Satelitski navigacioni sistemi GPS
|
|
|
- Πυθαγόρας Ρέντης
- 7 χρόνια πριν
- Προβολές:
Transcript
1 Visoka škola elektrotehnike i računarstva strukovnih studija Studijski program: Specijalističke strukovne studije Elektronika i Telekomunikacije Predmet: SATELITSKI KOMUNIKACIONI SISTEMI Nastavnik: Hana Stefanović Kabinet: hanapopstefanovic@yahoo.com, hana@viser.edu.rs Nastavna jedinica: Satelitski navigacioni sistemi GPS Beograd 2012.

2 Satelitski navigacioni sistemi GPS
3 Uloga satelitskih navigacionih sistema - SNS Prvobitna namena SNS isključivo u vojne svrhe Razvoj tehnike, povećanje tržišta, ekonomski razlozi i pojeftinjenje elektronskih uređaja uslovljavaju primenu SNS i u civilne svrhe Današnji SNS sastavni deo opreme aviona, brodova, automobila, mobilnih telefona, biciklova, ručnih satova... Najpoznatiji i najčešće korišćen SNS je GPS (Global Positioning System sistem za globalno pozicioniranje) Postoje i drugi SNS, zasnovani na sličnim principima kao GPS, kao što su GLONASS i GALILEO GPS sistem za određivanje pozicije koji obezbeđuje svojim korisnicima tačnu i kontinualnu informaciju o trodimenzionalnoj poziciji i brzini GPS takođe obezbeđuje vremensku sinhronizaciju svih korisnika sa GPS sistemskim vremenom, koje je predstavljeno kao univerzalno vreme (Coordinated Universal Time UTC)
4 Osnovni principi navigacije Osnovni princip navigacije je merenje udaljenosti ili uglova između merne tačke i odgovarajućih referentnih (prirodnih ili veštačkih) objekata Zvezdana navigacija podrazumeva merenje uglova između merne tačke i zvezda kao referentnih objekata Satelitska navigacija podrazumeva merenje udaljenosti i vremena potrebnog da signal sa satelita stigne do merne tačke koncept one-way Time of Arrival (TOA) rang GPS koncept merenja vremena prostiranja signala od jedna do druge tačke u prostoru (TOA), pri čemu se na osnovu izmerenih rastojanja od nekoliko satelita čije su lokacije poznate, određuje pozicija prijemnika
5 Hronologija razvoja SNS Transit US NAVY, 1960 počeci satelitske navigacije. Sateliti u polarnim orbitama, na visini 1100 km (mali broj satelita, niska orbita), određivanje pozicije na osnovu primljenih satelitskih efemerida i merenjem Doplerovog pomaka signala, namenjen korisnicima na moru. Sistem korišćen za 2D navigaciju, uz mogućnost određivanja pozicije jednom u 110 min na ekvatoru, odnosno jednom u 30 min na 80. Vreme potrebno za procesiranje iznosilo je min, što je bilo neefikasno za korisnike koji se kreću velikim brzinama. Tačnost je iznosila oko 500 m, a kontinualna navigacija nije moguća. Program je ugašen 1996.god. Tsikada Ruski sistem slinih karakteristika kao Transit Timation US NAVY, aktiviran početkom 70-tih, precizno merenje vremena upotrebom kvarcnih, a kasnije i atomskih časovnika. Projekat 621B US AIR FORCE, sateliti u inkliniranoj visoko ekscentričnoj orbiti, sa periodom 24 h, slanje poruke o poziciji satelita i tačnom vremenu, uz primenu tehnike prenosa u proširenom spektru
6 Razvoj GPS-a Razvojna faza GPS-a vezuje se za period g., što je vreme razvoja dva nezavisna projekta od strane mornarice i ratnog vazduhoplovstva SAD. Sličnost ciljeva i planirane konkretne realizacije ovih projekata uslovljavaju razvoj novog zajedničkog projekta NAVSTAR/GPS Ciljevi NAVSTAR/GPS: uspostavljanje mreže od 24 satelita koji će orbitirati na visini od km, pri čemu svi sateliti emituju signale na istim učestanostima, a obradom signala na mestu prijema vrši se određivanje koordinata prijemne tačke Praktična realizacija projekta počinje 1978.g., kada je lansiran prvi satelit ove mreže, a sistem postaje potpuno operativan 1995.g. (završeno lansiranje i projektovanje kosmičkog, zemaljskog i korisničkog segmenta) Procenjuje se da je u u razvoj sistema uloženo oko 10 milijardi dolara, a godišnje održavanje sistema košta oko miliona dolara
7 Arhitektura GPS sistema Kosmički (svemirski ili prostorni) segment Zemaljski (kontrolni) segment Korisnički segment
8 Arhitektura GPS sistema kosmički segment Kosmički segment čine 24 satelita pozicionirana u MEO orbiti, na visini km Sateliti su raspoređeni u 6 orbitalnih ravni, sa po 4 satelita u svakoj orbitalnoj ravni, inlinacija orbitalnih ravni je 55, sa međusobnim razmakom 60 po geografskoj dužini Perioda svakog satelita je 12 h (11h i 58 min polovina sideričkog dana), tako da se jedan satelit nalazi na istoj poziciji dva puta u toku dana Povećanje konfiguracije na 27, pa na 30 satelita (sa inicijalnom funkcijom rezerve u orbiti) Predviđeni životni vek GPS satelita je oko 10 godina Za određivanje pozicije potrebno je da prijemnik primi signale sa 4 satelita istovremeno U cilju obezbeđivanja tačne frekvencije i vremena emitovanja signala, sateliti su opremljeni sa po dva cezijumska i dva rubidijumska časovnika

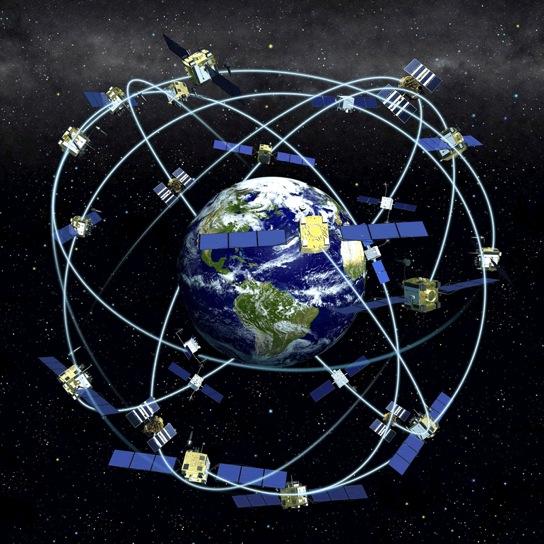
9 Izgled kosmičkog segmenta

10 Izgled GPS satelita

11 Orbite GPS satelita Svaki GPS satelit ima dva orbitalna prolaska u toku dana 27 GPS satelita (24+3)


12 Uslov preciznog određivanja pozicije istovremeni prijem signala sa 4 satelita Satelitska konstelacija je tako konfigurisana da u bilo kom trenutku vremena i na bilo kom mestu na Zemlji, obezbeđuje u vidnom polju korisnika minimalno 4 satelita
13 Karakteristike GPS satelita starije i novije generacije Sateliti starije generacije: Navigation Technology Satellites (program Timation) Block I, g. Block II, 1989.g. Block IIA, 1990.g. Block IIR, 1996.g. Block IIF, 2004.g. Sateliti su stabilisani u tri ose i koriste solarno napajanje Sateliti novije generacije: Imaju povećanu autonomiju u odnosu na zemeljske kontrolne stanice (Block II sateliti imaju autonomiju 14 dana, nakon čega greška iznosi m, dok je pri dnevnoj kontroli 5.5 m, Block IIR imaju autonomiju 180 dana nakon čega greška iznosi 7.4 m) Redundantni atomski časovnici Duži životni vek
14 Arhitektura GPS sistema zemaljski segment Zemaljsku komponentu čini 5 kontrolnih monitoring stanica (koje se nalaze na ostrvima Asunsion, Dijego Garsija, Havaji, Kvajlein i u Kolorado Springsu, i glavna kontrolna stanica nalazi u vazduhoplovnoj bazi Šrajver (bivša baza Falcon) u Koloradu Glavna kontrolna stanica obavlja praćenje i monitoring funkcija satelita, potrebne proračune i snabdevanje satelita potrebnim podacima Glavna kontrolna stanica na osnovu podataka dobijenih od monitoring stanica vrši proračune za određivanje satelitskih efemrida i korekciju grešaka atomskih satelitskih časovnika i formira satelitsku navigacionu poruku almanah Podatak o poziciji GPS satelita (ephemeris) i parametri sistemskog vremena se: šalju ka GPS satelitima koriste za formiranje navigacione poruke, koju će satelit emitovati ka krajnjim korisnicima

