ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ
|
|
|
- Ἀρφαξάδ Παυλόπουλος
- 9 χρόνια πριν
- Προβολές:
Transcript
1 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ Πτυχιακή εργασία Κατασκευή πακέτου προσομοίωσης σε Matlab της κυκλικής κίνησης στην Φυσική Επιβλέπων Καθηγητής: Δρ. Απόστολος Κουιρουκίδης Όνομα Σπουδαστή: Ιωάννης Χάγιαννης Σέρρες 2015

2 ΠΕΡΙΕΧΟΜΕΝΑ ΕΙΣΑΓΩΓΗ ΠΡΟΣΟΜΟΙΩΣΗ ΚΑΙ ΟΠΤΙΚΟΠΟΙΗΣΗ Η σημασία της προσομοίωσης Η σημασία της οπτικοποίησης ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ Νόμοι του Νεύτωνα Ομαλή Κυκλική κίνηση Κεντρομόλος δύναμη ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB Βασικές Πράξεις και Ορισμός Μεταβλητών M-Files Προγραμματισμός στο Matlab Δημιουργία GUI στο Matlab ΕΚΤΕΛΕΣΗ ΠΡΟΣΟΜΟΙΩΣΗ ΚΥΚΛΙΚΗΣ ΚΙΝΗΣΗΣ Θεωρητικός σχεδιασμός εφαρμογής Σχεδιασμός εφαρμογής Προγραμματισμός εφαρμογής Εκτέλεση εφαρμογής ΠΑΡΑΡΤΗΜΑ Α. Κώδικας MATLAB ΒΙΒΛΙΟΓΡΑΦΙΑ

3 ΕΙΣΑΓΩΓΗ Η κυκλική κίνηση είναι μια κίνηση που παρατηρείται πολύ συχνά, όπως στην κίνηση των τροχών των ποδηλάτων και των αυτοκινήτων, στην περιστροφή ενός ανεμιστήρα, στις κινήσεις πλανητών και δορυφόρων. Είναι γενικά εύκολο να περιγράψουμε και να μελετήσουμε τα καθαρά κινητικά χαρακτηριστικά της, όπως ακτίνα, περίοδο, συχνότητα, γωνιακή και γραμμική ταχύτητα και τις σχέσεις τους, αλλά μάλλον αδύνατο να παρατηρήσουμε την αιτία της, δηλαδή τα δυναμικά της χαρακτηριστικά, όπως την κεντρομόλο δύναμη και τις σχέσεις της με όλα τα προηγούμενα. Η μόνη εναλλακτική δυνατότητα που έχουμε, αν θέλουμε να κάνουμε την πειραματική μελέτη της δυναμικής της, είναι να καταφύγουμε σε προσομοιώσεις. Στην εργασία αυτή θα μελετήσουμε την κυκλική κίνηση μίας σημειακής μάζας και ιδιαίτερα την εξάρτηση της κεντρομόλου δύναμης από τη μάζα, την ακτίνα της τροχιάς και τη γωνιακή ταχύτητα, δημιουργώντας ένα εικονικό εργαστήριο φυσικής μέσο του λογισμικού πακέτου Μatlab. 2

4 1. ΠΡΟΣΟΜΟΙΩΣΗ ΚΑΙ ΟΠΤΙΚΟΠΟΙΗΣΗ 1.1. Η σημασία της προσομοίωσης Η προσομοίωση (simulation) είναι η τεχνητή μίμηση πραγματικών καταστάσεων, διαδικασιών ή πραγμάτων. Στις Φυσικές Επιστήμες, συνήθως αναπαριστούμε με την προσομοίωση κάποια ουσιώδη χαρακτηριστικά ή συμπεριφορές ενός φυσικού συστήματος. Η προσομοίωση την υλοποίηση μιας πειραματικής διαδικασίας, όχι όμως σε πραγματικό εργαστήριο, αλλά σε εικονικό. Σε ένα τέτοιο εικονικό εργαστήριο η λειτουργία της φύσης γίνεται από έναν ηλεκτρονικό υπολογιστή. Μερικά πλεονεκτήματα της προσομοίωσης είναι η επαναληψιμότητα όσον αφορά στα αποτελέσματα, η δυνατότητα εκτέλεσης του εικονικού πειράματος σε οποιοδήποτε περιβάλλον, η ευκολία χειρισμού μεταβλητών του περιβάλλοντος ή των αλληλεπιδράσεων, η ασφάλεια. Τελευταίο στάδιο της προσομοίωσης, είναι η ανάλυση των αποτελεσμάτων, που συχνά γίνεται με την οπτικοποίησή τους Η σημασία της οπτικοποίησης Δεν υπάρχει αμφιβολία ότι ο ανθρώπινος νους αντιλαμβάνεται πιο εύκολα και πιο γρήγορα το περιβάλλον του όταν το παρατηρεί σαν εικόνα, παρά όταν προσπαθεί να μεταφράσει τα αποτελέσματα της προσομοίωσης. Γίνεται έτσι απαραίτητο τα αποτελέσματα κάθε προσομοίωσης, που είναι αρχικά αριθμοί και που αντιστοιχούν σε συμβάντα, αντικείμενα και κατανομές στο χώρο, να «μεταφράζονται» σε εικόνες του συστήματος που μελετάμε και των παραμέτρων του. Με αυτές τις εικόνες οδηγούμαστε στην ταχύτερη και καλύτερη κατανόηση των φαινομένων. Στην επιστήμη, γενικότερα, χρησιμοποιούμε ένα πολύ μεγάλο πλήθος εικόνων και αναπαραστάσεων για την οπτικοποίηση. 3

5 2. ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ 2.1. Νόμοι του Νεύτωνα Οι δύο πρώτοι νόμοι του Νεύτωνα μας επιτρέπουν να περιγράφουμε την κίνηση που κάνει ένα σώμα όταν γνωρίζουμε τη συνισταμένη των δυνάμεων που ενεργούν σ' αυτό, την αρχική θέση του καθώς και την αρχική του ταχύτητα. Έτσι αν σε ένα σώμα δεν ασκούνται δυνάμεις, ή αν ασκούνται και έχουν συνισταμένη μηδέν, τότε σύμφωνα με τον πρώτο νόμο του Νεύτωνα αυτό θα ηρεμεί ή θα κινείται με ομαλή ευθύγραμμη κίνηση. Αν η συνισταμένη των δυνάμεων που ασκούνται σε ένα σώμα δεν είναι μηδέν, τότε σύμφωνα με το δεύτερο νόμο του Νεύτωνα αυτό έχει επιτάχυνση α, ομόρροπη της δύναμης, που προσδιορίζεται από τη σχέση F = m α, όπου m είναι η μάζα του σώματος Ομαλή Κυκλική κίνηση Ένα κινητό κάνει κυκλική κίνηση όταν η τροχιά που διαγράφει είναι περιφέρεια κύκλου. Ομαλή χαρακτηρίζεται η κυκλική κίνηση ενός κινητού, όταν η τιμή της ταχύτητάς του παραμένει σταθερή. Ο χρόνος που χρειάζεται το κινητό για να κάνει μία περιφορά, λέγεται περίοδος (Τ) της κυκλικής κίνησης. Ο αριθμός των περιφορών που εκτελεί το κινητό στη μονάδα του χρόνου λέγεται συχνότητα (f )της κυκλικής κίνησης. Γραμμική ταχύτητα (u) είναι ένα διάνυσμα που έχει μέτρο ίσο με το πηλίκο του τόξου Δs που διανύει το υλικό σημείο σε χρόνο Δt προς τον χρόνο αυτό. Γωνιακή ταχύτητα (ω) είναι ένα διάνυσμα που έχει διεύθυνση κάθετη στο επίπεδο της τροχιάς του και μέτρο ίσο με το πηλίκο της γωνίας Δθ που διαγράφει το υλικό σημείο σε χρόνο Δt προς τον χρόνο αυτό. Η κεντρομόλος επιτάχυνση(α) είναι υπεύθυνη για τη μεταβολή της διεύθυνσης της γραμμικής ταχύτητας. 4

 και σύμφωνα με το δεύτερο νόμο του Νεύτωνα στο σώμα ασκείται δύναμη.")
6 5 R R a f t t Rf T R t s t s 2 2 κ υ Κεντρομόλος δύναμη Ας θεωρήσουμε την περίπτωση που ένα σώμα εκτελεί κυκλική κίνηση με ταχύτητα σταθερής τιμής. Επειδή η κατεύθυνση της ταχύτητας συνεχώς μεταβάλλεται, συνεπώς υπάρχει επιτάχυνση (κεντρομόλος) και σύμφωνα με το δεύτερο νόμο του Νεύτωνα στο σώμα ασκείται δύναμη. Η δύναμη αυτή έχει κατεύθυνση προς το κέντρο της κυκλικής τροχιάς και γι' αυτό λέγεται κεντρομόλος δύναμη Γενικά κάθε δύναμη που αναγκάζει ένα σώμα να εκτελεί ομαλή κυκλική κίνηση λέγεται κεντρομόλος δύναμη. Η κεντρομόλος επιτάχυνση έχει την ίδια κατεύθυνση με την κεντρομόλο δύναμη. R m m a F 2 κ κ υ..

7 3. ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB Το λογισμικό MATLAB, παίρνει το όνομά του από τις λέξεις MATrix LABoratory, είναι ένα σύγχρονο ολοκληρωμένο μαθηματικό πακέτο για υψηλής απόδοσης αριθμητικούς υπολογισμούς (numerical computations). Είναι ένα διαδραστικό (interactive) πρόγραμμα για αριθμητικούς υπολογισμούς και για κατασκευή γραφημάτων, αλλά παρέχει επίσης και τη δυνατότητα προγραμματισμού, κάτι που το καθιστά ένα χρήσιμο εργαλείο για όλους όσους ασχολούνται με τις θετικές επιστήμες. Αποτελεί ένα εξελιγμένο υπολογιστικό εργαλείο το οποίο μπορεί να βρει εφαρμογή σε διάφορους τομείς της επιστήμης αλλά βέβαια και της πράξης, όπως για παράδειγμα τη μηχανική, την ιατρική και τη βιομηχανική παραγωγή. Μάλιστα, το φάσμα των εφαρμογών του συγκεκριμένου πακέτου λογισμικού διευρύνεται συνεχώς και περισσότερο, αναδεικνύοντας με αυτό τον τρόπο τις πολλαπλές δυνατότητες του, όπως την υψηλή απόδοση και ταχύτητα υπολογιστικών αναλύσεων, την δυνατότητα προσομοίωσης φυσικών συστημάτων, την δυνατότητα υλοποίησης αλγορίθμων, την δυνατότητα αμφίδρομης επικοινωνίας με πληθώρα άλλων προγραμμάτων και εφαρμογών και την υψηλής ποιότητας γραφικές απεικονίσεις και animations Βασικές Πράξεις και Ορισμός Μεταβλητών Η πιο απλή λειτουργία του Matlab είναι η χρήση του ως μία κοινή αριθμομηχανή. Η σειρά εκτέλεσης των πράξεων, στο Matlab είναι η ακόλουθη: Στην περίπτωση που σε μια αριθμητική παράσταση υπάρχουν παρενθέσεις εκτελούνται πρώτα οι πράξεις μέσα στις παρενθέσεις από μέσα προς τα έξω. Η εκτέλεση των πράξεων γίνεται πάντοτε από τα αριστερά προς τα δεξιά. Μεταξύ των βασικών αριθμητικών πράξεων πρώτα εκτελείται η ύψωση σε δύναμη. Στη συνέχεια εκτελούνται οι πολλαπλασιασμοί και οι διαιρέσεις με ίδια προτεραιότητα. Τελευταίες εκτελούνται οι προσθέσεις και οι αφαιρέσεις με την ίδια προτεραιότητα. 6

8 Μία εντολή εισάγεται πληκτρολογώντας στο παράθυρο εντολών δεξιά από το σύμβολο προτροπής». Η εισαγωγή της εντολής ολοκληρώνεται με το πάτημα του πλήκτρου Enter. Στην περίπτωση που δεν ορίζεται κάποια μεταβλητή, η εντολή εκτελείται και το αποτέλεσμα εμφανίζεται στην οθόνη μετά την έκφραση ans= (συντομογραφία της αγγλικής λέξης answer). Η έκφραση ans αποτελεί μια προεπιλεγμένη μεταβλητή η οποία χρησιμοποιείται για να αποθηκευτεί το αποτέλεσμα της εντολής. Στον ορισμό των μεταβλητών θα πρέπει να αναφέρουμε ότι μία μεταβλητή μπορεί να οριστεί χρησιμοποιώντας αλφαριθμητικούς χαρακτήρες και χαρακτήρες υπογράμμισης (_). To Matlab δεν δέχεται ελληνικούς χαρακτήρες για τον ορισμό τον μεταβλητών. Ο πρώτος χαρακτήρας μιας μεταβλητής θα πρέπει να είναι γράμμα του λατινικού αλφαβήτου. Ο μέγιστος αριθμός χαρακτήρων που μπορεί να έχει μία μεταβλητή είναι 63 χαρακτήρες. Μία εντολή στο Matlab εκτός από αριθμούς, μεταβλητές και αριθμητικές παραστάσεις, μπορεί να περιλαμβάνει και συναρτήσεις. To Matlab διαθέτει μία πληθώρα έτοιμων συναρτήσεων για την υλοποίηση ενός μεγάλου αριθμού μαθηματικών υπολογισμών. Κάθε συνάρτηση έχει ένα όνομα και μία παράμετρο (αριθμό, μεταβλητή, αριθμητική παράσταση) μέσα σε παρενθέσεις. To Matlab δίνει τη δυνατότητα στο χρήστη να εισάγει σχόλια μαζί με τις εντολές. Αυτό επιτυγχάνεται πληκτρολογώντας το σύμβολο επί τοις εκατό (%) στην αρχή μιας γραμμής ή δίπλα από μια εντολή. Οτιδήποτε γράφεται μετά το σύμβολο % αναγνωρίζεται από το Matlab ως σχόλιο M-Files To Matlab παρέχει τη δυνατότητα αποθήκευσης μιας ακολουθίας εντολών σε ένα αρχείο και στη συνέχεια την εκτέλεση αυτών με μία μόνο εντολή. Η ακολουθία αυτή των εντολών μπορεί να γραφεί σε ένα αρχείο κειμένου με την επέκταση (m), δηλαδή όνομααρχειου.m. Στο Matlab υπάρχουν δύο διαφορετικοί τύποι M-Files. τα αρχεία script και τα αρχεία συναρτήσεως. Τα αρχεία script : είναι ιδιαίτερα χρήσιμα σε περιπτώσεις που απαιτείται η επανάληψη μιας 7
.")
9 μεγάλης ακολουθίας εντολών, δεν έχουν μεταβλητές εισόδου και εξόδου, οι μεταβλητές που υπολογίζονται προστίθενται στο χώρο εργασίας με αποτέλεσμα να μπορούν να χρησιμοποιηθούν και από άλλα αρχεία script ή από το παράθυρο εντολών. Πρόκειται δηλαδή για καθολικές μεταβλητές (global variables). Τα αρχεία συναρτήσεων : επιτρέπουν τον εμπλουτισμό της γλώσσας προγραμματισμού Matlab στα πλαίσια των εφαρμογών του χρήστη, δέχονται μεταβλητές εισόδου και επιστρέφουν μεταβλητές εξόδου, οι μεταβλητές που ορίζονται μέσα στη συνάρτηση ισχύουν μόνο για τη συνάρτηση, είναι δηλαδή τοπικές μεταβλητές (local variables) Προγραμματισμός στο Matlab To Matlab ως γλώσσα προγραμματισμού διαθέτει ένα πλούσιο σύνολο εργαλείων που μπορούν να χρησιμοποιηθούν για τον έλεγχο της ροής ενός προγράμματος. Ένα πρόγραμμα είναι μια ακολουθία εντολών που στην απλούστερη του μορφή οι εντολές εκτελούνται η μία μετά την άλλη, με τη σειρά που έχουν πληκτρολογηθεί. Τις περισσότερες φορές σε πιο σύνθετα προγράμματα, διαφορετικές μεταβλητές εισόδου απαιτούν την υπό συνθήκη εκτέλεση κάποιων τμημάτων εντολών του προγράμματος ή μπορεί να απαιτείται η επανάληψη μιας ακολουθίας εντολών. Συνεπώς θα πρέπει να δηλώνεται κατά την πληκτρολόγηση του κώδικα ενός προγράμματος η πιθανή μεταβολή της ροής του προγράμματος. Αυτό πραγματοποιείται με τη χρήση των σχεσιακών και λογικών τελεστών καθώς και με τις δομές ελέγχου. Η δομή if χρησιμοποιείτε στην περίπτωση που υπάρχει μια αμοιβαία αποκλειόμενη περίπτωση που καθορίζετε από την ισχύ μιας συνθήκης. Η δομή if else χρησιμοποιείτε στην περίπτωση που υπάρχουν δύο αμοιβαία αποκλειόμενες περιπτώσεις που καθορίζονται από την ισχύ μιας συνθήκης. Η δομή if else if else χρησιμοποιείτε στην περίπτωση που υπάρχουν περισσότερες από δύο αμοιβαία αποκλειόμενες περιπτώσεις 8
. 3.")
10 Οι πιο συχνά χρησιμοποιούμενες δομές επανάληψης είναι ο βρόχος (loop) του for και ο βρόχος του while. Σε ένα βρόχο μία εντολή ή μια ομάδα εντολών επαναλαμβάνεται συνεχώς για έναν προκαθορισμένο αριθμό επαναλήψεων ή έως ότου ισχύσει μια συνθήκη. Σε κάθε επανάληψη, η οποία ονομάζεται βήμα, τουλάχιστον μία μεταβλητή η οποία ορίζεται μέσα στον βρόχο λαμβάνει νέα τιμή. Ειδικότερα, ο βρόχος for χρησιμοποιείται για την εκτέλεση μιας εντολής ή μιας ομάδας εντολών για συγκεκριμένο αριθμό επαναλήψεων. Από την άλλη, ο βρόχος while χρησιμοποιείται για την εκτέλεση μιας εντολής ή μιας ομάδας εντολών όταν δεν είναι προκαθορισμένο το πλήθος των επαναλήψεων αλλά εξαρτάται από την ισχύ μιας συγκεκριμένης συνθήκης Η δομή switch επιτρέπει την επιλογή εκτέλεσης διαφορετικών συνόλων εντολών ανάλογα με την τιμή μιας έκφρασης. Ουσιαστικά είναι εναλλακτική της δομής if else if - else - για την περίπτωση όπου οι διάφορες ελεγχόμενες συνθήκες είναι συνθήκες ισότητας. Η δομή switch χρησιμοποιείται συνήθως για τη δημιουργία ενός μενού επιλογών. Μερικές έτοιμες συναρτήσεις που είναι υλοποιημένες στη Matlab, τις οποίες χρησιμοποίησα για την υλοποίηση του προγράμματος είναι: Hold on Διατηρεί το τρέχον γράφημα και προσθέτει άλλο ένα γράφημα σε αυτό. Η MATLAB προσαρμόζει τα όρια στους άξονες και σημειώνει τις ετικέτες όπως είναι απαραίτητο για να εμφανιστεί το πλήρες φάσμα του γραφήματος που προστίθεται. Hold off Επαναφέρει την κατάσταση «hold» στην προεπιλεγμένη συμπεριφορά, στην οποία η MATLAB καθαρίζει το υπάρχον γράφημα και επαναφέρει τις ιδιότητες των αξόνων στις προεπιλογές τους πριν την σχεδίαση νέων γραφημάτων. Str2double Μετατρέπει τη συμβολοσειρά που δέχεται ως είσοδο σε μια αναπαράσταση πραγματικού αριθμού. Η συμβολοσειρά θα πρέπει να είναι σε μια αναπαράσταση χαρακτήρα τύπου ASCII που αντιστοιχεί σε ένα πραγματικό αριθμό. 9

