УНИВЕРЗИТЕТ У БАЊА ЛУЦИ АРХИТЕКТОНСКО-ГРАЂЕВИНСКИ ФАКУЛТЕТ. Предметни наставник: Дoц. др Матић Бојан, диг
|
|
|
- Ἀσκληπιός Αντωνιάδης
- 6 χρόνια πριν
- Προβολές:
Transcript
1 УНИВЕРЗИТЕТ У БАЊА ЛУЦИ АРХИТЕКТОНСКО-ГРАЂЕВИНСКИ ФАКУЛТЕТ ПУТЕВИ Предавање 5: Елементи пројектне геометрије ситуациони и нивелациони план Предметни наставник: Дoц. др Матић Бојан, диг 1 Асистенти: мр Бојана Грујић, диг. и Жарко Грујић, диг Драгана Зељић, диг /14
2 Elementi situacionog plana - Pravac Teško se uklapa u složene uslove terena i negativno utiče na ponašanje vozača jer umanjuje njegovu pažnju. Zato se koristi samo tamo gde to diktiraju uslovi lokacije (objekti, fiksne regulacije, mostovi i sl.) Preporuke: Između dve suprotno orijentisane krivine, međuparavac se toleriše u granicama: 2Vr L [m] 20 Vr Između dve istosmerno orijentisane krivine, međuparavac se toleriše u granicama: 4Vr L [m] 20 Vr (20 Vr ) je približno jednako najvećoj dubini vidnog polja. 2
3 Elementi situacionog plana kružne krivine (1) Geometrijska konstrukcija i proračun elemenata kružnog luka Polazi se od poznatog radijusa R i skretnog ugla (slika). Detaljni podaci za proračun i obeležavanje kružnih krivina se mogu naći u Priručniku za obeležavanje kružnih krivina (Prof. Žnideršić, Beograd, 1966). 3
4 Elementi situacionog plana kružne krivine (2) Kružni luk ( zakrivljenost 1/R = const.) je najjednostavniji oblik krive. Teži se što većim radijusima zbog smanjenja ukupne dužine trase, sigurnosti i udobnosti vožnje. 4
5 Elementi situacionog plana kružne krivine (3) Minimalni i maksimalni radijus U projektovanju se postavlja uslov: min R R max R Minimalni radijus se određuje iz vozno dinamičkih odnosa (uslov za stabilnost vozila u krivini), što znači da će minimalni radijus biti onaj pri kome se koristi puna vrednost koeficijenta radijalnog trenja (max fr) uz maksimalni poprečni nagib (max ip), za datu računsku brzinu (Vr): V 2 r min R = [m] 127(max fr + max ip) 5
6 Elementi situacionog plana kružne krivine (4) Za ranije definisane veličine (fr ) u zavisnosti od brzine, pri max ip = 7% tj 0,07, minimalni radijus u funkciji od računske brzine iznosi (zaokruženo na celih 5, odnosno 10 m): Preporučene minimalne dužine kružnog luka min Lk ovde su uslovljene vožnjom od dve sekunde konstantnom brzinom datom kružnom krivinom, koliko je neophodno za omogućenje saglasnosti projektovanog radijusa i radijusa vožene trajektorije. 6 Treba težiti da dužina kružnih lukova bude Lk 5 Vr, gde je Vr u [m/s]. Minimalni radijus se primenjuje samo kada je to jedino prihvatljivo rešenje.
7 Elementi situacionog plana kružne krivine (5) Maksimalni radijus se ograničava na vrednost pri kojoj se ne gubi osećaj zakrivljenosti, u normalnim okolonostima treba da bude max R = m (izuzetno max R = m ) Susedni radijusi - kombinacije krivina sa velikom razlikom vrednosti radijusa narušavaju sklad trase, pa se preporučuje odnos max R / min R ~ 6. Na primer, za Vr = 80 km/h sledi 250 R 1500 m. Izuzetak se javlja jedino kod planinskih puteva sa serpentinama, koje su sa izuzetno malim radijusima, pa se ne mogu uzeti kao merodavne za procenu korespodentih elemenata. Pri prelasku iz pravca na zakrivljeni deo trase, u zavisnosti od prethodne dužine pravca, zahteva se da bude ispunjeno: 7 L pravca 500 m R Lpravca L pravca 500 m R 500 m

8 Elementi situacionog plana kružne krivine (5) Polje izbora susednih radijusa horizontalnih krivina 8
9 Elementi situacionog plana - Prelazne krivine Pri prelazu vozila iz pravca u kružnu krivinu, dolazi do nagle promene radijalnog ubrzanja, što se može ublažiti primenom prelazne krivine. Pravac i krivina a) bez prelazne krivine b) složena krivina sa ulaznim i izlaznim delom dvostruko većeg radijusa Prelazna krivina sa linearnim rastom zakrivljenost od 0 do R 9
10 Matematičko rešenje prelazne krivine Konturni uslovi za matematički oblik prelazne krivine: Promena poluprečnika prelazne krivine treba da bude obavljena postupno od R0 = do R = Ri, tj, zakrivljenost podleže linearnoj promeni. Kružni luk i prelazna krivina treba da u prelaznoj dodirnoj tačci imaju zajedničku tangentu. Pri коnstantnoj brzini vožnje V = const, brzina zakretanja prednjih točkova treba da bude konstantna, tj. d / dt = const. 10
11 Matematičko rešenje prelazne krivine 11
12 Matematičko rešenje prelazne krivine V=L/t L=V*t sin ε=e/r= ε (sa preth. slike) R=e/ ε ε=e/r L1=V*t1 ε1=δ ε*t1 R1=e/ ε1 ε1=e/r1 L2=V*t2 ε2=δ ε*t2 R1=e/ ε2 ε2=e/r2.. Ln=V*tn εn=δ ε*tn Rn=e/ εn εn=e/rn t1= ε1/δ ε t2= ε2/δ ε... tn= εn/δ ε t1= e/(r1δ ε) t2= e/(r2δ ε)... tn= e/(rnδ ε) 12 Podeli se L1 sa L2... L1/L2= t1/t2=r2/r1 R*L=const.
13 Matematičko rešenje prelazne krivine Polaznom analizom se dolazi do zaključka da je proizvod dužine luka i poluprečnika krivine na svakom mestu konstantan: L * R = const = A 2 - prirodna jednačina klotoide Gde je: L - dužina luka klotoide R - poluprečnik na kraju luka (faktor veličine kruga) [m] A - parametar klotoide (faktor veličine prelazne krivine) [m] 13
14 Matematički oblik klotoide 14
15 Parametar kolotoide A Parametar klotoide ima dimenziju [m], pa je to u stvari faktor veličine prelazne krivine, kao što je R faktor veličine kruga. To znači da se promenom parametra A jedan isti oblik verno smanjuje ili povećava. Na slici se uočava sličnost klotoida različitih parametara. 15
16 Parametar kolotoide A Ugao koji zaklapa tangenta u posmatranoj tački klotoide sa tangentom u početnoj tački (skretni ugao) se izražava kao: dalje: i L L 2 A 2 = = = [rad] A 2 = RL 2R 2A 2 2R 2 A 2 L A R = = = [m] L 2 2 A 2 L = = 2 R = A 2 [m] R 16

17 Obeležavanje klotoide 17
18 Za obeležavanje klotoida postoje priručnici sa tablicama u kojima su date sve karakteristične vrednosti (slika) neophodne za definisanje klotoide. Tu pre svega treba izdvojiti standardnu ili jediničnu klotoidu (parametar A=1) koja predstavlja osnovni oblik klotoide. Sve ostale su dobijene multipliciranjem vrednosti osnovne klotoide odgovarajućim koeficijentom A i verne su joj po obliku. Pored tablica, prilikom projektovanja se koriste nomogrami za izbor parametara prekretnih i jajastih linija, klotoidni lenjiri, savitljive šipke i sl. 18
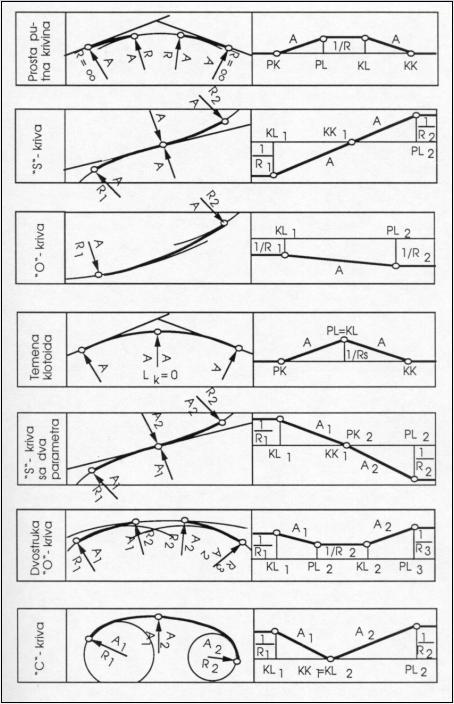
19 Primena klotoide i izbor parametara (1) Klotoida na prelazu sa pravca na krug i obrnuto - može se govoriti o simetričnoj (A1 = A2, ) i nesimetričnoj (A1 A2) krivini (slika 5.9). Geometrijski elementi proste putne krivine: 19
20 Primena klotoide i izbor parametara (2) Dužina tangente: Tg=(R+ΔR)tg(γ/2)+xm Dužina bisektrise: B=(R+ ΔR)sec(γ/2-1)+ΔR Dužina krivine: 20 D=L+Lk+L=2L+(Rπ(γ-2τ))/180
21 Primena klotoide i izbor parametara (3) Prekretna S kriva - Primenjuje se između dve kružne krivine suprotne zakrivljenosti, čime se obezbeđuje postupnost promene zakrivljenosti i kontinuitet krivinskih oblika. Normalna je primena klotoide istog parametra. (A1 = A2). Jajasta O kriva - Primenjuje se kao vezni element između dva kružna luka različitih radijusa, a istosmerne zakrivljenosti. Sa stanovišta optike trase, minimalna vrednost pripadajućeg ugla ove klotoide je
