White Noise Critical Design Review (CDR)
|
|
|
- Ἀγαμέμνων Φιλιππίδης
- 6 χρόνια πριν
- Προβολές:
Transcript
1 White Noise Critical Design Review (CDR)
2 Περιεχόμενα 0. Κατάσταση του Project 1. Εισαγωγή 1.1 Οργάνωση της ομάδας και ρόλοι των μελών 1.2 Στόχοι της αποστολής 2. Περιγραφή του CanSat 2.1 Επισκόπηση αποστολής 2.2 Μηχανολογικό / κατασκευαστικό σχέδιο 2.3 Ηλεκτρολογικό σχέδιο 2.4 Λογισμικό 2.5 Σύστημα ανάκτησης 2.6 Εξοπλισμός σταθμού βάσης 3. Προγραμματισμός του Project 3.1 Πόροι και Υλικοτεχνικός Εξοπλισμός 3.2 Πλάνο Δοκιμών 4. Πλάνο προώθησης 4.1 Social Media 4.2 Εκδηλώσεις 4.3 Χορηγοί 5. Προδιαγραφές
3 Κατάσταση του Project Η ομάδα μας βρίσκεται πίσω σε σχέση με το αρχικό χρονοδιάγραμμα αλλά παραμένει σε καλή τροχιά στην κατασκευή του CanSat. Στο κομμάτι του λογισμικού, έχουμε υλοποιήσει την βασική αποστολή και ένα μεγάλο κομμάτι της δευτερεύουσας αποστολής, ενώ απομένει η υλοποίηση του προγράμματος data plotting που θα τρέχει στον υπολογιστή του σταθμού βάσης. Στο κομμάτι των ηλεκτρονικών, η καθυστερημένη άφιξη των φωτοβολταικών πάνελ ( ήρθαν στα χέρια μας στις 26/2 ) έχει αφήσει λίγο πίσω την σχεδίαση του κυκλώματος. Απομένει να αποφασίσουμε ποιά στοιχεία θα χρησιμοποιήσουμε για τον έλεγχο των μοτέρ ( H-bridge ) να τελιοποιήσουμε το κύκλωμα του αισθητήρα υγρασίας και να μετρήσουμε με ακρίβεια την κατανάλωση ισχύος. Το τελικό κύκλωμα ενδέχεται να τυπωθεί σε PCB για να χωρέσει στα πόδια του CanSat. Στο κομμάτι της τηλεμετρίας, έχουμε καταφέρει να προγραμματίσουμε τα Xbee και να τα κάνουμε να επικοινωνήσουν χρησιμοποιόντας μικρές κεραίες. Αυτήν τη στιγμή διεξάγουμε έρευνα αγοράς για την κεραία του ground station και απομένουν μόνο οι τελικές δοκιμές. Στο κομμάτι του συστήματος ανάκτησης, έχουμε σχεδιάσει το αλεξίπτωτο και έχουμε εκτελέσει πειράματα για την μέτρηση της οριακής ταχύτητας. Τέλος, ο σκελετός, μετά από αρκετές ώρες εργασίας, έχει πάρει την τελική του μορφή και απομένουν κάποιες λεπτομέρειες στον μηχανισμό των τρυπανιών. Αυτή τη στιγμή διεξάγουμε τα πειράματά μας με ένα προτότυπο τυπωμένο στον 3D Printer της ομάδας, ενώ σε λίγες μέρες θα έχουμε στα χέρια μας τον κανονικό σκελετό που θα φτιαχτεί σε CNC από την εταιρία Stefanidis Machines IPROM.
4 Λίστα καθηκόντων Αρχικός Σχεδιασμός Αρχική αποτίμηση προϊόντων που θα χρειαστούν Έρευνα αγοράς Προμήθεια βασικών εξαρτημάτων Πρωτεύουσα Αποστολή Εκμάθηση λειτουργίας αισθητήρων Δοκιμές αισθητήρων Υλοποίηση συνολικού κυκλώματος σε breadboard Αρχικός κώδικας για την αποστολή Δοκιμές Δευτερεύουσα Αποστολή Αισθητήρας Soil Moisture Θεωρητική Μελέτη Σχεδιασμός Αρχική υλοποίηση με βίδες Τελικός σχεδιασμός
5 Βελτίωση κατασκευής Αισθητήρας Υπεριώδους Ακτινοβολίας Θεωρητική Μελέτη Έρευνα Αγοράς Αγορά Δοκιμές Αισθητήρας CO2 Θεωρητική Μελέτη Έρευνα Αγοράς Αγορά NOT Δοκιμές Φωτοβολταϊκά Θεωρητική Μελέτη Έρευνα Αγοράς Αγορά Δοκιμές Τηλεμετρία CanSat RF Θεωρητική Μελέτη Επιλογή κεραίας Αγορά κεραίας Προγραμματισμός Xbee Χρήση Xbee με Arduino Καθορισμός Πακέτων Τηλεμετρίας Δοκιμές
6 Ground Station Θεωρητική μελέτη Αρχικός Σχεδιασμός Επιλογή τύπου κεραίας Έρευνα Αγοράς Αγορά NOT Δοκιμές Σχεδιασμός Προγράμματος απεικόνισης δεδομένων τηλεμετρίας Υλοποίηση Δοκιμές Μηχανική Κατασκευή Σχεδιασμός σκελετού Σύλληψη ιδέας του βασικού μηχανισμού για τα πόδια και τα τρυπάνια Υλοποίηση σχεδίου σε σχεδιαστικό πρόγραμμα Προσομοιώσεις στον υπολογιστή Κατασκευή Σκελετού Εκτύπωση κομματιών Προμήθεια εξαρτημάτων Συναρμολόγηση
7 πρωτοτύπου Δοκιμές στο πρωτότυπο Δοκιμές στο μηχανισμό των ποδιών Δοκιμές στο μηχανισμό των τρυπανιών Δοκιμή drop test Βελτιώσεις στο σχέδιο Κατασκευή τελικού σκελετού Επικοινωνία με κατασκευαστική εταιρεία (Stefanidis Machines IPROM) Κατασκευή σε CNC από την Stefanidis Machines IPROM Σύστημα Ανάκτησης ( ασφαλής προσγείωση ) Αλεξίπτωτο Θεωρητική Μελέτη Καθορισμός Σχήματος Επιλογή υφάσματος Αγορά Υφάσματος Υπολογισμός διαστάσεων Υλοποίηση
8 Μέτρηση Οριακής Βελτιστοποίηση Σταθερότητας Ηλεκτρολογική κατασκευή Σχεδιασμός Κυκλώματος Θεωρητική Μελέτη Επιλογή μπαταρίας Επιλογή charger Επιλογή Step-up / Booster Αγορά Εξαρτημάτων Αρχικός Σχεδιασμός Υλοποίηση Κυκλώματος Βελτιστοποίηση Αρχική υλοποίηση σε breadboard Μετρήσεις ηλεκτρικών μεγεθών Επανακαθορισμός κυκλώματος Τύπωμα σε PCB Προώθηση Δημιουργία Facebook Page Δημιουργία Youtube Channel Παρουσίαση Διαγωνισμού σε σχολεία
9 Αναζήτηση Χορηγών Ανέβασμα φωτογραφιών και βίντεο από την κατασκευή

10 1. Εισαγωγή 1.1 Οργάνωση της ομάδας και ρόλοι των μελών Τα μέλη της ομάδας μας είναι : Δημήτρης Μπράλιος, φοιτητής του τμήματος Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών στο ΕΜΠ. Έχει μεγάλο πάθος για τη διαστημική, τη ρομποτική και τον προγραμματισμό. Ιάσονας Νικολάου, φοιτητής του τμήματος Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών στο ΕΜΠ. Στον ελεύθερό του χρόνο, ασχολείται με τον προγραμματισμό, το μπάσκετ και την κλασσική μουσική. Σπύρος Παυλάτος, φοιτητής του τμήματος Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών στο ΕΜΠ. Ασχολείται με τον αθλητισμό και ιδιαίτερα με το μπάσκετ, ενώ στα ενδιαφέροντά του συμπεριλαμβάνονται ο προγραμματισμός και η λογοτεχνία. Γιώργος Ραπακούλιας, φοιτητής του τμήματος Μηχανολόγων Μηχανικών του ΕΜΠ. Τα ενδιαφέροντά του είναι η ρομποτική σε μηχανολογικο και ηλεκτρολογικό επίπεδο, η θεωρητική φυσική και η κολυμβηση. Μιλτιάδης Στούρας, φοιτητής του τμήματος Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών στο ΕΜΠ. Έχει πάθος με την θεωρητική πληροφορική και το software development. Στον ελεύθερό του χρόνο ασχολείται με τον προγραμματισμό και το μπάσκετ. Χαρίτωνας Χαριτωνίδης, φοιτητής του τμήματος Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών στο ΕΜΠ. Ασχολείται με τον αθλητισμό και τη μουσική και του αρέσει η φωτογραφία και το βίντεο. Το οργανόγραμμα της ομάδας μας παρουσιάζεται παρακάτω :
11 1.2 Στόχοι Αποστολής Κατά την διεξαγωγή της πρωτεύουσας αποστολής θα λάβουμε μετρήσεις για τα εξής μεγέθη: Βαρομετρική πίεση Θερμοκρασία Συντεταγμένες θέσης Η δευτερέουσα αποστολή έχει ως στόχο την ανάλυση των συνθηκών που επικρατούν στον πλανήτη ώστε να αποφασίσουμε αν είναι κατοικήσιμος. Πιο συγκεκριμένα, θα λάβουμε τις εξής μετρήσεις: UV ακτινοβολία Διοξείδιο του άνθρακα (CO2) Υγρασία εδάφους Η υπεριώδης (UV) ακτινοβολία είναι επικύνδυνη για τον άνθρωπο όταν ξεπεράσει ένα όριο. Πιο συγκεκριμένα υπάρχουν τρία είδη υπεριώδους ακτινοβολίας: UV-A, UV-B και UV-Γ. Η δύο πρώτες είναι λιγότερο επικύνδυνες αλλά η τρίτη είναι πολύ επικίνδυνη καθώς μπορεί να προκαλέσει μεταλλάξεις. Το διοξείδιο του άνθρακα ως αέριο του θερμοκηπίου συντελεί στην αύξηση της θερμοκρασίας του πλανήτη και αποτελεί αποτελεί απαραίτητο αέριο για την επιβίωση του ανθρώπου. Επιπλέον, η εύρεση μεγάλων ποσοτήτων διοξειδίου του άνθρακα είναι ισχυρή ένδειξη γεωολογικής δραστηριότητας (ηφαίστεια, θερμές πηγές) αλλά και ύπαρξης ζωντανών οργανισμών,αφού παράγεται κατά την αναπνοή όλων των φυτών και των ζώων αλλά και από τους μύκητες και μικροοργανισμούς που εξαρτώνται άμεσα ή έμμεσα από τα φυτά για την τροφή τους. Η υγρασία του εδάφους θα μας δώσει πληροφορίες για την σύσταση του εδάφους και την ικανότητά του να καλλιεργηθεί, ώστε να παρέχει τροφή στον άνρθωπο. Τα δεδομένα αυτά σε συνδυασμό με τα δεδομένα της πρωτεύουσας αποστολής θα μας δώσουν μια πολύ καλή εικόνα για την κατάσταση του πλανήτη ώστε να αποφασίσουμε αν μπορεί να φιλοξενήσει τον άνθρωπο σε μια μελλοντική αποστολή. Συνεπώς, η αποστολή μας θα θεωρηθεί επιτυχημένη εάν : Συλλέξουμε, επιτυχώς, τα δεδομένα της πρωτεύουσας αποστολής.
12 Προσγειωθούμε ομαλά και καταφέρει το CanSat να ανασηκωθεί με τον μηχανισμό ποδιών του. Συλλέξουμε τις μετρήσεις της δευτερεύουσας αποστολής, οι οποίες θα μας δώσουν την εικόνα για τη βιωσιμότητα του πλανήτη. Επιτύχουμε τη μεγαλύτερη δυνατή ενεργειακή αυτονομία, μέσω των ηλιακών συλλεκτών.
13 2. Περιγραφή του CanSat 2.1 Επισκόπηση αποστολής Θα σχεδιάσουμε και θα κατασκευάσουμε ένα CanSat, το οποίο με τη βοήθεια πυραύλου θα εκτοξευθεί σε υψόμετρο 1000 μέτρων, όπου και θα διαχωριστεί από τον πύραυλο. Στη συνέχεια θα ξεκινήσει η πτώση με τη βοήθεια αλεξιπτώτου με ταχύτητα 7 μέτρων/δευτερόλεπτο. Κατά την πτώση το CanSat θα αρχίσει να εκτελεί την πρωτεύουσα αποστολή, θα συλλέγει δηλαδή μετρήσεις της θερμοκρασίας, της ατμοσφαιρικής πίεσης, καθώς και τον γεωγραφικών συντεταγμένων. Οι μετρήσεις αυτές, μερικές από τις οποίες θα χρησιμοποιηθούν και για τη δευτερεύουσα αποστολή, θα αποστέλλονται σε πραγματικό χρόνο στο σταθμό βάσης μας στη γη με το σύστημα τηλεμετρίας. Η συχνότητα λήψης και αποστολής των μετρήσεων θα είναι 1Hz. Μόλις προσγειωθεί το CanSat θα ξεκινήσει και η δευτερεύουσα αποστολή του. Με τη βοήθεια ενός μηχανισμού ποδιών θα ανασηκωθεί και θα σταθεροποιήσει τη θέση του στο έδαφος. Πάνω στα πόδια θα υπάρχουν τοποθετημένα φωτοβολταϊκά, μέσω των οποίων θέλουμε να εξασφαλίσουμε όσο το δυνατόν μεγαλύτερη ενεργειακή αυτονομία του CanSat. Στη συνέχεια με τη χρήση μοτέρ θα τρυπήσουμε το έδαφος με δυο τρυπάνια με σκοπό την μέτρηση της υγρασίας του εδάφους, στοιχείο απαραίτητο για να βγάλουμε συμπεράσματα για τη βιωσιμότητα του πλανήτη, η οποία είναι και ο απώτερος στόχος της αποστολής. Παράλληλα, θα παρθούν μετρήσεις σχετικά με το επίπεδο της UV ακτινοβολίας και του CO2, τα οποία είναι και αυτά βασικά στοιχεία της δευτερεύουσας αποστολής μας. Προφανώς, η τηλεμετρία συνεχίζεται καθόλη τη διάρκεια της δευτερεύουσας αποστολής και μετά το πέρας της αποστολής θα επεξεργαστούμε τα δεδομένα, τα οποία θα έχουμε συλλέξει στον σταθμό βάσης θα αποφανθούμε σχετικά με τον στόχο της αποστολής μας. Παρακάτω παρουσιάζουμε το σχηματικό διάγραμμα block του εξοπλισμού του CanSat :


14 Αναλυτικά τα εξαρτήματα, που θα χρησιμοποιηθούν : Arduino Pro Mini : Mass : 2g Microcontroller : ATmega328P Operating Voltage : 5V Clock Speed : 16MHz Flash Memory : 32KB




15 Xbee Pro S5 868Mhz Mass : 5g Operating Voltage : 5V Current Consumption : 60mA standing-by, 200mA κατα την εκπομπή πακέτου Slim Sticker-type GSM/Cellular Quad-Band Antenna Mass : 0.5g Gain : 3dBi Datasheet GPS : u-blox LEA-6H Connectivity: Serial Mass : 17g Operating Voltage : 5V Current Consumption : 60mA Integrated Antenna : taoglas GP A.02 Datasheet, Protocols Datasheet Pressure Temperature : BMP280 Connectivity: I2C Mass : 1.3g Current Consumption : 1Hz sampling rate Datasheet, Schematic



 Current")

16 UV sensor : ML8511 Mass : 0.5g Operating Voltage : 3.3V Current consumption : 300μΑ Datasheet, Schematic microsd Card Adapter Mass : 4g Connectivity : SPI Operating Voltage : 4.5~5.5V, 3.3V ( διαθέτει voltage regulator και logic level regulator) Current Consumption : 100mA Solar Panels Mass : 5g Μπαταρία Polymer Lithium Ion Mass : 19.5g Capacity : 980mAh Voltage Output : 3.7V Datasheet

17 Μοτέρ μηχανισμού ποδιών : Micro Gearmotor - 90 RPM Mass : 17g Operating Voltage : 6-12V Current consumption : 1,6A Torque : 5kg*cm Speed : 45 6V Μοτέρ τρυπανιών : Micro Gearmotor RPM Mass : 17g Operating Voltage : 6-12V Current consumption : 1,6A Torque : 0.64kg*cm Speed : 450 6V Datasheet ( το μηχανολογικό σχέδιο είναι κοινό και για τα δύο μοτέρ ) Τέλος, θα κατασκευάσουμε το δικό μας αισθητήρα υγρασίας, ο οποίος βασίζεται στο ακόλουθο διάγραμμα : Πειραματικά παρατηρούμε, ότι οι μετρήσεις που λαμβάνουμε απο το αναλογικό pin επηρεάζονται άμεσα από το νερό, που υπάρχει στο έδαφος. Οι μετρήσεις αυτές αντιστοιχίζονται με τιμές στο διάστημα [0,100] και έτσι έχουμε ένα μέτρο της υγρασίας του εδάφους.

