ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ M.K. & A.E. Εργαστήριο Αυτομάτου Ελέγχου
|
|
|
- Ευαδνη Γεωργιάδης
- 8 χρόνια πριν
- Προβολές:
Transcript

1 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ M.K. & A.E. Εργαστήριο Αυτομάτου Ελέγχου Διπλωματική Εργασία Μοντελοποίηση, Έλεγχος και Προγραμματισμός Ρομπότ Επίπεδου Διαστημικού Εξομοιωτή Θάλεια Γ. Φλέσσα Επιβλέπων Καθηγητής: E. Γ. Παπαδόπουλος AΘHNA 9
2 Περίληψη Στην παρούσα Διπλωματική Εργασία παρουσιάζεται η μοντελοποίηση, ο έλεγχος και ο προγραμματισμός ενός ρομπότ επίπεδου διαστημικού εξομοιωτή. Αναλυτικότερα: (α) αναλύονται οι δυναμικές εξισώσεις κίνησης του ρομπότ, (β) αναπτύσσεται ο αλγόριθμος ελέγχου βασισμένος στο μοντέλο του ρομπότ, (γ) παρουσιάζονται τα αποτελέσματα της προσομοίωσης διαφόρων κινήσεων σε περιβάλλον MATLAB/Simulink, (δ) υλοποιούνται βασικές εφαρμογές για το λογισμικό του ρομπότ σε γλώσσα C και τέλος (ε) παρουσιάζονται τα αποτελέσματα από πειράματα με το ρομπότ στον εξομοιωτή. Ο σκοπός του διαστημικού εξομοιωτή είναι η αναλυτική και πειραματική μελέτη της συμπεριφοράς ενός ρομπότ σε συνθήκες οι οποίες εξομοιώνουν έλλειψη βαρύτητας στο επίπεδο, σε ένα εργαστηριακό περιβάλλον. Ο εξομοιωτής αποτελείται από ένα ρομπότ (μάζας περίπου 5 kg) και την τράπεζα γρανίτη (τραχύτητα μικρότερη από 5μm). Το ρομπότ αιωρείται πάνω στην τράπεζα σε ένα λεπτό στρώμα αερίου CO, χρησιμοποιώντας τρία αεροέδρανα. Με αυτόν τον τρόπο, εξομοιώνεται επίπεδη κίνηση σε συνθήκες έλλειψης βαρύτητας. Το ρομπότ έχει πλήρη υπολογιστική και ενεργειακή αυτονομία καθώς και πλήρη αυτονομία κινήσεων. Επίσης, είναι μικρής μάζας και διαθέτει υποσυστήματα αντίστοιχα με αυτά των πραγματικών διαστημικών συστημάτων. Οι επενεργητές του ρομπότ είναι: τρία ζεύγη προωθητήρων (αέριο: CO ), ένας σφόνδυλος αντίδρασης και δύο βραχίονες με δύο περιστροφικές αρθρώσεις ο καθένας. Επάνω στο ρομπότ βρίσκεται μία φιάλη με CO, η οποία τροφοδοτεί τα αεροέδρανα και τους προωθητήρες. Το κίνητρο για την ανάπτυξη ενός διαστημικού εξομοιωτή είναι η συνεχώς αυξανόμενη σπουδαιότητα των αυτόνομων ρομποτικών συστημάτων στο διάστημα σε περιπτώσεις όπως: κατασκευή, συντήρηση, επίβλεψη/επιθεώρηση, προσέγγιση και πρόσδεση σε άλλες κατασκευές καθώς και διαστημική εξερεύνηση. Ωστόσο, η ανάπτυξη ενός αυτόνομου ρομποτικού συστήματος είναι χρονοβόρα, παρουσιάζει πληθώρα τεχνικών δυσκολιών, και έχει υψηλό κόστος κατασκευής. Για κάθε ρομποτικό σύστημα πρέπει πρώτα να επαληθευτεί αναλυτικά και πειραματικά η σωστή λειτουργία του. Ο επίπεδος διαστημικός εξομοιωτής παρέχει τη δυνατότητα πειραματισμού και επαλήθευσης δυναμικών μοντέλων, αλγορίθμων ελέγχου και μεθόδων σχεδιασμού τροχιάς, προσέγγισης, σύνδεσης και σύλληψης αντικειμένων με τελικό σκοπό την επιτυχημένη ανάπτυξη αυτόνομων διαστημικών ρομποτικών συστημάτων. Η
3 πρωτοτυπία του εξομοιωτή έγκειται στο ότι το ρομπότ είναι μικρής μάζας, πλήρως αυτόνομο και με υποσυστήματα ανάλογα με αυτά ενός πραγματικού ρομποτικού συστήματος. Τα χαρακτηριστικά αυτά σε συνδυασμό με την εξομοίωση επίπεδης κίνησης σε έλλειψη βαρύτητας, καθιστούν τον εξομοιωτή πολύ ρεαλιστικό. 3
4 Abstract The present study is the authoress' Diploma Thesis or the ulilment o the requirements at the School o Mechanical Engineering, National Technical University o Athens (NTUA). In this thesis, the modelling, control, programming and simulation & experimental results o a robot or a planar space emulator are presented. In particular: a) the dynamic equations o motion or the robot are derived, b) the model-based control algorithm is developed, c) the simulation and experimental results are discussed and d) the C unctions necessary or programming the robot are presented. The motivation or the development o the space emulator is that the growing importance o space robots in satellite servicing, in EVA assistance, in removing orbital debris and in space exploration requires their analytical and experimental task validation. To this end, the planar space robot emulator developed at the NTUA provides a low cost, long duration and easily reconigurable platorm or the analytical and experimental validation o dierent control, dynamics, and planning schemes, thus acilitating the transition rom theory and analysis to application. The emulator consists o a granite table o minimum roughness (less than 5 micron) and a small robot (approximately 5 kg) supported on three air-bearings. The robot hovers over the granite table on a μm CO ilm and is thereore capable o horizontal rictionless motion on the table, thus allowing or D emulation o zero gravity in a laboratory environment. The robot is ully autonomous. Its propulsion autonomy is achieved by an on-board CO tank used to provide gas to the air bearings and to three couples o propulsion thrusters. The robot is also equipped with a reaction wheel to control its angular momentum. Moreover, the robot is equipped with two arms, with two joints each. Computational autonomy is achieved with a PC4 mounted on the robot and power autonomy is achieved with a set o on- board batteries. Additionally, three optical sensors at the robot s base in conjunction with an external camera provide position and velocity eedback. The novelty o this coniguration is that the robot is not only o low mass and completely sel-contained but it is also composed o subsystems analogous to those o a space system, thereore making the emulator signiicantly more realistic. 4
5 Ευχαριστίες Σε αυτό το σημείο θα ήθελα να ευχαριστήσω τον επιβλέποντα Καθηγητή κ. Ε. Παπαδόπουλο για την ευκαιρία την οποία μου έδωσε να ασχοληθώ με ένα ιδιαίτερα ενδιαφέρον θέμα σε μία επιστημονική περιοχή η οποία παρουσιάζει πολλές προκλήσεις αλλά και προσδοκίες για το μέλλον. Η εμπιστοσύνη και η καθοδήγησή του με βοήθησαν να κάνω ένα (πολύ) μικρό βήμα στην γοητευτική και πολύπλοκη όψη του διαστήματος και της ρομποτικής. Οφείλω επίσης να ευχαριστήσω τους συναδέλφους μου στο Εργαστήριο Αυτομάτου Ελέγχου για το πολύ ευχάριστο και δημιουργικό κλίμα και την βοήθειά τους στις απορίες μου, ιδιαιτέρως τον Υ.Δ. Γ. Ρεκλείτη και τον Δρ. Ν. Χερουβείμ. Θα ήθελα επίσης να ευχαριστήσω τον Δ. Ξανθάκη για τις πάντα εύστοχες παρατηρήσεις του και τη συνεχή ενθάρρυνση. Τέλος, δεν μπορώ παρά να ευχαριστήσω τους γονείς μου για την υποστήριξή τους όλα αυτά τα χρόνια! Η εργασία αυτή αφιερώνεται στην οικογένειά μου και ιδιαιτέρως στους παππούδες και στις γιαγιάδες μου, για την αγάπη που πάντα μου έδειχναν. 5
6 Περιεχόμενα Περίληψη... Abstract... 4 Ευχαριστίες... 5 Περιεχόμενα... 6 Κατάλογος Σχημάτων... 8 Κατάλογος Πινάκων.... Εισαγωγή..... Σκοπός της εργασίας..... Βιβλιογραφική Ανασκόπηση Δομή εργασίας Παρουσίαση του Διδιάστατου Διαστημικού Εξομοιωτή Περιγραφή Διάταξης Προωθητήρες Σφόνδυλος αντίδρασης Βραχίονες Αισθητήρες..... Βελτιστοποίηση κατανάλωσης προωθητικού αερίου Χαρακτηριστικά PC Hardware Λογισμικό Δυναμική και Έλεγχος του Ρομποτικού Συστήματος Εισαγωγή Δυναμική Εξισώσεις κίνησης και επενεργητές Λειτουργία σφονδύλου αντίδρασης και προωθητήρων Έλεγχος του συστήματος Έλεγχος βασισμένος στο δυναμικό μοντέλο Επιλογή κερδών για την μεταφορική κίνηση Επιλογή κερδών για την περιστροφή Επιλογή κερδών για τις αρθρώσεις Μοντέλο προσομοίωσης
7 3.6. Μοντέλο Simulink Υποσύστημα Dynamics Υποσύστημα PD controller Λογισμικό Γενικά Βασικοί ορισμοί Βασικές συναρτήσεις Κάρτα ανάγνωσης encoder Κάρτα ψηφιοαναλογικού μετατροπέα (DAC) Κινητήρας Εφαρμογές Πραγματικού Χρόνου (Real Time) Γεωμετρικές ρουτίνες Αποτελέσματα Προσομοιώσεων και Πειραμάτων Εισαγωγή Προσομοίωση μεταφορικής κίνησης Κίνηση κατά X Κίνηση κατά Y Κίνηση κατά X, Y Προσομοίωση περιστροφής Προσομοίωση περιστροφής αρθρώσεων βραχιόνων Περιστροφή άρθρωσης Περιστροφή άρθρωσης Περιστροφή άρθρωσης & Προσομοίωση σύνθετων κινήσεων Περιστροφή και μεταφορά Περιστροφή και στροφή άρθρωσης Πειραματικά Αποτελέσματα Συμπεράσματα και Μελλοντική Εργασία... Βιβλιογραφία... Παράρτημα : Φυλλάδια Λειτουργίας Κινητήρων... 4 Παράρτημα : Φυλλάδια Λειτουργίας PC4... Παράρτημα 3: Αδρανειακά Χαρακτηριστικά Συστήματος... 9 Παράρτημα 4: Κώδικας C
8 Κατάλογος Σχημάτων Σχήμα -. Τράπεζα γρανίτη (αριστερά) και το ρομπότ πάνω στην τράπεζα (δεξιά)... 7 Σχήμα -. Ζεύγος προωθητήρων: ο προωθητήρας () είναι επάνω και ο () κάτω Σχήμα -3. Διάγραμμα Μέσης Ώθησης Κύκλου Παλμού... 8 Σχήμα -4. Σφόνδυλος Αντίδρασης Σχήμα -5. Βραχίονας ρομπότ... Σχήμα -6. (α) Δύο περιπτώσεις κίνησης, (β) Τροχιά, (γ) Προωθητήρες για την πρώτη περίπτωση, (δ) Προωθητήρες για την δεύτερη περίπτωση (με τον σφόνδυλο) Σχήμα -7. PC Σχήμα 3-. Κάτοψη ρομπότ Σχήμα 3-. Δυνάμεις στη βάση του ρομπότ Σχήμα 3-3. Στροφή βάσης ρομπότ Σχήμα 3-4. Ανάλυση δυνάμεων προωθητήρων, Σχήμα 3-5. Προφίλ θέσης, ταχύτητας & επιτάχυνσης Σχήμα 5-. Μεταφορική κίνηση (Χ), με () είναι η επιθυμητή θέση Σχήμα 5-. Ενεργοποίηση προωθητήρων (α),, 3, (β) 4, 5, Σχήμα 5-3. (α) Διαταραχή Βραχίονα, (β) Διαταραχή Βραχίονα Σχήμα 5-4. Περιστροφή Σχήμα 5-5. Μεταφορική κίνηση (Y), με () είναι η επιθυμητή θέση Σχήμα 5-6. Ενεργοποίηση προωθητήρων (α),, 3 (β) 4, 5, Σχήμα 5-7. (α) Διαταραχή Βραχίονα, (β) Διαταραχή Βραχίονα Σχήμα 5-8. Περιστροφή Σχήμα 5-9. Μεταφορική κίνηση (X, Y), με () είναι το επιθυμητό προφίλ Σχήμα 5-. Ενεργοποίηση προωθητήρων (α),, 3 (β) 4, 5, Σχήμα 5-. (α) Διαταραχή Βραχίονα, (β) Διαταραχή Βραχίονα Σχήμα 5-. Περιστροφή Σχήμα 5-3. Περιστροφή. Με κόκκινο είναι το επιθυμητό προφίλ... 9 Σχήμα 5-4. Ενεργοποίηση σφονδύλου αντίδρασης Σχήμα 5-5. Ενεργοποίηση προωθητήρων (α),, 3 (β) 4, 5, Σχήμα 5-6. (α) Διαταραχή Βραχίονα, (β) Διαταραχή Βραχίονα Σχήμα 5-7. Κίνηση X, Y Σχήμα 5-8. Άρθρωση,
9 Σχήμα 5-9. Ενεργοποίηση κινητήρα άρθρωσης, ροπή στο φορτίο Σχήμα 5-. Άρθρωση, Σχήμα 5-. Περιστροφή Σχήμα 5-. X, Y Σχήμα 5-3. Άρθρωση, Σχήμα 5-4. Ενεργοποίηση κινητήρα άρθρωσης, ροπή στο φορτίο Σχήμα 5-5. Άρθρωση, Σχήμα 5-6. Περιστροφή Σχήμα 5-7. X, Y Σχήμα 5-8. Άρθρωση,. Με κόκκινο είναι το επιθυμητό προφίλ Σχήμα 5-9. Ενεργοποίηση κινητήρα άρθρωσης,, ροπή στο φορτίο Σχήμα 5-3. Άρθρωση,.... Σχήμα 5-3. Περιστροφή.... Σχήμα 5-3. X, Y... Σχήμα Μεταφορική κίνηση (X, Y). Με κόκκινο είναι το επιθυμητό προφίλ.... Σχήμα Ενεργοποίηση προωθητήρων (α),, 3, (β) 4, 5, Σχήμα (α) Διαταραχή βραχίονα, (β) Διαταραχή βραχίονα... 3 Σχήμα Περιστροφή Σχήμα Άρθρωση, Σχήμα Ενεργοποίηση κινητήρα άρθρωσης, ροπή στο φορτίο Σχήμα Άρθρωση, Σχήμα 5-4. Περιστροφή Σχήμα 5-4. X, Y... 5 Σχήμα 5-4. Κίνηση κέντρου βάρους βάσης κατά X, Y... 7 Σχήμα Προσανατολισμός βάσης... 8 Σχήμα Κίνηση κέντρου βάρους συστήματος κατά X, Y... 8 Σχήμα Ανεξέλεγκτη περιστροφή του συστήματος
10 Κατάλογος Πινάκων Πίνακας 3-. Βαθμοί ελευθερίας συστήματος... 3 Πίνακας 3-. Βασικά χαρακτηριστικά συστήματος Πίνακας 3-3. Κέρδη ελέγχου... 5
11 . Εισαγωγή.. Σκοπός της εργασίας Ο σκοπός της παρούσας Διπλωματικής Εργασίας είναι η μοντελοποίηση, ο έλεγχος και ο προγραμματισμός ενός ρομπότ επίπεδου διαστημικού εξομοιωτή. Ο επίπεδος διαστημικός εξομοιωτής έχει αναπτυχθεί στο Εργαστήριο Μηχανολογικών Κατασκευών και Αυτομάτου Ελέγχου στο Εθνικό Μετσόβιο Πολυτεχνείο, στα πλαίσια του ερευνητικού έργου του εργαστηρίου. Ο σκοπός της διάταξης είναι η αναλυτική και πειραματική μελέτη της επίπεδης κίνησης ενός ρομπότ σε συνθήκες οι οποίες εξομοιώνουν έλλειψη βαρύτητας. Ο εξομοιωτής αποτελείται από το ρομπότ και την τράπεζα γρανίτη πάνω στην οποία αυτό αιωρείται χρησιμοποιώντας αεροέδρανα. Στην παρούσα διπλωματική: (α) αναλύονται οι δυναμικές εξισώσεις κίνησης του ρομπότ, (β) αναπτύσσεται ο αλγόριθμος ελέγχου βασισμένος στο μοντέλο του ρομπότ, (γ) παρουσιάζονται τα αποτελέσματα της προσομοίωσης διαφόρων κινήσεων σε περιβάλλον MATLAB/Simulink, (δ) υλοποιούνται βασικές εφαρμογές για το λογισμικό του ρομπότ σε γλώσσα C και τέλος (ε) παρουσιάζονται τα αποτελέσματα από πειράματα με το ρομπότ στον εξομοιωτή... Βιβλιογραφική Ανασκόπηση Ο αυξανόμενος αριθμός κατασκευών σε τροχιά γύρω από την Γη (δορυφόροι, τηλεσκόπια, κλπ.) και οι ανάγκες για διαστημική εξερεύνηση και αυτόνομες ρομποτικές εργασίες, απαιτούν ρομποτικά συστήματα τα οποία μπορούν να λειτουργήσουν αυτόνομα και να εκτελέσουν διαφορετικές εργασίες: κατασκευή, συντήρηση, επίβλεψη/επιθεώρηση, προσέγγιση και πρόσδεση σε άλλες κατασκευές (rendezvous & docking). Τα ρομποτικά συστήματα μπορούν επίσης να μειώσουν το φόρτο εργασίας των αστροναυτών, βοηθώντας ή ακόμα και απαλλάσσοντας τους από επικίνδυνες εργασίες. Ιδιαίτερο ενδιαφέρον παρουσιάζουν ρομποτικά συστήματα τα οποία μπορούν να προσεγγίσουν, να ελέγξουν, να επισκευάσουν ή και να αλλάξουν την τροχιά σε άλλες κατασκευές στο διάστημα. Η διαδικασία αυτή καλείται On Orbit Servicing (OOS) και είναι μία σχετικά καινούργια ιδέα. Οι στόχοι του OOS είναι (α) επαναχρησιμοποίηση τροχιακών κατασκευών (π.χ. δορυφόροι στους οποίους έχει τελειώσει το καύσιμο) και κατά επέκταση μείωση του κόστους επένδυσης σε αυτούς και (β) μείωση του κινδύνου για τους αστροναύτες μειώνοντας τις εργασίες που πρέπει να γίνουν στο διάστημα. Μία
12 επισκόπηση για συστήματα με ικανότητες κατασκευής, συντήρησης και επιθεώρησης βρίσκεται στο [9]. Η συλλογή τροχιακών συστημάτων και η επιδιόρθωση ή επαναφορά τους στην ατμόσφαιρα είναι μεγάλης σημασίας, διότι υπάρχει ένας πολύ μεγάλος αριθμός μη λειτουργικών κατασκευών στο διάστημα (διαστημικά απορρίμματα - space debris). Τα διαστημικά απορρίμματα αποτελούν ένα συνεχή κίνδυνο για άλλες διαστημικές κατασκευές και τους ίδιους τους αστροναύτες, διότι οποιαδήποτε σύγκρουση μπορεί να αποδειχθεί καταστροφική. Ένα αντικείμενο σε τροχιά κάτω από km (low earth orbit LEO) έχει ταχύτητα 7 με 8 km/s. Η μέση ταχύτητα σε μία σύγκρουση μεταξύ δύο αντικειμένων είναι km/s. Συνεπώς, ακόμα και μία σύγκρουση με ένα μικρό αντικείμενο μπορεί να είναι επικίνδυνη. Υπάρχουν σε τροχιά γύρω από τη Γη περίπου 9 αντικείμενα μεγαλύτερα από cm, 5 αντικείμενα με διάμετρο μεταξύ και cm και δεκάδες εκατομμύρια αντικείμενα μικρότερα του cm [4]. Τα αντικείμενα αυτά είναι παλιοί δορυφόροι, τμήματα από προωθητικούς πυραύλους και κομμάτια από διάφορες κατασκευές οι οποίες εξερράγησαν. Ενδεικτικά αναφέρουμε, ότι τον Φεβρουάριο του 9 ένας τηλεπικοινωνιακός δορυφόρος της εταιρείας Iridium Satellite LLC (USA) συγκρούστηκε με έναν παλιό σοβιετικό δορυφόρο με αποτέλεσμα να καταστραφούν και οι δύο. Η σύγκρουση είχε ως αποτέλεσμα πάνω από 5 συντρίμμια. Είναι εμφανές λοιπόν ότι τα ρομποτικά συστήματα στο διάστημα έχουν συνεχώς αυξανόμενη σπουδαιότητα σε πολλαπλούς τομείς: επισκευή δορυφόρων, συλλογή και απομάκρυνση διαστημικών σκουπιδιών, βοήθεια σε αστροναύτες καθώς και στην εξερεύνηση του διαστήματος και των πλανητών. Επίσης, είναι ιδιαίτερα σημαντικό τα συστήματα αυτά να είναι αυτόνομα ώστε να μπορούν να λειτουργήσουν και χωρίς ανθρώπινη επίβλεψη (π.χ. εξερεύνηση) ή με περιορισμένη (π.χ. κατασκευή). Τα αυτόνομα ρομποτικά συστήματα στο διάστημα είναι αντικείμενο συνεχούς μελέτης με πολλές προκλήσεις και καινοτομίες. Μία επισκόπηση για τη δυναμική, τον σχεδιασμό τροχιάς και τον έλεγχο ενός διαστημικού ρομπότ είναι στο [4]. Για κάθε ρομποτικό σύστημα το οποίο τελικώς προορίζεται για χρήση στο διάστημα πρέπει πρώτα να επαληθευτεί αναλυτικά και πειραματικά η λειτουργία του. Η ανάπτυξη ρομπότ τα οποία είναι αυτόνομα και εκτελούν εργασίες όπως κατασκευή, συντήρηση, επίβλεψη και πρόσδεση παρουσιάζει πληθώρα τεχνικών δυσκολιών, είναι χρονοβόρα και έχει υψηλό κόστος κατασκευής. Υπό αυτούς τους περιορισμούς, ακόμα και στις αποστολές επίδειξης τεχνολογίας, περιορίζεται σημαντικά η σχεδιαστική ευελιξία έτσι
13 ώστε να έχουν κάποιο βαθμό επιτυχίας. Τέτοιες πετυχημένες αποστολές επίδειξης τεχνολογίας είναι το ETS-VII (JAXA) και το Orbital Express (DARPA). Η αποστολή ETS-VII [] έδειξε επιτυχώς την προσέγγιση και πρόσδεση μεταξύ δύο συστημάτων (μάζας 4kg και kg αντίστοιχα), την επιθεώρηση ενός συστήματος για την εύρεση σφαλμάτων, τη μεταφορά και τοποθέτηση ενός ORU (Orbital Replaceable Unit) και την μεταφορά υγρού μεταξύ δύο συστημάτων. Η αποστολή Orbital Express (DARPA) [,, 5] έδειξε την προσέγγιση μεταξύ δύο συστημάτων (στόχος ή target & κυνηγός ή chaser), την σύλληψη του ενός συστήματος (στόχος) από το άλλο (κυνηγός) με την βοήθεια ενός βραχίονα και την μεταφορά ενός ORU με τον βραχίονα από το σύστημακυνηγό στο σύστημα-στόχο. Σε αντίθεση με τις παραπάνω αποστολές, η αποστολή DART της NASA, η οποία είχε ως στόχο την επίδειξη προσέγγισης δύο συστημάτων και την σύλληψη του ενός από το άλλο, δεν ολοκληρώθηκε διότι κατά την φάση της προσέγγισης τα δύο συστήματα συγκρούστηκαν [3]. Συναφή πετυχημένα παραδείγματα ρομποτικών συστημάτων τα οποία είναι σε χρήση είναι οι δύο βραχίονες Canadarm (SRMS) [8] και Canadarm [7] της CSA (Canadian Space Agency). Ο βραχίονας Canadarm έχει επισκευάσει και επανατοποθετήσει στην επιθυμητή τροχιά δορυφόρους και έχει χρησιμοποιηθεί σε έντεκα διαστημικές αποστολές. Ο βραχίονας Canadarm βρίσκεται στον Διεθνή Διαστημικό Σταθμό και χρησιμοποιείται για την κατασκευή και συντήρηση του σταθμού. Επίσης, ένα πρόσφατο επιτυχημένο παράδειγμα είναι το αυτόνομο όχημα (ATV Automated Vehicle) Jules Verne (ESA) [9]. Το ATV Jules Verne προσέγγισε, συνδέθηκε αυτόνομα με τον Διεθνή Διαστημικό Σταθμό και μετέφερε 8.3 τόνους προμηθειών για τον σταθμό. Μετά την ολοκλήρωση της αποστολής του, επανήλθε στην ατμόσφαιρα και κάηκε. Η επόμενη αποστολή ATV προβλέπεται να γίνει τον Σεπτέμβριο του με το ATV Johannes Kepler. Είναι εμφανές λοιπόν ότι για την επιτυχημένη ανάπτυξη αυτόνομων ρομποτικών συστημάτων, απαιτείται αναλυτική και πειραματική επαλήθευση της συμπεριφοράς τους σε περιβάλλον πολύ διαφορετικό από το επίγειο. Το διαστημικό περιβάλλον μπορεί να προσομοιωθεί στην γη με ποικίλους τρόπους: εικονικούς προσομοιωτές λογισμικού, συστήματα φυσικής άνωσης (buoyancy tanks), συστήματα αντιστάθμισης βαρύτητας και παραβολικές πτήσεις. Η κάθε μία από τις παραπάνω μεθόδους παρουσιάζει ορισμένα μειονεκτήματα, όπως αντίσταση στο νερό για τα συστήματα φυσικής άνωσης, μηχανικά ιδιόμορφα σημεία και ατέλειες στα συστήματα αντιστάθμισης και στην περίπτωση των παραβολικών πτήσεων, μεγάλο κόστος και λίγο διαθέσιμο χρόνο για πειράματα. 3
14 Μία διαφορετική προσέγγιση είναι η κατασκευή ενός επίπεδου εξομοιωτή στον οποίο η επίδραση της βαρύτητας αντισταθμίζεται από την κίνηση η οποία γίνεται χωρίς τριβή. Ένας δημοφιλής τρόπος για να επιτευχθεί κίνηση χωρίς τριβή είναι η χρήση αεροεδράνων. Ωστόσο, οι επίπεδοι εξομοιωτές δεν μπορούν να εξομοιώσουν τρισδιάστατες κινήσεις. Παρόλα αυτά, οι επίπεδοι εξομοιωτές με αεροέδρανα είναι οι πλέον ευέλικτοι και οικονομικοί σε σύγκριση με τις άλλες μεθόδους. Επίσης, παρέχουν την δυνατότητα για συνεχή και σε βάθος πειραματισμό αλγορίθμων ελέγχου, επαλήθευσης δυναμικών μοντέλων και μεθόδων σχεδιασμού τροχιάς, προσέγγισης, σύνδεσης και σύλληψης αντικειμένων. Η επισκόπηση για επίπεδους εξομοιωτές με αεροέδρανα [7] δείχνει τα πλεονεκτήματα αυτού του τύπου διαστημικών εξομοιωτών. Διαστημικοί εξομοιωτές έχουν αναπτυχθεί στις ΗΠΑ (MIT, Stanord, NASA), στην Ευρώπη (University o Southampton, University o Padova) και στην Ιαπωνία (Tokyo Institute o Technology, Tokyo University)..3. Δομή εργασίας Η παρούσα διπλωματική εργασία αποτελείται από έξι κεφάλαια και τέσσερα παραρτήματα. Στο Κεφάλαιο περιγράφεται ο σκοπός της εργασίας και γίνεται μία σύντομη παρουσίαση διαφόρων ρομποτικών συστημάτων και των διαθέσιμων μεθόδων εξομοίωσης του διαστημικού περιβάλλοντος στη Γη. Στο Κεφάλαιο παρουσιάζονται αναλυτικά τα συστήματα του εξομοιωτή και η λειτουργία τους. Στο Κεφάλαιο 3 αναπτύσσονται οι εξισώσεις δυναμικής του ρομπότ, ο αλγόριθμος ελέγχου και το μοντέλο για τις προσομοιώσεις σε MATLAB/Simulink. Στο Κεφάλαιο 4 παρουσιάζεται το λογισμικό το οποίο έχει αναπτυχθεί για τη λειτουργία του ρομπότ. Στο Κεφάλαιο 5 παρουσιάζονται και σχολιάζονται τα αποτελέσματα των προσομοιώσεων του ρομπότ και τα πειραματικά αποτελέσματα. Στο Κεφάλαιο 6 παρουσιάζονται τα συνολικά συμπεράσματα και η μελλοντική εργασία. 4
15 . Παρουσίαση του Διδιάστατου Διαστημικού Εξομοιωτή.. Περιγραφή Διάταξης Ο επίπεδος διαστημικός εξομοιωτής αποτελείται από ένα πλήρως αυτόνομο ρομπότ το οποίο κινείται - αιωρείται χρησιμοποιώντας αεροέδρανα πάνω σε μία τράπεζα γρανίτη εξαιρετικά μικρής τραχύτητας. Η επιλογή και ανάπτυξη του επίπεδου διαστημικού εξομοιωτή με αεροέδρανα έγινε με βάση τα πλεονεκτήματα τα οποία παρουσιάζει αυτή η μέθοδος (βλ..) και σύμφωνα με τις παρακάτω προδιαγραφές [4]: Ρεαλιστική εξομοίωση συνθηκών έλλειψης βαρύτητας. Σχεδιασμός ο οποίος μπορεί να ενσωματωθεί στο διαθέσιμο χώρο Υποσυστήματα του ρομπότ αντίστοιχα με αυτά των πραγματικών διαστημικών συστημάτων και μικρής μάζας. Ενεργειακή και υπολογιστική αυτονομία ρομπότ καθώς και πλήρης αυτονομία κινήσεων. Δυνατότητα για διεξαγωγή διαφορετικών πειραμάτων και επανάληψής τους. Σχετικά εύκολος κατασκευαστικά, στιβαρός και χαμηλού κόστους. Η επίπεδη τράπεζα γρανίτη (Σχήμα -) έχει διαστάσεις. x.8m x.3 m και βάρος περίπου 3.5 tn. Η τραχύτητα της τράπεζας είναι κατά το μέγιστο 5μm και στηρίζεται σε έξι πόδια μεταβλητού μήκους. Η κλίση της τράπεζας είναι μικρότερη από ρυθμίζεται με μεταβολή των ποδιών στήριξης.. και Το ρομπότ έχει μάζα ίση με 5. kg και στηρίζεται πάνω σε τρία αεροέδρανα (airbearings) από πορώδη γραφίτη τα οποία είναι τοποθετημένα στην βάση του ρομπότ έτσι ώστε να σχηματίζουν ισόπλευρο τρίγωνο (Σχήμα -). Τα αεροέδρανα είναι της εταιρείας NewWay Machine Components, μοντέλο S5 και έχουν διάμετρο 5 mm. Το ρομπότ είναι κατασκευασμένο από αλουμίνιο, το οποίο παρέχει επαρκή στιβαρότητα ενώ είναι ταυτοχρόνως ελαφρύ. Επάνω στο ρομπότ βρίσκεται μία φιάλη με CO, μάζας 55 gr και πίεσης 6 bar (στους C), η οποία παρέχει το αέριο στα αεροέδρανα που ανυψώνουν το ρομπότ κατά μm πάνω από την τράπεζα. Με αυτόν τον τρόπο το ρομπότ αιωρείται πάνω σε ένα 5
16 λεπτό στρώμα αερίου και επιτυγχάνεται κίνηση χωρίς τριβή. Επίσης, επειδή η επιτάχυνση της βαρύτητας είναι κάθετη στο επίπεδο κίνησης, η κίνηση του συστήματος είναι ίδια με αυτή σε συνθήκες μηδενική βαρύτητας. Η δύναμη λόγω αεροδυναμικής αντίστασης για ταχύτητες μικρότερες από.5 m/s είναι μικρότερη από. N και δεδομένου ότι το ρομπότ αναπτύσσει ταχύτητες μικρότερες από αυτό το όριο, η επίδραση της αντίστασης του αέρα θεωρείται αμελητέα [5]. Το ρομπότ περιλαμβάνει έναν υπολογιστή PC4, ο οποίος ικανοποιεί την απαίτηση της υπολογιστικής αυτονομίας του συστήματος. Το PC4 ελέγχει όλα τα υποσυστήματα του ρομπότ. Το ρομπότ διαθέτει τους εξής επενεργητές: τρία ζεύγη προωθητήρων, σφόνδυλο αντίδρασης και δύο βραχίονες με δύο αρθρώσεις ο καθένας. Οι προωθητήρες τροφοδοτούνται από τη φιάλη με CO. Στο Σχήμα - φαίνεται το ρομπότ επάνω στην τράπεζα γρανίτη. Διακρίνονται οι δύο βραχίονες, τα αεροέδρανα, το PC4, οι κινητήρες του αριστερού βραχίονα, ένας ενισχυτής και η φιάλη CO με το σύστημα διαχείρισης του αερίου. Στο κάτω μέρος του ρομπότ διακρίνεται ο σφόνδυλος αντίδρασης. Το PC4 είναι σταθερά τοποθετημένο στην επάνω πλάκα της βάσης του ρομπότ. Η ενεργειακή αυτονομία του ρομπότ επιτυγχάνεται με την χρήση μπαταριών πολυμερούς λιθίου (LiPo). Το σύστημα διαχείρισης ισχύος χωρίζεται σε δύο απομονωμένα κυκλώματα: στο χαμηλής τάσης (8V), το οποίο τροφοδοτεί το ηλεκτρονικό υποσύστημα και το PC4 και στο υψηλής τάσης (33V), το οποίο τροφοδοτεί τους σερβοκινητήρες, το σύστημα ενεργοποίησης των προωθητήρων, το DC-DC converter και το regulator. Το ηλεκτρονικό υποσύστημα του ρομπότ βρίσκεται στα τελικά στάδια υλοποίησης. Η πρωτοτυπία του εξομοιωτή έγκειται στο ότι το ρομπότ είναι μικρής μάζας, πλήρως αυτόνομο και με υποσυστήματα ανάλογα με αυτά σε ένα πραγματικό ρομποτικό σύστημα. Τα χαρακτηριστικά αυτά σε συνδυασμό με την επίπεδη εξομοίωση κίνησης με έλλειψη βαρύτητας, καθιστούν τον εξομοιωτή πολύ πιο ρεαλιστικό. Σημειώνουμε ότι στη συνέχεια της εργασίας, οι όροι ρομπότ και σύστημα θα χρησιμοποιούνται χωρίς διάκριση. Επίσης, η βάση του ρομπότ θεωρείται ότι είναι το κυρίως σώμα με τους προωθητήρες, σφόνδυλο κλπ., χωρίς τους βραχίονες. Στη συνέχεια, αναλύονται περαιτέρω οι επενεργητές του ρομπότ και οι αισθητήρες του. 6

. Για να επιτευχθεί έλεγχος του ρομπότ σε τρεις διευθύνσεις, χρειάζονται τουλάχιστον δύο ζεύγη προωθητήρων.")
 είναι επάνω και ο () κάτω.")