11 3.4. Δημιουργία GUI στο Matlab Το ΜΑΤLΑΒ προσφέρει στο χρήστη τη δυνατότητα να κατασκευάσει δικές του γραφικές διεπιφάνειες, (GUI). Ένα GUI αποτελείται συνήθως από διάφορα παράθυρα, τα οποία περιέχουν ποικίλα στοιχεία ελέγχου όπως πεδία κειμένου, γραμμές κύλισης, λίστες, πεδία εισαγωγής κειμένου κ.α. Τα παράθυρα αυτά είναι δυνατόν να καλούν το ένα το άλλο, να δέχονται δεδομένα από το χρήστη, να μεταβιβάζουν πιθανώς τα δεδομένα από το ένα παράθυρο στο άλλο και γενικά να επιτελούν διάφορες λειτουργίες. Η ανάπτυξη μίας εφαρμογής σε GUI χωρίζεται σε τέσσερα στάδια: Θεωρητική σχεδίαση της εφαρμογής πριν την υλοποίησή της σε MATLAB. Σχεδίαση της εφαρμογής στο κατάλληλο περιβάλλον (GUIDE Layout Editor) και δημιουργία των απαιτούμενων αντικειμένων. Καθορισμός των ιδιοτήτων του GUI και του κάθε αντικειμένου. Προγραμματισμός του κάθε αντικειμένου, εάν χρειάζεται. To GUIDE είναι το πρόγραμμα σχεδιασμού GUI της Matlab. Εμφανίζεται με την εντολή GUIDE και μας δίνει τη δυνατότητα να σχεδιάσουμε το GUI και να προσθέσουμε τον κώδικα. Το GUIDE για να το πετύχει αυτό δημιουργεί για κάθε νέο παράθυρο δύο αρχεία. Τα αρχεία αυτά είναι το Fig-file και το M-file. Το Fig-file ουσιαστικά είναι το παράθυρο figure, όπου το ΜΑΤLΑΒ αποθηκεύει τα στοιχεία ελέγχου και την ακριβή θέση τους. Εδώ ο προγραμματιστής σχεδιάζει την εμφάνιση του παραθύρου. Στο M-file ο προγραμματιστής πρέπει να γράψει τον κώδικα που θα ενσωματωθεί στα στοιχεία ελέγχου (π.χ. κουμπιά ή φόρμες εισαγωγής δεδομένων), ώστε αυτά να επιτελέσουν τις επιθυμητές λειτουργίες. Πρέπει να σημειωθεί ότι κάθε αρχείο *.fig πρέπει να συνοδεύεται από το αντίστοιχο αρχείο *.m (με το ίδιο όνομα). Αν για κάποιο λόγο, χαθεί ή καταστραφεί το *.m αρχείο, τότε το παράθυρο *.fig δε θα είναι λειτουργικό. Κάθε φορά που κάποιος χρήστης δημιουργεί ένα νέο παράθυρο (figure), το 10

12 GUIDE δημιουργεί αυτομάτως και τους δυο προαναφερθέντες τύπους αρχείων. 11

13 4. ΕΚΤΕΛΕΣΗ ΠΡΟΣΟΜΟΙΩΣΗ ΚΥΚΛΙΚΗΣ ΚΙΝΗΣΗΣ 4.1. Θεωρητικός σχεδιασμός εφαρμογής Η εφαρμογή που θα δημιουργήσουμε αφορά την μελέτη της κυκλική κίνησης μίας σημειακής μάζας, οπτικοποιώντας την εκτέλεση της κίνησης σε ρυθμό προσομοίωσης που επιλέγει ο χρήστης. Οι πράξεις που θα υπολογίζει η εφαρμογή θα αφορούν την εξάρτηση της κεντρομόλου δύναμης από τη μάζα, την ακτίνα της τροχιάς και τη γωνιακή ταχύτητα. Για την καλύτερη λειτουργία του συγκεκριμένου προγράμματος, οι τιμές στις μεταβλητές είναι εντός καθορισμένων οριακών τιμών. Ο χρήστης θα χειρίζεται το πρόγραμμα μέσω μιας διεπιφάνειας, η οποία θα περιέχει τα απαραίτητα στοιχεία ελέγχου: 5 κουμπιά εκτέλεσης εντολών (push_button) για να εκτελούν τις λειτουργίες Εκτέλεση, Διακοπή, Ανανέωση, Έξοδος, Βοήθεια. 6 στοιχεία ελέγχου (edit_text). για πάρουμε την τιμή που θα εισάγει μέσα σε αυτό ο χρήστης. Δημιουργία γραφήματος (axes) σε πραγματικό χρόνο για οπτικοποίηση των αποτελεσμάτων Σχεδιασμός εφαρμογής Αρχικά εκκινούμε το GUIDE και δημιουργούμε ένα νέο παράθυρο-figure. Το αποθηκεύουμε δίνοντάς του ταυτόχρονα το όνομα gkentromolos. Σε αυτό το σημείο το ΜΑΤLΑΒ αυτομάτως εκκινεί τον Μ-file editor και δημιουργεί το αντίστοιχο Μ-file. Παρατηρούμε ότι στο Μ-file δημιουργούνται κάποιες ενσωματωμένες συναρτήσεις, όπως είναι οι ακόλουθες: function varargout = gkentromolos (varargin) function gkentromolos _OpeningFcn(hObject, eventdata, handles, varargin) function varargout = gkentromolos _OutputFcn(hObject, eventdata, handles) 12

.")
14 Οι παραπάνω συναρτήσεις που ενσωματώθηκαν στο Μ-file, είναι απαραίτητες για τη σωστή λειτουργία του παραθύρου. Το ΜΑΤLΑΒ για κάθε μία από αυτές συμπεριλαμβάνει κάποια επεξηγηματικά σχόλια. Συγκεκριμένα, η πρώτη συνάρτηση χρειάζεται ώστε να μπορεί ο χρήστης να καλεί το παράθυρο από τη γραμμή εντολών πληκτρολογώντας το όνομά του (» gkentromolos). Επιπλέον, ο κώδικας που περιλαμβάνεται στο σώμα εντολών της δεύτερης συνάρτησης εκτελείται ακριβώς πριν εκκινήσει το παράθυρο. Τέλος, οι εντολές που υπάρχουν στην τρίτη συνάρτηση, εξάγουν τα αποτελέσματά τους στη γραμμή εντολών του ΜΑΤLΑΒ. Έπειτα θα αρχίσουμε να εισάγουμε από την αριστερή κάθετη γραμμή εργαλείων τα διάφορα στοιχεία ελέγχου. Εισάγουμε πρώτα ένα πλαίσιο (frame), αλλάζοντας το μέγεθός του έτσι ώστε να καλύπτει τον χώρο στον οποίο θα βάλουμε τα στοιχειά έλεγχου της εφαρμογής μας, καθώς και την διαμόρφωση του. Στη συνέχεια εισάγουμε όλα στοιχεία ελέγχου που θα μας χρειαστούν. Αναλυτικά, πέντε push buttons, έξι edit text, έξι static text και axes. 13

15 Συνεχίζουμε αλλάζοντας, εάν θέλουμε, για όλα αυτά τα στοιχεία που έχουμε εισάγει το χρώμα τους κατά τη βούληση μας, καθώς επίσης και το κείμενο που θα φαίνεται επάνω τους αλλά και το μέγεθος των στοιχείων ελέγχου. Επιπλέον, όπως προαναφέραμε, μπορούμε να τα στοιχίσουμε για να πετύχουμε ομοιόμορφη εμφάνιση Προγραμματισμός εφαρμογής Σε αυτό το σημείο στο αντίστοιχο Μ file, παρατηρεί κανείς ότι έχουν ενσωματωθεί πολλές ακόμη συναρτήσεις. Στην συνεχεία θα αρχίσουμε τον προγραμματισμό των push buttons, τα οποία θα εκτελούν κάποιες λειτουργίες. Μέσα στο Μ-file υπάρχουν οι αντίστοιχες συναρτήσεις : function pushbutton1_callback(hobject, eventdata, handles) %Εκτέλεση function pushbutton2 _Callback(hObject, eventdata, handles) % Διακοπή function pushbutton3 _Callback(hObject, eventdata, handles) %Ανανέωση function pushbutton4 _Callback(hObject, eventdata, handles) %Έξοδος function pushbutton5 _Callback(hObject, eventdata, handles) % Βοήθεια Στην πρώτη θα δηλώσουμε τις εντολές που χρειάζονται για να εκτελεστεί η λειτουργία Εκτέλεση. Δηλαδή την εκτέλεση της εφαρμογής και την ενεργοποίηση των λειτουργιών Ανανέωση και Έξοδος. Στην δεύτερη θα δηλώσουμε τις εντολές που χρειάζονται για να εκτελεστεί η λειτουργία Διακοπή. Δηλαδή την παύση εκτέλεσης της εφαρμογής και την ενεργοποίηση των λειτουργιών Συνεχεία, Ανανέωση και Έξοδος. Στην τρίτη θα δηλώσουμε τις εντολές που χρειάζονται για να εκτελεστεί η λειτουργία Ανανέωση. Δηλαδή να διαγράφεται το όποιο αποτέλεσμα της εφαρμογής και να εμφανίζονται κενά (Nul) τα edit texts, για να εισάγει ξανά ο χρήστης τις τιμές και την ενεργοποίηση την λειτουργιάς Εκτέλεση. Στην τέταρτη θα δηλώσουμε τις εντολές που χρειάζονται για να εκτελεστεί η λειτουργία Έξοδος, όπου θα κλείνει η εφαρμογή. Στην πέμπτη θα δηλώσουμε τις εντολές που χρειάζονται για να εκτελεστεί η λειτουργία Βοήθεια, όπου θα παραπέμπει σε βοηθητικό αρχείο με επεξηγήσεις. 14

, Χρόνος Παρατήρησης (t) και Ρυθμός Προσομοίωσης. Στις τιμές αυτές υπάρχει η δυνατότητα αλλαγής τους.")
16 4.4. Εκτέλεση εφαρμογής Κατά την εκτέλεση του προγράμματος εμφανίζεται το figure της εικονικής απεικόνισης της Κυκλικής Κίνησης με προκαθορισμένες τιμές στις μεταβλητές / παραμέτρους Μάζα Κινητού (m), Χρόνος Παρατήρησης (t) και Ρυθμός Προσομοίωσης. Στις τιμές αυτές υπάρχει η δυνατότητα αλλαγής τους. Στις μεταβλητές Ακτίνα Τροχιάς (R), Γραμμική Ταχύτητα(u), Γωνιακή Ταχύτητα (ω), θα πρέπει να δώσουμε τιμές στις δύο από τις τρείς μεταβλητές στα όρια που έχουμε καθορίσει. 15
, Γραμμική Ταχύτητα(u), Γωνιακή Ταχύτητα (ω), θα πρέπει να δώσουμε τιμές στις δύο")
.")
17 Στην περίπτωση που ο χρήστης δεν δηλώσει τις δυο από τις τρεις μεταβλητές ή καταχωρήσει τιμές σε οπουδήποτε μεταβλητή εκτός των πιο πάνω ορίων, τότε εμφανίζετε μήνυμα λάθους, μέσο της εντολής : h=warndlg(warningstring). if (R>2) hfin=warndlg('βάλτε στην Ακτίνα Τροχιάς τιμή μικρότερη ή ίση του 2'); return Η εντολή εμφανίζει ένα παράθυρο διαλόγου (dialog box) με το μήνυμα προειδοποίησης που είναι δηλωμένο στο string. Η εντολή h=questdlg(warningstring) εμφανίζει παράθυρο διαλόγου (dialog box) με το μήνυμα προειδοποίησης. Το παράθυρο διαλόγου έχει τρία κουπιά, YES, NO, CANCEL και με την επιλογή τους δίνουν τον ανάλογο string στην h. Ο χρήσης δηλώνει τιμές στις μεταβλητές που επιθυμεί, μέσο των edit text, και πατώντας το push button Εκτέλεση, η εφαρμογή αρχίζει να εκτελείται. Η εφαρμογή εκτελείτε για χρόνο παρατήρησης (t) που έχει δηλώσει ο χρήστης. Κατά την διάρκεια της εκτέλεσης ο χρήστης έχει την δυνατότητα : 16
 εμφανίζει παράθυρο διαλόγου (dialog box) με το μήνυμα προειδοποίησης.")
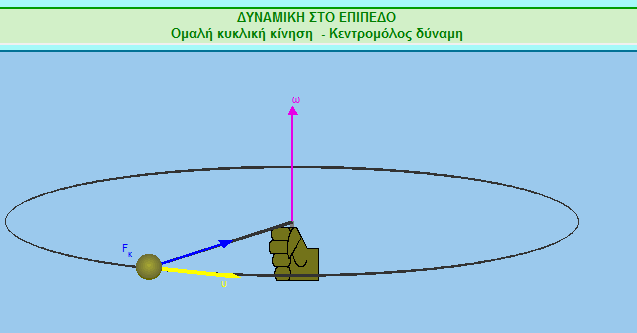
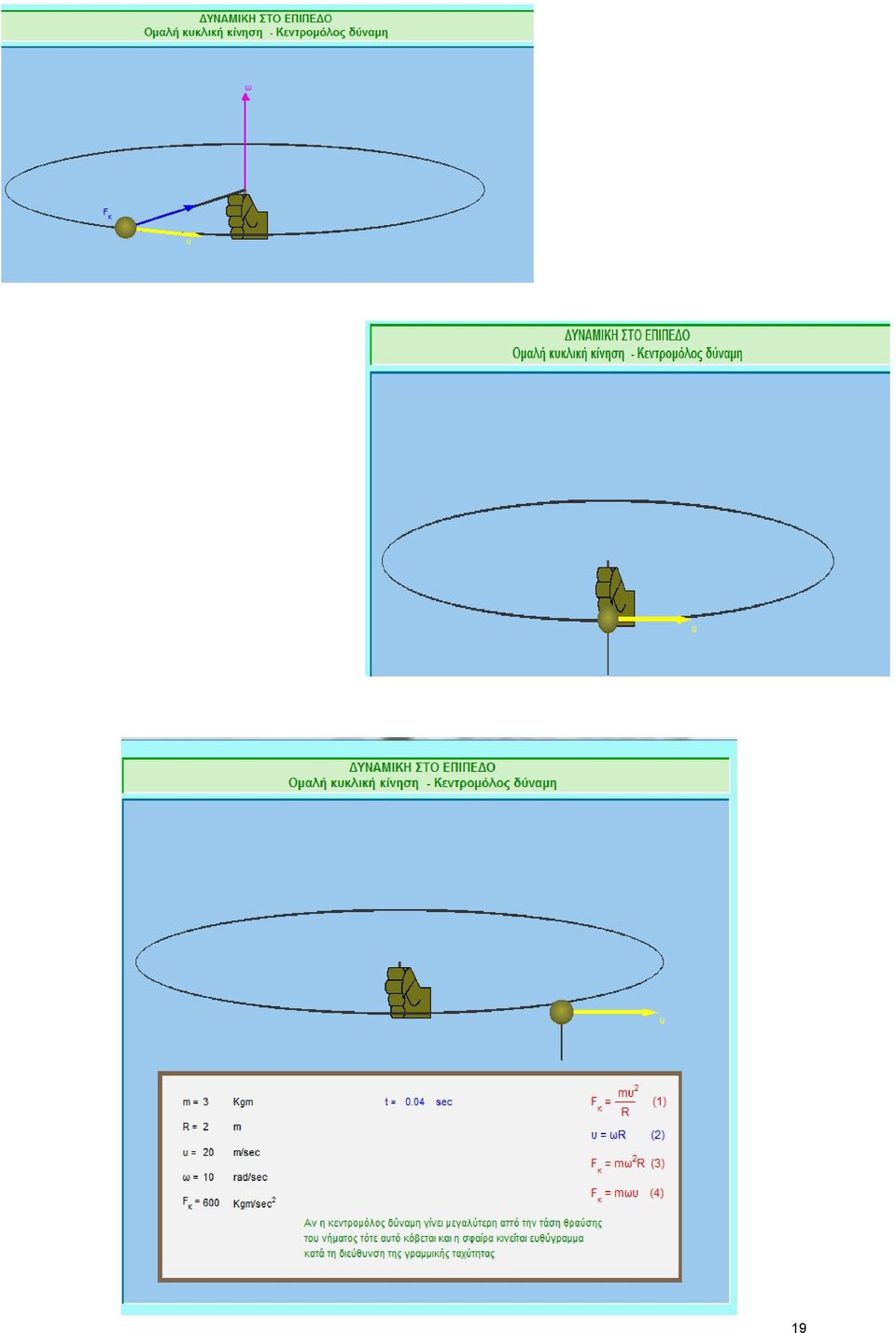
18 να λάβει τις τιμές των φυσικών παραμέτρων της κυκλικής κίνησης καθώς και την τιμή της κεντρομόλου δύναμης Οι τιμές των φυσικών παραμέτρων της κυκλικής κίνησης υπολογιστήκαν βάση τις τιμές των μεταβλητών που δήλωσε ο χρήστης και με βάση τις μαθηματικές σχέσεις που δηλώθηκαν στο πρόγραμμα : R ί ά R ή ύ ή ύ R 2 υ Fκ m. R ό ύ a1=isnan(r); %η εντολή isnan (is not a number) επιστρέφει true or false a2=isnan(omega); a3=isnan(v); if (a1==1) R=v/omega; if (a2==1) omega=v/r; if (a3==1) v=omega*r; Fk=m*v*v/R; Στην περίπτωση τις πιο πάνω εφαρμογής η κεντρομόλος δύναμη που αναγκάζει τη σφαίρα να κινηθεί σε κυκλική τροχιά είναι η τάση του νήματος. ή Fκ m. 2 υ R ό ύ 17


19 Αν η σφαίρα περιφέρεται με ολοένα αυξανόμενη ταχύτητα, τότε σύμφωνα με τη πιο πάνω σχέση απαιτείται μεγαλύτερη δύναμη για να τη συγκρατήσει σε κυκλική τροχιά. Αν η δύναμη αυτή υπερβεί την τάση θραύσης του νήματος, τότε αυτό κόβεται και η σφαίρα κινείται ευθύγραμμα κατά την εφαπτομένη της τροχιάς στη θέση που κόπηκε το νήμα. Στην περίπτωση τις εφαρμογής αυτής η τάση θραύσης του νήματος ορίστηκε 200 kgm/sec 2. F K >200 Όταν η τιμή της κεντρομόλου είναι μεγαλύτερη από 200 kgm/sec2 τότε επιτρέπουμε στο σώμα να εκτελέσει την κυκλική κίνηση για μια περίοδο και τότε δείχνουμε την πορεία που ακλουθεί το σώμα μετά το σπάσιμο του νήματος, το όποιο κινείται ευθύγραμμα κατά την εφαπτομένη του τροχιά στη θέση που κόπηκε το νήμα. Η πορεία εκτέλεσης του προγράμματος με βάση την τιμή της κεντρομόλου δύναμης, έγινε με την χρήση της δομής if else, oπου: if (Fk<=200) %εντολές else %εντολές 18

