Σχεδιασμός Συστημάτων Ελέγχου ΔΠΜΣ Συστήματα Αυτοματισμού
|
|
|
- Σπυριδούλα Ελευθεριάδης
- 8 χρόνια πριν
- Προβολές:
Transcript
1 Σχεδιασμός Συστημάτων Ελέγχου ΔΠΜΣ Συστήματα Αυτοματισμού Μάθημα 7: Hinfinity / Βάρη, Μικτή Ευαισθησία 19/12/2016 Δρ. Γεώργιος Παπαλάμπρου Επίκουρος Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο Ναυτικής Μηχανολογίας
2 Εισαγωγή στην Σύνθεση Εύρωστου Ελεγκτή Hinfinity Λαμβάνοντας υπόψη τις ελλείψεις του βέλτιστου ελέγχου LQG (Linear Quadratic Gaussian), αναπτύχθηκε την δεκαετία του 80 η μέθοδος βελτιστοποίησης νόρμας Hinfinity για σύνθεση ελεγκτή. Η ανάπτυξη βασίστηκε στην δουλειά του G. Zames (1981), Πανεπ. Mc Gill, Καναδάς. Ο Zames ασκούσε κριτική στις φτωχές ιδιότητες ευρωστίας του LQG θεωρώντας ότι οφείλονται α) στη χρήση της νόρμας H2 και β) στην προσέγγιση αβεβαιότητας με λευκό θόρυβο (white noise) που την έβρισκε ακατάλληλη για πρακτικά προβλήματα. Αργότερα η μέθοδος Hinfinity αναπτύχθηκε περαιτέρω από τους K. Glover, Πανεπ. Cambridge και J. Doyle, Πανεπ. Caltech, ΗΠΑ.
3 Εισαγωγή στην Σύνθεση Εύρωστου Ελεγκτή Hinfinity Σήμερα υπάρχουν διαθέσιμα εμπορικά εργαλεία (πχ το MATLAB/Robust Control Toolbox) που καλύπτουν την μαθηματική λύση της μεθοδολογίας Hinfinity. Στην βιομηχανία χρησιμοποιείται ευρέως, με υλοποίηση επιπλέον επιπέδων (layers) δημιουργίας της εφαρμογής (πχ αεροδιαστημικές εφαρμογές ESCAPE της ALCATEL Space).
4 Εισαγωγή στην Σύνθεση Εύρωστου Ελεγκτή Hinfinity Η μέθοδος Hinfinity αποτελεί πλέον ένα καθιερωμένο εργαλείο σχεδιασμού ελεγκτών στην βιομηχανία, με πλούσιο ιστορικό από πραγματικά παραδείγματα εφαρμογών. Ενδεικτικά αναφέρονται: Σύστημα ελέγχου θέσης μη-επανδρωμένων διαστημικών οχημάτων (Automated Transfer Vehicle) ATV 1-5, , της ESA/EADS Astrium (βλέπε σχετικό powertpoint), Σύστημα ελέγχου ελικοπτέρου Bell 205 (1997), Αεροσκάφη κάθετης απογείωσης (V/STOL UK), 1991, κλπ.
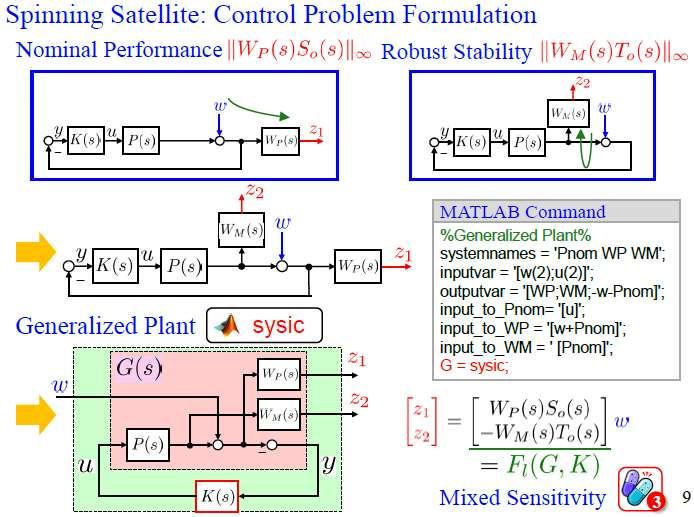
5 Συνήθως στον Εύρωστο Έλεγχο εξετάζουμε NP και RS NP RS Μας ενδιαφέρει να περιορίσουμε την τιμή της L=GK με τις 2 περιοχές Nominal Performance (NP) και Robust Stability (RS) [SP05, κεφ. 9, Controller design]
6 Προσδιoρισμός NP, RS: με τα βάρη WP, WM -> Γνωρίζοντας τα βάρη WP, WM υπολογίζουμε τον ελεγκτή Hinfinity

7 Προσδιoρισμός NP, RS: με τα βάρη WP, WM
 Αυτό περιβάλλει την συνάρτηση S Συνήθως είναι Ms <")
8 Μέχρι τώρα (χωρίς τις αβεβαιότητες) εξετάσαμε το NP Στις περιπτώσεις που δεν υπάρχει αβεβαιότητα μοντέλου, εξετάζουμε την NP Χαρακτηρίζεται από το βάρος WP Είδαμε πως σχεδιάζεται το βάρος WP (s) Αυτό περιβάλλει την συνάρτηση S Συνήθως είναι Ms < 2
 Αυτό περιβάλλει την συνάρτηση Τ Συνήθως είναι MΤ <")
9 Στην περίπτωση με αβεβαιότητα μοντέλου εξετάζουμε την RS Στις περιπτώσεις που υπάρχει αβεβαιότητα μοντέλου, εξετάζουμε την RS Θα δούμε πως σχεδιάζεται το βάρος WΜ (s) Αυτό περιβάλλει την συνάρτηση Τ Συνήθως είναι MΤ < 1.25

10 Eξέταση RS [SP05, σ. 277]

11 Eξέταση RS [SP05, σ. 277]
12 Πολλαπλασιαστική Αβεβαιότητα Τελικό Σύστημα Κανονικό (nominal) wm(s) Βάρος αβεβαιότητας Η Πολλαπλασιαστική Αβεβαιότητα είναι η πιό συχνή μορφή αβεβαιότητας. Πολλές φορές ξεκινάμε με αυτήν την δομή αν δεν γνωρίζουμε περισότερα στοιχεία.

13 Αβεβαιότητα Παράσταση αβεβαιότητας Σύστημα 1 ης τάξης [SP05, σ. 265] Περίπτωση 1: αβεβαιότητα σε κέρδος K και σταθερά χρόνου Τ Nominal Value = 2.5 Αβεβαιότητα +/- 20%, για κάθε
 Βήμα 3: Έυρεση βάρους wm(s) που καλύπτει το")
14 Πολλαπλασιαστική Αβεβαιότητα-βάρος Βήμα 1: Επιλογή κανονικού μοντέλου P(s) Βήμα 2: Σχηματισμός όλων των πιθανών συστημάτων lm(ω) Βήμα 3: Έυρεση βάρους wm(s) που καλύπτει το σετ ώστε:
![Μορφή βάρους αβεβαιότητας [SP05] 1/τ: Η συχνότητα όπου η σχετική αβεβαιότητα φθάνει το 100%.](/docs-images/62/47153829/images/15-1.jpg "r : Μέτρο του βάρους wm σε υψηλές συχνότητες.")
15 Μορφή βάρους αβεβαιότητας [SP05] 1/τ: Η συχνότητα όπου η σχετική αβεβαιότητα φθάνει το 100%. r : Μέτρο του βάρους wm σε υψηλές συχνότητες. r0: Αβεβαιότητα σε χαμηλές συχνότητες (steady state).

16 Αβεβαιότητα παράγοντα καθυστέρησης [SP05, σ. 269] Βήμα 1: Επιλογή κανονικού μοντέλου, θ=0. Βήμα 2: Σχηματισμός όλων των πιθανών συστημάτων Βήμα 3: Έυρεση βάρους wm(s)


17 Βάρος αβεβαιότητας [SP05, σ. 295] >> 20*log10(2.3)=7.23

18 Οι 2 απαραίτητες συνθήκες στον έλεγχο Hinfinity Ο τύπος αυτός ελέγχου προσπαθεί να ικανοποιήσει τις συνθήκες NP και RS ταυτόχρονα
19 Έλεγχος Hinfinity Στην απλή μορφή - χωρίς αβεβαιότητα μοντέλουο τύπος αυτός ελέγχου προσπαθεί να ικανοποιήσει την συνθήκη NP, οπότε λαμβάνεται υπόψη η μορφή της S (sensitivity) Επιπλέον μπορεί να ληφθεί υπόψη η επιθυμητή συμπεριφορά του σήματος ελέγχου, λαμβάνοντας υπόψη τη μορφή της ΚS, με Κ τον ελεγκτή Στην περίπτωση όμως που εμφανίζεται αβεβαιότητα, τότε μπορεί να ληφθεί αυτή υπόψη, εξετάζοντας μαζί την συνθήκη RS, όπως παρακάτω

20 Mixed sensitivity: ισχύουν μαζί στον εύρωστο έλεγχο

21 Mixed sensitivity S/T Mixed Sensitivity Problem S/T: Έυρεση Κ(s) ώστε


22 Mixed sensitivity S/KS/T Mixed Sensitivity Problem S/KS/T: Έυρεση Κ(s) ώστε
23 Έλεγχος Hinfinity χωρίς αβεβαιότητα Στην απλή μορφή - χωρίς αβεβαιότητα μοντέλουεξετάζονται οι περιπτώσεις regulator και tracking, oπότε λαμβάνεται υπόψη η μορφή της S (sensitivity) Επιπλέον μπορεί να ληφθεί υπόψη η επιθυμητή συμπεριφορά του σήματος ελέγχου, λαμβάνοντας υπόψη τη μορφή της ΚS, με Κ τον ελεγκτή
24 Έλεγχος Hinfinity S/KS Regulator Θεωρούμε την περίπτωση ρυθμιστή (regulator), όπου θέλουμε να απορρίψουμε την διαταραχή που εισέρχεται στην έξοδο εγκατάστασης, όπου ο θόρυβος είναι ασήμαντος. Δεν μας ενδιαφέρει η ακολουθία σήματος εισόδου αναφοράς (tracking). Έτσι εδώ θα διαμορφώσουμε τις συναρτήσεις κλειστού βρόχου S;KS, συνήθως σε διάταξη 1-DOF. Η συνάρτηση μεταφοράς ευαισθησίας S συνδέει την διαταραχή d με την έξοδο y. Η συνάρτηση KS συνδέει την διαταραχή d με την είσοδο ελέγχου u. Η KS περιλαμβάνεται έτσι ώστε να περιορίζεται το μέγεθος και το εύρος ζώνης το ελεγκτή, άρα και της ενέργειας ελέγχου.
