις πριν τη διαδικασία της ραφής αντικειμένου αλλάζουν. Ενώ, οι 3-δ εικόνες περιέχουν πλεονάζουσες πληροφορίες γεγονός που επιβαρύνει τη διαδικασία επεξεργασίας τους. Τα νευρωνικά δίκτυα από την άλλη, έχουν χρησιμοποιηθεί στην επεξεργασία εικόνας σε διάφορες άλλες εφαρμογές [78] όπως: η αναγνώριση προτύπων (pattern recognition), η κατηγοριοποίηση (classification) κλπ. Ένα ισχυρό επιχείρημα για τη χρήση μεθόδων υπολογιστικής νοημοσύνης σε συνδυασμό με μηχανική όραση είναι η αβεβαιότητα του συγκεκριμένου προβλήματος που σχετίζεται με το περιβάλλον μέσα στο οποίο καλείται να λειτουργήσει ένα τέτοιο αυτοματοποιημένο σύστημα. Επίσης, οι δυσκολίες χειρισμού των υφασμάτων, που σχετίζονται με τη φύση τους αλλά και την απρόβλεπτη συμπεριφοράς τους, συνηγορούν προς την χρήση ευφυών και ευέλικτων μεθόδων. Αυτές οι μέθοδοι θα πρέπει επίσης να ενσωματώνουν χαρακτηριστικά παράλληλης επεξεργασίας για να μπορούν να ανταποκριθούν σε εφαρμογές πραγματικού χρόνου. Στην παρούσα προσέγγιση έγινε χρήση νευρωνικών δικτύων, ούτως ώστε να εξαχθούν μόνο οι απαραίτητες πληροφορίες που εμπεριέχονται σε μία εικόνα ενός υφάσματος με πτύχωση. Τα νευρωνικά δίκτυα μπορούν να υπερνικήσουν τις ανεπάρκειες και τις αδυναμίες των αναλυτικών μεθόδων, καθώς δεν χρειάζεται να αλλάξουν τη δομή τους και τις παραμέτρους τους για να πάρουν μία απόφαση όταν αλλάξει το αντικείμενο που εξετάζουν. Στην περίπτωσή μας, επίσης, δεν υπάρχει ανάγκη για μία αναλυτική και με λεπτομέρεια επεξεργασία εικόνας του πτυχωμένου υφάσματος. Χρειάζεται μόνο μία χονδρική εκτίμηση της διεύθυνσης της πτύχωσης του υφάσματος αγνοώντας και παρακάμπτοντας όλες τις υπόλοιπες πληροφορίες που εμπεριέχονται στην εικόνα. Μειώνοντας έτσι το απαιτούμενο υπολογιστικό κόστος. Απ την άλλη, μία οποιαδήποτε πηγή φωτισμού, η οποία θα είναι ικανή να δημιουργήσει έστω και μία υποτυπώδης σκιά, είναι αρκετή για να λειτουργήσει η διαδικασία αναγνώρισης Περιγραφή του προβλήματος αναγνώρισης και διόρθωσης των πτυχώσεων. Το πρόβλημα της αναγνώρισης και της διόρθωσης των πτυχώσεων περιγράφεται στο Σχ Μία κάμερα είναι τοποθετημένη πάνω από το τραπέζι εργασίας μπροστά από το ρομπότ και λαμβάνει εικόνες του υφάσματος. Οι εικόνες με τις πτυχώσεις καταγράφονται, ψηφιοποιούνται και χρησιμοποιούνται ως σετ εκπαίδευσης σε ένα νευρωνικό δίκτυο που εκπαιδεύεται να αναγνωρίζει τις πτυχώσεις. Στο Σχ. 4.3 φαίνονται δύο εικόνες που έχει καταγράψει η κάμερα. Μία με το ύφασμα χωρίς πτύχωση και μία με το ύφασμα να έχει εμφανίσει μία πτύχωση περίπου στις από τον οριζόντιο άξονα. 53






72 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Εικόνες με παραδείγματα πτυχώσεων Νευρωνικό Δίκτυο Ψηφιοποίηση εικόνων Σχ. 4.2 Αναγνώριση πτυχώσεων και εκπαίδευση νευρωνικού δικτύου. Σκοπός του συστήματος ελέγχου είναι να αναγνωρίσει την εκάστοτε πτύχωση ούτως ώστε να γίνουν οι απαραίτητες διορθωτικές κινήσεις του ρομποτικού βραχίονα για να την εξαφανίσει. Το διάγραμμα ελέγχου αυτής της διαδικασίας φαίνεται στο Σχ. 4.4, όπου η εικόνα που λαμβάνεται από το σύστημα μηχανικής όρασης εισάγεται στο εκπαιδευμένο για αυτό το σκοπό νευρωνικό δίκτυο το οποίο 54


73 Κεφ.4 - Προκαταρκτικές φάσεις πριν τη διαδικασία της ραφής μπορεί και αναγνωρίζει την ύπαρξη και τη διεύθυνση της πτύχωσης. Εν συνεχεία υπολογίζεται η διεύθυνση της κίνησης του ρομπότ για να επιτευχθεί η διόρθωση της πτύχωσης και λαμβάνεται νέα εικόνα του υφάσματος. Εάν διορθωθεί-εξαφανιστεί πλήρως η πτύχωση τότε το ρομπότ συνεχίζει την τροχιά που ακολουθούσε πριν εμφανιστεί η πτύχωση. Εάν δεν βρισκόταν σε κίνηση, τότε προχωράει στο επόμενο επίπεδο ελέγχου που είναι η εύρεση της αρχικής θέσης του ρομπότ επί του υφάσματος. Σχ. 4.3 Εικόνα ενός τμήματος του υφάσματος: α) χωρίς πτύχωση β) με πτύχωση. 1 : κόμβος Or Σχ. 4.4 Σχήμα ελέγχου αναγνώρισης πτυχώσεων. Οι προδιαγραφές και η δομή του συστήματος σχεδιάστηκαν έτσι ώστε να είναι ένα σύστημα το οποίο θα μπορεί να δουλέψει on-line κατά τη διάρκεια των χειρισμών των υφασμάτων από το ρομπότ. Έτσι, η προσπάθεια σχεδιασμού του συστήματος επικεντρώθηκε στη μείωση του απαιτούμενου υπολογιστικού κόστους καθώς και στη μείωση των απαραίτητων δεδομένων που θα υποστούν την επεξεργασία για την εξαγωγή των πληροφοριών. Στα παρακάτω περιγράφονται αναλυτικά οι προδιαγραφές του συστήματος, η δομή του νευρωνικού δικτύου, η εκπαίδευσή του και η λειτουργία του Νευρωνικό δίκτυο για την αναγνώριση των πτυχώσεων. Στο νευρωνικό δίκτυο εισάγουμε ως δεδομένα εισόδου απευθείας τα εικονοστοιχεία (pixel) της εικόνας και όχι κάποια χαρακτηριστικά τα οποία θα μπορούσαν να εξαχθούν από την εικόνα. Η προσέγγιση της εξαγωγής των χαρακτηριστικών της εικόνας [79] είναι μία τεχνική που χρησιμοποιείται ευρέως στην αναγνώριση προτύπων (pattern recognition). Παρόλα αυτά, δεν χρησιμοποιήθηκε αυτή η προσέγγιση καθώς θέλουμε να μειώσουμε το υπολογιστικό κόστος όσο 55
74 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ γίνεται περισσότερο ούτως ώστε να προσεγγίσουμε ένα σύστημα πραγματικού χρόνου. Έτσι, το ίδιο το νευρωνικό δίκτυο, μέσω της εκπαίδευσής του, καταφέρνει να εξάγει τα απαραίτητα χαρακτηριστικά της εικόνας. Η κάθε ασπρόμαυρη εικόνα έχει τη μορφή ενός δισδιάστατου πίνακα δεδομένων (πλάτος ύψος σε εικονοστοιχεία) όπου κάθε στοιχείο του αντιπροσωπεύει μία απόχρωση του γκρι. Αυτός ο πίνακας μετατρέπεται σε ένα διάνυσμα όπου τα στοιχεία του είναι τα εικονοστοιχεία της εικόνας αρχίζοντας από την πάνω αριστερή γωνία της και προχωρώντας προς τα κάτω και μετά δεξιά. Το διάνυσμα αυτό εισάγεται στο εκπαιδευμένο δίκτυο ως ένα σήμα εισόδου. Η έξοδος του νευρωνικού δικτύου είναι ένας αριθμός ο οποίος αντιπροσωπεύει την γωνία (από 0 έως ) της διεύθυνσης της πτύχωσης του υφάσματος ως προς την οριζόντια. Η εικόνα που χρησιμοποιείται ( εικονοστοιχεία) αποτελεί τμήμα της αρχικής εικόνας ( εικονοστοιχεία) που λαμβάνεται από την ψηφιακή κάμερα. Παρόλο που χρησιμοποιείται ένα μικρό τμήμα της αρχικής εικόνας, που περιλαμβάνει φυσικά την πτύχωση, αυτό είναι αρκετό για να περιγράψει το φαινόμενο της πτύχωσης και σχετικές πληροφορίες. Αυτό όμως, το μέγεθος ( = στοιχεία ή με άλλα λόγια νευρώνες στην είσοδο του δικτύου) είναι πολύ μεγάλο για το νευρωνικό δίκτυο. Όπως είναι γνωστό τα νευρωνικά δίκτυα με μεγάλο πλήθος νευρώνων στην είσοδο δεν καταφέρνουν να κάνουν σωστή κατηγοριοποίηση (classification) εξαιτίας της κατάρας της διαστατικότητας ( curse of dimensionality ) [79] και επίσης χαρακτηρίζονται από πολύ μεγάλο υπολογιστικό κόστος. Για αυτό τα αρχικά δεδομένα εισόδου (εικόνα εικονοστοιχεία) περνούν από μία προ-επεξεργασία ούτως ώστε να μειωθεί η διάσταση του διανύσματος εισόδου στο νευρωνικό δίκτυο, μειώνοντας έτσι και την ακρίβεια της αρχικής εικόνας. Η αρχική εικόνα περνάει από μία απλή διαδικασία ψηφιοποίησης, όπως φαίνεται στο Σχ. 4.5, μειώνοντας έτσι την αρχική της ανάλυση από σε εικονοστοιχεία. Από την σύγκριση των (α) και (β) εικόνων στο Σχ. 4.5, είναι φανερό ότι η απαραίτητη πληροφορία της διεύθυνσης της πτύχωσης υφίσταται ακόμα ξεκάθαρα στην εικόνα (β) με τη μειωμένη ακρίβεια. Με αυτόν τον τρόπο το υπολογιστικό κόστος μειώνεται σημαντικά. Έτσι, οι νευρώνες στην είσοδο του δικτύου μειώνονται δραστικά σε 20 20=400 νευρώνες. (α) (β) Σχ. 4.5 Πτύχωση υφάσματος α) αρχική εικόνα εικονοστοιχείων, β) ψηφιοποιημένη εικόνα εικονοστοιχείων. 56
75 Κεφ.4 - Προκαταρκτικές φάσεις πριν τη διαδικασία της ραφής Ο τύπος του νευρωνικού που επιλέχθηκε, για τη λύση του προβλήματος της αναγνώρισης της διεύθυνσης των πτυχώσεων, είναι ένα νευρωνικό δίκτυο ευθείας τροφοδότησης (Feedforward Neural Network-FNN) με χρήση του αλγορίθμου οπισθόδρομης διάδοσης του σφάλματος (error back propagation algorithm). Η επιλογή αυτή έγινε μετά από δοκιμή των περισσότερων νευρωνικών δικτύων [80] με σκοπό την εύρεση του δικτύου το οποίο προσεγγίζει καλύτερα το πρόβλημα. Επίσης, το δίκτυο αυτό επιλέχθηκε με βάση το κριτήριο του ότι είναι το πιο κοινό και ευρέως χρησιμοποιούμενο νευρωνικό δίκτυο και είναι εύκολο να υλοποιηθεί είτε σε λογισμικό (software) είτε σε υλικό (hardware). Η δομή του νευρωνικού δικτύου αποτελείται από τρία επίπεδα (layers): το επίπεδο εισόδου (input layer), το κρυμμένο επίπεδο (hidden layer) και το επίπεδο εξόδου (output layer), όπως φαίνεται και στο Σχ Το επίπεδο εισόδου έχει 400- νευρώνες που προκύπτουν από το διάνυσμα εισόδου της εικόνας το οποίο έχει 20 20=400 στοιχεία. Το κρυμμένο επίπεδο έχει 31-νευρώνες. Τέλος, το επίπεδο εξόδου έχει 1-νευρώνα καθώς αναζητάμε μία τιμή ως έξοδο από το δίκτυο, δηλαδή τη γωνία της πτύχωσης. Αυτή η δομή επιλέχθηκε ούτως ώστε να κρατηθεί το δίκτυο όσο το δυνατόν πιο απλό και ως εκ τούτου να μειωθεί το υπολογιστικό κόστος. Γ βάρη (w) πόλωση (b) εικόνα Γ Σ Σ βάρη (w) πόλωση (b) Σ γωνία πτύχωσης Σ Γ Επίπεδο εισόδου 400-νευρώνες Κρυμμένο επίπεδο 31-νευρώνες Επίπεδο εξόδου 1-νευρώνας Σ: σιγμοειδής νευρώνας Γ: γραμμικός νευρώνας Σχ. 4.6 Δομή νευρωνικού δικτύου για την αναγνώριση των πτυχώσεων. Στους νευρώνες του κρυμμένου επιπέδου και του επιπέδου της εξόδου χρησιμοποιήθηκε η σιγμοειδής συνάρτηση ενεργοποίησης η οποία δίνεται από τον τύπο (4.1): 57
76 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ ( ) (4.1) όπου, ο όρος ονομάζεται θερμοκρασία του νευρώνα [81], ο όρος είναι η είσοδος του νευρώνα και ( ) είναι η έξοδος του νευρώνα. Όσο μεγαλύτερη είναι η θερμοκρασία του νευρώνα τόσο πιο ομαλά μεταβάλλεται η σιγμοειδής. Κατά τη φάση της εκπαίδευσης του δικτύου, η περισσότερο χρησιμοποιούμενη τιμή της θερμοκρασίας είναι:. Ο καθορισμός του πλήθους των κρυμμένων νευρώνων είναι μία από τις πιο κρίσιμες επιλογές σε ένα νευρωνικό δίκτυο. Σε αρκετές περιπτώσεις προβλημάτων, ένας χονδρικός τρόπος επιλογής του πλήθους των κρυμμένων νευρώνων είναι ο κανόνας της γεωμετρικής πυραμίδας, που δίνεται από την Εξίσωση (4.2): (4.2) όπου, είναι το πλήθος των νευρώνων στο κρυμμένο επίπεδο, είναι το πλήθος των νευρώνων της εισόδου και είναι το πλήθος των νευρώνων της εξόδου. Ένα άλλο σημαντικό θέμα είναι η υπερ-τροφοδότηση (overfitting) του δικτύου. Σε μία τέτοια περίπτωση το δίκτυο αρχίζει να μαθαίνει μη-σημαντικές πληροφορίες από το σετ εκπαίδευσης με αποτέλεσμα να μην είναι ικανό να κάνει την αναζητούμενη σωστή κατηγοριοποίηση. Στο συγκεκριμένο πρόβλημα που εξετάζουμε, όπου υπάρχουν πάρα πολλά δεδομένα εισόδου αλλά και από κάθε φωτογραφία θα μπορούσαν να εξαχθούν πάρα πολλές πληροφορίες, το φαινόμενο της υπερ-τροφοδότησης είναι υπαρκτό. Έτσι, δεδομένου ότι μας ενδιαφέρει μόνο ο καθορισμός της διεύθυνσης της πτύχωσης, στόχος είναι να βρεθεί το ελάχιστο απαραίτητο πλήθος των κρυμμένων νευρώνων ούτως ώστε να δομηθεί ένα δίκτυο ικανό να κάνει σωστή κατηγοριοποίηση [82]. Έχοντας υπόψη τα παραπάνω και μετά από αρκετές δοκιμές, βρέθηκε ότι ο κανόνας (4.2) δεν πρέπει να εφαρμοστεί επακριβώς. Το νευρωνικό δίκτυο, με πλήθος κρυμμένων νευρώνων σύμφωνα με την Εξίσωση (4.2), δεν είναι ικανό να γενικεύσει και να κάνει σωστή κατηγοριοποίηση και έτσι προστέθηκαν επιπλέον κρυμμένοι νευρώνες πέραν των 20. Τελικά, χρησιμοποιήθηκαν 31 νευρώνες στο κρυμμένο επίπεδο για να εκπαιδευτεί το δίκτυο και να είναι ικανό να εξάγει το επιθυμητό χαρακτηριστικό από τις εισαγόμενες εικόνες. Τα ίδια αποτελέσματα μπορούν να επιτευχθούν και με λιγότερους νευρώνες (27 κρυμμένους νευρώνες) αλλά απαιτούνται περισσότερες επαναλήψεις εκπαίδευσης. Όπως προαναφέρθηκε, στο επίπεδο εξόδου υπάρχει μόνο ένας σιγμοειδής νευρώνας ο οποίος δίνει τιμές εξόδου που ανήκουν στο και μετά τη απαραίτητη κανονικοποίηση αντιστοιχούν στη γωνία της διεύθυνσης της πτύχωσης Εκπαίδευση και δοκιμή του νευρωνικού δικτύου. Όπως περιγράφηκε στα προηγούμενα οι είσοδοι στο νευρωνικό δίκτυο είναι τα εικονοστοιχεία της κάθε εικόνας. Κάθε εικόνα αντιστοιχεί σε ένα ύφασμα με μία πτύχωση σε συγκεκριμένη γωνία ή και σε μία εικόνα χωρίς πτύχωση. Οι γωνίες των 58

77 Κεφ.4 - Προκαταρκτικές φάσεις πριν τη διαδικασία της ραφής πτυχώσεων κυμαίνονται από έως. Θεωρούμε ότι είναι οι πτυχώσεις που είναι παράλληλες στον x-άξονα και βρίσκονται σε κάποιο σημείο μεταξύ της πάνω και κάτω πλευρά της εικόνας, όπως φαίνεται στο Σχ x y Σχ. 4.7 Περιπτώσεις εμφάνισης πτύχωσης στις. Το νευρωνικό δίκτυο πρέπει να είναι ικανό να αναγνωρίσει από τις εικόνες των υφασμάτων όλες τις διευθύνσεις της πτύχωσης σε οποιοδήποτε σημείο και αν αυτή εμφανιστεί. Έτσι, σχεδιάστηκε το σετ των εικόνων εκπαίδευσης, που φαίνεται στον Πιν. 4.1, το οποίο περιέχει 20 περιπτώσεις πτυχώσεων ως εξής: 18-περιπτώσεις με πτυχώσεις από έως με βήμα όπου η περίπτωση των συμπίπτει με αυτήν των 2-περιπτώσεις με πτυχώσεις στις και Όπως είναι κατανοητό στα πραγματικά προβλήματα, μία πτύχωση μπορεί να εμφανιστεί οπουδήποτε εντός της εικόνας. Για παράδειγμα, μία πτύχωση στις μπορεί να εμφανιστεί στο κάτω μέρος της εικόνας, στη μέση ή στο πάνω μέρος της εικόνας. Ενώ μία πτύχωση στις μπορεί να εμφανιστεί στο αριστερό μέρος της εικόνας, στο κέντρο της ή στο δεξί μέρος της εικόνας κλπ. Για το λόγο αυτό, εντάξαμε στο σετ εκπαίδευσης τις τρεις αυτές πιθανές περιπτώσεις εμφάνισης της πτύχωσης σε κάθε μία από τις γωνίες της πτύχωσης. Ο Πιν. 4.1, παρουσιάζει σε κάθε του γραμμή ένα ύφασμα με την ίδια γωνία πτύχωσης αλλά σε διαφορετικές θέσεις εντός της εικόνας. Στην γραμμή 21 παρουσιάζεται η μία και μοναδική περίπτωση της εικόνας χωρίς πτύχωση καθώς το δίκτυο θα πρέπει επίσης να αποφασίζει εάν μία πτύχωση υπάρχει μέσα στην εικόνα ή όχι. Τελικά, το δίκτυο που εκπαιδεύτηκε με αυτό το σετ εκπαίδευσης έχει την ικανότητα να γενικεύει μέσα στο πλαίσιο ενός ρεαλιστικού προβλήματος όπου μία πτύχωση μπορεί να εμφανιστεί οπουδήποτε εντός της εικόνας. Πιν. 4.1 Εικόνες του σετ εκπαίδευσης και περιπτώσεις πτυχώσεων. Εικόνα Γωνία Πτύχωση ς Πτύχωση κάτω αριστερά ή Πτύχωση στη μέση Πτύχωση πάνω ή δεξιά Επιθυμητ ή έξοδος












78 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ χωρίς πτύχωση 0 Θα πρέπει επίσης να σημειωθεί ότι εξετάζεται η εκδοχή της ύπαρξης μίας μόνο πτύχωσης και όχι περισσοτέρων. Επίσης, αυτή η πτύχωση θεωρείται ότι είναι ή τουλάχιστον προσεγγίζει μία ευθεία γραμμή. Αυτές οι δύο παραδοχές καλύπτουν την πλειοψηφία των πιθανών περιπτώσεων εμφάνισης πτυχώσεων σε ένα ύφασμα το οποίο βρίσκεται πάνω σε ένα τραπέζι. Παρόλο που το σύστημα εκπαιδεύεται με ευθύγραμμες πτυχώσεις, αυτό δεν είναι περιοριστικό και θα μπορούσε να δώσει ως ένα βαθμό αποτελέσματα και για πτυχώσεις που ένα τμήμα τους είναι ευθύγραμμο. Τελικά, το σετ εκπαίδευσης αποτελείται συνολικά από 61 εικόνες. Μετά από πολλές δοκιμές, βρέθηκε ότι οι 61 εικόνες που αποτελούν το συνολικό σετ εκπαίδευσης πρέπει να τροφοδοτηθούν στο δίκτυο με συγκεκριμένο 60
79 Κεφ.4 - Προκαταρκτικές φάσεις πριν τη διαδικασία της ραφής τρόπο ούτως ώστε να επιτευχθεί η επιθυμητή εκπαίδευση του δικτύου αλλά και η ικανοποιητική λειτουργία του. Όπως φαίνεται και στον Πιν. 4.1, οι εικόνες εκπαίδευσης χωρίζονται σε τρεις κατηγορίες. Η πρώτη κατηγορία (η πρώτη στήλη στον πίνακα) περιέχει τις εικόνες με τις 20 περιπτώσεις γωνιών πτύχωσης καθώς και την εικόνα χωρίς πτύχωση. Η δεύτερη και τρίτη κατηγορία (δεύτερη και Τρίτη στήλη στον πίνακα) περιέχουν τις εικόνες με τις ίδιες γωνίες αλλά με τις πτυχώσεις να εμφανίζονται σε διαφορετικές θέσεις. Αυτές οι κατηγορίες εισάγονται στο δίκτυο, για την εκπαίδευσή του, με την σειρά που παρουσιάζονται (από πάνω προς τα κάτω και μετά δεξιά) και όχι με κάποιον άλλο τρόπο. Για κάθε εικόνα -παράδειγμα εκπαίδευσης- πρέπει να καθοριστεί η επιθυμητή έξοδος (γωνία πτύχωσης) του δικτύου. Δεδομένου ότι στην έξοδο έχει χρησιμοποιηθεί σιγμοειδής νευρώνας οι επιθυμητές τιμές εξόδου κανονικοποιήθηκαν μεταξύ των τιμών 0 και 1 με βήμα Οι επιθυμητές τιμές εξόδου για κάθε περίπτωση φαίνονται στην τελευταία στήλη του Πιν Η περίπτωση της εικόνας χωρίς πτύχωση θεωρήθηκε ότι θα έχει ως επιθυμητή έξοδο το 0. Η περίπτωση της πτύχωσης στις έχει ως επιθυμητή έξοδο το 0.05 ενώ η περίπτωση με πτύχωση στις έχει ως επιθυμητή έξοδο το 0.1 κλπ. Το σφάλμα το οποίο χρησιμοποιήθηκε στον αλγόριθμο εκπαίδευσης (οπισθόδρομης διάδοσης του σφάλματος) είναι η διαφορά ανάμεσα στην κανονικοποιημένη γωνία της πτύχωσης και στην πραγματική έξοδο του νευρωνικού δικτύου. Ανάμεσα στο επίπεδο εισόδου και στο κρυμμένο υπάρχουν =12400 βάρη και 31 πολώσεις. Ανάμεσα στο κρυμμένο και στο επίπεδο εξόδου υπάρχουν 31 1=31 βάρη και 1 πόλωση. Μία συνηθισμένη τακτική κατά τη διαμόρφωση των νευρωνικών δικτύων [83] είναι ο καθορισμός των αρχικών τιμών των βαρών και των πολώσεων με τυχαίες τιμές στο. Όλες οι προσπάθειες να εκπαιδευτεί το δίκτυο με αυτήν την αρχικοποίηση απέτυχαν. Τελικά, το δίκτυο εκπαιδεύτηκε επιτυχώς χρησιμοποιώντας ως αρχικές τιμές αυτές που προτείνουν οι Pandya and Macy [81], δηλαδή τυχαίοι αριθμοί στο. Για τα πειράματα χρησιμοποιήθηκε μία Pulnix CCD κάμερα και μία κάρτα εικόνας της Data Translation με το απαραίτητο λογισμικό συλλογής εικόνων. Οι εικόνες που χρησιμοποιήθηκαν για την εκπαίδευση του δικτύου αλλά και τη δοκιμή πάρθηκαν με μία συγκεκριμένη διαδικασία. Ένα κομμάτι μονόχρωμου υφάσματος τοποθετείται σε ένα τραπέζι και δημιουργούνται οι επιθυμητές πτυχώσεις. Για την φωτογράφιση χρησιμοποιήθηκε μία τυχαία πηγή φωτός (κοινή λάμπα) για να δημιουργηθούν οι σκιές της πτύχωσης. Στις 61 εικόνες (σε αποχρώσεις του γκρι), πέραν της ψηφιοποίησης για τη μείωση του μεγέθους τους, μεταβλήθηκε και η αντίθεσή τους (contrast) για να χρησιμοποιηθούν τελικά για την εκπαίδευση. Με τη χρήση κατωφλιών στην απόχρωση των εικονοστοιχείων της εικόνας, αυτά τα οποία είναι πολύ κοντά στο μαύρο (κοντά στην πτύχωση) μετατρέπονται σε μαύρα ενώ αυτά που είναι πολύ κοντά στο άσπρο μετατρέπονται σε άσπρα και τα υπόλοιπα ακολουθούν επιπλέον διαβαθμίσεις, όπως φαίνεται στο Σχ Με αυτόν τον τρόπο δημιουργούμε έντονη αντίθεση (αυξάνουμε το contrast) στην εικόνα και επιτρέπουμε στο δίκτυο να αναγνωρίσει πιο εύκολα την πτύχωση. 61
80 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 4.8 Ασπρόμαυρη εικόνα (της εικόνας 16 με πτύχωση στη μέση). Στα διαγράμματα των Σχ. 4.9 και Σχ φαίνονται ενδεικτικά τα δεδομένα εισόδου στο νευρωνικό δίκτυο. Στο Σχ. 4.9, φαίνεται η περίπτωση της εικόνας 1 όπου η πτύχωση παρουσιάζεται στις και εμφανίζεται στη μέση της εικόνας. Ενώ στο Σχ. 4.10, φαίνεται η περίπτωση της εικόνας 1 όπου έχει την ίδια γωνία πτύχωσης αλλά αυτή εμφανίζεται στην πάνω πλευρά της εικόνας. 1,10 0,90 0,70 0,50 0,30 0, ,10 Σχ. 4.9 Δεδομένα εισόδου για την εικόνα 1 με πτύχωση στη μέση της εικόνας. 62
81 Κεφ.4 - Προκαταρκτικές φάσεις πριν τη διαδικασία της ραφής 1,10 0,90 0,70 0,50 0,30 0, ,10 Σχ Δεδομένα εισόδου για την εικόνα 1 με πτύχωση εικόνας. στην πάνω πλευρά της Το νευρωνικό δίκτυο με τα παραπάνω χαρακτηριστικά και δομή χρειάζεται επαναλήψεις, όπου κάθε επανάληψη νοείται η είσοδος στο δίκτυο μίας εικόνας από τις 61 συνολικά. Μετά από την εκπαίδευσή του το δίκτυο είναι ικανό να αναγνωρίζει το 100% των δεδομένων εκπαίδευσης (61 εικόνες με συγκεκριμένες πτυχώσεις). Επίσης, το δίκτυο ελέγχθηκε για την αναγνώριση εικόνων (για τις οποίες δεν είχε εκπαιδευτεί) που είχαν τυχαίες πτυχώσεις με το ποσοστό επιτυχίας περίπου στο 90% Συμπεράσματα. Το αποτέλεσμα του νευρωνικού δικτύου είναι η γωνία της πτύχωσης σύμφωνα με το σύστημα αναφοράς που έχει ορισθεί. Από αυτήν τη γωνία εύκολα εξάγεται η διεύθυνση κίνησης του ρομπότ για να διορθωθεί η πτύχωση. Η διεύθυνση αυτή είναι κάθετη πάνω στη διεύθυνση της πτύχωσης και περνάει από το μέσον της. Η κατεύθυνση της κίνησης του ρομπότ πάνω σε αυτή τη διεύθυνση εξαρτάται από την θέση του σώματος του ρομπότ, από τη θέση της πτύχωσης καθώς και από τη θέση της ραπτικής μηχανής, όπως φαίνεται στο Σχ δύο είναι τα πιθανά σημεία εφαρμογής της αρπάγης πάνω στο ύφασμα. Το πιο θα επιλεγεί εξαρτάται από τη συνολική διάταξη και συνήθως είναι προς την αντίθετη πλευρά από αυτήν που βρίσκεται η ραπτική μηχανή. Από τα αποτελέσματα φαίνεται ότι το σύστημα μπορεί να παράγει πληροφορίες τρισδιάστατων χαρακτηριστικών, όπως αυτό της διεύθυνσης μιας πτύχωσης σε ένα ύφασμα, χρησιμοποιώντας δεδομένα μίας 2-δ εικόνας με χρήση μίας μόνο κάμερας. Το εκπαιδευμένο νευρωνικό δίκτυο είναι ικανό να αναγνωρίσει τις γωνίες των πτυχώσεων σε ικανοποιητική απόδοση. Σημαντικός, σε αυτό, είναι ο παράγοντας του φωτισμού ο οποίος δημιουργεί τις απαραίτητες σκιές. Ο σωστός φωτισμός (η σωστή γωνία και φωτεινότητα) είναι καθοριστικός παράγοντας και μπορεί να κάνει το σύστημα ανεξάρτητο ή όχι από τις συνθήκες του περιβάλλοντος. Αυτό το αντικείμενο όμως ξεφεύγει από τους στόχους της παρούσας διατριβής καθώς αποτελεί κυρίως αντικείμενο επεξεργασίας εικόνων. 63
82 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Η συγκεκριμένη μέθοδος μπορεί να επεκταθεί και να εφαρμοστεί στην εύρεση του προσανατολισμού ενός αντικειμένου, όπως το ύφασμα, πάνω σε ένα τραπέζι. Ενώ το ίδιο νευρωνικό θα μπορούσε να εκπαιδευτεί για να αναγνωρίζει την απόκλιση της διεύθυνσης ενός υφάσματος από μία σταθερή διεύθυνση. Για παράδειγμα, θα μπορούσε να χρησιμοποιηθεί κατά τη ραφή για την εύρεση της διεύθυνσης της ακμής του υφάσματος σε μία μικρή περιοχή μπροστά από τη βελόνα της ραπτικής μηχανής, όπως γίνεται στο [39] με άλλες όμως μεθόδους. Σε μία δυνητική εφαρμογή, θα μπορούσε να γίνεται διόρθωση του προσανατολισμού του υφάσματος (περιστροφή γύρω από τη βελόνα), με βάση τη διεύθυνση της ακμής του, ούτως ώστε η ραφή να έχει συγκεκριμένη απόσταση από το περίγραμμά του. 4.3 Αρχική τοποθέτηση του ρομπότ πάνω στο ύφασμα. Πριν από την έναρξη της ραφής τα υφάσματα πρέπει να τοποθετηθούν κάτω από τη βελόνα. Αυτό προϋποθέτει ότι το ρομπότ πρέπει να σπρώξει τα υφάσματα από μία αρχική θέση μέχρι τη βελόνα. Ακόμα και αυτή η φαινομενικά εύκολη εργασία εμπεριέχει πολλές δυσκολίες που πηγάζουν κυρίως από τις μη-γραμμικές ιδιότητες των υφασμάτων. Για να αποφευχθεί η σύγκρουση του άκρου εργασίας του ρομπότ με τη βελόνα και τη ραπτομηχανή, το ρομπότ δεν πρέπει να πιάσει το ύφασμα από την άκρη του και να το τραβάει προς τη ραπτομηχανή, που θα ήταν ή εύκολη προσέγγιση. Αντιθέτως, πρέπει να το πιάσει από λίγο πιο μέσα και να αφήσει ένα τμήμα ελεύθερο. Μολονότι, το μεγαλύτερο τμήμα του υφάσματος τραβιέται προς τη ραπτομηχανή, το ελεύθερο τμήμα του σπρώχνεται προς τη ραπτομηχανή και εξαιτίας της τριβής του με το τραπέζι αναπτύσσονται στο ύφασμα δυνάμεις συμπίεσης. Όταν το μήκος του ελεύθερου τμήματος του υφάσματος είναι αρκετά μεγάλο τότε εμφανίζονται πτυχώσεις στο ύφασμα οι οποίες προκαλούν προβλήματα στην εκτέλεση της εργασίας. Η δεύτερη κατά σειρά προκαταρκτική εργασία πριν τη διαδικασία της ραφής ονομάζεται αρχική θέση του ρομπότ. Στην εργασία αυτή αναζητείται η καλύτερη θέση της αρπάγης του ρομπότ επί του υφάσματος με σκοπό να μετακινηθεί αυτό μπροστά από τη βελόνα χωρίς να προκληθούν πτυχώσεις κατά τη μετακίνησή του ή να μειωθεί κατά το δυνατόν η πιθανότητα εμφάνισης της πτύχωσης. Στο Σχ φαίνεται το άκρο εργασίας του ρομπότ το οποίο τοποθετείται πάνω στο ύφασμα, σε μία απόσταση L από την ελεύθερη άκρη του, με σκοπό να το μετακινήσει προς τη ραπτική μηχανή. 64



83 Κεφ.4 - Προκαταρκτικές φάσεις πριν τη διαδικασία της ραφής Σχ Αρχική τοποθέτηση του άκρου εργασίας του ρομπότ. Για κάθε τύπο υφάσματος υπάρχει ένα κρίσιμο μέγιστο μήκος L όπου το ύφασμα μπορεί να σπρώχνεται χωρίς να δημιουργείται πτύχωση. Για τιμές του L μεγαλύτερες από την κρίσιμη τιμή εμφανίζεται πτύχωση όπως φαίνεται στο Σχ Για το λόγο αυτό, το άκρο εργασίας του ρομπότ θα πρέπει να τοποθετείται σε μία απόσταση από το ελεύθερο άκρο του υφάσματος μικρότερη ή ίση του L. Σχ Εμφάνιση πτύχωσης σε μετακινούμενο ύφασμα. 65
84 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Το πρόβλημα της εύρεσης του κρίσιμου μήκους L, ούτως ώστε να μη δημιουργηθεί πτύχωση στο ύφασμα, έχει ερευνηθεί από τον D. Gershon [3] [84]. Το μήκος αυτό συνδέεται άμεσα με τις ιδιότητες του εκάστοτε υφάσματος. Οι βασικές ιδιότητες από τις οποίες εξαρτάται η έναρξη της πτύχωσης είναι ο συντελεστής τριβής ( ), ανάμεσα στο ύφασμα και το τραπέζι, και ο λόγος ( ), όπου είναι η δυσκαμψία (bending rigidity) του υφάσματος, και είναι το βάρος ανά μονάδα επιφάνειας. Από την αναλυτική λύση του προβλήματος [3] η πτύχωση του υφάσματος εμφανίζεται όταν: (4.3) Για να καθορίσει την έναρξη της πτύχωσης ο D. Gershon στο [84] παρουσίασε μία μαθηματική ανάλυση βασισμένη σε ενεργειακές μεθόδους και συνδυασμό εμπειρικών και αναλυτικών σχέσεων. Από αυτήν τη μελέτη είναι ξεκάθαρο ότι το κρίσιμο μήκος L που δίνεται από την Εξίσωση (4.3) είναι πολύ μικρότερο από αυτό που παρατηρήθηκε και καταγράφηκε από τον D.Gershon στο [84]. Τελικά, η μελέτη του καταλήγει με την παρουσίαση των πραγματικών τιμών του κρίσιμου μήκους L που εξαρτάται κυρίως από τον λόγο, ενώ ο συντελεστής τριβής ( ) θεωρείται ότι έχει μία σταθερή τιμή 0.44 για λείες και καθαρές επιφάνειες. Καθώς ο λόγος αυξάνεται, η ευκαμπτότητα (flexibility) του υφάσματος μειώνεται και έτσι το κρίσιμο μήκος L αυξάνεται. Συγκεκριμένα, ο D.Gershon αναφέρει: Για πλεκτά υφάσματα η τιμή του κυμαίνεται από 0.2 μέχρι 2. Το ύφασμα είναι πολύ εύκαμπτο και έτσι η τιμή του κρίσιμου μήκους L είναι πολύ μικρή. (μεταξύ 10~35cm) Για επεξεργασμένα (finished) υφαντά υφάσματα,. Έτσι το κρίσιμο μήκος L κυμαίνεται μεταξύ 35~80cm Για loomstate 27 υφαντά υφάσματα,. Tο κρίσιμο μήκος L κυμαίνεται μεταξύ 80~140cm Για μη-επεξεργασμένα (unfinished) σφυχτοπλεγμένα υφάσματα ο λόγος είναι μεγαλύτερος από 20. Η ευκαμπτότητα του υφάσματος είναι πολύ μικρή και έτσι η τιμή του κρίσιμου μήκους L είναι πολύ μεγάλη (μεγαλύτερη από 140cm) Όπως συνέχεια τονίζεται, στην παρούσα διατριβή, στόχος είναι η εισαγωγή νέων μεθόδων για την ανάπτυξη ενός συστήματος το οποίο θα είναι ευέλικτο και 27 Loomstate fabric is fabric as it comes off the loom. Unsinged, raw, unsanforized, unstabilised, unskewed. For years, this type of fabric has been obscure, almost forgotten. When you wash it, it shrinks, it twists, it gets hairy. It is awkward, ornery stuff, and it fell out of use. Now, I hope, people are starting to love it. 66

85 Κεφ.4 - Προκαταρκτικές φάσεις πριν τη διαδικασία της ραφής ανεξάρτητο από τις ιδιότητες των υφασμάτων. Επομένως, όλη η παραπάνω πληροφορία και γνώση συγκεντρώθηκε και φιλτραρίστηκε από τις καθαρά μηχανικές ιδιότητες του υφάσματος για να μπορεί να χρησιμοποιηθεί με έναν ευέλικτο τρόπο στο συνολικό ιεραρχικό σύστημα. Η πρωτότυπη προσέγγιση που ακολουθήθηκε περιγράφεται στο Σχ Για να λειτουργήσει αυτό το σχήμα ελέγχου, πρέπει να τροφοδοτηθεί με τα δεδομένα της ευκαμπτότητας και του τύπου του υφάσματος. Στην συγκεκριμένη υλοποίηση τα δύο αυτά δεδομένα εισάγονται από τον εκάστοτε έμπειρο χειριστή του συστήματος με μία εκτίμηση που κάνει ή με πληροφορίες που μπορεί να έχει από τη διαδικασία παραγωγής των υφασμάτων. Τα δύο δεδομένα εισάγονται σε ένα σύστημα αποφάσεων βασισμένο σε ασαφή λογική το οποίο εμπεριέχει οργανωμένη όλη την απαραίτητη γνώση για να καθορίσει το κρίσιμο μήκος L. Αυτό δίδεται στο ρομπότ ως αρχική θέση επί του υφάσματος για να προχωρήσει στη μετακίνησή του. : κόμβος Or Σχ Σχήμα ελέγχου για την αρχική τοποθέτηση του άκρου εργασίας του ρομπότ. Στον Πιν. 4.2 φαίνεται η προτεινόμενη προσέγγιση και η ανάλυση του συστήματος απόφασης που βασίζεται στην Ασαφή Λογική (Fuzzy Logic). Ο όρος ευκαμπτότητα (flexibility) αναπαριστάται από ένα δείκτη που αντιστοιχεί στην εκτίμηση έμπειρων χρηστών σχετικά με την ευκαμπτότητα του εκάστοτε υφάσματος. Η είσοδος του συστήματος ευκαμπτότητα υφάσματος, που φαίνεται στο Σχ. 4.13, καθορίζεται από το χρήστη με μία τιμή από 0 έως 100%. Πιν. 4.2 Ασαφείς κανόνες για την αρχική θέση του ρομπότ (κρίσιμο μήκος L). Ευκαμπτότητα μεγάλη μέτρια μικρή Τύπος Υφάσματος πλεκτό μικρό μέτριο μεγάλο finished woven μικρό μέτριο μεγάλο loomstate woven μικρό μέτριο μεγάλο unfinished tight μικρό μέτριο μεγάλο 67
86 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Οι τιμές για το κρίσιμο μήκος L που καθορίζεται από τον Πιν. 4.2 κυμαίνονται ως εξής: για πλεκτά υφάσματα (knitted): για επεξεργασμένα (finished) υφαντά υφάσματα (woven): για loomstate υφαντά (woven): και για μη-επεξεργασμένα σφυχτοπλεγμένα (unfinished tight): Αυτές οι τιμές δεν είναι αυστηρά περιοριστικές. Το μήκος L μπορεί να είναι ίσο ή μικρότερο από αυτό που καθορίζεται από το σύστημα απόφασης, καθώς αυτό είναι το μέγιστο επιτρεπτό. Οι περιπτώσεις όπου πρέπει να χρησιμοποιηθούν μικρότερα μήκη, από το κρίσιμο L, καθορίζονται από τους τεχνικούς περιορισμούς. Τέτοιοι είναι οι περιορισμοί του περιβάλλοντος (μικρό τραπέζι εργασίας), του ρομπότ (μικρή δυνατότητα εμβέλειας-reach) ή/και του αντικειμένου (μικρό κομμάτι υφάσματος). Για παράδειγμα, όταν η μέγιστη εμβέλεια (reach) του ρομπότ είναι μικρότερη από το κρίσιμο μήκος L που αποφασίζει το σύστημα τότε η απόσταση L καθορίζεται από την εμβέλεια του ρομπότ και όχι από το ιεραρχικό σύστημα ελέγχου. Η γνώση που συγκεντρώθηκε περιγράφεται από ένα σετ κανόνων, που φαίνεται στον Πιν Κάθε γραμμή του πίνακα είναι ανεξάρτητη από τις άλλες. Παρ όλα αυτά, παρουσιάζονται όλες μαζί σε έναν πίνακα καθώς κάθε γραμμή (κάθε ασαφές σετ) είναι η φυσική συνέχεια του προηγούμενου, δηλαδή η μεγαλύτερη τιμή του L μιας γραμμής είναι ίδια με την μικρότερη τιμή του L της επόμενης γραμμής. Υπό μία άλλη μορφή αναπαράστασης, η παραπάνω γνώση μπορεί να μετασχηματιστεί στη μορφή που φαίνεται στην Σχ. 4.14, όπου οι περιοχές που κυμαίνονται οι τιμές του L καθορίζονται σύμφωνα με τη θεωρία της ασαφούς λογικής. Οι δώδεκα ασαφείς κανόνες (fuzzy rules) που παρουσιάζονται στον Πιν. 4.2 έχουν την παρακάτω μορφή: Εάν τύπος υφάσματος = Και ευκαμπτότητα = Τότε μήκος = Η διαδικασία των 7-βημάτων ενός ασαφούς συστήματος που περιγράφεται από τον Zimmermann στο [85] ακολουθείται και εδώ η οποία είναι: Είσοδος (Input), Ασαφοποίηση (Fuzzification), Κανόνες (Rules), Αξιολόγηση Κανόνων (Rule Evaluation), Συνάθροιση εξόδων (Aggregation), Άρση Ασάφειας ή απόασαφοποίηση (Defuzzification) και Έξοδος (Output). Στο πρώτο βήμα της Εισόδου, καθορίζονται τα σήματα εισόδου. Στην δικιά μας περίπτωση και για κάθε έναν από τους τέσσερεις τύπους υφασμάτων έχουμε μία είσοδο την ευκαμπτότητα. Κατά τη διαδικασία Από-Ασαφοποίησης μετατρέπονται οι είσοδοι σε λεκτικές τιμές (linguistic values) και στις αντίστοιχες συναρτήσεις συγγενείας (membership functions). Κατά το βήμα της Αξιολόγησης των Κανόνων ή της μηχανής συμπερασμού (inference engine) χρησιμοποιείται ο τελεστής min, ενώ για τη συνάθροιση ο τελεστής max. Στο βήμα της Άρσης της Ασάφειας 68
87 Κεφ.4 - Προκαταρκτικές φάσεις πριν τη διαδικασία της ραφής χρησιμοποιείται η μέθοδος κεντρικής τιμής (centroid) ή (center of gravity) καθώς είναι η πιο ευρέως χρησιμοποιούμενη και έχει αρκετά επιθυμητά πλεονεκτήματα [86]. Στο τελευταίο βήμα της Εξόδου καθορίζεται η τιμή του κρίσιμου μήκους L. 69
88 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ small medium large small medium large % % knitted fabric flexibility critical length L (cm) small medium large small medium large % % 1 finished woven fabric flexibility critical length L (cm) small medium large small medium large % % 1 loomstate woven fabric flexibility critical length L (cm) small medium large small medium large % % 1 unfinished tight fabric flexibility critical length L (cm) Σχ Ασαφή σετ για τον καθορισμό του κρίσιμου μήκους L. 70
89 Κεφ.4 - Προκαταρκτικές φάσεις πριν τη διαδικασία της ραφής Τελικά, χρησιμοποιώντας αυτό το μήκος L εξασφαλίζεται ή τουλάχιστον μειώνεται η πιθανότητα να εμφανιστεί πτύχωση όταν πρόκειται να μετακινηθεί το ύφασμα πάνω στο τραπέζι. Πρέπει να τονισθεί ότι η παραπάνω μελέτη βασίστηκε στην παραδοχή του σταθερού συντελεστή τριβής μ για λεία και καθαρή επιφάνεια. Αλλά όταν μετά από κάποιους κύκλους εργασίας το τραπέζι αρχίζει και βρομίζει εξαιτίας του υφάσματος και της χρήσης τότε ο συντελεστής τριβής αυξάνεται και συνεπώς το κρίσιμο μήκος L πρέπει να μειωθεί για να εξασφαλιστεί ότι δεν θα εμφανιστεί πτύχωση. Εδώ έρχεται πάλι να παίξει το ρόλο της, η προεργασία της αναγνώρισης των πτυχώσεων. Όπως φαίνεται και στα Σχ. 4.1 και Σχ. 4.13, η ροή του ιεραρχικού ελέγχου επιστρέφει πάλι πίσω στην πρώτη προεργασία όπου ενεργοποιείται από την πιθανή εμφάνιση της πτύχωσης και όπου αποφασίζεται η διόρθωσή της και η μείωση του μήκους L για να συνεχιστεί η μετακίνηση ή να προχωρήσει στο επόμενο στάδιο (ραφή) εάν το ύφασμα βρίσκεται ήδη στην επιθυμητή θέση κάτω από τη βελόνα. 71
90

91 5 Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού Εισάγεται για πρώτη φορά στη διεθνή βιβλιογραφία η έννοια των λεκτικών μεταβλητών για την ποιοτική περιγραφή των ιδιοτήτων των υφασμάτων. Η προσέγγιση αυτή εξυπηρέτησε τον πρωταρχικό σκοπό της κατασκευής ενός ευέλικτου, ευφυή και όσο το δυνατόν λιγότερο εξαρτώμενου από το ίδιο το ύφασμα συστήματος ραφής. Με αυτόν τον τρόπο παρακάμφθηκαν οι δυσκολίες και οι περιορισμοί προγενέστερων συστημάτων που εφάρμοζαν κλασικές μεθόδους ελέγχου κατά τη ραφή και οι οποίες ήταν άμεσα εξαρτημένες από τις ιδιότητες του εκάστοτε υφάσματος. Στο πλαίσιο αυτό, εκφράζεται για πρώτη φορά, ποιοτικά σαν ποσοστό, η έννοια της εκτατότητας (extensibility) των υφασμάτων, που είναι μία βασική και καθοριστική ιδιότητά τους κατά την εργασία της ραφής τους. Αναπτύχθηκε μια νέα μέθοδος αυτοματοποιημένου πειραματικού προσδιορισμού της εκτατότητας των υφασμάτων [J2] και με αυτό τον τρόπο ανεξαρτητοποιήθηκε το σύστημα από την παρέμβαση του ανθρώπινου παράγοντα. Η πρωτότυπη αυτή προσέγγιση εφαρμόστηκε σε μονά και διπλά υφάσματα ενώ τα πειράματα εφελκυσμού τους αναπτύχθηκαν αυτόνομα αλλά και ενσωματωμένα έξυπνα στην ίδια τη ραπτομηχανή και λίγο πριν τη διαδικασία της ραφής. Αναπτύχθηκε ένα ολοκληρωμένο σύστημα πειραμάτων και επεξεργασίας δεδομένων για την αυτοματοποιημένη εξαγωγή των χαρακτηριστικών των υφασμάτων υπό τη μορφή λεκτικών μεταβλητών ούτως ώστε να είναι δυνατή η άμεση χρησιμοποίησή τους στο ιεραρχικό σύστημα ελέγχου της ραφής. Η αυτοματοποιημένη εκτίμηση της εκτατότητας ανήκει στα ανώτερα επίπεδα του ιεραρχικού συστήματος ελέγχου κατά την εκτίμηση των ποιοτικών ιδιοτήτων των υφασμάτων. Σχεδιάστηκαν και αναπτύχθηκαν αυτοματοποιημένα πειράματα εφελκυσμού υφασμάτων με χρήση του ρομπότ και του αισθητήρα δύναμης με σκοπό την εξαγωγή της ιδιότητας εκτατότητα των δοκιμίων. Από αυτά εκπαιδεύτηκε με επίβλεψη και με βάση την εμπειρία του ανθρώπου ένα νευρωνικό δίκτυο το οποίο εν συνεχεία χρησιμοποιήθηκε για την εκτίμηση της εκτατότητας άγνωστων για το σύστημα υφασμάτων. Χαρακτηριστικό και βασικό πλεονέκτημα του συστήματος είναι ότι μπορεί να γενικεύσει και να εκτιμήσει με ικανοποιητική ακρίβεια την εκτατότητα υφασμάτων από τα πρώτα δευτερόλεπτα του πειράματος του εφελκυσμού. Αυτή η εκτατότητα εκφρασμένη υπό τη μορφή λεκτικών μεταβλητών μπορεί πλέον να χρησιμοποιηθεί από το ασαφές σύστημα για την εξαγωγή της επιθυμητής τάνυσης κατά τη ραφή του εκάστοτε υφάσματος. Μελετήθηκαν τα όρια και η δυνατότητα κλιμάκωσης των πειραμάτων εφελκυσμού υφασμάτων. Έγινε μία εμπεριστατωμένη μελέτη της επιρροής
92 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ που μπορούν να έχουν οι μεταβολές στις διαστάσεις των υφασμάτων, κατά το πείραμα του εφελκυσμού, τόσο του πλάτους όσο και του μήκους τους. Η παραπάνω εργασία επεκτάθηκε, ενσωματώθηκε και παρουσιάστηκε η χρήση νευρωνικών δικτύων για την εξαγωγή των ιδιοτήτων εύκαμπτων αλλά και στιβαρών αντικειμένων [C8, C9]. 5.1 Εισαγωγή. Στο κεφάλαιο αυτό παρουσιάζεται το πρώτο στάδιο (τμήμα ) του ιεραρχικού συστήματος ελέγχου (Σχ. 3.2 και Σχ. 3.3). Το υψηλό αυτό επίπεδο (επίπεδο εκτιμήσεων) ασχολείται με την αυτοματοποίηση της ποιοτικής εκτίμησης της εκτατότητας των υφασμάτων ούτως ώστε να εισαχθεί αυτή η πληροφορία στο επόμενο επίπεδο (επίπεδο αποφάσεων) του ιεραρχικού ελεγκτή. 5.2 Εκτατότητα υφασμάτων και αυτοματοποίηση της εκτίμησής της. Στη βιομηχανία ένδυσης, παραδοσιακά, οι έμπειροι χειριστές, γαζώτριες κλπ. βασίζονται στις δικές τους υποκειμενικές εκτιμήσεις για τις ιδιότητες των υφασμάτων και δεν χρησιμοποιούν συσκευές ελέγχου και μετρήσεων των ιδιοτήτων τους [52]. Αυτός ο εμπειρικός τρόπος προσέγγισης ακολουθείται ακόμα και στις μέρες μας στους περισσότερους κλάδους της βιομηχανίας ένδυσης και κυρίως στον τομέα της ραφής των υφασμάτων. Οι έμπειροι εκτιμούν τις ιδιότητες των υφασμάτων (τις μηχανικές και πολύ περισσότερο τις ποιοτικές) μέσω χειρονακτικών διαδικασιών και δοκιμών, όπως το να τα κάμπτουν (bending), να τα τεντώνουν (stretching), να τα υποβάλουν σε διάτμηση (shearing) και να τα τρίβουν ανάμεσα στα δάκτυλά τους (rubbing). Τελικά, εκφράζουν την εκτίμησή τους με ποιοτικές πληροφορίες χρησιμοποιώντας λεκτικές μεταβλητές, όπως πολύ μικρή, μικρή, μέτρια, μεγάλη, πολύ μεγάλη ευκαμπτότητα, εκτατότητα κλπ. Η ερευνητική εργασία που παρουσιάζεται σε αυτό το κεφάλαιο έχει τρεις στόχους: Την εισαγωγή, στον ευρύτερο χώρο της βιομηχανίας ένδυσης, της έννοιας των λεκτικών μεταβλητών για την ποιοτική περιγραφή των ιδιοτήτων των υφασμάτων. Η διατύπωση των ιδιοτήτων με λεκτικές μεταβλητές μπορεί να ωθήσει στην ευρεία χρήση μεθόδων υπολογιστικής νοημοσύνης και κατ επέκταση ευφυών ελεγκτών που θα χρησιμοποιούν ποιοτικά χαρακτηριστικά των υφασμάτων. Επίσης, η καθιέρωση των λεκτικών μεταβλητών στον χώρο, θα βοηθήσει στο να γεφυρωθούν τα κενά επικοινωνίας που υπάρχουν ανάμεσα στους διάφορους κλάδους αλλά κυρίως θα βοηθήσει στην αμεσότερη επικοινωνία και συνεργασία των ανθρώπων με τις μηχανές. Την ανάπτυξη μιας τεχνικής για την εντός γραμμής παραγωγής (on-line) εκτέλεση πειραμάτων εφελκυσμού, για τη μέτρηση της εκτατότητας των υφασμάτων, με αυτοματοποιημένες πειραματικές διατάξεις. Τη θέσπιση νέων προσεγγίσεων, με χρήση μεθόδων υπολογιστικής νοημοσύνης, για την αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων από τα πειραματικά δεδομένα των μετρήσεων, με παράδειγμα την εκτατότητα. 74
93 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού Όλοι οι παραπάνω στόχοι απαιτούν την ανάπτυξη μιας μεθόδου για τον έλεγχο των υφασμάτων και την εκτίμηση της εκτατότητάς τους κάνοντας πειράματα και μετρήσεις με πολύ μικρές δυνάμεις (low-stress measurements). Η εκτατότητα των υφασμάτων είναι μία βασική και δεσπόζουσα ιδιότητα των υφασμάτων που παίζει καθοριστικό ρόλο στις εργασίες χειρισμού τους. Κατά τη ραφή των υφασμάτων δε, η εκτατότητά τους είναι η καθοριστική εκείνη ιδιότητα που επηρεάζει τη ποιότητα της ραφής και γενικά του ρούχου. Στο Σχ. 5.1 φαίνεται η συνολική προσέγγιση και η συμβολή της διατριβής. Στο Σχ. 5.1 (α) φαίνεται η τρέχουσα κατάσταση στη βιομηχανία ένδυσης και κυρίως στα επιτεύγματα της έρευνας στον χώρο. Ενώ στο Σχ. 5.1 (β) φαίνεται η συμβολή της διατριβής και τα σημεία εκείνα τα οποία βελτιώνει, αυτοματοποιεί και τους αλλάζει προοπτική. Αρχικά λοιπόν (Σχ. 5.1 (α)), εκτελείται το πείραμα μετρήσεων (εφελκυσμού) στα υποψήφια προς ραφή υφάσματα. Αυτά γίνονται είτε με απλές συσκευές εφελκυσμού, είτε με εξελιγμένες όπως τα KES [20], FAMOUS [29] [30], FAST [21] [22] συστήματα, είτε με αυτοματοποιημένα ρομποτικά συστήματα. Όλα τα παραπάνω βρίσκονται εκτός γραμμής παραγωγής. Από τα πειράματα αυτά μπορεί κάποιος να πάρει τις μετρήσεις, οι οποίες εμπεριέχουν-υποκρύπτουν τα χαρακτηριστικά και τις ιδιότητες των υφασμάτων. Για παράδειγμα στην περίπτωση του εφελκυσμού, τα δεδομένα από το πείραμα του εφελκυσμού καταγράφονται σε ζεύγη εφαρμοζόμενης δύναμης και παραμόρφωση του υφάσματος (έμμεσα μετακίνησης του άκρου εργασίας του ρομπότ). Αυτά τα δεδομένα εμπεριέχουν μέσα τους εκτός των άλλων και την πληροφορία της εκτατότητας του υφάσματος. Από αυτά τα δεδομένα μπορεί κάποιος να παράγει εύκολα και αυτόματα τα αντίστοιχα διαγράμματα και συγκεκριμένα την καμπύλη δύναμης παραμόρφωσης. Από εκεί και πέρα όμως χρειάζεται η παρέμβαση του ανθρώπου. Η εξόρυξη της πληροφορίας της εκτατότητας από την καμπύλη ή οποιαδήποτε άλλη πληροφορία δεν μπορεί να γίνει αυτόματα ούτως ώστε να αξιοποιηθούν οι ιδιότητες των υφασμάτων σε ένα σύστημα ελέγχου ή κάπου αλλού. Εδώ λοιπόν, μεσολαβεί ο άνθρωπος ο οποίος αξιολογεί τα δεδομένα και εξάγει την πληροφορία για τις σχετικές με το πείραμα ιδιότητες των υφασμάτων. Από εκεί και πέρα, θα πρέπει να αξιολογήσει και κυρίως να εκφράσει αυτές τις πληροφορίες με τον κατάλληλο τρόπο για να μπορέσει να τις αξιοποιήσει μέσα στη γραμμή παραγωγής και κυρίως στα συστήματα ελέγχου των εργασιών (πχ. ραφή). 75

")
 επεξεργάζονται από")

 Σχ. 5.")
 πριν και (β) μετά. Στο Σχ. 5.")

