Digitalni sistemi automatskog upravljanja
|
|
|
- Τυρώ Παπάγος
- 6 χρόνια πριν
- Προβολές:
Transcript
1 Digitalni sistemi automatskog upravljanja Status predmeta Obavezni Semestar VII Broj ECTS kredita 6,0 Fond časova 2P+2V nastavnik: Doc. dr Milovan RADULOVIĆ termini nastave: SVAKA SUBOTA od 11:00 14:00 1 Literatura: Stojić M. Kontinualni sistemi automatskog upravljanja, Naučna knjiga, Beograd, 1990 Stojić M. Digitalni sistemi upravljanja, Naučna knjiga, Beograd 1989 Kovačević B. Sistemi automatskog upravljanja (zbirka zadataka), Naučna knjiga, Beograd, Latinka Ćalasan, Menka Petkovska, Matlab i dodatni moduli Conrtol System Toolbox i Simulink, Beograd, R.C.Dorf, R.H.Bishop: Modern Control Systems; Addison-Wesley, USA Oblici provjere znanja i ocjenjivanje: Dva kolokvijuma po 25 poena (ukupno 50 poena) Završni ispit 50 poena. Prelazna ocjena se dobija ako se kumulativno sakupi najmanje 51 poen. 2 1
2 CILJ KURSA Razumijevanje uloge upravljanja u inženjerstvu Upoznavanje sa ključnim idejama i konceptima Dinamike i POVRATNOM SPREGOM - Feedback Upoznavanje sa relevantnom matematičkom teorijom Sposobnost rješavanja prostih problema upravljanja Prepoznavanje problema upravljanja 3 Sadržaj 1. Uvod u sisteme automatskog upravljanja 2. Matematičko modelovanje sistema 3. Modelovanje sistema u prostoru stanja 4. Karakteristike SAU sa povratnom spregom 5. Performanse SAU sa povratnom spregom 6. Stabilnost linearnih SAU - algebarski kriterijumi 7. Analiza sistema u frekventnom domenu 8. Analiza stabilnosti sistema u frekventnom domenu 9. Sinteza sistema automatskog upravljanja 10.Regulatori - PID 11.Uvod u digitalne sisteme upravljanja 4 2
3 Automatika je izazovno naučno i stručno područje sa teorijskog i praktičnog aspekta Primjena koncepta povratne veze bila je revolucionarna Primjena sustema upravljanja u proizvodnim i radnim procesima je nužna Postoji čitav niz otvorenih neriješenih problema vezanih uz automatsko upravljanje (izazov za dolazeće generacije automatičara) Ohrabrujuća je činjenica da su postojeća znanja i pozitivni trend razvoja automatike dobro polazište za rješavanje otvorenih problema Obrazovanje u području automatskog upravljanja kao sistemske nauke vrlo je važno za sve tehničke struke 5 Uvod Šta je sistem automatskog upravljanja? Sistem automatskog upravljanja je skup međusobno povezanih komponenti projektovan radi postizanja (ostvarivanja) zadatog cilja (zadatka, svrhe, namjere). Moderna praksa SAU podrazumijeva projektovanje upravljanja (upravljačkih strategija) u cilju: unapređenja procesa proizvodnje efikasnije potrošnje energije ostvarivanja naprednog i inteligentnog upravljanje (npr. vozilima) itd. 6 3
4 "Projektantski procep Kompleksna struktura i fizika sistema opisuje se relativno jednostavnim modelima Problem!!! Sistemi su najčešće kompleksni i teško razumljivi a samim tim teški za modelovanje i upravljanje (hemijski procesi,kontrola saobraćaja, robotski sistemi, EES). 7 Upravljanje sistemima se primenjuje u okviru različitih tehničkih disciplina: aeronautika, hemijsko, mašinsko i elektro inženjerstvo, građevina, ekonomija, pravo, ekologija... U praksi se često susreću sistemi koji u sebi kombinuju komponente (i probleme) iz više različitih oblasti. U industriji se često susreće kombinacija: hemija, mašinstvo, elektrotehnika 8 4
5 9 1. Negativna povratna sprega Negativna povratna sprega je princip po kome funkcioniše sav živi svijet i gotovo svi složeniji tehnički sistemi. Taj princip označava da unutar sistema postoji nekakav mehanizam samokontrole koji je u stanju da prepozna kada sa neka od važnih fizičkih veličina u sistemu značajno poveća i da reaguje tako da smanji pobudu koja tu fizičku veličinu generiše. I obrnuto, ukoliko se posmatrana fizička veličina smanji ispod željene vrijednosti, negativna povratna sprega treba da uzročnika te veličine poveća. Dakle, ovakva sprega deluje sa negativnim predznakom i zbog toga se i naziva negativnom povratnom spregom. 10 5
6 Osnovni cilj negativne povratne sprege je da obezbedi ispravno funkcionisanje sistema ukoliko se u okruženju pojavljuju i deluju poremećaji različitog tipa. Primjera za negativnu povratnu spregu ima nebrojeno. Posmatrajući ljudsko tijelo neki zanimljivi primeri su mehanizmi regulacije ili održavanja tjelesne temperature, regulacija koncentracije natrijumovih jona u krvi, regulacija otvora zenice, regulacija krvnog pritiska i tako dalje. Ovi su sistemi vrlo složeni jer se cio postupak regulacije realizuje kroz kompleksne hemijske reakcije u kojima učestvuju hormoni, bjelančevine, različita hemjska jedinjenja. 11 Naš je cilj da se upoznamo sa primjenom i osobinama negativne povratne sprege u okviru tehničkih sistema, jer je jasno da samo takvi sistemi, koji u sebi imaju ugrađeni mehanizam samokontrole odnosno negativne povratne sprege, mogu da funkcionišu istovjetno nezavisno od promjene različitih uslova u okruženju sistema. 12 6
7
8
9 17 Negativna povratna sprega tehnički sistemi 18 9
10

11 Sistem je skup međusobno zavisnih elemenata obrazovan radi postizanja određenog cilja posredstvom izvršavanja određenih funkcija
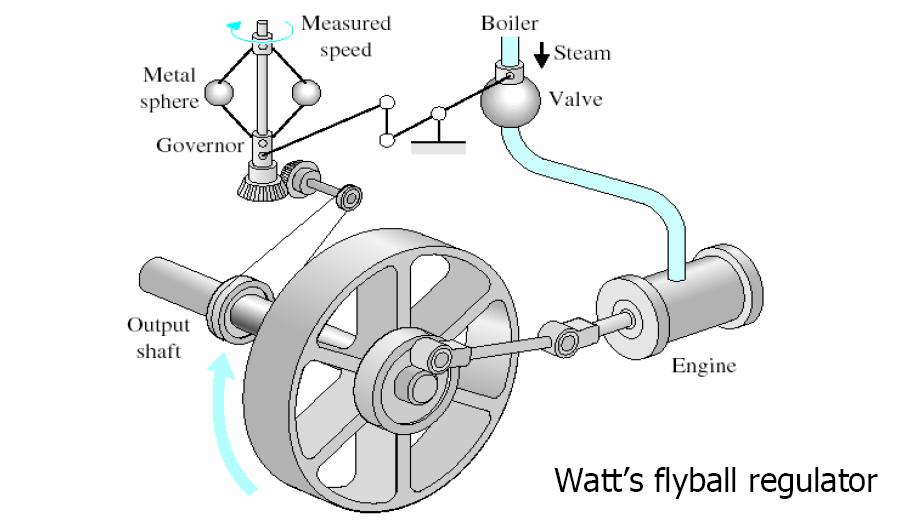
12 Važnije faze u razvoju automatskog upravljanja 1769 Vatov regulator. Smatra se zvaničnim početkom industrijske revolucije u UK Eli Whitney. Koncept unapred izrađenih izmenjivih delova u proizvodnji (proizvodnja musketi). Smatra se početkom masovne proizvodnje Maxwel je formulisao matematički model regulatora parne mašine Henry Ford je uveo automatizovane mašine u automobilsku industriju Bode analizira pojačavače sa povratnom spregom Nyquist razvija metodu za analizu stabilnosti sistema 1952 NC (numerical control) regulacija alatnih mašina (upravljanje po osama) 1954 George Devol razvija "programirani prenos predmeta". Preteča prvog industrijskog robota Predstavljen prvi UNIMATE robot. Od 1961 se koristi u livnicama Modeli u prostoru stanja i razvoj optimalnog upravljanja Razmatra se projektovanje robusnih SAU 1994 Masovna upotreba upravljanja sa povratnom spregom u automobilima. Uvođenje veoma pouzdanih robotskih sistema u proizvodnju
13
14
15
16

17

18 Upravljanje je dejstvo na sistem ili u sistemu usmjereno na postizanje određenog cilja. Ručno upravljanje je upravljanje koje zahtijeva direktno ili indirektno djelovanje čoveka na izvršni uređaj. Prateće upravljanje je upravljanje sa povratnom spregom čiji je cilj mjerenje upravljane veličine tako da ona prati zadatu veličinu. Programsko upravljanje je upravljanje koje se izvršava prema programu koji propisuje dejstva na sistem samo kao funkciju vremena. Sekvencijalno upravljanje je upravljanje koje se izvršava prema redosledu programa koji određuje dejstvo na sistem po unapred određenom redosledu. Pri tome neka dejstva zavise od izvršenja prethodnih dejstava ili od ispunjenja određenih uslova. 35 Neki primjeri tehničkih sistema sistem automatizacije procesa 36 18