25
26 Έλεγχος Hinfinity S/KS Tracking Εδώ θεωρούμε περίπτωση ακολουθίας εισόδου αναφοράς (tracking), λαμβάνοντας έλεγχο S/KS. Η εξωγενής είσοδος είναι είσοδος αναφοράς r και τα σήματα σφάλματος είναι z1 = -W1e=W1(r-y)

27
28

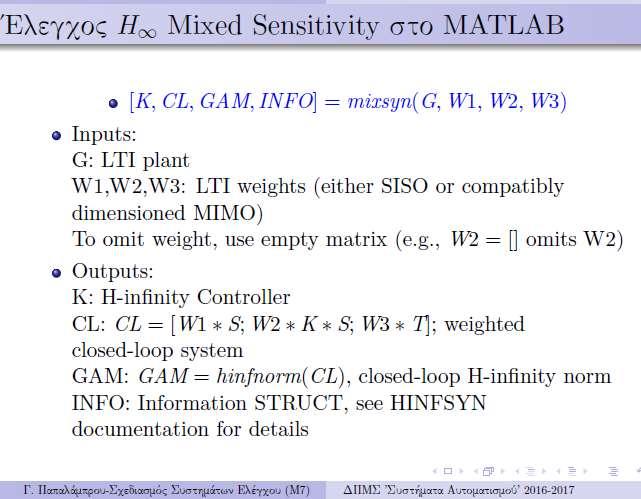
29 Το παράδειγμα της εντολής mixsyn
30
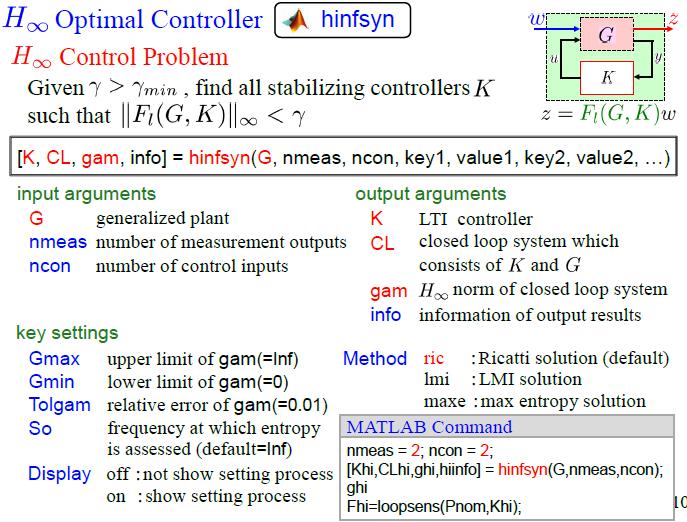
31 Η εντολή mixsyn καλεί τη εντολή hinfsyn για τον υπολογισμό ελεγκτή Hinfinity
32
33

34 Παραδείγματα βιβλίου [SP05]
35

36 Dropbox: \books_robust_control
Σχεδιασμός Συστημάτων Ελέγχου
 Σχεδιασμός Συστημάτων Ελέγχου ΔΠΜΣ Συστήματα Αυτοματισμού 2015-2016 Δρ Γ Παπαλάμπρου Λέκτορας ΕΜΠ georgepapalambrou@lmentuagr Εργαστήριο Ναυτικής Μηχανολογίας (Κτίριο Λ) Σχολή Ναυπηγών Μηχανολόγων Μηχανικών
Σχεδιασμός Συστημάτων Ελέγχου ΔΠΜΣ Συστήματα Αυτοματισμού 2015-2016 Δρ Γ Παπαλάμπρου Λέκτορας ΕΜΠ georgepapalambrou@lmentuagr Εργαστήριο Ναυτικής Μηχανολογίας (Κτίριο Λ) Σχολή Ναυπηγών Μηχανολόγων Μηχανικών
Βιομηχανικοί Ελεγκτές
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #10: Μοντέρνες Μέθοδοι Αναλογικού Ελέγχου Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #10: Μοντέρνες Μέθοδοι Αναλογικού Ελέγχου Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης
Εισαγωγή στον Αυτόματο Έλεγχο
 Εισαγωγή στον Αυτόματο Έλεγχο ΣΑΕ 2016-2017 Δρ Γ Παπαλάμπρου Επίκουρος Καθηγητής ΕΜΠ georgepapalambrou@lmentuagr Εργαστήριο Ναυτικής Μηχανολογίας (Κτίριο Λ) Σχολή Ναυπηγών Μηχανολόγων Μηχανικών Εθνικό
Εισαγωγή στον Αυτόματο Έλεγχο ΣΑΕ 2016-2017 Δρ Γ Παπαλάμπρου Επίκουρος Καθηγητής ΕΜΠ georgepapalambrou@lmentuagr Εργαστήριο Ναυτικής Μηχανολογίας (Κτίριο Λ) Σχολή Ναυπηγών Μηχανολόγων Μηχανικών Εθνικό
Συστήματα Αυτόματου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Χαρακτηριστικά των Συστημάτων Ελέγχου Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Χαρακτηριστικά των Συστημάτων Ελέγχου Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν
Σ εδιασμός Συστημάτ ν Ε έ ου
 Σ εδιασμός Συστημάτ ν Ε έ ου ΔΠΜΣ Συστήματα Αυτοματισμού 2014-2015 Δρ Γ Παπα άμπρου Λέκτορας ΕΜΠ georgepapalambrou@lmentuagr Ερ αστήριο Ναυτικής Μη ανο ο ίας (Κτίριο Λ) Σ ο ή Ναυπη ών Μη ανο ό ν Μη ανικών
Σ εδιασμός Συστημάτ ν Ε έ ου ΔΠΜΣ Συστήματα Αυτοματισμού 2014-2015 Δρ Γ Παπα άμπρου Λέκτορας ΕΜΠ georgepapalambrou@lmentuagr Ερ αστήριο Ναυτικής Μη ανο ο ίας (Κτίριο Λ) Σ ο ή Ναυπη ών Μη ανο ό ν Μη ανικών
Βιομηχανικοί Ελεγκτές
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #9: Αναλογικά Συστήματα Ελέγχου Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #9: Αναλογικά Συστήματα Ελέγχου Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου
 Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 3 η : ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΜΕΓΕΘΗ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ Άδειες Χρήσης
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 3 η : ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΜΕΓΕΘΗ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΕ Άδειες Χρήσης
Εισαγωγή στον Αυτόματο Έλεγχο Συστήματα, Εφαρμογές, Αισθητήρια
 Εισαγωγή στον Αυτόματο Έλεγχο 2016-2017 Συστήματα, Εφαρμογές, Αισθητήρια Δρ. Γεώργιος Παπαλάμπρου Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο Ναυτικής Μηχανολογίας
Εισαγωγή στον Αυτόματο Έλεγχο 2016-2017 Συστήματα, Εφαρμογές, Αισθητήρια Δρ. Γεώργιος Παπαλάμπρου Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο Ναυτικής Μηχανολογίας
FORTRAN και Αντικειμενοστραφής Προγραμματισμός
 FORTRAN και Αντικειμενοστραφής Προγραμματισμός Παραδόσεις Μαθήματος 2016 Δρ Γ Παπαλάμπρου Επίκουρος Καθηγητής ΕΜΠ georgepapalambrou@lmentuagr Εργαστήριο Ναυτικής Μηχανολογίας (Κτίριο Λ) Σχολή Ναυπηγών
FORTRAN και Αντικειμενοστραφής Προγραμματισμός Παραδόσεις Μαθήματος 2016 Δρ Γ Παπαλάμπρου Επίκουρος Καθηγητής ΕΜΠ georgepapalambrou@lmentuagr Εργαστήριο Ναυτικής Μηχανολογίας (Κτίριο Λ) Σχολή Ναυπηγών
1) Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι
 Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι") 1) Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι επιπτώσεις της 4) Μαθηματικό υπόβαθρο για την μελέτη των
1) Τι είναι ένα Σύστημα Αυτομάτου Ελέγχου 2) Παραδείγματα εφαρμογών Συστημάτων Ελέγχου 3) Τι είναι ανατροφοδότηση (Feedback) και ποιες είναι οι επιπτώσεις της 4) Μαθηματικό υπόβαθρο για την μελέτη των
Έλεγχος Κίνησης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Αυτόματος Έλεγχος Συστημάτων Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Αυτόματος Έλεγχος Συστημάτων Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το
Κεφάλαιο 4 Σχεδίαση Συστηµάτων Ελέγχου µε Μικροϋπολογιστές - Συνεχής Σχεδίαση
 Κεφάλαιο 4 Σχεδίαση Συστηµάτων Ελέγχου µε Μικροϋπολογιστές - Συνεχής Σχεδίαση Επανάληψη στα Συστήµατα από Δειγµατοληπτικά Δεδοµένα στα Πεδία Συχνότητας και Χρόνου Ψηφιακός Έλεγχος µε Συνεχή Σχεδιασµό Χαρακτηριστικά
Κεφάλαιο 4 Σχεδίαση Συστηµάτων Ελέγχου µε Μικροϋπολογιστές - Συνεχής Σχεδίαση Επανάληψη στα Συστήµατα από Δειγµατοληπτικά Δεδοµένα στα Πεδία Συχνότητας και Χρόνου Ψηφιακός Έλεγχος µε Συνεχή Σχεδιασµό Χαρακτηριστικά
Έλεγχος Κίνησης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Συστήματα Ελέγχου Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Συστήματα Ελέγχου Κίνησης Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το παρόν εκπαιδευτικό
Η Βασική Δομή Συστημάτων Ελέγχου Κίνησης
 Η Βασική Δομή Συστημάτων Ελέγχου Κίνησης Σύστημα ονομάζουμε ένα σύνολο στοιχείων κατάλληλα συνδεδεμένων μεταξύ τους για να επιτελέσουν κάποιο έργο Είσοδο ονομάζουμε τη διέγερση, εντολή ή αιτία η οποία
Η Βασική Δομή Συστημάτων Ελέγχου Κίνησης Σύστημα ονομάζουμε ένα σύνολο στοιχείων κατάλληλα συνδεδεμένων μεταξύ τους για να επιτελέσουν κάποιο έργο Είσοδο ονομάζουμε τη διέγερση, εντολή ή αιτία η οποία
Συστήματα Αυτομάτου Ελέγχου ΙΙ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου ΙΙ Ενότητα #1: Ποιοτικά Χαρακτηριστικά Συστημάτων Κλειστού Βρόχου Δημήτριος Δημογιαννόπουλος Τμήμα