94 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Πειράματα εφελκυσμού εκτελούνται από ρομποτικό βραχίονα σε κάθε ύφασμα σε ανεξάρτητους σταθμούς εργασίας πειράματα σε υφάσματα χαρακτηριστικάιδιότητες υφασμάτων αξιοποίηση ιδιοτήτων Οι πειραματικές μετρήσεις έχουν τη μορφή αριθμητικών δεδομένων από αισθητήρα δύναμης διαγράμματα (α) Πειράματα εφελκυσμού εκτελούνται από ρομποτικό βραχίονα σε κάθε ύφασμα εντός της διαδικασίας της ραφής Οι πειραματικές μετρήσεις (διαγράμματα) επεξεργάζονται από Ν.Δ. αυτοματοποίηση λεκτικές μεταβλητές ιδιοτήτων πειράματα σε υφάσματα χαρακτηριστικάιδιότητες υφασμάτων αξιολόγησηεπεξεργασία ιδιοτήτων αξιοποίηση ιδιοτήτων Οι λεκτικές μεταβλητές ιδιότητες, χρησιμοποιούνται αυτόματα. Δεν χρειάζεται πλέον η εκτίμηση του χρήστη (β) Σχ. 5.1 Ευφυής αυτοματοποίηση της διαδικασία: Πειράματα-ιδιότητες-αξιολόγησηαξιοποίηση (α) πριν και (β) μετά. Στο Σχ. 5.1 (β), φαίνεται με πράσινο η πρωτότυπη συνεισφορά της διατριβής που δυνητικά μπορεί να αλλάξει τον τρόπο που λειτουργεί όλη η αλυσίδα σε μία γραμμή παραγωγής έτοιμου ενδύματος και να δώσει νέα ώθηση στη χρήση ευφυών συστημάτων και ελεγκτών στον χώρο. Τα πειράματα εφελκυσμού εκτελούνται με τη 76
95 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού χρήση ρομπότ πάνω στη ραπτομηχανή. Έτσι, το ίδιο το ρομπότ που χρησιμοποιείται για τη ραφή χρησιμοποιείται και για την εκτέλεση των πειραμάτων εφελκυσμού, χωρίς να χρειάζονται επιπρόσθετες αρπάγες, συσκευές και τροποποιήσεις. Ο άνθρωπος πλέον δεν μεσολαβεί στην όλη διαδικασία, αλλά ευφυή συστήματα επεξεργάζονται και αξιολογούν τα δεδομένα των πειραμάτων για να εκφράσουν τις ιδιότητες των υφασμάτων με λεκτικές μεταβλητές και να τις αξιοποιήσουν αυτόματα σε ευφυή συστήματα ελέγχου. Για το λόγο αυτό χρησιμοποιούνται νευρωνικά δίκτυα και ασαφής λογική όπως περιγράφεται στα παρακάτω κεφάλαια. Η αξιολόγηση και η επεξεργασία των πειραματικών δεδομένων γίνεται από εκπαιδευμένο για αυτό το λόγο νευρωνικό δίκτυο, του οποίου οι προδιαγραφές εκπαίδευσης περιγράφονται στο επόμενο υποκεφάλαιο. Η υλοποίηση της παραπάνω προσέγγισης έγινε με πειράματα τόσο σε μονά υφάσματα όσο και σε διπλά, καθώς για την παραγωγή ενός ρούχου στις περισσότερες περιπτώσεις πρέπει να γαζωθούν δύο κομμάτια υφάσματος. 5.3 Πειράματα εφελκυσμού σε μονά υφάσματα Προδιαγραφές πειραμάτων εφελκυσμού. Οι προδιαγραφές των πειραμάτων εφελκυσμού προήλθαν από τη συστηματική παρατήρηση των έμπειρων χειριστών καθώς αυτοί χρησιμοποιούσαν τα χέρια τους, τις αισθήσεις τους και το μυαλό τους για να εκτελέσουν το πείραμα και να το αξιολογήσουν. Η εκτέλεση πειραμάτων με ρομπότ, απαιτεί αρχικά μία μελέτη και έναν σχεδιασμό των διατάξεων και της διαδικασίας. Πρέπει επίσης, να δοθούν απαντήσεις τόσο για το υλικό μέρος όσο και για το λογισμικό που θα ελέγχει τη διαδικασία. Σημαντικός παράγοντας είναι και το ίδιο το ύφασμα και συγκεκριμένα ο καθορισμός του πλήθους και του μεγέθους των δειγμάτων αλλά και ο τρόπος χειρισμού τους. Το μέγεθος των δειγμάτων των υφασμάτων καθορίζει τις διαστάσεις της αρπάγης, καθώς και τις διαστάσεις της συνολικής διάταξης. Οι διαστάσεις των δειγμάτων καθορίστηκαν μετά από την παρατήρηση και την μελέτη των ενεργειών των έμπειρων χειριστών. Οι έμπειροι κλήθηκαν να αξιολογήσουν μία μεγάλη ποικιλία υφασμάτων και να καθορίσουν την εκτατότητά τους εκτελώντας το πείραμα του εφελκυσμού. Οι έμπειροι ήταν μοδίστρες-γαζώτριες από μικρές βιοτεχνίες παραγωγής ρούχων αλλά και μεταποίησης, καθώς και ερευνητές που είχαν μακρά εμπειρία στην έρευνα του χειρισμού υφασμάτων. Χρησιμοποιήθηκαν έξι τύποι υφασμάτων (3-υφαντά με πολύ μικρή, μέτρια και πολύ μεγάλη εκτατότητα και 3- πλεκτά με αντίστοιχες εκτατότητες) και τρία μεγέθη δείγματος για κάθε τύπο υφάσματος. Τα 18 συνολικά δείγματα μοιράστηκαν κάθε μία (έναν) από τους οκτώ έμπειρους, προκειμένου να μελετηθούν οι ενέργειές τους, ο τρόπος εκτέλεσης του πειράματος εφελκυσμού, ο τρόπος που πιάνουνε το ύφασμα κλπ. Οι κινήσεις των έμπειρων κατά τη διάρκεια των πειραμάτων καταγράφηκαν και εξήχθησαν τα βασικά χαρακτηριστικά της διαδικασίας. Στο Σχ. 5.2, φαίνεται το πείραμα εφελκυσμού όπως εκτελείται στην πλειοψηφία των περιπτώσεων από τους έμπειρους χειριστές. Στη φωτογραφία φαίνεται ο τρόπος που πιάνεται το ύφασμα όπου είναι φανερό ότι δύο είναι τα βασικά χαρακτηριστικά του πειράματος, το μήκος L και το πλάτος D. Το L είναι το απόσταση ανάμεσα στους δύο αντίχειρες των χεριών και το D είναι η διάσταση εκείνου του τμήματος ανάμεσα στον αντίχειρα και τον δείκτη μέσα στο οποίο εγκλωβίζεται το ύφασμα. 77

96 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ L D Σχ. 5.2 Πείραμα του εφελκυσμού υφάσματος όπως εκτελείται από τον έμπειρο χειριστή. Τα δύο χαρακτηριστικά μεγέθη L και D εξαρτώνται από την ανατομία και τις διαστάσεις των χεριών των ανθρώπων. Το μήκος L εξαρτάται από τις διαστάσεις των ώμων των ανθρώπων, ενώ το πλάτος D εξαρτάται από τις διαστάσεις των χεριώνδακτύλων των ανθρώπων. Το μήκος L, κυμαίνεται από 5 μέχρι 15cm μεταξύ των έμπειρων, με την πλειοψηφία να είναι γύρω στα 10cm. Ομοίως, το πλάτος D κυμαίνεται μεταξύ 3 και 8cm με τις περισσότερες περιπτώσεις να είναι γύρω στα 5cm. Ως εκ τούτου, οι διαστάσεις της ενεργούς περιοχής των υφασμάτων καθορίστηκαν στα 10x5cm. Το πραγματικό μέγεθος των δειγμάτων των υφασμάτων είναι 20x5cm για να μπορεί να συγκρατηθεί το κομμάτι για να εκτελεστεί το πείραμα του εφελκυσμού, όπως φαίνεται στο Σχ L = 10 cm 5 cm D = 5 cm Tensile active area Gripping area Σχ. 5.3 Διαστάσεις των δειγμάτων υφασμάτων για το πείραμα του εφελκυσμού. Στο σύστημα KES, το μέγεθος των δειγμάτων που χρησιμοποιούνται είναι 20x20cm, ενώ το πείραμα του εφελκυσμού εφαρμόζεται σε μία ενεργή περιοχή του 78
97 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού δείγματος 20x5cm και κατά μήκος της διάστασης των 5cm. Η επιλογή αυτών των διαστάσεων δικαιολογείται από το γεγονός ότι είναι μία τυπική περιοχή-μέγεθος υφάσματος το οποίο φέρει όλες τις πιθανές παραμορφώσεις όταν φοριέται το ρούχο. Αυτό είναι ένα ικανοποιητικό επιχείρημα, επειδή ο στόχος του συστήματος KES [19, 20] είναι ο καθορισμός της τιμής της συνολικής αίσθησης (total hand value) του ρούχου που έχει να κάνει κυρίως με την αίσθηση του ρούχου που δημιουργείται όταν αυτό φοριέται. Το ίδιο ακριβώς μέγεθος δειγμάτων χρησιμοποιείται και στο σύστημα FAMOUS [29, 30]. Στο σύστημα FAST [21, 22] και συγκεκριμένα για το πείραμα εφελκυσμού τα δείγματα πρέπει να έχουν διαστάσεις 20x5cm, ή 13x6cm για την διεύθυνση υπό 45 0 γωνία (bias). Η ενεργή περιοχή της τάνυσης είναι 10x5cm (ή 10x6cm για την bias διεύθυνση) και η τάνυση εφαρμόζεται κατά μήκος της διεύθυνσης των 10cm. Πέρα από τα προηγούμενα αποτελέσματα, η συστηματική διερεύνηση του τρόπου με τον οποίο οι έμπειροι χειρίζονται τα υφάσματα για να εκτιμήσουν την εκτατότητά τους, οδήγησε σε κάποια σημαντικά συμπεράσματα: Η απόσταση ανάμεσα στα χέρια δεν ρυθμίζεται με ακρίβεια από τον έμπειρο. Δεν ενδιαφέρονται δηλαδή, εάν τα χέρια τους τοποθετήθηκαν επακριβώς ευθυγραμμισμένα και απόλυτα παράλληλα μεταξύ τους. Επίσης, δεν είναι σε θέση να επαναλάβουν το πείραμα με τον ίδιο ακριβώς τρόπο, έτσι υπάρχουν μικρές διακυμάνσεις στην τοποθέτηση των χεριών και των αντίστοιχων διαστάσεων από πείραμα σε πείραμα. Παρ όλα αυτά, δεν επηρεάζεται η επαναληψιμότητα των πειραμάτων καθώς καταλήγουν σχεδόν πάντα στα ίδια αποτελέσματα. Οι περιβαλλοντικές συνθήκες (υγρασία, θερμοκρασία κλπ.) δεν λαμβάνονται υπόψη. Όταν το πείραμα επαναλαμβάνεται από τον ίδιο έμπειρο αυτό δεν γίνεται υπό τις ίδιες περιβαλλοντικές συνθήκες και κυρίως όταν αυτό γίνεται μέσα στο βιομηχανικό περιβάλλον. Παρ όλα αυτά, αυτό δεν επηρεάζει την εκτίμηση των ειδικών. Θα πρέπει επίσης να σημειωθεί, ότι τα εργαστηριακά πειράματα έγιναν στις περιόδους καλοκαιριού και του χειμώνα αλλά αυτό δεν επηρέαζε τις εκτιμήσεις. Οι έμπειροι εξέφρασαν την εκτίμησή τους για την εκτατότητα χρησιμοποιώντας λεκτικές τιμές. Πέντε τέτοιες τιμές κατεγράφησαν από τους έμπειρους: πολύ μικρή, μικρή, μέτρια, μεγάλη και πολύ μεγάλη εκτατότητα (όπως επίσης περιγράφεται και στο επόμενο Κεφ.6.2). Παρά την έλλειψη συγκεκριμένων και ποσοτικών προδιαγραφών οι έμπειροι χειριστές βασίζονται περισσότερο στη δικιά τους υποκειμενική εκτίμηση των ιδιοτήτων των υφασμάτων για να ράψουν, πάρα σε μετρήσιμες ιδιότητες που θα μπορούσαν να έχουν από ειδικά όργανα (KES, FAMOUS, FAST συστήματα). Εξάλλου, αυτή είναι η κοινή πρακτική που ακολουθείται συνήθως στη βιομηχανία ενδυμάτων, όπου οι πραγματικές καταστάσεις και συνθήκες διαφέρουν από τις ιδανικές εργαστηριακές. Είναι λοιπόν μία πρόκληση για τον μηχανικό, το να συμπεριλάβει όλα τα προηγούμενα συμπεράσματα στον σχεδιασμό ενός αυτοματοποιημένου συστήματος το οποίο θα κάνει εκτίμηση της εκτατότητας υφασμάτων με παρόμοιο τρόπο με αυτόν του ανθρώπου. Η ενσωμάτωση αυτών των χαρακτηριστικών στο σύστημά του μπορεί επίσης να τον βοηθήσει στην μείωση του κόστους κατά την υλοποίηση. Είναι 79
98 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ πραγματικά μία πρόκληση να σχεδιαστεί ένα σύστημα το οποίο θα μιμείται τους ανθρώπινους χειρισμούς με μη αυστηρό, όσον αφορά τις προδιαγραφές, τρόπο λειτουργίας αλλά αξιόπιστο όσον αφορά τα αποτελέσματά του και ανεπηρέαστο (σθεναρό) όσον αφορά τις αλλαγές του περιβάλλοντός του. Ο έμπειρος χειριστής έχει μία σφαιρική προσέγγιση στην εκτίμηση των ιδιοτήτων και αυτό είναι πολύ σημαντικό όταν έχεις να κάνεις με υλικά όπως τα υφάσματα, τα οποία είναι έντονα μη-γραμμικά και ανισότροπα. Από την άλλη πλευρά, δίνεται ένα αβαντάζ στον μηχανικό γιατί μπορεί έτσι να μειώσει το κόστος για το υλικό (hardware) τμήμα της κατασκευής χρησιμοποιώντας αισθητήρες και μηχανικά μέρη χαμηλής ακρίβειας και κόστους. Το βάρος όμως μεταφέρεται στο λογισμικό (software) το οποίο θα πρέπει να είναι ικανό να ανταπεξέλθει στην πολυπλοκότητα του προβλήματος της εκτίμησης ιδιοτήτων των υφασμάτων με λεκτικές μεταβλητές Ανάπτυξη πειραμάτων εφελκυσμού. Αρχικά, το πείραμα εφελκυσμού αναπτύχτηκε σε ανεξάρτητο από τη ραπτομηχανή σταθμό εργασίας, καθώς θα έπρεπε να καθοριστούν οι προδιαγραφές του, οι λεπτομέρειες και τα όρια λειτουργίας του και να δοκιμαστεί η εφικτότητα του συστήματος ελέγχου και του λογισμικού για την αξιολόγηση των πειραματικών δεδομένων. Στο Σχ. 5.4 φαίνεται η πειραματική διάταξη που αναπτύχθηκε. Η μία άκρη του υφάσματος συγκρατείται σταθερά από έναν σφικτήρα, ενώ η άλλη άκρη του υφάσματος πιάνεται από μία απλή κατασκευή συγκράτησης που είναι προσαρμοσμένη στον καρπό του ρομπότ. Στον καρπό του ρομπότ έχει προσαρμοστεί επίσης και ένας αισθητήρας δύναμης για την καταγραφή των δυνάμεων. Το ύφασμα βρίσκεται πάντα σε απόσταση από το τραπέζι ούτως ώστε να μην αναπτύσσονται δυνάμεις τριβής πάνω σε αυτό. Το ρομπότ αρχίζει να τραβάει το ύφασμα και καταγράφονται η θέση του άκρου εργασίας καθώς και η δύναμη (s, f). Η θέση του άκρου εργασίας αντιστοιχεί στην εφελκυστική παραμόρφωση του υφάσματος. Το ζεύγος των μετρήσεων αυτών τροφοδοτούνται σε ένα νευρωνικό δίκτυο όπως περιγράφεται στα παρακάτω. Το πείραμα εφελκυσμού σταματάει όταν η δύναμη εφελκυσμού φτάσει τα 30Ν ή όταν η επιμήκυνση του υφάσματος φτάσει στο 50% του αρχικού μήκους του L. Ο περιορισμός της δύναμης καθορίστηκε από το όριο της μέγιστης φόρτισης (maximum load) του ρομπότ, ενώ η μέγιστη εφαρμοζόμενη δύναμη του ανθρώπου κατά το πείραμα του εφελκυσμού είναι περίπου 10 με 15Ν. Στο σύστημα KES, η μέγιστη εφαρμοζόμενη δύναμη είναι 5Ν/cm για τα υφαντά και 2.5Ν/cm για τα πλεκτά υφάσματα. Στο σύστημα FAST, η μέγιστη δύναμη είναι 98.1Ν/m και η μέγιστη επιμήκυνση είναι 20%. Στη δικιά μας περίπτωση, η μέγιστη επιμήκυνση ορίστηκε στο 50%, το οποίο είναι πιο κοντά στη μέγιστη επιμήκυνση που εφαρμόζει ο άνθρωπος όταν εκτελεί το πείραμα με τα χέρια του. 80
, διαδικασία ανεξάρτητη από τη ραφή.")
: 634 mm. Μέγιστη οριζόντια διαδρομή: 351 mm. Μέγιστη ταχύτητα (maximum resultant velocity): 5800mm/sec. Επαναληψιμότητα (repeatability): ±0.")
99 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού Αισθητήρας δύναμης Σχ. 5.4 Ρομποτικά αυτοματοποιημένο πείραμα εφελκυσμού (για μονό ύφασμα), διαδικασία ανεξάρτητη από τη ραφή. Για την υλοποίηση των πειραμάτων χρησιμοποιήθηκε το ρομπότ Mitsubishi RV- 4A, το οποίο είναι ένα αρθρωτό ρομπότ με τα παρακάτω χαρακτηριστικά τα οποία σχετίζονται με το πείραμα: Μέγιστη ακτίνα δράσης από το κέντρο της βάσης του ρομπότ (Arm reachable radius): 634 mm. Μέγιστη οριζόντια διαδρομή: 351 mm. Μέγιστη ταχύτητα (maximum resultant velocity): 5800mm/sec. Επαναληψιμότητα (repeatability): ±0.03 mm. Μέγιστο φορτίο (maximum load): 4kg. Ο αισθητήρας δύναμης που χρησιμοποιήθηκε είναι ο Gamma(65/5) F/T της εταιρείας ATI Industrial Automation. Τα χαρακτηριστικά του στη διεύθυνση της τάνυσης είναι: Περιοχή ευαισθησίας (Sensing range): ±65N Ανάλυση (resolution): 0.05N Ακρίβεια (Accuracy): <1 % (σε θερμοκρασία 22 0 C) Ρυθμός δεδομένων (Output data rate): 9600 baud ( 126Hz) Το πείραμα εφελκυσμού μπορεί να ολοκληρωθεί σε λιγότερο από 1 λεπτό για υφάσματα με πολύ μεγάλη εκτατότητα, αλλά ο απαιτούμενος χρόνος μειώνεται δραματικά σε μερικά μόλις δευτερόλεπτα για υφάσματα με πολύ μικρή εκτατότητα. Αυτό διότι το πάνω όριο των 30Ν προσεγγίζεται πολύ γρήγορα με πολύ μικρή μετατόπιση του ρομπότ. 81


100 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Μεθοδολογία πειραμάτων εφελκυσμού. Για την περίπτωση των πειραμάτων εφελκυσμού σε μονά υφάσματα επιλέχθηκαν 14-δείγματα για να χρησιμοποιηθούν ως δείγματα εκπαίδευσης του νευρωνικού δικτύου. Τα δείγματα καλύπτουν μία μεγάλη γκάμα υφασμάτων όσον αφορά την εκτατότητά τους, την σύνθεση και τον τύπο τους όπως φαίνεται στον Πιν Επίσης, χρησιμοποιήθηκαν άλλα 6-δείγματα υφασμάτων, που φαίνονται στον Πιν. 5.2, για τη δοκιμή του εκπαιδευμένου νευρωνικού δικτύου. Πιν. 5.1 Δείγματα μονών υφασμάτων που χρησιμοποιήθηκαν για την εκπαίδευση του νευρωνικού δικτύου. Sample No. Construction Composition Fabric picture Experts estimation: extensibility 1 Woven viscose 65% polyester 35% Woven linen 100% Woven cotton 100% Knitted inter rib polyester 65% cotton 35% Knitted acrylic cotton Knitted single-jersey polyester 70% cotton 30% Knitted polyester 65% cotton 35% Knitted rib Knitted interlock Knitted rib Knitted single-jersey Knitted (No. 16 in warp direction) Knitted interlock cotton 100% 0.7 polyester 100% 0.7 cotton 49% acrylic 49% lycra 2% polyester 94% lycra 6% polyester 60% cotton 40% nylon 100%

 17 Woven 18 Knitted 19 20 Knitted rib Knitted rib polyester 60% cotton 40% cotton 92% elastane 8% polyester 65% cotton 35% 0.5 0.5 0.6 acrylic 100% 0.5 cotton 100% 0.")


101 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού 14 Knitted cotton 94% elastane 6% 0.9 Πιν. 5.2 Δείγματα μονών υφασμάτων που χρησιμοποιήθηκαν για τον έλεγχο του νευρωνικού δικτύου. Sample No. Construction Composition Fabric picture Experts estimation: extensibility 15 Woven synthetic wool 50%-50% Knitted (No. 12 in weft direction) 17 Woven 18 Knitted Knitted rib Knitted rib polyester 60% cotton 40% cotton 92% elastane 8% polyester 65% cotton 35% acrylic 100% 0.5 cotton 100% 0.9 Η εκτατότητα για κάθε δείγμα εκτιμήθηκε από ένα σύνολο έμπειρων χειριστών. Η σύνθεση και ο τρόπος λειτουργία της έμπειρης ομάδας περιγράφεται στο Κεφ Οι ειδικοί ρωτήθηκαν και τους ζητήθηκε να χαρακτηρίσουν τα δείγματα χρησιμοποιώντας τις λεκτικές τιμές που καθορίστηκαν κατά τη φάση της μελέτης της διαδικασίας (Κεφ.5.3.1), ήτοι πολύ μικρή, μικρή, μέτρια, μεγάλη και πολύ μεγάλη εκτατότητα. Οι τιμές αυτές αντιστοιχήθηκαν με τους αριθμούς 0.1, 0.3, 0.5, 0.7 και 0.9, αντίστοιχα, ούτως ώστε να διευκολυνθεί η χρήση τους στο νευρωνικό δίκτυο. Η εκτίμηση των έμπειρων χειριστών φαίνεται στην τελευταία στήλη των Πιν. 5.1 και Πιν Η ενδιάμεσες τιμές, όπως για παράδειγμα η τιμή 0.6, είναι περίπτωση όπου οι έμπειροι βρίσκονταν σε δίλημμα και εξέφρασαν την εκτίμησή τους ως κάτι μεταξύ μέτριας και μεγάλης εκτατότητας. Στο Σχ. 5.5 φαίνονται οι καμπύλες δύναμης/επιμήκυνσης για κάθε δείγμα που χρησιμοποιήθηκε. Με συνεχόμενη γραμμή είναι τα 14-δείγματα που χρησιμοποιήθηκαν για την εκπαίδευση του νευρωνικού, ενώ με διακεκομμένη γραμμή φαίνονται τα 6-δείγματα που χρησιμοποιήθηκαν για τον έλεγχο και τη δοκιμή του εκπαιδευμένου νευρωνικού. Τελικά, οι μετρήσεις (s, f) χρησιμοποιούνται στο νευρωνικό δίκτυο όπως περιγράφεται στο Κεφ
102 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ 14-fabrics for training 6-fabrics for testing Force (Nt) 20 f Strain (%) s Σχ. 5.5 Καμπύλες εφελκυσμού μονών υφασμάτων. Όπως φαίνεται από τις 14-καμπύλες, αυτές καλύπτουν ικανοποιητικά όλη την περιοχή του διαγράμματος δύναμης-επιμήκυνσης, από ένα ύφασμα με πολύ μικρή εκτατότητα (Νο.1) μέχρι ένα ύφασμα με πολύ μεγάλη εκτατότητα (Νο.14). Ενώ, μερικές περιοχές υπερ-καλύπτονται από περισσότερες καμπύλες. Η επιλογή αυτών των 14-καμπυλών φαίνεται ικανοποιητική για την εκπαίδευση ενός νευρωνικού, το οποίο θα μπορεί να εκτιμά την εκτατότητα νέων υφασμάτων εντός της περιοχής που φαίνεται στο Σχ Η εκτίμηση της εκτατότητας υφασμάτων από τα δεδομένα δύναμηςεπιμήκυνσης είναι ένα πρόβλημα κατηγοριοποίησης (classification). Αυτό είναι κατανοητό από το γεγονός ότι: για κάθε είσοδο του συστήματος (δεδομένα από πείραμα εφελκυσμού) η αντίστοιχη επιθυμητή έξοδος (εκτίμηση της εκτατότητας) είναι γνωστά στοιχεία και διαθέσιμα από την εμπειρία των ειδικών, αλλά επίσης είναι γνωστό και το πλήθος των κατηγοριών (classes) του προβλήματος. Η χρήση νευρωνικών δικτύων σε τέτοια προβλήματα κατηγοριοποίησης προϋποθέτει ότι αυτά θα εκπαιδευτούν με επιτήρηση (supervised training) για να μπορούν να αντιστοιχήσουν τα παραδείγματα με τις προκαθορισμένες κατηγορίες. Από τις καμπύλες που φαίνονται στα Σχ. 5.5 και Σχ. 5.7 (για την περίπτωση των διπλών υφασμάτων), μπορεί κάποιος να παρατηρήσει ότι έχουν δημιουργηθεί τρείς κατηγορίες καμπυλών Α, Β και C. Αυτό συμφωνεί και με τον τύπο των υφασμάτων. Οι Α-καμπύλες είναι από υφαντά (woven), οι Β-καμπύλες είναι από πλεκτά (knitted) συνθετικά υφάσματα με μεγάλο ποσοστό πολυεστέρα στην σύνθεσή τους και οι C- καμπύλες είναι από πλεκτά συνθετικά υφάσματα με υψηλό ποσοστό σε νάιλον (nylon) ή ελαστάν-σπάντεξ (elastane-spandex) ή λύκρα (lycra). Από αυτές τις τρείς κατηγορίες γίνεται ξεκάθαρο ότι το πρόβλημα της εκτατότητας είναι ένα πρόβλημα κατηγοριοποίησης (classification). Άρα, από τα παραπάνω βγαίνει το συμπέρασμα 84
103 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού ότι θα μπορούσαν ίσως να χρησιμοποιηθούν και άλλες κλασσικές μέθοδοι κατηγοριοποίησης 28. Αυτό, όμως, δεν μπορεί να γίνει επειδή πέρα από τις παραπάνω παρατηρήσεις, υπάρχουν και άλλοι παράγοντες που εμπλέκονται στο πρόβλημα και δεν μπορούν να αγνοηθούν. Ο τύπος και η σύνθεση των υφασμάτων δεν μπορούν να χρησιμοποιούνται από μόνα τους ως δεδομένα για να κατηγοριοποιούνται τα υφάσματα και μετά να εκτιμάται η εκτατότητά τους. Ο τρόπος κατασκευής των κλωστών και των υφασμάτων δεν μπορεί να αγνοηθεί. Η εκτατότητα εξαρτάται επίσης και από τον τρόπο που έχουν πλεχτεί/υφανθεί τα υφάσματα καθώς και από τη δομή και από τον τρόπο πλέξης των κλωστών τους. Επίσης, η διεύθυνση εφαρμογής της δύναμης πάνω στο ύφασμα, δηλαδή κατά μήκος του υφαδιού (weft), του στημονιού (warp) ή της διαγωνίου ύφανσης (bias), είναι ένας παράγοντας που επηρεάζει την εκτατότητα των υφασμάτων. Επίσης, σημαντικός και καθοριστικός παράγοντας είναι και το πλεονέκτημα που παρουσιάζουν τα νευρωνικά δίκτυα και ο τρόπος με τον οποίο χρησιμοποιήθηκαν στη συγκεκριμένη εφαρμογή. Όπως θα περιγραφεί στις επόμενες παραγράφους, το συνολικό σύστημα είναι ικανό, μετά την εκπαίδευσή του, να προβαίνει σε εκτιμήσεις χωρίς καν να ολοκληρωθεί το πείραμα εφελκυσμού αλλά σχεδόν από την έναρξη του πειράματος. Τελικά, το εκπαιδευμένο νευρωνικό δίκτυο δοκιμάζεται για την ικανότητά του να εκτιμήσει την εκτατότητα των υπολοίπων 6-υφασμάτων (Νο.15-20), που φαίνονται στον Πιν. 5.2 και στο Σχ. 5.5 με διακεκομμένες καμπύλες. Τα υφάσματα αυτά δεν χρησιμοποιήθηκαν κατά την διαδικασία της εκπαίδευσης. Στο τέλος, το εκπαιδευμένο νευρωνικό δίκτυο μπορεί να χρησιμοποιηθεί για την εκτίμηση της εκτατότητας νέων υφασμάτων, τα οποία έχουν εκτατότητες εντός (ή κοντά) της περιοχής των αντίστοιχων τιμών που είχαν τα υφάσματα που χρησιμοποιήθηκαν για την εκπαίδευση. 5.4 Πειράματα εφελκυσμού σε διπλά υφάσματα. Η ίδια διαδικασία, που περιγράφθηκε για τα πειράματα εφελκυσμού στα μονά υφάσματα, εφαρμόστηκε και στα διπλά υφάσματα. Το πείραμα εφελκυσμού βελτιώθηκε, εξελίχθηκε και ενσωματώθηκε έξυπνα στη ίδια τη ραπτομηχανή και πριν την έναρξη της ραφής. Το ίδιο το ρομπότ που πρόκειται να χρησιμοποιηθεί για τη ραφή χρησιμοποιείται και για την εκτέλεση του πειράματος εφελκυσμού. Το πείραμα εφελκυσμού εκτελείται λίγο πριν αρχίσει η διαδικασία της ραφής και ενώ τα υφάσματα είναι ήδη τοποθετημένα και έτοιμα για ραφή. Τα διπλά υφάσματα πιάνονται από το ρομπότ από τη μία άκρη τους, ενώ η άλλη άκρη τους πιάνεται από το ποδαράκι της ραπτομηχανής όπως φαίνεται στο Σχ Η ενσωμάτωση του πειράματος εφελκυσμού μέσα στη συνολική διαδικασία της ραφής είναι ένα πλεονέκτημα συγκρινόμενο με άλλα συστήματα, όπου χρησιμοποιούνται ειδικές συσκευές για αυτό το σκοπό (KES, FAMOUS, FAST συστήματα) [25] ή ρομποτικοί σταθμοί εργασίας [28]. Εναλλακτικά, εάν η πληροφορία για την εκτατότητα κάποιων υφασμάτων είναι ήδη διαθέσιμη στο σύστημα, τότε δεν χρειάζεται να γίνει κάποια αλλαγή ή μετατροπή στη γραμμή παραγωγής, αλλά απλά μπορεί να αρχίσει η 28 π.χ. Support vector machines, k-nearest neighbours, Gaussian mixture model, Gaussian, Naive Bayes, Decision tree και RBF. 85
 Σχ. 5.")
104 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ διαδικασία της ραφής αφού τα υφάσματα θα είναι ήδη εκεί. Διαφορετικά, το σύστημα χρειάζεται μόνο μερικά δευτερόλεπτα να κάνει το πείραμα και να εξάγει την εκτατότητα και εν συνεχεία την επιθυμητή τάνυση (δες Κεφ.6.3) Σχ. 5.6 Ρομποτικά αυτοματοποιημένο πείραμα εφελκυσμού (για διπλό ύφασμα), διαδικασία ενσωματωμένη στη ραπτική μηχανή. Οι πτυχώσεις κατά μήκος του υφάσματος (στη διεύθυνση τάνυσης), που φαίνονται στο σχήμα Σχ. 5.6, είναι αποτέλεσμα του πειράματος εφελκυσμού και εμφανίζονται κυρίως σε υφάσματα με πολύ μεγάλη εκτατότητα. Κατά τη διάρκεια των πειραμάτων η μέγιστη τάνυση των υφασμάτων μπορεί να φτάσει στα 30Ν. Αυτές οι πτυχώσεις δεν εμφανίζονται κατά τη διάρκεια της ραφής, όπου οι δυνάμεις τάνυσης είναι πολύ μικρότερες. Στο Σχ. 5.7 φαίνονται οι καμπύλες δύναμης/επιμήκυνσης για τα διπλά υφάσματα που χρησιμοποιήθηκαν. Με έγχρωμες γραμμές είναι τα 11-δείγματα που χρησιμοποιήθηκαν για την εκπαίδευση του νευρωνικού, ενώ με μαύρη παχιά γραμμή φαίνονται τα 2-δείγματα που χρησιμοποιήθηκαν για τον έλεγχο και τη δοκιμή του εκπαιδευμένου νευρωνικού. 86
105 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού 30 A B T T2 7 8 Force (N) C strain (%) Σχ. 5.7 Καμπύλες εφελκυσμού διπλών υφασμάτων. Οι πειραματικές μετρήσεις (δύναμη, παραμόρφωση) εισάγονται κατά τη διάρκεια του πειράματος και από την πρώτη στιγμή (on-line) σε ένα εκπαιδευμένο νευρωνικό δίκτυο. Αυτό το νευρωνικό δίκτυο έχει εκπαιδευτεί (όπως περιγράφεται στο επόμενο υποκεφάλαιο) σύμφωνα με την εμπειρία του ανθρώπου να εκτιμά την εκτατότητα των υφασμάτων και να την εκφράζει ποιοτικά. Χαρακτηριστικό πλεονέκτημα της προσέγγισης είναι ότι το νευρωνικό μπορεί και παράγει μία εκτίμηση της εκτατότητας σχεδόν από τα πρώτα βήματα του πειράματος. Η έξοδος του νευρωνικού δικτύου είναι μία τιμή στην περιοχή [0, 100] που εκφράζει ως ποσοστό την εκτατότητα. Η τιμή αυτή εισάγεται στο επόμενο ιεραρχικά επίπεδο για τον καθορισμό της επιθυμητής δύναμης. 5.5 Νευρωνικό δίκτυο για την εκτίμηση της εκτατότητας. Η δομή του συστήματος ελέγχου, που αφορά την εκτέλεση των πειραμάτων εφελκυσμού, φαίνεται στο Σχ Στο πάνω τμήμα του σχήματος απεικονίζεται η διαδικασία εκπαίδευσης του συστήματος. Στο κάτω τμήμα περιγράφεται ο τρόπος χρήσης του εκπαιδευμένου νευρωνικού για την εκτίμησης της εκτατότητας. Ο κεντρικός μηχανισμός αυτού του συστήματος βασίστηκε σε απλά νευρωνικά δίκτυα ευθείας τροφοδότησης (feedforward neural network). 87
106 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Tensile tests in a wide range of fabrics Measured data for each fabric (force, strain) Experts estimations of fabrics extensibility Feed-forward Neural Network ET EN - + error = ET EN Training phase training Testing phase Tensile test for unknown / known fabrics Trained Neural Network Fabric extensibility Σχ. 5.8 Μέτρηση και ευφυής εκτίμηση της εκτατότητας υφασμάτων. Στη φάση εκπαίδευσης του συστήματος εκτελούνται τα πειράματα εφελκυσμού από το ρομποτικό σύστημα. Αυτά είναι δυνατόν να γίνονται είτε αποκομμένα από τη γραμμή παραγωγής σε ανεξάρτητο σταθμό εργασίας, είτε ενσωματωμένα στη διαδικασία της ραφής και λίγο πριν την έναρξή της. Όλες οι μετρήσεις του πειράματος εφελκυσμού καταγράφονται αυτόματα αφενός μεν σε διαγράμματα δύναμης-επιμήκυνσης, αφετέρου δε εισάγονται σε νευρωνικό δίκτυο με σκοπό την εκπαίδευσή του. Το δίκτυο εκπαιδεύεται (με επιτήρηση), με βάση τις εκτιμήσεις των έμπειρων, ούτως ώστε να εξάγει την εκτατότητα των υφασμάτων. Εκπαιδεύτηκε ένα νευρωνικό για την περίπτωση των μονών υφασμάτων και ένα για την περίπτωση των διπλών. Χαρακτηριστικό πλεονέκτημα της διαδικασίας, είναι ότι μπορεί η εκπαίδευση του κάθε νευρωνικού να επεκταθεί μελλοντικά εάν χρησιμοποιηθούν νέα δοκίμια υφασμάτων. Στη δεύτερη φάση, που αφορά πλέον τη διαδικασία της ραφής, χρησιμοποιείται το εκπαιδευμένο νευρωνικό δίκτυο. Όταν πρόκειται να γαζωθεί ένα ύφασμα και βρίσκεται μπροστά από την ραπτική μηχανή, αρχίζει να εκτελείται το πείραμα του εφελκυσμού. Πριν καν ολοκληρωθεί το πείραμα, οι μετρήσεις του εισάγονται στο εκπαιδευμένο νευρωνικό το οποίο αρχίζει να εξάγει εκτιμήσεις για την εκτατότητα του υφάσματος καθώς το πείραμα εξελίσσεται. Οι εκτιμήσεις αυτέ γίνονται όλο και πιο ακριβείς καθώς το πείραμα βαίνει προς το τέλος του. Παρόλα αυτά, επειδή από τα πρώτα βήμα του πειράματος έχουμε μία πολύ καλή εκτίμηση της εκτατότητας, το πείραμα μπορεί να σταματήσει δεδομένου ότι η έξοδος του νευρωνικού έχει φτάσει σε μία τελική μόνιμη κατάσταση και δεν αλλάζει καθώς συνεχίζεται το πείραμα. Το νευρωνικό δίκτυο δομήθηκε με βάση τα χαρακτηριστικά και τις ιδιαιτερότητες των πειραματικών δεδομένων. Στα Σχ. 5.5 και Σχ. 5.7, φαίνεται ότι δύο (ή περισσότερες) καμπύλες εφελκυσμού μπορεί να διασταυρώνονται σε ένα (ή περισσότερα) σημεία. Το γεγονός αυτό προκαλεί προβλήματα στη λειτουργία του 88
107 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού νευρωνικού δικτύου. Στο Σχ. 5.9, φαίνεται ένα κοινό σημείο το (s, f), δύο τυχαίων καμπυλών a και b, όπου f είναι η μετρούμενη δύναμη και s είναι η ποσοστιαία επιμήκυνση του υφάσματος. b a force (s, f) ( a s p, a f p ) ( b s p, b f p ) s f s p f p Neural Network Extensibility (EN) strain Σχ. 5.9 Βελτίωση της λειτουργικότητας του νευρωνικού δικτύου τροφοδοτώντας το με την τρέχουσα και την προηγούμενη μέτρηση. Το σημείο (s, f) πέρα από το ότι είναι κοινό σε δύο καμπύλες, όταν είναι είσοδος στο νευρωνικό τότε αντιστοιχεί σε διαφορετική έξοδο (εκτατότητα) όταν πρόκειται για την a καμπύλη και διαφορετική όταν πρόκειται για την b καμπύλη. Όταν λοιπόν, για την ίδια είσοδο αντιστοιχούν δύο διαφορικές έξοδοι τότε η εκπαίδευση του νευρωνικού δικτύου μπορεί να γίνει δύσκολη. Το πρόβλημα αυτό, αντιμετωπίστηκε με την ιδέα να τροφοδοτηθεί το νευρωνικό με την πληροφορία της τοπικής κλίσης των καμπυλών. Έτσι, δίνοντας στο νευρωνικό εκτός από το τρέχον σημείο και την τοπική κλίση της καμπύλης σε αυτό το σημείο, τότε δεν δημιουργείται σύγχυση στο δίκτυο για ποια καμπύλη πρόκειται. Η διαδικασία όμως αυτή, προϋποθέτει τον υπολογισμό της κλίσης της καμπύλης σε κάθε σημείο της. Αλλά για να αποφευχθεί ο διαφορισμός των μετρήσεων του αισθητήρα δύναμης, αποφασίστηκε να τροφοδοτείται το νευρωνικό με την τρέχουσα κάθε φορά δύναμη (s, f) καθώς και την προηγούμενη (s p, f p ) τιμή της. Με αυτόν τον τρόπο, αφέθηκε στο ίδιο το νευρωνικό να υπολογίζει, εντός της εσωτερικής του δομής, την πληροφορία της κλίσης της καμπύλης. Κάθε σετ δεδομένων που εισάγεται ως είσοδος στο νευρωνικό αποτελείται από τέσσερα στοιχεία: ( ) όπου: j είναι το νούμερο της καμπύλης που αντιστοιχεί στο j-ύφασμα. i είναι η τρέχουσα μέτρηση, είναι η τρέχουσα δύναμη και η προηγούμενη και, είναι η τρέχουσα τιμή της επιμήκυνσης και η προηγούμενη. 89
108 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Η περιοχή τιμών του j αντιστοιχεί στο πλήθος των υφασμάτων κατά την εκπαίδευση. Η περιοχή των τιμών του i μεταβάλλεται από ύφασμα σε ύφασμα καθώς η διάρκεια του πειράματος εφελκυσμού είναι διαφορετική μεταξύ των υφασμάτων με διαφορετικές εκτατότητες. Δηλαδή, για ένα ύφασμα με πολύ μικρή εκτατότητα το πείραμα εφελκυσμού ολοκληρώνεται γρήγορα και καταγράφεται ένας μικρός σχετικά αριθμός μετρήσεων, ενώ για ένα ύφασμα με πολύ μεγάλη εκτατότητα το πείραμα διαρκεί περισσότερο και καταγράφονται αρκετά περισσότερες μετρήσεις. Για κάθε είσοδο στο νευρωνικό, αυτό υπολογίζει μία έξοδο (EN) η οποία συγκρίνεται με την αντίστοιχη επιθυμητή (ΕΤ) και δημιουργείται το σφάλμα ούτως ώστε να εκπαιδευτεί το δίκτυο. Η επιθυμητή έξοδος ( ) είναι η εκτίμηση των έμπειρων για την εκτατότητα του j-υφάσματος. Το σφάλμα που χρησιμοποιείται κατά τη διάρκεια της εκπαίδευσης με επίβλεψη είναι: όπου: είναι η έξοδος του δικτύου για i-σετ εισόδου του j-υφάσματος. Παρόλο που υπάρχουν αρκετά είδη νευρωνικών δικτύων και αρκετοί αλγόριθμοι εκπαίδευσης, δεν υπάρχει μία συγκεκριμένη μέθοδος (πέρα από τις ευρετικές) για τον καθορισμό του πλήθους των κρυμμένων επιπέδων καθώς και του πλήθους των νευρώνων σε κάθε επίπεδο. Για αυτό, για να βρεθεί το κατάλληλο πλήθος των κρυμμένων νευρώνων έγινε ένας μεγάλος αριθμός πειραμάτων με δοκιμές. Τα κριτήρια για την επιλογή της κατάλληλης δομής του νευρωνικού ήταν: η ομαλότητα της απόκρισης (response smoothness), ο ρυθμός της απόκρισης (response rate) και κυρίως η υπερακόντιση (overshooting). Τελικά, ένα κρυμμένο επίπεδο με εφτά νευρώνες είναι η μικρότερη δομή του νευρωνικού για να έχει ικανοποιητική λειτουργία. Δίκτυα με περισσότερους από εφτά νευρώνες στο κρυμμένο επίπεδο έχουν ταχύτερη απόκριση και καλύτερη ακρίβεια σύμφωνα με τις επιθυμητές τιμές. Παρόλα αυτά, υιοθετήθηκε η ελάχιστη δυνατή δομή καθώς η φύση του συγκεκριμένου προβλήματος δεν απαιτεί υπερβολική ακρίβεια αλλά έχει ανάγκη από μικρό υπολογιστικό κόστος για να ενσωματωθεί στην ιεραρχική δομή ελέγχου της ραφής. Για τον ίδιο λόγο, δομές με δύο ή περισσότερα κρυμμένα επίπεδα απορρίπτονται, καθώς αυξάνουν υπερβολικά το υπολογιστικό κόστος. 90