20 19
21 να παρακολουθεί τη πορεία του σώματος και των δυνάμεων που ασκούνται σε αυτό. Για να επιτύχουμε το πιο πάνω σχεδιάγραμμα που απεικονίζει την κίνηση του σώματος, το όποιο είναι στερεωμένο σε νήμα και εκτελεί κυκλική κίνηση με την βοήθεια ενός χεριού, χρησιμοποιήσαμε την εντολή fill όπου δέχεται συντεταμένες (Χ,Υ)και δημιουργεί κλειστά πολύγωνα με καθορισμένο χρώμα. 20
22 ΠΑΡΑΡΤΗΜΑ Α. Κώδικας MATLAB function varargout = kentromolos(varargin) % KENTROMOLOS M-file for kentromolos.fig % KENTROMOLOS, by itself, creates a new KENTROMOLOS or raises the existing % singleton*. % % H = KENTROMOLOS returns the handle to a new KENTROMOLOS or the handle to % the existing singleton*. % % KENTROMOLOS('CALLBACK',hObject,eventData,handles,...) calls the local % function named CALLBACK in KENTROMOLOS.M with the given input arguments. % % KENTROMOLOS('Property','Value',...) creates a new KENTROMOLOS or raises the % existing singleton*. Starting from the left, property value pairs are % applied to the GUI before kentromolos_openingfcn gets called. An % unrecognized property name or invalid value makes property application % stop. All inputs are passed to kentromolos_openingfcn via varargin. % % *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one % instance to run (singleton)". % % See also: GUIDE, GUIDATA, GUIHANDLES % Edit the above text to modify the response to help kentromolos % Begin initialization code - DO NOT EDIT gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_layoutfcn', [],... 'gui_callback', []); if nargin && ischar(varargin{1}) gui_state.gui_callback = str2func(varargin{1}); if nargout [varargout{1:nargout}] = gui_mainfcn(gui_state, varargin{:}); else gui_mainfcn(gui_state, varargin{:}); % End initialization code - DO NOT EDIT % --- Executes just before kentromolos is made visible. function kentromolos_openingfcn(hobject, eventdata, handles, varargin) % This function has no output args, see OutputFcn. % hobject handle to figure % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % varargin command line arguments to kentromolos (see VARARGIN) % Choose default command line output for kentromolos handles.output = hobject; % Update handles structure guidata(hobject, handles); % UIWAIT makes kentromolos wait for user response (see UIRESUME) % uiwait(handles.figure1); % --- Outputs from this function are returned to the command line. function varargout = kentromolos_outputfcn(hobject, eventdata, handles) % varargout cell array for returning output args (see VARARGOUT); % hobject handle to figure % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % Get default command line output from handles structure varargout{1} = handles.output; function edit1_callback(hobject, eventdata, handles) % hobject handle to edit1 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) 21
23 % Hints: get(hobject,'string') returns contents of edit1 as text % str2double(get(hobject,'string')) returns contents of edit1 as a double % --- Executes during object creation, after setting all properties. function edit1_createfcn(hobject, eventdata, handles) % hobject handle to edit1 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white'); function edit2_callback(hobject, eventdata, handles) % hobject handle to edit2 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % Hints: get(hobject,'string') returns contents of edit2 as text % str2double(get(hobject,'string')) returns contents of edit2 as a double % --- Executes during object creation, after setting all properties. function edit2_createfcn(hobject, eventdata, handles) % hobject handle to edit2 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white'); function edit3_callback(hobject, eventdata, handles) % hobject handle to edit3 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % Hints: get(hobject,'string') returns contents of edit3 as text % str2double(get(hobject,'string')) returns contents of edit3 as a double % --- Executes during object creation, after setting all properties. function edit3_createfcn(hobject, eventdata, handles) % hobject handle to edit3 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white'); function edit4_callback(hobject, eventdata, handles) % hobject handle to edit4 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % Hints: get(hobject,'string') returns contents of edit4 as text % str2double(get(hobject,'string')) returns contents of edit4 as a double % --- Executes during object creation, after setting all properties. function edit4_createfcn(hobject, eventdata, handles) % hobject handle to edit4 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white'); function edit5_callback(hobject, eventdata, handles) % hobject handle to edit5 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) 22
24 % Hints: get(hobject,'string') returns contents of edit5 as text % str2double(get(hobject,'string')) returns contents of edit5 as a double % --- Executes during object creation, after setting all properties. function edit5_createfcn(hobject, eventdata, handles) % hobject handle to edit5 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white'); function edit6_callback(hobject, eventdata, handles) % hobject handle to edit6 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % Hints: get(hobject,'string') returns contents of edit6 as text % str2double(get(hobject,'string')) returns contents of edit6 as a double % --- Executes during object creation, after setting all properties. function edit6_createfcn(hobject, eventdata, handles) % hobject handle to edit6 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white'); % --- Executes on button press in pushbutton1. function pushbutton1_callback(hobject, eventdata, handles) % hobject handle to pushbutton1 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) global m; global v; global omega; global RR; global t; global ryt; m=str2double(get(handles.edit1,'string')); %object mass RR=str2double(get(handles.edit2,'String')); %orbit radius omega=str2double(get(handles.edit3,'string')); %angular velocity v=str2double(get(handles.edit4,'string')); %linear velocity t=str2double(get(handles.edit5,'string')); %observation time ryt=str2double(get(handles.edit6,'string')); %simulation speed global stam; stam=0; set(handles.pushbutton2,'string','διακοπή'); global status; status=0; %check if RR, omega and v are specified a1=isnan(rr); a2=isnan(omega); a3=isnan(v); suma=a1+a2+a3; %check variable values and issue warnings if values are outside of %specified limits if (suma~=1) hfin=warndlg('επιλέξτε ακριβώς 2 από τις τρείς μεταβλητές'); return if (ryt>0.5 ryt<0.001) h=warndlg('βάλτε στο Ρυθμό Προσομοίωσης τιμή μεταξύ και 0.5'); return 23
25 if (t<10) hfin=warndlg('βάλτε στο Χρόνο Παρατήρησης τιμή μεγαλύτερη ή ίση του 10'); return if (t>400) hfin=warndlg('βάλτε στο Χρόνο Παρατήρησης τιμή μικρότερη ή ίση του 400'); return if (m<1) hfin=warndlg('βάλτε στη Μάζα τιμή μεγαλύτερη ή ίση του 1'); return if (m>3) hfin=warndlg('βάλτε στη Μάζα τιμή μικρότερη ή ίση του 3'); return if (a1==0) if (RR<0.5) hfin=warndlg('βάλτε στην Ακτίνα Τροχιάς τιμή μεγαλύτερη ή ίση του 0.5'); return if (RR>2) hfin=warndlg('βάλτε στην Ακτίνα Τροχιάς τιμή μικρότερη ή ίση του 2'); return if (a2==0) if (omega<5) hfin=warndlg('βάλτε στην Γωνιακή Ταχύτητα τιμή μεγαλύτερη ή ίση του 5'); return if (omega>10) hfin=warndlg('βάλτε στην Γωνιακή Ταχύτητα τιμή μικρότερη ή ίση του 10'); return if (a3==0) if (v<5) hfin=warndlg('βάλτε στη Γραμμική Ταχύτητα τιμή μεγαλύτερη ή ίση του 5'); return if (v>10) hfin=warndlg('βάλτε στη Γραμμική Ταχύτητα τιμή μικρότερη ή ίση του 10'); return ryte =-ryt ; set(handles.edit1,'enable','off'); set(handles.edit2,'enable','off'); set(handles.edit3,'enable','off'); set(handles.edit4,'enable','off'); set(handles.edit5,'enable','off'); set(handles.edit6,'enable','off'); set(handles.pushbutton1,'enable','off'); set(handles.pushbutton3,'enable','off') set(handles.pushbutton4,'enable','off') axes(handles.axes1) axis off; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 24
26 %set some variables L0=1; th=0:0.01:pi; th1=0:0.01:2*pi; Rmin=0.0125; Rmin1=0.04; L=0.5; Dx=0.325; Dy=-0.025; %set initial co-ordinates of objects on the diagram %wall co-ordinates xtoixos=[0,3,3,0]; ytoixos=[-0.5,-0.5,0.5,0.5]; %hand co-ordinates xxeri=[1.00, , , , , , , Rmin*cos(3*pi/2-th), Rmin*cos(3*pi/2-th), Rmin*cos(3*pi/2-th), Rmin*cos(3*pi/2-th)]; xxeri=xxeri+l-0.06*l ; yxeri=[0.40, , , , , , , Rmin+Rmin*sin(3*pi/2-th), Rmin+Rmin*sin(3*pi/2-th), Rmin+Rmin*sin(3*pi/2-th), Rmin+Rmin*sin(3*pi/2-th)]; yxeri=yxeri ; xxeri1=[1.015+rmin*cos(3*pi/2-th), ,1.060, Rmin*cos(pi/2-th),1.015]; xxeri1=xxeri1+l-0.06*l ; yxeri1=[0.30+rmin+rmin*sin(3*pi/2-th), ,0.325, Rmin+Rmin*sin(pi/2-th),0.30]; yxeri1=yxeri ; xxeri2=[1.005+rmin*cos(3*pi/2-th), ,1.060, Rmin*cos(pi/2-th),1.005]; xxeri2=xxeri2+l-0.06*l ; yxeri2=[0.325+rmin+rmin*sin(3*pi/2-th), ,0.350, Rmin+Rmin*sin(pi/2-th),0.325]; yxeri2=yxeri ; xxeri3=[0.99+rmin*cos(3*pi/2-th), ,1.060, Rmin*cos(pi/2-th),0.99]; xxeri3=xxeri3+l-0.06*l ; yxeri3=[0.350+rmin+rmin*sin(3*pi/2-th), ,0.375, Rmin+Rmin*sin(pi/2-th),0.350]; yxeri3=yxeri ; xxeri4=[1.00+rmin*cos(3*pi/2-th), ,1.060, Rmin*cos(pi/2-th),1.00]; xxeri4=xxeri4+l-0.06*l ; 25
27 yxeri4=[0.375+rmin+rmin*sin(3*pi/2-th), ,0.40, Rmin+Rmin*sin(pi/2-th),0.375]; yxeri4=yxeri ; xxeri5=[1.10+rmin1*cos(pi/2+2*th/3), Rmin1*cos(pi/2+2*pi/3)+3*Rmin*sin(th/2),1.125]; xxeri5=xxeri5+l-0.06*l ; yxeri5=[0.40-rmin1+rmin1*sin(pi/2+2*th/3), Rmin1+Rmin1*sin(pi/2+2*pi/3)-2*Rmin*cos(pi/2+th/2),0.38]; yxeri5=yxeri ; xxeri6=[0.1,0.15+rmin1*cos(5*pi/4+th/2),0.15+rmin1*cos(5*pi/4+pi/2-th/2)]; xxeri6=xxeri6+l-0.06*l+0.50; yxeri6=[0.0,rmin1*sin(5*pi/4+th/2),rmin1*sin(5*pi/4+pi/2-th/2)]; yxeri6=yxeri ; %bar co-ordinates xstick=[1.4,1.42,1.42,1.4]-0.035; ystick=[0.185,0.185,0.2,0.2]-0.024; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %5<w<10 %1<m<3 %t=10; %ryt=0.05; %m=3; %omega=5; %v=5; %RR=v/omega; %if not specified set the radius of rotation if (a1==1) RR=v/omega; %if not specified set the angular velocity if (a2==1) omega=v/rr; %if not specified set the linear velocity if (a3==1) v=omega*rr; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %force= mass * (linear velocity)^2 / radius; Fk=m*v*v/RR; %Lom = 0.1 * (angular velocity) / 5 Lom=0.1*omega/5; a=0.65*rr; b=0.05*rr; %pythagoras theorem for ab ab=(a*a+b*b)^0.5; xc= ; yc= ; Rb=0.06*(m/3)^(1/3); LFk=0.5; LFkx=LFk*a; LFky=LFk*b; Lv=0.4; Lvx=Lv*a; Lvy=Lv*b; %estimate orbit in x-direction: a*cosine(theta1), same but shifted by xtroxia=[a*cos(th1),(a+0.005)*cos(th1)]+xc; %estimate orbit in y-direction: a*sine(theta1), same but shifted by ytroxia=[b*sin(th1),(b+0.005)*sin(th1)]+yc; xvectorom=xc+[0.0065,0.0065,0.025,0.0,-0.025, , ]; yvectorom=yc+[0.0,lom,lom,lom+0.02,lom,lom,0.0]; xpivakas=[0.2,2.75,2.75,0.2]; ypivakas=[ ,-0.05,-0.05]; 26
28 xpivakasb=[0.18,2.77,2.77,0.18]; ypivakasb=[ ,-0.04,-0.04]; xgom=xc; ygom=yc+lom+0.03; nm=num2str(0.01*round(100*m)); nv=num2str(0.01*round(100*v)); nr=num2str(0.01*round(100*rr)); nom=num2str(0.01*round(100*omega)); nfk=num2str(0.01*round(100*fk)); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% t1=(3*pi/2)/omega; NN=t1/0.05; NN=round(NN); %time step for simulation if Force > 200N Dt=t1/NN; %if the force is smaller than 200N, execute this loop; else execute loop if (Fk<=200) %%%%%%%%%%%% %simulate system for t seconds in time steps of 0.05 for time=0.0:0.05:t if (stam==1) cc1=stam; while (cc1==1) cc1=stam; pause(0.01); if (status==1) return nt=num2str(0.01*round(100*time)); phi1=omega*time; %calculate angle at each time step xhand=(a/20)*cos(phi1); yhand=(b/20)*sin(phi1); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %co-odrinates for hand image xxeri=[1.00, , , , , , , Rmin*cos(3*pi/2-th), Rmin*cos(3*pi/2-th), Rmin*cos(3*pi/2-th), Rmin*cos(3*pi/2-th)]; xxeri=xxeri+l-0.06*l xhand; yxeri=[0.40, , , , , , , Rmin+Rmin*sin(3*pi/2-th), Rmin+Rmin*sin(3*pi/2-th), Rmin+Rmin*sin(3*pi/2-th), Rmin+Rmin*sin(3*pi/2-th)]; yxeri=yxeri yhand; xxeri1=[1.015+rmin*cos(3*pi/2-th), ,1.060,... 27
