REDUCTOR DE TURAŢIE CU O TREAPTĂ ÎNDRUMAR DE PROIECTARE
|
|
|
- Νύξ Μοσχοβάκης
- 7 χρόνια πριν
- Προβολές:
Transcript

1 VASILE PALADE REDUCTOR DE TURAŢIE CU O TREAPTĂ ÎNDRUMAR DE PROIECTARE Galaţi 008
2 1 CUPRINS 1. ALEGEREA MOTORULUI ELECTRIC Determinarea puterii motorului electric Calculul cinematic al transmisiei 6. DIMENSIONAREA ANGRENAJULUI 7.1. Materiale pentru roţi dinţate 7.. Valori necesare calculului angrenajului 8.3. Proiectarea angrenajelor cilindrice cu dinţi drepţi şi înclinaţi VERIFICAREA LA ÎNCĂLZIRE A REDUCTOARELOR Randamentul total al reductorului Dimensionarea carcaselor Verificarea reductorului la încălzire CALCULUL ARBORILOR Alegerea materialului Dimensionarea arborilor 4.3. Forma constructivă a arborilor Alegerea penelor Verificarea la oboseală a arborilor 9 5. ALEGEREA RULMENŢILOR Alegerea tipului de rulment Stabilirea încărcării rulmenţilor Calculul sarcinii dinamice echivalente Capacitatea dinamică necesară ALEGEREA CUPLAJULUI Alegerea cuplajului Verificarea cuplajului 38 ANEXE 39 BIBLIOGRAFIE 4
3 TEMĂ DE PROIECTARE din : Să se proiecteze o transmisie mecanică necesară acţionării unui concasor compusă 1. motor electric trifazat cu rotorul în scurtcircuit;. reductor de turaţie cu o treaptă de roţi dinţate cilindrice cu dinţi înclinaţi; 3. cuplaj elastic cu bolţuri. Date de proiectare: P [Kw] puterea necesară la maşina de lucru; n [rot/min] turaţia motorului electric; i a raportul de transmitere al reductorului; L h [ore] durata de funcţionare Transmisia funcţionează în două schimburi.
4 3 1. ALEGEREA MOTORULUI ELECTRIC Pentru alegerea motorului electric trebuie cunoscute condiţiile de exploatare (graficul de lucrări, temperatura şi umiditatea mediului înconjurător etc.), puterea necesară şi turaţia arborelui motorului Determinarea puterii motorului electric Deoarece motoarele utilajelor propuse a fi acţionate lucrează în regim de lungă durată, cu sarcină constantă, determinarea puterii se face pentru această situaţie. Puterea motorului electric P e se determină cu relaţia: P Pe= [kw] η unde: P puterea la arborele de ieşire din reductor, în kw; η randamentul total al mecanismului de acţionare, determinat cu relaţia: η = ηa ηl η (1.) u unde: η a randamentul angrenajului; η a = 0,96...0,98 pentru un angrenaj cu roţi dinţate cilindrice; η l = o,99...0,995 randamentul unei perechi de lagăre cu rulmenţi; η u = o,99 randamentul ungerii; 1. Alegerea motorului electric Pentru alegerea seriei motorului electric trebuie să se cunoască puterea necesară acţionării Pe şi turaţia la arborele motorului electric, n. In funcţie de turaţia n (dată prin temă), ce reprezintă turaţia de sincronism a motorului electric, se selectează tabelul corespunzător (1.1; 1.; sau 1.3) procedânduse în continuare astfel: p = 8; n = 750 rot/min Tabelul 1.1 Tipul motorului Puterea P [kw] Turaţia n e [rot/min] ASI 100L 8 8 0, ASI 100L 8 8 1,1 705 ASI 11M 8 8 1,5 705 ASI 13S 38 8, 710 ASI 13M ASI 160M ASI 160M 4 8 5,5 708 ASI 160L 4 8 7,5 708 ASI 180L ASI 00L ASI 5S ,5 730 ASI 5M ASI 50M (1.1)
5 4 se parcurge coloana a doua din tabelul respectiv şi se alege o putere P astfel încât să fie satisfăcută condiţia P Pe ; se alege tipul motorului, caracterizat prin seria sa, care are puterea nominală P [kw] şi turaţia nominală n e [rot/min]. p = 6; n = 1000 rot/min Tabelul 1. Tipul motorului Puterea Turaţia P [kw] n e [rot/min] ASI 90S 4 6 0, ASI 90L 4 6 1,1 940 ASI 100L 8 6 1,5 930 ASI 11M 8 6, 945 ASI 13S ASI 13M ASI 13M ,5 960 ASI 160M 4 6 7,5 960 ASI 160L ASI 180L ASI 00L ,5 970 ASI 00L ASI 5M p = 4; n =1500 rot/min Tabelul 1.3 Tipul motorului Puterea P [kw] Turaţia n e [rot/min] ASI , ASI 90S 4 4 1, ASI 90L 4 4 1,5 145 ASI 100L 8 4, 140 ASI 100L ASI 11M ASI 13S , ASI 13M , ASI 160M ASI 160L ASI 180M , ASI 180L ASI 00L
6 5 In figura 1.1 şi tabelul 1.4 se prezintă schiţa, respectiv principalele dimensiuni de gabarit şi montaj pentru motoarele electrice asincrone trifazate cu rotorul în scurtcircuit în construcţie cu tălpi. Fig. 1.1 Tabelul 1.4 Gabarit A AA AB B BB D E H HD K L 8o o 165 1oo 14o 19 4o 8o oS 4 14o 5o 19o 1oo o 9o 8 3o3 9oL 4 14o 5o 19o o 9o ooL 8 16o o 13o 8 6o 1oo 1o 37o 11M8 19o o 18o 8 6o 11 1o S o o 13 3o5 1o 45 13M o 38 8o 13 3o5 1o 49o 16oM4 54 7o 34 1o 6o 4 11o 16o o8 16oL o o 16o o 18oM o oo 48 11o 18o 4o oL o o 18o 4o o ool o5 36o 55 11o oo o 5S oo 44o 86 43o 55 11o 5 56o S 6o 356 1oo 44o 86 43o 6o 14o 5 56o M oo 44o o 55 11o 5 56o M6o 356 1oo 44o o 6o 14o 5 56o oM6o 4o o o 14o 5o 59o Observaţii: Puterea motorului electric P din tabel rămâne ca o dată specifică a motorului electric şi nu intervine în calculele ulterioare. Puterea necesară la arborele motorului electric P e reprezintă puterea de calcul la dimensionarea transmisiei. Turaţia ce intervine în calculele ulterioare este turaţia nominală a motorului electric n e.
7 6 Motoarele electrice sincrone trifazate cu rotorul în scurtcircuit se simbolizează prin grupul de litere ASI, urmat de un grup de cifre şi o literă majusculă. De exemplu, simbolul ASI 13S386 înseamnă: A motor asincron trifazat; S rotor în scurtcircuit; I construcţie închisă (capsulată); 13S gabaritul 13, scurt, ceea ce înseamnă că înălţimea axului maşinii este de 13 mm de la planul tălpilor de fixare, iar motorul este executat în lungimea scurtă (există trei lungimi pentru fiecare gabarit: S scurtă; M medie; L lungă); 38 diametrul capătului de arbore (mm); 6 numărul de poli ai motorului, care indică viteza de sincronism, respectiv 1000 rot/min în cazul dat Calculul cinematic al transmisiei Stabilirea turaţiilor la arbori n1 n1 = ne ; n =. i a (1.3) Stabilirea puterilor debitate pe arbori Puterea debitată pe arborele 1: P = 1 P e. (1.4) în care: Determinarea momentelor de torsiune ale arborilor 30P1 30P 6 6 M t1 = 10 [ Nmm]; M t = 10 π n π n [ Nmm] ; (1.5) 1 P1 puterea la arborele conducător, în kw; P puterea la arborele condus, în kw; n 1,n turaţiile la arborele conducător, respectiv condus, în rot/min.
8 7.DIMENSIONAREA ANGRENAJULUI.1 Materiale pentru roţi dinţate Pentru construcţia roţilor dinţate se poate utiliza o mare varietate de materiale. Opţiunea asupra unuia sau altuia dintre acestea are implicaţii asupra gabaritului transmisiei, tehnologiei de execuţie, preţului de cost etc. In general, alegerea materialului pentru roţile dinţate trebuie sa aibă în vedere următoarele criterii: felul angrenajului şi destinaţia acestuia; condiţiile de exploatare (mărimea şi natura încărcării, mărimea vitezelor periferice, durata de funcţionare şi condiţiile de mediu); tehnologia de execuţie agreată; restricţiile impuse prin gabarit, durabilitate şi preţ de fabricaţie. Principalele materiale folosite în construcţia roţilor dinţate sunt: oţelurile, fontele, unele aliaje neferoase şi materialele plastice. Oţelurile sunt utilizate, în general, pentru angrenajele de lucru, la care uzura trebuie să fie cât mai mică. Din această grupă se folosesc oţelurile carbon de calitate şi oţelurile aliate. Aceste materiale se supun tratamentelor termice în scopul ameliorării caracteristicilor de rezistenţă şi a îmbunătăţirii comportării flancurilor dinţilor la diverse forme de uzură. In alegerea oţelurilor se pot face următoarele recomandări: Roţile care angrenează să nu fie executate din acelaşi material (la materiale identice tendinţa de gripare este maximă). Roata conducătoare funcţionează în condiţii mai grele decât roata condusă, deci trebuie să fie executată dintrun material cu caracteristici mecanice superioare. Câteva combinaţii de materiale întâlnite la reductoare de uz general sunt: OLC45 / OLC35; OLC60 / OLC45; OLC60 / OLC35; 40Cr10 / OLC45; OLC35 / OL70; OLC15 / OLC10; 41MoCr11 / 40Cr10; 33MoCr11 / OLC45 etc. Pentru reductoarele obişnuite se recomandă utilizarea oţelurilor cu durităţi mici şi mijlocii HB ( ) MPa, astfel micşorânduse pericolul gripării, diferenţa între roţi fiind de HB ( )MPa. Fontele se utilizează pentru angrenajele de dimensiuni mari care funcţionează cu viteze periferice relativ scăzute. Roţile dinţate executate din fonte rezistă bine la uzură dar nu se recomandă în cazul solicitărilor de încovoiere. Pentru roţile dinţate puţin solicitate se utilizează materiale neferoase de tipul alamei şi bronzului. Aceste materiale se prelucrează uşor, se comportă bine la uzură şi sunt antimagnetice. Materialele plastice se utilizează acolo unde condiţiile de exploatare a roţilor dinţate permit acest lucru. Ele prezintă avantajul reducerii zgomotului, dar nu pot fi folosite decât întrun domeniu restrâns de temperatură şi umiditate. In funcţie de modul de solicitare se recomandă următoarele: pentru angrenaje puternic solicitate şi viteze periferice v (3...1) m/s: oţeluri aliate de cementare (1MoMnCr1; 15MoMnCr1; 13Cr08; 1TiMnCr1; 18MoCr10), cementate în adâncime min.1,5 mm şi călite la (58...6) HRC pe suprafaţă şi ( ) HRC în miez; pentru angrenaje mediu solicitate şi viteze periferice v (4..8) m/s: oţeluri carbon de calitate (OLC 35; OLC 45; OLC 60) şi oţeluri aliate (35CrMnSi13; 40Cr10; 41MoCr11) îmbunătăţite. Pentru viteze v (8...1) m/s: oţeluri carbon de calitate şi aliate (OLC 35; OLC 45; 40Cr10;
9 8 41MoCr11) îmbunătăţite la HRC şi călite superficial la HRC. pentru angrenaje slab solicitate şi viteze periferice v (6...1) m/s: oţeluri carbon de cementare (OLC 10; OLC 15) cementate pe o adâncime de (0,6...1) mm şi călite la ( ) HRC pe suprafaţă. Pentru v < 6 m/s: oţeluri carbon de calitate (OLC 35; OLC 45; OLC 60) şi oţeluri aliate (40Cr10; 35 Mn16; 7MnSi1; 31CrMnSi10; 35CrMnSi13) îmbunătăţite la (0...5) HRC. pentru angrenaje foarte slab solicitate, indiferent de viteză: oţeluri carbon obişnuite netratate (OL4; OL50; OL60; OL70), oţeluri turnate (OT45; OT50), fontă turnată (Fgn600; Fgn700), textolit. Caracteristicile de rezistenţă ale oţelurilor şi fontelor folosite la construcţia roţilor dinţate sunt prezentate în tabelul.1 Tabelul.1 Grupa Materialul Simbol Tratament termic sau termochimi c Duritatea flancurilor HB [MPa] H lim Relaţii de calcul σ [MPa] σ 0lim [MPa] Fonte nodulare sau perlitice Fgn 600 Fmp ,15 HB ,067 HB + 30 Oţeluri aliate de îmbunătăţire 40Cr10 41MoCr11 30MoCrNi 0 I Laminate 0,15 HB Turnate 0,15 HB + 50 Laminate 0,057 HB Turnate 0,057 HB Cr10 41MoCr11 I + Nitrurare sau (5055) HRC 0HRC ± 00 Oţeluri carbon şi aliate de cementare 40Cr10 41MoCr11 OLC10 OLC15 1MoMnCr 1 Călire sau (5057) HRC cementare + călire sau (5563) HRC 0 HRC 600 ± HRC 5,5 HRC Oţeluri carbon de îmbunătăţire OLC35 OLC45 OLC60 I Laminate 0,15 HB + 50 Turnate 0,1 HB + 50 Laminate 0,05 HB + 30 Turnate 0,05 HB Valori necesare calculului angrenajului.. 1. Tensiuni admisibile a) Tensiunea admisibilă la solicitarea de contact: σ Hlim σ HP= Z N Z L Z R Z v ZW Z X ; (.1) S HP în care: σ tensiunea limită de bază la solicitarea de contact (tabelul 4.1); H lim S HP coeficientul de siguranţă minim admisibil pentru solicitarea de contact. Pentru o
, în funcţie de material şi numărul de cicli de funcţionare, N N = 60Lhn cicli; Lh durata de funcţionare, în ore; n1 turaţia arborelui conducător, în rot/min); ( 1 Z L factorul de ungere.")

