ISTORIJAT 2. Veća cena Složenije i skuplje održavanje Manja pouzdanost i kraći vek trajanja
|
|
|
- Εἰρήνη Θεοδωρίδης
- 6 χρόνια πριν
- Προβολές:
Transcript
1 JEDNOSMERNI POGONI


2 ISTORIJAT 1 Prvi realizovani električni pogoni. Prvi DC motor konstruisao je Jacobi godine u Petrogradu, a motor je pokretao čamac s 14 osoba po reci Nevi. Namotaji statora i rotora bili su učvršćeni na drvenoj konstrukciji. 2


3 ISTORIJAT 2 DC motor razvijen početkom XX veka imao je sve bitne delove kao i danas. U drugoj polovini XX veka DC motor je BIO dominantan u pogonima koji su zahtevali regulaciju brzine obrtanja, pri čemu je poseban značaj imao razvoj upravljivih poluprovodničkih pretvarača. Zašto je BIO: Loše osobine Veća cena Složenije i skuplje održavanje Manja pouzdanost i kraći vek trajanja 3

4 KONCEPT RADA DC MOTORA 1 Jedan namotaj provodnika dužine L u stalnom magnetnom polju jačine B. Dovođenjem DC napajanja I u namotaj preko dve grafitne četkice koje ostvaruju pokretni kontakt s komutatorom. Nastaje sila: F=B L I Lorensova sila, tj. obrtni moment 4


5 KONCEPT RADA DC MOTORA 2 Kolektor menja smer struje svakih pola obrtaja kako bi se zadržao isti smer okretanja namotaja usled delovanja momenta. Kolektor služi za ispravljanje naizmeničnog napona indukovanog u rotoru u jednosmerni napon na stezaljkama motora. Magnetno polje ima smer od N ka S-polu. Realizacija sa većim brojem namotaja na rotoru zbog ujednačenijeg obrtnog momenta. Magnetno polje se stvara pomoću elektromagneta ili pomoću stalnih magneta (do 2kW). 5

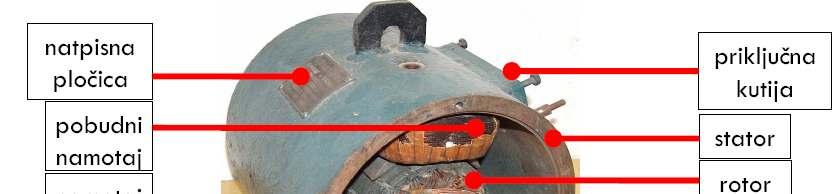
6 OSNOVNE CELINE DC MOTORA Osnovne celine DC motora su: Mehanički delovi kućište, vratilo, ležajni štitovi, ležaji, ventilatori; Električni delovi namotaji statora i rotora, kolektor, četkice, priključne stezaljke; Magnetni delovi jaram statora, glavni i pomoćni polovi statora, jaram i zubi rotora, međugvožđe (zazor); 6
 magneti ili namotaj u kome postoji DC struja (elektromagnet).")

7 STATOR Stator čine kućište i polovi magneta sa pobudnim namotajem. Uloga statora je stvaranje pobudnog fluksa, kojeg stvaraju permanentni (stalni) magneti ili namotaj u kome postoji DC struja (elektromagnet). Stator se sastoji od kućišta - jarma u obliku šupljeg valjka od masivnog gvožđa, na čijoj su unutrašnjoj periferiji pričvršćena 2p istaknuta pola složenih od feromagnetnih limova. Na polovima statora je pobudni namotaj, povezan između polova na određeni način i izveden na dva priključna kraja. Kroz pobudni namotaj se propušta DC struja koja stvara statorsku magnetnopobudnu silu i statorski fluks koji je nepomičan. Na statoru su i četkice koje kližu po kolektoru rotora, a prisutni su i neki konstrukcijski delovi poput nosača ležaja, te nosača držača četkica. DC motori manjih i srednjih snaga imaju i pomoćne polove s pomoćnim namotajem. Kod najvećih motora postoji i kompenzacijski namotaj u žlebovima glavnih polova. 7



8 8
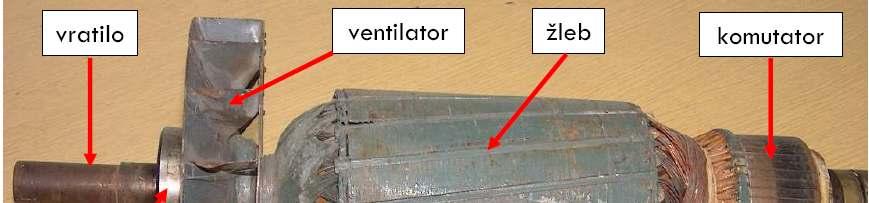
9 ROTOR Rotor je cilindričnog oblika, čine ga rotorski paket sa namotajem i vratilo sa komutatorom + ventilator. Rotorski paket je sastavljen od tankih feromagnetnih limova (dinamolimova) i ravnomerno je ožljebljen po svom obimu. Rotorski paket čvrsto je spojen sa vratilom mašine direktno ili preko glavčine (sa klinom). Namotaj na rotoru (indukt, armatura) je raspodeljen po žlebovima rotorskog paketa i direktno priključen na lamele kolektora, koji su izolovani međusobno i u odnosu na masu. Komutator (kolektor) je pričvršćen je sa jedne strane rotora i obrće se zajedno sa njim. 9

10 10
11 KOLEKTOR Komutator (kolektor) je sastavljen od bakarnih segmenata (lamela, kriški) koji su izolovani međusobno i u odnosu na masu. Uloga komutatora je preusmeravanje smera struje kroz navoje rotora. Postavljen je sa jedne strane rotora i obrće se zajedno sa njim. Na površinu komutatora naleže izvestan broj dirki (četkica), koje su smeštene na simetrali među polovima, u "neutralnoj zoni" i nepomične (mehanički učvršćene za stator), spojene na dva priključna kraja na statoru. Lamele komutatora su u električnoj vezi sa namotajem rotora, svaki segment komutatora spojen je sa istim tolikim brojem tačaka namotaja indukta. 11


12 12
13 Kućište statora je izrađeno od liva. Na unutrašnjoj strani kućišta nalazi se jaram na koji su ugrađeni glavni i pomoćni polovi sa svojim namotajima. Jaram s polovima predstavlja stator. Na osovini rotora nalazi se rotorski paket sastavljen od dinamo-limova, a u žlebovima tog paketa ugrađen je armaturni namotaj koji je priključen na lamele kolektora. KONSTRUKCIJA POPREČNI PRESEK: 1) Kućište; 2) Glavni pol; 3) Namotaj glavnog pola; 4) Pomoćni pol; 5) Namotaj pomoćnog pola; 6) Rotorski paket; 7) Armaturni namotaj; 8) Vratilo
14 REALIZACIJA DC MOTORA Princip rada DC motora može se pokazati na pojednostavljenom shematskom prikazu dvopolnog motora s jednim žlebom na rotoru. Kada na četkice rotora dođe DC napon, preko kolektora protiče struja kroz dva provodnika u žlebu. Provodnici se nalaze u magnetnom polju stvorenom od strane elektromagneta na istaknutim polovima, na svaki provodnik deluje sila F=B L I, gde je B magnetna indukcija, I - struja i L - dužina provodnika. 14
15 Moment na 2 provodnika M = BILD Stvarni DC motor ima na rotoru namotaj sa p parova polova, z provodnika i a parova paralelnih grana, te razvija moment M = pz a I k I a Φ= 2π gde je I a ukupna struja rotora, a Φ magnetni fluks pod jednim polom Φ = B sr τ p l MOMENT NA ROTORU m a Φ gde je korak polova: τ p = Dπ/2p, a B sr srednja vrednost indukcije pod polom. 15