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου ΙΙ Ενότητα #1: Ποιοτικά Χαρακτηριστικά Συστημάτων Κλειστού Βρόχου Δημήτριος Δημογιαννόπουλος Τμήμα
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΛΟΠΟΝΝΗΣΟΥ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΛΟΠΟΝΝΗΣΟΥ ΤΜΗΜΑ ΕΠΙΣΤΗΜΗΣ & ΤΕΧΝΟΛΟΓΙΑΣ ΤΗΛΕΠΙΚΟΙΝΩΝΙΩΝ Κ 17 Επικοινωνίες ΙΙ Χειμερινό Εξάμηνο Διάλεξη 3 η Νικόλαος Χ. Σαγιάς Επίκουρος Καθηγητής Webpage: http://eclass.uop.gr/courses/tst15
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΛΟΠΟΝΝΗΣΟΥ ΤΜΗΜΑ ΕΠΙΣΤΗΜΗΣ & ΤΕΧΝΟΛΟΓΙΑΣ ΤΗΛΕΠΙΚΟΙΝΩΝΙΩΝ Κ 17 Επικοινωνίες ΙΙ Χειμερινό Εξάμηνο Διάλεξη 3 η Νικόλαος Χ. Σαγιάς Επίκουρος Καθηγητής Webpage: http://eclass.uop.gr/courses/tst15
Εισαγωγή στα Συστήματα Αυτομάτου Ελέγχου. Επικ. Καθ. Νίκος Καραμπετάκης Τμήμα Μαθηματικών Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης
 Εισαγωγή στα Συστήματα Αυτομάτου Ελέγχου Επικ. Καθ. Νίκος Καραμπετάκης Τμήμα Μαθηματικών Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης Σύστημα Σύστημα (Λεξικό Μπαμπινιώτη) :...Σύνολο από επιμέρους τμήματα, εξαρτήματα,
Εισαγωγή στα Συστήματα Αυτομάτου Ελέγχου Επικ. Καθ. Νίκος Καραμπετάκης Τμήμα Μαθηματικών Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης Σύστημα Σύστημα (Λεξικό Μπαμπινιώτη) :...Σύνολο από επιμέρους τμήματα, εξαρτήματα,
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016
 FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016 Δρ. Γεώργιος Παπαλάμπρου Επικ. Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο Ναυτικής Μηχανολογίας
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016 Δρ. Γεώργιος Παπαλάμπρου Επικ. Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο Ναυτικής Μηχανολογίας
Συστήματα Αυτομάτου Ελέγχου 2
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Τεχνολογικό Εκπαιδευτικό Ίδρυμα Πειραιά Συστήματα Αυτομάτου Ελέγχου 2 Ενότητα #1: Ποιοτικά χαρακτηριστικά συστημάτων κλειστού βρόχου Δ. Δημογιαννόπουλος, dimogian@teipir.gr Επ. Καθηγητής
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Τεχνολογικό Εκπαιδευτικό Ίδρυμα Πειραιά Συστήματα Αυτομάτου Ελέγχου 2 Ενότητα #1: Ποιοτικά χαρακτηριστικά συστημάτων κλειστού βρόχου Δ. Δημογιαννόπουλος, dimogian@teipir.gr Επ. Καθηγητής
Χρήστος Ξενάκης. Πανεπιστήμιο Πειραιώς, Τμήμα Ψηφιακών Συστημάτων
 ΘΕΩΡΙΑ ΠΛΗΡΟΦΟΡΙΑΣ Κεφάλαιο 5 : Θόρυβος Χρήστος Ξενάκης Πανεπιστήμιο Πειραιώς, Τμήμα Ψηφιακών Συστημάτων Περιεχόμενα Ομιλίας Είδη θορύβου Περιγραφή θορύβου Θεώρημα Shannon Hartley Απόδοση ισχύος και εύρους
ΘΕΩΡΙΑ ΠΛΗΡΟΦΟΡΙΑΣ Κεφάλαιο 5 : Θόρυβος Χρήστος Ξενάκης Πανεπιστήμιο Πειραιώς, Τμήμα Ψηφιακών Συστημάτων Περιεχόμενα Ομιλίας Είδη θορύβου Περιγραφή θορύβου Θεώρημα Shannon Hartley Απόδοση ισχύος και εύρους
Εισαγωγή στην Τεχνολογία Αυτοματισμού
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ Εισαγωγή στην Τεχνολογία Αυτοματισμού Ενότητα # 1: Βασικές έννοιες Μπλόκ διαγράμματα Δ. Δημογιαννόπουλος,
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ Εισαγωγή στην Τεχνολογία Αυτοματισμού Ενότητα # 1: Βασικές έννοιες Μπλόκ διαγράμματα Δ. Δημογιαννόπουλος,
Συστήματα Αυτομάτου Ελέγχου 1
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Τεχνολογικό Εκπαιδευτικό Ίδρυμα Πειραιά Συστήματα Αυτομάτου Ελέγχου 1 Ενότητα # 1: Βασικές έννοιες Μπλόκ διαγράμματα Δ. Δημογιαννόπουλος, dimogian@teipir.gr Επ. Καθηγητής Τμήματος Μηχανικών
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Τεχνολογικό Εκπαιδευτικό Ίδρυμα Πειραιά Συστήματα Αυτομάτου Ελέγχου 1 Ενότητα # 1: Βασικές έννοιες Μπλόκ διαγράμματα Δ. Δημογιαννόπουλος, dimogian@teipir.gr Επ. Καθηγητής Τμήματος Μηχανικών
Βιομηχανικοί Ελεγκτές
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #12: Παραδείγματα Αναλογικών Συστημάτων Ελέγχου Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #12: Παραδείγματα Αναλογικών Συστημάτων Ελέγχου Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες
Βέλτιστος Έλεγχος Συστημάτων
 Βέλτιστος Έλεγχος Συστημάτων Ενότητα 11: Στοχαστικός βέλτιστος έλεγχος γραμμικών συστημάτων με χρήση τετραγωνικών κριτηρίων (LQG Problem) Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων
Βέλτιστος Έλεγχος Συστημάτων Ενότητα 11: Στοχαστικός βέλτιστος έλεγχος γραμμικών συστημάτων με χρήση τετραγωνικών κριτηρίων (LQG Problem) Καθηγητής Αντώνιος Αλεξανδρίδης Πολυτεχνική Σχολή Τμήμα Ηλεκτρολόγων
ΕΛΕΓΧΟΣ ΠΑΡΑΓΩΓΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΕΛΕΓΧΟΣ ΠΑΡΑΓΩΓΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ Ενότητα: Αναγνώριση Διεργασίας - Προσαρμοστικός Έλεγχος (Process Identification) Αλαφοδήμος Κωνσταντίνος
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΕΛΕΓΧΟΣ ΠΑΡΑΓΩΓΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ Ενότητα: Αναγνώριση Διεργασίας - Προσαρμοστικός Έλεγχος (Process Identification) Αλαφοδήμος Κωνσταντίνος
Συστήματα Αυτομάτου Ελέγχου II
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου II Ενότητα #2: Ποιοτικά Χαρακτηριστικά Συστημάτων Κλειστού Βρόχου - Μόνιμα Σφάλματα Δημήτριος Δημογιαννόπουλος
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου II Ενότητα #2: Ποιοτικά Χαρακτηριστικά Συστημάτων Κλειστού Βρόχου - Μόνιμα Σφάλματα Δημήτριος Δημογιαννόπουλος
Κλασσική Θεωρία Ελέγχου
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 16. Υπολογισμός αντισταθμιστή με χρήση διοφαντικών εξισώσεων Νίκος Καραμπετάκης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 16. Υπολογισμός αντισταθμιστή με χρήση διοφαντικών εξισώσεων Νίκος Καραμπετάκης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016
 FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016 Μ6. Φάσεις ανάπτυξης λογισμικού: προδιαγραφές, σχεδίαση, υλοποίηση, επαλήθευση, τεκμηρίωση, συντήρηση προγραμμάτων Δρ. Γεώργιος Παπαλάμπρου Επικ.
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016 Μ6. Φάσεις ανάπτυξης λογισμικού: προδιαγραφές, σχεδίαση, υλοποίηση, επαλήθευση, τεκμηρίωση, συντήρηση προγραμμάτων Δρ. Γεώργιος Παπαλάμπρου Επικ.
Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών. Διάλεξη 7
 Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Τομέας Συστημάτων και Αυτομάτου Ελέγχου ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ Διάλεξη 7 Πάτρα 2008 Τοποθέτηση Επιλογή πόλων Θεωρούμε ένα (Σ)
Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Τομέας Συστημάτων και Αυτομάτου Ελέγχου ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ Διάλεξη 7 Πάτρα 2008 Τοποθέτηση Επιλογή πόλων Θεωρούμε ένα (Σ)
Εισαγωγή στην Επιστήμη του Ηλεκτρολόγου Μηχανικού (και στην Τεχνολογία Υπολογιστών;)
") Εισαγωγή στην Επιστήμη του Ηλεκτρολόγου Μηχανικού (και στην Τεχνολογία Υπολογιστών;) Τι είναι αυτό; 1. Διαλέξεις; 2. Σεμινάριο; 3. Μάθημα; 4. Αλλο; Θεωρία Συστημάτων, Θεωρία Αποφάσεων και (αυτόματος) Έλεγχος
Εισαγωγή στην Επιστήμη του Ηλεκτρολόγου Μηχανικού (και στην Τεχνολογία Υπολογιστών;) Τι είναι αυτό; 1. Διαλέξεις; 2. Σεμινάριο; 3. Μάθημα; 4. Αλλο; Θεωρία Συστημάτων, Θεωρία Αποφάσεων και (αυτόματος) Έλεγχος
Συστήματα Ελέγχου Μηχανής Ειδικά Συστήματα Ελέγχου Πλοίου Δρ. Γ. Παπαλάμπρου ΣΝΜΜ-ΕΜΠ 4/2013
 Συστήματα Ελέγχου Μηχανής Ειδικά Συστήματα Ελέγχου Πλοίου 2013 Δρ. Γ. Παπαλάμπρου ΣΝΜΜ-ΕΜΠ 4/2013 Περιεχόμενα Εισαγωγή Συστήματα ελέγχου μηχανής Καύσιμο: σύστημα ελέγχου, governors, common rail Ελεγκτές
Συστήματα Ελέγχου Μηχανής Ειδικά Συστήματα Ελέγχου Πλοίου 2013 Δρ. Γ. Παπαλάμπρου ΣΝΜΜ-ΕΜΠ 4/2013 Περιεχόμενα Εισαγωγή Συστήματα ελέγχου μηχανής Καύσιμο: σύστημα ελέγχου, governors, common rail Ελεγκτές
Έλεγχος «Ελάχιστης Ενέργειας»
 Έλεγχος «Ελάχιστης Ενέργειας» Σε πολλές εφαρµογές, τόσο της αεροδιαστηµικής όσο και άλλων µορφών της τεχνολογίας µεταφορών κλπ, η βελτιστοποίηση επικεντρώνεται στο ζήτηµα της ενέργειας κατά την επίτευξη
Έλεγχος «Ελάχιστης Ενέργειας» Σε πολλές εφαρµογές, τόσο της αεροδιαστηµικής όσο και άλλων µορφών της τεχνολογίας µεταφορών κλπ, η βελτιστοποίηση επικεντρώνεται στο ζήτηµα της ενέργειας κατά την επίτευξη
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 1 η : Εισαγωγή
 Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 1 η : Εισαγωγή Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΒΙΟΜΗΧΑΝΙΚΟΥ ΣΧΕΔΙΑΣΜΟΥ ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 1 η : Εισαγωγή Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΒΙΟΜΗΧΑΝΙΚΟΥ ΣΧΕΔΙΑΣΜΟΥ ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016
 FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016 M10 Παραδείγματα FORTRAN Δρ. Γεώργιος Παπαλάμπρου Επικ. Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016 M10 Παραδείγματα FORTRAN Δρ. Γεώργιος Παπαλάμπρου Επικ. Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο
Ψηφιακός Έλεγχος. 10 η διάλεξη Ασκήσεις. Ψηφιακός Έλεγχος 1
 Ψηφιακός Έλεγχος 10 η διάλεξη Ασκήσεις Ψηφιακός Έλεγχος 1 Άσκηση1 Ασκήσεις Επιθυμούμε να ελέγξουμε την γωνία ανύψωσης μιας κεραίας για να παρακολουθείται η θέση ενός δορυφόρου. Το σύστημα της κεραίας και
Ψηφιακός Έλεγχος 10 η διάλεξη Ασκήσεις Ψηφιακός Έλεγχος 1 Άσκηση1 Ασκήσεις Επιθυμούμε να ελέγξουμε την γωνία ανύψωσης μιας κεραίας για να παρακολουθείται η θέση ενός δορυφόρου. Το σύστημα της κεραίας και
Μάθημα: Ρομποτικός Έλεγχος
 Διατμηματικό Πρόγραμμα Μεταπτυχιακών Σπουδών «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» Ε.Μ.Π., Ακαδημαϊκό Έτος 011-1 Μάθημα: Ρομποτικός Έλεγχος Αυτόματος Έλεγχος Ρομπότ (Μη-Γραμμικός Ρομποτικός Έλεγχος Κων/νος Τζαφέστας
Διατμηματικό Πρόγραμμα Μεταπτυχιακών Σπουδών «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» Ε.Μ.Π., Ακαδημαϊκό Έτος 011-1 Μάθημα: Ρομποτικός Έλεγχος Αυτόματος Έλεγχος Ρομπότ (Μη-Γραμμικός Ρομποτικός Έλεγχος Κων/νος Τζαφέστας
Λύσεις θεμάτων Α εξεταστικής περιόδου χειμερινού εξαμήνου 2013-14 (Ιούνιος 2014)
") Λύσεις θεμάτων Α εξεταστικής περιόδου χειμερινού εξαμήνου 201314 (Ιούνιος 2014) ΘΕΜΑ 1 Ο (3,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό λειτουργικό διάγραμμα που περιγράφει ένα αναγνωριστικό αυτοκινούμενο
Λύσεις θεμάτων Α εξεταστικής περιόδου χειμερινού εξαμήνου 201314 (Ιούνιος 2014) ΘΕΜΑ 1 Ο (3,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό λειτουργικό διάγραμμα που περιγράφει ένα αναγνωριστικό αυτοκινούμενο
Ο Γραμμικός Τετραγωνικός Ρυθμιστής: Ευρεση Νόμου Ελέγχου
 Ο Γραμμικός Τετραγωνικός Ρυθμιστής: Ευρεση Νόμου Ελέγχου Για την ανεύρεση της µορφής των λύσεων στρεφόµαστε προς τις αναγκαίες συνθήκες, αρχικά στις Εξισώσεις Euler-Lagrange: Τ Τ Τ! f d! f = 0 t t0, t
Ο Γραμμικός Τετραγωνικός Ρυθμιστής: Ευρεση Νόμου Ελέγχου Για την ανεύρεση της µορφής των λύσεων στρεφόµαστε προς τις αναγκαίες συνθήκες, αρχικά στις Εξισώσεις Euler-Lagrange: Τ Τ Τ! f d! f = 0 t t0, t
Σχολή Ηλεκτρολόγων Μηχ/κών και Μηχ/κών Υπολογιστών, Ε.Μ.Π., Ακαδημαϊκό Έτος , 8ο Εξάμηνο. Ρομποτική II. Ευφυή και Επιδέξια Ρομποτικά Συστήματα
 Σχολή Ηλεκτρολόγων Μηχ/κών και Μηχ/κών Υπολογιστών, Ε.Μ.Π., Ακαδημαϊκό Έτος 009-0, 8ο Εξάμηνο Ρομποτική II Ευφυή και Επιδέξια Ρομποτικά Συστήματα Κων/νος Τζαφέστας Τομέας Σημάτων, Ελέγχου & Ρομποτικής
Σχολή Ηλεκτρολόγων Μηχ/κών και Μηχ/κών Υπολογιστών, Ε.Μ.Π., Ακαδημαϊκό Έτος 009-0, 8ο Εξάμηνο Ρομποτική II Ευφυή και Επιδέξια Ρομποτικά Συστήματα Κων/νος Τζαφέστας Τομέας Σημάτων, Ελέγχου & Ρομποτικής
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016
 FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016 Μ6. Φάσεις ανάπτυξης λογισμικού: προδιαγραφές, σχεδίαση, υλοποίηση, επαλήθευση, τεκμηρίωση, συντήρηση προγραμμάτων Δρ. Γεώργιος Παπαλάμπρου Επικ.
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016 Μ6. Φάσεις ανάπτυξης λογισμικού: προδιαγραφές, σχεδίαση, υλοποίηση, επαλήθευση, τεκμηρίωση, συντήρηση προγραμμάτων Δρ. Γεώργιος Παπαλάμπρου Επικ.
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2017
 FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2017 M5 Ασκήσεις Γεώργιος Παπαλάμπρου Επικ. Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο Ναυτικής
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2017 M5 Ασκήσεις Γεώργιος Παπαλάμπρου Επικ. Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο Ναυτικής
Συστήματα Αυτομάτου Ελέγχου & Ρυθμίσεως Μηχανών (h>p://courseware.mech.ntua.gr/ml23147/)
") Συστήματα Αυτομάτου Ελέγχου & Ρυθμίσεως Μηχανών (h>p://courseware.mech.ntua.gr/ml23147/) Κων/νος Ι. Κυριακόπουλος Καθηγητής ΕΜΠ (h>p://users.ntua.gr/kkyria/) Kostas J. Kyriakopoulos - Σ.Α.Ε. ΙΙ 1 Δομή
Συστήματα Αυτομάτου Ελέγχου & Ρυθμίσεως Μηχανών (h>p://courseware.mech.ntua.gr/ml23147/) Κων/νος Ι. Κυριακόπουλος Καθηγητής ΕΜΠ (h>p://users.ntua.gr/kkyria/) Kostas J. Kyriakopoulos - Σ.Α.Ε. ΙΙ 1 Δομή
Τηλεπικοινωνιακά Συστήματα Ι
 Τηλεπικοινωνιακά Συστήματα Ι Διάλεξη 3: Ο Θόρυβος στα Τηλεπικοινωνιακά Συστήματα Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Ατζέντα Εισαγωγή Τύποι Θορύβου Θερμικός θόρυβος Θόρυβος βολής Θόρυβος περιβάλλοντος
