The logic of the Mechanics of Materials
|
|
|
- Λυσιστράτη Ζάχος
- 8 χρόνια πριν
- Προβολές:
Transcript
1 Torsion

2 The logic of the Mechanics of Materials
3 Torsion


4 Chapter 5 Torsion



5 Torsional failures (ductile, buckling, buckling):
6 Bars subjected to Torsion Let us now consider a straight bar supported at one end and acted upon by two pairs of equal and opposite forces. P1 P2 Then each pair of forces and form a couple that tend to twist the bar about its longitudinal axis, thus producing surface tractions and moments. Then we can write the moments as T 1= Pd 1 1 T2= Pd 2 2




7 Torsion of Circular Shafts In this chapter, we will examine uniaxial bars subject to torque. Where does this occur? Transmission Shaft Force Couples
 produce internal")

8 Recall: External loads (T) produce internal loads which produce deformation, strain and stress. Torsion

 How does the bar deform?")

.")
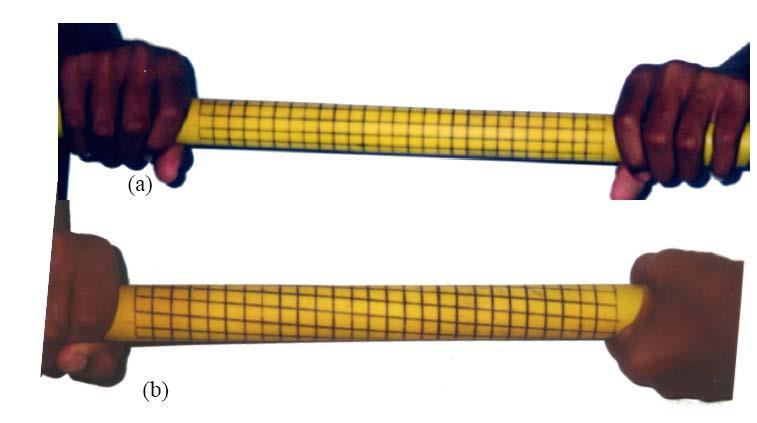
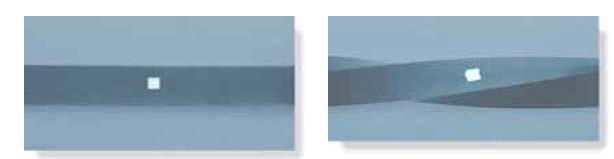
9 Torsion of Circular Shafts cont d We assume Bar is in pure torsion Small rotations (the length and radius will not change) How does the bar deform? Cross-section of the bar remains the same shape, bar is simply rotating. Cross-section remains perpendicular to axis of cylinder (cylinder does not warp). Not true for most non-circular bars



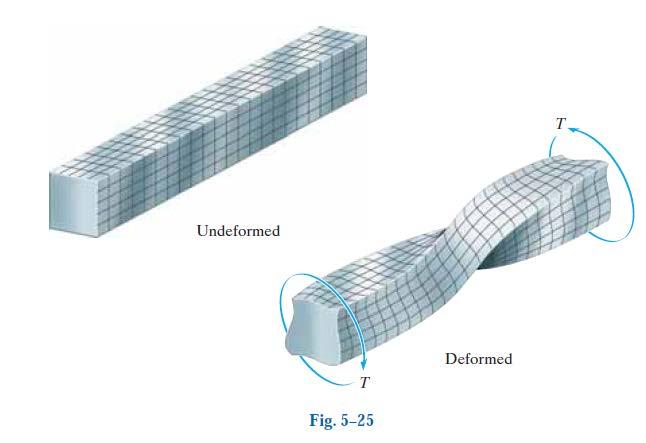
10 Torsional Deformation of a Circular Shaft Torque is a moment that twists a member about its longitudinal axis. If the angle of rotation is small, the length of the shaft and its radius will remain unchanged. Chapter 5: Torsion

 = 0 at x = 0 φ (x) = φ at x = L For pure torsion, φ is")
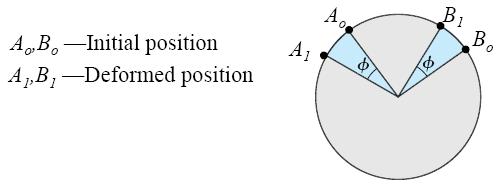
11 Angle of Twist Deformation of a circular shaft subjected to pure torsion Fix left end of shaft A moves to A φ = angle of twist (in radians) What are the boundary conditions on φ? x φ (x) = 0 at x = 0 φ (x) = φ at x = L For pure torsion, φ is linear.




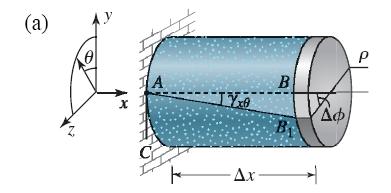
12 Shearing Strain Calculate the surface shear strain in the cylinder. Consider an element of length dx. Recall we assume small φ & small γ. dx This equation applies to any function φ (x). For pure torsion φ (x) = φ x / L, so C C





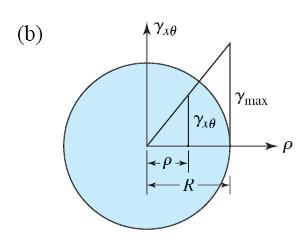
13 Shearing Strain cont d Maximum shear strain on surface The maximum shear strain on the surface of the cylinder occurs when ρ=c. We can express the shearing strain at any distance from the axis of the shaft as



14 The Torsion Formula When material is linear-elastic, Hooke s law applies. A linear variation in shear strain leads to a corresponding linear variation in shear stress along any radial line on the cross section.



15 The Torsion Formula If the shaft has a solid circular cross section, If a shaft has a tubular cross section,


16 Stress Profiles: Shear stress profile YOU MUST UNDERSTAND THIS!!!! Where is shear stress max? zero? How does it vary along the length and circumference?

17 Stress Profiles:

18 Shearing Strain cont d We can also apply the equation for maximum surface shear strain to a hollow circular tube. c c This applies for all types of materials: elastic, linear, nonlinear, plastic, etc.

19 Elastic Shearing Stress Calculate shear stress in a bar made of linearly elastic material. Recall Hooke s Law for shearing stress: τ=gγ


20 Torque We still need to relate τ to the applied torque T, which is generally the known, applied load. First, find the resultant moment acting on a cross-section and set this equal to T. c
21 Torque cont d Continuing from previous slide: Where J is the polar moment of inertia of the cross section of the bar Plug this into the equation for τ max.

22 Torque cont d For a non-uniform bar n n φ = φ = T i L i i i=1 i =1 G i J i For a continuously varying bar


23 Inclined Plane Cut a rectangular element along the plane at an angle θ.

24 Inclined Plane cont d y x

25 Inclined Plane cont d τ max occurs at θ = 0º, ±90º σ max occurs at θ = ±45º τ max = σ max When σ θ is max, τ θ = 0, and when τ θ is max, σ θ =0.

26 Transmission Shafts In a transmission, a circular shaft transmits mechanical power from one device to another. Generator Turbine ω = angular speed of rotation of the shaft The shaft applies a torque T to another device To satisfy equilibrium the other device applies torque T to the shaft. The power transmitted by the shaft is
27 Transmission Shafts cont d Units for P=Tω ω = rad/s T = N m (SI) T = ft lb (English) P = Watts (1 W = 1 N m/s) (SI) P = ft lb/s (1 horsepower = hp = 550 ft lb/s) (English) We can also express power in terms of frequency.


28 Stress Concentrations in Circular Shafts Up to now, we assumed that transmission shafts are loaded at the ends through solidly attached, rigid end plates. In practice, torques are applied through flange couplings and fitted keyways, which produce high stress concentrations. Fitted keyway Flange coupling One way to reduce stress concentrations is through the use of a fillet.