10 9 funcţionare normală S HP =1,15; Z N factorul de durabilitate (fig.4.1), în funcţie de material şi numărul de cicli de funcţionare, N N = 60Lhn cicli; Lh durata de funcţionare, în ore; n1 turaţia arborelui conducător, în rot/min); ( 1 Z L factorul de ungere. Pentru calcule preliminare Z L =1; Z R factorul de rugozitate. Pentru danturile rectificate Z R =1 iar pentru cele frezate Z R =0,9; Z V factorul de viteză. Pentru calcule preliminare Z V =1; Z W factorul de duritate al flancurilor: Z W = 1 la angrenaje cu roţi fără diferenţă mare de duritate; HB 1300 Z W = la pinion durificat şi rectificat şi roată îmbunătăţită şi frezată Z X factorul de dimensiune. In general Z X = 1. b) Tensiunea admisibilă la solicitarea de încovoiere se determină cu relaţia: σ 0lim σ FP = Y N Y δ Y R Y X ; (.) S FP unde: σ 0lim tensiunea limită la solicitarea de încovoiere (tabelul.1); S F P coeficientul de siguranţă minim admisibil pentru solicitarea de încovoiere. Pentru o funcţionare normală S F P = 1,5; Y N factorul de durabilitate la încovoiere (fig..), în funcţie de material şi durata de funcţionare ( N = 60Lhn1 cicli); Y R factorul rugozităţii racordării dintelui: Y R 1 pentru roţi rectificate cu Fig Oţeluri de îmbunătăţire; oţeluri nitrurate; fonte cenuşii. Oţeluri de îmbunătăţire; oţeluri călite superficial; fonte cu grafit nodular; fonte perlitice (se admit ciupituri pe flancuri) R a 0,16 mm; Y R 0,95 pentru roţi frezate; Y X factorul de dimensiune, în funcţie de modulul normal al roţii. Pentru calcule preliminare Y X =1. Y δ factorul de sprijin. Pentru calcule preliminare Y δ = 1,1; Fig..
11 10... Factorul de corecţie al încărcării a) Pentru solicitarea de contact: K H = K A KV K Hα K Hβ ; (.3) unde: K A factorul de utilizare. In cazul antrenării reductorului cu motor electric, când caracteristica de funcţionare a maşinii antrenate este: uniformă (generatoare, ventilatoare, transportoare, ascensoare uşoare, mecanisme de avans la maşiniunelte, amestecătoare pentru materiale uniforme) K A = 1; cu şocuri medii (transmisia principală a maşinilor unelte, ascensoare grele, mecanismul de rotaţie a macaralelor, agitatoare şi amestecătoare pentru materiale neuniforme) K A =1,5; cu şocuri puternice (foarfeci, ştanţe, prese, laminoare, concasoare, maşini siderurgice, instalaţii de foraj) K A =1,50. K V factorul dinamic. Pentru calcule preliminarii alegerea lui se face din tabelul. în funcţie de treapta de precizie adoptată pentru prelucrarea roţilor. Pentru reductoare de uz general treapta de precizie recomandată este 7 sau 8. Tabelul. K V Treapta de precizie dinţi drepţi Roţi cilindrice dinţi înclinaţi Roţi conice dinţi drepţi dinţi înclinaţi Angrenaje melcate cilindrice 6 1,4 1,3 HB 1() < ,96+ 0,0003n 1 7 1,5 1,4 HB 1() > 3500 HB 1() < ,98+0,00011n 1 HB 1() > ,6 1,5 0,97+ 0,00014n 1 0,96+ 0,0007n 1 1,3 K Hα factorul repartiţiei frontale a sarcinii la solicitarea de contact. La angrenajele precise, în clasele 1...7, se adoptă K Hα =1. K Hβ factorul repartiţiei sarcinii pe lăţimea danturii la solicitarea de contact. Pentru calcule preliminarii se adoptă sau conice). K Hβ 1,3...1,4 la angrenaje rodate şi K Hβ b) Pentru solicitarea de încovoiere: K F = K A K V 1,1 1, =1,5 la angrenaje nerodate (cilindrice K Fα K Fβ ; (.4) unde: K A; KV au aceleaşi semnificaţii şi se determină la fel ca în cazul solicitării de contact; K Fα factorul repartiţiei frontale a sarcinii la solicitarea de încovoiere. La angrenajele precise, în clasele 1...7, cu încărcare normală sau mare se adoptă : K Fα = K Hα = 1. K Fβ factorul repartiţiei sarcinii pe lăţimea danturii la solicitarea de încovoiere. Pentru calcule preliminarii se adoptă K Fβ = K Hβ.
12 11.3 Proiectarea angrenajelor cilindrice cu dinţi drepţi sau înclinaţi (STAS 16881).3.1 Calculul de predimensionare Alegerea numărului de dinţi la pinion Recomandări: a) La danturile cementatecălite: z 1 = (1) dinţi. b) La danturile durificate inductiv sau nitrurate: z 1 = (5) dinţi. c) La danturile îmbunătăţite (HB 3500): z 1 = dinţi. d) Numărul de dinţi ai roţii conduse z = u z 1 (unde u = i a ). Pe cât posibil z 1 şi z trebuie să nu aibă divizori comuni. e) Se alege astfel z 1 încât z să fie număr întreg, iar u să aibă o valoare apropiată de i a şi să fie îndeplinită condiţia: u ia 3 % % ia f) In general, numărul total de dinţi pe o treaptă să fie mai mic de Alegerea coeficientului de lăţime al danturii Acest coeficient se poate calcula cu relaţia: unde Ψ se alege din tabelul.3 d (.5) Ψd Ψ a = ; (.6) (u + 1) Tabelul.3 Duritatea flancurilor Amplasarea pinionului Ψ d Treapta de precizie Una sau ambele danturi cu Intre reazeme simetric asimetric 1,3...1,4 1,0...1, 1,0...1, 0,7...0,9 0,7...0,8 0,5...0,6 HB 3500 MPa In consolă 0,7...0,9 0,5...0,6 0,3...0,4 Ambele danturi cu HB > 3500 MPa Intre reazeme simetric asimetric 0,8...0,6 0,6...0,5 0,6...0,5 0,5...0,4 0,5...0,4 0,4...0,3 durificate superficial In consolă 0,5...0,4 0,4...0,3 0,3...0, Alegerea unghiului de înclinare al dinţilor, β Se recomandă: β = ( ) o la reductoarele mari (treptele înalte); β=(10...0) o la reductoare uzuale (mai puţin treptele finale); β = (0...30) o la angrenaje cu dinţi în V deschis; β = ( ) o la angrenaje cu dinţi în V închis Distanţa minimă necesară între axe Aceasta se determină din limitarea presiunii de contact cu relaţia: a min =(u + M t K H( Z H Z E Zε Z β ) 1 ) 3 (.7) u ψ a σ HP unde: M t momentul de torsiune la roata condusă (rel. 1.5 din cap.1);
13 1 Z H factorul zonei de contact. Se poate determina cu relaţia: în care: Z E Z H = cos β t b sinα cosα αt unghiul profilului în plan frontal: tg n α t = arc tg α cos β t unde : α = 0 β b unghiul de înclinare al dintelui pe cilindrul de bază: n 0 (.8) (.9) sin βb = sin β cosα n (.10) factorul de material care se poate determina cu relaţia: Z E = 1 1 v π + E1 1 1 v E (.11) Pentru câteva combinaţii de materiale factorul Z E se dă în tabelul.4. Tabelul.4 Material Pinion E [MPa] Material Roată condusă E 1 [MPa] Z E [MPa] 1/ Oţel laminat, oţel laminat oţel turnat fontă nodulară bronz cu zinc turnat bronz cu zinc fontă cenuşie, , , , , (1,6...1,18) ,9 181,4 155,0 159,8 165, oţel turnat, oţel turnat fontă nodulară fontă cenuşie, , , ,0 180,5 161,4 Zε factorul gradului de acoperire. Pentru calcule preliminare: Z β factorul de înclinare al dinţilor: După stabilirea lui a min apar două situaţii: Z ε =1. Z β = cos β (.1) a) Se cere o distanţă dintre axe a STAS, conform STAS In acest caz a min se măreşte la prima valoare a STAS şi se obţine a STAS = a w. Se adoptă a STAS dacă: a a min 0,05 a STAS STAS (.13) Valorile standardizate pentru distanţele dintre axe la angrenajele cilindrice şi melcate se prezintă în tabelul.5.
14 13 Tabelul.5 I II I II I II I II I II I II Observaţii: 1. In tabel nu au fost trecute valori mai mari de 560 mm;. Valorile şirului I sunt preferenţiale; 3. Se admite şi folosirea valorilor 30 mm, respectiv 360 mm, în locul valorilor 315 mm şi 355 mm; 4. valoarea 5 mm face excepţie de la şirul II. b) Nu se cere a STAS. In acest caz a min se rotunjeşte la următoarea valoare întreagă în milimetri şi se obţine a w. unde: Modulul normal, m n Se calculează modulul normal minim, t w a m nmin, astfel: din limitarea tensiunii de încovoiere: M (u + 1) K F YFa Y Sa Y β Y ε mn min = (.14) a ψ u σ YSa factorul de concentrare al tensiunii la piciorul dintelui, din figura.3; FP YFa coeficient de formă al danturii (funcţie de numărul de dinţi echivalenţi 3 z v = z / cos β şi deplasare), din figura.4; Yβ factorul înclinării dintelui: Fig..3 0 β Y β = 1 ε β (.15) 0 10

15 14 Pentru calcule preliminare: Y β = 1 pentru dinţi drepţi;y β = 0,9 pentru dinţi înclinaţi cu 0 o < β 10 o şi Y β = 0,8 pentru dinţi înclinaţi cu β > 10 o. Yε factorul gradului de acoperire. Pentru calcule preliminare Y ε =1, iar pentru calcule precise se determină cu relaţia: 0,75 Y ε = 0,5+ cos β (.16) din limitarea tensiunii de contact: ε α aw cos β mn min = z1(1 + u) Se alege max ( m n min, mn min ). Modulul m n min astfel stabilit se standardizează conform STAS 88 la o valoare superioară celei calculate, valoare cuprinsă în tabelul.6, obţinânduse m n. Modulul, mm (după STAS 8 8) Mecanică fină Mecanică generală şi grea Fig..4 Tabelul.6 0,05; 0,055; 0,06; 0,07; 0,08; 0,09; 0,1; 0,11;0,1; 0,14; 0,15; 0,18; 0,; 0, ; 0,5; 0,8;0,3; 0,35; 0,4; 0,45; 0,5; 0,55; 0,6; 0,7; 0,8; 0,9; 1,0. 1; 1,15; 1,5; 1,375; 1,5; 1,75; ;,5;,5;,75; 3; 3,5; 4; 4,5; 5; 5,5; 6; 7; 8; 9; 10; 11; 1; 14; 16; 18; 0; ; 5; 8; 3; 36; 40; 45; 50; 55; 60; 70; 80; 90; 100.
16 15 Observaţii: 1. Se recomandă folosirea valorilor boldate (şirul R10); Recalcularea unghiului de înclinare, β * Pentru a se putea obţine o distanţă între axe standardizată şi un modul normal standardizat, la roţile cilindrice cu dinţi înclinaţi, se recalculează unghiul de înclinare al danturii cu relaţia: * mnstas z1 (u + 1) cos β = (.17) a w Dacă valoarea obţinută este mai mare decât 1 se va modifica z1astfel încât cos β 1. * <.3.. Calculul elementelor caracteristice angrenajelor cilindrice.3..1 Elementele geometrice ale danturii (tabelul.7). Profilul de referinţă conform STAS : α n =0 o * * ; h a =1; c =0,5. Pentru angrenajele cilindrice cu dantură dreaptă β * = 0. Relaţia de calcul Elementul geometric Simbol Dantură nedeplasată Dantură deplasată Tabelul.7 Numerele de dinţi Modulul normal standardizat Modulul frontal Înălţimea capului dintelui Înălţimea piciorului dintelui Înălţimea dintelui Diametrul de divizare z 1() m n m * t m n / cos β h a h f h ( h * ha m n * * a + c ) m n h + h d 1() m t z 1( ) a f Diametrul cercului de picior Diametrul cercului de vârf Diametrul de rostogolire d f 1() d1() h f d a1() d () ha d 1() + c * m x n 1() ( h 1 + d f 1 () + h d w1() d 1() d1() mn x1( ) Distanţa dintre axe a (d w1 + d w ) / (d 1 +d )/ + m n (x 1 +x ) Unghiul profilului în plan frontal Diametrul cercului de bază Unghiul de presiune la capul dintelui Lăţimea roţii conduse Lăţimea roţii conducătoare α * t tgα t = tgα n / cos β cosα d b1() d1 () t α a1() arccos( d b1() / d a1() ) b b 1 b aψ a + (0,5...1) m n + ) * a +
17 Gradul de acoperire, ε Gradul de acoperire pentru un angrenaj cu roţi dinţate cilindrice cu dinţi drepţi se determină cu relaţia: 1 ε α = [ z1tgα a1 + ztgα a ( z1 + z)tgαt ] 1, 1; (.18) π iar pentru un angrenaj cu roţi dinţate cilindrice cu dinţi înclinaţi, cu relaţia: unde: ε ε α + ε 1, ; (.19) = β * b sin β ε β =. (.0) π mn Toţi termenii din relaţiile.18 şi.0 au fost determinaţi în tabelul Randamentul angrenării, η a Randamentul unei trepte cu roţi dinţate cilindrice se determină cu relaţia: πµ aεα 1 1 ηa = 1 + * (.1) f cos β z1 z unde: f = pentru angrenaje aflate în rodaj; f = 5 pentru angrenaje bine rodate; µ a coeficient de frecare (tabelul.8 atât pentru angrenajele cilindrice cât şi pentru cele conice). Ungerea se realizează în baia de ulei. Tabelul.8 Materialele danturilor Prelucrarea flancurilor µ a Oţeluri durificate superficial Oţeluri îmbunătăţite sau normalizate Rectificare Şeveruire Frezare 0,04...0,08 0,06...0,10 0,09...0,1 Frezare 0,09...0, Forţe în angrenare forţa tangenţială: forţa axială: forţa radială: M t1 Ft 1 = (.) d 1 * a 1 = F t 1 tgβ F (.3) Ft1 Fr 1 = tg * α n (.4) cos β Se va considera: F t1 = F t ; F a1 = F a ; F r1 = F r
18 17 3. VERIFICAREA LA ÎNCĂLZIRE A REDUCTOARELOR unde: 3.1 Randamentul total al reductorului Randamentul unui reductor cu k trepte de reducere se determină cu relaţia: l ηt = ηa η ηu ; (3.1) η randamentul treptei de roţi dinţate (vezi cap., rel..1); a η l = 0,99...0,995 randamentul unei perechi de lagăre cu rulmenţi; η u = 0,99 randamentul ungerii. 3. Dimensionarea carcaselor 3..1 Elemente constructive Observaţie: Valorile recomandate prin relaţiile de mai jos sunt orientative, adoptânduse valori întregi imediat superioare celor calculate. Grosimea peretelui corpului pentru reductoare cu angrenaje cilindrice şi conice: δ = 0,05 a + 5 mm ; unde: a = a w distanţa între axe, la reductoarele cilindrice cu o treaptă, în mm (tabel.7); Grosimea peretelui capacului : δ 1 = 0,8 δ. Grosimea flanşei corpului: h = 1,5 δ. Grosimea flanşei capacului: h 1 = 1,5 δ 1. Grosimea tălpii (în varianta cu bosaje pentru şuruburile de fundaţie): t = 1,5 δ. Grosimea nervurilor corpului: c = 0,8 δ. Grosimea nervurilor capacului: c 1 = 0,8 δ 1. Diametrul şuruburilor de fixare a reductorului pe fundaţie: d 1,5 δ. Diametrul şuruburilor de fixare a capacului de corpul reductorului, care se află lângă lagăre: d 1 0,75 d. Diametrul şuruburilor de fixare a capacului de corpul reductorului, care nu sunt lângă lagăre: d 0,50 d. Diametrul şuruburilor capacelor lagărelor: d3 0, 75d. Observaţie. Valorile obţinute pentru d; d1 ; d; d3 se adoptă din următorul şir de valori standardizate (se alege valoarea imediat superioară celei calculate): 4; 6; 8; 10; 1; 16; 0; 4; 30; 36; 4; 48. Lăţimea flanşei corpului şi a capacului: K = 3 d. Distanţa minimă între roţile dinţate şi suprafaţa interioară a reductorului: 1,5 δ ( = mm). Distanţa între roata cea mare şi fundul băii de ulei: 1 5δ. Distanţa de la rulment la marginea interioară a carcasei reductorului: l 1 = (5...10) mm. Distanţa de la elementul rotitor (roata de curea) până la capacul lagărului: l = (15...0) mm. Lungimea părţii de arbore pe care se fixează cuplajul: l 3 = (1,...1,5) d I.
