ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
|
|
|
- Ιωάννα Σαμαράς
- 8 χρόνια πριν
- Προβολές:
Transcript
1 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
2 Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται η χρήση, αντιγραφή, αποθήκευση και διανομή της παρούσης εργασίας, εξ ολοκλήρου ή τμήματος αυτής, για πάσης φύσεως εμπορικό ή επαγγελματικό σκοπό. Επιτρέπεται η ανατύπωση, αποθήκευση και διανομή για σκοπό µη κερδοσκοπικό, εκπαιδευτικής ή ερευνητικής φύσεως, υπό την προϋπόθεση να αναφέρεται η πηγή προέλευσης και να διατηρείται το παρόν μήνυμα
3
4
5
6
7
8

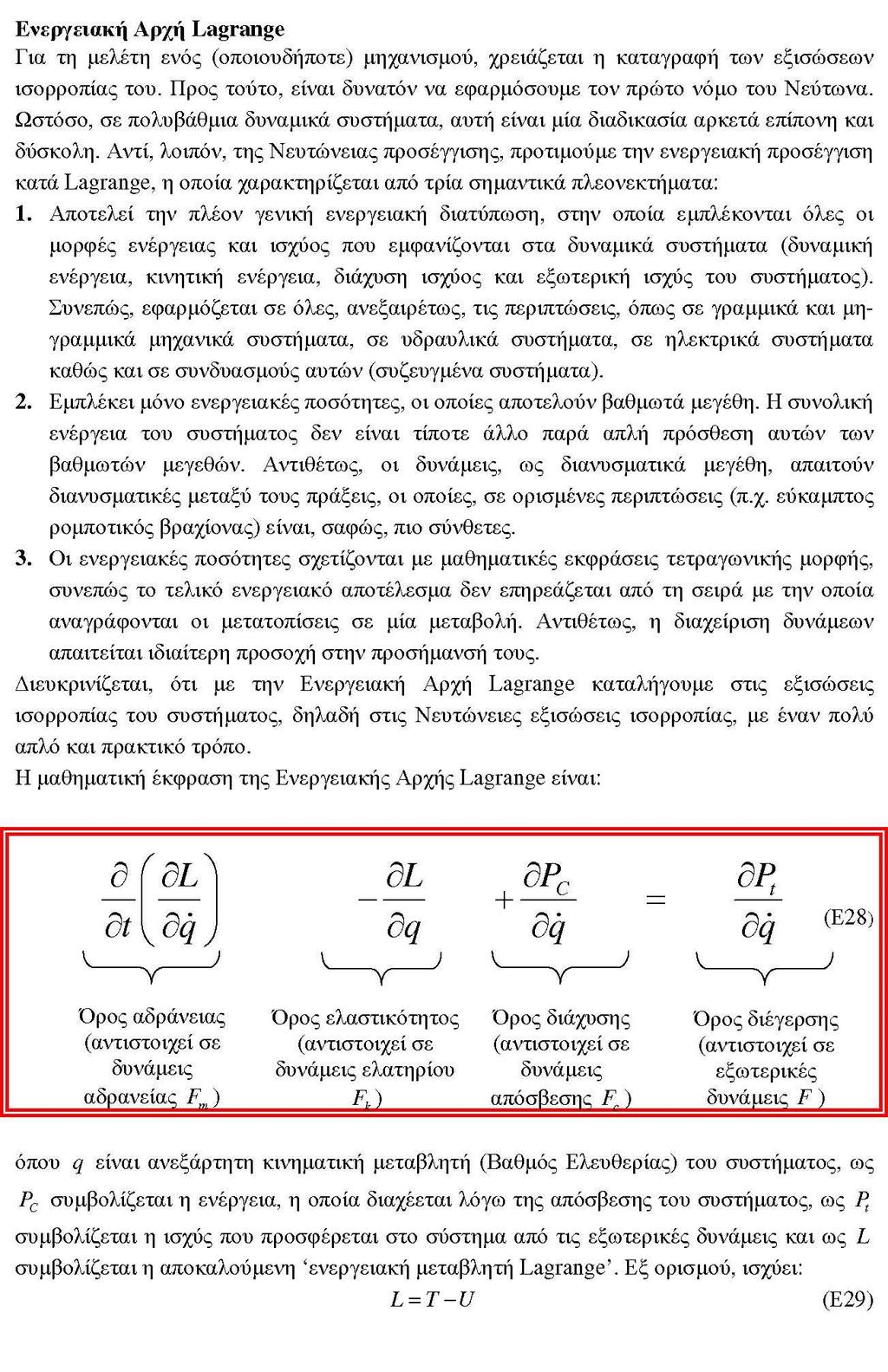
 () P t = Nθ Fu (3) L = T U (4) Διευκρινίσεις: u o : Αρχικό μήκος που αντιστοιχεί σε ελεύθερο ελατήριο N: Εξωτερική ροπή F: Εξωτερική δύναμη")
9 Εκπαιδευτική Ενότητα 9 η Ενεργειακή Αρχή Lagrange - Ασκήσεις ΑΣΚΗΣΗ Α r B m B l m r, I r m l, I l A C N θ φ D k Ο F m D u m r : Μάζα μέλους OA I r : Ροπή αδράνειας μέλους ΟΑ περί το κέντρο βάρους A του OA m B : Συγκεντρωμένη μάζα στο B m l : Μάζα μέλους BD I l : Ροπή αδράνειας μέλους BD περί το κέντρο βάρους C του BD m D : Μάζα εμβόλου D Ενέργειες: T = 1 m r(x A + y A ) + 1 I rθ + 1 m B(x B + y B ) + 1 m l(x C + y C ) + 1 I lφ + 1 m Du (1) U = 1 k(u u o) () P t = Nθ Fu (3) L = T U (4) Διευκρινίσεις: u o : Αρχικό μήκος που αντιστοιχεί σε ελεύθερο ελατήριο N: Εξωτερική ροπή F: Εξωτερική δύναμη
10 Βασικές σχέσεις μηχανισμού: u = rcosθ + lcosφ (5) 0 = rsinθ lsinφ (6) Εξαρτημένες σχέσεις: x A = r cosθ (7) y A = r sinθ (8) x B = rcosθ (9) y B = rsinθ (10) x C = rcosθ + l cosφ (11) y C = rsinθ l sinφ (1) κινηματικές μεταβλητές θ, φ Από Εξ.(6) θα έχουμε: sinφ = r sinθ = λsinθ (13) l λ = r l (14) cosφ = (1 λ sin θ) 1 (15) Από την Εξ.(15) 1 Β.Ε.: η γωνία θ Παραγωγίσεις ως προς το χρόνο: Από την Εξ.(13) φ cosφ = λθ cosθ φ = λθ cosθ cosφ (16) x A = r θ sinθ x A = r 4 θ sin θ (17) y A = r θ cosθ y A = r 4 θ cos θ (18)
11 Προσθέτωντας τις Εξ.(17),(18) θα έχουμε: Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: x A + y A = r 4 θ (19) Ομοίως θα έχουμε: x B + y B = r θ (0) x C = rθ sinθ l φ sinφ = rθ sinθ l sinφλθ cosθ cosφ x C = rθ (sinθ + 1 cosθtanφ) (1) y C = rθ cosθ l φ cosφ = rθ cosθ l cosφλθ cosθ cosφ y C = rθ (cosθ 1 cosθ) = 1 rθ cosθ () Προσθέτωντας τα τετράγωνα των Εξ. (1),() θα έχουμε: x C + y C = r θ (sin θ cos θtan φ + sinθcosθtanφ cos θ) x C + y C = r θ [sin θ (1 + tan φ)cos θ + sinθcosθtanφ] x C + y C = r θ [sin θ + 1 cos θ 4 cos + sinθcosθtanφ] (3) φ u = rθ sinθ lφ sinφ = rθ sinθ lsinφλθ cosθ cosφ u = rθ sinθ rθ cosθtanφ = rθ (sinθ + cosθtanφ) u = r θ (sinθ + cosθtanφ) (4) Από την Εξ.(1) T = 1 Ι (θ)θ I (θ) = I r + r 4 m r + r m B + I l λ cos θ cos φ + +r m l [sin θ cos θ cos φ + sinθcosθtanφ] + r m D (sinθ + cosθtanφ) (5)
12 Ενεργειακή Αρχή Lagrange για q 1 = θ Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: t ( L ) L θ = P t (6) L = T U = 1 Ι (θ)θ 1 k[u(θ) u o ] (7) P 1 = P θ = L = I(θ)θ (8) Μ 11 = Μ θθ = I (θ) (9) d dt ( L = I (θ)θ + I (θ) θ ) = I (θ)θ + di (θ) θ = dt dθ dt θ = I (θ)θ + Ι (θ)θ (30) L θ = 1 I (θ) θ θ + k(u uo ) u θ L θ = 1 Ι (θ)θ + k(u uo ) u (θ) (31) P t = Ν F u = Ν + F r (sinθ + cosθtanφ) (3) Έτσι, αντικαθιστώντας στην Εξ.(6) τις Εξ.(30), (31), (3) θα έχουμε: I (θ)θ + 1 Ι (θ)θ + k(u u o ) u (θ) = Ν + F r (sinθ + cosθtanφ) (33) u (θ) = rsinθ + l cosφ θ = rsinθ + l (1 λ sin θ) 1 ( rλ sinθcosθ) = = rsinθ λ lsinθcosθ (1 λ sin 1 = r κ(θ) (34) θ) κ(θ) = sinθ + λsinθcosθ (1 λ sin 1 (35) θ) Ομοίως, το Ι (θ) προκύπτει από την παραγώγιση της Εξ.(5), ως προς θ
13 ΑΣΚΗΣΗ Β Y m, I l D Β δ C r R k N θ φ Α d m: Μάζα μέλους BD I: Ροπή αδράνειας μέλους BD περί το κέντρο βάρους C του BD Ενέργειες: T = 1 m(x C + y C ) + 1 Iδ (1) U = 1 k {[(x E x B ) + y B ] 1 l o } () P t = Nθ (3) Διευκρινίσεις: l o : Αρχικό μήκος ελατηρίου N: Εξωτερική ροπή Βασικές σχέσεις μηχανισμού: d = rcosθ + lcosδ Rcosφ (4) 0 = rsinθ + lsinδ Rsinφ (5)
14 Εξαρτημένες σχέσεις: x B = rcosθ (6) y B = rsinθ (7) x C = rcosθ + l cosδ (8) y C = rsinθ + l sinδ (9) 1 Β.Ε., η γωνία θ: Από την Εξ. (4) Rcosφ = rcosθ + lcosδ d } Από την Εξ. (5) Rsinφ = rsinθ + lsinδ R = (rcosθ + lcosδ d) + (rsinθ + lsinδ) R = r cos θ + l cos δ + d rdcosθ ldcosδ + +rlcosθcosδ + r sin θ + l sin δ + rlsinθsinδ R = r + l + d rdcosθ ldcosδ + rlcosθcosδ + rlsinθsinδ rlsinθsinδ = R (r + l + d ) + rdcosθ + ldcosδ rlcosθcosδ (rlsinθ) (1 cos δ) = [R (r + l + d ) + rdcosθ + ldcosδ rlcosθcosδ] αcos δ + βcosδ + γ = 0 δ = Δ(θ) (10) Ομοίως, θα έχουμε: φ = Φ(θ) (11) Από την Εξ.(4) rθ sinθ lδ sinδ + Rφ sinφ = 0 (1) Από την Εξ.(5) rθ cosθ + lδ cosδ Rφ cosφ = 0 (13)
15 Πολλαπλασιάζουμε την Εξ.(11) επί cosφ και την Εξ.(1) επί sinφ και προσθέτουμε κατά μέλη: rθ sinθcosφ lδ sinδcosφ + rθ cosθsinφ + lδ cosδsinφ = 0 lδ (cosδsinφ sinδcosφ) = rθ (cosθsinφ sinθcosφ) δ = r l θ cosθsinφ sinθcosφ cosδsinφ sinδcosφ = r θ sin(θ φ) l sin(δ φ) (14) x C = rθ sinθ l δ sinδ x C = rθ sinθ + l r θ sin(θ φ) l sin(δ φ) sinδ x C = rθ [ sinθ + sin(θ φ) sin(δ φ) sinδ] = rθ p x (θ) (15) p x (θ) = [ sinθ + sin(θ φ) sinδ] (16) sin(δ φ) y C = rθ cosθ + l δ cosδ y C = rθ cosθ l r θ sin(θ φ) l sin(δ φ) cosδ y C = rθ [cosθ sin(θ φ) sin(δ φ) cosδ] = rθ p y (θ) (17) p y (θ) = [cosθ sin(θ φ) cosδ] (18) sin(δ φ) Από την Εξ.(1) T = 1 mr θ [Px (θ) + P y (θ)] + 1 I (r l ) sin θ (θ φ) sin (δ φ) T = 1 Ι (θ)θ (19) I (θ) = mr [P x (θ) + P y (θ)] + I ( r l ) sin (θ φ) sin (δ φ) (0)
16 L = I (θ)θ t ( L ) = I (θ)θ + I (θ)θ (1) L θ = k(l B l o ) l B θ 1 I (θ) θ θ () l B = [(x E x B ) + y B ] 1 = [(d rcosθ) + (rsinθ) ] 1 (3) Ι (θ) = I (θ) θ (4) l B θ = 1 [(d rcosθ) + (rsinθ) ] 1 [(d rcosθ)(rsinθ) + (rsinθ)(rcosθ)] l B θ = (d rcosθ)(rsinθ)+(rsinθ)(rcosθ) = rdsinθ = b(θ) (5) l B l B I (θ) = di (θ) dt = I (θ) θ dθ I (θ) = Ι (θ)θ (6) dt Ενεργειακή Αρχή Lagrange t ( L ) L θ = P t (7) Αντικαθιστώντας στην Εξ.(6) τις Εξ.(3)(1),() θα έχουμε: I (θ)θ + 1 Ι (θ)θ + k(l B l o )b(θ) = N (8)
17 ΑΣΚΗΣΗ Γ Y I b B Β F A m,l F B C Α O θ B X I k B,l B h A b Α C mg h k A,l A D E m: Μάζα μέλους AB I: Ροπή αδράνειας μέλους AB περί το κέντρο βάρους C του AB Ενέργειες: T = 1 m(x C + y C ) + 1 Iθ (1) U = 1 k A(l A l o ) + 1 k B(l B l o ) + mgy C () P t = F A y A + F B y B (3) Διευκρινίσεις: l o : Αρχικό μήκος ελατηρίου l A : Μήκος ελατηρίου Α l Β : Μήκος ελατηρίου Β F A, F B διατηρούν σταθερή κατεύθυνση κατά OY I
18 ΚΙΝΗΜΑΤΙΚΕΣ ΣΧΕΣΕΙΣ x A = b A cosθ (4) y A = b A sinθ (5) x B = b B cosθ (6) y B = b B sinθ (7) x C = Ccosθ (8) y C = Csinθ (9) x D = b A (10) y D = h (11) x E = b B (1) y E = h (13) l A = [(x A x D ) + (y A y D ) ] 1 (14) l B = [(x B x E ) + (y B y E ) ] 1 (15) 1 Β.Ε., η γωνία θ: x C = θ Csinθ (16) y C = θ Ccosθ (17) x C + y C = θ C (18) y A = b A θ cosθ (19) y B = b B θ cosθ (0) l A = [b A (1 cosθ) + (h b A sinθ) ] 1 (1)
19 l B θ = 1 [b A (1 cosθ) + (h b A sinθ) ] 1 {b A (1 cosθ)sinθ + (h ba sinθ)( b A cosθ)} l B θ = b A sinθ ba cosθsinθ hba cosθ+b A sinθcosθ l A l B θ = b A(b A sinθ hcosθ) l A = b A p A (θ) () p A (θ) = (b Asinθ hcosθ) l A (3) l B = [b B (1 cosθ) + (h + b A sinθ) ] 1 () l B θ = 1 [b B (1 cosθ) + (h + b A sinθ) ] 1 {b B (1 cosθ)sinθ + (h + ba sinθ)b A cosθ} l B θ = b B sinθ bb cosθsinθ+hba cosθ+b A sinθcosθ l A l B θ = b B(b B sinθ+hcosθ) l A = b B p B (θ) (3) p B (θ) = (b Bsinθ+hcosθ) l A (4) T = 1 (mc + I)θ = 1 I θ (5) I = mc + I (6)