29 Rmin*cos(pi/2-th),1.015]; xxeri1=xxeri1+l-0.06*l xhand; yxeri1=[0.30+rmin+rmin*sin(3*pi/2-th), ,0.325, Rmin+Rmin*sin(pi/2-th),0.30]; yxeri1=yxeri yhand; xxeri2=[1.005+rmin*cos(3*pi/2-th), ,1.060, Rmin*cos(pi/2-th),1.005]; xxeri2=xxeri2+l-0.06*l xhand; yxeri2=[0.325+rmin+rmin*sin(3*pi/2-th), ,0.350, Rmin+Rmin*sin(pi/2-th),0.325]; yxeri2=yxeri yhand; xxeri3=[0.99+rmin*cos(3*pi/2-th), ,1.060, Rmin*cos(pi/2-th),0.99]; xxeri3=xxeri3+l-0.06*l xhand; yxeri3=[0.350+rmin+rmin*sin(3*pi/2-th), ,0.375, Rmin+Rmin*sin(pi/2-th),0.350]; yxeri3=yxeri yhand; xxeri4=[1.00+rmin*cos(3*pi/2-th), ,1.060, Rmin*cos(pi/2-th),1.00]; xxeri4=xxeri4+l-0.06*l xhand; yxeri4=[0.375+rmin+rmin*sin(3*pi/2-th), ,0.40, Rmin+Rmin*sin(pi/2-th),0.375]; yxeri4=yxeri yhand; xxeri5=[1.10+rmin1*cos(pi/2+2*th/3), Rmin1*cos(pi/2+2*pi/3)+3*Rmin*sin(th/2),1.125]; xxeri5=xxeri5+l-0.06*l xhand; yxeri5=[0.40-rmin1+rmin1*sin(pi/2+2*th/3), Rmin1+Rmin1*sin(pi/2+2*pi/3)-2*Rmin*cos(pi/2+th/2),0.38]; yxeri5=yxeri yhand; xxeri6=[0.1,0.15+rmin1*cos(5*pi/4+th/2),0.15+rmin1*cos(5*pi/4+pi/2-th/2)]; xxeri6=xxeri6+l-0.06*l+0.50+xhand; yxeri6=[0.0,rmin1*sin(5*pi/4+th/2),rmin1*sin(5*pi/4+pi/2-th/2)]; yxeri6=yxeri yhand; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %co-ordinates for bar xbar=xc+[0.005*sin(phi1),0.005*sin(phi1)+a*cos(phi1), *sin(phi1)+a*cos(phi1),-0.005*sin(phi1)]; ybar=yc+[-0.005*cos(phi1),-0.005*cos(phi1)+b*sin(phi1), *cos(phi1)+b*sin(phi1),0.005*cos(phi1)]; xbody=xc+a*cos(phi1)+rb*cos(th1); ybody=yc+b*sin(phi1)+(rb-0.6*rb)*sin(th1); xbody1=xc+a*cos(phi1)+0.97*rb*cos(th1); ybody1=yc+b*sin(phi1)+0.97*(rb-0.6*rb)*sin(th1)+0.002; xbody2=xc+a*cos(phi1)+0.93*rb*cos(th1); ybody2=yc+b*sin(phi1)+0.93*(rb-0.6*rb)*sin(th1)+0.002; xbody3=xc+a*cos(phi1)+0.85*rb*cos(th1); ybody3=yc+b*sin(phi1)+0.85*(rb-0.6*rb)*sin(th1)+0.002; xbody4=xc+a*cos(phi1)+0.75*rb*cos(th1); ybody4=yc+b*sin(phi1)+0.75*(rb-0.6*rb)*sin(th1) ;
30 xbody5=xc+a*cos(phi1)+0.62*rb*cos(th1); ybody5=yc+b*sin(phi1)+0.62*(rb-0.6*rb)*sin(th1) ; xbody6=xc+a*cos(phi1)+0.48*rb*cos(th1); ybody6=yc+b*sin(phi1)+0.48*(rb-0.6*rb)*sin(th1)+0.003; xbody7=xc+a*cos(phi1)+0.32*rb*cos(th1); ybody7=yc+b*sin(phi1)+0.32*(rb-0.6*rb)*sin(th1)+0.003; xbody8=xc+a*cos(phi1)+0.14*rb*cos(th1); ybody8=yc+b*sin(phi1)+0.14*(rb-0.6*rb)*sin(th1) ; xbody9=xc+a*cos(phi1)+0.02*rb*cos(th1); ybody9=yc+b*sin(phi1)+0.02*(rb-0.025)*sin(th1) ; xk=xc+a*cos(phi1); yk=yc+b*sin(phi1); xvectorf=xk+[0.005*sin(phi1),0.005*sin(phi1)-lfkx*cos(phi1), *sin(phi1)-LFkx*cos(phi1)+0.01*sin(phi1),... -(LFkx+0.085*a)*cos(phi1), *sin(phi1)-LFkx*cos(phi1)-0.01*sin(phi1), *sin(phi1)-LFkx*cos(phi1),-0.005*sin(phi1)]; yvectorf=yk+[-0.005*cos(phi1),-0.005*cos(phi1)-lfky*sin(phi1), *cos(phi1)-LFky*sin(phi1)-0.01*cos(phi1),... -(LFky+0.085*b)*sin(phi1), *cos(phi1)-LFky*sin(phi1)+0.01*cos(phi1), *cos(phi1)-LFky*sin(phi1),0.005*cos(phi1)]; xgf=xc+0.8*a*cos(phi1-pi/10); ygf=yc+0.8*b*sin(phi1-pi/10); xgv=xc+1.2*a*cos(phi1+pi/10); ygv=yc+1.2*b*sin(phi1+pi/10); xvectorv=xk+[0.004*cos(phi1),0.004*cos(phi1)-lvx*sin(phi1)/ab, *cos(phi1)-Lvx*sin(phi1)/ab+0.02*a*cos(phi1)/ab,... -(Lvx+0.085*a)*sin(phi1)/ab, *cos(phi1)-Lvx*sin(phi1)/ab-0.02*a*cos(phi1)/ab, *cos(phi1)-Lvx*sin(phi1)/ab,-0.004*cos(phi1)]; yvectorv=yk+[0.004*sin(phi1),0.004*sin(phi1)+lvy*cos(phi1)/ab, *sin(phi1)+Lvy*cos(phi1)/ab+0.02*b*sin(phi1)/ab,... (Lvy+0.085*b)*cos(phi1)/ab, *sin(phi1)+Lvy*cos(phi1)/ab-0.02*b*sin(phi1)/ab, *sin(phi1)+Lvy*cos(phi1)/ab,-0.004*sin(phi1)]; %start drawing image fill(xtoixos,ytoixos,[ ],... xpivakasb, ypivakasb,[0.5,0.4,0.3],... xpivakas,ypivakas,[0.95,0.95,0.95],... xstick,ystick,[0.2,0.2,0.2],... xtroxia,ytroxia,[0.2,0.2,0.2],... xvectorf,yvectorf,[0,0.0,1],... xvectorv,yvectorv,[1,1,0],... xvectorom,yvectorom,[0.9,0.,0.9],... xbody,ybody,[0.4,0.4,0.],... xbody1,ybody1,[0.42,0.42,0.2],... xbody2,ybody2,[0.44,0.44,0.2],... xbody3,ybody3,[0.46,0.46,0.2],... xbody4,ybody4,[0.49,0.49,0.2],... xbody5,ybody5,[0.52,0.52,0.2],... xbody6,ybody6,[0.56,0.56,0.2],... xbody7,ybody7,[0.6,0.6,0.2],... xbody8,ybody8,[0.65,0.65,0.2],... xbody9,ybody9,[0.7,0.7,0.2],... 'Linestyle','None') hold on %draw hand fill(xxeri+dx,yxeri+dy,[0.45,0.45,0.1],... xxeri6+dx,yxeri6+dy,[0.45,0.45,0.1],... xxeri1+dx,yxeri1+dy,[0.45,0.45,0.1],... xxeri2+dx,yxeri2+dy,[0.45,0.45,0.1],... xxeri3+dx,yxeri3+dy,[0.45,0.45,0.1],... xxeri4+dx,yxeri4+dy,[0.45,0.45,0.1],... xxeri5+dx,yxeri5+dy,[0.45,0.45,0.1]) 29
31 hold on %draw orbit and object body fill(xtroxia,ytroxia,[0.2,0.2,0.2],... xbar,ybar,[0.2,0.2,0.2],... xvectorf,yvectorf,[0,0.0,1],... xvectorv,yvectorv,[1,1,0],... xvectorom,yvectorom,[0.9,0.,0.9],... xbody,ybody,[0.4,0.4,0.],... xbody1,ybody1,[0.42,0.42,0.2],... xbody2,ybody2,[0.44,0.44,0.2],... xbody3,ybody3,[0.46,0.46,0.2],... xbody4,ybody4,[0.49,0.49,0.2],... xbody5,ybody5,[0.52,0.52,0.2],... xbody6,ybody6,[0.56,0.56,0.2],... xbody7,ybody7,[0.6,0.6,0.2],... xbody8,ybody8,[0.65,0.65,0.2],... xbody9,ybody9,[0.7,0.7,0.2],... 'Linestyle','None') hold off % text(0.8,-0.07,'ομαλη ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ - Κεντρομόλος Δύναμη ','Color','b','Fontsize',9) % text(1.75,-0.07,'γραμμική Ταχύτητα','Color','k','Fontsize',8) %%%%%% %fill in table with variables, their values, units and equations text(xgf,ygf,'f_κ','color','b','fontsize',8) text(xgv,ygv,'υ','color','y','fontsize',8) text(xgom,ygom,'ω','color',[ ],'Fontsize',8) text(0.3, ,'m =','Color','k','Fontsize',8) text(0.4, ,nm,'color','k','fontsize',8) text(0.55, ,'kgm','color','k','fontsize',8) text(0.3, ,'r =','Color','k','Fontsize',8) text(0.4, ,nr,'color','k','fontsize',8) text(0.55, ,'m','color','k','fontsize',8) text(0.3, ,'υ =','Color','k','Fontsize',8) text(0.4, ,nv,'color','k','fontsize',8) text(0.55, ,'m/sec','color','k','fontsize',8) text(0.3, ,'ω =','Color','k','Fontsize',8) text(0.4, ,nom,'color','k','fontsize',8) text(0.55, ,'rad/sec','color','k','fontsize',8) text(0.3, ,'f_κ =','Color','k','Fontsize',8) text(0.4, ,nfk,'color','k','fontsize',8) text(0.55, ,'kgm/sec^2','color','k','fontsize',8) text(0.3+1, ,'t =','Color','b','Fontsize',8) text(0.4+1, ,nt,'color','b','fontsize',8) text(0.55+1, ,'sec','color','b','fontsize',8) axis([0,3,-0.5,0.5]) axis off arx1 = [0.85, 0.95] ; tel1 = [-0.12, -0.12] ; line(arx1, tel1, 'Color','r'); text( , ,'mυ^2','color','r','fontsize',9) text( , ,'F_κ = (1)','Color','r','Fontsize',9) text( , ,'r ','Color','r','Fontsize',9) text( , ,'υ = ωr (2)','Color','b','Fontsize',9) text( , ,'F_κ = mω^2r (3)','Color','r','Fontsize',9) text( , ,'F_κ = mωυ pause(ryte) (4)','Color','r','Fontsize',9) %if Force is >200N, execute this loop which shows that the object excapes %the orbit 30
32 %%%%% else %%%%% % pause(1000) for time=0.0:dt:t1 if (stam==1) cc1=stam; while (cc1==1) cc1=stam; pause(0.01); if (status==1) return nt=num2str(0.01*round(100*time)); %estimate angle of rotation phi1=omega*time; xhand=(a/20)*cos(phi1); yhand=(b/20)*sin(phi1); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% xxeri=[1.00, , , , , , , Rmin*cos(3*pi/2-th), Rmin*cos(3*pi/2-th), Rmin*cos(3*pi/2-th), Rmin*cos(3*pi/2-th)]; xxeri=xxeri+l-0.06*l xhand; yxeri=[0.40, , , , , , , Rmin+Rmin*sin(3*pi/2-th), Rmin+Rmin*sin(3*pi/2-th), Rmin+Rmin*sin(3*pi/2-th), Rmin+Rmin*sin(3*pi/2-th)]; yxeri=yxeri yhand; xxeri1=[1.015+rmin*cos(3*pi/2-th), ,1.060, Rmin*cos(pi/2-th),1.015]; xxeri1=xxeri1+l-0.06*l xhand; yxeri1=[0.30+rmin+rmin*sin(3*pi/2-th), ,0.325, Rmin+Rmin*sin(pi/2-th),0.30]; yxeri1=yxeri yhand; xxeri2=[1.005+rmin*cos(3*pi/2-th), ,1.060, Rmin*cos(pi/2-th),1.005]; xxeri2=xxeri2+l-0.06*l xhand; yxeri2=[0.325+rmin+rmin*sin(3*pi/2-th), ,0.350, Rmin+Rmin*sin(pi/2-th),0.325]; yxeri2=yxeri yhand; xxeri3=[0.99+rmin*cos(3*pi/2-th), ,1.060, Rmin*cos(pi/2-th),0.99]; 31
33 32 xxeri3=xxeri3+l-0.06*l xhand; yxeri3=[0.350+rmin+rmin*sin(3*pi/2-th), ,0.375, Rmin+Rmin*sin(pi/2-th),0.350]; yxeri3=yxeri yhand; xxeri4=[1.00+rmin*cos(3*pi/2-th), ,1.060, Rmin*cos(pi/2-th),1.00]; xxeri4=xxeri4+l-0.06*l xhand; yxeri4=[0.375+rmin+rmin*sin(3*pi/2-th), ,0.40, Rmin+Rmin*sin(pi/2-th),0.375]; yxeri4=yxeri yhand; xxeri5=[1.10+rmin1*cos(pi/2+2*th/3), Rmin1*cos(pi/2+2*pi/3)+3*Rmin*sin(th/2),1.125]; xxeri5=xxeri5+l-0.06*l xhand; yxeri5=[0.40-rmin1+rmin1*sin(pi/2+2*th/3), Rmin1+Rmin1*sin(pi/2+2*pi/3)-2*Rmin*cos(pi/2+th/2),0.38]; yxeri5=yxeri yhand; xxeri6=[0.1,0.15+rmin1*cos(5*pi/4+th/2),0.15+rmin1*cos(5*pi/4+pi/2-th/2)]; xxeri6=xxeri6+l-0.06*l+0.50+xhand; yxeri6=[0.0,rmin1*sin(5*pi/4+th/2),rmin1*sin(5*pi/4+pi/2-th/2)]; yxeri6=yxeri yhand; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% xbar=xc+[0.005*sin(phi1),0.005*sin(phi1)+a*cos(phi1), *sin(phi1)+a*cos(phi1),-0.005*sin(phi1)]; ybar=yc+[-0.005*cos(phi1),-0.005*cos(phi1)+b*sin(phi1), *cos(phi1)+b*sin(phi1),0.005*cos(phi1)]; xbody=xc+a*cos(phi1)+rb*cos(th1); ybody=yc+b*sin(phi1)+(rb-0.6*rb)*sin(th1); xbody1=xc+a*cos(phi1)+0.97*rb*cos(th1); ybody1=yc+b*sin(phi1)+0.97*(rb-0.6*rb)*sin(th1)+0.002; xbody2=xc+a*cos(phi1)+0.93*rb*cos(th1); ybody2=yc+b*sin(phi1)+0.93*(rb-0.6*rb)*sin(th1)+0.002; xbody3=xc+a*cos(phi1)+0.85*rb*cos(th1); ybody3=yc+b*sin(phi1)+0.85*(rb-0.6*rb)*sin(th1)+0.002; xbody4=xc+a*cos(phi1)+0.75*rb*cos(th1); ybody4=yc+b*sin(phi1)+0.75*(rb-0.6*rb)*sin(th1) ; xbody5=xc+a*cos(phi1)+0.62*rb*cos(th1); ybody5=yc+b*sin(phi1)+0.62*(rb-0.6*rb)*sin(th1) ; xbody6=xc+a*cos(phi1)+0.48*rb*cos(th1); ybody6=yc+b*sin(phi1)+0.48*(rb-0.6*rb)*sin(th1)+0.003; xbody7=xc+a*cos(phi1)+0.32*rb*cos(th1); ybody7=yc+b*sin(phi1)+0.32*(rb-0.6*rb)*sin(th1)+0.003; xbody8=xc+a*cos(phi1)+0.14*rb*cos(th1); ybody8=yc+b*sin(phi1)+0.14*(rb-0.6*rb)*sin(th1) ; xbody9=xc+a*cos(phi1)+0.02*rb*cos(th1); ybody9=yc+b*sin(phi1)+0.02*(rb-0.6*rb)*sin(th1) ; xk=xc+a*cos(phi1); yk=yc+b*sin(phi1); xvectorf=xk+[0.005*sin(phi1),0.005*sin(phi1)-lfkx*cos(phi1), *sin(phi1)-LFkx*cos(phi1)+0.01*sin(phi1),... -(LFkx+0.085*a)*cos(phi1), *sin(phi1)-LFkx*cos(phi1)-0.01*sin(phi1), *sin(phi1)-LFkx*cos(phi1),-0.005*sin(phi1)]; yvectorf=yk+[-0.005*cos(phi1),-0.005*cos(phi1)-lfky*sin(phi1), *cos(phi1)-LFky*sin(phi1)-0.01*cos(phi1),...
34 -(LFky+0.085*b)*sin(phi1), *cos(phi1)-LFky*sin(phi1)+0.01*cos(phi1), *cos(phi1)-LFky*sin(phi1),0.005*cos(phi1)]; xgf=xc+0.8*a*cos(phi1-pi/10); ygf=yc+0.8*b*sin(phi1-pi/10); xgv=xc+1.2*a*cos(phi1+pi/10); ygv=yc+1.2*b*sin(phi1+pi/10); xvectorv=xk+[0.004*cos(phi1),0.004*cos(phi1)-lvx*sin(phi1)/ab, *cos(phi1)-Lvx*sin(phi1)/ab+0.04*a*cos(phi1)/ab,... -(Lvx+0.085*a)*sin(phi1)/ab, *cos(phi1)-Lvx*sin(phi1)/ab-0.04*a*cos(phi1)/ab, *cos(phi1)-Lvx*sin(phi1)/ab,-0.004*cos(phi1)]; yvectorv=yk+[0.004*sin(phi1),0.004*sin(phi1)+lvy*cos(phi1)/ab, *sin(phi1)+Lvy*cos(phi1)/ab+0.04*b*sin(phi1)/ab,... (Lvy+0.085*b)*cos(phi1)/ab, *sin(phi1)+Lvy*cos(phi1)/ab-0.04*b*sin(phi1)/ab, *sin(phi1)+Lvy*cos(phi1)/ab,-0.004*sin(phi1)]; fill(xtoixos,ytoixos,[ ],... xpivakasb, ypivakasb,[0.5,0.4,0.3],... xpivakas,ypivakas,[0.95,0.95,0.95],... xstick,ystick,[0.5,0.5,0.5],... xtroxia,ytroxia,[0.2,0.2,0.2],... xvectorf,yvectorf,[0,0.0,1],... xvectorv,yvectorv,[1.0,1.0,0.0],... xvectorom,yvectorom,[0.9,1.0,0.9],... xbody,ybody,[0.7,0.7,0.2],... xbody,ybody,[0.4,0.4,0.],... xbody1,ybody1,[0.42,0.42,0.2],... xbody2,ybody2,[0.44,0.44,0.2],... xbody3,ybody3,[0.46,0.46,0.2],... xbody4,ybody4,[0.49,0.49,0.2],... xbody5,ybody5,[0.52,0.52,0.2],... xbody6,ybody6,[0.56,0.56,0.2],... xbody7,ybody7,[0.6,0.6,0.2],... xbody8,ybody8,[0.65,0.65,0.2],... xbody9,ybody9,[0.7,0.7,0.2],... 'Linestyle','None') hold on fill(xxeri+dx,yxeri+dy,[0.45,0.45,0.1],... xxeri6+dx,yxeri6+dy,[0.45,0.45,0.1],... xxeri1+dx,yxeri1+dy,[0.45,0.45,0.1],... xxeri2+dx,yxeri2+dy,[0.45,0.45,0.1],... xxeri3+dx,yxeri3+dy,[0.45,0.45,0.1],... xxeri4+dx,yxeri4+dy,[0.45,0.45,0.1],... xxeri5+dx,yxeri5+dy,[0.45,0.45,0.1]) hold on fill(xtroxia,ytroxia,[0.2,0.2,0.2],... xbar,ybar,[0.2,0.2,0.2],... xvectorf,yvectorf,[0,0.0,1],... xvectorv,yvectorv,[1.0,1.0,0.0],... xvectorom,yvectorom,[0.9,0.,0.9],... xbody,ybody,[0.7,0.7,0.2],... xbody,ybody,[0.4,0.4,0.],... xbody1,ybody1,[0.42,0.42,0.2],... xbody2,ybody2,[0.44,0.44,0.2],... xbody3,ybody3,[0.46,0.46,0.2],... xbody4,ybody4,[0.49,0.49,0.2],... xbody5,ybody5,[0.52,0.52,0.2],... xbody6,ybody6,[0.56,0.56,0.2],... xbody7,ybody7,[0.6,0.6,0.2],... xbody8,ybody8,[0.65,0.65,0.2],... xbody9,ybody9,[0.7,0.7,0.2],... 'Linestyle','None') hold off % text(0.8,-0.07,'ομαλη ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ - Κεντρομόλος Δύναμη ','Color','b','Fontsize',9) % text(1.75,-0.07,'γραμμική Ταχύτητα','Color','k','Fontsize',8) text(xgf,ygf,'f_κ','color','b','fontsize',8) 33
ΚΑΤΑΣΚΕΥΗ ΕΚΠΑΙΔΕΥΤΙΚΟΥ ΠΑΚΕΤΟΥ ΠΡΟΣΟΜΟΙΩΣΗΣ ΠΕΙΡΑΜΑΤΩΝ ΥΔΡΟΣΤΑΤΙΚΗΣ ΓΥΜΝΑΣΙΟΥ ΣΕ ΠΕΡΙΒΑΛΛΟΝ MATLAB