19 37 TEHNIČKI SISTEM - HIDROELEKTRANA 38 19
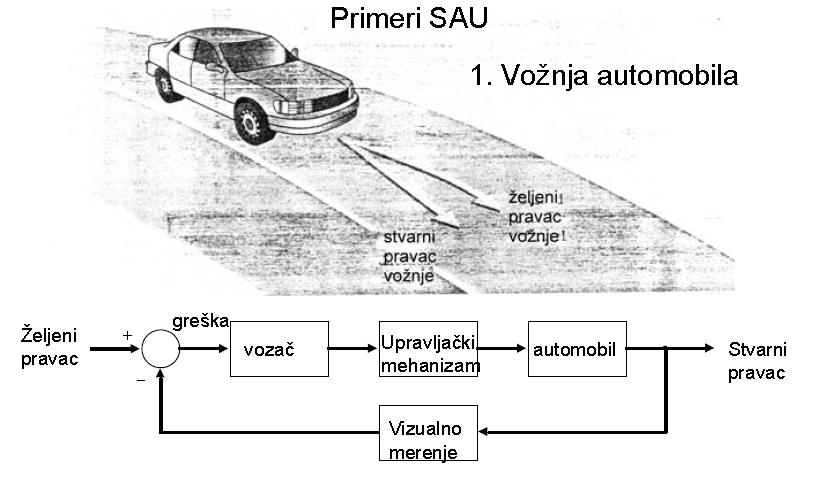
20 Upravljanje sa povratnom spregom je ono upravljanje koje, u prisustvu smetnji, teži da smanji razliku između izlaza sistema i zadatog ulaza. Pri tome, ovdje se radi o nepredvidivim smetnjama budući da je poznate smetnje uvijek moguće kompenzovati. 39 Osnovna struktura sistema upravljanja Regulaciona petlja sadrži 4 glavna osnovna dijela: proces mjerni element regulator izvršni element d r + - e u r izvršni član u regulator organ proces y s y mjerni član 40 20
21 Važne veličine regulacione petlje y regulisana veličina (stvarna vrijednost) (engl. Controlled variable) r ˆ= w referentna veličina ( referenca) (engl. reference value) e regulaciono odstupanje (engl. control error) u upravljačka, izvršna veličina (engl. manipulated variable) d smetnja, poremećaj (engl. disturbance) 41 Povratna sprega Mjerenje izlaza objekta upravljanja i njegovo vraćanje na ulaz sistema u regulator sa ciljem da se redukuje i dostigne zadata vrijednost zove se zatvaranje konture. Sistem u otvorenom nema povratne sprege. Obično se koristi negativna povratna sprega za stabilizaciju sistema. Ponekad, za pojačanja u konturi koristi se pozitivna povratna sprega, ali to vodi sistem u nestabilno stanje. Signal povratne sprege bitan je za sisteme automatskog upravljanja (SAU) i od njegove tačnosti zavisi tačnost održavanja izlazne veličine na zadatoj vrijednosti
22 Pojednostavljena struktura sistema upravljanja Često nije moguće regulacionu petlju podijeliti u 4 navedena dijela, pa se koristi pojednostavljena blok-šema: d ponašanje u odnosu na smetnju ponašanje u odnosu na upravljanje 43 Regulator Suštinska je uloga regulatora da obrađuje regulaciono odstupanje: e(t) = r(t) y(t) po određenom algoritmu (zakonu upravljanja): u = f (e(t)) djelujući preko izvršnog elementa na proces (zatvoreni tok signala)
23 Smetnja je uticaj na proces ili upravljanje koji u opštem slučaju nije predvidiv osim na statički način. Sistem upravljanja kompenzuje takvu smetnju bilo njenim direktnim merenjem ili detektovanjem njenog uticaja na izlaz sistema redukujući njene efekte regulatorom ili aktuatorom. 45 Aktuator je izvršni organ mehaničkog tipa. Izvršni mehanizam se obično sastoji iz mehaničkog uređaja kojim se mijenja upravljačka veličina i pogonskog uređaja koji mogu, ali ne moraju, biti izvedeni kao jedinstvena konstrukcijska celina. Ulaz u aktuator je signal iz regulatora, a izlaz pokreće izvršni organ
24 Izvršni organ je element direktne grane SAU kojim se neposredno mijenja izvršna veličina. Izvršni organ mijenja tok energije ili materijala kroz objekat upravljanja u cilju dostizanja određenih radnih stanja. 47 Prednost sistema s povratnom spregom je što ovi sistemi upravljanja koriste povratnu spregu koja omogućava da odziv sistema bude relativno neosjetljiv na eksterne smetnje i u izvjesnoj mjeri, na varijacije parametara sistema. Zbog toga, osim mjernog pretvarača, koji mora biti visoke tačnosti, ostali elementi sistema upravljanja mogu biti relativno manje tačnosti i jeftiniji, da se dobije dovoljno tačan izlaz. Ovo je nemoguće ostvariti korišćenjem sistema upravljanja bez povratne sprege
25 SISTEM UPRAVLJANJA BEZ POVRATNE SPREGE To je sistem upravljanja kod kojeg upravljačko dejstvo ne zavisi od izlazne varijable. Kod ovog sistema izlazna varijabla se ne mjeri i ne upoređuje sa ulaznom varijablom. Praktičan primjer sistema bez povratne sprege je veš mašina. Natapanje, pranje i cijeđenje u veš mašini vrše se na vremenskoj osnovi. Mašina ne mjeri izlazni signal čistoću u rublju koje pere. U bilo kom sistemu upravljanja bez povratne sprege, izlazna varijabla ne upoređuje se sa referentnim ulazom, slika Svakom referentnom ulazu odgovaraju fiksni radni uslovi. Radi toga, tačnost sistema zavisi od kalibracije. U prisustvu smetnje, ovaj sistem neće izvršiti postavljeni zadatak. Sa gledišta stabilnosti, sisteme upravljanja bez povratne sprege lakše je sintetizovati jer je kod njih problem stabilnosti manje izražen. Problem stabilnosti sistema upravljanja sa povratnom spregom mnogo je više izražen; težeći da se smanji greška, može doći do pojave oscilacija konstantne ili promjenljive amplitude
26 ADAPTIVNI SISTEMI UPRAVLJANJA Jedna od najčešće korišćenih definicija glasi: Adaptivni sistem upravljanja određuje (mjeri) indeks performanse, korišćenjem ulaza, izlaza i stanja upravljanog sistema i na bazi upoređivanja vrijednosti indeksa performanse sa njegovom zadatom vrijednošću, mijenja parametre podesivog sistema ili generiše na ulazu upravljačke signale sa ciljem da indeks performanse održi na zadatoj vrijednosti ili u njenoj okolini
27 Dinamičke karakteristike većine sistema upravljanja nisu postojane iz više razloga, kao što je kvar komponenti sistema ili izmjena parametara i ambijentalnih uslova (npr. promjene u masi i atmosferskim uslovima u slučaju vasionske letjelice). Mada su efekti određenih promjena na dinamičke karakteristike sistema upravljanja prigušeni uvođenjem povratne sprege, u slučaju značajnih promjena parametara sistema, da bi sistem zadovoljavajuće funkcionisao, on mora imati mogućnost adaptacije. Adaptacija sistema upravljanja podrazumjeva mogućnost samopodešavanja i modifikacije u skladu sa nepredvidivim promjenama parametara objekta upravljanja, ambijentalnih uslova ili strukture objekta. Dakle, sistemi upravljanja koji imaju takvu mogućnost adaptacije nazivaju se adaptivni sistemi upravljanja. 53 U adaptivnom sistemu upravljanja, dinamičke karakteristike upravljanog objekta moraju biti identifikovane u svakom trenutku vremena tako da je moguće podešavanje parametara upravljačke strukture (regulatora) s ciljem održavanja željene performanse. Adaptivni sistem upravljanja, saglasno prethodnoj definiciji, dat je na slici
28 Proces je progresivna neprekidna operacija koja sadrži niz kontrolisanih delovanja ili kretanja usmjerenih sistemski prema određenom rezultatu ili kraju. Svaka operacija koja treba da bude upravljana predstavlja proces. Proces je skup postupaka fizičkog ili hemijskog pretvaranja ili niza takvih pretvaranja. Transport materijala ili energije kao i prenos informacija mogu se razmatrati kao proces. 55 Procesno upravljanje je automatsko upravljanje koje se primjenjuje za upravljanje tehnoloških procesa u procesnoj industriji. Upravljane varijable su najčešće temperatura, pritisak, protok, diferencijalni pritisak, ph vrijednost, koncentracija, nivo tečnosti, linearni pomak
29 METODE IDENTIFIKACIJE EKSPERIMENTALNE ANALITIČKE ZA ODREĐIVANJE DINAMIČKIH KARAKTERISTIKA ZA ODREĐIVANJE STATIČKIH KARAKTERISTIKA AKTIVNI PASIVNI AKTIVNI PASIVNI 57 Identifikacija objekta upravljanja ili sistema upravljanja znači rješavanje problema izgradnje matematičkog modela dinamičkih sistema bazirano na razmatranjima podataka o i iz sistema. Modeli mogu biti više ili manje formalne prirode, ali njihova osnovna karakteristika je da oni omogućavaju da se opservacije o njima organizuju i strukturiraju u neki skup podataka u vidu parametara ili stanja sistema. Cilj je da se iznesu osnovne metode i alati identifikacije objekta / procesa upravljanja kako bi se objekat upravljanja identifikovao (struktura, parametri, varijable stanja...), a za potrebe projektovanja SAU
30 Kada se identifikuje objekat upravljanja, njemu se pridružuju odgovarajući senzori i mjerni pretvarači varijabli stanja i smetnji i biraju se odgovarajući izvršni organi i aktuatori za promjenu upravljanih veličina. Upravljačka struktura se onda projektuje i sintetizuje tako da se zadovolje određene tehničke specifikacije i funkcionalne karakteristike. 59 Jednom kada se identifikuje objekat upravljanja odaberu se senzori i aktuatori, jedini stepen slobode koji ostaje da se poprave performanse SAU, je na upravljačkoj strukturi ili regulatoru
31 MATEMATIČKI MODEL ELEMENATA I SAU Klasične metode formalnog opisa linearnih sistema koje se najčešće koriste su: metod funkcije prenosa, metod impulsnog odziva, blok dijagrami, metod teorije grafova, i mnoge druge. Opisivanje ovih sistema vrši se ulazno izlaznim relacijama. Opisivanjem funkcijama prenosa, zanemaruje se postojanje početnih uslova. No i pored toga funkcije prenosa pogodne su za analizu u frekventnom domenu i za analizu stabilnosti sistema. Alternativni metod opisivanja linearnih, nelineanih i nestacionarnih sistema je metod prostora stanja. 61 Svrha matematičkog modela (1) Matematički modeli su matematički objekti koji se koriste za opis raznorodnih procesa (sistema) čija se stanja vremenom mijenjaju Primjeri matematičkih modela: modeli tehničkih sistema modeli za finansijska i ekonomska predviđanja modeli za medicinske dijagnoze
32 Glavna svrha modeliranja u automatici je: analiza sistema upravljanja sinteza sistema upravljanja Za uspješno projektovanje sistema upravljanja (regulatora) i njegovu analizu i sintezu neophodno je dobro poznavanje ponašanja procesa kao dinamičkih sistema 63 ANALIZA I SINTEZA SAU Pod analizom SAU podrazumijeva se postupak s kojim se određuju njegove bitne karakteristike ponašanja. Analizom se dolazi do odgovarajućih zaključaka u pogledu ponašanja sistema u stacionarnom i prelaznom režimu, te se na taj način utvrđuje da li je dinamičko ponašanje zadovoljavajuće ili nije