Τηλεπικοινωνιακά Συστήματα Ι Διάλεξη 3: Ο Θόρυβος στα Τηλεπικοινωνιακά Συστήματα Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Ατζέντα Εισαγωγή Τύποι Θορύβου Θερμικός θόρυβος Θόρυβος βολής Θόρυβος περιβάλλοντος
ΕΛΕΓΧΟΣ ΠΑΡΑΓΩΓΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΕΛΕΓΧΟΣ ΠΑΡΑΓΩΓΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ Ενότητα: Προσαρμοστικός και Συμπερασματικός Έλεγχος Αλαφοδήμος Κωνσταντίνος Τμήμα Μηχανικών Αυτοματισμού
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΕΛΕΓΧΟΣ ΠΑΡΑΓΩΓΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ Ενότητα: Προσαρμοστικός και Συμπερασματικός Έλεγχος Αλαφοδήμος Κωνσταντίνος Τμήμα Μηχανικών Αυτοματισμού
Σύγχρονος Αυτόματος Έλεγχος. (Π3) Η «ιδιότητα του τριγώνου»: για οποιαδήποτε διανύσματα ισχύει x, y ότι
 Η «ιδιότητα του τριγώνου»: για οποιαδήποτε διανύσματα ισχύει x, y ότι") Σύγχρονος Αυτόματος Έλεγχος 1.Ορισμοί και Χρήσιμες Ιδιότητες (Π1) λ(a) είναι το διάνυσμα ιδιοτιμών του πίνακα Α (Π) x = x 1 + x +... + xn (Π3) Η «ιδιότητα του τριγώνου»: για οποιαδήποτε διανύσματα ισχύει
Σύγχρονος Αυτόματος Έλεγχος 1.Ορισμοί και Χρήσιμες Ιδιότητες (Π1) λ(a) είναι το διάνυσμα ιδιοτιμών του πίνακα Α (Π) x = x 1 + x +... + xn (Π3) Η «ιδιότητα του τριγώνου»: για οποιαδήποτε διανύσματα ισχύει
Σύγχρονος Αυτόματος Έλεγχος. είναι το διάνυσμα ιδιοτιμών του πίνακα Α (Π2)
") Σύγχρονος Αυτόματος Έλεγχος.Ορισμοί και Χρήσιμες Ιδιότητες (Π) (A) είναι το διάνυσμα ιδιοτιμών του πίνακα Α (Π) x x x... xn (Π3) Η «ιδιότητα του τριγώνου»: για οποιαδήποτε διανύσματα ισχύει x, y ότι x
Σύγχρονος Αυτόματος Έλεγχος.Ορισμοί και Χρήσιμες Ιδιότητες (Π) (A) είναι το διάνυσμα ιδιοτιμών του πίνακα Α (Π) x x x... xn (Π3) Η «ιδιότητα του τριγώνου»: για οποιαδήποτε διανύσματα ισχύει x, y ότι x
Συστήματα Αυτομάτου Ελέγχου ΙΙ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου ΙΙ Ενότητα #6: Σχεδιασμός Ελεγκτών με Χρήση Αναλυτικής Μεθόδου Υπολογισμού Παραμέτρων Δημήτριος Δημογιαννόπουλος
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου ΙΙ Ενότητα #6: Σχεδιασμός Ελεγκτών με Χρήση Αναλυτικής Μεθόδου Υπολογισμού Παραμέτρων Δημήτριος Δημογιαννόπουλος
7 ο Εργαστήριο Θόρυβος 2Δ, Μετακίνηση, Περιστροφή
 7 ο Εργαστήριο Θόρυβος 2Δ, Μετακίνηση, Περιστροφή O θόρυβος 2Δ μας δίνει τη δυνατότητα να δημιουργίας υφής 2Δ. Στο παρακάτω παράδειγμα, γίνεται σχεδίαση γραμμών σε πλέγμα 300x300 με μεταβαλόμενη τιμή αδιαφάνειας
7 ο Εργαστήριο Θόρυβος 2Δ, Μετακίνηση, Περιστροφή O θόρυβος 2Δ μας δίνει τη δυνατότητα να δημιουργίας υφής 2Δ. Στο παρακάτω παράδειγμα, γίνεται σχεδίαση γραμμών σε πλέγμα 300x300 με μεταβαλόμενη τιμή αδιαφάνειας
Simulation Users Manual
 Simulation Users Manual πτυχιακή αυτή ασχολήθηκε µε την εφαρµογή των συστηµάτων και των τεχνολογιών του αυτόµατου ελέγχου στην ελληνική βιοµηχανία. Συγκεκριµένα, ανέπτυξε και µοντελοποίησε ένα τµήµα της
Simulation Users Manual πτυχιακή αυτή ασχολήθηκε µε την εφαρµογή των συστηµάτων και των τεχνολογιών του αυτόµατου ελέγχου στην ελληνική βιοµηχανία. Συγκεκριµένα, ανέπτυξε και µοντελοποίησε ένα τµήµα της
Συστήματα Αυτομάτου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Συστήματα Αυτομάτου Ελέγχου Ενότητα #6: Σχεδιασμός ελεγκτών με χρήση αναλυτικής μεθόδου υπολογισμού παραμέτρων 2 Δ. Δημογιαννόπουλος, dimogian@teipir.gr
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Συστήματα Αυτομάτου Ελέγχου Ενότητα #6: Σχεδιασμός ελεγκτών με χρήση αναλυτικής μεθόδου υπολογισμού παραμέτρων 2 Δ. Δημογιαννόπουλος, dimogian@teipir.gr
Εισαγωγή στα Προσαρµοστικά Συστήµατα
 ΒΕΣ 06 Προσαρµοστικά Συστήµατα στις Τηλεπικοινωνίες Εισαγωγή στα Προσαρµοστικά Συστήµατα Νικόλας Τσαπατσούλης Επίκουρος Καθηγητής Π..407/80 Τµήµα Επιστήµη και Τεχνολογίας Τηλεπικοινωνιών Πανεπιστήµιο Πελοποννήσου
ΒΕΣ 06 Προσαρµοστικά Συστήµατα στις Τηλεπικοινωνίες Εισαγωγή στα Προσαρµοστικά Συστήµατα Νικόλας Τσαπατσούλης Επίκουρος Καθηγητής Π..407/80 Τµήµα Επιστήµη και Τεχνολογίας Τηλεπικοινωνιών Πανεπιστήµιο Πελοποννήσου
ΕΛΕΓΧΟΣ ΒΙΟΜΗΧΑΝΙΚΩΝ ΔΙΕΡΓΑΣΙΩΝ ΚΕΦΑΛΑΙΟ 4 ΚΕΦΑΛΑΙΟ 5. ΑΝΑΓΝΩΡΙΣΗ ΔΙΕΡΓΑΣΙΑΣ ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ (Process Identifications)
") ΚΕΦΑΛΑΙΟ 5 ΑΝΑΓΝΩΡΙΣΗ ΔΙΕΡΓΑΣΙΑΣ ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ (Process Idetificatios) Στο κεφάλαιο αυτό γίνεται παρουσίαση μεθοδολογίας για την ανεύρεση ενός αξιόπιστου μοντέλου πριν ή κατά την λειτουργία της
ΚΕΦΑΛΑΙΟ 5 ΑΝΑΓΝΩΡΙΣΗ ΔΙΕΡΓΑΣΙΑΣ ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ (Process Idetificatios) Στο κεφάλαιο αυτό γίνεται παρουσίαση μεθοδολογίας για την ανεύρεση ενός αξιόπιστου μοντέλου πριν ή κατά την λειτουργία της
Kalman Filter Γιατί ο όρος φίλτρο;
 Kalman Filter Γιατί ο όρος φίλτρο; Συνήθως ο όρος φίλτρο υποδηλώνει µια διαδικασία αποµάκρυνσης µη επιθυµητών στοιχείων Απότολατινικόόροfelt : το υλικό για το φιλτράρισµα υγρών Στη εποχή των ραδιολυχνίων:
Kalman Filter Γιατί ο όρος φίλτρο; Συνήθως ο όρος φίλτρο υποδηλώνει µια διαδικασία αποµάκρυνσης µη επιθυµητών στοιχείων Απότολατινικόόροfelt : το υλικό για το φιλτράρισµα υγρών Στη εποχή των ραδιολυχνίων:
Τηλεπικοινωνιακά Συστήματα ΙΙ
 Τηλεπικοινωνιακά Συστήματα ΙΙ Διάλεξη 1: Χωρητικότητα Καναλιών Το θεώρημα Shannon - Hartley Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Ατζέντα 1. Δυαδική σηματοδοσία 2. Μορφές δυαδικής σηματοδοσίας 3.
Τηλεπικοινωνιακά Συστήματα ΙΙ Διάλεξη 1: Χωρητικότητα Καναλιών Το θεώρημα Shannon - Hartley Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Ατζέντα 1. Δυαδική σηματοδοσία 2. Μορφές δυαδικής σηματοδοσίας 3.
Ποσοτικές Μέθοδοι στη Διοίκηση Επιχειρήσεων ΙΙ Σύνολο- Περιεχόμενο Μαθήματος
 Ποσοτικές Μέθοδοι στη Διοίκηση Επιχειρήσεων ΙΙ Σύνολο- Περιεχόμενο Μαθήματος Χιωτίδης Γεώργιος Τμήμα Λογιστικής και Χρηματοοικονομικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης
Ποσοτικές Μέθοδοι στη Διοίκηση Επιχειρήσεων ΙΙ Σύνολο- Περιεχόμενο Μαθήματος Χιωτίδης Γεώργιος Τμήμα Λογιστικής και Χρηματοοικονομικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης
Βασίλειος Μαχαιράς Πολιτικός Μηχανικός Ph.D.
 Βασίλειος Μαχαιράς Πολιτικός Μηχανικός Ph.D. Κλασικές Τεχνικές Βελτιστοποίησης Πανεπιστήμιο Θεσσαλίας Σχολή Θετικών Επιστημών ΤμήμαΠληροφορικής Διάλεξη 2 η /2017 Μαθηματική Βελτιστοποίηση Η «Μαθηματική
Βασίλειος Μαχαιράς Πολιτικός Μηχανικός Ph.D. Κλασικές Τεχνικές Βελτιστοποίησης Πανεπιστήμιο Θεσσαλίας Σχολή Θετικών Επιστημών ΤμήμαΠληροφορικής Διάλεξη 2 η /2017 Μαθηματική Βελτιστοποίηση Η «Μαθηματική
Έλεγχος Κίνησης
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Ελεγκτές - Controller Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 1501 - Έλεγχος Κίνησης Ενότητα: Ελεγκτές - Controller Μιχαήλ Παπουτσιδάκης Τμήμα Αυτοματισμού Άδειες Χρήσης Το παρόν εκπαιδευτικό
Συλλογή μεταφορά και έλεγχος Δεδομένων. 1.4 Απλά και σύνθετα συστήματα αυτοματισμού.
