ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΣΧΕΔΙΑΣΜΟΣ ΕΛΕΓΚΤΗ ΓΙΑ ΤΗΝ ΑΥΤΟΜΑΤΗ ΠΡΟΣΓΕΙΩΣΗ ΑΕΡΟΣΚΑΦΟΥΣ ΜΕ ΧΡΗΣΗ ΚΛΑΣΙΚΩΝ ΜΕΘΟΔΩΝ ΕΛΕΓΧΟΥ ΤΣΟΚΑΝΑΣ ΝΙΚΟΛΑΟΣ
|
|
|
- Μέλαινα Βαρουξής
- 7 χρόνια πριν
- Προβολές:
Transcript

1 Τμήμα Ηλεκτρολόγων Μηχανικών & Τεχνολογίας Υπολογιστών Πανεπιστήμιο Πατρών ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΣΧΕΔΙΑΣΜΟΣ ΕΛΕΓΚΤΗ ΓΙΑ ΤΗΝ ΑΥΤΟΜΑΤΗ ΠΡΟΣΓΕΙΩΣΗ ΑΕΡΟΣΚΑΦΟΥΣ ΜΕ ΧΡΗΣΗ ΚΛΑΣΙΚΩΝ ΜΕΘΟΔΩΝ ΕΛΕΓΧΟΥ ΤΣΟΚΑΝΑΣ ΝΙΚΟΛΑΟΣ Πάτρα, Σεπτέμβριος 2017
2
3 Στους γονείς μου
4 Περίληψη Κατά τη διάρκεια της δεκαετίας του 90', η ομάδα GARTEUR, Group for Aeronautical Research and Technology in EURope (AG08), πρότεινε έναν διαγωνισμό σχεδιασμού ενός σθεναρού ελεγκτή πτήσης με σκοπό να επιδείξει στους Ευρωπαϊκούς κατασκευαστές αεροσκαφών τα πλεονεκτήματα των τεχνικών σχεδιασμού σθεναρού ελέγχου σε αντίθεση με αυτών του κλασικού ελέγχου. Για να επιτευχθεί αυτός ο στόχος, η FM (AG08) γνωστοποίησε δύο προβλήματα σθεναρού ελέγχου με την χρήση του λογισμικού Matlab/Simulink, που αποτελούν σήματα αναφοράς στην μηχανική πτήσης. Το πρώτο πρόβλημα αφορούσε την αυτόματη προσγείωση του Ερευνητικού Μοντέλου Πολιτικού Αεροσκάφους (Research Civil Aircraft Model, RCAM), ενώ το δεύτερο το χειροκίνητο έλεγχο του Ερευνητικό Μοντέλο Μεγάλης Γωνίας Πρόσπτωσης (High Incidence Research Model, HIRM). Αρκετές ομάδες από πανεπιστήμια, ιδρύματα βιομηχανίας και έρευνας συμμετείχαν στον διαγωνισμό για να σχεδιάσουν και να συγκρίνουν μια μεγάλη ποικιλία σύγχρονων και κλασικών μεθόδων ελέγχου. Ενώ μερικές ομάδες χρησιμοποίησαν γραμμικές τετραγωνικές μεθόδους ελέγχου (LQ) στο HIRM, δεν υπήρχε κανένας LQ σχεδιασμός για το RCAM. Ταυτόχρονα, στην άλλη πλευρά του Ατλαντικού, οι μέθοδοι σχεδιασμού LQT/LTR είχαν προκαλέσει μεγάλο ενδιαφέρον καθώς είχαν και λεπτομερή πρακτική εφαρμογή, η οποία χρησιμοποιείται ακόμα και σήμερα για τους FBW σχεδιασμούς. Η παρούσα διπλωματική εργασία επανασχεδιάζει το μοντέλο αναφοράς RCAM σε Matlab/Simulink περιβάλλον εφαρμόζοντας τεχνικές ελέγχου LQ με κριτήρια εξόδου. Αποστολή του αεροσκάφους είναι να ακολουθεί μια συγκεκριμένη τροχιά, ώστε να μπορέσει να προσεγγίσει τον αεροδιάδρομο για προσγείωση. Με σκοπό να δοκιμαστεί η σθεναρότητα του υπό ελέγχου συστήματος, εισάγεται μία ποικιλία εξωτερικών διαταραχών στην τροχιά αυτή, όπως μεταβολή των καιρικών συνθηκών και βλάβη σε έναν από τους δύο κινητήρες για συγκεκριμένο χρονικό διάστημα. Τα αποτελέσματα των προσομοιώσεων ήταν ιδιαίτερα ικανοποιητικά, αφού το αεροσκάφος κατάφερνε να αντεπεξέλθει σε όποιες εξωτερικές διαταραχές δεχόταν μέσα στα επιτρεπτά χρονικά όρια, διασφαλίζοντας σε κάθε περίπτωση ασφαλή και ποιοτική πτήση. Επιπλέον, τα ικανοποιητικά αυτά αποτελέσματα μας δίνουν κίνητρο για περαιτέρω μελλοντικές μελέτες που θα αποσκοπούν στην ολοένα και μεγαλύτερη βελτίωση των αυτόματων συστημάτων ελέγχου και ως αποτέλεσμα, σε ακόμα ασφαλέστερες και ποιοτικότερες πτήσεις.
5
6 Abstract During 90s the GARTEUR, Group for Aeronautical Research and Technology in EURope (AG08), proposed a Robust Flight Control design challenge with the objective to demonstrate to the European aircraft manufacturers the advantages of the Robust Control Techniques over Classical ones. To achieve this objective FM(AG08) issued two robust aircraft flight control benchmark problems using Matlab/Simulink, the first was an automatic landing for the Research Civil Aircraft Model (RCAM) and the second was a manual control for the High Incidence Research Model (HIRM). Several teams from Universities, Industry and Research Establishments were involved in order to design and compare a wide variety of modern and classical control methods. While couple of teams used Linear Quadratic methods in the HIRM there wasn t any LQ design for the RCAM. At the same time on the other side of the ocean, the LQG/LTR approach had received a full focus with a practical detailed methodology, which is still proposed for today s Business jets FBW designs. This thesis redesigns the RCAM benchmark model with current Matlab/Simulink design process and applies the LQ methodology with output shaping. The aircraft must follow a particular path in order to be able to approach the runway for landing. To test the robustness of the controlled system, we introduced a variety of external disturbances on this track, as changing weather conditions and damage to one of the two engines for a specified period. The simulation results were more than satisfactory since the aircraft could cope with any disturbances within permitted time limits, ensuring in all cases safety and quality of the flight. Furthermore, these positive results give us more incentive for future studies aimed at increasing improvement of these control systems that ensures greater safety and quality of future flights.
7
8 Ευχαριστίες Θα ήθελα να ευχαριστήσω θερμά τον κύριο Ιωάννη Κίτσιο, διοικητή της Αεροπορικής Βάσης Καλαμάτας, για το ειλικρινές ενδιαφέρον και την ανιδιοτελή βοήθεια που μου προσέφερε καθ όλη τη διάρκεια εκπόνησης της διπλωματικής εργασίας μου. Η υποστήριξη, η καθοδήγηση και οι συμβουλές του ήταν πολύτιμες για την επιτυχή ολοκλήρωσή της. Παρόλο που βρισκόταν μακριά από την Πάτρα, ήταν σε συνεχή επικοινωνία μαζί μου και πάντα πρόθυμος να επιλύσει ακούραστα τις όποιες απορίες είχα και να με βοηθήσει με όποιο τρόπο μπορούσε. Μέσω της διπλωματικής εργασίας, όχι μόνο μου μετέδωσε γνώσεις και στρατηγικές μάθησης για το αντικείμενο του αυτομάτου ελέγχου αλλά παράλληλα με δίδαξε τον τρόπο ζωής, σκέψης και αντίληψης που πρέπει να διακρίνει κάθε μηχανικό, παρέχοντάς μου σημαντικά εφόδια για την μελλοντική επαγγελματική μου πορεία. Επίσης, θα ήθελα να ευχαριστήσω θερμά τον επιβλέποντα καθηγητή μου, κύριο Νικόλαο Κούσουλα, ο οποίος ήταν πάντα διατεθειμένος να με βοηθήσει επιλύοντας πρόθυμα τις απορίες μου, αντιμετωπίζοντας τις δυσκολίες που συναντούσα αλλά και παρέχοντάς μου το κατάλληλο βοηθητικό υλικό που ήταν απαραίτητο για την εκπόνηση της διπλωματικής εργασίας μου. Τέλος, θα ήθελα να ευχαριστήσω ιδιαίτερα τους γονείς μου και την οικογένειά μου για την στήριξη και την βοήθειά τους, χωρίς τους οποίους δεν θα είχα την δυνατότητα να ολοκληρώσω την παρούσα εργασία.
9
10
11 <Περιεχόμενα Περιεχόμενα ΕΙΚΟΝΕΣ... 1 ΠΙΝΑΚΕΣ... 3 ΣΥΝΤΟΜΟΓΡΑΦΙΕΣ ΑΡΚΤΙΚΟΛΕΞΑ ΕΙΣΑΓΩΓΗ ΠΕΡΙΓΡΑΦΗ ΤΟΥ ΜΟΝΤΕΛΟΥ ΠΑΡΑΔΟΧΕΣ ΚΑΙ ΥΠΟΘΕΣΕΙΣ ΆΞΟΝΕΣ ΠΕΡΙΣΤΡΟΦΗΣ ΔΟΜΙΚΟ ΔΙΑΓΡΑΜΜΑ ΤΟΥ ΣΥΣΤΗΜΑΤΟΣ ΟΝΟΜΑΤΟΛΟΓΊΑ Προσδιορισμός Εισόδων Προσδιορισμός Καταστάσεων Προσδιορισμός Εξόδων Προσδιορισμός Παραμέτρων ΔΥΝΑΜΙΚΗ ΣΥΜΠΕΡΙΦΟΡΑ ΑΕΡΟΣΚΑΦΟΥΣ Εξισώσεις κίνησης άκαμπτου σώματος Υπολογισμός Ταχύτητας Αεροδυναμικές Εξισώσεις Εξισώσεις κίνησης στο Χώρο Κατάστασης Υπολογισμός Στοιχείων Κινητήρα Πηδάλια Ελέγχου Ατμόσφαιρα Βαρύτητα ΜΟΝΤΕΛΟ ΑΝΕΜΟΥ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΑΕΡΟΣΚΑΦΟΥΣ ΕΙΣΑΓΩΓΙΚΑ Ταξινόμηση αεροσκάφους Φάσεις Πτήσης Επίπεδα των χαρακτηριστικών πτήσης Φάκελοι Πτήσης Απαιτήσεις των διαμήκων χαρακτηριστικών Απαιτήσεις των εγκάρσιων χαρακτηριστικών ΤΟ ΥΠΟ ΜΕΛΕΤΗ ΜΟΝΤΕΛΟ, RCAM... 44
12 <Περιεχόμενα 4 ΟΡΙΣΜΟΣ ΤΟΥ ΠΡΟΒΛΗΜΑΤΟΣ ΒΑΣΙΚΟΣ ΣΤΟΧΟΣ ΚΡΙΤΗΡΙΑ ΣΧΕΔΙΑΣΜΟΥ Κριτήρια Επίδοσης Κριτήρια Σθεναρότητας Κριτήρια Ποιότητας Πτήσης Κριτήρια Ασφάλειας Κριτήρια Διαδικασίας ελέγχου ΜΕΓΙΣΤΕΣ ΕΠΙΤΡΕΠΤΕΣ ΤΙΜΕΣ ΜΕΤΑΒΛΗΤΩΝ ΚΑΘΟΔΗΓΗΣΗ ΚΑΙ ΣΕΝΑΡΙΟ ΠΤΗΣΗΣ ΣΧΕΔΙΑΣΗ ΣΥΣΤΗΜΑΤΟΣ ΕΛΕΓΧΟΥ ΕΙΣΑΓΩΓΙΚΑ Ο Γραμμικός Τετραγωνικός Ρυθμιστής LQR Ο Σθεναρός Σερβομηχανισμός Ο Robust Servomechanism LQR (RSLQR) Μεθοδολογία επιλογής Q, R LQR με Κριτήρια Εξόδου Βήματα Σχεδίασης Ανάδρασης ΤΟ ΣΥΣΤΗΜΑ ΕΛΕΓΧΟΥ ΤΟΥ RCAM Διαμήκης Δυναμική Εγκάρσια Δυναμική ΠΡΟΣΟΜΟΙΩΣΕΙΣ ΤΟ ΓΡΑΜΜΙΚΟ ΣΥΣΤΗΜΑ ΤΟ ΜΗ ΓΡΑΜΜΙΚΟ ΣΥΣΤΗΜΑ Πρώτο Τμήμα: Βλάβη Κινητήρα Δεύτερο Τμήμα: Στροφή 90 μοιρών Τρίτο Τμήμα: Κάθοδος Τέταρτο Τμήμα: Τελική Προσέγγιση ΣΥΝΟΨΗ & ΠΕΡΑΙΤΕΡΩ ΕΦΑΡΜΟΓΕΣ - ΜΕΛΕΤΕΣ ΠΑΡΑΡΤΗΜΑ Α ΔΟΜΙΚΟ ΔΙΑΓΡΑΜΜΑ SIMULINK ΠΑΡΑΡΤΗΜΑ Β ΣΗΜΕΙΑ ΓΡΑΜΜΙΚΟΠΟΙΗΣΗΣ ΒΙΒΛΙΟΓΡΑΦΙΑ
13 1 Εικόνες Εικόνες ΕΙΚΟΝΑ 2.1 ΚΑΤΑΚΟΡΥΦΟ ΣΥΣΤΗΜΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ΕΙΚΟΝΑ 2.2 ΣΩΜΑΤΟΔΕΤΟ ΣΥΣΤΗΜΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ΕΙΚΟΝΑ 2.3 ΣΥΣΤΗΜΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ΕΥΣΤΑΘΕΙΑΣ ΕΙΚΟΝΑ 2.4 ΣΥΣΤΗΜΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ΑΝΕΜΟΥ ΕΙΚΟΝΑ 2.5 ΣΥΣΤΗΜΑΤΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ΣΩΜΑΤΟΔΕΤΟΥ, ΕΥΣΤΑΘΕΙΑΣ, ΑΝΕΜΟΥ ΕΙΚΟΝΑ 2.6 ΔΟΜΙΚΟ ΔΙΑΓΡΑΜΜΑ ΤΟΥ ΑΕΡΟΣΚΑΦΟΥΣ ΣΕ SIMULINK I ΕΙΚΟΝΑ 2.7 ΔΟΜΙΚΟ ΔΙΑΓΡΑΜΜΑ ΤΟΥ ΑΕΡΟΣΚΑΦΟΥΣ ΣΕ SIMULINK II ΕΙΚΟΝΑ 2.8 ΔΟΜΙΚΟ ΔΙΑΓΡΑΜΜΑ ΚΙΝΗΤΗΡΑ ΕΙΚΟΝΑ 2.9 ΔΟΜΙΚΟ ΔΙΑΓΡΑΜΜΑ ΣΗΜΑΤΟΣ ΕΛΕΓΧΟΥ ΤΟΥ ΠΗΔΑΛΙΟΥ ΑΝΟΔΟΥ-ΚΑΘΟΔΟΥ ΕΙΚΟΝΑ 2.10 ΔΟΜΙΚΟ ΔΙΑΓΡΑΜΜΑ ΣΗΜΑΤΩΝ ΕΛΕΓΧΟΥ ΕΙΚΟΝΑ 2.11 ΤΟ ΜΟΝΤΕΛΟ ΑΝΕΜΟΥ ΕΙΚΟΝΑ 3.1 ΚΡΙΤΗΡΙΟ ΑΝΤΙΧΕΙΡΑ ΓΙΑ ΤΗΝ ΣΧΕΣΗ ΤΗΣ ΠΟΙΟΤΗΤΑΣ ΕΥΚΟΛΙΑΣ ΧΕΙΡΙΣΜΩΝ ΜΕ ΤΗ ΣΥΧΝΟΤΗΤΑ ΚΑΙ ΤΗΝ ΑΠΟΣΒΕΣΗ ΜΙΚΡΗΣ ΠΕΡΙΟΔΟΥ ΕΙΚΟΝΑ 4.1 ΧΡΟΝΟΣ ΑΝΟΔΟΥ, ΑΠΟΚΑΤΑΣΤΑΣΗΣ ΚΑΙ ΥΠΕΡΒΑΣΗΣ ΕΙΚΟΝΑ 4.2 ΤΡΟΧΙΑ ΑΕΡΟΣΚΑΦΟΥΣ. Ο ΒΟΡΡΑΣ ΕΙΝΑΙ ΣΤΗΝ ΔΙΕΥΘΥΝΣΗ ΤΟΥ ΑΕΡΟΔΙΑΔΡΟΜΟΥ ΕΙΚΟΝΑ ΥΛΟΠΟΙΗΣΗ ΤΗΣ ΚΑΘΟΔΗΓΗΣΗΣ ΣΕ ΠΕΡΙΒΑΛΛΟΝ SIMULINK ΕΙΚΟΝΑ 4.4 ΥΛΟΠΟΙΗΣΗ ΤΟΥ ΣΕΝΑΡΙΟΥ ΠΤΗΣΗΣ ΣΕ ΠΕΡΙΒΑΛΛΟΝ SIMULINK ΕΙΚΟΝΑ 5.1 ΔΟΜΙΚΟ ΔΙΑΓΡΑΜΜΑ ΣΘΕΝΑΡΟΥ ΣΕΡΒΟΜΗΧΑΝΙΣΜΟΥ ΕΙΚΟΝΑ 5.2 ΜΟΝΤΕΛΟ ΣΥΝΘΕΣΗΣ: ΜΟΝΤΕΛΟ ΑΕΡΟΣΚΑΦΟΥΣ ΜΕΙΩΜΕΝΗΣ ΤΑΞΗΣ ΜΕ ΕΙΣΑΓΩΓΗ ΜΗΔΕΝΙΚΩΝ ΕΙΚΟΝΑ 5.3 ΔΙΑΓΡΑΜΜΑ NICHOLS ΑΝΟΙΧΤΟΥ ΒΡΟΧΟΥ ΣΤΗΝ ΚΑΘΕΤΗ ΕΠΙΤΑΧΥΝΣΗ ΕΙΚΟΝΑ 5.4 ΔΟΜΙΚΟ ΔΙΑΓΡΑΜΜΑ ΤΟΥ ΕΛΕΓΚΤΗ ΕΙΚΟΝΑ 5.5 ΚΡΙΤΗΡΙΑ ΕΞΟΔΟΥ ΓΙΑ ΤΗΝ ΔΙΑΜΗΚΗ ΚΙΝΗΣΗ ΕΙΚΟΝΑ 5.6 ΚΡΙΤΗΡΙΑ ΕΞΟΔΟΥ ΓΙΑ ΤΗΝ ΕΓΚΑΡΣΙΑ ΚΙΝΗΣΗ ΕΙΚΟΝΑ 6.1 ΓΡΑΦΗΜΑΤΑ NICHOLS - ΔΙΑΜΗΚΗ ΔΥΝΑΜΙΚΗ ΕΙΚΟΝΑ 6.2 ΓΡΑΦΗΜΑΤΑ NICHOLS - ΕΓΚΑΡΣΙΑ ΔΥΝΑΜΙΚΗ ΕΙΚΟΝΑ 6.3 ΑΠΟΚΡΙΣΕΙΣ ΤΩΝ ΠΡΟΣ ΡΥΘΜΙΣΗ ΜΕΤΑΒΛΗΤΩΝ - ΔΙΑΜΗΚΗ ΔΥΝΑΜΙΚΗ ΕΙΚΟΝΑ 6.4 ΑΠΟΚΡΙΣΕΙΣ ΣΕ ΔΙΑΤΑΡΑΧΕΣ ΑΝΕΜΟΥ ΤΑΧΥΤΗΤΑΣ 13M/S - ΔΙΑΜΗΚΗ ΔΥΝΑΜΙΚΗ ΕΙΚΟΝΑ 6.5 ΑΠΟΚΡΙΣΕΙΣ ΓΙΑ ΒΗΜΑΤΙΚΗ ΕΙΣΟΔΟ ΤΑΧΥΤΗΤΑΣ 13 M/S - ΔΙΑΜΗΚΗ ΔΥΝΑΜΙΚΗ ΕΙΚΟΝΑ 6.6 ΑΠΟΚΡΙΣΕΙΣ ΓΙΑ ΒΗΜΑΤΙΚΗ ΕΙΣΟΔΟ ΥΨΟΜΕΤΡΟΥ 30 M - ΔΙΑΜΗΚΗ ΔΥΝΑΜΙΚΗ ΕΙΚΟΝΑ 6.7 ΑΠΟΚΡΙΣΕΙΣ ΕΙΣΟΔΟΥ W V ΓΙΑ ΓΩΝΙΑ ΙΧΝΟΥΣ -3 DEG - ΔΙΑΜΗΚΗ ΔΥΝΑΜΙΚΗ ΕΙΚΟΝΑ 6.8 ΑΠΟΚΡΙΣΕΙΣ ΠΡΟΣ ΡΥΘΜΙΣΗ ΜΕΤΑΒΛΗΤΩΝ - ΕΓΚΑΡΣΙΑ ΔΥΝΑΜΙΚΗ ΕΙΚΟΝΑ 6.9 ΑΠΟΚΡΙΣΕΙΣ ΣΕ ΒΗΜΑΤΙΚΗ ΕΙΣΟΔΟ ΠΛΕΥΡΙΚΗΣ ΑΠΟΚΛΙΣΗΣ 100 M - ΕΓΚΑΡΣΙΑ ΔΥΝΑΜΙΚΗ ΕΙΚΟΝΑ 6.10 ΑΠΟΚΡΙΣΕΙΣ ΣΕ ΒΗΜΑΤΙΚΗ ΕΙΣΟΔΟ ΓΩΝΙΑΣ ΤΡΟΧΙΑΣ 20 DEG - ΕΓΚΑΡΣΙΑ ΔΥΝΑΜΙΚΗ ΕΙΚΟΝΑ 6.11 ΑΠΟΚΡΙΣΕΙΣ ΣΕ ΔΙΑΤΑΡΑΧΕΣ ΑΝΕΜΟΥ ΤΑΧΥΤΗΤΑΣ 13 M/S - ΕΓΚΑΡΣΙΑ ΔΥΝΑΜΙΚΗ ΕΙΚΟΝΑ 6.12 ΤΡΟΧΙΑ ΤΟΥ RCAM ΕΙΚΟΝΑ 6.13 ΠΡΩΤΟ ΤΜΗΜΑ: ΕΠΙΔΡΑΣΗ ΒΛΑΒΗΣ ΚΙΝΗΤΗΡΑ - ΚΑΤΟΨΗ... 91
14 2 ΕΙΚΟΝΑ 6.14 ΠΡΩΤΟ ΤΜΗΜΑ: ΕΠΙΔΡΑΣΗ ΒΛΑΒΗΣ ΚΙΝΗΤΗΡΑ - ΑΠΟΚΛΙΣΕΙΣ ΥΨΟΜΕΤΡΟΥ ΕΙΚΟΝΑ 6.15 ΔΕΥΤΕΡΟ ΤΜΗΜΑ: ΣΤΡΟΦΗ 90 ΜΟΙΡΩΝ - ΚΑΤΟΨΗ ΕΙΚΟΝΑ 6.16 ΔΕΥΤΕΡΟ ΤΜΗΜΑ: ΣΤΡΟΦΗ 90 ΜΟΙΡΩΝ - ΠΛΕΥΡΙΚΕΣ ΑΠΟΚΛΙΣΕΙΣ ΕΙΚΟΝΑ 6.17 ΤΡΙΤΟ ΤΜΗΜΑ: ΚΑΘΟΔΟΣ - ΠΛΑΓΙΑ ΟΨΗ ΕΙΚΟΝΑ 6.18 ΤΡΙΤΟ ΤΜΗΜΑ: ΚΑΘΟΔΟΣ - ΑΠΟΚΛΙΣΕΙΣ ΥΨΟΜΕΤΡΟΥ ΕΙΚΟΝΑ 6.19 ΤΕΤΑΡΤΟ ΤΜΗΜΑ: ΤΕΛΙΚΗ ΠΡΟΣΕΓΓΙΣΗ - ΠΛΑΓΙΑ ΟΨΗ ΕΙΚΟΝΑ 6.20 ΤΕΤΑΡΤΟ ΤΜΗΜΑ: ΤΕΛΙΚΗ ΠΡΟΣΕΓΓΙΣΗ - ΑΠΟΚΛΙΣΕΙΣ ΥΨΟΜΕΤΡΟΥ... 96
15 3 Πίνακες Πίνακες ΠΙΝΑΚΑΣ 2.1ΕΙΣΟΔΟΙ ΠΙΝΑΚΑΣ 2.2 ΚΑΤΑΣΤΑΣΕΙΣ ΠΙΝΑΚΑΣ 2.3 ΈΞΟΔΟΙ ΠΙΝΑΚΑΣ 2.4 ΠΑΡΑΜΕΤΡΟΙ ΑΕΡΟΣΚΑΦΟΥΣ ΠΙΝΑΚΑΣ 2.5 ΌΡΙΑ ΠΑΡΑΜΕΤΡΩΝ ΠΙΝΑΚΑΣ 2.6 ΣΥΝΤΕΛΕΣΤΕΣ ΠΙΝΑΚΑΣ 2.7 ΑΡΙΘΜΗΤΙΚΆ ΌΡΙΑ ΕΙΣΌΔΩΝ ΠΙΝΑΚΑΣ 3.1 ΑΠΟΔΕΚΤΕΣ ΟΡΙΑΚΕΣ ΤΙΜΕΣ ΤΟΥ ΛΟΓΟΥ ΑΠΟΣΒΕΣΗΣ ΜΙΚΡΗΣ ΠΕΡΙΟΔΟΥ ΠΙΝΑΚΑΣ 3.2 ΑΠΟΔΕΚΤΕΣ ΟΡΙΑΚΕΣ ΤΙΜΕΣ ΤΟΥ ΛΟΓΟΥ ΑΠΟΣΒΕΣΗΣ ΤΟΥ ΦΥΓΟΕΙΔΟΥΣ ΠΙΝΑΚΑΣ 3.3ΑΠΟΔΕΚΤΕΣ ΟΡΙΑΚΕΣ ΤΙΜΕΣ ΤΗΣ ΧΡΟΝΙΚΗΣ ΣΤΑΘΕΡΑ ΤR ΤΗΣ ΠΕΡΙΣΤΡΟΦΗΣ ΠΙΝΑΚΑΣ 3.4 ΤΙΜΕΣ ΚΑΙ ΑΝΤΙΣΤΟΙΧΟΙ ΜΕΓΙΣΤΟΙ ΧΡΟΝΟΙ ΓΩΝΙΑΣ ΠΕΡΙΣΤΡΟΦΗΣ ΠΙΝΑΚΑΣ 3.5 ΤΙΜΕΣ ΚΑΙ ΑΝΤΙΣΤΟΙΧΟΙ ΜΕΓΙΣΤΟΙ ΧΡΟΝΟΙ ΓΩΝΙΑΣ ΠΕΡΙΣΤΡΟΦΗΣ ΣΕ ΣΠΕΙΡΟΕΙΔΗ ΑΠΟΚΛΙΣΗ ΠΙΝΑΚΑΣ 3.6 ΕΛΑΧΙΣΤΑ ΟΡΙΑ ΛΟΓΟΥ ΑΠΟΣΒΕΣΗΣ ΚΑΙ ΣΥΧΝΟΤΗΤΑΣ ΟΛΛΑΝΔΙΚΗΣ ΠΕΡΙΣΤΡΟΦΗΣ ΠΙΝΑΚΑΣ 3.7 ΛΟΓΟΣ ΑΠΟΣΒΕΣΗΣ ΚΑΙ ΣΥΧΝΟΤΗΤΑ ΣΕ ΔΙΑΚΥΜΑΝΣΕΙΣ ΤΑΧΥΤΗΤΑΣ ΜΑΖΑΣ ΓΙΑ ΤΗΝ ΔΙΑΜΗΚΗ ΔΥΝΑΜΙΚΗ ΠΙΝΑΚΑΣ 3.8 ΛΟΓΟΣ ΑΠΟΣΒΕΣΗΣ ΚΑΙ ΣΥΧΝΟΤΗΤΑ ΣΕ ΔΙΑΚΥΜΑΝΣΕΙΣ ΤΑΧΥΤΗΤΑΣ ΓΙΑ ΤΗΝ ΠΙΝΑΚΑΣ 3.9 ΛΟΓΟΣ ΑΠΟΣΒΕΣΗΣ ΚΑΙ ΣΥΧΝΟΤΗΤΑ ΣΕ ΜΕΤΑΒΟΛΕΣ ΚΕΝΤΡΟΥ ΒΑΡΟΥΣ ΜΑΖΑΣ ΓΙΑ ΤΗΝ ΔΙΑΜΗΚΗ ΔΥΝΑΜΙΚΗ ΠΙΝΑΚΑΣ 3.10 ΛΟΓΟΣ ΑΠΟΣΒΕΣΗΣ ΚΑΙ ΣΥΧΝΟΤΗΤΑ ΣΕ ΜΕΤΑΒΟΛΕΣ ΚΕΝΤΡΟΥ ΒΑΡΟΥΣ ΓΙΑ ΤΗΝ ΠΙΝΑΚΑΣ 3.11 ΛΟΓΟΣ ΑΠΟΣΒΕΣΗΣ ΚΑΙ ΣΥΧΝΟΤΗΤΑ ΣΕ ΔΙΑΚΥΜΑΝΣΕΙΣ ΜΑΖΑΣ ΓΙΑ ΤΗΝ ΔΙΑΜΗΚΗ ΔΥΝΑΜΙΚΗ ΠΙΝΑΚΑΣ 3.12 ΛΟΓΟΣ ΑΠΟΣΒΕΣΗΣ ΚΑΙ ΣΥΧΝΟΤΗΤΑ ΣΕ ΔΙΑΚΥΜΑΝΣΕΙΣ ΜΑΖΑΣ ΓΙΑ ΤΗΝ ΠΙΝΑΚΑΣ 4.1 ΚΡΙΤΗΡΙΑ ΕΠΙΔΟΣΗΣ ΠΙΝΑΚΑΣ 4.2 ΣΗΜΕΙΑ ΤΡΟΧΙΑΣ ΚΑΙ ΤΑ ΑΝΤΙΣΤΟΙΧΑ ΣΥΜΒΑΝΤΑ/ΣΥΝΘΗΚΕΣ ΠΙΝΑΚΑΣ 5.1 ΕΣΩΤΕΡΙΚΟ ΜΟΝΤΕΛΟ ΑΝΑΠΑΡΑΓΩΓΗΣ ΣΗΜΑΤΩΝ ΑΝΑΦΟΡΑΣ ΠΙΝΑΚΑΣ 6.1 ΧΡΟΝΟΙ ΑΠΟΚΡΙΣΗΣ ΜΕΤΑΒΛΗΤΩΝ ΠΡΟΣ ΡΥΘΜΙΣΗ ΠΙΝΑΚΑΣ 7.1 ΑΡΙΘΜΗΤΙΚΑ ΑΠΟΤΕΛΕΣΜΑΤΑ... 97
16 4 Συντομογραφίες Αρκτικόλεξα Συντομογραφίες Αρκτικόλεξα P Στατική πίεση αέρα T Απόλυτη θερμοκρασία g G Επιτάχυνση λόγω βαρύτητας, g = m MASS Ολική Μάζα Αεροσκάφους ρ RHO Πυκνότητα αέρα cc CBAR Μέση αεροδυναμική χορδή b Β Εκπέτασμα πτερύγων lt LTAIL Απόσταση μεταξύ αεροδυναμικού κέντρου των πτερύγων κ αι του ουραίου S S Επιφάνεια πτερύγων St STAIL Επιφάνεια Ουραίου ε p EPSILON Γωνία μεταξύ σωματόδετο άξονα και αδρανειακού k q Συντελεστής διόρθωσης σφάλματος για να συμπεριληφθεί μια μικρή μεταβολή της α κατά την περιστροφή Vα VAVEC Διάνυσμα ταχύτητας σεf B V A VA Ολική ταχύτητα VV AA = (uu 2 αα + vv 2 αα + ww 2 αα ) u α x-συνιστώσα της Vα σε FB v α y-συνιστώσα της Vα σε FB w α z-συνιστώσα της Vα σε FB u B UB x-συνιστώσα ταχύτητας στο σωματόδετο σύστημα συντεταγμένων v B VB y-συνιστώσα ταχύτητας στο σωματόδετο σύστημα συντεταγμένων w B WB z-συνιστώσα ταχύτητας στο σωματόδετο σύστημα συντεταγμένων u V UV x-συνιστώσα ταχύτητας στο κατακόρυφο σύστημα συντεταγμένων v V VV y-συνιστώσα ταχύτητας στο κατακόρυφο σύστημα συντεταγμένων w V WV z-συνιστώσα ταχύτητας στο κατακόρυφο σύστημα συντεταγμένων V t Πραγματική ταχύτητα W XE WXE Tαχύτητα ανέμου στον x-άξονα του F E W YE WYE Tαχύτητα ανέμου στον y-άξονα του F E W ZE WZE Ταχύτητα ανέμου στον z-άξονα του F E W XB WXB Tαχύτητα ανέμου στον x-άξονα του F B W YB WYB Ταχύτητα ανέμου στον y-άξονα του F B W ZB WZB Tαχύτητα ανέμου στον z-άξονα του F B δ Α DA Eκτροπή πηδαλίου κλίσης δ Τ DT Eκτροπή πηδαλίου ανόδου-καθόδου δ R DR Eκτροπή πηδαλίου διεύθυνσης δ ΤΗ1 THROTTLE1 Ώση κινητήρα 1 δ ΤΗ2 THROTTLE2 Ώση κινητήρα 2 Ω Β Διάνυσμα ρυθμών περιστροφής (F B ) p P Ρυθμός περιστροφής (F B ) q Q Ρυθμός πρόνευσης (F B ) r R Ρυθμός εκτροπής (F B )
17 5 Συντομογραφίες Αρκτικόλεξα φ PHI Γωνία κλίσης ψ PSI Γωνία διεύθυνσης θ THETA Γωνία πρόνευσης α ALPHA Γωνίας προσβολής α t Γωνία προσβολής του ουραίου α 0 Γωνία προσβολής κατά την οποία C Lwb = 0 β BETA Γωνία πλαγιολίσθησης χ CHI Αδρανειακή γωνία τροχιάς γ GAMMA Αδρανειακή γωνία ίχνους πτήσης dε/dα Παράγωγος της downwash γωνίας ως προς την γωνία προσβολής x X Θέση κέντρου βάρους αεροσκάφους σε F E y Y Θέση κέντρου βάρους αεροσκάφους σε F E z Z Θέση κέντρου βάρους αεροσκάφους σε F E Xcg XCG Θέση κέντρου βάρους σε F M Ycg YCG Θέση κέντρου βάρους σε F M Zcg ZCG Θέση κέντρου βάρους σε F M X APT1 XAPT1 Θέση εφαρμογής ώσης κινητήρα 1 σε F M Y APT1 YAPT1 Θέση εφαρμογής ώσης κινητήρα 1 σε F M Z APT1 ZAPT1 Θέση εφαρμογής ώσης κινητήρα 1 σε F M X APT2 XAPT2 Θέση εφαρμογής ώσης κινητήρα 2 σε F M Y APT2 YAPT2 Θέση εφαρμογής ώσης κινητήρα 2 σε F M Z APT2 ZAPT2 Θέση εφαρμογής ώσης κινητήρα 2 σε F M C L0 Συντελεστής άντωσης σε μηδενική γωνία προσβολής C Lα Συντελεστής άντωσης ως προς την γωνία προσβολής C Lwbα Παράγωγος του CLwb ως προς την α C Lwb Συντελεστής άντωσης της ατράκτου-πτερύγων C Ltα Παράγωγος του CL ως προς την αt C Lq Συντελεστής άντωσης ως προς τον ρυθμό πρόνευσης C LδT Συντελεστής άντωσης ως προς την εκτροπή του πηδαλίου ανόδου-καθόδου C D0 Συντελεστής οπισθέλκουσας σε μηδενική γωνία προσβολής C Yβ Συντελεστής πλαγιολίσθησης ως προς την γωνία πλαγιολίσθησης C YδR Συντελεστής πλαγιολίσθησης ως προς την εκτροπή του πηδαλίου διεύθυνσης C lβ Συντελεστής ροπής περιστροφής ως προς την γωνία πλαγιολίσθησης C lp Συντελεστής ροπής περιστροφής ως προς τον ρυθμό περιστροφή C lr Συντελεστής ροπής περιστροφής ως προς τον ρυθμό εκτροπής C lδa Συντελεστής ροπής περιστροφής ως προς την εκτροπή του πηδαλίου κλίσης C lδr Συντελεστής ροπής περιστροφής ως προς την εκτροπή του πηδαλίου διεύθυνσης C m0 Συντελεστής ροπής πρόνευσης σε μηδενική γωνία προσβολής Συντελεστής ροπής πρόνευσης ως προς την γωνία προσβολής C mα C mq C mδt Συντελεστής ροπής πρόνευσης ως προς τον ρυθμό πρόνευσης Συντελεστής ροπής πρόνευσης ως προς την εκτροπή του πηδαλίου ανόδου-καθόδου
18 6 Συντομογραφίες Αρκτικόλεξα C nβ Συντελεστής ροπής εκτροπής ως προς την γωνία πλαγιολίσθησης C np Συντελεστής ροπής εκτροπής ως προς τον ρυθμό περιστροφής C nr Συντελεστής ροπής εκτροπής ως προς τον ρυθμό κλίσης C nδα Συντελεστής ροπής εκτροπής ως προς την εκτροπή του πηδαλίου διεύθυνσης C nδr Συντελεστής ροπής εκτροπής ως προς την εκτροπή του πηδαλίου διεύθυνσης F Το σύνολο των δυνάμεων από τους κινητήρες, των αεροδυναμικών δυνάμεων και της βαρύτητας Μ Το σύνολο των ροπών που ασκούνται στο κέντρο βάρους του αεροσκάφους και οφείλονται στους κινητήρες, τις αεροδυναμικές δυνάμεις και την βαρύτητα ω Το διάνυσμα των γωνιακών ταχυτήτων εκφρασμένα σε σωματόδετους άξονες α Β Το διάνυσμα της επιτάχυνσης εκφρασμένο σε σωματόδετους άξονες F xt x-συνιστώσα διανύσματος δυνάμεων που οφείλονται στον κινητήρα F yt y-συνιστώσα διανύσματος δυνάμεων που οφείλονται στον κινητήρα F zt z-συνιστώσα διανύσματος δυνάμεων που οφείλονται στον κινητήρα L A Ροπή περιστροφής σε σωματόδετους άξονες M A Ροπή πρόνευσης σε σωματόδετους άξονες N A Ροπή εκτροπής σε σωματόδετους άξονες I Αδρανειακός πίνακας ροπών αδράνειας Ιx x-συνιστώσα σωματόδετου άξονα αδρανειακής ροπής Ιy y-συνιστώσα σωματόδετου άξονα αδρανειακής ροπής Ιz z-συνιστώσα σωματόδετου άξονα αδρανειακής ροπής Ιxy x-y γινόμενο σωματόδετου άξονα αδρανειακής ροπής Ιxz x-z γινόμενο σωματόδετου άξονα αδρανειακής ροπής Ιyz y-z γινόμενο σωματόδετου άξονα αδρανειακής ροπής n x NX Συντελεστής οριζόντιου φορτίου σε F B (F x /mg) n y NY Πλευρικός συντελεστής φορτίου σε F B (F y /mg) n z NZ Συντελεστής κάθετου φορτίου σε F B (F z /mg) ζ p Λόγος απόσβεσης φυγοειδούς ω p Συχνότητα φυγοειδούς T p Περίοδος φυγοειδούς ζ s Λόγος απόσβεσης μικρής περιόδου ω s Συχνότητα μικρής περιόδου T s Περίοδος μικρής περιόδου x(t) Το διάνυσμα m καταστάσεων y(t) Το διάνυσμα r εξόδων Α Ο (n n) πίνακας κατάστασης B Ο (n m) πίνακας εισόδου C Ο (r n) πίνακας εξόδου D Ο (r m) άμεσος πίνακας