19 18 Lăţimea capacului lagărului: l 4 = (15...5) mm. Lăţimea rulmentului: l 5 = ( 0,4...0,8) d max, unde d max este valoarea cea mai mare dintre d I ; d II. Predimensionarea arborilor se face ţinând seama de solicitarea lor la răsucire: d I 16M t1 16M t 3 ; d II 3 [ mm] (3.) πτ πτ at(0) at(0) unde: M t1 şi M t sunt momentele de torsiune pe cei doi arbori,, în N.mm, determinate în cap.1 cu relaţia (1.5). τ at(0) = (0...5) [N/mm ] tensiunea admisibilă la răsucire întrun ciclu pulsator, pentru arbori din oţel. Valorile obţinute pentru d I, d II şi d III se adoptă din următoarea gamă standardizată: 18; 19; 0; ; 4; 5; 8; 30; 3; 35; 38; 40; 4; 45; 48; 50; 55; 56; 60; 65; 70; 71; 75; 80; 85; 90; 95; 100 (extras din STAS 874/84) 3.. Calculul suprafeţei reductorului Pentru a stabili temperatura uleiului din baie este necesar să se determine suprafaţa de schimb de căldură cu mediul exterior. a) pentru reductor cu o treaptă de roţi dinţate cilindrice (fig.3.1): d a d a1 R = + + δ1 ; r = + + δ1 ; L= a + R + r; d a R r l= b1 + + δ ; H = + 1 +t ; tgθ = ; a π π a S = L l + H ( L + l ) + ( R + r ) + ar + a( R r) + l ( ). R + r + cos θ La calculul suprafeţei reductorului S, sa considerat că el se află suspendat pe un suport metalic, din acest motiv a fost adăugată şi suprafaţa bazei. Când reductorul se află montat pe un postament de beton şi nu se realizează schimbul de căldură prin suprafaţa bazei, se va elimina din calcule produsul (L l ). (3.3) 3.3 Verificarea reductorului la încălzire Temperatura uleiului din baie, în cazul carcaselor închise când nu are loc recircularea uleiului, se calculează din ecuaţia echilibrului termic: P (1 η t) t = t0 + ta ; (3.4) λ Scηt unde: t 0 temperatura mediului ambiant (t 0 =18 o C); P puterea la arborele de ieşire din reductor, în watt; η t randamentul total al reductorului (rel. 3.1); S c suprafaţa de calcul a reductorului, în m : S c =1, S, unde S reprezintă suprafaţa carcasei calculată cu rel Această suprafaţă se majorează cu 0 % pentru a ţine seama de nervurile de rigidizare şi de flanşe, obţinânduse astfel S c ;
20 19 λ coeficientul de transmitere a căldurii între carcasă şi aer; λ = (8...1) [W/(m. o C)] dacă există o circulaţie slabă a aerului în zona de montare a reductorului; reductorului. Fig. 3.1 λ = (1...18) [W/(m. o C)] dacă există o bună circulaţie a aerului în zona de montare a
21 ta 0 temperatura admisibilă ( t a = ( ) 0 C pentru angrenaje cilindrice şi conice; Dacă rezultă o temperatură mai mare decât cea recomandată, este necesar să se adopte una din soluţiile următoare: a) mărirea suprafeţei carcasei prin adoptarea unor distanţe mai mari de la roţi la interiorul carcasei ( = mm) sau nervurarea carcasei; b) montarea reductorului întrun loc bine ventilat; c) sistem de răcire forţată prin folosirea unui ventilator montat pe arborele de intrare.
22 1 4. CALCULUL ARBORILOR 4 1 Alegerea materialului Alegerea materialului se va face în funcţie de felul solicitării arborilor, precum şi funcţie de natura acestor solicitări. Pentru solicitări uşoare şi medii se recomandă oţelurile carbon obişnuite, mărcile: OL50 sau OL60 (STAS 500/80). Pentru solicitări medii cu cerinţe de durabilitate pentru fusuri se recomandă oţelurile carbon de calitate cu tratament de îmbunătăţire, mărcile: OLC35, OLC45, OLC60 (STAS 88080). Pentru arbori cu solicitări importante sau când se impun restricţii deosebite de gabarit şi greutate se recomandă oţelurile aliate de îmbunătăţire, mărcile: 33MoCr11, 41MoCr11 sau 41CrNi1 (STAS 79180). In cazul în care se impun condiţii de duritate ridicată fusurilor, arborii se vor executa din oţeluri carbon de cementare, mărcile: OLC10, OLC 15 (STAS 88080), sau oţelurile aliate de cementare, mărcile: 18MnCr10, 18MoCrNi13 (STAS 79180). Principalele caracteristici mecanice ale oţelurilor uzuale utilizate la execuţia arborilor se dau în tabelul 41, iar în tabelul 4 sunt prezentate tensiunile admisibile pentru aceleaşi categorii de materiale, utilizate în calculele de dimensionare. Tabelul 4,1 Rezistenţa la oboseală [MPa] Marca oţelului STAS Duritatea [HB] R m (σ r ) [MPa] σ c [MPa] τ c [MPa] Tracţiune σ1t OL50 OL60 OLC15 OLC45 OLC60 40Cr10 41MoCr11 41CrNi1 18MnCr10 18MoCrNi13 500/ 80 " " " " " " (0,58...0,65) σc Tabelul 4, Materialul σ r [MPa] Rezistenţa admisibilă la oboseală [MPa] răsucire încovoiere τ at(0) σ aî (0) σ aî (1) Oţel carbon obişnuit şi de calitate Oţel aliat
23 4 Dimensionarea arborilor Dimensionarea arborilor se poate efectua pe baza următoarelor variante: A. Determinarea diametrelor arborelui în punctele importante, ţinânduse seama de solicitările reale şi natura acestor solicitări (tipul ciclului de solicitare), stabilirea formei geometrice a arborelui prin corelarea dimensiunilor obţinute şi verificarea la oboseală în secţiunile cu concentratori puternic solicitate, ţinânduse seama de felul şi natura concentratorului. B. Stabilirea formei geometrice a arborelui pornind de la un diametru preliminar calculat şi verificarea arborelui astfel dimensionat în secţiunile cu solicitări maxime, ţinânduse seama de solicitările reale, de natura acestor solicitări şi de concentratorii de tensiuni ce pot produce ruperea prin oboseală a arborelui. Determinarea preliminară a diametrului arborelui se face pe baza unui calcul simplificat, considerând numai solicitarea la răsucire (v. rel. 3. cap.3). Valoarea adoptată pentru τ at(0) =(0 5)MPa, ţine seama de solicitarea suplimentară la încovoiere a arborelui. Diametrul astfel obţinut, pentru varianta B, reprezintă diametrul capătului de arbore pentru arborele de intrare sau de ieşire, de la care se porneşte la stabilirea celorlalte dimensiuni, pe baza recomandărilor de la 4.3. Atât pentru calculele de dimensionare cât şi pentru cele de verificare (în funcţie de metoda adoptată ) este necesară cunoaşterea încărcării arborilor, ce depinde de tipul reductorului de turaţie şi de felul angrenajelor Stabilirea schemelor de încărcare. Reductoare cu o treaptă de roţi dinţate cilindrice cu dinţi înclinaţi. a sens de rotaţie pinion stânga dreapta, înclinare dinte dreapta; b sens de rotaţie pinion dreapta stânga, înclinare dinte dreapta Fig.4.1 In fig. 4.1 se prezintă arborii I şi II cu organele de maşini ce transmit puterea mecanică, precum şi forţele din angrenaj care solicită arborii. Se consideră că angrenarea se petrece în plan orizontal, axele arborilor fiind paralele în acest plan. Din aceeaşi figură rezultă încărcarea arborilor în plan vertical (V) şi în plan orizontal (H). Reazemele arborelui I, care corespund jumătăţii lăţimii rulmenţilor, au fost notate cu şi 4; iar zonele în care se montează organele ce transmit momentul de torsiune şi puterea, cu 1 şi 3, aceste puncte corespunzând jumătăţii lăţimii cuplajului, respectiv jumătăţii lăţimii pinionului. Distanţele dintre reazeme şi punctele de aplicaţie a forţelor ' l 1 şi ' l se
24 3 stabilesc cu relaţiile: (v. fig.3.1). ' l 3 l 5 l 1 = + l + l 4 + ; (4.1) ' l 5 b1 l = + l unde l 1, l, l 3, l 4, l 5, sunt dimensiuni stabilite la 3..1 din cap.3; l 3 lăţimea cuplajului (preliminar se adoptă l 3 =30 40 mm); b 1 lăţimea roţii dinţate conducătoare (v. tabelul.7). Pentru arborele II, datorită condiţiei de aliniere a reazemelor distanţa de la reazemele 5 şi 7 la ' punctul de aplicaţie al forţelor 6, va fi l. Observaţie: La angrenajele cu roţi dinţate cilindrice cu dinţi drepţi schema de încărcare este asemănătoare, cu observaţia că F a1 = F a = 0. Este de observat, din schemele prezentate anterior, că forţele care încarcă arborii nu sunt în acelaşi plan, unele acţionează în plan vertical (V), altele în plan orizontal (H). În acest caz pentru calculul reacţiunilor şi pentru predimensionarea la rezistenţă a arborelui, se va reprezenta încărcarea fiecărui arbore cu forţe, separat în cele două plane, indicânduse şi variaţia momentului de torsiune transmis (este necesară trasarea variaţiei momentului de torsiune transmis deoarece pot exista tronsoane care nu sunt solicitate la torsiune). Fig.4.