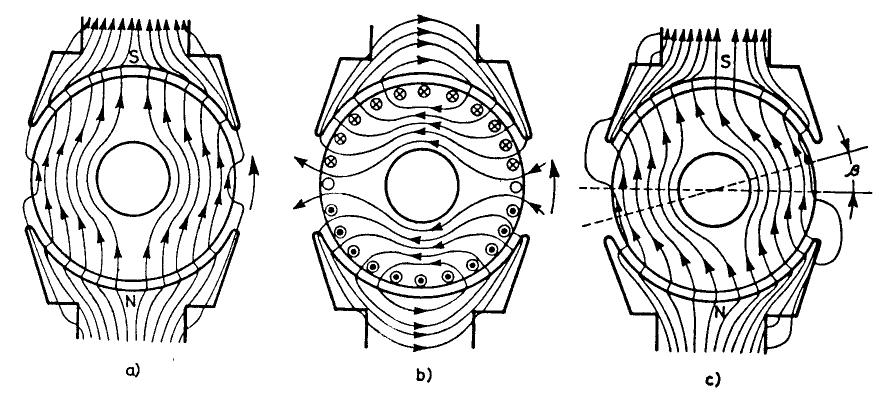
16 MAGNETNO POLJE DC MOTORA 16

 Nastavak rotacije 3) Komutator menja smer struje i obrtanje")
17 KRETANJE ROTORA 1) Dovođenje napajanja na namotaj rotora -> magnetno polje oko rotora. Leva strana armature je odgurnuta od levog magneta -> rotacija 2) Nastavak rotacije 3) Komutator menja smer struje i obrtanje se nastavlja 4) Unutrašnjost DC motora 17
18 ELEKTROMOTORNA SILA - EMS Pri obrtanju u svakom provodniku rotorskog namotaja indukuje se EMS: e = Blv, gde je B indukcija u provodniku, l dužina provodnika u magnetnom polju i v brzina obrtanja provodnika. Talasni oblik indukcije po obodu rotora (B) i indukovani napon u jednom namotu ili svitku (e) uz konstantnu brzinu obrtanja prikazan je na slici a) Na slici b) prikazan je napon svitka na četkicama (e č ) koji se ispravlja pomoću sistema četkica-kolektor. B Stvarni DC motor ima na rotoru e namotaj sa p parova polova, z provodnika i a parova paralelnih grana, pa je ukupni indukovani a) napon namotaja na rotoru: pz Ea = Φω = ke Φω 2πa ω - ugaona brzina (rad/s), Φ gl magnetni fluks pod jednim polom. b) e č E a t, α t 18
19 NAPON U KOLU ROTORA Šema rotorskog kola za stacionarna stanja data je na slici Rotorskom naponu (U a ) ravnotežu drži elektromotorna sila (E a ). Naponska jednačina u kolu rotora za stacionarna stanja glasi Ua = IaRa + Ea + R a U a i u Φ I a = E = k Φω a e 19
20 NAPON U KOLU ROTORA Na četkicama motora javlja se pad napona koji je zavisi od struje, ali nije linearan. R a I a Taj se pad napona može uzeti u obzir povećanjem otpora armature (R a ) ili se u naponskoj jednačini dodaje pad napona na četkicama ( U č ) za koji se obično uzima konstantna vrednost od 2 V. + U a i u Φ = E = k Φω a e Tada naponska jednačina glasi U a = I a R a + E a + U č 20
21 OSTALI NAMOTAJI DC MOTORA Osim pobudnog namotaja na statoru i armaturnog namotaja na rotoru, DC motori često imaju i sledeće namotaje: Pomoćni polovi ugrađuju se između glavnih polova (u tzv. neutralnu zonu), a osnovni zadatak im je rešavanje problema komutacije. Namotaj pomoćnih polova ima mali broj navojaka, a kroz njega teče struja rotora. Kompenzacioni namotaj ugrađuje se u polne papuče glavnih polova, kroz njega teče struja rotora, a osnovni zadatak mu je kompenzacija reakcije rotora. Kompaudni namotaj ugrađuje se na glavne polove, ima mali broj navojaka, kroz njega teče struja rotora koja stvara magnetno polje istog smera kao i pobudni namotaj. Zadatak mu je kompenzacija gubitka indukovanog napona usled reakcije rotora. Pravilnim dimenzionisanjem ovog namotaja mogu se postići različite karakteristike kompaudnih motora. 21
22 POMOĆNI POLOVI 22
23 KOMPENZACIONI NAMOTAJ 23
24 KOMPAUNDNI NAMOTAJ 24
25 ŠEMATSKI PRIKAZ SVIH NAMOTAJA 25


26 ŠEMATSKI PRIKAZ SVIH NAMOTAJA 26
27 MOMENTNA KARAKTERISTIKA Pri konstantnom naponu napajanja rotorskog namotaja i pobudnog (statorskog) namotaja, brzina obrtanja rotora zavisi od razvijenog elektromagnetnog momenta. Veza koja postoji između brzine obrtanja i momenta u stacionarnom stanju se zove momentna (mehanička) karakteristika: M=f(n). Ona prvenstveno zavisi od sistema pobude i može biti: 1. "tvrda, kod koje se brzina obrtanja vrlo malo menja sa promenom momenta opterećenja (nezavisna i paralelna pobuda), 2. "meka, kod koje se značajno menja brzina obrtanja sa promenom momenta opterećenja (redna pobuda). 27
28 MOMENTNA KARAKTERISTIKA 28
29 VRSTE KOMUTATORSKIH DC MOTORA U praksi se koristi veliki broj navojaka namotaja rotora, a magnetno polje se proizvodi elektromagnetom (namotaj pobude), te je srednja vrednost elektromagnetnog momenta motora približno konstantna. Prema načinu spajanja namotaja pobude i namotaja rotora, razlikujemo sledeće osnovne vrste komutatorskih DC motora: 1. Nezavisna pobuda, namotaj pobude je spojen na poseban spoljni izvor napona, koji je potpuno nezavisan od prilika u mašini. Namotaj rotora se napaja iz drugog izvora jednosmernog napona. Jednosmerni naponi se dobijaju iz naizmenične trofazne mreže, preko ispravljača. 2. Paralelna pobuda, pobudni namotaj je spojen paralelno na namotaj rotora i priključeni su na izvor jednosmernog napona. 3. Redna (serijska) pobuda, pobudni namotaj je spojen na red sa namotajem rotora i priključeni su na izvor jednosmernog napona. 4. Kompaund (složena) pobuda, ima nezavisnu (ređe paralelnu) + serijsku pobudu, uzima dobre osobine oba tipa 5. DC motori sa permanentnim magnetima, za minijaturne motore i male snage 29
30 1. NEZAVISNA POBUDA DC motor sa nezavisnom pobudom ima nezavisni pobudni namotaj na koji se dovodi jednosmerni napon iz posebnog izvora. Najčešće korišćen tip pobude kod elektromotornih pogona. Kroz pobudni namotaj teče struja koja stvara fluks motora Φ gl koji u okolini radne tačke nema linearnu karakteristiku u odnosu na struju pobude zbog zasićenja I a iu F1 A1 F2 A2 B1 B2 Oznake stezaljki: A1-A2 armaturni namotaj F1-F2 pobudni namotaj B1-B2 namotaj pomoćnih polova 30
31 1. NEZAVISNA POBUDA Uzimajući u obzir tri osnovne jednačine elektromagnetnog momenta indukovanog napona naponsku jednadžbu armaturnog kruga, karakteristika DC motora s nezavisnom pobudom: U a R a ω = M = ω km k Φ k k Φ 2 0 ω e e m Povećanjem momenta tereta brzina motora opada približno linearno, samo zbog neznatnih padova napona. I a = I. Treba ga prvo pobuditi punom vrednošću fluksa Φ gl pa tek onda priključiti strujno kolo indukta da ne bi došlo do pobega ω 0 M 31
32 2. PARALELNA POBUDA DC motor sa paralelnom pobudom ima ponašanje kao i motor sa nezavisnom pobudom, ista momentna karakteristika (malo mekša ). Ima samopobuđivanje, pod uslovom da je od prethodnog rada ostao remanentni magnetizam. Služi za pogon dizalica, alatnih i štamparskih mašina, u valjaonicama, za kompresore, pokretne trake, dobra regulacija brzine obrtanja. I a + I f = I. 32
33 3. SERIJSKA POBUDA Pobudni i armaturni namotaj serijskog motora spojeni su u seriju, pa je struja armature ujedno i struja pobude (I a = i u = I). Fluks je proporcionalan struji armature, pa je moment serijskog motora M = k' I I a I a = i u A1 D1 iu D2 A2 B1 B2 Oznake stezaljki: A1-A2 armaturni namotaj D1-D2 serijski pob. namotaj B1-B2 namotaj pomoćnih polova 33
34 Uzimajući u obzir vezu između brzine i indukovanog napona ω = E a k Φ e gl 3. SERIJSKA POBUDA sledi približni izraz za brzinu obrtanja: ω =k U a s M Zbog karakteristike konstantne snage (P=Mω), serijski motor se najviše koristi u vuči (lokomotiva, tramvaj). ω Ne sme da radi neopterećen jer ω. Primer - preopterećenje 30% Paralelna pobuda: Do 30% veća struja od nazivne Do 69% veće zagrevanje Serijska pobuda Do 14% veća struja od nazivne Do 30% veće zagrevanje M 34
35 4. KOMPAUND POBUDA Motor sa kompaud pobudom ima nezavisnu (ili paralelnu) i serijsku pobudu. Za velika opt. Delovanje serijske pobude (i us ) gotovo uvek potpomaže nezavisnu pobudu (i un ). U zavisnosti od udela pojedinih pobuda kompaud motor ima tvrđu ili mekšu momentnu karakteristiku. Za razliku od serijskog motora kompaud motor može raditi neopterećen, jer je brzina praznog hoda određena nezavisnom pobudom. ω ω I a i un E1 A1 E2 i us D1 D2 A2 B1 B2 35 M