17 Σχήμα -. Τράπεζα γρανίτη (αριστερά) και το ρομπότ πάνω στην τράπεζα (δεξιά)... Προωθητήρες Κάθε ζεύγος προωθητήρων είναι δύο ακροφύσια τα οποία ανοίγουν και κλείνουν μέσω μίας βαλβίδας. Οι δύο προωθητήρες είναι τοποθετημένοι αντίθετα μεταξύ τους έτσι ώστε να αποδίδουν ένας ζεύγος αντίθετων ωθήσεων. Οι προωθητήρες τροφοδοτούνται με CO από την φιάλη πάνω στο ρομπότ. Τα τρία ζεύγη προωθητήρων είναι τοποθετημένα υπό γωνία μεταξύ τους και στερεώνονται στην πλάκα του ρομπότ μέσω μιάς μικρής βάσης σχήματος ταυ (Σχήμα -). Κάτω από κάθε ζεύγος προωθητήρων έχει τοποθετηθεί ένα αεροστατικό έδρανο (Σχήμα -). Για να επιτευχθεί έλεγχος του ρομπότ σε τρεις διευθύνσεις, χρειάζονται τουλάχιστον δύο ζεύγη προωθητήρων. Το πλεονάζον ζεύγος προορίζεται για κάλυψη τυχόν ιδιομορφιών καθώς και για ασφάλεια στην περίπτωση που κάποιος προωθητήρας τεθεί εκτός λειτουργίας, κατά αντιστοιχία με ένα πραγματικό διαστημικό σύστημα. Σχήμα -. Ζεύγος προωθητήρων: ο προωθητήρας () είναι επάνω και ο () κάτω. Οι προωθητήρες ενεργοποιούνται με τη μέθοδο της «Διαμόρφωσης Εύρους Παλμού» (Pulse Width Modulation PWM). Η μέθοδος αυτή επιτρέπει στους προωθητήρες να 7
18 αποδώσουν δύναμη μεταβλητού μεγέθους χρησιμοποιώντας βαλβίδες ON/OFF με συγκεκριμένη σταθερή τάση λειτουργίας, V. Η αρχή λειτουργίας της μεθόδου PWM είναι η ακόλουθη. Σε μία περίοδο T η τάση τροφοδοσίας V των βαλβίδων εναλλάσσεται με μηδενική τάση με συγκεκριμένη συχνότητα, η οποία συχνότητα ονομάζεται συχνότητα τροφοδοσίας. Το χρονικό ποσοστό σε μία περίοδο κατά το οποίο η βαλβίδα τροφοδοτείται με την τάση V ( t on ) είναι ο κύκλος παλμού (duty cycle): t duty cycle = = T on T (.) Το ρομπότ έχει έξι συνολικά βαλβίδες τοποθετημένες σε τρία ζεύγη. Οι βαλβίδες είναι της εταιρείας Festo, τύπος MHP-MH-3/3G-M5-PI, με τα εξής χαρακτηριστικά: τάση τροφοδοσίας 4V, μέγιστη συχνότητα ενεργοποίησης = 5Hz και χρόνο απόκρισης 7 ms. Μετά από μελέτη, επιλέχθηκε συχνότητα ενεργοποίησης = 7Hz. Ο κύκλος παλμού σχετίζεται με την ώθηση που δίνει μία βαλβίδα σύμφωνα με το παρακάτω σχήμα, για ενεργοποίηση = 7Hz και τάση τροφοδοσίας 4 V []: Σχήμα -3. Διάγραμμα Μέσης Ώθησης Κύκλου Παλμού. Με βάση το παραπάνω σχήμα, το χρήσιμο εύρος κύκλου παλμού είναι το γραμμικό τμήμα C για τιμές κύκλου παλμού από 3% έως 9%. Συνεπώς, το εύρος τιμών της ώθησης από κάθε προωθητήρα είναι: =.6N,. 48N (.) min max = 8

19 Η ενεργοποίηση των προωθητήρων με την μέθοδο PWM επιτρέπει την εξομοίωση της λειτουργίας αναλογικών βαλβίδων με ψηφιακές βαλβίδες. Αυτό είναι ιδιαίτερα σημαντικό διότι στο διάστημα δεν χρησιμοποιούνται αναλογικές βαλβίδες. Με αυτή την μέθοδο, το ρομπότ διαθέτει προωθητήρες μεταβλητής δύναμης και σταθερής κατεύθυνσης χωρίς να απομακρύνεται από την απαίτηση να έχει υποσυστήματα αντίστοιχα με αυτά των πραγματικών διαστημικών συστημάτων... Σφόνδυλος αντίδρασης Το ρομπότ διαθέτει ένα σφόνδυλο αντίδρασης ο οποίος χρησιμοποιείται κατά προτεραιότητα σε σχέση με τους προωθητήρες για την περιστροφή του ρομπότ, με σκοπό την ελαχιστοποίηση της κατανάλωσης αερίου και την αύξηση της αυτονομίας του ρομπότ. Ο σφόνδυλος αντίδρασης κινείται μέσω ενός DC σερβοκινητήρα γύρω από τον κάθετο άξονα περιστροφής του. Το ρομπότ λόγω δράσης-αντίδρασης περιστρέφεται με αντίθετη φορά από αυτήν του σφονδύλου [5]. Σχήμα -4. Σφόνδυλος Αντίδρασης. Για το σφόνδυλο χρησιμοποιήθηκαν από την εταιρεία Maxon: Κινητήρας RE3 686, 6W ισχύς με μέγιστη συνεχή ροπή 9.54 mνm και βαθμό απόδοσης 88% Encoder MR, 4CPT, 3 κανάλια, τύπου 5787 Ενισχυτής 4-Q-DC Servoampliier ADS 5/5 Ο κινητήρας του σφονδύλου είναι συνδεδεμένος με ένα ενισχυτή και ελέγχεται με έλεγχο ρεύματος. Τα φυλλάδια λειτουργίας του κινητήρα και του encoder δίνονται στο Παράρτημα. 9

20 ..3 Βραχίονες Το ρομπότ διαθέτει δύο βραχίονες με δύο περιστροφικές αρθρώσεις ο καθένας. Στο τέλος κάθε βραχίονα έχει προστεθεί μία αρπάγη για την σύλληψη κινουμένων αντικειμένων πάνω στην τράπεζα, η οποία προς το παρόν δεν χρησιμοποιείται. Κάθε άρθρωση κινείται μέσω ενός συστήματος DC σερβοκινητήρα και μειωτήρα για την απόδοση μεγαλύτερης ροπής στο φορτίο. Επίσης, κάθε κινητήρας συνδέεται με έναν ενισχυτή. Σχήμα -5. Βραχίονας ρομπότ. Οι κινητήρες βρίσκονται στην βάση κάθε βραχίονα έτσι ώστε να μειωθεί η αδράνεια των κινουμένων μαζών. Κάθε άρθρωση κινείται αυτόνομα μέσω μίας κατασκευής με μικρούς τένοντες και τροχαλίες. Για κάθε άρθρωση χρησιμοποιήθηκαν από την εταιρεία Maxon: Κινητήρας RE5 8746, W ισχύς με μέγιστη συνεχή ροπή 6.8 mνm με βαθμό απόδοσης 87%. Encoder MR, CPT, 3 κανάλια, τύπου 578 Μειωτήρας GP 3 A, τύπου 6673 με μέγιστη ροπή εξόδου 4.5 Nm, λόγο μείωσης 9/ και βαθμό απόδοσης 7%. Ενισχυτής 4-Q-DC Servoampliier ADS 5/5 Οι κινητήρες των αρθρώσεων ελέγχονται με έλεγχο ρεύματος. Τα φυλλάδια λειτουργίας του κινητήρα, του μειωτήρα και του encoder δίνονται στο Παράρτημα.
21 ..4 Αισθητήρες Ο επίπεδος διαστημικός εξομοιωτής συμπληρώνεται από αισθητήρες οι οποίοι δίνουν την θέση του ρομπότ επάνω στην τράπεζα: την κάμερα επάνω από τον γρανίτη και οπτικούς αισθητήρες στην βάση του ρομπότ. Η κάμερα έχει υλοποιηθεί και απομένει η ολοκλήρωση της ασύρματης επικοινωνίας με το PC4. Οι οπτικοί αισθητήρες είναι στο στάδιο της υλοποίησής τους σε ένα ολοκληρωμένο κύκλωμα. (α) Κάμερα Η κάμερα χρησιμοποιείται για την εύρεση της θέσης και προσανατολισμού του ρομπότ ως προς το σταθερό σύστημα συντεταγμένων και είναι τοποθετημένη επάνω από την τράπεζα. Η κάμερα εντοπίζει τρία (κατά ελάχιστο) LED τα οποία είναι τοποθετημένα στην επάνω πλάκα του ρομπότ και σχηματίζουν τρίγωνο. Η εικόνα από την κάμερα στέλνεται σε έναν εξωτερικό υπολογιστή και με τεχνικές επεξεργασίας εικόνας λαμβάνεται η θέση και ο προσανατολισμός του ρομπότ. Στην συνέχεια, τα δεδομένα της θέσης του ρομπότ στέλνονται μέσω TCP/IP στο PC4. Για την διαδικασία αυτή έχουν αναπτυχθεί (α) ένα πρόγραμμα για την λήψη της εικόνας, (β) ένα πρόγραμμα για την επεξεργασία της εικόνας και (γ) ένα πρόγραμμα για την μεταφορά των δεδομένων. Τα προγράμματα (β) και (γ) έχουν αναπτυχθεί σε περιβάλλον λειτουργικού πραγματικού χρόνου, το RTLinux, με σκοπό την επεξεργασία και αποστολή των εικόνων σε πραγματικό χρόνο, χωρίς δηλαδή να μεσολαβούν καθυστερήσεις από τις διεργασίες του ίδιου του λειτουργικού συστήματος []. Στην παρούσα φάση, μένει να υλοποιηθεί η επικοινωνία της κάμερας και του PC4 μέσω wireless χρησιμοποιώντας το πρωτόκολλο RTnet για ασύρματη επικοινωνία σε πραγματικό χρόνο (Hard Real- Time Networking). Η κάμερα είναι της εταιρείας Matrix Vision, μοντέλο mvbluefox. Έχει ανάλυση 6x, απεικόνιση στην κλίμακα του γκρι με μέγεθος στοιχείου 8 bits, ρυθμό ανανέωσης 8 ps, αισθητήρα CCD (SONY, μοντέλο ICX74AL/AQ) και συνδέεται μέσω USB./. (έως 48 Mbits/sec). Η κάμερα και ο οπτικός φακός επιλέχθηκαν έτσι ώστε από το ύψος στήριξης της διάταξης πάνω από την τράπεζα, να απεικονίζεται σε ένα καρέ ολόκληρη η περιοχή δράσης με ικανοποιητική ανάλυση. (β) Οπτικοί Αισθητήρες Οι οπτικοί αισθητήρες είναι όμοιοι με αυτούς που χρησιμοποιούνται σε ένα καλό οπτικό ποντίκι για Η/Υ. Οι αισθητήρες χρησιμοποιούνται ως εναλλακτική μέθοδος για τον ακριβή εντοπισμό της θέσης και του προσανατολισμού του ρομπότ. Η μέθοδος αυτή
22 προσθέτει μικρή μάζα και όγκο και είναι πολύ οικονομική με πολύ γρήγορη απόκριση. Ωστόσο, συγκεντρώνει μετά από κάποιο διάστημα οδομετρικό σφάλμα. Επίσης, οι αισθητήρες πρέπει να βρίσκονται σε πολύ μικρή απόσταση από την επιφάνεια κίνησης. Για την ελαχιστοποίηση του σφάλματος χρησιμοποιούνται τρεις οπτικοί αισθητήρες τοποθετημένοι στην βάση του ρομπότ σε συνδυασμό με την πληροφορία θέσης από την κάμερα και με χρήση φίλτρων (π.χ. Kalman). Οι αισθητήρες προβλέπεται να τοποθετηθούν στο κάτω μέρος της βάσης του ρομπότ έτσι ώστε να είναι όσο πιο κοντά γίνεται στην επιφάνεια κίνησης του ρομπότ. Η ανάλυση των αισθητήρων είναι μεγαλύτερη από dpi και το σφάλμα για μετατόπιση m είναι μικρότερο από 5mm. Τα δεδομένα από κάθε αισθητήρα επεξεργάζονται σε έναν μικροεπεξεργαστή PIC και χρησιμοποιούν το πρωτόκολλο επικοινωνίας SPI [3]. (γ) Άλλοι αισθητήρες Το ρομπότ διαθέτει διάφορους αισθητήρες για την εσωτερική κατάστασή του: αισθητήρες τάσης των μπαταριών, πίεσης και ποσότητας CO, αισθητήρες δύναμης στις αρπάγες, αισθητήρες Hall για την μέγιστη έκταση των βραχιόνων... Βελτιστοποίηση κατανάλωσης προωθητικού αερίου Η περιστροφή του ρομπότ γίνεται με κατάλληλο συνδυασμό των προωθητήρων και του σφονδύλου αντίδρασης. Ο συνδυασμός τους έχει ως στόχο την ελαχιστοποίηση της χρήσης των προωθητήρων και κατ επέκταση της κατανάλωσης προωθητικού αερίου. Η μείωση της κατανάλωσης του προωθητικού αερίου είναι ιδιαίτερα επιθυμητή σε ένα πραγματικό σύστημα, αλλά και στον εξομοιωτή, διότι η διαθέσιμη ποσότητα αερίου είναι περιορισμένη. Η μελέτη της συμπεριφοράς του ρομπότ και της κατανάλωσης αερίου από τους προωθητήρες με και χωρίς σφόνδυλο αντίδρασης έδειξε ότι ο συνδυασμός τους μειώνει την κατανάλωση του αερίου. Η θετική επίδραση της συνδυασμένης χρήσης σφονδύλου και προωθητήρων δεν υπόκειται σε λειτουργικούς περιορισμούς, χρειάζεται ωστόσο κατάλληλος σχεδιασμός της τροχιάς του ρομπότ. Στο επόμενο σχήμα βλέπουμε την κατανάλωση αερίου για μία τροχιά η οποία αποτελείται από ένα ευθύγραμμο τμήμα, ένα κυκλικό και ένα ευθύγραμμο. Στην πρώτη περίπτωση, οι απαραίτητες δυνάμεις δίνονται μόνο από τους προωθητήρες ενώ στη δεύτερη περίπτωση από τους προωθητήρες και το σφόνδυλο αντίδρασης. Στη δεύτερη περίπτωση, το ρομπότ έχει στραφεί πρώτα έτσι ώστε η διεύθυνση της επιθυμητής δύναμης να είναι παράλληλη με την διεύθυνση ενός προωθητήρα. Στη συνέχεια, για
23 την ευθύγραμμη κίνηση χρησιμοποιείται ένας προωθητήρας σε συνδυασμό με το σφόνδυλο για την εξουδετέρωση της περιστροφικής κίνησης ενώ για την αλλαγή προσανατολισμού χρησιμοποιείται μόνο ο σφόνδυλος. Όπως φαίνεται και από τα διαγράμματα, η δεύτερη μέθοδος απαιτεί μικρότερη χρήση των προωθητήρων και συνεπώς είναι οικονομικότερη. Ωστόσο, η συνολική διαθέσιμη ώθηση είναι μικρότερη στη δεύτερη περίπτωση (συνδυασμός σφονδύλου και προωθητήρων) ενώ στην πρώτη περίπτωση (μόνο προωθητήρες) η ώθηση είναι.4 φορές μεγαλύτερη. Η χρήση μόνο του σφονδύλου είναι επιθυμητή στην περίπτωση όπου ζητείται η μείωση της κατανάλωσης του προωθητικού αερίου, εάν όμως απαιτείται αυξημένη ώθηση, θα πρέπει να χρησιμοποιηθούν και οι προωθητήρες. Επίσης, οι προωθητήρες χρησιμοποιούνται για να καλύψουν έλλειμμα ροπής το οποίο δεν μπορεί να δώσει ο σφόνδυλος, δεδομένου ότι ο κινητήρας του δουλεύει μέσα σε συγκεκριμένα όρια [, 5]. Σχήμα -6. (α) Δύο περιπτώσεις κίνησης, (β) Τροχιά, (γ) Προωθητήρες για την πρώτη περίπτωση, (δ) Προωθητήρες για την δεύτερη περίπτωση (με τον σφόνδυλο). Η φιάλη με CO του ρομπότ τροφοδοτεί τα αεροέδρανα και τους προωθητήρες και επαρκεί για πειράματα διάρκειας περίπου λεπτών, όταν συνδυάζονται ο σφόνδυλος και οι προωθητήρες για την περιστροφή. Ο χρόνος αυτός είναι αρκετός για την διεξαγωγή ποικίλων πειραμάτων με το ρομπότ πάνω στην τράπεζα γρανίτη. Όταν δεν χρησιμοποιούνται καθόλου οι προωθητήρες σε ένα πείραμα, η φιάλη επαρκεί για περίπου 3 λεπτά..3. Χαρακτηριστικά PC4 Η υπολογιστική αυτονομία του ρομπότ επιτυγχάνεται με έναν υπολογιστή PC4 ο οποίος βρίσκεται πάνω στο ρομπότ. Το PC4 είναι της εταιρείας RTD και επιλέχθηκε με κριτήριο την υψηλή υπολογιστική του απόδοση, χαμηλή κατανάλωση ενέργειας, αξιοπιστία, χαμηλό βάρος, μικρές διαστάσεις, χαμηλό θόρυβο και την αντοχή του. Ο προγραμματισμός του PC4 γίνεται σε γλώσσα C. 3
24 .3. Hardware Το PC4 είναι σε μορφή πύργου και αποτελείται από τις παρακάτω μονάδες (ή κάρτες). Για κάθε κάρτα δίνουμε στο Παράρτημα τον πίνακα με τα βασικά χαρακτηριστικά, την συνδεσμολογία και τις θέσεις μνήμης από το εγχειρίδιο λειτουργίας. Τα πλήρη εγχειρίδια λειτουργίας δίνονται στο cd το οποίο συνοδεύει την εργασία. Κεντρική μονάδα επεξεργασίας (CPU): Intel Celeron 65MHz, 5MB RAM, μοντέλο CML47786HX. Η μονάδα CPU υλοποιεί όλες τις βασικές λειτουργίες ενός PC ATcompatible: SVGA controller, analog SVGA & digital TFT έξοδο, 33/66/ EIDE controller, παράλληλη θύρα, δύο RS3/4/485 σειριακές θύρες, δύο USB θύρες, / Ethernet, ποντίκι, πληκτρολόγιο, υποδοχή για loppy & cd-rom, real time clock καθώς και μία υποδοχή για Solid State Disk. Το BIOS της μονάδας υποστηρίζει ROM- DOS, MS-DOS, Linux και Windows και μπορεί να ρυθμιστεί από τον χρήστη. Η μονάδα διαθέτει επίσης 6 DMA (Direct Memory Access) channels, 5 interrupt channels, 3 counter/timers και 6bits adio (Advanced Digitial I/O Ports). Στον χρήστη είναι διαθέσιμα τρία interrupt. Incremental Encoder: Κάρτα ανάγνωσης αυξητικών παλμογεννητριών (encoder) από τους κινητήρες, μοντέλο DM666HR. Κάθε κάρτα μπορεί να διαβάσει μέχρι τρεις encoder 6-bit εισόδους και διαθέτει 4 6-bit τtimers, 4 ψηφιακές I/O γραμμές, ένα 8MHz ρολόι και 4 interrupt circuits. Από τις 4 ψηφιακές I/O γραμμές, οι 6 μπορούν να προγραμματιστούν μόνο ως input και οι μπορούν να προγραμματιστούν ως input ή output. Η ανάγνωση των εισόδων των encoder και των ψηφιακών εισόδων (input) γίνεται διαβάζοντας από μία θέση μνήμης τα δεδομένα εισόδου, χρησιμοποιώντας την εντολή inb(). Η έξοδος (output) σε μία ψηφιακή γραμμή γίνεται με την εντολή outb(). Η θέση μνήμης από την οποία και μετά διαβάζονται ή γράφονται δεδομένα καθορίζεται από το base address (BA) της κάρτας. Το ΒΑ μπορεί να αλλάξει ρυθμίζοντας τον συνδυασμό τεσσάρων ON/OFF διακοπτών στην επιφάνεια της κάρτας. Το PC4 έχει δύο κάρτες Incremental Encoder, συνεπώς μπορεί να διαβάσει έξι encoder από τους αντίστοιχους κινητήρες και διαθέτει 48 ψηφιακές I/O γραμμές. Κάθε κάρτα έχει διαφορετικό BA, τα οποία στην παρούσα κατάσταση είναι BA: 576 (4 σε Hex) για την μία κάρτα και BA: 768 (3 σε Hex). 4
![Analog Output: Κάρτα ψηφιοαναλογικού μετατροπέα (DAC), μοντέλο DM564. Η κάρτα DAC διαθέτει οκτώ -bit αναλογικές εξόδους γρήγορης απόκρισης και με εύρος τάσης ±5, ±, [,5] ή [,]V.](/docs-images/60/44474958/images/25-0.png "Το εύρος της τάσης εξόδου είναι ίδιο για τις οκτώ αναλογικές εξόδους και ρυθμίζεται με ένα jumper πάνω στην κάρτα.")
25 Analog Output: Κάρτα ψηφιοαναλογικού μετατροπέα (DAC), μοντέλο DM564. Η κάρτα DAC διαθέτει οκτώ -bit αναλογικές εξόδους γρήγορης απόκρισης και με εύρος τάσης ±5, ±, [,5] ή [,]V. Το εύρος της τάσης εξόδου είναι ίδιο για τις οκτώ αναλογικές εξόδους και ρυθμίζεται με ένα jumper πάνω στην κάρτα. Η κάρτα έχει επίσης 4 ψηφιακές Ι/Ο γραμμές και τα sotware interrupts IRQ-IRQ7, IRQ9-IRQ5. Η έξοδος (output) σε μία αναλογική έξοδο γίνεται με την εντολή outb(). Η θέση μνήμης από την οποία και μετά διαβάζονται ή γράφονται δεδομένα καθορίζεται από το base address (BA) της κάρτας. Το ΒΑ μπορεί να αλλάξει ρυθμίζοντας τον συνδυασμό τεσσάρων ON/OFF διακοπτών στην επιφάνεια της κάρτας και είναι BA: 64 (8 σε Hex). Το PC4 έχει επίσης μία κάρτα για ασύρματη σύνδεση (μοντέλο WLAN7ER) συμβατή με το πρωτόκολλα 8.a/b/g η οποία μπορεί να συνδέσει μεταξύ τους σε δίκτυο πολλαπλά μηχανήματα. Τέλος, το PC4 συμπληρώνεται από μία κάρτα η οποία είναι ο σκληρός δίσκος, χωρητικότητας GB (μοντέλο CMT36ER). Ως εναλλακτική λύση αντί για τον σκληρό δίσκο, μπορεί να τοποθετηθεί μία κάρτα PCMCIA (MPL, IDECF) με μία μνήμη lash για να μειωθεί η κατανάλωση ενέργειας από το PC4. Στην επόμενη εικόνα φαίνεται το PC4. Από κάτω προς τα πάνω διακρίνονται: η κάρτα για ασύρματη σύνδεση, η κάρτα κεντρικής μονάδας επεξεργασίας, η κάρτα με το σκληρό δίσκο, η κάρτα ψηφιοαναλογικού μετατροπέα και η μία από τις δύο κάρτες ανάγνωσης αυξητικών παλμογεννήτριων. Στην πάνω δεξιά πλευρά της επάνω κάρτας διακρίνονται οι τέσσερεις ON/OFF διακόπτες για την αλλαγή του BA της κάρτας στο κόκκινο τμήμα. Αντίστοιχα είναι και στην κάρτα ψηφιοαναλογικού μετατροπέα. Σχήμα -7. PC4 5
26 .3. Λογισμικό Το λειτουργικό σύστημα του PC4 είναι Arch Linux 8.6 με πυρήνα Πρόσθετα στο λειτουργικό σύστημα έχει εγκατασταθεί μία τροποποίηση (patch) του πυρήνα με σκοπό τον προγραμματισμό εφαρμογών πραγματικού χρόνου (real time tasks) σε περιβάλλον Linux. Το σύστημα αυτό είναι το Xenomai, έκδοση.4.6, και έχει εγκατασταθεί ως patch πάνω στο πυρήνα του Linux. Με αυτόν τον τρόπο, ο χρήστης μπορεί να προγραμματίσει εφαρμογές πραγματικού χρόνου σε περιβάλλον Linux στο kernel space ή στο user space σε ένα Λειτουργικό Σύστημα Πραγματικού Χρόνου (Real-Time System). Σε αυτό το σημείο θα πρέπει να δώσουμε τον ορισμό του Λειτουργικού Συστήματος Πραγματικού Χρόνου, σύμφωνα με το ΙΕΕΕ: A real-time system is a system whose correctness includes its response time as well as its unctional correctness. Δηλαδή, ένα σύστημα πραγματικού χρόνου δεν εγγυάται μόνο ότι μία εφαρμογή θα εκτελεστεί σωστά αλλά και ότι θα εκτελεστεί σε ένα συγκεκριμένο χρόνο. Ένα λειτουργικό σύστημα πραγματικού χρόνου μπορεί να είναι αυστηρό (hard realtime) ή ελαστικό (sot real-time). Σε ένα αυστηρό σύστημα, ο χρόνος εκτέλεσης μιάς εφαρμογής είναι εγγυημένος και πιο συγκεκριμένα για κάθε εφαρμογή είναι εγγυημένος ένας χειρότερος χρόνος απόκρισης (worst-case response time). Σε ένα ελαστικό σύστημα, οι εφαρμογές εκτελούνται στο συγκεκριμένο χρόνο, ωστόσο εάν για μία εφαρμογή δεν συμβεί αυτό, δεν θεωρείται ότι η εφαρμογή απέτυχε. Ένα παράδειγμα ελαστικού συστήματος είναι οι εφαρμογές Voice-over-IP (VoIP), ακόμα και εάν χαθεί ή καθυστερήσει κάποιο από τα πακέτα η εφαρμογή μπορεί να συνεχίσει. Εάν όμως πολλά πακέτα καθυστερήσουν ή χαθούν, δεν μπορεί να εκτελεστεί η εφαρμογή και η συζήτηση θα διακοπεί. Αντίθετα, το σύστημα για αποφυγή εμποδίων σε ένα ρομπότ όπως π.χ. το Phoenix Mars Lander (NASA), είναι αυστηρό σύστημα πραγματικού χρόνου. Εάν δεν εκτελεστεί η εφαρμογή στον επιθυμητό χρόνο, το ρομπότ μπορεί να συγκρουστεί. Υπάρχουν διάφορες επιλογές για ένα λειτουργικό σύστημα πραγματικού χρόνου. Λειτουργικά συστήματα όπως το QNX ή το LynxOS έχουν αναπτυχθεί εξ αρχής για να ανταποκρίνονται στις ανάγκες εφαρμογών πραγματικού χρόνου. Αντίθετα, τα Windows και το Linux δεν έχουν αναπτυχθεί για αυτό τον σκοπό. Το Linux έχει το πλεονέκτημα ότι υποστηρίζει το πρότυπο POSIX.b. Το POSIX.b καθορίζει χαρακτηριστικά πραγματικού χρόνου σε UNIX συστήματα και λόγω της συμβατότητας με αυτό το πρότυπο, τα συστήματα UNIX είναι πολύ πιο κατάλληλα για εφαρμογές πραγματικού 6
27 χρόνου. Η συμβατότητα με το πρότυπο POSIX.b επιτρέπει την υλοποίηση περιορισμένων ελαστικών εφαρμογών πραγματικού χρόνου στο Linux. Η υλοποίηση εφαρμογών πραγματικού χρόνου σε περιβάλλον Linux γίνεται εγκαθιστώντας patches στον πυρήνα τα οποίο τον τροποποιούν έτσι ώστε να μπορούν να εκτελεστούν εφαρμογές πραγματικού χρόνου. Τέτοιες λύσεις είναι το RTLinux, το RTAI και το Xenomai, το οποίο βασίζεται στο RTAI. Οι λύσεις αυτές εγγυώνται χειρότερο χρόνο εκτέλεσης για μία εφαρμογή (worst case scenario) της τάξης των μικρό-δευτερολέπτων. Το RTLinux, το RTAI και το Xenomai τρέχουν εκτός του Linux, στον πυρήνα πραγματικού χρόνου. Οι διεργασίες πραγματικού χρόνου εκτελούνται πάντα στον πυρήνα πραγματικού χρόνου και έχουν πάντα προτεραιότητα, χωρίς παρεμβολές από διεργασίες του Linux. Οι διεργασίες του ίδιου του Linux διαχειρίζονται από τον κανονικό πυρήνα. Με άλλα λόγια, στο σύστημα συνυπάρχουν δύο πυρήνες, ο πραγματικού χρόνου και ο κανονικός ενώ οι εφαρμογές πραγματικού χρόνου δεν είναι εφαρμογές Linux. Η επικοινωνία μεταξύ των δύο πυρήνων και η διαχείριση των εφαρμογών πραγματικού χρόνου γίνεται με διαφορετικό τρόπο στο RTLinux, στο RTAI και στο Xenomai, ωστόσο η αρχή λειτουργίας είναι η ίδια. Η διαφοροποίηση στην διαχείριση των εφαρμογών πραγματικού χρόνου και των υπολοίπων σημαίνει ότι υπάρχουν στο σύστημα δύο API (Application Programming Interace), ένα για τις εφαρμογές πραγματικού χρόνου και ένα για τις υπόλοιπες. Συνεπώς, ο προγραμματισμός των εφαρμογών πραγματικού χρόνου πρέπει να γίνει χρησιμοποιώντας το αντίστοιχο API, η ύπαρξη απλώς του πυρήνα πραγματικού χρόνου δεν κάνει μία εφαρμογή να είναι πραγματικού χρόνου. Συνεπώς, ο προγραμματιστής πρέπει να διαφοροποιήσει μεταξύ των λειτουργιών που χρειάζεται να είναι πραγματικού χρόνου και των υπολοίπων και να τις υλοποιήσει με το κατάλληλο API. Στο PC4 επιλέχθηκε να εγκατασταθεί η διανομή Arch Linux μαζί με το Xenomai για την υλοποίηση των εφαρμογών πραγματικού χρόνου. Η διανομή Arch Linux επιλέχθηκε διότι είναι ιδιαιτέρως ελαφριά και δεν επιβαρύνει το σύστημα με πλεονάζουσες διεργασίες. Το Xenomai είναι open source και έχει πολύ καλό documentation. Ένα πολύ σημαντικό χαρακτηριστικό του Xenomai είναι ότι επιτρέπει την ανάπτυξη αυστηρών εφαρμογών πραγματικού χρόνου σε kernel space και σε user space και μάλιστα η ανάπτυξη εφαρμογών σε user space είναι η προτεινόμενη μέθοδος. Η ανάπτυξη εφαρμογών σε user space έχει το πλεονέκτημα, εκτός του ότι είναι ευκολότερη σε σχέση με το kernel space, ότι προστατεύει το σύστημα από τυχόν σφάλματα, καθώς οποιοδήποτε λάθος σε μία εφαρμογή στο kernel space θα έχει ως 7
28 αποτέλεσμα να παγώσει όλο το σύστημα. Επίσης, το Xenomai υποστηρίζει το πρωτόκολλο RTnet για ασύρματη επικοινωνία σε πραγματικό χρόνο, το οποίο προβλέπεται να χρησιμοποιηθεί για την επικοινωνία του PC4 με την εξωτερική κάμερα. Περαιτέρω πληροφορίες για τα λειτουργικά συστήματα πραγματικού χρόνου και τις διάφορες open source διανομές υπάρχουν στα [,]. Πληροφορίες και εγχειρίδια λειτουργίας για το Arch Linux μπορούν να βρεθούν στο [6] και για το Xenomai στο [5]. 8
29 3. Δυναμική και Έλεγχος του Ρομποτικού Συστήματος 3.. Εισαγωγή Στο παρόν κεφάλαιο μελετάται η δυναμική του συστήματος και ο έλεγχός του. Επίσης, παρουσιάζεται το περιβάλλον προσομοίωσης για το σύστημα, το οποίο αναπτύχθηκε σε MATLAB/Simulink. Αρχικά καταστρώνονται οι δυναμικές εξισώσεις κίνησης με την μέθοδο Euler-Lagrange, όπως αυτή παρουσιάστηκε στο [3]. Με γνωστές τις δυναμικές εξισώσεις του ρομπότ και την επιθυμητή θέση του, υπολογίζονται οι απαραίτητες δυνάμεις και ροπές από τους επενεργητές. Στη συνέχεια, αναπτύσσονται παράλληλα ο αλγόριθμος ελέγχου του ρομπότ και το μοντέλο της προσομοίωσης σε MATLAB/Simulink. Σύμφωνα με την ανάλυση η οποία προηγήθηκε στο Κεφάλαιο, το ρομπότ διαθέτει τους εξής επενεργητές: Τρία ζεύγη προωθητήρων πεπιεσμένου CO τοποθετημένους σε γωνία μεταξύ τους, οι οποίοι ενεργοποιούνται με σήμα PWM. Σφόνδυλο αντίδρασης με DC σερβοκινητήρα. Δύο βραχίονες με δύο περιστροφικές αρθρώσεις, άρα με δύο βαθμούς ελευθερίας ο καθένας, που κινούνται μέσω συστήματος DC σερβοκινητήρα - μειωτήρα. Κάθε βραχίονας έχει επίσης στο τέλος του μία αρπάγη αλλά στην παρούσα φάση οι αρπάγες δεν κινούνται και θεωρούνται μέρος του βραχίονα. Συνεπώς, το ρομπότ έχει επτά βαθμούς ελευθερίας: μπορεί να εκτελέσει επίπεδη μεταφορική κίνηση, περιστροφή και να στρέψει τις τέσσερις αρθρώσεις των βραχιόνων. Στο Σχήμα 3- βλέπουμε σε κάτοψη το ρομπότ και την τοποθέτηση και ονοματολογία των προωθητήρων και βραχιόνων. Ο βραχίονας είναι ο αριστερά και ο βραχίονας ο δεξιά. Στο ζεύγος προωθητήρων, ο προωθητήρας είναι στην επάνω πλευρά της πλάκας ενώ ο προωθητήρας είναι στην κάτω πλευρά. Η φορά του βέλους δείχνει την κατεύθυνση του αερίου από τον προωθητήρα. Ομοίως είναι και οι υπόλοιποι προωθητήρες. Τα τρία ζεύγη των προωθητήρων είναι σε γωνία μεταξύ τους και είναι σταθερά τοποθετημένοι, η διεύθυνση του αερίου δεν αλλάζει. Η ακτίνα της κυκλικής πλάκας είναι r. 9
30 3 4 r 5 6 l th th l th th l l Σχήμα 3-. Κάτοψη ρομπότ. 3.. Δυναμική Στο γενικό τρισδιάστατο πρόβλημα, το διαστημικό ρομπότ αποτελείται από μία βάση με διάφορα προσαρτήματα (κεραίες, βραχίονες κλπ.) και ζητείται ο έλεγχος της θέσης και του προσανατολισμού του ρομπότ (ree-lying mode). Το ρομπότ περιγράφεται παραμετρικά ως (α) μία βάση οποιουδήποτε σχήματος με γνωστά αδρανειακά χαρακτηριστικά και (β) m προσαρτήματα με k συνδέσμους σε κάθε ένα, με γνωστά αδρανειακά χαρακτηριστικά. Όλες οι αρθρώσεις στα προσαρτήματα είναι ενός βαθμού ελευθερίας και περιστροφικές. Οι παράμετροι του συστήματος είναι ο αριθμός των προσαρτημάτων (m ) και ο αριθμός των συνδέσμων σε κάθε προσάρτημα (k ). Οι βαθμοί ελευθερίας του συστήματος είναι n = K 6 όπου K είναι ο συνολικός αριθμός των συνδέσμων. Οι μεταβλητές του συστήματος είναι [3]: Διάνυσμα θέσης του κέντρου βάρους της βάσης ως προς το αδρανειακό σύστημα συντεταγμένων: = ( Rc, Rc Rc ) Rc x y, z Γωνίες Euler (roll pitch yaw) της βάσης: d x, d y, dz 3
31 Γωνία άρθρωσης i ως προς την άρθρωση i : thij όπου i =,..., m, j =,...,k, σύμφωνα με την μέθοδο Denavit-Hartenberg, για κάθε προσάρτημα. Γωνιακή ταχύτητα άρθρωσης i ως προς την άρθρωση i : thdij όπου i =,...,m, j =,..., k, σύμφωνα με την μέθοδο Denavit-Hartenberg. Το διάνυσμα των μεταβλητών ελέγχου είναι το q και έχει διαστάσεις n. Οι δυναμικές εξισώσεις κίνησης προσδιορίζονται χρησιμοποιώντας την μέθοδο Euler- Lagrange για κάθε μεταβλητή ελέγχου q i. Η ανάλυση της πλήρους μεθοδολογίας είναι εκτός των σκοπών της παρούσας διπλωματικής και υπάρχει πλήρης στο [3]. Οι εξισώσεις κίνησης είναι: ( q) q& C( q q& ) F( q) H &, = (3.) Ο πίνακας H έχει διαστάσεις n n, το διάνυσμα C έχει διαστάσεις n και το διάνυσμα F έχει διαστάσεις n. Η εξίσωση (3.) δεν περιέχει τον πίνακα G (q) των βαρυτικών όρων, διότι στο ρομπότ δεν επιδρούν βαρυτικές δυνάμεις. Ο πίνακας H περιέχει τους αδρανειακούς όρους του συστήματος και είναι θετικά ορισμένος και συμμετρικός. Το διάνυσμα C περιέχει τους μη γραμμικούς όρους ταχύτητας του συστήματος (φυγόκεντρες ροπές, ροπές Coriolis). Το διάνυσμα F περιλαμβάνει τις μη συντηρητικές γενικευμένες δυνάμεις οι οποίες ασκούνται στο σύστημα (π.χ. ροπές στις αρθρώσεις βραχίονα). Εάν το ρομπότ έχει βραχίονες ( m = ) και ο κάθε βραχίονας έχει δύο αρθρώσεις άρα και δύο συνδέσμους ( k = ), οι βαθμοί ελευθερίας του συστήματος είναι n =. Στην περίπτωση της γενικής, τρισδιάστατης κίνησης, το διάνυσμα των μεταβλητών q (x) και η παράγωγός του q& είναι: q = q& = q() t = [ Rc x, Rc y, Rc z, dx, d y, dz, th, th, th, th] [ R&, R&, R&, d&, d&, d&, th&, th&, th&, th& ] T cx c y cz x y z T (3.) όπου, είναι η κίνηση κατά x, y, z της βάσης, d x, d y, dz είναι η Rc x Rc y, Rc z περιστροφή της βάσης κατά x, y, z και th είναι η στροφή της άρθρωσης και αντίστοιχα για τις αρθρώσεις,,. 3
32 Στην περίπτωση την οποία εξετάζουμε (Σχήμα 3-), το πρόβλημα τοποθετείται στο επίπεδο. Το ρομπότ έχει κυλινδρική βάση ακτίνας r =.5 m και βραχίονες ( m = ). Κάθε βραχίονας έχει δύο περιστροφικές αρθρώσεις άρα και δύο συνδέσμους ( k = ), συνολικά δηλαδή τέσσερις αρθρώσεις (,,, ). Η συνολική μάζα του ρομπότ είναι m = 5. kg. Το ρομπότ μπορεί να εκτελέσει (α) επίπεδη, μεταφορική κίνηση κατά X, Y με χρήση των προωθητήρων, (β) περιστροφική κίνηση γύρω από τον άξονα Z συνδυάζοντας κατάλληλα τον σφόνδυλο αντίδρασης και τους προωθητήρες και (γ) στροφή των αρθρώσεων των βραχιόνων. Συνεπώς, το σύστημα διαθέτει συνολικά επτά βαθμούς ελευθερίας οι οποίοι είναι οι μεταβλητές ελέγχου: Πίνακας 3-. Βαθμοί ελευθερίας συστήματος. Βαθμός ελευθερίας Μεταφορική κίνηση κατά x (κέντρου βάρους βάσης) Μεταφορική κίνηση κατά y (κέντρου βάρους βάσης) Μεταφορική κίνηση κατά z Στροφή γύρω από τον x άξονα Στροφή γύρω από τον y άξονα Στροφή γύρω από τον κάθετο άξονα z (βάσης) Μεταβλητή Rc x Rc y Rc z = Δεν υπάρχει d x = Δεν υπάρχει d y = Δεν υπάρχει d z Περιστροφή άρθρωσης th Περιστροφή άρθρωσης th Περιστροφής άρθρωσης th Περιστροφή άρθρωσης th Το διάνυσμα των μεταβλητών ελέγχου q είναι: 3
