ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3
|
|
|
- Βαριησού Λιακόπουλος
- 8 χρόνια πριν
- Προβολές:
Transcript
1 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 3 ο : ΣΤΡΟΦΕΣ Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου
2 ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Πώς να στρίβετε το robot ένα προκαθορισμένο αριθμό μοιρών 2. Ποιες οι διαφορές μεταξύ στροφής Spin και στροφής Pivot 3. Πώς προγραμματίζουμε αυτές τις 2 στροφές 4. Ανεξάρτητη κίνηση τροχών 5. Υπάρχει και το move tank block 6. Χρήση κινητήρα μεσαίων στροφών 2
3 ΣΤΡΟΦΕΣ PIVOT VS. SPIN 180 μοιρών στροφή Pivot Αρχική θέση Τελική θέση To robot σταματάει εφόσον στρίψει κατά 180 μοίρες. Αρχική θέση 180 μοιρών στροφή Spin Κίνηση Κινητήρα Β Κίνηση Κινητήρα Β και Τελική θέση Στην στροφή Spin, το robot μετακινείται πολύ λιγότερο, αυτό είναι βολικό για στροφές σε περιορισμένους χώρους. Οι στροφές Spin είναι λίγο γρηγορότερες αλλά έχουν μικρότερη ακρίβεια. Όποτε έχεις να κάνεις μία στροφή, θα πρέπει να επιλέξεις την κατάλληλη. 3


4 ΠΩΣ ΚΑΝΕΙΣ ΣΤΡΟΦΗ PIVOT 1 ος τρόπος 2 ος τρόπος Large motor lock Move Steering lock Large Motor Large Motor Move Steering Steering=50 Move Steering Steering=-50 Pivot στροφή δεξιά Pivot στροφή αριστερά Pivot στροφή δεξιά Pivot στροφή αριστερά Large Motor lock Move Steering lock 1. Το 50 σημαίνει πλήρη ισχύ του κινητήρα Β προς τα εμπρός και ακινησία του κινητήρα 2. Το -50 σημαίνει πλήρη ισχύ του κινητήρα προς τα εμπρός και ακινησία του κινητήρα 4
5 ΣΤΡΟΦΗ PIVOT ΚΑΤΑ 90 ΜΟΙΡΕΣ??? Προγραμμάτισε το robot να στρίψει 90 μοίρες με στιλ Pivot... Δοκίμασε και παρατήρησε αν κάνει πραγματικά στροφή ορθής γωνίας 5
6 ΜΕΡΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΓΙΑ ΤΟ PIVOT Για να στρίψει το robot n μοίρες με στροφή τύπου pivot Αριθμός περιστροφών = n ΠΛΑΤ οχ π ΠΕΡ τρ όπου n = γωνίες στροφής ΠΛΑΤ οχ = πλάτος οχήματος (μετατρόχιο) ΠΕΡ τρ = περίμετρος τροχού π=3.14 6


7 ΥΠΑΡΧΕΙ ΚΑΙ Η ΛΥΣΗ ΤΟΥ PORT VIEW? Απάντηση: Χρησιμοποίησε το port view για να μετρήσεις την στροφή και κατόπιν χρησιμοποίησε τη μέτρηση ως μοίρες στροφής. 7


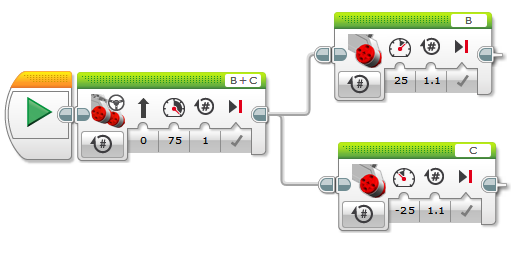
8 ΠΩΣ ΚΑΝΕΙΣ ΣΤΡΟΦΗ SPIN 1 ος τρόπος 2 ος τρόπος Large motor lock Move Steering lock Large Motor Large Motor Large Motor Large Motor Move Steering Steering=100 Move Steering Steering=-100 Spin στροφή δεξιά Spin στροφή αριστερά Spin στροφή δεξιά Spin στροφή αριστερά Large Motor lock Move Steering lock Το 100 σημαίνει αναστροφή δεξιά, δηλαδή: πλήρη ισχύ του αριστερού κινητήρα προς τα εμπρός και πλήρη ισχύ του δεξιού κινητήρα προς τα πίσω (To -100?) 8

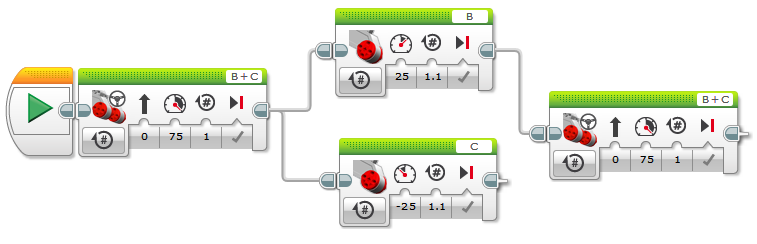
9 ΣΤΡΟΦΗ SPIN ΜΕ ΑΝΕΞΑΡΤΗΤΟΥΣ ΚΙΝΗΤΗΡΕΣ??? 9

10 ΧΡΗΣΗ ΤΟΥ MOVE TANK LOK Ένα πολύ χρήσιμο block: Δεν απαιτεί διακλάδωση Συγχρονίζει τους κινητήρες Ορίζουμε ακριβώς πόσο θα στρίψει ο κάθε ένας κινητήρας Προσοχή: ο αριθμός περιστροφών/μοιρών αφορά τον κινητήρα που θα στρίψει τις περισσότερες περιστροφές/μοίρες 10
11 ΜΕΡΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΓΙΑ ΤΟ SPIN Για να στρίψει n μοίρες με degree pivot turn Αριθμός περιστροφών = n 360 ΠΛΑΤ οχ π ΠΕΡ τρ Όπου n = μοίρες στροφής ΠΛΑΤ οχ = πλάτος οχήματος ΠΕΡ τρ = περίμετρος τροχού π =
12 ΠΡΟΚΛΗΣΕΙΣ ΣΤΡΟΦΩΝ Πρόκληση 1 Το robot περιπολεί γύρω από το τετράγωνο του σπιτιού σου. Θέλει να κάνει μία πλήρη περιστροφή. Μπορείς να προγραμματίσεις το robot να κινείται ευθεία και να στρίβει αριστερά γύρω από το τετράγωνο? 12
13 ΠΡΟΚΛΗΣΕΙΣ ΣΤΡΟΦΩΝ Πρόκληση 2 Το robot περιπολεί μπροστά από το σπίτι σου στο πεζοδρόμιο. Μπορείς να πας από τη μία άκρη στην άλλη και να επιστρέψεις? Σημείο 2 Πήγαινε ευθεία, στρίψε 180 μοίρες και επέστρεψε στο ίδιο σημείο. Σημείο εκκίνησης - τερματισμού Σημείο 1 13
14 ΕΠΙΛΥΣΗ ΠΡΟΚΛΗΣΕΩΝ Πρόκληση 1 Μάλλον χρησιμοποίησες κίνηση σε ευθεία και στροφές pivot για να πας γύρω από το τετράγωνο. Πρόκληση 2 Μάλλον χρησιμοποίησες στροφή spin γιατί είναι καλύτερη για απότομες στροφές και σε φέρνει στην ίδια ευθεία για την επιστροφή! Σημείο 2 Σημείο εκκίνησης - τερματισμού Σημείο 1 14
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3
 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 3 ο : ΣΤΡΟΦΕΣ Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Πώς να στρίβετε το robot ένα προκαθορισμένο αριθμό μοιρών 2.
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 3 ο : ΣΤΡΟΦΕΣ Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Πώς να στρίβετε το robot ένα προκαθορισμένο αριθμό μοιρών 2.
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3
 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 1 ο : Περιγραφή του EV3 και του περιβάλλοντος προγραμματισμού του Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου 2 3 4 ΑΝΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Πώς
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 1 ο : Περιγραφή του EV3 και του περιβάλλοντος προγραμματισμού του Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου 2 3 4 ΑΝΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Πώς
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3
 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 9ο: Αισθητήρας υπερήχων Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Η χρησιμότητα ενός αισθητήρα υπερήχων (ultrasonic)
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 9ο: Αισθητήρας υπερήχων Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Η χρησιμότητα ενός αισθητήρα υπερήχων (ultrasonic)
Θεματική Ενότητα: Κίνηση στην ευθεία (Moving Straight)
") ΜΑΘΗΜΑΤΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΑΡΧΑΡΙΩΝ ΓΙΑ EV3 Θεματική Ενότητα: Κίνηση στην ευθεία (Moving Straight) By: Droids Robotics Απόδοση στα ελληνικά: Ομάδα Καθηγητών Κέντρου Ρομποτικής & Προγραμματισμού Καλαμάτας
ΜΑΘΗΜΑΤΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΑΡΧΑΡΙΩΝ ΓΙΑ EV3 Θεματική Ενότητα: Κίνηση στην ευθεία (Moving Straight) By: Droids Robotics Απόδοση στα ελληνικά: Ομάδα Καθηγητών Κέντρου Ρομποτικής & Προγραμματισμού Καλαμάτας
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3
 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 11ο: Μεταβλητές, Αριθμητικές - Λογικές πράξεις Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Τι είναι μία μεταβλητή 2.
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 11ο: Μεταβλητές, Αριθμητικές - Λογικές πράξεις Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Τι είναι μία μεταβλητή 2.