36 5. STALNI MAGNETI NA STATORU DC motor sa stalnim magnetima na statoru: ova konstrukcija se koristi za manje snage (tahogeneratori, motori za pogon bočnih stakala i brisača na automobilima, anlaser za SUS motore manjih snaga, pogon osa totalne stanice). 36
37 MOTORI SA STALNIM MAGNETIMA NA ROTORU Povećana primena motora sa stalnim magnetima na rotoru, korišćenjem magneta s visokom koncentracijom magnetne energije po jedinici zapremine (magneti na bazi retkih zemalja), te ubrzan razvoj mikroproc. upravljanih pretvarača energetske elektronike. Moguće je da u bliskoj budućnosti zamene DC i AC motore u velikom broju aplikacija, naročito u servopogonima (snaga do 10 kw). Osnovna područja primene očekuju se u: robotici, alatnim mašinama, uređajima za pozicioniranje, fleksibilnim linijama, itd. U odnosu na DC motore osnovna prednost ovih motora je nepostojanje četkica i kolektora. U odnosu na AC motore prednosti pogona s PM motorima su 1) Veća korisnost zbog zanemarljivih rotorskih gubitaka (na rotoru PM motora nema gubitaka u namotajima kao kod AC motora). 2) Manji moment inercije, pa se uz isti razvijeni moment postiže bolja dinamika što je posebno važno kod servo pogona. 3) Manji gabariti i težina kod iste snage. 37
38 MOTORI SA STALNIM MAGNETIMA NA ROTORU 4) S obzirom da magnetno polje stvaraju stalni magneti nije potrebna jalova snaga iz mreže pa je cosθ 1 (veća korisnost). 5) Upravljanje PM motorima je jednostavnije u odnosu na vektorski upravljane asinhrone motore. 6) Konstantna pobuda PM daje bolje karakteristike kočenja. Nedostaci PM motora u odnosu na asinhrone motore 1) Relativno skupi kvalitetni magneti + složenost ugradnje 4-6 puta skuplji od asinhronih motora. 2) Moguće razmagnetisanje magneta kod PM motora pri visokim strujama. 3) S obzirom da pri povećanim temperaturama opada jačina polja PM (zavisi od vrste magneta), kod PM motora je jače izražen uticaj promene temperature na karakteristike pogona. 38
39 BRUSHLESS DC MOTORI To su DC motori sa elektronskom komutacijom, bez četkica. Ograničenja motora s četkicama Klasična električna veza između rotora i izvora jednosmerne struje se ostvaruje tako da se izvor jednosmerne struje spoji na grafitne četkice koje kližu po komutatoru. Prilikom prelaska četkice s jedne na drugu lamelu komutatora postoji trenutak kada se izvor nalazi u kratkom spoju usled čega dolazi do iskrenja četkica. Iskrenje četkica dovodi do postepenog uništavanja grafitnih četkica, ali i do oksidacije i trošenja komutatora, pa je to glavni nedostatak ove vrste motora. Iskrenje se pojačava se uvećanjem: broja obrtaja motora (pri velikim brzinama teško je održavanje kontakta četkica s komutatorom), napon, opterećenje, odnosno struja kao posledica povećanja napona ili opterećenja. Iskrenje sem uništavanja komutatora i četkica stvara čujni i električni šum. Kod velikih motora komutator je skup i zahteva mnogo mehanike. 39

40 BRUSHLESS DC MOTORI Osnovne karakteristike brushless motora Na rotoru su permanentni magneti, a na statoru su namotaji predstavlja oblik AC motora s električnom komutacijom Ovi motori nemaju četkice ili komutator mnogo efikasniji, manje trenje rad sa većim brzinama bez rizika oštećenja četkica Kroz statorske namotaje se propušta struja koja dovodi do zakretanja rotora, statorskom strujom se upravlja pomoću elektronskog komutatora 40




41 BRUSHLESS DC MOTORI Stalni magneti na rotoru, romboidni namotaj na statoru koji povećava značajno obrtni moment, višestepeni planetni reduktor (i do 1:2548 prenosni odnos) Glavna karakteristika: proces komutacije se vrši elektronski, efikasniji, mala EMI, duže traje, nema trošenja četkica, nema problema sa hlađenjem. Dva senzora bazirana na Halovom efektu, služe da kontrolišu položaj rotora i daju upravljački signal za elektronsku komutaciju, može i bez senzora merenjem EMS u namotaju statora. Upravljanje impulsno PWM, pobudnom strujam u statoru 41
42 BRUSHLESS DC MOTORI Tačno definisanje kroz koji namotaj će elektronski komutator poslati struju i to kojeg smera, se ostvaruje senzorom položaja rotora na osnovu čega se upravlja radom samog komutatora (dodatna elektronika i senzori položaja). Ovaj senzor koristi Hall-ov efekat Ukoliko se poluprovodnik nalazi u električnom polju, ono će izazvati tok struje gustine J. Ako normalno na smer tog polja deluje magnetno polje indukcije B, javlja se, transverzalno na oba polja, novo električno polje jačine: E = R H J B gde je R H Hallova konstanta. Brza promena broja obrtaja Stepen korisnosti DC motora bez četkica je 85-90%, dok je kod DC motora sa četkicama 75-80%. Dodatni energetski prekidači u pojačalu zahtevaju znatne troškove. Koriste se za aplikacije gde se zahtevaju velika područja promene brzine. 42
 najčešće spojen u zvezdu, a na rotoru su permanentni magneti.")

43 BRUSHLESS DC MOTORI Hardverska realizacija brushless motora Na statoru je trofazni simetrični namotaj (slično kao kod asinhronog motora) najčešće spojen u zvezdu, a na rotoru su permanentni magneti. Konfiguracija magneta zahteva najkvalitetnije materijale (SmCo, NdFeB) da bi se ostvarila zadovoljavajuća vrednost magnetne indukcije u međugvožđu. Raspored namotaja na statoru, te izvedba i položaj magneta na rotoru obezbeđuju da se pri v=const. u namotaju statora indukuju fazne EMS trapeznog oblika sa trajanjem ravnog dela trapeza od
44 BRUSHLESS DC MOTORI Idealni oblici EMS-a i faznih struja pomoću kojih se ostvaruje konstantan moment motora. Moment se može definisati kao odnos snage u međugvožđu i ugaone brzine rotora. Veličine e a, e b, e c su fazne EMS indukovane PM poljem, i a, i b, i c su fazne struje, a ω je ugaona brzina rotora. 44
45 BRUSHLESS DC MOTORI Da bi se ostvario konstantan moment, u međugvožđu struje moraju imati oblik pravougaonih impulsa koji se po širini, fazi i predznaku poklapaju s intervalom u kojem je EMS te faze konstantna. Postoji 6 intervala u ciklusu u kojima struja teče kroz 2 faze, a u 3. je nula U svakoj šestini periode motor se ponaša kao DC motor, s tim da se pobuda nalazi na rotoru a armatura na statoru. Svaku šestinu periode vrši se komutacija struje s faze na fazu pomoću elektronskog pretvarača. 45
")

 sa sinusnom funkcijom")