109 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού B B S j f i L W 11 S K 11 j s i L S S S j th fabric extensibility j f i-1 L S Output Layer j s i-1 L Input Layer with 4 neurons W 47 S S Hidden Layer with 7 neurons K 71 S: sigmoid neuron L: linear neuron B: bias W ij : weight array for the hidden layer K j1 : weight array for the output layer Σχ Τοπολογία νευρωνικού δικτύου (4-7-1) για την εκτίμηση της εκτατότητας. Στο Σχ φαίνεται η τοπολογία του νευρωνικού δικτύου. Οι νευρώνες του επιπέδου της εισόδου είναι γραμμικοί, ενώ του κρυμμένου επιπέδου και της εξόδου είναι σιγμοειδείς, δηλαδή: Το δίκτυο έχει τη δομή 4-7-1, δηλαδή: 91
110 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ 4 γραμμικοί νευρώνες στο επίπεδο εισόδου, από τους οποίους οι δύο πρώτοι είναι για τις τρέχουσες τιμές (δύναμης, παραμόρφωσης) και οι δύο επόμενοι είναι για τις προηγούμενες τιμές. 7 σιγμοειδείς νευρώνες στο κρυμμένο επίπεδο, που βρέθηκε ως το καλύτερο πλήθος μετά από πολλές δοκιμές. 1 σιγμοειδής νευρώνας στο επίπεδο εξόδου, που είναι μία τιμή μεταξύ 0 και 1 και η οποία πολλαπλασιάζεται με το 100. Η έξοδος του νευρωνικού είναι και η εκτίμησή του για την εκτατότητα των υφασμάτων. Η έξοδος συγκρίνεται με την επιθυμητή τιμή, η οποία είναι η εκτίμηση των έμπειρων για την εκτατότητα των υφασμάτων. Οι έμπειροι εκτίμησαν την εκτατότητα των υφασμάτων με τη διαδικασία που περιγράφτηκε στα προηγούμενα υποκεφάλαια. Το σφάλμα από τη σύγκριση αυτή χρησιμοποιείται από τον αλγόριθμο Levenberg-Marquardt [87] για την εκπαίδευση του δικτύου Εκπαίδευση νευρωνικού δικτύου για την εκτίμηση της εκτατότητας. Η εκπαίδευση του νευρωνικού έγινε χωρίς να προηγηθεί κάποια προεπεξεργασία των δεδομένων, ούτως ώστε να κρατηθεί το υπολογιστικό κόστος όσο το δυνατόν πιο χαμηλά. Παρόλα αυτά, για να διευκολυνθεί η εκπαίδευση του νευρωνικού και για να γίνει πιο ρεαλιστική η απόκριση του δικτύου, ένα τμήμα των δεδομένων δεν χρησιμοποιήθηκε. Όλα τα πειραματικά δεδομένα με στοιχεία δύναμης μικρότερα των 1.5Ν και επιμήκυνσης μικρότερα των 0.05 αγνοήθηκαν. Αυτή η περιοχή των δεδομένων φαίνεται στα Σχ. 5.5 και Σχ. 5.7 με γκρι σκίαση και περιέχει δυσδιάκριτες καμπύλες με δεδομένα που υπερκαλύπτονται έντονα. Αυτό το αρχικό στάδιο των μετρήσεων εφελκυσμού μπορεί να προκαλέσει σύγχυση στην εκπαίδευση του νευρωνικού δικτύου για αυτό και αφέθηκε εκτός διαδικασίας εκπαίδευσης. Ο κλασσικός αλγόριθμος οπισθόδρομης διάδοσης του σφάλματος (backpropagation), με ή χωρίς ορμή (momentum), είναι ένας πολύ γνωστός και σίγουρα ο πιο κοινός αλγόριθμος εκπαίδευσης νευρωνικών δικτύων. Παρόλα αυτά, εξαιτίας της αργής σύγκλυσή του, είναι δύσχρηστος όταν πρόκειται για πραγματικές εφαρμογές με πολλά δεδομένα. Πολλοί αλγόριθμοι μάθησης έχουν προταθεί [88], οι οποίοι έχουν πολύ υψηλότερο ρυθμό σύγκλισης από ότι ο κλασσικός αλγόριθμος backpropagation. Ο αλγόριθμος Levenberg-Marquardt [87] είναι ένας πολύ γρήγορος αλγόριθμος μάθησης για μέτριου μεγέθους δίκτυα καθώς και για προβλήματα προσέγγισης συναρτήσεων. Ωστόσο, όσο αυξάνεται το πλήθος των βαρών (το πλήθος των νευρώνων) του νευρωνικού δικτύου τόσο μειώνεται το πλεονέκτημα αυτού του αλγορίθμου. Όλοι οι αλγόριθμοι που παρέχονται από την εργαλειοθήκη νευρωνικών δικτύων (neural network toolbox) του Matlab δοκιμάστηκαν ούτως ώστε να βρεθεί ο πιο αποδοτικός για το συγκεκριμένο πρόβλημα. Τελικά, για την εκπαίδευση του νευρωνικού χρησιμοποιήθηκε ο αλγόριθμος Levenberg-Marquardt. Η αρχική τιμή του συντελεστή απόσβεσης μ [87] τέθηκε στο Ο συντελεστής απόσβεσης μ μεταβάλλεται ανάλογα με την συνάρτηση απόδοσης που είναι το άθροισμα των τετραγώνων των σφαλμάτων (sum of squares of errors) επί όλων των εισόδων. Μετά από κάθε επιτυχημένη επανάληψη (όπου η συνάρτηση απόδοσης μειώνεται) ο 92
111 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού συντελεστής απόσβεσης μ πολλαπλασιάζεται με το 0.1 για να μειωθεί η τιμή του. Εάν η επανάληψη είναι ανεπιτυχής, ο συντελεστής απόσβεσης μ πολλαπλασιάζεται με το 10 για να αυξηθεί η τιμή του, με τη μέγιστη επιτρεπόμενη να είναι ίση με Το νευρωνικό δίκτυο εκπαιδεύεται για 1000 επαναλήψεις, που σημαίνει ότι όλο το σετ των δεδομένων εισόδου (όλες οι μετρήσεις για όλα τα υφάσματα) τροφοδοτούνται 1000 φορές στο δίκτυο. Στο τέλος της εκπαίδευσης, το μέσο τετραγωνικό σφάλμα (MSE) είναι περίπου , όπως φαίνεται στο Σχ Για τη δικιά μας περίπτωση, την εκτίμηση της εκτατότητας, αυτό το μέσο τετραγωνικό σφάλμα είναι αρκετά ικανοποιητικό, καθώς το δίκτυο μπορεί να εκτιμήσει την εκτατότητα για κάθε ύφασμα από το σετ της εκπαίδευσης με μία ακρίβεια περίπου ± Η εκτατότητα των υφασμάτων εκφράζεται από τον άνθρωπο με ακρίβεια ενός δεκαδικού ψηφίου (0.1, 0.3, 0.5, 0.7, 0.9). Από την άλλη, το νευρωνικό δίκτυο εκτιμά την εκτατότητα των ίδιων υφασμάτων με ακρίβεια ±0.001 μετά από 10 μόλις επαναλήψεις, ενώ το μέσο τετραγωνικό σφάλμα είναι σχεδόν ±0.1 από την αρχή της εκπαίδευσης, όπως φαίνεται στο Σχ Σχ Μέσο τετραγωνικό σφάλμα (MSE) της διαδικασίας εκπαίδευσης. Μικρές διακυμάνσεις στην ακρίβεια με την οποία πιάνεται το ύφασμα από την αρπάγη του ρομπότ, δεν επηρεάζουν την απόδοση του συστήματος, καθώς το νευρωνικό είναι αρκετά σθεναρό (robust) και απορρίπτει τέτοιες διαταραχές. Μετά την εκπαίδευσή του, το νευρωνικό δίκτυο χρησιμοποιείται και δοκιμάζεται με ένα σετ άγνωστων υφασμάτων τα οποία δεν χρησιμοποιήθηκαν κατά την εκπαίδευσή του, όπως φαίνεται στο κάτω μέρος (testing phase) του Σχ Τα πείραμα εφελκυσμού εκτελείται πλέον στα νέα-άγνωστα υφάσματα και οι μετρήσεις δύναμης και επιμήκυνση τροφοδοτούνται κατά τη διάρκεια του πειράματος (on-line) στο εκπαιδευμένο δίκτυο. Η έξοδος του νευρωνικού από την αρχή του πειράματος 93
112 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ (από την πρώτη κιόλας μέτρηση) είναι η εκτίμησή του για την εκτατότητα των υφασμάτων. Στο Σχ φαίνονται οι αποκρίσεις του εκπαιδευμένου νευρωνικού για την περίπτωση των έξι μονών υφασμάτων που παρουσιάζονται στον Πιν. 5.2 και στο Σχ. 5.5 με διακεκομμένες γραμμές. Σχ Οι εκτιμήσεις του νευρωνικού δικτύου για την εκτατότητα των δειγμάτων Για κάθε μία από τις έξι περιπτώσεις, η συνεχής γραμμή είναι η επιθυμητή εκτατότητα που προσδιορίζεται από τον έμπειρο, ενώ με διακεκομμένη γραμμή είναι ή έξοδος του νευρωνικού κατά τη διάρκεια του πειράματος εφελκυσμού. Το νευρωνικό δίκτυο είναι ικανό να κάνει μία χονδρική εκτίμηση της εκτατότητας 94
113 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού σχεδόν από τα πρώτα στάδια του πειράματος εφελκυσμού και αυτή η εκτίμησή του βελτιώνεται συνεχώς καθώς το πείραμα εξελίσσεται. Είναι αξιοσημείωτο να υπενθυμίσουμε ότι η εκπαίδευση του νευρωνικού έγινε με δεδομένα που ήταν μεγαλύτερα του 0.05 για την επιμήκυνση και μεγαλύτερα του 1.5Ν για τη δύναμη. Όμως, το δίκτυο μπορεί να κάνει ικανοποιητικές εκτιμήσεις ακόμα και για αυτή τη γκρίζα περιοχή. Επίσης, αρκετά πριν το τέλος των πειραμάτων εφελκυσμού (περίπου στο πρώτο 20-30% του συνολικού χρόνου του πειράματος) η επιθυμητή εκτατότητα σχεδόν προσεγγίζεται. Έτσι, από τη στιγμή που τα δεδομένα εισάγονται στο νευρωνικό από την αρχή του πειράματος εφελκυσμού, δεν είναι απαραίτητο να περιμένει το σύστημα για να ολοκληρωθεί το πείραμα ούτως ώστε να κάνει μία εκτίμηση της εκτατότητας. Όπως φαίνεται από τις αποκρίσεις των δειγμάτων 15 και 20 οι εκτιμήσεις δεν είναι τόσο ικανοποιητικές (έχουν απόκλιση) όσο οι υπόλοιπες. Αυτό συμβαίνει γιατί οι καμπύλες αυτών των υφασμάτων βρίσκονται στα όρια του σετ εκπαίδευσης, όπως φαίνεται στο Σχ Είναι γνωστό ότι όταν ένα παράδειγμα εισόδου στο νευρωνικό δίκτυο είναι κοντά στο πάνω και κάτω όριο του σετ εκπαίδευσης, τότε η απόδοση του νευρωνικού περιορίζεται. Όσο τα νέα παραδείγματα βγαίνουν εκτός ορίων εκπαίδευσης τόσο μειώνεται η απόδοση του νευρωνικού. Παρόλα αυτά, το νευρωνικό εξακολουθεί και βγάζει ένα αποτέλεσμα χωρίς να καταρρέει. Επιπλέον, τα δείγματα 15 και 20 είναι υφάσματα με πολύ μικρή και πολύ μεγάλη εκτατότητα αντίστοιχα, όπου για αυτές τις περιπτώσεις χρησιμοποιήθηκε μικρότερο πλήθος υφασμάτων για την εκπαίδευση του νευρωνικού από ότι στις άλλες περιοχές. Αυτό το πρόβλημα μπορεί να αντιμετωπιστεί χρησιμοποιώντας κατά την εκπαίδευση, αφενός μεν περισσότερα δείγματα υφασμάτων και αφετέρου δε περισσότερα υφάσματα με καμπύλες εφελκυσμού εκτός των τρεχόντων ορίων. Τα αποτελέσματα της εκπαίδευσης του νευρωνικού που παρουσιάστηκαν αφορούν την περίπτωση των μονών υφασμάτων. Η ίδια ακριβώς διαδικασία ακολουθείται και στην περίπτωση των διπλών υφασμάτων για την εκπαίδευση του αντίστοιχου νευρωνικού. 5.6 Διερεύνηση των λειτουργικών ορίων των πειραμάτων εφελκυσμού. Τα πειράματα εφελκυσμού εκτελέστηκαν σύμφωνα με τις προδιαγραφές που προέκυψαν από τη μελέτη της συμπεριφοράς και των χειρισμών των έμπειρων χειριστών, όπως περιγράφτηκε στα προηγούμενα υποκεφάλαια. Για παράδειγμα, το μήκος και το πλάτος των δειγμάτων εφελκυσμού ήταν αποτέλεσμα των χαρακτηριστικών των ανθρώπων και του τρόπου που αυτοί εκτελούν το πείραμα εφελκυσμού. Παρόλα αυτά όμως, πολλές φορές τα κομμάτια των υφασμάτων που ράβονται μπορεί να είναι μικρότερα ή μεγαλύτερα από αυτά των πειραμάτων εφελκυσμού. Ο ίδιος ο άνθρωπος, παρόλο που εκτελεί το πείραμα εφελκυσμού με τον τρόπο που περιγράφθηκε (σε μία ενεργή περιοχή του υφάσματος 5 10 cm), πολλές φορές πρέπει να ράψει υφάσματα διαφορετικών διαστάσεων. Δεν μπαίνει όμως στη διαδικασία να κάνει το πείραμα του εφελκυσμού και σε διαφορετικά μεγέθη υφασμάτων. Στο παρόν υποκεφάλαιο γίνεται μία διερεύνηση της επιρροής που μπορούν να έχουν οι μεταβολές στις διαστάσεις των υφασμάτων κατά το πείραμα του εφελκυσμού, που φαίνεται στο Σχ Η διερεύνηση γίνεται προς δύο κατευθύνσεις. Πρώτον, ποια μπορεί να είναι η επιρροή που μπορεί να έχει το πλάτος των δοκιμίων, δηλαδή η διάσταση που είναι κάθετη στη διεύθυνση ραφής ή με άλλα 95

114 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ λόγια κάθετη στη διεύθυνση εκτέλεσης του πειράματος εφελκυσμού. Δεύτερον, ποια μπορεί να είναι η επιρροή που μπορεί να έχει το μήκος των υφασμάτων. Πλάτος Μήκος Σχ Πείραμα εφελκυσμού με μεταβλητό μήκος και πλάτος Πειράματα εφελκυσμού με μεταβλητό πλάτος υφασμάτων. Κατά την πρώτη διερεύνηση, το πείραμα του εφελκυσμού εκτελέστηκε με 8 διαφορετικά πλάτη υφασμάτων. Οι διαστάσεις των δοκιμίων είχαν ένα σταθερό ενεργό μήκος 30 cm, δηλαδή όχι το ολικό μήκος τους αλλά αυτό που φαίνεται στο Σχ και επί του οποίου εφαρμόζεται τελικά η τάνυση. Το πλάτος των δοκιμίων ήταν μεταβλητό: 4, 5, 6, 8, 10, 14, 18 και 22 cm. Συνολικά, εκτελέστηκαν 20 διαφορετικά πειράματα σύμφωνα με τον Πιν Οι επιπλέον περιπτώσεις, πέραν των 8 των ανεξάρτητων υφασμάτων, προκύπτουν από τον τρόπο με τον οποίο έγιναν τα πειράματα. Συγκεκριμένα, το πείραμα εφελκυσμού εκτελέστηκε με τρεις διαφορετικούς τρόπους για κάθε ένα δείγμα. Για παράδειγμα, για την περίπτωση του δείγματος με πλάτος 6 cm και μήκος 30 cm, όπως φαίνεται στο Σχ. 5.14, το πείραμα έγινε μία φορά εφαρμόζοντας την τάνυση στην δεξιά του πλευρά, μία δεύτερη φορά εφαρμόζοντας τάνυση στη μέση του υφάσματος και μία τρίτη φορά εφαρμόζοντας την τάνυση στην αριστερή του πλευρά. Εξαίρεση αποτελούν τα δύο πρώτα δείγματα με πλάτη 4 cm και 5 cm όπου το πλάτος τους είναι πολύ μικρό και δεν είναι δυνατόν να ορισθούν τα παραπάνω όρια θέσης, αφού η ίδια η αρπάγη έχει διάσταση 3 cm. Πιν. 5.3 Δείγματα υφασμάτων διαφορετικού πλάτους για πειράματα εφελκυσμού. Αριθμός Δείγματος Μήκος (cm) Πλάτος (cm) Εφαρμογή της δύναμης: στη μέση στη μέση στα αριστερά 96
115 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού στη μέση στα δεξιά στα αριστερά στη μέση στα δεξιά στα αριστερά στη μέση στα δεξιά στα αριστερά στη μέση στα δεξιά στα αριστερά στη μέση στα δεξιά στα αριστερά στη μέση στα δεξιά Η διερεύνηση της εφαρμογής της τάνυσης σε διαφορετικές θέσεις πάνω στο ύφασμα, κατά την διάρκεια του πειράματος εφελκυσμού, έγινε επειδή κατά τη φάση του γαζώματος είναι πιθανό να χρειαστούν ραφές στη μία πλευρά του υφάσματος, στην άλλη πλευρά του η στη μέση του. Άρα, η διερεύνηση του πειράματος εφελκυσμού σε αυτές τις περιπτώσεις μπορεί να αναδείξει την αξιοπιστία του συστήματος και σε άλλες περιπτώσεις, πέρα από αυτές με τις οποίες εκπαιδεύτηκε. 97
116 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ εφαρμογή τάνυσης στα δεξιά πλάτος μήκος στη μέση εφαρμογή τάνυσης στα αριστερά Σχ Εκτέλεση του πειράματος εφελκυσμού με τρεις διαφορετικούς τρόπους στο ίδιο όμως δείγμα. Τα παραπάνω 20 πειράματα επαναλήφθηκαν αρκετές φορές ούτως ώστε να επιβεβαιωθεί η επαναληψιμότητα της διαδικασίας. Στο Σχ. 5.15, φαίνονται οι καμπύλες εφελκυσμού για τα 8 ίδιου τύπου υφάσματα και τους διαφορετικούς τρόπους εκτέλεσης του πειράματος. Σχ Καμπύλες εφελκυσμού υφασμάτων με μεταβλητό πλάτος. 98
117 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού Παρατηρώντας τις καμπύλες είναι φανερό ότι αυτές δεν μεταβάλλονται ιδιαίτερα καθώς αλλάζουν είτε το πλάτος του υφάσματος είτε η θέση από την οποία πιάνουμε το ύφασμα. Συγκρίνοντας τις καμπύλες αυτές μέσα στην ευρύτερη περιοχή όλων των υπολοίπων καμπυλών (Σχ. 5.7) συμπεραίνουμε ότι η μεταβολή στο πλάτος του υφάσματος δεν επηρεάζει τα αποτελέσματα του πειράματος εφελκυσμού και κατ επέκταση την εκτίμηση της εκτατότητας του υφάσματος. Άρα, η προσέγγιση που ακολουθήθηκε είναι αξιόπιστη και επιβεβαιώνεται ότι η εκτέλεση πειραμάτων με το αρχικά επιλεγμένο πλάτος υφασμάτων μπορεί να καλύψει και άλλες περιπτώσεις υφασμάτων με διαφορετικά πλάτη Πειράματα εφελκυσμού με μεταβλητό μήκος υφασμάτων. Κατά τη δεύτερη διερεύνηση των πειραμάτων εφελκυσμού, ο τύπος και το πλάτος των υφασμάτων κρατήθηκαν σταθερά ενώ μεταβαλλόταν το μήκος τους (στη διεύθυνση εφαρμογής της τάνυσης). Οι λόγοι που μας οδήγησαν να διερευνήσουμε τη μεταβλητότητα του μήκους του υφάσματος είναι δύο και έχουν να κάνουν με τις πραγματικές συνθήκες της διαδικασίας της ραφής. Ο πρώτος, όπως έχει ήδη ειπωθεί, είναι διότι το σύστημα ενδέχεται να κληθεί να ράψει και διαφορετικά μεγέθη υφασμάτων. Ο δεύτερος λόγος είναι διότι καθώς ένα ύφασμα ράβεται, το πραγματικό (ενεργό) μήκος του υφάσματος, το οποίο υπόκειται σε εφελκυσμό, συνεχώς μειώνεται. Άρα πρέπει να διερευνηθεί κατά πόσο το σύστημα μπορεί να ακολουθήσει αυτή τη μεταβολή δεδομένου ότι έχει εκπαιδευτεί για ένα συγκεκριμένο αρχικό μήκος. Για τον έλεγχο της επίδρασης που μπορεί να έχει το μήκος του υφάσματος στο πείραμα του εφελκυσμού, υλοποιήθηκαν πειράματα με 16 διαφορετικά μήκη υφάσματος. Στην πραγματικότητα, στα πειράματα αυτά, το συνολικό μέγεθος του υφάσματος είναι το ίδιο αλλά το ενεργό μήκος επί του οποίου εφαρμόζεται η τάνυση είναι διαφορετικό, όπως φαίνεται στο Σχ όπου παρουσιάζονται τρία περιπτώσεις από τα 16 παραδείγματα. Η εκδοχή αυτή, αντιστοιχεί στις πραγματικές συνθήκες ραφής όπου το ενεργό μήκος του υφάσματος μειώνεται συνεχώς. Παρόμοια όμως, είναι και η άλλη εκδοχή όπου το αρχικό μήκος του υφάσματος μπορεί να είναι διαφορετικό από αυτό που χρησιμοποιήθηκε για την εκπαίδευση του συστήματος. 99



118 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Ενεργό Μήκος Σχ Μείωση του ενεργού μήκους του υφάσματος καθώς εξελίσσεται η διαδικασία της ραφής. Συνολικά, εκτελέστηκαν 16 διαφορετικά πειράματα σύμφωνα με τον Πιν Τα πειράματα ξεκίνησαν με ένα αρχικό ενεργό μήκος υφάσματος 40 cm. Καθώς υποτίθεται ότι η διαδικασία της ραφής εξελίσσεται και το ενεργό μήκος μειώνεται 100
119 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού έγιναν πειράματα εφελκυσμού ανά τρία εκατοστά. Στο τέλος όμως, και για να είναι δυνατόν να μελετηθεί η εξέλιξη του φαινομένου καθώς η αρπάγη πλησιάζει πολύ κοντά στη βελόνα, έγιναν πειράματα εφελκυσμού ανά ένα εκατοστό. Πιν. 5.4 Δείγματα υφασμάτων διαφορετικού μήκους για πειράματα εφελκυσμού. Αριθμός Δείγματος Μήκος Πλάτος (cm) (cm)
120 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ Καμπύλες εφελκυσμού υφασμάτων με μεταβλητό μήκος. Από τις καμπύλες εφελκυσμού που φαίνονται στο Σχ. 5.17, είναι εμφανές ότι καθώς προχωράει η διαδικασία της ραφής και μειώνεται το ενεργό μήκος του υφάσματος η καμπύλη εφελκυσμού του μετατοπίζεται προς τα αριστερά. Δηλαδή, η εκτατότητα του υφάσματος μειώνεται ή με άλλα λόγια, γίνεται πιο στιβαρό. Οι καμπύλες εφελκυσμού, παρόλο που προέρχονται από το ίδιο ύφασμα καλύπτουν μία ευρύτερη περιοχή στο διάγραμμα δύναμης-επιμήκυνσης. Σε αυτήν την περίπτωση θα έπρεπε να μεταβάλλεται η επιθυμητή τάνυση πάνω στα υφάσματα καθώς προχωράει η διαδικασία της ραφής, όπως περιγράφεται και στο επόμενο κεφάλαιο. Σύμφωνα όμως, με την προσέγγιση που ακολουθείται στην παρούσα διατριβή, η επιθυμητή τάνυση επί των υφασμάτων παραμένει σταθερή καθ όλη τη διάρκεια της ραφής. Μέσα όμως από τα πειράματα εφελκυσμού μεταβλητού μήκους, γίνεται μία μελέτη που θέτει τα θεμέλια για μια μελλοντική εναλλακτική προσέγγιση του προβλήματος, όπου η επιθυμητή τάνυση σε κάθε ύφασμα θα μεταβάλλεται (θα μειώνεται) on-line, καθώς θα προχωράει η διαδικασία της ραφής. Η επίδραση που έχει αυτή η περίπτωση εξηγείται αναλυτικά στο Κεφ. 7, όπου παρουσιάζονται αποτελέσματα κατά τη ραφή. 5.7 Επέκταση της χρήσης της νέας μεθόδου προσέγγισης των πειραμάτων. Η μέθοδος που αναπτύχθηκε, για την ευφυή επεξεργασία των πειραματικών δεδομένων με χρήση νευρωνικών δικτύων, επεκτάθηκε και ενσωματώθηκε με άλλα συστήματα. Έτσι, παρουσιάστηκε [89] [90] η χρήση νευρωνικών δικτύων για την εξαγωγή των ιδιοτήτων τόσο εύκαμπτων όσο και στιβαρών αλλά και σύνθετων αντικειμένων. Τα ανεξάρτητα συστήματα (ένα για εύκαμπτα, ένα για στιβαρά και ένα για σύνθετα) αξιολογήθηκαν υπό ένα γενικότερο πλαίσιο το οποίο χρησιμοποιεί νευρωνικά δίκτυα για την εκτίμηση και την αξιολόγηση των ιδιοτήτων αντικειμένων, τα οποία υφίστανται κάποια δοκιμή (εφελκυσμό, συμπίεση) υπό διαφορετικές συνθήκες. 102
121 Κεφ.5 - Αυτοματοποιημένη ποιοτική εκτίμηση των ιδιοτήτων των υφασμάτων πειράματα εφελκυσμού 5.8 Συμπεράσματα Η νέα μέθοδος που αναπτύχθηκε θέτει τα θεμέλια μίας νέας προσέγγισης κατά την οποία οι ιδιότητες των υφασμάτων διατυπώνονται και χρησιμοποιούνται κατά έναν τρόπο που είναι πιο κοντά στην ανθρώπινη αντίληψη. Χρησιμοποιήθηκε η ικανότητα των νευρωνικών δικτύων να προσεγγίζουν μη-γραμμικές συναρτήσεις εισόδου-εξόδου ούτως ώστε να εκφραστεί η εκτατότητα των υφασμάτων με μία ασαφή παράμετρο και όσο το δυνατόν πιο κοντά στην εκτίμηση των έμπειρων χειριστών. Επιπλέον, τα νευρωνικά δίκτυα χρησιμοποιήθηκαν εξαιτίας της ικανότητας γενίκευσης [83]. Τέλος, χρησιμοποιήθηκαν επειδή μπορούν και δουλεύουν ικανοποιητικά όταν τα δεδομένα έχουν θόρυβο, όπως στην περίπτωση των μετρήσεων δύναμης σε ένα περιβάλλον με εξωτερικές διαταραχές όπως αυτές του κινητήρα της ραπτομηχανής. Τα καινοτόμα στοιχεία της νέας μεθόδου βασίζονται σε δύο βασικούς άξονες: Πρώτον, στην ευφυή επεξεργασία των μετρήσεων, χρησιμοποιώντας εκπαιδευμένα νευρωνικά δίκτυα, κατά το πείραμα του εφελκυσμού που εκτελείται με ρομπότ. Δεύτερον, στην έξυπνη ενσωμάτωση του πειράματος εφελκυσμού μέσα στη διαδικασία της ραφής εκμεταλλευόμενοι την ίδια τη ραπτική μηχανή. Η πρωτότυπη μέθοδος που αναπτύχθηκε μπορεί να βοηθήσει προς την κατεύθυνση της εισαγωγής των λεκτικών μεταβλητών (ποιοτικά δεδομένα), για την έκφραση και τη χρήση των ιδιοτήτων των υφασμάτων, στην βιομηχανία ένδυσης και κυρίως στον τομέα της ραφής υφασμάτων. Μία διαδικασία που έτσι και αλλιώς χρησιμοποιείται από όσους εμπλέκονται στην αλυσίδα της παραγωγής υφασμάτων και ρούχων αλλά όχι από τα μηχανήματα που χρησιμοποιούνται κατά την παραγωγή. Αυτή όμως η γνώση και εμπειρία αφενός μεν είναι υποκειμενική αφετέρου δε μεταβιβάζεται από άνθρωπο σε άνθρωπο και τελικά δεν καταγράφεται για να μπορέσει να χρησιμοποιηθεί συστηματικά. Η αισιόδοξη προοπτική αυτής της προσέγγισης είναι η μελλοντική επιστημονική καθιέρωση μιας κοινά αποδεκτής και αναγνωρίσιμης γλώσσας για την επικοινωνία μεταξύ ανθρώπων-ανθρώπων, ανθρώπων-μηχανών και μηχανών-μηχανών. Αλλά και η επέκταση αυτής της προσέγγισης και σε άλλα ευέλικτα βιομηχανικά συστήματα τα οποία θα μπορούν να βασίζονται σε νευρωνικά δίκτυα, ασαφή λογική και γενετικούς αλγορίθμους. Το προτεινόμενο σύστημα είναι αρκετά ευέλικτο και δεν απαιτεί επιπλέον μηχανολογικό κόστος εάν είναι ενσωματωμένο στη διαδικασία ραφής και χρησιμοποιείται ο ίδιος ρομποτικός βραχίονας που χρησιμοποιείται και στη ραφή. Συγκρινόμενη με τις μεθόδους και τους τρόπους μετρήσεων των κλασικών οργάνων (KES, FAST, FAMOUS) αλλά και με τους τρόπους που αξιολογούν τις μετρήσεις τους, η μέθοδος που παρουσιάζεται σε αυτή τη διατριβή εξετάζει και διαχειρίζεται την εκτατότητα των υφασμάτων σαν μία συνολική ιδιότηταχαρακτηριστικό των υφασμάτων, όπως κάνει και ο άνθρωπος. Η χρήση και η αξιολόγηση της συνολικής καμπύλης εφελκυσμού ενός υφάσματος, βοηθάει στο να γίνεται καλύτερη σύγκριση μεταξύ των υφασμάτων. Αυτό επειδή η συνολική καμπύλη περιέχει περισσότερες πληροφορίες για την εκτατότητα των υφασμάτων από ότι περιέχονται στα χαρακτηριστικά που εξάγονται από τα κλασικά όργανα 103
122 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ μετρήσεων όπως τα LT, WT, RT και EMT, που περιγράφονται στο πρώτο κεφάλαιο. Το νευρωνικό δίκτυο παίρνει υπόψη του το συνολικό σχήμα της καμπύλης και όχι μόνο τις τελικές τιμές ή κάποιους μέσους όρους τιμών. Η εκτίμηση της εκτατότητας των υφασμάτων που πρόκειται να ραφτούν ανήκει στο υψηλότερο ιεραρχικά επίπεδο του συστήματος ελέγχου. Στο επόμενο επίπεδο (επίπεδο αποφάσεων) χρησιμοποιείται η εκτατότητα, ως δεδομένο πλέον, για τον υπολογισμό της επιθυμητής τάνυσης που θα εφαρμοστεί κατά τη διάρκεια της ραφής. 104
123 6 Εκτίμηση των επιθυμητών προδιαγραφών του ελέγχου της ραφής επιθυμητή τάνυση κάθε υφάσματος Ακολουθήθηκε η τακτική της εξόρυξης της γνώσης με επαφές και συνεντεύξεις με έμπειρους χειριστές ραπτικών μηχανών, από τους οποίους αποκτήθηκε και καταγράφτηκε η εμπειρία τους στον χειρισμό υφασμάτων με σκοπό την ενσωμάτωσή της στον τρόπο αντιμετώπισης του προβλήματος. Παρουσιάζεται ένα ασαφές σύστημα προσδιορισμού της επιθυμητής τάνυσης του κάθε υφάσματος το οποίο βασίζεται στην ποιοτική εκτίμηση της εκτατότητας του υφάσματος και διαμορφώθηκε από την εμπειρία του έμπειρου χειριστή και την ασαφή συνεπαγωγή που κάνει αυτός ανάμεσα στην εκτατότητα και την επιθυμητή τάνυση. 6.1 Εισαγωγή. Η εξασφάλιση ποιοτικών ραφών εξαρτάται από τη σωστή εφαρμογή διαφορετικών κάθε φορά τανύσεων των υφασμάτων κατά τη ραφή τους, όπως αναφέρεται από τους έμπειρους χειριστές, από τις οδηγίες χρήσης ραπτομηχανών, από τους οδηγούς ραφής ρούχων καθώς και από τη διεθνή επιστημονική βιβλιογραφία [2]. Έτσι, πριν τη σωστή εφαρμογή της τάνυσης κατά την ραφή θα πρέπει να καθοριστεί ποια θα είναι η επιθυμητή τάνυση για το κάθε ύφασμα που πρόκειται να ραφτεί. Άρα, η τάνυση αυτή θα καθοριστεί είτε από τον έμπειρο χειριστή είτε από μία αυτοματοποιημένη διαδικασία. Δεδομένου ότι ο έμπειρος χειριστής δεν μπορεί να εκφράσει ποσοτικά αυτήν την πληροφορία, όπως παρουσιάζεται στο επόμενο υποκεφάλαιο, απαιτείται ένα ευφυές σύστημα που θα δίνει την απαραίτητη ευελιξία στην όλη διαδικασία. Έτσι, αναπτύχθηκε ένα ασαφές σύστημα το οποίο χρησιμοποιεί την πληροφορία που προέρχεται από το προηγούμενο ιεραρχικά επίπεδο. Στο ασαφές αυτό σύστημα έχει επίσης ενσωματωθεί η εμπειρία του ανθρώπου για να μπορεί να εκτιμήσει την επιθυμητή τάνυση που θα εφαρμοστεί κατά τη ραφή.
124 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ 6.2 Εξόρυξη γνώσης από έμπειρους χειριστές ραπτικών μηχανών. Οι μέθοδοι συλλογής υλικού και δεδομένων κατά την προσπάθεια λύσης κάποιου προβλήματος βασίζονται σε τρεις κατευθύνσεις: Παρατήρηση Συνέντευξη Ερωτηματολόγιο Η τακτική, η οποία ακολουθήθηκε στο πρόβλημά μας, για την συλλογή των δεδομένων και την εξόρυξη της γνώσης από τους έμπειρους χειριστές βασίστηκε στα δύο πρώτα από αυτά. Την Παρατήρηση [να βάλω την αναφορά του Δημητρόπουλου 1994] και τη Συνέντευξη [να βάλω την αναφορά του Ζαφειρίου 2003]. Κατά τη παρατήρηση το φαινόμενο (η εργασία της ραφής με ραπτομηχανή) και η συμπεριφορά των έμπειρων παρατηρήθηκαν κατά τρόπο προγραμματισμένο, οργανωμένο και συστηματοποιημένο. Χρησιμοποιήθηκε η καταγραφή των εργασιών και η επαλήθευση της καταγραφής. Το είδος της παρατήρησης ήταν: η άμεση και πειραματική παρατήρηση. Κατά τη φάση της συνέντευξης ακολουθήθηκε η διαδικασία της υποβολής ερωτήσεων τις οποίες καλείται να απαντήσει ο ερωτώμενος-έμπειρος χειριστής. Το σημείο ενδιαφέροντος ήταν η ανακάλυψη του τι σκέφτεται ο ερωτώμενος σε σχέση με τον τρόπο ραφής και η σύγκριση των γνωμών και των απόψεων των ερωτώμενων. Το είδος της συνέντευξης που εφαρμόστηκε ήταν: η ημί-κατευθυνόμενη και η ελεύθερη συνέντευξη. Από τα αποτελέσματα της διαδικασίας της εξόρυξης της γνώσης από τους έμπειρους χειριστές και τις γαζώτριες, διαπιστώθηκε ότι αυτοί χρησιμοποιούν λεκτικές μεταβλητές και τιμές για να εκφράσουν τα χαρακτηριστικά και τις ιδιότητες των υφασμάτων, την τάνυση που εφαρμόζουν πάνω στα υφάσματα, τον τρόπο με τον οποίο πιάνουν και χειρίζονται τα υφάσματα κλπ. Όσον αφορά το πρώτο, δηλαδή τα χαρακτηριστικά και τις ιδιότητες των υφασμάτων, χρησιμοποιούν λεκτικές τιμές όπως μαλακό, σκληρό, απαλό, εκτατό κλπ. καθώς και συγκριτικούς βαθμούς αυτών των τιμών, δηλαδή πολύ, πάρα πολύ, λιγότερο, πολύ λίγο, μέτριο κλπ. Για την περιγραφή της επιθυμητής τάνυσης που εφαρμόζουν κατά τη ραφή χρησιμοποιούν παρόμοιες εκφράσεις, όπως μικρή δύναμη, πολύ μικρή δύναμη, μεγάλη δύναμη κλπ. Αυτή η εμπειρία, η οποία δεν μπορεί να εκφραστεί ποσοτικά από τους έμπειρους, χρησιμοποιήθηκε ως οδηγός για να αναπτυχθεί ένα σχετικό ασαφές σύστημα. Οι έμπειροι χειριστές-γαζώτριες ραπτομηχανών πέρασαν από τη διαδικασία της συνέντευξης-ερωτήσεων και ο τρόπος εργασίας τους παρατηρήθηκε και μελετήθηκε. Στόχος όλων αυτών ήταν να εντοπιστούν όλες εκείνες οι διαφορετικές ενέργειες που γίνονται από τους έμπειρους για να ράψουν διαφορετικά κάθε φορά υφάσματα. Το κύριο βάρος των εστιάσεων ήταν στο τι είναι εκείνο που κάνουν όταν ράβουν, δηλαδή τραβάνε ή σπρώχνουν το ύφασμα; και πόσο πολύ για κάθε διαφορετικό ύφασμα; Σύμφωνα με τα αποτελέσματα που εξήχθησαν, το ύφασμα κρατιέται τεντωμένο κατά τη διάρκεια της ραφής και χωρίς να δημιουργούνται πτυχώσεις επ αυτού. Αυτό σημαίνει ότι μόνο εφελκυστικές δυνάμεις πρέπει να εφαρμόζονται πάνω στο ύφασμα. Επίσης, ο καθορισμός της τάνυση για κάθε ύφασμα εξαρτάται από: 106
125 Κεφ.6-Εκτίμηση των επιθυμητών προδιαγραφών του ελέγχου της ραφής επιθυμητή τάνυση κάθε υφάσματος Την εκτατότητα του κάθε υφάσματος. Οι έμπειροι εξέφραζαν την εκτατότητα του κάθε υφάσματος με τις λεκτικές τιμές: το ύφασμα έχει μέτρια εκτατότητα, μεγάλη εκτατότητα, πολύ μεγάλη εκτατότητα, μικρή εκτατότητα και πολύ μικρή εκτατότητα. Τη διεύθυνση του υφάσματος πάνω στην οποία θα γίνει η ραφή (bias) Για τον πρώτο παράγοντα, την εκτατότητα, οι έμπειροι καθόριζαν την τάνυση που εφάρμοζαν πάνω στο ύφασμα, σύμφωνα με τον παρακάτω γενικό και βασικό κανόνα: Όσο πιο εκτατό είναι το ύφασμα τόσο μεγαλύτερη τάνυση εφαρμόζεται σε αυτό κατά τη ραφή του Από την άλλη πλευρά, η ίδια η τάνυση εκφραζόταν πάλι με λεκτικές τιμές: μέτρια, μεγάλη, πολύ μεγάλη, μικρή και πολύ μικρή δύναμη τάνυσης. Ο δεύτερος παράγοντας που καθορίζει την τάνυση είναι η διεύθυνση. Δεδομένου ότι η εκτατότητα αυξάνεται όσο προχωράμε προς τη διαγώνιο ενός υφάσματος (bias), όπως επιβεβαιώνεται και από τους Potluri και Porat [28], θα πρέπει να αυξάνεται και η τάνυση του υφάσματος. Για αυτό, οι έμπειροι χειριστές εφαρμόζουν μεγαλύτερη τάνυση σε ένα ύφασμα όταν το ράβουν κατά τη διαγώνιο από την τάνυση που εφαρμόζουν όταν το ράβουν κατά μήκος (παράλληλα) με τις κλωστές του. Η μέγιστη αύξηση της τάνυσης είναι στη διεύθυνση των 45 0 ως προς τις κλωστές. Οι έμπειροι χειριστές δεν είναι σε θέση να προσδιορίσουν ποσοτικά την τάνυση που εφαρμόζουν σε κάθε ύφασμα. Παρόλα αυτά, μπορούν και παράγουν ραφές υψηλής ποιότητας χρησιμοποιώντας μόνο λεκτικές μεταβλητές και τιμές για να εκφράσουν τα χαρακτηριστικά των υφασμάτων και τις ενέργειες που κάνουν κατά το χειρισμό τους. Επίσης χρησιμοποιούν τον ίδιο ασαφή τρόπο προσέγγισης όταν μεταβιβάζουν την εμπειρία τους και εκπαιδεύουν νέους ανθρώπους στο χώρο της ραφής υφασμάτων. Το συμπέρασμα είναι ότι ο τρόπος καθορισμού της επιθυμητής τάνυσης κατά τη ραφή εμπεριέχει ασάφεια. Ως εκ τούτου, η θεωρία της ασαφούς λογικής θεωρείται η πιο αρμόζουσα για να εφαρμοστεί. 6.3 Ασαφές σύστημα εξαγωγής της επιθυμητής τάνυσης. Όπως προαναφέρθηκε, για την αποτελεσματική και ποιοτική ραφή των υφασμάτων απαιτείται η γνώση της επιθυμητής τάνυσης που θα εφαρμοστεί κατά τη διάρκεια της ραφής τους. Στο προηγούμενο υποκεφάλαιο περιγράφτηκε ότι η επιθυμητή τάνυση του κάθε υφάσματος εξαρτάται από την εκτατότητά του και τη διεύθυνση ραφής του. Αυτό φαίνεται και στα Σχ. 3.2, Σχ. 3.3 (τμήμα ), όπου η εκτατότητα και η διεύθυνση ραφής εισάγονται σε ένα ασαφές σύστημα το οποίο καθορίζει την επιθυμητή τάνυση όπως φαίνεται στο Σχ Σε αυτό το σχήμα, τα πλάγια παραλληλόγραμμα αντιστοιχούν στις δύο εισόδους. Η πρώτη είσοδος είναι η εκτατότητα και μπορεί να προέρχεται, ως πληροφορία, με τον τρόπο που περιγράφτηκε στο προηγούμενο κεφάλαιο ή μπορεί να εισάγεται από τον άνθρωπο. 107

126 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Η δεύτερη είσοδος, είναι η διεύθυνση της ραφής και προέρχεται ως δεδομένο από τον άνθρωπο ή από κάποιο άλλο αυτοματοποιημένα σύστημα. Σχ. 6.1 Εκτίμηση επιθυμητής τάνυσης από το ασαφές σύστημα. Σύμφωνα λοιπόν με τη γνώση που αποκτήθηκε, καθορίστηκαν δύο ασαφείς μεταβλητές για την είσοδο στο ασαφές σύστημα και μία για την έξοδο. Αυτές είναι η εκτατότητα (extensibility) και η διεύθυνση (direction) για την είσοδο, ενώ για την έξοδο είναι η τάνυση (tension). Οι συναρτήσεις συγγενείας των μεταβλητών αυτών φαίνονται στο Σχ. 6.2, Σχ. 6.3 και Σχ. 6.4 αντίστοιχα. very low low medium high very high % % Percentage of the fabric extensibility Σχ. 6.2 Η ασαφής μεταβλητή εκτατότητα με πέντε λεκτικές τιμές. 108
127 Κεφ.6-Εκτίμηση των επιθυμητών προδιαγραφών του ελέγχου της ραφής επιθυμητή τάνυση κάθε υφάσματος zero medium great % % Percentage of the fabric bias Σχ. 6.3 Η ασαφής μεταβλητή διεύθυνση με τρεις λεκτικές τιμές. very low low medium high very high Normalized desired force Σχ. 6.4 Η ασαφής μεταβλητή τάνυση με πέντε λεκτικές τιμές. Η ασαφής μεταβλητή εκτατότητα αντιπροσωπεύει την εκτατότητα του εκάστοτε υφάσματος όπως αυτή καθορίζεται στο Κεφ. 5. Αποτελείται από πέντε λεκτικές τιμές οι οποίες καθορίστηκαν από τους έμπειρους χειριστές. Στην περίπτωση του ασαφούς συστήματος που αναπτύχθηκε, η εκτατότητα είναι ένα ποσοστό που αντιστοιχεί είτε στην αυτοματοποιημένη εκτίμηση από το προηγούμενο ιεραρχικά στάδιο (νευρωνικό δίκτυο) είτε στην εκτίμηση ενός έμπειρου χειριστή για το πόσο μπορεί το ύφασμα να εκταθεί σε σύγκριση με άλλα 109
128 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ υφάσματα χωρίς να εμφανίσει πτυχώσεις (wrinkles). Έτσι, η εκτατότητα του κάθε υφάσματος εκφράζεται ως ένα ποσοστό 0-100%. Η ασαφής μεταβλητή διεύθυνση εκφράζει τη διεύθυνση του υφάσματος πάνω στην οποία θα γίνει η ραφή σε σχέση με τη διαγώνιο ύφανσης (bias). Αποτελείται από πέντε λεκτικές τιμές. Η διεύθυνση είναι ένα ποσοστό που προέρχεται είτε από την εκτίμηση του ανθρώπου είτε από δεδομένα από το τμήμα σχεδιασμού του ρούχου (σύστημα CAD), εφόσον είναι γνωστό το πατρόν τους. Εκφράζεται ως ένα ποσοστό 0-100%, όπου η τιμή 0% σημαίνει ότι το ύφασμα πρόκειται να ραφτεί κατά μήκος (παράλληλα) των κλωστών που το αποτελούν και η τιμή 100% σημαίνει ότι πρόκειται να ραφτεί σε γωνία 45 0 ως προς τις κλωστές του, δηλαδή στη διαγώνιο ύφανσης (bias). Τέλος, η ασαφής μεταβλητή τάνυση που αντιπροσωπεύει την τάνυση που θα εφαρμοστεί στο ύφασμα κατά τη ραφή του, αποτελείται από πέντε λεκτικές μεταβλητές και αντιστοιχούν στις λέξεις που χρησιμοποιούν οι έμπειροι χειριστές. Πιν. 6.1 Ασαφείς κανόνες για την επιθυμητή τάνυση. E x t e n s i b i l i t y very low Low medium high very high D i r e c t i o n zero very low very low low medium high medium low Low medium high very high great medium Medium high very high very high Στον Πιν. 6.1 φαίνονται οι ασαφείς κανόνες που δομήθηκαν από την εμπειρία των ειδικών. Ο συνδυασμός των δύο εισόδων οδηγεί στους 15-κανόνες που έχουν την παρακάτω μορφή: If extensibility is x And direction is y Then tension is z όπου: x {very low, low, medium, high, very high}, y {zero, medium, great} και z {very low, low, medium, high, very high} Κατά τη λειτουργία του ασαφούς συστήματος ακολουθήθηκε η διαδικασία που περιγράφτηκε και στα προηγούμενα συστήματα (Κεφ. 4): Είσοδος (Input), Ασαφοποίηση (Fuzzification), Κανόνες (Rules), Αξιολόγηση Κανόνων (Rule Evaluation), Συνάθροιση εξόδων (Aggregation), Άρση Ασάφειας (Defuzzification) και 110
129 Κεφ.6-Εκτίμηση των επιθυμητών προδιαγραφών του ελέγχου της ραφής επιθυμητή τάνυση κάθε υφάσματος Έξοδος (Output). Στο τελευταίο βήμα της Εξόδου καθορίζεται η τιμή της επιθυμητής τάνυσης. Με αυτόν τον τρόπο αναπτύχθηκε μία αυτοματοποιημένη διαδικασία η οποία ενσωματώνει την εμπειρία των έμπειρων χειριστών. Αποτελεί δε, το ενδιάμεσο στάδιο στο ιεραρχικό σύστημα ελέγχου της ραφής, δηλαδή είναι το επίπεδο αποφάσεων το οποίο συνδέει το υψηλό επίπεδο εκτιμήσεων με το κατώτερο επίπεδο του ελέγχου. Η επιθυμητή τάνυση για κάθε, υποψήφιο προς ραφή, ύφασμα χρησιμοποιείται στο κατώτερο επίπεδο ελέγχου και παρουσιάζεται στο επόμενο κεφάλαιο. 111
130
131 7 Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές Παρουσιάζεται μία νέα μέθοδος ελέγχου της τάνυσης του υφάσματος κατά τη ραφή. Σε αυτήν χρησιμοποιήθηκε ένας νευρωνικός ελεγκτής ευθείας τροφοδότησης για τον έλεγχο της ταχύτητας του ρομποτικού άκρου εργασίας με σκοπό τη διατήρηση της τάνυσης του υφάσματος σύμφωνα με μία επιθυμητή κάθε φορά τιμή σε συνθήκες προσομοίωσης [C2]. Για τις ανάγκες της προσομοίωσης αναπτύχθηκε ένα απλουστευμένο μοντέλο ενός συγκεκριμένου υφάσματος μετά από πειράματα τάνυσης και συμπίεσής του. Παρουσιάστηκαν πειραματικά αποτελέσματα [C7] του προτεινόμενου συστήματος όπου το ιεραρχικό σύστημα ελέγχου και ο νευρωνικός ελεγκτής συγκρίθηκαν με έναν PID ελεγκτή κατά τη διαδικασία της ραφής που συμπεριλάμβανε ρομποτικό βραχίονα, αισθητήρα δύναμης και μία βιομηχανικού τύπου ραπτική μηχανή. Οι πρώτες πραγματικές ραφές σε μονά ορθογώνια παραλληλόγραμμα κομμάτια υφάσματος [C13] απέδειξαν την αποτελεσματικότητα του συστήματος. Για κάθε ύφασμα το αυτοματοποιημένο πείραμα του εφελκυσμού δίνει την εκτατότητα του υφάσματος. Αυτή χρησιμοποιείται από το ασαφές σύστημα αποφάσεων με σκοπό την εξαγωγή της επιθυμητής τάνυσης του υφάσματος κατά τη διάρκεια της ραφής. Ο προτεινόμενος νευρωνικός ελεγκτής είναι υπεύθυνος για τη διατήρηση αυτής της τάνυσης καθ όλη τη διάρκεια της ραφής. Επίσης, ο νευρωνικός ελεγκτής βελτιώθηκε και μία εξελιγμένη παραλλαγή του χρησιμοποιήθηκε για τη ραφή διπλών υφασμάτων. Μια μεγάλη γκάμα μονών [C13] και διπλών [J3] υφασμάτων ράφτηκε με τη χρήση του ρομπότ και πραγματικής ραπτικής μηχανής, ενώ τα αποτελέσματα της ραφής συγκρίθηκαν με τις αντίστοιχες ραφές που προέκυψαν στην περίπτωση όπου ο άνθρωπος έραβε τα ίδια υφάσματα. Παρουσιάζεται μία πρωτότυπη ευρετική λύση για την αποθήκευση της αποκτώμενης μετά από κάθε ραφή εμπειρίας, για την επέκτασή της σε ραφές για πρωτοεμφανιζόμενα για το σύστημα υφάσματα καθώς και για τον τρόπο αξιοποίησης της γνώσης του συστήματος. Επίσης, για πρώτη φορά χρησιμοποιήθηκε ένας προσαρμοστικός ασαφής ελεγκτής [C12] σε αντικατάσταση του νευρωνικού ελεγκτή και υλοποιήθηκαν πειράματα με τη διαδικασία της ραφής. Όπως φάνηκε από τα αποτελέσματα ο ασαφής ελεγκτής υστερεί σε απόδοση σε σχέση με τον αντίστοιχο νευρωνικό. Ο προτεινόμενος νευρωνικός ελεγκτής ελέγχθηκε και αξιολογήθηκε με την επέκταση της χρήσης του και σε άλλα παραδείγματα χειρισμού υφασμάτων όπως η μετακίνηση ενός υφάσματος σε μία διάσταση από τον άνθρωπο και το ρομπότ ταυτόχρονα [C7]. Ο ίδιος νευρωνικός ελεγκτής διευρύνθηκε με σκοπό τον έλεγχο και των τριών δυνάμεων (Fx, Fy, Fz) που καταγράφονται από τον
132 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ αισθητήρα δύναμης ούτως ώστε να γίνει δυνατή η μετακίνηση και στις τρεις διαστάσεις του καρτεσιανού συστήματος. Εφαρμογή αυτού ήταν η συνεργασία ανθρώπου-ρομπότ για τον χειρισμό ενός υφάσματος, ένα νέο αντικείμενο έρευνας που παρουσιάστηκε για πρώτη φορά στη διεθνή βιβλιογραφία [C10] και από ότι διαφαίνεται ανέδειξε ένα νέο ερευνητικό πεδίο στο χώρο της συνεργασίας ανθρώπου-ρομπότ για το χειρισμό εύκαμπτων αντικειμένων. Επίσης, ενσωματώθηκε και μηχανική όραση για την παρακολούθηση του χεριού του ανθρώπου [C14] και επεκτάθηκε αποτελεσματικότερα η συνεργασία ανθρώπου-ρομπότ στη μετακίνηση και το δίπλωμα υφασμάτων. Επιπλέον, ο ίδιος νευρωνικός ελεγκτής χρησιμοποιήθηκε για τη ρομποτική υποβοήθηση ενός ανθρώπου με σκοπό τη μετακίνηση αντικειμένων όπου το βάρος τους φέρει αποκλειστικά το ρομπότ ενώ ο άνθρωπος καθοδηγεί το ρομπότ μέσω του αισθητήρα δύναμης και του συστήματος ελέγχου των δυνάμεων. Τα αποτελέσματα της εφαρμογής του ίδιου νευρωνικού ελεγκτή σε ένα σύστημα ανύψωσης φορτίων δείχνουν την υπεροχή του σε σχέση με άλλη μέθοδο που εξετάστηκε [C15, J4]. Αυτές οι δύο τελευταίες παράλληλες εφαρμογές της προτεινόμενης προσέγγισης δείχνουν τη δυνατότητα γενίκευσης της και σε άλλες παραπλήσιες εργασίες. 7.1 Εισαγωγή. Στο κεφάλαιο αυτό παρουσιάζεται το κατώτερο ιεραρχικά επίπεδο του προτεινόμενου συστήματος, που είναι ο έλεγχος της δύναμης που εφαρμόζεται στα υφάσματα κατά τη ραφή τους σε ευθείες γραμμές. Η γενική μορφή του διαγράμματος ελέγχου της δύναμης, φαίνεται στο Σχ. 7.1, ενώ στα Σχ. 3.2 και Σχ. 3.3 φαίνεται η ένταξή του (τμήμα ) μέσα στο συνολικό διάγραμμα του ιεραρχικού συστήματος ελέγχου της ραφής. Ο ελεγκτής παίρνει ως είσοδο το σφάλμα της επιθυμητής και της τρέχουσας δύναμης και υπολογίζει την εντολή που θα στείλει προς το ρομπότ. Το ρομπότ ενεργεί επί του υφάσματος, στο οποίο όμως ενεργεί και μία εξωτερική διαταραχή, αυτή της ραπτικής μηχανής η οποία τραβάει το ύφασμα με μία μεταβλητή και βηματικού προφίλ ταχύτητα. Ο αισθητήρας δύναμης που είναι εφαρμοσμένος στο άκρο εργασίας του ρομπότ μετράει την τρέχουσα δύναμη επί του υφάσματος και ανατροφοδοτεί τον ελεγκτή κλείνοντας έτσι τον βρόχο. 114
 Επιθυμητή Δύναμη + - Ελεγκτής?")