 Συλλογή μεταφορά και έλεγχος Δεδομένων 1.4 Απλά και σύνθετα συστήματα αυτοματισμού. Το είδαμε μέχρι τώρα Δομή συστήματος αυτοματισμού Ο ελεγκτής προϋποθέτει την ύπαρξη κάποιων στοιχείων, στα οποία θα επιδράσει
Συλλογή μεταφορά και έλεγχος Δεδομένων 1.4 Απλά και σύνθετα συστήματα αυτοματισμού. Το είδαμε μέχρι τώρα Δομή συστήματος αυτοματισμού Ο ελεγκτής προϋποθέτει την ύπαρξη κάποιων στοιχείων, στα οποία θα επιδράσει
ΔΙΔΑΣΚΩΝ: Δρ. Στυλιανός Τσίτσος
 ΤΗΛΕΠΙΚΟΙΝΩΝΙΑΚΑ ΔΙΚΤΥΑ ΥΨΗΛΩΝ ΣΥΧΝΟΤΗΤΩΝ (Θ) Ενότητα 5: Μικροκυματικές Διατάξεις ΔΙΔΑΣΚΩΝ: Δρ. Στυλιανός Τσίτσος ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ 1 Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΤΗΛΕΠΙΚΟΙΝΩΝΙΑΚΑ ΔΙΚΤΥΑ ΥΨΗΛΩΝ ΣΥΧΝΟΤΗΤΩΝ (Θ) Ενότητα 5: Μικροκυματικές Διατάξεις ΔΙΔΑΣΚΩΝ: Δρ. Στυλιανός Τσίτσος ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΤΕ 1 Άδειες Χρήσης Το παρόν εκπαιδευτικό
Πληροφοριακά Συστήματα Διοίκησης. Επισκόπηση μοντέλων λήψης αποφάσεων Τεχνικές Μαθηματικού Προγραμματισμού
 Πληροφοριακά Συστήματα Διοίκησης Επισκόπηση μοντέλων λήψης αποφάσεων Τεχνικές Μαθηματικού Προγραμματισμού Σημασία μοντέλου Το μοντέλο δημιουργεί μια λογική δομή μέσω της οποίας αποκτούμε μια χρήσιμη άποψη
Πληροφοριακά Συστήματα Διοίκησης Επισκόπηση μοντέλων λήψης αποφάσεων Τεχνικές Μαθηματικού Προγραμματισμού Σημασία μοντέλου Το μοντέλο δημιουργεί μια λογική δομή μέσω της οποίας αποκτούμε μια χρήσιμη άποψη
5o Εργαστήριο Σ.Α.Ε Ενότητα : Ελεγκτές PID
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 5o Εργαστήριο Σ.Α.Ε Ενότητα : Ελεγκτές PID Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 5o Εργαστήριο Σ.Α.Ε Ενότητα : Ελεγκτές PID Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε
Μοντελοποίηση προβληµάτων
 Σχεδιασµός Αλγορίθµων Ακέραιος προγραµµατισµός Αποδοτικοί Αλγόριθµοι Μη Αποδοτικοί Αλγόριθµοι Σχεδιασµός Αλγορίθµων Ακέραιος προγραµµατισµός Αποδοτικοί Αλγόριθµοι Μη Αποδοτικοί Αλγόριθµοι Θεωρία γράφων
Σχεδιασµός Αλγορίθµων Ακέραιος προγραµµατισµός Αποδοτικοί Αλγόριθµοι Μη Αποδοτικοί Αλγόριθµοι Σχεδιασµός Αλγορίθµων Ακέραιος προγραµµατισµός Αποδοτικοί Αλγόριθµοι Μη Αποδοτικοί Αλγόριθµοι Θεωρία γράφων
Τοποθετήστε τη δισκέτα στο drive B και σε περιβάλλον MS-DOS πληκτρολογήστε: B:
 Συστήματα floppy disk Τοποθετήστε τη δισκέτα στο drive B και σε περιβάλλον MS-DOS πληκτρολογήστε: B: Συστήματα σκληρού δίσκου Οι χρήστες σκληρού δίσκου θα πρέπει να δημιουργήσουν ένα directory με το όνομα
Συστήματα floppy disk Τοποθετήστε τη δισκέτα στο drive B και σε περιβάλλον MS-DOS πληκτρολογήστε: B: Συστήματα σκληρού δίσκου Οι χρήστες σκληρού δίσκου θα πρέπει να δημιουργήσουν ένα directory με το όνομα
Αυτόματος Έλεγχος. Ενότητα 10 η : Σχεδίαση αντισταθμιστών στο πεδίο της συχνότητας. Παναγιώτης Σεφερλής
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 1 η : Σχεδίαση αντισταθμιστών στο πεδίο της συχνότητας Παναγιώτης Σεφερλής Εργαστήριο Δυναμικής Μηχανών Άδειες Χρήσης Το παρόν
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 1 η : Σχεδίαση αντισταθμιστών στο πεδίο της συχνότητας Παναγιώτης Σεφερλής Εργαστήριο Δυναμικής Μηχανών Άδειες Χρήσης Το παρόν
Τεχνητή Νοημοσύνη. 2η διάλεξη (2015-16) Ίων Ανδρουτσόπουλος. http://www.aueb.gr/users/ion/
 Ίων Ανδρουτσόπουλος. http://www.aueb.gr/users/ion/") Τεχνητή Νοημοσύνη 2η διάλεξη (2015-16) Ίων Ανδρουτσόπουλος http://www.aueb.gr/users/ion/ 1 Οι διαφάνειες αυτής της διάλεξης βασίζονται στα βιβλία: Τεχνητή Νοημοσύνη των Βλαχάβα κ.ά., 3η έκδοση, Β. Γκιούρδας
Τεχνητή Νοημοσύνη 2η διάλεξη (2015-16) Ίων Ανδρουτσόπουλος http://www.aueb.gr/users/ion/ 1 Οι διαφάνειες αυτής της διάλεξης βασίζονται στα βιβλία: Τεχνητή Νοημοσύνη των Βλαχάβα κ.ά., 3η έκδοση, Β. Γκιούρδας
ΕΠΙΧΕΙΡΗΣΙΑΚΗ ΕΡΕΥΝΑ Επιστήµη των Αποφάσεων, ιοικητική Επιστήµη 5 ο Εξάµηνο. Τµήµα Στατιστικής & Αναλογιστικών-Χρηµατοοικονοµικών Μαθηµατικών
 ΕΠΙΧΕΙΡΗΣΙΑΚΗ ΕΡΕΥΝΑ Επιστήµη των Αποφάσεων, ιοικητική Επιστήµη 5 ο Εξάµηνο ηµήτρης Λέκκας Επίκουρος Καθηγητής dlekkas@env.aegean.gr Τµήµα Στατιστικής & Αναλογιστικών-Χρηµατοοικονοµικών Μαθηµατικών Ορισµός
ΕΠΙΧΕΙΡΗΣΙΑΚΗ ΕΡΕΥΝΑ Επιστήµη των Αποφάσεων, ιοικητική Επιστήµη 5 ο Εξάµηνο ηµήτρης Λέκκας Επίκουρος Καθηγητής dlekkas@env.aegean.gr Τµήµα Στατιστικής & Αναλογιστικών-Χρηµατοοικονοµικών Μαθηµατικών Ορισµός
ΤΜΗΜΑΕΠΙΧΕΙΡΗΜΑΤΙΚΟΥΣΧΕΔΙΑΣΜΟΥ & ΠΛΗΡΟΦΟΡΙΑΚΩΝΣΥΣΤΗΜΑΤΩΝ
 ΤΜΗΜΑΕΠΙΧΕΙΡΗΜΑΤΙΚΟΥΣΧΕΔΙΑΣΜΟΥ & ΠΛΗΡΟΦΟΡΙΑΚΩΝΣΥΣΤΗΜΑΤΩΝ ΤΕΧΝΙΚΕΣ ΠΡΟΒΛΕΨΕΩΝ& ΕΛΕΓΧΟΥ ΜΑΘΗΜΑ ΤΡΙΤΟ ΣΥΝΑΡΤΗΣΗ ΑΥΤΟΣΥΣΧΕΤΙΣΗΣ-ΕΛΕΓΧΟΣ ΣΤΑΣΙΜΟΤΗΤΑΣ Δρ. Κουνετάς Η Κωνσταντίνος ΕΠΙΧ Τεχνικές Προβλέψεων & Ελέγχου
ΤΜΗΜΑΕΠΙΧΕΙΡΗΜΑΤΙΚΟΥΣΧΕΔΙΑΣΜΟΥ & ΠΛΗΡΟΦΟΡΙΑΚΩΝΣΥΣΤΗΜΑΤΩΝ ΤΕΧΝΙΚΕΣ ΠΡΟΒΛΕΨΕΩΝ& ΕΛΕΓΧΟΥ ΜΑΘΗΜΑ ΤΡΙΤΟ ΣΥΝΑΡΤΗΣΗ ΑΥΤΟΣΥΣΧΕΤΙΣΗΣ-ΕΛΕΓΧΟΣ ΣΤΑΣΙΜΟΤΗΤΑΣ Δρ. Κουνετάς Η Κωνσταντίνος ΕΠΙΧ Τεχνικές Προβλέψεων & Ελέγχου
Μάθημα: Ειδικά Συστήματα Ελέγχου Πλοίου(8.3.45.8) Κεφάλαιο: Συστήματα Ελέγχου Πλοίου
 Κεφάλαιο: Συστήματα Ελέγχου Πλοίου") Μάθημα: Ειδικά Συστήματα Ελέγχου Πλοίου(8.3.45.8) Κεφάλαιο: Συστήματα Ελέγχου Πλοίου Δρ.ΓεώργιοςΠαπαλάμπρου 1 Εισαγωγή Στο παρόν κεφάλαιο παρουσιάζονται συστήματα ελέγχου πλοίων, όπως αυτόματοι πιλότοι
Μάθημα: Ειδικά Συστήματα Ελέγχου Πλοίου(8.3.45.8) Κεφάλαιο: Συστήματα Ελέγχου Πλοίου Δρ.ΓεώργιοςΠαπαλάμπρου 1 Εισαγωγή Στο παρόν κεφάλαιο παρουσιάζονται συστήματα ελέγχου πλοίων, όπως αυτόματοι πιλότοι
Έλεγχος «Ελάχιστης Ενέργειας»
 Έλεγχος «Ελάχιστης Ενέργειας» Σε πολλές εφαρµογές, τόσο της αεροδιαστηµικής όσο και άλλων µορφών της τεχνολογίας µεταφορών κλπ, η βελτιστοποίηση επικεντρώνεται στο ζήτηµα της ενέργειας κατά την επίτευξη
Έλεγχος «Ελάχιστης Ενέργειας» Σε πολλές εφαρµογές, τόσο της αεροδιαστηµικής όσο και άλλων µορφών της τεχνολογίας µεταφορών κλπ, η βελτιστοποίηση επικεντρώνεται στο ζήτηµα της ενέργειας κατά την επίτευξη
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER
 4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
Ψηφιακή Επεξεργασία Σημάτων
 Ψηφιακή Επεξεργασία Σημάτων Ενότητα 3: Συστήματα Διακριτού Χρόνου Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Συστήματα Διακριτού Χρόνου Εισαγωγή στα Συστήματα Διακριτού Χρόνου Ταξινόμηση Συστημάτων ΔΧ
Ψηφιακή Επεξεργασία Σημάτων Ενότητα 3: Συστήματα Διακριτού Χρόνου Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Συστήματα Διακριτού Χρόνου Εισαγωγή στα Συστήματα Διακριτού Χρόνου Ταξινόμηση Συστημάτων ΔΧ
Βιομηχανικοί Ελεγκτές
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #13: Ψηφιακός Έλεγχος Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #13: Ψηφιακός Έλεγχος Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν εκπαιδευτικό
Ερωτήσεις για το μάθημα Μη Γραμμικά ΣΑΕ και Εφαρμογές: 10, 11, 15, 16, 17,18
 ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Διευθυντής Γ.Π. Παπαβασιλόπουλος Τίτλος Άσκησης: Sampling, Quantization, Jitter noise, Chaos Επιμέλεια: Ι. Κορδώνης Υ.Δ., Dr Ε. Σαρρή Ερωτήσεις για το μάθημα Προχωρημένες
ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Διευθυντής Γ.Π. Παπαβασιλόπουλος Τίτλος Άσκησης: Sampling, Quantization, Jitter noise, Chaos Επιμέλεια: Ι. Κορδώνης Υ.Δ., Dr Ε. Σαρρή Ερωτήσεις για το μάθημα Προχωρημένες