29 Stress Concentrations in Circular Shafts cont d Maximum shear stress at the fillet τ max = K Tc J Fillet Tc/J is calculated for the smaller-diameter shaft K = stress concentration factor
30 Στρέψη περιορισμοί για άξονες κυκλικής διατομής Το μήκος του μέλους που υπόκειται σε στρέψη είναι σημαντικά μεγαλύτερο από τη μεγαλύτερη διάσταση της διατομής. Η περιοχή που εξετάζεται δεν περιέχει συγκεντρώσεις τάσεων. Η μεταβολή της εξωτερικής στρέψης ή η μεταβολή των εμβαδών των διατομών είναι βαθμιαία, με εξαίρεση τις περιοχές συγκέντρωσης τάσεων. ΟΙ εξωτερικές στρεπτικές ροπές δεν εξαρτώνται από το χρόνο, το πρόβλημα είναι στατικό. Η διατομή είναι κυκλική, επιτρέποντας τη χρήση της συμμετρίας ως προς τον άξονα για τη μείωση της παραμόρφωσης.
31 Στρέψη - Παραδοχές 1. Τα επίπεδα τμήματα που είναι κάθετα στον άξονα περιστροφής παραμένουν επίπεδα κατά τη διάρκεια της παραμόρφωσης. 2. Σε μια διατομή, όλες οι ακτινικές γραμμές περιστρέφονται κατά ίσες γωνίες κατά τη διάρκεια της παραμόρφωσης. 3. Οι ακτινικές γραμμές παραμένουν ευθείες κατά τη διάρκεια της παραμόρφωσης. 4. Οι παραμορφώσεις είναι μικρές. 5. Το υλικό είναι γραμμικά ελαστικό. 6. Το υλικό είναι ισότροπο. 7. Το υλικό είναι ομογενές κατά μήκος της περιοχής της διατομής.
32
33
34
 Η εξωτερική (και επομένως και η εσωτερική) στρέψη δεν μεταβάλλεται με το x μεταξύ x 1 και x 2 (T =")
35 ΠΑΡΑΔΟΧΕΣ Το υλικό είναι ομογενές μεταξύ x 1 και x 2 (G=σταθερό) Ο άξονας δεν λαμβάνει κωνοειδές σχήμα (J =σταθερή) Η εξωτερική (και επομένως και η εσωτερική) στρέψη δεν μεταβάλλεται με το x μεταξύ x 1 και x 2 (T = σταθερό)
36 NON-UNIFORM TORSION Uniform/Pure torsion torsion of prismatic bar subjected to torques acting only at the ends Non-uniform torsion the bar need not be prismatic and the applied torque may act anywhere along the axis of bar Non-uniform torsion can be analysed by Applying formula of pure torsion to finite segments of the bar then adding the results Applying formula to differential elements of the bar and then integrating
37 NON-UNIFORM TORSION CASE 1: Bar consisting of prismatic segments with constant torque throughout each segment φ = n n = i i φi i= 1 i= 1 Gi ( I p ) i T L CASE 2: Bar with continuously varying cross sections and constant torque φ L φ L = d = Tdx GI p ( x) 0 0
38 NON-UNIFORM TORSION CASE 3: Bar with continuously varying cross sections and continuously varying torque φ L L = dφ = T ( x) dx GI ( x) 0 0 p
39 NON-UNIFORM TORSION Limitations Analyses described valid for bar made of linearly elastic materials Circular cross sections (Solid /hollow) Stresses determined from the torsion formula valid in region of the bar away from stress concentrations (diameter changes abruptly/concentrated torque applied For the case above, Angle of twist still valid Changes in diameter is are small and gradually (angle of taper max 10o)

40 SOLID NON-CIRCULAR SHAFTS

41 Solid Noncircular Shafts The maximum shear stress and the angle of twist for solid noncircular shafts are tabulated as below:
42 Comparison of Axial and Torsion formulae. AE =Axial rigidity Axial Stiffness AE k A = L Axial Flexibilty: Axial displacement δ = i Axial stress σ = P A PL i i A E i i 1 f A = k A GJ =Torsional rigidity Torsional Stiffness GJ k T = L Torsional Flexibilty: Torsional displacement φ = i Ti Li J G Torsional stress τ = Tρ J i i 1 f T = k T

43 Sample Problem 1 SOLUTION: Cut sections through shafts AB and BC and perform static equilibrium analyses to find torque loadings. Shaft BC is hollow with inner and outer diameters of 90 mm and 120 mm, respectively. Shafts AB and CD are solid and of diameter d. For the loading shown, determine (a) the minimum and maximum shearing stress in shaft BC, (b) the required diameter d of shafts AB and CD if the allowable shearing stress in these shafts is 65 MPa. Apply elastic torsion formulas to find minimum and maximum stress on shaft BC. Given allowable shearing stress and applied torque, invert the elastic torsion formula to find the required diameter.


44 Sample Problem 1 SOLUTION: Cut sections through shafts AB and BC and perform static equilibrium analysis to find torque loadings. Fig. 1 Free-body diagram for section between A and B. Fig. 2 Free-body diagram for section between B and C. T M AB x = = 0 = ( 6kN m) T M = 0 = ( 6kN m) + ( 14kN m) 6kN m = T CD AB T BC x = 20kN m T BC

![3 Shearing stress distribution on cross section. π = 2 4 4 π 4 4 ( c c ) = [( 0.060) ( 0.045) ] 2 1 = 13.92 10 max min max min = τ 2 = 6 = 86.](/docs-images/62/48362524/images/45-1.jpg "2MPa = = c c 1 2 2 m T BC c J 64.7 MPa 2 4 = τmin 86.2MPa ( 20kN m)( 0.060 m) 13.92 10 = 45mm 60mm 6 m 4 τ τ max min = 86.2MPa = Fig.")
45 Sample Problem 1 Apply elastic torsion formulas to find minimum and maximum stress on shaft BC. Given allowable shearing stress and applied torque, invert the elastic torsion formula to find the required diameter. J τ τ τ τ Fig. 3 Shearing stress distribution on cross section. π = π 4 4 ( c c ) = [( 0.060) ( 0.045) ] 2 1 = max min max min = τ 2 = 6 = 86.2MPa = = c c m T BC c J 64.7 MPa 2 4 = τmin 86.2MPa ( 20kN m)( m) = 45mm 60mm 6 m 4 τ τ max min = 86.2MPa = Fig. 4 Free-body diagram of shaft portion AB. τ max 64.7 MPa = Tc J = c = π 2 3 Tc c m 4 65MPa d 6kN m = 3 c π 2 = 2 c = 77.8mm
46 Statically Indeterminate Shafts (a) Shaft with central applied torque and fixed ends. (b) free-body diagram of shaft AB. (c) Free-body diagrams for solid and hollow segments. Given the shaft dimensions and the applied torque, we would like to find the torque reactions at A and B. From a free-body analysis of the shaft, T A + T B = 90lb ft which is not sufficient to find the end torques. The problem is statically indeterminate. Divide the shaft into two components which must have compatible deformations, TAL TBL φ = φ φ2 = = 0 TB = J G J G Substitute into the original equilibrium equation, T L 1 J2 T = 90lb ft L J A + A L1 J L J T A




47 Example 2 The tapered shaft is made of a material having a shear modulus G. Determine the angle of twist of its end B when subjected to the torque. Solution: From free body diagram, the internal torque is T. Thus, at x, For angle of twist,
48 STATICALLY INDETERMINATE TORQUE-LOADED MEMBERS Procedure for analysis: use both equilibrium and compatibility equations Equilibrium Draw a free-body diagram of the shaft in order to identify all the torques that act on it. Then write the equations of moment equilibrium about the axis of the shaft. Compatibility To write the compatibility equation, investigate the way the shaft will twist when subjected to the external loads, and give consideration as to how the supports constrain the shaft when it is twisted.
49 STATICALLY INDETERMINATE TORQUE-LOADED MEMBERS (cont) Express the compatibility condition in terms of the rotational displacements caused by the reactive torques, and then use a torque-displacement relation, such as Φ = TL/JG, to relate the unknown torques to the unknown displacements. Solve the equilibrium and compatibility equations for the unknown reactive torques. If any of the magnitudes have a negative numerical value, it indicates that this torque acts in the opposite sense of direction to that indicated on the free-body diagram.

