Αυτόματη προσγείωση τετρακόπτερου με χρήση κάμερας
|
|
|
- Ναβουχοδονόσορ Βούλγαρης
- 6 χρόνια πριν
- Προβολές:
Transcript
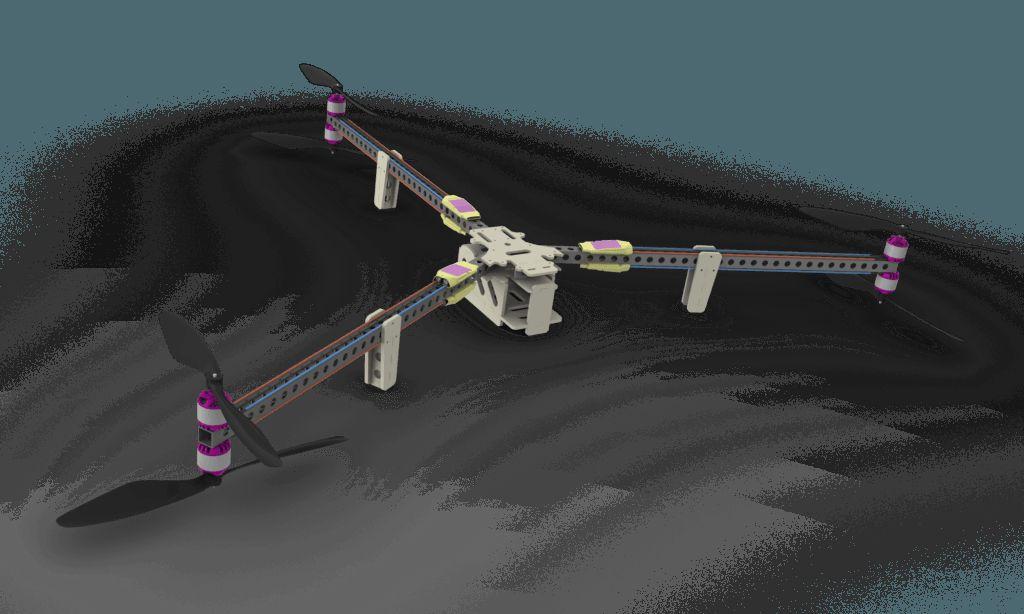
1 Διπλωματική εργασία Αυτόματη προσγείωση τετρακόπτερου με χρήση κάμερας Τζιβάρας Βασίλης Επιβλέπων: Κ. Κωνσταντίνος Βλάχος Τμήμα Μηχανικών Η/Υ και Πληροφορικής Ιωάννινα Φεβρουάριος 2018
2 Περιεχόμενα Εισαγωγή Βασική ιδέα Σχεδιασμός Κινηματική Δυναμική Έλεγχος Συνδεσμολογία Σφάλμα Έλεγχος υψηλού επιπέδου Έλεγχος χαμηλού επιπέδου Προσομοίωση Σενάρια Φάσεις προσγείωσης Αποτελέσματα Πειράματα 2
 4 μέχρι 6 βαθμοι ελευθερίας (DOF) 3 μεταφορικές κινήσεις Μέχρι και 3 περιστροφικές")
3 Εισαγωγή Εναέρια οχήματα Πλήρης αυτονομία ή επικοινωνία με σταθμό βάσης Ηλεκτροκινητήρες (Η/Κ) 4 μέχρι 6 βαθμοι ελευθερίας (DOF) 3 μεταφορικές κινήσεις Μέχρι και 3 περιστροφικές κινήσεις 3

4 Hexacopter 4
5 Tricopter 4 βαθμοί ελευθερίας 3 ηλεκτροκινητήρες 2 σταθεροί 1 με δυνατότητα περιστροφής 5

6 Omnicopter 6 βαθμοί ελευθερίας 8 ηλεκτροκινητήρες Σπατάλη ενέργειας 6


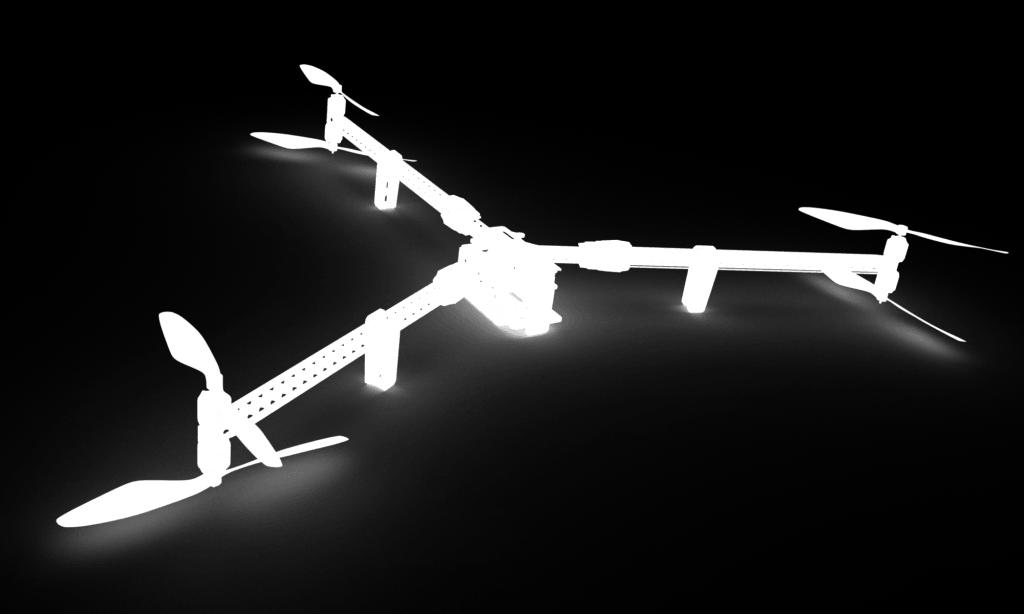
7 Quadrotor 4 βαθμοί ελευθερίας 4 ηλεκτροκινητήρες 3 μεταφορικές κινήσεις 1 περιστροφική κίνηση Αντικείμενο ενασχόλησης της εργασίας 7



8 Τύποι σκελετού Quad H Quad + Quad X Διαφορετικός συνδυασμός ενεργοποίησης των Η/Κ 8


9 Βαθμοί ελευθερίας Κατακόρυφη μεταφορική κίνηση Εμπρόσθια/Οπίσθια μεταφορική κίνηση Δεξιά/Αριστερή μεταφορική κίνηση Περιστροφική κίνηση Διαφορετικές στροφές σε κάθε Η/Κ 9
10 Υλοποίηση γραμμικής ταχύτητας 1/2 Πλαινή όψη Ζ Εφαρμόζουμε ταχύτητα vx κατα μήκος του Χ άξονα Ζ F vx Χ Χ W Υ Υ Κατάσταση ισορροπίας με ΣF=0 και Στ=0 10
11 Υλοποίηση γραμμικής ταχύτητας 1/2 Πλαινή όψη Ζ Περιστροφή ως προς τον Υ άξονα Ζ F vx Χ Fz Fx Χ W Υ Υ Ανάγκη για νέο ΣΣ για την υλοποίηση των ταχυτήτων 11
12 Κινηματική Συστήματα συντεταγμένων Euler γωνίες για τον προσανατολισμό Περιγραφή των πινάκων περιστροφής 12
13 Συστήματα συντεταγμένων (ΣΣ) I : Αδρανειακό ΣΣ B : Σωματόδετο ΣΣ C : ΣΣ της κάμερας 13
14 Γωνίες euler Γωνίες φ θ ψ Άξονας X Y Z roll pitch yaw Περιγραφή προσανατολισμού Αναπαράσταση των γωνιών euler στο σωματόδετο σύστημα συντεταγμένων 14
15 Ορισμός πινάκων περιστροφής Ένας πίνακας περιστροφής εκφράζει την περιστροφή ενός συστήματος συντεταγμένων σε σχέση με ένα άλλο Έστω b1 διάνυσμα ορισμένο ως προς το {Α} σύστημα συντεταγμένων. Εκφράζουμε το b1 ως προς το {Β} σύστημα συντεταγμένων: 15
16 Πίνακες περιστροφής 1/2 Πίνακας περιστροφής από το σωματόδετο {Β} στο αδρανειακό {Ι} σύστημα συντεταγμένων όπου, c είναι η συνάρτηση cos() s είναι η συνάρτηση sin() φ, ψ, θ οι γωνίες euler του quadrotor 16
17 Πίνακες περιστροφής 2/2 Πίνακας περιστροφής από την κάμερα {C} στο σωματόδετο {Β} σύστημα συντεταγμένων όπου, φ ισούται με 180 μοίρες Ο Ζ άξονας του {C} είναι αντίθετος με τον Ζ άξονα του {B} ΣΣ. Περιστροφή ως προς Χ άξονα κατά 180 μοίρες 17
18 ΣΣ της ταχύτητας 1/2 Η αρχή αξόνων του {V} ταυτίζεται με το {B} Μετακινείται όπως και το {B} Περιστρέφεται μόνο στον Ζ άξονα 18
19 ΣΣ της ταχύτητας 2/2 Πίνακας περιστροφής από το σωματόδετο {Β} στο αδρανειακό {Ι} σύστημα συντεταγμένων Περιστροφή ως προς Ζ άξονα κατά ψ γωνία (yaw) 19
20 Δυναμική Μελέτη των δυνάμεων που ασκούνται στο quadrotor Μελέτη των ροπών που ασκούνται στο quadrotor Thrust MOTOR Weight 20
21 Θεμελιώδης νόμοι Z Θεμελιώδης νόμος της μηχανικής F Motor1 Motor2 Y B X Motor4 W Motor3 Θεμελιώδης νόμος της στροφικής κίνησης Οι δυνάμεις και ροπές εκφράζονται ως προς το {B} ΣΣ 21
22 Συνολική δύναμη Τh2 Τh1 Συνολική δύναμη του quadrotor : Z Motor1 Motor2 Y Τh4 Τh3 B Motor4 X Motor3 όπου, ct είναι συντελεστής ώθησης που εξαρτάται από την γεωμετρία του Η/Κ και έλικας ωi είναι η γωνιακή ταχύτητα του i Η/Κ 22
23 Ροπές στον Χ και Υ άξονα (pitch & roll) Η ροπή στον Χ και Υ άξονα υπολογίζεται ως εξής: όπου, di είναι η απόσταση του i H/K από το κέντρο μάζας 23
24 Ροπή στον Ζ άξονα (yaw) Η ροπή στον Ζ άξονα υπολογίζεται ως εξής: όπου, cq είναι συντελεστής ώθησης που εξαρτάται από την γεωμετρία του Η/Κ και έλικας σi ορίζει την διεύθυνση και ανήκει στο {-1, 1} 24

 PID ελεγκτές")
25 Έλεγχος Ο έλεγχος αφορά τον υπολογισμό των επιθυμητών τιμών ώστε να ελαχιστοποιηθεί κάποιο κατάλληλο σφάλμα Συνδεσμολογία Σφάλμα απόστασης 2 επίπεδα ελέγχου (υψηλό & χαμηλό) PID ελεγκτές 25
26 Συνδεσμολογία Ηλεκτροκινητήρες (Motor) Ελεγκτές ταχύτητας (ESC) Υλοποίηση των στοφών των Η/Κ Ελεγκτής πτήσης (FC) Επεξεργασία εισόδου και υπολογισμός στροφών Η/Κ Μπαταρία Πλακέτα διαμοιρασμού ρεύματος (PDB) 26








27 Στόχος Μελέτη της διαδικασίας προσγείωσης με αποκλειστική χρήση κάμερας 27

28 Σημεία ενδιαφέροντος στον χώρο (3D) Αρχικό σημείο εκκίνησης Επιθυμητό σημείο Το σφάλμα απόστασης ορίζεται ως: Σημεία ενδιαφέροντος 28