25 4 Pentru exemplificare în figura 4. se prezentă schemele de încărcare în cele două plane, a arborilor prezentaţi în figura 4.1 Practic, determinarea solicitărilor arborilor cuprinde etapele: 1. Determinarea reacţiunilor în cele două plane. Se vor determina analitic componentele R V şi R H ale reacţiunilor corespunzătoare reazemelor şi se va reprezenta sensul lor real. a) Arborele I în plan vertical: 1 4 t V V F R R = =. (4.) în plan orizontal: Corectitudinea calculelor se verifică scriind ecuaţia de echilibru a forţelor pe orizontală: = + + r H H F R R (4.4) b)arborele II in plan vertical: t t t V V F F F R R = = =. (4.5) in plan orizontal: ' ' 4 ' 4 ' ' ' ' ' l l l l l l l l Σ Σ dw F F = R = 0 dw F R F = 0 ) M ( F dw F = R = 0 dw F + F R = 0 ) M ( 1 a1 r1 H 1 a1 H r1 r1 1 a1 H 1 a1 r1 H 4 (4.3) ' ' 5 ' ' 5 7 ' ' 7 ' ' 7 5 l l l l l l l l + Σ + Σ dw F F = R = 0 dw F F R = 0 ) M ( dw F F = R = 0 dw F F R = 0 ) M ( a r H a r H a r H a r H (4.6)
26 5. Determinarea analitică şi grafică a momentelor încovoietoare. Se vor calcula momentele încovoietoare în punctele caracteristice ale grinzii, corespunzătoare încărcării din cele două plane, şi se va trasa linia de variaţie a lor dea lungul arborelui (diagramele M iv şi M ih ). Calculul se va efectua în conformitate cu noţiunile studiate la disciplina "Rezistenţa materialelor" numai la arborele II. în plan vertical: ' M iv 5 = M iv 7 = 0; M iv 6 = RV 5 l ; (4.7) în plan orizontal: ' " ' dw M ih 5 = M ih 7 = 0 M ih 6 = RH 5 l M ih 6 = RH 5 l Fa (4.8) 3. Calculul momentului încovoietor rezultant M ij. Se determină momentul încovoietor rezultant, relaţia 4.9, prin însumarea geometrică a ' componentelor M iv şi M ih corespunzătoare, din cele două plane (se va lua max( M ih 6; M ih 6) în valoare absolută): M = M + M (4.9) i6 iv 6 ih 6 4. Calculul momentelor încovoietoare echivalente M ej. Momentul echivalent se determină cu considerarea momentului încovoietor şi a celui de răsucire în fiecare punct. Pentru a nu rezulta diametre inutil de mari şi, implicit o risipă de material, se recomandă sa se ia în considerare natura ciclurilor de solicitare ale momentului încovoietor şi de răsucire. Momentul echivalent se determină cu relaţia: M e6= M i6+( α M t ) (4.10) unde α este coeficient ce ţine seama de faptul că solicitarea de încovoiere se desfăşoară după un ciclu alternant simetric (R = 1), iar cea de torsiune după un ciclu pulsator (R=0). α = σ σ ai ( 1) ai(0), (4.11) în care: σ ai( 1) şi σ ai(0) sunt caracteristice materialului arborelui şi se extrag din tabelul Determinarea diametrelor în punctele importante Acest paragraf este valabil pentru situaţia în care se adoptă metodologia prezentată la varianta A în 4., mai întâi procedânduse la determinarea diametrelor în punctele caracteristice şi apoi pe baza lor urmând a se stabili forma constructivă a arborelui, pe baza recomandărilor din 6.3. Determinarea diametrelor în punctele importante presupune: 1. Stabilirea materialului şi alegerea corespunzătoare a rezistenţelor admisibile. Materialul arborelui se va alege conform recomandărilor de la 4.1, caracteristicile mecanice corespunzătoare se vor adopta conform tabelelor 4.1 şi 4... Calcularea diametrelor. Diametrele se calculează pentru fiecare punct caracteristic al arborelui, utilizânduse relaţiile: dacă pe porţiunea respectivă M ij 0 şi M tj 0
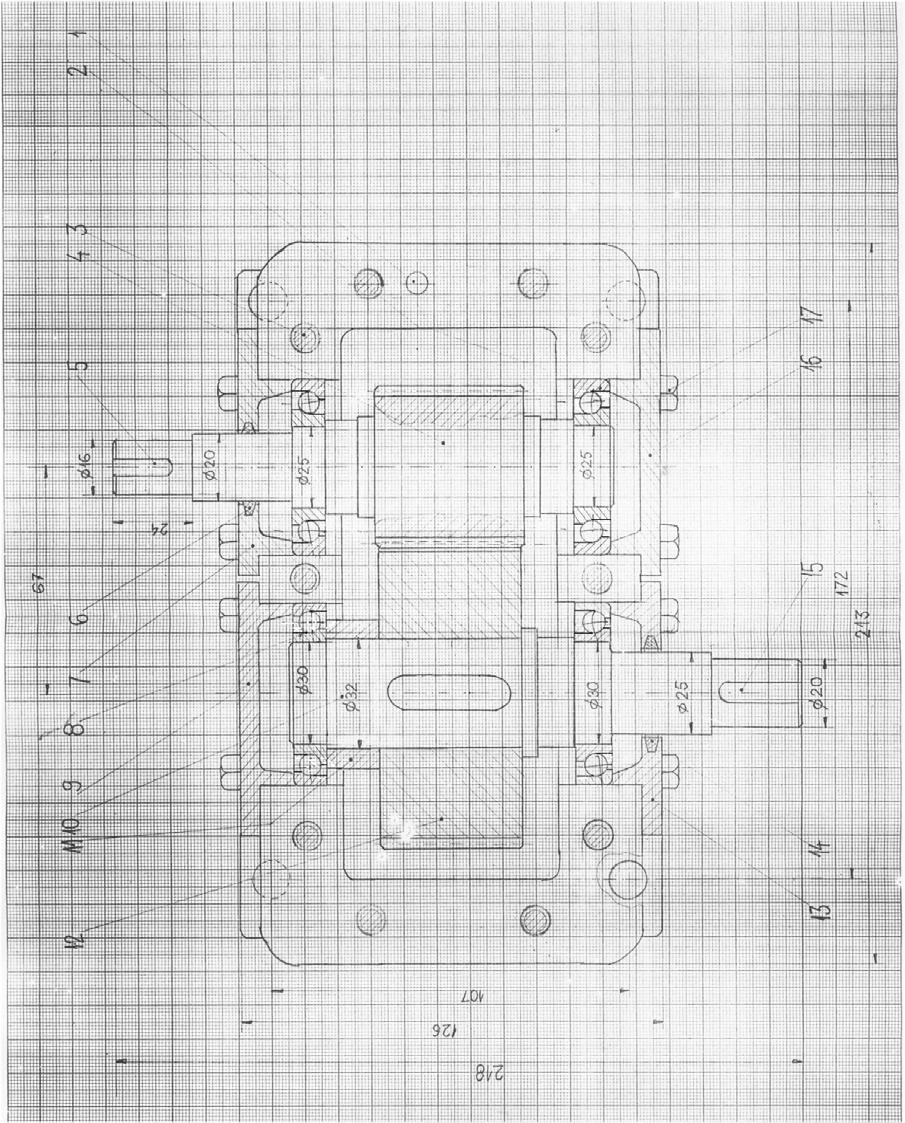
27 6 3M ej [ mm], πσ (4.1) d j 3 ai( 1) unde: M ej momentul încovoietor echivalent în punctul respectiv, în N.mm; σ ai (1) tensiunea admisibilă la încovoiere pentru un ciclu alternant simetric, în MPa, dată în tabelul 6.. dacă pe porţiunea respectivă M ij =0 şi M tj 0 16M tj [ mm], πτ (4.13) d j 3 at(0) în care: M tj momentul de torsiune în punctul respectiv, în N.mm; τ at(0) tensiunea admisibilă la torsiune pentru ciclu pulsator, în MPa, dată în tabelul 4.. Diametrele calculate cu relaţiile de mai sus se rotunjesc la valori imediat superioare, de preferinţă din şirul de valori cuprinse în STAS 874/84 (v. 3..1) Forma constructivă a arborilor Forma constructivă a arborelui rezultă din secţiunile de bază ale căror diametre au fost determinate anterior şi din modificările care se aduc, ţinând seama de organele de maşină care se aplică pe arbore, de montajul, fixarea axială şi solidarizarea lor. În cele ce urmează se vor prezenta câteva modele de arbori şi unele recomandări privind stabilirea formei Reductor cu roţi cilindrice cu dinţi înclinaţi. Modelele de arbori prezentate sunt pentru reductorul cu o treaptă de roţi dinţate (desen de ansamblu Anexa 1, respectiv fig.3.1). Arborele I Valorile diametrelor pentru figura 4.3 se vor adopta constructiv ţinând cont de următoarele recomandări: d 1 = d I (calculat cu relaţia 3.), pentru varianta B; Restul dimensiunilor se adoptă constructiv pornind de la acest diametru, astfel: d 1 = d 1 + (3...5) mm ; d = d 1 + (3...5) mm (multiplu de 5) d 3 = d + (...4) mm d 34 = d 3 + (5...7) mm d 4 = d (deoarece se utilizează aceeaşi serie de rulmenţi) c = min. 5 mm (poate rezulta diferit de valoarea recomandată ca urmare a reprezentării la scară a Fig.4.3 pieselor montate pe arbore, în desenul de ansamblu al reductorului).
28 7 Pentru a se stabili forma constructivă a arborelui este necesar să se verifice varianta de montaj a pinionului pe arbore. Astfel dacă are loc inegalitatea: d f1 d 3 0 mm, pentru arbore se va adopta soluţia constructivă din figura 4.3, pinionul montânduse pe arbore cu pană. (unde d f1 este diametrul de picior al roţii dinţate z 1 ce urmează a fi montată pe arbore, v. tabelul.7; iar d 3 este diametrul tronsonului de arbore pe care se montează pinionul). Dacă d f1 d 3 < 0 mm, se va adopta soluţia constructivă arbore pinion, figura 4.4 (arborele I şi roata dinţată z 1 vor face corp comun). In această situaţie porţiunea umărului de sprijin (de dimensiuni d 34 şi c, fig.4.3) se va elimina şi nu este necesar canalul de pană. Deşi materialul arborelui se modifică (fiind identic cu cel al roţii dinţate) diametrele stabilite cu relaţiile (3.), (4.1) şi (4.13) se păstrează. Pentru figura 4.4, valorile diametrelor d 1, d 1, d, d 4 se aleg utilizând indicaţiile de mai sus, iar d 3 = d 34 se vor adopta cu condiţia să rezulte mai mici ca d f1, astfel: d 3 = d 34 = d + (3 5) mm l1 se alege conform STAS 874/81, privind dimensiunile capetelor de arbori cilindrici, din Fig.4.4 tabelul 4.3 în funcţie de d 1. Observaţie: Toate valorile adoptate trebuie să fie numere întregi. Arborele II Forma arborelui se recomandă a fi cea din figura 4.5, iar diametrele se vor adopta constructiv conform recomandărilor: d 8 = d II (calculat cu relaţia 3.), pentru varianta B; d 78 = d 8 + (3...5) mm d 7 = d 78 + (3...5) mm (multiplu de 5) d 6 = d 7 + (...4) mm d 56 = d 6 + (5...7) mm d 5 =d 7 (deoarece se utilizează aceeaşi serie de rulmenţi) c = (4...7) mm l 8 se adoptă conform tabelului 4.3 (la fel ca l 1). Fig.4.5 Tabelul 4.3 d 1 mm l 1 mm
29 Alegerea penelor Pentru montarea roţilor de curea, a roţilor dinţate sau a cuplajului pe arbori se vor utiliza pene paralele, acestea având avantajul unei mai bune centrări a elementului rotitor. Transmiterea încărcării se realizează prin zonele de contact dintre feţele laterale ale penei şi suprafeţele respective ale canalelor din arbore şi butuc. Penele paralele se execută din oţel carbon, mărcile OL50 sau OL60. In figura 4.6 se prezintă o asamblare cu pană paralelă. In funcţie de diametrul tronsonului de arbore pe care se montează roata sau cuplajul, d j, din tabelul 4.4 se aleg dimensiunile penei (b x h) şi ale canalului de pană (t 1 şi t ), conform STAS Observaţie: In cadrul proiectului se va alege pana necesară asamblării roţii dinţate conduse cu arborele (în punctul 6 căruia îi corespunde diametrul d 6 ). Fig.4.6 Tabelul 4.4 d 6 [mm] Dimensiunile penei [mm] Dimensiunile canalului [mm] peste până la b h Adâncimea arbore t 1 butuc t ,5 4,0 5,0 5,0 5,5 6,0 7,0 7,5 9,0 9,0,8 3,3 3,3 3,3 3,8 4,3 4,4 4,9 5,4 5, Calculul lungimii penelor Forţa care acţionează în asamblarea cu pană paralelă, se calculează cu relaţia: unde: M t F6 = [ N], 4 (4.14) d 6( 1+ µ ) π M t momentul de torsiune la arborele pe care se află pana (v.rel.1.5 cap.1) [N.mm]; d 6 diametrul arborelui pe tronsonul respectiv al asamblării [mm]; µ = 0,15 coeficient de frecare dintre pană şi butucul roţii.
30 9 Lungimea penelor paralele se calculează din : a) limitarea presiunii de contact: F 6 l1 [ mm], h p (4.15) unde: h înălţimea penei, în mm, din tabelul 4.4; a p a presiunea admisibilă de contact, pentru sarcini pulsatorii; p a = ( ) [N/mm ]. b) condiţia de rezistenţă la tensiunea de forfecare: Fj l [ mm] (4.16) bτ af unde: b lăţimea penei [mm] din tab.4.4; τ af = (0,...0,3) σ c tensiunea admisibilă la forfecare; σ c limita de curgere a materialului penei, din tabelul 4.1. Având lungimea penei calculată aceasta se va standardiza (STAS ), impunânduse condiţia: l st max( l 1 ; l ) (4.17) Valorile l st se adoptă din tabelul 4.5 (extras din STAS ). Tabelul 4.5 b [mm] h [mm] l st [mm] Lungimea penei (l st ) se va corela cu lăţimea butucului roţii dinţate, astfel încât: l st = ( 0,8...0,9) l butuc (4.18) unde l butuc = b ( b reprezintă lăţimea roţii dinţate conduse v. tab..7 din cap.) 4. 5 Verificarea la oboseală a arborilor Verificarea la oboseală se face în secţiunile cu o concentrare importantă a tensiunilor ( canale de pană, raze de racordare la salturi de diametre etc. ) şi constă în determinarea coeficientului de siguranţă efectiv c şi compararea lui cu un coeficient de siguranţă admis c a. c = c σ c σ c τ τ + c c a = 1,5...,5 (4.19)


; ε σ factor dimensional (fig.4.9); σ 1 c (4.")