50 EXAMPLE 3 The solid steel shaft shown in Fig. has a diameter of 20 mm. If it is subjected to the two torques, determine the reactions at the fixed supports A and B.
 Since the ends of the shaft are fixed, the angle of twist of one end of the shaft with respect to the other must be zero.")
51 EXAMPLE 3 (cont) Solution It is seen that the problem is statically indeterminate since there is only one available equation of equilibrium and there are 2 unknowns M T b x = T A = 0 (1) Since the ends of the shaft are fixed, the angle of twist of one end of the shaft with respect to the other must be zero. φ A / B = 0
 TB + JG T = 645 N m B T A JG (Ans) The negative sign indicates that acts in the opposite direction of that shown in Fig.")
52 EXAMPLE 3 (cont) Solution Using the sign convention established, Using Eq. 1, ( 0.2) ( 800 T )( 1.5) ( 300 T )( 0.3) TB + JG T = 645 N m B T A JG (Ans) The negative sign indicates that acts in the opposite direction of that shown in Fig. (b) B + = 345 N m B JG = 0
Chapter 7 Transformations of Stress and Strain
 Chapter 7 Transformations of Stress and Strain INTRODUCTION Transformation of Plane Stress Mohr s Circle for Plane Stress Application of Mohr s Circle to 3D Analsis 90 60 60 0 0 50 90 Introduction 7-1
Chapter 7 Transformations of Stress and Strain INTRODUCTION Transformation of Plane Stress Mohr s Circle for Plane Stress Application of Mohr s Circle to 3D Analsis 90 60 60 0 0 50 90 Introduction 7-1
Strain gauge and rosettes
 Strain gauge and rosettes Introduction A strain gauge is a device which is used to measure strain (deformation) on an object subjected to forces. Strain can be measured using various types of devices classified
Strain gauge and rosettes Introduction A strain gauge is a device which is used to measure strain (deformation) on an object subjected to forces. Strain can be measured using various types of devices classified
MECHANICAL PROPERTIES OF MATERIALS
 MECHANICAL PROPERTIES OF MATERIALS! Simple Tension Test! The Stress-Strain Diagram! Stress-Strain Behavior of Ductile and Brittle Materials! Hooke s Law! Strain Energy! Poisson s Ratio! The Shear Stress-Strain
MECHANICAL PROPERTIES OF MATERIALS! Simple Tension Test! The Stress-Strain Diagram! Stress-Strain Behavior of Ductile and Brittle Materials! Hooke s Law! Strain Energy! Poisson s Ratio! The Shear Stress-Strain
Macromechanics of a Laminate. Textbook: Mechanics of Composite Materials Author: Autar Kaw
 Macromechanics of a Laminate Tetboo: Mechanics of Composite Materials Author: Autar Kaw Figure 4.1 Fiber Direction θ z CHAPTER OJECTIVES Understand the code for laminate stacing sequence Develop relationships
Macromechanics of a Laminate Tetboo: Mechanics of Composite Materials Author: Autar Kaw Figure 4.1 Fiber Direction θ z CHAPTER OJECTIVES Understand the code for laminate stacing sequence Develop relationships
CHAPTER 25 SOLVING EQUATIONS BY ITERATIVE METHODS
 CHAPTER 5 SOLVING EQUATIONS BY ITERATIVE METHODS EXERCISE 104 Page 8 1. Find the positive root of the equation x + 3x 5 = 0, correct to 3 significant figures, using the method of bisection. Let f(x) =
CHAPTER 5 SOLVING EQUATIONS BY ITERATIVE METHODS EXERCISE 104 Page 8 1. Find the positive root of the equation x + 3x 5 = 0, correct to 3 significant figures, using the method of bisection. Let f(x) =
Areas and Lengths in Polar Coordinates
 Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Areas and Lengths in Polar Coordinates
 Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
2 Composition. Invertible Mappings
 Arkansas Tech University MATH 4033: Elementary Modern Algebra Dr. Marcel B. Finan Composition. Invertible Mappings In this section we discuss two procedures for creating new mappings from old ones, namely,
Arkansas Tech University MATH 4033: Elementary Modern Algebra Dr. Marcel B. Finan Composition. Invertible Mappings In this section we discuss two procedures for creating new mappings from old ones, namely,
Lecture 2: Dirac notation and a review of linear algebra Read Sakurai chapter 1, Baym chatper 3
 Lecture 2: Dirac notation and a review of linear algebra Read Sakurai chapter 1, Baym chatper 3 1 State vector space and the dual space Space of wavefunctions The space of wavefunctions is the set of all
Lecture 2: Dirac notation and a review of linear algebra Read Sakurai chapter 1, Baym chatper 3 1 State vector space and the dual space Space of wavefunctions The space of wavefunctions is the set of all
ADVANCED STRUCTURAL MECHANICS
 VSB TECHNICAL UNIVERSITY OF OSTRAVA FACULTY OF CIVIL ENGINEERING ADVANCED STRUCTURAL MECHANICS Lecture 1 Jiří Brožovský Office: LP H 406/3 Phone: 597 321 321 E-mail: jiri.brozovsky@vsb.cz WWW: http://fast10.vsb.cz/brozovsky/
VSB TECHNICAL UNIVERSITY OF OSTRAVA FACULTY OF CIVIL ENGINEERING ADVANCED STRUCTURAL MECHANICS Lecture 1 Jiří Brožovský Office: LP H 406/3 Phone: 597 321 321 E-mail: jiri.brozovsky@vsb.cz WWW: http://fast10.vsb.cz/brozovsky/
Homework 8 Model Solution Section
 MATH 004 Homework Solution Homework 8 Model Solution Section 14.5 14.6. 14.5. Use the Chain Rule to find dz where z cosx + 4y), x 5t 4, y 1 t. dz dx + dy y sinx + 4y)0t + 4) sinx + 4y) 1t ) 0t + 4t ) sinx
MATH 004 Homework Solution Homework 8 Model Solution Section 14.5 14.6. 14.5. Use the Chain Rule to find dz where z cosx + 4y), x 5t 4, y 1 t. dz dx + dy y sinx + 4y)0t + 4) sinx + 4y) 1t ) 0t + 4t ) sinx
( ) 2 and compare to M.
 2 and compare to M.") Problems and Solutions for Section 4.2 4.9 through 4.33) 4.9 Calculate the square root of the matrix 3!0 M!0 8 Hint: Let M / 2 a!b ; calculate M / 2!b c ) 2 and compare to M. Solution: Given: 3!0 M!0 8
Problems and Solutions for Section 4.2 4.9 through 4.33) 4.9 Calculate the square root of the matrix 3!0 M!0 8 Hint: Let M / 2 a!b ; calculate M / 2!b c ) 2 and compare to M. Solution: Given: 3!0 M!0 8
EE512: Error Control Coding
 EE512: Error Control Coding Solution for Assignment on Finite Fields February 16, 2007 1. (a) Addition and Multiplication tables for GF (5) and GF (7) are shown in Tables 1 and 2. + 0 1 2 3 4 0 0 1 2 3
EE512: Error Control Coding Solution for Assignment on Finite Fields February 16, 2007 1. (a) Addition and Multiplication tables for GF (5) and GF (7) are shown in Tables 1 and 2. + 0 1 2 3 4 0 0 1 2 3
DESIGN OF MACHINERY SOLUTION MANUAL h in h 4 0.
 DESIGN OF MACHINERY SOLUTION MANUAL -7-1! PROBLEM -7 Statement: Design a double-dwell cam to move a follower from to 25 6, dwell for 12, fall 25 and dwell for the remader The total cycle must take 4 sec
DESIGN OF MACHINERY SOLUTION MANUAL -7-1! PROBLEM -7 Statement: Design a double-dwell cam to move a follower from to 25 6, dwell for 12, fall 25 and dwell for the remader The total cycle must take 4 sec
3.4 SUM AND DIFFERENCE FORMULAS. NOTE: cos(α+β) cos α + cos β cos(α-β) cos α -cos β
 cos α + cos β cos(α-β) cos α -cos β") 3.4 SUM AND DIFFERENCE FORMULAS Page Theorem cos(αβ cos α cos β -sin α cos(α-β cos α cos β sin α NOTE: cos(αβ cos α cos β cos(α-β cos α -cos β Proof of cos(α-β cos α cos β sin α Let s use a unit circle
3.4 SUM AND DIFFERENCE FORMULAS Page Theorem cos(αβ cos α cos β -sin α cos(α-β cos α cos β sin α NOTE: cos(αβ cos α cos β cos(α-β cos α -cos β Proof of cos(α-β cos α cos β sin α Let s use a unit circle
Section 7.6 Double and Half Angle Formulas
 09 Section 7. Double and Half Angle Fmulas To derive the double-angles fmulas, we will use the sum of two angles fmulas that we developed in the last section. We will let α θ and β θ: cos(θ) cos(θ + θ)
09 Section 7. Double and Half Angle Fmulas To derive the double-angles fmulas, we will use the sum of two angles fmulas that we developed in the last section. We will let α θ and β θ: cos(θ) cos(θ + θ)
Dr. D. Dinev, Department of Structural Mechanics, UACEG
 Lecture 4 Material behavior: Constitutive equations Field of the game Print version Lecture on Theory of lasticity and Plasticity of Dr. D. Dinev, Department of Structural Mechanics, UACG 4.1 Contents