46 PRINCIP PWM Koristi se pravougaoni signal, promenom vremena trajanja signala (signal width) i frekvencije impulsa postiže se zaobljeniji izgled finalne krive Upravljanje impulsno PWM, promenom jačine struje Poređenjem signala testere (modulacijski signal) sa sinusnom funkcijom (referentni signal) dobija se PWM signal, 1 se dobija kada je referentni signal veći od modulacijskog i obrnuto. 46
47 BRUSHLESS DC MOTORI Oblici faznih struja u zavisnosti od položaja rotora (pobudnog toka). 47
48 UPRAVLJANJE BRZINOM OBRTANJA Brzina obrtanja motora sa nezavisnom pobudom Ua Ra ω = M k Φ k k Φ 2 e Budući su konstante k e i k m određene konstrukcijom motora, iz izraza se zaključuje da se brzinom obrtanja može upravljati na dva načina: - promenom napona armature (U a ): od 0 do v nazivno uz i u =const. - promenom struje pobude i u, tj. fluksa (Ф): do 2v nazivno uz U a =const. e m Ukoliko se u armaturni krug postavi spoljnji otpor, taj otpor, sa stanovišta karakteristike ω=f(m), ima isti uticaj kao i otpor armature (R a ). To znači da se i dodavanjem otpora u armaturni krug može upravljati brzinom. Iako se takav način koristio u starim elektromotornim pogonima, u novim pogonima se ne koristi zbog slabog stepena iskorišćenja pri upravljanju otporom i velikih gubitaka na dodatom otporu. 48
49 49
50 1. PROMENA NAPONA ARMATURE Promenom U a upravlja se brzinom DC motora do njegove nazivne brzine. Napon armature se menja: tiristorski konvertor AC/DC ispravljač (nekad Vard-Leonardova grupa) ili tranzistorski čoper DC/DC konvertor, pomoću kojeg je brzinu moguće i reverzirati. Slika: principijelna šema upravljanja s jednofaznim tiristorskim konvertorom, oblici naizmeničnog i regulisanog jednosmernog napona, te momentne karakteristike za različite napone armature (Konstantan moment). U ~ ω U an U an U a 2 M + - U an 2 i un - U an 50
51 Uz konstantan napon armature (U a ), promenom struje pobude menja se fluks (Φ) i upravlja brzinom iznad njene nominalne vrednosti. Konstantna snaga. 2. PROMENA FLUKSA Zbog problema zasićenja gvožđa promena fluksa može se ostvariti samo tako da se on smanjuje (Φ < Φ n ). 2ω 0n ω ω 0n Φ n I a < I an 0.75Φ n 0.5Φ n Smanjivanjem fluksa povećava se brzina praznog hoda, a karakteristike postaju sve strmije. M n M ω = Ua Ra k Φ k k Φ 2 e e m M 51
52 2. PROMENA FLUKSA Ako bi se pri smanjenom fluksu zadržao konstantan moment (M=k m Φ I a ) povećala bi se armaturna struja a time i gubici, odnosno zagrevanje motora. 2ω 0n ω I a < I an 0.75Φ n Zato se smanjuje moment opterećenja tako da struja armature ne premaši nominalnu vrednost, I a < I an. ω 0n Φ n 0.5Φ n M Na slici je ograničenje po momentu usled ograničenja struje armature. M n 52
53 Regulacija pozicije i brzine 1 53
54 Regulacija pozicije i brzine 2 Tri regulacione petlje: strujna, brzinska i poziciona Spoljašnja petlja: Regulacija pozicije, (PID), merenje pozicije enkoderom Središnja petlja: Regulacija brzine, PI regulacija, V-Kvf vrednost upravljanja u ustaljenom stanju (bez poremećaja), ako je greška nula da strujni regulator nema ulaz 0, ograničava se vrednost struje, merenje brzine enkoderom ili tahogenerat., prelazni režim struje je završen pre procesa regulacije brzine Unutrašnja petlja: Strujni regulator, PI regulacija, dinamika strujnih procesa je mnogo brža nego kod mehaničkih, finija regulacija, povratna sprega merenjem struje, pretvara se naponsko upravljanje u strujno. 54
55 55
56 Regulacija pozicije i brzine 3 Position Command - zadata trajektorija kretanja po svakoj osi, sa merenjem stvarne pozicije (direktno ili indirektno) formira grešku koja je ulaz u regulator pozicije Ograničenje struje na integralnom dejstvu: prilikom integraljenja greške, pri neograničenom procesu, generiše se upravljanje koje je nemoguće da se ostvari (prevelika vrednost struje), efekat koji se zove windup Sekundarni enkoder ima ulogu integrišućeg dejstva, postavlja se direktno na vratilo motora Primarni enkoder (u procesu) meri poziciju za zatvaranje sprege u pozicionoj petlji kao i brzinu (derivativno dejstvo) za zatvaranje sprege u brzinskoj petlji Izlaz iz pozicione petlje je ulaz u brzinsku petlju 56
57 FUNKCIJA PRENOSA DC MOTORA Definisati funkciju prenosa DC motora s nezavisnom (konstantnom) pobudom upravljanog strujom rotora i a, kao zavisnost brzine rotora (ω) od napona rotora (u a ). Šematski prikaz motora: R a L a + i a Φ u a i u e = k Φω a m e e ω m t 57
58 FUNKCIJA PRENOSA DC MOTORA Uz konstantnu pobudnu struju i u, odnosno fluks Φ, naponska jednačina armaturnog kola je: u ir L di a a = a a + a + ea, dt gde je indukovani napon: e = k Φω a e R a L a + i a Φ u a i u e = k Φω a m e e ω m t 58
59 FUNKCIJA PRENOSA DC MOTORA Za matematički opis dinamičkog ponašanja DC motora potrebno je napisati i jednačinu kretanja, koja uz zanemareno trenje glasi: J d ω = me m dt t J moment inercije, m t moment tereta i m e - elektromagnetni moment motora koji je jednak: me = km Φia 59
60 FUNKCIJA PRENOSA DC MOTORA Uz konstantan fluks Φ izrazi za indukovani napon i elektromagnetni moment se pojednostavljuju: e = K ω m = K i gde konstante K e i K m sadrže i fluks Φ. a e e m a Matematički model DC motora s konstantnom nezavisnom pobudom opisan je s naponskom jednačinom i jednačinom kretanja: dia 1 = ( dt L u i R K a a a e ω) a dω 1 = ( dt J K i m m a t ) 60
61 FUNKCIJA PRENOSA DC MOTORA Ove DJ se Laplaceovom transformacijom prevode u algebarske jednačine Ka I s st U s K s a( ) = ( ) ( ) 1 + [ a e ] gde su: K a =1/R a ; T a =L a /R a. a a a a a a 1 Js K I s M Ω Ω( s) = [ m a( ) t] Sada se formira blok dijagram koji definiše funkciju prenosa DC motora s konstantnom pobudom: M t U a + K M a e + 1 Ω K - 1+ T s m Js a I a - E a K e 61
62 FUNKCIJA PRENOSA DC MOTORA Sa blok dijagrama se mogu izvesti dve funkcije prenosa: 1) Odziv brzine obrtanja na naglu (odskočnu) promenu napona rotora Ω( s) 1 1 = 2 U ( s) K 1+ st + s TT a e m a m 2) Odziv brzine obrtanja na naglu (odskočnu) promenu tereta T a = L R a a Ω( s) M ( s) t T = J m 1+ sta 2 1+ st + s TT m a m - električna vremenska konst. armaturnog namotaja T m = J K K K a e m elektromehanička vremenska konstanta 62
63 FUNKCIJA PRENOSA DC MOTORA Odziv brzine obrtanja DC motora je u funkciji njegovih vremenskih konstanti. Ako je T m > 4T a odziv je aperiodičan, T m = 4T a odziv je kritično aperiodičan: (2s+1) 2 Ako je T m < 4T a odziv je oscilatoran ω T m > 4T a ω T m < 4T a t t u a u a t t 63
ELEKTRIČNE MAŠINE Sinhrone mašine
 ELEKTRIČNE MAŠINE Sinhrone mašine Uvod Sinhrone mašine predstavljaju mašine naizmenične struje. Koriste se uglavnom kao generatori električne energije naizmenične struje, te stoga predstavljaju jedan od
ELEKTRIČNE MAŠINE Sinhrone mašine Uvod Sinhrone mašine predstavljaju mašine naizmenične struje. Koriste se uglavnom kao generatori električne energije naizmenične struje, te stoga predstavljaju jedan od
Komutatorske mašine jednosmerne struje
 ELEKTRIČNE MAŠINE Komutatorske mašine jednosmerne struje Uvod Mašine jednosmerne struje su zbog svojih veoma dobrih funkcionalnih karakteristika nekada predstavljale često rešenje u električnim pogonima.
ELEKTRIČNE MAŠINE Komutatorske mašine jednosmerne struje Uvod Mašine jednosmerne struje su zbog svojih veoma dobrih funkcionalnih karakteristika nekada predstavljale često rešenje u električnim pogonima.
MAŠINE JEDNOSMERNE STRUJE