 Τ Ε Χ Ν Ο Λ Ο Γ Ι Κ Ο Ε Κ Π Α Ι Δ Ε Υ Τ Ι Κ Ο Ι Δ Ρ Υ Μ Α Σ Ε Ρ Ρ Ω Ν Σ Χ Ο Λ Η Τ Ε Χ Ν Ο Λ Ο Γ Ι Κ Ω Ν Ε Φ Α Ρ Μ Ο Γ Ω Ν Τ Μ Η Μ Α Π Λ Η Ρ Ο Φ Ο Ρ Ι Κ Η Σ & Ε Π Ι Κ Ο Ι Ν Ω Ν Ι Ω Ν ΚΑΤΑΣΚΕΥΗ ΕΚΠΑΙΔΕΥΤΙΚΟΥ
Τ Ε Χ Ν Ο Λ Ο Γ Ι Κ Ο Ε Κ Π Α Ι Δ Ε Υ Τ Ι Κ Ο Ι Δ Ρ Υ Μ Α Σ Ε Ρ Ρ Ω Ν Σ Χ Ο Λ Η Τ Ε Χ Ν Ο Λ Ο Γ Ι Κ Ω Ν Ε Φ Α Ρ Μ Ο Γ Ω Ν Τ Μ Η Μ Α Π Λ Η Ρ Ο Φ Ο Ρ Ι Κ Η Σ & Ε Π Ι Κ Ο Ι Ν Ω Ν Ι Ω Ν ΚΑΤΑΣΚΕΥΗ ΕΚΠΑΙΔΕΥΤΙΚΟΥ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙ ΕΥΤΙΚΟ Ι ΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙ ΕΥΤΙΚΟ Ι ΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ ΤΙΤΛΟΣ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ ΑΝΑΠΤΥΞΗ ΕΚΠΑΙΔΕΥΤΙΚΟΥ ΠΑΚΕΤΟΥ ΑΣΚΗΣΕΩΝ ΣΤΟ MATLAB ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙ ΕΥΤΙΚΟ Ι ΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕ ΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ ΤΙΤΛΟΣ ΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ ΑΝΑΠΤΥΞΗ ΕΚΠΑΙΔΕΥΤΙΚΟΥ ΠΑΚΕΤΟΥ ΑΣΚΗΣΕΩΝ ΣΤΟ MATLAB ΓΙΑ ΤΟΝ ΠΡΟΣΔΙΟΡΙΣΜΟ
Κατασκευή πακέτου προσομοίωσης σε Matlab εργαστηριακών ασκήσεων του εργαστηρίου Ηλεκτρικών Κυκλωμάτων σε σχέση με το ισοδύναμο κύκλωμα Thevenin
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ Κατασκευή πακέτου προσομοίωσης σε Matlab εργαστηριακών ασκήσεων του εργαστηρίου Ηλεκτρικών Κυκλωμάτων
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ Κατασκευή πακέτου προσομοίωσης σε Matlab εργαστηριακών ασκήσεων του εργαστηρίου Ηλεκτρικών Κυκλωμάτων
Θέμα: ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ. Πτυχιακή Εργασία
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Πτυχιακή Εργασία Θέμα: Ανάπτυξη εκπαιδευτικού πακέτου ασκήσεων στο MatlaB για τα φαινόμενα των χημικών και
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Πτυχιακή Εργασία Θέμα: Ανάπτυξη εκπαιδευτικού πακέτου ασκήσεων στο MatlaB για τα φαινόμενα των χημικών και
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ. Πτυχιακή Εργασία
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Πτυχιακή Εργασία Κατασκευή διδακτικού πακέτου προσομοίωσης των φαινομένων της τάσης και έντασης
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Πτυχιακή Εργασία Κατασκευή διδακτικού πακέτου προσομοίωσης των φαινομένων της τάσης και έντασης
Συστήματα Αναμονής (Queuing Systems)
") ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ - ΕΜΠ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧ. ΥΠΟΛΟΓΙΣΤΩΝ Τομέας Επικοινωνιών, Ηλεκτρονικής & Συστημάτων Πληροφορικής Εργαστήριο Διαχείρισης & Βέλτιστου Σχεδιασμού Δικτύων Τηλεματικής
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ - ΕΜΠ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧ. ΥΠΟΛΟΓΙΣΤΩΝ Τομέας Επικοινωνιών, Ηλεκτρονικής & Συστημάτων Πληροφορικής Εργαστήριο Διαχείρισης & Βέλτιστου Σχεδιασμού Δικτύων Τηλεματικής
Εισαγωγή στην Αριθμητική Ανάλυση
 Εισαγωγή στην Αριθμητική Ανάλυση Εισαγωγή στη MATLAB ΔΙΔΑΣΚΩΝ: ΓΕΩΡΓΙΟΣ ΑΚΡΙΒΗΣ ΒΟΗΘΟΙ: ΔΗΜΗΤΡΙΑΔΗΣ ΣΩΚΡΑΤΗΣ, ΣΚΟΡΔΑ ΕΛΕΝΗ E-MAIL: SDIMITRIADIS@CS.UOI.GR, ESKORDA@CS.UOI.GR Τι είναι Matlab Είναι ένα περιβάλλον
Εισαγωγή στην Αριθμητική Ανάλυση Εισαγωγή στη MATLAB ΔΙΔΑΣΚΩΝ: ΓΕΩΡΓΙΟΣ ΑΚΡΙΒΗΣ ΒΟΗΘΟΙ: ΔΗΜΗΤΡΙΑΔΗΣ ΣΩΚΡΑΤΗΣ, ΣΚΟΡΔΑ ΕΛΕΝΗ E-MAIL: SDIMITRIADIS@CS.UOI.GR, ESKORDA@CS.UOI.GR Τι είναι Matlab Είναι ένα περιβάλλον
Πτυχιακή Εργαςία. Θζμα: Καταςκευή διδακτικοφ πακζτου προςομοίωςησ τησ ευθφγραμμησ ομαλά μεταβαλλόμενησ κίνηςησ ςτο MaTLaB.
 ΣΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΤΣΙΚΟ ΙΔΡΤΜΑ ΕΡΡΩΝ ΧΟΛΗ ΣΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΣΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗ Πτυχιακή Εργαςία Θζμα: Καταςκευή διδακτικοφ πακζτου προςομοίωςησ τησ ευθφγραμμησ ομαλά μεταβαλλόμενησ κίνηςησ
ΣΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΤΣΙΚΟ ΙΔΡΤΜΑ ΕΡΡΩΝ ΧΟΛΗ ΣΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΣΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗ Πτυχιακή Εργαςία Θζμα: Καταςκευή διδακτικοφ πακζτου προςομοίωςησ τησ ευθφγραμμησ ομαλά μεταβαλλόμενησ κίνηςησ
Πληρουορική Γ Γσμμασίοσ
 Πληρουορική Γ Γσμμασίοσ Προγραμματισμός και Αλγόριθμοι Από το και τημ Χελώμα στημ Ευριπίδης Βραχνός http://evripides.mysch.gr/ 2014 2015 1 Προγραμματισμός Ζάννειο Πρότυπο Πειραματικό Γυμνάσιο Πειραιά Ενότητα:
Πληρουορική Γ Γσμμασίοσ Προγραμματισμός και Αλγόριθμοι Από το και τημ Χελώμα στημ Ευριπίδης Βραχνός http://evripides.mysch.gr/ 2014 2015 1 Προγραμματισμός Ζάννειο Πρότυπο Πειραματικό Γυμνάσιο Πειραιά Ενότητα:
1 η Εργαστηριακή Άσκηση MATLAB Εισαγωγή
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΗΠΕΙΡΟΥ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. Εργαστήριο Επεξεργασία Εικόνας & Βίντεο 1 η Εργαστηριακή Άσκηση MATLAB Εισαγωγή Νικόλαος Γιαννακέας Άρτα 2018 1 Εισαγωγή Το Matlab
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΗΠΕΙΡΟΥ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. Εργαστήριο Επεξεργασία Εικόνας & Βίντεο 1 η Εργαστηριακή Άσκηση MATLAB Εισαγωγή Νικόλαος Γιαννακέας Άρτα 2018 1 Εισαγωγή Το Matlab
Τυπικές χρήσεις της Matlab
 Matlab Μάθημα 1 Τι είναι η Matlab Ολοκληρωμένο Περιβάλλον Περιβάλλον ανάπτυξης Διερμηνευμένη γλώσσα Υψηλή επίδοση Ευρύτητα εφαρμογών Ευκολία διατύπωσης Cross platform (Wintel, Unix, Mac) Τυπικές χρήσεις
Matlab Μάθημα 1 Τι είναι η Matlab Ολοκληρωμένο Περιβάλλον Περιβάλλον ανάπτυξης Διερμηνευμένη γλώσσα Υψηλή επίδοση Ευρύτητα εφαρμογών Ευκολία διατύπωσης Cross platform (Wintel, Unix, Mac) Τυπικές χρήσεις
Δυναμικές Ιστοσελίδες Εισαγωγή στην Javascript για προγραμματισμό στην πλευρά του client
 ΕΣΔ 516 Τεχνολογίες Διαδικτύου Δυναμικές Ιστοσελίδες Εισαγωγή στην Javascript για προγραμματισμό στην πλευρά του client Περιεχόμενα Περιεχόμενα Javascript και HTML Βασική σύνταξη Μεταβλητές Τελεστές Συναρτήσεις
ΕΣΔ 516 Τεχνολογίες Διαδικτύου Δυναμικές Ιστοσελίδες Εισαγωγή στην Javascript για προγραμματισμό στην πλευρά του client Περιεχόμενα Περιεχόμενα Javascript και HTML Βασική σύνταξη Μεταβλητές Τελεστές Συναρτήσεις
ΠΛΗΡΟΦΟΡΙΚΗ Ι Εργαστήριο 1 MATLAB ΠΛΗΡΟΦΟΡΙΚΗ Ι ΕΡΓΑΣΤΗΡΙΟ 1. Θέμα εργαστηρίου: Εισαγωγή στο MATLAB και στο Octave
 ΠΛΗΡΟΦΟΡΙΚΗ Ι ΕΡΓΑΣΤΗΡΙΟ 1 Θέμα εργαστηρίου: Εισαγωγή στο MATLAB και στο Octave Περιεχόμενο εργαστηρίου: - Το περιβάλλον ανάπτυξης προγραμμάτων Octave - Διαδικασία ανάπτυξης προγραμμάτων MATLAB - Απλά
ΠΛΗΡΟΦΟΡΙΚΗ Ι ΕΡΓΑΣΤΗΡΙΟ 1 Θέμα εργαστηρίου: Εισαγωγή στο MATLAB και στο Octave Περιεχόμενο εργαστηρίου: - Το περιβάλλον ανάπτυξης προγραμμάτων Octave - Διαδικασία ανάπτυξης προγραμμάτων MATLAB - Απλά
ΠΑΝΕΠΙΣΤΗΜΙΟ AΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ. Εισαγωγή στη Python
 ΠΑΝΕΠΙΣΤΗΜΙΟ AΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ ΠΛΗΡΟΦΟΡΙΚΗ ΤΕΧΝΟΛΟΓΙΑ ΚΑΙ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ Η/Υ Εισαγωγή στη Python Νικόλαος Ζ. Ζάχαρης Αναπληρωτής
ΠΑΝΕΠΙΣΤΗΜΙΟ AΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ ΠΛΗΡΟΦΟΡΙΚΗ ΤΕΧΝΟΛΟΓΙΑ ΚΑΙ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ Η/Υ Εισαγωγή στη Python Νικόλαος Ζ. Ζάχαρης Αναπληρωτής
Προγραμματισμός και Χρήση Ηλεκτρονικών Υπολογιστών - Βασικά Εργαλεία Λογισμικού
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΧΗΜΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΟ ΚΕΝΤΡΟ Προγραμματισμός και Χρήση Ηλεκτρονικών Υπολογιστών - Βασικά Εργαλεία Λογισμικού Μάθημα 2ο Μεταβλητές Μεταβλητή ονομάζεται ένα μέγεθος
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΧΗΜΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΟ ΚΕΝΤΡΟ Προγραμματισμός και Χρήση Ηλεκτρονικών Υπολογιστών - Βασικά Εργαλεία Λογισμικού Μάθημα 2ο Μεταβλητές Μεταβλητή ονομάζεται ένα μέγεθος
Πανεπιστήμιο Δυτικής Μακεδονίας. Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών. Ηλεκτρονική Υγεία. Εργαστήριο 4 ο : MATLAB
 Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Ηλεκτρονική Υγεία Εργαστήριο 4 ο : MATLAB Αν. καθηγητής Αγγελίδης Παντελής e-mail: paggelidis@uowm.gr Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Άδειες
Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Ηλεκτρονική Υγεία Εργαστήριο 4 ο : MATLAB Αν. καθηγητής Αγγελίδης Παντελής e-mail: paggelidis@uowm.gr Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Άδειες
Εισαγωγή στο MATLAB. Κολοβού Αθανασία, ΕΔΙΠ,
 Εισαγωγή στο MATLAB Κολοβού Αθανασία, ΕΔΙΠ, akolovou@di.uoa.gr Εγκατάσταση του Matlab Διανέμεται ελεύθερα στα μέλη του ΕΚΠΑ το λογισμικό MATLAB με 75 ταυτόχρονες (concurrent) άδειες χρήσης. Μπορείτε να
Εισαγωγή στο MATLAB Κολοβού Αθανασία, ΕΔΙΠ, akolovou@di.uoa.gr Εγκατάσταση του Matlab Διανέμεται ελεύθερα στα μέλη του ΕΚΠΑ το λογισμικό MATLAB με 75 ταυτόχρονες (concurrent) άδειες χρήσης. Μπορείτε να
Σύντομες εισαγωγικές σημειώσεις για την. Matlab
 Σύντομες εισαγωγικές σημειώσεις για την Matlab Δήλωση Μεταβλητών Για να εισάγει κανείς δεδομένα στη Matlab υπάρχουν πολλοί τρόποι. Ο πιο απλός είναι στη γραμμή εντολών να εισάγουμε αυτό που θέλουμε και
Σύντομες εισαγωγικές σημειώσεις για την Matlab Δήλωση Μεταβλητών Για να εισάγει κανείς δεδομένα στη Matlab υπάρχουν πολλοί τρόποι. Ο πιο απλός είναι στη γραμμή εντολών να εισάγουμε αυτό που θέλουμε και
ΕΡΩΤΗΣΕΙΣ - ΑΣΚΗΣΕΙΣ ΣΤΗΝ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ
 ΕΡΩΤΗΣΕΙΣ - ΑΣΚΗΣΕΙΣ ΣΤΗΝ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ Ερωτήσεις 1. Στην ομαλή κυκλική κίνηση, α. Το μέτρο της ταχύτητας διατηρείται σταθερό. β. Η ταχύτητα διατηρείται σταθερή. γ. Το διάνυσμα της ταχύτητας υ έχει την
ΕΡΩΤΗΣΕΙΣ - ΑΣΚΗΣΕΙΣ ΣΤΗΝ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ Ερωτήσεις 1. Στην ομαλή κυκλική κίνηση, α. Το μέτρο της ταχύτητας διατηρείται σταθερό. β. Η ταχύτητα διατηρείται σταθερή. γ. Το διάνυσμα της ταχύτητας υ έχει την
Το διαστημόπλοιο. Γνωστικό Αντικείμενο: Φυσική (Δυναμική σε μία διάσταση - Δυναμική στο επίπεδο) Τάξη: Α Λυκείου
 Τάξη: Α Λυκείου") Το διαστημόπλοιο Γνωστικό Αντικείμενο: Φυσική (Δυναμική σε μία διάσταση - Δυναμική στο επίπεδο) Τάξη: Α Λυκείου Χρονική Διάρκεια Προτεινόμενη χρονική διάρκεια σχεδίου εργασίας: 5 διδακτικές ώρες Διδακτικοί
Το διαστημόπλοιο Γνωστικό Αντικείμενο: Φυσική (Δυναμική σε μία διάσταση - Δυναμική στο επίπεδο) Τάξη: Α Λυκείου Χρονική Διάρκεια Προτεινόμενη χρονική διάρκεια σχεδίου εργασίας: 5 διδακτικές ώρες Διδακτικοί
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Β ΛΥΚΕΙΟΥ Καμπυλόγραμμες Κινήσεις Επιμέλεια: Αγκανάκης Α. Παναγιώτης, Φυσικός http://phyiccore.wordpre.com/ Βασικές Έννοιες Μέχρι στιγμής έχουμε μάθει να μελετάμε απλές κινήσεις,
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Β ΛΥΚΕΙΟΥ Καμπυλόγραμμες Κινήσεις Επιμέλεια: Αγκανάκης Α. Παναγιώτης, Φυσικός http://phyiccore.wordpre.com/ Βασικές Έννοιες Μέχρι στιγμής έχουμε μάθει να μελετάμε απλές κινήσεις,
Πτυχιακή Εργασία. Θέμα: Ανάπτυξη εκπαιδευτικού πακέτου ασκήσεων στο MatlaB για τα «Μαγνητικά αποτελέσματα του Ηλεκτρικού Ρεύματος».
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Πτυχιακή Εργασία Θέμα: Ανάπτυξη εκπαιδευτικού πακέτου ασκήσεων στο MatlaB για τα «Μαγνητικά αποτελέσματα
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Πτυχιακή Εργασία Θέμα: Ανάπτυξη εκπαιδευτικού πακέτου ασκήσεων στο MatlaB για τα «Μαγνητικά αποτελέσματα
Συνοπτικό εγχειρίδιο χρήσης του Microsoft Visual Studio 2010
 Τμήμα Πληροφορικής & Επικοινωνιών Τομέας Υπολογιστικών Τεχνικών & Συστημάτων Συνοπτικό εγχειρίδιο χρήσης του Microsoft Visual Studio 2010 Ιωάννης Γεωργουδάκης - Πάρις Μαστοροκώστας Σεπτέμβριος 2011 ΠΕΡΙΕΧΟΜΕΝΑ
Τμήμα Πληροφορικής & Επικοινωνιών Τομέας Υπολογιστικών Τεχνικών & Συστημάτων Συνοπτικό εγχειρίδιο χρήσης του Microsoft Visual Studio 2010 Ιωάννης Γεωργουδάκης - Πάρις Μαστοροκώστας Σεπτέμβριος 2011 ΠΕΡΙΕΧΟΜΕΝΑ
ΚΕΦΑΛΑΙΟ 1 Ο ΚΑΜΠΥΛΟΓΡΑΜΜΕΣ ΚΙΝΗΣΕΙΣ
 Σχολικό Έτος 016-017 1 ΚΕΦΑΛΑΙΟ 1 Ο ΚΑΜΠΥΛΟΓΡΑΜΜΕΣ ΚΙΝΗΣΕΙΣ Α. ΟΡΙΖΟΝΤΙΑ ΒΟΛΗ Οριζόντια βολή, ονομάζουμε την εκτόξευση ενός σώματος από ύψος h από το έδαφος, με οριζόντια ταχύτητα u o, όταν στο σώμα επιδρά
Σχολικό Έτος 016-017 1 ΚΕΦΑΛΑΙΟ 1 Ο ΚΑΜΠΥΛΟΓΡΑΜΜΕΣ ΚΙΝΗΣΕΙΣ Α. ΟΡΙΖΟΝΤΙΑ ΒΟΛΗ Οριζόντια βολή, ονομάζουμε την εκτόξευση ενός σώματος από ύψος h από το έδαφος, με οριζόντια ταχύτητα u o, όταν στο σώμα επιδρά
Εισαγωγή στον Προγραμματισμό
 Εισαγωγή στον Προγραμματισμό Έλεγχος Δημήτρης Μιχαήλ Τμήμα Πληροφορικής και Τηλεματικής Χαροκόπειο Πανεπιστήμιο Ακ. Έτος 2012-2013 Σχεσιακοί Τελεστές και Ισότητας Ένα πρόγραμμα εκτός από αριθμητικές πράξεις
Εισαγωγή στον Προγραμματισμό Έλεγχος Δημήτρης Μιχαήλ Τμήμα Πληροφορικής και Τηλεματικής Χαροκόπειο Πανεπιστήμιο Ακ. Έτος 2012-2013 Σχεσιακοί Τελεστές και Ισότητας Ένα πρόγραμμα εκτός από αριθμητικές πράξεις