Lecture 4 Material behavior: Constitutive equations Field of the game Print version Lecture on Theory of lasticity and Plasticity of Dr. D. Dinev, Department of Structural Mechanics, UACG 4.1 Contents
Section 8.3 Trigonometric Equations
 99 Section 8. Trigonometric Equations Objective 1: Solve Equations Involving One Trigonometric Function. In this section and the next, we will exple how to solving equations involving trigonometric functions.
99 Section 8. Trigonometric Equations Objective 1: Solve Equations Involving One Trigonometric Function. In this section and the next, we will exple how to solving equations involving trigonometric functions.
Stresses in a Plane. Mohr s Circle. Cross Section thru Body. MET 210W Mohr s Circle 1. Some parts experience normal stresses in
 ME 10W E. Evans Stresses in a Plane Some parts eperience normal stresses in two directions. hese tpes of problems are called Plane Stress or Biaial Stress Cross Section thru Bod z angent and normal to
ME 10W E. Evans Stresses in a Plane Some parts eperience normal stresses in two directions. hese tpes of problems are called Plane Stress or Biaial Stress Cross Section thru Bod z angent and normal to
HOMEWORK 4 = G. In order to plot the stress versus the stretch we define a normalized stretch:
 HOMEWORK 4 Problem a For the fast loading case, we want to derive the relationship between P zz and λ z. We know that the nominal stress is expressed as: P zz = ψ λ z where λ z = λ λ z. Therefore, applying
HOMEWORK 4 Problem a For the fast loading case, we want to derive the relationship between P zz and λ z. We know that the nominal stress is expressed as: P zz = ψ λ z where λ z = λ λ z. Therefore, applying
Example Sheet 3 Solutions
 Example Sheet 3 Solutions. i Regular Sturm-Liouville. ii Singular Sturm-Liouville mixed boundary conditions. iii Not Sturm-Liouville ODE is not in Sturm-Liouville form. iv Regular Sturm-Liouville note
Example Sheet 3 Solutions. i Regular Sturm-Liouville. ii Singular Sturm-Liouville mixed boundary conditions. iii Not Sturm-Liouville ODE is not in Sturm-Liouville form. iv Regular Sturm-Liouville note
Phys460.nb Solution for the t-dependent Schrodinger s equation How did we find the solution? (not required)
") Phys460.nb 81 ψ n (t) is still the (same) eigenstate of H But for tdependent H. The answer is NO. 5.5.5. Solution for the tdependent Schrodinger s equation If we assume that at time t 0, the electron starts
Phys460.nb 81 ψ n (t) is still the (same) eigenstate of H But for tdependent H. The answer is NO. 5.5.5. Solution for the tdependent Schrodinger s equation If we assume that at time t 0, the electron starts
Concrete Mathematics Exercises from 30 September 2016
 Concrete Mathematics Exercises from 30 September 2016 Silvio Capobianco Exercise 1.7 Let H(n) = J(n + 1) J(n). Equation (1.8) tells us that H(2n) = 2, and H(2n+1) = J(2n+2) J(2n+1) = (2J(n+1) 1) (2J(n)+1)
Concrete Mathematics Exercises from 30 September 2016 Silvio Capobianco Exercise 1.7 Let H(n) = J(n + 1) J(n). Equation (1.8) tells us that H(2n) = 2, and H(2n+1) = J(2n+2) J(2n+1) = (2J(n+1) 1) (2J(n)+1)
Approximation of distance between locations on earth given by latitude and longitude
 Approximation of distance between locations on earth given by latitude and longitude Jan Behrens 2012-12-31 In this paper we shall provide a method to approximate distances between two points on earth
Approximation of distance between locations on earth given by latitude and longitude Jan Behrens 2012-12-31 In this paper we shall provide a method to approximate distances between two points on earth
1. In calculating the shear flow associated with the nail shown, which areas should be included in the calculation of Q? (3 points) Areas (1) and (5)
 Areas (1) and (5)") IDE 0 S08 Test 5 Name:. In calculating the shear flow associated with the nail shown, which areas should be included in the calculation of Q? ( points) Areas () and (5) Areas () through (5) Areas (), ()
IDE 0 S08 Test 5 Name:. In calculating the shear flow associated with the nail shown, which areas should be included in the calculation of Q? ( points) Areas () and (5) Areas () through (5) Areas (), ()
Απόκριση σε Μοναδιαία Ωστική Δύναμη (Unit Impulse) Απόκριση σε Δυνάμεις Αυθαίρετα Μεταβαλλόμενες με το Χρόνο. Απόστολος Σ.
 Απόκριση σε Δυνάμεις Αυθαίρετα Μεταβαλλόμενες με το Χρόνο. Απόστολος Σ.") Απόκριση σε Δυνάμεις Αυθαίρετα Μεταβαλλόμενες με το Χρόνο The time integral of a force is referred to as impulse, is determined by and is obtained from: Newton s 2 nd Law of motion states that the action
Απόκριση σε Δυνάμεις Αυθαίρετα Μεταβαλλόμενες με το Χρόνο The time integral of a force is referred to as impulse, is determined by and is obtained from: Newton s 2 nd Law of motion states that the action
Partial Differential Equations in Biology The boundary element method. March 26, 2013
 The boundary element method March 26, 203 Introduction and notation The problem: u = f in D R d u = ϕ in Γ D u n = g on Γ N, where D = Γ D Γ N, Γ D Γ N = (possibly, Γ D = [Neumann problem] or Γ N = [Dirichlet
The boundary element method March 26, 203 Introduction and notation The problem: u = f in D R d u = ϕ in Γ D u n = g on Γ N, where D = Γ D Γ N, Γ D Γ N = (possibly, Γ D = [Neumann problem] or Γ N = [Dirichlet
[1] P Q. Fig. 3.1
![[1] P Q. Fig. 3.1](/thumbs/79/80362156.jpg "[1] P Q. Fig. 3.1") 1 (a) Define resistance....... [1] (b) The smallest conductor within a computer processing chip can be represented as a rectangular block that is one atom high, four atoms wide and twenty atoms long. One
1 (a) Define resistance....... [1] (b) The smallest conductor within a computer processing chip can be represented as a rectangular block that is one atom high, four atoms wide and twenty atoms long. One
1. Sketch the ground reactions on the diagram and write the following equations (in units of kips and feet). (8 points) ΣF x = 0 = ΣF y = 0 =
. (8 points) ΣF x = 0 = ΣF y = 0 =") IDE S8 Test 6 Name:. Sketch the ground reactions on the diagram and write the following equations (in units of kips and feet). (8 points) ΣF x = = ΣF y = = ΣM A = = (counter-clockwise as positie). Sketch
IDE S8 Test 6 Name:. Sketch the ground reactions on the diagram and write the following equations (in units of kips and feet). (8 points) ΣF x = = ΣF y = = ΣM A = = (counter-clockwise as positie). Sketch
θ p = deg ε n = με ε t = με γ nt = μrad
 IDE 110 S08 Test 7 Name: 1. The strain components ε x = 946 με, ε y = -294 με and γ xy = -362 με are given for a point in a body subjected to plane strain. Determine the strain components ε n, ε t, and
IDE 110 S08 Test 7 Name: 1. The strain components ε x = 946 με, ε y = -294 με and γ xy = -362 με are given for a point in a body subjected to plane strain. Determine the strain components ε n, ε t, and
ΚΥΠΡΙΑΚΗ ΕΤΑΙΡΕΙΑ ΠΛΗΡΟΦΟΡΙΚΗΣ CYPRUS COMPUTER SOCIETY ΠΑΓΚΥΠΡΙΟΣ ΜΑΘΗΤΙΚΟΣ ΔΙΑΓΩΝΙΣΜΟΣ ΠΛΗΡΟΦΟΡΙΚΗΣ 19/5/2007
 Οδηγίες: Να απαντηθούν όλες οι ερωτήσεις. Αν κάπου κάνετε κάποιες υποθέσεις να αναφερθούν στη σχετική ερώτηση. Όλα τα αρχεία που αναφέρονται στα προβλήματα βρίσκονται στον ίδιο φάκελο με το εκτελέσιμο
Οδηγίες: Να απαντηθούν όλες οι ερωτήσεις. Αν κάπου κάνετε κάποιες υποθέσεις να αναφερθούν στη σχετική ερώτηση. Όλα τα αρχεία που αναφέρονται στα προβλήματα βρίσκονται στον ίδιο φάκελο με το εκτελέσιμο
Numerical Analysis FMN011
 Numerical Analysis FMN011 Carmen Arévalo Lund University carmen@maths.lth.se Lecture 12 Periodic data A function g has period P if g(x + P ) = g(x) Model: Trigonometric polynomial of order M T M (x) =
Numerical Analysis FMN011 Carmen Arévalo Lund University carmen@maths.lth.se Lecture 12 Periodic data A function g has period P if g(x + P ) = g(x) Model: Trigonometric polynomial of order M T M (x) =
Exercises 10. Find a fundamental matrix of the given system of equations. Also find the fundamental matrix Φ(t) satisfying Φ(0) = I. 1.
 satisfying Φ(0) = I. 1.") Exercises 0 More exercises are available in Elementary Differential Equations. If you have a problem to solve any of them, feel free to come to office hour. Problem Find a fundamental matrix of the given