19 7 Εισαγωγή 1 Εισαγωγή Σκοπός της διπλωματικής εργασίας είναι ο σχεδιασμός συστήματος ελέγχου για την αυτόματη προσγείωση πολιτικού αεροσκάφους δύο κινητήρων. Αρχικά δημιουργήθηκε το μοντέλο του αεροσκάφους σε περιβάλλον Simulink χρησιμοποιώντας τις διαφορικές εξισώσεις που διέπουν την κίνησή του. Εν συνεχεία, το μοντέλο γραμμικοποιήθηκε με σκοπό να μελετηθεί η συμπεριφορά του ανοιχτού βρόχου εφαρμόζοντας διαφορετικές παραμέτρους. Βαθιά κατανόηση του ανοιχτού βρόχου του αεροσκάφους είναι απαραίτητη για τον σχεδιασμό του ελεγκτή. Η ανάλυση ανοικτού βρόχου δίνει μια εικόνα της δυσκολίας επίτευξης των απαιτήσεων σχεδιασμού πριν από την έναρξη του λεπτομερούς κύκλου σχεδιασμού. Δοκιμάστηκαν διάφορες περιπτώσεις μεταβολής ταχύτητας, μετατόπισης κέντρου βάρους και μεταβολής μάζας. Εξετάστηκαν χαρακτηριστικά του αεροσκάφους όπως η μικρή περίοδος και το φυγοειδές (για την διαμήκη δυναμική) καθώς και η περιστροφική κίνηση, η σπειροειδής λειτουργία και η ολλανδική περιστροφή (για την εγκάρσια δυναμική). Πραγματοποιήθηκαν βηματικές αποκρίσεις, αναλύσεις συχνότητας, ελεγξιμότητας και παρατηρησιμότητας καθώς και προσομοιώσεις στο πεδίο του χρόνου. Αφού έχει κατανοηθεί η συμπεριφορά του ανοιχτού βρόχου του αεροσκάφους, προσδιορίζεται η δομή του ελεγκτή και του μοντέλου σύνθεσης. Η ανατροφοδότηση του συστήματος ελέγχου αποτελείται από δύο βρόχους, τον εσωτερικό και τον εξωτερικό. Ο εσωτερικός βρόχος αποτελείται από δύο RSLQR ελεγκτές (ένα για την διαμήκη κίνηση και ένα για την εγκάρσια) με κριτήρια εξόδου. Ο εξωτερικός βρόχος αποτελείται από ελεγκτές κέρδους, για το υψόμετρο και για το πλευρικό σφάλμα παρακολούθησης, σχεδιασμένους μέσω κλασικού γεωμετρικού τόπου ριζών. Το μοντέλο σύνθεσης δημιουργείται χρησιμοποιώντας ως πυρήνα τον ανοιχτό βρόχο του αεροσκάφους. Το πρώτο βήμα στην δημιουργία του μοντέλου σύνθεσης είναι ο προσδιορισμός των ανεξάρτητων μεταβλητών ελέγχου που θα οδηγούν τον ελεγκτή. Για την διαμήκη και την εγκάρσια δυναμική επιλέγονται από δύο μεταβλητές ελέγχου έκαστος: η εκτροπή του πηδαλίου ανόδου-καθόδου και η ώση του κινητήρα για τον διαμήκη σχεδιασμό και οι εκτροπές των πηδαλίων κλίσης και διεύθυνσης για τον εγκάρσιο. Αφού έχει πραγματοποιηθεί η επιλογή των μεταβλητών ελέγχου, επόμενο βήμα είναι η επιλογή των μεταβλητών προς ρύθμιση. Η διατήρηση της ακεραιότητας της χαμηλής συχνότητας των μεταβλητών προς ρύθμιση είναι ιδιαίτερης σημασίας αφού παίζει σημαντικό
20 8 Εισαγωγή ρόλο στην παρακολούθηση των μεταβλητών του αεροσκάφους στην μόνιμη κατάσταση. Στην περίπτωση της διαμήκους κίνησης οι μεταβλητές προς ρύθμιση είναι το υψόμετρο και η ταχύτητα. Οι γωνίες πλαγιολίσθησης και τροχιάς αποτελούν τις μεταβλητές προς ρύθμιση για την εγκάρσια κίνηση. Ένας ολοκληρωτής έχει προστεθεί σε κάθε μία από τις παραπάνω τέσσερις μεταβλητές, επαυξάνοντας το σύστημα και σχηματίζοντας τον RSLQR ελεγκτή. Έπειτα, διαμορφώνονται τα κριτήρια εξόδου προσθέτοντας τις μεταβλητές προς ρύθμιση, τους ολοκληρωτές τους και όποιες άλλες εξόδους του ανοιχτού συστήματος χρειάζονται. Τα εν λόγω κριτήρια έχουν την μορφή φίλτρων πρώτης και δεύτερης τάξης και έχουν σκοπό να εισάγουν μηδενικά ώστε να βελτιώνουν τις λειτουργίες μικρής περιόδου, φυγοειδούς, ολλανδικής περιστροφής και της τροχιάς. Μετά την διαμόρφωση του μοντέλου σύνθεσης, προσδιορίζονται τα κέρδη ανάδρασης, επιλέγοντας τα βάρη στις συναρτήσεις κόστους, επιλύνοντας την εξίσωση Riccati για τον υπολογισμό των κερδών και χρησιμοποιώντας προγραμματισμό κερδών για τον προσδιορισμό του ελεγκτή για ένα εύρος καταστάσεων πτήσης. Το αεροσκάφος πετά με ένα συγκεκριμένο σενάριο πτήσης και πρέπει να ακολουθεί μια συγκεκριμένη τροχιά ώστε να προσεγγίσει τον αεροδιάδρομο για προσγείωση. Η τροχιά αυτή αποτελείται από επιμέρους τμήματα, σε κάποια από τα οποία υπεισέρχονται εξωτερικές διαταραχές, όπως άνεμος και βλάβη σε έναν από τους 2 κινητήρες για συγκεκριμένο χρονικό διάστημα. Η δομή της διπλωματικής εργασίας παρουσιάζεται παρακάτω: Κεφάλαιο 2 Περιγραφή του μοντέλου Το εν λόγω κεφάλαιο πραγματεύεται την ανάλυση των αξόνων περιστροφής καθώς και την περιγραφή των μεταβλητών και των σταθερών παραμέτρων ενός αεροσκάφους. Ακόμα γίνεται περιγραφή των εξισώσεων κίνησης του άκαμπτου σώματος αλλά και των εξισώσεων στο χώρο κατάστασης. Τέλος, παρατίθενται ορισμένα στοιχεία για τα πηδάλια ελέγχου, την ατμόσφαιρα, την βαρύτητα και το μοντέλο ανέμου. Κεφάλαιο 3 Χαρακτηριστικά Αεροσκάφους Σε αυτό το κεφάλαιο γίνεται μία εισαγωγή στις κατηγορίες ταξινόμησης των αεροσκαφών καθώς και στις φάσεις πτήσης. Τέτοια ανάλυση πραγματοποιείται και για το μοντέλο RCAM.
21 Εισαγωγή 9 Κεφάλαιο 4 Ορισμός του προβλήματος Περιγράφεται ο βασικός στόχος του προβλήματος ελέγχου και αναλύονται τα βασικά κριτήρια σχεδιασμού. Επίσης, αναλύεται η επιθυμητή τροχιά του αεροσκάφους καθώς και το σενάριο πτήσης. Κεφάλαιο 5 Σχεδίαση Συστήματος Ελέγχου Αρχικά παρατίθεται μια θεωρητική περιγραφή των συστημάτων ελέγχου που επρόκειτο να χρησιμοποιηθούν και στην συνέχεια πώς αυτά εφαρμόζονται στο RCAM μοντέλο. Κεφάλαιο 6 Προσομοιώσεις Πραγματοποίηση προσομοιώσεων με σκοπό την μελέτη της δυνατότητας του αεροσκάφους να ακολουθεί συγκεκριμένα σήματα αναφοράς καθώς και της συμπεριφοράς του σε εξωτερικές διαταραχές. Κεφάλαιο 7 Σύνοψη & Περαιτέρω Εφαρμογές - Μελέτες Παρουσίαση τελικών αποτελεσμάτων και σχολιασμός αυτών. Σκέψεις για μελλοντική βελτίωση του μοντέλου αλλά και του συστήματος ελέγχου.
22 10 Περιγραφή του μοντέλου 2 Περιγραφή του μοντέλου Σε αυτό το κεφάλαιο θα πραγματοποιηθεί η περιγραφή της μοντελοποίησης του αεροσκάφους καθώς και η εφαρμογή του μοντέλου αυτού στο περιβάλλον του Simulink. Το μοντέλο βασίζεται σε ένα μεγάλο μεταγωγικό αεροσκάφος, κινούμενο από δύο στροβιλοκινητήρες διπλής ροής, τύπου Airbus Beluga. Πρόκειται για ένα τροποποιημένο συμβατικό μεταγωγικό αεροσκάφος: το σχήμα της ατράκτου είναι τροποποιημένου και η διάμετρός του αρκετά μεγάλη. 2.1 Παραδοχές και Υποθέσεις Με σκοπό την απλοποίηση των μη γραμμικών εξισώσεων κίνησης έγιναν κάποιες υποθέσεις χωρίς βλάβη της γενικότητας. Αυτές είναι : Η γη παραμένει ακίνητη και θεωρείται επίπεδη. Έτσι κάθε πλαίσιο αναφοράς σε σχέση με την γη (θέση και προσανατολισμός) συμπεριφέρεται ως αδρανειακό σύστημα αναφοράς. Οι εξισώσεις κίνησης ισχύουν για ένα άκαμπτο σώμα, γεγονός που σημαίνει ότι όλοι οι ελαστικοί βαθμοί ελευθερίας οποιουδήποτε σημείου έχουν παραμεληθεί. Αυτή η υπόθεση ισχύει για όσο οι ιδιοσυχνότητες των ελαστικών μέσων είναι πολύ υψηλότερες από εκείνες του άκαμπτου σώματος. Η μάζα του αεροσκάφους είναι συνεχής, αφού η διάρκεια κατανάλωσης καυσίμου είναι πολύ μεγαλύτερη από τις σταθερές χρόνου λειτουργίας του άκαμπτου σώματος. Οι χρόνοι προσομοίωσης είναι της τάξης των λεπτών. Το αεροσκάφος είναι συμμετρικό ως προ τις διευθύνσεις X B Z B. Για αυτό το λόγο τα στοιχεία Ixy και Iyz του αδρανειακού πίνακα απαλείφονται. Οι αλληλεπιδράσεις μεταξύ των μηχανών και των άλλων τμημάτων της ατράκτου δεν λαμβάνονται υπόψη. Αυτό σημαίνει ότι η πολλαπλή σύζευξη που προκαλείται από την περιστροφή των κινητήρων παραμελείτε. Επιπλέον, οι αλληλεπιδράσεις μεταξύ του στρώματος αέρα που προέρχεται από τους κινητήρες και την ροή αέρα γύρω από την άτρακτο παραμελούνται. Όλες οι δυνάμεις ασκούνται στο κέντρο βάρους του αεροσκάφους. Οι δυνάμεις και ροπές που ασκούνται στο αεροσκάφος μπορούν να χωριστούν σε τρεις κατηγορίες:
23 Περιγραφή του μοντέλου 11 Αεροδυναμικές δυνάμεις και ροπές, Δυνάμεις και ροπές που παράγονται από το αεροσκάφος, Δυνάμεις βαρύτητας Οι πρώτες δύο κατηγορίες αφορούν πολύπλοκες, πολυδιάστατες και μη γραμμικές δυνάμεις και ροπές που συνήθως προσεγγίζονται από πολυώνυμα. Οι εν λόγω δυνάμεις και ροπές εκφράζονται πολλές φορές σε διαφορετικά συστήματα συντεταγμένων που θα αναλυθούν παρακάτω. 2.2 Άξονες Περιστροφής Το Γήινο σύστημα συντεταγμένων (earth-fixed axes system) είναι το πιο σημαντικό αφού αποτελεί το αδρανειακό σύστημα στο οποίο εφαρμόζονται οι νόμοι του Νεύτωνα. Ο άξονας X E έχει διεύθυνση προς τον βορρά, ο Y E προς την ανατολή και ο Z E έχει την διεύθυνση της Γης. Αυτό το σύστημα αξόνων χρησιμοποιείται για πλοήγηση επειδή μέσω αυτού μπορούμε να προσδιορίσουμε επακριβώς την θέση του αεροσκάφους ως προς ένα συγκεκριμένο σημείο αναφοράς πάνω στην Γη. Τα υπόλοιπα συστήματα αναφοράς θεωρούμε ότι έχουν το σταθερό σημείο αναφοράς τους πάνω στο αεροσκάφος (vehicle-carried axes system). Αν μεταφέρουμε τους Γήινους άξονες στο κέντρο βάρους του αεροσκάφους προκύπτει το κατακόρυφο σύστημα συντεταγμένων (vehicle-carried vertical axes system) το οποίο έχει τον ίδιο προσανατολισμό με το Γήινο (X V, Y V, Z V ) με ταχύτητες (U V, V V, W V ) αντίστοιχα. Εικόνα 2.1 Κατακόρυφο Σύστημα Συντεταγμένων
24 12 Περιγραφή του μοντέλου Με περιστροφή του κατακόρυφου συστήματος ως προς τις γωνίες διεύθυνσης (heading angle) Ψ, πρόνευσης Θ (pitch angle) και κλίσης Φ (roll angle) προκύπτει το σωματόδετο σύστημα συντεταγμένων (body-fixed axes system). Αυτές οι γωνίες σχηματίζουν το διάνυσμα Euler Ε = [Ψ, Θ, Φ] Τ και περιγράφουν την στάση του αεροσκάφους. Ο άξονας X B έχει διεύθυνση προς την μύτη του αεροσκάφους, ο Y B προς την δεξιά πτέρυγα και ο Z B προς το κάτω μέρος του αεροσκάφους. Οι συνιστώσες του διανύσματος ταχύτητας,v, κατά μήκος των αξόνων είναι U B, V B, W B αντίστοιχα και οι συνιστώσες των ρυθμών περιστροφής, Ω B, γύρω από τους άξονες είναι αντίστοιχα : ρυθμός περιστροφής P (roll rate), ρυθμός πρόνευσης Q (pitch rate) και ρυθμός εκτροπής R (yaw rate). Εικόνα 2.2 Σωματόδετο Σύστημα Συντεταγμένων Αν περιστρέψουμε το κατακόρυφο σύστημα συντεταγμένων γύρω από τον Z V άξονα ως προς την γωνία τροχιάς (track angle, χ) και γύρω από τον Y V άξονα ως προς γωνία ίχνους πτήσης (flightpath angle, γ) θα προκύψει το flightpath σύστημα συντεταγμένων, όπου ο άξονας X βρίσκεται στην διεύθυνση του διανύσματος ταχύτητας V. Οι παραπάνω δύο γωνίες μπορούν να υπολογιστούν μέσω των ακόλουθων εξισώσεων : tttttt γγ = WW VV UU VV 2 + VV VV 2 Εξ
25 Περιγραφή του μοντέλου 13 tttttt χχ = VV VV UU VV Εξ Με περιστροφή του σωματόδετου συστήματος αξόνων επί της γωνίας πλαγιολίσθησης, β, και της γωνίας προσβολής, α, προκύπτουν οι άξονες ανέμου (wind axes system). Με παρόμοιο τρόπο υπολογίζονται και οι άξονες ευστάθειας (stability axes system ). Εικόνα 2.3 Σύστημα Συντεταγμένων Ευστάθειας
26 14 Περιγραφή του μοντέλου Εικόνα 2.4 Σύστημα Συντεταγμένων Ανέμου Πιο συγκεκριμένα για την μετατροπή από ένα σύστημα M σε ένα σύστημα N χρησιμοποιούμε τον πίνακα R NM = R MN T, ως εξής : Από ανέμου σε σωματόδετο : cccccccc 0 ssssssss cccccccc ssssssss 0 RR BBBB = ssssssss cccccccc 0 ssssssss 0 cccccccc Εξ Από ευστάθειας σε σωματόδετο : cccccccc 0 ssssssss RR BBBB = ssssssss 0 cccccccc Εξ Από κατακόρυφο σε σωματόδετο : cccccccc 0 ssssssss cccccccc ssssssss 0 RR BBBB = 0 cccccccc ssssssss ssssssss cccccccc 0 0 ssssssss cccccccc ssssssss 0 cccccccc Εξ
27 Περιγραφή του μοντέλου 15 Από κατακόρυφο σε ίχνος πτήσης : cccccccc 0 ssssssss cccccccc 0 ssssssss RR BBBB = ssssssss 0 cccccccc ssssssss 0 cccccccc Εξ Παρακάτω απεικονίζονται τα συστήματα συντεταγμένων που αναφέρθηκαν προηγουμένως σε κοινό διάγραμμα : Εικόνα 2.5 Συστήματα Συντεταγμένων Σωματόδετου, Ευστάθειας, Ανέμου

28 16 Περιγραφή του μοντέλου 2.3 Δομικό Διάγραμμα του Συστήματος Το μοντέλο του συστήματος υλοποιήθηκε στο περιβάλλον του Simulink και απεικονίζεται στα παρακάτω σχήματα. Επιπλέον διαγράμματα από το περιβάλλον του Simulink δίνονται στο Παράρτημα Α. Εικόνα 2.6 Δομικό Διάγραμμα του αεροσκάφους σε Simulink I Εικόνα 2.7 Δομικό Διάγραμμα του αεροσκάφους σε Simulink II
29 Περιγραφή του μοντέλου Ονοματολογία Προσδιορισμός Εισόδων Οι είσοδοι του μοντέλου δίνονται στον παρακάτω πίνακα : Σύμβολο Αλφαριθμητικό Όνομα Μονάδες Είσοδοι Ελέγχου δ Α DA u (1) = εκτροπή πηδαλίου κλίσης rad δ Τ DT u (2) = εκτροπή πηδαλίου ανόδου-καθόδου rad δ R DR u (3) = εκτροπή πηδαλίου διεύθυνσης rad δ ΤΗ1 THROTTLE1 u (4) = ώση κινητήρα 1 rad δ ΤΗ2 THROTTLE2 u (5) = ώση κινητήρα 2 rad Είσοδοι Ανέμου W XE WXE u (6) = ταχύτητα ανέμου στον x-άξονα του F E m/s W YE WYE u (7) = ταχύτητα ανέμου στον y-άξονα του F E m/s W ZE WZE u (8) = ταχύτητα ανέμου στον z-άξονα του F E m/s W XB WXB u (9) = ταχύτητα ανέμου στον x-άξονα του F B m/s W YB WYB u (10) = ταχύτητα ανέμου στον y-άξονα του F B m/s W ZB WZB u (11) = ταχύτητα ανέμου στον z-άξονα του F B m/s Πίνακας 2.1Είσοδοι
30 18 Περιγραφή του μοντέλου Προσδιορισμός Καταστάσεων Οι καταστάσεις του μοντέλου δίνονται στον παρακάτω πίνακα : Σύμβολο Αλφαριθμητικό Όνομα Μονάδες p P x (1) = ρυθμός περιστροφής (F B ) rad/s q Q x (2) = ρυθμός πρόνευσης (F B ) rad/s r R x (3) = ρυθμός εκτροπής (F B ) rad/s φ PHI x (4) = γωνία κλίσης rad θ THETA x (5) = γωνία πρόνευσης rad ψ PSI x (6) = γωνία διεύθυνσης rad u B UB x (7) = x συνιστώσα αδρανειακής ταχύτητας σε F B m/s v B VB x (8) = y συνιστώσα αδρανειακής ταχύτητας σε F B m/s w B WB x (9) = z συνιστώσα αδρανειακής ταχύτητας σε F B m/s x X x (10) = θέση κέντρου βάρους αεροσκάφους σε F E m y Y x (11) = θέση κέντρου βάρους αεροσκάφους σε F E m z Z x (12) = θέση κέντρου βάρους αεροσκάφους σε F E m Πίνακας 2.2 Καταστάσεις Προσδιορισμός Εξόδων Οι έξοδοι του μοντέλου δίνονται στον παρακάτω πίνακα :
31 Περιγραφή του μοντέλου 19 Σύμβολο Αλφαριθμητικό Όνομα Μονάδες q Q y (1) = ρυθμός πρόνευσης = x (2) rad/s n x NX y (2) = συντελεστής οριζόντιου φορτίου σε F B ( FF xx mmmm ) - n z NZ y (3) = συντελεστής κάθετου φορτίου σε F B ( FF zz mmmm ) - w V WV y (4) = z συνιστώσα αδρανειακής ταχύτητας σε F V m/s z Z y (5) = θέση κέντρου βάρους αεροσκάφους σε F E = x (12) m V A VA y (6) =ταχύτητα m/s V V y (7) =ολική αδρανειακή ταχύτητα m/s β BETA y (8) = γωνία πλαγιολίσθησης rad p P y (9) = ρυθμός περιστροφής = x (1) rad/s r R y (10) = ρυθμός εκτροπής= x (3) rad/s φ PHI y (11) = γωνία κλίσης = x (4) rad u V UV y (12) = x συνιστώσα αδρανειακής ταχύτητας σε F V m/s v V VV y (13) = y συνιστώσα αδρανειακής ταχύτητας σε F V m/s y Y y (14) = θέση κέντρου βάρους αεροσκάφους σε F E = x (11) χ CHI y (15) = αδρανειακή γωνία τροχιάς rad ψ PSI y (16) = γωνία διεύθυνσης = x (6) rad θ THETA y (17) = γωνία πρόνευσης = x (5) rad α ALPHA y (18) = γωνία προσβολής rad γ GAMMA y (19) =αδρανειακή γωνία ίχνους πτήσης rad x X y (20) = θέση κέντρου βάρους αεροσκάφους σε F E = x (10) n y NY y (21) = πλευρικός συντελεστής φορτίου σε F B ( FF yy mmmm ) - X Tail XTAIL y (22) = σήμα ελέγχου για εκτροπή πηδαλίου ανόδουκαθόδου X Throttle XTHROTTLE y (23) = σήμα ελέγχου για ώση κινητήρα 1 + ώση κινητήρα 2 X Ail XAIL y (24) = σήμα ελέγχου για εκτροπή πηδαλίου κλίσης rad X Rdr XRDR y (25) = σήμα ελέγχου για εκτροπή πηδαλίου διεύθυνσης rad Πίνακας 2.3 Έξοδοι m m rad rad
32 20 Περιγραφή του μοντέλου Προσδιορισμός Παραμέτρων Οι προεπιλεγμένες τιμές των παραμέτρων του αεροσκάφους καθώς και το εύρος ορισμένων εξ αυτών φαίνονται στους παρακάτω πίνακες : Σύμβολο Αλφαριθμητικό Όνομα Προεπιλεγμένη Μονάδες Τιμή Παράμετροι Μάζας m MASS Ολική Μάζα Αεροσκάφους kg Αδρανειακοί Παράμετροι I X m I Y m I Z m IX Αδρανειακή Ροπή στον x B -άξονα 40.0 m 2 MASS IY Αδρανειακή Ροπή στον y B -άξονα 64.0 m 2 MASS IZ Αδρανειακή Ροπή στον z B -άξονα m 2 MASS ε p EPSILONP Γωνία μεταξύ σωματόδετου άξονα -2.0 deg και αδρανειακού Αεροδυναμικοί Παράμετροι cc CBAR Μέση αεροδυναμική χορδή 6.6 m b Β Εκπέτασμα πτερύγων m l t LTAIL Απόσταση μεταξύ αεροδυναμικού 24.8 m κέντρου των πτερύγων και του ουραίου S S Επιφάνεια πτερύγων 260 m 2 S t STAIL Επιφάνεια Ουραίου 64 m 2 X cg XCG Θέση κέντρου βάρους σε F M 0.23 cc m Y cg YCG Θέση κέντρου βάρους σε F M 0 cc m Z cg ZCG Θέση κέντρου βάρους σε F M 0.1 cc m Παράμετροι Κινητήρα X APT1 XAPT1 Θέση εφαρμογής ώσης κινητήρα 1 0 m σε F M Y APT1 YAPT1 Θέση εφαρμογής ώσης κινητήρα m σε F M Z APT1 ZAPT1 Θέση εφαρμογής ώσης κινητήρα m
33 Περιγραφή του μοντέλου 21 σε F M X APT2 XAPT2 Θέση εφαρμογής ώσης κινητήρα 2 σε F M Y APT2 YAPT2 Θέση εφαρμογής ώσης κινητήρα 2 σε F M Z APT2 ZAPT2 Θέση εφαρμογής ώσης κινητήρα 2 0 m m -1.9 m σε F M Πίνακας 2.4 Παράμετροι Αεροσκάφους Παράμετροι Όρια Ονομαστικές τιμές m kg < m < kg kg X cg 0.15 cc < X cg < 0.31 cc 0.23 cc Y cg cc < Y cg < 0.03 cc 0.0 cc Z cg 0.00 cc < Z cg < 0.21 cc 0.10 cc Πίνακας 2.5 Όρια Παραμέτρων
34 22 Περιγραφή του μοντέλου Παράμετροι k 0.07 k q 1.3 α dε/dα 0.25 rad VV tt 2 VV Συντελεστές Δυνάμεων C D C L C Lα C Lwbα C Ltα C Lq C LδT C Yβ C YδR 0.24 Συντελεστές Ροπών - C m C mα C lβ C nβ C nαβ C lp C np C mq C lr C nr C lδa C nδα C mδt C lδr C nδr Πίνακας 2.6 Συντελεστές
35 Περιγραφή του μοντέλου Δυναμική Συμπεριφορά Αεροσκάφους Σε αυτήν την ενότητα θα αναλύσουμε την δυναμική συμπεριφορά του αεροσκάφους δίνοντας έμφαση στα ακόλουθα : Εξισώσεις κίνησης άκαμπτου σώματος Υπολογισμός ταχύτητας Αεροδυναμικές εξισώσεις Εξισώσεις κίνησης στο Χώρο Κατάστασης Υπολογισμός στοιχείων κινητήρα Πηδάλια Ελέγχου Ατμόσφαιρα Βαρύτητα Μοντέλο Ανέμου Εξισώσεις κίνησης άκαμπτου σώματος Οι εξισώσεις κίνησης του άκαμπτου σώματος με έξι βαθμούς ελευθερίας ανάγονται στις αντίστοιχες μεταφορικές και περιστροφικές εξισώσεις κίνησης Μεταφορική Κίνηση Οι εξισώσεις για την μεταφορική κίνηση άκαμπτου σε σωματόδετους άξονες (body axes system) απορρέουν από το διάνυσμα των δυνάμεων: FF = mm(αα BB + ΩΩ VV BB ) Εξ ,όπου F είναι το σύνολο των δυνάμεων από τους κινητήρες, των αεροδυναμικών δυνάμεων και της βαρύτητας. V B = το διάνυσμα της αδρανειακής ταχύτητας και ω = το διάνυσμα των γωνιακών ταχυτήτων εκφρασμένα σε σωματόδετους άξονες Η επιτάχυνση, α Β, υπολογίζεται από την πρώτη παράγωγο της ταχύτητας ως προς τον χρόνο : FF xxxx aa BB = ddvv BB dddd = dd uu BB dddd vv BB = 1 ww mm RR BBBB FF yyyy BB FF zzzz SS + 1 mm FF xxxx FF yyyy FF zzzz BB 0 + RR BBBB 0 1 VV gg ΩΩ BB VV BB Εξ
36 24 Περιγραφή του μοντέλου pp,όπου ΩΩ BB VV BB = qq rr BB uu vv ww BB qqqq rrrr 0 = rrrr pppp και RR BBBB 0 pppp qqqq 1 BB VV gggggggggg gg = gggggggggggggggg θθ gggggggggggggggggg Αντίστοιχα η ταχύτητα υπολογίζεται από την πρώτη παράγωγο της θέσης ως προς τον χρόνο εκφρασμένη σε κατακόρυφους άξονες (vehicle-carried vertical axes system) : VV VV = ddxx VV dddd = dd xx dddd yy zz Περιστροφική Κίνηση Εξ Οι εξισώσεις για την περιστροφική κίνηση άκαμπτου σε σωματόδετους άξονες (body axes system) απορρέουν από το διάνυσμα των ροπών : ΜΜ = ΙΙ dddd dddd + ΩΩ ΙΙΙΙ Εξ ,όπου Μ είναι το σύνολο των ροπών που ασκούνται στο κέντρο βάρους του αεροσκάφους και οφείλονται στους κινητήρες, τις αεροδυναμικές δυνάμεις και την βαρύτητα. Ομοίως με την μεταφορική κίνηση, η γωνιακή επιτάχυνση υπολογίζεται από την πρώτη παράγωγο της γωνιακής ταχύτητας ως προς τον χρόνο : dddd = dd pp dddd BB dddd qq rr BB LL AA = II 1 MM AA NN AA BB LL TT + MM TT ΩΩ BB IIII BB NN TT BB Εξ Η σχέση μεταξύ των γωνιών Euler, Ε = [Ψ, Θ, Φ] Τ, και των γωνιακών ταχυτήτων δίνεται από : 1 ssssssssssssssss cccccccccccccccc dddd pp dddd = 0 cccccccc ssssssss qq 0 ssssssss/cccccccc cccccccc/cccccccc rr Εξ Επίσης για αεροσκάφη που είναι συμμετρικά γύρω από τους σωματόδετους άξονες OXZ ο αδρανειακός πίνακας ροπών αδράνειας είναι :
37 Περιγραφή του μοντέλου 25 II xx 0 II xxzz II = 0 II yy 0 = II xxxx 0 II zz Υπολογισμός Ταχύτητας Εξ Το διάνυσμα της ταχύτητας, Vα, είναι η διαφορά των αδρανειακών ταχυτήτων, VB, και των ταχυτήτων ανέμου, WB και WE. Εκφρασμένο σε σωματόδετους άξονες το διάνυσμα της ταχύτητας ισούται με : VV αα = VV BB WW BB RR BBBB WW EE uu αα Δεχόμενοι ότι VV αα = vv αα το μέτρο της ταχύτητας θα ισούται με : ww αα VV AA = (uu αα 2 + vv αα 2 + ww αα 2 ) Επιπλέον η γωνία προσβολής, α, και η γωνία πλαγιολίσθησης, β, προσδιορίζονται : και αντίστοιχα Αεροδυναμικές Εξισώσεις tan αα = ww αα uu αα ssssss ββ = vv αα VV AA Εξ Εξ Εξ Εξ Οι εξισώσεις που διέπουν τις αεροδυναμικές δυνάμεις και ροπές καθορίζονται μέσω των αεροδυναμικών συντελεστών. Οι αεροδυναμικές συντελεστές μπορεί να εκφραστούν είτε σε άξονες ευστάθειας, F S, ή σε άξονες ανέμου,f W, ή και σε σωματόδετους άξονες, F B. Παρακάτω θα χρησιμοποιηθούν οι άξονες ευστάθειας.