![[x2, y2]t P3 = [x3, y3]t P4 = [x4, y4]t P1* = [x1*,](/docs-images/95/125136655/images/29-1.jpg "y1*]t P2* = [x2*, y2*]t P3* = [x3*, y3*]t P4* = [x4*,")
29 Σημεία ενδιαφέροντος στην κάμερα (2D) Επιθυμητές τιμές σημείων Τρέχουσες τιμές σημείων P1 = [x1, y1]t P2 = [x2, y2]t P3 = [x3, y3]t P4 = [x4, y4]t P1* = [x1*, y1*]t P2* = [x2*, y2*]t P3* = [x3*, y3*]t P4* = [x4*, y4*]t 29

30 Ορισμός σφάλματος απόστασης Ορίζουμε τα παρακάτω διανύσματα s και s* βάση των συντεταγμένων τους ως προς το ΣΣ της κάμερας. Το σφάλμα απόστασης ορίζεται ως: e(t) = s - s* 30
31 Επίπεδα ελέγχου s* s + e(t) IBVS ελεγκτής Καθορισμός τρέχον και επιθυμητού σημείου Μοντέλο quadrotor Ελεγκτής συνολικής δύναμης Ελεγκτής ροπών Υψηλό επίπεδο [vx, vy, vz, ωz]t Χαμηλό επίπεδο 31


32 Έλεγχος υψηλού επιπέδου Ελεγκτής επιθυμητής ταχύτητας: Κέρδος: 32

33 Έλεγχος υψηλού επιπέδου Πίνακες αλληλεπίδρασης Lx1 και Lx2 για το σημείο P(x, y): Με Ζ είναι η εκτίμηση του βάθους της κάμερας Ο L1 και ο L2 αφορούν 4 σημεία ενδιαφέροντος. 33
34 Έλεγχος για την συνολική δύναμη Εξισορρόπηση της βαρύτικής δύναμης Σφάλμα ταχυτήτων Παράγωγος του σφάλματος Ολοκλήρωση του σφάλματος Εκφράζουμε τις ταχύτητες ως προς το σύστημα συντεταγμένων της ταχύτητας: 34
35 Έλεγχος για ροπή στον Ζ άξονας Συμβολίζουμε με psi, phi, theta τις γωνίες euler του quadrotor και ορίζουμε τον W Επιθυμητός ρυθμός μεταβολής της γωνίας yaw: Επιθυμητή ροπή στον Ζ άξονα: 35
36 Έλεγχος για ροπή στους Χ και Υ άξονες Επιθυμητή γωνία pitch: Επιθυμητή γωνία roll: Επιθυμητές ροπές: 36
37 Σχεδιασμός και έλεγχος της διαδικασίας προσγείωσης Προσομοίωση Σενάρια υλοποίησης Φάσεις προσγείωσης MATLAB 37
38 Σενάρια Υλοποίησης Σταθερού στόχου Έλεγχος υψηλού επιπέδου Έλεγχος χαμηλού επιπέδου Σταθερά σημεία ενδιαφέροντος Κινούμενου στόχου Έλεγχος υψηλού επιπέδου Έλεγχος χαμηλού επιπέδου Κινούμενα σημεία ενδιαφέροντος 38
39 Σενάριο Σταθερού στόχου Η πλατφόρμα προσγείωσης: Μηδενική γραμμική ταχύτητα Μηδενική περιστροφική ταχύτητα 39
40 Σενάριο Κινούμενου στόχου Η πλατφόρμα προσγείωσης: v1 Σταθερή γραμμική ταχύτητα μετακίνησης στο επίπεδο Χ-Υ vp < max(vq) v2 vp : ταχύτητα πλατφόρμας vq : ταχύτητα quadrotor 40
41 Φάσεις προσγείωσης Φάση 1 : Προσέγγιση του στόχου Φάση 2 : Τυφλή προσγείωση Φάση 3 : Κατάσταση αδράνειας 41



42 Φάση 1 : Προσέγγιση του στόχου Βήματα αλγορίθμου προσγείωσης: Αναγνώριση των σημείων Υπολογισμός σφάλματος απόστασης Υπολογισμός επιθυμητών ταχυτήτων Υπολογισμός απαραίτητων δυνάμεων και ροπών Εφαρμογή δυνάμεων και ροπών και επανάληψη διαδικασίας 42
43 Φάση 2 : Τυφλή προσγείωση Βήματα αλγορίθμου προσγείωσης: Καθορισμός σταθερής ταχύτητας προσγείωσης Υπολογισμός απαραίτητων δυνάμεων και ροπών Εφαρμογή δυνάμεων και ροπών και επανάληψη διαδικασίας 43

44 Φάση 3 : Κατάσταση αδράνειας Βήματα αλγορίθμου προσγείωσης: Μηδενισμός των στροφών των Η/Κ Τέλος προσγείωσης 44
45 Αποτελέσματα MATLAB Raspberry Pi 45
46 Συνθήκες προσομοίωσης Αρχική γωνία (yaw): 25 μοίρες Τελική γωνία (yaw): 0 μοίρες Αρχική θέση: [15.2, 5.3, 15] Επιθυμητή θέση: [2.5, 2.5, 3.4] Ταχύτητα πλατφόρμας: [0, 0, 0] Θόρυβος ανέμου: ΟΧΙ 46

47 Σενάριο σταθερού στόχου 47
48 Διάγραμμα Θέσης-Χρόνου στον X άξονα 48
49 Διάγραμμα Θέσης-Χρόνου στον Υ άξονα 49
50 Διάγραμμα Θέσης-Χρόνου στον Ζ άξονα 50
51 Διάγραμμα Ταχύτητας-Χρόνου στον X άξονα 51
52 Διάγραμμα Ταχύτητας-Χρόνου στον Υ άξονα 52
53 Διάγραμμα Ταχύτητας-Χρόνου στον Ζ άξονα 53
54 Διάγραμμα Δύναμης-Χρόνου στον X άξονα 54
55 Διάγραμμα Δύναμης-Χρόνου στον Υ άξονα 55
56 Διάγραμμα Δύναμης-Χρόνου στον Ζ άξονα 56
57 Διάγραμμα Ροπής-Χρόνου στον X άξονα 57
58 Διάγραμμα Ροπής-Χρόνου στον Υ άξονα 58
59 Διάγραμμα Ροπής-Χρόνου στον Ζ άξονα 59
60 Συνθήκες προσομοίωσης Αρχική γωνία (yaw): 25 μοίρες Τελική γωνία (yaw): 0 μοίρες Αρχική θέση: [15.2, 5.3, 15] Επιθυμητή θέση: [2.5, _, 3.4] Ταχύτητα πλατφόρμας: [0, 0.5, 0] Θόρυβος ανέμου: ΝΑΙ 60
61 Σενάριο κινούμενου στόχου 61
62 Διάγραμμα Θέσης-Χρόνου στον X άξονα 62
63 Διάγραμμα Θέσης-Χρόνου στον Y άξονα 63
64 Διάγραμμα Θέσης-Χρόνου στον Ζ άξονα 64

65 Διάγραμμα Δύναμης-Χρόνου στον X άξονα 65
66 Διάγραμμα Δύναμης-Χρόνου στον Y άξονα 66
67 Διάγραμμα Δύναμης-Χρόνου στον Ζ άξονα 67



68 Πειράματα MATLAB Raspberry Pi 68

69 Προσγείωση με χρήση αισθητήρα απόστασης Υλοποίηση των φάσεων προσγείωσης στο φυσικό μοντέλο, χρησιμοποιώντας αισθητήρα απόστασης. 69

70 Δομικό διάγραμμα προσγείωσης Αισθητήρας απόστασης Επιθυμητή Απόσταση - Τρέχον Απόσταση Σφάλμα απόστασης P ελεγκτής ώθησης 70
71 Διάγραμμα Απόστασης- Χρόνου Ύψος Μέγιστο ύψος Χρόνος 71

72 Εντοπισμός σημείων ενδιαφέροντος Η υλοποίηση του αλγορίθμου εντοπισμού 4 σημείων έγινε στο Raspberry Pi με την βιβλιοθήκη OpenCV 72
73 Μελλοντικά θέματα Αναγνώριση σημείου-στόχου Μοντελοποίηση των Η/Κ Δημιουργία αναλυτικού μοντέλου θορύβου 73





