OSNOVE AUTOMATIZACIJE
|
|
|
- Σιμωνίδης Πανταζής
- 7 χρόνια πριν
- Προβολές:
Transcript
1 OSNOVE AUTOMATIZACIJE
2 Osnovne definicije Automatizacija je tehnička disciplina koja obuhvaća sve mjere s kojima se smanjuje udio ljudskog rada u proizvodnji i s kojima se postiže viši stupanj ekonomične i rentabilne proizvodnje u pogledu utroška sirovine, energije i vremena. Automatika (engl. Automatic control) je znanstveno-tehnička disciplina čija su područja teorija vođenja, istraživanje i analiza uvjeta djelovanja i zakonitosti vođenja različitih sustava te sinteza i gradnja sustava za automatsko vođenje.
3 Automatizacija broda - smanjenje brojnosti posade, - smanjenje troškova za posadu, - smanjenje vremena operacija s teretom, - smanjenje kvarova, - smanjenje utroška goriva, - poboljšanje održavanja, - poboljšanje radnih uvjeta.
4 Automatizacija broda Automatizacija se provodi: daljinskim upravljanjem brodskih uređaja, regulacijom brodskih uređaja, daljinskim mjerenjima, signalizacijom, centralizacijom dobivenih informacija o procesima, predočavanjem i registracijom informacija u obliku najpogodnijem čovjeku, automatskom obradom dobivenih informacija, - programiranjem izvođenja važnijih i složenijih operacija, itd.
5 Primjeri sustava automatizacije na brodu protusudarni sustavi, određivanje položaja pomoću satelita, izračunavanje položaja zbrajanjem kurseva, navigacijski proračuni, upravljanje ukrcavanjem i iskrcavanjem tereta, nadzor strojarnice, registriranje podataka o strojevima u strojarnici, upravljanje zakretnim momentom glavnog stroja, dojava požara, automatsko gašenje..
6 Osnovne definicije Mjerenje (engl. monitoring) je kad se određuje stanje neke fizikalne veličine, primjerice da li je nešto npr. vruće ili hladno, a mjerenje kad se određuje kolika je temperatura, npr. 22ºC.

7 Primjer sustava dinamičkog pozicioniranja sustav automatizacije
8 Osnovne definicije Pod pojmom automat podrazumijeva se tehnički uređaj koji samostalno izvršava rad kojeg je zamislio njegov konstruktor. S motrišta upravljanja sva sredstva rada i strojevi koji se upravljaju nazivaju se objektima upravljanja, a onaj sustav kojim se ostvaruje to upravljanje naziva se sustav upravljanja.
9 Objekt upravljanja - proces Stanje objekta upravljanja određeno je: - unutarnjim svojstvima objekta - vanjskim djelovanjima na objekt. U vanjska djelovanja na objekt upravljanja ubrajaju se: - poremećajne veličine i upravljačke veličine. Poremećajne veličine općenito su slučajnog karaktera.
10 Objekt upravljanja - proces Poremećajna veličina Izlazni tok Upravljačka veličina Ulazni tok Izlazna veličina Razina vode u tanku
11 Primjer procesa sa mrtvim vremenom Izlazna veličina se mijenja nakon kašnjenja t
12 Primjer procesa sa kašnjenjem prvog reda Tank se puni po eksponcijalnom Zakonu (zatvoren izlazni ventil): t (1 T L = L ) 0 e T = RC T- vremenska konstanta sustava
13 Primjer procesa sa kašnjenjem višeg reda
14 Zadaci sustava upravljanja Regulirana ili izlazna veličina sustava y(t) je fizikalna veličina koja se regulira. Algoritam funkcioniranja sustava su zahtjevi kojima trebaju udovoljiti izlazne veličine sustava. Algoritam upravljanja sustava je zakonitost djelovanja automatskog uređaja na objekt upravljanja.

15 Zadaci sustava upravljanja Sustav automatskog upravljanja osigurava da se izlazna veličina sustava mijenja prema algoritmu funkcioniranja bez obzira na vanjske poremećaje. Izlazni tok Ulazni tok Razina vode u tanku
16 TEMELJNA NAČELA SUSTAVA UPRAVLJANJA
17 Temeljna načela sustava upravljanja Temeljna su načela sustava upravljanja: 1. načelo otvorenog sustava, 2. načelo kompenzacije 3. načelo povratne veze.
18 NAČELO OTVORENOG SUSTAVA
19 Načelo otvorenog sustava Izvršna veličina formira se isključivo na temelju zadanog algoritma funkcioniranja (vodeće veličina) bez obzira na poremećajne veličine koje mogu djelovati na objekt. Ne nadziru se izlazne veličine. Primjeri: automatska signalizacija, blokada, zaštita, upuštanje, zaustavljanje, upravljanje elektrohidrauličkim i elektropneumatskim ventilima, logički elementi, itd.

20 Načelo otvorenog sustava Regulator na temelju vodeće veličine generira upravljačku veličinu koja se pojačava u aktuatoru i stvara se izvršna veličina kojom se djeluje na objekt upravljanja. Zeleno, žuto i crveno svijetlo na semaforu mijenjaju se naizmjenično prema unaprijed utvrđenim vremenskim intervalima, a bez obzira na gustoću saobraćaja.
21 Primjer otvorenog sustava
22 NAČELO KOMPENZACIJE
23 Načelo kompenzacije Suština načela kompenzacije je u mjerenju poremećajnih veličina, te, ovisno o rezultatima mjerenja, formiranja izvršnog djelovanja na objekt regulacije. Namjera je osiguranje promjene izlazne veličine prema zadanoj vodećoj veličini uz poništavanje mjerljivih poremećaja.
24 Načelo kompenzacije
25 Načelo kompenzacije Ako se želi održati konstantan pritisak u posudi P (krivulja bez obzira na promjenu na pritiska vanjskog zraka (krivulja 1) tada treba pomicati zasun i regulirati protok zraka G 2 Povećanjem pritiska vanjskog zraka stišće se posuda i pritisak zraka u posudi teži ka povećanju, međutim pritisak vanjskog zraka pritiska također i mijeh 2 te oprugu 1 i diže zasun. Opruga koja otvara zasun, povećava se protok G 2. Pritisak zraka u posudi ostaje konstantan
26 NAČELO POVRATNE VEZE

27 Blok shema otvorenog sustava i sustava s povratnom vezom
28 Primjeri povratne veze Primjer: zatvoreni sustav upravljanja automobilom. Pri vožnji automobilom potrebno je uočiti četiri osnovne radnje: 1) vozač prati položaj automobila u odnosu na put - tu oči imaju funkciju detektora informacije o ostvarenom rezultatu upravljanja, ta se informacija prenosi u mozak; 2) mozak vozača vrši usporedbu i analizu primljenih informacija o putu (to je referentna ili vodeća veličina) i o trenutnom položaju automobila (to je regulirana veličina); mozak donosi odluku o aktiviranju izvršnog organa, to su ruke, tj. stvara izvršnu veličinu yr (t); 3) izvršenje odluke na objektu reguliranja: to je upravljač automobila kojega vozač rukama pomiče.
29
30 Blok shema povratne veze Bitno je uočiti da se kod načela zatvorenog sustava ne mjere poremećajne veličine.
31 Načelo povratne veze Zadatak sustava automatske regulacije je ostvarivanje uvjeta: y(t) = r(t) Informacija o stanju na izlazu y(t) stalno se mjeri pomoću senzora, te se dovodi u komparator gdje se uspoređuje s referentnom veličinom r(t).
32 Načelo povratne veze Razlika između referentne r(t) i regulirane veličine y(t) naziva se regulacijsko odstupanje sustava automatske regulacije. ε(t) = r(t) - r(t) Signal regulacijskog odstupanja ε se dovodi na ulaz regulatora. Zadatak regulatora je da generira signal u(t) koji će upravljati pomoću aktuatora sa objektom regulacije na način da što više smanji regulacijsko odstupanje (ε= 0).
33 Kormilarski sustav U sustavu sa slike izlazna veličina je kurs ϕ(t). Odstupanje izlazne veličine ϕ(t) od zadanog kursa ϕ 0 = konst. registrira se (mjeri) žiroskopom (2). Uz pomoć kormilarskog stroja (3) pomiče se regulacijski uređaj (list kormila) za potreban kut γ. Izvršna je veličina γ(t) i ona kompenzira djelovanje poremećajnih veličina (valovi, morske struje, vjetar, itd.) te zadržava brod na zadanom kursu ϕ 0.
, na temelju signala greške upravlja kormilarskim strojem (3) pomiče (list kormila) za potreban kut γ.")