ΣΑΕ 1. Σημειώσεις από τις παραδόσεις. Για τον κώδικα σε L A TEX, ενημερώσεις και προτάσεις: https://github.com/kongr45gpen/ece-notes
 ΣΑΕ Σημειώσεις από τις παραδόσεις Για τον κώδικα σε L A TEX, ενημερώσεις και προτάσεις: https://github.com/kongr45gpen/ece-notes Οκτώβριος-Ιανουάριος 207 Τελευταία ενημέρωση: 3 Οκτωβρίου 207 Συστήματα
ΣΑΕ Σημειώσεις από τις παραδόσεις Για τον κώδικα σε L A TEX, ενημερώσεις και προτάσεις: https://github.com/kongr45gpen/ece-notes Οκτώβριος-Ιανουάριος 207 Τελευταία ενημέρωση: 3 Οκτωβρίου 207 Συστήματα
Εισαγωγή στον Αυτόματο Έλεγχο ( ) Σημειώσεις Μαθήματος Μέρος 3ο: Κλασσικός Έλεγχος. Γεώργιος Παπαλάμπρου
 Σημειώσεις Μαθήματος Μέρος 3ο: Κλασσικός Έλεγχος. Γεώργιος Παπαλάμπρου") Εισαγωγή στον Αυτόματο Έλεγχο (8.3.01.5) Σημειώσεις Μαθήματος 2015-2016 Μέρος 3ο: Κλασσικός Έλεγχος Γεώργιος Παπαλάμπρου 2 Δρ. Γεώργιος Παπαλάμπρου Επίκουρος Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας
Εισαγωγή στον Αυτόματο Έλεγχο (8.3.01.5) Σημειώσεις Μαθήματος 2015-2016 Μέρος 3ο: Κλασσικός Έλεγχος Γεώργιος Παπαλάμπρου 2 Δρ. Γεώργιος Παπαλάμπρου Επίκουρος Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας
ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΤΟΥ ΦΟΙΤΗΤΗ ΤΟΥ ΤΜΗΜΑΤΟΣ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΗΣ ΠΟΛΥΤΕΧΝΙΚΗΣ ΣΧΟΛΗΣ ΤΟΥ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΠΑΤΡΩΝ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ: ΣΥΣΤΗΜΑΤΩΝ ΚΑΙ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΡΓΑΣΤΗΡΙΟ: ΓΕΝΙΚΗΣ ΗΛΕΚΤΡΟΤΕΧΝΙΑΣ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΤΟΥ ΦΟΙΤΗΤΗ ΤΟΥ ΤΜΗΜΑΤΟΣ ΗΛΕΚΤΡΟΛΟΓΩΝ
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ: ΣΥΣΤΗΜΑΤΩΝ ΚΑΙ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΡΓΑΣΤΗΡΙΟ: ΓΕΝΙΚΗΣ ΗΛΕΚΤΡΟΤΕΧΝΙΑΣ ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΤΟΥ ΦΟΙΤΗΤΗ ΤΟΥ ΤΜΗΜΑΤΟΣ ΗΛΕΚΤΡΟΛΟΓΩΝ
- ΟΡΙΟ - ΣΥΝΕΧΕΙΑ ΣΥΝΑΡΤΗΣΗΣ ΕΝΟΤΗΤΑ 6: ΜΗ ΠΕΠΕΡΑΣΜΕΝΟ ΟΡΙΟ ΣΤΟ
 ΚΕΦΑΛΑΙΟ ο: ΣΥΝΑΡΤΗΣΕΙΣ - ΟΡΙΟ - ΣΥΝΕΧΕΙΑ ΣΥΝΑΡΤΗΣΗΣ ΕΝΟΤΗΤΑ 6: ΜΗ ΠΕΠΕΡΑΣΜΕΝΟ ΟΡΙΟ ΣΤΟ R - ΟΡΙΟ ΣΥΝΑΡΤΗΣΗΣ ΣΤΟ ΑΠΕΙΡΟ - ΠΕΠΕΡΑΣΜΕΝΟ ΟΡΙΟ ΑΚΟΛΟΥΘΙΑΣ [Κεφ..6: Μη Πεπερασμένο Όριο στο R - Κεφ..7: Όρια Συνάρτησης
ΚΕΦΑΛΑΙΟ ο: ΣΥΝΑΡΤΗΣΕΙΣ - ΟΡΙΟ - ΣΥΝΕΧΕΙΑ ΣΥΝΑΡΤΗΣΗΣ ΕΝΟΤΗΤΑ 6: ΜΗ ΠΕΠΕΡΑΣΜΕΝΟ ΟΡΙΟ ΣΤΟ R - ΟΡΙΟ ΣΥΝΑΡΤΗΣΗΣ ΣΤΟ ΑΠΕΙΡΟ - ΠΕΠΕΡΑΣΜΕΝΟ ΟΡΙΟ ΑΚΟΛΟΥΘΙΑΣ [Κεφ..6: Μη Πεπερασμένο Όριο στο R - Κεφ..7: Όρια Συνάρτησης
Άσκηση 3. Ποιοτική Μελέτη των νόμων ελέγχου δύο και τριών όρων (συσκευή: Προσομοιωτής ελέγχου PCS327: Σχ.1) Απαραίτητες γνώσεις
 Απαραίτητες γνώσεις") Άσκηση 3 Ποιοτική Μελέτη των νόμων ελέγχου δύο και τριών όρων (συσκευή: Προσομοιωτής ελέγχου PCS327: Σχ.1) Απαραίτητες γνώσεις 1) Αυτόματος έλεγχος δύο και τριών όρων 2) Εμπειρικαί μέθοδοι εκλογής των
Άσκηση 3 Ποιοτική Μελέτη των νόμων ελέγχου δύο και τριών όρων (συσκευή: Προσομοιωτής ελέγχου PCS327: Σχ.1) Απαραίτητες γνώσεις 1) Αυτόματος έλεγχος δύο και τριών όρων 2) Εμπειρικαί μέθοδοι εκλογής των
Ψηφιακές Τηλεπικοινωνίες. Δισδιάστατες Κυματομορφές Σήματος
 Ψηφιακές Τηλεπικοινωνίες Δισδιάστατες Κυματομορφές Σήματος Εισαγωγή Στα προηγούμενα μελετήσαμε τη διαμόρφωση PAM δυαδικό και Μ-αδικό, βασικής ζώνης και ζωνοπερατό Σε κάθε περίπτωση προέκυπταν μονοδιάστατες
Ψηφιακές Τηλεπικοινωνίες Δισδιάστατες Κυματομορφές Σήματος Εισαγωγή Στα προηγούμενα μελετήσαμε τη διαμόρφωση PAM δυαδικό και Μ-αδικό, βασικής ζώνης και ζωνοπερατό Σε κάθε περίπτωση προέκυπταν μονοδιάστατες
Τ.Ε.Ι. ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΚΑΙ ΘΡΑΚΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΜΑΘΗΜΑΤΙΚΗ ΜΟΝΤΕΛΟΠΟΙΗΣΗ ΠΡΟΒΛΗΜΑΤΩΝ ΓΡΑΜΜΙΚΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ
 Τ.Ε.Ι. ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΚΑΙ ΘΡΑΚΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΜΑΘΗΜΑΤΙΚΗ ΜΟΝΤΕΛΟΠΟΙΗΣΗ ΠΡΟΒΛΗΜΑΤΩΝ ΓΡΑΜΜΙΚΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΕΙΣΗΓΗΤΗΣ: Δρ. Ιωάννης Σ. Τουρτούρας Μηχανικός Παραγωγής & Διοίκησης
Τ.Ε.Ι. ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΚΑΙ ΘΡΑΚΗΣ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΜΑΘΗΜΑΤΙΚΗ ΜΟΝΤΕΛΟΠΟΙΗΣΗ ΠΡΟΒΛΗΜΑΤΩΝ ΓΡΑΜΜΙΚΟΥ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΕΙΣΗΓΗΤΗΣ: Δρ. Ιωάννης Σ. Τουρτούρας Μηχανικός Παραγωγής & Διοίκησης
Εφαρµογες Της Ψηφιακης Επεξεργασιας Σηµατων. Εκτιµηση Συχνοτητων Με ΙδιοΑναλυση του Μητρωου ΑυτοΣυσχετισης
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ Η/Υ ΚΑΙ ΠΛΗΡΟΦΟΡΙΚΗΣ ΕΡΓΑΣΤΗΡΙΟ ΕΠΕΞΕΡΓΑΣΙΑΣ ΣΗΜΑΤΩΝ ΚΑΙ ΤΗΛΕΠΙΚΟΙΝΩΝΙΩΝ Εφαρµογες Της Ψηφιακης Επεξεργασιας Σηµατων Εκτιµηση Συχνοτητων Με ΙδιοΑναλυση του Μητρωου ΑυτοΣυσχετισης
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ Η/Υ ΚΑΙ ΠΛΗΡΟΦΟΡΙΚΗΣ ΕΡΓΑΣΤΗΡΙΟ ΕΠΕΞΕΡΓΑΣΙΑΣ ΣΗΜΑΤΩΝ ΚΑΙ ΤΗΛΕΠΙΚΟΙΝΩΝΙΩΝ Εφαρµογες Της Ψηφιακης Επεξεργασιας Σηµατων Εκτιµηση Συχνοτητων Με ΙδιοΑναλυση του Μητρωου ΑυτοΣυσχετισης
ΕΝΔΕΙΚΤΙΚΑ ΠΡΟΒΛΗΜΑΤΑ
 Πρόβλημα 1 ΕΝΔΕΙΚΤΙΚΑ ΠΡΟΒΛΗΜΑΤΑ Η εταιρεία GALAXY INDUSTRIES διαθέτει στην αγορά 2 είδη πλάκες πεζοδρομίου: τη Space Ray και τη Galaxy Ray. Τα 2 είδη κατασκευάζονται σε δωδεκάδες από την ίδια βασική πρώτη
Πρόβλημα 1 ΕΝΔΕΙΚΤΙΚΑ ΠΡΟΒΛΗΜΑΤΑ Η εταιρεία GALAXY INDUSTRIES διαθέτει στην αγορά 2 είδη πλάκες πεζοδρομίου: τη Space Ray και τη Galaxy Ray. Τα 2 είδη κατασκευάζονται σε δωδεκάδες από την ίδια βασική πρώτη
Ψηφιακές Τηλεπικοινωνίες. Πιθανότητα Σφάλματος για Δυαδική Διαμόρφωση
 Ψηφιακές Τηλεπικοινωνίες Πιθανότητα Σφάλματος για Δυαδική Διαμόρφωση Σύνδεση με τα Προηγούμενα Σχεδιάστηκε ο βέλτιστος δέκτης για κανάλι AWGN Επειδή πάντοτε υπάρχει ο θόρυβος, ακόμη κι ο βέλτιστος δέκτης
Ψηφιακές Τηλεπικοινωνίες Πιθανότητα Σφάλματος για Δυαδική Διαμόρφωση Σύνδεση με τα Προηγούμενα Σχεδιάστηκε ο βέλτιστος δέκτης για κανάλι AWGN Επειδή πάντοτε υπάρχει ο θόρυβος, ακόμη κι ο βέλτιστος δέκτης
Προγραμματισμός Ηλεκτρονικών Υπολογιστών 2 - Εργαστήριο
 Προγραμματισμός Ηλεκτρονικών Υπολογιστών 2 - Εργαστήριο Ενότητα 9: Εισαγωγή στα Συστήματα Ανοικτού Ελέγχου Διδάσκουσα: Τσαγκαλίδου Ροδή Τμήμα: Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Προγραμματισμός Ηλεκτρονικών Υπολογιστών 2 - Εργαστήριο Ενότητα 9: Εισαγωγή στα Συστήματα Ανοικτού Ελέγχου Διδάσκουσα: Τσαγκαλίδου Ροδή Τμήμα: Ηλεκτρολόγων Μηχανικών ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ ΣΧΕΔΙΑΣΗ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΑΣΚΗΣΗ 2
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΗΜΑΤΩΝ ΕΛΕΓΧΟΥ ΚΑΙ ΡΟΜΠΟΤΙΚΗΣ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΗΜΑΤΩΝ ΕΛΕΓΧΟΥ ΚΑΙ ΡΟΜΠΟΤΙΚΗΣ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ
ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΧΕΙΜ17-18 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 2 ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ - ΕΡΓΑΣΤΗΡΙΟ ΧΕΙΜ17-18 ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ 2 ΕΛΕΓΧΟΣ ΤΑΧΥΤΗΤΑΣ
Είδη Διορθωτών: Υπάρχουν πολλών ειδών διορθωτές. Μία βασική ταξινόμησή τους είναι οι «Ειδικοί Διορθωτές» και οι «Κλασσικοί Διορθωτές».