74 Τέλος Σας ευχαριστώ θερμά για την προσοχή σας! 74
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3A: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3A: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ Συστήματα αξόνων του αεροσκάφους Κίνηση αεροσκάφους στην ατμόσφαιρα Απαιτούνται κατάλληλα συστήματα αξόνων για την περιγραφή
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3A: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ Συστήματα αξόνων του αεροσκάφους Κίνηση αεροσκάφους στην ατμόσφαιρα Απαιτούνται κατάλληλα συστήματα αξόνων για την περιγραφή
Δυναμική Μηχανών I. Επανάληψη: Κινηματική και Δυναμική
 Δυναμική Μηχανών I 2 2 Επανάληψη: Κινηματική και Δυναμική 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε αναπαραγωγή χωρίς άδεια Περιεχόμενα
Δυναμική Μηχανών I 2 2 Επανάληψη: Κινηματική και Δυναμική 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε αναπαραγωγή χωρίς άδεια Περιεχόμενα
Δυναμική Μηχανών I. Διάλεξη 3. Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
 Δυναμική Μηχανών I Διάλεξη 3 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Περιεχόμενα: Διακριτή Μοντελοποίηση Μηχανικών Συστημάτων Επανάληψη: Διακριτά στοιχεία μηχανικών δυναμικών συστημάτων Δυναμικά
Δυναμική Μηχανών I Διάλεξη 3 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Περιεχόμενα: Διακριτή Μοντελοποίηση Μηχανικών Συστημάτων Επανάληψη: Διακριτά στοιχεία μηχανικών δυναμικών συστημάτων Δυναμικά
Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής
 ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 10//10/01 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 Σώμα μάζας 1 Kg βρίσκεται πάνω σε κεκλιμένο επίπεδο γωνίας κλίσης 45º. Μεταξύ
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 10//10/01 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 Σώμα μάζας 1 Kg βρίσκεται πάνω σε κεκλιμένο επίπεδο γωνίας κλίσης 45º. Μεταξύ
Μηχανική Στερεού Ασκήσεις Εμπέδωσης
 Μηχανική Στερεού Ασκήσεις Εμπέδωσης Όπου χρειάζεται, θεωρείστε δεδομένο ότι g = 10m/s 2. 1. Μία ράβδος ΟΑ, μήκους L = 0,5m, περιστρέφεται γύρω από σταθερό άξονα που περνάει από το ένα άκρο της Ο, με σταθερή
Μηχανική Στερεού Ασκήσεις Εμπέδωσης Όπου χρειάζεται, θεωρείστε δεδομένο ότι g = 10m/s 2. 1. Μία ράβδος ΟΑ, μήκους L = 0,5m, περιστρέφεται γύρω από σταθερό άξονα που περνάει από το ένα άκρο της Ο, με σταθερή
Δυναμική Μηχανών I. Διάλεξη 4. Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
 Δυναμική Μηχανών I Διάλεξη 4 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Περιεχόμενα: Μοντελοποίηση Μηχανικών Συστημάτων Ν Βαθμών Ελευθερίας Μηχανικά δυναμικά συστήματα πολλών Β.Ε. Μοντελοποίηση
Δυναμική Μηχανών I Διάλεξη 4 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Περιεχόμενα: Μοντελοποίηση Μηχανικών Συστημάτων Ν Βαθμών Ελευθερίας Μηχανικά δυναμικά συστήματα πολλών Β.Ε. Μοντελοποίηση
Θέση και Προσανατολισμός
 Κεφάλαιο 2 Θέση και Προσανατολισμός 2-1 Εισαγωγή Προκειμένου να μπορεί ένα ρομπότ να εκτελέσει κάποιο έργο, πρέπει να διαθέτει τρόπο να περιγράφει τα εξής: Τη θέση και προσανατολισμό του τελικού στοιχείου
Κεφάλαιο 2 Θέση και Προσανατολισμός 2-1 Εισαγωγή Προκειμένου να μπορεί ένα ρομπότ να εκτελέσει κάποιο έργο, πρέπει να διαθέτει τρόπο να περιγράφει τα εξής: Τη θέση και προσανατολισμό του τελικού στοιχείου
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Θέματα Εξετάσεων Ασκήσεις στο Mάθημα: "ΡΟΜΠΟΤΙΚΗ Ι: ΑΝΑΛΥΣΗ, ΕΛΕΓΧΟΣ, ΕΡΓΑΣΤΗΡΙΟ" 1 η Σειρά Θεμάτων Θέμα 1-1 Έστω ρομποτικός
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Θέματα Εξετάσεων Ασκήσεις στο Mάθημα: "ΡΟΜΠΟΤΙΚΗ Ι: ΑΝΑΛΥΣΗ, ΕΛΕΓΧΟΣ, ΕΡΓΑΣΤΗΡΙΟ" 1 η Σειρά Θεμάτων Θέμα 1-1 Έστω ρομποτικός
M m l B r mglsin mlcos x ml 2 1) Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br
 Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br") ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
Επαναληπτική άσκηση: Περιστροφή Κρούση - Κύλιση με ολίσθηση
 Επαναληπτική άσκηση: Περιστροφή Κρούση - Κύλιση με ολίσθηση α) Το μέτρο της δύναμης που δέχεται η ράβδος από την άρθρωση λίγο πριν και αμέσως μετά το κόψιμο του νήματος, Η ομογενής και ισοπαχής ράβδος
Επαναληπτική άσκηση: Περιστροφή Κρούση - Κύλιση με ολίσθηση α) Το μέτρο της δύναμης που δέχεται η ράβδος από την άρθρωση λίγο πριν και αμέσως μετά το κόψιμο του νήματος, Η ομογενής και ισοπαχής ράβδος
Κεφάλαιο 3 ο : Αναπαράσταση θέσης
 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ Μάθηµα 3 ο Αναπαράσταση θέσης στο επίπεδο (2 ) και στο χώρο (3 ) Οµογενής Μετασχηµατισµός Κεφάλαιο 3 ο : Αναπαράσταση θέσης Μεταφορά αξόνων σε 2 X Ι Ο Ι Y Ι
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ Μάθηµα 3 ο Αναπαράσταση θέσης στο επίπεδο (2 ) και στο χώρο (3 ) Οµογενής Μετασχηµατισµός Κεφάλαιο 3 ο : Αναπαράσταση θέσης Μεταφορά αξόνων σε 2 X Ι Ο Ι Y Ι
ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ. Α5. α. Λάθος β. Λάθος γ. Σωστό δ. Λάθος ε. Σωστό
 ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ. Α. δ. Α3. γ. Α4. γ. Α5. α. Λάθος β. Λάθος γ. Σωστό δ. Λάθος ε. Σωστό ΘΕΜΑ B B1. Σωστή απάντηση είναι η
ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ. Α. δ. Α3. γ. Α4. γ. Α5. α. Λάθος β. Λάθος γ. Σωστό δ. Λάθος ε. Σωστό ΘΕΜΑ B B1. Σωστή απάντηση είναι η
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 3//7/2013 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 3//7/013 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 Σώμα μάζας m=0.1 Kg κινείται σε οριζόντιο δάπεδο ευθύγραμμα με την
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 3//7/013 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 Σώμα μάζας m=0.1 Kg κινείται σε οριζόντιο δάπεδο ευθύγραμμα με την
Σφαίρα σε ράγες: Η συνάρτηση Lagrange. Ν. Παναγιωτίδης
 Σφαίρα σε ράγες: Η συνάρτηση Lagrange Ν. Παναγιωτίδης Έστω σύστημα δυο συγκλινόντων ραγών σε σχήμα Χ που πάνω τους κυλίεται σφαίρα ακτίνας. Θεωρούμε σύστημα συντεταγμένων με οριζόντιους τους άξονες και.
Σφαίρα σε ράγες: Η συνάρτηση Lagrange Ν. Παναγιωτίδης Έστω σύστημα δυο συγκλινόντων ραγών σε σχήμα Χ που πάνω τους κυλίεται σφαίρα ακτίνας. Θεωρούμε σύστημα συντεταγμένων με οριζόντιους τους άξονες και.
Το ελαστικο κωνικο εκκρεμε ς
 Το ελαστικο κωνικο εκκρεμε ς 1. Εξισώσεις Euler -Lagrange x 0 φ θ z F l 0 y r m B Το ελαστικό κωνικό εκκρεμές αποτελείται από ένα ελατήριο με σταθερά επαναφοράς k, το οποίο αναρτάται από ένα σταθερό σημείο,
Το ελαστικο κωνικο εκκρεμε ς 1. Εξισώσεις Euler -Lagrange x 0 φ θ z F l 0 y r m B Το ελαστικό κωνικό εκκρεμές αποτελείται από ένα ελατήριο με σταθερά επαναφοράς k, το οποίο αναρτάται από ένα σταθερό σημείο,
Κεφάλαιο M11. Στροφορµή
 Κεφάλαιο M11 Στροφορµή Στροφορµή Η στροφορµή παίζει σηµαντικό ρόλο στη δυναµική των περιστροφών. Αρχή διατήρησης της στροφορµής Η αρχή αυτή είναι ανάλογη µε την αρχή διατήρησης της ορµής. Σύµφωνα µε την
Κεφάλαιο M11 Στροφορµή Στροφορµή Η στροφορµή παίζει σηµαντικό ρόλο στη δυναµική των περιστροφών. Αρχή διατήρησης της στροφορµής Η αρχή αυτή είναι ανάλογη µε την αρχή διατήρησης της ορµής. Σύµφωνα µε την
Κατάργηση του σταθερού άξονα περιστροφής
 Κατάργηση του σταθερού άξονα περιστροφής Πρόβλημα Ο ομογενής κυλινδρικού σχήματος δίσκος μάζας m και ακτίνας R t = βρίσκεται πάνω σε αεροτράπεζα και από ένα σημείο της φ περιφέρειας του διέρχεται κατακόρυφος
Κατάργηση του σταθερού άξονα περιστροφής Πρόβλημα Ο ομογενής κυλινδρικού σχήματος δίσκος μάζας m και ακτίνας R t = βρίσκεται πάνω σε αεροτράπεζα και από ένα σημείο της φ περιφέρειας του διέρχεται κατακόρυφος
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔ ΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ Μεθοδολογία Κλεομένης Γ. Τσιγάνης Λέκτορας ΑΠΘ Πρόχειρες
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔ ΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ Μεθοδολογία Κλεομένης Γ. Τσιγάνης Λέκτορας ΑΠΘ Πρόχειρες
ΨΗΦΙΑΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΒΟΗΘΗΜΑ «ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ» 5 o ΔΙΑΓΩΝΙΣΜΑ ΑΠΡΙΛΙΟΣ 2017: ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ
 5 o ΔΙΑΓΩΝΙΣΜΑ ΑΠΡΙΛΙΟΣ 017: ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ. Α. δ. Α3. γ. Α4. γ. Α5. α. Λάθος β. Λάθος γ. Σωστό
5 o ΔΙΑΓΩΝΙΣΜΑ ΑΠΡΙΛΙΟΣ 017: ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ. Α. δ. Α3. γ. Α4. γ. Α5. α. Λάθος β. Λάθος γ. Σωστό
Έλεγχος Αλληλεπίδρασης με το. Έλεγχος «Συμμόρφωσης» ή «Υποχωρητικότητας» (Compliance Control)
") Έλεγχος Αλληλεπίδρασης με το Περιβάλλον Έλεγχος «Συμμόρφωσης» ή «Υποχωρητικότητας» (Compliance Control) Έλεγχος Εμπέδησης (Impeance Control) Αλληλεπίδραση με το περιβάλλον Η αλληλεπίδραση με το περιβάλλον
Έλεγχος Αλληλεπίδρασης με το Περιβάλλον Έλεγχος «Συμμόρφωσης» ή «Υποχωρητικότητας» (Compliance Control) Έλεγχος Εμπέδησης (Impeance Control) Αλληλεπίδραση με το περιβάλλον Η αλληλεπίδραση με το περιβάλλον
Ομαλή Κυκλική Κίνηση 1. Γίνεται με σταθερή ακτίνα (Το διάνυσμα θέσης έχει σταθερό μέτρο και περιστρέφεται γύρω από σταθερό σημείο.
 Ομαλή Κυκλική Κίνηση 1. Γίνεται με σταθερή ακτίνα (Το διάνυσμα θέσης έχει σταθερό μέτρο και περιστρέφεται γύρω από σταθερό σημείο. 1 3 υ υ 1 1. Το μέτρο της ταχύτητας του υλικού σημείου είναι σταθερό.
Ομαλή Κυκλική Κίνηση 1. Γίνεται με σταθερή ακτίνα (Το διάνυσμα θέσης έχει σταθερό μέτρο και περιστρέφεται γύρω από σταθερό σημείο. 1 3 υ υ 1 1. Το μέτρο της ταχύτητας του υλικού σημείου είναι σταθερό.
2 Η ΠΡΟΟΔΟΣ. Ενδεικτικές λύσεις κάποιων προβλημάτων. Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση
 2 Η ΠΡΟΟΔΟΣ Ενδεικτικές λύσεις κάποιων προβλημάτων Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση Ένας τροχός εκκινεί από την ηρεμία και επιταχύνει με γωνιακή ταχύτητα που δίνεται από την,
2 Η ΠΡΟΟΔΟΣ Ενδεικτικές λύσεις κάποιων προβλημάτων Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση Ένας τροχός εκκινεί από την ηρεμία και επιταχύνει με γωνιακή ταχύτητα που δίνεται από την,
ΤΥΠΟΛΟΓΙΟ ΚΕΦΑΛΑΙΟΥ 1 ΗΛΕΚΤΡΙΚΕΣ - ΜΗΧΑΝΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ
 ΤΥΠΟΛΟΓΙΟ ΚΕΦΑΛΑΙΟΥ ΗΛΕΚΤΡΙΚΕΣ - ΜΗΧΑΝΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ΜΗΧΑΝΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ( t ) Χρονική εξίσωση απομάκρυνσης a ( t ) με a Χρονική εξίσωση ταχύτητας a aa ( t ) με a a Χρονική εξίσωση επιτάχυνσης a Σχέση
ΤΥΠΟΛΟΓΙΟ ΚΕΦΑΛΑΙΟΥ ΗΛΕΚΤΡΙΚΕΣ - ΜΗΧΑΝΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ΜΗΧΑΝΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ ( t ) Χρονική εξίσωση απομάκρυνσης a ( t ) με a Χρονική εξίσωση ταχύτητας a aa ( t ) με a a Χρονική εξίσωση επιτάχυνσης a Σχέση
ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ Α2. β Α3. γ Α4. γ Α5. α. Σ, β. Λ, γ. Σ, δ. Λ, ε. Λ. ΘΕΜΑ Β Β 1. β. F ελ1. F ελ2. Θέση Φυσικού Μήκους. F ελ.
 ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α. γ Α. β Α. γ Α4. γ Α5. α. Σ, β. Λ, γ. Σ, δ. Λ, ε. Λ ΘΕΜΑ Β Β. β F ελ F ελ Θέση Φυσικού Μήκους A F ελ F ελ Σ m A W W Τ W Τ W Τ Τ W W Στη θέση ισορροπίας για κάθε σύστημα ισχύει ΣF=0:
ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α. γ Α. β Α. γ Α4. γ Α5. α. Σ, β. Λ, γ. Σ, δ. Λ, ε. Λ ΘΕΜΑ Β Β. β F ελ F ελ Θέση Φυσικού Μήκους A F ελ F ελ Σ m A W W Τ W Τ W Τ Τ W W Στη θέση ισορροπίας για κάθε σύστημα ισχύει ΣF=0:
ΥΠΟΛΟΓΙΣΜΟΣ ΚΑΙ ΜΕΤΡΗΣΗ ΣΥΝΑΡΤΗΣΗΣ ΜΕΤΑΦΟΡΑΣ ΣΕ ΠΡΑΚΤΙΚΑ ΣΥΣΤΗΜΑΤΑ
 Κεφάλαιο ΥΠΟΛΟΓΙΣΜΟΣ ΚΑΙ ΜΕΤΡΗΣΗ ΣΥΝΑΡΤΗΣΗΣ ΜΕΤΑΦΟΡΑΣ ΣΕ ΠΡΑΚΤΙΚΑ ΣΥΣΤΗΜΑΤΑ Στη διαδικασία σχεδιασμού των Συστημάτων Αυτομάτου Ελέγχου, η απαραίτητη και η πρώτη εργασία που έχουμε να κάνουμε, είναι να
Κεφάλαιο ΥΠΟΛΟΓΙΣΜΟΣ ΚΑΙ ΜΕΤΡΗΣΗ ΣΥΝΑΡΤΗΣΗΣ ΜΕΤΑΦΟΡΑΣ ΣΕ ΠΡΑΚΤΙΚΑ ΣΥΣΤΗΜΑΤΑ Στη διαδικασία σχεδιασμού των Συστημάτων Αυτομάτου Ελέγχου, η απαραίτητη και η πρώτη εργασία που έχουμε να κάνουμε, είναι να
ταχύτητα μέτρου. Με την άσκηση κατάλληλης σταθερής ροπής, επιτυγχάνεται
 ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 4: ΣΤΡΟΦΟΡΜΗ 26. Δύο σημειακές σφαίρες που η καθεμιά έχει μάζα συνδέονται μεταξύ τους με οριζόντια αβαρή ράβδο. Το σύστημα περιστρέφεται γύρω από κατακόρυφο
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 4: ΣΤΡΟΦΟΡΜΗ 26. Δύο σημειακές σφαίρες που η καθεμιά έχει μάζα συνδέονται μεταξύ τους με οριζόντια αβαρή ράβδο. Το σύστημα περιστρέφεται γύρω από κατακόρυφο
Τα ρομπότ στην βιομηχανία
 Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής" Βιομηχανική Ρομποτική «Κινηματική στερεών σωμάτων» Δρ. Φασουλάς Γιάννης
Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής" Βιομηχανική Ρομποτική «Κινηματική στερεών σωμάτων» Δρ. Φασουλάς Γιάννης
ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - ΣΥΝΟΨΗ
 ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - Π. ΑΣΒΕΣΤΑΣ E MAIL: pasv@uniwa.gr Εφαρμογές ρομποτικής στην Ιατρική Κλασσική χειρουργική Ορθοπεδικές επεμβάσεις Νευροχειρουργική Ακτινοθεραπεία Αποκατάσταση φυσιοθεραπεία 2 Βασικοί
ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - Π. ΑΣΒΕΣΤΑΣ E MAIL: pasv@uniwa.gr Εφαρμογές ρομποτικής στην Ιατρική Κλασσική χειρουργική Ορθοπεδικές επεμβάσεις Νευροχειρουργική Ακτινοθεραπεία Αποκατάσταση φυσιοθεραπεία 2 Βασικοί
9. ΕΛΕΓΧΟΣ ΑΛΛΗΛΕΠΙ ΡΑΣΗΣ ΜΕ ΤΟ ΠΕΡΙΒΑΛΛΟΝ. Εξετάζουµε διάφορα µοντέλα ελέγχου αλληλεπίδρασης του βραχίονα µε το περιβάλλον.
 9. ΕΛΕΓΧΟΣ ΑΛΛΗΛΕΠΙ ΡΑΣΗΣ ΜΕ ΤΟ ΠΕΡΙΒΑΛΛΟΝ 9.0 Εισαγωγικά Εξετάζουµε διάφορα µοντέλα ελέγχου αλληλεπίδρασης του βραχίονα µε το περιβάλλον. 9.1 Έλεγχος «Συµµόρφωσης» ή «Υποχωρητικότητας» (Comliance Control)
9. ΕΛΕΓΧΟΣ ΑΛΛΗΛΕΠΙ ΡΑΣΗΣ ΜΕ ΤΟ ΠΕΡΙΒΑΛΛΟΝ 9.0 Εισαγωγικά Εξετάζουµε διάφορα µοντέλα ελέγχου αλληλεπίδρασης του βραχίονα µε το περιβάλλον. 9.1 Έλεγχος «Συµµόρφωσης» ή «Υποχωρητικότητας» (Comliance Control)
Γιάννης Γιάκας. Συστήματα αναφοράς και μονάδες μέτρησης Γραμμικά κινηματικά χαρακτηριστικά Γωνιακά κινηματικά χαρακτηριστικά Βλητική 2/12/2013
 Γιάννης Γιάκας Ύλη προόδου Συστήματα αναφοράς και μονάδες μέτρησης Γραμμικά κινηματικά χαρακτηριστικά Γωνιακά κινηματικά χαρακτηριστικά Βλητική 1 Συστήματα Αναφοράς M.K.S. ( m, Kg, sec ) C.G.S. ( cm, gr,
Γιάννης Γιάκας Ύλη προόδου Συστήματα αναφοράς και μονάδες μέτρησης Γραμμικά κινηματικά χαρακτηριστικά Γωνιακά κινηματικά χαρακτηριστικά Βλητική 1 Συστήματα Αναφοράς M.K.S. ( m, Kg, sec ) C.G.S. ( cm, gr,
Δυναµική των Ροµποτικών Βραχιόνων. Κ. Κυριακόπουλος
 Δυναµική των Ροµποτικών Βραχιόνων Κ. Κυριακόπουλος Ροµποτική Αρχιτεκτονική: η Δυναµική Περιβάλλον u Ροµποτική Δυναµική q,!q Ροµποτική Κινηµατική Θέση, Προσανατολισµός και αλληλεπίδραση Η δυναµική ασχολείται
Δυναµική των Ροµποτικών Βραχιόνων Κ. Κυριακόπουλος Ροµποτική Αρχιτεκτονική: η Δυναµική Περιβάλλον u Ροµποτική Δυναµική q,!q Ροµποτική Κινηµατική Θέση, Προσανατολισµός και αλληλεπίδραση Η δυναµική ασχολείται
ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΑΣΚΗΣΕΙΣ ΦΥΣΙΚΗΣ 2019
 ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΑΣΚΗΣΕΙΣ ΦΥΣΙΚΗΣ 019 Κινηματική ΑΣΚΗΣΗ Κ.1 Η επιτάχυνση ενός σώματος που κινείται ευθύγραμμα δίνεται από τη σχέση a = (4 t ) m s. Υπολογίστε την ταχύτητα και το διάστημα που διανύει το σώμα
ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΑΣΚΗΣΕΙΣ ΦΥΣΙΚΗΣ 019 Κινηματική ΑΣΚΗΣΗ Κ.1 Η επιτάχυνση ενός σώματος που κινείται ευθύγραμμα δίνεται από τη σχέση a = (4 t ) m s. Υπολογίστε την ταχύτητα και το διάστημα που διανύει το σώμα
ΚΡΙΤΗΡΙΟ ΑΞΙΟΛΟΓΗΣΗΣ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ
 ΚΡΙΤΗΡΙΟ ΑΞΙΟΛΟΓΗΣΗΣ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ Αντικείμενο: Κεφάλαιο 4 Θέμα 1ο Α. Να επιλέξετε τη σωστή απάντηση που ακολουθεί κάθε μια από τις πιο κάτω προτάσεις α. Ένα σώμα ηρεμεί εκτός πεδίου βαρύτητας. Ασκούμε
ΚΡΙΤΗΡΙΟ ΑΞΙΟΛΟΓΗΣΗΣ ΦΥΣΙΚΗΣ Γ ΛΥΚΕΙΟΥ Αντικείμενο: Κεφάλαιο 4 Θέμα 1ο Α. Να επιλέξετε τη σωστή απάντηση που ακολουθεί κάθε μια από τις πιο κάτω προτάσεις α. Ένα σώμα ηρεμεί εκτός πεδίου βαρύτητας. Ασκούμε