34 Kormilarski sustav U sustavu sa slike izlazna veličina je kurs ϕ(t). Odstupanje izlazne veličine ϕ(t) od zadanog kursa ϕ 0 = konst. registrira se (mjeri) žiroskopom (2). Autopilot (regulator), na temelju signala greške upravlja kormilarskim strojem (3) pomiče (list kormila) za potreban kut γ. Izvršna je veličina γ(t) kompenzira djelovanje poremećajnih veličina (valovi, morske struje, vjetar, itd.) te zadržava brod na zadanom kursu ϕ 0.
35 Servomehanizam

36 Upravljanje procesom i servomehanizmom
37 REGULATORI

38 Primjer održavanja konstantne razine tanka regulacijom izlaznog toka ulazni tok Zadana razina razina tanka
39 Tipovi regulatora Postoje različite vrste regulatora: P regulator D regulator I regulator Moguće su i kombinacije P PI PID PD se ne koristi
 =")
40 P-REGULATOR k = p pojačanje 100 PB( proportional _ band) = k p
41 Idealan sustav Primjer P regulatora Realan sustav mora postojati odstupanje od par stupnjeva veće pojačanje manje odstupanje - veće pojačanje manje vrijeme uspona - veće pojačanje veće oscilacije
42 Zadatak Proporcionalni kontroler se koristi za regulaciju pritiska zraka u cjevovodu, i podešen je na 80% PB. Senzor pritiska koji je spojen na kontroler je opsega 10 bara i registrira pritisak 6,5 bara (izmjerena regulacijska veličina).vodeća veličina (set point) je 7 bara. Ako se kontroler odspoji od aktuatora, kolika će biti promjena signala na izlazu iz kontrolera (izraziti u postotcima). Izlazna stuja kontrolera je u rasponu 4-20 ma. Struja na izlazu kontrolera je 12 ma u slučaju nema signala greške. e 0,5bar 100 % = = 5% 10bar [ ] G = 100 = 100 1, 25 PB 80 = Na izlazu kontrolera greška e se pojačava: e G = 5% 1,25 = 6, 25% Raspon izlazne struje kontrolera je 16 6, 25 = 1 ma 100 Izlazna struja iz kontrolera = 13mA Postotna promjena izlaza kontrolera je 20 4 = 16mA
43 e(t)- regulacijsko odstupanje y r (t)-izlazni signal iz regulatora I-REGULATOR Integracijsko djelovanje regulatora
44 I-REGULATOR
45 PI-REGULATOR Proporcionalno integracijsko djelovanje kp proporcionalno pojačanje sustava ki integracijsko pojačanje sustava Ti integracijsko vrijeme [s, min]
46 PI-REGULATOR Vrijeme potrebno da izlazni signal iz regulatora postigne dvostruko veću vrijednost od početnog skoka (koji je posljedica proporcionalnog dijelovanja) se naziva integracijsko vrijeme Ti izražava se u sekundama, minutama ili u broju ponavljanja u minuti
47 Zadatak PI kontroler je u otvorenoj petlji (nije spojen na aktuator) sa podešenim PB 50% i integracijskim vremenom od T i =10 s. Izlazna struja kontrolera je 20% od maksimalne struje. Ako se vodeća veličina (set point) iznenada poveća za 10%, treba odrediti za koliko će vremena izlazna struja kontrolera postići svoju maksimalnu vrijednost? e [%] = 10% G = = 2 PB 50 = Na izlazu kontrolera greška e se pojačava: e G = 10% 2 = 20% Postotak od maksimalne izlazne struje u t=0 ( nakonpobude) 20%(originalno) = 20% = 40% Da bi se postigla maksimalna struja potrebno je još 60% izlazne struje ili 3 puta veći proporcionalni efekt (3*20%=60%) 60% signala se postiže za 3 T = 3 10 = 30s i
48 TEMELJNE ZNAČAJKE PI REGULATORA Proporcionalno djelovanje daje neposrednost i stabilnost djelovanja, dok integracijsko djelovanje otklanja odstupanje. Postoje oscilacije za vrijeme prijelaznih pojava.
49 D-REGULATOR Derivacijsko djelovanje regulatora e(t)- regulacijsko odstupanje y r (t)-izlazni signal iz regulatora kd derivacijsko pojačanje sustava Td derivacijsko vrijeme [s, min]
50 D-REGULATOR
51 PD-REGULATOR Proporcionalno derivacijsko djelovanje
52 PD-REGULATOR Vrijeme potrebno da izlazni signal iz regulatora postigne vrijednost proporcionalnog pojačanja kp koji je jednak početnom skoku (koji je posljedica derivacijskog djelovanja) se naziva derivacijsko vrijeme Td izražava se u sekundama, minutama ili u broju ponavljanja u minuti
53 Zadatak PD kontroler je u otvorenoj petlji (nije spojen na aktuator). Izlazna struja kontrolera je 40% od maksimalne struje. Signal mjerene temperature se povećava brzinom 1% u sekundi. Ako je pojačanje kontrolera PB=200% te derivacijsko vrijeme T d =40 s,odredi za koliko će vremena izlazna struja kontrolera postići svoju maksimalnu vrijednost? % e = 1 G 0,5 s = = PB 200 = % % Na izlazu kontrolera greška e se pojačava: e G = 1 0,5 = 0,5 s s % Za vrijeme Td = 40 s izlazni signal jednak je e G T1 = 0,5 40s = 20% s Inicijalni D efekt dakle iznosi 20% Izlaz = 40% (originalno)+20% (D efekt) = 60% (dakle ostaje 40%) Za ostalih 40% signala potrebno je 40% = 80 s % 0,5 s
54 TEMELJNE ZNAČAJKE PD REGULATORA Proporcionalno djelovanje daje neposrednost i stabilnost djelovanja te otklanja veća odstupanja, dok se derivacijsko djelovanje daje brzinu odziva. Preostaje odstupanje regulirane i vođene veličine.
55 PID-REGULATOR Proporcionalno integracijsko derivacijsko djelovanje
56 TEMELJNE ZNAČAJKE PID REGULATORA Proporcionalno djelovanje mu osigurava stabilnost, integracijsko otklanja odstupanje, a derivacijsko poboljšava brzinu odziva i prigušuje eventualnu sklonost sustava k osciliranju.
57 PODEŠAVANJE REGULATORA
58 Dobro podešen regulator: Kratko vrijeme uspona T Kratko vrijeme smirivanja T s ilacije Mali offset E SS
59 Utjecaj P, I i D pojačanja na ponašanje regulatora Najbolji odziv proporcionalnog regulatora se dobije kada je proporcionalno pojačanje što je više moguće (preveliko pojačanje može dovesti do nestabilnosti sustava) Integracijsko djelovanje eliminira odstupanje (offset), takođe može prouzrokovati i nestabilnost sustava (integracijsko djelovanje unosi pozitivnu povratnu vezu). Ukoliko se proporcionalnom djelovanju dodaje integracijsko djelovanje, proporcionalno pojačanje se mora smanjiti. Derivacijsko djelovanje smanjuje vrijeme smirivanja i vrijeme porasta te dodatno stabilizira sustav (derivacijsko djelovanje unosi negativnu povratnu vezu). Ukoliko se proporcionalnom djelovanju dodaje derivacijsko djelovanje, proporcionalno pojačanje se može malo pojačati.
60 Ziegler-Nicholls metoda otvorene petlje Koristi se za određivanje parametara regulatora kod otvorene petlje
61 Ziegler-Nicholls metoda otvorene petlje 1. Ručno narini step signal na ulaz regulatora (pomoću potenciometra) 2. Snimaj promjenu izmjerene regulacijske veličine (PV) 3. Nacrtaj tangentu na odzivu PV u točki najveće derivacije 4. Izmjeri se G=M/N, L i T
62 Ziegler-Nicholls metoda otvorene petlje
63 Ziegler-Nicholls metoda zatvorene petlje Koristi se za određivanje parametara regulatora kod zatvorene petlje
64 Ziegler-Nicholls metoda zatvorene petlje T = T = 0 1.Isključi se integracijsko i derivacijsko djelovanje ( i d ) 2. Povećeva se proporcionalno pojačanje do granice stabilnosti (do kritičnog pojačanja G) 2. Mjeri se T c
65 Ziegler-Nicholls metoda zatvorene petlje
66 Modificirana metoda Ziegler-Nicholls zatvorene petlje (quoter decay) Koristi se za određivanje parametara regulatora kod otvorene petlje. Nije potrebno sustav donjeti na rub stabilnosti.