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 2 ο Κινητήρες και Δομή Επανάληψης Σημειώσεις Καθηγητή Τώρα θα δούμε πως μπορούν να τροποποιηθούν τα προγράμματα
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 2 ο Κινητήρες και Δομή Επανάληψης Σημειώσεις Καθηγητή Τώρα θα δούμε πως μπορούν να τροποποιηθούν τα προγράμματα
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3
 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 4 ο : Wait Block Motor on, off Display Block Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Χρήση του Wait Block 2. Λειτουργία
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 4 ο : Wait Block Motor on, off Display Block Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Χρήση του Wait Block 2. Λειτουργία
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ EV3 Επίπεδο Ι
 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ EV3 Επίπεδο Ι Δρ. Γιώργος Α. Δημητρίου Εργαστήριο Ρομποτικής και Αυτομάτων Συστημάτων & Ακαδημία Ρομποτικής Τμήμα Πληροφορικής και Μηχανικών Υπολογιστών Σχολή Μηχανικής και Εφαρμοσμένων
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ EV3 Επίπεδο Ι Δρ. Γιώργος Α. Δημητρίου Εργαστήριο Ρομποτικής και Αυτομάτων Συστημάτων & Ακαδημία Ρομποτικής Τμήμα Πληροφορικής και Μηχανικών Υπολογιστών Σχολή Μηχανικής και Εφαρμοσμένων
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3
 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 7ο: Επαναλαμβανόμενες ενέργειες (Loops) Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Τι σημαίνει η επανάληψη 2. Πώς χρησιμοποιείται
ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΜΕ ΤΟ ΚΙΤ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS EV3 Μάθημα 7ο: Επαναλαμβανόμενες ενέργειες (Loops) Σύλλογος Εκπαιδευτικών Πληροφορικής Χίου ΑΝΤΙΚΕΙΜΕΝΑ ΜΑΘΗΣΗΣ 1. Τι σημαίνει η επανάληψη 2. Πώς χρησιμοποιείται
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 5 ο Πρόκληση με αισθητήρες φωτός Σημειώσεις Καθηγητή Ακολουθώντας τη γραμμή (Line follower) Φύλλο Εργασιών
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 5 ο Πρόκληση με αισθητήρες φωτός Σημειώσεις Καθηγητή Ακολουθώντας τη γραμμή (Line follower) Φύλλο Εργασιών
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 4 ο Πρόκληση με αισθητήρες αφής Σημειώσεις Καθηγητή Έξοδος από σπηλιά Φύλλο Εργασιών 4 : Πρόκληση με αισθητήρες
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 4 ο Πρόκληση με αισθητήρες αφής Σημειώσεις Καθηγητή Έξοδος από σπηλιά Φύλλο Εργασιών 4 : Πρόκληση με αισθητήρες
ΒΑΣΙΚΑ ΜΑΘΗΜΑΤΑ ΝΤΟΥΛΑΚΗΣ - ΜΕΝΙΟΥΔΑΚΗΣ ΕΠΑ.Λ ΕΛ. ΒΕΝΙΖΕΛΟΥ
 ΒΑΣΙΚΑ ΜΑΘΗΜΑΤΑ ΠΕΡΙΕΧΟΜΕΝΑ ΠΕΡΙΕΧΟΜΕΝΑ... 2 ΠΡΟΛΟΓΟΣ... 3 ΕΙΣΑΓΩΓΗ... 4 Η ΑΝΑΠΤΥΞΗ ΤΗΣ ΟΘΟΝΗΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ... 4 Ο ΕΚΠΑΙΔΕΥΤΗΣ ΡΟΜΠΟΤ... 5 ΤΟ ΠΑΡΑΘΥΡΟ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ... 5 ΤΑ ΚΟΥΜΠΙΑ ΚΑΙ ΤΑ ΜΠΛΟΚ...
ΒΑΣΙΚΑ ΜΑΘΗΜΑΤΑ ΠΕΡΙΕΧΟΜΕΝΑ ΠΕΡΙΕΧΟΜΕΝΑ... 2 ΠΡΟΛΟΓΟΣ... 3 ΕΙΣΑΓΩΓΗ... 4 Η ΑΝΑΠΤΥΞΗ ΤΗΣ ΟΘΟΝΗΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ... 4 Ο ΕΚΠΑΙΔΕΥΤΗΣ ΡΟΜΠΟΤ... 5 ΤΟ ΠΑΡΑΘΥΡΟ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ... 5 ΤΑ ΚΟΥΜΠΙΑ ΚΑΙ ΤΑ ΜΠΛΟΚ...
7. Επαναλήψεις (Loops) Προγραμματισμός EV3 Ακαδημία Ρομποτικής 58
 Προγραμματισμός EV3 Ακαδημία Ρομποτικής 58") 7. Επαναλήψεις (Loops) Προγραμματισμός EV3 Ακαδημία Ρομποτικής 58 Στόχοι Μαθήματος 1. Πώς να επαναλάβετε μια δράση 2. Μάθετε πώς να χρησιμοποιείτε το Loop Blocks Προγραμματισμός EV3 Ακαδημία Ρομποτικής
7. Επαναλήψεις (Loops) Προγραμματισμός EV3 Ακαδημία Ρομποτικής 58 Στόχοι Μαθήματος 1. Πώς να επαναλάβετε μια δράση 2. Μάθετε πώς να χρησιμοποιείτε το Loop Blocks Προγραμματισμός EV3 Ακαδημία Ρομποτικής
Ενότητα 2: Εντολές Επανάληψης
 Ενότητα 2: Εντολές Επανάληψης Όταν κάποια εντολή ή ολόκληρη ομάδα εντολών επαναλαμβάνεται τότε δεν είναι απαραίτητο να τις γράψουμε πολλές φορές αλλά χρησιμοποιούμε την εντολή ΕΠΑΝΑΛΑΒΕ Συντάσσεται ως
Ενότητα 2: Εντολές Επανάληψης Όταν κάποια εντολή ή ολόκληρη ομάδα εντολών επαναλαμβάνεται τότε δεν είναι απαραίτητο να τις γράψουμε πολλές φορές αλλά χρησιμοποιούμε την εντολή ΕΠΑΝΑΛΑΒΕ Συντάσσεται ως
ραστηριότητες τάξης για εκπαιδευτικούς LEGO Mindstorms EV3 Οδηγός για τους εκπαιδευτικούς που εφαρμόζουν την εκπαιδευτική ρομποτική στην
 ραστηριότητες τάξης για εκπαιδευτικούς LEGO Mindstorms EV3 Οδηγός για τους εκπαιδευτικούς που εφαρμόζουν την εκπαιδευτική ρομποτική στην Δραστηριότητες τάξης για εκπαιδευτικούς: EV3 Κεφάλαιο 1: Εισαγωγή
ραστηριότητες τάξης για εκπαιδευτικούς LEGO Mindstorms EV3 Οδηγός για τους εκπαιδευτικούς που εφαρμόζουν την εκπαιδευτική ρομποτική στην Δραστηριότητες τάξης για εκπαιδευτικούς: EV3 Κεφάλαιο 1: Εισαγωγή
STEM Education via Educational Robotics
 STEM Education via Educational Robotics Sample Exercises Grade 5 and 6 (10-11 years old) Developed by Chrysanthos Sokratous PhD Candidate Cyprus Interaction Lab, Department of Multimedia and Graphic Arts
STEM Education via Educational Robotics Sample Exercises Grade 5 and 6 (10-11 years old) Developed by Chrysanthos Sokratous PhD Candidate Cyprus Interaction Lab, Department of Multimedia and Graphic Arts
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 2 ο Κινητήρες και Δομή Επανάληψης Όνομα Ημερομηνία ραστηριότητα 6 η : κίνηση μπροστά συγχρονισμένα Ξεκινήστε
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 2 ο Κινητήρες και Δομή Επανάληψης Όνομα Ημερομηνία ραστηριότητα 6 η : κίνηση μπροστά συγχρονισμένα Ξεκινήστε
Φύλλο εργασίας 3 Προγραμματίζω το ρομπότ μου
 Φύλλο εργασίας 3 Προγραμματίζω το ρομπότ μου Διατηρώντας τις ίδιες ομάδες εργασίας ασχοληθείτε με τις παρακάτω δραστηριότητες. Δραστηριότητα 1 Βήμα 1: Δημιουργήστε ένα νέο έργο (Project) στο λογισμικό
Φύλλο εργασίας 3 Προγραμματίζω το ρομπότ μου Διατηρώντας τις ίδιες ομάδες εργασίας ασχοληθείτε με τις παρακάτω δραστηριότητες. Δραστηριότητα 1 Βήμα 1: Δημιουργήστε ένα νέο έργο (Project) στο λογισμικό
Εξοικείωση με το NXT-G
 Εξοικείωση με το NXT-G Εντολές Λίγα λόγια για τους κινητήρες Οι κινητήρες μπορούν να προγραμματιστούν να ξεκινούν και να σταματούν τη στιγμή που θέλουμε. Η εντολή κίνησης κινητήρα motor είναι πολύ απλή.
Εξοικείωση με το NXT-G Εντολές Λίγα λόγια για τους κινητήρες Οι κινητήρες μπορούν να προγραμματιστούν να ξεκινούν και να σταματούν τη στιγμή που θέλουμε. Η εντολή κίνησης κινητήρα motor είναι πολύ απλή.
Ενότητα 1: Απλές εντολές γραφικών
 Ενότητα 1: Απλές εντολές γραφικών ΣΤΚ: Στυλό Κάτω ΣΒΓ: Σβήσε Γραφικά (Σβήνει όλα τα σχέδια και φέρνει τη χελώνα στην αρχή με το κεφάλι προς τα πάνω) Εντολές Κίνησης: Εντολές Παραδείγματα σύνταξης Εντολή
Ενότητα 1: Απλές εντολές γραφικών ΣΤΚ: Στυλό Κάτω ΣΒΓ: Σβήσε Γραφικά (Σβήνει όλα τα σχέδια και φέρνει τη χελώνα στην αρχή με το κεφάλι προς τα πάνω) Εντολές Κίνησης: Εντολές Παραδείγματα σύνταξης Εντολή
ΠΑΡΑΡΤΗΜΑ IV. ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΑΡΑΡΤΗΜΑ IV Ασκήσεις για το Robolab
 ΠΑΡΑΡΤΗΜΑ IV Παρακάτω παραθέτουμε μία σειρά ασκήσεων για το Robolab ομαδοποιημένων σε κατηγορίες : Επιμέλεια : Κυριακού Γεώργιος 1 Φύλλο Ασκήσεων (πρόκληση με κινητήρες) ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΑΡΑΡΤΗΜΑ
ΠΑΡΑΡΤΗΜΑ IV Παρακάτω παραθέτουμε μία σειρά ασκήσεων για το Robolab ομαδοποιημένων σε κατηγορίες : Επιμέλεια : Κυριακού Γεώργιος 1 Φύλλο Ασκήσεων (πρόκληση με κινητήρες) ΔΙΔΑΚΤΙΚΗ ΤΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΑΡΑΡΤΗΜΑ
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT. ΚΕΦΑΛΑΙΟ 7ο. Δραστηριότητες για το ΝΧΤ-G και το Robolab
 ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 7ο Δραστηριότητες για το ΝΧΤ-G και το Robolab Α. Αποφυγή εμποδίων Θα επιδιώξουμε να προγραμματίσουμε το όχημα-ρομπότ μας ώστε να είναι σε θέση
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 7ο Δραστηριότητες για το ΝΧΤ-G και το Robolab Α. Αποφυγή εμποδίων Θα επιδιώξουμε να προγραμματίσουμε το όχημα-ρομπότ μας ώστε να είναι σε θέση
ΠΕΡΙΕΧΟΜΕΝΑ... 2 ΠΡΟΛΟΓΟΣ... 3 ΕΙΣΑΓΩΓΗ... 4 ΤΑ ΚΟΥΜΠΙΑ ΚΑΙ ΤΑ ΜΠΛΟΚ... 6 ΧΡΗΣΙΜΟΠΟΙΩΝΤΑΣ ΤΟΥΣ ΚΙΝΗΤΗΡΕΣ... 9 ΚΙΝΗΣΕΙΣ ΚΙΝΗΤΗΡΑ...