31 în care: c σ coeficient de siguranţă la oboseală, pentru solicitarea la încovoiere; 30 c τ coeficient de siguranţă la oboseală, pentru solicitarea la torsiune. Se ţine seama că solicitarea de încovoiere se produce după un ciclu alternant simetric iar solicitarea de torsiune după un ciclu pulsator. Observaţie: In cadrul proiectului se va face verificarea la oboseală la arborele în punctul 6 (căruia îi corespunde diametrul d 6 ), concentrator de tensiune fiind canalul de pană executat cu freză deget Calculul coeficientului de siguranţă c σ Coeficientul de siguranţă c σ se calculează cu relaţia: 1 cσ = β σ σ v σ m + γ ε σ σ unde: β σ coeficient efectiv de concentrare a tensiunilor. Pentru canal de pană executat cu freză disc sau freză deget se alege din figura 4.7. γ coeficient de calitate al suprafeţei (fig.4.8); ε σ factor dimensional (fig.4.9); σ 1 c (4.0) Fig.4.7 Fig oţel carbon, fără concentratori de tensiune; oţel aliat fără concentrări şi oţel carbon cu concentrări moderate; 3 oţel aliat cu concentrări moderate; 4 oţel aliat cu concentrări foarte mari. Fig.4.9
32 31 σ v amplitudinea ciclului de solicitare la încovoiere în secţiunea respectivă, în N/mm : M i6 σ v= [ N / mm ], (4.1) W z în care: M i6 momentul încovoietor rezultant în secţiunea în care se face verificarea la oboseală,în N.mm (rel.4.9); W z modulul de rezistenţă axial al secţiunii verificate. In cazul verificării în zona unui canal de pană, W z se calculează cu relaţia: 3 π d 6 bt1 ( d6 t1) 3 W z = [ mm ], 3 d (4.) 6 în care: d 6 diametrul arborelui în zona canalului de pană, în mm; b; t 1 aleşi în 4.4, tabelul 4.4; σ 1 rezistenţa la oboseală a materialului arborelui, în N/mm, dată în tabelul 4.1; σ m tensiunea medie la solicitarea de încovoiere a secţiunii respective (σ m = 0 ciclul de solicitare fiind alternant simetric) Calculul coeficientului de siguranţă c τ Coeficientul de siguranţă c τ se calculează cu relaţia: 1 cτ = βτ τ τ m v + γ ε τ τ unde: β τ din figura 4.7 pentru canal de pană; γ din figura 4.8; ε τ din figura 4.10; τ 1 şi τ c, în N/mm, din tabelul 4.1 Amplitudinea ciclului la solicitarea pulsatorie: τ M t τ v = τ m = max = W (4.4) p în care: M t momentul de torsiune la arborele pentru care se face verificarea, în Fig.4.10 secţiunea considerată, în N.mm; W p momentul de rezistenţă polar în secţiunea în care se face verificarea. 3 π d 6 b t1 ( d6 t1) 3 W p = [ mm ] 16 d6 τ 1 c (4.3) (4.5) unde termenii au aceeaşi semnificaţie ca în relaţia (4.) Calculul coeficientului de siguranţă global Coeficientul de siguranţă global se va calcula cu relaţia (4.19). Dacă coeficientul global c < c a =(1,5...,5), este necesar să se majoreze diametrele în secţiunile verificate.
33 3 5. ALEGEREA RULMENŢILOR 5.1 Alegerea tipului de rulment In construcţia reductoarelor sunt foarte răspândite lagărele cu rulmenţi. Rulmenţii fiind tipizaţi, alegerea lor se face după standarde şi cataloagele fabricilor producătoare pe baza diametrului fusului arborelui pe care se montează, a sarcinilor pe lagăr şi a duratei de exploatare alese iniţial. Pentru a adopta un anume tip de rulment se va ţine seama de: mărimea şi sensul solicitării, turaţie, temperatura de lucru, condiţii de montaj şi exploatare etc. Recomandări: la încărcări mici se vor utiliza rulmenţi cu bile, la încărcări mari, rulmenţi cu role; la turaţii mari se utilizează rulmenţi cu bile; la turaţii mai mici, rulmenţi cu role; când în lagăre există atât încărcare radială cât şi axială, se vor utiliza rulmenţi radialaxiali; când în lagăre există numai încărcare radială sau pe lângă aceasta şi o încărcare axială mică, se vor utiliza rulmenţi radiali cu bile. 5. Stabilirea încărcării rulmenţilor Montajul cu rulmenţi, indiferent unde este utilizat, trebuie să realizeze fixarea radială şi axială în ambele sensuri a arborelui, fără a introduce forţe suplimentare în rulmenţi. Recomandabil este ca rulmenţii ce sprijină un arbore să fie aleşi identici. Din acest motiv se va lua în considerare rulmentul cel mai încărcat şi calculele se vor efectua pentru acesta. Alegerea rulmenţilor identici are în vedere posibilitatea inversării sensului de rotaţie al arborelui, în acest caz schimbânduse direcţia forţei F a. Rulmenţii pot fi solicitaţi numai de forţe radiale sau de forţe radiale şi axiale. Forţele radiale din rulmenţi se calculează cu relaţia: Arborele 1 Arborele F r (4) = R H (4) + R V (4) (5.1) F r 5 (7) = R H 5(7) + R V 657) (5.) unde R H şi R V reprezintă reacţiunile din lagăre în plan orizontal H, respectiv vertical V, calculate cu relaţiile 4., 4.3, respectiv 4.5 şi 4.6. Rulmenţii radialiaxiali cu bile sau cu role conice se pot monta pe arbore în două moduri şi anume: în X (fig. 5.1) sau în O (fig. 5.). Fig. 5.1 Schema din figura 5.1 la care fixarea axială se realizează la ambele capete se recomandă

34 33 pentru arborii scurţi, cu deformaţii termice neglijabile, deformaţiile de încovoiere în anumite limite fiind admise. La acest montaj distanţa dintre punctele de aplicaţie a reacţiunilor este mai mică decât distanţa dintre centrele corpurilor de rostogolire ale rulmenţilor. Fig. 5. Schema din figura 5. se recomandă pentru arborii scurţi şi rigizi, permiţând dilatarea arborelui. Montajul se caracterizează printro distanţă mai mare între punctele de aplicaţie a reacţiunilor decât distanţa dintre centrele corpurilor de rostogolire ale rulmenţilor. Acest montaj se recomandă în cazul unor restricţii de gabarit axial. La rulmenţii radialiaxiali pe lângă forţele radiale ia naştere şi o forţă axială interioară (chiar dacă asupra rulmentului nu se exercită o forţă axială exterioară). Această forţă axială se datorează apăsării oblice a corpurilor de rulare asupra inelelor şi ea tinde să îndepărteze corpurile de rulare de căile de rulare. Ea este echilibrată prin montarea pereche a rulmenţilor radialaxiali. Obs.: In cadrul acestui proiect se vor utiliza rulmenţi radialiaxiali cu bile pe un rând. In funcţie de diametrul fusului d şi de tipul de rulment ales, din tabelul 5. se va adopta o serie de rulmenţi (cu capacitatea dinamică C mijlocie) şi corespunzător ei se vor nota: capacitatea dinamică de încărcare C, capacitatea statică C o, D, B, α. RULMENŢI RADIALI AXIALI CU BILE PE UN RÂND Fig. 5.3 a) seriile 7 B şi 73 B, e =1,14 pentru F a / F r 1,14, X = 1 şi Y = 0; pentru F a / F r > 1,14, X = 0,35 şi Y = 0,57 b) seriile 70 C şi 7 C pentru F a / F r e, X = 1 şi Y = 0; pentru F a / F r > e, X = 0,4. Valorile pentru Y şi e se aleg din tabelul de mai jos: Tabelul 5.1 F a / C 0 0,05 0,04 0,07 0,13 0,5 0,5 e 0,4 0,4 0,44 0,48 0,53 0,56 Y 1,4 1,36 1,7 1,16 1,05 1
35 Dimensiuni [mm] 34 d D B α o Dinamică C Capacitatea de încărcare [N] Statică C 0 Tabelul 5. Seria C C B B C C B B C C B B C C B B C C B B C C B B C C B B C C B B C C B B C C B B C C B B C C B B
36 35 Tabelul 5.1continuare) Dimensiuni [mm] Capacitatea de încărcare [N] d D B α o Dinamică Statică C 0 Seria C C C B B C C B B C C B B C C B B Forţele axiale interne, provenite din descompunerea forţei normale la căile de rulare (fig.5.1) în direcţia axei rulmentului, se vor determina în calculul preliminar cu relaţia (5.3), adoptând α=15 o. F a i j = 1, 1 F tgα (5.3) rj unde: j = respectiv 4 la arborele 1 şi j=5 respectiv 7 la arborele ; α din tabelul 5. în funcţie de seria rulmentului ales. Se consideră un arbore pe care sunt montaţi doi rulmenţi radialiaxiali cu bile pe un rând (fig. 5.1) şi asupra căruia acţionează o forţa axială exterioară F a şi forţele radiale, calculate cu relaţiile (5.1) şi (5.), precum şi cele axiale interne, calculate cu relaţia (5.3). Se face sumă de forţe în plan orizontal şi se vede sensul rezultantei (I sau II). Montaj în X Arborele 1 sensul forţei F a de la stânga la dreapta (fig.5.1a). sensul rezultantei :I F ai + Fa > Fai 4 Fa 4 = Fai + Fa ; Fa = Fa i (5.4) sensul rezultantei :II F + F < F F = F F F = F (5.5) ai a a i4 a a i4 a ; a4 a i4 Arborele sensul forţei F a de la dreapta la stânga (fig.7.1b) sensul rezultantei: I F ai5 > Fai 7 + Fa Fa 7 = Fai 5 Fa ; Fa 5 = Fa i5 (5.6) sensul rezultantei : II F + F < F F = F + F F = F (5.7) ai7 a a i5 a5 a i7 a ; a7 a i7
37 36 unde F a este forţa axială exterioară ce încarcă arborele, calculată cu relaţia.3 ( F a = Fa1 = Fa ). 5.3 Calculul sarcinii dinamice echivalente Sarcina dinamică echivalentă ce solicită rulmentul se calculează cu relaţia: P j = X j V Frj +Y j Faj unde j =,4,5,7 (5.8) unde: V coeficient cinematic (V = 1 pentru inelul interior rotitor şi V = 1, pentru inelul exterior rotitor); X j coeficient radial al rulmentului; Y j coeficient axial al rulmentului. Pentru alegerea coeficienţilor X şi Y se va ţine cont de indicaţiile din tabelul 5.1. Sarcina dinamică se va calcula separat pentru arborele 1 (în punctele şi 4) şi arborele (în punctele 5 şi 7). 5.4 Capacitatea dinamică necesară Se calculează cu relaţia: p C j = Pj L unde j =,4,5,7 (5.9) Arborele 1 C P p (4) = (4) L (5.9) unde L este durabilitatea nominală a rulmentului, care se calculează cu relaţia: 60 n1 Lh L= [ milioane de rotatii] 6 (5.10) 10 n 1 turaţia arborelui de intrare, în rot /min (vezi rel. 1.3). L h durata de funcţionare, în ore, dată prin temă. p = 3 la rulmenţi cu bile.. Arborele C P p 5 (7) = 5(7) L (5.11) unde: 60 n Lh L= [ milioane de rotatii] 6 (5.1) 10 în care n este turaţia la arborele de ieşire, calculată cu rel Capacitatea dinamică C j cea mai mare, trebuie să fie inferioară capacităţii dinamice C corespunzătoare seriei de rulment aleasă (v. 5.): C j C In acest caz rulmenţii au fost bine aleşi. Dacă C j > C poate fi adoptată una din soluţiile: pentru acelaşi diametru de fus d, se alege o altă serie de rulment care să aibă o capacitate dinamică C mai mare decât a rulmentului ales iniţial; se poate mări diametrul fusului; se pot folosi câte doi rulmenţi pentru sprijinirea unui fus.
38 37 6. ALEGEREA CUPLAJULUI 6.1. Alegerea cuplajului Cuplarea reductorului cu alte ansamble se realizează cel mai adesea printrun cuplaj elastic cu bolţuri datorită avantajelor conferite de acesta. Acest cuplaj permite deplasări axiale până la 5 mm, radiale până la 1 mm şi unghiulare până la 1 o, amortizează şocurile şi vibraţiile torsionale, schimbă frecvenţa oscilaţiilor proprii ale arborilor evitând rezonanţa. Cuplajul elastic cu bolţuri este standardizat, în STAS 59879, executânduse în două variante (tip N şi tip B) şi de mărimi. Cel mai utilizat este cuplajul tip N (fig.6.1). Semicuplele se execută în următoarele variante: Fig. 6.1 a) P pregăurit: se utilizează în cazul în care mărimea de cuplaj aleasă este corespunzătoare din punct de vedere al momentului nominal necesar, dar capetele de arbore pe care se montează cuplajul au diametrele mai mici decât diametrele nominale d corespunzătoare mărimii respective de cuplaj; b) C cu alezaj cilindric, fără fixare frontală; c) C f cu alezaj cilindric, cu fixare frontală; d) K i cu alezaj conic, cu fixare frontală. Dacă momentul de torsiune pe care trebuie săl transmită cuplajul este M t, datorită şocurilor care apar la pornire, precum şi a unei funcţionări neuniforme, alegerea din standard a cuplajului (tabelul 8.) se face luânduse în considerare un moment nominal M n : M n= cs M t ; (6.1) unde cs este coeficientul de serviciu şi se alege din tabelul 6.1. Tabelul 6.1 Regimul de lucru al maşinii antrenate c s Funcţionare foarte uniformă, fără şocuri şi suprasarcini 1,55 Funcţionare uniformă, şocuri mici şi rare, suprasarcini uşoare şi de scurtă durată Funcţionare neuniformă, şocuri moderate şi relativ frecvente, suprasarcini relativ importante de scurtă durată Funcţionare neuniformă, şocuri mari şi frecvente, suprasarcini mari, inversări de sens frecvente şi rapide Funcţionare foarte neuniformă, şocuri foarte mari şi repetate, suprasarcini foarte mari, inversări de sens foarte frecvente Funcţionare extrem de neuniformă, şocuri extrem de mari şi foarte dese, suprasarcini extrem de mari, inversări de sens foarte frecvente şi rapide 1,65 1,85,15,65 4,50
39 38 Cuplajul de o anumită mărime se utilizează la cuplarea arborilor ale căror capete au diametre egale sau diametre diferite, în limitele alezajelor semicuplajelor din cadrul mărimii respective de cuplaj, conform tabelului 6.. Diametrul bolţului δ, nespecificat în standard, se adoptă în funcţie de capătul lui filetat cu relaţia: δ = 1,5 d4 Tabelul 6. Mărime M n [Nm] 1 0 Diametrul nominal d semicupla C; C f ; K i 16; 18; 19; 0; ; 4 Semicupla P Dimensiuni constructive [mm] P;C l l d 3 4 D D 1 D s M ; 8; M ;35;38;40 4;45; 48; M n buc M , M ;63; 65;70 71;75; 80; M M Verificarea cuplajului Forţa cu care se încarcă un bolţ se calculează cu relaţia: M n F1 = ; (6.) D1 n unde: n numărul de bolţuri pe cuplaj; D 1 diametrul pe care sunt amplasate bolţurile (fig.6.1). Bolţurile se verifică la: presiune de contact, presiune ce apare între manşoanele de cauciuc şi bolţ: 1 4 p = F pas = ( 3...5) [ MPa]. (6.3) δ ( l 3 l ) π la încovoiere, în secţiunea de încastrare în semicupla 1: σ l 3 3F1 + s i = σ 3 ai π δ l = ( ) [ MPa]. (6.4) Dacă cu dimensiunea adoptată pentru diametrul bolţului δ nu se verifică vreuna din relaţiile de mai sus, aceasta se poate majora până la: δ = d 4.