67 Modificirana metoda Ziegler-Nicholls zatvorene petlje (quoter decay) 1. X/Y mora biti oko 4 2. Očitati period P
68 KASKADNA REGULACIJA
69 Ventil za regulaciju će moći vrlo teško regulirati razinu u tanku 2 radi vremenskog kašnjenja u sustavu veliko odstupanje razine tanka 2
70 Kaskadno spojeni kontroleri Puno bolja regulacija razine tanka 2. Poništava se efekt vremenskog kašnjenja tanka 1. SLAVE P ili PI MASTER - PID
71 Podešavanje kaskadno spojenih kontrolera Podešavanje regulatora se vrši tako da se prvo podešava SLAVE kontroler (unutrašnja petlja) uz isključeni MASTER, a tek onda MASTER kontroler (vanjska petlja) uz uključeni SLAVE kontroler
72 Kaskadna regulacija temperature rashladne vode
73 DISKRETNI SUSTAVI
74 Izvršni mehanizmi (aktuatori) su u praksi ostvareni kao elementi s kontinuiranim djelovanjem. To su najčešće motori (električki, pneumatski, hidraulički). Regulatori mogu biti diskretni - najčešće su elektronička računala koji mogu obrađivati digitalne brojeve (diskretne veličine). Kako su prisutne i kontinuirane i diskretne veličine nužni su A/D (analogno-digitalni) i D/A (digitalno-analogni) pretvornici.
75 Jednostavni diskretni sustav Regulacija temperature prostorije
76 Sustav s pretvorbom diskretnog u kontinuirani signal U sustavu se mogu uočiti tri diskretna elementa: D/A pretvornik, komparator i A/D pretvornik te tri analogna elementa: pojačalo K, motor M i reduktor R.


77 Amplitudno vremenska diskretizacija konzinuiranog signala A/D- D/A pretvorba
78 Logički kontroler može upravljati sustavima sa diskretnim događajima m upravljački dio (logički kontroler) ulazi logičkog kontrolera izlazi logičkog kontrolera a b p D L Z m a b p logički kontroler D L Z procesni dio sustava (motor vozila, vrata spremišta...)
 - je univerzalna programibilna upravljačka")
79 Što je to PLC? Programabilni Logički Controler (Regulator) - je univerzalna programibilna upravljačka jedinica, razvijen kao zamjena za složene relejne upravljačke sklopove 79
80 Osnovne cjeline PLC-a 80
81 Podjela PLC uređja Prema broju ulaznih i izlaznih stezaljki (povećanjem broja ulazno/izlaznih stezaljki povećava se i složenost uređaja, snaga procesora i kapcitet memorije) S obzirom na tip signala s kojim rade uređaji, tj. imaju li digitalne i analogne ulaze/izlaze Pri podijeli na jednosavnije i složenije uređaje treba uzeti u obzir mogućnost izvođenja matematičkih operacija nad realnim brojevima (floating point), PID regulaciju, mogućnost proširenja, itd. 81
82 Prednosti korištenja PLC-a u odnosu na druge (npr. relejne) upravljačke skolopove Pouzdanost nema mehaničkih pokretnih dijelova, otporan na pogonske uvjete rada (temperaturu, vlagu, udarce,...). Adaptivnost - kad se napiše i testira, PLC program za upravljanje nekog uređaja može se bez problema prenijeti na drugi PLC u drugom uređaju. Fleksibilnost jedan PLC uređaj može izmjenom programa obavljati funkciju sasvim novog, različitog upravljačkog sklopa. Za izmjenu programa potrebno je vrlo malo vremena. Brzina brojne aplikacije na automatiziranim strojevima zahtjevaju vrlo brzu reakciju na pojavu signala. Takve aplikacije jednostavno su izvedive uz pomoć PLC-a 82
83 Ulazni dio Priključne vijčane stezaljke na koje se spajaju signali iz okoline (dojavni signali iz procesa kojim se upravlja) Mjesto početka prilagodbe signala Digitalna ulazna informacija su sklopke, tipkala, senzori Analogna ulazna informacija npr. naponski signal od 0 do 10 V s mjernog pretvornika tlaka, temperature i sl. 83
84 Izlazni dio Priključne vijčane stezaljke na koje se spajaju izvršni uređaji iz procesa kojima PLC šalje upravljačke signale Na digitalne izlaze spajaju se magnetni svici, releji, sklopnici, motorske sklopke, signalne lampe, pneumatski razvodnici i sl. Analogni izlazi daju strujne signale za prikaz neke veličine na pokaznom instrumentu, služe kao referenca brzine za frekvencijski pretvarač, predstavljaju PID upravljački signal i sl. 84
85 Centralna procesorska jedinica (CPU) Centralna procesorska jedinica s memorijom glavna je jedinica PLC uređaja. Procesorska jedinica čita stanja svih ulaza PLC uređaja (analognih i digitalnih), logički ih obrađuje u skladu s programom izrađenim od strane korisnika, te upravlja izlazima prema rezultatima dobivenim nakon logičke obrade. 85
86 Rad uređaja PLC prema promjeni stanja na njegovim ulazima mora kontinuirano korigirati stanja izlaza, na način određen logikom u korisničkom programu. PLC tu internu obradu podataka vrti ciklički u beskonačnoj petlji. Vrijeme jednog ciklusa za oko 500 programskih naredbi se kreće e oko 1,5 ms. 86
87 Programiranje i komunikacija Program za PLC se piše na računalu, a potom snima na PLC. Računalo i PLC povezani su komunikacijskim kabelom (RS 232 standard). 87
88 Programiranje PLC-a Pisanje programa najčešće se izvodi preko nadređenog PC računala na kojem je instaliran softver za korišteni PLC. Svaki proizvođač uz svoj PLC daje softver koji je u stvari kombinacija programskog editora, prevodioca (compilera), te komunikacijskog softvera. U editoru se napiše programski kod u nekom od programskih jezika te se zatim provjeri sintaksa (compiler). Ako program nema sintaksnih grašaka softver ga šalje u RAM memoriju PLC-a (komunikacijski softver), koji je tada spreman za rad. 88
89 Programiranje PLC-a Proizvođači PLC-a nude razne tehnike programiranja. Najčešće uporabljivane tehnike su : ljestvičasti dijagrami (eng. ladder diagram, njem. kontakt plan), funkcijsko blokovski dijagrami (grafičko programiranje), STL (eng. statement list) instrukcijske liste. Grafcet 89
90 Programiranje PLCa- Ljestvičasti dijagram Ljestvičasti dijagrami (eng. ladder diagram) nastali su na bazi strujnih upravljačkih shema kojima se prikazuje protok struje u strujnom krugu i koje služe električarima kao podloga za ožičenje istog 90
91 Programiranje PLCa - Ljestvičasti dijagram Svaki programski logički put u ljestvičastom dijagramu mora imati najmanje jednu izlaznu naredbu, a obično sadrži jedan ili više uvjeta koji moraju biti zadovoljeni da bi se izvršila izlazna naredba. Uvjeti su najčešće signali koji dolaze sa uređaja priključenih na ulaz PLC-a u kombinaciji sa statusom izlaza, pomoćnih memorijskih varijabli, vremenskih i brojačkih članova. Na desnoj strani svakog logičkog puta nalazi se izlazna naredba koja se aktivira/deaktivira s obzirom na stanje uvjeta. Izlazne 91 naredbe su npr. 'uključi izlaz'.