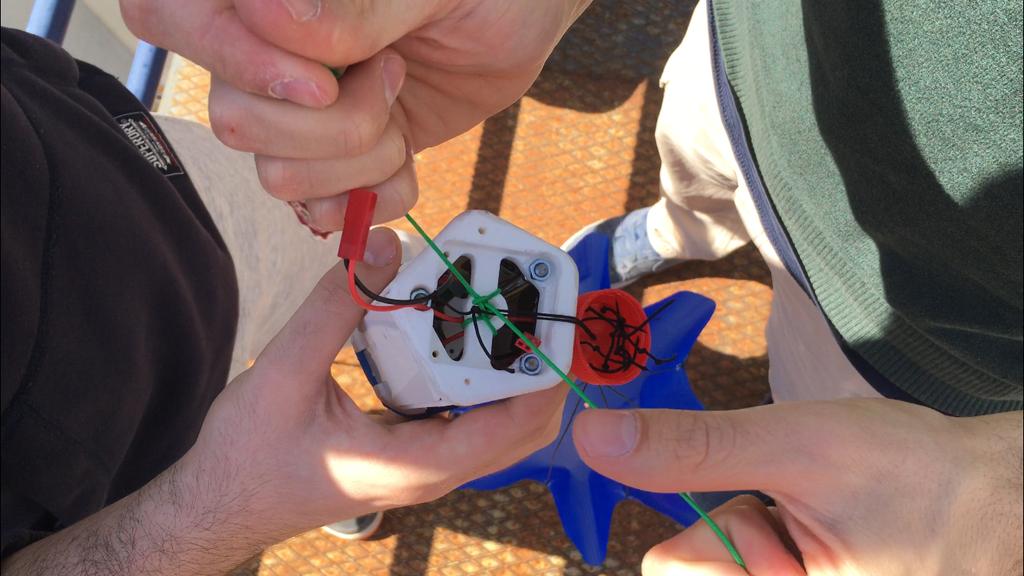
18 2.2 Μηχανολογικό / Κατασκευαστικό σχέδιο Τα κυριότερα προβλήματα που καλείται να αντιμετωπίσει ο σκελετός του CanSat της ομάδας μας είναι τα εξής : Όταν γίνει η προσγείωση πρέπει με κάποιο τρόπο να εμβυθιστούν στο έδαφος δύο μεταλλικά ελάσματα μεταξύ των οποίων θα μετρήσουμε την αγωγιμότητα. Ο σκοπός είναι ο προσδιορισμός της υγρασίας του εδάφους. Ο σκελετός πρέπει να είναι αρκετά στιβαρός για να αντέξει την προσγείωση και να διαθέτει κάποιο είδος αποσβεστήρα έτσι ώστε η ενέργεια από την πτώση να απορροφηθεί από αυτόν και όχι από τα ευαίσθητα μέρη του σκελετού. Επειδή υπάρχει περιορισμός βάρους στα 350g το CanSat δεν μπορεί μόνο με την δύναμη του βάρους του να καρφώσει τα μεταλλικά ελάσματα στο έδαφος. Για το πρόβλημα αυτό αποφασίσαμε αντί για έλασμα να χρησιμοποιήσουμε ένα τρυπάνι το οποίο θα βιδωθεί στο έδαφος. Οι διαστάσεις του σκελετού μας υποχρεώνουν να έχουμε τον άξονα των δυο τρυπανιών παράλληλο με την μεγαλύτερη διάστασή του, προκειμένου να πετύχουμε μέγιστη εμβύθιση. Για το λόγο αυτό το CanSat πρέπει να διαθέτει ένα μηχανισμό που θα το φέρνει σε όρθια θέση, ώστε τα τρυπάνια να κοιτάνε το έδαφος. Ολόκληρος ο σκελετός είναι χτισμένος γύρο από το μηχανισμό αυτό. Η λύση, που δώσαμε, είναι στην περιφέρεια του CanSat να υπάρχουν πόδια τα οποία θα είναι διπλωμένα κατά την κάθοδο και θα ανοίξουν φέρνοντας το CanSat σε κατακόρυφη θέση μετά την προσγείωση. Ο αρχικός μηχανισμός ήταν ο εξής : Ένας σερβομηχανισμός στο κάτω μέρος του σκελετού (κόκκινο) θα περιστρέφει μια στρογγυλή βάση(ροζ) πάνω στον οποία θα υπάρχουν βραχίονες που θα την συνδέουν με τα πόδια. Ο μηχανισμός πιάνει πολύ λίγο χώρο και ο σερβομηχανισμός χρειάζεται μόνο τάση 5V για να δουλέψει. Το μεγάλο μειονέκτημα του είναι η έλλειψη δύναμης λόγω του μικρού μοχλού, που έχει ο βραχίονας ως προς τον άξονα περιστροφής. Για να λύσουμε το πρόβλημα την έλλειψης δύναμης αλλάξαμε τελείως τον μηχανισμό. Στην εικόνα, ένας κινητήρας συνεχούς ρεύματος με μειωτήρα συνδεδεμένος με μία βίδα


19 ανεβοκατεβάζει το μπλε εξάρτημα το οποίο διαθέτει σπείρωμα. Αυτό είναι συνδεδεμένο με τα πόδια με σύρματα. Έτσι επιτυγχάνεται το ανεβοκατέβασμα των ποδιών με την περιστροφή της βίδας. Λόγω του πολύ μικρού βήματος του σπειρώματος της βίδας η δύναμη που έχει ο μηχανισμός είναι πολύ μεγαλύτερη από τον προηγούμενο. Το σχήμα του είναι απλούστερο από την πρώτη λύση και αυτό μας επιτρέπει να αναλύσουμε τις δυνάμεις με μεγαλύτερη ακρίβεια και άρα να διαλέξουμε το βέλτιστο κινητήρα. Το μέγεθος της όλης κατασκευής πάντως είναι αρκετά μεγάλο και δεν αφήνει πολύ χώρο για τα υπόλοιπα μέρη του σχεδίου. Τα προβλήματα της παραπάνω κατασκευής είναι η έλλειψη χώρου και ο τρόπος με τον οποίο θα συνδεθεί η βίδα με τον κινητήρα. Για την έλλειψη χώρου αυξήσαμε των αριθμό την ποδιών από 3 σε 5 για να προσεγγίσουμε καλύτερα την κυκλική διατομή του δορυφόρου ελαχιστοποιώντας έτσι το χώρο που χάνεται. Για την σύνδεση του κοχλία με τον κινητήρα η χρήση ενός coupler δεν ήταν αρκετή. Συναντήσαμε ιδιαίτερη δυσκολία στο να ευθυγραμμίσουμε του δύο άξονες (βίδας και κινητήρα) και να μηδενίσουμε τις ανεπιθύμητες κινήσεις*. Τελικά αποφασίσαμε να στηρίξουμε την βίδα σε έδρανα (ρουλεμάν). Έτσι ο κινητήρας δεν θα παίζει ρόλο στην ευθυγράμμισή της, αλλά μόνο στην περιστροφή της. Τέλος, οι βραχίονες που ένωναν τα πόδια με το μπλε εξάρτημα αντικαταστάθηκαν με συνδέσμους τύπου Ν clevis 2mm του εμπορίου. Αυτό γιατί μας ήταν δύσκολο να κατασκευάσουμε και τους 5 βραχίονες ίδιους. Ενδεικτικά λέμε ότι μια διαφορά της τάξης του.1 mm στο μήκος τους αντιστοιχούσε σε περιστροφή του ποδιού
 και ένα μεταλλικό κέλυφος, που προστατεύει τον κινητήρα των ποδιών(shield).")
.")
20 περίπου 22 (αυτός είναι και ο λόγος που η τέλεια ευθυγράμμιση της βίδας παίζει τεράστιο ρόλο στην ομαλή κίνηση). Αυτή είναι και μέχρι τώρα η τελική μας κατασκευή. Για μια όσο το δυνατόν ομαλή προσγείωση το CanSat διαθέτει δυο επιπλέων εξαρτήματα. Έναν λαστιχένιο πάτο(damper) και ένα μεταλλικό κέλυφος, που προστατεύει τον κινητήρα των ποδιών(shield). Το υλικό για το damper είναι ένα ζήτημα, που ακόμα δεν έχει επιλυθεί. Στο στάδιο του πρωτοτύπου θα τυπωθεί είτε από TPE ή TPC ανάλογα με την σκληρότητα που κρίνουμε βέλτιστη. Το τελικό εξάρτημα θα είναι μάλλον χυτό. Το shield έχει στόχο να μην αφήσει να έρθουν σε επαφή το damper με τον κινητήρα. Θα κατασκευαστεί με δίπλωμα φίλου ανοξείδωτου χάλυβα(sheet metal). Η επιλογή του πάχους του και του υλικού του έχει προκύψει από προσομοιώσεις πεπερασμένων στοιχείων στον υπολογιστή(finite element analysis). Παρακάτω, παραθέτουμε ολόκληρο το μηχανολογικό σχέδιο :
21
22
23
24 2.3 Ηλεκτρολογικό σχέδιο Το κύκλωμα τροφοδοσίας αποτελείται από μία μπαταρία λιθίου 3.7V 980mAh, η οποία συνδέεται σε charger. Ο charger τροφοδοτείται από 4 φωτοβολταϊκά πάνελ συνδεδεμένα σε σειρά, ενώ η έξοδος του πηγαίνει σαν είσδος στον regulator Li Power που σταθεροποιεί την τάση εξόδου στα 5V. Στη συνέχεια έχουμε έναν ακόμα regulator Li Power για να έχουμε μία σταθερή τάση 3.3V για τις ανάγκες των αισθητήρων. Ως μικροεπεξεργαστή χρησιμοποιούμε το Arduino Pro Mini, που τροφοδοτείται από το κύκλωμα στα 5V και ελέγχει τον αισθητήρα UV μέσω ενός analog pin, τον αισθητήρα πίεσης και θερμοκρασίας μέσω I2C και τον αισθητήρα υγρασίας, το Xbee και το GPS μέσω digital pins. Οι αισθητήρες τροφοδοτούνται από τον regulator Li Power με τάση εξόδου 3.3V, ενώ το Xbee και το GPS από το κύκλωμα της τροφοδοσίας με 5V. To κύκλωμα τον μοτέρ αποτελείται από το μοτέρ των ποδιών και τα δύο των τρυπανιών. Τα παραπάνω ελέγχονται από ένα h-bridge, το οποίο τροφοδοτείται από το κύκλωμα της μπαταρίας και ελέγχεται από το Arduino μέσω τριών digital pins. Το ηλεκτρολογικό σχέδιο παρουσιάζεται παρακάτω :
25 Το πλάνο κατανάλωσης ισχύος είναι το ακόλουθο : Εξάρτημα Τάση Ρεύμα Ισχύς Arduino 5V 150mA 0.75Watt Xbee 5V 60mA / 200mA peak 0.3Watt / 1Watt GPS 5V 60mA 0.3Watt SD 5V 100mA 0.5Watt UV Sensor 3.3V 0.5mA Watt BMP280 Sensor 3.3V 1mA 0.005Watt Motors 5V 350mA(max) 1.75Watt Τηλεμετρία Η ομάδα μας χρησιμοποιεί Xbee Pro S5 στα 868MHz για την αποστολή και παραλαβή των πακέτων τηλεμετρίας. Σύμφωνα με την Ζώνη Συχνοτήτων όπως αυτή ορίζεται από
26 την Ε.Ε.Τ.Τ., η συχνότητα 868MHz είναι ελεύθερη για χρήση με τον περιορισμό ότι η ισχύς του σήματος εκπομπής δεν θα υπερβαίνει τα 25mW. Τα Xbee προγραμματίστηκαν να εκπέμπουν με ισχύ 25mW. Τα Xbee έχουν ρυθμιστεί να λειτουργούν σε AT mode, με το Xbee του CanSat να είναι Router και το Xbee του ground station να είναι Coordinator. Τα πακέτα τηλεμετρίας που στέλνονται έχουν την ακόλουθη μορφή: 1ο software state: <PACKET_COUNT>,1,<LATITUDE>,<LONGTITUDE>,<ALTITUDE>, <PRESSURE>,<TEMPERATURE>,<CHK_SUM1>,<CHK_SUM2> παράδειγμα πακέτου τηλεμετρίας : 73,1, , ,500, ,15.0, , ο software state: <PACKET_COUNT>,2,<LATITUDE>,<LONGTITUDE>,<UV_RADIATION>,<SOL AR_PANELS_OUTPUT_VOLTAGE>,<SOIL MOISTURE>,<CHK_SUM1>,<CHK_SUM2> Τα CHK_SUM1, CHK_SUM2 θα είναι το άθροισμα των προηγούμενων τιμών του πακέτου εξαιρουμένων του software state ( 1 ή 2 ) και του αριθμού του πακέτου. Τα check sums προστέθηκαν στα πακέτα μας σε μια προσπάθεια να ελέγχουμε την εγκυρότητα των πακέτων που λαμβάνει το ground station. Για παράδειγμα, στο 1ο πακέτο τηλεμετρίας, θα ισχύει : CHK_SUM1 = CHK_SUM2 = <LATITUDE> + <LONGTITUDE> + <ALTITUDE> + <PRESSURE> + <TEMPERATURE> 2.4 Λογισμικό Το λογισμικό του CanSat είναι γραμμένο στην γλώσσα του Arduino και στην παρούσα φάση αποτελείται από 2 software states. Η πρώτη κατάσταση αντιστοιχεί στην λειτουργία του CanSat κατά την πτώση όπου εκτελείται η βασική αποστολή και η δεύτερη λειτουργία αντιστοιχεί στην δευτερεύουσα αποστολή που επιλέξαμε.
27 Όταν το CanSat βρίκεται στο 1ο software state, λαμβάνει μετρήσεις από τον αισθητήρα πίεσης και θερμοκρασίας καθώς και τις γεωγραφικές συντεταγμένες από το GPS, τα οποία στέλνει στην βάση κάθε 1 δευτερόλεπτο. Αξίζει να σημειωθεί πως για την εξοικονόμηση μνήμης του προγράμματος αποφασίσαμε να μην χρησιμοποιήσουμε την συνηθισμένη βιβλιοθήκη TinyGPS++ και να γράψουμε τις δικιές μας συναρτήσεις για data parsing. Έτσι, ρυθμίσαμε το GPS,με βάση το datasheet και τα πρωτόκολλα επικοινωνίας των μοντέλων u-blox, να χρησιμοποιεί το πρωτόκολλο UBX και συγκεκριμένα να στέλνει το πακέτο NAV-POSLLH το οποίο επεξεργαζόμαστε με δικές μας συναρτήσεις. Με τον τρόπο αυτό καταφέραμε να εξοικονομήσουμε πάνω από 10KB flash memory! Μόλις μεταβούμε στο 2ο software state, το Arduino ενεργοποιεί τους μηχανισμούς των ποδιών και περιμένει να βρεθεί το CanSat σε όρθια θέση. Έπειτα εκκινεί τους μηχανισμούς των τρυπανιών και περιμένει να φτάσουν στο μέγιστο βάθος. Αφού έχουμε εγκατασταθεί στην τελική μας θέση, ξεκινάμε να παίρνουμε μετρήσεις από τον UV sensor, από τον Soil moisture sensor καθώς και το Voltage output των φωτοβολταϊκών,τα οποία και αποστέλλονται στην βάση μας. Όλα τα πακέτα που στέλνονται στην βάση, ταυτόχρονα γράφονται και στην SD Card Εργασίες που απομένουν: 1) Να παρθεί η απόφαση για το αν θα χρησιμοποιήσουμε τελικά τον αισθητήρα CO2 καθώς υπάρχει περιορισμός χώρου. 2) Να τροποποιθεί κατάλληλα ο υπάρχων κώδικας ώστε το παρόν software state να καθορίζεται από τις τιμές που παίρνουμε. Στην παρούσα φάση, στο void setup() θέτουμε αυθαίρετα το παρόν state ως το 1ο. Η τακτική αυτή καλό θα ήταν να αλλαχτεί καθώς αν για τον οποιοδήποτε λόγο το Arduino κάνει reset κατά την διάρκεια της αποστολής, όταν ξαναεκκινήσει μπορεί να βρεθεί σε λάθος state. 3) Δημιουργία GitHub repository με τον κώδικα της ομάδας. Το flowchart το λογισμικού του CanSat μας παρουσιάζεται παρακάτω :
28

29 2.5 Σύστημα ανάκτησης Το αλεξίπτωτο που αρχικά αγοράσαμε μας φάνηκε ανεπαρκές για την αποστολή, επομένως αποφασίστηκε να σχεδιαστεί και να κατασκευαστεί ένα αλεξίπτωτο από την ομάδα μας. Ως μια πρώτη προσέγγιση, κόψαμε ένα εξάγωνο από συνηθισμένο, απλό ύφασμα με διάμετρο περιγεγραμένου κύκλου περίπου ίση με 30 εκατοστά. όπως περιμέναμε, το πάνινο ύφασμα δεν ήταν ικανό να αντισταθεί στον αέρα ούτε έδειχνε αρκετά γερό για να το χρησιμοποιήσουμε. Έπειτα από έρευνα και πρόταση της οργανωτικής επιτροπής, καταλήξαμε στο ripstop nylon ύφασμα. Αγοράσαμε ένα κομμάτι από μία ελληνική επιχείρηση στο χώρο των πανιών για σκάφη αναψυχής, κόψαμε έναν κύκλο διαμέτρου 48 εκατοστών, κάναμε 8 κουμπότρυπες για να περαστεί το σχοινί και αρχίσαμε τις δοκιμές. Τέλος, κόβοντας όλο και μεγαλύτερη τρύπα στο κέντρο του κυκλικού αλεξιπτώτου επετύχαμε την επιθυμητή οριακή ταχύτητα (περίπου ίση με 7 m/s). Συνεπώς, ο εκτιμώμενος χρόνος πτήσης είναι περίπου 143 sec.