133 δύναμη ταχύτητα ή μετατόπιση Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές PID Νευρωνικό Δίκτυο Προσαρμοστικός ασαφής ελεγκτής Εξωτερική διαταραχή (ραπτομηχανή) Επιθυμητή Δύναμη + - Ελεγκτής? Ρομπότ Ύφασμα Αισθητήρας Δύναμης Σχ. 7.1 Γενικό διάγραμμα ελέγχου δύναμης κατά τη ραφή. Βασικός στόχος στο παραπάνω διάγραμμα ελέγχου είναι η εύρεση του κατάλληλου ελεγκτή ούτως ώστε να εφαρμόζεται στο ύφασμα η επιθυμητή τάνυση κατά τη ραφή του. Για το σκοπό αυτό υλοποιήθηκαν και αξιολογήθηκαν ελεγκτές όπως PID, Νευρωνικός και προσαρμοστικός ασαφής ελεγκτής. Στο υπόλοιπο τμήμα του κεφαλαίου παρουσιάζονται οι παραπάνω ελεγκτές και κυρίως ο νευρωνικός ελεγκτής που είναι η βασική προσέγγιση που ακολουθήθηκε. Υπό το πρίσμα της εφικτότητας της προτεινόμενης προσέγγισης, αρχικά το υπό έλεγχο σύστημα μοντελοποιήθηκε και ο νευρωνικός ελεγκτής δοκιμάστηκε σε συνθήκες προσομοίωσης [51]. Τελικά, ο νευρωνικός ελεγκτής δοκιμάστηκε σε πραγματικές συνθήκες ραφής μονών [54] και διπλών [55] υφασμάτων. Επιπλέον, ο νευρωνικός αυτός ελεγκτής εφαρμόστηκε και σε άλλα παραδείγματα ελέγχου δύναμης υπό το πρίσμα της πιθανής διεύρυνσης/επέκτασης των προσεγγίσεων που αναπτύχθηκαν. Η επέκτασή του και σε άλλες εφαρμογές παρουσιάζεται στο τέλος αυτού του κεφαλαίου. 7.2 Προσομοίωση νευρωνικού ελεγκτή. Ο προτεινόμενος νευρωνικός ελεγκτής υλοποιήθηκε και δοκιμάστηκε αρχικά σε συνθήκες προσομοίωσης. Στο διάγραμμα ελέγχου που φαίνεται στο Σχ. 7.1 ο ελεγκτής αποτελείται από ένα νευρωνικό δίκτυο ευθείας τροφοδότησης όπως περιγράφεται στο Σχ
134 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ S measured force L w1 w2 w3 w4 bias1 bias2 bias3 S S v1 v2 v3 v4 S robot velocity w5 bias4 S v5 S bias5 Input Layer Hidden Layer Output Layer S: sigmoid neuron L: linear neuron Σχ. 7.2 Νευρωνικό δίκτυο για τις ανάγκες της προσομοίωσης. Αυτός ο τύπος νευρωνικού επιλέχθηκε επειδή έχει πολύ απλή τοπολογία και έχει χρησιμοποιηθεί επιτυχώς σε πάρα πολλές άλλες εφαρμογές [91] [92]. Ο αλγόριθμος εκπαίδευσης είναι ο γνωστός αλγόριθμος οπισθόδρομης διάδοσης του σφάλματος (back propagation) [83]. Η εμπειρία από τη χρήση των νευρωνικών δικτύων λέει ότι ο αριθμός των νευρώνων του κρυμμένου επιπέδου επηρεάζει τη απόδοση του δικτύου. Σε γενικές γραμμές, ένας πολύ μεγάλος ή πολύ μικρός αριθμός κρυμμένων νευρώνων σε σχέση με το πλήθος των νευρώνων της εισόδου μειώνει την αποτελεσματικότητα του νευρωνικού δικτύου. Έτσι, η κλασσική προσέγγιση της δοκιμής και λάθους (trial and error) ακολουθήθηκε για να βρεθεί το καλύτερο πλήθος των κρυμμένων νευρώνων. Στη συγκεκριμένη περίπτωση βρέθηκε ότι πέντε νευρώνες είναι κατάλληλοι για το κρυμμένο επίπεδο. Αυτό προέκυψε μετά από πολλές δοκιμές της προσομοίωσης μεταβάλλοντας το πλήθος των κρυμμένων νευρώνων, όπου τα κριτήρια για την καλύτερη επιλογή ήταν η υπερακόντιση (overshooting), η ομαλότητα της απόκρισης (response smoothness) και ο χρόνος απόκρισης. Τελικά, η διαμόρφωση χρησιμοποιήθηκε κατά τη φάση της προσομοίωσης, δηλαδή ένας νευρώνας στο επίπεδο εισόδου, πέντε νευρώνες στο κρυμμένο επίπεδο και ένας στο επίπεδο εξόδου. Ο νευρώνας της εισόδου είναι ένας γραμμικός νευρώνας όπως συνήθως ενδείκνυται [83]. Στους νευρώνες του κρυμμένου επιπέδου χρησιμοποιούνται νευρώνες με σιγμοειδής συναρτήσεις ενεργοποίησης που δίνονται από τον τύπο: 116
135 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές (7.1) Στον νευρώνα του επιπέδου της εξόδου, επίσης χρησιμοποιήθηκε η σιγμοειδής συνάρτηση ενεργοποίησης Εξ. (7.1) επειδή η ταχύτητα του άκρου εργασίας του ρομπότ θεωρήθηκε ότι θα είναι πάντα θετική, δηλαδή το ρομπότ κουνιέται μόνο προς τη διεύθυνση της ραπτομηχανής. Δεδομένου ότι κατά την προσομοίωση δεν είναι δυνατόν να έχουμε την πραγματική συμπεριφορά του συστήματος αλλά ούτε και να ενσωματώσουμε πραγματικούς αισθητήρες, η μέτρηση της δύναμης που εφαρμόζεται στο ύφασμα είναι αδύνατη και για αυτό πρέπει να υπολογιστεί η σχέση δύναμης-παραμόρφωσης. Με άλλα λόγια η συμπεριφορά του υφάσματος, όταν αυτό βρίσκεται υπό τάνυση ή υπό συμπίεση, πρέπει να προβλεφθεί μέσα από μαθηματικά μοντέλα. Όπως αναφέρθηκε όμως στο κεφάλαιο 2, η χρήση μαθηματικών μοντέλων υφασμάτων σε τέτοιου είδους εφαρμογές είναι δύσκολη έως και αδύνατη. Για αυτό, είναι απαραίτητη η εύρεση άλλων προσεγγιστικών μεθόδων για να περιγραφεί η συμπεριφορά των υφασμάτων. Έτσι, για την υλοποίηση της προσομοίωσης, χρησιμοποιήθηκαν δύο καμπύλες δύναμης-παραμόρφωσης για ένα συγκεκριμένο ύφασμα. Μία για την περίπτωση του εφελκυσμού και μία για την περίπτωση της συμπίεσης του υφάσματος. Οι δύο αυτές καμπύλες μπορούν να θεωρηθούν αντιπροσωπευτικές της μηχανικής συμπεριφοράς οποιουδήποτε υφάσματος υπό εφελκυσμό και συμπίεση. Για να εξαχθούν αυτές οι καμπύλες, εκτελέστηκαν πειράματα εφελκυσμού και συμπίεσης υφασμάτων. Οι καμπύλες εφελκυσμού και συμπίεσης ενός τυχαίου υφάσματος φαίνονται στα Σχ. 7.3(α) και Σχ. 7.4(α) αντίστοιχα, ενώ η μορφή τους είναι πολύ κοντά με αυτές που παρουσιάζονται στο [66]. Ο νευρωνικός ελεγκτής δοκιμάστηκε χρησιμοποιώντας μαθηματικές προσεγγίσεις αυτών των καμπυλών οι οποίες φαίνονται στα Σχ. 7.3(β) για τον εφελκυσμό και Σχ. 7.4(β) για τη συμπίεση αντίστοιχα. 117
136 Δύναμη (N) Δύναμη (N) Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ 3 2,5 2 1,5 1 0,5 (α) παραμόρφωση (%) 3 2,5 2 1,5 1 0,5 (β) παραμόρφωση (%) Σχ. 7.3 Καμπύλες εφελκυσμού υφάσματος: α) πειραματική, β) προσεγγιστική. 118
137 Δύναμη (N) Δύναμη (N) Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές 0,14 0,12 0,10 0,08 0,06 0,04 0,02 0, (α) παραμόρφωση (%) 0,14 0,12 0,1 0,08 0,06 0,04 0, (β) παραμόρφωσση (%) Σχ. 7.4 Καμπύλες συμπίεσης υφάσματος: α) πειραματική, β) προσεγγιστική. Η προσεγγιστική καμπύλη (για τη συμπίεση) η οποία φαίνεται στο Σχ. 7.4(β), μοιάζει να διαφέρει ελαφρώς από την αντίστοιχη πειραματική που φαίνεται στο Σχ. 7.4(α) και κυρίως στην περιοχή όπου η παραμόρφωση είναι μεγαλύτερη του -5%. Παρά ταύτα, από τα αποτελέσματα που παρουσιάζονται παρακάτω, θα φανεί ότι ο νευρωνικός ελεγκτής είναι ικανός να ελέγξει τη δύναμη έτσι ώστε να μη χρειαστεί ποτέ να συμπιέσει το ύφασμα περισσότερο από -3%. Συνεπώς, η προσεγγιστική καμπύλη που χρησιμοποιήθηκε κατά την προσομοίωση θεωρείται ότι είναι αποδεκτή καθώς δεν χρειάστηκε ποτέ να χρησιμοποιηθεί στην περιοχή πέρα από τα -3% όσον αφορά την παραμόρφωση. 119
138 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Αποτελέσματα προσομοίωσης. Για τις ανάγκες της προσομοίωσης ενεργοποιήθηκε το σύνολο του ιεραρχικού συστήματος ελέγχου με σκοπό την εύρεση της κατάλληλης επιθυμητής τάνυσης για το συγκεκριμένο ύφασμα. Οι είσοδοι στο ιεραρχικό σύστημα καθορίστηκαν ως εξής: Η εκτατότητα του υφάσματος τέθηκε στο 20%. Κατά τη διαδικασία της ασαφοποίησης ( Β στο Σχ. 3.2) αυτό μεταφράζεται ως πολύ χαμηλή και χαμηλή εκτατότητα. Η διεύθυνση της ραφής ως προς τις ίνες του υφάσματος, τέθηκε στο 10%. Κατά τη διαδικασία της ασαφοποίησης Β αυτό μεταφράζεται ως μηδέν. Ο τύπος του υφάσματος είναι πλεκτό ενώ η "ευκαμπτότητά" του θεωρήθηκε ότι είναι ίση με 70%. Κατά τη διαδικασία της ασαφοποίησης Β αυτό μεταφράζεται ως μεσαία και μεγάλη. Μετά την ολοκλήρωση του ιεραρχικού επιπέδου Β (δείτε αναλυτικά Κεφ.6), δηλαδή το αποτέλεσμα από την άρση της ασάφειας, η έξοδος είναι η επιθυμητή τάνυση για το συγκριμένο ύφασμα η οποία είναι ίση με 0.12Ν. Tο κρίσιμο μήκος L, για μέγιστη απόσταση ανάμεσα στο άκρο εργασίας του ρομπότ και τη βελόνα της ραπτικής μηχανής (όπως περιγράφεται στο Κεφ. 4.3) είναι L=20cm. Tα βάρη και οι πολώσεις του νευρωνικού δικτύου (Σχ. 7.2) αρχικοποιήθηκαν τυχαία στο διάστημα [-1, 1]. Αυτό σημαίνει ότι το αρχικό δίκτυο δεν έχει καμία εκπαίδευση, που έχει ως αποτέλεσμα ο ελεγκτής να αρχίσει τη λειτουργία του με τις χειρότερες αρχικές συνθήκες. Ο ρυθμός ανανέωσης του νευρωνικού, που χρησιμοποιείται στον αλγόριθμο ανανέωσης των βαρών/πολώσεων του, ορίστηκε μετά από δοκιμές στο 0.7. Τέλος, για τις ανάγκες της προσομοίωσης, η ταχύτητα της ραπτικής μηχανής θεωρήθηκε ότι είναι ίση με 0.8. Στο Σχ. 7.5(α), συγκρίνεται η ταχύτητα της ραπτικής μηχανής με την ταχύτητα του άκρου εργασίας του ρομπότ που προέρχεται από τον ελεγκτή. Ο ελεγκτής είναι σε θέση να προσεγγίσει αρκετά καλά την ταχύτητα της ραπτομηχανής μετά από περίπου 150 επαναλήψεις. Από τα αποτελέσματα που φαίνονται στο Σχ. 7.5(β) είναι φανερό ότι, καθώς η ταχύτητα του ρομπότ προσεγγίζει την ταχύτητα της ραπτομηχανής η δύναμη τάνυσης επί του υφάσματος φθάνει την επιθυμητή τιμή (0.12Ν). 120
139 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές Δύναμη Force (Ν) Ταχύτητα velocity 1 ταχύτητα machine velocity ραπτικής μηχανής 0,95 ταχύτητα robot velocity ρομπότ 0,9 0,85 0,8 0,75 0,7 0,65 0, επαναλήψεις loops α) ταχύτητες ρομπότ και ραπτικής μηχανής. 0,9 desired επιθυμητή forceδύναμη force πραγματική applied δύναμη on the fabric 0,7 0,5 0,3 0,1-0, ,3-0,5 επαναλήψεις loops β) επιθυμητή και πραγματική δύναμη. Σχ. 7.5 Απόκριση νευρωνικού ελεγκτή. α) ταχύτητα ρομπότ και ραπτικής μηχανής, β) επιθυμητή και πραγματική δύναμη επί του υφάσματος. (προσομοίωση) Οι μορφές των δύο γραφικών παραστάσεων, της "ταχύτητας του ρομπότ" και της "δύναμης", ήταν αναμενόμενες και επίσης επαληθεύονται ποιοτικά. Όταν ξεκινά η ραπτομηχανή, το άκρο εργασίας του ρομπότ δεν κινείται με την κατάλληλη ταχύτητα, ούτως ώστε να μπορεί να ακολουθεί τη ραπτομηχανή. Κατά συνέπεια, η μετρούμενη επί του υφάσματος δύναμη είναι εφελκυστική και αυξάνεται με πολύ μεγάλο ρυθμό, όπως απεικονίζεται στις πρώτες επαναλήψεις στο Σχ. 7.5(β). Την ίδια στιγμή ο νευρωνικός ελεγκτής αντιδρά σε αυτή την αύξηση της δύναμης προσαρμόζοντας τα βάρη/πολώσεις του. Έτσι, παράγει μία ταχύτητα για το ρομπότ μεγαλύτερη από την ταχύτητα της ραπτομηχανής προκειμένου να μειώσει την εφελκυστική δύναμη στα επιθυμητό επίπεδο. Δεδομένου ότι τα βάρη/πολώσεις του νευρωνικού τροποποιούνται συνεχώς (διαρκής εκπαίδευση), το σφάλμα στο τέλος της προσομοίωσης κυμαίνεται στο εύρος του τρίτου δεκαδικού για τη δύναμη και του έβδομου δεκαδικού για την ταχύτητα. Αυτό το αποτέλεσμα είναι αναμενόμενο δεδομένου ότι μία πολύ μικρή 121
140 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ αύξηση της διαφοράς μεταξύ της ταχύτητας της ραπτομηχανή και του ρομπότ, έχει ως αποτέλεσμα μια πολύ μεγάλη αύξηση της εφελκυστικής δύναμης. Η απόδοση του νευρωνικού ελεγκτή εξετάστηκε επίσης υπό την παρουσία εξωτερικών διαταραχών με τη μορφή θορύβου στη δύναμη. Στη δύναμη, η οποία υπολογίζεται στην προσομοίωση όπως περιγράφεται στο Κεφ.7.2, προστέθηκε ένας θόρυβος που παράγεται από μία συνάρτηση τυχαίων αριθμών. Το εύρος του θορύβου είναι στην περιοχή του ±10% της υπολογιζόμενης δύναμης. Η τοπολογία του νευρωνικού δικτύου είναι ακριβώς ίδια, προκειμένου να συγκριθούν τα αποτελέσματα υπό τις ίδιες συνθήκες. Στο Σχ. 7.6 φαίνονται τα αποτελέσματα αυτής της περίπτωσης. Στο Σχ. 7.6(α), με τη λευκή γραμμή φαίνεται η ταχύτητα του ρομπότ ενώ με τη μαύρη γραμμή φαίνεται η ταχύτητα του ρομπότ στην περίπτωση όπου ο θόρυβος δεν λαμβάνεται υπόψη. Η επιθυμητή ταχύτητα (ταχύτητα της ραπτομηχανής) εμφανίζεται με την γκρι γραμμή. Στο Σχ. 7.6(β), φαίνονται η δύναμη που εφαρμόζεται στο ύφασμα με το θόρυβο (λευκή γραμμή) και η δύναμη που εφαρμόζεται στο ύφασμα χωρίς το θόρυβο (μαύρη γραμμή), ενώ η επιθυμητή δύναμη τάνυσης φαίνεται με την γκρι γραμμή. Η σύγκριση γίνεται με τη δύναμη που εφαρμόζεται στο ύφασμα, η οποία φαίνεται στο Σχ. 7.5(β) όπου ο θόρυβος δεν λαμβάνεται υπόψη. Επίσης, διεξήχθησαν παρόμοια πειράματα με διαφορετικούς τύπους θορύβου και τα αποτελέσματα έδειξαν ότι ο ελεγκτής μπορεί να χαρακτηριστεί ως σθεναρός/εύρωστος (robust), δεδομένου ότι είναι ικανός να ρυθμίσει τη δύναμη που εφαρμόζεται στο ύφασμα σύμφωνα με την επιθυμητή. Οι μικρές αποκλίσεις της εφαρμοζόμενης δύναμης, που φαίνονται στο Σχ. 7.6(β) με μαύρη γραμμή, είναι οι συνέπειες του θορύβου και έχουν την τάση να αυξάνονται όταν αυξάνεται το εύρος του προστιθέμενου θορύβου. Αυτές οι αποκλίσεις μπορούν να θεωρηθούν αποδεκτές όταν ο θόρυβος κυμαίνεται μέσα στα όρια του ± 10% της εφαρμοζόμενης δύναμης. 122
141 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές 1 ταχύτητα machine velocity ραπτικής μηχανής ταχύτητα robot velocity ρομπότ with με noise θόρυβο ταχύτητα robot velocity ρομπότ without χωρίς noise θόρυβο Ταχύτητα velocity 0,8 0, επαναλήψεις loops α) ταχύτητες 0,9 0,7 επιθυμητή desired force δύναμη δύναμη measured με force θόρυβο with noise πραγματική force applied δύναμη on the fabric 0,5 Δύναμη Force (Ν) 0,3 0,1-0,1-0,3-0, επαναλήψεις loops β) δυνάμεις Σχ. 7.6 Απόκριση νευρωνικού ελεγκτή με την παρουσία θορύβου. α) ταχύτητες, β) δυνάμεις. (προσομοίωση) Κατά το στάδιο της προσομοίωσης ακολουθήθηκε και δοκιμάστηκε και η τακτική της αποθήκευσης και χρησιμοποίησης της προγενέστερης εμπειρίας. Τα τελικά βάρη/πολώσεις του νευρωνικού δικτύου, μετά την ολοκλήρωση της προσομοίωσης, αποθηκεύονται. Η προσομοίωση του νευρωνικού ελεγκτή επαναλαμβάνεται χρησιμοποιώντας τα αποθηκευμένα βάρη/πολώσεις ως αρχικές τιμές του νευρωνικού δικτύου. Τα αποτελέσματα της χρήση της εμπειρίας του νευρωνικού δικτύου φαίνονται στο Σχ Συγκρίνοντας τα διαγράμματα πριν (Σχ. 7.5 α, β) και μετά (Σχ. 7.7 α,β) την εκπαίδευση του νευρωνικού, δηλαδή χωρίς εμπειρία και με εμπειρία, είναι σαφές ότι η απόδοση του ελεγκτή είναι αισθητά βελτιωμένη όταν χρησιμοποιείται η εμπειρία. Οι υπερακοντίσεις στην απόκριση τόσο στο διάγραμμα της ταχύτητας όσο και στο διάγραμμα της δύναμης έχουν μειωθεί περίπου στο μισό. Καθώς επίσης, έχει μειωθεί σημαντικά και ο χρόνος εκπαίδευσης του νευρωνικού. Η αυτοματοποίηση της διαδικασίας της αποθήκευσης και της ανα-προσαρμογής του ελεγκτή περιγράφεται αναλυτικά στο Κεφ
142 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Ταχύτητα velocity 1 sewing ταχύτητα machine ραπτικής velocity μηχανής 0,95 robot ταχύτητα velocity ρομπότ 0,9 0,85 0,8 0,75 0,7 0,65 0, επαναλήψεις loops α) ταχύτητες. 0,9 0,7 επιθυμητή desired force δύναμη πραγματική force δύναμη Δύναμη (Ν) Force 0,5 0,3 0,1-0,1-0,3-0, επαναλήψεις loops β) δυνάμεις Σχ. 7.7 Απόκριση νευρωνικού ελεγκτή με χρήση προγενέστερης εμπειρίας. α) ταχύτητες, β) δυνάμεις. (προσομοίωση) Συμπεράσματα προσομοίωσης. Η μελέτη εφικτότητας, μέσα από τα αποτελέσματα της προσομοίωσης, έδειξε ότι είναι δυνατή η υλοποίηση ενός νευρωνικού ελεγκτή για τον έλεγχο της δύναμης κατά τη ραφή. Χαρακτηριστικό του ελεγκτή είναι ότι έχει μία πολύ απλή τοπολογία (1-5-1) ενός νευρωνικού δικτύου ευθείας τροφοδότησης. Το βασικό πλεονέκτημα της προσέγγισης είναι ότι ο νευρωνικός ελεγκτής είναι ικανός να ελέγξει τη δύναμη χωρίς να έχει κάποια ποσοτική άμεση γνώση των ιδιοτήτων και των χαρακτηριστικών του υφάσματος. Η επιλογή του υφάσματος για την προσομοίωση ήταν τυχαία και ο ευέλικτος νευρωνικός ελεγκτής έχει το πλεονέκτημα να ανταποκριθεί αποτελεσματικά σε αυτήν την αυθαίρετη επιλογή. Επίσης, από την προσομοίωση είναι φανερό ότι ο ελεγκτής είναι ικανός να ανταποκριθεί σε συνθήκες θορύβου σήματος, που εμπεριέχουν οι ίδιες οι μετρήσεις της δύναμης αλλά και οι διαταραχές που προκαλούνται από τη διακοπτόμενη κίνηση του μηχανισμού τροφοδότησης της ραπτομηχανής. Τέλος, αποδεικνύεται ότι η αποθήκευση και η επαναχρησιμοποίηση 124
143 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές της εμπειρίας του συστήματος είναι μία τακτική που πρέπει να συμπεριληφθεί στο συνολικό ιεραρχικό σύστημα ελέγχου της ραφής. Παρόλο που οι ιδανικές συνθήκες της προσομοίωσης διαφέρουν από τον έλεγχο ενός πραγματικού συστήματος, τα πειράματα που παρουσιάζονται στα παρακάτω κεφάλαια αποδεικνύουν την αποτελεσματικότητα του νευρωνικού ελεγκτή και σε πραγματικές συνθήκες ραφής. 7.3 Νευρωνικός ελεγκτής (τμήμα ). Ο πραγματικός νευρωνικός ελεγκτής που χρησιμοποιήθηκε στο πειραματικό μέρος της διατριβής και φαίνεται στο τμήμα στα Σχ. 3.2 και Σχ. 3.3, είναι αντίστοιχος με αυτόν της προσομοίωσης και όπως προαναφέρθηκε αποτελεί το κατώτερο ιεραρχικά επίπεδο ελέγχου. Στο Σχ. 7.9 φαίνεται ο συνολικός νευρωνικός ελεγκτής Νευρωνικός Ελεγκτής για ραφές μονών υφασμάτων. Για την περίπτωση της ραφής μονών υφασμάτων χρησιμοποιήθηκε το ίδιο νευρωνικό δίκτυο με αυτό της προσομοίωσης αλλά με τη δομή 1-6-1, δηλαδή ένας γραμμικός (Γ) νευρώνας στο επίπεδο εισόδου, έξι σιγμοειδείς (Σ) νευρώνες στο κρυμμένο επίπεδο και ένας σιγμοειδής (Σ) στο επίπεδο εξόδου. Το συνολικό σχήμα αυτού του νευρωνικού ελεγκτή φαίνεται στο Σχ
 Επίπεδο Εξόδου Σ: Σιγμοειδής νευρώνας L: Γραμμικός νευρώνας b: πόλωση (bias) w j : βάρη κρυμμένου επιπέδου v j : βάρη εξόδου x(k): μετακίνηση του ρομπότ k: αριθμός επανάληψης j:")
144 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Αλγόριθμος εκπαίδευσης: Backpropagation Γ w j b j Σ Σ v j Εξωτερική διαταραχή (ραπτομηχανή) F d + - F e (k) Γ Σ Σ b Σ x(k) Ρομπότ Ύφασμα Επίπεδο Εισόδου Σ Σ Κρυμμένο Επίπεδο Νευρωνικό Δίκτυο F(k) Επίπεδο Εξόδου Σ: Σιγμοειδής νευρώνας L: Γραμμικός νευρώνας b: πόλωση (bias) w j : βάρη κρυμμένου επιπέδου v j : βάρη εξόδου x(k): μετακίνηση του ρομπότ k: αριθμός επανάληψης j: δείκτης κρυμμένου νευρώνα (1,2,..,6) F d : Επιθυμητή Σχ. 7.8 Τοπολογία νευρωνικού ελεγκτή για ραφή μονών υφασμάτων. Η σιγμοειδής συνάρτηση, που χρησιμοποιήθηκε στα δύο τελευταία επίπεδα, είναι αυτή της υπερβολικής εφαπτομένης: (7.2) Ενώ η έξοδος του νευρωνικού δικτύου ορίστηκε να είναι η αυξομείωση (incremental displacement) στη θέση του άκρου εργασίας του ρομπότ x(k). 126
 νευρώνες στο επίπεδο εισόδου,")
145 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές Νευρωνικός Ελεγκτής για ραφές διπλών υφασμάτων. Για την περίπτωση της ραφής διπλών υφασμάτων χρησιμοποιήθηκε ο ίδιος τύπος νευρωνικού δικτύου με αυτόν της προσομοίωσης αλλά με τη δομή 2-6-1, δηλαδή δύο γραμμικούς (Γ) νευρώνες στο επίπεδο εισόδου, έξι σιγμοειδείς (Σ) νευρώνες στο κρυμμένο επίπεδο και ένας σιγμοειδής (Σ) στο επίπεδο εξόδου. Το συνολικό σχήμα αυτού του νευρωνικού ελεγκτή φαίνεται στο Σχ Αλγόριθμος εκπαίδευσης: Backpropagation F d + - F e (k) Γ Γ w 11 w ij b j Σ Σ Σ v 11 b Σ x(k) Ρομπότ Εξωτερική διαταραχή (ραπτομηχανή) Ύφασμα F e (k-1) Γ Επίπεδο Εισόδου w 26 Σ Σ Σ Κρυμμένο Επίπεδο Νευρωνικό Δίκτυο F(k) Επίπεδο Εξόδου Σ: Σιγμοειδής νευρώνας L: Γραμμικός νευρώνας b: πόλωση (bias) w ij : βάρη κρυμμένου επιπέδου v j : βάρη εξόδου x(k): μετακίνηση του ρομπότ k: αριθμός επανάληψης i: δείκτης νευρώνα εισόδου (1, 2) j: δείκτης κρυμμένου νευρώνα (1,2,..,6) F d : Επιθυμητή δύναμη F e : Σφάλμα δύναμης Σχ. 7.9 Τοπολογία νευρωνικού ελεγκτή για ραφή διπλών υφασμάτων Σε αυτήν την περίπτωση η καινοτομία έγκειται στο ότι το νευρωνικό βελτιώθηκε με την πρόσθεση μίας επιπλέον εισόδου. Έτσι, το δίκτυο τροφοδοτείται ταυτόχρονα με το τρέχων σφάλμα δύναμης F e (k)=f d -F(k) και το προηγούμενο F e (k-1). Με αυτόν τον τρόπο δίνεται η δυνατότητα στο νευρωνικό να παίρνει υπόψη του και να αντιδρά στο ρυθμό μεταβολής της δύναμης. Ένας άλλος τρόπος που θα μπορούσε να γίνει αυτό θα ήταν να τροφοδοτηθεί το δίκτυο με την τρέχουσα τιμή του σφάλματος 127
146 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ δύναμης και την κλίση της αντίστοιχης καμπύλης δύναμης στο τρέχον σημείο. Στην περίπτωση αυτή όμως, θα πρέπει να προ-υπολογίζεται η τοπική κλίση πριν από την τροφοδότησή της στο δίκτυο, αλλά δεδομένου ότι το σήμα της δύναμης είναι θορυβώδης και έχει ταλαντωτική συμπεριφορά είναι προτιμότερο να αποφεύγεται η διαφόρισή της. Ως εκ τούτου, ο υπολογισμός του ρυθμού μεταβολής δύναμης αφήνεται να γίνεται από το δίκτυο εντός της εσωτερικής δομής του. Ταυτόχρονα, όπως και στην προηγούμενη περίπτωση, το σφάλμα της δύναμης F e (k) χρησιμοποιείται από τον αλγόριθμο εκπαίδευσης για την αναπροσαρμογή των βαρών/πολώσεων του δικτύου. Τα βάρη/πολώσεις ορίζονται τυχαία στο [-1, 1] μόνο μία φορά στην αρχή και πριν αρχίσει να ράβεται το πρώτο ζεύγος υφασμάτων και όχι κάθε φορά που πρόκειται να ραφτεί ένα νέο ύφασμα. Μετά τη ραφή του πρώτου ζεύγους υφασμάτων χρησιμοποιούνται τα παλιά/αποθηκευμένα βάρη/πολώσεις για να ραφτούν όλα τα υπόλοιπα. Με άλλα λόγια, το σύστημα χρησιμοποιεί τη συνεχώς συσσωρευόμενη γνώση του όπως περιγράφεται στο επόμενο κεφάλαιο Τελικά, με αυτήν τη βελτίωση του νευρωνικού δικτύου, επιτεύχθηκε μία σημαντικότατη αύξηση της ταχύτητας ραφής περίπου στο 300% σε σχέση με την προηγούμενη δομή του νευρωνικού (κεφ ), όπως παρουσιάζεται και στο κεφάλαιο των αποτελεσμάτων (κεφ. 8) Αποθήκευση εμπειρίας και (ανα-)προσαρμογή συστήματος (τμήμα ). Ένα από τα βασικά πλεονεκτήματα του προτεινόμενου νευρωνικού ελεγκτή είναι η ικανότητά του να θυμάται τη συμπεριφορά των υφασμάτων τα οποία έχει χειριστεί στο παρελθόν. Αρχικά, την πρώτη φορά που θα λειτουργήσει το ιεραρχικό σύστημα ελέγχου δεν έχει καμία προγενέστερη εμπειρία όσον αφορά τον νευρωνικό ελεγκτή. Αλλά καθώς ράβει όλο και περισσότερα υφάσματα η γνώση του πάνω σε αυτήν την εμπειρία συσσωρεύεται και αυξάνεται συνεχώς. Αυτό επιτυγχάνεται μέσω της ακόλουθης διαδικασίας. Κατά την πρώτη εκτέλεση του ελεγκτή τα βάρη (weights) και οι πολώσεις ή τα κατώφλια (bias or thresholds) καθορίζονται με τυχαίες τιμές [-1, 1] και οι τελικές τους τιμές, μετά την ολοκλήρωση της ραφής, αποθηκεύονται σε μία βάση δεδομένων [51] [55]. Για κάθε παράδειγμα ραφής οι παράμετροι του νευρωνικού αποθηκεύονται κάτω από μία ετικέτα που αντιπροσωπεύει την αντίστοιχη επιθυμητή δύναμη τάνυσης που εφαρμόστηκε κατά τη διάρκεια της ραφής, όπως φαίνεται στο Σχ


147 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές Επιθυμητή δύναμη τάνυσης Τελικά βάρη και πολώσεις του εκπαιδευμένου νευρωνικού, εφόσον ολοκληρώθηκε η ραφή ενός συγκεκριμένου υφάσματος εφαρμόζοντάς τους την αντίστοιχη επιθυμητή τάνυση. Επιθυμητή δύναμη τάνυσης για ένα άλλο ύφασμα. Σχ Η δομή της βάσης δεδομένων για την αποθήκευση της εμπειρίας. Στο παράδειγμα αυτό, η επιθυμητή δύναμη τάνυσης για το πρώτο ύφασμα που ράβεται από το σύστημα είναι 0.2 Ν. Έτσι, δημιουργείται μία ετικέτα [0.2] στη βάση δεδομένων κάτω από την οποία αποθηκεύονται όλα τα τελικά βάρη/πολώσεις του δικτύου. Η ίδια τακτική ακολουθείται και για τα επόμενα υφάσματα. Για κάθε, όμως, νέο ύφασμα μετά το πρώτο, το σύστημα ψάχνει τη βάση για να βρει μία ετικέτα με τιμή κοντά στην επιθυμητή τάνυση για να χρησιμοποιήσει τα αποθηκευμένα δεδομένα της. Για παράδειγμα, εάν η επιθυμητή τάνυση είναι 0.4 Ν τότε θα χρησιμοποιηθούν ως αρχικές τιμές του δικτύου οι τιμές των βαρών/πολώσεων που βρίσκονται κάτω από την ετικέτα [0.5] καθώς είναι πιο κοντά στην τρέχουσα επιθυμητή τάνυση. Μετά την ολοκλήρωση της ραφής τα βάρη/πολώσεις θα αποθηκευτούν κάτω από μία νέα ετικέτα [0.4]. Με αυτόν τον τρόπο, το ιεραρχικό σύστημα ελέγχου αυξάνει συνέχεια την συσσωρευμένη γνώση του καθώς ράβει όλο και περισσότερα υφάσματα. Η συσσωρευμένη γνώση του συστήματος δεν αυξάνεται μόνο αλλά και αναπροσαρμόζεται. Όταν το σύστημα, μετά από το σάρωμα της μνήμης, βρει μία ετικέτα που είναι ίδια με την τρέχουσα επιθυμητή τάνυση τότε χρησιμοποιεί τα αντίστοιχα βάρη/πολώσεις ως αρχικές παραμέτρους του νευρωνικού. Αλλά ακόμα και σε αυτήν την περίπτωση το σύστημα δεν μένει αδρανές αλλά αναπροσαρμόζεται. Το νευρωνικό δίκτυο κατά τη λειτουργία του προσαρμόζει τα βάρη/πολώσεις για να επαν-εκπαιδευτεί ακλουθώντας μία λογική διαρκούς και πραγματικού χρόνου εκπαίδευση (on-line και endless training). Τελικά, οι νέες τιμές των βαρών/πολώσεων αποθηκεύονται κάτω από την ίδια ετικέτα διαγράφοντας τις παλιές. 129
148 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Αυτή η μνημονική ικανότητα του ιεραρχικού συστήματος, δηλαδή η διαχείριση, η συσσώρευση και η αναπροσαρμογή της γνώσης μπορούμε να πούμε ότι αποτελεί μία στοιχειώδης προσέγγιση των πραγματικών ενεργειών που κάνει και ο άνθρωπος. Δηλαδή, χρησιμοποιεί την προγενέστερη γνώση του για να ράψει νέα υφάσματα αλλά ταυτόχρονα εκπαιδεύεται και επεκτείνει τελικά την ικανότητά του στο να ράβει όλο και περισσότερα υφάσματα. Η ενσωμάτωση του χαρακτηριστικού της μνήμης στον ελεγκτή, του επιτρέπει να λειτουργεί με έναν τρόπο ενσωματωμένης εμπειρίας προσαρμόζοντας και επεκτείνοντας συνέχεια την μνήμη του. 7.4 Σύγκριση PID με Νευρωνικό Ελεγκτή. Ο νευρωνικός ελεγκτής που παρουσιάστηκε στα προηγούμενα συγκρίθηκε με έναν PID ελεγκτή κάτω από τις ίδιες συνθήκες όπως φαίνεται και στο Σχ Αρχικά η σύγκριση γίνεται στην πρώτη φάση της ραφής, δηλαδή στην εφαρμογή της τάνυσης επί του υφάσματος και χωρίς να δουλεύει η ραπτομηχανή. Εν συνεχεία, η σύγκριση επεκτείνεται και με τη ραπτομηχανή σε λειτουργία. Στα παρακάτω πειράματα ραφής η επιθυμητή τάνυση επί του υφάσματος είναι F d =2N. Όλα τα πειράματα έγιναν δύο φορές μία για ένα πλεκτό ύφασμα και μία για ένα υφαντό ύφασμα. Εξωτερική διαταραχή (ραπτομηχανή) F d + - F e (k) Γ PID x(k) Ρομπότ Ύφασμα F(k) Σχ Τοπολογία PID ελεγκτή για ραφή υφασμάτων. Αρχικά πραγματοποιήθηκε μία έρευνα για να αποφασιστεί ποιοί από τους P, I ή/και D όρους του συμβατικού PID ελεγκτή είναι απαραίτητοι για τον έλεγχο της διεργασίας. Δεδομένου ότι το μοντέλο του συστήματος θεωρείται άγνωστο, ερευνήθηκαν συνδυασμοί και των τριών συνιστωσών. Τελικά, αποφασίστηκε να χρησιμοποιηθούν και οι τρεις όροι, αφού οι περιπτώσεις P, PI ή PD παρουσίαζαν υψηλές ταλαντώσεις, καθυστερήσεις ή/και σφάλματα μόνιμης κατάστασης. Η 130
149 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές επιλογή των τριών κερδών του ελεγκτή έγινε χειροκίνητα (manual tuning), προσέγγιση η οποία δεν απαιτεί μαθηματικό μοντέλο αλλά έμπειρο χειριστή. Η σύγκριση του PID γίνεται με το αρχικό νευρωνικό δίκτυο (το οποίο δεν έχει εκπαιδευτεί ακόμα) και φαίνεται στο Σχ Αυτή η σύγκριση μπορεί να θεωρηθεί σχετικά η πιο δίκαιη. Σε αυτήν την περίπτωση, ο νευρωνικός ελεγκτής ενεργοποιείται με αρχικές τυχαίες τιμές των βαρών/πολώσεων και εκπαιδεύεται κατά την λειτουργία του. Οι υπερακοντίσεις που φαίνονται στο σχήμα με την μπλε γραμμή (στους πρώτους κύκλους λειτουργίας) φανερώνουν αυτό το αρχικό στάδιο εκπαίδευσης, όπου το δίκτυο δεν έχει μάθει ακόμα τη συμπεριφορά του συστήματος και προσπαθεί να προσαρμοστεί. Το νευρωνικό εκπαιδεύεται ικανοποιητικά μετά τις πρώτες 30 περίπου επαναλήψεις από την έναρξη της ραφής σε αντίθεση με τον PID που αρχίζει να έχει μία ικανοποιητική απόκριση μετά από τις 60 πρώτες επαναλήψεις. Ενώ, είναι προφανές ότι το σφάλμα μόνιμης κατάστασης είναι πολύ μικρότερο στην περίπτωση του νευρωνικού ελεγκτή PID NN Force (Nt) Loops -1 Σχ PID σε σύγκριση με Νευρωνικό (χωρίς αρχική εκπαίδευση) ελεγκτή. Τα τελικά βάρη/πολώσεις του εκπαιδευμένου πλέον νευρωνικού δικτύου αποθηκεύονται και χρησιμοποιούνται ως αρχικές τιμές του νευρωνικού σε ένα νέο δεύτερο πείραμα ραφής. Η υπεροχή του εκπαιδευμένου νευρο-ελεγκτή έναντι του PID ελεγκτή φαίνεται στο Σχ Η υπερακόντιση της απόκρισης του νευρωνικού ελεγκτή έχει μειωθεί σημαντικά όπως επίσης και η απόκριση στη μόνιμη κατάσταση. Το σφάλμα μόνιμης κατάστασης του νευρωνικού ελεγκτή είναι μικρότερο από αυτό του PID ελεγκτή και σε αυτό το πείραμα. Όπως φαίνεται και στο παράθυρο μεγέθυνσης στο Σχ. 7.13, ο μέσος όρος της απόκρισης του νευρωνικού ελεγκτή είναι 2,0179Ν (0,0179 σφάλμα) σε αντίθεση με του PID ελεγκτή που είναι 1,9574Ν (0,0426 σφάλμα). Για να γίνει αυτή η σύγκριση των δύο ελεγκτών επιλέχθηκε το καλύτερο τμήμα της απόκρισης του PID ελεγκτή που φαίνεται στο συγκεκριμένο παράθυρο μεγέθυνσης. Παρόλα αυτά, το τμήμα μεταξύ των επαναλήψεων είναι το καλύτερο αλλά δεν είναι αντιπροσωπευτικό της συμπεριφοράς του PID ελεγκτή όπως φαίνεται στα τμήματα αριστερά και δεξιά αυτού, όπου η απόκριση του είναι πολύ χειρότερη από αυτή του νευρωνικού παρουσιάζοντας διαταραχές και απότομες 131
150 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ κορυφές. Επίσης, ο PID ελεγκτής φαίνεται να επηρεάζεται από το θορυβώδες σήμα μέτρησης της δύναμης ενώ ο νευρωνικός ελεγκτής φαίνεται ότι είναι πιο σθεναρός (robust) σε τέτοιες διαταραχές. Παίρνοντας υπόψη και την ανάλυση του αισθητήρα δύναμης (0,05Ν) τότε μπορούμε να πούμε ότι και οι δύο αποκρίσεις είναι αποδεκτές με αυτήν του νευρωνικού ελεγκτή να υπερτερεί στα σημεία που προαναφέρθηκαν. 2,2 2, ,9 1,8 1,7 Zoom of Loops Force (Nt) Loops PID NN Trained Σχ PID σε σύγκριση με Νευρωνικό (εκπαιδευμένο) ελεγκτή. Στη δεύτερη φάση των πειραμάτων και μετά την αρχική εφαρμογή της τάνυσης των 2Ν στο ύφασμα, μπαίνει σε λειτουργία η ραπτική μηχανή και αρχίζει η ραφή. Η έναρξη της ραπτικής μηχανής προκαλεί κίνηση στο ύφασμα και ως εκ τούτου αύξηση στην τάνυση του υφάσματος. Ο ελεγκτής πρέπει να αντιδράσει ούτως ώστε να κρατήσει σταθερή την τάνυση στα 2Ν που σημαίνει ότι τελικά θα πρέπει να δώσει μία ταχύτητα στο ρομπότ η οποία θα πρέπει να είναι ίδια με αυτή της ραπτομηχανής. 132
151 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές 5 4 NN 3 Force (Nt) 2 1 S S1 S2 E Loops -1 5 (α) 4 PID 3 Force (Nt) 2 1 S S1 S2 E Loops -1 (β) Σχ Έλεγχος δύναμης κατά τη ραφή (πλεκτό). α) νευρωνικού ελεγκτή β) PID ελεγκτή. Οι αποκρίσεις των δύο ελεγκτών κατά τη ραφή φαίνονται στο Σχ (α) και (β). Στις δύο αυτές περιπτώσεις τα πειράματα αρχίζουν όπως και πριν με την εφαρμογή της τάνυσης (2Ν) επί του υφάσματος από την αρχή μέχρι το σημείο (S) που φαίνεται στα δύο διαγράμματα. Στο σημείο (S) η ραπτομηχανή αρχίζει να τραβάει το ύφασμα (έναρξη ραφής) μέχρι το σημείο (Ε) όπου σταματάει η λειτουργία της ραπτομηχανής. Τα αρχικά τμήματα των δύο αποκρίσεων (μέχρι το σημείο S) είναι ακριβώς τα ίδια με αυτά που παρουσιάζονται στα προηγούμενα πειράματα στο Σχ Παρόλα αυτά, και οι δύο αποκρίσεις παρουσιάζουν μία αυξημένη ταλαντωτική συμπεριφορά σε σχέση με αυτήν που φαίνεται στο Σχ Αυτό οφείλεται στις διαταραχές (θόρυβος) που προκαλούνται από την λειτουργία του κινητήρα της ραπτομηχανής ο οποίος είναι σε κατάσταση αναμονής μέχρι να συμπλεχθεί με τον μηχανισμό κίνησης της βελόνας στο σημείο (S). Η ταλάντωση του κινητήρα μεταφέρεται στο σώμα της ραπτομηχανής και από εκεί στο ύφασμα και στον αισθητήρα δύναμης. Όπως φαίνεται στα διαγράμματα αυτή η εξωτερική διαταραχή επηρεάζει κυρίως τον PID ελεγκτή και λιγότερο τον νευρωνικό ελεγκτή. 133