38 26 Περιγραφή του μοντέλου Αεροδυναμικές Δυνάμεις Οι αεροδυναμικές δυνάμεις προσδιορίζονται μέσω των αεροδυναμικών συντελεστών άνωσης (C L ), οπισθέλκουσας (C D ) και πλάγιας δύναμης (C Y ), οι οποίοι είναι συναρτήσει των γωνιών προσβολής, πλαγιολίσθησης καθώς και των εκτροπών των πηδαλίων. Ο αεροδυναμικός συντελεστής άνωσης προσδιορίζεται ως εξής : CC LL = CC LLLLLL + CC LLLL SS tt SS VV tt VV 2 Εξ , όπου VV tt VV 2 = 1 είναι οι απώλειες δυναμικής πίεσης στο οριζόντιο ουραίο πτερύγιο και C Lwb είναι ο αεροδυναμικός συντελεστής άνωσης των πτερύγων και του σώματος και ασκείται στο αεροδυναμικό κέντρο αυτών παράλληλα στον Z S άξονα. Είναι συνάρτηση μόνο της γωνίας προσβολής και για α < 19 μοιρών ισχύει η σχέση : 5.5(aa aa 0 ), aa 14.5 ππ CC LLLLLL = 180 rrrrrr aa aa aa , aa > 14.5 ππ 180 rrrrrr Εξ ,όπου α 0 είναι η γωνία προσβολής στην οποία η άνωση είναι μηδέν : aa 0 = 11.5 ππ 180 rrrrrr Ο αεροδυναμικός συντελεστής του ουραίου, C Lt, δρα στο αεροδυναμικό κέντρο του ουραίου και είναι επίσης παράλληλο στον Z S άξονα και δίνεται από τον τύπο : CC LLLL = CC LLLLLL aa tt Εξ ,όπου ο όρος CC LLLLLL υποδηλώνει την παράγωγο του CC LLLL ως προς aa tt, ενώ ο όρος α t υποδηλώνει την γωνία προσβολής του ουραίου και υπολογίζεται από τον ακόλουθο τύπο : aa tt = aa εε + δδ ΤΤ + 1,3 qqqq tt VV AA εε = dddd dddd (αα αα 0) dddd dddd = 0,25 Εξ Εξ
39 Περιγραφή του μοντέλου 27, όπου ε = γωνία κατωρεύματος (downwash angle), δ Τ = εκτροπή του ουραίου. Ο αεροδυναμικός συντελεστής οπισθέλκουσας, C D, εξαρτάται μόνο από την γωνία προσβολής επειδή θεωρούμε ότι η οπισθέλκουσα στο ουραίο είναι αμελητέα και άρα η δύναμη ασκείται μόνο στο αεροδυναμικό κέντρο της πτέρυγας και της ατράκτου. Υπολογίζεται από τον ακόλουθο τύπο : CC DD = CC DD0 + kk(cc LLLLLL (aa aa 0 ) CC LL0 ) 2 Εξ Ο αεροδυναμικός συντελεστής πλάγιας δύναμης επίσης θεωρείται ότι δρα μόνο στο αεροδυναμικό κέντρο της πτέρυγας και της ατράκτου και υπολογίζεται από τον ακόλουθο τύπο : CC YY = CC YYYY ββ + CC ΥΥΥΥΥΥ δδ RR,όπου β = γωνία πλαγιολίσθησης και δ R = εκτροπή του πηδάλιού διεύθυνσης Εξ Οι παραπάνω συντελεστές προσδιορίζουν τις αεροδυναμικές δυνάμεις μέσω των ακόλουθων σχέσεων : Αεροδυναμική δύναμη κατά μήκος του X S άξονα (οπισθέλκουσα, drag) : XX = DD = CC DD 1 2 ρρvv AA 2 SS Εξ Αεροδυναμική δύναμη κατά μήκος του Y S άξονα (πλάγια δύναμη, sideforce): YY = CC YY 1 2 ρρvv AA 2 SS Εξ Αεροδυναμική δύναμη κατά μήκος του Z S άξονα (άνωση, lift) : ZZ = LL = CC LL 1 2 ρρvv AA 2 SS Εξ Προκειμένου να υπολογίσουμε τις εξισώσεις της μεταφορικής κίνησης, Εξ , θα πρέπει να μετατραπούν οι παραπάνω δυνάμεις (D, Y, L) σε σωματόδετους άξονες (F xa, F ya, F za ). Αυτό γίνεται ως εξής :
40 28 Περιγραφή του μοντέλου Αεροδυναμικές Ροπές FF xxxx = LLLLLLLLLL DDDDDDDDDD FF yyyy = YY FF zzzz = LLLLLLLLLL DDDDDDDDDD Όμοια με τις δυνάμεις, έτσι και οι αεροδυναμικές ροπές εκφράζονται μέσω των συντελεστών ροπών (C l, C m, C n ), οι οποίοι θεωρούμε ότι δρουν μόνο στο αεροδυναμικό κέντρο της πτέρυγας και της ατράκτου και υπολογίζονται ως εξής : CC ll CC mm = CCnn 0 CC mm0 0 pp bb 0 CC llll 0 αα CC llll 0 CC llll 2VV AA + CC mmmm 0 0 ββ + 0 CC mmmm 0 qq cc 0 CC nnnn CC nnnnnn αααα VV CC nnnn 0 CC nnnn AA rr bb 2VV AA CC llllll 0 CC llllll + 0 CC mmmmmm 0 CC nnnnnn 0 CC nnnnnn Ο παραπάνω τύπος με την αντικατάσταση των σταθερών τιμών γίνεται : 1.4ββ CC ll CC SS tt ll tt (aa εε) mm = SS cc CCnn 1 aa SS 2 tt ll tt 0 cc pp qq SS cc 2 VV AA rr ββ ππ,όπου δ Α = εκτροπή του πηδαλίου κλίσης, δ Τ = εκτροπή του ουραίου πηδαλίου, δ R = εκτροπή του πηδαλίου διεύθυνσης, δδ AA δδ TT δδ RR SS δδ tt ll AA tt 0 δδ TT SS cc δδ RR C l = αεροδυναμικός συντελεστής ροπής περιστροφής, C m = αεροδυναμικός συντελεστής ροπής πρόνευσης, C n = αεροδυναμικός συντελεστής ροπής εκτροπής. Εξ Εξ Η αεροδυναμική ροπή ως προς το αεροδυναμικό κέντρο μπορεί να γραφεί ως εξής :
41 Περιγραφή του μοντέλου 29 CC mm = CC mm0 + CC mmmm (αα αα 0 ) + CC mmmm qqcc VV AA + CC mmmmmm δδ TT Εξ ,όπου CC mm0 = CC mmmmmm CC LLLLLL αα 0 SS tt ll tt SScc VV tt VV 2 Εξ CC mmmm = CC LLLLLL (1 dε dα ) SS ttll tt VV 2 tt SScc VV Εξ CC mmmm = kk qq CC LLLLLL αα 0 SS tt ll tt SScc 2 VV tt VV 2 Εξ CC mmmmmm = CC LLLLLL SS tt ll tt SScc VV tt VV 2 Εξ Οι παραπάνω συντελεστές προσδιορίζουν τις αεροδυναμικές ροπές μέσω της ακόλουθης σχέσης : LL AA MM AA NN AA BB = 1 CC ll 2 ρρvv AA 2 SS CC mm + 1 CCnn 2 ρρvv AA 2 SS xx cccc cc xx aaaa cc yy cccc cc zz cccc cc SSSS 0 0,όπου SS = 0 Scc 0, LL AA = ροπή περιστροφής 0 0 Sb BB CC DD RR BBBB CC YY CC LL SS BB Εξ σε σωματόδετους άξονες (rolling moment), MM AA = ροπή πρόνευσης σε σωματόδετους άξονες (pitching moment) και NN AA = ροπή εκτροπής σε σωματόδετους άξονες (yawing moment). Οι παραπάνω ροπές σε συνδυασμό με τις ροπές που οφείλονται στους κινητήρες χρησιμοποιούνται για τον υπολογισμό των εξισώσεων περιστροφικής κίνησης, Εξ
42 30 Περιγραφή του μοντέλου Εξισώσεις κίνησης στο Χώρο Κατάστασης Προκειμένου να εξαχθούν οι γραμμικές εξισώσεις στο χώρο κατάστασης θα πρέπει πρώτα να γραμμικοποιηθεί το αρχικό μοντέλο. Για να διαπιστωθεί καλύτερα η συμπεριφορά του αεροσκάφους ως ανοιχτός βρόχος, η γραμμικοποίηση πραγματοποιήθηκε γύρω από 81 διαφορετικά σημεία λειτουργίας μεταβάλλοντας την ταχύτητα, το κέντρο βάρος και τη μάζα του αεροσκάφους. Για να σχεδιασθεί ο γραμμικός νόμος ελέγχου το σύστημα γραμμικοποιήθηκε σε σημείο λειτουργίας με Va = 80 m/s, m = kg, Xcg = 0.23cc και Zcg = 0.1cc. Οι εξισώσεις κίνησης στο χώρο κατάστασης του γραμμικοποιημένου χρονικά αμετάβλητου συστήματος, ΓΧΑ, πολλών μεταβλητών μπορεί να γραφεί ως εξής : xx (tt) = AAAA(tt) + BBBB(tt) yy(tt) = CCCC(tt) + DDDD(tt),όπου x(t) είναι το διάνυσμα m καταστάσεων, u(t) το διάνυσμα εισόδου, A ο (n n) πίνακας κατάστασης, B ο (n m) πίνακας εισόδου, y(t) το διάνυσμα r εξόδων, C ο (r n) πίνακας εξόδου και D ο (r m) άμεσος πίνακας Διαμήκης Δυναμική Αφού αποζεύξουμε τις εξισώσεις κίνησης στις αντίστοιχες διαμήκεις και εγκάρσιες μπορούμε να υπολογίσουμε τις εξισώσεις στο χώρο κατάστασης που είναι οι ακόλουθες. Για τον διαμήκη άξονα : qq θ uu bb ww bb q qq δδ ΤΤ θθ = AA uu bb + BB δδ ΤΤΤΤ 1 ww bb δδ ΤΤΤΤ 2 qq δδ n ΤΤ z θθ w = CC v uu bb + DD δδ ΤΤΤΤ 1 V a ww bb δδ ΤΤΤΤ 2 Εξ Μέσω των εξισώσεων κίνησης μπορούμε να υπολογίσουμε τις συναρτήσεις μεταφοράς που εκφράζουν την διαμήκη αλλά και την εγκάρσια κίνηση του αεροσκάφους. Είναι βολικό να μελετάμε την απόκριση στον διαμήκη άξονα γύρω από ένα σημείο ισορροπίας όπου τα στοιχεία του κινητήρα διατηρούνται σταθερά. Οπότε η Εξ μετατρέπεται ως εξής :
43 Περιγραφή του μοντέλου 31 qq θ uu bb ww bb = AA qq θθ uu bb + BBδδ ΤΤ ww bb Εξ Αναλύοντας την παραπάνω εξίσωση υπολογίζουμε τις τέσσερις συναρτήσεις μεταφοράς που έχουν την ακόλουθη μορφή: YY(ss) U(ss) = N(s) ss 2 + 2ζζ pp ωω pp ss + ωω pp 2 (ss 2 + 2ζζ ss ωω ss ss + ωω ss2 ) Εξ Η χαρακτηριστική εξίσωση ενός αεροσκάφους είναι συνήθως τέταρτης τάξης και έχει την ακόλουθη μορφή : ως εξής: AAss 4 + BBss 3 + CCss 2 + DDDD + EE = 0 Εξ Η παραπάνω εξίσωση αναπαριστά 2 ζευγάρια μιγαδικών πόλων και μπορεί να γραφτεί ss 2 + 2ζζ pp ωω pp ss + ωω pp 2 (ss 2 + 2ζζ ss ωω ss ss + ωω ss 2 )=0 Κάθε ένας από τους όρους (ss 2 + 2ζζζζζζ + ωω 2 ) εκφράζει μια αρμονική κίνηση με λόγο απόσβεσης ζ και συχνότητα ω. Ο όρος με την μικρότερη συχνότητα ονομάζεται φυγοειδές κίνηση (phugoid) και εκφράζεται από τον όρο ss 2 + 2ζζ pp ωω pp ss + ωω pp 2, ενώ αυτός με την μεγαλύτερη συχνότητα, ταλάντωση μικρής περιόδου (short term oscillation) και εκφράζεται από τον όρο (ss 2 + 2ζζ ss ωω ss ss + ωω ss 2 ).
44 32 Περιγραφή του μοντέλου Εγκάρσια Δυναμική Για τον εγκάρσιο άξονα : pp rr pp rr φφ = AA φφ ψψ ψψ vv bb vv bb + BB δδ AA δδ RR ββ pp pp rr rr = CC φφ φφ xx ψψ vv bb + DD δδ AA δδ RR Εξ Οι συναρτήσεις μεταφοράς έχουν την εξής μορφή : YY(ss) U(ss) = N(s) (ss + (1/TTTT))(ss + (1/TTTT ))(ss 2 + 2ζζ dd ωω dd ss + ωω dd 2 ) Εξ Όπως και στην διαμήκη δυναμική η χαρακτηριστική εξίσωση για την εγκάρσια κίνηση είναι: AAss 4 + BBss 3 + CCss 2 + DDDD + EE = 0, με την διαφορά ότι στην εγκάρσια δυναμική αναπαριστά ένα ζεύγος μιγαδικών και δύο πραγματικούς πόλους. Όποτε γράφεται : ss + 1 TT ss + 1 ss TT (ss 2 + 2ζζ dd ωω dd ss + ωω 2 dd ) = 0 rr Ο πρώτος όρος εκφράζει την σπειροειδή κίνηση (spiral mode), ο δεύτερος την περιστροφή (roll motion), και ο τρίτος τον ολλανδικό διατοιχισμό (dutch roll) Υπολογισμός Στοιχείων Κινητήρα Το εν λόγω μοντέλο αεροσκάφους λαμβάνει ισχύ από δύο κινητήρες. Η ώση T i κάθε κινητήρα υπολογίζεται από : TT ii = δδ TTTTTT mmmm, i = 1,2 Εξ Η διεύθυνση της ώσης του κινητήρα ταυτίζεται με τον x σωματόδετο άξονα, x B, ενώ οι συνιστώσες στους y B και z B είναι μηδέν. Οπότε το διάνυσμα των δυνάμεων που οφείλονται στους κινητήρες είναι :
45 Περιγραφή του μοντέλου 33 FF xxxx FF yyyy FF zzzz BB TT1 + TT2 = 0 0 BB Εξ Αντίστοιχα το διάνυσμα των ροπών που οφείλονται στους κινητήρες είναι : xx cccc xx AAAAAAAA TT ii MM TTTT = yy cccc + yy AAAAAAAA 0 zz cccc zz AAAAAAAA 0 BB BB Το μοντέλο του κινητήρα στο περιβάλλον Simulink απεικονίζεται παρακάτω: Εξ Πηδάλια Ελέγχου Εικόνα 2.8 Δομικό Διάγραμμα Κινητήρα Οι επιφάνειες των πτερυγίων κλίσης, οριζόντιου και κάθετου ουραίου ελέγχονται από τας αντίστοιχα πηδάλια κλίσης (aileron, δ Α ), διεύθυνσης (rudder, δ R ) και ανόδου-καθόδου (tailplane, δ T ).Οι συναρτήσει μεταφοράς για κάθε ένα από αυτά είναι οι εξής : HH δδaa = ss+1 HH δδtt = ss+1 HH δδrr = ss+1 Η αντίστοιχη συνάρτηση μεταφοράς για τα στοιχεία του κινητήρα είναι : HH δδtttt = 1 1.5ss+1. Στον παρακάτω πίνακα φαίνονται τα όρια των εισόδων :
46 34 Περιγραφή του μοντέλου Είσοδος Ελάχιστο Μέγιστο Μονάδες Όριο Ρυθμού Μονάδες Όριο Όριο Μεταβολής δ Α deg 25 deg/s δ Τ deg 15 deg/s δ R deg 25 deg/s δ THi deg 1.6 deg/s Πίνακας 2.7 Αριθμητικά Όρια Εισόδων Παρακάτω απεικονίζεται ενδεικτικά το δομικό διάγραμμα του σήματος ελέγχου του πηδαλίου ανόδου-καθόδου καθώς και το διάγραμμα με όλα τα σήματα ελέγχου: Εικόνα 2.9 Δομικό Διάγραμμα σήματος ελέγχου του πηδαλίου ανόδου-καθόδου Εικόνα 2.10 Δομικό Διάγραμμα Σημάτων Ελέγχου
47 Περιγραφή του μοντέλου Ατμόσφαιρα Η ατμόσφαιρα θεωρείται ότι είναι συνεχής ανεξάρτητα ύψους και θέσης. Για την επιφάνεια της θάλασσας χρησιμοποιήθηκαν οι εξής τιμές : ρ = 1,225 kg/m 3 P = N/m 2 T = K,όπου ρ = πυκνότητα του αέρα, P = στατική πίεση αέρα και T = απόλυτη θερμοκρασία Βαρύτητα Επειδή η βαρύτητα δεν θεωρείται συνάρτηση του ύψους, είναι σταθερή και ίση με : g = 9.81m/s. 2.6 Μοντέλο Ανέμου Προκειμένου οι προσομοιώσεις τόσο του ανοιχτού βρόχου όσο και του κλειστού να γίνουν όσο το δυνατόν πιο ρεαλιστικές, το μη γραμμικό μοντέλο έχει εισόδους για τον άνεμο και για ριπές αέρα. Χρησιμοποιούνται τρία είδη ανέμου: Σταθερός Άνεμος: Εφαρμόζεται σταθερός άνεμος κατά την διεύθυνση X E του αδρανειακού συστήματος συντεταγμένων. Μοντέλο Ριπής Αέρα: Πρόκειται για στοχαστική διαδικασία, η οποία ορίζεται από φάσματα ταχυτήτων και αναπαράγει ριπές αέρα κατά την διάρκεια των προσομοιώσεων. Πεδίο Μεταβλητού Ανέμου: Χρησιμοποιείται ένα μοντέλο δύο διαστάσεων και συμμετρικό ως προς τους άξονες Y-Z. Το μοντέλο υλοποιείται ως ένας πίνακας αναζήτησης των θέσεων x και z σε αδρανειακό σύστημα συντεταγμένων με τις αντίστοιχες ταχύτητες ανέμου W XE και W ZE, ενώ η ταχύτητα W ΥE θεωρείται μηδέν.
48 36 Περιγραφή του μοντέλου Εικόνα 2.11 Το μοντέλο Ανέμου
49 Χαρακτηριστικά Αεροσκάφους 37 3 Χαρακτηριστικά Αεροσκάφους 3.1 Εισαγωγικά Ταξινόμηση αεροσκάφους Τα αεροσκάφη ταξινομούνται ανάλογα με το μέγεθος και το βάρος τους ως εξής : Κλάση 1 Μικρά, ελαφριά αεροσκάφη Κλάση 2 Μεσαίου μεγέθους, χαμηλή με μεσαία ικανότητα ελιγμών αεροσκάφη Κλάση 3 Μεγάλα, βαριά, χαμηλή με μεσαία ικανότητα ελιγμών αεροσκάφη Κλάση 4 Υψηλής ικανότητας ελιγμών αεροσκάφη Φάσεις Πτήσης Μια πτητική έξοδος ή αποστολή, mission, μπορεί να καθοριστεί πλήρως από μια αλληλουχία συγκεκριμένων ελιγμών, piloting tasks. Δηλαδή μια αποστολή μπορεί να περιγραφεί ως μια διαδοχή πτητικών φάσεων οι οποίες περιλαμβάνουν διάφορους ελιγμούς. Οι φάσεις της πτήσης ομαδοποιούνται σε τρεις κατηγορίες οι οποίες περιλαμβάνουν μια ποικιλία από ελιγμούς που απαιτούν παρόμοια χαρακτηριστικά πτήσης για την επιτυχή τους εκτέλεση. Οι ελιγμοί προσδιορίζονται ξεχωριστά ως προς τους φακέλους πτήσης. Οι κατηγορίες των φάσεων της πτήσης ορίζονται ως ακολούθως: Κατηγορία Α: μη τερματικές φάσεις που απαιτούν ταχείς ελιγμούς, ακρίβεια στη διόρθωση, precision tracking, ή ακριβή έλεγχο του ίχνους πτήσης. Κατηγορία Β: μη τερματικές φάσεις που απαιτούν βαθμιαίους ελιγμούς, λιγότερη ακρίβεια στη διόρθωση και ακριβή έλεγχο του ίχνους πτήσης. Κατηγορία C: τερματική φάση που απαιτεί βαθμιαίους ελιγμούς και ακριβή έλεγχο του ίχνους πτήσης Επίπεδα των χαρακτηριστικών πτήσης Τα επίπεδα των χαρακτηριστικών πτήσης, περιγράφουν ποσοτικά τον βαθμό που είναι αποδεκτό ένα αεροσκάφος, σε σχέση με την ικανότητά του να εκτελεί με επιτυχία την αποστολή που του έχει ανατεθεί. Τα τρία επίπεδα των χαρακτηριστικών πτήσης, διερευνούν τον φόρτο πτήσης του πιλότου, pilot work load, κατά την εκτέλεση της φάσης της αποστολής και ορίζονται ως ακολούθως: Επίπεδο 1: χαρακτηριστικά πτήσης που είναι επαρκή για τη φάση της αποστολής
50 38 Χαρακτηριστικά Αεροσκάφους Επίπεδο 2: χαρακτηριστικά πτήσης που είναι επαρκή για τη φάση της αποστολής αλλά με αύξηση στον φόρτο του πιλότου ή/και υποβάθμιση στην αποτελεσματικότητα της αποστολής Επίπεδο 3: υποβαθμισμένα χαρακτηριστικά πτήσης αλλά τέτοια ώστε το αεροσκάφος να μπορεί να ελεγχθεί, αλλά με μη επαρκές επίπεδο εκπλήρωσης της αποστολής και υψηλό ή οριακό φόρτο για τον πιλότο Φάκελοι Πτήσης Το επιχειρησιακά όρια που αφορούν το ύψος, τον αριθμό Mach και τον κάθετο συντελεστή φόρτισης προσδιορίζουν τον φάκελο πτήσης του αεροσκάφους. Οι φάκελοι πτήσης χρησιμοποιούνται, ώστε να περιγράψουν τα απόλυτα όρια του σκάφους, never exceed limits, και επίσης για να περιγράψουν τα λειτουργικά όρια για την εκτέλεση μιας συγκεκριμένης αποστολής ή φάσης πτήσης. Επιτρεπόμενος φάκελος πτήσης (permissible flight envelope): αφορά στα όρια των συνθηκών πτήσης εντός των οποίων ένα αεροσκάφος μπορεί να πετάξει και να ανακτήσει την κανονική του πτητική λειτουργία χωρίς επίδειξη εξαιρετικών ικανοτήτων από πλευράς του πιλότου, exceptional pilot skill. Επιχειρησιακός φάκελος πτήσης (service flight envelope): καθορίζει τα όρια ύψους, αριθμού Mach και κάθετου συντελεστή φόρτισης που συμπεριλαμβάνει όλες τις απαιτήσεις της αποστολής. Αυτός ο φάκελος ορίζει τα όρια εντός των οποίων ένα αεροσκάφος μπορεί να πετάξει κανονικά χωρίς κίνδυνο να ξεπεράσει τον επιτρεπόμενο φάκελο πτήσης. Φάκελος λειτουργίας (operational flight envelope): βρίσκεται εντός του υπηρεσιακού φακέλου πτήσης και ορίζει τα όρια του ύψους, αριθμού Mach και κάθετου συντελεστή φόρτισης για κάθε φάση της πτήσης. Είναι απαίτηση ότι το αεροσκάφος πρέπει να είναι ικανό για λειτουργία στα όρια του κατάλληλου επιχειρησιακού φακέλου πτήσης κατά την εκτέλεση της αποστολής του.
51 Χαρακτηριστικά Αεροσκάφους Απαιτήσεις των διαμήκων χαρακτηριστικών Προδιαγραφές παραμέτρων διαμήκους δυναμικής ευστάθειας Τα αποδεκτά όρια στην ευστάθεια της μικρής περιόδου περιγράφονται ποσοτικά ως προς τις μέγιστες και τις ελάχιστες τιμές του λόγου απόσβεσης, σε σχέση με τις μεταβολές στη κατηγορία της φάσης και στο επίπεδο των χαρακτηριστικών πτήσης. Επίπεδο 1 Επίπεδο 2 Επίπεδο 3 Φάσεις ζ s min ζ s max ζ s min ζ s max ζ s min Πτήσης CAT A CAT B CAT C Πίνακας 3.1 Αποδεκτές οριακές τιμές του λόγου απόσβεσης μικρής περιόδου Οι μέγιστες και οι ελάχιστες τιμές για τη συχνότητα του φυγοειδούς δεν μπορούν να περιγραφούν ποσοτικά. Όμως συνίσταται οι συχνότητες του φυγοειδούς και της μικρής περιόδου να είναι επαρκώς διαχωρισμένες. Έχει προταθεί ότι οι δυσκολίες στον χειρισμό μπορεί να γίνουν ενοχλητικές εφόσον ο λόγος φυσικής συχνότητας των δύο μορφών γίνει ωp/ωs > 0,1. Γενικά η δυναμική του φυγοειδούς είναι αποδεκτή, με την προϋπόθεση ότι η μορφή αυτή είναι ευσταθής και ότι ο λόγος απόσβεσης βρίσκεται μέσα στα όρια που φαίνονται στον παρακάτω πίνακα. Επίπεδο χαρακτηριστικών πτήσης ζ p min 1 0, Ασταθές, περίοδος Τp > 55 sec Πίνακας 3.2 Αποδεκτές οριακές τιμές του λόγου απόσβεσης του φυγοειδούς Το κριτήριο «αποτυπώματος του αντίχειρα» Η ευκολία χειρισμού των αεροσκαφών καθώς και η σύνταξη προδιαγραφών για τα επιθυμητά χαρακτηριστικά πτήσης οδήγησε στον προσδιορισμό ποικίλων κριτηρίων, ένα εξ αυτών είναι το κριτήριο «αποτυπώματος του αντίχειρα», thumb print criterion. Το κριτήριο αυτό προσφέρει στους σχεδιαστές ένα οδηγό που αφορά τον καλύτερο συνδυασμό της συχνότητας και της απόσβεσης της διαμήκους μικρής περιόδου, ώστε να επιτευχθούν
52 40 Χαρακτηριστικά Αεροσκάφους ικανοποιητικά χαρακτηριστικά ευκολίας χειρισμού. Πρέπει όμως πάντοτε να λαμβάνεται υπόψη ότι το πιο πάνω κριτήριο αφορά εμπειρικές πληροφορίες και βασίζεται στην άποψη που σχηματίζει ο πιλότος για το αεροσκάφος, pilot opinion. Η κοινή μορφή στην οποία παρουσιάζεται το κριτήριο αυτό απεικονίζεται στην Εικόνα 3.1 ενώ η συγκεκριμένη απεικόνιση αφορά τα τυπικά κλασσικά αεροσκάφη, Όπως προκύπτει από την Εικόνα 3.1, η βέλτιστη φυσική συχνότητα χωρίς απόσβεση της μικρής περιόδου είναι ω s 3 rad/sec με αντίστοιχο λόγο απόσβεσης ζ s = 0.6:0.8. Εικόνα 3.1 Κριτήριο Αντίχειρα για την σχέση της ποιότητας ευκολίας χειρισμών με τη συχνότητα και την απόσβεση μικρής περιόδου Γίνεται εύκολα κατανοητό ότι δεν επικρατούν οι ιδανικές συνθήκες καθώς οι μετρήσεις δεν είναι στην επιθυμητή περιοχή. Αυτό συμβαίνει λόγω της φυσικής συχνότητας, η οποία κυμαίνεται από 1 έως 2 rad/sec, που θα έπρεπε να ισούται με περίπου 3 rad/sec Απαιτήσεις των εγκάρσιων χαρακτηριστικών Αντίθετα με τις απαιτήσεις των χαρακτηριστικών διαμήκους δυναμικής οι απαιτήσεις στην εγκάρσια διεύθυνση δεν αναφέρονται στη στατική ευστάθεια με τον ίδιο τρόπο. Γενικά η στατική ευστάθεια στην εγκάρσια διεύθυνση είναι ανεξάρτητη από τη θέση του κέντρου βάρους και τις συνθήκες πτήσης, ενώ εφόσον καθοριστεί από τον αεροδυναμικό σχεδιασμό του αεροσκάφους, δεν μεταβάλλεται σημαντικά.
53 Χαρακτηριστικά Αεροσκάφους 41 Οι περισσότερες αμφιβολίες επικεντρώνονται στην πρόβλεψη της ύπαρξης επαρκούς ισχύος ελέγχου, ειδικά σε μόνιμες ασύμμετρες συνθήκες πτήσης, ή σε κάποιες άλλες, ενδεχομένως οριακές συνθήκες κατά τη συμμετρική πτήση. Είναι δε ουσιαστικής σημασίας οι δυνάμεις ελέγχου που απαιτούνται για να αντιμετωπιστούν τέτοιες συνθήκες να μην ξεπεράσουν τις φυσικές ικανότητες του μέσου όρου των πιλότων Απαιτήσεις περιστροφής (roll motion) Επειδή αυτή η μορφή περιγράφει τη βραχυπρόθεσμη εγκάρσια δυναμική, αποτελεί παράγοντα κρίσιμης σημασίας στον καθορισμό των εγκάρσιων χαρακτηριστικών ευκολίας χειρισμού. Για αυτόν τον λόγο, οι αποδεκτές οριακές τιμές της χρονικής σταθερά Τr της περιστροφής φαίνεται στον παρακάτω πίνακα : Μέγιστη τιμή T r (s) Κλάση Φάση Πτήσης Επίπεδο 1 Επίπεδο 2 Επίπεδο 3 Αεροσκάφους 1,4 Α, C ,3 Α, C ,2,3,4 B Πίνακας 3.3Αποδεκτές οριακές τιμές της χρονικής σταθερά Τr της περιστροφής Εναλλακτικά, είναι επίσης συνηθισμένο να προδιαγράφεται η απόδοση της περιστροφής με όρους μεταβολής της γωνίας περιστροφής σε συγκεκριμένο χρονικό διάστημα, σαν απόκριση σε μια εντολή μεταβολής περιστροφής μοναδιαίας βαθμίδας.