15 GPS - monitoring Položaj glavne i kontrolnih stanica
16 Veza između zemaljskog i kosmičkog segmenta Interfejs između zemaljskog i kosmičkog segmenta obezbeđuju 4 komunikacione stanice (Upload Station ULS) Poruka koju za svaki satelit pripremi glavna kontrolna stanica i koju komunikacione stanice ULS emituju, osim navigacionog dela sadrži i deo koji se odnosi na telemetriju, praćenje i upravljanje Komuniukacija ka satelitima (uplink) realizovana je u S frekvencijskom opsegu
17 Arhitektura GPS sistema korisnički segment Korisnički segment obuhvata sve korisnike informacija (fizička lica ili sredstva koje poseduju GPS prijemnik) koje sistem obezbeđuje Korisnički segment čine dve celine: uređaji razvijani za vojne namene i uređaji razvijani za civilnu (komercijalnu) upotrebu Principi rada uređaja iz obe grupe su isti, s tim što se uređaji razlikuju po tehničkoj realizaciji, stepenu tačnosti podataka i ceni Uređaji za vojne namene su precizniji, imaju integrisane sisteme za zaštitu podataka, što ih takođe čini i skupljim
18 Funkcije korisničkog segmenta Korisnički segment čine GPS antena i prijemnik, specifično dizajniran za prijem, dekodovanje i procesiranje koda za merenje rastojanja i navigacione poruke, koji su sadržani u satelitskom GPS signalu GPS sateliti emituju GPS signale na dve frekvencije: L MHz L MHz, korišćenjem višestrukog pristupa na bazi CDMA Svaki od GPS satelita emituje signale na ovim frekvencijama, ali sa različitim kodovima za merenje rastojanja (ranging codes) Kod za merenje rastojanja koristi se za merenje vremena prostiranja signala od satelita do korisnika, na osnovu čega prijemnik vrši procenu rastojanja satelit-korisnik
19 Časovnik GPS prijemnika Ako su časovnik na satelitu i časovnik GPS prijemnika vremenski sinhronizovani, određivanje korisničke pozicije može se izvršiti na osnovu merenja rastojanja od korisnika do tri različita satelita Zbog smanjenja cene, kompleksnosti izrade i gabarita GPS prijemnika, njegov časovnik nije perfektno sinhronizovan sa sistemskim vremenom Zbog toga je, da bi se tačno odredili geografska širina, geografska dužina i nadmorska visina korisnika, kao i odstupanje časovnika GPS prijemnika od sistemskog vremena, potrebno izvršiti četiri merenja rastojanja (od korisnika do četiri različita satelita) Uvođenjem kompenzacije veličine odstupanja časovnika GPS prijemnika od sistemskog vremena smanjuje se greška pri određivanju lokacije korisnika
20 Usklađivanje časovnika GPS prijemnika GPS sateliti imaju po četiri atomska časovnika, koji nisu usklađeni sa vremenskim zonama na Zemlji, nego se njihovo međusobno usklađivanje vrši iz zemaljskih kontrolnih stanica Bilo bi ekonomski neisplativo postaviti atomske časovnike u svaki GPS prijemnik, zbog čega se umesto atomskih časovnika za GPS prijemnike koriste kristalni oscilatori koji imaju vrlo stabilnu frekvenciju oscilovanja Pošto je tačnost atomskih časovnika mnogo veća, potrebno je izvršiti uskalđivanje časovnika na prijemniku i satelitu Primer: ako je vremenski ofset GPS prijemnika 10 ms, i ako se ne vrši usklađivanje časovnika, greška u određivanju rastojanja bi iznosila ~3000 km. Nakon usklađivanja časovnika ova greška se smanjuje na ~50 m. Kao referentni satelit za usklađivanje časovnika koristi se četvrti satelit, sa čijim se časovnikom vrši usklađivanje časovnika prijemnika
21 Servisi usluga GPS-a GPS obezbeđuje dva servisa usluga: Servis standardne tačnosti određivanja pozicije (Standard Positioning Service SPS) Servis koji obezbeđuje veliku tačnost određivanja pozicije (Precise Positioning Service PPS) SPS je namenjen za civilne potrebe, a PPS prvenstveno za vojne i potrebe posebnih agencija vlade SAD PPS usluge mogu da koriste samo povlašćeni korisnici koji imaju kriptozaštitne uređaje, čiju upotrebu dozvoljava američka vlada SPS servis je dostupan svim korisnicima širom sveta i ne postoje nikakva ograničenja u pogledu korišćenja ovog servisa Moguće je izvršiti degradaciju tačnosti ovih usluga upotrebom opcije selektivne dostupnosti (SA Selective Availibility). Upotreba ove opcije je u nadležnosti američkog ministarstva odbrane, a ova opcija se od 2000.g. ne koristi, s tim što ministarstvo zadržava pravo da izvrši njeno aktiviranje u slučaju ugrožavanja nacionalne bezbednosti
22 Tačnost SPS i PPS PPS obezbeđuje tačnost od najmanje 22 m (2 drms ili 95%) u horizontalnoj ravni i 27.7 m (95%) u vertikalnoj ravni Veličina drms (Distance Root Mean Square) predstavlja osnovnu veličinu koja se koristi u navigaciji. Dvostruka vrednost drms (2 drms) označava poluprečnik kruga unutar kojeg će se nalaziti najmanje 95% svih dobijenih izmerenih vrednosti PPS obezbeđuje tačnost prenesenog UTC vremena 200 ns (95%) u odnosu na vreme koje obezbeđuje U.S. Naval observatorija (USNO) Tačnost merenja brzine je 0.2 m/s SPS obezbeđuje tačnost od 100 m (95%) u horizontalnoj ravni i 156 m (95%) u vertikalnoj ravni, dok je tačnost prenesenog UTC vremena 340 ns (95%) Oba servisa omogućavaju određivanje pozicije u tri dimenzije, a u zavisnosti od softvera koji je implementiran u prijemnik moguće je odrediti brzinu kretanja prijemnika i iscrtati promenu pozicije na karti


23 Određivanje 2D pozicije korisnika merenje u odnosu na jedan satelit Ako korisnik ima GPS prijemnik čiji je časovnik vremenski sinhronizovan sa satelitskim časovnikom i ako satelit emituje tačnu informaciju o svojoj poziciji, korisnik može tačno da odredi vremenski interval prostiranja signala od satelita do prijemnika, na osnovu poznatog trenutka emitovanja signala sa satelita Ako korisnik vrši merenje u odnosu na samo jedan satelit, skup mogućih pozicija korisnika nalazi se na kružnici poluprečnika R1, pri čemu je R1 izmereno rastojanje od satelita do korisnika

24 Određivanje 2D pozicije korisnika merenje u odnosu na dva satelita Ako korisnik na isti način vrši merenje rastojanja od dva satelita, tada će se u preseku dve kružnice poluprečnika R1 i R2 nalaziti moguća pozicija korisnika, pri čemu R1 predstavlja rastojanje od prvog, a R2 od drugog satelita Pozicija korisnika još uvek nije jednoznačno određena, ali je skup mogućih rešenja značajno smanjen (na dve tačke)