 ΒΑΣΙΚΑ ΜΑΘΗΜΑΤΑ ΠΕΡΙΕΧΟΜΕΝΑ ΠΕΡΙΕΧΟΜΕΝΑ... 2 ΠΡΟΛΟΓΟΣ... 3 ΕΙΣΑΓΩΓΗ... 4 Η ΑΝΑΠΤΥΞΗ ΤΗΣ ΟΘΟΝΗΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ... 4 Ο ΕΚΠΑΙΔΕΥΤΗΣ ΡΟΜΠΟΤ... 5 ΤΟ ΠΑΡΑΘΥΡΟ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ... 5 ΤΑ ΚΟΥΜΠΙΑ ΚΑΙ ΤΑ ΜΠΛΟΚ...
ΒΑΣΙΚΑ ΜΑΘΗΜΑΤΑ ΠΕΡΙΕΧΟΜΕΝΑ ΠΕΡΙΕΧΟΜΕΝΑ... 2 ΠΡΟΛΟΓΟΣ... 3 ΕΙΣΑΓΩΓΗ... 4 Η ΑΝΑΠΤΥΞΗ ΤΗΣ ΟΘΟΝΗΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ... 4 Ο ΕΚΠΑΙΔΕΥΤΗΣ ΡΟΜΠΟΤ... 5 ΤΟ ΠΑΡΑΘΥΡΟ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ... 5 ΤΑ ΚΟΥΜΠΙΑ ΚΑΙ ΤΑ ΜΠΛΟΚ...
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 4 ο Πρόκληση με αισθητήρες αφής Όνομα Ημερομηνία Έξοδος από σπηλιά Θα επιδιώξουμε να προγραμματίσουμε το
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 4 ο Πρόκληση με αισθητήρες αφής Όνομα Ημερομηνία Έξοδος από σπηλιά Θα επιδιώξουμε να προγραμματίσουμε το
Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία ΡομποΚαθαριστής Μέρος Β : Το Πρόγραμμα. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping).
.") Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής Μέρος Β : Το Πρόγραμμα. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εξαμηνιαία 2015 ΡομποΚαθαριστής Μέρος Β : Το Πρόγραμμα. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Μονάδες ενός Ρομποτικού Συστήματος Μονάδα Συλλογής
Φύλλο εργασίας 1 Εισαγωγή στη Ρομποτική
 Φύλλο εργασίας 1 Εισαγωγή στη Ρομποτική Χωριστείτε σε ομάδες 2-3 ατόμων και απαντήστε στις ερωτήσεις του φύλλου εργασίας. Δραστηριότητα 1 Συζητήστε με τα μέλη της ομάδας σας και γράψτε μια λίστα με ρομποτικές
Φύλλο εργασίας 1 Εισαγωγή στη Ρομποτική Χωριστείτε σε ομάδες 2-3 ατόμων και απαντήστε στις ερωτήσεις του φύλλου εργασίας. Δραστηριότητα 1 Συζητήστε με τα μέλη της ομάδας σας και γράψτε μια λίστα με ρομποτικές
Αγώνες αυτοκινήτου Παιχνίδι για 2 παίκτες
 Αγώνες αυτοκινήτου Παιχνίδι για 2 παίκτες Άνοιξε το προγραμματιστικό περιβάλλον του Scratch 2.0. Επίλεξε το Σκηνικό. Επίλεξε την καρτέλα Υπόβαθρα. Επίλεξε το πινέλο, αύξησε το πλάτος της γραμμής του πινέλου
Αγώνες αυτοκινήτου Παιχνίδι για 2 παίκτες Άνοιξε το προγραμματιστικό περιβάλλον του Scratch 2.0. Επίλεξε το Σκηνικό. Επίλεξε την καρτέλα Υπόβαθρα. Επίλεξε το πινέλο, αύξησε το πλάτος της γραμμής του πινέλου
Αριστείδης Παλιούρας Εισαγωγή στη δομή επανάληψης
 Εισαγωγή στη δομή επανάληψης 1. Τίτλος σεναρίου: Εισαγωγή στη δομή επανάληψης. 2. Εμπλεκόμενες γνωστικές περιοχές Πρόκειται για ένα σενάριο, το οποίο μπορεί να ενταχθεί στην Πληροφορική και τα Μαθηματικά.
Εισαγωγή στη δομή επανάληψης 1. Τίτλος σεναρίου: Εισαγωγή στη δομή επανάληψης. 2. Εμπλεκόμενες γνωστικές περιοχές Πρόκειται για ένα σενάριο, το οποίο μπορεί να ενταχθεί στην Πληροφορική και τα Μαθηματικά.
Πακέτο Lego Mindstorms
 Πακέτο Lego Mindstorms Τούβλο NXT και Κινητήρες, Αισθητήρες Α. Κινητήρες Οι κινητήρες είναι αυτοί που κινούν το ρομπότ μας. Οι κινητήρες συνδέονται με καλώδια στις θύρες εξόδου A,B ή C του NXT. Αν μάλιστα
Πακέτο Lego Mindstorms Τούβλο NXT και Κινητήρες, Αισθητήρες Α. Κινητήρες Οι κινητήρες είναι αυτοί που κινούν το ρομπότ μας. Οι κινητήρες συνδέονται με καλώδια στις θύρες εξόδου A,B ή C του NXT. Αν μάλιστα
Φύλλο εργασίας 4. Η γάτα και τα ποντίκια
 Φύλλο εργασίας 4 Η γάτα και τα ποντίκια Οι επόμενες δραστηριότητες αφορούν την κατασκευή ρομποτικής κατασκευής που θα προσομοιώνει μια γάτα που προσπαθεί να πιάσει ποντίκια. Για την υλοποίηση του φύλλου
Φύλλο εργασίας 4 Η γάτα και τα ποντίκια Οι επόμενες δραστηριότητες αφορούν την κατασκευή ρομποτικής κατασκευής που θα προσομοιώνει μια γάτα που προσπαθεί να πιάσει ποντίκια. Για την υλοποίηση του φύλλου
1. ΠΕΡΙΓΡΑΦΗ ΚΑΙ ΑΝΑΛΥΣΗ ΦΥΛΛΩΝ ΕΡΓΑΣΙΑΣ (Ή ΚΑΙ ΑΛΛΟΥ ΔΙΔΑΚΤΙΚΟΥ ΥΛΙΚΟΥ) ΑΞΙΟΛΟΓΗΣΗ ΤΩΝ ΜΑΘΗΤΩΝ
 ΑΞΙΟΛΟΓΗΣΗ ΤΩΝ ΜΑΘΗΤΩΝ") 1. ΠΕΡΙΓΡΑΦΗ ΚΑΙ ΑΝΑΛΥΣΗ ΦΥΛΛΩΝ ΕΡΓΑΣΙΑΣ (Ή ΚΑΙ ΑΛΛΟΥ ΔΙΔΑΚΤΙΚΟΥ ΥΛΙΚΟΥ) ΑΞΙΟΛΟΓΗΣΗ ΤΩΝ ΜΑΘΗΤΩΝ ΦΥΛΛΟ ΕΡΓΑΣΙΑΣ 1 «Μαθαίνω στη γάτα να σχεδιάζει» Δραστηριότητα 1 Παρατηρήστε τις εντολές στους παρακάτω πίνακες,
1. ΠΕΡΙΓΡΑΦΗ ΚΑΙ ΑΝΑΛΥΣΗ ΦΥΛΛΩΝ ΕΡΓΑΣΙΑΣ (Ή ΚΑΙ ΑΛΛΟΥ ΔΙΔΑΚΤΙΚΟΥ ΥΛΙΚΟΥ) ΑΞΙΟΛΟΓΗΣΗ ΤΩΝ ΜΑΘΗΤΩΝ ΦΥΛΛΟ ΕΡΓΑΣΙΑΣ 1 «Μαθαίνω στη γάτα να σχεδιάζει» Δραστηριότητα 1 Παρατηρήστε τις εντολές στους παρακάτω πίνακες,
ΜΑΘΗΜΑ: ΠΛΗΡΟΦΟΡΙΚΗ ΤΑΞΗ: Γ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΣΕ ΓΛΩΣΣΑ LOGO ΠΕΡΙΒΑΛΛΟΝ MICROWORLDS PRO
 ΜΑΘΗΜΑ: ΠΛΗΡΟΦΟΡΙΚΗ ΤΑΞΗ: Γ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΣΕ ΓΛΩΣΣΑ LOGO ΠΕΡΙΒΑΛΛΟΝ MICROWORLDS PRO 1. Δημιουργήστε τα παρακάτω σχήματα: Όλα τα σχήματα έχουν πλευρά 100, εκτός από το δωδεκάγωνο που έχει πλευρά 80. Τον
ΜΑΘΗΜΑ: ΠΛΗΡΟΦΟΡΙΚΗ ΤΑΞΗ: Γ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΣΕ ΓΛΩΣΣΑ LOGO ΠΕΡΙΒΑΛΛΟΝ MICROWORLDS PRO 1. Δημιουργήστε τα παρακάτω σχήματα: Όλα τα σχήματα έχουν πλευρά 100, εκτός από το δωδεκάγωνο που έχει πλευρά 80. Τον
Εισαγωγή στη ρομποτική Γίνε κατασκευαστής
 Εισαγωγή στη ρομποτική Γίνε κατασκευαστής Περιεχόμενα Εισαγωγή... 3 Η συμβατότητα του Edison με τα LEGO... 4 Αποστολή 1 Ο Ed-εκσκαφέας... 5 Αποστολή 2 Ο Ed-εκτυπωτής... 18 Αποστολή 3 Η δική μας αποστολή!...
Εισαγωγή στη ρομποτική Γίνε κατασκευαστής Περιεχόμενα Εισαγωγή... 3 Η συμβατότητα του Edison με τα LEGO... 4 Αποστολή 1 Ο Ed-εκσκαφέας... 5 Αποστολή 2 Ο Ed-εκτυπωτής... 18 Αποστολή 3 Η δική μας αποστολή!...
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασίας 1 ο Γνωριμία με το προγραμματιστικό περιβάλλον ΝΧΤ-G Όνομα Ημερομηνία Εξοικείωση με το NXT-G Στις παρακάτω
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασίας 1 ο Γνωριμία με το προγραμματιστικό περιβάλλον ΝΧΤ-G Όνομα Ημερομηνία Εξοικείωση με το NXT-G Στις παρακάτω
«Προγραµµατισµός του LEGO Mindstorm NXT για το διαγωνισµό "Move the Ball!"»
 ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΚΠ 413 / ΕΚΠ 606 ΑΥΤΟΝΟΜΟΙ ΠΡΑΚΤΟΡΕΣ Εργασία Εξαµήνου Προγραµµατισµός του LEGO Mindstorm NXT για το διαγωνισµό "Move the Ball!"