54 42 Χαρακτηριστικά Αεροσκάφους Οι σχετικές γωνίες περιστροφής και οι απαιτούμενοι χρόνοι φαίνονται στον παρακάτω πίνακα. Κλάση Φάση Πτήσης Γωνία Περιστροφής Επίπεδο 1 Επίπεδο2 Επίπεδο 3 1 A 60 σε 1.3 sec 60 σε 1.7 sec 60 σε 2.6 sec B 60 σε 1.7 sec 60 σε 2.5 sec 60 σε 3.4 sec C 30 σε 1.3 sec 30 σε 1.8 sec 30 σε 2.6 sec 2 A 45 σε 1.4 sec 45 σε 1.9 sec 45 σε 2.8 sec B 45 σε 1.9 sec 45 σε 2.8 sec 45 σε 3.0 sec C 30 σε 2.5 sec 30 σε 3.5 sec 30 σε 5.0 sec 3 A 30 σε 1.5 sec 30 σε 1.3 sec 30 σε 3.0 sec B 30 σε 2.0 sec 30 σε 2.0 sec 30 σε 4.0 sec C 30 σε 3.0 sec 30 σε 3.0 sec 30 σε 6.0 sec 4 A 90 σε 1.3 sec 90 σε 1.7 sec 90 σε 2.6 sec B 60 σε 1.7 sec 60 σε 2.5 sec 60 σε 3.4 sec C 30 σε 1.0 sec 30 σε 1.3 sec 30 σε 2.0 sec Πίνακας 3.4 Τιμές και αντίστοιχοι μέγιστοι χρόνοι γωνίας περιστροφής Απαιτήσεις σπειροειδούς (spiral mode) Το ευσταθές σπειροειδές είναι αποδεκτό, ανεξάρτητα από τη χρονική σταθερά. Επειδή η μορφή αυτή προκαλεί μια πολύ αργή δυναμική συμπεριφορά, δεν αποτελεί τόσο κρίσιμο παράγοντα για την ευκολία χειρισμού εκτός και εάν είναι πολύ ασταθής. Για αυτόν τον λόγο, ο ελάχιστος αποδεκτός βαθμός της αστάθειας ποσοτικοποιείται ως προς τον απαιτούμενο χρόνο Τ 2 διπλασιασμού της γωνίας περιστροφής, σε μια αρχική διαταραχή της γωνίας περιστροφής έως 20 μοίρες. Οι σχετικές οριακές τιμές φαίνονται στον παρακάτω πίνακα. Μέγιστη τιμή T 2 (s) Φάση Πτήσης Επίπεδο 1 Επίπεδο 2 Επίπεδο 3 A, C B Πίνακας 3.5 Τιμές και αντίστοιχοι μέγιστοι χρόνοι γωνίας περιστροφής σε σπειροειδή απόκλιση Οι τιμές της χρονικής σταθεράς σπειροειδούς (T s ) προκύπτουν από την σχέση: TT ss = TT 2 /llll2
55 Χαρακτηριστικά Αεροσκάφους Απαιτήσεις ολλανδικού διατοιχισμού (Dutch Roll) Επειδή ο ολλανδικός διατοιχισμός είναι βραχυπρόθεσμη μορφή, επηρεάζει σημαντικά τα χαρακτηριστικά ευκολίας χειρισμού και συνεπώς οι απαιτήσεις στην απόσβεση και στη συχνότητα καθορίζονται με αρκετή λεπτομέρεια. Ο ολλανδικός διατοιχισμός είναι το ανάλογο της διαμήκους μορφής ταλάντωσης της μικρής περιόδου στην εγκάρσια διεύθυνση και έχει συχνότητα της ίδιας τάξης μεγέθους. Όμως, σε αντίθεση με την ταλάντωση της μικρής περιόδου, ο ολλανδικός διατοιχισμός δεν είναι τόσο κρίσιμος για την ευκολία χειρισμού. Για την ακρίβεια, η περίπτωση ολλανδικής περιστροφής με χαμηλή απόσβεση γίνεται αντιληπτή ουσιαστικά ως κάτι ενοχλητικό στον χειρισμό του αεροσκάφους, παρά ως ένα σοβαρό πρόβλημα ευστάθειας. Τα αποδεκτά ελάχιστα όρια για το λόγο απόσβεσης, τη φυσική συχνότητα χωρίς απόσβεση και το γινόμενο του λόγου απόσβεσης με τη συχνότητα καθορίζονται για διαφορετικούς συνδυασμούς κλάσης του αεροσκάφους και κατηγορία φάσης της πτήσης όπως φαίνεται στον παρακάτω πίνακα : Επίπεδο 1 Επίπεδο 2 Επίπεδο 3 Κλάση Αεροσκάφους Φάσεις Πτήσης ζ ζω ω ζ ζω ω ζ ω 1,4 CATA ,3 CAT A ,2,3,4 CAT Β ,4 CAT C ,3 CAT C Πίνακας 3.6 Ελάχιστα όρια λόγου απόσβεσης και συχνότητας Ολλανδικής περιστροφής
56 44 Χαρακτηριστικά Αεροσκάφους 3.2 Το Υπό Μελέτη Μοντέλο, RCAM Μελετώντας τα παραπάνω χαρακτηριστικά αεροσκαφών είμαστε σε θέση να βγάλουμε τα αντίστοιχα συμπεράσματα για το μοντέλο RCAM, που πρόκειται για ένα αεροσκάφος κλάσης 3. Στην προσπάθεια μας να αποκτήσουμε μια πιο σφαιρική εικόνα για το μοντέλο, υπολογίσαμε τον λόγο απόσβεσης και την συχνότητα για διαφορετικές τιμές της ταχύτητας, του κέντρου βάρους καθώς και της μάζας του αεροσκάφους γύρω από ένα σημείο λειτουργίας. Πιο συγκεκριμένα οι μεταβολές των αντίστοιχων μεγεθών αλλά και τα μετρήσιμα μεγέθη απεικονίζονται στους παρακάτω πίνακες για τον διαμήκη αλλά και τον εγκάρδιο άξονα. Διακυμάνσεις ταχύτητας της διαμήκους δυναμικής m = kg, x cg = 0.23 cc Short Period Phugoid V A ζ ω 0 (rad/s) ζ ω 0 (rad/s) 60 0,61 1,05 0,06 0, ,60 1,21 0,08 0, ,60 1,38 0,10 0, ,60 1,55 0,13 0,11 Πίνακας 3.7 Λόγος απόσβεσης και συχνότητα σε διακυμάνσεις ταχύτητας μάζας για την διαμήκη δυναμική Διακυμάνσεις ταχύτητας της εγκάρσιας δυναμικής m = kg, x cg = 0.23 cc Dutch roll Roll motion Spiral mode V A ζ ω 0 (rad/s) τ (s) τ (s) 60 0,15 0,41 1,14 2, ,32 0,51 0,91 3, ,37 0,64 0,77 5, ,37 0,77 0,67 7,38 Πίνακας 3.8 Λόγος απόσβεσης και συχνότητα σε διακυμάνσεις ταχύτητας για την εγκάρσια δυναμική
57 Χαρακτηριστικά Αεροσκάφους 45 Μετατοπίσεις κέντρου βάρους της διαμήκους δυναμικής V A = 70 m/s, m = kg Short Period Phugoid x cg ζ ω 0 (rad/s) ζ ω 0 (rad/s) 0,15 0,55 1,34 0,08 0,16 0,23 0,60 1,21 0,08 0,15 0,3 0,66 1,09 0,09 0,13 z cg 0,21 0,63 1,15 0,10 0,12 Πίνακας 3.9 Λόγος απόσβεσης και συχνότητα σε μεταβολές κέντρου βάρους μάζας για την διαμήκη δυναμική Μετατοπίσεις κέντρου βάρους της εγκάρσιας δυναμικής V A = 70 m/s, m = kg Dutch roll Roll motion Spiral mode x cg ζ ω 0 (rad/s) τ (s) τ (s) 0,15 0,35 0,56 0,91 4,45 0,23 0,32 0,51 0,91 3,49 0,3 0,27 0,47 0,90 2,82 z cg 0,21 0,40 0,50 0,90 4,87 Πίνακας 3.10 Λόγος απόσβεσης και συχνότητα σε μεταβολές κέντρου βάρους για την εγκάρσια δυναμική Διακυμάνσεις μάζας της διαμήκους δυναμικής V A = 70 m/s, x cg = 0.23 cc Short Period Phugoid m (kg) ζ ω 0 (rad/s) ζ ω 0 (rad/s) ,64 1,37 0,10 0, ,60 1,21 0,08 0, ,56 1,05 0,07 0,15 Πίνακας 3.11 Λόγος απόσβεσης και συχνότητα σε διακυμάνσεις μάζας για την διαμήκη δυναμική Διακυμάνσεις μάζας της εγκάρσιας δυναμικής V A = 70 m/s, x cg = 0.23 cc Dutch roll Roll motion Spiral mode m (kg) ζ ω 0 (rad/s) τ (s) τ (s) ,39 0,59 0,74 4, ,32 0,51 0,91 3, ,20 0,43 1,21 2,68 Πίνακας 3.12 Λόγος απόσβεσης και συχνότητα σε διακυμάνσεις μάζας για την εγκάρσια δυναμική
58 46 Χαρακτηριστικά Αεροσκάφους Παρατηρούμε δηλαδή ότι το μοντέλο μας (κλάση 3) ως προς την διαμήκη κίνηση έχει τα εξής χαρακτηριστικά: Επίπεδο 1 ως προς τον λόγο απόσβεσης μικρής περιόδου για CAT A, B, C Επίπεδο 1ως προς τον λόγο απόσβεσης του φυγοειδούς και Ικανοποιητική στο κριτήριο «αποτυπώματος του αντίχειρα». Αντίστοιχα ως προς την εγκάρσια κίνηση έχει τα εξής χαρακτηριστικά: Επίπεδο 1 ως προς την χρονική σταθερά Τr της περιστροφής για Φάση Πτήσης A, B, C Επίπεδο 2 ως προς τον χρόνο γωνίας περιστροφής σε σπειροειδή απόκλιση για Φάση Πτήσης A, B, C και Επίπεδο 3 ως προς τον λόγο απόσβεσης και συχνότητας της ολλανδικής περιστροφής για Φάση Πτήσης A, B, C. Επιπλέον αξίζει να αναφερθεί ότι μόνο στις διακυμάνσεις ταχύτητας και ειδικότερα για V A = 80 m/s και V A = 90 m/s έχουμε ω p /ω s < 0,1. Σε όλες τις άλλες περιπτώσεις ω p /ω s > 0,1.
59 Ορισμός του προβλήματος 47 4 Ορισμός του προβλήματος 4.1 Βασικός στόχος Στην αεροναυπηγική βιομηχανία επικρατεί αρκετή εμπειρία και ποικιλία στον σχεδιασμό πτήσης αυτομάτου ελέγχου. Για αυτό το λόγο στα πλαίσια αυτής της διπλωματικής ο κύριος στόχος του ελέγχου δεν είναι κυρίως να σχεδιάσουμε έναν απλά ικανοποιητικό ελεγκτή αλλά πιο συγκεκριμένα να πληροί τα παρακάτω γενικά κριτήρια : Η ανάδειξη προσεγγίσεων που μειώνουν την πολυπλοκότητα των νόμων ελέγχων καθώς και του συνολικού κύκλου σχεδιασμού ελέγχου. Η καθοδήγηση του αεροσκάφους δεν πρέπει να επηρεάζεται από πιθανή βλάβη κινητήρα. Όλοι οι σχεδιασμοί πρέπει να είναι σε θέση να ακολουθούν την δοθείσα τροχιά μεταξύ συγκεκριμένων ορίων. Μερικές από τις δυνατότητες των μοντέρνων τεχνικών σχεδιασμού ελέγχου είναι να μας παρέχουν την δυνατότητα να λάβουμε υπόψη μας τις πολλές μεταβλητές που διέπουν την φύση του προβλήματος ελέγχου, την μη γραμμική συμπεριφορά και την χρονική μεταβλητότητα του συστήματος, την σθεναρότητα τόσο σε μεταβολές των παραμέτρων αλλά και σε αβεβαιότητες καθώς και την ταυτόχρονη επίτευξη κριτήριων σθεναρότητας και επίδοσης. Λαμβάνοντας υπόψη αυτές τις δυνατότητες έχουμε την ικανότητα να σχεδιάσουμε ένα σύστημα ελέγχου ικανό να προσγειώνει το αεροσκάφος υπό την ύπαρξη ποικίλων εξωτερικών διαταραχών, όπως αναταράξεις και ρεύματα ανέμου, ενώ παράλληλα διατηρεί την σθεναρότητα του ως προς τις μεταβολές των παραμέτρων. 4.2 Κριτήρια Σχεδιασμού Το πρόβλημα σχεδιασμού ελέγχου για το RCAM μοντέλο αποτελείται από πέντε ομάδες κριτηρίων : Eπίδοσης (Performance PC) Σθεναρότητας (Robustness RC) Ποιότητας πτήσης ( Ride Quality RQC ) Ασφάλειας (Safety SC) Διαδικασίας ελέγχου ( Control Activity CAC)
60 48 Ορισμός του προβλήματος Κριτήρια Επίδοσης Συμπεριλαμβάνουν σφάλματα παρακολούθησης και απόρριψη διαταραχών συγκεκριμένων σημάτων. Αποκρίσεις t r t s M p RMSE Ύψος < 12 sec < 45 sec < 5 % 9.15 m Γωνία ίχνους πτήσης < 5 sec < 20 sec < 5 % - Γωνία Διεύθυνσης < 10 sec < 30 sec < 5 % - Ταχύτητα < 12 sec < 45 sec < 5 % < 1 % Γωνία πρόνευσης < 12 sec < 45 sec < 5 % ± 0.5 Πίνακας 4.1 Κριτήρια Επίδοσης,όπου t r = χρόνος ανόδου (rise time), ο χρόνος που χρειάζεται η απόκριση για να φτάσει από το 10% της τελικής της τιμής στο 90%, t r = t (y 90% ) t (y 10% ). t s = χρόνος αποκατάστασης (settling time), ο χρόνος που χρειάζεται η απόκριση για να φτάσει στο 99% της τελικής της τιμής. RMSE = η ρίζα του μέσου τετραγωνικού σφάλματος Οι παραπάνω χρόνοι καθώς και η υπέρβαση, overshoot, φαίνονται στο παρακάτω σχήμα : Εικόνα 4.1 Χρόνος ανόδου, αποκατάστασης και υπέρβασης
61 Ορισμός του προβλήματος Κριτήρια Σθεναρότητας Συμπεριλαμβάνουν όρια ευστάθειας ως προς τις μεταβολές των παραμέτρων. Πιο συγκεκριμένα η ευστάθεια και οι ικανοποιητικές επιδόσεις του αεροσκάφους θα πρέπει να διατηρούνται: Για μεταβολές του οριζόντιου κέντρο βάρους από 15% έως 31% cc και του κάθετου από 0 έως 21% cc Για μεταβολές της μάζας από έως kg. Για καθυστερήσεις μεταφοράς από 0 έως 100 ms. Για μεταβολές της ταχύτητας από 60 έως 90 m/s Κριτήρια Ποιότητας Πτήσης Συμπεριλαμβάνουν όρια σε μέγιστα επίπεδα επιτάχυνσης και ελάχιστα επίπεδα απόσβεσης με σκοπό την διασφάλισης ικανοποιητικών ανέσεων για τους επιβάτες και τους πιλότους. Υπό κανονικές συνθήκες (χωρίς στροβιλισμό) η κάθετη επιτάχυνση στο κέντρο βάρους πρέπει να είναι ελαχιστοποιημένη. Κατά την διάρκεια ευθείας οριζόντιας πτήσης (ΕΟΠ) πρέπει να είναι μικρότερη από ± 0.05 g, ενώ κατά την διάρκεια στροφής 30 μοιρών μικρότερη από ± 0.2 g. Υπό κανονικές συνθήκες (χωρίς στροβιλισμό) η πλευρική επιτάχυνση στο κέντρο βάρους πρέπει να είναι ελαχιστοποιημένη. Κατά την διάρκεια ευθείας οριζόντιας πτήσης (ΕΟΠ) πρέπει να είναι μικρότερη από ± 0.02 g, ενώ κατά την διάρκεια στροφής 30 μοιρών μικρότερη από ± 0.04 g. Πάνω από τα 305 m, 1000 ft, δεν θα πρέπει να υπάρχει καθόλου υπέρβαση σε καμία βηματική απόκριση καμιάς μεταβλητής ελέγχου. Κάτω από τα 305 m η υπέρβαση μπορεί να αυξηθεί μέχρι 30% με σκοπό να εξασφαλίσουμε μεγαλύτερη επίδοση παρακολούθησης Κριτήρια Ασφάλειας Συμπεριλαμβάνουν θέματα ασφάλειας πτήσης και αποτελούνται από τα παρακάτω : Η ταχύτητα πρέπει πάντα να είναι μεγαλύτερη από 1.05 * V stall, όπου V stall είναι η ταχύτητα στην οποία από αυτήν και κάτω το αεροσκάφος δεν μπορεί να πετάξει. Υπολογίζεται από την σχέση mmmm = 1 ρρssvv 2 2 ssssssssss CC LLLLLLLL.
62 50 Ορισμός του προβλήματος Η μέγιστη γωνία προσβολής ορίζεται στις 18 μοίρες Η μεγαλύτερη γωνίας περιστροφής περιορίζεται στις 30 μοίρες. Η γωνία πλαγιολίσθησης πρέπει να ελαχιστοποιείται Κριτήρια Διαδικασίας ελέγχου Συμπεριλαμβάνουν μετρήσεις της καταναλωμένης ενέργειας καθώς και αποτελέσματα κόπωσης και αποτελούνται από τα παρακάτω : Υπό συνθήκες στροβιλισμού οι μέσες εκτροπές των πηδαλίων κλίσης, ουραίου και διεύθυνσης θα πρέπει να είναι λιγότερες από το 33% των μέγιστων εκτροπών. Υπό συνθήκες στροβιλισμού η μέση ώση από τους κινητήρες θα πρέπει αν είναι λιγότερη από το 15% της μέγιστης. 4.3 Μέγιστες επιτρεπτές τιμές μεταβλητών Παρακάτω παρατίθενται οι μέγιστες επιτρεπτές τιμές ορισμένων μεταβλητών για το καθένα στάδιο της τροχιάς ξεχωριστά, προκειμένου να ικανοποιούνται τα κριτήρια σχεδιασμού. Από 0 έως 1: Επίδοσης: Κατά την διάρκεια κράτησης κινητήρα, η μέγιστη επιτρεπτή πλευρική απόκλιση (e yb ) είναι 100 μέτρα και πρέπει να έχει μειωθεί σε λιγότερο από 20 μέχρι το σημείο 1 (t 1 ). Σθεναρότητας: 1 2 max ee yyyy (tt) tt ee yyyy (tt 1 ) < 1 20 ΔΔ eeeeee (tt) = mmmmmm ee yyyyyyyyyy (tt) ee yyyy (tt), ee yyyyyyyyyy (tt) ee yyyy (tt) 1 2 max tt Ποιότητας πτήσης: ΔΔ eeeeee (tt) 10 + ΔΔ eeeeee (tt 1 ) < 1 2 max nn yy (tt) tt 0.2 < 1 Ασφάλειας: max αα(tt) 3 tt 12 < 1
63 Ορισμός του προβλήματος 51 Διαδικασίας ελέγχου: tt 1 2 δδ RR dddd tt bb Η παραπάνω σχέση χρησιμοποιείται σαν μέγεθος για σχετική σύγκριση μεταξύ των στοιχείων ελέγχου, με t b ο χρόνος στο σημείο b. Από 1έως 2: Επίδοσης: H μέγιστη επιτρεπτή πλευρική απόκλιση (e yb ) είναι 200 μέτρα και πρέπει να έχει μειωθεί σε λιγότερο από 20 μέχρι το σημείο 2 (t 2 ). Σθεναρότητας: 1 2 max tt Ποιότητας πτήσης: 1 2 max ee yyyy (tt) tt ee yyyy (tt 2 ) < 1 20 ΔΔ eeeeee (tt) 20 + ΔΔ eeeeee (tt 2 ) < 1 2 max nn yy (tt) tt 0.02 < 1 Ασφάλειας: max αα(tt) 3 tt 12 < 1 Διαδικασίας ελέγχου: tt 2 (δδ 2 RR + δδ 2 AA ) dddd tt 1 Η παραπάνω σχέση χρησιμοποιείται σαν μέγεθος για σχετική σύγκριση μεταξύ των στοιχείων ελέγχου. Από 2έως 3: Επίδοσης: Το e zb εκφράζει την μέγιστη επιτρεπτή κάθετη απόκλιση, t 3 είναι ο χρόνος που αντιστοιχεί στο σημείο 3 και V Ac = 80 m/s. Σθεναρότητας: 1 3 max tt ee zzzz (tt) 20 + ee zzzz (tt 3 ) 6 + VV AA VV AAAA < 1 4 ΔΔ eeeeee (tt) = mmmmmm( ee zzzzzzzzzz (tt) ee zzzz (tt), ee zzzzzzzzzz (tt) ee zzzz (tt) ) 1 2 max tt ΔΔ eezzzz (tt) 2 + ΔΔ eeeeee (tt 3 ) 0.6 < 1
64 52 Ορισμός του προβλήματος Ποιότητας πτήσης: Ασφάλειας: max nn zz(tt) tt 0.05 < 1 max αα(tt) 3 tt 12 < 1 των στοιχείων ελέγχου. Διαδικασίας ελέγχου: tt 3 2 δδ TT dddd tt 2 Η παραπάνω σχέση χρησιμοποιείται σαν μέγεθος για σχετική σύγκριση μεταξύ Από 3έως 4: Επίδοσης: t 4 είναι ο χρόνος που αντιστοιχεί στο σημείο 4. Σθεναρότητας: 1 2 max tt 1 2 max tt ΔΔ eeeeee (tt) 2 ee zzzz (tt) 20 + ee zzzz (tt 4 ) < ΔΔ eeeeee (tt 4 ) 0.15 < 1 Ποιότητας πτήσης: max nn zz(tt) tt 0.1 < 1 Ασφάλειας: Διαδικασίας ελέγχου: 1 3 e yb e zb tt 4 (δδ 2 TT + (δδ TTTT1 + δδ TTTT2 ) 2 ) dddd tt 3 + (V 2 A V Ac ) < 1 3 Η παραπάνω σχέση χρησιμοποιείται σαν μέγεθος για σχετική σύγκριση μεταξύ των στοιχείων ελέγχου.
65 Ορισμός του προβλήματος Καθοδήγηση και Σενάριο πτήσης Για να δοκιμάσουμε αν το σύστημά μας λειτουργεί σύμφωνα με τα επιθυμητά κριτήρια είναι απαραίτητο να του ορίσουμε μία αποστολή (σενάριο πτήσης). Στα πλαίσια αυτής της διπλωματικής ο σκοπός είναι το αεροσκάφος να μπορεί να ακολουθήσει μια συγκεκριμένη τροχιά μέχρι να φτάσει στον αεροδιάδρομο. Η εν λόγω τροχιά φαίνεται σχηματικά παρακάτω : Εικόνα 4.2 Τροχιά αεροσκάφους. Ο βορράς είναι στην διεύθυνση του αεροδιαδρόμου. Όπως φαίνεται και στο σχήμα, η τροχιά είναι χωρισμένη σε στάδια. Σε κάθε στάδιο εκτελείται και ένα διαφορετικό σενάριο. Πιο συγκεκριμένα : 0 έως 1: Ξεκινώντας από υψόμετρο 1000 μέτρα και με γωνία τροχιάς χ = -90 μοίρες (270 δυτικά), η ταχύτητα πρέπει να διατηρηθεί σταθερή στα 80 m/s. Επίσης στο σημείο a έχουμε κράτηση του κινητήρα 1, ο οποίος επανέρχεται στο σημείο b 1 έως 2: Αυτό το στάδιο αποτελείται από μία στροφή μεταξύ των σημείων c και d, με ρυθμό εκτροπής ψψ = 3 μοίρες/sec. Η ταχύτητα του αεροσκάφους πρέπει να διατηρηθεί στα 80 m/s, η πλευρική επιτάχυνση να μηδενιστεί και η γωνία κλίσης να περιοριστεί στις φ = 30 μοίρες με συνεχόμενες εκτροπές των πηδαλίων διεύθυνσης και κλίσης. 2 έως 3: Η κάθοδος του αεροσκάφους προς τον αεροδιάδρομο αποτελείται, για λόγους μείωσης της ηχορύπανσης, από 2 φάσεις: μία με γωνία ίχνους πτήσης γ
66 54 Ορισμός του προβλήματος = -6 μοίρες/sec και μία με γ = -3 μοίρες/ sec. Να σημειωθεί ότι αυτή η προσέγγιση δεν είναι η συνηθισμένη αλλά μας προσφέρει καλύτερες εκτιμήσεις από την ILS προσέγγιση, η οποία έχει σταθερή γωνία γ = -3 μοίρες/sec. Το αρχικό υψόμετρο είναι 1000 μέτρα και στο σημείο e θέτουμε γ = -6 μοίρες/sec μέχρι το σημείο f στο οποίο θέτουμε γ = -3 μοίρες/sec. Η ταχύτητα πρέπει να διατηρηθεί στα 80 m/s. 3 έως 4: Η γωνία ίχνους πτήσης γ = -3 μοίρες/sec πρέπει να διατηρηθεί υπό την παρουσία σταθερού ανέμου μεταξύ των σημείων g και h. Το αεροσκάφος πρέπει να πληροί τα κριτήρια ασφάλειας και να μην αποκλίνει από την τροχιά του. Η ταχύτητα πρέπει να διατηρηθεί στα 80 m/s.
67 Ορισμός του προβλήματος 55 Στο παρακάτω πίνακα φαίνονται πιο αναλυτικά τα στάδια και τα σημεία της προσέγγισης του αεροσκάφους στον αεροδιάδρομο. Σημεία Συμβάντα Διαστήματα Συνθήκες Χρόνοι (sec) 0-0 a 40 a Βλάβη κινητήρα 1 a b Υψόμετρο: 1000m 80 b Επαναφορά b 1 χ = -90 μοίρες Ταχύτητα: 80m/s 80 κινητήρα c Υψόμετρο: 1000 m 20 c Έναρξη στροφής 90 c d φ = 30 μοίρες 30 d μοιρών Τέλος στροφής 90 d 2 ψψ = 3 μοίρες/sec Ταχύτητα: 80 m/s 60 μοιρών 2-2 e 5 e Έναρξη καθόδου με e f γ = -6 μοίρες/sec (e) 45 f -6 μοίρες/ sec Συνέχιση καθόδου f 3 γ = -3 μοίρες/sec (f) Ταχύτητα: 80 m/s 30 με -3 μοίρες/ sec 3-3 g 5 g Έναρξη ρεύματος g h 100 h σταθερού ανέμου Τέλος ρεύματος γ = -3 μοίρες/sec Ταχύτητα: 80 m/s σταθερού ανέμου h Πίνακας 4.2 Σημεία τροχιάς και τα αντίστοιχα συμβάντα/συνθήκες Στο παρακάτω διάγραμμα απεικονίζεται ο τρόπος σχεδιασμού της καθοδήγησης του αεροσκάφους προς τον αεροδιάδρομο για προσγείωση καθώς και ο τρόπος δημιουργίας των σημάτων αναφοράς για την πλοήγησή του. To παρακάτω υλοποιείται στο Σύστημα Διαχείρισης Πτήσης (Flight Management System).

68 56 Ορισμός του προβλήματος Εικόνα Υλοποίηση της καθοδήγησης σε περιβάλλον Simulink Εικόνα 4.4 Υλοποίηση του σεναρίου πτήσης σε περιβάλλον Simulink
69 Σχεδίαση Συστήματος Ελέγχου 57 5 Σχεδίαση Συστήματος Ελέγχου 5.1 Εισαγωγικά Τα βήματα που ακολουθούνται για τον σχεδιασμό ενός συστήματος αυτόματου ελέγχου παρουσιάζονται παρακάτω: 1. Δημιουργία του ως προς έλεγχο μη γραμμικό μοντέλο σε περιβάλλον Simulink, χρησιμοποιώντας τις απαραίτητες εξισώσεις που διέπουν την δυναμική του. 2. Γραμμικοποίηση του μοντέλου σε ποικίλα σημεία λειτουργίας και με διαφορετικές παραμέτρους, με σκοπό την βαθιά κατανόηση του ανοιχτού βρόχου του συστήματος. Απόζευξη εξισώσεων κίνησης σε διαμήκης και εγκάρσιες και εξέταση των χαρακτηριστικών τους (μικρή περίοδος, φυγοειδές, ολλανδικός διατοιχισμός, περιστροφή και σπειροειδής κίνηση). 3. Προσδιορισμός κριτηρίων σχεδίασης και επιτρεπτών ορίων ώστε να εξακριβωθεί η αποδοτικότητα του τελικού συστήματος ελέγχου. 4. Προσδιορισμός σεναρίου πτήσης. Ορισμός της τροχιάς που θα ακολουθήσει το αεροσκάφος ώστε να προσεγγίσει τον αεροδιάδρομο για προσγείωση. 5. Προσδιορισμός της δομής του ελεγκτή, του μοντέλου σύνθεσης καθώς και του μοντέλου ανάλυσης. Επαύξηση και μετασχηματισμός του συστήματος με τις όποιες απαραίτητες προς έλεγχο καταστάσεις, τα σήματα ελέγχου και τις καθυστερήσεις του συστήματος. Υπολογισμός των κερδών ανάδρασης. 6. Εξέταση αν ικανοποιούνται τα κριτήρια σχεδιασμού με τα εν λόγω κέρδη ανάδρασης. Αν όχι επιστροφή στο βήμα Εφαρμογή των γραμμικών νόμων ελέγχου στο μη γραμμικό σύστημα και έναρξη προσομοιώσεων στο πεδίο του χρόνου Ο Γραμμικός Τετραγωνικός Ρυθμιστής LQR Ο γραμμικός τετραγωνικός ρυθμιστής (LQR) είναι ένας από τους πιο διαδεδομένους ρυθμιστές ελέγχου σε μια μεγάλη ποικιλία εφαρμογών, όπως και στην αεροναυπηγική. Αυτό συμβαίνει επειδή τα συστήματα που έχουν σχεδιασθεί με LQR είναι απλά στον σχεδιασμό τους, χαρακτηρίζονται από άριστη επίδοση και σθεναρότητα και μας εγγυώνται ευστάθεια κλειστού βρόγχου. Δοθέντος του γραμμικού συστήματος:
70 58 Σχεδίαση Συστήματος Ελέγχου x = Αx + Bu x(t 0 ) = x 0 x R n x, u R n u Εξ. 5.1 το πρόβλημα βέλτιστου ελέγχου αποσκοπεί στην ελαχιστοποίηση κάποιου κριτηρίου κόστους και πιο συγκεκριμένα ο LQR έλεγχος στην ελαχιστοποίηση του τετραγωνικού κριτηρίου: J = (x T Qx + u T Ru) dτ t 0,όπου τα βάρη Q, R είναι τετραγωνικοί, συμμετρικοί πίνακες και πιο συγκεκριμένα: Εξ. 5.2 Υποθέσεις Q = Q T 0 (θετικά ορισμένος) R = R T > 0 (θετικά ημι-ορισμένος) P = P T 0 (θετικά ορισμένος) Το ζεύγος πινάκων (Α, Β) είναι σταθεροποιήσιμο Το ζεύγος πινάκων (Α, Q 1/2 ) είναι ανιχνεύσιμο Ο πίνακας P προκύπτει από την λύση της αλγεβρικής εξίσωσης Riccati: PP (tt) = PP(tt)AA + AA TT PP(tt) + QQ PP(tt)BBRR 1 BB TT PP(tt) Εξ. 5.3 με όριο Οπότε η Εξ. 5.3 ισούται με: lim TT PP(tt) = 0 nn χχ xx nn χχ PA + A T P PBR 1 B T P + Q = 0 Εξ. 5.4 και ο νόμος ελέγχου με ανατροφοδότηση κατάστασης είναι της μορφής: u = R 1 B T P x = Kx Εξ. 5.5,όπου K R n χ xxnn χχ είναι ένας σταθερός πίνακας με τα βέλτιστα LQR κέρδη ανάδρασης. Χρησιμοποιώντας τις Εξ. 5.1 και Εξ. 5.5 καταλήγουμε στο σύστημα κλειστού βρόγχου: x = (A BK)x = A cl x x(0) = x 0 Εξ. 5.6
71 Σχεδίαση Συστήματος Ελέγχου 59 Ο LQR έλεγχος μας εγγυάται ότι το σύστημα κλειστού βρόγχου θα είναι ευσταθές, δηλαδή ότι οι ιδιοτιμές του κλειστού βρόγχου θα έχουν πραγματικό μέρος αρνητικό Re{λ(A cl )}< 0. Επίσης, επειδή x 0 καθώς το t συνεπάγεται ότι και u 0 όταν t. Το κριτήριο κόστους της Εξ. 5.2 μπορεί να γραφεί και ως εξής:,όπου ρ θετική σταθερά βάρους. J = (xx TT QQQQ + ρρ 2 uu TT RRRR) dddd tt 0 Στην Εξ. 5.2 με αντικατάσταση του QQ με CC TT QQQQ προκύπτει: (x T Qx + u T Ru) = (x T C T QCx + u T Ru) = ((Cx) T QCx + u T Ru) = (y T Qy + u T Ru),δηλαδή το τετραγωνικό κριτήριο κόστους μετατρέπεται στην ακόλουθη μορφή: J = (y T Qy + u T Ru) dτ t 0 Έτσι προκύπτει νόμος ελέγχου ανατροφοδότησης κατάστασης με ρύθμιση εξόδου (LQRY). Πρέπει να σημειωθεί ότι ο παραπάνω μετασχηματισμός ισχύει σε συστήματα με D = Ο Σθεναρός Σερβομηχανισμός Εξ. 5.7 Πολλές εφαρμογές ελέγχου απαιτούν η έξοδος του συστήματος να ακολουθεί συγκεκριμένα σήματα αναφοράς. Από την κλασσική θεωρία ελέγχου γνωρίζουμε ότι προκειμένου να επιτευχθεί αυτό με μηδενικό σφάλμα μόνιμης κατάστασης, θα πρέπει να εισαχθούν ορισμένοι ολοκληρωτικοί όροι στον ελεγκτή. Ο αριθμός αυτών των ολοκληρωτικών όρων εξαρτάται από το σήμα αναφοράς. Για σταθερό σήμα αναφοράς χρειαζόμαστε έναν ολοκληρωτικό όρο, ενώ για σήμα ράμπας, π.χ., χρειαζόμαστε 2 όρους (στα πλαίσια αυτή της διπλωματικής, τα σήματα αναφοράς θα είναι σταθερά οπότε θα χρησιμοποιηθεί ένας τέτοιος όρος). Η διαδικασία κατά την οποία δημιουργείται ένα επαυξημένο σύστημα πινάκων στο χώρο κατάστασης με σκοπό η έξοδος να ακολουθεί ένα συγκεκριμένο σήμα αναφοράς με μηδενικό σφάλμα μόνιμης κατάστασης καθώς και με χαρακτηριστικά σθεναρότητας, καλείται σθεναρός σερβομηχανισμός (robust servomechanism).