Γιάννης Σαμωνάκης. 1 ο ΣΧΟΛΕΙΟ ΚΩΔΙΚΑ «Βασικά Θέματα Προγραμματισμού στην Ανάπτυξη Δυναμικών Διαδικτυακών Εφαρμογών» (Part 4 - PHP)
") ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ 1 ο ΣΧΟΛΕΙΟ ΚΩΔΙΚΑ «Βασικά Θέματα Προγραμματισμού στην Ανάπτυξη Δυναμικών Διαδικτυακών Εφαρμογών» (Part 4 - PHP) Γιάννης Σαμωνάκης 1 Περιεχόμενα Τι είναι η PHP Που μπορεί να χρησιμοποιηθεί
ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ 1 ο ΣΧΟΛΕΙΟ ΚΩΔΙΚΑ «Βασικά Θέματα Προγραμματισμού στην Ανάπτυξη Δυναμικών Διαδικτυακών Εφαρμογών» (Part 4 - PHP) Γιάννης Σαμωνάκης 1 Περιεχόμενα Τι είναι η PHP Που μπορεί να χρησιμοποιηθεί
Εργαστήριο Μαθηματικής Ανάλυσης Ι. Εισαγωγή στη Matlab Βασικές Συναρτήσεις-Γραφικές παραστάσεις. Πανεπιστήμιο Θεσσαλίας. Σχολή Θετικών Επιστημών
 Πανεπιστήμιο Θεσσαλίας Σχολή Θετικών Επιστημών Τμήμα Πληροφορικής με εφαρμογές στη Βιοϊατρική Εργαστήριο Μαθηματικής Ανάλυσης Ι Εισαγωγή στη Matlab Βασικές Συναρτήσεις-Γραφικές παραστάσεις Εισαγωγή στη
Πανεπιστήμιο Θεσσαλίας Σχολή Θετικών Επιστημών Τμήμα Πληροφορικής με εφαρμογές στη Βιοϊατρική Εργαστήριο Μαθηματικής Ανάλυσης Ι Εισαγωγή στη Matlab Βασικές Συναρτήσεις-Γραφικές παραστάσεις Εισαγωγή στη
Εισαγωγή στην PHP. ΕΣΔ 516 Τεχνολογίες Διαδικτύου. Περιεχόμενα. Περιεχόμενα. ΕΣ 516: Τεχνολογίες ιαδικτύου. ΕΣ 516: Τεχνολογίες ιαδικτύου
 ΕΣΔ 516 Τεχνολογίες Διαδικτύου Εισαγωγή στην PHP Περιεχόμενα Περιεχόμενα PHP και HTML Βασική σύνταξη Μεταβλητές Τελεστές Συναρτήσεις Παράδειγματα 1 Βιβλιογραφία Ενότητας Βιβλιογραφία [Lane 2004]: Chapter
ΕΣΔ 516 Τεχνολογίες Διαδικτύου Εισαγωγή στην PHP Περιεχόμενα Περιεχόμενα PHP και HTML Βασική σύνταξη Μεταβλητές Τελεστές Συναρτήσεις Παράδειγματα 1 Βιβλιογραφία Ενότητας Βιβλιογραφία [Lane 2004]: Chapter
Ασκήσεις στη Κυκλική Κίνηση
 1 Ασκήσεις στη Κυκλική Κίνηση 1.Δυο τροχοί ακτινών R 1=40cm και R 2=10cm συνδέονται με ιμάντα και περιστρέφονται ο πρώτος με συχνότητα f 1=4Hz, ο δε δεύτερος με συχνότητα f 2. Να βρεθεί ο αριθμός των στροφών
1 Ασκήσεις στη Κυκλική Κίνηση 1.Δυο τροχοί ακτινών R 1=40cm και R 2=10cm συνδέονται με ιμάντα και περιστρέφονται ο πρώτος με συχνότητα f 1=4Hz, ο δε δεύτερος με συχνότητα f 2. Να βρεθεί ο αριθμός των στροφών
Σκοπός. Αλγεβρικοί και Λογικοί Υπολογισμοί στη PASCAL
 Αλγεβρικοί και Λογικοί Υπολογισμοί στη PASCAL Δυνατότητα ανάπτυξης, μεταγλώττισης και εκτέλεσης προγραμμάτων στη PASCAL. Κατανόηση της σύνταξης των προτάσεων της PASCAL. Κατανόηση της εντολής εξόδου για
Αλγεβρικοί και Λογικοί Υπολογισμοί στη PASCAL Δυνατότητα ανάπτυξης, μεταγλώττισης και εκτέλεσης προγραμμάτων στη PASCAL. Κατανόηση της σύνταξης των προτάσεων της PASCAL. Κατανόηση της εντολής εξόδου για
Εισαγωγή στο GNU Octave/MATLAB
 Εισαγωγή στο GNU Octave/MATLAB Δρ. Βασίλειος Δαλάκας Καλώς ήρθατε στο εργαστήριο Σημάτων και Συστημάτων με το λογισμικό Octave (Οκτάβα). Οι σημειώσεις αυτές έχουν βασιστεί στις σημειώσεις του εργαστηρίου
Εισαγωγή στο GNU Octave/MATLAB Δρ. Βασίλειος Δαλάκας Καλώς ήρθατε στο εργαστήριο Σημάτων και Συστημάτων με το λογισμικό Octave (Οκτάβα). Οι σημειώσεις αυτές έχουν βασιστεί στις σημειώσεις του εργαστηρίου
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ Ο.Π / Β ΛΥΚΕΙΟΥ (ΑΠΑΝΤΗΣΕΙΣ) ΗΜΕΡΟΜΗΝΙΑ: 12/11/2017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ
 ΗΜΕΡΟΜΗΝΙΑ: 12/11/2017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ") ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΟΠ / Β ΛΥΚΕΙΟΥ (ΑΠΑΝΤΗΣΕΙΣ) ΗΜΕΡΟΜΗΝΙΑ: 1/11/017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1-Α4
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΟΠ / Β ΛΥΚΕΙΟΥ (ΑΠΑΝΤΗΣΕΙΣ) ΗΜΕΡΟΜΗΝΙΑ: 1/11/017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1-Α4
Χρονικές σειρές 1 ο μάθημα: Εισαγωγή στη MATLAB
 Χρονικές σειρές 1 ο μάθημα: Εισαγωγή στη MATLAB Εαρινό εξάμηνο 2018-2019 Τμήμα Μαθηματικών ΑΠΘ Διδάσκουσα: Αγγελική Παπάνα Μεταδιδακτορική Ερευνήτρια Πολυτεχνική σχολή, Α.Π.Θ. & Οικονομικό Τμήμα, Πανεπιστήμιο
Χρονικές σειρές 1 ο μάθημα: Εισαγωγή στη MATLAB Εαρινό εξάμηνο 2018-2019 Τμήμα Μαθηματικών ΑΠΘ Διδάσκουσα: Αγγελική Παπάνα Μεταδιδακτορική Ερευνήτρια Πολυτεχνική σχολή, Α.Π.Θ. & Οικονομικό Τμήμα, Πανεπιστήμιο
Προβλήματα, αλγόριθμοι, ψευδοκώδικας
 Προβλήματα, αλγόριθμοι, ψευδοκώδικας October 11, 2011 Στο μάθημα Αλγοριθμική και Δομές Δεδομένων θα ασχοληθούμε με ένα μέρος της διαδικασίας επίλυσης υπολογιστικών προβλημάτων. Συγκεκριμένα θα δούμε τι
Προβλήματα, αλγόριθμοι, ψευδοκώδικας October 11, 2011 Στο μάθημα Αλγοριθμική και Δομές Δεδομένων θα ασχοληθούμε με ένα μέρος της διαδικασίας επίλυσης υπολογιστικών προβλημάτων. Συγκεκριμένα θα δούμε τι
Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα.
 ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ ΣΤΕΡΕΟΎ ΣΏΜΑΤΟΣ Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα. Ένα υλικό σημείο μπορεί να κάνει μόνο μεταφορική
ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ ΣΤΕΡΕΟΎ ΣΏΜΑΤΟΣ Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα. Ένα υλικό σημείο μπορεί να κάνει μόνο μεταφορική
Πρόβλημα 1: Αναζήτηση Ελάχιστης/Μέγιστης Τιμής
 Πρόβλημα 1: Αναζήτηση Ελάχιστης/Μέγιστης Τιμής Να γραφεί πρόγραμμα το οποίο δέχεται ως είσοδο μια ακολουθία S από n (n 40) ακέραιους αριθμούς και επιστρέφει ως έξοδο δύο ακολουθίες από θετικούς ακέραιους
Πρόβλημα 1: Αναζήτηση Ελάχιστης/Μέγιστης Τιμής Να γραφεί πρόγραμμα το οποίο δέχεται ως είσοδο μια ακολουθία S από n (n 40) ακέραιους αριθμούς και επιστρέφει ως έξοδο δύο ακολουθίες από θετικούς ακέραιους
Άσκηση 3 Υπολογισμός του μέτρου της ταχύτητας και της επιτάχυνσης
 Άσκηση 3 Υπολογισμός του μέτρου της ταχύτητας και της επιτάχυνσης Σύνοψη Σκοπός της συγκεκριμένης άσκησης είναι ο υπολογισμός του μέτρου της στιγμιαίας ταχύτητας και της επιτάχυνσης ενός υλικού σημείου
Άσκηση 3 Υπολογισμός του μέτρου της ταχύτητας και της επιτάχυνσης Σύνοψη Σκοπός της συγκεκριμένης άσκησης είναι ο υπολογισμός του μέτρου της στιγμιαίας ταχύτητας και της επιτάχυνσης ενός υλικού σημείου
Προγραμματισμός I (Θ)
") Τεχνολογικό Εκπαιδευτικό Ίδρυμα Κεντρικής Μακεδονίας - Σέρρες Τμήμα Μηχανικών Πληροφορικής Προγραμματισμός I (Θ) Δρ. Δημήτρης Βαρσάμης Επίκουρος Καθηγητής Οκτώβριος 2017 Δρ. Δημήτρης Βαρσάμης Οκτώβριος
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Κεντρικής Μακεδονίας - Σέρρες Τμήμα Μηχανικών Πληροφορικής Προγραμματισμός I (Θ) Δρ. Δημήτρης Βαρσάμης Επίκουρος Καθηγητής Οκτώβριος 2017 Δρ. Δημήτρης Βαρσάμης Οκτώβριος
> μεγαλύτερο <= μικρότερο ή ίσο < μικρότερο == ισότητα >= μεγαλύτερο ή ίσο!= διαφορετικό
 5 ο Εργαστήριο Λογικοί Τελεστές, Δομές Ελέγχου Λογικοί Τελεστές > μεγαλύτερο = μεγαλύτερο ή ίσο!= διαφορετικό Οι λογικοί τελεστές χρησιμοποιούνται για να ελέγξουμε
5 ο Εργαστήριο Λογικοί Τελεστές, Δομές Ελέγχου Λογικοί Τελεστές > μεγαλύτερο = μεγαλύτερο ή ίσο!= διαφορετικό Οι λογικοί τελεστές χρησιμοποιούνται για να ελέγξουμε
2 Η ΠΡΟΟΔΟΣ. Ενδεικτικές λύσεις κάποιων προβλημάτων. Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση
 2 Η ΠΡΟΟΔΟΣ Ενδεικτικές λύσεις κάποιων προβλημάτων Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση Ένας τροχός εκκινεί από την ηρεμία και επιταχύνει με γωνιακή ταχύτητα που δίνεται από την,
2 Η ΠΡΟΟΔΟΣ Ενδεικτικές λύσεις κάποιων προβλημάτων Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση Ένας τροχός εκκινεί από την ηρεμία και επιταχύνει με γωνιακή ταχύτητα που δίνεται από την,
3) το παράθυρο Πίνακας τιμών όπου εμφανίζονται οι τιμές που παίρνουν οι παράμετροι
 το παράθυρο Πίνακας τιμών όπου εμφανίζονται οι τιμές που παίρνουν οι παράμετροι") Ο Δ Η Γ Ι Ε Σ Γ Ι Α Τ Ο M O D E L L U S 0.0 4. 0 5 Για να κατεβάσουμε το πρόγραμμα Επιλέγουμε Download στη διεύθυνση: http://modellus.co/index.php/en/download. Στη συνέχεια εκτελούμε το ModellusX_windows_0_4_05.exe
Ο Δ Η Γ Ι Ε Σ Γ Ι Α Τ Ο M O D E L L U S 0.0 4. 0 5 Για να κατεβάσουμε το πρόγραμμα Επιλέγουμε Download στη διεύθυνση: http://modellus.co/index.php/en/download. Στη συνέχεια εκτελούμε το ModellusX_windows_0_4_05.exe
Εργαστήριο Δομημένος Προγραμματισμός (C#) Τμήμα Μηχανολογίας Νικόλαος Ζ. Ζάχαρης Καθηγητής Εφαρμογών
 Τμήμα Μηχανολογίας Νικόλαος Ζ. Ζάχαρης Καθηγητής Εφαρμογών") Εργαστήριο Δομημένος Προγραμματισμός (C#) Τμήμα Μηχανολογίας Νικόλαος Ζ. Ζάχαρης Καθηγητής Εφαρμογών Σκοπός Να αναπτύξουν ένα πρόγραμμα όπου θα επαναλάβουν τα βήματα ανάπτυξης μιας παραθυρικής εφαρμογής.
Εργαστήριο Δομημένος Προγραμματισμός (C#) Τμήμα Μηχανολογίας Νικόλαος Ζ. Ζάχαρης Καθηγητής Εφαρμογών Σκοπός Να αναπτύξουν ένα πρόγραμμα όπου θα επαναλάβουν τα βήματα ανάπτυξης μιας παραθυρικής εφαρμογής.
Προγραμματισμός Υπολογιστών & Εφαρμογές Python. Κ.Π. Γιαλούρης
 Προγραμματισμός Υπολογιστών & Κ.Π. Γιαλούρης Στόχοι του σημερινού μαθήματος Εξοικείωση με τα περιβάλλοντα της Python Κατανόηση βασικών εννοιών & τεχνικών Τύπος δεδομένων Μεταβλητή Εντολή ανάθεση τιμής
Προγραμματισμός Υπολογιστών & Κ.Π. Γιαλούρης Στόχοι του σημερινού μαθήματος Εξοικείωση με τα περιβάλλοντα της Python Κατανόηση βασικών εννοιών & τεχνικών Τύπος δεδομένων Μεταβλητή Εντολή ανάθεση τιμής
Εγκατάσταση λογισμικού και αναβάθμιση συσκευής Device software installation and software upgrade
 Για να ελέγξετε το λογισμικό που έχει τώρα η συσκευή κάντε κλικ Menu > Options > Device > About Device Versions. Στο πιο κάτω παράδειγμα η συσκευή έχει έκδοση λογισμικού 6.0.0.546 με πλατφόρμα 6.6.0.207.
Για να ελέγξετε το λογισμικό που έχει τώρα η συσκευή κάντε κλικ Menu > Options > Device > About Device Versions. Στο πιο κάτω παράδειγμα η συσκευή έχει έκδοση λογισμικού 6.0.0.546 με πλατφόρμα 6.6.0.207.
Σχήµα 5.1: Εισαγωγή της δοµής formula node στο Block Diagram.
 Η δοµή Formula Node 1. Η δοµή Formula Node επιτρέπει την εισαγωγή αναλυτικών σχέσεων στο Block Diagram µε πληκτρολόγηση, αποφεύγοντας έτσι την εισαγωγή των εικονίδιων συναρτήσεων απλών αλγεβρικών πράξεων
Η δοµή Formula Node 1. Η δοµή Formula Node επιτρέπει την εισαγωγή αναλυτικών σχέσεων στο Block Diagram µε πληκτρολόγηση, αποφεύγοντας έτσι την εισαγωγή των εικονίδιων συναρτήσεων απλών αλγεβρικών πράξεων
2.1. Κυκλική κίνηση Κυκλική κίνηση. Ομάδα Β.
 2.1.. 2.1.. Ομάδα Β. 2.1.Σχέσεις μεταξύ γραμμικών και γωνιακών μεγεθών στην ΟΚΚ. Κινητό κινείται σε περιφέρεια κύκλου ακτίνας 40m με ταχύτητα μέτρου 4m/s. i) Ποια είναι η περίοδος και ποια η συχνότητά
2.1.. 2.1.. Ομάδα Β. 2.1.Σχέσεις μεταξύ γραμμικών και γωνιακών μεγεθών στην ΟΚΚ. Κινητό κινείται σε περιφέρεια κύκλου ακτίνας 40m με ταχύτητα μέτρου 4m/s. i) Ποια είναι η περίοδος και ποια η συχνότητά
Γνωρίστε το Excel 2007
 Εισαγωγή τύπων Γνωρίστε το Excel 2007 Πληκτρολογήστε το σύμβολο της ισότητας (=), χρησιμοποιήστε ένα μαθηματικό τελεστή (+,-,*,/) και πατήστε το πλήκτρο ENTER. Πρόσθεση, διαίρεση, πολλαπλασιασμός και αφαίρεση
Εισαγωγή τύπων Γνωρίστε το Excel 2007 Πληκτρολογήστε το σύμβολο της ισότητας (=), χρησιμοποιήστε ένα μαθηματικό τελεστή (+,-,*,/) και πατήστε το πλήκτρο ENTER. Πρόσθεση, διαίρεση, πολλαπλασιασμός και αφαίρεση
ΑΝΑΠΤΥΞΗ ΛΟΓΙΣΜΙΚΟΥ ΓΙΑ ΤΗ ΔΙΕΝΕΡΓΕΙΑ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΜΕΛΕΤΩΝ
 ΤΜΗΜΑ ΕΦΑΡΜΟΣΜΕΝΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΑΝΑΠΤΥΞΗ ΛΟΓΙΣΜΙΚΟΥ ΓΙΑ ΤΗ ΔΙΕΝΕΡΓΕΙΑ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΜΕΛΕΤΩΝ ΠΛΟΣΚΑΣ ΝΙΚΟΛΑΟΣ Α.Μ. 123/04 ΕΠΙΒΛΕΠΩΝ: ΣΑΜΑΡΑΣ ΝΙΚΟΛΑΟΣ ΘΕΣΣΑΛΟΝΙΚΗ, ΙΟΥΝΙΟΣ 2007 Περιεχόμενα
ΤΜΗΜΑ ΕΦΑΡΜΟΣΜΕΝΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΑΝΑΠΤΥΞΗ ΛΟΓΙΣΜΙΚΟΥ ΓΙΑ ΤΗ ΔΙΕΝΕΡΓΕΙΑ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΜΕΛΕΤΩΝ ΠΛΟΣΚΑΣ ΝΙΚΟΛΑΟΣ Α.Μ. 123/04 ΕΠΙΒΛΕΠΩΝ: ΣΑΜΑΡΑΣ ΝΙΚΟΛΑΟΣ ΘΕΣΣΑΛΟΝΙΚΗ, ΙΟΥΝΙΟΣ 2007 Περιεχόμενα
ΚΕΦΑΛΑΙΟ 8 Η ΓΛΩΣΣΑ PASCAL
 8.1. Εισαγωγή ΚΕΦΑΛΑΙΟ 8 Η ΓΛΩΣΣΑ PACAL Πως προέκυψε η γλώσσα προγραμματισμού Pascal και ποια είναι τα γενικά της χαρακτηριστικά; Σχεδιάστηκε από τον Ελβετό επιστήμονα της Πληροφορικής Nicklaus Wirth to
8.1. Εισαγωγή ΚΕΦΑΛΑΙΟ 8 Η ΓΛΩΣΣΑ PACAL Πως προέκυψε η γλώσσα προγραμματισμού Pascal και ποια είναι τα γενικά της χαρακτηριστικά; Σχεδιάστηκε από τον Ελβετό επιστήμονα της Πληροφορικής Nicklaus Wirth to
Διάλεξη 1. Πράξεις Τελεστές Έλεγχος Ροής
 Διάλεξη 1 Πράξεις Τελεστές Έλεγχος Ροής Διοργάνωση : ΚΕΛ ΣΑΤΜ Διαφάνειες: Skaros, MadAGu Παρουσίαση: MadAGu Άδεια: Creative Commons 3.0 Αριθμητικοί Τελεστές- Αριθμητικές Πράξεις 2 Internal use only Αριθμητικοί
Διάλεξη 1 Πράξεις Τελεστές Έλεγχος Ροής Διοργάνωση : ΚΕΛ ΣΑΤΜ Διαφάνειες: Skaros, MadAGu Παρουσίαση: MadAGu Άδεια: Creative Commons 3.0 Αριθμητικοί Τελεστές- Αριθμητικές Πράξεις 2 Internal use only Αριθμητικοί