 MAŠINE JEDNOSMERNE STRUJE ELEKTROMEHANIČKO PRETVARANJE ENERGIJE Uređaji za elektromehaničko pretvaranje energije: ELEKTRIČNI SISTEM MEHANIČKI SISTEM Električni motori Električni generatori Sprega između
MAŠINE JEDNOSMERNE STRUJE ELEKTROMEHANIČKO PRETVARANJE ENERGIJE Uređaji za elektromehaničko pretvaranje energije: ELEKTRIČNI SISTEM MEHANIČKI SISTEM Električni motori Električni generatori Sprega između
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET SIGNALI I SISTEMI. Zbirka zadataka
 UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
3.1 Granična vrednost funkcije u tački
 3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
I.13. Koliki je napon između neke tačke A čiji je potencijal 5 V i referentne tačke u odnosu na koju se taj potencijal računa?
 TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović
 DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
Uvod. Asinhrona mašina se u primjeni najčešće koristi kao motor, i to trofazni, iako može da radi i kao generator.
 Asinhrone mašine Uvod Asinhrona mašina se u primjeni najčešće koristi kao motor, i to trofazni, iako može da radi i kao generator. Prednosti asinhronih mašina, u odnosu na ostale vrste električnih mašina,
Asinhrone mašine Uvod Asinhrona mašina se u primjeni najčešće koristi kao motor, i to trofazni, iako može da radi i kao generator. Prednosti asinhronih mašina, u odnosu na ostale vrste električnih mašina,
STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA
 Katedra za elektroniku Elementi elektronike Laboratorijske vežbe Vežba br. 2 STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA Datum: Vreme: Studenti: 1. grupa 2. grupa Dežurni: Ocena: Elementi elektronike -
Katedra za elektroniku Elementi elektronike Laboratorijske vežbe Vežba br. 2 STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA Datum: Vreme: Studenti: 1. grupa 2. grupa Dežurni: Ocena: Elementi elektronike -
Kaskadna kompenzacija SAU
 Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
OSNOVI ELEKTRONIKE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA
 ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
Sinhrone mašine imaju istu (sinhronu) brzinu obrtanja rotora i obrtnog magnetnog polja statora
 brzinu obrtanja rotora i obrtnog magnetnog polja statora") SINHRONE MAŠINE Sinhrone mašine imaju istu (sinhronu) brzinu obrtanja rotora i obrtnog magnetnog polja statora Mogu raditi i kao generatori i kao motori U oba režima rada mogu proizvoditi reaktivnu energiju
SINHRONE MAŠINE Sinhrone mašine imaju istu (sinhronu) brzinu obrtanja rotora i obrtnog magnetnog polja statora Mogu raditi i kao generatori i kao motori U oba režima rada mogu proizvoditi reaktivnu energiju
Otpornost R u kolu naizmjenične struje
 Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
OSNOVI ELEKTRONIKE. Vežbe (2 časa nedeljno): mr Goran Savić
: mr Goran Savić") OSNOVI ELEKTRONIKE Vežbe (2 časa nedeljno): mr Goran Savić savic@el.etf.rs http://tnt.etf.rs/~si1oe Termin za konsultacije: četvrtak u 12h, kabinet 102 Referentni smerovi i polariteti 1. Odrediti vrednosti
OSNOVI ELEKTRONIKE Vežbe (2 časa nedeljno): mr Goran Savić savic@el.etf.rs http://tnt.etf.rs/~si1oe Termin za konsultacije: četvrtak u 12h, kabinet 102 Referentni smerovi i polariteti 1. Odrediti vrednosti
Elementi spektralne teorije matrica
 Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II
 1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II Zadatak: Klipni mehanizam se sastoji iz krivaje (ekscentarske poluge) OA dužine R, klipne poluge AB dužine =3R i klipa kompresora B (ukrsne glave). Krivaja
1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II Zadatak: Klipni mehanizam se sastoji iz krivaje (ekscentarske poluge) OA dužine R, klipne poluge AB dužine =3R i klipa kompresora B (ukrsne glave). Krivaja
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
Regulisani elektromotorni pogoni sa mašinama jednosmerne struje
 Regulisani elektromotorni pogoni sa mašinama jednosmerne struje Osnovne karakteristike Načini realizacije (aktuatora) Rad u 2 ili 4 kvadranta Rad u proširenom opsegu brzina Naponski izvor naponski upravljivi
Regulisani elektromotorni pogoni sa mašinama jednosmerne struje Osnovne karakteristike Načini realizacije (aktuatora) Rad u 2 ili 4 kvadranta Rad u proširenom opsegu brzina Naponski izvor naponski upravljivi
Osnovni primer. (Z, +,,, 0, 1) je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju
 je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju") RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
PRAVA. Prava je u prostoru određena jednom svojom tačkom i vektorom paralelnim sa tom pravom ( vektor paralelnosti).
.") PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
numeričkih deskriptivnih mera.
 DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama.
 Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
41. Jednačine koje se svode na kvadratne
 . Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
. Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
Novi Sad god Broj 1 / 06 Veljko Milković Bulevar cara Lazara 56 Novi Sad. Izveštaj o merenju
 Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
ELEKTRIČNE MAŠINE Asinhrone mašine
 ELEKTRIČNE MAŠINE Asinhrone mašine Uvod Asinhrona mašina je tipičnan predstavnik električne mašine male i srednje snage koja se obično pravi u velikim serijama. Prednosti asinhrone mašine u odnosu na ostale
ELEKTRIČNE MAŠINE Asinhrone mašine Uvod Asinhrona mašina je tipičnan predstavnik električne mašine male i srednje snage koja se obično pravi u velikim serijama. Prednosti asinhrone mašine u odnosu na ostale
III VEŽBA: FURIJEOVI REDOVI
 III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
Induktivno spregnuta kola
 Induktivno spregnuta kola 13. januar 2016 Transformatori se koriste u elektroenergetskim sistemima za povišavanje i snižavanje napona, u elektronskim i komunikacionim kolima za promjenu napona i odvajanje
Induktivno spregnuta kola 13. januar 2016 Transformatori se koriste u elektroenergetskim sistemima za povišavanje i snižavanje napona, u elektronskim i komunikacionim kolima za promjenu napona i odvajanje
RAČUNSKE VEŽBE IZ PREDMETA POLUPROVODNIČKE KOMPONENTE (IV semestar modul EKM) IV deo. Miloš Marjanović
 IV deo. Miloš Marjanović") Univerzitet u Nišu Elektronski fakultet RAČUNSKE VEŽBE IZ PREDMETA (IV semestar modul EKM) IV deo Miloš Marjanović MOSFET TRANZISTORI ZADATAK 35. NMOS tranzistor ima napon praga V T =2V i kroz njega protiče
Univerzitet u Nišu Elektronski fakultet RAČUNSKE VEŽBE IZ PREDMETA (IV semestar modul EKM) IV deo Miloš Marjanović MOSFET TRANZISTORI ZADATAK 35. NMOS tranzistor ima napon praga V T =2V i kroz njega protiče
Ispitivanje toka i skiciranje grafika funkcija
 Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI)
") IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
Ogled zaustavljanja i zaletanja
 Ogled zaustavljanja i zaletanja Ogled zaustavljanja Koristi se za određivanje momenta inercije ili za određivanje gubitaka pri zaustavljanju Postupak podrazumeva da zaletimo mašinu, pa je isključimo sa
Ogled zaustavljanja i zaletanja Ogled zaustavljanja Koristi se za određivanje momenta inercije ili za određivanje gubitaka pri zaustavljanju Postupak podrazumeva da zaletimo mašinu, pa je isključimo sa
Pismeni ispit iz matematike Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: ( ) + 1.