30 2.6 Εξοπλισμός σταθμού βάσης Ο σταθμός βάσης αποτελείται από: 1) Xbee Pro S5 868MHz,τοποθετημένο σε USB Adapter, όμοιο με αυτό του CanSat με την διαφορά πως του έχουμε προσθέσει RP-SMA connector 2) Προσωπικός Υπολογιστής 3) Κεραία Yagi UHF συντονισμένη στα 868ΜHz 4) Εξωτερικός Σκληρός Δίσκος Για το ground station θα χρησιμοποιήσουμε High Gain Yagi UHF Antenna την οποία σκοπεύουμε να κατασκευάσουμε (βρισκόμαστε στο στάδιο της θεωρητικής μελέτης). To Xbee module είναι τοποθετημένο σε USB Adapter και συνδέεται μέσω USB στον υπολογιστή. Επίσης, θα λειτουργεί σε AT mode ( transparent ), θα αποστέλει, δηλαδή, τα πακέτα που λαμβάνει απο την κεραία, κατευθείαν ( χωρίς επεξεργασία ) στην σειριακή θύρα του υπολογιστή. Στον υπολογιστή, ένα απλό πρόγραμμα γραμμένο σε Python διαβάζει τα δεδομένα από την σειριακή θύρα και τα αποθηκεύει σε ένα αρχείο στον υπολογιστή ( telemetry_data.txt ) και σε ενα δεύτερο αρχείο στον εξωτερικό σκληρό δίσκο για back-up. Για την απεικόνιση των δεδομένων θα γράψουμε ένα μικρό site που θα τρέξει σε local server ( npm, Node.js ). Σε αυτό, με Javascript θα διαβάζουμε τα δεδομένα από το τοπικό αρχείο telemetry_data.txt και με την χρήση της React.js, της βιβλιοθήκης plotly.js και του Google Maps Javascript API ( για την προβολή KML αρχείων ), θα δημιουργήσουμε real-time γραφικές παραστάσεις των δεδομένων καθώς και 3D απεικόνιση της τροχιάς του δορυφόρου.
31 3. Προγραμματισμός του Project 3.1 Πόροι και Υλικοτεχνικός Εξοπλισμός Πολλά από τα εξαρτήματα (XBee, GPS, Arduino) τα είχαμε ήδη στην κατοχή μας, οπότε δεν συμπεριλήφθηκαν στα κόστη κατασκευής. Παρακάτων φαίνεται ένας πίνακας με μερικά κόστη μέχρι στιγμής : Είδος Τιμή (Ευρώ) Polymer Lithium Ion Battery -980mAh 3.7V 9.9 UV Sensor Breakout MLB BMP280 I2C or SPI Barometric Pressure & Altitude Sensor 12.2 (3x) Precision Shaft D4mm x L200mm 9.6 Precision Shaft D3mm x L200mm 3.2 Micro Gearmotor 90RPM (6-12V) 12.4 (2x)Waveshar XBEE USB Adapter 12.7 LiPower Boost Converter 17.5 USB / DC / Solar Lithium Ion/Polymer Charger 21.5 Estess D-ES Parachute 5.5 MG811 CO2 Solid Electrolyte Sensor 14.8 (4x) Solar Panels 6 Σημειώνεται πως στον παραπάνω πίνακα δεν συμπεριλαμβάνονται υλικά τα οποία είτε δεν έχουν φτάσει ακόμα στην κατοχή μας, είτε θα παραγγείλουμε στη συνέχεια. Έτσι, το παραπάνω μερικό σύνολο που είναι 140 Ευρώ πιθανότατα να αυξηθεί και να φτάσει μέχρι και 200 Ευρώ.
. 3.")
32 Όσον αφορά την εξωτερική υποστήριξη, συνεργαζόμαστε με την εταιρεία Stefanidis Machines IPROM, η οποία θα μας κατασκευάσει τον σκελετό του CanSat δωρεάν, γλυτώνοντας μας αρκετά χρήματα και επίσης έχουμε λάβει χορηγία απο την εταιρεία Ermis Graphics για το σχεδιασμό του logo της ομάδας μας (περισσότερα στο κομμάτι της προώθησης). 3.2 Πλάνο Δοκιμών 1) Δοκιμή αισθητήρων Δοκιμάστηκαν όλοι οι αιθητήρες που θα χρησιμοποιηθούν στην αποστολή του CanSat για να επιβεβαιωθεί η σωστή λειτουργία τους. Συγκεκριμένα, α) Αισθητήρας Βαρομετρικής Πίεσης : Η τιμή που λαμβάναμε συγκρίθηκε με την αναμενόμενη τιμή στο υψόμετρο που βρισκόμασταν καθώς και με τις μετρήσεις αισθητήρων των κινητών τηλεφώνων μας και κάποιων weather station στο Internet β) Αισθητήρας Θερμοκρασίας : Η εγκυρότητα των μετρήσεων επιβεβαιώθηκε από μετρήσεις θερμόμετρου ακριβείας. Ο αισθητήρας δοκιμάστηκε και σε ακραίες θερμοκρασίες εντός των τιμών λειτουργίας του. γ) GPS : Οι μετρήσεις από το GPS είναι προφανώς εύκολο να ελεγχθούν κοιτάζοντας τις τιμές που λαμβάνουμε στο Google Maps. Για να εξακριβώσουμε όμως την ακρίβεια του αισθητήρα πραγματοποιήσαμε κάποιες διαδρομές λαμβάνοντας δεδομένα και τα αναπαραστήσαμε σε χάρτη δημιουργώντας ένα html αρχείο. Οι διαδρομές ήταν εκπληκτικά ακριβείς, μία από αυτές φαίνεται παρακάτω:
 Υπολογισμός οριακής ταχύτητας αλεξίπτωτου Αφού κατασκευάσαμε το αλεξίπτωτό μας, με βάση τους υπολογισμούς που αναφέρονται στο αντίστοιχο κεφάλαιο, ξεκινήσαμε τις δοκιμές για να επιβεβαιώσουμε την")
33 Για την επιβεβαίωση της μέτρησης της ταχύτητας του GPS λαμβάναμε τιμές καθώς κινούμασταν με αυτοκίνητο και συγκρίναμε τις μετρήσεις με την ταχύτητα του αυτοκινήτου. 2) Υπολογισμός οριακής ταχύτητας αλεξίπτωτου Αφού κατασκευάσαμε το αλεξίπτωτό μας, με βάση τους υπολογισμούς που αναφέρονται στο αντίστοιχο κεφάλαιο, ξεκινήσαμε τις δοκιμές για να επιβεβαιώσουμε την θεωρητική τιμή της οριακής ταχύτητας. Πραγματοποιήσαμε αρκετές ρίψεις σε έναν υπαίθριο χώρο της σχολής μας, από ύψος περίπου 12 μέτρων. Στο σημείο που αναμενόταν η πρόσκρουση με το έδαφος, είχαμε τοποθετήσει ένα σημάδι στον τοίχο σε ύψος ενός μέτρου. Η πτώση καταγραφόταν σε slow motion video ( 240fps ) και μετρώντας τα frames τα οποία χρειάστηκε ο δορυφόρος για να διανύσει το τελευταίο 1 μέτρο μπορούσαμε να συμπεράνουμε την ταχύτητα του. Ένας δεύτερος τρόπος με τον οποίο σκοπεύουμε να επιβεβαιώσουμε την ταχύτητα πτώσης, είναι η απευθείας μέτρηση της ταχύτητας από το GPS σε επόμενη δοκιμή. Μερικές φωτογραφίες από τις δοκιμές του αλεξίπτωτου:

34
35 3) Τεστ αντοχής Υπολογισμός επιταχύνσεων κατά την πρόσκρουση στο έδαφος. Για την δοκιμή της αντοχής του σκελετού και των κυκλωμάτων πραγματοποιήσαμε ένα drop test. Για να καταλάβουμε καλύτερα την καταπόνηση που θα δεχθεί ο σκελετός κατά την πρόσκρουση με το έδαφος μέσα στο CanSat βάλαμε ένα κύκλωμα που περιέχει τα εξής Τον ίδιο επεξεργαστή που θα χρησιμοποιήσουμε στη βασική αποστολή(arduino pro mini) Ένα αισθητήρα επιτάχυνσης και μαγνητικού πεδίου( 9 Dof IMU) Ένα σύστημα τηλεμετρίας με Bluetooth Μία microsd card για datalog σε περίπτωση απώλειας σήματο. Ο σκοπός του κυκλώματος είναι να μετρήσουμε το μέτρο και την διεύθυνση της επιτάχυνσης που δέχεται ο σκελετός και την γωνία στην οποία βρίσκεται το CanSat κατά την πρόσκρουση. Το πείραμα διαδραματίστηκε σε δύο μέρη. Στο πρώτο μέρος αφήναμε το πρωτότυπο να εκτελέσει ελεύθερή πτώση από σταδιακά αυξανόμενο ύψος και στο δεύτερο μέρος συνδέσαμε το CanSat με αλεξίπτωτο και το αφήσαμε από ύψος περίπου 12 μέτρων. Αποτελέσματα πειράματος Στο πρώτο πείραμα οι μετρήσεις έδειξαν ότι η πρόσκρουση ήταν σχεδόν κατακόρυφη( ~ ±30 ) και η μέγιστη επιτάχυνση που μετρήσαμε ήταν περίπου 12 g σε ελεύθερη πτώση από περίπου 5m. Στις περισσότερες δοκιμές η κρούση μπορεί να διακριθεί σε δύο περιπτώσεις. Στην πρώτη περίπτωση το CanSat προσγειωνόταν πάνω στο λαστιχένιο damper το μεγαλύτερος μέρος της ενέργειας αποροφούνταν. Έπειτα η δεύτερη κρούση, στην οποία καταγράφθηκαν οι μεγαλύτερες μετρήσεις γινόταν με το πλαϊνό μέρος του σκελετού. Παρόλο που η επιτάχυνση στη δεύτερη κρούση είναι μεγαλύτερη δεν σημαίνει ότι αυτή είναι και ή πιο επίπονη κατάσταση για το σκελετό. Το μεγάλο μέτρο της επιτάχυνσης στη δεύτερη κρούση οφείλεται στη πολύ μεγαλύτερη σκληρότητα του περιφερειακού κελύφους σε σχέση με το λαστιχένιο damper. Παρακάτω παραθέτουμε αυτούσια τα δεδομένα που μας έστελνε ο δορυφόρος από μια πτώση από 3,5 m :
36 Στις πρώτες δυο στήλες βρίσκονται οι γωνίες οι οποίες σχηματίζει ο δορυφόρος με την κατακόρυφο. Στις επόμενες τρείς βρίσκονται οι τρείς συνιστώσες της επιτάχυνσης εκφρασμένες σε m/s2. Ακολουθεί η μέγιστη μετρούμενη συνολική επιτάχυνση σε g και τέλος ο χρόνος ανάμεσα στις μετρήσεις σε μs. Στο δεύτερο στάδιο η επιτάχυνση ήταν γενικά μικρότερη από την ελεύθερή πτώση. Η γωνία του CanSat με την κατακόρυφο ήταν στο εύρος των ±60 πράγμα που δυσκόλευε την κατάσταση μιας και το damper λειτουργεί καλύτερα σε σχεδόν κατακόρυφες πτώσεις.
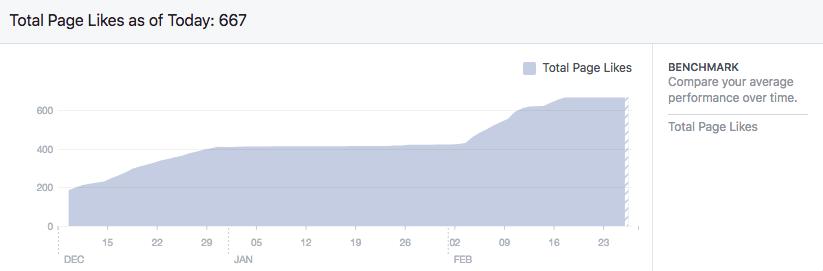
37 4. Πλάνο Προώθησης Τι έχουμε κάνει: Έχουμε δημιουργήσει σελίδα στο Facebook και κανάλι στο YouTube, όπου ανεβάζουμε κυρίως updates από την κατασκευή του CanSat μας. Επικοινωνήσαμε με πιθανούς χορηγούς και ανθρώπους που μπορούν να στηρίξουν ή να προωθήσουν την αποστολή και το διαγωνισμό, όπως δημοσιογράφους, καταστήματα ηλεκτρονικών ειδών, εταιρείες στο χώρο της τεχνολογίας κ.α. Ως αποτέλεσμα του παραπάνω η εταιρεία Ermis Graphics προσφέρθηκε να μας σχεδιάσει το λογότυπο της ομάδας μας (μέλει να γίνει ο σχεδιασμός) Ο κ. Στεφανίδης, ιδιοκτήτης της εταιρείας Stephanidis Machines IPROM πρότεινε στην ομάδα μας δωρεάν κατασκευή του σκελετού του δορυφόρου. Παραχωρήσαμε συνέντευξη στο Αθηναϊκό και Μακεδονικό Πρακτορείο Ειδήσεων και τον κ. Σωτήρη Κυριακίδη. Επικοινωνήσαμε με καθηγητές σχολείων και προτείναμε τη δημιουργία ομάδων για τη συμμετοχή τους στο διαγωνισμό την επόμενη χρονιά. Τι σκοπεύουμε να κάνουμε: Να συνεχίσουμε την προσπάθεια επικοινωνίας με σκοπό την εύρεση κάποιου χορηγού, ο οποίος θα καλύψει πλήρως τα εξοδα της αποστολής. Να διευρύνουμε το κοινό μας στους υπάρχοντες λογαριασμούς μας στο Facebook και το Youtube. Σε περίπτωση μη-εύρεσης χορηγού, να σχεδιάσουμε t-shirts με θέμα το διάστημα, με την πώληση των οποίων θα καλύψουμε τα έξοδα της αποστολής μας. Μετά το πέρας του διαγωνισμού, να διατηρήσουμε την παρουσία μας στα social media ανεβάζοντας tutorials σχετικά με την κατασκευή του CanSat και όχι μόνο.

38 Να καθοδηγήσουμε τις σχολικές ομάδες που θα δημιουργηθούν για τη συμμετοχή στο διαγωνισμό χάρη στην προώθησή μας. Να συμμετάσχουμε στο Athens Science Festival, όπου και θα παρουσιάσει μετά το τέλος του διαγωνισμού ολοκληρωμένο το project μας και τα αποτελέσματα μας και θα μιλήσουμε για τις εμπειρίες μας απο το διαγωνισμό.