25 Određivanje 2D pozicije korisnika merenje u odnosu na tri satelita Problem nejednoznačnosti rešava se uvođenjem merenja rastojanja od trećeg satelita U preseku tri kružnice nalazi se jedino moguće rešenje, koje predstavlja jednoznačno određenu poziciju korisnika
26 Kompenzacija vremenske sinhronizacije Realno časovnik GPS prijemnika i časovnik na satelitu nisu sinhronitovani Ako časovnik GPS prijemnika prednjači u odnosu na satelitski časovnik za t, izmereni vremenski interval prostiranja signala od satelita do korisnika postaje uvećan za t, a ako su časovnici svih satelita perfektno sinhronizovani nekorektnost merenja vremenskog intervala prostiranja signala od svakog satelita biće ista Na osnovu prisutne greške merenja vremenskih intervala javlja se greška u proceni rastojanja satelit-korisnik Ako su greške merenja vremenskih intervala prostiranja od pojedinih satelita do korisnika iste, i greške u proceni rastojanja satelit-korisnik biće takođe iste Usled toga pojavljuju se i dodatne greške preseka kružnica, koje su u funkciji odstupanja časovnika GPS prijemnika Kompenzacija veličine odstupanja časovnika GPS prijemnika može značajno smanjiti grešku određivanja lokacije prijemnika
27 Greške u proceni određivanja pozicije usled odstupanja časovnika GPS prijemnika Pojava dodatnih tačaka presecanja kružnica
28 Slučajne greške u proceni pozicije korisnika U realnim situacijama, čak i ako je časovnik GPS prijemnika usklađen sa sistemskim vremenom, pojavljuju se greške merenje vremenskih intervala prostiranja signala od satelita do prijemnika usled: Uticaja atmosfere na prostiranje GPS signala Pojeve višestrukih propagacija GPS signala Usled slučajnih grešaka merenja rastojanja (ε 1, ε 2, ε 3 ) od pojedinih satelita do korisnika, kružnice nemaju jedinstvenu presečnu tačku koja bi definisala položaj korisnika, nego se formira presečna oblast unutar koje se nalazi tačna pozicija korisnika
29 Određivanje 3D pozicije korisnika merenje u odnosu na jedan satelit Ako vremenski sinhronizovan GPS prijemnik prima signal sa jednog od satelita (uz pretpostavku da su svi časovnici na satelitima vremenski sinhronizovani), prijemnik izračunava vremenski interval prostiranja signala od satelita do korisnika Pozicija korisnika nalazi se negde na površini sfere u čijem se centru nalazi satelit
30 Određivanje 3D pozicije korisnika merenje u odnosu na dva satelita Ako se izvrši merenje i sa drugog satelita, pozicija korisnika nalazi se na kružnici koja je u ravni presecanja dve sfere Ako se sfere dodiruju, pozicija korisnika je u tački u kojoj postoji tangenta na obe sfere Slučaj dodirivanja sfera je atipičan i moguć je samo u slučaju kada je pozicija korisnika kolinearna sa satelitom, što se skoro nikad u praksi ne dešava
31 Određivanje 3D pozicije korisnika merenje u odnosu na tri satelita Uključivanjem merenja sa još jednog satelita, pozicija korisnika se još preciznije određuje Pozicija korisnika u ovom slučaju nalazi se u jednoj od dve tačke nastale presecanjem kružnice sa površinom treće sfere
32 Određivanje 3D pozicije korisnika merenje u odnosu na četiri satelita Jednoznačno određivanje pozicije moguće je uključivanjem merenja sa četvrtog satelita, u kom slučaju je pozicija korisnika definisana jedinstvenom presečnom tačkom



33 Ilustracija uticaja broja GPS satelita sa kojih se šalju podaci na preciznost merenja

34 Jednoznačno određivanje 3D pozicije na osnovu podataka sa četiri satelita
35 Princip rada GPS uređaja Osnovni zahtev za precizno određivanje pozicije prijemnika je prijem signala sa minimalno četiri satelita (merenja sa tri satelita potrebna su za određivanje geografske širine, geografske dužine i nadmorske visine, a sa četvrtog zbog korekcije grešaka koje se javljaju kao posledica nesinhronizovanosti GPS vremena i sistemskog vremena) Obradom prijemnih signala sa svakog satelita prijemnik određuje rastojanje od svakog od njih (pošto su pozicije satelita poznate, na osnovu procenjenih rastojanja određuje se pocizija korisnika) Rastojanja satelit-prijemnik određuju se na osnovu merenja vremenskog intervala koji je potreban za propagaciju GPS signala (brzina kretanja EM talasa jednaka je brzini svetlosti) do prijemnika Prijemniku je neophodan podatak o tačnom vremenskom trenutku kada je signal emitovan sa satelita i podatak o sinhronizaciji sa internim satom satelita
36 Matematička postavka određivanja pozicije pomoću GPS-a ECEF koordinatni sistem Koordinatni sistem u kome se vrši određivanje pozicije zove se ECEF (Earth Centered Earth Fixed) sistem U koordinatnom početku ECEF sistema nalazi se središte Zemlje, Z osa prolazi kroz Severni pol, a X i Y ose su smeštene u ekvatorijalnoj ravni, pri čemu X osa prolazi kroz Grinič, a Y osa kroz meridijan koji označava 90 istočne geografske duđine Koordinate prijemnika predstavljene su uređenim parom (U x, U y, U z ), a svaki od satelita ima koordinate određene sa (X i, Y i, Z i ), i=1,2,3,4. Koordinate satelita određuju se iz navigacione poruke koju sateliti periodično šalju Izmerena daljina do svakog satelita naziva se pseudodaljina (jer se procenjuje na osnovu časovnika GPS prijemnika) i označava se sa (PR) i Pseudodaljina se određuje kao proizvod vremena T i potrebnog da signal sa i-tog satelita stigne do prijemnika i brzine svetlosti c Da bi se odredila tačna vrednost daljine, potrebno je vrednost pseudodaljine korigovati za vrednost τc, gde je τ greška časovnika GPS prijemnika (vremenski ofset)
37 Matematičko određivanje pozicije Na osnovu određivanja rastojanja između dve tačke A i B u pravouglom koordinatnom sistemu R = ( X A XB) + ( YA YB) + ( ZA ZB) može se napisati sistem jednačina: ( X U ) + ( Y U ) + ( Z U ) = ( PR τc) X 1 Y 1 Z 1 ( X 2 UX ) + ( Y2 UY) + ( Z2 UZ) = ( PR2 τc) ( X 3 UX ) + ( Y3 UY) + ( Z3 UZ) = ( PR3 τ c) ( X U ) + ( Y U ) + ( Z U ) = ( PR τc) X 4 Y 4 Z 4 Rešavanjem sistema 4x4 određuju se koordinate prijemnika (geografska širina, geografska dužina i nadmorska visina), kao i vrednost ofseta Greška tipično iznosi ~30 m (upotrebom jeftinih komercijalnih uređaja), a na vrednost greške utiču brojni faktori
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET SIGNALI I SISTEMI. Zbirka zadataka
 UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
3.1 Granična vrednost funkcije u tački
 3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Pismeni ispit iz matematike Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: ( ) + 1.