33 q = q qd = Rc z () t = [ Rc x, Rc y,,,, dz, th, th, th, th] T &q = [ R&, R&,,,, d&, th&, th&, th&, th& ] =, d cx x c y =, d y = z T (3.3) Στο διάνυσμα q έχουμε θέσει μηδέν () τις μεταβλητές οι οποίες αντιστοιχούν στην μεταφορά κατά z και στροφή γύρω από x, y. Έτσι, η διάσταση του q είναι x, παρόλο που οι βαθμοί ελευθερίας είναι n = 7. Οι εξισώσεις κίνησης περιγράφονται από την εξίσωση (3.) στην οποία τώρα ο πίνακας H έχει διαστάσεις x, το διάνυσμα C έχει διαστάσεις x και το διάνυσμα F έχει διαστάσεις x. Το διάνυσμα F περιλαμβάνει τις δυνάμεις και ροπές οι οποίες ασκούνται στο σύστημα: F = F z [ F F, F, n, n, n, t, t, t, t ] =, n T x, y z x y z x = n y = (3.4) Αναλυτικότερα: Οι δυνάμεις F x, Fy είναι οι απαραίτητες για την μεταφορική κίνηση κατά X, Y αντίστοιχα. Προκύπτουν από τις δυνάμεις από τους έξι προωθητήρες. Η ροπή n z είναι η απαραίτητη για την περιστροφή του συστήματος γύρω από τον κατακόρυφο Z άξονα. Προκύπτει από τον συνδυασμό των δυνάμεων των προωθητήρων και της ροπής από τον σφόνδυλο αντίδρασης. Ο συνδυασμός αυτός έχει ως σκοπό την ελαχιστοποίηση της κατανάλωσης CO από τους προωθητήρες, σύμφωνα με την ανάλυση της., και συνεπώς προτιμάται η χρήση του σφονδύλου για την απόδοση ροπής. Οι ροπές t, t, t, t δίνονται κατευθείαν από το αντίστοιχο σύστημα κινητήραμειωτήρα σε κάθε άρθρωση. Οι δυνάμεις F, F και η ροπή n z είναι εξωτερικές δυνάμεις για το σύστημα ενώ οι x y ροπές t, t, t, t στις αρθρώσεις είναι εσωτερικές. Συνεπώς, η συνολική στροφορμή του συστήματος H διατηρείται σταθερή όταν F F = & n =. cm x = y z Τα πλήρη αδρανειακά χαρακτηριστικά του συστήματος παρουσιάζονται στο Παράρτημα 3 και προκύπτουν από τα σχέδια του ρομπότ, τα οποία έχουν γίνει στο ProEngineer. Στο βάρος κάθε συνδέσμου έχει προστεθεί και το βάρος της αντίστοιχης 33
34 άρθρωσης ενώ το βάρος της αρπάγης έχει προστεθεί στο δεύτερο σύνδεσμο σε κάθε βραχίονα. Ομοίως έχουν υπολογιστεί και οι ροπές αδρανείας των βραχιόνων. Στους υπολογισμούς μάζας και ροπής αδρανείας για την βάση έχουν συμπεριληφθεί ο σκελετός του ρομπότ, η φιάλη CO, το σύστημα διαχείρισης του CO, μπαταρίες, το PC4, ενισχυτές, όλα τα ηλεκτρονικά, λοιπά εξαρτήματα και ο σφόνδυλος αντίδρασης μαζί με τα εξαρτήματά του. Στον παρακάτω πίνακα παρουσιάζονται τα βασικά χαρακτηριστικά του ρομπότ. Ο βραχίονας είναι εκ κατασκευής ίδιος με τον βραχίονα, οπότε θα δώσουμε σε αυτό το σημείο μόνο τα χαρακτηριστικά του βραχίονα. Πίνακας 3-. Βασικά χαρακτηριστικά συστήματος. Συνολική μάζα Ρομπότ: m = 5. kg Βάση m b = 4.6 kg Βραχίονας : πρώτος σύνδεσμος Βραχίονας : δεύτερος σύνδεσμος m =. kg m =.7 kg Μήκος συνδέσμων l ij, i=, (βραχίονας), j=, (σύνδεσμος) Βραχίονας Ροπή αδρανείας βάσης [kg m ] Ροπή αδρανείας: βραχίονας, σύνδεσμος [kg m ] Ροπή αδρανείας: βραχίονας, σύνδεσμος [kg m ] l =.8 m l =.8 m I x =.3 I y =. I z =.3 I x =.4 I y =.87 I z =.94 I x =. I y =.6 I z =.6 =.69 kg Υποσύστημα σφονδύλου αντίδρασης I =.3 kg m m w zw 34
35 Αντίστροφα, με γνωστό τον πίνακα H και τα διανύσματα C, F, μπορεί να γίνει επίλυση των δυναμικών εξισώσεων (3.) ως προς το διάνυσμα των επιθυμητών επιταχύνσεων των μεταβλητών ελέγχου q : q&& = H ( F C) (3.5) Ο πίνακας H είναι θετικά ορισμένος, άρα υπάρχει πάντα ο αντίστροφός του οποίος είναι επίσης θετικά ορισμένος. H, ο Οι δυναμικές εξισώσεις του συστήματος έχουν υπολογιστεί στο Mathematica σύμφωνα με την παραπάνω μέθοδο για το τρισδιάστατο πρόβλημα για μία βάση οποιουδήποτε σχήματος με δύο βραχίονες με δύο βαθμούς ελευθερίας ο καθένας. Οι παράμετροι του συστήματος είναι τα αδρανειακά χαρακτηριστικά. Στην συνέχεια, έχουν μετατραπεί σε m-ile ώστε να μπορούν να χρησιμοποιηθούν στο περιβάλλον του MATLAB. Η εισαγωγή των δυναμικών εξισώσεων στο Mathematica και στην συνέχεια σε MATLAB έχει γίνει από τον υποψήφιο διδάκτορα Γ. Ρεκλείτη, μέλος του Εργαστηρίου Αυτομάτου Ελέγχου. Τα αρχεία dynamicsdpart.m και dynamicsdpart.m τα οποία χρησιμοποιούν αυτές τις εξισώσεις, δίνονται στο cd της παρούσας διπλωματικής Εξισώσεις κίνησης και επενεργητές Το πρόβλημα το οποίο καλούμαστε να λύσουμε είναι το εξής: Με γνωστή την επιθυμητή τελική θέση του ρομπότ και τις επιθυμητές θέσεις των αρθρώσεων όπως ορίζονται στο διάνυσμα q, εξίσωση (3.3), ζητούνται οι αναγκαίες δυνάμεις και ροπές για να προκαλέσουν τις συγκεκριμένες μετατοπίσεις των βαθμών ελευθερίας, δηλαδή το διάνυσμα F : R&& F cx x && R F c y y H C = && d n z z && t t && t t & t & 3 t t 3 t q& F (3.6) 35
36 Οι δυνάμεις και ροπές στο διάνυσμα F εφαρμόζονται από τους επενεργητές του συστήματος. Υπενθυμίζουμε ότι: (α) οι ροπές t, t, t, t στις αρθρώσεις των βραχιόνων, δίνονται από το αντίστοιχο σύστημα κινητήρα μειωτήρα σε κάθε άρθρωση, (β) οι δυνάμεις F, F προκύπτουν από τις δυνάμεις από τους προωθητήρες και (γ) για x y την απόδοση της ροπής, n z ενεργοποιείται κατά προτεραιότητα ο σφόνδυλος αντίδρασης και στην συνέχεια οι προωθητήρες. Παρατηρούμε επίσης στο Σχήμα 3- ότι εξαιτίας της διάταξης των τριών ζευγών προωθητήρων, για να αποδοθεί μία δύναμη ( ) F = F, F x y θα πρέπει να ενεργοποιηθεί παραπάνω από ένα ζεύγος προωθητήρων. Προκύπτει λοιπόν το ερώτημα, με γνωστές τις F, F και n z με ποιο τρόπο θα x y ενεργοποιηθούν οι κατάλληλοι προωθητήρες και ο σφόνδυλος αντίδρασης. Αναλυτικότερα, θα πρέπει να εξετάσουμε τα παρακάτω: a) Ποια είναι η κατάλληλη ενεργοποίηση των έξι προωθητήρων για την απόδοση των δυνάμεων F, F. x y b) Με ποιο τρόπο θα συνδυαστεί η ενεργοποίηση του σφονδύλου αντίδρασης και των προωθητήρων για την απόδοση της ροπής. c) Πώς θα ενεργοποιηθεί κατά προτεραιότητα οι σφόνδυλος για την απόδοση ροπής. d) Οι δυνάμεις από τους προωθητήρες θα πρέπει να είναι μέσα στο εύρος λειτουργίας τους. Επίσης, η ροπή από τον κινητήρα του σφονδύλου καθώς και οι ροπές από τους αντίστοιχους κινητήρες στις αρθρώσεις θα πρέπει να είναι μέσα στα όρια λειτουργίας των αντίστοιχων κινητήρων. Στη συνέχεια, θα αναλυθούν οι δυνάμεις από τους προωθητήρες και η ροπή από τον σφόνδυλο αντίδρασης όταν το ρομπότ εκτελεί μεταφορική κίνηση και περιστροφή, έτσι ώστε να προσδιοριστεί η κατάλληλη ενεργοποίηση των προωθητήρων και του σφονδύλου αντίδρασης για τα ερωτήματα (a) και (b). Στην ανάλυσή μας θα θεωρήσουμε την στροφή της βάσης του ρομπότ και δεν θα ληφθεί υπόψη η επίδραση των βραχιόνων, παρόλο που οι κινήσεις της βάσης και των βραχιόνων είναι συζευγμένες. Οποιαδήποτε σφάλματα τα οποία προκύψουν από αυτήν την παραδοχή, θα διορθωθούν από τον αλγόριθμο ελέγχου. 36
37 Στο Σχήμα 3- η βάση του ρομπότ βρίσκεται στην αρχική θέση. Το σωματόδετο σύστημα συντεταγμένων x, y είναι τοποθετημένο στο κέντρο της κυκλικής πλάκας του ρομπότ και δεν έχει στραφεί ως προς το X, Y. F 4 F 3 o o F 6 6 o 6o F y F 5 F Χ Υ x T Σχήμα 3-. Δυνάμεις στη βάση του ρομπότ. Κάθε ένας από τους έξι προωθητήρας αποδίδει μία δύναμη, όπου i =,..., 6 για i κάθε προωθητήρα αντίστοιχα. Η δύναμη i από κάθε προωθητήρα εφαρμόζεται στο σημείο στο οποίο είναι τοποθετημένος, είναι κάθετη στην ακτίνα r της πλάκας, έχει την διεύθυνση του προωθητικού αερίου και φορά αντίθετη από την κατεύθυνση του αερίου. Υπενθυμίζουμε ότι η δύναμη i είναι πάντα μη αρνητική, εξίσωση (.). Τα τρία ζεύγη των προωθητήρων είναι υπό γωνία μεταξύ τους. Η ροπή από τον σφόνδυλο αντίδρασης είναι T και αποδίδεται από τον κινητήρα του σφονδύλου. Η ακτίνα της πλάκας είναι r =.5m. Στο Σχήμα 3-3 η βάση του ρομπότ έχει στραφεί κατά γωνία θ ως προς το X, Y. 37
38 F 4 F 3 y o 6 o 6o F Y F 6 F F 5 X θ x Y X Μεγέθυνση για το Σχήμα 3-4 Σχήμα 3-3. Στροφή βάσης ρομπότ. Οι εξισώσεις κίνησης του ρομπότ είναι: X Y M = m a z = m a = J X = F = F X Y Y (3.7) & θ = nz Για την ανάλυση των δυνάμεων, ενδιαφέρει η γωνία την οποία σχηματίζει κάθε δύναμη i από τους προωθητήρες με το X, Y. Θα αναλύσουμε πρώτα το ζεύγος προωθητήρων,, Σχήμα 3-4, το οποίο είναι μία μεγέθυνση του διακεκομμένου τμήματος στο Σχήμα 3-3, εστραμμένο κατάλληλα για λόγους ευκρίνειας. 38
39 y Υ F 9 -ω θ θ r ω F x ω α=6 θ X Σχήμα 3-4. Ανάλυση δυνάμεων προωθητήρων,. Οι δυνάμεις, των προωθητήρων, στο Σχήμα 3-4 σχηματίζουν με τον άξονα X γωνία θ ενώ η βάση έχει στραφεί κατά θ. Από τα Σχήματα 3-, 3-3 παρατηρούμε ότι η γωνία α είναι η γωνία την οποία σχηματίζει η ακτίνα r με τον άξομα x, κάθετα στην οποία ακτίνα είναι τοποθετημένο το ζεύγος προωθητήρων,. Οπότε, είναι Παρατηρούμε επίσης ότι: α = 6. α θ ω = 9 ω = 3 α = 6 θ (3.8) Επίσης το ζεύγος δυνάμεων, είναι κάθετο στην ακτίνα r οπότε: θ θ (9 ω) = 9 = ω θ = 3 ω = 3 θ θ (3.9) Με γνωστή την γωνία θ συναρτήσει της γωνία στροφής θ, οι δυνάμεις, και οι ροπές τους M, M είναι: 39
40 x y x y M M = cosθ = cos = sinθ = = = r = r cosθ = = sinθ = = r = r sin ( 3 θ ) ( 3 θ ) cos( 3 θ ) ( 3 θ ) sin (3.) Εφαρμόζοντας την ίδια μεθοδολογία για το ζεύγος προωθητήρων 3, 4, έπεται ότι οι δυνάμεις 3, 4 σχηματίζουν με τον άξονα X γωνία θ = θ. Οι δυνάμεις 3, 4 και οι ροπές M 3, M 4 είναι: 3x 3 y 4x 4 y M M 3 4 = sinθ = = sinθ = = 4 = r 3 = r cosθ = = r = r sinθ = cosθ = cosθ sinθ 4 cosθ (3.) Ομοίως, για το ζεύγος προωθητήρων 5, 6 οι δυνάμεις 5, 6 σχηματίζουν με τον άξονα X γωνία θ = 3 θ. 3 Οι δυνάμεις 5, 6 και οι ροπές M 5, M 6 είναι: 5x 5 y 6x 6 y M M 5 6 = cosθ = 5 = sinθ = 5 = 6 = 6 = r = r sin cosθ = sinθ = = r = r 6 cos 6 6 ( 3 θ ) ( 3 θ ) cos( 3 θ ) sin( 3 θ ) (3.) Αντικαθιστώντας στην (3.7) τις (3.), (3.), (3.): x y M = z = x y = M x y M 3x 3 y M 3 4x 4 y M 4 5x 5 y M 5 6x 6 y M 6 (3.3) 4
41 4 θ θ θ θ θ θ θ θ θ θ θ θ θ && = = = = J T r r r r r r M z y x sin sin cos cos sin sin cos cos sin sin cos cos (3.4) όπου T είναι η ροπή από τον σφόνδυλο αντίδρασης. Το σύστημα (3.4) σε μορφή πίνακα: b x A = (3.5) στο οποίο: { { { = = = = z y x y x x x n F F J a m a m r r r r r r θ θ θ θ θ θ θ θ θ θ θ θ θ && 3x , sin sin cos cos sin sin cos cos sin sin cos cos b x A (3.6) Το διάνυσμα x αποτελείται από τις δυνάμεις των προωθητήρων και την ροπή του σφονδύλου αντίδρασης. Το διάνυσμα b αποτελείται από τις οι δυνάμεις y x F F, και την ροπή z n, όπως προκύπτουν από την (3.6). Η τάξη του πίνακα A είναι 3, όσες είναι οι γραμμικώς ανεξάρτητες γραμμές του πίνακα. Ο A είναι διάστασης 3x7, συνεπώς δεν είναι πλήρους τάξης. Επειδή η τάξη του A είναι τρία, οι γραμμικώς ανεξάρτητες λύσεις του συστήματος (3.5) είναι τρεις. Αυτό είναι αναμενόμενο, διότι το σύστημα διαθέτει πλεονάζοντες επενεργητές (βλ...). Το σύστημα (3.5) έχει λύση: { b A x = 3 7 (3.7)
42 στο οποίο ο A είναι ο ψευδοαντίστροφος του A. Ο ψευδοαντίστροφος A είναι μία γενίκευση του αντίστροφου πίνακα για μη τετραγωνικούς πίνακες και χρησιμοποιείται για να υπολογιστεί σε ένα σύστημα εξισώσεων όπως το (3.5), μία λύση βασισμένη στη μέθοδο των ελαχίστων τετραγώνων. Σε ένα τέτοιο σύστημα, στο οποίο ο A δεν είναι τετραγωνικός, δεν είναι πάντα γνωστό εάν θα υπάρχει μία λύση ή εάν αυτή η λύση θα είναι μοναδική. Η χρήση του ψευδοαντίστροφου A δίνει μία λύση x η οποία ελαχιστοποιεί το Ax b, έχουμε δηλαδή ένα πρόβλημα ελαχίστων τετραγώνων. Για έναν πίνακα A διαστάσεων n m ο οποίος έχει περισσότερες στήλες από γραμμές ( n < m ) και είναι τάξης n, όπως δηλαδή είναι ο A (3.6), ο ψευδοαντίστροφος A είναι [8]: ( ) A = A T AA T (3.8) Σημειώνουμε ότι για συστήματα αντίστροφος. n n ισχύει ότι A = A, όταν υπάρχει ο Η λύση όπως προκύπτει από την εξίσωση (3.7) δίνει το διάνυσμα x στο οποίο περιλαμβάνονται οι δυνάμεις από τους προωθητήρες,,, 3, 4, 5, 6. Οι υπολογιζόμενες δυνάμεις με αυτόν τον τρόπο θα είναι θετικές, μηδέν ή αρνητικές. Ωστόσο, οι δυνάμεις από τους προωθητήρες είναι πάντα μη αρνητικές, όπως αναφέραμε παραπάνω (βλ. εξίσωση.). Θα πρέπει λοιπόν να τροποποιήσουμε το προς επίλυση σύστημα (3.5) με ένα ισοδύναμο, έτσι ώστε οι δυνάμεις οι οποίες προκύπτουν για τους προωθητήρες να είναι μη αρνητικές. Ανατρέχοντας στο Σχήμα 3-, ορίζουμε για τα ζεύγη των προωθητήρων: a b c = = = (3.9) Οπότε, η (3.4) τροποποιείται ως εξής: x = ( )cosθ ( 3 4)sinθ ( 5 6)cosθ3 y = ( )sinθ ( 3 4)cosθ ( 5 6)sinθ3 M = r r r T = J && z ( ) ( 3 4) ( 5 6) θ (3.) 4
43 x y M = = z a = cosθ a sinθ a r b b sinθ b cosθ r r T c cosθ c sinθ c 3 = J && θ 3 (3.) Το προς επίλυση σύστημα είναι τώρα: A x = b (3.) στο οποίο: a cosθ sinθ cosθ3 { { = b A = sinθ cosθ sinθ3, x, b { 3x4 4x c r r r T 3x Fx = Fy n z (3.3) Η λύση του συστήματος (3.) υπολογίζεται ως: x = A b (3.4) όπου A είναι ο ψευδοαντίστροφος του A. Η τάξη του πίνακα A είναι 3, όσες είναι οι γραμμικώς ανεξάρτητες γραμμές του πίνακα. Συνεπώς, οι γραμμικώς ανεξάρτητες λύσεις του συστήματος (3.) είναι τρεις. Παρατηρούμε ότι είναι ίδιας τάξης με τον πίνακα A, κάτι το οποίο είναι αναμενόμενο διότι τα συστήματα (3.5) και (3.) είναι ισοδύναμα. Ένα μέγεθος το οποίο μας ενδιαφέρει για την επίλυση του συστήματος (3.) ως προς x είναι ο αριθμός κατάστασής του πίνακα A. O αριθμός κατάστασης για έναν πίνακα M ορίζεται ως: cond (M) = M M (3.5) και είναι επιθυμητό να είναι κοντά στη μονάδα. Ο αριθμός κατάστασης αποτελεί μέτρο του πόσο κοντά βρίσκεται ο πίνακας M στο να είναι ιδιάζων: ένας πίνακας με μεγάλο αριθμό κατάστασης είναι ιδιάζων [8]. Αποτελεί δηλαδή ένδειξη του πόσο ευσταθές είναι το σύστημα και επίσης δείχνει πόσο καλά μπορεί να υπολογιστεί αριθμητικά μία λύση για ένα σύστημα όπως το (3.), χωρίς να έχει σημαντικά σφάλματα 43
44 στρογγυλοποίησης. Συνεπώς, μεγάλος αριθμός κατάστασης για τον πίνακα A δείχνει ότι μικρά σφάλματα στα στοιχεία του οδηγούν σε μεγάλα σφάλματα στη λύση x. Ο αριθμός κατάστασης του πίνακα A υπολογίστηκε στο MATLAB με την εντολή cond() για γωνίες θ π με βήμα. rad. O αριθμός κατάστασης είναι.9, συνεπώς το σύστημα μας είναι ευσταθές και οι λύσεις του συστήματος (3.) δεν θα έχουν σημαντικά αριθμητικά σφάλματα. Υπολογίζουμε λοιπόν το διάνυσμα x από την εξίσωση (3.4) και έτσι προκύπτουν οι δυνάμεις,,. Στην συνέχεια, από την εξίσωση (3.9) και ανάλογα με το πρόσημο a b c των,, προκύπτουν τελικά οι δυνάμεις των προωθητήρων,,, 3, 4, 5, 6, a b c ως εξής (βλ. και Σχήμα 3-): a a b b c c > : < : > : < : > : < : = = = a b c, =,, =,, =, =, = a 4 = 3,4 = b = 5,6 = c (3.6) Οπότε, η τροποποιημένη λύση του (3.7): [ T ] T x (3.7) = στο οποίο διάνυσμα x οι δυνάμεις των προωθητήρων είναι μη αρνητικές και η ροπή T δίνεται από τον κινητήρα του σφονδύλου αντίδρασης. Συνοψίζοντας, με την παραπάνω μεθοδολογία με γνωστό το διάνυσμα F από τις δυναμικές εξισώσεις του συστήματος (3.6) υπολογίζουμε τις κατάλληλες δυνάμεις των προωθητήρων και την ροπή του σφονδύλου από τις εξισώσεις (3.9), (3.) και (3.6). Έτσι, προκύπτει το διάνυσμα x (3.7) με τις κατάλληλες ενεργοποιήσεις των προωθητήρων και του σφονδύλου. Υπενθυμίζουμε επίσης, ότι οι απαιτούμενες ροπές t, t στις αρθρώσεις των βραχιόνων, εξίσωση (3.6), δίνονται κατευθείαν από το t, t, αντίστοιχο σύστημα κινητήρα μειωτήρα σε κάθε άρθρωση. Συνεπώς, έχουν υπολογιστεί όλες οι ενεργοποιήσεις των επενεργητών του συστήματος με βάση τις δυναμικές εξισώσεις του συστήματος (3.6). 44
45 Σημειώνουμε ότι το πρόβλημα της εύρεσης των ενεργοποιήσεων των προωθητήρων και του σφονδύλου θα μπορούσε να είχε λυθεί ως εξής. Το διάνυσμα x υπολογίζεται από την (3.7). Ορίζουμε στην συνέχεια τις,, με την εξίσωση (3.9) και οι δυνάμεις των προωθητήρων διορθώνονται με βάση την εξίσωση (3.6). Έτσι, προκύπτει το διορθωμένο διάνυσμα x, εξίσωση (3.7). Οι δύο αυτές μέθοδοι είναι ισοδύναμες. Επιλέχθηκε η λύση με το σύστημα (3.) διότι δίνει κατευθείαν τις επιθυμητές, μη αρνητικές δυνάμεις των προωθητήρων. Σε αυτό το σημείο θα πρέπει να συμπληρώσουμε ότι οι επενεργητές του ρομπότ λειτουργούν μέσα σε συγκεκριμένα όρια. Αναλυτικότερα: a b c Ο αποδιδόμενη δύναμη i από κάθε προωθητήρα είναι:.6n i max =. 48N (3.8) Η ροπή T αποδίδεται από την στροφή του σφονδύλου αντίδρασης για T και περιορίζεται από το εύρος λειτουργίας του ηλεκτροκινητήρα. Από τα φυλλάδια προδιαγραφών του κινητήρα Maxon RE3 686 (Παράρτημα ) για τη ροπή του σφονδύλου και για συνεχή λειτουργία, είναι: 9.56 mnm T 9.56 mnm (3.9) Ο βαθμός απόδοσης του κινητήρα είναι 88%. Η ζητούμενη ροπή και η αντίστοιχη γωνιακή ταχύτητα του κινητήρα θα πρέπει να ελέγχονται για το εάν βρίσκονται μέσα στα αποδεκτά όρια συνεχούς λειτουργίας, όπως αυτά ορίζονται στο φυλλάδιο προδιαγραφών του κινητήρα (Παράρτημα ). Ο κινητήρας έχει επιλεγεί έτσι ώστε να αποφεύγεται ο κορεσμός και η υπερθέρμανσή του για τις περισσότερες περιπτώσεις ενεργοποίησης του σφονδύλου [5]. Οι ροπές t, t, t, t δίνονται από το σύστημα κινητήρα-μειωτήρα σε κάθε άρθρωση. Από τα φυλλάδια προδιαγραφών του κινητήρα Maxon RE (Παράρτημα ) και του μειωτήρα Maxon GP3A 6673 (Παράρτημα ), η μέγιστη ροπή του κινητήρα για συνεχή λειτουργία είναι: 6.8 mnm t 6.8 mnm (3.3) m Ο βαθμός απόδοσης του κινητήρα είναι 87%. Ο μειωτήρας έχει λόγο μείωσης n = 67/64 και βαθμό απόδοσης 7%. Συνεπώς, εάν η ζητούμενη ροπή στο φορτίο, 45
46 δηλαδή μετά το μειωτήρα, είναι t ij και η στροφή της άρθρωσης t m και οι στροφές φ m στον κινητήρα είναι: thij είναι τότε η ροπή t m φ m = t /(n ), i, j =, ij = th ij n (3.3) Ομοίως με τον κινητήρα του σφονδύλου, η ζητούμενη ροπή και η αντίστοιχη γωνιακή ταχύτητα του κινητήρα. θα πρέπει να ελέγχονται για το εάν βρίσκονται εντός των αποδεκτών ορίων συνεχούς λειτουργίας, όπως αυτά ορίζονται στο φυλλάδιο προδιαγραφών του κινητήρα (Παράρτημα ). Έχουμε λοιπόν απαντήσει στα τρία από τα τέσσερα ερωτήματα τα οποία θέσαμε στην αρχή της παρούσας παραγράφου: πώς ενεργοποιούνται οι προωθητήρες, με ποιο τρόπο συνδυάζονται με το σφόνδυλο αντίδρασης και ποια είναι τα όρια λειτουργίας των επενεργητών. Στη συνέχεια, θα εξετάσουμε το πώς ενεργοποιείται κατά προτεραιότητα οι σφόνδυλος για την απόδοση ροπής Λειτουργία σφονδύλου αντίδρασης και προωθητήρων Θα εξετάσουμε στη συνέχεια τον τρόπο με τον οποίο θα ενεργοποιηθεί κατά προτεραιότητα οι σφόνδυλος για την απόδοση ροπής. Η συνδυασμένη χρήση του σφονδύλου αντίδρασης και των προωθητήρων για την απόδοση ροπής έχει ως στόχο την ελαχιστοποίηση της χρήση καυσίμου ( CO ) στους προωθητήρες. Για να επιτευχθεί αυτός ο στόχος, προτιμάται η χρήση του σφονδύλου για την απόδοση ροπής. Εάν υπάρχει έλλειμμα ροπής, εάν δηλαδή ο σφόνδυλος αντίδρασης δεν μπορεί να δώσει όλη την αναγκαία ροπή, ενεργοποιούνται συμπληρωματικά οι κατάλληλοι προωθητήρες. Σημειώνουμε επίσης ότι στη γενική περίπτωση η ζητούμενη δύναμη F (, ) = F F έχει x y τυχαία διεύθυνση και απαιτείται ενεργοποίηση τριών προωθητήρων, δύο για να δώσουν την δύναμη F και ο τρίτος για να εξουδετερώσει την αναπτυσσόμενη ροπή. Η ενεργοποίηση των κατάλληλων προωθητήρων και η προτίμηση της χρήσης του σφονδύλου για την απόδοση ροπής επιτυγχάνεται με την τροποποίηση του συστήματος (3.) εισάγοντας τον διαγώνιο πίνακα συντελεστών ποινής W. Με αυτήν τη μέθοδο, ο σφόνδυλος θα ενεργοποιείται κατά προτεραιότητα όταν υπάρχει ανάγκη ροπής. Ο σφόνδυλος θα έχει τον μικρότερο συντελεστή ποινής. Το σύστημά μας μετασχηματίζεται ως εξής 46
47 Θεωρούμε τη λύση y = W x (3.3) Αντικαθιστούμε στην (3.) το x (ο πίνακας W είναι αντιστρέψιμος): ( A W ) y = b (3.33) και η λύση υπολογίζεται ως: y = y = W ( A W ) W T A b T T T ( A W W A ) b (3.34) Το ζητούμενο διάνυσμα x με τους συντελεστές ποινής υπολογίζεται από τις εξισώσεις (3.3), (3.34): [ T ] T a b c T T ( A W W A ) T T x = W [ W W A b] x = (3.35) Οι συντελεστές ποινής του πίνακα W είναι: ( w w w ) W = diag (3.36) 33 w44 όπου w,..., w33 είναι οι συντελεστές ποινής για τις δυνάμεις a, b, c όπως αυτές ορίζονται στην εξίσωση (3.9). Το w 44 είναι ο συντελεστής ποινής για το σφόνδυλο αντίδρασης. Οι συντελεστές ποινής επιλέγονται ως εξής. Η μέγιστη ροπή του κινητήρα στον σφόνδυλο αντίδρασης είναι σφόνδυλο ορίζεται ως: T max = 9.54 mnm (3.9). Ο συντελεστή ποινής για το w = (/ 9.54) 9.54 (3.37) 44 = Οι δυνάμεις,, αντιστοιχούν στους προωθητήρες και όλοι οι προωθητήρες a b c έχουν τον ίδιο συντελεστή ποινής. Η μέγιστη δύναμη για κάθε προωθητήρα είναι max =. 48N (.) και ο συντελεστής ποινής w ii, i =,,3 ορίζεται ως: 47
48 ( ) w = 833 w ii =.48 ii (3.38) Οπότε, ο πίνακας των συντελεστών ποινής προκύπτει τελικά: ( ) W = diag (3.39) Από το διάνυσμα x (3.35) οι δυνάμεις των προωθητήρων προκύπτουν με εφαρμογή της εξίσωσης (3.6) για τις,, και η ροπή του σφονδύλου αντίδρασης είναι T. a b c 3.5. Έλεγχος του συστήματος 3.5. Έλεγχος βασισμένος στο δυναμικό μοντέλο Με γνωστές τις δυναμικές εξισώσεις του συστήματος, μπορούμε να προχωρήσουμε στον αυτόματο έλεγχο του συστήματος. Ο έλεγχος του συστήματος βασίζεται στο μη γραμμικό δυναμικό μοντέλο του (model based control) και ο στόχος του είναι να ελέγξουμε την θέση και τον προσανατολισμό του ρομπότ. Κατά τη διάρκεια της κίνησης, υπολογίζεται το διάνυσμα F των γενικευμένων δυνάμεων από την εξίσωση (3.) και τα σφάλματα ελέγχονται και τελικά εξουδετερώνονται από τον PD έλεγχο. Ο έλεγχος βασισμένος στο μοντέλο του συστήματος έχει τα εξής πλεονεκτήματα: Πλήρης εκμετάλλευση της δυναμικής του συστήματος. Τα κέρδη ελέγχου (θέση, ταχύτητα) επιλέγονται εύκολα. Καλή παρακολούθηση τροχιάς όταν είναι γνωστές οι παράμετροι του συστήματος. Η δυναμική των σφαλμάτων είναι ίδια σε όλο τον χώρο εργασίας και δεν εξαρτάται από την διαμόρφωση του ρομπότ. Τα μειονεκτήματα είναι ότι ο νόμος ελέγχου απαιτεί καλή γνώση των παραμέτρων του συστήματος και είναι υπολογιστικά απαιτητικός, εφόσον ο νόμος ελέγχου υπολογίζεται συνεχώς κατά την διάρκεια της κίνησης. Στη δική μας περίπτωση, οι παράμετροι του συστήματος είναι γνωστές με καλή ακρίβεια και οποιαδήποτε μικρή παρέκκλιση θα διορθωθεί από τον έλεγχο. Το δυναμικό μοντέλο του ρομπότ περιγράφεται από την εξίσωση (3.6): 48
49 H { q& { C{ = F{ x x q = x x [, R,,,, d, th, th, th, th ] T Rc x c y z (3.4) Στο διάνυσμα των μεταβλητών ελέγχου q, οι μεταβλητές Rc x Rc y, dz, αναφέρονται στο κίνηση του κέντρου βάρους της βάσης (Πίνακας 3-). Προφανώς, το κέντρο βάρος της βάσης δεν ταυτίζεται με το κέντρο βάρους ολοκλήρου του συστήματος (βάση και βραχίονες). Ο έλεγχος θα γίνει για την θέση του κέντρου βάρους της βάσης. Αυτό είναι επιθυμητό διότι μας ενδιαφέρει η μετακίνηση της βάσης. Με γνωστή και ελέγξιμη την θέση της βάσης, μπορούμε να προσδιορίσουμε τις υπόλοιπες μεταβλητές ελέγχου και την κίνηση του κέντρου βάρους του σώματος. Έστω ότι η επιθυμητή διαμόρφωση του ρομπότ είναι q d και η παρούσα διαμόρφωση είναι q. Υπολογίζεται πρώτα μία βοηθητική επιτάχυνση η οποία περιλαμβάνει τους όρους του PD ελέγχου, όπου q & K, K είναι οι πίνακες με τα κέρδη του ελέγχου: p d ( q q) K ( q& q& ) = q&& d K p d d d (3.4) Στη συνέχεια, υπολογίζεται το διάνυσμα F : F = Hq& C (3.4) Τότε, η εξίσωση κλειστού βρόγχου είναι: Hq&& C = Hq&& C Hq&& C = Hq&& Hq&& C = Hq&& d d C H K C H K ( q q) K ( q & q) d 443 [ ε K ε& ] p p ε d d 443 & d ε& (3.43) Οι παράμετροι του συστήματος είναι γνωστές με καλή ακρίβεια, συνεπώς μπορούμε να υποθέσουμε ότι: H = H, C = C (3.44) και τότε η (3.43): && ε = q&& [&& K ε& K ε] = H ε d q&& d p (3.45) 49
50 Ο πίνακας H είναι θετικά ορισμένος άρα υπάρχει ο H και η (3.45) : & ε K ε K ε = (3.46) & d p Τα σφάλματα είναι: && ε = ε& = ε = T [&& ε && x ε y && ε && z ε && ε && ε && ε ] T [& ε & x ε y & ε & z ε & ε & ε & ε ] [ ε ε ε ε ε ε ε ] T x y z (3.47) και τα κέρδη ελέγχου: K K p d = diag = diag ( K px K py K pz K p K p K p K p ) ( K K K K K K K ) dx dy d z d d d d (3.48) Συνεπώς, η μέθοδος ελέγχου με βάση το μοντέλο θα οδηγήσει σε μηδενισμό των σφαλμάτων θέσης και ταχύτητας στην μόνιμη κατάσταση, δηλαδή σε μηδενικό σφάλμα μόνιμης κατάστασης. Το διάνυσμα F των γενικευμένων δυνάμεων υπολογίζεται τελικά από την σχέση: (&& K ( q q) K ( q& q& )) C F = H qd p d d d (3.49) q&& Για κάθε μεταβλητή q i με τα αντίστοιχα σφάλματα ομογενή διαφορική εξίσωση δεύτερης τάξης: ε,ε&,ε & έχουμε μία απλή γραμμική, i ι ι && ε K i s di ε& K ζω s ω i pi ε = i i = (3.5) άρα: K K pi di = ω i = ζω ι (3.5) Επιλέγουμε ζ = για ρομποτικά συστήματα έτσι ώστε να μην υπάρχουν ταλαντώσεις στο σύστημα. Ο χρόνος αποκατάστασης για ζ = υπολογίζεται ως: 5
51 και ω είναι η φυσική συχνότητα σε rad/s. 6 τ s = s (3.5) ω Στην συνέχεια, για κάθε μεταβλητή ελέγχου q i θα επιλέξουμε τα κέρδη K, K. pi di 3.5. Επιλογή κερδών για την μεταφορική κίνηση Η μεταφορική κίνηση του ρομπότ κατά X, Y περιγράφεται από τις μεταβλητές,. Επιλέγουμε χρόνο αποκατάστασης τ s = s : Rc x Rc y 6 τ s = = ω = 6 (3.53) ω και τα κέρδη ελέγχου υπολογίζονται από την (3.5): K K px dx = K = K py dy = 36 = (3.54) Επιλογή κερδών για την περιστροφή Η περιστροφή κίνηση του ρομπότ γύρω από τον κάθετο άξονα Z περιγράφεται από την μεταβλητή d. Επιλέγουμε χρόνο αποκατάστασης τ s =.3s : z 6 τ s = = ω = 4.6 (3.55) ω Tα κέρδη ελέγχου υπολογίζονται από την (3.5): K K pz d z =.3 = 9.3 (3.56) Επιλογή κερδών για τις αρθρώσεις Η περιστροφή των αρθρώσεων περιγράφεται από τις μεταβλητές ελέγχου th, th για τον βραχίονα και th, th για τον βραχίονα. Τα αντίστοιχα κέρδη K pij, K pij ( i =,, j =,) υπολογίζονται ως εξής. 5
52 Οι δύο βραχίονες είναι όμοιοι, συνεπώς οι υπολογισμοί για τις αρθρώσεις και θα ισχύουν και για τις αρθρώσεις και αντίστοιχα. Για την άρθρωση επιλέγουμε χρόνο αποκατάστασης τ s =. s : 6 τ s = = ω = 5 (3.57) ω Tα κέρδη ελέγχου υπολογίζονται από την (3.5): K K p d = 5 = (3.58) Για την άρθρωση επιλέγουμε χρόνο αποκατάστασης τ s =.3s : 6 τ s = = ω = 4.6 (3.59) ω Tα κέρδη ελέγχου υπολογίζονται από την (3.5): K K p d =.3 = 9.3 (3.6) Συνοψίζοντας, τα κέρδη τα οποία επιλέχθηκαν είναι: Πίνακας 3-3. Κέρδη ελέγχου. Μεταβλητή Κέρδος P Κέρδος D Rc K = 36 = x y px K dx Rc K = 36 = py K dy d K p z =. 3 = 9. 3 z K d th K 5 K d = p = th K p =. 3 K d = 9. 3 th K 5 K d = p = th K p =. 3 K d = 9. 3 z 5
53 Στη συνέχεια θα παρουσιάσουμε το μοντέλο του συστήματος όπως αυτό αναπτύχθηκε στο Simulink Μοντέλο προσομοίωσης 3.6. Μοντέλο Simulink Το μοντέλο του συστήματος αναπτύχθηκε στο Simulink (v.7.)/matlab (v.7.7, R8a) σε λειτουργικό σύστημα Ubuntu 9.4. Αποτελείται από τα εξής αρχεία: Το μοντέλο στο Simulink: simulinkdspacerobotsimulator_v5inal.mdl Tα m-ile dynamicsdpart.m, dynamicsdpart.m: περιέχουν την δυναμική του συστήματος και τα όρια λειτουργίας των επενεργητών. Καλούνται από το simulinkdspacerobotsimulator_v5inal.mdl., στο υποσύστημα Dynamics. Το script system_parameters_s.m: περιλαμβάνει όλα τα αδρανειακά χαρακτηριστικά του συστήματος. Το script PDgains.m: περιλαμβάνει τα κέρδη του συστήματος. Το m-ile position_proile.m: περιλαμβάνει τα προφίλ θέσης, ταχύτητας και επιτάχυνσης για τους βαθμούς ελευθερίας του συστήματος. Πριν γίνει η πρώτη προσομοίωση πρέπει να εκτελεστούν μία φορά τα αρχεία system_parameters_s.m, PDgains.m και position_proile.m από το command line του MATLAB. Στην συνέχεια, οι απαραίτητες σταθερές για την προσομοίωση (κέρδη, προφίλ θέσης, κλπ.) είναι αποθηκευμένες στο workspace και διαθέσιμες για τις επόμενες προσομοιώσεις. Εάν είναι επιθυμητό να αλλάξουν για παράδειγμα κάποιο από τα κέρδη του συστήματος ή ένα προφίλ θέσης, θα πρέπει να αλλαχτούν και στην συνέχεια να τρέξουν ξανά τα αντίστοιχα αρχεία. Όλα τα αρχεία υπάρχουν στο cd της παρούσας διπλωματικής. Επίσης, το Simulink μοντέλο δίνεται και σε web view. Τα αρχεία αυτά μπορούν να ανοιχτούν από οποιοδήποτε web browser (Mozilla Fireox, Internet Explorer, Saari κλπ.) και δείχνουν ιεραρχικά τα συστήματα και υποσυστήματα του μοντέλου. Το μοντέλο υλοποιεί τον έλεγχο, όπως αναπτύχθηκε στην παράγραφο 3.5, και δημιουργήθηκε για να μπορούν να γίνουν προσομοιώσεις του συστήματος και να μελετηθεί η συμπεριφορά του. 53