92 Programiranje PLCa -Ljestvičasti dijagram Usporedba strujnog puta (električnog kontinuiteta) u strujnoj shemi i logičkog puta, tj. jedne linije programskog koda (logičkog kontinuiteta) u ljestvičastom dijagramu. Ekvivalencije: Stanje kontakta ~ istinitost naredbe Strujni put ~ logički put Izvršni uređaj ~ izlazna naredba 92
93 Programiranje PLCa -Ljestvičasti dijagram - Razlika između ljestvičastog dijagrama i strujne sheme je što strujna shema prikazuje stanje kontakata (otvoreno ili zatvoreno) i tako ostvaruje električni kontinuitet,, dok se u ljestvičastom dijagramu ispituje je li naredba istinita 1 ili neistinita 0 i tako ostvaruje logički kontinuitet. Strujni put (električni kontinuitet) u strujnoj shemi završava ava izvršnim (upravljanim) uređajem eđajem,, a logički put u ljestvičastom dijagramu izlaznom naredbom. 93
. Iz strujnog puta može se uočiti da je rad upravljanog uređaja određen uvjetima (npr. tipkala, pomoćni kontakti i slično) za njegovo uključenje. 94")
94 Programiranje PLCa - Ljestvičasti dijagram Svaki strujni krug u strujnoj shemi prikazan je kao zaseban strujni put, a svaki strujni put sadrži minimalno jedan upravljani uređaj (npr. motor, relej, žarulja ili slično). Iz strujnog puta može se uočiti da je rad upravljanog uređaja određen uvjetima (npr. tipkala, pomoćni kontakti i slično) za njegovo uključenje. 94
95 Programiranje PLCa - Ljestvičasti dijagram - Osnovne naredbe za programiranje PLC-a Naredba NO -Normally Open : Ova naredba ispituje je li adresirani bit (stanje na ulazu I0.1) u stanju logičke jedinice. Ako je uvjet je zadovoljen ostvaruju se logički kontinuitet. Naredba NC-Normally Closed: Ova naredba ispituje je li adresirani bit (stanje na ulazu I0.2) u stanju logičke nule. Ako je uvjet je zadovoljen ostvaruju se logički kontinuitet. Naredba Output uključi izlaz: Naredba Output koristi se za promjenu stanja (0/1) adresirane lokacije (izlaza Q0.0) kada stanje kruga (logički kontinuitet) poprimi vrijednost '1' / '0'. 95
96 Programiranje PLCa - Ljestvičasti dijagram - Osnovne naredbe za programiranje PLC-a TON timer, on-delay TON vremensko brojilo počinje brojati vrijeme kada se stanje pripadajućeg kruga postavi u '1'. Sve dok je stanje kruga visoko, vrijednost akumulatora se povećava. Kada vrijednost akumulatora dostigne predefinirano vrijeme (eng. preset time = PT) vremensko brojilo završi s radom i na izlazu daje '1', u međuvremenu je na izlazu '0'. Ovaj bit, da bi bio iskorišten, je potrebno adresirati. 96
97 Programiranje PLCa - Ljestvičasti dijagram - Osnovne naredbe za programiranje PLC-a TOFF timer, off-delay TOFF vremensko brojilo počinje brojati vrijeme kada se stanje pripadajućeg kruga postavi u '1'. Sve dok je stanje kruga visoko, vrijednost akumulatora se povećava. Kada vrijednost akumulatora dostigne predefinirani vrijeme (PT) vremensko brojilo završi s radom i na izlazu daje '0', u međuvremenu je na izlazu '1'. Ovaj bit, da bi bio iskorišten, je potrebno adresirati. Ovi bitovi se koriste na način da se pozove na stanje izlaza vremenskog brojila naredbom NO ili NC. 97
98 Programiranje PLCa - Funkcijski dijagram - Kod programiranja u funkcijskom blok dijagramu ulazi, izlazi i naredbe su predstavljene blokovima, tako da se programiranje PLC-a svodi na povezivanje blokova. Na ulaz bloka dovode se uvjeti koji se ispituju (ulazi u PLC ili izlaz iz prethodnog bloka). U skladu s funkcijom koju predstavlja na izlazu iz bloka generira se izlazni signal. 98
99 Programiranje PLCa Primjer logičke funkcije ILI u ljestvičastom i funkcijskom dijagramu 99
100 Primjer startera motora
101
102
103 Grafcet grafički alat za programiranje PLC-a neaktivan korak 1 jednostavan prijelaz aktivan korak 2 dva ulazna luka u prijelaz dva izlazna luka iz prijelaza početni korak 3 dva ulazna i dva izlazna luka iz prijelaza a) b) Grafički prikaz koraka i prijelaza u Grafcetu
104 Grafcet grafički alat za programiranje PLC-a (1) (3) (4) 3 1 (2) 2 (5) (6) a) b) c) Prikazivanje orijentiranih lukova u Grafcetu
105 Grafcet grafički alat za programiranje PLC-a prije pokretanja prijelaza (1) a (2) a (6) b b (7) (67) b a = 1 b = 1 b = poslije pokretanja prijelaza (1) a (2) a (6) b b (7) (67) b a) b) c)
106 korištenje utovarenog materijala A Grafcet primjer zahtjev za utovarom materijala u vozilo a) B utovar materijala u vozilo a m L D Z b b) p 1 vozilo na poziciji A (1) zahtjev za utovarom 2 putovanje udesno 1 (1) m 2 D (2) dolazak u poziciju B (2) b 3 utovar materijala 3 Z (3) završetak utovara (3) p 4 putovanje ulijevo 4 L (4) dolazak u poziciju A (4) a a) b)
107 Rezervoar s tekućinom m Grafcet kompleksniji primjer V 1 V 2 h 1 h 2 Spremnik 1 Spremnik 2 b 1 b 2 W 1 W 2 1 (1) m 4 7 V V 2 (2) h 1 h 2 (4) (1) m W W 2 V V 2 (3) b 1 b 2 (5) 4 7 (6) =1 (2) h 1 h 2 (4) W 1 3 (3) b 1 b 2 (5) 6 W 2 a) b)
108 PLC LOGO primjer jednostavnog PLC-a LOGO je Siemensov univerzalni logički modul koji je u osnovi građen kao standardni PLC uređaj, a služi za rješavanje upravljačkih zadataka iz područja: kućne i instalacijske tehnike strojeva i raznih uređaja (upravljanje vratima, crpkama, ventilacijom) u upravljačkim ormarima 108

109 PLC LOGO Izgled i osnovni dijelovi PLC-a LGO Basic Napajanje Ulazi Izlazi Priključak za PC Tipkovnica Display 109
110 PLC LOGO LOGO nosi oznaku koja daje informaciju o njegovim karakteristikama Koristit ćemo LOGO! 230RC Ova oznaka znači da se PLC priključuje na mrežni napon 230V AC, da ima relejne izlaze a na izlazu 230V i 10A, te da ima integrirani sat realnog vremena (timer) 110
111 Spajanje napajanja LOGO! PLCa 111
112 Spajanje ulaza PLCa LOGO! 230RC Ovaj tip PLCa ima samo digitalne ulaze na koje se dovode dojavni signali sa senzora (iz procesa) ili se taj signal može simulirati spajanjem sklopke na ulazu. - log 0 < 40V (0.03 ma) - log 1 > 79V (0.08 ma) 112
113 Spajanje izlaza PLCa LOGO! 230RC Izlazi ovog PLCa su digitalni što znači da stanje na izlazu može biti uključeno ili isključeno, tj. log 0 ili log 1 Pri tom u uključenom stanju smije kod omskog opterećenja teći struja od maksimalno 10A, a kod induktivnog opterećenja maksimalno 3A. 113
114 LOGO! modovi rada Postoje dva moda rada : Stop (kada želimo da LOGO prestane s izvođenjem programa ili za promjene programa) Run (za izvođenje već učitanog programa) 114
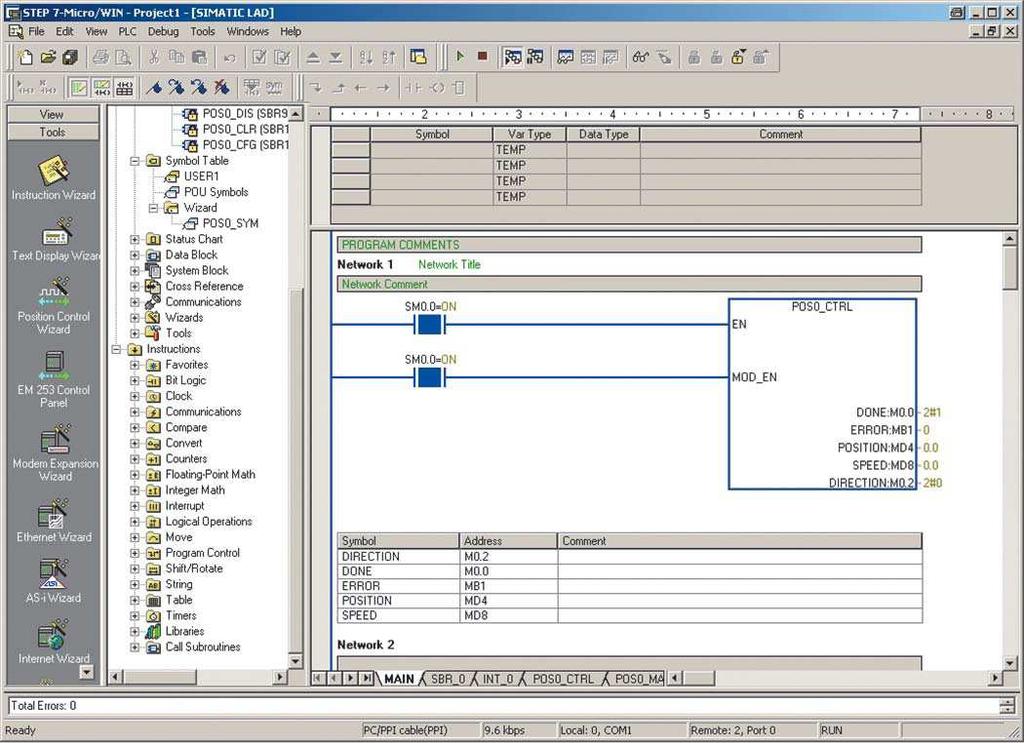
115 Izvođenje vježbi u laboratoriju Zadatak/problem je zadan električnom shemom ili u obliku scenarija Potrebno je napisati program na računalu, u SiemensLOGO!Soft: LOGOComfort_V3 programskom jeziku, specializiranom za programiranje Siemensovog PLC-a LOGO Programi se pišu u Ladder dijagramu i Funkcijskom dijagramu Učitati program u PLC Testirati program 115
116
117 HIJERARHIJSKI SUSTAV AUTOMATSKOG UPRAVLJANJA
Kaskadna kompenzacija SAU
 Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET SIGNALI I SISTEMI. Zbirka zadataka
 UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
PRIMJER 3. MATLAB filtdemo
 PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović
 DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
Upravljanje u mehatroničkim sustavima
 Upravljanje u mehatroničkim sustavima Fetah Kolonić Jadranko Matuško Fakultet elektrotehnike i računarstva 27. listopada 2009 Upravljanje u mehatroničkim sustavima Upravljanje predstavlja integralni dio