Exercises 0 More exercises are available in Elementary Differential Equations. If you have a problem to solve any of them, feel free to come to office hour. Problem Find a fundamental matrix of the given
Appendix to On the stability of a compressible axisymmetric rotating flow in a pipe. By Z. Rusak & J. H. Lee
 Appendi to On the stability of a compressible aisymmetric rotating flow in a pipe By Z. Rusak & J. H. Lee Journal of Fluid Mechanics, vol. 5 4, pp. 5 4 This material has not been copy-edited or typeset
Appendi to On the stability of a compressible aisymmetric rotating flow in a pipe By Z. Rusak & J. H. Lee Journal of Fluid Mechanics, vol. 5 4, pp. 5 4 This material has not been copy-edited or typeset
Jesse Maassen and Mark Lundstrom Purdue University November 25, 2013
 Notes on Average Scattering imes and Hall Factors Jesse Maassen and Mar Lundstrom Purdue University November 5, 13 I. Introduction 1 II. Solution of the BE 1 III. Exercises: Woring out average scattering
Notes on Average Scattering imes and Hall Factors Jesse Maassen and Mar Lundstrom Purdue University November 5, 13 I. Introduction 1 II. Solution of the BE 1 III. Exercises: Woring out average scattering
Mechanics of Materials Lab
 Mechanics of Materials Lab Lecture 9 Strain and lasticity Textbook: Mechanical Behavior of Materials Sec. 6.6, 5.3, 5.4 Jiangyu Li Jiangyu Li, Prof. M.. Tuttle Strain: Fundamental Definitions "Strain"
Mechanics of Materials Lab Lecture 9 Strain and lasticity Textbook: Mechanical Behavior of Materials Sec. 6.6, 5.3, 5.4 Jiangyu Li Jiangyu Li, Prof. M.. Tuttle Strain: Fundamental Definitions "Strain"
DERIVATION OF MILES EQUATION FOR AN APPLIED FORCE Revision C
 DERIVATION OF MILES EQUATION FOR AN APPLIED FORCE Revision C By Tom Irvine Email: tomirvine@aol.com August 6, 8 Introduction The obective is to derive a Miles equation which gives the overall response
DERIVATION OF MILES EQUATION FOR AN APPLIED FORCE Revision C By Tom Irvine Email: tomirvine@aol.com August 6, 8 Introduction The obective is to derive a Miles equation which gives the overall response
D Alembert s Solution to the Wave Equation
 D Alembert s Solution to the Wave Equation MATH 467 Partial Differential Equations J. Robert Buchanan Department of Mathematics Fall 2018 Objectives In this lesson we will learn: a change of variable technique
D Alembert s Solution to the Wave Equation MATH 467 Partial Differential Equations J. Robert Buchanan Department of Mathematics Fall 2018 Objectives In this lesson we will learn: a change of variable technique
Matrices and Determinants
 Matrices and Determinants SUBJECTIVE PROBLEMS: Q 1. For what value of k do the following system of equations possess a non-trivial (i.e., not all zero) solution over the set of rationals Q? x + ky + 3z
Matrices and Determinants SUBJECTIVE PROBLEMS: Q 1. For what value of k do the following system of equations possess a non-trivial (i.e., not all zero) solution over the set of rationals Q? x + ky + 3z
Homework 3 Solutions
 Homework 3 Solutions Igor Yanovsky (Math 151A TA) Problem 1: Compute the absolute error and relative error in approximations of p by p. (Use calculator!) a) p π, p 22/7; b) p π, p 3.141. Solution: For
Homework 3 Solutions Igor Yanovsky (Math 151A TA) Problem 1: Compute the absolute error and relative error in approximations of p by p. (Use calculator!) a) p π, p 22/7; b) p π, p 3.141. Solution: For
Section 9.2 Polar Equations and Graphs
 180 Section 9. Polar Equations and Graphs In this section, we will be graphing polar equations on a polar grid. In the first few examples, we will write the polar equation in rectangular form to help identify
180 Section 9. Polar Equations and Graphs In this section, we will be graphing polar equations on a polar grid. In the first few examples, we will write the polar equation in rectangular form to help identify
( y) Partial Differential Equations
 Partial Differential Equations") Partial Dierential Equations Linear P.D.Es. contains no owers roducts o the deendent variables / an o its derivatives can occasionall be solved. Consider eamle ( ) a (sometimes written as a ) we can integrate
Partial Dierential Equations Linear P.D.Es. contains no owers roducts o the deendent variables / an o its derivatives can occasionall be solved. Consider eamle ( ) a (sometimes written as a ) we can integrate
Srednicki Chapter 55
 Srednicki Chapter 55 QFT Problems & Solutions A. George August 3, 03 Srednicki 55.. Use equations 55.3-55.0 and A i, A j ] = Π i, Π j ] = 0 (at equal times) to verify equations 55.-55.3. This is our third
Srednicki Chapter 55 QFT Problems & Solutions A. George August 3, 03 Srednicki 55.. Use equations 55.3-55.0 and A i, A j ] = Π i, Π j ] = 0 (at equal times) to verify equations 55.-55.3. This is our third
1 String with massive end-points
 1 String with massive end-points Πρόβλημα 5.11:Θεωρείστε μια χορδή μήκους, τάσης T, με δύο σημειακά σωματίδια στα άκρα της, το ένα μάζας m, και το άλλο μάζας m. α) Μελετώντας την κίνηση των άκρων βρείτε
1 String with massive end-points Πρόβλημα 5.11:Θεωρείστε μια χορδή μήκους, τάσης T, με δύο σημειακά σωματίδια στα άκρα της, το ένα μάζας m, και το άλλο μάζας m. α) Μελετώντας την κίνηση των άκρων βρείτε
Problem Set 3: Solutions
 CMPSCI 69GG Applied Information Theory Fall 006 Problem Set 3: Solutions. [Cover and Thomas 7.] a Define the following notation, C I p xx; Y max X; Y C I p xx; Ỹ max I X; Ỹ We would like to show that C
CMPSCI 69GG Applied Information Theory Fall 006 Problem Set 3: Solutions. [Cover and Thomas 7.] a Define the following notation, C I p xx; Y max X; Y C I p xx; Ỹ max I X; Ỹ We would like to show that C
CHAPTER 48 APPLICATIONS OF MATRICES AND DETERMINANTS
 CHAPTER 48 APPLICATIONS OF MATRICES AND DETERMINANTS EXERCISE 01 Page 545 1. Use matrices to solve: 3x + 4y x + 5y + 7 3x + 4y x + 5y 7 Hence, 3 4 x 0 5 y 7 The inverse of 3 4 5 is: 1 5 4 1 5 4 15 8 3
CHAPTER 48 APPLICATIONS OF MATRICES AND DETERMINANTS EXERCISE 01 Page 545 1. Use matrices to solve: 3x + 4y x + 5y + 7 3x + 4y x + 5y 7 Hence, 3 4 x 0 5 y 7 The inverse of 3 4 5 is: 1 5 4 1 5 4 15 8 3
Solutions to Exercise Sheet 5
 Solutions to Eercise Sheet 5 jacques@ucsd.edu. Let X and Y be random variables with joint pdf f(, y) = 3y( + y) where and y. Determine each of the following probabilities. Solutions. a. P (X ). b. P (X
Solutions to Eercise Sheet 5 jacques@ucsd.edu. Let X and Y be random variables with joint pdf f(, y) = 3y( + y) where and y. Determine each of the following probabilities. Solutions. a. P (X ). b. P (X
derivation of the Laplacian from rectangular to spherical coordinates
 derivation of the Laplacian from rectangular to spherical coordinates swapnizzle 03-03- :5:43 We begin by recognizing the familiar conversion from rectangular to spherical coordinates (note that φ is used
derivation of the Laplacian from rectangular to spherical coordinates swapnizzle 03-03- :5:43 We begin by recognizing the familiar conversion from rectangular to spherical coordinates (note that φ is used
Potential Dividers. 46 minutes. 46 marks. Page 1 of 11
 Potential Dividers 46 minutes 46 marks Page 1 of 11 Q1. In the circuit shown in the figure below, the battery, of negligible internal resistance, has an emf of 30 V. The pd across the lamp is 6.0 V and
Potential Dividers 46 minutes 46 marks Page 1 of 11 Q1. In the circuit shown in the figure below, the battery, of negligible internal resistance, has an emf of 30 V. The pd across the lamp is 6.0 V and
Reminders: linear functions
 Reminders: linear functions Let U and V be vector spaces over the same field F. Definition A function f : U V is linear if for every u 1, u 2 U, f (u 1 + u 2 ) = f (u 1 ) + f (u 2 ), and for every u U
Reminders: linear functions Let U and V be vector spaces over the same field F. Definition A function f : U V is linear if for every u 1, u 2 U, f (u 1 + u 2 ) = f (u 1 ) + f (u 2 ), and for every u U