54 Αποτελείται από τα εξής κύρια υποσυστήματα: Dynamics: Αυτό το υποσύστημα καλεί τα αρχεία dynamicsdpart.m, dynamicsdpart.m για να υπολογίσει την δυναμική του συστήματος και τελικά το διάνυσμα F των επιθυμητών δυνάμεων, σύμφωνα με τη μεθοδολογία των 3., 3.3 Η έξοδος είναι ένα διάνυσμα το οποίο περιλαμβάνει τα: ( F C) q& = H, τη θέση του κέντρου βάρους του ρομπότ, R cm, τη στροφορμή H cm, τις δυνάμεις των προωθητήρων, την ροπή του σφονδύλου αντίδρασης και τις ροπές των κινητήρων στις αρθρώσεις. PD controller: Υλοποιεί τον έλεγχο όπως αναπτύχθηκε στην 3.5. Η είσοδος είναι το διάνυσμα των ταχυτήτων q& και θέσεων q, τα οποία προκύπτουν με ολοκλήρωση του q& &. Το υποσύστημα έχει δύο εξόδους. Η μία έξοδος είναι το διάνυσμα K ( q q) K ( q& q& ) p d d d και η δεύτερη έξοδος είναι το διάνυσμα των επιθυμητών επιταχύνσεων q & q& & d ( q q) K ( q& q& ) = q&& d K p d d d (3.4).. Οι δύο έξοδοι σχηματίζουν το διάνυσμα Επίσης, δημιουργούνται διάφορα γραφήματα για άμεσο έλεγχο των αποτελεσμάτων. Τα αποτελέσματα αποθηκεύονται σε αρχεία τύπου.mat για περαιτέρω επεξεργασία. Στο τέλος του κεφαλαίου δίνουμε το μοντέλο, το υποσύστημα υπολογισμού της δυναμικής (Dynamics) και το υποσύστημα του ελεγκτή (PD controller) Υποσύστημα Dynamics Το υποσύστημα καλεί τα m-ile dynamicsdpart.m, dynamicsdpart. Η έξοδος είναι το διάνυσμα q& & των επιταχύνσεων των βαθμών ελευθερίας του συστήματος. Οι είσοδοι είναι το διάνυσμα q& & (3.4) τα αδρανειακά χαρακτηριστικά του ρομπότ, η θέση q, η ταχύτητα q& και το χρονικό βήμα. Αναλυτικότερα, το υποσύστημα έχει ως εισόδους 34 σταθερές (τα αδρανειακά χαρακτηριστικά του συστήματος) και 38 μεταβλητές: Αδρανειακά χαρακτηριστικά συστήματος (βάση και βραχίονες) από το system_parameters_s.m (34 σταθερές). 54
55 Ανάδραση από το υποσύστημα του ελεγκτή (PD controller): διάνυσμα ( q q) K ( q& q& ) K p d d d ( μεταβλητές). Ανάδραση από το υποσύστημα του ελεγκτή (PD controller): διάνυσμα επιθυμητών επιταχύνσεων q& & d (7 μεταβλητές). Θέση (q ) και ταχύτητα (q& ) όλων των βαθμών ελευθερίας του συστήματος ( μεταβλητές, για το κάθε ένα). Χρονικό βήμα προσομοίωσης ( μεταβλητή). Το υποσύστημα Dynamics είναι από τα βασικά τμήματα του μοντέλου και οι υπολογισμοί που εκτελεί οι πλέον χρονοβόροι. Πρώτα καλείται το m-ile dynamicsdpart.m, το οποίο αναλύεται στη συνέχεια. Αρχικά, γίνεται η αντιστοίχηση των εισόδων σε μεταβλητές για τους υπολογισμούς. Διάνυσμα K ( q q) K ( q& q& ) p d d d : %Error rom Feedback... %Error is Kp(qdes-q)Kd(vdes-v) ex = u(); ey = u(); enz = u(6); et = u(7); et = u(8); et = u(9); et = u(); error=[ex ; ey ; ; ; ; enz ; et ; et ; et ; et]; Αδρανειακά χαρακτηριστικά: %m: masses mb = u(); m= u(); m = u(3); m = u(4); m = u(5); %rij = distance rom base's CM or i arm (i=,), j=,,3 (x,y,x) r = u(6); r = u(7); r3 = u(8); r = u(9); r = u(); r3 = u(); %cmij= distance o link's CM rom start o the link cm = u(); cm = u(3); 55
56 cm = u(4); cm = u(5); %I: inertia, I:base, Iij:link Ix = u(6); Ix = u(7); Ix = u(8); Ix = u(9); Ix = u(3); Iy = u(3); Iy = u(3); Iy = u(33); Iy = u(34); Iy = u(35); Iz = u(36); Iz = u(37); Iz = u(38); Iz = u(39); Iz = u(4); %lij: length o link l = u(4); l = u(4); l = u(43); l = u(44); Παρούσα θέση και ταχύτητα: %Deining the Current State q and qd %R: base position (absolute), derivative RcxD = u(45); RcyD = u(46); RczD = u(47); %d: Euler angles, roll - pitch - yaw (x - y - z), derivative dxd = u(48); dyd = u(49); dzd = u(5); %th:joint angles, derivative thd = u(5); thd = u(5); thd = u(53); thd = u(54); %R: base's position (absolute) Rcx = u(55); Rcy = u(56); Rcz = u(57); %d: robot's Euler angles roll - pitch - yaw dx = u(58); dy = u(59); dz = u(6); %th: joint angles th = u(6); th = u(6); th = u(63); th = u(64); 56
57 Διάνυσμα επιθυμητών επιταχύνσεων: %desired acceleration vector qdd qdd_des=[u(66);u(67);;;;u(68);u(69);u(7);u(7);u(7)]; Μετά, υπολογίζονται οι πίνακες ( x), C ( x) κέντρου βάρους του συστήματος H (3.6), το διάνυσμα της θέσης του R cm και η στροφορμή του H cm. Οι υπολογισμοί αυτοί όπως φάνηκε στην πράξη είναι ιδιαίτερα χρονοβόροι. Σε μία προσπάθεια βελτιστοποίησης, τα ημίτονα και συνημίτονα των διαφόρων γωνιών τα οποία χρησιμοποιούνται στους υπολογισμούς υπολογίζονται μία φορά και μετά χρησιμοποιούνται ως παράμετροι. Επίσης, οι πίνακες προς στοιχείο. Με γνωστούς τους πίνακες Fx Fy nz t t t t δυνάμεων [ ] T H, C υπολογίζονται στοιχείο H, C υπολογίζεται το διάνυσμα των F = από την εξίσωση (3.49). Προκαταρκτικοί υπολογισμοί γωνιών: sindx=sin(dx); sindy=sin(dy); sindz=sin(dz); cosdx=cos(dx); cosdy=cos(dy); cosdz=cos(dz); sinth=sin(th); sinth=sin(th); costh=cos(th); costh=cos(th); sinth=sin(th); sinth=sin(th); costh=cos(th); costh=cos(th); Υπολογισμοί R, H, H C : cm cm, %Robot CM Rcm = %Robot angular momentum Hcm = % Matrix H or dynamics Η= H = [H, H, H3, H4, H5, H6, H7, H8, H9, H;... H, H, H3, H4, H5, H6, H7, H8, H9, H;... H3, H3, H33, H34, H35, H36, H37, H38, H39, H3;... H4, H4, H43, H44, H45, H46, H47, H48, H49, H4;... H5, H5, H53, H54, H55, H56, H57, H58, H59, H5;... H6, H6, H63, H64, H65, H66, H67, H68, H69, H6;... H7, H7, H73, H74, H75, H76, H77, H78, H79, H7;... H8, H8, H83, H84, H85, H86, H87, H88, H89, H8;... H9, H9, H93, H94, H95, H96, H97, H98, H99, H9;... H, H, H3, H4, H5, H6, H7, H8, H9, H]; 57
58 %Matrix C or dynamics C= C = [C; C; C3; C4; C5; C6; C7; C8; C9; C;]; Διάνυσμα των δυνάμεων F ( x) : F=CH*(qdd_deserror); %F = [Fx; Fy; ; ; ; nz; t; t; t; t;]; Έχοντας υπολογίσει το διάνυσμα F, ελέγχεται πρώτα εάν οι ροπές t, t, t, t για τις αρθρώσεις είναι μέσα στα αποδεκτά όρια λειτουργίας του κινητήρα (βλ. 3.4). Ο αλγόριθμος υπολογίζει τις ροπές από την μεριά του φορτίου, δηλαδή μετά τον μειωτήρα. Συνεπώς, θα πρέπει πρώτα να διαιρεθούν με τον λόγο μείωσης n. Η γωνιακή ταχύτητα του κινητήρα είναι ίδια με αυτήν της άρθρωσης, πριν το φορτίο, εξίσωση (3.3). %We calculate the torque ater the joint %Each joint has a planetary gearhead. %To check motor torque irst divide with gear ratio n %And multiply the angular velocity thijd with ratio n %Motor eiciency is.87, gearhead eiciency is.7 %vkj[v], ktj[nm/a], raj[ξ ]: joint motor characteristics mn=.87; mg=.7; vkj=4.; raj=7.74; ktj=43.8/; n=67/64; %Check: speed (thd - rad/s) & torque (F- Nm) at motor, beore gearbox thd=[thd;thd;thd;thd]*n; F=[F(7,);F(8,);F(9,);F(,)]/(n*mn*mg); %Limits or joints torque - speed %wjoint(i,j) is max permisable rad/s or the given torque F(i,j) wjoint(,)=(vkj/ktj-raj*f(,)/(ktj^)); wjoint(,)=(vkj/ktj-raj*f(,)/(ktj^)); wjoint(3,)=(vkj/ktj-raj*f(3,)/(ktj^)); wjoint(4,)=(vkj/ktj-raj*f(4,)/(ktj^)); or i=:4 i thd(i,)<=wjoint(i,); %motor speed/torque is within limits elsei thd(i,)>wjoint(i,); disp('saturation') %motor speed/torque is out o limits, torque must be adjusted F(i,)=(ktj*vkj/raj)-(ktj^*thd(i,)/raj); end end 58
59 Διορθωμένες ροπές για τις αρθρώσεις F new : %New F (joints torques) Fnew=F*n*mn*mg; Στη συνέχεια, για τις δυνάμεις F x, Fy και την ροπή z n του διανύσματος F υπολογίζουμε το αντίστοιχο διάνυσμα x από την εξίσωση (3.35): [ T ] T a b c T T ( A W W A ) T T x = W [ W W A b] x = H ροπή του σφονδύλου είναι Τ και οι μη αρνητικές δυνάμεις των προωθητήρων (,,,,, ) υπολογίζονται από τις εξισώσεις (3.4), (3.6) Η εξίσωση (3.35) για τον υπολογισμό του x δεν είναι πρόσφορη για αριθμητικούς υπολογισμούς. Η χρήση αντιστρόφων και ψευδοαντιστρόφων πινάκων σε υπολογιστικά προγράμματα είναι υπολογιστικά απαιτητική, ιδιαίτερα χρονοβόρα και οδηγεί σε αριθμητικά σφάλματα. Συνεπώς, δεν θα χρησιμοποιηθούν οι εντολές MATLAB pinv() (υπολογισμός ψευδοαντίστροφου) και inv() (υπολογισμός αντιστρόφου) για τους απαραίτητους υπολογισμούς. Έτσι, για τον υπολογισμό του x χρησιμοποιήθηκε μία ελαφρώς διαφορετική μεθοδολογία σε συνδυασμό με το πακέτο THE FACTORIZE OBJECT or solving linear systems για MATLAB από τον καθηγητή Timothy A. Davis (University o Florida) []. Αναπτύχθηκε λοιπόν η παρακάτω μεθοδολογία για τον υπολογισμό του x. Ανατρέχοντας στην 3.4 για την συνδυασμένη λειτουργία των προωθητήρων και του σφονδύλου αντίδρασης έχουμε: Στην εξίσωση (3.3) το y ορίζεται ως: y = W x και το σύστημα προς επίλυση από την εξίσωση (3.33): (A W )y = b Επίσης, ο πίνακας W είναι διαγώνιος άρα ο αντίστροφός του υπολογίζεται εύκολα: W = diag ( / w / w / w / w ) (3.6) 59
60 Ορίζουμε τη βοηθητική μεταβλητή yy : yy = A W (3.6) οπότε το σύστημα (3.33) είναι: ( yy ) y = b (3.63) Στην επίλυση ως προς y της εξίσωσης (3.63), αντί για τον ψευδοαντίστροφο του yy, θα χρησιμοποιηθεί η εντολή actorize ( yy) [] οπότε: ( yy) b y = actorize \ (3.64) Η εντολή actorize ( matrix) χρησιμοποιεί την κατάλληλη μέθοδο παραγοντοποίησης για τον κάθε πίνακα, επιλέγοντας μεταξύ LU, QR και Cholesky. Το (\) (backslash) χρησιμοποιείται για την επίλυση μη τετραγωνικών συστημάτων με την μέθοδο των ελαχίστων τετραγώνων [8, ]. Έχοντας υπολογίσει το y από την εξίσωση (3.64), το ζητούμενο διάνυσμα x προκύπτει με βάση την εξίσωση ορισμού του y (3.3): x W = y (3.65) Για να γίνει πιο κατανοητό γιατί επιλέξαμε την παραπάνω μεθοδολογία για τον υπολογισμό του x θα δώσουμε στη συνέχεια ένα παράδειγμα σε MATLAB στο οποίο συγκρίνεται η λύση συστημάτων μορφής ίδιας με το (3.): >> A=rand(,); >> b=rand(,); >> tic; x=a\b;toc,norm(x) Elapsed time is.9883 seconds. ans =.385 >> tic; x=pinv(a)*b;toc,norm(x) Elapsed time is seconds. ans =.4676 >> tic; x=inverse(a)*b;toc,norm(x) Elapsed time is.496 seconds. ans =.4676 >> tic; x=actorize(a)\b;toc,norm(x) Elapsed time is.9546 seconds. ans =.4676 Είναι εμφανές ότι η χρήση της εντολής actorize ( matrix) για τον υπολογισμό της λύσης x υπερτερεί σε ακρίβεια και χρόνο εκτέλεσης. Η εντολή inverse ( matrix) περιλαμβάνεται 6
61 στο πακέτο THE FACTORIZE OBJECT or solving linear systems και είναι αντίστοιχη της actorize ( matrix) []. Το διάνυσμα x υπολογίζεται σε αυτό το σημείο για να υπολογιστούν οι κατάλληλες ενεργοποιήσεις των προωθητήρων και του σφονδύλου και για να ελέγξουμε κατά πόσο το σύστημα μπορεί να ανταποκριθεί στις απαιτήσεις δύναμης ( F, F x y ) και ροπής ( n z ). Οι επενεργητές του συστήματος έχουν συγκεκριμένους περιορισμούς, συνεπώς το διάνυσμα F θα πρέπει να τους τηρεί. Υπολογισμός των πινάκων A και W : %F: Fx, Fz, nz %Actuated by Thrusters (-6) & Reaction wheel F=[F(,);F(,);F(6,)]; %Thruster orces angles th=pi/6-dz; th=dz; th3=pi/6dz; r=.5; costh=cos(th); sinth=sin(th); costh=cos(th); sinth=sin(th); costh3=cos(th3); sinth3=sin(th3); %A or A*x=F %x vector is (Fa;Fb;Fc;tw) %Fa=-: thrusters, %Fb=3-4: " 3,4 %Fc=5-6: " 5,6 %tw: torque rom wheel %...6 are the thruster orces, >= A=[costh -sinth costh3 ]; A=[-sinth costh sinth3 ]; A3=[-r -r r ]; A=[A;A;A3]; %W or the penalties: wheel is preerred wt=83; ww=.87; wti=/wt; wwi=/ww; %w=[wt wt wt ww]; %W=diag(w); winv=[wti wti wti wwi]; invw=diag(winv); 6
62 Υπολογισμός του x : %Calculation o x using weights W hy=a*invw; pinvhy=actorize(hy); y=pinvhy\f; x=invw*y; Υπολογισμός δυνάμεων από τους προωθητήρες: %Having calculated Fa, Fb, Fc we deine the thruster orces %according to the sign o Fa,b,c %Thrusters, i x(,)> thruster(,)=x(,); thruster(,)=; elsei x(,)< thruster(,)=; thruster(,)=abs(x(,)); elsei x(,)== thruster(,)=; thruster(,)=; end %Thrusters 3,4 i x(,)> thruster(3,)=x(,); thruster(4,)=; elsei x(,)< thruster(3,)=; thruster(4,)=abs(x(,)); elsei x(,)== thruster(3,)=; thruster(4,)=; end %Thrusters 4,5 i x(3,)> thruster(5,)=x(3,); thruster(6,)=; elsei x(3,)< thruster(5,)=; thruster(6,)=abs(x(3,)); elsei x(3,)== thruster(5,)=; thruster(6,)=; end Υπολογισμός της ροπής του σφονδύλου και της απαιτούμενης ροπή του κινητήρα: Υπενθυμίζουμε ότι λόγω δράσης-αντίδρασης η ροπή του κινητήρα είναι αντίθετη (ίσο μέτρο, αντίθετη φορά) με την απαιτούμενη ροπή από το σφόνδυλο για τη στροφή του συστήματος. 6
63 %Wheel torque tw=x(4,); %Motor eiciency is.88 so we divided the desired torque with.88 tm=-tw/.88; Έπειτα, υπολογίζεται η γωνιακή επιτάχυνση του κινητήρα του σφονδύλου. Η γωνιακή επιτάχυνη του κινητήρα είναι ίδια με αυτήν του σφονδύλου. %Motor = -wheel acceleration, Iw: wheel inertia Iw=.3; accw=tm/iw; Οι υπολογισμοί του dynamicsdpart.m ολοκληρώνονται σε αυτό το σημείο και το ενδιάμεσο διάνυσμα εξόδου είναι: οι ροπές στις αρθρώσεις, οι δυνάμεις από τους προωθητήρες, η θέση και η στροφορμή του κέντρου βάρους του ρομπότ, το διάνυσμα C, ο πίνακας H, η στροφή του συστήματος, το χρονικό βήμα, η ροπή του σφονδύλου και η γωνιακή επιτάχυνση του κινητήρα του σφονδύλου. %Intermediate output (7 outputs...) orces=[fnew;thruster;rcm();rcm();hcm(3);c;h;h;h3;h4;h5;h6;h7;h8;h9; H;dz;time;tw;accw]; Η γωνιακή ταχύτητά του κινητήρα προκύπτει ολοκληρώνοντας τη γωνιακή επιτάχυνσή του. Στη συνέχεια, καλείται το m-ile dynamicsdpart.m. Οι είσοδοι είναι το ενδιάμεσο διάνυσμα εξόδου από το dynamicsdpart.m και η γωνιακή ταχύτητα του κινητήρα. Με γνωστή τη γωνιακή ταχύτητα και την απαιτούμενη ροπή, γίνεται ο έλεγχος για το κατά πόσο η ζητούμενη ροπή είναι μέσα στα όρια λειτουργίας του κινητήρα. Εάν η ροπή η οποία ζητείται από τον σφόνδυλο είναι εκτός των ορίων λειτουργίας του κινητήρα, το έλλειμμα ροπής δίνεται από τους προωθητήρες. Επίσης, ελέγχεται κατά πόσο οι δυνάμεις από τους προωθητήρες είναι εντός των ορίων λειτουργίας τους. %Limits or torque - speed %I the required wheel torque is bigger than the motor's max, %the motor gives that maximum and the remaining torque is given %by the thrusters %Motor eiciency is.88 so we divided the desired torque with.88 %vkw[v], ktw[nm/a], raw[ξ ]: wheel motor characteristics mn=.88; tmotor=-tw/mn; vkw=4.; raw=.5; ktw=53.8/; %Limits or motor wheel torque - speed 63
64 %max w (rad/s) or given torque tmotor (Nm) wmax=(vkw/ktw-raw*tmotor/(ktw^)); i wmega<=wmax; %motor speed/torque is within limits twnew=-tmotor*mn; elsei wmega>wmax; disp('wheel saturation') %motor speed/torque is out o limits, torque must be adjusted % adjust torque or the given rotation speed wmega (rad/s) tmotornew=(ktw*vkw/raw)-(ktw^*wmega/raw); twnew=-tmotornew*mn; i twnew> add=abs(tw-twnew)/(3*r); thruster(,)=thruster(,)add; thruster(4,)=thruster(4,)add; thruster(5,)=thruster(5,)add; elsei twnew< add=abs(tw-twnew)/(3*r); thruster(,)=thruster(,)add; thruster(3,)=thruster(3,)add; thruster(6,)=thruster(6,)add; end end %Check i thruster orce is within limits or i=:6 i thruster(i,)<.6 thruster(i,)=; elsei thruster(i,)>.48 thruster(i,)=.48; end end Διορθωμένο διάνυσμα F (Fnew). %New x a=thruster(,)-thruster(,); b=thruster(3,)-thruster(4,); c=thruster(5,)-thruster(6,); xnew=[a;b;c;twnew]; %Thruster orces angles th=pi/6-dz; th=dz; th3=pi/6dz; costh=cos(th); sinth=sin(th); costh=cos(th); sinth=sin(th); costh3=cos(th3); sinth3=sin(th3); %A or A*x=F A=[costh -sinth costh3 ]; A=[-sinth costh sinth3 ]; A3=[-r -r r ]; 64
65 A=[A;A;A3]; Fnew=A*xnew; Fnew=[Fnew(,);Fnew(,);;;;Fnew(3,);Fnew(,);Fnew(,);Fnew( 3,);Fnew(4,)]; Υπολογισμός q& & και διανύσματος εξόδου: επιθυμητές επιταχύνσεις βαθμών ελευθερίας (q& & ), θέση του κέντρου βάρους του ρομπότ, στροφορμή, δυνάμεις των προωθητήρων, ροπή του σφονδύλου αντίδρασης και ροπές των κινητήρων στις αρθρώσεις. %Output or controller FC=Fnew-C; qdd = H\FC; % Output is named qdd: qdd (desired acceleration x,y, rotation, joints), CM position (Rcm), angular momentum (Hcm), % x:thruster & wheel actuation, Fnew: joints actuation qdd = [qdd(); qdd(); qdd(3); qdd(4); qdd(5); qdd(6); qdd(7); qdd(8); qdd(9); qdd(); Rcm; Rcm; Hcm3;thruster;twnew;Fnew]; Υποσύστημα PD controller q & = &, & & & & & & και θέσεων Rc x Rc y,,,, dz, th, th, th, th Τα διανύσματα των ταχυτήτων [ ] T [, R,,,, d, th, th, th th ] T q = Rc x c y z, αναλύονται στα στοιχεία τους q i, qi αντίστοιχα. Τα κέρδη ελέγχου φαίνονται στον Πίνακα 3-3. Κάθε q& i αφαιρείται από την επιθυμητή τιμή q& di και προκύπτει η διαφορά di i & q & q&. Στην συνέχεια η διαφορά αυτή πολλαπλασιάζεται με το κέρδος ελέγχου για την συγκεκριμένη μεταβλητή i, K ( q& q& ) ( q& q& ) di di i. Προκύπτει έτσι το διάνυσμα σφάλματος ε& = K. Ομοίως, για το διάνυσμα των θέσεων q προκύπτει το σφάλμα d d ( q q) ε = K. Στη συνέχεια, τα σφάλματα ε, ε& προστίθενται και προκύπτει η έξοδος K p p d ( q q) K ( q& q& ) d επιθυμητών επιταχύνσεων d d. Η δεύτερη έξοδος του υποσυστήματος είναι το διάνυσμα των q& & d. Τα προφίλ των επιθυμητών θέσεων q d, ταχυτήτων q& d και επιταχύνσεων περιγράφονται από γραμμικές συναρτήσεις με παραβολικά τμήματα. Η συνολική διάρκεια της κίνησης είναι επιβράδυνσης (Σχήμα 3-5). t. Η κίνηση έχει ίσα διαστήματα επιτάχυνσης και q& & d 65
66 66 Η θέση είναι: = t t t, t t t, t t, t ax t ax ax S (3.66) Η ταχύτητα είναι: = t t t, t t t, t t, t ax t ax S & (3.67) Η επιτάχυνση είναι: = t t t, t t t, t t, t a t a S & & (3.68) Σχήμα 3-5. Προφίλ θέσης, ταχύτητας & επιτάχυνσης. Η μέγιστη ταχύτητα είναι: max at u = (3.69) S 3 S F S S 3 Ταχύτητα Επιτάχυνση t t t t t F -t t F t t t v max Θέση α
67 Η τελική θέση είναι: S = at (3.7) att και ο συνολικός χρόνος της κίνησης υπολογίζεται ως: t = t t (3.7) Από το Σχήμα 3-5, με γνωστή τη μέγιστη επιτάχυνση και τελική θέση και θέτοντας ίσο διάστημα επιτάχυνσης, σταθερής ταχύτητας και επιβράδυνσης ( t = t ), μπορούμε να υπολογίσουμε πλήρως τα προφίλ: S = at = 3 t S t = a u = at = u t max (3.7) Σε ένα ρομποτικό σύστημα στο διάστημα, οι κινήσεις των ρομποτικών βραχιόνων γίνονται πολύ αργά διότι η κίνησή τους επηρεάζει όλο το σύστημα. Επίσης, οι μειωτήρες οι οποίοι χρησιμοποιούνται στην παρούσα διάταξη μειώνουν την γωνιακή ταχύτητα στο φορτίο. Η περιστροφή του συστήματος γίνεται με συνδυασμό του σφονδύλου και των προωθητήρων. Από την εξίσωση (3.4) προκύπτει ότι η μέγιστη ροπή διαθέσιμη για περιστροφή είναι M max =.3 Nm. Η μέγιστη γωνιακή επιτάχυνση για την βάση είναι: M = J && θ && θ J =.3kgm max =.3rad / s (3.73) όπου J είναι η ροπή αδρανείας για την βάση. (Παράρτημα 3) Στην πραγματικότητα, ένα διαστημικό ρομπότ έχει πολύ μικρότερη γωνιακή επιτάχυνση από την & θ max. Η μέγιστη επιτάχυνση στην μεταφορική κίνηση του ρομπότ περιορίζεται από την μέγιστη διαθέσιμη δύναμη κατά x και y. Από την εξίσωση (3.4) προκύπτουν οι μέγιστες δυνάμεις κατά x, y : 67
68 F F x, max y, max =. 83N =. 96N a m = 5.kg x,max =.5m / s, a y,max =.64m / s, a max =.8m / s (3.74) όπου m είναι η συνολική μάζα του ρομπότ (Παράρτημα 3). Παρατηρούμε ότι εξαιτίας της διάταξης των προωθητήρων, η δύναμη άρα και η επιτάχυνση κατά y είναι ελαφρώς μεγαλύτερη από τη δύναμη κατά x. Η ταχύτητα την οποία μπορεί να αναπτύξει το ρομπότ σε ένα πείραμα επάνω στην τράπεζα γρανίτη, περιορίζεται από το μέγεθος της τράπεζας. Η μέγιστη απόσταση την οποία μπορεί να διανύσει το ρομπότ είναι η διαγώνιος της τράπεζας οπότε: u S a max,max max S,max a = =.84 m =.8m / s max u max =.34 m/s (3.75) Επίσης, για μεγάλη ταχύτητα αυξάνεται η αεροδυναμική αντίσταση, κάτι το οποίο είναι ανεπιθύμητο διότι προσομοιώνουμε επίπεδη κίνηση στο διάστημα. Για ταχύτητα του ρομπότ μικρότερη από.5m/s, η αεροδυναμική αντίσταση είναι.4n, η οποία δεν επηρεάζει τα πειραματικά αποτελέσματα [5]. Συνεπώς, στις προσομοιώσεις και στα πειράματα, η μέγιστη ταχύτητα θα είναι μικρότερη από.5m/s. Τα προφίλ ταχυτήτων για όλες τις μεταβλητές ορίζονται στο αρχείο position_proile.m και μπορούν εύκολα να αλλάξουν. 68
69 Μοντέλο Simulink: 69
70 Υποσύστημα PD Controller: 7
71 Υποσύστημα Dynamics: 7
72 4. Λογισμικό 4.. Γενικά Ο έλεγχος του ρομπότ και όλων των υποσυστημάτων του γίνεται από το PC4. Συνολικά, το PC4 εκτελεί τις παρακάτω λειτουργίες: Έλεγχος αρθρώσεων Έλεγχος σφονδύλου αντίδρασης Έλεγχος προωθητήρων Λήψη θέσης με ασύρματη επικοινωνία από εξωτερικό σύστημα εντοπισμού της θέσης του ρομπότ Επικοινωνία με το ηλεκτρονικό υποσύστημα του ρομπότ Οι τρεις πρώτες λειτουργίες είναι η υλοποίηση του αλγόριθμου ελέγχου, όπως αυτός αναλύθηκε στο Kεφάλαιο 3. Το εξωτερικό σύστημα εντοπισμού της θέσης του ρομπότ δίνει την θέση του ως προς το αδρανειακό σύστημα συντεταγμένων και είναι απαραίτητο για την υλοποίηση του ελέγχου. Ο έλεγχος των αρθρώσεων και του σφονδύλου αντίδρασης έχει ως έξοδο την επιθυμητή θέση του αντίστοιχου βαθμού ελευθερίας και υλοποιείται τελικά ως έλεγχος ρεύματος των αντίστοιχων κινητήρων. Ο έλεγχος των προωθητήρων γίνεται με εφαρμογή της μεθόδου διαμόρφωσης εύρους παλμού (Pulse Width Modulation Method PWM). Στην παρούσα φάση, το ηλεκτρονικό υποσύστημα του ρομπότ και η επικοινωνία με την εξωτερική κάμερα και τους οπτικούς αισθητήρες δεν έχουν ολοκληρωθεί. Επειδή δεν είναι δυνατή η ανάπτυξη του πλήρους αλγόριθμου ελέγχου χωρίς να έχει ολοκληρωθεί το αντίστοιχο hardware, η συγγραφή του λογισμικού επικεντρώθηκε στην υλοποίηση των εξής βασικών λειτουργιών, χωρίς να υλοποιηθεί ο τελικός αλγόριθμος ελέγχου: Ανάγνωση των σημάτων από τον encoder κάθε κινητήρα Τροφοδότηση του ενισχυτή ισχύος (servoampliier) κάθε κινητήρα με τάση ανάλογη του σήματος ελέγχου για τον κινητήρα Χρήση των διαθέσιμων ψηφιακών εισόδων και εξόδων 7
73 Οι δύο πρώτες λειτουργίες υλοποιούν τον έλεγχο ρεύματος για τους κινητήρες των αρθρώσεων και του σφονδύλου ενώ η τρίτη λειτουργία είναι απαραίτητη για την επικοινωνία με το ηλεκτρονικό υποσύστημα και την υλοποίηση του ελέγχου των προωθητήρων μέσω PWM. Για να ενεργοποιηθεί ένας προωθητήρας πρέπει να τροφοδοτηθεί με την ονομαστική τάση (5V) και για συγκεκριμένη τιμή κύκλου παλμού το κύκλωμα ενεργοποίησης των βαλβίδων. Συνεπώς, η ενεργοποίηση κάθε προωθητήρα μπορεί να υλοποιηθεί μέσω μίας ψηφιακής εξόδου σε κατάσταση ΟΝ (5V, ενεργοποίηση) ή OFF (V, απενεργοποίηση). Το PC4 έχει δύο κάρτες για την ανάγνωση των αυξητικών παλμογεννητριών (encoder) των κινητήρων και μία κάρτα ψηφιοαναλογικού μετατροπέα (DAC). Επίσης, κάθε πλακέτα ανάγνωσης encoder έχει 8 ψηφιακές θύρες εισόδου/εξόδου (διπλής κατεύθυνσης) και επιπλέον 8 ψηφιακές εισόδους (μονής κατεύθυνσης) ενώ η κάρτα DAC έχει 4 I/O ψηφιακές θύρες. Για την υλοποίηση των παραπάνω βασικών λειτουργιών θα αναπτυχθούν τα αντίστοιχα προγράμματα σε γλώσσα C. Η υλοποίηση έγινε με βάση τα εγχειρίδια λειτουργίας για τις κάρτες του PC4 της εταιρίας κατασκευής του RTD. Στη συνέχεια, θα παρουσιαστούν οι ρουτίνες οι οποίες υλοποιήθηκαν. Ο πλήρης κώδικας δίνεται στο cd το οποίο συνοδεύει την παρούσα διπλωματική. 4.. Βασικοί ορισμοί Οι διάφορες ρουτίνες χρησιμοποιούν κάποιους κοινούς ορισμούς (deines, typedes), οι οποίοι βρίσκονται στο common.h και φαίνονται παρακάτω: #deine TRUE #deine FALSE typede int BOOLEAN; typede unsigned char BYTE; typede enum {D,D,D,D3,D4,D5,D6,D7,D8,D9,D,D,D,D3,D4,D5} BITPOS; typede unsigned int MEMPORT; 4.3. Βασικές συναρτήσεις Οι κάρτες ανάγνωσης encoder και η κάρτα DAC εμφανίζονται στον προγραμματιστή ως ένας αριθμός θέσεων μνήμης (memory addresses), οι οποίες χρησιμοποιούνται για ανάγνωση δεδομένων εισόδου (π.χ. τα δεδομένα από τον encoder ενός κινητήρα) και εγγραφή δεδομένων εξόδου. Για την υλοποίηση αυτής της λειτουργικότητας σε περιβάλλον Linux και γλώσσα C υπάρχουν οι συναρτήσεις inb() και outb(). H inb() 73
74 διαβάζει ένα byte από κάποια θέση μνήμης και η outb() γράφει ένα byte σε κάποια θέση μνήμης. Επειδή η ανάπτυξη του κώδικα έγινε τόσο σε Linux όσο και σε Windows, για λόγους debugging αλλά και για λόγους αποδέσμευσης από τη συγκεκριμένη ονοματολογία, ορίστηκαν οι παρακάτω ρουτίνες (wrappers) για την κλήση των inb() και outb(): outbyte(τιμή, θέση μνήμης): αλλάζει μια διεύθυνση μνήμης inbyte(θέση μνήμης): διαβάζει μια διεύθυνση μνήμης outword(τιμή, θέση μνήμης): γράφει μια λέξη ( bytes - word) σε μια διεύθυνση μνήμης inword(θέση μνήμης): διαβάζει μια λέξη ( bytes) από μια διεύθυνση μνήμης void outbyte(byte b, MEMPORT m) { outb(b,m); #ide DEBUG print(stderr,"outb(%d,%d)\n",b,m); #endi } BYTE inbyte(memport m) { unsigned int b; b=inb(m); #ide DEBUG print(stderr,"inb(%d)\n",m); #endi return(b); } void outword(unsigned int v, MEMPORT m) { BYTE lsb, msb; lsb = v % 56; msb = v / 56; } outbyte(lsb, m); outbyte(msb, m); unsigned int inword(memport m) { BYTE lsb, msb; msb=inbyte(m); lsb=inbyte(m); return(lsb56*msb); } Για τη διαχείριση των bits μέσα στα bytes ορίστηκαν οι παρακάτω συναρτήσεις bit manipulation: bitread(θέση bit, διεύθυνση μνήμης): επιστρέφει την τιμή ενός bit από κάποια θέση μνήμης 74
75 bitset(θέση bit, διεύθυνση μνήμης): «ανάβει» ένα bit σε κάποια θέση μνήμης bitclear(θέση bit, διεύθυνση μνήμης): «σβήνει» ένα bit σε κάποια θέση μνήμης Στον παρακάτω κώδικα διευκρινίζεται ότι στη C ισχύει: <<=, <<=, <<= 4, <<3=8, κλπ. /* Read bit b o memory location m */ BOOLEAN bitread(bitpos b, MEMPORT m) { return ( (inbyte(m) & (<<b) )? TRUE : FALSE ); } /* Set bit b o memory location m and return new contents */ BYTE bitset(bitpos b, MEMPORT m) { BYTE a; a = inbyte(m) (<<b); outbyte(a, m); return(a); } /* Clear bit b o memory location m and return new contents */ BYTE bitclear(bitpos b, MEMPORT m) { BYTE a; a = inbyte(m) & ( ~(<<b) ); outbyte(a, m); return(a); } Οι παραπάνω συναρτήσεις ορίζονται στο hardware.c. Οι βασικές σταθερές του συστήματος ορίστηκαν στο common.h: #deine DAC_BA 64 /* DAC base address */ #deine ENC_BA 5 /* Base address o st encoder */ #deine ENC_BA 768 /* Base address o nd encoder */ /* Encoder Card, BA=5, is dedicated to the let arm */ #deine LARM_MOTOR 5 #deine LARM_MOTOR 56 #deine FREE_ENC 5 /* encoder not connected to any motor */ /* Encoder Card, BA=768, is dedicated to the right arm and the reaction wheel */ #deine RARM_MOTOR 768 #deine RARM_MOTOR 77 #deine REACTION_WHEEL Κάρτα ανάγνωσης encoder Η κάρτα ανάγνωσης encoder διαθέτει τρία κυκλώματα ανάγνωσης encoder από κινητήρα, 6 bit το κάθε ένα, και 4 ψηφιακές Ι/Ο γραμμές. Ο encoder παρουσιάζεται στον προγραμματιστή ως διαδοχικές θέσεις μνήμης, όπως φαίνονται στον πίνακα 4- του εγχειριδίου χρήσης (βλ. και Παράρτημα ). Το 75