ΠΟΛΥΤΕΧΝΕΙΟ ΚΡΗΤΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΕΚΠ 413 / ΕΚΠ 606 ΑΥΤΟΝΟΜΟΙ ΠΡΑΚΤΟΡΕΣ Εργασία Εξαµήνου Προγραµµατισµός του LEGO Mindstorm NXT για το διαγωνισµό "Move the Ball!"
Φύλλο Εργασίας 4 Συνθετική εργασία
 Φύλλο Εργασίας 4 Συνθετική εργασία Ομάδα Πετυχαίνοντας το στόχο Α1. Προγραμματισμός στόχου: Για τον προγραμματισμό των ρομποτικών μηχανών, όπως ήδη είδαμε, χρησιμοποιούμε το λογισμικό Lego Mindstorms Edu
Φύλλο Εργασίας 4 Συνθετική εργασία Ομάδα Πετυχαίνοντας το στόχο Α1. Προγραμματισμός στόχου: Για τον προγραμματισμό των ρομποτικών μηχανών, όπως ήδη είδαμε, χρησιμοποιούμε το λογισμικό Lego Mindstorms Edu
Αυτόματη στάθμευση. Το πρόβλημα:
 Αυτόματη στάθμευση Αυτόματη στάθμευση φορτηγών σε βιομηχανικό χώρο Χώρος στάθμευσης δρόμος Σηματοδότης επιλογής χώρου στάθμευσης Το πρόβλημα: Ένα εργοστάσιο διαθέτει 2 χώρους στάθμευσης των 12 οχημάτων
Αυτόματη στάθμευση Αυτόματη στάθμευση φορτηγών σε βιομηχανικό χώρο Χώρος στάθμευσης δρόμος Σηματοδότης επιλογής χώρου στάθμευσης Το πρόβλημα: Ένα εργοστάσιο διαθέτει 2 χώρους στάθμευσης των 12 οχημάτων
Μέρος Α Γνωριμία με το περιβάλλον προγραμματισμού του ρομπότ OTTO
 OTTO ROBOT Εκπαιδευτικές Δραστηριότητες Μέρος Α Γνωριμία με το περιβάλλον προγραμματισμού του ρομπότ OTTO Δραστηριότητα 1 - Γνωριμία, περιγραφή Otto Τι είναι το ρομπότ Otto; Είναι ένα αλληλεπιδραστικό
OTTO ROBOT Εκπαιδευτικές Δραστηριότητες Μέρος Α Γνωριμία με το περιβάλλον προγραμματισμού του ρομπότ OTTO Δραστηριότητα 1 - Γνωριμία, περιγραφή Otto Τι είναι το ρομπότ Otto; Είναι ένα αλληλεπιδραστικό
Πτυχιακή Εργασία Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Η Ασύρματη Επικοινωνία, χρησιμοποιώντας
 Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Εισαγωγή στο EV3 Μέρος 2
 Εισαγωγή στο EV3 Μέρος 2 Δρ. Γιώργος Α. Δημητρίου Εργαστήριο και Αυτομάτων Συστημάτων & Ακαδημία Τμήμα Πληροφορικής και Μηχανικών Υπολογιστών Σχολή Μηχανικής και Εφαρμοσμένων Επιστημών Πανεπιστήμιο Frederick
Εισαγωγή στο EV3 Μέρος 2 Δρ. Γιώργος Α. Δημητρίου Εργαστήριο και Αυτομάτων Συστημάτων & Ακαδημία Τμήμα Πληροφορικής και Μηχανικών Υπολογιστών Σχολή Μηχανικής και Εφαρμοσμένων Επιστημών Πανεπιστήμιο Frederick
Μάθημα 1 ο : Εντολές κίνησης
 Μάθημα 1 ο : Εντολές κίνησης Στο πρώτο µάθηµα θα εξοικειωθείς µε τις βασικές εντολές του Scratch που βρίσκονται στην παλέτα κίνηση. Θα µάθεις να µετακινείς ένα αντικείµενο, να το περιστρέφεις και να το
Μάθημα 1 ο : Εντολές κίνησης Στο πρώτο µάθηµα θα εξοικειωθείς µε τις βασικές εντολές του Scratch που βρίσκονται στην παλέτα κίνηση. Θα µάθεις να µετακινείς ένα αντικείµενο, να το περιστρέφεις και να το
ΕΚΠΑΙΔΕΥΤΙΚΉ ΡΟΜΠΟΤΙΚΉ & STEM. Δημήτριος Κράββαρης Καθηγητής Πληροφορικής Α/θμιας Εκπ/σης MSc. BSc. Πληροφορικής
 ΕΚΠΑΙΔΕΥΤΙΚΉ ΡΟΜΠΟΤΙΚΉ & STEM Δημήτριος Κράββαρης Καθηγητής Πληροφορικής Α/θμιας Εκπ/σης MSc. BSc. Πληροφορικής ΤΙ ΕΊΝΑΙ STEM; Ο όρος STEM [Science, Technology, Engineering and Mathematics] είναι το ακρωνύμιο
ΕΚΠΑΙΔΕΥΤΙΚΉ ΡΟΜΠΟΤΙΚΉ & STEM Δημήτριος Κράββαρης Καθηγητής Πληροφορικής Α/θμιας Εκπ/σης MSc. BSc. Πληροφορικής ΤΙ ΕΊΝΑΙ STEM; Ο όρος STEM [Science, Technology, Engineering and Mathematics] είναι το ακρωνύμιο
Πώς μπορούμε να δημιουργούμε γεωμετρικά σχέδια με τη Logo;
 Κεφάλαιο 2 Εισαγωγή Πώς μπορούμε να δημιουργούμε γεωμετρικά σχέδια με τη Logo; Η Logo είναι μία από τις πολλές γλώσσες προγραμματισμού. Κάθε γλώσσα προγραμματισμού έχει σκοπό τη δημιουργία προγραμμάτων
Κεφάλαιο 2 Εισαγωγή Πώς μπορούμε να δημιουργούμε γεωμετρικά σχέδια με τη Logo; Η Logo είναι μία από τις πολλές γλώσσες προγραμματισμού. Κάθε γλώσσα προγραμματισμού έχει σκοπό τη δημιουργία προγραμμάτων
ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΡΟΜΠΟΤΙΚΗ 2010-2011 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ ΟΜΑΔΑ: ΑΘΑΝΑΣΙΑΔΗΣ ΚΩΝΣΤΑΝΤΙΝΟΣ (konsatha@mie.uth.gr) ΚΑΛΤΣΑΣ ΑΘΑΝΑΣΙΟΣ ( bingo_than@msn.com ) ΚΙΚΙΔΟΥ ΒΑΣΙΛΙΚΗ (
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΡΟΜΠΟΤΙΚΗ 2010-2011 ΕΡΓΑΣΙΑ ΕΞΑΜΗΝΟΥ ΟΜΑΔΑ: ΑΘΑΝΑΣΙΑΔΗΣ ΚΩΝΣΤΑΝΤΙΝΟΣ (konsatha@mie.uth.gr) ΚΑΛΤΣΑΣ ΑΘΑΝΑΣΙΟΣ ( bingo_than@msn.com ) ΚΙΚΙΔΟΥ ΒΑΣΙΛΙΚΗ (
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασίας 1 ο Γνωριμία με το προγραμματιστικό περιβάλλον ΝΧΤ-G Σημειώσεις Καθηγητή Σκοπός : να μάθουν να χρησιμοποιούν
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασίας 1 ο Γνωριμία με το προγραμματιστικό περιβάλλον ΝΧΤ-G Σημειώσεις Καθηγητή Σκοπός : να μάθουν να χρησιμοποιούν
Απεικόνιση Κειμένου και Γραφικών. By Sanjay and Arvind Seshan MΑΘΗΜΑΤΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΑΡΧΑΡΙΩΝ
 Απεικόνιση Κειμένου και Γραφικών By Sanjay and Arvind Seshan MΑΘΗΜΑΤΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΑΡΧΑΡΙΩΝ ΣΤΟΧΟΙ ΤΟΥ ΜΑΘΗΜΑΤΟΣ 1. Να μάθεις πώς να χρησιμοποιείς το Display Block ώστε να εμφανίζεις κείμενα και εικόνες
Απεικόνιση Κειμένου και Γραφικών By Sanjay and Arvind Seshan MΑΘΗΜΑΤΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΑΡΧΑΡΙΩΝ ΣΤΟΧΟΙ ΤΟΥ ΜΑΘΗΜΑΤΟΣ 1. Να μάθεις πώς να χρησιμοποιείς το Display Block ώστε να εμφανίζεις κείμενα και εικόνες
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5. Ρυθμίζοντας τη Φορά Περιστροφής. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Σχεδιαστικές προδιαγραφές
 Εισαγωγή Τα τελευταία χρόνια, ένα σημαντικό πεδίο δράσης της επιστήμης της Ρομποτικής αφορά στον τομέα της ανάπτυξης και εξέλιξης αυτόνομων οχημάτων επίγειων, εναέριων, πλωτών, υποβρύχιων και διαστημικών.
Εισαγωγή Τα τελευταία χρόνια, ένα σημαντικό πεδίο δράσης της επιστήμης της Ρομποτικής αφορά στον τομέα της ανάπτυξης και εξέλιξης αυτόνομων οχημάτων επίγειων, εναέριων, πλωτών, υποβρύχιων και διαστημικών.