22 Primena klotoide i izbor parametara (4) Temena klotoida - Ako je dužina kružnog luka Lk = 0, znači da je čitava krivina sastavljena od dve prelaznice; ovo je slučaj tzv. temene klotoide, pri čemu može biti A1 = A2 ili A1 A2.. Temena klotoida se primenjuje samo onda kada su vrednosti skretnih uglova male, a primenjeni radijus kružne krivine znatno veći od minimalnog. Primena klotoide ograničena je uslovom R 2 min R. Poprečni profil u temenoj zoni oblikuje se na taj način da se njegova konstantna vrednost obezbedi za minimum dve sekunde vožnje odgovarajućom projektnom brzinom (Vpi). 22
23 Primena klotoide i izbor parametara (5) Prekretna S kriva sa dva različita parametra - Primena ovih oblika opravdana je za slučaj većih priključnih radijusa i veće razlike između radijusa. U slučaju primene klotoida različitih parametara (A1 A2) i kada je A2 200 m, važi odnos: A1 1,5 A2, gde je A1 veći parametar klotoide. Dvostruka jajasta linija - Primenjuje se samo kada su u pitanju složeni geometrijski oblici koji se ne mogu rešiti drugim sredstvima. Takav slučaj je obično opravdan kod saobraćajnih čvorova i uklapanja u fiksne regulacije. C kriva - Primena ovog oblika je veoma retka i najčešće se javlja kod projektovanja indirektnih rampi na denivelisanim raskrsnicama. 23
24 24
25 Primena klotoide i izbor parametara (6) Za klotoide, slično kao kod kružnih krivina, preporučene su minimalne vrednosti parametra A i dužine prelazne krivine L koje se primenjuju u projektovanju vangradskih puteva: 25
26 Primena klotoide i izbor parametara (7) Granične vrednosti prelaznih krivina su: R/3 A R. Pri određivanju parametara prelazne krivine primenjuju se i: Vozno dinamički kriterijum - promena radijalnog ubrzanja ili bočni udar. 26 Konstruktivni kriterijum - u konstruktivnom pogledu prelazna krivina se koristi i za promenu poprečnog nagiba. Pri tome se deformiše tok jedne ili obeju ivica kolovoza - javlja se tzv. rampa vitoperenja, sa svojim sopstvenim podužnim nagibom ir = h/lr. U normalnim uslovima, max ir = 0,5%, a samo kod oštrih krivina, koje se javljaju kod spiralnih rampi na denivelisanim raskrsnicama ili serpentinskim okretnicima, dozvoljava se max ir = 1-1,2%
27 Primena klotoide i izbor parametara (8) Pri određivanju parametara prelazne krivine primenjuju se i: Estetski kriterijum - prelazna krivina treba da ublaži utisak oštrine krivine, odnosno treba da vizuelno otvori krivinu. Iz prakse se pokazuje da se povoljni saobraćajno psihološki efekti mogu očekivati samo kod prelaznih krivina sa skretnim uglom 3 0 odakle sledi minimalna vrednost parametra min A = R/3. Sa likovne tačke gledišta, optimalna dužina prelazne krivine postiže se kod odnosa L : Lk : L = 1 : 1 : 1, a to će biti kada je : : = 1 : 2 : 1. 27
28 Vitoperenje u S krivini oko osovine kolovoza 28
29 Specijalni oblici putnih krivina Dosadašnja razmatranja krivina su se odnosila na vozno dinamičke, konstruktivne i estetske zahteve u području brzina od 40 do 120 km/h. U slučaju kada su dominantni zahtevi za minimalnim korišćenjem prostora, brzine su male (V 30 km/h) moraju se primeniti posebni oblici krivina kod kojih se geometrijski elementi moraju kombinovati prema uslovima prohodnosti vozila. To je slučaj kod površinskih raskrsnica, okretnica, serpentina, pristupa objektima i sl.) Najčešći oblici specijalnih krivina su: Kriva tragova Serpentinske okretnice 29
30 Kriva tragova (1) Do oblika krive koja može da zadovolji navedene uslove može se doći na osnovu grafoanalitičkih i eksperimentalnih istraživanja. I u jednom i u drugom slučaju ta kriva predstavlja obvojnicu poligonalne putanje koju opisuje zadnji unutrašnji točak ispitivanog vozila. Kao merodavno vozilo za analizu krive tragova se po pravilu usvaja najveće vozilo koje se pojavljuje pri normalnim uslovima odvijanja saobraćaja. 30
31 Kriva tragova (2) Na slici je prikazana karakteristična putanja motornog vozila kroz krivinu minimalnog radijusa 31
32 Složena trocentrična krivina (1) Da bi se pojednostavila upotreba krive tragova, izvršena je njena aproksimacija kružnim krivinama. Najmanja odstupanja daje složena krivina sa tri centra pri odnosu radijusa: R1 : R2 : R3 = 2,5 : 1 : 5,5 i odnosu centralnih uglova: : : = 1 : 5,5 : 1 Vrednost radijusa R2 je u funkciji merodavnog vozila i ukupnog skretnog ugla, a vrednost najmanjeg poluprečnika kruga okretanja (Rs) je poznata za svaki tip vozila. 32
33 Složena trocentrična krivina (2) 33
 34")
34 Veličina srednjeg radijusa R 2 (krive tragova) u funkciji tipa vozila i ugla ukrštanja Rs vrednost najmanjeg poluprečnika kruga okretanja za određeni tip vozila (poznata) 34
35 Serpentinske okretnice (1) U ograničenim uslovima razvijanja trase javlja se potreba za primenom složenog krivinskog oblika, tzv. serpentine, koja se sastoji iz: okretnice minimalnog prohodnog radijusa sa centralnim uglom i dve priključne krivine iste ili suprotne zakrivljenosti. Područje okretnice podleže specijalnim uslovima nivelacionog oblikovanja. Maksimalna vrednost poprečnog nagiba ipk = 9% dok se vrednost nagiba nivelete na području okretnice ograničava na i N = 3%. Na osnovu merenja tragova, formirani su standardni tipovi okretnica koji se u praksi najčešće primenjuju (videti tablicu na slikama koje slede). 35
36 Serpentinske okretnice (2) Ove analize su pokazale da okretnice nisu simetrične na pravac bisektrise. Oblik i konstrukcija proističe iz tri karakteristične linije: unutrašnje ivice okretnice (ui), osovine okretnice (o) i spoljne ivice okretnice (si). Svaka od ovih putanja predstavlja složenu krivu kojom je aproksimirana eksperimentalna kriva tragova. Ona se sastoji od: ulazne prelazne krivine, kružne krivine datog radijusa i izlazne prelazne krivine. 36
37 Serpentinske okretnice (3) Oblik ovih prelaznih krivina se ne može izraziti jednostavnim matematičkim izrazima, već je za svaku karakterističnu liniju pravouglim koordinatama definisan njihov tačan tok. Tako su na primer, za TIP 6/10 definisane sledeće vrednosti: b = 6,00 m Ru = 10,00 m R = 14,00 m Rs = 18,65 m M (v M, y M ), v M = +14,50 m; y M = + 15,20 m 37
38 Glavni elementi serpentine i konstrukcija serpentinske okretnice (1) Dalje su u tablicama date vrednosti koordinata karakterističnih linija na delu prelaznica u dva koordinatna sistema u v (za o, ui i si) i na isti način u x y sistemu. 38
39 Glavni elementi serpentine i konstrukcija serpentinske okretnice (2) 39
40 Proširenja kolovoza u krivini (1) U kretanju vozila kroz krivinu, točkovi opisuju tragove različitog radijusa. Razlika ekstremnih radijusa je uvek veća od širine vozila, a značajna je kod krivina sa radijusom većim od 200 m. Zbog toga se proširenje kolovoza izvodi kod svih krivina radijusa 25 < R < 200 m. Za krivine R > 200 m potrebna vrednost proširenja se zanemaruje, a za krivine radijusa R< 25 m se oblik mora analizirati prema krivoj tragova. 40
41 Proširenja kolovoza u krivini (2) U analizi proširenja merodavne su dimenzije najzastupljenijih tipova vozila na datom putu. U razmatranje se obično uzimaju sledeći tipovi vozila, za koje se daju praktični obrasci za proračun potrebnog proširenja saobraćajne trake: PA p = 10/R KAM - BUS p = 30/R [m] K + P p = 45/R Ove vrednosti su prikazane i u odgovarajućim dijagramima R - p [m] 41 Ukupno proširenje za n saobraćajnih se dobija sabiranjem proširenja pojedinih saobraćajnih traka i iznosi p = pi.