152 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Κατά τη διάρκεια της ραφής, δηλαδή από το σημείο (S) μέχρι το σημείο (Ε) η απόδοση του νευρωνικού ελεγκτή είναι καλύτερη από αυτήν του PID ελεγκτή. Η απόκριση του PID ελεγκτή παρουσιάζει μεγαλύτερο εύρος ταλαντωτικής συμπεριφοράς από ότι ο νευρωνικός. Αυτό το μεγαλύτερο εύρος στην περίπτωση του PID προκαλεί μία ταλαντωτικής μορφής τάνυση πάνω στο ύφασμα κατά τη ραφή του γεγονός που επηρεάζει την ποιότητα της ραφής όσο πιο έντονο είναι το φαινόμενο αυτό. Επιπλέον, μία αναμενόμενη συμπεριφορά στην απόκριση των ελεγκτών εμφανίζεται κατά τη διάρκεια της ραφής. Αυτή η συμπεριφορά έχει να κάνει με τη μείωση του μήκους του υφάσματος, το οποίο βρίσκεται ανάμεσα στη βελόνα και στο άκρο εργασίας του ρομπότ, καθώς εξελίσσεται το πείραμα της ραφής. Στο συγκεκριμένο πείραμα το μήκος της ραφής είναι περίπου 20cm, όπως φαίνεται στο Σχ. 7.15, όπου η ραφή αρχίζει στο σημείο (S), τα (S1) και (S2) είναι ενδιάμεσα σημεία και (E) είναι το σημείο ολοκλήρωσης της ραφής. Καθώς η απόσταση ανάμεσα στο άκρο εργασίας του ρομπότ και της βελόνας μειώνεται το ενεργό μήκος του υφάσματος το οποίο υφίσταται την τάνυση μειώνεται και έτσι το μοντέλο του υφάσματος αλλάζει. S S1 S2 E Σχ Στιγμιότυπα της διαδικασίας ραφής. Μια εις βάθος ανάλυση των αποτελεσμάτων φανερώνει αυτήν την αλλαγή. Στον Πιν. 7.1 φαίνεται η μέση απόκλιση της δύναμης και για τους δύο ελεγκτές στα τρία διαστήματα S-S1, S1-S2 και S2-E. Είναι φανερό ότι καθώς προχωράει η διαδικασία της ραφής η μέση απόκλιση αυξάνεται επειδή μειώνεται το ενεργό μήκος του υφάσματος (αλλάζουν οι παράμετροι που καθορίζουν την συμπεριφορά του), δηλαδή στην ουσία μειώνεται η εκτατότητά του. Επίσης από τα διαγράμματα φαίνεται ότι το εύρος της ταλαντωτικής συμπεριφοράς αυξάνεται καθώς η ραφή φτάνει προς το τέλος της επειδή μειώνεται η εκτατότητα του υφάσματος. Αυτές οι αρνητικές επιδράσεις είναι πολύ πιο έντονες στην περίπτωση του PID ελεγκτή. Αυτό το μειονέκτημα του PID ελεγκτή οφείλεται στο ότι τα κέρδη του είναι σταθερά ενώ θα έπρεπε να μεταβάλλονται κατά τη διάρκεια της διαδικασίας αφού μεταβάλλεται κα το μοντέλο του ελεγχόμενου συστήματος. 134
153 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές Πιν. 7.1 Μέση απόκλιση δύναμης κατά τη ραφή. Τμήμα ραφής FNN PID (S-S1) (S1-S2) (S2-E) Η ταλαντωτική συμπεριφορά που παρουσιάζεται και στους δύο ελεγκτές, κατά τη διάρκεια της ραφής, οφείλεται στο προφίλ της ταχύτητας της ραπτομηχανής. Όπως αναφέρθηκε αναλυτικά στο Κεφ.2, η ραπτομηχανή τραβάει το ύφασμα διακοπτόμενα, με αποτέλεσμα αυτή η περιοδική κίνηση να επηρεάζεται αντίστοιχα και την απόκριση. Όλα τα παραπάνω αποτελέσματα αφορούν τη ραφή ενός συγκεκριμένου πλεκτού υφάσματος. Τα πειράματα επαναλήφθηκαν και για τη ραφή ενός δεύτερου υφαντού υφάσματος, το οποίο έχει πολλή διαφορετικές ιδιότητες από το πλεκτό για παράδειγμα πολλή μικρότερη εκτατότητα. Καθώς η εκτατότητα ενός υφάσματος μικραίνει μπορούμε να πούμε ότι αυτό προσεγγίζει τη συμπεριφορά ενός στιβαρού (rigid) αντικειμένου όσον αφορά τον εφελκυσμό του. Έτσι, ελέγχθηκε η ικανότητα των ελεγκτών να διατηρήσουν την επιθυμητή τάνυση κατά τη ραφή δύο διαφορετικών τύπων υφασμάτων. Η απόκριση των δύο ελεγκτών, στο δεύτερο ύφασμα, φαίνεται στο σχήμα Σχ Τα αποτελέσματα από τη ραφή αυτού του υφάσματος δείχνουν πολύ πιο έντονα τα φαινόμενο που περιγράφηκε πριν κατά το οποίο αυξάνεται η ταλαντωτική απόκριση καθώς το ρομπότ πλησιάζει προς τη ραπτομηχανή και μειώνεται η εκτατότητα του υφάσματος (μειώνεται το ενεργό μήκος του). 135
154 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ 5 ΝΝ 4 3 Force (Nt) 2 1 S E Loops -1 5 PID 4 (α) 3 Force (Nt) S E Loops -1 (β) Σχ Έλεγχος δύναμης κατά τη ραφή (υφαντό). α) νευρωνικού ελεγκτή β) PID ελεγκτή. Η μειωμένης ποιότητας απόκριση φαίνεται από τη αρχή, κατά την πρώτη φάση της εφαρμογής της τάνυσης, όπου στο αρχικό μεταβατικό στάδιο εμφανίζονται μεγάλες υπερακοντίσεις και κυρίως στο PID ελεγκτή. Μετά τη λήξη της ραφής, δηλαδή μετά το σημείο Ε, το ρομπότ έχει πλησιάσει πλέον πολλή κοντά στη βελόνα. Οπότε, το πολύ μικρό τμήμα του υφάσματος που παραμένει ανάμεσα στο ρομπότ και στη ραπτομηχανή συμπροφέρεται ως σχεδόν στιβαρό αντικείμενο με υπερβολικά μικρή εκτατότητα. Για αυτό και το εύρος της ταλαντωτικής απόκρισης είναι πολλή μεγαλύτερο από αυτό πριν την έναρξη της ραφής (πριν το σημείο S). Ακόμα και σε αυτά τα ακραία για τους ελεγκτές πειράματα, η συμπεριφορά του νευρωνικού ελεγκτή είναι σαφώς καλύτερη από αυτήν του PID. 136
155 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές Σύγκριση υπολογιστικού κόστους Οι δύο ελεγκτές συγκρίθηκαν επίσης και σε σχέση με το υπολογιστικό κόστος τους. Η ανάλυση υπολογιστικού κόστους 29 βασίστηκε σε όρους απαραίτητων πράξεων, δηλαδή πλήθος προσθέσεων, πολλαπλασιασμών, διαιρέσεων και εκθετικών συναρτήσεων. Ο χρόνος για τις απαραίτητες πράξεις του κάθε ελεγκτή υπολογίστηκε υποθέτοντας ότι ο χρόνος εκτέλεσης μία πρόσθεσης είναι μία μονάδα χρόνου και ο χρόνος για όλες οι άλλες πράξεις υπολογίζεται με βάση έναν σχετικό συντελεστή. Στον Πιν. 7.2, φαίνεται το πλήθος των απαραίτητων πράξεων για τον Νευρωνικό και τον PID ελεγκτή για ένα βρόχο των αλγορίθμων τους. Τα τμήματα των αλγορίθμων τα οποία είναι κοινά και στους δύο ελεγκτές παραλείπονται. Πιν. 7.2 Πλήθος πράξεων και υπολογιστικό κόστος (ΝΝ vs. PID). NN PID Μονάδες χρόνου για μία πράξη + or * / exp Μονάδες χρόνου Από τα αποτελέσματα του υπολογιστικού κόστους είναι ολοφάνερο ότι η καλύτερη ποιότητα και η αυξημένη ακρίβεια που προσφέρει ο νευρωνικός ελεγκτής αντισταθμίζεται από τους αυξημένους υπολογιστικούς χρόνους που χρειάζεται σε σχέση με τον PID ελεγκτή. 7.5 Σύγκριση προσαρμοστικού ασαφή ελεγκτή με τον νευρωνικό ελεγκτή. Ο νευρωνικός ελεγκτής συγκρίθηκε, επίσης, με έναν προσαρμοστικό ασαφή ελεγκτή, ο οποίος αντικατέστησε τον νευρωνικό ελεγκτή και υλοποιήθηκαν πειράματα για την εργασία της ραφής ενός υφάσματος [59]. Η εργασία αυτή υλοποιήθηκε σε συνεργασία με την μεταπτυχιακή φοιτήτρια κα. Δήμητρα Τριανταφύλλου, η οποία ανέπτυξε τον προσαρμοστικό ασαφή ελεγκτή. Στο Σχ. 7.17, φαίνονται οι αποκρίσεις του προσαρμοστικού ελεγκτή για τη ραφή ενός συγκριμένου υφάσματος με επιθυμητή τάνυση 2Ν. Το ύφασμα που χρησιμοποιήθηκε έχει πολύ μεγάλη εκτατότητα, γεγονός που διευκολύνει την λειτουργία του ελεγκτή. Στο Σχ (α), παρουσιάζεται η φάση της προτάνυσης πριν την έναρξη της διαδικασίας της ραφής, ενώ στο Σχ (β) παρουσιάζεται η συνολική διαδικασία, όπου στην 200- επανάληψη γίνεται η έναρξη της ραπτομηχανής for SparcStationII 137

156 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ (α) (β) Σχ Αποκρίσεις προσαρμοστικού ασαφή ελεγκτή. Σε σύγκριση με την απόκριση του νευρωνικού ελεγκτή, που είναι σαφώς καλύτερη, ο ασαφής ελεγκτής φαίνεται ότι μπορεί και ανταποκρίνεται ικανοποιητικά σε υφάσματα με μεγάλη εκτατότητα. Αλλά, αδυνατεί να καλύψει περιπτώσεις υφασμάτων με μικρή εκτατότητα. Όπως φάνηκε από τα προκαταρκτικά αποτελέσματα ο ασαφής ελεγκτής υστερεί σε απόδοση σε σχέση με τον αντίστοιχο νευρωνικό, και χρήζει περαιτέρω έρευνας. 138
157 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές 7.6 Επέκταση χρήσης νευρωνικού ελεγκτή και σε άλλες εφαρμογές. Ο προτεινόμενος νευρωνικός ελεγκτής ελέγχθηκε και αξιολογήθηκε με την επέκταση της χρήσης του και σε άλλες εφαρμογές όπως η συνεργασία Ανθρώπου- Ρομπότ (Human Robot Cooperation-HRC). Μία τέτοια εφαρμογή είναι ο χειρισμός υφασμάτων, όπως η μετακίνησή του σε μία διάσταση (F x ), από τον άνθρωπο και το ρομπότ ταυτόχρονα [53]. Ο ίδιος νευρωνικός ελεγκτής διευρύνθηκε με σκοπό τον έλεγχο και των τριών δυνάμεων (F x, F y, F z ) που καταγράφονται από τον αισθητήρα δύναμης ούτως ώστε να γίνει δυνατή η μετακίνηση του υφάσματος και στις τρεις διαστάσεις. Εφαρμογή αυτού ήταν η συνεργασία ανθρώπου-ρομπότ για τον χειρισμό ενός υφάσματος, ένα νέο αντικείμενο έρευνας που παρουσιάστηκε για πρώτη φορά στη διεθνή βιβλιογραφία [60] και από ότι διαφαίνεται ανέδειξε ένα νέο ερευνητικό πεδίο στο χώρο της συνεργασίας ανθρώπου-ρομπότ για το χειρισμό υπερεύκαμπτων αντικειμένων. Επίσης, ενσωματώθηκε και μηχανική όραση για την παρακολούθηση του χεριού του ανθρώπου [61] και επεκτάθηκε αποτελεσματικότερα η συνεργασία ανθρώπου-ρομπότ για τη μετακίνηση 30 και το δίπλωμα 31 υφασμάτων. Επιπλέον, ο ίδιος νευρωνικός ελεγκτής χρησιμοποιήθηκε και σε ένα διαφορετικό ερευνητικό πεδίο της ρομποτικής και συγκεκριμένα στη ρομποτική υποβοήθηση ενός ανθρώπου με σκοπό τη μετακίνηση αντικειμένων όπου το βάρος τους φέρει αποκλειστικά το ρομπότ ενώ ο άνθρωπος καθοδηγεί το ρομπότ μέσω του αισθητήρα δύναμης και του συστήματος ελέγχου των δυνάμεων. Η εφαρμογή του ίδιου νευρωνικού ελεγκτή σε ένα σύστημα ανύψωσης φορτίων και η υπεροχή του σε σχέση με άλλες μεθόδους παρουσιάστηκαν στα [62] και [63]. Αυτές οι δύο τελευταίες παράλληλες εφαρμογές της προτεινόμενης προσέγγισης δείχνουν τη δυνατότητα επέκτασης της χρήσης του ελεγκτή και σε άλλες παραπλήσιες ή/και διαφορετικές εργασίες. Οι λεπτομέρειες και τα αποτελέσματα αυτών των δύο εφαρμογών περιγράφονται στα παρακάτω Συνεργασία Ανθρώπου-Ρομπότ για τη μετακίνηση και το δίπλωμα υφασμάτων. Αρκετές εργασίες κατά τις οποίες δύο άνθρωποι είναι απαραίτητοι για τη μετακίνηση και το χειρισμό ενός εύκαμπτου υλικού, θα μπορούσαν να υλοποιηθούν με την προσέγγιση, που παρουσιάζεται στα παρακάτω. Η ευελιξία και η ευφυΐα του ανθρώπου να σχεδιάζει και να υλοποιεί μία εργασία θα μπορούσε να συνδυαστεί με την ακρίβεια και την ταχύτητα των ρομπότ, έτσι ώστε να επιτευχθεί τελικά η διεκπεραίωση πολύπλοκων εργασιών χειρισμού/συναρμολόγησης. Η όλη προσέγγιση βασίζεται στο σύστημα άνθρωπος-ρομπότ-αντικείμενο αντί του συστήματος ρομπότ-αντικείμενο [93]. Πρακτικές εφαρμογές μπορούν να υλοποιηθούν στη βιομηχανία υφασμάτων/ρούχων/χαλιών σε εργασίες όπως η μεταφορά και το δίπλωμα μεγάλων σε μέγεθος υφασμάτων καθώς και σε καθημερινές οικιακές εργασίες, όπως ο χειρισμός σεντονιών, τραπεζομάντιλων, καλυμμάτων κλπ. Επιπλέον, οι εν λόγω εργασίες συναντιούνται και στη βιομηχανία αυτοκινήτου, όπως ο χειρισμός των υφασμάτων στα καθίσματα, των μοκετών και

158 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ των πλεξούδων των καλωδίων. Η προτεινόμενη προσέγγιση μπορεί να έχει εφαρμογές και σε διαστημικές εργασίες όπως ο χειρισμός των ειδικών κουβερτών/καλυμμάτων, που χρησιμοποιούνται στους τεχνητούς δορυφόρους [94]. Τέλος, μία ιδιαίτερα ενδιαφέρουσα εφαρμογή θα μπορούσε να είναι ο χειρισμός των επιμέρους στρώσεων κατά την παραγωγή των σύνθετων υλικών. Το μεγαλύτερο τμήμα της διαδικασίας, κατά την παραγωγή σύνθετων υλικών, αποτελείται από επιδέξιους και δύσκολους χειρισμούς υφασμάτων (στρώσεων), για τους οποίους πολλές φορές απαιτούνται δύο άνθρωποι. Η παρούσα προσέγγιση θα μπορούσε επίσης να επεκταθεί και στη χρήση δύο συνεργαζόμενων ρομπότ, όπου θα χειρίζονται ένα ύφασμα ή υπερ-εύκαμπτο υλικό σε εργασίες μέσα στο σπίτι ή στη βιομηχανία. F z F y z F x x y Σχ Συνεργασία ρομπότ-ανθρώπου για τον χειρισμό υφάσματος. Στα παρακάτω παρουσιάζεται ένα πολύ απλό παράδειγμα χειρισμού, με σκοπό να ερευνηθούν οι βασικές αρχές καθώς και οι δυσκολίες που παρουσιάζει ένα τόσο πολύπλοκο πρόβλημα. Ο προτεινόμενος νευρωνικός ελεγκτής εφαρμόστηκε 32 και ελέγχθηκε στο παράδειγμα που φαίνεται στο Σχ Ένα κομμάτι υφάσματος, τυχαίου μεγέθους και τύπου, κρατιέται από την αρπάγη του ρομποτικού βραχίονα ενώ το άλλο άκρο του υφάσματος μετακινείται από έναν άνθρωπο. Tο ρομπότ προσπαθεί να ακολουθήσει τις κινήσεις του ανθρώπου ενώ ταυτόχρονα πρέπει να εκτελεστεί η προκαθορισμένη εργασία χειρισμού του υφάσματος. Στον καρπό του ρομπότ έχει τοποθετηθεί ένας αισθητήρας δύναμης, όπως φαίνεται στο σχήμα. Η απόσταση ανάμεσα στο χέρι του ανθρώπου και της αρπάγης (των δύο σημείων εφαρμογής πάνω στο ύφασμα) είναι τυχαία καθώς επίσης και οι κινήσεις του ανθρώπου είναι τυχαίες προς όλες τις κατευθύνσεις και με μεταβλητή άγνωστη ταχύτητα. Σκοπός του νευρωνικού ελεγκτή είναι να ελαχιστοποιεί το σφάλμα δύναμης σύμφωνα με τις προκαθορισμένες επιθυμητές δυνάμεις και ανεξάρτητα από τις κινήσεις του ανθρώπου. Η έξοδος του νευρωνικού ελεγκτή είναι η ταχύτητα του άκρου εργασίας του ρομπότ. Οι επιθυμητές δυνάμεις, ή με άλλα λόγια οι
159 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές τεχνητοί περιορισμοί, θα μπορούσαν να καθορίζονται σε ένα υψηλότερο επίπεδο αποφάσεων, είτε από έναν άνθρωπο είτε από ένα σύστημα αποφάσεων και σύμφωνα με την επιθυμητή εργασία χειρισμού του υφάσματος. Η απόσταση ανάμεσα στο σημείο επαφής της αρπάγης και στην αρχή του συστήματος συντεταγμένων του αισθητήρα δύναμης προκαλεί την εμφάνιση ροπών, οι οποίες όμως δεν λαμβάνονται υπόψη από τον νευρωνικό ελεγκτή. Το μαθηματικό μοντέλο του υφάσματος θεωρείται άγνωστο και αυτό εξαιτίας των δυσκολιών, που υπάρχουν κατά την μοντελοποίηση των υφασμάτων αλλά κυρίως επειδή σκοπός της παρουσιαζόμενης προσέγγισης είναι η ανάπτυξη ενός ευφυή ελεγκτή, ο οποίος θα μπορεί να εφαρμοστεί στο χειρισμό ενός πλήθους από διαφορετικούς τύπους υφασμάτων χωρίς να χρησιμοποιούνται οι ιδιότητες ή/και τα μοντέλα τους. Ο προτεινόμενος ελεγκτής φαίνεται στο Σχ Η ίδια, με τα προηγούμενα, τοπολογία του Feedforward Neural Network (FNN) επιλέχτηκε λόγω της απλότητάς της και επειδή χρησιμοποιείται με επιτυχία σε πάρα πολλές εφαρμογές. Όπως φαίνεται στο δομικό διάγραμμα του ελεγκτή, οι τρείς δυνάμεις Fx, Fy και Fz, όπως αυτές εφαρμόζονται πάνω στο ύφασμα από το ανθρώπινο χέρι, καταγράφονται από τον αισθητήρα και αποτελούν τις εισόδους στο νευρωνικό ελεγκτή. Ο νευρωνικός ελεγκτής προσδιορίζει την απαραίτητη ταχύτητα του άκρου εργασίας ούτως ώστε οι δυνάμεις να συγκλίνουν προς τις επιθυμητές τιμές. 141
160 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ (a) forces (b) or (c) FNN robot velocity human movements forces Robot Fabric F x, F y, F z new FNN weights (b) Fx, Fy, Fz Back Propagation forces F x F y FNN 1 FNN 2 force forces error - + desired forces: F x,d, F y,d, F z,d robot velocities v x v y v z Robot (c) F z FNN 3 Fx, Fy, Fz FNN v x, v y, v z Robot Σχ Νευρωνικός Ελεγκτής (a), περίπτωση αποκεντρωτικού ελεγκτή (b) και συγκεντρωτικού (c). Ο αλγόριθμος μάθησης, που χρησιμοποιήθηκε είναι ο γνωστός αλγόριθμος οπισθόδρομης διάδοσης του σφάλματος (backpropagation). Το σφάλμα δύναμης, που υπολογίζεται από τη διαφορά μεταξύ της επιθυμητής και της μετρούμενης δύναμης, χρησιμοποιείται στο τμήμα εκπαίδευσης του ελεγκτή όπως φαίνεται στο σχήμα. Κατά την εκπαίδευση τα βάρη του νευρωνικού δικτύου αναπροσαρμόζονται με σκοπό τον μηδενισμό του σφάλματος. Ο βρόχος ελέγχου κλείνει με την ανατροφοδότηση των τριών δυνάμεων πίσω στην είσοδο του ελεγκτή. Για το παραπάνω σχήμα ελέγχου υλοποιήθηκαν και δοκιμάστηκαν δύο εκδοχές: πρώτον ο αποκεντρωτικός και δεύτερον ο συγκεντρωτικός έλεγχος όπως φαίνεται στο Σχ (b) και (c) αντίστοιχα. Αυτό έγινε για να διερευνηθεί η ικανότητα της κάθε περίπτωσης να ανταπεξέλθει σε προβλήματα συζευγμένων δυνάμεων όπως αυτές που καταγράφονται στα υφάσματα εξαιτίας της εσωτερικής τους δομής όπως περιγράφεται παρακάτω. Οι προτεινόμενοι FNN ελεγκτές υλοποιήθηκαν και δοκιμάστηκαν στον εσωτερικό ελεγκτή (SmartController CX) του ρομποτικού βραχίονα Adept Cobra s800. Οι δυνάμεις καταγράφονται χρησιμοποιώντας το σύστημα αισθητήρα δύναμης (F/T system Gamma 65/5) από την ATI Industrial Automation, το οποίο είναι 142
161 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές προσαρμοσμένο στον καρπό του ρομπότ όπως φαίνεται στο Σχ Οι συνδέσεις και ο τρόπος επικοινωνίας των διάφορων τμημάτων της πειραματικής διάταξης είναι ακριβώς ίδια με τα προηγούμενα και φαίνονται στο Σχ PC Optional, for initial settings: specification of handling task desired forces Ethernet Force FNN algorithms Robot internal controller Robot controller (SmartController CX) Force controller RS-232 Force transducer Robot manipulator Σχ Συνδέσεις πειραματικής διάταξης. Για τα αποτελέσματα των πειραμάτων, που παρουσιάζονται παρακάτω, οι επιθυμητές δυνάμεις τέθηκαν ίσες με μηδέν για τους x-, z-άξονες (F x,d = 0N, F z,d = 0N) και μία δύναμη τάνυσης F y,d = 2Nt για τον y-άξονα, σύμφωνα με το σύστημα συντεταγμένων του αισθητήρα που φαίνεται στο Σχ Σύμφωνα με αυτούς τους περιορισμούς, το πρακτικό αποτέλεσμα είναι ότι το ρομπότ ακολουθεί το ανθρώπινο χέρι ενώ ταυτόχρονα προσπαθεί να διατηρεί συνεχώς το ύφασμα σε οριζόντια θέση και τανυσμένο. Για όλα τα παρακάτω πειράματα ο άνθρωπος που συμμετέχει στο πείραμα έχει κληθεί να προσπαθήσει να ακολουθήσει μία σειρά κινήσεων ως εξής (σύμφωνα με το καρτεσιανό σύστημα συντεταγμένων του Σχ. 7.18): 1. το πείραμα αρχίζει και ο άνθρωπος προσπαθεί να κρατήσει το χέρι του σε μία σταθερή θέση για 20 sec περίπου. 2. μετακινεί το χέρι μακριά από το ρομπότ ( y διεύθυνση) για 15 sec περίπου. 3. μετακινεί το χέρι προς τα πάνω (+z διεύθυνση) για 10 sec περίπου. 4. μετακινεί το χέρι προς το ρομπότ (+y διεύθυνση) για 20 sec περίπου. 5. μετακινεί το χέρι προς τα κάτω ( z διεύθυνση) για 10 sec περίπου. 6. μετακινεί το χέρι μακριά από το ρομπότ και προς τα πάνω ταυτόχρονα ( y και +z διεύθυνση) για 20 sec περίπου. 7. μετακινεί το χέρι προς τα αριστερά ( x διεύθυνση) για 10 sec περίπου. 8. μετακινεί το χέρι προς τα δεξιά ( x διεύθυνση) για 10 sec περίπου και το πείραμα τερματίζεται. Η απόκριση του FNN ελεγκτή για την περίπτωση του αποκεντρωτικού ελέγχου φαίνεται στο Σχ. 7.21(a). Η θέση του άκρου εργασίας του ρομπότ κατά την διάρκεια των παραπάνω κινήσεων απεικονίζεται στο Σχ. 7.21(b). Σ αυτή την περίπτωση χρησιμοποιήθηκαν τρία ανεξάρτητα νευρωνικά δίκτυα με νευρώνες όπου κάθε ένα είναι υπεύθυνο να ελέγχει τη μία από τις τρείς δυνάμεις. Οι αποκρίσεις, που φαίνονται στο Σχ. 7.21, καταγράφηκαν ενώ το νευρωνικό δίκτυο δεν είχε εκπαιδευτεί ακόμα, τα βάρη δηλαδή του νευρωνικού δικτύου είχαν τυχαίες αρχικές τιμές. Όπως φαίνεται και από τα σχήματα, το άκρο εργασίας του ρομπότ ακολουθεί το χέρι του ανθρώπου ενώ ταυτόχρονα προσπαθεί να κρατήσει την επιθυμητή δύναμη τάνυσης (F y,d = 2N) επί του υφάσματος. 143
162 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Forces (N) Fx Fy Fz -4 (a) Robot position (mm) X Y Z -400 (b) -600 Time (sec) Σχ Απόκριση αποκεντρωτικού ελέγχου. (a) Δυνάμεις και (b) θέση άκρου εργασίας. Στην περίπτωση του συγκεντρωτικού ελέγχου χρησιμοποιήθηκε ένα νευρωνικό δίκτυο με νευρώνες και η απόκριση του ελεγκτή φαίνεται στο Σχ Οι δύο προσεγγίσεις του αποκεντρωτικού και του συγκεντρωτικού ελέγχου παρουσιάζουν παρόμοιες αποκρίσεις. Η περίπτωση όμως του συγκεντρωτικού ελεγκτή έχει καλύτερη απόδοση καθώς μπορεί και ανταποκρίνεται καλύτερα στην περίπτωση της εμφάνισης συζευγμένων δυνάμεων. Όταν ο άνθρωπος μετακινεί το ύφασμα προς τα αριστερά ( x διεύθυνση) ή προς τα δεξιά (+x διεύθυνση) τότε εμφανίζονται μεγαλύτερες δυνάμεις στην y διεύθυνση παρά στις x διευθύνσεις, εξαιτίας της παραμόρφωσης του υφάσματος. Όπως φαίνεται στο Σχ. 7.22(a) και στο διάστημα 100 έως 120 sec, o συγκεντρωτικός ελεγκτής μπορεί και αντιμετωπίζει επιδέξια αυτήν την περίπτωση σε αντίθεση με τον αποκεντρωτικό ελεγκτή όπως φαίνεται στο αντίστοιχο χρονικό διάστημα στο Σχ. 7.21(a). 144
163 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές 6 4 Forces (N) Fx Fy Fz -4 (a) Robot position (mm) X Y Z -400 (b) -600 Time (sec) Σχ Απόκριση συγκεντρωτικού ελέγχου. (a) Δυνάμεις και (b) θέση άκρου εργασίας. Και οι δύο ελεγκτές, αποκεντρωτικός και συγκεντρωτικός, δοκιμάστηκαν με εκπαιδευμένα πλέον νευρωνικά δίκτυα. Οι τιμές που είχαν τα βάρη του νευρωνικού δικτύου μετά το τέλος των δύο πειραμάτων αποθηκεύθηκαν και ορίσθηκαν ως αρχικές τιμές των νευρωνικών δικτύων για να επαναληφθούν τα πειράματα. Τα αποτελέσματα από τους εκπαιδευμένους ελεγκτές φαίνονται στα Σχ. 7.23(a) και (b) για την περίπτωση του αποκεντρωτικού και συγκεντρωτικού ελεγκτή αντίστοιχα. 145
164 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ 6 4 Forces (N) Fx Fy Fz (a) Time (sec) 4 Forces (N) Fx Fy Fz -4 (b) -6 Time (sec) Σχ Απόκριση εκπαιδευμένων ελεγκτών. (a) αποκεντρωτικού και (b) συγκεντρωτικού. Αυτές οι αποκρίσεις φαίνονται να είναι πιο ομαλές από τις αντίστοιχες στο Σχ. 7.21(a) και Σχ. 7.22(a) αντίστοιχα. Αυτές οι δύο περιπτώσεις όμως δεν είναι απόλυτα συγκρίσιμες αλλά οι διαφορές τους εξαρτώνται και από την ικανότητα του ανθρώπου να επαναλαμβάνει με την ίδια ακρίβεια τις κινήσεις του. Με άλλα λόγια η επαναληψιμότητα του πειράματος δεν εξασφαλίζεται από την πλευρά του ανθρώπου. Παρόλα αυτά, το βασικό πλεονέκτημα των εκπαιδευμένων ελεγκτών εντοπίζεται στην αρχική φάση των πειραμάτων κατά τα 2-3 αρχικά δευτερόλεπτα. Σε αυτό το αρχικό στάδιο οι απότομες μεταβολές στην απόκριση έχουν μειωθεί σημαντικά στην περίπτωση των εκπαιδευμένων ελεγκτών. Η αποτελεσματικότητα των νευρωνικών ελεγκτών συγκρίθηκε με την ακριβώς αντίθετη εκδοχή του πειράματος όπου το ρομπότ καθοδηγεί τον άνθρωπο. Σ αυτό το αντίθετο πείραμα το ρομπότ έχει προγραμματισθεί να μετακινεί το ύφασμα με την σειρά των 8 προηγούμενων κινήσεων ενώ ο άνθρωπος προσπαθεί να κρατήσει το ύφασμα σε οριζόντια θέση και τανυσμένο όπως έκανε πριν το ρομπότ. Οι κινήσεις του ρομπότ είναι άγνωστες για τον άνθρωπο. Οι δυνάμεις που καταγράφηκαν σ αυτή την περίπτωση φαίνονται στο Σχ Force (N) Fx Fy Fz -4-6 Time (sec) Σχ Δυνάμεις που καταγράφηκαν όταν το ρομπότ καθοδηγεί τον άνθρωπο. 146
165 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές 6 4 Force (N) Fx Fy Fz -4-6 Σχ Δυνάμεις που καταγράφηκαν όταν το ρομπότ καθοδηγεί τον άνθρωπο ο οποίος έχει κλειστά τα μάτια του Robot position (mm) X Y Z Time (sec) Σχ Θέση του άκρου εργασίας το ρομπότ καθοδηγεί τον άνθρωπο. Η απόκριση του ανθρώπου φαίνεται να είναι χειρότερη από αυτή του ρομπότ που καταγράφηκε στα προηγούμενα πειράματα και εντοπίζεται κυρίως στα σημεία που έχουμε αλλαγή της κατεύθυνσης της κίνησης του ρομπότ. Αυτή η σύγκριση της απόκρισης του νευρωνικού ελεγκτή σε σχέση με την απόκριση του ανθρώπου δεν είναι απόλυτα δίκαιη ως προς το ρομπότ, όπως φαίνεται και στις παρακάτω συμπερασματικές παρατηρήσεις: Η επαναληψιμότητα του πειράματος μπορεί να εξασφαλιστεί στη δεύτερη περίπτωση όπου το ρομπότ καθοδηγεί τον άνθρωπο σε αντίθεση με την πρώτη περίπτωση όπου ο άνθρωπος καθοδηγεί το ρομπότ. Όταν ο άνθρωπος κληθεί να επαναλάβει το πείραμα τότε δεν πρόκειται να ακολουθήσει επακριβώς την ίδια διαδρομή γεγονός που θα επηρεάσει και την διαδρομή του άκρου εργασίας του ρομπότ. Οι κινήσεις του ρομπότ, στην περίπτωση όπου το ρομπότ καθοδηγεί τον άνθρωπο, χαρακτηρίζονται από μεγάλη ακρίβεια, όπως φαίνεται στο Σχ. 7.26, σε αντίθεση με τις κινήσεις του ανθρώπου όταν ο άνθρωπος καθοδηγεί το ρομπότ, όπως φαίνεται στο Σχ. 7.21(b) και Σχ. 7.22(b). Αυτό το μειονέκτημα του ανθρώπου προκαλεί μικρο-μετακινήσεις και προς τις άλλες διευθύνσεις και ο νευρωνικός ελεγκτής προσπαθεί να διορθώσει τις μικρές δυνάμεις που εμφανίζονται και στις άλλες διευθύνσεις. 147
166 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Όταν το ρομπότ καθοδηγεί τον άνθρωπο, ο άνθρωπος έχει το πλεονέκτημα της όρασης σαν μία επιπλέον πληροφορία κατά τον έλεγχο. Συνεπώς, η απόκριση του ανθρώπου κατά κύριο λόγο βασίζεται στην οπτική πληροφορία βλέποντας τις κινήσεις του ρομπότ και κατά κάποιο τρόπο προβλέπει τις κινήσεις, που θα κάνει ο ίδιος και κατά δεύτερο λόγω αντιδρά σύμφωνα με τις δυνάμεις που αισθάνεται στα δάχτυλα του. Ως εκ τούτου, υλοποιήθηκε ένα επιπλέον πείραμα κατά το οποίο ο άνθρωπος εξαναγκάζεται να έχει κλειστά τα μάτια του κατά τη διάρκεια του πειράματος. Χωρίς οπτική πληροφορία ο άνθρωπος πλέον βασίζεται μόνο στην ανατροφοδότηση της δύναμης και η απόκρισή του γίνεται χειρότερη όπως φαίνεται στο Σχ Οι μέγιστες διακυμάνσεις των δυνάμεων κυμαίνονται στο ±1 Newton σε σχέση με την επιθυμητή δύναμη η οποία ορίσθηκε στην αρχή και προέκυψε από την εργασία χειρισμού που πρέπει να φέρει εις πέρας ο ελεγκτής. Έλεγχος με ενσωμάτωση μηχανικής όρασης (Machine vision control) Στο σύστημα ελέγχου ενσωματώθηκε και μηχανική όραση για την παρακολούθηση του χεριού του ανθρώπου [61]. Όπως φαίνεται στο Σχ. 7.27, τα παραδείγματα εφαρμογής του συστήματος επεκτάθηκαν πέραν από την απλή μετακίνηση του υφάσματος και στο άπλωμα, το στρώσιμο και το δίπλωμά του πάνω σε ένα τραπέζι εργασίας 33. Τα βασικά χαρακτηριστικά και οι προδιαγραφές του συστήματος που προκύπτει παρουσιάζονται στα παρακάτω

167 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές Σχ Συνεργασία Ανθρώπου-Ρομπότ για το άπλωμα, στρώσιμο και δίπλωμα υφάσματος πάνω σε τραπέζι. 149

168 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Ο έλεγχος με machine vision είναι χρήσιμος στην περίπτωση όπου το χειριζόμενο αντικείμενο έχει μεγάλη εκτατότητα. Όσο πιο εκτατό είναι το ύφασμα τόσο περισσότερο απαραίτητος είναι ο έλεγχος με machine vision. Στην περίπτωση όπου η εργασία χειρισμού είναι όπως στο Σχ. 7.28, τότε είναι απαραίτητη μόνο η χρήση του οπτικού ελέγχου για την μετακίνηση του υφάσματος καθώς δεν αναπτύσσονται δυνάμεις κατά την μετακίνηση του. Η μόνη δύναμη είναι η βαρυτική η οποία είναι ίδια είτε μετακινείται το ύφασμα είτε κρατιέται ακίνητο. Αυτή η εργασία χειρισμού μπορεί να αντιπροσωπεύει την απλή μετακίνηση του υφάσματος όπου λόγω μεγάλου μήκους μπορεί να είναι προτιμότερο να μετακινηθεί κρεμασμένο. Επίσης μπορεί να αντιπροσωπεύει το γνωστό δίπλωμα σεντονιών/τραπεζομάντιλων όπου το ύφασμα αφήνεται να κρέμεται υπό το βάρος του μέχρι να ενωθούν τα δύο σημεία από όπου πιάνεται. Αντιθέτως, ο έλεγχος μόνο με αισθητήρα δύναμης είναι απαραίτητος όσο η εκτατότητα του υφάσματος μειώνεται. Όταν η εκτατότητα γίνεται σχεδόν μηδενική τότε χρήσιμος είναι μόνο ο αισθητήρας δύναμης. Επίσης, όταν το ύφασμα είναι υπό εφελκυσμό τότε σε αυτή τη διεύθυνση και λόγω ανάπτυξης μεγαλύτερων δυνάμεων και μικρότερων μετατοπίσεων η χρήση οπτικού ελέγχου μειονεκτεί. z x y Σχ Δίπλωμα ή μετακίνηση υφάσματος με συνεργασία Ανθρώπου-Ρομπότ. Η φύση του προβλήματος του χειρισμού υπερ-εύκαμπτων αντικειμένων, το είδος και οι ιδιότητες του υλικού αλλά και το είδος των εργασιών, καταδεικνύουν ότι είναι απαραίτητος ο συνδυασμός και των δύο αισθητήρων δύναμης και όρασης. Το συνολικό σχήμα ελέγχου με την ανατροφοδότηση δύναμης και όρασης φαίνεται στο Σχ
169 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές Αισθητήρας Δύναμης Νευρωνικός Ελεγκτής Αρχικές συνθήκες & ρυθμίσεις θέση Ρομπότ Ύφασμα Άνθρωπος Μηχανική όραση Σχ Σχήμα ελέγχου για τον χειρισμό υφάσματος με συνεργασία Ανθρώπου- Ρομπότ (με αισθητήρα δύναμης και μηχανική όραση). Επίσης, ο κάθε αισθητήρας μπορεί να λειτουργήσει επικουρικά αλλά και συμπληρωματικά ως προς τον άλλον. Όταν το vision control αποτύχει, είτε επειδή θα χαθεί το mark από το οπτικό πεδίο της κάμερας είτε επειδή δεν το αναγνωρίσει λόγω κακής ποιότητας της εικόνας ή κακού φωτισμού ή και άλλων περιβαλλοντικών αλλαγών, τότε δεν υπάρχει περίπτωση να αποτύχει και ο ελεγκτής καθώς ο έλεγχος δύναμης θα αναλάβει εξολοκλήρου την εκτέλεση της εργασίας μέχρι να επανέλθει ο οπτικός με την αναγνώριση του mark. Όταν ο αισθητήρας δύναμης αποτύχει επειδή ο άνθρωπος μπορεί να αφήσει το ύφασμα ή το ύφασμα να γλιστρήσει από την αρπάγη τότε ό έλεγχος του ρομπότ δεν θα σταματήσει καθώς θα αναλάβει εξολοκλήρου ο οπτικός έλεγχος και το ρομπότ θα μπορεί να μετακινείται και να ελέγχεται από τον άνθρωπο, εξ αποστάσεως 34. Τα διακριτικά αναγνώρισης (marks) τα οποία μπορούν να χρησιμοποιηθούν είναι δυνατόν να έχουν οποιοδήποτε σχήμα και μορφή αρκεί να εισαχθούν ως πρότυπα και να εκπαιδευτεί με αυτά το λογισμικό επεξεργασίας εικόνας. Μπορεί να είναι το δάχτυλο του ανθρώπου ή/και το νύχι κλπ.. Στο συγκεκριμένο παράδειγμα χρησιμοποιήσαμε ένα ειδικό mark (κύκλος και σταυρός) τυπωμένο σε ένα χαρτί και κολλημένο πάνω στο νύχι του ανθρώπου. Αυτή η επιλογή έγινε καθώς αυτό το mark είναι πιο εύκολο στην αναγνώρισή του και με περισσότερα ποσοστά επιτυχίας από τα άλλα. Επίσης δεδομένου ότι το αντικείμενο της παρούσας εργασίας δεν είναι η επεξεργασία εικόνας, επιλέχθηκε εκείνη η λύση που δεν θα δημιουργούσε επιπλέον δυσκολίες. Τέλος, η αναγνώριση της θέσης του χεριού του ανθρώπου έχει γίνει και
170 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ με τη χρήση του πολύ-αισθητήρα Kinect, όπου δεν απαιτούνται ειδικά marks ενώ επιτυγχάνονται υψηλές ταχύτητες επεξεργασίας της εικόνας. Τελικά, γίνεται προσπάθεια ενσωμάτωσης και υλοποίησης αυτής της προσέγγισης σε πραγματικά παραδείγματα, το αντικείμενο όμως αυτό ξεφεύγει από τα ερευνητικά όρια της διατριβής. Η σύλληψη του υφάσματος γίνεται αυτόματα από το ρομπότ με τσίμπημά του από πάνω (pinch). Σε αυτήν την περίπτωση πρέπει το ρομπότ να γνωρίζει το αρχικό σημείο σύλληψης το οποίο μπορεί να καθορίζεται με έναν από τους τρείς παρακάτω τρόπους: 1. Με αυτόματη τοποθέτηση του άκρου σε σημείο του οποίου η θέση αποφασίζεται είτε από τον άνθρωπο είτε από ένα σύστημα επεξεργασίας εικόνας (εύρεση ακμών και γωνιών) και εισάγοντας τις συντεταγμένες στον ελεγκτή του ρομπότ. 2. Με τοποθέτηση του άκρου εργασίας από τον άνθρωπο χρησιμοποιώντας μόνο τον αισθητήρα δύναμης και τον ίδιο ελεγκτή Με τοποθέτηση του άκρου εργασίας από τον άνθρωπο χρησιμοποιώντας μόνο οπτικό έλεγχο. Ο άνθρωπος το καθοδηγεί εξ αποστάσεως στο κατάλληλο σημείο για να γίνει η σύλληψη 36. Η σύλληψη του υφάσματος μπορεί να γίνεται με τη βοήθεια του ανθρώπου. Ο άνθρωπος τροφοδοτεί το ρομπότ με το ύφασμα ούτως ώστε να γίνει η αρχική σύλληψη. Σε αυτή την περίπτωση δεν χρειάζεται το αρχικό σημείο σύλληψης καθώς αυτό μπορεί να γίνει οπουδήποτε αφού καθορίζεται από τον άνθρωπο. Οι αρχικές συνθήκες και ρυθμίσεις του συστήματος εξαρτώνται από την εκάστοτε εργασία και μπορούν να καθορίζονται αυτόματα πριν την έναρξη της εργασίας από ένα υψηλότερο επίπεδο αποφάσεων. Οι αρχικές ρυθμίσεις έχουν να κάνουν με τους φυσικούς και τεχνητούς περιορισμούς κατά τον έλεγχο δύναμης αλλά και με τα δεδομένα της οπτικής επεξεργασίας τα οποία θα ληφθούν υπόψη κατά τον οπτικό έλεγχο. Για τον ελεγκτή είναι απαραίτητες οι επιθυμητές τιμές των δυνάμεων (F x F y F z ) και τα δεδομένα των θέσεων από την οπτική επεξεργασία (V x V y V z ), όπου οι x, y, z-διευθύνσεις φαίνονται στο Σχ Για παράδειγμα: Για την απλή μετακίνηση του υφάσματος ή και το άπλωμά του πάνω στο τραπέζι πρέπει να καθορισθούν οι επιθυμητές δυνάμεις F x =τάνυση, F y =0, F z =0 ενώ από την οπτική επεξεργασία πρέπει να ληφθούν υπόψη τα δεδομένα των θέσεων V x, V y και V z =ΟΧΙ. Για το δίπλωμα όπως αυτό περιγράφεται παραπάνω (Σχ. 7.28), τότε δεν απαιτούνται επιθυμητές δυνάμεις F x =ΟΧΙ, F y =ΟΧΙ, F z =ΟΧΙ, ενώ από την οπτική επεξεργασία πρέπει να ληφθούν υπόψη τα δεδομένα των θέσεων V x = ΟΧΙ, V y, V z στην περίπτωση που το άκρο του ρομπότ δεν κινείται (ή V x = -x/2, V y, V z εάν κινείται και το άκρο του ρομπότ)
171 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές Συμπεράσματα της εφαρμογής: συνεργασία Ανθρώπου-Ρομπότ για τον χειρισμό υφάσματος. Η μελέτη εφικτότητας και τα προκαταρκτικά πειράματα έδειξαν ότι η προτεινόμενη δομή νευρωνικού ελεγκτή που εφαρμόστηκε και στην περίπτωση της ραφής μπορεί να εφαρμοστεί και να επεκταθεί και σε διάφορους άλλους χειρισμούς υφασμάτων. Από μία άλλη οπτική γωνία, θα μπορούσε κανείς να πει ότι πρόκειται για παρόμοιο πρόβλημα μόνο που στην άλλη πλευρά του υφάσματος αντί για ραπτική μηχανή έχουμε τον άνθρωπο, ο οποίος δύναται να μετακινεί το ύφασμα προς τυχαίες και άγνωστες κατευθύνσεις και ταχύτητες. Τα νευρωνικά δίκτυα, ανεξάρτητα από την εξωτερική διαταραχή που εφαρμόζεται πάνω στο ύφασμα μπορούν να χρησιμοποιηθούν με επιτυχία στο να ελέγχουν τη δύναμη που εφαρμόζεται πάνω σε αυτό από το ρομπότ. Επίσης, το σύστημα μηχανικής όρασης, με την παρακολούθηση του ανθρώπινου χεριού, βελτιώνει την απόδοση του ελεγκτή και η συνεργασία ανθρώπου-ρομπότ κατά τους χειρισμούς γίνεται αποτελεσματικότερη. Με την παρούσα εφαρμογή πρωτοπαρουσιάζεται η ιδέα του χειρισμού υφασμάτων/ρούχων/υπερ-εύκαμπτων αντικειμένων από ένα ρομπότ το οποίο συνεργάζεται για αυτό το σκοπό με έναν άνθρωπο ή ακόμα και με ένα άλλο ρομπότ. Η τοποθέτηση του ρομποτικού βραχίονα πάνω σε κινητό ρομπότ (mobile robot) μπορεί να επεκτείνει την εμβέλεια εφαρμογής του συστήματος. Το νέο αυτό ερευνητικό πεδίο ανοίγει νέους ορίζοντες στη χρήση των ρομπότ και χρήζει περαιτέρω και εις βάθος έρευνας Ρομποτική υποβοήθηση ανθρώπου για την ανύψωση αντικειμένων. Η επέκταση της χρήσης του νευρωνικού ελεγκτή έγινε και σε ένα δεύτερο παράδειγμα. Ο ίδιος τύπος νευρωνικού ελεγκτή που χρησιμοποιήθηκε και στη ραφή εφαρμόστηκε και σε ένα διαφορετικό ερευνητικό πεδίο της ρομποτικής, τη ρομποτική υποβοήθηση ανθρώπων για τη μετακίνηση αντικειμένων 37, όπως φαίνεται στο Σχ Το βάρος του φορτίου το φέρει αποκλειστικά το ρομπότ ενώ ο άνθρωπος καθοδηγεί το ρομπότ μέσω του αισθητήρα δύναμης και του αντίστοιχου συστήματος ελέγχου των δυνάμεων. Για να είναι δυνατή η μετακίνηση των φορτίων στον χώρο, ο νευρωνικός ελεγκτής επεκτάθηκε με έλεγχο δυνάμεων και στις τρεις διευθύνσεις x, y, z






![διπλωματικής του εργασίας [95].](/docs-images/61/46142248/images/172-6.png "Κινητήρας Συρματόσκοινο Αισθητήρας")
172 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ Ρομποτική υποβοήθηση ανθρώπου για τη μετακίνηση φορτίων. Σε μία δεύτερη απλουστευμένη εκδοχή του ίδιου προβλήματος, το βάρος του φορτίου το φέρει αποκλειστικά ένας μηχανισμός ανύψωσης φορτίων, όπως φαίνεται στο Σχ Η δεύτερη αυτή εργασία, υλοποιήθηκε σε συνεργασία με τον μεταπτυχιακό φοιτητή και συνεργάτη κ. Φώτη Δημέα ως επέκταση της διπλωματικής του εργασίας [95]. Κινητήρας Συρματόσκοινο Αισθητήρας δύναμης Φορτίο Σχ Σχεδιάγραμμα μηχανισμού υποβοήθησης για το ανεβοκατέβασμα φορτίων. 154
173 Κεφ.7 - Ευφυής έλεγχος της διαδικασίας της ραφής για γαζί σε ευθείες γραμμές Στο παράδειγμα που υλοποιήθηκε πειραματικά, το ελεγχόμενο σύστημα αποτελείται από έναν κινητήρα με μηχανισμό τύπου βίντσι για την ανύψωση φορτίων. Στο άκρο του βίντσι κρέμεται ο αισθητήρας δύναμης και το προς ανύψωση φορτίο. Ο νευρωνικός ελεγκτής ελέγχει τη δύναμη κατά τη διεύθυνση του συρματόσχοινου (κάθετη διεύθυνση). Όταν ο άνθρωπος προσπαθεί να μετακινήσει το φορτίο οι δύναμη που εφαρμόζει αναγνωρίζεται ως εξωτερική διαταραχή από τον ελεγκτή ο οποίος προσπαθεί να τη μηδενίσει. Το αποτέλεσμα είναι ότι ο νευρωνικός ελεγκτής βοηθάει τον άνθρωπο να ανεβοκατεβάζει όπου το βάρος του το φέρει το ρομπότ. Το παράδειγμα αυτό είναι παραπλήσιο με τις υπόλοιπες εφαρμογές. Μόνο που τώρα, το αντικείμενο το οποίο χειρίζονται ο άνθρωπος και το ρομπότ είναι ο συνδυασμός σε σειρά των: φορτίο - συρματόσκοινο - αισθητήρας - συρματόσκοινο. Δηλαδή, δύο απόλυτα στιβαρά αντικείμενα (φορτίο και αισθητήρας), σε συνέχεια με τα συρματόσχοινα τα οποία είναι αντικείμενα απόλυτα στιβαρά κατά τον εφελκυσμό τους και με μεγάλη ενδοτικότητα κατά τη θλίψη τους. Οι λεπτομέρειες αυτής της παράλληλης εφαρμογής παρουσιάζονται αναλυτικά στις εργασίες [62] και [63]. Τα αποτελέσματα της εφαρμογής του, ίδιου με τη ραφή, νευρωνικού ελεγκτή σε ένα σύστημα ανύψωσης φορτίων δείχνουν την υπεροχή του σε σχέση με έναν PID scheduling που εξετάστηκε επίσης. Και οι δύο περιπτώσεις ελεγκτών, αποτελούσαν τον εσωτερικό βρόχο ενός εξωτερικού ελεγκτή σύνθετης μηχανικής αντίδρασης (impedance control). 155
174
175 8 Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις Παρουσιάστηκαν στη διεθνή βιβλιογραφία ραφές σε ευθεία γραμμή για μονά υφάσματα και για διπλά υφάσματα. Είναι η πρώτη φορά που παρουσιάζονται, στη διεθνή βιβλιογραφία, συστηματική εργαστηριακή εκτέλεση ραφών σε μία μεγάλη ποικιλία υφασμάτων. Οι ραφές που υλοποιήθηκαν από το ρομπότ συγκρίθηκαν με τις αντίστοιχες που έκανε ο άνθρωπος όπου σε κάποιες περιπτώσεις οι ραφές από το ρομπότ ήταν καλύτερες από αυτές του ανθρώπου. Ταυτόχρονα, η προτεινόμενη ιεραρχική δομή ελέγχου της ραφής παρουσιάστηκε ως ολοκληρωμένο σύστημα [C5, C6, B1] και εντάχθηκε μέσα σε ένα γενικότερο πλαίσιο αντιμετώπισης του προβλήματος του χειρισμού υφασμάτων καθώς ενσωματώθηκαν οι προτεινόμενες προσεγγίσεις μαζί με άλλες δύο σχετικές διατριβές, απόθεσης υφασμάτων σε τράπεζα εργασίας και περιστροφής των υφασμάτων γύρω από τη βελόνα. Για τις εξειδικευμένες και αυξημένες απαιτήσεις του πειραματικού τμήματος της διατριβής, για την ραφή μονών και διπλών υφασμάτων, σχεδιάστηκε και υλοποιήθηκε ολοκληρωμένη πειραματική διάταξη αποτελούμενη από τα παρακάτω τμήματα: Εγκαταστάθηκε στον υπάρχοντα ρομποτικό βραχίονα και ελέγχθηκε σύστημα μηχανικής όρασης καθώς και σύστημα αισθητήρα δύναμης. Το σύστημα μηχανικής όρασης χρησιμοποιήθηκε για την αναγνώριση της διεύθυνσης των πτυχώσεων του υφάσματος ενώ ο αισθητήρας δύναμης για τη μέτρηση των αναπτυσσόμενων δυνάμεων επί του υφάσματος. Κατά τα πρώτα στάδια της διατριβής σχεδιάστηκε και χρησιμοποιήθηκε πρότυπος μηχανισμός προσομοίωσης της ραπτικής μηχανής ο οποίος βοήθησε στα πρώτα πειράματα για την αξιολόγηση της εφικτότητας της ρομποτικής ραφής και τα οποία οδήγησαν στο συμπέρασμα της επιτευξιμότητάς της. Μεταγενέστερα και στην τελική φάση, όλα τα πειράματα υλοποιήθηκαν σε μία βιομηχανικού τύπου ραπτική μηχανή. Στον κινητήρα της ραπτικής μηχανής προσαρμόστηκε ένα σύστημα ρύθμισης στροφών (inverter) ούτως ώστε να είναι δυνατόν να ρυθμίζεται η ταχύτητα ραφής και έτσι να δοκιμαστεί η προτεινόμενη μέθοδος κάτω από διαφορετικές συνθήκες αλλά και να βρεθούν τα όρια απόδοσης του συστήματος. Σχεδιάστηκε και υλοποιήθηκε μία ολοκληρωμένη πειραματική διάταξη για την εκτέλεση των πειραμάτων εφελκυσμού υφασμάτων. Τα υφάσματα δένονται χειροκίνητα σε μία ειδικού σκοπού αρπάγη τοποθετημένη στο άκρο του ρομπότ ενώ το άλλο άκρο τους δένεται και συγκρατείται από σταθερή δαγκάνα.
176 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχεδιάστηκε και κατασκευάστηκε μια αρπάγη συγκράτησης και χειρισμού των υφασμάτων για την υλοποίηση των πειραμάτων σε ρεαλιστικές συνθήκες ραφής. Ο σχεδιασμός της αρπάγης ήταν αποτέλεσμα μιας εκτεταμένης έρευνας και ανάλυσης [C4] με αντικείμενο την επισκόπηση και τη συστηματική καταγραφή των αρπαγών για τον χειρισμό υφασμάτων. Η ίδια αρπάγη χρησιμοποιήθηκε(-είται) αποτελεσματικά σε όλα τα πειραματικά στάδια της διατριβής. Παρουσιάστηκε μία έξυπνη λύση για την ενσωμάτωση και την απευθείας εκτέλεση των πειραμάτων εφελκυσμού εντός της όλης διαδικασίας και λίγο πριν αρχίσει η ραφή. Σε αυτήν την προσέγγιση [J3] η ίδια αρπάγη που χρησιμοποιείται για τη ραφή χρησιμοποιείται και για το πείραμα του εφελκυσμού ενώ το ύφασμα κρατιέται από την άλλη του πλευρά από το ποδαράκι της ραπτικής μηχανής καθώς αυτό είχε τοποθετηθεί εκεί για να γίνει η ραφή. Κατά αυτόν τον τρόπο το πείραμα του εφελκυσμού και η ραφή μπορούν να γίνουν με τις ίδιες διατάξεις και η μία διαδικασία να ακολουθεί την άλλη χωρίς τη μεσολάβηση ανθρώπου ή μηχανισμού. Όλοι οι αλγόριθμοι και το απαραίτητο λογισμικό αναπτύχθηκε, εγκαταστάθηκε και λειτουργεί στον εσωτερικό ελεγκτή του ρομπότ για να επιτευχθούν όσον το δυνατόν μεγαλύτερες ταχύτητες υπολογισμών, αλλά και να απαλειφθούν οι καθυστερήσεις που θα προέκυπταν από την επικοινωνία του ρομπότ με τον ηλεκτρονικό υπολογιστή που θα έτρεχε τους αλγορίθμους. 8.1 Εισαγωγή. Στο κεφάλαιο αυτό παρουσιάζονται και σχολιάζονται όλα τα αποτελέσματα των ραφών (πάνω σε ευθείες γραμμές) σε μονά και σε διπλά υφάσματα και γίνονται ποιοτικές αλλά και ποσοτικές συγκρίσεις με αντίστοιχες ραφές που έγιναν από τον άνθρωπο. Επίσης, παρουσιάζονται αναλυτικά η πειραματική διάταξη, η αρπάγη και πληροφορίες για λειτουργικές προδιαγραφές τόσο της ραπτομηχανής όσο και του νόμου ελέγχου. Η ραφή υφασμάτων με ρομπότ είναι ένα πολύπλοκο πρόβλημα από μηχανολογικής, ηλεκτρολογικής/νικής αλλά κυρίως από λογισμικής οπτικής γωνίας. Είναι, δηλαδή, ένα πρόβλημα το οποίο επιβάλλει την μηχανοτρονική προσέγγιση σχεδιασμού της λύσης του. Έτσι και προσεγγίστηκε κατά τη φάση του σχεδιασμού και υλοποίησης της πειραματικής διάταξης. Σκοπός, όμως πάντα, ήταν ο απλός σχεδιασμός και η ανεξαρτητοποίηση των υποσυστημάτων του ούτως ώστε κάθε ένα από αυτά να μπορεί να λειτουργήσει και με άλλα διαφορετικά υποσυστήματα. Για παράδειγμα, δεν υπάρχει αλληλεξάρτηση της ραπτομηχανής με το ρομπότ και έτσι το ρομποτικό σύστημα μπορεί, εύκολα, να δουλέψει και με μία άλλου τύπου ραπτομηχανή. 8.2 Πειραματική διάταξη και συσκευές. Η τελική πειραματική διάταξη που σχεδιάστηκε και χρησιμοποιήθηκε για τη ραφή φαίνεται στο Σχ Αποτελείται από ένα ρομπότ (Ρ) και μία ραπτομηχανή (ΡΜ). Επίσης, στο σχήμα φαίνονται ο ελεγκτής του ρομπότ (Ε), ο ελεγκτής του αισθητήρα δύναμης (ΕΔ), ο αισθητήρας δύναμης (ΑΔ), η κάμερα (Κ), η αρπάγη (Α) και ο ηλεκτρονικός υπολογιστής (ΗΥ). 158