M m l B r mglsin mlcos x ml 2 1) Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br
 Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br") ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
Εντολές της LOGO (MicroWorlds Pro)
") Εντολές της LOGO (MicroWorlds Pro) Εντολές εμφάνισης (εξόδου) και αριθμητικές πράξεις δείξε Εμφανίζει στην οθόνη έναν αριθμό, το αποτέλεσμα πράξεων, μια λέξη ή μια λίστα (ομάδα) λέξεων. δείξε 200 200 δείξε
Εντολές της LOGO (MicroWorlds Pro) Εντολές εμφάνισης (εξόδου) και αριθμητικές πράξεις δείξε Εμφανίζει στην οθόνη έναν αριθμό, το αποτέλεσμα πράξεων, μια λέξη ή μια λίστα (ομάδα) λέξεων. δείξε 200 200 δείξε
Το περιβάλλον προγραμματισμού MicroWorlds Pro
 Μενού επιλογών Το περιβάλλον προγραμματισμού MicroWorlds Pro Γραμμή εργαλείων Επιφάνεια εργασίας Περιοχή Καρτελών Κέντρο εντολών Εικόνα 2.1: Το περιβάλλον της MicroWorlds Pro. Καρτέλες Οι πρώτες εντολές
Μενού επιλογών Το περιβάλλον προγραμματισμού MicroWorlds Pro Γραμμή εργαλείων Επιφάνεια εργασίας Περιοχή Καρτελών Κέντρο εντολών Εικόνα 2.1: Το περιβάλλον της MicroWorlds Pro. Καρτέλες Οι πρώτες εντολές
Πρόκληση κατηγορίας Δημοτικού. Clean Road to School Καθαρίζω την διαδρομή προς το σχολείο μου
 World Robot Olympiad 2016 Πρόκληση κατηγορίας Δημοτικού Περιγραφή πρόκλησης, κανονισμοί και βαθμολόγηση Clean Road to School Καθαρίζω την διαδρομή προς το σχολείο μου Έκδοση: 15/01/2016 Προσαρμογή στα
World Robot Olympiad 2016 Πρόκληση κατηγορίας Δημοτικού Περιγραφή πρόκλησης, κανονισμοί και βαθμολόγηση Clean Road to School Καθαρίζω την διαδρομή προς το σχολείο μου Έκδοση: 15/01/2016 Προσαρμογή στα
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 3 ο Αισθητήρες και Δομή Επιλογής Όνομα Ημερομηνία ραστηριότητα 12 η : σταμάτημα με αισθητήρα υπερήχων Τοποθετείστε
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 3 ο Αισθητήρες και Δομή Επιλογής Όνομα Ημερομηνία ραστηριότητα 12 η : σταμάτημα με αισθητήρα υπερήχων Τοποθετείστε
Επιμέλεια παρουσίασης: Αριστείδης Παλιούρας ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)?
?") 1 ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)? Τι είναι το ρομπότ (robot)? 1. Περιγράψτε με μια πρόταση την έννοια της λέξης ρομπότ (robot) Το ρομπότ είναι μια μηχανή που συλλέγει δεδομένα από το περιβάλλον του (αισθάνεται),
1 ΤΙ ΕΊΝΑΙ ΈΝΑ ΡΟΜΠΟΤ (ROBOT)? Τι είναι το ρομπότ (robot)? 1. Περιγράψτε με μια πρόταση την έννοια της λέξης ρομπότ (robot) Το ρομπότ είναι μια μηχανή που συλλέγει δεδομένα από το περιβάλλον του (αισθάνεται),
Μαθήματα Scratch -Δραστηριότητα 1 Παλέτα Κίνηση
 Μάθημα: Scrtach Τάξη: Ε/ΣΤ Παλέτα Κίνηση Προετοιμασία για το μάθημα: Καλό είναι πριν ξεκινήσουμε να παρακολουθήσουμε τα παρακάτω δύο videos: a) Εισαγωγή στο περιβάλλον του Scratch β) Εντολές κίνησης και
Μάθημα: Scrtach Τάξη: Ε/ΣΤ Παλέτα Κίνηση Προετοιμασία για το μάθημα: Καλό είναι πριν ξεκινήσουμε να παρακολουθήσουμε τα παρακάτω δύο videos: a) Εισαγωγή στο περιβάλλον του Scratch β) Εντολές κίνησης και
ήγαινε στο x : y : κατέβασε πένα σήκωσε πένα
 Παραδείγματα Ας δούμε τώρα πρακτικά πως μπορούμε να συνδυάσουμε την εντολή κίνησης πήγαινε στο x: y: με τις κατέβασε πένα, σήκωσε πένα για να δημιουργήσουμε ένα τετράγωνο. Έστω ότι θέλουμε να το δημιουργήσουμε
Παραδείγματα Ας δούμε τώρα πρακτικά πως μπορούμε να συνδυάσουμε την εντολή κίνησης πήγαινε στο x: y: με τις κατέβασε πένα, σήκωσε πένα για να δημιουργήσουμε ένα τετράγωνο. Έστω ότι θέλουμε να το δημιουργήσουμε
Φύλλα εργασίας. MicroWorlds Pro. Πολυμεσικές Εφαρμογές με την χρήση της γλώσσας LOGO Στο Γυμνάσιο. Β. Χ. Χρυσοχοΐδης
 Φύλλα εργασίας MicroWorlds Pro Πολυμεσικές Εφαρμογές με την χρήση της γλώσσας LOGO Στο Γυμνάσιο Β. Χ. Χρυσοχοΐδης Πρόεδρος Συλλόγου Εκπαιδευτικών Πληροφορικής Φλώρινας 2 «Σχεδίαση και ανάπτυξη δραστηριοτήτων
Φύλλα εργασίας MicroWorlds Pro Πολυμεσικές Εφαρμογές με την χρήση της γλώσσας LOGO Στο Γυμνάσιο Β. Χ. Χρυσοχοΐδης Πρόεδρος Συλλόγου Εκπαιδευτικών Πληροφορικής Φλώρινας 2 «Σχεδίαση και ανάπτυξη δραστηριοτήτων
Β1.1 Δημιουργία Εφαρμογής στο Περιβάλλον Προγραμματισμού EdScratch του Edison ρομπότ
 Β1.1 Δημιουργία Εφαρμογής στο Περιβάλλον Προγραμματισμού EdScratch του Edison ρομπότ Τι θα μάθουμε σήμερα: Να γνωρίσουμε την Ρομποτική Να προετοιμάσουμε και να γνωρίσουμε το Edison ρομπότ Να μεταφερόμαστε
Β1.1 Δημιουργία Εφαρμογής στο Περιβάλλον Προγραμματισμού EdScratch του Edison ρομπότ Τι θα μάθουμε σήμερα: Να γνωρίσουμε την Ρομποτική Να προετοιμάσουμε και να γνωρίσουμε το Edison ρομπότ Να μεταφερόμαστε
Ανάλυση βημάτων. Α ρ χ ι κ ή θ έ σ η. Β ή μ α 5 ο. 1. Αρχική θέση: Το δεξί πόδι είναι σταυρωμένο πάνω από το αριστερό, στα δάκτυλα
 νάλυση βημάτων ρ χ ι κ ή θ έ σ η 1. ρχική θέση: Το δεξί πόδι είναι σταυρωμένο πάνω από το αριστερό, στα δάκτυλα Β ή μ α 1 ο 2. Φέρνουμε το δεξί πόδι προς τη φορά του κύκλου Β ή μ α 2 ο 3. Φέρνουμε το αριστερό
νάλυση βημάτων ρ χ ι κ ή θ έ σ η 1. ρχική θέση: Το δεξί πόδι είναι σταυρωμένο πάνω από το αριστερό, στα δάκτυλα Β ή μ α 1 ο 2. Φέρνουμε το δεξί πόδι προς τη φορά του κύκλου Β ή μ α 2 ο 3. Φέρνουμε το αριστερό
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT. ΚΕΦΑΛΑΙΟ 4ο. Ασκήσεις προγραμματισμού για το NXT-G
 ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 4ο Ασκήσεις προγραμματισμού για το NXT-G Λίγα λόγια για τους κινητήρες Στις προηγούμενες ασκήσεις για να κινήσουμε το ρομπότ μας χρησιμοποιήσαμε
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 4ο Ασκήσεις προγραμματισμού για το NXT-G Λίγα λόγια για τους κινητήρες Στις προηγούμενες ασκήσεις για να κινήσουμε το ρομπότ μας χρησιμοποιήσαμε
Κεφάλαιο 1.Εντολές κίνησης
 Προγραμματίζω με το ΒΥΟΒ 1 Κεφάλαιο 1.Εντολές κίνησης Από το μάθημα της Φυσικής γνωρίζουμε ότι κίνηση σημαίνει αλλαγή της θέσης ενός αντικειμένου. Οι εντολές κίνησης που μας παρέχει το ΒΥΟΒ χωρίζονται
Προγραμματίζω με το ΒΥΟΒ 1 Κεφάλαιο 1.Εντολές κίνησης Από το μάθημα της Φυσικής γνωρίζουμε ότι κίνηση σημαίνει αλλαγή της θέσης ενός αντικειμένου. Οι εντολές κίνησης που μας παρέχει το ΒΥΟΒ χωρίζονται
ΚΑΤΑΣΚΕΥΗ ΠΑΡΑΛΛΗΛΟΓΡΑΜΜΩΝ ΜΕ ΧΡΗΣΗ LOGO
 1 ΚΑΤΑΣΚΕΥΗ ΠΑΡΑΛΛΗΛΟΓΡΑΜΜΩΝ ΜΕ ΧΡΗΣΗ LOGO ΦΥΛΛΑ ΕΡΓΑΣΙΑΣ ΜΑΘΗΤΗ ΦΥΛΛΟ ΕΡΓΑΣΙΑΣ 1 1. Τοποθέτησε μια χελώνα στην επιφάνεια εργασίας. 2. Με ποια εντολή γράφει η χελώνα μας;.. 3. Γράψε την εντολή για να πάει
1 ΚΑΤΑΣΚΕΥΗ ΠΑΡΑΛΛΗΛΟΓΡΑΜΜΩΝ ΜΕ ΧΡΗΣΗ LOGO ΦΥΛΛΑ ΕΡΓΑΣΙΑΣ ΜΑΘΗΤΗ ΦΥΛΛΟ ΕΡΓΑΣΙΑΣ 1 1. Τοποθέτησε μια χελώνα στην επιφάνεια εργασίας. 2. Με ποια εντολή γράφει η χελώνα μας;.. 3. Γράψε την εντολή για να πάει
Τα ηλεκτρονικά μέρη του ρομπότ Επιλογή των μονάδων εισόδου εξόδου ανάλογα το μοντέλο που θέλουμε να κατασκευάσουμε
 1 Τα ηλεκτρονικά μέρη του ρομπότ Επιλογή των μονάδων εισόδου εξόδου ανάλογα το μοντέλο που θέλουμε να κατασκευάσουμε 2 Η υπολογιστική μονάδα Είσοδοι για τους κινητήρες Είσοδος για USB stick USB πόρτα για
1 Τα ηλεκτρονικά μέρη του ρομπότ Επιλογή των μονάδων εισόδου εξόδου ανάλογα το μοντέλο που θέλουμε να κατασκευάσουμε 2 Η υπολογιστική μονάδα Είσοδοι για τους κινητήρες Είσοδος για USB stick USB πόρτα για
Γρανάζια και Ταχύτητα
 Γρανάζια και Ταχύτητα 19 ο Μάθημα ΟΜΙΛΟΣ ΡΟΜΠΟΤΙΚΗΣ ΙΩΝΙΔΕΙΟΥ ΣΧΟΛΗΣ ΠΕΙΡΑΙΑ 2012 2013 Σωτήριος Ματακιάς Όμιλος Ρομποτικής Σωτήριος Ματακιάς, Ιανουάριος 2013 1/20 Εισαγωγική Δραστηριότητα Μέχρι στιγμής
Γρανάζια και Ταχύτητα 19 ο Μάθημα ΟΜΙΛΟΣ ΡΟΜΠΟΤΙΚΗΣ ΙΩΝΙΔΕΙΟΥ ΣΧΟΛΗΣ ΠΕΙΡΑΙΑ 2012 2013 Σωτήριος Ματακιάς Όμιλος Ρομποτικής Σωτήριος Ματακιάς, Ιανουάριος 2013 1/20 Εισαγωγική Δραστηριότητα Μέχρι στιγμής
Φύλλο εργασίας 6. Αποφυγή εμποδίων. Χωριστείτε σε ομάδες 2-3 ατόμων και απαντήστε στις ερωτήσεις του φύλλου εργασίας.