42 Izvođenje proširenja (1) U principu, proširenje se izvodi sa unutrašnje strane krivine. Pri tome se zahteva da se održi kontinuitet ivičnih linija puta. Ovo se može ostvariti samo ako je minimalna dužina kružnog luka Lk 15,00 m i minimalna dužina prelaznice L 15,00 m. Ako ovi uslovi nisu ispunjeni, oblikovanje ivičnih linija puta se mora vršiti na osnovu krive tragova. 42
43 Izvođenje proširenja (2) Raspodela proširenja za slučaj prelazna krivina - krug - prelazna krivina: 43
44 Izvođenje proširenja (3) Za izvođenje proširenja, karakteristični oblici krivina su: prelazna krivina - krug - prelazna krivina, S krivina i O linija. Za sva tri slučaja važi sledeća jednačina krive raspodele proširenja: Gde je: Pi- veličina proširenja u tački i P- veličina ukupnog proširenja Pi = ½ p * [1 cos x ] [m] X - odnos rastojanja tačke u kojoj se određuje proširenje (Li) prema ukupnoj dužini na kojoj se vrši proširenje (L ); 44 X = Li / L ; 0 x 1. Ova jednačina daje najbolju raspodelu proširenja sa gledišta kontinuiteta unutrašnje ivice.
45 Elementi nivelacionog plana Nivelacioni tok puta utvrđuje se linijskim projekcijama u vertikalnoj ravni. Ovim se definiše visinski položaj karakterističnih tačaka poprečnog profila (koordinata Z) i uspostavljaju zakonitosti visinskih promena. Elementi: nagib nivelete, vertikalne krivine, vitoperenje - poprečni nagibi kolovoza. 45
46 Elementi nivelacionog plana nagib nivelete (1) Podužni nagib puta, ili nagib nivelete (i N %) usvaja se na osnovu realne procene objektivnih uslova. Sa stanovišta sigurnosti saobraćaja, eksploatacionih efekata, ekoloških posledica i kvaliteta saobraćajnog toka, treba težiti što je moguće manjim vrednostima podužnih nagiba. Minimalni nagib nivelete (min i N ) min i N = 0% ako se efikasno odvođenje površinskih voda može ostvariti samo poprečnim nagibom kolovoza 46
47 Elementi nivelacionog plana nagib nivelete (2) min i N 0,5 (0,8) % ako je put u useku, gde se odvodnjavanje rešava rigolama ili kanalima, potrebno je da postoji određeni podužni nagib nivelete koji obezbeđuje minimalne hidrauličke uslove za podužno tečenje vode; pri tome se podrazumeva da takav nagib u sebi objedinjuje uslove vitoperenja kolovoza i minimalne hidrološke uslove oticanja, odnosno treba da bude ispunjeno: I N i rv min i hid Gde je: I N - nagib nivelete (%) i rv - nagib rampe vitoperenja (%) min i hid - minimalni hidraulički pad za oticanje voda u funkciji primenjenog tipa rigola ili kanala (betonski, kameni, zatravljen i sl.) Posebni slučajevi: dijagonalno vitoperenje u zonama infleksije, porozni asfalt, nivelacioni planovi sa ekvidistancijom izohipsi 1 cm 47
48 Elementi nivelacionog plana nagib nivelete (3) Maksimalni nagib nivelete (max i N ) Predstavlja gornju granicu podužnog nagiba na koju utiču uslovi vuče, troškovi građenja i niz eksploatacionih faktora. Najjednostavniji metod je onaj koji proističe iz osnovne jednačine kretanja gde se nagib rešava u zavisnosti od vučne sile, otpora vazduha, otpora kotrljanja i bruto težine vozila: max Z - Wv max i N = w k = maxd w k [%] G br 48
49 Elementi nivelacionog plana nagib nivelete (4) Analizu ima smisla vršiti samo za područje brzina bliskih Vr, što znači da se radi o dinamičkom faktoru koji leži u asponu III IV brzinskog spoja. U ovom opsegu brzina postoje znatne razlike u mogućnostima teretnih i putničkih vozila (npr. KAM 1,5-2,5 %, PA 4-5%), pa se zaključci ove analize teško mogu prihvatiti kao univerzalni kriterijum, pogotovu što postoje i drugi razlozi koje treba uvažiti. Tako, po pravilu se sa povećanjem nagiba smanjuju investicioni troškovi, ali se zato uvećavaju troškovi eksploatacije, smanjuje se propusna moć puta i sl. 49
50 Elementi nivelacionog plana nagib nivelete (5) Propisi ukazuju samo na orijentacione vrednosti za max i N, u zavisnosti od kategorije puta i terena, uz obavezu projektanta da za svaki konkretan slučaj dokaže opravdanost njegove primene 50
 mora se vršiti zaobljenje, da bi se izbegla skokovita promena otpora od nagiba.")
51 Elementi nivelacionog plana vertikalne krivine (1) Karakteristični tipovi preloma nivelete: a) konveksni b) konkavni: Bez obzira na oštrinu preloma ( i %) mora se vršiti zaobljenje, da bi se izbegla skokovita promena otpora od nagiba. 51

52 Elementi nivelacionog plana vertikalne krivine (2) Dijagram otpora od nagiba na prelomu nivelete bez zaobljenja i sa zaobljenjem. 52
53 Elementi nivelacionog plana vertikalne krivine (3) Zaobljavanje vertikalnih preloma izvodi se kružnim lukom radijusa Rv. Oblik funkcije zaobljenja ja kvadratna parabola koja sa dovoljno tačnosti aproksimira krug, a data je izrazom: y = x 2 /2Rv gde je: y - ordinata kvadratne parabole [m] x apscisa kvadratne parabole [m] Rv oskulatorni krug (radijus zaobljenja) kvadratne parabole [m] 53
54 Elementi nivelacionog plana vertikalne krivine (4) Matematički oblik funkcije zaobljenja: 54
55 Minimalne vrednosti radijusa vertikalnih krivina min Rv (1) Minimalne vrednosti radijusa vertikalnih krivina za konveksna i konkavna zaobljenja u funkciji računske brzine daju se na osnovu kriterijuma obezbeđenja zaustavne preglednosti za dnevne i noćne uslove vožnje. Minimalne vrednosti radijusa vertikalnih krivina: 55
56 Minimalne vrednosti radijusa vertikalnih krivina min Rv (2) U pogledu vozno dinamičkih uslova, uzima se u obzir uticaj centrifugalne sile koji se javlja kod vertikalnih krivina u smeru upravnom na ravan kolovoza. Efekti centrifugalne sile mogu da budu neudobni, ali se taj rizik ne javlja ako se primenjuje kriterijum zaustavne preglednosti, koji za određene brzine daje značajno veće radijuse. 56
57 Maksimalne vrednosti radijusa vertikalnih krivina max Rv (1) Kod primene maksimalnih vrednosti radijusa vertikalnih krivina praktično ne postoji ograničenje u pogledu veličine. Ovde se pre postavlja pitanje odnosa susednih radijusa vertikalnih krivina. U pogledu uslova geometrijske kompatibilnosti oblika mogu se primeniti veličine radijusa koje kao granični slučaj imaju zajedničku tačku dodira dveju vertikalnih krivina iste ili suprotne zakrivljenosti. Estetski razlozi ukazuju da radijus konkavne krivine ne treba da bude manji od 2/3 susednog radijusa konveksne krivine. 57
58 Maksimalne vrednosti radijusa vertikalnih krivina max Rv (2) Geometrijski uslov za određivanje max Rv: 58
59 Konstrukcija i proračun vertikalne krivine (1) Osnovni elementi vertikalne krivine proističu iz poznatih relacija za kružni luk: T g = R tg /2 Zamenom tg /2 = i N /2 dobija se tangenta vertikalne krivine: T g = R v * i N /2 Maksimalna ordinata (max y) dobija se kada se u funkciji zaobljenja: y = x 2 /2R zameni x = Tg = Rv i N /2 : max y = Rv * i 2 N /8 U oba izraza i N predstavlja oštrinu preloma nivelete izraženu kao tg = i N /
60 Konstrukcija i proračun vertikalne krivine (2) Karakteristični geometrijski elementi za konstrukciju i proračun vertikalne krivine: 60
61 Vitoperenje - poprečni nagibi kolovoza I p pravac, i pk krivina (1) Minimalni poprečni nagib (min i p min i pk ) iznosi 2,5% u pravcu i u krivini čiji je radijus veći od graničnog, odnosno u krivini sa negativnim nagibom (tzv. kontra nagibom). Ova vrednost je određena iz uslova odvodnjavanja. Maksimalni poprečni nagib (max i pk ) iznosi 7%, izuzetno 9% kod serpentinskih oktretnica. Pritom se rezultujuća vrednost nagiba kolovoza ograničava na 10%. U praksi su se primenjivali i poprečni nagibi do 14%, što je izazivalo negativne posledice pri manjim brzinama kretanja vozila. 61
62 Vitoperenje - poprečni nagibi kolovoza I p pravac, i pk krivina (2) Za određenu vrednost projektne brzine Vp i poznati radijus kružne krivine moguće je odrediti idealni poprečni nagib kod koga je rezultanta svih sila koje deluju na vozilo, upravna na kolovoznu površinu. Tada mora postojati ravnoteža svih radijalnih sila koje deluju na vozilo: Gbr * sin = C * cos,, i tada se ne oseća radijalno ubrzanje, a upravljanje je moguće bez dodirivanja volana. 62
63 Vitoperenje - poprečni nagibi kolovoza I p pravac, i pk krivina (3) Brzina vožnje pri ovim uslovima naziva se brzina slobodnog volana, ili optimalna brzina krivine. Vs 127 ipk R km/ h Logično je da ovaj slučaj nastaje kod primene maksimalnih radijusa kružnih krivina. 63 Međutim, realno se primenjuju radijusi znatno manji od maksimalnih, tako da u prijemu radijalne sile učestvuju i poprečni nagib i raspoloživo radijalno trenje.