40 39 Anexa 1
41 40 Anexa

42 41 Anexa 3
Capitolul 14. Asamblari prin pene
 Capitolul 14 Asamblari prin pene T.14.1. Momentul de torsiune este transmis de la arbore la butuc prin intermediul unei pene paralele (figura 14.1). De care din cotele indicate depinde tensiunea superficiala
Capitolul 14 Asamblari prin pene T.14.1. Momentul de torsiune este transmis de la arbore la butuc prin intermediul unei pene paralele (figura 14.1). De care din cotele indicate depinde tensiunea superficiala
Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25
 Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25 LAGĂRELE CU ALUNECARE!" 25.1.Caracteristici.Părţi componente.materiale.!" 25.2.Funcţionarea lagărelor cu alunecare.! 25.1.Caracteristici.Părţi componente.materiale.
Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25 LAGĂRELE CU ALUNECARE!" 25.1.Caracteristici.Părţi componente.materiale.!" 25.2.Funcţionarea lagărelor cu alunecare.! 25.1.Caracteristici.Părţi componente.materiale.
Capitolul 30. Transmisii prin lant
 Capitolul 30 Transmisii prin lant T.30.1. Sa se precizeze domeniile de utilizare a transmisiilor prin lant. T.30.2. Sa se precizeze avantajele si dezavantajele transmisiilor prin lant. T.30.3. Realizati
Capitolul 30 Transmisii prin lant T.30.1. Sa se precizeze domeniile de utilizare a transmisiilor prin lant. T.30.2. Sa se precizeze avantajele si dezavantajele transmisiilor prin lant. T.30.3. Realizati
Capitolul 15. Asamblari prin caneluri, arbori profilati
 Capitolul 15 Asamblari prin caneluri, arbori profilati T.15.1. Care dintre asamblarile arbore-butuc prin caneluri are portanta mai mare? a) cele din seria usoara; b) cele din seria mijlocie; c) cele din
Capitolul 15 Asamblari prin caneluri, arbori profilati T.15.1. Care dintre asamblarile arbore-butuc prin caneluri are portanta mai mare? a) cele din seria usoara; b) cele din seria mijlocie; c) cele din
RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii transversale, scrisă faţă de una dintre axele de inerţie principale:,
 REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
Transmisii mecanice cu reductoare într-o treaptă. (Indrumar de proiectare)
") MIHAI MUŞAT GINA STOICA Transmisii mecanice cu reductoare într-o treaptă (Indrumar de proiectare) 4 Conf. dr. ing. MIHAI MUŞAT Conf. dr. ing.gina STOICA Transmisii mecanice cu reductoare într-o treaptă
MIHAI MUŞAT GINA STOICA Transmisii mecanice cu reductoare într-o treaptă (Indrumar de proiectare) 4 Conf. dr. ing. MIHAI MUŞAT Conf. dr. ing.gina STOICA Transmisii mecanice cu reductoare într-o treaptă
5.5. REZOLVAREA CIRCUITELOR CU TRANZISTOARE BIPOLARE
 5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
Tabele ORGANE DE MAȘINI 1 Îndrumar de proiectare 2014
 Tabele ORGANE DE MAȘINI 1 Îndruar de roiectare 01 Caracteristicile ecanice entru ateriale etalice utilizate în construcţia organelor de aşini sunt rezentate în tabelele 1.1... 1.. Marca oţelului Tabelul
Tabele ORGANE DE MAȘINI 1 Îndruar de roiectare 01 Caracteristicile ecanice entru ateriale etalice utilizate în construcţia organelor de aşini sunt rezentate în tabelele 1.1... 1.. Marca oţelului Tabelul
Fig Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36].
![Fig Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36].](/thumbs/72/67648751.jpg "Fig Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36].") Componente şi circuite pasive Fig.3.85. Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36]. Fig.3.86. Rezistenţa serie echivalentă pierderilor în funcţie
Componente şi circuite pasive Fig.3.85. Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36]. Fig.3.86. Rezistenţa serie echivalentă pierderilor în funcţie
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM 1 electronica.geniu.ro
 Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
V O. = v I v stabilizator
 Stabilizatoare de tensiune continuă Un stabilizator de tensiune este un circuit electronic care păstrează (aproape) constantă tensiunea de ieșire la variaţia între anumite limite a tensiunii de intrare,
Stabilizatoare de tensiune continuă Un stabilizator de tensiune este un circuit electronic care păstrează (aproape) constantă tensiunea de ieșire la variaţia între anumite limite a tensiunii de intrare,
PROIECTAREA TRANSMISIEI PRIN CURELE TRAPEZOIDALE
 - 1-2. PROIECTAREA TRANSMISIEI PRIN CURELE TRAPEZOIDALE Acest tip de transmisie se realizează între arbori paraleli, are în construcţie cel puţin două roţi pe care se înfăşoară elementul intermediar elastic
- 1-2. PROIECTAREA TRANSMISIEI PRIN CURELE TRAPEZOIDALE Acest tip de transmisie se realizează între arbori paraleli, are în construcţie cel puţin două roţi pe care se înfăşoară elementul intermediar elastic
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate.
 Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Aplicaţii ale principiului I al termodinamicii la gazul ideal
 Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
(a) se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.
 se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.") Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
MARCAREA REZISTOARELOR
 1.2. MARCAREA REZISTOARELOR 1.2.1 MARCARE DIRECTĂ PRIN COD ALFANUMERIC. Acest cod este format din una sau mai multe cifre şi o literă. Litera poate fi plasată după grupul de cifre (situaţie în care valoarea
1.2. MARCAREA REZISTOARELOR 1.2.1 MARCARE DIRECTĂ PRIN COD ALFANUMERIC. Acest cod este format din una sau mai multe cifre şi o literă. Litera poate fi plasată după grupul de cifre (situaţie în care valoarea
4. ARBORI ŞI OSII [1, 2, 4, 6, 10]
![4. ARBORI ŞI OSII [1, 2, 4, 6, 10]](/thumbs/78/77149340.jpg "4. ARBORI ŞI OSII [1, 2, 4, 6, 10]") 4. ARBORI ŞI OSII [1, 2, 4, 6, 10] 4.1. CARACTERIZARE, DOMENII DE FOLOSIRE, CLASIFICARE Arborii sunt organe de maşini cu mişcare de rotaţie, destinate să transmită un moment de torsiune în lungul axei
4. ARBORI ŞI OSII [1, 2, 4, 6, 10] 4.1. CARACTERIZARE, DOMENII DE FOLOSIRE, CLASIFICARE Arborii sunt organe de maşini cu mişcare de rotaţie, destinate să transmită un moment de torsiune în lungul axei
Curs 4 Serii de numere reale
 Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...4
 SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
Metode iterative pentru probleme neliniare - contractii
 Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
5. FUNCŢII IMPLICITE. EXTREME CONDIŢIONATE.
 5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
Subiecte Clasa a VIII-a
 Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Planul determinat de normală şi un punct Ecuaţia generală Plane paralele Unghi diedru Planul determinat de 3 puncte necoliniare
 1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
a. 11 % b. 12 % c. 13 % d. 14 %
 1. Un motor termic funcţionează după ciclul termodinamic reprezentat în sistemul de coordonate V-T în figura alăturată. Motorul termic utilizează ca substanţă de lucru un mol de gaz ideal având exponentul
1. Un motor termic funcţionează după ciclul termodinamic reprezentat în sistemul de coordonate V-T în figura alăturată. Motorul termic utilizează ca substanţă de lucru un mol de gaz ideal având exponentul
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE
 DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
R R, f ( x) = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.
 = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.") 5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
 10. STABILIZATOAE DE TENSIUNE 10.1 STABILIZATOAE DE TENSIUNE CU TANZISTOAE BIPOLAE Stabilizatorul de tensiune cu tranzistor compară în permanenţă valoare tensiunii de ieşire (stabilizate) cu tensiunea
10. STABILIZATOAE DE TENSIUNE 10.1 STABILIZATOAE DE TENSIUNE CU TANZISTOAE BIPOLAE Stabilizatorul de tensiune cu tranzistor compară în permanenţă valoare tensiunii de ieşire (stabilizate) cu tensiunea
1. ESTIMAREA UNUI SCHIMBĂTOR DE CĂLDURĂ CU PLĂCI
 1. ESTIMAREA UNUI SCHIMBĂTOR DE CĂLDURĂ CU PLĂCI a. Fluidul cald b. Fluidul rece c. Debitul masic total de fluid cald m 1 kg/s d. Temperatura de intrare a fluidului cald t 1i C e. Temperatura de ieşire
1. ESTIMAREA UNUI SCHIMBĂTOR DE CĂLDURĂ CU PLĂCI a. Fluidul cald b. Fluidul rece c. Debitul masic total de fluid cald m 1 kg/s d. Temperatura de intrare a fluidului cald t 1i C e. Temperatura de ieşire
1.7. AMPLIFICATOARE DE PUTERE ÎN CLASA A ŞI AB
 1.7. AMLFCATOARE DE UTERE ÎN CLASA A Ş AB 1.7.1 Amplificatoare în clasa A La amplificatoarele din clasa A, forma de undă a tensiunii de ieşire este aceeaşi ca a tensiunii de intrare, deci întreg semnalul
1.7. AMLFCATOARE DE UTERE ÎN CLASA A Ş AB 1.7.1 Amplificatoare în clasa A La amplificatoarele din clasa A, forma de undă a tensiunii de ieşire este aceeaşi ca a tensiunii de intrare, deci întreg semnalul
Componente şi Circuite Electronice Pasive. Laborator 3. Divizorul de tensiune. Divizorul de curent
 Laborator 3 Divizorul de tensiune. Divizorul de curent Obiective: o Conexiuni serie şi paralel, o Legea lui Ohm, o Divizorul de tensiune, o Divizorul de curent, o Implementarea experimentală a divizorului
Laborator 3 Divizorul de tensiune. Divizorul de curent Obiective: o Conexiuni serie şi paralel, o Legea lui Ohm, o Divizorul de tensiune, o Divizorul de curent, o Implementarea experimentală a divizorului
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor X) functia f 1
 functia f 1") Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
2. STATICA FLUIDELOR. 2.A. Presa hidraulică. Legea lui Arhimede
 2. STATICA FLUIDELOR 2.A. Presa hidraulică. Legea lui Arhimede Aplicația 2.1 Să se determine ce masă M poate fi ridicată cu o presă hidraulică având raportul razelor pistoanelor r 1 /r 2 = 1/20, ştiind
2. STATICA FLUIDELOR 2.A. Presa hidraulică. Legea lui Arhimede Aplicația 2.1 Să se determine ce masă M poate fi ridicată cu o presă hidraulică având raportul razelor pistoanelor r 1 /r 2 = 1/20, ştiind
Problema a II - a (10 puncte) Diferite circuite electrice
 Diferite circuite electrice") Olimpiada de Fizică - Etapa pe judeţ 15 ianuarie 211 XI Problema a II - a (1 puncte) Diferite circuite electrice A. Un elev utilizează o sursă de tensiune (1), o cutie cu rezistenţe (2), un întrerupător
Olimpiada de Fizică - Etapa pe judeţ 15 ianuarie 211 XI Problema a II - a (1 puncte) Diferite circuite electrice A. Un elev utilizează o sursă de tensiune (1), o cutie cu rezistenţe (2), un întrerupător
III. Serii absolut convergente. Serii semiconvergente. ii) semiconvergentă dacă este convergentă iar seria modulelor divergentă.
 semiconvergentă dacă este convergentă iar seria modulelor divergentă.") III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile
 Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
2CP Electropompe centrifugale cu turbina dubla
 2CP Electropompe centrifugale cu turbina dubla DOMENIUL DE UTILIZARE Capacitate de până la 450 l/min (27 m³/h) Inaltimea de pompare până la 112 m LIMITELE DE UTILIZARE Inaltimea de aspiratie manometrică
2CP Electropompe centrifugale cu turbina dubla DOMENIUL DE UTILIZARE Capacitate de până la 450 l/min (27 m³/h) Inaltimea de pompare până la 112 m LIMITELE DE UTILIZARE Inaltimea de aspiratie manometrică
S.C. Rulmenti S.A. Barlad Romania Strada Republicii Nr
 DETERMINAREA DIMENSIUNII RULMENTULUI Dimensiunea unui rulment se determina in functie de sarcina din lagarul in care se monteaza, de durabilitatea in functionare si de siguranta impusa in exploatare. Sarcina
DETERMINAREA DIMENSIUNII RULMENTULUI Dimensiunea unui rulment se determina in functie de sarcina din lagarul in care se monteaza, de durabilitatea in functionare si de siguranta impusa in exploatare. Sarcina
TERMOCUPLURI TEHNICE
 TERMOCUPLURI TEHNICE Termocuplurile (în comandă se poate folosi prescurtarea TC") sunt traductoare de temperatură care transformă variaţia de temperatură a mediului măsurat, în variaţie de tensiune termoelectromotoare
TERMOCUPLURI TEHNICE Termocuplurile (în comandă se poate folosi prescurtarea TC") sunt traductoare de temperatură care transformă variaţia de temperatură a mediului măsurat, în variaţie de tensiune termoelectromotoare
a. Caracteristicile mecanice a motorului de c.c. cu excitaţie independentă (sau derivaţie)
") Caracteristica mecanică defineşte dependenţa n=f(m) în condiţiile I e =ct., U=ct. Pentru determinarea ei vom defini, mai întâi caracteristicile: 1. de sarcină, numită şi caracteristica externă a motorului
Caracteristica mecanică defineşte dependenţa n=f(m) în condiţiile I e =ct., U=ct. Pentru determinarea ei vom defini, mai întâi caracteristicile: 1. de sarcină, numită şi caracteristica externă a motorului
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor
 Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Criterii de clasificare Dupa forma axei geometrice
 3. ARBORI SI OSII Arborii sunt organe de masini simple aflate în miscare de rotatie, solidarizate cu piesele montate pe acestea (roti, volanti) si care se sprijina prin intermediul lagarelor pe structuri
3. ARBORI SI OSII Arborii sunt organe de masini simple aflate în miscare de rotatie, solidarizate cu piesele montate pe acestea (roti, volanti) si care se sprijina prin intermediul lagarelor pe structuri
Stabilizator cu diodă Zener
 LABAT 3 Stabilizator cu diodă Zener Se studiază stabilizatorul parametric cu diodă Zener si apoi cel cu diodă Zener şi tranzistor. Se determină întâi tensiunea Zener a diodei şi se calculează apoi un stabilizator
LABAT 3 Stabilizator cu diodă Zener Se studiază stabilizatorul parametric cu diodă Zener si apoi cel cu diodă Zener şi tranzistor. Se determină întâi tensiunea Zener a diodei şi se calculează apoi un stabilizator
SERII NUMERICE. Definiţia 3.1. Fie (a n ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0
 n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0") SERII NUMERICE Definiţia 3.1. Fie ( ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0 şirul definit prin: s n0 = 0, s n0 +1 = 0 + 0 +1, s n0 +2 = 0 + 0 +1 + 0 +2,.......................................