 Φύλλο εργασίας 6 Αποφυγή εμποδίων Ο στόχος του φύλλου εργασίας είναι η κατασκευή και ο προγραμματισμός ρομπότ το οποίο θα διασχίζει ένα διάδρομο με πολλά εμπόδια, θα τα αποφεύγει και θα τερματίζει με ασφάλεια
Φύλλο εργασίας 6 Αποφυγή εμποδίων Ο στόχος του φύλλου εργασίας είναι η κατασκευή και ο προγραμματισμός ρομπότ το οποίο θα διασχίζει ένα διάδρομο με πολλά εμπόδια, θα τα αποφεύγει και θα τερματίζει με ασφάλεια
Γ Λυκείου. ένταση. μήκος κύματος θέρμανσης. Ε 4 =-1, J Ε 3 =-2, J Ε 2 =-5, J Ε 1 = J
 22 Μαρτίου 2008 Θεωρητικό Μέρος Θέμα 1o Γ Λυκείου Στις ερωτήσεις Α και Β, μια μόνο απάντηση είναι σωστή. Γράψτε στο τετράδιό σας το κεφαλαίο γράμμα της ερώτησης και το μικρό γράμμα της σωστής απάντησης.
22 Μαρτίου 2008 Θεωρητικό Μέρος Θέμα 1o Γ Λυκείου Στις ερωτήσεις Α και Β, μια μόνο απάντηση είναι σωστή. Γράψτε στο τετράδιό σας το κεφαλαίο γράμμα της ερώτησης και το μικρό γράμμα της σωστής απάντησης.
Lego WeDo - Αεροπλάνο
 Lego WeDo - Αεροπλάνο Το σετ κατασκευής Lego WeDo δίνει τη δυνατότητα στους μαθητές του δημοτικού (ηλικίες 7 11) να κατασκευάσουν απλά μοντέλα Lego και στη συνέχεια να τα συνδέσουν με έναν υπολογιστή για
Lego WeDo - Αεροπλάνο Το σετ κατασκευής Lego WeDo δίνει τη δυνατότητα στους μαθητές του δημοτικού (ηλικίες 7 11) να κατασκευάσουν απλά μοντέλα Lego και στη συνέχεια να τα συνδέσουν με έναν υπολογιστή για
Περίληψη των MyBlocks Οδηγός βήμα-βήμα για την δημιουργία MyBlocks με εισόδους και εξόδους
 ΜΑΘΗΜΑΤΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕΣΑΙΟΥ ΕΠΙΠΕΔΟΥ Περίληψη των MyBlocks Οδηγός βήμα-βήμα για την δημιουργία MyBlocks με εισόδους και εξόδους By: Droids Robotics ΣΚΟΠΟΣ ΜΑΘΗΜΑΤΟΣ 1. Να μάθεις πώς να δημιουργείς
ΜΑΘΗΜΑΤΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕΣΑΙΟΥ ΕΠΙΠΕΔΟΥ Περίληψη των MyBlocks Οδηγός βήμα-βήμα για την δημιουργία MyBlocks με εισόδους και εξόδους By: Droids Robotics ΣΚΟΠΟΣ ΜΑΘΗΜΑΤΟΣ 1. Να μάθεις πώς να δημιουργείς
Προγραμματισμός με Logo στο MicroWorlds Pro
 1 Προγραμματισμός με Logo στο MicroWorlds Pro Η Logo είναι μια γλώσσα προγραμματισμού ειδικά σχεδιασμένη για τους μαθητές. Το πιο βασικό ίσως εργαλείο της Logo είναι η χελώνα. Κάποιες βασικές εντολές της
1 Προγραμματισμός με Logo στο MicroWorlds Pro Η Logo είναι μια γλώσσα προγραμματισμού ειδικά σχεδιασμένη για τους μαθητές. Το πιο βασικό ίσως εργαλείο της Logo είναι η χελώνα. Κάποιες βασικές εντολές της
Αισθητήρας Χρώματος. By Sanjay and Arvind Seshan ΜΑΘΗΜΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΑΡΧΑΡΙΩΝ
 Αισθητήρας Χρώματος By Sanjay and Arvind Seshan ΜΑΘΗΜΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΑΡΧΑΡΙΩΝ ΣΤΟΧΟΙ ΜΑΘΗΜΑΤΟΣ 1. Μάθε πώς να χρησιμοποιείς τον αισθητήρα χρώματος 2. Μάθετε για την κίνηση (Coast) και το φρένο (Break)
Αισθητήρας Χρώματος By Sanjay and Arvind Seshan ΜΑΘΗΜΑ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΑΡΧΑΡΙΩΝ ΣΤΟΧΟΙ ΜΑΘΗΜΑΤΟΣ 1. Μάθε πώς να χρησιμοποιείς τον αισθητήρα χρώματος 2. Μάθετε για την κίνηση (Coast) και το φρένο (Break)
αξιοποίηση των ΤΠΕ: Η logo στη διδακτική διδακτική πράξη
 Παιδαγωγική αξιοποίηση Δρ. Ι. Μπέλλου, Σχ αξιοποίηση των ΤΠΕ: Η logo στη διδακτική διδακτική πράξη Μια προσέγγιση για τη Γ Γυμνασίου Σχ. Σύμβουλος ΠΕ19 Δρ. Ιωάννα Μπέλλου Σχ. Σύμβουλος ΠΕ19 Μια διδακτική
Παιδαγωγική αξιοποίηση Δρ. Ι. Μπέλλου, Σχ αξιοποίηση των ΤΠΕ: Η logo στη διδακτική διδακτική πράξη Μια προσέγγιση για τη Γ Γυμνασίου Σχ. Σύμβουλος ΠΕ19 Δρ. Ιωάννα Μπέλλου Σχ. Σύμβουλος ΠΕ19 Μια διδακτική
ΚΑΝΟΝΙΣΜΟΙ «CITY PASSING»
 ΚΑΝΟΝΙΣΜΟΙ «CITY PASSING» Συγγραφέας: Οργανωτική Επιτροπή CYPRUS ROBOTEX CHALLENGE Πρωτότυπο στα Αγγλικά: raimond.paaru@robotex.ee www.robotex.ee Σελίδα: 1 Πίνακας Περιεχομένων 1 Εισαγωγή... 3 2 Στόχος...
ΚΑΝΟΝΙΣΜΟΙ «CITY PASSING» Συγγραφέας: Οργανωτική Επιτροπή CYPRUS ROBOTEX CHALLENGE Πρωτότυπο στα Αγγλικά: raimond.paaru@robotex.ee www.robotex.ee Σελίδα: 1 Πίνακας Περιεχομένων 1 Εισαγωγή... 3 2 Στόχος...
Thymio το Ρομποτάκι: Προγραμματισμός και Ρομποτική στις πρώτες τάξεις του Δημοτικού
 Thymio το Ρομποτάκι: Προγραμματισμός και Ρομποτική στις πρώτες τάξεις του Δημοτικού Στον σύγχρονο κόσμο... η ανάγνωση η γραφή ο προγραμματισμός ωθεί κριτική σκέψη αλγοριθμική σκέψη δημιουργικότητα ικανότητα
Thymio το Ρομποτάκι: Προγραμματισμός και Ρομποτική στις πρώτες τάξεις του Δημοτικού Στον σύγχρονο κόσμο... η ανάγνωση η γραφή ο προγραμματισμός ωθεί κριτική σκέψη αλγοριθμική σκέψη δημιουργικότητα ικανότητα
ΦΥΣΙΚΗ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ Α ΛΥΚΕΙΟΥ
 ΦΥΣΙΚΗ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ Α ΛΥΚΕΙΟΥ Ευθύγραμμη Ομαλή Κίνηση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός https://physicscorses.wordpress.com/ Βασικές Έννοιες Ένα σώμα καθώς κινείται περνάει από διάφορα σημεία.
ΦΥΣΙΚΗ ΓΕΝΙΚΗΣ ΠΑΙΔΕΙΑΣ Α ΛΥΚΕΙΟΥ Ευθύγραμμη Ομαλή Κίνηση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός https://physicscorses.wordpress.com/ Βασικές Έννοιες Ένα σώμα καθώς κινείται περνάει από διάφορα σημεία.