20 L = I θ (7) t ( L ) = I θ (8) L θ = k A(l A l o ) l A θ + k B(l B l o ) l B θ + mg y C θ L θ = k A(l A l o )b A p A (θ) + k B (l B l o )b B p B (θ) + mgcsinθ (9) P t = F A y A + F B y B = F A b A cosθ + F B b B cosθ (30) Ενεργειακή Αρχή Lagrange t ( L ) L θ = P t (31) Αντικαθιστώντας στην Εξ.(31) τις Εξ.(8)(9),(30) θα έχουμε: I θ + k A b A (l A l o )p A (θ) + k B b B (l B l o )p B (θ) + mgcsinθ = ( F A b A + F B b B )cosθ (3)
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
 Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 7.1 - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 Copyright ΕΜΠ
Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 7.1 - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 Copyright ΕΜΠ
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
 Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ -A.1 - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 Copyright ΕΜΠ
Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ -A.1 - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 Copyright ΕΜΠ
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 8. - opyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών - 202. Με επιφύλαξη παντός δικαιώµατος. ll rights reserved. Απαγορεύεται
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 8. - opyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών - 202. Με επιφύλαξη παντός δικαιώµατος. ll rights reserved. Απαγορεύεται
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
 Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 04-05 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 5. - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 04-05 opyight ΕΜΠ - Σχολή
Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 04-05 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 5. - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 04-05 opyight ΕΜΠ - Σχολή
ΑΣΚΗΣΗ 7. έκδοση DΥΝI-EXC b
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΣΚΗΣΗ 7 έκδοση DΥΝI-EXC07-06b Copyright Ε.Μ.Π. - 06 Σχολή
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΣΚΗΣΗ 7 έκδοση DΥΝI-EXC07-06b Copyright Ε.Μ.Π. - 06 Σχολή
ΔΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι
 Δυναμική Μηχανών Ι Ακαδημαϊκό έτος: 015-016 ΔΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 1.1- Δυναμική Μηχανών Ι Ακαδημαϊκό έτος: 015-016 Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών - 015.
Δυναμική Μηχανών Ι Ακαδημαϊκό έτος: 015-016 ΔΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 1.1- Δυναμική Μηχανών Ι Ακαδημαϊκό έτος: 015-016 Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών - 015.
ΑΣΚΗΣΗ 19. έκδοση DΥΝI-EXC a
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΣΚΗΣΗ 19 έκδοση DΥΝI-EXC19-2017a Copyright Ε.Μ.Π. - 2017 Σχολή
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΣΚΗΣΗ 19 έκδοση DΥΝI-EXC19-2017a Copyright Ε.Μ.Π. - 2017 Σχολή
υναµική Μηχανών Ι Ακαδηµαϊκό έτος : Ε. Μ. Π. Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 22.
 υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 0-0 ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι -. - υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 0-0 Cprigh ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 0. Με επιφύλαξη παντός
υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 0-0 ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι -. - υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 0-0 Cprigh ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 0. Με επιφύλαξη παντός
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - Β. - Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών - 06. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - Β. - Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών - 06. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
( () () ()) () () ()
 () ()) () () ()") ΑΝΑΛΥΣΗ ΙΙ- ΜΗΧΑΝΟΛΟΓΟΙ ΜΗΧΑΝΙΚΟΙ ΦΥΛΛΑΔΙΟ /011 1 Έστω r = r( t = ( x( t, ( t, z( t, t I = [ a, b] συνάρτηση C τάξης και r = r( t = r ( t = x ( t + ( t z ( t είναι μία διανυσματική + Nα αποδείξετε ότι:
ΑΝΑΛΥΣΗ ΙΙ- ΜΗΧΑΝΟΛΟΓΟΙ ΜΗΧΑΝΙΚΟΙ ΦΥΛΛΑΔΙΟ /011 1 Έστω r = r( t = ( x( t, ( t, z( t, t I = [ a, b] συνάρτηση C τάξης και r = r( t = r ( t = x ( t + ( t z ( t είναι μία διανυσματική + Nα αποδείξετε ότι:
Ολοκληρώματα. ΗΥ111 Απειροστικός Λογισμός ΙΙ
 ΗΥ- Απειροστικός Λογισμός ΙΙ Ολοκληρώματα Εφαρμογές Ολοκληρωμάτων Υπολογισμός μήκους Υπολογισμός εμβαδού Υπολογισμός όγκου Χρήση σε Τύπους/Μετρικές Φυσική Πιθανότητες Γραφική Θέματα Αναγνώρισης προτύπων
ΗΥ- Απειροστικός Λογισμός ΙΙ Ολοκληρώματα Εφαρμογές Ολοκληρωμάτων Υπολογισμός μήκους Υπολογισμός εμβαδού Υπολογισμός όγκου Χρήση σε Τύπους/Μετρικές Φυσική Πιθανότητες Γραφική Θέματα Αναγνώρισης προτύπων
( () () ()) () () ()
 () ()) () () ()") ΑΝΑΛΥΣΗ ΙΙ- ΠΟΛΙΤΙΚΟΙ ΜΗΧΑΝΙΚΟΙ ΦΥΛΛΑΔΙΟ /011 1 Έστω r = r( t = ( x( t ( t z( t t I = [ a b] συνάρτηση C τάξης και r = r( t = r ( t = x ( t + ( t z ( t είναι μία διανυσματική + Nα αποδείξετε ότι: d 1 1
ΑΝΑΛΥΣΗ ΙΙ- ΠΟΛΙΤΙΚΟΙ ΜΗΧΑΝΙΚΟΙ ΦΥΛΛΑΔΙΟ /011 1 Έστω r = r( t = ( x( t ( t z( t t I = [ a b] συνάρτηση C τάξης και r = r( t = r ( t = x ( t + ( t z ( t είναι μία διανυσματική + Nα αποδείξετε ότι: d 1 1
Το ελαστικο κωνικο εκκρεμε ς
 Το ελαστικο κωνικο εκκρεμε ς 1. Εξισώσεις Euler -Lagrange x 0 φ θ z F l 0 y r m B Το ελαστικό κωνικό εκκρεμές αποτελείται από ένα ελατήριο με σταθερά επαναφοράς k, το οποίο αναρτάται από ένα σταθερό σημείο,
Το ελαστικο κωνικο εκκρεμε ς 1. Εξισώσεις Euler -Lagrange x 0 φ θ z F l 0 y r m B Το ελαστικό κωνικό εκκρεμές αποτελείται από ένα ελατήριο με σταθερά επαναφοράς k, το οποίο αναρτάται από ένα σταθερό σημείο,
( ) ) V(x, y, z) Παραδείγματα. dt + "z ˆk + z d ˆk. v 2 =!x 2 +!y 2 +!z 2. F =! "p. T = 1 2 m (!x2 +!y 2 +!z 2
 ) V(x, y, z) Παραδείγματα. dt + z ˆk + z d ˆk. v 2 =!x 2 +!y 2 +!z 2. F =! p. T = 1 2 m (!x2 +!y 2 +!z 2") ΦΥΣ 211 - Διαλ.04 1 Παραδείγματα Κίνηση ενός και μόνο σωματιδίου, χρησιμοποιώντας Καρτεσιανές συντεταγμένες και συντηρητικές δυνάμεις. Οι εξισώσεις Lagrange θα πρέπει να επιστρέφουν τα ίδια αποτελέσματα
ΦΥΣ 211 - Διαλ.04 1 Παραδείγματα Κίνηση ενός και μόνο σωματιδίου, χρησιμοποιώντας Καρτεσιανές συντεταγμένες και συντηρητικές δυνάμεις. Οι εξισώσεις Lagrange θα πρέπει να επιστρέφουν τα ίδια αποτελέσματα
ΔΥΝΑΜΙΚΗ ΣΥΣΤΗΜΑΤΩΝ ΣΥΝΕΧΟΥΣ ΜΕΣΟΥ
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΔΥΝΑΜΙΚΗ ΣΥΣΤΗΜΑΤΩΝ ΣΥΝΕΧΟΥΣ ΜΕΣΟΥ έκδοση DΥΝI-DCMB_2016b Copyright
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΔΥΝΑΜΙΚΗ ΣΥΣΤΗΜΑΤΩΝ ΣΥΝΕΧΟΥΣ ΜΕΣΟΥ έκδοση DΥΝI-DCMB_2016b Copyright
ΑΣΚΗΣΗ 8. έκδοση DΥΝI-EXC b
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΣΚΗΣΗ 8 έκδοση DΥΝI-EXC08-016b Copyright Ε.Μ.Π. - 016 Σχολή
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΣΚΗΣΗ 8 έκδοση DΥΝI-EXC08-016b Copyright Ε.Μ.Π. - 016 Σχολή
x 3 D 1 (x 1)dxdy = dydx = (x 1)[y] x x 3 dx + x)dx = 3 x5
![x 3 D 1 (x 1)dxdy = dydx = (x 1)[y] x x 3 dx + x)dx = 3 x5](/thumbs/100/147787649.jpg "x 3 D 1 (x 1)dxdy = dydx = (x 1)[y] x x 3 dx + x)dx = 3 x5") 1 Επαναληπτικές Ασκήσεις 19-1-18 Διπλά Ολοκληρώματα 1. Να υπολογισθεί το ολοκλήρωμα (x 1)dxdy όπου το χωρίο περιέχεται από τις καμπύλες y x και y x. Λύση Οι δύο καμπύλες τέμνονται στα σημεία όπου x x.