76 memory map της κάρτας παρουσιάζεται αναλυτικά bit προς bit στο εγχειρίδιο χρήσης, σελίδες 4-3 έως 4-. Οι διαθέσιμες θέσεις μνήμης για το χρήστη της κάρτας καθορίζονται από το base address (BA) της κάρτας. Το BA μπορεί να αλλάξει ρυθμίζοντας τον συνδυασμό τεσσάρων ON/OFF διακοπτών στην επιφάνεια της κάρτας. Επειδή το ΒΑ είναι μία βασική παράμετρος για την χρήση του hardware, ορίζεται στο αρχείο common.h για τις δύο κάρτες ανάγνωσης encoder. Εάν είναι επιθυμητό να αλλαχτεί το ΒΑ, θα πρέπει να ρυθμιστούν πρώτα οι διακόπτες στην κάρτα (βλ. και σελίδα -8 στο εγχειρίδιο χρήσης) και στη συνέχεια να αλλαχτεί η τιμή του ΒΑ και στο common.h. Τα ΒΑ για τις δύο κάρτες encoder ρυθμίζονται ανεξάρτητα, κάθε BA για κάθε κάρτα του PC4 πρέπει να είναι διαφορετικό. Με βάση το ΒΑ της κάρτας ανάγνωσης encoder, καθορίζονται μοναδικά οι θέσεις μνήμης τις οποίες μπορεί να διαβάσει ή να γράψει ο προγραμματιστής. Η ανάγνωση του encoder κάθε κινητήρα υλοποιείται με τις παρακάτω ρουτίνες, οι οποίες ορίζονται στο encoder.c: EncoderEnable(): ενεργοποίηση του encoder EncoderLoad(): αρχικοποίηση του encoder με την τιμή EncoderSelectRegister(): επιλογή τρόπου λειτουργίας, καθαρισμός ( clean ), παύση λειτουργίας ( hold ) ή χρήση ψηφιακών εισόδων και εξόδων ( digital I/O ). EncoderHold(): παύση λειτουργίας ( hold ) EncoderRead(): ανάγνωση τιμής EncoderClearChip(): καθαρισμός EncoderInitialize(): αρχικοποίηση του encoder με την επιθυμητή base address (BA) Ο κώδικας για τις παραπάνω συναρτήσεις παρουσιάζεται παρακάτω. #deine ENC_LSB #deine ENC_MSB #deine ENC_CLEAR #deine ENC_HOLD #deine ENC_MODE 3 /* Enable incremental encoder */ 76
77 void EncoderEnable(MEMPORT address) { bitset(d5,(address ENC_MODE)); bitset(d6,(address ENC_MODE)); } /* Load at the incremental encoder the starting value "" */ void EncoderLoad(MEMPORT address, unsigned int initialvalue) { outword(initialvalue, address ENC_LSB); } /* This routine picks one o the dierent modes o operation on the selected Encoder chip. ** Select: = Clear mode ** = Hold mode ** = Digital I/O ** 3 = reserved */ void EncoderSelectRegister(MEMPORT address, unsigned char Select) { outbyte((inbyte(address ENC_MODE) & xfc ) Select, address ENC_MODE); } /* This routine latches the selected chip's Encoder counter */ void EncoderHold(MEMPORT address) { EncoderSelectRegister(address, ); /* Hold Mode */ outbyte(, address ENC_HOLD); } /* Actually manages to read the selected encoder chip :) */ unsigned int EncoderRead(MEMPORT address) { EncoderHold(address); return(inbyte(address ENC_LSB) 56*inbyte(address ENC_MSB)); } /* This routine clears the selected Incremental Encoder chip (SelectedChip) by writting "" */ void EncoderClearChip(MEMPORT address) { EncoderSelectRegister(address, ); /* Clear Mode */ outbyte(, address ENC_CLEAR); } /* Initializes the encoder module. Always use this irst! */ void EncoderInitialize(MEMPORT address, MEMPORT address, MEMPORT address3) { EncoderClearChip(address); EncoderClearChip(address); EncoderClearChip(address3); } Ένα απλό πρόγραμμα που διαβάζει τις ψηφιακές εισόδους φαίνεται παρακάτω (encoderin.c): #deine TIMEKILLER 3 void bigdelay() { int i; or(i=; i<=timekiller; i); } void smalldelay() { int i; or(i=; i<=timekiller/; i); } main () { 77
78 } unsigned int input; print("setting permissions..\n"); i ( ioperm(ba,4,)!= ) { print("cannot set permissions!\n"); exit(); } /* We set BA3 and PO. & PO. or input */ print("setting BA3 or digital input..\n"); outbyte(, BA3); /* set only D,D,D3 */ smalldelay(); print("done, BA3 is now: %i (should be: )\n", inbyte(ba3) ); /* And now we read all the digital input lines */ print("starting program, hit ctrl-c to end\n"); print(" \n"); smalldelay(); or(;;) { print("reading all the digital lines.. "); input=inbyte(ba); smalldelay(); print("done\n Value o BA is now: %i\n\n", input); bigdelay(); } Αντίστοιχο πρόγραμμα για ψηφιακή έξοδο (enctestout.c): #deine TIMEKILLER 3 /* Deine two delay unctions, big/small, ** to avoid loops inside the main code*/ void bigdelay() { int i; or(i=; i<=timekiller; i); } void smalldelay() { int i; or(i=; i<=timekiller/; i); } main () { } print("setting permissions..\n"); i ( ioperm(ba,4,)!= ) { /* set permissions */ print("cannot set permissions!\n"); exit(); } print("setting BA3 or digital output..\n"); outbyte( 84, BA3); /* set only D,D,D3 */ smalldelay(); print("done, BA3 is now: %i (should be: 4)\n", inbyte(ba3) ); print("starting program, hit ctrl-c to end\n"); print(" \n"); smalldelay(); print("value o BA is now: %i\n\n", inbyte(ba) ); 78
79 4.5. Κάρτα ψηφιοαναλογικού μετατροπέα (DAC) Η κάρτα DAC διαθέτει οκτώ -bit αναλογικές εξόδους γρήγορης απόκρισης και είναι σταθμισμένη για έξοδο -/V. Το εύρος της τάσης εξόδου είναι ίδιο για τις οκτώ αναλογικές εξόδους. Η κάρτα έχει επίσης 4 ψηφιακές Ι/Ο γραμμές. Αντίστοιχα με τον encoder, η κάρτα DAC παρουσιάζεται στον προγραμματιστή ως 4 διαδοχικές θέσεις μνήμης, όπως φαίνονται στον πίνακα 4- του εγχειριδίου (βλ. και Παράρτημα ). Το memory map της κάρτας παρουσιάζεται αναλυτικά bit προς bit στο εγχειρίδιο χρήσης, σελίδες 4-3 έως 4-7. Οι διαθέσιμες θέσεις μνήμης καθορίζονται από το base address (BA) της κάρτας. Το BA μπορεί να αλλάξει ρυθμίζοντας τον συνδυασμό τεσσάρων ON/OFF διακοπτών στην επιφάνεια της κάρτας. Το ΒΑ του DAC είναι μία βασική παράμετρος για την χρήση του hardware και ορίζεται στο αρχείο common.h Η ρουτίνα η οποία γράφει μια τιμή στο DAC είναι η ακόλουθη και ορίζεται στο dac.c: UpdateDAC(dac, βολτ): γράφει στο dac την τιμή που αντιστοιχεί στα βολτ #deine DAC_LSB 4 /* DAC channel LSB */ #deine DAC_MSB 5 /* DAC channel MSB */ #deine DAC_UPDATE /* Used or updating simultaneously all eight DAC channels */ #deine DAC_HIGH /* DAC highest voltage in mv */ #deine DAC_LOW - /* DAC lowest voltage in mv */ #deine DACOset(low) (((low)==)?.:48.) #deine DACSlope(low, high) (495./(((high)-(low))/.)) /* UpdateDAC: outputs the speciied voltage to the speciied DAC channel (-8) */ void UpdateDAC(unsigned char dac, loat volts) { int value = (int)(loor(volts * DACSlope(DAC_LOW, DAC_HIGH) DACOset(DAC_LOW))); } outbyte(value % 56, DAC_BA DAC_LSB (dac - ) * ); /* LSB */ outbyte(value / 56, DAC_BA DAC_MSB (dac - ) * ); /* MSB */ outbyte(, DAC_BA DAC_UPDATE); Παράδειγμα προγράμματος το οποίο γράφει/διαβάζει το DAC παρουσιάζεται παρακάτω (dacdigital.c): main() { int outputa, outputcup, inputb, inputclow; /* Set DAC permissions */ i ( ioperm(dac_ba,3,)!= ) { print("error: cannot set DAC permissions!\n"); exit(); } 79
80 /* Control word to set the ports */ controlbyte=3; outbyte(controlbyte,dac_ba3); /* ** Using outbyte() we set the value o the digital output port to ** equal the value passed as parameter output. Each digital output ** line is represented by a bit o output. Digital out is bit, ** digital out is bit, and so on. */ print("enter any value between -55 or output at Port A(8 bits)\n "); scan("%", &outputa); outbyte(outputa,dac_ba); print("enter any value between -55 or output at Port C upper(4 bits)\n"); scan("%", &outputcup); outbyte(outputcup,dac_ba); } /* ** Using inbyte() we read the value o the digital input port. Each ** digital input line is represented by a bit o the return value. ** Digital in is bit, digital in is bit, and so on. */ print("reading the input lines at Port B (8 bits)...\n"); inputb=inbyte(dac_ba); print("input at line B is %d\n", inputb); print("reading the input lines at Port C lower (4 bits)...\n"); inputclow=inbyte(dac_ba); print("input at line C lower is %d\n", inputclow); 4.6. Κινητήρας Το τμήμα προγράμματος το οποίο γράφει/διαβάζει το hardware του κινητήρα φαίνεται παρακάτω (motornew.c). EncoderInitialize(LARM_MOTOR, LARM_MOTOR, FREE_ENC); EncoderLoad(LARM_MOTOR, ); EncoderEnable(LARM_MOTOR); EncoderLoad(LARM_MOTOR, ); EncoderEnable(LARM_MOTOR); EncoderLoad(FREE_ENC, ); EncoderEnable(FREE_ENC); voltage=.; temp=encoderread(larm_motor); print("starting encoder counts are %6d\n", temp); while(voltage!=) { * begin while */ print("enter voltage in V between %d and %d, zero to stop: ", DAC_LOW/, DAC_HIGH/); scan("%", &voltage); print(pdata, "#voltage=%\n", voltage); /* Update DAC */ 8
81 } i (DAC_LOW==) { UpdateDAC(, voltage); UpdateDAC(, voltage); UpdateDAC(3, voltage); UpdateDAC(4, voltage); UpdateDAC(5, voltage); UpdateDAC(6, voltage); UpdateDAC(7, voltage); UpdateDAC(8, voltage); } else { UpdateDAC(, voltage); UpdateDAC(, -voltage); UpdateDAC(3, voltage); UpdateDAC(4, -voltage); UpdateDAC(5, voltage); UpdateDAC(6, -voltage); UpdateDAC(7, voltage); UpdateDAC(8, -voltage); } or(i=; i<; i) { counts=encoderread(larm_motor); counts=encoderread(larm_motor); counts3=encoderread(free_enc); // print("%6d %6d %6d\n", counts, counts, counts3); angle=(loat)(counts-temp)*36./496.; print(pdata,"%d, %\n", counts, angle); temp=counts; } } /* end while */ close(pdata); return(); 4.7. Εφαρμογές Πραγματικού Χρόνου (Real Time) Το λειτουργικό σύστημα του PC4 επιτρέπει τον προγραμματισμό του ρομπότ σε συνθήκες πραγματικού χρόνου. Ο προγραμματισμός μιάς εφαρμογής πραγματικού χρόνου δεν είναι απλή υπόθεση και φυσικά προϋποθέτει ότι όλα τα επιμέρους συστήματα έχουν υλοποιηθεί και έχει ελεγχθεί η λειτουργία τους. Στην παρούσα φάση, ο εξομοιωτής βρίσκεται στο στάδιο της τελικής υλοποίησής του, για αυτό το λόγο, αποφασίστηκε οι συναρτήσεις οι οποίες προγραμματιστήκαν στα πλαίσια αυτής της εργασίας στην παρούσα φάση να μην υλοποιηθούν ως εφαρμογές πραγματικού χρόνου. Ωστόσο, για λόγους πληρότητας δίνουμε στο cd το οποίο συνοδεύει την παρούσα διπλωματική μία εφαρμογή πραγματικού χρόνου. Η εφαρμογή δεν είναι παρά το πολύ γνωστό Hello World, γραμμένο όμως με τέτοιο τρόπο ώστε να δείξει πώς δομείται μία εφαρμογή πραγματικού χρόνου. 8
82 4.8. Γεωμετρικές ρουτίνες Για τους βασικούς γεωμετρικούς υπολογισμούς, όπως δημιουργία σημείων, υπολογισμός αποστάσεων, κλπ γράφτηκαν αρκετές ρουτίνες, οι οποίες ορίζονται στο geometry.c. Ενδεικτικά παραδείγματα ακολουθούν. Ορισμός τύπου σημείου και δημιουργία από τις συντεταγμένες του: typede struct { double x,y; } POINT; POINT Point(double, double g) { POINT p; p.x=; p.y=g; return(p); } Ορισμός τύπου τριγώνου και δημιουργία από σημεία: typede struct { POINT a,b,c; } TRIANGLE; TRIANGLE TriangleFromPoints(POINT d, POINT e, POINT ) { TRIANGLE t; t.a=d; t.b=e; t.c=; return(t); } Συνάρτηση η οποία επιστρέφει την απόσταση σημείων: double PointDistance(POINT p, POINT q) { return(sqrt((q.x-p.x)*(q.x-p.x)(q.y-p.y)*(q.y-p.y))); } Συνάρτηση η οποία επιστρέφει το εμβαδόν τριγώνου από 3 σημεία: double AreaTriangle(TRIANGLE t) { double ab=pointdistance(t.a, t.b); double bc=pointdistance(t.b, t.c); double ca=pointdistance(t.c, t.a); double s=.5 * (abbcca); return(sqrt(s*(s-ab)*(s-bc)*(s-ca))); } Συνάρτηση η οποία ελέγχει εάν ένα σημείο βρίσκεται εντός τριγώνου: BOOLEAN PointInsideTriangle(POINT p, TRIANGLE t) { VECTOR pa = VectorFromPoints(p,t.a); VECTOR pb = VectorFromPoints(p,t.b); VECTOR pc = VectorFromPoints(p,t.c); double angle = VectorAngle(pa,pb) VectorAngle(pb,pc) VectorAngle(pc,pa); return(almost_equal(angle, *PI)); } 8
83 5. Αποτελέσματα Προσομοιώσεων και Πειραμάτων 5.. Εισαγωγή Με σκοπό τη μελέτη της συμπεριφοράς του συστήματος και της επιβεβαίωσης του αναπτυχθέντος μοντέλου και αλγόριθμου ελέγχου, έγιναν προσομοιώσεις των κινήσεων του ρομπότ στο περιβάλλον Simulink. Εξετάστηκε η απόκριση κάθε βαθμού ελευθερίας και στη συνέχεια η συμπεριφορά του συστήματος σε σύνθετες κινήσεις. Επίσης, διεξάχθηκε ένα πείραμα μεταφορικής και περιστροφικής κίνησης του ρομπότ πάνω στον γρανίτη [5] με σκοπό την πειραματική παρατήρηση και επιβεβαίωση της συμπεριφοράς του συστήματος. Τα προφίλ επιθυμητής θέσης, ταχύτητας και επιτάχυνσης για κάθε προσομοίωση καθορίζονται σύμφωνα με την ανάλυση στο Κεφάλαιο 3 ( 3.6.3). Για κάθε βαθμό ελευθερίας, η τελική θέση S και επιτάχυνση α είναι γνωστά. Οι χρόνοι επιτάχυνσης ( t ), σταθερής ταχύτητας ( t ) και επιβράδυνσης ( t 3 ) είναι ίσοι. Τα προφίλ υπολογίζονται ως εξής: S = at = 3 t S t = a u = at = u t t = t = t 3 max (5.) Σε κάθε προσομοίωση οι αρχικές συνθήκες θέσης, ταχύτητας και επιτάχυνσης είναι μηδέν για όλες τις μεταβλητές, εκτός εάν αναφέρεται κάτι διαφορετικό. Σε κάθε εξεταζόμενη περίπτωση, όλες οι υπόλοιπες μεταβλητές ελέγχου διατηρούνται στην αρχική τους θέση. Υπενθυμίζουμε ότι: (&& K ( q q) K ( q& q& )) C F = H qd p d d d (5.) q&& όπου q, q&, q& είναι η επιθυμητή θέση, ταχύτητα και επιτάχυνση αντίστοιχα. d d d 83
84 5.. Προσομοίωση μεταφορικής κίνησης Η μεταφορική κίνηση κατά X, Y του κέντρου βάρους της βάσης αντιστοιχεί στις μεταβλητές ελέγχου (ή βαθμούς ελευθερίας) Rc x Rc y,. 5.. Κίνηση κατά X Το διάνυσμα των επιθυμητών θέσεων είναι: [ q ] T q = (5.3) d dx και ομοίως τα q &, q&. d d Το προφίλ της μεταφορικής κίνησης κατά X είχε τα εξής χαρακτηριστικά: S =.4m, t =.697s, a =.7495m / s, u max t = 8.9s =.74m / s (5.4) Τα αποτελέσματα είναι:.4 Translation movement.35.3 x y desired Distance [m].5..5 x Time [s] Σχήμα 5-. Μεταφορική κίνηση (Χ), με () είναι η επιθυμητή θέση. 84
85 Thruster Force [N] Thrusters,, 3 Forces Thruster Thruster Thruster 3 Thruster Force [N] Thrusters 4, 5, 6 Forces Thruster 4 Thruster 5 Thruster Time [s] (α) Time [s] (β) Σχήμα 5-. Ενεργοποίηση προωθητήρων (α),, 3, (β) 4, 5, 6. Το σύστημα ακολουθεί πολύ καλά το επιθυμητό προφίλ θέσης χωρίς παρεκκλίσεις. Παρατηρούμε ότι ενεργοποιούνται πρώτα οι προωθητήρες, 5 για το επιταχυνόμενο τμήμα και στη συνέχεια οι, 6 για το επιβραδυνόμενο. Οι προωθητήρες 3, 4 δεν ενεργοποιούνται. Οι προωθητήρες δίνουν δύναμη σαφώς μικρότερη από την μέγιστη δυνατή, το οποίο σημαίνει ότι το σύστημα μπορεί να ανταποκριθεί και σε μεγαλύτερες απαιτήσεις. Οι διαταραχές στους υπόλοιπους βαθμούς ελευθερίας του συστήματος: x - Joints, x - Joints, 5 Joint Joint 5 Joint Joint Angle [deg] -5 Angle [deg] Time [s] (α) Time [s] (β) Σχήμα 5-3. (α) Διαταραχή Βραχίονα, (β) Διαταραχή Βραχίονα. 85
86 x - Rotation Angle [deg] Time [s] Σχήμα 5-4. Περιστροφή. Οι υπόλοιποι βαθμοί ελευθερίας έχουν πρακτικά αμελητέες διαταραχές της τάξης του. Οι βραχίονες, παρουσιάζουν όμοια συμπεριφορά, κάτι το οποίο είναι αναμενόμενο διότι έχουν τα ίδια αδρανειακά χαρακτηριστικά και κέρδη ελέγχου. Συνολικά, η συμπεριφορά του ρομπότ στην μεταφορική κίνηση κατά X είναι πολύ καλή. 5.. Κίνηση κατά Y Το διάνυσμα των επιθυμητών θέσεων είναι: [ q ] T q = (5.5) d dy και ομοίως τα q &, q&. d d Το προφίλ της μεταφορικής κίνησης κατά y είχε τα εξής χαρακτηριστικά: S =.4m, t =.5s, t a =.375m / s, u max = 7.53s =.7969m / s (5.6) Τα αποτελέσματα της προσομοίωσης είναι: 86
87 .4 Translation movement.35.3 x y desired Distance [m].5..5 y Time [s] Σχήμα 5-5. Μεταφορική κίνηση (Y), με () είναι η επιθυμητή θέση. Thrusters,, 3 Forces Thrusters 4, 5, 6 Forces.3 Thruster Thruster Thruster 3.3 Thruster 4 Thruster 5 Thruster Thruster Force [N]..5 Thruster Force [N] Time [s] Time [s] (α) (β) Σχήμα 5-6. Ενεργοποίηση προωθητήρων (α),, 3 (β) 4, 5, 6. Το σύστημα ακολουθεί πολύ καλά το επιθυμητό προφίλ θέσης, όπως και στην κίνηση κατά X. Πρώτα ενεργοποιούνται οι προωθητήρες, 3 και 5 στο επιταχυνόμενο τμήμα της κίνησης και στη συνέχεια οι, 4 και 6 για το επιβραδυνόμενο τμήμα. Οι προωθητήρες δίνουν δύναμη σαφώς μικρότερη από την μέγιστη δυνατή, το οποίο σημαίνει ότι το σύστημα μπορεί να ανταποκριθεί και σε μεγαλύτερες απαιτήσεις. Παρατηρούμε ότι το σύστημα είναι ελαφρώς πιο γρήγορο στην μεταφορική κίνηση κατά Υ από ότι κατά Χ, κάτι το οποίο είναι αναμενόμενο διότι οι προωθητήρες 3, 4 έχουν συνιστώσα μόνον κατά Υ και η μέγιστη συνολικά διαθέσιμη δύναμη στην διεύθυνση Υ είναι μεγαλύτερη από την κατά Χ, εξίσωση (3.74) Οι διαταραχές στους υπόλοιπους βαθμούς ελευθερίας του συστήματος: 87
88 x Joints, Joint Joint x Joints, Joint Joint Angle [deg] Angle [deg] Time [s] (α) Time [s] (β) Σχήμα 5-7. (α) Διαταραχή Βραχίονα, (β) Διαταραχή Βραχίονα. x - 5 Rotation 4 3 Angle [deg] Time [s] Σχήμα 5-8. Περιστροφή. Οι υπόλοιποι βαθμοί ελευθερίας έχουν πρακτικά αμελητέες διαταραχές της τάξης του 9 για τους βραχίονες, και για την περιστροφή. Οι διαταραχές στους βραχίονες είναι λίγο μεγαλύτερες από αυτές για την κίνηση κατά Χ ενώ η διαταραχή στην περιστροφή είναι παρόμοια. Συγκριτικά λοιπόν, οι βραχίονες επηρεάζονται περισσότερο από την ταχύτητα του συστήματος από ότι η περιστροφή. Συνολικά, η συμπεριφορά του ρομπότ στην μεταφορική κίνηση κατά Υ είναι πολύ καλή Κίνηση κατά X, Y Εξετάζουμε την κίνηση του συστήματος κατά την συνδυασμένη μεταφορική κίνηση X, Y. Τα προφίλ της κίνησης για X και Y είναι όμοια με εκείνα των παραγράφων 5..,
89 Το διάνυσμα των επιθυμητών θέσεων είναι: [ q ] T q = (5.7) d dx q dy και ομοίως τα q &, q&. d d.4 Translation movement Distance [m] y x Time [s] Σχήμα 5-9. Μεταφορική κίνηση (X, Y), με () είναι το επιθυμητό προφίλ. Thrusters,, 3 Forces Thrusters 4, 5, 6 Forces.3 Thruster Thruster Thruster Thruster 4 Thruster 5 Thruster Thruster Force [N]..5. Thruster Force [N] Time [s] Time [s] (α) (β) Σχήμα 5-. Ενεργοποίηση προωθητήρων (α),, 3 (β) 4, 5, 6. Το σύστημα ακολουθεί πολύ καλά το επιθυμητό προφίλ θέσης, με την κίνηση κατά Υ να είναι ελαφρώς γρηγορότερη. Για την κίνηση, ενεργοποιούνται πρώτα οι προωθητήρες, 3 και 5 στο επιταχυνόμενο τμήμα της κίνησης και στη συνέχεια οι,, 4, 6 για το επιβραδυνόμενο. Η ελαφρώς γρηγορότερη απόκριση οφείλεται στο ότι η μέγιστη συνολικά διαθέσιμη δύναμη στην διεύθυνση Υ είναι μεγαλύτερη από την κατά Χ, εξίσωση (3.74). Οι διαταραχές στους υπόλοιπους βαθμούς ελευθερίας του συστήματος: 89
90 x Joints, Joint Joint x Joints, Joint Joint.5.5 Angle [deg].5 Angle [deg] Time [s] (α) Time [s] (β) Σχήμα 5-. (α) Διαταραχή Βραχίονα, (β) Διαταραχή Βραχίονα. x - Rotation.5 Angle [deg] Time [s] Σχήμα 5-. Περιστροφή. Οι βραχίονες έχουν μία διαταραχή της τάξης του -9 και η περιστροφή έχει μία διαταραχή της τάξης του -. Είναι ενδιαφέρον ότι οι διαταραχές στους βραχίονες στο τέλος της προσομοίωσης είναι μικρότερες σε σχέση με τις προηγούμενες περιπτώσεις. Πιθανώς αυτό συμβαίνει επειδή η κίνηση είναι συμμετρική κατά X και Y, οπότε αλληλοεξουδετερώνονται. Συνολικά, η συμπεριφορά του συστήματος σε μεταφορική κίνηση είναι πολύ καλή Προσομοίωση περιστροφής Η περιστροφή αντιστοιχεί στην μεταβλητή ελέγχου θέσεων είναι: d z. Το διάνυσμα των επιθυμητών [ d ] T q = (5.8) d zd 9
91 και ομοίως τα q &, q&. d d Το προφίλ της περιστροφής γύρω από τον κατακόρυφο Z άξονα είχε τα εξής χαρακτηριστικά: S = π = 45 4 t =.4s, & θ t = 4.3s max, && θ =.rad / s =.8rad / s (5.9) Τα αποτελέσματα της προσομοίωσης και η ενεργοποίηση των επενεργητών: 45 Rotation Angle [deg] Time [s] Σχήμα 5-3. Περιστροφή. Με κόκκινο είναι το επιθυμητό προφίλ..8 Reaction Wheel Torque.6.4 Torque [Nm] Time [s] Σχήμα 5-4. Ενεργοποίηση σφονδύλου αντίδρασης. 9
92 Thruster Force [N] Thr. 3 Thrusters,, 3 Forces Thr. Thruster Thruster Thruster 3 Thruster Force [N] Thr. 5 Thrusters 4, 5, 6 Forces Thr. 6 Thr. 4 Thruster 4 Thruster 5 Thruster 6 Thr Time [s] (α) Time [s] (β) Σχήμα 5-5. Ενεργοποίηση προωθητήρων (α),, 3 (β) 4, 5, 6. Tο σύστημα ακολουθεί πολύ καλά το επιθυμητό προφίλ θέσης. Oι προωθητήρες ενεργοποιούνται σε χαμηλές τιμές ώθησης, μικρότερες του.8n. Επίσης, ο προωθητήρας ενεργοποιείται και απενεργοποιείται πολύ γρήγορα μεταξύ.5 s και.8 s. Ομοίως, για τους προωθητήρες 4, 5, 6 στα αντίστοιχα χρονικά διαστήματα. Ο σφόνδυλος αντίδρασης δίνει ροπή κοντά στην μέγιστη διαθέσιμη ( 9.56 mnm ) για το μεγαλύτερο τμήμα της τροχιάς. Συνεπώς, για μεγαλύτερη ζητούμενη γωνιακή επιτάχυνση, η επιπλέον ανάγκη ροπής θα δοθεί από τους προωθητήρες. Το σύστημα πάντως διαθέτει επαρκή ροπή για να ανταποκριθεί και σε ταχύτερες κινήσεις, εάν αυτό είναι επιθυμητό. Επίσης, μπορεί να μειωθεί η γωνιακή επιτάχυνση στο προφίλ ταχύτητας έτσι ώστε να μειωθεί η χρήση των προωθητήρων. Οι διαταραχές στους υπόλοιπους βαθμούς ελευθερίας του συστήματος παραουσιάζονται παρακάτω: Joints, Joints,.5 Joint Joint.5 Joint Joint.5.5 Angle [deg] Angle [deg] Time [s] Time [s] (α) (β) Σχήμα 5-6. (α) Διαταραχή Βραχίονα, (β) Διαταραχή Βραχίονα. 9
93 .5 x -4 x y Translation movement.5 Distance [m] Time [s] Σχήμα 5-7. Κίνηση X, Y. Παρατηρούμε ότι τα σφάλματα στους βραχίονες λόγω διαταραχών από την περιστροφή του σώματος αν και μικρά είναι αυξημένα σε σχέση με τις προσομοιώσεις για τις κινήσεις κατά X, Y. Στο τέλος της προσομοίωσης, οι αρθρώσεις, έχουν στραφεί κατά.5 και οι αρθρώσεις, κατά.3. Υπάρχει επίσης μία πολύ μικρή μετατόπιση της τάξης του 4 του κέντρου βάρους της βάσης. Τα αποτελέσματα αυτά είναι αναμενόμενα διότι η περιστροφή του συστήματος επηρεάζει τους βραχίονες και στην μελέτη της δυναμικής του ρομπότ, δεν συμπεριλήφθηκε η επίδρασή τους (βλ. 3.3). Τα αποτελέσματα είναι ικανοποιητικά, κάτι το οποίο δείχνει ότι η παραδοχή που έγινε στην 3.3 είναι αποδεκτή και ο έλεγχος ο οποίος αναπτύχθηκε μπορεί να παραλάβει τα σφάλματα. Η βελτίωση του δυναμικού μοντέλου με την προσθήκη της επίδρασης των βραχιόνων αναμένεται να μειώσει σημαντικά τα σφάλματα τα οποία έχουν οι βραχίονες στο τέλος της κίνησης Προσομοίωση περιστροφής αρθρώσεων βραχιόνων Η περιστροφή μίας άρθρωσης εκφράζεται από την μεταβλητή ελέγχου th ij, i =,, j =,. Ο βραχίονας είναι όμοιος με τον βραχίονα, όπως φαίνεται και από τις όμοιες αποκρίσεις στις παραπάνω προσομοιώσεις. Για αυτό το λόγο, θα παρουσιαστούν τα αποτελέσματα των προσομοιώσεων μόνο για τον βραχίονα. Σε όλες τις προσομοιώσεις περιστροφής των αρθρώσεων, ο αντίστοιχος κινητήρας δεν μπήκε στην περιοχή κορεσμού. 93
94 5.4. Περιστροφή άρθρωσης Η περιστροφή της άρθρωσης αντιστοιχεί στην μεταβλητή ελέγχου th. Το διάνυσμα των επιθυμητών θέσεων είναι (ομοίως q &, q& ): d d [ th ] T q = (5.) d d Το προφίλ της περιστροφής είναι: S = π =.5, && θ =.6 rad / s 8 t =.8 s, & θ =.7 rad / s t =.83 s max (5.) Τα αποτελέσματα της προσομοίωσης είναι: Joints, 5 Joint Joint desired Angle [deg] Time [s] Σχήμα 5-8. Άρθρωση,. Joints, Torque.8.6 Joint Joint.4 Torque [Nm] Time [s] Σχήμα 5-9. Ενεργοποίηση κινητήρα άρθρωσης, ροπή στο φορτίο. 94
95 Η άρθρωση ακολουθεί πολύ καλά το επιθυμητό προφίλ και έχει γρήγορη απόκριση. Το διάγραμμα ροπής από τον κινητήρα αναφέρεται στην ροπή από την μεριά του φορτίου, δηλαδή μετά τον μειωτήρα. Ο λόγος μείωσης είναι n = 67/64, η μέγιστη ροπή του κινητήρα είναι 6.8 mnm (3.3) και η μέγιστη ροπή στο φορτίο είναι 5 Nm. Συνεπώς, το σύστημα μπορεί να ανταποκριθεί στις ανάγκες του φορτίου και υπάρχει σημαντικό απόθεμα διαθέσιμης ροπής. Οι διαταραχές στους υπόλοιπους βαθμούς ελευθερίας του συστήματος: Joints,.8 Joint Joint.6.4 Angle [deg] Time [s] Σχήμα 5-. Άρθρωση,. Rotation.. Angle [deg] Time [s] Σχήμα 5-. Περιστροφή. 95
96 x -5 Translation movement 5 x: blue, y: black Distance [m] Time [s] Σχήμα 5-. X, Y. 5 Υπάρχει μία μικρή μετατόπιση κατά Χ, Υ της τάξης του ενώ το σύστημα δεν έχει κάποια παραμένουσα στροφή. Οι αρθρώσεις στον άλλο βραχίονα έχουν στο τέλος της κίνησης μία μικρή στροφή Περιστροφή άρθρωσης Η περιστροφή της άρθρωσης αντιστοιχεί στην μεταβλητή ελέγχου th. Το διάνυσμα των επιθυμητών θέσεων είναι: [ th ] T q = (5.) d και ομοίως τα q &, q&. d d Το προφίλ της περιστροφής είναι: S = π =.5 6 t =.33 s, & θ t =.9397 s max, && θ = rad / s =.333 rad / s (5.3) Τα αποτελέσματα της προσομοίωσης είναι: 96
97 Joints, Joint Joint desired 8 Angle [deg] Time [s] Σχήμα 5-3. Άρθρωση,..5. Joints, Torque Joint Joint.5 Torque [Nm] Time [s] Σχήμα 5-4. Ενεργοποίηση κινητήρα άρθρωσης, ροπή στο φορτίο. Η άρθρωση ακολουθεί πολύ καλά το επιθυμητό προφίλ και έχει γρήγορη απόκριση. Ομοίως με την άρθρωση, το διάγραμμα ροπής από τον κινητήρα αναφέρεται στην ροπή από την μεριά του φορτίου, δηλαδή μετά τον μειωτήρα και η μέγιστη ροπή στο φορτίο είναι 5 Nm. Συνεπώς, το σύστημα μπορεί να ανταποκριθεί στις ανάγκες του φορτίου και υπάρχει σημαντικό απόθεμα διαθέσιμης ροπής. Η σύγκριση της απόκρισης της άρθρωσης με της άρθρωσης, δείχνει ότι η απόκριση της είναι ελαφρώς καλύτερη. Αυτό οφείλεται στο ότι έχουν διαφορετικά κέρδη και ροπές αδρανείας. Οι διαταραχές στους υπόλοιπους βαθμούς ελευθερίας του συστήματος: 97
98 Joints,..8 Joint Joint.6.4 Angle [deg] Time [s] Σχήμα 5-5. Άρθρωση,.. Rotation.5 Angle [deg] Time [s] Σχήμα 5-6. Περιστροφή. x -4 Translation movement.5 x y Distance [m] Time [s] Σχήμα 5-7. X, Y. Υπάρχει μία μικρή μετατόπιση κατά X, Y της τάξης του 4, η οποία είναι ελαφρώς μεγαλύτερη από την αντίστοιχη για την στροφή της άρθρωσης. Επίσης, το σύστημα έχει μικρή παραμένουσα στροφή, σε αντίθεση με την συμπεριφορά του συστήματος για 98
99 τη στροφή της άρθρωσης. Οι αρθρώσεις στον άλλο βραχίονα έχουν στο τέλος της κίνησης μία μικρή στροφή Περιστροφή άρθρωσης & Εξετάζουμε την κίνηση του συστήματος όταν στρέφεται η άρθρωση και. Τα προφίλ της κίνησης για τις δύο αρθρώσεις είναι όμοια με εκείνα των παραγράφων 5.4., Το διάνυσμα των επιθυμητών θέσεων είναι: [ th th ] T q = (5.4) d και ομοίως τα q &, q&. d d Τα αποτελέσματα της προσομοίωσης είναι: Joints, 5 Joint Joint desired desired Angle [deg] Time [s] Σχήμα 5-8. Άρθρωση,. Με κόκκινο είναι το επιθυμητό προφίλ. Joints, Torque..8 Joint Joint.6.4 Torque [Nm] Time [s] Σχήμα 5-9. Ενεργοποίηση κινητήρα άρθρωσης,, ροπή στο φορτίο. 99
100 Οι αρθρώσεις, ακολουθούν πολύ καλά το επιθυμητό προφίλ. Σε σχέση ωστόσο με την απόκριση της άρθρωσης ξεχωριστά, υπάρχει μία πολύ μικρή απόκλιση για t = s, η οποία όμως διορθώνεται άμεσα. Οι διαταραχές στους υπόλοιπους βαθμούς ελευθερίας του συστήματος: Joints,.5 Joint Joint Angle [deg] Time [s] Σχήμα 5-3. Άρθρωση,. Rotation.3.. Angle [deg] Time [s] Σχήμα 5-3. Περιστροφή.
101 x -4 Translation movement.5 x y Distance [m] Time [s] Σχήμα 5-3. X, Y. Υπάρχει μία μικρή μετατόπιση κατά X, Y, η οποία είναι λίγο μεγαλύτερη από την αντίστοιχη για την στροφή της κάθε άρθρωσης χωριστά. Ωστόσο, το σύστημα δεν έχει παραμένουσα στροφή στο τέλος της κίνησης. Οι αρθρώσεις στον άλλο βραχίονα έχουν στο τέλος της κίνησης μία μικρή στροφή, όμοια με αυτήν που παρατηρήθηκε για κάθε άρθρωση ξεχωριστά. Συνολικά, το σύστημα έχει πολύ καλή απόκριση στην στροφή των αρθρώσεων. Η σύγκριση των αποτελεσμάτων της κίνησης των βραχιόνων με τα αποτελέσματα από την περιστροφή, δείχνει ότι η κίνηση των βραχιόνων επηρεάζει την στροφή του ρομπότ. Η επίδραση αυτή είναι μικρότερη στο τέλος της κίνησης σε σχέση με την περιστροφή. Η ταχύτητα με την οποία κινείται η κάθε άρθρωση είναι αρκετά μικρή έτσι ώστε να μην επηρεάζει σημαντικά το υπόλοιπο σύστημα, μπορεί πάντως να μειωθεί περισσότερο. Μία τέτοια μείωση σε συνδυασμό με την βελτίωση του δυναμικού μοντέλου θα δώσει ακόμα καλύτερα αποτελέσματα Προσομοίωση σύνθετων κινήσεων Έχοντας μελετήσει την συμπεριφορά του συστήματος σε απλές κινήσεις των βαθμών ελευθερίας του, έγιναν προσομοιώσεις ορισμένων πιο συνθέτων κινήσεων. Ο σκοπός είναι να εξεταστεί η συμπεριφορά του συστήματος όταν οι αρχικές συνθήκες δεν είναι μηδέν και υπάρχει παραμένον σφάλμα από τις προηγούμενες κινήσεις.