 + 1.") Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
numeričkih deskriptivnih mera.
 DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
Osnovni primer. (Z, +,,, 0, 1) je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju
 je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju") RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
PRAVA. Prava je u prostoru određena jednom svojom tačkom i vektorom paralelnim sa tom pravom ( vektor paralelnosti).
.") PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
SISTEMI NELINEARNIH JEDNAČINA
 SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
Elementi spektralne teorije matrica
 Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI)
") IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
Ispitivanje toka i skiciranje grafika funkcija
 Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
( ) ( ) 2 UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET. Zadaci za pripremu polaganja kvalifikacionog ispita iz Matematike. 1. Riješiti jednačine: 4
 ( ) 2 UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET. Zadaci za pripremu polaganja kvalifikacionog ispita iz Matematike. 1. Riješiti jednačine: 4") UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET Riješiti jednačine: a) 5 = b) ( ) 3 = c) + 3+ = 7 log3 č) = 8 + 5 ć) sin cos = d) 5cos 6cos + 3 = dž) = đ) + = 3 e) 6 log + log + log = 7 f) ( ) ( ) g) ( ) log
UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET Riješiti jednačine: a) 5 = b) ( ) 3 = c) + 3+ = 7 log3 č) = 8 + 5 ć) sin cos = d) 5cos 6cos + 3 = dž) = đ) + = 3 e) 6 log + log + log = 7 f) ( ) ( ) g) ( ) log
OBRTNA TELA. Vladimir Marinkov OBRTNA TELA VALJAK
 OBRTNA TELA VALJAK P = 2B + M B = r 2 π M = 2rπH V = BH 1. Zapremina pravog valjka je 240π, a njegova visina 15. Izračunati površinu valjka. Rešenje: P = 152π 2. Površina valjka je 112π, a odnos poluprečnika
OBRTNA TELA VALJAK P = 2B + M B = r 2 π M = 2rπH V = BH 1. Zapremina pravog valjka je 240π, a njegova visina 15. Izračunati površinu valjka. Rešenje: P = 152π 2. Površina valjka je 112π, a odnos poluprečnika
II. ODREĐIVANJE POLOŽAJA TEŽIŠTA
 II. ODREĐIVANJE POLOŽAJA TEŽIŠTA Poožaj težišta vozia predstavja jednu od bitnih konstruktivnih karakteristika vozia s obzirom da ova konstruktivna karakteristika ima veiki uticaj na vučne karakteristike
II. ODREĐIVANJE POLOŽAJA TEŽIŠTA Poožaj težišta vozia predstavja jednu od bitnih konstruktivnih karakteristika vozia s obzirom da ova konstruktivna karakteristika ima veiki uticaj na vučne karakteristike
Zavrxni ispit iz Matematiqke analize 1
 Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
Teorijske osnove informatike 1
 Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
Pismeni ispit iz matematike GRUPA A 1. Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj, zatim naći 4 z.
 Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
Inženjerska grafika geometrijskih oblika (5. predavanje, tema1)
") Inženjerska grafika geometrijskih oblika (5. predavanje, tema1) Prva godina studija Mašinskog fakulteta u Nišu Predavač: Dr Predrag Rajković Mart 19, 2013 5. predavanje, tema 1 Simetrija (Symmetry) Simetrija
Inženjerska grafika geometrijskih oblika (5. predavanje, tema1) Prva godina studija Mašinskog fakulteta u Nišu Predavač: Dr Predrag Rajković Mart 19, 2013 5. predavanje, tema 1 Simetrija (Symmetry) Simetrija
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A
, grupa A") Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
IZVODI ZADACI (I deo)
") IZVODI ZADACI (I deo) Najpre da se podsetimo tablice i osnovnih pravila:. C`=0. `=. ( )`= 4. ( n )`=n n-. (a )`=a lna 6. (e )`=e 7. (log a )`= 8. (ln)`= ` ln a (>0) 9. = ( 0) 0. `= (>0) (ovde je >0 i a
IZVODI ZADACI (I deo) Najpre da se podsetimo tablice i osnovnih pravila:. C`=0. `=. ( )`= 4. ( n )`=n n-. (a )`=a lna 6. (e )`=e 7. (log a )`= 8. (ln)`= ` ln a (>0) 9. = ( 0) 0. `= (>0) (ovde je >0 i a
Elektrotehnički fakultet univerziteta u Beogradu 17.maj Odsek za Softversko inžinjerstvo
 Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
M086 LA 1 M106 GRP. Tema: Baza vektorskog prostora. Koordinatni sustav. Norma. CSB nejednakost
 M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
Novi Sad god Broj 1 / 06 Veljko Milković Bulevar cara Lazara 56 Novi Sad. Izveštaj o merenju
 Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama.
 Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
III VEŽBA: FURIJEOVI REDOVI
 III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
2 tg x ctg x 1 = =, cos 2x Zbog četvrtog kvadranta rješenje je: 2 ctg x
 Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu
 Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
Funkcija prenosa. Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k.