72 60 Σχεδίαση Συστήματος Ελέγχου Σήμα αναφοράς r (t) Διαφορική εξίσωση Παράμετροι μοντέλου Σταθερό r = 0 p = 1, α 1 = 0 Ράμπα rr = 0 p =2, α 1 = α 2 =0 Ημιτονοειδές rr = ωω 2 0 rr 2 p =2, α 1 = 0, α 2 = ωω 0 Πίνακας 5.1 Εσωτερικό μοντέλο αναπαραγωγής σημάτων αναφοράς Έστω το γραμμικό χρονικά αμετάβλητο σύστημα: x = Αx + Bu + EEEE y = Cx + Du Εξ. 5.8,όπου x R n χ, u R n uu, y R n yy και w άγνωστη φραγμένη διαταραχή. Το σήμα αναφοράς p ης τάξης είναι: p (p) rr = ααi i=1 (p i) r Εξ. 5.9 Παρόμοια με το σήμα αναφοράς, ορίζονται και οι διαταραχές: p (p) ww = ααi i=1 Το σφάλμα παρακολούθησης ορίζεται ως: e = y c r (p i) w Εξ T, όπου y c είναι ένα υποσύνολο του y και εκφράζει τις υπό έλεγχο μεταβλητές, y = [y c y T nc ] T. Το μοντέλο για το y c μπορεί να περιγραφεί από: y c = C c x + D c u Εξ Σκοπός είναι η έξοδος y c να ακολουθεί το σήμα αναφοράς r υπό την παρουσία μη μετρήσιμων διαταραχών w, δηλαδή e 0 για t. Παραγωγίζοντας την Εξ p φορές προκύπτει: p (p) e ααi i=1 (p i) ee p (p) = y cc αi i=1 (p i) yy cc p (p) r α i i=1 (p i) rr Εξ. 5.12
73 Σχεδίαση Συστήματος Ελέγχου 61 Παραγωγίζοντας (p-i) φορές την Εξ προκύπτει : (pp ii) (pp ii) (pp ii) y cc = Cc xx + Dc uu Εξ Χρησιμοποιώντας την Εξ στην Εξ προκύπτει: p (p) ee ααi (p i) e p = CC cc (p) x α i (p i) i=1 i=1 i=1 x + DD cc (p) uu α i p (p i) u Εξ Θέτουμε: p ξξ = (p) xx αα i i=1 (p i) xx Εξ p μμ = (p) uu αα i i=1 (p i) uu Εξ Αντικαθιστώντας τις Εξ και Εξ στην Εξ προκύπτει: p (p) e ααi i=1 (p i) ee = CC cc ξξ + DD cc μ Εξ Παραγωγίζοντας την Εξ. 5.15προκύπτει: p (p+1) ξξ = x ααi i=1 (p i+1) xx Εξ Χρησιμοποιώντας την Εξ. 5.8 το xx προκύπτει: p ξ = AA (p) x α i (p i) x p + B (p) uu α i (p i) i=1 i=1 i=1 uu p + E ww (p) α i (p i) w = Aξ + Bμμ Εξ Το μοντέλο του σερβομηχανισμού προκύπτει δημιουργώντας ένα νέο καταστατικό μοντέλο, το οποίο περιέχει τα σφάλματα παρακολούθησης και το σύστημα που περιγράφεται από την Εξ Ο νέος καταστατικός πίνακας z είναι ο ακόλουθος:
74 62 Σχεδίαση Συστήματος Ελέγχου e e z = (p i) e ξ Εξ Παραγωγίζοντας την Εξ προκύπτει το μοντέλου του σθεναρού σερβομηχανισμού: zz = AA zz + BB μμ 0 I I ,όπου A = και BB = I 0 0 α p I α p 1 I α 2 I α 1 I C c DD cc 0 0 A BB Εξ Εξ Από την εφαρμογή της θεωρίας του γραμμικού τετραγωνικού ρυθμιστή στην Εξ. 5.21, προκύπτει ο σθεναρός σερβομηχανισμός γραμμικού τετραγωνικού ρυθμιστή (robust servomechanism LQR, RSLQR). Ρυθμίζοντας το z 0 για t, ρυθμίζουμε ουσιαστικά το e, τις (p-1) παραγώγους του e και το ξ να τείνουν στο μηδέν για t.
75 Σχεδίαση Συστήματος Ελέγχου Ο Robust Servomechanism LQR (RSLQR) Αντίστοιχα με το κεφάλαιο ο RSLQR διέπεται από τις παρακάτω εξισώσεις: Το επαυξημένο σύστημα Ο νόμος ελέγχου Τα κέρδη ανατροφοδότησης κατάστασης,όπου KK cc = KK pp KK pp 1 KK 1 KK xx. Το κριτήριο κόστους Η εξίσωση Riccati Υποθέσεις Q = Q T 0 (θετικά ορισμένος) R = R T > 0 (θετικά ημι-ορισμένος) P = P T 0 (θετικά ορισμένος) z = A z + B μ μ = K c z KK cc = R 1 B T P J = (x T Qx + u T Ru) dτ t 0 PPAA + AA TT PP PPBB RR 1 BB TT PP + QQ = 0 Το ζεύγος πινάκων (AA,BB ) είναι σταθεροποιήσιμο Το ζεύγος πινάκων (AA, Q 1/2 ) είναι ανιχνεύσιμο Εξ H Εξ γίνεται: p μμ = (p) uu αα i i=1 (p i) uu p (p i) = KK i ee i=1 p KK xx (p) xx α i i=1 (p i) x Εξ Παραγωγίζοντας την Εξ p φορές προκύπτει ο νόμος ελέγχου για το σύστημα που περιγράφεται από την Εξ. 5.8: uu = KK xx x + ss ii aa ii uu p i=1 (pp ii) + KKxx (pp ii) (p i) xx KKi ee Εξ. 5.25
76 64 Σχεδίαση Συστήματος Ελέγχου Στο παρακάτω σχήμα απεικονίζεται το δομικό διάγραμμα του συστήματος που περιγράφεται από την Εξ. 5.8 (αναπαρίσταται με G) συνδεδεμένο με τον νόμο ελέγχου ανατροφοδότησης κατάστασης του σθεναρού σερβομηχανισμού. Η ευστάθεια του κλειστού συστήματος επιτυγχάνεται μέσω του όρου KK xx xx, ενώ η παρακολούθηση του σήματος αναφοράς με μηδενικό σφάλμα μόνιμης κατάστασης μέσω των p ολοκληρωμάτων, των αντίστοιχων κερδών και των α i συντελεστών. Οπότε το σύστημα κλειστού βρόγχου περιγράφεται από: z = A B KK cc z + Fr Εξ. 5.26,όπου F = II nnuu xxnn uu 0 nnuu xxnn χχ TT Εικόνα 5.1 Δομικό διάγραμμα Σθεναρού σερβομηχανισμού Ο RSLQR μπορεί να εκφραστεί και ως εξής: x cc = Α cc x cc + B cc1 x + BB cc2 rr u = C cc x cc + D cc1 x + DD cc2 rr,με AA cc BB cc1 BB cc2 CC cc DD cc1 DD cc2 = 0 II nnrr II nnrr 0 0 aa pp II nnrr DD cc KK pp aa 1 II nnrr DD cc KK 1 CC cc DD cc KK xx II nnrr KK pp KK 2 KK 1 [ KK xx ] [0]
77 Σχεδίαση Συστήματος Ελέγχου 65 Η ανατροφοδότηση κατάστασης μέσω RSLQR μας εγγυάται ολική εκθετική ευστάθεια του κλειστού συστήματος και αναγκάζει το σύστημα να ακολουθεί το σήμα αναφοράς r (t) με μηδενικό σφάλμα μόνιμης κατάστασης. Επίσης μέσω του RSLQR επιτυγχάνουμε: ελάχιστο overshoot/undershoot μικρό κέρδος ανάδρασης όχι πολύ μεγάλες εκτροπές πηδαλίων μεγιστοποιεί την ελάχιστη ιδιόμορφη τιμή σσ = (II + LL 1 )και θέτει την σσ(ii + LL) = 1 (είναι σημαντικό για σχεδιασμό ανατροφοδότησης εξόδου, όχι τόσο για ανατροφοδότηση κατάστασης),όπου σσ = (II + LL 1 ) = 1 TT και σσ = (II + LL) = 1 SS χρησιμοποιούνται για να προσδιορίσουν κατά πόσο το αυξανόμενο εύρος ζώνης του συστήματος επηρεάζει τα χαρακτηριστικά του συστήματος, S(s) είναι η συνάρτηση ευαισθησίας του συστήματος και TT(ss) η συνάρτηση μεταφοράς του κλειστού συστήματος Μεθοδολογία επιλογής Q, R Ένα πολύ σημαντικό κομμάτι του σχεδιασμού ενός LQR ελεγκτή είναι η κατάλληλη επιλογή των πινάκων Q και R, για τους οποίους ισχύει Q = Q T 0 και R = R T > 0. Έστω ότι ο Q είναι της μορφής QQ = qq Η μεθοδολογία ξεκινά θέτοντας R = 1 0 και δοκιμάζοντας τιμές του q 11 από μικρότερες σε υψηλότερες σύμφωνα με τα παρακάτω βήματα: R =1 Ορισμός τιμής για το q 11 Υπολογισμός P από:ppaa + AA TT PP PPBB RR 1 BB TT PP + QQ = 0 Υπολογισμός KK cc = R 1 B T P Σχεδιασμός του συστήματος z = A B KK cc z + Fr Έλεγχος του χρόνου ανόδου και αποκατάστασης, του overshoot και undershoot, του μέγιστου ελέγχου και του ρυθμού ελέγχου(κριτήρια στο πεδίο του χρόνου) μέσω της βηματικής απόκρισης του κλειστού βρόγχου.
78 66 Σχεδίαση Συστήματος Ελέγχου Έλεγχος της crossover συχνότητας του ανοιχτού βρόγχου, των ελάχιστων ιδιόμορφων τιμών II + LL και II + LL 1 και των TT, SS (κριτήρια στο πεδίο της συχνότητας) μέσω της συνάρτησης μεταφοράς ανοιχτού βρόγχου. Αύξηση του q 11 και επιστροφή στο βήμα 1 έως ότου προκύψουν ικανοποιητικά αποτελέσματα. Εκτός από την παραπάνω μεθοδολογία μπορούμε να χρησιμοποιήσουμε και μία εναλλακτική (κανόνας Bryson): Έστω QQ = CC cc TT QQ CC cc, με yy cc = CC cc xx οι έξοδοι που θέλουμε ρυθμίσουμε γύρω από το μηδέν RR = ρρii, οπότε JJ = xx TT C T c Q C c xx + ρρρρ TT uu dddd tt 0 Στόχος είναι η επιλογή κατάλληλων Q και R ώστε να κανονικοποιήσουμε τους πίνακες: QQ = aa 2 1 (xx 1 ) 2 mmmmmm aa 2 (xx 2 ) 2 mmmmmm aa 2 nn (xx nn ) 2 mmmmmm και RR = ρρ ββ 2 1 (uu 1 ) 2 mmmmmm ββ 2 2 (uu) 2 mmmmmm ββ 2 nn (uu nn ) 2 mmmmmm,όπου (xx ii ) mmmmmm και (uu ii ) mmmmmm εκφράζουν τις μέγιστες επιθυμητές αποκρίσεις ή εισόδους nn ελέγχου για το i-στοιχείο του σήματος κατάστασης/ εισόδου και 2 nn ii=1 aa ii = 1, 2 ii=1 ββ ii = LQR με Κριτήρια Εξόδου Το κλειδί στον σχεδιασμό ελέγχου είναι η επιλογή των μεταβλητών προς ρύθμιση καθώς και οι έλεγχοι που θα εφαρμοστούν για να ρυθμίσουν αυτές τις μεταβλητές. Ολοκληρωτικοί ρυθμιστές εισάγονται για να δημιουργούν μηδενικό σφάλμα μόνιμης κατάστασης, σε σταθερά σήματα εισόδου. Γραμμική τετραγωνική (LQ) θεωρία χρησιμοποιείται για τον υπολογισμό των κερδών ανάδρασης, για την ταχύτερη δυνατή απόκριση του συστήματος καθώς και για επίτευξη "καλής" θέσης των πόλων του κλειστού συστήματος, για να παρέχει απόζευξη των εξισώσεων κίνησης και ικανοποιητικά όρια ευστάθειας. Η συνήθης διαδικασία που ακολουθείται για την απλοποίηση του σχεδιασμού ελέγχου περιλαμβάνει τον προσδιορισμό δύο μοντέλων για το αεροσκάφος με ξεχωριστή λειτουργία το καθένα, όπως περιγράφονται παρακάτω:
79 Σχεδίαση Συστήματος Ελέγχου 67 Μοντέλο Σύνθεσης: πρόκειται για ένα μοντέλο μικρής τάξης που χρησιμοποιείται για τον σχεδιασμό των κερδών. Επίσης. περιέχει μοντέλα μειωμένης τάξης για τα σήματα ελέγχου, τα οποία είναι ισοδύναμα των καθυστερήσεων του συστήματος (φίλτρα, αισθητήρες κλπ), καταστάσεις που θα χρησιμοποιηθούν στην ανάδραση καθώς και χαρακτηριστικά για ικανοποίηση των κριτηρίων σχεδιασμού. Μοντέλο Ανάλυσης: πρόκειται για μοντέλο υψηλής τάξης που χρησιμοποιείται για έλεγχο ορίων ευστάθειας και περιέχει τους νόμους ελέγχους καθώς και την αλληλεπίδραση αυτών με το σύστημα. Ο κύριος λόγος που διαχωρίζουμε την διαδικασία σχεδιασμού σε δύο μοντέλα είναι για να αποφύγουμε αύξηση της πολυπλοκότητας για το LQ πρόβλημα. Μόνο οι πλέον απαραίτητες καταστάσεις πρέπει να λαμβάνονται υπόψη στην επίλυση της εξίσωσης Riccati. Σε κάθε άλλη περίπτωση, ο αλγόριθμος επίλυσης θα σπαταλάει αρκετό χρόνο προσπαθώντας να βρει βέλτιστη λύση σε καταστάσεις που δεν χρειάζεται. Υπολογίζοντας τα κέρδη με ένα απλό αλλά αντιπροσωπευτικό μοντέλο χαμηλής τάξης η επαναληπτική διαδικασία επίλυσης διαφορικών εξισώσεων και η ρύθμιση των παραμέτρων γίνεται γρηγορότερη και αποδοτικότερη. Εν συνεχεία, τα κέρδη που υπολογίστηκαν από το Μοντέλο Σύνθεσης δοκιμάζονται μέσω του Μοντέλου Ανάλυσης για να επιβεβαιωθεί αν η εκάστοτε προσαρμογή πληροί τα κριτήρια σχεδιασμού. Ένα από τα κύρια σημεία της παρούσας διπλωματικής είναι η έμφαση που δίνεται στα μηδενικά του συστήματος. Μηδενικό μπορεί να οριστεί ένα z i μιας G(s) συνάρτησης μεταφοράς, αν η τάξη του G(z i ) είναι μικρότερη από την τάξη του G(s). Το πολυώνυμο nn μηδενικών μπορεί να οριστεί ως zz(ss) = zz ii=1 (ss zz ii ), όπου n z είναι ο αριθμός των πεπερασμένων μηδενικών του συστήματος Ο παραπάνω ορισμός βασίζεται στον πίνακα της συνάρτησης μεταφοράς, που αντιστοιχεί στην ελάχιστη δυνατή αναπαράσταση του συστήματος Αυτά τα μηδενικά ονομάζονται και μηδενικά μετάδοσης. Τα μηδενικά μετάδοσης του μοντέλου σύνθεσης (που χρησιμοποιούνται στην εξίσωση Riccati για να λύσουν το LQ πρόβλημα) για ένα αεροσκάφος αποτελούνται από τα μηδενικά μετάδοσης του μοντέλου του αεροσκάφους καθώς και από τα μηδενικά μετάδοσης οποιαδήποτε άλλου μοντέλου είναι σειριακά συνδεδεμένο με το μοντέλο αεροσκάφους. Αν ο σχεδιαστής σκοπίμως συνδέσει ένα μοντέλο που περιέχει μηδενικά μετάδοσης στο σημείο που επιθυμεί να βρίσκονται οι ιδιοτιμές του κλειστού συστήματος, τότε είναι
80 68 Σχεδίαση Συστήματος Ελέγχου δυνατόν να ελέγξει την θέση των πόλων του κλειστού βρόχου, επειδή σε ένα γεωμετρικό τόπο ριζών τα μηδενικά "έλκουν" τους πόλους του κλειστού συστήματος. Αφού η απόκριση του κλειστού συστήματος εξαρτάται από την θέση των πόλων του, ο σχεδιαστής έχει την δυνατότητα να βελτιώσει την απόκριση του συστήματος προσθέτοντας επιπλέον μηδενικά. Αυτά τα επιπλέον μηδενικά καλούνται και μηδενικά στόχοι (target zeros). Η εισαγωγή αυτών των μηδενικών επιτυγχάνεται μέσω των Κριτηρίων Εξόδου. Στην εγκάρσια δυναμική για παράδειγμα, χρησιμοποιούντα επιπλέον μηδενικά για να διαμορφώσουν λειτουργίες όπως ο ολλανδικός διατοιχισμός και η περιστροφή. Στο παρακάτω διάγραμμα απεικονίζεται ένα σύστημα μαζί με τα επιπλέον μηδενικά. Εικόνα 5.2 Μοντέλο Σύνθεσης: μοντέλο αεροσκάφους μειωμένης τάξης με εισαγωγή μηδενικών Συνοψίζοντας, η κύρια διαφορά αυτής της τεχνικής σε σύγκριση με τον τυπικό LQR, είναι ο τρόπος με τον οποίο το σύστημα υποβάλλεται στην εξίσωση Riccati. Εξ' ορισμού, ο LQ έλεγχος υπολογίζει τον πίνακα K LQ με τα βέλτιστα κέρδη ανάδρασης που ελαχιστοποιούν το κόστος J. Ο πίνακας K LQ συσχετίζει τις καταστάσεις του συστήματος, x(t), με τα βέλτιστα σήματα ελέγχου, u(t). Αν οι καταστάσεις του συστήματος είναι τέτοιες ώστε να περιέχουν τις υπό ρύθμιση μεταβλητές και πιθανόν κάποιους παραγώγους ή ολοκληρώματα αυτών, τότε ο πίνακας K LQ θα περιέχει τα βέλτιστα κέρδη που συσχετίζουν τις υπό ρύθμιση μεταβλητές, τις παραγώγους και τα ολοκληρώματα τους, με τα βέλτιστα σήματα ελέγχου.
81 Σχεδίαση Συστήματος Ελέγχου Βήματα Σχεδίασης Ανάδρασης Τα βήματα που ακολουθούνται για την LQ μεθοδολογία με κριτήρια εξόδου παρουσιάζονται παρακάτω: 1. Δημιουργία ενός αντιπροσωπευτικού αλλά μειωμένης τάξης μοντέλου, το οποίο να περιγράφει την δυναμική του. 2. Δημιουργία Μοντέλου Σύνθεσης. Προσδιορισμός των ανεξάρτητων μεταβλητών ελέγχου που θα οδηγούν τον ελεγκτή. Για την διαμήκη δυναμική αυτές είναι η εκτροπή πηδαλίου ανόδου-καθόδου και η ώση του κινητήρα, ενώ για την εγκάρσια δυναμική είναι οι εκτροπές των πηδαλίων κλίσης και διεύθυνσης. 3. Προσδιορισμός των μεταβλητών προς ρύθμιση. Για την διαμήκη δυναμική αυτές είναι το υψόμετρο και η ταχύτητα του αεροσκάφους, ενώ για την εγκάρσια δυναμική είναι οι γωνίες πλαγιολίσθησης και ίχνους πτήσης. 4. Εισαγωγή σημάτων ελέγχου για κάθε μία από τις ανεξάρτητες μεταβλητές ελέγχου του βήματος Εισαγωγή ενός ολοκληρωτή σε κάθε μία από τις τέσσερις μεταβλητές του βήματος 3 με σκοπό την παρακολούθηση των σημάτων αναφοράς με εγγυημένο μηδενικό σφάλμα μόνιμης κατάστασης. 6. Διαμόρφωση κριτηρίων εξόδου. Εφαρμογή φίλτρου δεύτερης τάξης για κάθε μία από τις μεταβλητές υψομέτρου, ταχύτητας και γωνίας πλαγιολίσθησης ενώ ένα φίλτρο πρώτης τάξης για την γωνία ίχνους πτήσης. Τα εν λόγω φίλτρα εισάγουν μηδενικά σε επιλεγμένες θέσεις ώστε να βελτιώσουν την συνολική απόκριση του υπό έλεγχο συστήματος. Προσδιορισμός φυσικής συχνότητας και απόσβεσης των παραπάνω φίλτρων. 7. Υποβολή του συστήματος στην εξίσωση Riccati. Προσδιορισμός πινάκων κόστους Q και R. Υπολογισμός κερδών ανάδρασης, επιλύοντας το LQR πρόβλημα. 8. Επαναπροσδιορισμός Q, R έως ότου επιτευχθούν τα κριτήρια σχεδιασμού. 9. Αν τα κριτήρια σχεδιασμού δεν ικανοποιούνται πλήρως, επανέλεγχος του μοντέλου σύνθεσης και εκ νέου προσδιορισμός των Q και R.
82 70 Σχεδίαση Συστήματος Ελέγχου Αφού συνθέσουμε το μοντέλο και υπολογίσουμε τα κέρδη ανάδρασης, είναι απαραίτητο να εξετάσουμε αν μέσω αυτών κερδών πληρούνται τα αρχικά κριτήρια σχεδιασμού. Για αυτό το στάδιο χρησιμοποιούμε το Μοντέλο Ανάλυσης. Ένας πρώτος έλεγχος είναι να εξετάσουμε την θέση των πόλων του κλειστού βρόχου. Αφού τα μηδενικά μετάδοσης έχουν χρησιμοποιηθεί προκειμένου να αλλάξουν τις θέσεις των πόλων, είναι ιδιαίτερα ενδιαφέρον να εξετασθεί αν η απόσβεση και η συχνότητα των πόλων του κλειστού συστήματος είναι ικανοποιητική. Για να διαπιστωθεί η σθεναρότητα ευστάθειας σε αυτό το σημείο της σχεδίασης, γίνεται χρήση των γραφημάτων Nichols. Πιο συγκεκριμένα "σπάμε" τον βρόχο του συστήματος σε ορισμένα σημεία και σε καθένα από αυτά κάνουμε διάγραμμα Nichols. Οι θέσεις που "σπάμε" τον βρόχο για να διερευνήσουμε την συνάρτηση μεταφοράς είναι: στα σημεία ελέγχου του αεροσκάφους (εκτροπές πηδαλίων και ώση κινητήρα) και στους αισθητήρες (όπως η γωνία περιστροφής, η ταχύτητα, ο ρυθμός πρόνευσης κλπ). Το σύστημά μας χαρακτηρίζεται ως σθεναρώς ευσταθές αν η συνάρτηση μεταφοράς σε κάθε ένα από αυτά τα σημεία, ικανοποιεί το Κριτήριο Ευστάθειας Nyquist. Το εν λόγω κριτήριο εφαρμόζεται σε συστήματα Μονής-Εισόδου Μονής-Εξόδου (SISO). Τα όρια σθεναρότητας ορίζονται ως μία περιοχή γύρω από ένα κρίσιμο σημείο (π.χ. υστέρηση φάσης -180 deg) από όπου το διάγραμμα Nichols δεν θα πρέπει να διέρχεται προκειμένου να εγγυηθούν ικανοποιητικά περιθώρια κέρδους και φάσης. Στην παρούσα ανάλυση εκτιμούμε ότι κάθε βρόχος είναι διαμορφωμένος χωρίς διαταραχές από κάποιον άλλον βρόχο. Στο παρακάτω σχήμα φαίνεται ένα διάγραμμα Nichols το οποίο δεν διέρχεται από την περιοχή που ορίζεται από περιθώριο φάσης 35 μοιρών και περιθώριο κέρδους 6dB. Εικόνα 5.3 Διάγραμμα Nichols ανοιχτού βρόχου στην κάθετη επιτάχυνση
83 Σχεδίαση Συστήματος Ελέγχου Το σύστημα ελέγχου του RCAM Το σύστημα ελέγχου που εφαρμόζεται στο μοντέλο RCAM αποτελείται από 2 βρόγχους ελέγχους: τον εσωτερικό (inner loop) και τον εξωτερικό (outer loop). Στον εσωτερικό βρόχο υλοποιείται το LQ πρόβλημα μαζί με τα κριτήρια εξόδου, ενώ ο εξωτερικός βρόχος αποτελείται από δύο P ελεγκτές, ένας για την διαμήκη κίνηση και ένας για την εγκάρσια. Ο P ελεγκτής της διαμήκους δυναμικής είναι υπεύθυνους για τον έλεγχο του υψομέτρου, ενώ αυτός της εγκάρσιας δυναμικής για την πλευρική απόκλιση. Στις παραπάνω ενότητες πραγματοποιήθηκε η θεωρητική ανάλυση και περιγραφή του RSLQR. Σε αυτήν ενότητα θα εξηγηθεί πως χρησιμοποιήθηκε ο εν λόγω ελεγκτής στο μοντέλο RCAM προκειμένου να επιτευχθούν τα αρχικά κριτήρια σχεδιασμού. Όπως αναφέρθηκε και προηγουμένως, ένας από τους βασικούς στόχους του ελεγκτή είναι η απλότητα στον σχεδιασμό. Για λόγους μείωσης της πολυπλοκότητας του συστήματος αλλά και μεγαλύτερης ευκολίας στον υπολογισμό των διαφορικών εξισώσεων, χωρίζουμε τις εξισώσεις κίνησης σε διαμήκεις, longitudinal, και εγκάρσιες, lateral. Όποτε και ο ελεγκτής που θα υλοποιηθεί, θα αποτελείται από ένα διαμήκη και από ένα εγκάρσιο μέρος. Στην παρακάτω εικόνα απεικονίζεται σχηματικά το δομικό διάγραμμα του αποζευγμένου ελεγκτή: Εικόνα 5.4 Δομικό διάγραμμα του ελεγκτή
84 72 Σχεδίαση Συστήματος Ελέγχου Διαμήκης Δυναμική Αφού γραμμικοποιήσουμε το σύστημα γύρω από ένα επιθυμητό σημείο λειτουργίας, επιλέγουμε τις επιθυμητές μεταβλητές (εισόδους, εξόδους και καταστάσεις) και τις μετασχηματίζουμε αναλόγως. Η εν λόγω διαδικασία για την διαμήκη δυναμική φαίνεται πιο αναλυτικά παρακάτω: qq θθ uu bb ww bb qq θθ dd ee = AA uu + BB dd tth1 bb ww dd tth2 bb q qq dd n z θθ ee w = CC v uu + DD dd tth1 bb V a ww dd tth2 bb Το σύστημα μετασχηματίζεται ώστε να έχει 2 εισόδους: qq θθ uu bb ww bb qq θθ dd = AA uu + BB ee bb dd tth ww bb q qq n z θθ dd w = CC v uu + DD ee bb dd tth V a ww bb Εξ Εν συνεχεία, εισάγεται από ένα φίλτρο πρώτης τάξης για τα σήματα ελέγχου, dd ee και dd tth. Για το σήμα ελέγχου dd ee επιλέγεται συχνότητα W t = 6.67 rad/sec, ενώ για το σήμα ελέγχου dd tth, W t = 0,67 rad/sec, δημιουργώντας έτσι δύο ενεργοποιητές. Το μοντέλο τους στον χώρο κατάστασης φαίνεται παρακάτω: XX TTTTTTTT XX TThrrrrrrrrrrrr XX TTTTTTTT XX TTTTTTTT = AA aaaaaa + BB XX aaaaaa dd ee TThrrrrrrrrrrrr dd tth XX TTTTTTTT = CC XX aaaaaa + DD TThrrrrrrrrrrrr XX aaaaaa dd ee TThrrrrrrrrrrrr dd tth,όπου AA aaaaaa = ww tt 0 0 ww tth, BB aaaaaa = ww tt 0 0 ww tth, CC aaaaaa = και DD aaaaaa = Εξ. 5.28
85 Σχεδίαση Συστήματος Ελέγχου 73 Χρησιμοποιώντας μετασχηματισμό ομοιότητας, οι έξοδοι μετατρέπονται σε καταστάσεις. Απαραίτητη προϋπόθεση είναι ο πίνακας D να είναι μηδενικός και ο C αντιστρέψιμος. Ο μετασχηματισμός ομοιότητας γίνεται με τους ακόλουθους τύπους: AA nnnnnn = CCCCCC 1, BB nnnnnn = CCCC, CC nnnnnn = eeeeee(llllllllllh(aa nnnnnn )) και DD nnnnnn = zzzzzzzzzz(llllllllllh(aa nnnnnn ) Εξ Αφού έχουν μετασχηματιστεί οι έξοδοι σε καταστάσεις, εισάγονται 2 ολοκληρωτικοί όροι: ένας για την z-συνιστώσα αδρανειακής ταχύτητας (ww vv ) και ένας για την ταχύτητα του αεροσκάφους (VV AA ). Οι ολοκληρωτικοί όροι εισάγονται προκειμένου το σύστημα να ακολουθεί τα σήματα αναφοράς με μηδενικό σφάλμα μόνιμης κατάστασης. Τα σήματα αναφοράς που θέλουμε να ακολουθεί η έξοδος του συστήματος είναι το rrrrrr wwvv και το rrrrrr VVaa, και επειδή είναι και τα δύο σταθερά χρειαζόμαστε έναν ολοκληρωτικό όρο για το καθένα. Αυτοί οι ολοκληρωτικοί όροι περιγράφονται από τις εξής καταστατικές εξισώσεις:,όπου AA cc = και BB cc = iiii ww vv iiii VVaa = AA cc iiii ww vv iiii VVaa + BB cc rrrrrr ww vv rrrrrr VVaa Εξ Αφού έχουν εισαχθεί και οι ολοκληρωτικοί όροι, δημιουργούνται τα κριτήρια εξόδου. Πρόκειται για δύο φίλτρα δεύτερης τάξης, ένα για κάθε μεταβλητή προς ρύθμιση. Δηλαδή ένα για την z-συνιστώσα αδρανειακής ταχύτητας ( ww vv ) και ένα για την ταχύτητα του αεροσκάφους (VV AA ). Το πρώτο φίλτρο βελτιώνει την κίνηση μικρής περιόδου (sp), ενώ το δεύτερο το φυγοειδές (ph). Οι συναρτήσεις μεταφοράς κάθε φίλτρου είναι: ww vvcccccccccccccccc VV aacccccccccccccccc = ss2 + 2zz ssss ww ssss ss + ww ssss ss = ss2 + 2zz pph ww pph ss + ww pph ss 2 ww vv 2 VV aa Για καθένα από τα παραπάνω δύο φίλτρα έχουν επιλεχθεί οι ακόλουθες τιμές για την συχνότητα (w i ) και την απόσβεση (z i ): ww ssss = 1.15
86 74 Σχεδίαση Συστήματος Ελέγχου zz ssss = 0.75 ww pph = 0.45 zz pph = 0.75 Το σχηματικό διάγραμμα με τα κριτήρια εξόδου απεικονίζεται παρακάτω: Εικόνα 5.5 Κριτήρια Εξόδου για την Διαμήκη Κίνηση Το επαυξημένο σύστημα το οποίο υποβάλλεται στην Riccati εξίσωση και στο οποίο εφαρμόζεται ο LQRY έλεγχος είναι: qq nn zz ww vv VV aa XX TTTTTTTT XX TThrrrrrrrrrrrr iiee wwvv iiee VV aa = AA aaaaaa qq nn zz ww vv VV aa XX TTTTTTTT XX TThrrrrrrrrrrrr iiii wwvv iiii VV aa + BB aaaaaa dd ee dd tth χρησιμοποιώντας ως εξόδους μόνο τα w v και V a, δηλαδή τις μεταβλητές προς ρύθμιση. Τα βάρη της συνάρτησης κόστους έχουν επιλεγεί να είναι: QQ = και RR = Εξ Το μοντέλο που περιγράφεται από την Εξ αποτελεί το Μοντέλο Σύνθεσης. Για την δοκιμή του μοντέλου ως προς το Κριτήριο Ευστάθειας Nyquist προστίθεται στην Εξ ένα φίλτρο πρώτης τάξης (pade approximation) για κάθε μία από τις μεταβλητές XX TTTTTTTT και XX TThrrrrrrrrrrrr, το οποίο εισάγει χρονική καθυστέρηση 0.1 sec στο σύστημα. Τα εν λόγω φίλτρα προσθέτουν άλλες δύο καταστάσεις στο σύστημα: τις dddddddddd TTTTTTTT και dddddddddd TThrrrrrrrrrrrr.
87 Σχεδίαση Συστήματος Ελέγχου 75 Ο ελεγκτής του εσωτερικού βρόχου του συστήματος εκφρασμένος στο χώρο κατάστασης έχει την εξής μορφή: iiii ww vv iiii VV aa = AA cc iiii ww vv + BB iiii cc1 VV aa dd ee = CC dd cc iiii ww vv + DD tth iiii cc1 VV aa q n z w v V a XX TTTTTTTT XX TThrrrrrrrrrrrr q n z w v V a XX TTTTTTTT XX TThrrrrrrrrrrrr + BB cc2 rrrrrr ww vv rrrrrr VVaa + DD cc2 rrrrrr ww vv rrrrrr VVaa,όπου AA cc = , BB cc1 = , BB cc2 = , CC cc = LLLLLLLL ιι, DD cc1 = LLLLLLLL pp και DD cc2 = 0. Οι πίνακες LLLLLLLL ιι και LLLLLLLL pp, περιέχουν τα κέρδη ανάδρασης για τους ολοκληρωτικούς όρους και τις εξόδους του συστήματος y αντίστοιχα και προκύπτουν από την λύση του LQ προβλήματος. Αφού έχει δημιουργηθεί το μοντέλο σύνθεσης, σειρά έχει η δημιουργία του μοντέλου ανάλυσης. Το εν λόγω μοντέλο είναι μεγαλύτερης τάξης και σαφώς πολυπλοκότερο. Επιλέγονται οι μεταβλητές της Εξ και παράλληλα προστίθενται σε αυτές η μεταβλητή εξόδου γωνίας ίχνους πτήσης (γ) και η μεταβλητή εισόδου ταχύτητας ανέμου στον x-άξονα (W XE ). Έπειτα, προστίθεται ένα φίλτρο πρώτης τάξης (pade approximation) για κάθε μία από τις μεταβλητές XX TTTTTTTT και XX TThrrrrrrrrrrrr, το οποίο εισάγει χρονική καθυστέρηση 0.1 sec στο σύστημα, όπως στην Εξ. 5.31, το μοντέλο με τους ολοκληρωτικούς όρους και το μοντέλο με τους ενεργοποιητές (Εξ. 5.28). Τα παραπάνω αποτελούσαν τον εσωτερικό βρόχο του συστήματος ελέγχου. Συνδέοντας στα παραπάνω και τον εξωτερικό βρόχο, ο οποίος πραγματεύεται τον έλεγχο του υψομέτρου (h) μέσω ενός P κέρδους, προκύπτει το μοντέλο ανάλυσης. Το μοντέλο του ελεγκτή του εξωτερικού βρόχου του συστήματος είναι:
88 76 Σχεδίαση Συστήματος Ελέγχου,όπου AA eeee = DD eeee = 0 και BB eeee = CC eeee = 1. h = AA eeee [h] + BB eeee [w v ] [h] = CC eeee [h] + DD eeee [w v ] To σφάλμα παρακολούθησης του εξωτερικού βρόχου ορίζεται ως: ee = rrrrrrrr h και το κέρδος του P ελεγκτή ισούται με ygain = Το Μοντέλο Ανάλυσης εκφρασμένο στο χώρο κατάστασης έχει την εξής μορφή: iiii wwvv iiii VV aa iiii wwvv iiii qq VV aa qq θθ uu θθ bb ww uu bb bb = AA ww bb XX TTTTTTTT XX TTTTTTTT XX TThrrrrrrrrrrrr XX TThrrrrrrrrrrrr dddddddddd dddddddddd TTTTTTTT TTaaaaaa dddddddddd dddddddddd TThrrrrrrrrrrrr TThrrrrrrrrrrrr h h h γγ w v qq q θθ n z w uu v bb V = CC ww a bb XX TTTTTTTT XX TTTTTTTT XX XX TThrrrrrrrrrrrr TThrrrrrrrrrrrr dddddddddd dddddddddd TTaaaaaa TTaaaaaa dddddddddd dddddddddd TThrrrrrrrrrrrr TThrrrrrrrrrrrr rrrrrr wwvv + BB rrrrrr VVaa WW XXXX rrrrrr wwvv + DD rrrrrr VVaa WW XXXX Εξ Το παραπάνω μοντέλο αποτελεί και τον κλειστό βρόχο του συστήματος.