64 Poprečni nagib kolovoza u zavisnosti od projektnih brzina može se odrediti prema dijagramu: 64
65 Sistemi vitoperenja (1) Vitoperenje kolovozne ploče radi postizanja potrebnog poprečnog nagiba, vrši se oko osovine kolovoza ili oko jedne od kolovoznih ivica. Ono se obavlja na prelaznoj krivini, sa uslovom da se na početku kružne krivine postigne potreban poprečni nagib (i pk ). Postoje dva sistema vitoperenja: Vitoperenje oko osovine kolovoza Vitoperenje oko ivice kolovoza 65
66 Sistemi vitoperenja (2) Vitoperenje oko osovine kolovoza - preporučuje se u svim situacijama kada se radi o dvosmernim putevima i autoputevima sa samostalno vođenim kolovozima. Glavna prednost je u tome što se ravnomerno raspodeljuju deformacije ivičnih linija. 66
67 Sistemi vitoperenja (3) Slika: a) autoput sa prostorno razdvojenim kolovozima b) dvosmerni putevi i ulice 67
68 Sistemi vitoperenja (4) Vitoperenje oko ivice kolovoza - primenjuje se uglavnom kod jednosmernih kolovoza u sklopu denivelisanih raskrsnica, a takođe na auto-putevima koji su projektovani sa minimalnom širinom srednje razdelne trake. Ovaj način vitoperenja zahteva dvostruko duže prelazne rampe. 68
69 Sistemi vitoperenja (5) Slika: a) auto-put sa minimalnom razdelnom trakom b) samostalne jednosmerne rampe na denivelisanim raskrsnicama 69
70 Šema vitoperenja (1) za zadatu putnu krivinu definisanu radijusom (R), parametrom prelazne krivine (A), odnosno njenom dužinom (L) i širinom kolovoza (B), potrebno je da budu poznati početni i završni poprečni nagibi (i p0 i pk ) i usvojen sistem vitoperenja. Sa ovim elementarnim podacima, uz prethodno sračunavanje visinske razlike strukturnih linija (hi) u karakterističnim tačkama krivine (PKi KKi), može se konstruisati nivelacioni tok osovine i ivica kolovoza. 70
71 Karakteristična šema vitoperenja proste putne krivine: a) vitoperenje oko osovine; b) vitoperenje oko unutrašnje ivice 71
72 Šeme vitoperenja S krivine: a) vitoperenje oko osovine b) vitoperenje oko ivice 72
73 Granične vrednosti nagiba rampe vitoperenja (max irv, min irv) Nagib rampe vitoperenja je razlika podužnog nagiba ivice vitoperenja i osovine oko koje se vrši vitoperenje. Određuje se prema: i rv = b * (i pk i p )/L v Gde je: i rv b i pk i p L v - nagib rampe vitoperenja - odstojanje ivice kolovoza od osovine vitoperenja - poprečni nagib kolovoza na kraju područja vitoperenja - poprečni nagib kolovoza na početku područja vitoperenja - dužina vitoperenja = dužina prelazne krivine 73
74 Granične vrednosti nagiba rampe vitoperenja (max irv, min irv) Maksimalne vrednosti nagiba rampe vitoperenja Najmanje dopuštene vrednosti rampi vitoperenja iznose: za vitoperenje oko osovine kolovoza: min r v = 0,2% za vitoperenje oko ivice kolovoza: min r v = 0,4% 74 Kod svih preloma rampi vitoperenja oštrine veće od 0,5%, vrši se zaobljavanje ivica kolovoza radijusom zaobljenja: Rv 2 * 15/i rv
75 Preglednost (1) Istraživanje uzroka saobraćajnih nezgoda na putevima za brzi motorni saobraćaj pokazuju da se u skoro 40% slučajeva kao indirektan uzrok može navesti nedovoljna preglednost puta. U principu, samo pravci u jednolikoj ravni ili u konkavnim vertikalnim krivinama omogućuju punu preglednost. 75
76 Preglednost (2) U projektnim analizama proračuni i prostorne provere preglednosti obavljaju se za dva karakteristična slučaja: Prvi slučaj je kada se vozilo mora zaustaviti ispred nepokrtetne smetnje na kolovozu i tada se radi o zaustavnoj preglednosti. U drugom slučaju, u pitanju je preticajna preglednost kojom se provereava mogućnost puta za bezbedno izvođenje. 76
77 Zaustavna preglednost (Pz) (1) U situacionom planu, u svim pozicijama, a posebno u krivinama radijusa R<1.000 m potrebno je da vozač ispred sebe sagleda odsek puta na kome će biti u stanju da u slučaju nepokretne smetnje na kolovozu, bezbedno zaustavi vozilo. Proizilazi da vizura preglednosti (Pz) treba da bude najmanje jednaka dužini zaustavnog puta pri forsiranom kočenju: Pz = L zf + L [m] gde je: V 2 L zf = zaustavni put pri forsiranom kočenju 254 (Ft + w k i N ) L = 5 10 m sigurnosni razmak vozila zaustavljenog ispred smetnje. 77
78 Zaustavna preglednost (Pz) (2) Vizura zaustavne preglednosti, po pravilu treba da bude ostvarena na svakom mestu. Ova veličina predstavlja neophodan uslov za ispunjenje polazne pretpostavke da put garantuje bezbednu vožnju programiranom računskom brzinom. Iz psiholoških razloga, treba težiti što širem otvaranju preglednosti. 78

79 Geometrijske pretpostavke za određivanje zaustavne vizure preglednosti 79

80 Minimalna vizura zaustavne preglednosti u funkciji brzine vožnje i uslova puta 80
81 Uslov za određivanje min Rv za konveksan prelom nivelete 81
82 Uslov za određivanje min Rv za konkavan prelom nivelete 82

83 Preticajna preglednost (Pp) (1) Za ostvarenje preticanja elementarni uslov je da gustina toka bude manja od nivoa usluge D i drugo, da putni elementi obezbede dovoljnu preglednost pri kojoj se može obaviti manevar preticanja. Iz slike se vidi da je preticajna preglednost P p = L A + L C. 83 Ove osnovne dužine se mogu izraziti preko v A, v B i v C Ako se usvoji da je v B = v C = v r (računska brzina) i da se preticanje obavlja razlikom brzina v, jasno je da će za višak puta L = L A - L B biti potrebno vreme t = L/ v = 3,6 L/ V.
84 Preticajna preglednost (Pp) (2) t je ujedno ukupno vreme preticanja, u kome će istovremeno vozilo A savladati i put L B, a njemu dolazeće u susret vozilo C preći put L C, pa je ukupna dužina ovih puteva jednaka preticajnoj vizuri preglednosti: P p = L + L B + L C ako uvedemo L = t V/3,6 i L B = L C = t * V r /3,6 dobijamo: U ovom izrazu je nepoznata veličina t. t P p = (2Vr + V) [m 3,6 84

85 Odnos ukupnog vremena preticanja (t) i V. Istraživanjima je utvrđeno da se za prosečne razlike brzina V = 15 km/h preticanje pojedinačnog vozila normalno može obaviti za t = 10 s. To se vreme skraćuje ako se preticanje obavlja većom razlikom brzina. 85
86 Potrebne dužine vizura preticajne preglednosti za t = 10s i V = 15km/h: Kod autoputeva ne postoji vozilo iz suprotnog smera, pa se izostavlja dužina LC = Vr * t / 3,6 i dobija se: t P pa = (Vr + V) 3,6 [m] 86
87 Grafička konstrukcija zone preglednosti za slučaj nepokretne smetnje U projektovanju puteva preglednost se proverava na svim krivinama kod kojih, uz unutrašnju ivicu kolovoza, postoje vizuelne prepreke. To se najlakše izvodi grafičkim putem. Postupak u grafičkoj proveri zahteva precizan crtež kolovoza u krivini R = 1 : 1000 (1 : 500). Polazeći od tačke PK, na kritičnu osovinu voznog traga nanose se jednaki odseci P = P/n, a zatim se povlače tetive P = n * P koje predstavljaju vizuru preglednosti za odgovarajući slučaj. Obvojnica ovih tetiva omeđuje potrebnu zonu preglednosti. Najveća širina ove zone je na delu kružnog luka (b p ). Može se sračunati kao strelica luka radijusa R i tetive P: 87 b p = P 2 /8R
88 Grafička konstrukcija zone preglednosti za slučaj nepokretne smetnje 88
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET SIGNALI I SISTEMI. Zbirka zadataka
 UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
3.1 Granična vrednost funkcije u tački
 3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
PRAVA. Prava je u prostoru određena jednom svojom tačkom i vektorom paralelnim sa tom pravom ( vektor paralelnosti).
.") PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
PUTEVI I ŽELJEZNIČKE PRUGE
 V Predavanje PUTEVI I ŽELJEZNIČKE PRUGE Vertikalno vođenje trase puta Računska brzina Proračun zaustavnog puta Mr Katarina Mirković 1 Podužni profil puta Kada se trasa puta presiječe, podužno po njenoj
V Predavanje PUTEVI I ŽELJEZNIČKE PRUGE Vertikalno vođenje trase puta Računska brzina Proračun zaustavnog puta Mr Katarina Mirković 1 Podužni profil puta Kada se trasa puta presiječe, podužno po njenoj
Ispitivanje toka i skiciranje grafika funkcija
 Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
Ponašanje pneumatika pod dejstvom bočne sile
 Ponašanje pneumatika pod dejstvom bočne sile POVOĐENJE TOČKA Dejstvo bočne sile pravac kretanja pod uglom u odnosu na pravac uzdužne ravni pneumatika BOČNA SILA PAVAC KETANJA PAVAC UZDUŽNE AVNI PNEUMATIKA
Ponašanje pneumatika pod dejstvom bočne sile POVOĐENJE TOČKA Dejstvo bočne sile pravac kretanja pod uglom u odnosu na pravac uzdužne ravni pneumatika BOČNA SILA PAVAC KETANJA PAVAC UZDUŽNE AVNI PNEUMATIKA
Ponašanje pneumatika pod dejstvom bočne sile
 Ponašanje pneumatika pod dejstvom bočne sile POVOĐENJE TOČKA Dejstvo bočne sile pravac kretanja pod uglom u odnosu na pravac uzdužne ravni pneumatika BOČNA SILA PAVAC KETANJA PAVAC UZDUŽNE AVNI PNEUMATIKA
Ponašanje pneumatika pod dejstvom bočne sile POVOĐENJE TOČKA Dejstvo bočne sile pravac kretanja pod uglom u odnosu na pravac uzdužne ravni pneumatika BOČNA SILA PAVAC KETANJA PAVAC UZDUŽNE AVNI PNEUMATIKA
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
SISTEMI NELINEARNIH JEDNAČINA
 SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II
 1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II Zadatak: Klipni mehanizam se sastoji iz krivaje (ekscentarske poluge) OA dužine R, klipne poluge AB dužine =3R i klipa kompresora B (ukrsne glave). Krivaja
1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II Zadatak: Klipni mehanizam se sastoji iz krivaje (ekscentarske poluge) OA dužine R, klipne poluge AB dužine =3R i klipa kompresora B (ukrsne glave). Krivaja
Elementi spektralne teorije matrica
 Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A
, grupa A") Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
Pismeni ispit iz matematike GRUPA A 1. Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj, zatim naći 4 z.
 Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
ELEMENTI NIVELACIONOG PLANA Podužni nagibi Vertikalne krivine Poprečni nagibi Vitoperenje kolovoza
 V Predavanje ELEMENTI NIVELACIONOG PLANA Podužni nagibi Vertikalne krivine Poprečni nagibi Vitoperenje kolovoza mrkatarina Mirković 1 Nivelacioni plan jedne saobraćajnice pretstavlja sintezni prikaz odnosa
V Predavanje ELEMENTI NIVELACIONOG PLANA Podužni nagibi Vertikalne krivine Poprečni nagibi Vitoperenje kolovoza mrkatarina Mirković 1 Nivelacioni plan jedne saobraćajnice pretstavlja sintezni prikaz odnosa
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Osnovne teoreme diferencijalnog računa
 Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
Pismeni ispit iz matematike Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: ( ) + 1.
 + 1.") Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
Zavrxni ispit iz Matematiqke analize 1
 Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
Osnovni primer. (Z, +,,, 0, 1) je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju
 je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju") RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
UZDUŽNA DINAMIKA VOZILA
 UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
IZVODI ZADACI (I deo)
") IZVODI ZADACI (I deo) Najpre da se podsetimo tablice i osnovnih pravila:. C`=0. `=. ( )`= 4. ( n )`=n n-. (a )`=a lna 6. (e )`=e 7. (log a )`= 8. (ln)`= ` ln a (>0) 9. = ( 0) 0. `= (>0) (ovde je >0 i a
IZVODI ZADACI (I deo) Najpre da se podsetimo tablice i osnovnih pravila:. C`=0. `=. ( )`= 4. ( n )`=n n-. (a )`=a lna 6. (e )`=e 7. (log a )`= 8. (ln)`= ` ln a (>0) 9. = ( 0) 0. `= (>0) (ovde je >0 i a
10. STABILNOST KOSINA
 MEHANIKA TLA: Stabilnot koina 101 10. STABILNOST KOSINA 10.1 Metode proračuna koina Problem analize tabilnoti zemljanih maa vodi e na određivanje odnoa između rapoložive mičuće čvrtoće i proečnog mičućeg
MEHANIKA TLA: Stabilnot koina 101 10. STABILNOST KOSINA 10.1 Metode proračuna koina Problem analize tabilnoti zemljanih maa vodi e na određivanje odnoa između rapoložive mičuće čvrtoće i proečnog mičućeg
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu
 Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
( , 2. kolokvij)
") A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
numeričkih deskriptivnih mera.
 DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
II. ODREĐIVANJE POLOŽAJA TEŽIŠTA
 II. ODREĐIVANJE POLOŽAJA TEŽIŠTA Poožaj težišta vozia predstavja jednu od bitnih konstruktivnih karakteristika vozia s obzirom da ova konstruktivna karakteristika ima veiki uticaj na vučne karakteristike
II. ODREĐIVANJE POLOŽAJA TEŽIŠTA Poožaj težišta vozia predstavja jednu od bitnih konstruktivnih karakteristika vozia s obzirom da ova konstruktivna karakteristika ima veiki uticaj na vučne karakteristike
5 Ispitivanje funkcija
 5 Ispitivanje funkcija 3 5 Ispitivanje funkcija Ispitivanje funkcije pretodi crtanju grafika funkcije. Opšti postupak ispitivanja funkcija koje su definisane eksplicitno y = f() sadrži sledeće elemente:
5 Ispitivanje funkcija 3 5 Ispitivanje funkcija Ispitivanje funkcije pretodi crtanju grafika funkcije. Opšti postupak ispitivanja funkcija koje su definisane eksplicitno y = f() sadrži sledeće elemente:
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović
 DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
RAČUNSKE VEŽBE IZ PREDMETA POLUPROVODNIČKE KOMPONENTE (IV semestar modul EKM) IV deo. Miloš Marjanović
 IV deo. Miloš Marjanović") Univerzitet u Nišu Elektronski fakultet RAČUNSKE VEŽBE IZ PREDMETA (IV semestar modul EKM) IV deo Miloš Marjanović MOSFET TRANZISTORI ZADATAK 35. NMOS tranzistor ima napon praga V T =2V i kroz njega protiče
Univerzitet u Nišu Elektronski fakultet RAČUNSKE VEŽBE IZ PREDMETA (IV semestar modul EKM) IV deo Miloš Marjanović MOSFET TRANZISTORI ZADATAK 35. NMOS tranzistor ima napon praga V T =2V i kroz njega protiče
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama.
 Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
OM2 V3 Ime i prezime: Index br: I SAVIJANJE SILAMA TANKOZIDNIH ŠTAPOVA
 OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
OBRTNA TELA. Vladimir Marinkov OBRTNA TELA VALJAK
 OBRTNA TELA VALJAK P = 2B + M B = r 2 π M = 2rπH V = BH 1. Zapremina pravog valjka je 240π, a njegova visina 15. Izračunati površinu valjka. Rešenje: P = 152π 2. Površina valjka je 112π, a odnos poluprečnika
OBRTNA TELA VALJAK P = 2B + M B = r 2 π M = 2rπH V = BH 1. Zapremina pravog valjka je 240π, a njegova visina 15. Izračunati površinu valjka. Rešenje: P = 152π 2. Površina valjka je 112π, a odnos poluprečnika
MATEMATIKA 2. Grupa 1 Rexea zadataka. Prvi pismeni kolokvijum, Dragan ori
 MATEMATIKA 2 Prvi pismeni kolokvijum, 14.4.2016 Grupa 1 Rexea zadataka Dragan ori Zadaci i rexea 1. unkcija f : R 2 R definisana je sa xy 2 f(x, y) = x2 + y sin 3 2 x 2, (x, y) (0, 0) + y2 0, (x, y) =
MATEMATIKA 2 Prvi pismeni kolokvijum, 14.4.2016 Grupa 1 Rexea zadataka Dragan ori Zadaci i rexea 1. unkcija f : R 2 R definisana je sa xy 2 f(x, y) = x2 + y sin 3 2 x 2, (x, y) (0, 0) + y2 0, (x, y) =
Konstruisanje. Dobro došli na... SREDNJA MAŠINSKA ŠKOLA NOVI SAD DEPARTMAN ZA PROJEKTOVANJE I KONSTRUISANJE
 Dobro došli na... Konstruisanje GRANIČNI I KRITIČNI NAPON slajd 2 Kritični naponi Izazivaju kritične promene oblika Delovi ne mogu ispravno da vrše funkciju Izazivaju plastične deformacije Može doći i
Dobro došli na... Konstruisanje GRANIČNI I KRITIČNI NAPON slajd 2 Kritični naponi Izazivaju kritične promene oblika Delovi ne mogu ispravno da vrše funkciju Izazivaju plastične deformacije Može doći i
Betonske konstrukcije 1 - vežbe 3 - Veliki ekscentricitet -Dodatni primeri
 Betonske konstrukcije 1 - vežbe 3 - Veliki ekscentricitet -Dodatni primeri 1 1 Zadatak 1b Čisto savijanje - vezano dimenzionisanje Odrediti potrebnu površinu armature za presek poznatih dimenzija, pravougaonog
Betonske konstrukcije 1 - vežbe 3 - Veliki ekscentricitet -Dodatni primeri 1 1 Zadatak 1b Čisto savijanje - vezano dimenzionisanje Odrediti potrebnu površinu armature za presek poznatih dimenzija, pravougaonog
Program testirati pomoću podataka iz sledeće tabele:
 Deo 2: Rešeni zadaci 135 Vrednost integrala je I = 2.40407 42. Napisati program za izračunavanje koeficijenta proste linearne korelacije (Pearsonovog koeficijenta) slučajnih veličina X = (x 1,..., x n
Deo 2: Rešeni zadaci 135 Vrednost integrala je I = 2.40407 42. Napisati program za izračunavanje koeficijenta proste linearne korelacije (Pearsonovog koeficijenta) slučajnih veličina X = (x 1,..., x n
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15
 1 / 15") MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
( ) π. I slučaj-štap sa zglobovima na krajevima F. Opšte rešenje diferencijalne jednačine (1): min
 π. I slučaj-štap sa zglobovima na krajevima F. Opšte rešenje diferencijalne jednačine (1): min") Kritična sia izvijanja Kritična sia je ona najmanja vrednost sie pritisa pri ojoj nastupa gubita stabinosti, odnosno, pri ojoj štap iz stabine pravoinijse forme ravnoteže preazi u nestabinu rivoinijsu
Kritična sia izvijanja Kritična sia je ona najmanja vrednost sie pritisa pri ojoj nastupa gubita stabinosti, odnosno, pri ojoj štap iz stabine pravoinijse forme ravnoteže preazi u nestabinu rivoinijsu
II. ODREĐIVANJE POLOŽAJA TEŽIŠTA
 II. ODREĐIVANJE POLOŽAJA TEŽIŠTA Poožaj težišta vozia predstavja jednu od bitnih konstruktivnih karakteristika vozia s obzirom da ova konstruktivna karakteristika ima veiki uticaj na vučne karakteristike
II. ODREĐIVANJE POLOŽAJA TEŽIŠTA Poožaj težišta vozia predstavja jednu od bitnih konstruktivnih karakteristika vozia s obzirom da ova konstruktivna karakteristika ima veiki uticaj na vučne karakteristike
MEHANIKA FLUIDA. Isticanje kroz otvore sa promenljivim nivoom tečnosti
 MEHANIKA FLUIDA Isticanje kroz otvore sa promenljivim nivoom tečnosti zadatak Prizmatična sud podeljen je vertikalnom pregradom, u kojoj je otvor prečnika d, na dve komore Leva komora je napunjena vodom
MEHANIKA FLUIDA Isticanje kroz otvore sa promenljivim nivoom tečnosti zadatak Prizmatična sud podeljen je vertikalnom pregradom, u kojoj je otvor prečnika d, na dve komore Leva komora je napunjena vodom
Elektrotehnički fakultet univerziteta u Beogradu 17.maj Odsek za Softversko inžinjerstvo
 Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
IZVODI ZADACI ( IV deo) Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo
 Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo") IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
Iskazna logika 3. Matematička logika u računarstvu. novembar 2012
 Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Matematka 1 Zadaci za drugi kolokvijum
 Matematka Zadaci za drugi kolokvijum 8 Limesi funkcija i neprekidnost 8.. Dokazati po definiciji + + = + = ( ) = + ln( ) = + 8.. Odrediti levi i desni es funkcije u datoj tački f() = sgn, = g() =, = h()
Matematka Zadaci za drugi kolokvijum 8 Limesi funkcija i neprekidnost 8.. Dokazati po definiciji + + = + = ( ) = + ln( ) = + 8.. Odrediti levi i desni es funkcije u datoj tački f() = sgn, = g() =, = h()
INŽENJERSTVO NAFTE I GASA. 2. vežbe. 2. vežbe Tehnologija bušenja II Slide 1 of 50
 INŽENJERSTVO NAFTE I GASA Tehnologija bušenja II 2. vežbe 2. vežbe Tehnologija bušenja II Slide 1 of 50 Proračuni trajektorija koso-usmerenih bušotina 2. vežbe Tehnologija bušenja II Slide 2 of 50 Proračun
INŽENJERSTVO NAFTE I GASA Tehnologija bušenja II 2. vežbe 2. vežbe Tehnologija bušenja II Slide 1 of 50 Proračuni trajektorija koso-usmerenih bušotina 2. vežbe Tehnologija bušenja II Slide 2 of 50 Proračun
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI)
") IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
Rad, snaga, energija. Tehnička fizika 1 03/11/2017 Tehnološki fakultet
 Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
Prvi kolokvijum. y 4 dy = 0. Drugi kolokvijum. Treći kolokvijum
 27. septembar 205.. Izračunati neodredjeni integral cos 3 x (sin 2 x 4)(sin 2 x + 3). 2. Izračunati zapreminu tela koje nastaje rotacijom dela površi ograničene krivama y = 3 x 2, y = x + oko x ose. 3.
27. septembar 205.. Izračunati neodredjeni integral cos 3 x (sin 2 x 4)(sin 2 x + 3). 2. Izračunati zapreminu tela koje nastaje rotacijom dela površi ograničene krivama y = 3 x 2, y = x + oko x ose. 3.
( ) ( ) 2 UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET. Zadaci za pripremu polaganja kvalifikacionog ispita iz Matematike. 1. Riješiti jednačine: 4
 ( ) 2 UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET. Zadaci za pripremu polaganja kvalifikacionog ispita iz Matematike. 1. Riješiti jednačine: 4") UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET Riješiti jednačine: a) 5 = b) ( ) 3 = c) + 3+ = 7 log3 č) = 8 + 5 ć) sin cos = d) 5cos 6cos + 3 = dž) = đ) + = 3 e) 6 log + log + log = 7 f) ( ) ( ) g) ( ) log
UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET Riješiti jednačine: a) 5 = b) ( ) 3 = c) + 3+ = 7 log3 č) = 8 + 5 ć) sin cos = d) 5cos 6cos + 3 = dž) = đ) + = 3 e) 6 log + log + log = 7 f) ( ) ( ) g) ( ) log
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu
 Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Analitička geometrija 1. Tačka 1. MF000 Neka su A(1, 1) i B(,11) tačke u koordinatnoj ravni Oxy. Ako tačka S deli duž AB
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Analitička geometrija 1. Tačka 1. MF000 Neka su A(1, 1) i B(,11) tačke u koordinatnoj ravni Oxy. Ako tačka S deli duž AB
Univerzitet u Nišu, Prirodno-matematički fakultet Prijemni ispit za upis OAS Matematika
 Univerzitet u Nišu, Prirodno-matematički fakultet Prijemni ispit za upis OAS Matematika Rešenja. Matematičkom indukcijom dokazati da za svaki prirodan broj n važi jednakost: + 5 + + (n )(n + ) = n n +.
Univerzitet u Nišu, Prirodno-matematički fakultet Prijemni ispit za upis OAS Matematika Rešenja. Matematičkom indukcijom dokazati da za svaki prirodan broj n važi jednakost: + 5 + + (n )(n + ) = n n +.
Formiranje optimalne konfiguracije teretnog vozila u skladu sa potrebama i mogućnostima naručioca, ponudom proizvođača i nadgraditelja.
 Formiranje optimalne konfiguracije teretnog vozila u skladu sa potrebama i mogućnostima naručioca, ponudom proizvođača i nadgraditelja. Mora postojati interakcija sve tri uključene strane: -poznavanje
Formiranje optimalne konfiguracije teretnog vozila u skladu sa potrebama i mogućnostima naručioca, ponudom proizvođača i nadgraditelja. Mora postojati interakcija sve tri uključene strane: -poznavanje
M086 LA 1 M106 GRP. Tema: Baza vektorskog prostora. Koordinatni sustav. Norma. CSB nejednakost
 M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
ELEKTROTEHNIČKI ODJEL
 MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
TERMALNOG ZRAČENJA. Plankov zakon Stefan Bolcmanov i Vinov zakon Zračenje realnih tela Razmena snage između dve površine. Ž. Barbarić, MS1-TS 1
 OSNOVNI ZAKONI TERMALNOG ZRAČENJA Plankov zakon Stefan Bolcmanov i Vinov zakon Zračenje realnih tela Razmena snage između dve površine Ž. Barbarić, MS1-TS 1 Plankon zakon zračenja Svako telo čija je temperatura
OSNOVNI ZAKONI TERMALNOG ZRAČENJA Plankov zakon Stefan Bolcmanov i Vinov zakon Zračenje realnih tela Razmena snage između dve površine Ž. Barbarić, MS1-TS 1 Plankon zakon zračenja Svako telo čija je temperatura
41. Jednačine koje se svode na kvadratne
 . Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
. Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
III VEŽBA: FURIJEOVI REDOVI
 III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
2log. se zove numerus (logaritmand), je osnova (baza) log. log. log =
, je osnova (baza) log. log. log =") ( > 0, 0)!" # > 0 je najčešći uslov koji postavljamo a još je,, > 0 se zove numerus (aritmand), je osnova (baza). 0.. ( ) +... 7.. 8. Za prelazak na neku novu bazu c: 9. Ako je baza (osnova) 0 takvi se
( > 0, 0)!" # > 0 je najčešći uslov koji postavljamo a još je,, > 0 se zove numerus (aritmand), je osnova (baza). 0.. ( ) +... 7.. 8. Za prelazak na neku novu bazu c: 9. Ako je baza (osnova) 0 takvi se
Inženjerska grafika geometrijskih oblika (5. predavanje, tema1)
") Inženjerska grafika geometrijskih oblika (5. predavanje, tema1) Prva godina studija Mašinskog fakulteta u Nišu Predavač: Dr Predrag Rajković Mart 19, 2013 5. predavanje, tema 1 Simetrija (Symmetry) Simetrija
Inženjerska grafika geometrijskih oblika (5. predavanje, tema1) Prva godina studija Mašinskog fakulteta u Nišu Predavač: Dr Predrag Rajković Mart 19, 2013 5. predavanje, tema 1 Simetrija (Symmetry) Simetrija
Novi Sad god Broj 1 / 06 Veljko Milković Bulevar cara Lazara 56 Novi Sad. Izveštaj o merenju
 Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
OTPORNOST MATERIJALA
 3/8/03 OTPORNOST ATERIJALA Naponi ANALIZA NAPONA Jedinica u Si-sistemu je Paskal (Pa) Pa=N/m Pa=0 6 Pa GPa=0 9 Pa F (N) kn/cm =0 Pa N/mm =Pa Jedinična površina (m ) U tečnostima pritisak jedinica bar=0
3/8/03 OTPORNOST ATERIJALA Naponi ANALIZA NAPONA Jedinica u Si-sistemu je Paskal (Pa) Pa=N/m Pa=0 6 Pa GPa=0 9 Pa F (N) kn/cm =0 Pa N/mm =Pa Jedinična površina (m ) U tečnostima pritisak jedinica bar=0
KVADRATNA FUNKCIJA. Kvadratna funkcija je oblika: Kriva u ravni koja predstavlja grafik funkcije y = ax + bx + c. je parabola.
 KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: = a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije = a + b + c je parabola. Najpre ćemo naučiti kako
KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: = a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije = a + b + c je parabola. Najpre ćemo naučiti kako
Trigonometrijske nejednačine
 Trignmetrijske nejednačine T su nejednačine kd kjih se nepznata javlja ka argument trignmetrijske funkcije. Rešiti trignmetrijsku nejednačinu znači naći sve uglve kji je zadvljavaju. Prilikm traženja rešenja
Trignmetrijske nejednačine T su nejednačine kd kjih se nepznata javlja ka argument trignmetrijske funkcije. Rešiti trignmetrijsku nejednačinu znači naći sve uglve kji je zadvljavaju. Prilikm traženja rešenja
4.7. Zadaci Formalizam diferenciranja (teorija na stranama ) 343. Znajući izvod funkcije x arctg x, odrediti izvod funkcije x arcctg x.
 343. Znajući izvod funkcije x arctg x, odrediti izvod funkcije x arcctg x.") 4.7. ZADACI 87 4.7. Zadaci 4.7.. Formalizam diferenciranja teorija na stranama 4-46) 340. Znajući izvod funkcije arcsin, odrediti izvod funkcije arccos. Rešenje. Polazeći od jednakosti arcsin + arccos
4.7. ZADACI 87 4.7. Zadaci 4.7.. Formalizam diferenciranja teorija na stranama 4-46) 340. Znajući izvod funkcije arcsin, odrediti izvod funkcije arccos. Rešenje. Polazeći od jednakosti arcsin + arccos
5. Karakteristične funkcije
 5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
TAČKA i PRAVA. , onda rastojanje između njih računamo po formuli C(1,5) d(b,c) d(a,b)
 d(b,c) d(a,b)") TAČKA i PRAVA Najpre ćemo se upoznati sa osnovnim formulama i njihovom primenom.. Rastojanje između dve tačke Ako su nam date tačke Ax (, y) i Bx (, y ), onda rastojanje između njih računamo po formuli
TAČKA i PRAVA Najpre ćemo se upoznati sa osnovnim formulama i njihovom primenom.. Rastojanje između dve tačke Ako su nam date tačke Ax (, y) i Bx (, y ), onda rastojanje između njih računamo po formuli
Fakultet tehničkih nauka, Softverske i informacione tehnologije, Matematika 2 KOLOKVIJUM 1. Prezime, ime, br. indeksa:
 Fakultet tehničkih nauka, Softverske i informacione tehnologije, Matematika KOLOKVIJUM 1 Prezime, ime, br. indeksa: 4.7.1 PREDISPITNE OBAVEZE sin + 1 1) lim = ) lim = 3) lim e + ) = + 3 Zaokružiti tačne
Fakultet tehničkih nauka, Softverske i informacione tehnologije, Matematika KOLOKVIJUM 1 Prezime, ime, br. indeksa: 4.7.1 PREDISPITNE OBAVEZE sin + 1 1) lim = ) lim = 3) lim e + ) = + 3 Zaokružiti tačne
Otpornost R u kolu naizmjenične struje
 Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
Matematika 1 - vježbe. 11. prosinca 2015.
 Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika. Monotonost i ekstremi. Katica Jurasić. Rijeka, 2011.
 Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
Dimenzionisanje štapova izloženih uvijanju na osnovu dozvoljenog tangencijalnog napona.
 Dimenzionisanje štapova izloženih uvijanju na osnovu dozvoljenog tangencijalnog napona Prema osnovnoj formuli za dimenzionisanje maksimalni tangencijalni napon τ max koji se javlja u štapu mora biti manji
Dimenzionisanje štapova izloženih uvijanju na osnovu dozvoljenog tangencijalnog napona Prema osnovnoj formuli za dimenzionisanje maksimalni tangencijalni napon τ max koji se javlja u štapu mora biti manji
Dvanaesti praktikum iz Analize 1
 Dvaaesti praktikum iz Aalize Zlatko Lazovi 20. decembar 206.. Dokazati da fukcija f = 5 l tg + 5 ima bar jedu realu ulu. Ree e. Oblast defiisaosti fukcije je D f = k Z da postoji ula fukcije a 0, π 2.
Dvaaesti praktikum iz Aalize Zlatko Lazovi 20. decembar 206.. Dokazati da fukcija f = 5 l tg + 5 ima bar jedu realu ulu. Ree e. Oblast defiisaosti fukcije je D f = k Z da postoji ula fukcije a 0, π 2.
1.4 Tangenta i normala
 28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
Antene. Srednja snaga EM zračenja se dobija na osnovu intenziteta fluksa Pointingovog vektora kroz sferu. Gustina snage EM zračenja:
 Anene Transformacija EM alasa u elekrični signal i obrnuo Osnovne karakerisike anena su: dijagram zračenja, dobiak (Gain), radna učesanos, ulazna impedansa,, polarizacija, efikasnos, masa i veličina, opornos
Anene Transformacija EM alasa u elekrični signal i obrnuo Osnovne karakerisike anena su: dijagram zračenja, dobiak (Gain), radna učesanos, ulazna impedansa,, polarizacija, efikasnos, masa i veličina, opornos
MATERIJAL ZA VEŽBE. Nastavnik: prof. dr Nataša Sladoje-Matić. Asistent: dr Tibor Lukić. Godina: 2012
 MATERIJAL ZA VEŽBE Predmet: MATEMATIČKA ANALIZA Nastavnik: prof. dr Nataša Sladoje-Matić Asistent: dr Tibor Lukić Godina: 202 . Odrediti domen funkcije f ako je a) f(x) = x2 + x x(x 2) b) f(x) = sin(ln(x
MATERIJAL ZA VEŽBE Predmet: MATEMATIČKA ANALIZA Nastavnik: prof. dr Nataša Sladoje-Matić Asistent: dr Tibor Lukić Godina: 202 . Odrediti domen funkcije f ako je a) f(x) = x2 + x x(x 2) b) f(x) = sin(ln(x
Teorijske osnove informatike 1
 Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
OSNOVI ELEKTRONIKE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA
 ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
DIMENZIONISANJE PRAVOUGAONIH POPREČNIH PRESEKA NAPREGNUTIH NA PRAVO SLOŽENO SAVIJANJE
 TEORIJA ETONSKIH KONSTRUKCIJA T- DIENZIONISANJE PRAVOUGAONIH POPREČNIH PRESEKA NAPREGNUTIH NA PRAVO SLOŽENO SAVIJANJE 3.5 f "2" η y 2 D G N z d y A "" 0 Z a a G - tačka presek koja određje položaj sistemne
TEORIJA ETONSKIH KONSTRUKCIJA T- DIENZIONISANJE PRAVOUGAONIH POPREČNIH PRESEKA NAPREGNUTIH NA PRAVO SLOŽENO SAVIJANJE 3.5 f "2" η y 2 D G N z d y A "" 0 Z a a G - tačka presek koja određje položaj sistemne
Zadaci iz trigonometrije za seminar
 Zadaci iz trigonometrije za seminar FON: 1. Vrednost izraza sin 1 cos 6 jednaka je: ; B) 1 ; V) 1 1 + 1 ; G) ; D). 16. Broj rexea jednaqine sin x cos x + cos x = sin x + sin x na intervalu π ), π je: ;
Zadaci iz trigonometrije za seminar FON: 1. Vrednost izraza sin 1 cos 6 jednaka je: ; B) 1 ; V) 1 1 + 1 ; G) ; D). 16. Broj rexea jednaqine sin x cos x + cos x = sin x + sin x na intervalu π ), π je: ;
UZDUŽNA DINAMIKA VOZILA
 UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
Klasifikacija blizu Kelerovih mnogostrukosti. konstantne holomorfne sekcione krivine. Kelerove. mnogostrukosti. blizu Kelerove.