33 Pod sintezom (ili projektovanjem) SAU podrazumijeva se postupak ostvarivanja takvih dinamičkih i statičkih karakteristika sistema, koje pri zadatim ograničenjima na najbolji mogući način odgovaraju postavljenim zahtevima. Uvijek se teži da se postavljeni cilj kod sinteze realizuje na najjednostavniji način. 65 Dva pristupa posmatranju sistema Ponašanje sistema može se posmatrati kroz dva pristupa: pristup koji posmatra unutrašnje djelovanje sistema pristup koji posmatra sistem spolja Matematički modeli zasnovani na prvom pristupu nazivaju se unutrašnjim modelima, modelima stanja ili modelima bijele kutije (engl. white box) u ovu kategoriju spadaju modeli prikazani pomoću diferencijalnih jednačina i modeli prikazani u prostoru stanja, dakle modeli u vremenskom području ovi modeli predstavljaju nasljeđe iz mehanike, povezano sa Johannesom Keplerom i Isaacom Newtonom 66 33
34 Dva pristupa posmatranju sistema Ponašanje sistema može se posmatrati kroz dva pristupa: pristup koji posmatra unutrašnje djelovanje sistema pristup koji posmatra sistem spolja Matematički modeli zasnovani na drugom pristupu nazivaju se spoljašnjim modelima, ulazno-izlaznim modelima ili modelima crne kutije (engl. black box) u ovu kategoriju spadaju modeli prikazani pomoću prenosnih funkcija i modeli prikazani pomoću frekvencijskih karakteristika, dakle modeli u području kompleksne promjenljive odnosno u frekvencijskom području ovi modeli predstavljaju nasleđe iz elektrotehnike 67 Ponašanje procesa matematički se izražava matematičkim modelom: stacioniranim - opisuje ponašanje sistema u stacionarnom (ustaljenom, ravnoteženom) stanju dinamičkim - opisuje ponašanje sistema pri prelazu iz jednog stanja u drugo stanje, tj. pri prijelazu iz jedne radne tačke u drugu; brzina prelaza zavisi od karakteristika sistema (broju i veličini skladišta energije) i o pobudnom signalu koji djeluje na ulaz procesa 68 34
35 STATIČKA KARAKTERISTIKA 69 STATIČKA KARAKTERISTIKA 70 35
 Mp je maksimalna trenutna vrijednost za koju odskočni odziv prelazi svoju konačnu vrijednost. Podbačaj (eng.")
36 DINAMIČKA KARAKTERISTIKA 71 DINAMIČKA KARAKTERISTIKA Vrijeme uspona tr je ono vrijeme koje protekne dok odskočni odziv prvi put dostigne vrijednost k r y, gdje k r varira između 0.9 i 1. Preskok ( eng. overshoot) Mp je maksimalna trenutna vrijednost za koju odskočni odziv prelazi svoju konačnu vrijednost. Podbačaj (eng. undershoot) Mu je maksimalna (apsolutna) vrijednost za koju odskočni odziv pada ispod nule (za koju se odskočni odziv mijenja u suprotnu stranu od y( )). Vrijeme smirenja ts je vrijeme potrebno da odskočni odziv uđe i ostane u granicama ± δ oko svoje konačne vrijednosti. Ova devijacija δ se često izražava u postotcima od konačne 72 vrijednosti (naprimjer, 1% do 5%). 36
37 73 Matematički modeli procesa (čest je sinonim: proces = sistem) mogu imati i širu primjenu, npr.: obuka operatera za vođenje složenih postrojenja (nuklearnih elektrana, brodova, letjelica) za što se koriste trenažeri zasnovani na matematičkim modelima procesa u postrojenjima nadzor i dijagnostika postrojenja i procesa (monitoring); monitoring je često sastavni dio savremenih rješenja sistema automatizacije složenih postrojenja i procesa 74 37
38 Nadalje, matematički modeli sistema mogu poslužiti i za: simulaciju hipotetičkih situacija u koje bi stvarni sistem bilo opasno dovesti ("eksperimentisanje" na matematičkom modelu, umjesto na stvarnom sistemu ); matematički model je "surogat stvarnog sistema predikciju (predviđanje) budućih stanja sistema (npr. sistema iz ekonomske sfere) 75 Složenost matematičkog modela Složenost matematičkog modela procesa zavisi od svrhe matematičkog modela Matematički modeli koji se koriste u svrhu sinteze i analize sistema upravljanja u pravilu su jednostavnije strukture (opisuju dominantna stanja sistema, a pri tome se zanemaruju nedominantna stanja sistema - govorimo o nemodeliranoj dinamici sistema) Dakle, iz praktičnih razloga koriste se jednostavniji (redukovani) modeli procesa u svrhe analize i sinteze sistema upravljanja Modeli koji se koriste u svrhu simulacijskih istraživanja samih procesa u pravilu su složenije strukture Takođe su složeniji modeli koji se koriste u svrhu monitoringa 76 38
39 Tačnost matematičkog modela Greška matematičkog modela može se definisati na razne načine Ovdje je definisana kao odstupanje e izlaza matematičkog modela y M od izlaza stvarnog sistema y 77 Neodređenost matematičkog modela (1) Usko povezano sa tačnošću modela definiše se i neodređenost (engl. uncertainty) matematičkog modela: neodređenost matematičkog modela sistema predstavlja bilo koje njegovo odstupanje od stvarnog sistema Neodređenosti mogu biti: spoznajne neodređenosti (engl. epistemic uncertainty) - posljedica su nepotpunog poznavanja zakonitosti koje važe za sistem ; dubljom analizom sistema ove se neodređenosti mogu smanjiti prirodne neodređenosti - posljedica su inherentne promjenjivosti sistema, a posebno su izražene u slučajevima gdje je čovjek dio sistema kao i u slučajevima modeliranja prirodnih (stohastičkih) pojava; ove se neodređenosti u 78 principu ne mogu smanjiti 39
40 Sa stajališta automatskog upravljanja pod pojmom neodređenosti najčešće se podrazumijeva modelska neodređenost, tj. neodređenost koja predstavlja razliku između realnog sistema i njegovog matematičkog modela Kod modelske neodređenosti razlikujemo: strukturnu neodređenost koja se odnosi na neodgovarajuću strukturu matematičkog modela sistema, a može biti uzrokovana: nepotpunim poznavanjem sistema (spoznajna neodređenost) pojednostavljenjem modela što može obuhvatiti: korišćenje koncentrisanih parametara umjesto raspodjeljenih, zanemarivanje visokofrekvencijskih modova sistema, linearizaciju nelinearnih sistema i slično parametarsku neodređenost koja se odnosi na nemogućnost tačnog određivanja parametara sistema odgovarajuće strukture, a to može biti posledica: nedovoljno informativnog skupa podataka na bazi kojeg se obavlja identifikacija sistema inherentne promjenjivosti parametara sistema 79 Struktura matematičkog modela Matematički modeli mogu se klasificirati prema strukturi na sljedeći način: parametarski modeli (modeli sa strukturom) neparametarski modeli (modeli bez strukture) Parametarski modeli predstavljaju se jednačinama, koje eksplicitno sadrže parametre (npr. diferencijalne jednačine n-tog reda, prenosne funkcije n-tog reda, gdje je n strukturni parametar modela kojim je određen red sistema) Neparametarski modeli prikazuju zavisnost ulazne i izlazne veličine procesa u obliku tablica vrijednosti ili krivih (npr. težinske funkcije, prelazne funkcije u tabličnom ili grafičkom obliku, frekvencijske karakteristike); neparametarski modeli sadrže parametre implicitno 80 40
41 Opšti zahtjevi postavljeni prema matematičkim modelima procesa Odgovarajuća složenost određena namjenom modela (opisuje bitna dinamička svojstva koja su relevantna za namjenu modela) Štedljivost (engl. parsimony) model treba biti štedljiv u parametrima (minimalni, ali zadovoljavajući broj parametara modela) Fleksibilnost model treba biti fleskibilan, tj. primjenljiv za opis ponašanja sistema u svim radnim režimima Dobra numerička svojstva model treba biti prikladan za računarske simulacije (memorijska i računska složenost) 81 Modeliranje pomoću diferencijalnih jednačina (1) Linearni sistemi s koncentrisanim parametrima modeliraju se pomoću običnih linearnih diferencijalnih jednačina Sistemi s raspodijeljenim parametrima modeliraju se pomoću parcijalnih diferencijalnih jednačina (koje mogu biti linearne ili nelinearne, zavisno od toga da li je sistem linearan ili nelinearan) Fizički zakoni su polazište pri postavljanju matematičkog modela procesa (dinamičkog modela procesa) 82 41
42 Zaključak Princip povratne sprege ima centralnu ulogu u upravljanju Osnovni zahtjevi upravljačkog sistema Zahtjevi upravljanja - zadatak Aktuacija izvršni organi, aktuatori Upravljački uređaji ili algoritmi Senzori U ovom kursu ćemo se koncentrisati na analizu sistema tipa single-input, single-output Važan korak u projektovanju i analizi upravljačkog sistema je modelovanje sistema koga čine aktuatori, proces i senzori. 83 POSTUPAK PROJEKTOVANJA UPRAVLJAČKOG SISTEMA 1. Ustanovljavanje cilja upravljanja 2. Identifikacija upravljačkih varijabli 3. Određivanje specifikacije varijabli 4. Ustanovljavanje konfiguracije sistema i identifikacija aktuatora u slučaju da performanse ne odgovaraju zadatoj specifikaciji proces projektovanja se ponavlja od izbora aktuatora 5. Određivanje modela procesa, aktuatora i senzora 6. Opis regulatora i selekcija ključnih parametara za podešavanje 7. Optimizacija parametara i analiza performansi u slučaju da performanse odgovaraju zadatoj specifikaciji proces projektovanja 84 se finalizuje 42