39
40 5. Προδιαγραφές Για να εξασφαλίσουμε την ασφαλή μεταφορά του CanSat μέσα στον πύραυλο, το CanSat πρέπει να πληροί ορισμένες κατασκευαστικές προϋποθέσεις. Τα ακριβή χαρακτηριστικά της κατασκευής μας παρουσιάζονται στον ακόλουθο πίνακα : Χαρακτηριστικά Μέτρηση (μονάδα) Ύψος του CanSat (mm) 115mm Μάζα του CanSat (g) 350g Διάμετρος του CanSat (mm) 66mm Μήκος του συστήματος ανάκτησης (mm) 1m Προγραμματισμένος χρόνος πτήσης (s) 143s Υπολογισμένη ταχύτητα καθόδου (m/s) 7m/s Χρησιμοποιούμενη Ραδιοσυχνότητα (hz) 868MHz Ενεργειακή κατανάλωση (wh) 5Wh Συνολικό κόστος ( ) 200 Ευρώ (εκτιμώμενο) Εκ μέρους της ομάδας επιβεβαιώνω ότι το CanSat μας πληροί όλες τις προδιαγραφές οι οποίες θεσπίστηκαν για τον διαγωνισμό CanSat in Greece 2018 στις επίσημες Οδηγίες Συμμετοχής. Σπυρίδων Παυλάτος, Αθήνα, 01/03/2018
Pre-Launch Report (PLR)
") Pre-Launch Report (PLR) Περιεχόμενα 1. Εισαγωγή 1.1 Οργάνωση της ομάδας και ρόλοι των μελών 1.2 Στόχοι της αποστολής 2. Περιγραφή του CanSat 2.1 Επισκόπηση αποστολής 2.2 Μηχανολογικό / κατασκευαστικό σχέδιο
Pre-Launch Report (PLR) Περιεχόμενα 1. Εισαγωγή 1.1 Οργάνωση της ομάδας και ρόλοι των μελών 1.2 Στόχοι της αποστολής 2. Περιγραφή του CanSat 2.1 Επισκόπηση αποστολής 2.2 Μηχανολογικό / κατασκευαστικό σχέδιο
ASPiRE UoWM Pre-CDR Report
 ASPiRE UoWM Pre-CDR Report Cansat in Greece 2019 2 #LaunchingYourDreams Pre-CDR Κατάσταση του Project 3 1 Εισαγωγή 4 1.1 Οργάνωση της ομάδας και ρόλοι των μελών. 4 1.2 Στόχοι της Αποστολής 6 2 Περιγραφή
ASPiRE UoWM Pre-CDR Report Cansat in Greece 2019 2 #LaunchingYourDreams Pre-CDR Κατάσταση του Project 3 1 Εισαγωγή 4 1.1 Οργάνωση της ομάδας και ρόλοι των μελών. 4 1.2 Στόχοι της Αποστολής 6 2 Περιγραφή
Τελική Αναφορά Σχεδίου PLR
 Τελική Αναφορά Σχεδίου PLR CanSat in Greece 2018 1 #launching_your_dreams Περιεχόμενα ΑΝΑΦΟΡΑ ΠΡΟΟΔΟΥ - ΓΕΝΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣΣφάλμα! Δεν έχει οριστεί σελιδοδείκτης. ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT ΛΙΣΤΑ ΚΑΘΗΚΟΝΤΩΝ
Τελική Αναφορά Σχεδίου PLR CanSat in Greece 2018 1 #launching_your_dreams Περιεχόμενα ΑΝΑΦΟΡΑ ΠΡΟΟΔΟΥ - ΓΕΝΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣΣφάλμα! Δεν έχει οριστεί σελιδοδείκτης. ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT ΛΙΣΤΑ ΚΑΘΗΚΟΝΤΩΝ
Προγραμματισμο ς σε Arduino
 Προγραμματισμο ς σε Arduino Arduino UNO & Innoesys Educational Shield www.devobox.com Ηλεκτρονικά Εξαρτήματα & Υλικά Κατασκευής Πρωτοτύπων Λέανδρου 79, 10443, Κολωνός +30 210 51 55 513, info@devobox.com
Προγραμματισμο ς σε Arduino Arduino UNO & Innoesys Educational Shield www.devobox.com Ηλεκτρονικά Εξαρτήματα & Υλικά Κατασκευής Πρωτοτύπων Λέανδρου 79, 10443, Κολωνός +30 210 51 55 513, info@devobox.com
Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές. Εισαγωγή στο Arduino. Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών
 με μικροελεγκτές. Εισαγωγή στο Arduino. Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών") Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές Εισαγωγή στο Arduino Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών Τι είναι Μικροελεγκτής; Ηλεκτρονική συσκευή που διαχειρίζεται ηλεκτρονικά
Μετρήσεις και συλλογή δεδομένων (Data acquisition) με μικροελεγκτές Εισαγωγή στο Arduino Ηλεκτρομηχανολογικός εξοπλισμός διεργασιών Τι είναι Μικροελεγκτής; Ηλεκτρονική συσκευή που διαχειρίζεται ηλεκτρονικά
Αθήνα 29 ΝΟΕ, 2016 ΘΕΜΑ: ΑΙΤΗΜΑ ΑΓΟΡΑΣ ΥΛΙΚΩΝ ΓΙΑ ΤΟ ΕΡΓΑΣΤΗΡΙΟ ΣΥΛΛΟΓΗΣ & ΕΠΕΞΕΡΓΑΣΙΑΣ ΔΕΔΟΜΕΝΩΝ
 Αθήνα 29 ΝΟΕ, 2016 ΘΕΜΑ: ΑΙΤΗΜΑ ΑΓΟΡΑΣ ΥΛΙΚΩΝ ΓΙΑ ΤΟ ΕΡΓΑΣΤΗΡΙΟ ΣΥΛΛΟΓΗΣ & ΕΠΕΞΕΡΓΑΣΙΑΣ ΔΕΔΟΜΕΝΩΝ Προς, Ο πειραματικός εξοπλισμός αυτής της πρότασης / σ αυτό το αίτημα, θα μας δώσει τη δυνατότητα να δημιουργήσουμε
Αθήνα 29 ΝΟΕ, 2016 ΘΕΜΑ: ΑΙΤΗΜΑ ΑΓΟΡΑΣ ΥΛΙΚΩΝ ΓΙΑ ΤΟ ΕΡΓΑΣΤΗΡΙΟ ΣΥΛΛΟΓΗΣ & ΕΠΕΞΕΡΓΑΣΙΑΣ ΔΕΔΟΜΕΝΩΝ Προς, Ο πειραματικός εξοπλισμός αυτής της πρότασης / σ αυτό το αίτημα, θα μας δώσει τη δυνατότητα να δημιουργήσουμε
Little Investigator of Fluorescence Emission Οδηγός Αναφοράς Προόδου Pre CDR
 Little Investigator of Fluorescence Emission Οδηγός Αναφοράς Προόδου Pre CDR CanSat in Greece 2018 1 #launching_your_dreams ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT Η μεγαλύτερη πρόκληση που αντιμετωπίσαμε μέχρι τώρα, αφορά
Little Investigator of Fluorescence Emission Οδηγός Αναφοράς Προόδου Pre CDR CanSat in Greece 2018 1 #launching_your_dreams ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT Η μεγαλύτερη πρόκληση που αντιμετωπίσαμε μέχρι τώρα, αφορά
Cansat in Greece #LaunchingYourDreams PLR. Κατάσταση του Project 3
 ASPiRE UOWM PLR Cansat in Greece 2019 2 #LaunchingYourDreams PLR Κατάσταση του Project 3 1 Εισαγωγή 5 1.1 Οργάνωση της ομάδας και ρόλοι των μελών. 5 1.2 Στόχοι της Αποστολής 6 2 Περιγραφή του CanSat 7
ASPiRE UOWM PLR Cansat in Greece 2019 2 #LaunchingYourDreams PLR Κατάσταση του Project 3 1 Εισαγωγή 5 1.1 Οργάνωση της ομάδας και ρόλοι των μελών. 5 1.2 Στόχοι της Αποστολής 6 2 Περιγραφή του CanSat 7
ΑΥΤΟΜΑΤΟ ΦΩΤΟΒΟΛΤΑΪΚΟ ΠΑΝΕΛ
 ΑΥΤΟΜΑΤΟ ΦΩΤΟΒΟΛΤΑΪΚΟ ΠΑΝΕΛ ΜΙΑ ΚΑΤΑΣΚΕΥΗ ΤΟΥ ΟΜΙΛΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΚΑΙ ΡΟΜΠΟΤΙΚΗΣ ΤΟΥ ΠΕΙΡΑΜΑΤΙΚΟΥ ΔΗΜΟΤΙΚΟΥ ΣΧΟΛΕΙΟΥ ΦΛΩΡΙΝΑΣ «ΜΙΚΡΟΙ ΧΑΚΕΡ» ΗΛΙΑΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΜΕΣΑ ΕΚΜΕΤΑΛΛΕΥΣΗΣ ΔΙΑΦΟΡΕΣ ΠΛΗΡΟΦΟΡΙΕΣ
ΑΥΤΟΜΑΤΟ ΦΩΤΟΒΟΛΤΑΪΚΟ ΠΑΝΕΛ ΜΙΑ ΚΑΤΑΣΚΕΥΗ ΤΟΥ ΟΜΙΛΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΚΑΙ ΡΟΜΠΟΤΙΚΗΣ ΤΟΥ ΠΕΙΡΑΜΑΤΙΚΟΥ ΔΗΜΟΤΙΚΟΥ ΣΧΟΛΕΙΟΥ ΦΛΩΡΙΝΑΣ «ΜΙΚΡΟΙ ΧΑΚΕΡ» ΗΛΙΑΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΜΕΣΑ ΕΚΜΕΤΑΛΛΕΥΣΗΣ ΔΙΑΦΟΡΕΣ ΠΛΗΡΟΦΟΡΙΕΣ
ΦΥΣΙΚΗ. Θέμα: «Μελέτη της βολής με κατασκευή και εκτόξευση χάρτινων πυραύλων με χρήση εκτοξευτή που λειτουργεί με πιεσμένο αέρα»
 ΦΥΣΙΚΗ Θέμα: «Μελέτη της βολής με κατασκευή και εκτόξευση χάρτινων πυραύλων με χρήση εκτοξευτή που λειτουργεί με πιεσμένο αέρα» Τάξη Γ : Λεμπιδάκης Αποστόλης, Καπετανάκης Δημήτρης, Κοπιδάκης Γιώργος, Ζαμπετάκης
ΦΥΣΙΚΗ Θέμα: «Μελέτη της βολής με κατασκευή και εκτόξευση χάρτινων πυραύλων με χρήση εκτοξευτή που λειτουργεί με πιεσμένο αέρα» Τάξη Γ : Λεμπιδάκης Αποστόλης, Καπετανάκης Δημήτρης, Κοπιδάκης Γιώργος, Ζαμπετάκης
Μάθημα 4.2 Η μητρική πλακέτα
 Μάθημα 4.2 Η μητρική πλακέτα - Εισαγωγή - Οι βάσεις του επεξεργαστή και της μνήμης - Οι υποδοχές της μητρικής πλακέτας - Άλλα μέρη της μητρική πλακέτας - Τυποποιήσεις στην κατασκευή μητρικών πλακετών Όταν
Μάθημα 4.2 Η μητρική πλακέτα - Εισαγωγή - Οι βάσεις του επεξεργαστή και της μνήμης - Οι υποδοχές της μητρικής πλακέτας - Άλλα μέρη της μητρική πλακέτας - Τυποποιήσεις στην κατασκευή μητρικών πλακετών Όταν
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 1. Arduino + LabVIEW: Μέτρηση Έντασης Φωτός με Φωτοαντίσταση. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 1 Arduino + LabVIEW: Μέτρηση Έντασης Φωτός με Φωτοαντίσταση. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 1 Arduino + LabVIEW: Μέτρηση Έντασης Φωτός με Φωτοαντίσταση. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο
ΠΑΝΑΓΙΩΤΗΣ ΚΟΥΤΣΙΩΡΑΣ Α.Μ.: ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ. Αναφορά Πρακτικής Εργασίας: Μετατροπέας Κώδικα BCD Σε Κώδικα GRAY
 ΤΜΗΜΑ ΕΠΙΣΤΗΜΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΛΟΠΟΝΝΗΣΟΥ ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ Αναφορά Πρακτικής Εργασίας: Μετατροπέας Κώδικα BCD Σε Κώδικα GRAY ΠΑΝΑΓΙΩΤΗΣ ΚΟΥΤΣΙΩΡΑΣ Α.Μ.: 2025201100037 Χειμερινό
ΤΜΗΜΑ ΕΠΙΣΤΗΜΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΛΟΠΟΝΝΗΣΟΥ ΨΗΦΙΑΚΗ ΣΧΕΔΙΑΣΗ Αναφορά Πρακτικής Εργασίας: Μετατροπέας Κώδικα BCD Σε Κώδικα GRAY ΠΑΝΑΓΙΩΤΗΣ ΚΟΥΤΣΙΩΡΑΣ Α.Μ.: 2025201100037 Χειμερινό
ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017)
") ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017) Περιγραφή της Άσκησης Ο σκοπός της πρώτης άσκησης είναι κυρίως η εξοικείωση με το περιβάλλον προγραμματισμού του Arduino, γι αυτό και δεν είναι ιδιαίτερα σύνθετη. Αρχικά, θα
ΑΣΚΗΣΗ 1 (22 Νοεμβρίου 2017) Περιγραφή της Άσκησης Ο σκοπός της πρώτης άσκησης είναι κυρίως η εξοικείωση με το περιβάλλον προγραμματισμού του Arduino, γι αυτό και δεν είναι ιδιαίτερα σύνθετη. Αρχικά, θα
ΕΦΑΡΜΟΓΕΣ ΤΗΛΕΠIΚΟΙΝΩΝΙΑΚΩΝ ΔΙΑΤΑΞΕΩΝ
 ΕΦΑΡΜΟΓΕΣ ΤΗΛΕΠIΚΟΙΝΩΝΙΑΚΩΝ ΔΙΑΤΑΞΕΩΝ ΟΙΚΟΝOΜΟΥ ΧΑΡΗΣ (6424) ΦΩΚΟΣ ΝΙΚΟΛΑΟΣ(6592) ΚΑΜΒΥΣΗΣ ΝΙΚΟΛΑΟΣ(7178) 2013-2014 ΠΕΡΙΕΧΟΜΕΝΑ Σκοπός της εργασίας Ανάλυση Arduino Uno Δημιουργία πληροφορίας Αποστολή και
ΕΦΑΡΜΟΓΕΣ ΤΗΛΕΠIΚΟΙΝΩΝΙΑΚΩΝ ΔΙΑΤΑΞΕΩΝ ΟΙΚΟΝOΜΟΥ ΧΑΡΗΣ (6424) ΦΩΚΟΣ ΝΙΚΟΛΑΟΣ(6592) ΚΑΜΒΥΣΗΣ ΝΙΚΟΛΑΟΣ(7178) 2013-2014 ΠΕΡΙΕΧΟΜΕΝΑ Σκοπός της εργασίας Ανάλυση Arduino Uno Δημιουργία πληροφορίας Αποστολή και
WIRELESS SENSOR NETWORKS (WSN)
") WIRELESS SENSOR NETWORKS (WSN) Δρ. Ιωάννης Παναγόπουλος Εργαστήριο Υπολογιστικών Συστημάτων Καθ. Γεώργιος Παπακωνσταντίνου Αθήνα 2008 ΕΙΣΑΓΩΓΗ ΣΤΑ WSN Σε συγκεκριμένες εφαρμογές, επιθυμείται η μέτρηση
WIRELESS SENSOR NETWORKS (WSN) Δρ. Ιωάννης Παναγόπουλος Εργαστήριο Υπολογιστικών Συστημάτων Καθ. Γεώργιος Παπακωνσταντίνου Αθήνα 2008 ΕΙΣΑΓΩΓΗ ΣΤΑ WSN Σε συγκεκριμένες εφαρμογές, επιθυμείται η μέτρηση
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5. Ρυθμίζοντας τη Φορά Περιστροφής. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Μέτρηση Θερμοκρασίας με τον αισθητήρα TMP36. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων. Βασική δομή ενός προγράμματος στο LabVIEW.
 Σκοπός Μάθημα 2 Δραστηριότητα 1 Μέτρηση Θερμοκρασίας με τον αισθητήρα TMP36. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front panel). Σχεδίαση
Σκοπός Μάθημα 2 Δραστηριότητα 1 Μέτρηση Θερμοκρασίας με τον αισθητήρα TMP36. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front panel). Σχεδίαση
ΝΟΜΟΣ ΤΟΥ OHM ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: 1 ΣΚΟΠΟΣ 1 2 ΘΕΩΡΗΤΙΚΟ ΥΠΟΒΑΘΡΟ 1 3 ΕΞΟΠΛΙΣΜΟΣ 5 4 ΕΞΑΡΤΗΜΑΤΑ 5
 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ΝΟΜΟΣ ΤΟΥ OHM ΗΜΕΡΟΜΗΝΙΑ: ΤΡΙΩΡΟ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: Περιεχόμενα 1 ΣΚΟΠΟΣ 1 2 ΘΕΩΡΗΤΙΚΟ ΥΠΟΒΑΘΡΟ 1 2.1 Η ΓΡΑΜΜΙΚΗ ΣΧΕΣΗ ΡΕΥΜΑΤΟΣ ΚΑΙ ΤΑΣΗΣ 3
ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ΝΟΜΟΣ ΤΟΥ OHM ΗΜΕΡΟΜΗΝΙΑ: ΤΡΙΩΡΟ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: Περιεχόμενα 1 ΣΚΟΠΟΣ 1 2 ΘΕΩΡΗΤΙΚΟ ΥΠΟΒΑΘΡΟ 1 2.1 Η ΓΡΑΜΜΙΚΗ ΣΧΕΣΗ ΡΕΥΜΑΤΟΣ ΚΑΙ ΤΑΣΗΣ 3
Οδηγός Αναφοράς Προόδου Pre CDR
 Οδηγός Αναφοράς Προόδου Pre CDR ΑΝΑΦΟΡΑ ΠΡΟΟΔΟΥ - ΓΕΝΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT Σε γενικά πλαίσια η εξέλιξη του project ακολουθεί το προβλεπόμενο χρονοδιάγραμμα. Αρχικά μετά την επιλογή των
Οδηγός Αναφοράς Προόδου Pre CDR ΑΝΑΦΟΡΑ ΠΡΟΟΔΟΥ - ΓΕΝΙΚΕΣ ΠΛΗΡΟΦΟΡΙΕΣ ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT Σε γενικά πλαίσια η εξέλιξη του project ακολουθεί το προβλεπόμενο χρονοδιάγραμμα. Αρχικά μετά την επιλογή των
Κεφάλαιο 1.6: Συσκευές αποθήκευσης
 Κεφάλαιο 1.6: Συσκευές αποθήκευσης 1.6.1 Συσκευές αποθήκευσης Μνήμη τυχαίας προσπέλασης - RAM Η μνήμη RAM (Random Access Memory Μνήμη Τυχαίας Προσπέλασης), κρατεί όλη την πληροφορία (δεδομένα και εντολές)
Κεφάλαιο 1.6: Συσκευές αποθήκευσης 1.6.1 Συσκευές αποθήκευσης Μνήμη τυχαίας προσπέλασης - RAM Η μνήμη RAM (Random Access Memory Μνήμη Τυχαίας Προσπέλασης), κρατεί όλη την πληροφορία (δεδομένα και εντολές)
Ιατρικά Ηλεκτρονικά. Χρήσιμοι Σύνδεσμοι. ΙΑΤΡΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ - ΔΙΑΛΕΞΗ 2η. Σημειώσεις μαθήματος: E mail:
 Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/courses/tio127/ E mail: pasv@teiath.gr 2 1 Όπως
Ιατρικά Ηλεκτρονικά Δρ. Π. Ασβεστάς Τμήμα Μηχανικών Βιοϊατρικής Τεχνολογίας Τ.Ε Χρήσιμοι Σύνδεσμοι Σημειώσεις μαθήματος: http://medisp.bme.teiath.gr/eclass/courses/tio127/ E mail: pasv@teiath.gr 2 1 Όπως
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino UNO Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino UNO Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O
ΠΡΟΣΚΛΗΣΗ ΕΚ ΗΛΩΣΗΣ ΕΝ ΙΑΦΕΡΟΝΤΟΣ για την προµήθεια δύο αυτόνοµων τηλεµετρικών µετεωρολογικών σταθµών
 1 ΕΤΑΙΡΙΑ Υ ΡΕΥΣΕΩΣ & ΑΠΟΧΕΤΕΥΣΕΩΣ ΘΕΣΣΑΛΟΝΙΚΗΣ Α.Ε. /ΝΣΗ ΟΙΚΟΝΟΜΙΚΟΥ ΤΜΗΜΑ ΠΡΟΜΗΘΕΙΩΝ,.Υ. & ΑΠΟΘΗΚΩΝ Πληρ. Σπ. Πετρόπουλος Τηλ. 2310 966972,968,928 Fax 2310 283117 E - mail promithies@eyath.gr Θεσσαλονίκη
1 ΕΤΑΙΡΙΑ Υ ΡΕΥΣΕΩΣ & ΑΠΟΧΕΤΕΥΣΕΩΣ ΘΕΣΣΑΛΟΝΙΚΗΣ Α.Ε. /ΝΣΗ ΟΙΚΟΝΟΜΙΚΟΥ ΤΜΗΜΑ ΠΡΟΜΗΘΕΙΩΝ,.Υ. & ΑΠΟΘΗΚΩΝ Πληρ. Σπ. Πετρόπουλος Τηλ. 2310 966972,968,928 Fax 2310 283117 E - mail promithies@eyath.gr Θεσσαλονίκη
Μάθηµα 2 ο : ορυφόρος και δορυφορική διαστηµική πλατφόρµα
 Μάθηµα 2 ο : ορυφόρος και δορυφορική διαστηµική πλατφόρµα Στόχοι: Στο τέλος αυτού του µαθήµατος ο σπουδαστής θα γνωρίζει: Τη δοµή ενός τηλεπικοινωνιακού δορυφόρου καθώς και το έργο που επιτελεί Την οργάνωσης
Μάθηµα 2 ο : ορυφόρος και δορυφορική διαστηµική πλατφόρµα Στόχοι: Στο τέλος αυτού του µαθήµατος ο σπουδαστής θα γνωρίζει: Τη δοµή ενός τηλεπικοινωνιακού δορυφόρου καθώς και το έργο που επιτελεί Την οργάνωσης
Σχεδιασμός και υλοποίηση κυκλώματος μέτρησης κατανάλωσης ισχύος
 Σχεδιασμός και υλοποίηση κυκλώματος μέτρησης κατανάλωσης ισχύος Φοιτητής Φετινίδης Αναστάσιος Επιβλέπων Δασυγένης Μηνάς Μάρτιος 2014 1 Περιεχόμενα παρουσίασης Εισαγωγή Θεωρητικό υπόβαθρο Υλικό μέρος του
Σχεδιασμός και υλοποίηση κυκλώματος μέτρησης κατανάλωσης ισχύος Φοιτητής Φετινίδης Αναστάσιος Επιβλέπων Δασυγένης Μηνάς Μάρτιος 2014 1 Περιεχόμενα παρουσίασης Εισαγωγή Θεωρητικό υπόβαθρο Υλικό μέρος του
Κατασκευάστε ένα απλό antenna tuner (Μέρος Α )
") Κατασκευάστε ένα απλό antenna tuner (Μέρος Α ) Του Νίκου Παναγιωτίδη (SV6 DBK) φυσικού και ραδιοερασιτέχνη. Ο σκοπός του άρθρου αυτού είναι να κατευθύνει τον αναγνώστη ραδιοερασιτέχνη να κατασκευάσει το
Κατασκευάστε ένα απλό antenna tuner (Μέρος Α ) Του Νίκου Παναγιωτίδη (SV6 DBK) φυσικού και ραδιοερασιτέχνη. Ο σκοπός του άρθρου αυτού είναι να κατευθύνει τον αναγνώστη ραδιοερασιτέχνη να κατασκευάσει το
Η Λ Ε Κ Τ Ρ Ο Ν Ι Κ Ε Σ ΠΡΑΓΜΑΤΟΠΟΙΗΣΕΙΣ ΑΕ
 Η Λ ΠΡΑ Η Λ Ε Κ Τ Ρ Ο Ν Ι Κ Ε Σ ΠΡΑΓΜΑΤΟΠΟΙΗΣΕΙΣ ΑΕ ΒΙΟΜΗΧΑΝΙΚΗ ΠΕΡΙΟΧΗ ΘΕΡΜΗΣ ΤΗΛ 2310 464 021-464 022 ΤΘ 355 ΘΕΡΜΗ 57001 - ΘΕΣΣΑΛΟΝΙΚΗ FAX 2310 464 607 ΟΔΗΓΙΕΣ ΣΥΝΔΕΣΗΣ ΚΑΙ ΧΡΗΣΗΣ ΤΟΥ ΕΛΕΓΚΤΗ ΑΥΤΟΝΟΜΗΣ
Η Λ ΠΡΑ Η Λ Ε Κ Τ Ρ Ο Ν Ι Κ Ε Σ ΠΡΑΓΜΑΤΟΠΟΙΗΣΕΙΣ ΑΕ ΒΙΟΜΗΧΑΝΙΚΗ ΠΕΡΙΟΧΗ ΘΕΡΜΗΣ ΤΗΛ 2310 464 021-464 022 ΤΘ 355 ΘΕΡΜΗ 57001 - ΘΕΣΣΑΛΟΝΙΚΗ FAX 2310 464 607 ΟΔΗΓΙΕΣ ΣΥΝΔΕΣΗΣ ΚΑΙ ΧΡΗΣΗΣ ΤΟΥ ΕΛΕΓΚΤΗ ΑΥΤΟΝΟΜΗΣ
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 3 Μέτρηση Θερμοκρασίας Σύστημα Ελέγχου Θερμοκρασίας. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 3 Μέτρηση Θερμοκρασίας Σύστημα Ελέγχου Θερμοκρασίας με Θερμοστάτη. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Σκοπός Βασική δομή ενός προγράμματος στο LabVIEW.