 OT3OS1 7.11.217. Definicije Funkcija prenosa Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k Y z X z k Z y n Z h n Z x n Y z H z X z H z H z n h
OT3OS1 7.11.217. Definicije Funkcija prenosa Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k Y z X z k Z y n Z h n Z x n Y z H z X z H z H z n h
II. ODREĐIVANJE POLOŽAJA TEŽIŠTA
 II. ODREĐIVANJE POLOŽAJA TEŽIŠTA Poožaj težišta vozia predstavja jednu od bitnih konstruktivnih karakteristika vozia s obzirom da ova konstruktivna karakteristika ima veiki uticaj na vučne karakteristike
II. ODREĐIVANJE POLOŽAJA TEŽIŠTA Poožaj težišta vozia predstavja jednu od bitnih konstruktivnih karakteristika vozia s obzirom da ova konstruktivna karakteristika ima veiki uticaj na vučne karakteristike
5. Karakteristične funkcije
 5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
18. listopada listopada / 13
 18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović
 DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
Trigonometrija 2. Adicijske formule. Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto
 Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
OM2 V3 Ime i prezime: Index br: I SAVIJANJE SILAMA TANKOZIDNIH ŠTAPOVA
 OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
Antene. Srednja snaga EM zračenja se dobija na osnovu intenziteta fluksa Pointingovog vektora kroz sferu. Gustina snage EM zračenja:
 Anene Transformacija EM alasa u elekrični signal i obrnuo Osnovne karakerisike anena su: dijagram zračenja, dobiak (Gain), radna učesanos, ulazna impedansa,, polarizacija, efikasnos, masa i veličina, opornos
Anene Transformacija EM alasa u elekrični signal i obrnuo Osnovne karakerisike anena su: dijagram zračenja, dobiak (Gain), radna učesanos, ulazna impedansa,, polarizacija, efikasnos, masa i veličina, opornos
41. Jednačine koje se svode na kvadratne
 . Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
. Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
XI dvoqas veжbi dr Vladimir Balti. 4. Stabla
 XI dvoqas veжbi dr Vladimir Balti 4. Stabla Teorijski uvod Teorijski uvod Definicija 5.7.1. Stablo je povezan graf bez kontura. Definicija 5.7.1. Stablo je povezan graf bez kontura. Primer 5.7.1. Sva stabla
XI dvoqas veжbi dr Vladimir Balti 4. Stabla Teorijski uvod Teorijski uvod Definicija 5.7.1. Stablo je povezan graf bez kontura. Definicija 5.7.1. Stablo je povezan graf bez kontura. Primer 5.7.1. Sva stabla
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu
 Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Analitička geometrija 1. Tačka 1. MF000 Neka su A(1, 1) i B(,11) tačke u koordinatnoj ravni Oxy. Ako tačka S deli duž AB
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Analitička geometrija 1. Tačka 1. MF000 Neka su A(1, 1) i B(,11) tačke u koordinatnoj ravni Oxy. Ako tačka S deli duž AB
Kaskadna kompenzacija SAU
 Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
Program testirati pomoću podataka iz sledeće tabele:
 Deo 2: Rešeni zadaci 135 Vrednost integrala je I = 2.40407 42. Napisati program za izračunavanje koeficijenta proste linearne korelacije (Pearsonovog koeficijenta) slučajnih veličina X = (x 1,..., x n
Deo 2: Rešeni zadaci 135 Vrednost integrala je I = 2.40407 42. Napisati program za izračunavanje koeficijenta proste linearne korelacije (Pearsonovog koeficijenta) slučajnih veličina X = (x 1,..., x n
5 Ispitivanje funkcija
 5 Ispitivanje funkcija 3 5 Ispitivanje funkcija Ispitivanje funkcije pretodi crtanju grafika funkcije. Opšti postupak ispitivanja funkcija koje su definisane eksplicitno y = f() sadrži sledeće elemente:
5 Ispitivanje funkcija 3 5 Ispitivanje funkcija Ispitivanje funkcije pretodi crtanju grafika funkcije. Opšti postupak ispitivanja funkcija koje su definisane eksplicitno y = f() sadrži sledeće elemente:
Mašinsko učenje. Regresija.
 Mašinsko učenje. Regresija. Danijela Petrović May 17, 2016 Uvod Problem predviđanja vrednosti neprekidnog atributa neke instance na osnovu vrednosti njenih drugih atributa. Uvod Problem predviđanja vrednosti
Mašinsko učenje. Regresija. Danijela Petrović May 17, 2016 Uvod Problem predviđanja vrednosti neprekidnog atributa neke instance na osnovu vrednosti njenih drugih atributa. Uvod Problem predviđanja vrednosti
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f
 D f") IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II
 1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II Zadatak: Klipni mehanizam se sastoji iz krivaje (ekscentarske poluge) OA dužine R, klipne poluge AB dužine =3R i klipa kompresora B (ukrsne glave). Krivaja
1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II Zadatak: Klipni mehanizam se sastoji iz krivaje (ekscentarske poluge) OA dužine R, klipne poluge AB dužine =3R i klipa kompresora B (ukrsne glave). Krivaja
Principi pozicioniranja u radio sistemima. Doc. dr Mirjana Simić
 Principi pozicioniranja u radio sistemima 7 Doc. dr Mirjana Simić Standardizovane metode pozicioniranja u GSM i UMTS Prema GSM LCS standardu, za GERAN su standardizovane četiri metode pozicioniranja: 1.
Principi pozicioniranja u radio sistemima 7 Doc. dr Mirjana Simić Standardizovane metode pozicioniranja u GSM i UMTS Prema GSM LCS standardu, za GERAN su standardizovane četiri metode pozicioniranja: 1.
RIJEŠENI ZADACI I TEORIJA IZ
 RIJEŠENI ZADACI I TEORIJA IZ LOGARITAMSKA FUNKCIJA SVOJSTVA LOGARITAMSKE FUNKCIJE OSNOVE TRIGONOMETRIJE PRAVOKUTNOG TROKUTA - DEFINICIJA TRIGONOMETRIJSKIH FUNKCIJA - VRIJEDNOSTI TRIGONOMETRIJSKIH FUNKCIJA
RIJEŠENI ZADACI I TEORIJA IZ LOGARITAMSKA FUNKCIJA SVOJSTVA LOGARITAMSKE FUNKCIJE OSNOVE TRIGONOMETRIJE PRAVOKUTNOG TROKUTA - DEFINICIJA TRIGONOMETRIJSKIH FUNKCIJA - VRIJEDNOSTI TRIGONOMETRIJSKIH FUNKCIJA
S t r a n a 1. 1.Povezati jonsku jačinu rastvora: a) MgCl 2 b) Al 2 (SO 4 ) 3 sa njihovim molalitetima, m. za so tipa: M p X q. pa je jonska jačina:
 MgCl 2 b) Al 2 (SO 4 ) 3 sa njihovim molalitetima, m. za so tipa: M p X q. pa je jonska jačina:") S t r a n a 1 1.Povezati jonsku jačinu rastvora: a MgCl b Al (SO 4 3 sa njihovim molalitetima, m za so tipa: M p X q pa je jonska jačina:. Izračunati mase; akno 3 bba(no 3 koje bi trebalo dodati, 0,110
S t r a n a 1 1.Povezati jonsku jačinu rastvora: a MgCl b Al (SO 4 3 sa njihovim molalitetima, m za so tipa: M p X q pa je jonska jačina:. Izračunati mase; akno 3 bba(no 3 koje bi trebalo dodati, 0,110
10. STABILNOST KOSINA
 MEHANIKA TLA: Stabilnot koina 101 10. STABILNOST KOSINA 10.1 Metode proračuna koina Problem analize tabilnoti zemljanih maa vodi e na određivanje odnoa između rapoložive mičuće čvrtoće i proečnog mičućeg
MEHANIKA TLA: Stabilnot koina 101 10. STABILNOST KOSINA 10.1 Metode proračuna koina Problem analize tabilnoti zemljanih maa vodi e na određivanje odnoa između rapoložive mičuće čvrtoće i proečnog mičućeg
SEKUNDARNE VEZE međumolekulske veze
 PRIMARNE VEZE hemijske veze među atomima SEKUNDARNE VEZE međumolekulske veze - Slabije od primarnih - Elektrostatičkog karaktera - Imaju veliki uticaj na svojstva supstanci: - agregatno stanje - temperatura
PRIMARNE VEZE hemijske veze među atomima SEKUNDARNE VEZE međumolekulske veze - Slabije od primarnih - Elektrostatičkog karaktera - Imaju veliki uticaj na svojstva supstanci: - agregatno stanje - temperatura
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15
 1 / 15") MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
Obrada signala
 Obrada signala 1 18.1.17. Greška kvantizacije Pretpostavka je da greška kvantizacije ima uniformnu raspodelu 7 6 5 4 -X m p x 1,, za x druge vrednosti x 3 x X m 1 X m = 3 x Greška kvantizacije x x x p
Obrada signala 1 18.1.17. Greška kvantizacije Pretpostavka je da greška kvantizacije ima uniformnu raspodelu 7 6 5 4 -X m p x 1,, za x druge vrednosti x 3 x X m 1 X m = 3 x Greška kvantizacije x x x p
7 Algebarske jednadžbe
 7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
PARCIJALNI IZVODI I DIFERENCIJALI. Sama definicija parcijalnog izvoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je,
 PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
ELEKTROTEHNIČKI ODJEL
 MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
HEMIJSKA VEZA TEORIJA VALENTNE VEZE
 TEORIJA VALENTNE VEZE Kovalentna veza nastaje preklapanjem atomskih orbitala valentnih elektrona, pri čemu je region preklapanja između dva jezgra okupiran parom elektrona. - Nastalu kovalentnu vezu opisuje
TEORIJA VALENTNE VEZE Kovalentna veza nastaje preklapanjem atomskih orbitala valentnih elektrona, pri čemu je region preklapanja između dva jezgra okupiran parom elektrona. - Nastalu kovalentnu vezu opisuje
Matematika 1 - vježbe. 11. prosinca 2015.
 Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
MEHANIKA FLUIDA. Isticanje kroz otvore sa promenljivim nivoom tečnosti
 MEHANIKA FLUIDA Isticanje kroz otvore sa promenljivim nivoom tečnosti zadatak Prizmatična sud podeljen je vertikalnom pregradom, u kojoj je otvor prečnika d, na dve komore Leva komora je napunjena vodom
MEHANIKA FLUIDA Isticanje kroz otvore sa promenljivim nivoom tečnosti zadatak Prizmatična sud podeljen je vertikalnom pregradom, u kojoj je otvor prečnika d, na dve komore Leva komora je napunjena vodom
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika. Monotonost i ekstremi. Katica Jurasić. Rijeka, 2011.
 Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
Verovatnoća i Statistika I deo Teorija verovatnoće (zadaci) Beleške dr Bobana Marinkovića
 Beleške dr Bobana Marinkovića") Verovatnoća i Statistika I deo Teorija verovatnoće zadaci Beleške dr Bobana Marinkovića Iz skupa, 2,, 00} bira se na slučajan način 5 brojeva Odrediti skup elementarnih dogadjaja ako se brojevi biraju
Verovatnoća i Statistika I deo Teorija verovatnoće zadaci Beleške dr Bobana Marinkovića Iz skupa, 2,, 00} bira se na slučajan način 5 brojeva Odrediti skup elementarnih dogadjaja ako se brojevi biraju
IZVODI ZADACI ( IV deo) Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo
 Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo") IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
Iskazna logika 3. Matematička logika u računarstvu. novembar 2012
 Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Osnovne teoreme diferencijalnog računa
 Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
Prvi kolokvijum. y 4 dy = 0. Drugi kolokvijum. Treći kolokvijum
 27. septembar 205.. Izračunati neodredjeni integral cos 3 x (sin 2 x 4)(sin 2 x + 3). 2. Izračunati zapreminu tela koje nastaje rotacijom dela površi ograničene krivama y = 3 x 2, y = x + oko x ose. 3.
27. septembar 205.. Izračunati neodredjeni integral cos 3 x (sin 2 x 4)(sin 2 x + 3). 2. Izračunati zapreminu tela koje nastaje rotacijom dela površi ograničene krivama y = 3 x 2, y = x + oko x ose. 3.
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
RAČUNSKE VEŽBE IZ PREDMETA POLUPROVODNIČKE KOMPONENTE (IV semestar modul EKM) IV deo. Miloš Marjanović
 IV deo. Miloš Marjanović") Univerzitet u Nišu Elektronski fakultet RAČUNSKE VEŽBE IZ PREDMETA (IV semestar modul EKM) IV deo Miloš Marjanović MOSFET TRANZISTORI ZADATAK 35. NMOS tranzistor ima napon praga V T =2V i kroz njega protiče
Univerzitet u Nišu Elektronski fakultet RAČUNSKE VEŽBE IZ PREDMETA (IV semestar modul EKM) IV deo Miloš Marjanović MOSFET TRANZISTORI ZADATAK 35. NMOS tranzistor ima napon praga V T =2V i kroz njega protiče
APROKSIMACIJA FUNKCIJA
 APROKSIMACIJA FUNKCIJA Osnovni koncepti Gradimir V. Milovanović MF, Beograd, 14. mart 2011. APROKSIMACIJA FUNKCIJA p.1/46 Osnovni problem u TA Kako za datu funkciju f iz velikog prostora X naći jednostavnu
APROKSIMACIJA FUNKCIJA Osnovni koncepti Gradimir V. Milovanović MF, Beograd, 14. mart 2011. APROKSIMACIJA FUNKCIJA p.1/46 Osnovni problem u TA Kako za datu funkciju f iz velikog prostora X naći jednostavnu
PRILOG. Tab. 1.a. Dozvoljena trajna opterećenja bakarnih pravougaonih profila u(a) za θ at =35 C i θ=30 C, (θ tdt =65 C)
 za θ at =35 C i θ=30 C, (θ tdt =65 C)") PRILOG Tab. 1.a. Dozvoljena trajna opterećenja bakarnih pravougaonih profila u(a) za θ at =35 C i θ=30 C, (θ tdt =65 C) Tab 3. Vrednosti sačinilaca α i β za tipične konstrukcije SN-sabirnica Tab 4. Minimalni
PRILOG Tab. 1.a. Dozvoljena trajna opterećenja bakarnih pravougaonih profila u(a) za θ at =35 C i θ=30 C, (θ tdt =65 C) Tab 3. Vrednosti sačinilaca α i β za tipične konstrukcije SN-sabirnica Tab 4. Minimalni
Klasifikacija blizu Kelerovih mnogostrukosti. konstantne holomorfne sekcione krivine. Kelerove. mnogostrukosti. blizu Kelerove.