ΦΥΣΙΚΗ (ΜΗΧΑΝΙΚΗ-ΚΥΜΑΤΙΚΗ)
") ΠΑΝΕΠΙΣΤΗΜΙΟ ΔΥΤΙΚΗΣ ΑΤΤΙΚΗΣ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ- ΗΛΕΚΤΡΟΝΙΚΩΝ ΦΥΣΙΚΗ (ΜΗΧΑΝΙΚΗ-ΚΥΜΑΤΙΚΗ) ΤΜΗΜΑ Α.2 ΚΑΘΗΓ. ΖΑΧΑΡΙΑΔΟΥ ΚΑΤΕΡΙΝΑ ΓΡΑΦΕΙΟ ΖΒ114 (ΡΑΓΚΟΥΣΗ-ΖΑΧΑΡΙΑΔΟΥ) E-mail: zacharia@uniwa.gr
ΠΑΝΕΠΙΣΤΗΜΙΟ ΔΥΤΙΚΗΣ ΑΤΤΙΚΗΣ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ- ΗΛΕΚΤΡΟΝΙΚΩΝ ΦΥΣΙΚΗ (ΜΗΧΑΝΙΚΗ-ΚΥΜΑΤΙΚΗ) ΤΜΗΜΑ Α.2 ΚΑΘΗΓ. ΖΑΧΑΡΙΑΔΟΥ ΚΑΤΕΡΙΝΑ ΓΡΑΦΕΙΟ ΖΒ114 (ΡΑΓΚΟΥΣΗ-ΖΑΧΑΡΙΑΔΟΥ) E-mail: zacharia@uniwa.gr
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
 Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ -A.1 - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 Copyright ΕΜΠ
Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ -A.1 - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 Copyright ΕΜΠ
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΑΥΕΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΑΠΑΝΤΗΣΕΙΣ Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014
 ΗΜΕΡΟΜΗΝΙΑ: 09/03/2014") ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΑΥΕΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΑΠΑΝΤΗΣΕΙΣ Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/04 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα
ΜΑΘΗΜΑ / ΤΑΞΗ: ΦΥΣΙΚΗ ΚΑΤΑΥΕΘΥΝΣΗΣ / Γ ΛΥΚΕΙΟΥ ΣΕΙΡΑ: ΑΠΑΝΤΗΣΕΙΣ Α (ΘΕΡΙΝΑ) ΗΜΕΡΟΜΗΝΙΑ: 09/03/04 ΘΕΜΑ Α Οδηγία: Στις ερωτήσεις Α Α4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και δίπλα το γράμμα
α. 2 β. 4 γ. δ. 4 2 Μονάδες 5
 ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΟΠ Β Λ (ΠΡΟΕΤΟΙΜΑΣΙΑ) - ΑΠΑΝΤΗΣΕΙΣ ΗΜΕΡΟΜΗΝΙΑ: 04/01/017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις
ΜΑΘΗΜΑ / ΤΑΞΗ : ΦΥΣΙΚΗ ΟΠ Β Λ (ΠΡΟΕΤΟΙΜΑΣΙΑ) - ΑΠΑΝΤΗΣΕΙΣ ΗΜΕΡΟΜΗΝΙΑ: 04/01/017 ΕΠΙΜΕΛΕΙΑ ΔΙΑΓΩΝΙΣΜΑΤΟΣ: ΑΡΧΩΝ ΜΑΡΚΟΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013
 ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013 ΘΕΜΑ Α Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1- Α4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013 ΘΕΜΑ Α Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1- Α4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ Ι Φεβρουάριος 2013
 ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ Ι Φεβρουάριος 0 ΘΕΜΑ α) Να βρεθούν οι επιτρεπτές περιοχές της κίνησης στον άξονα x Ox για την απωστική δύναµη F x, > 0 και για ενέργεια Ε. β) Υλικό σηµείο µάζας m µπορεί να κινείται
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ Ι Φεβρουάριος 0 ΘΕΜΑ α) Να βρεθούν οι επιτρεπτές περιοχές της κίνησης στον άξονα x Ox για την απωστική δύναµη F x, > 0 και για ενέργεια Ε. β) Υλικό σηµείο µάζας m µπορεί να κινείται
 Ασκήσεις Κεφ. 1, Κινηματική υλικού σημείου Κλασική Μηχανική, Τμήμα Μαθηματικών Διδάσκων: Μιχάλης Ξένος, email : mxenos@cc.uoi.gr 10 Απριλίου 2012 1. Αν το διάνυσμα θέσης υλικού σημείου είναι: r(t) = [ln(t
Ασκήσεις Κεφ. 1, Κινηματική υλικού σημείου Κλασική Μηχανική, Τμήμα Μαθηματικών Διδάσκων: Μιχάλης Ξένος, email : mxenos@cc.uoi.gr 10 Απριλίου 2012 1. Αν το διάνυσμα θέσης υλικού σημείου είναι: r(t) = [ln(t
ΑΠΑΝΤΗΣΕΙΣ. Η κινητική ενέργεια του κυλίνδρου λόγω της μεταφορικής του κίνησης δίνεται από την σχέση: Κ μετ = 1 m u 2 cm
 ΠΡΟΣΟΜΟΙΩΣΗ ΑΠΟΛΥΤΗΡΙΩΝ ΕΞΕΤΑΣΕΩΝ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΟΥ ΛΥΕΙΟΥ Μ.ΤΕΤΑΡΤΗ 0 ΑΠΡΙΛΙΟΥ 011 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΗ ΘΕΤΙΗΣ - ΤΕΧΝΟΛΟΓΙΗΣ ΑΤΕΥΘΥΝΣΗΣ ΑΠΑΝΤΗΣΕΙΣ Θέμα 1 ο 1. γ. γ 3. α 4. δ 5. α) Λ β) Σ γ)
ΠΡΟΣΟΜΟΙΩΣΗ ΑΠΟΛΥΤΗΡΙΩΝ ΕΞΕΤΑΣΕΩΝ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΟΥ ΛΥΕΙΟΥ Μ.ΤΕΤΑΡΤΗ 0 ΑΠΡΙΛΙΟΥ 011 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΗ ΘΕΤΙΗΣ - ΤΕΧΝΟΛΟΓΙΗΣ ΑΤΕΥΘΥΝΣΗΣ ΑΠΑΝΤΗΣΕΙΣ Θέμα 1 ο 1. γ. γ 3. α 4. δ 5. α) Λ β) Σ γ)
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Βασικές Έννοιες Μέχρι στιγμής αντιμετωπίζαμε κάθε σώμα που μελετούσαμε την κίνηση του ως υλικό
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Βασικές Έννοιες Μέχρι στιγμής αντιμετωπίζαμε κάθε σώμα που μελετούσαμε την κίνηση του ως υλικό
Κεφάλαιο 10 Περιστροφική Κίνηση. Copyright 2009 Pearson Education, Inc.
 Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόμενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσματικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναμική της Περιστροφικής Κίνησης, Ροπή και
Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόμενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσματικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναμική της Περιστροφικής Κίνησης, Ροπή και
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 3/2/2016 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 3/2/2016 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ 2 ΩΡΕΣ ΑΣΚΗΣΗ 1 Σώμα μάζας m 0.25 Kg κινείται στο επίπεδο xy, με τις εξισώσεις κίνησης
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 3/2/2016 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ 2 ΩΡΕΣ ΑΣΚΗΣΗ 1 Σώμα μάζας m 0.25 Kg κινείται στο επίπεδο xy, με τις εξισώσεις κίνησης
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 15/10/2012 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 15/1/1 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 Σε σώμα μάζας m = 1Kg ασκείται η δύναμη F
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 15/1/1 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 Σε σώμα μάζας m = 1Kg ασκείται η δύναμη F
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ [Υποκεφάλαιο 4.2 Οι κινήσεις των στερεών σωμάτων του σχολικού βιβλίου]
![ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ [Υποκεφάλαιο 4.2 Οι κινήσεις των στερεών σωμάτων του σχολικού βιβλίου]](/thumbs/52/29790189.jpg "ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ [Υποκεφάλαιο 4.2 Οι κινήσεις των στερεών σωμάτων του σχολικού βιβλίου]") ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
mg ηµφ Σφαίρα, I = 52
 Μελέτη της κίνησης ενός σώµατος που µπορεί να κυλάει σε κεκλιµένο επίπεδο (π.χ. σφόνδυλος, κύλινδρος, σφαίρα, κλπ.) Τ mg συνφ Κ Ν mg ηµφ Το σώµα του σχήµατος έχει µάζα m, ακτίνα και µπορεί να είναι: Σφόνδυλος
Μελέτη της κίνησης ενός σώµατος που µπορεί να κυλάει σε κεκλιµένο επίπεδο (π.χ. σφόνδυλος, κύλινδρος, σφαίρα, κλπ.) Τ mg συνφ Κ Ν mg ηµφ Το σώµα του σχήµατος έχει µάζα m, ακτίνα και µπορεί να είναι: Σφόνδυλος
MATLAB. Εισαγωγή στο SIMULINK. Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής
 MATLAB Εισαγωγή στο SIMULINK Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής Εισαγωγή στο Simulink - Βιβλιοθήκες - Παραδείγματα Εκκίνηση BLOCKS click ή Βιβλιοθήκες Νέο αρχείο click ή Προσθήκη block σε αρχείο
MATLAB Εισαγωγή στο SIMULINK Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής Εισαγωγή στο Simulink - Βιβλιοθήκες - Παραδείγματα Εκκίνηση BLOCKS click ή Βιβλιοθήκες Νέο αρχείο click ή Προσθήκη block σε αρχείο
ΠΡΟΩΘΗΣΗ ΠΥΡΑΥΛΩΝ. Η προώθηση των πυραύλων στηρίζεται στην αρχή διατήρησης της ορμής.
 ΠΡΟΩΘΗΣΗ ΠΥΡΑΥΛΩΝ Η προώθηση των πυραύλων στηρίζεται στην αρχή διατήρησης της ορμής. Ο πύραυλος καίει τα καύσιμα που αρχικά βρίσκονται μέσα του και εκτοξεύει τα καυσαέρια προς τα πίσω. Τα καυσαέρια δέχονται
ΠΡΟΩΘΗΣΗ ΠΥΡΑΥΛΩΝ Η προώθηση των πυραύλων στηρίζεται στην αρχή διατήρησης της ορμής. Ο πύραυλος καίει τα καύσιμα που αρχικά βρίσκονται μέσα του και εκτοξεύει τα καυσαέρια προς τα πίσω. Τα καυσαέρια δέχονται
Χωρικές Περιγραφές και Μετασχηµατισµοί
 Χωρικές Περιγραφές και Μετασχηµατισµοί Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007 Ροµπότ SCR 1 Περιεχόµενα Στοιχεία γραµµικής άλγεβρας Χωρικές
Χωρικές Περιγραφές και Μετασχηµατισµοί Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007 Ροµπότ SCR 1 Περιεχόµενα Στοιχεία γραµµικής άλγεβρας Χωρικές
Εισαγωγή στη θεωρία μετασχηματισμών. Τα ρομπότ στην βιομηχανία
 Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής" Βιομηχανική Ρομποτική «Κινηματική στερεών σωμάτων» Τα ρομπότ στην
Τεχνολογικό Eκπαιδευτικό Ίδρυμα Kρήτης Διατμηματικό Μεταπτυχιακό Πρόγραμμα "Προηγμένα συστήματα παραγωγής, αυτοματισμού και ρομποτικής" Βιομηχανική Ρομποτική «Κινηματική στερεών σωμάτων» Τα ρομπότ στην
Σχολή Μηχανολόγων Μηχανικών - Μηχανική των Ρευστών Ι Ακαδ. Έτος Άσκηση 2, Καθηγητής Σ. Τσαγγάρης ΑΣΚΗΣΗ 2
 Σχολή Μηχανολόγων Μηχανικών - Μηχανική των Ρευστών Ι Ακαδ. Έτος 3-4- Άσκηση, Πεδίο ταχυτήτων : u=, v=6x ΑΣΚΗΣΗ ) Ενα στοιχείο του ρευστού, κινούµενο στο πεδίο ταχυτήτων µεταφέρεται, περιστρέφεται και παραµορφώνεται
Σχολή Μηχανολόγων Μηχανικών - Μηχανική των Ρευστών Ι Ακαδ. Έτος 3-4- Άσκηση, Πεδίο ταχυτήτων : u=, v=6x ΑΣΚΗΣΗ ) Ενα στοιχείο του ρευστού, κινούµενο στο πεδίο ταχυτήτων µεταφέρεται, περιστρέφεται και παραµορφώνεται
ΣΕΙΡΑ: 3 Κύματα: αρμονικό έως στάσιμο, Στερεό: κινηματική έως διατήρηση στροφορμής
 ΜΑΘΗΜΑ /ΤΑΞΗ: Φυσική Κατεύθυνσης Γ Λυκείου ΟΝΟΜΑΤΕΠΩΝΥMΟ: ΗΜΕΡΟΜΗΝΙΑ: 16/03/014 ΣΕΙΡΑ: 3 ΕΞΕΤΑΣΤΕΑ ΥΛΗ: Κύματα: αρμονικό έως στάσιμο, Στερεό: κινηματική έως διατήρηση στροφορμής ΘΕΜΑ Α Να γράψετε στο τετράδιό
ΜΑΘΗΜΑ /ΤΑΞΗ: Φυσική Κατεύθυνσης Γ Λυκείου ΟΝΟΜΑΤΕΠΩΝΥMΟ: ΗΜΕΡΟΜΗΝΙΑ: 16/03/014 ΣΕΙΡΑ: 3 ΕΞΕΤΑΣΤΕΑ ΥΛΗ: Κύματα: αρμονικό έως στάσιμο, Στερεό: κινηματική έως διατήρηση στροφορμής ΘΕΜΑ Α Να γράψετε στο τετράδιό
ΟΡΟΣΗΜΟ >Ι 3. δ. Ι Οι τροχοί (1) και (2) του σχήματος είναι ίδιοι. Τότε: και Ι 2
 και (2) του σχήματος είναι ίδιοι. Τότε: και Ι 2") ΚΕΦΑΛΑΙΟ 4 Ροπή αδράνειας - Θεμελιώδης νόμος της στροφικής κίνησης 4.1 Η ροπή αδράνειας ενός σώματος εξαρτάται: α. μόνο από τη μάζα του σώματος β. μόνο τη θέση του άξονα γύρω από τον οποίο μπορεί να περιστρέφεται
ΚΕΦΑΛΑΙΟ 4 Ροπή αδράνειας - Θεμελιώδης νόμος της στροφικής κίνησης 4.1 Η ροπή αδράνειας ενός σώματος εξαρτάται: α. μόνο από τη μάζα του σώματος β. μόνο τη θέση του άξονα γύρω από τον οποίο μπορεί να περιστρέφεται
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3B: ΓΡΑΜΜΙΚΟΠΟΙΗΣΗ ΕΞΙΣΩΣΕΩΝ ΚΙΝΗΣΗΣ ΑΠΟΣΥΖΕΥΓΜΕΝΕΣ ΕΞΙΣΩΣΕΙΣ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3B: ΓΡΑΜΜΙΚΟΠΟΙΗΣΗ ΕΞΙΣΩΣΕΩΝ ΚΙΝΗΣΗΣ ΑΠΟΣΥΖΕΥΓΜΕΝΕΣ ΕΞΙΣΩΣΕΙΣ ΣΥΝΟΨΗ Μόνιμη κατάσταση και κατάσταση διαταραχής Γραμμικοποίηση των κινηματικών και των αδρανειακών όρων Γραμμικοποίηση
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3B: ΓΡΑΜΜΙΚΟΠΟΙΗΣΗ ΕΞΙΣΩΣΕΩΝ ΚΙΝΗΣΗΣ ΑΠΟΣΥΖΕΥΓΜΕΝΕΣ ΕΞΙΣΩΣΕΙΣ ΣΥΝΟΨΗ Μόνιμη κατάσταση και κατάσταση διαταραχής Γραμμικοποίηση των κινηματικών και των αδρανειακών όρων Γραμμικοποίηση
Μηχανικό Στερεό. Μια εργασία για την Επανάληψη
 Μηχανικό Στερεό. Μια εργασία για την Επανάληψη Απλές προτάσεις Για τον έλεγχο της κατανόησης και εφαρμογής των εννοιών Δογραματζάκης Γιάννης 9/5/2013 Απλές προτάσεις για τον έλεγχο της κατανόησης και εφαρμογής
Μηχανικό Στερεό. Μια εργασία για την Επανάληψη Απλές προτάσεις Για τον έλεγχο της κατανόησης και εφαρμογής των εννοιών Δογραματζάκης Γιάννης 9/5/2013 Απλές προτάσεις για τον έλεγχο της κατανόησης και εφαρμογής
ΜΕΛΕΤΗ ΤΗΣ ΚΙΝΗΣΗΣ ΡΑΒΔΟΥ ΓΥΡΩ ΑΠΟ ΣΤΑΘΕΡΟ ΑΞΟΝΑ ΜΕΤΡΗΣΗ ΤΗΣ ΡΟΠΗΣ ΑΔΡΑΝΕΙΑΣ ΤΗΣ ΡΑΒΔΟΥ
 ΜΕΛΕΤΗ ΤΗΣ ΚΙΝΗΣΗΣ ΡΑΒΔΟΥ ΓΥΡΩ ΑΠΟ ΣΤΑΘΕΡΟ ΑΞΟΝΑ ΜΕΤΡΗΣΗ ΤΗΣ ΡΟΠΗΣ ΑΔΡΑΝΕΙΑΣ ΤΗΣ ΡΑΒΔΟΥ Συνοπτική περιγραφή Μελετάμε την κίνηση μιας ράβδου που μπορεί να περιστρέφεται γύρω από σταθερό οριζόντιο άξονα,
ΜΕΛΕΤΗ ΤΗΣ ΚΙΝΗΣΗΣ ΡΑΒΔΟΥ ΓΥΡΩ ΑΠΟ ΣΤΑΘΕΡΟ ΑΞΟΝΑ ΜΕΤΡΗΣΗ ΤΗΣ ΡΟΠΗΣ ΑΔΡΑΝΕΙΑΣ ΤΗΣ ΡΑΒΔΟΥ Συνοπτική περιγραφή Μελετάμε την κίνηση μιας ράβδου που μπορεί να περιστρέφεται γύρω από σταθερό οριζόντιο άξονα,
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
 Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 7.1 - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 Copyright ΕΜΠ
Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 7.1 - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 Copyright ΕΜΠ
ΠΕΡΙΓΡΑΜΜΑ ΜΑΘΗΜΑΤΟΣ
 ΠΕΡΙΓΡΑΜΜΑ ΜΑΘΗΜΑΤΟΣ 1. ΓΕΝΙΚΑ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. ΕΠΙΠΕΔΟ ΣΠΟΥΔΩΝ Προπτυχιακό ΚΩΔΙΚΟΣ ΜΑΘΗΜΑΤΟΣ HN5120 ΕΞΑΜΗΝΟ ΣΠΟΥΔΩΝ 1 ο ΤΙΤΛΟΣ ΜΑΘΗΜΑΤΟΣ ΦΥΣΙΚΗ ΑΥΤΟΤΕΛΕΙΣ
ΠΕΡΙΓΡΑΜΜΑ ΜΑΘΗΜΑΤΟΣ 1. ΓΕΝΙΚΑ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Τ.Ε. ΕΠΙΠΕΔΟ ΣΠΟΥΔΩΝ Προπτυχιακό ΚΩΔΙΚΟΣ ΜΑΘΗΜΑΤΟΣ HN5120 ΕΞΑΜΗΝΟ ΣΠΟΥΔΩΝ 1 ο ΤΙΤΛΟΣ ΜΑΘΗΜΑΤΟΣ ΦΥΣΙΚΗ ΑΥΤΟΤΕΛΕΙΣ
ΠΛΗΡΟΦΟΡΙΕΣ - ΕΙΣΑΓΩΓΙΚΑ
 ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΦΥΣΙΚΗ ΧΕΙΜΕΡΙΝΟ ΕΞΑΜΗΝΟ 2015-16 ΠΛΗΡΟΦΟΡΙΕΣ - ΕΙΣΑΓΩΓΙΚΑ 18/9/2014 ΕΙΣΑΓΩΓΗ_ΚΕΦ. 1 1 ΠΛΗΡΟΦΟΡΙΕΣ Διδάσκων Γεράσιμος Κουρούκλης Καθηγητής (Τμήμα Χημικών Μηχανικών). (gak@auth.gr,
ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΦΥΣΙΚΗ ΧΕΙΜΕΡΙΝΟ ΕΞΑΜΗΝΟ 2015-16 ΠΛΗΡΟΦΟΡΙΕΣ - ΕΙΣΑΓΩΓΙΚΑ 18/9/2014 ΕΙΣΑΓΩΓΗ_ΚΕΦ. 1 1 ΠΛΗΡΟΦΟΡΙΕΣ Διδάσκων Γεράσιμος Κουρούκλης Καθηγητής (Τμήμα Χημικών Μηχανικών). (gak@auth.gr,
1 f. d F D x m a D x m D x dt. 2 t. Όλες οι αποδείξεις στην Φυσική Κατεύθυνσης Γ Λυκείου. Αποδείξεις. d t dt dt dt. 1. Απόδειξη της σχέσης.
 Αποδείξεις. Απόδειξη της σχέσης N t T N t T. Απόδειξη της σχέσης t t T T 3. Απόδειξη της σχέσης t Ικανή και αναγκαία συνθήκη για την Α.Α.Τ. είναι : d F D ma D m D Η εξίσωση αυτή είναι μια Ομογενής Διαφορική
Αποδείξεις. Απόδειξη της σχέσης N t T N t T. Απόδειξη της σχέσης t t T T 3. Απόδειξη της σχέσης t Ικανή και αναγκαία συνθήκη για την Α.Α.Τ. είναι : d F D ma D m D Η εξίσωση αυτή είναι μια Ομογενής Διαφορική
ΑΠΟΤΥΠΩΣΕΙΣ - ΧΑΡΑΞΕΙΣ ΕΠΙΛΥΣΗ ΟΔΕΥΣΗΣ
 ΑΠΟΤΥΠΩΣΕΙΣ - ΧΑΡΑΞΕΙΣ ΕΠΙΛΥΣΗ ΟΔΕΥΣΗΣ Βασίλης Δ. Ανδριτσάνος Δρ. Αγρονόμος - Τοπογράφος Μηχανικός ΑΠΘ Επίκουρος Καθηγητής ΤΕΙ Αθήνας 3ο εξάμηνο http://eclass.teiath.gr Παρουσιάσεις, Ασκήσεις, Σημειώσεις,
ΑΠΟΤΥΠΩΣΕΙΣ - ΧΑΡΑΞΕΙΣ ΕΠΙΛΥΣΗ ΟΔΕΥΣΗΣ Βασίλης Δ. Ανδριτσάνος Δρ. Αγρονόμος - Τοπογράφος Μηχανικός ΑΠΘ Επίκουρος Καθηγητής ΤΕΙ Αθήνας 3ο εξάμηνο http://eclass.teiath.gr Παρουσιάσεις, Ασκήσεις, Σημειώσεις,
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ Συστήματα αξόνων του αεροσκάφους Κίνηση αεροσκάφους στην ατμόσφαιρα Απαιτούνται κατάλληλα συστήματα αξόνων για περιγραφή της.
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ Συστήματα αξόνων του αεροσκάφους Κίνηση αεροσκάφους στην ατμόσφαιρα Απαιτούνται κατάλληλα συστήματα αξόνων για περιγραφή της.
Α. Ροπή δύναµης ως προς άξονα περιστροφής
 Μηχανική στερεού σώµατος, Ροπή ΡΟΠΗ ΔΥΝΑΜΗΣ Α. Ροπή δύναµης ως προς άξονα περιστροφής Έστω ένα στερεό που δέχεται στο άκρο F Α δύναµη F όπως στο σχήµα. Στο Ο διέρχεται άξονας περιστροφής κάθετος στο στερεό
Μηχανική στερεού σώµατος, Ροπή ΡΟΠΗ ΔΥΝΑΜΗΣ Α. Ροπή δύναµης ως προς άξονα περιστροφής Έστω ένα στερεό που δέχεται στο άκρο F Α δύναµη F όπως στο σχήµα. Στο Ο διέρχεται άξονας περιστροφής κάθετος στο στερεό
Δυναμική Μηχανών I. Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink
 Δυναμική Μηχανών I 5 6 Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε
Δυναμική Μηχανών I 5 6 Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε
Συνταγολόγιο Φυσικής Μηχανική Στερεού Σώµατος. Επιµέλεια: Μιχάλης Ε. Καραδηµητρίου, MSc Φυσικός.
 Συνταγολόγιο Φυσικής Μηχανική Στερεού Σώµατος Επιµέλεια: Μιχάλης Ε. Καραδηµητρίου, MSc Φυσικός http://perifysikhs.wordpress.com 1 Κίνηση Ράβδου σε κατακόρυφο επίπεδο Εστω µια οµογενής ϱάβδος ΟΑ µάζας Μ
Συνταγολόγιο Φυσικής Μηχανική Στερεού Σώµατος Επιµέλεια: Μιχάλης Ε. Καραδηµητρίου, MSc Φυσικός http://perifysikhs.wordpress.com 1 Κίνηση Ράβδου σε κατακόρυφο επίπεδο Εστω µια οµογενής ϱάβδος ΟΑ µάζας Μ
ΑΣΚΗΣΗ 5.1 Το διάνυσμα θέσης ενός σώματος μάζας m=0,5kgr δίνεται από τη σχέση: 3 j οπότε το μέτρο της ταχύτητας θα είναι:
 ΑΣΚΗΣΗ. Το διάνυσμα θέσης ενός σώματος μάζας =,k δίνεται από τη σχέση: 6. α Βρείτε την θέση και το μέτρο της ταχύτητας του κινητού την χρονική στιγμή. β Τι είδους κίνηση κάνει το κινητό σε κάθε άξονα;
ΑΣΚΗΣΗ. Το διάνυσμα θέσης ενός σώματος μάζας =,k δίνεται από τη σχέση: 6. α Βρείτε την θέση και το μέτρο της ταχύτητας του κινητού την χρονική στιγμή. β Τι είδους κίνηση κάνει το κινητό σε κάθε άξονα;