177 Κεφ.8 - Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις Κ ΕΔ Ε Ρ ΑΔ ΗΥ Α ΡΜ Σχ. 8.1 Πειραματική διάταξη για τη ραφή (ρομπότ-ραπτομηχανή). Το δομικό διάγραμμα της πειραματικής διάταξης με το ρομπότ, τον ελεγκτή, τη ραπτομηχανή, τον αισθητήρα δύναμης καθώς και οι διασυνδέσεις τους φαίνεται στο Σχ Η συνολική πειραματική διάταξη αποτελείται από τις παρακάτω συσκευές: Η ραπτομηχανή είναι μία συμβατική βιομηχανικού τύπου ραπτομηχανή (Brother DB2-B757) χωρίς καμία επιπλέον μετατροπή-προσαρμογή όσον αφορά το ίδιο ράψιμο. Η μοναδική τροποποίηση είναι ένας on-off διακόπτης για την έναρξη και την παύση της λειτουργίας του κινητήρα της ραπτομηχανής. Ως εκ τούτου, το προτεινόμενο σύστημα είναι ανεξάρτητο από τον τύπο της ραπτομηχανής και θα μπορούσε να εφαρμοστεί σε οποιαδήποτε άλλη ραπτομηχανή. Επίσης, στον κινητήρα της ραπτομηχανής συνδέθηκε ένας μετατροπέας συχνότητας (inverter) για τη ρύθμιση της συχνότητας του κινητήρα (τριφασικός κινητήρας) και κατ επέκταση τη ρύθμιση της ταχύτητας ραφής. Αυτή η συσκευή προστέθηκε για να μπορούν να δοκιμαστούν οι προτεινόμενοι ελεγκτές υπό διάφορες ταχύτητες/συνθήκες. Ο ρομποτικός βραχίονας που χρησιμοποιήθηκε για τη ραφή είναι τύπου Scara (Adept Cobra s800). Ο συγκεκριμένος τύπος ρομπότ επιλέχθηκε, σε αντίθεση με τα αρθρωτά, επειδή είναι ιδανικό σε εργασίες οι οποίες εκτελούνται πάνω σε ένα συγκεκριμένο οριζόντιο επίπεδο. Η μέτρηση και η καταγραφή της δύναμης γίνεται με ένα Force/Torque αισθητήρα (Gamma 65/5) της εταιρείας ΑΤΙ Industrial Automation. Ο μετατροπέας (transducer) του αισθητήρα τοποθετήθηκε σε σειρά ανάμεσα στον καρπό του ρομπότ και την αρπάγη. Όλοι οι απαραίτητοι αλγόριθμοι του χαμηλότερου επιπέδου, δηλαδή, οι ελεγκτές νευρωνικό, PID και ασαφής ενσωματώθηκαν και εκτελούνται εντός του εσωτερικού ελεγκτή του ρομπότ (SmartController CX). Επίσης, οι αλγόριθμοι για την επικοινωνία του αισθητήρα δύναμης με το ρομπότ υλοποιήθηκαν εντός του εσωτερικού ελεγκτή του ρομπότ. Αυτό έγινε για να μπορεί να ανταποκριθεί το σύστημα στις απαιτήσεις για on-line αποκρίσεις και να γίνονται γρήγορα οι 159
 FNN Force controller RS-232 Force controller (ATI Standalone F/T Controller) Robot (Adept Cobra s800) Robot internal controller ethernet PC (Optional, for")
 ρυθμισμένη να λειτουργεί σε ταχύτητες baud rate στα 38400bps.")
178 on-off Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ απαραίτητοι υπολογισμοί ούτως ώστε να επιτευχθούν ταχύτητες αντίστοιχες της ραπτομηχανής. Robot controller (SmartController CX) FNN Force controller RS-232 Force controller (ATI Standalone F/T Controller) Robot (Adept Cobra s800) Robot internal controller ethernet PC (Optional, for initial settings and monitoring) Sewing machine Fabrics Force Transducer Inverter Σχ. 8.2 Διάγραμμα πειραματικής διάταξης για τη ραφή. Η επικοινωνία μεταξύ του ελεγκτή της δύναμης και του ελεγκτή του ρομπότ γίνεται μέσω της σειριακής θύρας (RS232) ρυθμισμένη να λειτουργεί σε ταχύτητες baud rate στα 38400bps. Η ταχύτητα αυτή μεταφράζεται σε περίπου 150Hz (6.6ms) και εξαρτάται από τα απαραίτητα bytes (χαρακτήρες) που μεταφέρονται μέσω της σειριακής θύρας. Οι μετρήσεις της δύναμης έχουν ένα θόρυβο περίπου ± 0,05N που είναι μία φυσιολογική τιμή έχοντας υπόψη ότι η ανάλυση του αισθητήρα είναι 0,05Ν. Ο χρόνος δειγματοληψίας του αισθητήρα δύναμης είναι πολύ μικρότερος από το χρόνο του βρόχου του ελεγκτή του ρομπότ ο οποίος είναι 16ms. Περιορισμός που καθορίζει και τους υπολοίπους χρόνους του ελέγχου. Από την άλλη πλευρά, η ραπτομηχανή λειτουργεί στις RPM (ή βελονιές ανά λεπτό), το οποίο μεταφράζεται σε Hz ή περίπου -15ms. Το μήκος του γαζιού ρυθμίστηκε στο μέγιστο δυνατό (περίπου στα 2.8 mm), το οποίο μεταφράζεται ως η μέγιστη δυνατή γραμμική ταχύτητα του υφάσματος και είναι η χειρότερη περίπτωση για τον ελεγκτή. Για κάθε βρόχο της ραπτομηχανής (κάθε γαζί) το 44,7% αντιστοιχεί στην κίνηση του υφάσματος, το 41,5% αντιστοιχεί στην κίνηση/διείσδυση της βελόνας στο ύφασμα και το υπόλοιπο 13,7% αντιστοιχεί στην κίνηση της βελόνας προς τα επάνω και έξω από το ύφασμα, όπου το ύφασμα σε αυτή τη φάση δεν μετακινείται, όπως φαίνεται στο Σχ. 2.3 και περιγράφηκε στο Κεφ Οι μέγιστες ταχύτητες ραφής που έχουν επιτευχθεί κατά τη διάρκεια των πειραμάτων ανέρχονται στο 45% της μέγιστης της ραπτομηχανής, το οποίο είναι 1800RPM ή 30Hz ή περίπου 33.3ms για κάθε γαζί. Η ποιότητα της απόκρισης του 160


. Όταν όμως το σφάλμα της δύναμης είναι κοντά στο μηδέν (± 0,05 Ν), δηλαδή μέσα σε αποδεκτά όρια σφάλματος, τότε το ρομπότ δεν κινείται και η συχνότητα αυξάνεται (περίπου στα 125Hz), η οποία")
179 Δύναμη Κεφ.8 - Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις ελεγκτή μειώνεται πέρα από αυτήν την ταχύτητα και ταυτόχρονα μειώνεται η ποιότητα των ραφών ειδικά για υφάσματα με πολύ μικρή εκτατότητα. Για περιπτώσεις υφασμάτων με πολύ μεγάλη εκτατότητα ο νευρωνικός ελεγκτής έχει ικανοποιητική απόκριση και για ταχύτητες πάνω από αυτό το όριο ms 1.4 ms 714 Hz 16 ms 62.5 Hz Ραπτομηχανή Επιθυμητή Δύναμη + - Ελεγκτής ΝΔ Ρομπότ Ύφασμα 16 ms 62.5 Hz ή 8 ms 125 Hz Αισθητήρας Δύναμης 6.6 ms 150 Hz Σχ. 8.3 Χρόνοι απόκρισης του βρόχου ελέγχου. Όπως φαίνεται και στο Σχ. 8.3, εάν το ρομπότ έχει πάρει εντολή κίνησης τότε κάθε βρόχος ελέγχου ολοκληρώνεται μέσα σε 16ms (συχνότητα βρόχου ελέγχου = 62.5Hz). Όταν όμως το σφάλμα της δύναμης είναι κοντά στο μηδέν (± 0,05 Ν), δηλαδή μέσα σε αποδεκτά όρια σφάλματος, τότε το ρομπότ δεν κινείται και η συχνότητα αυξάνεται (περίπου στα 125Hz), η οποία τελικά περιλαμβάνει μόνο τη χρονική καθυστέρηση για την ανάγνωση/επικοινωνία με τον αισθητήρα δύναμης και τους απαραίτητους υπολογισμούς από το νευρωνικό Σχεδιασμός αρπάγης Μια ιδιοκατασκευή πνευματικής αρπάγης σχεδιάστηκε κατασκευάστηκε και μονταρίστηκε στον καρπό του ρομπότ, όπως φαίνεται στα Σχ. 2.4 και Σχ Ο σχεδιασμός της αρπάγης είναι αποτέλεσμα της εκτεταμένης έρευνας και ανάλυσης [58] με αντικείμενο την επισκόπηση και τη συστηματική καταγραφή των αρπαγών που χρησιμοποιούνται για το χειρισμό υφασμάτων και περιγράφηκε αναλυτικά στο Κεφ

, με τη βοήθεια ενός εμβόλου, εκτελεί μεταφορική κίνηση πάνω στην κοινή εφαπτομένη που περνάει από το σημείο επαφής των δύο ακίνητων δαχτύλων.")

180 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 8.4 Αρπάγη συγκράτησης υφασμάτων βασισμένη στον τρόπο συγκράτησης από τον ανθρώπου. Ο τρόπος λειτουργίας της βασίζεται στον τρόπο που ο έμπειρος χειριστής πιάνει τα υφάσματα κατά τη ραφή τους, σε μία απλουστευμένη όμως εκδοχή. Η αρπάγη αποτελείται από τρία δάχτυλα και φαίνεται αναλυτικά στο Σχ Τα δύο δάχτυλα (δείκτης και μέσος) που βρίσκονται μπροστά, εφάπτονται μεταξύ τους και είναι ακίνητα ως προς την αρπάγη-ρομπότ. Το τρίτο (αντίχειρας), με τη βοήθεια ενός εμβόλου, εκτελεί μεταφορική κίνηση πάνω στην κοινή εφαπτομένη που περνάει από το σημείο επαφής των δύο ακίνητων δαχτύλων. Όταν η αρπάγη έρχεται σε επαφή με το ύφασμα, που βρίσκεται πάνω στο τραπέζι, τότε το κινητό δάκτυλο που εφάπτεται με το ύφασμα μετακινείται προς τα άλλα δύο παρασύροντας και εγκλωβίζοντας ένα τμήμα του υφάσματος ανάμεσα στα τρία δάχτυλα και έτσι το συγκρατεί. Όταν βρίσκεται στην κλειστή θέση, τα σημεία επαφής των τριών δαχτύλων πάνω στο ύφασμα σχηματίζουν ένα ισόπλευρο τρίγωνο. Ενώ, όταν βρίσκεται στην ανοιχτή θέση, σχηματίζουν ένα ισοσκελές τρίγωνο. Τα δάχτυλα έχουν επενδυθεί με ένα είδος σιλικόνης παίρνοντας το σχήμα και τις διαστάσεις μιας απλουστευμένης εκδοχής του ανθρώπινου δάχτυλου. Η επένδυση με αυτό το υλικό εξυπηρετεί δύο σκοπούς. Πρώτον, δημιουργεί μία ενδοτικότητα στην αρπάγη αλλά και σε ολόκληρο το ρομπότ όσον αφορά την κάθετη διεύθυνση, διευκολύνοντας την επαφή της αρπάγης με το ύφασμα-τραπέζι κατά τις κάθετες μετακινήσεις και την απορρόφηση των κρουστικών δυνάμεων μειώνοντας έτσι την επιβάρυνση των μηχανικών μερών. Δεύτερον, βοηθάει στην ασφαλή συγκράτηση του υφάσματος μέσα στην αρπάγη καθώς αυξάνεται ο συντελεστής τριβής υφάσματος-δαχτύλων δυσκολεύοντας έτσι την ολίσθηση του υφάσματος. 162


181 Κεφ.8 - Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις Ως μετεξέλιξη της σχετικής έρευνας, βρίσκεται στη φάση σχεδιασμού μία νέα αρπάγη τριών δαχτύλων, με κίνηση σε δύο από τα δάχτυλα, για τον γενικότερο χειρισμό υφασμάτων. Η γενική ιδέα του τρόπου λειτουργίας της αρπάγης [96], τυπωμένη σε τρισδιάστατο εκτυπωτή, φαίνεται στο Σχ. 8.5, αλλά το αντικείμενο αυτό ξεπερνά το πλαίσιο των ορίων της διατριβής και εντάσσεται στην υπό μελλοντική ερευνητική κατεύθυνση. Σχ. 8.5 Νέος σχεδιασμός αρπάγης χειρισμού υφασμάτων βασισμένη στον τρόπο λειτουργίας των δαχτύλων του ανθρώπου. 8.3 Πειράματα ραφών σε μονά και διπλά υφάσματα. Για τη διαδικασία της ραφής 38 τόσο των μονών όσο και διπλών υφασμάτων, τα δείγματα τοποθετούνται κάτω από τη βελόνα της ραπτομηχανής. Η ίδια η διαδικασία της ραφής χωρίζεται σε τέσσερις φάσεις: Στην πρώτη φάση (πιάσιμο του υφάσματος), το ρομπότ αρχίζει και πλησιάζει το τραπέζι-ύφασμα από πάνω μέχρις ότου τα δάχτυλα της αρπάγης ακουμπήσουν και πιέσουν το ύφασμα με μία προκαθορισμένη δύναμη ίση με 4Ν. Μετά, κλείνει η αρπάγη και τσιμπάει το ύφασμα από πάνω. Η αρπάγη κινείται προς τα πάνω (για 5mm) έτσι ώστε να αποφεύγεται η επαφή με το τραπέζι κατά τη ραφή και να μειώνονται δυνάμεις τριβής. Στη δεύτερη φάση (πείραμα εφελκυσμού), εκτελείται το πείραμα εφελκυσμού όπως αυτό περιγράφεται στο Κεφ.5. Το ρομπότ αρχίζει και έλκει το ύφασμα ενώ αυτό πιάνεται από το ποδαράκι της ραπτομηχανής. Το αποτέλεσμα της επεξεργασίας των δεδομένων του πειράματος είναι η επιθυμητή τάνυση που θα εφαρμοστεί πάνω στο ύφασμα κατά τη ραφή του (κατά τη διάρκεια των δύο επόμενων φάσεων). Στην τρίτη φάση (προτάνυση), ο νευρωνικός ελεγκτής ενεργοποιείται ενώ η ραπτομηχανή δεν έχει ξεκινήσει ακόμη. Ως αποτέλεσμα αυτού, το
182 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ ρομπότ εφαρμόζει μία τάνυση σύμφωνα με την επιθυμητή από την προηγούμενη φάση. Στην τέταρτη και τελευταία φάση (γάζωμα), η ραπτομηχανή ενεργοποιείται και γαζώνει τα υφάσματα ενώ ο νευρωνικός ελεγκτής ελέγχει την κίνηση του ρομπότ κουνώντας το προς τη βελόνα της ραπτομηχανής εξασφαλίζοντας ταυτόχρονα ότι εφαρμόζεται στο ύφασμα η επιθυμητή τάνυση Χαρακτηριστικά μονών υφασμάτων. Για τις ραφές στα μονά υφάσματα επιλέχτηκαν 12 υφάσματα, τα οποία καλύπτουν μία μεγάλη γκάμα διαφορετικών υφασμάτων όσον αφορά τον τύπο τους, τη σύνθεσή τους και την εκτατότητά τους. Τα δείγματα αυτά αποτελούν ένα τμήμα των υφασμάτων που παρουσιάζονται στο Σχ οι καμπύλες τάνυσης των 12 δειγμάτων φαίνονται στο Σχ Το ύφασμα (Νο. 12) έχει πολύ μεγάλη εκτατότητα ενώ το ζεύγος (Νο. 1) έχει πολύ μικρή εκτατότητα. Στον Πιν. 8.1, φαίνονται τα χαρακτηριστικά τους καθώς και οι ραφές που προέκυψαν από το ρομπότ και τον χειριστή Force (Nt) Strain (%) Σχ. 8.6 καμπύλες εφελκυσμού των 12 μονών υφασμάτων (αποτελούν τμήμα αυτών που παρουσιάζονται στο Σχ. 5.5). 164




















183 Κεφ.8 - Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις Πιν. 8.1 Ραφή μονών υφασμάτων από το ρομπότ και τον άνθρωπο. Δείγματα μονών υφασμάτων No. Construction Composition Desired force (N) Ραφές από το ρομπότ Ραφές από τον άνθρωπο Woven viscose 65% polyester 35% Woven synthetic wool 50%- 50% Woven cotton 100% Knitted polyester 60% cotton 40% Knitted acrylic cotton Woven cotton 92% elastane 8% Knitted acrylic 100% Knitted cotton 100% Knitted cotton 49% acrylic 49% lycra 2% Knitted polyester 60% cotton 40%


 έχει πολύ μικρή εκτατότητα, ή με άλλα λόγια προσεγγίζει τη συμπεριφορά ενός στιβαρού αντικειμένου")

 είναι 15 cm, ενώ το αρχικό ενεργό μήκος των")



184 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ 1 1 Knitted nylon 100% Knitted cotton 94% elastane 6% Χαρακτηριστικά διπλών υφασμάτων. Τα 11 διπλά υφάσματα, που επιλέχθηκαν να γαζωθούν στο δεύτερο σετ πειραμάτων, καλύπτουν μία μεγάλη γκάμα διαφορετικών υφασμάτων όσον αφορά την εκτατότητά τους, όπως φαίνεται στο Σχ Το ζεύγος υφασμάτων (Νο. 11) έχει πολύ μεγάλη εκτατότητα ενώ το ζεύγος (Νο. 1) έχει πολύ μικρή εκτατότητα, ή με άλλα λόγια προσεγγίζει τη συμπεριφορά ενός στιβαρού αντικειμένου όσον αφορά τον εφελκυσμό. Επιπλέον, στα επιλεγμένα υφάσματα περιλαμβάνονται υφαντά αλλά και πλεκτά τα οποία έχουν μία ποικιλομορφία όσον αφορά την σύνθεσή τους, όπως φαίνεται στον Πιν το μήκος της παραγόμενης ραφής (ραφή σε ευθεία γραμμή) είναι 15 cm, ενώ το αρχικό ενεργό μήκος των υφασμάτων (x στο Σχ. 2.4) είναι 18cm. Το ρομπότ σταματάει την κίνησή του στα 3 cm πριν τη βελόνα της ραπτομηχανής εξαιτίας των μηχανολογικών ορίων και για να αποφευχθεί η σύγκρουση της άκρης της αρπάγης με το σώμα της ραπτομηχανής. Στις δύο τελευταίες στήλες του Πιν. 8.2, φαίνονται οι ραφές που παρήχθησαν από το ρομποτικό σύστημα καθώς και αυτές που παρήχθησαν από τον χειριστή. Οι φωτογραφίες αυτές βρίσκονται επίσης στο [97] σε υψηλή ανάλυση. Στους Πιν. 8.1 και Πιν. 8.2, φαίνονται επίσης η δομή και η σύνθεση των υφασμάτων, η εκτατότητά τους, η επιθυμητή τάνυση καθώς και οι ραφές που παρήχθησαν. Πιν. 8.2 Ραφή διπλών υφασμάτων από το ρομπότ και τον άνθρωπο. Δείγματα διπλών υφασμάτων No. Constructio n Composition Extensibility (%) Desired force (N) Ραφές από το ρομπότ Ραφές από τον άνθρωπο 1 Woven viscose 70% polyester 30% Woven synthetic wool 50%- 50%



















185 Κεφ.8 - Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις 3 Woven cotton 100% Woven synthetic wool 50%- 50% Knitted acrylic 100% Knitted polyester 65% cotton 35% Knitted cotton 100% Knitted cotton 49% acrylic 49% lycra 2% Knitted nylon 100% Knitted Tulle cotton 92% elastane 8% Knitted cotton 49% acrylic 49% lycra 2% T1 Woven cotton 99% elastane 1% T2 Knitted polyester 60% cotton 40%
186 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ 8.4 Παρατηρήσεις συμπεράσματα για τα πειράματα ραφής υφασμάτων. Από τις φωτογραφίες αλλά και από τα πραγματικά ραμμένα υφάσματα φαίνεται ότι τα κομμάτια υφάσματος γαζώνονται σωστά ενώ η ποιότητα της ραφής είναι αρκετά ικανοποιητική. Οι ραφές που παρήχθησαν από το ρομπότ είναι συγκρίσιμες με αυτές που παρήγαγε ο χειριστής και μάλιστα σε μερικές περιπτώσεις του ρομπότ είναι καλύτερες, όπως φαίνεται στα μονά υφάσματα Νο.1 και Νο.6 στον Πιν. 8.1 και στα διπλά υφάσματα Νο.4, Νο.Τ1, Νο.Τ2 στον Πιν Επίσης, το πλεονέκτημα που έχει το ρομπότ, έναντι του ανθρώπου, στο να ακολουθεί μία ευθεία γραμμή χωρίς αποκλίσεις φαίνεται στις περισσότερες περιπτώσεις των υφασμάτων. Στον Πιν. 8.3, φαίνονται οι αποκλίσεις σφάλματος των παραχθεισών ραφών από την θεωρητική ευθεία, για τα διπλά υφάσματα. Η επιθυμητή ευθεία ραφής υποτίθεται ότι πρέπει να ακολουθεί το ίδιο νήμα (είτε το υφάδι είτε το στημόνι) του υφάσματος. Οι ραφές που προέρχονται από το ρομπότ έχουν σαφέστατα πολύ μικρότερες αποκλίσεις από τις αντίστοιχες ραφές του ανθρώπου. Το ρομπότ έχει την ικανότητα να ακολουθεί ευθύγραμμα τμήματα τροχιών με πολύ μεγάλη ακρίβεια. Από την άλλη, ο άνθρωπος δεν μπορεί να ακολουθήσει με ακρίβεια την γραμμή ραφής (και κυρίως όταν το ύφασμα δεν έχει ευδιάκριτα σημάδια, όπως τα ριγέ υφάσματα) εξαιτίας της κατασκευαστικής δομής του ανθρώπινου βραχίονα και του τρόπου κίνησής του χεριού του. Όπως φαίνεται στις φωτογραφίες των δύο πινάκων, το γάζωμα έχει γίνει στη μέση του υφάσματος και όχι κοντά σε κάποια από τις πλευρές του. Αυτό κάνει το γάζωμα ακόμα πιο δύσκολο καθώς δεν υπάρχει μία ευθεία αναφοράς (όπως η πλευρά του υφάσματος) που θα μπορούσε να είναι οδηγός για να την ακολουθήσει ο άνθρωπος και να πετύχει καλύτερη ακρίβεια. Επίσης στην περίπτωση του ρομπότ δεν χρησιμοποιείται κάποιος αισθητήρας που θα μπορούσε να το βοηθήσει να διορθώνει τις αποκλίσεις σε αντίθεση με τον άνθρωπο ο οποίος χρησιμοποιεί την όρασή του. Ο μέσος όρος (1-2 mm) των μέγιστων αποκλίσεων είναι ικανοποιητικός και μπορεί να θεωρηθεί αποδεκτός συγκρινόμενος με το συνηθισμένες εμπειρικές τιμές αποκλίσεων που κυμαίνονται στα 2-4 mm. Πιν. 8.3 Ακρίβεια των γαζιών που παρήχθησαν από το ρομπότ και τον άνθρωπο. Specimen s No. Seam s maximum deviation from the desired sewing straight line Robot (in mm) Seam s maximum deviation from the desired sewing straight line Human (in mm)
187 Κεφ.8 - Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις T1 2 4 T2 1 2 Στην πραγματικότητα, το σφάλμα που καταγράφεται από τις ραφές του ρομπότ δεν εξαρτάται ούτε προκαλείται από το σύστημα ελέγχου του ρομπότ, αλλά είναι αποτέλεσμα της μη-ευθυγραμμισμένης τοποθέτησης των υφασμάτων στην αρπάγη του ρομπότ. Αυτό με τη σειρά του μπορεί να προέρχεται και/ή από την μηευθυγραμμισμένη τοποθέτηση του υφάσματος στο τραπέζι μπροστά από τη βελόνα. Έτσι, η ευθεία που ενώνει την βελόνα με το σημείο της αρπάγης δεν συμπίπτει πάντα με ένα νήμα του υφάσματος, με αποτέλεσμα να υπάρχει απόκλιση κατά τη ραφή. Εάν ήταν δυνατόν να ευθυγραμμιστεί ακριβώς το ύφασμα τότε θα ήταν δυνατόν να μειωθεί ως και να επαλειφθεί το σφάλμα. Από την άλλη, για να επιτευχθεί αυτό, θα μπορούσαν να ενσωματωθούν στο σύστημα αισθητήρες αλλά σε αυτήν την περίπτωση θα έπρεπε να ενσωματωθεί και έλεγχος του προσανατολισμού του υφάσματος κατά τη διάρκεια της ραφής. Όλα τα σχετικά πειράματα έχουν επαναληφθεί αρκετές δεκάδες φορές ούτως ώστε να εξασφαλιστεί η επαναληψιμότητα της διαδικασίας τους. Η επαναληψιμότητα των πειραμάτων έχει νόημα και ορίζεται μόνο επί των επιτυχών δοκιμών [32], που σημαίνει ολοκληρωμένες ραφές αγνοώντας τις αποτυχημένες από εξωγενείς παράγοντες προσπάθειες, όπως για παράδειγμα το να κοπεί η κλωστή κατά τη διάρκεια της ραφής κλπ. Πρέπει να σημειωθεί ότι όλα τα επιτυχημένα πειράματα παρουσιάζουν σχεδόν παρόμοια αποτελέσματα. Η διακύμανση του σφάλματος της ακρίβειας της ραφής για ίδια υφάσματα κυμαίνεται στο ±1 mm, το οποίο οφείλεται κυρίως στην μη απόλυτη ευθυγράμμιση του υφάσματος. Η αναπαραγωγιμότητα των πειραμάτων δεν έχει διερευνηθεί, δεδομένου ότι για αυτό χρειάζονται διαφορετικοί χειριστές, διαφορετικές συσκευές και μηχανήματα ή/και διαφορετικά εργαστήρια [32]. Η αναπαραγωγιμότητα, όμως, θα μπορούσε να αποδειχθεί από άλλους ερευνητές που θα ήθελαν να δοκιμάσουν να αναπαράγουν την μεθοδολογία ραφής που παρουσιάζεται στην παρούσα διατριβή. Η ποιότητα των ραφών μπορεί επίσης να επιβεβαιωθεί ή όχι και από τη σταθερότητα του μήκους του κάθε ανεξάρτητου γαζιού. Οι περισσότερες από τις ραφές έχουν ένα σταθερό μήκος γαζιών καθ όλη τη διάρκεια της 15 cm ραφής, εκτός από τις περιπτώσεις όπου εμφανίζεται το φαινόμενο του σουρώματος του υφάσματος (puckering). Το σούρωμα εμφανίζεται και στις δύο περιπτώσεις: ρομπότ ή χειριστής. Οι πτυχώσεις ή τα τμήματα του υφάσματος με πτυχώσεις εμφανίζονται κατά κύριο λόγο στα υφάσματα τα οποία ράβονται πολύ σφιχτά και φαίνονται έντονα κυρίως στα μονά δείγματα Νο.1 και Νο.12 στον Πιν. 8.1 και στα διπλά δείγματα Νο.1, Νο.10 και Νο.Τ1, στον Πιν Αυτές οι περιπτώσεις μπορούν να θεωρηθούν ως τα όρια του εκπαιδευμένου ελεγκτή δύναμης. Ως γνωστόν ένας νευρωνικός ελεγκτής ο οποίος δουλεύει στα όριά του (όσον αφορά το πεδίο εκπαίδευσής του) παρουσιάζει μειωμένη αποδοτικότητα. Ειδικά, το δείγμα Νο.1 του Πιν. 8.1 και τα δείγματα Νο.1 και Νο.Τ1 του Πιν. 8.2, παρουσιάζουν περισσότερες και ψηλότερες πτυχώσεις στην περίπτωση που έχουν γαζωθεί από τον χειριστή. Αυτό δικαιολογείται από το γεγονός ότι ο άνθρωπος δεν μπορεί να κρατήσει την δύναμη τάνυσης απόλυτα σταθερή κατά τη ραφή και μία πολύ μικρή μεταβολή της μπορεί να προκαλέσει το σούρωμα πιο εύκολα σε ένα ύφασμα με πολύ μικρή εκτατότητα. Από τη άλλη πλευρά, αυτές οι πτυχώσεις μπορούν να μειωθούν σε αποδεκτά επίπεδα εάν 169
188 Force (N) Force (N) Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ το ύφασμα τεντώνεται πριν αλλά και μετά τη βελόνα καθώς γαζώνεται. Μάλιστα, σε πολλές περιπτώσεις ένας έμπειρος χειριστής ακολουθεί αυτήν την τακτική χειρισμού για να εξασφαλίσει την παραγωγή ποιοτικών ραφών, δηλαδή τεντώνει το ύφασμα κατά τη ραφή του βάζοντας το ένα χέρι πριν τη βελόνα και το άλλο μετά τη βελόνα. Σε όλα, όμως τα πειράματα που παρουσιάστηκαν παραπάνω, ο χειριστής περιορίστηκε να χρησιμοποιεί μόνο το ένα του χέρι κατά τη ραφή, πριν τη βελόνα, ούτως ώστε να μπορεί να γίνει σύγκριση με τον τρόπο λειτουργίας του ρομπότ. Η χρήση και ενός δεύτερου ρομποτικού βραχίονα ή πιο απλά μιας δεύτερης αρπάγης στο ίδιο ρομπότ, ούτως ώστε να μιμείται τον τρόπο χειρισμού που ακολουθεί μερικές φορές ο άνθρωπος, είναι πέρα από τα όρια της διατριβής και εντάσσεται στα μελλοντικά ερευνητικά σχέδια. Θα πρέπει να σημειωθεί ότι όλα τα υφάσματα δεν σιδερώθηκαν μετά το γάζωμά τους. Ένα προσεκτικό σιδέρωμα των γαζωμένων υφασμάτων, που είναι έτσι και αλλιώς μία κοινή διαδικασία που ακολουθείται στη βιομηχανία, μπορεί να βελτιώσει κατά πολύ την εμφάνιση των γαζωμένων υφασμάτων και κατ επέκταση την ποιότητα των ραφών. Οι πραγματικές δυνάμεις που αναπτύσσονται κατά τη διάρκεια του γαζώματος των μονών υφασμάτων Νο.1 και Νο.12, φαίνονται στο Σχ specimen 1 desired force = 0.1 N (προτάνυση) (γάζωμα) Time (sec) 6 4 specimen 12 desired force = 0.9 N (προτάνυση) (γάζωμα) Time (sec) Σχ. 8.7 Δυνάμεις κατά την 3 η φάση (προτάνυση) και 4 η φάση (γάζωμα) για τα μονά υφάσματα Νο.1 και Νο
189 Κεφ.8 - Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις Οι πραγματικές δυνάμεις που αναπτύσσονταν κατά τη διάρκεια του γαζώματος των διπλών υφασμάτων Νο.1, Νο.5 και Νο.11, φαίνονται στο Σχ Η επιλογή της παρουσίασης των τριών αυτών περιπτώσεων έγινε επειδή αυτά τα υφάσματα μπορούν να θεωρηθούν ως αντιπροσωπευτικά. Δηλαδή, τα δύο από αυτά (Νο.1 και Νο.11) έχουν την μικρότερη και την μεγαλύτερη εκτατότητα αντίστοιχα ενώ το τρίτο (Νο.5) έχει μια ενδιάμεση. Τα διαγράμματα των δυνάμεων για όλα τα υπόλοιπα υφάσματα είναι παραπλήσια με αυτά που παρουσιάζονται στο Σχ κάθε ένα από το τρία διαγράμματα χωρίζεται σε δύο περιοχές: στην τρίτη φάση (προτάνυση) και στην τέταρτη φάση (γάζωμα), η οποία ξεκινάει 5sec μετά την έναρξη της τρίτης φάσης. 171
190 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Σχ. 8.8 Δυνάμεις κατά την 3 η φάση (προτάνυση) και 4 η φάση (γάζωμα) για τα διπλά υφάσματα Νο.1, Νο.5 και Νο.11. Είναι φανερό, σχεδόν και από τα τρία διαγράμματα, ότι η ταλαντωτική συμπεριφορά της δύναμης, που προκαλείται από την κίνηση του μηχανισμού τροφοδοσίας της ραπτομηχανής, αυξάνεται καθώς το ρομπότ πλησιάζει τη 172
191 Κεφ.8 - Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις ραπτομηχανή. Το υπολειπόμενο ενεργό μήκος του υφάσματος (ανάμεσα στο ρομπότ και τη βελόνα) μειώνεται συνεχώς με αποτέλεσμα το ύφασμα να γίνεται όλο και πιο στιβαρό (μειώνεται η εκτατότητά του). Ως εκ τούτου, οι ταλαντώσεις των μετρούμενων δυνάμεων, υπό τις ίδιες μετακινήσεις του υφάσματος, είναι μεγαλύτερες. Στην πρώτη περίπτωση (υφάσματα Νο.1), το γάζωμα ολοκληρώνεται σε περίπου 2.5sec, το οποίο είναι μεγαλύτερο από το αναμενόμενο, εξαιτίας της φάσης επιτάχυνσης της ραπτομηχανής. Επιπλέον, ο συνολικός χρόνος του γαζώματος αυξάνεται, όπως φαίνεται στις περιπτώσεις των υφασμάτων Νο.5 και Νο.11. Αυτό συμβαίνει εξαιτίας της μεγαλύτερης εκτατότητας των υφασμάτων και ως εκ τούτου του μεγαλύτερου αρχικού μήκους του υφάσματος που δημιουργείται κατά την τρίτη φάση (προτάνυση). Το ρομποτικό σύστημα είναι ικανό να ανταποκριθεί σε μία μεγάλη ποικιλία υφασμάτων γνωστών αλλά και άγνωστων για αυτό. Η περίπτωση των υφασμάτων Τ1 και Τ2 του Πιν. 8.2, είναι άγνωστη για το σύστημα καθώς δεν έχει εκπαιδευτεί για αυτά τα υφάσματα. Μπορεί να ράψει άγνωστα προς αυτό υφάσματα και να επεκτείνει τη γνώση του για αντιμετώπιση μελλοντικών άγνωστων καταστάσεων. Έτσι μπορεί να αντιμετωπιστεί η πληθώρα διαφορετικών υφασμάτων και όσον αφορά το τύπο αλλά και τη σύνθεση τους, που ενδέχεται να αντιμετωπίσει το σύστημα. Όπως προαναφέρθηκε, το προτεινόμενο ιεραρχικό ευφυές ρομποτικό σύστημα δοκιμάστηκε μόνο σε ευθύγραμμες ραφές. Αυτό το είδος ραφών αντιστοιχεί σε περισσότερο από το 70% των ραφών που χρησιμοποιούνται όταν ράβονται υφάσματα για την παραγωγή ρούχων και περισσότερο από το 90% όταν ράβονται άλλα είδη όπως: πετσέτες, σεντόνια, τραπεζομάντιλα, κλπ. Επίσης, πέρα από το πρόβλημα του χειρισμού των υφασμάτων, υπάρχουν και άλλες παράμετροι της ραπτομηχανής που επηρεάζουν την ποιότητα της ραφής. Αυτές είναι: η δύναμη πίεσης των υφασμάτων από το ποδαράκι της ραπτομηχανής, τα διάφορα είδη γαζιού, το μήκος του γαζιού, η τάνυση της κλωστής κλπ. Για όλες αυτές τις παραμέτρους έχει γίνει η υπόθεση εργασίας ότι ρυθμίζονται αρχικά και παραμένουν σταθερές καθ όλη τη διάρκεια των πειραμάτων. Επομένως, έχουν την ίδια επίδραση στην ποιότητα της ραφής είτε αυτή γίνεται από το ρομπότ είτε από τον χειριστή. 173
192
193 9 Συμπεράσματα Προοπτικές 9.1 Ανακεφαλαίωση και γενικά συμπεράσματα Στην παρούσα διατριβή αναπτύχτηκε ένα ευφυές ιεραρχικό σύστημα εκτιμήσεων, αποφάσεων και ελέγχου για τη διαδικασία της ραφής υφασμάτων με ρομπότ. Τα κύρια χαρακτηριστικά του συστήματος, όπως αυτά παρουσιάστηκαν, είναι: Η αναγνώριση, με χρήση νευρωνικών δικτύων, και η διόρθωση των πτυχώσεων των υφασμάτων. Η εύρεση βέλτιστης θέσης του ρομπότ επί του υφάσματος με σκοπό την μετακίνησή του και την αποφυγή πτυχώσεων. Η ποιοτική εκτίμηση των χαρακτηριστικών των υφασμάτων (εκτατότητα) με χρήση λεκτικών μεταβλητών. Η έξυπνη αυτοματοποίηση των πειραμάτων εφελκυσμού και η ενσωμάτωσή τους εντός του ρομποτικού συστήματος και λίγο πριν την έναρξη της διαδικασίας της ραφής. Νευρωνικός έλεγχος τάνυσης σε αντίθεση με άλλες μεθόδους. Καθ όλη τη δομή του ιεραρχικού συστήματος γίνεται χρήση μεθόδων υπολογιστικής νοημοσύνης, όπως νευρωνικά δίκτυα και ασαφής λογική. Η προσέγγιση αυτή βοήθησε στο να γίνει εφικτή η χρήση και ο χειρισμός των ποιοτικών ιδιοτήτων των υφασμάτων. Η μέθοδος του νευρωνικού ελέγχου, της τάνυσης κατά τη ραφή, συγκρίθηκε με έναν PID ελεγκτή και έναν προσαρμοστικό ασαφή ελεγκτή. Χαρακτηριστικό πλεονέκτημα της προσέγγισης, είναι ότι μπορεί η εκπαίδευση του συστήματος να επεκταθεί μελλοντικά εάν χρησιμοποιηθούν νέα δοκίμια υφασμάτων. Η συνεισφορά της διατριβής στον επιστημονικό χώρο εντοπίζεται στα παρακάτω σημεία: Παρουσιάστηκε για πρώτη φορά στη διεθνή βιβλιογραφία, η συστηματική εργαστηριακή εκτέλεση ραφών, σε μία μεγάλη ποικιλία τόσο μονών όσο και
194 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ διπλών υφασμάτων, με ρομπότ ενώ συγκρίθηκαν αυτές με ραφές από έμπειρους. Εισάγεται για πρώτη φορά, η έννοια των λεκτικών μεταβλητών για την ποιοτική περιγραφή των ιδιοτήτων των υφασμάτων με σκοπό την χρήση τους σε ευέλικτα συστήματα ελέγχου. Εκφράζεται ποιοτικά, σαν ποσοστό, η έννοια της εκτατότητας (extensibility) των υφασμάτων. Με την ποιοτική καταγραφή και χρήση των ιδιοτήτων γίνεται ευκολότερη η χρήση μεθόδων υπολογιστικής νοημοσύνης. Έτσι, δίνονται νέα εργαλεία στο χώρο της σχετικής βιομηχανίας (ίνα, ύφασμα, έτοιμο ένδυμα, καταναλωτής). Οι προτεινόμενη προσέγγιση δεν χρησιμοποιεί ποσοτικοποιημένα μοντέλα του υφάσματος και είναι ανεξάρτητη από τα χαρακτηριστικά της ραπτομηχανής ενώ μπορεί να εφαρμοστεί χωρίς τροποποιήσεις σε οποιαδήποτε ραπτομηχανή. Η προτεινόμενη προσέγγιση, νευρωνικού ελέγχου της τάνυσης, επεκτάθηκε και έδειξε τη δυνατότητα γενίκευσής της και σε άλλες παραπλήσιες εργασίες. Ανοίγουν νέα ερευνητικά πεδία στο χώρο της συνεργασίας ανθρώπουρομπότ για τον χειρισμό υπερ-εύκαμπτων και εύκαμπτων αντικειμένων. Η πρωτότυπη προσέγγιση που ακολουθήθηκε, θα μπορούσε δυνητικά να αλλάξει τον τρόπο που λειτουργεί όλη η αλυσίδα σε μία γραμμή παραγωγής έτοιμου ενδύματος και να δώσει νέα ώθηση στη χρήση ευφυών συστημάτων και ελεγκτών στον χώρο. Επίσης, θα μπορούσε να γεφυρώσει τα κενά επικοινωνίας που υπάρχουν ανάμεσα στα διάφορα στάδια παραγωγής του έτοιμου ενδύματος ξεκινώντας από την παραγωγή της ίνας μέχρι και τον τελικό καταναλωτή. 9.2 Προοπτικές και προτάσεις για μελλοντική έρευνα Η ραφή υφασμάτων βρίσκει εφαρμογή σε με μία μεγάλη γκάμα προϊόντων, όπως αυτά της ένδυσης, της εσωτερικής διακόσμησης, της οικιακής και βιομηχανικής χρήσης. Το πρόβλημα της αυτοματοποίησης της ραφής υφασμάτων εξακολουθεί να αποτελεί μία πολύπλοκη και δελεαστική ερευνητική πρόκληση, καθώς χαρακτηρίζεται ως μία από τις πιο δύσκολες εφαρμογές της ρομποτικής τεχνολογίας. Η προσέγγιση που αναπτύχθηκε στην παρούσα διατριβή βοηθάει προς την αυτοματοποίηση της ραφής και θέτει τα θεμέλια για την επέκταση της σε: Ραφή τριπλών, τετραπλών κλπ. υφασμάτων. Ραφή υφασμάτων διαφορετικού τύπου (υφαντό με πλεκτό, φόδρα σε υφαντό, ετικέτες σε ύφασμα, βάτες σε υφάσματα κλπ.) Επέκταση της ραφής σε μεγάλης κλίμακας εφαρμογές όπως: σεντόνια, κουβέρτες, τραπεζομάντιλα, κουρτίνες, χαλιά, τέντες κλπ. Η παρούσα διατριβή ανοίγει και νέους ορίζοντες και σε άλλους ευρύτερους ερευνητικούς χώρους, πέραν του στενού πλαισίου της ραφής υφασμάτων. Τέτοιες, περιοχές, όπου το προτεινόμενο ιεραρχικό σύστημα ελέγχου μπορεί να βρει εφαρμογή είναι: 176
195 Κεφ.8 - Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις Η συνεργασία ανθρώπου-ρομπότ ή ρομπότ-ρομπότ για τον χειρισμό και μετακίνηση υπερ-εύκαμπτων αντικειμένων. Η ρομποτική υποβοήθηση του ανθρώπου για την ανύψωση και μεταφορά βαριών αντικειμένων. Η συνεργασία ανθρώπου-ρομπότ για την ρομποτική μετα-χειρουργική αποκατάσταση των άκρων. Επίσης, μία αξιόλογη μελλοντική επέκταση της διατριβής θα μπορούσε να είναι, η αυτοματοποίηση όλων των πειραμάτων σε υφάσματα (αλλά και σε σύνθετα υλικά) για την ποιοτική εκτίμηση όλων των ιδιοτήτων τους με σκοπό τη χρήση των ποιοτικών αποτελεσμάτων σε διάφορους τομείς, όπως για παράδειγμα: Κατασκευή αντικειμένων από σύνθετα υλικά. Χειρισμούς υφασμάτων στη βιομηχανία ή/και σε οικιακές εργασίες, που χαρακτηρίζονται ως ρουτίνα, όπως η απόθεση, το δίπλωμα, η μεταφορά, το σιδέρωμα κλπ. Τα περισσότερα από τα ανοιχτά ζητήματα που θίγονται παραπάνω μπορούν να υποστηριχθούν και να αναπτυχθούν πολύ πιο εύκολα με την κατασκευή μίας αρπάγης για τον χειρισμό υφασμάτων. Ο σχεδιασμός μίας αρπάγης που θα προσεγγίζει τη λειτουργία του ανθρώπινου χεριού μπορεί να είναι ένα θέμα μελλοντική έρευνας το οποίο αφενός μεν θα μπορούσε να βοηθήσει στην διευκόλυνση και στην απλούστευση των χειρισμών αλλά αφετέρου δε θα μπορούσε να θέσει και νέες προκλήσεις για το σύστημα ελέγχου κατά τον χειρισμό των υφασμάτων. 177
196


197 Παράρτημα Α Γενικές πληροφορίες υφασμάτων Πλεκτά υφάσματα (knitted fabrics)
198 180 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ




199 Κεφ.8 - Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις Υφαντά υφάσματα (woven fabrics) 181

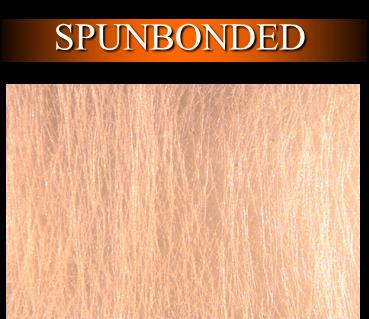
200 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Μη-Υφαντά υφάσματα (non-woven fabrics) 182
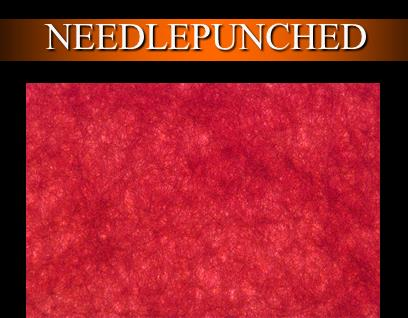