89 Σχεδίαση Συστήματος Ελέγχου Εγκάρσια Δυναμική Αντίστοιχα, με την διαμήκη δυναμική, επιλέγουμε τις επιθυμητές μεταβλητές (εισόδους, εξόδους και καταστάσεις) και τις μετασχηματίζουμε αναλόγως. Η εν λόγω διαδικασία για την εγκάρσια δυναμική φαίνεται πιο αναλυτικά παρακάτω: pp rr pp rr φφ = AA φφ ψψ ψψ vv bb vv bb ββ pp pp rr rr = CC φφ φφ ψψ χχ vv bb + BB dd aa dd rr + DD dd aa dd rr Εξ Εν συνεχεία, εισάγεται από ένα φίλτρο πρώτης τάξης για τα σήματα ελέγχου, dd aa και dd rr. Για το σήμα ελέγχου dd aa επιλέγεται συχνότητα W a = rad/sec, ενώ για το σήμα ελέγχου dd rr, W r = rad/sec, δημιουργώντας έτσι δύο ενεργοποιητές. Το μοντέλο τους στον χώρο κατάστασης φαίνεται παρακάτω: XX AAAAAA XX RRRRRR = AA aaaaaa XX AAAAAA XX RRRRRR + BB aaaaaa dd aa dd rr XX AAAAAA XX RRRRRR = CC aaaaaa XX AAAAAA XX RRRRRR + DD aaaaaa dd aa dd rr,όπου AA aaaaaa = ww aa 0 0 ww rr, BB aaaaaa = ww aa 0 0 ww rr, CC aaaaaa = και DD aaaaaa = Εξ Αφού μετατραπούν οι έξοδοι σε καταστάσεις μέσω των τύπων μετασχηματισμού ομοιότητας της Εξ. 5.29, εισάγονται 2 ολοκληρωτικοί όροι: ένας για την γωνία πλαγιολίσθησης (ββ) και ένας για την γωνία τροχιάς (χχ). Τα σήματα αναφοράς που θέλουμε να ακολουθεί η έξοδος του συστήματος είναι το rrrrrr ββ και το rrrrrr χχ, και επειδή είναι και τα δύο σταθερά χρειαζόμαστε έναν ολοκληρωτικό όρο για το καθένα. Αυτοί οι ολοκληρωτικοί όροι περιγράφονται από τις εξής καταστατικές εξισώσεις: iiii ββ iiii χχ = AA cc iiii ββ iiii χχ + BB cc rrrrrr ββ rrrrrr χχ Εξ. 5.35
90 78 Σχεδίαση Συστήματος Ελέγχου,όπου AA cc = και BB cc = Αφού έχουν εισαχθεί και οι ολοκληρωτικοί όροι, δημιουργούνται τα κριτήρια εξόδου. Πρόκειται για ένα φίλτρο πρώτης τάξης και για ένα δεύτερης. Το φίλτρο πρώτης τάξης εφαρμόζεται στην γωνία τροχιάς, ενώ το φίλτρο δεύτερης τάξης στην γωνία πλαγιολίσθησης. Το φίλτρο δεύτερης τάξης βελτιώνει την κίνηση της ολλανδικής περιστροφής (ph), ενώ αυτό της πρώτης τάξης βελτιώνει την κατάσταση γωνίας ίχνους πτήση (l). Οι συναρτήσεις μεταφοράς κάθε φίλτρου είναι: ββ cccccccccccccccc 2 = ss2 + 2zz pph ww pph ss + ww pph ss χχ cccccccccccccccc = (ss + ll) χχ ss ββ Οι τιμές που έχουν επιλεγεί για τα w ph, z ph και l είναι: ww pph = 2 zz pph = 1.4 ll = 0.4 Το σχηματικό διάγραμμα με τα κριτήρια εξόδου απεικονίζεται παρακάτω: Εικόνα 5.6 Κριτήρια Εξόδου για την Εγκάρσια Κίνηση Το επαυξημένο σύστημα το οποίο υποβάλλεται στην Riccati εξίσωση και στο οποίο εφαρμόζεται ο LQRY έλεγχος είναι:
91 Σχεδίαση Συστήματος Ελέγχου 79 ββ pp rr φφ χχ iiee ββ iiii χχ XX AAAAAA XX RRRRRR = AA aaaaaa ββ pp rr φφ χχ XX AAAAAA XX RRRRRR iiii ββ iiii χχ + BB aaaaaa dd aa dd rr χρησιμοποιώντας ως εξόδους μόνο τα β και χ, δηλαδή τις μεταβλητές προς ρύθμιση. Τα βάρη της συνάρτησης κόστους έχουν επιλεγεί να είναι: QQ = και RR = Εξ Το μοντέλο που περιγράφεται από την Εξ αποτελεί το Μοντέλο Σύνθεσης. Για την δοκιμή του μοντέλου ως προς το Κριτήριο Ευστάθειας Nyquist προστίθεται στην Εξ ένα φίλτρο πρώτης τάξης (pade approximation) για κάθε μία από τις μεταβλητές XX AAAAAA και XX RRRRRR, το οποίο εισάγει χρονική καθυστέρηση 0.1 sec στο σύστημα. Τα εν λόγω φίλτρα προσθέτουν άλλες δύο καταστάσεις στο σύστημα: τις dddddddddd AAAAAA και dddddddddd RRRRRR. Ο ελεγκτής του εσωτερικού βρόχου του συστήματος εκφρασμένος στο χώρο κατάστασης έχει την εξής μορφή: iiii ββ iiii χχ = AA cc iiii ββ + BB iiii cc1 χχ ββ pp rr φφ χχ XX AAAAAA XX RRRRRR + BB cc2 rrrrrr ββ rrrrrr χχ ββ pp dd aa = CC dd cc iiii rr ββ + DD rr iiii cc1 χχ φφ + DD cc2 rrrrrr ββ rrrrrr χχ χχ XX AAAAAA XX RRRRRR Εξ. 5.37,όπου AA cc = , BB cc1 = , BB cc2 = , CC cc = LLLLLLLL ιι, DD cc1 = LLLLLLLL pp και DD cc2 = 0.
92 80 Σχεδίαση Συστήματος Ελέγχου Οι πίνακες LLLLLLLL ιι και LLLLLLLL pp, περιέχουν τα κέρδη ανάδρασης για τους ολοκληρωτικούς όρους και τις εξόδους του συστήματος y αντίστοιχα και προκύπτουν από την λύση του LQ προβλήματος. Αφού έχει δημιουργηθεί το μοντέλο σύνθεσης, σειρά έχει η δημιουργία του μοντέλου ανάλυσης. Αντίστοιχα με την διαμήκη δυναμική, επιλέγονται οι μεταβλητές της Εξ και παράλληλα προστίθενται σε αυτές η μεταβλητή εξόδου y-συνιστώσας αδρανειακής ταχύτητας (vv vv ) και η μεταβλητή εισόδου ταχύτητας ανέμου στον y-άξονα (W YE ). Έπειτα, προστίθεται ένα φίλτρο πρώτης τάξης (pade approximation) για κάθε μία από τις μεταβλητές XX AAAAAA και XX RRRRRR, το οποίο εισάγει χρονική καθυστέρηση 0.1 sec στο σύστημα, όπως στην Εξ. 5.31, το μοντέλο με τους ολοκληρωτικούς όρους και το μοντέλο με τους ενεργοποιητές (Εξ. 5.34). Τα παραπάνω αποτελούσαν τον εσωτερικό βρόχο του συστήματος ελέγχου. Συνδέοντας στα παραπάνω και τον εξωτερικό βρόχο, ο οποίος πραγματεύεται τον έλεγχο της πλευρικής απόκλισης (y) μέσω ενός P κέρδους, προκύπτει το μοντέλο ανάλυσης. Το μοντέλο του ελεγκτή του εξωτερικού βρόχου του συστήματος είναι: [yy ] = AA eeee [yy] + BB eeee [v v ] [yy] = CC eeee [yy] + DD eeee [v v ],όπου AA eeee = DD eeee = 0 και BB eeee = CC eeee = 1. To σφάλμα παρακολούθησης του εξωτερικού βρόχου ορίζεται ως: ee = rrrrrrrr yy και το κέρδος του P ελεγκτή ισούται με ygain =
93 Σχεδίαση Συστήματος Ελέγχου 81 Το Μοντέλο Ανάλυσης εκφρασμένο στο χώρο κατάστασης έχει την εξής μορφή: iiii ββ iiii ββ iiii χχ iiii χχ pp pp rr rr φφ φφ ψψ = AA ψψ XX AAAAAA χχ XX RRRRRR XX AAAAAA XX RRRRRR dddddddddd AAAAAA dddddddddd AAAAAA dddddddddd RRRRRR dddddddddd RRRRRR yy yy rrrrrr ββ + BB rrrrrr χχ WW YYYY iiii y ββ ββ iiii χχ p pp r rr φ φφ rrrrrr χ ββ ψ = CC ψψ + DD rrrrrr χχ χχ XX AAAAAA XX WW AAAAAA YYYY XX RRRRRR XX RRRRRR dddddddddd AAAAAA dddddddddd AAAAAA dddddddddd RRRRRR dddddddddd RRRRRR yy Εξ. 5.38
94 82 Προσομοιώσεις 6 Προσομοιώσεις Το κεφάλαιο αυτό πραγματεύεται την παρουσίαση προσομοιώσεων στο πεδίο του χρόνου. Οι προσομοιώσεις έχουν γίνει τόσο στο γραμμικοποιημένο μοντέλο όσο και στο μη γραμμικό, παρέχοντας με αυτόν τον τρόπο πληροφορίες για το πόσο ικανοποιητικά εφαρμόζεται ο γραμμικός νόμος έλεγχου στο μη γραμμικό σύστημα. 6.1 Το Γραμμικό Σύστημα Το σύστημα ελέγχου έχει σχεδιασθεί με βάση το γραμμικοποιημένο μοντέλο, λαμβάνοντας υπόψη κυρίως τα σημεία λειτουργίας που χαρακτηρίζονται από Va = 80 m/s, m = kg, Xcg = 0.23cc και Zcg = 0.1cc. Παρόλα αυτά προσομοιώσεις έγιναν για 81 διαφορετικά σημεία λειτουργίας μεταβάλλοντας κάθε φορά ένα από τα παραπάνω χαρακτηριστικά σε συγκεκριμένα διαστήματα τιμών. Ζήτημα μεγάλης σημασίας αποτελεί η ικανοποίηση του κριτηρίου ευστάθειας Nyquist, το οποίο απεικονίζεται παρακάτω μέσω γραφημάτων Nichols για κάθε έξοδο και είσοδο του συστήματος και για κάθε σημείο γραμμικοποίησης.



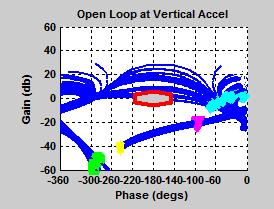
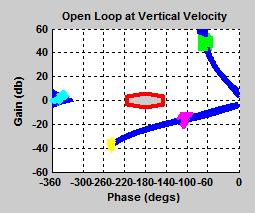
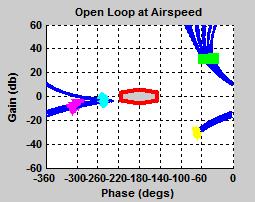
95 Εικόνα 6.1 Γραφήματα Nichols - Διαμήκη δυναμική Προσομοιώσεις 83
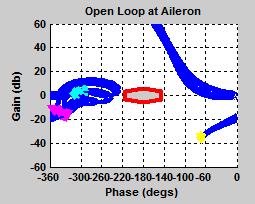
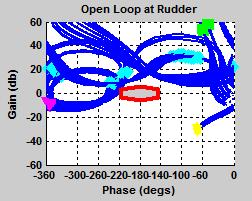
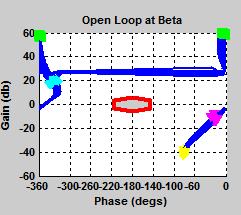
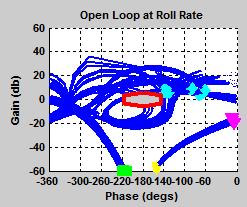
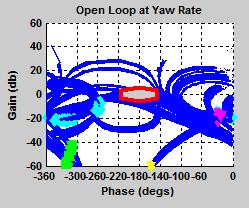
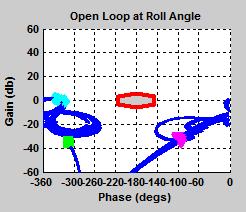
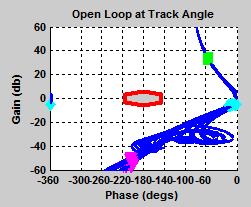
96 84 Προσομοιώσεις Εικόνα 6.2 Γραφήματα Nichols - Εγκάρσια δυναμική
97 Προσομοιώσεις 85 Παρατηρούμε ότι δημιουργείται πρόβλημα στην κάθετη επιτάχυνση, στον ρυθμό περιστροφής και εκτροπής αλλά αυτό συμβαίνει μόνο για μεταβολές της ταχύτητας και όχι όταν αυτή είναι στα 80 m/s. Έπειτα το σύστημα δοκιμάζεται κατά πόσο ικανοποιητικά μπορεί να ακολουθεί συγκεκριμένα σήματα αναφοράς. Οι παρακάτω προσομοιώσεις αφορούν μόνο τα χαρακτηριστικά: Va = 80 m/s, m = kg, Xcg = 0.23cc και Zcg = 0.1cc. Σε όλες τις μεταβολές των παραπάνω χαρακτηριστικών, οι αποκρίσεις είναι μέσα στα επιθυμητά όρια και σχεδόν ίδιες με τις παρακάτω, αποδεικνύοντας την σθεναρότητα του συστήματος. Εικόνα 6.3 Αποκρίσεις των προς ρύθμιση μεταβλητών - Διαμήκη Δυναμική
98 86 Προσομοιώσεις Εικόνα 6.4 Αποκρίσεις σε διαταραχές ανέμου ταχύτητας 13m/s - Διαμήκη Δυναμική Εικόνα 6.5 Αποκρίσεις για βηματική είσοδο ταχύτητας 13 m/s - Διαμήκη Δυναμική
99 Προσομοιώσεις 87 Εικόνα 6.6 Αποκρίσεις για βηματική είσοδο υψομέτρου 30 m - Διαμήκη Δυναμική Εικόνα 6.7 Αποκρίσεις εισόδου w V για γωνία ίχνους -3 deg - Διαμήκη Δυναμική
100 88 Προσομοιώσεις Εικόνα 6.8 Αποκρίσεις προς ρύθμιση μεταβλητών - Εγκάρσια Δυναμική Εικόνα 6.9 Αποκρίσεις σε βηματική είσοδο πλευρικής απόκλισης 100 m - Εγκάρσια Δυναμική
101 Προσομοιώσεις 89 Εικόνα 6.10 Αποκρίσεις σε βηματική είσοδο γωνίας τροχιάς 20 deg - Εγκάρσια Δυναμική Εικόνα 6.11 Αποκρίσεις σε διαταραχές ανέμου ταχύτητας 13 m/s - Εγκάρσια Δυναμική Παρατηρούμε ότι όλες οι αποκρίσεις βρίσκονται μεταξύ των επιθυμητών ορίων, ικανοποιώντας παράλληλα και τα αρχικά κριτήρια σχεδιασμού. Στον παρακάτω πίνακα παρατίθενται οι χρόνοι απόκρισης των μεταβλητών προς ρύθμιση, ενώ μέσα στις παρενθέσεις βρίσκονται οι μέγιστες αυτών των χρόνων.
102 90 Προσομοιώσεις Πίνακας 6.1 Χρόνοι απόκρισης μεταβλητών προς ρύθμιση 6.2 Το Μη Γραμμικό Σύστημα Το αεροσκάφος θα πρέπει να ακολουθεί την επιθυμητή τροχιά, Εικόνα 4.2, ικανοποιώντας τα αρχικά κριτήρια σχεδιασμού. Οι προσομοιώσεις διαρκούν 570 δευτερόλεπτα. Στα παρακάτω γραφήματα απεικονίζεται η πορεία του αεροσκάφους στην εν λόγω τροχιά και αναλύεται με περισσότερη λεπτομέρεια το κάθε στάδιο της τροχιάς αυτής. Οι προσομοιώσεις έχουν γίνει και για τις 81 διαφορετικές τιμές ταχύτητας, κέντρου βάρους και μάζας και απεικονίζονται όλες σε κοινά διαγράμματα. Στο παρακάτω διάγραμμα απεικονίζεται με την κόκκινη γραμμή, ολόκληρη η τροχιά του αεροσκάφους και για τα τέσσερα τμήματα, στο τρισδιάστατο αδρανειακό σύστημα συντεταγμένων xyz. Εικόνα 6.12 Τροχιά του RCAM
103 Προσομοιώσεις Πρώτο Τμήμα: Βλάβη Κινητήρα Στα παρακάτω δύο διαγράμματα απεικονίζονται η κάτοψη και η πλάγια όψη του πρώτου τμήματος της τροχιάς του αεροσκάφους. Από την κάτοψη διακρίνονται οι αποκλίσεις στους άξονες x-y, ενώ από την πλάγια όψη οι αποκλίσεις του υψομέτρου στον z άξονα. Με τις διακεκομμένες γραμμές συμβολίζονται τα όρια αυτών των αποκλίσεων. Στο πρώτο τμήμα επιδρά η βλάβη στον ένα κινητήρα. Κατά την διάρκεια της βλάβης επιτρέπεται μια μέγιστη πλευρική απόκλιση των 100 m, η οποία θα πρέπει να έχει μειωθεί σε λιγότερο από 20 m μέχρι το τέλος του τμήματος. Για την πλάγια όψη, μόνο στην περίπτωση της χαμηλής ταχύτητας το υψόμετρο ξεπερνά οριακά τα -10 m. Εικόνα 6.13 Πρώτο τμήμα: Επίδραση βλάβης κινητήρα - Κάτοψη
104 92 Προσομοιώσεις Εικόνα 6.14 Πρώτο τμήμα: Επίδραση βλάβης κινητήρα - Αποκλίσεις υψομέτρου Δεύτερο Τμήμα: Στροφή 90 μοιρών Κατά την διάρκεια της στροφής θα πρέπει να διατηρηθεί σταθερή ταχύτητα 80 m/s, οι πλευρικές επιταχύνσεις κοντά στο μηδέν, να περιοριστεί η γωνία περιστροφής στις 30 μοίρες με συνεχές εκτροπές των πηδαλίων διεύθυνσης και κλίσης, όχι υπέρβαση της πλευρικής απόκλισης πάνω από 200m. Στα παρακάτω δύο διαγράμματα απεικονίζεται η συμπεριφορά του αεροσκάφους σε αυτήν την στροφή. Φαίνεται ότι η απόκριση περνά τα όρια των διακεκομμένων γραμμών, αλλά η πλευρική απόκλιση ποτέ δεν ξεπερνά τα την μέγιστη τιμή των 200m και στο τέλος του τμήματος είναι σχεδόν μηδενική. Επίσης, η πλευρική επιτάχυνση δεν ξεπερνά το ανώτερο όριο των 0.02g και τα κριτήρια επίδοσης ικανοποιούνται πλήρως.
105 Προσομοιώσεις 93 Εικόνα 6.15 Δεύτερο τμήμα: Στροφή 90 μοιρών - Κάτοψη Εικόνα 6.16 Δεύτερο τμήμα: Στροφή 90 μοιρών - Πλευρικές αποκλίσεις
106 94 Προσομοιώσεις Τρίτο Τμήμα: Κάθοδος Σε αυτό το τμήμα μετά από ένα μικρό χρονικό διάστημα πτήσης ΕΟΠ στα 1000m, η γωνία ίχνους πτήσης τίθεται γγ = 6 dddddd στο σημείο e και γγ = 3 dddddd στο σημείο f. Το αεροσκάφος πρέπει να διατηρεί σταθερή ταχύτητα 80 m/s, με αποκλίσεις μικρότερες της τάξης των 5%. Η μέγιστη κάθετη επιτάχυνση δεν πρέπει να ξεπερνά τα 0.05g και η κάθετη απόκλιση στον άξονα z να μην ξεπερνά τα 20m. Στα παρακάτω δύο διαγράμματα απεικονίζεται η συμπεριφορά του αεροσκάφους σε αυτήν την φάση πτήσης. Φαίνεται ότι η απόκριση περνά τα όρια των διακεκομμένων γραμμών, αλλά η κάθετη απόκλιση ποτέ δεν ξεπερνά τα την μέγιστη τιμή των 20m και στο τέλος του τμήματος είναι σχεδόν μηδενική. Εικόνα 6.17 Τρίτο τμήμα: Κάθοδος - Πλάγια όψη
107 Προσομοιώσεις 95 Εικόνα 6.18 Τρίτο τμήμα: Κάθοδος - Αποκλίσεις υψομέτρου Τέταρτο Τμήμα: Τελική Προσέγγιση Σε αυτήν την φάση πτήσης, υπεισέρχεται ρεύμα ανέμου. Κατά την διάρκεια αυτού του τμήματος, η κάθετη απόκλιση δεν πρέπει να ξεπεράσει τα 20m, η κάθετη επιτάχυνση να είναι μικρότερη από 0.1g. Εικόνα 6.19 Τέταρτο τμήμα: Τελική προσέγγιση - Πλάγια όψη
108 96 Προσομοιώσεις Εικόνα 6.20 Τέταρτο τμήμα: Τελική προσέγγιση - Αποκλίσεις υψομέτρου
109 Σύνοψη & Περαιτέρω Εφαρμογές - Μελέτες 97 7 Σύνοψη & Περαιτέρω Εφαρμογές - Μελέτες Στον παρακάτω πίνακα παρατίθενται αριθμητικά αποτελέσματα για όλα τα τμήματα της πτήσης του αεροσκάφους, όπως ανακτήθηκαν από τις προσομοιώσεις. Πίνακας 7.1 Αριθμητικά αποτελέσματα Τα παραπάνω αριθμητικά αποτελέσματα βρίσκονται μέσα στα όρια τιμών που είχαν οριστεί, ικανοποιώντας όλα τα αρχικά κριτήρια σχεδιασμού. Το μόνο πρόβλημα είναι η ποιότητα πτήσης στο τρίτο τμήμα, αφού η τιμή είναι μεγαλύτερη της μονάδας. Αυτό ευθύνεται σε μια μικρή αύξηση της κάθετης επιτάχυνσης. Ιδιαίτερης σημασίας όμως, αποτελεί η τιμή της συνολικής σθεναρότητας, καθώς παρά τις μεταβολές ταχύτητας, κέντρου βάρους και μάζας, το σύστημα ελέγχου είναι σε θέση να ανταπεξέλθει στα κριτήρια σχεδιασμού. Τα αποτελέσματα των προσομοιώσεων ήταν ιδιαίτερα ικανοποιητικά, γεγονός που μας ενθαρρύνει να συνεχίσουμε την έρευνα πάνω στο μοντέλο αυτό με σκοπό την περαιτέρω βελτίωσή του. Μια πρώτη σκέψη, θα ήταν η κατά το δυνατόν μεγαλύτερη εκμηδένιση των αρχικών παραδοχών και υποθέσεων που κάναμε. Με αυτό το τρόπο, το μοντέλο του αεροσκάφους θα τείνει να συμπεριφέρεται ολοένα και περισσότερο σύμφωνα με τις συνθήκες πτήσης που επικρατούν στη πραγματικότητα. Επιπλέον, μια πιθανή μελλοντική προσθήκη θα ήταν ο άνεμος να μεταβάλλεται χρονικά και να περιγράφεται από μη γραμμικές εξισώσεις. Σκοπός του αεροσκάφους θα ήταν και πάλι να μην παρεκκλίνει από την τροχιά του και η πτήση να διέπεται από ασφάλεια και ικανοποιητική ποιότητα. Επίσης, η υλοποίηση ενός προσαρμοστικού ελέγχου θα ήταν αρκετά ενδιαφέρουσα και θα μπορούσε να μας παρέχει χρήσιμα αποτελέσματα ως προς την συμπεριφορά του αεροσκάφους κάτω από άγνωστες παραμέτρους. Εκτός από τα παραπάνω, μελλοντικά θα μπορούσε να πραγματοποιηθεί αρκετή έρευνα γύρω από τον σχεδιασμό συστημάτων αυτομάτου ελέγχου για μαχητικά
110 98 Σύνοψη & Περαιτέρω Εφαρμογές - Μελέτες αεροσκάφη καθώς και σύγκριση αυτών με τα συστήματα ελέγχου που χρησιμοποιήθηκαν στο πολιτικό αεροσκάφος της διπλωματικής εργασίας.

111 Παράρτημα Α Δομικό Διάγραμμα Simulink 99 Παράρτημα Α Δομικό Διάγραμμα Simulink Το Simulinkείναι ένα γραφικό περιβάλλον προγραμματισμού για την μοντελοποίηση, προσομοίωση και ανάλυση πολλών τομέων των δυναμικών συστημάτων. Κύρια διασύνδεση του είναι ένα γραφικό εργαλείο μπλοκ διαγραμμάτων και ένα προσαρμόσιμο σύνολο μπλοκ βιβλιοθηκών. Προσφέρει στενή ενοποίηση με το λογισμικό MATLAB, επιτρέποντας έτσι την δυνατότητα εκμετάλλευσης πολλών λειτουργιών αυτού. Το Simulink χρησιμοποιείται ευρέως στον αυτόματο έλεγχο αλλά και σε άλλους τομείς όπως η ψηφιακή επεξεργασία σημάτων για σχεδιασμό και προσομοίωση. Παρακάτω παρατίθενται ενδεικτικά κάποιες εικόνες από το δομικό διάγραμμα του μοντέλου που χρησιμοποιήθηκε: Δεδομένα Αεροδυναμικού Συστήματος Αεροδυναμικοί Συντελεστές
112 100 Παράρτημα Α Δομικό Διάγραμμα Simulink Αεροδυναμικοί Συντελεστές Δυνάμεων Αεροδυναμικοί Συντελεστές Ροπών Δυνάμεις & Ροπές



113 Παράρτημα Α Δομικό Διάγραμμα Simulink 101 Εξισώσεις Κίνησης Το Flight Management System, FMS, μαζί με το Flight Control system, FCS Το ολοκληρωμένο δομικό διάγραμμα
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3A: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3A: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ Συστήματα αξόνων του αεροσκάφους Κίνηση αεροσκάφους στην ατμόσφαιρα Απαιτούνται κατάλληλα συστήματα αξόνων για την περιγραφή
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3A: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ Συστήματα αξόνων του αεροσκάφους Κίνηση αεροσκάφους στην ατμόσφαιρα Απαιτούνται κατάλληλα συστήματα αξόνων για την περιγραφή
Διπλωματική Εργασία ΑΝΤΩΝΙΟΥ ΧΡΗΣΤΟΣ «ΣΘΕΝΑΡΟΣ ΕΛΕΓΧΟΣ ΚΑΤΑ ΤΗΝ ΠΡΟΣΓΕΙΩΣΗ ΑΕΡΟΣΚΑΦΟΥΣ»
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Τομέας Συστημάτων και Αυτομάτου Ελέγχου Εργαστήριο Αυτοματισμού και Ρομποτικής Διπλωματική Εργασία του φοιτητή του Τμήματος
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Τομέας Συστημάτων και Αυτομάτου Ελέγχου Εργαστήριο Αυτοματισμού και Ρομποτικής Διπλωματική Εργασία του φοιτητή του Τμήματος
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3B: ΓΡΑΜΜΙΚΟΠΟΙΗΣΗ ΕΞΙΣΩΣΕΩΝ ΚΙΝΗΣΗΣ ΑΠΟΣΥΖΕΥΓΜΕΝΕΣ ΕΞΙΣΩΣΕΙΣ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3B: ΓΡΑΜΜΙΚΟΠΟΙΗΣΗ ΕΞΙΣΩΣΕΩΝ ΚΙΝΗΣΗΣ ΑΠΟΣΥΖΕΥΓΜΕΝΕΣ ΕΞΙΣΩΣΕΙΣ ΣΥΝΟΨΗ Μόνιμη κατάσταση και κατάσταση διαταραχής Γραμμικοποίηση των κινηματικών και των αδρανειακών όρων Γραμμικοποίηση
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3B: ΓΡΑΜΜΙΚΟΠΟΙΗΣΗ ΕΞΙΣΩΣΕΩΝ ΚΙΝΗΣΗΣ ΑΠΟΣΥΖΕΥΓΜΕΝΕΣ ΕΞΙΣΩΣΕΙΣ ΣΥΝΟΨΗ Μόνιμη κατάσταση και κατάσταση διαταραχής Γραμμικοποίηση των κινηματικών και των αδρανειακών όρων Γραμμικοποίηση
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 6: ΔΙΑΜΗΚΕΙΣ ΑΕΡΟΔΥΝΑΜΙΚΕΣ ΠΑΡΑΓΩΓΟΙ ΕΥΣΤΑΘΕΙΑΣ ΚΑΙ ΕΛΕΓΧΟΥ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 6: ΔΙΑΜΗΚΕΙΣ ΑΕΡΟΔΥΝΑΜΙΚΕΣ ΠΑΡΑΓΩΓΟΙ ΕΥΣΤΑΘΕΙΑΣ ΚΑΙ ΕΛΕΓΧΟΥ Εισαγωγή Μοντελοποίηση αεροδυναμικών φαινομένων: Το σημαντικότερο ίσως ζήτημα στη μελέτη της δυναμικής πτήσης: Αναγνώριση
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 6: ΔΙΑΜΗΚΕΙΣ ΑΕΡΟΔΥΝΑΜΙΚΕΣ ΠΑΡΑΓΩΓΟΙ ΕΥΣΤΑΘΕΙΑΣ ΚΑΙ ΕΛΕΓΧΟΥ Εισαγωγή Μοντελοποίηση αεροδυναμικών φαινομένων: Το σημαντικότερο ίσως ζήτημα στη μελέτη της δυναμικής πτήσης: Αναγνώριση
Ε Μ Π Σ Χ Ο Λ Η Μ Η Χ Α Ν Ο Λ Ο Γ Ω Ν Μ Η Χ Α Ν Ι Κ Ω Ν Ι Ω Α Ν Ν Η Σ Α Ν Τ Ω Ν Ι Α Δ Η Σ 1: ΕΙΣΑΓΩΓΗ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ Ε Μ Π Σ Χ Ο Λ Η Μ Η Χ Α Ν Ο Λ Ο Γ Ω Ν Μ Η Χ Α Ν Ι Κ Ω Ν Ι Ω Α Ν Ν Η Σ Α Ν Τ Ω Ν Ι Α Δ Η Σ 1: ΕΙΣΑΓΩΓΗ Εισαγωγή Το μάθημα πραγματεύεται τα εξής βασικά θέματα: τη διαμόρφωση των
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ Ε Μ Π Σ Χ Ο Λ Η Μ Η Χ Α Ν Ο Λ Ο Γ Ω Ν Μ Η Χ Α Ν Ι Κ Ω Ν Ι Ω Α Ν Ν Η Σ Α Ν Τ Ω Ν Ι Α Δ Η Σ 1: ΕΙΣΑΓΩΓΗ Εισαγωγή Το μάθημα πραγματεύεται τα εξής βασικά θέματα: τη διαμόρφωση των
Προσομoίωση Απόκρισης Συστήματος στο MATLAB
 Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Προσομoίωση Απόκρισης Συστήματος στο MATLAB Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Προσομoίωση Απόκρισης Συστήματος στο MATLAB του καθ. Ιωάννη
Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Προσομoίωση Απόκρισης Συστήματος στο MATLAB Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Προσομoίωση Απόκρισης Συστήματος στο MATLAB του καθ. Ιωάννη
Δυναμική Μηχανών Ι. Διδάσκων: Αντωνιάδης Ιωάννης. Απόκριση Συστημάτων 1 ου Βαθμού Ελευθερίας, που περιγράφονται από Σ.Δ.Ε.
 Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Απόκριση Συστημάτων 1 ου Βαθμού Ελευθερίας, που περιγράφονται από Σ.Δ.Ε. 1 ης τάξης Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Απόκριση Συστημάτων
Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Απόκριση Συστημάτων 1 ου Βαθμού Ελευθερίας, που περιγράφονται από Σ.Δ.Ε. 1 ης τάξης Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Απόκριση Συστημάτων
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 4: ΔΙΑΜΗΚΗΣ ΔΥΝΑΜΙΚΗ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 4: ΔΙΑΜΗΚΗΣ ΔΥΝΑΜΙΚΗ ΣΥΝΟΨΗ Απόκριση σε εντολές ελέγχου Η χαρακτηριστική εξίσωση Ταλάντωση πρόνευσης μικρής περιόδου Το φυγοειδές Μοντέλα χαμηλότερης τάξης Η προσέγγιση της
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 4: ΔΙΑΜΗΚΗΣ ΔΥΝΑΜΙΚΗ ΣΥΝΟΨΗ Απόκριση σε εντολές ελέγχου Η χαρακτηριστική εξίσωση Ταλάντωση πρόνευσης μικρής περιόδου Το φυγοειδές Μοντέλα χαμηλότερης τάξης Η προσέγγιση της
Μοντελοποίηση Μηχανικών Συστημάτων Πολλών Βαθμών Ελευθερίας
 Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Μοντελοποίηση Μηχανικών Συστημάτων Πολλών Βαθμών Ελευθερίας Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Μοντελοποίηση Μηχανικών Συστημάτων Πολλών
Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Μοντελοποίηση Μηχανικών Συστημάτων Πολλών Βαθμών Ελευθερίας Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Μοντελοποίηση Μηχανικών Συστημάτων Πολλών
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 5: ΕΚΓΑΡΣΙΑ-ΔΙΕΥΘΥΝΣΗΣ ΔΥΝΑΜΙΚΗ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 5: ΕΚΓΑΡΣΙΑ-ΔΙΕΥΘΥΝΣΗΣ ΔΥΝΑΜΙΚΗ Εγκάρσιες-διεύθυνσης εξισώσεις κίνησης Αποσυζευγμένες εξισώσεις εγκάρσιας - διεύθυνσης μη συμμετρικής κίνησης: m v Y v v Y p + mw e p Y r mu
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 5: ΕΚΓΑΡΣΙΑ-ΔΙΕΥΘΥΝΣΗΣ ΔΥΝΑΜΙΚΗ Εγκάρσιες-διεύθυνσης εξισώσεις κίνησης Αποσυζευγμένες εξισώσεις εγκάρσιας - διεύθυνσης μη συμμετρικής κίνησης: m v Y v v Y p + mw e p Y r mu
Απόκριση σε Αρμονική Διέγερση
 Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Απόκριση σε Αρμονική Διέγερση Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Απόκριση σε Αρμονική Διέγερση του καθ. Ιωάννη Αντωνιάδη και υπόκειται
Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Απόκριση σε Αρμονική Διέγερση Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Απόκριση σε Αρμονική Διέγερση του καθ. Ιωάννη Αντωνιάδη και υπόκειται
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ ΕΜΠ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΙΩΑΝΝΗΣ ΑΝΤΩΝΙΑΔΗΣ ΑΝΔΡΕΑΣ ΠΑΡΑΔΕΙΣΙΩΤΗΣ 1: ΕΙΣΑΓΩΓΗ Υλικό-Πληροφορίες Ιστοσελίδα Μαθήματος: http://courseware.mech.ntua.gr/ml23229/ Παρουσιάσεις
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ ΕΜΠ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΙΩΑΝΝΗΣ ΑΝΤΩΝΙΑΔΗΣ ΑΝΔΡΕΑΣ ΠΑΡΑΔΕΙΣΙΩΤΗΣ 1: ΕΙΣΑΓΩΓΗ Υλικό-Πληροφορίες Ιστοσελίδα Μαθήματος: http://courseware.mech.ntua.gr/ml23229/ Παρουσιάσεις
Αυτόματη προσγείωση τετρακόπτερου με χρήση κάμερας
 Διπλωματική εργασία Αυτόματη προσγείωση τετρακόπτερου με χρήση κάμερας Τζιβάρας Βασίλης Επιβλέπων: Κ. Κωνσταντίνος Βλάχος Τμήμα Μηχανικών Η/Υ και Πληροφορικής Ιωάννινα Φεβρουάριος 2018 Περιεχόμενα Εισαγωγή
Διπλωματική εργασία Αυτόματη προσγείωση τετρακόπτερου με χρήση κάμερας Τζιβάρας Βασίλης Επιβλέπων: Κ. Κωνσταντίνος Βλάχος Τμήμα Μηχανικών Η/Υ και Πληροφορικής Ιωάννινα Φεβρουάριος 2018 Περιεχόμενα Εισαγωγή
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ Συστήματα αξόνων του αεροσκάφους Κίνηση αεροσκάφους στην ατμόσφαιρα Απαιτούνται κατάλληλα συστήματα αξόνων για περιγραφή της.