 + 1.") Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
RAD, SNAGA I ENERGIJA
 RAD, SNAGA I ENERGIJA SADRŢAJ 1. MEHANIĈKI RAD SILE 2. SNAGA 3. MEHANIĈKA ENERGIJA a) Kinetiĉka energija b) Potencijalna energija c) Ukupna energija d) Rad kao mera za promenu energije 4. ZAKON ODRŢANJA
RAD, SNAGA I ENERGIJA SADRŢAJ 1. MEHANIĈKI RAD SILE 2. SNAGA 3. MEHANIĈKA ENERGIJA a) Kinetiĉka energija b) Potencijalna energija c) Ukupna energija d) Rad kao mera za promenu energije 4. ZAKON ODRŢANJA
INTELIGENTNO UPRAVLJANJE
 INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
nvt 1) ukoliko su poznate struje dioda. Struja diode D 1 je I 1 = I I 2 = 8mA. Sada je = 1,2mA.
 ukoliko su poznate struje dioda. Struja diode D 1 je I 1 = I I 2 = 8mA. Sada je = 1,2mA.") IOAE Dioda 8/9 I U kolu sa slike, diode D su identične Poznato je I=mA, I =ma, I S =fa na 7 o C i parametar n= a) Odrediti napon V I Kolika treba da bude struja I da bi izlazni napon V I iznosio 5mV? b)
IOAE Dioda 8/9 I U kolu sa slike, diode D su identične Poznato je I=mA, I =ma, I S =fa na 7 o C i parametar n= a) Odrediti napon V I Kolika treba da bude struja I da bi izlazni napon V I iznosio 5mV? b)
2 tg x ctg x 1 = =, cos 2x Zbog četvrtog kvadranta rješenje je: 2 ctg x
 Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
SISTEMI NELINEARNIH JEDNAČINA
 SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Zavrxni ispit iz Matematiqke analize 1
 Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
Obrada signala
 Obrada signala 1 18.1.17. Greška kvantizacije Pretpostavka je da greška kvantizacije ima uniformnu raspodelu 7 6 5 4 -X m p x 1,, za x druge vrednosti x 3 x X m 1 X m = 3 x Greška kvantizacije x x x p
Obrada signala 1 18.1.17. Greška kvantizacije Pretpostavka je da greška kvantizacije ima uniformnu raspodelu 7 6 5 4 -X m p x 1,, za x druge vrednosti x 3 x X m 1 X m = 3 x Greška kvantizacije x x x p
OM2 V3 Ime i prezime: Index br: I SAVIJANJE SILAMA TANKOZIDNIH ŠTAPOVA
 OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
M086 LA 1 M106 GRP. Tema: Baza vektorskog prostora. Koordinatni sustav. Norma. CSB nejednakost
 M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
UZDUŽNA DINAMIKA VOZILA
 UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
PRILOG. Tab. 1.a. Dozvoljena trajna opterećenja bakarnih pravougaonih profila u(a) za θ at =35 C i θ=30 C, (θ tdt =65 C)
 za θ at =35 C i θ=30 C, (θ tdt =65 C)") PRILOG Tab. 1.a. Dozvoljena trajna opterećenja bakarnih pravougaonih profila u(a) za θ at =35 C i θ=30 C, (θ tdt =65 C) Tab 3. Vrednosti sačinilaca α i β za tipične konstrukcije SN-sabirnica Tab 4. Minimalni
PRILOG Tab. 1.a. Dozvoljena trajna opterećenja bakarnih pravougaonih profila u(a) za θ at =35 C i θ=30 C, (θ tdt =65 C) Tab 3. Vrednosti sačinilaca α i β za tipične konstrukcije SN-sabirnica Tab 4. Minimalni
Betonske konstrukcije 1 - vežbe 3 - Veliki ekscentricitet -Dodatni primeri
 Betonske konstrukcije 1 - vežbe 3 - Veliki ekscentricitet -Dodatni primeri 1 1 Zadatak 1b Čisto savijanje - vezano dimenzionisanje Odrediti potrebnu površinu armature za presek poznatih dimenzija, pravougaonog
Betonske konstrukcije 1 - vežbe 3 - Veliki ekscentricitet -Dodatni primeri 1 1 Zadatak 1b Čisto savijanje - vezano dimenzionisanje Odrediti potrebnu površinu armature za presek poznatih dimenzija, pravougaonog
Operacije s matricama
 Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
Konstruisanje. Dobro došli na... SREDNJA MAŠINSKA ŠKOLA NOVI SAD DEPARTMAN ZA PROJEKTOVANJE I KONSTRUISANJE
 Dobro došli na... Konstruisanje GRANIČNI I KRITIČNI NAPON slajd 2 Kritični naponi Izazivaju kritične promene oblika Delovi ne mogu ispravno da vrše funkciju Izazivaju plastične deformacije Može doći i
Dobro došli na... Konstruisanje GRANIČNI I KRITIČNI NAPON slajd 2 Kritični naponi Izazivaju kritične promene oblika Delovi ne mogu ispravno da vrše funkciju Izazivaju plastične deformacije Može doći i
Osnovne karakteristike koračnih pogona
 Osnovne karakteristike koračnih pogona Elektromagnetni koračni pogoni Rotor koračnog motora izvodi koračno kretanje Koračni ugao: α = 0,36... 180 о Broj koraka po obrtaju: z = 360 o / α = 1000 2 Univerzitet
Osnovne karakteristike koračnih pogona Elektromagnetni koračni pogoni Rotor koračnog motora izvodi koračno kretanje Koračni ugao: α = 0,36... 180 о Broj koraka po obrtaju: z = 360 o / α = 1000 2 Univerzitet
5 Ispitivanje funkcija
 5 Ispitivanje funkcija 3 5 Ispitivanje funkcija Ispitivanje funkcije pretodi crtanju grafika funkcije. Opšti postupak ispitivanja funkcija koje su definisane eksplicitno y = f() sadrži sledeće elemente:
5 Ispitivanje funkcija 3 5 Ispitivanje funkcija Ispitivanje funkcije pretodi crtanju grafika funkcije. Opšti postupak ispitivanja funkcija koje su definisane eksplicitno y = f() sadrži sledeće elemente:
Osnovne teoreme diferencijalnog računa
 Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
ELEKTROMOTORNI POGONI - AUDITORNE VJEŽBE
 veučilište u ijeci TEHNIČKI FAKULTET veučilišni preddiplomki tudij elektrotehnike ELEKTOOTONI OGONI - AUDITONE VJEŽBE Ainkroni motor Ainkroni motor inkrona obodna brzina inkrona brzina okretanja Odno n
veučilište u ijeci TEHNIČKI FAKULTET veučilišni preddiplomki tudij elektrotehnike ELEKTOOTONI OGONI - AUDITONE VJEŽBE Ainkroni motor Ainkroni motor inkrona obodna brzina inkrona brzina okretanja Odno n
FAKULTET PROMETNIH ZNANOSTI
 SVUČILIŠT U ZAGU FAKULTT POMTNIH ZNANOSTI predmet: Nastavnik: Prof. dr. sc. Zvonko Kavran zvonko.kavran@fpz.hr * Autorizirana predavanja 2016. 1 Pojačala - Pojačavaju ulazni signal - Zahtjev linearnost
SVUČILIŠT U ZAGU FAKULTT POMTNIH ZNANOSTI predmet: Nastavnik: Prof. dr. sc. Zvonko Kavran zvonko.kavran@fpz.hr * Autorizirana predavanja 2016. 1 Pojačala - Pojačavaju ulazni signal - Zahtjev linearnost
Funkcija prenosa. Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k.
 OT3OS1 7.11.217. Definicije Funkcija prenosa Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k Y z X z k Z y n Z h n Z x n Y z H z X z H z H z n h
OT3OS1 7.11.217. Definicije Funkcija prenosa Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k Y z X z k Z y n Z h n Z x n Y z H z X z H z H z n h
SINHRONE MAŠINE. Osnovi elektroenergetike. Dr Ivana Vlajić-Naumovska
 SINHRONE MAŠINE Osnovi elektroenergetike Dr Ivana Vlajić-Naumovska Sadržaj Uopšteno o sinhronim mašinama Sinhroni generatori Podela sinhronih generatora Osnovni delovi Princip rada Pobuda sinhronih mašina
SINHRONE MAŠINE Osnovi elektroenergetike Dr Ivana Vlajić-Naumovska Sadržaj Uopšteno o sinhronim mašinama Sinhroni generatori Podela sinhronih generatora Osnovni delovi Princip rada Pobuda sinhronih mašina
DINAMIČKI MODEL (SIMETRIČNOG) TROFAZNOG ASINHRONOG MOTORA
 TROFAZNOG ASINHRONOG MOTORA") DINAMIČKI MODEL (SIMETRIČNOG) TROFAZNOG ASINHRONOG MOTORA bs as cs bs br cr br ar br ar cr ar cr bs cs as 1856-1943 cs as Asinhroni (indukcioni) motor Patent iz1888 godine Naponska jednačina: u u R i t
DINAMIČKI MODEL (SIMETRIČNOG) TROFAZNOG ASINHRONOG MOTORA bs as cs bs br cr br ar br ar cr ar cr bs cs as 1856-1943 cs as Asinhroni (indukcioni) motor Patent iz1888 godine Naponska jednačina: u u R i t
Elektromagnetizam. Elektromagnetizam. Elektromagnetizam. Elektromagnetizam
 (AP301-302) Magnetno polje dva pravolinijska provodnika (AP312-314) Magnetna indukcija (AP329-331) i samoindukcija (AP331-337) Prvi zapisi o magentizmu se nalaze još u starom veku: pronalazak rude gvožđa