1 Επαναληπτικές Ασκήσεις 19-1-18 Διπλά Ολοκληρώματα 1. Να υπολογισθεί το ολοκλήρωμα (x 1)dxdy όπου το χωρίο περιέχεται από τις καμπύλες y x και y x. Λύση Οι δύο καμπύλες τέμνονται στα σημεία όπου x x.
Θεωρητική μηχανική ΙΙ
 ΟΣΑ ΓΡΑΦΟΝΤΑΙ ΕΔΩ ΝΑ ΤΑ ΔΙΑΒΑΖΕΤΕ ΜΕ ΣΚΕΠΤΙΚΟ ΒΛΕΜΜΑ. ΜΠΟΡΕΙ ΝΑ ΠΕΡΙΕΧΟΥΝ ΛΑΘΗ. Θεωρητική μηχανική ΙΙ Να δειχθεί ότι αν L x, L y αποτελούν ολοκληρώματα της κίνησης τότε και η L z αποτελεί ολοκλήρωμα της
ΟΣΑ ΓΡΑΦΟΝΤΑΙ ΕΔΩ ΝΑ ΤΑ ΔΙΑΒΑΖΕΤΕ ΜΕ ΣΚΕΠΤΙΚΟ ΒΛΕΜΜΑ. ΜΠΟΡΕΙ ΝΑ ΠΕΡΙΕΧΟΥΝ ΛΑΘΗ. Θεωρητική μηχανική ΙΙ Να δειχθεί ότι αν L x, L y αποτελούν ολοκληρώματα της κίνησης τότε και η L z αποτελεί ολοκλήρωμα της
Μοντέρνα Θεωρία Ελέγχου
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 1: Μαθηματικά Μοντέλα Συστημάτων Νίκος Καραμπετάκης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 1: Μαθηματικά Μοντέλα Συστημάτων Νίκος Καραμπετάκης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
Θεωρητική μηχανική ΙΙ
 ΟΣΑ ΓΡΑΦΟΝΤΑΙ ΕΔΩ ΝΑ ΤΑ ΔΙΑΒΑΖΕΤΕ ΜΕ ΣΚΕΠΤΙΚΟ ΒΛΕΜΜΑ. ΜΠΟΡΕΙ ΝΑ ΠΕΡΙΕΧΟΥΝ ΛΑΘΗ. Θεωρητική μηχανική ΙΙ Να δειχθεί ότι αν L x, L y αποτελούν ολοκληρώματα της κίνησης τότε και η L z αποτελεί ολοκλήρωμα της
ΟΣΑ ΓΡΑΦΟΝΤΑΙ ΕΔΩ ΝΑ ΤΑ ΔΙΑΒΑΖΕΤΕ ΜΕ ΣΚΕΠΤΙΚΟ ΒΛΕΜΜΑ. ΜΠΟΡΕΙ ΝΑ ΠΕΡΙΕΧΟΥΝ ΛΑΘΗ. Θεωρητική μηχανική ΙΙ Να δειχθεί ότι αν L x, L y αποτελούν ολοκληρώματα της κίνησης τότε και η L z αποτελεί ολοκλήρωμα της
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ
 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ - 19.1 - Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 1. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ - 19.1 - Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 1. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
Μηχανισµοί & Εισαγωγή στο Σχεδιασµό Μηχανών Ακαδηµαϊκό έτος: Ε.Μ.Π. Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 3.
 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ - 3.1 - Cpright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 2012. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ - 3.1 - Cpright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 2012. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
E = 1 2 k. V (x) = Kx e αx, dv dx = K (1 αx) e αx, dv dx = 0 (1 αx) = 0 x = 1 α,
 = Kx e αx, dv dx = K (1 αx) e αx, dv dx = 0 (1 αx) = 0 x = 1 α,") Μαθηματική Μοντελοποίηση Ι 1. Φυλλάδιο ασκήσεων Ι - Λύσεις ορισμένων ασκήσεων 1.1. Άσκηση. Ενα σωμάτιο μάζας m βρίσκεται σε παραβολικό δυναμικό V (x) = 1/2x 2. Γράψτε την θέση του σαν συνάρτηση του χρόνου,
Μαθηματική Μοντελοποίηση Ι 1. Φυλλάδιο ασκήσεων Ι - Λύσεις ορισμένων ασκήσεων 1.1. Άσκηση. Ενα σωμάτιο μάζας m βρίσκεται σε παραβολικό δυναμικό V (x) = 1/2x 2. Γράψτε την θέση του σαν συνάρτηση του χρόνου,
ΜΑΘΗΜΑΤΙΚΑ ΙΙ ΠΑΡΑΔΕΙΓΜΑΤΑ Συναρτήσεις Πολλών Μεταβλητών
 ΜΑΘΗΜΑΤΙΚΑ ΙΙ ΠΑΡΑΔΕΙΓΜΑΤΑ Συναρτήσεις Πολλών Μεταβλητών Να βρεθούν τα όρια, αν υπάρχουν: lim i) (,) (0,0) + ii) lim (,) (0,0) + iii) 3 lim 3 (,) (0,0) 6 + lim iv) (,) (0,0) + + lim sin + sin v) (,) (0,0)
ΜΑΘΗΜΑΤΙΚΑ ΙΙ ΠΑΡΑΔΕΙΓΜΑΤΑ Συναρτήσεις Πολλών Μεταβλητών Να βρεθούν τα όρια, αν υπάρχουν: lim i) (,) (0,0) + ii) lim (,) (0,0) + iii) 3 lim 3 (,) (0,0) 6 + lim iv) (,) (0,0) + + lim sin + sin v) (,) (0,0)
Πολλαπλασιαστές Lagrange Δυνάμεις δεσμών
 ΦΥΣ - Διαλ.08 Πολλαπλασιαστές Lagrange Δυνάμεις δεσμών q q Το μεγάλο πλεονέκτημα του Lagrangian φορμαλισμού είναι ότι δεν χρειάζεται να υπολογισθούν οι δυνάμεις των δεσμών Ø Υπάρχουν περιπτώσεις που χρειαζόμαστε
ΦΥΣ - Διαλ.08 Πολλαπλασιαστές Lagrange Δυνάμεις δεσμών q q Το μεγάλο πλεονέκτημα του Lagrangian φορμαλισμού είναι ότι δεν χρειάζεται να υπολογισθούν οι δυνάμεις των δεσμών Ø Υπάρχουν περιπτώσεις που χρειαζόμαστε
Κλασσική Θεωρία Ελέγχου
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 3: Μαθηματική περιγραφή συστημάτων Νίκος Καραμπετάκης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 3: Μαθηματική περιγραφή συστημάτων Νίκος Καραμπετάκης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
xsin ydxdy (α) Εάν το χωρίο R είναι φραγμένο αριστερά και δεξιά από τις ευθείες x=α και x=β και από πάνω και κάτω από τις καμπύλες dr = dxdy
 Εάν το χωρίο R είναι φραγμένο αριστερά και δεξιά από τις ευθείες x=α και x=β και από πάνω και κάτω από τις καμπύλες dr = dxdy") ΔΙΠΛΑ ΟΛΟΚΛΗΡΩΜΑΤΑ Εφαρμογή Να υολογιστεί το ολοκλήρωμα : cos sin dd Ολοκληρώνουμε ρώτα ως ρος θεωρώντας το σαν σταθερά (αρατηρούμε ότι το «εσωτερικό» ολοκλήρωμα είναι ως ρος, δηλαδή ρώτα εμφανίζεται το
ΔΙΠΛΑ ΟΛΟΚΛΗΡΩΜΑΤΑ Εφαρμογή Να υολογιστεί το ολοκλήρωμα : cos sin dd Ολοκληρώνουμε ρώτα ως ρος θεωρώντας το σαν σταθερά (αρατηρούμε ότι το «εσωτερικό» ολοκλήρωμα είναι ως ρος, δηλαδή ρώτα εμφανίζεται το
υναµ α ι µ κή τ ων Ρ οµ ο π µ ο π τ ο ικών Βραχιόνων
 υναµική των Ροµποτικών Βραχιόνων Ροµποτική Αρχιτεκτονική: η υναµική u Ροµποτική υναµική q, q& Ροµποτική Κινηµατική Περιβάλλον Θέση, Προσανατολισµός & και αλληλε ίδραση Η δυναµική ασχολείται µε την εξαγωγή
υναµική των Ροµποτικών Βραχιόνων Ροµποτική Αρχιτεκτονική: η υναµική u Ροµποτική υναµική q, q& Ροµποτική Κινηµατική Περιβάλλον Θέση, Προσανατολισµός & και αλληλε ίδραση Η δυναµική ασχολείται µε την εξαγωγή
Εφαρμοσμένα Μαθηματικά ΙΙ 4ο Σετ Ασκήσεων (Λύσεις) Διπλά Ολοκληρώματα Επιμέλεια: Ι. Λυχναρόπουλος
 Διπλά Ολοκληρώματα Επιμέλεια: Ι. Λυχναρόπουλος") Εφαρμοσμένα Μαθηματικά ΙΙ ο Σετ Ασκήσεων (Λύσεις) Διπλά Ολοκληρώματα Επιμέλεια: Ι. Λυχναρόπουλος. Προσεγγίστε τo ολοκλήρωμα ( + ) I d d με αθροίσματα iemann χωρίζοντας το πεδίο ολοκλήρωσης σε ίσα ορθογώνια.