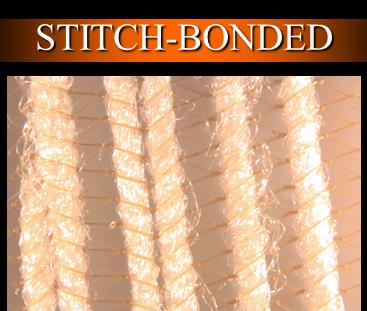
201 Κεφ.8 - Πειραματικές ραφές με μονά και διπλά υφάσματα πειραματικές διατάξεις 183
202
203 Βιβλιογραφία [1] E. Bernardon and T. S. Kondoleon, "Real time robotic control for apparel manufacturing," in Conf. Proc. Robots 9, Detroit, [2] D. Gershon, "Parallel Process Decomposition of a Dynamic Manipulation Task: Robotic Sewing," IEEE Transactions on Robotics and Automation, vol. 6, no. 3, pp , [3] D. Gershon, "Strategies for Robotic Handling of Flexible Sheet Material," Mechatronics, vol. 3, no. 5, pp , [4] K. Makoto, N. Yasuo, M. Kazuhisa and B. Branislav, "Multi-Arm Robot Control System for Manipulation of Flexible Materials in Sewing Operation," Mechatronics, vol. 10, no. 3, pp , [5] C.-C. Ho and T. Tsai, "Machine-vision-based servo control of a robotic sewing system," Advanced Science Letters, vol. 9, pp , [6] G. Zeng and A. Hemami, "An overview of robot force control," Robotica, vol. 15, no. 5, pp , [7] B. Siciliano and L. Villani, Robot Force Control, The Netherlands: Kluwer, [8] C. Wogerer, G. Nittmann and P. Tatzer, "Industrial handling of soft and flexible parts," in International Conference on Intelligent Manipulation and Grasping IMG04, Genova, Italy, [9] R. Patton, F. Swern, S. Tricamo and A. v. d. Veen, "Automated Cloth Handling Using Adaptive Force Feedback," Journal of Dynamic Systems, Measurement, and Control, vol. 114, pp , [10] E. Fung, C. Yuen, L. Hau, W. Wong and L. Chan, "A robot system for the control of fabric tension for inspection," in ASME International Mechanical Engineering Congress and Exposition, [11] R. Winck, S. Dickerson, W. Book and J. Huggins, "A novel approach to fabric control for automated sewing," in IEEE/ASME International Conference on Advanced Intelligent Mechatronics AIM, [12] W. J. Book, R. C. Winck, M. D. Killpack, J. D. Huggins, S. L. Dickerson, S. Jayaraman, T. R. Collins and R. J. Prado, "Automated garment manufacturing system using novel sensing and actuation," in Proceedings of 2010 ISFA 2010 International Symposium on Flexible Automation, Tokyo, Japan, July 12-14, [13] J. Schrimpf, L. E. Wetterwald and M. Lind, "Real-Time System Integration in a Multi-Robot Sewing Cell," in IEEE/RSJ International Conference on Intelligent Robots and Systems, Portugal, October 7-12, [14] M. C. Bjerkeng, Sensor-based control of industrial manipulators, Norway: (Doctoral theses) Norwegian University of Science and Technology, [15] J. Schrimpf and L. E. Wetterwald, "Experiments towards Automated Sewing with a Multi-Robot System," in IEEE International Conference on Robotics and Automation, Saint Paul, Minnesota, USA, May 14-18, [16] F. T. Peirce, "The handle of cloth as a measurable quantity," Journal of the Textile Institute, vol. 55, pp. pp. T377-T416, 1930.
204 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ [17] Shirley, "Shirley Developments Catalogue No. 12," SDL International Group, Manchester, NH, [18] P. Potluri and I. Porat, "Towards automated testing of fabrics," International Journal of Clothing Science & Technology, vol. 7, no. 2/3, pp , [19] S. Kawabata, The Standardization and Analysis of Hand Evaluation, Osaka: The Textile Machinery Society of Japan, 2nd ed., [20] M. KES, Manuals for the Kawabata Evaluation System, Kyoto: Kato Tekko Ltd, [21] C. D. o. W. Technology, Fabric Assurance by Simple Testing, Melbourne: CSIRO Division of Wool Technology, [22] SiroFAST, "Report No. WT92.02," CSIRO Division of Wool Technology, ISBN , Melbourne, [23] G. K. Stylios, Textile Objective Measurement and Automation in Garment Manufacture, Chichester: Ellis Horwood Ltd, [24] D. P. Bishop, "Fabrics: sensory and mechanical properties," Textile Progress, vol. 26, no. 3, [25] M. Matsudaira, "Fabric handle and its basic mechanical properties," Journal of Textile Engineering, vol. 52, no. 1, pp. 1-8, [26] N. Magnenat-Thalmann, Modeling and Simulating Bodies and Garments, London: Springer-Verlag, [27] I. L. Ciesielska-Wróbel and L. Van Langenhove, "The hand of textiles- definitions, achievements, perspectives- a review," Textile Research Journal, vol. 82, no. 14, pp , [28] P. Potluri and I. Porat, "Low-stress fabric testing for process control in garment assembly. Aplication of Robotics.," International Journal of Clothing Science Technology, vol. 8, no. 1/2, pp , [29] G. K. Stylios, "The FAMOUS concept in the textile industries," in International Textile Congress, June, [30] G. K. Stylios, "The concept of fabric automated measurement and optimisation system for textiles and clothing," in 4th IMCEP, Maribor, [31] G. Κ. Stylios, "New measurement technologies for textiles and clothing," International Journal of Clothing Science and Technology, vol. 17, no. 3/4, pp , [32] B. P. Saville, Physical Testing of Textiles, Cambridge: Woodhead Publishing Ltd, [33] S. Lin and S. Tzeng, "Neural Network Force Control for Industrial Robots," Journal of Intelligent and Robotic Systems, vol. 24, no. 3, pp , [34] H. Liu, L. Wang and F. Wang, "Fuzzy force control of constrained robot manipulators based on impedance model in an unknown environment," Frontiers of Mechanical Engineering in China, vol. 2, no. 2, pp , [35] Z. Guo, W. Wong, S. Leung and M. Li, "Applications of Artificial Intelligence in the Apparel Industry: A Review," Textile Research Journal, vol. 81, no. 18, pp , [36] G. Stylios, "Intelligent textile and garment manufacture," Assembly Automation, vol. 16, no. 3, pp. 5-6, [37] Α. Zadeh, "Fuzzy sets," Information and Control, vol. 8, no. 3, pp ,
205 Βιβλιογραφία [38] Γ. Θ. Ζουμπόνος, Έλεγχος ρομπότ για το διαχωρισμό υφάσματος από στοίβα και τη μεταφορά του σε επόμενο στάδιο επεξεργασίας, βασιζόμενος σε μεθόδους τεχνητής νοημοσύνης, Πάτρα: Πανεπιστήμιο Πατρών, [39] Π. Ζαχαρία, Έλεγχος ρομπότ για το χειρισμό υφασμάτων κατά τη ραφή βασιζόμενος σε μεθόδους υπολογιστικής νοημοσύνης και ανάδραση όρασης (Διδακτορική Διατριβή), Πάτρα: Πανεπιστήμιο Πατρών, [40] G. Stylios and J. O. Sotomi, "Thinking sewing machines for intelligent garment manufacture," Internatιonal Journal of Clothing Science Technology, vol. 8, no. 1/2, pp , [41] N. C. Tsourveloudis, R. Kolluru, K. P. Valavanis and D. Gracanin, "Suction control of a robotic gripper: A neuro-fuzzy approach," Journal of Intelligent and Robotic Systems, vol. 27, no. 3, pp , [42] G. T. Zoumponos and N. A. Aspragathos, "Fuzzy logic path planning for the robotic placement of fabrics on a work table," Robotics and Computer-Integrated Manufacturing, vol. 24, no. 2, pp , [43] G. T. Zoumponos and N. Aspragathos, "A Fuzzy Strategy for the Robotic Folding of Fabrics with Machine Vision Feedback," Industrial Robot: An International, vol. 37, no. 3, pp , [44] P. Zacharia, I. Mariolis, N. Aspragathos and E. Dermatas, "Visual Servoing Controller for Robot Handling Fabrics of Curved Edges," in Intelligent Production Machines and Systems - 2nd I*PROMS Virtual International Conference, 3-14 July [45] P. Zacharia, N. Aspragathos, I. Mariolis and E. Dermatas, "A robotic system based on fuzzy visual servoing for handling flexible sheets lying on a table," Industrial Robot, vol. 36, no. 5, pp , [46] R. Gong and Y. Chen, "Predicting the performance of fabrics in garment manufacturing with artificial neural networks," Textile Research Journal, vol. 69, no. 7, pp , [47] S. Park, Y. Hwang, B. Kang and S. Yeo, "Applying fuzzy logic and neural networks to total hand evaluation of knitted fabrics," Textile Research Journal, vol. 70, no. 8, pp , [48] S. Park, Y. Hwang, B. Kang and S. Yeo, "Total handle evaluation from selected mechanical properties of knitted fabrics using neural network," International Journal of Clothing Science & Technology, vol. 13, no. 2, pp , [49] T. Amano, Y. Maenaka, T. Kitaura and K. Obara, "Fabric hand evaluation using qualitative data," Sen-I Gakkaishi, vol. 56, no. 1, pp , [50] P. Koustoumpardis and N. Aspragathos, "Neuro-Control of Force applied by a robot in fabric handling tasks," in Proceedings of 8 th IEEE Mediterranean Conference on Control & Automation MED 2000, Patras, Greece, [51] P. N. Koustoumpardis and N. A. Aspragathos, "Fuzzy Logic Decision Mechanism Combined with a Neuro-Controller for Fabric Tension in Robotized Sewing Process," Journal of Intelligent and Robotics Systems, vol. 36, no. 1, pp , [52] P. Ν. Koustoumpardis, J. S. Fourkiotis and N. A. Aspragathos, "Intelligent evaluation of fabrics' extensibility from robotized tensile test," International Journal of Clothing Science and Technology, vol. 19, no. 2, pp , [53] P. N. Koustoumpardis and N. A. Aspragathos, "Neural network force control for robotized handling of fabrics," in International Conference on Control, Automation 187
206 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ and Systems, ICCAS 2007, COEX, Seoul, Korea, October, [54] P. N. Koustoumpardis and N. A. Aspragathos, "Robotized Sewing of Fabrics based on a Force Neural Network Controller," in Lecture Notes in Computer Science, 4th International Conference on Intelligent Robotics and Applications, ICIRA, Volume 7101 LNAI, Issue Part 1, Aachen, Germany, [55] P. N. Koustoumpardis and N. A. Aspragathos, "Intelligent Hierarchical Robot Control for Sewing Fabrics," Robotics and Computer-Integrated Manufacturing, vol. 30, no. 1, pp , [56] P. N. Koustoumpardis and N. A. Aspragathos, "Control and Sensor Integration in Designing Grippers for Handling Fabrics," in 8 th International Workshop on Robotics in Alpe-Adria-Danube Region, RAAD'99, Munich, June [57] P. N. Koustoumpardis, L. N. Misopolinos and N. A. Aspragathos, "Intelligent Vision Determination of Material's Wrinkles in Robotized Handling," in Hellenic- European Research on Computer Mathematics and its Applications Conference HERCMA '2001, Athens, pp , [58] P. N. Koustoumpardis and N. Α. Aspragathos, "A Review of Gripping Devices for Fabric Handling," in International Conference on Intelligent Manipulation and Grasping IMG04, Genova, Italy, July [59] D. Triantafyllou, P. Koustoumpardis and N. Aspragathos, "Model Reference Fuzzy Learning Force Control for Robotized Sewing," in 19th Mediterranean Conference on Control and Automation - MED, Corfu, Greece, June, [60] P. N. Koustoumpardis and N. A. Aspragathos, "Robot-Human Cooperation Holding and Handling a Piece of Fabric," in 11th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, CLAWAR'2008, Coimbra,Portugal, 8-10 September, [61] P. N. Koustoumpardis and N. A. Aspragathos, "Interactive robot handling of nonrigid materials (fabrics and cloths)," in Journées Nationales de la Robotique Interactive, JNRI 2011, Paris, [62] F. Dimeas, P. Koustoumpardis and N. Aspragathos, "Control of a Power Assisted Lifting Device," in 21th International Workshop on Robotics in Alpe-Adria-Danube Region, RAAD, Naples, Italy, September, [63] F. Dimeas, P. Koustoumpardis and N. Aspragathos, "Admittance neuro-control of a lifting device to reduce human effort," Advanced Robotics, vol. 27, no. 13, pp , [64] "SoftWear Automation," SoftWear Automation Inc., [Online]. Available: [65] R. C. Rosenberg and D. C. Karnopp, Introduction to Physical System Dynamics, New York: McGraw-Hill, [66] J. W. S. Hearle, J. J. Thwaites and J. Amirbayat, Mechanics of Flexible Fibre Assemblies, Proceedings of the NATO Advanced Study Institute, Sijthoff & Noordhoff ASI Series, [67] Ι. Σ. Χατζής, Εκτίμηση της ανακλαστικότητας χρώματος αντικειμένων και εφαρμογή στον ποιοτικό έλεγχο χρωματικών και σχεδιαστικών αποκλίσεων (Διδακτορική Διατριβή), Πάτρα: Πανεπιστήμιο Πατρών, [68] Γ. Δ. Ευαγγελίδης, Ανάπτυξη αποδοτικών παραμετρικών τεχνικών αντιστοίχισης εικόνων με εφαρμογή στην υπολογιστική όραση (Διδακτορική Διατριβή), Πάτρα: Πανεπιστήμιο Πατρών,
207 Βιβλιογραφία [69] Ι.-Ε. Μαριόλης, Ποιοτικός έλεγχος ραφής σε υπερ - εύκαμπτα υλικά με χρήση μεθόδων ψηφιακής επεξεργασίας σημάτων βίντεο (Διδακτορική Διατριβή), Πάτρα: Πανεπιστήμιο Πατρών, [70] P. Koustoumpardis, P. Zacharia and N. Aspragathos, "Intelligent Robotic Handling of Fabrics Towards Sewing," in Industrial Robotics: Programming, Simulation and Applications, edited by Low Kin Huat, Advanced Robotics Systems International, 2007, pp [71] P. Koustoumpardis, G. Zoumponos, P. Zacharia, I. Mariolis, I. Xatzis, G. Evagelidis and A. Zabetakis, "Handling of non-rigid materials with robots (XROMA), application in robotic sewing," in 37th International Symposium on Novelties in Textiles, Ljubljana, Slovenia, June, [72] P. Zacharia, G. Zoumponos, P. Koustoumpardis, A. Zabetakis and N. Aspragathos, "Robot Handling of Non-Rigid Materials Lying on a Working Table," in ITC&DC International Textile, Clothing & Design Conference, Dubrovnik, Croatia, 8-11 October, [73] G. J. Monkman, "Sensory Integrated Fabric Ply Separation," Robotica, vol. 14, pp , [74] K. Paraschidis, N. Fahantidis, V. Vassiliadis, V. Petridis, Z. Doulgeri, L. Petrou and G. Hasapis, "A Robotic System for Handling Textile Materials," in IEEE International Conference on Robotics and Automation, [75] Ι. Βλαχάβας, Π. Κεφαλάς, Ν. Βασιλειάδης, Φ. Κόκκορας and Η. Σακελλαρίου, Τεχνητή Νοημοσύνη, Θεσσαλονίκη: Εκδόσεις Πανεπιστημίου Μακεδονίας, [76] E. Torgerson and F. W. Paul, "Vision-Guided Robotic Fabric Manipulation for Apparel Manufacturing," IEEE Control Systems Magazine, pp , [77] E. Trucco and A. Verri, Introductory Techniques for 3-D Computer Vision, Prentice Hall, [78] H. O. Nyongesa and P. L. Rosin, "Editorial: Neural-Fuzzy Applications in Computer Vision," Journal of Intelligent and Robotics Systems, vol. 29, pp , [79] C. M. Bishop, Neural Networks for Pattern Recognition, Clarendon Press, [80] Matlab-Documentation, Neural Network Toolbox, The MathWorks, Inc. [81] A. S. Pandya and R. B. Macy, Pattern Recognition with Neural Networks in C++, CRC Press, [82] T. Masters, Practical Neural Networks Recipes in C++, Academic Press, [83] P. D. Wasserman, Neural Computing Theory and Practice, Van Nostrand Reinhold, [84] D. Gershon and P. Grosberg, "The Buckling of Fabrics during Feeding into Automatic Sewing Stations," J. Text. Inst., vol. 83, no. 1, pp , [85] H.-J. Zimmermann, Fuzzy Set Theory and its Applications, Kluwer Academic Publishers, [86] E. Cox, The Fuzzy Systems Handbook, A.P. Professional, pp , [87] M. T. Hagan and M. Menhaj, "Training feedforward networks with the Marquardt algorithm," IEEE Transactions on Neural Networks, vol. 5, no. 6, pp , [88] S. Haykin, Neural Networks: A Comprehensive Foundation,, Prentice-Hall, Englewood Cliffs, NJ, ISBN: , [89] P. N. Koustoumpardis, N. A. Aspragathos, D. D'Addona and R. Teti, "Evaluating and Calculating the Properties of Rigid and Non-rigid Materials Via Neural 189
208 Π. ΚΟΥΣΤΟΥΜΠΑΡΔΗΣ Networks," in 6th CIRP Int. Conference. on Intelligent Computation in Manufacturing Engineering - CIRP ICM 2008, Napoli, July, [90] D. D. D'Addona, R. Teti, P. N. Koustoumpardis and N. A. Aspragathos, "Intelligent evaluation of ultimate strength prediction of composites and fabrics' extensibility," in Fourth Virtual International Conference on Innovative Production Machines and Systems, I*PROMS, [91] Y. K. Sun and J.-N. Hwang, "Neural network architectures for robotic applications," IEEE Trans.Robotics Automat., vol. 5, no. 5, pp , [92] K. S. Narendra, "Neural networks for control: Theory and practice," Proc. IEEE, vol. 84, no. 10, pp , [93] "Strategic Research Agenda SRA," Europ The European Robotics Platform, May [94] T. Lalibert and C. Gosselin, "Development of a blanket manipulation tool for satellite servicing," in Proceedings of the ASME Design Engineering Technical Conference & Computers in Engineering Conferenc, Philadelphia, Pennsylva, September 10-13, [95] Φ. Δημέας, Σχεδιασμός και κατασκευή μηχανισμού ανύψωσης φορτίων με σύστημα υποβοήθησης, Πάτρα: Διπλωματική εργασία, Πανεπιστήμιο Πατρών, [96] Κ. Νάστος, Σχεδιασμός ρομποτικής αρπάγης για τον χειρισμό υπέρ-εύκαμπτων υφασμάτων, Πάτρα: Σπουδαστική εργασία, Πανεπιστήμιο Πατρών, [97] "Robotics Group," [Online]. Available: 190