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 3 Μέτρηση Θερμοκρασίας Σύστημα Ελέγχου Θερμοκρασίας με Θερμοστάτη. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Σκοπός Βασική δομή ενός προγράμματος στο LabVIEW.
Οδηγίες Συμμετοχής Φοιτητικού Διαγωνισμού
 Οδηγίες Συμμετοχής Φοιτητικού Διαγωνισμού Περιεχόμενα Προκήρυξη 3 Προϋποθέσεις συµµετοχής 3 Υπεύθυνος Οµάδας 3 Η εκτόξευση του πυραύλου 4 Η Αποστολή του Δορυφόρου 6 Πρωτεύουσα αποστολή 6 Δευτερεύουσα αποστολή
Οδηγίες Συμμετοχής Φοιτητικού Διαγωνισμού Περιεχόμενα Προκήρυξη 3 Προϋποθέσεις συµµετοχής 3 Υπεύθυνος Οµάδας 3 Η εκτόξευση του πυραύλου 4 Η Αποστολή του Δορυφόρου 6 Πρωτεύουσα αποστολή 6 Δευτερεύουσα αποστολή
Άσκηση 3 Υπολογισμός του μέτρου της ταχύτητας και της επιτάχυνσης
 Άσκηση 3 Υπολογισμός του μέτρου της ταχύτητας και της επιτάχυνσης Σύνοψη Σκοπός της συγκεκριμένης άσκησης είναι ο υπολογισμός του μέτρου της στιγμιαίας ταχύτητας και της επιτάχυνσης ενός υλικού σημείου
Άσκηση 3 Υπολογισμός του μέτρου της ταχύτητας και της επιτάχυνσης Σύνοψη Σκοπός της συγκεκριμένης άσκησης είναι ο υπολογισμός του μέτρου της στιγμιαίας ταχύτητας και της επιτάχυνσης ενός υλικού σημείου
SUNNY MINI CENTRAL. Ακριβής σχεδιασμός και υλοποίηση φωτοβολταϊκών συστημάτων
 SUNNY MINI CENTRAL Ακριβής σχεδιασμός και υλοποίηση φωτοβολταϊκών συστημάτων Προσγείωση Ακριβείας Εξαιρετικά ακριβής σχεδιασμός φωτοβολταϊκών συστημάτων Ποτέ άλλοτε δεν ήταν τόσο απλό να σχεδιαστούν και
SUNNY MINI CENTRAL Ακριβής σχεδιασμός και υλοποίηση φωτοβολταϊκών συστημάτων Προσγείωση Ακριβείας Εξαιρετικά ακριβής σχεδιασμός φωτοβολταϊκών συστημάτων Ποτέ άλλοτε δεν ήταν τόσο απλό να σχεδιαστούν και
ΠΕΙΡΑΜΑΤΙΚΟ ΓΥΜΝΑΣΙΟ ΠΑΤΡΩΝ TO ΠΕΡΙΒΑΛΛΟΝ ΕΙΝΑΙ ΔΙΚΗ ΜΑΣ ΥΠΟΘΕΣΗ
 ΠΕΙΡΑΜΑΤΙΚΟ ΓΥΜΝΑΣΙΟ ΠΑΤΡΩΝ TO ΠΕΡΙΒΑΛΛΟΝ ΕΙΝΑΙ ΔΙΚΗ ΜΑΣ ΥΠΟΘΕΣΗ Ενότητα 1: εισαγωγή Στα πλαίσια της συμμετοχής μας στο έργο GAIA πραγματοποιήσαμε διάφορες δράσεις στο σχολείο οι οποίες αποτέλεσαν και
ΠΕΙΡΑΜΑΤΙΚΟ ΓΥΜΝΑΣΙΟ ΠΑΤΡΩΝ TO ΠΕΡΙΒΑΛΛΟΝ ΕΙΝΑΙ ΔΙΚΗ ΜΑΣ ΥΠΟΘΕΣΗ Ενότητα 1: εισαγωγή Στα πλαίσια της συμμετοχής μας στο έργο GAIA πραγματοποιήσαμε διάφορες δράσεις στο σχολείο οι οποίες αποτέλεσαν και
ΣΥΝΔΕΣΗ ΣΕ ΣΕΙΡΑ ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: 1 ΣΚΟΠΟΣ 1 2 ΘΕΩΡΗΤΙΚΟ ΥΠΟΒΑΘΡΟ 1 3 ΕΞΟΠΛΙΣΜΟΣ 7 4 ΕΞΑΡΤΗΜΑΤΑ 7
 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ΣΥΝΔΕΣΗ ΣΕ ΣΕΙΡΑ ΗΜΕΡΟΜΗΝΙΑ: ΤΡΙΩΡΟ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: Περιεχόμενα 1 ΣΚΟΠΟΣ 1 2 ΘΕΩΡΗΤΙΚΟ ΥΠΟΒΑΘΡΟ 1 2.1 ΑΝΤΙΣΤΑΣΕΙΣ ΣΕ ΣΕΙΡΑ 1 2.2 ΣΥΝΟΛΙΚΗ
ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ΣΥΝΔΕΣΗ ΣΕ ΣΕΙΡΑ ΗΜΕΡΟΜΗΝΙΑ: ΤΡΙΩΡΟ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΜ: Περιεχόμενα 1 ΣΚΟΠΟΣ 1 2 ΘΕΩΡΗΤΙΚΟ ΥΠΟΒΑΘΡΟ 1 2.1 ΑΝΤΙΣΤΑΣΕΙΣ ΣΕ ΣΕΙΡΑ 1 2.2 ΣΥΝΟΛΙΚΗ
ΤΟΠΙΚΟΣ ΠΡΟΚΡΙΜΑΤΙΚΟΣ ΔΙΑΓΩΝΙΣΜΟΣ ΕΥΡΩΠΑΪΚΗΣ ΟΛΥΜΠΙΑΔΑΣ ΕΠΙΣΤΗΜΩΝ - EUSO Σάββατο 7 Δεκεμβρίου Εξέταση στη Φυσική
 ΠΑΝΕΛΛΗΝΙΑ ΕΝΩΣΗ ΥΠΕΥΘΥΝΩΝ ΕΡΓΑΣΤΗΡΙΑΚΩΝ ΚΕΝΤΡΩΝ ΦΥΣΙΚΩΝ ΕΠΙΣΤΗΜΩΝ - «ΠΑΝΕΚΦE» 1ο και 2ο ΕΚΦΕ Ηρακλείου ΤΟΠΙΚΟΣ ΠΡΟΚΡΙΜΑΤΙΚΟΣ ΔΙΑΓΩΝΙΣΜΟΣ ΕΥΡΩΠΑΪΚΗΣ ΟΛΥΜΠΙΑΔΑΣ ΕΠΙΣΤΗΜΩΝ - EUSO 2014 Σάββατο 7 Δεκεμβρίου
ΠΑΝΕΛΛΗΝΙΑ ΕΝΩΣΗ ΥΠΕΥΘΥΝΩΝ ΕΡΓΑΣΤΗΡΙΑΚΩΝ ΚΕΝΤΡΩΝ ΦΥΣΙΚΩΝ ΕΠΙΣΤΗΜΩΝ - «ΠΑΝΕΚΦE» 1ο και 2ο ΕΚΦΕ Ηρακλείου ΤΟΠΙΚΟΣ ΠΡΟΚΡΙΜΑΤΙΚΟΣ ΔΙΑΓΩΝΙΣΜΟΣ ΕΥΡΩΠΑΪΚΗΣ ΟΛΥΜΠΙΑΔΑΣ ΕΠΙΣΤΗΜΩΝ - EUSO 2014 Σάββατο 7 Δεκεμβρίου
Ημερήσιο Γενικό Λύκειο Σητείας. Σχ. έτος
 Ημερήσιο Γενικό Λύκειο Σητείας Σχ. έτος 2015-2016 Προγραμματισμός μικρο ελεγκτή Arduino για μέτρηση μετεωρολογικών δεδομένων. Υπεύθυνος καθηγητής:τσιφετάκης Μανώλης Οι μαθητές: Αϊλαμάκη Κατερίνα--Αισωπάκη
Ημερήσιο Γενικό Λύκειο Σητείας Σχ. έτος 2015-2016 Προγραμματισμός μικρο ελεγκτή Arduino για μέτρηση μετεωρολογικών δεδομένων. Υπεύθυνος καθηγητής:τσιφετάκης Μανώλης Οι μαθητές: Αϊλαμάκη Κατερίνα--Αισωπάκη
Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου. Ενότητα 2
 Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου Ενότητα 2 Τι είναι το PLC ΠΕΡΙΕΧΟΜΕΝΑ 2 Τι είναι το PLC. 2.1 Πλεονεκτήματα των PLC. 2.2 Η δομή ενός PLC. 2.3 Τα PLC της αγοράς. 2.4 Αρχή λειτουργίας ενός PLC.
Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου Ενότητα 2 Τι είναι το PLC ΠΕΡΙΕΧΟΜΕΝΑ 2 Τι είναι το PLC. 2.1 Πλεονεκτήματα των PLC. 2.2 Η δομή ενός PLC. 2.3 Τα PLC της αγοράς. 2.4 Αρχή λειτουργίας ενός PLC.