Volley. Προπονητικές ομάδες ΦΑΣΗ 1. Ανάπτυξη των ειδικών κινητικών δεξιοτήτων και τα πρώτα στοιχεία του επιθετικού χτυπήματος
 PAOLINI final_layout 1 12/17/14 5:52 PM Page 7 Volley Προπονητικές ομάδες ΦΑΣΗ 1 Ανάπτυξη των ειδικών κινητικών δεξιοτήτων και τα πρώτα στοιχεία του επιθετικού χτυπήματος PAOLINI final_layout 1 12/17/14
PAOLINI final_layout 1 12/17/14 5:52 PM Page 7 Volley Προπονητικές ομάδες ΦΑΣΗ 1 Ανάπτυξη των ειδικών κινητικών δεξιοτήτων και τα πρώτα στοιχεία του επιθετικού χτυπήματος PAOLINI final_layout 1 12/17/14
PRECISION FARMING (Ακριβής φύτευση)
") World Robot Olympiad 2018 Αγωνιστική Κατηγορία Γυμνάσιο Regular Περιγραφή πρόκλησης, κανονισμοί και βαθμολογία FOOD MATTERS (Το φαγητό έχει σημασία) PRECISION FARMING (Ακριβής φύτευση) Έκδοση: Τελική Έκδοση
World Robot Olympiad 2018 Αγωνιστική Κατηγορία Γυμνάσιο Regular Περιγραφή πρόκλησης, κανονισμοί και βαθμολογία FOOD MATTERS (Το φαγητό έχει σημασία) PRECISION FARMING (Ακριβής φύτευση) Έκδοση: Τελική Έκδοση
ΚΕΦΑΛΑΙΟ 2. Φύλλο Εργασίας Καλυπτόμενες ενότητες: 2.4 Κάνοντας τις πρώτες δοκιμές με τη χελώνα
 Γυμνάσιο Ιτέας Σχολικό Έτος : 2016-2017 Τάξη : Γ Μάθημα : ΠΛΗΡΟΦΟΡΙΚΗ Διδάσκων : Χρήστος Ρέτσας Ηλ/κη τάξη (e-class) : tiny.cc/ggym ΚΕΦΑΛΑΙΟ 2 Φύλλο Εργασίας 2.4.1 Καλυπτόμενες ενότητες: 2.4 Κάνοντας τις
Γυμνάσιο Ιτέας Σχολικό Έτος : 2016-2017 Τάξη : Γ Μάθημα : ΠΛΗΡΟΦΟΡΙΚΗ Διδάσκων : Χρήστος Ρέτσας Ηλ/κη τάξη (e-class) : tiny.cc/ggym ΚΕΦΑΛΑΙΟ 2 Φύλλο Εργασίας 2.4.1 Καλυπτόμενες ενότητες: 2.4 Κάνοντας τις
2 ΜΟΡΦΕΣ ΑΣΚΗΣΕΩΝ ΜΕ ΤΗ ΜΠΑΛΑ
 2 ΜΟΡΦΕΣ ΑΣΚΗΣΕΩΝ ΜΕ ΤΗ ΜΠΑΛΑ Ένας πολύ σημαντικός και ουσιαστικός στόχος της προπόνησης είναι η καλύτερη δυνατή προετοιμασία για τον αγώνα. Κατά συνέπεια, στην ιδανική περίπτωση εξασκούνται στην προπόνηση
2 ΜΟΡΦΕΣ ΑΣΚΗΣΕΩΝ ΜΕ ΤΗ ΜΠΑΛΑ Ένας πολύ σημαντικός και ουσιαστικός στόχος της προπόνησης είναι η καλύτερη δυνατή προετοιμασία για τον αγώνα. Κατά συνέπεια, στην ιδανική περίπτωση εξασκούνται στην προπόνηση
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT
 ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 3 ο Αισθητήρες και Δομή Επιλογής Σημειώσεις Καθηγητή ραστηριότητα 12 η : σταμάτημα με αισθητήρα υπερήχων
ΔΙΔΑΣΚΑΛΙΑ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ ΡΟΜΠΟΤΙΚΗΣ LEGO MINDSTORMS NXT Φύλλο Εργασιών 3 ο Αισθητήρες και Δομή Επιλογής Σημειώσεις Καθηγητή ραστηριότητα 12 η : σταμάτημα με αισθητήρα υπερήχων
Σενάριο 13: Προγραμματίζοντας ένα Ρομπότ
 Σενάριο 13: Προγραμματίζοντας ένα Ρομπότ Φύλλο Εργασίας Τίτλος: Προγραμματίζοντας ένα Ρομπότ Γνωστικό Αντικείμενο: Πληροφορική Διδακτική Ενότητα: Ελέγχω-Προγραμματίζω τον Υπολογιστή Τάξη: Γ Γυμνασίου Διάρκεια:
Σενάριο 13: Προγραμματίζοντας ένα Ρομπότ Φύλλο Εργασίας Τίτλος: Προγραμματίζοντας ένα Ρομπότ Γνωστικό Αντικείμενο: Πληροφορική Διδακτική Ενότητα: Ελέγχω-Προγραμματίζω τον Υπολογιστή Τάξη: Γ Γυμνασίου Διάρκεια:
Καταγραφή βημάτων στο χαρτί (Pseudocode)
") Εκπαιδευτική ρομποτική Lego Καταγραφή βημάτων στο χαρτί (Pseudocode) Πανεπιστήμιο Αιγαίου / Τμήμα Μηχανικών Πληροφοριακών και Επικοινωνιακών Συστημάτων ΠΜΣ Διδακτική Πληροφορικής & Επικοινωνιών / Φιλίππου
Εκπαιδευτική ρομποτική Lego Καταγραφή βημάτων στο χαρτί (Pseudocode) Πανεπιστήμιο Αιγαίου / Τμήμα Μηχανικών Πληροφοριακών και Επικοινωνιακών Συστημάτων ΠΜΣ Διδακτική Πληροφορικής & Επικοινωνιών / Φιλίππου
Waste Sorting Ταξινόμηση Απορριμμάτων
 World Robot Olympiad 2016 Πρόκληση κατηγορίας Γυμνασίου Περιγραφή πρόκλησης, κανονισμοί και βαθμολόγηση Waste Sorting Ταξινόμηση Απορριμμάτων έκδοση: 15 Ιανουαρίου 2016 Επιμέλεια: Μπαράς Γιάννης 2 Εισαγωγή
World Robot Olympiad 2016 Πρόκληση κατηγορίας Γυμνασίου Περιγραφή πρόκλησης, κανονισμοί και βαθμολόγηση Waste Sorting Ταξινόμηση Απορριμμάτων έκδοση: 15 Ιανουαρίου 2016 Επιμέλεια: Μπαράς Γιάννης 2 Εισαγωγή
10 Ν 100 εκ (1 μέτρο) Άγνωστο Ψ (N) 20 εκ (0.2 Μ)
 Άγνωστο Ψ (N) 20 εκ (0.2 Μ)") Τεχνολογία A τάξης Λυκείου Μάθημα 20 ον - Μηχανισμοί Φύλλο εργασίας Μοχλοί σελίδες Dan-78-87 Collins 167-208 1. Ο άνθρωπος όταν πρωτοεμφανίστηκε στην γη ανακάλυψε πολύ σύντομα την χρήση του μοχλού για
Τεχνολογία A τάξης Λυκείου Μάθημα 20 ον - Μηχανισμοί Φύλλο εργασίας Μοχλοί σελίδες Dan-78-87 Collins 167-208 1. Ο άνθρωπος όταν πρωτοεμφανίστηκε στην γη ανακάλυψε πολύ σύντομα την χρήση του μοχλού για
9 o Ε.Λ. ΠΕΙΡΑΙΑ ΙΑΓΩΝΙΣΜΑ ΦΥΣΙΚΗΣ
 9 o Ε.Λ. ΠΕΙΡΑΙΑ Τµήµα: Α 2 ΙΑΓΩΝΙΣΜΑ ΦΥΣΙΚΗΣ Ονοµατεπώνυµο:.. Πειραιάς 4 /12 / 2006 Οδηγίες: Στις τρεις πρώτες ερωτήσεις, να επιλέξτε την σωστή πρόταση. Προσοχή!! Υπάρχει και η πίσω σελίδα. Μην ξεχάσετε
9 o Ε.Λ. ΠΕΙΡΑΙΑ Τµήµα: Α 2 ΙΑΓΩΝΙΣΜΑ ΦΥΣΙΚΗΣ Ονοµατεπώνυµο:.. Πειραιάς 4 /12 / 2006 Οδηγίες: Στις τρεις πρώτες ερωτήσεις, να επιλέξτε την σωστή πρόταση. Προσοχή!! Υπάρχει και η πίσω σελίδα. Μην ξεχάσετε
ΜΑΘΑΙΝΩ ΝΑ ΚΥΚΛΟΦΟΡΩ ΜΕ ΑΣΦΑΛΕΙΑ ΣΥΝΤΕΛΕΣΤΕΣ
 ΜΑΘΑΙΝΩ ΝΑ ΚΥΚΛΟΦΟΡΩ ΜΕ ΑΣΦΑΛΕΙΑ ΣΥΝΤΕΛΕΣΤΕΣ Ανάδοχος Φορέας Έργου INTE*LEARN ΕΠΕ Υπεύθυνος Έργου Μαρία Καραβελάκη Ομάδα Ανάπτυξης του Έργου «Μαθαίνω να κυκλοφορώ με ασφάλεια» Συντονίστρια Έργου Ανέτα
ΜΑΘΑΙΝΩ ΝΑ ΚΥΚΛΟΦΟΡΩ ΜΕ ΑΣΦΑΛΕΙΑ ΣΥΝΤΕΛΕΣΤΕΣ Ανάδοχος Φορέας Έργου INTE*LEARN ΕΠΕ Υπεύθυνος Έργου Μαρία Καραβελάκη Ομάδα Ανάπτυξης του Έργου «Μαθαίνω να κυκλοφορώ με ασφάλεια» Συντονίστρια Έργου Ανέτα
ΚΑΝΟΝΙΣΜΟΙ «CITY PASSING»
 ΚΑΝΟΝΙΣΜΟΙ «CITY PASSING» Συγγραφέας: Οργανωτική Επιτροπή ROBOTEX CYPRUS Πρωτότυπο στα Αγγλικά: raimond.paaru@robotex.ee www.robotex.ee Σελίδα: 1 Πίνακας Περιεχομένων 1 Εισαγωγή... 3 2 Στόχος... 3 3 Δικαίωμα
ΚΑΝΟΝΙΣΜΟΙ «CITY PASSING» Συγγραφέας: Οργανωτική Επιτροπή ROBOTEX CYPRUS Πρωτότυπο στα Αγγλικά: raimond.paaru@robotex.ee www.robotex.ee Σελίδα: 1 Πίνακας Περιεχομένων 1 Εισαγωγή... 3 2 Στόχος... 3 3 Δικαίωμα
Εισαγωγή στη Ρομποτική και τον Προγραμματισμό με τη χρήση του ρομπότ Thymio & του λογισμικού Aseba
 5 ο Πανελλήνιο Επιστημονικό Συνέδριο Ένταξη και Χρήση των ΤΠΕ στην Εκπαιδευτική Διαδικασία Εισαγωγή στη Ρομποτική και τον Προγραμματισμό με τη χρήση του ρομπότ Thymio & του λογισμικού Aseba Κόμης Βασίλης
5 ο Πανελλήνιο Επιστημονικό Συνέδριο Ένταξη και Χρήση των ΤΠΕ στην Εκπαιδευτική Διαδικασία Εισαγωγή στη Ρομποτική και τον Προγραμματισμό με τη χρήση του ρομπότ Thymio & του λογισμικού Aseba Κόμης Βασίλης
Σεμινάριο προπονητών επιτραπέζιας αντισφαίρισης
 Σεμινάριο προπονητών επιτραπέζιας αντισφαίρισης Βασικές δεξιότητες 1)Κατάλληλη ρακέτα 2)Σωστός τρόπος κρατήματος 3)Διδασκαλία βασικών χτυπημάτων και σωστή στάση 4)Σέρβις 5)Εκμάθηση τεχνικής χτυπημάτων