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ. Ενότητα 5 η : Παραδείγµατα 3 µηχανισµών. χώρο (3 )
") ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ Ενότητα 5 η Παραδείγµατα µηχανισµών στο χώρο (3 ) Παράδειγµα 1 ο : Ροµποτικός βραχίονας RPPRR R: revolute pair P: prismatic pair Βραχίονας Τηλεσκοπικός βραχίονας
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ Ενότητα 5 η Παραδείγµατα µηχανισµών στο χώρο (3 ) Παράδειγµα 1 ο : Ροµποτικός βραχίονας RPPRR R: revolute pair P: prismatic pair Βραχίονας Τηλεσκοπικός βραχίονας
3.6 Ευθεία και Αντίστροφη υναµική
 3.6 Ευθεία και Αντίστροφη υναµική Στη δυναµική µας απασχολούν δύο ειδών προβλήµατα, το ευθύ δυναµικό πρόβληµα και το αντίστροφο δυναµικό πρόβληµα. Το αντίστροφο πρόβληµα αφορά στον προσδιορισµό των ροπών
3.6 Ευθεία και Αντίστροφη υναµική Στη δυναµική µας απασχολούν δύο ειδών προβλήµατα, το ευθύ δυναµικό πρόβληµα και το αντίστροφο δυναµικό πρόβληµα. Το αντίστροφο πρόβληµα αφορά στον προσδιορισµό των ροπών
Θεωρητική μηχανική ΙΙ
 ΟΣΑ ΓΡΑΦΟΝΤΑΙ ΕΔΩ ΝΑ ΤΑ ΔΙΑΒΑΖΕΤΕ ΜΕ ΣΚΕΠΤΙΚΟ ΒΛΕΜΜΑ. ΜΠΟΡΕΙ ΝΑ ΠΕΡΙΕΧΟΥΝ ΛΑΘΗ. Θεωρητική μηχανική ΙΙ Να δειχθεί ότι αν L x, L y αποτελούν ολοκληρώματα της κίνησης τότε και η L z αποτελεί ολοκλήρωμα της
ΟΣΑ ΓΡΑΦΟΝΤΑΙ ΕΔΩ ΝΑ ΤΑ ΔΙΑΒΑΖΕΤΕ ΜΕ ΣΚΕΠΤΙΚΟ ΒΛΕΜΜΑ. ΜΠΟΡΕΙ ΝΑ ΠΕΡΙΕΧΟΥΝ ΛΑΘΗ. Θεωρητική μηχανική ΙΙ Να δειχθεί ότι αν L x, L y αποτελούν ολοκληρώματα της κίνησης τότε και η L z αποτελεί ολοκλήρωμα της
Κεφάλαιο 6β. Περιστροφή στερεού σώματος γύρω από σταθερό άξονα
 Κεφάλαιο 6β Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Ροπή Ροπή ( ) είναι η τάση που έχει μια δύναμη να περιστρέψει ένα σώμα γύρω από κάποιον άξονα. d είναι η κάθετη απόσταση του άξονα περιστροφής
Κεφάλαιο 6β Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Ροπή Ροπή ( ) είναι η τάση που έχει μια δύναμη να περιστρέψει ένα σώμα γύρω από κάποιον άξονα. d είναι η κάθετη απόσταση του άξονα περιστροφής
ιαγώνισµα Γ Τάξης Ενιαίου Λυκείου Μηχανική Στερεού Σώµατος
 ιαγώνισµα Γ Τάξης Ενιαίου Λυκείου Μηχανική Στερεού Σώµατος Σύνολο Σελίδων: οκτώ (8) - ιάρκεια Εξέτασης: 3 ώρες Σάββατο 24 Φλεβάρη 2018 Βαθµολογία % Ονοµατεπώνυµο: Θέµα Α Στις ηµιτελείς προτάσεις Α.1 Α.4
ιαγώνισµα Γ Τάξης Ενιαίου Λυκείου Μηχανική Στερεού Σώµατος Σύνολο Σελίδων: οκτώ (8) - ιάρκεια Εξέτασης: 3 ώρες Σάββατο 24 Φλεβάρη 2018 Βαθµολογία % Ονοµατεπώνυµο: Θέµα Α Στις ηµιτελείς προτάσεις Α.1 Α.4
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ ( Μεθοδολογία- Παραδείγματα ) Κλεομένης Γ. Τσιγάνης
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ ( Μεθοδολογία- Παραδείγματα ) Κλεομένης Γ. Τσιγάνης
website:
 Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση και Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 29 Μαρτίου 2017 1 Συναρτήσεις μεταφοράς σε
Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση και Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 29 Μαρτίου 2017 1 Συναρτήσεις μεταφοράς σε
ΦΥΕ 14 5η ΕΡΓΑΣΙΑ Παράδοση ( Οι ασκήσεις είναι βαθμολογικά ισοδύναμες) Άσκηση 1 : Aσκηση 2 :
 Άσκηση 1 : Aσκηση 2 :") ΦΥΕ 14 5 η ΕΡΓΑΣΙΑ Παράδοση 19-5-8 ( Οι ασκήσεις είναι βαθμολογικά ισοδύναμες) Άσκηση 1 : Συμπαγής κύλινδρος μάζας Μ συνδεδεμένος σε ελατήριο σταθεράς k = 3. N / και αμελητέας μάζας, κυλίεται, χωρίς να
ΦΥΕ 14 5 η ΕΡΓΑΣΙΑ Παράδοση 19-5-8 ( Οι ασκήσεις είναι βαθμολογικά ισοδύναμες) Άσκηση 1 : Συμπαγής κύλινδρος μάζας Μ συνδεδεμένος σε ελατήριο σταθεράς k = 3. N / και αμελητέας μάζας, κυλίεται, χωρίς να
Διαγώνισμα Γ Λυκείου Θετικού προσανατολισμού. Διαγώνισμα Μηχανική Στερεού Σώματος. Σάββατο 24 Φεβρουαρίου Θέμα 1ο
 Διαγώνισμα Μηχανική Στερεού Σώματος Σάββατο 24 Φεβρουαρίου 2018 Θέμα 1ο Στις παρακάτω προτάσεις 1.1 1.4 να επιλέξτε την σωστή απάντηση (4 5 = 20 μονάδες ) 1.1. Ένας δίσκος στρέφεται γύρω από άξονα που
Διαγώνισμα Μηχανική Στερεού Σώματος Σάββατο 24 Φεβρουαρίου 2018 Θέμα 1ο Στις παρακάτω προτάσεις 1.1 1.4 να επιλέξτε την σωστή απάντηση (4 5 = 20 μονάδες ) 1.1. Ένας δίσκος στρέφεται γύρω από άξονα που
Άσκηση 9 Μελέτη στροφικής κίνησης στερεού σώματος
 Άσκηση 9 Μελέτη στροφικής κίνησης στερεού σώματος Σύνοψη Σκοπός της συγκεκριμένης άσκησης είναι: ο πειραματικός υπολογισμός της ροπής αδράνειας ενός στερεού και η σύγκριση της πειραματικής τιμής με τη
Άσκηση 9 Μελέτη στροφικής κίνησης στερεού σώματος Σύνοψη Σκοπός της συγκεκριμένης άσκησης είναι: ο πειραματικός υπολογισμός της ροπής αδράνειας ενός στερεού και η σύγκριση της πειραματικής τιμής με τη
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - Β. - Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών - 06. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - Β. - Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών - 06. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
ΨΗΦΙΑΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΒΟΗΘΗΜΑ «ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ» 5 o ΔΙΑΓΩΝΙΣΜΑ ΑΠΡΙΛΙΟΣ 2018: ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ
 5 o ΔΙΑΓΩΝΙΣΜΑ ΑΠΡΙΛΙΟΣ 018: ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1α. (δ) Α1β. (α) Αα. (α) Αβ. (δ) Α3α. (β) Α3β. (γ) Α4α. (β)
5 o ΔΙΑΓΩΝΙΣΜΑ ΑΠΡΙΛΙΟΣ 018: ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1α. (δ) Α1β. (α) Αα. (α) Αβ. (δ) Α3α. (β) Α3β. (γ) Α4α. (β)
Μηχανισµοί & Εισαγωγή στο Σχεδιασµό Μηχανών Ακαδηµαϊκό έτος: Ε.Μ.Π. Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 3.
 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ - 3.1 - Cpright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 2012. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ - 3.1 - Cpright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 2012. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ - ΠΑΝΕΛΛΗΝΙΕΣ 2016 ΛΥΣΕΙΣ ΘΕΜΑΤΩΝ. ΕΠΙΜΕΛΕΙΑ : Φ. ΧΑΛΑΝΤΖΟΥΚΑ ΦΥΣΙΚΟΣ M.Sc.
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ - ΠΑΝΕΛΛΗΝΙΕΣ 06 ΛΥΣΕΙΣ ΘΕΜΑΤΩΝ ΕΠΙΜΕΛΕΙΑ : Φ. ΧΑΛΑΝΤΖΟΥΚΑ ΦΥΣΙΚΟΣ M.Sc. ΘΕΜΑ Α Α. β Α. γ Α. β Α. δ Α5. α. Σ β. Λ γ. Σ δ. Λ ε. Λ ΘΕΜΑ Β Β. Θα χρησιμοποιήσουμε τη θεωρία του φαινομένου
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ - ΠΑΝΕΛΛΗΝΙΕΣ 06 ΛΥΣΕΙΣ ΘΕΜΑΤΩΝ ΕΠΙΜΕΛΕΙΑ : Φ. ΧΑΛΑΝΤΖΟΥΚΑ ΦΥΣΙΚΟΣ M.Sc. ΘΕΜΑ Α Α. β Α. γ Α. β Α. δ Α5. α. Σ β. Λ γ. Σ δ. Λ ε. Λ ΘΕΜΑ Β Β. Θα χρησιμοποιήσουμε τη θεωρία του φαινομένου
Ερωτήσεις. 2. Η ροπή αδράνειας μιας σφαίρας μάζας Μ και ακτίνας R ως προς άξονα που διέρχεται
 - Μηχανική στερεού σώματος Ερωτήσεις 1. Στερεό στρέφεται γύρω από σταθερό άξονα. Η γωνιακή ταχύτητα του στερεού μεταβάλλεται με το χρόνο όπως στο διπλανό διάγραμμα ω -. Να χαρακτηρίσετε τις παρακάτω προτάσεις
- Μηχανική στερεού σώματος Ερωτήσεις 1. Στερεό στρέφεται γύρω από σταθερό άξονα. Η γωνιακή ταχύτητα του στερεού μεταβάλλεται με το χρόνο όπως στο διπλανό διάγραμμα ω -. Να χαρακτηρίσετε τις παρακάτω προτάσεις
Σφαίρα σε ράγες: Η συνάρτηση Lagrange. Ν. Παναγιωτίδης
 Η Εξίσωση Euler-Lagrange Σφαίρα σε ράγες: Η συνάρτηση Lagrange Ν. Παναγιωτίδης Έστω σύστημα δυο συγκλινόντων ραγών σε σχήμα Χ που πάνω τους κυλίεται σφαίρα ακτίνας. Θεωρούμε σύστημα συντεταγμένων με οριζόντιους
Η Εξίσωση Euler-Lagrange Σφαίρα σε ράγες: Η συνάρτηση Lagrange Ν. Παναγιωτίδης Έστω σύστημα δυο συγκλινόντων ραγών σε σχήμα Χ που πάνω τους κυλίεται σφαίρα ακτίνας. Θεωρούμε σύστημα συντεταγμένων με οριζόντιους
[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]
![[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]](/thumbs/61/46095927.jpg "[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]") ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 5: ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΕΡΓΟ ΔΥΝΑΜΗΣ ΣΤΗ ΣΤΡΟΦΙΚΗ ΚΙΝΗΣΗ 34. Μία κατακόρυφη ράβδος μάζας μήκους, μπορεί να περιστρέφεται στο κατακόρυφο επίπεδο γύρω από