Upravljanje u mehatroničkim sustavima Fetah Kolonić Jadranko Matuško Fakultet elektrotehnike i računarstva 27. listopada 2009 Upravljanje u mehatroničkim sustavima Upravljanje predstavlja integralni dio
Sortiranje prebrajanjem (Counting sort) i Radix Sort
 i Radix Sort") Sortiranje prebrajanjem (Counting sort) i Radix Sort 15. siječnja 2016. Ante Mijoč Uvod Teorem Ako je f(n) broj usporedbi u algoritmu za sortiranje temeljenom na usporedbama (eng. comparison-based sorting
Sortiranje prebrajanjem (Counting sort) i Radix Sort 15. siječnja 2016. Ante Mijoč Uvod Teorem Ako je f(n) broj usporedbi u algoritmu za sortiranje temeljenom na usporedbama (eng. comparison-based sorting
2 tg x ctg x 1 = =, cos 2x Zbog četvrtog kvadranta rješenje je: 2 ctg x
 Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
FAKULTET PROMETNIH ZNANOSTI
 SVUČILIŠT U ZAGU FAKULTT POMTNIH ZNANOSTI predmet: Nastavnik: Prof. dr. sc. Zvonko Kavran zvonko.kavran@fpz.hr * Autorizirana predavanja 2016. 1 Pojačala - Pojačavaju ulazni signal - Zahtjev linearnost
SVUČILIŠT U ZAGU FAKULTT POMTNIH ZNANOSTI predmet: Nastavnik: Prof. dr. sc. Zvonko Kavran zvonko.kavran@fpz.hr * Autorizirana predavanja 2016. 1 Pojačala - Pojačavaju ulazni signal - Zahtjev linearnost
3.1 Granična vrednost funkcije u tački
 3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
18. listopada listopada / 13
 18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
Strukture podataka i algoritmi 1. kolokvij 16. studenog Zadatak 1
 Strukture podataka i algoritmi 1. kolokvij Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati i uvid u kolokvije: ponedjeljak,
Strukture podataka i algoritmi 1. kolokvij Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati i uvid u kolokvije: ponedjeljak,
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
( , 2. kolokvij)
") A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
(P.I.) PRETPOSTAVKA INDUKCIJE - pretpostavimo da tvrdnja vrijedi za n = k.
 PRETPOSTAVKA INDUKCIJE - pretpostavimo da tvrdnja vrijedi za n = k.") 1 3 Skupovi brojeva 3.1 Skup prirodnih brojeva - N N = {1, 2, 3,...} Aksiom matematičke indukcije Neka je N skup prirodnih brojeva i M podskup od N. Ako za M vrijede svojstva: 1) 1 M 2) n M (n + 1) M,
1 3 Skupovi brojeva 3.1 Skup prirodnih brojeva - N N = {1, 2, 3,...} Aksiom matematičke indukcije Neka je N skup prirodnih brojeva i M podskup od N. Ako za M vrijede svojstva: 1) 1 M 2) n M (n + 1) M,
Mehatronika - Metode i Sklopovi za Povezivanje Senzora i Aktuatora. Sadržaj predavanja: 1. Operacijsko pojačalo
 Mehatronika - Metode i Sklopovi za Povezivanje Senzora i Aktuatora Sadržaj predavanja: 1. Operacijsko pojačalo Operacijsko Pojačalo Kod operacijsko pojačala izlazni napon je proporcionalan diferencijalu
Mehatronika - Metode i Sklopovi za Povezivanje Senzora i Aktuatora Sadržaj predavanja: 1. Operacijsko pojačalo Operacijsko Pojačalo Kod operacijsko pojačala izlazni napon je proporcionalan diferencijalu
VJEŽBE 3 BIPOLARNI TRANZISTORI. Slika 1. Postoje npn i pnp bipolarni tranziostori i njihovi simboli su dati na slici 2 i to npn lijevo i pnp desno.
 JŽ 3 POLAN TANZSTO ipolarni tranzistor se sastoji od dva pn spoja kod kojih je jedna oblast zajednička za oba i naziva se baza, slika 1 Slika 1 ipolarni tranzistor ima 3 izvoda: emitor (), kolektor (K)
JŽ 3 POLAN TANZSTO ipolarni tranzistor se sastoji od dva pn spoja kod kojih je jedna oblast zajednička za oba i naziva se baza, slika 1 Slika 1 ipolarni tranzistor ima 3 izvoda: emitor (), kolektor (K)
Prikaz sustava u prostoru stanja
 Prikaz sustava u prostoru stanja Prikaz sustava u prostoru stanja je jedan od načina prikaza matematičkog modela sustava (uz diferencijalnu jednadžbu, prijenosnu funkciju itd). Promatramo linearne sustave
Prikaz sustava u prostoru stanja Prikaz sustava u prostoru stanja je jedan od načina prikaza matematičkog modela sustava (uz diferencijalnu jednadžbu, prijenosnu funkciju itd). Promatramo linearne sustave
RIJEŠENI ZADACI I TEORIJA IZ
 RIJEŠENI ZADACI I TEORIJA IZ LOGARITAMSKA FUNKCIJA SVOJSTVA LOGARITAMSKE FUNKCIJE OSNOVE TRIGONOMETRIJE PRAVOKUTNOG TROKUTA - DEFINICIJA TRIGONOMETRIJSKIH FUNKCIJA - VRIJEDNOSTI TRIGONOMETRIJSKIH FUNKCIJA
RIJEŠENI ZADACI I TEORIJA IZ LOGARITAMSKA FUNKCIJA SVOJSTVA LOGARITAMSKE FUNKCIJE OSNOVE TRIGONOMETRIJE PRAVOKUTNOG TROKUTA - DEFINICIJA TRIGONOMETRIJSKIH FUNKCIJA - VRIJEDNOSTI TRIGONOMETRIJSKIH FUNKCIJA
Eliminacijski zadatak iz Matematike 1 za kemičare
 Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE)
") (Enegane) List: PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE) Na mjestima gdje se istovremeno troši električna i toplinska energija, ekonomičan način opskrbe energijom
(Enegane) List: PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE) Na mjestima gdje se istovremeno troši električna i toplinska energija, ekonomičan način opskrbe energijom
- Prilikom promjene opterećenja objekta regulacije nastaje odstupanje regulirane veličine od nazivne vrijednosti
 2. REGULACIJA I NAČELA AUTOMATSKE REGULACIJE - Prilikom promjene opterećenja objekta regulacije nastaje odstupanje regulirane veličine od nazivne vrijednosti - U statičkom režimu dovod ili odvod energije
2. REGULACIJA I NAČELA AUTOMATSKE REGULACIJE - Prilikom promjene opterećenja objekta regulacije nastaje odstupanje regulirane veličine od nazivne vrijednosti - U statičkom režimu dovod ili odvod energije
INTELIGENTNO UPRAVLJANJE
 INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
ELEKTROTEHNIČKI ODJEL
 MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
Ovisnost ustaljenih stanja uzlaznog pretvarača 16V/0,16A o sklopnoj frekvenciji
 Ovisnost ustaljenih stanja uzlaznog pretvarača 16V/0,16A o sklopnoj frekvenciji Električna shema temeljnog spoja Električna shema fizički realiziranog uzlaznog pretvarača +E L E p V 2 P 2 3 4 6 2 1 1 10
Ovisnost ustaljenih stanja uzlaznog pretvarača 16V/0,16A o sklopnoj frekvenciji Električna shema temeljnog spoja Električna shema fizički realiziranog uzlaznog pretvarača +E L E p V 2 P 2 3 4 6 2 1 1 10
, Zagreb. Prvi kolokvij iz Analognih sklopova i Elektroničkih sklopova
 Grupa A 29..206. agreb Prvi kolokvij Analognih sklopova i lektroničkih sklopova Kolokvij se vrednuje s ukupno 42 boda. rijednost pojedinog zadatka navedena je na kraju svakog zadatka.. a pojačalo na slici
Grupa A 29..206. agreb Prvi kolokvij Analognih sklopova i lektroničkih sklopova Kolokvij se vrednuje s ukupno 42 boda. rijednost pojedinog zadatka navedena je na kraju svakog zadatka.. a pojačalo na slici
PARCIJALNI IZVODI I DIFERENCIJALI. Sama definicija parcijalnog izvoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je,
 PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
Najjednostavnija metoda upravljanja slijedom instrukcija:
 4. Upravljačka jedinica Funkcija upravljačke jedinice Prijenos upravljanja između programa Rekurzivni programi LIFO ili stožna struktura Uporaba stoga AIOR, S. Ribarić 1 Funkcije upravljačke jedinice:
4. Upravljačka jedinica Funkcija upravljačke jedinice Prijenos upravljanja između programa Rekurzivni programi LIFO ili stožna struktura Uporaba stoga AIOR, S. Ribarić 1 Funkcije upravljačke jedinice:
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI)
") IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Matematika 1 - vježbe. 11. prosinca 2015.
 Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
1.4 Tangenta i normala
 28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
Teorijske osnove informatike 1
 Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
- pravac n je zadan s točkom T(2,0) i koeficijentom smjera k=2. (30 bodova)
 i koeficijentom smjera k=2. (30 bodova)") MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
1 Promjena baze vektora
 Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
Numerička matematika 2. kolokvij (1. srpnja 2009.)
") Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
Tranzistori s efektom polja. Postupak. Spoj zajedničkog uvoda. Shema pokusa
 Tranzistori s efektom polja Spoj zajedničkog uvoda U ovoj vježbi ispitujemo pojačanje signala uz pomoć FET-a u spoju zajedničkog uvoda. Shema pokusa Postupak Popis spojeva 1. Spojite pokusni uređaj na
Tranzistori s efektom polja Spoj zajedničkog uvoda U ovoj vježbi ispitujemo pojačanje signala uz pomoć FET-a u spoju zajedničkog uvoda. Shema pokusa Postupak Popis spojeva 1. Spojite pokusni uređaj na
Ispitivanje toka i skiciranje grafika funkcija
 Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
TRIGONOMETRIJSKE FUNKCIJE I I.1.
 TRIGONOMETRIJSKE FUNKCIJE I I Odredi na brojevnoj trigonometrijskoj kružnici točku Et, za koju je sin t =,cost < 0 Za koje realne brojeve a postoji realan broj takav da je sin = a? Izračunaj: sin π tg
TRIGONOMETRIJSKE FUNKCIJE I I Odredi na brojevnoj trigonometrijskoj kružnici točku Et, za koju je sin t =,cost < 0 Za koje realne brojeve a postoji realan broj takav da je sin = a? Izračunaj: sin π tg
Iskazna logika 3. Matematička logika u računarstvu. novembar 2012
 Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Grafičko prikazivanje atributivnih i geografskih nizova
 Grafičko prikazivanje atributivnih i geografskih nizova Biserka Draščić Ban Pomorski fakultet u Rijeci 17. veljače 2011. Grafičko prikazivanje atributivnih nizova Atributivni nizovi prikazuju se grafički
Grafičko prikazivanje atributivnih i geografskih nizova Biserka Draščić Ban Pomorski fakultet u Rijeci 17. veljače 2011. Grafičko prikazivanje atributivnih nizova Atributivni nizovi prikazuju se grafički
I.13. Koliki je napon između neke tačke A čiji je potencijal 5 V i referentne tačke u odnosu na koju se taj potencijal računa?
 TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
Elementi spektralne teorije matrica
 Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Operacije s matricama
 Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
7 Algebarske jednadžbe
 7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
numeričkih deskriptivnih mera.
 DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
21. ŠKOLSKO/OPĆINSKO/GRADSKO NATJECANJE IZ GEOGRAFIJE GODINE 8. RAZRED TOČNI ODGOVORI
 21. ŠKOLSKO/OPĆINSKO/GRADSKO NATJECANJE IZ GEOGRAFIJE 2014. GODINE 8. RAZRED TOČNI ODGOVORI Bodovanje za sve zadatke: - boduju se samo točni odgovori - dodatne upute navedene su za pojedine skupine zadataka
21. ŠKOLSKO/OPĆINSKO/GRADSKO NATJECANJE IZ GEOGRAFIJE 2014. GODINE 8. RAZRED TOČNI ODGOVORI Bodovanje za sve zadatke: - boduju se samo točni odgovori - dodatne upute navedene su za pojedine skupine zadataka
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama.
 Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
Otpornost R u kolu naizmjenične struje
 Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
Novi Sad god Broj 1 / 06 Veljko Milković Bulevar cara Lazara 56 Novi Sad. Izveštaj o merenju
 Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA
 Katedra za elektroniku Elementi elektronike Laboratorijske vežbe Vežba br. 2 STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA Datum: Vreme: Studenti: 1. grupa 2. grupa Dežurni: Ocena: Elementi elektronike -
Katedra za elektroniku Elementi elektronike Laboratorijske vežbe Vežba br. 2 STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA Datum: Vreme: Studenti: 1. grupa 2. grupa Dežurni: Ocena: Elementi elektronike -
Trigonometrija 2. Adicijske formule. Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto
 Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
Obrada signala
 Obrada signala 1 18.1.17. Greška kvantizacije Pretpostavka je da greška kvantizacije ima uniformnu raspodelu 7 6 5 4 -X m p x 1,, za x druge vrednosti x 3 x X m 1 X m = 3 x Greška kvantizacije x x x p
Obrada signala 1 18.1.17. Greška kvantizacije Pretpostavka je da greška kvantizacije ima uniformnu raspodelu 7 6 5 4 -X m p x 1,, za x druge vrednosti x 3 x X m 1 X m = 3 x Greška kvantizacije x x x p
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A
, grupa A") Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
PRAVA. Prava je u prostoru određena jednom svojom tačkom i vektorom paralelnim sa tom pravom ( vektor paralelnosti).
.") PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
OM2 V3 Ime i prezime: Index br: I SAVIJANJE SILAMA TANKOZIDNIH ŠTAPOVA
 OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
AUTOMATIZACIJA BRODSKOG POGONA. doc. dr.sc. Maro Jelić
 AUTOMATIZACIJA BRODSKOG POGONA doc. dr.sc. Maro Jelić 1 AUTOMATIZACIJA BRODSKOG POGONA 1. OPĆENITO O AUTOMATIZACIJI - Brod je složeni organizacijski sustav s 3 glavna podsustava: pogonsko-energetski podsustav
AUTOMATIZACIJA BRODSKOG POGONA doc. dr.sc. Maro Jelić 1 AUTOMATIZACIJA BRODSKOG POGONA 1. OPĆENITO O AUTOMATIZACIJI - Brod je složeni organizacijski sustav s 3 glavna podsustava: pogonsko-energetski podsustav
IZVODI ZADACI ( IV deo) Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo
 Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo") IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
Elektrotehnički fakultet univerziteta u Beogradu 17.maj Odsek za Softversko inžinjerstvo
 Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
Linearna algebra 2 prvi kolokvij,
 1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
IZVODI ZADACI (I deo)
") IZVODI ZADACI (I deo) Najpre da se podsetimo tablice i osnovnih pravila:. C`=0. `=. ( )`= 4. ( n )`=n n-. (a )`=a lna 6. (e )`=e 7. (log a )`= 8. (ln)`= ` ln a (>0) 9. = ( 0) 0. `= (>0) (ovde je >0 i a
IZVODI ZADACI (I deo) Najpre da se podsetimo tablice i osnovnih pravila:. C`=0. `=. ( )`= 4. ( n )`=n n-. (a )`=a lna 6. (e )`=e 7. (log a )`= 8. (ln)`= ` ln a (>0) 9. = ( 0) 0. `= (>0) (ovde je >0 i a
Funkcije dviju varjabli (zadaci za vježbu)
") Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
Napisat demo program koji generira funkciju prijenosa G(s)=(2s+4)/(s2+4s+3) s=tf('s'); Br=2*s+4;Naz=s^2+4*s+3; G=Br/Naz
=(2s+4)/(s2+4s+3) s=tf('s'); Br=2*s+4;Naz=s^2+4*s+3; G=Br/Naz") LV3 Napisat demo program koji generira funkciju prijenosa G(s)=(2s+4)/(s2+4s+3) s=tf('s'); Br=2*s+4;Naz=s^2+4*s+3; G=Br/Naz s=tf('s'); Br=2*(s+2);Naz=(s+1)*(s+3); G=Br/Naz s=tf('s'); Br=[2 4];Naz=[1 4
LV3 Napisat demo program koji generira funkciju prijenosa G(s)=(2s+4)/(s2+4s+3) s=tf('s'); Br=2*s+4;Naz=s^2+4*s+3; G=Br/Naz s=tf('s'); Br=2*(s+2);Naz=(s+1)*(s+3); G=Br/Naz s=tf('s'); Br=[2 4];Naz=[1 4