SERII NUMERICE Definiţia 3.1. Fie ( ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0 şirul definit prin: s n0 = 0, s n0 +1 = 0 + 0 +1, s n0 +2 = 0 + 0 +1 + 0 +2,.......................................
Exemple de probleme rezolvate pentru cursurile DEEA Tranzistoare bipolare cu joncţiuni
 Problema 1. Se dă circuitul de mai jos pentru care se cunosc: VCC10[V], 470[kΩ], RC2,7[kΩ]. Tranzistorul bipolar cu joncţiuni (TBJ) este de tipul BC170 şi are parametrii β100 şi VBE0,6[V]. 1. să se determine
Problema 1. Se dă circuitul de mai jos pentru care se cunosc: VCC10[V], 470[kΩ], RC2,7[kΩ]. Tranzistorul bipolar cu joncţiuni (TBJ) este de tipul BC170 şi are parametrii β100 şi VBE0,6[V]. 1. să se determine
1. ANGRENAJE [1; 2; 5; 9; 10; 11; 12; 15; 16; 18; 19; 20; 25; 26; 27; 32; 33; 34; 35; 36; 37; 38; 39; 40; 41; 42; 43; 44; 45; 46; 48]
![1. ANGRENAJE [1; 2; 5; 9; 10; 11; 12; 15; 16; 18; 19; 20; 25; 26; 27; 32; 33; 34; 35; 36; 37; 38; 39; 40; 41; 42; 43; 44; 45; 46; 48]](/thumbs/72/67432351.jpg "1. ANGRENAJE [1; 2; 5; 9; 10; 11; 12; 15; 16; 18; 19; 20; 25; 26; 27; 32; 33; 34; 35; 36; 37; 38; 39; 40; 41; 42; 43; 44; 45; 46; 48]") . ANGRENAJE [; ; 5; 9; 0; ; ; 5; 6; 8; 9; 0; 5; 6; 7; 3; 33; 34; 35; 36; 37; 38; 39; 40; 4; 4; 43; 44; 45; 46; 48].. CARACTERIZARE. CLASIFICARE. DOMENII DE FOLOSIRE Angrenajul este mecanismul format din
. ANGRENAJE [; ; 5; 9; 0; ; ; 5; 6; 8; 9; 0; 5; 6; 7; 3; 33; 34; 35; 36; 37; 38; 39; 40; 4; 4; 43; 44; 45; 46; 48].. CARACTERIZARE. CLASIFICARE. DOMENII DE FOLOSIRE Angrenajul este mecanismul format din
2. Sisteme de forţe concurente...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
Metode de interpolare bazate pe diferenţe divizate
 Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
Subiecte Clasa a VII-a
 lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
Curs 1 Şiruri de numere reale
 Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
Analiza funcționării și proiectarea unui stabilizator de tensiune continuă realizat cu o diodă Zener
 Analiza funcționării și proiectarea unui stabilizator de tensiune continuă realizat cu o diodă Zener 1 Caracteristica statică a unei diode Zener În cadranul, dioda Zener (DZ) se comportă ca o diodă redresoare
Analiza funcționării și proiectarea unui stabilizator de tensiune continuă realizat cu o diodă Zener 1 Caracteristica statică a unei diode Zener În cadranul, dioda Zener (DZ) se comportă ca o diodă redresoare
CALCUL FUNDAȚIE IZOLATĂ DE TIP TALPĂ DE BETON ARMAT. Fundație de tip 2 elastică
 CALCUL FUNDAȚIE IZOLATĂ DE TIP TALPĂ DE BETON ARMAT Fundație de tip 2 elastică FUNDAȚIE DE TIP 2 TALPĂ DE BETON ARMAT Etapele proiectării fund ației și a verificării terenului pe care se fundează 1. D
CALCUL FUNDAȚIE IZOLATĂ DE TIP TALPĂ DE BETON ARMAT Fundație de tip 2 elastică FUNDAȚIE DE TIP 2 TALPĂ DE BETON ARMAT Etapele proiectării fund ației și a verificării terenului pe care se fundează 1. D
 4. CIRCUITE LOGICE ELEMENTRE 4.. CIRCUITE LOGICE CU COMPONENTE DISCRETE 4.. PORŢI LOGICE ELEMENTRE CU COMPONENTE PSIVE Componente electronice pasive sunt componente care nu au capacitatea de a amplifica
4. CIRCUITE LOGICE ELEMENTRE 4.. CIRCUITE LOGICE CU COMPONENTE DISCRETE 4.. PORŢI LOGICE ELEMENTRE CU COMPONENTE PSIVE Componente electronice pasive sunt componente care nu au capacitatea de a amplifica
SIGURANŢE CILINDRICE
 SIGURANŢE CILINDRICE SIGURANŢE CILINDRICE CH Curent nominal Caracteristici de declanşare 1-100A gg, am Aplicaţie: Siguranţele cilindrice reprezintă cea mai sigură protecţie a circuitelor electrice de control
SIGURANŢE CILINDRICE SIGURANŢE CILINDRICE CH Curent nominal Caracteristici de declanşare 1-100A gg, am Aplicaţie: Siguranţele cilindrice reprezintă cea mai sigură protecţie a circuitelor electrice de control
Asupra unei inegalităţi date la barajul OBMJ 2006
 Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
Valori limită privind SO2, NOx şi emisiile de praf rezultate din operarea LPC în funcţie de diferite tipuri de combustibili
 Anexa 2.6.2-1 SO2, NOx şi de praf rezultate din operarea LPC în funcţie de diferite tipuri de combustibili de bioxid de sulf combustibil solid (mg/nm 3 ), conţinut de O 2 de 6% în gazele de ardere, pentru
Anexa 2.6.2-1 SO2, NOx şi de praf rezultate din operarea LPC în funcţie de diferite tipuri de combustibili de bioxid de sulf combustibil solid (mg/nm 3 ), conţinut de O 2 de 6% în gazele de ardere, pentru
1. PROPRIETĂȚILE FLUIDELOR
 1. PROPRIETĂȚILE FLUIDELOR a) Să se exprime densitatea apei ρ = 1000 kg/m 3 în g/cm 3. g/cm 3. b) tiind că densitatea glicerinei la 20 C este 1258 kg/m 3 să se exprime în c) Să se exprime în kg/m 3 densitatea
1. PROPRIETĂȚILE FLUIDELOR a) Să se exprime densitatea apei ρ = 1000 kg/m 3 în g/cm 3. g/cm 3. b) tiind că densitatea glicerinei la 20 C este 1258 kg/m 3 să se exprime în c) Să se exprime în kg/m 3 densitatea
Integrala nedefinită (primitive)
") nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
Seminariile Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reziduurilor
 Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Componente şi Circuite Electronice Pasive. Laborator 4. Măsurarea parametrilor mărimilor electrice
 Laborator 4 Măsurarea parametrilor mărimilor electrice Obiective: o Semnalul sinusoidal, o Semnalul dreptunghiular, o Semnalul triunghiular, o Generarea diferitelor semnale folosind placa multifuncţională
Laborator 4 Măsurarea parametrilor mărimilor electrice Obiective: o Semnalul sinusoidal, o Semnalul dreptunghiular, o Semnalul triunghiular, o Generarea diferitelor semnale folosind placa multifuncţională
COLEGIUL NATIONAL CONSTANTIN CARABELLA TARGOVISTE. CONCURSUL JUDETEAN DE MATEMATICA CEZAR IVANESCU Editia a VI-a 26 februarie 2005.
 SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
ORGANE DE MAŞINI ŞI MECANISME
 Viorica CONSTANTIN Vasile PALADE ORGANE DE MAŞINI ŞI MECANISME VOLUMUL II TRANSMISII MECANICE EDITURA FUNDAŢIEI UNIVERSITARE Dunărea de Jos GALAŢI Viorica CONSTANTIN Vasile PALADE ORGANE DE MAŞINI ŞI MECANISME
Viorica CONSTANTIN Vasile PALADE ORGANE DE MAŞINI ŞI MECANISME VOLUMUL II TRANSMISII MECANICE EDITURA FUNDAŢIEI UNIVERSITARE Dunărea de Jos GALAŢI Viorica CONSTANTIN Vasile PALADE ORGANE DE MAŞINI ŞI MECANISME
Definiţia generală Cazul 1. Elipsa şi hiperbola Cercul Cazul 2. Parabola Reprezentari parametrice ale conicelor Tangente la conice
 1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
SEMINAR 14. Funcţii de mai multe variabile (continuare) ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0
 ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0") Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Curs 14 Funcţii implicite. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi"
 Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Curs 2 DIODE. CIRCUITE DR
 Curs 2 OE. CRCUTE R E CUPRN tructură. imbol Relația curent-tensiune Regimuri de funcționare Punct static de funcționare Parametrii diodei Modelul cu cădere de tensiune constantă Analiza circuitelor cu
Curs 2 OE. CRCUTE R E CUPRN tructură. imbol Relația curent-tensiune Regimuri de funcționare Punct static de funcționare Parametrii diodei Modelul cu cădere de tensiune constantă Analiza circuitelor cu
Erori si incertitudini de măsurare. Modele matematice Instrument: proiectare, fabricaţie, Interacţiune măsurand instrument:
 Erori i incertitudini de măurare Sure: Modele matematice Intrument: proiectare, fabricaţie, Interacţiune măurandintrument: (tranfer informaţie tranfer energie) Influente externe: temperatura, preiune,
Erori i incertitudini de măurare Sure: Modele matematice Intrument: proiectare, fabricaţie, Interacţiune măurandintrument: (tranfer informaţie tranfer energie) Influente externe: temperatura, preiune,
* * * 57, SE 6TM, SE 7TM, SE 8TM, SE 9TM, SC , SC , SC 15007, SC 15014, SC 15015, SC , SC
 Console pentru LEA MT Cerinte Constructive Consolele sunt executate in conformitate cu proiectele S.C. Electrica S.A. * orice modificare se va face cu acordul S.C. Electrica S.A. * consolele au fost astfel
Console pentru LEA MT Cerinte Constructive Consolele sunt executate in conformitate cu proiectele S.C. Electrica S.A. * orice modificare se va face cu acordul S.C. Electrica S.A. * consolele au fost astfel
Laborator 1: INTRODUCERE ÎN ALGORITMI. Întocmit de: Claudia Pârloagă. Îndrumător: Asist. Drd. Gabriel Danciu
 INTRODUCERE Laborator 1: ÎN ALGORITMI Întocmit de: Claudia Pârloagă Îndrumător: Asist. Drd. Gabriel Danciu I. NOŢIUNI TEORETICE A. Sortarea prin selecţie Date de intrare: un şir A, de date Date de ieşire:
INTRODUCERE Laborator 1: ÎN ALGORITMI Întocmit de: Claudia Pârloagă Îndrumător: Asist. Drd. Gabriel Danciu I. NOŢIUNI TEORETICE A. Sortarea prin selecţie Date de intrare: un şir A, de date Date de ieşire:
a n (ζ z 0 ) n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea
 n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea") Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
2. NOŢIUNI SUMARE ASUPRA DEPLASĂRII AUTOMOBILULUI
 2. NOŢIUNI SUMARE ASUPRA DEPLASĂRII AUTOMOBILULUI 2.1. Consideraţii generale Utilizarea automobilului constă în transportul pe drumuri al pasagerilor, încărcăturilor sau al utilajului special montat pe
2. NOŢIUNI SUMARE ASUPRA DEPLASĂRII AUTOMOBILULUI 2.1. Consideraţii generale Utilizarea automobilului constă în transportul pe drumuri al pasagerilor, încărcăturilor sau al utilajului special montat pe
Esalonul Redus pe Linii (ERL). Subspatii.