43 Kako doći do matematičkog modela? Potrebno je odrediti strukturu i parametre matematičkog modela Do matematičkog modela procesa može se doći teoretskom i eksperimentalnom analizom procesa Teoretska analiza procesa zasniva se na detaljnom poznavanju fizičkih (i drugih) zakonitosti procesa iz čega slijedi prikaz sistema u obliku matematičkih jednačina Eksperimentalna analiza zasniva se na mjerenju ulazno-izlaznih veličina procesa te obradi tih veličina zasnovanoj na algoritmima identifikacije iz čega slijede struktura i parametri matematičkog modela procesa (ovaj se pristup zasniva na identifikaciji procesa). Načelni pristup postavljanju matematičkog modela procesa zasnovan na teoretskoj analizi: 1. korak (proučiti proces) spoznati fizičke (i hemijske) zakonitosti djelovanja u procesu (npr. tokove materije, tokove energije) 2. korak - fizičke (i hemijske) zakonitosti izraziti pomoću matematičkih jednačina (diferencijalnih, algebarskih, logičkih) 85 DINAMIKA MEHANIČKIH SISTEMA Kretanje mase uz djelovanje trenja 86 43


44 Dvomaseni sistem - princip vješanja na automobilu m 1 masatočka m 2 masa automobila k s - konstanta elastičnosti amortizera b - konstanta prigušenja amortizera k w - konstanta elastičnosti točka
45 KLATNO Za malu vrijednost Θ nelinearni model se aproksimira linearnim modelom: 89 ELEKTRIČNI SISTEM 90 45
46 Za rješenje ove diferencijalne jednačine 2. reda, u i (t), mora biti poznato: u u (t) i u C (0) 91 Projektovanje upravljanja Povećanjem pouzdanog opisa sistema povećava se osjetljivost na mjerljivi šum nesavršenost aktuatora nesavršenost modela Projektovanje upravljanja predstavlja projektovanje regulatora koji će uspjeti da uspostavi ravnotežu između performansi sistema i robustnosti 92 46
 su upravljački signali i signali poremećaja. Poželjno je da se bliskost ponašanja modela i objekta analizira i ispita za proizvoljne vrijednosti ovih signala.")
47 93 STANDARDNI SIGNALI I PRIMJENA LAPLASOVE TRANSFORMACIJE Model objekta upravljanja je zadovoljavajući ako su reakcije modela i procesa bliske za ista vanjska djelovanja. Vanjska djelovanja (ulazi) su upravljački signali i signali poremećaja. Poželjno je da se bliskost ponašanja modela i objekta analizira i ispita za proizvoljne vrijednosti ovih signala. Međutim ovakvo poređenje nije praktično izvodljivo. Iz tog razloga su od interesa takozvani standardni signali. Oni trebaju da zadovolje više uslova od kojih su neki međusobno kontradiktorni: Da se mogu predstaviti jednostavnim funkcijama vremena (time je jednostavnija analiza i realizacija takvog djelovanja na objekat) Da su dovoljno kompleksni da se na osnovu odziva objekta na takvo djelovanje može zaključiti o njegovom ponašanju za druge oblike ulaza Oblika bliskog signalima koji djeluju na objekat u njegovom nominalnom režimu 94 47
48 STANDARDNI SIGNALI I PRIMJENA LAPLASOVE TRANSFORMACIJE Signali koji zadovoljavaju gornje uslove su: Signal jediničnog skoka Impulsna funkcija Linearna (rampa ) funkcja Sinusna funkcija. Navedeni signali su najčešći i posebno će biti razmatrani. 95 STANDARDNI SIGNALI I PRIMJENA LAPLASOVE TRANSFORMACIJE 96 48
49 STANDARDNI SIGNALI I PRIMJENA LAPLASOVE TRANSFORMACIJE 97 STANDARDNI SIGNALI I PRIMJENA LAPLASOVE TRANSFORMACIJE 98 49


50 STANDARDNI SIGNALI I PRIMJENA LAPLASOVE TRANSFORMACIJE

51 101 STANDARDNI SIGNALI I PRIMJENA LAPLASOVE TRANSFORMACIJE Problemi analize i sinteze svakog dinamičkog elementa/ sistema redovno su vezani za rješavanje diferencijalnih jednačina. Jedan od najjednostavnijih postupaka rješavanja tih jednačina je vezan za primjenu Laplasove transformacije. Iz tog razloga će se kratko dati teoretske osnove ove transformacije i neke jednostavnije primjene. Def. Za posmatrani kontinualan signal (funkciju) x(t), (0 t< ), Laplasova transformacija je definisana sa
52


53 105 Neka je original x(t) kontinualna funkcija po vremenu za t>0 +, sa skokovitim diskontinuitetom u koordinatnom početku, x(0 - ) x(0 + ) te sa X - (s) koja je racionalna funkcija po kompleksnoj varijabli s.tada će teorema o početnoj vrijednosti dati:


54


55 109 DINAMIČKI SISTEM

56


57


58


59 Pobuđeni LTI sistem 117 Pobuđeni LTI sistem pobuda se prigušuje

60 Pobuđeni LTI sistem pobuda se prigušuje

61 Zašto formalni prikaz SAU? Sistemi automatskog upravljanja iz raznih tehničkih oblasti često su veliki i složeni sa stajališta razumijevanja, analize i projektovanja Zahvaljujući konceptu povratne veze i uvođenjem formalnih (apstraktnih) prikaza pomoću prikladnih šema, složeni sistemi iz raznih tehničkih oblasti mogu se posmatrati na jedinstven način Češće korišteni šematski prikaz je blokovski prikaz (dijagram) koji prikazuje tok signala u sistemu, zanemarujući tehnološke detalje sistema Blok dijagramom prikazuje se uzročno-posljedična zavisnost u elementima sistema i sistema u cjelini (pobuda odziv) 121 Osnovne komponente blok dijagrama
62 Šta prikazuje blok dijagram? Blok dijagram prikazuje tok signala (u smjeru strelice) kroz sistem te međusobnu vezu komponenata koje grade sistem. Grafički simboli blok dijagrama omogućuju da se opišu komponente sistema na nedvosmislen i jednostavan način Prikaz djelovanja sistema pomoću blok dijagrama predstavlja prvi korak u matematičkoj analizi sistema upravljanja U automatici se blok dijagram koristi za prikaz sistema odnosno komponenata koji grade sistem upravljanja, te signala koji prolaze kroz sistem (tok informacija) Blok dijagram je apstraktni prikaz sistema koji ne prikazuje fizičku strukturu sistema, energetske izvore i energetske 123 tokove kao ni tokove materijala
63
64 127 REDUKCIJA BLOK DIJAGRAMA