Φύλλο Εργασίας. Μάθημα 7 Τεχνητοί δορυφόροι και Σύγχρονα Επαγγέλματα ΙΙ
 Φύλλο Εργασίας Μάθημα 7 Τεχνητοί δορυφόροι και Σύγχρονα Επαγγέλματα ΙΙ Σχολείο:. Τάξη: Ημερομηνία: Δραστηριότητα 1: Προβολή Αφήγησης με βίντεο (7 λεπτά) Δραστηριότητα 2: Προβολή εικόνων (2 λεπτά) Παρακολουθήστε
Φύλλο Εργασίας Μάθημα 7 Τεχνητοί δορυφόροι και Σύγχρονα Επαγγέλματα ΙΙ Σχολείο:. Τάξη: Ημερομηνία: Δραστηριότητα 1: Προβολή Αφήγησης με βίντεο (7 λεπτά) Δραστηριότητα 2: Προβολή εικόνων (2 λεπτά) Παρακολουθήστε
Ανεμογεννήτρια Polaris P15 50 kw
 Ανεμογεννήτρια Polaris P15 50 kw Τεχνική περιγραφή Μια ανεμογεννήτρια (Α/Γ) 50kW παράγει ενέργεια για να τροφοδοτηθούν αρκετές κατοικίες. Επίσης μπορεί να χρησιμοποιηθεί για να τροφοδοτηθούν με ρεύμα απομονωμένα
Ανεμογεννήτρια Polaris P15 50 kw Τεχνική περιγραφή Μια ανεμογεννήτρια (Α/Γ) 50kW παράγει ενέργεια για να τροφοδοτηθούν αρκετές κατοικίες. Επίσης μπορεί να χρησιμοποιηθεί για να τροφοδοτηθούν με ρεύμα απομονωμένα
ΑΣΚΗΣΗ 6. Μελέτη συντονισμού σε κύκλωμα R,L,C, σειράς
 ΑΣΚΗΣΗ 6 Μελέτη συντονισμού σε κύκλωμα R,L,C, σειράς Σκοπός : Να μελετήσουμε το φαινόμενο του συντονισμού σε ένα κύκλωμα που περιλαμβάνει αντιστάτη (R), πηνίο (L) και πυκνωτή (C) συνδεδεμένα σε σειρά (κύκλωμα
ΑΣΚΗΣΗ 6 Μελέτη συντονισμού σε κύκλωμα R,L,C, σειράς Σκοπός : Να μελετήσουμε το φαινόμενο του συντονισμού σε ένα κύκλωμα που περιλαμβάνει αντιστάτη (R), πηνίο (L) και πυκνωτή (C) συνδεδεμένα σε σειρά (κύκλωμα
ΑΣΚΗΣΗ 11. Προσδιορισμός του πηλίκου του φορτίου προς τη μάζα ενός ηλεκτρονίου
 ΑΣΚΗΣΗ 11 Προσδιορισμός του πηλίκου του φορτίου προς τη μάζα ενός ηλεκτρονίου Σκοπός : Να προσδιορίσουμε μια από τις φυσικές ιδιότητες του ηλεκτρονίου που είναι το πηλίκο του φορτίου προς τη μάζα του (/m
ΑΣΚΗΣΗ 11 Προσδιορισμός του πηλίκου του φορτίου προς τη μάζα ενός ηλεκτρονίου Σκοπός : Να προσδιορίσουμε μια από τις φυσικές ιδιότητες του ηλεκτρονίου που είναι το πηλίκο του φορτίου προς τη μάζα του (/m
Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Εργαστήριο Κυκλωμάτων και Μετρήσεων
 Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Εργαστήριο Κυκλωμάτων και Μετρήσεων Εργαστήριο 3 Νόμος του Ohm, Κυκλώματα σε Σειρά και Παράλληλα Λευκωσία, 2010 Εργαστήριο 3 Νόμος
Πανεπιστήμιο Κύπρου Τμήμα Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών Εργαστήριο Κυκλωμάτων και Μετρήσεων Εργαστήριο 3 Νόμος του Ohm, Κυκλώματα σε Σειρά και Παράλληλα Λευκωσία, 2010 Εργαστήριο 3 Νόμος
Άσκηση 9 Μελέτη στροφικής κίνησης στερεού σώματος
 Άσκηση 9 Μελέτη στροφικής κίνησης στερεού σώματος Σύνοψη Σκοπός της συγκεκριμένης άσκησης είναι: ο πειραματικός υπολογισμός της ροπής αδράνειας ενός στερεού και η σύγκριση της πειραματικής τιμής με τη
Άσκηση 9 Μελέτη στροφικής κίνησης στερεού σώματος Σύνοψη Σκοπός της συγκεκριμένης άσκησης είναι: ο πειραματικός υπολογισμός της ροπής αδράνειας ενός στερεού και η σύγκριση της πειραματικής τιμής με τη
x = r cos φ y = r sin φ
 Αυτόνομοι Πράκτορες ΠΛΗ 513 Αναφορά Εργασίας Κίνηση Τερματοφύλακα Στο RoboCup Καρανδεινός Εκτωρ Α.Μ 2010030020 Περίληψη Το Robocup είναι ένας παγκόσμιος ετήσιος διαγωνισμός ρομποτικής στον οποίο προγραμματίζονται
Αυτόνομοι Πράκτορες ΠΛΗ 513 Αναφορά Εργασίας Κίνηση Τερματοφύλακα Στο RoboCup Καρανδεινός Εκτωρ Α.Μ 2010030020 Περίληψη Το Robocup είναι ένας παγκόσμιος ετήσιος διαγωνισμός ρομποτικής στον οποίο προγραμματίζονται
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
Β ΛΥΚΕΙΟΥ - ΓΕΝΙΚΕΣ ΑΣΚΗΣΕΙΣ
 Β ΛΥΚΕΙΟΥ - ΓΕΝΙΚΕΣ ΑΣΚΗΣΕΙΣ 1. Ποια η σημασία των παρακάτω μεγεθών; Αναφερόμαστε στην κυκλική κίνηση. Α. Επιτρόχια επιτάχυνση: Β. Κεντρομόλος επιτάχυνση: Γ. Συχνότητα: Δ. Περίοδος: 2. Ένας τροχός περιστρέφεται
Β ΛΥΚΕΙΟΥ - ΓΕΝΙΚΕΣ ΑΣΚΗΣΕΙΣ 1. Ποια η σημασία των παρακάτω μεγεθών; Αναφερόμαστε στην κυκλική κίνηση. Α. Επιτρόχια επιτάχυνση: Β. Κεντρομόλος επιτάχυνση: Γ. Συχνότητα: Δ. Περίοδος: 2. Ένας τροχός περιστρέφεται
ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ
 Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
Τ.Ε.Ι. ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΑΥΤΟΜΑΤΟ ΣΥΣΤΗΜΑ ΕΝΑΛΛΑΓΗΣ ΤΑΧΥΤΗΤΩΝ ΣΕ ΠΟΔΗΛΑΤΟ ΟΝΟΜΑΤΑ ΦΟΙΤΗΤΩΝ: ΒΟΥΡΔΕΡΗΣ ΑΝΤΩΝΙΟΣ Α.Μ: 30086 ΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ: 33359 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΗΣ Ιστορική
Οδηγίες Συμμετοχής Μαθητικού Διαγωνισμού
 Οδηγίες Συμμετοχής Μαθητικού Διαγωνισμού Περιεχόμενα Προκήρυξη 3 Προϋποθέσεις συµµετοχής 3 Υπεύθυνος Οµάδας 3 Η εκτόξευση του πυραύλου 4 Η Αποστολή του Δορυφόρου 5 Πρωτεύουσα αποστολή 5 Δευτερεύουσα αποστολή
Οδηγίες Συμμετοχής Μαθητικού Διαγωνισμού Περιεχόμενα Προκήρυξη 3 Προϋποθέσεις συµµετοχής 3 Υπεύθυνος Οµάδας 3 Η εκτόξευση του πυραύλου 4 Η Αποστολή του Δορυφόρου 5 Πρωτεύουσα αποστολή 5 Δευτερεύουσα αποστολή
ΛΥΚΕΙΟ ΑΓΙΟΥ ΝΙΚΟΛΑΟΥ ΛΕΜΕΣΟΣ
 ΛΥΚΕΙΟ ΑΓΙΟΥ ΝΙΚΟΛΑΟΥ ΛΕΜΕΣΟΣ Διαγωνισμός F1 in Schools Έτος 2013 1 Περιεχόμενα 1. Εισαγωγή Σελ.3 2. Μέλη Ομάδας Σελ.4 3. Σχεδιασμός του λογότυπου της ομάδας Σελ.5 3.1 Αρχικές ιδέες 3.2 Διαμορφωμένες ιδέες
ΛΥΚΕΙΟ ΑΓΙΟΥ ΝΙΚΟΛΑΟΥ ΛΕΜΕΣΟΣ Διαγωνισμός F1 in Schools Έτος 2013 1 Περιεχόμενα 1. Εισαγωγή Σελ.3 2. Μέλη Ομάδας Σελ.4 3. Σχεδιασμός του λογότυπου της ομάδας Σελ.5 3.1 Αρχικές ιδέες 3.2 Διαμορφωμένες ιδέες
Οδηγίες Συμμετοχής Μαθητικού Διαγωνισμού
 Οδηγίες Συμμετοχής Μαθητικού Διαγωνισμού Περιεχόμενα Προκήρυξη 3 Προϋποθέσεις συµµετοχής 3 Υπεύθυνος Οµάδας 3 Η εκτόξευση του πυραύλου 4 Η Αποστολή του Δορυφόρου 6 Πρωτεύουσα αποστολή 6 Δευτερεύουσα αποστολή
Οδηγίες Συμμετοχής Μαθητικού Διαγωνισμού Περιεχόμενα Προκήρυξη 3 Προϋποθέσεις συµµετοχής 3 Υπεύθυνος Οµάδας 3 Η εκτόξευση του πυραύλου 4 Η Αποστολή του Δορυφόρου 6 Πρωτεύουσα αποστολή 6 Δευτερεύουσα αποστολή
Προστασία Σ.Η.Ε. Ενότητα 4: Στατικοί ηλεκτρονόμοι. Νικόλαος Βοβός Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών
 Προστασία Σ.Η.Ε Ενότητα 4: Στατικοί ηλεκτρονόμοι Νικόλαος Βοβός Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών 1 Σημείωμα Αδειοδότησης Το παρόν υλικό διατίθεται με τους όρους
Προστασία Σ.Η.Ε Ενότητα 4: Στατικοί ηλεκτρονόμοι Νικόλαος Βοβός Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών 1 Σημείωμα Αδειοδότησης Το παρόν υλικό διατίθεται με τους όρους
ΕΝΟΤΗΤΑ 7 7.0 ΚΕΡΑΙΕΣ ΕΙΣΑΓΩΓΗ
 ΕΝΟΤΗΤΑ 7 7.0 ΚΕΡΑΙΕΣ ΕΙΣΑΓΩΓΗ Οι κεραίες είναι βασικό εξάρτημα της ασύρματης επικοινωνίας. Στον πομπό του ασύρματου επικοινωνιακού συστήματος, υπάρχει η κεραία εκπομπής και στο δέκτη υπάρχει η κεραία
ΕΝΟΤΗΤΑ 7 7.0 ΚΕΡΑΙΕΣ ΕΙΣΑΓΩΓΗ Οι κεραίες είναι βασικό εξάρτημα της ασύρματης επικοινωνίας. Στον πομπό του ασύρματου επικοινωνιακού συστήματος, υπάρχει η κεραία εκπομπής και στο δέκτη υπάρχει η κεραία
Συλλογή μεταφορά και έλεγχος Δεδομένων ΘΟΡΥΒΟΣ - ΓΕΙΩΣΕΙΣ
 Συλλογή μεταφορά και έλεγχος Δεδομένων ΘΟΡΥΒΟΣ - ΓΕΙΩΣΕΙΣ ΘΟΡΥΒΟΣ - ΓΕΙΩΣΕΙΣ Σε ένα ηλεκτρικό κύκλωμα δημιουργούνται ανεπιθύμητα ηλεκτρικά σήματα, που οφείλεται σε διάφορους παράγοντες, καθώς επίσης και
Συλλογή μεταφορά και έλεγχος Δεδομένων ΘΟΡΥΒΟΣ - ΓΕΙΩΣΕΙΣ ΘΟΡΥΒΟΣ - ΓΕΙΩΣΕΙΣ Σε ένα ηλεκτρικό κύκλωμα δημιουργούνται ανεπιθύμητα ηλεκτρικά σήματα, που οφείλεται σε διάφορους παράγοντες, καθώς επίσης και
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 2: Βασικός Προγραμματισμός Arduino (AVR) Εργαστήριο Αυτομάτου Ελέγχου Η πλατφόρμα Arduino Microcontroller: ATmega328 Operating Voltage: 5V Digital I/O Pins:
Pre - Critical Design Review (CDR) Έκδοση 1.1. ΟΜΑΔΑ: ElementarysaveSatellite 1
 Έκδοση 1.1. ΟΜΑΔΑ: ElementarysaveSatellite 1") Pre - Critical Design Review (CDR) Έκδοση 1.1 ΟΜΑΔΑ: ElementarysaveSatellite 1 ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT Το project της ομάδας μας συνεχίζετε ομαλά και με ρυθμό. Αυτά που έχουν πραγματοποιηθεί είναι: Οι αγορές
Pre - Critical Design Review (CDR) Έκδοση 1.1 ΟΜΑΔΑ: ElementarysaveSatellite 1 ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT Το project της ομάδας μας συνεχίζετε ομαλά και με ρυθμό. Αυτά που έχουν πραγματοποιηθεί είναι: Οι αγορές
Φύλλο εργασίας 7 - Δημιουργώ τα δικά μου χρώματα με το RGB LED
 Φύλλο εργασίας 7 - Δημιουργώ τα δικά μου χρώματα με το RGB LED Στην δραστηριότητα αυτή θα δουλέψουμε με το RGB LED για να παράγουμε μια μεγάλη ποικιλία χρωμάτων. Το RGB LED είναι στην ουσία τρία διαφορετικά
Φύλλο εργασίας 7 - Δημιουργώ τα δικά μου χρώματα με το RGB LED Στην δραστηριότητα αυτή θα δουλέψουμε με το RGB LED για να παράγουμε μια μεγάλη ποικιλία χρωμάτων. Το RGB LED είναι στην ουσία τρία διαφορετικά
ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΣΥΣΤΗΜΑΤΟΣ ΜΕΤΡΗΣΗΣ ΑΤΜΟΣΦΑΙΡΙΚΩΝ ΠΑΡΑΜΕΤΡΩΝ ΠΟΥ ΕΠΗΡΕΑΖΟΥΝ ΤΗΝ ΔΙΕΝΕΡΓΕΙΑ ΑΣΤΡΟΝΟΜΙΚΩΝ ΠΑΡΑΤΗΡΗΣΕΩΝ ΚΑΙ ΜΕΤΡΗΣΕΩΝ.
 Ερασιτεχνικής Αστρονομίας ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΣΥΣΤΗΜΑΤΟΣ ΜΕΤΡΗΣΗΣ ΑΤΜΟΣΦΑΙΡΙΚΩΝ ΠΑΡΑΜΕΤΡΩΝ ΠΟΥ ΕΠΗΡΕΑΖΟΥΝ ΤΗΝ ΔΙΕΝΕΡΓΕΙΑ ΑΣΤΡΟΝΟΜΙΚΩΝ ΠΑΡΑΤΗΡΗΣΕΩΝ ΚΑΙ ΜΕΤΡΗΣΕΩΝ. Κυριάκος Πανίτσας Διπλ. Ηλεκτρολόγος Μηχανικός-Εκπαιδευτικός
Ερασιτεχνικής Αστρονομίας ΜΕΛΕΤΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΣΥΣΤΗΜΑΤΟΣ ΜΕΤΡΗΣΗΣ ΑΤΜΟΣΦΑΙΡΙΚΩΝ ΠΑΡΑΜΕΤΡΩΝ ΠΟΥ ΕΠΗΡΕΑΖΟΥΝ ΤΗΝ ΔΙΕΝΕΡΓΕΙΑ ΑΣΤΡΟΝΟΜΙΚΩΝ ΠΑΡΑΤΗΡΗΣΕΩΝ ΚΑΙ ΜΕΤΡΗΣΕΩΝ. Κυριάκος Πανίτσας Διπλ. Ηλεκτρολόγος Μηχανικός-Εκπαιδευτικός
Ταυτότητα εκπαιδευτικού σεναρίου. Γνώσεις και πρότερες ιδέες των μαθητών. Σκοπός και στόχοι
 Τίτλος: Υποδοχή εξωγήινων Ταυτότητα εκπαιδευτικού σεναρίου Σύντομη περιγραφή: Οι μαθητές και οι μαθήτριες καλούνται να κάνουν μια απλή κατασκευή με την χρήση του εκπαιδευτικού πακέτου Lego NXT Mindstorms.
Τίτλος: Υποδοχή εξωγήινων Ταυτότητα εκπαιδευτικού σεναρίου Σύντομη περιγραφή: Οι μαθητές και οι μαθήτριες καλούνται να κάνουν μια απλή κατασκευή με την χρήση του εκπαιδευτικού πακέτου Lego NXT Mindstorms.
ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ ΓΙΑ ΔΙΣΚΟΠΡΙΟΝΟ ΞΥΛΟΥ ΔΥΟ ΕΡΓΑΣΙΩΝ BORMANN BDX
 ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ ΓΙΑ ΔΙΣΚΟΠΡΙΟΝΟ ΞΥΛΟΥ ΔΥΟ ΕΡΓΑΣΙΩΝ BORMANN BDX 2500 2 3 4 5 6 Τεχνικά χαρακτηριστικά Τάση 230V/50Hz Ισχύς 1800W Ταχύτητα 4500rpm Δυνατότητα κοπής 43mm Διάμετρος δίσκου 250mm Διαστάσεις Τραπεζιού
ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ ΓΙΑ ΔΙΣΚΟΠΡΙΟΝΟ ΞΥΛΟΥ ΔΥΟ ΕΡΓΑΣΙΩΝ BORMANN BDX 2500 2 3 4 5 6 Τεχνικά χαρακτηριστικά Τάση 230V/50Hz Ισχύς 1800W Ταχύτητα 4500rpm Δυνατότητα κοπής 43mm Διάμετρος δίσκου 250mm Διαστάσεις Τραπεζιού
ΛΥΚΕΙΟ ΑΓΙΟΥ ΣΠΥΡΙΔΩΝΑ ΣΧΟΛΙΚΗ ΧΡΟΝΙΑ 2011-2012 ΓΡΑΠΤΕΣ ΠΡΟΑΓΩΓΙΚΕΣ ΕΞΕΤΑΣΕΙΣ ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Β ΛΥΚΕΙΟΥ
 ΛΥΚΕΙΟ ΑΓΙΟΥ ΠΥΡΙΔΩΝΑ ΧΟΛΙΚΗ ΧΡΟΝΙΑ 2011-2012 ΓΡΑΠΤΕ ΠΡΟΑΓΩΓΙΚΕ ΕΞΕΤΑΕΙ ΦΥΙΚΗ ΚΑΤΕΥΘΥΝΗ Β ΛΥΚΕΙΟΥ ΗΜΕΡΟΜΗΝΙΑ: 31-05-2012 ΔΙΑΡΚΕΙΑ: 07.45 10.15 Οδηγίες 1. Το εξεταστικό δοκίμιο αποτελείται από 9 σελίδες.
ΛΥΚΕΙΟ ΑΓΙΟΥ ΠΥΡΙΔΩΝΑ ΧΟΛΙΚΗ ΧΡΟΝΙΑ 2011-2012 ΓΡΑΠΤΕ ΠΡΟΑΓΩΓΙΚΕ ΕΞΕΤΑΕΙ ΦΥΙΚΗ ΚΑΤΕΥΘΥΝΗ Β ΛΥΚΕΙΟΥ ΗΜΕΡΟΜΗΝΙΑ: 31-05-2012 ΔΙΑΡΚΕΙΑ: 07.45 10.15 Οδηγίες 1. Το εξεταστικό δοκίμιο αποτελείται από 9 σελίδες.