forms This gives Remark 1. How to remember the above formulas: Substituting these into the equation we obtain with
 Week 03: C lassification of S econd- Order L inear Equations In last week s lectures we have illustrated how to obtain the general solutions of first order PDEs using the method of characteristics. We
Week 03: C lassification of S econd- Order L inear Equations In last week s lectures we have illustrated how to obtain the general solutions of first order PDEs using the method of characteristics. We
Every set of first-order formulas is equivalent to an independent set
 Every set of first-order formulas is equivalent to an independent set May 6, 2008 Abstract A set of first-order formulas, whatever the cardinality of the set of symbols, is equivalent to an independent
Every set of first-order formulas is equivalent to an independent set May 6, 2008 Abstract A set of first-order formulas, whatever the cardinality of the set of symbols, is equivalent to an independent
ANSWERSHEET (TOPIC = DIFFERENTIAL CALCULUS) COLLECTION #2. h 0 h h 0 h h 0 ( ) g k = g 0 + g 1 + g g 2009 =?
 COLLECTION #2. h 0 h h 0 h h 0 ( ) g k = g 0 + g 1 + g g 2009 =?") Teko Classes IITJEE/AIEEE Maths by SUHAAG SIR, Bhopal, Ph (0755) 3 00 000 www.tekoclasses.com ANSWERSHEET (TOPIC DIFFERENTIAL CALCULUS) COLLECTION # Question Type A.Single Correct Type Q. (A) Sol least
Teko Classes IITJEE/AIEEE Maths by SUHAAG SIR, Bhopal, Ph (0755) 3 00 000 www.tekoclasses.com ANSWERSHEET (TOPIC DIFFERENTIAL CALCULUS) COLLECTION # Question Type A.Single Correct Type Q. (A) Sol least
Trigonometric Formula Sheet
 Trigonometric Formula Sheet Definition of the Trig Functions Right Triangle Definition Assume that: 0 < θ < or 0 < θ < 90 Unit Circle Definition Assume θ can be any angle. y x, y hypotenuse opposite θ
Trigonometric Formula Sheet Definition of the Trig Functions Right Triangle Definition Assume that: 0 < θ < or 0 < θ < 90 Unit Circle Definition Assume θ can be any angle. y x, y hypotenuse opposite θ
9.09. # 1. Area inside the oval limaçon r = cos θ. To graph, start with θ = 0 so r = 6. Compute dr
 9.9 #. Area inside the oval limaçon r = + cos. To graph, start with = so r =. Compute d = sin. Interesting points are where d vanishes, or at =,,, etc. For these values of we compute r:,,, and the values
9.9 #. Area inside the oval limaçon r = + cos. To graph, start with = so r =. Compute d = sin. Interesting points are where d vanishes, or at =,,, etc. For these values of we compute r:,,, and the values
Problem Set 9 Solutions. θ + 1. θ 2 + cotθ ( ) sinθ e iφ is an eigenfunction of the ˆ L 2 operator. / θ 2. φ 2. sin 2 θ φ 2. ( ) = e iφ. = e iφ cosθ.
 sinθ e iφ is an eigenfunction of the ˆ L 2 operator. / θ 2. φ 2. sin 2 θ φ 2. ( ) = e iφ. = e iφ cosθ.") Chemistry 362 Dr Jean M Standard Problem Set 9 Solutions The ˆ L 2 operator is defined as Verify that the angular wavefunction Y θ,φ) Also verify that the eigenvalue is given by 2! 2 & L ˆ 2! 2 2 θ 2 +
Chemistry 362 Dr Jean M Standard Problem Set 9 Solutions The ˆ L 2 operator is defined as Verify that the angular wavefunction Y θ,φ) Also verify that the eigenvalue is given by 2! 2 & L ˆ 2! 2 2 θ 2 +
ST5224: Advanced Statistical Theory II
 ST5224: Advanced Statistical Theory II 2014/2015: Semester II Tutorial 7 1. Let X be a sample from a population P and consider testing hypotheses H 0 : P = P 0 versus H 1 : P = P 1, where P j is a known
ST5224: Advanced Statistical Theory II 2014/2015: Semester II Tutorial 7 1. Let X be a sample from a population P and consider testing hypotheses H 0 : P = P 0 versus H 1 : P = P 1, where P j is a known
b. Use the parametrization from (a) to compute the area of S a as S a ds. Be sure to substitute for ds!
 to compute the area of S a as S a ds. Be sure to substitute for ds!") MTH U341 urface Integrals, tokes theorem, the divergence theorem To be turned in Wed., Dec. 1. 1. Let be the sphere of radius a, x 2 + y 2 + z 2 a 2. a. Use spherical coordinates (with ρ a) to parametrize.
MTH U341 urface Integrals, tokes theorem, the divergence theorem To be turned in Wed., Dec. 1. 1. Let be the sphere of radius a, x 2 + y 2 + z 2 a 2. a. Use spherical coordinates (with ρ a) to parametrize.
4.6 Autoregressive Moving Average Model ARMA(1,1)
") 84 CHAPTER 4. STATIONARY TS MODELS 4.6 Autoregressive Moving Average Model ARMA(,) This section is an introduction to a wide class of models ARMA(p,q) which we will consider in more detail later in this
84 CHAPTER 4. STATIONARY TS MODELS 4.6 Autoregressive Moving Average Model ARMA(,) This section is an introduction to a wide class of models ARMA(p,q) which we will consider in more detail later in this
Finite Field Problems: Solutions
 Finite Field Problems: Solutions 1. Let f = x 2 +1 Z 11 [x] and let F = Z 11 [x]/(f), a field. Let Solution: F =11 2 = 121, so F = 121 1 = 120. The possible orders are the divisors of 120. Solution: The
Finite Field Problems: Solutions 1. Let f = x 2 +1 Z 11 [x] and let F = Z 11 [x]/(f), a field. Let Solution: F =11 2 = 121, so F = 121 1 = 120. The possible orders are the divisors of 120. Solution: The
the total number of electrons passing through the lamp.
 1. A 12 V 36 W lamp is lit to normal brightness using a 12 V car battery of negligible internal resistance. The lamp is switched on for one hour (3600 s). For the time of 1 hour, calculate (i) the energy
1. A 12 V 36 W lamp is lit to normal brightness using a 12 V car battery of negligible internal resistance. The lamp is switched on for one hour (3600 s). For the time of 1 hour, calculate (i) the energy
Parametrized Surfaces
 Parametrized Surfaces Recall from our unit on vector-valued functions at the beginning of the semester that an R 3 -valued function c(t) in one parameter is a mapping of the form c : I R 3 where I is some
Parametrized Surfaces Recall from our unit on vector-valued functions at the beginning of the semester that an R 3 -valued function c(t) in one parameter is a mapping of the form c : I R 3 where I is some
Volume of a Cuboid. Volume = length x breadth x height. V = l x b x h. The formula for the volume of a cuboid is
 Volume of a Cuboid The formula for the volume of a cuboid is Volume = length x breadth x height V = l x b x h Example Work out the volume of this cuboid 10 cm 15 cm V = l x b x h V = 15 x 6 x 10 V = 900cm³
Volume of a Cuboid The formula for the volume of a cuboid is Volume = length x breadth x height V = l x b x h Example Work out the volume of this cuboid 10 cm 15 cm V = l x b x h V = 15 x 6 x 10 V = 900cm³
Fourier Series. MATH 211, Calculus II. J. Robert Buchanan. Spring Department of Mathematics
 Fourier Series MATH 211, Calculus II J. Robert Buchanan Department of Mathematics Spring 2018 Introduction Not all functions can be represented by Taylor series. f (k) (c) A Taylor series f (x) = (x c)
Fourier Series MATH 211, Calculus II J. Robert Buchanan Department of Mathematics Spring 2018 Introduction Not all functions can be represented by Taylor series. f (k) (c) A Taylor series f (x) = (x c)
DETERMINATION OF FRICTION COEFFICIENT
 EXPERIMENT 5 DETERMINATION OF FRICTION COEFFICIENT Purpose: Determine μ k, the kinetic coefficient of friction and μ s, the static friction coefficient by sliding block down that acts as an inclined plane.
EXPERIMENT 5 DETERMINATION OF FRICTION COEFFICIENT Purpose: Determine μ k, the kinetic coefficient of friction and μ s, the static friction coefficient by sliding block down that acts as an inclined plane.
The Simply Typed Lambda Calculus
 Type Inference Instead of writing type annotations, can we use an algorithm to infer what the type annotations should be? That depends on the type system. For simple type systems the answer is yes, and
Type Inference Instead of writing type annotations, can we use an algorithm to infer what the type annotations should be? That depends on the type system. For simple type systems the answer is yes, and
Lecture 6 Mohr s Circle for Plane Stress