radni nerecenzirani materijal za predavanja
 Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Kažemo da je funkcija f : a, b R u točki x 0 a, b postiže lokalni minimum ako postoji okolina O(x 0 ) broja x 0 takva da je
Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Kažemo da je funkcija f : a, b R u točki x 0 a, b postiže lokalni minimum ako postoji okolina O(x 0 ) broja x 0 takva da je
Osnovni primer. (Z, +,,, 0, 1) je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju
 je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju") RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
radni nerecenzirani materijal za predavanja R(f) = {f(x) x D}
 = {f(x) x D}") Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Neka su D i K bilo koja dva neprazna skupa. Postupak f koji svakom elementu x D pridružuje točno jedan element y K zovemo funkcija
Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Neka su D i K bilo koja dva neprazna skupa. Postupak f koji svakom elementu x D pridružuje točno jedan element y K zovemo funkcija
Riješeni zadaci: Nizovi realnih brojeva
 Riješei zadaci: Nizovi realih brojeva Nizovi, aritmetički iz, geometrijski iz Fukciju a : N R azivamo beskoači) iz realih brojeva i ozačavamo s a 1, a,..., a,... ili a ), pri čemu je a = a). Aritmetički
Riješei zadaci: Nizovi realih brojeva Nizovi, aritmetički iz, geometrijski iz Fukciju a : N R azivamo beskoači) iz realih brojeva i ozačavamo s a 1, a,..., a,... ili a ), pri čemu je a = a). Aritmetički
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
Alarmni sustavi 07/08 predavanja 12. i 13. Detekcija metala, izvori napajanja u sustavima TZ
 Alarmni sustavi 07/08 predavanja 12. i 13. Detekcija metala, izvori napajanja u sustavima TZ pred.mr.sc Ivica Kuric Detekcija metala instrument koji detektira promjene u magnetskom polju generirane prisutnošću
Alarmni sustavi 07/08 predavanja 12. i 13. Detekcija metala, izvori napajanja u sustavima TZ pred.mr.sc Ivica Kuric Detekcija metala instrument koji detektira promjene u magnetskom polju generirane prisutnošću
Betonske konstrukcije 1 - vežbe 3 - Veliki ekscentricitet -Dodatni primeri
 Betonske konstrukcije 1 - vežbe 3 - Veliki ekscentricitet -Dodatni primeri 1 1 Zadatak 1b Čisto savijanje - vezano dimenzionisanje Odrediti potrebnu površinu armature za presek poznatih dimenzija, pravougaonog
Betonske konstrukcije 1 - vežbe 3 - Veliki ekscentricitet -Dodatni primeri 1 1 Zadatak 1b Čisto savijanje - vezano dimenzionisanje Odrediti potrebnu površinu armature za presek poznatih dimenzija, pravougaonog
SISTEMI NELINEARNIH JEDNAČINA
 SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
2log. se zove numerus (logaritmand), je osnova (baza) log. log. log =
, je osnova (baza) log. log. log =") ( > 0, 0)!" # > 0 je najčešći uslov koji postavljamo a još je,, > 0 se zove numerus (aritmand), je osnova (baza). 0.. ( ) +... 7.. 8. Za prelazak na neku novu bazu c: 9. Ako je baza (osnova) 0 takvi se
( > 0, 0)!" # > 0 je najčešći uslov koji postavljamo a još je,, > 0 se zove numerus (aritmand), je osnova (baza). 0.. ( ) +... 7.. 8. Za prelazak na neku novu bazu c: 9. Ako je baza (osnova) 0 takvi se
BIPOLARNI TRANZISTOR Auditorne vježbe
 BPOLARN TRANZSTOR Auditorne vježbe Struje normalno polariziranog bipolarnog pnp tranzistora: p n p p - p n B0 struja emitera + n B + - + - U B B U B struja kolektora p + B0 struja baze B n + R - B0 gdje
BPOLARN TRANZSTOR Auditorne vježbe Struje normalno polariziranog bipolarnog pnp tranzistora: p n p p - p n B0 struja emitera + n B + - + - U B B U B struja kolektora p + B0 struja baze B n + R - B0 gdje
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15
 1 / 15") MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
a M a A. Može se pokazati da je supremum (ako postoji) jedinstven pa uvodimo oznaku sup A.
 jedinstven pa uvodimo oznaku sup A.") 3 Infimum i supremum Definicija. Neka je A R. Kažemo da je M R supremum skupa A ako je (i) M gornja meda skupa A, tj. a M a A. (ii) M najmanja gornja meda skupa A, tj. ( ε > 0)( a A) takav da je a > M
3 Infimum i supremum Definicija. Neka je A R. Kažemo da je M R supremum skupa A ako je (i) M gornja meda skupa A, tj. a M a A. (ii) M najmanja gornja meda skupa A, tj. ( ε > 0)( a A) takav da je a > M
Pošto pretvaramo iz veće u manju mjernu jedinicu broj 2.5 množimo s 1000,
 PRERAČUNAVANJE MJERNIH JEDINICA PRIMJERI, OSNOVNE PRETVORBE, POTENCIJE I ZNANSTVENI ZAPIS, PREFIKSKI, ZADACI S RJEŠENJIMA Primjeri: 1. 2.5 m = mm Pretvaramo iz veće u manju mjernu jedinicu. 1 m ima dm,
PRERAČUNAVANJE MJERNIH JEDINICA PRIMJERI, OSNOVNE PRETVORBE, POTENCIJE I ZNANSTVENI ZAPIS, PREFIKSKI, ZADACI S RJEŠENJIMA Primjeri: 1. 2.5 m = mm Pretvaramo iz veće u manju mjernu jedinicu. 1 m ima dm,
III VEŽBA: FURIJEOVI REDOVI
 III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
Elektronički Elementi i Sklopovi
 Sadržaj predavanja: 1. Strujna zrcala pomoću BJT tranzistora 2. Strujni izvori sa BJT tranzistorima 3. Tranzistor kao sklopka 4. Stabilizacija radne točke 5. Praktični sklopovi s tranzistorima Strujno
Sadržaj predavanja: 1. Strujna zrcala pomoću BJT tranzistora 2. Strujni izvori sa BJT tranzistorima 3. Tranzistor kao sklopka 4. Stabilizacija radne točke 5. Praktični sklopovi s tranzistorima Strujno
Pismeni ispit iz matematike Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: ( ) + 1.
 + 1.") Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
SEMINAR IZ KOLEGIJA ANALITIČKA KEMIJA I. Studij Primijenjena kemija
 SEMINAR IZ OLEGIJA ANALITIČA EMIJA I Studij Primijenjena kemija 1. 0,1 mola NaOH je dodano 1 litri čiste vode. Izračunajte ph tako nastale otopine. NaOH 0,1 M NaOH Na OH Jak elektrolit!!! Disoira potpuno!!!
SEMINAR IZ OLEGIJA ANALITIČA EMIJA I Studij Primijenjena kemija 1. 0,1 mola NaOH je dodano 1 litri čiste vode. Izračunajte ph tako nastale otopine. NaOH 0,1 M NaOH Na OH Jak elektrolit!!! Disoira potpuno!!!
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
TRIGONOMETRIJA TROKUTA
 TRIGONOMETRIJA TROKUTA Standardne oznake u trokutuu ABC: a, b, c stranice trokuta α, β, γ kutovi trokuta t,t,t v,v,v s α,s β,s γ R r s težišnice trokuta visine trokuta simetrale kutova polumjer opisane
TRIGONOMETRIJA TROKUTA Standardne oznake u trokutuu ABC: a, b, c stranice trokuta α, β, γ kutovi trokuta t,t,t v,v,v s α,s β,s γ R r s težišnice trokuta visine trokuta simetrale kutova polumjer opisane
1.1. Pripreme za vježbu. Slijedni sustavi upute za laboratorijske vježbe
 Vježba 1. Simuliranje, analiza i sinteza kontinuiranog i digitalnog sustava regulacije brzine vrtnje istosmjernog elektromotornog pogona, te eksperimentalna provjera digitalnog proporcionalno-integralnog
Vježba 1. Simuliranje, analiza i sinteza kontinuiranog i digitalnog sustava regulacije brzine vrtnje istosmjernog elektromotornog pogona, te eksperimentalna provjera digitalnog proporcionalno-integralnog
Neka je a 3 x 3 + a 2 x 2 + a 1 x + a 0 = 0 algebarska jednadžba trećeg stupnja. Rješavanje ove jednadžbe sastoji se od nekoliko koraka.