minimath.eu Φυσική A ΛΥΚΕΙΟΥ Περικλής Πέρρος 1/1/2014
 minimath.eu Φυσική A ΛΥΚΕΙΟΥ Περικλής Πέρρος 1/1/014 minimath.eu Περιεχόμενα Κινηση 3 Ευθύγραμμη ομαλή κίνηση 4 Ευθύγραμμη ομαλά μεταβαλλόμενη κίνηση 5 Δυναμικη 7 Οι νόμοι του Νεύτωνα 7 Τριβή 8 Ομαλη κυκλικη
minimath.eu Φυσική A ΛΥΚΕΙΟΥ Περικλής Πέρρος 1/1/014 minimath.eu Περιεχόμενα Κινηση 3 Ευθύγραμμη ομαλή κίνηση 4 Ευθύγραμμη ομαλά μεταβαλλόμενη κίνηση 5 Δυναμικη 7 Οι νόμοι του Νεύτωνα 7 Τριβή 8 Ομαλη κυκλικη
ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΡΟΜΠΟΤΙΚΗ 2010-2011 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ ΟΜΑΔΑ: ΑΘΑΝΑΣΙΑΔΗΣ ΚΩΝΣΤΑΝΤΙΝΟΣ (konsatha@mie.uth.gr) ΚΑΛΤΣΑΣ ΑΘΑΝΑΣΙΟΣ ( bingo_than@msn.com ) ΚΙΚΙΔΟΥ ΒΑΣΙΛΙΚΗ (
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΡΟΜΠΟΤΙΚΗ 2010-2011 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ ΟΜΑΔΑ: ΑΘΑΝΑΣΙΑΔΗΣ ΚΩΝΣΤΑΝΤΙΝΟΣ (konsatha@mie.uth.gr) ΚΑΛΤΣΑΣ ΑΘΑΝΑΣΙΟΣ ( bingo_than@msn.com ) ΚΙΚΙΔΟΥ ΒΑΣΙΛΙΚΗ (
Κεφάλαιο 14: Συμβουλές προς έναν νέο προγραμματιστή
 Κεφάλαιο 14: Συμβουλές προς έναν νέο προγραμματιστή Φτάσαμε σιγά σιγά στο τέλος του βιβλίου. Αντί για κάποιον επίλογο σκέφτηκα να συλλέξω κάποια πράγματα που θα ήθελα να πω σε κάποιον ο οποίος αρχίζει
Κεφάλαιο 14: Συμβουλές προς έναν νέο προγραμματιστή Φτάσαμε σιγά σιγά στο τέλος του βιβλίου. Αντί για κάποιον επίλογο σκέφτηκα να συλλέξω κάποια πράγματα που θα ήθελα να πω σε κάποιον ο οποίος αρχίζει
Η φυσική με πειράματα Α Γυμνασίου
 Εργαστήριο Φυσικών Επιστημών Γυμνασίου Δρεπάνου Η φυσική με πειράματα Α Γυμνασίου Φύλλο Εργασίας 10 Το Ηλεκτρικό Βραχύ-Κύκλωμα Κίνδυνοι και Ασφάλεια Επεξεργασία-Απαντήσεις δραστηριοτήτων και ερωτημάτων
Εργαστήριο Φυσικών Επιστημών Γυμνασίου Δρεπάνου Η φυσική με πειράματα Α Γυμνασίου Φύλλο Εργασίας 10 Το Ηλεκτρικό Βραχύ-Κύκλωμα Κίνδυνοι και Ασφάλεια Επεξεργασία-Απαντήσεις δραστηριοτήτων και ερωτημάτων
Πρόγραμμα Μεταπτυχιακών Σπουδών Σχεδίαση και Ανάπτυξη Προηγμένων Συστημάτων Ηλεκτρονικής ΕΞΕΤΑΣΕΙΣ ΕΑΡΙΝΟΥ ΕΞΑΜΗΝΟΥ ΑΚΑΔΗΜΑΙΚΟΥ ΕΤΟΥΣ
 Πρόγραμμα Μεταπτυχιακών Σπουδών Σχεδίαση και Ανάπτυξη Προηγμένων Συστημάτων Ηλεκτρονικής ΕΞΕΤΑΣΕΙΣ ΕΑΡΙΝΟΥ ΕΞΑΜΗΝΟΥ ΑΚΑΔΗΜΑΙΚΟΥ ΕΤΟΥΣ 2012-13 ΜΑΘΗΜΑ Σύγχρονη οργανολογία και μετρολογία ΚΩΔΙΚΟΣ MH21 ΕΞΑΜΗΝΟ
Πρόγραμμα Μεταπτυχιακών Σπουδών Σχεδίαση και Ανάπτυξη Προηγμένων Συστημάτων Ηλεκτρονικής ΕΞΕΤΑΣΕΙΣ ΕΑΡΙΝΟΥ ΕΞΑΜΗΝΟΥ ΑΚΑΔΗΜΑΙΚΟΥ ΕΤΟΥΣ 2012-13 ΜΑΘΗΜΑ Σύγχρονη οργανολογία και μετρολογία ΚΩΔΙΚΟΣ MH21 ΕΞΑΜΗΝΟ
ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ DVR KTEC
 ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ DVR KTEC 1) Πατάμε δεξί κλικ Μενού 2) Όνομα Χρήστη βάζουμε «admin» 3) Κωδικός Πρόσβασης το αφήνουμε «κενό» 4) Πατάμε OK και μπαίνουμε στο Μενού Είσοδος στο μενού Στην πρώτη εκκίνηση μετά
ΟΔΗΓΙΕΣ ΧΡΗΣΗΣ DVR KTEC 1) Πατάμε δεξί κλικ Μενού 2) Όνομα Χρήστη βάζουμε «admin» 3) Κωδικός Πρόσβασης το αφήνουμε «κενό» 4) Πατάμε OK και μπαίνουμε στο Μενού Είσοδος στο μενού Στην πρώτη εκκίνηση μετά
M m l B r mglsin mlcos x ml 2 1) Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br
 Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br") ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΓΥΜΝΑΣΙΟ ΑΓΛΑΝΤΖΙΑΣ ΣΧΟΛIKH ΧΡΟΝΙΑ
 ΓΥΜΝΑΣΙΟ ΑΓΛΑΝΤΖΙΑΣ ΣΧΟΛIKH ΧΡΟΝΙΑ 2015-2016 ΒΑΘΜΟΣ ΦΥΣΙΚΗΣ Αριθμητικώς:... Ολογρ.:... Υπογραφή:... ΒΑΘΜΟΣ ΦΥΣΙΚΑ Αριθμητικώς:... Ολογρ.:... Υπογραφές:...... ΓΡΑΠΤΕΣ ΑΠΟΛΥΤΗΡΙΕΣ ΕΞΕΤΑΣΕΙΣ ΙΟΥΝΙΟΥ 2016
ΓΥΜΝΑΣΙΟ ΑΓΛΑΝΤΖΙΑΣ ΣΧΟΛIKH ΧΡΟΝΙΑ 2015-2016 ΒΑΘΜΟΣ ΦΥΣΙΚΗΣ Αριθμητικώς:... Ολογρ.:... Υπογραφή:... ΒΑΘΜΟΣ ΦΥΣΙΚΑ Αριθμητικώς:... Ολογρ.:... Υπογραφές:...... ΓΡΑΠΤΕΣ ΑΠΟΛΥΤΗΡΙΕΣ ΕΞΕΤΑΣΕΙΣ ΙΟΥΝΙΟΥ 2016
Το Μαγνητικό πεδίο σαν διάνυσμα Μέτρηση οριζόντιας συνιστώσας του μαγνητικού πεδίου της γης
 Το Μαγνητικό πεδίο σαν διάνυσμα Μέτρηση οριζόντιας συνιστώσας του μαγνητικού πεδίου της Α. Το Μαγνητικό πεδίο σαν διάνυσμα Σο μαγνητικό πεδίο περιγράφεται με το μέγεθος που αποκαλούμε ένταση μαγνητικού
Το Μαγνητικό πεδίο σαν διάνυσμα Μέτρηση οριζόντιας συνιστώσας του μαγνητικού πεδίου της Α. Το Μαγνητικό πεδίο σαν διάνυσμα Σο μαγνητικό πεδίο περιγράφεται με το μέγεθος που αποκαλούμε ένταση μαγνητικού
Εγχειρίδιο Χρήσης Μετατροπέα Τάσης / Φορτιστή Συσσωρευτών
 Εγχειρίδιο Χρήσης Μετατροπέα Τάσης / Φορτιστή Συσσωρευτών ΟΔΗΓΙΕΣ ΑΣΦΑΛΕΙΑΣ ΠΡΟΕΙΔΟΠΟΙΗΣΗ: Αυτό το κεφάλαιο περιέχει σημαντικές οδηγίες ασφαλείας και λειτουργίας. Διάβασε και κρατήστε αυτό το εγχειρίδιο
Εγχειρίδιο Χρήσης Μετατροπέα Τάσης / Φορτιστή Συσσωρευτών ΟΔΗΓΙΕΣ ΑΣΦΑΛΕΙΑΣ ΠΡΟΕΙΔΟΠΟΙΗΣΗ: Αυτό το κεφάλαιο περιέχει σημαντικές οδηγίες ασφαλείας και λειτουργίας. Διάβασε και κρατήστε αυτό το εγχειρίδιο
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. [ATLAS T50 solar tracker]
![ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. [ATLAS T50 solar tracker]](/thumbs/25/5346398.jpg "ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ. [ATLAS T50 solar tracker]") ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ [ATLAS T50 solar tracker] Τεχνική περιγραφή T50 Greek Revision A-05 10-AUG-2010 Κύρια Χαρακτηριστικά Πλεονεκτήματα Πρωτοποριακή Σχεδίαση Στιβαρό χωροδικτύωμα για μηδενικές ταλαντώσεις
ΤΕΧΝΙΚΗ ΠΕΡΙΓΡΑΦΗ [ATLAS T50 solar tracker] Τεχνική περιγραφή T50 Greek Revision A-05 10-AUG-2010 Κύρια Χαρακτηριστικά Πλεονεκτήματα Πρωτοποριακή Σχεδίαση Στιβαρό χωροδικτύωμα για μηδενικές ταλαντώσεις
Τεχνικό Δελτίο. Εντάσσοντας την θερμογραφία στο πρόγραμμα συντήρησης
 Εντάσσοντας την θερμογραφία στο πρόγραμμα συντήρησης Απο την σειρά τεχνικών δελτίων της Transam Trading Co «Η Θερμογραφία ως μέθοδος διάγνωσης» Οι Ειδικοί στην Θερμογραφία απο το 1997 [ 1 ] Ξεκινώντας
Εντάσσοντας την θερμογραφία στο πρόγραμμα συντήρησης Απο την σειρά τεχνικών δελτίων της Transam Trading Co «Η Θερμογραφία ως μέθοδος διάγνωσης» Οι Ειδικοί στην Θερμογραφία απο το 1997 [ 1 ] Ξεκινώντας
ΘΕΜΑ : ΟΛΟΚΛΗΡΩΜΕΝΑ ΚΥΚΛΩΜΑΤΑ ΔΙΑΡΚΕΙΑ: 1 περιόδος. 24/11/2011 12:09 Όνομα: Λεκάκης Κωνσταντίνος καθ. Τεχνολογίας
 ΘΕΜΑ : ΟΛΟΚΛΗΡΩΜΕΝΑ ΚΥΚΛΩΜΑΤΑ ΔΙΑΡΚΕΙΑ: 1 περιόδος 24/11/2011 12:09 καθ. Τεχνολογίας ΜΙΚΡΟΕΠΕΞΕΡΓΑΣΤΗΣ Ένας μικροεπεξεργαστής είναι ένα ολοκληρωμένο κύκλωμα που επεξεργάζεται όλες τις πληροφορίες σε ένα
ΘΕΜΑ : ΟΛΟΚΛΗΡΩΜΕΝΑ ΚΥΚΛΩΜΑΤΑ ΔΙΑΡΚΕΙΑ: 1 περιόδος 24/11/2011 12:09 καθ. Τεχνολογίας ΜΙΚΡΟΕΠΕΞΕΡΓΑΣΤΗΣ Ένας μικροεπεξεργαστής είναι ένα ολοκληρωμένο κύκλωμα που επεξεργάζεται όλες τις πληροφορίες σε ένα
Π ΑΝΕΠΙΣΤΗΜΙΟ Π ΑΤΡΩΝ Π ΟΛΥΤΕΧΝΙΚΗ Σ ΧΟΛΗ Τ ΜΗΜΑ Μ ΗΧΑΝΙΚΩΝ Η/Υ ΚΑΙ Π ΛΗΡΟΦΟΡΙΚΗΣ Κ ΑΤΑΝΕΜΗΜΕΝΑ Σ ΥΣΤΗΜΑΤΑ ΙΙ
 Π ΑΝΕΠΙΣΤΗΜΙΟ Π ΑΤΡΩΝ Π ΟΛΥΤΕΧΝΙΚΗ Σ ΧΟΛΗ Τ ΜΗΜΑ Μ ΗΧΑΝΙΚΩΝ Η/Υ ΚΑΙ Π ΛΗΡΟΦΟΡΙΚΗΣ Κ ΑΤΑΝΕΜΗΜΕΝΑ Σ ΥΣΤΗΜΑΤΑ ΙΙ Αδάμ Γιώργος Γκορτσίλας Δημήτρης Οικονομίδης Γιάννης 2009 TARIFA Project 1. Περιγραφή προβλήματος-αρχιτεκτονική
Π ΑΝΕΠΙΣΤΗΜΙΟ Π ΑΤΡΩΝ Π ΟΛΥΤΕΧΝΙΚΗ Σ ΧΟΛΗ Τ ΜΗΜΑ Μ ΗΧΑΝΙΚΩΝ Η/Υ ΚΑΙ Π ΛΗΡΟΦΟΡΙΚΗΣ Κ ΑΤΑΝΕΜΗΜΕΝΑ Σ ΥΣΤΗΜΑΤΑ ΙΙ Αδάμ Γιώργος Γκορτσίλας Δημήτρης Οικονομίδης Γιάννης 2009 TARIFA Project 1. Περιγραφή προβλήματος-αρχιτεκτονική
ΑΠΑΝΤΗΣΕΙΣ ΦΥΣΙΚΗ Ο.Π Β Λ Γ Λ ΧΡΗΣΤΟΣ ΚΑΡΑΒΟΚΥΡΟΣ ΙΩΑΝΝΗΣ ΤΖΑΓΚΑΡΑΚΗΣ
 ΑΠΑΝΤΗΣΕΙΣ ΦΥΣΙΚΗ Ο.Π Β Λ Γ Λ 5//08 ΧΡΗΣΤΟΣ ΚΑΡΑΒΟΚΥΡΟΣ ΙΩΑΝΝΗΣ ΤΖΑΓΚΑΡΑΚΗΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α-Α4 και δίπλα το γράμμα που αντιστοιχεί
ΑΠΑΝΤΗΣΕΙΣ ΦΥΣΙΚΗ Ο.Π Β Λ Γ Λ 5//08 ΧΡΗΣΤΟΣ ΚΑΡΑΒΟΚΥΡΟΣ ΙΩΑΝΝΗΣ ΤΖΑΓΚΑΡΑΚΗΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α-Α4 και δίπλα το γράμμα που αντιστοιχεί
Ελληνική Έκδ ση. Εισαγωγή. Περιεχόμενα της συσκευασίας. Τεχνικές προδιαγραφές BT100. Πρόσθετες τεχνικές προδιαγραφές ΒΤ100 S W E E X.
 BT100 - Sweex Bluetooth Class II Adapter USB BT110 - Sweex Bluetooth Class I Adapter USB Εισαγωγή Αρχικά, σας ευχαριστούμε που αγοράσατε το Sweex Bluetooth Adapter. Με αυτό τον προσαρμογέα μπορείτε να
BT100 - Sweex Bluetooth Class II Adapter USB BT110 - Sweex Bluetooth Class I Adapter USB Εισαγωγή Αρχικά, σας ευχαριστούμε που αγοράσατε το Sweex Bluetooth Adapter. Με αυτό τον προσαρμογέα μπορείτε να
Ενσωµατωµένα Συστήµατα
 Ενσωµατωµένα Συστήµατα για εφαρµογές πραγµατικού χρόνου Μικροελεγκτής Arduino Ιωάννης Καλόµοιρος Αναπληρωτής Καθηγητής Τµήµα Μηχανικών Πληροφορικής Μάθηµα 7ο Τι είναι το Arduino... Ένα open-hardware σύστηµα
Ενσωµατωµένα Συστήµατα για εφαρµογές πραγµατικού χρόνου Μικροελεγκτής Arduino Ιωάννης Καλόµοιρος Αναπληρωτής Καθηγητής Τµήµα Μηχανικών Πληροφορικής Μάθηµα 7ο Τι είναι το Arduino... Ένα open-hardware σύστηµα
Β2.6 Άλλες Περιφερειακές Συσκευές και Κάρτες Επέκτασης
 Β2.6 Άλλες Περιφερειακές Συσκευές και Κάρτες Επέκτασης Τι θα μάθουμε σήμερα: Να αναγνωρίζουμε και να ονομάζουμε άλλες περιφερειακές συσκευές και κάρτες επέκτασης Να εντοπίζουμε τα κύρια χαρακτηριστικά
Β2.6 Άλλες Περιφερειακές Συσκευές και Κάρτες Επέκτασης Τι θα μάθουμε σήμερα: Να αναγνωρίζουμε και να ονομάζουμε άλλες περιφερειακές συσκευές και κάρτες επέκτασης Να εντοπίζουμε τα κύρια χαρακτηριστικά
GI_V_FYSP_4_ m/s, ξεκινώντας από το σημείο Κ. Στο σημείο Λ (αντιδιαμετρικό του Κ) βρίσκεται ακίνητο σώμα Σ 2 μάζας m2 1 kg.