Εφαρμοσμένα Μαθηματικά ΙΙ ο Σετ Ασκήσεων (Λύσεις) Διπλά Ολοκληρώματα Επιμέλεια: Ι. Λυχναρόπουλος. Προσεγγίστε τo ολοκλήρωμα ( + ) I d d με αθροίσματα iemann χωρίζοντας το πεδίο ολοκλήρωσης σε ίσα ορθογώνια.
υναµική Μηχανών Ι Ακαδηµαϊκό έτος : Ε. Μ. Π. Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 15.
 υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 010-011 ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 15.1 - υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 010-011 Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 010.
υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 010-011 ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 15.1 - υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 010-011 Copyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 010.
υναµική Μηχανών Ι Ακαδηµαϊκό έτος : Ε. Μ. Π. Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 19.
 υναµική Μηχανών Ι Ακαδηµαϊκό έτος: - ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 9. - υναµική Μηχανών Ι Ακαδηµαϊκό έτος: - Cpyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών -. Με επιφύλαξη παντός
υναµική Μηχανών Ι Ακαδηµαϊκό έτος: - ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 9. - υναµική Μηχανών Ι Ακαδηµαϊκό έτος: - Cpyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών -. Με επιφύλαξη παντός
ΣΕΙΣΜΟΣ & ΑΝΤΙΣΕΙΣΜΙΚΗ ΠΡΟΣΤΑΣΙΑ ΣΤΟ ΣΧΟΛΙΚΟ ΧΩΡΟ ΣΤΟ ΠΛΑΙΣΙΟ ΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΓΙΑ ΤΗΝ ΑΕΙΦΟΡΟ ΑΝΑΠΤΥΞΗ
 ΧΑΤΖΗΝΙΚΟΛΑΣ ΜΙΧΑΗΛ ΣΕΙΣΜΟΣ & ΑΝΤΙΣΕΙΣΜΙΚΗ ΠΡΟΣΤΑΣΙΑ ΣΤΟ ΣΧΟΛΙΚΟ ΧΩΡΟ ΣΤΟ ΠΛΑΙΣΙΟ ΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΓΙΑ ΤΗΝ ΑΕΙΦΟΡΟ ΑΝΑΠΤΥΞΗ ΠΕΙΡΑΜΑΤΙΚΗ ΕΡΕΥΝΑ ΜΕ ΧΡΗΣΗ ΠΟΣΟΤΙΚΩΝ ΜΕΘΟΔΩΝ 2015 Copyright Μιχαήλ Χατζηνικόλας,
ΧΑΤΖΗΝΙΚΟΛΑΣ ΜΙΧΑΗΛ ΣΕΙΣΜΟΣ & ΑΝΤΙΣΕΙΣΜΙΚΗ ΠΡΟΣΤΑΣΙΑ ΣΤΟ ΣΧΟΛΙΚΟ ΧΩΡΟ ΣΤΟ ΠΛΑΙΣΙΟ ΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΓΙΑ ΤΗΝ ΑΕΙΦΟΡΟ ΑΝΑΠΤΥΞΗ ΠΕΙΡΑΜΑΤΙΚΗ ΕΡΕΥΝΑ ΜΕ ΧΡΗΣΗ ΠΟΣΟΤΙΚΩΝ ΜΕΘΟΔΩΝ 2015 Copyright Μιχαήλ Χατζηνικόλας,
Δυναμική Μηχανών I. Διάλεξη 3. Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
 Δυναμική Μηχανών I Διάλεξη 3 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Περιεχόμενα: Διακριτή Μοντελοποίηση Μηχανικών Συστημάτων Επανάληψη: Διακριτά στοιχεία μηχανικών δυναμικών συστημάτων Δυναμικά
Δυναμική Μηχανών I Διάλεξη 3 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Περιεχόμενα: Διακριτή Μοντελοποίηση Μηχανικών Συστημάτων Επανάληψη: Διακριτά στοιχεία μηχανικών δυναμικών συστημάτων Δυναμικά
ΚΒΑΝΤΟΜΗΧΑΝΙΚΗ Ι Τελική Εξέταση: 30 Αυγούστου 2010 ( ιδάσκων: Α.Φ. Τερζής) ιάρκεια εξέτασης 2,5 ώρες.
 ιάρκεια εξέτασης 2,5 ώρες.") ΘΕΜΑ [5575] ΚΒΑΝΤΟΜΗΧΑΝΙΚΗ Ι Τελική Εξέταση: 3 Αυγούστου ( ιδάσκων: ΑΦ Τερζής) ιάρκεια εξέτασης,5 ώρες (α) Να αποδειχθεί ότι για οποιοδήποτε µη εξαρτώµενο από τον χρόνο τελεστή Α, ισχύει d A / dt = A,
ΘΕΜΑ [5575] ΚΒΑΝΤΟΜΗΧΑΝΙΚΗ Ι Τελική Εξέταση: 3 Αυγούστου ( ιδάσκων: ΑΦ Τερζής) ιάρκεια εξέτασης,5 ώρες (α) Να αποδειχθεί ότι για οποιοδήποτε µη εξαρτώµενο από τον χρόνο τελεστή Α, ισχύει d A / dt = A,
ΜΑΘΗΜΑΤΙΚΗ ΠΡΟΤΥΠΟΠΟΙΗΣΗ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΕΦΑΡΜΟΣΜΕΝΩΝ ΜΑΘΗΜΑΤΙΚΩΝ ΚΑΙ ΦΥΣΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΜΑΘΗΜΑΤΙΚΗ ΠΡΟΤΥΠΟΠΟΙΗΣΗ η ΣΕΙΡΑ ΑΣΚΗΣΕΩΝ Προβλήματα Διαταραχών Λογισμού Μεταβολών Άσκηση 3.10, σελίδα 35 από το βιβλίο
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΕΦΑΡΜΟΣΜΕΝΩΝ ΜΑΘΗΜΑΤΙΚΩΝ ΚΑΙ ΦΥΣΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΜΑΘΗΜΑΤΙΚΗ ΠΡΟΤΥΠΟΠΟΙΗΣΗ η ΣΕΙΡΑ ΑΣΚΗΣΕΩΝ Προβλήματα Διαταραχών Λογισμού Μεταβολών Άσκηση 3.10, σελίδα 35 από το βιβλίο
Μετασχηματισμοί στον R 2 Μπορούν να παρασταθούν (και να υλοποιηθούν) με πολλαπλασιασμό πινάκων Ο πολλαπλασιασμός Ax μπορεί να ειδωθεί σαν μετασχηματισ
 με πολλαπλασιασμό πινάκων Ο πολλαπλασιασμός Ax μπορεί να ειδωθεί σαν μετασχηματισ") Μετασχηματισμοί στον R 2 Μπορούν να παρασταθούν (και να υλοποιηθούν) με πολλαπλασιασμό πινάκων Μετασχηματισμοί στον R 2 Μπορούν να παρασταθούν (και να υλοποιηθούν) με πολλαπλασιασμό πινάκων Ο πολλαπλασιασμός
Μετασχηματισμοί στον R 2 Μπορούν να παρασταθούν (και να υλοποιηθούν) με πολλαπλασιασμό πινάκων Μετασχηματισμοί στον R 2 Μπορούν να παρασταθούν (και να υλοποιηθούν) με πολλαπλασιασμό πινάκων Ο πολλαπλασιασμός
Δυναμική Μηχανών I. Επανάληψη: Μαθηματικά
 Δυναμική Μηχανών I 2 1 Επανάληψη: Μαθηματικά 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε αναπαραγωγή χωρίς άδεια Συμβολισμοί Μεταβλητών
Δυναμική Μηχανών I 2 1 Επανάληψη: Μαθηματικά 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε αναπαραγωγή χωρίς άδεια Συμβολισμοί Μεταβλητών
υναµική Μηχανών Ι Ακαδηµαϊκό έτος : Ε. Μ. Π. Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 10.
 υναµική Μηχανών Ι Ακαδηµαϊκό έτος: - ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι -. - υναµική Μηχανών Ι Ακαδηµαϊκό έτος: - opyrght ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών -. Με επιφύλαξη παντός δικαιώµατος.
υναµική Μηχανών Ι Ακαδηµαϊκό έτος: - ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι -. - υναµική Μηχανών Ι Ακαδηµαϊκό έτος: - opyrght ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών -. Με επιφύλαξη παντός δικαιώµατος.
Εφαρμοσμένα Μαθηματικά ΙΙ
 Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας Εφαρμοσμένα Μαθηματικά ΙΙ Διπλά Ολοκληρώματα Ιωάννης Λυχναρόπουλος Μαθηματικός, MSc, PhD Ορθογώνια Χωρία Ορισμός n f( x, y) da lim f( x, y ) = Α Α 0 k
Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας Εφαρμοσμένα Μαθηματικά ΙΙ Διπλά Ολοκληρώματα Ιωάννης Λυχναρόπουλος Μαθηματικός, MSc, PhD Ορθογώνια Χωρία Ορισμός n f( x, y) da lim f( x, y ) = Α Α 0 k
Δυναμική Μηχανών I. Επανάληψη: Κινηματική και Δυναμική
 Δυναμική Μηχανών I 2 2 Επανάληψη: Κινηματική και Δυναμική 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε αναπαραγωγή χωρίς άδεια Περιεχόμενα
Δυναμική Μηχανών I 2 2 Επανάληψη: Κινηματική και Δυναμική 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε αναπαραγωγή χωρίς άδεια Περιεχόμενα
E ολ =K max =U max. q=q max cos(ω 0 t+φ 0 ) q= ω 0 q max sin (ω 0 t+φ 0 ) K max. q max. ω 2 2. =1/2k ισοδ
 q= ω 0 q max sin (ω 0 t+φ 0 ) K max. q max. ω 2 2. =1/2k ισοδ") Στο προηγούμενο κείμενο είδαμε πως από την εξίσωση της ενέργειας του μηχανικου συστηματος, χρησιμοποιωντας de/dt =0, φτάνουμε στην εξισωση της ταλάντωσης. Σε πολλες περιπτώσεις ο τροπος αυτος ειναι πιο
Στο προηγούμενο κείμενο είδαμε πως από την εξίσωση της ενέργειας του μηχανικου συστηματος, χρησιμοποιωντας de/dt =0, φτάνουμε στην εξισωση της ταλάντωσης. Σε πολλες περιπτώσεις ο τροπος αυτος ειναι πιο
Δυναμική Μηχανών I. Διάλεξη 4. Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
 Δυναμική Μηχανών I Διάλεξη 4 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Περιεχόμενα: Μοντελοποίηση Μηχανικών Συστημάτων Ν Βαθμών Ελευθερίας Μηχανικά δυναμικά συστήματα πολλών Β.Ε. Μοντελοποίηση
Δυναμική Μηχανών I Διάλεξη 4 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Περιεχόμενα: Μοντελοποίηση Μηχανικών Συστημάτων Ν Βαθμών Ελευθερίας Μηχανικά δυναμικά συστήματα πολλών Β.Ε. Μοντελοποίηση
Διάλεξη #10. Διδάσκων: Φοίβος Μυλωνάς. Γραφικά με υπολογιστές. Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής Χειμερινό εξάμηνο.
 Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής Χειμερινό εξάμηνο Γραφικά με υπολογιστές Διδάσκων: Φοίβος Μυλωνάς fmlonas@ionio.gr Διάλεξη # Δ Μετασχηματισμοί (γενικά) Γραμμικοί Μετασχηματισμοί Απλοί Συσχετισμένοι
Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής Χειμερινό εξάμηνο Γραφικά με υπολογιστές Διδάσκων: Φοίβος Μυλωνάς fmlonas@ionio.gr Διάλεξη # Δ Μετασχηματισμοί (γενικά) Γραμμικοί Μετασχηματισμοί Απλοί Συσχετισμένοι
υναµική Μηχανών Ι Ακαδηµαϊκό έτος : Ε. Μ. Π. Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι - 21.
 υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 00-0 ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι -. - υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 00-0 Cpyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 00. Με επιφύλαξη
υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 00-0 ΥΝΑΜΙΚΗ ΜΗΧΑΝΩΝ Ι -. - υναµική Μηχανών Ι Ακαδηµαϊκό έτος: 00-0 Cpyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 00. Με επιφύλαξη
ΦΥΣ Διαλ Κινηµατική και Δυναµική Κυκλικής κίνησης
 ΦΥΣ - Διαλ.4 Κινηµατική και Δυναµική Κυκλικής κίνησης Κυκλική κίνηση ΦΥΣ - Διαλ.4 Ορίζουµε τα ακόλουθα µοναδιαία διανύσµατα: ˆ βρίσκεται κατά µήκος του διανύσµατος της ακτίνας θˆ είναι εφαπτόµενο του κύκλου
ΦΥΣ - Διαλ.4 Κινηµατική και Δυναµική Κυκλικής κίνησης Κυκλική κίνηση ΦΥΣ - Διαλ.4 Ορίζουµε τα ακόλουθα µοναδιαία διανύσµατα: ˆ βρίσκεται κατά µήκος του διανύσµατος της ακτίνας θˆ είναι εφαπτόµενο του κύκλου
Μαθηματική Ανάλυση Ι
 Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Μαθηματική Ανάλυση Ι Ενότητα 9: Εφαρμογές Ολοκληρωμάτων Επίκουρος Καθηγητής Θ. Ζυγκιρίδης e-mil: tzgiridis@uowm.gr Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών
Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Μαθηματική Ανάλυση Ι Ενότητα 9: Εφαρμογές Ολοκληρωμάτων Επίκουρος Καθηγητής Θ. Ζυγκιρίδης e-mil: tzgiridis@uowm.gr Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών
Δυναμική και Έλεγχος E-L Ηλεκτρομηχανικών Συστημάτων
 Δυναμική και Έλεγχος E-L Ηλεκτρομηχανικών Συστημάτων Ενότητα 6: Δυναμική μηχανής συνεχούς ρεύματος Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών
Δυναμική και Έλεγχος E-L Ηλεκτρομηχανικών Συστημάτων Ενότητα 6: Δυναμική μηχανής συνεχούς ρεύματος Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών
κινηµατική καταστατική = k θ ισορροπία στροφικό ελατήριο
 u Η κινηµατική u= sinθ θ θ καταστατική M ισορροπία = k θ M = H cosθ H στροφικό ελατήριο k Μ H k = u ΕΝΕΡΓΕΙΑΚΗ ΙΣΟΡΡΟΠΙΑ δυναµική ενέργεια Π = U + V Π = 1 + k θ H u ( ) καταστατική M = k θ κινηµατική u=
u Η κινηµατική u= sinθ θ θ καταστατική M ισορροπία = k θ M = H cosθ H στροφικό ελατήριο k Μ H k = u ΕΝΕΡΓΕΙΑΚΗ ΙΣΟΡΡΟΠΙΑ δυναµική ενέργεια Π = U + V Π = 1 + k θ H u ( ) καταστατική M = k θ κινηµατική u=
ΑΣΚΗΣΗ 11. έκδοση ΕΧ b
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΣΚΗΣΗ 11 έκδοση ΕΧ11-2015b Copyright Ε.Μ.Π. - 2015 Σχολή Μηχανολόγων
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΣΚΗΣΗ 11 έκδοση ΕΧ11-2015b Copyright Ε.Μ.Π. - 2015 Σχολή Μηχανολόγων
ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 19//013 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 υ (m/s) Σώμα μάζας m = 1Kg κινείται σε ευθύγραμμη τροχιά
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 19//013 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ 1 υ (m/s) Σώμα μάζας m = 1Kg κινείται σε ευθύγραμμη τροχιά
Τριγωνοµετρική (ή πολική) µορφή µιγαδικού αριθµού. Έστω z = x+ yi ένας µη µηδενικός µιγαδικός αριθµός και OM
 µορφή µιγαδικού αριθµού. Έστω z = x+ yi ένας µη µηδενικός µιγαδικός αριθµός και OM") 1 Τριγωνοµετρική (ή πολική µορφή µιγαδικού αριθµού Έστω z = x+ yi ένας µη µηδενικός µιγαδικός αριθµός και OM η αντίστοιχη διανυσµατική ακτίνα του Ονοµάζοµε όρισµα του µιγαδικού αριθµού z κάθε µια από τις
1 Τριγωνοµετρική (ή πολική µορφή µιγαδικού αριθµού Έστω z = x+ yi ένας µη µηδενικός µιγαδικός αριθµός και OM η αντίστοιχη διανυσµατική ακτίνα του Ονοµάζοµε όρισµα του µιγαδικού αριθµού z κάθε µια από τις
Κεφάλαιο 3 Πολλαπλά Ολοκληρώματα
 Κεφάλαιο Πολλαπλά Ολοκληρώματα Διπλά Ολοκληρώματα. Έστω ότι η f ( είναι, ) ορισμένη σε ένα ορθογώνιο χωρίο : a b, c d d ΔA (, ) Δ c Δ a b Το οποίο διαμερίζουμε σε ορθογώνια υποχωρία (, ). Σχηματίζουμε
Κεφάλαιο Πολλαπλά Ολοκληρώματα Διπλά Ολοκληρώματα. Έστω ότι η f ( είναι, ) ορισμένη σε ένα ορθογώνιο χωρίο : a b, c d d ΔA (, ) Δ c Δ a b Το οποίο διαμερίζουμε σε ορθογώνια υποχωρία (, ). Σχηματίζουμε
Λύσεις στο επαναληπτικό διαγώνισμα 3
 Τμήμα Μηχανικών Οικονομίας και Διοίκησης Απειροστικός Λογισμός ΙΙ Γ. Καραγιώργος ykarag@aegean.gr Λύσεις στο επαναληπτικό διαγώνισμα Διπλά Ολοκληρώματα Άσκηση (Υπολογισμός διπλού ολοκληρώματος- Αλλαγή
Τμήμα Μηχανικών Οικονομίας και Διοίκησης Απειροστικός Λογισμός ΙΙ Γ. Καραγιώργος ykarag@aegean.gr Λύσεις στο επαναληπτικό διαγώνισμα Διπλά Ολοκληρώματα Άσκηση (Υπολογισμός διπλού ολοκληρώματος- Αλλαγή
ΣΥΝΑΡΤΗΣΗ ΜΕΤΑΦΟΡΑΣ & ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΥΝΑΡΤΗΣΗ ΜΕΤΑΦΟΡΑΣ & ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE έκδοση DΥΝI-TFLT_016b
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΥΝΑΡΤΗΣΗ ΜΕΤΑΦΟΡΑΣ & ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE έκδοση DΥΝI-TFLT_016b
Κβαντική Φυσική Ι. Ενότητα 29: Το άτομο του υδρογόνου. Ανδρέας Τερζής Σχολή Θετικών Επιστημών Τμήμα Φυσικής
 Κβαντική Φυσική Ι Ενότητα 29: Το άτομο του υδρογόνου Ανδρέας Τερζής Σχολή Θετικών Επιστημών Τμήμα Φυσικής Σκοποί ενότητας Σκοπός της ενότητας είναι να δώσει μια πλήρη μαθηματική- κβαντομηχανική μελέτη
Κβαντική Φυσική Ι Ενότητα 29: Το άτομο του υδρογόνου Ανδρέας Τερζής Σχολή Θετικών Επιστημών Τμήμα Φυσικής Σκοποί ενότητας Σκοπός της ενότητας είναι να δώσει μια πλήρη μαθηματική- κβαντομηχανική μελέτη
ΜΑΘΗΜΑΤΙΚΑ ΙΙ Παραδείγματα Στις Μερικές Παραγώγους Και τον Κανόνα Αλυσιδωτής Παραγώγισης
 ΜΑΘΗΜΑΤΙΚΑ ΙΙ Παραδείγματα Στις Μερικές Παραγώγους Και τον Κανόνα Αλυσιδωτής Παραγώγισης Άσκηση Αν t ( ) < cos t,sin( t) > δύο τρόπους και gt () 3t 4 d gt να υπολογισθεί η παράγωγος ( ()) με Λύση 1 ος
ΜΑΘΗΜΑΤΙΚΑ ΙΙ Παραδείγματα Στις Μερικές Παραγώγους Και τον Κανόνα Αλυσιδωτής Παραγώγισης Άσκηση Αν t ( ) < cos t,sin( t) > δύο τρόπους και gt () 3t 4 d gt να υπολογισθεί η παράγωγος ( ()) με Λύση 1 ος
( ) Ολική στροφορμή L = p! i. L =! R M! v + ri m i vi. r i. q Ορίζουμε την θέση ενός σημείου I από το κέντρο μάζας: r! i
 Ολική στροφορμή L = p! i. L =! R M! v + ri m i vi. r i. q Ορίζουμε την θέση ενός σημείου I από το κέντρο μάζας: r! i") ΦΥΣ - Διαλ.03 Ολική στροφορμή q Ορίζουμε την θέση ενός σημείου I από το κέντρο μάζας: r = r R q Ορίζουμε επίσης τις ταχύτητες: v = " r v = και R " Ø Υπολογίζουμε την ολική στροφορμή L = r p = L = R M v
ΦΥΣ - Διαλ.03 Ολική στροφορμή q Ορίζουμε την θέση ενός σημείου I από το κέντρο μάζας: r = r R q Ορίζουμε επίσης τις ταχύτητες: v = " r v = και R " Ø Υπολογίζουμε την ολική στροφορμή L = r p = L = R M v
F (x) = kx. F (x )dx. F = kx. U(x) = U(0) kx2
 = kx. F (x )dx. F = kx. U(x) = U(0) kx2") F (x) = kx x k F = F (x) U(0) U(x) = x F = kx 0 F (x )dx U(x) = U(0) + 1 2 kx2 x U(0) = 0 U(x) = 1 2 kx2 U(x) x 0 = 0 x 1 U(x) U(0) + U (0) x + 1 2 U (0) x 2 U (0) = 0 U(x) U(0) + 1 2 U (0) x 2 U(0) =
F (x) = kx x k F = F (x) U(0) U(x) = x F = kx 0 F (x )dx U(x) = U(0) + 1 2 kx2 x U(0) = 0 U(x) = 1 2 kx2 U(x) x 0 = 0 x 1 U(x) U(0) + U (0) x + 1 2 U (0) x 2 U (0) = 0 U(x) U(0) + 1 2 U (0) x 2 U(0) =
( )U 1 ( θ )U 3 ( ) = U 3. ( ) όπου U j περιγράφει περιστροφή ως προς! e j. Γωνίες Euler. ω i. ω = ϕ ( ) = ei = U ij ej j
U 1 ( θ )U 3 ( ) = U 3. ( ) όπου U j περιγράφει περιστροφή ως προς! e j. Γωνίες Euler. ω i. ω = ϕ ( ) = ei = U ij ej j") Γωνίες Euler ΦΥΣ 11 - Διαλ.3 1 q Όλοι σχεδόν οι υπολογισµοί που έχουµε κάνει για την κίνηση ενός στερεού στο σύστηµα συντεταγµένων του στερεού σώµατος Ø Για παράδειγµα η γωνιακή ταχύτητα είναι: ω = i ω
Γωνίες Euler ΦΥΣ 11 - Διαλ.3 1 q Όλοι σχεδόν οι υπολογισµοί που έχουµε κάνει για την κίνηση ενός στερεού στο σύστηµα συντεταγµένων του στερεού σώµατος Ø Για παράδειγµα η γωνιακή ταχύτητα είναι: ω = i ω
N/m, k 2 = k 4 = 6 N/m και m=2 kgr. (α) k 1 m k 3 k 4. (β) k 12 m k 34. k 12 = k 1 +k 2 = 3+6 = 9 N/m (1) k k = = = = 2 N/m (2) (3) k 2.