102 5.5. Περιστροφή και μεταφορά Εξετάζουμε την κίνηση του συστήματος όταν μετά την ολοκλήρωση της περιστροφής ζητείται μία μεταφορική κίνηση. Για να είναι πιο εύκολη η σύγκριση με τα προηγούμενα αποτελέσματα, εξετάστηκε η μεταφορική κίνηση κατά X,Y, με προφίλ όμοια με των 5.., 5..., μετά την ολοκλήρωση μίας περιστροφική κίνησης, όπως αυτή της Translation movement.35.3 y x y desired x desired y Distance [m].5..5 x Time [s] Σχήμα Μεταφορική κίνηση (X, Y). Με κόκκινο είναι το επιθυμητό προφίλ. Thrusters,, 3 Forces Thrusters 4, 5, 6 Forces.3 Thruster Thruster Thruster Thruster 4 Thruster 5 Thruster Thruster Force [N]..5. Thruster Force [N] Time [s] Time [s] (α) (β) Σχήμα Ενεργοποίηση προωθητήρων (α),, 3, (β) 4, 5, 6. Η σύγκριση με τα αποτελέσματα της παραγράφου 5..3 δείχνει ότι (α) το σύστημα ακολουθεί πολύ καλά το επιθυμητό προφίλ και δεν παρατηρείται κάποια διαφοροποίηση, (β) ενεργοποιούνται οι ίδιοι προωθητήρες για το ίδιο χρονικό διάστημα και (γ) οι απαιτούμενες δυνάμεις είναι ίδιες. Οι διαταραχές στους υπόλοιπους βαθμούς ελευθερίας του συστήματος:
103 x Joints, Joint Joint x Joints, Joint Joint 4 4 Angle [deg] 8 Angle [deg] Time [s] Time [s] (α) (β) Σχήμα (α) Διαταραχή βραχίονα, (β) Διαταραχή βραχίονα..3 Rotation.5. Angle [deg] Time [s] Σχήμα Περιστροφή. Το σύστημα στο τέλος της κίνησης έχει μηδενικές παραμένουσες διαταραχές. Αυτό είναι ιδιαίτερα ενδιαφέρον διότι δείχνει ότι το σύστημα είναι ικανό να εκτελέσει διαδοχικές κινήσεις με πολύ καλή ακρίβεια χωρίς αύξηση των σφαλμάτων Περιστροφή και στροφή άρθρωσης Εξετάζουμε την κίνηση του συστήματος όταν μετά την ολοκλήρωση μιάς περιστροφικής κίνησης ζητείται η στροφή της άρθρωσης. Για να είναι πιο εύκολη η σύγκριση με τα προηγούμενα αποτελέσματα, το επιθυμητό προφίλ για την περιστροφή είναι αυτό της 5.3 και η στροφή της άρθρωσης έχει προφίλ όμοιο με εκείνο της Υπενθυμίζουμε ότι το διάγραμμα ροπής από τον κινητήρα αναφέρεται στην ροπή από 3
104 την μεριά του φορτίου, δηλαδή μετά τον μειωτήρα, και η μέγιστη ροπή στο φορτίο είναι 5Nm. Τα αποτελέσματα της προσομοίωσης είναι: Joints, Joint Joint desired 8 Angle [deg] Time [s] Σχήμα Άρθρωση,. Joints, Torque.5 Joint Joint..5 Torque [Nm] Time [s] Σχήμα Ενεργοποίηση κινητήρα άρθρωσης, ροπή στο φορτίο. Η σύγκριση με τα αποτελέσματα της παραγράφου 5.4. δείχνει ότι (α) η άρθρωση ακολουθεί πολύ καλά το επιθυμητό προφίλ και (β) η απαιτούμενη ροπή είναι ίδια και ασκείται για το ίδιο χρονικό διάστημα. Οι διαταραχές στους υπόλοιπους βαθμούς ελευθερίας του συστήματος: 4
105 Joints,..8.6 Joint Joint Angle [deg] Time [s] Σχήμα Άρθρωση,..3 Rotation.5..5 Angle [deg] Time [s] Σχήμα 5-4. Περιστροφή. x -4 Translation movement.5 x y Distance [m] Time [s] Σχήμα 5-4. X, Y. Οι αρθρώσεις, έχουν μία μικρή στροφή, ίδια με αυτήν που παρατηρείται στο Σχήμα 5.5. Επίσης, το σύστημα έχει μικρή παραμένουσα στροφή, και υπάρχει μία 5
106 μικρή μετατόπιση κατά Χ,Υ, ελαφρώς μεγαλύτερη σε σχέση με το Σχήμα 5.7. Συνολικά, η απόκριση της άρθρωσης παραμένει σχεδόν ίδια χωρίς αξιοσημείωτη αύξηση των σφαλμάτων Πειραματικά Αποτελέσματα Στα πλαίσια της μελέτης της συμπεριφοράς του ρομπότ πραγματοποιηθήκαν και πειράματα με το πραγματικό σύστημα πάνω στην τράπεζα από γρανίτη. Επειδή τα συστήματα τα οποία δίνουν την θέση του ρομπότ και τα απαραίτητα ηλεκτρονικά δεν ήταν έτοιμα, τα πειράματα έγιναν με έλεγχο ανοικτού βρόγχου και χρησιμοποιώντας μόνο τους προωθητήρες. Οι προωθητήρες λειτουργούν ως on/o βαλβίδες. Η προσομοίωση των πειραμάτων έγινε χρησιμοποιώντας μία διαφοροποιημένη εκδοχή του Simulink μοντέλου με έλεγχο ανοικτού βρόγχου. Στην συνέχεια, τα αποτελέσματα της προσομοίωσης συγκρίθηκαν με τα πειραματικά αποτελέσματα για την επιβεβαίωσή τους. Η κίνηση η οποία μελετήθηκε αποτελείται από τα εξής τμήματα:. Επιταχυνόμενη μεταφορική κίνηση κατά x διάρκειας.5s με χρήση των προωθητήρων, 5.. Μεταφορική κίνηση σταθερής ταχύτητας διάρκειας.5s. Οι προωθητήρες δεν χρησιμοποιούνται. 3. Επιβραδυνόμενη μεταφορική κίνηση κατά x διάρκειας.5s με χρήση των προωθητήρων, 6. Το ρομπότ στο τέλος αυτού του τμήματος, συνολικής διάρκειας.5s, θα πρέπει να σταματήσει. 4. Το ρομπότ είναι σε κατάσταση ηρεμίας για s. 5. Επιταχυνόμενη περιστροφή, αντίθετα με τους δείκτες του ρολογιού, διάρκειας.s χρησιμοποιώντας τους προωθητήρες,4, Περιστροφή διάρκειας.8s με κλειστούς προωθητήρες. 7. Επιβραδυνόμενη περιστροφή διάρκειας.s χρησιμοποιώντας τους προωθητήρες,3, Στο τέλος της κίνησης, συνολικής διάρκειας 5.7s το ρομπότ έχει σταματήσει να κινείται. 6

107 Σημειώνουμε ότι το ρομπότ περιστρέφεται γύρω από το κέντρο βάρους του. Ωστόσο, οι δυνάμεις από τους προωθητήρες ασκούνται στο κέντρο βάρους της βάσης, συνεπώς το ρομπότ κατά την διάρκεια των περιστροφών εκτελεί και μεταφορική κίνηση. Επειδή δεν υπάρχει ανάδραση στο σύστημα, αυτή η μεταφορική κίνηση δεν εξουδετερώνεται στον παρόν πείραμα. Στο επόμενο σχήμα παρουσιάζεται η σύγκριση μεταξύ των αποτελεσμάτων της προσομοίωσης (φωτογραφίες) και των πειραματικών αποτελεσμάτων (διαγράμματα). Οι φωτογραφίες του πειράματος είναι από την κάμερα επάνω από την τράπεζα. Σχήμα 5-4. Κίνηση κέντρου βάρους βάσης κατά X, Y. 7


108 Σχήμα Προσανατολισμός βάσης. Σχήμα Κίνηση κέντρου βάρους συστήματος κατά X, Y. 8
.")
109 Παρατηρούμε ότι τα πειραματικά αποτελέσματα συμβαδίζουν με την προσομοίωση. Μετά το κλείσιμο των προωθητήρων το ρομπότ κινείται με σχεδόν τελείως μεταφορική κίνηση. Κατά τη διάρκεια των πειραμάτων παρατηρήθηκε ότι το σύστημα επιβραδύνει ελαφρώς προς το τέλος της μεταφορικής κίνησης με σταθερή ταχύτητα (τμήμα b). Οι διαφορές μεταξύ πειράματος και προσομοίωσης οφείλονται σε μικρές διαφορές μεταξύ του πραγματικού συστήματος και των μηχανολογικών σχεδίων στο ProEngineer τα οποία χρησιμοποιήθηκαν για τον προσδιορισμό των αδρανειακών χαρακτηριστικών. Επίσης, το σύστημα δεν είναι απόλυτα ζυγοσταθμισμένο και αυτό επηρεάζει την κίνηση του ρομπότ. Ωστόσο, τα πειραματικά αποτελέσματα για την περιστροφή συμπίπτουν καλά με την προσομοίωση με το σύστημα να ανταποκρίνεται καλά στην επενέργεια των προωθητήρων. Κατά την διάρκεια ενός δευτέρου πειράματος καθαρής περιστροφής, ένα βραχυκύκλωμα στα ηλεκτρονικά ελέγχου των προωθητήρων είχε ως αποτέλεσμα ένας προωθητήρας να μην μπορεί να κλείσει. Υπό την επίδραση του προβληματικού προωθητήρα, το σύστημα άρχισε να περιστρέφεται ανεξέλεγκτα και επιταχυνόμενα. Η κατάσταση αυτή παρουσιάζει ιδιαίτερο ενδιαφέρον διότι η κίνηση του συστήματος ήταν παρόμοια με την πραγματική κίνηση στο διάστημα ενός συστήματος το οποίο περιστρέφεται ανεξέλεγκτα (uncontrollable spinning). Τέτοια προβλήματα δεν είναι σπάνια σε διαστημικά συστήματα και αποτελούν πεδίο μελέτης σημαντικού ενδιαφέροντος. Στο επόμενο σχήμα φαίνεται το σύστημα κατά την διάρκεια της ανεξέλεγκτης περιστροφής. Αξίζει να σημειωθεί ότι για να διακοπεί το πείραμα χρειάστηκε να αποσυνδεθεί όλη η παροχή ισχύος. Σχήμα Ανεξέλεγκτη περιστροφή του συστήματος. Τέλος, κατά τη διάρκεια των πειραμάτων δεν παρατηρήθηκαν (ορατές) ταλαντώσεις στους βραχίονες. Ο C κώδικας για το πείραμα δίνεται στο Παράρτημα 4. 9
110 6. Συμπεράσματα και Μελλοντική Εργασία Η μοντελοποίηση και ο έλεγχος βασισμένος στο δυναμικό μοντέλο του ρομπότ έχουν ολοκληρωθεί. Οι δυναμικές εξισώσεις του μοντέλου είναι παραμετρικές, γεγονός το οποίο δίνει τη δυνατότητα για εύκολη ενσωμάτωση στο μέλλον τυχών αλλαγών στο σύστημα. Το τελικό Simulink μοντέλο του συστήματος παρέχει τη δυνατότητα για προσομοιώσεις όλων των δυνατών κινήσεων και των συνδυασμών τους. Επίσης, τα κέρδη ελέγχου και τα επιθυμητά προφίλ θέσης, ταχύτητας και επιτάχυνσης είναι εύκολο να αλλάξουν. Συνεπώς, με το μοντέλο Simulink γίνεται η διερεύνηση διαφορετικών σεναρίων, κάτι το οποίο το καθιστά ιδιαιτέρως χρήσιμο και για μελλοντική χρήση πέρα από του σκοπούς της παρούσας εργασίας. Στο επίπεδο του προγραμματισμού, έχουν ολοκληρωθεί οι βασικές συναρτήσεις, οι οποίες είναι τα δομικά στοιχεία για τον πλήρη προγραμματισμό του ρομπότ με την ολοκλήρωση των υπολοίπων υποσυστημάτων (ηλεκτρονικά, κάμερα). Επίσης, δόθηκαν ορισμένες γενικές κατευθύνσεις για την μελλοντική υλοποίηση του πλήρους ελέγχου του συστήματος καθώς και την χρησιμοποίηση προγραμματισμού σε πραγματικό χρόνο (Real Time Programming). Πρέπει να σημειώσουμε ότι ο προγραμματισμός σε πραγματικό χρόνο καθιστά το σύστημα έτοιμο να ανταποκριθεί άμεσα σε οποιαδήποτε ανάγκη, απαιτεί ωστόσο μία διαφορετική φιλοσοφία προγραμματισμού. Τα αποτελέσματα των προσομοιώσεων και του πειράματος επιβεβαιώνουν τον αρχικό σκοπό της κατασκευής, την εξομοίωση δηλαδή επίπεδων κινήσεων χωρίς τριβή. Αναλυτικότερα, από τα αποτελέσματα όπως παρουσιάστηκαν στο Κεφάλαιο 5 συμπεραίνουμε ότι το ρομπότ εκτελεί ομαλά όλες τις επιθυμητές κινήσεις (μεταφορά, περιστροφή, στροφή αρθρώσεων) και παραμένει στην επιθυμητή θέση, με πολύ μικρές διαταραχές στους βαθμούς ελευθερίας που παραμένουν ακίνητοι. Οι διαταραχές είναι ελαφρώς αυξημένες στην περίπτωση της περιστροφής και της στροφής των αρθρώσεων. Είναι πιθανό αυτό να οφείλεται στο ότι στις εξισώσεις κίνησης υπό την επίδραση των προωθητήρων και του σφονδύλου αντίδρασης ( 3.3), μελετήθηκε μόνο η βάση και δεν λήφθηκε υπόψη η επίδραση των βραχιόνων. Στις εργασίες που προηγήθηκαν [,5] για την μελέτη των προωθητήρων και του σφονδύλου αντίδρασης, τα αποτελέσματα έδειξαν ότι η επίδραση ενός βραχίονα συνολικής μάζας. kg στην κίνηση δεν ήταν σημαντική. Στην περίπτωσή μας, ο κάθε βραχίονας είναι μάζας.48 kg, συνεπώς η επίδραση είναι σημαντικότερη. Οπωσδήποτε πάντως, τα
111 αποτελέσματα από τις προσομοιώσεις και το πείραμα είναι πολύ καλά και επιβεβαιώνουν την σωστή λειτουργία του συστήματος και την ικανότητα του ελέγχου να μειώνει τα σφάλματα. Επίσης, θα ήταν χρήσιμο να υλοποιηθεί μία περαιτέρω βελτιστοποίηση της συνδυασμένης χρήσης προωθητήρων και σφονδύλου αντίδρασης, βασιζόμενη στην προηγούμενη εργασία [5]. Η μελλοντική εργασία θα πρέπει να επικεντρωθεί (α) στην υλοποίηση του ηλεκτρονικού υποσυστήματος (απαραίτητο για την σύνδεση κινητήρων, PC4, προωθητήρων, μπαταριών κλπ.), (β) στην υλοποίηση του συστήματος το οποίο θα παρέχει την απόλυτη θέση του ρομπότ επάνω στην τράπεζα (απαραίτητο για την υλοποίηση ελέγχου κλειστού βρόγχου) και (γ) στην υλοποίηση του πλήρους αλγορίθμου ελέγχου. Η ολοκλήρωση αυτών των τμημάτων του εξομοιωτή θα επιτρέψει την διεξαγωγή ολοκληρωμένων πειραμάτων με το ρομπότ επάνω στην τράπεζα γρανίτη. Η πλήρης ολοκλήρωση του εξομοιωτή θα επιτρέψει τον πειραματισμό διαφόρων αλγορίθμων ελέγχου και μεθόδων σχεδιασμού τροχιάς, την επαλήθευση δυναμικών μοντέλων και την διεξαγωγή πειραμάτων όπως σύλληψη κινουμένων αντικειμένων και συνεργασία μεταξύ ρομπότ. Η ύπαρξη ενός ολοκληρωμένου επίπεδου διαστημικού εξομοιωτή θα δώσει τη δυνατότητα για πειραματισμό στο πλαίσιο διαφόρων διαστημικών σεναρίων.
112 Βιβλιογραφία [] Christiansen, S. and Nilson, T., Docking System or Autonomous, Un-manned Docking Operations, Aerospace Conerence 8 IEEE, -8 March 8. [] Howard, R.T., Heaton, A.F., Pinson, R.M., and Carrington, C.K., Orbital Express Advanced Video Guidance Sensor, Aerospace Conerence 8 IEEE, -8 March 8. [3] Moosavian, S. Ali A., Dynamics and Control o Free-lying Manipulators Capturing Space Objects, PhD Thesis, McGill University, Montréal, Canada, 996. [4] Moosavian, S. A. and Papadopoulos, E., "Free-Flying Robots in Space: An Overview o Dynamics Modeling, Planning and Control," Robotica, Volume 5, Issue 5, September 7, pp [5] Ogilvie, A., Justin Allport, Michael Hannah, John Lymer, Autonomous Satellite Servicing Using the Orbital Express Demonstration Manipulator System, Proc. o the 9th International Symposium on Artiicial Intelligence, Robotics and Automation in Space (i-sairas '8), Los Angeles, Caliornia, February 5-9, 8. [6] Papadopoulos, E., Paraskevas, I., Flessa, T., Nanos, K., and Kontolatis, I., The NTUA Space Robot Simulator: Design & Results, th ESA Workshop on Advanced Space Technologies or Robotics and Automation (ASTRA 8), - 3 November 8, ESA/ESTEC, Noordwijk, The Netherlands. [7] Schwartz, J., Peck M., Hall C., Historical Review o Air-Bearing Spacecrat Simulators, Journal o Guidance, Control, and Dynamics, vol. 6, no. 4, pp. 53-5, 3. [8] Strang, G., «Γραμμική Άλγεβρα και Εφαρμογές», Πανεπιστημιακές Εκδόσεις Κρήτης, 999. [9] Tatsch, A., Fitz-Coy N., Gladun S., On-orbit Servicing: A Brie Survey, IEEE Int. Workshop on Saety, Security & Rescue Robotics, NIST, Gaithersburg, MD, August - 4, 6. [] Yoshida, K., Space Robot Dynamics and Control: To Orbit, From Orbit, and Future, Robotics Research, the Ninth International Symposium, ed. by J. Hollerbach and D. Koditschek, Springer, pp , 999.
113 [] Καλιακάτσος Ι., «Σχεδιασμός Συστήματος Προώθησης Πεπιεσμένου CO και Έλεγχος Κίνησης Εξομοιωτή Διαστημικού Ρομπότ», Διπλωματική Εργασία, Εθνικό Μετσόβιο Πολυτεχνείο, Αθήνα, 6. [] Κοντολάτης, Ι., «Ανάδραση Θέσης για την Οπτική Οδήγηση Εξομοιωτή Διαστημικού Ρομπότ», Μεταπτυχιακή Εργασία, Εθνικό Μετσόβιο Πολυτεχνείο, Αθήνα, 8. [3] Παρασκευάς, Ι., «Ανάπτυξη Συστήματος Οπτικών Αισθητήρων για Εντοπισμό Θέσης Ρομπότ σε Επίπεδη Κίνηση»», Μεταπτυχιακή Εργασία, Εθνικό Μετσόβιο Πολυτεχνείο, Αθήνα, 8. [4] Τσιφάκης, Α., «Σχεδιασμός Συστήματος Προώθησης Πεπιεσμένου CO και Έλεγχος Κίνησης Εξομοιωτή Διαστημικού Ρομπότ», Μεταπτυχιακή Εργασία, Εθνικό Μετσόβιο Πολυτεχνείο, Αθήνα, 6. [5] Ψαρρός Δ., «Ανάλυση, Σχεδίαση και Αξιολόγηση Σφονδύλου Αντίδρασης για Επίπεδο Εξομοιωτή Διαστημικού Ρομπότ», Μεταπτυχιακή Εργασία, Εθνικό Μετσόβιο Πολυτεχνείο, Αθήνα, 6. [6] [7] [8] [9] [] Sotware-Quick-Reerence-Guide/ [] [] [3] [4] [5] 3
114 Παράρτημα : Φυλλάδια Λειτουργίας Κινητήρων 4
115 maxon DC motor RE 3 3 mm, Graphite Brushes, 6 Watt M : Stock program Standard program Order Number Special program (on request) according to dimensional drawing shat length 5.7 shortened to 8.7 mm Motor Data Values at nominal voltage Nominal voltage V No load speed rpm No load current ma Nominal speed rpm Nominal torque (max. continuous torque) mnm Nominal current (max. continuous current) A Stall torque mnm Starting current A Max. eiciency % Characteristics Terminal resistance Terminal inductance mh Torque constant mnm / A Speed constant rpm / V Speed / torque gradient rpm / mnm Mechanical time constant ms Rotor inertia gcm Speciications Thermal data 7 Thermal resistance housing-ambient 6. K / W 8 Thermal resistance winding-housing.7 K / W 9 Thermal time constant winding 6. s Thermal time constant motor 74 s Ambient temperature -... C Max. permissible winding temperature 5 C Mechanical data (ball bearings) 3 Max. permissible speed rpm 4 Axial play mm 5 Radial play.5 mm 6 Max. axial load (dynamic) 5.6 N 7 Max. orce or press its (static) N (static, shat supported) N 8 Max. radial loading, 5 mm rom lange 8 N Other speciications 9 Number o pole pairs 3 Number o commutator segments 3 3 Weight o motor 38 g Values listed in the table are nominal. Explanation o the igures on page 47. Tolerances may vary rom the standard speciication. Operating Range n [rpm] Comments Continuous operation In observation o above listed thermal resistance (lines 7 and 8) the maximum permissible winding temperature will be reached during continuous operation at 5 C ambient. = Thermal limit. Short term operation The motor may be briely overloaded (recurring). Assigned power rating maxon Modular System Overview on page 6 - Planetary Gearhead 3 mm Nm Page 3 Planetary Gearhead 3 mm Nm Page 3 Encoder MR 56-4 CPT 3 channels Page 5 Option Preloaded ball bearings Recommended Electronics: ADS 5/5 Page 68 ADS_E 5/5 69 EPOS 4/5 86 EPOS P 4/5 87 MIP 5 89 Notes 8 8 maxon DC motor May 7 edition / subject to change
116 maxon tacho Encoder MR, Type L, 56-4 CPT, 3 Channels, with Line Driver Stock program Standard program Special program (on request) Order Number Type Counts per turn Number o channels Max. operating requency (khz) overall length overall length Combination Motor Page Gearhead Page Brake Page Overall length [mm] / see: Gearhead RE 3, 6 W RE 3, 6 W 8 GP 3, Nm 3/3 RE 35, 9 W RE 35, 9 W 8 GP 3, Nm 3/3 RE 35, 9 W 8 GP 3, 8 Nm 33 RE 35, 9 W 8 GP 4, 3-5 Nm 35 RE 36, 7 W RE 36, 7 W 8 GP 3,.4 -. Nm 8 RE 36, 7 W 8 GP 3, Nm 3/3 RE 36, 7 W 8 GP 4, 3-5 Nm 35 RE 4, 5 W RE 4, 5 W 83 GP 4, 3-5 Nm 35 RE 4, 5 W 83 GP 5, 4-3 Nm 38 A-max 3 / A-max 3 /4 GP 3, Nm 3/3 A-max 3 /4 GS 38,. -.6 Nm 34 EC-max 4, 7 W EC-max 4, 7 W 78 GP 4, 3-5 Nm 36 EC-max 4, W EC-max 4, W 79 GP 5, 4-3 Nm 39 Technical Data Pin Allocation Connection example Supply voltage 5 V 5% Encoder N.C. Output signal TTL compatible Line Driver V CC Index pulse width (nominal) 9 e ± 45 e 3 GND Operating temperature range C 4 N.C. Channel Moment o inertia o code wheel.7 gcm 5 Channel A Channel 6 Channel A Output current per channel max. 5 ma 7 Channel B 9 Channel 8 Channel B 5 ±5 9 Channel I (Index) Channel Channel I (Index) Channel DIN Connector 465 The index signal I is synchronised with channel A or B. lat band cable AWG 8 Channel Line receiver Recommended IC's: - MC SN AM6LS3 May 7 edition / subject to change maxon tacho 5
117 maxon DC motor RE 5 5 mm, Precious Metal Brushes CLL, Watt, approved M : Stock program Standard program Special program (on request!) Order Number Motor Data Assigned power rating W Nominal voltage Volt No load speed rpm Stall torque mnm Speed / torque gradient rpm / mnm No load current ma Starting current ma Terminal resistance Ohm Max. permissible speed rpm Max. continuous current ma Max. continuous torque mnm Max. power output at nominal voltage mw Max. eiciency % Torque constant mnm / A Speed constant rpm / V Mechanical time constant ms Rotor inertia gcm Terminal inductance mh Thermal resistance housing-ambient K / W Thermal resistance rotor-housing K / W Thermal time constant winding s 3 Speciications Axial play mm Max. ball bearing loads axial (dynamic) not preloaded 3. N preloaded 3. N radial (5 mm rom lange) 6 N Force or press its (static) 64 N (static, shat supported) 7 N Radial play ball bearing.5 mm Ambient temperature range C Max. rotor temperature C Number o commutator segments Weight o motor 3 g pole permanent magnet Values listed in the table are nominal. For applicable tolerances see page 43. For additional details please use the maxon selection program on the enclosed CD-ROM. CLL = Capacitor Long Lie Operating Range Comments Details on page 49 n [rpm] Watt Recommended operating range Continuous operation In observation o above listed thermal resistances (lines 9 and ) the maximum permissible rotor temperature will be reached during continuous operation at 5 C ambient. = Thermal limit. Short term operation The motor may be briely overloaded (recurring) M [mnm] I [A] Motor with high resistance winding Motor with low resistance winding I [A] maxon Modular System Overview on page 7 - Planetary Gearhead 6 mm.5 -. Nm Details page 6 Planetary Gearhead 3 mm Nm Details page 8 / Planetary Gearhead 3 mm.4 -. Nm Details page Encoder MR 8 - CPT, 3 channels Details page 38 Encoder mm CPT, channels Details page 4 Encoder HED_ CPT, 3 channels Details page 4 / 44 DC-Tacho DCT mm.5 V Details page 5 Recommended Electronics: LSC 3/ page 57 ADS 5/5 59 ADS_E 5/5 6 EPOS 4/5 7 MIP 73 Notes 7 April 5 edition / subject to change maxon DC motor 77
 8 6 3 overall length overall length Combination Motor Page Gearhead Page Brake Page Overall length [mm] / see: Gearhead RE 5 76 / 78 65.5 65.")
118 maxon tacho Encoder MR, Type ML, 8 - CTP, 3 Channels, with Line Driver Stock program Standard program Special program (on request) Order Number Type Counts per turn Number o channels Max. operating requency (khz) overall length overall length Combination Motor Page Gearhead Page Brake Page Overall length [mm] / see: Gearhead RE 5 76 / RE 5 76 / 78 GP 6,.5 -. Nm 6 RE 5 76 / 78 GP 3,.4-6. Nm 8-3 RE 6, 8 W RE 6, 8 W 79 GP 6,.5 -. Nm 6 RE 6, 8 W 79 GP 3,.4-6.Nm 8-3 A-max A-max 6 4- GP 6,.5 -. Nm 6 A-max 6 4- GS 3,.7 -. Nm 8 A-max 6 4- GP 3,.4-6. Nm 8-3 A-max 6 4- GS 38,. -.6 Nm 34 RE-max 9 44/ RE-max 9 44/46 GP 6,.5 -. Nm 6 RE-max 9 44/46 GP 3, Nm 9-3 EC-max 3, 4 W EC-max 3, 4 W 76 GP 3, - 6 Nm 3 EC-max 3, 6 W EC-max 3, 6 W 77 GP 3, - 6 Nm 36 EC-powermax EC-powermax 3 85 GP 3, 8 Nm 33 EC-powermax 3 85 GP 4, 3-5 Nm 3 EC-powermax EC-powermax 3 86 GP 3, 8 Nm 33 EC-powermax 3 86 GP 4, 3-5 Nm 36 Technical Data Pin Allocation Connection example Supply voltage V CC 5V 5% N.C. Output signal TTL compatible V CC Index pulse width (nominal) 9 e ± 45 e 3 GND Encoder Line Driver Operating temperature range C 4 N.C. Channel Moment o inertia o code wheel.7 gcm 5 Channel A 6 Channel A Output current per channel max. 5 ma 7 Channel B 9 8 Channel B Channel Channel 5 ±5 9 Channel I (Index) Channel I (Index) Channel Channel DIN Connector 465 The index signal I is synchronised with channel A or B. lat band cable AWG 8 Channel Line receiver Recommended IC's: - MC SN AM6LS3 5 maxon tacho May 7 edition / subject to change

119 maxon gear Planetary Gearhead GP 3 A 3 mm, Nm Metal Version Technical Data Planetary Gearhead straight teeth Output shat stainless steel Shat diameter as option 8 mm Bearing at output ball bearing Radial play, 5 mm rom lange max..4 mm Axial play max..4 mm Max. radial load, mm rom lange 4 N Max. permissible axial load N Max. permissible orce or press its N Sense o rotation, drive to output = Recommended input speed < 6 rpm Recommended temperature range -... C Extended area as option C M : Option: Low-noise version Stock program Standard program Order Number Special program (on request) Gearhead Data Reduction 3.7 : 4 : 33 : 5 : : 46 : 49 : 76 : 8 : 97 : 89 : 438 : Reduction absolute 6 / / / / / 5 / / / / / / / 5 3 Max. motor shat diameter mm Order Number Reduction 4.8 : 8 : 66 : 3 : 95 : 53 : 93 : 44 : 89 : 35 : 547 : Reduction absolute 4 / 5 64 / / / 56 6 / / / / / / / 6 3 Max. motor shat diameter mm Order Number Reduction 5.8 : : 79 : 3 : 38 : 589 : 93 : 56 : 36 : 3389 : 685 : Reduction absolute 3 / 4 99 / / / / 5 63 / / 56 / / / 4 / 4 3 Max. motor shat diameter mm Order Number Reduction 3 : 86 : 59 : 4 : 636 : 694 : 548 : 3656 : Reduction absolute 576 / / / / / 5 63 / / / 5 3 Max. motor shat diameter mm Order Number Reduction 8 : 3 : 9 : 456 : 76 : 88 : 63 : 46 : Reduction absolute 38 / / / / / / / / Max. motor shat diameter mm Number o stages Max. continuous torque Nm Intermittently permissible torque at gear output Nm Max. eiciency % Weight g Average backlash no load Mass inertia gcm Gearhead length L mm overall length overall length Combination Motor Page Tacho / Brake Page Overall length [mm] = Motor length gearhead length (tacho / brake) assembly parts RE 3, 6 W RE 3, 6 W 8 MR RE 35, 9 W RE 35, 9 W 8 MR RE 35, 9 W 8 HED_ / RE 35, 9 W 8 DCT RE 35, 9 W 8 AB RE 35, 9 W 8 HEDS 554 / AB 8 54/ RE 36, 7 W RE 36, 7 W 8 MR RE 36, 7 W 8 HED_ / RE 36, 7 W 8 DCT A-max 3 / A-max 3 / A-max 3 /4 MR A-max 3 /4 HED_ / EC 3, 8 W EC 3, 8 W 6 HED_ / EC 3, 8 W 6 Res maxon gear May 7 edition / subject to change
120 Παράρτημα : Φυλλάδια Λειτουργίας PC4 Χαρακτηριστικά κάρτας CPU CML47786HX

121 Σχηματικό διάγραμμα κάρτας CPU Συνδεσμολογία κάρτας CPU
122
123 Χαρακτηριστικά Κάρτας Encoder DM694 3
124 Συνδεσμολογία Κάρτας Encoder 4

125 Θέσεις Μνήμης Κάρτας Encoder 5
126 Χαρακτηριστικά Κάρτας DAC DM564 6
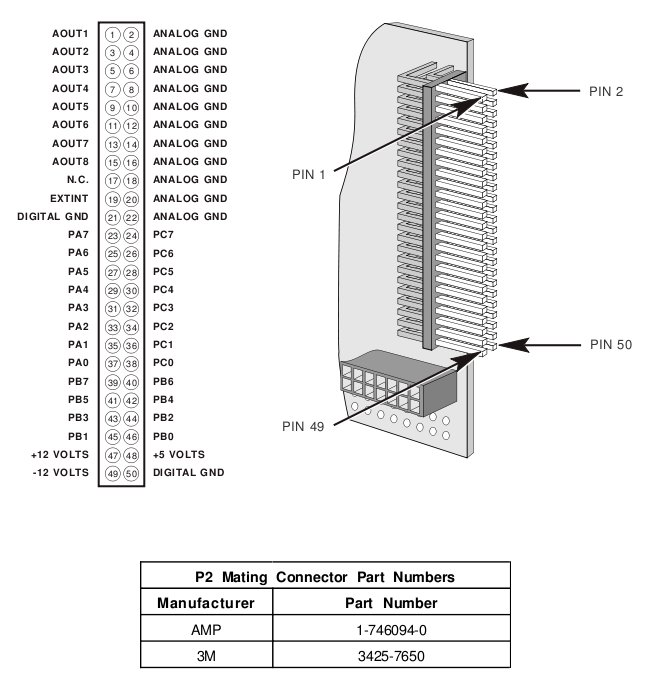
127 Συνδεσμολογία Κάρτας DAC 7

128 Θέσεις Μνήμης Κάρτας DAC 8
ΑΝΑΠΤΥΞΗ ΣΥΣΤΗΜΑΤΟΣ ΠΡΟΣΟΜΟΙΩΣΗΣ & ΕΞΟΜΟΙΩΣΗΣ ΓΙΑ ΡΟΜΠΟΤ ΣΤΟ ΔΙΑΣΤΗΜΑ
 ΑΝΑΠΤΥΞΗ ΣΥΣΤΗΜΑΤΟΣ ΠΡΟΣΟΜΟΙΩΣΗΣ & ΕΞΟΜΟΙΩΣΗΣ ΓΙΑ ΡΟΜΠΟΤ ΣΤΟ ΔΙΑΣΤΗΜΑ Ευάγγελος Παπαδόπουλος, Ιωσήφ Σ. Παρασκευάς, Θάλεια Φλέσσα, Κώστας Νάνος, Γεώργιος Ρεκλείτης και Ιωάννης Κοντολάτης Εθνικό Μετσόβιο
ΑΝΑΠΤΥΞΗ ΣΥΣΤΗΜΑΤΟΣ ΠΡΟΣΟΜΟΙΩΣΗΣ & ΕΞΟΜΟΙΩΣΗΣ ΓΙΑ ΡΟΜΠΟΤ ΣΤΟ ΔΙΑΣΤΗΜΑ Ευάγγελος Παπαδόπουλος, Ιωσήφ Σ. Παρασκευάς, Θάλεια Φλέσσα, Κώστας Νάνος, Γεώργιος Ρεκλείτης και Ιωάννης Κοντολάτης Εθνικό Μετσόβιο
Κεφάλαιο 1.6: Συσκευές αποθήκευσης
 Κεφάλαιο 1.6: Συσκευές αποθήκευσης 1.6.1 Συσκευές αποθήκευσης Μνήμη τυχαίας προσπέλασης - RAM Η μνήμη RAM (Random Access Memory Μνήμη Τυχαίας Προσπέλασης), κρατεί όλη την πληροφορία (δεδομένα και εντολές)
Κεφάλαιο 1.6: Συσκευές αποθήκευσης 1.6.1 Συσκευές αποθήκευσης Μνήμη τυχαίας προσπέλασης - RAM Η μνήμη RAM (Random Access Memory Μνήμη Τυχαίας Προσπέλασης), κρατεί όλη την πληροφορία (δεδομένα και εντολές)
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ. Επενεργητές Αισθητήρες Σύστηµα Ελέγχου
 Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου. Ενότητα 2
 Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου Ενότητα 2 Τι είναι το PLC ΠΕΡΙΕΧΟΜΕΝΑ 2 Τι είναι το PLC. 2.1 Πλεονεκτήματα των PLC. 2.2 Η δομή ενός PLC. 2.3 Τα PLC της αγοράς. 2.4 Αρχή λειτουργίας ενός PLC.
Αυτοματισμοί και Συστήματα Αυτομάτου Ελέγχου Ενότητα 2 Τι είναι το PLC ΠΕΡΙΕΧΟΜΕΝΑ 2 Τι είναι το PLC. 2.1 Πλεονεκτήματα των PLC. 2.2 Η δομή ενός PLC. 2.3 Τα PLC της αγοράς. 2.4 Αρχή λειτουργίας ενός PLC.
1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές. ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης
 www.robolab.tuc.gr 1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας R/C σέρβο βηματικός κινητήρας 2 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας
www.robolab.tuc.gr 1. Ηλεκτρικοί κινητήρες- σερβοκινητήρας 2. Ελεγκτές ΜΠΔ, 9 Ο Εξάμηνο Σάββας Πιπερίδης 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας R/C σέρβο βηματικός κινητήρας 2 1. Ηλεκτρικοί κινητήρες σερβοκινητήρας
ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι
 ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι ΕΛΕΓΧΟΣ ΣΤΑΘΜΗΣ ΥΓΡΟΥ ΕΞΑΜΕΝΗΣ 1. ΠΕΡΙΓΡΑΦΗ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΙΑΤΑΞΗΣ Τα βασικά µέρη της εργαστηριακής διάταξης είναι κατασκευασµένα από την εταιρεία LUCAS-NULLE.
ΕΡΓΑΣΤΗΡΙΑΚΕΣ ΑΣΚΗΣΕΙΣ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι ΕΛΕΓΧΟΣ ΣΤΑΘΜΗΣ ΥΓΡΟΥ ΕΞΑΜΕΝΗΣ 1. ΠΕΡΙΓΡΑΦΗ ΕΡΓΑΣΤΗΡΙΑΚΗΣ ΙΑΤΑΞΗΣ Τα βασικά µέρη της εργαστηριακής διάταξης είναι κατασκευασµένα από την εταιρεία LUCAS-NULLE.