 Klasifikacija blizu Teorema Neka je M Kelerova mnogostrukost. Operator krivine R ima sledeća svojstva: R(X, Y, Z, W ) = R(Y, X, Z, W ) = R(X, Y, W, Z) R(X, Y, Z, W ) + R(Y, Z, X, W ) + R(Z, X, Y, W ) =
Klasifikacija blizu Teorema Neka je M Kelerova mnogostrukost. Operator krivine R ima sledeća svojstva: R(X, Y, Z, W ) = R(Y, X, Z, W ) = R(X, Y, W, Z) R(X, Y, Z, W ) + R(Y, Z, X, W ) + R(Z, X, Y, W ) =
I.13. Koliki je napon između neke tačke A čiji je potencijal 5 V i referentne tačke u odnosu na koju se taj potencijal računa?
 TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
S t r a n a 1. 1.Povezati jonsku jačinu rastvora: a) MgCl 2 b) Al 2 (SO 4 ) 3 sa njihovim molalitetima, m. za so tipa: M p X q. pa je jonska jačina:
 MgCl 2 b) Al 2 (SO 4 ) 3 sa njihovim molalitetima, m. za so tipa: M p X q. pa je jonska jačina:") S t r a n a 1 1.Povezati jonsku jačinu rastvora: a MgCl b Al (SO 4 3 sa njihovim molalitetima, m za so tipa: M p X q pa je jonska jačina:. Izračunati mase; akno 3 bba(no 3 koje bi trebalo dodati, 0,110
S t r a n a 1 1.Povezati jonsku jačinu rastvora: a MgCl b Al (SO 4 3 sa njihovim molalitetima, m za so tipa: M p X q pa je jonska jačina:. Izračunati mase; akno 3 bba(no 3 koje bi trebalo dodati, 0,110
SOPSTVENE VREDNOSTI I SOPSTVENI VEKTORI LINEARNOG OPERATORA I KVADRATNE MATRICE
 1 SOPSTVENE VREDNOSTI I SOPSTVENI VEKTORI LINEARNOG OPERATORA I KVADRATNE MATRICE Neka je (V, +,, F ) vektorski prostor konačne dimenzije i neka je f : V V linearno preslikavanje. Definicija. (1) Skalar
1 SOPSTVENE VREDNOSTI I SOPSTVENI VEKTORI LINEARNOG OPERATORA I KVADRATNE MATRICE Neka je (V, +,, F ) vektorski prostor konačne dimenzije i neka je f : V V linearno preslikavanje. Definicija. (1) Skalar
APROKSIMACIJA FUNKCIJA
 APROKSIMACIJA FUNKCIJA Osnovni koncepti Gradimir V. Milovanović MF, Beograd, 14. mart 2011. APROKSIMACIJA FUNKCIJA p.1/46 Osnovni problem u TA Kako za datu funkciju f iz velikog prostora X naći jednostavnu
APROKSIMACIJA FUNKCIJA Osnovni koncepti Gradimir V. Milovanović MF, Beograd, 14. mart 2011. APROKSIMACIJA FUNKCIJA p.1/46 Osnovni problem u TA Kako za datu funkciju f iz velikog prostora X naći jednostavnu
1.1 Tangentna ravan i normala površi
 Površi. Tangentna ravan i normala površi Zadatak Data je površ r(u, v) = (u cos v, u sin v, a 2 u 2 ), a = const. Ispitati o kojoj se površi radi i odrediti u i v linije. Zadatak 2 Data je površ r(u, v)
Površi. Tangentna ravan i normala površi Zadatak Data je površ r(u, v) = (u cos v, u sin v, a 2 u 2 ), a = const. Ispitati o kojoj se površi radi i odrediti u i v linije. Zadatak 2 Data je površ r(u, v)
, 81, 5?J,. 1o~",mlt. [ BO'?o~ ~Iel7L1 povr.sil?lj pt"en:nt7 cf~ ~ <;). So. r~ ~ I~ + 2 JA = (;82,67'11:/'+2-[ 4'33.10'+ 7M.
. So. r~ ~ I~ + 2 JA = (;82,67'11:/'+2-[ 4'33.10'+ 7M.") J r_jl v. el7l1 povr.sl?lj pt"en:nt7 cf \ L.sj,,;, ocredz' 3 Q),sof'stvene f1?(j'me")7e?j1erc!je b) po{o!.aj 'i1m/' ce/y11ra.[,p! (j'j,a 1lerc!/e
J r_jl v. el7l1 povr.sl?lj pt"en:nt7 cf \ L.sj,,;, ocredz' 3 Q),sof'stvene f1?(j'me")7e?j1erc!je b) po{o!.aj 'i1m/' ce/y11ra.[,p! (j'j,a 1lerc!/e
PRILOG. Tab. 1.a. Dozvoljena trajna opterećenja bakarnih pravougaonih profila u(a) za θ at =35 C i θ=30 C, (θ tdt =65 C)
 za θ at =35 C i θ=30 C, (θ tdt =65 C)") PRILOG Tab. 1.a. Dozvoljena trajna opterećenja bakarnih pravougaonih profila u(a) za θ at =35 C i θ=30 C, (θ tdt =65 C) Tab 3. Vrednosti sačinilaca α i β za tipične konstrukcije SN-sabirnica Tab 4. Minimalni
PRILOG Tab. 1.a. Dozvoljena trajna opterećenja bakarnih pravougaonih profila u(a) za θ at =35 C i θ=30 C, (θ tdt =65 C) Tab 3. Vrednosti sačinilaca α i β za tipične konstrukcije SN-sabirnica Tab 4. Minimalni
Značenje indeksa. Konvencija o predznaku napona
 * Opšte stanje napona Tenzor napona Značenje indeksa Normalni napon: indeksi pokazuju površinu na koju djeluje. Tangencijalni napon: prvi indeks pokazuje površinu na koju napon djeluje, a drugi pravac
* Opšte stanje napona Tenzor napona Značenje indeksa Normalni napon: indeksi pokazuju površinu na koju djeluje. Tangencijalni napon: prvi indeks pokazuje površinu na koju napon djeluje, a drugi pravac
PRESECI SA PRSLINOM - VELIKI EKSCENTRICITET
 TEORIJA BETONSKIH KONSTRUKCIJA 1 PRESECI SA PRSLINOM - VELIKI EKSCENTRICITET ODREĐIVANJE MOMENTA LOMA - "T" PRESEK Na skici dole su prikazane sve potrene geometrijske veličine, dijagrami dilatacija i napona,
TEORIJA BETONSKIH KONSTRUKCIJA 1 PRESECI SA PRSLINOM - VELIKI EKSCENTRICITET ODREĐIVANJE MOMENTA LOMA - "T" PRESEK Na skici dole su prikazane sve potrene geometrijske veličine, dijagrami dilatacija i napona,
π π ELEKTROTEHNIČKI ODJEL i) f (x) = x 3 x 2 x + 1, a = 1, b = 1;
 f (x) = x 3 x 2 x + 1, a = 1, b = 1;") 1. Provjerite da funkcija f definirana na segmentu [a, b] zadovoljava uvjete Rolleova poučka, pa odredite barem jedan c a, b takav da je f '(c) = 0 ako je: a) f () = 1, a = 1, b = 1; b) f () = 4, a =,
1. Provjerite da funkcija f definirana na segmentu [a, b] zadovoljava uvjete Rolleova poučka, pa odredite barem jedan c a, b takav da je f '(c) = 0 ako je: a) f () = 1, a = 1, b = 1; b) f () = 4, a =,
4 Izvodi i diferencijali
 4 Izvodi i diferencijali 8 4 Izvodi i diferencijali Neka je funkcija f() definisana u intervalu (a, b), i neka je 0 0 + (a, b). Tada se izraz (a, b) i f( 0 + ) f( 0 ) () zove srednja brzina promene funkcije
4 Izvodi i diferencijali 8 4 Izvodi i diferencijali Neka je funkcija f() definisana u intervalu (a, b), i neka je 0 0 + (a, b). Tada se izraz (a, b) i f( 0 + ) f( 0 ) () zove srednja brzina promene funkcije
KVADRATNA FUNKCIJA. Kvadratna funkcija je oblika: Kriva u ravni koja predstavlja grafik funkcije y = ax + bx + c. je parabola.
 KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije a + b + c je parabola. Najpre ćemo naučiti kako izgleda
KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije a + b + c je parabola. Najpre ćemo naučiti kako izgleda
Kaskadna kompenzacija SAU
 Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
INTELIGENTNO UPRAVLJANJE
 INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
- pravac n je zadan s točkom T(2,0) i koeficijentom smjera k=2. (30 bodova)
 i koeficijentom smjera k=2. (30 bodova)") MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
18. listopada listopada / 13
 18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
RAD, SNAGA I ENERGIJA
 RAD, SNAGA I ENERGIJA SADRŢAJ 1. MEHANIĈKI RAD SILE 2. SNAGA 3. MEHANIĈKA ENERGIJA a) Kinetiĉka energija b) Potencijalna energija c) Ukupna energija d) Rad kao mera za promenu energije 4. ZAKON ODRŢANJA
RAD, SNAGA I ENERGIJA SADRŢAJ 1. MEHANIĈKI RAD SILE 2. SNAGA 3. MEHANIĈKA ENERGIJA a) Kinetiĉka energija b) Potencijalna energija c) Ukupna energija d) Rad kao mera za promenu energije 4. ZAKON ODRŢANJA