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 3: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ ΓΕΝΙΚΕΣ ΕΞΙΣΩΣΕΙΣ Συστήματα αξόνων του αεροσκάφους Κίνηση αεροσκάφους στην ατμόσφαιρα Απαιτούνται κατάλληλα συστήματα αξόνων για περιγραφή της.
M m l B r mglsin mlcos x ml 2 1) Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br
 Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br") ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 8B: ΑΥΤΟΜΑΤΟΙ ΠΙΛΟΤΟΙ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 8B: ΑΥΤΟΜΑΤΟΙ ΠΙΛΟΤΟΙ Βασικά συστήματα αυτομάτων πιλότων «ΑΥΤΟΜΑΤΟΙ ΠΙΛΟΤΟΙ» (AUTOPILOTS): Αυτόματα συστήματα ελέγχου πτήσης (AFCS), που επιτρέπουν στον πιλότο να εκτελεί διάφορους
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 8B: ΑΥΤΟΜΑΤΟΙ ΠΙΛΟΤΟΙ Βασικά συστήματα αυτομάτων πιλότων «ΑΥΤΟΜΑΤΟΙ ΠΙΛΟΤΟΙ» (AUTOPILOTS): Αυτόματα συστήματα ελέγχου πτήσης (AFCS), που επιτρέπουν στον πιλότο να εκτελεί διάφορους
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 8Α: ΣΥΣΤΗΜΑΤΑ ΕΠΑΥΞΗΣΗΣ ΤΗΣ ΕΥΣΤΑΘΕΙΑΣ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 8Α: ΣΥΣΤΗΜΑΤΑ ΕΠΑΥΞΗΣΗΣ ΤΗΣ ΕΥΣΤΑΘΕΙΑΣ ΣΥΝΟΨΗ 1) ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ ΠΤΗΣΗΣ Συστήματα επαύξησης ευστάθειας και αυτόματοι πιλότοι Ρόλος συστημάτων επαύξησης της ευστάθειας 2) ΑΡΧΙΤΕΚΤΟΝΙΚΗ
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 8Α: ΣΥΣΤΗΜΑΤΑ ΕΠΑΥΞΗΣΗΣ ΤΗΣ ΕΥΣΤΑΘΕΙΑΣ ΣΥΝΟΨΗ 1) ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ ΠΤΗΣΗΣ Συστήματα επαύξησης ευστάθειας και αυτόματοι πιλότοι Ρόλος συστημάτων επαύξησης της ευστάθειας 2) ΑΡΧΙΤΕΚΤΟΝΙΚΗ
ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΑΣΚΗΣΕΙΣ ΦΥΣΙΚΗΣ 2019
 ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΑΣΚΗΣΕΙΣ ΦΥΣΙΚΗΣ 019 Κινηματική ΑΣΚΗΣΗ Κ.1 Η επιτάχυνση ενός σώματος που κινείται ευθύγραμμα δίνεται από τη σχέση a = (4 t ) m s. Υπολογίστε την ταχύτητα και το διάστημα που διανύει το σώμα
ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΑΣΚΗΣΕΙΣ ΦΥΣΙΚΗΣ 019 Κινηματική ΑΣΚΗΣΗ Κ.1 Η επιτάχυνση ενός σώματος που κινείται ευθύγραμμα δίνεται από τη σχέση a = (4 t ) m s. Υπολογίστε την ταχύτητα και το διάστημα που διανύει το σώμα
Συστήματα Αυτομάτου Ελέγχου Ι
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου Ι Ενότητα #9: Σύστημα ης τάξης: Χρονική Απόκριση και Χαρακτηριστικά Μεγέθη (Φυσικοί Συντελεστές) Δημήτριος
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου Ι Ενότητα #9: Σύστημα ης τάξης: Χρονική Απόκριση και Χαρακτηριστικά Μεγέθη (Φυσικοί Συντελεστές) Δημήτριος
Φυσική Ι. Ενότητα 2: Κίνηση σε επίπεδο Υλικό σημείο. Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών
 Φυσική Ι Ενότητα 2: Κίνηση σε επίπεδο Υλικό σημείο Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών Σκοποί ενότητας Επανάληψη θεωρίας διανυσμάτων Εξοικείωση με τη χρήση τους στην περιγραφή
Φυσική Ι Ενότητα 2: Κίνηση σε επίπεδο Υλικό σημείο Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών Σκοποί ενότητας Επανάληψη θεωρίας διανυσμάτων Εξοικείωση με τη χρήση τους στην περιγραφή
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 3/2/2016 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 3/2/2016 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ 2 ΩΡΕΣ ΑΣΚΗΣΗ 1 Σώμα μάζας m 0.25 Kg κινείται στο επίπεδο xy, με τις εξισώσεις κίνησης
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 3/2/2016 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ 2 ΩΡΕΣ ΑΣΚΗΣΗ 1 Σώμα μάζας m 0.25 Kg κινείται στο επίπεδο xy, με τις εξισώσεις κίνησης
Διακριτή Μοντελοποίηση Μηχανικών Συστημάτων
 Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Διακριτή Μοντελοποίηση Μηχανικών Συστημάτων Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Διακριτή Μοντελοποίηση Μηχανικών Συστημάτων του καθ. Ιωάννη
Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Διακριτή Μοντελοποίηση Μηχανικών Συστημάτων Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Διακριτή Μοντελοποίηση Μηχανικών Συστημάτων του καθ. Ιωάννη
Συστήματα Αυτομάτου Ελέγχου Ι
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου Ι Ενότητα #7: Άλγεβρα Βαθμίδων (μπλόκ) Ολική Συνάρτηση Μεταφοράς Δημήτριος Δημογιαννόπουλος Τμήματος
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου Ι Ενότητα #7: Άλγεβρα Βαθμίδων (μπλόκ) Ολική Συνάρτηση Μεταφοράς Δημήτριος Δημογιαννόπουλος Τμήματος
Επίλυση Δυναμικών Εξισώσεων
 Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Επίλυση Δυναμικών Εξισώσεων Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Επίλυση Δυναμικών Εξισώσεων του καθ. Ιωάννη Αντωνιάδη και υπόκειται σε
Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Επίλυση Δυναμικών Εξισώσεων Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Επίλυση Δυναμικών Εξισώσεων του καθ. Ιωάννη Αντωνιάδη και υπόκειται σε
ΓΡΑΜΜΙΚΑ ΜΟΝΤΕΛΑ ΚΑΙ ΣΧΕΔΙΑΣΜΟΙ ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ I
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΕΦΑΡΜΟΣΜΕΝΩΝ ΜΑΘΗΜΑΤΙΚΩΝ ΚΑΙ ΦΥΣΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΓΡΑΜΜΙΚΑ ΜΟΝΤΕΛΑ ΚΑΙ ΣΧΕΔΙΑΣΜΟΙ ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ I Άσκηση 1 Ερώτημα (i) HH 0 : μμ 1 = μμ = μμ 3 = μμ 4 = μμ HH 1 : τουλάχιστον
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΕΦΑΡΜΟΣΜΕΝΩΝ ΜΑΘΗΜΑΤΙΚΩΝ ΚΑΙ ΦΥΣΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΓΡΑΜΜΙΚΑ ΜΟΝΤΕΛΑ ΚΑΙ ΣΧΕΔΙΑΣΜΟΙ ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ I Άσκηση 1 Ερώτημα (i) HH 0 : μμ 1 = μμ = μμ 3 = μμ 4 = μμ HH 1 : τουλάχιστον
ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 10//10/01 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 Σώμα μάζας 1 Kg βρίσκεται πάνω σε κεκλιμένο επίπεδο γωνίας κλίσης 45º. Μεταξύ
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 10//10/01 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 Σώμα μάζας 1 Kg βρίσκεται πάνω σε κεκλιμένο επίπεδο γωνίας κλίσης 45º. Μεταξύ
Προτεινόμενο διαγώνισμα Φυσικής Α Λυκείου
 Προτεινόμενο διαγώνισμα Φυσικής Α Λυκείου Θέμα 1 ο Σε κάθε μια από τις παρακάτω προτάσεις 1-5 να επιλέξετε τη μια σωστή απάντηση: 1. Όταν ένα σώμα ισορροπεί τότε: i. Ο ρυθμός μεταβολής της ταχύτητάς του
Προτεινόμενο διαγώνισμα Φυσικής Α Λυκείου Θέμα 1 ο Σε κάθε μια από τις παρακάτω προτάσεις 1-5 να επιλέξετε τη μια σωστή απάντηση: 1. Όταν ένα σώμα ισορροπεί τότε: i. Ο ρυθμός μεταβολής της ταχύτητάς του
website:
 Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 6 Μαρτίου 2017 1 Εισαγωγή Κάθε φυσικό σύστημα
Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 6 Μαρτίου 2017 1 Εισαγωγή Κάθε φυσικό σύστημα
ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΣΧΟΛΗ ΘΕΤΙΚΩΝ ΕΠΙΣΤΗΜΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ. ΠΡΟΓΡΑΜΜΑ ΣΠΟΥΔΩΝ ΠΕΡΙΒΑΛΛΟΝΤΙΚΟΣ ΣΧΕΔΙΑΣΜΟΣ ΕΡΓΩΝ ΥΠΟΔΟΜΗΣ (MSc)
") ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΣΧΟΛΗ ΘΕΤΙΚΩΝ ΕΠΙΣΤΗΜΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥΔΩΝ ΠΕΡΙΒΑΛΛΟΝΤΙΚΟΣ ΣΧΕΔΙΑΣΜΟΣ ΕΡΓΩΝ ΥΠΟΔΟΜΗΣ (MSc) ΘΕΜΑΤΙΚΗ ΕΝΟΤΗΤΑ ΠΣΕ60 Ακαδημαϊκό Έτος: 207-208 η Γραπτή Εργασία Επιβλέπων
ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΣΧΟΛΗ ΘΕΤΙΚΩΝ ΕΠΙΣΤΗΜΩΝ & ΤΕΧΝΟΛΟΓΙΑΣ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥΔΩΝ ΠΕΡΙΒΑΛΛΟΝΤΙΚΟΣ ΣΧΕΔΙΑΣΜΟΣ ΕΡΓΩΝ ΥΠΟΔΟΜΗΣ (MSc) ΘΕΜΑΤΙΚΗ ΕΝΟΤΗΤΑ ΠΣΕ60 Ακαδημαϊκό Έτος: 207-208 η Γραπτή Εργασία Επιβλέπων
Δυναμική Μηχανών I. Διάλεξη 3. Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
 Δυναμική Μηχανών I Διάλεξη 3 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Περιεχόμενα: Διακριτή Μοντελοποίηση Μηχανικών Συστημάτων Επανάληψη: Διακριτά στοιχεία μηχανικών δυναμικών συστημάτων Δυναμικά
Δυναμική Μηχανών I Διάλεξη 3 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Περιεχόμενα: Διακριτή Μοντελοποίηση Μηχανικών Συστημάτων Επανάληψη: Διακριτά στοιχεία μηχανικών δυναμικών συστημάτων Δυναμικά
ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ. Α5. α. Λάθος β. Λάθος γ. Σωστό δ. Λάθος ε. Σωστό
 ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ. Α. δ. Α3. γ. Α4. γ. Α5. α. Λάθος β. Λάθος γ. Σωστό δ. Λάθος ε. Σωστό ΘΕΜΑ B B1. Σωστή απάντηση είναι η
ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ. Α. δ. Α3. γ. Α4. γ. Α5. α. Λάθος β. Λάθος γ. Σωστό δ. Λάθος ε. Σωστό ΘΕΜΑ B B1. Σωστή απάντηση είναι η
Αριθμητικές μέθοδοι σε ταλαντώσεις μηχανολογικών συστημάτων
 ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Καθηγητής κ. Σ. Νατσιάβας Αριθμητικές μέθοδοι σε ταλαντώσεις μηχανολογικών συστημάτων Στοιχεία Φοιτητή Ονοματεπώνυμο: Νατσάκης Αναστάσιος Αριθμός Ειδικού Μητρώου:
ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ Καθηγητής κ. Σ. Νατσιάβας Αριθμητικές μέθοδοι σε ταλαντώσεις μηχανολογικών συστημάτων Στοιχεία Φοιτητή Ονοματεπώνυμο: Νατσάκης Αναστάσιος Αριθμός Ειδικού Μητρώου:
Γενικευμένες συντεταγμένες
 Γενικευμένες συντεταγμένες Έστω ένα σύστημα n-υλικών σημείων. Η θέση του συστήματος ως προς ένα αδρανειακό σύστημα αναφοράς, καθορίζεται την τυχαία χρονική στιγμή t από τα διανύσματα θέσης των υλικών σημείων:
Γενικευμένες συντεταγμένες Έστω ένα σύστημα n-υλικών σημείων. Η θέση του συστήματος ως προς ένα αδρανειακό σύστημα αναφοράς, καθορίζεται την τυχαία χρονική στιγμή t από τα διανύσματα θέσης των υλικών σημείων:
Υποθέστε ότι ο ρυθμός ροής από ένα ακροφύσιο είναι γραμμική συνάρτηση της διαφοράς στάθμης στα δύο άκρα του ακροφυσίου.
 ΕΡΩΤΗΜΑ Δίνεται το σύστημα δεξαμενών του διπλανού σχήματος, όπου: q,q : h,h : Α : R : οι παροχές υγρού στις δύο δεξαμενές, τα ύψη του υγρού στις δύο δεξαμενές, η διατομή των δεξαμενών και η αντίσταση ροής
ΕΡΩΤΗΜΑ Δίνεται το σύστημα δεξαμενών του διπλανού σχήματος, όπου: q,q : h,h : Α : R : οι παροχές υγρού στις δύο δεξαμενές, τα ύψη του υγρού στις δύο δεξαμενές, η διατομή των δεξαμενών και η αντίσταση ροής
Κεφάλαιο 10 Περιστροφική Κίνηση. Copyright 2009 Pearson Education, Inc.
 Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόμενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσματικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναμική της Περιστροφικής Κίνησης, Ροπή και
Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόμενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσματικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναμική της Περιστροφικής Κίνησης, Ροπή και
β) Από τον νόμο του Νεύτωνα για την μεταφορική κίνηση του κέντρου μάζας έχουμε: Επομένως το κέντρο μάζας αποκτάει αρνητική επιτάχυνση σταθερού μέτρου
 Από τον νόμο του Νεύτωνα για την μεταφορική κίνηση του κέντρου μάζας έχουμε: Επομένως το κέντρο μάζας αποκτάει αρνητική επιτάχυνση σταθερού μέτρου") ΣΥΝΘΕΤΗ ΚΙΝΗΣΗ 1) Συμπαγής κύλινδρος μάζας m και ακτίνας R δέχεται μια αρχική μεγάλη και στιγμιαία ώθηση προς τα πάνω σε κεκλιμένο επίπεδο γωνίας θ και μετά αφήνεται ελεύθερος. Κατά την παύση της ώθησης,
ΣΥΝΘΕΤΗ ΚΙΝΗΣΗ 1) Συμπαγής κύλινδρος μάζας m και ακτίνας R δέχεται μια αρχική μεγάλη και στιγμιαία ώθηση προς τα πάνω σε κεκλιμένο επίπεδο γωνίας θ και μετά αφήνεται ελεύθερος. Κατά την παύση της ώθησης,
ΕΞΕΤΑΣΕΙΣ ΑΚΑΔΗΜΑΪΚΟΥ ΕΤΟΥΣ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ, 8 Μαρτίου 2019 Διδάσκοντες: Βαρσάμης Χρήστος, Φωτόπουλος Παναγιώτης
 ΕΞΕΤΑΣΕΙΣ ΑΚΑΔΗΜΑΪΚΟΥ ΕΤΟΥΣ 218-219 ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ, 8 Μαρτίου 219 Διδάσκοντες: Βαρσάμης Χρήστος, Φωτόπουλος Παναγιώτης ΘΕΜΑ 1 Διάρκεια εξέτασης 2 ώρες Υλικό σημείο κινείται ευθύγραμμα πάνω στον άξονα
ΕΞΕΤΑΣΕΙΣ ΑΚΑΔΗΜΑΪΚΟΥ ΕΤΟΥΣ 218-219 ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ, 8 Μαρτίου 219 Διδάσκοντες: Βαρσάμης Χρήστος, Φωτόπουλος Παναγιώτης ΘΕΜΑ 1 Διάρκεια εξέτασης 2 ώρες Υλικό σημείο κινείται ευθύγραμμα πάνω στον άξονα
ΨΗΦΙΑΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΒΟΗΘΗΜΑ «ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ» 5 o ΔΙΑΓΩΝΙΣΜΑ ΑΠΡΙΛΙΟΣ 2017: ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ
 5 o ΔΙΑΓΩΝΙΣΜΑ ΑΠΡΙΛΙΟΣ 017: ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ. Α. δ. Α3. γ. Α4. γ. Α5. α. Λάθος β. Λάθος γ. Σωστό
5 o ΔΙΑΓΩΝΙΣΜΑ ΑΠΡΙΛΙΟΣ 017: ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α Α1. γ. Α. δ. Α3. γ. Α4. γ. Α5. α. Λάθος β. Λάθος γ. Σωστό
Αυτόματος Έλεγχος. Ενότητα 9 η : Σχεδίαση ελεγκτών με το γεωμετρικό τόπο ριζών. Παναγιώτης Σεφερλής
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 9 η : Σχεδίαση ελεγκτών με το γεωμετρικό τόπο ριζών Παναγιώτης Σεφερλής Εργαστήριο Δυναμικής Μηχανών Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 9 η : Σχεδίαση ελεγκτών με το γεωμετρικό τόπο ριζών Παναγιώτης Σεφερλής Εργαστήριο Δυναμικής Μηχανών Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΚΑΤΑΣΤΡΩΣΗ ΔΙΑΦΟΡΙΚΩΝ ΕΞΙΣΩΣΕΩΝ ΠΟΛΥΒΑΘΜΙΩΝ ΣΥΣΤΗΜΑΤΩΝ 55
 ΚΑΤΑΣΤΡΩΣΗ ΔΙΑΦΟΡΙΚΩΝ ΕΞΙΣΩΣΕΩΝ ΠΟΛΥΒΑΘΜΙΩΝ ΣΥΣΤΗΜΑΤΩΝ 55 ΚΕΦΑΛΑΙΟ 3 ΚΑΤΑΣΤΡΩΣΗ ΔΙΑΦΟΡΙΚΩΝ ΕΞΙΣΩΣΕΩΝ ΠΟΛΥΒΑΘΜΙΩΝ ΣΥΣΤΗΜΑΤΩΝ 3.. Εισαγωγή Αναφέρθηκε ήδη στο ο κεφάλαιο ότι η αναπαράσταση της ταλαντωτικής
ΚΑΤΑΣΤΡΩΣΗ ΔΙΑΦΟΡΙΚΩΝ ΕΞΙΣΩΣΕΩΝ ΠΟΛΥΒΑΘΜΙΩΝ ΣΥΣΤΗΜΑΤΩΝ 55 ΚΕΦΑΛΑΙΟ 3 ΚΑΤΑΣΤΡΩΣΗ ΔΙΑΦΟΡΙΚΩΝ ΕΞΙΣΩΣΕΩΝ ΠΟΛΥΒΑΘΜΙΩΝ ΣΥΣΤΗΜΑΤΩΝ 3.. Εισαγωγή Αναφέρθηκε ήδη στο ο κεφάλαιο ότι η αναπαράσταση της ταλαντωτικής
Γιάννης Γιάκας. Συστήματα αναφοράς και μονάδες μέτρησης Γραμμικά κινηματικά χαρακτηριστικά Γωνιακά κινηματικά χαρακτηριστικά Βλητική 2/12/2013
 Γιάννης Γιάκας Ύλη προόδου Συστήματα αναφοράς και μονάδες μέτρησης Γραμμικά κινηματικά χαρακτηριστικά Γωνιακά κινηματικά χαρακτηριστικά Βλητική 1 Συστήματα Αναφοράς M.K.S. ( m, Kg, sec ) C.G.S. ( cm, gr,
Γιάννης Γιάκας Ύλη προόδου Συστήματα αναφοράς και μονάδες μέτρησης Γραμμικά κινηματικά χαρακτηριστικά Γωνιακά κινηματικά χαρακτηριστικά Βλητική 1 Συστήματα Αναφοράς M.K.S. ( m, Kg, sec ) C.G.S. ( cm, gr,
Φυσική Ι. Ενότητα 9: Στροφορμή. Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών
 Φυσική Ι Ενότητα 9: Στροφορμή Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών Σκοποί ενότητας Εισαγωγή στην έννοια της στροφορμής Διαφοροποίηση υλικού σημείου από στερεό σώμα Εναλλακτικοί
Φυσική Ι Ενότητα 9: Στροφορμή Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών Σκοποί ενότητας Εισαγωγή στην έννοια της στροφορμής Διαφοροποίηση υλικού σημείου από στερεό σώμα Εναλλακτικοί
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 2: ΣΤΑΤΙΚΗ ΙΣΟΡΡΟΠΙΑ ΚΑΙ ΑΝΤΙΣΤΑΘΜΙΣΗ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 2: ΣΤΑΤΙΚΗ ΙΣΟΡΡΟΠΙΑ ΚΑΙ ΑΝΤΙΣΤΑΘΜΙΣΗ Ισορροπία και ευστάθεια Κατάσταση ισορροπίας: F = 0 και M g = 0 Tο αεροσκάφος διατηρείται σε κατάσταση σταθερής ομαλής πτήσης. Ευστάθεια:
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 2: ΣΤΑΤΙΚΗ ΙΣΟΡΡΟΠΙΑ ΚΑΙ ΑΝΤΙΣΤΑΘΜΙΣΗ Ισορροπία και ευστάθεια Κατάσταση ισορροπίας: F = 0 και M g = 0 Tο αεροσκάφος διατηρείται σε κατάσταση σταθερής ομαλής πτήσης. Ευστάθεια:
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 2: ΣΤΑΤΙΚΗ ΙΣΟΡΡΟΠΙΑ ΚΑΙ ΑΝΤΙΣΤΑΘΜΙΣΗ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 2: ΣΤΑΤΙΚΗ ΙΣΟΡΡΟΠΙΑ ΚΑΙ ΑΝΤΙΣΤΑΘΜΙΣΗ Ισορροπία και ευστάθεια Κατάσταση ισορροπίας: F = 0 και M g = 0 Tο αεροσκάφος διατηρείται σε κατάσταση σταθερής ομαλής πτήσης. Ευστάθεια:
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 2: ΣΤΑΤΙΚΗ ΙΣΟΡΡΟΠΙΑ ΚΑΙ ΑΝΤΙΣΤΑΘΜΙΣΗ Ισορροπία και ευστάθεια Κατάσταση ισορροπίας: F = 0 και M g = 0 Tο αεροσκάφος διατηρείται σε κατάσταση σταθερής ομαλής πτήσης. Ευστάθεια:
ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ- 2018
 ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ- 2018 Κώστας Γαλιώτης, καθηγητής Τμήμα Χημικών Μηχανικών galiotis@chemeng.upatras.gr 1 Περιεχόμενα ενότητας Α Βασικές έννοιες Στατική υλικού σημείου Αξιωματικές αρχές Νόμοι Νεύτωνα
ΜΗΧΑΝΙΚΗ ΤΩΝ ΥΛΙΚΩΝ- 2018 Κώστας Γαλιώτης, καθηγητής Τμήμα Χημικών Μηχανικών galiotis@chemeng.upatras.gr 1 Περιεχόμενα ενότητας Α Βασικές έννοιες Στατική υλικού σημείου Αξιωματικές αρχές Νόμοι Νεύτωνα
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 7: ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΠΤΗΣΗΣ ΚΑΙ ΕΥΚΟΛΙΑΣ ΧΕΙΡΙΣΜΟΥ
 ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 7: ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΠΤΗΣΗΣ ΚΑΙ ΕΥΚΟΛΙΑΣ ΧΕΙΡΙΣΜΟΥ Εισαγωγή ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΠΤΗΣΗΣ ΚΑΙ ΕΥΚΟΛΙΑΣ ΧΕΙΡΙΣΜΟΥ ΑΕΡΟΣΚΑΦΟΥΣ: Οι ιδιότητες που περιγράφουν την ευκολία και την ακρίβεια
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ 7: ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΠΤΗΣΗΣ ΚΑΙ ΕΥΚΟΛΙΑΣ ΧΕΙΡΙΣΜΟΥ Εισαγωγή ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΠΤΗΣΗΣ ΚΑΙ ΕΥΚΟΛΙΑΣ ΧΕΙΡΙΣΜΟΥ ΑΕΡΟΣΚΑΦΟΥΣ: Οι ιδιότητες που περιγράφουν την ευκολία και την ακρίβεια
2 Η ΠΡΟΟΔΟΣ. Ενδεικτικές λύσεις κάποιων προβλημάτων. Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση
 2 Η ΠΡΟΟΔΟΣ Ενδεικτικές λύσεις κάποιων προβλημάτων Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση Ένας τροχός εκκινεί από την ηρεμία και επιταχύνει με γωνιακή ταχύτητα που δίνεται από την,
2 Η ΠΡΟΟΔΟΣ Ενδεικτικές λύσεις κάποιων προβλημάτων Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση Ένας τροχός εκκινεί από την ηρεμία και επιταχύνει με γωνιακή ταχύτητα που δίνεται από την,
Πίνακες Ορίζουσες. Πίνακας: ορθογώνια διάταξη αριθμών που αποτελείται από γραμμές και στήλες.
 1 Πίνακες Ορίζουσες Πίνακας: ορθογώνια διάταξη αριθμών που αποτελείται από γραμμές και στήλες. Παράδειγμα (χορήγηση Βαλασικλοβιρης (αντιυπερτασικό) σε νήπια) Ηλικία (μήνες) Μέσο Cmax (μg/ml) Μέσο βάρος
1 Πίνακες Ορίζουσες Πίνακας: ορθογώνια διάταξη αριθμών που αποτελείται από γραμμές και στήλες. Παράδειγμα (χορήγηση Βαλασικλοβιρης (αντιυπερτασικό) σε νήπια) Ηλικία (μήνες) Μέσο Cmax (μg/ml) Μέσο βάρος
ΥΠΟΛΟΓΙΣΜΟΣ ΚΑΙ ΜΕΤΡΗΣΗ ΣΥΝΑΡΤΗΣΗΣ ΜΕΤΑΦΟΡΑΣ ΣΕ ΠΡΑΚΤΙΚΑ ΣΥΣΤΗΜΑΤΑ
 Κεφάλαιο ΥΠΟΛΟΓΙΣΜΟΣ ΚΑΙ ΜΕΤΡΗΣΗ ΣΥΝΑΡΤΗΣΗΣ ΜΕΤΑΦΟΡΑΣ ΣΕ ΠΡΑΚΤΙΚΑ ΣΥΣΤΗΜΑΤΑ Στη διαδικασία σχεδιασμού των Συστημάτων Αυτομάτου Ελέγχου, η απαραίτητη και η πρώτη εργασία που έχουμε να κάνουμε, είναι να
Κεφάλαιο ΥΠΟΛΟΓΙΣΜΟΣ ΚΑΙ ΜΕΤΡΗΣΗ ΣΥΝΑΡΤΗΣΗΣ ΜΕΤΑΦΟΡΑΣ ΣΕ ΠΡΑΚΤΙΚΑ ΣΥΣΤΗΜΑΤΑ Στη διαδικασία σχεδιασμού των Συστημάτων Αυτομάτου Ελέγχου, η απαραίτητη και η πρώτη εργασία που έχουμε να κάνουμε, είναι να
ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 19//013 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 υ (m/s) Σώμα μάζας m = 1Kg κινείται σε ευθύγραμμη τροχιά
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 19//013 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 υ (m/s) Σώμα μάζας m = 1Kg κινείται σε ευθύγραμμη τροχιά
ΕΞΕΤΑΣΕΙΣ ΑΚΑΔΗΜΑΪΚΟΥ ΕΤΟΥΣ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ Διδάσκοντες: Βαρσάμης Χρήστος, Φωτόπουλος Παναγιώτης
 ΕΞΕΤΑΣΕΙΣ ΑΚΑΔΗΜΑΪΚΟΥ ΕΤΟΥΣ 218-219 ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ Διδάσκοντες: Βαρσάμης Χρήστος, Φωτόπουλος Παναγιώτης ΘΕΜΑ 1 Διάρκεια εξέτασης 2 ώρες Υλικό σημείο κινείται ευθύγραμμα πάνω στον άξονα x με ταχύτητα,
ΕΞΕΤΑΣΕΙΣ ΑΚΑΔΗΜΑΪΚΟΥ ΕΤΟΥΣ 218-219 ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ Διδάσκοντες: Βαρσάμης Χρήστος, Φωτόπουλος Παναγιώτης ΘΕΜΑ 1 Διάρκεια εξέτασης 2 ώρες Υλικό σημείο κινείται ευθύγραμμα πάνω στον άξονα x με ταχύτητα,
Ψηφιακός Έλεγχος. 10 η διάλεξη Ασκήσεις. Ψηφιακός Έλεγχος 1
 Ψηφιακός Έλεγχος 10 η διάλεξη Ασκήσεις Ψηφιακός Έλεγχος 1 Άσκηση1 Ασκήσεις Επιθυμούμε να ελέγξουμε την γωνία ανύψωσης μιας κεραίας για να παρακολουθείται η θέση ενός δορυφόρου. Το σύστημα της κεραίας και
Ψηφιακός Έλεγχος 10 η διάλεξη Ασκήσεις Ψηφιακός Έλεγχος 1 Άσκηση1 Ασκήσεις Επιθυμούμε να ελέγξουμε την γωνία ανύψωσης μιας κεραίας για να παρακολουθείται η θέση ενός δορυφόρου. Το σύστημα της κεραίας και
ΤΑΛΑΝΤΩΣΕΙΣ ΜΕ ΑΠΟΣΒΕΣΗ ΚΑΙ ΔΙΕΓΕΡΣΗ
 ΤΑΛΑΝΤΩΣΕΙΣ ΜΕ ΑΠΟΣΒΕΣΗ ΚΑΙ ΔΙΕΓΕΡΣΗ ΑΣΚΗΣΗ 1 d x dx Η διαφορική εξίσωση κίνησης ενός ταλαντωτή δίνεται από τη σχέση: λ μx. Αν η μάζα d d του ταλαντωτή είναι ίση με =.5 kg, τότε να διερευνήσετε την κίνηση
ΤΑΛΑΝΤΩΣΕΙΣ ΜΕ ΑΠΟΣΒΕΣΗ ΚΑΙ ΔΙΕΓΕΡΣΗ ΑΣΚΗΣΗ 1 d x dx Η διαφορική εξίσωση κίνησης ενός ταλαντωτή δίνεται από τη σχέση: λ μx. Αν η μάζα d d του ταλαντωτή είναι ίση με =.5 kg, τότε να διερευνήσετε την κίνηση
Συστήματα Αυτόματου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Χαρακτηριστικά των Συστημάτων Ελέγχου Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Χαρακτηριστικά των Συστημάτων Ελέγχου Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν
Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα
 Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα ΔΙΑΛΕΞΗ 08 Δυναμική περιστροφικής κίνησης Ροπή Ροπή Αδρανείας ΦΥΣ102 1 Περιστροφική κίνηση
Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα ΔΙΑΛΕΞΗ 08 Δυναμική περιστροφικής κίνησης Ροπή Ροπή Αδρανείας ΦΥΣ102 1 Περιστροφική κίνηση
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013
 ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013 ΘΕΜΑ Α Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1- Α4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΣΤΗ ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ 2013 ΘΕΜΑ Α Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1- Α4 και δίπλα το γράμμα που αντιστοιχεί στη σωστή
Άσκηση 9 Μελέτη στροφικής κίνησης στερεού σώματος
 Άσκηση 9 Μελέτη στροφικής κίνησης στερεού σώματος Σύνοψη Σκοπός της συγκεκριμένης άσκησης είναι: ο πειραματικός υπολογισμός της ροπής αδράνειας ενός στερεού και η σύγκριση της πειραματικής τιμής με τη
Άσκηση 9 Μελέτη στροφικής κίνησης στερεού σώματος Σύνοψη Σκοπός της συγκεκριμένης άσκησης είναι: ο πειραματικός υπολογισμός της ροπής αδράνειας ενός στερεού και η σύγκριση της πειραματικής τιμής με τη
ΨΗΦΙΑΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΒΟΗΘΗΜΑ «ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ» 5 o ΔΙΑΓΩΝΙΣΜΑ ΜΑΡΤΙΟΣ 2017: ΘΕΜΑΤΑ
 ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΘΕΜΑΤΑ ΘΕΜΑ Α Στις προτάσεις 1-4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση, η οποία
ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 5 ο ΔΙΑΓΩΝΙΣΜΑ ΘΕΜΑΤΑ ΘΕΜΑ Α Στις προτάσεις 1-4 να γράψετε στο τετράδιό σας τον αριθμό της πρότασης και δίπλα το γράμμα που αντιστοιχεί στη φράση, η οποία
Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα.
 ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ ΣΤΕΡΕΟΎ ΣΏΜΑΤΟΣ Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα. Ένα υλικό σημείο μπορεί να κάνει μόνο μεταφορική
ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ ΣΤΕΡΕΟΎ ΣΏΜΑΤΟΣ Τα σώματα τα έχουμε αντιμετωπίσει μέχρι τώρα σαν υλικά σημεία. Το υλικό σημείο δεν έχει διαστάσεις. Έχει μόνο μάζα. Ένα υλικό σημείο μπορεί να κάνει μόνο μεταφορική
1. Κίνηση Υλικού Σημείου
 1. Κίνηση Υλικού Σημείου Εισαγωγή στην Φυσική της Γ λυκείου Τροχιά: Ονομάζεται η γραμμή που συνδέει τις διαδοχικές θέσεις του κινητού. Οι κινήσεις ανάλογα με το είδος της τροχιάς διακρίνονται σε: 1. Ευθύγραμμες
1. Κίνηση Υλικού Σημείου Εισαγωγή στην Φυσική της Γ λυκείου Τροχιά: Ονομάζεται η γραμμή που συνδέει τις διαδοχικές θέσεις του κινητού. Οι κινήσεις ανάλογα με το είδος της τροχιάς διακρίνονται σε: 1. Ευθύγραμμες
Φυσική Ι. Ενότητα 10: Σύνθετη κίνηση. Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών
 Φυσική Ι Ενότητα 10: Σύνθετη κίνηση Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών Σκοποί ενότητας Ανάλυση σύνθετων κινήσεων (υλικών σημείων και σωμάτων) σε μεταφορική και περιστροφική Ορισμός
Φυσική Ι Ενότητα 10: Σύνθετη κίνηση Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών Σκοποί ενότητας Ανάλυση σύνθετων κινήσεων (υλικών σημείων και σωμάτων) σε μεταφορική και περιστροφική Ορισμός
Μοντελοποίηση Μηχανικών - Ηλεκτρικών - Υδραυλικών Θερμικών Συστημάτων
 Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Μοντελοποίηση Μηχανικών - Ηλεκτρικών - Υδραυλικών Θερμικών Συστημάτων Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Μοντελοποίηση Μηχανικών - Ηλεκτρικών
Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Μοντελοποίηση Μηχανικών - Ηλεκτρικών - Υδραυλικών Θερμικών Συστημάτων Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Μοντελοποίηση Μηχανικών - Ηλεκτρικών
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 2015
 Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 205 ΘΕΜΑ Ο (2,0 μονάδες) Ο ηλεκτρικός θερμοσίφωνας χρησιμοποιείται για τη θέρμανση νερού σε μια προκαθορισμένη επιθυμητή θερμοκρασία (θερμοκρασία
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 205 ΘΕΜΑ Ο (2,0 μονάδες) Ο ηλεκτρικός θερμοσίφωνας χρησιμοποιείται για τη θέρμανση νερού σε μια προκαθορισμένη επιθυμητή θερμοκρασία (θερμοκρασία
Φύλλο εργασίας - Ενδεικτικές απαντήσεις
 Φύλλο εργασίας - Ενδεικτικές απαντήσεις Κεφάλαιο 1ο: Καμπυλόγραμμες κινήσεις 1.3 Κεντρομόλος δύναμη 1.4 Μερικές περιπτώσεις κεντρομόλου δύναμης Α) Ερωτήσεις του τύπου σωστό / λάθος Σημειώστε με Σ αν η
Φύλλο εργασίας - Ενδεικτικές απαντήσεις Κεφάλαιο 1ο: Καμπυλόγραμμες κινήσεις 1.3 Κεντρομόλος δύναμη 1.4 Μερικές περιπτώσεις κεντρομόλου δύναμης Α) Ερωτήσεις του τύπου σωστό / λάθος Σημειώστε με Σ αν η
Αυτόματος Έλεγχος. Ενότητα 11 η : Σχεδίαση ελεγκτών στο πεδίο του χώρου μεταβλητών κατάστασης. Παναγιώτης Σεφερλής
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα η : Σχεδίαση ελεγκτών στο πεδίο του χώρου μεταβλητών κατάστασης Παναγιώτης Σεφερλής Εργαστήριο Δυναμικής Μηχανών Άδειες Χρήσης
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα η : Σχεδίαση ελεγκτών στο πεδίο του χώρου μεταβλητών κατάστασης Παναγιώτης Σεφερλής Εργαστήριο Δυναμικής Μηχανών Άδειες Χρήσης
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 3//7/2013 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 3//7/013 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 Σώμα μάζας m=0.1 Kg κινείται σε οριζόντιο δάπεδο ευθύγραμμα με την
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 3//7/013 ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΙΑΣ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 Σώμα μάζας m=0.1 Kg κινείται σε οριζόντιο δάπεδο ευθύγραμμα με την
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ. Η ενέργεια ταλάντωσης ενός κυλιόμενου κυλίνδρου
 A A N A B P Y A 9 5 ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ Η ενέργεια ταλάντωσης ενός κυλιόμενου κυλίνδρου Στερεό σώμα με κυλινδρική συμμετρία (κύλινδρος, σφαίρα, σφαιρικό κέλυφος, κυκλική στεφάνη κλπ) μπορεί να
A A N A B P Y A 9 5 ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ Η ενέργεια ταλάντωσης ενός κυλιόμενου κυλίνδρου Στερεό σώμα με κυλινδρική συμμετρία (κύλινδρος, σφαίρα, σφαιρικό κέλυφος, κυκλική στεφάνη κλπ) μπορεί να
Φυσική IΙ. Ενότητα 5: Ηλεκτρικό δυναμικό στις 3 διαστάσεις. Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών
 Φυσική IΙ Ενότητα 5: Ηλεκτρικό δυναμικό στις 3 διαστάσεις Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών Σκοποί ενότητας Ορισμός και ερμηνεία του ηλεκτρικού δυναμικού στις 3 διαστάσεις μέσω:
Φυσική IΙ Ενότητα 5: Ηλεκτρικό δυναμικό στις 3 διαστάσεις Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών Σκοποί ενότητας Ορισμός και ερμηνεία του ηλεκτρικού δυναμικού στις 3 διαστάσεις μέσω:
ΦΥΣΙΚΗ Ο.Π Β Λ-Γ Λ ΧΡΗΣΤΟΣ ΚΑΡΑΒΟΚΥΡΟΣ ΙΩΑΝΝΗΣ ΤΖΑΓΚΑΡΑΚΗΣ
 ΦΥΣΙΚΗ Ο.Π Β Λ-Γ Λ 25/11/2018 ΧΡΗΣΤΟΣ ΚΑΡΑΒΟΚΥΡΟΣ ΙΩΑΝΝΗΣ ΤΖΑΓΚΑΡΑΚΗΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1-Α4 και δίπλα το γράμμα που αντιστοιχεί
ΦΥΣΙΚΗ Ο.Π Β Λ-Γ Λ 25/11/2018 ΧΡΗΣΤΟΣ ΚΑΡΑΒΟΚΥΡΟΣ ΙΩΑΝΝΗΣ ΤΖΑΓΚΑΡΑΚΗΣ ΘΕΜΑ Α Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις Α1-Α4 και δίπλα το γράμμα που αντιστοιχεί
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Πτυχιακή εξέταση στη Μηχανική ΙI 20 Σεπτεμβρίου 2007
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Πτυχιακή εξέταση στη Μηχανική ΙI 0 Σεπτεμβρίου 007 Τμήμα Π. Ιωάννου & Θ. Αποστολάτου Απαντήστε στα ερωτήματα που ακολουθούν με σαφήνεια, ακρίβεια και απλότητα. Όλα τα
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Πτυχιακή εξέταση στη Μηχανική ΙI 0 Σεπτεμβρίου 007 Τμήμα Π. Ιωάννου & Θ. Αποστολάτου Απαντήστε στα ερωτήματα που ακολουθούν με σαφήνεια, ακρίβεια και απλότητα. Όλα τα
Theory Greek (Greece) Παρακαλώ διαβάστε τις Γενικές Οδηγίες που θα βρείτε σε ξεχωριστό φάκελο πριν ξεκινήσετε να εργάζεστε στο πρόβλημα αυτό.
 Παρακαλώ διαβάστε τις Γενικές Οδηγίες που θα βρείτε σε ξεχωριστό φάκελο πριν ξεκινήσετε να εργάζεστε στο πρόβλημα αυτό.") Q1-1 Δύο προβλήματα Μηχανικής (10 Μονάδες) Παρακαλώ διαβάστε τις Γενικές Οδηγίες που θα βρείτε σε ξεχωριστό φάκελο πριν ξεκινήσετε να εργάζεστε στο πρόβλημα αυτό. Μέρος A. Ο Κρυμμένος Δίσκος (3.5 Μονάδες)
Q1-1 Δύο προβλήματα Μηχανικής (10 Μονάδες) Παρακαλώ διαβάστε τις Γενικές Οδηγίες που θα βρείτε σε ξεχωριστό φάκελο πριν ξεκινήσετε να εργάζεστε στο πρόβλημα αυτό. Μέρος A. Ο Κρυμμένος Δίσκος (3.5 Μονάδες)
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Στερεό (Μέχρι Ροπή Αδράνειας) Γ ΛΥΚΕΙΟΥ. Α)Σε κάθε μια από τις ερωτήσεις (1-4) να σημειώσετε στο τετράδιό σας τη σωστή απάντηση.
 Γ ΛΥΚΕΙΟΥ. Α)Σε κάθε μια από τις ερωτήσεις (1-4) να σημειώσετε στο τετράδιό σας τη σωστή απάντηση.") ΦΥΣΙΚΗ ΚΤΕΥΘΥΝΣΗΣ Στερεό (Μέχρι Ροπή δράνειας) Γ ΛΥΚΕΙΟΥ ΘΕΜ 1 Ο : )Σε κάθε μια από τις ερωτήσεις (1-4) να σημειώσετε στο τετράδιό σας τη σωστή απάντηση. 1. Για ένα ζεύγος δυνάμεων Η ροπή του, εξαρτάται
ΦΥΣΙΚΗ ΚΤΕΥΘΥΝΣΗΣ Στερεό (Μέχρι Ροπή δράνειας) Γ ΛΥΚΕΙΟΥ ΘΕΜ 1 Ο : )Σε κάθε μια από τις ερωτήσεις (1-4) να σημειώσετε στο τετράδιό σας τη σωστή απάντηση. 1. Για ένα ζεύγος δυνάμεων Η ροπή του, εξαρτάται
Φυσική Ι. Ενότητα 11: Ταλαντώσεις. Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών
 Φυσική Ι Ενότητα 11: Ταλαντώσεις Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών Σκοποί ενότητας Εισαγωγή και ερμηνεία των ταλαντώσεων Διαφορική εξίσωση κι η λύση της στην περίπτωση του απλού
Φυσική Ι Ενότητα 11: Ταλαντώσεις Κουζούδης Δημήτρης Πολυτεχνική Σχολή Τμήμα Χημικών Μηχανικών Σκοποί ενότητας Εισαγωγή και ερμηνεία των ταλαντώσεων Διαφορική εξίσωση κι η λύση της στην περίπτωση του απλού
Διαγώνισμα Φυσικής Γ Λυκείου Απλή αρμονική ταλάντωση Κρούσεις
 Διαγώνισμα Φυσικής Γ Λυκείου Απλή αρμονική ταλάντωση Κρούσεις ~ Διάρκεια: 3 ώρες ~ Θέμα Α Α1. Η ορμή συστήματος δύο σωμάτων που συγκρούονται διατηρείται: α. Μόνο στην πλάγια κρούση. β. Μόνο στην έκκεντρη
Διαγώνισμα Φυσικής Γ Λυκείου Απλή αρμονική ταλάντωση Κρούσεις ~ Διάρκεια: 3 ώρες ~ Θέμα Α Α1. Η ορμή συστήματος δύο σωμάτων που συγκρούονται διατηρείται: α. Μόνο στην πλάγια κρούση. β. Μόνο στην έκκεντρη
ΘΕΜΑ Α Ι. Στις ερωτήσεις 1-4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και το γράμμα που αντιστοιχεί στη σωστή απάντηση.
 ΔΙΑΓΩΝΙΣΜΑ ΠΡΟΣΟΜΟΙΩΣΗΣ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΘΕΜΑ Α Ι. Στις ερωτήσεις 1-4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και το γράμμα που αντιστοιχεί στη σωστή απάντηση. 1.
ΔΙΑΓΩΝΙΣΜΑ ΠΡΟΣΟΜΟΙΩΣΗΣ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΘΕΜΑ Α Ι. Στις ερωτήσεις 1-4 να γράψετε στο τετράδιο σας τον αριθμό της ερώτησης και το γράμμα που αντιστοιχεί στη σωστή απάντηση. 1.
5: ΕΓΚΑΡΣΙΑ ΔΥΝΑΜΙΚΗ Σύνοψη Προαπαιτούμενη γνώση 1. Απόκριση σε εντολές ελέγχου
 5: ΕΓΚΑΡΣΙΑ ΔΥΝΑΜΙΚΗ Σύνοψη Το κεφάλαιο πραγματεύεται την ανάλυση της εγκάρσιας δυναμικής και τα μοντέλα χαμηλότερης τάξης με τα οποία μπορεί να προσεγγιστεί. Η ανάλυση που πραγματοποιείται είναι αντίστοιχη
5: ΕΓΚΑΡΣΙΑ ΔΥΝΑΜΙΚΗ Σύνοψη Το κεφάλαιο πραγματεύεται την ανάλυση της εγκάρσιας δυναμικής και τα μοντέλα χαμηλότερης τάξης με τα οποία μπορεί να προσεγγιστεί. Η ανάλυση που πραγματοποιείται είναι αντίστοιχη
2. Κατά την ανελαστική κρούση δύο σωμάτων διατηρείται:
 Στις ερωτήσεις 1-4 να επιλέξετε μια σωστή απάντηση. 1. Ένα πραγματικό ρευστό ρέει σε οριζόντιο σωλήνα σταθερής διατομής με σταθερή ταχύτητα. Η πίεση κατά μήκος του σωλήνα στην κατεύθυνση της ροής μπορεί
Στις ερωτήσεις 1-4 να επιλέξετε μια σωστή απάντηση. 1. Ένα πραγματικό ρευστό ρέει σε οριζόντιο σωλήνα σταθερής διατομής με σταθερή ταχύτητα. Η πίεση κατά μήκος του σωλήνα στην κατεύθυνση της ροής μπορεί
ΘΕΩΡΗΤΙΚΟ ΜΕΡΟΣ. Γ Λυκείου Σελ. 1 από 10 ΟΔΗΓΙΕΣ: ΕΚΦΩΝΗΣΕΙΣ: ΘΕΜΑ 1 Ο
 ΟΔΗΓΙΕΣ: 1. Οι απαντήσεις σε όλα τα ερωτήματα θα πρέπει να αναγραφούν στο Φύλλο Απαντήσεων που θα σας δοθεί χωριστά από τις εκφωνήσεις.. Η επεξεργασία των θεμάτων θα γίνει γραπτώς σε φύλλα Α4 ή σε τετράδιο
ΟΔΗΓΙΕΣ: 1. Οι απαντήσεις σε όλα τα ερωτήματα θα πρέπει να αναγραφούν στο Φύλλο Απαντήσεων που θα σας δοθεί χωριστά από τις εκφωνήσεις.. Η επεξεργασία των θεμάτων θα γίνει γραπτώς σε φύλλα Α4 ή σε τετράδιο
Φυσική Προσανατολισμού Β τάξη Ενιαίου Λυκείου 1 0 Κεφάλαιο- Καμπυλόγραμμες κινήσεις : Οριζόντια βολή, Κυκλική Κίνηση. Περιέχει: 1.
 Φυσική Προσανατολισμού Β τάξη Ενιαίου Λυκείου 1 0 Κεφάλαιο- Καμπυλόγραμμες κινήσεις : Οριζόντια βολή, Κυκλική Κίνηση Περιέχει: 1. Αναλυτική Θεωρία 2. Ερωτήσεις Θεωρίας 3. Ερωτήσεις Πολλαπλής Επιλογής 4.
Φυσική Προσανατολισμού Β τάξη Ενιαίου Λυκείου 1 0 Κεφάλαιο- Καμπυλόγραμμες κινήσεις : Οριζόντια βολή, Κυκλική Κίνηση Περιέχει: 1. Αναλυτική Θεωρία 2. Ερωτήσεις Θεωρίας 3. Ερωτήσεις Πολλαπλής Επιλογής 4.
Ηλεκτρομαγνητισμός. Μαγνητικό πεδίο. Νίκος Ν. Αρπατζάνης
 Ηλεκτρομαγνητισμός Μαγνητικό πεδίο Νίκος Ν. Αρπατζάνης Μαγνητικοί πόλοι Κάθε μαγνήτης, ανεξάρτητα από το σχήμα του, έχει δύο πόλους. Τον βόρειο πόλο (Β) και τον νότιο πόλο (Ν). Μεταξύ των πόλων αναπτύσσονται
Ηλεκτρομαγνητισμός Μαγνητικό πεδίο Νίκος Ν. Αρπατζάνης Μαγνητικοί πόλοι Κάθε μαγνήτης, ανεξάρτητα από το σχήμα του, έχει δύο πόλους. Τον βόρειο πόλο (Β) και τον νότιο πόλο (Ν). Μεταξύ των πόλων αναπτύσσονται
Συστήματα Αυτομάτου Ελέγχου Ι
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου Ι Ενότητα #4: Μαθηματική εξομοίωση συστημάτων στο επίπεδο της συχνότητας Μετασχηματισμός Laplace και
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου Ι Ενότητα #4: Μαθηματική εξομοίωση συστημάτων στο επίπεδο της συχνότητας Μετασχηματισμός Laplace και
Παραρτήματα. Παράρτημα 1 ο : Μιγαδικοί Αριθμοί
 Παράρτημα ο : Μιγαδικοί Αριθμοί Παράρτημα ο : Μετασχηματισμός Lplce Παράρτημα 3 ο : Αντίστροφος μετασχηματισμός Lplce Παράρτημα 4 ο : Μετασχηματισμοί δομικών διαγραμμάτων Παράρτημα 5 ο : Τυποποιημένα σήματα
Παράρτημα ο : Μιγαδικοί Αριθμοί Παράρτημα ο : Μετασχηματισμός Lplce Παράρτημα 3 ο : Αντίστροφος μετασχηματισμός Lplce Παράρτημα 4 ο : Μετασχηματισμοί δομικών διαγραμμάτων Παράρτημα 5 ο : Τυποποιημένα σήματα
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ) Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 2002 ÈÅÌÅËÉÏ
 Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 2002 ÈÅÌÅËÉÏ") ΘΕΜΑ 1ο ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ) Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 00 Στις ερωτήσεις 1-4 να γράψετε στο τετράδιό σας τον αριθµό της ερώτησης και δίπλα το γράµµα που αντιστοιχεί
ΘΕΜΑ 1ο ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ) Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 00 Στις ερωτήσεις 1-4 να γράψετε στο τετράδιό σας τον αριθµό της ερώτησης και δίπλα το γράµµα που αντιστοιχεί
Κεφάλαιο 3. Κίνηση σε δύο διαστάσεις (επίπεδο)
") Κεφάλαιο 3 Κίνηση σε δύο διαστάσεις (επίπεδο) Κινηματική σε δύο διαστάσεις Θα περιγράψουμε τη διανυσματική φύση της θέσης, της ταχύτητας, και της επιτάχυνσης με περισσότερες λεπτομέρειες. Σαν ειδικές περιπτώσεις,
Κεφάλαιο 3 Κίνηση σε δύο διαστάσεις (επίπεδο) Κινηματική σε δύο διαστάσεις Θα περιγράψουμε τη διανυσματική φύση της θέσης, της ταχύτητας, και της επιτάχυνσης με περισσότερες λεπτομέρειες. Σαν ειδικές περιπτώσεις,
ΣΕΙΡΑ: 3 Κύματα: αρμονικό έως στάσιμο, Στερεό: κινηματική έως διατήρηση στροφορμής
 ΜΑΘΗΜΑ /ΤΑΞΗ: Φυσική Κατεύθυνσης Γ Λυκείου ΟΝΟΜΑΤΕΠΩΝΥMΟ: ΗΜΕΡΟΜΗΝΙΑ: 16/03/014 ΣΕΙΡΑ: 3 ΕΞΕΤΑΣΤΕΑ ΥΛΗ: Κύματα: αρμονικό έως στάσιμο, Στερεό: κινηματική έως διατήρηση στροφορμής ΘΕΜΑ Α Να γράψετε στο τετράδιό
ΜΑΘΗΜΑ /ΤΑΞΗ: Φυσική Κατεύθυνσης Γ Λυκείου ΟΝΟΜΑΤΕΠΩΝΥMΟ: ΗΜΕΡΟΜΗΝΙΑ: 16/03/014 ΣΕΙΡΑ: 3 ΕΞΕΤΑΣΤΕΑ ΥΛΗ: Κύματα: αρμονικό έως στάσιμο, Στερεό: κινηματική έως διατήρηση στροφορμής ΘΕΜΑ Α Να γράψετε στο τετράδιό
Κεφάλαιο 6α. Περιστροφή στερεού σώματος γύρω από σταθερό άξονα
 Κεφάλαιο 6α Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Στερεό (ή άκαμπτο) σώμα Τα μοντέλα ανάλυσης που παρουσιάσαμε μέχρι τώρα δεν μπορούν να χρησιμοποιηθούν για την ανάλυση όλων των κινήσεων. Μπορούμε
Κεφάλαιο 6α Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Στερεό (ή άκαμπτο) σώμα Τα μοντέλα ανάλυσης που παρουσιάσαμε μέχρι τώρα δεν μπορούν να χρησιμοποιηθούν για την ανάλυση όλων των κινήσεων. Μπορούμε
ΓΕΝΙΚΑ ΜΑΘΗΜΑΤΙΚΑ. Τμήμα Φαρμακευτικής Α εξάμηνο. Αριστείδης Δοκουμετζίδης. Ύλη. Διανύσματα. Πίνακες Ορίζουσες - Συστήματα. Διαφορικές εξισώσεις
 1 ΓΕΝΙΚΑ ΜΑΘΗΜΑΤΙΚΑ Τμήμα Φαρμακευτικής Α εξάμηνο Αριστείδης Δοκουμετζίδης Ύλη Διανύσματα Πίνακες Ορίζουσες - Συστήματα Διαφορικές εξισώσεις ΔΙΑΝΥΣΜΑΤΙΚΟΣ ΛΟΓΙΣΜΟΣ Μία φυσική ποσότητα μπορεί να αναπαρίσταται
1 ΓΕΝΙΚΑ ΜΑΘΗΜΑΤΙΚΑ Τμήμα Φαρμακευτικής Α εξάμηνο Αριστείδης Δοκουμετζίδης Ύλη Διανύσματα Πίνακες Ορίζουσες - Συστήματα Διαφορικές εξισώσεις ΔΙΑΝΥΣΜΑΤΙΚΟΣ ΛΟΓΙΣΜΟΣ Μία φυσική ποσότητα μπορεί να αναπαρίσταται
ΔΙΑΜΗΚΗΣ ΔΥΝΑΜΙΚΗ ΕΠΙΛΥΣΗ ΕΞΙΣΩΣΕΩΝ ΚΙΝΗΣΗΣ ΑΕΡΟΔΥΝΑΜΙΚΕΣ ΠΑΡΑΓΩΓΟΙ ΕΥΣΤΑΘΕΙΑΣ ΠΡΟΣΟΜΟΙΩΣΗ ΣΤΟ MATLAB
 ΔΙΑΜΗΚΗΣ ΔΥΝΑΜΙΚΗ ΕΠΙΛΥΣΗ ΕΞΙΣΩΣΕΩΝ ΚΙΝΗΣΗΣ ΑΕΡΟΔΥΝΑΜΙΚΕΣ ΠΑΡΑΓΩΓΟΙ ΕΥΣΤΑΘΕΙΑΣ ΠΡΟΣΟΜΟΙΩΣΗ ΣΤΟ MATLAB Γραμμικοποίηση των κινηματικών και των αδρανειακών όρων H απλοποιημένες εκφράσεις για τους αδρανειακούς
ΔΙΑΜΗΚΗΣ ΔΥΝΑΜΙΚΗ ΕΠΙΛΥΣΗ ΕΞΙΣΩΣΕΩΝ ΚΙΝΗΣΗΣ ΑΕΡΟΔΥΝΑΜΙΚΕΣ ΠΑΡΑΓΩΓΟΙ ΕΥΣΤΑΘΕΙΑΣ ΠΡΟΣΟΜΟΙΩΣΗ ΣΤΟ MATLAB Γραμμικοποίηση των κινηματικών και των αδρανειακών όρων H απλοποιημένες εκφράσεις για τους αδρανειακούς
ΠΡΟΣΟΜΟΙΩΣΗ ΠΑΝΕΛΛΑΔΙΚΩΝ ΕΞΕΤΑΣΕΩΝ Γʹ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΤΡΙΤΗ 18 ΑΠΡΙΛΙΟΥ 2017 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ΠΕΝΤΕ (5)
") ΠΡΟΣΟΜΟΙΩΣΗ ΠΑΝΕΛΛΑΔΙΚΩΝ ΕΞΕΤΑΣΕΩΝ Γʹ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΤΡΙΤΗ 8 ΑΠΡΙΛΙΟΥ 07 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ΠΕΝΤΕ (5) ΘΕΜΑ A Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό κάθε
ΠΡΟΣΟΜΟΙΩΣΗ ΠΑΝΕΛΛΑΔΙΚΩΝ ΕΞΕΤΑΣΕΩΝ Γʹ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΤΡΙΤΗ 8 ΑΠΡΙΛΙΟΥ 07 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ΠΕΝΤΕ (5) ΘΕΜΑ A Οδηγία: Να γράψετε στο τετράδιό σας τον αριθμό κάθε
ΟΜΟΣΠΟΝΔΙΑ ΕΚΠΑΙΔΕΥΤΙΚΩΝ ΦΡΟΝΤΙΣΤΩΝ ΕΛΛΑΔΟΣ (Ο.Ε.Φ.Ε.) ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 2018 Β ΦΑΣΗ
 ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 2018 Β ΦΑΣΗ") ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 08 ΤΑΞΗ: Γ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΣ: ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ Ημερομηνία: Σάββατο 4 Απριλίου 08 Διάρκεια Εξέτασης: 3 ώρες ΘΕΜΑ Α ΕΚΦΩΝΗΣΕΙΣ Στις ημιτελείς προτάσεις Α Α4
ΕΠΑΝΑΛΗΠΤΙΚΑ ΘΕΜΑΤΑ 08 ΤΑΞΗ: Γ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΣ: ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ Ημερομηνία: Σάββατο 4 Απριλίου 08 Διάρκεια Εξέτασης: 3 ώρες ΘΕΜΑ Α ΕΚΦΩΝΗΣΕΙΣ Στις ημιτελείς προτάσεις Α Α4
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ
 ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ 12. Ένας οριζόντιος ομογενής δίσκος ακτίνας μπορεί να περιστρέφεται χωρίς τριβές, γύρω από κατακόρυφο
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 3: ΡΟΠΗ ΑΔΡΑΝΕΙΑΣ - ΘΕΜΕΛΙΩΔΗΣ ΝΟΜΟΣ ΣΤΡΟΦΙΚΗΣ ΚΙΝΗΣΗΣ 12. Ένας οριζόντιος ομογενής δίσκος ακτίνας μπορεί να περιστρέφεται χωρίς τριβές, γύρω από κατακόρυφο
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔ ΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ Μεθοδολογία Κλεομένης Γ. Τσιγάνης Λέκτορας ΑΠΘ Πρόχειρες
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔ ΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ Μεθοδολογία Κλεομένης Γ. Τσιγάνης Λέκτορας ΑΠΘ Πρόχειρες
ΑΡΧΗ 1ης ΣΕΛΙΔΑΣ ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : OKTΩΒΡΙΟΣ 2017 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 7
 ΑΡΧΗ 1ης ΣΕΛΙΔΑΣ ΘΕΜΑ 1 Ο : ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : OKTΩΒΡΙΟΣ 2017 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 7 Στις παρακάτω ερωτήσεις 1 έως 4 να γράψετε στο τετράδιό σας
ΑΡΧΗ 1ης ΣΕΛΙΔΑΣ ΘΕΜΑ 1 Ο : ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ : ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ ΤΑΞΗ : Γ ΛΥΚΕΙΟΥ ΔΙΑΓΩΝΙΣΜΑ ΠΕΡΙΟΔΟΥ : OKTΩΒΡΙΟΣ 2017 ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ : 7 Στις παρακάτω ερωτήσεις 1 έως 4 να γράψετε στο τετράδιό σας
Θέμα 1 ο (Μονάδες 25) προς τη θετική φορά του άξονα χ. Για τις φάσεις και τις ταχύτητες ταλάντωσης των σημείων Α και Β του μέσου ισχύει:
 προς τη θετική φορά του άξονα χ. Για τις φάσεις και τις ταχύτητες ταλάντωσης των σημείων Α και Β του μέσου ισχύει:") ΙΓΩΝΙΣΜ ΦΥΣΙΚΗΣ ΚΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΥ 99 11 -- 1111 Θέμα 1 ο 1. Στο σχήμα φαίνεται το στιγμιότυπο ενός εγκάρσιου αρμονικού κύματος που διαδίδεται προς τη θετική φορά του άξονα χ. Για τις φάσεις και τις ταχύτητες
ΙΓΩΝΙΣΜ ΦΥΣΙΚΗΣ ΚΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΥ 99 11 -- 1111 Θέμα 1 ο 1. Στο σχήμα φαίνεται το στιγμιότυπο ενός εγκάρσιου αρμονικού κύματος που διαδίδεται προς τη θετική φορά του άξονα χ. Για τις φάσεις και τις ταχύτητες
[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]
![[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]](/thumbs/61/46095927.jpg "[1kgm 2, 5m/s, 3,2cm, 8rad/s][1kgm 2, 5m/s, 3,2cm, 8rad/s]") ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 5: ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΕΡΓΟ ΔΥΝΑΜΗΣ ΣΤΗ ΣΤΡΟΦΙΚΗ ΚΙΝΗΣΗ 34. Μία κατακόρυφη ράβδος μάζας μήκους, μπορεί να περιστρέφεται στο κατακόρυφο επίπεδο γύρω από
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 5: ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΚΑΙ ΕΡΓΟ ΔΥΝΑΜΗΣ ΣΤΗ ΣΤΡΟΦΙΚΗ ΚΙΝΗΣΗ 34. Μία κατακόρυφη ράβδος μάζας μήκους, μπορεί να περιστρέφεται στο κατακόρυφο επίπεδο γύρω από
Θέμα 1ο Να σημειώσετε τη σωστή απάντηση σε καθεμία από τις παρακάτω ερωτήσεις πολλαπλής επιλογής.
 ΕΠΑΝΑΛΗΠΤΙΚΑ ΚΡΙΤΗΡΙΑ ΑΞΙΟΛΟΓΗΣΗΣ o ΕΠΑΝΑΛΗΠΤΙΚΟ ΚΡΙΤΗΡΙΟ ΑΞΙΟΛΟΓΗΣΗΣ Θέμα ο Να σημειώσετε τη σωστή απάντηση σε καθεμία από τις παρακάτω ερωτήσεις πολλαπλής επιλογής. ) Σώμα εκτελεί ταυτόχρονα δύο απλές
ΕΠΑΝΑΛΗΠΤΙΚΑ ΚΡΙΤΗΡΙΑ ΑΞΙΟΛΟΓΗΣΗΣ o ΕΠΑΝΑΛΗΠΤΙΚΟ ΚΡΙΤΗΡΙΟ ΑΞΙΟΛΟΓΗΣΗΣ Θέμα ο Να σημειώσετε τη σωστή απάντηση σε καθεμία από τις παρακάτω ερωτήσεις πολλαπλής επιλογής. ) Σώμα εκτελεί ταυτόχρονα δύο απλές
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 15/10/2012 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 15/1/1 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 Σε σώμα μάζας m = 1Kg ασκείται η δύναμη F
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 15/1/1 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 Σε σώμα μάζας m = 1Kg ασκείται η δύναμη F
ΕΥΦΥΗΣ ΕΛΕΓΧΟΣ. Ενότητα #8: Βελτιστοποίηση Συστημάτων Ασαφούς Λογικής. Αναστάσιος Ντούνης Τμήμα Μηχανικών Αυτοματισμού Τ.Ε.
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΕΥΦΥΗΣ ΕΛΕΓΧΟΣ Ενότητα #8: Βελτιστοποίηση Συστημάτων Ασαφούς Λογικής Αναστάσιος Ντούνης Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Άδειες
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΕΥΦΥΗΣ ΕΛΕΓΧΟΣ Ενότητα #8: Βελτιστοποίηση Συστημάτων Ασαφούς Λογικής Αναστάσιος Ντούνης Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Άδειες
Ψηφιακός Έλεγχος. 11 η διάλεξη Ασκήσεις. Ψηφιακός Έλεγχος 1
 Ψηφιακός Έλεγχος η διάλεξη Ψηφιακός Έλεγχος Άσκηση 3 Θεωρούμε το σύστημα διακριτού χρόνου της μορφής με A R, B R, C R nxn nx xn ( + ) + Cx( k) x k Ax k Bu k y k Υποθέτουμε ότι το διάνυσμα κατάστασης x(k)
Ψηφιακός Έλεγχος η διάλεξη Ψηφιακός Έλεγχος Άσκηση 3 Θεωρούμε το σύστημα διακριτού χρόνου της μορφής με A R, B R, C R nxn nx xn ( + ) + Cx( k) x k Ax k Bu k y k Υποθέτουμε ότι το διάνυσμα κατάστασης x(k)
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ) Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 2002
 Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 2002") ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ) Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 00 ΕΚΦΩΝΗΣΕΙΣ ΘΕΜΑ 1ο Στις ερωτήσεις 1-4 να γράψετε στο τετράδιό σας τον αριθµό της ερώτησης και δίπλα το γράµµα
ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΥΟ ΚΥΚΛΩΝ) Γ ΤΑΞΗΣ ΕΝΙΑΙΟΥ ΛΥΚΕΙΟΥ 00 ΕΚΦΩΝΗΣΕΙΣ ΘΕΜΑ 1ο Στις ερωτήσεις 1-4 να γράψετε στο τετράδιό σας τον αριθµό της ερώτησης και δίπλα το γράµµα