. Subspatii.") Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
Profesor Blaga Mirela-Gabriela DREAPTA
 DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
13. Grinzi cu zăbrele Metoda izolării nodurilor...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...
 SEMINAR GRINZI CU ZĂBRELE METODA IZOLĂRII NODURILOR CUPRINS. Grinzi cu zăbrele Metoda izolării nodurilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele
SEMINAR GRINZI CU ZĂBRELE METODA IZOLĂRII NODURILOR CUPRINS. Grinzi cu zăbrele Metoda izolării nodurilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele
Conice. Lect. dr. Constantin-Cosmin Todea. U.T. Cluj-Napoca
 Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
MECANIC CU ŞURUBURI DE MIŞCARE
 1. TEMA DE PROIECTARE Să se proiecteze un SISTEM MECANIC CU ŞURUBURI DE MIŞCARE pentru ridicarea unei sarcini axiale F, cu acţionare manuală cu clichet vertical, ce realizează o cursă H, cu raportul K
1. TEMA DE PROIECTARE Să se proiecteze un SISTEM MECANIC CU ŞURUBURI DE MIŞCARE pentru ridicarea unei sarcini axiale F, cu acţionare manuală cu clichet vertical, ce realizează o cursă H, cu raportul K
Dioda Zener şi stabilizatoare de tensiune continuă
 Laborator 2 Dioda Zener şi stabilizatoare de tensiune continuă Se vor studia dioda Zener şi stabilizatoarele de tensiune continua cu diodă Zener şi cu diodă Zener si tranzistor serie. Pentru diodă se va
Laborator 2 Dioda Zener şi stabilizatoare de tensiune continuă Se vor studia dioda Zener şi stabilizatoarele de tensiune continua cu diodă Zener şi cu diodă Zener si tranzistor serie. Pentru diodă se va
15. Se dă bara O 1 AB, îndoită în unghi drept care se roteşte faţă de O 1 cu viteza unghiulară ω=const, axa se rotaţie fiind perpendiculară pe planul
 INEMTI 1. Se consideră mecanismul plan din figură, compus din manivelele 1 şi 2, respectiv biela legate intre ele prin articulaţiile cilindrice şi. Manivela 1 se roteşte cu viteza unghiulară constantă
INEMTI 1. Se consideră mecanismul plan din figură, compus din manivelele 1 şi 2, respectiv biela legate intre ele prin articulaţiile cilindrice şi. Manivela 1 se roteşte cu viteza unghiulară constantă
Ecuaţia generală Probleme de tangenţă Sfera prin 4 puncte necoplanare. Elipsoidul Hiperboloizi Paraboloizi Conul Cilindrul. 1 Sfera.
 pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
Sisteme diferenţiale liniare de ordinul 1
 1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
BARDAJE - Panouri sandwich
 Panourile sunt montate vertical: De jos în sus, îmbinarea este de tip nut-feder. Sensul de montaj al panourilor trebuie să fie contrar sensului dominant al vântului. Montaj panouri GAMA ALLIANCE Montaj
Panourile sunt montate vertical: De jos în sus, îmbinarea este de tip nut-feder. Sensul de montaj al panourilor trebuie să fie contrar sensului dominant al vântului. Montaj panouri GAMA ALLIANCE Montaj
5.4. MULTIPLEXOARE A 0 A 1 A 2
 5.4. MULTIPLEXOARE Multiplexoarele (MUX) sunt circuite logice combinaţionale cu m intrări şi o singură ieşire, care permit transferul datelor de la una din intrări spre ieşirea unică. Selecţia intrării
5.4. MULTIPLEXOARE Multiplexoarele (MUX) sunt circuite logice combinaţionale cu m intrări şi o singură ieşire, care permit transferul datelor de la una din intrări spre ieşirea unică. Selecţia intrării
Laborator 11. Mulţimi Julia. Temă
 Laborator 11 Mulţimi Julia. Temă 1. Clasa JuliaGreen. Să considerăm clasa JuliaGreen dată de exemplu la curs pentru metoda locului final şi să schimbăm numărul de iteraţii nriter = 100 în nriter = 101.
Laborator 11 Mulţimi Julia. Temă 1. Clasa JuliaGreen. Să considerăm clasa JuliaGreen dată de exemplu la curs pentru metoda locului final şi să schimbăm numărul de iteraţii nriter = 100 în nriter = 101.
14. Grinzi cu zăbrele Metoda secţiunilor...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR GRINZI CU ZĂBRELE METODA SECŢIUNILOR CUPRINS. Grinzi cu zăbrele Metoda secţiunilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele Metoda secţiunilor
SEMINAR GRINZI CU ZĂBRELE METODA SECŢIUNILOR CUPRINS. Grinzi cu zăbrele Metoda secţiunilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele Metoda secţiunilor
2.1 Sfera. (EGS) ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2
 ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2") .1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
.1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
IV. CUADRIPOLI SI FILTRE ELECTRICE CAP. 13. CUADRIPOLI ELECTRICI
 V. POL S FLTE ELETE P. 3. POL ELET reviar a) Forma fundamentala a ecuatiilor cuadripolilor si parametrii fundamentali: Prima forma fundamentala: doua forma fundamentala: b) Parametrii fundamentali au urmatoarele
V. POL S FLTE ELETE P. 3. POL ELET reviar a) Forma fundamentala a ecuatiilor cuadripolilor si parametrii fundamentali: Prima forma fundamentala: doua forma fundamentala: b) Parametrii fundamentali au urmatoarele
Ovidiu Gabriel Avădănei, Florin Mihai Tufescu,
 vidiu Gabriel Avădănei, Florin Mihai Tufescu, Capitolul 6 Amplificatoare operaţionale 58. Să se calculeze coeficientul de amplificare în tensiune pentru amplficatorul inversor din fig.58, pentru care se
vidiu Gabriel Avădănei, Florin Mihai Tufescu, Capitolul 6 Amplificatoare operaţionale 58. Să se calculeze coeficientul de amplificare în tensiune pentru amplficatorul inversor din fig.58, pentru care se
MOTOARE DE CURENT CONTINUU
 MOTOARE DE CURENT CONTINUU În ultimul timp motoarele de curent continuu au revenit în actualitate, deşi motorul asincron este folosit în circa 95% din sistemele de acţionare electromecanică. Această revenire
MOTOARE DE CURENT CONTINUU În ultimul timp motoarele de curent continuu au revenit în actualitate, deşi motorul asincron este folosit în circa 95% din sistemele de acţionare electromecanică. Această revenire
VII.2. PROBLEME REZOLVATE
 Teoria Circuitelor Electrice Aplicaţii V PROBEME REOVATE R7 În circuitul din fiura 7R se cunosc: R e t 0 sint [V] C C t 0 sint [A] Se cer: a rezolvarea circuitului cu metoda teoremelor Kirchhoff; rezolvarea
Teoria Circuitelor Electrice Aplicaţii V PROBEME REOVATE R7 În circuitul din fiura 7R se cunosc: R e t 0 sint [V] C C t 0 sint [A] Se cer: a rezolvarea circuitului cu metoda teoremelor Kirchhoff; rezolvarea
LUCRAREA DE LABORATOR Nr. 2 MÃSURAREA DIAMETRULUI MEDIU AL FILETULUI PRIN METODA SÂRMELOR CALIBRATE
 LUCRAREA DE LABORATOR Nr. 2 MÃSURAREA DIAMETRULUI MEDIU AL FILETULUI PRIN METODA SÂRMELOR CALIBRATE 1. Scopul lucrãrii Lucrarea urmãreşte cunoaşterea unei metode de mãsurare a diametrului mediu al filetelor
LUCRAREA DE LABORATOR Nr. 2 MÃSURAREA DIAMETRULUI MEDIU AL FILETULUI PRIN METODA SÂRMELOR CALIBRATE 1. Scopul lucrãrii Lucrarea urmãreşte cunoaşterea unei metode de mãsurare a diametrului mediu al filetelor
ENUNŢURI ŞI REZOLVĂRI 2013
 ENUNŢURI ŞI REZOLVĂRI 8. Un conductor de cupru ( ρ =,7 Ω m) are lungimea de m şi aria secţiunii transversale de mm. Rezistenţa conductorului este: a), Ω; b), Ω; c), 5Ω; d) 5, Ω; e) 7, 5 Ω; f) 4, 7 Ω. l
ENUNŢURI ŞI REZOLVĂRI 8. Un conductor de cupru ( ρ =,7 Ω m) are lungimea de m şi aria secţiunii transversale de mm. Rezistenţa conductorului este: a), Ω; b), Ω; c), 5Ω; d) 5, Ω; e) 7, 5 Ω; f) 4, 7 Ω. l
3. TRANSMISII PRIN CURELE [3; 4; 8; 13; 14; 16; 29; 31]
![3. TRANSMISII PRIN CURELE [3; 4; 8; 13; 14; 16; 29; 31]](/thumbs/70/63541971.jpg "3. TRANSMISII PRIN CURELE [3; 4; 8; 13; 14; 16; 29; 31]") 3. TRANSMISII PRIN CURELE [3; 4; 8; 3; 4; 6; 9; 3] 3.. CARACTERIZARE. CLASIFICARE. DOMENII DE FOLOSIRE Transmisiile prin curele sunt transmisii mecanice, care realizează transmiterea mişcării de rotaţie
3. TRANSMISII PRIN CURELE [3; 4; 8; 3; 4; 6; 9; 3] 3.. CARACTERIZARE. CLASIFICARE. DOMENII DE FOLOSIRE Transmisiile prin curele sunt transmisii mecanice, care realizează transmiterea mişcării de rotaţie
2.4. CALCULUL SARCINII TERMICE A CAPTATORILOR SOLARI
 .4. CALCULUL SARCINII TERMICE A CAPTATORILOR SOLARI.4.1. Caracterul variabil al radiaţiei solare Intensitatea radiaţiei solare prezintă un caracter foarte variabil, atât în timpul anului, cât şi zilnic,
.4. CALCULUL SARCINII TERMICE A CAPTATORILOR SOLARI.4.1. Caracterul variabil al radiaţiei solare Intensitatea radiaţiei solare prezintă un caracter foarte variabil, atât în timpul anului, cât şi zilnic,
Capitolul 3 NELINIARITĂŢI ALE COMPORTAMENTULUI MATERIALELOR - III-
 Capitolul 3 NELINIARITĂŢI ALE COMPORTAMENTULUI MATERIALELOR - III- 3.4. Criterii de plasticitate Criteriile de plasticitate au apărut din necesitatea de a stabili care sunt factorii de care depinde trecerea
Capitolul 3 NELINIARITĂŢI ALE COMPORTAMENTULUI MATERIALELOR - III- 3.4. Criterii de plasticitate Criteriile de plasticitate au apărut din necesitatea de a stabili care sunt factorii de care depinde trecerea
Criptosisteme cu cheie publică III
 Criptosisteme cu cheie publică III Anul II Aprilie 2017 Problema rucsacului ( knapsack problem ) Considerăm un număr natural V > 0 şi o mulţime finită de numere naturale pozitive {v 0, v 1,..., v k 1 }.
Criptosisteme cu cheie publică III Anul II Aprilie 2017 Problema rucsacului ( knapsack problem ) Considerăm un număr natural V > 0 şi o mulţime finită de numere naturale pozitive {v 0, v 1,..., v k 1 }.
TRANSFORMATOARE MONOFAZATE DE SIGURANŢĂ ŞI ÎN CARCASĂ
 TRANSFORMATOARE MONOFAZATE DE SIGURANŢĂ ŞI ÎN CARCASĂ Transformatoare de siguranţă Este un transformator destinat să alimenteze un circuit la maximum 50V (asigură siguranţă de funcţionare la tensiune foarte
TRANSFORMATOARE MONOFAZATE DE SIGURANŢĂ ŞI ÎN CARCASĂ Transformatoare de siguranţă Este un transformator destinat să alimenteze un circuit la maximum 50V (asigură siguranţă de funcţionare la tensiune foarte
Examen AG. Student:... Grupa: ianuarie 2016
 16-17 ianuarie 2016 Problema 1. Se consideră graful G = pk n (p, n N, p 2, n 3). Unul din vârfurile lui G se uneşte cu câte un vârf din fiecare graf complet care nu-l conţine, obţinându-se un graf conex
16-17 ianuarie 2016 Problema 1. Se consideră graful G = pk n (p, n N, p 2, n 3). Unul din vârfurile lui G se uneşte cu câte un vârf din fiecare graf complet care nu-l conţine, obţinându-se un graf conex
V5433A vană rotativă de amestec cu 3 căi
 V5433A vană rotativă de amestec cu 3 căi UTILIZARE Vana rotativă cu 3 căi V5433A a fost special concepută pentru controlul precis al temperaturii agentului termic în instalațiile de încălzire și de climatizare.
V5433A vană rotativă de amestec cu 3 căi UTILIZARE Vana rotativă cu 3 căi V5433A a fost special concepută pentru controlul precis al temperaturii agentului termic în instalațiile de încălzire și de climatizare.
10. TRANSMISII PRIN CURELE [1, 3, 5] CARACTERIZARE. CLASIFICARE. DOMENII DE FOLOSIRE
![10. TRANSMISII PRIN CURELE [1, 3, 5] CARACTERIZARE. CLASIFICARE. DOMENII DE FOLOSIRE](/thumbs/79/80232502.jpg "10. TRANSMISII PRIN CURELE [1, 3, 5] CARACTERIZARE. CLASIFICARE. DOMENII DE FOLOSIRE") 10. TRANSMISII PRIN CURELE [1, 3, 5] 10.1. CARACTERIZARE. CLASIFICARE. DOMENII DE FOLOSIRE Transmisiile prin curele sunt transmisii mecanice care realizează transmiterea mişcării de rotaţie şi a sarcinii,
10. TRANSMISII PRIN CURELE [1, 3, 5] 10.1. CARACTERIZARE. CLASIFICARE. DOMENII DE FOLOSIRE Transmisiile prin curele sunt transmisii mecanice care realizează transmiterea mişcării de rotaţie şi a sarcinii,
riptografie şi Securitate
 riptografie şi Securitate - Prelegerea 12 - Scheme de criptare CCA sigure Adela Georgescu, Ruxandra F. Olimid Facultatea de Matematică şi Informatică Universitatea din Bucureşti Cuprins 1. Schemă de criptare
riptografie şi Securitate - Prelegerea 12 - Scheme de criptare CCA sigure Adela Georgescu, Ruxandra F. Olimid Facultatea de Matematică şi Informatică Universitatea din Bucureşti Cuprins 1. Schemă de criptare
Studiu privind soluţii de climatizare eficiente energetic
 Studiu privind soluţii de climatizare eficiente energetic Varianta iniţială O schemă constructivă posibilă, a unei centrale de tratare a aerului, este prezentată în figura alăturată. Baterie încălzire/răcire
Studiu privind soluţii de climatizare eficiente energetic Varianta iniţială O schemă constructivă posibilă, a unei centrale de tratare a aerului, este prezentată în figura alăturată. Baterie încălzire/răcire