 Neka je a 3 x 3 + a x + a 1 x + a 0 = 0 algebarska jednadžba trećeg stupnja. Rješavanje ove jednadžbe sastoji se od nekoliko koraka. 1 Normiranje jednadžbe. Jednadžbu podijelimo s a 3 i dobivamo x 3 +
Neka je a 3 x 3 + a x + a 1 x + a 0 = 0 algebarska jednadžba trećeg stupnja. Rješavanje ove jednadžbe sastoji se od nekoliko koraka. 1 Normiranje jednadžbe. Jednadžbu podijelimo s a 3 i dobivamo x 3 +
nvt 1) ukoliko su poznate struje dioda. Struja diode D 1 je I 1 = I I 2 = 8mA. Sada je = 1,2mA.
 ukoliko su poznate struje dioda. Struja diode D 1 je I 1 = I I 2 = 8mA. Sada je = 1,2mA.") IOAE Dioda 8/9 I U kolu sa slike, diode D su identične Poznato je I=mA, I =ma, I S =fa na 7 o C i parametar n= a) Odrediti napon V I Kolika treba da bude struja I da bi izlazni napon V I iznosio 5mV? b)
IOAE Dioda 8/9 I U kolu sa slike, diode D su identične Poznato je I=mA, I =ma, I S =fa na 7 o C i parametar n= a) Odrediti napon V I Kolika treba da bude struja I da bi izlazni napon V I iznosio 5mV? b)
5. Karakteristične funkcije
 5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
INTEGRALNI RAČUN. Teorije, metodike i povijest infinitezimalnih računa. Lucija Mijić 17. veljače 2011.
 INTEGRALNI RAČUN Teorije, metodike i povijest infinitezimalnih računa Lucija Mijić lucija@ktf-split.hr 17. veljače 2011. Pogledajmo Predstavimo gornju sumu sa Dodamo još jedan Dobivamo pravokutnik sa Odnosno
INTEGRALNI RAČUN Teorije, metodike i povijest infinitezimalnih računa Lucija Mijić lucija@ktf-split.hr 17. veljače 2011. Pogledajmo Predstavimo gornju sumu sa Dodamo još jedan Dobivamo pravokutnik sa Odnosno
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f
 D f") IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
Matematička analiza 1 dodatni zadaci
 Matematička analiza 1 dodatni zadaci 1. Ispitajte je li funkcija f() := 4 4 5 injekcija na intervalu I, te ako jest odredite joj sliku i inverz, ako je (a) I = [, 3), (b) I = [1, ], (c) I = ( 1, 0].. Neka
Matematička analiza 1 dodatni zadaci 1. Ispitajte je li funkcija f() := 4 4 5 injekcija na intervalu I, te ako jest odredite joj sliku i inverz, ako je (a) I = [, 3), (b) I = [1, ], (c) I = ( 1, 0].. Neka
M086 LA 1 M106 GRP. Tema: Baza vektorskog prostora. Koordinatni sustav. Norma. CSB nejednakost
 M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
Linearna algebra 2 prvi kolokvij,
 Linearna algebra 2 prvi kolokvij, 27.. 20.. Za koji cijeli broj t je funkcija f : R 4 R 4 R definirana s f(x, y) = x y (t + )x 2 y 2 + x y (t 2 + t)x 4 y 4, x = (x, x 2, x, x 4 ), y = (y, y 2, y, y 4 )
Linearna algebra 2 prvi kolokvij, 27.. 20.. Za koji cijeli broj t je funkcija f : R 4 R 4 R definirana s f(x, y) = x y (t + )x 2 y 2 + x y (t 2 + t)x 4 y 4, x = (x, x 2, x, x 4 ), y = (y, y 2, y, y 4 )
Ĉetverokut - DOMAĆA ZADAĆA. Nakon odgledanih videa trebali biste biti u stanju samostalno riješiti sljedeće zadatke.
 Ĉetverokut - DOMAĆA ZADAĆA Nakon odgledanih videa trebali biste biti u stanju samostalno riješiti sljedeće zadatke. 1. Duljine dijagonala paralelograma jednake su 6,4 cm i 11 cm, a duljina jedne njegove
Ĉetverokut - DOMAĆA ZADAĆA Nakon odgledanih videa trebali biste biti u stanju samostalno riješiti sljedeće zadatke. 1. Duljine dijagonala paralelograma jednake su 6,4 cm i 11 cm, a duljina jedne njegove
Konstruisanje. Dobro došli na... SREDNJA MAŠINSKA ŠKOLA NOVI SAD DEPARTMAN ZA PROJEKTOVANJE I KONSTRUISANJE
 Dobro došli na... Konstruisanje GRANIČNI I KRITIČNI NAPON slajd 2 Kritični naponi Izazivaju kritične promene oblika Delovi ne mogu ispravno da vrše funkciju Izazivaju plastične deformacije Može doći i
Dobro došli na... Konstruisanje GRANIČNI I KRITIČNI NAPON slajd 2 Kritični naponi Izazivaju kritične promene oblika Delovi ne mogu ispravno da vrše funkciju Izazivaju plastične deformacije Može doći i
PROPORCIONALNO-INTEGRACIJSKO-DERIVACIJSKA REGULACIJA
 PROPORCIONALNO-INTEGRACIJSKO-DERIVACIJSKA REGULACIJA -Proporcionalno-integracijsko-derivacijska regulacija (PID-regulacija) temelji se na trikomponentnim PID regulatorima -PID-regualtori se dobivaju kad
PROPORCIONALNO-INTEGRACIJSKO-DERIVACIJSKA REGULACIJA -Proporcionalno-integracijsko-derivacijska regulacija (PID-regulacija) temelji se na trikomponentnim PID regulatorima -PID-regualtori se dobivaju kad
Akvizicija tereta. 5660t. Y= masa drva, X=masa cementa. Na brod će se ukrcati 1733 tona drva i 3927 tona cementa.
 Akvizicija tereta. Korisna nosivost broda je 6 t, a na brodu ia 8 cu. ft. prostora raspoloživog za sještaj tereta pod palubu. Navedeni brod treba krcati drvo i ceent, a na palubu ože aksialno ukrcati 34
Akvizicija tereta. Korisna nosivost broda je 6 t, a na brodu ia 8 cu. ft. prostora raspoloživog za sještaj tereta pod palubu. Navedeni brod treba krcati drvo i ceent, a na palubu ože aksialno ukrcati 34
Signali i sustavi - Zadaci za vježbu II. tjedan
 Signali i sustavi - Zadaci za vježbu II tjedan Periodičnost signala Koji su od sljedećih kontinuiranih signala periodički? Za one koji jesu, izračunajte temeljni period a cos ( t ), b cos( π μ(, c j t
Signali i sustavi - Zadaci za vježbu II tjedan Periodičnost signala Koji su od sljedećih kontinuiranih signala periodički? Za one koji jesu, izračunajte temeljni period a cos ( t ), b cos( π μ(, c j t
Cauchyjev teorem. Postoji više dokaza ovog teorema, a najjednostvniji je uz pomoć Greenove formule: dxdy. int C i Cauchy Riemannovih uvjeta.
 auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
OSNOVI ELEKTRONIKE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA
 ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
π π ELEKTROTEHNIČKI ODJEL i) f (x) = x 3 x 2 x + 1, a = 1, b = 1;
 f (x) = x 3 x 2 x + 1, a = 1, b = 1;") 1. Provjerite da funkcija f definirana na segmentu [a, b] zadovoljava uvjete Rolleova poučka, pa odredite barem jedan c a, b takav da je f '(c) = 0 ako je: a) f () = 1, a = 1, b = 1; b) f () = 4, a =,
1. Provjerite da funkcija f definirana na segmentu [a, b] zadovoljava uvjete Rolleova poučka, pa odredite barem jedan c a, b takav da je f '(c) = 0 ako je: a) f () = 1, a = 1, b = 1; b) f () = 4, a =,
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu
 Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
S t r a n a 1. 1.Povezati jonsku jačinu rastvora: a) MgCl 2 b) Al 2 (SO 4 ) 3 sa njihovim molalitetima, m. za so tipa: M p X q. pa je jonska jačina:
 MgCl 2 b) Al 2 (SO 4 ) 3 sa njihovim molalitetima, m. za so tipa: M p X q. pa je jonska jačina:") S t r a n a 1 1.Povezati jonsku jačinu rastvora: a MgCl b Al (SO 4 3 sa njihovim molalitetima, m za so tipa: M p X q pa je jonska jačina:. Izračunati mase; akno 3 bba(no 3 koje bi trebalo dodati, 0,110
S t r a n a 1 1.Povezati jonsku jačinu rastvora: a MgCl b Al (SO 4 3 sa njihovim molalitetima, m za so tipa: M p X q pa je jonska jačina:. Izračunati mase; akno 3 bba(no 3 koje bi trebalo dodati, 0,110