209 Σύντομο Βιογραφικό Ο Παναγιώτης Ν. Κουστουμπάρδης είναι Μηχανικός Έρευνας & Ανάπτυξης και Επιστημονικός Συνεργάτης της Ομάδας Ρομποτικής του Τμήματος Μηχανολόγων & Αεροναυπηγών Μηχανικών στο Πανεπιστήμιο Πατρών από όπου και απέκτησε το δίπλωμα του Μηχανολόγου & Αεροναυπηγού Μηχανικού το Είναι επίσης υποψήφιος διδάκτορας στο ίδιο Τμήμα στην Ομάδα Ρομποτικής. Από το 2004 έως το 2006 δίδασκε το μάθημα της Ρομποτικής στο Τμήμα Μηχανολογίας του ΑΤΕΙ Πατρών. Το ήταν εργαστηριακός συνεργάτης των μαθημάτων Βάσεις Δεδομένων και Δομές Δεδομένων στο Τμήμα Εφαρμογών Πληροφορικής του ΑΤΕΙ Μεσολογγίου. Τα κύρια ερευνητικά του ενδιαφέροντα είναι ο ευφυής έλεγχος, η μηχανική μάθηση, τα νευρωνικά δίκτυα και η μηχανική όραση σε ρομποτικές εφαρμογές όπως στον ρομποτικό έλεγχο δύναμης και ευφυή χειρισμό υπέρ-εύκαμπτων αντικειμένων. Έχει συμμετάσχει στην πλειοψηφία των ερευνητικών προγραμμάτων της Ομάδας Ρομποτικής αλλά και στη συγγραφή διεθνών και εθνικών ερευνητικών προτάσεων. Έχει 20 δημοσιεύσεις σε περιοδικά και συνέδρια. Είναι κριτής επιστημονικών εργασιών σε 4 διεθνή περιοδικά (Mechatronics, Journal of Engineered Fibers and Fabrics, European Journal of Control, International Journal of Electrical Power & Energy Systems). Επίσης, ήταν κριτής σε 6 διεθνή συνέδρια (CSNDSP 2006, ECC (2007, 2013), MED ) και κύριο μέλος της οργανωτικής επιτροπής του 1ου και 2ου Πανελλήνιου Συνεδρίου Ρομποτικής. Ήταν επίσης, προσκεκλημένος ομιλητής σε Επιστημονική Ημερίδα του ΕΚΦΕ Κω (με θέμα: Εξελίξεις στη Ρομποτική, 2009). Είναι μέλος του Textile ETP Expert Community, του Τεχνικού Επιμελητηρίου Ελλάδας (TEE), του Πανελλήνιου Συλλόγου Διπλωματούχων Μηχανολόγων-Ηλεκτρολόγων (ΠΣΔΜ-Η) και της Πανελλήνιας Ομοσπονδίας Ενώσεων Μηχανικών Δημοσίων Υπαλλήλων Διπλωματούχων Ανωτάτων Σχολών (ΠΟΕΜΔΥΔΑΣ). Περισσότερες πληροφορίες και δείκτες: (κάντε κλικ στα παρακάτω εικονίδια για άμεση μετάβαση)
ΣΠΟΥΔΑΣΤΙΚΕΣ
 Ομάδα Ρομποτικής Τμ. ΜΗΧΑΝΟΛΟΓΩΝ & ΑΕΡΟΝΑΥΠΗΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΠΟΥΔΑΣΤΙΚΕΣ 2016-2017 1. Έλεγχος του άκρου εργασίας ρομπότ 7 βαθμών ελευθερίας. Για να εκτελέσει το άκρο του ρομπότ μια συγκεκριμένη κίνηση στο
Ομάδα Ρομποτικής Τμ. ΜΗΧΑΝΟΛΟΓΩΝ & ΑΕΡΟΝΑΥΠΗΓΩΝ ΜΗΧΑΝΙΚΩΝ ΣΠΟΥΔΑΣΤΙΚΕΣ 2016-2017 1. Έλεγχος του άκρου εργασίας ρομπότ 7 βαθμών ελευθερίας. Για να εκτελέσει το άκρο του ρομπότ μια συγκεκριμένη κίνηση στο
ΕΛΕΓΧΟΣ ΠΑΡΑΓΩΓΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΕΛΕΓΧΟΣ ΠΑΡΑΓΩΓΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ Ενότητα: Αναγνώριση Διεργασίας - Προσαρμοστικός Έλεγχος (Process Identification) Αλαφοδήμος Κωνσταντίνος
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΕΛΕΓΧΟΣ ΠΑΡΑΓΩΓΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ Ενότητα: Αναγνώριση Διεργασίας - Προσαρμοστικός Έλεγχος (Process Identification) Αλαφοδήμος Κωνσταντίνος
RobotArmy Περίληψη έργου
 RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
«Αριθμητική και πειραματική μελέτη της διεπιφάνειας χάλυβασκυροδέματος στις σύμμικτες πλάκες με χαλυβδόφυλλο μορφής»
 ΠΕΡΙΛΗΨΗ ΤΗΣ ΔΙΔΑΚΤΟΡΙΚΗΣ ΔΙΑΤΡΙΒΗΣ «Αριθμητική και πειραματική μελέτη της διεπιφάνειας χάλυβασκυροδέματος στις σύμμικτες πλάκες με χαλυβδόφυλλο μορφής» του Θεμιστοκλή Τσαλκατίδη, Δρ. Πολιτικού Μηχανικού
ΠΕΡΙΛΗΨΗ ΤΗΣ ΔΙΔΑΚΤΟΡΙΚΗΣ ΔΙΑΤΡΙΒΗΣ «Αριθμητική και πειραματική μελέτη της διεπιφάνειας χάλυβασκυροδέματος στις σύμμικτες πλάκες με χαλυβδόφυλλο μορφής» του Θεμιστοκλή Τσαλκατίδη, Δρ. Πολιτικού Μηχανικού
ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΧΕΙΜ17-18 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 2 ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΧΕΙΜ17-18 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 2 ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ
ΗΥ562 Προχωρημένα Θέματα Βάσεων Δεδομένων Efficient Query Evaluation over Temporally Correlated Probabilistic Streams
 ΗΥ562 Προχωρημένα Θέματα Βάσεων Δεδομένων Efficient Query Evaluation over Temporally Correlated Probabilistic Streams Αλέκα Σεληνιωτάκη Ηράκλειο, 26/06/12 aseliniotaki@csd.uoc.gr ΑΜ: 703 1. Περίληψη Συνεισφοράς
ΗΥ562 Προχωρημένα Θέματα Βάσεων Δεδομένων Efficient Query Evaluation over Temporally Correlated Probabilistic Streams Αλέκα Σεληνιωτάκη Ηράκλειο, 26/06/12 aseliniotaki@csd.uoc.gr ΑΜ: 703 1. Περίληψη Συνεισφοράς
ΤΙΤΛΟΣ ΑΝΑΦΟΡΑΣ: ΕΦΑΡΜΟΓΗ ΚΑΙ ΑΠΟΤΕΛΕΣΜΑΤΑ ΣΕ ΕΠΙΛΕΓΜΕΝΕΣ ΠΕΡΙΤΠΩΣΕΙΣ
 ΤΙΤΛΟΣ ΑΝΑΦΟΡΑΣ: ΕΦΑΡΜΟΓΗ ΚΑΙ ΑΠΟΤΕΛΕΣΜΑΤΑ ΣΕ ΕΠΙΛΕΓΜΕΝΕΣ ΠΕΡΙΤΠΩΣΕΙΣ ΚΩΔΙΚΟΣ ΠΑΡΑΔΟΤΕΟΥ: Π18 ΑΡΙΘΜΟΣ ΠΡΩΤΟΚΟΛΛΟΥ ΈΡΓΟΥ: ΤΠΕ/ΟΡΖΙΟ/0308(ΒΕ)/03 ΤΙΤΛΟΣ ΕΡΓΟΥ: ΓΕΝΙΚΕΥΜΕΝΟ ΣΥΣΤΗΜΑ ΑΣΑΦΟΥΣ ΓΝΩΣΤΙΚΟΥ ΧΑΡΤΗ
ΤΙΤΛΟΣ ΑΝΑΦΟΡΑΣ: ΕΦΑΡΜΟΓΗ ΚΑΙ ΑΠΟΤΕΛΕΣΜΑΤΑ ΣΕ ΕΠΙΛΕΓΜΕΝΕΣ ΠΕΡΙΤΠΩΣΕΙΣ ΚΩΔΙΚΟΣ ΠΑΡΑΔΟΤΕΟΥ: Π18 ΑΡΙΘΜΟΣ ΠΡΩΤΟΚΟΛΛΟΥ ΈΡΓΟΥ: ΤΠΕ/ΟΡΖΙΟ/0308(ΒΕ)/03 ΤΙΤΛΟΣ ΕΡΓΟΥ: ΓΕΝΙΚΕΥΜΕΝΟ ΣΥΣΤΗΜΑ ΑΣΑΦΟΥΣ ΓΝΩΣΤΙΚΟΥ ΧΑΡΤΗ
Δραστηριότητες Έρευνας και Ανάπτυξης του Εργαστηρίου Αυτοματικής Ρομποτικής του Τμήματος Μηχανολογίας του ΤΕΙ Κρήτης
 Δραστηριότητες Έρευνας και Ανάπτυξης του Εργαστηρίου Αυτοματικής Ρομποτικής του Τμήματος Μηχανολογίας του ΤΕΙ Κρήτης των Δρ. Μανόλη Καββουσανού και Δρ. Γιάννη Φασουλά Το Εργαστήριο Αυτοματικής Ρομποτικής
Δραστηριότητες Έρευνας και Ανάπτυξης του Εργαστηρίου Αυτοματικής Ρομποτικής του Τμήματος Μηχανολογίας του ΤΕΙ Κρήτης των Δρ. Μανόλη Καββουσανού και Δρ. Γιάννη Φασουλά Το Εργαστήριο Αυτοματικής Ρομποτικής
Κεφάλαιο 14: Διαστασιολόγηση αγωγών και έλεγχος πιέσεων δικτύων διανομής
 Κεφάλαιο 14: Διαστασιολόγηση αγωγών και έλεγχος πιέσεων δικτύων διανομής Έλεγχος λειτουργίας δικτύων διανομής με χρήση μοντέλων υδραυλικής ανάλυσης Βασικό ζητούμενο της υδραυλικής ανάλυσης είναι ο έλεγχος
Κεφάλαιο 14: Διαστασιολόγηση αγωγών και έλεγχος πιέσεων δικτύων διανομής Έλεγχος λειτουργίας δικτύων διανομής με χρήση μοντέλων υδραυλικής ανάλυσης Βασικό ζητούμενο της υδραυλικής ανάλυσης είναι ο έλεγχος
710 -Μάθηση - Απόδοση. Κινητικής Συμπεριφοράς: Προετοιμασία
 710 -Μάθηση - Απόδοση Διάλεξη 5η Ποιοτική αξιολόγηση της Κινητικής Συμπεριφοράς: Προετοιμασία Περιεχόμενο ενοτήτων Ποιοτική αξιολόγηση Ορισμός και στάδια που περιλαμβάνονται Περιεχόμενο: στοιχεία που τη
710 -Μάθηση - Απόδοση Διάλεξη 5η Ποιοτική αξιολόγηση της Κινητικής Συμπεριφοράς: Προετοιμασία Περιεχόμενο ενοτήτων Ποιοτική αξιολόγηση Ορισμός και στάδια που περιλαμβάνονται Περιεχόμενο: στοιχεία που τη
ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΠΑΤΡΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΚΑΙ ΑΕΡΟΝΑΥΠΗΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΤΩΝ ΡΕΥΣΤΩΝ ΚΑΙ ΕΦΑΡΜΟΓΩΝ ΑΥΤΗΣ
 ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΠΑΤΡΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΚΑΙ ΑΕΡΟΝΑΥΠΗΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΤΩΝ ΡΕΥΣΤΩΝ ΚΑΙ ΕΦΑΡΜΟΓΩΝ ΑΥΤΗΣ Διευθυντής: Διονύσιος-Ελευθ. Π. Μάργαρης, Αναπλ. Καθηγητής ΕΡΓΑΣΤΗΡΙΑΚΗ
ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΠΑΤΡΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΚΑΙ ΑΕΡΟΝΑΥΠΗΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΤΩΝ ΡΕΥΣΤΩΝ ΚΑΙ ΕΦΑΡΜΟΓΩΝ ΑΥΤΗΣ Διευθυντής: Διονύσιος-Ελευθ. Π. Μάργαρης, Αναπλ. Καθηγητής ΕΡΓΑΣΤΗΡΙΑΚΗ
Περιγραφή του εκπαιδευτικού/ μαθησιακού υλικού (Teaching plan)
") On-the-fly feedback, Upper Secondary Περιγραφή του εκπαιδευτικού/ μαθησιακού υλικού (Teaching plan) Τάξη: Β Λυκείου Διάρκεια ενότητας Μάθημα: Φυσική Θέμα: Ταλαντώσεις (αριθμός Χ διάρκεια μαθήματος): 6X90
On-the-fly feedback, Upper Secondary Περιγραφή του εκπαιδευτικού/ μαθησιακού υλικού (Teaching plan) Τάξη: Β Λυκείου Διάρκεια ενότητας Μάθημα: Φυσική Θέμα: Ταλαντώσεις (αριθμός Χ διάρκεια μαθήματος): 6X90
Περιεχόμενα. Πρόλογος στην πέμπτη έκδοση... 13
 Περιεχόμενα Πρόλογος στην πέμπτη έκδοση... 13 Μέρος 1. Το πλαίσιο... 15 1. Οδηγός του βιβλίου... 16 Η προσέγγιση του βιβλίου... 16 Η δομή του βιβλίου... 17 Ιδιαίτερα γνωρίσματα του βιβλίου... 21 Πώς θα
Περιεχόμενα Πρόλογος στην πέμπτη έκδοση... 13 Μέρος 1. Το πλαίσιο... 15 1. Οδηγός του βιβλίου... 16 Η προσέγγιση του βιβλίου... 16 Η δομή του βιβλίου... 17 Ιδιαίτερα γνωρίσματα του βιβλίου... 21 Πώς θα
Αστικά υδραυλικά έργα
 Εθνικό Μετσόβιο Πολυτεχνείο Τομέας Υδατικών Πόρων και Περιβάλλοντος Αστικά υδραυλικά έργα Διαστασιολόγηση αγωγών και έλεγχος πιέσεων δικτύων διανομής Δημήτρης Κουτσογιάννης, Καθηγητής ΕΜΠ Σχολή Πολιτικών
Εθνικό Μετσόβιο Πολυτεχνείο Τομέας Υδατικών Πόρων και Περιβάλλοντος Αστικά υδραυλικά έργα Διαστασιολόγηση αγωγών και έλεγχος πιέσεων δικτύων διανομής Δημήτρης Κουτσογιάννης, Καθηγητής ΕΜΠ Σχολή Πολιτικών
Ειδικότητα: Ύφασµα Ένδυση
 Ειδικότητα: Ύφασµα Ένδυση Αναλυτικό Πρόγραµµα Σπουδών του Μαθήµατος Α Τάξη 2 ου Κύκλου Τ.Ε.Ε. 3 ώρες /εβδοµάδα Αθήνα, Απρίλιος 2001 Σελίδα 1 από 11 Μάθηµα: «Τεχνολογία Ραφής Υφάσµατος» Α. ΣΚΟΠΟΣ ΤΗΣ Ι
Ειδικότητα: Ύφασµα Ένδυση Αναλυτικό Πρόγραµµα Σπουδών του Μαθήµατος Α Τάξη 2 ου Κύκλου Τ.Ε.Ε. 3 ώρες /εβδοµάδα Αθήνα, Απρίλιος 2001 Σελίδα 1 από 11 Μάθηµα: «Τεχνολογία Ραφής Υφάσµατος» Α. ΣΚΟΠΟΣ ΤΗΣ Ι
Υπολογισμός της επιτάχυνσης της βαρύτητας με φωτογράφιση πτώσης φωτοδιόδου LED
 Στη στήλη παρουσιάζονται ιδέες, πρακτικές και σχέδια μαθήματος που έχουν εφαρμοστεί στην τάξη και προτείνουν μια πρωτότυπη, διαφορετική, καινοτόμα διδακτική προσέγγιση που προκαλεί το ενδιαφέρον στα παιδιά.
Στη στήλη παρουσιάζονται ιδέες, πρακτικές και σχέδια μαθήματος που έχουν εφαρμοστεί στην τάξη και προτείνουν μια πρωτότυπη, διαφορετική, καινοτόμα διδακτική προσέγγιση που προκαλεί το ενδιαφέρον στα παιδιά.
ΑΡΗΣ ΑΣΛΑΝΙΔΗΣ Φυσικός, M.Ed. Εκπαιδευτικός-Συγγραφέας
 ΑΡΗΣ ΑΣΛΑΝΙΔΗΣ Φυσικός, M.Ed. Εκπαιδευτικός-Συγγραφέας Ομιλία με θέμα: ΕΡΕΥΝΗΤΙΚΕΣ ΕΡΓΑΣΙΕΣ & ΦΥΣΙΚΕΣ ΕΠΙΣΤΗΜΕΣ ΕΝΩΣΗ ΕΛΛΗΝΩΝ ΦΥΣΙΚΩΝ Εκδήλωση αριστούχων μαθητών: Οι μαθητές συναντούν τη Φυσική και η Φυσική
ΑΡΗΣ ΑΣΛΑΝΙΔΗΣ Φυσικός, M.Ed. Εκπαιδευτικός-Συγγραφέας Ομιλία με θέμα: ΕΡΕΥΝΗΤΙΚΕΣ ΕΡΓΑΣΙΕΣ & ΦΥΣΙΚΕΣ ΕΠΙΣΤΗΜΕΣ ΕΝΩΣΗ ΕΛΛΗΝΩΝ ΦΥΣΙΚΩΝ Εκδήλωση αριστούχων μαθητών: Οι μαθητές συναντούν τη Φυσική και η Φυσική
Εφαρμογές Προσομοίωσης
 Εφαρμογές Προσομοίωσης H προσομοίωση (simulation) ως τεχνική μίμησης της συμπεριφοράς ενός συστήματος από ένα άλλο σύστημα, καταλαμβάνει περίοπτη θέση στα πλαίσια των εκπαιδευτικών εφαρμογών των ΤΠΕ. Μπορούμε
Εφαρμογές Προσομοίωσης H προσομοίωση (simulation) ως τεχνική μίμησης της συμπεριφοράς ενός συστήματος από ένα άλλο σύστημα, καταλαμβάνει περίοπτη θέση στα πλαίσια των εκπαιδευτικών εφαρμογών των ΤΠΕ. Μπορούμε
Προσφερόμενα Διπλώματα (Προσφερόμενοι Τίτλοι)
") Εισαγωγή Το Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών του Πανεπιστημίου Κύπρου προσφέρει ολοκληρωμένα προπτυχιακά και μεταπτυχιακά προγράμματα σπουδών στους κλάδους του Ηλεκτρολόγου Μηχανικού
Εισαγωγή Το Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών του Πανεπιστημίου Κύπρου προσφέρει ολοκληρωμένα προπτυχιακά και μεταπτυχιακά προγράμματα σπουδών στους κλάδους του Ηλεκτρολόγου Μηχανικού
Μία μέθοδος προσομοίωσης ψηφιακών κυκλωμάτων Εξελικτικής Υπολογιστικής
 Μία μέθοδος προσομοίωσης ψηφιακών κυκλωμάτων Εξελικτικής Υπολογιστικής Βασισμένο σε μια εργασία των Καζαρλή, Καλόμοιρου, Μαστοροκώστα, Μπαλουκτσή, Καλαϊτζή, Βαλαή, Πετρίδη Εισαγωγή Η Εξελικτική Υπολογιστική
Μία μέθοδος προσομοίωσης ψηφιακών κυκλωμάτων Εξελικτικής Υπολογιστικής Βασισμένο σε μια εργασία των Καζαρλή, Καλόμοιρου, Μαστοροκώστα, Μπαλουκτσή, Καλαϊτζή, Βαλαή, Πετρίδη Εισαγωγή Η Εξελικτική Υπολογιστική
ΣΧΕ ΙΑΣΜΟΣ ΚΟΠΤΙΚΩΝ ΕΡΓΑΛΕΙΩΝ ΜΕΤΑΒΛΗΤΗΣ ΓΕΩΜΕΤΡΙΑΣ
 ΣΧΕ ΙΑΣΜΟΣ ΚΟΠΤΙΚΩΝ ΕΡΓΑΛΕΙΩΝ ΜΕΤΑΒΛΗΤΗΣ ΓΕΩΜΕΤΡΙΑΣ Σκοπός Εργασίας Σκοπός της παρούσας εργασίας είναι η μελέτη της εξέλιξης της έρευνας πάνω στη λείανση μέχρι σήμερα, προτείνοντας λύσεις για χρήση μοναδικού
ΣΧΕ ΙΑΣΜΟΣ ΚΟΠΤΙΚΩΝ ΕΡΓΑΛΕΙΩΝ ΜΕΤΑΒΛΗΤΗΣ ΓΕΩΜΕΤΡΙΑΣ Σκοπός Εργασίας Σκοπός της παρούσας εργασίας είναι η μελέτη της εξέλιξης της έρευνας πάνω στη λείανση μέχρι σήμερα, προτείνοντας λύσεις για χρήση μοναδικού
ΕΛΕΓΧΟΣ ΒΙΟΜΗΧΑΝΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ ΚΕΦΑΛΑΙΟ 4 ΚΕΦΑΛΑΙΟ 5. ΑΝΑΓΝΩΡΙΣΗ ΔΙΕΡΓΑΣΙΑΣ ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ (Process Identifications)
") ΚΕΦΑΛΑΙΟ 5 ΑΝΑΓΝΩΡΙΣΗ ΔΙΕΡΓΑΣΙΑΣ ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ (Process Idetificatios) Στο κεφάλαιο αυτό γίνεται παρουσίαση μεθοδολογίας για την ανεύρεση ενός αξιόπιστου μοντέλου πριν ή κατά την λειτουργία της
ΚΕΦΑΛΑΙΟ 5 ΑΝΑΓΝΩΡΙΣΗ ΔΙΕΡΓΑΣΙΑΣ ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ (Process Idetificatios) Στο κεφάλαιο αυτό γίνεται παρουσίαση μεθοδολογίας για την ανεύρεση ενός αξιόπιστου μοντέλου πριν ή κατά την λειτουργία της
Ανάπτυξη Δικτύων Ελέγχου και Αυτοματισμού Ενεργειακών Εγκαταστάσεων
 ΜΕΤΑΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Παρίντας Θεμιστοκλής Ανάπτυξη Δικτύων Ελέγχου και Αυτοματισμού Ενεργειακών Εγκαταστάσεων Επιβλέπων Καθηγητής: Ασημόπουλος Νικόλαος Εξεταστές:Ασημόπουλος Νικόλαος, Παναγιωτόπουλος Δημόκριτος
ΜΕΤΑΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Παρίντας Θεμιστοκλής Ανάπτυξη Δικτύων Ελέγχου και Αυτοματισμού Ενεργειακών Εγκαταστάσεων Επιβλέπων Καθηγητής: Ασημόπουλος Νικόλαος Εξεταστές:Ασημόπουλος Νικόλαος, Παναγιωτόπουλος Δημόκριτος
Κεφάλαιο 1 Εισαγωγή.
 Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
ΠΟΩΤΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΔΤΝΑΜΙΚΗΣ ΜΗΧΑΝΩΝ
 ΡΙΣΤΟΤΕΩΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΟΕΣΣΑΩΟΝΙΚΗΣ ΠΟΩΤΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΤΑΣΚΕΤΑΣΤΙΚΟΣ ΤΟΜΕΑΣ ΕΡΓΑΣΤΗΡΙΟ ΔΤΝΑΜΙΚΗΣ ΜΗΧΑΝΩΝ Γεωργία N. Γεωργίου Διπλ. Μηχανολόγος Μηχανικός A.Π.O. ΙΖΡΟΣΔΙΟΡΙΣΜΟΣ
ΡΙΣΤΟΤΕΩΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΟΕΣΣΑΩΟΝΙΚΗΣ ΠΟΩΤΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΤΑΣΚΕΤΑΣΤΙΚΟΣ ΤΟΜΕΑΣ ΕΡΓΑΣΤΗΡΙΟ ΔΤΝΑΜΙΚΗΣ ΜΗΧΑΝΩΝ Γεωργία N. Γεωργίου Διπλ. Μηχανολόγος Μηχανικός A.Π.O. ΙΖΡΟΣΔΙΟΡΙΣΜΟΣ
ΔΙΟΙΚΗΣΗ ΠΑΡΑΓΩΓΗΣ. ΕΝΟΤΗΤΑ 4η ΠΡΟΒΛΕΨΗ ΖΗΤΗΣΗΣ
 ΤΕΙ ΚΡΗΤΗΣ ΣΧΟΛΗ ΔΙΟΙΚΗΣΗΣ ΚΑΙ ΟΙΚΟΝΟΜΙΑΣ ΤΜΗΜΑ ΔΙΟΙΚΗΣΗΣ ΕΠΙΧΕΙΡΗΣΕΩΝ ΔΙΟΙΚΗΣΗ ΠΑΡΑΓΩΓΗΣ ΕΝΟΤΗΤΑ 4η ΠΡΟΒΛΕΨΗ ΖΗΤΗΣΗΣ ΓΙΑΝΝΗΣ ΦΑΝΟΥΡΓΙΑΚΗΣ ΕΠΙΣΤΗΜΟΝΙΚΟΣ ΣΥΝΕΡΓΑΤΗΣ ΤΕΙ ΚΡΗΤΗΣ ΔΟΜΗ ΠΑΡΟΥΣΙΑΣΗΣ 1. Εισαγωγή
ΤΕΙ ΚΡΗΤΗΣ ΣΧΟΛΗ ΔΙΟΙΚΗΣΗΣ ΚΑΙ ΟΙΚΟΝΟΜΙΑΣ ΤΜΗΜΑ ΔΙΟΙΚΗΣΗΣ ΕΠΙΧΕΙΡΗΣΕΩΝ ΔΙΟΙΚΗΣΗ ΠΑΡΑΓΩΓΗΣ ΕΝΟΤΗΤΑ 4η ΠΡΟΒΛΕΨΗ ΖΗΤΗΣΗΣ ΓΙΑΝΝΗΣ ΦΑΝΟΥΡΓΙΑΚΗΣ ΕΠΙΣΤΗΜΟΝΙΚΟΣ ΣΥΝΕΡΓΑΤΗΣ ΤΕΙ ΚΡΗΤΗΣ ΔΟΜΗ ΠΑΡΟΥΣΙΑΣΗΣ 1. Εισαγωγή
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. [ATLAS T50 solar tracker]
![ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. [ATLAS T50 solar tracker]](/thumbs/25/5346398.jpg "ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. [ATLAS T50 solar tracker]") ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ [ATLAS T50 solar tracker] Τεχνική περιγραφή T50 Greek Revision A-05 10-AUG-2010 Κύρια Χαρακτηριστικά Πλεονεκτήματα Πρωτοποριακή Σχεδίαση Στιβαρό χωροδικτύωμα για μηδενικές ταλαντώσεις
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ [ATLAS T50 solar tracker] Τεχνική περιγραφή T50 Greek Revision A-05 10-AUG-2010 Κύρια Χαρακτηριστικά Πλεονεκτήματα Πρωτοποριακή Σχεδίαση Στιβαρό χωροδικτύωμα για μηδενικές ταλαντώσεις
Μεθοδολογία ερευνητικής εργασίας
 Μεθοδολογία ερευνητικής εργασίας Σύντομος οδηγός επιβίωσης Μεθοδολογία Ερευνητικής Εργασίας: Γ. Τράπαλης & Ά. Μητρέλης 1 Τι είναι Έρευνα: η παραγωγή πρωτότυπων αποτελεσμάτων μέσω της συστηματικής, ορθολογικής
Μεθοδολογία ερευνητικής εργασίας Σύντομος οδηγός επιβίωσης Μεθοδολογία Ερευνητικής Εργασίας: Γ. Τράπαλης & Ά. Μητρέλης 1 Τι είναι Έρευνα: η παραγωγή πρωτότυπων αποτελεσμάτων μέσω της συστηματικής, ορθολογικής
ΠΕΙΡΑΜΑΤΙΚΕΣ ΜΕΘΟΔΟΙ ΕΥΡΕΣΗΣ ΤΩΝ ΡΥΘΜΩΝ ΤΩΝ ΧΗΜΙΚΩΝ ΑΝΤΙΔΡΑΣΕΩΝ
 ΠΕΙΡΑΜΑΤΙΚΕΣ ΜΕΘΟΔΟΙ ΕΥΡΕΣΗΣ ΤΩΝ ΡΥΘΜΩΝ ΤΩΝ ΧΗΜΙΚΩΝ ΑΝΤΙΔΡΑΣΕΩΝ Οποιοδήποτε είδος αντιδραστήρα με γνωστό τρόπο ανάμειξης, μπορεί να χρησιμοποιηθεί για τη διερεύνηση της κινητικής καταλυτικών αντιδράσεων.
ΠΕΙΡΑΜΑΤΙΚΕΣ ΜΕΘΟΔΟΙ ΕΥΡΕΣΗΣ ΤΩΝ ΡΥΘΜΩΝ ΤΩΝ ΧΗΜΙΚΩΝ ΑΝΤΙΔΡΑΣΕΩΝ Οποιοδήποτε είδος αντιδραστήρα με γνωστό τρόπο ανάμειξης, μπορεί να χρησιμοποιηθεί για τη διερεύνηση της κινητικής καταλυτικών αντιδράσεων.
Δοκιμή Αντίστασης σε Θρυμματισμό (Los Angeles)
") Δοκιμή Αντίστασης σε Θρυμματισμό (Los Angeles) 1. Εισαγωγή Γενική Περιγραφή Δοκιμής Η δοκιμή της αντοχής των αδρανών σε τριβή και κρούση ή αλλιώς «δοκιμή Los Angeles (LA)» υπάγεται στους ελέγχους σκληρότητας
Δοκιμή Αντίστασης σε Θρυμματισμό (Los Angeles) 1. Εισαγωγή Γενική Περιγραφή Δοκιμής Η δοκιμή της αντοχής των αδρανών σε τριβή και κρούση ή αλλιώς «δοκιμή Los Angeles (LA)» υπάγεται στους ελέγχους σκληρότητας
Π ε ρ ι ε χ ό μ ε ν α
 Π ε ρ ι ε χ ό μ ε ν α Πρόλογος...7 Πρόλογος Επιμελητή...9 Εισαγωγή Τεχνολογίες για την ανάπτυξη ικανοτήτων...23 Σκοπός του βιβλίου...24 Eνα μοντέλο για την παιδαγωγική χρήση των εργαλείων με γνωστικό δυναμικό...26
Π ε ρ ι ε χ ό μ ε ν α Πρόλογος...7 Πρόλογος Επιμελητή...9 Εισαγωγή Τεχνολογίες για την ανάπτυξη ικανοτήτων...23 Σκοπός του βιβλίου...24 Eνα μοντέλο για την παιδαγωγική χρήση των εργαλείων με γνωστικό δυναμικό...26
Γ Γυμνασίου: Οδηγίες Γραπτής Εργασίας και Σεμιναρίων. Επιμέλεια Καραβλίδης Αλέξανδρος. Πίνακας περιεχομένων
 Γ Γυμνασίου: Οδηγίες Γραπτής Εργασίας και Σεμιναρίων. Πίνακας περιεχομένων Τίτλος της έρευνας (title)... 2 Περιγραφή του προβλήματος (Statement of the problem)... 2 Περιγραφή του σκοπού της έρευνας (statement
Γ Γυμνασίου: Οδηγίες Γραπτής Εργασίας και Σεμιναρίων. Πίνακας περιεχομένων Τίτλος της έρευνας (title)... 2 Περιγραφή του προβλήματος (Statement of the problem)... 2 Περιγραφή του σκοπού της έρευνας (statement
ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΑΥΤΟΜΑΤΙΣΜΟ ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΜΑΘΗΜΑΤΟΣ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΤΑ ΤΕΧΝΟΛΟΓΙΚΑ ΕΠΑΓΓΕΛΜΑΤΙΚΑ ΕΚΠΑΙΔΕΥΤΗΡΙΑ-ΤΕΕ
 Αφιέρωμα στο Γ Συνέδριο «Τεχνολογία & Αυτοματισμός» ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΑΥΤΟΜΑΤΙΣΜΟ ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΜΑΘΗΜΑΤΟΣ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΤΑ ΤΕΧΝΟΛΟΓΙΚΑ ΕΠΑΓΓΕΛΜΑΤΙΚΑ ΕΚΠΑΙΔΕΥΤΗΡΙΑ-ΤΕΕ Νίκος Γλώσσας Καθηγητής Δευτεροβάθμιας
Αφιέρωμα στο Γ Συνέδριο «Τεχνολογία & Αυτοματισμός» ΕΙΣΑΓΩΓΗ ΣΤΟΝ ΑΥΤΟΜΑΤΙΣΜΟ ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΜΑΘΗΜΑΤΟΣ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΤΑ ΤΕΧΝΟΛΟΓΙΚΑ ΕΠΑΓΓΕΛΜΑΤΙΚΑ ΕΚΠΑΙΔΕΥΤΗΡΙΑ-ΤΕΕ Νίκος Γλώσσας Καθηγητής Δευτεροβάθμιας
ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ ΕΙΣΑΓΩΓΗ...17
 ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ ΕΙΣΑΓΩΓΗ.........................................................17 Ι - ΤΑ ΒΑΣΙΚΑ ΣΤΟΙΧΕΙΑ ΤΟΥ ΕΠΙΧΕΙΡΗΣΙΑΚΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΓΙΑ ΜΙΑ ΕΠΙΤΥΧΗΜΕΝΗ ΕΠΙΧΕΙΡΗΣΗ................................19
ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ ΕΙΣΑΓΩΓΗ.........................................................17 Ι - ΤΑ ΒΑΣΙΚΑ ΣΤΟΙΧΕΙΑ ΤΟΥ ΕΠΙΧΕΙΡΗΣΙΑΚΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΓΙΑ ΜΙΑ ΕΠΙΤΥΧΗΜΕΝΗ ΕΠΙΧΕΙΡΗΣΗ................................19
Διερευνητική μάθηση We are researchers, let us do research! (Elbers and Streefland, 2000)
") Διερευνητική μάθηση We are researchers, let us do research! (Elbers and Streefland, 2000) Πρόκειται για την έρευνα που διεξάγουν οι επιστήμονες. Είναι μια πολύπλοκη δραστηριότητα που απαιτεί ειδικό ακριβό
Διερευνητική μάθηση We are researchers, let us do research! (Elbers and Streefland, 2000) Πρόκειται για την έρευνα που διεξάγουν οι επιστήμονες. Είναι μια πολύπλοκη δραστηριότητα που απαιτεί ειδικό ακριβό
Πανεπιστήμιο Κύπρου. Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών (ΗΜΜΥ)
") Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών (ΗΜΜΥ) 26/01/2014 Συνεισφορά του κλάδους ΗΜΜΥ Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Ευρύ φάσμα γνώσεων και επιστημονικών
Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών (ΗΜΜΥ) 26/01/2014 Συνεισφορά του κλάδους ΗΜΜΥ Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Ευρύ φάσμα γνώσεων και επιστημονικών
ΤΕΧΝΟΛΟΓΙΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΣΧΟΛΗ ΓΕΩΤΕΧΝΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΚΑΙ ΔΙΑΧΕΙΡΙΣΗΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ. Πτυχιακή διατριβή
 ΤΕΧΝΟΛΟΓΙΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΣΧΟΛΗ ΓΕΩΤΕΧΝΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΚΑΙ ΔΙΑΧΕΙΡΙΣΗΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ Πτυχιακή διατριβή ΜΕΛΕΤΗ ΤΗΣ ΑΝΤΙΔΡΑΣΗΣ ΚΑΤΑΛΥΤΙΚΗΣ ΑΝΑΓΩΓΗΣ ΝΙΤΡΙΚΩΝ ΚΑΙ ΝΙΤΡΩΔΩΝ ΙΟΝΤΩΝ ΣΕ ΝΕΡΟ ΜΕ ΧΡΗΣΗ ΥΔΡΟΓΟΝΟΥ
ΤΕΧΝΟΛΟΓΙΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΣΧΟΛΗ ΓΕΩΤΕΧΝΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΚΑΙ ΔΙΑΧΕΙΡΙΣΗΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ Πτυχιακή διατριβή ΜΕΛΕΤΗ ΤΗΣ ΑΝΤΙΔΡΑΣΗΣ ΚΑΤΑΛΥΤΙΚΗΣ ΑΝΑΓΩΓΗΣ ΝΙΤΡΙΚΩΝ ΚΑΙ ΝΙΤΡΩΔΩΝ ΙΟΝΤΩΝ ΣΕ ΝΕΡΟ ΜΕ ΧΡΗΣΗ ΥΔΡΟΓΟΝΟΥ
Ενότητα 1: Εισαγωγή. ΤΕΙ Στερεάς Ελλάδας. Τμήμα Φυσικοθεραπείας. Προπτυχιακό Πρόγραμμα. Μάθημα: Βιοστατιστική-Οικονομία της υγείας Εξάμηνο: Ε (5 ο )
") ΤΕΙ Στερεάς Ελλάδας Τμήμα Φυσικοθεραπείας Προπτυχιακό Πρόγραμμα Μάθημα: Βιοστατιστική-Οικονομία της υγείας Εξάμηνο: Ε (5 ο ) Ενότητα 1: Εισαγωγή Δρ. Χρήστος Γενιτσαρόπουλος Λαμία, 2017 1.1. Σκοπός και
ΤΕΙ Στερεάς Ελλάδας Τμήμα Φυσικοθεραπείας Προπτυχιακό Πρόγραμμα Μάθημα: Βιοστατιστική-Οικονομία της υγείας Εξάμηνο: Ε (5 ο ) Ενότητα 1: Εισαγωγή Δρ. Χρήστος Γενιτσαρόπουλος Λαμία, 2017 1.1. Σκοπός και
Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC.
 Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC. Ονόματα μαθητών Γεωργίου Χρίστος Η1β, Γεωργίου Αντώνης Η1β Ονόματα καθηγητών: Αγγελίδης Λουκής, Πετρίδης Πέτρος Περίληψη Σκοπός της
Ασύρματος αυτοματισμός σε συρόμενη καγκελόπορτα που ελέγχεται από PLC. Ονόματα μαθητών Γεωργίου Χρίστος Η1β, Γεωργίου Αντώνης Η1β Ονόματα καθηγητών: Αγγελίδης Λουκής, Πετρίδης Πέτρος Περίληψη Σκοπός της
ΠΡΟΤΕΙΝΟΜΕΝΑ ΘΕΜΑΤΑ ΔΙΠΛΩΜΑΤΙΚΩΝ ΕΡΓΑΣΙΩΝ ΑΚΑΔΗΜΑΪΚΟΥ ΕΤΟΥΣ
 ΠΡΟΤΕΙΝΟΜΕΝΑ ΘΕΜΑΤΑ ΔΙΠΛΩΜΑΤΙΚΩΝ ΕΡΓΑΣΙΩΝ ΑΚΑΔΗΜΑΪΚΟΥ ΕΤΟΥΣ 2015-2016 Προτεινόμενο Θέμα: [1] Ανάλυση της μόνιμης και της μεταβατικής κατάστασης Συστημάτων Ηλεκτρικής Ενέργειας με το λογισμικό PSAT Για
ΠΡΟΤΕΙΝΟΜΕΝΑ ΘΕΜΑΤΑ ΔΙΠΛΩΜΑΤΙΚΩΝ ΕΡΓΑΣΙΩΝ ΑΚΑΔΗΜΑΪΚΟΥ ΕΤΟΥΣ 2015-2016 Προτεινόμενο Θέμα: [1] Ανάλυση της μόνιμης και της μεταβατικής κατάστασης Συστημάτων Ηλεκτρικής Ενέργειας με το λογισμικό PSAT Για
Νέες τεχνολογίες εισάγονται ή χρησιµοποιούνται
 special report τoυ Γιώργου Φετοκάκη / gfetokakis@boussias.com Jobs scheduling Η χρυσή τοµή της αυτοµατοποίησης Μια λύση job scheduling πρέπει να είναι αρκετά περιεκτική. Πρέπει να υποστηρίζει την ενσωµάτωση
special report τoυ Γιώργου Φετοκάκη / gfetokakis@boussias.com Jobs scheduling Η χρυσή τοµή της αυτοµατοποίησης Μια λύση job scheduling πρέπει να είναι αρκετά περιεκτική. Πρέπει να υποστηρίζει την ενσωµάτωση
Ο Δρόμος προς την Αυτόματη Κυκλοφορία
 2 ο Auto Forum με τίτλο Αλλάξτε αυτοκίνητο Ο Δρόμος προς την Αυτόματη Κυκλοφορία Γιώργος Γιαννής, Καθηγητής ΕΜΠ Παναγιώτης Παπαντωνίου, Επιστ. Συνεργάτης ΕΜΠ Απόστολος Ζιακόπουλος, Υπ.Διδάκτορας ΕΜΠ Αθήνα,
2 ο Auto Forum με τίτλο Αλλάξτε αυτοκίνητο Ο Δρόμος προς την Αυτόματη Κυκλοφορία Γιώργος Γιαννής, Καθηγητής ΕΜΠ Παναγιώτης Παπαντωνίου, Επιστ. Συνεργάτης ΕΜΠ Απόστολος Ζιακόπουλος, Υπ.Διδάκτορας ΕΜΠ Αθήνα,
ΤΕΧΝΟΛΟΓΙΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΣΧΟΛΗ ΓΕΩΤΕΧΝΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΚΑΙ ΕΠΙΣΤΗΜΗΣ & ΤΕΧΝΟΛΟΓΙΑΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ. Πτυχιακή διατριβή
 ΤΕΧΝΟΛΟΓΙΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΣΧΟΛΗ ΓΕΩΤΕΧΝΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΚΑΙ ΕΠΙΣΤΗΜΗΣ & ΤΕΧΝΟΛΟΓΙΑΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ Πτυχιακή διατριβή ΚΙΝΗΤΙΚΗ ΜΕΛΕΤΗ ΤΗΣ ΑΝΤΙΔΡΑΣΗΣ ΚΑΤΑΛΥΤΙΚΗΣ ΑΝΑΓΩΓΗΣ ΤΩΝ ΟΞΕΙΔΙΩΝ ΤΟΥ ΑΖΩΤΟΥ (NO X
ΤΕΧΝΟΛΟΓΙΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΣΧΟΛΗ ΓΕΩΤΕΧΝΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΚΑΙ ΕΠΙΣΤΗΜΗΣ & ΤΕΧΝΟΛΟΓΙΑΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ Πτυχιακή διατριβή ΚΙΝΗΤΙΚΗ ΜΕΛΕΤΗ ΤΗΣ ΑΝΤΙΔΡΑΣΗΣ ΚΑΤΑΛΥΤΙΚΗΣ ΑΝΑΓΩΓΗΣ ΤΩΝ ΟΞΕΙΔΙΩΝ ΤΟΥ ΑΖΩΤΟΥ (NO X
ΕΡΓΑΣΤΗΡΙΑΚΗ ΕΦΑΡΜΟΓΗ 1 ΤO ΡΟΜΠΟΤ INTELLITEK ER-2u
 Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής.
 ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής. Α) Σκοπός: Σκοπός της παρούσας άσκησης είναι να επιδειχθεί ο έλεγχος των στροφών
ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής. Α) Σκοπός: Σκοπός της παρούσας άσκησης είναι να επιδειχθεί ο έλεγχος των στροφών
Το σενάριο προτείνεται να διεξαχθεί με τη χρήση του Cabri Geometry II.
 9.2.3 Σενάριο 6. Συμμεταβολές στο ισοσκελές τρίγωνο Γνωστική περιοχή: Γεωμετρία Β Λυκείου. Συμμεταβολή μεγεθών. Εμβαδόν ισοσκελούς τριγώνου. Σύστημα συντεταγμένων. Γραφική παράσταση συνάρτησης. Μέγιστη
9.2.3 Σενάριο 6. Συμμεταβολές στο ισοσκελές τρίγωνο Γνωστική περιοχή: Γεωμετρία Β Λυκείου. Συμμεταβολή μεγεθών. Εμβαδόν ισοσκελούς τριγώνου. Σύστημα συντεταγμένων. Γραφική παράσταση συνάρτησης. Μέγιστη
Βιομηχανικοί Ελεγκτές
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #9: Αναλογικά Συστήματα Ελέγχου Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #9: Αναλογικά Συστήματα Ελέγχου Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εισαγωγή στα Συστήματα Ηλεκτρικής Ενέργειας (ΣΗΕ) Ηλ. Αμφ. 1, 2, 3. Ηλεκτρομαγνητικά Πεδία Β. Ηλ. Αμφ.
 Ηλ. Αμφ. 1, 2, 3. Ηλεκτρομαγνητικά Πεδία Β. Ηλ. Αμφ.") ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2018-19 Περίοδος Ιουνίου 2019 'Εκδοση 20/05/2019 03/06/2019 04/06/2019 05/06/2019 06/06/2019
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2018-19 Περίοδος Ιουνίου 2019 'Εκδοση 20/05/2019 03/06/2019 04/06/2019 05/06/2019 06/06/2019
Ρετσινάς Σωτήριος ΠΕ 1703 Ηλεκτρολόγων ΑΣΕΤΕΜ
 Ρετσινάς Σωτήριος ΠΕ 1703 Ηλεκτρολόγων ΑΣΕΤΕΜ Τι είναι η ερευνητική εργασία Η ερευνητική εργασία στο σχολείο είναι μια δυναμική διαδικασία, ανοιχτή στην αναζήτηση για την κατανόηση του πραγματικού κόσμου.
Ρετσινάς Σωτήριος ΠΕ 1703 Ηλεκτρολόγων ΑΣΕΤΕΜ Τι είναι η ερευνητική εργασία Η ερευνητική εργασία στο σχολείο είναι μια δυναμική διαδικασία, ανοιχτή στην αναζήτηση για την κατανόηση του πραγματικού κόσμου.
Ερευνητικό Κέντρο Ευφυών Συστημάτων και Δικτύων Κοίος
 Ερευνητικό Κέντρο Ευφυών Συστημάτων και Δικτύων Κοίος Μάριος Μ. Πολυκάρπου, PhD Διευθυντής, Ερευνητικό Κέντρο Κοίος Πρόεδρος, Κοίνότητα Υπολογιστικής Νοημοσύνης, IEEE Καθηγητής, Τμήμα Ηλεκτρολόγων Μηχανικών
Ερευνητικό Κέντρο Ευφυών Συστημάτων και Δικτύων Κοίος Μάριος Μ. Πολυκάρπου, PhD Διευθυντής, Ερευνητικό Κέντρο Κοίος Πρόεδρος, Κοίνότητα Υπολογιστικής Νοημοσύνης, IEEE Καθηγητής, Τμήμα Ηλεκτρολόγων Μηχανικών
ΘΕΜΑ ΈΡΕΥΝΑΣ: Η ΣΧΕΣΗ ΑΝΑΜΕΣΑ ΣΤΗ
 Μαθήτρια: Αίγλη Θ. Μπορονικόλα Καθηγητής : Ιωάννης Αντ. Παπατσώρης ΜΑΘΗΜΑ: ΈΡΕΥΝΑ & ΤΕΧΝΟΛΟΓΙΑ ΘΕΜΑ ΈΡΕΥΝΑΣ: Η ΣΧΕΣΗ ΑΝΑΜΕΣΑ ΣΤΗ ΓΩΝΙΑ ΚΕΚΛΙΜΕΝΟΥ ΕΠΙΠΕΔΟΥ ΚΑΙ ΤΗ ΔΥΝΑΜΗ ΕΛΞΗΣ ΓΙΑ ΝΑ ΙΣΟΡΡΟΠΗΣΕΙ ΕΝΑ ΣΩΜΑ
Μαθήτρια: Αίγλη Θ. Μπορονικόλα Καθηγητής : Ιωάννης Αντ. Παπατσώρης ΜΑΘΗΜΑ: ΈΡΕΥΝΑ & ΤΕΧΝΟΛΟΓΙΑ ΘΕΜΑ ΈΡΕΥΝΑΣ: Η ΣΧΕΣΗ ΑΝΑΜΕΣΑ ΣΤΗ ΓΩΝΙΑ ΚΕΚΛΙΜΕΝΟΥ ΕΠΙΠΕΔΟΥ ΚΑΙ ΤΗ ΔΥΝΑΜΗ ΕΛΞΗΣ ΓΙΑ ΝΑ ΙΣΟΡΡΟΠΗΣΕΙ ΕΝΑ ΣΩΜΑ
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΑΣ MM505 ΗΛΕΚΤΡΙΚΕΣ ΜΗΧΑΝΕΣ ΒΙΟΜΗΧΑΝΙΚΟΙ ΑΥΤΟΜΑΤΙΣΜΟΙ Εργαστήριο ο - Θεωρητικό Μέρος Βασικές ηλεκτρικές μετρήσεις σε συνεχές και εναλλασσόμενο
ΚΕΦΑΛΑΙΟ Εισαγωγή Μεθοδολογία της Έρευνας ΕΙΚΟΝΑ 1-1 Μεθοδολογία της έρευνας.
 ΚΕΦΑΛΑΙΟ 1 Εισαγωγή Η Μεθοδολογία της Έρευνας (research methodology) είναι η επιστήμη που αφορά τη μεθοδολογία πραγματοποίησης μελετών με συστηματικό, επιστημονικό και λογικό τρόπο, με σκοπό την παραγωγή
ΚΕΦΑΛΑΙΟ 1 Εισαγωγή Η Μεθοδολογία της Έρευνας (research methodology) είναι η επιστήμη που αφορά τη μεθοδολογία πραγματοποίησης μελετών με συστηματικό, επιστημονικό και λογικό τρόπο, με σκοπό την παραγωγή
Άρθρο 1 Γενικές Διατάξεις
 ΚΑΝΟΝΙΣΜΟΣ ΕΚΠΟΝΗΣΗΣ ΔΙΔΑΚΤΟΡΙΚΩΝ ΔΙΑΤΡΙΒΩΝ ΤΟΥ ΤΜΗΜΑΤΟΣ ΑΡΧΙΤΕΚΤΟΝΩΝ ΜΗΧΑΝΙΚΩΝ ΠΟΛΥΤΕΧΝΕΙΟΥ ΚΡΗΤΗΣ Άρθρο 1 Γενικές Διατάξεις Στο Τμήμα Aρχιτεκτόνων Μηχανικών του Πολυτεχνείου Κρήτης είναι δυνατή η εκπόνηση
ΚΑΝΟΝΙΣΜΟΣ ΕΚΠΟΝΗΣΗΣ ΔΙΔΑΚΤΟΡΙΚΩΝ ΔΙΑΤΡΙΒΩΝ ΤΟΥ ΤΜΗΜΑΤΟΣ ΑΡΧΙΤΕΚΤΟΝΩΝ ΜΗΧΑΝΙΚΩΝ ΠΟΛΥΤΕΧΝΕΙΟΥ ΚΡΗΤΗΣ Άρθρο 1 Γενικές Διατάξεις Στο Τμήμα Aρχιτεκτόνων Μηχανικών του Πολυτεχνείου Κρήτης είναι δυνατή η εκπόνηση
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εισαγωγή στα Συστήματα Ηλεκτρικής Ενέργειας (ΣΗΕ) (επί πτυχίω) Ηλ. Αμφ. 1, 2, 3
 (επί πτυχίω) Ηλ. Αμφ. 1, 2, 3") ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2018-19 Περίοδος Ιουνίου 2019 Έκδοση 24/05/2019 03/06/2019 04/06/2019 05/06/2019 06/06/2019
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2018-19 Περίοδος Ιουνίου 2019 Έκδοση 24/05/2019 03/06/2019 04/06/2019 05/06/2019 06/06/2019
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εισαγωγή στα Συστήματα Ηλεκτρικής Ενέργειας (ΣΗΕ) (επί πτυχίω) Ηλ. Αμφ. 1, 2, 3
 (επί πτυχίω) Ηλ. Αμφ. 1, 2, 3") ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2018-19 Περίοδος Ιουνίου 2019 Έκδοση 21/05/2019 03/06/2019 04/06/2019 05/06/2019 06/06/2019
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2018-19 Περίοδος Ιουνίου 2019 Έκδοση 21/05/2019 03/06/2019 04/06/2019 05/06/2019 06/06/2019
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Αρχιτεκτονική Υπολογιστών Ηλ. Αιθ. 001, 002. Ηλ. Αιθ. 003, 004 Ηλεκτρονική ΙΙΙ Ηλ. αιθ. 003, 004. Θεωρία Δικτύων & Κυκλωμάτων
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 v20180517 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 v20180517 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ
Τι είναι τα εξελιγμένα-έξυπνα δίκτυα-σκοπός του ΔΜΔΕ ΓΕΝΙΚΗ ΠΕΡΙΓΡΑΦΗ
 ΓΕΝΙΚΗ ΠΕΡΙΓΡΑΦΗ Σε αναλογία με την ανάπτυξη που προέκυψε από την ψηφιοποίηση των επικοινωνιών, τα έξυπνα δίκτυα επιτρέπουν ανάλογο μετασχηματισμό στην παροχή ηλεκτρική ενέργειας Τα έξυπνα δίκτυα αξιοποιούν
ΓΕΝΙΚΗ ΠΕΡΙΓΡΑΦΗ Σε αναλογία με την ανάπτυξη που προέκυψε από την ψηφιοποίηση των επικοινωνιών, τα έξυπνα δίκτυα επιτρέπουν ανάλογο μετασχηματισμό στην παροχή ηλεκτρική ενέργειας Τα έξυπνα δίκτυα αξιοποιούν
Συλλογή μεταφορά και έλεγχος Δεδομένων. 1.4 Απλά και σύνθετα συστήματα αυτοματισμού.
 Συλλογή μεταφορά και έλεγχος Δεδομένων 1.4 Απλά και σύνθετα συστήματα αυτοματισμού. Το είδαμε μέχρι τώρα Δομή συστήματος αυτοματισμού Ο ελεγκτής προϋποθέτει την ύπαρξη κάποιων στοιχείων, στα οποία θα επιδράσει
Συλλογή μεταφορά και έλεγχος Δεδομένων 1.4 Απλά και σύνθετα συστήματα αυτοματισμού. Το είδαμε μέχρι τώρα Δομή συστήματος αυτοματισμού Ο ελεγκτής προϋποθέτει την ύπαρξη κάποιων στοιχείων, στα οποία θα επιδράσει
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Ηλ. Αιθ. 003, 004 Ηλεκτρονική ΙΙΙ Ηλ. αιθ. 003, 004
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2017-2018 Περίοδος Ιουνίου 2018 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
H Έννοια και η Φύση του Προγραμματισμού. Αθανασία Καρακίτσιου, PhD
 H Έννοια και η Φύση του Προγραμματισμού Αθανασία Καρακίτσιου, PhD 1 Η Διαδικασία του προγραμματισμού Προγραμματισμός είναι η διαδικασία καθορισμού στόχων και η επιλογή μιας μελλοντικής πορείας για την
H Έννοια και η Φύση του Προγραμματισμού Αθανασία Καρακίτσιου, PhD 1 Η Διαδικασία του προγραμματισμού Προγραμματισμός είναι η διαδικασία καθορισμού στόχων και η επιλογή μιας μελλοντικής πορείας για την
Σχεδιαστικά Προγράμματα Επίπλου
 Σχεδιαστικά Προγράμματα Επίπλου Καθηγήτρια ΦΕΡΦΥΡΗ ΣΩΤΗΡΙΑ Τμήμα ΣΧΕΔΙΑΣΜΟΥ & ΤΕΧΝΟΛΟΓΙΑΣ ΞΥΛΟΥ - ΕΠΙΠΛΟΥ Σχεδιαστικά Προγράμματα Επίπλου Η σχεδίαση με τον παραδοσιακό τρόπο απαιτεί αυξημένο χρόνο, ενώ
Σχεδιαστικά Προγράμματα Επίπλου Καθηγήτρια ΦΕΡΦΥΡΗ ΣΩΤΗΡΙΑ Τμήμα ΣΧΕΔΙΑΣΜΟΥ & ΤΕΧΝΟΛΟΓΙΑΣ ΞΥΛΟΥ - ΕΠΙΠΛΟΥ Σχεδιαστικά Προγράμματα Επίπλου Η σχεδίαση με τον παραδοσιακό τρόπο απαιτεί αυξημένο χρόνο, ενώ
Κεφάλαιο 1. Εισαγωγή στα συστήματα σχεδιομελέτης και παραγωγής με χρήση υπολογιστή computer aided design and manufacture (cad/cam)
") Κεφάλαιο 1 Εισαγωγή στα συστήματα σχεδιομελέτης και παραγωγής με χρήση υπολογιστή computer aided design and manufacture (cad/cam) 1.1 Ορισμός σχεδιομελέτης και παραγωγής με χρήση υπολογιστή CAD (Computer
Κεφάλαιο 1 Εισαγωγή στα συστήματα σχεδιομελέτης και παραγωγής με χρήση υπολογιστή computer aided design and manufacture (cad/cam) 1.1 Ορισμός σχεδιομελέτης και παραγωγής με χρήση υπολογιστή CAD (Computer
Διατάξεις εκκίνησης κινητήρων ΣΡ
 Διατάξεις εκκίνησης κινητήρων ΣΡ Η διάταξη ελέγχου και προστασίας του κινητήρα ΣΡ πρέπει: 1. Να προστατεύει τον κινητήρα από βραχυκυκλώματα στην ίδια τη διάταξη προστασίας 2. Να προστατεύει τον κινητήρα
Διατάξεις εκκίνησης κινητήρων ΣΡ Η διάταξη ελέγχου και προστασίας του κινητήρα ΣΡ πρέπει: 1. Να προστατεύει τον κινητήρα από βραχυκυκλώματα στην ίδια τη διάταξη προστασίας 2. Να προστατεύει τον κινητήρα
215 Μηχανικών Η/Υ και Πληροφορικής Πάτρας
 215 Μηχανικών Η/Υ και Πληροφορικής Πάτρας Το Τμήμα ασχολείται με τη διδασκαλία και την έρευνα στην επιστήμη και τεχνολογία των υπολογιστών και τη μελέτη των εφαρμογών τους. Το Τμήμα ιδρύθηκε το 1980 (ως
215 Μηχανικών Η/Υ και Πληροφορικής Πάτρας Το Τμήμα ασχολείται με τη διδασκαλία και την έρευνα στην επιστήμη και τεχνολογία των υπολογιστών και τη μελέτη των εφαρμογών τους. Το Τμήμα ιδρύθηκε το 1980 (ως
Τα κύρια σηµεία της παρούσας διδακτορικής διατριβής είναι: Η πειραµατική µελέτη της µεταβατικής συµπεριφοράς συστηµάτων γείωσης
 Κεφάλαιο 5 ΣΥΜΠΕΡΑΣΜΑΤΑ Το σηµαντικό στην επιστήµη δεν είναι να βρίσκεις καινούρια στοιχεία, αλλά να ανακαλύπτεις νέους τρόπους σκέψης γι' αυτά. Sir William Henry Bragg 5.1 Ανακεφαλαίωση της διατριβής
Κεφάλαιο 5 ΣΥΜΠΕΡΑΣΜΑΤΑ Το σηµαντικό στην επιστήµη δεν είναι να βρίσκεις καινούρια στοιχεία, αλλά να ανακαλύπτεις νέους τρόπους σκέψης γι' αυτά. Sir William Henry Bragg 5.1 Ανακεφαλαίωση της διατριβής
Μέθοδος : έρευνα και πειραματισμός
 1 Ο ΓΥΜΝΑΣΙΟ ΠΕΥΚΩΝ Γ ΓΥΜΝΑΣΙΟΥ ΜΑΘΗΜΑ : ΤΕΧΝΟΛΟΓΙΑ ΕΚΠΑΙΔΕΥΤΙΚΟΣ : Τρασανίδης Γεώργιος, διπλ. Ηλεκ/γος Μηχανικός Μsc ΠΕ12 05 Μέθοδος : έρευνα και πειραματισμός Στόχος της Τεχνολογίας στην Γ Γυμνασίου
1 Ο ΓΥΜΝΑΣΙΟ ΠΕΥΚΩΝ Γ ΓΥΜΝΑΣΙΟΥ ΜΑΘΗΜΑ : ΤΕΧΝΟΛΟΓΙΑ ΕΚΠΑΙΔΕΥΤΙΚΟΣ : Τρασανίδης Γεώργιος, διπλ. Ηλεκ/γος Μηχανικός Μsc ΠΕ12 05 Μέθοδος : έρευνα και πειραματισμός Στόχος της Τεχνολογίας στην Γ Γυμνασίου
ΜΗΧΑΝΙΚΗ ΡΕΥΣΤΩΝ. Φυγοκεντρική αντλία 3η εργαστηριακή άσκηση. Βλιώρα Ευαγγελία
 ΜΗΧΑΝΙΚΗ ΡΕΥΣΤΩΝ Φυγοκεντρική αντλία 3η εργαστηριακή άσκηση Βλιώρα Ευαγγελία ΘΕΣΣΑΛΟΝΙΚΗ 2014 Σκοπός της εργαστηριακής άσκησης Σκοπός της εργαστηριακής άσκησης είναι ο υπολογισμός της πραγματικής χαρακτηριστικής
ΜΗΧΑΝΙΚΗ ΡΕΥΣΤΩΝ Φυγοκεντρική αντλία 3η εργαστηριακή άσκηση Βλιώρα Ευαγγελία ΘΕΣΣΑΛΟΝΙΚΗ 2014 Σκοπός της εργαστηριακής άσκησης Σκοπός της εργαστηριακής άσκησης είναι ο υπολογισμός της πραγματικής χαρακτηριστικής
Διδακτορική Διατριβή
 Διδακτορική Διατριβή Ένας μοναχικός δρόμος με διεξόδους; Τόνια Αράχωβα, Υποψήφια Διδάκτωρ, tonia@idkaramanlis.gr Γκέλη Μανούσου, Υποψήφια Διδάκτωρ manousou@eap.gr Τόνια Χαρτοφύλακα, Υποψήφια Διδάκτωρ tonia@eap.gr
Διδακτορική Διατριβή Ένας μοναχικός δρόμος με διεξόδους; Τόνια Αράχωβα, Υποψήφια Διδάκτωρ, tonia@idkaramanlis.gr Γκέλη Μανούσου, Υποψήφια Διδάκτωρ manousou@eap.gr Τόνια Χαρτοφύλακα, Υποψήφια Διδάκτωρ tonia@eap.gr
ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΧΕΙΜ5-6 ΗΜΕΡΟΜΗΝΙΑ: ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 3 ΕΛΕΓΧΟΣ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΧΕΙΜ5-6 ΗΜΕΡΟΜΗΝΙΑ: ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 3 ΕΛΕΓΧΟΣ
ΗΡΑΚΛΕΙΟ 2007 ΙΩΑΝΝΑ ΚΑΠΕΤΑΝΟΥ
 ΙΩΑΝΝΑ ΚΑΠΕΤΑΝΟΥ ΠΕΡΙΕΧΟΜΕΝΑ ΕΙΣΑΓΩΓΗ 1.1 Γιατί οι επιχειρήσεις έχουν ανάγκη την πρόβλεψη σελ.1 1.2 Μέθοδοι πρόβλεψης....σελ.2 ΑΝΑΛΥΤΙΚΗ ΠΑΡΟΥΣΙΑΣΗ 2.1 Υπόδειγμα του Κινητού μέσου όρου.σελ.5 2.2 Υπόδειγμα
ΙΩΑΝΝΑ ΚΑΠΕΤΑΝΟΥ ΠΕΡΙΕΧΟΜΕΝΑ ΕΙΣΑΓΩΓΗ 1.1 Γιατί οι επιχειρήσεις έχουν ανάγκη την πρόβλεψη σελ.1 1.2 Μέθοδοι πρόβλεψης....σελ.2 ΑΝΑΛΥΤΙΚΗ ΠΑΡΟΥΣΙΑΣΗ 2.1 Υπόδειγμα του Κινητού μέσου όρου.σελ.5 2.2 Υπόδειγμα
ΣΥΣΤΗΜΑ ΔΙΠΛΗΣ ΑΥΤΟΜΑΤΗΣ ΚΟΠΗΣ ΜΕ ΤΕΧΝΟΛΟΓΙΑ ΥΔΡΟΒΟΛΗΣ (WATERJET) Η ΤΕΛΕΙΑ ΛΥΣΗ ΓΙΑ ΑΠΟΤΕΛΕΣΜΑΤΙΚΗ ΚΑΙ ΑΚΡΙΒΗΣ ΚΟΠΗ ΓΙΑ ΟΛΑ ΤΑ ΓΝΩΣΤΑ ΥΛΙΚΑ!
 Η ΤΕΛΕΙΑ ΛΥΣΗ ΓΙΑ ΑΠΟΤΕΛΕΣΜΑΤΙΚΗ ΚΑΙ ΑΚΡΙΒΗΣ ΚΟΠΗ ΓΙΑ ΟΛΑ ΤΑ ΓΝΩΣΤΑ ΥΛΙΚΑ!") ΣΥΣΤΗΜΑ ΔΙΠΛΗΣ ΑΥΤΟΜΑΤΗΣ ΚΟΠΗΣ ΜΕ ΤΕΧΝΟΛΟΓΙΑ ΥΔΡΟΒΟΛΗΣ (WATERJET) WJ-VERSATILE: Bασικά χαρακτηριστικά Η ΤΕΛΕΙΑ ΛΥΣΗ ΓΙΑ ΑΠΟΤΕΛΕΣΜΑΤΙΚΗ ΚΑΙ ΑΚΡΙΒΗΣ ΚΟΠΗ ΓΙΑ ΟΛΑ ΤΑ ΓΝΩΣΤΑ ΥΛΙΚΑ! Διπλή τεχνολογία κοπής με
ΣΥΣΤΗΜΑ ΔΙΠΛΗΣ ΑΥΤΟΜΑΤΗΣ ΚΟΠΗΣ ΜΕ ΤΕΧΝΟΛΟΓΙΑ ΥΔΡΟΒΟΛΗΣ (WATERJET) WJ-VERSATILE: Bασικά χαρακτηριστικά Η ΤΕΛΕΙΑ ΛΥΣΗ ΓΙΑ ΑΠΟΤΕΛΕΣΜΑΤΙΚΗ ΚΑΙ ΑΚΡΙΒΗΣ ΚΟΠΗ ΓΙΑ ΟΛΑ ΤΑ ΓΝΩΣΤΑ ΥΛΙΚΑ! Διπλή τεχνολογία κοπής με
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ ΥΔΡΑΥΛΙΚΗΣ ΚΑΙ ΤΕΧΝΙΚΗΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ ΥΔΡΑΥΛΙΚΗΣ ΚΑΙ ΤΕΧΝΙΚΗΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ ΕΥΑΓΓΕΛΙΑΣ Π. ΛΟΥΚΟΓΕΩΡΓΑΚΗ Διπλωματούχου Πολιτικού Μηχανικού ΟΛΟΚΛΗΡΩΜΕΝΟ
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ ΥΔΡΑΥΛΙΚΗΣ ΚΑΙ ΤΕΧΝΙΚΗΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ ΕΥΑΓΓΕΛΙΑΣ Π. ΛΟΥΚΟΓΕΩΡΓΑΚΗ Διπλωματούχου Πολιτικού Μηχανικού ΟΛΟΚΛΗΡΩΜΕΝΟ
ΕΝΤΑΣΗ ΗΛΕΚΤΡΙΚΟΥ ΡΕΥΜΑΤΟΣ (Ε.Χαραλάμπους)
") ΕΝΤΑΣΗ ΗΛΕΚΤΡΙΚΟΥ ΡΕΥΜΑΤΟΣ (Ε.Χαραλάμπους) Όνομα Παιδιού: Ναταλία Ασιήκαλη ΤΙΤΛΟΣ ΔΙΕΡΕΥΝΗΣΗΣ: Πως οι παράγοντες υλικό, μήκος και πάχος υλικού επηρεάζουν την αντίσταση και κατ επέκταση την ένταση του ρεύματος
ΕΝΤΑΣΗ ΗΛΕΚΤΡΙΚΟΥ ΡΕΥΜΑΤΟΣ (Ε.Χαραλάμπους) Όνομα Παιδιού: Ναταλία Ασιήκαλη ΤΙΤΛΟΣ ΔΙΕΡΕΥΝΗΣΗΣ: Πως οι παράγοντες υλικό, μήκος και πάχος υλικού επηρεάζουν την αντίσταση και κατ επέκταση την ένταση του ρεύματος
Μηχανολόγος Μηχανικός στο Α.Π.Θ.
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Μηχανολόγος Μηχανικός στο Α.Π.Θ. Παναγιώτης Σεφερλής Αναπληρωτής Καθηγητής Έχεις το «μικρόβιο» του Μηχανικού; Dilbert 2 Επιστήμη του Μηχανολόγου
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Μηχανολόγος Μηχανικός στο Α.Π.Θ. Παναγιώτης Σεφερλής Αναπληρωτής Καθηγητής Έχεις το «μικρόβιο» του Μηχανικού; Dilbert 2 Επιστήμη του Μηχανολόγου
Στόχος της ψυχολογικής έρευνας:
 Στόχος της ψυχολογικής έρευνας: Συστηματική περιγραφή και κατανόηση των ψυχολογικών φαινομένων. Η ψυχολογική έρευνα χρησιμοποιεί μεθόδους συστηματικής διερεύνησης για τη συλλογή, την ανάλυση και την ερμηνεία
Στόχος της ψυχολογικής έρευνας: Συστηματική περιγραφή και κατανόηση των ψυχολογικών φαινομένων. Η ψυχολογική έρευνα χρησιμοποιεί μεθόδους συστηματικής διερεύνησης για τη συλλογή, την ανάλυση και την ερμηνεία
1 Συστήματα Αυτοματισμού Βιβλιοθηκών
 1 Συστήματα Αυτοματισμού Βιβλιοθηκών Τα Συστήματα Αυτοματισμού Βιβλιοθηκών χρησιμοποιούνται για τη διαχείριση καταχωρήσεων βιβλιοθηκών. Τα περιεχόμενα των βιβλιοθηκών αυτών είναι έντυπα έγγραφα, όπως βιβλία
1 Συστήματα Αυτοματισμού Βιβλιοθηκών Τα Συστήματα Αυτοματισμού Βιβλιοθηκών χρησιμοποιούνται για τη διαχείριση καταχωρήσεων βιβλιοθηκών. Τα περιεχόμενα των βιβλιοθηκών αυτών είναι έντυπα έγγραφα, όπως βιβλία
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εφαρμοσμένος & Υπολογιστικός Ηλεκτρομαγνητισμός Ηλ. Αιθ. 012, 013. Στοχαστικά Συστήματα & Επικοινωνίες Ηλ. Αμφ.
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εφαρμοσμένος & Υπολογιστικός Ηλεκτρομαγνητισμός Ηλ. Αιθ. 012, 013. Εργαστήριο Ψηφιακών Συστημάτων Ηλ. Εργ.
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Ακαδημαϊκό Έτος 2014-2015 Περίοδος Ιουνίου 2015 ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο ΕΞΑΜΗΝΟ 5ο-6ο ΕΞΑΜΗΝΟ
ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ. Εργαστηριακή και Βιομηχανική Ηλεκτρονική Ηλ. Αμφ. 2, 3. Γλώσσες Προγραμματισμού Ι. Ηλ. Αμφ. 1, 2, 3, 4, 5
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Ιουνίου 2017 Έκδοση 08.06.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΠΡΟΓΡΑΜΜΑ ΕΞΕΤΑΣΕΩΝ Ακαδημαϊκό Έτος 2016-2017 Περίοδος Ιουνίου 2017 Έκδοση 08.06.2017 ΗΜΕΡΟΜΗΝΙΑ ΩΡΑ 1ο-2ο ΕΞΑΜΗΝΟ 3ο-4ο
Άσκηση 3. Ποιοτική Μελέτη των νόμων ελέγχου δύο και τριών όρων (συσκευή: Προσομοιωτής ελέγχου PCS327: Σχ.1) Απαραίτητες γνώσεις
 Απαραίτητες γνώσεις") Άσκηση 3 Ποιοτική Μελέτη των νόμων ελέγχου δύο και τριών όρων (συσκευή: Προσομοιωτής ελέγχου PCS327: Σχ.1) Απαραίτητες γνώσεις 1) Αυτόματος έλεγχος δύο και τριών όρων 2) Εμπειρικαί μέθοδοι εκλογής των
Άσκηση 3 Ποιοτική Μελέτη των νόμων ελέγχου δύο και τριών όρων (συσκευή: Προσομοιωτής ελέγχου PCS327: Σχ.1) Απαραίτητες γνώσεις 1) Αυτόματος έλεγχος δύο και τριών όρων 2) Εμπειρικαί μέθοδοι εκλογής των
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 1 η : Εισαγωγή
 Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 1 η : Εισαγωγή Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΒΙΟΜΗΧΑΝΙΚΟΥ ΣΧΕΔΙΑΣΜΟΥ ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 1 η : Εισαγωγή Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΒΙΟΜΗΧΑΝΙΚΟΥ ΣΧΕΔΙΑΣΜΟΥ ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
1)Σε ένα πυκνωτή, η σχέση μεταξύ φορτίου Q και τάσης V μεταξύ των οπλισμών του, απεικονίζεται στο διάγραμμα.
Σε ένα πυκνωτή, η σχέση μεταξύ φορτίου Q και τάσης V μεταξύ των οπλισμών του, απεικονίζεται στο διάγραμμα.") 1)Σε ένα πυκνωτή, η σχέση μεταξύ φορτίου Q και τάσης V μεταξύ των οπλισμών του, απεικονίζεται στο διάγραμμα. Να επιλέξετε τη σωστή απάντηση. Η χωρητικότητα του πυκνωτή είναι: α. 5 F, β. 1 / 5 μf, γ. 5
1)Σε ένα πυκνωτή, η σχέση μεταξύ φορτίου Q και τάσης V μεταξύ των οπλισμών του, απεικονίζεται στο διάγραμμα. Να επιλέξετε τη σωστή απάντηση. Η χωρητικότητα του πυκνωτή είναι: α. 5 F, β. 1 / 5 μf, γ. 5
Μελέτη προβλημάτων ΠΗΙ λόγω λειτουργίας βοηθητικών προωστήριων μηχανισμών
 «ΔιερΕΥνηση Και Aντιμετώπιση προβλημάτων ποιότητας ηλεκτρικής Ισχύος σε Συστήματα Ηλεκτρικής Ενέργειας (ΣΗΕ) πλοίων» (ΔΕΥ.Κ.Α.Λ.Ι.ΩΝ) πράξη ΘΑΛΗΣ-ΕΜΠ, πράξη ένταξης 11012/9.7.2012, MIS: 380164, Κωδ.ΕΔΕΙΛ/ΕΜΠ:
«ΔιερΕΥνηση Και Aντιμετώπιση προβλημάτων ποιότητας ηλεκτρικής Ισχύος σε Συστήματα Ηλεκτρικής Ενέργειας (ΣΗΕ) πλοίων» (ΔΕΥ.Κ.Α.Λ.Ι.ΩΝ) πράξη ΘΑΛΗΣ-ΕΜΠ, πράξη ένταξης 11012/9.7.2012, MIS: 380164, Κωδ.ΕΔΕΙΛ/ΕΜΠ:
Διαδικασίες παραγωγής λογισμικού. Βασικές αρχές Τεχνολογίας Λογισμικού, 8η αγγ. έκδοση
 Διαδικασίες παραγωγής λογισμικού Περιεχόμενα Παρουσίαση μοντέλων διεργασίας ανάπτυξης λογισμικού Περιγραφή τριών γενικών μοντέλων διεργασίας ανάπτυξης λογισμικού Γενική περιγραφή των διαδικασιών που περιλαμβάνονται
Διαδικασίες παραγωγής λογισμικού Περιεχόμενα Παρουσίαση μοντέλων διεργασίας ανάπτυξης λογισμικού Περιγραφή τριών γενικών μοντέλων διεργασίας ανάπτυξης λογισμικού Γενική περιγραφή των διαδικασιών που περιλαμβάνονται
ΕΕΟ 11. Η χρήση στατιστικών εργαλείων στην εκτιμητική
 ΕΕΟ 11 Η χρήση στατιστικών εργαλείων στην εκτιμητική 1. Εισαγωγή 2. Προϋποθέσεις χρήσης των Αυτοματοποιημένων Εκτιμητικών Μοντέλων (ΑΕΜ) 3. Περιορισμοί στη χρήση των ΑΕΜ εφόσον έχουν πληρωθεί οι προϋποθέσεις
ΕΕΟ 11 Η χρήση στατιστικών εργαλείων στην εκτιμητική 1. Εισαγωγή 2. Προϋποθέσεις χρήσης των Αυτοματοποιημένων Εκτιμητικών Μοντέλων (ΑΕΜ) 3. Περιορισμοί στη χρήση των ΑΕΜ εφόσον έχουν πληρωθεί οι προϋποθέσεις
Προηγμένος έλεγχος ηλεκτρικών μηχανών
 Προηγμένος έλεγχος ηλεκτρικών μηχανών Ενότητα 3: Βαθμωτός Έλεγχος Ασύχρονων Μηχανών Επαμεινώνδας Μητρονίκας - Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών & Τεχνολογίας Υπολογιστών
Προηγμένος έλεγχος ηλεκτρικών μηχανών Ενότητα 3: Βαθμωτός Έλεγχος Ασύχρονων Μηχανών Επαμεινώνδας Μητρονίκας - Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών & Τεχνολογίας Υπολογιστών
219 Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Θεσσαλονίκης
 219 Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Θεσσαλονίκης Το Τμήμα Ηλεκτρολόγων Μηχανικών ιδρύθηκε με το ΒΔ.400/72 και άρχισε να λειτουργεί το 1972-73. Το ΑΠΘ είχε τότε ήδη 28.000 φοιτητές. Η ακριβής
219 Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Θεσσαλονίκης Το Τμήμα Ηλεκτρολόγων Μηχανικών ιδρύθηκε με το ΒΔ.400/72 και άρχισε να λειτουργεί το 1972-73. Το ΑΠΘ είχε τότε ήδη 28.000 φοιτητές. Η ακριβής
Εργαστήρι για «Ευφυή συστήματα συμψηφισμού» Πιλοτικό πρόγραμμα εγκατάστασης έξυπνων μετρητών Από τους στόχους στην υλοποίηση
 Εργαστήρι για «Ευφυή συστήματα συμψηφισμού» Πιλοτικό πρόγραμμα εγκατάστασης έξυπνων μετρητών Από τους στόχους στην υλοποίηση Ιωάννης Παπαγεωργίου Αρχή Ηλεκτρισμού Κύπρου 26 Οκτωβρίου 2016 Λευκωσία Περιεχόμενα
Εργαστήρι για «Ευφυή συστήματα συμψηφισμού» Πιλοτικό πρόγραμμα εγκατάστασης έξυπνων μετρητών Από τους στόχους στην υλοποίηση Ιωάννης Παπαγεωργίου Αρχή Ηλεκτρισμού Κύπρου 26 Οκτωβρίου 2016 Λευκωσία Περιεχόμενα
Είδη Διορθωτών: Υπάρχουν πολλών ειδών διορθωτές. Μία βασική ταξινόμησή τους είναι οι «Ειδικοί Διορθωτές» και οι «Κλασσικοί Διορθωτές».
 ΔΙΟΡΘΩΣΗ ΣΑΕ Είδη Διορθωτών: Οι Διορθωτές έχουν την δική τους (Σ.Μ). Ενσωματώνονται στον βρόχο του ΣΑΕ και δρουν πάνω στην αρχική Σ.Μ κατά τρόπο ώστε να της προσδώσουν την επιθυμητή συμπεριφορά, την οποία
ΔΙΟΡΘΩΣΗ ΣΑΕ Είδη Διορθωτών: Οι Διορθωτές έχουν την δική τους (Σ.Μ). Ενσωματώνονται στον βρόχο του ΣΑΕ και δρουν πάνω στην αρχική Σ.Μ κατά τρόπο ώστε να της προσδώσουν την επιθυμητή συμπεριφορά, την οποία
Ν. Κυρτάτος, Καθηγητής ΕΜΠ, Δ/ντής ΕΝΜ, Γ. Παπαλάμπρου, Λέκτορας ΕΜΠ, Σ. Τοπάλογλου, ΥΔ ΣΝΜΜ/ΕΜΠ
 Η ΝΕΑ ΜΕΓΑΛΗ ΠΕΙΡΑΜΑΤΙΚΗ ΚΛΙΝΗ ΔΟΚΙΜΩΝ ΥΒΡΙΔΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΠΡΟΩΣΗΣ ΠΛΟΙΩΝ ΜΕ ΘΕΡΜΙΚΟΥΣ ΚΑΙ ΗΛΕΚΤΡΙΚΟΥΣ ΚΙΝΗΤΗΡΕΣ ΚΑΙ ΣΥΣΤΗΜΑ ΑΠΟΡΡΥΠΑΝΣΗΣ ΚΑΥΣΑΕΡΙΩΝ, ΤΟΥ ΕΡΓΑΣΤΗΡΙΟΥ ΝΑΥΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ ΕΜΠ Ν. Κυρτάτος,
Η ΝΕΑ ΜΕΓΑΛΗ ΠΕΙΡΑΜΑΤΙΚΗ ΚΛΙΝΗ ΔΟΚΙΜΩΝ ΥΒΡΙΔΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΠΡΟΩΣΗΣ ΠΛΟΙΩΝ ΜΕ ΘΕΡΜΙΚΟΥΣ ΚΑΙ ΗΛΕΚΤΡΙΚΟΥΣ ΚΙΝΗΤΗΡΕΣ ΚΑΙ ΣΥΣΤΗΜΑ ΑΠΟΡΡΥΠΑΝΣΗΣ ΚΑΥΣΑΕΡΙΩΝ, ΤΟΥ ΕΡΓΑΣΤΗΡΙΟΥ ΝΑΥΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ ΕΜΠ Ν. Κυρτάτος,
Η Λύση για Πρατήρια Καυσίμων. Ολοκληρωμένες και απεριόριστες πληρωμές για πρατήρια καυσίμων
 Η Λύση για Πρατήρια Καυσίμων Ολοκληρωμένες και απεριόριστες πληρωμές για πρατήρια καυσίμων Εύκολες, γρήγορες και ασφαλείς πληρωμές - στις αντλίες καυσίμων και στα καταστήματα σας SIX Payment Services Η
Η Λύση για Πρατήρια Καυσίμων Ολοκληρωμένες και απεριόριστες πληρωμές για πρατήρια καυσίμων Εύκολες, γρήγορες και ασφαλείς πληρωμές - στις αντλίες καυσίμων και στα καταστήματα σας SIX Payment Services Η
ιδακτική μαθημάτων Ειδικότητας
 ιδακτική μαθημάτων Ειδικότητας Ασημίνα Κοντογεωργίου 2010-2011 2 Εκπαιδευτικές Τεχνικές 3 Εμπλουτισμένη Εισήγηση: Γιατί την επιλέγουμε; Ο εκπαιδευτής νιώθει την ανάγκη να παρουσιάσει τις προσωπικές του
ιδακτική μαθημάτων Ειδικότητας Ασημίνα Κοντογεωργίου 2010-2011 2 Εκπαιδευτικές Τεχνικές 3 Εμπλουτισμένη Εισήγηση: Γιατί την επιλέγουμε; Ο εκπαιδευτής νιώθει την ανάγκη να παρουσιάσει τις προσωπικές του
Κωνσταντίνος Π. Χρήστου
 1 Κριτήρια: Διδακτική διαδικασία Μαθητοκεντρικά Δασκαλοκεντρικά Αλληλεπίδρασης διδάσκοντα διδασκόµενου Είδος δεξιοτήτων που θέλουν να αναπτύξουν Επεξεργασίας Πληροφοριών Οργάνωση-ανάλυση πληροφοριών, λύση
1 Κριτήρια: Διδακτική διαδικασία Μαθητοκεντρικά Δασκαλοκεντρικά Αλληλεπίδρασης διδάσκοντα διδασκόµενου Είδος δεξιοτήτων που θέλουν να αναπτύξουν Επεξεργασίας Πληροφοριών Οργάνωση-ανάλυση πληροφοριών, λύση
Γεωµετρία Β' Λυκείου. Συµµεταβολή µεγεθών. Εµβαδόν ισοσκελούς τριγώνου. Σύστηµα. συντεταγµένων. Γραφική παράσταση συνάρτησης. Μέγιστη - ελάχιστη τιµή.
 Σενάριο 6. Συµµεταβολές στο ισοσκελές τρίγωνο Γνωστική περιοχή: Γεωµετρία Β' Λυκείου. Συµµεταβολή µεγεθών. Εµβαδόν ισοσκελούς τριγώνου. Σύστηµα συντεταγµένων. Γραφική παράσταση συνάρτησης. Μέγιστη - ελάχιστη
Σενάριο 6. Συµµεταβολές στο ισοσκελές τρίγωνο Γνωστική περιοχή: Γεωµετρία Β' Λυκείου. Συµµεταβολή µεγεθών. Εµβαδόν ισοσκελούς τριγώνου. Σύστηµα συντεταγµένων. Γραφική παράσταση συνάρτησης. Μέγιστη - ελάχιστη
Οργάνωση και Διοίκηση Πωλήσεων
 Οργάνωση και Διοίκηση Πωλήσεων Ενότητα 4: Η ΠΡΟΒΛΕΨΗ ΠΩΛΗΣΕΩΝ Αθανασιάδης Αναστάσιος Τμήμα Εφαρμογών Πληροφορικής στη Διοίκηση και Οικονομία Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες
Οργάνωση και Διοίκηση Πωλήσεων Ενότητα 4: Η ΠΡΟΒΛΕΨΗ ΠΩΛΗΣΕΩΝ Αθανασιάδης Αναστάσιος Τμήμα Εφαρμογών Πληροφορικής στη Διοίκηση και Οικονομία Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες
ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
Μεταπτυχιακή διατριβή
 ΤΕΧΝΟΛΟΓΙΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΣΧΟΛΗ ΓΕΩΤΕΧΝΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΚΑΙ ΔΙΑΧΕΙΡΙΣΗΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ Μεταπτυχιακή διατριβή ΜΕΛΕΤΗ ΤΗΣ ΕΚΛΕΚΤΙΚΗΣ ΚΑΤΑΛΥΤΙΚΗΣ ΟΞΕΙΔΩΣΗΣ ΤΟΥ ΜΕΘΑΝΙΟΥ ΠΡΟΣ ΔΙΟΞΕΙΔΙΟ ΤΟΥ ΑΝΘΡΑΚΑ Βασιλική
ΤΕΧΝΟΛΟΓΙΚΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΥΠΡΟΥ ΣΧΟΛΗ ΓΕΩΤΕΧΝΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΚΑΙ ΔΙΑΧΕΙΡΙΣΗΣ ΠΕΡΙΒΑΛΛΟΝΤΟΣ Μεταπτυχιακή διατριβή ΜΕΛΕΤΗ ΤΗΣ ΕΚΛΕΚΤΙΚΗΣ ΚΑΤΑΛΥΤΙΚΗΣ ΟΞΕΙΔΩΣΗΣ ΤΟΥ ΜΕΘΑΝΙΟΥ ΠΡΟΣ ΔΙΟΞΕΙΔΙΟ ΤΟΥ ΑΝΘΡΑΚΑ Βασιλική
Επιστήμη της Πληροφορικής. Εργασία του μαθητή Δημήτρη Τσιαμπά του τμήματος Α4
 Επιστήμη της Πληροφορικής Εργασία του μαθητή Δημήτρη Τσιαμπά του τμήματος Α4 Η πληροφορική είναι η επιστήμη που ερευνά την κωδικοποίηση, διαχείριση και μετάδοση συμβολικών αναπαραστάσεων πληροφοριών. Επίσης
Επιστήμη της Πληροφορικής Εργασία του μαθητή Δημήτρη Τσιαμπά του τμήματος Α4 Η πληροφορική είναι η επιστήμη που ερευνά την κωδικοποίηση, διαχείριση και μετάδοση συμβολικών αναπαραστάσεων πληροφοριών. Επίσης
Εκπαιδευτική Μονάδα 10.2: Εργαλεία χρονοπρογραμματισμού των δραστηριοτήτων.
 Εκπαιδευτική Μονάδα 10.2: Εργαλεία χρονοπρογραμματισμού των δραστηριοτήτων. Στην προηγούμενη Εκπαιδευτική Μονάδα παρουσιάστηκαν ορισμένα χρήσιμα παραδείγματα διαδεδομένων εργαλείων για τον χρονοπρογραμματισμό
Εκπαιδευτική Μονάδα 10.2: Εργαλεία χρονοπρογραμματισμού των δραστηριοτήτων. Στην προηγούμενη Εκπαιδευτική Μονάδα παρουσιάστηκαν ορισμένα χρήσιμα παραδείγματα διαδεδομένων εργαλείων για τον χρονοπρογραμματισμό