 P4 Stress and Strain Dr. A.B. Zavatsk HT08 Lecture 6 Mohr s Circle for Plane Stress Transformation equations for plane stress. Procedure for constructing Mohr s circle. Stresses on an inclined element.
P4 Stress and Strain Dr. A.B. Zavatsk HT08 Lecture 6 Mohr s Circle for Plane Stress Transformation equations for plane stress. Procedure for constructing Mohr s circle. Stresses on an inclined element.
w o = R 1 p. (1) R = p =. = 1
 R = p =. = 1") Πανεπιστήµιο Κρήτης - Τµήµα Επιστήµης Υπολογιστών ΗΥ-570: Στατιστική Επεξεργασία Σήµατος 205 ιδάσκων : Α. Μουχτάρης Τριτη Σειρά Ασκήσεων Λύσεις Ασκηση 3. 5.2 (a) From the Wiener-Hopf equation we have:
Πανεπιστήµιο Κρήτης - Τµήµα Επιστήµης Υπολογιστών ΗΥ-570: Στατιστική Επεξεργασία Σήµατος 205 ιδάσκων : Α. Μουχτάρης Τριτη Σειρά Ασκήσεων Λύσεις Ασκηση 3. 5.2 (a) From the Wiener-Hopf equation we have:
PARTIAL NOTES for 6.1 Trigonometric Identities
 PARTIAL NOTES for 6.1 Trigonometric Identities tanθ = sinθ cosθ cotθ = cosθ sinθ BASIC IDENTITIES cscθ = 1 sinθ secθ = 1 cosθ cotθ = 1 tanθ PYTHAGOREAN IDENTITIES sin θ + cos θ =1 tan θ +1= sec θ 1 + cot
PARTIAL NOTES for 6.1 Trigonometric Identities tanθ = sinθ cosθ cotθ = cosθ sinθ BASIC IDENTITIES cscθ = 1 sinθ secθ = 1 cosθ cotθ = 1 tanθ PYTHAGOREAN IDENTITIES sin θ + cos θ =1 tan θ +1= sec θ 1 + cot
Lecture 26: Circular domains
 Introductory lecture notes on Partial Differential Equations - c Anthony Peirce. Not to be copied, used, or revised without eplicit written permission from the copyright owner. 1 Lecture 6: Circular domains
Introductory lecture notes on Partial Differential Equations - c Anthony Peirce. Not to be copied, used, or revised without eplicit written permission from the copyright owner. 1 Lecture 6: Circular domains
Introduction to Theory of. Elasticity. Kengo Nakajima Summer
 Introduction to Theor of lasticit Summer Kengo Nakajima Technical & Scientific Computing I (48-7) Seminar on Computer Science (48-4) elast Theor of lasticit Target Stress Governing quations elast 3 Theor
Introduction to Theor of lasticit Summer Kengo Nakajima Technical & Scientific Computing I (48-7) Seminar on Computer Science (48-4) elast Theor of lasticit Target Stress Governing quations elast 3 Theor
Math 6 SL Probability Distributions Practice Test Mark Scheme
 Math 6 SL Probability Distributions Practice Test Mark Scheme. (a) Note: Award A for vertical line to right of mean, A for shading to right of their vertical line. AA N (b) evidence of recognizing symmetry
Math 6 SL Probability Distributions Practice Test Mark Scheme. (a) Note: Award A for vertical line to right of mean, A for shading to right of their vertical line. AA N (b) evidence of recognizing symmetry
Second Order RLC Filters
 ECEN 60 Circuits/Electronics Spring 007-0-07 P. Mathys Second Order RLC Filters RLC Lowpass Filter A passive RLC lowpass filter (LPF) circuit is shown in the following schematic. R L C v O (t) Using phasor
ECEN 60 Circuits/Electronics Spring 007-0-07 P. Mathys Second Order RLC Filters RLC Lowpass Filter A passive RLC lowpass filter (LPF) circuit is shown in the following schematic. R L C v O (t) Using phasor
Chapter 6: Systems of Linear Differential. be continuous functions on the interval
 Chapter 6: Systems of Linear Differential Equations Let a (t), a 2 (t),..., a nn (t), b (t), b 2 (t),..., b n (t) be continuous functions on the interval I. The system of n first-order differential equations
Chapter 6: Systems of Linear Differential Equations Let a (t), a 2 (t),..., a nn (t), b (t), b 2 (t),..., b n (t) be continuous functions on the interval I. The system of n first-order differential equations
Econ 2110: Fall 2008 Suggested Solutions to Problem Set 8 questions or comments to Dan Fetter 1
 Eon : Fall 8 Suggested Solutions to Problem Set 8 Email questions or omments to Dan Fetter Problem. Let X be a salar with density f(x, θ) (θx + θ) [ x ] with θ. (a) Find the most powerful level α test
Eon : Fall 8 Suggested Solutions to Problem Set 8 Email questions or omments to Dan Fetter Problem. Let X be a salar with density f(x, θ) (θx + θ) [ x ] with θ. (a) Find the most powerful level α test
Second Order Partial Differential Equations
 Chapter 7 Second Order Partial Differential Equations 7.1 Introduction A second order linear PDE in two independent variables (x, y Ω can be written as A(x, y u x + B(x, y u xy + C(x, y u u u + D(x, y
Chapter 7 Second Order Partial Differential Equations 7.1 Introduction A second order linear PDE in two independent variables (x, y Ω can be written as A(x, y u x + B(x, y u xy + C(x, y u u u + D(x, y
C.S. 430 Assignment 6, Sample Solutions
 C.S. 430 Assignment 6, Sample Solutions Paul Liu November 15, 2007 Note that these are sample solutions only; in many cases there were many acceptable answers. 1 Reynolds Problem 10.1 1.1 Normal-order
C.S. 430 Assignment 6, Sample Solutions Paul Liu November 15, 2007 Note that these are sample solutions only; in many cases there were many acceptable answers. 1 Reynolds Problem 10.1 1.1 Normal-order
Math221: HW# 1 solutions
 Math: HW# solutions Andy Royston October, 5 7.5.7, 3 rd Ed. We have a n = b n = a = fxdx = xdx =, x cos nxdx = x sin nx n sin nxdx n = cos nx n = n n, x sin nxdx = x cos nx n + cos nxdx n cos n = + sin
Math: HW# solutions Andy Royston October, 5 7.5.7, 3 rd Ed. We have a n = b n = a = fxdx = xdx =, x cos nxdx = x sin nx n sin nxdx n = cos nx n = n n, x sin nxdx = x cos nx n + cos nxdx n cos n = + sin
Inverse trigonometric functions & General Solution of Trigonometric Equations. ------------------ ----------------------------- -----------------
 Inverse trigonometric functions & General Solution of Trigonometric Equations. 1. Sin ( ) = a) b) c) d) Ans b. Solution : Method 1. Ans a: 17 > 1 a) is rejected. w.k.t Sin ( sin ) = d is rejected. If sin
Inverse trigonometric functions & General Solution of Trigonometric Equations. 1. Sin ( ) = a) b) c) d) Ans b. Solution : Method 1. Ans a: 17 > 1 a) is rejected. w.k.t Sin ( sin ) = d is rejected. If sin
2. THEORY OF EQUATIONS. PREVIOUS EAMCET Bits.
 EAMCET-. THEORY OF EQUATIONS PREVIOUS EAMCET Bits. Each of the roots of the equation x 6x + 6x 5= are increased by k so that the new transformed equation does not contain term. Then k =... - 4. - Sol.
EAMCET-. THEORY OF EQUATIONS PREVIOUS EAMCET Bits. Each of the roots of the equation x 6x + 6x 5= are increased by k so that the new transformed equation does not contain term. Then k =... - 4. - Sol.
Spherical Coordinates
 Spherical Coordinates MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Spherical Coordinates Another means of locating points in three-dimensional space is known as the spherical
Spherical Coordinates MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Spherical Coordinates Another means of locating points in three-dimensional space is known as the spherical
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ. Ψηφιακή Οικονομία. Διάλεξη 7η: Consumer Behavior Mαρίνα Μπιτσάκη Τμήμα Επιστήμης Υπολογιστών
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Ψηφιακή Οικονομία Διάλεξη 7η: Consumer Behavior Mαρίνα Μπιτσάκη Τμήμα Επιστήμης Υπολογιστών Τέλος Ενότητας Χρηματοδότηση Το παρόν εκπαιδευτικό υλικό έχει αναπτυχθεί
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Ψηφιακή Οικονομία Διάλεξη 7η: Consumer Behavior Mαρίνα Μπιτσάκη Τμήμα Επιστήμης Υπολογιστών Τέλος Ενότητας Χρηματοδότηση Το παρόν εκπαιδευτικό υλικό έχει αναπτυχθεί
If we restrict the domain of y = sin x to [ π, π ], the restrict function. y = sin x, π 2 x π 2
![If we restrict the domain of y = sin x to [ π, π ], the restrict function. y = sin x, π 2 x π 2](/thumbs/53/31933086.jpg "If we restrict the domain of y = sin x to [ π, π ], the restrict function. y = sin x, π 2 x π 2") Chapter 3. Analytic Trigonometry 3.1 The inverse sine, cosine, and tangent functions 1. Review: Inverse function (1) f 1 (f(x)) = x for every x in the domain of f and f(f 1 (x)) = x for every x in the
Chapter 3. Analytic Trigonometry 3.1 The inverse sine, cosine, and tangent functions 1. Review: Inverse function (1) f 1 (f(x)) = x for every x in the domain of f and f(f 1 (x)) = x for every x in the