(AP301-302) Magnetno polje dva pravolinijska provodnika (AP312-314) Magnetna indukcija (AP329-331) i samoindukcija (AP331-337) Prvi zapisi o magentizmu se nalaze još u starom veku: pronalazak rude gvožđa
DIMENZIONISANJE PRAVOUGAONIH POPREČNIH PRESEKA NAPREGNUTIH NA PRAVO SLOŽENO SAVIJANJE
 TEORIJA ETONSKIH KONSTRUKCIJA T- DIENZIONISANJE PRAVOUGAONIH POPREČNIH PRESEKA NAPREGNUTIH NA PRAVO SLOŽENO SAVIJANJE 3.5 f "2" η y 2 D G N z d y A "" 0 Z a a G - tačka presek koja određje položaj sistemne
TEORIJA ETONSKIH KONSTRUKCIJA T- DIENZIONISANJE PRAVOUGAONIH POPREČNIH PRESEKA NAPREGNUTIH NA PRAVO SLOŽENO SAVIJANJE 3.5 f "2" η y 2 D G N z d y A "" 0 Z a a G - tačka presek koja određje položaj sistemne
ELEKTROMOTORNI POGONI SA ASINHRONIM MOTOROM
 ELEKTROOTORNI POGONI SA ASINHRONI OTORO Poučavamo amo pogone a tofaznim motoom. Najčešće koišćeni moto u elektomotonim pogonima. Ainhoni moto: - jednotavna kontukcija; - mala cena; - vioka enegetka efikanot.
ELEKTROOTORNI POGONI SA ASINHRONI OTORO Poučavamo amo pogone a tofaznim motoom. Najčešće koišćeni moto u elektomotonim pogonima. Ainhoni moto: - jednotavna kontukcija; - mala cena; - vioka enegetka efikanot.
S t r a n a 1. 1.Povezati jonsku jačinu rastvora: a) MgCl 2 b) Al 2 (SO 4 ) 3 sa njihovim molalitetima, m. za so tipa: M p X q. pa je jonska jačina:
 MgCl 2 b) Al 2 (SO 4 ) 3 sa njihovim molalitetima, m. za so tipa: M p X q. pa je jonska jačina:") S t r a n a 1 1.Povezati jonsku jačinu rastvora: a MgCl b Al (SO 4 3 sa njihovim molalitetima, m za so tipa: M p X q pa je jonska jačina:. Izračunati mase; akno 3 bba(no 3 koje bi trebalo dodati, 0,110
S t r a n a 1 1.Povezati jonsku jačinu rastvora: a MgCl b Al (SO 4 3 sa njihovim molalitetima, m za so tipa: M p X q pa je jonska jačina:. Izračunati mase; akno 3 bba(no 3 koje bi trebalo dodati, 0,110
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A
, grupa A") Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
Teorijske osnove informatike 1
 Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
TRANSFORMATORI I ASINHRONE MAŠINE
 TRANSFORMATORI I ASINHRONE MAŠINE napon transformacije : nema kretanja provodnika u magnetnom polju 0 e E M S = dφ d( B S) db ds db = = ( S + B) = S dt dt dt dt dt za mrežni napon U = U eff 2 sinωt napon
TRANSFORMATORI I ASINHRONE MAŠINE napon transformacije : nema kretanja provodnika u magnetnom polju 0 e E M S = dφ d( B S) db ds db = = ( S + B) = S dt dt dt dt dt za mrežni napon U = U eff 2 sinωt napon
Merenje u regulisanim elektromotornim pogonima. Merenje veličina koje se koriste u upravljačkim algoritmima pogona ili za zaštitu
 Merenje u regulisanim elektromotornim pogonima Merenje veličina koje se koriste u upravljačkim algoritmima pogona ili za zaštitu Merenje struje Sadržaj Strujni transformatori, senzori na bazi Hall-ovog
Merenje u regulisanim elektromotornim pogonima Merenje veličina koje se koriste u upravljačkim algoritmima pogona ili za zaštitu Merenje struje Sadržaj Strujni transformatori, senzori na bazi Hall-ovog
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f
 D f") IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
PARCIJALNI IZVODI I DIFERENCIJALI. Sama definicija parcijalnog izvoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je,
 PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
VJEŽBE 3 BIPOLARNI TRANZISTORI. Slika 1. Postoje npn i pnp bipolarni tranziostori i njihovi simboli su dati na slici 2 i to npn lijevo i pnp desno.
 JŽ 3 POLAN TANZSTO ipolarni tranzistor se sastoji od dva pn spoja kod kojih je jedna oblast zajednička za oba i naziva se baza, slika 1 Slika 1 ipolarni tranzistor ima 3 izvoda: emitor (), kolektor (K)
JŽ 3 POLAN TANZSTO ipolarni tranzistor se sastoji od dva pn spoja kod kojih je jedna oblast zajednička za oba i naziva se baza, slika 1 Slika 1 ipolarni tranzistor ima 3 izvoda: emitor (), kolektor (K)
OBRTNO MAGNETNO POLJE DVOSTRUKA VIŠEFAZNOST: PROSTORNA I VREMENSKA
 VISOKA ŠKOLA ELEKTROTEHNIKE I RAČUNARSTVA STRUKOVNIH STUDIJA-VIŠER, BEOGRAD STUDIJSKI PROGRAM: NOVE ENERGETSKE TEHNOLOGIJE SPECIALISTIČKE STUDIJE PREDMET: SPECIJALNE ELEKTRIČNE INSTALACIJE OBRTNO MAGNETNO
VISOKA ŠKOLA ELEKTROTEHNIKE I RAČUNARSTVA STRUKOVNIH STUDIJA-VIŠER, BEOGRAD STUDIJSKI PROGRAM: NOVE ENERGETSKE TEHNOLOGIJE SPECIALISTIČKE STUDIJE PREDMET: SPECIJALNE ELEKTRIČNE INSTALACIJE OBRTNO MAGNETNO
KVADRATNA FUNKCIJA. Kvadratna funkcija je oblika: Kriva u ravni koja predstavlja grafik funkcije y = ax + bx + c. je parabola.
 KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: = a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije = a + b + c je parabola. Najpre ćemo naučiti kako
KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: = a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije = a + b + c je parabola. Najpre ćemo naučiti kako
Iskazna logika 3. Matematička logika u računarstvu. novembar 2012
 Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Poglavlje 7. Blok dijagrami diskretnih sistema
 Poglavlje 7 Blok dijagrami diskretnih sistema 95 96 Poglavlje 7. Blok dijagrami diskretnih sistema Stav 7.1 Strukturni dijagram diskretnog sistema u kome su sve veliqine prikazane svojim Laplasovim transformacijama
Poglavlje 7 Blok dijagrami diskretnih sistema 95 96 Poglavlje 7. Blok dijagrami diskretnih sistema Stav 7.1 Strukturni dijagram diskretnog sistema u kome su sve veliqine prikazane svojim Laplasovim transformacijama
Elektrotehnički fakultet univerziteta u Beogradu 17.maj Odsek za Softversko inžinjerstvo
 Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
PRIMJER 3. MATLAB filtdemo
 PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
Mašinsko učenje. Regresija.
 Mašinsko učenje. Regresija. Danijela Petrović May 17, 2016 Uvod Problem predviđanja vrednosti neprekidnog atributa neke instance na osnovu vrednosti njenih drugih atributa. Uvod Problem predviđanja vrednosti
Mašinsko učenje. Regresija. Danijela Petrović May 17, 2016 Uvod Problem predviđanja vrednosti neprekidnog atributa neke instance na osnovu vrednosti njenih drugih atributa. Uvod Problem predviđanja vrednosti
OSNOVI ELEKTRONIKE VEŽBA BROJ 2 DIODA I TRANZISTOR
 ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE ODSEK ZA SOFTVERSKO INŽENJERSTVO LABORATORIJSKE VEŽBE VEŽBA BROJ 2 DIODA I TRANZISTOR 1. 2. IME I PREZIME BR. INDEKSA GRUPA
ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE ODSEK ZA SOFTVERSKO INŽENJERSTVO LABORATORIJSKE VEŽBE VEŽBA BROJ 2 DIODA I TRANZISTOR 1. 2. IME I PREZIME BR. INDEKSA GRUPA
Strukture podataka i algoritmi 1. kolokvij 16. studenog Zadatak 1
 Strukture podataka i algoritmi 1. kolokvij Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati i uvid u kolokvije: ponedjeljak,
Strukture podataka i algoritmi 1. kolokvij Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati i uvid u kolokvije: ponedjeljak,
( ) π. I slučaj-štap sa zglobovima na krajevima F. Opšte rešenje diferencijalne jednačine (1): min
 π. I slučaj-štap sa zglobovima na krajevima F. Opšte rešenje diferencijalne jednačine (1): min") Kritična sia izvijanja Kritična sia je ona najmanja vrednost sie pritisa pri ojoj nastupa gubita stabinosti, odnosno, pri ojoj štap iz stabine pravoinijse forme ravnoteže preazi u nestabinu rivoinijsu