Αυτόματη προσγείωση τετρακόπτερου με χρήση κάμερας
 Διπλωματική εργασία Αυτόματη προσγείωση τετρακόπτερου με χρήση κάμερας Τζιβάρας Βασίλης Επιβλέπων: Κ. Κωνσταντίνος Βλάχος Τμήμα Μηχανικών Η/Υ και Πληροφορικής Ιωάννινα Φεβρουάριος 2018 Περιεχόμενα Εισαγωγή
Διπλωματική εργασία Αυτόματη προσγείωση τετρακόπτερου με χρήση κάμερας Τζιβάρας Βασίλης Επιβλέπων: Κ. Κωνσταντίνος Βλάχος Τμήμα Μηχανικών Η/Υ και Πληροφορικής Ιωάννινα Φεβρουάριος 2018 Περιεχόμενα Εισαγωγή
Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης
 Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης Αντώνιος Γαστεράτος, Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Παραγωγής και Διοίκησης, Δημοκρίτειο Πανεπιστήμιο Θράκης μηχανοτρονική διαδικασία σχεδιασμού
Μηχανοτρονική Μάθημα 2 ο ενεργοποιητές - συστήματα κίνησης Αντώνιος Γαστεράτος, Αναπληρωτής Καθηγητής Τμήμα Μηχανικών Παραγωγής και Διοίκησης, Δημοκρίτειο Πανεπιστήμιο Θράκης μηχανοτρονική διαδικασία σχεδιασμού
Ροµποτικοί Επενεργητές Σερβοκινητήρες Πνευµατικοί Υδραυλικοί Ηλεκτρικοί
 Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Ηλεκτρικό & Ηλεκτρονικό Υποσύστηµα ενός Ροµπότ Επενεργητές Αισθητήρες Σύστηµα Ελέγχου Επενεργητές στη Ροµποτική Απαιτήσεις Ροµποτικών Επενεργητών χαµηλή αδράνεια µεγάλη σχέση ισχύος-βάρους, ικανότητα ανάπτυξης
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5. Ρυθμίζοντας τη Φορά Περιστροφής. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 5 Ρυθμίζοντας τη Φορά Περιστροφής DC Κινητήρα. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο Πλαίσιο (front
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ Μ.Κ & Α.Ε Εργαστήριο Αυτομάτου Ελέγχου
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ Μ.Κ & Α.Ε Εργαστήριο Αυτομάτου Ελέγχου Διπλωματική Εργασία Σχεδιασμός, Υλοποίηση και Έλεγχος Ρομποτικών Βραχιόνων για Ρομπότ Διαστημικού Εξομοιωτή
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ Μ.Κ & Α.Ε Εργαστήριο Αυτομάτου Ελέγχου Διπλωματική Εργασία Σχεδιασμός, Υλοποίηση και Έλεγχος Ρομποτικών Βραχιόνων για Ρομπότ Διαστημικού Εξομοιωτή
ΕΡΓΑΣΤΗΡΙΑΚΗ ΕΦΑΡΜΟΓΗ 1 ΤO ΡΟΜΠΟΤ INTELLITEK ER-2u
 Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Εφαρμογή 1: Το ρομπότ INTELITEK ER-2u Εργαστήριο Ευφυών Συστημάτων και Ρομποτικής Τμήμα Μηχανικών Παραγωγής και Διοίκησης Πολυτεχνείο Κρήτης www.robolab.tuc.gr, τηλ: 28210 37292 / 37314 e-mail: savas@dpem.tuc.gr,
Κεφάλαιο 10 Περιστροφική Κίνηση. Copyright 2009 Pearson Education, Inc.
 Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόμενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσματικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναμική της Περιστροφικής Κίνησης, Ροπή και
Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόμενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσματικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναμική της Περιστροφικής Κίνησης, Ροπή και
ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΑΣΚΗΣΕΙΣ ΦΥΣΙΚΗΣ 2019
 ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΑΣΚΗΣΕΙΣ ΦΥΣΙΚΗΣ 019 Κινηματική ΑΣΚΗΣΗ Κ.1 Η επιτάχυνση ενός σώματος που κινείται ευθύγραμμα δίνεται από τη σχέση a = (4 t ) m s. Υπολογίστε την ταχύτητα και το διάστημα που διανύει το σώμα
ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΑΣΚΗΣΕΙΣ ΦΥΣΙΚΗΣ 019 Κινηματική ΑΣΚΗΣΗ Κ.1 Η επιτάχυνση ενός σώματος που κινείται ευθύγραμμα δίνεται από τη σχέση a = (4 t ) m s. Υπολογίστε την ταχύτητα και το διάστημα που διανύει το σώμα
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΟΧΗΜΑΤΩΝ Ακαδημαϊκό Έτος: 2014 2015 Μάθημα: Διδάσκων: ΚΑΤΑΣΚΕΥΗ ΟΧΗΜΑΤΩΝ ΙΙ Δρ. Μηχ. Δ. Κουλοχέρης, Λέκτορας Ε.Μ.Π. Ημ/νία Διεξαγωγής:...
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΟΧΗΜΑΤΩΝ Ακαδημαϊκό Έτος: 2014 2015 Μάθημα: Διδάσκων: ΚΑΤΑΣΚΕΥΗ ΟΧΗΜΑΤΩΝ ΙΙ Δρ. Μηχ. Δ. Κουλοχέρης, Λέκτορας Ε.Μ.Π. Ημ/νία Διεξαγωγής:...
2 Η ΠΡΟΟΔΟΣ. Ενδεικτικές λύσεις κάποιων προβλημάτων. Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση
 2 Η ΠΡΟΟΔΟΣ Ενδεικτικές λύσεις κάποιων προβλημάτων Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση Ένας τροχός εκκινεί από την ηρεμία και επιταχύνει με γωνιακή ταχύτητα που δίνεται από την,
2 Η ΠΡΟΟΔΟΣ Ενδεικτικές λύσεις κάποιων προβλημάτων Τα νούμερα στις ασκήσεις είναι ΤΥΧΑΙΑ και ΟΧΙ αυτά της εξέταση Ένας τροχός εκκινεί από την ηρεμία και επιταχύνει με γωνιακή ταχύτητα που δίνεται από την,
ΥΠΟΛΟΓΙΣΜΟΣ ΚΑΙ ΜΕΤΡΗΣΗ ΣΥΝΑΡΤΗΣΗΣ ΜΕΤΑΦΟΡΑΣ ΣΕ ΠΡΑΚΤΙΚΑ ΣΥΣΤΗΜΑΤΑ
 Κεφάλαιο ΥΠΟΛΟΓΙΣΜΟΣ ΚΑΙ ΜΕΤΡΗΣΗ ΣΥΝΑΡΤΗΣΗΣ ΜΕΤΑΦΟΡΑΣ ΣΕ ΠΡΑΚΤΙΚΑ ΣΥΣΤΗΜΑΤΑ Στη διαδικασία σχεδιασμού των Συστημάτων Αυτομάτου Ελέγχου, η απαραίτητη και η πρώτη εργασία που έχουμε να κάνουμε, είναι να
Κεφάλαιο ΥΠΟΛΟΓΙΣΜΟΣ ΚΑΙ ΜΕΤΡΗΣΗ ΣΥΝΑΡΤΗΣΗΣ ΜΕΤΑΦΟΡΑΣ ΣΕ ΠΡΑΚΤΙΚΑ ΣΥΣΤΗΜΑΤΑ Στη διαδικασία σχεδιασμού των Συστημάτων Αυτομάτου Ελέγχου, η απαραίτητη και η πρώτη εργασία που έχουμε να κάνουμε, είναι να
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Θέματα Εξετάσεων Ασκήσεις στο Mάθημα: "ΡΟΜΠΟΤΙΚΗ Ι: ΑΝΑΛΥΣΗ, ΕΛΕΓΧΟΣ, ΕΡΓΑΣΤΗΡΙΟ" 1 η Σειρά Θεμάτων Θέμα 1-1 Έστω ρομποτικός
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧ/ΚΩΝ & ΜΗΧ/ΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ Θέματα Εξετάσεων Ασκήσεις στο Mάθημα: "ΡΟΜΠΟΤΙΚΗ Ι: ΑΝΑΛΥΣΗ, ΕΛΕΓΧΟΣ, ΕΡΓΑΣΤΗΡΙΟ" 1 η Σειρά Θεμάτων Θέμα 1-1 Έστω ρομποτικός
υναµ α ι µ κή τ ων Ρ οµ ο π µ ο π τ ο ικών Βραχιόνων
 υναµική των Ροµποτικών Βραχιόνων Ροµποτική Αρχιτεκτονική: η υναµική u Ροµποτική υναµική q, q& Ροµποτική Κινηµατική Περιβάλλον Θέση, Προσανατολισµός & και αλληλε ίδραση Η δυναµική ασχολείται µε την εξαγωγή
υναµική των Ροµποτικών Βραχιόνων Ροµποτική Αρχιτεκτονική: η υναµική u Ροµποτική υναµική q, q& Ροµποτική Κινηµατική Περιβάλλον Θέση, Προσανατολισµός & και αλληλε ίδραση Η δυναµική ασχολείται µε την εξαγωγή
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
ΑΣΚΗΣΗ 4 η ΕΙΣΑΓΩΓΗ ΣΤΙΣ ΜΗΧΑΝΕΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ Σκοπός της Άσκησης: Σκοπός της εργαστηριακής άσκησης είναι α) η κατανόηση της αρχής λειτουργίας των μηχανών συνεχούς ρεύματος, β) η ανάλυση της κατασκευαστικών
Άσκηση 3 Υπολογισμός του μέτρου της ταχύτητας και της επιτάχυνσης
 Άσκηση 3 Υπολογισμός του μέτρου της ταχύτητας και της επιτάχυνσης Σύνοψη Σκοπός της συγκεκριμένης άσκησης είναι ο υπολογισμός του μέτρου της στιγμιαίας ταχύτητας και της επιτάχυνσης ενός υλικού σημείου
Άσκηση 3 Υπολογισμός του μέτρου της ταχύτητας και της επιτάχυνσης Σύνοψη Σκοπός της συγκεκριμένης άσκησης είναι ο υπολογισμός του μέτρου της στιγμιαίας ταχύτητας και της επιτάχυνσης ενός υλικού σημείου
3. ΥΝΑΜΙΚΗ ΡΟΜΠΟΤΙΚΩΝ ΒΡΑΧΙΟΝΩΝ
 3. ΥΝΑΜΙΚΗ ΡΟΜΠΟΤΙΚΩΝ ΒΡΑΧΙΟΝΩΝ Η δυναµική ασχολείται µε την εξαγωγή και τη µελέτη του δυναµικού µοντέλου ενός ροµποτικού βραχίονα. Το δυναµικό µοντέλο συνίσταται στις διαφορικές εξισώσεις που περιγράφουν
3. ΥΝΑΜΙΚΗ ΡΟΜΠΟΤΙΚΩΝ ΒΡΑΧΙΟΝΩΝ Η δυναµική ασχολείται µε την εξαγωγή και τη µελέτη του δυναµικού µοντέλου ενός ροµποτικού βραχίονα. Το δυναµικό µοντέλο συνίσταται στις διαφορικές εξισώσεις που περιγράφουν
Μαθαίνοντας το hardware του αναπτυξιακού
 1. ΑΣΚΗΣΗ 1 Μαθαίνοντας το hardware του αναπτυξιακού Προϋποθέσεις Το εργαστήριο αυτό προϋποθέτει το διάβασμα και χρήση των εξής: Αρχείο mcbstr9.chm HTML, που δίδεται με τα υπόλοιπα αρχεία του εργαστηρίου.
1. ΑΣΚΗΣΗ 1 Μαθαίνοντας το hardware του αναπτυξιακού Προϋποθέσεις Το εργαστήριο αυτό προϋποθέτει το διάβασμα και χρήση των εξής: Αρχείο mcbstr9.chm HTML, που δίδεται με τα υπόλοιπα αρχεία του εργαστηρίου.
ΤΜΗΜΑΤΑ ΗΛΕΚΤΡΟΝΙΚΟΥ ΥΠΟΛΟΓΙΣΤΗ
 ΤΜΗΜΑΤΑ ΗΛΕΚΤΡΟΝΙΚΟΥ ΥΠΟΛΟΓΙΣΤΗ Τα τμήματα ενός ηλεκτρονικού υπολογιστή είναι: 1. Επεξεργαστής 2. Μνήμη RAM και ROM 3. Κάρτα γραφικών 4. Μητρική Πλακέτα 5. Σκληρός Δίσκος 6. DVD / Blue Ray 7. Τροφοδοτικό
ΤΜΗΜΑΤΑ ΗΛΕΚΤΡΟΝΙΚΟΥ ΥΠΟΛΟΓΙΣΤΗ Τα τμήματα ενός ηλεκτρονικού υπολογιστή είναι: 1. Επεξεργαστής 2. Μνήμη RAM και ROM 3. Κάρτα γραφικών 4. Μητρική Πλακέτα 5. Σκληρός Δίσκος 6. DVD / Blue Ray 7. Τροφοδοτικό
Εισαγωγή στην Ρομποτική
 Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
Τμήμα Μηχανολογίας Τ.Ε.Ι. Κρήτης Εισαγωγή στην Ρομποτική 1 Γενική περιγραφή ρομποτικού βραχίονα σύνδεσμοι αρθρώσεις αρπάγη Περιστροφική Πρισματική Βάση ρομποτικού βραχίονα 3 Βασικές ρομποτικές αρθρώσεις
Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής.
 ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής. Α) Σκοπός: Σκοπός της παρούσας άσκησης είναι να επιδειχθεί ο έλεγχος των στροφών
ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής. Α) Σκοπός: Σκοπός της παρούσας άσκησης είναι να επιδειχθεί ο έλεγχος των στροφών
β) Από τον νόμο του Νεύτωνα για την μεταφορική κίνηση του κέντρου μάζας έχουμε: Επομένως το κέντρο μάζας αποκτάει αρνητική επιτάχυνση σταθερού μέτρου
 Από τον νόμο του Νεύτωνα για την μεταφορική κίνηση του κέντρου μάζας έχουμε: Επομένως το κέντρο μάζας αποκτάει αρνητική επιτάχυνση σταθερού μέτρου") ΣΥΝΘΕΤΗ ΚΙΝΗΣΗ 1) Συμπαγής κύλινδρος μάζας m και ακτίνας R δέχεται μια αρχική μεγάλη και στιγμιαία ώθηση προς τα πάνω σε κεκλιμένο επίπεδο γωνίας θ και μετά αφήνεται ελεύθερος. Κατά την παύση της ώθησης,
ΣΥΝΘΕΤΗ ΚΙΝΗΣΗ 1) Συμπαγής κύλινδρος μάζας m και ακτίνας R δέχεται μια αρχική μεγάλη και στιγμιαία ώθηση προς τα πάνω σε κεκλιμένο επίπεδο γωνίας θ και μετά αφήνεται ελεύθερος. Κατά την παύση της ώθησης,
ΜΙΚΡΟΕΛΕΓΚΤΗΣ PICAXE 18M2
 ΘΕΜΑ : ΜΙΚΡΟΕΛΕΓΚΤΗΣ PICAXE 18M2 ΔΙΑΡΚΕΙΑ:? περίοδος Οι μικροελεγκτές είναι υπολογιστές χωρίς περιφερειακά, σε ολοκληρωμένα κυκλώματα. Μπορούν να συνδυάσουν αρκετές από τις βασικές λειτουργίες άλλων ειδικών
ΘΕΜΑ : ΜΙΚΡΟΕΛΕΓΚΤΗΣ PICAXE 18M2 ΔΙΑΡΚΕΙΑ:? περίοδος Οι μικροελεγκτές είναι υπολογιστές χωρίς περιφερειακά, σε ολοκληρωμένα κυκλώματα. Μπορούν να συνδυάσουν αρκετές από τις βασικές λειτουργίες άλλων ειδικών
Λογικά σύμβολα των CPU, RAM, ROM και I/O module
 Μικροϋπολογιστές Λογικά σύμβολα των CPU, RAM, ROM και I/O module Data CPU Data Data Address RAM Control Address Control External Data Data Address Control I/O module External Data External Control ROM
Μικροϋπολογιστές Λογικά σύμβολα των CPU, RAM, ROM και I/O module Data CPU Data Data Address RAM Control Address Control External Data Data Address Control I/O module External Data External Control ROM
Κεφάλαιο 10 Περιστροφική Κίνηση. Copyright 2009 Pearson Education, Inc.
 Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόµενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσµατικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναµική της Περιστροφικής Κίνησης, Ροπή και
Κεφάλαιο 10 Περιστροφική Κίνηση Περιεχόµενα Κεφαλαίου 10 Γωνιακές Ποσότητες Διανυσµατικός Χαρακτήρας των Γωνιακών Ποσοτήτων Σταθερή γωνιακή Επιτάχυνση Ροπή Δυναµική της Περιστροφικής Κίνησης, Ροπή και
ΔΠΜΣ «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» «ΕΡΓΑΣΤΗΡΙΟ ΡΟΜΠΟΤΙΚΗΣ» Άσκηση 2. Έλεγχος Pendubot
 Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Ηλεκτρ. Μηχ/κών και Μηχ/κών Υπολογιστών Τομέας Σημάτων, Ελέγχου και Ρομποτικής ΔΠΜΣ «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» «ΕΡΓΑΣΤΗΡΙΟ ΡΟΜΠΟΤΙΚΗΣ» Άσκηση 2. Έλεγχος Pendubot Υπεύθυνος
Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Ηλεκτρ. Μηχ/κών και Μηχ/κών Υπολογιστών Τομέας Σημάτων, Ελέγχου και Ρομποτικής ΔΠΜΣ «ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ» «ΕΡΓΑΣΤΗΡΙΟ ΡΟΜΠΟΤΙΚΗΣ» Άσκηση 2. Έλεγχος Pendubot Υπεύθυνος
minimath.eu Φυσική A ΛΥΚΕΙΟΥ Περικλής Πέρρος 1/1/2014
 minimath.eu Φυσική A ΛΥΚΕΙΟΥ Περικλής Πέρρος 1/1/014 minimath.eu Περιεχόμενα Κινηση 3 Ευθύγραμμη ομαλή κίνηση 4 Ευθύγραμμη ομαλά μεταβαλλόμενη κίνηση 5 Δυναμικη 7 Οι νόμοι του Νεύτωνα 7 Τριβή 8 Ομαλη κυκλικη
minimath.eu Φυσική A ΛΥΚΕΙΟΥ Περικλής Πέρρος 1/1/014 minimath.eu Περιεχόμενα Κινηση 3 Ευθύγραμμη ομαλή κίνηση 4 Ευθύγραμμη ομαλά μεταβαλλόμενη κίνηση 5 Δυναμικη 7 Οι νόμοι του Νεύτωνα 7 Τριβή 8 Ομαλη κυκλικη
Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής
 ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
ΡΟΜΠΟΤΙΚΗ: ΟΡΙΣΜΟΣ: Σύμφωνα με το Ινστιτούτο Ρομποτικής της Αμερικής, ρομπότ είναι ένας αναπρογραμματιζόμενος και πολυλειτουργικός χωρικός μηχανισμός σχεδιασμένος να μετακινεί υλικά, αντικείμενα, εργαλεία
Το παρακάτω διάγραμμα παριστάνει την απομάκρυνση y ενός σημείου Μ (x Μ =1,2 m) του μέσου σε συνάρτηση με το χρόνο.
 του μέσου σε συνάρτηση με το χρόνο.") ΟΔΗΓΙΕΣ: 1. Η επεξεργασία των θεμάτων θα γίνει γραπτώς σε χαρτί Α4 ή σε τετράδιο που θα σας δοθεί (το οποίο θα παραδώσετε στο τέλος της εξέτασης). Εκεί θα σχεδιάσετε και όσα γραφήματα ζητούνται στο Θεωρητικό
ΟΔΗΓΙΕΣ: 1. Η επεξεργασία των θεμάτων θα γίνει γραπτώς σε χαρτί Α4 ή σε τετράδιο που θα σας δοθεί (το οποίο θα παραδώσετε στο τέλος της εξέτασης). Εκεί θα σχεδιάσετε και όσα γραφήματα ζητούνται στο Θεωρητικό
Β Γυμνασίου Σελ. 1 από 10
 ΟΔΗΓΙΕΣ: 1. Οι απαντήσεις σε όλα τα ερωτήματα θα πρέπει να αναγραφούν στο Φύλλο Απαντήσεων που θα σας δοθεί μαζί με τις εκφωνήσεις. 2. Η επεξεργασία των θεμάτων θα γίνει γραπτώς σε φύλλα Α4 ή σε τετράδιο
ΟΔΗΓΙΕΣ: 1. Οι απαντήσεις σε όλα τα ερωτήματα θα πρέπει να αναγραφούν στο Φύλλο Απαντήσεων που θα σας δοθεί μαζί με τις εκφωνήσεις. 2. Η επεξεργασία των θεμάτων θα γίνει γραπτώς σε φύλλα Α4 ή σε τετράδιο
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015
 ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΥΠΟΥΡΓΕΙΟ ΠΑΙΔΕΙΑΣ ΚΑΙ ΠΟΛΙΤΙΣΜΟΥ ΔΙΕΥΘΥΝΣΗ ΑΝΩΤΕΡΗΣ ΚΑΙ ΑΝΩΤΑΤΗΣ ΕΚΠΑΙΔΕΥΣΗΣ ΥΠΗΡΕΣΙΑ ΕΞΕΤΑΣΕΩΝ ΠΑΓΚΥΠΡΙΕΣ ΕΞΕΤΑΣΕΙΣ 2015 ΤΕΧΝΟΛΟΓΙΑ (Ι) ΤΕΧΝΙΚΩΝ ΣΧΟΛΩΝ ΠΡΑΚΤΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ Μάθημα : Αυτοματισμοί και
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Βασικές Έννοιες Μέχρι στιγμής αντιμετωπίζαμε κάθε σώμα που μελετούσαμε την κίνηση του ως υλικό
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ Μηχανική Στερεού Σώματος - Κύλιση Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός Βασικές Έννοιες Μέχρι στιγμής αντιμετωπίζαμε κάθε σώμα που μελετούσαμε την κίνηση του ως υλικό
ΔΟΡΥΦΟΡΟΙ. Παπαδοπούλου Σοφιάννα. Περίληψη
 ΔΟΡΥΦΟΡΟΙ Παπαδοπούλου Σοφιάννα Περίληψη Οι δορυφόροι είναι ουράνια σώματα τα οποία μπορεί να μεταφέρουν είτε μια εικόνα ή οτιδήποτε άλλο. Το παρακάτω κείμενο έχει γραφτεί για να εξηγήσει σε τι περίπου
ΔΟΡΥΦΟΡΟΙ Παπαδοπούλου Σοφιάννα Περίληψη Οι δορυφόροι είναι ουράνια σώματα τα οποία μπορεί να μεταφέρουν είτε μια εικόνα ή οτιδήποτε άλλο. Το παρακάτω κείμενο έχει γραφτεί για να εξηγήσει σε τι περίπου
Μηχανική Στερεού Ασκήσεις Εμπέδωσης
 Μηχανική Στερεού Ασκήσεις Εμπέδωσης Όπου χρειάζεται, θεωρείστε δεδομένο ότι g = 10m/s 2. 1. Μία ράβδος ΟΑ, μήκους L = 0,5m, περιστρέφεται γύρω από σταθερό άξονα που περνάει από το ένα άκρο της Ο, με σταθερή
Μηχανική Στερεού Ασκήσεις Εμπέδωσης Όπου χρειάζεται, θεωρείστε δεδομένο ότι g = 10m/s 2. 1. Μία ράβδος ΟΑ, μήκους L = 0,5m, περιστρέφεται γύρω από σταθερό άξονα που περνάει από το ένα άκρο της Ο, με σταθερή
δ. έχουν πάντα την ίδια διεύθυνση.
 Διαγώνισμα ΦΥΣΙΚΗ Κ.Τ Γ ΛΥΚΕΙΟΥ ΖΗΤΗΜΑ 1 ον 1.. Σφαίρα, μάζας m 1, κινούμενη με ταχύτητα υ1, συγκρούεται μετωπικά και ελαστικά με ακίνητη σφαίρα μάζας m. Οι ταχύτητες των σφαιρών μετά την κρούση α. έχουν
Διαγώνισμα ΦΥΣΙΚΗ Κ.Τ Γ ΛΥΚΕΙΟΥ ΖΗΤΗΜΑ 1 ον 1.. Σφαίρα, μάζας m 1, κινούμενη με ταχύτητα υ1, συγκρούεται μετωπικά και ελαστικά με ακίνητη σφαίρα μάζας m. Οι ταχύτητες των σφαιρών μετά την κρούση α. έχουν
Ευρωπαϊκή Ολυμπιάδα Φυσικών Επιστημών 2011 Πανελλήνιος προκαταρκτικός διαγωνισμός στη Φυσική. Σχολείο: Ονόματα των μαθητών της ομάδας: 1) 2) 3)
 2) 3)") ΠΑΝΕΚΦΕ Ευρωπαϊκή Ολυμπιάδα Φυσικών Επιστημών 2011 Πανελλήνιος προκαταρκτικός διαγωνισμός στη Φυσική Σχολείο: Ονόματα των μαθητών της ομάδας: 1) 2) 3) Σχήμα 1 Εργαστηριακή Άσκηση: Μέτρηση της μάζας κινούμενου
ΠΑΝΕΚΦΕ Ευρωπαϊκή Ολυμπιάδα Φυσικών Επιστημών 2011 Πανελλήνιος προκαταρκτικός διαγωνισμός στη Φυσική Σχολείο: Ονόματα των μαθητών της ομάδας: 1) 2) 3) Σχήμα 1 Εργαστηριακή Άσκηση: Μέτρηση της μάζας κινούμενου
Βασικές Έννοιες της Πληροφορικής
 Βασικές Έννοιες της Πληροφορικής Ηλεκτρονικός Υπολογιστής Αυτόματη ηλεκτρονική μηχανή που δέχεται, φυλάσσει, επαναφέρει, επεξεργάζεται και παρουσιάζει πληροφορίες σύμφωνα με προκαθορισμένες εντολές. Δεδομένα
Βασικές Έννοιες της Πληροφορικής Ηλεκτρονικός Υπολογιστής Αυτόματη ηλεκτρονική μηχανή που δέχεται, φυλάσσει, επαναφέρει, επεξεργάζεται και παρουσιάζει πληροφορίες σύμφωνα με προκαθορισμένες εντολές. Δεδομένα
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ ΜΗΧΑΝΩΝ
 ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ ΜΗΧΑΝΩΝ Εργαστηριακή Άσκηση 2 ΦΥΓΟΚΕΝΤΡΟΣ ΔΥΝΑΜΗ Ονοματεπώνυμο: Παριανού Θεοδώρα Όνομα Πατρός: Απόστολος Αριθμός μητρώου: 1000107 Ημερομηνία Διεξαγωγής: 05/12/11 Ημερομηνία Παράδοσης:
ΕΡΓΑΣΤΗΡΙΟ ΔΥΝΑΜΙΚΗΣ ΜΗΧΑΝΩΝ Εργαστηριακή Άσκηση 2 ΦΥΓΟΚΕΝΤΡΟΣ ΔΥΝΑΜΗ Ονοματεπώνυμο: Παριανού Θεοδώρα Όνομα Πατρός: Απόστολος Αριθμός μητρώου: 1000107 Ημερομηνία Διεξαγωγής: 05/12/11 Ημερομηνία Παράδοσης:
ΗΛΕΚΤΡΟΝΙΚΟΙ ΥΠΟΛΟΓΙΣΤΕΣ
 Άριστος Πασιάς 1 ΗΛΕΚΤΡΟΝΙΚΟΙ ΥΠΟΛΟΓΙΣΤΕΣ Η ΔΟΜΗ ΤΟΥ ΗΛΕΚΤΡΟΝΙΚΟΥ ΥΠΟΛΟΓΙΣΤΗ Άριστος Πασιάς Σεπτέμβριος 2017 2 Στόχοι: Στο τέλος αυτού του μαθήματος ο μαθητή πρέπει: Να μπορεί να αναφέρει τα κύρια χαρακτηριστικά
Άριστος Πασιάς 1 ΗΛΕΚΤΡΟΝΙΚΟΙ ΥΠΟΛΟΓΙΣΤΕΣ Η ΔΟΜΗ ΤΟΥ ΗΛΕΚΤΡΟΝΙΚΟΥ ΥΠΟΛΟΓΙΣΤΗ Άριστος Πασιάς Σεπτέμβριος 2017 2 Στόχοι: Στο τέλος αυτού του μαθήματος ο μαθητή πρέπει: Να μπορεί να αναφέρει τα κύρια χαρακτηριστικά
ΕΠΙ ΡΑΣΗ ΤΗΣ ΣΤΡΟΦΟΡΜΗΣ ΣΕ ΕΛΕΥΘΕΡΑ ΑΙΩΡΟΥΜΕΝΑ ΡΟΜΠΟΤΙΚΑ ΣΥΣΤΗΜΑΤΑ ΣΕ ΤΡΟΧΙΑ
 ΕΠΙ ΡΑΣΗ ΤΗΣ ΣΤΡΟΦΟΡΜΗΣ ΣΕ ΕΛΕΥΘΕΡΑ ΑΙΩΡΟΥΜΕΝΑ ΡΟΜΠΟΤΙΚΑ ΣΥΣΤΗΜΑΤΑ ΣΕ ΤΡΟΧΙΑ Κώστας Νάνος και Ευάγγελος Παπαδόπουλος Εθνικό Μετσόβιο Πολυτεχνείο (ΕΜΠ) Σχολή Μηχανολόγων Μηχανικών, Εργαστήριο Αυτοµάτου
ΕΠΙ ΡΑΣΗ ΤΗΣ ΣΤΡΟΦΟΡΜΗΣ ΣΕ ΕΛΕΥΘΕΡΑ ΑΙΩΡΟΥΜΕΝΑ ΡΟΜΠΟΤΙΚΑ ΣΥΣΤΗΜΑΤΑ ΣΕ ΤΡΟΧΙΑ Κώστας Νάνος και Ευάγγελος Παπαδόπουλος Εθνικό Μετσόβιο Πολυτεχνείο (ΕΜΠ) Σχολή Μηχανολόγων Μηχανικών, Εργαστήριο Αυτοµάτου
ΠΡΟΩΘΗΣΗ ΠΥΡΑΥΛΩΝ. Η προώθηση των πυραύλων στηρίζεται στην αρχή διατήρησης της ορμής.
 ΠΡΟΩΘΗΣΗ ΠΥΡΑΥΛΩΝ Η προώθηση των πυραύλων στηρίζεται στην αρχή διατήρησης της ορμής. Ο πύραυλος καίει τα καύσιμα που αρχικά βρίσκονται μέσα του και εκτοξεύει τα καυσαέρια προς τα πίσω. Τα καυσαέρια δέχονται
ΠΡΟΩΘΗΣΗ ΠΥΡΑΥΛΩΝ Η προώθηση των πυραύλων στηρίζεται στην αρχή διατήρησης της ορμής. Ο πύραυλος καίει τα καύσιμα που αρχικά βρίσκονται μέσα του και εκτοξεύει τα καυσαέρια προς τα πίσω. Τα καυσαέρια δέχονται
ΑΝΑΣΚΟΠΗΣΗ ΚΑΙ ΤΡΙΣΔΙΑΣΤΑΤΗ ΣΧΕΔΙΑΣΗ ΜΗΧΑΝΙΣΜΩΝ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΔΙΑΤΑΞΕΩΝ. Αργυρώ Λάσκαρη
 ΑΝΑΣΚΟΠΗΣΗ ΚΑΙ ΤΡΙΣΔΙΑΣΤΑΤΗ ΣΧΕΔΙΑΣΗ ΜΗΧΑΝΙΣΜΩΝ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΔΙΑΤΑΞΕΩΝ Αργυρώ Λάσκαρη Χανιά 2014 Δομή της παρουσίασης Εισαγωγή Ιστορική Αναδρομή Σχεδιασμός Μηχανισμός με τέσσερα μέλη Κυκλοειδής μειωτήρας
ΑΝΑΣΚΟΠΗΣΗ ΚΑΙ ΤΡΙΣΔΙΑΣΤΑΤΗ ΣΧΕΔΙΑΣΗ ΜΗΧΑΝΙΣΜΩΝ ΜΗΧΑΝΟΛΟΓΙΚΩΝ ΔΙΑΤΑΞΕΩΝ Αργυρώ Λάσκαρη Χανιά 2014 Δομή της παρουσίασης Εισαγωγή Ιστορική Αναδρομή Σχεδιασμός Μηχανισμός με τέσσερα μέλη Κυκλοειδής μειωτήρας
Μάθημα 4.1 Βασικές μονάδες προσωπικού υπολογιστή
 Μάθημα 4.1 Βασικές μονάδες προσωπικού υπολογιστή - Εισαγωγή - Αρχιτεκτονική προσωπικού υπολογιστή - Βασικά τμήματα ενός προσωπικού υπολογιστή - Η κεντρική μονάδα Όταν ολοκληρώσεις το μάθημα αυτό θα μπορείς:
Μάθημα 4.1 Βασικές μονάδες προσωπικού υπολογιστή - Εισαγωγή - Αρχιτεκτονική προσωπικού υπολογιστή - Βασικά τμήματα ενός προσωπικού υπολογιστή - Η κεντρική μονάδα Όταν ολοκληρώσεις το μάθημα αυτό θα μπορείς:
ΑΡΧΙΤΕΚΤΟΝΙΚΗ HARDWARE ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ
 ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΚΕΦΑΛΑΙΟ 7ο ΑΡΧΙΤΕΚΤΟΝΙΚΗ HARDWARE ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ Γενικό διάγραμμα υπολογιστικού συστήματος Γενικό διάγραμμα υπολογιστικού συστήματος - Κεντρική Μονάδα Επεξεργασίας ονομάζουμε
ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΚΕΦΑΛΑΙΟ 7ο ΑΡΧΙΤΕΚΤΟΝΙΚΗ HARDWARE ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ Γενικό διάγραμμα υπολογιστικού συστήματος Γενικό διάγραμμα υπολογιστικού συστήματος - Κεντρική Μονάδα Επεξεργασίας ονομάζουμε
ΡΟΜΠΟΤΙΚΗ ΟΡΑΣΗ. Όταν ένα ρομπότ κινείται σε άγνωστο χώρο ή σε χώρο που μπορεί να αλλάξει η διάταξή του τότε εμφανίζεται η ανάγκη της όρασης μηχανής.
 ΡΟΜΠΟΤΙΚΗ ΟΡΑΣΗ Όταν ένα ρομπότ κινείται σε άγνωστο χώρο ή σε χώρο που μπορεί να αλλάξει η διάταξή του τότε εμφανίζεται η ανάγκη της όρασης μηχανής. Αισθητήρες που χρησιμοποιούνται για να αντιλαμβάνεται
ΡΟΜΠΟΤΙΚΗ ΟΡΑΣΗ Όταν ένα ρομπότ κινείται σε άγνωστο χώρο ή σε χώρο που μπορεί να αλλάξει η διάταξή του τότε εμφανίζεται η ανάγκη της όρασης μηχανής. Αισθητήρες που χρησιμοποιούνται για να αντιλαμβάνεται
Κεφάλαιο 8. Βαρυτικη Δυναμικη Ενεργεια { Εκφραση του Βαρυτικού Δυναμικού, Ταχύτητα Διαφυγής, Τροχιές και Ενέργεια Δορυφόρου}
 Κεφάλαιο 8 ΒΑΡΥΤΙΚΟ ΠΕΔΙΟ Νομος της Βαρυτητας {Διανυσματική Εκφραση, Βαρύτητα στη Γη και σε Πλανήτες} Νομοι του Kepler {Πεδίο Κεντρικών Δυνάμεων, Αρχή Διατήρησης Στροφορμής, Κίνηση Πλανητών και Νόμοι του
Κεφάλαιο 8 ΒΑΡΥΤΙΚΟ ΠΕΔΙΟ Νομος της Βαρυτητας {Διανυσματική Εκφραση, Βαρύτητα στη Γη και σε Πλανήτες} Νομοι του Kepler {Πεδίο Κεντρικών Δυνάμεων, Αρχή Διατήρησης Στροφορμής, Κίνηση Πλανητών και Νόμοι του
ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΠΑΤΡΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΚΑΙ ΑΕΡΟΝΑΥΠΗΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΤΩΝ ΡΕΥΣΤΩΝ ΚΑΙ ΕΦΑΡΜΟΓΩΝ ΑΥΤΗΣ
 ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΠΑΤΡΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΚΑΙ ΑΕΡΟΝΑΥΠΗΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΤΩΝ ΡΕΥΣΤΩΝ ΚΑΙ ΕΦΑΡΜΟΓΩΝ ΑΥΤΗΣ Διευθυντής: Διονύσιος-Ελευθ. Π. Μάργαρης, Αναπλ. Καθηγητής ΕΡΓΑΣΤΗΡΙΑΚΗ
ΠΟΛΥΤΕΧΝΙΚΗ ΣΧΟΛΗ ΠΑΝΕΠΙΣΤΗΜΙΟΥ ΠΑΤΡΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΚΑΙ ΑΕΡΟΝΑΥΠΗΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΤΩΝ ΡΕΥΣΤΩΝ ΚΑΙ ΕΦΑΡΜΟΓΩΝ ΑΥΤΗΣ Διευθυντής: Διονύσιος-Ελευθ. Π. Μάργαρης, Αναπλ. Καθηγητής ΕΡΓΑΣΤΗΡΙΑΚΗ
1.Η δύναμη μεταξύ δύο φορτίων έχει μέτρο 120 N. Αν η απόσταση των φορτίων διπλασιαστεί, το μέτρο της δύναμης θα γίνει:
 ΗΛΕΚΤΡΟΜΑΓΝΗΤΙΣΜΟΣ ΕΡΩΤΗΣΕΙΣ ΠΟΛΛΑΠΛΩΝ ΕΠΙΛΟΓΩΝ Ηλεκτρικό φορτίο Ηλεκτρικό πεδίο 1.Η δύναμη μεταξύ δύο φορτίων έχει μέτρο 10 N. Αν η απόσταση των φορτίων διπλασιαστεί, το μέτρο της δύναμης θα γίνει: (α)
ΗΛΕΚΤΡΟΜΑΓΝΗΤΙΣΜΟΣ ΕΡΩΤΗΣΕΙΣ ΠΟΛΛΑΠΛΩΝ ΕΠΙΛΟΓΩΝ Ηλεκτρικό φορτίο Ηλεκτρικό πεδίο 1.Η δύναμη μεταξύ δύο φορτίων έχει μέτρο 10 N. Αν η απόσταση των φορτίων διπλασιαστεί, το μέτρο της δύναμης θα γίνει: (α)
Ενότητα 4. Εισαγωγή στην Πληροφορική. Αναπαράσταση δεδοµένων. Αναπαράσταση πληροφορίας. υαδικοί αριθµοί. Χειµερινό Εξάµηνο 2006-07
 Ενότητα 4 Εισαγωγή στην Πληροφορική Κεφάλαιο 4Α: Αναπαράσταση πληροφορίας Κεφάλαιο 4Β: Επεξεργαστές που χρησιµοποιούνται σε PCs Χειµερινό Εξάµηνο 2006-07 ρ. Παναγιώτης Χατζηδούκας (Π..407/80) Εισαγωγή
Ενότητα 4 Εισαγωγή στην Πληροφορική Κεφάλαιο 4Α: Αναπαράσταση πληροφορίας Κεφάλαιο 4Β: Επεξεργαστές που χρησιµοποιούνται σε PCs Χειµερινό Εξάµηνο 2006-07 ρ. Παναγιώτης Χατζηδούκας (Π..407/80) Εισαγωγή
Κεφάλαιο 4. Διδακτικοί Στόχοι. Για την αναγκαιότητα, τον τρόπο συνεργασίας, τις δυνατότητες και τον τρόπο εγκατάστασης των περιφερειακών συσκευών.