 k 1 m k 3 k 4. (β) k 12 m k 34. k 12 = k 1 +k 2 = 3+6 = 9 N/m (1) k k = = = = 2 N/m (2) (3) k 2.") ΚΕΦΑΛΑΙΟ ΤΑΛΑΝΤΩΣΗ ΥΝΑΜΙΚΏΝ ΣΥΣΤΗΜΑΤΩΝ ΜΕ ΕΝΑ ΒΑΘΜΟ ΕΛΕΥΘΕΡΙΑΣ. Ελεύθερη ταλάντωση χωρίς απόσβεση. Να βρεθεί η ιδιοσυχνότητα του συστήµατος στο σχήµα (α). ίνεται 3 3 N/m, 4 6 N/m και m gr. (α) m 3 4 (β)
ΚΕΦΑΛΑΙΟ ΤΑΛΑΝΤΩΣΗ ΥΝΑΜΙΚΏΝ ΣΥΣΤΗΜΑΤΩΝ ΜΕ ΕΝΑ ΒΑΘΜΟ ΕΛΕΥΘΕΡΙΑΣ. Ελεύθερη ταλάντωση χωρίς απόσβεση. Να βρεθεί η ιδιοσυχνότητα του συστήµατος στο σχήµα (α). ίνεται 3 3 N/m, 4 6 N/m και m gr. (α) m 3 4 (β)
v = r r + r θ θ = ur + ωutθ r = r cos θi + r sin θj v = u 1 + ω 2 t 2
 ΑΠΑΝΤΗΣΕΙΣ ΣΤΑ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ ΦΥΣΙΚΉΣ Ι ΤΜΗΜΑ ΧΗΜΕΙΑΣ, 9 ΙΑΝΟΥΑΡΙΟΥ 019 ΚΏΣΤΑΣ ΒΕΛΛΙΔΗΣ, cvellid@phys.uoa.r, 10 77 6895 ΘΕΜΑ 1: Σώµα κινείται µε σταθερή ταχύτητα u κατά µήκος οριζόντιας ράβδου που περιστρέφεται
ΑΠΑΝΤΗΣΕΙΣ ΣΤΑ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ ΦΥΣΙΚΉΣ Ι ΤΜΗΜΑ ΧΗΜΕΙΑΣ, 9 ΙΑΝΟΥΑΡΙΟΥ 019 ΚΏΣΤΑΣ ΒΕΛΛΙΔΗΣ, cvellid@phys.uoa.r, 10 77 6895 ΘΕΜΑ 1: Σώµα κινείται µε σταθερή ταχύτητα u κατά µήκος οριζόντιας ράβδου που περιστρέφεται
Γενικά Μαθηματικά ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 3 η : Εισαγωγικές Ένvοιες ΙI Λουκάς Βλάχος Καθηγητής Αστροφυσικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 3 η : Εισαγωγικές Ένvοιες ΙI Λουκάς Βλάχος Καθηγητής Αστροφυσικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες
ΕΡΓΑΣΙΑ 5 (Παράδοση 5/6/05) Οι ασκήσεις είναι βαθμολογικά ισοδύναμες
 Οι ασκήσεις είναι βαθμολογικά ισοδύναμες") ΕΡΓΑΣΙΑ 5 (Παράδοση 5/6/5) Οι ασκήσεις είναι βαθμολογικά ισοδύναμες ΑΣΗΣΗ 1 Ομογενής ράβδος μάζας m και μήκους L είναι στερεωμένη σε οριζόντιο άξονα Ο. Αρχικά βρίσκεται σε κατακόρυφη θέση και αφήνεται
ΕΡΓΑΣΙΑ 5 (Παράδοση 5/6/5) Οι ασκήσεις είναι βαθμολογικά ισοδύναμες ΑΣΗΣΗ 1 Ομογενής ράβδος μάζας m και μήκους L είναι στερεωμένη σε οριζόντιο άξονα Ο. Αρχικά βρίσκεται σε κατακόρυφη θέση και αφήνεται
ΚΕΦΑΛΑΙΟ 9 ΠΕΡΙΣΤΡΟΦΗ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ 18/11/2011 ΚΕΦ. 9
 ΚΕΦΑΛΑΙΟ 9 ΠΕΡΙΣΤΡΟΦΗ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ 18/11/011 ΚΕΦ. 9 1 ΓΩΝΙΑΚΗ ΚΙΝΗΣΗ: ΟΡΙΣΜΟΙ Περιστροφική κινηματική: περιγράφει την περιστροφική κίνηση. Στερεό Σώμα: Ιδανικό μοντέλο σώματος που έχει τελείως ορισμένα
ΚΕΦΑΛΑΙΟ 9 ΠΕΡΙΣΤΡΟΦΗ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ 18/11/011 ΚΕΦ. 9 1 ΓΩΝΙΑΚΗ ΚΙΝΗΣΗ: ΟΡΙΣΜΟΙ Περιστροφική κινηματική: περιγράφει την περιστροφική κίνηση. Στερεό Σώμα: Ιδανικό μοντέλο σώματος που έχει τελείως ορισμένα
ΑΣΚΗΣΗ 14. έκδοση DΥΝI-EXC b
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΣΚΗΣΗ 14 έκδοση DΥΝI-EXC14-016b Copyright Ε.Μ.Π. - 016 Σχολή
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΣΚΗΣΗ 14 έκδοση DΥΝI-EXC14-016b Copyright Ε.Μ.Π. - 016 Σχολή
Δυναμική και Έλεγχος E-L Ηλεκτρομηχανικών Συστημάτων
 Δυναμική και Έλεγχος E-L Ηλεκτρομηχανικών Συστημάτων Ενότητα 5: Παραδείγματα Περιγραφής Δυναμικών Συστημάτων III Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Δυναμική και Έλεγχος E-L Ηλεκτρομηχανικών Συστημάτων Ενότητα 5: Παραδείγματα Περιγραφής Δυναμικών Συστημάτων III Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας
Δυναμική και Έλεγχος E-L Ηλεκτρομηχανικών Συστημάτων
 Δυναμική και Έλεγχος E-L Ηλεκτρομηχανικών Συστημάτων Ενότητα : Περιγραφή Δυναμικών Συστημάτων Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών
Δυναμική και Έλεγχος E-L Ηλεκτρομηχανικών Συστημάτων Ενότητα : Περιγραφή Δυναμικών Συστημάτων Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών
Συζευγμένα ταλαντώσεις - Ένα άλλο σύστημα
 ΦΥΣ 11 - Διαλ.3 1 Συζευγμένα ταλαντώσεις - Ένα άλλο σύστημα q Το παρακάτω σύστημα είναι ανάλογο με το σύστημα των δύο εκκρεμών. q Οι δυο ιδιοσυχνότητες του συστήματος είναι ίδιες με τις ιδιοσυχνότητες
ΦΥΣ 11 - Διαλ.3 1 Συζευγμένα ταλαντώσεις - Ένα άλλο σύστημα q Το παρακάτω σύστημα είναι ανάλογο με το σύστημα των δύο εκκρεμών. q Οι δυο ιδιοσυχνότητες του συστήματος είναι ίδιες με τις ιδιοσυχνότητες
ΘΕΜΑ 1. Στο φορέα του σχήματος ζητούνται να χαραχθούν τα διαγράμματα M, Q, N. (3 μονάδες)
") ΘΕΜΑ ΔΕΔΟΜΕΝΑ: Στο φορέα του σχήματος ζητούνται να χαραχθούν τα διαγράμματα M, Q, N. (3 μονάδες) ΕΠΙΛΥΣΗ: Ο φορέας χωρίζεται στα τμήματα Α και Β. Το τμήμα Α είναι τριαρθρωτό τόξο. Απομονώνοντας το Α και
ΘΕΜΑ ΔΕΔΟΜΕΝΑ: Στο φορέα του σχήματος ζητούνται να χαραχθούν τα διαγράμματα M, Q, N. (3 μονάδες) ΕΠΙΛΥΣΗ: Ο φορέας χωρίζεται στα τμήματα Α και Β. Το τμήμα Α είναι τριαρθρωτό τόξο. Απομονώνοντας το Α και
ΦΥΣΙΚΗ (ΜΗΧΑΝΙΚΗ-ΚΥΜΑΤΙΚΗ)
") ΠΑΝΕΠΙΣΤΗΜΙΟ ΔΥΤΙΚΗΣ ΑΤΤΙΚΗΣ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ- ΗΛΕΚΤΡΟΝΙΚΩΝ ΦΥΣΙΚΗ (ΜΗΧΑΝΙΚΗ-ΚΥΜΑΤΙΚΗ) ΤΜΗΜΑ Α. ΚΑΘΗΓ. ΖΑΧΑΡΙΑΔΟΥ ΚΑΤΕΡΙΝΑ ΓΡΑΦΕΙΟ ΖΒ4 (ΡΑΓΚΟΥΣΗ-ΖΑΧΑΡΙΑΔΟΥ) E-mail: zacaria@niwa.gr Βιβλιογραφία
ΠΑΝΕΠΙΣΤΗΜΙΟ ΔΥΤΙΚΗΣ ΑΤΤΙΚΗΣ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ- ΗΛΕΚΤΡΟΝΙΚΩΝ ΦΥΣΙΚΗ (ΜΗΧΑΝΙΚΗ-ΚΥΜΑΤΙΚΗ) ΤΜΗΜΑ Α. ΚΑΘΗΓ. ΖΑΧΑΡΙΑΔΟΥ ΚΑΤΕΡΙΝΑ ΓΡΑΦΕΙΟ ΖΒ4 (ΡΑΓΚΟΥΣΗ-ΖΑΧΑΡΙΑΔΟΥ) E-mail: zacaria@niwa.gr Βιβλιογραφία
Δυναμική Μηχανών I. Διάλεξη 11. Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
 Δυναμική Μηχανών I Διάλεξη 11 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1 Περιεχόμενα Γραμμικοποίηση Ευστάθεια Απόκριση Συστημάτων 1 Β.Ε. που περιγράφονται από ΣΔΕ 1 ης τάξης 2 Πρόβλημα/Ερώτημα
Δυναμική Μηχανών I Διάλεξη 11 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1 Περιεχόμενα Γραμμικοποίηση Ευστάθεια Απόκριση Συστημάτων 1 Β.Ε. που περιγράφονται από ΣΔΕ 1 ης τάξης 2 Πρόβλημα/Ερώτημα
Δυναµική των Ροµποτικών Βραχιόνων. Κ. Κυριακόπουλος
 Δυναµική των Ροµποτικών Βραχιόνων Κ. Κυριακόπουλος Ροµποτική Αρχιτεκτονική: η Δυναµική Περιβάλλον u Ροµποτική Δυναµική q,!q Ροµποτική Κινηµατική Θέση, Προσανατολισµός και αλληλεπίδραση Η δυναµική ασχολείται
Δυναµική των Ροµποτικών Βραχιόνων Κ. Κυριακόπουλος Ροµποτική Αρχιτεκτονική: η Δυναµική Περιβάλλον u Ροµποτική Δυναµική q,!q Ροµποτική Κινηµατική Θέση, Προσανατολισµός και αλληλεπίδραση Η δυναµική ασχολείται
Μηχανισµοί & Εισαγωγή στο Σχεδιασµό Μηχανών Ακαδηµαϊκό έτος: Ε.Μ.Π. Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 3.