Σεμινάριο προπονητών επιτραπέζιας αντισφαίρισης Βασικές δεξιότητες 1)Κατάλληλη ρακέτα 2)Σωστός τρόπος κρατήματος 3)Διδασκαλία βασικών χτυπημάτων και σωστή στάση 4)Σέρβις 5)Εκμάθηση τεχνικής χτυπημάτων
ΣΗΜΕΙΩΣΕΙΣ. στη γλώσσα προγραμματισμού. Γκέτσιος Βασίλειος
 ΣΗΜΕΙΩΣΕΙΣ στη γλώσσα προγραμματισμού Microsoft Worlds Pro Γκέτσιος Βασίλειος Σημειώσεις στη γλώσσα προγραμματισμού Microsoft Worlds Pro σελ. 1 Το περιβάλλον προγραμματισμού Microsoft Worlds Pro Μενού
ΣΗΜΕΙΩΣΕΙΣ στη γλώσσα προγραμματισμού Microsoft Worlds Pro Γκέτσιος Βασίλειος Σημειώσεις στη γλώσσα προγραμματισμού Microsoft Worlds Pro σελ. 1 Το περιβάλλον προγραμματισμού Microsoft Worlds Pro Μενού
Ρύθμιση ενός Αισθητήρα
 Ρύθμιση ενός Αισθητήρα (τι είναι συνδεδεμένο στο NXT και που;) Υπέθεσε See ότι how έχεις far συνδέσει away something στο NXT έναν is. αισθητήρα φωτός στην θύρα 3. Πως το λες αυτό στο Enchanting; 1. Κάνε
Ρύθμιση ενός Αισθητήρα (τι είναι συνδεδεμένο στο NXT και που;) Υπέθεσε See ότι how έχεις far συνδέσει away something στο NXT έναν is. αισθητήρα φωτός στην θύρα 3. Πως το λες αυτό στο Enchanting; 1. Κάνε
Πίνακας Περιεχομένων. LEGO.com/mindstorms. Εισαγωγή + Καλώς ήρθες... 3
 Οδηγός Χρήσης Πίνακας Περιεχομένων Εισαγωγή + Καλώς ήρθες... 3 Τεχνολογία EV3 + Επισκόπηση... 4 + EV3 Brick (Τουβλάκι EV3)... 5 Επισκόπηση... 5 Τοποθέτηση Μπαταριών... 8 Ενεργοποίηση του EV3 Brick... 9
Οδηγός Χρήσης Πίνακας Περιεχομένων Εισαγωγή + Καλώς ήρθες... 3 Τεχνολογία EV3 + Επισκόπηση... 4 + EV3 Brick (Τουβλάκι EV3)... 5 Επισκόπηση... 5 Τοποθέτηση Μπαταριών... 8 Ενεργοποίηση του EV3 Brick... 9
Παλέτα Κίνηση. Καλό είναι πριν ξεκινήσετε το παρακάτω φυλλάδιο να έχετε παρακολουθήσει τα παρακάτω δύο videos: a) Εισαγωγή στο περιβάλλον του Scratch
 Εισαγωγή στο περιβάλλον του Scratch") Τάξη : Α Λυκείου Λογισμικό : Scratch Διάρκεια : 45 λεπτά Παλέτα Κίνηση Σε αυτό το φύλλο εργασίας θα εξοικειωθείτε με τις εντολές του Scratch που βρίσκονται στην παλέτα Κίνηση. Για τον σκοπό αυτό διαβάστε
Τάξη : Α Λυκείου Λογισμικό : Scratch Διάρκεια : 45 λεπτά Παλέτα Κίνηση Σε αυτό το φύλλο εργασίας θα εξοικειωθείτε με τις εντολές του Scratch που βρίσκονται στην παλέτα Κίνηση. Για τον σκοπό αυτό διαβάστε
ΔΙΑΛΕΞΗ ΙΙ ΕΝΑ ΒΗΜΑ ΠΑΡΑΠΑΝΩ ΜΕ SCRATCH ΕΠΙΛΕΓΩΝΤΑΣ & ΕΠΑΝΑΛΑΜΒΑΝΟΝΤΑΣ
 Τ.Ε.Ι. ΔΥΤΙΚΗΣ ΕΛΛΑΔΑΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΔΙΑΛΕΞΗ ΙΙ ΕΝΑ ΒΗΜΑ ΠΑΡΑΠΑΝΩ ΜΕ SCRATCH ΕΠΙΛΕΓΩΝΤΑΣ & ΕΠΑΝΑΛΑΜΒΑΝΟΝΤΑΣ Γ ι ά ν ν η ς Ε. Τ ζ ή μ α ς Μάθημα: ΤΕΧΝΙΚΕΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ Το πρώτο πράγμα
Τ.Ε.Ι. ΔΥΤΙΚΗΣ ΕΛΛΑΔΑΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΔΙΑΛΕΞΗ ΙΙ ΕΝΑ ΒΗΜΑ ΠΑΡΑΠΑΝΩ ΜΕ SCRATCH ΕΠΙΛΕΓΩΝΤΑΣ & ΕΠΑΝΑΛΑΜΒΑΝΟΝΤΑΣ Γ ι ά ν ν η ς Ε. Τ ζ ή μ α ς Μάθημα: ΤΕΧΝΙΚΕΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ Το πρώτο πράγμα
World Robot Olympiad Κατηγορία Regular Elementary Δημοτικό Σχολείο. Περιγραφή πρόκλησης, κανόνες και διαδικασία βαθμολογίας
 World Robot Olympiad 2017 Κατηγορία Regular Elementary Δημοτικό Σχολείο Περιγραφή πρόκλησης, κανόνες και διαδικασία βαθμολογίας Ρομπότ για την αειφόρο ανάπτυξη [Sustainabots] Βιώσιμος Τουρισμός Υπεύθυνος
World Robot Olympiad 2017 Κατηγορία Regular Elementary Δημοτικό Σχολείο Περιγραφή πρόκλησης, κανόνες και διαδικασία βαθμολογίας Ρομπότ για την αειφόρο ανάπτυξη [Sustainabots] Βιώσιμος Τουρισμός Υπεύθυνος
1.1. Κινηματική Ομάδα Ε
 1.1. Ομάδα Ε 61. Μετά από λίγο αρχίζει να επιταχύνεται. Δυο αυτοκίνητα Α και Β κινούνται σε ευθύγραμμο δρόμο με σταθερές ταχύτητες υ Α=21,8m/s και υ Β=12m/s, προς την ίδια κατεύθυνση. Σε μια στιγμή τα
1.1. Ομάδα Ε 61. Μετά από λίγο αρχίζει να επιταχύνεται. Δυο αυτοκίνητα Α και Β κινούνται σε ευθύγραμμο δρόμο με σταθερές ταχύτητες υ Α=21,8m/s και υ Β=12m/s, προς την ίδια κατεύθυνση. Σε μια στιγμή τα
ΚΕΦΑΛΑΙΟ 1.1 ΕΥΘΥΓΡΑΜΜΗ ΚΙΝΗΣΗ
 7 ΚΕΦΑΛΑΙΟ 1.1 ΕΥΘΥΓΡΑΜΜΗ ΚΙΝΗΣΗ ΘΕΜΑΤΑ Α Α. ΚΙΝΗΣΗ - ΜΕΤΑΤΟΠΙΣΗ ΧΡΟΝΟΣ ΤΑΧΥΤΗΤΑ Στις ακόλουθες προτάσεις να διαλέξετε την σωστή απάντηση: 1. Ένα σημειακό αντικείμενο κινείται σε ευθύγραμμο δρόμο ο οποίος
7 ΚΕΦΑΛΑΙΟ 1.1 ΕΥΘΥΓΡΑΜΜΗ ΚΙΝΗΣΗ ΘΕΜΑΤΑ Α Α. ΚΙΝΗΣΗ - ΜΕΤΑΤΟΠΙΣΗ ΧΡΟΝΟΣ ΤΑΧΥΤΗΤΑ Στις ακόλουθες προτάσεις να διαλέξετε την σωστή απάντηση: 1. Ένα σημειακό αντικείμενο κινείται σε ευθύγραμμο δρόμο ο οποίος
Η εντολή «επανέλαβε Χ»
 Η εντολή «επανέλαβε Χ» Όπως είδαμε πιο πάνω, η εντολή για πάντα είναι χρήσιμη σε διάφορα προγράμματα όταν π.χ. θέλουμε να δείξουμε την κίνηση της γης γύρω από τον ήλιο ή για να αναπαραστήσουμε το δίλημμα
Η εντολή «επανέλαβε Χ» Όπως είδαμε πιο πάνω, η εντολή για πάντα είναι χρήσιμη σε διάφορα προγράμματα όταν π.χ. θέλουμε να δείξουμε την κίνηση της γης γύρω από τον ήλιο ή για να αναπαραστήσουμε το δίλημμα
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT. ΚΕΦΑΛΑΙΟ 3ο. Προγραμματιστικό περιβάλλον ΝΧΤ-G
 ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 3ο Προγραμματιστικό περιβάλλον ΝΧΤ-G Το προγραμματιστικό περιβάλλον NXT-G Το προγραμματιστικό περιβάλλον NXT-G Το NXT-G είναι μια γλώσσα προγραμματισμού
ΡΟΜΠΟΤΙΚΗ ΜΕ ΧΡΗΣΗ ΤΟΥ ΠΑΚΕΤΟΥ LEGO MINDSTORMS NXT ΚΕΦΑΛΑΙΟ 3ο Προγραμματιστικό περιβάλλον ΝΧΤ-G Το προγραμματιστικό περιβάλλον NXT-G Το προγραμματιστικό περιβάλλον NXT-G Το NXT-G είναι μια γλώσσα προγραμματισμού
1. Ποιο είναι το ανώτατο όριο θέσεων μαζί με αυτήν του οδηγού που προβλέπει ο KOK για τα επιβατικά οχήματα; Α. Πέντε (5) B. Επτά (7) Γ.
 B. Επτά (7) Γ.") Λυσάρι Οι σωστές απαντήσεις είναι σημειωμένες με κόκκινο. ΕΡΩΤΗΣΕΙΣ ΤΕΥΧΟΥΣ #133 1. Ποιο είναι το ανώτατο όριο θέσεων μαζί με αυτήν του οδηγού που προβλέπει ο KOK για τα επιβατικά οχήματα; Α. Πέντε (5)
Λυσάρι Οι σωστές απαντήσεις είναι σημειωμένες με κόκκινο. ΕΡΩΤΗΣΕΙΣ ΤΕΥΧΟΥΣ #133 1. Ποιο είναι το ανώτατο όριο θέσεων μαζί με αυτήν του οδηγού που προβλέπει ο KOK για τα επιβατικά οχήματα; Α. Πέντε (5)
Ενότητα 2. Ζωγραφίζοντας με το ΒΥΟΒ
 Ενότητα 2 : Ζωγραφίζοντας με το ΒΥΟΒ -1- Ενότητα 2. Ζωγραφίζοντας με το ΒΥΟΒ Κεφάλαιο 1: Κίνηση και γεωμετρικά σχήματα α. Θέση και προσανατολισμός της μορφής Η θέση της κάθε μορφής στο σκηνικό προσδιορίζεται
Ενότητα 2 : Ζωγραφίζοντας με το ΒΥΟΒ -1- Ενότητα 2. Ζωγραφίζοντας με το ΒΥΟΒ Κεφάλαιο 1: Κίνηση και γεωμετρικά σχήματα α. Θέση και προσανατολισμός της μορφής Η θέση της κάθε μορφής στο σκηνικό προσδιορίζεται