65 REDUKCIJA BLOK DIJAGRAMA 129 REDUKCIJA UNUTRAŠNJIH PETLJI
66
67 Primjer 4.3: Blok prikaz sistema upravljanja naponom jednosmjernog generatora (1) Jednosmjerni generator pogonjen motorom s konstantnom brzinom obrtanja (na slici pogon nije prikazan) Regulisana veličina y: napon generatora u G Poremećajna veličina z: nastaje uslijed promjene opterećenja generatora (što je prikazano omskim otporima R T, koji mijenjaju potrošače)
68 Opis blokova Za simulaciju sistema na računaru svaki je blok potrebno strukturno opisati Uobičajeni opisi blokova ilustrovani su na primjeru sistema (elementa) prvog reda čije je dinamičko ponašanje prikazano diferencijalnom jednačinom, prelaznom funkcijom i prenosnom funkcijom: 135 Dobre strane i mane blokovskog prikaza sistema Sistemi upravljanja iz različitih područja prikazani blokovski imaju isti oblik što je veoma važno sa stajališta primjene jedinstvenih metoda analize i sinteze sistema upravljanja Blokovski prikaz pretpostavlja jednosmjerni tok informacija u sistemu (uzročna zavisnost); za korektan blokovski prikaz fizičkog sistema potrebno je poznavanje fizičkih zakonitosti sistema
69 Primjer 4.4: Spregnuti rezeorvari tečnosti spojeni u kaskadu Ne mogu se prikazati serijskim spojem dva bloka, jer nivo drugog rezeorvara utiče na nivo prvog rezervoara (interakcija) te je narušena jednosmjernost toka informacija, odnosno uzročna zavisnost U tom i sličnim sluščajevima potrebno je fizički sistem (podssistem) prikazati jedinstvenim blokom. 137 Zaključak Blok, sumator i linija sa strelicom osnovni su elementi blok dijagrama Blok dijagram nam pomaže da lakše odredimo prenosnu funkciju zatvorenog kruga složene strukture Blok dijagram prikazuje samo prolaz informacije kroz sistem Prolaz energije i/ili materije ne prikazuje se blok dijagramom