 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ - 3.1 - Cpright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 1. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ - 3.1 - Cpright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο υναµικής και Κατασκευών - 1. Με επιφύλαξη παντός δικαιώµατος. All rights reserved. Απαγορεύεται
Ανασκόπηση-Μάθημα 29 Σφαιρικές συντεταγμένες- Εφαρμογές διπλού και τριπλού ολοκληρώματος- -Επικαμπύλιο ολοκλήρωμα α είδους
 Τμήμα Μηχανικών Οικονομίας και Διοίκησης Απειροστικός Λογισμός ΙΙ Γ. Καραγιώργος ykarag@aegean.gr Ανασκόπηση-Μάθημα 29 Σφαιρικές συντεταγμένες- Εφαρμογές διπλού και τριπλού ολοκληρώματος- -Επικαμπύλιο
Τμήμα Μηχανικών Οικονομίας και Διοίκησης Απειροστικός Λογισμός ΙΙ Γ. Καραγιώργος ykarag@aegean.gr Ανασκόπηση-Μάθημα 29 Σφαιρικές συντεταγμένες- Εφαρμογές διπλού και τριπλού ολοκληρώματος- -Επικαμπύλιο
ΚΕΦΑΛΑΙΟ 2. Τρισδιάστατες κινήσεις
 ΚΕΦΑΛΑΙΟ Τρισδιάστατες κινήσεις Οι µονοδιάστατες κινήσεις είναι εύκολες αλλά ζούµε σε τρισδιάστατο χώρο Θα δούµε λοιπόν τώρα πως θα αντιµετωπίζοµε την κίνηση υλικού σηµείου στις τρεις διαστάσεις Ας θεωρήσοµε
ΚΕΦΑΛΑΙΟ Τρισδιάστατες κινήσεις Οι µονοδιάστατες κινήσεις είναι εύκολες αλλά ζούµε σε τρισδιάστατο χώρο Θα δούµε λοιπόν τώρα πως θα αντιµετωπίζοµε την κίνηση υλικού σηµείου στις τρεις διαστάσεις Ας θεωρήσοµε
Μοντελοποίηση Μηχανικών Συστημάτων Πολλών Βαθμών Ελευθερίας
 Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Μοντελοποίηση Μηχανικών Συστημάτων Πολλών Βαθμών Ελευθερίας Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Μοντελοποίηση Μηχανικών Συστημάτων Πολλών
Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Μοντελοποίηση Μηχανικών Συστημάτων Πολλών Βαθμών Ελευθερίας Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Μοντελοποίηση Μηχανικών Συστημάτων Πολλών
ΔΥΝΑΜΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ. Διδάσκων: Κολιόπουλος Παναγιώτης
 ΔΥΝΑΜΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ Ενότητα 1: δυναμικά φορτία Διδάσκων: Κολιόπουλος Παναγιώτης ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ 1 Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για
ΔΥΝΑΜΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ Ενότητα 1: δυναμικά φορτία Διδάσκων: Κολιόπουλος Παναγιώτης ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ 1 Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για
ΤΑΛΑΝΤΩΣΕΙΣ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΤΑΛΑΝΤΩΣΕΙΣ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ έκδοση DΥΝI-INTDYN_2016b Copyright
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΤΑΛΑΝΤΩΣΕΙΣ ΜΗΧΑΝΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ έκδοση DΥΝI-INTDYN_2016b Copyright
ΑΣΚΗΣΕΙΣ ΣΕ ΤΑΛΑΝΤΩΣΕΙΣ
 ΑΣΚΗΣΕΙΣ ΣΕ ΤΑΛΑΝΤΩΣΕΙΣ ΑΣΚΗΣΗ Ένα αντικείμενο εκτελεί απλή αρμονική κίνηση με πλάτος 4, cm και συχνότητα 4, Hz, και τη χρονική στιγμή t= περνά από το σημείο ισορροπίας και κινείται προς τα δεξιά. Γράψτε
ΑΣΚΗΣΕΙΣ ΣΕ ΤΑΛΑΝΤΩΣΕΙΣ ΑΣΚΗΣΗ Ένα αντικείμενο εκτελεί απλή αρμονική κίνηση με πλάτος 4, cm και συχνότητα 4, Hz, και τη χρονική στιγμή t= περνά από το σημείο ισορροπίας και κινείται προς τα δεξιά. Γράψτε
Δύο δίσκοι, μια ράβδος, και ένα ελατήριο
 Δύο δίσκοι, μια ράβδος, και ένα ελατήριο Στην διάταξη στου σχήματος εικονίζονται μια ράβδος μάζας Μ, δύο δίσκοι ακτίνας R και μάζας m και ένα ιδανικό ελατήριο σταθεράς k. Αρχικά το σύστημα βρίσκεται σε
Δύο δίσκοι, μια ράβδος, και ένα ελατήριο Στην διάταξη στου σχήματος εικονίζονται μια ράβδος μάζας Μ, δύο δίσκοι ακτίνας R και μάζας m και ένα ιδανικό ελατήριο σταθεράς k. Αρχικά το σύστημα βρίσκεται σε
Παράρτημα Ι. 1 Το ισόχρονο της ταλάντωσης επί κυκλοειδούς
 Παράρτημα Ι 1 Το ισόχρονο της ταλάντωσης επί κυκλοειδούς Ας θεωρήσουμε μια κυκλική στεφάνη ακτίνας a η οποία κυλίεται, χωρίς να ολισθαίνει, πάνω σε μια ευθεία (για ευκολία υποθέστε ότι η ευθεία είναι ο
Παράρτημα Ι 1 Το ισόχρονο της ταλάντωσης επί κυκλοειδούς Ας θεωρήσουμε μια κυκλική στεφάνη ακτίνας a η οποία κυλίεται, χωρίς να ολισθαίνει, πάνω σε μια ευθεία (για ευκολία υποθέστε ότι η ευθεία είναι ο
ΜΜ803 ΑΥΤΟΜΑΤΟΣ ΕΛΕΓΧΟΣ
 ΜΜ83 ΑΥΤΟΜΑΤΟΣ ΕΛΕΓΧΟΣ Εαρινό εξάµηνο 8 Λύσεις εργασίας # Λύση άσκησης : Για την πρώτη συνάρτηση ισχύει ότι sin( ωt+ θ) sinωtcosθ + cosωtsinθ άρα L[sin( ωt+ θ)] L[sin ωtcosθ + cosωtsin θ] cos θ L[sin ωt]
ΜΜ83 ΑΥΤΟΜΑΤΟΣ ΕΛΕΓΧΟΣ Εαρινό εξάµηνο 8 Λύσεις εργασίας # Λύση άσκησης : Για την πρώτη συνάρτηση ισχύει ότι sin( ωt+ θ) sinωtcosθ + cosωtsinθ άρα L[sin( ωt+ θ)] L[sin ωtcosθ + cosωtsin θ] cos θ L[sin ωt]
ΦΥΣΙΚΗ Ι. ΤΜΗΜΑ Α Ευστάθιος Στυλιάρης ΠΑΝΕΠΙΣΤΗΜΙΟN ΑΘΗΝΩΝ,, ΕΡΓΟ ΚΑΙ ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ ΔΥΝΑΜΙΚΗ ΕΝΕΡΓΕΙΑ
 ΦΥΣΙΚΗ Ι ΤΜΗΜΑ Α Ευστάθιος Στυλιάρης ΠΑΝΕΠΙΣΤΗΜΙΟN ΑΘΗΝΩΝ,, 6 7 ΕΡΓΟ ΚΑΙ ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ Έργο και Κινητική Ενέργεια Έργο Βαρυτικής Δύναμης και Δύναμης Ελατηρίου Έργο Μεταβλητής Δύναμης Ισχύς ΔΥΝΑΜΙΚΗ
ΦΥΣΙΚΗ Ι ΤΜΗΜΑ Α Ευστάθιος Στυλιάρης ΠΑΝΕΠΙΣΤΗΜΙΟN ΑΘΗΝΩΝ,, 6 7 ΕΡΓΟ ΚΑΙ ΚΙΝΗΤΙΚΗ ΕΝΕΡΓΕΙΑ Έργο και Κινητική Ενέργεια Έργο Βαρυτικής Δύναμης και Δύναμης Ελατηρίου Έργο Μεταβλητής Δύναμης Ισχύς ΔΥΝΑΜΙΚΗ
website:
 Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 6 Μαρτίου 2017 1 Εισαγωγή Κάθε φυσικό σύστημα
Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 6 Μαρτίου 2017 1 Εισαγωγή Κάθε φυσικό σύστημα
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ ΙΟΥΝΙΟΣ 2013 ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΕΜ: (ΠΤΥΧΙΟ)
") ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ ΙΟΥΝΙΟΣ 2013 ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΕΜ: (ΠΤΥΧΙΟ) 1. (α) Περιγράψτε συνοπτικά το πείραμα των Michelson και Morley (όχι απόδειξη σχέσεων). Ποιό ήταν το βασικό αποτέλεσμα του πειράματος; (β)
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ ΙΟΥΝΙΟΣ 2013 ΕΠΩΝΥΜΟ: ΟΝΟΜΑ: ΑΕΜ: (ΠΤΥΧΙΟ) 1. (α) Περιγράψτε συνοπτικά το πείραμα των Michelson και Morley (όχι απόδειξη σχέσεων). Ποιό ήταν το βασικό αποτέλεσμα του πειράματος; (β)
Δυναμική Μηχανών I. Μοντελοποίηση Mηχανικών Συστημάτων Ι: Μηχανικά Συστήματα σε Μεταφορική Κίνηση
 Δυναμική Μηχανών I 3 2 Μοντελοποίηση Mηχανικών Συστημάτων Ι: Μηχανικά Συστήματα σε Μεταφορική Κίνηση 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε
Δυναμική Μηχανών I 3 2 Μοντελοποίηση Mηχανικών Συστημάτων Ι: Μηχανικά Συστήματα σε Μεταφορική Κίνηση 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε
Με τη σύμβαση της «κινηματικής αλυσίδας», ο μηχανισμός αποτυπώνεται σε πίνακα παραμέτρων ως εξής:
 ΑΝΩΤΑΤΟ ΕΚΠΑΙ ΕΥΤΙΚΟ Ι ΡΥΜΑ ΠΕΙΡΑΙΑ ΤΕΧΝΟΛΟΓΙΚΟΥ ΤΟΜΕΑ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Τ.Ε. ΤΟΜΕΑΣ ΙΙΙ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Π. Ράλλη & Θηβών 250, 12244 Αθήνα Καθηγητής Γ. Ε. Χαμηλοθώρης αρχείο: θέμα:
ΑΝΩΤΑΤΟ ΕΚΠΑΙ ΕΥΤΙΚΟ Ι ΡΥΜΑ ΠΕΙΡΑΙΑ ΤΕΧΝΟΛΟΓΙΚΟΥ ΤΟΜΕΑ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Τ.Ε. ΤΟΜΕΑΣ ΙΙΙ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Π. Ράλλη & Θηβών 250, 12244 Αθήνα Καθηγητής Γ. Ε. Χαμηλοθώρης αρχείο: θέμα:
Κεφάλαιο 6β. Περιστροφή στερεού σώματος γύρω από σταθερό άξονα
 Κεφάλαιο 6β Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Ροπή Ροπή ( ) είναι η τάση που έχει μια δύναμη να περιστρέψει ένα σώμα γύρω από κάποιον άξονα. d είναι η κάθετη απόσταση του άξονα περιστροφής
Κεφάλαιο 6β Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Ροπή Ροπή ( ) είναι η τάση που έχει μια δύναμη να περιστρέψει ένα σώμα γύρω από κάποιον άξονα. d είναι η κάθετη απόσταση του άξονα περιστροφής
Μικρές ταλαντώσεις Συζευγμένες ταλαντώσεις
 Μικρές ταλαντώσεις Συζευγμένες ταλαντώσεις q Ταλαντώσεις εμφανίζονται παντού Ø Μικρές ταλαντώσεις γύρω από θέση ισορροπίας Ø Εμφανίζονται σε πολλά προβλήματα κβαντοµηχανικής Ø Έχουμε ήδη συναντήσει σε
Μικρές ταλαντώσεις Συζευγμένες ταλαντώσεις q Ταλαντώσεις εμφανίζονται παντού Ø Μικρές ταλαντώσεις γύρω από θέση ισορροπίας Ø Εμφανίζονται σε πολλά προβλήματα κβαντοµηχανικής Ø Έχουμε ήδη συναντήσει σε
1. Δυναμική Ενέργεια και Διατηρητικές Δυνάμεις
 . Δυναμική Ενέργεια και Διατηρητικές Δυνάμεις Εξετάζοντας την αιώρα παρατηρούμε ότι στα ανώτατα σημεία η ενέργεια μοιάζει να έχει αποθηκευτεί υπό κάποια άλλη μορφή, που συνδέεται με το ύψος της πάνω από
. Δυναμική Ενέργεια και Διατηρητικές Δυνάμεις Εξετάζοντας την αιώρα παρατηρούμε ότι στα ανώτατα σημεία η ενέργεια μοιάζει να έχει αποθηκευτεί υπό κάποια άλλη μορφή, που συνδέεται με το ύψος της πάνω από
( ) * Λύση (α) Καθώς η Χαµιλτονιανή είναι ερµιτιανός τελεστής έχουµε ότι = = = = 0. (β) Απαιτούµε
 * Λύση (α) Καθώς η Χαµιλτονιανή είναι ερµιτιανός τελεστής έχουµε ότι = = = = 0. (β) Απαιτούµε") ΚΒΑΝΤΟΜΗΧΑΝΙΚΗ Ι Τελική Εξέταση: 3 Γενάρη ( ιδάσκων: ΑΦ Τερζής) ιάρκεια εξέτασης 3 ώρες ΘΕΜΑ [555555553] Θεωρούµε κβαντικό σύστηµα που περιγράφεται από την Χαµιλτονιανή H 3ε µ iε µε ιδιοσυναρτήσεις κάποιου
ΚΒΑΝΤΟΜΗΧΑΝΙΚΗ Ι Τελική Εξέταση: 3 Γενάρη ( ιδάσκων: ΑΦ Τερζής) ιάρκεια εξέτασης 3 ώρες ΘΕΜΑ [555555553] Θεωρούµε κβαντικό σύστηµα που περιγράφεται από την Χαµιλτονιανή H 3ε µ iε µε ιδιοσυναρτήσεις κάποιου
8. ΜΑΓΝΗΤΙΣΜΟΣ. Φυσική ΙΙ Δ. Κουζούδης. Πρόβλημα 8.6.
 1 8. ΜΑΓΝΗΤΙΣΜΟΣ Πρόβλημα 8.6. Το σύρμα του παρακάτω σχήματος έχει άπειρο μήκος και διαρρέεται από ρεύμα I. Υπολογίστε με τη βοήθεια του νόμου του Biot-Savart με ολοκλήρωση το μέτρο και την κατεύθυνση
1 8. ΜΑΓΝΗΤΙΣΜΟΣ Πρόβλημα 8.6. Το σύρμα του παρακάτω σχήματος έχει άπειρο μήκος και διαρρέεται από ρεύμα I. Υπολογίστε με τη βοήθεια του νόμου του Biot-Savart με ολοκλήρωση το μέτρο και την κατεύθυνση
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα. Μηχανική Ι. Ενότητα 6: Ασκήσεις. Κωνσταντίνος Ι.
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Μηχανική Ι Ενότητα 6: Ασκήσεις Κωνσταντίνος Ι. Γιαννακόπουλος Τμήμα Μηχανολογίας Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Μηχανική Ι Ενότητα 6: Ασκήσεις Κωνσταντίνος Ι. Γιαννακόπουλος Τμήμα Μηχανολογίας Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται
Ομαλή Κυκλική Κίνηση 1. Γίνεται με σταθερή ακτίνα (Το διάνυσμα θέσης έχει σταθερό μέτρο και περιστρέφεται γύρω από σταθερό σημείο.
 Ομαλή Κυκλική Κίνηση 1. Γίνεται με σταθερή ακτίνα (Το διάνυσμα θέσης έχει σταθερό μέτρο και περιστρέφεται γύρω από σταθερό σημείο. 1 3 υ υ 1 1. Το μέτρο της ταχύτητας του υλικού σημείου είναι σταθερό.
Ομαλή Κυκλική Κίνηση 1. Γίνεται με σταθερή ακτίνα (Το διάνυσμα θέσης έχει σταθερό μέτρο και περιστρέφεται γύρω από σταθερό σημείο. 1 3 υ υ 1 1. Το μέτρο της ταχύτητας του υλικού σημείου είναι σταθερό.
ΑΠΟΣΒΕΣΗ ΤΑΛΑΝΤΩΣΕΩΝ ΔΥΝΑΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΠΟΣΒΕΣΗ ΤΑΛΑΝΤΩΣΕΩΝ ΔΥΝΑΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ έκδοση DΥΝI-VIS_2017a
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ & ΚΑΤΑΣΚΕΥΩΝ ΤΟΜΕΑΣ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΚΑΤΑΣΚΕΥΩΝ & ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΑΠΟΣΒΕΣΗ ΤΑΛΑΝΤΩΣΕΩΝ ΔΥΝΑΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ έκδοση DΥΝI-VIS_2017a
) A a r a. Κίνηση σωματιδίου κάτω από επίδραση δύναμης. T = 1 2 m (!r 2 + r 2!θ 2. A a r a + C. = Ar a 1 dr V = F = V r V = Fdr
 A a r a. Κίνηση σωματιδίου κάτω από επίδραση δύναμης. T = 1 2 m (!r 2 + r 2!θ 2. A a r a + C. = Ar a 1 dr V = F = V r V = Fdr") Κίνηση σωματιδίου κάτω από επίδραση δύναμης ΦΥΣ 211 - Διαλ.05 1 Έστω ένα σωματίδιο κινείται κάτω από την επίδραση μιας δύναμης F = Ar α 1 που έχει διεύθυνση προς την αρχή των αξόνων. Τα Α και α είναι σταθερές.
Κίνηση σωματιδίου κάτω από επίδραση δύναμης ΦΥΣ 211 - Διαλ.05 1 Έστω ένα σωματίδιο κινείται κάτω από την επίδραση μιας δύναμης F = Ar α 1 που έχει διεύθυνση προς την αρχή των αξόνων. Τα Α και α είναι σταθερές.
ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 4// ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ α) Για δεδομένη αρχική ταχύτητα υ, με ποια γωνία
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 4// ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ α) Για δεδομένη αρχική ταχύτητα υ, με ποια γωνία
ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΝΟΜΟΥ ΤΟΥ ΝΕΥΤΩΝΑ
 ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΝΟΜΟΥ ΤΟΥ ΝΕΥΤΩΝΑ ΑΣΚΗΣΗ 1 Στο πάτωμα ενός ανελκυστήρα βρίσκεται ένας ζυγός. Αν πάνω στο ζυγό τοποθετηθεί ένα αντικείμενο το οποίο έχει μάζα m=85, kg και ο ανελκυστήρας κινείται με σταθερή
ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΝΟΜΟΥ ΤΟΥ ΝΕΥΤΩΝΑ ΑΣΚΗΣΗ 1 Στο πάτωμα ενός ανελκυστήρα βρίσκεται ένας ζυγός. Αν πάνω στο ζυγό τοποθετηθεί ένα αντικείμενο το οποίο έχει μάζα m=85, kg και ο ανελκυστήρας κινείται με σταθερή
Geodesic Equations for the Wormhole Metric
 Geodesic Equations for the Wormhole Metric Dr R Herman Physics & Physical Oceanography, UNCW February 14, 2018 The Wormhole Metric Morris and Thorne wormhole metric: [M S Morris, K S Thorne, Wormholes
Geodesic Equations for the Wormhole Metric Dr R Herman Physics & Physical Oceanography, UNCW February 14, 2018 The Wormhole Metric Morris and Thorne wormhole metric: [M S Morris, K S Thorne, Wormholes