 Κεφάλαιο 4 Ένα υπολογιστικό σύστημα εκτός από την ΚΜΕ και την κύρια μνήμη που χρησιμοποιούνται για την επεξεργασία και προσωρινή αποθήκευση δεδομένων βασίζεται στις περιφερειακές συσκευές για την επικοινωνία
Κεφάλαιο 4 Ένα υπολογιστικό σύστημα εκτός από την ΚΜΕ και την κύρια μνήμη που χρησιμοποιούνται για την επεξεργασία και προσωρινή αποθήκευση δεδομένων βασίζεται στις περιφερειακές συσκευές για την επικοινωνία
υ λ γ. λ δ. λ 0 υ. Μονάδες 5
 ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΕΣΠΕΡΙΝΩΝ ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΠΑΝΕΛΛΗΝΙΕΣ ΕΞΕΤΑΣΕΙΣ ΤΑΞΗΣ ΕΣΠΕΡΙΝΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΤΕΤΑΡΤΗ 1 ΙΟΥΝΙΟΥ 01 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΣΥΝΟΛΟ ΣΕΛΙ ΩΝ: ΕΠΤΑ
ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ ΕΣΠΕΡΙΝΩΝ ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΠΑΝΕΛΛΗΝΙΕΣ ΕΞΕΤΑΣΕΙΣ ΤΑΞΗΣ ΕΣΠΕΡΙΝΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΤΕΤΑΡΤΗ 1 ΙΟΥΝΙΟΥ 01 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΣΥΝΟΛΟ ΣΕΛΙ ΩΝ: ΕΠΤΑ
Γκύζη 14-Αθήνα Τηλ :
 ΘΕΜΑ Α ΠΑΝΕΛΛΑΔΙΚΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΚΑΙ ΕΠΑΛ (ΟΜΑΔΑ Β ) ΤΕΤΑΡΤΗ 22 ΜΑΪΟΥ 2013 ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΔΥΟ ΚΥΚΛΩΝ) Στις ερωτήσεις Α1-Α4 να γράψετε
ΘΕΜΑ Α ΠΑΝΕΛΛΑΔΙΚΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΚΑΙ ΕΠΑΛ (ΟΜΑΔΑ Β ) ΤΕΤΑΡΤΗ 22 ΜΑΪΟΥ 2013 ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ (ΚΑΙ ΤΩΝ ΔΥΟ ΚΥΚΛΩΝ) Στις ερωτήσεις Α1-Α4 να γράψετε
, συγκρούεται μετωπικά και ελαστικά με ακίνητη σφαίρα μάζας m 2. Οι ταχύτητες υ και υ των σφαιρών μετά την κρούση
 ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ Γ ΗΜΕΡΗΣΙΩΝ ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΠΑΝΕΛΛΗΝΙΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΤΕΤΑΡΤΗ 13 ΙΟΥΝΙΟΥ 01 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΣΥΝΟΛΟ ΣΕΛΙ ΩΝ:
ΑΡΧΗ 1ΗΣ ΣΕΛΙ ΑΣ Γ ΗΜΕΡΗΣΙΩΝ ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΠΑΝΕΛΛΗΝΙΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΤΕΤΑΡΤΗ 13 ΙΟΥΝΙΟΥ 01 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΣΥΝΟΛΟ ΣΕΛΙ ΩΝ:
Μία μέθοδος προσομοίωσης ψηφιακών κυκλωμάτων Εξελικτικής Υπολογιστικής
 Μία μέθοδος προσομοίωσης ψηφιακών κυκλωμάτων Εξελικτικής Υπολογιστικής Βασισμένο σε μια εργασία των Καζαρλή, Καλόμοιρου, Μαστοροκώστα, Μπαλουκτσή, Καλαϊτζή, Βαλαή, Πετρίδη Εισαγωγή Η Εξελικτική Υπολογιστική
Μία μέθοδος προσομοίωσης ψηφιακών κυκλωμάτων Εξελικτικής Υπολογιστικής Βασισμένο σε μια εργασία των Καζαρλή, Καλόμοιρου, Μαστοροκώστα, Μπαλουκτσή, Καλαϊτζή, Βαλαή, Πετρίδη Εισαγωγή Η Εξελικτική Υπολογιστική
Έλεγχος με Μικροϋπολογιστές Εργαστήριο ενσωματωμένων συστημάτων
 Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 1: Εισαγωγή στα ενσωματωμένα συστήματα (embedded systems) Εργαστήριο Αυτομάτου Ελέγχου Ενσωματωμένα συστήματα (Embedded Systems) Ενσωματωμένα συστήματα (Embedded
Εργαστήριο ενσωματωμένων συστημάτων Παρουσίαση 1: Εισαγωγή στα ενσωματωμένα συστήματα (embedded systems) Εργαστήριο Αυτομάτου Ελέγχου Ενσωματωμένα συστήματα (Embedded Systems) Ενσωματωμένα συστήματα (Embedded
Προσομοίωση, Έλεγχος και Βελτιστοποίηση Ενεργειακών Συστημάτων
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΑΘΗΝΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ Μαρία Σαμαράκου Καθηγήτρια, Τμήμα Μηχανικών Ενεργειακής Τεχνολογίας Διονύσης Κανδρής Επίκουρος Καθηγητής, Τμήμα Ηλεκτρονικών Μηχανικών
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΑΘΗΝΑΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ Μαρία Σαμαράκου Καθηγήτρια, Τμήμα Μηχανικών Ενεργειακής Τεχνολογίας Διονύσης Κανδρής Επίκουρος Καθηγητής, Τμήμα Ηλεκτρονικών Μηχανικών
7 η ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ
 7 η ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ΑΚΤΙΝΙΚΟ Ε ΡΑΝΟ ΟΛΙΣΘΗΣΗΣ 7.1 Εδρανα Τα έδρανα αποτελούν φορείς στήριξης και οδήγσης κινούµενων µηχανολογικών µερών, όπως είναι οι άξονες, -οι οποίοι καταπονούνται µόνο σε κάµψη
7 η ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ ΑΚΤΙΝΙΚΟ Ε ΡΑΝΟ ΟΛΙΣΘΗΣΗΣ 7.1 Εδρανα Τα έδρανα αποτελούν φορείς στήριξης και οδήγσης κινούµενων µηχανολογικών µερών, όπως είναι οι άξονες, -οι οποίοι καταπονούνται µόνο σε κάµψη
Ν. Κυρτάτος, Καθηγητής ΕΜΠ, Δ/ντής ΕΝΜ, Γ. Παπαλάμπρου, Λέκτορας ΕΜΠ, Σ. Τοπάλογλου, ΥΔ ΣΝΜΜ/ΕΜΠ
 Η ΝΕΑ ΜΕΓΑΛΗ ΠΕΙΡΑΜΑΤΙΚΗ ΚΛΙΝΗ ΔΟΚΙΜΩΝ ΥΒΡΙΔΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΠΡΟΩΣΗΣ ΠΛΟΙΩΝ ΜΕ ΘΕΡΜΙΚΟΥΣ ΚΑΙ ΗΛΕΚΤΡΙΚΟΥΣ ΚΙΝΗΤΗΡΕΣ ΚΑΙ ΣΥΣΤΗΜΑ ΑΠΟΡΡΥΠΑΝΣΗΣ ΚΑΥΣΑΕΡΙΩΝ, ΤΟΥ ΕΡΓΑΣΤΗΡΙΟΥ ΝΑΥΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ ΕΜΠ Ν. Κυρτάτος,
Η ΝΕΑ ΜΕΓΑΛΗ ΠΕΙΡΑΜΑΤΙΚΗ ΚΛΙΝΗ ΔΟΚΙΜΩΝ ΥΒΡΙΔΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΠΡΟΩΣΗΣ ΠΛΟΙΩΝ ΜΕ ΘΕΡΜΙΚΟΥΣ ΚΑΙ ΗΛΕΚΤΡΙΚΟΥΣ ΚΙΝΗΤΗΡΕΣ ΚΑΙ ΣΥΣΤΗΜΑ ΑΠΟΡΡΥΠΑΝΣΗΣ ΚΑΥΣΑΕΡΙΩΝ, ΤΟΥ ΕΡΓΑΣΤΗΡΙΟΥ ΝΑΥΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ ΕΜΠ Ν. Κυρτάτος,
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 2 USB και Σειριακή Επικοι- νωνία Σ Σειριακή Επικοινωνία
 Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 2 USB και Σειριακή Επικοινωνία. Σειριακή Επικοινωνία USB Σύνδεση / Πρωτόκολλο Σκοπός Εντολή επιλογής (if) Εντολή Επανάληψης (while) Πίνακες 1 Μέρος Α : Σκοπός
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 2 USB και Σειριακή Επικοινωνία. Σειριακή Επικοινωνία USB Σύνδεση / Πρωτόκολλο Σκοπός Εντολή επιλογής (if) Εντολή Επανάληψης (while) Πίνακες 1 Μέρος Α : Σκοπός
Κεφάλαιο 6α. Περιστροφή στερεού σώματος γύρω από σταθερό άξονα
 Κεφάλαιο 6α Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Στερεό (ή άκαμπτο) σώμα Τα μοντέλα ανάλυσης που παρουσιάσαμε μέχρι τώρα δεν μπορούν να χρησιμοποιηθούν για την ανάλυση όλων των κινήσεων. Μπορούμε
Κεφάλαιο 6α Περιστροφή στερεού σώματος γύρω από σταθερό άξονα Στερεό (ή άκαμπτο) σώμα Τα μοντέλα ανάλυσης που παρουσιάσαμε μέχρι τώρα δεν μπορούν να χρησιμοποιηθούν για την ανάλυση όλων των κινήσεων. Μπορούμε
Συστήματα Αυτόματου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Ψηφιακός Έλεγχος Συστημάτων Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Ψηφιακός Έλεγχος Συστημάτων Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Το εσωτερικό ενός PC. Τεχνολογία Η/Υ & Πληροφοριών - 05 Κεντρική μονάδα Χουρδάκης Μανόλης
 Το εσωτερικό ενός PC 1 Το κουτί του PC (περίβλημα) περιέχει όλα τα βασικά μέρη του συστήματος Δύο κατηγορίες κουτιών: Desktop και Tower Mini tower Midi tower Full tower Κεντρική μονάδα Ο τύπος του κουτιού
Το εσωτερικό ενός PC 1 Το κουτί του PC (περίβλημα) περιέχει όλα τα βασικά μέρη του συστήματος Δύο κατηγορίες κουτιών: Desktop και Tower Mini tower Midi tower Full tower Κεντρική μονάδα Ο τύπος του κουτιού
ΤΕΙ ΚΑΒΑΛΑΣ 2012. 1.1 Εισαγωγή Αντικείμενο πτυχιακής εργασίας.σελ. 2. 1.2 Περιεχόμενα εγχειριδίου Αναφοράς Προγραμμάτων.. σελ. 3
 1 ΠΕΡΙΕΧΟΜΕΝΑ 1.1 Εισαγωγή Αντικείμενο πτυχιακής εργασίας.σελ. 2 1.2 Περιεχόμενα εγχειριδίου Αναφοράς Προγραμμάτων.. σελ. 3 1.3 Παράδειγμα τριφασικού επαγωγικού κινητήρα..σελ. 4-9 1.4 Σχεδίαση στο Visio
1 ΠΕΡΙΕΧΟΜΕΝΑ 1.1 Εισαγωγή Αντικείμενο πτυχιακής εργασίας.σελ. 2 1.2 Περιεχόμενα εγχειριδίου Αναφοράς Προγραμμάτων.. σελ. 3 1.3 Παράδειγμα τριφασικού επαγωγικού κινητήρα..σελ. 4-9 1.4 Σχεδίαση στο Visio
3.6 Ευθεία και Αντίστροφη υναµική
 3.6 Ευθεία και Αντίστροφη υναµική Στη δυναµική µας απασχολούν δύο ειδών προβλήµατα, το ευθύ δυναµικό πρόβληµα και το αντίστροφο δυναµικό πρόβληµα. Το αντίστροφο πρόβληµα αφορά στον προσδιορισµό των ροπών
3.6 Ευθεία και Αντίστροφη υναµική Στη δυναµική µας απασχολούν δύο ειδών προβλήµατα, το ευθύ δυναµικό πρόβληµα και το αντίστροφο δυναµικό πρόβληµα. Το αντίστροφο πρόβληµα αφορά στον προσδιορισµό των ροπών
ΘΕΜΑ 1. Λύση. V = V x. H θ y O V 1 H/2. (α) Ακίνητος παρατηρητής (Ο) (1) 6 = = (3) 6 (4)
 Ακίνητος παρατηρητής (Ο) (1) 6 = = (3) 6 (4)") ΘΕΜΑ Ένα αεροπλάνο πετάει οριζόντια σε ύψος h=km µε σταθερή ταχύτητα V=6km/h, ως προς ακίνητο παρατηρητή στο έδαφος. Ο πιλότος αφήνει µια βόµβα να πέσει ελεύθερα: (α) Γράψτε τις εξισώσεις κίνησης (δηλαδή
ΘΕΜΑ Ένα αεροπλάνο πετάει οριζόντια σε ύψος h=km µε σταθερή ταχύτητα V=6km/h, ως προς ακίνητο παρατηρητή στο έδαφος. Ο πιλότος αφήνει µια βόµβα να πέσει ελεύθερα: (α) Γράψτε τις εξισώσεις κίνησης (δηλαδή
ΑΡΧΗ 1ΗΣ ΣΕΛΙΔΑΣ Δ ΕΣΠΕΡΙΝΩΝ
 ΑΡΧΗ ΗΣ ΣΕΛΙΔΑΣ Δ ΕΣΠΕΡΙΝΩΝ ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΠΑΝΕΛΛΗΝΙΕΣ ΕΞΕΤΑΣΕΙΣ Δ ΤΑΞΗΣ ΕΣΠΕΡΙΝΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΔΕΥΤΕΡΑ 5 ΙΟΥΝΙΟΥ 05 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ΕΠΤΑ
ΑΡΧΗ ΗΣ ΣΕΛΙΔΑΣ Δ ΕΣΠΕΡΙΝΩΝ ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΠΑΝΕΛΛΗΝΙΕΣ ΕΞΕΤΑΣΕΙΣ Δ ΤΑΞΗΣ ΕΣΠΕΡΙΝΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΔΕΥΤΕΡΑ 5 ΙΟΥΝΙΟΥ 05 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ΕΠΤΑ
ΠΡΟΜΗΘΕΙΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΚΑΙ ΠΕΡΙΦΕΡΕΙΑΚΩΝ ΣΥΣΚΕΥΩΝ ΔΗΜΟΥ ΒΕΡΟΙΑΣ ΕΤΟΥΣ 2017
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΔΗΜΟΣ ΒΕΡΟΙΑΣ ΔΙΕΥΘΥΝΣΗ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΟΡΓΑΝΩΣΗΣ & ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΡΟΜΗΘΕΙΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΚΑΙ ΠΕΡΙΦΕΡΕΙΑΚΩΝ ΣΥΣΚΕΥΩΝ ΔΗΜΟΥ ΒΕΡΟΙΑΣ ΕΤΟΥΣ 2017 CPV: 30237300-2,30213300-8,30237460-1,
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΔΗΜΟΣ ΒΕΡΟΙΑΣ ΔΙΕΥΘΥΝΣΗ ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΥ ΟΡΓΑΝΩΣΗΣ & ΠΛΗΡΟΦΟΡΙΚΗΣ ΠΡΟΜΗΘΕΙΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΚΑΙ ΠΕΡΙΦΕΡΕΙΑΚΩΝ ΣΥΣΚΕΥΩΝ ΔΗΜΟΥ ΒΕΡΟΙΑΣ ΕΤΟΥΣ 2017 CPV: 30237300-2,30213300-8,30237460-1,
Physics by Chris Simopoulos
 ΕΠΩΗ 1. Ευθύγραμμος αγωγός μήκους L = 1 m κινείται με σταθερή ταχύτητα υ = 2 m/s μέσα σε ομογενές μαγνητικό πεδίο έντασης Β = 0,8 Τ. Η κίνηση γίνεται έτσι ώστε η ταχύτητα του αγωγού να σχηματίζει γωνία
ΕΠΩΗ 1. Ευθύγραμμος αγωγός μήκους L = 1 m κινείται με σταθερή ταχύτητα υ = 2 m/s μέσα σε ομογενές μαγνητικό πεδίο έντασης Β = 0,8 Τ. Η κίνηση γίνεται έτσι ώστε η ταχύτητα του αγωγού να σχηματίζει γωνία
LFT169 - LFR169 ΠΟΜΠΟΣ ΚΑΙ ΔΕΚΤΗΣ ΨΗΦΙΑΚΩΝ ΚΑΙ ΑΝΑΛΟΓΙΚΩΝ ΣΗΜΑΤΩΝ
 LFT169 - LFR169 ΠΟΜΠΟΣ ΚΑΙ ΔΕΚΤΗΣ ΨΗΦΙΑΚΩΝ ΚΑΙ ΑΝΑΛΟΓΙΚΩΝ ΣΗΜΑΤΩΝ Οδηγίες Παραμετροποίησης Power Electronics Control Ε.Π.Ε. Τύποι Συσκευών: LFT169 - LFR169 Περιγραφή: Πομπός και Δέκτης Τηλεχειρισμού 169MHz
LFT169 - LFR169 ΠΟΜΠΟΣ ΚΑΙ ΔΕΚΤΗΣ ΨΗΦΙΑΚΩΝ ΚΑΙ ΑΝΑΛΟΓΙΚΩΝ ΣΗΜΑΤΩΝ Οδηγίες Παραμετροποίησης Power Electronics Control Ε.Π.Ε. Τύποι Συσκευών: LFT169 - LFR169 Περιγραφή: Πομπός και Δέκτης Τηλεχειρισμού 169MHz
ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ
 ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
ΜΑΘ.. 12 ΕΙΣΑΓΩΓΗ ΣΤΟΥΣ ΜΕΤΑΤΡΟΠΕΙΣ ΣΥΝΕΧΟΥΣ ΡΕΥΜΑΤΟΣ 1. ΓΕΝΙΚΑ Οι μετατροπείς συνεχούς ρεύματος επιτελούν τη μετατροπή μιας τάσης συνεχούς μορφής, σε συνεχή τάση με ρυθμιζόμενο σταθερό πλάτος ή και πολικότητα.
Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2. Προγραμματισμός Φυσικών Συστημάτων. Συστήματα Πραγματικών Εφαρμογών. Νέα Ψηφιακά Αντικείμενα
 Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Σκοπός Ψηφιακά Αντικείμενα Μάθημα 1 Δραστηριότητα 2 ΤΟ ΣΥΣΤΗΜΑ ΣΑΡΩΣΗΣ ΤΟΥ ΟΠΤΙΚΟΥ ΠΕΔΙΟΥ. Ψηφιακά Αντικείμενα Μικροελεγκτής Προγραμματισμός Φυσικών Συστημάτων Συστήματα Πραγματικών Εφαρμογών Νέα Ψηφιακά
Δυναµική των Ροµποτικών Βραχιόνων. Κ. Κυριακόπουλος
 Δυναµική των Ροµποτικών Βραχιόνων Κ. Κυριακόπουλος Ροµποτική Αρχιτεκτονική: η Δυναµική Περιβάλλον u Ροµποτική Δυναµική q,!q Ροµποτική Κινηµατική Θέση, Προσανατολισµός και αλληλεπίδραση Η δυναµική ασχολείται
Δυναµική των Ροµποτικών Βραχιόνων Κ. Κυριακόπουλος Ροµποτική Αρχιτεκτονική: η Δυναµική Περιβάλλον u Ροµποτική Δυναµική q,!q Ροµποτική Κινηµατική Θέση, Προσανατολισµός και αλληλεπίδραση Η δυναµική ασχολείται
Μέτρηση της επιτάχυνσης της βαρύτητας με τη βοήθεια του απλού εκκρεμούς.
 Μ2 Μέτρηση της επιτάχυνσης της βαρύτητας με τη βοήθεια του απλού εκκρεμούς. 1 Σκοπός Η εργαστηριακή αυτή άσκηση αποσκοπεί στη μέτρηση της επιτάχυνσης της βαρύτητας σε ένα τόπο. Αυτή η μέτρηση επιτυγχάνεται
Μ2 Μέτρηση της επιτάχυνσης της βαρύτητας με τη βοήθεια του απλού εκκρεμούς. 1 Σκοπός Η εργαστηριακή αυτή άσκηση αποσκοπεί στη μέτρηση της επιτάχυνσης της βαρύτητας σε ένα τόπο. Αυτή η μέτρηση επιτυγχάνεται
Ηλεκτρονικός Υπολογιστής
 Ηλεκτρονικός Υπολογιστής Ε ί ν α ι μ ι α μ η χ α ν ή κα τ α σ κ ε υ α σ μ έ ν η κ υ ρ ί ω ς α π ό ψ η φ ι α κά η λ ε κ τ ρ ο ν ι κά κ υ κ λ ώ μ α τ α κα ι δ ε υ τ ε ρ ε υ ό ν τ ω ς α π ό η λ ε κ τ ρ ι
Ηλεκτρονικός Υπολογιστής Ε ί ν α ι μ ι α μ η χ α ν ή κα τ α σ κ ε υ α σ μ έ ν η κ υ ρ ί ω ς α π ό ψ η φ ι α κά η λ ε κ τ ρ ο ν ι κά κ υ κ λ ώ μ α τ α κα ι δ ε υ τ ε ρ ε υ ό ν τ ω ς α π ό η λ ε κ τ ρ ι
Ο ελεγκτής PID χοντρικά...
 Ο ελεγκτής PID χοντρικά... Έχετε ένα αμάξι που με τέρμα γκάζι πηγαίνει 200χλμ.. Σας λέει κάποιος λοιπόν ότι θέλει να πάτε με 100 ακριβώς. Λέει κάποιος άλλος..θα πατήσω το γκάζι μέχρι την μέση και άρα θα
Ο ελεγκτής PID χοντρικά... Έχετε ένα αμάξι που με τέρμα γκάζι πηγαίνει 200χλμ.. Σας λέει κάποιος λοιπόν ότι θέλει να πάτε με 100 ακριβώς. Λέει κάποιος άλλος..θα πατήσω το γκάζι μέχρι την μέση και άρα θα
Προσομοίωση Μηχανολογικών συστημάτων Σχήμα 2.71 Σχήμα 2.72
 Προσομοίωση Μηχανολογικών συστημάτων Ας δούμε πρώτα τις βιβλιοθήκες που σχετίζονται με τα μηχανολογικά συστήματα μεταφοράς. Στο σχήμα 2.71 βλέπουμε τις βιβλιοθήκες αυτές Translational elements Rotational
Προσομοίωση Μηχανολογικών συστημάτων Ας δούμε πρώτα τις βιβλιοθήκες που σχετίζονται με τα μηχανολογικά συστήματα μεταφοράς. Στο σχήμα 2.71 βλέπουμε τις βιβλιοθήκες αυτές Translational elements Rotational
12. Δυναμομέτρηση Εμβολοφόρου Βενζινοκινητήρα με τη χρήση Υδραυλικής Πέδης Νερού
 12. Δυναμομέτρηση Εμβολοφόρου Βενζινοκινητήρα με τη χρήση Υδραυλικής Πέδης Νερού Προαπαιτούμενες γνώσεις: (α) Θεωρητικές γνώσεις κατάστρωσης Ενεργειακού Ισολογισμού Μ.Ε.Κ. και (β) Θεωρητικές γνώσεις για
12. Δυναμομέτρηση Εμβολοφόρου Βενζινοκινητήρα με τη χρήση Υδραυλικής Πέδης Νερού Προαπαιτούμενες γνώσεις: (α) Θεωρητικές γνώσεις κατάστρωσης Ενεργειακού Ισολογισμού Μ.Ε.Κ. και (β) Θεωρητικές γνώσεις για
1. Από ποια μέρη αποτελείται η περιστροφική αντλία πετρελαίου ; Πώς διανέμεται το καύσιμο στους διάφορους κυλίνδρους ;
 Απαντήσεις στο διαγώνισμα του 6 ου κεφαλαίου 1. Από ποια μέρη αποτελείται η περιστροφική αντλία πετρελαίου ; 197 1. τον κινητήριο άξονα ( περιστρέφεται με τις μισές στροφές του στροφάλου για 4-χρονο κινητήρα
Απαντήσεις στο διαγώνισμα του 6 ου κεφαλαίου 1. Από ποια μέρη αποτελείται η περιστροφική αντλία πετρελαίου ; 197 1. τον κινητήριο άξονα ( περιστρέφεται με τις μισές στροφές του στροφάλου για 4-χρονο κινητήρα
Πτυχιακή Εργασία Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Η Ασύρματη Επικοινωνία, χρησιμοποιώντας
 Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Βασικές Έννοιες Πτυχιακή Εργασία 2015 Οδηγώντας ένα Ρομποτικό Αυτοκίνητο με το WiFi. Σχεδίαση Συστήματος Πραγματικής Εφαρμογής (Prototyping). Η Ασύρματη Επικοινωνία, χρησιμοποιώντας το πρωτόκολλο WiFi.
Σχήμα 1 Διαστημόμετρο (Μ Κύρια κλίμακα, Ν Βερνιέρος)
") Άσκηση Μ1 Θεωρητικό μέρος Μήκος και μάζα (βάρος) Όργανα μέτρησης μήκους Διαστημόμετρο Με το διαστημόμετρο μετράμε μήκη μέχρι και μερικά μέτρα, σε χαμηλές απαιτήσεις ως προς την ακρίβεια. Το κύριο μέρος
Άσκηση Μ1 Θεωρητικό μέρος Μήκος και μάζα (βάρος) Όργανα μέτρησης μήκους Διαστημόμετρο Με το διαστημόμετρο μετράμε μήκη μέχρι και μερικά μέτρα, σε χαμηλές απαιτήσεις ως προς την ακρίβεια. Το κύριο μέρος
Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα
 Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα ΔΙΑΛΕΞΗ 08 Δυναμική περιστροφικής κίνησης Ροπή Ροπή Αδρανείας ΦΥΣ102 1 Περιστροφική κίνηση
Τμήμα Φυσικής Πανεπιστημίου Κύπρου Χειμερινό Εξάμηνο 2016/2017 ΦΥΣ102 Φυσική για Χημικούς Διδάσκων: Μάριος Κώστα ΔΙΑΛΕΞΗ 08 Δυναμική περιστροφικής κίνησης Ροπή Ροπή Αδρανείας ΦΥΣ102 1 Περιστροφική κίνηση
Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 1. Arduino + LabVIEW: Μέτρηση Έντασης Φωτός με Φωτοαντίσταση. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων
 Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 1 Arduino + LabVIEW: Μέτρηση Έντασης Φωτός με Φωτοαντίσταση. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο
Σκοπός Συλλογή & Επεξεργασία Δεδομένων Εργαστήριο 1 Arduino + LabVIEW: Μέτρηση Έντασης Φωτός με Φωτοαντίσταση. Σύστημα Συλλογής & Επεξεργασίας Μετρήσεων Βασική δομή ενός προγράμματος στο LabVIEW. Εμπρόσθιο
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Β ΛΥΚΕΙΟΥ Καμπυλόγραμμες Κινήσεις Επιμέλεια: Αγκανάκης Α. Παναγιώτης, Φυσικός http://phyiccore.wordpre.com/ Βασικές Έννοιες Μέχρι στιγμής έχουμε μάθει να μελετάμε απλές κινήσεις,
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Β ΛΥΚΕΙΟΥ Καμπυλόγραμμες Κινήσεις Επιμέλεια: Αγκανάκης Α. Παναγιώτης, Φυσικός http://phyiccore.wordpre.com/ Βασικές Έννοιες Μέχρι στιγμής έχουμε μάθει να μελετάμε απλές κινήσεις,
Φυσική Θετικών Σπουδών Γ τάξη Ενιαίου Λυκείου 2 0 Κεφάλαιο
 Φυσική Θετικών Σπουδών Γ τάξη Ενιαίου Λυκείου 0 Κεφάλαιο Περιέχει: Αναλυτική Θεωρία Ερωτήσεις Θεωρίας Ερωτήσεις Πολλαπλής Επιλογής Ερωτήσεις Σωστού - λάθους Ασκήσεις ΘΕΩΡΙΑ 4- ΕΙΣΑΓΩΓΗ Στην μέχρι τώρα
Φυσική Θετικών Σπουδών Γ τάξη Ενιαίου Λυκείου 0 Κεφάλαιο Περιέχει: Αναλυτική Θεωρία Ερωτήσεις Θεωρίας Ερωτήσεις Πολλαπλής Επιλογής Ερωτήσεις Σωστού - λάθους Ασκήσεις ΘΕΩΡΙΑ 4- ΕΙΣΑΓΩΓΗ Στην μέχρι τώρα
Θέματα Παγκύπριων Εξετάσεων
 Θέματα Παγκύπριων Εξετάσεων 2009-2015 Σελίδα 1 από 13 Μηχανική Στερεού Σώματος 1. Στο πιο κάτω σχήμα φαίνονται δύο όμοιες πλατφόρμες οι οποίες μπορούν να περιστρέφονται χωρίς τριβές, γύρω από κατακόρυφο
Θέματα Παγκύπριων Εξετάσεων 2009-2015 Σελίδα 1 από 13 Μηχανική Στερεού Σώματος 1. Στο πιο κάτω σχήμα φαίνονται δύο όμοιες πλατφόρμες οι οποίες μπορούν να περιστρέφονται χωρίς τριβές, γύρω από κατακόρυφο
Γ ΛΥΚΕΙΟΥ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ & ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ
 ε π α ν α λ η π τ ι κ ά θ έ µ α τ α 0 0 5 Γ ΛΥΚΕΙΟΥ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ & ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 1 ΘΕΜΑ 1 o Για τις ερωτήσεις 1 4, να γράψετε στο τετράδιο σας τον αριθµό της ερώτησης και δίπλα το γράµµα που
ε π α ν α λ η π τ ι κ ά θ έ µ α τ α 0 0 5 Γ ΛΥΚΕΙΟΥ ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ & ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ 1 ΘΕΜΑ 1 o Για τις ερωτήσεις 1 4, να γράψετε στο τετράδιο σας τον αριθµό της ερώτησης και δίπλα το γράµµα που
Κεφάλαιο 1 Εισαγωγή.
 Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
Κεφάλαιο 1 Εισαγωγή Αντικείμενο της εργασίας είναι η σχεδίαση και κατασκευή του ηλεκτρονικού τμήματος της διάταξης μέτρησης των θερμοκρασιών σε διάφορα σημεία ενός κινητήρα Ο στόχος είναι η ανάκτηση του
ΟΕΦΕ 2009 Γ' ΛΥΚΕΙΟΥ ΘΕΤΙΚΗ & ΤΕΧΝΟΛΟΓΙΚΗ ΚΑΤΕΥΘΥΝΣΗ ΦΥΣΙΚΗ
 ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ 1 ΟΕΦΕ 2009 Γ' ΛΥΚΕΙΟΥ ΘΕΤΙΚΗ & ΤΕΧΝΟΛΟΓΙΚΗ ΚΑΤΕΥΘΥΝΣΗ ΦΥΣΙΚΗ ΘΕΜΑ 1 Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράμμα που
ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Γ ΛΥΚΕΙΟΥ 1 ΟΕΦΕ 2009 Γ' ΛΥΚΕΙΟΥ ΘΕΤΙΚΗ & ΤΕΧΝΟΛΟΓΙΚΗ ΚΑΤΕΥΘΥΝΣΗ ΦΥΣΙΚΗ ΘΕΜΑ 1 Να γράψετε στο τετράδιό σας τον αριθμό καθεμιάς από τις παρακάτω ερωτήσεις 1-4 και δίπλα το γράμμα που
Εισαγωγή στον Αυτόματο Έλεγχο Συστήματα, Εφαρμογές, Αισθητήρια
 Εισαγωγή στον Αυτόματο Έλεγχο 2016-2017 Συστήματα, Εφαρμογές, Αισθητήρια Δρ. Γεώργιος Παπαλάμπρου Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο Ναυτικής Μηχανολογίας
Εισαγωγή στον Αυτόματο Έλεγχο 2016-2017 Συστήματα, Εφαρμογές, Αισθητήρια Δρ. Γεώργιος Παπαλάμπρου Εργαστήριο Ναυτικής Μηχανολογίας george.papalambrou@lme.ntua.gr ΕΜΠ/ΣΝΜΜ Εργαστήριο Ναυτικής Μηχανολογίας
ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - ΣΥΝΟΨΗ
 ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - Π. ΑΣΒΕΣΤΑΣ E MAIL: pasv@uniwa.gr Εφαρμογές ρομποτικής στην Ιατρική Κλασσική χειρουργική Ορθοπεδικές επεμβάσεις Νευροχειρουργική Ακτινοθεραπεία Αποκατάσταση φυσιοθεραπεία 2 Βασικοί
ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - Π. ΑΣΒΕΣΤΑΣ E MAIL: pasv@uniwa.gr Εφαρμογές ρομποτικής στην Ιατρική Κλασσική χειρουργική Ορθοπεδικές επεμβάσεις Νευροχειρουργική Ακτινοθεραπεία Αποκατάσταση φυσιοθεραπεία 2 Βασικοί
ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ [Υποκεφάλαιο 4.2 Οι κινήσεις των στερεών σωμάτων του σχολικού βιβλίου]
![ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ [Υποκεφάλαιο 4.2 Οι κινήσεις των στερεών σωμάτων του σχολικού βιβλίου]](/thumbs/52/29790189.jpg "ΚΕΦΑΛΑΙΟ 4 ο : ΜΗΧΑΝΙΚΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ ΕΝΟΤΗΤΑ 1: ΚΙΝΗΣΗ ΣΤΕΡΕΟΥ ΣΩΜΑΤΟΣ [Υποκεφάλαιο 4.2 Οι κινήσεις των στερεών σωμάτων του σχολικού βιβλίου]") ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
ΤΟ ΥΛΙΚΟ ΕΧΕΙ ΑΝΤΛΗΘΕΙ ΑΠΟ ΤΑ ΨΗΦΙΑΚΑ ΕΚΠΑΙΔΕΥΤΙΚΑ ΒΟΗΘΗΜΑΤΑ ΤΟΥ ΥΠΟΥΡΓΕΙΟΥ ΠΑΙΔΕΙΑΣ http://www.study4exams.gr/ ΕΧΕΙ ΤΑΞΙΝΟΜΗΘΕΙ ΑΝΑ ΕΝΟΤΗΤΑ ΚΑΙ ΑΝΑ ΤΥΠΟ ΓΙΑ ΔΙΕΥΚΟΛΥΝΣΗ ΤΗΣ ΜΕΛΕΤΗΣ ΣΑΣ ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΤΗ
Εισαγωγή στην επιστήμη των υπολογιστών. Υλικό Υπολογιστών Κεφάλαιο 5ο Οργάνωση υπολογιστών
 Εισαγωγή στην επιστήμη των υπολογιστών Υλικό Υπολογιστών Κεφάλαιο 5ο Οργάνωση υπολογιστών 1 Οργάνωση υπολογιστών ΚΜΕ Κύρια Μνήμη Υποσύστημα εισόδου/εξόδου 2 Κεντρική Μονάδα Επεξεργασίας (ΚΜΕ) R1 R2 ΑΛΜ
Εισαγωγή στην επιστήμη των υπολογιστών Υλικό Υπολογιστών Κεφάλαιο 5ο Οργάνωση υπολογιστών 1 Οργάνωση υπολογιστών ΚΜΕ Κύρια Μνήμη Υποσύστημα εισόδου/εξόδου 2 Κεντρική Μονάδα Επεξεργασίας (ΚΜΕ) R1 R2 ΑΛΜ
«ΠΡΟΜΗΘΕΙΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΚΑΙ ΠΕΡΙΦΕΡΙΑΚΩΝ ΣΥΣΚΕΥΩΝ» ΤΟΥ ΔΗΜΟΥ ΙΩΑΝΝΙΤΩΝ ΤΕΧΝΙΚΗ ΜΕΛΕΤΗ
 «ΠΡΟΜΗΘΕΙΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΚΑΙ ΠΕΡΙΦΕΡΙΑΚΩΝ ΣΥΣΚΕΥΩΝ» ΤΟΥ ΔΗΜΟΥ ΙΩΑΝΝΙΤΩΝ ΤΕΧΝΙΚΗ ΜΕΛΕΤΗ ΠΡΟΫΠΟΛΟΓΙΣΜΟΣ : 49999,50 ΕΥΡΩ ΜΕ Φ.Π.Α. Κ.Α. : 70.01.7134.001 ΕΤΟΣ : 2015 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΑΠΟΚΕΝΤΡΩΜΕΝΗ
«ΠΡΟΜΗΘΕΙΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΚΑΙ ΠΕΡΙΦΕΡΙΑΚΩΝ ΣΥΣΚΕΥΩΝ» ΤΟΥ ΔΗΜΟΥ ΙΩΑΝΝΙΤΩΝ ΤΕΧΝΙΚΗ ΜΕΛΕΤΗ ΠΡΟΫΠΟΛΟΓΙΣΜΟΣ : 49999,50 ΕΥΡΩ ΜΕ Φ.Π.Α. Κ.Α. : 70.01.7134.001 ΕΤΟΣ : 2015 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ ΑΠΟΚΕΝΤΡΩΜΕΝΗ
ΑΡΧΗ 1ΗΣ ΣΕΛΙΔΑΣ Γ ΗΜΕΡΗΣΙΩΝ
 ΑΡΧΗ 1ΗΣ ΣΕΛΙΔΑΣ Γ ΗΜΕΡΗΣΙΩΝ ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΠΑΝΕΛΛΗΝΙΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΔΕΥΤΕΡΑ 15 ΙΟΥΝΙΟΥ 015 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ:
ΑΡΧΗ 1ΗΣ ΣΕΛΙΔΑΣ Γ ΗΜΕΡΗΣΙΩΝ ΕΠΑΝΑΛΗΠΤΙΚΕΣ ΠΑΝΕΛΛΗΝΙΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΔΕΥΤΕΡΑ 15 ΙΟΥΝΙΟΥ 015 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΦΥΣΙΚΗ ΘΕΤΙΚΗΣ ΚΑΙ ΤΕΧΝΟΛΟΓΙΚΗΣ ΚΑΤΕΥΘΥΝΣΗΣ ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ:
Κεφάλαιο 3. Κίνηση σε δύο διαστάσεις (επίπεδο)
") Κεφάλαιο 3 Κίνηση σε δύο διαστάσεις (επίπεδο) Κινηματική σε δύο διαστάσεις Θα περιγράψουμε τη διανυσματική φύση της θέσης, της ταχύτητας, και της επιτάχυνσης με περισσότερες λεπτομέρειες. Σαν ειδικές περιπτώσεις,
Κεφάλαιο 3 Κίνηση σε δύο διαστάσεις (επίπεδο) Κινηματική σε δύο διαστάσεις Θα περιγράψουμε τη διανυσματική φύση της θέσης, της ταχύτητας, και της επιτάχυνσης με περισσότερες λεπτομέρειες. Σαν ειδικές περιπτώσεις,