70 Savremeni sistemi automatizacije procesa Hijerarhijski strukturirani sistemi sa više nivoa 139 Primjer strukture sistema upravljanja procesom
71 Postoji jaka simbioza između upravljanja i računarstva. Računari su integralni dijelovi regulatora. Računari i simulacije se široko koriste u projektovanju i ispitivanju sistema upravljanja Primjena rašunara za upravljanje sistemima, tj. upravljanje u stvarnom vremenu (engl. embeded computers) postavlja posebnezahtjeve arhitekture računara i njegove programske podrške. Posebno su strogi zahtjevi u odnosu na operativni sistem koji mora osigurati brzi odziv na vanjske događaje Pri realizaciji sistema upravljanja potrebno je razumijevanje algoritama upravljanja i softvera Računarska simulacija važna je faza u razvoju sistema upravljanja provjera funkcionalnosti postrojenja u raznim radnim režimima (ove simulacije zahtijevaju odgovarajuće matematičke modele procesa) 141 Postoje komercijalno raspoloživi specijalizovani programski paketi za simulaciju specifičnih postrojenja simulatori (za brodove, vozila, avione, vjetroturbine, nuklearne elektrane...) Razvoj sistema upravljanja značajno se može pospješiti korišćenjem simulatora (engl. Hardware In the Loop HIL) Internet, kao široko rasprostranjena robusna komunikaciona mreža, predstavlja vrlo složeni distribuirani sistem sastavljen od velikog broja čvorova (router) i veza (link) čija se funkcionalnost zasniva na mehanizmima automatskog upravljanja
72 Što je automatika danas? Automatsko upravljanje + (Procesno) računarstvo + Komunikacione tehnologije Sinergija automatike (Control), računarstva (Computing) i komunikacija (Communication): C3 složeni međusobno povezani sistem AUTOMATIKA
METODE IDENTIFIKACIJE
 METODE IDENTIFIKACIJE EKSPERIMENTALNE ANALITIČKE ZA ODREĐIVANJE DINAMIČKIH KARAKTERISTIKA ZA ODREĐIVANJE STATIČKIH KARAKTERISTIKA AKTIVNI PASIVNI AKTIVNI PASIVNI MATEMATIČKI MODEL ELEMENATA I SAU Klasične
METODE IDENTIFIKACIJE EKSPERIMENTALNE ANALITIČKE ZA ODREĐIVANJE DINAMIČKIH KARAKTERISTIKA ZA ODREĐIVANJE STATIČKIH KARAKTERISTIKA AKTIVNI PASIVNI AKTIVNI PASIVNI MATEMATIČKI MODEL ELEMENATA I SAU Klasične
BRODSKA AUTOMATIKA I
 BRODSKA AUTOMATIKA I Status predmeta Obavezni Semestar IV Broj ECTS kredita 5,0 Fond časova 2P+1V nastavnik: Doc. dr Milovan RADULOVIĆ saradnik : Mr Martin ĆALASAN termini nastave: SVAKA DRUGA srijeda
BRODSKA AUTOMATIKA I Status predmeta Obavezni Semestar IV Broj ECTS kredita 5,0 Fond časova 2P+1V nastavnik: Doc. dr Milovan RADULOVIĆ saradnik : Mr Martin ĆALASAN termini nastave: SVAKA DRUGA srijeda
Kaskadna kompenzacija SAU
 Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET SIGNALI I SISTEMI. Zbirka zadataka
 UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
LabView priprema za 1. kolokvijum 2011.
 Navesti razliku između koncepta upravljanja sa negativnom povratnom spregom i bez nje? Za stabilizaciju sistema koristi se negativna povratna sprega. Upravljanje bez povratne sprege ne koristi informaciju
Navesti razliku između koncepta upravljanja sa negativnom povratnom spregom i bez nje? Za stabilizaciju sistema koristi se negativna povratna sprega. Upravljanje bez povratne sprege ne koristi informaciju
3.1 Granična vrednost funkcije u tački
 3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
Teorijske osnove informatike 1
 Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
Prikaz sustava u prostoru stanja
 Prikaz sustava u prostoru stanja Prikaz sustava u prostoru stanja je jedan od načina prikaza matematičkog modela sustava (uz diferencijalnu jednadžbu, prijenosnu funkciju itd). Promatramo linearne sustave
Prikaz sustava u prostoru stanja Prikaz sustava u prostoru stanja je jedan od načina prikaza matematičkog modela sustava (uz diferencijalnu jednadžbu, prijenosnu funkciju itd). Promatramo linearne sustave
18. listopada listopada / 13
 18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
Pismeni ispit iz matematike Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: ( ) + 1.
 + 1.") Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
SISTEMI NELINEARNIH JEDNAČINA
 SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
III VEŽBA: FURIJEOVI REDOVI
 III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
Trigonometrija 2. Adicijske formule. Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto
 Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
Zavrxni ispit iz Matematiqke analize 1
 Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI)
") IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
Elementi spektralne teorije matrica
 Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Osnovni primer. (Z, +,,, 0, 1) je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju
 je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju") RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
PRAVA. Prava je u prostoru određena jednom svojom tačkom i vektorom paralelnim sa tom pravom ( vektor paralelnosti).
.") PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
5. Karakteristične funkcije
 5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
Upravljanje u mehatroničkim sustavima
 Upravljanje u mehatroničkim sustavima Fetah Kolonić Jadranko Matuško Fakultet elektrotehnike i računarstva 27. listopada 2009 Upravljanje u mehatroničkim sustavima Upravljanje predstavlja integralni dio
Upravljanje u mehatroničkim sustavima Fetah Kolonić Jadranko Matuško Fakultet elektrotehnike i računarstva 27. listopada 2009 Upravljanje u mehatroničkim sustavima Upravljanje predstavlja integralni dio
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
Iskazna logika 3. Matematička logika u računarstvu. novembar 2012
 Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
INTELIGENTNO UPRAVLJANJE
 INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
INTEGRALNI RAČUN. Teorije, metodike i povijest infinitezimalnih računa. Lucija Mijić 17. veljače 2011.
 INTEGRALNI RAČUN Teorije, metodike i povijest infinitezimalnih računa Lucija Mijić lucija@ktf-split.hr 17. veljače 2011. Pogledajmo Predstavimo gornju sumu sa Dodamo još jedan Dobivamo pravokutnik sa Odnosno
INTEGRALNI RAČUN Teorije, metodike i povijest infinitezimalnih računa Lucija Mijić lucija@ktf-split.hr 17. veljače 2011. Pogledajmo Predstavimo gornju sumu sa Dodamo još jedan Dobivamo pravokutnik sa Odnosno
Pismeni ispit iz matematike GRUPA A 1. Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj, zatim naći 4 z.
 Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
numeričkih deskriptivnih mera.
 DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
Elektromotorni pogon je jedan DINAMIČKI SISTEM, koji se može podeliti na više DINAMIČKIH PODSISTEMA između kojih postoji INTERAKCIJA.
 ELEKTROMOTORNI POGON KAO DINAMIČKI SISTEM Elektromotorni pogon je jedan DINAMIČKI SISTEM, koji se može podeliti na više DINAMIČKIH PODSISTEMA između kojih postoji INTERAKCIJA. apstraktan. DINAMIČKI SISTEM
ELEKTROMOTORNI POGON KAO DINAMIČKI SISTEM Elektromotorni pogon je jedan DINAMIČKI SISTEM, koji se može podeliti na više DINAMIČKIH PODSISTEMA između kojih postoji INTERAKCIJA. apstraktan. DINAMIČKI SISTEM
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović
 DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
ELEKTROTEHNIČKI ODJEL
 MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
FAKULTET PROMETNIH ZNANOSTI
 SVUČILIŠT U ZAGU FAKULTT POMTNIH ZNANOSTI predmet: Nastavnik: Prof. dr. sc. Zvonko Kavran zvonko.kavran@fpz.hr * Autorizirana predavanja 2016. 1 Pojačala - Pojačavaju ulazni signal - Zahtjev linearnost
SVUČILIŠT U ZAGU FAKULTT POMTNIH ZNANOSTI predmet: Nastavnik: Prof. dr. sc. Zvonko Kavran zvonko.kavran@fpz.hr * Autorizirana predavanja 2016. 1 Pojačala - Pojačavaju ulazni signal - Zahtjev linearnost
Elektrotehnički fakultet univerziteta u Beogradu 17.maj Odsek za Softversko inžinjerstvo
 Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
Cauchyjev teorem. Postoji više dokaza ovog teorema, a najjednostvniji je uz pomoć Greenove formule: dxdy. int C i Cauchy Riemannovih uvjeta.
 auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
Sortiranje prebrajanjem (Counting sort) i Radix Sort
 i Radix Sort") Sortiranje prebrajanjem (Counting sort) i Radix Sort 15. siječnja 2016. Ante Mijoč Uvod Teorem Ako je f(n) broj usporedbi u algoritmu za sortiranje temeljenom na usporedbama (eng. comparison-based sorting
Sortiranje prebrajanjem (Counting sort) i Radix Sort 15. siječnja 2016. Ante Mijoč Uvod Teorem Ako je f(n) broj usporedbi u algoritmu za sortiranje temeljenom na usporedbama (eng. comparison-based sorting
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama.
 Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
M086 LA 1 M106 GRP. Tema: Baza vektorskog prostora. Koordinatni sustav. Norma. CSB nejednakost
 M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
(P.I.) PRETPOSTAVKA INDUKCIJE - pretpostavimo da tvrdnja vrijedi za n = k.
 PRETPOSTAVKA INDUKCIJE - pretpostavimo da tvrdnja vrijedi za n = k.") 1 3 Skupovi brojeva 3.1 Skup prirodnih brojeva - N N = {1, 2, 3,...} Aksiom matematičke indukcije Neka je N skup prirodnih brojeva i M podskup od N. Ako za M vrijede svojstva: 1) 1 M 2) n M (n + 1) M,
1 3 Skupovi brojeva 3.1 Skup prirodnih brojeva - N N = {1, 2, 3,...} Aksiom matematičke indukcije Neka je N skup prirodnih brojeva i M podskup od N. Ako za M vrijede svojstva: 1) 1 M 2) n M (n + 1) M,
7 Algebarske jednadžbe
 7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
radni nerecenzirani materijal za predavanja R(f) = {f(x) x D}
 = {f(x) x D}") Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Neka su D i K bilo koja dva neprazna skupa. Postupak f koji svakom elementu x D pridružuje točno jedan element y K zovemo funkcija
Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Neka su D i K bilo koja dva neprazna skupa. Postupak f koji svakom elementu x D pridružuje točno jedan element y K zovemo funkcija
Poglavlje 7. Blok dijagrami diskretnih sistema
 Poglavlje 7 Blok dijagrami diskretnih sistema 95 96 Poglavlje 7. Blok dijagrami diskretnih sistema Stav 7.1 Strukturni dijagram diskretnog sistema u kome su sve veliqine prikazane svojim Laplasovim transformacijama
Poglavlje 7 Blok dijagrami diskretnih sistema 95 96 Poglavlje 7. Blok dijagrami diskretnih sistema Stav 7.1 Strukturni dijagram diskretnog sistema u kome su sve veliqine prikazane svojim Laplasovim transformacijama