 ΔΙΟΡΘΩΣΗ ΣΑΕ Είδη Διορθωτών: Οι Διορθωτές έχουν την δική τους (Σ.Μ). Ενσωματώνονται στον βρόχο του ΣΑΕ και δρουν πάνω στην αρχική Σ.Μ κατά τρόπο ώστε να της προσδώσουν την επιθυμητή συμπεριφορά, την οποία
ΔΙΟΡΘΩΣΗ ΣΑΕ Είδη Διορθωτών: Οι Διορθωτές έχουν την δική τους (Σ.Μ). Ενσωματώνονται στον βρόχο του ΣΑΕ και δρουν πάνω στην αρχική Σ.Μ κατά τρόπο ώστε να της προσδώσουν την επιθυμητή συμπεριφορά, την οποία
Controllers - Eλεγκτές
 Controller - Eλεγκτές Στις επόμενες ενότητες θα εξετασθούν οι βιομηχανικοί ελεγκτές ή ελεγκτές τριών όρων PID, (με τους διάφορους συνδυασμούς τους όπως: P, PI ή PID). Η προτίμηση των ελεγκτών PID οφείλεται
Controller - Eλεγκτές Στις επόμενες ενότητες θα εξετασθούν οι βιομηχανικοί ελεγκτές ή ελεγκτές τριών όρων PID, (με τους διάφορους συνδυασμούς τους όπως: P, PI ή PID). Η προτίμηση των ελεγκτών PID οφείλεται
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου
 Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 7 η : ΕΛΕΓΚΤΕΣ PID Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΒΙΟΜΗΧΑΝΙΚΟΥ ΣΧΕΔΙΑΣΜΟΥ ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 7 η : ΕΛΕΓΚΤΕΣ PID Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΒΙΟΜΗΧΑΝΙΚΟΥ ΣΧΕΔΙΑΣΜΟΥ ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Συστήματα Αυτομάτου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Συστήματα Αυτομάτου Ελέγχου Ενότητα #5: Σχεδιασμός ελεγκτών με τη μέθοδο του Τόπου Ριζών 2 Δ. Δημογιαννόπουλος, dimogian@teipir.gr Επ. Καθηγητής
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Συστήματα Αυτομάτου Ελέγχου Ενότητα #5: Σχεδιασμός ελεγκτών με τη μέθοδο του Τόπου Ριζών 2 Δ. Δημογιαννόπουλος, dimogian@teipir.gr Επ. Καθηγητής
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2017
 FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2017 M9 Διασύνδεση FORTRAN με άλλες γλώσσες Γεώργιος Παπαλάμπρου Επικ. Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2017 M9 Διασύνδεση FORTRAN με άλλες γλώσσες Γεώργιος Παπαλάμπρου Επικ. Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 2015
 Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 20 ΘΕΜΑ Ο (4,0 μονάδες). Να προσδιοριστεί η συνάρτηση μεταφοράς / του συστήματος που περιγράφεται από το δομικό (λειτουργικό) διάγραμμα. (2,0
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 20 ΘΕΜΑ Ο (4,0 μονάδες). Να προσδιοριστεί η συνάρτηση μεταφοράς / του συστήματος που περιγράφεται από το δομικό (λειτουργικό) διάγραμμα. (2,0
Ενότητα 10: Γραμμικό Τετραγωνικό Πρόβλημα. Νίκος Καραμπετάκης Τμήμα Μαθηματικών
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 10: Γραμμικό Τετραγωνικό Πρόβλημα Νίκος Καραμπετάκης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons.
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 10: Γραμμικό Τετραγωνικό Πρόβλημα Νίκος Καραμπετάκης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons.
Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών. Διάλεξη 9
 Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Τομέας Συστημάτων και Αυτομάτου Ελέγχου ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ Διάλεξη 9 Πάτρα 2008 Ρύθμιση ελαχίστης διασποράς Η στρατηγική
Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Τομέας Συστημάτων και Αυτομάτου Ελέγχου ΠΡΟΣΑΡΜΟΣΤΙΚΟΣ ΕΛΕΓΧΟΣ Διάλεξη 9 Πάτρα 2008 Ρύθμιση ελαχίστης διασποράς Η στρατηγική
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016
 FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016 M7 Δομές δεδομένων: Πίνακες Δρ. Γεώργιος Παπαλάμπρου Επικ. Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ
FORTRAN & Αντικειμενοστραφής Προγραμματισμός ΣΝΜΜ 2016 M7 Δομές δεδομένων: Πίνακες Δρ. Γεώργιος Παπαλάμπρου Επικ. Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ
9. Συστολικές Συστοιχίες Επεξεργαστών
 Κεφάλαιο 9: Συστολικές συστοιχίες επεξεργαστών 208 9. Συστολικές Συστοιχίες Επεξεργαστών Οι συστολικές συστοιχίες επεξεργαστών είναι επεξεργαστές ειδικού σκοπού οι οποίοι είναι συνήθως προσκολλημένοι σε
Κεφάλαιο 9: Συστολικές συστοιχίες επεξεργαστών 208 9. Συστολικές Συστοιχίες Επεξεργαστών Οι συστολικές συστοιχίες επεξεργαστών είναι επεξεργαστές ειδικού σκοπού οι οποίοι είναι συνήθως προσκολλημένοι σε
Σχεδιασμός Συστημάτων Ελέγχου ΔΠΜΣ Συστήματα Αυτοματισμού
 Σχεδιασμός Συστημάτων Ελέγχου ΔΠΜΣ Συστήματα Αυτοματισμού 2016-2017 Εισαγωγή στα Συστήματα Ελέγχου-Εφαρμογές Δρ. Γεώργιος Παπαλάμπρου Επίκ. Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr
Σχεδιασμός Συστημάτων Ελέγχου ΔΠΜΣ Συστήματα Αυτοματισμού 2016-2017 Εισαγωγή στα Συστήματα Ελέγχου-Εφαρμογές Δρ. Γεώργιος Παπαλάμπρου Επίκ. Καθηγητής ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr
ΔΙΠΛΩΜΑΤΙΚΗ ΕΡΓΑΣΙΑ ΓΟΥΛΙΟΥ ΝΙΚΗ. Πρόγραμμα Μεταπτυχιακών Σπουδών <<Θεωρητική Πληροφορική
 Τμήμα Μαθηματικών Πρόγραμμα Μεταπτυχιακών Σπουδών 1 Πρόγραμμα Μεταπτυχιακών Σπουδών
Τμήμα Μαθηματικών Πρόγραμμα Μεταπτυχιακών Σπουδών 1 Πρόγραμμα Μεταπτυχιακών Σπουδών
ΕΦΑΡΜΟΓΕΣ ΔΙΟΙΚΗΤΙΚΗΣ ΕΠΙΣΤΗΜΗΣ
 ΕΦΑΡΜΟΓΕΣ ΔΙΟΙΚΗΤΙΚΗΣ ΕΠΙΣΤΗΜΗΣ Dr. Christos D. Tarantilis Associate Professor in Operations Research & Management Science http://tarantilis.dmst.aueb.gr/ ΕΦΑΡΜΟΓΕΣ ΙΟΙΚΗΤΙΚΗΣ ΕΠΙΣΤΗΜΗΣ Ι - 1- ΣΥΝΔΥΑΣΤΙΚΗΔΟΜΗ:
ΕΦΑΡΜΟΓΕΣ ΔΙΟΙΚΗΤΙΚΗΣ ΕΠΙΣΤΗΜΗΣ Dr. Christos D. Tarantilis Associate Professor in Operations Research & Management Science http://tarantilis.dmst.aueb.gr/ ΕΦΑΡΜΟΓΕΣ ΙΟΙΚΗΤΙΚΗΣ ΕΠΙΣΤΗΜΗΣ Ι - 1- ΣΥΝΔΥΑΣΤΙΚΗΔΟΜΗ:
2 η ΕΝΟΤΗΤΑ ΑΚΕΡΑΙΟΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ
 ΣΧΟΛΗ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΜΠ ΕΙΣΑΓΩΓΗ ΣΤΗN ΒΕΛΤΙΣΤΟΠΟΙΗΣΗ ΣΥΣΤΗΜΑΤΩΝ 2 η ΕΝΟΤΗΤΑ ΑΚΕΡΑΙΟΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ Μ. Καρλαύτης Ν. Λαγαρός Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες Χρήσης Creative
ΣΧΟΛΗ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΜΠ ΕΙΣΑΓΩΓΗ ΣΤΗN ΒΕΛΤΙΣΤΟΠΟΙΗΣΗ ΣΥΣΤΗΜΑΤΩΝ 2 η ΕΝΟΤΗΤΑ ΑΚΕΡΑΙΟΣ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ Μ. Καρλαύτης Ν. Λαγαρός Άδεια Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες Χρήσης Creative