Kritična sia izvijanja Kritična sia je ona najmanja vrednost sie pritisa pri ojoj nastupa gubita stabinosti, odnosno, pri ojoj štap iz stabine pravoinijse forme ravnoteže preazi u nestabinu rivoinijsu
SEKUNDARNE VEZE međumolekulske veze
 PRIMARNE VEZE hemijske veze među atomima SEKUNDARNE VEZE međumolekulske veze - Slabije od primarnih - Elektrostatičkog karaktera - Imaju veliki uticaj na svojstva supstanci: - agregatno stanje - temperatura
PRIMARNE VEZE hemijske veze među atomima SEKUNDARNE VEZE međumolekulske veze - Slabije od primarnih - Elektrostatičkog karaktera - Imaju veliki uticaj na svojstva supstanci: - agregatno stanje - temperatura
l = l = 0, 2 m; l = 0,1 m; d = d = 10 cm; S = S = S = S = 5 cm Slika1.
 . U zračnom rasporu d magnetnog kruga prema slici akumulirana je energija od,8 mj. Odrediti: a. Struju I; b. Magnetnu energiju akumuliranu u zračnom rasporu d ; Poznato je: l = l =, m; l =, m; d = d =
. U zračnom rasporu d magnetnog kruga prema slici akumulirana je energija od,8 mj. Odrediti: a. Struju I; b. Magnetnu energiju akumuliranu u zračnom rasporu d ; Poznato je: l = l =, m; l =, m; d = d =
ELEKTROMAGNETNA INDUKCIJA
 ELEKTROMAGNETNA INDUKCIJA Nakon Erstedovog otkrića elektromagnetizma, Faradej je 1821. god. konstruisao eksperimentalni uređaj - prvi elektromotor Električni provodnik rotirao je oko fiksiranog magneta
ELEKTROMAGNETNA INDUKCIJA Nakon Erstedovog otkrića elektromagnetizma, Faradej je 1821. god. konstruisao eksperimentalni uređaj - prvi elektromotor Električni provodnik rotirao je oko fiksiranog magneta
Električne struje. Električne struje. Električne struje. Električne struje
 Električna struja (AP47-5) Elektromotorna sila (AP5-53) Omov zakon za deo provodnika i otpor provodnika (AP53-6) Omov zakon za prosto električno kolo (AP6-63) Kirhofova pravila (AP63-66) Vezivanje otpornika
Električna struja (AP47-5) Elektromotorna sila (AP5-53) Omov zakon za deo provodnika i otpor provodnika (AP53-6) Omov zakon za prosto električno kolo (AP6-63) Kirhofova pravila (AP63-66) Vezivanje otpornika
7 Algebarske jednadžbe
 7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu
 Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
BIPOLARNI TRANZISTOR Auditorne vježbe
 BPOLARN TRANZSTOR Auditorne vježbe Struje normalno polariziranog bipolarnog pnp tranzistora: p n p p - p n B0 struja emitera + n B + - + - U B B U B struja kolektora p + B0 struja baze B n + R - B0 gdje
BPOLARN TRANZSTOR Auditorne vježbe Struje normalno polariziranog bipolarnog pnp tranzistora: p n p p - p n B0 struja emitera + n B + - + - U B B U B struja kolektora p + B0 struja baze B n + R - B0 gdje
PRETHODNI PRORACUN VRATILA (dimenzionisanje vratila)
") Predet: Mašinski eleenti Proračun vratila strana Dienzionisati vratilo elektrootora sledecih karakteristika: oinalna snaga P = 3kW roj obrtaja n = 400 in Shea opterecenja: Faktor neravnoernosti K =. F
Predet: Mašinski eleenti Proračun vratila strana Dienzionisati vratilo elektrootora sledecih karakteristika: oinalna snaga P = 3kW roj obrtaja n = 400 in Shea opterecenja: Faktor neravnoernosti K =. F
5. Karakteristične funkcije
 5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
ELEKTROTEHNIČKI ODJEL
 MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE)
") (Enegane) List: PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE) Na mjestima gdje se istovremeno troši električna i toplinska energija, ekonomičan način opskrbe energijom
(Enegane) List: PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE) Na mjestima gdje se istovremeno troši električna i toplinska energija, ekonomičan način opskrbe energijom
Trigonometrijske nejednačine
 Trignmetrijske nejednačine T su nejednačine kd kjih se nepznata javlja ka argument trignmetrijske funkcije. Rešiti trignmetrijsku nejednačinu znači naći sve uglve kji je zadvljavaju. Prilikm traženja rešenja
Trignmetrijske nejednačine T su nejednačine kd kjih se nepznata javlja ka argument trignmetrijske funkcije. Rešiti trignmetrijsku nejednačinu znači naći sve uglve kji je zadvljavaju. Prilikm traženja rešenja
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15
 1 / 15") MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
( ) ( ) 2 UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET. Zadaci za pripremu polaganja kvalifikacionog ispita iz Matematike. 1. Riješiti jednačine: 4
 ( ) 2 UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET. Zadaci za pripremu polaganja kvalifikacionog ispita iz Matematike. 1. Riješiti jednačine: 4") UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET Riješiti jednačine: a) 5 = b) ( ) 3 = c) + 3+ = 7 log3 č) = 8 + 5 ć) sin cos = d) 5cos 6cos + 3 = dž) = đ) + = 3 e) 6 log + log + log = 7 f) ( ) ( ) g) ( ) log
UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET Riješiti jednačine: a) 5 = b) ( ) 3 = c) + 3+ = 7 log3 č) = 8 + 5 ć) sin cos = d) 5cos 6cos + 3 = dž) = đ) + = 3 e) 6 log + log + log = 7 f) ( ) ( ) g) ( ) log
Prof.dr.sc. Jasmin Velagić. Kolegij: Aktuatori
 Lekcija 2 Električki strojevi Prof.dr.sc. Jasmin Velagić Elektrotehnički fakultet Sarajevo Kolegij: Aktuatori 2.1. Električki strojevi Koriste se kao izvršni članovi za pokretanje radnih mehanizama. Prema
Lekcija 2 Električki strojevi Prof.dr.sc. Jasmin Velagić Elektrotehnički fakultet Sarajevo Kolegij: Aktuatori 2.1. Električki strojevi Koriste se kao izvršni članovi za pokretanje radnih mehanizama. Prema
Trigonometrija 2. Adicijske formule. Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto
 Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
Pismeni ispit iz matematike GRUPA A 1. Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj, zatim naći 4 z.
 Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
INTEGRALNI RAČUN. Teorije, metodike i povijest infinitezimalnih računa. Lucija Mijić 17. veljače 2011.
 INTEGRALNI RAČUN Teorije, metodike i povijest infinitezimalnih računa Lucija Mijić lucija@ktf-split.hr 17. veljače 2011. Pogledajmo Predstavimo gornju sumu sa Dodamo još jedan Dobivamo pravokutnik sa Odnosno
INTEGRALNI RAČUN Teorije, metodike i povijest infinitezimalnih računa Lucija Mijić lucija@ktf-split.hr 17. veljače 2011. Pogledajmo Predstavimo gornju sumu sa Dodamo još jedan Dobivamo pravokutnik sa Odnosno
Matematika 1 - vježbe. 11. prosinca 2015.
 Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
IZVODI ZADACI ( IV deo) Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo
 Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo") IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
Snage u kolima naizmjenične struje
 Snage u kolima naizmjenične struje U naizmjeničnim kolima struje i naponi su vremenski promjenljive veličine pa će i snaga koja se isporučuje potrošaču biti vremenski promjenljiva Ta snaga naziva se trenutna
Snage u kolima naizmjenične struje U naizmjeničnim kolima struje i naponi su vremenski promjenljive veličine pa će i snaga koja se isporučuje potrošaču biti vremenski promjenljiva Ta snaga naziva se trenutna
MATEMATIKA 2. Grupa 1 Rexea zadataka. Prvi pismeni kolokvijum, Dragan ori
 MATEMATIKA 2 Prvi pismeni kolokvijum, 14.4.2016 Grupa 1 Rexea zadataka Dragan ori Zadaci i rexea 1. unkcija f : R 2 R definisana je sa xy 2 f(x, y) = x2 + y sin 3 2 x 2, (x, y) (0, 0) + y2 0, (x, y) =
MATEMATIKA 2 Prvi pismeni kolokvijum, 14.4.2016 Grupa 1 Rexea zadataka Dragan ori Zadaci i rexea 1. unkcija f : R 2 R definisana je sa xy 2 f(x, y) = x2 + y sin 3 2 x 2, (x, y) (0, 0) + y2 0, (x, y) =