CRASH COURSE IN PRECALCULUS
 CRASH COURSE IN PRECALCULUS Shiah-Sen Wang The graphs are prepared by Chien-Lun Lai Based on : Precalculus: Mathematics for Calculus by J. Stuwart, L. Redin & S. Watson, 6th edition, 01, Brooks/Cole Chapter
CRASH COURSE IN PRECALCULUS Shiah-Sen Wang The graphs are prepared by Chien-Lun Lai Based on : Precalculus: Mathematics for Calculus by J. Stuwart, L. Redin & S. Watson, 6th edition, 01, Brooks/Cole Chapter
Statistical Inference I Locally most powerful tests
 Statistical Inference I Locally most powerful tests Shirsendu Mukherjee Department of Statistics, Asutosh College, Kolkata, India. shirsendu st@yahoo.co.in So far we have treated the testing of one-sided
Statistical Inference I Locally most powerful tests Shirsendu Mukherjee Department of Statistics, Asutosh College, Kolkata, India. shirsendu st@yahoo.co.in So far we have treated the testing of one-sided
Forced Pendulum Numerical approach
 Numerical approach UiO April 8, 2014 Physical problem and equation We have a pendulum of length l, with mass m. The pendulum is subject to gravitation as well as both a forcing and linear resistance force.
Numerical approach UiO April 8, 2014 Physical problem and equation We have a pendulum of length l, with mass m. The pendulum is subject to gravitation as well as both a forcing and linear resistance force.
Differential equations
 Differential equations Differential equations: An equation inoling one dependent ariable and its deriaties w. r. t one or more independent ariables is called a differential equation. Order of differential
Differential equations Differential equations: An equation inoling one dependent ariable and its deriaties w. r. t one or more independent ariables is called a differential equation. Order of differential
Aerodynamics & Aeroelasticity: Beam Theory
 Εθνικό Μετσόβιο Πολυτεχνείο National Technical Universit of thens erodnamics & eroelasticit: Beam Theor Σπύρος Βουτσινάς / Spros Voutsinas Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης
Εθνικό Μετσόβιο Πολυτεχνείο National Technical Universit of thens erodnamics & eroelasticit: Beam Theor Σπύρος Βουτσινάς / Spros Voutsinas Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης
SCHOOL OF MATHEMATICAL SCIENCES G11LMA Linear Mathematics Examination Solutions
 SCHOOL OF MATHEMATICAL SCIENCES GLMA Linear Mathematics 00- Examination Solutions. (a) i. ( + 5i)( i) = (6 + 5) + (5 )i = + i. Real part is, imaginary part is. (b) ii. + 5i i ( + 5i)( + i) = ( i)( + i)
SCHOOL OF MATHEMATICAL SCIENCES GLMA Linear Mathematics 00- Examination Solutions. (a) i. ( + 5i)( i) = (6 + 5) + (5 )i = + i. Real part is, imaginary part is. (b) ii. + 5i i ( + 5i)( + i) = ( i)( + i)
If we restrict the domain of y = sin x to [ π 2, π 2
 Chapter 3. Analytic Trigonometry 3.1 The inverse sine, cosine, and tangent functions 1. Review: Inverse function (1) f 1 (f(x)) = x for every x in the domain of f and f(f 1 (x)) = x for every x in the
Chapter 3. Analytic Trigonometry 3.1 The inverse sine, cosine, and tangent functions 1. Review: Inverse function (1) f 1 (f(x)) = x for every x in the domain of f and f(f 1 (x)) = x for every x in the
Quadratic Expressions
 Quadratic Expressions. The standard form of a quadratic equation is ax + bx + c = 0 where a, b, c R and a 0. The roots of ax + bx + c = 0 are b ± b a 4ac. 3. For the equation ax +bx+c = 0, sum of the roots
Quadratic Expressions. The standard form of a quadratic equation is ax + bx + c = 0 where a, b, c R and a 0. The roots of ax + bx + c = 0 are b ± b a 4ac. 3. For the equation ax +bx+c = 0, sum of the roots
CHAPTER 12: PERIMETER, AREA, CIRCUMFERENCE, AND 12.1 INTRODUCTION TO GEOMETRIC 12.2 PERIMETER: SQUARES, RECTANGLES,
 CHAPTER : PERIMETER, AREA, CIRCUMFERENCE, AND SIGNED FRACTIONS. INTRODUCTION TO GEOMETRIC MEASUREMENTS p. -3. PERIMETER: SQUARES, RECTANGLES, TRIANGLES p. 4-5.3 AREA: SQUARES, RECTANGLES, TRIANGLES p.
CHAPTER : PERIMETER, AREA, CIRCUMFERENCE, AND SIGNED FRACTIONS. INTRODUCTION TO GEOMETRIC MEASUREMENTS p. -3. PERIMETER: SQUARES, RECTANGLES, TRIANGLES p. 4-5.3 AREA: SQUARES, RECTANGLES, TRIANGLES p.
On a four-dimensional hyperbolic manifold with finite volume
 BULETINUL ACADEMIEI DE ŞTIINŢE A REPUBLICII MOLDOVA. MATEMATICA Numbers 2(72) 3(73), 2013, Pages 80 89 ISSN 1024 7696 On a four-dimensional hyperbolic manifold with finite volume I.S.Gutsul Abstract. In
BULETINUL ACADEMIEI DE ŞTIINŢE A REPUBLICII MOLDOVA. MATEMATICA Numbers 2(72) 3(73), 2013, Pages 80 89 ISSN 1024 7696 On a four-dimensional hyperbolic manifold with finite volume I.S.Gutsul Abstract. In
ECE Spring Prof. David R. Jackson ECE Dept. Notes 2
 ECE 634 Spring 6 Prof. David R. Jackson ECE Dept. Notes Fields in a Source-Free Region Example: Radiation from an aperture y PEC E t x Aperture Assume the following choice of vector potentials: A F = =
ECE 634 Spring 6 Prof. David R. Jackson ECE Dept. Notes Fields in a Source-Free Region Example: Radiation from an aperture y PEC E t x Aperture Assume the following choice of vector potentials: A F = =
Derivations of Useful Trigonometric Identities
 Derivations of Useful Trigonometric Identities Pythagorean Identity This is a basic and very useful relationship which comes directly from the definition of the trigonometric ratios of sine and cosine
Derivations of Useful Trigonometric Identities Pythagorean Identity This is a basic and very useful relationship which comes directly from the definition of the trigonometric ratios of sine and cosine
Lecture 5 Plane Stress Transformation Equations
 Lecture 5 Plane Stress Transformation Equations Stress elements and plane stress. Stresses on inclined sections. Transformation equations. Principal stresses, angles, and planes. Maimum shear stress. Normal
Lecture 5 Plane Stress Transformation Equations Stress elements and plane stress. Stresses on inclined sections. Transformation equations. Principal stresses, angles, and planes. Maimum shear stress. Normal
2. Μηχανικό Μαύρο Κουτί: κύλινδρος με μια μπάλα μέσα σε αυτόν.
 Experiental Copetition: 14 July 011 Proble Page 1 of. Μηχανικό Μαύρο Κουτί: κύλινδρος με μια μπάλα μέσα σε αυτόν. Ένα μικρό σωματίδιο μάζας (μπάλα) βρίσκεται σε σταθερή απόσταση z από το πάνω μέρος ενός
Experiental Copetition: 14 July 011 Proble Page 1 of. Μηχανικό Μαύρο Κουτί: κύλινδρος με μια μπάλα μέσα σε αυτόν. Ένα μικρό σωματίδιο μάζας (μπάλα) βρίσκεται σε σταθερή απόσταση z από το πάνω μέρος ενός
(1) Describe the process by which mercury atoms become excited in a fluorescent tube (3)
 Describe the process by which mercury atoms become excited in a fluorescent tube (3)") Q1. (a) A fluorescent tube is filled with mercury vapour at low pressure. In order to emit electromagnetic radiation the mercury atoms must first be excited. (i) What is meant by an excited atom? (1) (ii)
Q1. (a) A fluorescent tube is filled with mercury vapour at low pressure. In order to emit electromagnetic radiation the mercury atoms must first be excited. (i) What is meant by an excited atom? (1) (ii)
Written Examination. Antennas and Propagation (AA ) April 26, 2017.
 April 26, 2017.") Written Examination Antennas and Propagation (AA. 6-7) April 6, 7. Problem ( points) Let us consider a wire antenna as in Fig. characterized by a z-oriented linear filamentary current I(z) = I cos(kz)ẑ
Written Examination Antennas and Propagation (AA. 6-7) April 6, 7. Problem ( points) Let us consider a wire antenna as in Fig. characterized by a z-oriented linear filamentary current I(z) = I cos(kz)ẑ
Derivation of Optical-Bloch Equations
 Appendix C Derivation of Optical-Bloch Equations In this appendix the optical-bloch equations that give the populations and coherences for an idealized three-level Λ system, Fig. 3. on page 47, will be
Appendix C Derivation of Optical-Bloch Equations In this appendix the optical-bloch equations that give the populations and coherences for an idealized three-level Λ system, Fig. 3. on page 47, will be