Λειτουργικά. Συστήματα Ι. Φ ρ ο ν τ ι σ τ ή ρ ι ο. Αριστείδης Ηλίας. Εργαστήριο Ηλεκτρονικών Υπολογιστών
 Λειτουργικά Αριστείδης Ηλίας Συστήματα Ι Φ ρ ο ν τ ι σ τ ή ρ ι ο Shell Scripting Εισαγωγή Ένα shell script είναι μια λίστα εντολών που εκτελούνται ακολουθιακά Εκτελούνται ανάλογα με το κέλυφος και για
Λειτουργικά Αριστείδης Ηλίας Συστήματα Ι Φ ρ ο ν τ ι σ τ ή ρ ι ο Shell Scripting Εισαγωγή Ένα shell script είναι μια λίστα εντολών που εκτελούνται ακολουθιακά Εκτελούνται ανάλογα με το κέλυφος και για
Πρώτη επαφή με το μαθηματικό πακέτο Mathematica
 Πρώτη επαφή με το μαθηματικό πακέτο Mathematica Με δύο λόγια, μπορούμε να πούμε ότι η Mathematica είναι ένα πρόγραμμα που το χρησιμοποιούμε για να κάνουμε αναλυτικούς και αριθμητικούς υπολογισμούς αλλά
Πρώτη επαφή με το μαθηματικό πακέτο Mathematica Με δύο λόγια, μπορούμε να πούμε ότι η Mathematica είναι ένα πρόγραμμα που το χρησιμοποιούμε για να κάνουμε αναλυτικούς και αριθμητικούς υπολογισμούς αλλά
SPSS Statistical Package for the Social Sciences
 SPSS Statistical Package for the Social Sciences Ξεκινώντας την εφαρμογή Εισαγωγή εδομένων Ορισμός Μεταβλητών Εισαγωγή περίπτωσης και μεταβλητής ιαγραφή περιπτώσεων ή και μεταβλητών ΣΤΑΤΙΣΤΙΚΗ Αθανάσιος
SPSS Statistical Package for the Social Sciences Ξεκινώντας την εφαρμογή Εισαγωγή εδομένων Ορισμός Μεταβλητών Εισαγωγή περίπτωσης και μεταβλητής ιαγραφή περιπτώσεων ή και μεταβλητών ΣΤΑΤΙΣΤΙΚΗ Αθανάσιος
Γ ΓΥΜΝΑΣΙΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΗ ΓΛΩΣΣΑ MicroWorlds Pro
 Για να μπορέσουμε να εισάγουμε δεδομένα από το πληκτρολόγιο αλλά και για να εξάγουμε εμφανίσουμε αποτελέσματα στην οθόνη του υπολογιστή χρησιμοποιούμε τις εντολές Εισόδου και Εξόδου αντίστοιχα. Σύνταξη
Για να μπορέσουμε να εισάγουμε δεδομένα από το πληκτρολόγιο αλλά και για να εξάγουμε εμφανίσουμε αποτελέσματα στην οθόνη του υπολογιστή χρησιμοποιούμε τις εντολές Εισόδου και Εξόδου αντίστοιχα. Σύνταξη
ΜΜΚ 105: Πειραματική και Στατιστική Ανάλυση Δημιουργία Πινάκων και Γραφικών Παραστάσεων στην Excel 18/09/14
 ΜΜΚ 105: Πειραματική και Στατιστική Ανάλυση Δημιουργία Πινάκων και Γραφικών Παραστάσεων στην Excel 18/09/14 1. Δημιουργία Πίνακα 1.1 Εισαγωγή μετρήσεων και υπολογισμός πράξεων Έστω ότι χρειάζεται να υπολογιστεί
ΜΜΚ 105: Πειραματική και Στατιστική Ανάλυση Δημιουργία Πινάκων και Γραφικών Παραστάσεων στην Excel 18/09/14 1. Δημιουργία Πίνακα 1.1 Εισαγωγή μετρήσεων και υπολογισμός πράξεων Έστω ότι χρειάζεται να υπολογιστεί
Αριθμητικές Μέθοδοι σε Προγραμματιστικό Περιβάλλον (Εργαστήριο 2)
") Τμήμα Μηχανικών Πληροφορικής Αριθμητικές Μέθοδοι σε Προγραμματιστικό Περιβάλλον (Εργαστήριο 2) Δρ. Δημήτρης Βαρσάμης Επίκουρος Καθηγητής Δρ. Δημήτρης Βαρσάμης Αριθμητικές Μέθοδοι (E 2) Σεπτέμβριος 2015
Τμήμα Μηχανικών Πληροφορικής Αριθμητικές Μέθοδοι σε Προγραμματιστικό Περιβάλλον (Εργαστήριο 2) Δρ. Δημήτρης Βαρσάμης Επίκουρος Καθηγητής Δρ. Δημήτρης Βαρσάμης Αριθμητικές Μέθοδοι (E 2) Σεπτέμβριος 2015
2.1. Εντολές. 2.2. Σχόλια. 2.3. Τύποι Δεδομένων
 2 Βασικές Εντολές 2.1. Εντολές Οι στην Java ακολουθούν το πρότυπο της γλώσσας C. Έτσι, κάθε εντολή που γράφουμε στη Java θα πρέπει να τελειώνει με το ερωτηματικό (;). Όπως και η C έτσι και η Java επιτρέπει
2 Βασικές Εντολές 2.1. Εντολές Οι στην Java ακολουθούν το πρότυπο της γλώσσας C. Έτσι, κάθε εντολή που γράφουμε στη Java θα πρέπει να τελειώνει με το ερωτηματικό (;). Όπως και η C έτσι και η Java επιτρέπει
Εισαγωγή στην Επιστήμη Υπολογιστών. Εισαγωγή στην Python
 Εισαγωγή στην Επιστήμη Υπολογιστών Εισαγωγή στην Python Python scripts Ένα πρόγραμμα στην Python (συχνά αποκαλείται script) αποτελείται από μία ακολουθία ορισμών και εντολών. H ακολουθία των ορισμών και
Εισαγωγή στην Επιστήμη Υπολογιστών Εισαγωγή στην Python Python scripts Ένα πρόγραμμα στην Python (συχνά αποκαλείται script) αποτελείται από μία ακολουθία ορισμών και εντολών. H ακολουθία των ορισμών και
Εργαστήριο Δομημένος Προγραμματισμός (C#) Τμήμα Μηχανολογίας Νικόλαος Ζ. Ζάχαρης Καθηγητής Εφαρμογών
 Τμήμα Μηχανολογίας Νικόλαος Ζ. Ζάχαρης Καθηγητής Εφαρμογών") Εργαστήριο Δομημένος Προγραμματισμός (C#) Τμήμα Μηχανολογίας Νικόλαος Ζ. Ζάχαρης Καθηγητής Εφαρμογών Σκοπός Να καταλάβουν την διαφορά ανάμεσα σε τοπικές και καθολικές μεταβλητές. Nα κάνουν αποσφαλμάτωση
Εργαστήριο Δομημένος Προγραμματισμός (C#) Τμήμα Μηχανολογίας Νικόλαος Ζ. Ζάχαρης Καθηγητής Εφαρμογών Σκοπός Να καταλάβουν την διαφορά ανάμεσα σε τοπικές και καθολικές μεταβλητές. Nα κάνουν αποσφαλμάτωση
ΦΥΣΙΚΗ Β ΛΥΚΕΙΟΥ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ
 ΜΑΝΩΛΗ ΡΙΤΣΑ ΦΥΣΙΚΗ Β ΛΥΚΕΙΟΥ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΣ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Τράπεζα θεμάτων Β Θέμα ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ 16118 Δύο σφαιρίδια Σ 1 και Σ 2 βρίσκονται σε λείο οριζόντιο τραπέζι (κάτοψη του οποίου φαίνεται στο
ΜΑΝΩΛΗ ΡΙΤΣΑ ΦΥΣΙΚΗ Β ΛΥΚΕΙΟΥ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΣ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Τράπεζα θεμάτων Β Θέμα ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ 16118 Δύο σφαιρίδια Σ 1 και Σ 2 βρίσκονται σε λείο οριζόντιο τραπέζι (κάτοψη του οποίου φαίνεται στο
ΟΜΑΛΗ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ ΥΛΙΚΟΥ ΣΗΜΕΙΟΥ
 ΟΜΑΛΗ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ ΥΛΙΚΟΥ ΣΗΜΕΙΟΥ Οι δακτύλιοι του Κρόνου είναι ένα σύστημα πλανητικών δακτυλίων γύρω από αυτόν. Αποτελούνται από αμέτρητα σωματίδια των οποίων το μέγεθος κυμαίνεται από μm μέχρι m, με
ΟΜΑΛΗ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ ΥΛΙΚΟΥ ΣΗΜΕΙΟΥ Οι δακτύλιοι του Κρόνου είναι ένα σύστημα πλανητικών δακτυλίων γύρω από αυτόν. Αποτελούνται από αμέτρητα σωματίδια των οποίων το μέγεθος κυμαίνεται από μm μέχρι m, με
Εργαστήριο Δομημένος Προγραμματισμός (C#) Τμήμα Μηχανολογίας Νικόλαος Ζ. Ζάχαρης Καθηγητής Εφαρμογών
 Τμήμα Μηχανολογίας Νικόλαος Ζ. Ζάχαρης Καθηγητής Εφαρμογών") Εργαστήριο Δομημένος Προγραμματισμός (C#) Τμήμα Μηχανολογίας Νικόλαος Ζ. Ζάχαρης Καθηγητής Εφαρμογών Σκοπός Nα κατασκευάσουν πίνακες από δεδομένα. Να κατασκευάσουν συναρτήσεις με πίνακες. Να κάνουν χρήση
Εργαστήριο Δομημένος Προγραμματισμός (C#) Τμήμα Μηχανολογίας Νικόλαος Ζ. Ζάχαρης Καθηγητής Εφαρμογών Σκοπός Nα κατασκευάσουν πίνακες από δεδομένα. Να κατασκευάσουν συναρτήσεις με πίνακες. Να κάνουν χρήση
1. Εισαγωγή στο Sage.
 1. Εισαγωγή στο Sage. 1.1 Το μαθηματικό λογισμικό Sage Το Sage (System for Algebra and Geometry Experimentation) είναι ένα ελεύθερο (δωρεάν) λογισμικό μαθηματικών ανοιχτού κώδικα που υποστηρίζει αριθμητικούς
1. Εισαγωγή στο Sage. 1.1 Το μαθηματικό λογισμικό Sage Το Sage (System for Algebra and Geometry Experimentation) είναι ένα ελεύθερο (δωρεάν) λογισμικό μαθηματικών ανοιχτού κώδικα που υποστηρίζει αριθμητικούς
Βυζαντινός Ρεπαντής Κολλέγιο Αθηνών 2010
 Βυζαντινός Ρεπαντής Κολλέγιο Αθηνών 2010 Δημιουργία ενός απλού παιχνιδιού με το Gamemaker (μετάφραση από το http://www.stuffucanuse.com/downloads/gamemaker-introductionlessons/free_game_downloads_gamemaker.htm)
Βυζαντινός Ρεπαντής Κολλέγιο Αθηνών 2010 Δημιουργία ενός απλού παιχνιδιού με το Gamemaker (μετάφραση από το http://www.stuffucanuse.com/downloads/gamemaker-introductionlessons/free_game_downloads_gamemaker.htm)
επιµέλεια Θοδωρής Πιερράτος
 Βασικές έννοιες προγραµµατισµού Η ύλη που αναπτύσσεται σε αυτό το κεφάλαιο είναι συναφής µε την ύλη που αναπτύσσεται στο 2 ο κεφάλαιο. Όπου υπάρχουν διαφορές αναφέρονται ρητά. Προσέξτε ιδιαίτερα, πάντως,
Βασικές έννοιες προγραµµατισµού Η ύλη που αναπτύσσεται σε αυτό το κεφάλαιο είναι συναφής µε την ύλη που αναπτύσσεται στο 2 ο κεφάλαιο. Όπου υπάρχουν διαφορές αναφέρονται ρητά. Προσέξτε ιδιαίτερα, πάντως,
ΕΠΑΝΑΛΗΠΤΙΚΗ ΕΡΓΑΣΙΑ ΦΥΣΙΚΗΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ 2015 ΟΡΙΖΟΝΤΙΑ ΒΟΛΗ
 ΕΠΑΝΑΛΗΠΤΙΚΗ ΕΡΓΑΣΙΑ ΦΥΣΙΚΗΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ 2015 ΟΡΙΖΟΝΤΙΑ ΒΟΛΗ Οριζόντια βολή: Είναι η κίνηση (παραβολική τροχιά) που κάνει ένα σώμα το οποίο βάλλεται με οριζόντια ταχύτητα U 0 μέσα στο πεδίο βαρύτητας
ΕΠΑΝΑΛΗΠΤΙΚΗ ΕΡΓΑΣΙΑ ΦΥΣΙΚΗΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ 2015 ΟΡΙΖΟΝΤΙΑ ΒΟΛΗ Οριζόντια βολή: Είναι η κίνηση (παραβολική τροχιά) που κάνει ένα σώμα το οποίο βάλλεται με οριζόντια ταχύτητα U 0 μέσα στο πεδίο βαρύτητας
Λειτουργικά Συστήματα
 Λειτουργικά Συστήματα Ενότητα: ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ No:01 Δρ. Μηνάς Δασυγένης mdasyg@ieee.org Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών
Λειτουργικά Συστήματα Ενότητα: ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ No:01 Δρ. Μηνάς Δασυγένης mdasyg@ieee.org Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Εργαστήριο Ψηφιακών Συστημάτων και Αρχιτεκτονικής Υπολογιστών
Βασικοί τύποι δεδομένων (Pascal) ΕΠΑ.Λ Αλίμου Γ Πληροφορική Δομημένος Προγραμματισμός (Ε) Σχολ. Ετος Κων/νος Φλώρος
 ΕΠΑ.Λ Αλίμου Γ Πληροφορική Δομημένος Προγραμματισμός (Ε) Σχολ. Ετος Κων/νος Φλώρος") Βασικοί τύποι δεδομένων (Pascal) ΕΠΑ.Λ Αλίμου Γ Πληροφορική Δομημένος Προγραμματισμός (Ε) Σχολ. Ετος 2012-13 Κων/νος Φλώρος Απλοί τύποι δεδομένων Οι τύποι δεδομένων προσδιορίζουν τον τρόπο παράστασης των
Βασικοί τύποι δεδομένων (Pascal) ΕΠΑ.Λ Αλίμου Γ Πληροφορική Δομημένος Προγραμματισμός (Ε) Σχολ. Ετος 2012-13 Κων/νος Φλώρος Απλοί τύποι δεδομένων Οι τύποι δεδομένων προσδιορίζουν τον τρόπο παράστασης των
1. Κίνηση Υλικού Σημείου
 1. Κίνηση Υλικού Σημείου Εισαγωγή στην Φυσική της Γ λυκείου Τροχιά: Ονομάζεται η γραμμή που συνδέει τις διαδοχικές θέσεις του κινητού. Οι κινήσεις ανάλογα με το είδος της τροχιάς διακρίνονται σε: 1. Ευθύγραμμες
1. Κίνηση Υλικού Σημείου Εισαγωγή στην Φυσική της Γ λυκείου Τροχιά: Ονομάζεται η γραμμή που συνδέει τις διαδοχικές θέσεις του κινητού. Οι κινήσεις ανάλογα με το είδος της τροχιάς διακρίνονται σε: 1. Ευθύγραμμες
Εισαγωγή στον Προγραμματισμό Python Μάθημα 1: Μεταβλητές, τελεστές, είσοδος/έξοδος προγράμματος, συνθήκη ελέγχου if Νοέμβριος 2014 Χ. Αλεξανδράκη, Γ.
 Εισαγωγή στον Προγραμματισμό Python Μάθημα 1: Μεταβλητές, τελεστές, είσοδος/έξοδος προγράμματος, συνθήκη ελέγχου if Νοέμβριος 2014 Χ. Αλεξανδράκη, Γ. Δημητρακάκης Σύνοψη Μαθήματος Προηγούμενο μάθημα Αλγόριθμοι
Εισαγωγή στον Προγραμματισμό Python Μάθημα 1: Μεταβλητές, τελεστές, είσοδος/έξοδος προγράμματος, συνθήκη ελέγχου if Νοέμβριος 2014 Χ. Αλεξανδράκη, Γ. Δημητρακάκης Σύνοψη Μαθήματος Προηγούμενο μάθημα Αλγόριθμοι
Ψευδοκώδικας. November 7, 2011
 Ψευδοκώδικας November 7, 2011 Οι γλώσσες τύπου ψευδοκώδικα είναι ένας τρόπος περιγραφής αλγορίθμων. Δεν υπάρχει κανένας τυπικός ορισμός της έννοιας του ψευδοκώδικα όμως είναι κοινός τόπος ότι οποιαδήποτε
Ψευδοκώδικας November 7, 2011 Οι γλώσσες τύπου ψευδοκώδικα είναι ένας τρόπος περιγραφής αλγορίθμων. Δεν υπάρχει κανένας τυπικός ορισμός της έννοιας του ψευδοκώδικα όμως είναι κοινός τόπος ότι οποιαδήποτε
Διαγώνισμα Φυσικής Β Λυκείου Προσανατολισμού. Οριζόντια βολή Κυκλικές κινήσεις
 Διαγώνισμα Φυσικής Β Λυκείου Προσανατολισμού Οριζόντια βολή Κυκλικές κινήσεις ~~Διάρκεια 2 ώρες~~ Θέμα Α 1) Δύο μαθητές παρακολουθούν το μάθημα της Φυσικής από τα έδρανα του εργαστηρίου του σχολείου τους.
Διαγώνισμα Φυσικής Β Λυκείου Προσανατολισμού Οριζόντια βολή Κυκλικές κινήσεις ~~Διάρκεια 2 ώρες~~ Θέμα Α 1) Δύο μαθητές παρακολουθούν το μάθημα της Φυσικής από τα έδρανα του εργαστηρίου του σχολείου τους.
A3.3 Γραφικά Περιβάλλοντα Επικοινωνίας και Διαχείριση Παραθύρων
 A3.3 Γραφικά Περιβάλλοντα Επικοινωνίας και Διαχείριση Παραθύρων Τι θα μάθουμε σήμερα: Να αναφέρουμε τα κύρια χαρακτηριστικά ενός Γραφικού Περιβάλλοντος Επικοινωνίας Να εξηγούμε τη χρήση των κουμπιών του
A3.3 Γραφικά Περιβάλλοντα Επικοινωνίας και Διαχείριση Παραθύρων Τι θα μάθουμε σήμερα: Να αναφέρουμε τα κύρια χαρακτηριστικά ενός Γραφικού Περιβάλλοντος Επικοινωνίας Να εξηγούμε τη χρήση των κουμπιών του
ΠΛΗΡΟΦΟΡΙΚΗ Ι ΕΡΓΑΣΤΗΡΙΟ 1. Θέμα εργαστηρίου: Εισαγωγή στην Python και στο IDLE
 ΠΛΗΡΟΦΟΡΙΚΗ Ι ΕΡΓΑΣΤΗΡΙΟ 1 Θέμα εργαστηρίου: Εισαγωγή στην Python και στο IDLE Περιεχόμενο εργαστηρίου: - Το περιβάλλον ανάπτυξης προγραμμάτων IDLE - Διαδικασία ανάπτυξης προγραμμάτων Python - Απλά προγράμματα
ΠΛΗΡΟΦΟΡΙΚΗ Ι ΕΡΓΑΣΤΗΡΙΟ 1 Θέμα εργαστηρίου: Εισαγωγή στην Python και στο IDLE Περιεχόμενο εργαστηρίου: - Το περιβάλλον ανάπτυξης προγραμμάτων IDLE - Διαδικασία ανάπτυξης προγραμμάτων Python - Απλά προγράμματα
Αλγόριθμοι Αναπαράσταση αλγορίθμων Η αναπαράσταση των αλγορίθμων μπορεί να πραγματοποιηθεί με:
 Αλγόριθμοι 2.2.1. Ορισμός: Αλγόριθμος είναι μια πεπερασμένη σειρά εντολών, αυστηρά καθορισμένων και εκτελέσιμων σε πεπερασμένο χρόνο, που στοχεύουν στην επίλυση ενός προβλήματος. Τα κυριότερα χρησιμοποιούμενα
Αλγόριθμοι 2.2.1. Ορισμός: Αλγόριθμος είναι μια πεπερασμένη σειρά εντολών, αυστηρά καθορισμένων και εκτελέσιμων σε πεπερασμένο χρόνο, που στοχεύουν στην επίλυση ενός προβλήματος. Τα κυριότερα χρησιμοποιούμενα
ΗΥ-150. Προγραμματισμός
 ΗΥ-150 Εντολές Ελέγχου Ροής Σειριακή εκτέλεση εντολών Όλα τα προγράμματα «γράφονται» χρησιμοποιώντας 3 είδη εντολών: Σειριακές εντολές (sequential built in C) Εντολές απόφασης (if, if/else, switch) Περιλαμβάνει
ΗΥ-150 Εντολές Ελέγχου Ροής Σειριακή εκτέλεση εντολών Όλα τα προγράμματα «γράφονται» χρησιμοποιώντας 3 είδη εντολών: Σειριακές εντολές (sequential built in C) Εντολές απόφασης (if, if/else, switch) Περιλαμβάνει
ΗΥ-150. Προγραμματισμός
 ΗΥ-150 Εντολές Ελέγχου Ροής Σειριακή εκτέλεση εντολών Όλα τα προγράμματα «γράφονται» χρησιμοποιώντας 3 είδη εντολών: Σειριακές εντολές (sequential built in C) Εντολές απόφασης (if, if/else, switch) Περιλαμβάνει
ΗΥ-150 Εντολές Ελέγχου Ροής Σειριακή εκτέλεση εντολών Όλα τα προγράμματα «γράφονται» χρησιμοποιώντας 3 είδη εντολών: Σειριακές εντολές (sequential built in C) Εντολές απόφασης (if, if/else, switch) Περιλαμβάνει
Εισαγωγή στους Υπολογιστές
 Εισαγωγή στους Υπολογιστές Ενότητα #5: Διαγράμματα ροής (Flow Charts), Δομές επανάληψης Καθ. Δημήτρης Ματαράς Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών Διαγράμματα ροής (Flow Charts), Δομές επανάληψης
Εισαγωγή στους Υπολογιστές Ενότητα #5: Διαγράμματα ροής (Flow Charts), Δομές επανάληψης Καθ. Δημήτρης Ματαράς Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών Διαγράμματα ροής (Flow Charts), Δομές επανάληψης
ΠΛΗΡΟΦΟΡΙΚΗ Ι JAVA Τμήμα θεωρίας με Α.Μ. σε 3, 7, 8 & 9 22/11/07
 Ακαδ έτος 2007-2008 ΠΛΗΡΟΦΟΡΙΚΗ Ι Φερεντίνος 22/11/07 ΠΛΗΡΟΦΟΡΙΚΗ Ι JAVA Τμήμα θεωρίας με ΑΜ σε 3, 7, 8 & 9 22/11/07 Παράδειγμα με if/else if και user input: import javautil*; public class Grades public
Ακαδ έτος 2007-2008 ΠΛΗΡΟΦΟΡΙΚΗ Ι Φερεντίνος 22/11/07 ΠΛΗΡΟΦΟΡΙΚΗ Ι JAVA Τμήμα θεωρίας με ΑΜ σε 3, 7, 8 & 9 22/11/07 Παράδειγμα με if/else if και user input: import javautil*; public class Grades public
ΥΠΟΠΡΟΓΡΑΜΜΑΤΑ. Κάθε υποπρόγραμμα έχει μόνο μία είσοδο και μία έξοδο. Κάθε υποπρόγραμμα πρέπει να είναι ανεξάρτητο από τα άλλα.
 ΥΠΟΠΡΟΓΡΑΜΜΑΤΑ Τμηματικός προγραμματισμός ονομάζεται η τεχνική σχεδίασης και ανάπτυξης των προγραμμάτων ως ένα σύνολο από απλούστερα τμήματα προγραμμάτων. Όταν ένα τμήμα προγράμματος επιτελεί ένα αυτόνομο
ΥΠΟΠΡΟΓΡΑΜΜΑΤΑ Τμηματικός προγραμματισμός ονομάζεται η τεχνική σχεδίασης και ανάπτυξης των προγραμμάτων ως ένα σύνολο από απλούστερα τμήματα προγραμμάτων. Όταν ένα τμήμα προγράμματος επιτελεί ένα αυτόνομο
2 ΟΥ και 7 ΟΥ ΚΕΦΑΛΑΙΟΥ
 ΑΝΑΠΤΥΞΗ ΕΦΑΡΜΟΓΩΝ ΣΕ ΠΡΟΓΡΑΜΜΑΤΙΣΤΙΚΟ ΠΕΡΙΒΑΛΛΟΝ ΕΠΙΜΕΛΕΙΑ: ΜΑΡΙΑ Σ. ΖΙΩΓΑ ΚΑΘΗΓΗΤΡΙΑ ΠΛΗΡΟΦΟΡΙΚΗΣ ΘΕΩΡΙΑ 2 ΟΥ και 7 ΟΥ ΚΕΦΑΛΑΙΟΥ ΒΑΣΙΚΕΣ ΕΝΝΟΙΕΣ ΑΛΓΟΡΙΘΜΩΝ και ΔΟΜΗ ΑΚΟΛΟΥΘΙΑΣ 2.1 Να δοθεί ο ορισμός
ΑΝΑΠΤΥΞΗ ΕΦΑΡΜΟΓΩΝ ΣΕ ΠΡΟΓΡΑΜΜΑΤΙΣΤΙΚΟ ΠΕΡΙΒΑΛΛΟΝ ΕΠΙΜΕΛΕΙΑ: ΜΑΡΙΑ Σ. ΖΙΩΓΑ ΚΑΘΗΓΗΤΡΙΑ ΠΛΗΡΟΦΟΡΙΚΗΣ ΘΕΩΡΙΑ 2 ΟΥ και 7 ΟΥ ΚΕΦΑΛΑΙΟΥ ΒΑΣΙΚΕΣ ΕΝΝΟΙΕΣ ΑΛΓΟΡΙΘΜΩΝ και ΔΟΜΗ ΑΚΟΛΟΥΘΙΑΣ 2.1 Να δοθεί ο ορισμός
ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ Β ΛΥΚΕΙΟΥ
 η εξεταστική περίοδος 03-4 - Σελίδα ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ Β ΛΥΚΕΙΟΥ Τάξη: Β Λυκείου Τμήμα: Βαθμός: Ημερομηνία: 6-0-03 Διάρκεια: 3 ώρες Ύλη: Κυκλική κίνηση - Βολή - Ορμή - Κρούση Καθηγητής:
η εξεταστική περίοδος 03-4 - Σελίδα ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ Β ΛΥΚΕΙΟΥ Τάξη: Β Λυκείου Τμήμα: Βαθμός: Ημερομηνία: 6-0-03 Διάρκεια: 3 ώρες Ύλη: Κυκλική κίνηση - Βολή - Ορμή - Κρούση Καθηγητής:
Σχήµα 4.1: Εισαγωγή βρόγχου while-loop.
 Ο βρόγχος While-loop 1. Ο βρόγχος while-loop εκτελείται έως ότου ικανοποιηθεί µία προκαθορισµένη συνθήκη. 2. Ο αριθµός των επαναλήψεων ενός βρόγχου while-loop δεν είναι εκ των προτέρων προκαθορισµένος,
Ο βρόγχος While-loop 1. Ο βρόγχος while-loop εκτελείται έως ότου ικανοποιηθεί µία προκαθορισµένη συνθήκη. 2. Ο αριθµός των επαναλήψεων ενός βρόγχου while-loop δεν είναι εκ των προτέρων προκαθορισµένος,
Λογισμικά για Στατιστική Ανάλυση. Minitab, R (ελεύθερο λογισμικό), Sas, S-Plus, Stata, StatGraphics, Mathematica (εξειδικευμένο λογισμικό για
, Sas, S-Plus, Stata, StatGraphics, Mathematica (εξειδικευμένο λογισμικό για") ΒΙΟΣΤΑΤΙΣΤΙΚΗ Εργαστήριο 1ο Τι είναι το SPSS; Statistical Package for the Social Sciences Λογισμικό για διαχείριση και στατιστική ανάλυση δεδομένων σε γραφικό περιβάλλον http://en.wikipedia.org/wiki/spss
ΒΙΟΣΤΑΤΙΣΤΙΚΗ Εργαστήριο 1ο Τι είναι το SPSS; Statistical Package for the Social Sciences Λογισμικό για διαχείριση και στατιστική ανάλυση δεδομένων σε γραφικό περιβάλλον http://en.wikipedia.org/wiki/spss
Εισαγωγή στην PHP. ΕΣΔ 232 Διαχείριση Δεδομένων στη Κοινωνία της Πληροφορίας. Περιεχόμενα. Περιεχόμενα
 ΕΣΔ 232 Διαχείριση Δεδομένων στη Κοινωνία της Πληροφορίας Εισαγωγή στην PHP Περιεχόμενα Περιεχόμενα PHP και HTML Βασική σύνταξη Μεταβλητές Τελεστές Συναρτήσεις Παράδειγματα 1 Βιβλιογραφία Ενότητας Βιβλιογραφία
ΕΣΔ 232 Διαχείριση Δεδομένων στη Κοινωνία της Πληροφορίας Εισαγωγή στην PHP Περιεχόμενα Περιεχόμενα PHP και HTML Βασική σύνταξη Μεταβλητές Τελεστές Συναρτήσεις Παράδειγματα 1 Βιβλιογραφία Ενότητας Βιβλιογραφία
Ανάλυση, Στατιστική Επεξεργασία και Παρουσίαση Δεδομένων με χρήση Ανοικτών Λογισμικών Δρ. Φίλιππος Σοφός
 Ανάλυση, Στατιστική Επεξεργασία και Παρουσίαση Δεδομένων με χρήση Ανοικτών Λογισμικών Δρ. Φίλιππος Σοφός ΠΕΡΙΓΡΑΜΜΑ ΠΑΡΟΥΣΙΑΣΗΣ Διερεύνηση αναγκών Επιλογή του Octave Χαρακτηριστικά και περιβάλλον εργασίας
Ανάλυση, Στατιστική Επεξεργασία και Παρουσίαση Δεδομένων με χρήση Ανοικτών Λογισμικών Δρ. Φίλιππος Σοφός ΠΕΡΙΓΡΑΜΜΑ ΠΑΡΟΥΣΙΑΣΗΣ Διερεύνηση αναγκών Επιλογή του Octave Χαρακτηριστικά και περιβάλλον εργασίας
ΕΠΛ 012. JavaScripts
 ΕΠΛ 012 JavaScripts Γλώσσα JavaScript (JS) ηµιουργεί δυναµικές ιστοσελίδες και αλληλεπιδράσεις µε το χρήστη εν είναι Java, αλλά είναι αντικειµενοστραφής (απλό µοντέλο υποκειµένων) Objects, properties (τιµές
ΕΠΛ 012 JavaScripts Γλώσσα JavaScript (JS) ηµιουργεί δυναµικές ιστοσελίδες και αλληλεπιδράσεις µε το χρήστη εν είναι Java, αλλά είναι αντικειµενοστραφής (απλό µοντέλο υποκειµένων) Objects, properties (τιµές
γραπτή εξέταση στη ΦΥΣΙΚΗ B κατεύθυνσης
 η εξεταστική περίοδος από 4/0/5 έως 08//5 γραπτή εξέταση στη ΦΥΣΙΚΗ B κατεύθυνσης Τάξη: Β Λυκείου Τμήμα: Βαθμός: Ονοματεπώνυμο: Καθηγητές: Θ Ε Μ Α A Στις ερωτήσεις Α-Α4 να επιλέξετε τη σωστή απάντηση.
η εξεταστική περίοδος από 4/0/5 έως 08//5 γραπτή εξέταση στη ΦΥΣΙΚΗ B κατεύθυνσης Τάξη: Β Λυκείου Τμήμα: Βαθμός: Ονοματεπώνυμο: Καθηγητές: Θ Ε Μ Α A Στις ερωτήσεις Α-Α4 να επιλέξετε τη σωστή απάντηση.
ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ. 1. Β.2 Ο ωροδείκτης και ο λεπτοδείκτης ξεκινούν μαζί στις 12:00.
 ΤΡΑΠΕΖΑ ΘΕΜΑΤΩΝ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ ΘΕΜΑ 2 1. Β.2 Ο ωροδείκτης και ο λεπτοδείκτης ξεκινούν μαζί στις 12:00. Α) Να επιλέξετε τη σωστή απάντηση. Η πρώτη τους συνάντηση θα γίνει: α. Σε μια ώρα. β. Σε λιγότερο
ΤΡΑΠΕΖΑ ΘΕΜΑΤΩΝ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ ΘΕΜΑ 2 1. Β.2 Ο ωροδείκτης και ο λεπτοδείκτης ξεκινούν μαζί στις 12:00. Α) Να επιλέξετε τη σωστή απάντηση. Η πρώτη τους συνάντηση θα γίνει: α. Σε μια ώρα. β. Σε λιγότερο
Εισαγωγή στη Matlab Βασικές Συναρτήσεις
 Πανεπιστήμιο Θεσσαλίας Σχολή Θετικών Επιστημών Τμήμα Πληροφορικής με Εφαρμογές στη Βιοϊατρική Εργαστήριο Γραμμικής Άλγεβρας Εισαγωγή στη Matlab Βασικές Συναρτήσεις 2016-2017 Εισαγωγή στη Matlab Matlab
Πανεπιστήμιο Θεσσαλίας Σχολή Θετικών Επιστημών Τμήμα Πληροφορικής με Εφαρμογές στη Βιοϊατρική Εργαστήριο Γραμμικής Άλγεβρας Εισαγωγή στη Matlab Βασικές Συναρτήσεις 2016-2017 Εισαγωγή στη Matlab Matlab
Εργαστήρια Αριθμητικής Ανάλυσης Ι. 1 ο Εργαστήριο. Εισαγωγή στο Matlab
 Εργαστήρια Αριθμητικής Ανάλυσης Ι 1 ο Εργαστήριο Εισαγωγή στο Matlab 2017 Εισαγωγή Στα εργαστήρια θα ασχοληθούμε με την υλοποίηση των αριθμητικών μεθόδων που βλέπουμε στο θεωρητικό μέρος του μαθήματος,
Εργαστήρια Αριθμητικής Ανάλυσης Ι 1 ο Εργαστήριο Εισαγωγή στο Matlab 2017 Εισαγωγή Στα εργαστήρια θα ασχοληθούμε με την υλοποίηση των αριθμητικών μεθόδων που βλέπουμε στο θεωρητικό μέρος του μαθήματος,
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Βασικές Έννοιες Μέχρι στιγμής αντιμετωπίζαμε κάθε σώμα που μελετούσαμε την κίνηση του ως υλικό
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Βασικές Έννοιες Μέχρι στιγμής αντιμετωπίζαμε κάθε σώμα που μελετούσαμε την κίνηση του ως υλικό
3 ο Εργαστήριο Μεταβλητές, Τελεστές
 3 ο Εργαστήριο Μεταβλητές, Τελεστές Μια μεταβλητή έχει ένα όνομα και ουσιαστικά είναι ένας δείκτης σε μια συγκεκριμένη θέση στη μνήμη του υπολογιστή. Στη θέση μνήμης στην οποία δείχνει μια μεταβλητή αποθηκεύονται
3 ο Εργαστήριο Μεταβλητές, Τελεστές Μια μεταβλητή έχει ένα όνομα και ουσιαστικά είναι ένας δείκτης σε μια συγκεκριμένη θέση στη μνήμη του υπολογιστή. Στη θέση μνήμης στην οποία δείχνει μια μεταβλητή αποθηκεύονται
Εφαρμογές Η/Υ στη Χρηματοοικονομική. Εργαστήριο ΙI. Διδάσκων Καθηγητής: Αχιλλέας Ζαπράνης. Επιμέλεια Σημειώσεων: Ευστράτιος Λιβάνης
 Εφαρμογές Η/Υ στη Χρηματοοικονομική Εργαστήριο ΙI Διδάσκων Καθηγητής: Αχιλλέας Ζαπράνης Επιμέλεια Σημειώσεων: Ευστράτιος Λιβάνης 1.1 Εισαγωγή Το αντικείμενο αυτού του εργαστηρίου είναι η δημιουργία αρχείων
Εφαρμογές Η/Υ στη Χρηματοοικονομική Εργαστήριο ΙI Διδάσκων Καθηγητής: Αχιλλέας Ζαπράνης Επιμέλεια Σημειώσεων: Ευστράτιος Λιβάνης 1.1 Εισαγωγή Το αντικείμενο αυτού του εργαστηρίου είναι η δημιουργία αρχείων
Προγραμματισμός στο Matlab
 Κλάδοι με την εντολή if Προγραμματισμός στο Matlab Σαν ένα απλό παράδειγμα κλάδου με την εντολή if ας θεωρήσουμε το παρακάτω παράδειγμα που υπολογίζει την απόλυτη τιμή ενός πραγματικού αριθμού. function
Κλάδοι με την εντολή if Προγραμματισμός στο Matlab Σαν ένα απλό παράδειγμα κλάδου με την εντολή if ας θεωρήσουμε το παρακάτω παράδειγμα που υπολογίζει την απόλυτη τιμή ενός πραγματικού αριθμού. function
Παράδειγμα για διαχείριση strings
 Παράδειγμα για διαχείριση strings Ας υποθέσουμε ότι έχουμε ένα string που αποτελείται από μια γωνία ακολουθούμενη από ένα γράμμα ή d για μοίρες ή r για ακτίνια. Για παράδειγμα μπορεί να είναι ένα string
Παράδειγμα για διαχείριση strings Ας υποθέσουμε ότι έχουμε ένα string που αποτελείται από μια γωνία ακολουθούμενη από ένα γράμμα ή d για μοίρες ή r για ακτίνια. Για παράδειγμα μπορεί να είναι ένα string
Σημαντικές δυνατότητες των σύγχρονων υπολογιστικών μηχανών: Αξιόπιστη καταγραφή πολύ μεγάλου όγκου δεδομένων
 Σημαντικές δυνατότητες των σύγχρονων υπολογιστικών μηχανών: Γρήγορες προσθέσεις αριθμών Γρήγορες συγκρίσεις αριθμών Αξιόπιστη καταγραφή πολύ μεγάλου όγκου δεδομένων Σχετικά γρήγορη μετάδοση και πρόσληψη
Σημαντικές δυνατότητες των σύγχρονων υπολογιστικών μηχανών: Γρήγορες προσθέσεις αριθμών Γρήγορες συγκρίσεις αριθμών Αξιόπιστη καταγραφή πολύ μεγάλου όγκου δεδομένων Σχετικά γρήγορη μετάδοση και πρόσληψη
Μέτρηση της επιτάχυνσης της βαρύτητας με τη βοήθεια του απλού εκκρεμούς.
 Μ2 Μέτρηση της επιτάχυνσης της βαρύτητας με τη βοήθεια του απλού εκκρεμούς. 1 Σκοπός Η εργαστηριακή αυτή άσκηση αποσκοπεί στη μέτρηση της επιτάχυνσης της βαρύτητας σε ένα τόπο. Αυτή η μέτρηση επιτυγχάνεται
Μ2 Μέτρηση της επιτάχυνσης της βαρύτητας με τη βοήθεια του απλού εκκρεμούς. 1 Σκοπός Η εργαστηριακή αυτή άσκηση αποσκοπεί στη μέτρηση της επιτάχυνσης της βαρύτητας σε ένα τόπο. Αυτή η μέτρηση επιτυγχάνεται
ΠΛΗΡΟΦΟΡΙΚΗ Ι JAVA Τμήμα θεωρίας με Α.Μ. σε 3, 7, 8 & 9 25/10/07
 ΠΛΗΡΟΦΟΡΙΚΗ Ι JAVA Τμήμα θεωρίας με Α.Μ. σε 3, 7, 8 & 9 25/10/07 Αριθμητική στο δυαδικό σύστημα (γενικά) Συμπληρωματικά για δυαδικό σύστημα Η πρόσθεση στηρίζεται στους κανόνες: 0 + 0 = 0, 0 + 1 = 1, 1
ΠΛΗΡΟΦΟΡΙΚΗ Ι JAVA Τμήμα θεωρίας με Α.Μ. σε 3, 7, 8 & 9 25/10/07 Αριθμητική στο δυαδικό σύστημα (γενικά) Συμπληρωματικά για δυαδικό σύστημα Η πρόσθεση στηρίζεται στους κανόνες: 0 + 0 = 0, 0 + 1 = 1, 1
Οδηγίες για προσθήκη Web Frames Tools to the Quick Access Bar σε μεταγενέστερη έκδοση του Word
 Οδηγίες για προσθήκη Web Frames Tools to the Quick Access Bar σε μεταγενέστερη έκδοση του Word Επειδή οι μεταγενέστερες εκδόσεις του Word δεν περιλαμβάνουν στο μενού τη δυνατότητα δημιουργίας πολλαπλών
Οδηγίες για προσθήκη Web Frames Tools to the Quick Access Bar σε μεταγενέστερη έκδοση του Word Επειδή οι μεταγενέστερες εκδόσεις του Word δεν περιλαμβάνουν στο μενού τη δυνατότητα δημιουργίας πολλαπλών