OSNOVI ELEKTRONIKE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA
 ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
nvt 1) ukoliko su poznate struje dioda. Struja diode D 1 je I 1 = I I 2 = 8mA. Sada je = 1,2mA.
 ukoliko su poznate struje dioda. Struja diode D 1 je I 1 = I I 2 = 8mA. Sada je = 1,2mA.") IOAE Dioda 8/9 I U kolu sa slike, diode D su identične Poznato je I=mA, I =ma, I S =fa na 7 o C i parametar n= a) Odrediti napon V I Kolika treba da bude struja I da bi izlazni napon V I iznosio 5mV? b)
IOAE Dioda 8/9 I U kolu sa slike, diode D su identične Poznato je I=mA, I =ma, I S =fa na 7 o C i parametar n= a) Odrediti napon V I Kolika treba da bude struja I da bi izlazni napon V I iznosio 5mV? b)
UZDUŽNA DINAMIKA VOZILA
 UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
Strukture podataka i algoritmi 1. kolokvij 16. studenog Zadatak 1
 Strukture podataka i algoritmi 1. kolokvij Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati i uvid u kolokvije: ponedjeljak,
Strukture podataka i algoritmi 1. kolokvij Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati i uvid u kolokvije: ponedjeljak,
MATEMATIKA 2. Grupa 1 Rexea zadataka. Prvi pismeni kolokvijum, Dragan ori
 MATEMATIKA 2 Prvi pismeni kolokvijum, 14.4.2016 Grupa 1 Rexea zadataka Dragan ori Zadaci i rexea 1. unkcija f : R 2 R definisana je sa xy 2 f(x, y) = x2 + y sin 3 2 x 2, (x, y) (0, 0) + y2 0, (x, y) =
MATEMATIKA 2 Prvi pismeni kolokvijum, 14.4.2016 Grupa 1 Rexea zadataka Dragan ori Zadaci i rexea 1. unkcija f : R 2 R definisana je sa xy 2 f(x, y) = x2 + y sin 3 2 x 2, (x, y) (0, 0) + y2 0, (x, y) =
Operacije s matricama
 Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
Linearna algebra 2 prvi kolokvij,
 Linearna algebra 2 prvi kolokvij, 27.. 20.. Za koji cijeli broj t je funkcija f : R 4 R 4 R definirana s f(x, y) = x y (t + )x 2 y 2 + x y (t 2 + t)x 4 y 4, x = (x, x 2, x, x 4 ), y = (y, y 2, y, y 4 )
Linearna algebra 2 prvi kolokvij, 27.. 20.. Za koji cijeli broj t je funkcija f : R 4 R 4 R definirana s f(x, y) = x y (t + )x 2 y 2 + x y (t 2 + t)x 4 y 4, x = (x, x 2, x, x 4 ), y = (y, y 2, y, y 4 )
VJEŽBE 3 BIPOLARNI TRANZISTORI. Slika 1. Postoje npn i pnp bipolarni tranziostori i njihovi simboli su dati na slici 2 i to npn lijevo i pnp desno.
 JŽ 3 POLAN TANZSTO ipolarni tranzistor se sastoji od dva pn spoja kod kojih je jedna oblast zajednička za oba i naziva se baza, slika 1 Slika 1 ipolarni tranzistor ima 3 izvoda: emitor (), kolektor (K)
JŽ 3 POLAN TANZSTO ipolarni tranzistor se sastoji od dva pn spoja kod kojih je jedna oblast zajednička za oba i naziva se baza, slika 1 Slika 1 ipolarni tranzistor ima 3 izvoda: emitor (), kolektor (K)
1 Promjena baze vektora
 Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
Linearna algebra 2 prvi kolokvij,
 1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
Funkcija prenosa. Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k.
 OT3OS1 7.11.217. Definicije Funkcija prenosa Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k Y z X z k Z y n Z h n Z x n Y z H z X z H z H z n h
OT3OS1 7.11.217. Definicije Funkcija prenosa Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k Y z X z k Z y n Z h n Z x n Y z H z X z H z H z n h
2 tg x ctg x 1 = =, cos 2x Zbog četvrtog kvadranta rješenje je: 2 ctg x
 Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Funkcije dviju varjabli (zadaci za vježbu)
") Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f
 D f") IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
APROKSIMACIJA FUNKCIJA
 APROKSIMACIJA FUNKCIJA Osnovni koncepti Gradimir V. Milovanović MF, Beograd, 14. mart 2011. APROKSIMACIJA FUNKCIJA p.1/46 Osnovni problem u TA Kako za datu funkciju f iz velikog prostora X naći jednostavnu
APROKSIMACIJA FUNKCIJA Osnovni koncepti Gradimir V. Milovanović MF, Beograd, 14. mart 2011. APROKSIMACIJA FUNKCIJA p.1/46 Osnovni problem u TA Kako za datu funkciju f iz velikog prostora X naći jednostavnu
PRIMJER 3. MATLAB filtdemo
 PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
Matematička analiza 1 dodatni zadaci
 Matematička analiza 1 dodatni zadaci 1. Ispitajte je li funkcija f() := 4 4 5 injekcija na intervalu I, te ako jest odredite joj sliku i inverz, ako je (a) I = [, 3), (b) I = [1, ], (c) I = ( 1, 0].. Neka
Matematička analiza 1 dodatni zadaci 1. Ispitajte je li funkcija f() := 4 4 5 injekcija na intervalu I, te ako jest odredite joj sliku i inverz, ako je (a) I = [, 3), (b) I = [1, ], (c) I = ( 1, 0].. Neka
OSNOVI AUTOMATSKOG UPRAVLJANJA PROCESIMA. Vežba br. 6: Dinamika sistema u frekventnom domenu u MATLABu
 OSNOVI AUTOMATSKOG UPRAVLJANJA PROCESIMA Vežba br. 6: Dinamika sistema u frekventnom domenu u MATLABu I Definisanje frekventnih karakteristika Dinamički modeli sistema se definišu u vremenskom, Laplace-ovom
OSNOVI AUTOMATSKOG UPRAVLJANJA PROCESIMA Vežba br. 6: Dinamika sistema u frekventnom domenu u MATLABu I Definisanje frekventnih karakteristika Dinamički modeli sistema se definišu u vremenskom, Laplace-ovom
Riješeni zadaci: Limes funkcije. Neprekidnost
 Riješeni zadaci: Limes funkcije. Neprekidnost Limes funkcije Neka je 0 [a, b] i f : D R, gdje je D = [a, b] ili D = [a, b] \ { 0 }. Kažemo da je es funkcije f u točki 0 jednak L i pišemo f ) = L, ako za
Riješeni zadaci: Limes funkcije. Neprekidnost Limes funkcije Neka je 0 [a, b] i f : D R, gdje je D = [a, b] ili D = [a, b] \ { 0 }. Kažemo da je es funkcije f u točki 0 jednak L i pišemo f ) = L, ako za
Ispitivanje toka i skiciranje grafika funkcija
 Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
Konstruisanje. Dobro došli na... SREDNJA MAŠINSKA ŠKOLA NOVI SAD DEPARTMAN ZA PROJEKTOVANJE I KONSTRUISANJE
 Dobro došli na... Konstruisanje GRANIČNI I KRITIČNI NAPON slajd 2 Kritični naponi Izazivaju kritične promene oblika Delovi ne mogu ispravno da vrše funkciju Izazivaju plastične deformacije Može doći i
Dobro došli na... Konstruisanje GRANIČNI I KRITIČNI NAPON slajd 2 Kritični naponi Izazivaju kritične promene oblika Delovi ne mogu ispravno da vrše funkciju Izazivaju plastične deformacije Može doći i
a M a A. Može se pokazati da je supremum (ako postoji) jedinstven pa uvodimo oznaku sup A.
 jedinstven pa uvodimo oznaku sup A.") 3 Infimum i supremum Definicija. Neka je A R. Kažemo da je M R supremum skupa A ako je (i) M gornja meda skupa A, tj. a M a A. (ii) M najmanja gornja meda skupa A, tj. ( ε > 0)( a A) takav da je a > M
3 Infimum i supremum Definicija. Neka je A R. Kažemo da je M R supremum skupa A ako je (i) M gornja meda skupa A, tj. a M a A. (ii) M najmanja gornja meda skupa A, tj. ( ε > 0)( a A) takav da je a > M
( ) ( ) 2 UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET. Zadaci za pripremu polaganja kvalifikacionog ispita iz Matematike. 1. Riješiti jednačine: 4
 ( ) 2 UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET. Zadaci za pripremu polaganja kvalifikacionog ispita iz Matematike. 1. Riješiti jednačine: 4") UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET Riješiti jednačine: a) 5 = b) ( ) 3 = c) + 3+ = 7 log3 č) = 8 + 5 ć) sin cos = d) 5cos 6cos + 3 = dž) = đ) + = 3 e) 6 log + log + log = 7 f) ( ) ( ) g) ( ) log
UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET Riješiti jednačine: a) 5 = b) ( ) 3 = c) + 3+ = 7 log3 č) = 8 + 5 ć) sin cos = d) 5cos 6cos + 3 = dž) = đ) + = 3 e) 6 log + log + log = 7 f) ( ) ( ) g) ( ) log
Osnovne teoreme diferencijalnog računa
 Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15
 1 / 15") MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
Dimenzionisanje štapova izloženih uvijanju na osnovu dozvoljenog tangencijalnog napona.
 Dimenzionisanje štapova izloženih uvijanju na osnovu dozvoljenog tangencijalnog napona Prema osnovnoj formuli za dimenzionisanje maksimalni tangencijalni napon τ max koji se javlja u štapu mora biti manji
Dimenzionisanje štapova izloženih uvijanju na osnovu dozvoljenog tangencijalnog napona Prema osnovnoj formuli za dimenzionisanje maksimalni tangencijalni napon τ max koji se javlja u štapu mora biti manji
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika. Monotonost i ekstremi. Katica Jurasić. Rijeka, 2011.
 Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
Rad, snaga, energija. Tehnička fizika 1 03/11/2017 Tehnološki fakultet
 Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
Obrada signala
 Obrada signala 1 18.1.17. Greška kvantizacije Pretpostavka je da greška kvantizacije ima uniformnu raspodelu 7 6 5 4 -X m p x 1,, za x druge vrednosti x 3 x X m 1 X m = 3 x Greška kvantizacije x x x p
Obrada signala 1 18.1.17. Greška kvantizacije Pretpostavka je da greška kvantizacije ima uniformnu raspodelu 7 6 5 4 -X m p x 1,, za x druge vrednosti x 3 x X m 1 X m = 3 x Greška kvantizacije x x x p
Dijagonalizacija operatora
 Dijagonalizacija operatora Problem: Može li se odrediti baza u kojoj zadani operator ima dijagonalnu matricu? Ova problem je povezan sa sljedećim pojmovima: 1 Karakteristični polinom operatora f 2 Vlastite
Dijagonalizacija operatora Problem: Može li se odrediti baza u kojoj zadani operator ima dijagonalnu matricu? Ova problem je povezan sa sljedećim pojmovima: 1 Karakteristični polinom operatora f 2 Vlastite
XI dvoqas veжbi dr Vladimir Balti. 4. Stabla
 XI dvoqas veжbi dr Vladimir Balti 4. Stabla Teorijski uvod Teorijski uvod Definicija 5.7.1. Stablo je povezan graf bez kontura. Definicija 5.7.1. Stablo je povezan graf bez kontura. Primer 5.7.1. Sva stabla
XI dvoqas veжbi dr Vladimir Balti 4. Stabla Teorijski uvod Teorijski uvod Definicija 5.7.1. Stablo je povezan graf bez kontura. Definicija 5.7.1. Stablo je povezan graf bez kontura. Primer 5.7.1. Sva stabla
SEKUNDARNE VEZE međumolekulske veze
 PRIMARNE VEZE hemijske veze među atomima SEKUNDARNE VEZE međumolekulske veze - Slabije od primarnih - Elektrostatičkog karaktera - Imaju veliki uticaj na svojstva supstanci: - agregatno stanje - temperatura
PRIMARNE VEZE hemijske veze među atomima SEKUNDARNE VEZE međumolekulske veze - Slabije od primarnih - Elektrostatičkog karaktera - Imaju veliki uticaj na svojstva supstanci: - agregatno stanje - temperatura
Numerička matematika 2. kolokvij (1. srpnja 2009.)
") Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
Otpornost R u kolu naizmjenične struje
 Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
Eliminacijski zadatak iz Matematike 1 za kemičare
 Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
Više dokaza jedne poznate trigonometrijske nejednakosti u trokutu
 Osječki matematički list 000), 5 9 5 Više dokaza jedne poznate trigonometrijske nejednakosti u trokutu Šefket Arslanagić Alija Muminagić Sažetak. U radu se navodi nekoliko različitih dokaza jedne poznate
Osječki matematički list 000), 5 9 5 Više dokaza jedne poznate trigonometrijske nejednakosti u trokutu Šefket Arslanagić Alija Muminagić Sažetak. U radu se navodi nekoliko različitih dokaza jedne poznate
( , treći kolokvij) 3. Na dite lokalne ekstreme funkcije z = x 4 + y 4 2x 2 + 2y 2 3. (20 bodova)
 3. Na dite lokalne ekstreme funkcije z = x 4 + y 4 2x 2 + 2y 2 3. (20 bodova)") A MATEMATIKA (.6.., treći kolokvij. Zadana je funkcija z = e + + sin(. Izračunajte a z (,, b z (,, c z.. Za funkciju z = 3 + na dite a diferencijal dz, b dz u točki T(, za priraste d =. i d =.. c Za koliko
A MATEMATIKA (.6.., treći kolokvij. Zadana je funkcija z = e + + sin(. Izračunajte a z (,, b z (,, c z.. Za funkciju z = 3 + na dite a diferencijal dz, b dz u točki T(, za priraste d =. i d =.. c Za koliko
Funkcija gustoće neprekidne slučajne varijable ima dva bitna svojstva: 1. Nenegativnost: f(x) 0, x R, 2. Normiranost: f(x)dx = 1.
 0, x R, 2. Normiranost: f(x)dx = 1.") σ-algebra skupova Definicija : Neka je Ω neprazan skup i F P(Ω). Familija skupova F je σ-algebra skupova na Ω ako vrijedi:. F, 2. A F A C F, 3. A n, n N} F n N A n F. Borelova σ-algebra Definicija 2: Neka
σ-algebra skupova Definicija : Neka je Ω neprazan skup i F P(Ω). Familija skupova F je σ-algebra skupova na Ω ako vrijedi:. F, 2. A F A C F, 3. A n, n N} F n N A n F. Borelova σ-algebra Definicija 2: Neka
RIJEŠENI ZADACI I TEORIJA IZ
 RIJEŠENI ZADACI I TEORIJA IZ LOGARITAMSKA FUNKCIJA SVOJSTVA LOGARITAMSKE FUNKCIJE OSNOVE TRIGONOMETRIJE PRAVOKUTNOG TROKUTA - DEFINICIJA TRIGONOMETRIJSKIH FUNKCIJA - VRIJEDNOSTI TRIGONOMETRIJSKIH FUNKCIJA
RIJEŠENI ZADACI I TEORIJA IZ LOGARITAMSKA FUNKCIJA SVOJSTVA LOGARITAMSKE FUNKCIJE OSNOVE TRIGONOMETRIJE PRAVOKUTNOG TROKUTA - DEFINICIJA TRIGONOMETRIJSKIH FUNKCIJA - VRIJEDNOSTI TRIGONOMETRIJSKIH FUNKCIJA
Induktivno spregnuta kola
 Induktivno spregnuta kola 13. januar 2016 Transformatori se koriste u elektroenergetskim sistemima za povišavanje i snižavanje napona, u elektronskim i komunikacionim kolima za promjenu napona i odvajanje
Induktivno spregnuta kola 13. januar 2016 Transformatori se koriste u elektroenergetskim sistemima za povišavanje i snižavanje napona, u elektronskim i komunikacionim kolima za promjenu napona i odvajanje
PARCIJALNI IZVODI I DIFERENCIJALI. Sama definicija parcijalnog izvoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je,
 PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A
, grupa A") Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
PID regulatori. Univerzitet u Novom Sadu, Fakultet tehničkih nauka, Katedra za Automatiku i upravljanje sistemima
 PID regulatori UVOD PID regulatori su našli široku primenu u procesnoj industriji zahvaljujući jednostavnoj konstrukciji i implementaciji u praksi. Zato u praktičnoj upotrebi imaju prednost u odnosu na
PID regulatori UVOD PID regulatori su našli široku primenu u procesnoj industriji zahvaljujući jednostavnoj konstrukciji i implementaciji u praksi. Zato u praktičnoj upotrebi imaju prednost u odnosu na
41. Jednačine koje se svode na kvadratne
 . Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
. Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
MATEMATIKA Pokažite da za konjugiranje (a + bi = a bi) vrijedi. a) z=z b) z 1 z 2 = z 1 z 2 c) z 1 ± z 2 = z 1 ± z 2 d) z z= z 2
 vrijedi. a) z=z b) z 1 z 2 = z 1 z 2 c) z 1 ± z 2 = z 1 ± z 2 d) z z= z 2") (kompleksna analiza, vježbe ). Izračunajte a) (+i) ( i)= b) (i+) = c) i + i 4 = d) i+i + i 3 + i 4 = e) (a+bi)(a bi)= f) (+i)(i )= Skicirajte rješenja u kompleksnoj ravnini.. Pokažite da za konjugiranje
(kompleksna analiza, vježbe ). Izračunajte a) (+i) ( i)= b) (i+) = c) i + i 4 = d) i+i + i 3 + i 4 = e) (a+bi)(a bi)= f) (+i)(i )= Skicirajte rješenja u kompleksnoj ravnini.. Pokažite da za konjugiranje
ZBIRKA POTPUNO RIJEŠENIH ZADATAKA
 **** IVANA SRAGA **** 1992.-2011. ZBIRKA POTPUNO RIJEŠENIH ZADATAKA PRIRUČNIK ZA SAMOSTALNO UČENJE POTPUNO RIJEŠENI ZADACI PO ŽUTOJ ZBIRCI INTERNA SKRIPTA CENTRA ZA PODUKU α M.I.M.-Sraga - 1992.-2011.
**** IVANA SRAGA **** 1992.-2011. ZBIRKA POTPUNO RIJEŠENIH ZADATAKA PRIRUČNIK ZA SAMOSTALNO UČENJE POTPUNO RIJEŠENI ZADACI PO ŽUTOJ ZBIRCI INTERNA SKRIPTA CENTRA ZA PODUKU α M.I.M.-Sraga - 1992.-2011.
Periodičke izmjenične veličine
 EHNČK FAKULE SVEUČLŠA U RJEC Zavod za elekroenergeiku Sudij: Preddiploski sručni sudij elekroehnike Kolegij: Osnove elekroehnike Nosielj kolegija: Branka Dobraš Periodičke izjenične veličine Osnove elekroehnike
EHNČK FAKULE SVEUČLŠA U RJEC Zavod za elekroenergeiku Sudij: Preddiploski sručni sudij elekroehnike Kolegij: Osnove elekroehnike Nosielj kolegija: Branka Dobraš Periodičke izjenične veličine Osnove elekroehnike
KVADRATNA FUNKCIJA. Kvadratna funkcija je oblika: Kriva u ravni koja predstavlja grafik funkcije y = ax + bx + c. je parabola.
 KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: = a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije = a + b + c je parabola. Najpre ćemo naučiti kako
KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: = a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije = a + b + c je parabola. Najpre ćemo naučiti kako
Grafičko prikazivanje atributivnih i geografskih nizova
 Grafičko prikazivanje atributivnih i geografskih nizova Biserka Draščić Ban Pomorski fakultet u Rijeci 17. veljače 2011. Grafičko prikazivanje atributivnih nizova Atributivni nizovi prikazuju se grafički
Grafičko prikazivanje atributivnih i geografskih nizova Biserka Draščić Ban Pomorski fakultet u Rijeci 17. veljače 2011. Grafičko prikazivanje atributivnih nizova Atributivni nizovi prikazuju se grafički
( , 2. kolokvij)
") A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
POTPUNO RIJEŠENIH ZADATAKA PRIRUČNIK ZA SAMOSTALNO UČENJE
 **** MLADEN SRAGA **** 011. UNIVERZALNA ZBIRKA POTPUNO RIJEŠENIH ZADATAKA PRIRUČNIK ZA SAMOSTALNO UČENJE SKUP REALNIH BROJEVA α Autor: MLADEN SRAGA Grafički urednik: BESPLATNA - WEB-VARIJANTA Tisak: M.I.M.-SRAGA
**** MLADEN SRAGA **** 011. UNIVERZALNA ZBIRKA POTPUNO RIJEŠENIH ZADATAKA PRIRUČNIK ZA SAMOSTALNO UČENJE SKUP REALNIH BROJEVA α Autor: MLADEN SRAGA Grafički urednik: BESPLATNA - WEB-VARIJANTA Tisak: M.I.M.-SRAGA
STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA
 Katedra za elektroniku Elementi elektronike Laboratorijske vežbe Vežba br. 2 STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA Datum: Vreme: Studenti: 1. grupa 2. grupa Dežurni: Ocena: Elementi elektronike -
Katedra za elektroniku Elementi elektronike Laboratorijske vežbe Vežba br. 2 STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA Datum: Vreme: Studenti: 1. grupa 2. grupa Dežurni: Ocena: Elementi elektronike -
MEHANIKA FLUIDA. Isticanje kroz otvore sa promenljivim nivoom tečnosti
 MEHANIKA FLUIDA Isticanje kroz otvore sa promenljivim nivoom tečnosti zadatak Prizmatična sud podeljen je vertikalnom pregradom, u kojoj je otvor prečnika d, na dve komore Leva komora je napunjena vodom
MEHANIKA FLUIDA Isticanje kroz otvore sa promenljivim nivoom tečnosti zadatak Prizmatična sud podeljen je vertikalnom pregradom, u kojoj je otvor prečnika d, na dve komore Leva komora je napunjena vodom
PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE)
") (Enegane) List: PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE) Na mjestima gdje se istovremeno troši električna i toplinska energija, ekonomičan način opskrbe energijom
(Enegane) List: PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE) Na mjestima gdje se istovremeno troši električna i toplinska energija, ekonomičan način opskrbe energijom
5 Ispitivanje funkcija
 5 Ispitivanje funkcija 3 5 Ispitivanje funkcija Ispitivanje funkcije pretodi crtanju grafika funkcije. Opšti postupak ispitivanja funkcija koje su definisane eksplicitno y = f() sadrži sledeće elemente:
5 Ispitivanje funkcija 3 5 Ispitivanje funkcija Ispitivanje funkcije pretodi crtanju grafika funkcije. Opšti postupak ispitivanja funkcija koje su definisane eksplicitno y = f() sadrži sledeće elemente:
Mašinsko učenje. Regresija.
 Mašinsko učenje. Regresija. Danijela Petrović May 17, 2016 Uvod Problem predviđanja vrednosti neprekidnog atributa neke instance na osnovu vrednosti njenih drugih atributa. Uvod Problem predviđanja vrednosti
Mašinsko učenje. Regresija. Danijela Petrović May 17, 2016 Uvod Problem predviđanja vrednosti neprekidnog atributa neke instance na osnovu vrednosti njenih drugih atributa. Uvod Problem predviđanja vrednosti
radni nerecenzirani materijal za predavanja
 Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Kažemo da je funkcija f : a, b R u točki x 0 a, b postiže lokalni minimum ako postoji okolina O(x 0 ) broja x 0 takva da je
Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Kažemo da je funkcija f : a, b R u točki x 0 a, b postiže lokalni minimum ako postoji okolina O(x 0 ) broja x 0 takva da je
π π ELEKTROTEHNIČKI ODJEL i) f (x) = x 3 x 2 x + 1, a = 1, b = 1;
 f (x) = x 3 x 2 x + 1, a = 1, b = 1;") 1. Provjerite da funkcija f definirana na segmentu [a, b] zadovoljava uvjete Rolleova poučka, pa odredite barem jedan c a, b takav da je f '(c) = 0 ako je: a) f () = 1, a = 1, b = 1; b) f () = 4, a =,
1. Provjerite da funkcija f definirana na segmentu [a, b] zadovoljava uvjete Rolleova poučka, pa odredite barem jedan c a, b takav da je f '(c) = 0 ako je: a) f () = 1, a = 1, b = 1; b) f () = 4, a =,
10. STABILNOST KOSINA
 MEHANIKA TLA: Stabilnot koina 101 10. STABILNOST KOSINA 10.1 Metode proračuna koina Problem analize tabilnoti zemljanih maa vodi e na određivanje odnoa između rapoložive mičuće čvrtoće i proečnog mičućeg
MEHANIKA TLA: Stabilnot koina 101 10. STABILNOST KOSINA 10.1 Metode proračuna koina Problem analize tabilnoti zemljanih maa vodi e na određivanje odnoa između rapoložive mičuće čvrtoće i proečnog mičućeg