 Klasifikacija blizu Teorema Neka je M Kelerova mnogostrukost. Operator krivine R ima sledeća svojstva: R(X, Y, Z, W ) = R(Y, X, Z, W ) = R(X, Y, W, Z) R(X, Y, Z, W ) + R(Y, Z, X, W ) + R(Z, X, Y, W ) =
Klasifikacija blizu Teorema Neka je M Kelerova mnogostrukost. Operator krivine R ima sledeća svojstva: R(X, Y, Z, W ) = R(Y, X, Z, W ) = R(X, Y, W, Z) R(X, Y, Z, W ) + R(Y, Z, X, W ) + R(Z, X, Y, W ) =
TRIGONOMETRIJA TROKUTA
 TRIGONOMETRIJA TROKUTA Standardne oznake u trokutuu ABC: a, b, c stranice trokuta α, β, γ kutovi trokuta t,t,t v,v,v s α,s β,s γ R r s težišnice trokuta visine trokuta simetrale kutova polumjer opisane
TRIGONOMETRIJA TROKUTA Standardne oznake u trokutuu ABC: a, b, c stranice trokuta α, β, γ kutovi trokuta t,t,t v,v,v s α,s β,s γ R r s težišnice trokuta visine trokuta simetrale kutova polumjer opisane
21. ŠKOLSKO/OPĆINSKO/GRADSKO NATJECANJE IZ GEOGRAFIJE GODINE 8. RAZRED TOČNI ODGOVORI
 21. ŠKOLSKO/OPĆINSKO/GRADSKO NATJECANJE IZ GEOGRAFIJE 2014. GODINE 8. RAZRED TOČNI ODGOVORI Bodovanje za sve zadatke: - boduju se samo točni odgovori - dodatne upute navedene su za pojedine skupine zadataka
21. ŠKOLSKO/OPĆINSKO/GRADSKO NATJECANJE IZ GEOGRAFIJE 2014. GODINE 8. RAZRED TOČNI ODGOVORI Bodovanje za sve zadatke: - boduju se samo točni odgovori - dodatne upute navedene su za pojedine skupine zadataka
1 Afina geometrija. 1.1 Afini prostor. Definicija 1.1. Pod afinim prostorom nad poljem K podrazumevamo. A - skup taqaka
 1 Afina geometrija 11 Afini prostor Definicija 11 Pod afinim prostorom nad poljem K podrazumevamo svaku uređenu trojku (A, V, +): A - skup taqaka V - vektorski prostor nad poljem K + : A V A - preslikavanje
1 Afina geometrija 11 Afini prostor Definicija 11 Pod afinim prostorom nad poljem K podrazumevamo svaku uređenu trojku (A, V, +): A - skup taqaka V - vektorski prostor nad poljem K + : A V A - preslikavanje
Pravilo 1. Svaki tip entiteta ER modela postaje relaciona šema sa istim imenom.
 1 Pravilo 1. Svaki tip entiteta ER modela postaje relaciona šema sa istim imenom. Pravilo 2. Svaki atribut entiteta postaje atribut relacione šeme pod istim imenom. Pravilo 3. Primarni ključ entiteta postaje
1 Pravilo 1. Svaki tip entiteta ER modela postaje relaciona šema sa istim imenom. Pravilo 2. Svaki atribut entiteta postaje atribut relacione šeme pod istim imenom. Pravilo 3. Primarni ključ entiteta postaje
OSNOVI ELEKTRONIKE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA
 ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
Operacije s matricama
 Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
I.13. Koliki je napon između neke tačke A čiji je potencijal 5 V i referentne tačke u odnosu na koju se taj potencijal računa?
 TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
nvt 1) ukoliko su poznate struje dioda. Struja diode D 1 je I 1 = I I 2 = 8mA. Sada je = 1,2mA.
 ukoliko su poznate struje dioda. Struja diode D 1 je I 1 = I I 2 = 8mA. Sada je = 1,2mA.") IOAE Dioda 8/9 I U kolu sa slike, diode D su identične Poznato je I=mA, I =ma, I S =fa na 7 o C i parametar n= a) Odrediti napon V I Kolika treba da bude struja I da bi izlazni napon V I iznosio 5mV? b)
IOAE Dioda 8/9 I U kolu sa slike, diode D su identične Poznato je I=mA, I =ma, I S =fa na 7 o C i parametar n= a) Odrediti napon V I Kolika treba da bude struja I da bi izlazni napon V I iznosio 5mV? b)
4 Numeričko diferenciranje
 4 Numeričko diferenciranje 7. Funkcija fx) je zadata tabelom: x 0 4 6 8 fx).17 1.5167 1.7044 3.385 5.09 7.814 Koristeći konačne razlike, zaključno sa trećim redom, odrediti tačku x minimuma funkcije fx)
4 Numeričko diferenciranje 7. Funkcija fx) je zadata tabelom: x 0 4 6 8 fx).17 1.5167 1.7044 3.385 5.09 7.814 Koristeći konačne razlike, zaključno sa trećim redom, odrediti tačku x minimuma funkcije fx)
2log. se zove numerus (logaritmand), je osnova (baza) log. log. log =
, je osnova (baza) log. log. log =") ( > 0, 0)!" # > 0 je najčešći uslov koji postavljamo a još je,, > 0 se zove numerus (aritmand), je osnova (baza). 0.. ( ) +... 7.. 8. Za prelazak na neku novu bazu c: 9. Ako je baza (osnova) 0 takvi se
( > 0, 0)!" # > 0 je najčešći uslov koji postavljamo a još je,, > 0 se zove numerus (aritmand), je osnova (baza). 0.. ( ) +... 7.. 8. Za prelazak na neku novu bazu c: 9. Ako je baza (osnova) 0 takvi se
Eliminacijski zadatak iz Matematike 1 za kemičare
 Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
Sistemi veštačke inteligencije primer 1
 Sistemi veštačke inteligencije primer 1 1. Na jeziku predikatskog računa formalizovati rečenice: a) Miloš je slikar. b) Sava nije slikar. c) Svi slikari su umetnici. Uz pomoć metode rezolucije dokazati
Sistemi veštačke inteligencije primer 1 1. Na jeziku predikatskog računa formalizovati rečenice: a) Miloš je slikar. b) Sava nije slikar. c) Svi slikari su umetnici. Uz pomoć metode rezolucije dokazati
Poglavlje 7. Blok dijagrami diskretnih sistema
 Poglavlje 7 Blok dijagrami diskretnih sistema 95 96 Poglavlje 7. Blok dijagrami diskretnih sistema Stav 7.1 Strukturni dijagram diskretnog sistema u kome su sve veliqine prikazane svojim Laplasovim transformacijama
Poglavlje 7 Blok dijagrami diskretnih sistema 95 96 Poglavlje 7. Blok dijagrami diskretnih sistema Stav 7.1 Strukturni dijagram diskretnog sistema u kome su sve veliqine prikazane svojim Laplasovim transformacijama
TEORIJA BETONSKIH KONSTRUKCIJA 79
 TEORIJA BETOSKIH KOSTRUKCIJA 79 Primer 1. Odrediti potrebn površin armatre za stb poznatih dimenzija, pravogaonog poprečnog preseka, opterećen momentima savijanja sled stalnog ( g ) i povremenog ( w )
TEORIJA BETOSKIH KOSTRUKCIJA 79 Primer 1. Odrediti potrebn površin armatre za stb poznatih dimenzija, pravogaonog poprečnog preseka, opterećen momentima savijanja sled stalnog ( g ) i povremenog ( w )
Riješeni zadaci: Nizovi realnih brojeva
 Riješei zadaci: Nizovi realih brojeva Nizovi, aritmetički iz, geometrijski iz Fukciju a : N R azivamo beskoači) iz realih brojeva i ozačavamo s a 1, a,..., a,... ili a ), pri čemu je a = a). Aritmetički
Riješei zadaci: Nizovi realih brojeva Nizovi, aritmetički iz, geometrijski iz Fukciju a : N R azivamo beskoači) iz realih brojeva i ozačavamo s a 1, a,..., a,... ili a ), pri čemu je a = a). Aritmetički
Polarne, cilindrične, sferne koordinate. 3D Math Primer for Graphics & Game Development
 Polarne, cilindrične, sferne koordinate 3D Math Primer for Graphics & Game Development Polarni koordinatni sistem 2D polarni koordinatni sistem ima koordinatni početak (pol), koji predstavlja centar koordinatnog
Polarne, cilindrične, sferne koordinate 3D Math Primer for Graphics & Game Development Polarni koordinatni sistem 2D polarni koordinatni sistem ima koordinatni početak (pol), koji predstavlja centar koordinatnog
Korektivno održavanje
 Održavanje mreže Korektivno održavanje Uzroci otkaza mogu biti: loši radni uslovi (temperatura, loše održavanje čistoće...), operativne promene (promene konfiguracije, neadekvatno manipulisanje...) i nedostaci
Održavanje mreže Korektivno održavanje Uzroci otkaza mogu biti: loši radni uslovi (temperatura, loše održavanje čistoće...), operativne promene (promene konfiguracije, neadekvatno manipulisanje...) i nedostaci
Rad, snaga, energija. Tehnička fizika 1 03/11/2017 Tehnološki fakultet
 Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA
 Katedra za elektroniku Elementi elektronike Laboratorijske vežbe Vežba br. 2 STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA Datum: Vreme: Studenti: 1. grupa 2. grupa Dežurni: Ocena: Elementi elektronike -
Katedra za elektroniku Elementi elektronike Laboratorijske vežbe Vežba br. 2 STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA Datum: Vreme: Studenti: 1. grupa 2. grupa Dežurni: Ocena: Elementi elektronike -
Cauchyjev teorem. Postoji više dokaza ovog teorema, a najjednostvniji je uz pomoć Greenove formule: dxdy. int C i Cauchy Riemannovih uvjeta.
 auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
Univerzitet u Nišu, Prirodno-matematički fakultet Prijemni ispit za upis OAS Matematika
 Univerzitet u Nišu, Prirodno-matematički fakultet Prijemni ispit za upis OAS Matematika Rešenja. Matematičkom indukcijom dokazati da za svaki prirodan broj n važi jednakost: + 5 + + (n )(n + ) = n n +.
Univerzitet u Nišu, Prirodno-matematički fakultet Prijemni ispit za upis OAS Matematika Rešenja. Matematičkom indukcijom dokazati da za svaki prirodan broj n važi jednakost: + 5 + + (n )(n + ) = n n +.
POTPUNO RIJEŠENIH ZADATAKA PRIRUČNIK ZA SAMOSTALNO UČENJE
 **** MLADEN SRAGA **** 011. UNIVERZALNA ZBIRKA POTPUNO RIJEŠENIH ZADATAKA PRIRUČNIK ZA SAMOSTALNO UČENJE SKUP REALNIH BROJEVA α Autor: MLADEN SRAGA Grafički urednik: BESPLATNA - WEB-VARIJANTA Tisak: M.I.M.-SRAGA
**** MLADEN SRAGA **** 011. UNIVERZALNA ZBIRKA POTPUNO RIJEŠENIH ZADATAKA PRIRUČNIK ZA SAMOSTALNO UČENJE SKUP REALNIH BROJEVA α Autor: MLADEN SRAGA Grafički urednik: BESPLATNA - WEB-VARIJANTA Tisak: M.I.M.-SRAGA
( ) π. I slučaj-štap sa zglobovima na krajevima F. Opšte rešenje diferencijalne jednačine (1): min
 π. I slučaj-štap sa zglobovima na krajevima F. Opšte rešenje diferencijalne jednačine (1): min") Kritična sia izvijanja Kritična sia je ona najmanja vrednost sie pritisa pri ojoj nastupa gubita stabinosti, odnosno, pri ojoj štap iz stabine pravoinijse forme ravnoteže preazi u nestabinu rivoinijsu
Kritična sia izvijanja Kritična sia je ona najmanja vrednost sie pritisa pri ojoj nastupa gubita stabinosti, odnosno, pri ojoj štap iz stabine pravoinijse forme ravnoteže preazi u nestabinu rivoinijsu
Termovizijski sistemi MS1TS
 Termovizijski sistemi MS1TS Vežbe 02 primer 1 MATLAB funkcija conv. f x = rect x rect x 2 ( ) ( ) ( ) y=conv(rectangle_function(x),rectangle_function(x-2)); figure,subplot(3,1,1),plot(x,rectangle_function(x)),xlabel('\itx'),ylabel('rect({\itx})');
Termovizijski sistemi MS1TS Vežbe 02 primer 1 MATLAB funkcija conv. f x = rect x rect x 2 ( ) ( ) ( ) y=conv(rectangle_function(x),rectangle_function(x-2)); figure,subplot(3,1,1),plot(x,rectangle_function(x)),xlabel('\itx'),ylabel('rect({\itx})');
Algoritmi i strukture podataka - 1.cas
 Algoritmi i strukture podataka - 1.cas Aleksandar Veljković October 2016 Materijali su zasnovani na materijalima Mirka Stojadinovića 1 Složenost algoritama Približna procena vremena ili prostora potrebnog
Algoritmi i strukture podataka - 1.cas Aleksandar Veljković October 2016 Materijali su zasnovani na materijalima Mirka Stojadinovića 1 Složenost algoritama Približna procena vremena ili prostora potrebnog
Periodičke izmjenične veličine
 EHNČK FAKULE SVEUČLŠA U RJEC Zavod za elekroenergeiku Sudij: Preddiploski sručni sudij elekroehnike Kolegij: Osnove elekroehnike Nosielj kolegija: Branka Dobraš Periodičke izjenične veličine Osnove elekroehnike
EHNČK FAKULE SVEUČLŠA U RJEC Zavod za elekroenergeiku Sudij: Preddiploski sručni sudij elekroehnike Kolegij: Osnove elekroehnike Nosielj kolegija: Branka Dobraš Periodičke izjenične veličine Osnove elekroehnike
MATEMATIKA Pokažite da za konjugiranje (a + bi = a bi) vrijedi. a) z=z b) z 1 z 2 = z 1 z 2 c) z 1 ± z 2 = z 1 ± z 2 d) z z= z 2
 vrijedi. a) z=z b) z 1 z 2 = z 1 z 2 c) z 1 ± z 2 = z 1 ± z 2 d) z z= z 2") (kompleksna analiza, vježbe ). Izračunajte a) (+i) ( i)= b) (i+) = c) i + i 4 = d) i+i + i 3 + i 4 = e) (a+bi)(a bi)= f) (+i)(i )= Skicirajte rješenja u kompleksnoj ravnini.. Pokažite da za konjugiranje
(kompleksna analiza, vježbe ). Izračunajte a) (+i) ( i)= b) (i+) = c) i + i 4 = d) i+i + i 3 + i 4 = e) (a+bi)(a bi)= f) (+i)(i )= Skicirajte rješenja u kompleksnoj ravnini.. Pokažite da za konjugiranje
PRIMJER 3. MATLAB filtdemo
 PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
( , 2. kolokvij)
") A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
Elektrotehnički fakultet univerziteta u Beogradu 16.maj Odsek za Softversko inžinjerstvo
 Elektrotehnčk fakultet unverzteta u Beogradu 6.maj 8. Odsek za Softversko nžnjerstvo Performanse računarskh sstema Drug kolokvjum Predmetn nastavnk: dr Jelca Protć (35) a) () Posmatra se segment od N uzastonh
Elektrotehnčk fakultet unverzteta u Beogradu 6.maj 8. Odsek za Softversko nžnjerstvo Performanse računarskh sstema Drug kolokvjum Predmetn nastavnk: dr Jelca Protć (35) a) () Posmatra se segment od N uzastonh