 βρίσκεται ακίνητο σώμα Σ 2 μάζας m2 1 kg.") Μια ράβδος μήκους R m και αμελητέας μάζας βρίσκεται πάνω σε λείο οριζόντιο επίπεδο και μπορεί να περιστρέφεται γύρω από το σημείο Ο. Στο άλλο άκρο της είναι στερεωμένο σώμα Σ, μάζας m kg το οποίο εκτελεί
Μια ράβδος μήκους R m και αμελητέας μάζας βρίσκεται πάνω σε λείο οριζόντιο επίπεδο και μπορεί να περιστρέφεται γύρω από το σημείο Ο. Στο άλλο άκρο της είναι στερεωμένο σώμα Σ, μάζας m kg το οποίο εκτελεί
Critical Design Review (CDR) Έκδοση 1.1. ΟΜΑΔΑ: ElementarysaveSatellite 1
 Έκδοση 1.1. ΟΜΑΔΑ: ElementarysaveSatellite 1") Critical Design Review (CDR) Έκδοση 1.1 ΟΜΑΔΑ: ElementarysaveSatellite 1 Περιεχόμενα 1.ΕΙΣΑΓΩΓΗ 1.1 Οργάνωση της ομάδας και ρόλοι των μελών 1.2 Στόχοι της αποστολής 2. ΠΕΡΙΓΡΑΦΗ ΤΟΥ CANSAT 2.1.1 Επισκόπηση
Critical Design Review (CDR) Έκδοση 1.1 ΟΜΑΔΑ: ElementarysaveSatellite 1 Περιεχόμενα 1.ΕΙΣΑΓΩΓΗ 1.1 Οργάνωση της ομάδας και ρόλοι των μελών 1.2 Στόχοι της αποστολής 2. ΠΕΡΙΓΡΑΦΗ ΤΟΥ CANSAT 2.1.1 Επισκόπηση
ΑΣΚΗΣΗ 8 Tutorial by TeSLa Συνδεσμολογία κυκλώματος Διαδικασία Προγραμματισμού
 Α.Τ.Ε.Ι. ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΫΠΟΛΟΓΙΣΤΩΝ ΑΣΚΗΣΗ 8 Tutorial by TeSLa Συνδεσμολογία κυκλώματος Διαδικασία Προγραμματισμού Θεσσαλονίκη, Ιανουάριος 2007 Η Άσκηση 8 του εργαστηρίου
Α.Τ.Ε.Ι. ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΕΡΓΑΣΤΗΡΙΟ ΜΙΚΡΟΫΠΟΛΟΓΙΣΤΩΝ ΑΣΚΗΣΗ 8 Tutorial by TeSLa Συνδεσμολογία κυκλώματος Διαδικασία Προγραμματισμού Θεσσαλονίκη, Ιανουάριος 2007 Η Άσκηση 8 του εργαστηρίου
Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας
 Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας Ενότητα: Άσκηση 6: Αντιστάθμιση γραμμών μεταφοράς με σύγχρονους αντισταθμιστές Νικόλαος Βοβός, Γαβριήλ Γιαννακόπουλος, Παναγής Βοβός Τμήμα Ηλεκτρολόγων
Εργαστήριο Ανάλυσης Συστημάτων Ηλεκτρικής Ενέργειας Ενότητα: Άσκηση 6: Αντιστάθμιση γραμμών μεταφοράς με σύγχρονους αντισταθμιστές Νικόλαος Βοβός, Γαβριήλ Γιαννακόπουλος, Παναγής Βοβός Τμήμα Ηλεκτρολόγων
ΠΕΙΡΑΜΑ FRANK-HERTZ ΜΕΤΡΗΣΗ ΤΗΣ ΕΝΕΡΓΕΙΑΣ ΔΙΕΓΕΡΣΗΣ ΕΝΟΣ ΑΤΟΜΟΥ
 ΠΕΙΡΑΜΑ FRANK-HERTZ ΜΕΤΡΗΣΗ ΤΗΣ ΕΝΕΡΓΕΙΑΣ ΔΙΕΓΕΡΣΗΣ ΕΝΟΣ ΑΤΟΜΟΥ Η απορρόφηση ενέργειας από τα άτομα γίνεται ασυνεχώς και σε καθορισμένες ποσότητες. Λαμβάνοντας ένα άτομο ορισμένα ποσά ενέργειας κάποιο
ΠΕΙΡΑΜΑ FRANK-HERTZ ΜΕΤΡΗΣΗ ΤΗΣ ΕΝΕΡΓΕΙΑΣ ΔΙΕΓΕΡΣΗΣ ΕΝΟΣ ΑΤΟΜΟΥ Η απορρόφηση ενέργειας από τα άτομα γίνεται ασυνεχώς και σε καθορισμένες ποσότητες. Λαμβάνοντας ένα άτομο ορισμένα ποσά ενέργειας κάποιο
Κεφάλαιο 4 ο. Ο Προσωπικός Υπολογιστής
 Κεφάλαιο 4 ο Ο Προσωπικός Υπολογιστής Μάθημα 4.3 Ο Επεξεργαστής - Εισαγωγή - Συχνότητα λειτουργίας - Εύρος διαδρόμου δεδομένων - Εύρος διαδρόμου διευθύνσεων - Εύρος καταχωρητών Όταν ολοκληρώσεις το μάθημα
Κεφάλαιο 4 ο Ο Προσωπικός Υπολογιστής Μάθημα 4.3 Ο Επεξεργαστής - Εισαγωγή - Συχνότητα λειτουργίας - Εύρος διαδρόμου δεδομένων - Εύρος διαδρόμου διευθύνσεων - Εύρος καταχωρητών Όταν ολοκληρώσεις το μάθημα
ΑΣΚΗΣΕΙΣ ΣΤΗΝ ΚΥΚΛΙΚΗ ΟΜΑΛΗ ΚΙΝΗΣΗ
 ΑΣΚΗΣΕΙΣ ΣΤΗΝ ΚΥΚΛΙΚΗ ΟΜΑΛΗ ΚΙΝΗΣΗ 1) Δυο τροχοί με ακτίνες ο πρώτος 100cm και ο δεύτερος 60cm περιστρέφονται ομαλά συνδεδεμένοι μεταξύ τους με ιμάντα. Αν η συχνότητα του πρώτου τροχού είναι 10Hz να βρεθεί
ΑΣΚΗΣΕΙΣ ΣΤΗΝ ΚΥΚΛΙΚΗ ΟΜΑΛΗ ΚΙΝΗΣΗ 1) Δυο τροχοί με ακτίνες ο πρώτος 100cm και ο δεύτερος 60cm περιστρέφονται ομαλά συνδεδεμένοι μεταξύ τους με ιμάντα. Αν η συχνότητα του πρώτου τροχού είναι 10Hz να βρεθεί
1. Από ποια μέρη αποτελείται η περιστροφική αντλία πετρελαίου ; Πώς διανέμεται το καύσιμο στους διάφορους κυλίνδρους ;
 Απαντήσεις στο διαγώνισμα του 6 ου κεφαλαίου 1. Από ποια μέρη αποτελείται η περιστροφική αντλία πετρελαίου ; 197 1. τον κινητήριο άξονα ( περιστρέφεται με τις μισές στροφές του στροφάλου για 4-χρονο κινητήρα
Απαντήσεις στο διαγώνισμα του 6 ου κεφαλαίου 1. Από ποια μέρη αποτελείται η περιστροφική αντλία πετρελαίου ; 197 1. τον κινητήριο άξονα ( περιστρέφεται με τις μισές στροφές του στροφάλου για 4-χρονο κινητήρα
ΦΥΣΙΚΗ Β ΛΥΚΕΙΟΥ ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ
 ΜΑΝΩΛΗ ΡΙΤΣΑ ΦΥΣΙΚΗ Β ΛΥΚΕΙΟΥ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΣ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Τράπεζα θεμάτων Β Θέμα ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ 16118 Δύο σφαιρίδια Σ 1 και Σ 2 βρίσκονται σε λείο οριζόντιο τραπέζι (κάτοψη του οποίου φαίνεται στο
ΜΑΝΩΛΗ ΡΙΤΣΑ ΦΥΣΙΚΗ Β ΛΥΚΕΙΟΥ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΣ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ Τράπεζα θεμάτων Β Θέμα ΚΥΚΛΙΚΗ ΚΙΝΗΣΗ 16118 Δύο σφαιρίδια Σ 1 και Σ 2 βρίσκονται σε λείο οριζόντιο τραπέζι (κάτοψη του οποίου φαίνεται στο
Εγκατάσταση του Arduino IDE
 ΑΣΠΑΙΤΕ Συλλογή και Επεξεργασία Δεδομένων Εργαστήριο ΠΕΡΙΕΧΟΜΕΝΑ: Πώς να κατεβάσετε και να εγκαταστήσετε το Ολοκληρωμένο Περιβάλλον Ανάπτυξης (IDE), για το προγραμματισμό του Arduino. Χρησιμοποιώντας το
ΑΣΠΑΙΤΕ Συλλογή και Επεξεργασία Δεδομένων Εργαστήριο ΠΕΡΙΕΧΟΜΕΝΑ: Πώς να κατεβάσετε και να εγκαταστήσετε το Ολοκληρωμένο Περιβάλλον Ανάπτυξης (IDE), για το προγραμματισμό του Arduino. Χρησιμοποιώντας το
Μετρολογικές Διατάξεις Μέτρησης Θερμοκρασίας. 4.1. Μετρολογικός Ενισχυτής τάσεων θερμοζεύγους Κ και η δοκιμή (testing).
.") Κεφάλαιο 4 Μετρολογικές Διατάξεις Μέτρησης Θερμοκρασίας. 4.1. Μετρολογικός Ενισχυτής τάσεων θερμοζεύγους Κ και η δοκιμή (testing). Οι ενδείξεις (τάσεις εξόδου) των θερμοζευγών τύπου Κ είναι δύσκολο να
Κεφάλαιο 4 Μετρολογικές Διατάξεις Μέτρησης Θερμοκρασίας. 4.1. Μετρολογικός Ενισχυτής τάσεων θερμοζεύγους Κ και η δοκιμή (testing). Οι ενδείξεις (τάσεις εξόδου) των θερμοζευγών τύπου Κ είναι δύσκολο να
ΣΧΕΔΙΑΣΜΟΣ, ΚΑΤΑΣΚΕΥΗ ΚΑΙ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΟΥ ΒΡΑΧΙΟΝΑ
 ΣΧΕΔΙΑΣΜΟΣ, ΚΑΤΑΣΚΕΥΗ ΚΑΙ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΟΥ ΒΡΑΧΙΟΝΑ Καθ. Αριστομένης Αντωνιάδης Καθ. Νικόλαος Μπιλάλης Καθ. Γεώργιος Σταυρουλάκης Δεληκωνσταντίνου Βασίλης Πολυτεχνείο Κρήτης Χανιά 2016 3 ΔΟΜΗ
ΣΧΕΔΙΑΣΜΟΣ, ΚΑΤΑΣΚΕΥΗ ΚΑΙ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΡΟΜΠΟΤΙΚΟΥ ΒΡΑΧΙΟΝΑ Καθ. Αριστομένης Αντωνιάδης Καθ. Νικόλαος Μπιλάλης Καθ. Γεώργιος Σταυρουλάκης Δεληκωνσταντίνου Βασίλης Πολυτεχνείο Κρήτης Χανιά 2016 3 ΔΟΜΗ
Έλεγχος κινητήρα συνεχούς ρεύματος με τρανζίστορ και Arduino
 Έλεγχος κινητήρα συνεχούς ρεύματος με τρανζίστορ και Arduino Στην κατασκευή αυτή ο σκοπός ήταν να ελέγξουμε την ταχύτητα ενός κινητήρα συνεχούς ρεύματος με τη χρήση ενός τρανζίστορ που θα χρησιμοποιηθεί
Έλεγχος κινητήρα συνεχούς ρεύματος με τρανζίστορ και Arduino Στην κατασκευή αυτή ο σκοπός ήταν να ελέγξουμε την ταχύτητα ενός κινητήρα συνεχούς ρεύματος με τη χρήση ενός τρανζίστορ που θα χρησιμοποιηθεί
- Εισαγωγή - Επίπεδα μνήμης - Ολοκληρωμένα κυκλώματα μνήμης - Συσκευασίες μνήμης προσωπικών υπολογιστών
 Μάθημα 4.5 Η Μνήμη - Εισαγωγή - Επίπεδα μνήμης - Ολοκληρωμένα κυκλώματα μνήμης - Συσκευασίες μνήμης προσωπικών υπολογιστών Όταν ολοκληρώσεις το μάθημα αυτό θα μπορείς: Να αναφέρεις τα κυριότερα είδη μνήμης
Μάθημα 4.5 Η Μνήμη - Εισαγωγή - Επίπεδα μνήμης - Ολοκληρωμένα κυκλώματα μνήμης - Συσκευασίες μνήμης προσωπικών υπολογιστών Όταν ολοκληρώσεις το μάθημα αυτό θα μπορείς: Να αναφέρεις τα κυριότερα είδη μνήμης
Πανελλήνιος Μαθητικός Διαγωνισμός για την επιλογή στη 13η Ευρωπαϊκή Ολυμπιάδα Επιστημών - EUSO 2015 Σάββατο 07 Φεβρουαρίου 2015 ΦΥΣΙΚΗ
 Πανελλήνιος Μαθητικός Διαγωνισμός για την επιλογή στη 13η Ευρωπαϊκή Ολυμπιάδα Επιστημών - EUSO 2015 Σάββατο 07 Φεβρουαρίου 2015 ΦΥΣΙΚΗ Σχολείο: Ονόματα των μαθητών: 1) 2)...... 3) 1 Πειραματικός προσδιορισμός
Πανελλήνιος Μαθητικός Διαγωνισμός για την επιλογή στη 13η Ευρωπαϊκή Ολυμπιάδα Επιστημών - EUSO 2015 Σάββατο 07 Φεβρουαρίου 2015 ΦΥΣΙΚΗ Σχολείο: Ονόματα των μαθητών: 1) 2)...... 3) 1 Πειραματικός προσδιορισμός
Περιεχόμενα 4. ΠΛΑΝΟ ΠΡΟΩΘΗΣΗΣ 5. ΠΡΟΔΙΑΓΡΑΦΕΣ
 1 Περιεχόμενα 1. ΕΙΣΑΓΩΓΗ 1.1. Η Συμμετοχή 1.2. Οργάνωση της ομάδας και ρόλοι των μελών 1.2.1. Βιογραφικά σημειώματα των συμμετεχόντων 1.2.2. Ρόλοι μελών ομάδας 1.3. Στόχοι της αποστολής 1.4. Πίνακας κατάστασης
1 Περιεχόμενα 1. ΕΙΣΑΓΩΓΗ 1.1. Η Συμμετοχή 1.2. Οργάνωση της ομάδας και ρόλοι των μελών 1.2.1. Βιογραφικά σημειώματα των συμμετεχόντων 1.2.2. Ρόλοι μελών ομάδας 1.3. Στόχοι της αποστολής 1.4. Πίνακας κατάστασης
Tεχνική Πληροφορία Διαδικασία Derating για Sunny Boy και Sunny Tripower
 Tεχνική Πληροφορία Διαδικασία Derating για Sunny Boy και Sunny Tripower Με τη διαδικασία Derating, ο μετατροπέας μειώνει την απόδοσή του, ώστε να προστατεύσει τα εξαρτήματα από υπερθέρμανση. Αυτό το έγγραφο
Tεχνική Πληροφορία Διαδικασία Derating για Sunny Boy και Sunny Tripower Με τη διαδικασία Derating, ο μετατροπέας μειώνει την απόδοσή του, ώστε να προστατεύσει τα εξαρτήματα από υπερθέρμανση. Αυτό το έγγραφο
Ελεγκτής Σταδιακής Ανατολής/Δύσης Λαμπτήρων Ενυδρείου Sunrise/Sunset Aquarium Dim Controller
 Ελεγκτής Σταδιακής Ανατολής/Δύσης Λαμπτήρων Ενυδρείου Sunrise/Sunset Aquarium Dim Controller 1. Γενικά. Ιστορικά, οι πρώτοι λαμπτήρες που κατασκευάστηκαν ήταν οι γνωστοί σε όλους μας λαμπτήρες πυρακτώσεως.
Ελεγκτής Σταδιακής Ανατολής/Δύσης Λαμπτήρων Ενυδρείου Sunrise/Sunset Aquarium Dim Controller 1. Γενικά. Ιστορικά, οι πρώτοι λαμπτήρες που κατασκευάστηκαν ήταν οι γνωστοί σε όλους μας λαμπτήρες πυρακτώσεως.
DVR-422. DVR 422 ver 1.1 www.tele.gr
 Συσκευή καταγραφής εικόνας DVR-422 Οδηγίες χρήσης 1 Χειριστήρια και µέρη της συσκευής Ενδεικτικό φόρτισης Ενδεικτικό λειτουργίας Οθόνη Έναρξη λειτουργίας Ακροδέκτης τροφοδοσίας Κουµπί ΟΚ Κουµπί Μενού Μικρόφωνο
Συσκευή καταγραφής εικόνας DVR-422 Οδηγίες χρήσης 1 Χειριστήρια και µέρη της συσκευής Ενδεικτικό φόρτισης Ενδεικτικό λειτουργίας Οθόνη Έναρξη λειτουργίας Ακροδέκτης τροφοδοσίας Κουµπί ΟΚ Κουµπί Μενού Μικρόφωνο
Σύστημα Αυτόματης Ταυτοποίησης. AIS Automatic Identification System
 Σύστημα Αυτόματης Ταυτοποίησης AIS Automatic Identification System Ορισμός Απαίτηση από τον ΙΜΟ (international Maritime Organization) από το 2004 (για πλοία με χωρητικότητας μεγαλύτερη από 300 gt) Παρέχει
Σύστημα Αυτόματης Ταυτοποίησης AIS Automatic Identification System Ορισμός Απαίτηση από τον ΙΜΟ (international Maritime Organization) από το 2004 (για πλοία με χωρητικότητας μεγαλύτερη από 300 gt) Παρέχει
Πανελλήνιος Μαθητικός Διαγωνισμός για την επιλογή στη 13η Ευρωπαϊκή Ολυμπιάδα Επιστημών - EUSO 2015 Σάββατο 07 Φεβρουαρίου 2015 ΦΥΣΙΚΗ
 Πανελλήνιος Μαθητικός Διαγωνισμός για την επιλογή στη 13η Ευρωπαϊκή Ολυμπιάδα Επιστημών - EUSO 2015 Σάββατο 07 Φεβρουαρίου 2015 ΦΥΣΙΚΗ Σχολείο: Ονόματα των μαθητών: 1) 2)...... 3) 1 Πειραματικός προσδιορισμός
Πανελλήνιος Μαθητικός Διαγωνισμός για την επιλογή στη 13η Ευρωπαϊκή Ολυμπιάδα Επιστημών - EUSO 2015 Σάββατο 07 Φεβρουαρίου 2015 ΦΥΣΙΚΗ Σχολείο: Ονόματα των μαθητών: 1) 2)...... 3) 1 Πειραματικός προσδιορισμός
Το διαστημόπλοιο. Γνωστικό Αντικείμενο: Φυσική (Δυναμική σε μία διάσταση - Δυναμική στο επίπεδο) Τάξη: Α Λυκείου
 Τάξη: Α Λυκείου") Το διαστημόπλοιο Γνωστικό Αντικείμενο: Φυσική (Δυναμική σε μία διάσταση - Δυναμική στο επίπεδο) Τάξη: Α Λυκείου Χρονική Διάρκεια Προτεινόμενη χρονική διάρκεια σχεδίου εργασίας: 5 διδακτικές ώρες Διδακτικοί
Το διαστημόπλοιο Γνωστικό Αντικείμενο: Φυσική (Δυναμική σε μία διάσταση - Δυναμική στο επίπεδο) Τάξη: Α Λυκείου Χρονική Διάρκεια Προτεινόμενη χρονική διάρκεια σχεδίου εργασίας: 5 διδακτικές ώρες Διδακτικοί