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 5: ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΕΡΓΟ ΔΥΝΑΜΗΣ ΣΤΗ ΣΤΡΟΦΙΚΗ ΚΙΝΗΣΗ 34. Μία κατακόρυφη ράβδος μάζας μήκους, μπορεί να περιστρέφεται στο κατακόρυφο επίπεδο γύρω από
Θεωρητική μηχανική ΙΙ
 ΟΣΑ ΓΡΑΦΟΝΤΑΙ ΕΔΩ ΝΑ ΤΑ ΔΙΑΒΑΖΕΤΕ ΜΕ ΣΚΕΠΤΙΚΟ ΒΛΕΜΜΑ. ΜΠΟΡΕΙ ΝΑ ΠΕΡΙΕΧΟΥΝ ΛΑΘΗ. Θεωρητική μηχανική ΙΙ Να δειχθεί ότι αν L x, L y αποτελούν ολοκληρώματα της κίνησης τότε και η L z αποτελεί ολοκλήρωμα της
ΟΣΑ ΓΡΑΦΟΝΤΑΙ ΕΔΩ ΝΑ ΤΑ ΔΙΑΒΑΖΕΤΕ ΜΕ ΣΚΕΠΤΙΚΟ ΒΛΕΜΜΑ. ΜΠΟΡΕΙ ΝΑ ΠΕΡΙΕΧΟΥΝ ΛΑΘΗ. Θεωρητική μηχανική ΙΙ Να δειχθεί ότι αν L x, L y αποτελούν ολοκληρώματα της κίνησης τότε και η L z αποτελεί ολοκλήρωμα της
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ ΙΟΥΝΙΟΣ 2013 ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΕΜ: (ΠΤΥΧΙΟ)
") ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ ΙΟΥΝΙΟΣ 2013 ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΕΜ: (ΠΤΥΧΙΟ) 1. (α) Περιγράψτε συνοπτικά το πείραμα των Michelson και Morley (όχι απόδειξη σχέσεων). Ποιό ήταν το βασικό αποτέλεσμα του πειράματος; (β)
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ ΙΟΥΝΙΟΣ 2013 ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΕΜ: (ΠΤΥΧΙΟ) 1. (α) Περιγράψτε συνοπτικά το πείραμα των Michelson και Morley (όχι απόδειξη σχέσεων). Ποιό ήταν το βασικό αποτέλεσμα του πειράματος; (β)
υναµική Μηχανών Ι Ακαδηµαϊκό έτος : Ε. Μ. Π. Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 15.
 υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 010-011 ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 15.1 - υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 010-011 Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 010.
υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 010-011 ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 15.1 - υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 010-011 Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 010.
ΕΠΑΝΑΛΗΠΤΙΚΟ ΔΙΑΓΩΝΙΣΜΑ ΣΤΕΡΕΟ. ΘΕΜΑ Α (μοναδες 25)
") ΕΠΑΝΑΛΗΠΤΙΚΟ ΔΙΑΓΩΝΙΣΜΑ ΣΤΕΡΕΟ ΘΕΜΑ Α (μοναδες 25) Α1. Σε στερεό που περιστρέφεται γύρω από σταθερό κατακόρυφο άξονα ενεργεί σταθερή ροπή. Τότε αυξάνεται με σταθερό ρυθμό: α. η ροπή αδράνειας του β. η
ΕΠΑΝΑΛΗΠΤΙΚΟ ΔΙΑΓΩΝΙΣΜΑ ΣΤΕΡΕΟ ΘΕΜΑ Α (μοναδες 25) Α1. Σε στερεό που περιστρέφεται γύρω από σταθερό κατακόρυφο άξονα ενεργεί σταθερή ροπή. Τότε αυξάνεται με σταθερό ρυθμό: α. η ροπή αδράνειας του β. η
3.1. Κινηματική στερεού.
 3.1.. 3.1.1. Γωνιακή επιτάχυνση και γωνία στροφής Η γραφική παράσταση της γωνιακής ταχύτητας ενός στερεού που στρέφεται γύρω από σταθερό άξονα δίνεται στο διπλανό διάγραμμα. Να υπολογίσετε: i) Τη γωνιακή
3.1.. 3.1.1. Γωνιακή επιτάχυνση και γωνία στροφής Η γραφική παράσταση της γωνιακής ταχύτητας ενός στερεού που στρέφεται γύρω από σταθερό άξονα δίνεται στο διπλανό διάγραμμα. Να υπολογίσετε: i) Τη γωνιακή
ΤΟΠΟΓΡΑΦΙΚΑ ΔΙΚΤΥΑ ΚΑΙ ΥΠΟΛΟΓΙΣΜΟΙ Η ΣΥΝΟΡΘΩΣΗ ΤΩΝ ΟΡΙΖΟΝΤΙΩΝ ΔΙΚΤΥΩΝ (ΤΟ ΣΥΣΤΗΜΑ ΤΩΝ ΚΑΝΟΝΙΚΩΝ ΕΞΙΣΩΣΕΩΝ)
") ΤΟΠΟΓΡΑΦΙΚΑ ΔΙΚΤΥΑ ΚΑΙ ΥΠΟΛΟΓΙΣΜΟΙ Η ΣΥΝΟΡΘΩΣΗ ΤΩΝ ΟΡΙΖΟΝΤΙΩΝ ΔΙΚΤΥΩΝ (ΤΟ ΣΥΣΤΗΜΑ ΤΩΝ ΚΑΝΟΝΙΚΩΝ ΕΞΙΣΩΣΕΩΝ) Βασίλης Δ. Ανδριτσάνος Δρ. Αγρονόμος - Τοπογράφος Μηχανικός ΑΠΘ 3ο εξάμηνο http://eclass.teiath.gr
ΤΟΠΟΓΡΑΦΙΚΑ ΔΙΚΤΥΑ ΚΑΙ ΥΠΟΛΟΓΙΣΜΟΙ Η ΣΥΝΟΡΘΩΣΗ ΤΩΝ ΟΡΙΖΟΝΤΙΩΝ ΔΙΚΤΥΩΝ (ΤΟ ΣΥΣΤΗΜΑ ΤΩΝ ΚΑΝΟΝΙΚΩΝ ΕΞΙΣΩΣΕΩΝ) Βασίλης Δ. Ανδριτσάνος Δρ. Αγρονόμος - Τοπογράφος Μηχανικός ΑΠΘ 3ο εξάμηνο http://eclass.teiath.gr
Βαθµολογία Προβληµάτων ΘΕΜΑ 1 ΘΕΜΑ 2.1 ΘΕΜΑ 2.2 ΘΕΜΑ 2.3 ΘΕΜΑ 3.1 ΘΕΜΑ 3.2 ΘΕΜΑ 4 ΘΕΜΑ 5.1 ΘΕΜΑ 5.2. G(s)
") ΑΠΑΓΟΡΕΥΕΤΑΙ Η ΑΝΑΤΥΠΩΣΗ ΤΩΝ ΘΕΜΑΤΩΝ ΠΡΙΝ ΤΗΝ 3 Σεπτεµβρίου 4 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Σεπτεµβρίου 4 Να επιστραφεί η εκφώνηση των θεµάτων (υπογεγραµµένη από τον εξεταστή) ΕΠΩΝΥΜΟ
ΑΠΑΓΟΡΕΥΕΤΑΙ Η ΑΝΑΤΥΠΩΣΗ ΤΩΝ ΘΕΜΑΤΩΝ ΠΡΙΝ ΤΗΝ 3 Σεπτεµβρίου 4 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Σεπτεµβρίου 4 Να επιστραφεί η εκφώνηση των θεµάτων (υπογεγραµµένη από τον εξεταστή) ΕΠΩΝΥΜΟ
Μοντελοποίηση Μηχανικών Συστημάτων Πολλών Βαθμών Ελευθερίας
 Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Μοντελοποίηση Μηχανικών Συστημάτων Πολλών Βαθμών Ελευθερίας Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Μοντελοποίηση Μηχανικών Συστημάτων Πολλών
Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Μοντελοποίηση Μηχανικών Συστημάτων Πολλών Βαθμών Ελευθερίας Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Μοντελοποίηση Μηχανικών Συστημάτων Πολλών
20/9/2012. Διδάσκοντες. Γραμμική κινηματική. Αξιολόγηση. Γωνιακή κινηματική. Γραμμική Κινητική Δυναμική
 Διδάσκοντες Αποκατάσταση μέσω ισοκινητικής δυναμομετρίας (ΜΒ01) ΠΜΣ Άσκηση και Υγεία ΤΕΦΑΑ, Πανεπιστήμιο Θεσσαλίας Γιάννης Γιάκας Γιάννης Γιάκας - ΠΘ Βασίλης Γεροδήμος - ΠΘ Τσαόπουλος Δημήτριος - ΚΕΤΕΑΘ
Διδάσκοντες Αποκατάσταση μέσω ισοκινητικής δυναμομετρίας (ΜΒ01) ΠΜΣ Άσκηση και Υγεία ΤΕΦΑΑ, Πανεπιστήμιο Θεσσαλίας Γιάννης Γιάκας Γιάννης Γιάκας - ΠΘ Βασίλης Γεροδήμος - ΠΘ Τσαόπουλος Δημήτριος - ΚΕΤΕΑΘ
ΔΟΚΙΜΕΣ ΘΑΛΑΣΣΗΣ ΠΛΟΙΩΝ
 ΔΟΚΙΜΕΣ ΘΑΛΑΣΣΗΣ ΠΛΟΙΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ 1/3 ΑΠΟΔΕΙΞΗ ΛΕΙΤΟΥΡΓΙΚΟΤΗΤΑΣ ΕΠΙΔΟΣΕΩΝ ΑΝΤΟΧΗΣ ΟΙΚΟΝΟΜΙΑΣ ΔΥΝΑΤΟΤΗΤΩΝ ΕΛΙΓΜΩΝ ΔΕΔΟΜΕΝΑ ΣΧΕΔΙΑΣΗΣ ΑΠΑΙΤΗΣΕΙΣ ΑΣΦΑΛΕΙΑΣ, ΠΛΟΙΟΥ, ΠΛΗΡΩΜΑΤΟΣ, ΕΠΙΒΑΤΩΝ
ΔΟΚΙΜΕΣ ΘΑΛΑΣΣΗΣ ΠΛΟΙΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ 1/3 ΑΠΟΔΕΙΞΗ ΛΕΙΤΟΥΡΓΙΚΟΤΗΤΑΣ ΕΠΙΔΟΣΕΩΝ ΑΝΤΟΧΗΣ ΟΙΚΟΝΟΜΙΑΣ ΔΥΝΑΤΟΤΗΤΩΝ ΕΛΙΓΜΩΝ ΔΕΔΟΜΕΝΑ ΣΧΕΔΙΑΣΗΣ ΑΠΑΙΤΗΣΕΙΣ ΑΣΦΑΛΕΙΑΣ, ΠΛΟΙΟΥ, ΠΛΗΡΩΜΑΤΟΣ, ΕΠΙΒΑΤΩΝ
ΔΥΝΑΜΙΚΗ ΣΥΣΤΗΜΑΤΩΝ ΣΥΝΕΧΟΥΣ ΜΕΣΟΥ
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΔΥΝΑΜΙΚΗ ΣΥΣΤΗΜΑΤΩΝ ΣΥΝΕΧΟΥΣ ΜΕΣΟΥ έκδοση DΥΝI-DCMB_2016b Copyright
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΔΥΝΑΜΙΚΗ ΣΥΣΤΗΜΑΤΩΝ ΣΥΝΕΧΟΥΣ ΜΕΣΟΥ έκδοση DΥΝI-DCMB_2016b Copyright
Τα θέματα συνεχίζονται στην πίσω σελίδα
 ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΤΟΠΟΓΡΑΦΙΑΣ ΚΑΙ ΓΕΩΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ ΚΑΤΕΥΘΥΝΣΗ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΕΞΕΤΑΣΤΙΚΗ ΙΑΝΟΥΑΡΙΟΥ ΑΚΑΔ. ΕΤΟΣ 16-17 Διδάσκων : Χ. Βοζίκης Τ. Ε. Ι. ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ
ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΤΟΠΟΓΡΑΦΙΑΣ ΚΑΙ ΓΕΩΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ ΚΑΤΕΥΘΥΝΣΗ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ ΕΞΕΤΑΣΤΙΚΗ ΙΑΝΟΥΑΡΙΟΥ ΑΚΑΔ. ΕΤΟΣ 16-17 Διδάσκων : Χ. Βοζίκης Τ. Ε. Ι. ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ
ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΘΕΜΑ Β
 ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ : ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΘΕΜΑ Β Ερώτηση. Tο γιο-γιο του σχήματος έχει ακτίνα R και αρχικά είναι ακίνητο. Την t=0 αφήνουμε ελεύθερο το δίσκο
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ : ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΘΕΜΑ Β Ερώτηση. Tο γιο-γιο του σχήματος έχει ακτίνα R και αρχικά είναι ακίνητο. Την t=0 αφήνουμε ελεύθερο το δίσκο
ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝ- ΣΗΣ Γ ΛΥΚΕΙΟΥ ΑΠΑΝΤΗΣΕΙΣ
 ΑΠΑΝΤΗΣΕΙΣ ΠΑΝΕΛΛΑ ΙΚΩΝ ΕΞΕΤΑΣΕΩΝ 011 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΤΕΧΝΟΛΟΙΚΗΣ ΚΑΤΕΥΘΥΝ- ΣΗΣ ΛΥΚΕΙΟΥ ΘΕΜΑ 1 ο ΑΠΑΝΤΗΣΕΙΣ Α1 γ Α β Α3 γ Α4 γ Α5. (α) Σ (β) Λ (γ) Σ (δ) Λ (ε) Λ ΘΕΜΑ ο Β1. Σωστό είναι
ΑΠΑΝΤΗΣΕΙΣ ΠΑΝΕΛΛΑ ΙΚΩΝ ΕΞΕΤΑΣΕΩΝ 011 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΤΕΧΝΟΛΟΙΚΗΣ ΚΑΤΕΥΘΥΝ- ΣΗΣ ΛΥΚΕΙΟΥ ΘΕΜΑ 1 ο ΑΠΑΝΤΗΣΕΙΣ Α1 γ Α β Α3 γ Α4 γ Α5. (α) Σ (β) Λ (γ) Σ (δ) Λ (ε) Λ ΘΕΜΑ ο Β1. Σωστό είναι
Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα.
 ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ ΣΤΕΡΕΟΎ ΣΏΜΑΤΟΣ Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα. Ένα υλικό σημείο μπορεί να κάνει μόνο μεταφορική
ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ ΣΤΕΡΕΟΎ ΣΏΜΑΤΟΣ Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα. Ένα υλικό σημείο μπορεί να κάνει μόνο μεταφορική